

Page 1
Rev. 3 EM098R1857F
SCARA-ROBOTER
RS-Serie
MANIPULATOR-HANDBUCH
Page 2

MANIPULATOR-HANDBUCH RS-Serie Rev. 3
Page 3

SCARA-ROBOTER
RS-Serie Manipulator-Handbuch
Rev. 3
Copyright © 2008–2009 SEIKO EPSON CORPORATION. Alle Rechte vorbehalten.
RS Rev. 3 i
Page 4

r
r
b
r
r
VORWORT
GARANTIE
Vielen Dank, dass Sie unsere Roboterprodukte erworben haben.
Dieses Handbuch beinhaltet die erforderlichen Informationen für die richtige Bedienung
des Manipulators.
Bitte lesen Sie dieses Handbuch und andere in Beziehung stehende Handbücher sorgfältig,
bevor Sie das Robotersystem installieren.
Bewahren Sie dieses Handbuch so auf, dass es jederzeit griffbereit ist.
Der Manipulator sowie alle Optionen werden vor Versand an den Kunden sehr strengen
Qualitätskontrollen, Tests und Untersuchungen unterzogen, um sicher zu stellen, dass das
System in einwandfreiem Zustand ist und unseren hohen Leistungsanforderung en ge nü gt.
Alle Schäden bzw. Fehlfunktionen, die trotz normaler Betriebsbedingungen und
Handhabung entstanden sind, werden innerhalb der normalen Garantiezeit kostenlos
repariert. (Bitte informieren Sie sich bei Ihrem regionalen EPSON-Vertrieb über die
übliche Garantiezeit.)
Für die Reparatur folgender Schäden muss der Kunde aufkommen (selbst wenn sie
innerhalb der Garantiezeit auftreten):
1. Schäden oder Fehlfunktionen, die durch nachlässige Bedienung oder Bedienvorgänge
verursacht wurden, welche nicht in diesem Handbuch beschrieben sind.
2. Unerlaubte kundenseitige Modifikation oder Demontage.
3. Schäden oder Fehlfunktionen, die durch unerlaubte Einstellungen ode
Reparaturversuche verursacht wurden.
4. Durch Naturkatastrophen (wie z. B. Erdbeben, Wasserschäden usw.) hervorgerufene
Schäden.
Warnungen, Vorsichtsgebote, Nutzung:
1. Wird der Manipulator oder mit diesem verbundene Ausrüstung außerhalb der dafü
estimmten Betriebsbedingungen und Produktspezifikationen betrieben, verfällt de
Garantieanspruch.
2. Sollten Sie sich nicht an die in diesem Handbuch dargelegten Warnungen und
Vorsichtsgebote halten, müssen wir die Verantwortung für Fehlfunktionen und Unfälle
zurückweisen, selbst wenn diese zu Verletzungen oder Todesfolge führen.
3. Wir können nicht alle möglichen Gefahren und die daraus resultierenden
Konsequenzen vorhersehen. Aus diesem Grund kann dieses Handbuch den Nutze
nicht vor allen Gefahrenmomenten warnen.
ii RS Rev. 3
Page 5
WARENZEICHEN
Microsoft, Windows und das Windows-Logo sind Warenzeichen oder eingetragene
Warenzeichen der Microsoft Corporation in den USA und/oder in anderen Ländern.
Andere Marken und Produktnamen sind Warenzeichen oder eingetragene Warenzeichen
der jeweiligen Inhaber.
HINWEIS
Kein Teil dieses Handbuches darf ohne Genehmigung vervielfältigt oder reproduziert
werden.
Wir behalten uns vor, die in diesem Handbuch enthaltenen Informationen ohne
Vorankündigung zu ändern.
Bitte benachrichtigen Sie uns, wenn Sie in diesem Handbuch Fehler finden oder uns einen
inhaltsbezogenen Kommentar übermitteln wollen.
ANFRAGEN
Wenn Reparaturen, Wartungsmaßnahmen oder Neueinstellungen nötig sind, wenden Sie
sich bitte an Ihr EPSON Service-Center.
Sollten an dieser Stelle keine Information bezüglich Ihres Service-Centers angegeben sein,
wenden Sie sich bitte an Ihren regionalen EPSON-Vertrieb.
Bitte halten Sie folgende Informationen bereit, wenn Sie sich an uns wenden.
- Das Steuerungsmodell und die Seriennummer
- Das Manipulatormodell und die Seriennummer
- Die Softwareversion Ihres Roboters
- Die Beschreibung des Problems
SERVICE-CENTER
RS Rev. 3 iii
Page 6

HERSTELLER UND LIEFERANTEN
Suwa Minami Plant
TEL. : +81-(0)266-61-1802
FAX : +81-(0)266-61-1846
Japan & Andere
SEIKO EPSON CORPORATION
Factory Automation Systems Dept.
1010 Fujimi, Fujimi-machi,
Suwa-gun, Nagano, 399-0295
JAPAN
LIEFERANTEN
Factory Automation/Robotics
TEL. : +1-562-290-5900
FAX : +1-562-290-5999
E-MAIL info@robots.epson.com
Factory Automation Division
TEL. : +49-(0)-2159-538-1391
FAX : +49-(0)-2159-538-3170
E-MAIL robot.infos@epson.de
Nord- & Südamerika
Europa
EPSON AMERICA, INC.
18300 Central Avenue
Carson, CA 90746
USA
EPSON DEUTSCHLAND GmbH
Otto-Hahn-Str.4
D-40670 Meerbusch
Deutschland
iv RS Rev. 3
Page 7
Für Kunden in der Europäischen Union
Der Aufkleber mit der durchgestrichenen Mülltonne auf Ihrem Produkt bedeutet, dass
dieses Produkt sowie eingesetzte Batterien nicht mit dem Hausmüll entsorgt werden
sollten. Um mögliche Schäden für Mensch und Umwelt zu vermeiden, entsorgen Sie
dieses Produkt und seine Batterien separat, sodass sie auf umweltfreundliche Weise
wiederverwertet werden können. Nähere Informationen zu Sammelstellen können Sie bei
der zuständigen örtlichen Behörde oder bei dem Händler erhalten, bei dem Sie dieses
Gerät gekauft haben. Die chemischen Symbole Pb, Cd oder Hg zeigen an, ob diese
Materialien in der Batterie enthalten sind.
Diese Information gilt nur für Kunden in der Europäischen Union gemäß der
RICHTLINIE 2006/66/EG DES EUROPÄISCHEN PARLAMENTS UND DES RATES
vom 6. September 2006 über Batterien und Akkumulatoren sowie Altbatterien und
Altakkumulatoren und zur Aufhebung der Richtlinie 91/157/EWG sowie gemäß der
Gesetze, die diese Richtlinie auf nationaler Ebene umsetzen.
Kunden außerhalb der EU sollten die zuständige örtliche Behörde kontaktieren um
herauszufinden, wie das Produkt der Wiederverwertung zugeführt werden kann.
Der Austausch und die Entnahme der Batterie sind in den folgenden Handbüchern
beschrieben:
Steuerungshandbuch/Manipulator-Handbuch (Wartungskapitel)
RS Rev. 3 v
Page 8

Bevor Sie das Handbuch lesen…
In diesem Abschnitt finden Sie die Informationen, die Sie benötigen, bevor Sie dieses
Handbuch lesen.
Zusammensetzung des Steuerungssystems
Manipulatoren der RS-Serie können mit den folgenden Kombinationen aus Steuerungen und
Software betrieben werden.
Die Betriebs-Methoden und Beschreibungen sind abhängig davon, welche Software Sie
verwenden, unterschiedlich. Die folgenden Zeichen sind bei Bedarf neben dem
entsprechenden Text eingefügt. Verwenden Sie die Beschreibungen, die Ihre verwendete
Software betreffen.
Steuerung : RC180
Software : EPSON RC+ 5.0 Ver. 5.3 oder höher
Für Details zu den Befehlen, sehen Sie bitte im Benutzerhandbuch oder in der
"Online-Hilfe" nach.
Steuerung EIN/AUS schalten
Wenn Sie die Anweisung „Die Steuerung EIN/AUS schalten“ in diesem Handbuch sehen,
schalten Sie alle Hardwarekomponenten EIN/AUS. Für die Zusammensetzung des
Steuerungssystems lesen Sie die Tabelle oben.
Form der Motoren
Die Form der Motoren, die für Ihren verwendeten Manipulator benutzt werden, kann sich
aufgrund der technischen Bedingungen von der Form der Motoren unterscheiden, die in
diesem Handbuch beschrieben werden.
Einstellungen in der Software
In diesem Handbuch werden Einstellungen beschrieben, die in der Software vorgenommen
werden. Die betreffenden Textabschnitte sind mit dem folgenden Icon markiert.
EPSON
RC+
Abbildungen in diesem Handbuch
Die Abbildungen des Manipulators in diesem Handbuch sind in der Regel Abbildungen
des Standard-Modells. Wenn nicht speziell darauf hingewiesen wird, gelten die Angaben
gleichermaßen für das Standard-Modell, das Reinraum-Modell und das Protected-Modell
(IP54 / IP65).
vi RS Rev. 3
Page 9

INHALTSVERZEICHNIS
Bevor Sie das Handbuch lesen ........................................................................ v
Einrichten und Betrieb
1. Sicherheit 3
1.1 Konventionen ............................................................................................. 3
1.2 Konstruktion und Installationssicherheit ..................................................... 4
1.3 Betriebssicherheit ....................................................................................... 5
1.4 Not-Aus ...................................................................................................... 6
1.5 Manuelle Manipulatorbewegung im Not-Aus-Modus .................................. 7
1.6 Beschriftungen am Manipulator .................................................................. 8
2. Spezifikationen 10
2.1 Eigenschaften der Manipulatoren der RS-Serie ....................................... 10
2.2 Modellbezeichnung und Modellunterschiede ........................................... 10
2.3 Bauteilenamen und Außenabmessungen................................................. 1 1
2.4 Spezifikationen ......................................................................................... 15
2.5 Einstellen des Modells .............................................................................. 18
3. Umgebungen und Installation 19
3.1 Umgebungsbedingungen ......................................................................... 19
3.2 Basis-Tisch ............................................................................................... 20
3.3 Montageabmessungen ............................................................................. 23
3.4 Auspacken und Transport ......................................................................... 24
3.5 Installationsvorgang ................................................................................. 25
3.6 Anschluss der Kabel ................................................................................. 26
3.7 Anwenderkabel und Pneumatikschläuche ................................................ 27
3.8 Standortwechsel und Lagerung ................................................................ 28
4. Einstellung der Greifer 30
4.1 Greifer anbringen ..................................................................................... 30
4.2 Kameras und Luftventile anbringen .......................................................... 31
4.3 Einstellen von Weight (Gewicht) und Inertia (Trägheit) ............................ 31
4.4 Vorkehrungen für die Auto-Beschleunigung/Verzögerung der 3. Achse ... 37
5. Arbeitsbereich 38
5.1 Einstellung des Arbeitsbereiches durch den Pulse-Bereich ..................... 38
5.1.1 Max. Pulse-Bereich der 1. Achse .................................................. 39
5.1.2 Max. Pulse-Bereich der 2. Achse .................................................. 39
5.1.3 Max. Pulse-Bereich der 3. Achse .................................................. 40
5.1.4 Max. Pulse-Bereich der 4. Achse .................................................. 40
5.2 Arbeitsbereich-Einstellung durch mechanische Stopper der 3. Achse ...... 41
5.3 Einstellen des kartesischen (rechteckigen) Bereichs im
XY-Koordinatensystem des Manipulators (für 1. und 2. Achse) ........... 43
5.4 Standard Arbeitsbereich ........................................................................... 43
RS Rev. 3 vii
Page 10
INHALTSVERZEICHNIS
Wartung
1. Sicherheit Wartung 45
2. Allgemeine Wartung 47
2.1 Zeitplan für die Inspektion ........................................................................ 47
2.2 Inspektionspunkt ...................................................................................... 48
2.3 Schmieren ............................................................................................... 50
2.4 Festziehen der Innensechskantschrauben .............................................. 51
2.5 Anpassen der Ursprungspositionen ......................................................... 51
2.6 Anordnung der Ersatzteile ....................................................................... 52
3. Abdeckung 53
3.1 1. Arm ...................................................................................................... 54
3.2 2. Arm ...................................................................................................... 56
3.3 Anschlussplatte ........................................................................................ 59
3.4 Sockelabdeckung .................................................................................... 60
3.5 Anwender-Anschlusseinheit ..................................................................... 61
2.2.1 Inspektion in ausgeschaltetem Zustand ....................................... 48
2.2.2 Inspektion in eingeschaltetem Zustand ........................................ 49
3.1.1 RS3-351S (Standard-Modell) ....................................................... 55
3.1.2 RS3-351C (Reinraum-Modell) ..................................................... 55
3.2.1 Abdeckung 2. Arm ........................................................................ 56
3.2.2 Untere Abdeckung ....................................................................... 57
3.2.3 2. Arm Wartungsabdeckung ......................................................... 58
4. Kabelbaum 62
4.1 Austausch des Kabelbaums .................................................................... 63
4.2 Verkabelungspläne .................................................................................. 71
4.2.1 Signalkabel .................................................................................. 71
4.2.2 Stromkabel ................................................................................... 73
4.2.3 Anwenderkabel ............................................................................ 75
5. 1. Arm 76
5.1 Austausch des Motors der 1. Achse ......................................................... 77
5.2 Austausch des Untersetzungsgetriebes der 1. Achse .............................. 80
5.3 Austausch des J1-Riemens ..................................................................... 84
6. 2. Arm 85
6.1 Austausch des Motors der 2. Achse ......................................................... 86
6.2 Austausch des Untersetzungsgetriebes der 2. Achse .............................. 90
6.3 Austausch des J2-Riemens ..................................................................... 94
7. 3. Arm 95
7.1 Austausch des Motors der 3. Achse ......................................................... 96
7.2 Austausch des Zahnriemens.................................................................. 100
7.3 Austausch der Bremse ........................................................................... 101
viii RS Rev. 3
Page 11

INHALTSVERZEICHNIS
8. 4. Arm 103
8.1 Austausch des Motors der 4. Achse ....................................................... 104
8.2 Austausch des Zahnriemens .................................................................. 108
8.3 Austausch der Bremse ........................................................................... 112
9. Faltenbalg 113
10. Kugelumlaufspindel 116
10.1 Schmieren der Kugelumlaufspindel ...................................................... 116
10.1.1 Standard-Modell ....................................................................... 117
10.1.2 Reinraum-Modell / Protected-Modell ........................................ 1 18
10.2 Austausch der Kugelumlaufspindel ...................................................... 119
11. Lithium-Batterie 125
11.1 Austausch der Batterie (Lithium-Batterie) ............................................. 126
11.2 Austausch des Batterie-Boards ............................................................ 127
12. LED-Lampe 128
13. Kalibrierung 129
13.1 Über die Kalibrierung ............................................................................ 129
13.2 Kalibrierverfahren ................................................................................. 130
13.3 Genaue Kalibrierung der 2. Achse ....................................................... 136
13.4 Kalibrieren ohne den Kalibrierungsassistenten .................................... 138
14. Ersatzteilliste 142
14.1 Teile aller Modelle ................................................................................. 142
14.2 Teile je Modell ....................................................................................... 143
RS Rev. 3 ix
Page 12

Einrichten und Betrieb
Dieses Handbuch beinhaltet Informationen über das Einrichten und den
Betrieb des RS-Serie Manipulators.
Bitte lesen Sie dieses Handbuch gründlich, bevor Sie den Manipulator
einrichten und betreiben.
Page 13

Page 14
1. Sicherheit
Die Installation sowie der Transport von Robotern und Roboterausrüstung darf nur von
qualifiziertem Personal in Übereinstimmung mit nationalen und örtlichen Vorschriften
durchgeführt werden. Lesen Sie dieses Handbuch und andere in Beziehung stehende
Handbücher, bevor Sie das Robotersystem installieren oder bevor Sie Kabel anschließen.
Bewahren Sie dieses Handbuch so auf, dass es jederzeit griffbereit ist.
1.1 Konventionen
Wichtige Sicherheitshinweise sind in diesem Handbuch durch folgende Symbole
gekennzeichnet. Lesen Sie die Beschreibungen zu jedem Symbol.
WARNUNG
WARNUNG
Einrichten und Betrieb 1. Sicherheit
Dieses Symbol weist Sie auf die Gefahr schwerer Verletzungen
oder Lebensgefahr hin, die besteht, wenn die zugehörigen
Anweisungen nicht befolgt werden.
Dieses Symbol weist Sie auf die Gefahr möglicher schwerster
Verletzung oder Todesfolge durch elektrischen Schlag hin, die
besteht, wenn diese A nweisungen nicht richtig befolgt werden.
Dieses Symbol weist Sie auf mögliche Personen- oder
Sachschäden an der Ausrüstung oder am System hin, die
VORSICHT
entstehen können, wenn die zugehörigen Anweisungen nicht
befolgt werden.
RS Rev. 3 3
Page 15
Einrichten und Betrieb 1. Sicherheit
N
1.2 Konstruktion und Installationssicherheit
Nur geschultes Personal darf das Robotersystem zusammenbauen und installieren.
Geschultes Personal ist Personal, das an Robotersystemschulungen und
Wartungsschulungen teilgenommen hat, die vom Hersteller, Händler oder Repräsentanten
vor Ort durchgeführt werden. Geschultes Personal ist auch das Personal, das die
Handbücher vollständig versteht und über das Wissen und die Qualifikationen verfügt, die
dem Wissen des Personals entsprechen, das an den Schulungen teilgenommen hat.
Um Sicherheit zu gewährleisten, muss eine Sicherheitsabschrankung für das
Robotersystem installiert werden. Für nähere Informationen zur Sicherheitsabschrankung
lesen Sie den Abschnitt Vorkehrungen für die Installation und den Aufbau im Kapitel
Sicherheit im EPSON RC+ Benutzerhandbuch.
In den folgenden Abschnitten werden Sicherheitsvorkehrungen für das
Konstruktionspersonal beschrieben:
■
Personal, welches das Robotersystem mit diesem Produkt gestaltet und/oder konstruiert,
muss das Kapitel Sicherheit im EPSON RC+ Benutzerhandbuch lesen, um die
Sicherheitsanforderungen zu verstehen, bevor es das Robotersystem gestaltet oder
konstruiert. Der Zusammenbau und/oder die Konstruktion des Robotersystems ohne die
Sicherheitsanforderungen zu verstehen, ist extrem gefährlich. Dies kann schwere
Verletzungen und/oder Schäden am Robotersystem zur Folge haben und ernste
Sicherheitsprobleme verursachen.
WARNUNG
■
Der Manipulator und die Steuerung müssen in den Umgebungsbedingungen betrieben
werden, die in den entsprechenden Handbüchern beschrieben werden. Dieses Produkt ist
ausschließlich für den Gebrauch in normaler Innenraumumgebung entworfen und
hergestellt worden. Die Verwendung des Produktes in einer Umgebung mit anderen als
den vorgegebenen Umgebungsbedingungen kann nicht nur die Lebensdauer des
Produktes verkürzen, sondern auch ernste Sicherheitsprobleme verursachen.
■
Das Robotersystem muss gemäß den Installationsanforderungen verwendet werden, die
in den Handbüchern beschrieben werden. Die Verwendung des Robotersystems unter
ichterfüllung der Installationsanforderungen kann nicht nur die Lebensdauer des
Produkts verkürzen, sondern auch ernste Sicherheitsprobleme verursachen.
Weitere Vorkehrungen für die Installation sind im Kapitel Einrichten und Betrieb
beschrieben: 3. Umgebungen und Installation. Bitte lesen Sie dieses Kapitel vor der
Installation der Roboter und der Roboterausrüstung sorgfältig durch, damit Sie mit den
Sicherheitsvorkehrungen bei der Installation vertraut sind.
4 RS Rev. 3
Page 16
j
N
N
1.3 Betriebssicherheit
In den folgenden Abschnitten werden Sicherheitsvorkehrungen für qualifiziertes
Bedienpersonal beschrieben:
■
Bitte lesen Sie die Sicherheitsbezogenen Anforderungen im Kapitel Sicherheit des
EPSON RC+ Benutzerhandbuchs, bevor Sie das Robotersystem in Betrieb nehmen. Der
Betrieb des Robotersystems, ohne die Sicherheitsanforderungen zu verstehen, ist extrem
gefährlich und kann zu schweren Verletzungen und/oder schweren Schäden an Geräten
des Robotersystem führen.
■
Betreten Sie den Arbeitsbereich des Manipulators nicht, während das Robotersystem mit
Strom versorgt wird. Das Betreten des Arbeitsbereichs bei EINgeschaltetem System ist
extrem gefährlich und kann ernste Sicherheitsprobleme verursachen, da sich der
Manipulator bewegen kann, auch wenn es so aussieht, als wäre er angehalten.
■
Bevor Sie das Robotersystem betreiben, stellen Sie sicher, dass sich niemand innerhalb
WARNUNG
der Sicherheitsabschrankung aufhält. Das Robotersystem kann im TEACH-Modus
betrieben werden, auch wenn sich jemand innerhalb der Sicherheitsabschrankung
aufhält.
Um die Sicherheit des Bedieners zu gewährleisten befindet sich der Manipulator dann
immer im begrenzten Status (langsame Geschwindigkeit und Low Power). Während sich
emand im geschützten Bereich befindet, ist der Betrieb des Manipulators extrem
gefährlich und kann ernste Sicherheitsprobleme verursachen, wenn der Manipulator sich
unerwartet bewegt.
Einrichten und Betrieb 1. Sicherheit
WARNUNG
VORSICHT
■
Drücken Sie den Not-Aus-Taster, wann immer sich der Manipulator während des
Robotersystem-Betriebes unnormal bewegt.
■
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung
an.
■
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von
der Spannungsversorgung. Austauscharbeiten bei EINgeschalteter Spannung sind extrem
gefährlich und können zu einem elektrischen Schlag und/oder einer Fehlfunktion des
Robotersystems führen.
■
Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange Spannung
am Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorstecker bei
anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen
Verletzungen führen, da sich der Manipulator unnormal bewegen kann. Es kann auch zu
einem elektrischen Schlag und/oder Fehlfunktion des Robotersystems führen.
■
Wann immer möglich, sollte nur eine Person das Robotersystem betreiben. Wenn es
erforderlich ist, das Robotersystem mit mehr als einer Person zu betreiben, stellen Sie
sicher, dass alle beteiligten Personen miteinander darüber kommunizieren, was sie tun,
und treffen Sie alle nötigen Sicherheitsvorkehrungen.
RS Rev. 3 5
Page 17
Einrichten und Betrieb 1. Sicherheit
1.4 Not-Aus
Wenn sich der Manipulator während des Betriebes unnormal bewegt, drücken Sie sofort
den Not-Aus-Taster. Der Taster unterbricht die Stromversorgung der Motoren, sodass der
Arm so schnell wie möglich mithilfe der generatorischen Bremse und der mechanischen
Bremse angehalten wird.
Vermeiden Sie es jedoch, den Not-Aus-Taster unnötig zu drücken, während der
Manipulator normal arbeitet. Andernfalls kann der Manipulator gegen die Peripheriegeräte
schlagen, da sich die Bewegungsbahn während des Anh altens des Robo tersystems von der
Bewegungsbahn im normalen Betrieb unterscheidet.
Um das System während des normalen Betriebes in den Not-Aus-Modus zu versetzen,
betätigen Sie den Not-Aus-Taster, wenn sich der Manipulator nicht bewegt.
Lesen Sie im Steuerungshandbuch nach, wie der Not-Aus-Stromkreis zu verdrahten ist.
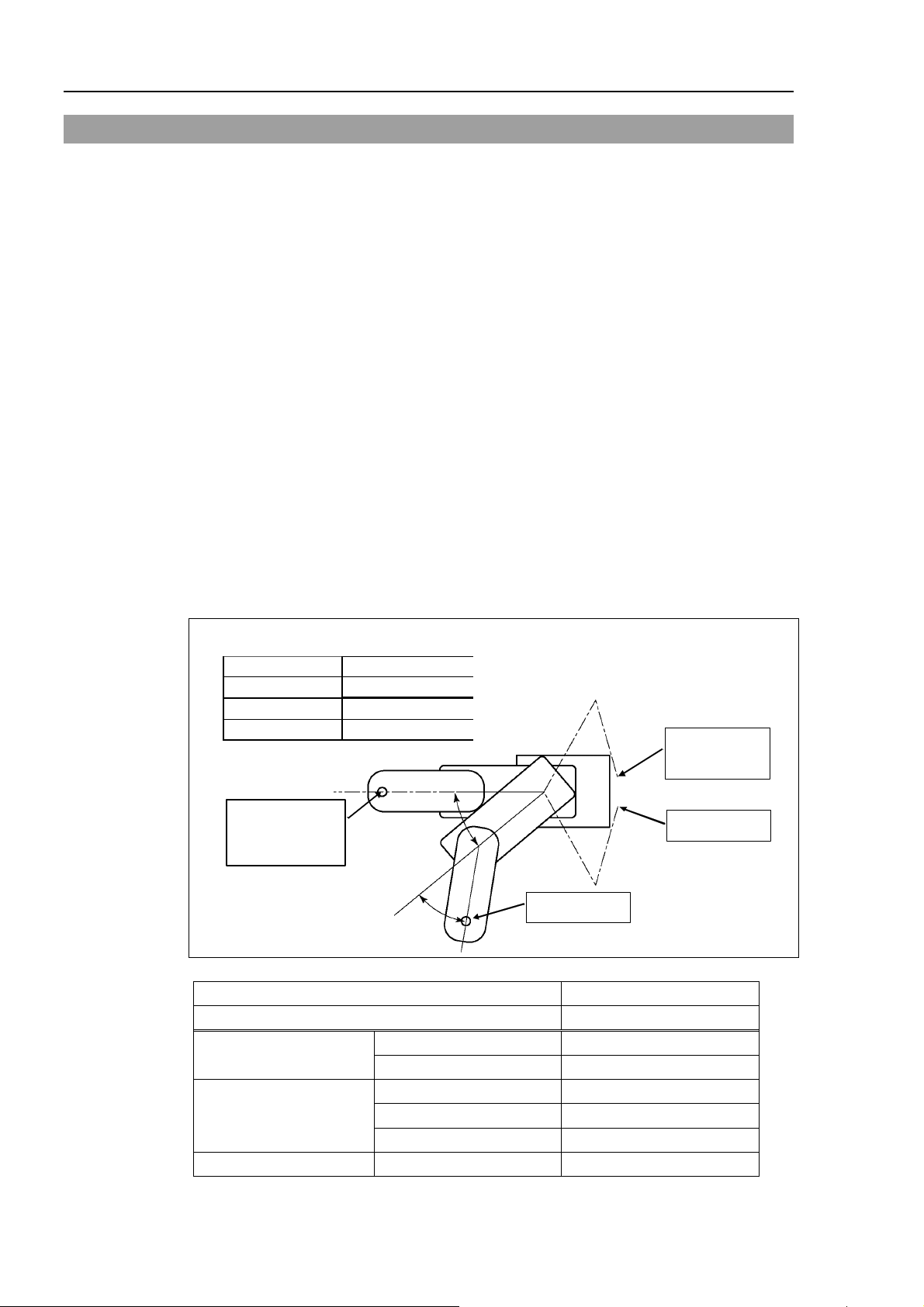
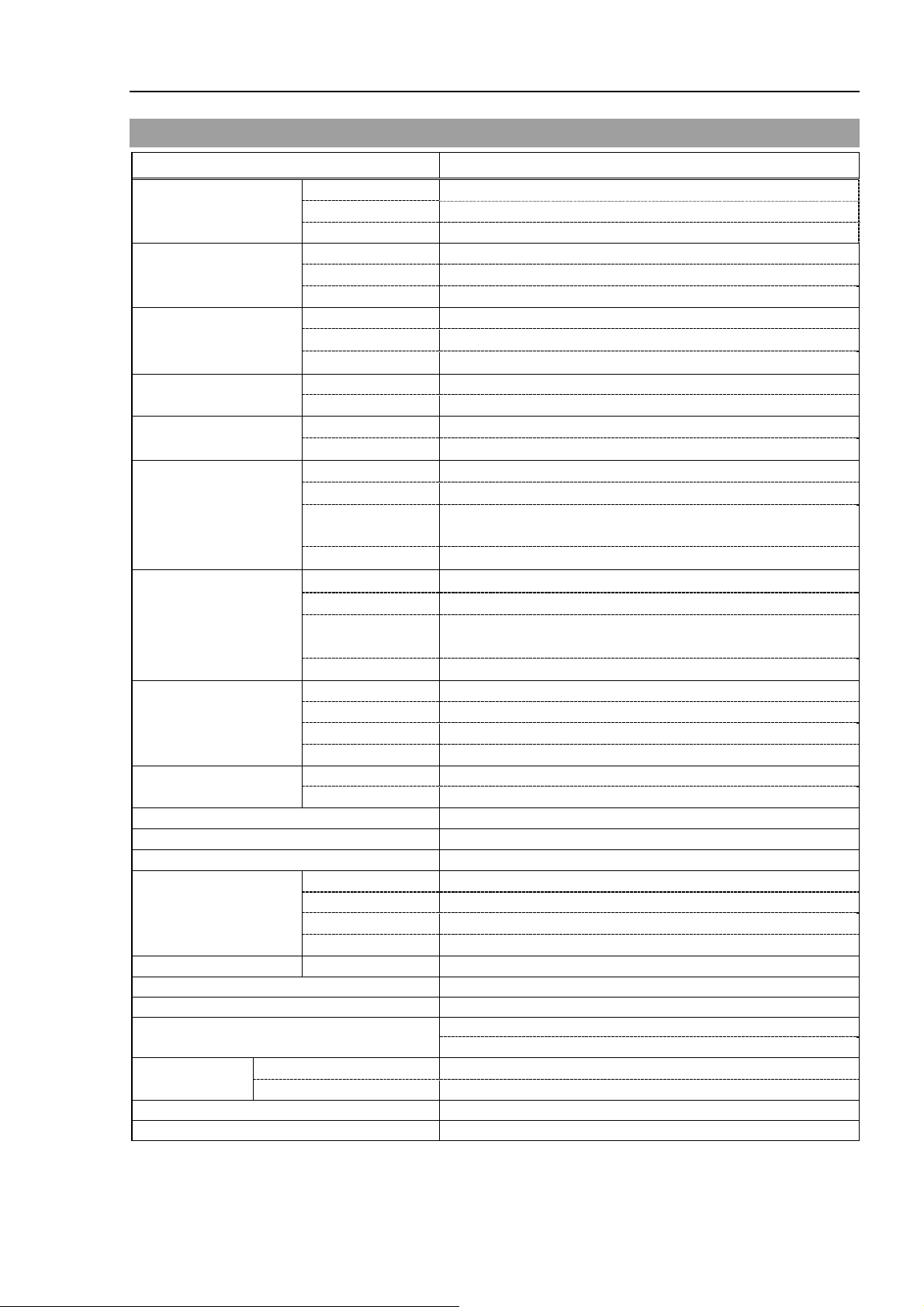
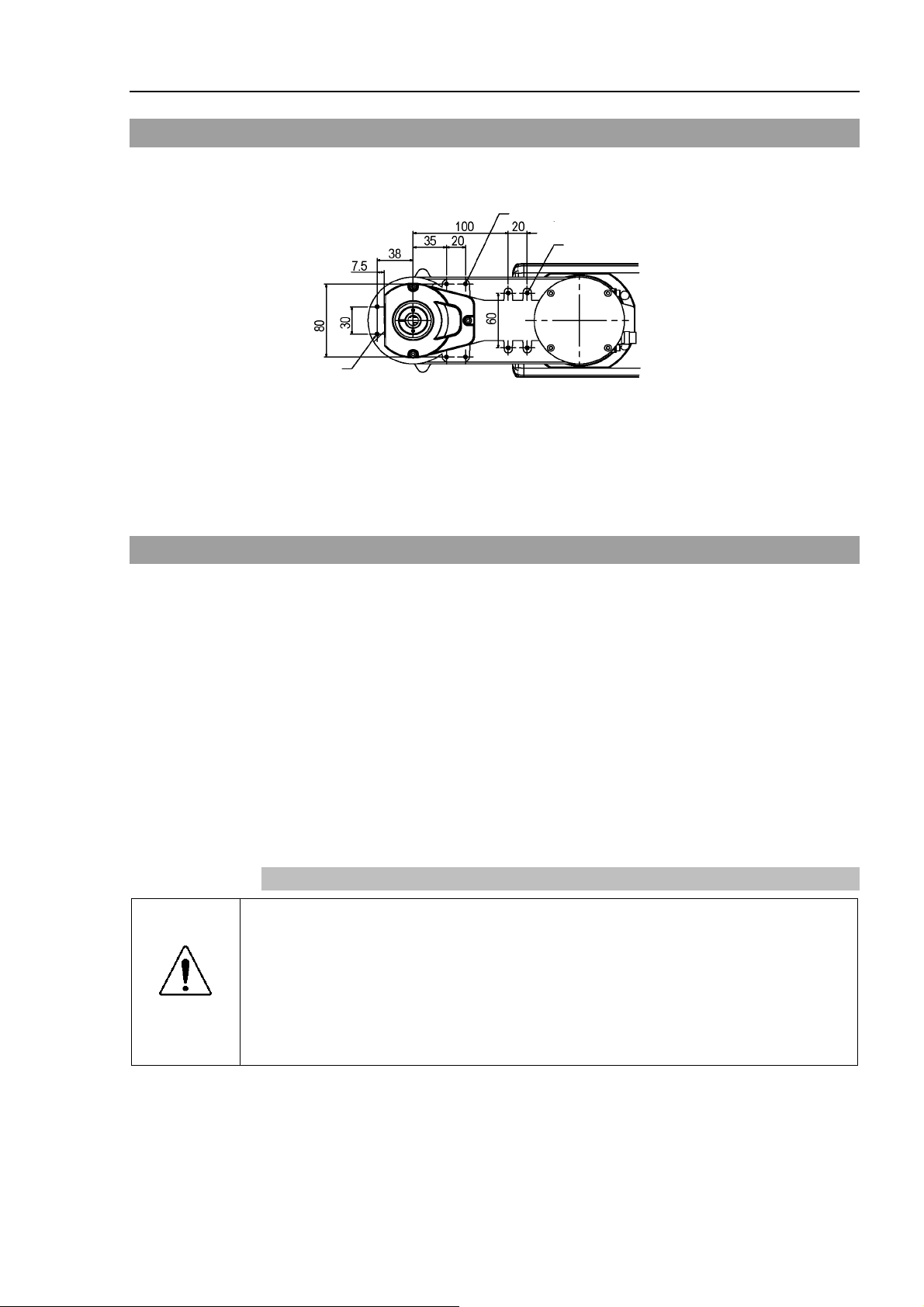
Freischwingende Strecke beim Not-Aus
Der arbeitende Manipulator kann nicht sofort anhalten, nachdem der Not-Aus-Taster
gedrückt wurde.
Die freie Laufzeit/-weite und der freie Laufwinkel des Manipulators sind unten dargestellt.
Beachten Sie jedoch, dass die Werte abhängig von den folgenden Bedingungen variieren.
Greifergewicht, Werkstückgewicht, Arbeitsposition,
Weight/Speed/Accel-Einstellungen, etc.
Messbedingungen
Accel-Einstellung 100
Speed-Einstellung 100
Last [kg] 3
Weight-Einstellung 3
Stelle, an der das
Not-Aus-Signal
ausgelöst wird
1. Achse
2. Achse
Stoppposition
Startposition
der Bewegung
Zielpunkt
Steuerung RC180
Manipulator RS3-351*
Freie Laufzeit
Freier Laufwinkel
Freischwingende Strecke 3. Achse [mm] 55
1. + 2. Achse [s] 0,4
3. Achse [s] 0,2
1. Achse [Grad] 50
2. Achse [Grad] 30
1. + 2. Achse [Grad] 80
6 RS Rev. 3
Page 18
Einrichten und Betrieb 1. Sicherheit
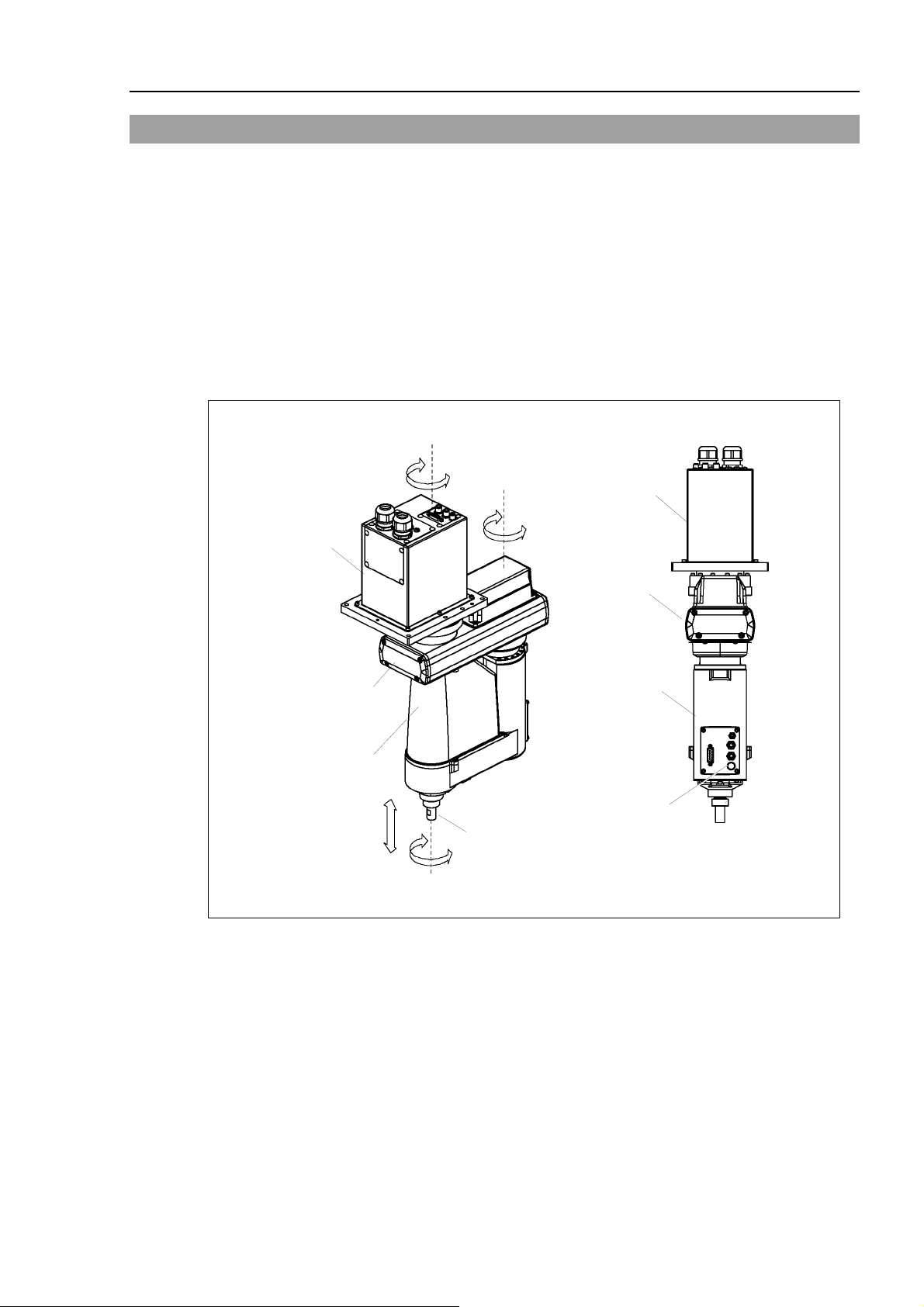
1.5 Manuelle Manipulatorbewegung im Not-Aus-Modus
Wenn sich das System im Not-Aus-Modus befindet, bewegen Sie den Arm oder die
Achse des Manipulators wie unten beschrieben:
1. Arm .............. Bewegen Sie den Arm manuell.
2. Arm .............. Bewegen Sie den Arm manuell.
3. Achse ........... Die Achse kann nicht manuell auf- oder abbewegt werden,
solange die elektromagnetische Bremse der Achse nicht gelöst
wird. Drücken Sie den Bremsfreigabetaster und bewegen Sie
die Achse auf/ab.
4. Achse ......... Bewegen Sie die Z-Achse von Hand.
1. Achse
(dreht)
−
+
2. Achse
(dreht)
−
Sockel
HINWEIS
Sockel
3. Achse
(auf und ab)
1. Arm
2. Arm
+
−
−
4. Achse
(dreht)
Z-Achse
+
+
1. Arm
2. Arm
3. Achse
Bremsfreigabetaster
Seien Sie vorsichtig, da sich die Z-Achse während der Betätigung des
Bremsfreigabetasters aufgrund des Gewichtes eines Greifers absenken kann.
RS Rev. 3 7
Page 19
Einrichten und Betrieb 1. Sicherheit
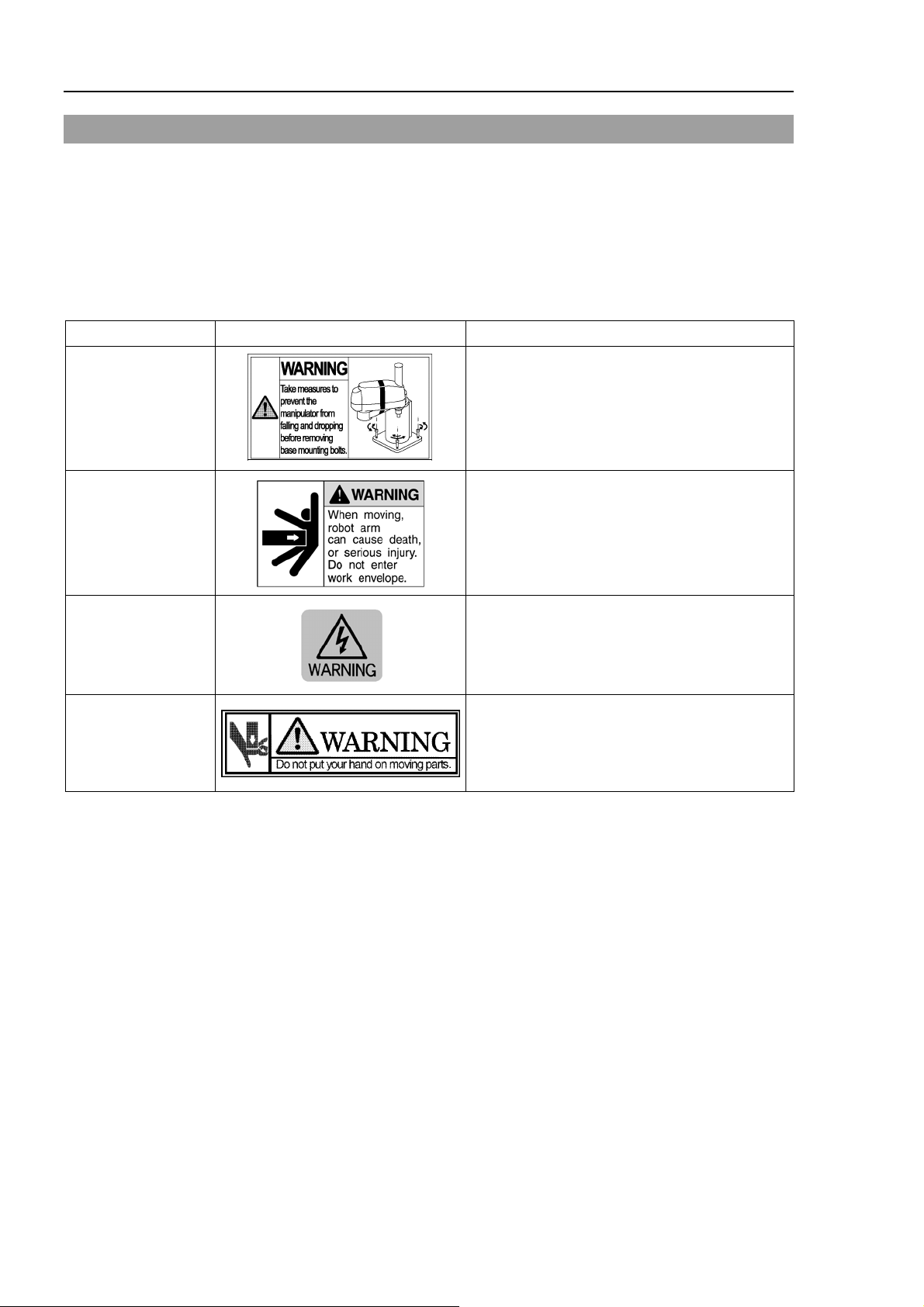
1.6 Beschriftungen am Manipulator
Die folgenden Aufkleber sind nahe den Stellen des Manipulators angebracht, an denen
besondere Gefahr besteht.
Befolgen Sie die Beschreibungen und Warnungen auf den Aufklebern, um den
Manipulator sicher zu betreiben und zu warten.
Reißen Sie die Aufkleber nicht ab, beschädigen oder entfernen Sie die Aufkleber nicht.
Seien Sie äußerst sorgsam, wenn Sie mit den Teilen oder Einheiten arbeiten, an welchen
die folgenden Aufkleber angebracht sind, oder wenn Sie sich in deren Nähe befinden:
Label HINWEIS
A
Bevor Sie die Sockel-Befestigungsschrauben
lösen, halten Sie den Arm und binden Sie ihn fest,
um Hände und Finger davor zu schützen, im
Manipulator eingeklemmt zu werden.
B
Es besteht gefährliche Spannung, während der
C
D
Manipulator EINgeschaltet ist. Um einen
elektrischen Schlag zu vermeiden, berühren Sie
keine elektrischen Teile im Inneren.
Wenn sie zu nah an bewegliche Teile kommen,
können Hand oder Finger zwischen Z-Achse und
1. Arm gequetscht werden.
8 RS Rev. 3
Page 20
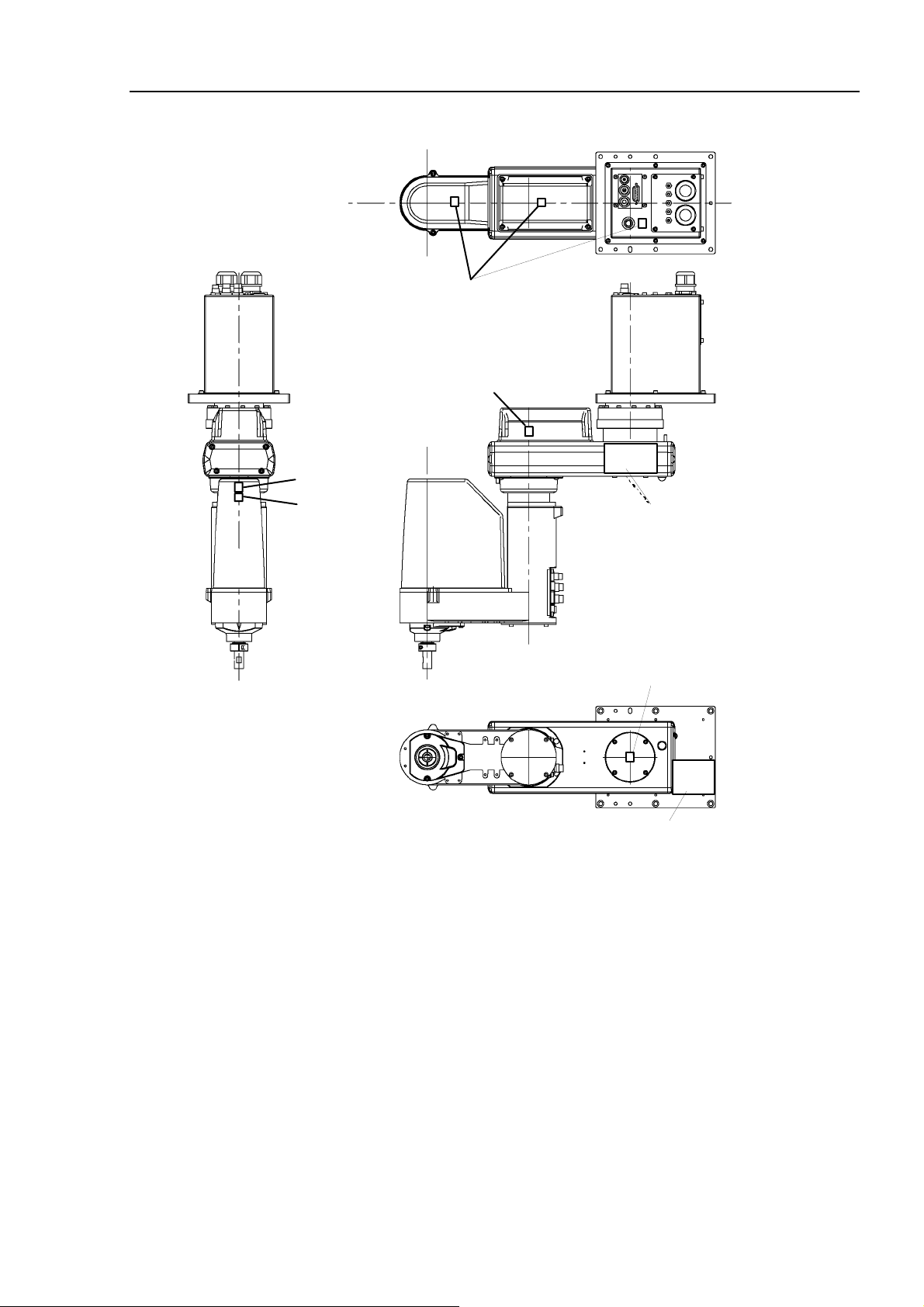
Einrichten und Betrieb 1. Sicherheit
A
A
Draufsicht
C
Seitenansicht
D
C
B (beide Seiten)
Vo rd e rs e it e
C
nsicht
von unten
RS Rev. 3 9
Page 21
Einrichten und Betrieb 2. Spezifikationen
A
2. Spezifikationen
2.1 Eigenschaften der Manipulatoren der RS-Serie
Die Manipulatoren der RS-Serie sind Hochleistungs-Manipulatoren in
bedienerfreundlichem Design, die für hohe Geschwindigkeit, hohe Genauigkeit,
Platzeinsparung und vielfältigen Einbau stehen.
Die Manipulatoren der RS-Serie haben folgende Eigenschaften:
Platzeinsparung
kompakt durch Ausführung ohne Schläuche
Geringe Körpergröße und großer Arbeitsbereich
Zylindrischer Arbeitsbereich durch Deckenmontage
- Arbeitsbereich: ca. 160 % des Arbeitsbereichs eines SCARA-Roboters mit derselben
Armlänge
- max. eingeschriebenes Quadrat: ca. 250 % im Vergleich zu einem SCARA-Roboter
mit derselben Armlänge
Höhe Flexibilität in Bezug auf den Einbau von Peripheriegeräten
Zugriff auf ALLE Richtungen
Verbesserte Betriebsleistung
Verkürzter Weg durch nach innen gerichtete Bewegung.
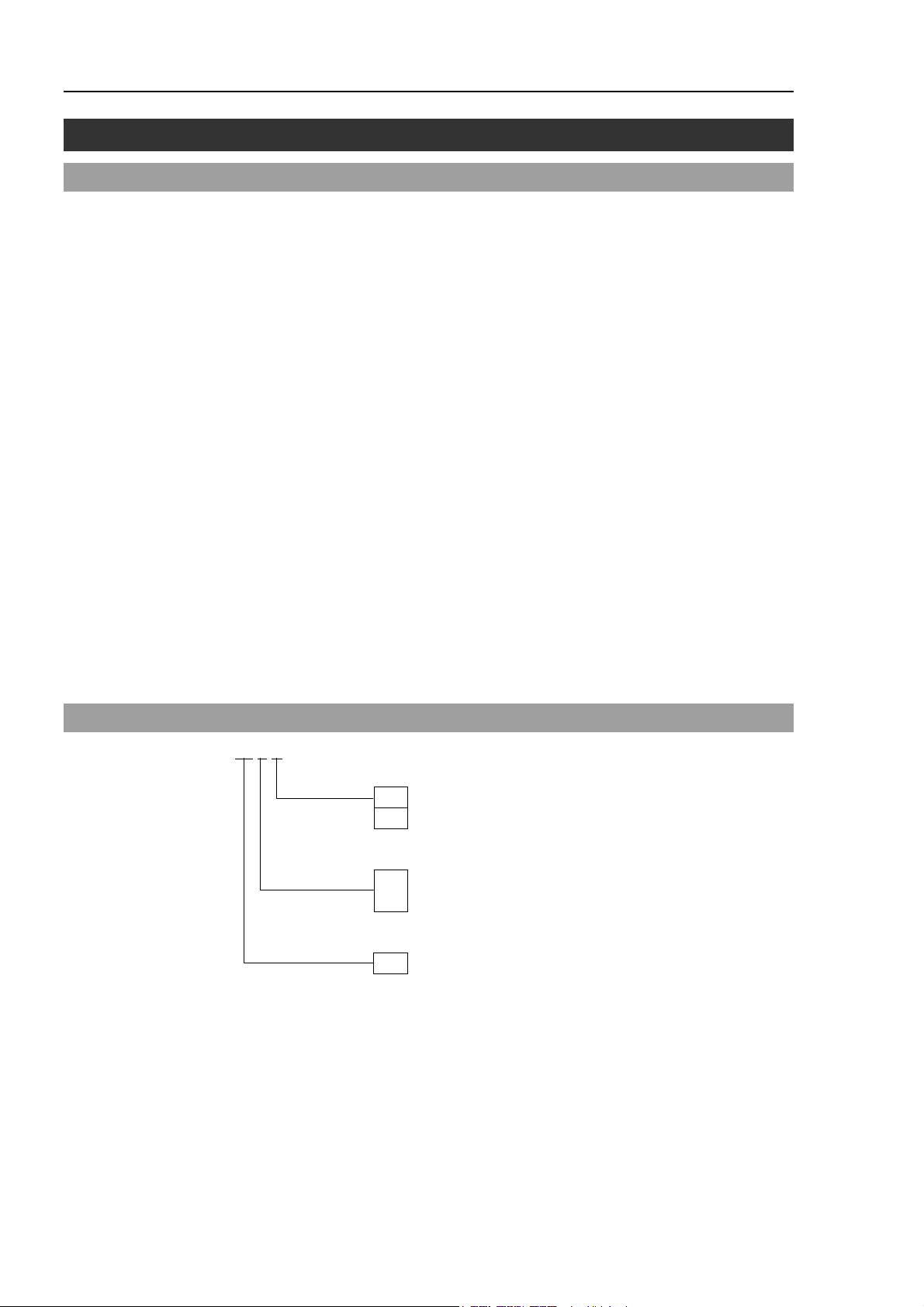
2.2 Modellnummer
RS3-35 1 S
Umgebung
Reinraum-Modell
Dieses Modell verfügt über zusätzliche Vorrichtungen, die den Staub reduzieren, der
durch den Manipulator abgegeben wird, um den Gebrauch in Reinraum-Umgebungen zu
ermöglichen.
Umgebung
S : Standard
C : Reinraum und ESD (antistatisch)
3. Achse Hub
: 130 mm
1
: 100 mm (mit Faltenbalg)
rmlänge
35 : 350 mm
Nähere Informationen zu den Spezifikationen finden Sie im Kapitel Einrichten und
Betrieb: 2.4 Spezifikationen.
10 RS Rev. 3
Page 22
Einrichten und Betrieb 2. Spezifikationen
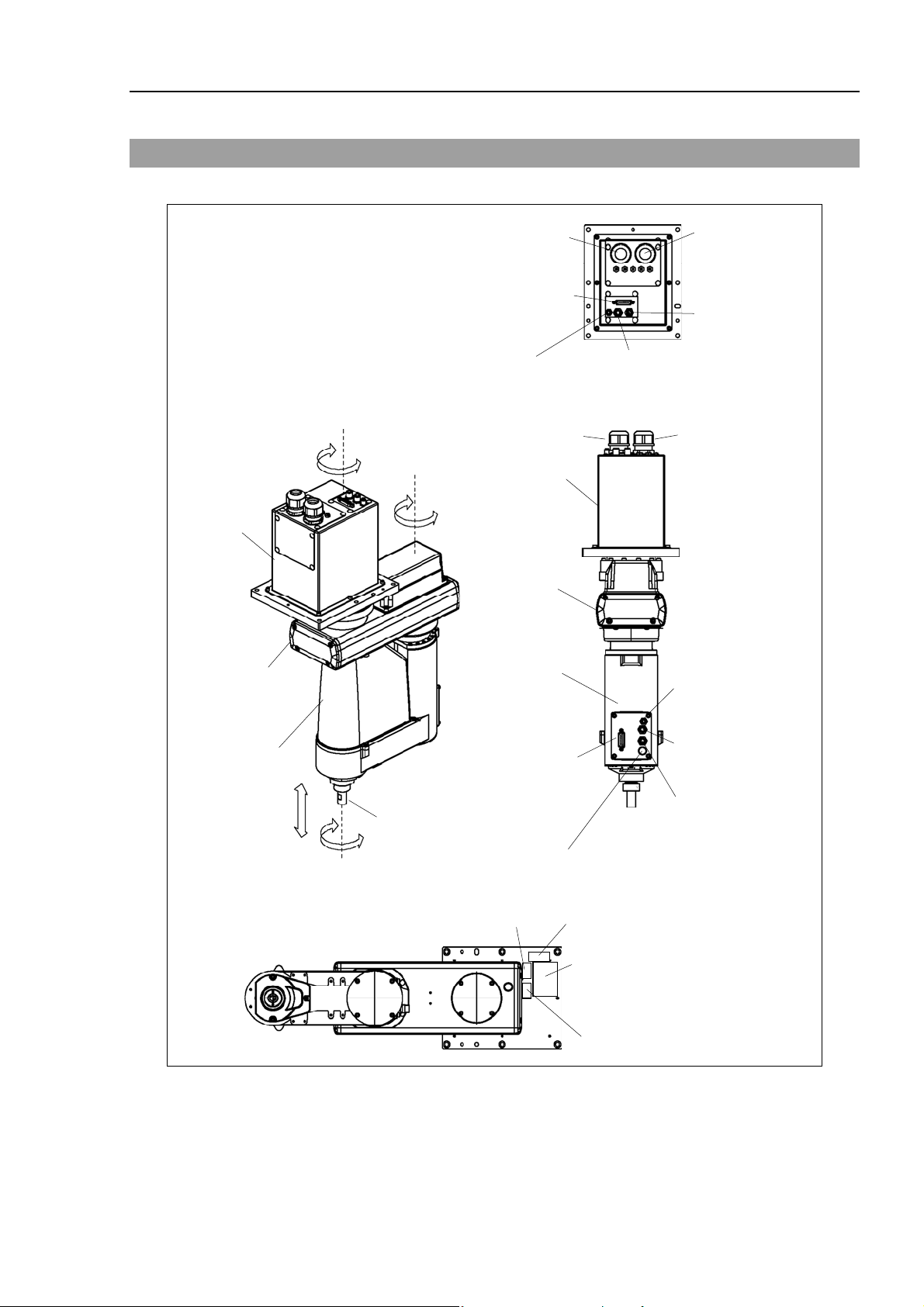
2.3 Bauteilenamen und Außenabmessungen
Standard-Modell: RS3-351S
Signalkabel
Schnellkupplung
(weiß) für
Pneumatikschlauch
ø 6 mm
Signalkabel
1. Achse
(dreht)
−
+
Stromkabel
Anwenderverkabelung
(15 Pin D-Sub-Anschluss)
Schnellkupplung
(weiß) für
Pneumatikschlauch
ø 4 mm
2. Achse
(dreht)
Stromkabel
Sockel
Schnellkupplung
(schwarz) für
Pneumatikschlauch
ø 6 mm
−
Sockel
1. Arm
+
1. Arm
Schnellkupplung
2. Arm
(weiß) für
Pneumatikschlauch
ø 4 mm
2. Arm
3. Achse
(auf und ab)
+
−
−
4. Achse
(dreht)
Z-Achse
+
Anwenderverkabelung
(15 Pin D-Sub-Anschluss)
3. und 4. Achse
Bremsfreigabetaster
CE Aufkleber
MT Aufkleber (nur für
Kundenspezifikation)
Signatur-Aufkleber
(SerienNr. des Manipulators)
UL Aufkleber
Schnellkupplung
(schwarz) für
Pneumatikschlauch
ø 6 mm
Schnellkupplung
(weiß) für
Pneumatikschlauch
ø 6 mm
RS Rev. 3 11
Page 23
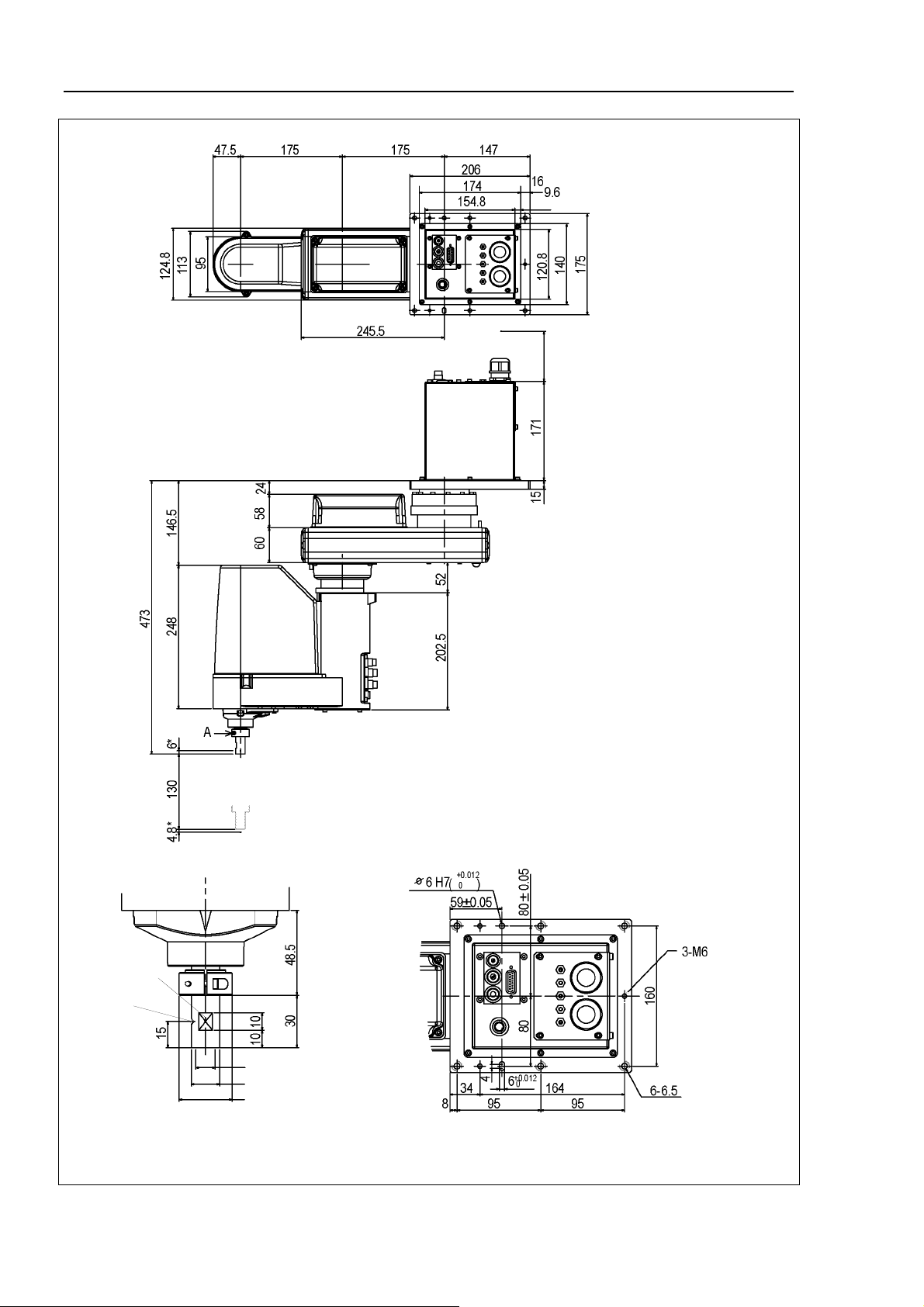
Einrichten und Betrieb 2. Spezifikationen
9
gang
n
o
0odermehr Platz
für K ab el
sition für
←P
Manipu lator-In stallation
(*) zeigt Hubweite durch mechanischen Stopper an.
1 mm flacher
Sch nittt
Ø3,90°
Konisches
Loch
Max.ø1 1 Durc hga ng sbo hrung
ø16h 7 Durc hmesse r Z-Ach se
ø30
Du rc hmess e r me c han isch er Sto ppe r
Vergrößerte Ansicht von A
(Or iginal Ausrichtung der 3. und 4. Achse)
Referenz-Durchgang sbohrung
(Sockelansicht)
Durchgangsbohrung
für Manipulator Befestigun
Durch
ø11 Sti r nsenke
Ti ef e 6.5
sbohru
12 RS Rev. 3
Page 24
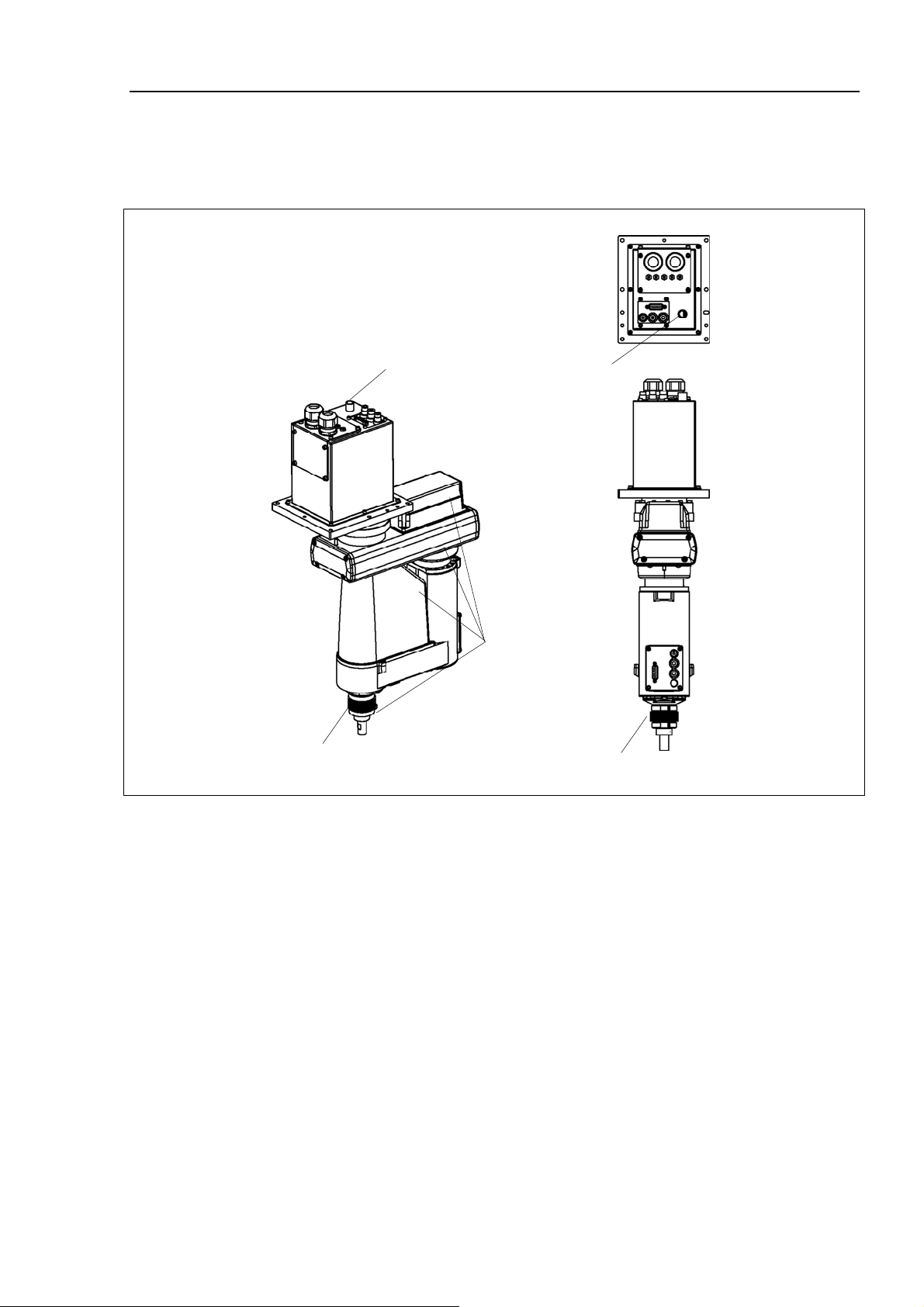
Einrichten und Betrieb 2. Spezifikationen
)
Reinraum-Modell: RS3-351C
Die folgenden Abbildungen zeigen die Teile, die nur das Reinraum-Modell hat (Tischplattenmontage).
Diese Teile sehen anders aus als beim Standard-Modell.
Faltenbalg
Abluft-Ausgang
Abluft-Ausgang
Metallisierte
Abdeckung (gegen
statische Elektrizität
Faltenbalg
RS Rev. 3 13
Page 25
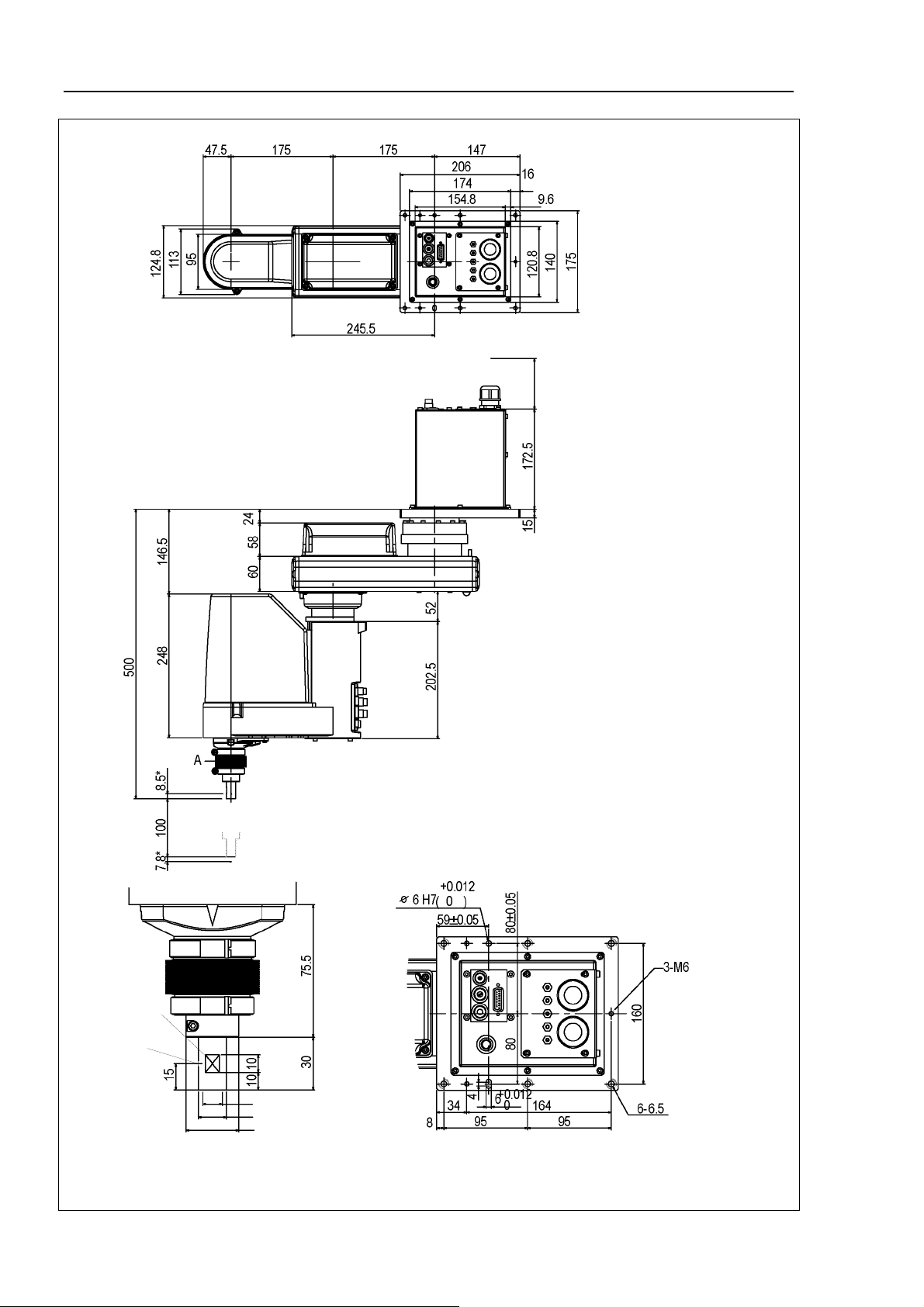
Einrichten und Betrieb 2. Spezifikationen
9
0 oder mehr Platz
für Kabel
← Positio n für
Man ipu lato r-In stallat ion
(*) zeigt Hubweite durch mechanischen Stopper an.
Durchgangsbohrung
1 mm fl ach er
Schnitt
Ø3,90°
konisches
Loch
Max.ø11 Durchgangsbohrung
ø16h7 Durchmesser Z-Achse
Du rchm esser m ech an ische r St op per Ø11 St irns enk e
ø30
Vergrößerte Ansicht von A
(Original Ausrichtung der 3. und 4. Achse
Referenz-Durchgangsbohrung
(Sockelansicht)
für Manipulator-Befestigun
Dur chgan gsbohru
Tiefe 6.5 (von der
Rückseite)
14 RS Rev. 3
Page 26
Einrichten und Betrieb 2. Spezifikationen
2.4 Spezifikationen
Parameter RS-Serie
1. & 2. Arm 350 mm
Armlänge
Max. Geschwindigkeit
*1
Wiederholgenauigkeit
Nutzlast (Last)
4. Achse erlaubtes
Trägheitsmoment *2
Max. Arbeitsbereich
Max. Pulse-Bereich
(Pulse)
Auflösung
Handdurchmesser
Montagebohrung
Gewicht (ohne Kabel)
Antriebsmethode
Motorleistungsaufnahme
Option
3. Achse Abwärts-Kraft 150 N
Anwenderverkabelung elektrisch 15-adrig: D-Sub/15-polige Stecker
Anwenderanschlüsse Pneumatik
Umgebungs-
bedingungen
Schallpegel *4 LAeq = 70 dB (A)
Verwendbare Steuerungen RC180
Umgebungstemperatur
Relative Luftfeuchtigkeit 10 % bis 80 % RH (nicht kondensierend)
1. Arm 175 mm
2. Arm 175 mm
1., 2. Achs e
3. Achse
4. Achse
1., 2. Achs e
3. Achse
4. Achse
Nennwert
Max.
Nennwert
Max.
1. Achse
2. Achse
3. Achse
4. Achse
1. Achse
2. Achse
3. Achse
4. Achse
1. Achse
2. Achse
3. Achse
4. Achse
Montage
hohl
1. Achse
2. Achse
3. Achse
4. Achse
Umgebung
6237 mm/s
1100 mm/s
2600 Grad/s
± 0,01 mm
± 0,01 mm
± 0,01 Grad
1 kg
3 kg
0,005 kg
0,05 kg
⋅m
⋅m
2
2
± 225 Grad
± 225 Grad
RS3-351S: 130 mm
RS3-351C: 100 mm
720 Grad
±
− 2.560.000 bis + 5.973.334 Pulse
± 4177920 Pulse
RS3-351S:
RS3-351C:
3145728 Pulse
±
0,0000527 Grad/Pulse
0,0000538 Grad/Pulse
0,0000879 mm/Pulse
0,000229 Grad/Pulse
ø 16 mm
ø 11 mm
6-M6
17 kg: 38 lb (Spezifikationen für
AC Servomotor
400 W
200 W
150 W
100 W
Reinraum *3 und ESD
2 Pneumatikschläuche (ø 6 mm): 0,59 Mpa (6 kgf/cm
1 Pneumatikschlauch (ø 4 mm): 0,59 Mpa (6 kgf/cm2 : 86 psi)
5 bis 40
− 1.479.112 Pulse bis 0 Pulse
− 1.137.778 Pulse bis 0 Pulse
°C (mit minimaler Temperaturschwankung)
Standard- und Reinraum-Modell)
2
: 86 psi)
RS Rev. 3 15
Page 27
Einrichten und Betrieb 2. Spezifikationen
Parameter RS-Serie
Zuordenbarer Wert ( )
Standardwerte
MTBF
Sicherheitsstandard
SPEED
ACCEL *5
SPEEDS
ACCELS
FINE
WEIGHT
1 bis (5) bis 100
1 bis (10) bis 120
1 bis (50) bis 2000
1 bis (200) bis 25000
0 bis (10000) bis 65000
0130 bis (1130) bis 3130
3 Jahre
erfüllt ANSI/RIA R15.06 CE-konform
*1: Beim PTP-Befehl. Die maximale Geschwindigkeit für den CP-Befehl beträgt 2,000 mm/s in der
horizontalen Ebene.
*2: W enn der Massenschwerpunkt in der Mitte der 4. A chse lieg t.
Wenn der Massenschwerpunkt nicht in der Mitte der 4. Achse liegt, stellen Sie den Parameter mithilfe des
Inertia-Befehls ein.
*3: Das Abluftsystem des Reinraum-Modell-Manipulators saugt Luft aus dem Inneren des Sockels und der
Armabdeckung.
Ein Riss oder eine andere Öffnung im Grundgerät kann den Verlust des negativen Luftdrucks im äußeren
Teil des Armes verursachen, was zu einem erhöhten Staubaustritt führen kann.
Entfernen Sie nicht die Wartungsabdeckung auf der Vorderseite des Sockels.
Dichten Sie den Abluft-Ausgang und den Abluft-Schlauch mit Vinyl-Klebeband ab, sodass der Anschluss
luftdicht ist.
Wenn der Abluft-Durchfluss nicht ausreichend ist, kann der Staubpartikel-Austritt den angegebenen
maximalen Grad überschreiten.
Reinheitsgrad: ISO-Klasse 3 (ISO14644-1)
Nach früheren Normen: Reinheitsklasse: 10 bzw. deren Entsprechung
3
Staubmenge (Durchmesser 0,1 µm oder größer) in 28317 cm
(1 cft) Probeluft um den Mittelpunkt
des Arbeitsbereiches herum: 10 Partikel oder weniger.)
Abluftsystem:
Durchmesser Abluft-Ausgang: Innendurchmesser: ø 12 mm / Außendurchmesser: ø16 mm
Abluftschlauch : Polyurethan-Schlauch
Außendurchmesser: ø 12 mm (Innendurchmesser: ø 8 mm)
oder Innendurchmesser ø 16 mm oder größer
Empfohlene A bluft-D urc hfl u s smenge: ca. 1000 cm
3
*4: Für die Messung müssen die folgenden Bedingungen für den Manipulator erfüllt sein:
Betriebsbedingungen : Unter Nennlast, 4-Achsen simultane Bewegung, maximale Geschwindigkeit,
maximale Beschleunigung und 50 % Leistung.
Messpunkt : Gegenüber dem Manipulator, 1000 mm vom Arbeitsbereich entfernt, 50 mm
über der Installations-Oberfläche.
/s (normal)
16 RS Rev. 3
Page 28

Einrichten und Betrieb 2. Spezifikationen
*5: Während des Normalbetriebs ist die Accel-Einstellung 100 die optimale Einstellung, die während der
Positionierung ein Gleichgewicht zwischen Beschleunigung und Vibration gewährleistet.
Es ist jedoch möglich, dass Sie den Manipulator mit einer höheren Beschleunigung betreiben müssen, um
die Zykluszeit zu verkürzen, indem Sie die Vibration während der Positionierung erhöhen. Wählen Sie in
diesem Fall eine Accel-Einstellung größer 100.
Wenn Sie einen höheren Accel-Wert einstellen, kann im Dauerbetrieb schneller ein Überlastungsfehler
oder ein Überhitzungsfehler auftreten. Ein hoher Accel-Wert wird nur für Bewegungen empfohlen, für die
er tatsächlich erforderlich ist.
RS Rev. 3 17
Page 29
Einrichten und Betrieb 2. Spezifikationen
2.5 Einstellen des Modells
Das Manipulator-Modell für Ihr System wurde vor der Lieferung in der Fabrik eingestellt.
Es ist normalerweise nicht erforderlich, das Modell einzustellen, wenn Sie Ihr System
erhalten.
■
Wenn es jedoch erforderlich ist, die Einstellung des Manipulator-Modells zu ändern,
stellen Sie sicher, dass dies fachgerecht erfolgt. Eine unsachgemäße Einstellung des
VORSICHT
HINWEIS
Manipulator-Modells kann zu einem fehlerhaften Betrieb oder einem Ausfall des
Manipulators führen und/oder Sicherheitsprobleme verursachen.
Wenn ein MT-Aufkleber auf der Rückseite eines Manipulators angebracht ist, verfügt
dieser Manipulator über kundenspezifische Besonderheiten. Kundenspezifikationen
können eine andere Art der Konfiguration erfordern. Prüfen Sie die Nummer der
Kundenspezifikation auf dem MT-Aufkleber und wenden Sie sich an uns, wenn
erforderlich.
Das Manipulator-Modell kann in der Software eingestellt werden.
Siehe Kapitel Roboterkonfiguration im EPSON RC+ Benutzerhandbuch.
18 RS Rev. 3
Page 30
Einrichten und Betrieb 3. Umgebungen und Installation
3. Umgebungen und Installation
3.1 Umgebungsbedingungen
Eine geeignete Umgebung ist erforderlich, damit das Robotersystem richtig und sicher
funktioniert.
Installieren Sie das Robotersystem in einer Umgebung, die folgende Bedingungen erfüllt:
Parameter Bedingungen
Umgebungstemperatur *1 5 bis 40 °C (mit minimaler Temperaturschwankung)
relative Luftfeuchtigkeit 10 % bis 80 % (nicht kondensierend)
Rauschen des ersten
Transienten
elektrostatische Störungen 6 kV oder weniger
Umgebung
2 kV oder weniger
· In Innenräumen installieren.
· Halten Sie direktes Sonnenlicht fern.
Halten Sie Staub, öligen Rauch, Salzhaltiges,
Metallpulver und andere Fremdkörper fern.
· Halten Sie entflammbare oder ätzende Flüssigkeiten
und Gase fern.
· Halten Sie Wasser fern.
· Vermeiden Sie Stöße oder Vibrationen.
· Halten Sie Quellen elektrostatischer Störungen fern.
HINWEIS
Manipulatoren sind nicht geeignet für den Betrieb in rauen Umgebungen wie
beispielsweise in Lackierereien usw. Wenn Sie Manipulatoren in unangemessenen
Umgebungen einsetzen möchten, die nicht die oben genannten Bedingungen erfüllen,
setzen Sie sich bitte mit uns in Verbindung.
*1 Die angegebenen Umgebungstemperatur-Bedingungen gelten nur für die
Manipulatoren. Informationen zur angeschlossenen Steuerung finden Sie im Handbuch
der Steuerung.
RS Rev. 3 19
Page 31

Einrichten und Betrieb 3. Umgebungen und Installation
3.2 Basis-Tisch
Ein Basis-Tisch zur Befestigung des Manipulators wird nicht mitgeliefert. Bitte fertigen
oder besorgen Sie selbst den Basis-Tisch für Ihren Manipulator. Die Form und die Größe
des Basis-Tisches unterscheiden sich abhängig von der Verwendung des Robotersystems.
Als Empfehlung listen wir hier einige Anforderungen an Manipulator-Tische auf.
Der Basis-Tisch muss nicht nur dafür ausgelegt sein, das Gewicht des Manipulators zu
tragen, er muss auch dafür ausgelegt sein, den dynamischen Bewegungen des
Manipulators standzuhalten, wenn der Manipulator mit maximaler Beschleunigung
arbeitet. Stellen Sie sicher, dass der Basis-Tisch ausreichend stabil ist, indem Sie
verstärkende Materialien wie Querstreben anbringen.
Die Drehmoment- und Reaktionskräfte, die durch die Bewegung des Manipulators erzeugt
werden, sind folgende:
Max. Drehmoment in horizontaler Ebene : 500 Nm
Max. horizontale Reaktionskraft : 1200 N
Max. vertikale Reaktionskraft : 1100 N
Die für die Montage des Manipulatorsockels erforderlichen Gewindebohrungen sind M6.
Verwenden Sie Befestigungsschrauben mit Spezifikationen gemäß ISO898-1
Festigkeitsklasse: 10.9 oder 12.9.
Für Informationen zu den Abmessungen lesen Sie Einrichten und Betrieb:
3.3 Montageabmessungen.
Die Platte für die Manipulator-Montagefläche sollte etwa 20 mm stark oder stärker sein
und aus Stahl bestehen, um die Vibrationen zu reduzieren. Die Oberflächenrauheit der
Stahlplatte sollte höchstens 25 μm betragen.
Der Tisch muss am Boden oder an der Wand befestigt werden, um zu verhindern, dass er
sich bewegt.
Der Manipulator muss horizontal installiert werden.
Wenn Sie einen Nivellierer verwenden, um die Höhe des Basis-Tisches einzustellen,
verwenden Sie eine Schraube mit einem Durchmesser von mindestens M16.
20 RS Rev. 3
Page 32

Einrichten und Betrieb 3. Umgebungen und Installation
7
N
B
Beachten Sie die folgenden Abbildungen, wenn Sie die Kabel durch die Bohrungen
führen.
RC180 Steuerung
M/C Signa lkabel
M/C Strom kab el
[Einheit: mm]
HINWEIS
WARNUNG
Manipulator RS-Serie
(Abbildung: RS3-351S)
4
Stromkabel-
Anschluss
26
53
Signalkabel-
Anschluss
18
Entfernen Sie nicht die M/C-Kabel vom Manipulator.
Die M/C-Kabel sind am Manipulatorkörper fest installiert und können nicht entfernt
werden. Versuchen Sie nicht die M/C-Kabel zu entfernen.
Wenn der Basis-Tisch kein Wartungsfenster* hat, muss der Manipulator für
Wartungsarbeiten vom Basis-Tisch demontiert werden. Berücksichtigen Sie dies bei der
Konzeption des Basis-Tisches. (* Siehe nächste Seite.)
Für Umgebungsbedingungen bezüglich des Platzes, wenn Sie die Steuerung auf den
Basis-Tisch stellen, lesen Sie das Steuerungshandbuch.
■
Um Sicherheit zu gewährleisten, muss eine Sicherheitsabschrankung für das
Robotersystem installiert werden.
ähere Informationen zur Sicherheitsabschrankung finden Sie im EPSON RC+
enutzerhandbuch.
RS Rev. 3 21
Page 33

Einrichten und Betrieb 3. Umgebungen und Installation
g
r
A
A
Basis-Tisch – möglicher Aufbau
Im Folgenden ist der beispielhafte Aufbau eines Basis-Tisches für einen
RS3-Manipulator beschrieben.
Während des Betriebs eines RS3-Manipulators bei maximaler
Beschleunigung/Verzögerung, muss der Basis-Tisch so standfest sein, dass keine
Vibrationen auf den RS3-Manipulator übertragen werden.
Wartun
Betriebshöhe
Platz für die Steuerung
Drehzentrum 1. Achse
sfenste
: Lassen Sie Platz, um die Abdeckung
des 1. Arms zu entfernen
Einstellbare
Schraube
Tischgewicht : ca. 250 kg
X
Y
Rahmenmaterial : Eisenrohr: □ 100 × 50 mm 3,2 mm dick
Einstellbare Schraube : M36
8
Geometrisches Massenträgheitsmoment : Ix = 10,3 × 10
(A-A) Iy = 10,3 × 10
mm4
8
mm4
- Stellen Sie den Basis-Tisch auf ein niedriges Seitenverhältnis von Höhe und Breite
ein.
- Richten Sie den Schwerpunkt des Basis-Tisches niedrig ein, indem Sie die
Steuerung in der unteren Öffnung des Tisches installieren.
- Versteifen Sie den offenen Teil des Tisches mithilfe von Streben oder Ähnlichem.
- Die Tischkonstruktion ist abhängig von Höhe, Breite und Position der Streben
sowie vom Schwerpunkt.
22 RS Rev. 3
Page 34

3.3 Montageabmessungen
Der in den Abbildungen gezeigte maximale Arbeitsraum gilt für einen Greiferradius von
weniger als 60 mm. Definieren Sie Arbeitsraum bis zur äußersten Kante des Greifers,
wenn der Radius des Greifers 60 mm überschreitet.
Wenn eine montierte Kamera oder ein montiertes elektromagnetisches Ventil über den Arm
hinausreicht, legen Sie den maximalen Arbeitsraum so fest, dass der Raum, den sie
erreichen können, eingerechnet ist.
Bitte achten Sie darauf, dass Sie außer dem Platz für die Montage des Manipulators, der
Steuerung und der Peripheriegeräte auch folgenden Platz berücksichtigen.
Platz zum Teachen
Platz für Wartung und Inspektion
Stellen Sie sicher, dass Sie ausreichend Platz lassen, um die Abdeckung des 1.
Arms und die Wartungsabdeckung zu öffnen.
Platz für Kabel
Der Mindestbiegeradius des Motorkabels beträgt 90 mm. Wenn Sie das Kabel
anschließen, halten Sie ausreichend Abstand zu Hindernissen. Lassen Sie
zusätzlich ausreichend Platz für andere Kabel, so dass diese nicht gewaltsam
gebogen werden.
Einrichten und Betrieb 3. Umgebungen und Installation
Stellen Sie sicher, dass der Abstand der Sicherheitsabschrankung zum maximalen
Arbeitsbereich mehr als 50 mm beträgt.
Mit telpunkt 3. Achse
Maximaler
Raum
Y
X
Länge 1. Arm 175 mm
Länge 2. Arm 175 mm
Arbeitsbereich 1. Achse
Arbeitsbereich 2. Achse ± 225 Grad
RS3-351*
± 225 Grad
RS Rev. 3 23
Page 35

Einrichten und Betrieb 3. Umgebungen und Installation
N
3.4 Auspacken und Transport
DIE INSTALLATION MUSS VON QUALIFIZIERTEM MONTAGEPERSONAL
DURCHGEFÜHRT WERDEN UND ALLEN NATIONALEN UND LOKALEN
ANFORDERUNGEN ENTSPRECHEN.
■
ur autorisiertes Personal darf einen hängenden Transport durchführen und einen Kran
oder Gabelstapler bedienen. Das Ausführen dieser Tätigkeiten durch nicht autorisiertes
WARNUNG
Personal ist extrem gefährlich und kann zu schweren Verletzungen und/oder schweren
Schäden an Geräten des Robotersystems führen.
■
Verwenden Sie einen Hubwagen oder Ähnliches, um den Manipulator so zu
transportieren, wie er geliefert wurde.
■
Wenn Sie die Schrauben entfernt haben, mit denen der Manipulator an der
Liefervorrichtung befestigt ist, kann der Manipulator umkippen. Passen Sie auf, dass Sie
Ihre Hände oder Finger nicht quetschen.
■
Der Manipulator ist mit einem Kabelbinder gesichert. Entfernen Sie den Kabelbinder
erst nach der Installation, um zu vermeiden, dass Sie Ihre Hände oder Finger quetschen.
VORSICHT
■
Um den Manipulator zu tragen, sind mindestens zwei Personen erforderlich, die den
Manipulator an der Liefervorrichtung befestigen oder ihn von Hand an den Stellen
halten, die in der Abbildung grau schattiert sind (Unterseite des 1. Armes und Unterseite
des Sockels).
Wenn Sie die Unterseite des Sockels von Hand halten, gehen Sie mit äußerster Vorsicht
vor, um zu verhindern, dass Ihre Hände oder Finger gequetscht werden.
RS3-351S : ca. 17 kg : 38 lb.
■
Stabilisieren Sie den Manipulator von Hand, wenn Sie ihn hochheben.
■
Wenn Sie den Manipulator über eine lange Strecke transportieren, befestigen Sie ihn
direkt an der Liefervorrichtung, so dass er nicht umkippen kann.
Wenn nötig, verpacken Sie den Manipulator genauso, wie er geliefert wurde.
24 RS Rev. 3
Page 36

3.5 Installationsvorgang
3.5.1 Standard-Modell
■
Installieren Sie den Manipulator mit mindestens einer weiteren Person.
Die Manipulatoren haben das folgende Gewicht. Passen Sie auf, dass sich Ihre Hände,
Finger oder Füße nicht quetschen und/oder dass kein Geräteschaden durch
Herunterfallen des Manipulators entsteht.
RS3-351S: ca. 17 kg: 38 Ib. (ausschließlich der Kabel)
■
VORSICHT
(1)
Wenn Sie den Manipulator an der Decke anbringen, stützen Sie ihn ab und befestigen Sie
dann die Ankerschrauben. Das Entfernen der Stützen ohne die Ankerschrauben
ordnungsgemäß zu befestigen, ist sehr gefährlich und kann dazu führen, dass der
Manipulator herunterfällt.
Entpacken Sie den Manipulator, ohne
die Armstellung zu ändern.
Einrichten und Betrieb 3. Umgebungen und Installation
(2) Befestigen Sie den Sockel mit 6 Schrauben
an der Decke.
HINWEIS
Verwenden Sie Schrauben mit Festigkeiten
gemäß ISO898-1 Festigkeitsklasse 10.9 oder
12.9.
Schraubenloch
(Tiefe: 12 mm
oder mehr)
6-M6×20
3.5.2 Reinraum-Modell
(1) Entpacken Sie den Manipulator außerhalb des Reinraums.
(2) Befestigen Sie den Manipulator mit Schrauben an der Liefervorrichtung (z. B.
Palette), sodass er nicht herunterfällt.
(3) Entfernen Sie Staub auf dem Manipulator mit einem fusselfreien Tuch und etwas
Alkohol oder destilliertem Wasser.
(4) Tragen Sie den Manipulator in den Reinraum.
(5) Beachten Sie die Vorgehensweise für die Installation Ihres Manipulator-Modells und
installieren Sie den Manipulator.
(6) Schließen Sie einen Abluftschlauch am Abluftausgang an.
RS Rev. 3 25
Page 37

Einrichten und Betrieb 3. Umgebungen und Installation
N
N
3.6 Anschluss der Kabel
■
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung
an.
■
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von
der Spannungsversorgung.
Austauscharbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu
WARNUNG
VORSICHT
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
■
Schließen Sie die Kabel richtig an. Setzen Sie die Kabel keinen unnötigen mechanischen
Beanspruchungen aus. (Stellen Sie keine schweren Objekte auf die Kabel. Verbiegen
oder ziehen Sie die Kabel nicht gewaltsam.) Eine unnötige mechanische Beanspruchung
der Kabel kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung
und/oder zu Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der
Stromversorgung oder Kontaktfehler sind sehr gefährlich und können zu einem
elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
■
Wenn Sie den Manipulator mit der Steuerung verbinden, vergewissern Sie sich, dass die
Seriennummern auf jedem Gerät zusammenpassen. Eine unsachgemäße Verbindung
zwischen der Steuerung und dem Manipulator kann nicht nur eine unzureichende
Funktion des Robotersystems verursachen, sondern auch zu ernsten
Sicherheitsproblemen führen. Die Anschlussmethode variiert entsprechend der
verwendeten Software. Nähere Informationen zum Anschluss finden Sie im
Steuerungshandbuch.
Wenn ein Manipulator der G-Serie, der E2-Serie oder der RS-Serie an die Steuerung der
PS-Serie (ProSix) angeschlossen wird, kann dies zu einem Ausfall des Manipulators
führen.
Wenn es sich bei dem Manipulator um ein Reinraum-Modell handelt, müssen Sie ihn
zusammen mit einem Abluftsystem verwenden.
Nähere Informationen finden Sie im Kapitel Einrichten und Betrieb: 2.4 Spezifikationen.
Kabelanschlüsse
Schließen Sie den Stromanschluss und den Signalanschluss der M/C-Kabel an die
Steuerung an.
Steuerung RC180
Manipulator RS-Serie
(Abbildung: RS3-351S)
26 RS Rev. 3
M/C Signalkabel
M/C Stromkabel
Page 38

Einrichten und Betrieb 3. Umgebungen und Installation
3.7 Anwenderkabel und Pneumatikschläuche
■
Die Verdrahtung sollte ausschließlich von autorisiertem und zertifiziertem Personal
VORSICHT
Elektrokabel
Pneumatikschläuche
durchgeführt werden. Eine Verdrahtung durch nicht autorisiertes oder nicht zertifiziertes
Personal kann zu Personenschäden und/oder zu Fehlfunktion des Robotersystems führen.
Anwenderkabel und Pneumatikschläuche sind im Kabelbaum enthalten.
Nennspannung
Zulässiger
Strom
Adernanzahl
Nominaler
Querschnitt
AC/DC30 V 1 A 15 0,211 mm2
Hersteller Standard
Geeigneter
Anschluss
JAE
DA-15PF-N (Lötanschluss)
15 Pin
Gehäuse JAE
DA-C8-J10-F2-1R
Anschlüsse mit derselben Nummer, angegeben auf den Steckern an beiden Enden der
Kabel, werden miteinander verbunden.
Max. verwendbarer
pneumatischer Druck
Pneumatikschläuche
2
0,59 MPa (6 kgf/cm2: 86 psi)
1
Außendurchmesser Anmerkung
ø 8,3 ± 0,3 mm
abgeschirmt
(Anschluss
Befestigungsschraube: Nr. 4–40
NC)
Außendurchmesser x
Innendurchmesser
ø 6 mm × ø 4 mm
ø 4 mm × ø 2,5 mm
Pneumatikschnellkupplungen für ø 6 mm und 4 mm (Außendurchmesser)
Pneumatikschläuche befinden sich an beiden Enden der Pneumatikschläuche.
Anwenderverkabelung
(15 Pin D-Sub-Anschluss)
Schnellkupplung (weiß) für
Pneum a tikschlau ch ø4 m m
S chn ellkupp lun g (weiß)
für Pneumatikschlauch
ø4 mm
Anwenderverkabelung
(15 Pin D-Sub-Anschluss)
S chn el lk uppl un g (schwarz) fü r
P neu matiksch la uch ø 6 m m
S chn ellk uppl ung (wei ß) für
Pneumatikschlauch ø4 mm
S chn ellk uppl ung (schw arz) fü r
Pneumatikschlauch ø6 mm
Schnellkupplung (weiß) für
Pn eu matikschlauch ø6 mm
3. Achse
Bremsfreigabetaster
HINWEIS
Der Arbeitsbereich der (drehenden) 4. Achse beträgt ±720 Grad. Achten Sie darauf, dass
sich die Kabel und Schläuche nicht im Greifer verfangen.
RS Rev. 3 27
Page 39

Einrichten und Betrieb 3. Umgebungen und Installation
N
3.8 Standortwechsel und Lagerung
3.8.1 Vorkehrungen für Standortwechsel und Lagerung
Beachten Sie Folgendes, wenn Sie den Standort des Manipulators wechseln, den
Manipulator lagern oder transportieren.
DIE INSTALLATION MUSS VON QUALIFIZIERTEM MONTAGEPERSONAL
DURCHGEFÜHRT WERDEN UND ALLEN NATIONALEN UND LOKALEN
ANFORDERUNGEN ENTSPRECHEN.
■
ur autorisiertes Personal darf einen hängenden Transport durchführen und einen Kran
oder Gabelstapler bedienen. Das Ausführen dieser Tätigkeiten durch nicht autorisiertes
WARNUNG
Personal ist extrem gefährlich und kann zu schweren Verletzungen und/oder schweren
Schäden an Geräten des Robotersystems führen.
■
Bevor Sie den Standort des Manipulators wechseln, knicken Sie den Arm ein und sichern
Sie ihn fest mit einem Kabelbinder, um Hände und Finger vor Quetschungen am
Manipulator zu schützen.
■
Wenn Sie die Ankerschrauben entfernen, stützen Sie den Manipulator, um zu verhindern,
dass er umkippt. Das Entfernen der Befestigungsschrauben ohne den Manipulator zu
stützen kann dazu führen, dass er fällt und Ihre Hände, Finger oder Füße quetscht.
VORSICHT
■
Um den Manipulator zu tragen, sind mindestens zwei Personen erforderlich, die den
Manipulator an der Liefervorrichtung befestigen oder ihn von Hand an den Stellen
halten, die in der Abbildung grau schattiert sind (Unterseite des 1. Armes und Unterseite
des Sockels).
Wenn Sie die Unterseite des Sockels von Hand halten, gehen Sie mit äußerster Vorsicht
vor, um zu verhindern, dass Ihre Hände oder Finger gequetscht werden.
RS3-351S : ca. 17 kg : 38 lb.
■
Stabilisieren Sie den Manipulator von Hand, wenn Sie ihn hochheben. Instabiles
Anheben ist extrem gefährlich und kann dazu führen, dass der Manipulator herunterfällt.
Wenn Sie den Manipulator über eine lange Strecke transportieren, befestigen Sie ihn an
der Liefervorrichtung, so dass der Manipulator nicht herunterfallen kann.
Wenn nötig, verpacken Sie den Manipulator genauso, wie er geliefert wurde.
Wenn der Manipulator nach einer längeren Lagerung wieder für das Robotersystem
verwendet wird, führen Sie einen Testlauf des Robotersystems durch, um zu überprüfen,
ob es richtig funktioniert.
Transportieren und lagern Sie den Manipulator bei einer Temperatur zwischen -25 °C
und +55 °C.
28 RS Rev. 3
Page 40

WARNUNG
Einrichten und Betrieb 3. Umgebungen und Installation
Es wird eine Luftfeuchtigkeit zwischen 10 % und 90 % empfohlen.
Wenn während des Transportes oder der Lagerung Kondensation am Manipulator
entsteht, schalten Sie die Spannungsversorgung erst ein, wenn die Kondensation
abgetrocknet ist.
Setzen Sie den Manipulator während des Transportes keinen Schlägen oder
Erschütterungen aus.
3.8.2 Standortwechsel
■
Wenn Sie den Manipulator installieren oder seinen Standort ändern, führen Sie diesen
Vorgang mit mindestens zwei Personen durch.
Die Manipulatoren haben das folgende Gewicht. Passen Sie auf, dass sich Ihre Hände,
Finger oder Füße nicht verfangen und/oder dass kein Geräteschaden durch Herunterfallen
des Manipulators entsteht.
RS3-351S: ca. 17 kg: 38 lb.
■
Wenn Sie den Manipulator von der Decke entfernen, stützen Sie den Manipulator ab und
entfernen Sie dann die Befestigungsschrauben. Das Entfernen der
Befestigungsschrauben ohne den Manipulator abzustützen, ist sehr gefährlich und kann
dazu führen, dass er herunterfällt.
(1) Schalten Sie die Spannungsversorgung an allen Geräten aus und ziehen Sie die Kabel
heraus.
(2) Halten Sie die Unterseite des 1. Arms von Hand fest, um die Befestigungsschrauben
zu lösen. Demontieren Sie den Manipulator anschließend.
RS Rev. 3 29
Page 41

Einrichten und Betrieb 4. Einstellung des Greifers
r
4. Einstellung des Greifers
4.1 Anbringen eines Greifers
Die Benutzer sind für die Herstellung ihres eigenen Greifers/ihrer eigenen Greifer
verantwortlich. Bevor Sie einen Greifer anbringen, befolgen Sie diese Richtlinien.
■
Wenn Sie einen Greifer verwenden, der mit einer Greiferzange oder einer
Spannvorrichtung ausgestattet ist, schließen Sie Leitungen und/oder Pneumatikschläuche
richtig an, so dass die Greiferzange das Werkstück nicht loslässt, wenn der Strom des
Robotersystems AUSgeschaltet wird. Unsachgemäßes Anschließen der Kabel und/oder
VORSICHT
Pneumatikschläuche kann das Robotersystem und/oder das Werkstück beschädigen, weil
das Werkstück losgelassen wird, wenn der Not-Aus-Taster gedrückt wird.
Die E/A-Ausgänge sind bei Herstellung so konfiguriert worden, dass sie automatisch
durch Stromunterbrechung, Not-Aus-Taster oder die anderen Sicherheitseigenschaften
des Robotersystems ausschalten (0).
Z-Achse
- Bringen Sie einen Greifer am unteren Ende der Z-Achse an.
Für die Z-Achsenabmessungen und die Gesamtabmessungen des Manipulators, lesen
Sie Einrichten und Betrieb: 2. Spezifikatio nen.
- Verschieben Sie nicht den mechanischen Stopper der Obergrenze an der unteren Seite
der Z-Achse. Andernfalls kann der mechanische Stopper der Obergrenze den
Manipulator treffen, wenn eine „Jump (Sprung)-Bewegung“ ausgeführt wird, sodass
das Robotersystem möglicherweise nicht richtig funktioniert.
- Verwenden Sie einen Klemmring mit einer M4-Schraube oder größer, um den Greife
an der Z-Achse zu befestigen.
Bremsfreigabetaster
- Die 3. Achse kann nicht manuell auf/ab
bewegt werden, da die elektromagnetische
Bremse greift, während der Strom des
Robotersystems ausgeschaltet ist.
Dies verhindert, dass die Z-Achse gegen
Peripheriegeräte schlägt, für den Fall, dass die
Z-Achse durch das Gewicht des Greifers
abgesenkt wird, wenn der Strom während des
Betriebes ausgeschaltet wird, oder wenn der
Motor ausgeschaltet wird, obwohl der Strom
eingeschaltet ist.
Wenn Sie einen Greifer anbringen, schalten
Sie die Steuerung EIN. Drücken Sie den
Bremsfreigabetaster und bewegen Sie die 3.
Achse auf/ab.
Bremsfreigabetaster
Die Z-Achse kann durch das
Gewicht des Greifers
abgesenkt werden.
Dieser Knopf ist ein Taster; die Bremse wird nur gelöst, wenn der Knopf gedrückt
wird.
- Seien Sie vorsichtig, da sich die Z-Achse während der Betätigung des
Bremsfreigabetasters aufgrund des Gewichts des Greifers absenken bzw. drehen kann.
30 RS Rev. 3
Page 42
Einrichten und Betrieb 4. Einstellung des Greifers
4.2 Kameras und Luftventile anbringen
Der 2. Arm hat Gewindebohrungen, wie in der Abbildung unten dargestellt. Verwenden
Sie diese Bohrungen, um Kameras, Luftventile oder andere Geräte anzubringen.
4 -M 4 Ti ef e 8
[Einheit: mm]
4-M4 Tiefe 8
HINWEIS
-
- Wenn Kameras und Luftventile angebracht werden, kann dies aufgrund der Kabel und
Pneumatikschläuche den Arbeitsbereich einschränken. Achten Sie darauf besonders bei
der Konzeption und beim Anbau.
- Der Arbeitsbereich der (drehenden) 4. Achse beträgt ±720 Grad. Achten Sie darauf, dass
sich die Kabel und Schläuche nicht im Greifer verfangen.
4.3 Einstellen von Weight (Gewicht) und Inertia (Trägheit)
Um eine optimale Manipulator-Leistung sicherzustellen, ist es wichtig zu überprüfen, ob
die Last (Gewicht des Greifers und Werkstücks) und das Masseträgheitsmoment der Last
innerhalb der maximalen Nennwerte für den Manipulator liegen, und dass die 4. Achse
nicht exzentrisch wird.
Wenn die Last oder das Trägheitsmoment die Nennwerte überschreitet oder wenn die Last
exzentrisch wird, folgen Sie den Schritten 4.3.1 Einstellen von Weight (Gewicht) und
4.3.2 Einstellen von Inertia (Trägheit) unten, um die Parameter einzustellen.
Durch das Einstellen der Parameter wird die PTP-Bewegung des Manipulators optimiert,
die Vibration reduziert, die Bewegungszeit verkürzt und die Kapazität für größere Lasten
verbessert. Zusätzlich wird durch das Einstellen der Parameter die anhaltende Vibration
reduziert, die erzeugt wird, wenn das Trägheitsmoment an Greifer und Werkstück größer
als die Standardeinstellung ist.
VORSICHT
4.3.1 Einstellen von Weight (Gewicht)
■
Das Gesamtgewicht von Greifer und Werkstück darf 3 kg nicht überschreiten.
Manipulatoren der RS-Serie sind nicht dafür ausgelegt, mit Lasten größer 3 kg zu
arbeiten.
Stellen Sie den Weight-Parameter immer entsprechend der Last ein. Das Einstellen eines
Wertes, der kleiner ist als die tatsächliche Last, kann Fehler, plötzliche Stoßbewegungen
und ungenügende Funktion des Manipulators verursachen und/oder die Lebensdauer der
Teile/Mechanismen verkürzen.
Die zulässige Gewichtskapazität (Greifer und Werkstück) der RS-Serie beträgt 1 kg
Nennlast und 3 kg Maximallast. Wenn die Last (Gewicht von Greifer und Werkstück) die
Nennlast überschreitet, ändern Sie die Einstellung des Weight-Parameters.
Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der
Beschleunigung/Verzögerung des Robotersystems bei der PTP-Bewegung automatisch
entsprechend dem Weight-Parameter eingestellt.
RS Rev. 3 31
Page 43

Einrichten und Betrieb 4. Einstellung des Greifers
–
012010080604020
)
Last an der Z-Achse
Die Last (Gewicht des Greifers und Werkstückes) an der Z-Achse kann durch die
Weight-Parameter eingestellt werden.
EPSON
RC+
Geben Sie einen Wert in das Textfeld [Gewicht:] auf der [Weight]-Seite ([Tools]
[Robotermanager]) ein. (Sie können den Weight-Befehl auch im [Befehlseingabefenster]
ausführen.)
Last auf dem Arm
Wenn Sie eine Kamera oder andere Geräte am Arm anbringen, berechnen Sie das Gewicht
als Äquivalent zur Z-Achse. Addieren Sie dies dann zur Last und geben Sie das
Gesamtgewicht in den Weight-Parameter ein.
Äquivalenzformel
Wenn Sie das Gerät in der Nähe der 2. Achse anbringen:
Wenn Sie das Gerät am Ende des 2. Arms anbringen:
W
: äquivalentes Gewicht
M
: Gewicht der Kamera usw.
M
L
: Länge des 1. Armes
1
L
: Länge des 2. Armes
2
L
: Abstand vom Drehzentrum der 2. Achse zum Schwerpunkt der Kamera usw.
M
W
= M (L1)2/(L1+L2)2
M
= M (LM)2/(L2)2
W
M
<Beispiel > Eine „0,5 kg"-Kamera ist am Ende des Armes der RS-Serie angebracht
(450 mm entfernt vom Drehzentrum der 2. Achse), welcher ein
Lastgewicht von „1 kg" hat.
M = 0,5
= 175
L
2
L
= 250
M
W
= 0,5 × 2502/1752 = 1,02 → 1.1 (aufrunden)
M
W + W
= 1 + 1,1 = 2,1
M
Geben Sie „2,1” als Weight-Parameter ein.
Automatische Geschwindigkeitseinstellung durch Weight
(%
14
100
100
100
100
0 0,5 1 1,5 2 2,5 3 (kg) Weight-Einstellung
* Der Prozentsatz im
Diagramm basiert auf der
Geschwindigkeit bei
Nennlast (1 kg) als 100 %.
32
RS Rev. 3
Page 44

Einrichten und Betrieb 4. Einstellung des Greifers
)
5
–
Automatische Beschleunigungs-/Verzögerungs-Einstellung durch Weight
140
(%
120
100
80
60
12 0
100
70
* Der Prozentsatz im
Diagramm basiert auf der
Beschleunigung /
Verzögerung bei Nennlast
(1 kg) als 100 %.
0
40
20
VORSICHT
0 0,5 1 1,5 2 2,5 3 (kg)
Weight-Einstellung
4.3.2 Einstellen von Inertia (Trägheit)
Massenträgheitsmoment und die Inertia-Einstellung
Das Masseträgheitsmoment ist definiert als „das Verhältnis des Drehmoments, angewendet
auf einen starren Körper und dessen Widerstand gegen die Bewegung“. Dieser Wert wird
2
typischerweise als „Massenträgheitsmoment“, „Massenträgheit“ oder „GD
Wenn der Manipulator mit zusätzlich an der Z-Achse angebrachten Objekten (wie zum
Beispiel einem Greifer) arbeitet, muss das Massenträgheitsmoment der Last beachtet
werden.
■
Das Massenträgheitsmoment der Last (Gewicht von Greifer und Werkstück) muss
weniger als 0,05 kg m
mit Massenträgheitsmomenten von über 0,05 kgm
Stellen Sie den Inertia-Parameter immer auf das richtige Massenträgheitsmoment ein.
Das Einstellen eines Wertes, der kleiner als das tatsächliche Trägheitsmoment ist, kann
2
betragen. Manipulatoren der RS-Serie sind nicht dafür ausgelegt,
2
zu arbeiten.
Fehler, plötzliche Stoßbewegungen und ungenügende Funktion des Manipulators
verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen.
“ bezeichnet.
Das zulässige Massenträgheitsmoment für einen Manipulator der RS-Serie entspricht dem
2
Nennwert von 0,005 kgm
in der Standardeinstellung und 0,05 kgm2 in der
Maximaleinstellung. Wenn das Massenträgheitsmoment den Nennwert überschreitet,
ändern Sie die Parameter-Einstellung für das Trägheitsmoment über den Inertia-Befehl.
Nachdem die Einstellung geändert wurde, wird die maximale Geschwindigkeit der
Beschleunigung/Verzögerung der 4. Achse bei der PTP-Bewegung automatisch
entsprechend dem Trägheitsmoment-Wert eingestellt.
Massenträgheitsmoment an der Z-Achse
Das Massenträgheitsmoment (Gewicht von Greifer und Werkstück) an der Z-Achse kann
durch den „Trägheitsmoment (Inertia)“-Parameter des Inertia-Befehls eingestellt werden.
EPSON
RC+
Geben Sie einen Wert in das Textfeld [Lastträgheit:] auf der [Inertia]-Seite ([Tools]
[Robotermanager]) ein. (Sie können den Inertia-Befehl auch im [Befehlseingabefenster]
ausführen.)
RS Rev. 3 33
Page 45
Einrichten und Betrieb 4. Einstellung des Greifers
–
Automatische Beschleunigungs-/Verzögerungseinstellung der 4. Achse durch
Inertia (Trägheitsmoment)
120
(%)
100 100
100
80
60
40
50
30
20
20
* Der Prozentsatz im Diagramm
basiert auf der Beschleunigung /
Verzögerung zum
Nennträgheitsmoment (0.005 kg⋅m
als 100%.
2
)
VORSICHT
0 0,01 0,02 0,03 0,04 0,05 (kg・m2) Trägheitsmomenteinstellung
Größe der Exzentrizität und Inertia-Einstellung
■
Die Größe der Exzentrizität der Last (Gewicht des Greifers und des Werkstücks) muss
weniger als 100 mm betragen. Manipulatoren der RS-Serie si nd nicht dafür ausgelegt,
mit Exzentrizitätsgrößen von über 100 mm zu arbeiten.
Größe der Exzentrizität immer entsprechend der Größe der Exzentrizität ein. Das
Einstellen eines Wertes, der kleiner ist als die tatsächliche Größe der Exzentrizität kann
Stellen Sie den Parameter der
Fehler, plötzliche Stoßbewegungen und ungenügende Funktion des Manipulators
verursachen und/oder die Lebensdauer der Teile/Mechanismen verkürzen.
Die zulässige Größe der Exzentrizität der Last bei der RS-Serie beträgt 0 mm als
Nennwert und 100 mm als Maximalwert. Wenn die Größe der Exzentrizität der Last den
Nennwert überschreitet, ändern Sie die Einstellung des Parameters der Größe der
Exzentrizität des Inertia-Befehls. Nachdem die Einstellung geändert wurde, wird die
maximale Geschwindigkeit der Beschleunigung/Verzögerung des Manipulators bei der
PTP-Bewegung automatisch entsprechend der „Größe der Exzentrizität“ eingestellt.
Drehzentrum
Position des Schwerpunktes der La st
34
EPSON
RC+
Größe der Exzentrizität (10 0 mm oder
weniger)
Größe der Exzentrizität
Größe der Exzentrizität der Last an der Z-Achse
Die Größe der Exzentrizität der Last (Gewicht des Greifers und des Arbeitsstückes) an der
Z-Achse kann durch den „exzentrische Quantität“-Parameter des Inertia-Befehls
eingestellt werden.
Geben Sie einen Wert in das Textfeld [Exzentrizität:] im [Inertia]-Feld ([Tools]
[Robotermanager]) ein. (Sie können den Inertia-Befehl auch im [Befehlseingabefenster]
ausführen.)
RS Rev. 3
Page 46
Einrichten und Betrieb 4. Einstellung des Greifers
Automatische Beschleunigungs-/Verzögerungs-Einstellung durch Inertia (Größe
der Exzentrizität)
120
(%)
100
80
60
100
70
* Der Prozentsatz im Diagramm basiert
auf der Beschleunigung / Verzögerung
bei Nennexzentrizität (0 mm) als
100 %.
40
30
20
20
0 25 50 75 100 (mm) Exzentrizitätseinstellung
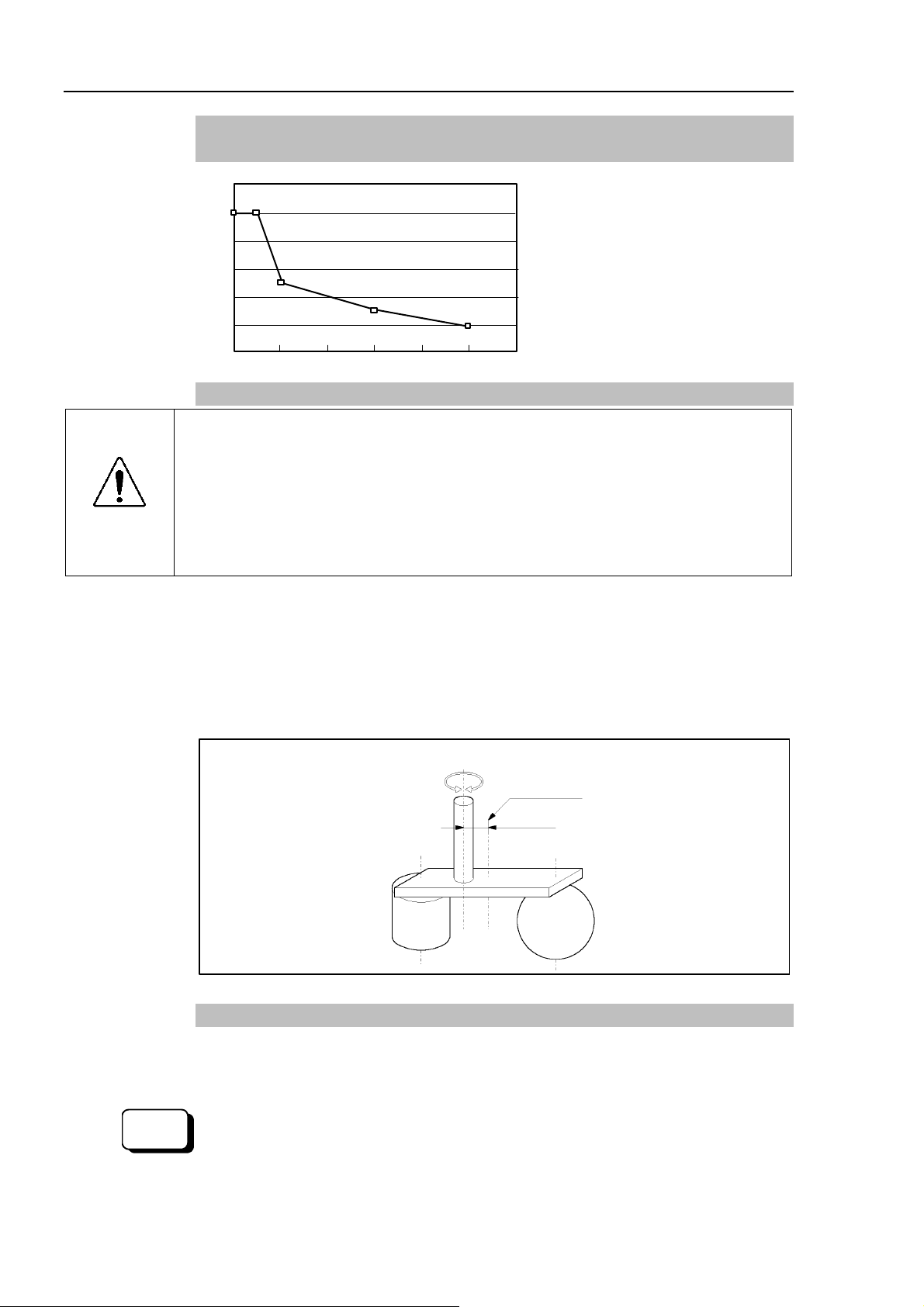
Das Massenträgheitsmoment berechnen
Beziehen Sie sich auf die folgenden Beispielformeln, um das Massenträgheitsmoment der
Last (Greifer und Werkstück) zu berechnen.
Das Massenträgheitsmoment der Gesamtlast wird berechnet aus der Summe jedes Teiles
(a), (b) und (c).
Drehzentrum
Werkstück (b)
3. Achse Z-Achse
Greifer (a)
Werkstück (c)
Gesamtmasse-
trägheitsmoment
Masseträgheits-
=
moment Greifer (a)
Masseträgheits-
moment Werkstück
+
(b)
Masseträgheits-
moment Werkstück
+
(c)
Die Methoden zur Berechnung des Massenträgheitsmoments für (a), (b) und (c) sind im
Folgenden dargestellt. Berechnen Sie das Gesamtträgheitsmoment mithilfe der
Grundformeln.
RS Rev. 3 35
Page 47
Einrichten und Betrieb 4. Einstellung des Greifers
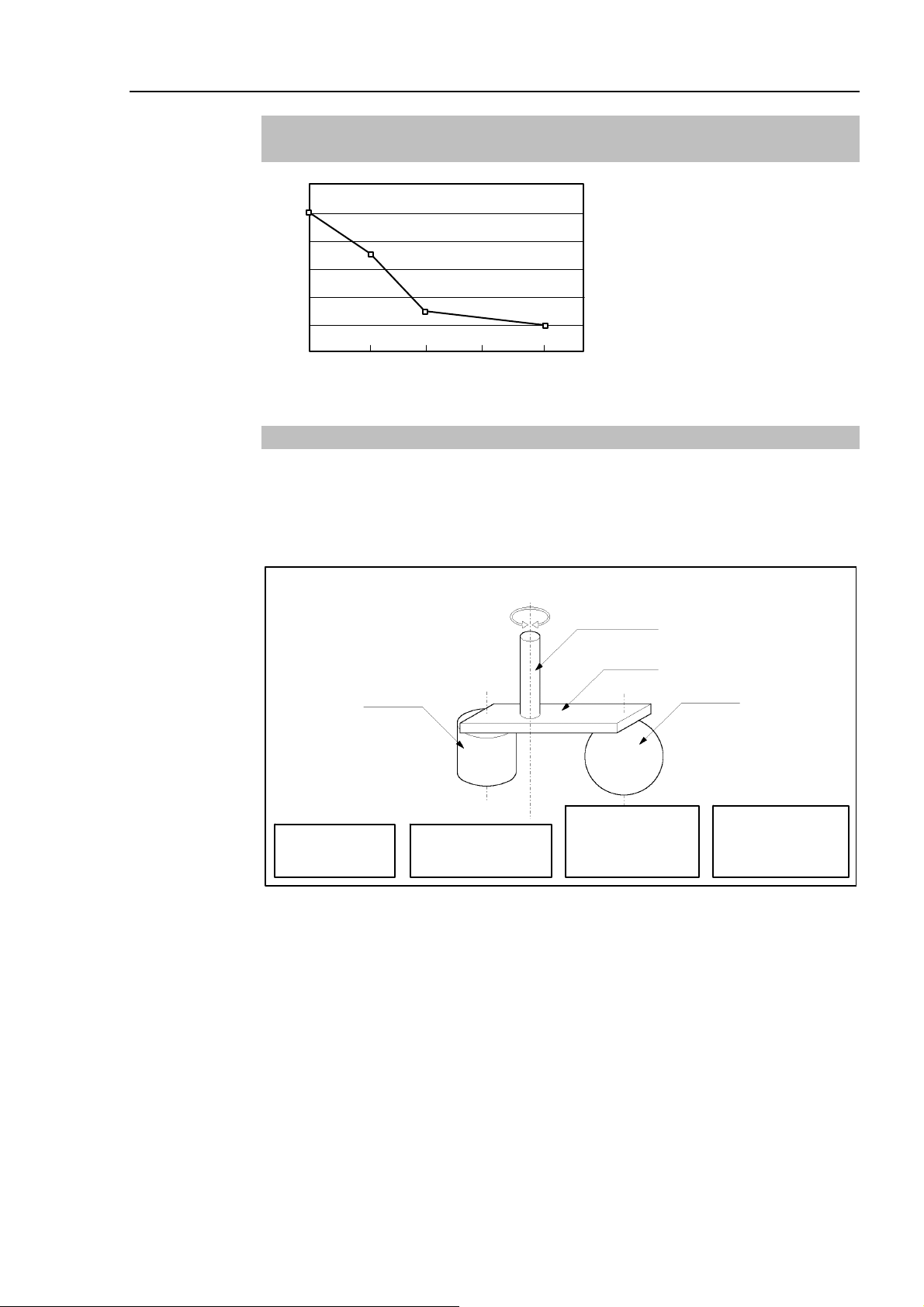
2
2
(a) Massenträgheitsmoment eines rechteckigen Quaders
Schwerpunkt rechteckiger Messquader Drehzentrum
Masse (m)
L
b
h
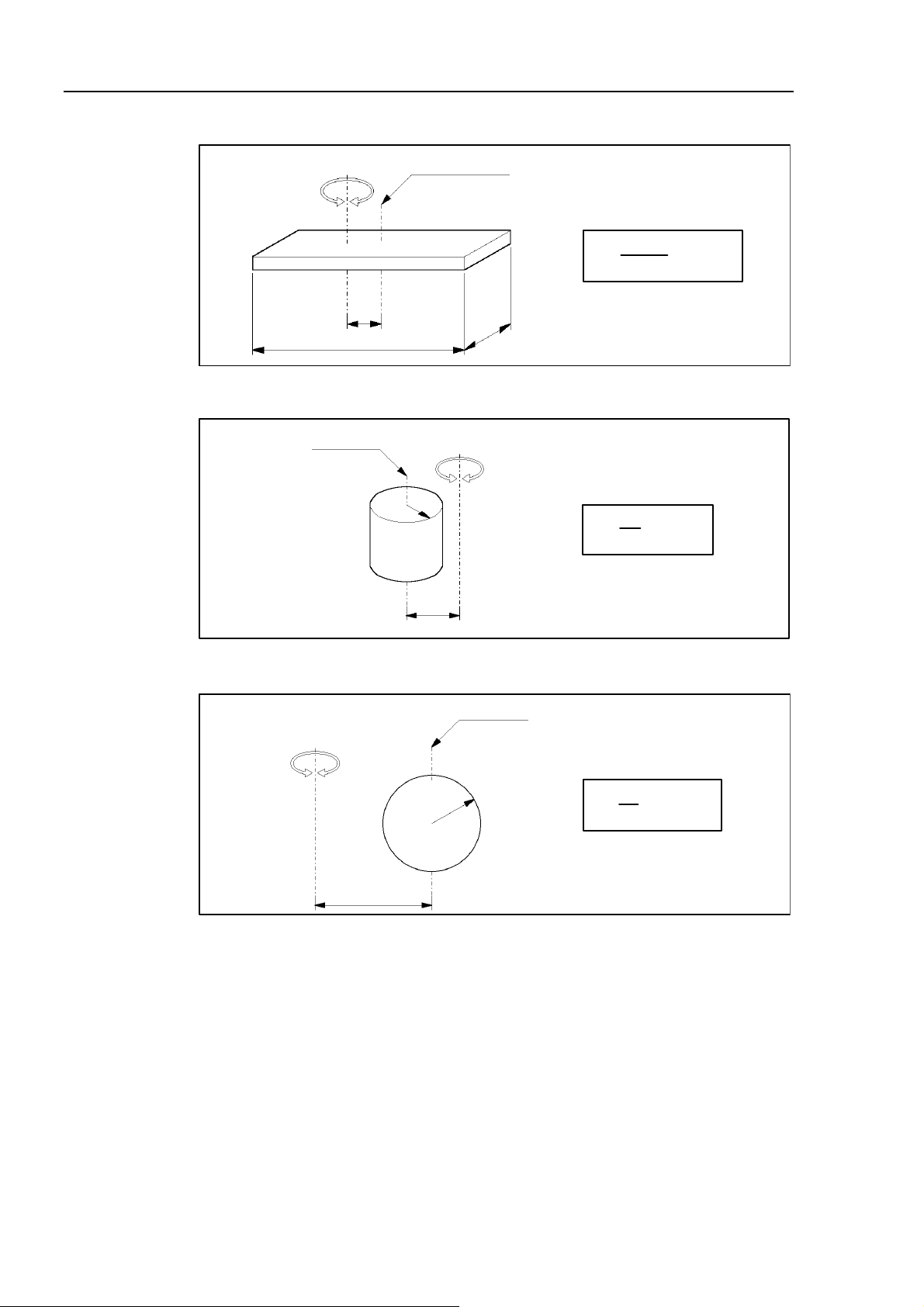
(b) Massenträgheitsmoment eines Zylinders
Schwerpunkt des Zylinders
Drehzentrum
r
Masse (m)
L
(c) Massenträgheitsmoment einer Kugel
Schwerpunkt der Kugel
2
b
+ h2
m + m × L
12
2
r
m + m × L
2
Drehzentrum
Masse (m)
L
2
r
m r
5
2
+ m × L2
36
RS Rev. 3
Page 48

Einrichten und Betrieb 4. Einstellung des Greifers
)
4.4 Vorkehrungen für die Auto-Beschleunigung/Verzögerung der
3. Achse
Wenn Sie den Manipulator horizontal mit einer PTP-Bewegung mit der 3. Achse (Z) an
einer hohen Position verfahren, ist die Bewegungszeit kürzer.
Wenn die 3. Achse unter einen bestimmten Punkt gelangt, wird die
Auto-Beschleunigung/Verzögerung verwendet, um die Beschleunigung/Verzögerung zu
reduzieren. (Siehe Abbildung unten.) Je höher die Position der Z-Achse ist, desto schneller
ist die Bewegungs-Beschleunigung/Verzögerung. Es benötigt jedoch mehr Zeit, die
3. Achse auf und ab zu bewegen. Stellen Sie die Position der 3. Achse für die
Manipulatorbewegung ein, unter Berücksichtigung der Beziehung zwischen der aktuellen
Position und der Zielposition.
Die Obergrenze für die 3. Achse während der horizontalen Bewegung mit dem
Jump-Befehl kann mit dem LimZ-Befehl eingestellt werden.
Automatische Beschleunigung/Verzögerung verglichen mit der Position der
3. Achse
120
(%
100
80
60
40
100
100
50
* Der Prozentsatz im Diagramm
basiert auf der Beschleunigung /
Verzögerung an der
Obergrenze der 3. Achse als
100%.
HINWEIS
20
0 -20 -60 -100 -140 (mm)
Wenn Sie den Manipulator horizontal verfahren, während die Z-Achse abgesenkt ist, kann
dies zu einem Überschwingen an der Zielposition führen.
Höhe der Z-Achse
RS Rev. 3 37
Page 49

Einrichten und Betrieb 5. Arbeitsbereich
5. Arbeitsbereich
■
Wenn Sie den Arbeitsbereich aus Gründen der Sicherheit begrenzen, müssen der
VORSICHT
Pulse-Bereich und die mechanischen Stopper immer gleichzeitig eingestellt werden.
Der Arbeitsbereich wird bei Herstellung voreingestellt, wie in Einrichten und Betrieb:
5.4 Standard Arbeitsbereich. Das ist der maximale Arbeitsbereich des Manipulators.
Es gibt die folgenden drei Methoden, den Arbeitsbereich einzustellen:
1. Einstellen durch den Pulse-Bereich (für alle vier Achsen)
2. Einstellen durch mechanische Stopper (für die 3. Achse)
3. Einstellen des kartesischen (rechteckigen) Bereichs im X, Y Koordinatensystem
des Manipulators (für 1. und 2. Achse)
Einstellung rechteckiger
Mechanischer
Stopper
Wenn der Arbeitsbereich wegen der Anordnungs-Effizienz oder der Sicherheit geändert
wurde, folgen Sie den Beschreibungen in 5.1 bis 5.3, um den Bereich einzustellen.
Bereich
Arbeitsbereich
Pulse-Bereich
5.1 Einstellung des Arbeitsbereiches durch den Pulse-Bereich
Pulse sind die Basiseinheit der Manipulator-Bewegung. Der Arbeitsbereich des
Manipulators wird durch den Pulse-Bereich zwischen dem unteren Pulse-Limit und dem
oberen Limit jeder Achse gesteuert.
Pulse-Werte werden vom Encoder-Ausgang des Servomotors gelesen.
Für den maximalen Pulse-Bereich, lesen Sie die folgenden Abschnitte.
Der Pulse-Bereich muss innerhalb des mechanischen Stopper-Bereiches eingestellt
werden.
5.1.1 Max. Pulse-Bereich der 1. Achse
5.1.2 Max. Pulse-Bereich der 2. Achse
5.1.3 Max. Pulse-Bereich der 3. Achse
5.1.4 Max. Pulse-Bereich der 4. Achse
Mechanischer
Stopper
HINWEIS
EPSON
RC+
38 RS Rev. 3
Sobald der Manipulator einen Arbeitsbefehl erhalten hat, überprüft er, ob sich die
Zielposition, die durch den Befehl angegeben wurde, im Pulse-Bereich befindet, bevor er
arbeitet. Wenn die Zielposition außerhalb des einstellten Pulse-Bereiches liegt, tritt ein
Fehler auf und der Manipulator bewegt sich nicht.
Der Pulse-Bereich kann auf der [Range]-Seite ([Tools] – [Robotermanager]) eingestellt
werden. (Sie können den Range-Befehl auch im [Befehlseingabefenster] ausführen.)
Page 50

Einrichten und Betrieb 5. Arbeitsbereich
5.1.1 Max. Pulse-Bereich der 1. Achse
Die 0-Pulse-Position (Null) der 1. Achse ist die Position, in der der 1. Arm in die
positive (+) Richtung auf der X-Koordinaten-Achse zeigt.
Wenn der 0-Pulse der Startpunkt ist, ist der Wert gegen Uhrzeigersinn als der positive (+)
definiert und der Wert im Uhrzeigersinn als der negative (-).
0 Pulse
Ansicht von
hier
A: max. Arbeitsbereich : ± 225 °
B: max. Pulse-Bereich : − 2.560.000 bis +5.973.334 Pulse
5.1.2 Max. Pulse-Bereich der 2. Achse
Die 0-Pulse-Position (Null) der 2. Achse ist die Position, in der der 2. Arm genau unter
dem 1. Arm liegt, wie in der Abbildung unten zu sehen. Wenn 0-Pulse der Startpunkt ist,
ist der Pulse-Wert gegen Uhrzeigersinn als positiv (+) und der Wert im Uhrzeigersinn als
negativ (-) definiert.
Ansicht von
hier
A: max. Arbeitsbereich : ± 225 °
B: max. Pulse-Bereich : − 4.177.920 bis + 4.177.920 Pulse
RS Rev. 3 39
Page 51
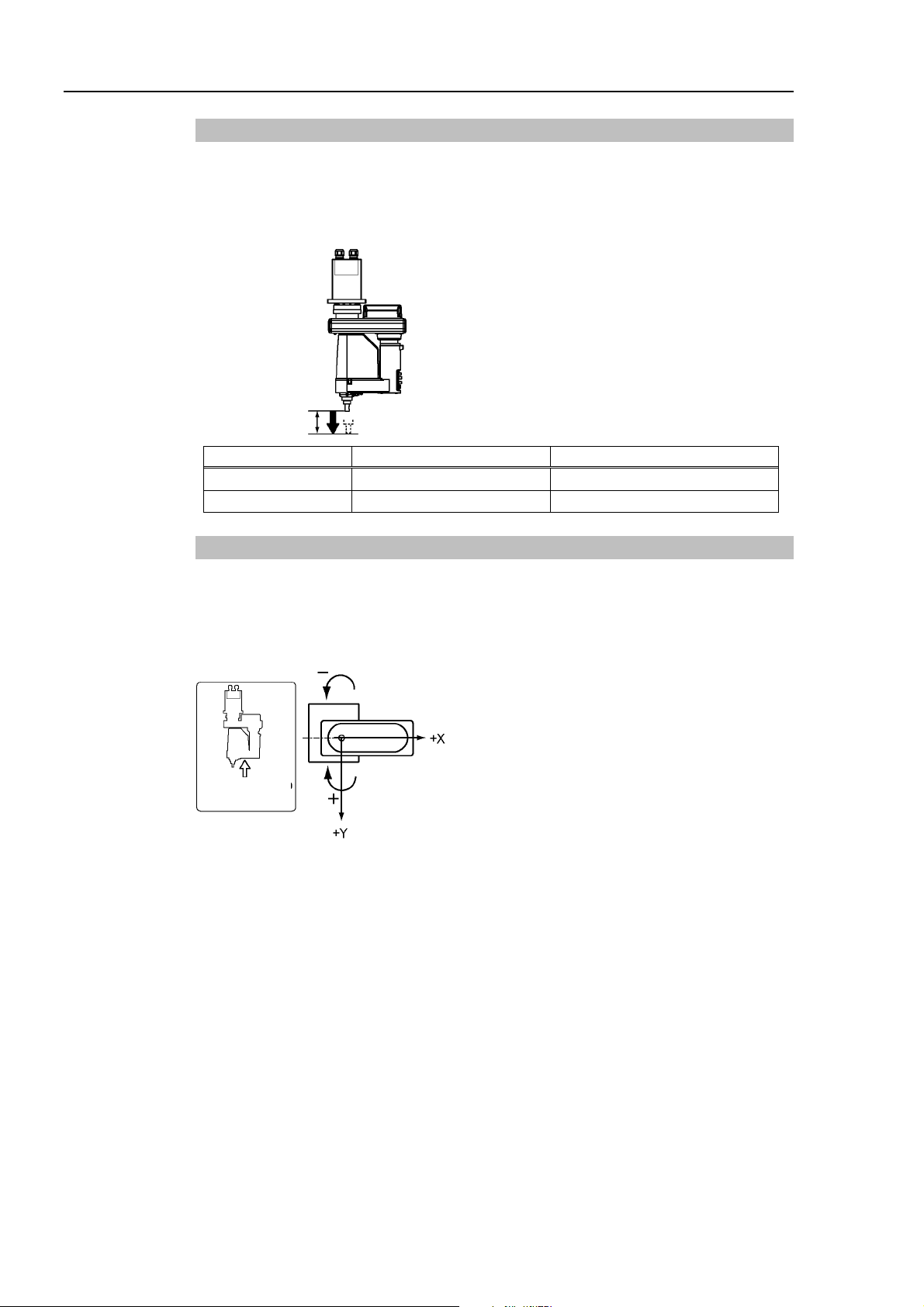
Einrichten und Betrieb 5. Arbeitsbereich
5.1.3 Max. Pulse-Bereich der 3. Achse
Die 0-Pulse-Position (Null) der 3. Achse ist die Position, in der sich die Z-Achse an ihrer
Obergrenze befindet.
Der Pulse-Wert ist immer negativ, da die 3. Achse immer unterhalb der 0 Pulse-Position
verfährt.
Obe rgrenze: 0 Pulse
Typ
RS3-351S 130 mm
RS3-351C 100 mm
5.1.4 Max. Pulse-Bereich der 4. Achse
3. Achse Hub Niedrigster Pulse-Wert
− 1479112 Pulse
− 1137778 Pulse
HINWEIS
Die 0-Pulse-Position (Null) der 4. Achse ist die Position, in der die flache Stelle nahe dem
Ende der Achse zum Ende des 2. Arms zeigt. Wenn 0-Pulse der Startpunkt ist, ist der
Pulse-Wert gegen Uhrzeigersinn als positiv (+) und der Wert im Uhrzeigersinn als
negativ (-) definiert.
0Pulse ± 3145728 Pulse
Ansicht von
hier
Der Arbeitsbereich der (drehenden) 4. Achse beträgt ±720 Grad.
40 RS Rev. 3
Page 52

Einrichten und Betrieb 5. Arbeitsbereich
r
A
5.2 Arbeitsbereich-Einstellung durch mechanische Stopper der 3. Achse
(1) Schalten Sie die Steuerung EIN und schalten Sie die Motoren mit dem Motor
OFF-Befehl AUS.
(2)
(3) Drücken Sie die Z-Achse hoch, während
Entfernen Sie die Abdeckung des 2. Arms (4-M4×10).
Sie den Bremsfreigabetaster drücken.
HINWEIS
Wenn Sie den Bremsfreigabetaster
drücken, kann die Z-Achse durch das
Gewicht des Greifers abgesenkt werden.
Halten Sie die Z-Achse mit der Hand fest,
während Sie den Taster drücken.
me cha ni sc her
Stopper der
Un te rg re nz e
M3 ×10
Z-Achse
Bremsfreig abetaster
(4) Schalten Sie die Steuerung aus.
(5)
Ein mechanischer Stopper ist sowohl oben als auch unten an der 3. Achse angebracht.
HINWEIS
Lösen Sie Schraube (M3×10) am mechanischen Stopper der Untergrenze.
Es kann jedoch lediglich die Position des mechanischen Stoppers der Untergrenze oben
an der Achse geändert werden. Entfernen Sie nicht den mechanischen Stopper de
Obergrenze auf der Unterseite, da hiermit der Kalibrierungspunkt der 3. Achse
angegeben wird.
(6) Das obere Ende der Z-Achse bestimmt den
maximalen Hub. Bewegen Sie den mechanischen
Stopper der Untergrenze um die Länge herunter,
Messen Sie
diesen
bstand.
um welche Sie den Hub begrenzen wollen.
Wenn zum Beispiel der mechanische Stopper der
Untergrenze auf „130 mm“ Hub eingestellt ist,
ist der Z-Koordinaten-Wert der Untergrenze
„−130“. Um den Wert auf „−100“ zu ändern,
bewegen Sie den mechanischen Stopper der
Untergrenze „30 mm“ herunter. Verwenden Sie
eine Schieblehre, um den Abstand zu messen,
wenn Sie den mechanischen Stopper einstellen.
(7)
Ziehen Sie die beiden Schrauben (M3×10) am mechanischen Stopper der Untergrenze
fest. Empfohlenes Anzugsmoment: 245 N⋅cm (25 kgf⋅cm)
(8) Schalten Sie die Steuerung EIN.
(9) Bewegen Sie die 3. Achse an ihre Untergrenze, während Sie den Bremsfreigabetaster
drücken. Überprüfen Sie dann die Position der Untergrenze. Senken Sie den
mechanischen Stopper nicht zu weit ab. Ansonsten erreicht die Achse keine
Zielposition.
RS Rev. 3 41
Page 53

Einrichten und Betrieb 5. Arbeitsbereich
n
r
d
r
r
r
n
(10) Berechnen Sie den Untergrenzen-Pulsewert des Pulse-Bereiches mit der unte
dargestellten Formel und stellen Sie den We rt ein.
Das Ergebnis der Berechnung ist immer negativ, weil der Z-Koordinatenwert de
Untergrenze negativ ist.
** Informationen zur Auflösung der 3. Achse finden Sie im Kapitel Einrichten un
EPSON
RC+
(11) Verwenden Sie den Pulse-Befehl (Go Pulse-Befehl), und verfahren Sie die 3. Achse
HINWEIS
Wenn es schwierig zu überprüfen ist, ob die 3. Achse an einen mechanischen Stoppe
EPSON
RC+
Pulse-Untergrenze (Pulse)
= Z-Koordinatenwert der Untergrenze (mm)/Auflösung (mm/Pulse)
Betrieb 2.4 Spezifikationen.
Führen Sie den folgenden Befehl im [Befehlseingabefenster] aus. Geben Sie den
errechneten Wert als X.
>JRANGE 3,X
mit langsam in die Position der Untergrenze des Pulse-Bereiches.
Wenn der Bereich des mechanischen Stoppers kleiner ist als der Pulse-Bereich, trifft
die 3. Achse den mechanischen Stopper und ein Fehler tritt auf. Wenn der Fehle
auftritt, ändern Sie entweder den Pulse-Bereich auf einen engeren Bereich ode
erweitern Sie die Position des mechanischen Stoppers innerhalb der Grenzen.
anschlägt, schalten Sie die Steuerung AUS und heben Sie die obere Armabdeckung an,
um von der Seite den Umstand zu prüfen, der das Problem verursacht hat.
Führen Sie die folgenden Befehle im [Befehlseingabefenster] aus. Geben Sie den i
Schritt (10) berechneten Wert als X ein.
>MOTOR ON ' Schaltet die Motoren EIN.
>SPEED 5 ' Stellt eine niedrige Geschwindigkeit ein.
>PULSE 0,0,X
ein.
,0 ' Stellt den Pulse-Bereich der 3. Achse ein.
,0 ' Verfährt an die Pulse-Position der Untergrenze der 3.
Achse.
(In diesem Beispiel sind alle Pulse, außer denen der 3.
Achse "0". Ersetzen Sie diese Nullen durch andere
Pulse-Werte, die eine Position bestimmen, an welcher keine
Beeinträchtigung besteht, auch wenn die 3. Achse
abgesenkt wird.)
42 RS Rev. 3
Page 54

Einrichten und Betrieb 5. Arbeitsbereich
–
5.3 Einstellen des kartesischen (rechteckigen) Bereichs im
XY-Koordinatensystem des Manipulators (für 1. und 2. Achse)
Verwenden Sie diese Methode, um die Ober- und Untergrenzen der X- und Y-Koordinaten
zu setzen.
Diese Einstellung ist nur für die Software erforderlich. Daher ändert sie nicht den
physikalischen Bereich. Der maximale physikalische Bereich richtet sich nach der Position
der mechanischen Stopper.
EPSON
RC+
Stellen Sie die XYLim-Einstellung auf der [XYZ Limits]-Seite ([Tools]
[Robotermanager]) ein. (Sie können den XYLim-Befehl auch im [Befehlseingabefenster]
ausführen.)
5.4 Standard Arbeitsbereich
Die folgenden Arbeitsbereichsdiagramme zeigen die Standardspezifikation (Maximum).
Wenn jeder Achsmotor servogesteuert wird, bewegt sich der Mittelpunkt des niedrigsten
Punktes der 3. Achse (Z-Achse) in den Bereichen, die in der Abbildung dargestellt sind.
„Durch mechanischen Stopper begrenzter Bereich” ist der Bereich, in welchem der
Mittelpunkt des niedrigsten Punktes der 3. Achse bewegt werden kann, wenn sich kein
Achsmotor unter Servosteuerung befindet.
„Mechanischer Stopper” stellt den begrenzten Arbeitsbereich ein, so dass der Mittelpunkt
der 3. Achse nicht mechanisch über den Bereich hinaus bewegt werden kann.
Maximaler Raum
Arbeitsbereich
Zentrum 3. Achse
Typ
n: Raum der 3. Achse zum mechanischen Stopper der Obergrenze
m: Hub der 3. Achse
p: Raum der 3. Achse zum mechanischen Stopper der U ntergrenze
(Einheit: mm)
RS Rev. 3 43
Page 55

Wartung
Diese Anleitung beinhaltet Wartungsprozeduren mit
Sicherheitsvorkehrungen für Manipulatoren der RS-Serie.
Page 56

Page 57

N
1. Sicherheit Wartung
Bitte lesen Sie dieses Kapitel, dieses Handbuch und andere relevante Handbücher
sorgfältig, um sichere Wartungsprozeduren zu verstehen, bevor Sie eine Routine-Wartung
durchführen.
Nur autorisiertes Personal, das an einer Sicherheitsschul ung teilgenommen hat, darf mit
der Wartung des Robotersystems betraut werden.
Die Sicherheitsschulung ist ein Programm für Industrie-Roboter-Bediener, das den
nationalen Gesetzen und Regelungen entspricht.
An der Sicherheitsschulung teilnehmendes Personal erlangt Wissen über
Industrie-Roboter (Betrieb, Teachen usw.), über Inspektionen und über entsprechende
Regeln/Vorschriften.
Das Robotersystem zu warten ist dem Personal erlaubt, welches die
Roboter-System-Schulung und die Wartungsschulung abgeschlossen hat, die durch den
Hersteller, Händler oder örtlich einbezogene Firmen durchgeführt wurden.
Arbeiten Sie mit mindestens einer weiteren Person zusammen, wenn Sie den Arm vom
Manipulator demontieren, z. B. um das Untersetzungsgetriebe auszutauschen.
Wenn Sie die Abdeckung des 1. Arms entfernen wollen und kein Wartungsfenster im
Basis-Tisch eingebaut ist, müssen Sie den Manipulator vom Basis-Tisch demontieren.
Arbeiten Sie mit mindestens einer weiteren Person zusammen, wenn Sie den Manipulator
demontieren.
Wartung 1. Sicherheit Wartung
WARNUNG
Entfernen Sie keine Teile, die nicht in diesem Handbuch dargestellt sind. Befolgen Sie
■
die Anweisungen zur Wartung in diesem Handbuch. Unsachgemäßes Entfernen von
Teilen oder unsachgemäße Wartung kann nicht nur eine Fehlfunktion des
Robotersystems, sondern auch ernste Sicherheitsprobleme verursachen.
■
Wenn Sie nicht an den Schulungen teilgenommen haben, bleiben Sie dem Manipulator
fern, während der Strom eingeschaltet ist. Betreten Sie nicht den Arbeitsbereich,
während der Strom eingeschaltet ist. Das Betreten des Arbeitsbereichs bei
EINgeschaltetem Strom ist extrem gefährlich und kann ernste Sicherheitsprobleme
verursachen, da sich der Manipulator bewegen kann, auch wenn es so aussieht, als wäre
er angehalten.
■
Wenn Sie den Betrieb des Manipulators überprüfen, nachdem Sie Teile ausgetauscht
haben, so tun Sie dies von außerhalb des geschützten Bereiches. Das Überprüfen des
Betriebs des Manipulators, während Sie sich im geschützten Bereich befinden, kann
ernste Sicherheitsprobleme verursachen, da der Manipulator sich unerwartet bewegen
kann.
■
Bevor Sie das Robotersystem in Betrieb nehmen, stellen Sie sicher, dass sowohl der
ot-Aus-Taster als auch der Sicherheitsabschrankungs-Schalter richtig funktionieren.
Der Betrieb des Robotersystems mit defekten Schaltern ist extrem gefährlich und kann
zu schweren Verletzungen und/oder ernsten Schäden am Robotersystem führen, da die
Schalter ihre bestimmungsgemäße Funktion im Notfall nicht erfüllen können.
RS Rev. 3 45
Page 58
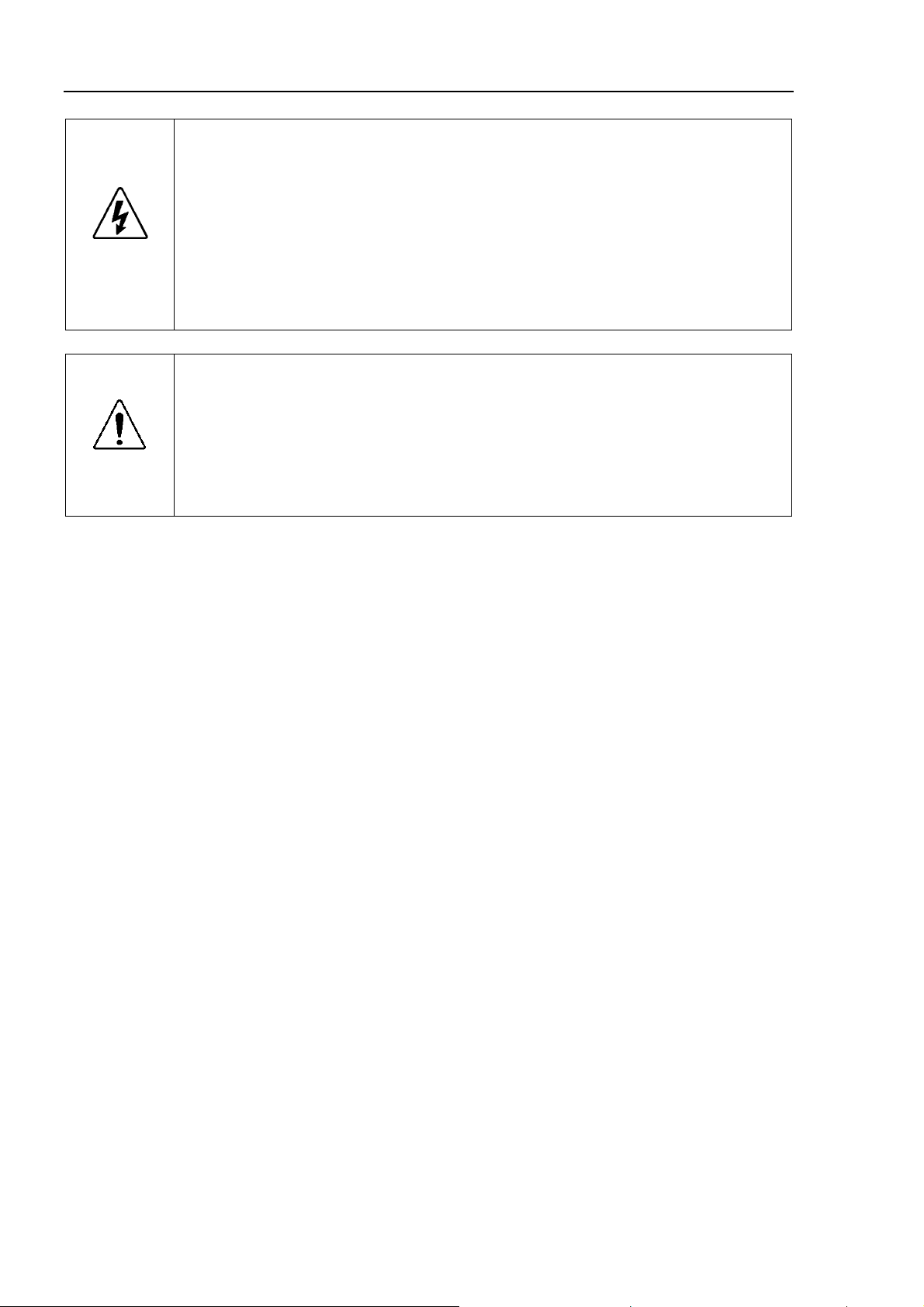
Wartung 1. Sicherheit Wartung
N
N
■
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung
an.
■
WARNUNG
VORSICHT
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von
der Spannungsversorgung.
Austauscharbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
Schließen Sie die Kabel richtig an. Setzen Sie die Kabel keinen unnötigen mechanischen
■
Beanspruchungen aus. (Stellen Sie keine schweren Objekte auf die Kabel. Verbiegen
oder ziehen Sie die Kabel nicht gewaltsam.) Eine unnötige mechanische Beanspruchung
der Kabel kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung
und/oder zu Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der
Stromversorgung oder Kontaktfehler sind sehr gefährlich und können zu einem
elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
46 RS Rev. 3
Page 59

2. Allgemeine Wartung
In diesem Kapitel werden die Wartung und die Inspektion einschließlich der erforderlichen
Vorgehensweisen beschrieben. Die richtige Durchführung von Wartungstätigkeiten ist
entscheidend, um Fehler zu vermeiden und die Sicherheit zu gewährleisten.
Stellen Sie sicher, dass die Wartungsinspektionen entsprechend dem Zeitplan durchgeführt
werden.
2.1 Zeitplan für die Inspektion
Die Inspektionspunkte sind fünffach unterteilt: in täglich, monatlich, vierteljährlich,
halbjährlich und jährlich. Alle zutreffenden Zeiträume werden aufgeführt.
Wenn der Manipulator länger als 250 Stunden im Monat betrieben wird, müssen nach
allen weiteren 250, 750, 1500 bzw. 3000 Betriebsstunden weitere Inspektionen der
einzelnen Inspektionspunkte erfolgen.
1 Monat (250 h)
2 Monate (500 h) √
3 Monate (750 h) √ √
4 Monate (1000 h) √
5 Monate (1250 h) √
6 Monate (1500 h) √ √ √
7 Monate (1750 h) √
8 Monate (2000 h) √
9 Monate (2250 h) √ √
10 Monate (2500 h) √
11 Monate (2750 h) √
12 Monate (3000 h) √ √ √ √
13 Monate (3250 h) √
…
Tägliche
Inspektion
Wartung 1. Sicherheit Wartung
h = Stunden
Inspektionspunkt
Monatliche
Inspektion
Inspizieren Sie täglich
…
Vierteljährliche
Inspektion
√
…
Halbjährliche
Inspektion
…
Jährliche
Inspektion
…
…
RS Rev. 3 47
Page 60
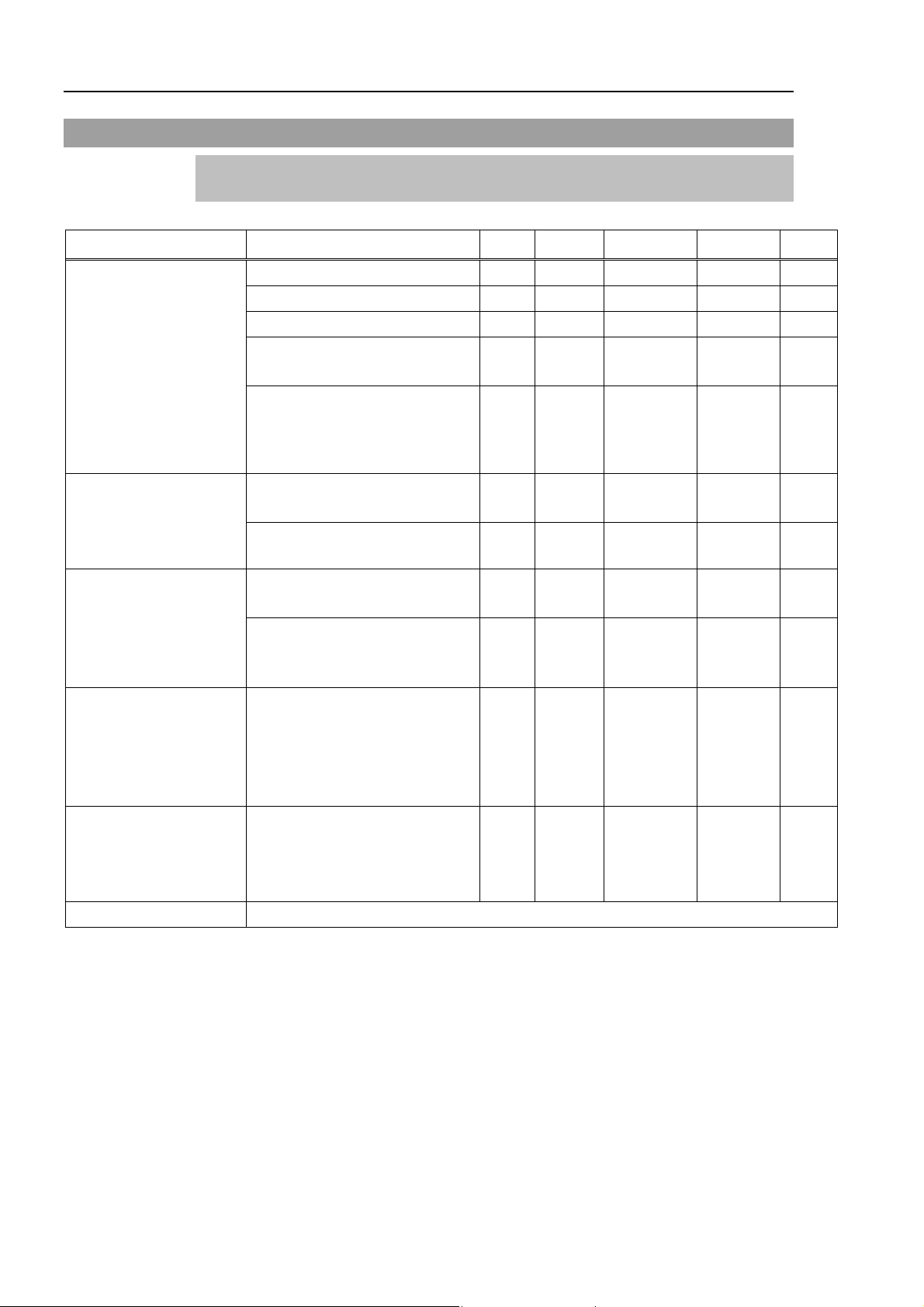
Wartung 2. Allgemeine Wartung
2.2 Inspektionspunkt
2.2.1 Inspektion während der Manipulator AUSgeschaltet ist
(Manipulator außer Betrieb)
Inspektionspunkt Inspektionsort Täglich Monatlich Vierteljährlich Halbjährlich Jährlich
Prüfen Sie
Bolzen/Schrauben auf
festen Sitz.
Ziehen Sie sie fest, wenn
nötig.
(Das Anzugsmoment finden
Sie im Kapitel Wartung: 2.4
Festziehen der
Innensechskantschrauben.)
Prüfen Sie Stecker auf
festen Sitz.
Wenn die Stecker lose sind,
befestigen Sie sie.
Führen Sie eine
Sichtprüfung auf äußere
Schäden durch.
Nehmen Sie eine
Reinigung vor, wenn nötig.
Prüfen Sie auf Biegungen
oder falsche Position.
Reparieren sie das Element
oder platzieren Sie es
richtig, wenn nötig.
Prüfen Sie die Spannung
der Zahnriemen.
Spannen Sie sie nach,
wenn nötig.
Schmierfett-Bedingungen Lesen Sie das Kapitel Wartung: 2.3 Schmieren.
Greifer-Befestigungsschrauben √ √ √ √ √
Manipulator-Befestigungsschrauben √ √ √ √ √
Arretierbolzen jedes Armes √ √ √ √ √
Bolzen/Schrauben um die Z-Achse
herum
Bolzen/Schrauben, mit denen die
Motoren, Untersetzungsgetriebe
usw. befestigt sind
Externe Stecker am Manipulator (an
den Anschlusseinheiten usw.)
Manipulator-Kabelbaum √ √ √ √
Äußeres Erscheinungsbild des
Manipulators
Externe Kabel √ √ √ √
Sichheitsabschrankung usw. √ √ √ √ √
In Arm Nr. 2 √ √
√
√
√ √ √ √ √
√ √ √ √ √
48 RS Rev. 2
Page 61
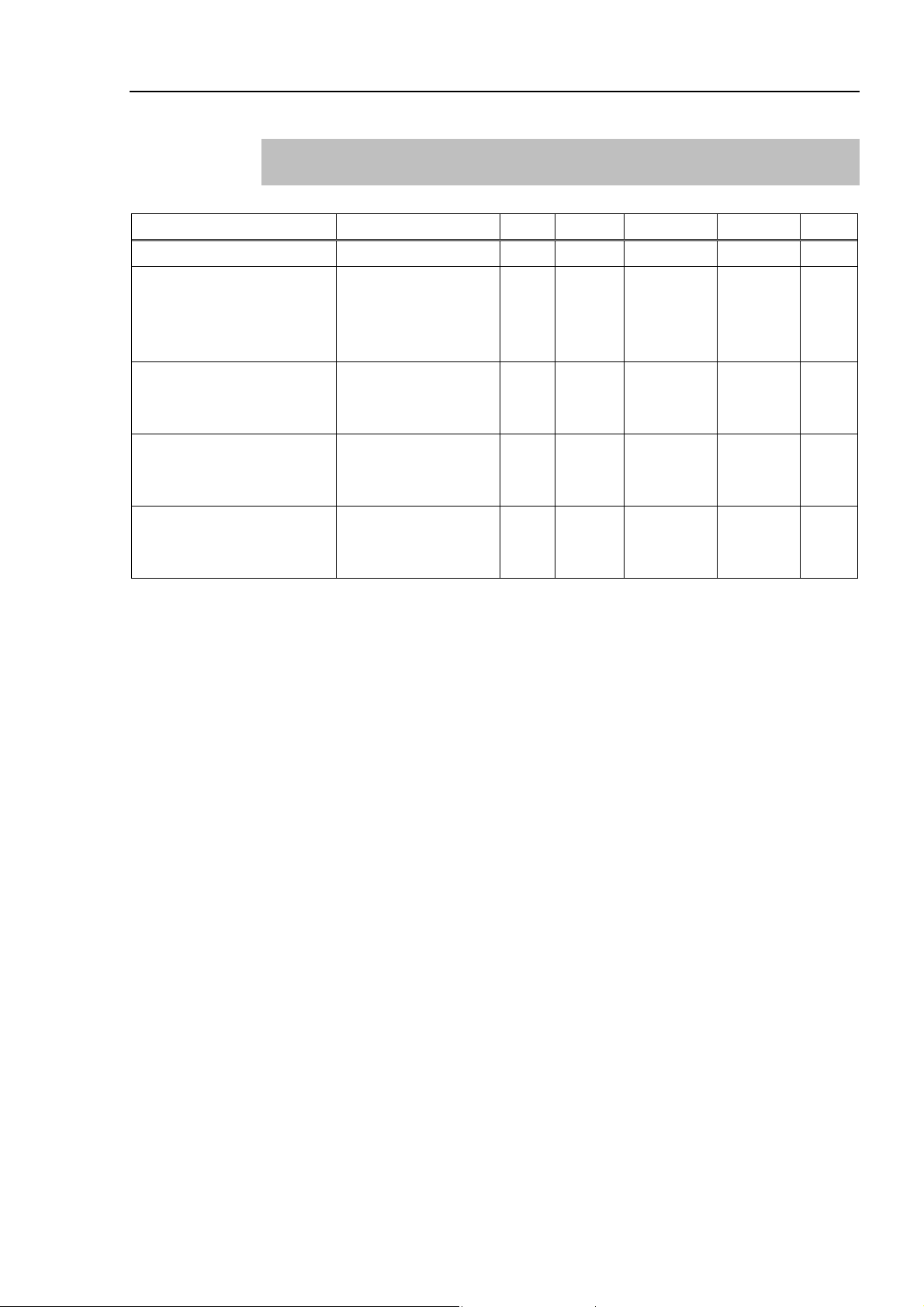
Wartung 2. Allgemeine Wartung
2.2.2 Inspektion während der Strom EINgeschaltet ist
(der Manipulator arbeitet)
Inspektionspunkt Inspektionsort Täglich Monatlich Vierteljährlich Halbjährlich Jährlich
Prüfen Sie den Arbeitsbereich Jede Achse √
Bewegen Sie die Kabel leicht
hin und her, um zu prüfen, ob
sie lose sitzen.
Drücken Sie jeden Arm im
MOTOR EIN-Status, um zu
prüfen, ob Spiel besteht.
Prüfen Sie, ob ungewöhnliche
Geräusche oder Vibrationen
auftreten.
Messen Sie die
Wiederholgenauigkeit mit einer
Messuhr.
Externe Kabel
(einschließlich des
Kabelbaums des
Manipulators)
Jeder Arm √
Gesamtes System √ √ √ √ √
Gesamtes System √
√ √
RS Rev. 2 49
Page 62
Wartung 2. Allgemeine Wartung
2.3 Schmieren
Die Kugelumlaufspindel und die Untersetzungsgetriebe müssen regelmäßig geschmiert
werden. Verwenden Sie ausschließlich das in der folgenden Tabelle angegebene
Schmierfett.
■
Achten Sie auf ausreichende Schmierung der gleitenden Teile im Manipulator. Den
Manipulator mit nicht ausreichendem Schmierfett zu betreiben, beschädigt die
VORSICHT
Zu schmierendes Teil Schmierintervall Schmierfett Beziehen Sie sich auf:
3. Achse Kugelumlaufspindel
1. Achse
2. Achse
Untersetzungsgetriebe Beim Austauschen des Motors* SK-1A
gleitenden Teile und/oder führt zu einer unzureichenden Funktion des Manipulators.
Sobald die Teile beschädigt sind, ist viel Zeit und Geld für die Reparaturen nötig.
Zum ersten Mal: nach 50 km
Betrieb
anschließend: nach 100 km
Betrieb
AFB
Wartung: 10.1 Schmieren der
Kugelumlaufspindel
Wartung:
5.2 Ersetzen des
Untersetzungsgetriebes der 1.
Achse
6.2 Ersetzen des
Untersetzungsgetriebes der 2.
Achse
* Unter normalen Bedingungen sollten die Untersetzungsgetriebe nur geschmiert werden, wenn der Motor
ausgetauscht wird. Im Fall erschwerter Betriebsbedingungen (wie Hochleistung, Hochgeschwindigkeit oder
Schwerlast usw.) müssen die Untersetzungsgetriebe jedoch alle 10.000 Stunden geschmiert werden.
■
Wenn Schmierfett in Ihre Augen, Ihren Mund oder auf Ihre Haut gelangt, folgen Sie den
Anweisungen unten.
Wenn Schmierfett in Ihre Augen gelangt
: Spülen Sie diese gründlich mit sauberem Wasser aus und suchen Sie dann
sofort einen Arzt auf.
Wenn Schmierfett in Ihren Mund gelangt
VORSICHT
: Wenn geschluckt, erbrechen Sie nicht. Suchen Sie sofort einen Arzt auf.
: Wenn Schmierfett nur in ihren Mund gelangt ist, spülen Sie Ihren Mund
gründlich mit Wasser aus.
Wenn Schmierfett auf Ihre Haut gelangt
: Waschen Sie die betroffene Stelle gründlich mit Seife und Wasser.
50 RS Rev. 2
Page 63

2.4 Festziehen der Innensechskantschrauben
Innensechskantschrauben werden an Stellen verwendet, wo mechanische Festigkeit
erforderlich ist. (Eine Innensechskantschraube wird in diesem Handbuch als “Schraube”
bezeichnet.) Diese Schrauben sind mit den Anzugsmomenten festgezogen, die in der
folgenden Tabelle angegeben sind.
Wenn es bei einigen in diesem Handbuch beschriebenen Verfahren erforderlich ist, diese
Schrauben wieder festzuziehen, verwenden Sie (außer in Sonderfällen, auf die besonders
hingewiesen wird) einen Drehmomentschlüssel, so dass die Schrauben mit dem richtigen
Anzugsmoment befestigt werden, wie unten angegeben.
Wartung 2. Allgemeine Wartung
Schraube
M10
M12
Anzugsdrehmoment
M3
M4
M5
M6
M8
245 N⋅cm (25 kgf⋅cm)
490 N
⋅cm (50 kgf⋅cm)
980 N
⋅cm (100 kgf⋅cm)
1760 N⋅cm (180 kgf⋅cm)
3720 N⋅cm (380 kgf⋅cm)
7350 N⋅cm (750 kgf⋅cm)
12740 N⋅cm (1300 kgf⋅cm)
Siehe unten für passende Madenschraube.
Madenschraube Anzugsdrehmoment
M4
M5
245 N⋅cm (25 kgf⋅cm)
392 N⋅cm (40 kgf⋅cm)
Wir empfehlen, die Schrauben, die auf einem Kreisumfang ausgerichtet sind, in einem sich
kreuzendem Muster anzuziehen, wie in der Abbildung unten dargestellt.
Schraubenloch
3
1
5
8
Ziehen Sie die Schrauben nicht in einem Zug fest.
Ziehen Sie die Schrauben mit zwei oder drei Zügen
fest. Verwenden Sie dafür einen
4
Sechskant-Schlüssel. Verwenden Sie anschließend
einen Drehmomentschlüssel, sodass die Schrauben
7
2
6
mit den oben in der Tabelle aufgeführten
Anzugsmomenten angezogen werden.
2.5 Anpassen der Ursprungspositionen
Nachdem Teile (Motoren, Untersetzungsgetriebe, Bremse, Zahnriemen,
Kugelumlaufspindel usw.) ausgetauscht wurden, muss der Manipulator kalibriert werden,
da die in jedem Motor gespeicherte Ursprungsposition von der entsprechenden in der
Steuerung gespeicherten Ursprungsposition abweicht. Nach Austausch der Teile ist es
daher notwendig, diese Ursprungspositionen anzupassen.
Für die Kalibrierung müssen die Pulse-Werte für eine bestimmte Position im Voraus
aufgezeichnet werden.
Bevor Sie die Teile austauschen, wählen Sie einfache Punkte (Pose)-Daten aus der
Punktedatei und überprüfen Sie die Genauigkeit. Folgen Sie dann den Schritten unten, um
die Pulse-We rte anzuzeigen und Sie zu notieren.
EPSON
RC+
RS Rev. 2 51
Führen Sie den folgenden Befehl im [Befehlseingabefenster] aus.
>PULSE
PULSE: [Joint #1 Pulse value] pls [Joint #2 Pulse value] pls [Joint #3 Pulse value]
pls [Joint #4 Pulse value] pls
Page 64

Wartung 2. Allgemeine Wartung
2.6 Anordnung der Ersatzteile
RS3-***S: Standard-Modell
St romka be l
Signalkabel
Lithium-Batterie
Batter ie-Bo ard
Moto r der 1. A chse
Untersetzungsgetriebe 1. Achse
Kabe lb au m 1
LED-Lampe
Abdeckung des 2. Arms
Ku ge lu m l auf spind el
Motor der 3. Achse
Bremse der 3. Achse
Z-Riemen
RS3-***C: Reinraum-Modell
J1-Riemen
U1-Riemen
Dic htun g
Dichtung
Kab el b aum 2
Abdeckung des 1. Arms
Motor der 2. Achse
J2-Riemen
Untersetzungsgetriebe 2. Achse
Motor der 4. Achse
Untersetzungsgetriebe 4.
Achse
Brem sf re igab etaste r
(Abbildung: RS3-351S)
Dichtung
Dichtung
Dichtung
Faltenbalg
Dic htung
Dic htung
Dichtung
Dichtung
Dic htung
(Abbildung: RS3-351C)
52 RS Rev. 2
Page 65
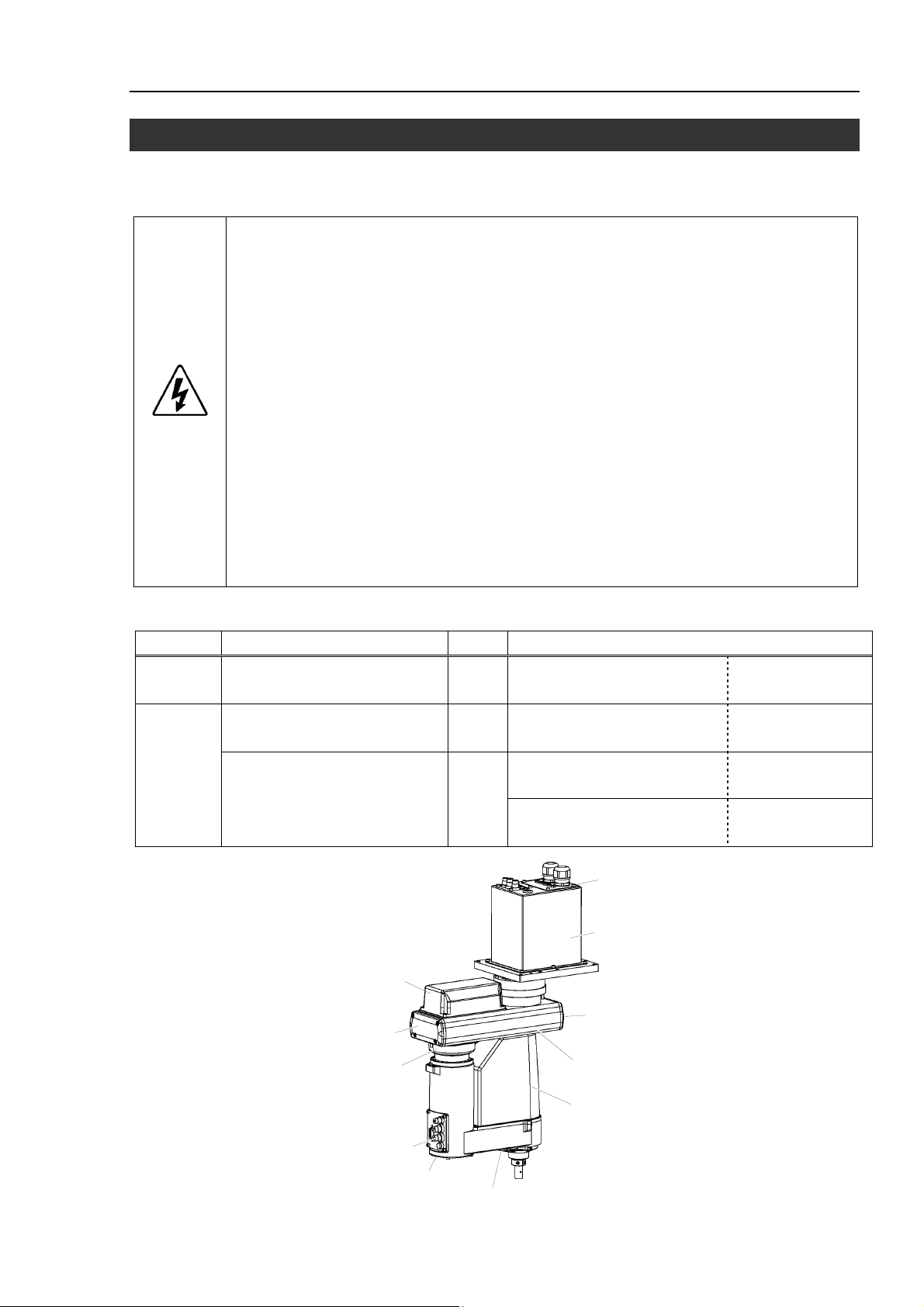
N
N
r
A
A
3. Abdeckungen
Alle Verfahren zum Entfernen und Installieren der Abdeckungen während der Wartung sind in
diesem Kapitel beschrieben.
■
Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange Spannung am
Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorstecker bei
anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen
Verletzungen führen, da sich der Manipulator unnormal bewegen kann. Es kann auch zu
einem elektrischen Schlag und/oder Fehlfunktion des Robotersystems führen.
■
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung an.
■
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
WARNUNG
Ersatzteile und Werkzeuge
Ersatzteile
Werkzeuge
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von der
Spannungsversorgung.
Austauscharbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
■
Achten Sie darauf, das währen der Wartung keine Fremdsubstanzen in den Manipulator,
die Stecker oder die Anschlüsse gelangen. Das EINschalten des Robote rsy s tems, wenn sich
Fremdsubstanzen im Robotersystem befinden, ist extrem gefährlich und kann zu einem
elektrischen Schlag und/oder zur Fehlfunktion des Robotersystems führen.
Name Menge Anmerkung
Dichtungseinheit 1 R13B031240
Inbusschlüssel
(Schlüsselweite: 3 mm)
Kreuzschlitzschraubendreher 1
Wartung 3. Abdeckungen
nur für
Reinraum-Modell
1 für M4-Schraube
zum Entfernen von
Faltenbälgen
für
M4-Flachrundkopfschraube
nur für
Reinraum-Modell
Abdeckung 1. Arm
Seitliche Abdeckung
1. Arm
Abdeckung de
2. Achse
nwender-Anschluss-
einheit
Wartungsabdeckung 2. Arm
ntere Abdeckung
Kabelplatte
Sockelabdeckung
Seitliche Abdeckung
1. Arm
Untere Abdeckung 1 . Arm
bdeckung 2. Arm
RS Rev. 3 53
Page 66

Wartung 3. Abdeckungen
3.1 1. Arm
Die folgenden Abdeckungen sind am 1. Arm angebracht.
Abdeckung 1. Arm × 1
untere Abdeckung 1. Arm × 1
Abdeckung der 2. Achse × 2
seitliche Abdeckung 1. Arm × 2
Entfernen Sie die Schraube, mit der die Abdeckung angebracht ist, um die Abdeckung zu
demontieren.
■
Wenn Sie eine Abdeckung installieren, achten Sie darauf, dass die Kabel die
Abdeckungsbefestigung nicht behindern und biegen Sie die Kabel nicht gewaltsam, um
Sie in die Abdeckung zu schieben.
Eine unnötige mechanische Beanspruchung der Kabel kann zu Schäden an den Kabeln,
VORSICHT
zur Unterbrechung der Stromversorgung und/oder zu Kontaktfehlern führen. Dies kann
zu einem elektrischen Schlag und/oder fehlerhafter Funktion de s Robotersystems füh ren.
Wenn Sie die Kabel verlegen, achten Sie auf die Kabelpositionen, nachdem Sie die
Abdeckung entfernt haben. Platzieren Sie die Kabel wieder an ihren ursprünglichen
Positionen.
Sowohl beim RS3-351S (Standard-Modell) als auch beim RS3-351C (Reinraum-Modell)
müssen Sie bei der Montage der Abdeckung des 1. Arms darauf achten, dass die
Luftschläuche und Kabel so befestigt sind wie unten abgebildet. Achten Sie darauf, dass
Sie Luftschläuche und Kabel nicht mit der Abdeckung einklemmen.
Wenn der Basis-Tisch nicht mit einem Wartungsfenster versehen ist, kann die Ab deckung
des 1. Arms nicht entfernt werden. Es ist dann für Wartungsarbeiten erforderlich, den
Manipulator vom Basis-Tisch zu demontieren.
Führen Sie diese Tätigkeit mit mindestens einer weiteren Person durch.
Weitere Informationen finden Sie im Kapitel Einrichten und Betrieb 3. Umgebu ngen und
Installation.
54 RS Rev. 3
Page 67

Wartung 3. Abdeckungen
A
A
A
A
3.1.1 RS3-351S (Standard-Modell)
ür die Abdeckung des 1. Arms:
-M4×12
Für die seitliche
bdeckung des 1.
rm s :
4-M4×15
Für die untere Abdeckung des 1. Arms:
4-M4×8
bdeckung 2. Achse:
4-M4×8 (Flachrundkopfschraube)
Für die seitliche
bdeckung des 1. Arms:
4-M4×15
3.1.2 RS3-351C (Reinraum-Modell)
Distanzstück
Dichtung
Dic htung
Di chtung
Di stanzstück
Am RS3-351C (Reinraum-Modell) sind Dichtungen und Distanzstücke installiert.
RS Rev. 3 55
Page 68

Wartung 3. Abdeckungen
N
N
3.2 2. Arm
3.2.1 Abdeckung 2. Arm
■
Wenn Sie eine Abdeckung installieren, passen Sie auf, dass die Kabel die
Abdeckungsbefestigung nicht behindern und biegen Sie die Kabel nicht gewaltsam, um
Sie in die Abdeckung zu schieben. Unnötige mechanische Beanspruchung der Kabel
kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung und/oder zu
Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der Stromversorgung
VORSICHT
Obere
Armabdeckung
Ausbau
oder Kontaktfehler sind sehr gefährlich und können zu einem elektrischen Schlag
und/oder einer Fehlfunktion des Robotersystems führen.
Wenn Sie die Kabel verlegen, achten Sie auf die Kabelpositionen, nachdem Sie die
Abdeckung entfernt haben. Platzieren Sie die Kabel wieder an ihren ursprünglichen
Positionen.
(1) Bewegen Sie den 2. Arm in die 180-Grad-Position.
Informationen zur Armposition finden Sie in der Abbildung im Kapitel
Wartung 3.1 1. Arm.
(2) Entfernen Sie die seitliche Abdeckung des 1. Arms von der Seite der 2. Achse.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
(3) Lösen Sie die Befestigungsschrauben der Abdeckung des 2. Arms und heben Sie die
Abdeckung ab.
RS-351S (Standard-Modell) RS-351C (Reinraum-Modell)
4-M4×10
4-M4×10
Dic htung
Obere
Armabdeckung
Einbau
(1) Setzen Sie die obere Armabdeckung wieder auf den Arm und sichern Sie sie mit den
zugehörigen Befestigungsschrauben.
Am RS-351C (Reinraum-Modell) sind Dichtungen installiert.
(2) Bringen Sie die seitliche Abdeckung des 1 . Arms an.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
56 RS Rev. 3
Page 69
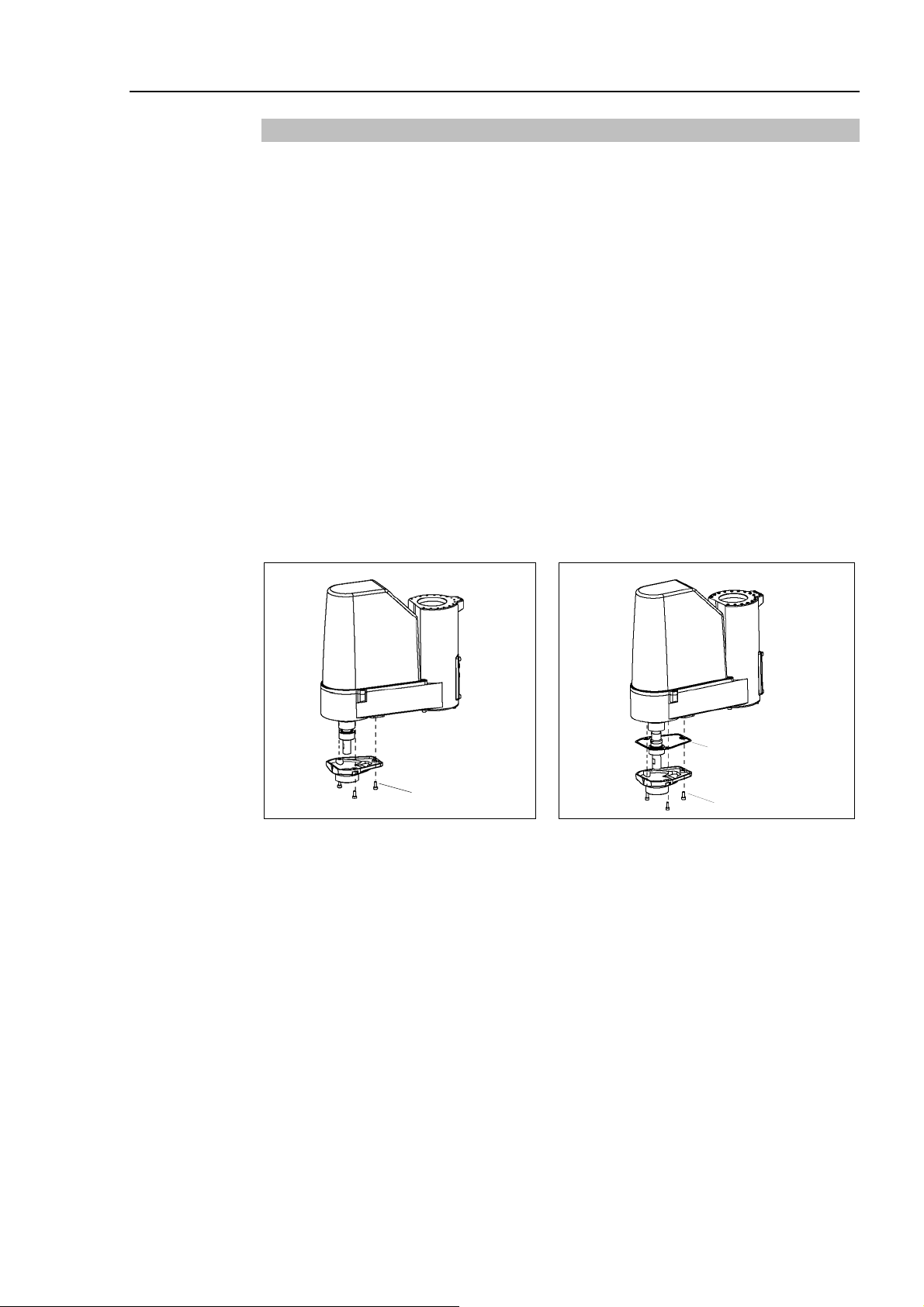
Wartung 3. Abdeckungen
r
r
d
n
n
3.2.2 Untere Abdeckung
Lösen Sie die Befestigungsschrauben der unteren Armabdeckung und ziehen Sie die
Abdeckung dann nach unten, um sie zu entfernen.
HINWEIS
Die untere Armabdeckung kann nicht von der Z-Achse entfernt werden, wenn ein Greife
installiert ist.
Wenn es erforderlich ist, die Abdeckung vollständig zu entfernen (für den Austausch de
Kugelumlaufspindel usw.), entfernen Sie den Greifer.
Wenn die Kugelumlaufspindel ausgetauscht werden muss, entfernen Sie den Greifer un
die untere Ab dec kung vollständig.
Wenn es nicht erforderlich ist, die Abdeckung vollständig zu entfernen, schieben Sie die
Z-Achse an die Untergrenze und lassen Sie die untere Armabdeckung herunter. Führen Sie
dann die Wartung oder Inspektion durch.
Wenn der Manipulator mit Faltenbälgen ausgestattet ist, entfernen Sie zuerst den untere
Faltenbalg oder drücken Sie ihn herunter und entfernen Sie anschließend die untere
Armabdeckung. Unter Wartung 9. Faltenbalg finden Sie die Beschreibung zum Entferne
des Faltenbalgs.
RS3-351S (Standard-Modell) RS3-351C (Reinraum-Modell)
3-M4×10
Eine Dichtung ist am RS3-351C (Reinraum-Modell) angebracht.
Dic htung
3-M4×10
RS Rev. 3 57
Page 70

Wartung 3. Abdeckungen
3.2.3 2. Arm Wartungsabdeckung
Lösen Sie die Schrauben, mit denen die Wartungsabdeckung des 2. Arms befestigt ist, und
ziehen Sie dann die Abdeckung nach unten ab, um sie zu demontieren.
RS3-351S (Standard-Modell) RS3-351C (Reinraum-Modell)
Dichtung
4-M4×8
Am RS3-351C (Reinraum-Modell) ist eine Dichtung installiert.
4-M4×8
58 RS Rev. 3
Page 71

3.3 Anschlussplatte
■
Entfernen Sie die Anschlussplatte nicht gewaltsam. Das gewaltsame Entfernen der
Anschlussplatte kann zu Schäden an den Kabeln, zur Unterbrechung der
Stromversorgung und/oder zu Kontaktfehlern führen. Beschädigte Kabel, eine
Unterbrechung der Stromversorgung oder Kontaktfehler sind sehr gefährlich und können
zu einem elektrischen Schlag und/oder einer Fehlfunktion des Robo tersystems führen.
■
Wenn Sie die Anschlussplatte installieren, passen Sie auf, dass die Kabel die
Plattenbefestigung nicht behindern und biegen Sie die Kabel nicht gewaltsam, um Sie in
die Abdeckung zu schieben.
VORSICHT
Unnötige mechanische Beanspruchung der Kabel kann zu Schäden an den Kabeln, zur
Unterbrechung der Stromversorgung und/oder zu Kontaktfehlern führen. Beschädigte
Kabel, eine Unterbrechung der Stromversorgung oder Kontaktfehler sind sehr gefährlich
und können zu einem elektrischen Schlag und/oder einer Fehlfunktion des
Robotersystems führen.
Wenn Sie die Kabel verlegen, merken Sie sich die Kabelpositionen, nachdem Sie die
Anschlussplatte entfernt haben. Platzieren Sie die Kabel wieder an ihren ursprünglichen
Positionen.
Wartung 3. Abdeckungen
Lösen Sie die Schrauben, die die Anschlussplatte halten und entfernen Sie diese.
RS3-351S (Standard-Modell) RS3-351C (Reinraum-Modell)
8-M4×10
Distanzstück
Dichtung
8-M4×10
Am RS3-351C (Reinraum-Modell) sind eine Dichtung und ein Distanzstück installiert.
RS Rev. 3 59
Page 72

Wartung 3. Abdeckungen
-
g
A
8
A
3.4 Sockelabdeckung
Bevor Sie die Sockelabdeckung entfernen, bauen Sie die Anschlussplatte ab und trennen
Sie die Stecker.
Um die Sockelabdeckung zu entfernen, lösen Sie die Schrauben, mit denen die
Sockelabdeckung befestigt ist.
RS3-351S (Standard-Modell) RS3-351C (Reinraum-Modell)
nschlussplatte
4-M4×8
So ck elab
deckun
6-M4× 10
8-M4× 10
nschlu sspl at te
Distanzstück
Di ch tun g
4-M4×
Sockelabdeckung
6-M4×10
8-M4× 10
Distanzstück
Dichtu ng
Distanzstück
Di ch t un g
Am RS3-351C (Reinraum-Modell) sind Dichtungen und Distanzstücke installiert.
60 RS Rev. 3
Page 73

k
3.5 Anwender-Anschlusseinheit
Lösen Sie die Schrauben, die die Anwender-Anschlusseinheit halten und entfernen Sie
diese.
RS-351S (Standard-Modell) RS3-351C (Reinraum-Modell)
Wartung 3. Abdeckungen
4-M4×8
Dichtung
Distanzstüc
4-M4×8
Am RS3-351C (Reinraum-Modell) sind eine Dichtung und ein Distanzstück installiert.
RS Rev. 3 61
Page 74
Wartung 4. Kabelbaum
N
N
4. Kabelbaum
■
Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange Spannung
am Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorstecker bei
anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen
Verletzungen führen, da sich der Manipulator unnormal bewegen kann. Es kann auch zu
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
■
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung
an.
■
WARNUNG
VORSICHT
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von
der Spannungsversorgung.
Austauscharbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
■
Achten Sie darauf, das während der Wartung keine Fremdsubstanzen in den Manipulator,
die Stecker oder die Anschlüsse gelangen. Das EINschalten des Robotersystems, wenn
sich Fremdsubstanzen im Robotersystem befinden, ist extrem gefährlich und kann zu
einem elektrischen Schlag und/oder zur Fehlfunktion des Robotersystems führen.
■
Schließen Sie die Kabel richtig an. Setzen Sie die Kabel keinen unnötigen mechanischen
Beanspruchungen aus. (Stellen Sie keine schweren Objekte auf die Kabel. Verbiegen
oder ziehen Sie die Kabel nicht gewaltsam.) Eine unnötige mechanische Beanspruchung
der Kabel kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung
und/oder zu Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der
Stromversorgung oder Kontaktfehler sind sehr gefährlich und können zu einem
elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
62 RS Rev. 3
Page 75

4.1 Austausch des Kabelbaums
Weil die Motorencoder von einer Lithiumbatterie, welche auf dem Batterie-Board
befestigt ist, mit Energie versorgt werden,, bleiben die Positionsdaten auch dann erhalten,
wenn die Steuerung AUSgeschaltet wird. Wenn die Batterie-Stecker gezogen werden,
gehen die Positionsdaten verloren und EPSON RC+ zeigt einen Fehler an, wenn die
Steuerung EINgeschaltet wird.
Wenn der Fehler auftritt, führen Sie eine Kalibrierung aller Achsen durch.
Ersatzteile, Werkzeuge und Materialien
Name Menge Anmerkung
Kabelbaum 1
Ersatzteile
Schmierfett für die Kabel (GPL-224) 10 g R13B030304
Batterieeinheit (Lithium-Batterie) 3 R13ZA00600300
Inbusschlüssel (Schlüsselweite: 3 mm) 1 für M4-Schraube
Inbusschlüssel (Schlüsselweite: 4 mm) 1 für M5-Schraube
Inbusschlüssel (Schlüsselweite: 5 mm) 1 für M6-Schraube
Schraubenschlüssel (Schlüsselweite: 5 mm) 1 zur Entfernung des
Werkzeuge
Material
Mutterndreher (Schlüsselweite: 5 mm) 1 zur Entfernung des
Seitenschneider 1 zum Durchschneiden von
Alkohol
Putzlappen 1 zum Abwischen von Schmierfett
Kabelbinder 20
ausreichende
Menge
Wartung 4. Kabelbaum
Nähere Informationen zu den
einzelnen Manipulatormodellen
finden Sie im Kapitel Wartung:
14. Ersatzteile.
D-Sub-Steckers
D-Sub-Steckers
Kabelbindern
zum Abwischen von Schmierfett
Kabelbaum 1
Kabelbaum 2
(Abbildung: RS3-351S)
RS Rev. 3 63
Page 76
Wartung 4. Kabelbaum
N
N
■
Wenn die Anschlüsse während des Austauschs des Kabelbaums getrennt wurden,
schließen Sie die Anschlüsse wieder an ihren richtigen Positionen an. Entnehmen Sie die
richtigen Anschlüsse den Blockdiagrammen.
Falscher Anschluss kann zu einer Fehlfunktion des Robotersystems führen.
ähere Informationen zu den Anschlüssen finden Sie im Kapitel
Wartung: 4.2 Verkabelungspläne.
■
Wenn Sie eine Abdeckung installieren, achten Sie darauf, dass die Kabel die
Abdeckungsbefestigung nicht behindern und biegen Sie die Kabel nicht gewaltsam, um
Sie in die Abdeckung zu schieben. Unnötige mechanische Beanspruchung der Kabel
kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung und/oder zu
VORSICHT
Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der Stromversorgung
oder Kontaktfehler sind sehr gefährlich und können zu einem elektrischen Schlag
und/oder einer Fehlfunktion des Robotersystems führen. Platzieren Sie die Kabel wieder
an ihren ursprünglichen Positionen.
■
Schließen Sie die Kabel richtig an. Setzen Sie die Kabel keinen unnötigen mechanischen
Beanspruchungen aus. (Stellen Sie keine schweren Objekte auf die Kabel. Verbiegen
oder ziehen Sie die Kabel nicht gewaltsam.) Eine unnötige mechanische Beanspruchung
der Kabel kann zu Schäden an den Kabeln, zur Unterbrechung der Stromversorgung
und/oder zu Kontaktfehlern führen. Beschädigte Kabel, eine Unterbrechung der
Stromversorgung oder Kontaktfehler sind sehr gefährlich und können zu einem
elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
Entfernen des
Kabelbaums
(1) Schalten Sie die Steuerung aus.
(2) Ziehen Sie den Stecker des Stromkabels und des Signalkabels aus der Steuerung.
(3) Entfernen Sie die Abdeckung des 2. Arms.
ähere Informationen finden Sie im Kapitel Wartung: 3.2 2. Arm.
(4) Schneiden Sie die Kabelbinder durch.
Kabelbinder
(5) Schließen Sie die Ersatzbatterien an die Stecker XB13 und XB14 an (im 2. Arm).
- Die Motorpositionen der 3. und 4. Achse werden von der Batterie im Sockel
gespeichert. Schließen Sie die Batterien an, um den Verlust von Positionsdaten zu
verhindern.
(6) Trennen Sie die folgenden Stecker.
Stecker X31, X32, X33, X41, XB33, XB34, X331, X341
(7) Entfernen Sie die Anwender-Anschlusseinheit, indem Sie sie nach vorne herausziehen.
Nähere Informationen finden Sie im Kapitel Wartung 3.5 Anwender-Anschlusseinheit.
64 RS Rev. 3
Page 77

N
N
N
(8) Trennen Sie die Luftschläuche, den Schutzleiter, das
D-Sub-Kabel (XU11, XU21) und den Stecker des
Bremsfreigabetasters von der AnwenderAnschlusseinheit.
Wartung 4. Kabelbaum
Luftschlauch
Drücken Sie den Ring auf die Halterung und ziehen Sie
den Luftschlauch heraus. (ø 6 × 2, ø 4 × 1)
HINWEIS
(9) Entfernen Sie den Schutzleiter von der Kabelbefestigungsvorrichtung.
(10) Entfernen Sie die Wartungsabdeckung des 2. Arms.
(11) Ziehen Sie die Kabelenden, die an der Motorseite
(12) Entfernen Sie die Abdeckung des 1. Arms.
(13) Schneiden Sie die beiden Kabelbinder durch.
Prägen Sie sich die Position der Kabel ein, damit Sie sie
anschließend wieder richtig anschließen können.
Schneiden Sie die beiden Kabelbinder durch.
ähere Informationen finden Sie im Kapitel Wartung: 3.2 2. Arm.
angeschlossen waren, nach unten aus der
Wartungsöffnung heraus. Gehen Sie dabei nach der
Dicke der Kabel vor und beginnen Sie mit dem dünnsten
Kabel.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
D-Sub-Kabel
Bremsfreigabetaster
Kabel
(14) Trennen Sie den Schutzleiter.
Kabelbinder
(15) Ziehen Sie die Kabel und Schläuche nach oben heraus. Gehen Sie dabei nach der
Dicke der Kabel bzw. Schläuche vor und beginnen Sie mit dem dünnsten.
(Achten Sie darauf, dass sich die Stecker nicht verfangen.)
(16)
(17) Schließen Sie die Ersatzbatterien an den Stecker XB12 an (im 2. Arm).
(18) Ziehen Sie die Stecker der Kabel und Schläuche, die Sie bereits herausgezogen
(19) Ziehen Sie alle Stecker bis auf den Batteriestecker ab.
Entfernen Sie die seitliche und die untere Abdeckung vom 1. Arm.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
- Die Motorposition der 2. Achse wird von der Batterie im Sockel gespeichert.
Schließen Sie die Batterien an, um den Verlust von Positionsdaten zu verhindern.
haben, durch die Öffnung in der unteren Abdeckung heraus.
Schutzleiter
Stecker X21, X22, X23, X30, XB22, XB23,
X221, X231, XU10, XU20
(20) Entfernen Sie den Schutzleiter.
RS Rev. 3 65
Page 78

Wartung 4. Kabelbaum
N
N
(21) Schneiden Sie die beiden Kabelbinder durch.
Ziehen Sie den Kabelbaum 2 heraus.
Kabelbinder
(22)
Entfernen Sie die Anschlussplatte.
ähere Informationen finden Sie im Kapitel Wartung: 3.3 Anschlussplatte.
(23)
Entfernen Sie die Sockelabdeckung.
ähere Informationen finden Sie im Kapitel Wartung 3.4 Sockelabdeckung.
(24)
Ziehen Sie den D-Sub-Stecker von der Platte ab, die die Kabel sichert.
(25) Entfernen Sie die drei Luftschläuche.
Schneiden Sie die beiden Kabelbinder durch.
(26)
Ziehen Sie den Kabelbaum 2 und die Luftschläuche heraus.
(Achten Sie darauf, dass sich der Stecker nicht verfängt.)
Kabelbinder
66 RS Rev. 3
Page 79

r
A
X
X
X
N
Installation des
Kabelbaums
Wartung 4. Kabelbaum
(1) Markieren Sie die Position des Kabelbaums 1 mit einem wasserfesten Stift.
1. Arm
Markierung
Sockelseite
XU10
XU20
21, X22
23, XB22
B23, X30
X221
X231
Schrumpfschlauch
Schmierstelle
15
15
15
120
120
120
120
120
nwenderkabel (ungefähr)
Signalkabel (ungefähr)
Stromkabel (ungefähr)
Luftschlauch ×3 (ungefähr)
350
240
(2) Schützen Sie beide Enden der Kabel mit Plastiktüten.
(Das Foto zeigt ein mit Plastiktüten umwickeltes Kabelende.)
Die Plastiktüten verhindern, dass sich Schmierfett an den Steckern und Luftschläuchen
absetzt, wenn an den Kabeln gezogen wird.
D-Sub
X20
X30
X62
X63
Schutzleite
X121
X131
Schutzleiter 400 mm (ungefähr)
(3) Führen Sie die Kabel von der Sockelseite in die
1. Achse ein. Achten Sie unbedingt auf die richtige
Richtung.
Siehe den Steckeraufkleber aus Schritt (1).
Führen Sie die Stecker der Größe nach ein, beginnend
mit dem größten. Schließen Sie anschließend den
Luftschlauch und den Schutzleiter an.
Ziehen Sie die Kabel und Schläuche aus der
Unterseite heraus und geben Sie Schmierfett
(GPL-224) auf die markierten Stellen.
ähere Informationen zu den Schmierstellen finden
Sie im Schritt (1).
Achse 1
Kabel
Einführrichtung
RS Rev. 3 67
Page 80

Wartung 4. Kabelbaum
A
r
X
X
X
(4) Bringen Sie zwei Kabelbinder an der
Kabelbefestigungsvorrichtung im 1. Arm an.
Kabelbinder
Sichern Sie Kabel, Schlauch und Schutzleiter
locker.
Befestigen Sie das untere Ende des Schlauchs und
des Schutzleiters, wo das Schmierfett (GPL-224)
Schrumpfschlauch
aufgetragen wurde.
(5) Verbinden Sie die Stecker mit dem Batterie-Board auf der Sockelseite.
Stecker X62, X63
(6) Ziehen Sie die Stecker von der Seite des 1. Arms (X21, X22, XB22, X221) von
vorne in den Arm.
(7) Schließen Sie das D-Sub-Kabel und die Luftschläuche an, die an die Kabelplatte
der 1. Achse anges chl osse n sind (Innensei te).
(8) Drücken Sie die Kabel, die Schläuche und den
Kabelbinder
Schutzleiter nach unten und befestigen Sie sie
mithilfe eines Kabelbinders an der Kabelplatte.
Wenn Sie die Kabel bündeln, entwirren Sie die
Kabel und bewegen Sie den 1. Arm in die
90-Grad-Position (Armende auf die dem Motor der
1. Achse abgewandte Seite gerichtet).
(9) Installieren Sie das Schutzleiter.
(10) Markieren Sie die Position des Kabelbaums 2 mit einem wasserfesten Stift.
31, XB33
32
41, XB34
2. Arm
XU11
XU21
X331
X341
nwenderkabel (ungefähr)
Signalkabel (ungefähr)
Stromkabel (ungefähr)
150
150
150
Markierung
300
300
300
1. Arm
XU10
XU20
X23
XB23
X30
Schutzleite
X231
Schrumpfschlauch
Luftschlauch ×3 (ungefähr)
Schmierstelle
Schutzleiter 600 mm (ungefähr)
150
150
Markierung
50
68 RS Rev. 3
Page 81

Wartung 4. Kabelbaum
(11) Führen Sie die Kabel in den 1. Arm ein.
Achten Sie unbedingt auf die richtige Richtung.
Siehe den Steckeraufkleber aus Schritt (1).
Kabel
(12) Binden Sie die Kabel mit einem Kabelbinder
zusammen.
Luftschlauch
Der Kabelbinder sollte nicht um die gefettete
Stelle der Kabel liegen.
Entwirren Sie die Kabel und binden Sie sie am
D-Sub-Kabel
Kalibrierpunkt des 2. Arms zusammen (wo der
1. Arm über dem 2. Arm liegt).
Bremsfreigabetaster
(13) Schließen Sie den Schutzleiter an.
(14) Befestigen Sie die Luftschläuche und Kabel auf
beiden Seiten des Motors.
(15) Schließen Sie den Schutzleiter an.
(16) Schließen Sie die folgenden Stecker an.
St ec ke r
Stecker X21, X22, X23, X30, XB22,
XB23, X221, X231, XU10,
XU20.
(17) Ziehen Sie die Ersatzbatterie von XB12 ab.
(18) Binden Sie die Kabel mit einem Kabelbinder
zusammen.
(19) Schließen Sie den Schutzleiter an die
Lufts chlauch
Anschlussplatte an.
(20) Schließen Sie die Stecker des D-Sub-Kabels
D-Sub-Kabel
(XU11, XU21) und die Luftschläuche auf der
Innenseite der A nschl usspl at te an.
Bremsfreigabetaster
RS Rev. 3 69
Page 82

Wartung 4. Kabelbaum
N
N
N
N
N
N
(21) Stecken Sie den Kabelbaum 2 durch die
(22) Schließen Sie die folgenden Stecker an.
Kabelöffnung im 2. Arm und binden Sie die
Kabelbinder
Kabel mit einem Kabelbinder zusammen.
Stecker X31, X32, X33, X41, XB33, XB34, X331, X341.
ähere Informationen finden Sie im Kapitel Wartung: 4.2 Verkabelungspläne.
(23) Ziehen Sie die Ersatzbatterien von XB13 und XB14 ab.
(24) Montieren Sie die Anwender-Anschlusseinheit an die Abdeckung des 2. Arms.
ähere Informationen finden Sie im Kapitel Wartung
3.5 Anwender-Anschlusseinheit.
(25) Setzen Sie die Abdeckung und die Wartungsabdeckung des 2. Arms ein und
befestigen Sie sie, ohne dass die Kabel eingeklemmt werden.
ähere Informationen finden Sie im Kapitel Wartung: 3.2 2. Arm.
(26) Montieren Sie die Abdeckung, die seitliche Abdeckung und die untere Abdeckung
des 1. Arms.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
(27) Montieren Sie die Sockelabdeckung.
ähere Informationen finden Sie im Kapitel Wartung 3.4 Sockelabdeckung.
(28) Schließen Sie den Stecker an und montieren Sie die Anschlussplatte.
ähere Informationen finden Sie im Kapitel Wartung: 3.3 Anschlussplatte.
(29) Führen Sie für alle Achsen eine Kalibrierung durch.
70 RS Rev. 3
Page 83

4.2 Verkabelungspläne
4.2.1 Signalkabel
Informationen zu Farben und Kennzeichnungen der Kabel finden Sie im Kapitel
Wartung 4.2.2 Stromkabel.
Wartung 4. Kabelbaum
Weiter auf der nächsten Seite.
RS Rev. 3 71
Page 84
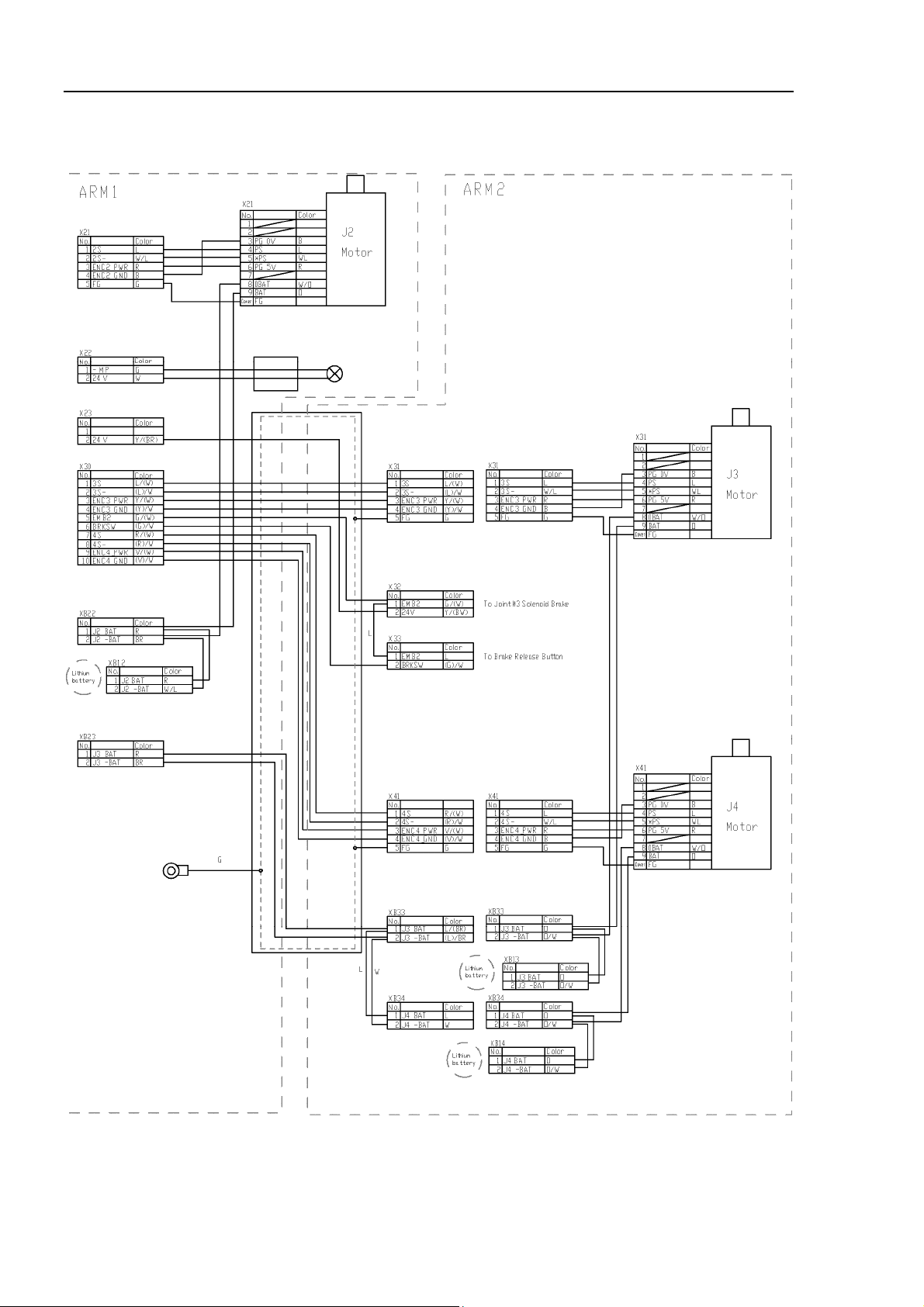
Wartung 4. Kabelbaum
Fortsetzung von der vorherigen Seite.
72 RS Rev. 3
Page 85

Wartung 4. Kabelbaum
4.2.2 Stromkabel
Weiter auf der nächsten Seite.
Code Kabelfarbe Code Kabelfarbe
B schwarz P pink
BR braun R rot
G grün V violett
L blau W weiß
O orange Y gelb
RS Rev. 3 73
Page 86

Wartung 4. Kabelbaum
Fortsetzung von der vorherigen Seite.
74 RS Rev. 3
Page 87

Wartung 4. Kabelbaum
4.2.3 Anwenderkabel
Code Kabelfarbe Code Kabelfarbe
B schwarz R rot
BR braun V violett
G grün W weiß
L blau Y gelb
In der folgenden Tabelle sind die verschiedenen Kabelbäume aufgeführt.
Umgebung Bestellnummer Anmerkung
S R13B020028
C R13B020029 wasserdichter Stecker: D-Sub
RS Rev. 3 75
Page 88

Wartung 5. 1. Arm
N
N
5. 1. Arm
■
■
WARNUNG
■
■
VORSICHT
■
Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange Spannung
am Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorstecker bei
anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen
Verletzungen führen, da sich der Manipulator unnormal bewegen kann. Es kann auch zu
einem elektrischen Schlag und/oder Fehlfunktion des Robotersystems führen.
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung
an.
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von
der Spannungsversorgung.
Austauscharbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
Passen Sie auf, dass die Motorwelle keine starken Erschütterungen erfährt, wenn Sie die
Motoren austauschen. Erschütterung kann die Lebensdauer der Motoren und Encoder
verkürzen und/oder sie beschädigen.
Bauen Sie die Motoren und Encoder niemals auseinander. Ein auseinandergebauter
Motor und Encoder verursachen eine Positionsabweichung und können nicht mehr
verwendet werden.
Nachdem Teile (Motoren, Untersetzungsgetriebe, Bremsen, Zahnriemen,
Kugelumlaufspindel usw.) ausgetauscht wurden, muss der Manipulator kalibriert werden,
da die in jedem Motor gespeicherte Ursprungsposition von der entsprechenden in der
Steuerung gespeicherten Ursprungsposition abweicht.
Nach Austa us ch der T eil e is t es daher notw endi g, di ese U r sprungsp osi tio ne n anz upa ssen.
Der Ausrichtungsprozess dieser zwei Ursprungspositionen wird „Kalibrierung“ genannt.
Lesen Sie Wartung: 13. Kalibrierung, um die Kalibrierung durchzuführen.
Motor 1. Achse
1. Achse Untersetzungsgetriebe
(Abbildung : RS3-351S)
76 RS Rev. 3
Page 89

N
N
5.1 Austausch des Motors der 1. Achse
Ersatzteile und Werkzeuge
Name Menge Anmerkung
Wartung 5. 1. Arm
Ersatzteile
Schmierfett (SK-1A) 13 g R13ZA0 0330100
Inbusschlüssel (Schlüsselweite: 2,5 mm) 1 für M5-Madenschraube,
Inbusschlüssel (Schlüsselweite: 3 mm) 1 für M4-Schraube
Drehmomentschlüssel M4 1
AC-Servomotor (400 W) 1 R13B000607
Werkzeuge
Federwaage
nicht-elastisches Band (Länge ca. 800 mm) 1 zum Spannen des Riemens
Putzlappen 1 Zum Abwischen von Schmierfett
1. Achse Ausbau
des Motors
M3-Schraube
Riemenspannung 150 N
1
(15,3 kgf)
(1) Schalten Sie die Steuerung EIN.
(2) Bewegen Sie die 1. Achse des Manipulators in die Ursprungsposition .
(3) Schalten Sie die Steuerung aus.
(4) Entfernen Sie die Anschlussplatte.
ähere Informationen finden Sie im Kapitel Wartung: 3.3 Anschlussplatte .
(5) Trennen Sie die folgenden Stecker.
Stecker X10, X20, X30, X111, X121, X131 (Halten Sie zum Entfernen den
Rasthaken fest.)
Stecker X61
(6) Entfernen Sie die Sockelabdeckung.
ähere Informationen finden Sie im Kapitel Wartung: 3.4 Sockelabdeckung.
(7) Lockern Sie den J1-Riemen.
Lösen Sie die vier Schrauben, mit welchen die
Motoreinheit der 1. Achse b efesti gt ist.
Schieben Sie die Motoreinheit der 1. Achse in
Richtung 1. Achse.
Motoreinheit 1. Achse
Riemensc heibe
4-M4×15
+ Scheibe
J1Riemen
RS Rev. 3 77
Page 90

Wartung 5. 1. Arm
(8) Entfernen Sie den Motor der 1. Achse von der
Basis.
Lösen Sie die Schrauben, mit denen die
Motoreinheit der 1. Achse befestigt ist, und ziehen
Sie sie nach oben ab.
(9) Entfernen Sie die Zahnriemenscheibe des Motors
der 1. Achse.
Motoreinheit 1. Achse
4-M4×15
Scheibe
2-M5×8
Madenschraube
M5
Messingplättchen
Riemenscheibe
(10) Entfernen Sie die Motorplatte des Motors der
1. Achse.
1. Achse Einbau
des Motors
(1) Befestigen Sie die Motorplatte am Motor der
1. Achse.
(2) Befestigen Sie die Zahnriemenscheibe am Motor
der 1. Achse.
Montieren Sie die Zahnriemenscheibe an der
Motorwelle, sodass das Ende der
Zahnriemenscheibe mit dem Ende der Welle plan
ist.
Mot orplatte
4-M5×15
+Scheibe
2-M5×8
Madenschraube
Ziehen Sie dazu eine der Madenschrauben an der
ebenen Fläche der Motorwelle fest, bis die
Schraube gerade die Oberfläche berührt.
Setzen Sie das Messingplättchen in das andere
M5
Mes sing-
plättchen
Riemenscheibe
Gewinde, um eine Beschädigung an der
Motorwelle zu vermeiden.
Ziehen Sie dann beide Madenschrauben fest.
78 RS Rev. 3
Page 91

N
N
N
(3) Legen Sie den J1-Riemen um die
Zahnriemenscheibe der Motoreinheit der 1.
Achse, um die Einheit provisorisch zu befestigen.
Wartung 5. 1. Arm
HINWEIS
Stellen Sie sicher, dass die Profile des Riemens
und der Zahnriemenscheiben vollständig
Riemensc heibe
ineinander greifen.
Führen Sie das Motorkabel zur
gegenüberliegenden Seite der 1. Achse.
Motoreinheit 1. Achse
Wenn Sie die Motoreinheit befestigen, achten Sie
darauf, dass die Motoreinheit von Hand bewegt
werden kann und nicht kippt, wenn an ihr
gezogen wird. Wenn die Motoreinheit zu locker
oder zu fest befestigt ist, kann der Riemen nicht
richtig gespannt werden.
(4)
Bringen Sie die richtige Spannung auf den
J1-Riemen und befestigen Sie die Motoreinheit
der 1. Achse.
J1- R i em en spannu ng = 15 0N ( 15. 3kg f)
Legen Sie dazu in der Nähe der
Befestigungsplatte ein nicht-elastisches Band um
die Motoreinheit der 1. Achse.
Ziehen Sie das Band dann mit einer Federwaage,
um die angegebene Spannung aufzubringen, wie
rechts in der Abbildung dargestellt.
J1Riemen
4-M4×15
+ Scheibe
Federwaage
Stecken Sie den Stecker in das Batterie-Board ein.
(5)
Stecker X61
(6) Montieren Sie die Sockelabdeckung.
ähere Informationen finden Sie im Kapitel Wartung: 3.4 Sockelabdeckung.
(7) Schließen Sie folgende Stecker an.
Stecker X10, X20, X30, X111, X121, X131
(8) Montieren Sie die Anschlussplatte.
ähere Informationen finden Sie im Kapitel Wartung: 3.3 Anschlussplatte .
(9) Führen Sie die Kalibrierung für die 1. Achse durch.
ähere Informationen finden Sie im Kapitel Wartung: 13. Kalibrierung.
RS Rev. 3 79
Page 92
Wartung 5. 1. Arm
r
5.2 Austausch des Untersetzungsgetriebes der 1. Achse
Ersatzteile, Werkzeuge und Material
Name Menge Anmerkung
Ersatzteile
Werkzeuge
Material
WARNUNG
1. Achse Ausbau des
Untersetzungsgetriebes
Untersetzungsgetriebe (HD25-50) 1 R13B010018
Schmierfett (SK-1A) 40 g R13ZA00330100
Inbusschlüssel (Schlüsselweite: 1,5 mm) 1 für M2-Schraube
Inbusschlüssel (Schlüsselweite: 3 mm) 1 für M4-Schraube
Inbusschlüssel (Schlüsselweite: 5 mm) 1 für M6-Schraube
Drehmomentschlüssel M4 1
Drehmomentschlüssel M6 1
Seitenschneider 1
Spatel 1
Federwaage
nicht-elastisches Band (Länge ca. 800 mm) 1 zum Spannen des Riemens
Putzlappen
Kabelbinder 4
■
Wenn Sie den Manipulator vom Basis-Tisch demontieren, arbeiten Sie mindestens zu
zweit.
Die Manipulatoren haben das folgende Gewicht. Passen Sie auf, dass sich Ihre Hände,
Finger oder Füße nicht verfangen und/oder dass kein Geräteschaden durch den Fall des
Manipulators entsteht.
RS3-351S: ca. 17 kg: 38 lb.
■
Wenn Sie den Manipulator vom Basis-Tisch entfernen, halten Sie den Manipulator fest
und entfernen Sie dann die Befestigungsschrauben. Das Entfernen der
Befestigungsschrauben ohne den Manipulator zu stützen, ist sehr gefährlich und kann
dazuführen, dass er herunterfällt.
1
1
1
(1) Entfernen Sie den Manipulator vom Basis-Tisch.
Beachten Sie den obenstehenden Warnhinweis.
Zum Auftragen von
Schmierfett
Riemenspannung 150 N
(15,3 kgf)
zum Abwischen von
Schmierfett (Flansch)
zum Abwischen von
Schmierfett (Schraube)
(2) Entfernen Sie die Motoreinheit der 1. A chs e.
Führen Sie zum Ausbau die Schritte (1) bis (5) im Kapitel Wartung:
5.1 Austausch des Motors der 1. Achse aus.
80 RS Rev. 3
(3) Lösen Sie den Luftschlauch, das D-Sub-Kabel und den Schutzleiter von de
Kabelanschlussplatte der 1. Achse. Schneiden Sie den Kabelbinder durch.
Page 93
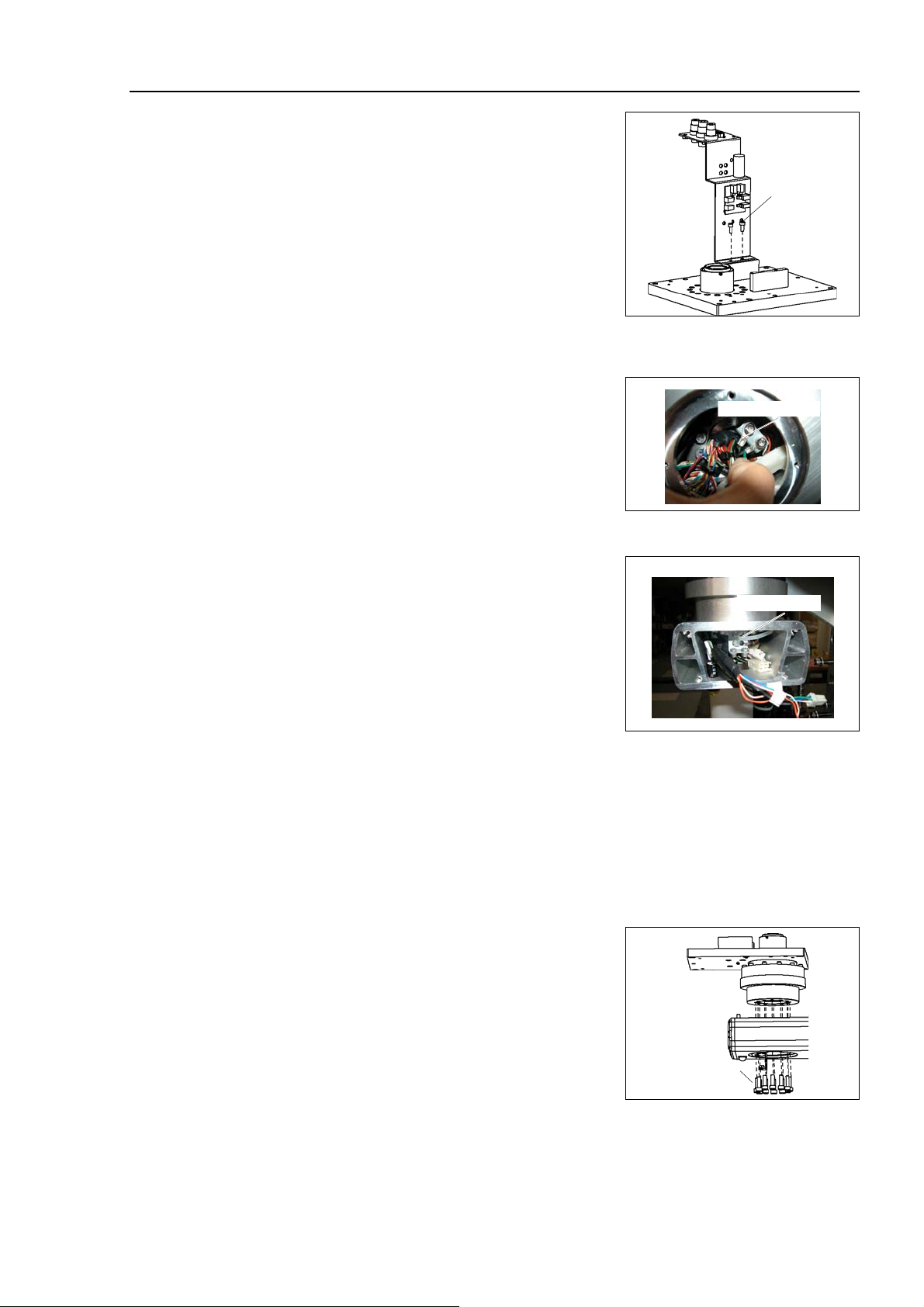
r
N
(4) Entfernen Sie die Kabelanschlussplatte de
1. Achse.
(5) Entfernen Sie die untere Ab dec ku ng des 1 . Arms.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
(6) Lösen Sie den Schutzleiter und die Stecker
von der 1. Achse des 1. Arms.
Wartung 5. 1. Arm
2-M4×10
Schutzleiter
(7) Schneiden Sie die beiden Kabelbinder
durch.
Ziehen Sie (bis auf die Luftschläuche) den
Kabelbaum 1 nach unten heraus.
Bevor Sie die Kabel herausziehen, ziehen
Sie erst die Luftschläuche seitlich aus dem
1. Arm (den Kabeln gegenüberliegende
Seite).
Ziehen Sie dann nacheinander die Kabel
heraus, beginnend mit dem kleinsten
Stecker.
Versuchen Sie nicht, die Kabel mit Gewalt
herauszuziehen. Andernfalls können
Stecker steckenbleiben, getrennt werden
oder Ansschlussstifte können abfallen.
(8) Entfernen Sie den 1. Arm.
Kabelbinder
12-M6×20
RS Rev. 3 81
Page 94

Wartung 5. 1. Arm
(9) Entfernen Sie das Untersetzungsgetriebe
16-M4×20
vom Sockel.
Achten Sie darauf, den O-Ring nicht zu
verlieren.
O-Ring
(10) Entfernen Sie die Schrauben, die den
J1-Ring
J1-Ring gegen Herausfallen sichern, und
entfernen Sie den J1-Ring.
(11) Entfernen Sie den Flansch der 1. Achse
(mit Metallrohr).
Achten Sie darauf, den O-Ring nicht zu
verlieren.
O-Ring
J1-F lansc h
Untersetzungsgetriebe
12-M4×30
2-M2×6
Schaube zum
Sichern des
J1-Rings
1. Achse Einbau des
Untersetzungsgetriebes
(1) Entpacken Sie das neue Untersetzungsgetriebe.
(2) Setzen Sie den O-Ring in die O-Ringnut im Flansch der 1. Achse.
(3) Positionieren Sie die Öffnung im
Untersetzungsgetriebe und die
Gewindebohrung im Flansch der
1. Achse übereinander.
Befestigen Sie alle Schrauben locker in
einem sich kreuzenden Muster, so dass
die Schrauben (M3 x 35) gleichmäßig
befestigt werden. Ziehen Sie dann mit
einem Drehmomentschlüssel jede
J1-Ring
O-Ring
J1-F lansc h
12-M4×30
2-M2×6
Schaube zum
Sichern des
J1-Rings
Untersetzungsgetriebe
Schraube in einem sich kreuzenden
Muster fest. Verwenden Sie das in der
Tabelle unten angegebene Drehmoment.
(4) Setzen Sie den J1-Ring ein und befestigen Sie den J1-Ring mit den Schrauben
gegen Herausfallen.
Parameter Schraubentyp
1. Achse
Untersetzungsgetriebe
M4
×30
M6×15
Anzahl der
Schrauben
12
8
Anzugsmoment
⋅cm (61,2 kgf)
600 N
⋅cm (22,4 kgf)
2200 N
82 RS Rev. 3
Page 95

Wartung 5. 1. Arm
E
—
E
(5) Setz en Sie den O-Ring in di e O-Ringnut des
Sockels ein.
16-M4×20
(6) Montieren Sie das Untersetzungsgetriebe
am Sockel.
Achten Sie darauf, den O-Ring nicht zu
verlieren.
(7) Montieren Sie den 1. Arm.
O-Ring
12-M6×20
(8) Montieren Sie die Kabelanschlussplatte der
1. Achse.
2-M4×10
(9) Führen Sie den Kabelbaum in die 1. Achse ein.
Befolgen Sie die Schritte in Wartung: 4.1 Austausch des Kabelbaums —
inbau (1)–(9).
(10) Befestigen Sie den Motor der 1. Achse und montieren Sie die Abdeckung.
Befolgen Sie die Schritte in Wartung: 5.1 Austausch des Motors der 1. Achse
inbau (4)–(8).
(11) Montieren Sie den Manipulator auf dem Basis-Tisch.
RS Rev. 3 83
Page 96

Wartung 5. 1. Arm
A
E
5.3 Austausch des J1-Riemens
J1-Riemen
usbau
J1-Riemen
Einbau
(1) Entfernen Sie die Motoreinheit der 1. Achse.
Befolgen Sie die Schritte in Wartung: 5.1 Austausch
J1-Motoreinheit
4-M4×15
S che ib e
des Motors der 1. Achse — Ausbau (1)–(8).
J1-Riemen
(2) Entfernen Sie den J1-Riemen.
(1) Legen Sie den J1-Riemen um die Zahnriemenscheibe an der Seite der 1. Achse.
(2) Montieren Sie die Motoreinheit der 1. Achse.
Befolgen Sie die Schritte in Wartung: 5.1 Austausch des Motors der 1. Achse —
inbau (3)–(9).
84 RS Rev. 3
Page 97

N
N
6. 2. Arm
■
■
WARNUNG
■
■
■
VORSICHT
Wartung 6. 2. Arm
Die Motorstecker dürfen nicht abgezogen oder eingesteckt werden, solange Spannung
am Robotersystem anliegt. Das Einstecken oder Herausziehen der Motorstecker bei
anliegender Spannung ist extrem gefährlich und kann zu schweren körperlichen
Verletzungen führen, da sich der Manipulator unnormal bewegen kann. Es kann auch zu
einem elektrischen Schlag und/oder Fehlfunktion des Robotersystems führen.
Um die Spannungsversorgung des Robotersystems zu unterbrechen, ziehen Sie den
etzstecker aus der Steckdose. Schließen Sie das Netzanschlusskabel an eine geeignete
etzsteckdose an. Schließen Sie es NICHT direkt an die Fabrik-Spannungsversorgung
an.
Bevor Sie einen Auswechselvorgang durchführen, schalten Sie die Steuerung und die
damit zusammenhängende Ausrüstung AUS und trennen Sie dann den Netzstecker von
der Spannungsversorgung.
Austauscharbeiten bei EINgeschalteter Spannung sind extrem gefährlich und können zu
einem elektrischen Schlag und/oder einer Fehlfunktion des Robotersystems führen.
Passen Sie auf, dass die Motorwelle keine starken Erschütterungen erfährt, wenn Sie die
Motoren austauschen. Erschütterung kann die Lebensdauer der Motoren und Encoder
verkürzen und/oder sie beschädigen.
Bauen Sie die Motoren und Encoder niemals auseinander. Ein auseinandergebauter
Motor und Encoder verursachen eine Positionsabweichung und können nicht mehr
verwendet werden.
Nachdem Teile (Motoren, Untersetzungsgetriebe, Bremsen, Zahnriemen,
Kugelumlaufspindel usw.) ausgetauscht wurden, muss der Manipulator kalibriert werden, da
die in jedem Motor gespeicherte Ursprungsposition von der entsprechenden in der Steuerung
gespeicherten Ursprungsposition abweicht.
Nach Austa us ch der T eil e is t es daher notw endi g, di ese U r sprungsp osi tio ne n anz upa ssen.
Der Ausrichtungsprozess dieser zwei Ursprungspositionen wird „Kalibrierung“ genannt.
Lesen Sie Wartung: 13. Kalibrierung, um die Kalibrierung durchzuführen.
Moto r 2. Achse
2. Achse
Untersetzungsgetriebe
(Abbildung: RS3-351S)
RS Rev. 3 85
Page 98

Wartung 6. 2. Arm
A
N
N
Ri
6.1 Austausch des Motors der 2. Achse
Ersatzteile, Werkzeuge und Material
Ersatzteile
Werkzeuge
Material
2. Achse
usbau des
Motors
Name Menge Anmerkung
AC-Servomotor (200 W) 1 R13B000614
Schmierfett (SK-1A) 6 g R13ZA00330100
Inbusschlüssel (Schlüsselweite: 2,5 mm) 1 für M5-Madenschraube
Inbusschlüssel (Schlüsselweite: 3 mm) 1 für M4-Schraube
Inbusschlüssel (Schlüsselweite: 4 mm) 1 für M5-Schraube
Seitenschneider
1
zum Durchschneiden von
Kabelbindern
Federwaage 1 Riemenspannung 100 N
nicht-elastisches Band (Länge ca. 800 mm) 1 zum Spannen des Riemens
Putzlappen 1
Zum Abwischen von
Schmierfett
Kabelbinder 4
(1) Entfernen Sie die Abdeckung des 1. Arms.
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
(2) Entfernen Sie die untere Abdeckung des 1. A rm s .
ähere Informationen finden Sie im Kapitel Wartung: 3.1 1. Arm.
(3) Trennen Sie die folgenden Stecker.
Stecker X21, X221, XB22 (Halten Sie zum Entfernen den
Rasthaken fest.)
(4) Lockern Sie den J2-Riemen.
Motoreinheit 2. Achse
4-M4×5
+ Scheibe
Lösen Sie die vier Schrauben (M4 x 15), mit denen die
Motoreinheit der 2. Achse befestigt ist. Schieben Sie die
Motoreinheit der 2. A chse i n Rich tu ng de r 2. Achse.
emen -
scheibe
J2-
Riemen
86 RS Rev. 3
Page 99

(5) Entfernen Sie die Motoreinheit der 2. Achse vom 1. Arm.
Lösen Sie die Schrauben, mit denen die Motorplatte der
2. Achse befestigt ist, und ziehen Sie sie nach oben ab.
(6) Entfernen Sie die Zahnriemenscheibe des Motors
der 2. Achse.
Wartung 6. 2. Arm
4-M4×15
Scheibe
Motoreinheit
2. Achse
(7) Entfernen Sie die Motorplatte des Motors der 2. Achse.
Riemenscheibe
M5
Messingplättchen
2-M5×8
Madenschraube
4-M5×12
Mot orplatte
RS Rev. 3 87
Page 100

Wartung 6. 2. Arm
2. Achse Einbau
(1) Befestigen Sie die Motorplatte am Motor der
des Motors
2. Achse.
4-M5×12
Mot orplatte
(2) Befestigen Sie die Zahnriemenscheibe am Motor der
2. Achse.
Befestigen Sie die Zahnriemenscheibe in einem
Abstand von 5 mm zum Ende der Motorwelle.
Ziehen Sie dazu eine der Madenschrauben an der
ebenen Fläche der Motorwelle fest, bis die Schraube
gerade die Oberfläche berührt.
Setzen Sie das Messingplättchen in das andere
Gewinde, um eine Beschädigung an der Motorwelle
zu vermeiden.
Ziehen Sie dann beide Madenschrauben fest.
(3) Legen Sie den J2-Riemen um die
Zahnriemenscheibe der Motoreinheit der 2. Achse,
um die Einheit provisorisch zu befestigen.
Riemenscheibe
M5
Messingplättchen
2-M5×8
Madenschraube
Stirnfläche Motorwelle
Stirnfläche
Riemenscheibe
J2Riemen
HINWEIS
Stellen Sie sicher, dass die Profile des Riemens und
der Zahnriemenscheiben vollständig ineinander
greifen.
Führen Sie das Motorkabel zur gegenüberliegenden
Seite der 2. Achse.
Riemensc heibe
4-M4×15
Wenn Sie die Motoreinheit befestigen, achten Sie
darauf, dass die Motoreinheit von Hand bewegt
werden kann und nicht kippt, wenn an ihr gezogen
Scheibe
Motoreinheit
2. Achse
wird. Wenn die Motoreinheit zu locker oder zu fest
befestigt ist, kann der Riemen nicht richtig gespannt
werden.
88 RS Rev. 3
 Loading...
Loading...