


Introduction
NT2511
Basic Guide
HITACHI SJ Series Inverter
P1
Contents
Chapter 1 Safety Instructions
Chapter 2 Installation and Wiring
Chapter 4 Settings
Chapter 3 Operation Setting and Examples of I/O
Adjustment
Chapter 5 Troubleshooting
Chapter 6 Maintenance and Inspection
Chapter 7 Specifications
Index
Read this “Basic Guide”, and keep it handy for future reference.
If you have any inquiry or problem,
Refer to Chapter 5 Troubleshooting
or
Contact to the Technical Inquiry Service
for Inverter found on the back cover.
List of contact information
When making a contact, inform
the reference number on below.

Introduction
Introduction/Cautions/Warranty & Contact us
Introduction
Thank you for purchasing Hitachi SJ Series P1 Inverter.
This is a user guide for basic handling and maintenance of
Hitachi SJ Series P1 Inverter.
For the purpose of reduction of paper usage and
provision of the latest information, we enclose the Basic
Guide only while providing the User's Guide for more
detailed description through electronic means instead of
CD or a printed document.
About the Basic Guide (this document)
The Basic Guide provides the minimum information
necessary for handling the product. Please make sure to
read this document as well as the User's Guide with more
detailed information.
About the User's Guide
The User's Guide provides detailed information necessary
for handling the product. Please make sure to read the
User's Guide for proper use.
If future updates make any difference from the Basic
Guide, the description in the User's Guide will have higher
priority. You should use the inverter by observing
specifications described in User's Guide. You should also
prevent risks by performing proper inspection and
maintenance.
Please refer to the following link for download:
Hitachi Industrial Equipment Systems' Website
http://www.hitachi-ies.co.jp/
Please follow as below on the Website.
Product Information -> Inverter -> Download of
technical data
Handling an optional products
If you use the inverter with optional products, also you
should read the instruction enclosed in those products.
Cautions
Proper use of the inverter
Please read the Basic Guide, User's Guide and optional
products instruction before handling. Read carefully the
Basic Guide, User's Guide or optional product instruction
before handling or performing maintenance of the
product.
Before attempting installation, operation, maintenance,
and inspection work, you should understand the
knowledge of equipment, information of safety,
precaution and how to use and service the inverter.
Cautions
No part of this document may be reproduced or reformed
in any form without the publisher's permission.
The contents of the document are subject to change
without prior notice.
If you lose the Basic Guide and need another one in
printed form, you will be charged for resupply, so please
keep it carefully.
You "CANNOT DO" what is not described in Basic Guide or
User's Guide. We are not responsible for any impact from
operations regardless of unexpected failure or accident
due to the operation or handling of the product in a
manner not specified in Basic Guide or User's Guide. We
apologize in advance for any inconvenience this may
cause.
If you find any unclear or incorrect description, missing
description, or misplaced or missing pages, please takes
time to inform Hitachi inverter technical service office.
Note that, the Basic Guide, User's Guide and the
instruction for each optional product enclosed, should be
delivered to the end user of the inverter. And also make
sure to be accessible any other guides or instruction to
the end user.
0-1

Introduction
Introduction/Cautions/Warranty & Contact us
■ Inverter Model: It beginning with P1- in specification label.
■ Manufacturer Number(MFG No.): It shows in specification label.
■ Date of purchase: Customer's purchased period.
■ Inquiry contents:
・ Inform us the defective point and its condition.
・ Inform us the suspicious content and its detail.
Method of Inquiry and Product Warranty
Method of Inquiry about Product
• For an inquiry about product damage or faults or a question
about the product, notify your supplier or Hitachi inverter
technical service office.
Product Warranty
• The product SJ series P1 inverter will be warranted by Hitachi
Industrial Equipment Systems Co., Ltd., afterward "Hitachi",
during the warranty period from your date of purchase only
under proper usage of product.
• Furthermore, the warranty expressed here is covered only for
the product delivered from Hitachi, and will not be
responsible for others damage or loss of products like a
motor or any equipment or systems damage caused by
improper usage of the product. Minimize the consequence
on equipment or system by applying safety design which is
able to notify a hazard alarm to the user in case of
malfunction or damage of the delivered product. The
selection and application of delivered product must be done
with sufficient margin on performance, as well as other
equipment or system with sufficient redundancy design. Also,
the compatibility of the product with the customer's
intended use is not warranted, hence the validation test
should be done by the customer by their responsibility
before put in operation.
• In case of delivery a defective product, or encountered a
defects on quality during a manufacturing process, Hitachi
will repair or exchange with free of charge, only when the
product is in warranty period (afterward, we call "warranty
service").
• The product will be warranted for one year from your date of
purchase. However, depending on case, sending technical
assistance for repairing will be charged to the customer. Also,
Hitachi will not be responsible of any readjustment or testing
on site.
• After warranty service, the exchanged or repaired part will be
warranted for 6 month from date of warranty service. Hitachi
will be responsible for repair or exchange of defective part
only for the exchanged or repaired part only during this
warranty period.
• In order to receive warranty service, you should present the
recipe issued by product supplier or any other document that
permit to check the purchase date. However, any defects,
damage, malfunction or any other failure caused by one of
the following facts will not be covered by warranty service.
(1) Cannot confirm the purchase date.
(2) The damage or fault resulted from improper usage or
inadequate handling of the product and not conforming
usage described into the user's guide or basic guide.
(3) Incorrect usage of product, inadequate setting of
product and optional product, remodeling or inadequate
repair and repair carried out by unqualified repair
center.
(4) Deterioration and wear resulted from normal operation.
(5) Fault resulted from natural disaster, such as earthquake,
fire disaster, lightning strike, pollution, salt pollution, or
abnormal voltage or any others external factor.
(6) Shock, falling, or Vibration resulted during
transportation or displacement after purchase.
(7) Damage or fault resulted from remodeling firmware by
unqualified personal not belonging to Hitachi.
(8) Damage or fault resulted from customer's made
programing function (EzSQ).
(9) For overseas use.
• By warranty service, might lose the data stored inside the
product, as well as, customers made (EzSQ) program. Make
sure to back up by own responsibility. However, malfunction
resulted from circuit board with storage devices the backup
will not be possible. It is recommended to keep a backup
during the testing phase by using VOP or PC software
ProDriveNext.
Liability Limitation
• The warranty policy stipulate all warranty provided to the
customer, thus, Hitachi, affiliated company or related dealer
will be absolved of any responsibility including implied
warranty for product merchantability or implied warranty of
fitness for particular purpose.
• Even more, Hitachi, affiliated company or related dealer are
not responsible of any incidental damage, special damage,
direct loss, or indirect loss (even predictable or not) resulted
on customer because of product defect.
0-2

Introduction
Introduction/Cautions/Warranty & Contact us
Hitachi America, Ltd. (Charlotte Office)
Industrial Components and Equipment Division
6901 Northpark Blvd., Suite A, Charlotte, NC 28216,
U.S.A
TEL : +1(704) 494-3008
FAX : +1(704) 599-4108
Hitachi Europe GmbH
Industrial Components & Equipment Group
Am Seestern 18 (Euro Center),
D-40547 Dusseldorf,
Germany
TEL : +49-211-5283-0
FAX : +49-211-5283-649
Hitachi Asia Ltd.
Industrial Components & Equipment Division
No.30 Pioneer Crescent, #10-15 West Park Bizcentral,
Singapore 628560,
Singapore
TEL : +65-6305-7400
FAX : +65-6305-7401
Hitachi Australia Ltd.
Level 3, 82 Waterloo Road
North Ryde, N.S.W.2113
Australia
TEL : +61-2-9888-4100
FAX : +61-2-9888-4188
Hitachi Industrial Equipment Systems Co., Ltd.
AKS Building, 3, Kanda
Nereibei-cho, Chiyoda-ku,
Tokyo, 101-0022
Japan
TEL : +81-3-4345-6910
FAX : +81-3-4345-6067
Warranty Service
• The customer is able to receive a warranty service from
product supplier or service station, if the product does not
meet the function described on basic guide or user's guide.
Moreover, in case of any mismatch occurred between user's
guide and basic guide, user's guide content will take a
priority.
• Contact to your supplier or local Hitachi distributor or service
station for fare-paying services.
Change on Product Specification
• We are sorry because any information described in Brochure,
Basic Guide, User's Guide or Technical Document would be
modified without permission.
Precaution for Product Application
• The product should apply following the condition of use,
handling method and precautions described in User's Guide.
• The installed product should be confirmed previously by own
that the product installation has done as intended in the
customer system.
• When using Hitachi inverter consider on below
(1) Select inverter with sufficient capacity for rate current
and performance.
(2) Safety design, for example, redundant system design.
(3) Equipment design where minimize hazard in case of
inverter failure.
(4) For safety precautions, make a system configuration that
alarms the hazard to user.
(5) Periodic maintenance of Hitachi inverter and customer's
equipment.
• Hitachi inverter is designed and manufactured intentionally
to be applied for general industrial equipment application.
Thus, when using for such application described on below,
will be covered by warranty when only existing a special
agreement by consensus document. Otherwise, the product
will not be warranted.
(1) Special application such as aircraft, spacecraft, nuclear,
electric power, passenger transportation, medical,
submarine repeater, etc.
(2) For application such as elevator, amusement equipment,
medical equipment which might have a big effect on
human life or fortune.
• Restricted use and special quality is unnecessary, please
contact to our sales office to carry out a further study
whether is applicable or not.
• For applications that involve human life, or have risk of
important loss, make sure to avoid a critical accident by
installing a fail-safe device, protecting device, detecting
device, alarm device, or spare device, etc.
• This inverter is only for three phase induction motor [IM] or
three phase synchronous motor [SM(SMM)].
• For any other application make inquiries.
Supplement
• Refer to "Chapter 7 Specification" for short lifespan
component.
• For optional product refer attached instruction.
• This warranty term will not restrict a legal right of customer
who has purchased the product.
• Contact to the local supplier for warranty of purchased
product sales in oversea.
Contact Information
0-3

Contents
Contents
Chapter 1 Safety Instructions
Chapter 2 Installation and Wiring
Chapter 3 Operation Setting and Examples of IO Adjustment
Chapter 4 Settings
Chapter 5 Troubleshooting
Chapter 7 Specifications
Chapter 6 Maintenance and Inspection
● Quick start .............................................................. 0-1
● Introduction/instructions ....................................... 0-2
Types of Warnings ................................................ 1-1
Description of Safety Symbols .............................. 1-1
Precautions for Installation ................................. 1-2
Precautions for Wiring ........................................ 1-2
Precautions for Running and Test Running ......... 1-3
Check the Inverter ................................................ 2-1
Install the Inverter ................................................ 2-3
Operation Setting and Examples of IO Adjustment3-1
● Method of Inquiry and Product Warranty .......... 0-3
● Contents ............................................................... 0-4
Precautions for Maintenance/Inspection ................. 1-5
Precautions for Maintenance/Inspection ................. 1-4
Other Cautions ............................................................ 1-4
Response to European Directive (CE) .......................... 1-5
Response to UL standards ........................................... 1-6
Wire the Inverter ........................................................ 2-7
Residual Risk ............................................................. 2-20
Outline of the Operator Keypad ........................... 4-1
How to Read the Monitor ................................... 4-12
Troubleshooting .................................................... 5-1
Cautions for Maintenance/Inspection .................. 6-1
Daily and Periodic Inspections .............................. 6-2
Method of Checking the Inverter and Converter
Circuits .................................................................. 6-4
Specifications Table .............................................. 7-1
● Appendix Index..................................... Appendix-1
● Quick start ...................................... End of the manual
● Contact Information ................................... Back cover
How to Read the Parameters .................................... 4-14
DC-Bus Capacitor Life Curve ........................................ 6-5
Output of Life Warning ............................................... 6-5
Methods of Measuring the Input/Output Voltages,
Current, and Power ..................................................... 6-6
0-4

Contents
Contents
(Memo)
0-5

Chapter 1
Safety Instructions
DANGER
Indicates that incorrect handling may cause hazardous
situations, which would most likely result in serious
personal injury or death, and may result in major physical
loss or damage.
WARNING
Indicates that incorrect handling may cause hazardous
situations, which may result in serious personal injury or
death, and may result in major physical loss or damage.
CAUTION
Indicates that incorrect handling may cause hazardous
situations, which may result in moderate or slight
personal injury or damage, and may result only physical
loss or damage.
Indicates a danger, warning or caution notice
for fire, electric shock and high temperature
while handling the product.
Details are indicated in or near by pictures
or words.
The drawing on the left indicates “a
non-specific and general danger or
caution”.
The drawing on the left indicates “a
possible damage due to electric
shock”.
Indicates “what you must not do” to prohibit
the described acts in the operation of the
product.
Indicates “what you must do” according to
the instructions in the operation of the
product.
Chapter 1
Safety Instructions
1.1 Types of Warnings
In the Basic Manual, the severity levels of safety
precautions and residual risks are classified as: "DANGER",
"WARNING" and "CAUTION".
Display meanings
1.2 Description of Safety Symbols
It describes annotation of the symbols in context. Be sure
to follow and pay attention of content.
Symbols meaning
Even more, that " CAUTION " level description may lead
to a serious risk depend on the circumstances. Be sure to
follow the instruction because whichever contains
important safety description.
1.3 Description of Safety Symbols
Read carefully following safety instruction for handling.
1-1

Chapter 1
Safety Instructions
Caution
Practise
Fire
Injury
Prohibited
Failure
Prohibited
WARNING
DANGER
Electric
shock Fire
Practise
Failure
DANGER
Caution
Fall
Injury
Prohibited
Practise
Electric
shock
Injury
Short circuit
Ground
fault
Prohibited
Prohibited
Practise
Prohibited
Practise
Practise
1.3.1 Caution
• Incorrect handling may result in personal death
or severe injury, or may result in damage to the
inverter, motor or the whole system.
• Be sure to read this Basic Manual and appended
documents thoroughly before installing, wiring,
operating, maintaining, inspecting or using the
inverter.
1.3.2 Precautions for installation
● You run the risk of fire!
• Do not place flammable materials near to the
installed inverter.
• Prevent foreign matter (e.g., cut pieces of wire,
sputtering welding materials, iron chips, wire,
and dust) from penetrating into the inverter.
• Install the inverter on a non-flammable surface,
such as, metal surface.
• Install the inverter in a well-ventilated indoor
site not exposed to direct sunlight. Avoid places
where the inverter is exposed to high
temperature, high humidity, condensation, dust,
explosive gases, corrosive gases, flammable
gases, grinding fluid mist, or salt water.
● You run the risk of injury!
• Do not install and operate the inverter if it is
damaged or its parts are missing.
• Many of the drawings in the Basic Guide show the
inverter with covers and/or parts blocking your view
as removed to illustrate the details.
• Do not operate the inverter in the status shown in
those drawings. If you have removed the covers
and/or parts, be sure to reinstall them in their
original positions before starting operation, and
follow all instructions when operating the inverter.
● You run the risk of injury due to the
inverter falling
• Do not hold its cover parts when carrying the
inverter.
• Install the inverter on a structure able to bear
the weight specified in this Basic Guide.
• Install the inverter on a vertical wall that is free
of vibrations.
● You run the risk of failure of the inverter!
• The inverter is precision equipment. Do not
allow it to fall or be subject to high impacts.
• Also do not step on it, or place a heavy load on
it.
1.3.3 Precautions for Wiring
● You run the risk of electric shock or
fire!
• Be sure to ground the inverter.
• Commit wiring work to a qualified electrician.
• Before wiring, make sure that the power supply
is off.
● You run the risk of failure of the
inverter!
• Do not pull the wire after wiring.
● You run the risk of electric shock and
injury!
• Perform wiring only after installing the inverter.
● You run the risk of short circuit and ground
fault!
• Do not remove rubber bushings from the wiring
section. Otherwise, the edges of the wiring cover
may damage the wire.
1-2

Chapter 1
Safety Instructions
WARNING
Injury
Fire
Practise
Electric
shock
Injury
Prohibited
Electric
shock
Fire
Prohibited
Prohibited
Electric
shock
Prohibited
Injury
Fire
Fire
Prohibited
Injury
Damage
Prohibited
Injury
Prohibited
Practise
Practise
Practise
DANGER
● You run the risk of injury or fire!
• Do not connect AC power supply to any of the
output terminals (U, V, and W).
• Make sure that the voltage of AC power supply
matches the rated voltage of your inverter.
● You run the risk of electric shock
and injury!
• Before operating slide switch SW in the
inverter, be sure to turn off the power supply.
• Since the inverter supports two modes of
cooling-fan operation, the inverter power is
not always off, even when the cooling fan is
stopped. Therefore, be sure to confirm that
the power supply is off before wiring.
1.3.4 Precautions to Run and Test Running
● You run the risk of electric shock or
fire!
• While power is supplied to the inverter, do not
touch any internal part or terminal of the
inverter. Also do not check signals, or connect
or disconnect any wire or connector.
• While power is supplied to the inverter, do not
touch any internal part of the inverter. Also do
not insert a bar in it.
● You run the risk of electric shock!
• Be sure to close the terminal block cover
before turning on the inverter power. Do not
open the terminal block cover while power is
being supplied to the inverter or voltage
remains inside.
• Do not operate switches with wet hands.
● You run the risk of injury or fire!
• While power is supplied to the inverter, do not
touch the terminal of the inverter, even if it
has stopped.
● You run the risk of fire!
• Do not use a single-phase input.
• Do not connect a resistor directly to any of the
DC terminals (PD, P, and N).
• Do not use the magnetic contactor installed on
the primary and secondary sides of the inverter
to stop its operation.
• T ighten each screw to the specified torque.
• No screws must be left loose.
• Connect an earth-leakage breaker to the power
input circuit.
• Use only the power cables, earth-leakage breaker,
and magnetic contactors that have the specified
capacity (ratings).
● You run the risk of injury and damage to
machine.
• Do not select the retry mode for controlling an
elevating or traveling device because free-running
status occurs in retry mode.
● You run the risk of injury!
• If the retry mode has been selected, the inverter
will restart suddenly after a break in the tripping
status. Stay away from the machine controlled by
the inverter when the inverter is under such
circumstances. (Design the machine so that human
safety can be ensured, even when the inverter
restarts suddenly.)
• The [STOP] key on the operator keypad is effective
only when its function is enabled by setting.
Prepare an emergency stop switch separately.
• If an operation command has been input to the
inverter before a short-term power failure, the
inverter may restart operation after the power
recovery. If such a restart may put persons in
danger, design a control circuit that disables the
inverter rom restarting after power recovery.
• If an operation command has been input to the
inverter before the inverter enters alarm status,
the inverter will restart suddenly when the alarm
status is reset. Before resetting the alarm status,
make sure that no operation command has been
input.
1-3

Chapter 1
Safety Instructions
WARNING
Injury
Damage
Practise
Burn
Injury
Prohibited
Injury
Practise
DANGER
Electric
shock
Practise
Prohibited
DANGER
Electric
shock
Fire
Injury
Prohibited
DANGER
Injury
Explosion
Practise
Practise
CAUTION
Life cycle
Practise
● You run the risk of injury and damage to
machine.
• The inverter easily allows you to control the
speed of operating motor. Confirm the
capacity and ratings of the motor or machine
before operating.
• When you run the motor at a high frequency,
check and confirm to each manufactures of a
permitting revolution of the respective motor
and machine.
• Check the rotate motor direction, abnormal
sound, and vibrations while operating.
1.3.5 Precautions for Maintenance/Inspection
● You run the risk of electric shock!
• Before inspecting the inverter, be sure to turn
off the power supply and wait for 10 minutes
or more. (Before inspection, confirm that the
Charge lamp on the inverter is off and the DC
voltage between terminals P and N is 45 V or
less.)
1.3.6 Precautions for disposal
● You run the risk of injury and
explosion!
• For disposal of the inverter, outsource to a
qualified industrial waste disposal contractor.
Disposing of the inverter on your own may
result in an explosion of the capacitor or
produce poisonous gas.
• Contact us or your distributor for fixing the
inverter.
1.3.7 Other Cautions
● You run the risk of electric shock, fire
and injury!
• Never modify the inverter.
● You run the risk of burn injury.
• Inverter heat sink will heat up during operation.
Do not touch the heat sink.
● You run the risk of injury!
• Install an external brake system if needed.
• Commit only a designated person to
maintenance, inspection, and the replacement
of parts. (Be sure to remove wristwatches and
metal accessories, e.g., bracelets, before
maintenance and inspection work and to use
insulated tools for the work.)
• A qualified waste disposer includes
“industrial waste collector/transporter”
and “industrial waste disposal operator”.
Follow the procedures stipulated in the
“Waste Management and Public Cleansing
Act” for disposing of the inverter.
● You run the risk of significantly shortening
the life cycle of a product!
• Sterilizing and disinfecting a packaging wood
materials use a means other than wood
fumigation method. If the product is included in
the fumigation treatment, electronic parts
receive a critical damage from emitted gases or
steams. Especially, halogen disinfectants
(including fluorine, chlorine, bromine and
iodine) can cause corrosion in the capacitor.
1-4

Chapter 1
Safety Instructions
1.4 Response to European Directive (CE)
1.4.1 Caution for EMC (Electromagnetic
Compatibility)
The SJ series P1 inverter conforms to requirements of
Electromagnetic Compatibility (EMC) Directive (2014/30/EU).
However, when using the inverter in Europe, you must comply
with the following specifications and requirements to meet the
EMC Directive and other standards in Europe:
WARNING: This equipment must be installed, adjusted,
and maintained by qualified engineers who have expert
knowledge of electric work, inverter operation, and the
hazardous circumstances that can occur. Otherwise,
personal injury may result.
1. Power supply requirements
a. Voltage fluctuation must be -15% to +10% or less.
b. Voltage imbalance must be ±3% or less.
c. Frequency variation must be ±4% or less.
d. Total harmonic distortion (THD) of voltage must be ±10% or
less.
2. Installation requirement
a. SJ series P1 includes a built-in EMC filter. The built-in EMC
filter must be activated.
b. According to EN61800-3 it is mandatory to mention that
any inverter with only C3 filter inside may NOT be
connected to a low voltage public power supply in
residential areas since for these installations C1 is required.
c. In case of external filter for C2, an additional note is
required according to EN61800-3 that “this product may
emit high frequency interference in residential areas which
may require additional EMC measures”.
d. According to the EN6100-3-12, an additional AC reactor or
DC choke should be installed for reducing harmonics in
power line.
3. Wiring requirements
a. A shielded wire (screened cable) must be used for motor
wiring, and the length of the cable must be according to the
following table (Table 1 on page 1-12).
b. The carrier frequency must be set according to the
following table to meet an EMC requirement (Table1 on
page 1-12).
c. The main circuit wiring must be separated from the control
circuit wiring.
4. Environmental requirements
(When an EMC filter is used)
a. SJ series P1 inverter that is activated built-in EMC filter
must be according to SJ series P1 specifications.
1-5

Chapter 1
Safety Instructions
Model
Cat.
Cable
Length
(m)
Carrier
Frequency
(kHz)
Model
Cat.
Cable
Length
(m)
Carrier
Frequency
(kHz)
P1-00044-L
(P1-004L)
C3
10 2 - - -
-
P1-00080-L
(P1-007L)
C3
10
2
P1-00041-H
(P1-007H)
C3
10
2
P1-00104-L
(P1-015L)
C3
10
2
P1-00054-H
(P1-015H)
C3
10
2
P1-00104-L
(P1-015L)
C3
10
2
P1-00083-H
(P1-022H)
C3
10
2
P1-00228-L
(P1-037L)
C3
10
2
P1-00126-H
(P1-037H)
C3
10
2
P1-00330-L
(P1-055L)
C3 5 2
P1-00175-H
(P1-055H)
C3 5 2
P1-00460-L
(P1-075L)
C3 5 2
P1-00250-H
(P1-075H)
C3 5 2
P1-00600-L
(P1-110L)
C3 5 2
P1-00310-H
(P1-110H)
C3 5 2
P1-00800-L
(P1-150L)
C3
10
1
P1-00400-H
(P1-150H)
C3
10
2
P1-00930-L
(P1-185L)
C3
10
1
P1-00470-H
(P1-185H)
C3
10
2
P1-01240-L
(P1-220L)
C3
10
1
P1-00620-H
(P1-220H)
C3
10
2
P1-01530-L
(P1-300L)
C3 5 2
P1-00770-H
(P1-300H)
C3 5 2
P1-01850-L
(P1-370L)
C3 5 2
P1-00930-H
(P1-370H)
C3 5 2
P1-02290-L
(P1-450L)
C3 5 2
P1-01160-H
(P1-450H)
C3 5 2
P1-02950-L
(P1-550L)
C3 5 2
P1-01470-H
(P1-550H)
C3 5 2
- - -
-
P1-01760-H
(P1-750H)
C3 5 2 - - - -
P1-02130-H
(P1-900H)
C3 5 2
- - -
-
P1-02520-H
(P1-1100H)
C3 5 2
- - -
-
P1-03160-H
(P1-1320H)
C3 5 2
Table 1
1-6

Chapter 1
Safety Instructions
1.4.2 Caution for Machinery Directive
(Functional Safety)
The SJ series P1 inverter meets the requirements for
functional safety. Refer to the “Functional Safety Guide”
for details.
1-7

Chapter 1
Safety Instructions
1.5 Response to UL standards
1.5.1 UL CAUTION
GENERAL:
SJ series Type P1 inverter is open type AC Inverter with
three phase input and three phase output. It is intended
to be used in an enclosure. It is used to provide both an
adjustable voltage and adjustable frequency to the AC
motor. The inverter automatically maintains the required
volts-Hz ratio allowing the capability through the motor
speed range. It is multi-rated device and the ratings are
selectable according to load types by operator with key
pad operation.
Markings:
Maximum Surrounding Temperature:
- ND (Normal Duty): 50degC
- LD (Low Duty): 45degC
- VLD (Very Low Duty): 40degC
Storage Environment rating:
- 65degC (for transportation)
Instruction for installation:
- Pollution degree 2 environment and Overvoltage
category III
Electrical Connections:
- See “7.5 Main circuit terminal wiring” of user's
guide
Interconnection and wiring diagrams:
- See “7.7 Control circuit terminal wiring” of user's
guide
1-8

Chapter 1
Safety Instructions
Model
Load Type
Required
Torque
(N.m)
Conductor
size
(AWG)
Model
Load Type
Required
Torque
(N.m)
Conductor
size
(AWG)
P1-00044-L
(P1-004L)
VLD
1.4
14
LD
ND
P1-00080-L
(P1-007L)
VLD
1.4
14
P1-00041-H
(P1-007H)
VLD
1.4
14
LD
LD
ND
ND
P1-00104-L
(P1-015L)
VLD
1.4
14
P1-00054-H
(P1-015H)
VLD
1.4
14
LD
LD
ND
ND
P1-00156-L
(P1-022L)
VLD
1.4
10
P1-00083-H
(P1-022H)
VLD
1.4
14
LD
LD
ND
ND
P1-00228-L
(P1-037L)
VLD
1.4
10
P1-00126-H
(P1-037H)
VLD
1.4
12
LD
LD
14
ND
ND
P1-00330-L
(P1-055L)
VLD
3
8
P1-00175-H
(P1-055H)
VLD 3 10
LD
LD
12
ND
ND
P1-00460-L
(P1-075L)
VLD 3 6
P1-00250-H
(P1-075H)
VLD 3 8
LD 8 LD
10
ND
ND
P1-00600-L
(P1-110L)
VLD
4
4
P1-00310-H
(P1-110H)
VLD
4
8
LD
LD
ND 6 ND
P1-00800-L
(P1-150L)
VLD
2.5 – 3.0
3
P1-00400-H
(P1-150H)
VLD
4
8
LD
LD
ND 4 ND
P1-00930-L
(P1-185L)
VLD
2.5 – 3.0
1
P1-00470-H
(P1-185H)
VLD
4
6
LD 2 LD
ND 3 ND
8
P1-01240-L
(P1-220L)
VLD
5.5 – 6.6
2/0
P1-00620-H
(P1-220H)
VLD
4
4
LD
1/0
LD
ND 1 ND
6
P1-01530-L
(P1-300L)
VLD
6.0
Parallel of 1/0
P1-00770-H
(P1-300H)
VLD
6.0
1
LD
LD 2 ND
ND
3
P1-01850-L
(P1-370L)
VLD
15.0
Parallel of 1/0
P1-00930-H
(P1-370H)
VLD
15.0
1
LD
Parallel of 1/0
LD
ND
4/0
ND
P1-02290-L
(P1-450L)
VLD
6.0 – 10.0
Parallel of 2/0
P1-01160-H
(P1-450H)
VLD
6.0 – 10.0
Parallel of 2/0
LD
Parallel of 1/0
LD
Parallel of 1/0
ND
Parallel of 1/0
ND
1
P1-02950-L
(P1-550L)
VLD
19.6
Parallel of 3/0
P1-01470-H
(P1-550H)
VLD
6.0 – 10.0
Parallel of 1/0
LD
Parallel of 3/0
LD
Parallel of 1/0
ND
350kcmil
ND
2/0
Terminal size and terminal tightening torque for field
wiring:
- Use 75degC only for temperature rating of field
wiring.
- Use Cupper conductors only.
1-9

Chapter 1
Safety Instructions
Model
Fuse
Circuit Breaker
Type
Maximum Rating
Maximum Rating
Voltage (V)
Current (A)
Voltage (V)
Current (A)
P1-00044-L
(P1-004L)
Class J or T
600
50 - -
P1-00080-L
(P1-007L)
Class J or T
600
50 - -
P1-00104-L
(P1-015L)
Class J or T
600
50 - -
P1-00156-L
(P1-022L)
Class J or T
600
50 - -
P1-00228-L
(P1-037L)
Class J or T
600
50 - -
P1-00330-L
(P1-055L)
Class J or T
600
100 - -
P1-00460-L
(P1-075L)
Class J or T
600
150 - -
P1-00600-L
(P1-110L)
Class J or T
600
150 - -
P1-00800-L
(P1-150L)
Class J or T
600
150 - -
P1-00930-L
(P1-185L)
Class J or T
600
200 - -
P1-01240-L
(P1-220L)
Class J or T
600
200 - -
P1-01530-L
(P1-300L)
Class J or T
600
300 - -
P1-01850-L
(P1-370L)
Class J or T
600
300 - -
P1-02290-L
(P1-450L)
Class J or T
600
300 - -
P1-02950-L
(P1-550L)
Class J or T
600
350 - -
Required protection by Fuse and circuit-breakers:
P1-L series models
1-10
Chapter 1
Safety Instructions
Model
Fuse
Circuit Breaker
Type
Maximum Rating
Maximum Rating
Voltage (V)
Current (A)
Voltage (V)
Current (A)
P1-00041-H
(P1-007H)
Class J or T
600
30 - -
P1-00054-H
(P1-015H)
Class J or T
600
30 - -
P1-00083-H
(P1-022H)
Class J or T
600
30 - -
P1-00126-H
(P1-037H)
Class J or T
600
30 - -
P1-00175-H
(P1-055H)
Class J or T
600
75 - -
P1-00250-H
(P1-075H)
Class J or T
600
75 - -
P1-00310-H
(P1-110H)
Class J or T
600
75 - -
P1-00400-H
(P1-150H)
Class J or T
600
100 - -
P1-00470-H
(P1-185H)
Class J or T
600
100 - -
P1-00620-H
(P1-220H)
Class J or T
600
100 - -
P1-00770-H
(P1-300H)
Class J or T
600
200 - -
P1-00930-H
(P1-370H)
Class J or T
600
200 - -
P1-01160-H
(P1-450H)
Class J or T
600
200 - -
P1-01470-H
(P1-550H)
Class J or T
600
250 - -
P1-H series models
1-11

Chapter 1
Safety Instructions
Short circuit rating and overcurrent protection for each
device rating:
P1-L series models
- Suitable for use on a circuit capable of delivering
not more than 5,000 Arms symmetrical amperes,
240 V maximum.
P1-H series models
- Suitable for use on a circuit capable of delivering
not more than 5,000 Arms symmetrical amperes,
500 V maximum.
Integral:
- Integral solid state short circuit protection does not
provide branch circuit protection. Branch circuit
protection must be provided in accordance with
the National Electrical Code and any additional
local codes.
(Memo)
1-12

Chapter 2
Installation and Wiring
P1
00228
L
F F
(2) (3) (4) (5) (6) (6)
Inverter model
phases/Current)
phases/Rate current)
Model: P1-00228-LFF
Hitachi Industrial Equipment
Systems Co., Ltd.
MADE IN JAPAN
Ver.2.00
INVERTER
Input/Entrée:50Hz,60Hz 200–240V 3ph 27.1/23.3/20.8A
Output/Sortie:0-590Hz 200–240V 3ph 22.8/19.6/17.5A
Date:****
NE18361-***
MFG No. 62AA****** BB001
SJ series type P1
MFG No.; factory serial No.
Inverter
Basic Guide
(This document)
Eye bolts for hanging the inverter
P1-01850L/-00930H or above
(enclosed in the package)
Functional Safety
Guide
Heat sink
Terminal block
cover
Specification label
Backing plate
Wire separation plate
Control circuit
terminal block
Main circuit
terminals
Operator keypad
Optional slots
instruction for detail.
USB (Micro-B)
Chapter 2
Installation and Wiring
2.1 Check the Inverter
Check the contents in the package, and confirm the
inverter model with a specification label.
The model of the product is as follows:
E.g.: 200V class input voltage for Japan
Applicable motor capacity for ND rating is 3.7kW
ND rated current 17.5A
LD rated current 19.6A
VLD rated current 22.8A
-
(1) Series name P1
(2) Motor maximum rated current (at VLD rated current
00001: 0.1A to 99999: 9999.9A
(3) Input power specification
L: three-phase 200V class;
H: three-phase 400V class
(4) Panel
B: no operator keypad equipped;
F: panel equipped
(5) Region (None): Japan;
E: Europe/Southeast Asia;
U: North America;
C: China
In case of (None), blank field is omitted.
(6) Integrated noise filter
F: integrated noise filter equipped;
CB: conduit box equipped
When both F and CB are equipped, it is indicated as
FCB.
• Specification label example
Description example for P1-00228-LFF
(*) means eigenvalues
-
Configuration and description contents vary
depending on the model.
Refer to User's Guide for more details.
If optional products are included with shipment,
optional instruction will be enclosed.
P1-00228-LFF example illustration in below.
Refer to each optional product
Input ratings
(Frequency/voltage/No. of
Output ratings
(Frequency/voltage/No. of
2-1

Chapter 2
Installation and Wiring
Air flow
Wall
For
P1-00044-L to P1-02950-L
(P1-004L to P1-550L)
or
P1-00041-H to P1-01800-H
(P1-007H to P1-550H)
In order to replace life cycle parts on following models require
• P1-00041-H (P1-007H) to P1-00310-H (P1-110H)
5 cm
or more
10 cm
or more
5 cm
or more
10 cm
or more
5 cm
or more
30 cm
or more
30 cm
or more
5 cm
or more
For
P1-02160-H to P1-03610-H
(P1-750H to P1-1320H)
2.2 Install the Inverter
Transportation
• The inverter uses plastic parts. When carrying the
inverter, handle it carefully to prevent damage to
the parts.
• Do not carry the inverter by holding the front or
terminal block cover. Doing so may cause the
inverter to fall.
• Do not install and operate the inverter if it is
damaged or its parts are missing.
Ambient temperature
• Avoid installing the inverter in a place where the
ambient temperature goes above or below the
allowable range defined by the standard inverter
specification.
Ambient temperature:
ND rated : -10 to 50°C
LD rated : -10 to 45°C
VLD rated : -10 to 40°C
• Leave sufficient space around the inverter.
Measure the temperature in a position about 5 cm
distant from the bottom-center point of the
inverter, and check that the measured
temperature is within the allowable range.
Operating the inverter at a temperature outside
this range will shorten the inverter life (especially
the capacitor life), resulting in damage to the
inverter.
Do not install on a high temperature, high
humidity or easily condensation area
• Avoid installing the inverter in a place where the
relative humidity goes above or below the range
(20% to 90% RH), as defined by the standard
inverter specification. Avoid a place where the
inverter is subject to condensation.
• Condensation inside the inverter will result in
short circuits, which may cause damage to the
inverter. Also avoid places where the inverter is
exposed to direct sunlight.
Surface on which to install the inverter
• The inverter will reach a high temperature (up to
about 150°C) during operation. Install the inverter
on a vertical wall surface made of nonflammable
material (e.g., metal) to avoid the risk of fire.
• In particular, keep sufficient distance between the
inverter and other heat sources (e.g., braking
resistors and reactors) if they are installed in the
vicinity.
a clearance of 22cm or more:
• P1-00800-L (P1-150L) to P1-01240-L (P1-220L)
• P1-00380-H (P1-150H) to P1-00620-H (P1-220H)
In order to replace life cycle parts on following models is
required to remove the installed units:
• P1-00044-L (P1-004L) to P1-00600-L (P1-110L)
• Keep enough clearance
between the inverter and the
wiring ducts located above
and below the inverter to
prevent the latter from
obstructing the ventilation of
the inverter.
For dimension drawing of
inverter see chapter 2-5.
2-2

Chapter 2
Installation and Wiring
(Unacceptable)
Ventilation
Inverter
(Acceptable)
Ventilation
Inverter
Position of ventilation fan
Screw
Screw
Screw
Screw
Installation environment
• Avoid installing the inverter in a place where the
inverter is subject to dust, corrosive gases,
combustible gases, flammable gases, grinding fluid
mist, or salt water.
• Foreign particles entering the inverter will cause it
to fail. If you use the inverter in a considerably
dusty environment, install the inverter inside a
totally enclosed panel.
Installation method and position
• Install the inverter vertically and securely with
screws or bolts on a surface that is free from
vibrations and that can bear the inverter weight.
• If the inverter is not installed properly, its cooling
performance may be degraded and tripping or
inverter damage may result.
Reduction of enclosure size
• External heat sink installation may reduce internal
heat emission resulting, a reduction on enclosure
size.
• External heat sink mounting for the inverter
P1-00044-L to P1-00228-L (P1-004L to P1-037L)
and
P1-00041-H to P1-00126-H (P1-007H to P1-037H)
requires an optional fitting metal.
• Other models than above can be installed with the
originally attached fitting metal. To mount the
inverter in an enclosure for external heat sink, cut
out the enclosure panel according to the specified
cutting dimensions.
• The cooling section (including the heat sink)
positioned outside the enclosure has a cooling fan.
Therefore, do not place the enclosure in any
environment where it is exposed to water drops,
oil mist, or dust.
• The heat sink part reaches a high temperature.
Install a protection cover as needed.
Mounting in an enclosure
• When mounting multiple inverters in an enclosure
with a ventilation fan, carefully design the layout
of the ventilation fan, air intake port, and inverters.
An inappropriate layout will reduce the
inverter-cooling effect and raise the ambient
temperature. Plan the layout so that the inverter
ambient temperature will remain within the range
specified in the specification table.
When the inverter is installed below ventilation fan,
the incoming dust may hit the inverter. Place in a
position to avoid this falling dust.
2-3

Chapter 2
Installation and Wiring
Model P1-*****-* (P1-*****-*)
200V class: 00044-L(004L), 00080-L(007L),
0104-L(015L),00156-L(022L), 00228-L(037L)
400V class: 00041-H(007H),00054-H(015H), 00083-H(022H),
00126-H(037H)
Dimension
W(mm)
H(mm)
D(mm)
150
255
140
Model P1-*****-* (P1-*****-*)
200V class: 00330-L(055L), 00460-L(075L), 00600-L(110L)
400V class: 00175-H(055H), 00250-H(075H),00310-H(110H)
Dimension
W(mm)
H(mm)
D(mm)
210
260
170
Model (P1-*****-*)
200V class: 00800-L(150L), 00930-L(185L), 01240-L(220L)
400V class: 00400-H(150H), 00470-H(185H), 00620-H(220H)
Dimension
W(mm)
H(mm)
D(mm)
245
390
190
Model P1-*****-* (P1-*****-*)
200V class: 01530-L(300L)
400V class: 00770-H(300H)
Dimension
W(mm)
H(mm)
D(mm)
540
300
195
2.3 Dimension Drawing
If you add optional parts to the inverter, some extra
space is required in the direction of the depth of the
inverter depending on the wiring layout. Keep a
clearance of 50 mm or more. For details, refer to the
instruction manual for each optional product.
(Eg.) See "Chapter 7 Specifications" for details.
VLD rated current for 00046-L(004L) is 4.6A,
(ND rated motor capacity is 0.4kW), and L indicates 200V
class, while H indicates 400V class.
2-4

Chapter 2
Installation and Wiring
Model P1-*****-* (P1-*****-*)
200V class: 01850-L(370L), 02290-L(450L),
400V class: 00930-H(370H),01160-H(450H),01470-H(550H)
Dimension
W(mm)
H(mm)
D(mm)
550
390
250
Model P1-*****-* (P1-*****-*)
200V class: 02950-L(550L)
Dimension
W(mm)
H(mm)
D(mm)
700
480
250
2-5

Chapter 2
Installation and Wiring
Total cable length
Sensitivity current (mA)
100 m or less
50
300 m or less
100
No.
Name
Function
<1>
Electric wire
See "Recommended cable gauges, wiring accessories, and crimp
terminals” on Page 2-9.
<2>
Earth-leakage circuit breaker ELCB or
MCCB
<3>
Magnetic contactor MC
<4>
Input AC reactor
(For harmonic control, power supply
coordination, and power factor
correction)
Use input reactor for harmonic wave control, or when power supply
voltage imbalance exceeds 3% or more, or when the power supply
capacity is over 500 kVA or more, or when the power voltage may
change rapidly. This reactor also improves the power factor.
<5>
Noise filter for inverter
This noise filter reduces the conductive noise that is generated by
the inverter and transmitted in cables. Connect this noise filter to
the primary side (input side) of the inverter.
<6>
Radio noise filter
(Zero-phase reactor)
The inverter may generate radio noise through power supply wiring
during operation.
Use this noise filter to reduce the radio noise (radiant noise).
<7>
Radio noise filter on the input side
(Capacitor filter)
Use this noise filter to reduce the radiant noise radiated from input
cables.
<8>
DC Choke
Use DC chokes to reduce the harmonic generated by the inverter.
<9>
Braking resistor
Use these devices to increase the braking torque of the inverter for
operation in which the inverter turns the connected load on and off
very frequently or decelerates the load running with a high moment
of inertia.
<10>
Regenerative braking unit
<11>
Noise filter on the output side
Connect this noise filter between the inverter and motor to reduce
the radiant noise radiated from cables for the purpose of reducing
the electromagnetic interference with radio and television reception
and preventing malfunctions of measuring equipment and sensors.
<12>
Radio noise filter
(Zero-phase reactor)
Use this noise filter to reduce the noise generated on the output
side of the inverter. (This noise filter can be used on both the input
and output sides.)
<13>
Output AC reactor
For reducing vibrations and
preventing thermal relay
malfunction
Inverter driven motor may cause large vibrations compared to
commercial power supply direct start motor.
Connect Output AC reactor between inverter and motor to lessen
the pulsation of motor. Also, connect output AC reactor, when the
cable length between inverter and motor is longer (10 m or more),
to prevent thermal relay malfunction due to the harmonic waves
generated by switching operation of inverter. Note that the thermal
relay can be replaced with a current sensor to avoid the
malfunction.
<14>
LCR filter
Connect this noise filter between the inverter and motor to convert
the inverter output into a sinusoidal waveform and to reduce the
motor vibration, motor noise and the radiant noise radiated from
cables. Surge voltage can be also controlled.
Notes:
• The description of peripheral equipment is for Hitachi 3-phase, 4-pole squirrel-cage motor.
• Select breakers with proper interrupting capacity. (Use inverter-ready breakers)
• Use earth-leakage circuit breakers (ELB or MCB) to ensure safety.
• Use copper electric wire (HIV cable) with allowable temperature rating 75°C or more.
• If the power line exceeds 20 m, use cable with mayor wire size for the power line.
• Tighten each terminal screw with the specified tightening torque.
Loose terminal screws may cause short circuits and fire.
Excessive tightening torque may cause damage to the terminal block or inverter body.
• When selecting a rated sensitivity current for earth-leakage circuit breaker, use a
separated breaker considering a total cable length of between Inverter-Power supply and
Inverter–Motor distance. Do not use a high-speed type of earth-leakage circuit breaker.
Use a delayed-type circuit breaker, because the high-speed type may malfunction.
• When using a CV cable for wiring through a metal conduit, the average current leakage
would be 30mA/km.
• When using a high relative dielectric constant cable such as IV cable, the leakage current is
about eight times as high as the standard cable. Therefore, when using an IV cable, use
ELCB with rated sensitivity current by eight times given in the table below. If the total cable
length exceeds 100 m, use a CV cable.
•Do not pull the power line cable after wiring. Doing so may cause screw loosening.
R S T
R0
T0
Power
supply
U V W
PD P N
Motor
M
RB
<1>
<2>
<3>
INV
<4>
<5>
<6>
<7>
<8>
<9>
<10>
<11>
<12>
<13>
<14>
2.4 Inverter Wiring
Applicable peripheral equipment
2-6

Chapter 2
Installation and Wiring
Symbol
Terminal name
Description
R,S,T
(L1,L2,L3)
Main power input
Connect to the AC power supply. Leave these terminals unconnected
when using a regenerative converter.
U,V,W
(T1,T2,T3)
Inverter output
Connect a Three-phase motor.
PD,P
(+1,+)
DC choke
connection terminal
Remove the PD-P jumper from terminals, and connect the optional DC
choke for power factor improvement.
P,RB
(+,RB)
External chopper
braking resistor
connection terminal
Connect the optional external braking resistor. See “Chapter 7
Specifications” for built-in braking circuit inverter models.
P,N
(+,-)
Regenerative braking
unit connection
terminal
Connect the optional regenerative braking unit.
Inverter ground
terminal
This serves as a ground terminal for the inverter chassis to ground.
Connect 200V class and 400V class models to Type-D grounding and
Type-C grounding, respectively.
ELB
Earth-leakage
circuit breaker
Magnetic
contactor
MC
Three-phase
AC power
supply
P+R/L1
S/L2
T/L3
R0
T0
U/T1
V/T2
W/T3
Control circuit
power supply
Type-D grounding
(200 V class model)
Type-C grounding
(400 V class model)
J51 connector
Three-phase
M
Main circuit
terminal section
3φ
P
PD
RB
N
Jumper
Internal EMC filter
Jumper or terminal
Disable
Enable
200V class:
200 to 240Vac
400V class:
380 to 500Vac
2.5 Wiring of the main circuit
Wire the main circuit of the inverter.
The following illustration shows the power supply and
wiring connections to a motor only.
Open a terminal block cover to wire the terminal block in
the main circuit.
Explanation of main circuit terminal block
See “Chapter 1 Safety Instructions” for response to CE and UL
standards.
The screw size may vary depending on terminal. Refer to Page
2-9/2-10 for the size of the terminal screw for the power line cable
while for other terminals, refer to the drawings of the wiring on
Page 2-11 or later.
The tables on Page 2-9/2-10 list the specifications of cables, crimp
terminals, and terminal screw tightening torques for reference.
Recommended wire gauges vary depending on the rated load
settings (ND/LD/VLD).
2-7

Chapter 2
Installation and Wiring
Applicable P1
inverter model
P1-*******
Rating
setting
Power line cable
AWG(mm2)
R,S,T,U,V,W,
P,PD,N
Grounding
cable
AWG(mm2)
External braking
resistor
between P and
RBAWG(mm2)
Power line cable
Terminal screw
size
Crimp
terminal
Tightening
torque
N•m
P1-00044-L
(P1-004L)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
P1-00080-L
(P1-007L)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
P1-00104-L
(P1-015L)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
P1-00156-L
(P1-022L)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
10(5.3)
10(5.3)
10(5.3)
5.5-4/5.5-4
P1-00228-L
(P1-037L)
ND
10(5.3)
10(5.3)
10(5.3)
M4
5.5-4/5.5-4
1.4
LD
VLD
P1-00330-L
(P1-055L)
ND
8(8.4)
8(8.4)
8(8.4)
M5
8-5/8-5
3.0
LD
VLD
P1-00460-L
(P1-075L)
ND
8(8.4)
6(13.3)
8(8.4)
M5
8-5/8-5
3.0
LD
VLD
4(21.2)
6(13.3)
14-5/8-5
P1-00600-L
(P1-110L)
ND
6(13.3)
6(13.3)
6(13.3)
M6
14-6/14-6
4.0
LD
4(21.2)
4(21.2)
22-6/14-6
VLD
P1-00800-L
(P1-150L)
ND
4(21.2)
6(13.3)
4(21.2)
M6
22-6/14-6
2.5 to 3.0
LD
3(26.7)
3(26.7)
38-6/14-6
VLD
P1-00930-L
(P1-185L)
ND
3(26.7)
6(13.3)
3(26.7)
M6
38-6/14-6
5.5 to 6.6
LD
2(33.6)
2(33.6)
60-6/14-6
VLD
1(42.4)
1(42.4)
P1-01240-L
(P1-220L)
ND
1(42.4)
6(13.3)
1(42.4)
M8
60-8/14-6
5.5 to 6.6
LD
1/0(53.5)
1/0(53.5)
VLD
2/0(67.4)
2/0(67.4)
70-8/14-6
P1-01530-L
(P1-300L)
ND
2/0(67.4)
4(21.2)
―
M8
70-8/22-8
6.0
LD
1/0×2(53.5×2)
60-8/22-8
VLD
P1-01850-L
(P1-370L)
ND
4/0(107.2)
4(21.2)
―
M8
100-8/22-6
15.0
LD
1/0×2(53.5×2)
60-8/22-6
VLD
P1-02290-L
(P1-450L)
ND
1/0×2(53.5×2)
4(21.2)
―
M8
60-8/22-6
6.0 to 10.0
LD
VLD
2/0×2(67.4×2)
70-8/22-6
P1-02950-L
(P1-550L)
ND
350kc(177)
3(26.7)
―
M10
180-8/38-6
19.6
LD
3/0×2(85.0×2)
80-8/38.6
VLD
2.6 Recommended wire gauges, wiring
accessories, and crimp terminals
200V class
The wire gauges in the above table shows the designed values
based on HIV cables (with thermal resistance of 75°C).
Please use the round type crimp terminals (for the UL standard)
suitable for the use electric wire when you connect the electric
wire with the main circuit terminal block. Please put on pressure
to the crimp terminals with a crimp tool that the crimp terminal
maker recommends.
2-8

Chapter 2
Installation and Wiring
Applicable P1
inverter model
P1-*******
Rating
setting
Power line cable
AWG(mm2)
R,S,T,U,V,W,
P,PD,N
Grounding
cable
AWG(mm2)
External braking
resistor
between P and
RBAWG(mm2)
Power line cable
Terminal screw
size
Crimp
terminal
Tightening
torque
N•m
P1-00041-H
(P1-007H)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
P1-00054-H
(P1-015H)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
P1-00083-H
(P1-022H)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
VLD
P1-00126-H
(P1-037H)
ND
14(2.1)
14(2.1)
14(2.1)
M4
2-4/2-4
1.4
LD
12(3.3)
12(3.3)
12(3.3)
5.5-4/5.5-4
VLD
P1-00175-H
(P1-055H)
ND
12(3.3)
12(3.3)
12(3.3)
M5
5.5-5/5.5-5
3.0
LD
10(5.3)
10(5.3)
10(5.3)
VLD
P1-00250-H
(P1-075H)
ND
10(5.3)
10(5.3)
10(5.3)
M5
5.5-5/5.5-5
3.0
LD
8(8.4)
8(8.4)
8(8.4)
8-5/8-5
VLD
P1-00310-H
(P1-110H)
ND
8(8.4)
8(8.4)
8(8.4)
M6
8-6/8-6
4.0
LD
VLD
P1-00400-H
(P1-150H)
ND
8(8.4)
8(8.4)
8(8.4)
M6
8-6/8-6
4.0
LD
VLD
P1-00470-H
(P1-185H)
ND
8(8.4)
8(8.4)
8(8.4)
M6
8-6/8-6
4.0
LD
6(13.3)
6(13.3)
14-6/8-6
VLD
P1-00620-H
(P1-220H)
ND
6(13.3)
8(8.4)
6(13.3)
M6
14-6/8-6
4.0
LD
4(21.2)
4(21.2)
22-6/8-6
VLD
P1-00770-H
(P1-300H)
ND
3(26.7)
6(13.3)
-
M8
38-8/14-8
6.0
LD
2(33.6)
VLD
1(42.4)
60-8/14-8
P1-00930-H
(P1-370H)
ND
1(42.4)
6(13.3)
-
M8
60-8/14-8
15.0
LD
VLD
P1-01160-H
(P1-450H)
ND
1(42.4)
6(13.3)
-
M8
60-8/14-8
6.0~10.0
LD
1/0(53.5)
VLD
2/0(67.4)
70-8/14-8
P1-01800-H
(P1-550H)
ND
2/0(67.4)
4(21.2)
-
M8
70-8/22-8
6.0~10.0
LD
1/0×2(53.5×2)
60-8/22-8
VLD
P1-02160-H
(P1-750H)
ND
― ― ― ― ―
―
LD
VLD
P1-02600-H
(P1-900H)
ND
― ― ― ― ―
―
LD
VLD
P1-03250-H
(P1-1100H)
ND
― ― ― ― ―
―
LD
VLD
P1-03610-H
(P1-1320H)
ND
― ― ― ― ―
―
LD
VLD
400V class
The wire gauges in the above table shows the designed values
based on HIV cable (with thermal resistance of 75°C).
Please use the round type crimp terminals (for the UL standard)
suitable for the use electric wire when you connect the electric
wire with the main circuit terminal block. Please put on pressure
to the crimp terminals with a crimp tool that the crimp terminal
maker recommends.
2-9

Chapter 2
Installation and Wiring
Model
P1-*******
(P1-****)
Applicable
Motor
(kW)
Applicable devices (Input Voltage 200~220V)
Without reactor
(DCL or ACL)
With reactor
(DCL or ACL)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Example
model
Current
Rate
AC-1
AC-3
Example
model
Current
Rate
AC-1
AC-3
P1-00044-L(P1-004L)
0.4
EB-30E 5 HS8
HS8
EB-30E 5 HS8
HS8
P1-00080-L(P1-007L)
0.75
EB-30E
10
HS8
HS8
EB-30E 5 HS8
HS8
P1-00104-L(P1-015L)
1.5
EB-30E
15
HS8
HS8
EB-30E
10
HS8
HS8
P1-00156-L(P1-022L)
2.2
EB-30E
20
HS8
HS8
EB-30E
15
HS8
HS8
P1-00228-L(P1-037L)
3.7
EB-30E
30
HS8
HS20
EB-30E
20
HS8
HS20
P1-00330-L(P1-055L)
5.5
EB-50E
40
HS20
HS25
EB-30E
30
HS8
HS20
P1-00460-L(P1-075L)
7.5
EB-50E
50
HS35
HS35
EB-50E
40
HS20
HS25
P1-00600-L(P1-110L)
11
EB-100E
75
HS50
H65C
EB-100E
60
HS35
HS50
P1-00800-L(P1-150L)
15
RXK125-S
125
H65C
H80C
EB-100E
100
HS50
H65C
P1-00930-L(P1-185L)
18.5
RXK125-S
125
H80C
H100C
EB-100E
100
HS50
H65C
P1-01240-L(P1-220L)
22
EXK225
150
H80C
H125C
RXK125-S
125
H65C
H80C
P1-01530-L(P1-300L)
30
EXK225
200
H125C
H150C
EXK225
150
H80C
H125C
P1-01850-L(P1-370L)
37
RXK250-S
250
H150C
H200C
EXK225
200
H100C
H125C
P1-02290-L(P1-450L)
45
EX400
300
H200C
H250C
EXK225
225
H125C
H150C
P1-02950-L(P1-550L)
55
EX400
400
H200C
H300C
EX400
300
H150C
H250C
Model
P1-*******
(P1-****)
Applicable
Motor
(kW)
Applicable devices(Input Voltage 200~220V)
Without reactor
(DCL or ACL)
With reactor
(DCL or ACL)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Example
model
Current
Rate
AC-1
AC-3
Example
model
Current
Rate
AC-1
AC-3
P1-00044-L(P1-004L)
0.75
EB-30E
10
HS8
HS8
EB-30E 5 HS8
HS8
P1-00080-L(P1-007L)
1.5
EB-30E
15
HS8
HS8
EB-30E
10
HS8
HS8
P1-00104-L(P1-015L)
2.2
EB-30E
20
HS8
HS8
EB-30E
15
HS8
HS8
P1-00156-L(P1-022L)
3.7
EB-30E
30
HS8
HS20
EB-30E
20
HS8
HS20
P1-00228-L(P1-037L)
5.5
EB-50E
40
HS20
HS25
EB-30E
30
HS8
HS20
P1-00330-L(P1-055L)
7.5
EB-50E
50
HS35
HS35
EB-50E
40
HS20
HS25
P1-00460-L(P1-075L)
11
EB-100E
75
HS50
H65C
EB-100E
60
HS35
HS50
P1-00600-L(P1-110L)
15
RXK125-S
125
H65C
H80C
EB-100E
100
HS50
H65C
P1-00800-L(P1-150L)
18.5
RXK125-S
125
H80C
H100C
EB-100E
100
HS50
H65C
P1-00930-L(P1-185L)
22
EXK225
150
H80C
H125C
RXK125-S
125
H65C
H80C
P1-01240-L(P1-220L)
30
EXK225
200
H125C
H150C
EXK225
150
H80C
H125C
P1-01530-L(P1-300L)
37
RXK250-S
250
H150C
H200C
EXK225
200
H100C
H125C
P1-01850-L(P1-370L)
45
EX400
300
H200C
H250C
EXK225
225
H125C
H150C
P1-02290-L(P1-450L)
55
EX400
400
H200C
H300C
EX400
300
H150C
H250C
P1-02950-L(P1-550L)
75
EX600B
500
H300C
H400C
EX400
400
H200C
H300C
2.7 Applicable circuit breaker
200V class
• For ND rating
• For LD/VLD rating
Device model name on above table shows example selection. The
device selection should be made in base on rated current, short
circuit current capability and accordance to the local electrical
legislation.
Applicable motor capacity is based on Hitachi 200Vac, 60Hz, 4 pole
IE3 motor.
Refer to the wire gauge table on chapter 2-8 for power line cable.
Electrical endurance for AC-1 magnetic contactor is 500000 times,
however, for emergency stop in motor operation will be only 25
times.
Select AC-3 class magnetic contactor for inverter output for
application which has an emergency stop or commercial power line
operation.
When selecting oversize inverter capacity compare to motor rating,
select according to the inverter capacity
2-10

Chapter 2
Installation and Wiring
Model
P1-*******
(P1-****)
Applicable
Motor
(kW)
Applicable devices (Input Voltage 400~440V)
Without reactor
(DCL or ACL)
With reactor
(DCL or ACL)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Example
model
Current
Rate
AC-1
AC-3
Example
model
Current
Rate
AC-1
AC-3
P1-00041-H(P1-007H)
0.75
EX50C 5 HS8
HS8
EX50C 5 HS8
HS8
P1-00054-H(P1-015H)
1.5
EX50C
10
HS8
HS8
EX50C 5 HS8
HS8
P1-00083-H(P1-022H)
2.2
EX50C
10
HS8
HS8
EX50C
10
HS8
HS8
P1-00126-H(P1-037H)
3.7
EXK50-C
15
HS8
HS10
EX50C
10
HS8
HS10
P1-00175-H(P1-055H)
5.5
EXK50-C
20
HS8
HS20
EXK50-C
15
HS8
HS20
P1-00250-H(P1-075H)
7.5
EXK50-C
30
HS8
HS25
EXK50-C
20
HS20
HS25
P1-00310-H(P1-110H)
11
EXK50-C
40
HS20
HS35
EXK50-C
30
HS25
HS35
P1-00400-H(P1-150H)
15
EXK50-C
50
HS25
HS50
EXK50-C
40
HS35
HS50
P1-00470-H(P1-185H)
18.5
EXK100-C
75
HS35
HS50
EXK50-C
50
HS50
HS50
P1-00620-H(P1-220H)
22
EXK100-C
75
HS50
H65C
EXK60-C
60
HS50
H65C
P1-00770-H(P1-300H)
30
EXK100-C
100
HS50
H80C
EXK100-C
75
H80C
H80C
P1-00930-H(P1-370H)
37
RXK125-S
125
H80C
H100C
EXK100-C
100
H80C
H100C
P1-01160-H(P1-450H)
45
EXK225
150
H80C
H125C
RXK125-S
125
H100C
H125C
P1-01470-H(P1-550H)
55
EXK225
200
H100C
H125C
EXK225
150
H150C
H125C
P1-01760-H(P1-750H)
75
RXK250-S
250
H150C
H200C
EXK225
200
H200C
H200C
P1-02130-H(P1-900H)
90
EX400
300
H200C
H250C
EXK225
225
H200C
H250C
P1-02520-H(P1-1100H)
110
EX400
400
H200C
H300C
EX400
300
H250C
H300C
P1-03160-H(P1-1320H)
132
EX600B
500
H250C
H300C
EX400
350
H400C
H400C
Model
P1-*******
(P1-****)
Applicable
Motor
(kW)
Applicable devices (Input Voltage 400~440V)
Without reactor
(DCL or ACL)
With reactor
(DCL or ACL)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Earth-leakage breaker
(ELB)
Magnetic Contactor
(MC)
Example
model
Current
Rate
AC-1
AC-3
Example
model
Current
Rate
AC-1
AC-3
P1-00041-H(P1-007H)
1.5
EX50C
10
HS8
HS8
EX50C 5 HS8
HS8
P1-00054-H(P1-015H)
2.2
EX50C
10
HS8
HS8
EX50C
10
HS8
HS8
P1-00083-H(P1-022H)
3.7
EXK50-C
15
HS8
HS10
EX50C
10
HS8
HS8
P1-00126-H(P1-037H)
5.5
EXK50-C
20
HS8
HS20
EXK50-C
15
HS8
HS20
P1-00175-H(P1-055H)
7.5
EXK50-C
30
HS8
HS25
EXK50-C
20
HS8
HS20
P1-00250-H(P1-075H)
11
EXK50-C
40
HS20
HS35
EXK50-C
30
HS8
HS25
P1-00310-H(P1-110H)
15
EXK50-C
50
HS25
HS50
EXK50-C
40
HS20
HS35
P1-00400-H(P1-150H)
18.5
EXK100-C
75
HS35
HS50
EXK50-C
50
HS20
HS35
P1-00470-H(P1-185H)
22
EXK100-C
75
HS50
H65C
EXK60-C
60
HS35
HS50
P1-00620-H(P1-220H)
30
EXK100-C
100
HS50
H80C
EXK100-C
75
HS50
H65C
P1-00770-H(P1-300H)
37
RXK125-S
125
H80C
H100C
EXK100-C
100
HS50
H65C
P1-00930-H(P1-370H)
45
EXK225
150
H80C
H125C
RXK125-S
125
H65C
H80C
P1-01160-H(P1-450H)
55
EXK225
200
H100C
H125C
EXK225
150
H80C
H100C
P1-01470-H(P1-550H)
75
EX400
250
H150C
H200C
EXK225
200
H100C
H125C
P1-01760-H(P1-750H)
90
EX400
300
H200C
H250C
EXK225
225
H125C
H150C
P1-02130-H(P1-900H)
110
EX400
400
H200C
H300C
EX400
300
H150C
H250C
P1-02520-H(P1-1100H)
132
EX600B
500
H250C
H300C
EX400
350
H200C
H250C
P1-03160-H(P1-1320H)
160
EX600B
600
H400C
H400C
EX400
400
H250C
H300C
400V class
• For ND rating
• For LD/VLD rating
Device model name on above table shows example selection. The
device selection should be made in base on rated current, short
circuit current capability and accordance to the local electrical
legislation.
Applicable motor capacity is based on Hitachi 400Vac, 60Hz, 4 pole
IE3 motor.
Refer to the wire gauge table on chapter 2-8.
Electrical endurance for AC-1 magnetic contactor is 500000 times,
however, for emergency stop in motor operation will be only 25
times.
Select AC-3 class magnetic contactor for inverter output for
application which has an emergency stop or commercial power line
operation.
When selecting oversize inverter capacity compare to motor rating,
select according to the inverter capacity
2-11

Chapter 2
Installation and Wiring
Model
P1-******
(P1-****)
Appli
cable
motor
(kW)
Min.
Resis
tor
(Ω)
Resistor
selection
Ex. (Ω)
Braking Resistor
Model
Usage
ratio
(%)
Short
period
capacity
(kW)
Rated
capacity
(kW)
00044-L
(004L)
0.4
50
180
SRB200-1
10
0.7
0.2
00080-L
(007L)
0.75
50
100
SRB200-1
10
0.7
0.2
00104-L
(015L)
1.5
35
100
SRB200-2
7.5
1.25
0.2
00156-L
(022L)
2.2
35
50
SRB300-1
7.5
2.5
0.3
00228-L
(037L)
3.7
35
35
SRB400-1
7.5
3.6
0.4
00330-L
(055L)
5.5
16
17
RB3
10
7.7
1.2
00460-L
(075L)
7.5
10
17
RB3
10
7.7
1.2
00600-L
(110L)
11
10
11.7
RB2 ×3
parallel
10
11.4
1.8
00800-L
(150L)
15
7.5
8.5
RB3 ×2
parallel
10
15.4
2.4
00930-L
(185L)
18.5
7.5
8.5
RB3 ×2
parallel
10
15.4
2.4
01240-L
(220L)
22 5 5.7
RB3 ×3
parallel
10
23.1
3.6
Model
P1-******
(P1-****)
Appli
cable
motor
(kW)
Min.
Resis
tor
(Ω)
Resistor
selection
Ex. (Ω)
Braking Resistor
Model
Usage
ratio
(%)
Short
period
capacity
(kW)
Rated
capacity
(kW)
00041-H
(007H)
0.75
100
360
SRB200-1
×2series
10
1.4
0.4
00054-H
(015H)
1.5
100
100
SRB200-1
×2series
10
1.4
0.4
00083-H
(022H)
2.2
100
100
SRB200-2
×2series
7.5
2.5
0.4
00126-H
(037H)
3.7
70
100
SRB300-1
×2 series
7.5 5 0.6
00175-H
(055H)
5.5
70
100
SRB300-1
×2 series
7.5 5 0.6
00250-H
(075H)
7.5
35
70
SRB400-1
×2 series
7.5
7.2
0.8
00310-H
(110H)
11
35
50
RB1
×2 series
×2 parallel
10
10.4
1.6
00400-H
(150H)
15
24
35
RB2
×2 series
×2parallel
10
15.2
2.4
00470-H
(185H)
18.5
24
35
RB2
×2 series
×2parallel
10
15.2
2.4
00620-H
(220H)
22
20
25
RB1
×2 series
×4parallel
10
20.8
3.2
00770-H
(300H)
30
15
17
RB3
×2 series
×2parallel
10
30.8
4.8
00930-H
(370H)
37
15
17
RB3
×2 series
×2parallel
10
30.8
4.8
01160-H
(450H)
45
10
10
CA-KB
(10Ω5unit)
20
45
17
01800-H
(550H)
55
10
10
CA-KB
(10Ω5unit)
20
45
17
2.8 Chopper Braking Resistor
• SJ Series P1 has a built-in chopper braking circuit in model below.
P1-00044-L (004L) to P1-01240-L (022L)
P1-00041-H (007H) to P1-00930-H (370H)
• By using an optional braking resistor, permit to use for high
regeneration load application such as lift or high speed load.
200V class
• SJ Series P1 can offer when desired a built-in chopper braking circuit
in models below.
P1-01160-H (450H) to P1-01470-H (550H)
• Using optional braking unit or regenerative unit, permit to use on
high regenerative load application even for models without built-in
chopp er braking circuit.
• The table below shows an example selection of braking resistor to
output 100% of braking torque for each motor rating on list.
■400V
When using RB2×2series×2parallel, will require in total 4 RB2 units.
2-12

Chapter 2
Installation and Wiring
R0
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
T0
G
P
(+) N (-)
G
PD-P Jumper
EMC filter
enabled
EMC filter
disabled
Charge lamp
(Turn-on while
energized)
OFF G ON
RB
(RB)
PD
(+1)
00044-L/00080-L/
00104-L/00156-L/
00228-L/00041-H/
00054-H/00083-H/
00126-H
Screw size
R0,T0: M4
Ground terminal: M4
Other terminals: M4
Power input line
Motor output line
Control circuit terminal
Main circuit terminal
Model P1- *****-*(P1-****)
200V class: 00330-L(055L), 00460-L(075L), 00600-L(110L)
400V class: 00175-H(055H), 00250-H(075H), 00310-H(110H)
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
G
T0
P
(+)
RB
(RB)
G
PD-P Jumper
EMC filter
enabled
EMC filter
disabled
Charge lamp
(Turn-on while
energized)
OFF G ON
N
(-)
PD
(+1)
R0
Power input line
Motor output line
00330-L/00460-L/
00175-H/00250-H
Screw size
R0,T0: M4
Ground terminal: M5
Other terminals: M5
00600-L/00310-H
Screw size
R0,T0: M4
Ground terminal: M6
Other terminals: M6
Model P1- *****-*(P1-****)
200V class: 00800-L(150L)/00930-L(185L)/01240-L(220L)
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
R0
PD
(+1) P (+) N (-)
RB
(RB)
G
PD-P Jumper
T0
G
Ground terminal
(With jumper)
Ground terminal
To enable EMC filter
Power input line
Motor output line
Charge lamp
(Turn-on while
energized)
00800-L/00930-L
Screw size
R0, T0 : M4
Ground terminal: M6
Other terminals: M6
01240-L
Screw size
R0, T0 : M4
Ground terminal: M6
Other terminals: M8
Model P1- *****-*(P1-****)
400V class: 00400-H(150H), 00470-H(185H), 00620-H(220H)
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
G
T0
P
(+)
RB
(RB)
G
PD-P Jumper
EMC filter
enabled
EMC filter
disabled
Charge lamp
(Turn-on while
energized)
OFF G ON
N
(-)
PD
(+1)
R0
Power input line
Motor output line
Screw size
R0,T0: M4
Ground terminal: M6
Other terminals: M6
Model P1- *****-*(P1-****)
200V class: 00044-L(004L), 00080-L(007L), 00104-L(015L),
00156-L(022L),00228-L(037L)
400V class: 00041-H(007H), 00054-H(015H), 00083-H(022H),
00126-H(037H)
Control circuit terminal
Main circuit terminal
Control circuit
terminal
Main circuit terminal
Ground
terminal
(With jumper)
Fix the jumper by
using 2 screws.
Control circuit terminal
Main circuit terminal
2.9 Wiring
Not necessary the charge lamp will indicate energization
status while using without J51 jumper. For own safety,
make sure to power off before handling the inverter.
Switch EMC jumper to enable or disable the EMC filter.
Exchange the EMC enable jumper from ground terminal to
enable or disable the EMC filter.
Switch EMC jumper to enable or disable the EMC filter.
Switching the short-circuit connector can enable/disable the
EMC filter.
2-13

Chapter 2
Installation and Wiring
Model P1- *****-*(P1-****)
200V class: 01530-L(300L)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M6
Other terminals: M8
R
(L1) S (L2) T (L3)
U
(T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
PD-P Jumper
Power input line
Motor output line
G
G
Model P1- *****-*(P1-****)
400V class: 00770-H(300H)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M6
Other terminals: M8
R
(L1) S (L2) T (L3)
U
(T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
RB
(RB)
PD-P Jumper
Input power line
Motor output line
G
G
Model P1- *****-*(P1-****)
200V class: 01850-L(370L)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M8
Other terminals: M8
R
(L1) S (L2) T (L3)
U
(T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
PD-P Jumper
Power input line
Motor output line
G
G
Model P1- *****-*(P1-****)
400V class: 00930-H(370H)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M8
Other terminals: M8
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
RB
(RB)
PD-P Jumper
Power input line
Motor output line
G
G
Switch the jumper bar to enable or disable the EMC filter.
Switch the jumper bar to enable or disable the EMC filter.
Switch the jumper bar to enable or disable the EMC filter.
Switch the jumper bar to enable or disable the EMC filter.
2-14

Chapter 2
Installation and Wiring
Model P1- *****-*(P1-****)
200V class: 02290-L(450L)
R
(L1) S (L2) T (L3)
U
(T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
PD-P Jumper
Input power line
Motor output line
G
G
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M8
Other terminals: M8
Model P1- *****-*(P1-****)
400V class: 01160-H(450H)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M8
Other terminals: M8
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
RB
(RB)
PD-P Jumper
Input power line
Motor output line
G
G
Model P1- *****-*(P1-****)
200V class: 02950-L(550L)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M8
Other terminals: M8
R
(L1) S (L2) T (L3)
U
(T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
PD-P Jumper
Input power line
Motor output line
G
G
Model P1- *****-*(P1-****)
400V class: 01470-H(550H)
R0
Jumper bar
for EMC filter
T0
Enable
Disable
Screw size
R0,T0: M4
Ground terminal: M8
Other terminals: M8
R
(L1) S (L2) T (L3) U (T1) V (T2) W (T3)
PD
(+1) P (+) N (-)
RB
(RB)
PD-P Jumper
Input power line
Motor output line
G
G
Switch the jumper bar to enable or disable the EMC filter.
Switch the jumper bar to enable or disable the EMC filter.
Switch the jumper bar to enable or disable the EMC filter.
Switch the jumper bar to enable or disable the EMC filter.
2-15

Chapter 2
Installation and Wiring
Label
Switch Name
Description
Ai1
(SW1)
Analog input 1
switch
It changes the input specification of Analog input 1
(Ai1 terminal).
10V: Voltage input is available.
20mA: Current input is available.
Ai2
(SW2)
Analog input 2
switch
It changes the input specification of Analog input 2
(Ai2 terminal).
10V: Voltage input is available.
20mA: Current input is available.
Ao1
(SW3)
Analog output 1
switch
It changes the output specification of Analog output 1
(Ao1 terminal).
10V: Voltage output is applied.
20mA: Current output is applied.
Ao2
(SW4)
Analog output 2
switch
It changes the output specification of Analog output 2
(Ao2 terminal).
10V: Voltage output is applied.
20mA: Current output is applied.
P.SEL
(SW5)
Power supply
input switch
It changes the power source for input terminals.
IN: Internal power source.
EX: External power source.
(While setting EX, it requires an external power supply
between input terminals and COM terminal)
SRC/SINK
(SW6)
Input terminal
Sink/Source
logic switching
It changes the sink or source logic for input terminal.
Is enabled when SW5 is in IN position.
SINK: Switch to Sink logic.
SRC: Switch to Source logic.
SW4
SW3
SW2
SW1
SW5
SW6
10V
20mA
10V
20mA
10V
20mA
10V
20mA
IN
EX
SINK
SRC
Ao2
Ao1
Ai2
Ai1
P.SEL
(SW4) (SW3) (SW2) (SW1) (SW5) (SW6)
Control circuit terminal
Make sure to power-off previous to change any
switches. Otherwise, may damage the inverter.
(SW4) (SW3) (SW2) (SW1) (SW5) (SW6)
Control circuit terminal
section
24V power
supply terminal
P-
1/RS
2/SCHG
3/JG
4/FRS
5/2CH
6/CF1
7/CF2
8/RV
9/FW
A/EXT
B/USP
COM
Interface
24V power source terminal
P24
H
Ai1
Ai2
Ai3
L
Analog
input 1
(+)
(-)
(±)
(0)
TH+
AL2
AL1
AL0
16a
16c
11/FA1
12/RUN
13/OL
14/OTQ
15/WAF
CM2
FM
CM1
Ao1
Ao2
L
SP
SN
SP
SN
RP
P24S
STC
CMS
ST1
ST2
ED+
ED-
TH-
Alarm relay
1C contact points
Relay
1A contact points
Output terminals
*Sink/source supported
L
L
10V
20mA
10V
20mA
10V
10V
20mA
20mA
Voltage input
Current input
Input terminals
Thermistor
RS485
Functional safety input
STO input
Functional safety
confirmation output
STO output
Sink or source logic
for input terminal is
switched by SW6.
P24
CM1
DC24V
P24
CM1
P24
IN
EX
Source
Sink
(SW5)
(SW6)
(SW1)
(SW2)
(SW3)
(SW4)
Analog
input 2
Analog
input 3
Voltage input
Current input
2.10 Wiring of the control circuit
An example for sink logic.
Switch configuration
2-16

Chapter 2
Installation and Wiring
Power cable size
mm2 (AWG)
Ferrule terminal
model*
L1 [mm]
L2 [mm]
d [mm]
D [mm]
0.25 (24)
AI 0,25-8YE
8
12.5
0.8
2.0
0.34 (22)
AI 0,34-8TQ
8
12.5
0.8
2.0
0.5 (20)
AI 0,5-8WH
8
14
1.1
2.5
0.75 (18)
AI 0,75-8GY
8
14
1.3
2.8
Push the orange part
into the socket with a
slotted screwdriver
Insert the wire
The wire is connected
when release the screw
driver
2.5mm
■ Recommended terminals for wiring
• The following ferrule terminals are recommended for
signal cable for easy wiring and improved reliability of
connectivity.
Ferrule terminal with sleeves
*) Manufacturer: Phoenix Contact
■ Wiring procedure
1. Push the orange part on the control circuit terminal
block into the socket with a slotted screwdriver (with a
wide of 2.5mm or less). (Insertion hole will open)
2. Insert the wire or ferrule terminal into the wire
insertion hole (round) while pressing the orange part
with a slotted screwdriver.
3. The wire is connected when release the screw driver.
Crimping tool: CRIMPFOX UD 6-4 or CRIMPFOX ZA 3
• Even for pulling out the wire from the socket, press the
orange part with a slotted screwdriver (the insertion
hole will be opened while pressing).
2-17

Chapter 2
Installation and Wiring
Forward
Reverse
Description
OFF
OFF
No command
ON
OFF
Forward rotation command operation
OFF
ON
Reverse rotation command operation
ON
ON
No command (inconsistent logic)
Multispeed-1
CF1
Multispee
d-2 CF2
Description
OFF
OFF
The set frequency source is enabled.
ON
OFF
The frequency source of [Ab-11] is enabled.
OFF
ON
The frequency source of [Ab-12] is enabled.
ON
ON
The frequency source of [Ab-13] is enabled.
Terminal
label
Terminal
name
Description
Electric characteristics
Intelligent input terminal
Digital input
Contact
9, 8,
7, 6,
5, 4,
3, 2,
1
Input
terminal
Terminal functions are selectable according to the
parameter settings for each terminal.
Switching SW6 to SRC or SINK allows you to select SINK or
Source logic.
Voltage between each input and
COM terminals
• ON voltage Min.DC18V
• OFF voltage Max.DC3V
• Max. allowable voltage DC27V
• Load current 5.6mA(at DC27V)
Pulse
A
Pulse input-A
This is a terminal for pulse input. A and B terminals can be
used also as an input terminal.
Terminal functions are selectable according to the
parameter settings for each terminal.
The maximum input pulse rate is 32kpps.
Voltage between an input and
COM terminals
• ON voltage Min.DC18V
• OFF voltage Max.DC3V
• Max. allowable voltage DC27V
• Load current 5.6mA(at DC27V)
• Max input pulse rate 32kpps
B
Pulse input-B
Common
COM
Input
(common)
This is a common terminal for digital input terminals
(1,2,3,4,5,6,7,8,9,A and B). Three COM terminals are
available.
SW6
SW5
Input terminal
1
[RS]
[SCHG]
3
[JG] 4 [FRS]
5
[2CH]
6
[CF1]
7
[CF2] 8 [RV] 9 [FW] A [EXT]
B
[USP]
COM
COM
COM
2.11 Control circuit wiring section
■ Input terminals
• All COMs have the same electric potential.
• Change SW5 to external power source (EX) to connect
the power source between Input terminals 1 to 9, A or
B, and COM.
• Sink or source logic of the input terminal is switched by
SW6.
(Wiring example)
• [] it means factory default settings.
Control circuit terminal
2
■ Terminal’s default function ([symbol: setting No.])
[RS:028]Reset
• Reset at every trip.
[SCHG:015]Command source change
• Change to the main speed command [AA101](OFF) or
sub-speed command[AA102](ON).
[JG:029]Jogging
• Run at a frequency of [AG-20] upon receipt of the operation
command by [JG]ON.
[FRS:032]Free-run stop
• [FRS]ON sets the motor in a free-run state.
[2CH:031]Two-step acceleration/deceleration
• [2CH]ON enables acceleration/deceleration
time-2[AC124][AC126].
[FW:001]Forward rotation and [RV:002]Reverse rotation
[CF1:003]Multispeed-1 and [CF2:004]Multispeed-2 commands
*) Setting CF3 and 4 allows you to set up to 16-speed.
[EXT:033]External trip
• [EXT]ON issues Trip[Er012].
[USP:034]Unattended start protection
• In a [USP]ON state, if an operation command has been input
before the power supply is ON, Trip[Er013] is issued.
2-18

Chapter 2
Installation and Wiring
Power
supply
Status
AL0-AL1
AL0-AL2
ON
Normal
operation
Open
Closed
ON
Tripping
Closed
Open
OFF – Open
Closed
Power
supply
Status
AL0-AL1
AL0-AL2
ON
Normal
operation
Closed
Open
ON
Tripping
Open
Closed
OFF – Open
Closed
Terminal label
Terminal name
Description
Electric characteristics
Intelligent output terminals
Digital output
Open collector
15
14
13
12
11
Output terminal
Terminal functions are selectable according
to the parameter settings for each terminal.
This is available for both SINK and Source
logics.
Open collector output
Between each terminal and CM2
• Voltage drop when turned on: 4 V
or less
• Max. allowable voltage 27V
• Max. allowable current 50mA
CM2
Output (common)
This is a common terminal for output
terminals 11 to 15.
Relay
16A
16C
1a relay terminal
Relays for A contact output
Maximum contact capacity
• AC250V, 2A(resistance)
• AC250V, 1A(inductive load)
(Minimum contact capacity)
• DC1V, 1mA
AL0
AL1
AL2
1c relay terminal
Relays for C contact output
Maximum contact capacity
AL1/AL0:
• AC250V, 2A(resistance)
• AC250V, 0.2A(inductive load)
AL2/AL0:
• AC250V, 1A(resistance)
• AC250V, 0.2A(inductive load)
Minimum contact capacity (common)
• AC100V, 10mA
• DC5V, 100mA
11
[FA1]
12
[RUN]
13
[OL]
14
[OTQ]
15
[WAF]
CM2
Output
RY
RY
RY
RY
RY
AL2
AL1
AL0
Alarm relay
Output terminal
X
X
16A
16C
Relay
Output terminal
X
RY
■Output terminals
(Wiring example)
[AL] [ZS]
: Equipment including lumps, relays and PLC
: Relays
• [] it means factory default settings.
Control circuit terminal
■ Terminal’s default function
[RUN:001]Running signal
• Turns ON during operation (PWM output).
[FA1:002]Frequency-arrival signal
• Turns ON when the output frequency reaches the control
frequency.
[FA1:003]Frequency-arrival signal 2
• Turns ON when the output frequency reaches the control
frequency [CE-10] to [CE-13].
[IRDY:007]
• Turns ON when is ready for operation.
[OL:035]Overload notice advance signal
• Turns ON when the current exceeds the overload warning
level.
[ZS:040]0Hz speed detection signal
• Turns ON when the inverter output frequency falls below the
threshold frequency [CE-33].
[AL:017]Operation
• In case of [CC-17]=00 (factory setting)
• In case of [CC-17]=01
2-19

Chapter 2
Installation and Wiring
Terminal
label
Terminal name
Description
Electric characteristics
Voltage/current switchable analog input/output terminal
Power supply
L
COM for analog
power supply
COM terminals for analog input terminals (Ai1,Ai2,Ai3) and
analog output terminals (Ao1,Ao2). Two L terminals are
available.
H
Speed setting
power supply
DC10V power supply. Used for voltage input with analog
input terminals (Ai1,Ai2,Ai3) using a variable resister.
Max. allowable input current 20mA
Analog input
Ai1
Analog input
terminal 1
(Voltage/current
selector SW1)
Either Ai1 or Ai2 can be used by switching the selector
switch to DC0 to 10V voltage input or 0- to 20mA current
input. Used as speed input and feedback input.
For voltage input:
• Input impedance Approx.10kΩ
• Allowable input voltage DC-0.3V to
12V
For current input:
• Input impedance Approx.100Ω
• Max. allowable input current 24mA
Ai2
Analog input
terminal 2
(Voltage/current
selector SW2)
Ai3
Analog input
terminal 3
DC-10 to 10V voltage input is available.
Used as speed input and feedback input.
Voltage input only:
• Input impedance Approx.10kΩ
• Allowable voltage input DC-12V to
12V
Analog output
Ao1
Analog output
terminal 1
(Voltage/current
selector SW3)
Either Ao1 or Ao2 can be used as an output for inverter
monitoring data by switching the selector switch to DC0 to
10V voltage output or 0 to 20mA current output.
For voltage output:
• Max. allowable output current 2mA
• Output voltage accuracy ±10%
(Ambient temperature: 25±10
degrees C)
For current input:
• Allowable load impedance
250Ω or less
• Output current accuracy ±20%
(Ambient temperature: 25±10
degrees C)
Ao2
Analog output
terminal 2
(Voltage/current
selector SW4)
Terminal
label
Terminal
name
Description
Electric characteristics
Thermistor terminal
Analog input
TH+
External
thermistor
input
Connect to an external thermistor to make the inverter trip if an
abnormal temperature is detected.
Connect the thermistor to TH+ and TH-. The impedance to detect
temperature errors can be adjusted within the range 0Ω to
9,999Ω.
[Recommended thermistor properties]
Allowable rated power: 100 mW or more
Impedance at temperature error: 3kΩ
DC0 to 5V
[Input circuit]
TH-
Common
terminal for
external
thermistor
input
SW4 SW3 SW2 SW1
TH-
TH+
External thermistor
terminals
Thermistor
DC5V
1kΩ
2kΩ
TH-
TH
Thermistor
Control circuit terminal
Ao2
Ao1
Analog input/output
H
Ai1
Ai2
Ai3 L L
Potentiometer for frequency source
* 1kΩ, 1W or more recommended
Frequency
meter
SW4 SW3 SW2 SW1
■Analog input/output
(Wiring example)
(0.5kΩ to 2kΩ)
Control circuit terminal
• As shown in left example, when using a potentiometer in H-Ai1-L
will be voltage input, therefore, set SW1 for analog input 1 (Ai1)
as voltage input.
• If a frequency meter connected in left example is current type (4
to 20mA), set SW3 for analog output 1 (Ao1) as current output.
■External thermistor
(Wiring example)
2-20
• Twist the cables connected from a thermistor to the TH terminal
only between TH+ and TH-, and separate the twisted cables from
other cables.
• Since very low current flows through the cables connected to the
thermistor, separate the cables from those (power line cables)
connected to the main circuit.
• The length of the cables connected to the thermistor must be 20 m
or less.

Chapter 2
Installation and Wiring
Terminal
label
Terminal name
Description
P24S
24V output power source
terminal
Refer to the appended
“Functional Safety
Guide” for details.
CMS
COM terminal for
functional safety
STC
Logic switching terminal
ST1
STO input1
ST2
STO input2
ED+
Output terminal for
monitoring
ED-
Output COM terminal for
monitoring
Terminal
label
Terminal name
Description
Electric characteristics
FM output
terminal
FM output
Monitor
output
FM
Digital monitor
(voltage)
Digital monitor output is selectable from PWM
output with 6.4ms cycle or pulse output with a
variable duty cycle of approx. 50%.
Pulse train output DC0 to 10V
• Max. allowable output current
1.2mA
• Maximum frequency 3.60kHz
CM1
COM for digital
monitor
This is a common terminal for digital monitor.
This is also used as 0V reference potential for P24.
Frequency meter
(PWM)
ED+
Safety confirmation
terminal
STO Safety terminal
P24S
STC
CMS
ST1
ST2
STC
Control circuit terminal
FM
CM1
Digital output
Control circuit terminal
■Functional safety STO terminals
Refer to the “Functional Safety Guide”
for using a safety functions.
■FM output terminals
(Wiring example)
ED-
• FM output is selectable from PWM output with a fixed cycle of
6.4ms or pulse output with a variable cycle.
• FM output is adjustable by parameter settings.
2-21

Chapter 2
Installation and Wiring
Terminal
label
Terminal name
Description
Electric characteristics
RS485 communication
Serial communication
SP
SN
RP
(CM1)
MODBUS
terminal
(RS-485)
SP terminal: RS-485 differential(+) signal
SN terminal: RS-485 differential(-) signal
RP terminal: Connect to SP through a termination
resistor
CM1 terminal: Connect to the signal ground of
external communication devices.
There are two SP and two SN terminals, which are
connected internally.
The maximum baud rate is 115.2kbps.
Termination resistor (120Ω) integrated
Enabled: RP-SN shorted
Disabled: RP-SN opened
Terminal
label
Terminal name
Description
Electric characteristics
24V power supply
Power input
P24
24V output
power source
terminal
This terminal supplies DC24V power for contact signals.
Max. output 100mA
CM1
Reference
terminal for
24V output
This serves as a 0V reference terminal for contact signal.
This is used also as a common terminal for FM output.
P+
Terminal for
external 24V
input (24V)
Input external DC24V power supply to the inverter.
24V power supply input permit to change parameter
settings and perform optional communication
operations without control power supply.
Allowable input voltage
DC24V±10%
Max. allowable current 1A
P-
Terminal for
external 24V
input (0V)
Connect CM1
Into the SG (signal ground) of
external devices,
For enabling the termination
resistor, short-circuit between
RP and SN.
Control circuit terminal
RP
SN
SP
SN
SP
CM1
Modbus communication
(+) (-)
Power supply
24V terminal
External 24V
terminal
P+
P24
P-
External DC24V power supply
■Serial communication
(Wiring example)
• SP and SN with the same name are internally connected, which are
available for a plurality of wiring.
• For the use of Modbus communication, refer to the “User’s guide”
to obtain a more detailed description.
■24V power supply input/output
(Wiring example)
Control circuit terminal
• Connecting DC24V external power supply into the terminal P+ and
P-, permit to change parameters and perform optional
communication without the main power source. Is also allowable
when connecting into the main power supply.
2-22

Chapter 2
Installation and Wiring
No.
Name of part
DANGER
WARNING
CAUTION
(A)
Main circuit
terminal block
8,10
(B)
Heat sink
4 1
(C)
Input/output
terminal block
11,12
‐
Unspecified
parts
9 2,3,5,6,7
No.
Operational
phase
Work
Part
Residual
risk
Details of harm or damage
Preventive measures
✓
1
Installation
Installation
(B)
CAUTION
Damage due to rough transportation.
Do not let the product fall. Do not apply
force when handing the cover and
operator keypad.
□
2
Installation
Installation
‐
CAUTION
Shortened lifetime of parts due to the use
in places where the product is exposed to
direct sunlight or the temperature is not
within the specified range.
Verify that the ambient temperature is
within the specified range throughout the
year by means of cooling or ventilation.
□
3
Installation
Installation
‐
CAUTION
Short-circuit failure due to the use in
places where the temperature is not
within the specified range or
condensation occurs.
Verify that the ambient temperature is
within the specified range throughout the
year by means of cooling or ventilation.
Install the product in places where no
condensation occurs.
□
4
Installation
Installation
(B)
DANGER
A cooling fan reaching a high temperature
exceeding 150 °C causes a fire on a
flammable wall.
Install the product on a non-flammable
metal wall.
□
5
Installation
Installation
‐
CAUTION
Damage to parts due to entry of dust and
corrosive gases.
Install the product inside a totally
enclosed panel.
□
6
Installation
Installation
‐
CAUTION
Shortened lifetime of parts due to
reduced cooling capability by placing the
product horizontally.
Install the product vertically.
□
7
Installation
Installation
‐
CAUTION
A cooling fan failed due to waterdrops or
oil mist when the heat sink is positioned
outside.
With the heat sink positioned outside,
install the product in places free from
waterdrops and oil mist.
□
8
Installation
Maintenance
Wiring
(A)
DANGER
A fire is caused inside by an arc due to
screws loosened by vibrations.
Regularly check the tightening of screws.
□
9
Installation
Maintenance
Wiring ‐ DANGER
A fire from flammable materials caused
by an arc due to screws loosened by
vibrations.
Regularly check the tightening of screws.
Do not place flammable materials near
the product.
□
10
Use
Maintenance
Wiring
Inspection
(A)
DANGER
Electric shock by touching a high voltage
part with the cover removed.
Do not open the cover when the power is
on. Wait for 10 minutes or more after the
power is off, and then confirm that the
voltage between P and N is significantly
less than 45Vdc to start the work.
□
11
Use
Maintenance
Wiring
Inspection
(C)
DANGER
Electric shock by touching a high voltage
part with a tool with the cover removed.
Do not open the cover when the power is
on. Wait for 10 minutes or more after the
power is off, and then confirm that the
voltage between P and N is significantly
less than 45Vdc to start the work.
□
(B)
(A)
(C)
2.12 Residual risk
Parts subject to residual risk
Please check for any residual risk upon completion of the
installation before power on.
■Residual risk checklist No.
Residual risk checklist
The installation, wiring and setting work must be
conducted by qualified engineers.
2-23

Chapter 2
Installation and Wiring
No.
Operational
phase
Work
Part
Residual
risk
Details of harm or damage
Preventive measures
✓
12
(a)
Installation
Wiring ‐ DANGER
Motor insulation damage due to surge
caused by long distance motor wiring.
When the motor wiring distance exceeds
20m or more, try to shorten the wiring.
Use LCR filter or output AC reactor.
□
12
(b)
Installation
Wiring ‐ DANGER
Motor damage due to insulation failure
caused by motor voltage unmatched.
Use motor according to the inverter
voltage class.
□
12
(c)
Installation
Wiring ‐ DANGER
Motor damage due to unstable power
supply, caused by power supply
unbalance, low voltage or excessive
voltage drop.
Confirm the inverter power supply
voltage, feeding method and capacity.
□
12
(d)
Use
Maintenance
Wiring
Inspection
-
DANGER
Motor damage due to continue ran in
open phase on motor output line.
Verify the motor output line that not
being in open phase.
□
12
(e)
Use
Maintenance
Setting ‐ DANGER
Motor damage due high current on motor
caused by inadequate parameter setting.
Set adequate value for related function
parameter of motor electronic thermal
level [bC-01] to [bC125].
□
Set adequate value for base frequency,
motor rated current, control mode,
motor constant, load rating, direct
current output related parameters.
(representative parameter)
Motor related parameter:
IM: [Hb102] to [Hb118]
SM(PMM): [Hd102] to [Hd118]
Control mode: [AA121]
Load rating: [Ub-03]
DC braking: [AF101] to [AF109]
13
Use
Operation
(C)
DANGER
The motor once stopped runs
automatically.
If automatic restart after motor stop is set
by a function, make sure to clearly
describe that in the system.
□
14
General
General ‐ DANGER
Damage or injury occurrence from a
hidden risk.
Confirm that system is structured for fail
safe considering a risk assessment.
□
The installation, wiring and setting work must be
conducted by qualified engineers.
For using [SET] function of input terminal, similarly, set the
related 2nd parameters settings.
2-24

Chapter 3
Operation Setting and Examples of I/O Adjustment
Menu
Option
60.00
Ub-03
Load type selection
oFW
STOP
M1
H03
00
V-Low Duty
01
Low Duty
02
Normal Duty
Parameter
Details
Setting data
[Ub-03]
Select the load
specification.
00: V-Low Duty (VLD)
01: Low Duty (LD)
02: Normal Duty (ND)
Menu
Option
60.00
AA121
Control mode_M1
oFW
STOP
M1
H03
0
VFC-VC
1
VFC-VP
2
VFC-FREE
3 VFC-A.bst
Parameter
Details
Setting data
[AA121]
Control pulse setting
00: V/f control constant
torque characteristic , etc.
[Hb102]
Capacity selection
0.01 to 630.00 (kW)
[Hb103]
Motor poles setting
2 to 48 (poles)
[Hb104]
Base frequency
10.00 to 590.00 (Hz)
[Hb105]
Maximum frequency
10.00 to 590.00 (Hz)
[Hb106]
Rated voltage
1 to 1000 (V)
[Hb108]
Rated current
0.01 to 9999.99 (A)
Parameter
Details
Setting data
[AA121]
Control pulse setting
09: PM motor
[Hd102]
Capacity selection
0.01 to 630.00 (kW)
[Hd103]
Motor poles setting
2 to 48 (poles)
[Hd104]
Base frequency
10.00 to 590.00 (Hz)
[Hd105]
Maximum frequency
10.00 to 590.00 (Hz)
[Hd106]
Rated voltage
1 to 1000 (V)
[Hd108]
Rated current
0.01 to 9999.99 (A)
Chapter 3
Operation Setting and
Examples of I/O Adjustment
This chapter describes basic settings, frequency source
required for operation, examples of run command
source settings and examples of adjusted I/O terminals.
Basic settings 1
3.1 Set the load rating
• Select [Ub-03] load specification selection on the
parameter setting screen.
See “Chapter 4 Settings” for detailed operating
instructions
Basic settings 2
3.2 Set the motor data
• Set the parameters listed in the table below on the
parameter setting screen according to the motor you
use (e.g. induction motor and permanent-magnet
motor).
• When [Ub-03] is changed, the parameters set for the
current are automatically adjusted in proportion to the
changed rated current, and the set values are changed.
• If the current is set using overload restriction,
electronic thermal and warning functions,
reconfirmation is required; therefore Load
specification selection is set first.
Parameter
*) The underlined value is set by default.
Parameter
Induction motor (IM)
Synchronous motor (permanent-magnet motor)
(SM(PMM))
Note: Motor constant setting is required for driving SM.
3-1

Chapter 3
Operation Setting and Examples of I/O Adjustment
Menu
Option
60.00
Output frequency (Keypa
0.00 Hz
oFW
STOP
M1
H03
FA-01
Set speed-M (Keypad)
60.00
Hz
Parameter
Details
Setting
data
[AA101]
Frequency source setting
from keypad
07
[FA-01]*)
Main speed command
0.00Hz
[Ab110]*)
Multispeed-0 speed No. 1
0.00Hz
Parameter
Details
Setting data
[AA111]
Run by pressing the
RUN key of keypad.
02
RUN key (start)
STOP key (stop)
The frequency source and run command source are
necessary to drive the motor.
Frequency source 1
3.3 Frequency setting from keypad
• Select [AA101] = 07 Frequency source from parameter
setting screen.
• Changing frequency setting from each source
(1) [FA-01] for frequency setting from keypad or
(2) [Ab110] on frequency setting from multispeed.
Eg.) For [FA-01]
Run command source 1
3.4 Run using the operator keypad
• Select [AA111] = 02 on the parameter setting screen to
RUN from keypad.
Frequency source
• Change the frequency source by setting [Ab110]
Multispeed-0 speed No.1 frequency setting by using
the up and down arrow keys.
Parameter
*) While [AA101] = 07, a change made in either [FA-01]
or [Ab110] will be automatically reflected in the
other. When no change can be made or is reflected
in [FA-01], the operator keypad is not specified as a
command source by the terminal function or
[AA101].
You need to set the frequency value to a value other
than 0.00.
Run/stop command
Press the RUN key and STOP key on the operator
keypad to start and stop the inverter, respectively.
Parameter
3-2

Chapter 3
Operation Setting and Examples of I/O Adjustment
Parameter
Details
Setting
data
[AA101]
Frequency setting from keypad
07
[FA-01]
*1)
Main speed source
0.00Hz
[Ab110]
*1)
Multispeed 0 setting 1st motor
([CF1]OFF/[CF2]OFF)
0.00Hz
[Ab-11]
*2)
Multispeed 1 setting
([CF1]ON/[CF2]OFF)
0.00Hz
[Ab-12]
*2)
Multispeed 2 setting
([CF1]OFF/[CF2]ON)
0.00Hz
[Ab-13]
*2)
Multispeed 3 setting
([CF1]ON/[CF2]ON)
0.00Hz
[CA-06]
The terminal 6 for [CF1]
001
[CA-07]
The terminal 7 for [CF2]
002
Parameter
Details
Setting
data
[AA111]
Run using FW/RV terminal
00
[CA-09]
The terminal 9 for [FW]
001
[CA-08]
The terminal 8 for [RV]
002
Input terminals
5
6
[CF1]
7
[CF2] 8
COM
COM
Input terminals
7
8
[RV] 9 [FW] A
COM
Frequency source 2
3.5 Multispeed terminals command
• While multispeed command is off, the speed command
will follow the parameter setting [AA101].
• To use multispeed 0, select [AA101] = 07 frequency
source selection.
Run command source 2
3.6 Operate using FW/RV terminal
• Select [AA111] = 00 [FW][RV] terminal from parameter
setting screen.
Frequency source
• Change the frequency command by turning ON/OFF
from multispeed input terminals [CF1] and [CF2].
Parameter
*1) While [AA101] = 07, a change made in either
[FA-01] or [Ab110] will be automatically reflected
in the other. When no change can be made or is
reflected in [FA-01], the operator keypad is not
specified as a command source by the terminal
function or [AA101].
*2) Set the frequency value for multispeed selection.
Run/stop command
• Run or stop by turning either [FW] terminal or [RV]
terminal ON/OFF.
Parameter
3-3

Chapter 3
Operation Setting and Examples of I/O Adjustment
Parameter
Details
Setting
data
[AA101]
Set as frequency command
for Ai1 input terminal.
01
Parameter
Details
Setting
data
[AA111]
Set the operation command
for 3WIRE function.
01
[CA-09]
The terminal 9 is [FR].
018
[CA-08]
The terminal 8 is [STP].
017
[CA-07]
The terminal 7 is [STA].
016
Analog input/output
H
Ai1
Ai2
Ai3
L
Potentiometer for frequency
Recommendation: 1kΩ 1W
Input terminals
7*
[STA]
8*
[STP]
9*
[FR]
A
COM
Control circuit terminal
SW1
10V
20mA
Ai1
Frequency source 3
3.7 Potentiometer frequency command
• Select [AA101] = 01 Ai1 terminal input from parameter
setting screen.
* Select voltage input (0 to 10V) for Ai1 switch of control
circuit board.
command (1kΩ to 2kΩ)
Run command source 3
3.8 Operate using 3WIRE terminal
• Select [AA111] = 01 to 3WIRE function from parameter
setting screen. In this section, 3WIRE functions are
assigned into the input terminals.
* Terminal 7[CA-07] = 016; terminal 8[CA-08] = 017;
terminal 9[CA-09] = 018
Frequency command
• Adjust the position of the knobs on the potentiometer
to change the frequency command.
Parameter
Run/stop command
• To run turn ON [STA] terminal, and turn ON [STP]
terminal to stop. Select the rotation direction with [FR]
terminal.
Parameter
3-4

Chapter 3
Operation Setting and Examples of I/O Adjustment
Parameter
Details
Ai1
Ai2
[Cb-03]
[Cb-13]
Set the frequency source ratio to the
start ratio of the analog input.
[Cb-04]
[Cb-14]
Set the frequency source ratio to the
end ratio of the analog input.
[Cb-05]
[Cb-15]
Set the start ratio of the analog input 0
to 10V/0 to 20mA.
[Cb-06]
[Cb-16]
Set the end ratio of the analog input 0
to 10V/0 to 20mA.
Parameter
Details
Ai1
Ai2
[Cb-30]
[Cb-32]
Adjust the zero-point reference line for
voltage input 10V/current input 20mA
and the maximum frequency.
[Cb-31]
[Cb-33]
Adjust the slope of the reference line
for voltage input 10V/current input
20mA.
Parameter
Details
Ao1
Ao2
FM
[Cd-23]
[Cd-33]
-
Adjust the zero-point
reference line for voltage
output 10V/current output
20mA and data at 100%.
[Cd-24]
[Cd-34]
-
Adjust the slope for voltage
output 10V/current output
20mA and data at 100%.
- - [Cd-13]
Adjust the zero-point
reference line for 100%
duty cycle output and data
at 100%.
- - [Cd-14]
Adjust the slope for 100%
duty cycle output and data
at 100%.
Maximum
frequency
100%
[Cb-04]
[Cb-03]
0
[Cb-05]
[Cb-06]
100
(0V/0mA)
(10V/20mA)
Analog input
(V/mA)
While setting [Cb-07] = 00,
the frequency command
from 0% to [Cb-05] will be
set by [Cb-03].
100(%)
0
Parallel
slide
[Cb-30]=-50.0(%)
[Cb-30]=0.0(%)
Max.
0
50
-50
Change the
Slope angle
[Cb-30]=50.0(%)
[Cb-31]=200.0(%)
[Cb-31]=50.0(%)
[Cb-31]=100.0(%)
Output scale
t/T(%)
100
0
Parallel
slide
Output
range
[Cd-23]=50.0(%)
[Cd-23]=-50.0(%)
[Cd-23]=0.0(%)
Max.
0
50
-50
Full scale (FS)
t/T(%)
100
0
Output
range
[Cd-24]=200.0(%)
[Cd-24]=50.0(%)
[Cd-24]=100.0(%)
Max.
0
50
-50
[Cd-24]=-50.0(%)
Slope the
slope
angle
Example for adjusting I/O terminals 1
3.9 Adjust the analog input (Ai1/Ai2)
E.g.) Adjust operation (E.g. for Ai1)
• Set the ratio to input to limit the operating range of
the frequency command.
(When selecting the frequency through terminal input)
Parameter
Example for adjusting I/O terminals 2
3.10 Adjust the analog output
(Ao1/Ao2/FM)
E.g.) Adjust operation (E.g. for Ao1)
• Set a value equivalent to 0% output first.
• Then, adjust a value equivalent to 100% output.
• Ai2 adjustment can be done in similar way to Ai1 by
using Ai2 parameters in order to Ai1.
E.g.) Make a fine adjustment (E.g. for Ai1)
Parameter
Parameter
*) Use the switch on control circuit terminal board to
change for voltage/current input.
3-5

Chapter 3
Operation Setting and Examples of I/O Adjustment
Parameter
Details
Ai3
[Cb-23]
Set the frequency source ratio to the start
ratio of the analog input.
[Cb-24]
Set the frequency source ratio to the end
ratio of the analog input.
[Cb-25]
Set the start ratio of the analog input -10V
to 10V.
[Cb-26]
Set the end ratio of the analog input -10V
to 10V.
Parameter
Details
Ai3
[Cb-34]
Adjust -10V on the reference line for
-10V/10V and the frequency.
[Cb-35]
Adjust the slope of the reference line.
Input
terminal
Response
time
Input
terminal
Response
time
1
[CA-41]
7
[CA-47]
2
[CA-42]
8
[CA-48]
3
[CA-43]
9
[CA-49]
4
[CA-44]
A
[CA-50]
5
[CA-45]
B
[CA-51]
6
[CA-46]
Output
terminal
On-delay time
Off-delay time
11
[CC-20]
[CC-21]
12
[CC-22]
[CC-23]
13
[CC-24]
[CC-25]
14
[CC-26]
[CC-27]
15
[CC-28]
[CC-29]
16A-16C
[CC-30]
[CC-31]
AL1-AL0/
AL2-AL0
[CC-32]
[CC-33]
Forward operation
Maximum frequency
Reverse operation
Maximum frequency
[Cb-23]
[Cb-26]
[Cb-25]
[Cb-24]
(-10V)
-100%
100%
(+10V)
Analog input
(Ai3)
100(%)
-100
Parallel
[Cb-34]=50.0(%)
[Cb-34]=-50.0(%)
[Cb-34]=0.0(%)
Max. 0 0
Slope
[Cb-35]=200.0(%)
[Cb-35]=100.0(%)
[Cb-35]=50.0(%)
Operation of
Operation of
[CA-41]
[CA-41]
ON
OFF
OFF
ON
Selected output
Operation of
[CC-20]
[CC-21]
ON
OFF
OFF
ON
Example for adjusting I/O terminals 3
3.11 Adjust the analog input (Ai3)
E.g.) Adjust operation (E.g. for Ai3)
Parameter
Example for adjusting I/O terminals 4
3.12 Prevent input terminal malfunction
• Set a response time for input terminal to prevent a
malfunction due to noise input.
the input
the internal
Parameter
E.g.) Make a fine adjustment
■Parameter
Example of adjusted I/O terminals 5
3.13 Stabilize an output terminal
• Set the delay time to stabilize an output terminal from
a sensitive reaction of internal functions.
the output
■Parameter
3-6

Chapter 4
For parameter configuration
Number
Name
Description
①
F1 key
Transition to home, cancel,
etc. Function of the key is
indicated at the bottom left
of the screen.
②
F2 key
Save data, etc. Function of
the key is indicated at the
bottom right of the screen.
③
RUN key
Motor motion starts when
this key is activated.
④
STOP/RESET keys
Decelerate to stop or reset
the tripping.
⑤
UP/DOWN/
LEFT/RIGHT keys
& SEL key
(centre)
To move between the
screen/data use UP/DOWN/
LEFT/RIGHT. To select the
data, press the SEL key.
⑥
Monitor screen
Display parameters and
data.
⑦
RUN LED
Turns ON while RUN
command is in execution.
⑧
POWER LED
Turns ON while the keypad
is powered-on.
Number
Description
(A)
Operation status.
(B)
Warning status.
(C)
Data/parameters.
(D)
Function assigned to F1 key.
(E)
Function of RUN key.
(F)
Frequency reference, Torque reference,
Inverter Name, Clock, etc.
Selected by F2 Option
(G)
Function assigned to F2 key.
Number
Name
Description
<a>
Pow
Type of power supply (Input).
<b>
SET
SET terminal for 1st/2nd motor setting.
<c>
Prm
Parameter display mode.
<d>
No.
Screen number.
<e>
STO
Functional Safety. STO
<f>
Cntrl
Control mode.
<g>
EzSQ
EzSQ programme.
<h>
Spcl
Special functions.
(D)
(G)
(F)
(E)
<b>
<d>
<c>
<a>
<g>
<f>
<e>
<h>
⑥
①
②
⑦ ④ ⑧ ③ ⑤
Chapter 4 Settings
4.1 Keypad overview
4.1.1 How to use the keypad
Image colour may differ from the real product.
4.1.2 Display mode ⑥
(A)
(B)
(C)
For more detail, refer to “Chapter 5.2 Confirming the
status” or users’ guide.
4-1

Chapter 4
For parameter configuration
Menu
Option
46.49
Output frequency
29.51 Hz
Output current
11.9 A
Input terminal monitor
LLLLLLLLLLL
oFW
RUN
FW
M1
H01
Menu
Option
46.49
Output frequency
29.51 Hz
oFW
RUN
FW
M1
H03
FA-01
Main speed reference (panel)
29.51 Hz
[0.00-60.00]
1. 3 lines screen [Multi-monitor]
2. Reference screen [While operating]
Menu
Option
46.49
oFW
RUN
FW
M1
H03
dA-01
Output frequency
29.51 Hz
Menu
Detail
46.49
Trip history
Total count 18 times
oFW
RUN
FW
M1
H06
1. E001.3 16/12/25 22:15
2. E007.2 16/12/25 20:33
3. E009.2 16/12/02 17:24
4. E012.4 16/10/10 08:50
5. E001.4 16/09/21 14:43
4. Trip history screen [whole display]
3. Large monitor screen [Huge monitor]
(Menu)
1
(Home)
1
Home
Option
46.49
oFW
RUN
FW
M1
M01
Menu
01 Scroll mode
02 Read/Write
03 System setting
4.1.3 Monitor mode
For screens not described below, refer to User’s Guide.
Pressing F1 key will return to any monitor screen.
4-2

Chapter 4
For parameter configuration
Menu
Option
29.51
Output frequency
29.51 Hz
oFW
RUN
FW
M1
H03
FA-01
Set Speed-M (Keypad)
29.51 Hz
Menu
Option
29.51
Output frequency
29.51 Hz
oFW
RUN
FW
M1
H03
FA-01
Set Speed-M (Keypad)
29.5
1 Hz
Back
Option
29.51
Output frequency
29.51 Hz
oFW
RUN
FW
M1
H03
FA-01
Set Speed-M (Keypad)
29.5
1 Hz
Back
----
29.51
Output frequency
29.51 Hz
oFW
RUN
FW
M1
H03
FA-01
Set Speed-M (keypad)
3
9.51 Hz
Back
----
29.51
AA111
RUN command selection_M1
oFW
RUN
FW
M1
H03
00:[FW]/[RV] terminal
01:3-wire
02:Keypad’s RUN key
03:RS485
4.1.3.1. Parameter setting screen
Change the parameter.
Press the SEL (O) key.
An area in the screen will be highlighted.
・In the case of a numerical value:
With UP/DOWN/LEFT/RIGHT ( ) keys
change the parameters value,
And then press the SEL (O) key to save the changes.
・In the case of a selection menu:
The upper area of the display shows the selected
function description.
With UP/DOWN ( ) keys select either parameter or
monitor area then will be highlighted.
If SEL (O) key is pressed, the parameter code can be
changed.
Using UP/DOWN/LEFT/RIGHT ( ) keys the function
code to be monitored can be changed, pressing again the
SEL (O) key give access to the function parameter. Press 1
key to return back.
With UP/DOWN ( ) keys you can move between
the available choices.
And then press the SEL (O) key to save the changes.
4-3

Chapter 4
For parameter configuration
Menu
Option
46.49
Output frequency
46.49 Hz
Output frequency
11.9 A
Input terminal monitor
LLLLLLLLLLL
oFW
RUN
FW
M1
H01
Menu
Option
46.49
Output frequency
46.49Hz
Output current
11.9 A
Input terminal monitor
LLLLLLLLLLL
oFW
RUN
FW
M1
H01
Back
Option
46.49
oFW
RUN
FW
M1
H01
d
A-01
Output frequency
29.51 Hz
Menu
----
46.49
Trip event
Overcurrent error
oFW
TRIP
M1
E001 16/12/25 22:15
Output frequency : +29.51 Hz
Output current : 47.71 A
DC voltage : 290.2 Vdc
Status 1 : Run
NRDY
Menu
Detail
46.49
Trip history
Total count
18 times
oFW
TRIP
M1
H06
1. E001 16/12/25 22:15
2. E007 16/12/25 20:33
3. E009 16/12/02 17:24
4. E012 16/10/10 08:50
5. E001 16/09/21 14:43
NRDY
4.1.3.2 3 lines monitor
To change the monitor details.
Press the SEL (O) key while on the 3 lines screen,
highlighting the first line as result.
4.1.3.3 Trip history screen
On tripping event.
With UP/DOWN ( ) keys, the trip status can be
confirmed. Also, the background will become red.
Trip history.
Then with UP/DOWN ( ) is possible to highlight the
one desired of the three monitors.
Pressing the SEL (O) key, the code can be accessed.
Making use of UP/DOWN/LEFT/RIGHT ( ) keys,
the code of the parameter to be monitored can be
changed, and then with the SEL (O) key confirm the
change. Press 1 key to return back.
In the Trip history screen press the SEL (O) key, and with
UP/DOWN ( ) keys highlight a history, then press SEL
(O) key to access the details regarding that trip status.
*) For more details about the detailed history, please refer
to “Chapter 5 Troubleshooting”.
*) Put a battery for using clock function.
4-4

Chapter 4
For parameter configuration
Menu
Option
46.49
Output frequency
46.49 Hz
Output current
11.9 A
Input terminal monitor
LLLLLLLLLLL
oFW
RUN
FW
M1
H01
Back
Option
29.51
Output frequency
0.00 Hz
oFW
STOP
M1
H03
FA-01
Set Speed-M (Keypad)
29.51 Hz
Back
Option
29.51
Output frequency
0.00 Hz
oFW
STOP
M1
H03
AA11
1
RUN command selection_M1
01:[FW]/[RV] terminal
[1-8]
Back
Option
29.51
AA111
RUN command selection_M1
oFW
STOP
M1
H03
00:[FW]/[RV] terminal
01:3-wire
02:Keypad’s RUN key
03:RS485
4.1.4 Doing a test run…
・This explains the method to how to do a test run using
the keypad.
Home screen
(E)↑ (F)↑
4.1.4.1 Confirm the operation command.
・In the position (E) of the upper illustration, when is
displayed FW or RV, the RUN key of the keypad is
enabled.
⇒Go to [4.1.4.2]
※In the cases that is not displayed, and want to operate
from the keypad, or want to change the RUN command
reference to FW terminal, is necessary to change the
RUN command selection.
⇒Go to [4.1.4.4 Run Command reference change]
4.1.4.2 Frequency reference status checking.
・In the upper illustration, in the position (F), when values
other than 0.00 are displayed, the frequency reference
is already set. ⇒Go to [4.1.4.3]
※In the case that 0.00 is displayed, is necessary to
change the value of the frequency reference. In the
case that you want to change to an analogue input and
such, the frequency command selection must be
changed.
⇒Go to [4.1.4.5]
4.1.4.3 Start the output by pressing the RUN
key and the motor will accelerate.
※When the motor does not rotate, please refer to the
troubleshooting.
4.1.4.4 RUN command reference change
① Press the RIGHT( ) key, after moving to the
parameter setting screen and by pressing the SEL(O)
key, the parameter section of the parameter setting
screen will blink.
② Change the code with UP/DOWN/LEFT/RIGHT
( ) keys to [AA111].
③ Press the SEL(O) key and then with UP/DOWN( )
keys select the RUN operation to be executed between
all the choices. In this case [03:Keypad’s RUN key] is the
one selected.
④ To save the changes press the SEL (O) key and then
in the position (E) FW or RV should be displayed. Press
the F1 key, and will go to Home screen.
⇒Go to [4.1.4.2]
4-5
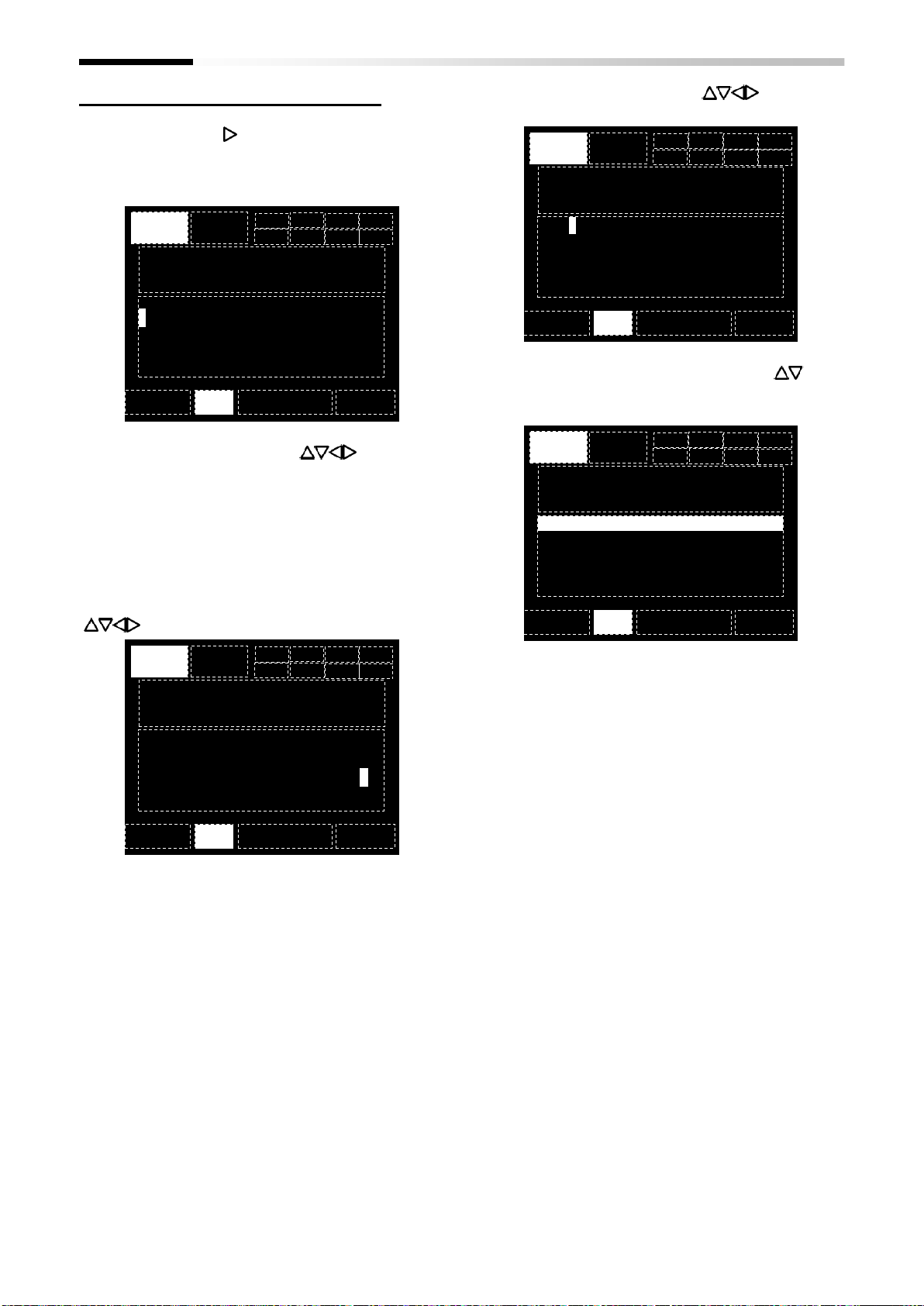
Chapter 4
For parameter configuration
Back
Option
0.00
Output frequency
0.00 Hz
oFW
STOP
M1
H03
FA-01
Set Speed-M (Keypad)
0.00 Hz
Back
-
0.00
Output frequency
0.00 Hz
oFW
STOP
M1
H03
FA-01
Set Speed-M (Keypad)
46.49
Hz
Back
Option
0.00
Output frequency
0.00 Hz
oFW
STOP
M1
AA101
Main speed source_M1
01:Analogue input[Ai1]
Back
Option
0.00
Output frequency
0.00 Hz
oFW
STOP
M1
H03
07:Keypad
08:RS485
09:Option-1
10:Option-2
4.1.4.5 Changing frequency reference
① Press the RIGHT ( ) key and after moving to the
parameter setting screen, press the SEL (O) key, the
parameter section of the parameter setting screen will
blink.
② With UP/DOWN/LEFT/RIGHT( ) keys change
the code to [FA-01], then [Main speed reference
(keypad)] shall be displayed, the frequency setting can
be chosen.
⇒Go to ③
If the displayed screen is different, change the
frequency reference source. ⇒Go to ⑤
③ Press the SEL(O) key, with UP/DOWN/LEFT/RIGHT
( ) keys change the frequency value.
⑤ With UP/DOWN/LEFT/RIGHT ( ) keys change
the function code to [AA101].
⑥ Press the SEL(O) key and with UP/DOWN( ) keys,
select the frequency reference source to be used.
[07:Keypad] is selected in this case.
⑦ To save changes press the SEL (O) key, and then in
the position (E), FW or RV should be displayed. Press
the F1 key, and will go to Home screen.
⇒Go to [4.1.4.2]
④ To save the changes press the SEL (O) key, and after
that in the position (F) should be displayed the set
frequency. Press the F1 key, and will go to Home screen.
⇒Go to [4.1.4.3]
(F)↑
4-6

Chapter 4
For parameter configuration
Home
Option
46.49
oFW
STOP
M1
M01
Menu
01 Scroll mode
02 Read / Write
03 System setting
Back
----
46.49
oFW
STOP
M1
R01
Read / Write
01 READ
02 WRITE
Home
----
46.49
oFW
STOP
M1
M01
Menu
01 Scroll mode
02 Read/Write
03 System setting
Name
Memo
Language selection
Change the language.
Date function *1)
Time setting, display format, and
the settings for the battery
warning.
Read lock
Limits the reading property of the
data.
R/W write mode
Change the R/W data
parameters.
Home automatic
transition timer
Sets the time for the automatic
home screen return function.
Initial home screen
selection
Sets which screen is displayed at
the home screen when turns-on.
Brightness
Adjust the brightness of the
keypad.
Auto backlight-off
function *2)
Set the turn-off time and
brightness.
Blinking at trip
Sets the screen blinking when
trips.
Background color
Set the background color.
Basic information monitor
Check the software information.
Keypad mode
Use this setting when connecting
to older models.
Keypad version
Display the keypad version.
Keypad initialization
Initialize the keypad
Self-diagnostic mode
Will be executed Self-diagnostic
mode.
4.1.5 Copying data
Data can be stored in the keypad and then copied to
other inverter unit. It is strongly recommended to backup
the data just in case.
Refer to user’s guide for a more detailed explanation.
① Select R/W from menu
②.”Read” function is used for storing the data from the
inverter to the keypad.
②’ 2-2. “Write” function is used for copying the data
stored in the keypad to the inverter
(Sequential writing function is used for copying the
data one after another)
4.1.6 Automatic functions of the keypad
With the system configuration, you can set and adjust
keypad related parameters.
・Available actions in the system configuration
For more information, refer to the user’s guide.
*1) Battery is required to use date function.
Recommend: Hitachi Maxwell CR2032, 3V
The battery is to be replacing every two years while the
inverter is power off.
*2) The auto backlight-off function will deactivate during
in trip status until trip reset. For more information, refer
to the user’s guide.
4-7

Chapter 4
For parameter configuration
Menu
Option
0.00Hz
Output Frequency
0.00 Hz
Output Current
0.00 A
Input terminal monitor
LLLLLLLLLLL
oFW
STOP
M1
H01
Home
----
0.00Hz
oFW
STOP
M1
M01
Menu
01 Scroll mode
02
Read/Write
03
System setting
Return
----
0.00Hz
oFW
STOP
M1
L01
Scroll Menu
All Parameters
d:Monitor
F:Ref-Mon./Setting
A:Standard Func.
b:Fine Tuning Func
S-Menu
Next Gr.
0.00Hz
oFW
STOP
M1
L02
A:Standard Func.
AA101Main Speed sou..
07:Keypad
AA102 Sub Speed sour..
00:Disable
AA104 Sub Speed Sett..
0.00Hz
Return
Save
0.00Hz
AA101
Main Speed source M1
oFW
STOP
M1
7 Keypad
8 RS485 Setting
9 Option 1
10 Option 2
Return
Save
0.00Hz
Output Frequency
0.00 Hz
oFW
STOP
M1
AA104
Sub Speed Reference
000.00
Hz
4.1.7 To check parameters in scroll
mode
In scroll mode, parameter can be change while
monitoring. To set parameters by monitoring monitor,
please refer to “4.1.3.1 Parameter setting screen
4.1.7.1 try scroll mode
①Press the F1 key on F [][home] screen
④Press the SEL (O) key, then, with UP/DOWN ( ) keys
select parameters to change.
⑤-1 When the parameter is to be set as alternative,
Press UP/DOWN ( ) key to select data and press F2
(Save) key to store then return to parameter list.
② With UP/DOWN ( ) key select scroll mode to
display scroll menu, then, press SEL (0) key to display
scroll menu screen.
③Press SEL (0) key follow to UP/DOWN ( ) key select
the monitor group, then return to parameter list.
For example, selecting “A:Standard Func.” then press
SEL (0) key.
⑤-2When the parameter is to be set is a numerical value,
Press UP/DOWN/LEFT/RIGHT ( ) key to change
data and press F2 (Save) key to store to return to
parameter list.
(Tips)
・Press F1 (Return) key to return to parameter list without
storing the parameter change.
・Parameter selected for reference screen is show in
upper line on ⑤-2.
・When scroll screen is set as initial mode, dA-01, dA-02,
dA-03 are displayed as initial setting.
4-8

Chapter 4
For parameter configuration
Menu
Next
0.00Hz
oFW
STOP
M1
L02
A: Operation Function
AA101 Main Speed Reference_M1
07:
Parameter Setting
AA102 Sub Speed Reference
00:I
AA104 Sub Speed Reference
0.00Hz
Menu
Next
0.00Hz
oFW
STOP
M1
L02
b: Protection Function
bA102 Frequency Upper Limit_M1
0.00Hz
bA103 Frequency Upper Limit
0.00Hz
bA110
Torque Limit Slection_M1
07: Parameter Setting
Menu
Next
0.00Hz
oFW
STOP
M1
L02
A: Operation Function
Ab -01 Frequency Scaling Conversion
1.00
Ab -03 Multispeed Operation
00:Binary (16Speed)
Ab110 Multispeed-0 M1
0.00Hz
Menu
next
0.00Hz
oFW
STOP
M1
L02
A:Opertion Function
AC -01 Accel/Decel time
00:Parameter Setting
AC -02 Multispeed Accel/Decel
00:Common
AC -03 Accel Curve Selection
(Next Group)
2
(Next Group)
2
(Next Group)
2
①LEFT/RIGHT ( ) key to jump
②Jump by
F2(Next)Key
4.1.7.2 Group Jump Function
①Press LEFT/RIGHT ( ) key to jump to 1st parameter
of each group.
(…⇔All parameters⇔d:Monitor⇔F:Command
Monitor/Setting⇔…⇔U:Initial Setting、PDN⇔All
Parameters⇔…)
②When to jump to the detailed subgroup (AA, Ab etc) in
parameter group, press F2 key.
A group for example : …⇒AA⇒Ab⇒AC⇒…⇒AJ⇒AA⇒…
4-9

Chapter 4
For parameter configuration
Code/Name
Range (unit)
dA-01 Output frequency
monitor
0.00~590.00(Hz)
<Actual frequency output>
dA-02 Output current monitor
0.0~655.35(A)
dA-03 Rotation direction
monitor
F(forward)/r(reverse)/
d(0Hz output)/o(shut down)
dA-04 Frequency reference
monitor
0.00~590.00(Hz)
<as target value>
dA-06
Output frequency scale monitor
0.00~59000.00(Hz)
dA-08
Detected speed monitor
-590.00~590.00(Hz)
<Encoder feedback required>
dA-12 Output frequency
monitor (signed)
-590.00~590.00(Hz)
dA-15
Torque reference monitor
-500.0~500.0(%)
<Torque control mode required>
dA-16 Torque limit monitor
-500.0~500.0(%)
dA-17 Torque monitor
-500.0~500.0(%)
dA-18 Output Voltage monitor
0.0~800.0(V)
dA-20 Actual position monitor
When [AA123]=02
-268435455~+268435455(pulse)
When [AA123]=03
-1073741823~+1073741823(pulse)
dA-26 Pulse train position
deviation monitor
-2147483647~+2147483647(pulse)
dA-28 Pulse counter monitor
0~2147483647(pulse)
dA-30 Input power monitor
0.00~600.00(kW)
dA-32 Accumulated input
power monitor
0.00~100000.00(kWh)
dA-34 Output power monitor
0.00~600.00(kW)
dA-36 Accumulated output
power monitor
0.00~100000.00 (kWh)
dA-40 DC voltage monitor
0.0~1000.0(V)
dA-41 Braking resistor load
factor monitor
0.00~100.00(%)
Code/Name
Range (unit)
dA-42 Electronic thermal load
factor monitor (MTR)
0.00~100.00(%)
dA-43 Electronic thermal load
factor monitor (CTL)
dA-45 Safety Torque Off (STO)
monitor
00(no input)/01(P-1A)/
02(P-2A)/03(P-1b)/04(P-2b)/
05(P-1C)/06(P-2C)/07(STO)
dA-46 P1-FS Hardware Monitor
(Refer to FS option guide for
detail)
dA-47 P1-FS Function Monitor
dA-50 Optional board insertion
status
00(P1-TMA)/01(P1-TMB)/
02(Others)
dA-51
Input terminal monitor
LLLLLLLLLLL~HHHHHHHHHHH
[L:OFF/H:ON]
[Left](B)(A)(9)(8)(7)(6)
(5)(4)(3)(2)(1)[Right]
dA-54
Output terminal monitor
LLLLLLL~HHHHHHH
[L:OFF/H:ON]
[Left](AL)(16c)(15)(14)(13)
(12)(11)[Right]
dA-60
Analogue input/output status
monitor *(1)
AAAAAAAA~VVVVVVVV
[A:Current/V:Voltage]
[Left](EAo2)(EAo1)(Ai6)(Ai5)
(Ao2)(Ao1)(Ai2)(Ai1)[Right]
dA-61 Analogue input [Ai1] monitor
0.00~100.00(%)
dA-62 Analogue input [Ai2] monitor
dA-63 Analogue input [Ai3] monitor
-100.00~100.00(%)
dA-64 Analogue input [Ai4] monitor
-100.00~100.00(%)
dA-65 Analogue input [Ai5] monitor
0.00~100.00(%)
dA-66 Analogue input [Ai6] monitor
dA-70 Pulse train input monitor
(main)
0.00~100.00(%)
dA-81 Option slot-1 status
00:(none)/01:(P1-EN)/
02:(P1-DN)/03:(P1-PB)/
04:(P1-FB)/05:(P1-RLV)/
06:(P1-DG)/07:(P1-AIO)/
08:(P1-RY)/09:(P1-TMP)/
10:(P1-FS)
dA-82 Option slot-2 status
dA-83 Option slot-3 status
dA - 01
Parameter
Group
Value in the
group
[dA-01]~[dA-41]
Monitor naming (Nomenclature)
Description of monitor functions
※For more detail, please refer to P1 user’s guide.
Monitors for all data
■Monitor mode (d code)
[dA-42]~[dA-83][db-01]~[db-20]
*(1)dA-60 is available also for the terminals of the option terminal board
4-10

Chapter 4
For parameter configuration
Code/Name
Range (unit)
db-01
Programme download monitor
00(Programme is not
installed)/
01(Programme is
installed)
db-02 Programme No. monitor
0000~9999
db-03 Programme counter (Task-1)
0~1024
db-04 Programme counter (Task-2)
db-05 Programme counter (Task-3)
db-06 Programme counter (Task-4)
db-07 Programme counter (Task-5)
db-08 User monitor 0
-2147483647
~+2147483647
db-10 User monitor 1
db-12 User monitor 2
db-14 User monitor 3
db-16 User monitor 4
db-18 Analogue output monitor YA0
0~10000
db-19 Analogue output monitor YA1
db-20 Analogue output monitor YA2
db-21 Analogue output monitor YA3
db-22 Analogue output monitor YA4
db-23 Analogue output monitor YA5
Code/Name
Range (unit)
db-30 PID1 feedback data 1 monitor
0.00~100.00(%)
db-32 PID1 feedback data 2 monitor
db-34 PID1 feedback data 3 monitor
db-36 PID2 feedback data monitor
db-38 PID3 feedback data monitor
db-40 PID4 feedback data monitor
db-42 PID1 target value monitor
0.00~100.00(%)
db-44 PID1 feedback data monitor
0.00~100.00(%)
db-50 PID1 output monitor
-100.00~+100.00(%)
db-51 PID1 deviation monitor
-100.00~+100.00(%)
db-52 PID1 deviation 1 monitor
db-53 PID1 deviation 2 monitor
db-54 PID1 deviation 3 monitor
db-55 PID2 Output monitor
-100.00~+100.00(%)
db-56 PID2 deviation monitor
-100.00~+100.00(%)
db-57 PID3 Output monitor
-100.00~+100.00(%)
db-58 PID3 deviation monitor
-100.00~+100.00(%)
db-59 PID4 Output monitor
-100.00~+100.00(%)
db-60 PID4 deviation monitor
-100.00~+100.00(%)
db-61 Actual PID P-Gain monitor
0.0~100.0
db-62 Actual PID I-Gain monitor
0.0~3600.0(s)
db-63 Actual PID D-Gain monitor
0.0~100.0(s)
db-64 PID feedforward monitor
0.00~100.00(%)
Code/Name
Range (unit)
dC-01
Inverter duty monitor
00(Very Low duty)/
01(Low duty)/
02(Normal duty)
dC-02 Rated current monitor
1)
dC-03 Operation Control Status monitor
1)
dC-04 Accel/Decel status monitor
1)
dC-05 Control status 3 monitor
1)
dC-07 Main speed reference monitor
1)
dC-08 Sub speed reference monitor
1)
dC-10 RUN command reference monitor
1)
dC-15 Heat sink temperature monitor
-20.0~200.0(°C)
dC-16 Lifespan assessment monitor
LL~HH
[L:Normal/H:Fatigued]
[Left](FAN lifespan)
(board capacitor life
span)[Right]
dC-20 Start-up counter monitor
1~65535(cycles)
dC-21 Power–up counter monitor
dC-22 Accumulated RUN time monitor
1~1000000(hour)
dC-24 Accumulated Power-on time monitor
dC-26 Accumulated cooling-fan operation time
monitor
dC-37 icon 2 LIM detail monitor
dC-38 icon 2 ALT detail monitor
dC-39 icon 2 RETRY detail monitor
dC-40 icon 2 NRDY detail monitor
dC-45 IM/SM monitor
00 (IM selected)/
01 (SM selected)
dC-50 Firmware ver. Monitor
00.000~99.99
Code/Name
Range (unit)
dE-50 warning monitor
Refer to users guide
[db-01]~[db-64]
[dC-01]~[dC-50]
1) Refer to users guide for detail
4-11

Chapter 4
For parameter configuration
Code/Name
Range (unit)
FA-01
Main speed reference monitor
0.00~590.00(Hz)
FA-02
Sub-speed reference monitor
FA-10
Acceleration time monitor
0.00~3600.00(s)
FA-12
Deceleration time monitor
FA-15
Torque reference monitor
-500.0~500.0(%)
FA-16
Torque bias reference monitor
-500.0~500.0(%)
FA-20
Position reference monitor
When [AA123]=02
-268435455~+268435455(pulse)
When [AA123]=03
-1073741823~+1073741823(pulse)
FA-30 PID1 target value 1
-100.00~100.00(%)
FA-32 PID1 target value 2
FA-34 PID1 target value 3
FA-36 PID2 target value
FA-38 PID3 target value
FA-40 PID4 target value
[FA-01]~[FA-36]
■ Variable mode monitor (F code)
・If a [FA] parameter that can be modified is selected, it can be modified
in the display monitor.
4-12

Chapter 4
For parameter configuration
[SET]OFF
[SET]ON
[**-**] type
[**-**] type
[**1**] type
[**2**] type
[SET]OFF
[SET]ON
[AH-01]
[AH-01]
[Ub-01]
[Ub-01]
・・・
・・・
[Hb102]
[Hb202]
[Ab110]
[Ab210]
[bA122]
[bA222]
・・・
・・・
Code/Name
Range (unit)
Initial value
AA101
Main speed reference
selection, 1st-motor
01~16 *1)
09(JPN)/
01(EU)(USA)
(ASIA)(CHN)
AA102
Sub speed reference
selection, 1st-motor
00~16 *1)
00
AA104
Sub speed setting,
1st-motor
0.00~590.00(Hz)
0.00
AA105
Math operator selection
for speed reference,
1st-motor
00(Disable)/
01(Addition)/
02(Subtraction)/
03(Multiplication)
00
Code/Name
Range (unit)
Initial value
AA106 Frequency to
be added, 1st-motor
-590.00~+590.00(Hz)
0.00
AA 1 01
Parameter
group
ー:Common for 1st and 2nd motor
1st motor enabled if function [SET] is OFF
Internal number
in the group
Working
parameters
Parameter naming (Nomenclature)
1:
2:2nd motor enabled if function [SET] is ON
※By default the motor 1 is enabled in the case that
08:[SET] is not assigned in the Intelligent Input
terminals [CA-01]~[CA-11].
[SET] function enable code example.
(Example)
Parameter explanation
※The initial value format may be different.
Format: P1-(numeral)-(voltage)(keypad)(area)(filter)
(Example) Japan 200V Class P1-00044-LFF
Voltage rating: The voltage class is L(200V)/H(400V)
Other formats:
※When option is connected, parameters to display or
setting range may be added. Refer to user’s gude for
detail.
■Parameter mode (A code)
Frequency reference selection
[AA101]~[AA106]
・To set parameters, please read an understand
the P1 user’s guide first.
・For the motor protection, the following
parameters are necessary to be set.
-[Hb102]~[Hb108](If [IM])
-[Hd102]~[Hd108](If [SM/PMM])
-[bC110](Motor overload protection current)
Europe 400V Class P1-00054-HFEF
Area; None(JPN)/E(EU,ASIA)/U(USA)/C(CHN)
※In the case that you want to use the terminal function
[SET] for the 2nd set (motor), overwrite in the
1st-motor the 2nd motor settings.
4.5Parameter arrangement
Next is the parameter explanation, such as the parameter
group and the internal group number line-up.
The [SET] classification numbers “-“ and “1” are lined
*1)00(Disable)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3
without distinction, except “2” which is lined-up after
“-“ and “1”.
Example) Regarding the order
[AA101]⇒[AA102]⇒[AA104]⇒[AA105]⇒…
⇒[AA123]⇒[AA201]⇒…⇒[AA223]⇒
[Ab-01]⇒[Ab-03]⇒[Ab110]⇒[Ab-11]⇒…
・To change the frequency input reference, use [AA111].
Example: [FA-01] tp cjamge -> [AA101]=07
Pot(voltage) to set -> [AA101]=01(Ai1)
・To change between main and sub speed is possible with the math
・If [AA105]=00, the Intelligent input terminal 032[SCHG] can change
(Last two digits are order by numerical order)
⇒[Ab-25]⇒[Ab210]⇒
[AC-01]⇒…
(After the middle values of “-” and “1”, using “2”
changes the group)
・Through the [AA105] selection, the operator for the main and sub
Temporary frequency addition
※Related parameters might be described together in
relevant parts.
・When the [ADD] terminal is active the frequency set in [AA106] will be
terminal)/09(Parameter)/10(By RS485)/11(Option-1)/12(Option-2)/
13(Option-3)/14(Pulse train input:main)/16(EzSQ)/17(PID function)
operator.
between the main(OFF) and sub(ON) speed.
speed frequency calculation is set.
temporally added to the frequency reference.
4-13

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
AA111
RUN command
reference selection,
1st-motor
00~03
02(JPN)/
00(EU)
(USA)
(ASIA)
(CHN)
Code/Name
Range (unit)
Initial value
AA-12
RUN key rotation
direction , 1st-motor
00(Forward)/
01(Reverse)
00
AA-13
STOP key, 1st-motor
00(Disable)/01(Enable)/
02(Enable only at trip)
01
Code/Name
Range (unit)
Initial value
AA114 RUN direction
restriction selection,
1st-motor
00(No restriction)/
01(Only forward)/
02(Only reverse)
00
Code/Name
Range (unit)
Initial value
AA115 STOP mode
selection, 1st-motor
00(Deceleration stop)/
01(Free-run stop)
00
bb-40
Restart mode after FRS
release
00(Start with 0Hz)/
01(Start with frequency
matching)/
02(Start with Active
frequency matching)/
03(Detect speed)
00
Code/Name
Range (unit)
Initial value
AA121
Control mode
1st-motor
00~03, 08, 09, 11 *2)
00
Code/Name
Range (unit)
Initial value
AA123
Vector control
mode selection,
1st-motor
00(Speed/Torque control mode)/
01(Pulse train position control)/
02(Position control)/
03(High-resolution position control)
00
Code/Name
Range
(unit)
Initial
value
AA201 Main speed reference selection,
2nd-motor
Same as AA101
AA202 Sub speed reference selection,
2nd-motor
Same as AA102
AA204 Sub speed setting, 2nd-motor
Same as AA104
AA205 Math operator selection for Speed
reference, 2nd-motor
Same as AA105
AA206 Frequency to be added, 2nd-motor
Same as AA106
AA211 RUN-command selection, 2nd-motor
Same as AA111
AA214 RUN-command direction restriction
selection, 2st-motor
Same as AA114
AA215 STOP mode selection, 2st-motor
Same as AA115
AA221 Control mode, 2nd-motor
Same as AA121
AA223 Vector control mode selection,
2nd-motor
Same as AA123
[AA111]~[AA115][bb-40]
RUN command selection
*1) 00([FW]/[RV] terminal)/01(3-wire)/02(Keypad’s RUN key)/03(RS485)
・Select in which way will be operated.
In case it does not work, please review it.
Keypad keys settings
・[AA-12] specifies in which direction (forward/reverse)
will be the rotation after pressing the RUN key in the
operation keypad.
・[AA-13] changes the operation of the STOP key.
Independently of the actual setting of the STOP key it
performs a stop. The STOP circumstances can be
changed only by the setting selected in [AA-13],.
RUN command direction restriction
[AA121]~[AA223]
Control mode selection
*2) IM control: 00([V/f] constant torque)/01([V/f] reduced torque)/
02([V/f] Free V/f)/03([V/f] constant torque with Automatic-trq boost)/
08(Sensorless vector control)/
09(0Hz-area sensorless vector control)/
SM/PMM control: 11(Sensorless vector control (SM/PMM))
・Generally for a light duty control (such as fans or pumps),
the [V/f] control with constant torque or the [V/f]
control with reduced torque are more closer to the
operation characteristics of fans and pumps.
・For heavy duty (Cranes, etc…), sensorless vector
control is the typically used. In the case there is an
encoder, use the vector control with encoder.
・For a magnet motor select the sensorless vector control
(SM/PMM).
※With a standard duty (ND) all the options are available,
but for Light and Very Light duty (LD/VLD) the option
09 is not available.
Vector control with encoder mode
・It will avoid that the output goes over the imposed
limitation in case of a mistaken operation.
Restart operation after decel/free-run STOP
・For when a stop command is executed, deceleration
stop or free-run stop can be selected.
・If input terminal 032[FRS] is active (ON), free-run stop is
possible.
・With [bb-40], a restart with the release of the [FRS], or a
restart operation that will be executed after the full
stop of the free-run can be selected.
・In free-run stop it can be configured to stop by inertia if
the [E007] overvoltage error occurs during deceleration
(The torque will be lost).
・For Vector control with encoder ([A121]=10) select
Speed/Torque control (00) or Position control (02).
・For more information, refer to the user’s guide.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
4-14

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
Ab-01 Frequency scaling
conversion factor
0.00~100.00
1.00
Code/Name
Range (unit)
Initial
value
Ab-03 Multispeed operation
selection
00(16 speeds)/
01(8 speeds)
00
Ab110 Multispeed-0, 1st-motor
0.00~590.00(Hz)
0.00
Ab-11 Multispeed-1, 1st-motor
0.00~590.00(Hz)
0.00
Ab-12 Multispeed-2, 1st-motor
0.00~590.00(Hz)
0.00
Ab-13 Multispeed-3, 1st-motor
0.00~590.00(Hz)
0.00
Ab-14 Multispeed-4, 1st-motor
0.00~590.00(Hz)
0.00
Ab-15 Multispeed-5, 1st-motor
0.00~590.00(Hz)
0.00
Ab-16 Multispeed-6, 1st-motor
0.00~590.00(Hz)
0.00
Ab-17 Multispeed-7, 1st-motor
0.00~590.00(Hz)
0.00
Ab-18 Multispeed-8, 1st-motor
0.00~590.00(Hz)
0.00
Ab-19 Multispeed-9, 1st-motor
0.00~590.00(Hz)
0.00
Ab-20 Multispeed-10, 1st-motor
0.00~590.00(Hz)
0.00
Ab-21 Multispeed-11, 1st-motor
0.00~590.00(Hz)
0.00
Ab-22 Multispeed-12, 1st-motor
0.00~590.00(Hz)
0.00
Ab-23 Multispeed-13, 1st-motor
0.00~590.00(Hz)
0.00
Ab-24 Multispeed-14, 1st-motor
0.00~590.00(Hz)
0.00
Ab-25 Multispeed-15, 1st-motor
0.00~590.00(Hz)
0.00
Multispeed
CF4
CF3
CF2
CF1
Speed 0
OFF
OFF
OFF
OFF
Speed 1
OFF
OFF
OFF
ON
Speed 2
OFF
OFF
ON
OFF
Speed 3
OFF
OFF
ON
ON
Speed 4
OFF
ON
OFF
OFF
Speed 5
OFF
ON
OFF
ON
Speed 6
OFF
ON
ON
OFF
Speed 7
OFF
ON
ON
ON
Speed 8
ON
OFF
OFF
OFF
Speed 9
ON
OFF
OFF
ON
Speed 10
ON
OFF
ON
OFF
Speed 11
ON
OFF
ON
ON
Speed 12
ON
ON
OFF
OFF
Speed 13
ON
ON
OFF
ON
Speed 14
ON
ON
ON
OFF
Speed 15
ON
ON
ON
ON
Multispeed
SF7
SF6
SF5
SF4
SF3
SF2
SF1
Speed 0
OFF
OFF
OFF
OFF
OFF
OFF
OFF
Speed 1 - - - - - -
ON
Speed 2 - - - - - ON
OFF
Speed 3 - - - -
ON
OFF
OFF
Speed 4 - - - ON
OFF
OFF
OFF
Speed 5 - -
ON
OFF
OFF
OFF
OFF
Speed 6
-
ON
OFF
OFF
OFF
OFF
OFF
Speed 7
ON
OFF
OFF
OFF
OFF
OFF
OFF
Code/Name
Range (unit)
Initial
value
Ab210 Multispeed-0, 2nd-motor
Same as Ab110
Code/Name
Range (unit)
Initial
value
AC-01
Acceleration/Deceleration
Time input selection
00(Parameter)/
01(Option 1)/
02(Option 2)/
03(Option 3)/
04(Function EzSQ)
00
Code/Name
Range (unit)
Initial value
AC-02
Acceleration/
Deceleration selection
00(Common)/01(Multi)
00
[Ab-01]~[Ab-25]
Scaled Output Frequency gain monitor [dA-06]
・The visualized “Scaled Output frequency [dA-06]” is
equal to the “Output frequency [dA-01]” multiplied by the
“Frequency scaling conversion factor[Ab-01]”.
Multispeed command
[Ab210][AC-01]~[AC-02]
・For the 8 speeds selection, set [Ab-03]=01 assigning the
intelligent terminals 007[SF1] to 013[SF7] makes
available the use of the speeds 0 to 7.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
Input method for Acc/Decel time
・For the 16 speeds selection, set [Ab-03]=03 for
assigning the intelligent terminals 003[CF1] to
006[CF4] makes available the use of the speeds 0 to
15.
・[AC-01] changes the reference target for the Acc/Decel
command.
Individual Acc/Decel for Multispeed
・When [AC-02]=00, the acceleration/deceleration time
settings [AC120][AC122] or [AC124][AC126] will be in
effect.
・2-stage acceleration/deceleration functions from
[AC115] to [AC117] can be set.
・When [AC-02]=01, the acceleration/deceleration time
[AC-30]~[AC-88] for each multispeed control (from
speed 1 to 15) are enabled.
・When [AC-02]=01, while in Multspeed-0 command,
Acc/Decel setting [AC120] [AC122] or Acc/Decel setting
[AC124] [AC126] are enabled.
・During remote control up/down [FUP]/[FDN]
(parameters [CA-64] and [CA-66]) and PID soft start
(parameter [AH-78]), those parameters can be
overwritten.
4-15

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AC-03 Acceleration curve
selection
00(Linear)/
01(S-curve)/
02(U-curve)/
03(Inverted-U-curve)/
04(EL-S-curve)
00
AC-04 Deceleration curve
selection
00
AC-05 Acceleration curve
constant (S, U Reverse U-curve)
1~10
2
AC-06 Deceleration curve
constant (S, U Reverse U-curve)
2
AC-08 Curvature EL-S-curve
acceleration 1 (start)
0~100
25
AC-09 Curvature EL-S-curve
acceleration 2 (end)
25
AC-10 Curvature EL-S-curve
deceleration 1 (start)
25
AC-11 Curvature EL-S-curve
deceleration 2 (end)
25
Code/Name
Range (unit)
Initial
value
AC115
Select method to switch to
Acc2/Decel2 profile, 1st-motor
00([2CH] terminal)/
01(Set by parameter)/
02(Switch only when
rotation is inverted)
00
AC116
Acc1 to Acc2 frequency
transition point, 1st-motor
0.00~590.00(Hz)
0.00
AC117
Decel1 to Decel2 frequency
transition point, 1st-motor
0.00
Code/Name
Range (unit)
Unit
value
AC120 Acceleration time 1,
1st-motor
0.00~3600.00(s)
30.00
AC122 Deceleration time 1,
1st-motor
30.00
AC124 Acceleration time 2,
1st-motor
15.00
AC126 Deceleration time 2,
1st-motor
15.00
Output
frequency
Set output frequency
Maximum
[Hb105]
[Hd105]
Actual
acceleration
time
[AC120]
Actual
time
[AC122]
Time
Output
frequency
2CH
FW
Acc.
time 1
Decel.
time 1
Decel.
Time 2
Acc.
time 2
[AC-03]~[AC117]
Acceleration/deceleration curve selection
・When [AC-03]/[AC-04]=00(Linear), decelerates at
regular intervals towards the target value.
・When [AC-03]/[AC-04]=01(S-curve), for a shockless
operation proceeds gradually at the beginning and at
the end of the acceleration and deceleration.
・When [AC-03]/[AC-04]=02(U-curve), proceeds gradually
at the start of the acceleration and deceleration.
・When [AC-03]/[AC-04]=03(Inverted-U-curve), proceeds
gradually at the end of the acceleration and
deceleration.
・For S-curve, U-curve and Inverted-U-curve, the degree
in which the operation accelerates and decelerates can
be set with [AC-05]/[AC-06].
・When AC-03]/[AC-04]=04 (EL-S-curve), proceeds
gradually at the beginning and the end of the
acceleration and deceleration.
・For EL-S-curve shockless operation, the beginning and
the end of the acceleration and deceleration [AC-08]~
[AC-11] should be adjusted.
Two-stage Acc/Decel change
[AC120]~[AC126]
Acceleration/deceleration time setting
・Assign the Acc/Decel time that takes from 0Hz to reach
the maximum frequency.
・In case that the two-stage Acc/Decel function is not
meant to be used, the Acceleration time 1 [AC120] and
Deceleration time 1 [AC122] are used.
frequency
or
deceleration
・Example of using the two-stage Acc/Decel function.
With[AC115]=00
・In the Acc2/Decel2 time, forward/reverse change can be
done when intelligent input terminal 031[2CH] is ON
and the set frequency in [AC116]/ [AC117] is reached.
・Sets Acc/Decel time 1[AC120][AC122] and Acc/Decel
time 2 [AC124] [AC126].
*) Acc/Decel time is what takes from 0Hz to reach the
maximum frequency.
4-16
Chapter 4
For parameter configuration
Code/Name
Range (unit)
Unit value
AC-30 Acc. time for Multispeed-1
0.00~
3600.00(s)
30.00
AC-32 Decel. time for Multispeed-1
30.00
AC-34 Acc. time for Multispeed-2
30.00
AC-36 Decel. time for Multispeed-2
30.00
AC-38 Acc. time for Multispeed-3
30.00
AC-40 Decel. time for Multispeed-3
30.00
AC-42 Acc. time for Multispeed-4
30.00
AC-44 Decel. time for Multispeed-4
30.00
AC-46 Acc. time for Multispeed-5
30.00
AC-48 Decel. time for Multispeed-5
30.00
AC-50 Acc. time for Multispeed-6
30.00
AC-52 Decel. time for Multispeed-6
30.00
AC-54 Acc. time for Multispeed-7
30.00
AC-56 Decel. time for Multispeed-7
30.00
AC-58 Acc. time for Multispeed-8
30.00
AC-60 Decel. time for Multispeed-8
30.00
AC-62 Acc. time for Multispeed-9
30.00
AC-64 Decel. time for Multispeed-9
30.00
AC-66 Acc. time for Multispeed-10
30.00
AC-68 Decel. time for Multispeed-10
30.00
AC-70 Acc. time for Multispeed-11
30.00
AC-72 Decel. time for Multispeed-11
30.00
AC-74 Acc. time for Multispeed-12
30.00
AC-76 Decel. time for Multispeed-12
30.00
AC-78 Acc. time for Multispeed-13
30.00
AC-80 Decel. time for Multispeed-13
30.00
AC-82 Acc. time for Multispeed-14
30.00
AC-84 Decel. time for Multispeed-14
30.00
AC-86 Acc. time for Multispeed-15
30.00
AC-88 Decel. time for Multispeed-15
30.00
Code/Name
Range (unit)
Initial value
AC215 Select method to switch to
Acc2/Decel2 Profile, 2nd-motor
Same as AC115
AC216 Acc1 to Acc2 frequency
transition point, 2nd-motor
Same as AC116
AC217 Decel1 to Decel2 frequency
transition point, 2nd-motor
Same as AC117
AC220 Acceleration time 1, 2nd-motor
Same as AC120
AC222 Deceleration time 1, 2nd-motor
Same as AC122
AC224 Acceleration time 2, 2nd-motor
Same as AC124
AC226 Deceleration time 2, 2nd-motor
Same as AC126
Code/Name
Range (unit)
Initial
value
Ad-01 Torque reference input
selection
01~06/09~18 *1)
07
Ad-02 Torque reference
setting
-500.0~500.0(%)
0.0
Ad-03 Polarity selection for
torque reference
00(Per sign)/
01(Depend on the
operation direction)
00
Ad-04 Switching time of
torque control speed
0~1000(ms)
0
Code/Name
Range (unit)
Initial
value
Ad-11
Torque bias input selection
01~06/09~18 *1)
07
Ad-12 Torque bias setting
-500.0~500.0(%)
0.0
Ad-13
Polarity selection for torque bias
00(Per sign)/
01(Depend on the
operation direction)
00
Ad-14
Torque bias enable terminal
00(Disable)/
01(Enable)
00
Code/Name
Range (unit)
Initial value
Ad-40 Input selection for
speed limit at torque control
01~13 *1)
07
Ad-41 Speed limit for torque
control (at Forward rotation)
0.00~
590.00(Hz)
0.00
Ad-42 Speed limit for torque
control (at Reverse rotation)
0.00
Ad-43 Operation mode
selection for speed limit arrival
00(P-control)/
01(Limit)
01
Speed 2 [Ab-12]
Speed 3 [Ab-13],
Speed 4 [Ab-14]
Speed 1 [Ab-11]
Multispeed
FW
Speed 1
Speed
Speed
Speed
Speed
Speed
Speed
Speed 4
Acc/decel time
Acc. 1
[AC-30]
Acc. 2
[AC-34]
Acc. 3
[AC-38]
Decel. 3
[AC-40]
Acc. 4
[AC-42]
Same
before
Decel. 3
[AC-40]
Acc. 4
[AC-42]
Decel. 4
[AC-44]
Only can be changed between acc. y
decel. If the set frequency is the same
[AC-30]~[AC-88]
Setting for two-stage Acc/Decel time
[AC215]~ [Ad-15]
2nd motor When Intelligent Input terminal 024[SET] is enabled.
Torque control function setting
・Individual Acc/Decel times can be set for multispeed
functions[Ab-11]~[Ab-25].
・Operations settings of torque control.
For more information, refer to the User’s guide.
Torque bias setting
・For setting the torque bias.
For more information, refer to the User’s guide.
Speed limitation for torque control
・In middle of the torque control the speed limit can be
as
set.
For more information, refer to the User’s guide.
*1)00(Disable)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/
07(Parameter)/08(RS485)/13(Pulse train input:main)/ 14(Programme
function)/15(PID calc.)
4-17

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AE-01 Electronic gear set
position selection
00(Feedback)/
01(Reference)
00
AE-02 Numerator for
electronic gear ratio
1~10000
1
AE-03 Denominator for
electronic gear ratio
1~10000
1
AE-04 Positioning complete
range
0~10000(Pulse)
5
AE-05 Positioning complete
delay time
0.00~10.00(s)
0.00
AE-06 Position feedforward
gain
0~655.35
0.00
AE-07 Position loop gain
0.00~100.00
0.50
AE-08 Position bias value
-2048~2048(Pulse)
0
Code/Name
Range (unit)
Initial
value
AE-10 Stop position
reference selection for
Home search function
00(Parameter)/
01(Option 1)/
02(Option 2)/
03(Option 3)/
09
AE-11 Stop position of
Home search function
0~4096
0
AE-12 Speed of Home
search function
0.00~120.00(Hz)
0.00
AE-13 Direction of
Home search function
00(Forward)/01(Reverse)
00
Code/Name
Range (unit)
Initial value
AE-20 Position reference 0
When [AA123]≠03
-268435455~
+268435455(pulse)
When [AA123]=03
-1073741823~
+107374182(pulse)
0
AE-22 Position reference 1
0
AE-24 Position reference 2
0
AE-26 Position reference 3
0
AE-28 Position reference 4
0
AE-30 Position reference 5
0
AE-32 Position reference 6
0
AE-34 Position reference 7
0
AE-36 Position reference 8
0
AE-38 Position reference 9
0
AE-40 Position reference 10
0
AE-42 Position reference 11
0
AE-44 Position reference 12
0
AE-46 Position reference 13
0
AE-48 Position reference 14
0
AE-50 Position reference 15
0
AE-52 Position range
specification (forward)
When [AA123]≠03
0~+268435455(pulse)/
When [AA123]=03
0~+107374182(pulse)
0
AE-54 Position range
specification (reverse)
When [AA123]≠03
-268435455~0(pulse)/
When [AA123]=03
-1073741823~0(pulse)
0
AE-56 Position control
mode selection
00(Limited)/
01(Not limited)
00
Code/Name
Range (unit)
Initial value
AE-60 Auto-learning
function selection
00~15(X00~X15)
00
Code/Name
Range (unit)
Initial value
AE-61 Save actual position
at power outage
00(Disable)/
01(Enable)
00
Code/Name
Range (unit)
Initial value
AE-62
Preset position data
When [AA123]≠03
-268435455~+268435455(pulse)
When [AA123]=03
-1073741823~+107374182(pulse)
0
[AE-01]~[AE-13]
Position control
・Feedback signal is needed to perform the position
control.
For more information, refer to the User’s guide.
Home search function setting
[AE-20]~[AE-62]
Absolute position control
・Adjust the Home search function of the position
control.
For more information, refer to the User’s guide.
・Sets the absolute position function.
For more information, refer to the User’s guide.
Auto-Learning function
・Set auto-learning position for the absolute position
mode.
For more information, refer to the User’s guide.
Enable position saving when power is cut off
・Saves the absolute position when the power supply is
cut-off.
For more information, refer to the User’s guide.
Pre-set position
・In the absolute position mode sets the pre-set position.
For more information, refer to the User’s guide.
4-18

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
AE-64 Calculation gain of the
deceleration for stop distance
50.00~200.00(%)
100.00
AE-65 Calculation bias of the
deceleration for stop distance
0.00~655.35(%)
0.00
AE-66 Speed Limit in APR
control
0.00~100.00(%)
1.00
AE-67 APR start speed
0.00~100.00(%)
0.20
Code/Name
Range (unit)
Initial
value
AE-70 Zero-return mode
selection
00(Low-speed)/
01(High-Speed 1)/
02(High-Speed 2)
00
AE-71 Zero-return direction
selection
00(Forward)/
01(Reverse)
00
AE-72 Zero-return Low-speed
0.00~10.00(Hz)
0.00
AE-73 Zero-return High-Speed
0.00~590.00(Hz)
0.00
Code/Name
Range (unit)
Initial
value
AF101 DC braking enable,
1st-motor
00(Disable)/01(Enable)/
02(Frequency reference)
00
AF102 Braking type
selection, 1st-motor
00(DC braking)/
01(Speed servo-lock)/
02(Position servo-lock)
00
AF103 DC braking
frequency, 1st-motor
0.00~590.00(Hz)
0.00
AF104 DC braking delay
time, 1st-motor
0.00~5.00(s)
0.00
AF105 DC braking force
while stopping, 1st-motor
0~100(%)
30
AF106 DC braking active
time at stop, 1st-motor
0.00~60.00(s)
0.00
AF107 DC braking trigger
selection, 1st-motor
00(Edge)/
01(Level)
01
AF108 DC braking force
while starting, 1st-motor
0~100(%)
30
AF109 DC braking active
time at start, 1st-motor
0.00~60.00(s)
0.00
[AF103]
[AF106]
DC braking
Operation
command
Output
frequency
[AH109]
DC braking
Operation
command
Output
frequency
ON
Operation
command
Frequency
reference
Output
frequency
[AF103]
ON
AF106
[AE-64]~[AE-76]
Positioning function adjustment
・Adjustment of control operation for positioning control.
For more information, refer to the user’s guide.
Zero-return (Return to reference position)
・Sets the Zero-return function for absolute position mode.
For more information, refer to the user’s guide.
[AF101]~[AF109]
DC braking (DB) function
・DB at stop/start [AF101]=01 or DB at frequency
reference [AF101]=02 can be selected.
・DC braking can be used if Intelligent input terminal
030[DB] is ON.
・In vector control with encoder, use the [AF102]
Servo-lock function.
・Stop DB example (Braking force adjusted by AF105)
・Start DB example (Braking force adjusted by AF108)
・Frequency reference DB example (Braking force adjusted
by AF105)
・When the DC braking time is set as 0.00(s), DC braking is
not operational.
4-19

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AF120 Contactor control
enable, 1st-motor
00(Disable)
01(Enable: primary side)
02(Enable: secondary side)
00
AF121 Activation delay
time, 1st-motor
0.00~2.00(s)
0.20
AF122 Deactivation delay
time, 1st-motor
0.00~2.00(s)
0.10
AF123 Contactor check
time, 1st-motor
0.00~5.00(s)
0.10
AF130
Brake control enable,
1st-motor
00(Disable)/
01(Brake control 1:
Common)/
02(Brake control 1:
Separate)/
03(Brake control 2)
00
AF131 Brake wait time for
release, 1st-motor (Forward)
0.00~5.00(s)
0.00
AF132 Brake wait time for
Acc., 1st-motor (Forward)
0.00~5.00(s)
0.00
AF133 Brake wait time for
Stop, 1st-motor (Forward)
0.00~5.00(s)
0.00
AF134 Brake wait time for
confirmation, 1st-motor
(Forward)
0.00~5.00(s)
0.00
AF135
Brake release frequency,
1st-motor (Forward)
0.00~590.00(Hz)
0.00
AF136 Brake release
current, 1st-motor (Forward)
Inverter rated current
×(0.20~2.00)
*1)
AF137 Brake frequency,
1st-motor (Forward)
0.00~590.00(Hz)
0.00
AF138 Brake wait time for
release, 1st-motor (Reverse)
0.00~5.00(s)
0.00
AF139
Brake wait time for Acc. ,
1st-motor (Reverse side)
0.00~5.00(s)
0.00
AF140 Brake wait time for
Stop, 1st-motor (Reverse)
0.00~5.00(s)
0.00
AF141 Brake wait time for
confirmation, 1st-motor
(Reverse)
0.00~5.00(s)
0.00
AF142
Brake release frequency,
1st-motor (Reverse)
0.00~590.00(Hz)
0.00
AF143 Brake release
current, 1st-motor (Reverse)
Inverter rated current
×(0.20~2.00)
*1)
AF144 Brake frequency,
1st-motor (Reverse)
0.00~590.00(Hz)
0.00
Code/Name
Range (unit)
Initial
value
AF150 Brake open delay time,
1st-motor
0.00~2.00(s)
0.20
AF151 Brake close delay time,
1st-motor
0.00~2.00(s)
0.20
AF152 Brake check time, 1st-motor
0.00~5.00(s)
0.10
AF153 Servo lock/ DC injection time
at start, 1st-motor
0.00~10.00(s)
0.60
AF154 Servo lock/ DC injection time
at stop, 1st-motor
0.00~10.00(s)
0.60
Code/Name
Range
(unit)
Initial
value
AF201 DC braking enable, 2nd-motor
Same as AF101
AF202 Braking type selection, 2nd-motor
Same as AF102
AF203 DC braking frequency, 1st-motor
Same as AF103
AF204 DC braking delay time, 2nd-motor
Same as AF104
AF205 DC braking force while stopping, 2nd-motor
Same as AF105
AF206 DC braking active time at stop, 2nd-motor
Same as AF106
AF207 DC braking trigger selection, 2nd-motor
Same as AF107
AF208 DC braking force while starting, 2nd-motor
Same as AF108
AF209 DC braking active time at start, 2nd-motor
Same as AF109
AF220 Contactor control enable, 2nd-motor
Same as AF120
AF221 Activation delay time, 2nd-motor
Same as AF121
AF222 Deactivation delay time, 2nd-motor
Same as AF122
AF223 Contactor check time, 2nd-motor
Same as AF123
AF230 Brake control enable, 2nd-motor
Same as AF130
AF231 Brake wait time for release, 2nd-motor
(Forward)
Same as AF131
AF232 Brake wait time for Acc., 2nd-motor
(Forward)
Same as AF132
AF233 Brake wait time for Stop, 2nd-motor
(Forward)
Same as AF133
AF234 Brake wait time for confirmation, 2nd-motor
(Forward)
Same as AF134
AF235 Brake release frequency, 2nd-motor
(Forward)
Same as AF135
AF236 Brake release current, 2nd-motor (Forward)
Same as AF136
AF237 Brake frequency, 2nd-motor (Forward)
Same as AF137
AF238 Brake wait time for release, 2nd-motor
(Reverse)
Same as AF138
AF239 Brake wait time for Acc., 2nd-motor (Reverse)
Same as AF139
AF240 Brake wait time for Stop, 2nd-motor
(Reverse)
Same as AF140
AF241 Brake wait time for confirmation, 2nd-motor
(Reverse)
Same as AF141
AF242 Brake release frequency, 2nd-motor (Reverse)
Same as AF142
AF243 Brake release current, 2nd-motor (Reverse)
Same as AF143
AF244 Braking frequency, 2nd-motor (Reverse side)
Same as AF144
AF250 Brake open delay time, 2nd-motor
Same as AF150
AF251 Brake close delay time, 2nd-motor
Same as AF151
AF252 Brake check time, 2nd-motor
Same as AF152
AF253 Servo lock/DC injection time at start,
2nd-motor
Same as AF153
AF254 Servo lock/DC injection time at stop,
2nd-motor
Same as AF154
[AF120]~[AF144]
Brake control function
[AF150]~[AF254]
・Operations settings of brake control.
For more information, refer to the User’s guide.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
*1) Inverter rated current × 1.00.
4-20

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AG101 Jump frequency 1, 1st-motor
0.00~590.00(Hz)
0.00
AG102 Jump frequency amplitude 1,
1st-motor
0.00~10.00(Hz)
0.00
AG103 Jump frequency 2, 1st-motor
0.00~590.00(Hz)
0.00
AG104 Jump frequency amplitude 2,
1st-motor
0.00~10.00(Hz)
0.00
AG105 Jump frequency 3, 1st-motor
0.00~590.00(Hz)
0.00
AG106 Jump frequency amplitude 3,
1st-motor
0.00~10.00(Hz)
0.00
Code/Name
Range (unit)
Initial
value
AG110 Frequency of acceleration dwell,
1st-motor
0.00~590.00(Hz)
0.00
AG111 Time of acceleration dwell,
1st-motor
0.00~60.00(s)
0.00
AG112 Frequency of deceleration dwell,
1st-motor
0.00~590.00(Hz)
0.00
AG113 Time of deceleration dwell,
1st-motor
0.00~60.00(s)
0.00
Code/Name
Range (unit)
Initial
value
AG-20
Jogging
frequency
0.00~10.00(Hz)
0.00
AG-21
Jogging stop
selection
00(free-running, disabled during operation)
01(decel/stop, disabled during operation)
02(DC braking, disabled during operation)
03(free-running, enabled during operation)
04(decel/stop, enabled during operation)
05(DC braking, enabled during operation)
00
Code/Name
Range
(unit)
Initial
value
AG201 Jump frequency 1, 2nd-motor
Same as AG101
AG202 Jump frequency amplitude 1, 2nd-motor
Same as AG102
AG203 Jump frequency 2, 2nd-motor
Same as AG103
AG204 Jump frequency amplitude 2, 2nd-motor
Same as AG104
AG205 Jump frequency 3, 2nd-motor
Same as AG105
AG206 Jump frequency amplitude 3, 2nd-motor
Same as AG106
AG210 Frequency of acceleration dwell,
2nd-motor
Same as AG110
AG211 Time of acceleration dwell, 2nd-motor
Same as AG111
AG212 Frequency of deceleration dwell,
2nd-motor
Same as AG112
AG213 Time of deceleration dwell, 2nd-motor
Same as AG113
Output
frequency
Frequency
reference
[AG101]
[AG103]
[AG105]
[AG102]
[AG102]
[AG104]
[AG104]
[AG106]
[AG106]
[AG111]
[AG110]
Output
Frequency
Time
[AG112]
[AG113]
JG
FW
RV
Output
Frequency
[AG-20]
[AG101]~[AG113]
Resonant frequency avoidance (Jump)
・Prevents the passing of the output frequency in a
resonant point. Output frequency changes continuously.
Motor Acc/Decel dwell (Hold)
[AG-20]~[AG213]
Jogging function
・When Input terminal [JG] is active (ON), if the operation
command is given the jogging frequency is outputted.
The frequency and stop method can be set when
performing jogging motion.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
・By using the dwell function when the inertial load is
considerable, if the set frequency is reached in the set
time the Acc/Decel of the frequency will be stopped.
・If the Intelligent input terminal function 100[HLD] is in
ON state, the acceleration and deceleration will be
stopped (Hold activation).
4-21

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
AH-01 PID1 enable
00(Disable)/
01(Enable)/
02(Enable:inverted output)
00
Code/Name
Range (unit)
Initial value
AH-02 Reverse PID1 deviation
00(Disable)/
01(Enable)
00 Code/Name
Range (unit)
Initial
value
AH-03 PID1 unit selection
<unit table> at the end
of the document can
be consulted
03
AH-04 PID1 scaling (0%)
-10000~10000
0
AH-05 PID1 scaling (100%)
-10000~10000
10000
AH-06 PID1 scaling (decimal
point)
0~4
2
Code/Name
Range (unit)
Initial
value
AH-07 Target value 1 reference
selection for PID1
00~06/09~15
*1)
09
AH-10 PID1 target value-1
0.00~100.00(%)
*1)
0.00
AH-12 PID1 Multistage target value 1
0.00
AH-14 PID1 Multistage target value 2
0.00
AH-16 PID1 Multistage target value 3
0.00
AH-18 PID1 Multistage target value 4
0.00
AH-20 PID1 Multistage target value 5
0.00
AH-22 PID1 Multistage target value 6
0.00
AH-24 PID1 Multistage target value 7
0.00
AH-26 PID1 Multistage target value 8
0.00
AH-28 PID1 Multistage target value 9
0.00
AH-30 PID1 Multistage target value 10
0.00
AH-32 PID1 Multistage target value 11
0.00
AH-34 PID1 Multistage target value 12
0.00
AH-36 PID1 Multistage target value 13
0.00
AH-38 PID1 Multistage target value 14
0.00
AH-40 PID1 Multistage target value 15
0.00
AH-42 Target value 2 reference
selection for PID1
00~13*2)
00
AH-44 PID1 target value-2
0.00~100.00(%)
0.00
AH-46 Target value 3 reference
selection for PID1
00~13*2)
0.00
AH-48 PID1 target value-3
0.00~100.00(%)
0.00
AH-50 Math operator selection of
PID1 target value 1
01(Addition)
02(Subtraction)
03(Multiplication)
04(Division)
01
Multistage value
SVC4
SVC3
SVC2
SVC1
Target value 0
OFF
OFF
OFF
OFF
Target value 1
OFF
OFF
OFF
ON
Target value 2
OFF
OFF
ON
OFF
Target value 3
OFF
OFF
ON
ON
Target value 4
OFF
ON
OFF
OFF
Target value 5
OFF
ON
OFF
ON
Target value 6
OFF
ON
ON
OFF
Target value 7
OFF
ON
ON
ON
Target value 8
ON
OFF
OFF
OFF
Target value 9
ON
OFF
OFF
ON
Target value 10
ON
OFF
ON
OFF
Target value 11
ON
OFF
ON
ON
Target value 12
ON
ON
OFF
OFF
Target value 13
ON
ON
OFF
ON
Target value 14
ON
ON
ON
OFF
Target value 15
ON
ON
ON
ON
PID
operation
PID target value
Feedback
00
01
+
-
Reverse PID1
-
target value
PID1 target [AH-10]
RS485
communication
Option 1
Option 2
Option 3
[AH-07]
Multistage target 1~15
Analogue input 1
Analogue input 2
Analogue input 3
Not used
[SVC1-4]
[AH-50]
+, -, x, ÷
[AH-42]
01
02
03
09
10
11
12
13
00
PID1 target [AH-44]
09
01
00
[AH-01]~[AH-06]
PID1 function
・Validates the PID1 operation.
・If [AH-01]=01 when the PID output reaches negative
value, the PID output is limited to 0.
・If [AH-01]=02 when the PID output reaches negative
value, the PID output lets out an inverted output.
・When the PID output is negative, the motor will rotate
in the contrary direction.
・If [PID] terminal is ON, the PID control is disabled and
the [PID] target value becomes the frequency
reference.
+
[AH-02]
[AH-07]~[AH-50]
・The unit and display data related to the output of the
PID control can be changed.
PID1
*1) Display range can be set by [AH-04], [AH-05] and [AH-06].
*2) 00(Disabled)/01(Ai1 terminal)/02(Ai2 terminal)/
03(Ai3 terminal)/07(Parameter)/08(RS485)/14(Pulse train
input:main)/
・For PID1 target value, two targets are selected, target value 1 and
target value 2, the result of the operation carried out between these
two targets constitutes the PID1 target value.
・If Input terminal function 051[SVC1]~054[SVC4] are used, the PID
target value can be changed for the Multistage.
4-22

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AH-51 Feedback data 1
reference selection for PID1
00~06/08~13 *1)
01
AH-52 Feedback data 2
reference selection for PID1
00
AH-53 Feedback data 3
reference selection for PID1
00
AH-54 Math operator
selection of PID1feedback data
01(Addition)/
02(Subtraction)/
03(Multiplication)/
04(Division)
05(Square Root FB1)
06(Square Root FB2)
07(Square Root
FB1-FB2)
08(Average of
three inputs)
09(Minimum of
three inputs)
10(Maximum of
three inputs)
01
Code/Name
Range (unit)
Initial
value
PID1
AH-60 PID1 gain
change method selection
00(Constant gain [1])/
01([PRO] terminal)
00
AH-61 PID1
proportional gain 1
0.0~100.0
1.0
AH-62 PID1 integral
time constant 1
0.0~3600.0(s)
1.0
AH-63 PID1 derivative
gain 1
0.0~100.0(s)
0.0
AH-64 PID1
proportional gain 2
0.0~100.0
0.0
AH-65 PID1 integral
time constant 2
0.0~3600.0(s)
0.0
AH-66 PID1 derivative
gain 2
0.0~100.0(s)
0.0
AH-67 PID1 gain
change time
0~10000(ms)
100
Code/Name
Range (unit)
Initial
value
AH-70
PID1 feedforward selection
00~03 *2)
00
PID feedback
value
RS485
communication
Option 1
Option 2
Option 3
[AH-51]
Analogue input 1
Analogue input 2
Analogue input 3
Not used
[AH-54]
+, -, x, ÷
[AH-52]
01
02
03
08
09
10
11
00
Pulse train
input (internal)
12
01
00
Pulse train
input (option)
13
PID operation
result
Terminal [PRO]
PID
deviation
+
P
I
D
+
+
P 1 [AH-61]
P 2 [AH-64]
I 1 [AH-62]
I 2 [AH-65]
D 1 [AH-63]
D 2 [AH-66]
OFF
OFF
OFF
ON
ON
ON
PID feedforward value
[AH-70]
01
02
03
Analogue input 1
Analogue input 2
Analogue input 3
Not used
01
02
03
00
00
[AH-51]~[AH-54]
*1)00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/
04(Ai4 input)/05(Ai5 input)/06(Ai6 input)
08(RS485)/ 09(Option 1)/10(Option 2)
11(Option 3)/12(Pulse train input:main)/13(Pulse train input:option)
・For PID1 feedback, two targets are selected, feedback
data 1 and feedback data 2, the result of the operation
carried out between these two constitutes the PID1
feedback value.
[AH-60]~[AH-70]
・If [PIDC] terminal is active (ON), the value of the integral
constant is purged. If done while operating, the
operation can become instable/insecure.
・With [PRO] terminal, the gain can be changed. If the
state is OFF, Gain 1 is used, if the state is ON, Gain 2 is
used.
*2) 00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)
・To perform the PID feedforward control, an input is
selected.
4-23

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
AH-71 PID1 output variable
range
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial value
AH-72 PID1 excessive
deviation level
0.00~100.00(%)
3.00
Code/Name
Range (unit)
Initial
value
AH-73 Maximum PID feedback
0.00~100.00(%)
100.00
AH-74 Minimum PID feedback
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AH-75 PID soft start function
enable
00(Disable)/
01(Enable)
00
AH-76 PID soft start target
level
0.00~100.00(%)
100.00
AH-78 Acceleration time for
PID soft start
0.00~3600.00(s)
30.00
AH-80 PID soft start time
0.00~100.00(s)
0.00
AH-81 PID soft start error
detection
00(Disable)/
01(Enable: Error)
02(Enable: Warning)
00
AH-76 PID soft start error
detection level
0.00~100.00(%)
100.00
Code/Name
Range (unit)
Initial
value
AH-85
PID sleep trigger selection
00(Disable)/
01(Low output)/
02([SLEP] terminal)
00
AH-86
PID sleep start level
0.00~590.00(Hz)
0.00
AH-87
PID sleep active time
0.0~100.0(s)
0.0
AH-88
Setpoint boost before PID sleep
enable
00(Disable)/01(Enab
le)
00
AH-89
Setpoint boost time
0.00~100.00(s)
0.00
AH-90
Setpoint boost value
0.00~100.00(%)
0.00
AH-91
Minimum RUN time befor PID
sleep
0.00~100.00(s)
0.00
AH-92
Minimum active time of PID
sleep
0.00~100.00(s)
0.00
PID Output (%)
Time(s)
PID
Target
value
[AH-71]
PID Output variable range
[AH-71]
PID deviation (%)
Time(s)
0%
[AH-72]
Terminal
045[OD]
ON
ON
[AH-72]
PID feedback (%)
Time(s)
0%
[AH-73]
Output
terminal
046[FBV]
Operation
command
[AH-74]
ON
ON
ON
[AH-80]
PID
operation
[AH-76]
Abides by [AH-78] acceleration
Output frequency
Time
PID feedback
PID Target value
ON
[AH-71]~[AH-74]
・Limits the output range of the PID. If [AH-71]=0.00 the
limit is disabled.
[AH-75]~[AH-92]
・When the PID deviation pass over the±[AH-72], the
output terminal function 045[OD] is activated.
・If the PID feedback cross over the [AH-73] level, the
output terminal function 046[FBV] is deactivated (OFF).
If it crosses under the [AH-74] level, is activated (ON).
・For a shockless operation, base frequency×[AH-76] is
made the target value, with the [AH-80] output time.
・In the case of a soft start, the acceleration time can be
set with [AH-78].
・The PID sleep function temporally reduces the PID
output, achieving an energy saving state.
4-24

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AH-93 PID wake-up
trigger selection
01(Deviation)/
02(Falling feedback)/
03( [WAKE] terminal)
01
AH-94
PID wake-up start level
0.00~100.00(%)
0.00
AH-95
PID wake-up start time
0.00~100.00(s)
0.00
AH-96 PID wake-up
start deviation value
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AJ-01 PID2
enable
00(Disable)/01(Enable)/
02(Enable:inverted output)
00
Code/Name
Range (unit)
Initial value
AJ-02 Reverse PID2 deviation
00(Disable)/
01(Enable)
00
Code/Name
Range (unit)
Initial
value
AJ-03 PID2 unit selection
<unit table> at the end
of the document can
be consulted
03
AJ-04 PID2 scaling (0%)
-10000~10000
0
AJ-05 PID2 scaling (100%)
-10000~10000
10000
AJ-06 PID2 scaling (decimal
point)
0~4
2
Code/Name
Range (unit)
Initial
value
AJ-07 Target value reference
selection for PID2
00~08, 12, 13, 15 *1)
07
AJ-10 PID2 target value
-100.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AJ-12 Feedback data
reference selection for PID2
00~08, 12, 13, 15 *1)
02
PID Target value
[AH-94]
[AH-86]
Output frequency
[AH-95]
Feedback value
[AH-87]
PID Target value
[AH-94]
[AH-86]
Output frequency
[AH-95]
Feedback value
[AH-87]
Feedback value
PID Target value
Output frequency
Terminal [SLEP]
Terminal [WAKE]
ON
ON
[AH-87]
[AH-95]
PID
operation
PID target
value
Feedback
value
00
01
-
Reverse PID2
-
[AH-93]~[AH-96]
・Operation example of the sleep function.
Example 1) [AH-85]=01(Low output)
[AH-93]=01(Deviation)
[AJ-01]~[AJ-10]
PID2 function
・Validates the PID2 operation.
・If [AJ-01]=01 when the PID output reaches a negative
value, the PID output is limited to 0.
・If [AJ-01]=02 when the PID output reaches a negative
value, the PID output lets out an inverted output.
・By activating the [PID2] terminal, the PID2 output
becomes 0.
+
[AJ-02]
Example 2) [AH-85]=01(Low output)
[AH-93]=02(Low feedback)
Example 3) [AH-85]=02([SLEP] terminal)
[AH-93]=03([WAKE] terminal)
+
・PID2 deviation can be reversed.
・You can switch the display data and the display unit
involved in the output of the PID control by the
calculation.
・When PID2 target value input is selected, if the selected
is the parameter setting, [AJ-10] gets enabled.
・Selects the PID2 feedback reference.
*1)00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/
04(Ai4 terminal)/05(Ai5 terminal)/06(Ai6 terminal)/07(Parameter)/
08(RS485)/ 12(Pulse train input: main)/ 13(Pulse train input:
option)/15(PID1 output)
4-25

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AJ-13 PID2 proportional gain
0.0~100.0
1.0
AJ-14 PID2 integral time constant
0.0~3600.0(s)
1.0
AJ-15 PID2 derivative gain
0.0~100.0(s)
0.0
Code/Name
Range (unit)
Initial value
AJ-16 PID2 output range
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial value
AJ-17 PID2 deviation level
0.00~100.00(%)
3.00
Code/Name
Range (unit)
Initial
value
AJ-18 Maximum PID2 feedback
0.00~100.00(%)
100.00
AJ-19 Minimum PID2 feedback
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AJ-21 PID3
enable
00(Disable)/01(Enable)/
02(Enable:inverted output)
00
Code/Name
Range (unit)
Initial value
AJ-22 Reverse PID3 deviation
00(Disable)/
01(Enable)
00
Code/Name
Range (unit)
Initial
value
AJ-23 PID3 unit selection
<unit table> at the end
of the document can
be consulted
03
AJ-24 PID3 scaling (0%)
-10000~10000
0
AJ-25 PID3 scaling (100%)
-10000~10000
10000
AJ-26 PID3 scaling (decimal
point)
0~4
2
Code/Name
Range (unit)
Initial
value
AJ-27 Target value reference
selection for PID3
00~08, 12, 13, 15 *1)
07
AJ-30 PID3 target value
-100.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AJ-32 Feedback data
reference selection for PID3
00~08, 12, 13, 15 *1)
02
PID output (%)
Time(s)
PID
Target
value
[AJ-16]
PID output range
[AJ-16
PID deviation (%)
Time(s)
0%
[AJ-17]
Output
terminal
047[OD2]
ON
ON
[AJ-17]
PID feedback (%)
Time(s)
0%
[AJ-18]
048[FBV2]
Operation
command
[AJ-19]
ON
ON
ON
PID
operation
PID target
value
Feedback
value
00
01
-
Reverse PID3
-
[AJ-13]~[AJ-19]
・Sets the PID2 gain.
・If [PIDC] terminal is active (ON), the value of the
integral constant is purged. If done while operating, the
operation can become instable/insecure.
・Limits the output range of the PID. If [AJ-16]=0.00 the
limit is disabled.
[AJ-21]~[AJ-30]
PID3 function
・Validates the PID3 operation.
・If [AJ-21]=01 when the PID output reaches a negative
value, the PID output is limited to 0.
・If [AJ-21]=02 when the PID output reaches a negative
value, the PID output lets out an inverted output.
・By activating the [PID3] terminal, the PID3 output
becomes 0.
+
+
・PID3 deviation can be reversed.
[AJ-22]
・When the PID deviation pass over ±[AJ-17], the output
terminal function 047[OD2] is activated.
・When the PID feedback cross over the [AJ-18] level, the
output terminal function 048[FBV2] is deactivated
(OFF). If it crosses under the [AJ-19] level, is activated
(ON).
・You can switch the display data and the display unit
involved in the output of the PID control by the
calculation.
・When PID3 target value input is selected, if the selected
is the parameter setting, [AJ-30] gets enabled.
・Selects the PID3 feedback reference.
*1)00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/
04(Ai4 terminal)/05(Ai5 terminal)/06(Ai6 terminal)/07(Parameter)/
08(RS485)/ 12(Pulse train input: main)/ 13(Pulse train input:
option)/15(PID1 output)
4-26
Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AJ-33 PID3 proportional gain
0.0~100.0
1.0
AJ-34 PID3 integral time constant
0.0~3600.0(s)
1.0
AJ-35 PID3 derivative gain
0.0~100.0(s)
0.0
Code/Name
Range (unit)
Initial value
AJ-36 PID3 output range
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial value
AJ-37 PID3 deviation level
0.00~100.00(%)
3.00
Code/Name
Range (unit)
Initial
value
AJ-38 Maximum PID3 feedback
0.00~100.00(%)
100.00
AJ-39 Minimum PID3 feedback
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AJ-41 PID4
enable
00(Disable)/01(Enable)/
02(Enable:inverted output)
00
Code/Name
Range (unit)
Initial value
AJ-42 Reverse PID4 deviation
00(Disable)/
01(Enable)
00
Code/Name
Range (unit)
Initial
value
AJ-43 PID4 unit selection
<unit table> at the end
of the document can
be consulted
03
AJ-44 PID4 scaling (0%)
-10000~10000
0
AJ-45 PID4 scaling (100%)
-10000~10000
10000
AJ-46 PID4 scaling (decimal
point)
0~4
2
Code/Name
Range (unit)
Initial
value
AJ-47 Target value reference
selection for PID4
00~08, 12, 13, 15 *1)
07
AJ-50 PID4 target value
-100.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
AJ-52 Feedback data
reference selection for PID4
00~08, 12, 13, 15 *1)
02
PID output (%)
Time(s)
PID
Target
value
[AJ-36]
PID output range
[AJ-36
PID deviation (%)
Time(s)
0%
[AJ-37]
Output
terminal
047[OD3]
ON
ON
[AJ-37]
PID feedback (%)
Time(s)
0%
[AJ-38]
048[FBV3]
Operation
command
[AJ-39]
ON
ON
ON
PID
operation
PID target
value
Feedback
value
+
00
01
+
-
Reverse PID4
[AJ-42]
-
[AJ-33]~[AJ-39]
・Sets the PID3 gain.
・If [PIDC] terminal is active (ON), the value of the
integral constant is purged. If done while operating, the
operation can become instable/insecure.
・Limits the output range of the PID. If [AJ-36]=0.00 the
limit is disabled.
[AJ-41]~[AJ-50]
PID3 function
・Validates the PID4 operation.
・If [AJ-41]=01 when the PID output reaches a negative
value, the PID output is limited to 0.
・If [AJ-41]=02 when the PID output reaches a negative
value, the PID output lets out an inverted output.
・By activating the [PID4] terminal, the PID4 output
becomes 0.
・PID4 deviation can be reversed.
・When the PID deviation pass over ±[AJ-37], the output
terminal function 089[OD3] is activated.
・When the PID feedback cross over the [AJ-18] level, the
output terminal function 090[FBV3] is deactivated
(OFF). If it crosses under the [AJ-39] level, is activated
(ON).
・You can switch the display data and the display unit
involved in the output of the PID control by the
calculation.
・When PID4 target value input is selected, if the selected
is the parameter setting, [AJ-50] gets enabled.
・Selects the PID4 feedback reference.
*1)00(Not used)/01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/
04(Ai4 terminal)/05(Ai5 terminal)/06(Ai6 terminal)/07(Parameter)/
08(RS485)/ 12(Pulse train input: main)/ 13(Pulse train input:
option)/15(PID1 output)
4-27

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
AJ-53 PID4 proportional gain
0.0~100.0
1.0
AJ-54 PID4 integral time constant
0.0~3600.0(s)
1.0
AJ-55 PID4 derivative gain
0.0~100.0(s)
0.0
Code/Name
Range (unit)
Initial value
AJ-56 PID4 output range
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial value
AJ-57 PID4 deviation level
0.00~100.00(%)
3.00
Code/Name
Range (unit)
Initial
value
AJ-58 Maximum PID4 feedback
0.00~100.00(%)
100.00
AJ-59 Minimum PID4 feedback
0.00~100.00(%)
0.00
Code/Name
Range (unit)
Initial
value
bA102
Frequency upper limit, 1st-motor
0.00~590.00(Hz)
0.00
bA103
Frequency lower limit, 1st-motor
0.00~590.00(Hz)
0.00
Code/Name
Range (unit)
Initial value
bA110
Torque limit selection, 1st-motor
01~03/
07, 08 *1)
27
bA111 Torque limiting
parameter selection, 1st-motor
00(4 quadrants)/
01([TRQ] terminal)
00
bA112 Torque limit (1)
(forward-driving in 4-quadrant
mode), 1st-motor
0.0~500.0(%)
120.0(%)
bA113 Torque limit (2)
(reverse-regenerating in
4-quadrant mode), 1st-motor
0.0~500.0(%)
120.0(%)
bA114 Torque limit (3)
(reverse-driving in 4-quadrant
mode), 1st-motor
0.0~500.0(%)
120.0(%)
bA115 Torque limit (4)
(forward-regenerating in
4-quadrant mode), 1st-motor
0.0~500.0(%)
120.0(%)
bA116 Torque limit LADSTOP
enable, 1st-motor
00(Disable)/
01(Enable)
00
PID output (%)
Time(s)
PID
Target
value
[AJ-36]
PID output range
[AJ-36
PID deviation (%)
Time(s)
0%
[AJ-37]
Output
terminal
091[OD4]
ON
ON
[AJ-37]
PID feedback (%)
Time(s)
0%
[AJ-58]
092[FBV4]
Operation
command
[AJ-59]
ON
ON
ON
[AJ-53]~[AJ-59]
・Sets the PID4 gain.
・If [PIDC] terminal is active (ON), the value of the
integral constant is purged. If done while operating, the
operation can become instable/insecure.
・Limits the output range of the PID. If [AJ-56]=0.00 the
limit is disabled.
[bA102]~[bA115]
■Parameter mode (b code)
Frequency limit
・Sets upper and lower limits of the frequency.
Torque limit
・When the PID deviation pass over ±[AJ-57], the output
terminal function 091[OD4] is activated.
*1) 01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/07(Parameter)/
08(RS485)
・In the case of vector control (With sensor – Sensorless –
0Hz) the torque limit function can limit the motor
output torque.
・When the PID feedback cross over the [AJ-58] level, the
output terminal function 092[FBV4] is deactivated
(OFF). If it crosses under the [AJ-59] level, is activated
(ON).
4-28
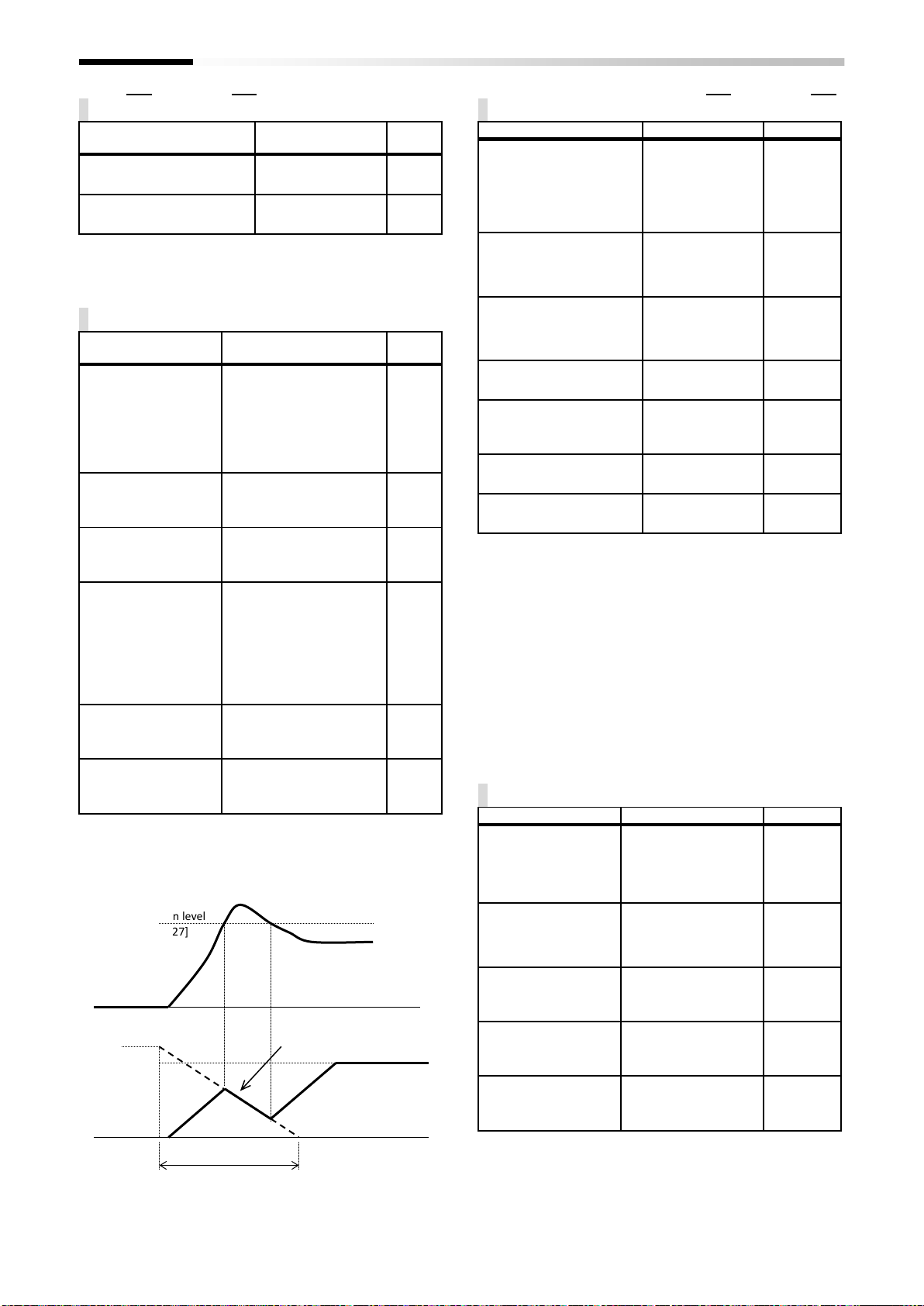
Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
bA120 Overcurrent
suppression enable, 1st-motor
00(Disable)/
01(Enable)
00
bA121 Overcurrent
suppression level, 1st-motor
Inverter ND rated
current×(0.20~2.00)
*1)
Code/Name
Range (unit)
Initial
value
bA122
Overload restriction 1
enable, 1st-motor
00(Disable)/
01(Enable during Acc. and
constant speed)/
02(Constant speed only)/
03(Enable during Acc. and
constant speed-Acc. during
regeneration)
01
bA123
Overload restriction 1
level, 1st-motor
Inverter rated current
×(0.20~2.00)
*2)
bA124 Overload
restriction 1 deceleration
time, 1st-motor
0.10~3600.00(s)
1.00
bA126
Overload restriction 2
enable, 1st-motor
00(Disable)/
01(Enable during Acc. and
constant speed)/
02(Constant speed only)/
03(Enable during Acc. and
constant speed - Increase
frequency during
regeneration)
00
bA127
Overload restriction 2
level, 1st-motor
Inverter rated current
×(0.20~2.00)
*2)
bA128 Overload
restriction 2 deceleration
time, 1st-motor
0.10~3600.00(s)
1.00
Code/Name
Range (unit)
Initial value
bA-30 Selection of
deceleration/stop in the
event of a power loss
00(Disable)/
01(Decel. stop)/
02(Decel. stop: with
resume)/
03(Decel. stop:
return to origin)
00
bA-31 DC voltage trigger
level during power loss
(200V class)
0.0~400.0(Vdc)
(400V class)
0.0~800.0(Vdc)
(200V class)
220.0
(400V class)
440.0
bA-32 Overvoltage
threshold during power loss
(200V class)
0.0~400.0(Vdc)
(400V class)
0.0~800.0(Vdc)
(200V class)
360.0
(400V class)
720.0
bA-34 Deceleration time
during power loss
0.01~3600.00(s)
1.00
bA-36 Initial output
frequency decrease during
power loss
0.00~10.00(Hz))
0.00
bA-37 Proportional gain
for operation at power loss
0.00~2.55
0.20
bA-38 Integral time for
operation at power loss
0.000~65.535(s)
0.100
Code/Name
Range (unit)
Initial value
bA140
Overvoltage suppression
enable, 1st-motor
00(Disable)/
01(DC, constant decel.)
02(Enable acceleration)/
03(Enable Acc. at
constant speed & decel.)
00
bA141
Overvoltage suppression
level, 1st-motor
(200V class)
330.0~390.0(Vdc)
(400V class)
660.0~780.0(Vdc)
(200V class)
380
(400V class)
760
bA142 Overvoltage
suppression action time,
1st-motor
0.00~3600.00(s)
1.00
bA144 Overvoltage
suppression proportional
gain, 1st-motor
0.00~2.55
0.50
bA145
Overvoltage suppression
integral time, 1st-motor
0.000~65.535(s)
0.060
Inverter output
frequency
Overload restriction level
[bA123]/[bA127]
Output current
Reference
frequency
Deceleration according to
the deceleration time at
overload restriction
[bA124]/[bA128]
Maximum frequency
[Hb105]
[Hd105]
[bA120]~[bA128]
Overcurrent suppression function setting
*1) Inverter ND rated current×1.80
・Overcurrent can be suppressed, but in that case torque
drop can occur. Disable it in cases such as cranes.
Overload restriction function settings
[bA-30]~[bA145]
Deceleration / stop at power loss (Non-stop)
*2) Inverter rated current×1.50
・When the current is increased, the overload restriction
function reduces the current automatically by lowering
the frequency.
・If the DC voltage of the main circuit is lower than the
level of [bA-31], the inverter decelerates to create a
regenerative state.
・When [bA-30]=01, if the DC voltage drops, deceleration
starts from the value of the actual frequency command
to the [bA-36], according to the deceleration time
[bA-34]. Once the DC voltage exceeds the [bA-32], the
deceleration is temporally stopped.
・When [bA-30]=02/03, if the DC voltage drops, by
decelerating for a regenerative state, the DC voltage is
maintained at [bA-32]target level decelerating using
the PI control.
Overvoltage suppression - deceleration
・Using [OLR] function state, the overload restriction 1
(OFF) and overload restriction 2 (ON) can be used.
・When [bA140]=01, the deceleration time is increased
until stop so the DC voltage do not cross over the
[bA141] level.
・When [bA140]=02/03, accelerates temporally so the DC
voltage do not cross over [bA141] level.
4-29

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
bA146
Over-excitation
function selection
(V/f) , 1st-motor
00(Disable)/01(Always ON)/
02(Only at deceleration)/
03(Operation at set level)/
04(Only at Decel. and level)
02
bA147
Time constant of
over-excitation
output filter (V/f) ,
1st-motor
0.00~1.00(s)
0.30
bA148
Over-excitation
voltage gain (V/f) ,
1st-motor
50~400(%)
100
bA149
Over-excitation
control level setting
(V/f) , 1st-motor
(200V Class)
330.0~390.0(Vdc)
(400V Class)
660.0~780.0(Vdc)
(200V Class)
380
(400V Class)
760
Code/Name
Range (unit)
Initial value
bA-60
Dynamic braking usage ratio
0.0~100.0(%)
10.0
bA-61
Dynamic braking control
00(Disable)/
01(Only while running)
02(Enable during stop)
00
bA-62 Dynamic braking
activation level
(200V class)
330.0~390.0(V)
(400V class)
660.0~780.0(V)
(200V class)
360.0
(400V class)
720.0
bA-63 Dynamic braking
resistor value
Inverter minimum
resistor value 600(Ω)
Minimum
resistance
Code/Name
Range (unit)
Initial
value
bA-70 Cooling fan
control selection
00(Always ON)/
01(While inverter operates)/
02(Depends on temperature)
00
bA-71 Cooling fan
control selection
00(Disable)/01(Clear)
00
Code/Name
Range
(unit)
Initial
value
bA202 Frequency upper limit, 2nd motor
Same as bA102
bA203 Frequency lower limit, 2nd motor
Same as bA103
bA210 Torque limit selection, 2nd motor
Same as bA110
bA211 Torque limit LADSTOP enable, 2nd motor
Same as bA111
bA212 Torque limit (1) (forward-driving in
4-quadrant mode), 2nd motor
Same as bA112
bA213 Torque limit (2) (reverse- regenerating in
4-quadrant mode), 2nd motor
Same as bA113
bA214 Torque limit (3) (reverse-driving in
4-quadrant mode), 2nd motor
Same as bA114
bA215 Torque limit (4) (forward- regenerating in
4-quadrant mode), 2nd motor
Same as bA115
bA220 Overcurrent suppression enable, 2nd
motor
Same as bA120
bA221 Overcurrent suppression level, 2nd-motor
Same as bA121
bA222 Overload restriction 1 selection, 2nd-motor
Same as bA122
bA223 Overload restriction 1 level, 2nd-motor
Same as bA123
bA224 Overload restriction 1 active time,
2nd-motor
Same as bA124
bA226 Overload restriction 2 selection, 2nd-motor
Same as bA126
bA227 Overload restriction 2 level, 2nd-motor
Same as bA127
bA228 Overload restriction 2 active time,
2nd-motor
Same as bA128
bA240 Overvoltage suppression enable,
2nd-motor
Same as bA140
bA241 Overvoltage suppression level, 2nd-motor
Same as bA141
bA242 Overvoltage suppression action time,
2nd-motor
Same as bA142
bA244 Overvoltage suppression proportional gain,
2nd-motor
Same as bA144
bA245 Overvoltage suppression integral time,
2nd-motor
Same as bA145
bA246 Over-excitation function selection,
2nd-motor
Same as bA146
bA247 Time constant of over-excitation output
filter (V/f) , 2nd-motor
Same as bA147
bA248 Over-excitation voltage gain, 2nd-motor
Same as bA148
bA249 Over-excitation control level setting,
2nd-motor
Same as bA149
[bA146]~[bA149] [bA-60]~[bA-63]
Overvoltage suppression - Over-excitation
・This function disables the AVR function output voltage,
works while in over-excitation.
・When [AA121]=00~02, 04~06, (V/f) is enabled.
・When [bA146]=03/04, it will be operative if DC voltage
exceeds [bA-149] level.
Dynamic braking (BRD) function
[bA-70]~[bA249]
Cooling-fan operation
・The Inverter cooling fan can be stopped.
・If you change the cooling-fan, assigning [bA-71]=01 you
will be able to clear the accumulated operation time.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
・This function operates the braking resistor of the built-in
braking circuits models. To use the BRD, setting [bA-60]
and [bA-61] is required.
4-30

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
bb101 Carrier
frequency, 1st-motor
0.5~16.0(kHz)
2.0
bb102 Sprinkle carrier
pattern selection,
1st-motor
00(Disable)/
01(Enable: Patern-1)/
02(Enable: Patern-2)/
03(Enable: Patern-3)
00
bb103
Automatic carrier
frequency reduction
selection, 1st-motor
00(Disable)/
01(Enable: Current)/
02(Enable: Temperature)
00
Code/Name
Range (unit)
Initial
value
bb-10 Automatic
reset selection
00(Disable)/
01(If RUN command is OFF)
02(After set time)/
04(Emergency force drive)
00
bb-11 Enable alarm
signal for automatic
reset event
00(Enable)/
01(Disable)
00
bb-12 Automatic
reset waiting time
0.0~600.0(s)
2.0
bb-13 Automatic
reset count setting
0~10(count)
3
Code/Name
Range (unit)
Initial
value
bb-20 Retry count after power loss
event
0~16/255
0
bb-21 Retry count after
undervoltage event
0~16/255
0
bb-22 Retry count after
overcurrent event
0~5
0
bb-23 Retry count after
overvoltage event
0~5
0
Code/Name
Range (unit)
Initial
value
bb-24 Selection of retry mode for
power loss / undervoltage
*3)
00
bb-25 Allowable power loss time
0.3~25.0(s)
1.0
bb-26 Retry wait time for power loss
/undervoltage
0.3~100.0(s)
1.0
bb-27 Selection of undervoltage trip
while on stop
00(Disable)/
01(Enable)/
02(Disable at
Stop/Decel. stop)
00
bb-28 Selection of retry mode for
overcurrent trip
*3)
00
bb-29 Retry wait time for
overcurrent
0.3~100.0(s)
1.0
bb-30 Selection of retry mode for
overvoltage trip
*3)
00
bb-31 Retry wait time for
overvoltage
0.3~100.0(s)
1.0
Code/Name
Range
(unit)
Initial
value
bb-40 Restart mode after free-run (FRS) release
*4)
00
bb-41 Restart mode after restart (RS) release
00
Code/Name
Range (unit)
Initial value
bb-42 Minimum level for
frequency matching
0.00~590.00(Hz)
0.00
Free-run (FRS)
Primary
cut off
Inverter
output
Motor speed
Lower limit
Restart with matching
frequency
[bb101]~[bb-42]
Reduction of electromagnetic sound
・To decrease noise, [bb101] should be set small. To lower
electromagnetic sound, [bb101] has to be set bigger.
・By setting the duty specification selection [Ub-03], the
carrier frequency is internally limited.
・For the sake of the inverter protection, the Automatic
carrier reduction [bb103] decreases the carrier in
certain cases.
Reset operation after error event
[bb-45]~[bb-59]
*3) 00(Restart motor with 0Hz)/01(Restart with a matching
frequency)/02(Restart with active frequency matching)/03(Detect
speed)/04(Decelerate and stop with a matching frequency and then
trip)
・Regarding the restart, after the waiting time is
completed the selected restart method is carried out.
Restart mode after FRS/RS
・Adjustment of the automatic reset that follows an error
event. In the case that RUN command was on
execution, after the reset, is followed by the setting of
[bb-41].
Retry/trip setting in error event
・Sets number of retries before tripping.
・If 0 is set, as soon as an error occurs, it will trip.
・If you want to reset the retry count, assign any value
other than 0.
*4) 00(Start with 0Hz)/01(Start with matching frequency)/02(Start with
active matching frequency)/03(Detect speed)/
・When using Intelligent input terminals [FRS] and [RS],
restart mode can be selected.
・[bb-40] allows you to select the restart operation after a
free-run stop.
・[bb-41] allows you to select the restart operation after a
trip or reset event.
Minimum level of frequency matching
・The matching frequency function adopts the motor
frequency for a shockless start-up.
・If at the restart the frequency is under the [bb-42]
frequency, a 0Hz restart will be used instead.
4-31
[bb-42]
Retry wait time

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
bb-43
Active frequency matching,
current level
Inverter rated
current
×(0.20~2.00)
Inverter
rated
current×1.00
bb-44 Active frequency
matching, scan time constant
(frequency)
0.10~30.00(s)
0.5
bb-45
Active frequency matching,
scan time constant (voltage)
0.10~30.00(s)
0.5
bb-46
Active frequency matching,
Overcurrent suppression level
Inverter rated
current
×(0.20~2.00)
Inverter
rated
current×1.00
bb-47
Active frequency matching,
restart frequency select
00(Frequency set
when inverter
output shut off)/
01(Maximum
frequency)/
02(Set frequency)
00
Code/Name
Range (unit)
Initial value
bb160 Overcurrent
detection level, 1st-motor
Inverter rated
current × (0.20~2.20)
Inverter rated
current×2.20
Code/Name
Range (unit)
Initial value
bb-61 Selection for power
supply overvoltage
00(Warning)/
01(Error)
00
bb-62 Selection of power
supply overvoltage level
(200V Class)
300.0~400.0(V)
(400V Class)
600.0~800.0(V)
(200V Class)
390.0
(400V Class)
780.0
Code/Name
Range (unit)
Initial
value
bb-65 Input phase loss detection
enable
00(Disable)/01(Enable)
00
bb-66 Output phase loss
detection enable
00(Disable)/01(Enable)
00
bb-67 Output phase loss
detection sensitivity
1~100(%)
10
Code/Name
Range (unit)
Initial value
bb-70 Thermistor error level
0~10000(Ω)
3000
CA-60 Thermistor enable
00(Disable)/
01(PTC)/02(NTC)
00
Code/Name
Range (unit)
Initial value
bb-80 Overspeed detection level
0.0~150.0(%)
135.0
bb-81 Overspeed detection time
0.0~5.0(s)
0.5
Code/Name
Range (unit)
Initial value
bb-82 Operation enable for
abnormal speed deviation
00(Disable)/
01(Enable)
00
bb-83 Speed deviation error
detection level
0.0~100.0(%)
15.0
bb-84 Speed deviation error
detection time
0.0~5.0(s)
0.5
Code/Name
Range (unit)
Initial value
bb-85 Operation enable for
abnormal position deviation
00(Disable)/
01(Enable)
00
bb-86 Position deviation error
detection level
0~65535
(×100pulse)
4096
bb-87 Position deviation error
detection time
0.0~5.0(s)
0.5
Code/Name
Range (unit)
Initial value
bb201 Carrier frequency, 2nd-motor
Same as bb101
bb203 Automatic carrier frequency
reduction enable, 2nd-motor
Same as bb103
bb260 Overcurrent detection level,
2nd-motor
Same as bb160
Retry waiting time
Free-run
Primary
cut off
Inverter output
Motor speed
Lower limit
[bb-59]
Start with matching frequency
Output
current
Active frequency
current level
[bb-43]
Frequency selected in [bb-47]
Deceleration according to[bb-44]
[bb-43]~[bb-62]
Active frequency matching
・The reset interval is set with [bb-46].
・Starts scanning from the frequency set in [bb-47].
[bb-65]~[bb260]
Phase loss detection
・Detects the disconnection of the supply RST input line
and UVW output line.
Thermistor error detection
・In [TH] terminal must be attached the kind of thermistor
specified in [CA-60].
・If [CA-60]=01 or 02, error level must be set in [bb-70].
Overspeed control
frequency
setting
Overcurrent level
・The motor protection level for overcurrent can be set.
・In the case of a permanent magnet motor is set lower
than the motor demagnetizing level.
Overvoltage warning
・In vector control, when speed arrives to “maximum
speed”×[bb-75], and pass over [bb-76], results in error.
Abnormal deviation in speed control
・In vector control, when speed arrives to “maximum
speed”×[bb-83] and pass over [bb-84], results in error.
Abnormal deviation in position control
・When the input suffers an overvoltage and if the DC
voltage is higher than the value in [bb-62], a warning is
issued in accordance with [bb-61].
・During position control, if the position deviation exceeds
the [bb-86], if exceeds the [bb-87] time, will result in an
error.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
4-32

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
bC110 Electronic thermal
level, 1st-motor
Motor rated
current ×
(0.20~3.00)
Motor rated
current
×1.00
bC111
Electronic thermal characteristic
selection, 1st-motor
00(Reduced
torque (VT))/
01(Constant
torque (CT))/
02(Free setting)
00(JPN)/
01(EU)(USA)
(ASIA)(CHN)
bC112
Electronic thermal subtraction
function enable, 1st-motor
00(Disable)/
01(Enable)
01
bC113 Electronic thermal
subtraction time, 1st-motor
1~1000(s)
600
bC114
Saved electronic thermal count at
power-off, 1st-motor
00(Disable)/
01(Enable)
01
bC120
Free setting, electronic thermal
frequency (1), 1st-motor
0.00
~bC122(Hz)
0.00
bC121
Free setting, electronic thermal
current (1), 1st-motor
Inverter rated
current ×
(0.00~1.00)
0.00
bC122
Free setting, electronic thermal
frequency (2), 1st-motor
bC120
~bC124(Hz)
0.00
bC123
Free setting, electronic thermal
current (2), 1st-motor
Inverter rated
current ×
×(0.00~1.00)
0.00
bC124
Free setting, electronic thermal
frequency (3), 1st-motor
bC122
~590.00(Hz)
0.00
bC125
Free setting, electronic thermal
current (3), 1st-motor
Inverter rated
current ×
×(0.00~1.00)
0.00
Code/Name
Range
(unit)
Initial
value
bC210 Electronic thermal level, 2nd-motor
Same as bC110
bC211 Electronic thermal characteristic
selection, 2nd-motor
Same as bC111
bC212 Electronic thermal subtraction function
selection, 2nd-motor
Same as bC112
bC213 Electronic thermal subtraction time,
2nd-motor
Same as bC113
bC220 Free setting, electronic thermal
frequency (1), 2nd-motor
Same as bC120
bC221 Free setting, electronic thermal current
(1), 2nd-motor
Same as bC121
bC222 Free setting, electronic thermal
frequency (2), 2nd-motor
Same as bC122
bC223 Free setting, electronic thermal current
(2), 2nd-motor
Same as bC123
bC224 Free setting, electronic thermal
frequency (3), 2nd-motor
Same as bC124
bC225 Free setting, electronic thermal current
(3), 2nd-motor
Same as bC125
Reduction
scale
Inverter output
frequency (Hz)
X1.0 5 16
50
X0.8
X0.6 0 6
20
60
0
Base frequency
55.8
(87.2%)
76.8
(120%)
102.4
(160%)
0
Motor current (A)
(Ratio to the inverter
rated current)
60
3.0
Trip time (s)
Reduction
scale
Inverter output
frequency (Hz)
X1.0
0
60
X0.9
X0.8
5
2.5
62.8
(98.1%)
86.4
(135%)
115.2
(180%)
Motor current (A)
(Ratio to the inverter
rated current)
60
3.0
0
Trip time(s)
Maximum frequency (Hz)
[Hb105][Hd105]
[bC125]
[bC123]
[bC125]
[bC120]
[bC122]
[bC124]
0
Current
output (A)
Trip time (s)
60
3.0
(x)
(y)
(z)
0
Output current (A)
(x):[bC123]×109%
(y)
(z):[bC123]×200%
[bC110]~[bC125]
Electronic thermal protection
[bC210]~[bC225]
(Example) When [bC111]=01, Inverter rated current:64A,[bC110]=64(A),
Base frequency[Hb103]=60Hz, Output frequency=2.5Hz
・In the case of output frequency=2.5Hz, the reduction
scale is ×0.9, current 135%(=150%×0.9) will trip in 60s
before it continues to flow.
(Example) When [bC111]=02, and there is Output frequency [bC122]
・With [bC112], it is possible the subtraction of thermal
integral value of the motor. Please set properly in
accordance with the heat dissipation characteristics of
the motor.
(Example) When [bC111]=00, Inverter rated current:64A, [bC110]=64(A),
Base frequency [Hb104]=60Hz, Output frequency=20Hz
・The reduction scale is ×0.8 in the case of an Output
frequency of 20Hz, the current 120%(=150%×0.8) will
trip before the flow continues for 60s.
:[bC123]×150%
2nd motor When Intelligent Input terminal 024[SET] is enabled.
4-33

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
bd-01 Safety input display
selection
00(Display)/
01(No display)/
02(Trip)
00
bd-02 Safety input allowable
time
0.00~60.00(s)
1.00
bd-03 Display selection at safety
input allowable time
00(Display)/
01(No display)
00
bd-04 Operation selection after
safety input allowable time
00(Trip)/
01(Maintain current
status)/
02(Disable)
00
[bd-01]~[bd-04][bE-02]~[bE-18]
Safety terminal
・For more information, refer to the user’s guide.
4-34

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
CA-01 Input terminal [1]
Reference
<Input terminal
function list>
103 [PLA] Pulse train
input A is restricted to
[CA-10],
104 [PLB] Pulse train
input B is restricted to
[CA-11],
028
CA-02 Input terminal [2]
015
CA-03 Input terminal [3]
029
CA-04 Input terminal [4]
032
CA-05 Input terminal [5]
031
CA-06 Input terminal [6]
003
CA-07 Input terminal [7]
004
CA-08 Input terminal [8]
002
CA-09 Input terminal [9]
001
CA-10 Input terminal [A]
033
CA-11 Input terminal [B]
034
Code/Name
Range (unit)
Initial
value
CA-21 Input terminal [1] active state
00(Normally
Open: NO)/
01(Normally
Closed: NC)
00
CA-22 Input terminal [2] active state
00
CA-23 Input terminal [3] active state
00
CA-24 Input terminal [4] active state
00
CA-25 Input terminal [5] active state
00
CA-26 Input terminal [6] active state
00
CA-27 Input terminal [7] active state
00
CA-28 Input terminal [8] active state
00
CA-29 Input terminal [9] active state
00
CA-30 Input terminal [A] active state
00
CA-31 Input terminal [B] active state
00
Code/Name
Range
(unit)
Initial
value
CA-41 Input terminal [1] response time
0~400(ms)
2
CA-42 Input terminal [2] response time
2
CA-43 Input terminal [3] response time
2
CA-44 Input terminal [4] response time
2
CA-45 Input terminal [5] response time
2
CA-46 Input terminal [6] response time
2
CA-47 Input terminal [7] response time
2
CA-48 Input terminal [8] response time
2
CA-49 Input terminal [9] response time
2
CA-50 Input terminal [A] response time
2
CA-51 Input terminal [B] response time
2
Code/Name
Range (unit)
Initial
value
CA-55 Multistage input settlement
time
0~2000(ms)
0
[CA-01]~[CA-31]
■Parameter mode (C code)
Input terminal settings
・The functions for the input terminals 1~9,A,B are
assigned in [CA-01]~[CA-09],[CA-10],[CA-11].
Input terminal NO/NC settings
[CA-41]~[CA-55]
Output terminal chatter prevention
・Sets the time to wait after the input change has ended,
and for the input to become stable and responsive.
Time allowed in simultaneous terminal change
・The functions for the Intelligent input terminals 1~
9,A,B are assigned in [CA-21]~[CA-29],[CA-30],[CA-31].
・However, in the case of [RS] assignment the NO/NC will
not apply, only NO will apply.
・Sets the dead time for multistage speed and position
terminals change.
4-35

Chapter 4
For parameter configuration
Function
code
Symbol
Function name
Description
000
no
Not use
-
001
FW
Forward rotation
Activating (ON) only one of
them will grant forward or
reverse rotation command.
⇒ [AA111]
002
RV
Reverse rotation
003
CF1
Multi-speed 1
Changing the states of these
terminals, allows to set
different motor speeds and
change among them.
⇒[Ab110]~[Ab-25],
[Ab210]
004
CF2
Multi-speed 2
005
CF3
Multi-speed 3
006
CF4
Multi-speed 4
007
SF1
Multi-speed bit 1
008
SF2
Multi-speed bit 2
009
SF3
Multi-speed bit 3
010
SF4
Multi-speed bit 4
011
SF5
Multi-speed bit 5
012
SF6
Multi-speed bit 6
013
SF7
Multi-speed bit 7
014
ADD
Trigger for
frequency
addition
When is turned ON, adds the
specified frequency value.
⇒[AA106]
015
SCHG
Command
change
Main speed(OFF)/Sub-speed
(ON), to change between
them use ⇒[AA105].
016
STA
Starting by 3-wire
input
If [STA] is ON, start the motor.
If [STP] is ON stop the motor.
Forward operation direction
if [FR] is (OFF), reverse
operation direction if is (ON).
⇒[AA111]
017
STP
Stopping by
3-wire input
018
FR
Forward/reverse
switching by
3-wire input
019
AHD
Analogue
command
holding
When the Analogue inputs
Ai1,2,3 are in use, if AHD
terminal is in ON state, holds
the Analogue terminal value.
⇒[AA101]
020
FUP
Remote control up
If the frequency can be set
([AHD] ON included), [FUP]
ON accelerates, and [FDN]
ON decelerates. [UDC]
returns to the saved value.
⇒[CA-62]~[CA-66]
021
FDN
Remote control
down
022
UDC
Data clearance by
remote control
023
F-OP
Forcible
Operation
If ON, switch set parameters.
⇒[CA-68],[CA-69]
024
SET
2nd-motor
Change between 1st-motor
(OFF) and 2nd-motor (ON).
⇒By parameter
028
RS
Reset
Reset trip⇒[CA-61],[bb-41]
029
JG
Jogging
Activates Jogging operation.
⇒[AG-20],[AG-21]
030
DB
External DC
braking
Enables the DC braking
operation⇒[AF101]~[AF109]
031
2CH
2-stage
acceleration/
deceleration
If ON, changes the Acc/Decel
time. ⇒[AC115]
032
FRS
Free-run stop
If ON allows the motor to
free run. ⇒[AA115],[bb-40]
033
EXT
External trip
If ON error E012 occurs.
⇒Trip E012
034
USP
Unattended start
protection
ON if at the start-up, the RUN
command was issued right at
the start up, E013 error.
⇒Tripping E013
035
CS
Commercial
power supply
switching
When changing to the public
electric grid, if it is ON, will
cut the output.
Function
code
Symbol
Function name
Description
036
SFT
Software lock
If ON, disables parameter
changes. ⇒[UA-21]
037
BOK
Braking
confirmation
Here is inputted the brake
confirmation signal for the
brake control.
038
OLR
Overload
restriction
selection
Switches between Overload
limit 1(OFF) and 2(ON).
⇒[bA122]~[bA128]
039
KHC
Accumulated
input power
clear
If ON, clears the Accumulated
input power monitor.
⇒[UA-14]
040
OKHC
Accumulated
output power
clear
If ON, clears the Accumulated
output power monitor.
⇒[UA-12]
041
PID
PID1 disable
If ON, disables PID1 and
changes the PID target value
for the frequency reference.
⇒[AH-01]
042
PIDC
PID1
integration
reset
If ON, clears the integral value
of the control.
⇒[AH-62],[AH-65]
043
PID2
PID2 disable
If ON, disables PID2 and
changes the PID target value
for the frequency reference.
⇒[AJ-01]
044
PIDC2
PID2
integration
reset
If ON, clears the integral value
of the control. ⇒[AJ-14]
046
PID3
PID3 disable
If ON, disables PID3 and
changes the PID target value
for the frequency reference.
⇒[AJ-21]
046
PIDC3
PID3
integration
reset
If ON, clears the integral value
of the control. ⇒[AJ-34]
047
PID4
PID4 disable
If ON, disables PID4 and
changes the PID target value
for the frequency reference.
⇒[AJ-41]
048
PIDC4
PID4
integration
reset
If ON, clears the integral value
of the control. ⇒[AJ-54]
051
SVC1
PID1 Multistage
target value 1
The target value can be
selected by changing the
pattern of ON/OFF states.
⇒[AH-06]
052
SVC2
PID1 Multistage
target value 2
053
SVC3
PID1 Multistage
target value 3
054
SVC4
PID1 Multistage
target value 4
055
PRO
PID gain
change
Switches between Gain 1(OFF)
and Gain 2(ON).
056
PIO
PID output
change 1
Switches PID Output 1 to 4 by
(PIO1:PIO2).
PID1 Enable(OFF:OFF)
PID2 Enable(OFF:ON)
PID3 Enable(ON:OFF)
PID4 Enable(ON:ON)
057
PIO2
PID output
change 2
058
SLEP
SLEEP trigger
In case it is used in Sleep
terminal functions, when ON, it
activates. ⇒[AH-85]
059
WAKE
WAKE trigger
In case it is used in Wake
terminal functions, when ON, it
activates. ⇒[AH-93]
060
TL
Enable torque
limit
If ON, enables torque limit.
061
TRQ1
Torque limit 1
The target value can be
selected by changing the
pattern of ON/OFF states.
062
TRQ2
Torque limit 2
[Input terminal function list]
[Input terminal function list]
4-36

Chapter 4
For parameter configuration
Function
code
Symbol
Function name
Description
063
PPI
P/PI switching
For drooping control,
switches between PI
control (OFF) and P
control (ON).
064
CAS
Control gain switching
Changes between the PI
gain 1 (OFF) and 2(ON)
of the speed control
system.
065
SON
Servo-ON
If ON, executes the
Servo-Lock operation.
066
FOC
Forcing
If ON, performs a
forcible operation, will
accelerate the rise of the
torque.
067
ATR
Enable torque command
input
If ON, enables the
torque limit.
068
TBS
Enable torque bias
If ON, enables the
torque bias.
069
ALP
Auto-learning
positioning
If ON, when in position
control mode, stops by
home search.
071
LAC
LAD cancellation
If ON, forces Acc/Decel
time to 0.00s.
072
PCLR
Position deviation
clearance
Clears the position
deviation of position
control mode.
073
STAT
Enable 90º-shift phase
In the pulse train
position control, if is ON,
the input is enabled.
074
PUP
Position bias addition
If in position control
mode, if [PUP] is ON,
adds, if
[PDN] is ON, subtracts.
075
PDN
Position bias subtraction
076
CP1
Multistage position
selection 1
The position reference
can be selected by
changing the pattern of
ON/OFF states.
077
CP2
Multistage position
selection 2
078
CP3
Multistage position
selection 3
079
CP4
Multistage position
selection 4
080
ORL
Zero-return limit
function
Used by the Zero-Return
position operations of
the position control.
081
ORG
Zero-return trigger
function
082
FOT
Forward drive stop
Limits forward motion by
forward limit torque.
083
ROT
Reverse drive stop
Limits reverse motion by
reverse limit torque.
084
SPD
Speed/position change
Switches position
control(OFF) and speed
control(ON).
085
PSET
Position data pre-set
If ON, sets the actual
position as the origin
point.
086
MI1
General-purpose input 1
To be set if you want to
make use of an input
signal for EzSQ function.
087
MI2
General-purpose input 2
088
MI3
General-purpose input 3
089
MI4
General-purpose input 4
090
MI5
General-purpose input 5
091
MI6
General-purpose input 6
092
MI7
General-purpose input 7
093
MI8
General-purpose input 8
094
MI9
General-purpose input 9
095
MI10
General-purpose input
10
096
MI11
General-purpose input
11
097
PCC
Pulse counter clearance
Clear the count for the
pulse counter function.
Function
code
Symbol
Function name
Description
098
ECOM
EzCOM activation
If ON, activates EzCOM.
099
PRG
EzSQ programme
start
If ON, EzSQ is executed.
100
HLD
Acc/Decel stop
If ON, temporally stagnates
Acc/Decel.
101
REN
Motion enable
signal
If ON, operation is enable. If
it is not assigned, it disables
operation.
102
DISP
Display lock
If made ON, the keypad
screen is lock and the RUN
key is disabled.
103
PLA
Pulse train input A
For pulse train input use.
104
PLB
Pulse train input B
For pulse train input use.
105
EMF
Em-Force
Forces the set operation in
emergency state.
107
COK
Contactor check
signal
Regarding the braking
control, check signal for the
contactor.
108
DTR
Start data trace
If ON, starts data trace
function.
109
PLZ
Pulse train input
Z 110
TCT If ON, starts function.
[Input terminal function list]
[Input terminal function list]
4-37

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
CA-60 FUP/FDN overwrite
target selection
00(Speed reference)
01(PID)
00
CA-61 FUP/FDN data save
enable
00(No save)/
01(Save)
00
CA-62 UDC terminal mode
selection
00(0Hz)/
01(Save data)
00
CA-64 Acceleration time for
FUP/FDN function
0.00~3600.00(s)
30.00
CA-66 Deceleration time for
FUP/FDN function
30.00
Code/Name
Range (unit)
Initial
value
CA-70 Speed command
selection when [F-OP] active
01~03、07、08、12、14、
15 *1)
01
CA-71 Operation command
reference selection when
[F-OP] active
00~03 *2)
01
Code/Name
Range (unit)
Initial
value
CA-72
Reset mode
selection
00(Trip release at turn-ON)/
01(Trip release at turn-OFF)/
02(Effective only in trip ON condition)/
03(Effective only in trip OFF condition)
00
Code/Name
Range (unit)
Initial value
CA-81
Encoder constant setting
0~65535(Pls)
1024
CA-82
Encoder phase selection
00(Phase A, Cos lead)/
01(Phase B, Sin lead)
00
CA-83 Numerator of the
motor gear ratio
1~10000
1
CA-84 Denominator of
the motor gear ratio
1~10000
1
Code/Name
Range (unit)
Initial
value
Pulse train input
(main)
CA-90
Detection method
selection
00(Frequency reference)/
01(Pulse count)/
02(Speed feedback :
sensor-V/f)
00
CA-91
Mode selection
00(90º-phase-shift)/
01(Forward/reverse
operation and direction of
rotation)/
02(Forward/reverse
operation with pulse train)
00
Pulse train frequency
(main)
CA-92
Scale
0.05~32.0(kHz)
25.0
CA-93
Filter time constant
0.01~2.00(s)
0.10
CA-94
Bias value
-100.0~100.0(%)
0.0
CA-95
Upper limit
0.0~100.0(%)
100.0
CA-96 Detection
Lower limit
0.0~100.0(%)
0.0
Code/Name
Range (unit)
Initial
value
CA-97 Pulse counter compare output
ON level
0~65535
0
CA-98 Pulse counter compare output
OFF level
0~65535
0
CA-99
Pulse counter compare output maximum
value
0~65535
65535
Internal counter
0
Max. count value
[CA-79]
OFF level [CA-78]
ON level [CA-77]
[PLA] input
[PCC] input
[PCMP] output
[CA-60]~[CA-84]
[FUP]/[FDN] operations
・[CA-60] sets as operation target the frequency reference
or the PID target value for 020[FUP]/021[FDN].
・[CA-61] sets if the modified values of [FUP] / [FDN]
should be saved or not in the storage memory.
・[CA-62] selects the frequency in which will change the
frequency reference for when [UDC] terminal is ON.
・If [FUP]/[FDN] is turn ON, in the case the frequency
reference is changed you can set the acceleration and
deceleration time [CA-64][CA-66].
[F-OP] Speed/Operation change
[CA-90]~[CA-99]
Pulse train input terminal
・A pulse train is introduced in functions [PLA][PLB]
assigned to terminals A,B. If [CA-90]=01, pulses in
terminals A & B are counted. Only terminal A in case
that is a single phase input.
Pulse train counter
・If Intelligent input terminal 023[F-OP] is ON the change
is carried out.
*1)01(Ai1 terminal)/02(Ai2 terminal)/03(Ai3 terminal)/ 07(Parameter)/ 08(RS485)/
12(Pulse train input:main)/14(EzSQ function)/15(PID result)
*2) 00([FW]/[RV] terminal)/01(3-wire)/02(Keypad’s RUN key)/03(RS485)
Reset terminal [RS]
・The reset terminal usually if is ON cuts the output, but it
also can be made to only operate in trip event.
Main encoder input
・Set 091[PCMP] to output the compare results of the
pulse train counters of functions 103[PLA]/104[PLB].
・Turning 097[PCC] terminal in ON state resets the
counter.
・In the following example, when [CA-81]=01, inputting a
pulse train in terminal A.
・Sets the main encoder input and the motor gear ratio
involved in the encoder feedback.
4-38

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
[Ai1] terminal
Cb-01 Time constant of filter
1~500(ms)
16
Cb-03 Start value
0.00~100.00(%)
0.00
Cb-04 End value
0.00~100.00(%)
100.00
Cb-05 Start rate
0.0~[Cb-06](%)
0.0
Cb-06 End rate
[Cb-05]~100.0(%)
100.0
Cb-07 Start selection
00(Initial value)/
01(0%)
01
[Ai2] terminal
Cb-11 Time constant of filter
1~500(ms)
16
Cb-13 Start value
0.00~100.00(%)
0.00
Cb-14 End value
0.00~100.00(%)
100.00
Cb-15 Start rate
0.0~[Cb-16](%)
0.0
Cb-16 End rate
[Cb-15]~100.0(%)
100.0
Cb-17 Start selection
00(Initial value)/
01(0%)
01
[Ai3] terminal
Cb-21 Time constant of filter
1~500(ms)
16
Cb-22 Operation selection
00(Individual)/
01(Ai1/Ai2 add:
with inversion/
02(Ai1/Ai2 add:
without inversion)
00
Cb-23 Start value
-100.00~100.00(%)
-100.00
Cb-24 End value
-100.00~100.00(%)
100.00
Cb-25 Start rate
-100.0~[Cb-26]
-100.0
Cb-26 End rate
[Cb-25]~100.0
100.0
Code/Name
Range (unit)
Initial
value
Cb-30
[Ai1] Voltage/Current zero-bias
adjustment
-200.00 ~
200.00(%)
0.00
Cb-31 [Ai1] Voltage/Current gain
adjustment
-200.00 ~
200.00(%)
100.00
Cb-32 [Ai2] Voltage/Current
zero-bias adjustment
-200.00 ~
200.00(%)
0.00
Cb-33 [Ai2] Voltage/Current gain
adjustment
-200.00 ~
200.00(%)
100.00
Cb-34 [Ai3] Voltage -10 bias
adjustment
-200.00 ~
200.00(%)
0.00
Cb-35 [Ai3] Voltage gain adjustment
-200.00 ~
200.00(%)
100.00
Code/Name
Range (unit)
Initial
value
CA-40 Thermistor type
selection
00(Disable)/
01(PTC)/02(NTC)
00
Cb-41
Thermistor gain adjustment
0.0~1000.0
100.0
Code/Name
Range (unit)
Initial
value
CC-01 Output terminal [11]
Reference
<Intelligent
output terminal
function list>
002
CC-02 Output terminal [12]
001
CC-03 Output terminal [13]
035
CC-04 Output terminal [14]
019
CC-05 Output terminal [15]
030
CC-06 Output terminal [16]
018
CC-07 Output terminal [AL]
017
Code/Name
Range
(unit)
Initial
value
CC-11 Output terminal [11] active state
00(Normally
open: NO)/
01(Normally
closed: NC)
00
CC-12 Output terminal [12] active state
00
CC-13 Output terminal [13] active state
00
CC-14 Output terminal [14] active state
00
CC-15 Output terminal [15] active state
00
CC-16 Output terminal [16] active state
00
CC-17 Output terminal [AL] active state
01
[Cb-01]~ [Cb-35]
Analogue input acquisition
[CA-40][Cb-41][CC-01]~[CC-17]
Thermistor error detection
・With [CA-40] is set the thermistor connected to the TH terminal.
・When [CA-40]=01 or 02, with [bb-70] the error level is set. Refer to
[bb-70].
・[Cb-41] thermistor gain adjustment, when the adjustment value is
raised the resistance value is lowered.
Output terminal settings
・Regarding the adjustment method of the Analogue input,
please refer to the chapter 3 example of I/O terminals
adjustment.
Analogue input fine tuning
・The functions for the output terminals 11~15,16A,AL are
assigned in [CC-01]~[CC-05],[CC-06],[CC-07].
Output terminal NO/NC settings
・The functions for the Intelligent output terminals 11~
15,16,AL are assigned in [CC-11]~[CC-15], [CC-16],
[CC-17].
・Regarding the adjustment method of the Analogue input,
please refer to the chapter 3 example of I/O terminals
adjustment.
・The thermistor adjustment, when recognizes an increase
in the adjustment value, reduces the resistor value.
4-39
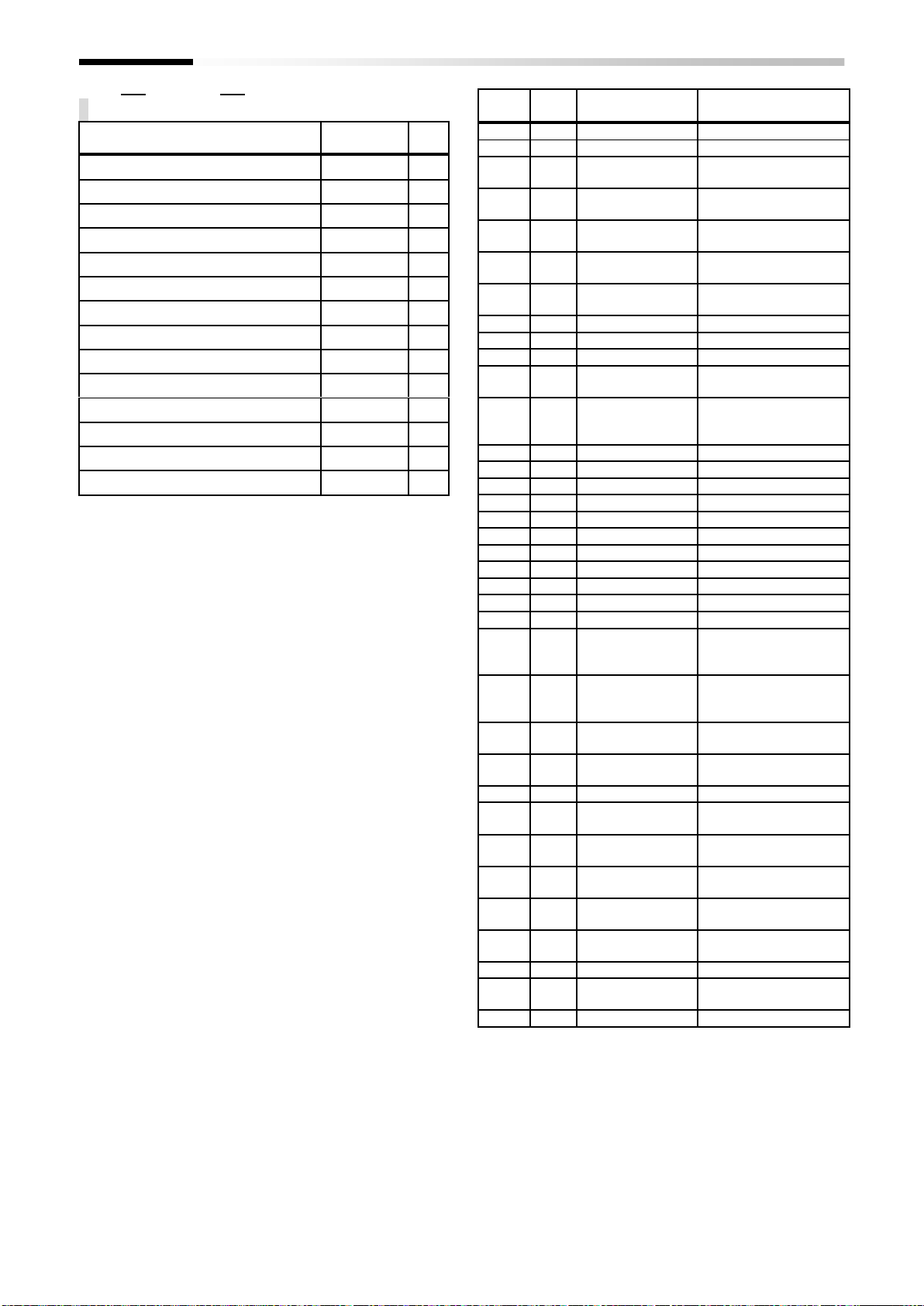
Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
CC-20 Output terminal [11] on-delay time
0.00~100.00(s)
0.00
CC-21 Output terminal [11] off-delay time
0.00~100.00(s)
0.00
CC-22 Output terminal [12] on-delay time
0.00~100.00(s)
0.00
CC-23 Output terminal [12] off-delay time
0.00~100.00(s)
0.00
CC-24 Output terminal [13] on-delay time
0.00~100.00(s)
0.00
CC-25 Output terminal [13] off-delay time
0.00~100.00(s)
0.00
CC-26 Output terminal [14] on-delay time
0.00~100.00(s)
0.00
CC-27 Output terminal [14] off-delay time
0.00~100.00(s)
0.00
CC-28 Output terminal [15] on-delay time
0.00~100.00(s)
0.00
CC-29 Output terminal [15] off-delay time
0.00~100.00(s)
0.00
CC-30 Output terminal [16] on-delay time
0.00~100.00(s)
0.00
CC-31 Output terminal [16] off-delay time
0.00~100.00(s)
0.00
CC-32 Output terminal [AL] on-delay time
0.00~100.00(s)
0.00
CC-33 Output terminal [AL] off-delay time
0.00~100.00(s)
0.00
Function
code
Symbol
Function name
Description
000
no
No assigned
001
RUN
While in RUN
While output is active
002
FA1
Constant speed
reached
When constant speed
reached, ON
003
FA2
Set frequency
overreached
ON at reaching the specified
frequency or more
004
FA3
Set frequency
reached
ON only at reaching the
specified frequency
005
FA4
Set frequency
overreached 2
ON at reaching the specified
frequency 2 or more
006
FA5
Set frequency
reached 2
ON only at reaching the
specified frequency 2
007
IRDY
Inverter ready
ON when inverter is ready
008
FWR
Forward rotation
ON while in forward drive
009
RVR
Reverse rotation
ON while in reverse drive
010
FREF
Keypad frequency
reference
ON if the frequency
reference is from keypad
011
REF
Keypad motion
operation
ON if the motion
operation is from
operation keypad
012
SETM
2nd-motor selected
ON if 2nd-motor selected
016
OPO
Option-Output
Controlled by the Option
017
AL
Alarm signal
ON when trip happens
018
MJA
Major failure signal
ON if major failure trips
019
OTQ
Over-torque
ON if torque is exceeded
020
IP
Power loss
ON if control power drops
021
UV
Undervoltage
ON if main voltage drops
022
TRQ
Torque limited
ON if torque limit operates
023
IPS
Decel. power loss
ON if set in power loss
024
RNT
RUN time beyond
ON if set time is exceeded
025
ONT
ON time beyond
ON if set time is exceeded
026
THM
Motor electronic
Thermal warning
ON if motor thermal
integral value exceeds set
value
027
THC
Electronic thermal
warning
ON if inverter thermal
integral value exceeds set
value
029
WAC
Capacitor life
warning
ON by life warning
030
WAF
Cooling-fan life
warning
ON by life warning
031
FR
Operation signal
On while in operation
032
OHF
Heat sink overheat
warning
ON if temperature exceeds
033
LOC
Low-current
indication signal 1
ON if output current is less
that the specified value
034
LOC2
Low-current
indication signal 2
ON if output current is less
that the specified value
035
OL
Overload warning
signal 1
ON if output current
exceeds specified value
036
OL2
Overload warning
signal 2
ON if output current
exceeds specified value
037
BRK
Brake release
ON when brake releases
038
BER
Brake error
ON if abnormality in
sequence happens
039
CON
Contactor control
ON if contactor releases
[CC-20]~[CC-33]
Output terminal response
・Sets the delay time since the output terminal changes,
until it actually become responsive.
[Intelligent output terminal function list]
4-40

Chapter 4
For parameter configuration
Function
code
Symbol
Function name
Description
040
ZS
0Hz detection signal
ON if output frequency is
less than set value
041
DSE
Maximum Speed
deviation
ON if speed deviation
exceeds the set value
042
PDD
Maximum position
deviation
ON if position deviation
exceeds the set value
043
POK
Positioning
completed
ON if positioning is
completed
044
PCMP
Pulse counter
compare output
ON when set value and
pulse train comparator
matches.
045
OD
Output deviation
for PID control
ON if PID control deviation
exceeds the set value
046
FBV
PID feedback
comparison
ON if PID feedback is
within range
047
OD2
Output deviation
for PID2 control
ON if PID control deviation
exceeds the set value
048
FBV2
PID2 feedback
comparison
ON if PID feedback is
within range
049
NDc
Communication
disconnection
ON if communication is
lost with operation keypad
050
Ai1Dc
Analogue Ai1
disconnection
ON if Analogue input 1 is
less than the set value
051
Ai2Dc
Analogue Ai2
disconnection
ON if Analogue input 2 is
less than the set value
052
Ai3Dc
Analogue Ai3
disconnection
ON if Analogue input 3 is
less than the set value
053
Ai4Dc
Analogue Ai4
disconnection
ON if Analogue input 4 is
less than the set value
054
Ai5Dc
Analogue Ai5
disconnection
ON if Analogue input 5 is
less than the set value
055
Ai6Dc
Analogue Ai6
disconnection
ON if Analogue input 6 is
less than the set value
056
WCAi1
Window
comparator Ai1
ON if Analogue input 1 is
within range
057
WCAi2
Window
comparator Ai2
ON if Analogue input 2 is
within range
058
WCAi3
Window
comparator Ai3
ON if Analogue input 3 is
within range
059
WCAi4
Window
comparator Ai4
ON if Analogue input 4 is
within range
060
WCAi5
Window
comparator Ai5
ON if Analogue input 5 is
within range
061
WCAi6
Window
comparator Ai6
ON if Analogue input 6 is
within range
062
LOG1
Logical operation
result 1
Determined by the
calculation results of two
output terminals
063
LOG2
Logical operation
result 2
064
LOG3
Logical operation
result 3
065
LOG4
Logical operation
result 4
066
LOG5
Logical operation
result 5
067
LOG6
Logical operation
result 6
068
LOG7
Logical operation
result 7
Function
code
Symbol
Function name
Description
069
MO1
General-output 1
Set if case of use of EzSQ
070
MO2
General-output 2
071
MO3
General-output 3
072
MO4
General-output 4
073
MO5
General-output 5
074
MO6
General-output 6
075
MO7
General-output 7
076
EMFC
Emergency force
drive indicator
ON while in force
operation
077
EMBP
Bypass mode
indicator
ON while in bypass
operation
078
WFT
Trace waiting signal
ON while in waiting status
079
TRA
Trace running signal
ON while in stand-by
080
LBK
Low battery of
operation keypad
ON while in low battery or
when no contain battery
on keypad
081
OVS
Power source over
voltage
ON when become
overvoltage in stop status
084
AC0
Alarm code bit 0
ON if detects low battery
Alarm information is
delivered as bit.
Use the user’s guide for
more information.
085
AC1
Alarm code bit 1
086
AC2
Alarm code bit 2
087
AC3
Alarm code bit 3
089
OD3
Over deviation for
PID3
ON when PID deviation
exceeds the value [AJ-37]
090
FBV3
PID3 feedback
comparison
ON when PID feedback is
between [AJ-38]/[AJ-39]
091
OD4
Over deviation for
PID4
ON when PID deviation
exceeds the value [AJ-57]
092
FBV4
PID4 feedback
comparison
ON when PID feedback is
between [AJ-58]/[AJ-59]
093
SSE
PID soft start error
ON when PID soft start
became in warning status
[Output terminal function list]
[Output terminal function list]
4-41

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
Logical output signal
CC-40 LOG1 selection 1
<Intelligent output
terminal function list>
reference
00
CC-41 LOG1 selection 2
<Intelligent output
terminal function list>
reference
00
CC-42 LOG1 operator
selection
00(AND)/01(OR)/
02(XOR)
00
CC-43 LOG2 selection 1
<Intelligent output
terminal function list>
reference
00
CC-44 LOG2 selection 2
<Intelligent output
terminal function list>
reference
00
CC-45 LOG2 operator
selection
00(AND)/01(OR)/
02(XOR)
00
CC-46 LOG3 selection 1
<Intelligent output
terminal function list>
reference
00
CC-47 LOG3 selection 2
<Intelligent output
terminal function list>
reference
00
CC-48 LOG3 operator
selection
00(AND)/01(OR)/
02(XOR)
00
CC-49 LOG4 selection 1
<Intelligent output
terminal function list>
reference
00
CC-50 LOG4 selection 2
<Intelligent output
terminal function list>
reference
00
CC-51 LOG4 operator
selection
00(AND)/01(OR)/
02(XOR)
00
CC-52 LOG5 selection 1
<Intelligent output
terminal function list>
reference
00
CC-53 LOG5 selection 2
<Intelligent output
terminal function list>
reference
00
CC-54 LOG5 operator
selection
00(AND)/01(OR)/
02(XOR)
00
CC-55 LOG6 selection 1
<Intelligent output
terminal function list>
reference
00
CC-56 LOG6 selection 2
<Intelligent output
terminal function list>
reference
00
CC-57 LOG6 operator
selection
00(AND)/01(OR)/
02(XOR)
00
CC-58 LOG7 selection 1
<Intelligent output
terminal function list>
reference
00
CC-59 LOG7 selection 2
<Intelligent output
terminal function list>
reference
00
CC-60 LOG7 operator
selection
00(AND)/01(OR)/
02(XOR)
00
Code/Name
Range (unit)
Initial
value
Cd-01 [FM] terminal output
wave form selection
00(PWM)/
01(Frequency)
00
Cd-02 [FM] terminal base
frequency (at PWM output)
0~3600(Hz)
2880
Cd-03 [FM] Output terminal
selection
Set monitor code
dA-01
Cd-04 [Ao1] Output terminal
selection
dA-01
Cd-05 [Ao2] Output terminal
selection
dA-01
Cd-10 Analogue monitor
adjustment mode enable
00(Disable)/
01(Enable)
00
Cd-11 Time constant of [FM]
output filter
1~500(ms)
10
Cd-12[FM] output data type
selection
00(Absolute value)/
01(Signed value)
00
Cd-13 [FM] bias adjustment
-100.0~100.0(%)
0.0
Cd-14 [FM] gain adjustment
-1000.0~1000.0(%)
100.0
Cd-15 Output level at [FM]
adjustment mode
0.0~300.0(%)
100.0
Cd-21 Time constant of [Ao1]
output filter
1~500(ms)
10
Cd-22 [Ao1] output data type
selection
00(Absolute value)/
01(Signed value)
00
Cd-23 [Ao1] bias
-100.0~100.0(%)
100.0
Cd-24 [Ao1] gain
-1000.0~1000.0(%)
100.0
Cd-25 Output level when
[Ao1] adjustment mode
0.0~300.0(%)
100.0
Cd-31 Time constant of [Ao2]
output filter
1~500(ms)
10
Cd-32 [Ao2] output data
selection
00(Absolute value)/
01(Signed value)
00
Cd-33 [Ao2] bias adjustment
-100.0~100.0(%)
0.0
Cd-34 [Ao2] gain adjustment
-1000.0~1000.0(%)
100.0
Cd-35 Output level at [Ao2]
adjustment mode
0.0~300.0(%)
100.0
[CC-40]~[CC-60]
Combinational output terminal
[Cd-01]~[Cd-35]
Analogue output terminal adjustment
・The logical operation function is used to output the
combinational result of two selected output terminals.
・Regarding the adjustment method of the Analogue
output, please refer to the chapter 3 example of I/O
terminals adjustment.
4-42

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
CE101 Low-current
indication signal mode
selection, 1st-motor
00(During Acc/Decel and
constant-speed operation)
01(only during
constant-speed operation)
01
CE102
Low-current detection
level 1, 1st-motor
Inverter rated
current×(0.00~2.00)
Inverter
rated current
×1.00
CE103
Low-current detection
level 2, 1st-motor
Inverter rated
current×(0.00~2.00)
Inverter
rated current
×1.00
Code/Name
Range (unit)
Initial value
CE105
Overload warning signal
mode selection, 1st-motor
00(During Acc/Decel
and constant speed)/
01(During constant
speed only)
01
CE106 Overload
warning level 1, 1st-motor
Inverter rated
current×(0.00~2.00)
Inverter
rated current
×1.00
CE107 Overload
warning level 2, 1st-motor
Inverter rated
current×(0.00~2.00)
Inverter
rated current
×1.00
Code/Name
Range
(unit)
Initial
value
CE-10 Arrival frequency for acceleration 1
0.00~
590.00(Hz)
0.00
CE-11 Frequency arrival for deceleration 1
0.00
CE-12 Arrival frequency for acceleration 2
0.00
CE-13 Frequency arrival for deceleration 2
0.00
Code/Name
Range (unit)
Initial
value
CE120 Over-torque level (Reverse
regenerative), 1st-motor
0.0~300.0(%)
100.0
CE121 Over-torque level (Reverse
driving), 1st-motor
100.0
CE122 Over-torque level (Forward
regenerative), 1st-motor
100.0
CE123 Over-torque level (Forward
driving), 1st-motor
100.0
Code/Name
Range
(unit)
Initial
value
CE-30 Electronic thermal level (monitor)
0.00~
100.00(%)
80.00
CE-31 Electronic thermal level (inverter)
80.00
Output current(A)
Low-current
indication signal
detection level
[CE102]/[CE103]
[LOC]/[LOC2]
indication signal
ON
ON
Overload warning
level [CE106]/[CE107]
Output current
OL/OL2 output
fon:Maximum frequency 1%
foff
Maximum frequency 2%
[CE-10]/[CE-12]
[CE-11]/[CE-13]
fon
foff
Output
frequency
FA2/FA4
fon:Maximum frequency 1%
foff
Maximum frequency 2%
fon
fon
foff
foff
[CE-11]/[CE-13]
[CE-10]/[CE-12]
Output frequency
FA3/FA5
[CE101]~[CE107]
Low-current detection signal
・In the case of low-current, outputs a signal.
[CE-10]~[CE-31]
Frequency arrival signal
・Sets the operation of the arrival signal.
(Example) In FA2/FA4 case:
:
(Example) In FA3/FA5 case:
Overload detection signal
・In the case of overload, outputs a signal.
:
Over-torque signal
・Sets the level to output the 019[OTQ] signal, when using
vector control and the torque goes over the limit.
Electronic thermal warning
・Sets the level to output the motor electronic thermal
warning 026[THM].
・Sets the level to output the inverter electronic thermal
warning 027[THC].
4-43

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
CE-33 Zero speed detection level
0.00~100.00(Hz)
0.00
Code/Name
Range (unit)
Initial value
CE-34 Heat sink overheat
warning level
0~200(°C)
120
Code/Name
Range (unit)
Initial
value
CE-36 Run/power-on warning time
0~100000(hour)
0
Code/Name
Range (unit)
Initial
value
Window comparator
CE-40 [Ai1] Upper limit
0~100(%)
100
CE-41 [Ai1] Lower limit
0~100(%)
0
CE-42 [Ai1] Hysteresis width
0~10(%)
0
CE-43 [Ai2] Upper limit
0~100(%)
100
CE-44 [Ai2] Lower limit
0~100(%)
0
CE-45 [Ai2] Hysteresis width
0~10(%)
0
CE-46 [Ai3] Upper limit
-100~100(%)
100
CE-47 [Ai3] Lower limit
-100~100(%)
-100
CE-48 [Ai3] Hysteresis width
0~10(%)
0
Disconnection detection
CE-50 [Ai1] Operation level
0~100(%)
0
CE-51 [Ai1] Level enable
00(Disable)/
01(Inside range)/
02(Out of range)
00
CE-52 [Ai2] Operation level
0~100(%)
0
CE-53 [Ai2] Level enable
00(Disable)/
01(Inside range)/
02(Out of range)
00
CE-54 [Ai3] Operation level
-100~100(%)
0
CE-55 [Ai3] Level enable
00(Disable)/
01(Inside range)/
02(Out of range)
00
Code/Name
Range (unit)
Initial
value
CE201 Low-current indication signal
output mode selection, 2nd-motor
Same as CE101
CE202 Low-current detection level 1,
2nd-motor
Same as CE102
CE203 Low-current detection level 2,
2nd-motor
Same as CE103
CE205 Overload warning signal output
mode selection, 2nd-motor
Same as CE105
CE206 Overload warning level 1,
2nd-motor
Same as CE106
CE207 Overload warning level 2,
2nd-motor
Same as CE107
CE220 Over-torque level (Reverse
regenerative), 2nd-motor
Same as CE120
CE221 Over-torque level (Reverse
driving), 2nd-motor
Same as CE121
CE222 Over-torque level (Forward
regenerative), 2nd-motor
Same as CE122
CE223 Over-torque level (Forward
driving), 2nd-motor
Same as CE123
[WC1]/[WC2]/
[WC3]
Max(100%)
Min
(Ai1/Ai2:0%)
(Ai3:-100%)
Ai1/Ai2/Ai3 Input
Analogue adopted value
Analogue input value
Analogue operation
level at disconnection
CF-80/CF-82/CF-84
Maximum-limit level
of window comparator
CF-70/CF-73/CF-76
Minimum-limit level of
window comparator
CF-71/CF-74/CF-77
Hysteresis width
[CE-42]/[CE-45]/[CE-48]
[CE-33]~[CE-55]
0Hz speed detection signal
・Sets the level in which the Inverter outputs the 0Hz
detection signal 040[ZS]
Heat sink overheat warning signal
・Sets the level in which outputs the Heat sink overheat
warning 032[OHF].
Signals for RUN/ON beyond time
・Sets the level in which the Inverter outputs the RUN
beyond time 024[RNT] and the Power-on beyond time
025[ONT].
Window comparator (detection of terminal
disconnection)
[CF201]~[CF223]
If [CE-51][CE-53][CE-55]=02
2nd motor When Intelligent Input terminal 024[SET] is enabled.
・Outputs a signal whenever the Analogue input value is
within or out of range.
・As for disconnection detection, if is within or out of
range, a value can be set for the operation.
4-44

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
CF-01
RS485 communication speed
(baud rate) selection
03(2400bps)/
04(4800bps)/
05(9600bps)/
06(19.2kbps)/
07(38.4kbps)/
08(57.6kbps)/
09(76.8kbps)/
10(115.2kbps)
05
CF-02 RS485 communication
Node allocation
1~247
1
CF-03 RS485 communication
parity selection
00(Absent)/
01(Even parity)/
02(Odd parity)
00
CF-04 RS485
communication stop-bit
selection
01(1bit)/02(2bit)
01
CF-05 Operation selection
for RS485 communication error
00(Error)/
01(Tripping after
deceleration and
stopping the
motor)/
02(Ignore errors)/
03(Stopping the
motor after
free-run)/
04(Deceleration and
stopping the motor)
02
CF-06
RS485 communication trip limit
time setting (timeout)
0.00~100.00(s)
0.00
CF-07 RS485 communication
wait time
0~1000(ms)
0
CF-08 RS485 communication
mode selection
01(Modbus-RTU)/
02(EzCOM)/
03(EzCOM control)
01
CF-09
Modbus coil selection
00(Hitachi protocol)/
01(Modbus)
01
Code/Name
Range (unit)
Initial
value
CF-20 EzCOM Start node No.
01~08
01
CF-21 EzCOM End node No.
01~08
01
CF-22 EzCOM Start selection
00(Terminal
ECOM)/
01(Always)
00
CF-23 EzCOM data size
01~05
05
CF-24 EzCOM destination address 1
1~247
1
CF-25 EzCOM destination register 1
0000~FFFF
0000
CF-26 EzCOM source register 1
0000~FFFF
0000
CF-27 EzCOM destination address 2
1~247
2
CF-28 EzCOM destination register 2
0000~FFFF
0000
CF-29 EzCOM source register 2
0000~FFFF
0000
CF-30 EzCOM destination address 3
1~247
3
CF-31 EzCOM destination register 3
0000~FFFF
0000
CF-32 EzCOM source register 3
0000~FFFF
0000
CF-33 EzCOM destination address 4
1~247
4
CF-34 EzCOM destination register 4
0000~FFFF
0000
CF-35 EzCOM source register 4
0000~FFFF
0000
CF-36 EzCOM destination address 5
1~247
5
CF-37 EzCOM destination register 5
0000~FFFF
0000
CF-38 EzCOM source register 5
0000~FFFF
0000
Code/Name
Range (unit)
Initial
value
CF-50 USB communication
node selection
1~247
1
[CF-01]~[CF-10]
Modbus communication
[CF-20]~[CF-50]
EzCOM peer to peer communication
・Sets the Modbus communication function for its use.
・Set at [CF-08] a value (Except 01) for the EzCOM
communication between inverter.
For more information, refer to the User’s guide.
・Set for the use of EzCOM function.
・For more information, refer to the User’s guide.
USB node code
・Sets the USB code in the case of multiple inverter
connections with ProDriveNext(PC software), as is also
required in the ProDriveNext side.
4-45

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
HA-01
Auto-tuning enable
00(Disable)/
01(No-rotation)/
02(Rotation)/
00
HA-02 RUN command when
Auto-tuning
00(RUN-key)/
01(By [AA111]/
and [AA211])
00
HA-03
Online auto-tuning selection
00(Disable)/
01(Enable)
00
HA-04 Decimal/unit display
00(1 size display)/
01(1/1000 size)
00
Code/Name
Range (unit)
Initial
value
HA110 Stabilization
constant, 1st-motor
0~1000(%)
100
Code/Name
Range (unit)
Initial
value
HA115 Speed response, 1st motor
0~1000(%)
100
Code/Name
Range (unit)
Initial
value
HA120 Gain switching
selection, 1st-motor
00([CAS] terminal)/
01(Change set)
00
HA121 Gain switching time,
1st-motor
0~10000(ms)
100
HA122 Intermediate frequency
1 of gain switching, 1st-motor
0.00~590.00(Hz)
0.00
HA123 Intermediate frequency
2 of gain switching, 1st-motor
0.00~590.00(Hz)
0.00
HA124 Gain mapping
maximum frequency, 1st-motor
0.00~590.00(Hz)
0.00
HA125 Mapping P gain 1,
1st-motor
0.0~1000.0(%)
0.0
HA126 Mapping I gain 1,
1st-motor
0.0~1000.0(%)
0.0
HA127 Mapping P control P
gain 1, 1st-motor
0.00~10.00
1.00
HA128 Mapping P gain 2,
1st-motor
0.0~1000.0(%)
100.0
HA129
Mapping I gain 2, 1st-motor
0.0~1000.0(%)
100.0
HA130 Mapping P control P
gain 2, 1st-motor
0.00~10.00
1.00
HA131 Mapping P gain 3,
1st-motor
0.0~1000.0(%)
100.0
HA132 Mapping I gain 3,
1st-motor
0.0~1000.0(%)
100.0
HA133 Mapping P gain 4,
1st-motor
0.0~1000.0(%)
100.0
HA134 Mapping I gain 4,
1st-motor
0.0~1000.0(%)
100.0
Terminal [CAS]
ON
[HA141] set time
[HA150]/
[HA152]
[HA153]/
[HA155]
0Hz
Intermediate
frequency 1
Intermediate
frequency 2
Maximum
frequency
Gain 1
Gain 2
Gain 3
Gain 4
Highest
frequency
[HA-01]~[HA135]
■Parameter mode (H code)
Auto-tuning
・After setting the motor basic parameters, by the
auto-tuning operation you can get the constant of the
motor.
・For no-rotation auto-tuning, the following variables are
acquired, IM:[Hb110]~[Hb114], SM(PMM):[Hd110]~
[Hd114].
・For rotation auto-tuning, the following variables are
acquired, IM:[Hb110]~[Hb118]. Keep the operation
conditions, as the motor can rotate.
・Auto-tuning start is done by the RUN-key ([HA-02] Initial
value)
・If [HA-04] is changed, the display unit will change also.
Motor stabilization (Hunting)
[HA140]~[HA154]
Control response gain
・For hunting in driving pumps or fans, lower the value of
the stabilization constant for adjustment.
・In the case that the duty is relatively light, and occurs
hunting, increase the stabilization constant.
Control mode response adjustment
・You can adjust the speed response in the operation
control of the inverter.
⇒[AA121] control mode
・Current response of the motor control ca be changed.
・In case of [CAS] terminal switching, [HA140]=00
[HA151]/
[HA154]/
・In case of Control Gain Mapping, [HA140]=01
4-46

Chapter 4
For parameter configuration
Code/Name
Range
(unit)
Initial
value
HA210 Stabilization constant, 2nd-motor
Same as HA110
HA215 Speed response, 2nd-motor
Same as HA115
HA220 Gain switching selection, 2nd-motor
Same as HA120
HA221 Gain switching time, 2nd-motor
Same as HA121
HA222 Intermediate frequency 1 of gain
switching, 2nd-motor
Same as HA122
HA223 Intermediate frequency 2 of gain
switching, 2nd-motor
Same as HA123
HA224 Gain mapping maximum frequency,
2nd-motor
Same as HA124
HA225 Mapping P gain 1, 2nd-motor
Same as HA125
HA226 Mapping I gain 1, 2nd-motor
Same as HA126
HA227 Mapping P control P gain 1, 2nd-motor
Same as HA127
HA228 Mapping P gain 2, 2nd-motor
Same as HA128
HA229 Mapping I gain 2, 2nd-motor
Same as HA129
HA230 Mapping P control P gain 2, 2nd-motor
Same as HA130
HA231 Mapping P gain 3, 2nd-motor
Same as HA131
HA232 Mapping I gain 3, 2nd-motor
Same as HA132
HA233 Mapping P gain 4, 2nd-motor
Same as HA133
HA234 Mapping I gain 4, 2nd-motor
Same as HA134
Code/Name
Range (unit)
Initial value
Induction motor (IM)
Hb102 Motor
capacity selection,
1st-motor
0.01 ~ 630.00
(kW)
Motor capacity setting
Hb103 Number
of poles selection,
1st-motor
2~48 (Pole)
4
Hb104 Motor
base frequency,
1st-motor
10.00 ~ 590.00
(Hz)
60.00(JPN)(USA)/
50.00(EU)(ASIA)(CHN)
Hb105
Motor maximum
frequency,
1st-motor
10.00 ~ 590.00
(Hz)
60.00(JPN)(USA)/
50.00(EU)(ASIA)(CHN)
Hb106 Motor
rated voltage,
1st-motor
1~1000 (V)
(200V Class)
200(JPN)
230(EU)(USA)(ASIA)(CHN)
(400V Class)
400(JPN)(EU)(ASIA)(CHN)
460(USA)
Hb108 Motor
rated current,
1st-motor
0.01~10000.00
(A)
Motor capacity setting
Motor typical data
Code
Range of values (Unit)
Capacity
[Hb102]
0.01~630.00 (kW)
Number of poles
[Hb103]
2~48 (poles)
Frequency
[Hb104]
10.00~590.00 (Hz)
[Hb105]
10.00~590.00 (Hz)
Voltage
[Hb106]
1~1000 (V)
Current
[Hb108]
0.01~9999.99 (A)
Output
voltage
Motor rated
voltage
(Ex.)200V
Command
frequency (Hz)
Base frequency
(Eg.)60Hz
Maximum
frequency
[HA230]~[HA254]
2nd motor When Intelligent Input terminal 024[SET] is enabled.
[Hb102]~[Hb108]
Basic parameters for Induction motor
・If the motor capacity [Hb102] and number of poles
[Hb103] are changed, the motor characteristics are set
according to the internal Hitachi table values.
・The output is decided by setting the frequency and
voltage. Below there is an example of V / f control.
・By setting the motor rated current, a reference current
for the motor protection is set.
※Initial value depends on the inverter.
4-47

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
Induction Motor (IM)
Hb110
Motor constant R1,
1st-motor
0.000001~1000.000000 (Ω)
Motor
capacity
setting
Hb112
Motor constant R2,
1st-motor
0.000001~1000.000000 (Ω)
Motor
capacity
setting
Hb114
Motor constant L,
1st-motor
0.000001~1000.000000 (mH)
Motor
capacity
setting
Hb116
Motor constant Io,
1st-motor
0.01~1000.00 (A)
Motor
capacity
setting
Hb118
Motor constant J,
1st-motor
0.00001~10000.00000 (kgm2)
Motor
capacity
setting
Code/Name
Range (unit)
Initial
value
Hb130 Minimum frequency,
1st-motor
0.00~10.00(Hz)
0.50
Hb131 Reduced voltage start
time, 1st-motor
0~2000(ms)
36
Code/Name
Range (unit)
Initial
value
Hb140
Manual torque boost operation
mode enable, 1st-motor
00(Disabled)/
01(Enabled)/
02(Only forward)/
03(Only reverse)
01
Hb141
Manual torque boost value,
1st-motor
0.0~20.0(%)
1.0
Hb142
Manual torque boost value,
1st-motor
0.0~50.0(%)
5.0
Code/Name
Range (unit)
Initial
value
Hb145 Energy saving
operation enable, 1st-motor
00(Disable)/
01(Enable)
00
Hb146
Energy saving mode adjustment,
1st-motor
0~100(%)
50
FW
Output
frequency
Output
voltage
Minimum frequency
00
10ms
60ms
・・・
Reduced voltage
start [Hb131]
Output
frequency
Base frequency (100%)
[Hb141]
[Hb142]
100
Output voltage (%)
Forward
Reverse
Base frequency (100%)
[Hb110]~[Hb131]
Induction motor constants
・If the motor capacity[Hb102] and number of poles
[Hb103] are changed, the motor characteristics are set
according to the internal Hitachi table values.
・For no-rotation auto-tuning, the following variables
are acquired:[Hb110]~[Hb114].
・For rotation auto-tuning, the following variables are
acquired:[Hb110]~[Hb118]
・It is possible to input the data obtained from the motor
manufacturer. However, it must also include the data of
the wiring and the like.
Minimum frequency setting
[Hb140]~[Hb146]
Manual torque boost adjustment
・In the manual boost operation mode only forward or
reverse boost can be selected.
・Example [Hb140]=02
Energy saving function
・If the torque at the time of start-up is not enough, you
can change the settings to raise the lowest frequency.
・Raise the minimum frequency, if the trip occurs, set a
longer time of reduced voltage start selection.
[Hb130]
・In V/f control, if the energy saving operations is enabled,
enters an energy saving control.
4-48

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
Hb150 Free-setting V/f frequency (1)
0.00~
[Hb152](Hz)
0.00
Hb151 Free-setting V/f voltage (1)
0.0~1000.0(V)
0.0
Hb152 Free-setting V/f frequency (2)
[Hb150] ~
[Hb154](Hz)
0.00
Hb153 Free-setting V/f voltage (2)
0.0~1000.0(V)
0.0
Hb154 Free-setting V/f frequency (3)
[Hb152] ~
[Hb156](Hz)
0.00
Hb155 Free-setting V/f voltage (3)
0.0~1000.0(V)
0.0
Hb156 Free-setting V/f frequency (4)
[Hb154] ~
[Hb158](Hz)
0.00
Hb157 Free-setting V/f voltage (4)
0.0~1000.0(V)
0.0
Hb158 Free-setting V/f frequency (5)
[Hb156] ~
[Hb160](Hz)
0.00
Hb159 Free-setting V/f voltage (5)
0.0~1000.0(V)
0.0
Hb160 Free-setting V/f frequency (6)
[Hb158] ~
[Hb162](Hz)
0.00
Hb161 Free-setting V/f voltage (6)
0.0~1000.0(V)
0.0
Hb162 Free-setting V/f frequency (7)
[Hb160] ~
[Hb105](Hz)
0.00
Hb163 Free-setting V/f voltage (7)
0.0~1000.0(V)
0.0
Code/Name
Range (unit)
Initial value
Hb170 Slip Compensation
P-gain with encoder
0~1000(%)
100
Hb171 Slip Compensation
I-gain with encoder
0~1000(%)
100
Code/Name
Range (unit)
Initial value
Hb180 Output voltage gain
0~255(%)
100
Code/Name
Range
(unit)
Initial
value
Induction Motor (IM)
Hb202 Capacity selection, 2nd-motor
Same as Hb102
Hb203 Number of poles, 2nd-motor
Same as Hb103
Hb204 Base frequency, 2nd-motor
Same as Hb104
Hb205 Maximum frequency,
2nd-motor
Same as Hb105
Hb206 Rated voltage, 2nd-motor
Same as Hb106
Hb208 Rated current, 2nd-motor
Same as Hb108
Hb210 Constant R1, 2nd-motor
Same as Hb110
Hb212 Constant R2, 2nd-motor
Same as Hb112
Hb214 Constant L, 2nd-motor
Same as Hb114
Hb216 Constant Io, 2nd-motor
Same as Hb116
Hb218 Constant J, 2nd-motor
Same as Hb118
Code/Name
Range
(unit)
Initial
value
Hb230 Minimum frequency, 2nd-motor
Same as Hb130
Hb231 Reduced voltage start time, 2nd-motor
Same as Hb131
Hb240 Manual torque boost operation mode
selection, 2nd-motor
Same as Hb140
Hb241 Manual torque boost value, 2nd-motor
Same as Hb141
Hb242 Manual torque boost peak, 2nd-motor
Same as Hb142
Hb245 Energy saving operation selection,
2nd-motor
Same as Hb145
Hb246 Energy saving mode adjustment,
2nd-motor
Same as Hb146
Hb250 Free-setting V/f frequency (1) ,
2nd-motor
Same as Hb150
Hb251 Free-setting V/f voltage (1) , 2nd-motor
Same as Hb151
Hb252 Free-setting V/f frequency (2) ,
2nd-motor
Same as Hb152
Hb253 Free-setting V/f voltage (2) , 2nd-motor
Same as Hb153
Hb254 Free-setting V/f frequency (3) ,
2nd-motor
Same as Hb154
Hb255 Free-setting V/f voltage (3) , 2nd-motor
Same as Hb155
Hb256 Free-setting V/f frequency (4) ,
2nd-motor
Same as Hb156
Hb257 Free-setting V/f voltage (4) , 2nd-motor
Same as Hb157
Hb258 Free-setting V/f frequency (5) ,
2nd-motor
Same as Hb158
Hb259 Free-setting V/f voltage (5) , 2nd-motor
Same as Hb159
Hb260 Free-setting V/f frequency (6) ,
2nd-motor
Same as Hb160
Hb261 Free-setting V/f voltage (6) , 2nd-motor
Same as Hb161
Hb262 Free-setting V/f frequency (7) ,
2nd-motor
Same as Hb162
Hb263 Free-setting V/f voltage (7) , 2nd-motor
Same as Hb163
Hb270 Slip Compensation P-gain with encoder,
2nd-motor
Same as Hb170
Hb271 Slip Compensation I-gain with encoder,
2nd-motor
Same as Hb171
Hb280 Output voltage gain, 2nd-motor
Same as Hb180
Output
frequency(Hz)
f1
f2
f3
f4
f5
f6
f7
0
V2,V3
V1
V5
V6
V7
V4
Output voltage(V)
Base
frequency
Maximum
frequency
Voltage
rated value
[Hb150]~[Hb180]
Free V/f setting
[Hb202]~[Hb280]
2nd motor When Intelligent Input terminal 024[SET] is enabled.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
・Frequency 1(f1)~frequency (f7) and the corresponding
voltage 1(V1)~voltage 7(V7) are set below the base
frequency and rated voltage. In the case of a
high-frequency motor, set the base/highest frequency
the first.
V/f feedback control adjustment
・When [AA121] is set as feedback control, slip
compensation is possible.
Output adjustment gain
・When the motor is hunting, you might want to improve
the adjustment of the voltage gain.
4-49

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
HC101 Voltage compensation gain
for automatic torque boost., 1st-motor
0~255(%)
100
HC102 Slippage compensation gain
for automatic torque boost , 1st-motor
0~255(%)
100
Code/Name
Range (unit)
Initial value
HC110 IM-SLV-0Hz Zero speed
area limit, 1st-motor
0~100(%)
80
HC111 IM-SLV starting boost
value, 1st-motor
0~50(%)
10
HC112 IM-SLV-0Hz starting
boost value, 1st-motor
0~50(%)
10
Code/Name
Range (unit)
Initial
value
HC113 Secondary resistor
compensation enable, 1st-motor
00(Disable)/
01(Enable)
00
Code/Name
Range (unit)
Initial
value
HC114 Reverse run
protection enable, 1st-motor
00(Disable)/01(Enable)
00
Code/Name
Range (unit)
Initial
value
HC120 Time constant of torque current
reference filter, 1st-motor
0~100(ms)
2
HC121 Feedforward gain compensation
adjustment for speed, 1st-motor
0~1000(%)
0
Code/Name
Range
(unit)
Initial
value
HC201 Voltage compensation gain for
automatic torque boost., 2nd-motor
Same as HC101
HC202 Slippage compensation gain for
automatic torque boost, 2nd-motor
Same as HC102
HC210 IM-SLV-0Hz Zero speed area limit,
2nd-motor
Same as HC110
HC211 IM-SLV starting boost value,
2nd-motor
Same as HC111
HC212 IM-SLV-0Hz starting boost value,
2nd-motor
Same as HC112
HC213 Secondary resistor compensation
enable, 2nd-motor
Same as HC113
HC214 Reverse protection selection,
2nd-motor
Same as HC114
HC220 Time constant of torque current
reference filter, 2nd-motor
Same as HC120
HC221
Feedforward gain compensation adjustment
for speed, 2nd-motor
Same as HC121
[HC101]~[HC121]
Automatic torque boost adjustment
・If is chosen the automatic torque boost control
function in [AA121], adjustments can be made.
For more information, refer to the user’s guide.
Sensorless vector control start
・When [AA121] is Sensorless vector control or 0Hz-Area
sensor less vector control, start boost is possible.
Secondary resistor compensation function
[HC201]~[HC220]
2nd motor When Intelligent Input terminal 024[SET] is enabled.
・This control method, in vector control (with encoder/
sensorless/0Hz), gets the temperature of the motor,
and reduces the speed variation due to temperature
change.
・If you want to use this function, use a thermistor PB-41E
from Shibaura Electronics(Ltd.) with [Cb-40]=02(NTC).
Reverse run protection function
・This control method prevents in case of torque control,
(for sensorless/encoder/0Hz), that in a low speed range
control the output frequency of the operation gets in
the reverse side.
Motor control adjustment gain
・[HC120] can put into effect a filter for torque command
of sensorless vector control, 0Hz sensorless vector
control and vector control with encoder.
・[HC121] adjust the compensation of the feedforward for
torque command of sensorless vector control, 0Hz
sensorless vector control and vector control with
encoder.
4-50

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial value
Permanent Magnet Sync. Motor(SM/PMM)
Hd102Capacity
selection,
1st-motor
0.01~630.00
(kW)
Factory setting
Hd103 Number
of poles, 1st-motor
2~48(Pole)
4
Hd104Base
frequency,
1st-motor
10.00~590.00
(Hz)
60.00(JPN)(USA)/
50.00(EU)(ASIA)(CHN)
Hd105
Maximum
frequency,
1st-motor
10.00~590.00
(Hz)
60.00(JPN)(USA)/
50.00(EU)(ASIA)(CHN)
Hd106 Rated
voltage, 1st-motor
1~1000
(V)
(200V Class)
200(JPN)
230(EU)(USA)(ASIA)(CHN)
(400V Class)
400(JPN)(EU)(ASIA)(CHN)
460(USA)
Hd108 Rated
current, 1st-motor
0.01~10000.00
(A)
Factory setting
Code/Name
Range (unit)
Initial
value
Permanent Magnet
Synchronous Motor
(SM/PMM)
Hd110
Constant R, 1st-motor
0.000001~
1000.000000 (Ω)
Factory
setting
Hd112
Constant Ld, 1st-motor
0.000001~
1000.000000 (mH)
Factory
setting
Hd114
Constant Lq, 1st-motor
0.000001~
1000.000000 (mH)
Factory
setting
Hd116
Constant Ke, 1st-motor
0.1~100000.0
(mVs/rad)
Factory
setting
Hd118
Constant J, 1st-motor
0.00001~
10000.00000 (kgm2)
Factory
setting
Motor typical data
Code
Range of values (unit)
Capacity
[Hd102]
0.01~630.00 (kW)
Number of poles
[Hd103]
2~48 (Poles)
Frequency
[Hd104]
10.00~590.00 (Hz)
[Hd105]
10.00~590.00 (Hz)
Voltage
[Hd106]
1~1000 (V)
Current
[Hd108]
0.01~10000.00 (A)
Code/Name
Range (unit)
Initial
value
Hd130 Minimum frequency,
1st-motor
0~50(%)
8
Hd131 No-load current,
1st-motor
0~100(%)
10
Code/Name
Range (unit)
Initial
value
Hd132 Starting method
00(Synchronous)/
01(Initial position
estimate)
00
Hd133 Initial position estimated
- 0V waiting times, 1st-motor
0~255
3
Hd134 Initial position estimated
- detection waiting times,
1st-motor
0~255
3
Hd135 Initial position estimated
- detection times, 1st-motor
0~255
10
Hd136 Initial position estimated
- voltage gain, 1st-motor
0~200(%)
100
Hd137 Initial position estimated
- position offset, 1st-motor
0~359(°)
15
Code/Name
Range
(unit)
Initial
value
Perm. Magnet Sync.
Motor (SM/PMM)
Hd202 Motor capacity, 2nd-motor
Same as Hd102
Hd203 Number of poles, 2nd-motor
Same as Hd103
Hd204 Base frequency, 2nd-motor
Same as Hd104
Hd205 Maximum frequency, 2nd-motor
Same as Hd105
Hd206 Rated voltage, 2nd-motor
Same as Hd106
Hd208 Rated current, 2nd-motor
Same as Hd108
Hd210 Constant R, 2nd-motor
Same as Hd110
Hd212 Constant Ld, 2nd-motor
Same as Hd112
Hd214 Constant Lq, 2nd-motor
Same as Hd114
Hd216 Constant Ke, 2nd-motor
Same as Hd116
Hd218 Constant J, 2nd-motor
Same as Hd118
[Hd102]~[Hd118]
(SM/PMM) basic parameters
[Hd130]~[Hd218]
Minimum frequency settings
・By base frequency[Hd104]×[Hd130], change from Sync.
to sensorless is possible.
・By [Hd131], the sensorless vector control no-load
current is set.
Magnetic pole position estimation SM(PMM)
・Motor capacity and number of poles will be set by
Hitachi characteristics table
・For SM/PMM, frequency, voltage, and the motor
characteristics are necessary.
・If the maximum current is decided, sets with a margin
the overcurrent detection level [bb160].
※Initial value depends on the inverter.
・If motor capacity [Hd102], number of poles [Hd103] are
changed, the motor characteristics are set according to
the internal Hitachi table values.
・By auto-tuning at stop, values of [Hd110]~[Hd114]
can be acquired.
・In the case of driving a SM(PMM), by setting [Hd132] to
initial position estimate, first estimates the pole
position and then starts.
・By setting [Hd132] to initial position estimate, and
enabling [Hd140], the first time the inverter is
connected to the power supply, it will estimate the pole
position, for next runs will use the saved position,
unless it gets disconnected
・Offset [Hd141] is added at the first start when doing
reverse motion.
2nd motor When Intelligent Input terminal 024[SET] is enabled.
4-51

Chapter 4
For parameter configuration
Code/Name
Range (unit)
Initial
value
Hd230 Minimum frequency, 2nd-motor
Same as Hd130
Hd231 No-load current, 2nd-motor
Same as Hd131
Hd232 Starting method, 2nd-motor
Same as Hd132
Hd233 Initial position estimated - 0V
waiting times, 2nd-motor
Same as Hd133
Hd234 Initial position estimated detection waiting times, 2nd-motor
Same as Hd134
Hd235 Initial position estimated detection times, 2nd-motor
Same as Hd135
Hd236 Initial position estimated voltage gain, 2nd-motor
Same as Hd136
Hd237 Initial position estimated -
position offset, 2nd-motor
Same as Hd137
Code/Name
Range (unit)
Initial
value
Slot 1
oA-10 Operation
selection at option error
00(Error)/
01(Continue operation)
00
oA-11 Communication
Watch Dog Timer setting
0.00~100.00(s)
0.00
oA-12 Operation
setting at communication
error
00(Error)/
01(Tripping after decelerating
and stopping the motor)/
02(Ignore error)/
03(Free-run stop)/
04(Decelerating and stopping)
00
oA-13 Enable of RUN
command at start
00(Disable)/
01(Enable)
0.00
Slot 2
oA-20 Operation
selection at option error
00(Error)/
01(Continue operation)
00
oA-21 Communication
Watch Dog Timer setting
0.00~100.00(s)
0.00
oA-22 Operation
setting at communication
error
00(Error)/
01(Tripping after decelerating
and stopping the motor)/
02(Ignore error)/
03(Free-run stop)/
04(Decelerating and stopping)
00
oA-23 Enable of RUN
command at start
00(Disable)/
01(Enable)
0.00
Slot 3
oA-30 Operation
selection at option error
00(Error)/
01(Continue operation)
00
oA-31 Communication
Watch Dog Timer setting
0.00~100.00(s)
0.00
oA-32 Operation
setting at communication
error
00(Error)/
01(Tripping after decelerating
and stopping the motor)/
02(Ignore error)/
03(Free-run stop)/
04(Decelerating and stopping)
00
oA-33 Enable of RUN
command at start
00(Disable)/
01(Enable)
0.00
Code/Name
Range (unit)
Initial
value
ob-01
Encoder constant setting
0~65535(Pulse)
1024
ob-02
Encoder phase selection
00(A Phase, Cos lead)/
01(B Phase, Sin lead)
0
ob-03 Numerator of the
motor gear ratio
1~10000
1
ob-04 Denominator of
the motor gear ratio
1~10000
1
[Hd230]~[Hd241]
2nd motor When Intelligent Input terminal 024[SET] is enabled.
[oA-10]~[oA-32][ob-01]~[ob-04]
■Parameter mode (o code)
・o parameters are displayed by the [UA-11] = 01. This
configuration is not necessary except when option is
used.
・For more information, refer to the User’s guide of the
corresponding option.
Optional board error operation
・For more information, refer to the User’s guide.
P1-FB Optional board encoder input setting
・Sets the encoder to be input into the optional board,
and sets the motor gear ratio involved in the feedback
of the encoder
4-52
 Loading...
Loading...