


MICRO E-HS-2.1
ELECTRIC SERVO MICRO NUTRUNNER
OPERATION INSTRUCTION MANUAL
2nd Edition Rev.1 December 2012
FEC MICRO NR
WARNING
All applicable national and local codes must be followed when installing and operating the
equipment detailed in this manual.
FAILURE TO ABIDE BY THESE CODES AND THE SPECIFICATIONS DESCRIBED IN
THIS MANUAL CAN RESULT IN SERIOUS INJURY TO PERSONNEL AND/OR DAMAGE
TO THE EQUIPMENT!
Any questions regarding the contents of this document or any related matter should be
directed to FEC INC. at (586) 580-2622, faxed to (586) 580-2620 or emailed to
support@fec-usa.com.
The information set forth in the following document is the property of FEC INC.
This document shall not be released to or copied for any person and/or organization
With out the expressed prior consent of FEC INC.
Unauthorized reproduction or distribution of this manual is strictly prohibited.
Please contact FEC INC. if you require additional copies.

Revision
date
Manual No.
Content of revision
2009/06/10
First Edition
Original manual release
2012/02
Second Edition
Revised per latest Japanese translations
2012/12
2.1
Added selection for X-Y curve in SD Memory
Chapter 4 pg 4-14 Chapter 7 pg 7-21, 7-27
Manual Numbering Convention
MICRO E-HS-1
DSP1500 = Servo Press
AFC1500 = Nutrunner
FUSION = DC Hand Tool
HS = SAN / MNR Unit Hardware
Operation Manual
HM = Multi / Main Unit Hardware
Operation Manual
HM-ENET = Ethernet Manual for
Multi / Main Unit
SW = Software Manual
DSP1500 = Servo Press
AFC1500 = Nutrunner
FUSION = DC Hand Tool
MICRO = Micro Nutrunner
E = English Version
S = Spanish Version
*Japanese Version furnished by DDK
uses DDK numbering convention.
Version Number
(Major Revision Level)
Revision History

For the safety of operator and equipment
Please confirm the followings when unpacking this equipment:
◆ Ensure that you received the correct model, as ordered.
◆ Ensure that there are no missing parts.
◆ Check for any damage caused during transportation.
Points to check when unpacking
◆ It is important for you to read all “Safety Precautions” before using the equipment, and
understand and observe all instructions and recommendations included in this manual.
◆ Read all instructions and recommendations included in this manual, understand the functions
and performance of this nutrunner, and correctly use this machine.
◆ Wirings and parameter settings shall only be conducted by a qualified professional.
◆ Never conduct a withstand voltage test or insulation resistance test on this equipment.
◆ Indicate the following on all instruction manuals that use this equipment:
”This equipment is capable of voltages hazardous to human life.”
Introduction
Thank you for purchasing our Electric Micro Nutrunner System.
This instruction manual describes the procedures for installation, wiring, and handling, and
actions to be taken in case of any failure.
◆ This instruction manual shall be delivered to the end user who operates the equipment.
◆ Read all instructions before use, and always keep this instruction manual with the equipment.
◆ Items not described in this instruction manual shall be considered “unavailable”.
◆ The product specification and appearance described in this instruction manual is subject to
change without notice.
◆ All rights reserved. Any disclosure, copying, distribution, or use of the information contained
herein for other than its intended purpose, is strictly prohibited.

Warranty Period
The standard warranty period is one year from the date of purchase or one year from delivery to
the designated End User (not to exceed 18 Months). Actual terms are order specific.
Provision of warranty
If your product proves to be defective, although it has been used properly in accordance with
this instruction manual, during the period of warranty, this product will be repaired free of
charge.
However, in the following cases, the customer will be required to pay for repair charges, even
for defects occurring within the warranty period.
1. Any defect due to improper conditions, improper circumstances, and improper handling.
2. Any defect due to modifications or repairs performed by the customer.
3. Any defect caused by other equipment.
4. Any defect caused by customer failing to meet the equipment’s specification.
5. Any defect due to natural disasters and accidents.
This warranty shall be limited to repairing or replacing this product. Any liability for indirect or
consequential loss or damage of any kind incurred or suffered by the customer due to a defect
of the product is excluded.
Warranty
Introduction

Warning
Caution
This symbol indicates that failure to observe instruction marked
with this symbol may result in severe personal injury or death.
This symbol indicates that failure to observe instruction marked
with this symbol may result in minor personal injury or material
damage.
Caution
Warning:
Fire
Caution:
Electric shock
Ground
Prohibited
Do not disassemble
Required
Warning:
Electric shock
Caution:
Fire
Safety Precautions
Caution:
High Temperature
Read all instructions before operating the equipment in order to use this equipment safely and correctly.
Prior to use, read this instruction manual carefully and fully understand the equipments functions, safety
precautions and instructions. Safety precautions in this manual are marked with two symbols [Warning]
and [Caution].
To prevent danger to the user and other persons as well as property damage, instructions that must be
fully observed are marked with the symbols below.
◆ This instruction manual uses the following two symbols according to the degree of damage that
may be caused when the instruction is not observed.
Even instructions that are marked with may result in severe damage if they are not
observed according to conditions.
Contents marked with the above symbols are very important instructions. For your safety, follow all
instructions and especially those marked with these symbols.
◆ This instruction manual uses the following additional symbols for instructions that shall be
observed.
Do not remove the motors and gear cases of tools while power is applied..
The tool output spindle may rotate and cause injury.
Do not repair, disassemble, or modify the equipment individual components of the system.
Failure to observe this instruction may cause injury, electric shock, fire, and malfunction.
Never operate the equipment where it is exposed to water, near a corrosive atmosphere or
flammable gases. Failure to observe this instruction may cause fire.
Keep fingers away from the connectors while the equipment is turned ON and for a while after
the equipment is turned OFF. Failure to observe this instruction may cause electric shock.
Wiring operation and maintenance work shall be conducted by a qualified professional.
Failure to observe this instruction may cause electric shock and injury.
Turn OFF the power when conducting wiring operation and maintenance.
Failure to observe this instruction may cause electric shock and injury.
Never damage the cables, apply excess stress to cables, or squeeze the cables.
Never use damaged cables. Failure to observe this instruction may cause electric shock and
fire.
Conduct type-3 grounding of FG terminals.
Failure to observe this instruction may cause electric shock.
In case of an abnormal odor, noise, or operation error occurrence, stop operation immediately
and turn OFF the power source. Failure to observe this instruction may cause injury and fire.
Install a Power shutdown device in order to ensure the safety of equipment.
Failure to observe this instruction may cause injury.
Install an emergency stop circuit on the outside of equipment in order to stop operation
promptly. Failure to observe this instruction may cause injury.
Keep away from the equipment during recovery from a temporary blackout, and ensure safety
measures are conducted after restarting the equipment. The equipment may suddenly restart.
Failure to observe this instruction may cause injury.
Warning
Safety Precautions
Transport the equipment properly according to its weight.
Failure to observe this instruction may cause injury and malfunction.
The conditions when transporting the equipment by ship is as below.
◆Ambient temperature: -5°C~+55°C (Avoid freezing)
◆Ambient humidity: 50% RH or lower (Avoid moisture)
◆Package: Tight seal
◆Rust prevention measure: Keep dry and ship with humidity control devices (desiccant).
Failure to observe this instruction may cause earth leakage and malfunction.
Do not hold cables and output spindles when transporting the tools.
Failure to observe this instruction may cause injury and malfunction.
Do not hold the indictor on the front panel when transporting the controller Unit.
The indicator may come off and drop from the front panel.
Failure to observe this instruction may cause injury and malfunction.
The equipment shall be stored under the following conditions.
◆Ambient temperature: -5°C~+55°C (Avoid freezing)
◆Ambient humidity: 90% RH or lower (Avoid moisture)
◆Atmosphere: Indoors (Avoid direct sunlight)
No corrosive gases or flammable gases
No oil mist, dust, water, salt, iron powder
◆Avoid direct vibration or shocks
Failure to observe this instruction may cause earth leakage and malfunction.
Caution
Transportation / Storage
Safety Precautions
Install all tools firmly where they can bear the maximum torque during operation.
Failure to observe this instruction may cause injury and malfunction.
Install the controller Unit firmly inside the control panel using the specified screws.
Failure to observe this instruction may cause malfunction.
Use the specified tool for the controller Unit.
Failure to observe this instruction may cause fire and malfunction.
The controller Unit shall maintain the specified distance from other devices.
Failure to observe this instruction may cause fire and malfunction.
Do not block the ventilation holes of the controller Unit.
Avoid any foreign body from entering inside the equipment.
Failure to observe this instruction may cause fire and malfunction.
The power source shall be provided with safety measures such as breakers and
circuit protectors. Failure to observe this instruction may cause fire and malfunction.
Do not use tools or controller Units that are damaged or missing parts.
Failure to observe this instruction may cause fire, injury, and malfunction.
Do not get on the top of equipment or do not place heavy objects on the top of equipment.
Failure to observe this instruction may cause injury, and malfunction.
Do not subject the equipment to excess shock and impact.
Failure to observe this instruction may cause malfunction.
Conduct wirings properly and firmly.
Failure to observe this instruction may cause injury, false operation, and malfunction.
Operate the equipment within the specified power supply voltage.
Failure to observe this instruction may cause injury, electric shock, fire, and malfunction.
When operating the equipment in the following conditions, take sufficient measures
to shield the equipment.
◆Location where electrical noise is generated
◆Location where the equipment is subjected to a strong electric field or magnetic field
◆Location near a high power wire.
Failure to observe this instruction may cause injury, false operation, and malfunction.
Caution
Safety Precautions
Installation / Wiring

Never operate the equipment with wet hands.
Failure to observe this instruction may cause electric shock.
Use the equipment under the following conditions.
◆Ambient temperature: 0°C~+45°C (Avoid freezing)
◆Ambient humidity: 90% RH or lower (Avoid moisture)
◆Atmosphere: Indoors (Avoid direct sunlight)
No corrosive gases or flammable gases
No oil mist, dust, water, salt, iron powder
◆Avoid direct vibration or shocks
Failure to observe this instruction may cause earth leakage and malfunction.
Confirm and adjust all parameters before operation in order to prevent unexpected
movement of the equipment.
Failure to observe this instruction may cause injury, false operation and malfunction.
Never conduct extreme adjustments or setting changes that may cause instability of operation.
Failure to observe this instruction may cause injury, false operation and malfunction.
The equipment may restart suddenly when the equipment is reset with the start signal ON.
Always ensure that the start signal is OFF before resetting the equipment.
Failure to observe this instruction may cause injury.
Do not turn ON and OFF the equipment repeatedly.
Failure to observe this instruction may cause malfunction.
Do not use the equipment at torque higher than the maximum torque.
Failure to observe this instruction may shorten equipment life or cause malfunction
due to the high temperature caused by overload.
In case any abnormality occurs, remove the cause and ensure safety before resetting
and restarting the equipment.
Failure to observe this instruction may cause injury.
Caution
Safety Precautions
Operation / Adjustment

Page
Chapter 1: Outline
1-1
1.1 About This operations manual
1-2
1.2 Features
1-3
1.3 Functions
1-5
1.4 System requirements
1-7
Chapter 2: Specifications
2-1
2.1 Main Specifications
2-2
2.2 Duty Cycle Calculation
2-3
2.3 SAN Unit Specifications
2-4
2.4 Capability.
2-5
2.4.1 Nutrunner Tool Specification Table
2-6
Chapter 3: System Description
3-1
3.1 System Block Diagram
3-2
3.1.1 System Block Diagram Description
3-2
3.2 Micro-NR MNR UNIT Front panel
3-3
3.2.1 MNR Front Panel Switches and Connectors
3-3
3.2.2 MNR Status LED
3-4
3.3 Micro-Nr Keyboard-Display description
3-5
3.3.1 MNR Serial Pin out
3-5
3.3.2 MNR Communication Protocol
3-6
3.3.3 MNR Communication Format
3-6
3.3.4 MNR Communication Format Description
3-7
3.3.5 Cable Connection to MNR Unit
3-8
3.4 Micro-NR (Tool) Unit
3-9
Chapter 4: System Setup and Wiring
4-1
4.1 Component Dimensions
4-2
4.1.1 MNR Controller Unit Dimensions
4-2
4.1.2 Micro-NR Tool Dimensions
4-3
4.2 Power Requirements and Connections
4-4
4.2.1 MNR Unit
4-4
4.3 Wiring PLC I/O
4-6
4.3.1 Explanation of MNR Unit I/O
4-7
4.3.2 Work / Parameter Select Table
4-8
4.3.3 PLC Wiring Sample
4-9
4.4 Signal Timing Chart
4-11
4.5 USB Communication Port
4-12
4.6 MNR Unit DIP Switch setting.
4-13
4.6.1 MNR Unit DIP SW1 settings
4-14
4.7 Tool Connection (cabling)
4-15
4.7.1 Cable Installation Guidelines
4-16
4.7.2 Considerations for Cable Trolleys
4-17
4.7.3 Considerations for Flexible Cable Tracks
4-17
4.7.4 Considerations for Cable Trays and Ladders
4-17
4.12 Firmware Flash Connector (CN8).
4-36
Table of Contents

Chapter 5: Power Up and Initial Checks
5-1
5.1 Before Powering On
5-2
5.2 Initial Data Setting
5-3
Chapter 6: Fastening Instructions
6-1
6.1 Fastening Control
6-2
6.1.1 Torque / Angle Method – Target Torque Control
6-2
6.1.2 Torque / Angle Method – Target Angle Control
6-4
6.2 Speed Functions
6-6
6.3 Reverse Functions
6-8
6.4 Special Functions
6-9
6.4.1 One Pulse Reverse Function
6-9
6.4.2 Rundown Revolution Limits
6-10
6.4.3 Torque Inhibit Function
6-11
Chapter 7: System Operations
7-1
7.1 MNR Display and Programming operation.
7-2
7.1.1 Manual Fastening controls for Display Programming Unit
7-2
7.1.2 Fastening Preset / Results Display
7-3
7.1.3 Fastening Presetting / Result Display Controls
7-3
7.2 Display Indication Modes.
7-4
7.2.1 Status Display
7-5
7.2.2 Real-time display indication mode.
7-8
7.2.3 Fastening results display mode.
7-10
7.2.4 Parameter display mode
7-11
7.2.5 Parameter Data List
7-13
7.3 Parameter Display, Select and Data Edit Operation
7-18
7.3.1 Parameter Select Mode
7-18
7.3.2 Data Edit Mode
7-19
7.3.3 Parameter Setup Confirmation
7-20
7.4 Torque Unit / RS232C / Memory Card Display Mode
7-21
7.4.1 Torque Unit Display / Edit Mode
7-22
7.4.2 RS232 Display / Edit Mode
7-23
7.4.3 Memory Card Station Name Display / Edit Mode
7-24
7.4.4 Memory Card Data Save Display / Edit Mode
7-25
7.4.5 Memory Card Data File Update by Size Display / Edit Mode
7-26
7.4.6 Memory Card Data File Update by Time Display / Edit Mode
7-27
7.4.6.1 Memory Card X-Y Curve Size Setup
7-27
7.4.7 Memory Card Abnormal Display / Edit Mode
7-28
7.4.8 Torque Unit / RS232C / Memory Card Data Update Confirmation
7-28
Chapter 8: Maintenance and Inspection
8-1
8.1 Inspection Items
8-2
8.1.1 Nutrunner (Tool)
8-2
8.1.2 Homerun cables
8-2
8.1.3 MNR Unit
8-3
8.1.4 Air Handling Units (Air Conditioner, Heat Exchanger, etc.)
8-3
8.2 Basic operational tests
8-4
8.2.1 Torque transducer.
8-4
8.2.2 Resolver.
8-4
8.3 Replacements
8-5
8.3.1 MNR Unit Replacement
8-5
8.3.2 Replace Nutrunner (tool)
8-6
8.3.3 Replace Homerun cables
8-6

Chapter 9: Troubleshooting
9-1
9.1 Abnormal Conditions.
9-2
9.2 Torque Transducer Origin Error, Cal Check Error.
9-3
9.2.1 Code 1-0 Torque transducer / Zero Voltage error.
9-3
9.2.2 Code 1-1 Torque transducer / Cal Voltage error.
9-3
9.2.3 Code 1-2 Torque transducer / Zero check error.
9-3
9.2.4 Code 1-3 Torque transducer / Cal self-check error.
9-4
9.2.5 Code 1-4 Torque transducer / Started on Zero condition error.
9-4
9.2.6 Code 1-5 Torque transducer / Started on Cal condition error
9-4
9.2.7 Code 1-6 Torque transducer / Zero Level Self Check Error
9-4
9.3 Torque Over Abnormals
9-5
9.3.1 Code 2-1 Torque Over Abnormal / Torque Inhibit High Limit
9-5
9.4 Tool EEPROM Errors
9-6
9.4.1 Code 3-0 Preamplifier / Tool ID Checksum error
9-6
9.4.2 Code 3-1 Preamplifier / Tool type error
9-6
9.4.3 Code 3-2 Preamplifier / Started without tool connected
9-6
9.4.4 Code 3-3 Preamplifier / Tool is not connected
9-6
9.5 System Memory / Memory Card Errors
9-7
9.5.1 Code 4-1 system memory error / Flash ROM read error
9-7
9.5.2 Code 4-3 system memory card error / Card write error
9-7
9.6 Servo Amplifier Response / Resolver
9-8
9.6.1 Code 5-0 Servo Amplifier reply error / No reply from Resolver
9-8
9.7 Servo Type Error
9-9
9.7.1 Code 6-0 Servo Type error / Servo Type mismatch
9-9
9.8 Servo Amplifier Error
9-10
9.8.1 Code 8-1 Servo Amplifier error / Servo is over heated
9-10
9.8.2 Code 8-4 Servo Amplifier error / Over current
9-10
9.8.3 Code 8-5 Servo Amplifier error /Internal power supply
9-10
9.8.4 Code 8-6 Servo Amplifier error / Input Voltage abnormal
9-11
9.8.5 Code 8-9 Servo Amplifier error / Over speed.
9-11
9.8.6 Code 8-10 Servo Amplifier error / over load ( I square T)
9-11
9.8.7 Code 8-11 Servo Amplifier error / Resolver Signal Error
9-11
9.8.8 Code 8-12 Servo Amplifier error / Amplifier Parameter Error
9-12
9.8.9 Code 8-13 Servo Amplifier error / Amplifier Program Error
9-12
9.8.10 Code 8-15 Servo Amplifier error / PDU Error
9-12
9.8.11 Code 8-16 Servo Amplifier error / CPU Error
9-12
9.9 Parameter Error
9-13
9.9.1 Code 9-0 Parameter Error / Missing speed preset.
9-13
9.9.2 Code 9-1 Parameter Error/ Missing Speed or Time
9-13
9.9.3 Code 9-2 Parameter Error/ Parameter Select Error
9-13
9.9.4 Code 9-3 Parameter Error/ Missing Reverse Speed
9-13
9.9.5 Code 9-4 Parameter Error/ Torque Speed not set
9-13
9.9.6 Code 9-5 Parameter Error/ Torque Setup Error
9-14
9.9.7 Code 9-6 Parameter Error/ Angle Setup Error
9-14
9.9.8 Code 9-7 Parameter Error/ Reverse Torque over.
9-14
9.10 Micro-NR MNR Unit Fastening Faults and Causes
9-15
9.10.1 Accept Conditions
9-15
9.10.2 Reject Conditions
9-15

FEC Micro Nutrunner Operations Manual Chapter 1: Outline (Rev. 2: 02/12)
Chapter 1: Outline
Page 1-1

Chapter 1: Outline
Chapter
Item
Contents
1.1 About This operations manual
This manual details the configuration, components, specifications, and the operation of the MNR-
8 Micro Nutrunner Fastening System.
The following table outlines the contents of each chapter:
Chapter 1 Outline Basic characteristics and requirements of the MICRO
Chapter 2 Specifications General specifications of the MICRO NUTRUNNER
Chapter 3 System Description Description of standard and optional system
Chapter 4 System Setup and Wiring Equipment installation procedure, dimensions, Input
Chapter 5 Power Up and Initial Checks Preliminary power on and operational tests.
Chapter 6 Fastening Instructions Basic fastening operations and presetting procedures.
Chapter 7 System Operations Instructions for the input of preset data and monitoring
Chapter 8 Maintenance and Inspection Guide for preventive maintenance.
Chapter 9 Troubleshooting Descriptions of fastening rejects, abnormal operation
Appendix A Reference Drawings Electrical reference drawings of standard cables and
NUTRUNNER System.
System.
components.
and Output signal descriptions and requirements for
PLC programming.
explanations.
faults, and corrective actions.
connections.
Page 1-2

FEC Micro Nutrunner Operations Manual Chapter 1: Outline (Rev. 2: 02/12)
1.2 Features
{ The MICRO NR Fastening System is a culmination of over thirty years of electric fastening
expertise integrated with the latest miniature electronic technology. For small screw
applications
(M2 – M3), the MICRO NR provides a highly accurate, transducerized fastening system with
fully programmable set-up. The system is designed with modular construction in mind keeping
maintenance and spare parts to a minimum.
{ The basic elements of this system are:
1) A brushless, Resolver Based permanent magnet high speed motor
2) Reliable intelligent Torque Transducer
3) A combination Fastening Controller / Digital Servo Amplifier (MNR unit)
{{{{ Compact Design
As the result of miniaturization circuit technology, the compact MNR units (Controller)
maintain a size not much bigger than a standard letter envelope in spite of the built-in power
source and Servo Amplifier. The MNR Unit can be back / side panel mounted.
{{{{ Front Keypad-Display.
A front keypad display is used for programming preset parameters and/or monitoring the
fastening results and status conditions in the system.
{{{{ Multiple Condition Display
The system features a multi-colored LED that lights to indicate the status of the System.
{{{{ Parameter Selection
Totally digitized system eliminates analog potentiometers.
Up to 8 different sets of parameters can be stored into Flash ROM for each spindle.
No battery-backup of memory is required.
{{{{ Motor
A high speed, permanent magnet DC motor provides for improved fastening control. The
sealed design of the motor provides greater protection from contamination without generating
excess heat. The resolver is uniquely designed to withstand harsh environments and provide
high resolution control / angular feedback signals.
{{{{ Preamplifier
Quality control of the tool torque transducer is accomplished electronically (digitally) through
the EEPROM (Electrically Erasable Programmable Read Only Memory) in the preamplifier.
During factory setup of the torque transducer, the unit is Dead Weight and dynamically tested
against Standards that are certified and traceable to the National Institute of Standards and
Technology. The resultant data is then programmed into the preamplifier where it is stored
on non volatile EEPROM.
{{{{ Servo Amplifier (Servo Drive)
Reduced equipment size with improved drive circuit strength is the result of incorporating
Insulated Gate Bipolar Transistor (IGBT) technology into the drive System.
{ Motor, Resolver and Torque Transducer Combined Single Cable
A combined cable reduces the number of cables in the system and provides easier cable
management
Page 1-3

Chapter 1: Outline
1.3 Functions
{{{{ Fastening function.
The following fastening control methods can be selected for either clockwise (CW) or
counterclockwise (CCW) operation:
P Torque / Angle Control
The fastening control method of the system is a combination of both Torque Control and
Angle Control. Setting both a torque target torque and an angle target torque allows the
system to target whichever setting would be reached first. The system can be also set-up to
run either of the fastening methods individually by setting the undesired target limit above it’s
respective high limit value.
{{{{ Multiple speed control
Four separate speed settings can be set allowing precise speed control for high accuracy
control. One reverse speed can also be set-up.
{{{{ Reject / Abnormal Condition Display
When a fastening Reject has occurred, the tool stops, outputs the appropriate signal and
displays the resultant data in the Detachable Keypad-Display unit if it is connected. Upon a
fastening reject, the unit will not require resetting prior to the next cycle.
The System will output an Abnormal signal when it detects there is a problem (Zero Check
out of limits, incorrect component connection, etc.) within the system itself. The output will be
displayed as a code on the affected Axis unit. Refer to Chapter 9 Troubleshooting for more
details. Correction of the abnormal cause and reset of the system is required on an abnormal
before normal operation can resume.
{{{{ Torque Inhibit Function
The Torque Inhibit function allows the controller to ignore the torque seen during initial startup for a programmed period of time. This is especially useful in self-tapping applications
where initial cutting of threads can require higher torque that the final target torque settings.
{{{{ Tool Type Check Function
The MICRO NR tools have an EEPROM in the preamplifier that contains tool data specific for
each tool. The Tool type check function reads the information of the tool EEPROM and
compares it to the information of the MNR Controller; any mismatch is reported as a Tool
Type Error Abnormal.
The tool type check is performed during the following times:
1) When the equipment is powered on.
2) When preset data is downloaded from a user console to the Axis unit.
3) When a tool is changed.
Page 1-4
FEC Micro Nutrunner Operations Manual Chapter 1: Outline (Rev. 2: 02/12)
1.4 System requirements
To ensure the most effective and extended use of all equipment, adhere to the following
specifications:
{{{{ Tool Installation
Tools must be installed in the proper positions and with adequate bolts. Use the supplied
bolts to prevent the tool from loosening due to vibration. A minimum of 2mm of clearance is
required between tools, with nothing touching a mounted tool that will impact free movement
for torque reaction (or improper torque readings will result). The tool assembly contains
precision parts and electronic components, and must not be subject to excessive shocks or
stresses.
Keep in mind that the torque transducer is a strain gage based instrument and, although it
has been designed to withstand sudden shock, repeated shock (over time) could damage the
transducer. Therefore, cylinder cushions or shock absorbers should be used to decelerate
spindle slides and prevent excessive (hard stop) vibration, particularly in short cycle time
applications operating at high speeds.
{{{{ Fastening Operation
Avoid fastening beyond the full scale torque. Do not use a duty cycle (the ratio of the tool
rotating time to the machine cycle time) higher than 60%, even when the torque is below the
full scale value.
{{{{ Cable Wiring
P Use the specified cables for all System connections.
P Circuit breakers or fuses are required on branch circuit power feeds to the controllers.
P Do not use a high voltage circuit as a frame ground (FG). Also, the frame ground should
be separate from the power ground.
P When multiple MNR Controller units are used, ensure that each unit is connected to its
matching numbered tool, and that all connectors are locked.
P I/O cables must be run separate from any high voltage power sources or cabling, and must
not exceed 50 feet in length.
{{{{ Control Equipment (MNR units) Installation Environment
P Controllers should be located in a NEMA 12 enclosure.
P Controller units must be located a minimum of 600 mm from high transient voltage sources
such as transformers, motor starters, AC inverters and AC contactors. If it cannot be
avoided, the units must be properly shielded.
Do not use at the following locations.
P Areas under direct sunlight.
P Areas where the environmental temperature is out of the 32 °~122° F range.
P Areas where the relative humidity is above the 90% range.
P Areas where the temperature changes quickly, which may cause moisture.
P Areas where conductive powder, oil mist, saline, or organic solvents exist.
P Areas that have corrosive or combustible gases.
P Areas that have strong electric or magnetic fields.
P Areas where a strong vibration or shock could be transmitted directly to a Controller unit or
tool.
Page 1-5

Chapter 1: Outline
{{{{ Static Electricity
MICRO NR System construction incorporates many electronic Surface Mounted Devices.
(SMD) It is advisable to strictly adhere to practices for safe electrostatic discharge in order to
prevent damage to the System when handling the units.
{{{{ Cleaning
Do not use any organic solvents, such as thinner, to clean an MNR unit or a tool. The solvent
could melt the surface paint, or penetrate inside and cause damage. A cloth dampened with
alcohol or warm water should be used to lightly wipe the components.
{{{{ Handling and Shipping
It is critical that MICRO NR System components are properly handled and shipped in order to
maintain the System's integrity. Adhere to the following requirements for shipping and
handling:
P Loose MICRO NR System components must be individually packaged in an approved anti-
static container or wrap to prevent damage from electrostatic discharge.
P Tighten mounting screws on all back panel mounted fastening controllers.
P Use care to wrap components to protect from moisture exposure during shipping
P All non-painted / coated metal parts (except for the tool motor and connectors) must be
greased or oiled to prevent rust.
P Adhere to Chapter 2 Specifications for environmental requirements.
Page 1-6

FEC Micro Nutrunner Operations Manual Chapter 2: Specifications (Rev. 2: 02/12)
Chapter 2: Specifications
Page 2-1

Chapter 2: Specifications
2.1 Main Specifications
{{{{ Power Supply Voltage
P 100~240 VAC, Single Phase, 50/60 Hz (24VDC Output)
{{{{ Operating Power Requirements
PPPP 180Watt
{{{{ Installation Requirement
P NEMA 12 enclosure (minimum).
{{{{ Range of Operation
P Duty cycle below 60% (reference Section 2.2 Duty Cycle Calculation)
{ Operating Conditions (may be met by incorporating an Air Handling Unit into System)
P Temperature: 0° ~ 50°C (32° ~ 122°F) Humidity: 20% ~ 90%, no moisture
{{{{ Storage Conditions
P Temperature: -5° ~ 55°C (23° ~ 131°F) Humidity: Below 90%, no moisture
{{{{ Shipping Conditions
P Temperature: -5° ~ 55°C (23° ~ 131°F) Humidity: Below 90%, no moisture
2.2 Duty Cycle Calculation
Duty Cycle is rated as a percentage of the time the motor is running to the time the motor is idle.
This is an important factor in determining overload protection for Servo Amplifiers and motors as
it directly relates to the amount of power or heat dissipation of the motor / servo package. The
rated duty cycle for the Micro NR System is calculated as follows:
Tool Rotation Time
Total Cycle Time (Tool Rotation + Tool Waiting)
Example: Tool Rotation Time = 3 Seconds x 100 = 25% Duty Cycle Percentage
Total Cycle Time = 12 Seconds
As a general rule, duty cycle, should not exceed 60%. IF duty cycles remain above 60% for extended periods, a Servo Amplifier Error / Overload will result (See abnormal CODE 8 -10). Protection for high duty cycle is a standard feature of the Servo Amplifier to prevent servo or motor
damage.
X 100 = Duty Cycle Percentage (%)
Page 2-2

FEC Micro Nutrunner Operations Manual Chapter 2: Specifications (Rev. 2: 02/12)
2.3 MNR Unit Specifications
UNIT TYPE UAN-8
TOOL MOTOR TYPE MFT-080M10
TOOL MAX. TORQUE
TOOL MAX. SPEED 1100RPM
OVERALL TOOL WEIGHT 605gram
MNR INPUT POWER SUPPLY
MNR UNIT WEIGHT
100 – 240VAC Single Phase 150watt max.
0.8 Nm
(7.08 in lb))
24VDC Output
556g
{ Parameter / Firmware Storage: Flash ROM
{ Fastening Method: Torque / Angle
{ Data Communications: RS232C for MNR User Console Software or Data Output
USB for MNR User Console Software (See 7.4.2)
2.4 Capability
{{{{ Fastening Accuracy (Torque):
From 1/4 to full scale torque: 3 sigma scatter less than 5% of target torque.
{{{{ Torque Display Resolution: 4-digit display with floating decimal point
(In display unit)
{{{{ Angle Display Resolution: 1 degree.
Forward Max. count 9999 degree
Reverse Max. count 1999 degree
{ Torque transducer accuracy: (0 - Full Scale) ±1.5%
{ Linearity of torque transducer: ± 0.5% of Full Scale value (Maximum).
Page 2-3

Chapter 2: Specifications
2.4.1 Micro Tool Specification Table
TOOL TYPE
MFT-080M10 MNR-8 0.8 0.08 8.0 .59 7.08 1100 1
CONVERSION GUIDE: 1 KGM = 100 KGCM = 9.8 NM = 7.2 FTLB = 86.7 INLB
Tool Assembly Model Number Breakdown
Example: MFT-080M10
MFT: MICRO NR Series Tool
080: .08 Kgm tool capacity (last digit indicates decimal position from left)
M10: Micro Resolver Motor (Model 10)
The tool lists located throughout this manual identify the specifications for the
standard Micro NR tool used with the MICRO NR System. If additional capacity,
information or special needs are required, please contact FEC INC.
SERVO
TYPE
NM KGM KGCM FTLB INLB MAX MIN
FULL SCALE TORQUE
SPEED
RPM
Page 2-4

FEC Micro Nutrunner Operations Manual Chapter 3: System Description (Rev 2: 02/12)
Chapter 3: System Description
Page 3-1

Chapter 3: System Description
Serial Output (1
) Ports
3.1 System Block Diagram
3.1.1 System Block Diagram Description
{ Spindle programming / monitoring is accomplished through either a detachable Laptop PC or
an embedded HMI PC, running the MNR User Console software package.
{ A keypad/display on each MNR Unit can be used to monitor the individual spindle status.
{ Discrete 24 VDC (Sinking or Sourcing) I/O on the MNR unit provides direct communications
with the PLC for limited individual spindle control.
User Console
Detachable Laptop
OR
Discrete
PLC I/O.
User Console HMI
Embedded
Serial Printer
Misc. Serial Device
Page 3-2
FEC Micro Nutrunner Operations Manual Chapter 3: System Description (Rev 2: 02/12)
ITEM AS
DESCRIPTION
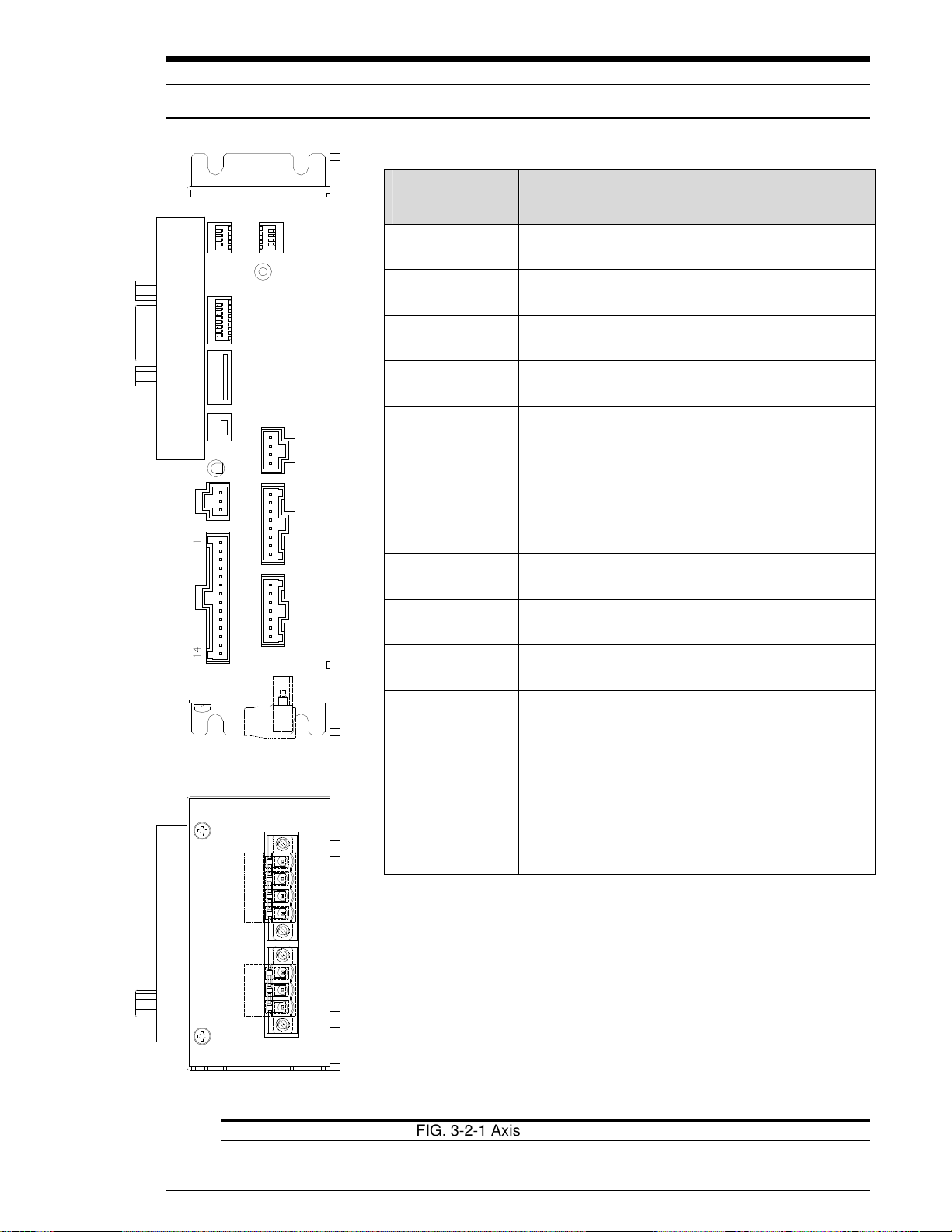
3.2 MNR UNIT Front panel
3.2.1 MNR Front Panel Switches and Connectors
MARKED ON
UNIT
SW2
SW1
MEMORY
CARD
SW3
CN1
CN1
CN2
SW1
SW2
Amplifier programming port (Not Used)
Expansion Connector (Not currently used)
Sets Start signal type, Angle count type & display
Not Used – (Set all OFF)
USB
STATUS
CN2
MON
T/D
SW3
RESOLVER
MON.
Not Used – (Set all OFF)
Resolver connection for tool Motor / Resolver
cable. (Angle of Rotation input)
Monitor Output
Torque Analog Voltage and Angle Pulse Output
for connection to independent monitor device.
RESOLVER
PLC
T/D
MOTOR
PLC
MEMORY
CARD
USB
STATUS
POWER
Connection for tool Transducer cable.
(Torque signal input)
Motor Connection for tool Motor/Resolver cable.
(Motor Drive)
Connection for Inputs and Output (I/O) signals. .
Expanded memory for data storage and X-Y
Curve storage
Communication port for Computer Software
connection
Status LED (See 3.2.2 for more info)
Connection for Input Power.
24VDC 5A
MOTOR
1 2 3 4
U V W FG
1 2 3
POWER
MP CP 0V
FIG. 3-2-1 Axis unit Front panel controls
Page 3-3
Chapter 3: System Description
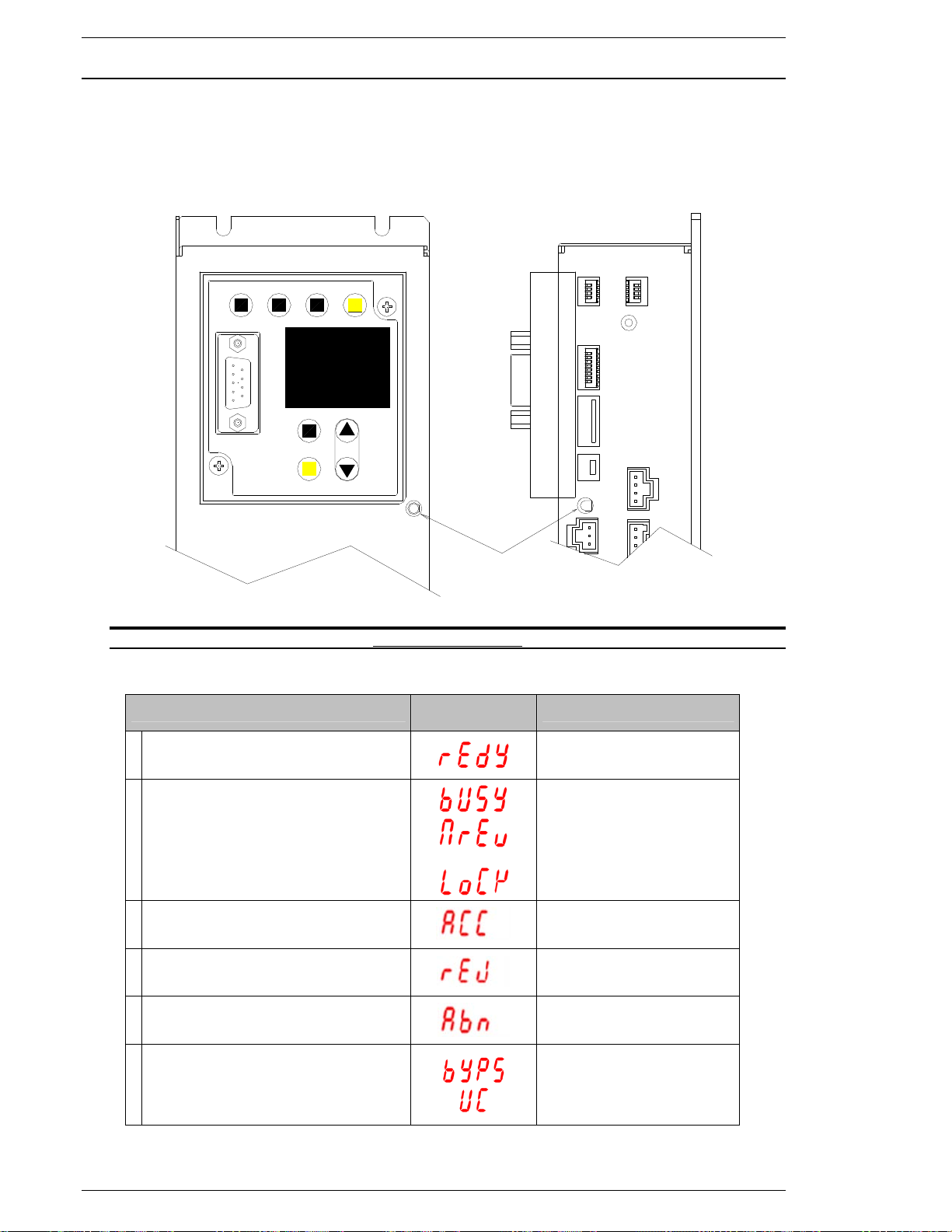
3.2.2 MNR Status LED
Located on the front of each MNR Unit is a status indicator LED which allows viewing from either
the front panel or from the side panel below the Keyboard / Display unit. Multiple system status
modes are displayed from this “shared status” LED.
START
RS232C
SAN3-DP2
REV.
CAL RESET
DATA
PARM. D-NO.
MODE
SET
DATA
STATUS
Fig. 3-2-2 Status LED
SHARED
STATUS LED
SW2
SW1
MEMORY
CARD
USB
STATUS
CN2
SW3
CN1
MON
1 READY
2
3 ACCEPT
4 REJECT
5 ABNORMAL
6
STATUS
BUSY
MANUAL REVERSE
SET-UP MODE
SERVO LOCK MODE
USER SOFTWARE BYPASS
USER SOFTWARE DOWNLOADING
SAN KEYPAD
LED DISPLAY
STATUS LED
ORANGE (ON)
ORANGE (FLASHING)
GREEN (ON)
RED (ON)
RED (ON)
RED (FLASHING)
Page 3-4

FEC Micro Nutrunner Operations Manual Chapter 3: System Description (Rev 2: 02/12)
3.3 MNR Keyboard-Display unit description
The display unit incorporates programming and monitor functions display into the MNR controller.
It comes standard within the MNR unit. Programming of parameters can be accomplished using
the programming keys as well as displaying the fastening result data from the LED display. The
included RS232 9 pin connector allows User Console communication or the output of fastening
data to host or monitor systems.
NOTE: Refer to Chapter 7 for detailed operation using the keyboard/display unit.
START
REV.
CAL RESET
MODE
RS232C
SET
SAN3-DP2
3.3.1 RS232C Serial Pin out
Connector: DB-9P (Male)
Mating Connector: DB-9S (Female)
PIN SIGNAL DESCRIPTION
1 NOT USED
2 RXD NOT USED
3 TXD TRANSMIT DATA
4 DTR DATA TERMINAL READY (ALWAYS ON)
5 GND SIGNAL GROUND
6 DSR NOT USED
7 RTS REQUEST TO SEND (ALWAYS ON)
8 CTS CLEAR TO SEND
9 NOT USED
DATA
PARM.
D-NO.
DATA
Note: The CTS signal needs to be activated in order for the fastening data to be output. If it is
not activated, up to 16KB of data will be stored in the output buffer. Once the buffer is full, the
data will be overwritten in a First In, First Out (FIFO) process. The CTS signal may be connected to the RTS signal if data is to be “dumped” at every fastening.
Page 3-5

Chapter 3: System Description
TQ
TQ
ASCII
49
ASCII
3.3.2 RS232C Communication Protocol
Communication protocol from the RS232C port is as follows;
Speed: 38400bps
Parity: NONE
Data Bits: 8 Bit
Stop Bit: 2 Bit
3.3.3 Front Display RS232C Communication Format
The data output from the RS232C port is a formatted ASCII output. This can be connected to a
serial printer, computer or other peripheral device. 78 bytes of data is output per fastening. The
data format is described in the table below.
Byte
Desc.
ASCII
Hex
Data
Byte
1
2
3
4
5
6
7
8
9 10 11 12 13 14 15 16
Cycle Count
30H 30H 30H 31H 20H 20H 30H 31H 20H 20H 20H 20H 31H 20H 20H 20H
0
0
17 18
0
1
19 20 21 22 23 24 25 26 27 28 29 30 31 32
Spindle
Number
0
1
Parameter
Number
1
0
PK
Desc.
ASCII
Desc.
Desc.
ASCII
Desc.
Peak Torque (PK TQ)
2EH 32H 33H 34H 4CH 20H 20H 31H 32H 33H 4CH 20H 20H 2EH 32H 33H
Hex
Data
Byte
Hex
Data
Byte
.
2
3
33
34 35 36 37 38 39 40 41 42 43 44 45 46 47 48
FN
Judge
34H 20H 20H 20H 20H 20H 20H 20H 20H 20H 20H 20H 20H 20H 20H 20H
4
50 51 52 53 54 55 56 57 58 59 60 61 62 63
1st Time
20H 20H 20H 20H 20H 20H 20H 20H 20H 31H 30H 2EH 30H 4CH 20H
Hex
Data
Byte
64 65 66 67 68 69 70 71 72 73 74 75 76 77 78
2nd Time
Judge
Final Angle
Judge
Final Torque (FN TQ)
4 L 1 2 3 L 0
1
0 . 0 L
Judge
Judge
CR LF
Judge
.
2
3
20H 20H 32H 2EH 30H 20H 20H 20H 20H 58H 20H 20H 20H 0DH 0AH
Hex
Data
2
.
0
Note: “H” shown in chart above = HEX (Ex. 20H)
Judge: High = “H” Low = “L” Total Judgment “O”: 4FH ACCEPT
“X”: 58H REJECT
“A”: 41H ABNORMAL
“S”: 53H STOP (RESET)
Page 3-6
X
 Loading...
Loading...