

Page 1

RC カ ー 用レート ジャイロ
Remote gain is still effective.
1M23N30902
Rate Gyro for RC Cars
For RC models
Before using your new gyro, please read this manual thoroughly
and use the gyro properly and safely. After reading this manual,
store it in a safe place.
• No part of this manual may be reproduced in any form without
prior permission.
• The contents of this manual are subject to change without prior
notice.
• Futaba is not liable for any potential damage (accidental or
otherwise) that may occur after installation.
INSTRUCTION MANUAL
INSTRUCTION MANUAL
Features of GYC440
● Dedicated RC car setting
Vehicle straightness and cornering performance can be increased without
taking into account the effect of the road surface, etc.
● Remote gain function and mode switching function
You can adjust gain from the transmitter (3 or more CH) by using the
remote gain function. Gain can also be adjusted with the trimmer on the
GYC440. The mode switching function allows AVCS/NORMAL gyro
mode switching.
● Integrated, compact,and light weight
Compact size(20.5x20.5x11mm)and light weight(3.7g)realized
by high density mounting technology.
● Easy setup
The GYC440 can be used immediately with minimum setup.
● Supporting the S.BUS/S.BUS2 connection
Only one wire connection to the receiver can operate the GYC440.
Functions
Port3(Steering servo output
●
Port2(Gain input
Servo selection switch
●
(Digital/Analog)
Gyro direction
●
●
Port1(Steering input/
●
S.BUS input
Switch
●
Trimmer
●
Limit/Gain
(
)
AN
DG
Monitor LED display
State Color Move Reference
1. No servo pulse /
sensor error
2. Warm-up Green Fast blink
3. Sensor initialization Red/Green ON
4. Turn Red/Green Fast blink
5. Neutral offset Orange Slow blink Stick operation
6. Gain OFF
7. Switch operation Green One blink
8. Low battery Red One flash Less than 4.0V
Red 2 flash
-
OFF
NORMAL (Green)
Each time of switch
)
)
)
LED
AVCS (Red)
Right (Green)
Left (Red)
operation
Thank you for purchasing the GYC440
RC cars gyro. Compact and lightweight,
the GYC440 is designed to RC cars
steering control. If the transmitter has
3 or more channels (capable of 3CH
adjustment) the gyro sensitivity can be
adjusted from the transmitter. Features
include simple set-up and S.BUS/S.BUS2
connectivity.
GYC440 Ratings:
(Integrated sensor type rate gyro)
• Gyro sensor: MEMS vibrating structure gyro
• Operating voltage: DC4.2V to 8.4V
• Current drain: 30mA (excluding a servo)
• Operating temperature range: -10ºC to +45ºC
• Dimensions: 20.5 x 20.5 x 11.0mm (except protrusion)
• Weight: 3.7g
• Functions: Sensitivity trimmer. LED monitor. Servo selection(Digital/
Analog). S.BUS/S.BUS2 connection.
Set Contents
The following items are supplied with the GYC440:
GYC440
Extension cord: (Black)
Sensor tape
Extension cord: (Red)
Wiring strap
WARNING
Failure to follow these safety precautions may result in severe injury
to yourself and others.
Check that there is sufficient transmitter battery capacity .
Analog servos cannot be used while in "digital servo"
mode.
• Analog servos may break down if "digital servo" mode is selected.
Do not operate the model and transmitter steering wheel
for about 3-5 seconds after turning on the GYC440 (When
shared with the receiver).
• GYC440 initialization and neutral position reading. The GYC440 is initialized when
the power is turned on. In the AVCS mode, the neutral position is also read at the
same time. If initialization ends normally, the operator is informed by two repetitive
movements of the servo to the left and right (a little).
Always check the direction of operation of the gyro.
Do not strike the gyro with a hard object. Do not drop it
onto a concrete surface or other hard floor.
• The sensor may become damaged during strong impacts.
Do not use trims or mixing in AVCS mode.
• In the AVCS mode all corrections are made by the gyro. Therefore, if trimming and
mixing, are turned on, operation will be the same as deviating from the neutral position.
Do not use the GYC440 for applications other than RC
cars.
•This gyro is designed for RC cars only. Do not use it for other applications.
Do not place gyro near heating equipment (engine, motor,
ESC, battery, servo, etc.).
•Always allow the gyro to adjust to the surrounding environmental temperature before ight. A large temperature change during use will cause drift and other operational issues.
Mini screwdriver
Connecting the GYC440
Extension cord:(Black)
Gyro gain CH
Receiver
Steering CH
Gyro gain CH(Receiver)←connect→Port2(GYC440)
Remote gain effective. Trimmer(GYC440) becomes LIMIT.
Gyro gain CH(Receiver)←It does not connect→Port2(GYC440)
Remote gain is invalid. Trimmer(GYC440) becomes GAIN.
Extension cord:(Red)
Connecting the GYC440 (S.BUS receiver is required)
Extension cord:(Black)
S.BUS Receiver
S.BUS/S.BUS 2 Port
S.BUS CH
Steering --- 1CH
Gyro gain --- 3CH
Mounting to Chassis
Use the a included double-sided sponge tape to rmly attach the gyro perpendicular to the control axis, at a
position where there is as little vibration as possible. Make the wiring loose and bundle it with the included
magic strap so that it will not interfere with the rod.
Gyro mounting position
The direction of rotation xed by the gyro can be
any direction within 360° relative to the steering
axis controlled by the gyro.
Port 3
Port 1
Port 2
AN
DG
GYC440
The port 2 is not connected.
Port 1
Port 3
AN
DG
GYC440
In S.BUS connection, the port
2 is not connected.
Included sponge
sensor tape
Degrease
and stick
Flat surface of the chassis where the sensor
tape sticks easily. Mount the gyro level so
Steering
servo
Steering
servo
Gyro
Horizontal plane
that it is not tilted relative to the chassis.
Page 2
Adjustments
0%
Servo
Link the servo in accordance with the kit instruction manual.
Adjust the linkage rod so that the trim amount is as small as possible.
Setup before a run [ Remote gain use ]
Gain adjustments are carried out with a transmitter.
Follow this procedure when the port 2 of gyro and gain CH of the
receiver are connected. (or with S.BUS connection)
Using the gyro direction switch, adjust the gyro operating
6
direction so that steering moves all the way to the right when
the car is turned to the left. Be sure to set gyro operating direction
correctly or the car will not run.
A car is shaken at the
left by hand → steering
goes out on the right
When the remote gain function is not used, the clockwise direction from the center of the sensitivity setting trimmer is the AVCS
mode and the counterclockwise direction is the NORMAL mode.
At the center position the sensitivity becomes zero and when
the trimmer is turned fully to the left or right, the sensitivity becomes 100%.
The sensitivity setting criteria by end point is shown in the gure
below.
100%
GAIN CH
<
>
Gain
AVCS side(LED : RED)
50%
[ When AVCS mode ]
*Steering trim must not be performed in the AVCS mode.
(The gyro automatically corrects the neutral position.)
Adjust steering trim with 0% gyro sensitivity or the NORMAL side.
1
In this state turn the receiver power OFF → ON. The AVCS side
2
neutral position is memorized and AVCS can be used. Steering
trim must not be performed while the car is running.
Run the car in the gyro o and adjust the steering trim (sub trim).
1
Select the appropriate setting for the steering servo that you are
2
using. Servo selection switch of GYC440 should be moved to
digital (DG) or analog (AN). For best results, use a digital servo and
set the GYC440 at (DG).
*Do not use an analog servo in the digital servo mode (DG). The servo
may be damaged. Use an analog servo in the analog servo mode (AN).
Turn on your transmitter's power. Set the gyro sensitivity to about
3
50% at the NORMAL side (minus rate side) in accordance with the
transmitter instruction manual. The <GAIN CH>graph of the next page
is referred to.
※ Make actual sensitivity adjustment while running.
Receiver ON → The GYC440 requires 3-5 seconds to initialize
4
when the power is turned on. Do not move the car and do not
move the steering wheel during this initialization or the gyro may not
initialize properly. Once the initialization process has been completed
the steering servo will move (a little) several times indicating that the
GYC440 is now ready for use. If the neutral has shifted, LED will blink
orange. In that case, it reboots.
Move the steering wheel to the left and right and perform
5
adjustment at the limit trimmer so that the servo operation angle
becomes the maximum value at which the servo horn does not strike
the linkage.
<Limit Trimmer Adjustments>
Steering wheel to
full
D/R (UP side)
*Limit is symmetricalness from a
trim position. Limit adjustment
after a steering trim adjustment.
● Trimmer operation
*Since this gyro is compact and light weight, the adjustment trimmer is also a small
part. Always operate the trimmer with the accessory mini screwdriver and without
applying unreasonable force.
Gyro sensitivity zero --- LED OFF
AVCS side --- LED red
NORMAL side --- LED green
Limit trimmer
Adjustments
It adjusts to the
maximum operation of
linkage.
[ When remote gain function is off ]
Adjust the gyro sensitivity with the GYC440 trimmer.
If the port 2 of gyro is not connected, remote gain is automatically set
to being inhibited. (S.BUS connection is excluded)
In this case, the limit trimmer is automatically changed to gyro
sensitivity setting trimmer.
(Limit adjustment cannot be performed. A limit is xed to 55 right and
left.)
Select the appropriate setting for the steering servo that you are
1
using. Servo selection switch of GYC440 is changed digital
(DG) or analog (AN). For best results, use a digital servo and set the
GYC440 at (DG).
*Do not use an analog servo in the digital servo mode (DG). The servo
may be damaged. Use an analog servo in the analog servo mode (AN).
Gain trimmer halfway to the left from the middle point.
2
LIMIT
GAIN
NORMAL 50%
Receiver ON → The GYC440 requires 3-5 seconds to initialize
3
when the power is turned on. Do not move the car and do not
move the steering wheel during this initialization or the gyro may not
initialize properly. Once the initialization process has been completed
the steering servo will move (a little) several times indicating that the
GYC440 is now ready for use. If the neutral has shifted, LED will blink
orange. In that case, it reboots.
Using the gyro direction switch, adjust the gyro's operating
4
direction so that steering moves all the way to the right when
the car is turned to the left. Be sure to set the operating direction
correctly or the car will not run.
Gyro Sensitivity and AVCS Switching
When the remote gain function is used, NORMAL and AVCS
mode switching is performed in accordance with the direction
of operation of the transmitter's remote gain channel. At the +
rate side, the AVCS mode is selected and at the – rate side, the
NORMAL mode is selected. The sensitivity is changed by adjusting the end point rate.
-100%
NORMAL side(LED : GREEN)
3CH (GAIN CH) is set up with reference to the manual of a transmitter. A neutral becomes GAIN 0%. It is divided into AVCS side
and NORMAL side. Check using the GYC440's LED.
Gyro sensitivity zero --- LED OFF
AVCS side --- LED red
NORMAL side --- LED green
Trimmer movement when remote gain not used (when S.BUS is
used and port 2 is not connected).
AVCS 50%
0%
-50%
AVCS 100%
LIMIT
GAIN
AN
DG
+50%
0%
End point rate
50%
100%
+100%
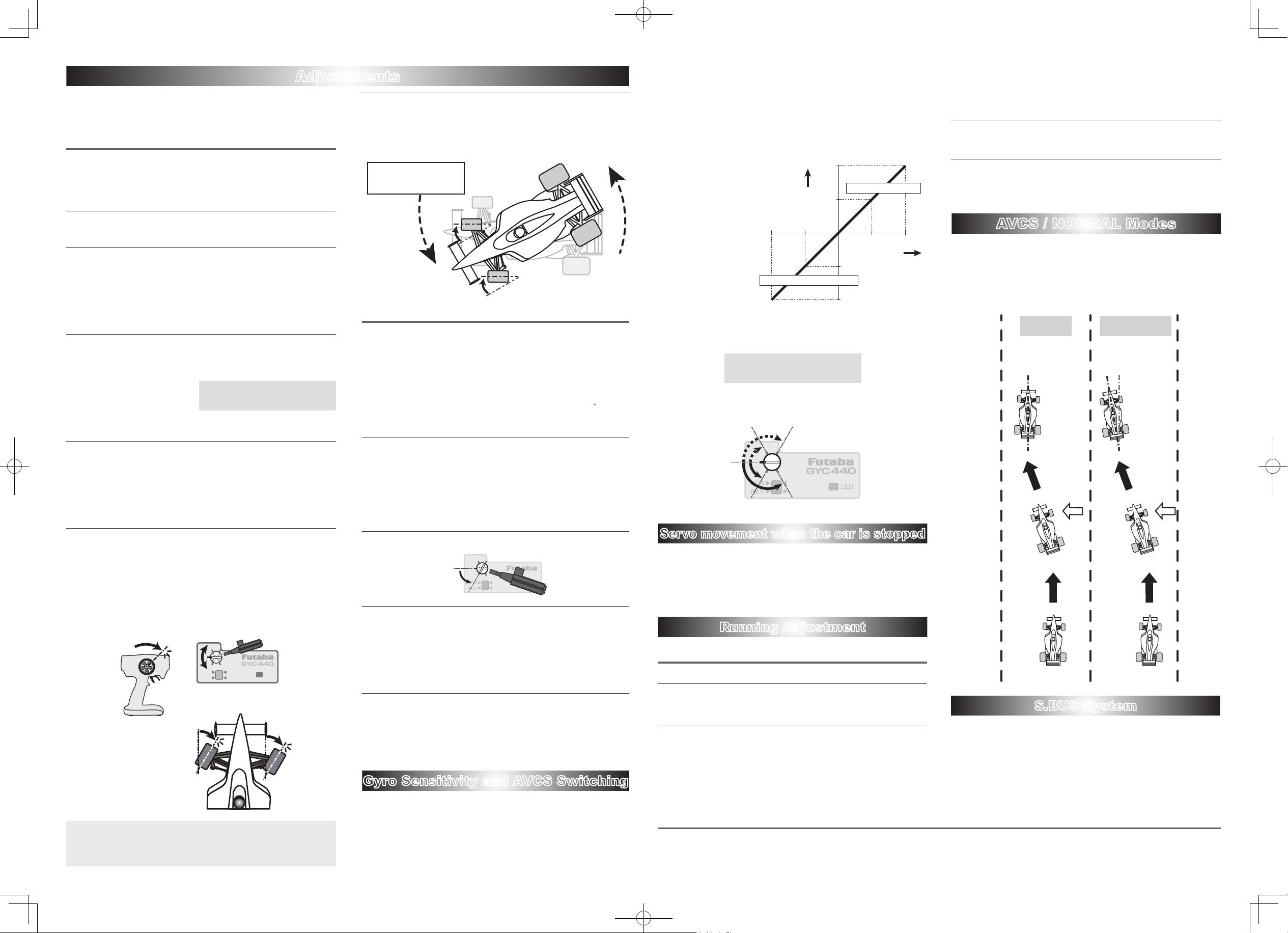
AVCS / NORMAL Modes
The gyro has 2 operating modes: NORMAL mode and AVCS
mode. In the AVCS mode, the angle is controlled simultaneously
with NORMAL mode rate control (swing speed). The AVCS mode
increases straight running stability more than that of the NORMAL mode. Because the feel of operation is different, choose
your favorite mode.
AVCS NORMAL
Corrects the skidding
direction and forcefully
maintains the heading.
Outside
force
Countersteers against
outside force, but cannot
correct the skid direction.
NORMAL 100%NORMAL 50%
Servo movement when the car is stopped
If steering is performed when the car is stopped, the servo will
move substantially and will operate up to the limit position. In
the AVCS mode, if steering is set to the neutral position, the servo will slowly return to the neutral position. This is dierent from
ordinary operation, but is normal.
Running Adjustment
Actually drive the vehicle and adjust the gyro sensitivity.
[ When NORMAL mode ]
Drive the vehicle and adjust the gyro sensitivity to a position . If
1
sensitivity is too high, a steering will vibrate. Sensitivity is
lowered so that it may not vibrate.
The eectiveness condition of a steering is adjusted by D/R or the
2
end point of a transmitter.
*When the vehicle is stopped, the maximum steering angle increases
as the gyro sensitivity is increased. This is because a control signal is
applied from the gyro. This is different from the maximum steering
angle when actually running.
1080 Yabutsuka, Chosei-mura, Chosei-gun, Chiba-ken, 299-4395, Japan
Phone: +81 475 32 6982, Facsimile: +81 475 32 6983
©FUTABA CORPORATION 2016, 2 (2)
FUTABA CORPORATION
Unlike conventional radio control systems, the S.BUS system
sends operating signals from the receiver to a gyro or other S.BUS
compatible device by data communication. The S.BUS compatible device executes only those parts of this data for the channels
set by itself. For this reason multiple servos can be connected to
the same signal line.
The S.BUS system requires a dedicated S.BUS receiver and S.BUS
servo (gyro, etc.).
S.BUS System
Outside
force
 Loading...
Loading...