

Page 1

MANUEL’D’UTILISATION
PILOTE AUTOMATIQUE
Modèle
NAVpilot-300
www.furuno.com
Page 2

Pub. No. OFR-72840-A
DATE OF ISSUE: MAY. 2018
Page 3

REMARQUES IMPORTANTES
Bluetooth® agréé IC
Généralités
• L’utilisateur de cet appareil doit lire et suivre attentivement les descriptions de ce manuel. Toute
erreur d’utilisation ou de maintenance risque d’annuler la garantie et de provoquer des blessures.
• Toute copie partielle ou intégrale du présent manuel sans l’accord écrit préalable de FURUNO est
formellement interdite.
• En cas de perte ou de dégradation du présent manuel, contactez votre distributeur pour le
remplacer.
• Le contenu du présent manuel et les caractéristiques techniques de l’équipement peuvent faire
l’objet de modifications sans préavis.
• Les exemples d’écrans (ou illustrations) contenus dans le présent manuel peuvent différer des
écrans réels. Ils dépendent de la configuration de votre système et des paramètres de votre
équipement.
• Conservez soigneusement le présent manuel afin de pouvoir le consulter ultérieurement.
• Toute modification de cet équipement (et du logiciel) par des personnes non autorisées par
FURUNO entraînera l’annulation de la garantie.
• Notre importateur pour l’Europe, conformément à la DÉCISION N° 768/2008/CE, est :
– Nom : FURUNO EUROPE B.V.
– Adresse : Ridderhaven 19B, 2984 BT Ridderkerk, Pays-Bas
• Tous les noms de marques et de produits sont des marques commerciales, des marques
déposées ou des marques de service appartenant à leurs détenteurs respectifs.
• La marque et les logos Bluetooth
®
sont des marques déposées appartenant à Bluetooth SIG, Inc.
Bluetooth® agréé IC
7305A-RM1017
Mise au rebut de cet équipement
Pour éliminer cet appareil, merci de vous conformer à la réglementation locale relative à l’élimination
des déchets industriels. En cas de mise au rebut aux États-Unis, consultez le site de l’Electronics
Industries Alliance (http://www.eiae.org/) pour connaître la procédure à suivre.
Mise au rebut d’une batterie usagée
Certains appareils FURUNO contiennent une ou plusieurs batteries. Pour savoir si c’est le cas du
vôtre, consultez le chapitre consacré à la maintenance. Si votre appareil contient une batterie,
suivez les instructions ci-dessous. Recouvrez les bornes + et - de la batterie avant la mise au rebut
pour éviter tout risque d’incendie et de génération de chaleur dû à un court-circuit.
Au sein de l’Union européenne
Le symbole de poubelle barrée indique que les batteries, quel que soit
leur type, ne doivent pas être jetées dans une poubelle classique, ni
dans une décharge. Rapportez vos batteries usagées à un site de
collecte de batteries conformément à votre législation nationale et à la
Directive batteries 2006/66/UE.
Aux États-Unis
Le symbole composé de trois flèches formant un triangle indique que les
batteries rechargeables Ni-Cd et à l’acide de plomb doivent être
recyclées. Veuillez rapporter les batteries usagées à un site de collecte
conformément à la législation locale.
Dans les autres pays
Il n’y a pas de normes internationales pour le symbole de recyclage des batteries. Les symboles de
recyclage peuvent être appelés à se multiplier au fur et à mesure que les autres pays en créeront.
Ni-Cd Pb
Cd
i
Page 4

AVERTISSEMENT
AVERTISSEMENT
CONSIGNES DE SÉCURITÉ
Lisez ces instructions de sécurité avant d'utiliser cet appareil.
Indique une situation qui peut provoquer la mort
AVERTISSEMENT
ATTENTION
ou des blessures graves si elle n'est pas évitée.
Indique une situation qui peut provoquer des blessures
mineures ou modérées si elle n'est pas évitée.
Avertissement, Attention
AVERTISSEMENT
Ne pas démonter ou modifier l'appareil.
Un incendie ou un choc électrique peut
survenir en cas de modification de l'appareil.
Couper immédiatement l’alimentation en
cas d’infiltration d’eau dans l’équipement
ou si l’équipement émet de la fumée ou
des flammes.
L'utilisation continue de l'équipement peut
provoquer un incendie ou un choc électrique.
Ne réglez pas la vitesse de changement
de route à une valeur trop élevée.
Le bateau virera trop brusquement lors du
changement de route, ce qui risque de créer
une situation très dangereuse.
N'utilisez pas le pilote automatique dans
les situations suivantes :
– La vitesse du bateau est supérieure
à 40 noeuds
– En cas de navigation dans des
canaux étroits
– Lorsque vous entrez au/sortez du port
– Lorsque vous naviguez dans des zones
très fréquentées
– Lorsque vous naviguez dans des zones
à faible visibilité (brouillard/brume/pluie)
– Lorsque vous êtes à quai.
Action interdite
Action obligatoire
AVERTISSEMENT
Observez les précautions suivantes
lorsque vous utilisez le pilote automatique :
– Restez toujours vigilant
– Surveillez la dérive du navire
N'utilisez pas le mode SIMULATION
sur le bateau.
La barre risquerait de bouger soudainement.
Ce mode est spécifiquement destiné aux
techniciens spécialisés.
N'utilisez pas le mode ORBITE en cas de
forte mer.
Dans la mesure où le bateau décrit un cercle
de 360° autour du Waypoint, une vague ou un
vent fort peut entraîner le chavirage du bateau.
En mode forme huit, vérifiez qu'aucun
objet ne se situe dans l'environnement
général du Waypoint.
La distance séparant le Waypoint du point de
giration dépend de la vitesse du bateau.
Utilisez un fusible adapté.
L'utilisation d'un fusible non adapté peut
provoquer un incendie ou
endommager l'appareil.
ii
Page 5

ATTENTION
ATTENTION
ATTENTION
CONSIGNES DE SÉCURITÉ
ATTENTION
N'appliquez pas une force excessive sur
l'écran LCD et évitez tout choc au niveau
de ce dernier.
Cela risquerait d'endommager l'écran LCD ou
de causer un dysfonctionnement de l'appareil.
En cas de panne d'alimentation, désactivez le
pilote automatique ou passez en mode manuel.
En cas de panne d'alimentation, continuez
en mode AUTO ou NAV provoque l'usure du
mécanisme de la barre.
Tenez compte des points suivants lorsque
vous utilisez le Fantum Feedback
Le pilote automatique ne peut pas détecter la
position de la barre en cas d'utilisation du
Fantum Feedback
sur-pilotage peut se produire après avoir atteint
la limite de barre. Si le phénomène perdure,
cela peut entraîner un dysfonctionnement au
niveau du groupe et entraver le fonctionnement
du pilote automatique. Pour éviter le
sur-pilotage, il convient de tenir compte des
points suivants :
TM
TM
. Par conséquent, un
Utiliser uniquement la batterie spécifiée.
Lors du remplacement de la batterie,
s'assurer que la polarité est correcte.
En cas de mauvais positionnement de la
batterie, cette dernière risque d'exploser ou
cela peut entraîner un dysfonctionnement
de l'appareil.
Étiquette(s) d'avertissement
Une ou plusieurs étiquettes
d’avertissement est/sont fixée(s) sur
.
l’appareil. Ne la ou les retirez pas.
En cas de perte ou de dégradation de
ces étiquettes, contactez un agent
FURUNO ou le revendeur pour les
remplacer.
– Utiliser le pilote automatique à une vitesse
permettant à ce dernier de contrôler le
bateau. Faire particulièrement attention
lorsque la poupe est face au vent (ou au
courant) en mode SABIKI.
– Toujours vérifier la position de la barre pour
arrêter cette dernière avec le pilote
automatique avant d'atteindre la limite de barre.
– Lorsque la barre atteint la limite définie,
le groupe est temporairement désactivé et le
pilote automatique ne peut pas déplacer la
barre. Si cela se produit, l'alarme de cap (voir
la Section 3.5) retentit indépendamment de la
valeur définie. Dans ce cas, passer au mode
STBY et tourner la barre pour la déplacer.
À propos de l'écran LCD TFT
L’écran LCD TFT est fabriqué selon les dernières techniques LCD et affiche
99,99 % de ses pixels. Les 0,01 % de pixels restants peuvent disparaître ou
clignoter, toutefois, il ne s’agit pas là d'un signe de dysfonctionnement.
Nom : Étiquette d'avertissement (Petite)
Type : 64-034-2002
Réf. : 100-416-400-10
iii
Page 6

TABLE DES MATIERES
AVANT-PROPOS............................................................................................................vi
CONFIGURATION DU SYSTÈME................................................................................viii
1. INTRODUCTION ................................................................................................... 1-1
1.1 Présentation des commandes....................................................................................1-1
1.2 Mise sous et hors tension ..........................................................................................1-3
1.3 Réglage de la luminosité et du contraste ................................................................... 1-5
1.4 Modification de la couleur d’affichage ........................................................................ 1-6
1.5 Présentation des modes de navigation ...................................................................... 1-7
1.5.1 Zone graphique..............................................................................................1-7
1.5.2 Zone de données .........................................................................................1-10
1.6 Présentation des fonctions de menu........................................................................1-11
2. MODES DE NAVIGATION.................................................................................... 2-1
2.1 Mode Veille (STBY)....................................................................................................2-1
2.2 Mode AUTO ...............................................................................................................2-2
2.2.1 Activation du mode AUTO..............................................................................2-2
2.2.2 Mode AUTO RTE FOND................................................................................ 2-4
2.3 Mode NAV..................................................................................................................2-5
2.3.1 Activation du mode NAV ................................................................................2-5
2.3.2 Méthode de navigation du mode NAV ...........................................................2-6
2.3.3 Méthode de changement de Waypoint ..........................................................2-7
2.3.4 Définition du mode de navigation du bateau après avoir atteint un Waypoint ....
.......................................................................................................................2-8
2.4 Mode VIRAGE............................................................................................................2-8
2.4.1 Sélection et réalisation d’un virage ................................................................2-8
2.4.2 Réglage de l’angle des virages....................................................................2-10
2.5 Mode FishHunter
2.5.1 Sélection et réalisation d’une rotation en mode FishHunter
2.5.2 Types de virage disponibles avec le mode FishHunter
2.5.3 Réglage des paramètres du mode FishHunter
2.6 Mode SABIKI
2.6.1 Utilisation du mode SABIKI
2.6.2 Réglage de la sensibilité du mode SABIKI
2.7 Modes ÉVITAGE et NFU .........................................................................................2-20
2.7.1 Utilisation du mode ÉVITAGE......................................................................2-20
2.7.2 Utilisation du mode NFU ..............................................................................2-20
2.8 Mode OVRD (uniquement pour le système EVC)....................................................2-21
2.8.1 Activation du mode OVRD en mode STBY.................................................. 2-21
2.8.2 Activation du mode OVRD en mode AUTO ou NAV.................................... 2-21
2.9 Mode Priorité barreur ...............................................................................................2-22
2.10 Mode Barre Assistée................................................................................................2-24
™
...................................................................................................2-11
™
™
.........................................................................................................2-17
™
.......................................................................2-18
™
.........................................2-16
................................................2-19
™
™
......................2-11
.............................2-12
3. ALERTES.............................................................................................................. 3-1
3.1 Affichage du menu Alertes ......................................................................................... 3-2
3.2 Configuration de l’Alerte Veille ................................................................................... 3-2
3.3 Configuration de l’Alerte de Cap ................................................................................3-3
3.4 Affichage des messages d’alerte ...............................................................................3-3
3.5 Affichage de l’Historique des Alertes .........................................................................3-4
iv
Page 7

TABLE DES MATIERES
4. PERSONNALISATION DE VOTRE NAVPILOT....................................................4-1
4.1 Configuration des paramètres ................................................................................... 4-1
4.1.1 Configuration automatique des paramètres .................................................. 4-1
4.1.2 Configuration manuelle des paramètres........................................................ 4-2
4.1.3 Calcul de la vitesse........................................................................................ 4-4
4.2 Réactivité de Barre (pour Fantum Feedback
4.3 Source de données de navigation............................................................................. 4-5
4.4 Menu Réglage Système ............................................................................................ 4-5
™
)......................................................... 4-4
5. UNITÉ DE CONTRÔLE DISTANTE GC-001.........................................................5-1
5.1 Unité de contrôle distante GC-001 ............................................................................ 5-1
5.2 Mise sous/hors tension.............................................................................................. 5-1
5.3 Présentation de l’écran.............................................................................................. 5-2
5.4 Présentation du menu du GC-001............................................................................. 5-3
5.5 Alertes du GC-001..................................................................................................... 5-5
5.5.1 Priorité des alertes......................................................................................... 5-5
5.5.2 Liste d’alertes ................................................................................................ 5-5
5.6 Réglage des paramètres de votre GC-001................................................................ 5-8
5.6.1 Verrouillage/déverrouillage des touches ....................................................... 5-8
5.6.2 Modification des réglages buzzer et vibration ............................................... 5-8
5.6.3 Activation/désactivation de la fonctionnalité Manœuvre Facile..................... 5-9
5.6.4 Mise sous/hors tension du rétroéclairage de l’écran ..................................... 5-9
5.6.5 Réglage du minuteur de veille....................................................................... 5-9
5.6.6 Utilisation de la fonctionnalité [AUTO OFF]................................................. 5-10
5.7 Utilisation de la fonctionnalité Manœuvre Facile..................................................... 5-10
5.8 Connexion (jumelage) du GC-001 avec votre NAVpilot-300................................... 5-11
5.9 Fonctions du GC-001 avec le NAVpilot-300............................................................ 5-13
5.9.1 Mode Veille (STBY)..................................................................................... 5-13
5.9.2 Mode Pilote Automatique (AUTO)............................................................... 5-14
5.9.3 Mode Navigation (NAV)............................................................................... 5-15
5.9.4 Modes VIRAGE et FishHunter
5.9.5 Mode SABIKI
5.10 Menu Diagnostique.................................................................................................. 5-18
™
............................................................................................ 5-17
™
.................................................................. 5-16
6. MAINTENANCE ET DÉPANNAGE .......................................................................6-1
6.1 Maintenance préventive ............................................................................................ 6-1
6.2 Remplacement du fusible.......................................................................................... 6-2
6.3 Dépannage................................................................................................................ 6-2
6.4 Diagnostique.............................................................................................................. 6-4
6.4.1 Menu Diagnostique........................................................................................ 6-4
6.4.2 Test du processeur........................................................................................ 6-5
6.4.3 Test de l’unité de contrôle ............................................................................. 6-6
6.4.4 Test clavier .................................................................................................... 6-7
6.4.5 Test écran...................................................................................................... 6-7
6.4.6 Test de barre ................................................................................................. 6-8
6.4.7 Test Sensibilité Barre .................................................................................. 6-11
6.5 Données Système ................................................................................................... 6-13
6.6 Messages ................................................................................................................ 6-13
6.6.1 Fenêtre de message pop-up ....................................................................... 6-13
6.6.2 Menu Message............................................................................................ 6-13
6.6.3 Description du message.............................................................................. 6-14
6.7 Affichage des capteurs utilisés................................................................................ 6-18
ANNEXE 1 ARBORESCENCE DES MENUS .......................................................AP-1
CARACTÉRISTIQUES .............................................................................................. SP-1
INDEX ......................................................................................................................... IN-1
v
Page 8

AVANT-PROPOS
Quelques mots à l’attention de l’utilisateur du NAVpilot-300.
Félicitations ! Vous venez d’acquérir le NAVpilot-300. Nous sommes convaincus que vous allez
bientôt comprendre pourquoi la marque FURUNO est synonyme de qualité et de fiabilité.
Depuis 1948, FURUNO Electric Company jouit d’une renommée enviable pour l’innovation et la
fiabilité de ses appareils électroniques marins. Cette recherche constante de l’excellence est
renforcée par notre vaste réseau mondial d’agents et de distributeurs.
Votre équipement a été conçu et fabriqué pour s’adapter aux conditions les plus rigoureuses en mer.
Toutefois, pour un fonctionnement optimal, tout matériel doit être correctement manipulé et
entretenu. Nous vous invitons par conséquent à lire et à suivre attentivement les procédures
d’utilisation et de maintenance du présent manuel.
Nous vous remercions de l’intérêt et de la confiance que vous portez aux produits FURUNO.
Tout retour d’information dont vous pourriez nous faire part en tant qu’utilisateur final nous sera très
précieux, ainsi que toute appréciation sur notre capacité à répondre à vos besoins.
Caractéristiques
Le NAVpilot-300 se compose d’un processeur, d’un écran et d’une télécommande. Ce système est
destiné à être utilisé sur les bateaux de 25 pieds ou plus avec des moteurs in-bord, hors-bord, in/
hors-bord ou des moteurs DBW*.
Le NAVpilot-300 présente les principales caractéristiques suivantes :
• Une commande à distance grâce à la télécommande GC-001 fournie.
• La technologie « adaptative » qui permet à votre NAVpilot d’optimiser en permanence et à chaque
parcours la navigation de votre bateau.
• Des écrans LCD couleur haute résolution et polyvalents qui offrent une variété de configurations
d’affichage définies par l’utilisateur.
• Une configuration automatique et un mode auto-adaptatif de la vitesse et de la course du bateau.
• L’accès direct à tous les modes de fonctionnement
• La fonction « FishHunter »
ou zigzag autour des bancs de poissons ou d’autres cibles.
• Compatible avec les traceurs NavNet TZtouch et NavNet TZtouch2.
• Réseau jusqu’à 3 systèmes NAVpilot-300.
™
guide votre bateau dans une manœuvre en cercle, orbite, spirale, huit
* : Les systèmes DBW (Commande par port câblé) sont compatibles avec le NAVpilot-300 selon le
détail suivant :
• IPS VOLVO PENTA
• Commande de barre YAMAHA
• YANMAR VC10
• SEASTAR SOLUTIONS OPTIMUS (La version logicielle du PCM (Module de commande de
pompe) principal doit être de type « Rév. T » ou ultérieure).
Numéros du programme
Système N° de programme Système N° de programme Système N° de programme
GC-001 FAP-3012 FAP-3011
MAIN 6454030.xx MAIN 6454026.xx MAIN 6454024.xx
BOOT 6454029.xx BOOT 6454027.xx BOOT 6454025.xx
BLE 6454031.xx BLE 6454032.xx
« xx » fait état de modifications de version mineures.
vi
Page 9

AVANT-PROPOS
Déclaration CE
En ce qui concerne les déclarations CE, consultez notre site Web (www.furuno.com) pour de plus
amples informations sur les déclarations de conformité RoHS.
vii
Page 10

CONFIGURATION DU SYSTÈME
Processeur
FAP-3012
Télécommande tactile
GC-001 (Max. 3 unités)
12/24 VCC
Pompe réversible
Système de référence de barre
FAP-6112
Unité de contrôle
FAP-3011 (Max. 3 unités)
Capteur linéaire
Boîte de
dérivation
Système Priorité
Barreur
Interrupteur
d'événement
Système EVC*
Résistance
de borne*
: Fourniture standard
: En option ou non fourni
*1 : Les résistances de borne doivent être installées à chacune des deux extrémités de la dorsale.
2
: Les systèmes EVC sont compatibles avec le NAVpilot selon le détail suivant :
*
Système EVC Remarques
VOLVO PENTA IPS
Commande de barre YAMAHA
YANMAR VC10
SEASTAR SOLUTIONS OPTIMUS
Boîte de
dérivation
2
1
Boîte de dérivation
FI-5002
15 VCC
Bus CAN
(NMEA2000)
Compas intégré
PG-700
Requiert une passerelle VOLVO IPS (disponible en option).
Requiert une passerelle YAMAHA HM (disponible en option).
-
La version logicielle du PCM (Module de commande de pompe)
principal doit être de type « Rév. T » ou ultérieure.
Résistance
de borne*
1
viii
Page 11

1. INTRODUCTION
Le NAVpilot-300 peut être contrôlé au choix depuis l’unité de contrôle (FAP-3011) ou
depuis l’unité de contrôle distante (GC-001). Pour plus de détails sur le GC-001,
reportez-vous à la chapitre 5.
1.1 Présentation des commandes
Les touches émettent un « bip » afin de vous informer si l’action envisagée a réussi
ou si cette dernière n’est pas autorisée. Un « bip » indique que l’action a réussi ; deux
« bips » indiquent qu’une erreur s’est produite.
Activez ou désactivez les « bips » du clavier selon vos besoins. Reportez-vous à la
section 4.4 pour plus de détails.
La figure ci-dessous présente l’unité de contrôle FAP-3011. Pour plus de détails sur
les commandes du GC-001, reportez-vous au chapitre 5.
Le tableau ci-dessous liste les principales fonctions des options surlignées dans la
figure ci-dessus. Pour obtenir des instructions détaillées quant à leur utilisation,
reportez-vous à la chapitre 2.
Nom Description
Touche PORT 10
10
Pression courte :
• Lorsque le mode AUTO est activé : Change de cap de 10°
vers bâbord.
• Permet d’ouvrir le menu de réglage sélectionné.
Pression longue :
• Lorsque le mode AUTO est activé : Amorce un virage à 180°
(réglage usine) vers bâbord.
• Lorsque le mode NAV est activé : Passe au mode Évitage
(virage à bâbord)
1-1
Page 12

1. INTRODUCTION
Touche PORT 1 Pression courte :
Touche Power/Brill
Touche Auto Pilot • Ferme toutes les fenêtres et tous les menus.
Touche STBD 1
Touche MENU
Touche STBD 10
Nom Description
• Lorsque le mode AUTO est activé : Change de cap de 1° vers
1
bâbord.
• Augmente la valeur pour le réglage sélectionné.
• Déplace le curseur de sélection vers le haut dans le menu.
• Lorsque le mode STBY est activé : Passe des indications
numériques aux indications de type sélecteur et vice versa.
Pression longue :
• Lorsque le mode AUTO est activé : Amorce un virage à 90°
(réglage usine) vers bâbord.
Pression courte :
• Lorsque le système est hors tension : Met le système sous
tension.
• Lorsque le système est sous tension : Affiche la fenêtre de
réglage de luminosité.
• Lorsque la fenêtre de réglage de luminosité est ouverte :
Permet de faire défiler les niveaux de luminosité.
Pression longue :
• Met le système hors tension (un décompte de trois secondes
apparaît).
• Passe au mode STBY (veille).
STBY
Lorsqu’aucune destination n’est sélectionnée au niveau du
navigateur GPS :
• Passe au mode AUTO.
Lorsqu’une destination est sélectionnée au niveau du navigateur
GPS :
• Ouvre la fenêtre de sélection du mode ([NAV]/[AUTO]/
[ANNULER]).
Pression courte :
• Lorsque le mode AUTO est activé : Change de cap de 1° vers
1
tribord.
• Réduit la valeur pour le réglage sélectionné.
• Déplace le curseur de sélection vers le bas dans le menu.
• Lorsque le mode STBY est activé : Passe des indications
numériques aux indications de type sélecteur et vice versa.
Pression longue :
• Lorsque le mode AUTO est activé : Amorce un virage à 90°
(réglage usine) vers tribord.
Pression courte :
• Ouvre le menu [VIRAGE].
• Lorsque le menu est ouvert : Remonte d’un niveau dans le
menu.
Pression longue :
• Ouvre/ferme le menu principal.
Pression courte :
• Lorsque le mode AUTO est activé : Change de cap de 10°
10
vers tribord.
• Ouvre le menu sélectionné.
Pression longue :
• Lorsque le mode AUTO est activé : Amorce un virage à 180°
(réglage usine) vers tribord.
• Lorsque le mode NAV est activé : Passe au mode Évitage
(virage à tribord)
1-2
Page 13

1.2 Mise sous et hors tension
COG
É
É
Remarque: Si le compas PG-500/PG-700 est connecté, mettez le NAVpilot sous
tension et patientez quelques minutes avant de quitter le port ou pilotez le bateau
manuellement. Les données de cap du PG-500/PG-700 peuvent ainsi être stabilisées.
Mise sous tension
Pour mettre l’appareil sous tension, appuyez sur . L’unité émet un « bip » pour
indiquer que la procédure de démarrage est lancée.
1. INTRODUCTION
L’équipement affiche
cran de démarrage
cran Mode Veille
les informations du
produit, se connecte au
processeur et lance le
test de démarrage. Le
test de démarrage
vérifie la ROM, la RAM,
ainsi que les données
de sauvegarde du
Connexion au processeur...
Processeur : XX. XX*1/XX. XX
Contrôleur : XX. XX*1/XX. XX
*1
: Indique le numéro de version de l'application.
*2
: Indique le numéro de version du programme de démarrage.
*2
*2
COG
processeur et de l’unité
de contrôle. Il recherche également des informations de cap du compas et des
informations d’angle de barre du système de référence de barre. Lorsque tous les
résultats de test affichent "OK", l’écran principal Pilotage Auto apparaît.
Si l’un des éléments testés rencontre un problème, un message d’erreur s’affiche (voir
le tableau figurant sur la page suivante). Le résultat du test peut également indiquer
"NG" (Problème). Suivez les instructions ci-dessous pour revenir en mode de
fonctionnement normal. Si vous ne parvenez pas à revenir à un fonctionnement
normal, adressez-vous à votre revendeur pour plus d’informations.
1-3
Page 14

1. INTRODUCTION
Priorité Message d’erreur Signification
L’unité de contrôle n’a pas réussi à se
connecter au processeur. Mettez le système
hors tension et vérifiez les connexions entre
les unités. Rebranchez les câbles lâches ou
débranchés. Si le problème persiste après
avoir redémarré le système, contactez votre
revendeur local.
Il se peut que le processeur soit défectueux.
Contactez votre revendeur local et
demandez la réparation.
Il se peut que l’unité de contrôle soit
défectueuse. Contactez votre revendeur
local et demandez la réparation.
Les données de sauvegarde du processeur
ne sont pas exploitables. Le système va
restaurer les réglages usine par défaut pour
le processeur. Appuyez sur une touche pour
lancer le processus.
Les données de sauvegarde de l’unité de
contrôle ne sont pas exploitables. Le
système va restaurer les réglages usine par
défaut pour l’unité de contrôle. Appuyez sur
une touche pour lancer le processus.
Il y a une différence dans les versions
logicielles du processeur et de l’unité de
contrôle.
Contactez votre revendeur local pour mettre
à jour le logiciel des deux unités sur la base
de la version la plus récente.
Élevée
Basse
Erreur de communication avec le
processeur.
Vérifiez les connexions.
Contactez votre distributeur si le problème
persiste.
Le processeur n’a pas réussi le test de
démarrage.
Contactez votre revendeur local.
L’unité de contrôle n’a pas réussi le test
de démarrage.
Contacter votre distributeur.
Les données de sauvegarde du
processeur sont corrompues ou ont été
perdues.
Les réglages usine par défaut du
processeur seront restaurés.
Appuyez sur une touche pour continuer.
Les données de sauvegarde de l’unité de
contrôle sont corrompues ou ont été
perdues.
Les réglages usine par défaut de l’unité de
contrôle seront restaurés.
Appuyez sur une touche pour continuer.
Les versions logicielles de l’unité de
contrôle et du processeur ne
correspondent pas.
Effectuez une mise à jour sur la base de la
version la plus récente.
Vous pouvez acquitter et masquer ces erreurs. Pour acquitter et masquer un message
d’erreur, appuyez sur une touche de l’unité de contrôle. S’il y a plusieurs erreurs, la
prochaine erreur s’affiche.
1-4
Mise hors tension
Pour mettre l’appareil hors tension, effectuez un appui long sur . Un message
de décompte apparaît à l’écran. Une fois le décompte terminé, l’unité de contrôle
s’éteint. Si un GC-001 qui est jumelé avec le système se trouve à proximité, il est
également mis hors tension.
Page 15

1. INTRODUCTION
1.3 Réglage de la luminosité et du contraste
La touche Power/Brill ( ) permet également de régler la luminosité et le
contraste de l’écran lorsque le système est sous tension.
1. Appuyez sur pour afficher l’écran de réglage du contraste et de la
luminosité de l’écran.
2. Appuyez sur pour augmenter ou pour diminuer la luminosité de
1
1
l’écran.
3. Appuyez sur pour augmenter ou pour diminuer le contraste de l’écran.
10
10
4. Appuyez sur pour fermer le menu.
De plus, si aucune action n’est réalisée pendant un bref laps de temps, cet écran
se ferme automatiquement.
1-5
Page 16

1. INTRODUCTION
COG
COG
1.4 Modification de la couleur d’affichage
Vous pouvez modifier la palette de couleurs utilisée pour l’affichage afin de l’adapter
à vos conditions visuelles et à vos exigences. Il existe deux palettes de couleurs
prédéfinies : Blanc (plus facile de voir l’écran en cas de soleil ou d’éclairage important)
et Noir (plus facile de voir l’écran dans le noir, quand il y a très peu de lumière).
La figure ci-dessous montre un exemple des deux palettes de couleurs.
COG
Exemple : [Couleur Affichg] = [Blanc] Exemple : [Couleur Affichg] = [Noir]
P
COG
S
10 77
Pour changer la palette de couleurs, procédez comme suit :
1. Pour tous les modes autres que le mode Priorité Barreur, effectuez un appui long
sur pour ouvrir le menu.
Pour le mode Priorité Barreur, appuyez sur ouvrir le menu [VIRAGE], puis
sélectionnez [MENU].
Pour savoir comment utiliser les menus, reportez-vous à la section 1.6.
2. Appuyez sur ou pour sélectionner [Couleur Affichg], puis appuyez
sur .
10
3. Appuyez sur ou pour sélectionner [Blanc] ou [Noir], puis appuyez sur
.
10
1
1
1
1
4. Appuyez sur pour fermer le menu.
1-6
Page 17

1. INTRODUCTION
1.5 Présentation des modes de navigation
Le NAVpilot-300 propose les modes de navigation suivants :
• Veille (STBY)
• Navigation (NAV)
• Priorité Barreur
Les contenus affichés pour chaque mode sont divisés en deux grandes zones : les
zones graphiques et les zones de données. La partie située en haut de l’écran affiche
des indications sur le mode de navigation actif et le statut de l’équipement.
Pour avoir plus de détails sur chaque mode Virage, reportez-vous à la chapitre 2.
La figure ci-dessus donne un exemple de l’écran principal Pilote automatique, pour
référence.
Indication du mode de navigation
: Mode veille
: Mode AUTO
: Mode AUTO Avancé
: Mode NAV (Précision)
: Mode NAV (Économie)
SABIKI
: Mode SABIKI™
: Mode ÉVITAGE
: Mode Non suivi
• Pilote Automatique (AUTO)
• Contrôle (OVRD)
• NFU (Non Follow-up)
• FishHunter
• Virage
• Évitage
Indications d'état
: Verr. Touche actif
: Alarme active
: Barre Assistée active
: Simulation active
Zone graphique
Zone de données
™
: Mode Contrôle
1.5.1 Zone graphique
Le contenu de la zone graphique change en fonction du mode de navigation actif.
Mode de navigation Contenu affiché/fonction
Veille Affichage Compas ou affichage Numérique La permutation
Pilote Automatique,
Contrôle, NFU, Évitage
Navigation Les données sont affichées sous le format sélectionné durant
Virage Les contenus affichés dépendent du mode Virage actif.
FishHunter
Priorité Barreur Les contenus affichés dépendent du mode actif lors de la
™
entre l’affichage Compas et l’affichage Numérique est
uniquement possible lorsque le système est en mode STBY.
Reportez-vous à la section 1.5.2.
Les données sont affichées sous le format sélectionné durant
la veille (affichage Numérique ou affichage Compas).
la veille ; cependant, si le compas est sélectionné, l’affichage
Piste 3D apparaît.
Reportez-vous à la section 2.4.1.
Les contenus affichés dépendent du mode FishHunter™
actif. Reportez-vous à la section 2.5.1.
récupération. Reportez-vous au mode AUTO et au mode
NAV ci-dessus.
1-7
Page 18

1. INTRODUCTION
DEFCAP
COG
DEFCAP
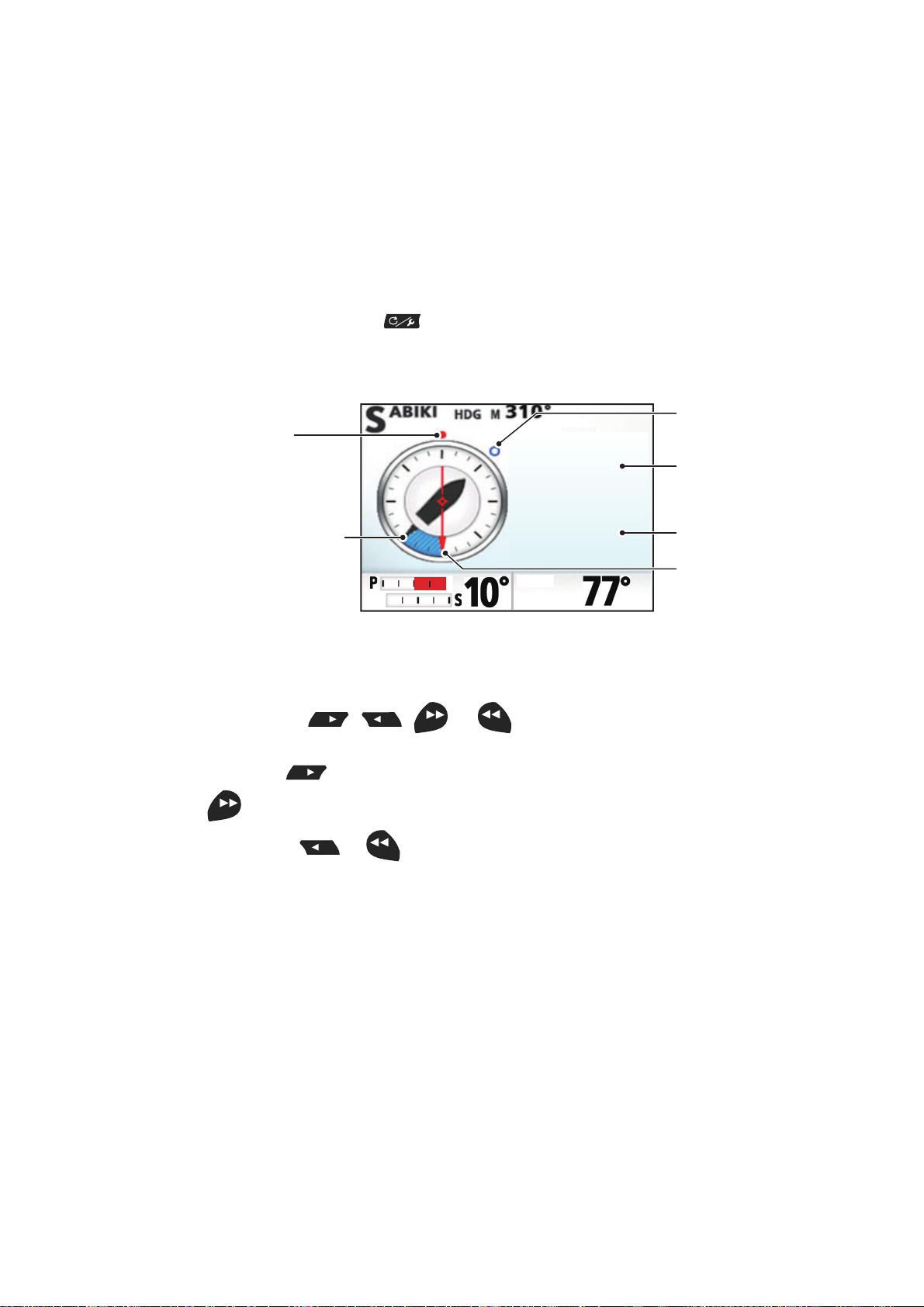
Affichage Compas
L’affichage du compas indique les données de cap et de course du bateau. Il requiert
des données de cap. En fonction des paramètres d’affichage du compas ([Menu
Installation] [Réglage Affichage] [Affichage Compas]), l’indication de course,
l’indication de cap et le cadran du compas se comportent différemment, comme
indiqué dans le tableau ci-dessous. Reportez-vous au Manuel d’installation pour
savoir comment modifier les paramètres d’affichage.
[Affichage Compas] réglé sur
[Cap en Haut]
Cadran du compas Le cadran du compas tourne pour
maintenir l’indication de cap en haut
au centre de l’écran.
Indication de cap L’indication est fixe. L’indication se déplace en
Indication de route L’indication se déplace en fonction
des changements de route.
Cap (flèche grise)
Route (flèche rouge)
DEFCAP
DEFCAP
Données du mode
de navigation (voir
Tableau ci-dessous)
COG
[Affichage Compas]
réglé sur [Route Haut]
Le cadran du compas
tourne pour maintenir l’indication de route en haut
au centre de l’écran.
fonction des changements de cap.
L’indication est fixe.
Les données de mode de navigation changent en fonction du mode de navigation, tel
que précisé dans le tableau ci-dessous.
Mode de navigation Données affichées
Veille, Non Follow Up, Contrôle Cap.
Pilote Automatique, Évitage Route.
Priorité Barreur Cap Priorité Barreur. (Clignotant)
1-8
Page 19

1. INTRODUCTION
HDG T
COG
Affichage Numérique
L’affichage numérique affiche les données au format numérique. Les données
affichées et l’endroit où elles sont affichées varient en fonction du mode de navigation.
Vous pouvez utiliser deux méthodes pour afficher les données numériques, comme
illustré dans les figures ci-dessous.
B
A C
D
Méthode 1 Méthode 2
Le tableau ci-dessous indique à quel endroit les données sont affichées en fonction
du mode de navigation.
Mode de navigation
Veille, Non Follow Up, Contrôle Méthode 1 A : Cap
Pilote Automatique, Évitage Méthode 1 A : Route
Navigation Méthode 2 B : Destination/Waypoint
Priorité Barreur (mode
Récupération : Pilote Automatique)
Priorité Barreur (mode
Récupération : Navigation)
Affichage Piste 3D
L’affichage Piste 3D présente une image graphique de votre bateau à mesure qu’il suit
la route définie. L’indication du bateau se déplace pour indiquer votre emplacement
sur la route.
Cap
Indication
Destination/Waypoint
indication (drapeau
rouge)
Indication Bateau
HDG T
Méthode
d’affichage
Données et endroit où elles
sont affichées
C : Erreur d’écart de route
D : Temps de Ralliement (TTG)
Méthode 1 A : Cap Priorité Barreur
Méthode 2 B : Destination/Waypoint
C : Erreur d’écart de route
D : Temps de Ralliement (TTG)
Nom Destination/Waypoint
TTG 47’ 29s
COG
Erreur de déviation
Heure estimée d'arrivée à la
destination ou au Waypoint
(Temps de parcours)
1-9
Page 20

1. INTRODUCTION
COG
COG
Permutation entre affichage Compas/Numérique (en mode Veille
uniquement)
Pour permuter entre l’affichage Compas et l’affichage Numérique, procédez comme
suit :
1. Appuyez sur pour mettre le système en mode Veille.
2. Appuyez sur pour permuter l’affichage.
STBY
1
Affichage Compas Affichage numérique
1.5.2 Zone de données
La zone de données peut afficher les données suivantes :
• Côté gauche : Indication d’angle de barre ou, pour Fantum Feedback
de direction de barre.
Indicateur d'angle de barre Indicateur de direction de barre
1
™
, indication
COG
COG
Angle de barre Directions de la barre
Indications de direction
P : BÂBORD ; S : TRIBORD
Rouge : BÂBORD
Vert : TRIBORD
• Côté droit : Position du bateau (POSN), Route sur le fond (COG), Vitesse sur le
fond (SOG) et Vitesse sur l’eau (STW).
En mode STBY, il est possible de modifier les données affichées à droite de la zone
de données. Pour tous les autres modes, les données sélectionnées en mode Veille
s’affichent.
1-10
Page 21

1. INTRODUCTION
Sélection des données (en mode Veille uniquement)
Pour modifier les données affichées à droite de la zone de données, procédez comme
suit :
1. Appuyez sur pour mettre le système en mode Veille.
2. Appuyez sur pour faire défiler les données. L’ordre de défilement est
STBY
1
indiqué dans la figure ci-dessous.
1 1
POSN COG SOG STW
Position Route sur le fond Vitesse sur le fond Vitesse surface
1
1
1.6 Présentation des fonctions de menu
Le contenu des menus change en fonction du mode de navigation actif. Pour plus de
détails sur le contenu des menus, reportez-vous à la "ARBORESCENCE DES
MENUS" de la page AP-1.
1. En mode AUTO, STBY, NAV ou OVRD, effectuez un appui long sur pour
ouvrir le menu.
Les éléments
affichés ici
dépendent du
mode actif.
Message
Capteur Utilisé
Réactivité de Barre :*
Apprentissg Auto :
䕰
Préc Ent.
On
Barre de défilement
Curseur de sélection
6
* : Affiché uniquement
avec Fantum Feedback
TM
.
Si vous n’appuyez pas suffisamment longtemps sur , le menu [VIRAGE]
apparaît. Dans ce cas, vous pouvez sélectionner le menu tout à droite du menu
[VIRAGE].
Pour le mode Priorité Barreau, il n’existe pas de touche de raccourci. Vous
pouvez sélectionner [Menu] depuis le menu [VIRAGE] en mode Priorité Barreur.
Menu ROTATION (le plus à gauche)
SABIKI
Configurer
Préc
▼
Exécuter
Après avoir mis l'appareil
sous tension, le menu affiche
[SABIKI] au centre.
Remarque: Lors d’un virage ou lorsque le mode
Menu ROTATION (le plus à droite)
1
Menu
▼
FishHunter
Préc
Ent.
™
/NFU/Évitage est
actif, la touche n’a aucune fonctionnalité. Pour ouvrir le menu, changez le
mode puis suivez les étapes susvisées.
1-11
Page 22

1. INTRODUCTION
2. Appuyez sur ou pour sélectionner (mettre en surbrillance) une option
1
de menu, puis appuyez sur .
1
déplace le curseur de sélection vers le haut dans le menu et déplace
1
10
1
le curseur de sélection vers le bas dans le menu.
Si une barre de défilement apparaît à gauche du menu, cela signifie qu’il existe
d’autres options de menu que celles déjà affichées.
3. Pour les menus disposant de plusieurs « niveaux », répétez l’étape 2 au besoin.
Pour remonter d’un niveau dans le menu, appuyez sur .
4. Appuyez sur ou pour sélectionner une option ou un réglage, puis
appuyez sur .
1
augmente la valeur de réglage et réduit la valeur de réglage.
1
10
1
1
5. Effectuez un appui long sur pour fermer le menu.
Remarque: Par souci de concision, les procédures décrites dans le présent manuel
utilise la terminologie suivante lorsqu’elles se réfèrent aux fonctions de menu.
• « Ouvrez/fermez le menu. » Cela signifie « Ouvrez/fermez le menu comme indiqué
à l’étape 1 ou à l’étape 5 de la procédure susvisée. »
• « Sélectionnez xxx. » Cela signifie « Appuyez sur ou pour sélectionner
1
1
xxx. » comme indiqué aux étapes 2 et 3 de la procédure susvisée. »
1-12
Page 23

2. MODES DE NAVIGATION
Ce chapitre décrit les modes et fonctions de navigation du NAVpilot.
Remarque: Pour les bateaux disposant d’interrupteurs extérieurs connectés,
l’interrupteur agit comme un dispositif de «mise en veille».
Remarques concernant le changement des modes de navigation
Lorsque vous changez les modes de navigation alors que le compas PG-500 ou
PG-700 est toujours en cours d’initialisation, tenez compte des éléments suivants:
• Le message "INITIALISATION DU CAPTEUR DE CAP. CELA DURE 2 MINUTES.
PATIENTEZ UN INSTANT." peut apparaître lors du changement des modes de
navigation. Dans ce cas, attendez deux minutes pour initialiser le compas, puis
changez à nouveau le mode de navigation.
• Lorsque le compas est redémarré suite à une coupure de courant, etc. alors que le
pilote automatique contrôle la barre, le message indiqué ci-dessus apparaît et le
pilote automatique cesse de contrôler la barre. Si cela se produit, passez au mode
STBY et manœuvrez le bateau manuellement.
2.1 Mode Veille (STBY)
Lorsque vous mettez l’appareil sous tension, ce dernier s’allume en mode veille
(STBY). Il s’agit du mode de navigation manuel. Lorsque vous vous dirigez vers ou
hors d’un port, dirigez le navire en mode STBY à l’aide de la barre du bateau.
Lorsque le mode Veille est actif, l’indication "STBY" apparaît à l’écran aux endroits
suivants:
• Lorsque le mode Veille est réglé sur l’affichage Compas ou Piste 3D: Au centre de
l’écran.
• Lorsque le mode Veille est réglé sur l’affichage Numérique: En haut au centre de
l’écran.
Si le compas est affiché, votre cap apparaît sous la forme d’une flèche grise sur le
compas et ce dernier tourne de sorte que la flèche pointe vers le haut de l’écran.
Mode Cap
T : Vrai
M : Magnétique
COGCOG
Indication de cap
(flèche grise)
Indication du
mode de
navigation
Indication
de cap
Indication de barre et
vitesse, indication de
route ou de position
Remarque: L’unité de contrôle distante GC-001 peut être utilisée lorsque le NAVpilot300 est en mode Veille. Reportez-vous à la chapitre 5 pour plus de détails.
2-1
Page 24

2. MODES DE NAVIGATION
DEFCAP
COG
2.2 Mode AUTO
Le mode AUTO permet de diriger le bateau automatiquement selon une route définie
par le pilote.
Le mode AUTO ne compensera pas les effets du vent ou de la marée qui peuvent faire
dévier le bateau de sa route. Il travaille en route surface. Utilisez le mode AUTO pour
les voyages courts et directs. Dans les autres cas, utilisez le mode NAV (reportezvous à la section 2.3).
2.2.1 Activation du mode AUTO
Marée et VentMarée et Vent Marée et Vent
Pour activer le mode AUTO, suivez la procédure ci-dessous.
1. Dirigez le bateau vers le cap souhaité.
2. Appuyez sur .
STBY
Votre bateau maintient automatiquement le cap actuel lorsque la touche est
enfoncée. À chaque changement de cap par rapport à la route définie, le système
NAVpilot commande automatiquement la barre pour replacer le bateau sur le cap
à suivre.
Lorsque le mode AUTO est actif, l’indication "A" apparaît en haut à gauche de
l’écran.
Indication
du mode de
navigation
Indication de cap
(flèche grise)
Indication de route
(flèche rouge)
DEFCAP
Indication de route
Mode de cap
T : Vrai
M : Magnétique
COG
(numérique)
Indication de barre
ou fenêtre de
données
2-2
Remarque: Si le NAVpilot-300 est connecté à un système de navigation GPS
avec une destination ou une route active et que vous appuyez sur , le mode
STBY
NAV est activé en lieu et place du mode AUTO (reportez-vous à la section 2.3).
Appuyez sur la touche une seconde fois pour afficher l’écran AUTO.
Page 25

2. MODES DE NAVIGATION
3. Pour modifier les paramètres du cap en mode AUTO, appuyez sur la touche
appropriée en vous référant au tableau ci-dessous.
Touche Nom & description Touche Nom & description
Touche STBD 10
Change de cap de 10° vers tribord.
10
Touche PORT 10
Change de cap de 10°
10
vers bâbord.
Touche PORT 1
1
Change de cap de 1°
1
Touche STBD 1
Change de cap de 1° vers tribord.
vers bâbord.
4. Pour quitter le mode AUTO et ainsi piloter le bateau manuellement, appuyez sur
. Dirigez le bateau à l’aide de la barre.
STBY
Remarque 1: En mode AUTO, si vous appuyez sur , , ou , le
1
1
10
10
message suivant apparaît. Les angles de virage figurant dans les messages cidessous se basent sur les réglages usine par défaut. Pour amorcer le virage, appuyez
sur la touche appropriée une nouvelle fois.
1
: "Amorce un virage à tribord (90°)"
: "Amorce un virage à bâbord (90°)"
1
: "Amorce un virage à tribord (150°)"
10
: "Amorce un virage à bâbord (150°)"
10
Remarque 2: La fonction ci-dessus est disponible sur le GC-001. Reportez-vous à la
section 5.9.
L’unité de contrôle émet un « bip » (l’option [Bip Clavier] dans le menu [Réglage
Système] doit être réglée sur [ON]) dans les conditions suivantes :
• Le mode a été modifié et passe en mode AUTO depuis un équipement externe.
• La route définie est modifiée depuis un équipement externe.
Remarque 3: Lorsque le mode AUTO est actif, si une route ou une destination est
sélectionnée depuis un système de navigation GPS, le mode NAV est disponible. Un
message de confirmation s’affiche. Appuyez sur , ou selon le cas.
1
1
STBY
Remarque 4: Vous pouvez également activer le mode AUTO depuis le menu
[VIRAGE]. Appuyez sur pour afficher le menu [VIRAGE], puis sélectionnez
[AUTO] ( ).
2-3
Page 26

2. MODES DE NAVIGATION
2.2.2 Mode AUTO RTE FOND
Le mode AUTO permet de suivre une route définie mais celle du bateau peut varier
en fonction de la marée et du vent. Pour régler l’impact de la marée et du vent, utilisez
le mode AUTO RTE FOND. Le système NAVpilot calcule la route en fonction de la
position et du cap actuels et en définissant en mémoire un « Waypoint » virtuel vers
lequel se diriger. Si la marée ou le vent vous fait dévier de votre cap, le système
NAVpilot corrige le cap en conséquence.
Le NAVpilot doit être connecté à un navigateur GPS qui fournit des données de
position (latitude et longitude).
Marée et Vent Marée et VentMarée et Vent
Pour activer le mode AUTO RTE FOND, suivez la procédure ci-dessous.
1. En mode AUTO, ouvrez le menu.
Calcul Vitesse :
Auto Rte Fond :
Couleur Affichg
▼
Préc Ent.
Auto
30,0kn
OFF
ON
2. Sélectionnez [AUTO RTE FOND] pour afficher la fenêtre des options.
3. Sélectionnez [ON].
Sélectionnez [OFF] pour désactiver le mode AUTO RTE FOND.
Lorsque le mode AUTO RTE FOND est activé, l’indication de mode qui
se trouve en haut à gauche de l’écran change comme indiqué sur le
figure de droite.
Remarque: Si aucune donnée de position n’est transmise au NAVpilot-300 et que
vous essayez de modifier le mode de navigation, un message d’erreur apparaît et
une alerte sonore est émise. Appuyez sur une touche pour arrêter l’alerte, puis
vérifiez la transmission des données au système.
2-4
4. Fermez le menu.
Remarque: La mesure dans laquelle le mode AUTO RTE FOND suit strictement la
route dépend de la configuration du [Mode NAV] dans le menu [Opt Pil Auto].
L’option [Économie] maintient la route dans la plage de 0,03 NM et l’option [Précision]
maintient la route dans la plage de 0,01 NM.
Page 27

2.3 Mode NAV
Le système NAVpilot dirige le bateau vers le Waypoint actuel tout en compensant les
effets de la marée et du vent.
S’il est connecté à un système de navigation GPS, le NAVpilot dirige le bateau de
sorte qu’il suive une série ordonnée de Waypoints. Lorsque vous atteignez chaque
Waypoint ou destination, des alertes sonores et visuelles sont déclenchées.
Il suffit de 15 secondes environ pour activer le mode NAV après réception des
données de destination par le système NAVpilot.
2. MODES DE NAVIGATION
Waypoint
Marée et Vent
Navigation vers un Waypoint
Waypoint Waypoint
Parcours d'une route (série de waypoints)
2.3.1 Activation du mode NAV
Waypoint
Marée et Vent
Waypoint
Marée et Vent
Pour activer le mode NAV, suivez la procédure ci-dessous.
1. Définissez le Waypoint de destination (ou route) sur le navigateur GPS ou le
traceur.
Pour suivre un cap, vérifiez que votre traceur se dirige bien vers le Waypoint le
plus proche ou celui souhaité avant de régler le NAVpilot sur le mode NAV.
2. Amenez manuellement le bateau au cap à suivre pour atteindre le Waypoint.
3. Appuyez sur . Une fenêtre de confirmation s’affiche.
4. Appuyez sur , ou pour sélectionner [Économie], [Précision] ou
STBY
1
1
STBY
mode AUTO, selon le cas.
• [Économie] : maintient la route dans la plage de 0,03 NM.
• [Précision] : maintient la route dans la plage de 0,01 NM.
2-5
Page 28

2. MODES DE NAVIGATION
HDG T
HDG T
COG
HDG T
Lorsque le mode NAV est actif, l’indication du mode de navigation apparaît en
haut à gauche de l’écran, accompagnée de l’indication de réglage XTE. La figure
ci-dessous donne un aperçu de l’écran du mode NAV.
Indication
Destination/Waypoint
indication (drapeau rouge)
Indication Bateau
5. Pour désactiver le changement entre le mode NAV et le mode SBTY, appuyez sur
Indication du mode de navigation
: Précision
: Économie
HDG T
HDG T
HDG T
COG
Cap
Nom Destination/Waypoint
Erreur de déviation ou
relèvement destination/Waypoint
Source de données
Indication de barre et
vitesse, indication de
route ou de position
. Une alerte sonore est émise et le mode est changé. Utilisez la barre pour
STBY
piloter le bateau.
Remarque 1: Le cap indiqué sur le NAVpilot n’est pas toujours identique à la direction
du Waypoint indiquée sur le traceur.
Remarque 2: La fonction ci-dessus est disponible sur le GC-001. Reportez-vous à la
section 5.9.
L’unité de contrôle émet un « bip » (l’option [Bip Clavier] dans le menu [Réglage
Système] doit être réglée sur [ON]) dans les conditions suivantes :
• Le mode a été modifié et passe en mode AUTO depuis un équipement externe.
• La route définie est modifiée depuis un équipement externe.
Remarque 3: Vous pouvez également activer le mode NAV depuis le menu
[VIRAGE]. Appuyez sur pour afficher le menu [VIRAGE], puis sélectionnez
[NAV] ( ).
2.3.2 Méthode de navigation du mode NAV
En mode NAV, le bateau peut changer de cap entre les Waypoints. Cela se produit,
par exemple, lorsqu’une commande est reçue de l’unité de contrôle distante. Deux
méthodes sont possibles pour revenir au cap défini : [Précision] et [Économie].
2-6
Les options [Précision] et [Économie] utilisent toutes les deux la valeur XTE (écart de
route) pour diriger le bateau vers la route d’origine avant évitage. L’option [Précision]
permet de se rapprocher au mieux, dans une plage de 0,01 NM, de la route définie.
L’option [Économie] permet de se rapprocher dans une moindre mesure, dans une
plage de 0,03 NM, de la route définie.
Page 29

Distance hors cap
Cap initial
Pour sélectionner la méthode de navigation, suivez la procédure ci-dessous.
1. En mode NAV, ouvrez le menu.
2. Sélectionnez [Mode NAV].
3. Sélectionnez [Économie] ou [Précision] selon le cas.
4. Fermez le menu.
2.3.3 Méthode de changement de Waypoint
En mode NAV, lorsque vous atteignez un Waypoint sur une route, vous pouvez
passer au Waypoint suivant automatiquement ou manuellement.
2. MODES DE NAVIGATION
Waypoint
Pour sélectionner la méthode de changement de Waypoint, suivez la procédure
ci-dessous.
1. En mode NAV, ouvrez le menu.
2. Sélectionnez [Passage Waypoint].
3. Sélectionnez [Auto] ou [Manuel] selon le cas.
[Auto] : passe au prochain Waypoint de destination lorsque votre bateau se situe
dans la zone d’alarme d’arrivée (définie sur le traceur). Lorsque votre bateau se
situe dans la zone d’alarme d’arrivée, le buzzer retentit et un message de
notification apparaît. Au bout de cinq secondes, le buzzer s’arrête et le message
disparaît. Cependant, si votre GC-001 est sous tension à ce moment, le message
de notification reste affiché. Appuyez sur une touche pour effacer le message.
[Manuel] : nécessite la confirmation de l’utilisateur pour pouvoir passer au
prochain Waypoint. En cas de changement manuel, le NAVpilot émet une alarme
sonore lorsque le bateau arrive au Waypoint de destination et un message de
confirmation apparaît. Ce message de confirmation apparaît uniquement sur
l’unité de contrôle FAP-3011.
Appuyez sur pour acquitter le message et passer au prochain Waypoint.
Le système émet une autre alarme sonore et un message apparaît sur l’unité de
contrôle FAP-3011 pour indiquer que le Waypoint a été modifié. Ce message
disparaît également au bout de cinq secondes ; cependant, l’utilisation de la
touche est nécessaire pour supprimer le message sur le GC-001.
Remarque: Le changement manuel de Waypoint est uniquement possible sur le
FAP-3011.
10
4. Fermez le menu.
2-7
Page 30

2. MODES DE NAVIGATION
2.3.4 Définition du mode de navigation du bateau après avoir atteint un Waypoint
Le mode FishHunter™, lorsqu’il est activé, permet de contrôler le mode de navigation
de votre bateau après qu’il ait atteint le dernier Waypoint d’une route. Pour plus de
détails sur le mode
FishHunter
™
, reportez-vous à la section 2.5.
Pour définir le comportement de navigation à utiliser avec le mode
suivez la procédure ci-dessous.
1. En mode NAV, ouvrez le menu.
2. Sélectionnez [APRÈS ARRIVÉE] pour afficher la fenêtre d’options Après Arrivée.
3. Sélectionnez l’option appropriée.
• Tout Droit : Suivre le même cap.
• Orbite Bâbord : Tournez continuellement vers bâbord, en « traçant des
cercles » au niveau du Waypoint final.
• Orbite Tribord : Tournez continuellement vers tribord, en « traçant des
cercles » au niveau du Waypoint final.
• Forme 8 Bâbord : Tournez en effectuant un mouvement en huit vers bâbord.
• Forme 8 Tribord : Tournez en effectuant un mouvement en huit vers tribord.
4. Fermez le menu.
2.4 Mode VIRAGE
Le mode VIRAGE fait tourner le bateau une seule fois dans la direction sélectionnée.
Pour effectuer plusieurs rotations, utilisez le mode FishHunter™ (reportez-vous à la
section 2.5).
FishHunter
™
,
2.4.1 Sélection et réalisation d’un virage
Le mode Virage propose deux types de rotation : Virage1 (par défaut : virage à 180°)
et Virage2 (par défaut : virage à 90°). En mode STBY, AUTO et NAV, vous pouvez
sélectionner la direction du virage (bâbord ou tribord). Il est, de plus, possible de
modifier l’angle de virage.
Pour activer le mode VIRAGE, suivez la procédure ci-dessous.
1. Appuyez sur la touche MENU ( ) pour afficher le menu Virage.
SABIKI
Configurer
䕰
Préc Exécuter
2-8
Page 31

2. MODES DE NAVIGATION
COG
2. Sélectionnez un virage. Le curseur indique la sélection en cours.
㻼
SABIKI Tourner à 180°
Tourner à 180°
vers BÂBORD*
vers TRIBORD*
㻿
㻼
Tourner à 90°
vers BÂBORD*
㻿
Tourner à 90°
vers TRIBORD*
㻼
Orbite à
BÂBORD
* : L'angle de ces virages dépend du réglage menu.
Le réglage par défaut pour Virage1 est 180° et pour Virage2 90°.
㻿
Orbite
à TRIBORD
㻼
Spirale
à BÂBORD
㻿
Spirale
à TRIBORD
㻼
Forme 8
à BÂBORD
㻿
Forme 8
à TRIBORD
Remarque: L’angle de virage peut être sélectionné avant d’amorcer le virage, en
appuyant sur . Pour plus de détails, consultez section 2.4.2.
3. Appuyez sur pour amorcer le virage.
10
10
Après avoir amorcé le virage, un message d’information s’affiche et l’alarme sonore
retentit trois fois. Les indications à l’écran changent durant la rotation comme illustré
dans l’exemple ci-dessous.
Zigzag
Démarrer indication de
virage (orienté à 0°)
Indication Fin du virage
(Apparaît au niveau de
l'angle de virage)
Marqueur
Bateau
Angle de
virage
COG
sélectionné
Mi-virage
Au démarrage du virage
Lorsque le virage est terminé, un message d’information apparaît.
Remarque: La fonction est disponible sur le GC-001 en mode VIRAGE.
Reportez-vous à la section 5.4.
Virage terminé
2-9
Page 32

2. MODES DE NAVIGATION
2.4.2 Réglage de l’angle des virages
Vous pouvez définir l’angle de virage pour les Virage1 et Virage2. Pour définir cet
angle, suivez la procédure ci-dessous.
1. Appuyez sur la touche MENU ( ) pour afficher le menu [VIRAGE].
2. Sélectionnez le virage approprié et la direction.
3. Appuyez sur pour afficher la fenêtre de réglage. L’exemple ci-dessous
10
montre les réglages du Virage1.
Réglage Virage1
Réglage Virage1
Exécuter
180°
L’angle de virage par défaut pour le Virage1 est 180° et pour le Virage2 90°.
4. Sélectionnez l’option d’angle. Une fenêtre pop-up apparaît et l’angle peut être
réglé.
5. Définissez l’angle de virage souhaité. Appuyez sur pour diminuer la valeur
ou pour augmenter la valeur.
1
1
6. Sélectionnez [Exécuter]. Votre bateau amorce le virage en utilisant l’angle défini
lors de l’étape 4.
Remarque: Les angles du Virage1 et du Virage2 peuvent également être définis
depuis leurs menus respectifs sous [Autre Menu] Menu [Opt Pil Auto].
2-10
Page 33

2. MODES DE NAVIGATION
2.5 Mode FishHunter
™
Le mode Pêche™ est une fonction exclusive des systèmes NAVpilot de FURUNO.
Recherchez des poissons à l’aide de votre sonar/sondeur FURUNO ou des oiseaux à
l’aide de votre radar FURUNO et transférez ces données vers le système NAVpilot. Le
NAVpilot active alors le mode FishHunter
™
pour effectuer des manœuvres en orbite,
spirale, huit ou zigzag autour de la cible indiquée.
2.5.1 Sélection et réalisation d’une rotation en mode Pêche
Le mode FishHunter™ peut être activé depuis les modes STBY, AUTO ou NAV et peut
être réglé de façon à effectuer un virage à bâbord ou à tribord (la direction ne peut être
définie pour les virages en zigzag).
1. Appuyez sur la touche MENU ( ) pour afficher le menu Virage.
2. Sélectionnez l’angle souhaité.
L’option sélectionnée à l’aide du curseur est entourée d’un rectangle bleu.
Pour avoir plus de détails sur chaque virage, reportez-vous au point section 2.5.2.
㻼
㻿
㻼
㻿
㻼
™
SABIKI Tourner à 180°
Orbite
à TRIBORD
Tourner à 180°
vers BÂBORD*
㻿
Spirale
à BÂBORD
Tourner à 90°
vers TRIBORD*
* : L'angle de ces virages dépend du réglage menu.
Le réglage par défaut pour Virage1 est 180° et pour Virage2 90°.
㻼
Spirale
à TRIBORD
vers BÂBORD*
㻿
㻼
Forme 8
à BÂBORD
Tourner à 90°
vers TRIBORD*
Forme 8
à TRIBORD
Orbite à
BÂBORD
㻿
3. Pour modifier les paramètres de la rotation, effectuez les étapes 1) à 4) cidessous. Si vous n’avez pas besoin de modifier les paramètres, allez à l’étape 4
de cette procédure.
1) Appuyez sur pour afficher le menu de réglage du virage. Si aucun menu
10
de réglage n’apparaît, les paramètres de ce virage ne peuvent pas être
modifiés.
2) Sélectionnez le paramètre que vous souhaitez modifier. Une fenêtre pop-up
s’affiche.
3) Définissez le paramètre selon vos besoins.
4) Sélectionnez [EXÉCUTER] pour amorcer le virage ou appuyez sur
pour retourner aux réglages.
Zigzag
4. Appuyez sur pour amorcer le virage. Le message "Le mode
10
FishHunter a été
activé." s’affiche.
Remarque: La vitesse du bateau doit être inférieure à 10 nœuds pour les
rotations en orbite et spirale. Si la vitesse est supérieure, le message "Trop rapide
pour ce mode. Réduire vitesse à moins de 10 nd." s’affiche. Réduisez la vitesse
à moins de 10 nœuds.
2-11
Page 34

2. MODES DE NAVIGATION
COG
L’indication de votre bateau se déplace pendant les virages pour indiquer que le
bateau effectue une rotation. La description de la direction prise par le bateau ou de
l’emplacement du bateau n’est pas toujours précise.
Pour arrêter la rotation, appuyez sur . Le message "Virage terminé" s’affiche.
STBY
Remarque: La fonction est disponible sur le GC-001 en mode VIRAGE. Reportezvous à la section 5.4.
2.5.2 Types de virage disponibles avec le mode FishHunter
Rotation en orbite
Indication
Bateau
Rayon de giration
(voir la Section
2.5.3.)
Votre bateau est en orbite autour de sa position. Un traceur ou un navigateur GPS est
requis pour cette fonction.
COG
™
2-12
Rayon (défini dans le menu)
Remarque: Lorsque l’option [À l’arrivée] est réglée sur [Orbite Bâbord] ou [Orbite
Tribord] dans le menu [Opt Pil Auto], le dernier Waypoint devient le point central de la
rotation en orbite.
Page 35

Rotation en spirale
COG
COG
2. MODES DE NAVIGATION
Indication
Bateau
Rayon de giration
(voir la Section
2.5.3.)
COG
Vitesse à laquelle le
point central de la
spirale se déplace
(voir la Section 2.5.3.)
Si la rotation en spirale est initiée en mode NAV, le nom du Waypoint/de la destination
apparaît sur l’écran de rotation en spirale avec l’icône "NAV" indiquant depuis quel
endroit le virage a été amorcé.
Nom du Waypoint
Icône NAV
COG
Le navire décrit une spirale dans la direction du cap en cours (STBY), du cap défini
(AUTO) ou de la route vers le prochain Waypoint (NAV) actif au moment où la rotation
en spirale est commencée. La vitesse de la spirale peut être définie dans le menu.
L’alarme d’arrivée doit également être active sur le traceur.
Le bateau continue en spirale jusqu’à ce que la touche AUTO ou STBY soit actionnée.
Rayon (défini dans le menu)
Distance entre les centres des spirales (D)
D (NM) = 6,28 × Rayon Spirale
Vitesse Spirale
Remarque: Si le navire n’entre pas dans la zone d’alarme d’arrivée, le NAVpilot ne
passe pas au prochain Waypoint. Pour éviter cela, définissez une plage d’alarme
d’arrivée aussi large que possible et activez la fonction perpendiculaire sur le traceur.
2-13
Page 36

2. MODES DE NAVIGATION
COG
Rotation en huit
Rayon de giration (« d »)
(voir la Section 2.5.3.)
Une fois que le bateau a parcouru la distance « d » définie dans le menu, il commence
à tourner en épousant la forme d’un huit, en retournant automatiquement à la position
où la rotation en huit a été initiée. « d », le rayon, est défini dans le menu.
Indication
Bateau
COG
Rayon défini dans le menu
2-14
Page 37

2. MODES DE NAVIGATION
COG
COG
Rotation en zigzag
Indication
Bateau
Angle de virage
(voir la Section 2.5.3.)
Largeur (des segments
de zigzag)
(voir la Section 2.5.3.)
COG
Si la rotation en zigzag est initiée en mode NAV, le nom du Waypoint/de la destination
apparaît sur l’écran de rotation en zigzag avec l’icône "NAV" indiquant depuis quel
endroit le virage a été amorcé.
Nom du Waypoint
Icône NAV
COG
La rotation en zigzag commence à partir de la position actuelle. L’angle de virage, le
nombre de virages et la largeur de rotation peuvent être définis dans le menu. Cette
rotation est disponible en modes AUTO et NAV.
Largeur
Angle de virage
2-15
Page 38

2. MODES DE NAVIGATION
2.5.3 Réglage des paramètres du mode FishHunter
Pour régler les paramètres du mode FishHunter™, suivez la procédure ci-dessous.
1. Ouvrez le menu.
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Options Mode Pêche]. Le menu
4. Sélectionnez le virage que vous souhaitez configurer. Les paramètres de virage
Orbite
Rayon Orbite :
+
Options Mode Pêche Options Mode Pêche
Orbite
1
Spirale
Forme 8
Préc
Ent.
1
s’affichent, comme illustré sur la figure ci-dessous.
0,05 NM
Préc
Plage de Réglage :
0,05 à 9,99 NM
Ent.
Rayon Forme 8 :
+
FishHunter
Zigzag
SABIKI
Forme 8
0,05 NM
Préc
™
™
s’affiche.
Préc
Plage de Réglage :
0,05 à 9,99 NM
Ent.
Ent.
Spirale
Vitesse Spirale :
Rayon Spirale :
+
-
Spirale
Vitesse Spirale :
Rayon Spirale :
+
5. Définissez les paramètres selon vos besoins.
6. Fermez le menu.
Remarque: Lorsque le mode
pour accéder au menu pour le virage en cours (hors virages en zigzag).
Préc
Préc
0,5 kn
0,05 NM
Ent.
0,5 kn
0,05 NM
Ent.
Plage de Réglage :
0,1 à 3,0 kn
Plage de Réglage :
0,05 à 9,99 NM
FishHunter
Zigzag
Plage de Réglage :
Angle Virage :
Largeur :
+
-
Préc
90°
0,05 NM
Ent.
30 à 150°
Zigzag
Angle Virage :
Largeur :
+
™
est actif, vous pouvez appuyer sur
Préc
90°
0,05 NM
Ent.
Plage de Réglage :
0,05 à 0,99 NM
2-16
Page 39

2. MODES DE NAVIGATION
2.6 Mode SABIKI
Le mode SABIKI™ contrôle la barre lorsque le bateau utilise la poussée inverse, en
maintenant la poupe face au vent (ou au courant) tout en conservant l’étrave sous le
vent (ou le courant).
Comme le mode SABIKI
un réglage périodique afin de maintenir le bateau dans la même direction.
La réduction des réglages nécessaires vous permet de vous concentrer sur la pêche,
même si l’équipage est restreint à bord.
Mode SABIKITM ONMode SABIKITM ON Mode SABIKITM OFFMode SABIKITM OFF
™
™
a la capacité de contrôler la barre, seule la manette requiert
La direction du
bateau (cap)
change en fonction
La direction de la
poupe (cap) peut
être maintenue
uniquement en
ajustant la
poussée inverse.
du Courant/Vent
Direction Courant/Vent Direction Courant/Vent
Le mode SABIKI™ est destiné aux types de bateau suivants :
• Bateaux dont l’option [TYPE DE BATEAU] est réglée sur [H.Bord], [A/H.Bord],
[EVCS H.Bord] ou [EVCS A/H B] lors de l’installation.
• Les bateaux affichant une longueur de 40 pieds ou moins.
Remarques importantes au sujet du mode SABIKI
™
• Le mode SABIKI™ requiert la réception de données de vitesse depuis un capteur
externe et n’est pas compatible avec une entrée de données de vitesse manuelle.
• Lorsque le mode SABIKI
™
est actif, les fonctions du mode Évitage ne sont pas
accessibles.
• Si l’alerte de cap se déclenche, contrôlez immédiatement le cap de votre bateau.
• Lorsque le réglage de l’option Alerte de Cap est supérieur à 45° et que le mode
SABIKI
SABIKI
• La précision de navigation en mode SABIKI
™
est activé, le réglage de l’Alerte de Cap est fixé à 45°. Lorsque le mode
™
est désactivé, le réglage retrouve sa valeur d’origine.
™
dépend des capacités d’inversion des
moteurs hors-bord.
• Le mode SABIKI
mode SABIKI
™
requiert une vitesse de moins de 5 nd. Si vous tentez d’activer le
™
alors que la vitesse est supérieure à 5 nd, le message "Réduire
vitesse pour SABIKI (<5ND)."s’affiche.
• Pour éviter un sur-pilotage en mode SABIKI
• Pour les configurations avec Fantum Feedback
™
, gardez la manette à portée de main.
™
, assurez-vous que la barre est
centrée (barre orientée directement vers l’avant) avant d’activer le mode SABIKI
Si la barre n’est pas centrée, il se peut que le mode SABIKI
™
pilote le bateau de façon
incorrecte.
™
.
2-17
Page 40
2. MODES DE NAVIGATION
COG
2.6.1 Utilisation du mode SABIKI
Préparatifs pour le mode SABIKI
• Vérifiez qu’un capteur de vitesse est connecté au processeur. Vérifiez que l’option
[Calcul Vitesse] est réglée sur [Auto].
• Dans le menu [Caractéristiques du Bateau], réglez l’option [Type de Bateau] sur
[Hors-Bord] ou [A/H.Bord], [EVCS H.Bord] or [EVCS A/H B].
1. Réduisez la vitesse du bateau à moins de 5 nœuds.
2. Orientez le bateau de sorte que la poupe soit face au vent ou au courant, puis
centrez la barre.
3. Appuyez sur la touche pour afficher le menu Virage.
4. Sélectionnez [SABIKI]. Le mode SABIKI
présenté ci-dessous s’affiche.
Direction
normalisée étrave
Marqueur de
cap poupe
™
™
™
est affiché et un écran similaire à celui
Marqueur de
cap étrave
Définition route
(cap poupe)
Direction
actuelle poupe
Direction
normalisée poupe
COG
RÉGLAGE
RÉGLAGE
85º
85º
VERS POUPE
VERS POUPE
130º
130º
La direction du bateau (cap) peut être ajustée manuellement en mode SABIKI
Cela est utile dans certaines situations, notamment en cas de changement de
direction du vent.
Appuyez sur , , ou pour réglez le cap d’étrave. Utilisez la
direction de l’étrave comme référence lors du réglage de la route.
La touche permet de régler le cap de l’étrave de 1° vers bâbord et la touche
permet de régler le cap de l’étrave de 10° vers bâbord. De la même manière,
10
les touches et permettent de régler le cap de l’étrave vers tribord.
Lorsque la poupe n’est pas face au vent ou au courant, augmentez la poussée
inverse au besoin pour ajuster la direction. Lorsque cette méthode ne permet pas
de corriger la direction du bateau, reportez-vous à la section 2.6.2.
Remarque: Vous pouvez également activer le mode SABIKI
(reportez-vous à la section 5.4). De plus, si l’option [Bip Clavier] dans le menu
[Réglage Système] est réglée sur [ON], le système émet un court « bip » dans les
situations suivantes :
• Le mode SABIKI
• La route définie est modifiée depuis un dispositif externe.
1
1
1
™
est activé depuis un dispositif externe.
10
1
10
10
™
depuis le GC-001
™
.
2-18
Page 41

2. MODES DE NAVIGATION
2.6.2 Réglage de la sensibilité du mode SABIKI
Si vous trouvez que le mode SABIKI™ ne permet pas de corriger le cap de manière
suffisante, suivez la procédure ci-dessous pour régler la sensibilité.
1. En mode STBY, appuyez sur pour ouvrir le menu.
2. Lorsque [SABIKI] est en surbrillance, appuyez sur . Le réglage de la
sensibilité du mode [SABIKI] apparaît.
SABIKI
Rép. SABIKI :
Exécuter
Préc
Vous pouvez accéder au réglage de la sensibilité du mode SABIKI
mode SABIKI
™
est actif en appuyant sur la touche .
3. Sélectionnez [Rép. SABIKI].
4. Ajuster le réglage tel que nécessaire.
• Si le mode SABIKI
™
est en sur-pilotage : Augmentez la sensibilité. Si le mode
SABIKI™ est toujours en sur-pilotage après ce réglage, réduisez la poussée
inverse.
™
• Si le mode SABIKI
SABIKI
™
est toujours en sous-pilotage après ce réglage, augmentez la
est en sous-pilotage : Diminuez la sensibilité. Si le mode
poussée inverse.
3
Ent.
™
10
™
lorsque le
5. Sélectionnez [Exécuter].
2-19
Page 42

2. MODES DE NAVIGATION
2.7 Modes ÉVITAGE et NFU
Les modes ÉVITAGE ou NFU sont utiles dans les situations dans lesquelles vous
devez prendre rapidement le contrôle de la barre pour éviter un obstacle.
• Mode ÉVITAGE : Utilisé avec les modes NAV, VIRAGE et
• Mode NFU (Non Follow-up) : Utilisé en mode STBY.
2.7.1 Utilisation du mode ÉVITAGE
Effectuez un appui long sur ou pour vous orienter de manière appropriée
jusqu’à ce que le bateau ait passé l’obstacle. L’appareil passe en mode ÉVITAGE et
un signal sonore retentit lorsque l’une des touches mentionnées ci-dessus est utilisée
pour vous avertir de la manœuvre d’évitage. Notez également que l’indication
apparaît en haut à gauche de l’écran.
Pour annuler le mode ÉVITAGE, relâchez ou . Pour les modes NAV et
FishHunter
™
, le système retourne au mode utilisé avant que le mode ÉVITAGE ne soit
activé. Pour le mode VIRAGE, le système passe au mode AUTO après que le mode
ÉVITAGE ait été annulé.
Remarque 1: Si vous appuyez sur et simultanément, le bateau est orienté
vers le cap au moment où les deux touches sont enfoncées.
10
10
10
10
10
10
FishHunter
™
.
Remarque 2: Le mode ÉVITAGE peut également être activé depuis le GC-001.
Reportez-vous à la section 5.9.3 et à la section 5.9.4.
2.7.2 Utilisation du mode NFU
Effectuez un appui long sur ou pour vous orienter de manière appropriée
jusqu’à ce que le bateau ait passé l’obstacle. L’appareil passe en mode NFU et un
signal sonore retentit lorsque l’une des touches mentionnées ci-dessus est utilisée
pour vous avertir de la manœuvre d’évitage. Notez également que l’indication
apparaît en haut à gauche de l’écran.
Pour annuler le mode NFU, relâchez ou . Le système retourne au mode
STBY.
Remarque: Le mode NFU peut également être activé depuis le GC-001. Reportezvous à la section 5.9.1.
10
10
10
10
2-20
Page 43

2. MODES DE NAVIGATION
COG
COG
COG
COG
COG
2.8 Mode OVRD (uniquement pour le système EVC)
Lorsque le système EVC contrôle la barre, le mode OVRD (Contrôle) est
automatiquement activé. Le pilote automatique ne peut contrôler le bateau dans le
mode OVRD.
Remarque: Le mode OVRD est activé lorsque l’option [TYPE DE BATEAU] est réglée
sur [EVCS Pod], [EVCS H.Bord], [EVCS A.Bord] ou [EVCS A/H B].
2.8.1 Activation du mode OVRD en mode STBY
Lorsque le mode OVRD est activé en mode STBY, [OVRD] apparaît dans le coin
supérieur gauche de l’écran. À ce moment, seuls les menus sont actifs. Lorsque le
système EVC libère le contrôle de la barre, le pilote automatique passe en mode
STBY.
Remarque: Pour les systèmes avec SEASTAR SOLUTIONS OPTIMUS, un message
de compte à rebours de cinq secondes apparaît lorsque le mode OVRD est désactivé.
Une fois le compte à rebours terminé, le système passe automatiquement en mode
STBY.
N
330
HDG
300
T
359°
Contrôle EVC est actif. Contrôle EVC est inactif.
COG
T
HDG
359°
COG
2.8.2 Activation du mode OVRD en mode AUTO ou NAV
Pour les configurations EVCS IPS VOLVO, HM YAMAHA ou YANMAR VC10
Lorsque le mode OVRD s’active en mode AUTO ou NAV, l’alarme sonore retentit, le
message pop-up "CONTRÔLE EVC" apparaît et l’indication de mode dans le coin
supérieur gauche de l’écran affiche [OVRD]. Appuyez sur une touche pour arrêter
l’alarme et effacer le message pop-up. Lorsque le système EVC libère le contrôle de
la barre, le pilote automatique passe en mode STBY.
330
HDG
Contrôle EVC
HDG
300
30
N
HDG
60
30
60
T
359°
COG
T
359°
Appuyer sur une touche.
COG
Le système EVC libère
le contrôle de la barre.
T
359°
COG
2-21
Page 44

2. MODES DE NAVIGATION
DEFCAP
COG
Pour les configurations EVCS SEASTAR SOLUTIONS OPTIMUS
Lorsque le mode OVRD s’active en mode AUTO ou NAV, l’alarme sonore retentit, le
message pop-up "CONTRÔLE EVC" apparaît et l’indication de mode dans le coin
supérieur gauche de l’écran affiche [OVRD]. Une fois que le contrôle EVC est terminé,
le système revient au mode précédent. Un message de compte à rebours "Reprise du
contrôle dans x secondes" (x indique un nombre de 1 à 5) apparaît pour indiquer
lorsque le mode système change.
Remarque: L’alarme sonore qui se déclenche lorsque le mode OVRD est activé peut
être désactivée depuis l’option [Bip Prior. Barre] dans le menu [Réglage Système].
2.9 Mode Priorité barreur
Le mode Priorité Barreur, disponible avec le groupe puissance Accu-Steer FPS 12 V/
24 V, passe temporairement le NAVpilot en navigation manuelle pour l’intervalle
spécifié lorsque la barre est dirigée selon un mode de navigation automatique (AUTO,
NAV, etc.). Cela évite que la barre ne tourne en continu. Le mode et les indications de
route clignotent lorsque le mode de priorité barreur s’active.
Le mode Priorité Barreur est désactivé et le mode de navigation automatique
précédent restauré dans les situations suivantes :
Mode NAV : Lorsque les données du capteur de barre ne sont pas reçues pour la
valeur définie sur le [Délai Prio Barre]*.
Mode AUTO : Lorsque les données de navigation tout droit et les données du capteur
de barre ne sont pas reçues pour la valeur définie sur le [Délai Prio Barre].
*: Reportez-vous à la section pour régler l’option [Délai Prio Barre].
La figure ci-dessus donne un exemple de l’écran Pilote automatique, pour référence.
Ces indications
DEFCAP
COG
clignotent lorsque
le mode Priorité
Barreur est actif.
2-22
Page 45

2. MODES DE NAVIGATION
Réglage du mode Priorité Barreur
1. En mode STBY ou OVRD, ouvrez le menu.
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Réglage Priorité Barreur]. Le menu [Réglage Priorité Barreur]
s’affiche.
4. Sélectionnez [Priorité Barreur].
Réglage Priorité Barreur
5. Sélectionnez [ON].
6. Sélectionnez [Délai Prio Barre].
7. Réglez le délai de Priorité Barreur tel que
souhaité.
Priorité Barreur : ON
Délai Prio Barre :
Sensib. Priorité Barre
5 sec
La plage de réglages est de 1 à 20
secondes.
En mode NAV : Lorsque les données du
Bip Prior. barre :
▼
Préc Ent.
ON
capteur de barre ne sont pas reçues pour la
valeur définie, le mode NAV est restauré.
En mode AUTO : Lorsque les données de navigation tout droit et les données du
capteur de barre ne sont pas reçues pour la valeur définie, le mode de navigation
précédent est restauré.
8. Sélectionnez [Sensib. Priorité Barre]. La fenêtre de réglage Sensib. Priorité Barre
apparaît.
Sensib. Priorité Barre
Réponse :
Tourner la barre à Bâbord/Tribord pour
régler la sensibilité de la priorité du barreur.
Valeur élevée = vitesse rapide.
㻙㻙㻙㻙
5
Lors de l'utilisation de la
barre, « BÂBORD » ou
« TRIBORD » s'affiche
en fonction du sens de
mouvement de la barre.
Préc Ent.
9. Sélectionnez [Réponse].
Plus la valeur est élevée, plus la réponse est rapide (plage de réglage : 1 à 10).
10. Appuyez sur pour revenir au menu Priorité Barreur.
11. Sélectionnez [Bip Prior. Barre].
L’option [Bip Prior. Barre] active ou désactive le « bip » lorsque le mode Priorité
Barreur est activé.
12. Sélectionnez [ON] pour émettre une alarme sonore quand le mode Priorité
Barreur est activé ou [OFF] pour désactiver l’alarme.
13. Fermez le menu.
2-23
Page 46

2. MODES DE NAVIGATION
COG
2.10 Mode Barre Assistée
Le mode de barre assistée, disponible avec la commande de type Accu-Steer FPS
12 V/24 V, permet de personnaliser la navigation manuelle selon vos préférences.
Ce mode requiert la connexion à un groupe puissance Accu-Steer FPS 12 V/24 V et
nécessite des réglages lors de l’installation.
Le mode est disponible dans le mode de priorité barreur et le mode STBY. L’indication
« PA » apparaît en haut de l’écran lorsque ce mode est actif.
N
N
330
330
HDG
HDG
300
300
T
T
359°
COG
30
30
60
60
L'indication « PA »
apparaît lorsque le
mode Barre
Assistée est actif.
Activation du mode Barre Assistée
1. En mode STBY ou OVRD, ouvrez le menu.
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Réglage Barre Assistée].
Le menu [Réglage Barre Assistée] s’affiche.
4. Sélectionnez [Barre Assistée].
5. Sélectionnez [ON].
Une fois ces opérations effectuées, les
éléments de menu Barre Assistée
apparaissent.
6. Sélectionnez [Vitesse inf à].
7. Définissez la vitesse la plus élevée à laquelle la barre assistée s’active. La plage
de réglage est comprise entre 1,0 et 25,0 nœuds (par défaut : 10,0 nœuds).
Remarque: Lorsque la barre assistée s’active à vitesse élevée, le bateau peut
virer plus que prévu. Définissez [Vitesse inf à] en fonction des caractéristiques du
bateau et de la barre.
8. Si vous souhaitez activer l’assistance en mode STBY, réglez [Assistance en
Stand-By] sur [ON].
Réglage Barre Assistée
Barre Assistée : ON
Vitesse inf à :
Assistance en Stand-By :
Vitesse Assistance Barre
▼
10,0kn
OFF
Préc Ent.
2-24
9. Sélectionnez [Vitesse Assistance Barre].
L’exemple présenté à droite montre la fenêtre
de réglage Vitesse Assistance Barre pour un
bateau équipé de Fantum Feedback
écran peut différer légèrement.
10. Définissez la [Vitesse Assistance Barre]. La
plage de réglage est comprise entre 1 et 10
(par défaut : 10). Plus la valeur est élevée,
plus l’assistance est forte.
11. Fermez le menu.
™
. Votre
Vitesse Assistance Barre
Vitesse Barre : 10
Tourner barre à BÂBORD/TRIBORD
pour régler la vitesse de barre.
Valeur plus élevée = temps de réponse
plus rapide
▼
Préc Ent.
Page 47

2. MODES DE NAVIGATION
Confirmation de la direction de la barre
Tournez la barre vers bâbord et tribord et confirmez que l’assistance s’active selon la
direction de la barre. Si l’assistance fonctionne seulement dans une direction,
effectuez le test du capteur de barre (reportez-vous à la section 6.4).
Remarque: La confirmation de direction de la barre doit uniquement être faite lorsque
le bateau est à quai ou à une vitesse de croisière faible, dans une zone de navigation
ne présentant aucun danger.
2-25
Page 48

2. MODES DE NAVIGATION
Cette page est laissée vierge intentionnellement.
2-26
Page 49

3. ALERTES
COG
Votre NAVpilot propose deux types l’alerte : L’Alerte Veille et l’Alerte de Cap.
Lorsque les paramètres d’alerte sont enfreints, le buzzer retentit, l’icône d’alerte ( )
clignote et un message pop-up apparaît (se reporter à la section 6.6.3). Appuyez sur
n’importe quelle touche pour arrêter le buzzer et fermer la fenêtre pop-up. L’icône
clignote jusqu’à ce que la cause de l’alerte soit corrigée. Si les paramètres d’alerte
sont toujours enfreints au bout d’une minute, le buzzer retentit et le message pop-up
apparaît à nouveau.
Icône d'alarme
(clignotante)
Alarme de
veille
COG
Vous pouvez vérifier quelles sont les alertes actuellement déclenchées (se reporter à
la section 3.4) et celles qui se sont déclenchées précédemment (se reporter à la
section 3.5).
Remarque 1: Si une alerte se déclenche, passez au mode STBY mode et pilotez le
bateau à l’aide de la barre.
Remarque 2: Si une alerte se déclenche, le FAP-3011 émet une alarme sonore et
affiche un message d’alerte. Si le GC-001 est activé, ce dernier émet alors une alarme
sonore et affiche un message d’alerte (se reporter à la section 5.5). L’alarme sonore
et le message d’alerte doivent être acquittés individuellement à la fois pour le GC-001
et le FAP-3011.
Message
d'alarme pop-up
Priorité des alertes
Les alertes ont trois niveaux de priorité : [Alarme], [Avertissement] et [Attention].
• Alarme : Situations ou conditions qui requièrent une attention, décision et (si
nécessaire) action immédiates de la part de l’équipage pour éviter tout type de
situation dangereuse et maintenir une navigation sécuritaire du navire.
• Avertissement : Conditions ou situations qui requièrent une attention immédiate
pour des raisons préventives pour avertir l’équipage des conditions qui ne sont pas
immédiatement dangereuses, mais qui peuvent le devenir.
• Attention : Vous informe d’une situation qui continue d’exiger l’attention suite à
l’examen ordinaire de la situation ou de l’information donnée.
En fonction de la priorité de l’alerte, le buzzer change également, comme le montre le
tableau ci-dessous.
Priorité des alertes Son du buzzer
Alarme Continu
Avertissement Bip long avec un court intervalle silencieux
Attention Bip aigu court
3-1
Page 50

3. ALERTES
Remarque 1: Si plusieurs alertes sont actives, l’alerte présentant le plus haut niveau
de priorité s’affiche sous la forme d’un message pop-up Se reporter à la section 6.6.3
pour en savoir plus sur les messages et leur priorité.
Remarque 2: Si l’alerte est de type « Alarme », l’icône Alarme ( ) clignote en
haut à gauche de l’écran.
3.1 Affichage du menu Alertes
Pour afficher le menu Alertes, procédez comme suit.
1. Ouvrez le menu.
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Alertes]. Le menu [Alertes] s’affiche.
Alerte
Alarme Veille :
Alerte de Cap :
Préc Ent.
ON
Alarme Veille ON/OFF
5
Réglage Alarme Veille
30°
Réglage Alerte de Cap
3.2 Configuration de l’Alerte Veille
L’Alerte Veille avertit régulièrement le barreur qu’il doit vérifier le NAVpilot en mode
AUTO ou NAV.
1. En vous référant à la section 3.1, ouvrez le menu [Alertes].
2. Sélectionnez [Alerte Veille].
3. Sélectionnez [ON] ou [OFF] selon le cas. Pour l’exemple ci-dessous, sélectionnez
[ON]. La valeur de paramétrage de l’alerte veille peut alors être sélectionnée.
4. Sélectionnez la valeur de réglage de l’[Alerte Veille].
5. Définissez le temps au boput duquel l’alerte veille doit émettre un bip
d’avertissement. La plage de réglages est comprise entre 1 et 99 (minutes).
Le réglage par défaut est 5 (minutes).
6. Fermez le menu.
Si le NAVpilot n’est pas actionné dans le laps de temps défini pour l’alerte veille, le
message d’alerte veille apparaît et le buzzer retentit. Si aucune action n’est réalisée
pendant encore 10 minutes, le son de l’alarme sonore augmente.
Pour désactiver l’alerte veille, sélectionnez [OFF] lors de l’étape 3 de la procédure
susvisée.
3-2
Page 51

3.3 Configuration de l’Alerte de Cap
A
En modes AUTO et NAV, l’alarme de cap déclenche le buzzer et affiche un message
pop-up si l’écart par rapport au cap est supérieur à la valeur de l’alerte de cap.
Remarque 1: La valeur de réglage de l’alerte de cap peut être modifiée mais vous ne
pouvez pas désactiver cette dernière.
Remarque 2: Si le pilote automatique ne peut pas déplacer la barre avec le Fantum
™
Feedback
, l’alerte d’écart retentit indépendamment de la valeur de réglage. Dans ce
cas, passez au mode STBY et tournez la barre pour la déplacer.
1. En vous référant à la section 3.1, ouvrez le menu [Alertes].
2. Sélectionnez [Alerte de Cap].
3. Définissez la valeur souhaitée pour l’écart. La plage de réglages est comprise
entre 1° et 90°. Le réglage par défaut est 30°.
4. Fermez le menu.
3.4 Affichage des messages d’alerte
3. ALERTES
Les alertes actives sont listées sous la forme de messages. Vous pouvez afficher la
liste des alertes actives en suivant la procédure ci-dessous.
1. En mode, STBY, AUTO, NAV ou OVRD, ouvrez le menu.
Pour le mode Priorité Barreur, appuyez sur pour afficher le menu [Virage],
puis sélectionnez [Menu].
2. Sélectionnez [Message]. La liste des alertes actives s’affiche. La liste affiche le
numéro du message, le nombre total de messages, le code d’alerte et la priorité
de l’alerte (Alarme, Avertissement ou Attention).
Message
Alerte 1/1
N° de message,
priorité du message
(Alarme, Avertissement,
ttention)
Lorsqu’il y a plus d’une page d’alertes, appuyez sur ou pour changer
2016 Attention
Alarme Veille
Préc
1
Page actuelle/
nombre total de page
Message
1
de page.
3. Fermez le menu.
3-3
Page 52

3. ALERTES
3.5 Affichage de l’Historique des Alertes
L’[Historique des Alertes] affiche le type, la date, l’heure et le numéro d’alerte des
10 alertes précédentes au maximum. Pour afficher [Historique des Alertes], suivez la
procédure ci-dessous.
1. En mode, STBY, AUTO, NAV ou OVRD, ouvrez le menu.
Pour le mode Priorité Barreur, appuyez sur pour afficher le menu [Virage],
puis sélectionnez [Menu].
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Réglage Système].
4. Sélectionnez [Historique des Alertes]. L’[Historique des Alertes] s’affiche.
Historique des Alertes
Date de
l'alerte
2017/04/15 10:20:30 2016
2017/04/15 10:08:15 1006
2017/04/15 10:02:45 1001
N° d'alerte
Type
d'alerte
Alarme Veille
5. Fermez le menu.
Préc Ent.
Heure
de l'alerte
3-4
Page 53

4. PERSONNALISATION DE VOTRE NAVPILOT
Ce chapitre vous explique comment personnaliser votre NAVpilot pour qu’il
corresponde aux caractéristiques de votre bateau et à vos besoins d’utilisation.
Les éléments affichés dans chaque menu dépendent du mode actif.
4.1 Configuration des paramètres
Il existe deux modes de configuration des paramètres : la configuration automatique
et la configuration manuelle.
4.1.1 Configuration automatique des paramètres
Le NAVpilot-300 peut configurer automatiquement ses paramètres de fonctionnement
sur la base des caractéristiques de votre bateau et de l’état de la mer. Le système peut
également sauvegarder les paramètres antérieurs, grâce à la fonctionnalité
[Apprentissg Auto].
1. Ouvrez le menu.
2. Sélectionnez [Apprentissg Auto].
3. Sélectionnez [ON] ou [OFF] selon le cas.
• [ON] : La fonctionnalité « Apprentissg Auto » est activée. Le système suit et
enregistre les caractéristiques et paramètres du bateau comme l’angle de
barre, le trim, etc. dès votre départ et ce jusqu’à votre retour à quai.
• [OFF] : La fonctionnalité « Apprentissg Auto » n’est pas activée.
Si vous sélectionnez [ON], passez à l’étape suivante de cette procédure.
Si vous sélectionnez [OFF], fermez le menu.
4. Sélectionnez [Valeur Déviation]. La valeur de déviation définit le seuil des
ajustements de cap effectués par le système. Lorsque [Apprentissg Auto] est
réglé sur [OFF], cette option de menu ne peut pas être sélectionnée.
5. Sélectionnez [Auto] ou [Valeur], selon le cas.
• [Auto] : Le système ajuste automatiquement le cap, quelle que soit la valeur de
l’écart.
• [Valeur] : Cette fonctionnalité définit le seuil auquel le système corrige le cap.
Si vous sélectionnez [Auto], fermez le menu.
Si vous sélectionnez [Valeur], passez à l’étape suivante de cette procédure.
6. Sélectionnez la [Valeur] souhaitée. Une fenêtre pop-up de réglage s’affiche.
7. Définissez la [Valeur].
Un réglage bas règle la barre de sorte à maintenir un cap constant.
Un réglage plus élevé réduit la précision du réglage de la barre, mais le cap n’est
pas constant.
8. Fermez le menu.
4-1
Page 54

4. PERSONNALISATION DE VOTRE NAVPILOT
4.1.2 Configuration manuelle des paramètres
Pour configurer les paramètres, procédez comme suit.
Remarque: Pour cette procédure, la fonctionnalité [Apprentissg Auto] doit être réglée
sur [OFF].
1. Ouvrez le menu.
2. Sélectionnez [Paramètres Manuels]. Le menu [Paramètres Manuels] s’affiche.
Paramètres Manuels Paramètres Manuels
Temps : Réd. Manuel :
Gain Barre :
Compt. Barre :
Préc Ent. Préc Ent.
3
1
1°
Appuyer sur
1
Appuyer sur
1
0,0°
3. Sélectionnez [Temps]. La fenêtre pop-up de réglage s’affiche.
Paramètres Manuels
1°
Temps :
Gain Barre :
Compt. Barre :
㻗 㻙
Préc Ent.
1°
3
1
4. Réglez le paramètre de [Temps] tel que souhaité. La plage de réglages est
comprise entre 1 et 10°. Le réglage par défaut est 1°.
Lorsque la mer est forte, le cap du bateau varie entre bâbord et tribord. Si la barre
est manœuvrée très souvent pour maintenir le cap défini, son mécanisme risque
de s’user. Pour éviter ce phénomène, le réglage du paramètre temps rend le
NAVpilot insensible aux écarts de cap minuscules.
Le schéma ci-dessous illustre la route planifiée pour le bateau avec une sensibilité
de 3° et 7°. Par exemple, lorsque la valeur 7° est définie, la barre n’est pas
manœuvrée tant que l’écart de cap n’excède par les 7°. Si vous augmentez le
paramètre, la barre bouge moins mais le bateau tend à zigzaguer. Lorsque la mer
est calme, vous devez définir une valeur plus petite.
7°
3°
Temps = 3° Temps = 7°
5. Sélectionnez [Gain Barre]. La fenêtre pop-up de réglage du gain de barre
apparaît.
Paramètres Manuels
Temps :
Gain Barre :
Compt. Barre :
㻗
㻙
Préc Ent.
1°
3
㻟
1
4-2
Page 55

4. PERSONNALISATION DE VOTRE NAVPILOT
6. Réglez le gain de barre (sensibilité). La plage de réglages est comprise entre 1 et
20. Le réglage par défaut est 3.
Lorsque le cap du bateau dévie de la route définie, le système NAVpilot ajuste la
barre pour le corriger. L’angle de barre (nombre de degrés) appliqué en fonction
de chaque degré d’écart de cap est connu sous le nom de gain de barre.
Définissez le gain de barre pour éviter que le bateau ne fasse de fréquentes
embardées. Le schéma ci-dessous fournit les directives générales pour le réglage
du gain de barre.
Rapide
Calme
Légère
Bas
Vitesse
État de la mer
Charge
GAIN BARRE
Lente
Fort
Lourde
Élevé
7. Sélectionner [Contre Barre]. La fenêtre pop-up de réglage de la contre barre
s’affiche.
Manual Parameters
Weather:
Rudder Gain:
Counter Rud.:
㻗 㻙
Prev Ent
1°
3
㻝
1
8. Réglez la contre barre tel que souhaité. La plage de réglages est comprise entre
0 et 20. Le réglage par défaut est 1.
Si le bateau est lourdement chargé, le cap peut dévier de façon excessive du fait
de l’inertie. Ce phénomène oblige le navire à « dépasser » le cap prévu. Dans ce
cas, le NAVpilot commande la barre dans l’autre direction et il y a dépassement
du cap de consigne. Dans les cas extrêmes, le cap oscille plusieurs fois avant de
se fixer sur la nouvelle route. Un ajustement connu sous le nom de « contre
barre » évite ce genre d’oscillation.
La contre barre n’est généralement pas nécessaire pour les petits bateaux.
Lorsque le bateau zigzague de façon importante avant de se fixer sur la nouvelle
route, vous devez augmenter la valeur de la contre barre.
Contre barre :
petit réglage
Contre barre :
réglage approprié
Lente
Légère
Bas
Écart de route important
Cap
voulu
La fonctionnalité de contre barre permet de réajuster
le cap du bateau sur le cap voulu.
Vitesse
Charge
CONTRE BARRE
Rapide
Lourde
Élevé
4-3
Page 56
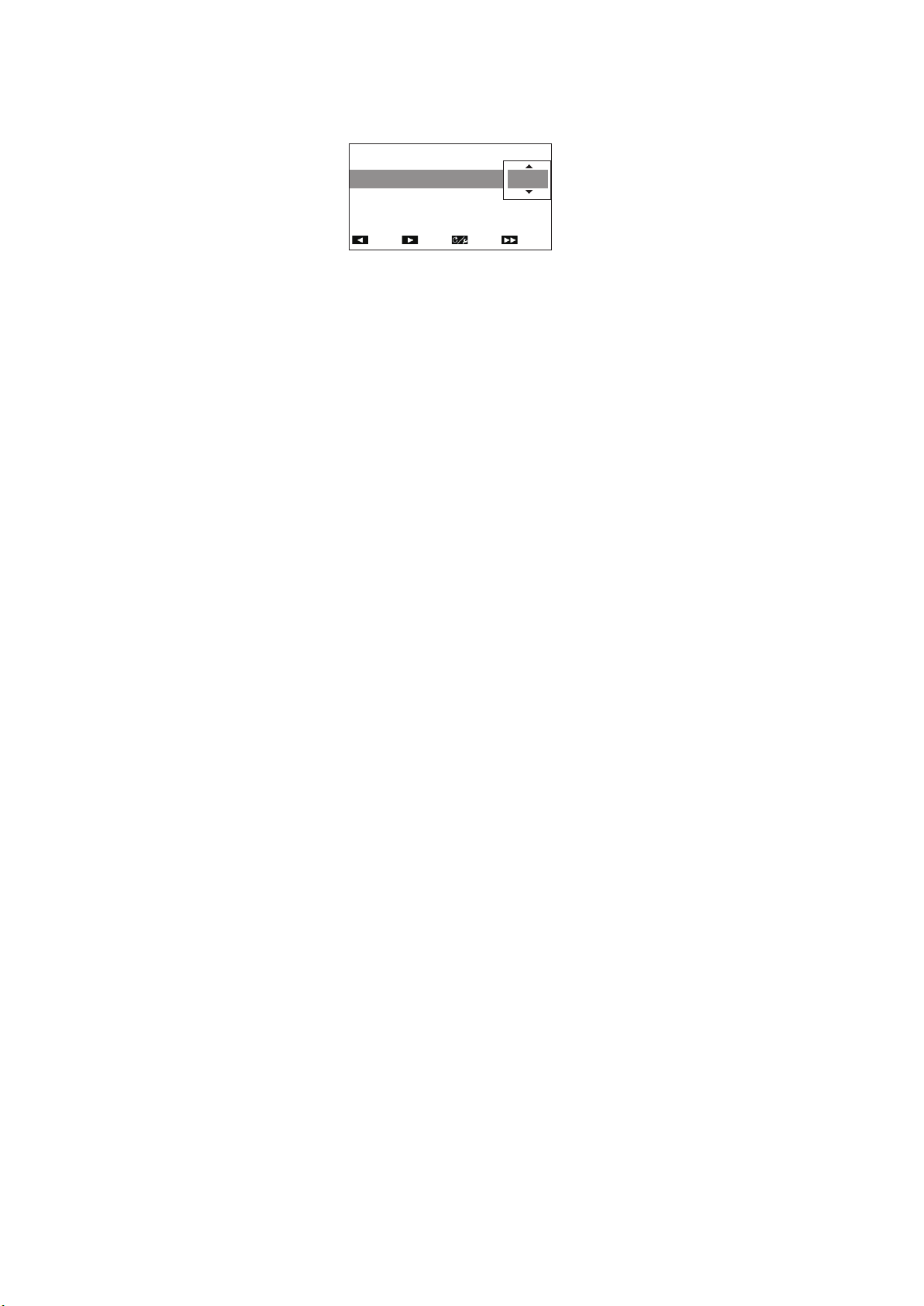
4. PERSONNALISATION DE VOTRE NAVPILOT
9. Sélectionnez [Réd. Manuel]. La fenêtre pop-up de réglage du trim manuel
s’affiche.
Paramètres Manuels
Réd. Manuel :
1°
0,0°
10. Réglez le trim tel que souhaité. La plage de réglages est comprise entre P5,0° et
S5,0°. Le réglage par défaut est 0,0°.
Ce réglage permet de compenser les embardées occasionnées en cas de mer
agitée ou de charges lourdes. Si le bateau fait des embardées vers bâbord, réglez
le trim vers tribord. Inversement, si le bateau fait des embardées vers tribord,
réglez le trim vers bâbord.
Remarque: Pour les bateaux équipés de Fantum Feedback
[Réd. Manuel] ne sont pas utilisés. Les options de menu sont accessibles.
Cependant, toute modification des paramètres n’est pas prise en compte.
11. Fermez le menu.
4.1.3 Calcul de la vitesse
La vitesse est généralement saisie automatiquement depuis votre navigateur. En cas
d’échec du navigateur, saisissez la vitesse manuellement en suivant la procédure cidessous.
1. Ouvrez le menu.
2. Sélectionnez [Calcul Vitesse].
㻗 㻙
Préc Ent.
™
, les paramètres
3. Sélectionnez [AUTO] ou [MANUEL], selon le cas. Si vous sélectionnez [AUTO],
passez à l’étape 4. Pour [MANUEL], procédez comme suit :
1) Sélectionnez la valeur actuelle.
2) Définissez une valeur. La plage de réglages est comprise entre 0,1 à
40,0 nœuds. Le réglage par défaut est 30,0 nœuds.
4. Fermez le menu.
4.2 Réactivité de Barre (pour Fantum Feedback™)
Pour Fantum Feedback™, la puissance motrice de la direction peut être ajustée grâce
à la fonctionnalité « Réactivité de Barre ». Plus le réglage est élevé, plus la barre
tourne.
1. Ouvrez le menu.
2. Sélectionnez [Réactivité de Barre].
3. Réglez la valeur requise. La plage de réglage est comprise entre 1 et 20.
Le réglage par défaut varie selon que le test de barre a été réalisé en amont ou
pas. Si le test de barre a été effectué, le réglage par défaut correspond au résultat
du test ; si le test de barre n’a pas été effectué, le réglage pas défaut est 6.
4-4
4. Fermez le menu.
Page 57

4. PERSONNALISATION DE VOTRE NAVPILOT
4.3 Source de données de navigation
Cette partie indique comment sélectionner la source de données de navigation à
utiliser en mode NAV.
1. Ouvrez le menu.
2. Si le mode NAV est activé, sélectionnez [Source Données de NAV].
Si un autre mode que le mode NAV est activé, sélectionnez [Autre Menu]
[Opt Pil Auto] [Source Données de NAV].
La liste de tous les appareils de navigation connectés au même réseau
NMEA2000 apparaît. Pour les besoins de l’exemple ci-dessous, la liste affiche un
TZTL12F.
- - - - - - - - - - - - - - - - -
Nom de la
TZTL12F : 0 : 000C2F
source
ID Exemple appareil
(défini lors de l'installation de l'appareil)
Si votre réseau NMEA2000 dispose de plus d’un appareil capable d’émettre des
données de navigation, ces dispositifs sont également listés. Chaque appareil
apparaît avec son ID exemple appareil unique et son ID de réseau. L’ID exemple
appareil est défini lors de l’intégration initiale de l’appareil au réseau NMEA2000.
L’ID de réseau est unique à chaque appareil.
ID de réseau unique
NMEA2000 de l'appareil
3. Sélectionnez l’appareil concerné pour l’émission des données de navigation vers
votre NAVpilot-300.
4. Fermez le menu.
4.4 Menu Réglage Système
Le menu [Réglage Système] propose diverses fonctions qui, une fois définies, ne
doivent pas être réglées fréquemment. Définissez les éléments de ce menu en
fonction de vos besoins d’utilisation, de l’environnement, etc. Pour ouvrir ce menu,
sélectionnez [AUTRE MENU], puis [RÉGLAGE SYSTÈME].
Paramètres Manuels Paramètres Manuels
Bip Prior. barre :*
Bip Clavier :
Verr. Touche :
Préc Ent. Préc Ent.
ON
ON
Déverrouiller
* : Voir le Tableau ci-dessous.
Paramètres Manuels
Simu/Démo :
OFF
Diagnostique :
Données Système
Préc Ent.
Appuyer sur
1
Appuyer sur
1
Appuyer sur
1
Appuyer sur
1
Partage :
Déverrouiller
Groupe :
Réglage usine :
Appuyer sur
1
Appuyer sur
1
Paramètres Manuels
Svgde Param Util :
Charg Param Util :
Historique des Alertes :
Préc Ent.
A
Non
Non
Non
Le tableau ci-dessous liste les options de menu figurant dans le menu [Réglage
Système] et donne une brève description de chaque option.
4-5
Page 58

4. PERSONNALISATION DE VOTRE NAVPILOT
Option de menu Description
[Bip Prior. Barre] Indiquez si vous voulez que le système émette un «bip» lorsque
le mode OVRD est activé.
Sélectionnez [OFF] pour qu’aucun « bip » ne soit émis, [ON] pour
qu’un «bip» soit émis.
Remarque: L’option de menu apparaît dans les conditions
suivantes :
• [Type de Bateau] est réglé sur [EVCS Pod], [EVCS H.Bord],
[EVCS A.Bord] ou [EVCS A/H B] lors de l’installation.
• L’EVCS est un SEASTAR SOLUTIONS OPTIMUS.
[Bip Clavier] Quand une touche est enfoncée, le système peut émettre un bip
sonore.
[ON] : Une pression de touche émet un bip sonore.
[OFF] : Une pression de touche n’émet pas de bip sonore.
[Verr. Touche] Active ou désactive le verrouillage des touches pour l’unité de
contrôle.
• [Verrouiller] : Les touches sont
verrouillées. Lorsqu’une autre
touche que la touche est
enfoncée, le message affiché à
droite apparaît. L’icône de
verrouillage ( ) s’affiche également.
Pour déverrouiller les touches, effectuez un appui long sur
Ce contrôleur est verrouillé.
Pour déverrouiller,
maintenir la touche [menu]
enfoncée et appuyer sur la
touche [10>>].
, puis appuyez sur . Si le système est mis hors tension
10
alors que les touches sont verrouillées, lors de la prochaine mise
sous tension du système, le verrouillage des touches sera
activé.
• [Déverrouiller] : Les touches ne sont pas verrouillées.
[Partage] Les paramètres d’installation suivants peuvent être partagés et
appliqués aux sous-unités du même réseau : [Capteur Utilisé],
[Configuration des Unités], [Affichage de Cap], [Décalage Horaire],
[Var. Magnétique], [Réglage STW].
L’unité désignée en tant que [Maître] partage ses paramètres avec
les unités désignées en tant que [Répétiteur].
Sélectionnez le niveau de partage approprié parmi les options
suivantes.
• [Autonome] : Désactive le partage des paramètres.
• [Répétiteur] : Désigne l’unité de contrôle en tant que sous-unité.
• [Maître] : Les paramètres de cette unité sont appliqués à toutes
les sous-unités. Lorsqu’un écran multifonctions (MFD) FURUNO
se trouve dans le même réseau, le MFD est automatiquement
désigné en tant que [Maître] et cette option n’est pas disponible.
[Groupe] Les paramètres Langue et Brillance peuvent être partagés au sein
d’un groupe d’unités de contrôle NAVpilot-300 et de FI-70. Si les
paramètres sont modifiés pour l’une des unités de contrôle ou l’un
des FI-70 dans le groupe, les paramètres de toutes les autres
unités présentes dans le même groupe sont alors modifiées, mais
les paramètres du MFD ne sont pas modifiés. Il existe trois groupes
différents : [A], [B] et [C]. Sélectionnez un groupe approprié pour
l’affecter à une unité de contrôle.
[RAZ Usine] Sélectionnez [Oui] pour restaurer les paramètres usine par défaut.
Le système redémarre automatiquement après avoir sélectionné
[Oui].
4-6
Page 59

4. PERSONNALISATION DE VOTRE NAVPILOT
Option de menu Description
[Svgde Param
Util]
[Charg Param
Util]
[Historique des
Alertes]
[Simu/Démo] Active ou désactive le mode de démonstration. NE sélectionnez
[Diagnostique] Effectue divers diagnostics sur le système NAVpilot. Disponible en
[Données
Système]
Sélectionnez [Oui] pour sauvegarder les paramètres actuels en
tant que paramètres utilisateur par défaut dans la mémoire interne.
Les paramètres utilisateur par défaut qui se trouvent dans la
mémoire interne sont remplacés par les paramètres actuels.
Sélectionnez [Oui] pour charger les données de réglage stockées
dans la mémoire interne. Les paramètres actuels seront remplacés
par les paramètres utilisateur par défaut dans la mémoire interne.
Vous pouvez consulter les alertes qui sont ou ont été
transgressées. Un maximum de 10 alertes sont répertoriées.
Lorsque la capacité est atteinte, l’alerte la plus ancienne est
supprimée afin de libérer de l’espace pour la dernière alerte.
PAS d’autre option que [OFF] lorsque vous êtes à bord du bateau.
Les options autres que [OFF] servent uniquement à des fins
d’entretien ou de démonstration.
mode STBY uniquement. Pour plus de détails, consultez
section 6.4.
Affiche les données du système.
• [Tension d’Alim] : Tension d’alimentation du NAVpilot.
• [Groupe Puissance]* : Groupe utilisé avec le NAVpilot.
• [Tempo FET] : Température de la carte de circuits imprimés
dans le processeur.
• [Courant Groupe]* : Courant de l’entraînement du moteur.
*: Ne s’affiche pas pour les bateaux équipés d’un système EVC.
4-7
Page 60

4. PERSONNALISATION DE VOTRE NAVPILOT
Cette page est laissée vierge intentionnellement.
4-8
Page 61

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Remarque: Pour prendre connaissance des consignes de sécurité et du mode
d’emploi de votre GC-001, reportez-vous au Guide Utilisateur fourni avec le GC-001.
5.1 Unité de contrôle distante GC-001
Les fonctions de la plupart des touches de votre GC-001 changent selon le mode
d’exploitation du NAVpilot-300. Pour obtenir des informations détaillées au sujet du
fonctionnement des touches, reportez-vous à la section 5.9.
Touche BÂBORD 1
Touche DIRECT
Touche BÂBORD 10
5.2 Mise sous/hors tension
Mise sous tension
Effectuez un appui long sur pour mettre l’appareil sous tension. Le GC-001
émet un « bip », puis affiche l’écran de démarrage. Le système effectue un autotest
et les numéros de programme du GC-001 apparaissent, suivis des résultats du test
pour la ROM, la RAM et la sauvegarde.
Touche TRIBORD 1
Touche TRIBORD 10
Touche STBY/AUTO
Touche ON/Menu
BOOTER :
6454029-XX XX
PRINCIP. :
6454030-XX XX
BLE :
6454031-XX XX
ROM : OK
RAM : OK
SAUV. : OK
HW : XXX
X : indique le numéro de version
5-1
Page 62

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Lorsque tous les résultats de test affichent "OK", le GC-001 tente de se connecter au
NAVpilot-300 jumelé. Une fois que le GC-001 a établi une connexion avec le
NAVpilot-300, l’écran principal s’affiche et vous pouvez utiliser le GC-001 pour
contrôler le NAVpilot-300 à distance.
Reportez-vous à la section 5.8 pour jumeler d’autres unités de contrôle distantes
GC-001 avec votre NAVpilot-300.
Remarque 1: Si NG apparaît à l’issue de l’un des autotests, le processus de
démarrage est interrompu. Mettez l’appareil hors tension, retirez la batterie du
GC-001 et contactez votre revendeur local.
Remarque 2: Les mises à jour logicielles sont automatiquement lancées si
nécessaire et s’installent une fois le processus de démarrage terminé.
Mise hors tension
Effectuez un appui long sur pour mettre l’appareil hors tension. Un message et
un compte à rebours apparaissent sur l’écran du GC-001. Lorsque le compte à
rebours est terminé, l’unité de contrôle distante s’éteint.
Remarque: Lorsque [Auto OFF] est réglé autrement que sur [OFF], si aucune action
n’est réalisée pendant le temps défini, le GC-001 s’éteint automatiquement. Reportezvous à la section 5.6.6 pour plus de détails.
5.3 Présentation de l’écran
La figure ci-dessous vous donne un aperçu de l’écran du GC-001 en mode STBY.
L’écran du GC-001 change en fonction du mode utilisé par le NAVpilot-300.
NP300-RC
Mode en cours
d'utilisation par
le NAVpilot-300.
Indication
d’ intensité
du signal
Icône d'alerte
VEILLE
HDG T
25
Nom de
l'appareil
jumelé
Indication
de réglage
du buzzer
Indication
du niveau
de batterie
Indication
du réglage
de vibration
5-2
Remarque 1: L’intensité du signal est indiquée sur une échelle de 1 à 4, comme
indiqué dans le tableau ci-dessous. La distance avec le processeur, les obstacles et
la tension de la batterie peuvent réduire l’intensité du signal. Vérifiez l’intensité du
signal lorsque vous utilisez le GC-001.
Indication d’intensité du signal Niveau d’intensité
Aucune barre pleine ( )
Signal extrêmement faible ou indisponible.
Rapprochez-vous du processeur
Page 63

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
É
Indication d’intensité du signal Niveau d’intensité
Une barre pleine ( )
Deux barres pleines ( )
Trois barres pleines ( )
Signal disponible mais faible. Il se peut que
certaines fonctionnalités ou commandes ne
fonctionnent pas correctement.
Signal d’intensité moyenne.
Signal de forte intensité.
Remarque 2: Lorsque le niveau de la batterie est inférieur à 10 %, le GC-001 émet
une alerte (reportez-vous à la section 5.5). Un faible niveau de batterie peut affecter
la visibilité de l’écran et les commandes de l’unité de contrôle distante. Pour remplacer
la batterie, reportez-vous au Guide Utilisateur fourni avec le GC-001.
5.4 Présentation du menu du GC-001
Le GC-001 dispose d’un menu principal qui contient deux types de menus.
• Le menu [VIRAGE] : contient essentiellement des raccourcis pour les virages en
mode
FishHunter
™
.
• Le [MENU SYSTÈME] : contient les menus de réglage de votre GC-001. Une fois
définis, les réglages ne requièrent pas d’ajustement régulier.
Pour accéder au menu, suivez la procédure ci-dessous.
1. Appuyez sur . Le menu [VIRAGE] apparaît. La première fois que le menu
s’affiche après la mise sous tension de l’équipement, l’option [SABIKI] est
surlignée. Si une autre option de menu est sélectionnée alors que l’équipement
est toujours sous tension, la dernière option de menu utilisée est sélectionnée.
2. Appuyez sur , , ou pour naviguer dans le menu. Le menu
10
10
défile dans le sens de la touche sur laquelle vous appuyez, comme indiqué dans
l’exemple ci-dessous.
SABIKI AUTO NAV
MENU
SYSTÈME
ZIGZAG
VIRAGE2 P VIRAGE2 S VIRAGE1 P VIRAGE1 S ORBRITE P
FORME8 PFORME8 S
ORBITE SSPIRALE PSPIRALE S
L’option sélectionnée s’affiche au centre de l’écran comme illustré sur la figure cidessous.
lément de menu sélectionné
NP300-RC
Remarque : Si le GC-001 n'est
pas jumelé avec le NAVpilot-300,
MENU SYSTÈME
les icônes de menu ne s'affichent
pas. Pour procéder au jumelage du
GC-001, se reporter à la Section 5.8.
5-3
Page 64

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
3. Appuyez sur pour confirmer votre sélection.
Si une option de menu autre que [MENU SYSTÈME] est sélectionnée,
le message "CHANGEMENT DE MODE" s’affiche sur l’écran du NAVpilot-300
pour vous informer que le mode a été modifié.
Pour obtenir plus d’informations sur l’utilisation du GC-001 avec chacun des
modes du NAVpilot-300, reportez-vous à la section 5.9.
Si l’option [MENU SYSTÈME] est sélectionnée, le [MENU SYSTÈME] apparaît.
Curseur de
sélection ( )
NP300-RC NP300-RC
VERR. TOUCHE
ALARME
DIRECT
RETROÉCLAIR.
JUMELAGE
Page 1 Page 2
Pour obtenir plus d’informations au sujet du [MENU SYSTÈME], reportez-vous à
la section 5.6.
Barre de défilement
ÉTALONNAGE
MODE VEILLE
AUTO OFF
DIAGNOSTIQUE
4. Sous [MENU SYSTÈME], appuyez sur ou pour sélectionner une
option de menu, puis appuyez sur pour confirmer la sélection.
Pour les besoins de l’exemple ci-dessous, sélectionnez [VERR. TOUCHE].
Le curseur de sélection montre la sélection actuelle. Appuyez sur pour
déplacer le curseur vers le haut ou pour déplacer le curseur vers le bas.
La barre de défilement apparaît lorsque certaines options de menu ne sont pas
visibles à l’écran.
5. Appuyez sur ou pour sélectionner une option de menu, puis appuyez
sur pour appliquer la modification. Les réglages actuels sont indiqués par
une barre pleine ( ). La figure ci-dessous illustre les réglages [VERR. TOUCHE].
NP300-RC
DÉVERROUILLER
VERROUILLER
Sélection
actuelle
5-4
6. Appuyez sur plusieurs fois pour fermer le menu.
Remarque: Par souci de concision, les fonctions de menu de ce chapitre utilisent
la phrase « Sélectionnez xxx. » pour décrire la sélection au niveau du menu.
Page 65

5.5 Alertes du GC-001
Les alertes sont affichées sur l’écran du GC-001 dans les situations suivantes:
• Le GC-001 génère une alerte.
• Le GC-001 reçoit une alerte générée par le processeur.
En fonction de vos réglages, le buzzer retentit et le GC-001 vibre pour vous indiquer
qu’une alerte s’est déclenchée. Appuyez sur une touche pour arrêter le buzzer et la
vibration du GC-001 ; les messages d’alerte affichés sur le GC-001 et le NAVpilot-300
se ferment également.
Lorsque le GC-001 détecte une condition d’alerte, l’icône d’alerte reste affichée
jusqu’à ce que la cause de l’alerte soit corrigée. Si la cause de l’alerte est toujours
présente au bout de trois minutes, le buzzer retentit à nouveau et le message d’alerte
réapparaît.
NP300-RC
5. UNITÉ DE CONTRÔLE DISTANTE GC-001
ATTENTION
Message
d'alerte
5.5.1 Priorité des alertes
Il existe trois niveaux de priorité d’alerte : [Alarme], [Avertissement] et [Attention]
(reportez-vous au point chapitre 3). S’il y a plusieurs alertes actives, l’alerte
présentant le plus haut niveau de priorité est affichée. Si une alerte générée par le
GC-001 est active au moment où le système reçoit une alerte du processeur, l’alerte
du GC-001 est affichée.
5.5.2 Liste d’alertes
Alertes générées par le GC-001
Le tableau ci-dessous liste les alertes générées par le GC-001, ainsi que leur
signification, le niveau d’alerte, la priorité selon laquelle elles sont affichées et les
actions correctives envisageables.
ALERTE
DE CAP
Icône d'alerte
Priorité des
alertes
Priorité
d’affichage
Niveau d’alerte : Alarme
1 BATTERIE
2 ERREUR COMM Il y a un problème de communication entre le GC-
Message Signification/Action corrective
La tension de batterie résiduelle est inférieure à
FAIBLE
10 %. Remplacez la batterie en vous référant au
Guide Utilisateur fourni avec le GC-001.
001 et le processeur. Vérifiez que le processeur est
sous tension.
5-5
Page 66

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Alertes reçues du processeur
Le tableau ci-dessous liste les alertes qui peuvent être reçues du processeur, ainsi
que la priorité selon laquelle elles sont affichées et le message d’alerte correspondant
qui s’affiche sur le NAVpilot-300. Pour plus de détails sur la signification et les actions
correctives se rapportant à ces alertes, reportez-vous à la section 6.6.3. Les codes
d’erreur 0001 et 1003 ne s’affichent pas sur le GC-001.
Priorité
d’affichage
Niveau d’alerte : Alarme
1 DYSFONCTIONNEMENT
GROUPE PUISSANCE.
METTRE LE SYSTÈME HORS
TENSION.
2 LE GROUPE PUISSANCE EST
EN SURCHARGE.
METTRE LE SYSTÈME HORS
TENSION.
3 LE GROUPE PUISSANCE EST
EN SURCHAUFFE.
METTRE LE SYSTÈME HORS
TENSION.
4 DYSFONCTIONNEMENT
PUISSANCE BARRE.
METTRE LE SYSTÈME HORS
TENSION.
5 ERREUR D’ANGLE DE
BARRE. METTRE LE
SYSTÈME HORS TENSION.
Niveau d’alerte : Avertissement
6 RÉDUIRE VITESSE POUR
SABIKI (<5ND).
7 ERREUR DE COMM. AVEC
SYST EVC.
8 AUCUNE DONNÉE DE CAP
DISPONIBLE.
9 MODIF SOUDAINE DES
DONNÉES DE CAP.
10 ERREUR ACCÉLÉROMÈTRE. Code d’erreur : 1006
11 INITIALISATION DU
CAPTEUR DE CAP.
12 AUCUNE DONNÉE DE
VITESSE DISPO.
13 PAS DE DONNÉE NAV
DISPONIBLE.
14 DONNÉES NAV
DÉTÉRIORÉES.
15 AUCUNE DONNÉE POSITION
REÇUE.
Message GC-001
Code d’erreur et message du
Code d’erreur : 0002
"Dysfonctionnement groupe
puissance.
Vérifier le groupe puissance."
Code d’erreur : 0003
"Le groupe puissance est en
surcharge.
Vérifier le groupe puissance."
Code d’erreur : 0004
"Le groupe puissance est en
surchauffe.
Vérifier le groupe puissance."
Code d’erreur : 0005
"Dysfonctionnement puissance barre.
Vérifier le groupe puissance."
Code d’erreur : 0006
"Erreur d’angle de barre.
Vérifier le groupe puissance."
Code d’erreur : 1001
"Réduire vitesse pour SABIKI (<5ND)."
Code d’erreur : 1002
"Erreur de comm. avec syst EVC."
Code d’erreur : 1004
"Aucune donnée de cap disponible."
Code d’erreur : 1005
"Modif soudaine des données de cap."
"Erreur accéléromètre."
Code d’erreur : 1013
"Initialisation du capteur de cap. Cela
dure 2 minutes. Patientez un instant."
Code d’erreur : 1007
"Aucune donnée de vitesse dispo.
Vérifier source vit. ou la saisir
manuellement ds Réglage Paramètre."
Code d’erreur : 1008
"Pas de donnée NAV disponible."
Code d’erreur : 1009
"Données NAV détériorées."
Code d’erreur : 1010
"Aucune donnée position reçue."
processeur
5-6
Page 67

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Priorité
d’affichage
16 TROP RAPIDE POUR CE
MODE.
17 ERREUR DONNÉES
SAUVEGARDÉES.
Niveau d’alerte : Attention
18 TENSION D’ENTRÉE TROP
FAIBLE.
19 TENSION D’ENTRÉE TROP
HAUTE.
20 ERREUR DS PARAMÈTRES
DU MODE NAV.
MODIFIER LES MODES.
21 RÉGLAGES COMPAS
INCOMPLETS.
22 SOURCE DU CAP MODIFIÉE. Code d’erreur : 2005
23 CONTRÔLE EVC. Code d’erreur : 2008
24 ARRIVÉ AU WAYPOINT
FINAL.
25 WAYPOINT A ÉTÉ MIS À
JOUR.
26 LE MODE PÊCHE A ÉTÉ
ACTIVÉ.
27 ATTENTION ALERTE ! Code d’erreur : 2013
28 SOURCE DE POSITION
MODIFIÉE.
29 SOURCE DE VITESSE
MODIFIÉE.
30 MODE NAV TERM.
CHANGEMENT DE MODES.
31 ERREUR CAPTEUR
PRIORITÉ BARRE.
32 ALERTE DE CAP. Code d’erreur : 2015
33 ATTENTION ALERTE ! Code d’erreur : 2016
Message GC-001
Code d’erreur et message du
Code d’erreur : 1011
"Trop rapide pour ce mode. Réduire
vitesse à moins de 10 nd."
Code d’erreur : 1012
"Erreur données sauvegardées."
Code d’erreur : 2001
"Tension d’entrée trop faible."
Code d’erreur : 2002
"Tension d’entrée trop haute."
Code d’erreur : 2003
"Erreur ds paramètres du mode NAV.
Modifier les modes."
Code d’erreur : 2004
"Réglages compas incomplets.
Étalonner le compas ds le menu."
"Source du cap modifiée. Réglages
compas incomplets. Étalonner le
compas ds le menu."
"Contrôle EVC."
Code d’erreur : 2009
"Arrivé au Waypoint final."
Code d’erreur : 2010
"Waypoint a été mis à jour."
Code d’erreur : 2011
"Le mode Pêche a été activé."
"Attention Alerte !"
Code d’erreur : 2006
"Source de position modifiée."
Code d’erreur : 2007
"Source de vitesse modifiée."
Code d’erreur : 2014
"Mode NAV term. Changement de
modes."
Code d’erreur : 2017
"Erreur capteur Priorité Barre."
"Alerte de cap."
"Attention Alerte !"
processeur
5-7
Page 68

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
5.6 Réglage des paramètres de votre GC-001
Tous les paramètres de votre GC-001 peuvent être réglés ou modifiés depuis le
[MENU SYSTÈME].
Remarque 1: Les procédures définies dans cette section utilisent la phrase « Ouvrez
le [MENU SYSTÈME]. » Pour savoir comment accéder au [MENU SYSTÈME],
reportez-vous à la section 5.4.
Remarque 2: Les procédures définies dans cette section utilisent la phrase « Fermez
le menu. » Cela signifie « Appuyez sur plusieurs fois jusqu’à ce que l’écran
principal s’affiche. »
5.6.1 Verrouillage/déverrouillage des touches
Vous pouvez verrouiller les touches pour empêcher toute utilisation accidentelle.
Pour verrouiller ou déverrouiller les touches, suivez la procédure ci-dessous.
1. Ouvrez le [MENU SYSTÈME].
2. Sélectionnez [VERR. TOUCHE].
3. Sélectionnez [VERROUILLER] pour verrouiller les touches. Le message "VERR.
TOUCHE" s’affiche à l’écran et toutes les touches, sauf , sont verrouillées.
4. Pour déverrouiller les touches, appuyez sur , puis sélectionnez
[DÉVERROUILLER].
5. Fermez le menu.
Remarque: Les touches sont automatiquement déverrouillées si une alerte se
déclenche ou en cas de mise hors tension de l’appareil.
5.6.2 Modification des réglages buzzer et vibration
Votre GC-001 peut émettre une alerte sonore et/ou vibrer pour vous indiquer qu’une
alerte s’est déclenchée. Vous pouvez activer ou désactiver l’alerte sonore (buzzer) et
la vibration selon vos besoins.
Pour modifier les réglages buzzer et vibration, suivez la procédure ci-dessous.
1. Ouvrez le [MENU SYSTÈME].
2. Sélectionnez [ALARME]. Le menu Buzzer et Vibration s’affiche.
3. Sélectionnez [BUZZER] ou [VIBRATION] selon le cas.
5-8
4. Sélectionnez [ON] ou [OFF] selon le cas.
Lorsque l’option [BUZZER] est réglée sur [ON], le buzzer retentit pendant environ
deux secondes.
Lorsque l’option [VIBRATION] est réglée sur [ON], l’unité vibre pendant environ
deux secondes.
De plus, les indications de buzzer et de vibration en haut de l’écran changent en
fonction du réglage, comme indiqué dans le tableau ci-dessous.
[ON] [OFF] [ON] [OFF]
[BUZZER] [VIBRATION]
5. Fermez le menu.
Page 69

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
5.6.3 Activation/désactivation de la fonctionnalité Manœuvre Facile
La fonctionnalité Manœuvre Facile vous permet de « piloter » votre bateau en
appuyant simplement sur la touche DIRECT ( ) toute en déplaçant le GC-001.
Pour activer/désactiver la fonctionnalité Manœuvre Facile, suivez la procédure cidessous.
1. Ouvrez le [MENU SYSTÈME].
2. Sélectionnez [DIRECT], puis sélectionnez [ON] ou [OFF] selon le cas.
3. Fermez le menu.
Remarque: Pour savoir comment utiliser la fonctionnalité Manœuvre Facile, reportezvous à la section 5.7.
5.6.4 Mise sous/hors tension du rétroéclairage de l’écran
L’écran LCD du GC-001 dispose d’un système de rétroéclairage que vous pouvez
mettre sous/hors tension en fonction de vos besoins.
Pour mettre le rétroéclairage sous/hors tension, suivez la procédure ci-dessous.
1. Ouvrez le [MENU SYSTÈME].
2. Sélectionnez [RÉTROÉCLAIRAGE], puis sélectionnez [ON] ou [OFF] selon le
cas.
3. Fermez le menu.
5.6.5 Réglage du minuteur de veille
Si le GC-001 n’est pas utilisé dans le laps de temps défini pour le [MODE VEILLE], le
GC-001 passe en mode Veille. Cela permet d’économiser la batterie et peut
contribuer à augmenter la durée de vie de l’écran LCD. Le minuteur démarre juste
après la dernière action. Toute action réalisée avant le laps de temps défini réinitialise
le minuteur.
Pour régler le minuteur de veille, suivez la procédure ci-dessous.
1. Ouvrez le [MENU SYSTÈME].
2. Sélectionnez [MODE VEILLE]. La fenêtre de réglage du minuteur de veille
apparaît.
3. Sélectionnez le minuteur approprié. Les options possibles sont [30SEC] (trente
secondes), [1MIN] (une minute) et [3MIN] (trois minutes).
4. Fermez le menu.
5-9
Page 70

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
5.6.6 Utilisation de la fonctionnalité [AUTO OFF]
Vous pouvez définir un laps de temps, identique à celui du minuteur de veille, à l’issue
duquel votre GC-001 s’éteindra automatiquement.
Pour régler le laps de temps [AUTO OFF], suivez la procédure ci-dessous.
1. Ouvrez le [MENU SYSTÈME].
2. Sélectionnez [AUTO OFF]. La fenêtre de réglage du laps de temps apparaît.
3. Sélectionnez le laps de temps approprié. Les options possibles sont [OFF], [1H]
(une heure), [3H] (trois heures) et [6H] (six heures).
Le GC-001 s’éteint lorsque le laps de temps défini ici est écoulé lorsque le GC001 est en mode Veille. Sélectionnez [OFF] pour désactiver la fonctionnalité
[AUTO OFF].
4. Fermez le menu.
5.7 Utilisation de la fonctionnalité Manœuvre Facile
La fonctionnalité Manœuvre Facile vous permet de faire virer votre bateau à distance,
sans utiliser la barre. Avant de pouvoir utiliser cette fonctionnalité, vérifiez les points
suivants :
• Le GC-001 et le NAVpilot-300 sont-ils sous tension ?
Les deux unités doivent être allumées pour utiliser cette fonctionnalité.
• La fonctionnalité Manœuvre Facile est-elle activée ?
Pour vérifier ce réglage, reportez-vous à la section 5.6.3.
• Le GC-001 est-il jumelé avec le système ?
Si vous ne disposez que d’un seul GC-001, le jumelage est déjà effectué. Si vous
avez plusieurs GC-001, reportez-vous à la section 5.8 pour connaître la procédure
de jumelage.
Pour utiliser la fonctionnalité Manœuvre Facile, suivez la procédure ci-dessous.
Remarque: Informez votre équipage et les passagers avant d’utiliser la fonctionnalité
Manœuvre Facile.
1. En vous référant à la section 2.2 ou à la section 5.9.2, mettre le système en mode
AUTO.
La fonctionnalité Manœuvre Facile n’est pas disponible dans les autres modes.
2. Face à l’étrave, effectuez une pression longue sur .
5-10
Page 71

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
3. Déplacez le GC-001, selon un arc horizontal, dans la direction vers laquelle vous
voulez tourner. La barre est corrigée afin de faire virer votre bateau dans cette
direction.
Pointé vers l'étrave
Virage à tribordVirage à bâbord
Les indications de direction de rotation et de relèvement changent également en
conséquence sur le GC-001. L’exemple ci-dessous montre un virage vers tribord.
NP300-RC
PS
AUTO
DEFCAP
23
Il existe trois cases d’indicateur de rotation à la fois vers bâbord et vers tribord.
Selon le degré du virage amorcé, les cases se remplissent en conséquence.
4. Relâchez .
Le cap réel au moment où vous relâchez la touche devient le cap défini.
NP300-RC
PS
AUTO
DEFCAP
28
Les indicateurs de
virage (cases) se
remplissent pour
indiquer l'angle et la
direction du virage.
5.8 Connexion (jumelage) du GC-001 avec votre NAVpilot-300
Le système NAVpilot-300 communique avec le GC-001 via la technologie Bluetooth®.
Pour utiliser le GC-001 avec votre NAVpilot-300, ils doivent être jumelés. Il est
possible de connecter jusqu’à trois GC-001 maximum au processeur. Votre système
NAVpilot est fourni avec un GC-001 qui est jumelé lors de l’installation.
Remarque: Lorsque plusieurs GC-001 sont jumelés avec votre système, afin d’éviter
que plusieurs actions ne soient réalisées simultanément, le dernier signal distant reçu
est utilisé pour mener à bien l’action correspondante.
Pour jumeler un nouveau GC-001 avec le système, suivez la procédure ci-dessous.
1. Sur le NAVpilot-300, ouvrez le menu.
2. Sélectionnez [RC sans fil]. Les GC-001 jumelés avec votre NAVpilot-300 sont
listés. Votre système NAVpilot-300 est déjà connecté à un GC-001 et le GC-001
5-11
Page 72

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
connecté apparaît en haut de la liste. Les connexions disponibles apparaissent
vides (sous formes de « barres »).
RC sans fil
Télécommande 1 :
Télécommande 2 :
GC-001 40F671792BE0
㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙
Le GC-001 qui a été
jumelé lors de l'installation
s'affiche ici.
Télécommande 3 :
㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙
▼
Préc Ent.
3. Sélectionnez [Télécommande 1], [Télécommande 2] ou [Télécommande 3] selon
le cas.
La fenêtre de sélection du dispositif s’affiche.
RC sans fil
Télécommande 1 :
Télécommande 2 :
Télécommande 3 :
4. Sur votre GC-001, appuyez sur pour mettre le GC-001 sous tension.
5. Lorsque le processus de démarrage du GC-001 est terminé, appuyez sur .
Le menu du GC-001 apparaît.
6. Sélectionnez [MENU SYSTÈME].
GC-001 40F671792BE0
▼
Préc Ent.
Fenêtre de sélection
7. Sélectionnez [JUMELAGE].
8. Sélectionnez [OUI]. Le message "JUMELAGE..." apparaît sur l’écran du GC-001.
9. Sur le NAVpilot-300, sélectionnez le GC-001 qui doit être jumelé dans la fenêtre
de sélection du dispositif, puis appuyez sur .
10
RC sans fil
Télécommande 1 :
Télécommande 2 :
Télécommande 3 :
GC-001 40F671792BE0
㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙㻙
GC-001 5DF00173D00
▼
Préc Ent.
Le GC-001 détecté
s'affiche ici.
5-12
Page 73
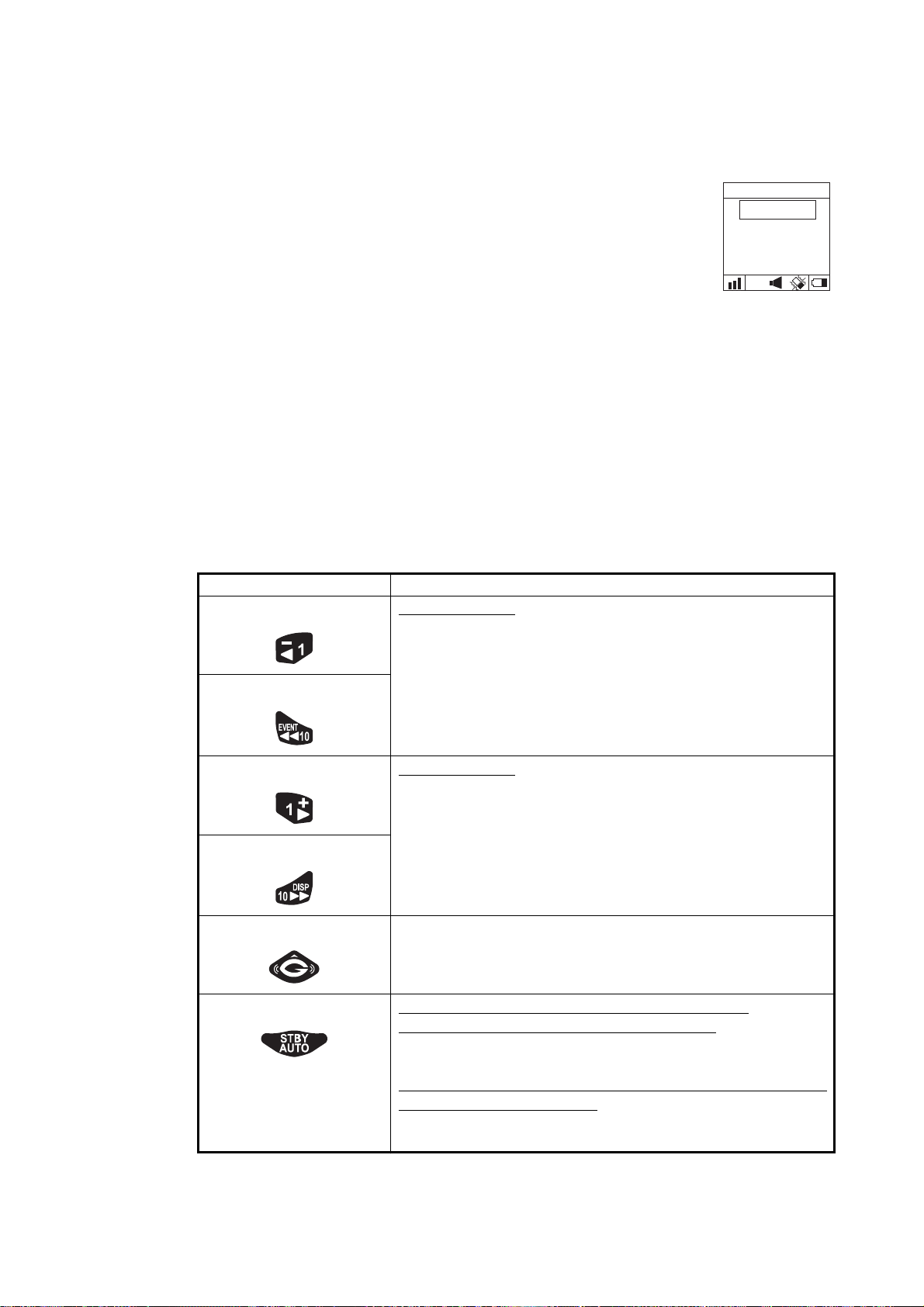
5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Remarque: Si le GC-001 qui doit être jumelé n’est pas sélectionné dans les
20 secondes, le message "TEMPS ÉCOULÉ !" apparaît sur le GC-001 et la
fenêtre de sélection du dispositif se ferme sur le NAVpilot-300. Dans ce cas,
répétez la procédure ci-dessus à partir de l’étape 8.
Le système NAVpilot-300 et le GC-001 sont connectés et
jumelés lorsque la fenêtre STBY (exemple présenté à droite)
apparaît sur le GC-001.
10. Fermez le menu.
NP300-RC
112
5.9 Fonctions du GC-001 avec le NAVpilot-300
Les fonctions de la plupart des touches de votre GC-001 changent selon le mode
d’exploitation du NAVpilot-300. Les sections suivantes détaillent la fonction de chaque
touche, selon le mode d’exploitation du NAVpilot-300.
Remarque: Lorsque plusieurs GC-001 sont jumelés avec votre système, afin d’éviter
que plusieurs actions ne soient réalisées simultanément, le dernier signal distant reçu
est utilisé pour mener à bien l’action correspondante.
5.9.1 Mode Veille (STBY)
Nom Description
Touche PORT1
Pression longue :
Active le mode [NFU(PORT)] jusqu’à ce que la touche soit
relâchée. Relâchez la touche pour revenir au mode STBY.
VEILLE
HDG M
Touche PORT10
Touche STBD1
Touche STBD10
Touche DIRECT Aucune fonction en mode [STBY].
Touche STBY AUTO
Pression longue :
Active le mode [NFU(PORT)] jusqu’à ce que la touche soit
relâchée. Relâchez la touche pour revenir au mode STBY.
Pression courte, lorsqu’aucune destination n’est
sélectionnée au niveau du navigateur GPS :
Active le mode [AUTO].
Pression courte, lorsqu’une destination est sélectionnée au
niveau du navigateur GPS :
Ouvre la fenêtre de sélection du mode ([NAV]/[AUTO]/
[ANNULER]).
5-13
Page 74

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Nom Description
Touche POWER/MENU Pression courte :
Ouvre le menu [VIRAGE].
Pression longue :
Met le GC-001 hors tension.
Remarque 1: En mode STBY, la touche ne dispose pas d’une fonction
« pression longue ».
Remarque 2: En mode STBY, les touches . , et ne
disposent pas de la fonction « pression courte ».
5.9.2 Mode Pilote Automatique (AUTO)
Nom Description
Touche PORT1
Pression courte :
Change de cap de 1° vers bâbord sur le NAVpilot-300.
Touche PORT10
Touche STBD1
Touche STBD10
Touche DIRECT Active la fonctionnalité Manœuvre Facile. Pour savoir
Touche STBY AUTO
Touche POWER/MENU
Pression courte :
Change de cap de 10° vers bâbord sur le NAVpilot-300.
Pression courte :
Change de cap de 1° vers tribord sur le NAVpilot-300.
Pression courte :
Change de cap de 10° vers tribord sur le NAVpilot-300.
comment utiliser la fonctionnalité Manœuvre Facile,
reportez-vous à la section 5.7.
Pression courte :
Active le mode [STBY].
Pression courte :
Ouvre le menu [VIRAGE].
5-14
Pression longue :
Met le GC-001 hors tension.
Remarque 1: En mode AUTO, il n’y a pas de fonction « pression longue » pour les
touches autres que et .
Remarque 2: Pour utiliser la touche , l’option [DIRECT] dans le menu
[SYSTÈME] doit être réglée sur [ON]. Si l’option [DIRECT] est réglée sur [OFF], la
touche ne dispose pas de fonction en mode Pilote Automatique.
Page 75

5.9.3 Mode Navigation (NAV)
Nom Description
Touche PORT1
Touche PORT10
Pression longue :
Active le mode [ÉVITAGE(PORT)] jusqu’à ce que la touche
soit relâchée. Relâchez la touche pour revenir au mode
VIRAGE.
5. UNITÉ DE CONTRÔLE DISTANTE GC-001
Touche STBD1
Touche STBD10
Touche DIRECT Aucune fonction en mode [NAV].
Touche STBY AUTO
Touche POWER/MENU
Pression longue :
Active le mode [ÉVITAGE(PORT)] jusqu’à ce que la touche
soit relâchée. Relâchez la touche pour revenir au mode
VIRAGE.
Pression courte :
Active le mode [STBY].
Pression courte :
Ouvre le menu [VIRAGE].
Pression longue :
Met le GC-001 hors tension.
Remarque 1: En mode NAV, la touche ne dispose pas de la fonction
« pression longue ».
Remarque 2: En mode NAV, les touches . , et ne
disposent pas de fonction « pression courte ».
5-15
Page 76

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
5.9.4 Modes VIRAGE et FishHunter
Nom Description
Touche PORT1
Touche PORT10
Touche STBD1
Touche STBD10
Touche DIRECT Aucune fonction dans l’un et l’autre des modes susvisés.
Pression longue :
Active le mode [ÉVITAGE(PORT)] jusqu’à ce que la touche
soit relâchée. Relâchez la touche pour revenir au mode
VIRAGE.
Pression longue :
Active le mode [ÉVITAGE(PORT)] jusqu’à ce que la touche
soit relâchée. Relâchez la touche pour revenir au mode
VIRAGE.
™
Touche STBY AUTO
Touche POWER/MENU
Pression courte :
Active le mode [STBY].
Pression courte :
Ouvre le menu [VIRAGE].
Pression longue :
Met le GC-001 hors tension.
Remarque 1: Dans l’un et l’autre des modes susvisés, les touches ne
disposent pas de fonction « pression longue ».
Remarque 2: Dans l’un et l’autre des modes susvisés, les touches . ,
et ne disposent pas de fonction « pression courte ».
5-16
Page 77

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
5.9.5 Mode SABIKI
Nom Description
Touche PORT1
Touche PORT10
Touche STBD1
Touche STBD10
Touche DIRECT
™
Pression courte :
Change de cap de 1° vers bâbord sur le NAVpilot-300.
Pression courte :
Change de cap de 10° vers bâbord sur le NAVpilot-300.
Pression courte :
Change de cap de 1° vers tribord sur le NAVpilot-300.
Pression courte :
Change de cap de 10° vers tribord sur le NAVpilot-300.
Aucune fonction en mode SABIKI
™
.
Touche STBY AUTO
Touche POWER/MENU
Pression courte :
Active le mode [STBY].
Pression courte :
Ouvre le menu [VIRAGE].
Pression longue :
Met le GC-001 hors tension.
Remarque: En mode SABIKI™, il n’y a pas de fonction « pression longue » pour les
touches autres que .
5-17
Page 78

5. UNITÉ DE CONTRÔLE DISTANTE GC-001
5.10 Menu Diagnostique
Le menu [DIAGNOSTIQUE] contient des outils de diagnostic dédiés à votre GC-001.
Pour accéder au menu [DIAGNOSTIQUE], suivez la procédure ci-dessous.
1. En vous référant à la section 5.4, accéder au [MENU SYSTÈME].
2. Sélectionnez [DIAGNOSTIQUE]. Le menu [DIAGNOSTIQUE] apparaît.
Option de menu Description
[TEST BT]
[MODIFICATION
PUISSANCE]
[BATTERIE] Vérifie la puissance résiduelle de la batterie.
[AUTOTEST] Réaliser un autotest sur le GC-001. Ce test vérifie la RAM, la
[TEST DES
TOUCHES]
[TEST GYRO] Utiliser ce test si la fonctionnalité Manœuvre Facile vous semble
Teste l’intensité du signal Bluetooth
Cette option de menu est uniquement destinée au personnel
qualifié.
ROM, le statut de la SAUVEGARDE et les versions de programme du GC-001.
Vérifie le statut des touches du GC-001. Appuyez sur chaque
touche pour mettre en surbrillance la case correspondante à
l’écran. Appuyez à nouveau sur la touche pour supprimer la
surbrillance. Si une touche n’est pas mise en surbrillance lorsque
vous appuyez sur cette dernière, consultez votre revendeur pour
un entretien.
Pour quitter le test, appuyez sur trois fois rapidement et de
façon successive.
®
. Utilisé lors de l’installation.
lente ou ne répond pas. Appuyez sur , puis balancez
légèrement le GC-001. Les valeurs des indications X, Y et Z
doivent changer avec chaque mouvement. Si l’une de ces valeurs ne change pas, il se peut que le GC-001 doive être remplacé. Consultez votre distributeur pour un entretien.
[TEST ÉCRAN]
[TEST BUZZER]
[TEST VIBRATION]
[MODE RE] Cette option de menu n’est pas utilisée.
[PARASITE] Cette option de menu n’est pas utilisée.
[TOUT EFFACER] Rétablit tous les réglages d’usine par défaut pour le GC-001.
Contrôle l’écran LCD. Appuyez sur pour faire défiler les
écrans de test. Appuyez sur pour quitter ce test.
Teste l’alarme sonore du buzzer. Appuyez sur pour activer
le son du buzzer ou appuyez sur pour désactiver le son du
buzzer.
Teste l’alarme de vibration. Appuyez sur pour activer la vi-
bration ou appuyez sur pour désactiver la vibration.
Pour rétablir les réglages par défaut, sélectionnez [OUI], puis ap-
5-18
puyez sur .
3. Réalisez les tests requis.
Lorsque tous les résultats de test affichent "NG"ou que le test ne peut pas être
réalisé, contactez votre revendeur local.
4. Fermez le menu.
Page 79

6. MAINTENANCE ET DÉPANNAGE
Ce chapitre détaille les procédures nécessaires à l’entretien et au dépannage de
l’appareil.
REMARQUE
Ne pas appliquer de peinture, de mastic
anticorrosif ou de nettoyant de contact
sur les pièces en plastique ou le
revêtement de l'appareil.
Ces produits contiennent des substances
susceptibles d'endommager les pièces en
plastique et le revêtement de l'appareil.
6.1 Maintenance préventive
Une maintenance régulière est nécessaire pour obtenir un fonctionnement optimal de
l’appareil. Définissez un programme de maintenance qui inclut les éléments indiqués
ci-dessous.
Option Point à vérifier Solution
Connecteurs Vérifiez s’ils sont
correctement fixés.
Câbles Vérifiez si les
câbles ne
présentent pas de
dommage ou de
trace de corrosion.
Processeur,
Unité de contrôle
LCD De la poussière sur
Poussière/saleté
sur les unités.
l’écran LCD
obscurcit l’image.
Resserrez les connexions lâches.
Remplacez les câbles si nécessaire.
Utilisez un chiffon sec pour nettoyer les
unités. En cas de saleté tenace, utilisez un
chiffon humidifié à l’aide d’un détergent doux
pour nettoyer, puis séchez l’unité à l’aide
d’un autre chiffon, doux et sec. N’utilisez pas
d’acétone, de benzène ou autres solvants
car cela risquerait d’endommager l’unité.
Nettoyez soigneusement l’écran LCD pour
éviter de l’endommager. Utilisez un mouchoir
en papier et un nettoyant pour écran LCD.
Pour retirer la poussière ou les dépôts de sel,
utilisez un produit pour écran LCD et essuyez
délicatement l’écran à l’aide de papier
optique. Changez fréquemment le papier
pour éviter toute détérioration due à la
poussière ou au sel. N’utilisez pas de solvant
de type diluant, acétone ou benzène pour le
nettoyage.
6-1
Page 80

6. MAINTENANCE ET DÉPANNAGE
6.2 Remplacement du fusible
Un fusible (125 V 2A) du processeur protège l’appareil contre les inversions de
polarité du réseau électrique du bateau et contre les pannes. Si le fusible fond, vous
ne parviendrez pas à mettre l’appareil sous tension. Contactez votre revendeur local
pour un entretien.
AVERTISSEMENT
Utiliser le fusible adapté.
L'utilisation d'un fusible non adapté
peut provoquer un incendie ou
endommager l'appareil.
Nom de la pièce Type Réf. Remarques
Fusible FGMB-A 125V 2A PBF 000-157-479-10 Fourni en pièce
de rechange
6.3 Dépannage
Le tableau de dépannage ci-dessous présente les pannes courantes, et les solutions
pour rétablir un fonctionnement normal.
Problème Cause/solution possible
Processeur/Unité de contrôle
Il est impossible de
mettre l’appareil sous
tension.
Rien ne s’affiche à
l’écran.
Rien ne se passe
lorsque vous appuyez
sur une touche.
Pas de réponse de la
barre en mode AUTO.
• Vérifiez les connexions de câble entre le système et
l’alimentation (tableau électrique, etc.)
• Vérifiez si les câbles et les connecteurs ne sont pas
endommagés.
• Vérifiez si la batterie embarquée est compatible avec la
tension nominale.
• Le fusible peut avoir grillé. Contactez votre revendeur local
pour un remplacement.
Appuyez plusieurs fois sur la touche pour régler la
luminosité.
• Vérifiez que l’unité de contrôle est bien connectée au
processeur.
• Vérifiez si les câbles et les connecteurs ne sont pas
endommagés.
• Mettez l’appareil hors tension, puis sous tension. Si le
problème persiste, contactez votre revendeur local pour un
entretien.
Si le message « Connexion au processeur... » apparaît,
attendez quelques minutes que le système ait terminé le
processus de démarrage.
• Si un système de référence de barre est installé, allez sur
[Réglage Limite de Barre] et réalisez un [Test de Barre].
Reportez-vous au Manuel d’Installation (IME-72840-xx ;
«xx» indique la version) pour plus de détails.
• Pour les bateaux équipés de Fantum Feedback
un Test de Barre. Reportez-vous au Manuel d’Installation
(IME-72840-xx ; «xx» indique la version) pour plus de
détails.
™
, réalisez
6-2
Page 81

Problème Cause/solution possible
Le mode AUTO avancé
ne s’active pas.
• Vérifiez les connexions entre ce système et le dispositif
GPS connecté.
• Vérifiez que le dispositif GPS fonctionne correctement.
• Vérifiez les réglages pour l’entrée des données (reportezvous à la section 4.3).
Lecture du compas et
cap affiché différents.
Un décalage du compas peut s’avérer nécessaire. Reportezvous au Manuel d’Installation (IME-72840-xx ; «xx» indique
la version) pour plus de détails.
Pas de réception des
données NMEA2000.
Vérifiez que le réseau NMEA2000 est activé. Si le NAVpilot a
été mis sous tension avant le réseau NMEA2000,
redémarrez le NAVpilot.
Télécommande tactile GC-001
Il est impossible de
mettre l’appareil sous
tension.
Rien ne s’affiche à
l’écran ou l’affichage
n’est pas visible.
Remplacez la batterie. Pour savoir comment remplacer la
batterie, reportez-vous au Guide Utilisateur fourni avec le
GC-001.
• Il se peut que le GC-001 soit en mode Veille. Appuyez sur
une touche.
• Le niveau de la batterie est peut-être bas. Remplacez la
batterie. Pour savoir comment remplacer la batterie,
reportez-vous au Guide Utilisateur fourni avec le GC-001.
Le menu [VIRAGE] ne
s’affiche pas.
Les fonctions du GC001 ne sont pas
transmises au système
NAVpilot.
En vous référant à la section 5.8, vérifiez les réglages de
jumelage.
• En vous référant à la section 5.8, vérifiez les réglages de
jumelage.
• En vous référant à la section 5.3, vérifiez l’intensité du
signal. Si l’indication affiche une barre ou moins,
rapprochez-vous du processeur. Consultez également les
directives inhérentes au Bluetooth
Guide Utilisateur fourni avec le GC-001.
La fonctionnalité
Manœuvre Facile ne
fonctionne pas.
• En vous référant à la section 5.6.3, vérifiez si l’option
[DIRECT] est réglée sur [ON].
• En vous référant à la section 5.8, vérifiez les réglages de
jumelage.
• En vous référant à la section 5.3, vérifiez l’intensité du
signal. Si l’indication affiche une barre ou moins, le signal
peut être interrompu ou stoppé. Rapprochez-vous du
processeur et réessayez.
Le FAP-3011 et le GC001 affichent des
modes différents après
changement du mode.
L’équipement s’éteint
lors de la réception
d’une alerte.
• Attendez quelques instants afin de permettre le transfert
des données entre les deux unités. Une fois que les
données ont bien été reçues, l’affichage change.
• Changez le mode du FAP-3011.
• En vous référant à la section 5.10, effectuez un test de
vibration. Si l’équipement est mis hors tension lorsque
vous appuyez sur , il se peut que le moteur soit
défectueux. Demandez conseil à votre revendeur local.
Solution temporaire en cas de moteur de vibration
défectueux : En vous référant à la section 5.6.2,
désactivez la vibration. Le GC-001 reste sous tension mais
n’émet plus de vibration pour vous indiquer qu’une alerte
s’est déclenchée.
La zone située près de
la batterie est chaude
au toucher.
Vérifiez qu’aucun corps étranger n’est logé entre la batterie
et les bornes de cette dernière. Pour savoir comment
accéder à la batterie, reportez-vous au Guide Utilisateur
fourni avec le GC-001.
6. MAINTENANCE ET DÉPANNAGE
®
qui figurent dans le
10
6-3
Page 82

6. MAINTENANCE ET DÉPANNAGE
6.4 Diagnostique
Le système NAVpilot contient les diagnostics permettant de vérifier le processeur,
l’unité de contrôle, l’entrée/sortie NMEA 0183, le bus CAN, le clavier, l’écran, la barre
et le gouvernail (capteur de barre Accu-Steer FPS 12 V/24 V uniquement). Les tests
sont destinés aux techniciens de maintenance mais vous pouvez les effectuer afin
d’aider le technicien d’assistance à résoudre le problème.
6.4.1 Menu Diagnostique
1. En mode, STBY ou OVRD, ouvrez le menu.
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Réglage Système].
4. Sélectionnez [Diagnostique]. Le menu [Diagnostique] apparaît.
Diagnostic
Processeur
Unité de contrôle
Test Clavier
Préc
Ent.
1
1
Test Écran
Test de Barre
Diagnostic
Préc
Ent.
Remarque: Le contenu du menu [Diagnostique] change en fonction des réglages
du NAVpilot-300 lors de l’installation.
Reportez-vous à la section correspondante pour obtenir plus de détails sur chacune
des options disponibles dans le menu [Diagnostique].
• Processeur : section 6.4.2.
• Unité de Contrôle : section 6.4.3
• Test Clavier : section 6.4.4
• Test Écran : section 6.4.5
• Test de Barre : section 6.4.6
6-4
Page 83

6.4.2 Test du processeur
Ce test contrôle le bon fonctionnement du processeur.
Pour réaliser ce test, ouvrez le menu [Diagnostique], puis sélectionnez [Processeur].
Processeur Processeur
App :
Amorçage :
BLE :
ROM/RAM/Sauveg. :
Communication :
DBW :*
NMEA2000 :
ID NMEA2000 :
▼
« x » indique le numéro de version
« X » indique le numéro ID NMEA2000
*: s'affiche uniquement pour les bateaux EVCS
Les résultats indiquent «OK» en cas de statut normal, «NG» en cas de statut
anormal. Si «NG» s’affiche pour l’une des options, répétez le test. Si le résultat
affiche toujours «NG», consultez votre revendeur.
6454026-xx. xx
6454027-xx. xx
6454032-xx. xx
OK/OK/OK
Préc
OK
OK
OK
XXXXX
6. MAINTENANCE ET DÉPANNAGE
ID DBW :*
Version HW :
1
1
Tension d'Alim :
▼
XXXXX
xx
24,0 V
Préc
Pour revenir au menu Diagnostique, appuyez sur .
Pour revenir à l’écran normal (fermer les menus), effectuez une pression longue sur
.
Description des options de test du processeur
• [App] : Affiche le numéro de version du programme d’application.
• [Amorçage] : Indique le numéro de version du programme de démarrage.
• BLE : Numéro de version du logiciel Bluetooth®.
• [ROM/RAM/Sauveg.] : Affiche le statut de la ROM, de la RAM et de la Sauvegarde.
• [Communication] : Affiche les résultats du test de communication entre l’unité de
contrôle et le processeur.
• [NMEA2000] : Affiche les résultats du test NMEA2000.
• [DBW] : Affiche les résultats du test du port DBW.
• [ID NMEA2000] : Affiche l’ID du réseau NMEA2000.
• ID DBW : Affiche le numéro d’identification du port DBW.
• [Version HW] : Affiche la version logicielle de la carte PCB.
• [Tension d’Alim] : Affiche la tension d’alimentation.
6-5
Page 84

6. MAINTENANCE ET DÉPANNAGE
6.4.3 Test de l’unité de contrôle
Ce test contrôle le bon fonctionnement de l’unité de contrôle.
Pour réaliser ce test, ouvrez le menu [Diagnostique], puis sélectionnez [Unité de
Contrôle].
Unité de contrôle
App :
Amorçage :
ROM/RAM/Sauveg. :
Communication :
NMEA2000 :
ID NMEA2000 :
Tension d'Alim :
Version HW :
Les résultats indiquent «OK» en cas de statut normal, «NG» en cas de statut
anormal. Si «NG» s’affiche pour l’une des options, répétez le test. Si le résultat
affiche toujours «NG», consultez votre revendeur.
64540xx-xx. xx
64540xx-xx. xx
OK/OK/OK
OK
OK
XXXXX
24,0 V
-xx
Préc
«x» indique le numéro de version
«X» indique le numéro ID NMEA2000
Pour revenir au menu Diagnostique, appuyez sur .
Pour revenir à l’écran normal (fermer les menus), effectuez une pression longue sur
.
Description des options de test de l’unité de contrôle
• [App] : Affiche le numéro de version du programme d’application.
• [Amorçage] : Indique le numéro de version du programme de démarrage.
• [ROM/RAM/Sauveg.] : Affiche le statut de la ROM, de la RAM et de la Sauvegarde.
• [Communication] : Affiche les résultats du test de communication entre l’unité de
contrôle et le processeur.
• [NMEA2000] : Affiche les résultats du test NMEA2000.
• [ID NMEA2000] : Affiche l’ID du réseau NMEA2000.
• [Tension d’Alim] : Affiche la tension d’alimentation.
• [Version HW] : Affiche la version logicielle de la carte PCB.
6-6
Page 85

6.4.4 Test clavier
Blanc
Démarrer test
Noir
Rouge
Vert
Bleu
Multi-HUE
RGB
Le test du clavier permet de vérifier les touches de l’unité de contrôle.
Pour réaliser ce test, ouvrez le menu [Diagnostique], puis sélectionnez [Test Clavier].
Appuyez sur chacune des touches. L’emplacement à l’écran associé est rempli en
bleu si la touche fonctionne normalement.
Pour revenir au menu Diagnostique, appuyez sur trois fois.
6. MAINTENANCE ET DÉPANNAGE
Test Clavier
Appuyer trois fois sur [menu]
pour revenir.
Pour revenir à l’écran normal (fermer les menus), effectuez une pression longue sur
.
6.4.5 Test écran
Le test de l’écran permet de vérifier que l’unité de contrôle affiche de manière
appropriée les tons des couleurs.
Pour réaliser ce test, ouvrez le menu [Diagnostique], puis sélectionnez [Test Écran].
Appuyez sur pour parcourir les écrans dans l’ordre indiqué ci-dessous.
Test Écran
Changer diagramme de test ?
Oui... Appuyer sur [10>>]
Démarrer test
Appuyer sur [Menu] pour revenir
10
Multi-HUE
RGB
Blanc
Bleu
Noir
Rouge
Vert
Pour revenir au menu Diagnostique, appuyez sur .
Pour revenir à l’écran normal (fermer les menus), effectuez une pression longue sur
.
6-7
Page 86
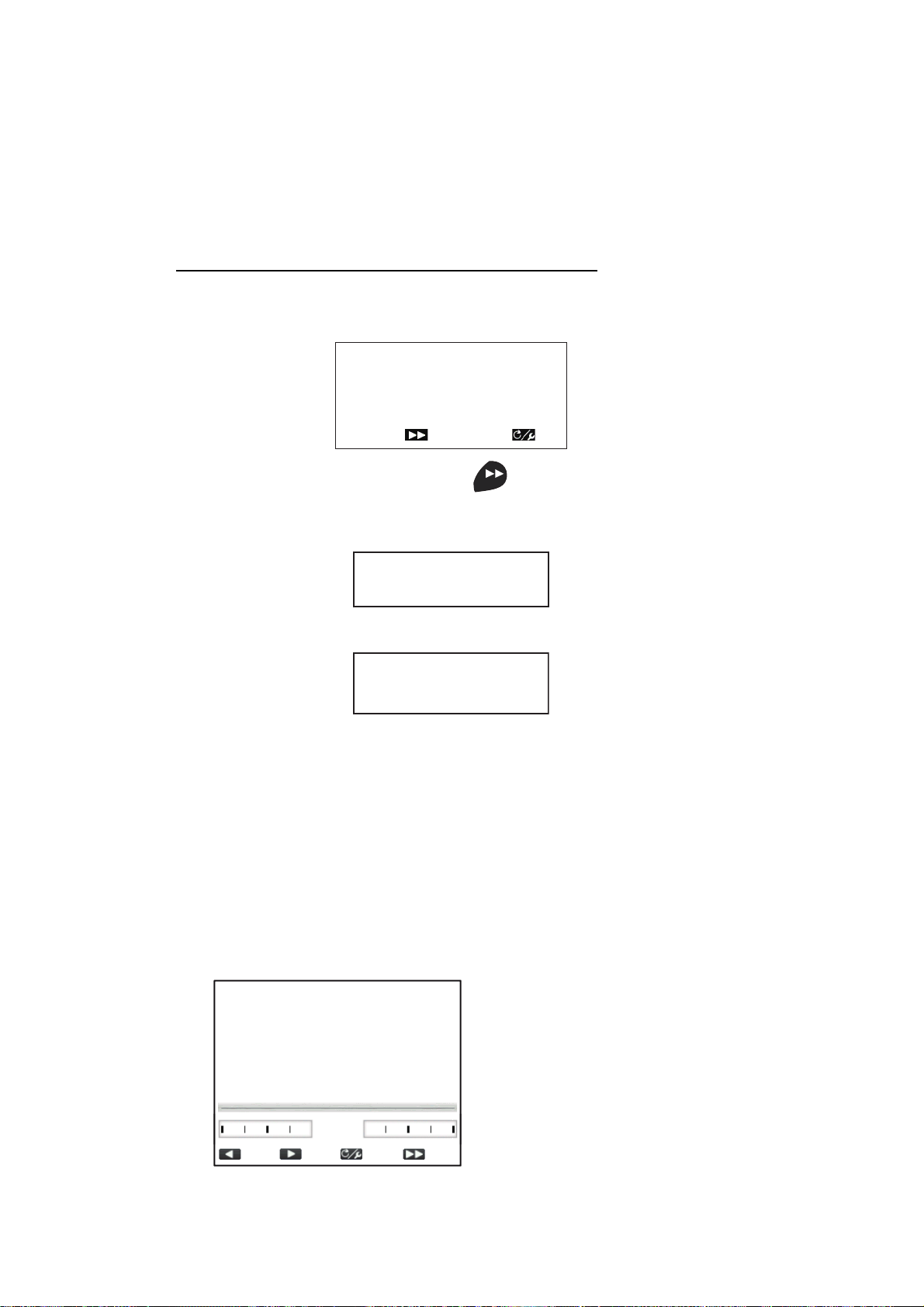
6. MAINTENANCE ET DÉPANNAGE
°
6.4.6 Test de barre
Le test de la barre permet de vérifier les différents aspects de la barre et des
commandes. Pour réaliser ce test, ouvrez le menu [Diagnostique], puis sélectionnez
[Test de Barre].
Remarque: Le test de barre n’est pas disponible lorsque [Type de Bateau] est réglé
sur [EVCS Pod], [EVCS H.Bord], [EVCS-A.Bord] ou [EVCS A/H B].
Lorsque l’unité de référence de barre est installée
1. Ouvrez le menu [Diagnostique], puis sélectionnez [Test de Barre]. Le message de
confirmation suivant apparaît.
Utiliser la barre pour
centrer le gouvernail avant
test gouvernail.
Êtes-vous sûr ?
Oui Non
2. Centrez la barre, puis appuyez sur pour démarrer le test de barre.
10
Le message suivant s’affiche.
Pour arrêter le test de barre à tout moment, appuyez sur une touche.
Test de Barre. Patienter Svp.
Appuyer sur une touche
pour annuler.
Une fois le test terminé, le message suivant apparaît.
Test de Barre terminé.
Appuyer sur une touche
pour continuer.
Remarque 1: Si le test de barre est interrompu avant la fin, le mode de navigation
ne peut sortir du mode STBY.
Remarque 2: Si l’un des messages suivants apparaît, cela indique que le test de
barre est interrompu avant la fin. Corrigez le problème, puis relancez le test de
barre.
• "Test de Barre échoué. Appuyez sur une touche pour continuer."
• "Erreur d’angle de barre. Vérifier le groupe puissance. Appuyez sur une touche
pour continuer."
• "Erreur commande barre. Vérifier le groupe puissance. Appuyez sur une touche
pour continuer."
3. Appuyez sur une touche pour afficher le résultat du test.
Test de Barre
Groupe Puissance :
Jeu de la Barre :
Vitesse de Barre :
Tension d'Alim :
Safe Helm 24V
Rapide
12,1 V
• [Groupe Puissance] : Groupe puissance
utilisé avec le NAVpilot : [Réversible 12V
OK
(ou 24V)] ou [Safe-Helm 12V (ou 24V)].
• [Jeu de Barre] : Jeu de barre ([OK] ou
[Gros])
• [Vitesse Barre] : Vitesse de barre ([OK],
[Rapide] ou [Lente])
• [Tension d’Alim] : Tension d’alimentation
0°
0
Préc
au niveau du processeur.
6-8
Page 87

6. MAINTENANCE ET DÉPANNAGE
Remarque 1: Si le jeu de barre est supérieur à 1,3°, le bateau ne peut être
contrôlé correctement. Vérifiez la présence d’air dans le système de barre et si
la vitesse de barre est supérieure à 10°/s.
Remarque 2: Ne mettez pas l’équipement hors tension dans les deux secondes
qui suivent le test de barre. Si l’équipement est mis hors tension de façon
accidentelle, relancez le test de barre.
4. Fermez le menu.
Pour Fantum Feedback
TM
1. Ouvrez le menu [Diagnostique], puis sélectionnez [Test de Barre]. Le message de
confirmation suivant apparaît.
Utiliser la barre pour
centrer le gouvernail avant
test gouvernail.
Êtes-vous sûr ?
Oui Non
2. Centrez la barre, puis appuyez sur pour démarrer le test de barre.
10
Le message suivant s’affiche.
Appuyer et maintenir enfoncée
la touche TRIBORD jusqu'au
mouvement de la barre.
Déplacer la barre.
Annuler
3. Appuyez sur et vérifiez que la barre se déplace.
4. Relâchez . Le message suivant s’affiche.
1
1
De quel côté la barre a-t-elle
tourné ?
BÂBORD
TRIBORD
Aucun mvmnt/Abandon
5. Appuyez sur ou pour confirmer la direction dans laquelle la barre se
1
1
déplace. Le message suivant s’affiche.
Utiliser la barre ou la touche
flèche pour déplacer la barre
vers limite de Bâbord ou Tribord.
BÂBORD
TRIBORD
Barre en Butée
Annuler
6. Tournez la barre ou appuyez sur ou pour déplacer la barre jusqu’en
1
butée. Si la barre ne peut plus bouger dans cette direction, appuyez sur .
1
10
Le message suivant s’affiche.
Appuyer et maintenir enfoncée la
touche flèche pour déplacer la
barre vers la limite opposée.
Déplacer vers BÂBORD
Déplacer vers TRIBORD
Annuler
6-9
Page 88

6. MAINTENANCE ET DÉPANNAGE
7. Effectuez un appui long sur ou pour déplacer la barre dans la
1
1
direction opposée à celle choisie à l’étape 6, jusqu’à ce qu’elle arrive en butée.
Lorsque la barre se déplace, le message suivant s’affiche.
Ne pas relâcher la touche
avant que la barre n'ait
atteint la butée.
8. Si la barre ne peut plus bouger dans cette direction, relâchez ou pour
1
1
afficher le message suivant.
La barre a-t-elle atteint
la butée ?
Oui
Non
9. Effectuez l’une des opérations suivantes :
Si la barre a atteint la butée correctement : Appuyez sur . L’un des
•
10
messages suivants s’affiche en fonction de la touche enfoncée à l’étape 7.
Appuyer et maintenir enfoncée la
touche flèche pour déplacer la
barre vers la limite opposée.
Déplacer vers BÂBORD
Annuler
1
est actionné à l'étape 7.
•
Si la barre n’a pas atteint correctement la butée: Appuyez sur pour
Appuyer et maintenir enfoncée la
touche flèche pour déplacer la
barre vers la limite opposée.
Déplacer vers TRIBORD
Annuler
1
est actionné à l'étape 7.
afficher le message suivant.
Le Test de Barre est incomplet.
Redémarrer ?
Oui
Non
Appuyez sur pour relancer le test à partir de l’étape 6 ou appuyez sur
10
pour interrompre le test.
10. Effectuez un appui long sur ou pour déplacer la barre dans la
1
1
direction opposée à celle choisie à l’étape 7, jusqu’à ce qu’elle arrive en butée.
Lorsque la barre se déplace, le message suivant s’affiche.
Ne pas relâcher la touche
avant que la barre n'ait
atteint la butée.
11. Si la barre ne peut plus bouger dans cette direction, relâchez ou pour
1
1
afficher le message suivant.
La barre a-t-elle atteint
la butée ?
Oui
Non
12. Effectuez l’une des opérations suivantes :
6-10
•
Si la barre a atteint la butée correctement : Appuyez sur pour réaliser le
10
test. Le message suivant apparaît.
Test de Barre terminé.
Appuyer sur une touche
pour continuer.
Page 89
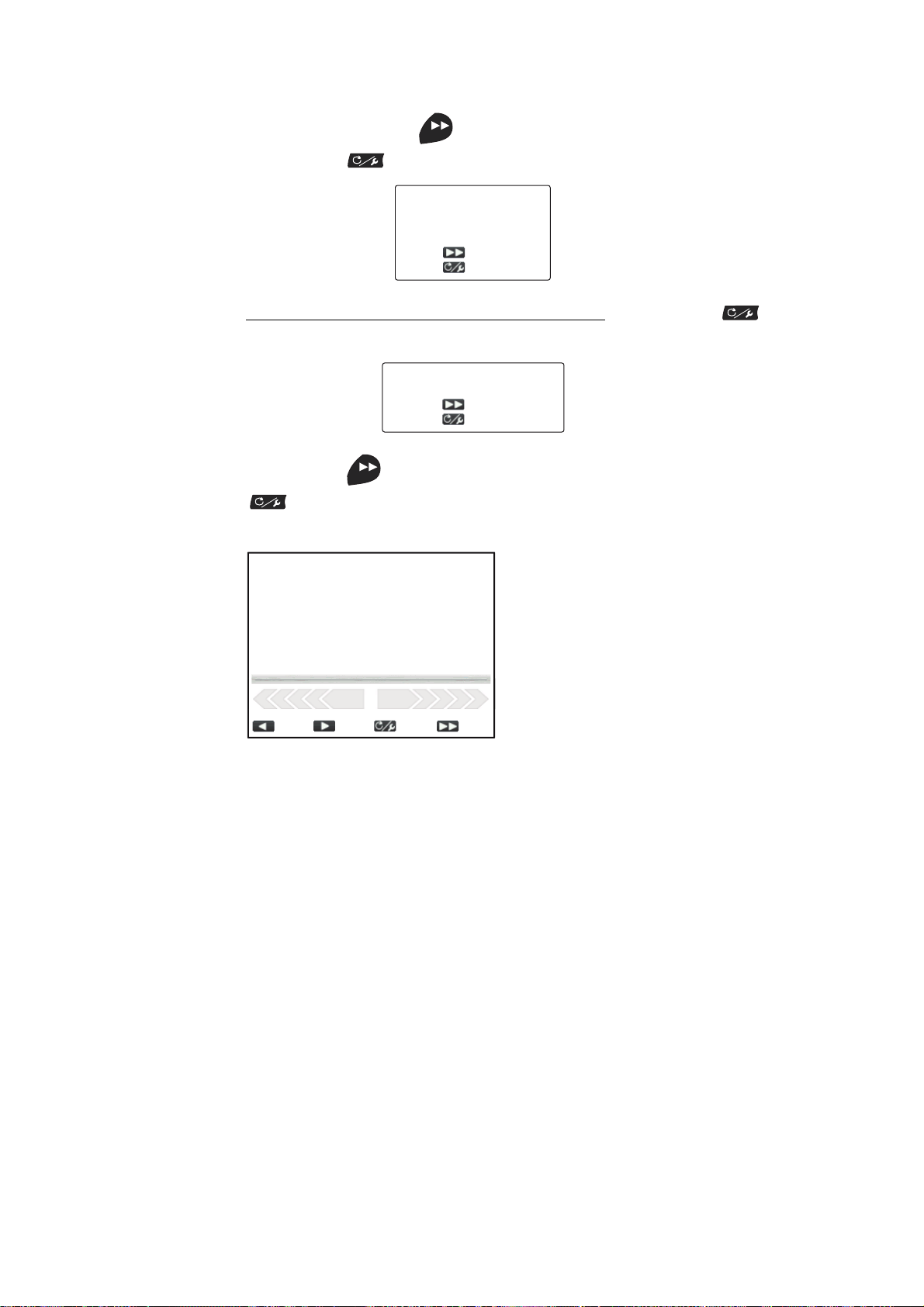
6. MAINTENANCE ET DÉPANNAGE
Remarque: Si la vitesse de navigation doit être ajustée, le message suivant
s’affiche. Appuyez sur pour relancer le test à partir de l’étape 6 ou
10
appuyez sur pour interrompre le test.
L'installation peut ne pas
être correcte, la vitesse
de la barre est inexacte.
Refaire le test Barre ?
Oui
Non
•
Si la barre n’a pas atteint correctement la butée : Appuyez sur pour
afficher le message suivant.
Le Test de Barre est incomplet.
Redémarrer ?
Oui
Non
Appuyez sur pour relancer le test à partir de l’étape 6 ou appuyez sur
10
pour interrompre le test.
13. Appuyez sur une touche pour afficher le résultat du test de barre.
Test de Barre
Groupe Puissance :
Vitesse de Barre :
Réactivité de Barre :
Tension d'Alim :
Safe Helm 24V
12,1 V
• [Groupe Puissance] : Groupe puissance
utilisé avec le NAVpilot : [Réversible 12V
OK
(ou 24V)] ou [Safe-Helm 12V (ou 24V)].
• [Vitesse Barre] : Vitesse de barre ([OK],
5
[Rapide] ou [Lente])
• [Réactivité de Barre] : L’importance de
l’opération de barre requise pour déplacer
la barre.
• [Tension d’Alim] : Tension d’alimentation
Préc
au niveau du processeur.
Remarque: Ne mettez pas l’équipement hors tension dans les deux secondes qui
suivent le test de barre. Si l’équipement est mis hors tension, le test n’est pas
effectué et doit être relancé.
14. Fermez le menu.
6.4.7 Test Sensibilité Barre
Le test de sensibilité de mouvement de barre vérifie la connexion entre le processeur
et le groupe Accu-Steer FPS 12V (ou 24V). Vous pouvez démarrer ce test depuis le
menu [Diagnostique] sous le menu [Réglage Système].
Remarque 1: La procédure suivante n’est pas disponible pour les bateaux équipés
de groupes puissance autres que l’Accu-Steer FPS 12 V (ou 24 V).
Remarque 2: Si le test de sensibilité de barre n’a pas été effectué lors de l’installation,
le menu [Test Sensibilité Barre] ne s’affiche pas dans le menu [Diagnostique].
6-11
Page 90

6. MAINTENANCE ET DÉPANNAGE
1. Appuyez sur pour sélectionner [Test Sensibilité Barre] dans le menu
1
[Diagnostique].
Centrer physiquement
la barre avant le
démarrage du test
Commencer le test ?
Oui
Non
2. Centrez la barre puis appuyez sur .
10
L’un des messages suivants s’affiche.
Tourner la barre pour déplacer
Tourner barre à BÂBORD ou TRIBORD.
Appuyer sur une touche pour annuler.
Lorsque le RRU est installé
le gouvernail à TRIBORD.
Appuyer sur une touche pour annuler.
Pour Fantum Feedback
TM
3. Lorsque le RRU est installé : Tournez la barre vers BÂBORD ou TRIBORD.
Pour Fantum Feedback
Tourner la barre du côté opposé.
Appuyer sur une touche pour annuler.
Lorsque le RRU est installé
™
: Tournez la barre vers TRIBORD.
Tourner la barre pour déplacer
le gouvernail à BÂBORD.
Appuyer sur une touche pour annuler.
Pour Fantum Feedback
TM
4. Lorsque le RRU est installé : Tournez la barre dans la direction opposée à celle
choisie à l’étape 3.
™
Pour Fantum Feedback
: Tournez la barre vers BÂBORD.
Si la connexion est normale, le message "Test sensi. Mvt Barre terminé. Appuyez
sur une touche pour continuer." s’affiche. En cas de dysfonctionnement, "Test
sensi. Mvt Barre raté. Vérifier le capteur. Appuyez sur une touche pour continuer."
s’affiche. Vérifiez que votre capteur de barre est un Accu-Drive FPS 12 V/24 V.
Vérifiez également que le capteur de barre est correctement connecté au
processeur.
5. Appuyez sur une touche pour afficher le résultat du test de barre.
L’exemple d’écran ci-dessous s’applique au Fantum Feedback
™
installé, l’apparence de l’indicateur en bas de l’écran change.
Test Sensibilité Barre
Entrée Universelle1 :
Entrée Universelle2 :
TRIBORD*
BÂBORD*
Préc
*: « -- » apparaît si le test échoue.
6. Appuyez sur pour fermer le résultat du test.
. Si le RRU est
6-12
Page 91

6.5 Données Système
L’écran des données système permet de vérifier l’état de l’équipement et du groupe.
Pour afficher les données système, suivez la procédure ci-dessous.
1. En mode STBY, AUTO, NAV ou OVRD, appuyez sur pour ouvrir le menu.
Pour Priorité Barreur, appuyez sur puis sélectionnez [MENU] dans le menu
[VIRAGE].
6. MAINTENANCE ET DÉPANNAGE
2. Sélectionnez [Autre Menu].
3. Sélectionnez [Réglage Système].
4. Sélectionnez [Données Système]. Les
données système s’affichent.
Contenu des données système
• [Tension d’Alim] : Tension d’alimentation du
NAVpilot.
• [Groupe Puissance]* : Groupe utilisé avec le
NAVpilot.
• [Tempo FET] : Température de la carte de circuits imprimés dans le processeur.
• [Courant Groupe]* : Courant de l’entraînement du moteur.
* : Ne s’affiche pas pour les bateaux équipés d’un système EVC.
6.6 Messages
Votre équipement affiche des messages pour vous informer des éventuels problèmes
d’équipement et d’état de fonctionnement.
Données Système
Tension d'Alim :
Groupe Puissance : Safe Helm 12V
Tempo FET : 30,2 °C (86,4 °F)
Courant Groupe : 0,0 A
Préc
24,0 V
6.6.1 Fenêtre de message pop-up
Le système envoie différentes notifications, comme les notifications du processeur,
les résultats de test et les alertes transgressées, sous la forme de messages pop-up.
Ces messages sont également stockés dans le menu [Message].
6.6.2 Menu Message
Le menu Message contient les détails inhérents aux dernières alertes.
Pour afficher le menu [Message], suivez la procédure ci-dessous.
1. En mode STBY, AUTO, NAV ou OVRD, appuyez sur pour ouvrir le menu.
Pour Priorité Barreur, appuyez sur puis sélectionnez [MENU] dans le menu
[VIRAGE].
6-13
Page 92
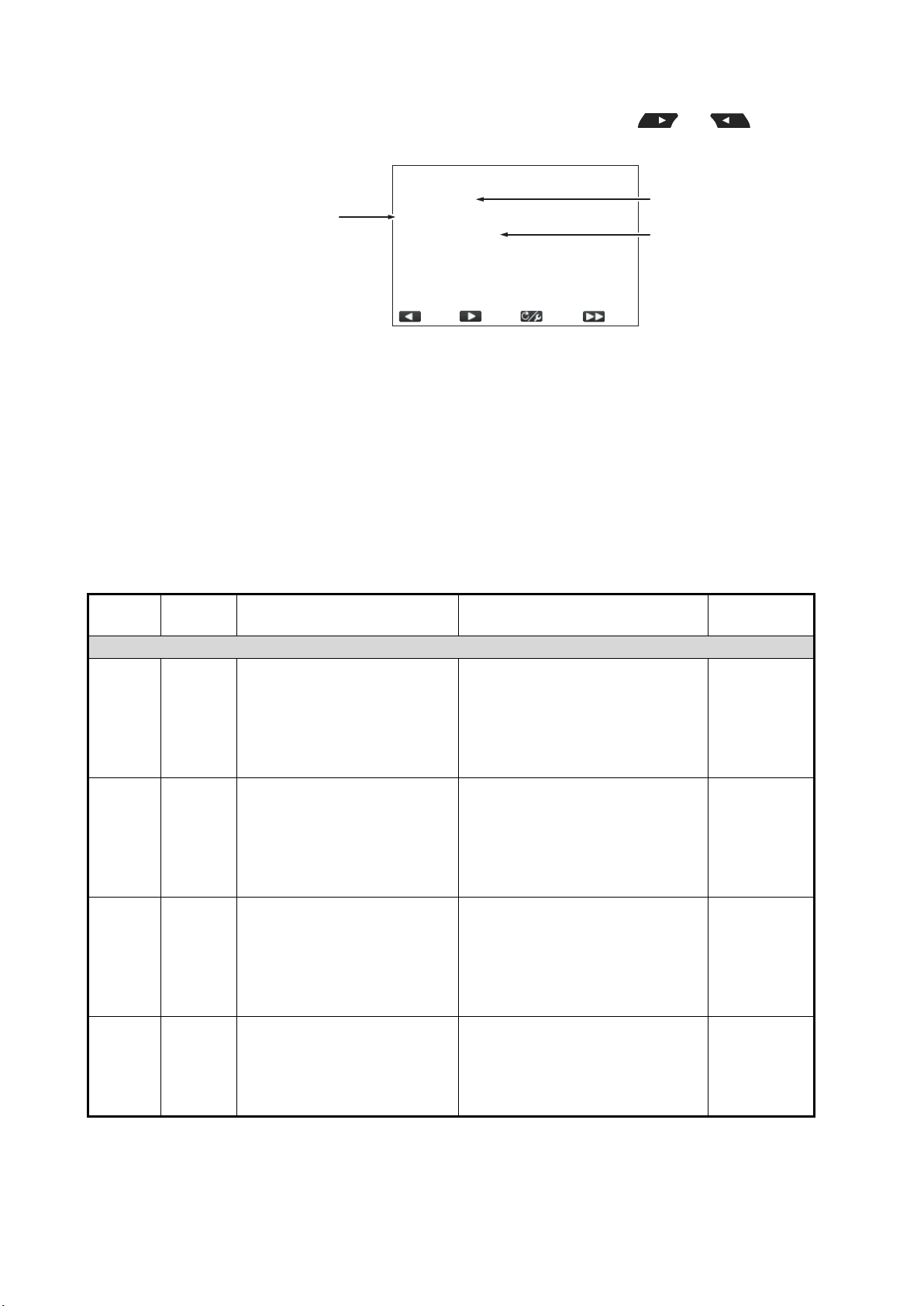
6. MAINTENANCE ET DÉPANNAGE
A
2. Sélectionnez [Message]. Le message apparaît par ordre décroissant de priorité.
Lorsqu’il y a plus d’une page de messages, appuyez sur ou pour
changer de page.
Alerte 1/1
N° de message,
priorité du message
(Alarme, Avertissement,
ttention)
2016 Attention
Alarme Veille
3. Fermez le menu.
6.6.3 Description du message
Le tableau ci-dessous indique la priorité selon laquelle les alertes sont affichées,
le code d’erreur, le niveau d’alerte, le message, la signification et l’action corrective
(si elle existe) pour l’ensemble des messages.
Message
Préc
1
Page actuelle/
nombre total de page
Message
1
Les messages qui apparaissent dans l’Historique des Alertes (reportez-vous à
la section 3.5) sont matérialisés par un "" dans la colonne Liste des Alertes.
Les messages qui n’apparaissent pas dans l’Historique des Alertes sont matérialisés
par un "".
Priorité
Code
erreur
Message
Signification/Action
corrective
Niveau d’alerte : Alarme
1 0001 Erreur de Communication Une erreur de communication
s’est produite dans le
processeur. Mettez l’appareil
hors tension et contactez votre
revendeur local pour un
entretien.
2 0002 Dysfonctionnement groupe
puissance.
Vérifiez le circuit du groupe.
Un dysfonctionnement a été
détecté dans le groupe
puissance. Mettez l’appareil hors
tension et contactez votre
revendeur local pour un
entretien.
3 0003 Le groupe puissance est en
surcharge.
Vérifiez le circuit du groupe.
Le système a détecté une
surcharge au niveau du groupe
puissance. Mettez l’appareil hors
tension et contactez votre
revendeur local pour un
entretien.
4 0004 Le groupe puissance est en
surchauffe.
Vérifiez le circuit du groupe.
Le groupe puissance a
surchauffé. Mettez l’appareil
hors tension et contactez votre
revendeur local pour un
entretien.
Historique
des Alertes
6-14
Page 93

6. MAINTENANCE ET DÉPANNAGE
Priorité
5 0005 Dysfonctionnement
6 0006 Erreur d’angle de barre.
Niveau d’alerte : Avertissement
7 1001 Réduire vitesse pour SABIKI
8 1002 Erreur de comm. avec syst
9 1003 Erreur de communication
10 1004 Aucune donnée de cap
11 1005 Modif soudaine des données
12 1006 Erreur accéléromètre. Le compas a reçu un message
13 1013 Initialisation du capteur de
14 1007 Aucune donnée de vitesse
15 1008 Pas de donnée NAV
Code
erreur
Message
puissance barre.
Vérifiez le circuit du groupe.
Vérifiez le circuit du groupe.
(<5nd).
EVC.
entre le processeur et l’unité
de contrôle.
disponible.
de cap.
cap. Cela dure 2 minutes.
Patientez un instant.
dispo. Vérifier source vit. ou
la saisir manuellement ds
Réglage Paramètre.
disponible.
Signification/Action
corrective
Un dysfonctionnement a été
détecté dans le groupe
puissance de barre. Mettez
l’appareil hors tension et
contactez votre revendeur local
pour un entretien.
Un dysfonctionnement a été
détecté dans le groupe
puissance. Mettez l’appareil hors
tension et contactez votre
revendeur local pour un
entretien.
Vous avez tenté d’activer le
mode SABIKI mais la vitesse de
votre bateau est supérieure à
5 nd. Réduisez la vitesse en
dessous de 5 nd et réessayez.
Il y a un problème de connexion
entre le processeur et l’IPS.
Vérifiez les connexions.
Il y a un problème de connexion
entre le processeur et l’unité de
contrôle. Vérifiez les
connexions.
Aucune donnée de cap n’est
réceptionnée. Vérifiez la
connexion au compas et le statut
de celui-ci.
Une modification soudaine des
données de cap a été détectée.
Vérifiez le statut du compas.
d’erreur. Vérifiez le statut du
compas.
Le compas est en cours
d’initialisation. Attendez que le
processus d’initialisation soit
terminé (environ deux minutes).
Aucune donnée de vitesse n’est
réceptionnée. Vérifiez la source
du capteur pour les données de
vitesse ou saisissez une valeur
de vitesse manuellement.
(Reportez-vous à la
section 4.1.3.)
Aucune donnée NAV n’est
réceptionnée. Vérifiez la
connexion au capteur utilisé en
tant que source de données
NAV.
Historique
des Alertes
6-15
Page 94

6. MAINTENANCE ET DÉPANNAGE
Priorité
16 1009 Données NAV détériorées. Le niveau de qualité des
17 1010 Aucune donnée position
18 1011 Trop rapide pour ce mode.
19 1012 Erreur données
Niveau d’alerte : Attention
20 2001 Tension d’entrée trop faible. La tension d’entrée est trop
21 2002 Tension d’entrée trop haute. La tension d’entrée est trop
22 2003 Erreur ds paramètres du
23 2004 Réglages compas
24 2005 Source du cap modifiée.
Code
erreur
Message
reçue.
Réduire vitesse à moins de
10 nd.
sauvegardées.
mode NAV. Modifier les
modes.
incomplets. Étalonner le
compas ds le menu.
Réglages compas
incomplets. Étalonner le
compas ds le menu.
Signification/Action
corrective
données de navigation reçues
est faible. Vérifiez le statut du
capteur utilisé en tant que
source de données NAV.
Aucune donnée de position n’est
réceptionnée. Vérifiez le statut
du capteur de position.
Le mode que vous avez
sélectionné requiert une vitesse
de moins de 10 nœuds.
Réduisez votre vitesse à moins
de 10 nœuds.
Une erreur s’est produite au
niveau des données de
sauvegarde stockées dans le
processeur.
Si cette erreur se produit, tous
les réglages usine sont
restaurés. Une configuration
d’installation est requise,
demandez conseil à votre
revendeur local.
faible. Vérifiez la puissance et le
statut de l’alimentation du
bateau.
haute. Vérifiez la puissance et le
statut de l’alimentation du
bateau.
Il y a une erreur dans les
paramètres du mode NAV.
Passez à un autre mode que le
mode NAV.
Les réglages du compas sont
incomplets ou une erreur a été
détectée au niveau des
réglages. Vérifiez et effectuez le
décalage compas via le menu
[Configuration du Compas] sous
le menu [Retours de Mer].
Reportez-vous au Manuel
d’Installation pour plus de
détails.
La source des données de cap a
été modifiée. Étalonnez le
compas à nouveau via le menu
[Configuration du Compas] sous
le menu [Retours de Mer].
Reportez-vous au Manuel
d’Installation pour plus de
détails.
Historique
des Alertes
6-16
Page 95

6. MAINTENANCE ET DÉPANNAGE
Priorité
25 2008 Contrôle EVC. Le mode Contrôle a été activé.
26 2009 Arrivé au Waypoint final. Vous avez atteint le Waypoint
27 2010 Waypoint a été mis à jour. Le système est passé au
28 2011 Le mode Pêche a été activé.
29 2013 Attention Alerte ! 10 minutes se sont écoulées
30 2006 Source de position modifiée. La source des données de
31 2007 Source de vitesse modifiée. La source des données de
32 2014 Mode NAV complet.
33 2017 Erreur capteur Priorité Barre. Il y a un problème avec les
34 2015 Alerte de cap. Un écart a été détecté par
35 2016 Attention Alerte ! L’alerte de veille a été émise
Code
erreur
Message
Changement de modes.
Signification/Action
corrective
final de votre route.
prochain Waypoint.
Le mode Pêche
depuis la dernière alerte de
veille. Appuyez sur une touche.
position a changé.
vitesse (SOG/STW) a changé.
Le mode NAV est terminé et le
système est passé à un autre
mode.
données du capteur de barre.
Vérifiez le statut du capteur de
barre.
rapport à la route définie
(reportez-vous à la section 3.3).
Corrigez le cap en conséquence.
(reportez-vous à la section 3.2).
Appuyez sur une touche.
™
a été activé.
Historique
des Alertes
6-17
Page 96

6. MAINTENANCE ET DÉPANNAGE
6.7 Affichage des capteurs utilisés
Le menu [Capteurs Utilisés] donne une liste exhaustive des capteurs connectés à
votre NAVpilot. Pour afficher le menu [Capteurs Utilisés], suivez la procédure cidessous.
1. En mode STBY, AUTO, NAV ou OVRD, appuyez sur pour ouvrir le menu.
Pour Priorité Barreur, appuyez sur puis sélectionnez [MENU] dans le menu
[VIRAGE].
2. Sélectionnez [Capteurs Utilisés]. La liste des capteurs utilisés en tant que source
de données s’affiche.
Exemple appareil ID unique CAN
Nom de l'appareil
Voir Capteurs Utilisés Voir Capteurs Utilisés
Source de données courant
HDG :
POS :
STW :
----------------------
TZTL12F : 0 : 000C2F
----------------------
▼
Préc Préc
1
1
SOG :
NAV :
----------------------
TZTL12F : 0 : 000C2F
▼
L’affichage montre le dispositif utilisé en tant que source pour chaque type de
données en indiquant l’ID exemple appareil et CAN unique du dispositif source.
Les lignes en pointillés indiquent qu’aucune connexion ou qu’aucun capteur n’est
actuellement actif.
3. Fermez le menu.
6-18
Page 97

ANNEXE 1 ARBORESCENCE DES MENUS
touche
(pression
longue)
Message (Afficher les messages d'alerte)
Capteur Utilisé (Afficher la liste des capteurs connectés)
Réactivité de Barre (1 à 20 ; lorsque le test de barre est terminé : Affiche les résultats
du test de barre ; lorsque le test de barre n'est pas terminé : 6)*
Apprentissg Auto (OFF, ON)
Valeur Déviation (
Paramétrage Manuel
Auto
, Valeur (1 à 9 ; 5))
Temps (0 à 10 (°) ; 1°)
Gain Barre (1 à 20 ; 3)
Compt. Barre (0 à 20 : 1)
Réd. Manuel (P5.0 à S5.0 (°) ;
Calcul Vitesse (Auto, Manuel (0,1 à 40,0 kn,
AUTO Avancé (OFF, ON)*
Mode NAV (Précision,
Source Data NAV ( ---------- , NMEA2000)*
Passage Waypoint (
À l'arrivée (
Couleur Affichg (
Tout Droit
Blanc
, Orbite Bâbord, Orbite Tribord, Forme 8 Bâbord, Forme 8 Tribord)*
RC sans fil
2
Économie
Auto
, Manuel)*
3
)*
3
3
, Noir)
1 ( ---------- , nom GC-001)
30,0 kn
Les réglages par défaut sont
affichés en caractères gras et
en italique. Pour les paramètres
par défaut non définis, une case
« » est utilisée.
0,0°
))
1
)
3
2 ( ---------- , nom GC-001)
3 ( ---------- , nom GC-001)
Menu Autre
Alerte (voir N° 1 ci-dessous pour les détails)
Opt Pil Auto (voir N° 2 ci-dessous pour les détails)
Options Mode Pêche (voir N° 3 ci-dessous pour les détails)
Réglage Priorité Barreur (voir N° 4 sur la page suivante pour les détails)
Réglage Barre Assistée (voir N° 5 sur la page suivante pour les détails)
Réglage Système (voir N° 6 sur la page suivante pour les détails)
AlerteN° 1
N° 2
Opt Pil Auto
N° 3
Options Mode Pêche
Disponible uniquement avec
*1 :
Fantum Feedback
Alerte Veille (OFF, ON (1 min à 99 min ;
5 min
)
Alerte de Cap (1° à 90° ; 30°)
AUTO Avancé (OFF, ON)*
Mode NAV (Précision,
Source de données NAV ( ---------- , NMEA2000)*
Passage Waypoint (Auto, Manuel)*
À l'arrivée (Tout Droit, Orbite Bâbord, Orbite Tribord, Forme 8 Bâbord,
Forme 8 Tribord)*
5
Économie
6
6
)*
6
6
Angle Virage1 (30° à 180° ; 180°)
Angle Virage2 (30° à 180° ; 90°)
Orbite
Spirale
Rayon Orbite (0,05 à 9,99 NM ; 0,10 NM)
Vitesse Spirale (0,1 à 3,0 kn ; 0,5 kn)
Rayon Spirale (0,05 à 9,99 NM ; 0,10 NM)
Forme 8
Zigzag
Rayon Forme 8 (0,05 à 9,99 NM ; 0,10 NM)
Angle Virage (30° à 150° ; 90°)
Largeur (0,05 à 0,99 NM ; 0,10 NM)
SABIKI
TM
Rép. SABIKI (1 à 5, 3)
Affiché uniquement lorsque
*3 :
le mode NAV est actif.
Non affiché lorsque le mode
*5 :
AUTO est actif.
Affiché uniquement lorsque
*2 :
le mode AUTO est actif.
Non affiché lorsque le mode
*4 :
STBY ou OVRD est actif.
Non affiché lorsque le mode
*6 :
NAV est actif.
AP-1
Page 98

ANNEXE 1 ARBORESCENCE DES MENUS
N° 4
Réglage
Priorité
Barreur*
N° 5
Réglage Barre
1*2
Assistée *
N° 6 Réglage
Système*
1*2
2
Priorité Barreur (OFF, ON)*2
Délai Prio Barre (1 sec à 20 sec, 5 sec)*
Sensib. Priorité Barre (1 à 10, 5)*
Bip Prior. barre (OFF, ON)*
Barre Assistée (OFF, ON)*
2
2
2
Vitesse inf à (1,0 à 25,0 kn, 10,0 kn)*
Assistance en Stand-By (OFF, ON)*
Vitesse Assistance Barre (1 à 10 ; 10)*
Bip Prior. barre (OFF, ON)*
Bip Clavier (OFF, ON)*
4
2
Verr. Touche (Déverrouiller, Verrouiller)*
Partage (Autonome, Répétiteur, Maître)*
Groupe (A, B, C)*
Réglage par Défaut (Oui, Non)*
Svgde Param Util (Non, Oui)*
Charg Param Util (Non, Oui)*
2
2
2
2
Historique des Alertes (Affiche l'historique des alertes)*
2
2
2
2
2
2
2
Simu/Démo (OFF, Images Démo, Simulateur, Simu avec Barre)*
Diagnostique*2 (OFF, Processeur, Unité de Contrôle, Test Clavier,
Test Écran, Test de Barre*
Données Système (Affiche l'écran des données du système)*
3
, Test Sensibilité Barre*1)
2
2
*1 : Disponible uniquement lorsque les réglages et tests suivants sont réalisés lors de l'installation :
• [Groupe Puiss.] réglé sur [Safe Helm12V] ou [Safe Helm24V].
• [Test Sensibilité Barre] réalisé.
*2 : Affiché uniquement lorsque le mode STBY ou OVRD est actif.
3
: Non affiché lorsque le réglage [Type de Bateau] lors de l'installation est [EVCS Pod],
*
[EVCS A Bord], [EVCS- A/HORS] ou [EVCS-Hors Bord].
*4 : Affiché uniquement lorsque l'appareil est connecté à SEASTAR SOLUTIONS OPTIMUS et que
[Type de Bateau] est réglé sur [EVCS Pod], [EVCS A Bord], [EVCS- A/HORS] ou [EVCS-Hors Bord].
Arborescence des menus GC-001
Appuyer sur
VERR. TOUCHE (
ALARME
puis sélectionner
[Menu Système]
DIRECT (OFF, ON)
RÉTROÉCLAIRAGE (OFF, ON)
JUMELAGE (NON, OUI)
ÉTALONNAGE (
MODE VEILLE (
AUTO OFF (
DIAGNOSTIQUE
DÉVERROUILLER
BUZZER (OFF, ON)
VIBRATION (
NON
30 SEC
OFF
, 1 H, 3 H, 6 H)
OFF
, ON)
, OUI)
, 1 MIN, 3 MIN)
TEST BT
CHANGER ALIM. (1 À 7 ; 7)
BATTERIE
AUTOTEST
TEST DES TOUCHES
TEST GYRO
TEST ÉCRAN
TEST BUZZER
TEST VIBRATION
MODE RE
PARASITE
TOUT EFFACER (NON, OUI)
, VERROUILLER)
AP-2
Page 99

NAVpilot-300
CARACTÉRISTIQUES DU PILOTE AUTOMATIQUE
NAVpilot-300
1 UNITÉ DE CONTRÔLE
1.1 Type d’écran LCD couleur 4,1 pouces TFT, 320 x 240 pixels (QVGA)
1.2 Luminosité 700 cd/m2 en utilisation normale
1.3 Contraste 8 niveaux
1.4 Nombre max. d’unités
dans un réseau
2 UNITÉ DE CONTRÔLE
2.1 Mode de navigation STBY, Auto, Évitage, NFU (Non-follow up), Virage, Auto avancé*,
2.2 Gain barre Auto/1-20 (Manuel)
2.3 Contre barre Auto/0-20 (Manuel)
2.4 Réglage Trim de -5° (bâbord) à +5° (tribord)
2.5 Vitesse changement
de cap
2.6 Alarme Écart de cap, Veille
2.7 Entraînement moteur/
électrovanne
3
Navigation*, Mode pêche TM*, Contrôle* : données externes
requises
de 1 à 20 deg/s
10 A en continu, 20 A pour 5 secondes
3 TÉLÉCOMMANDE TACTILE
3.1 Type d’écran LCD 1,28 pouces TFT, 128 x 128 pixels
3.2 Distance de communication Vision étendue 10 m (selon les conditions ambiantes)
)scp2 ,AAA( CCV 3 ehcès eliPecruoS3.3
4 INTERFACE
4.1 Nombre de ports
NMEA2000 1 port
Bus CAN 1 port, commande DBW
Signal de contact 3 ports, Priorité barreur, interrupteur STBY
USB 1 port, pour maintenance uniquement
4.2 Bluetooth LE Entre le processeur et la télécommande tactile
Fréquence 2,4 GHz
Puissance de
transmission
4.3 PGN NMEA2000
Entrée 059392/904, 060160/416/928, 061184, 065240,126208/464/720/
Sortie 059392/904, 060928, 126208/464/720/993/996/998,127237/245,
+4 dBm
992/996, 127237/250/258, 128259,129025/026/029/283/284/285/
538, 130577/818/821/827/841
130816/821/822/823/827/841
SP-1
E7284S01D (French)
Page 100

5 ALIMENTATION
5.1 Processeur 12-24 VCC : 0,22 A max., LEN : 2
5.2 Unité de contrôle 15 VCC : 0,29 A max., LEN : 6
6 CONDITIONS AMBIANTES
6.1 Température ambiante de -15° à +55°
6.2 Humidité relative 95 % ou moins à +40°
6.3 Degré de protection
Processeur IP55
Unité de contrôle IP56
Télécommande tactile IP65/67 (second chiffre caractéristique comme suit)
5 : Protégé contre les jets d’eau.
7 : Protégé contre les effets d’une immersion temporaire dans
l’eau.
6.4 Vibration CEI 60945 Éd. 4
7 COULEUR DE L’UNITÉ
NAVpilot-300
7.1 Processeur/unité de contrôle N2.5
7.2 Télécommande tactile N1.0
SP-2
E7284S01D (French)
 Loading...
Loading...