

Page 1
Rev.1 EM208S4407F
EPSON RC+ 7.0 Option
AOI
(Add-On Instructions)
Page 2

EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
Page 3

EPSON RC+ 7.0 Option
AOI (Add-On Instructions)
Rev.1
Copyright 2020 SEIKO EPSON CORPORATION. All rights reserved.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 i
Page 4

1.
Damage or malfunction caused by improper use which is not described in the manual, or
careless use.
2.
Malfunctions caused by customers’ unauthorized disassembly.
3.
Damage due to improper adjustments or unauthorized repair attempts.
4.
Damage caused by natural disasters such as earthquake, flood, etc.
1.
If the robot or associated equipment is used outside of the usage conditions and product
specifications described in the manuals, this warranty is void.
2.
If you do not follow the WARNINGS and CAUTIONS in this manual, we cannot be
responsible for any malfunction or accident, even if the result is injury or death.
3.
We cannot foresee all possible dangers and consequences. Therefore, this manual cannot
warn the user of all possible hazards.
FOREWORD
Thank you for purchasing our robot products.
This manual contains the information necessary for the correct use of the Manipulator.
Please carefully read this manual and other related manuals before installing the robot
system.
Keep this manual handy for easy access at all times.
WARRANTY
The robot and its optional parts are shipped to our customers only after being subjected to
the strictest quality controls, tests, and inspections to certify its compliance with our high
performance standards.
Product malfunctions resulting from normal handling or operation will be repaired free of
charge during the normal warranty period. (Please ask your Regional Sales Office for
warranty period information.)
However, customers will be charged for repairs in the following cases (even if they occur
during the warranty period):
Warnings, Cautions, Usage:
ii EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
Page 5

TRADEMARKS
Microsoft, Windows, and Windows logo are either registered trademarks or trademarks of
Microsoft Corporation in the United States and/or other countries. Allen-Bradley and Studio
5000 are registered trademarks of Rockwell Automation, Inc.. Other brand and product
names are trademarks or registered trademarks of the respective holders.
TRADEMARK NOTATION IN THIS MANUAL
Microsoft® Windows® 8 Operating system
Microsoft® Windows® 10 Operating system
Throughout this manual, Windows 8, and Windows 10 refer to above respective operating
systems. In some cases, Windows refers generically to Windows 8, and Windows 10.
NOTICE
No part of this manual may be copied or reproduced without authorization.
The contents of this manual are subject to change without notice.
Please notify us if you should find any errors in this manual or if you have any comments
regarding its contents.
MANUFACTURER
CONTACT INFORMATION
Contact information is described in “SUPPLIERS” in the first pages of the following
manual:
Robot System Safety and Installation Read this manual first
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 iii
Page 6

iv EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
Page 7

Table of Contents
1. Introduction 1
2. Operation 1
2.1 Requirements ...........................................................................................1
2.2 Robot Controller Preparation ...................................................................1
2.3 PLC Project Preparation ..........................................................................1
2.4 SPEL AOI Common Inputs and Outputs..................................................1
2.5 SPEL AOI General Operation ..................................................................2
3. Configuring the Robot Controller 2
4. Creating a PLC Project using SPEL AOIs 4
5. SPEL AOI Reference 14
SPEL_Above .................................................................................................14
SPEL_Accel ..................................................................................................15
SPEL_AccelS ................................................................................................16
SPEL_Arc ......................................................................................................17
SPEL_Arc3 ....................................................................................................18
SPEL_ArchGet ..............................................................................................19
SPEL_ArchSet ..............................................................................................20
SPEL_BaseGet .............................................................................................21
SPEL_BaseSet .............................................................................................22
SPEL_Below .................................................................................................23
SPEL_CPOff .................................................................................................24
SPEL_CPOn .................................................................................................25
SPEL_ExecCmd ...........................................................................................26
SPEL_FineGet ..............................................................................................27
SPEL_FineSet ...............................................................................................28
SPEL_Flip .....................................................................................................29
SPEL_Go ......................................................................................................30
SPEL_In ........................................................................................................31
SPEL_InertiaGet ...........................................................................................32
SPEL_InertiaSet ............................................................................................33
SPEL_Init ......................................................................................................34
SPEL_InW .....................................................................................................36
SPEL_Jog .....................................................................................................37
SPEL_Jump ..................................................................................................38
SPEL_Jump3 ................................................................................................39
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 v
Page 8

Table of Contents
SPEL_Jump3CP ........................................................................................... 40
SPEL_Lefty ................................................................................................... 41
SPEL_LimZ ................................................................................................... 42
SPEL_LocalGet ............................................................................................ 43
SPEL_LocalSet ............................................................................................. 44
SPEL_MemIn ................................................................................................ 45
SPEL_MemInW ............................................................................................ 46
SPEL_MemOff .............................................................................................. 47
SPEL_MemOn .............................................................................................. 48
SPEL_MemOut ............................................................................................. 49
SPEL_MemOutW ......................................................................................... 50
SPEL_MemSw .............................................................................................. 51
SPEL_MotorOff ............................................................................................. 52
SPEL_MotorOn ............................................................................................. 53
SPEL_Move .................................................................................................. 54
SPEL_NoFlip ................................................................................................ 55
SPEL_Off ...................................................................................................... 56
SPEL_On ...................................................................................................... 57
SPEL_Out ..................................................................................................... 58
SPEL_OutW .................................................................................................. 59
SPEL_PowerHigh ......................................................................................... 60
SPEL_PowerLow .......................................................................................... 61
SPEL_ResetError ......................................................................................... 62
SPEL_Righty ................................................................................................. 63
SPEL_SavePoints ........................................................................................ 64
SPEL_Speed ................................................................................................ 65
SPEL_SpeedS .............................................................................................. 66
SPEL_Sw ...................................................................................................... 67
SPEL_Teach ................................................................................................. 68
SPEL_ToolGet .............................................................................................. 69
SPEL_ToolSet ............................................................................................... 70
SPEL_WeightGet .......................................................................................... 71
SPEL_WeightSet .......................................................................................... 72
SPEL_XYLimGet .......................................................................................... 73
SPEL_XYLimSet ........................................................................................... 74
6. Error Codes 75
vi
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
Page 9
1. Introduction
Name of AOI
A local tag that references the name of the AOI.
ExtInputs
These are the input IO mapping.
ExtOutputs
These are the output IO mapping.
Start
This is the input that starts the AOI.
This manual contains instructions on how to use EPSON RC+ 7.0 SPEL AOI (Add-OnInstructions). AOI allows Allen-Bradley® PLC users to execute commands in EPSON
robot controllers from a PLC ladder logic program. EPSON AOI uses extended remote I/O
to communicate with the controller via EtherNet/IP.
2. Operation
2.1 Requirements
To use SPEL Add-On-Instructions, the following are required:
- An EPSON robot controller with an EtherNet/IP Fieldbus slave board installed. The
controller must have firmware version 7.5.0.0 or greater installed.
- A Windows PC with EPSON RC+ 7.0 v7.5.0 or greater installed. This is used to
configure the robot controller for AOI operation, and to create a project in the controller
when a robot point file is used.
2.2 Robot Controller Preparation
To prepare the robot controller for SPEL AOI execution:
1. Introduction
1. Install an EtherNet/IP Fieldbus slave board in the controller and connect it to the Ethernet
network used for communication with the PLC.
2. Configure the robot controller for use with SPEL AOI. See chapter 3. Configuring the
Robot Controller.
2.3 PLC Project Preparation
To prepare the PLC project for SPEL AOI execution:
1. Setup the A1 EtherNet module for communication with the robot controller. You can
import the EpsonEtherNetIP.L5X file (recommended), or you can manually set it up. See
chapter 5, Creating a PLC Program.
2. Either import all SPEL AOIs into the project by importing SPEL_All.L5x, or import the
desired SPEL AOIs separately. You must always import the SPEL_Init AOI.
3. Create a rung for execution of the SPEL_Init AOI. This must be executed once before
executing other AOIs. SPEL_Init executes SPEL_ResetError and checks robot controller
configuration. There are no errors, then AOI execution is allowed.
2.4 SPEL AOI Common Inputs and Outputs
Each SPEL AOI has the following common inputs and outputs:
Inputs:
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 1
Page 10
3. Configuring the Robot Controller
BOOL output bit that indicates the status of execution of the AOI.
If this is high, then the AOI is executing.
BOOL output bit that indicates the status of completion of the AOI.
If this is high, then the AOI execution is complete.
Error
BOOL output bit that indicates if an error occurred during execution.
INT error codes from the robot controller. These should be 0 in
bit is high.
Outputs:
InCycle
Done
ErrCode1 and
ErrCode2
AOIs have additional inputs and/or outputs. These are described separately for each AOI
in the chapter 5.SPEL AOI Reference.
normal operation, and one or both are greater than 0 when the Error
2.5 SPEL AOI General Operation
General operation of all SPEL AOIs is as follows:
1. SPEL_Init AOI must have been executed one time sucessfully before executing other
SPEL AOIs.
2. Set the Start input from low to high to start execution.
3. During execution, the Done and Error output bits are set to low and the InCycle output
bit is set to high.
4. After execution, the Done output bit is set to high and the InCycle output bit is set to
low. If an error occurred during execution, the Error output bit is set to high, and the
error code values ErrCode1 and ErrCode2 are set. See the chapter 6. Error Codes for
more information.
5. If an error occurs, SPEL AOI execution is prevented until the SPEL_ResetError AOI
is executed.
3. Configuring the Robot Controller
In this chapter we will describe how to configure the robot controller Fieldbus slave to
work with the PLC when using SPEL AOIs. Perform the following steps:
1. Start EPSON RC+ 7.0 on your PC.
2. Connect to the robot controller. You may need to configure a connection to the robot
controller in [Setup]-[PC to Controller Communications]. See the EPSON RC+ 7.0
User's Guide for instructions.
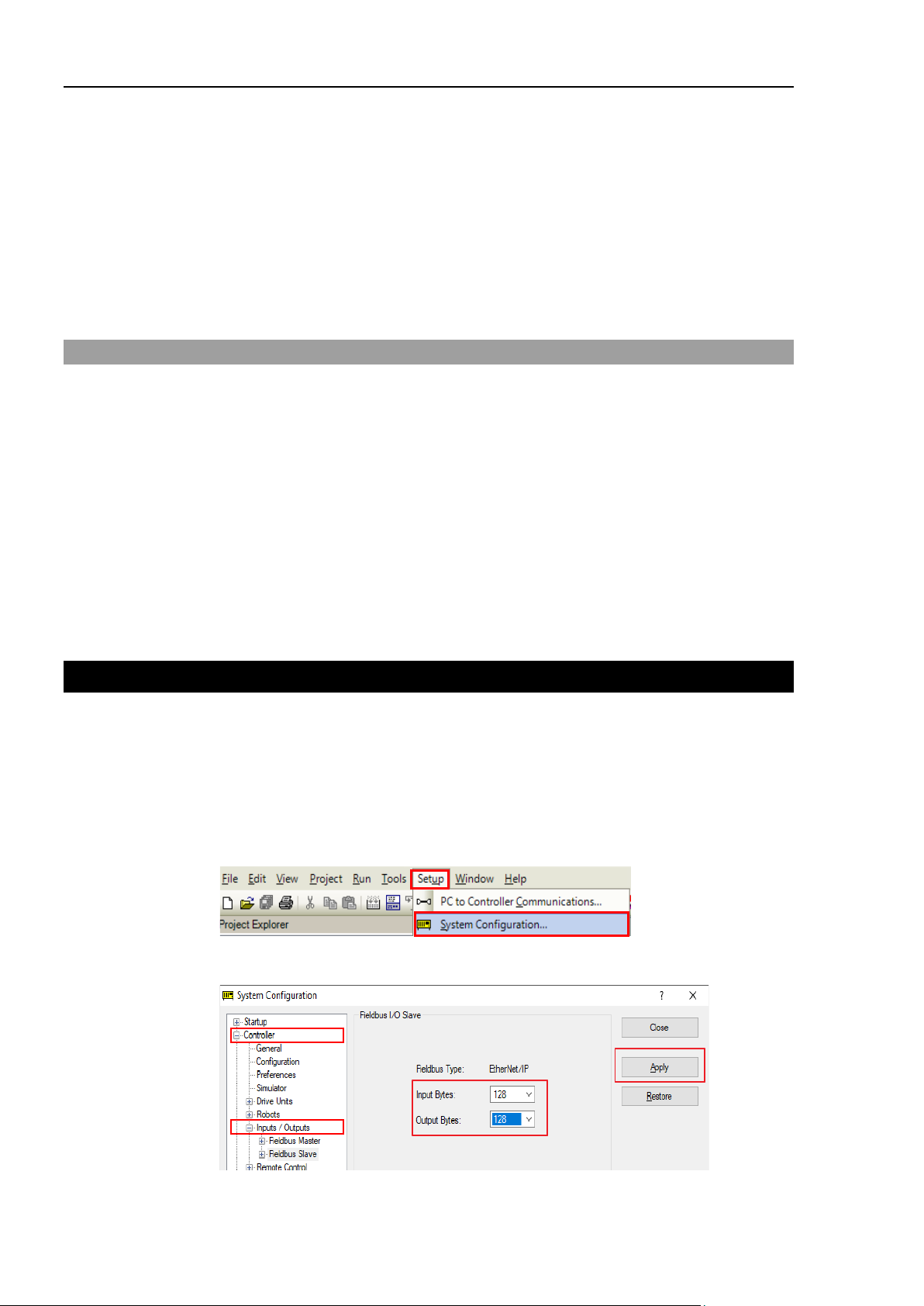
3. From the [Setup] menu, select [System Configuration].
4. Click [Controller]-[Inputs/Outputs]-[Fieldbus Slave]. Configure the number of input and
output bytes to 128 as shown below, then click <Apply>.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
2
Page 11
3. Configuring the Robot Controller
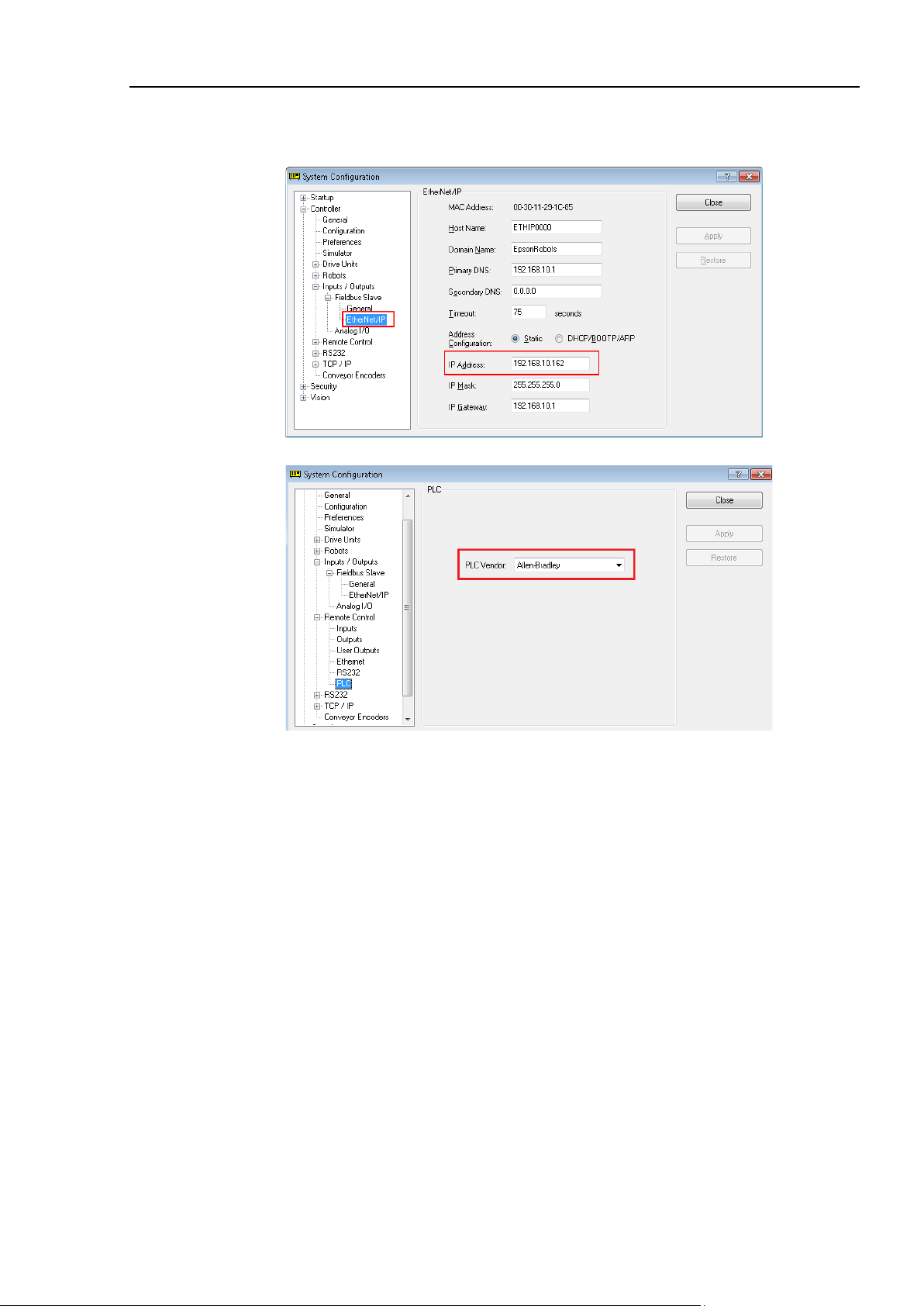
5. Expand [Fieldbus Slave] in the tree and select [Ethernet/IP].
Set the IP address, mask, and gateway that will be used for communication from the
A1 EtherNet module in the PLC.
6. Select [Remote Control]-[PLC] and select Allen-Bradley® as the PLC Vendor.
7. Click “Close” on the [System Configuration] dialog. The controller will restart.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 3
Page 12
4. Creating a PLC Project using SPEL AOIs
4. Creating a PLC Project using SPEL AOIs
EPSON RC+ 7.0 users are provided with Allen-Bradley® Logix Designer files which are
installed on the user PC by the EPSON RC+ v7.5.0 or greater installer. The files are
located in \EpsonRC70\Fieldbus\EtherNetIP\AOI on the user PC.
In this chapter, we will show how to create a simple example project to turn robot motors
on and off using SPEL AOIs.
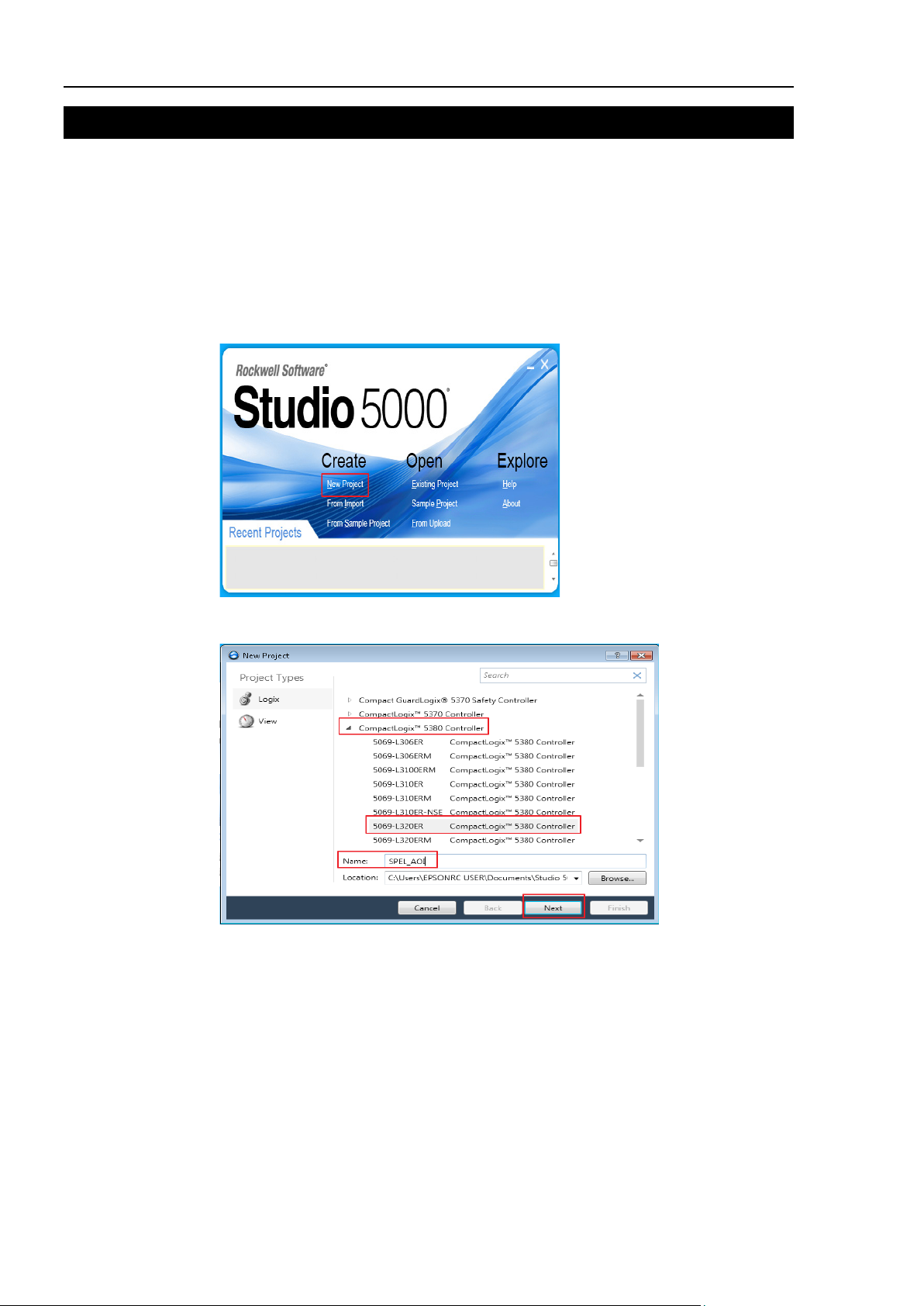
To create a new project, make sure you are in offline mode and follow these steps:
1. Start the Studio 5000® software, then click [New Project]. The New Project dialog will
be displayed.
2. Choose your Controller family and PLC controller model number. Enter a project name
under [Name], then click <Next>.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
4
Page 13
4. Creating a PLC Project using SPEL AOIs
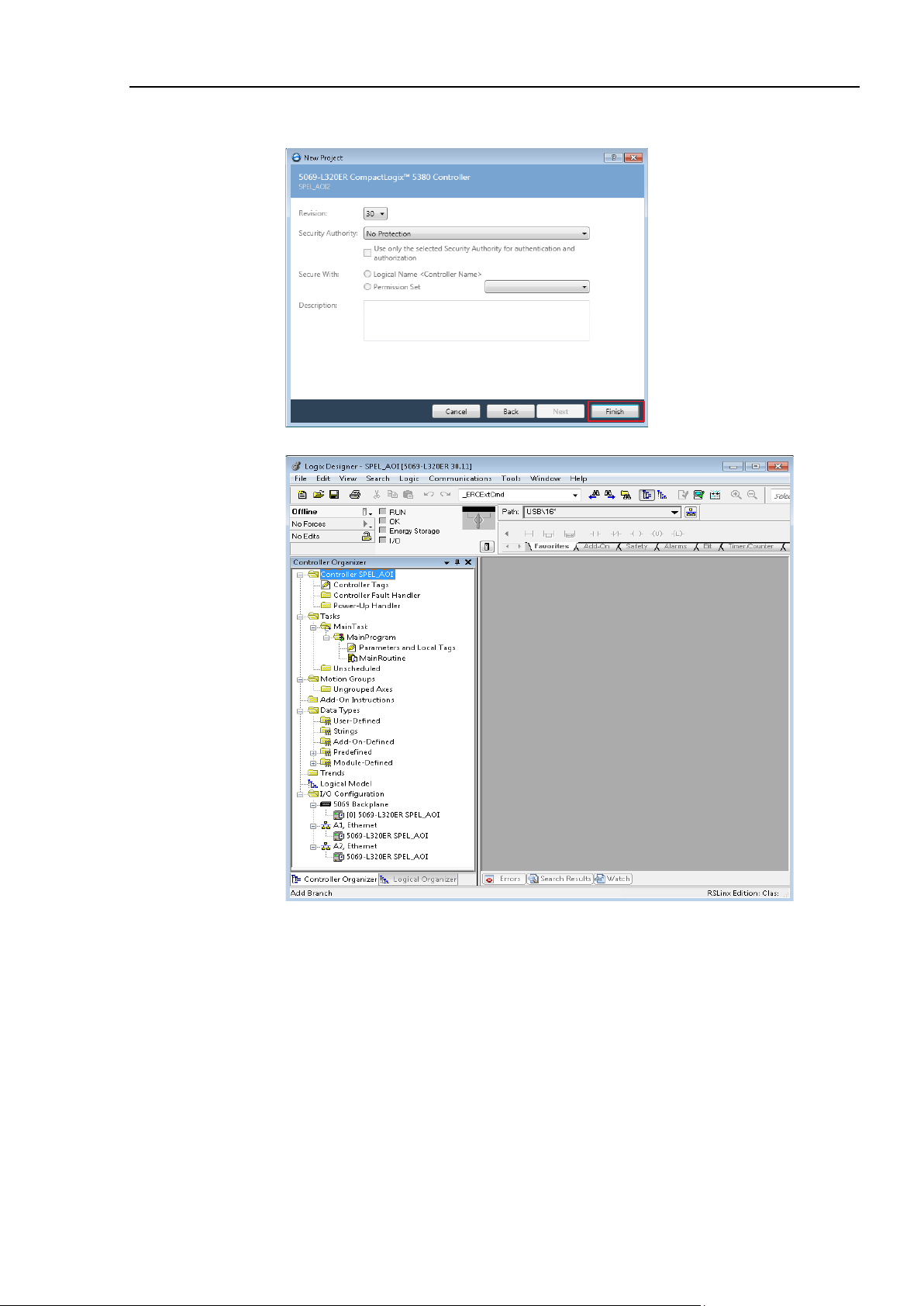
3. The dialog shown below will be displayed. Leave all choices as default, then click
<Finish>.
4. You have just created a new empty PLC project
5. Now you need to add and configure the Ethernet module for communications with the
robot controller. There are two methods: Import the file EpsonEtherNetIP.L5X, or
perform manual configuration.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 5
Page 14
4. Creating a PLC Project using SPEL AOIs
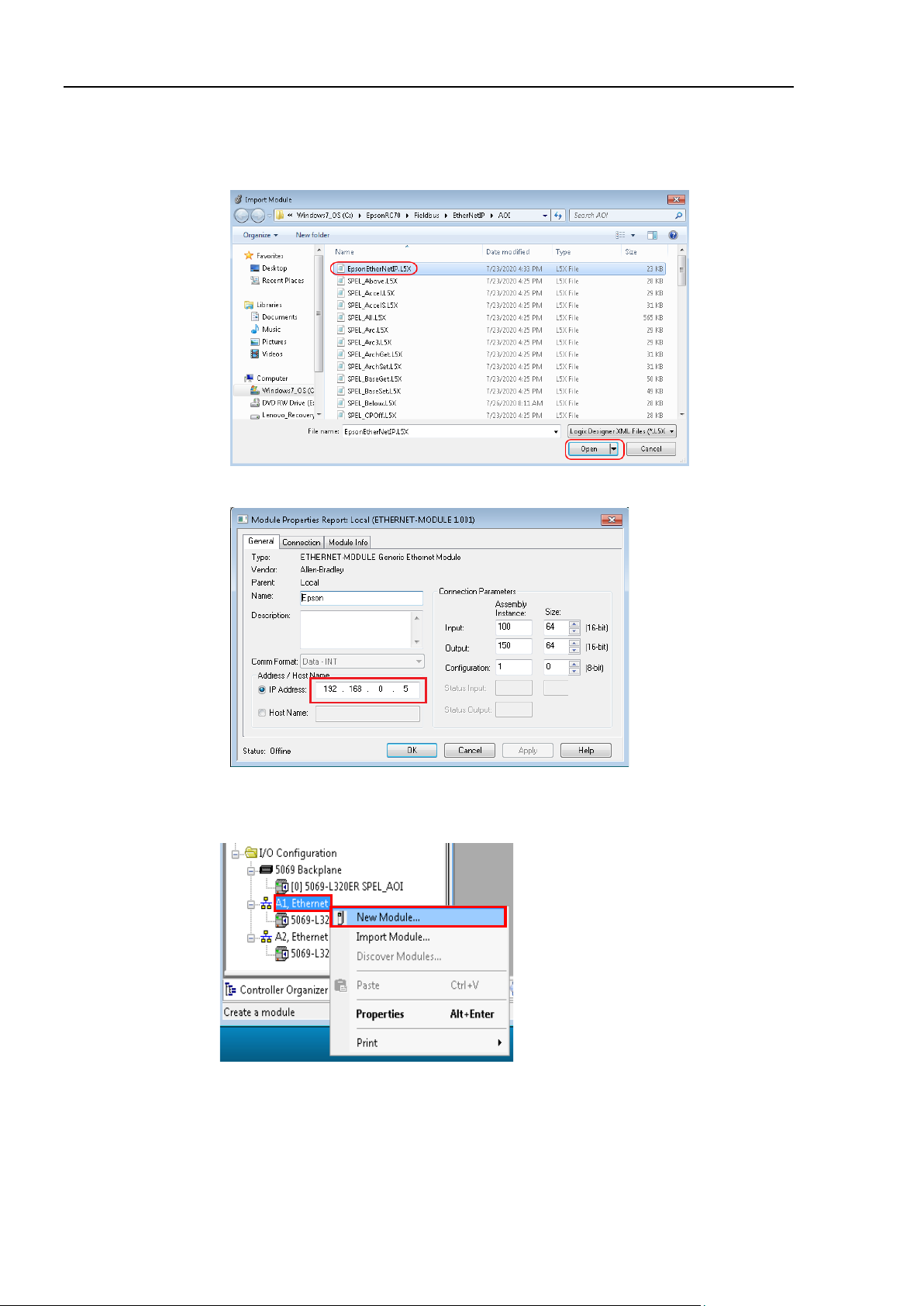
Importing the Ethernet configuration
1. Right click on [A1, Ethernet], then click [Import Module].
2. Navigate to \EpsonRC70\Fieldbus\EtherNetIP\AOI and select the file
EpsonEtherNetIP.L5X.
3. After import, right-click on the module and select Properties. Change the default IP
address to be the address of the robot controller's EtherNetIP slave board.
Manual Ethernet configuration
1. Right click on [A1, Ethernet], then click [New Module].
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
6
Page 15
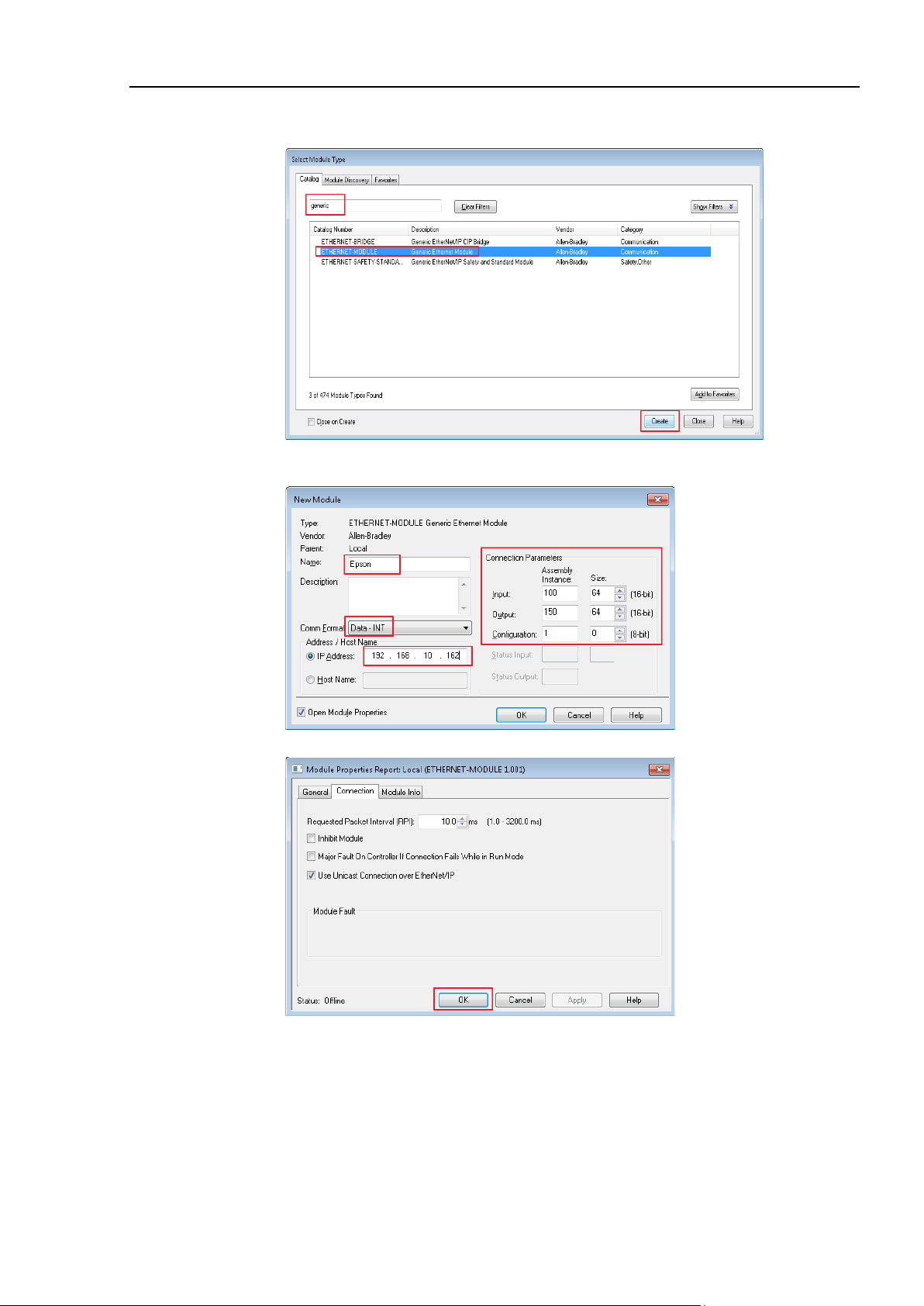
4. Creating a PLC Project using SPEL AOIs
2. Type in “generic” in the search field. Click “ETHERNET MODULE” under catalog
number, then click <Create>.
3. Enter the values as shown, and use the IP address of the robot controller EtherNet/IP
slave, then click <OK>.
4. Click <OK> on the next window.
Saving your project at this stage is a good idea. When creating a new Ethernet module,
please note that connection parameter values should match your robot controller values.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 7
Page 16
4. Creating a PLC Project using SPEL AOIs
Import SPEL AOIs in to the new project
1. Now you need to import AOIs in the new project. For this example, you will import
all SPEL AOIs. You can also import individual AOIs.
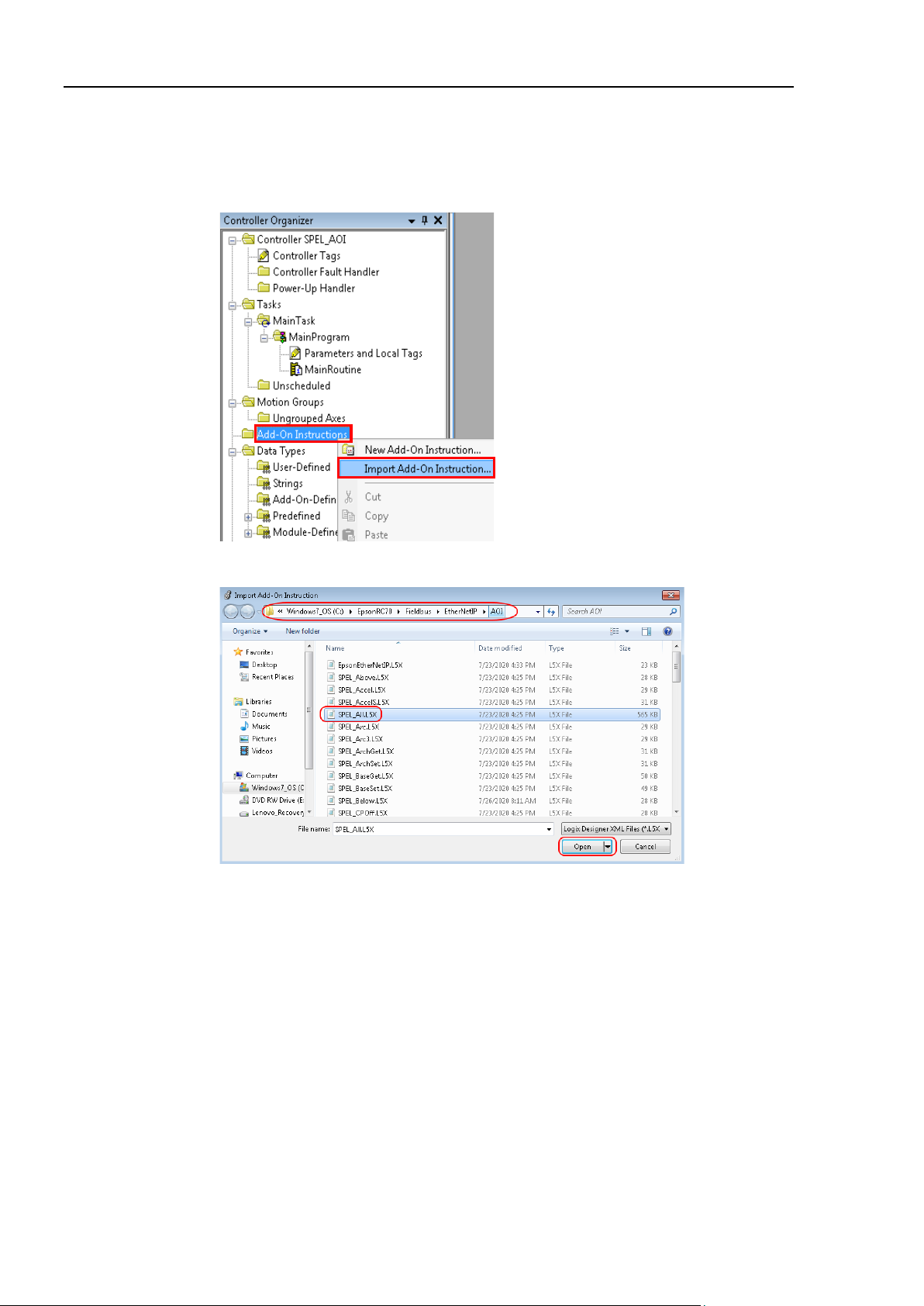
To do this, right click on [Add-On Instructions] folder from [Controller Organizer],
click [Import Add-On Instruction].
2. Navigate to \EpsonRC70\Fieldbus\EtherNetIP\AOI, then select “SPEL_All.L5X” file
and click <Open>.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
8
Page 17
4. Creating a PLC Project using SPEL AOIs
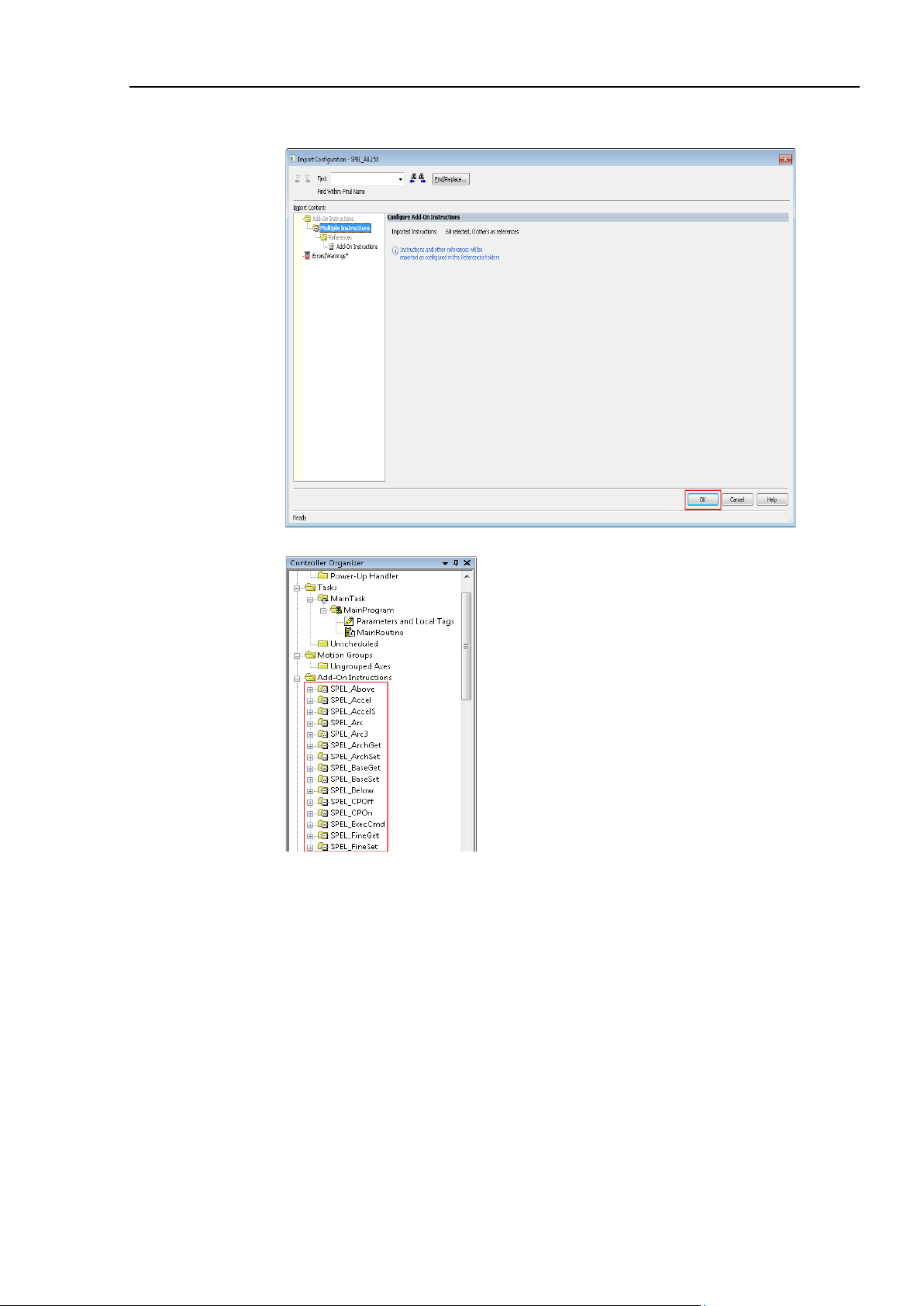
3. The dialog below is displayed. Check to make sure that there are no errors, then click
<OK>.
4. Now you should see the list of all SPEL AOIs in the project.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 9
Page 18
4. Creating a PLC Project using SPEL AOIs
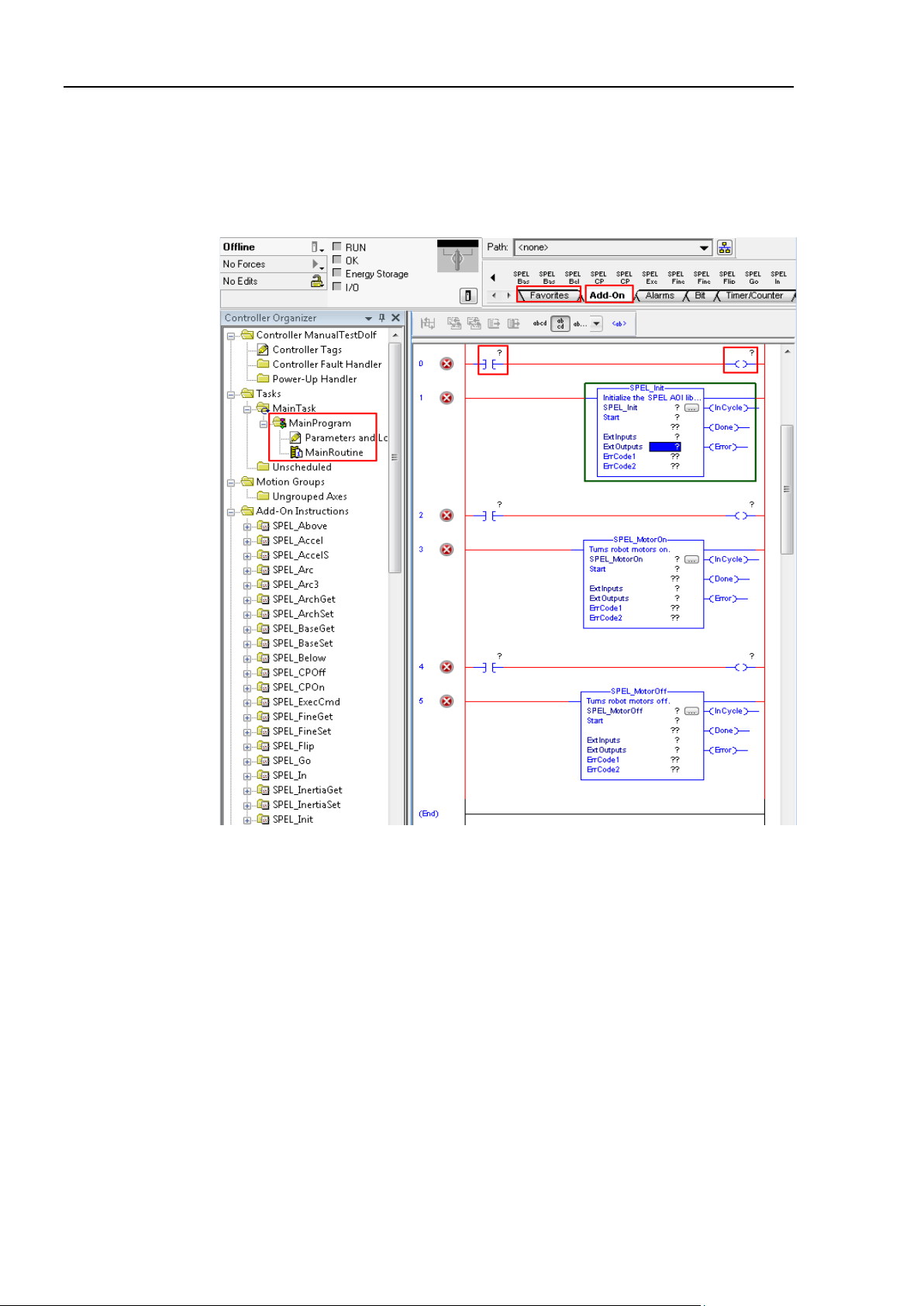
5. Now you can create a program.
5-1. Expand [MainProgram], then double click on [MainRoutine].
5-2. Click [Favorites] tab, add 5 extra rungs. Then drag “Examine On” and “Output
Energize” to rung 0, 2 and 4.
5-3. Click [Add-On] tab, drag “SPEL_Init” to rung 1, “SPEL_MotorOn” to rung 3,
and “SPEL_MotorOff” to rung 5, like shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
10
Page 19
4. Creating a PLC Project using SPEL AOIs
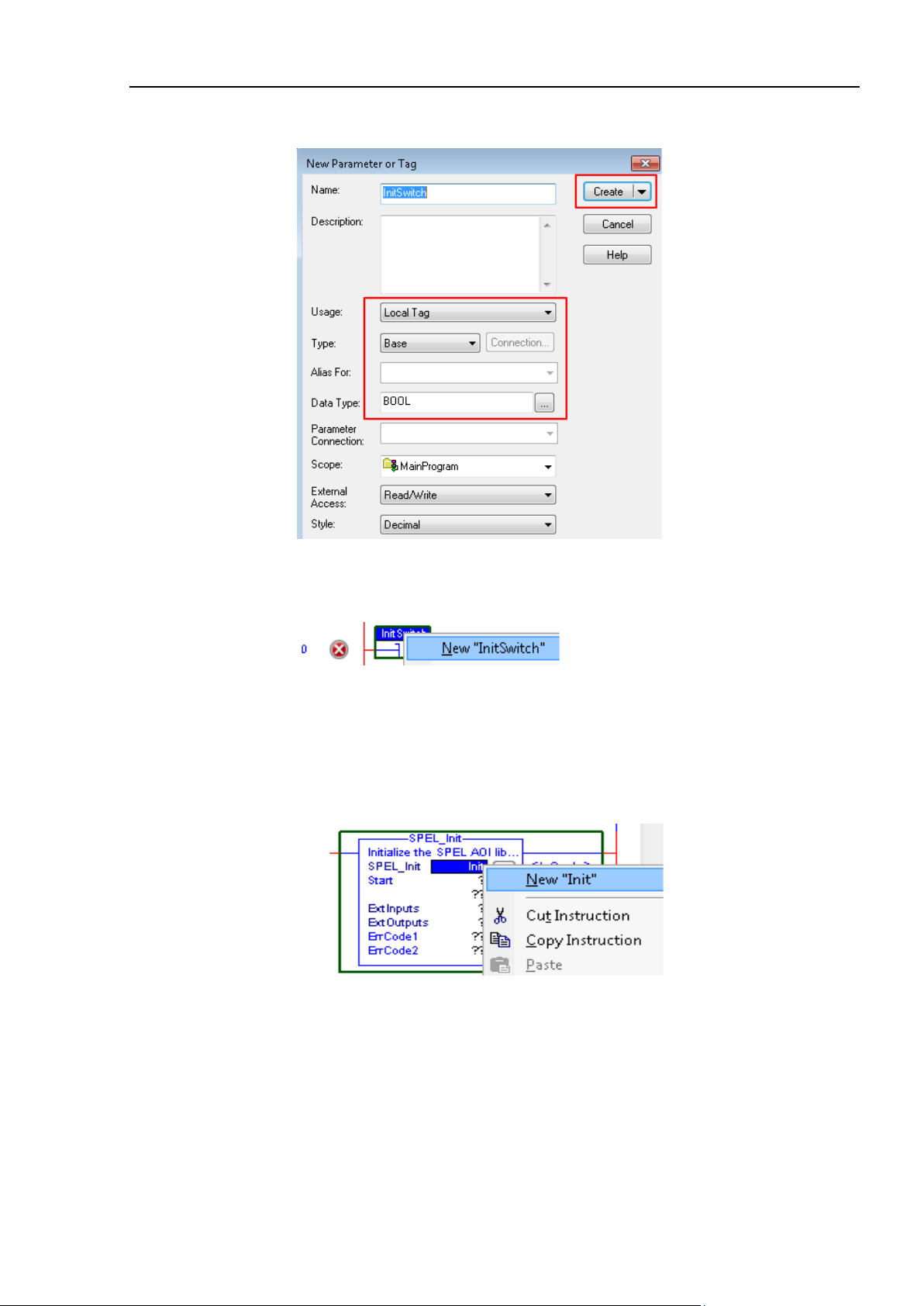
6. In rung 0, double click at [?] of “Examine On”, type in the name of the variable. In this
case we will use “InitSwitch”.
7. Do the same step as above, in rung 0, double click on [?] of the “Output Energize”, and
type “InitCoil”.
8. Right click on [InitSwitch], click on [New “InitSwitch”], then click <Create>, as shown
below.
9. Create new variable “InitCoil” same method used in “InitSwitch”.
10. Do same steps in 14 to 17 for rung 2 and 4 to create new variables. Use variable name
“MotorOnSwitch”, “MotorOnCoil” for rung 2, and “MotorOffSwitch”, “MotorOffCoil”
for rung 4.
11. Now we configure SPEL_Init AOI inputs.
11-1. Inside “SPEL_Init” block, click [?] to the right of [SPE_Init], and type “Init”.
11-2. Right click on [Init], choose [New “Init”]. then click <Create>.
“Init” will be the name of the structure that holds all internal variable of
“SPEL_Init” AOI.
11-3. Click [?] next to “Start”, type “InitCoil”, you do not need to create a new
variable.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 11
Page 20
4. Creating a PLC Project using SPEL AOIs
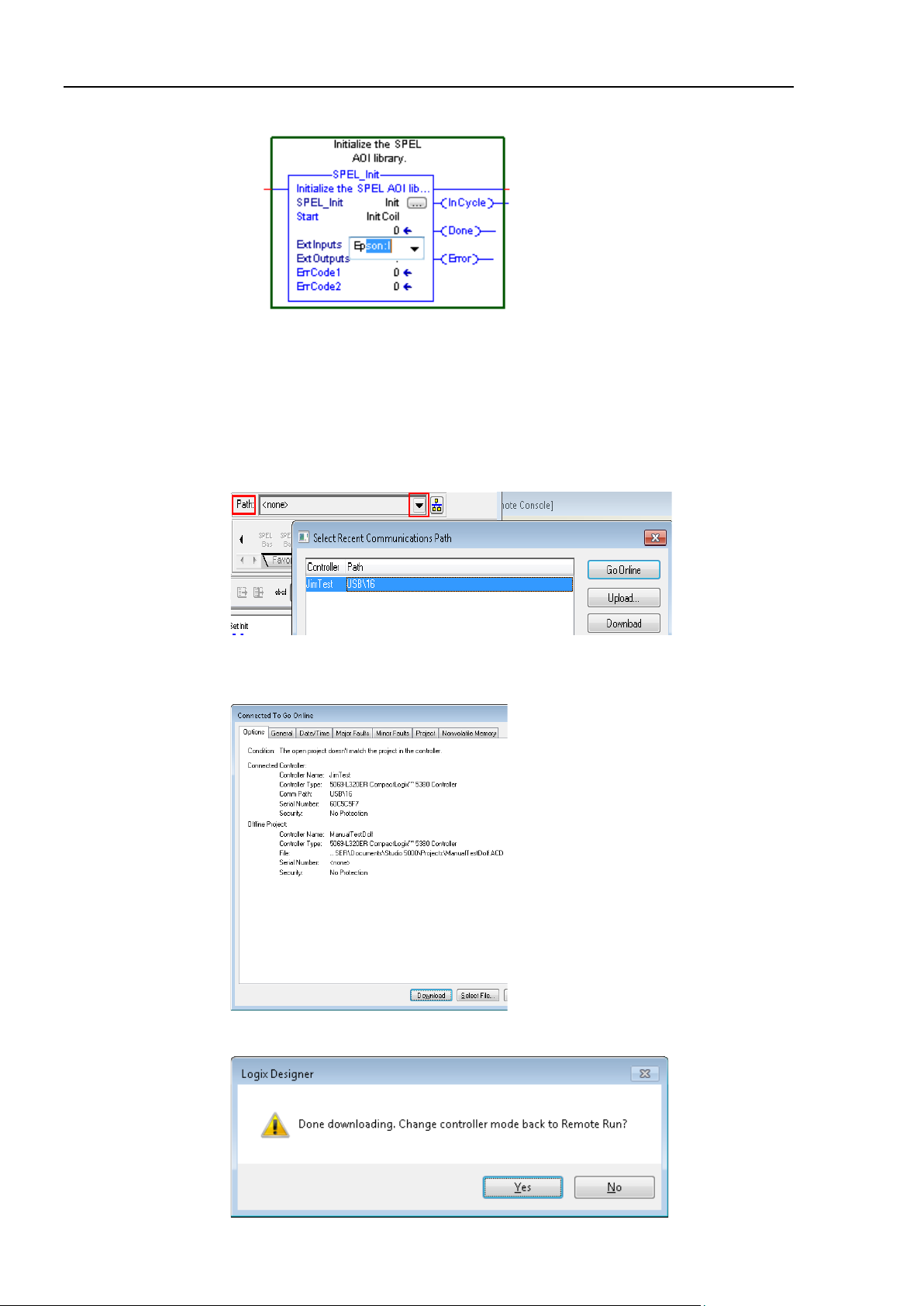
11-4. Click [?] next to [ExtInputs], type “Ep”, it will auto populate, press <Enter>.
11-5. Do same step to [ExtOutputs]. “SPEL_Init” is now configured and the rung lines
should change from red to blue.
11-6. Do the same steps as in 11-1 to 11-2 for rung 3 and 5. Choose “MotorOn” for
rung 3, “MotorOff” for rung 5.
11-7. Do the same steps as in 11-3 for rung 3 and 5. Use “MotorOnCoil” for rung 3,
“MotorOffCoil” for rung 5.
12. The program in now complete. Save the project.
13. Click the down arrow right to [Path] to choose communication path with controller.
In this example I am using USB to connect my PC to the PLC controller.
14. Double click on “USB” to close the window, then click <Download> in the next
window to transfer program to PLC controller.
15. Click <Yes> in the next window if prompted to change PLC into “Remote Run” mode,
like shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
12
Page 21
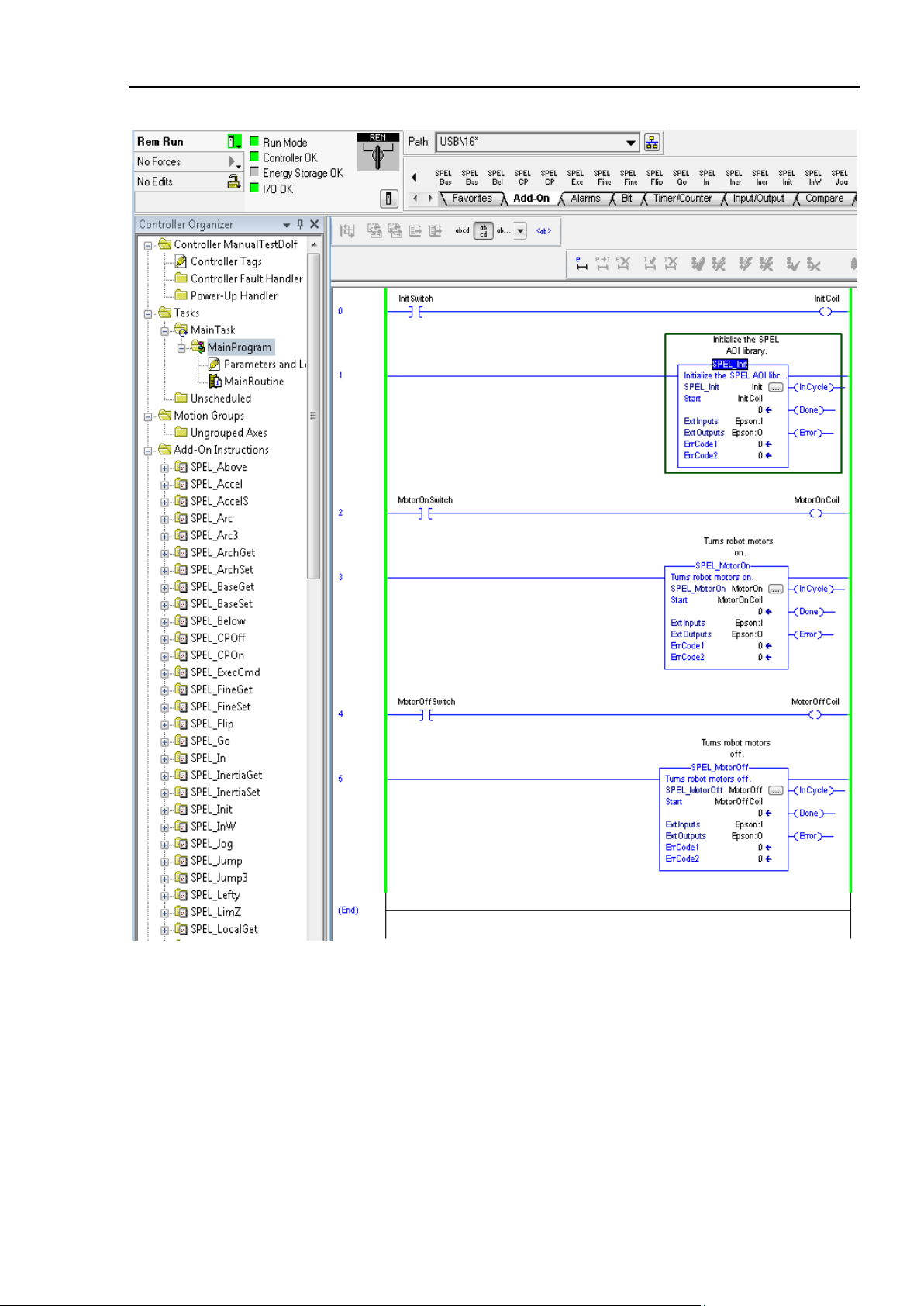
4. Creating a PLC Project using SPEL AOIs
16. PLC now in run mode and program is ready to be executed.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 13
Page 22
5. SPEL AOI Reference
5. SPEL AOI Reference
In this chapter each SPEL AOI is described.
For AOI operation in general, refer to section 2.5, SPEL AOI General Operation.
For each AOI in the Operation section, there is also a referal to the corresponding SPEL+
command in the SPEL+ Language Reference manual which has more details about the
command.
Each AOI has a simple example.
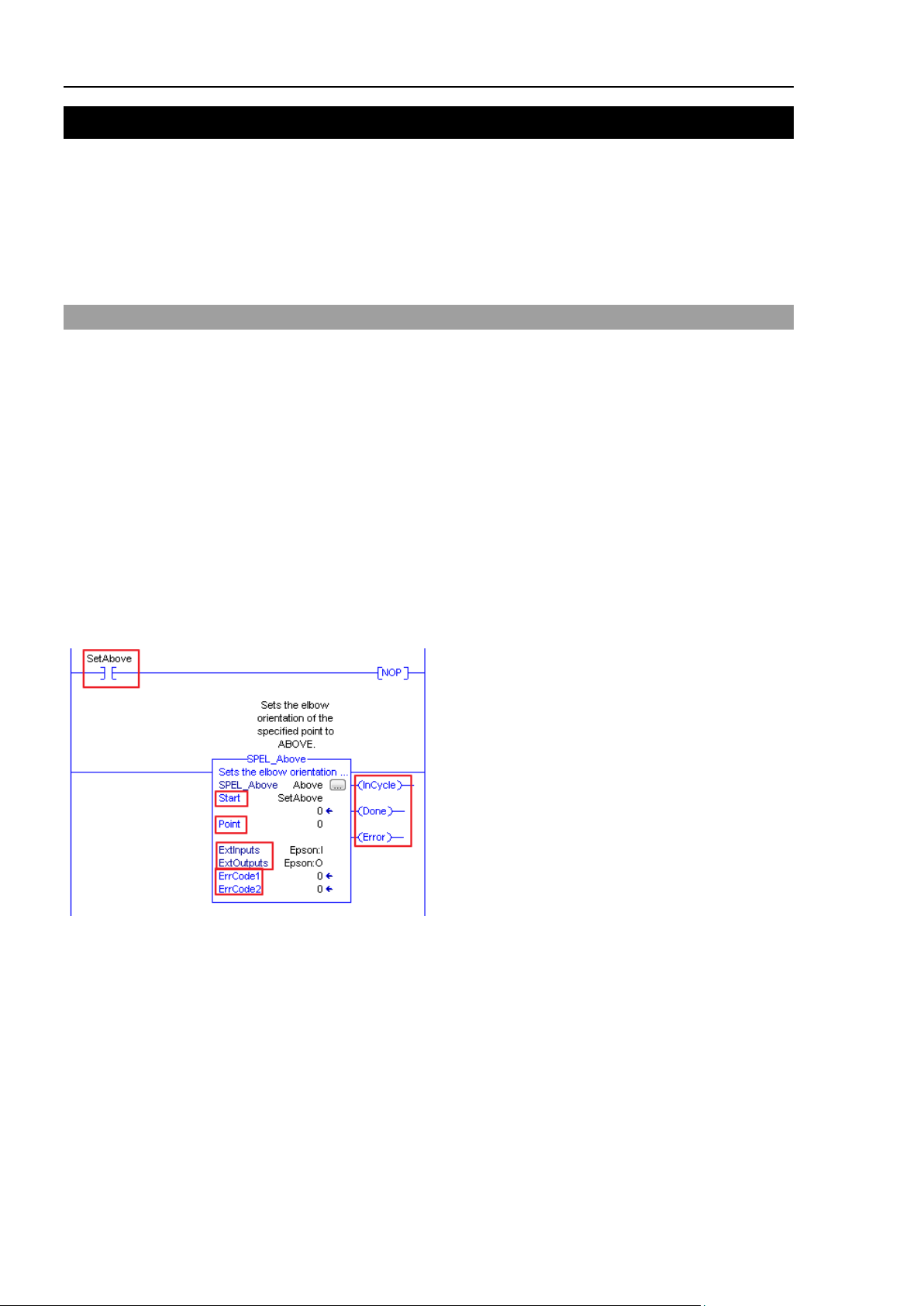
SPEL_Above
Description
Sets the elbow orientation of the specified point to Above.
Common inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT point number to set its orientation to ABOVE.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Elbow Statement in the SPEL+ Language Reference manual.
Example
To set P0 orientation to Above, set [Point] to “0”, as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
14
Page 23
5. SPEL AOI Reference
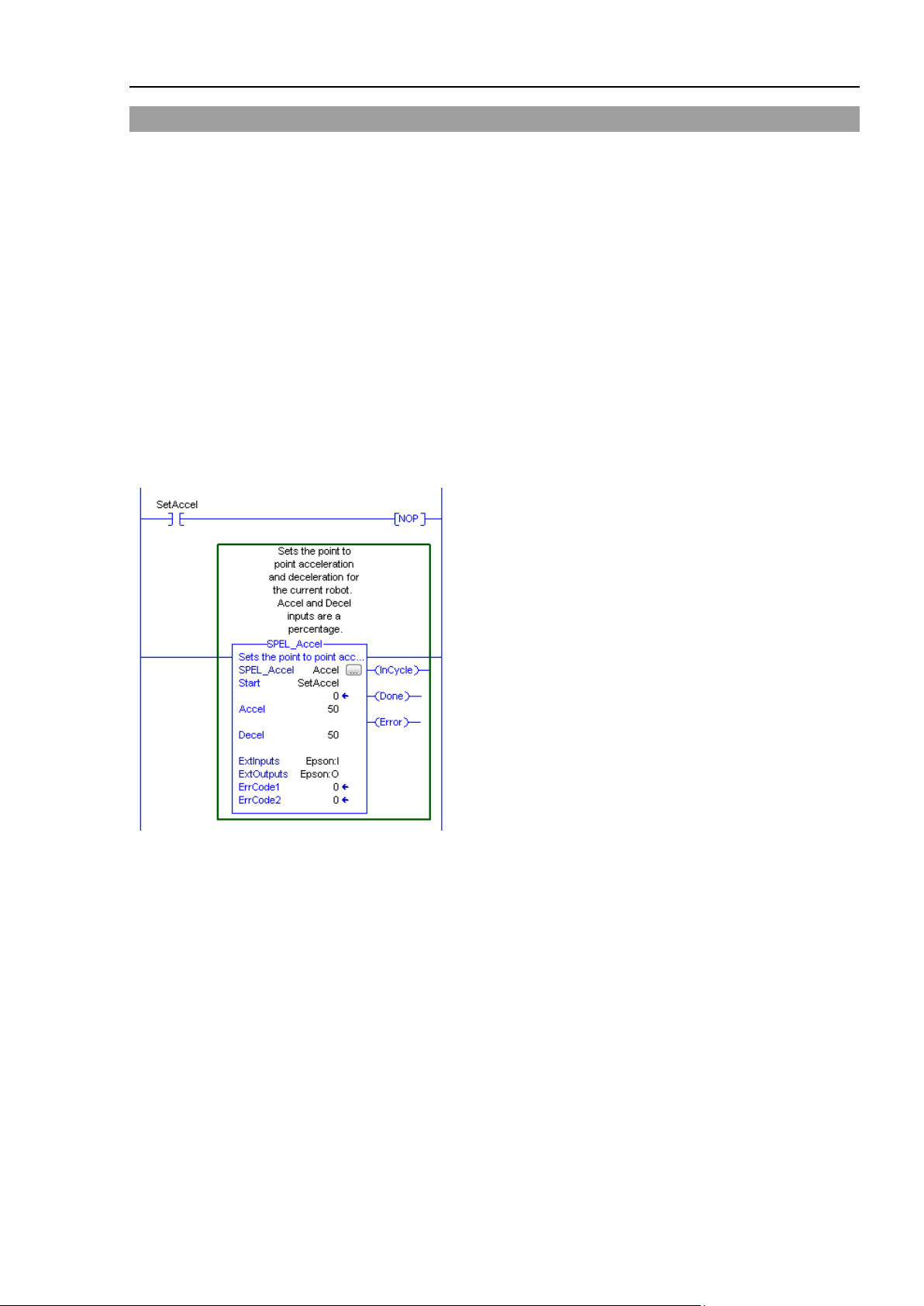
SPEL_Accel
Description
Sets the point to point acceleration and deceleration. Specifies the ratio (%) of the maximum
acceleration/deceleration using an integer equals to or greater than 1.
Common inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Accel INT value of acceleration as percentage.
Decel INT value of deceleration as percentage.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Accel Statement in the SPEL+ Language Reference manual.
Example
To set acceleration to 50% and deceleration to 50%, set [Accel] to “50” and [Decel] to “50”, as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 15
Page 24
5. SPEL AOI Reference
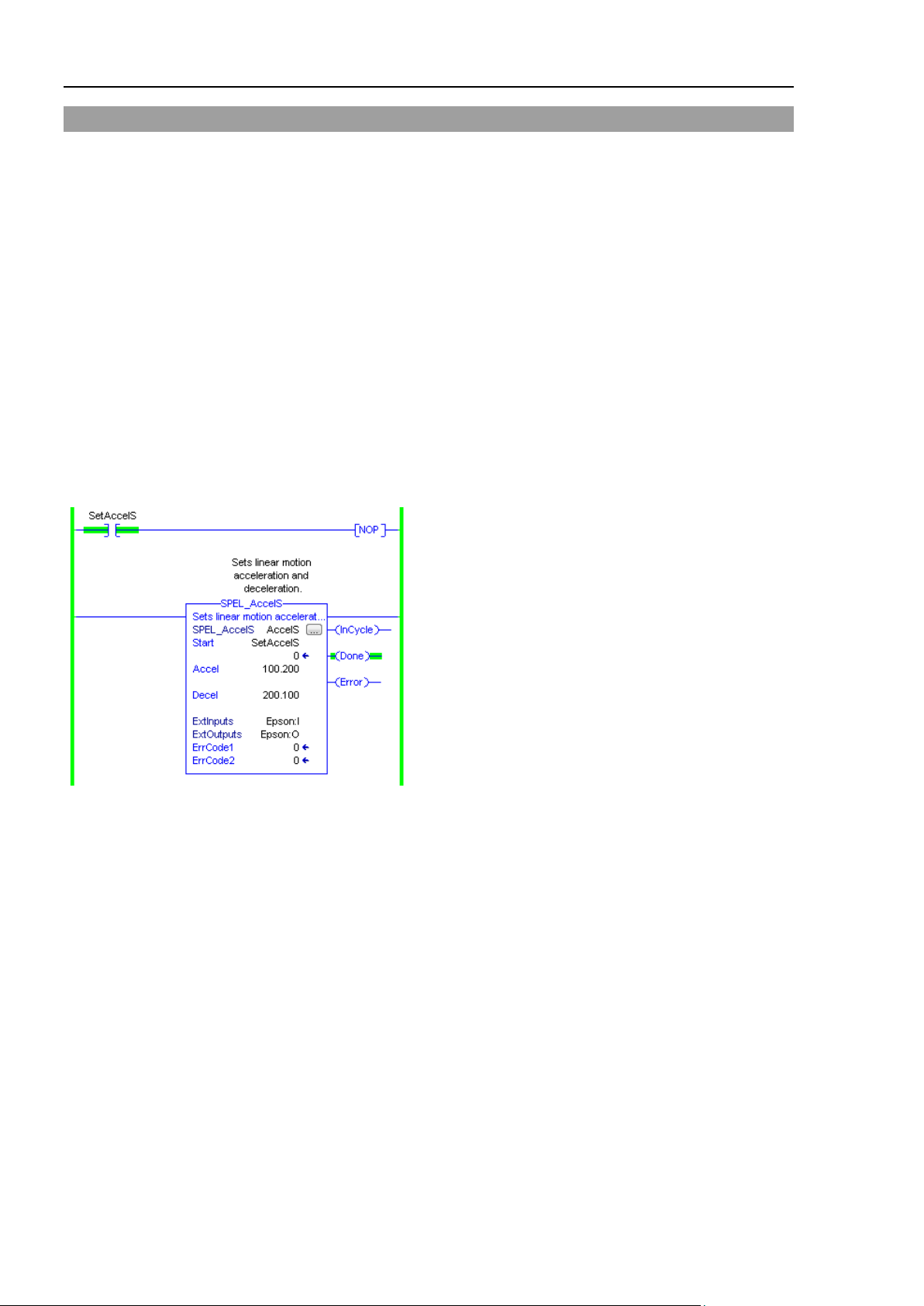
SPEL_AccelS
Description
Sets acceleration and deceleration. Specifies the value which is the actual acceleration/deceleration in linear or
CP motion (Unit: mm/sec2).
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Accel REAL value of acceleration.
Decel REAL value of deceleration.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to AccelS Statement in the SPEL+ Language Reference manual.
Example
To set acceleration to 100.200, deceleration to 200.100, set [Accel] to “100.200”, [Decel] to “200.100”, as shown
below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
16
Page 25
5. SPEL AOI Reference
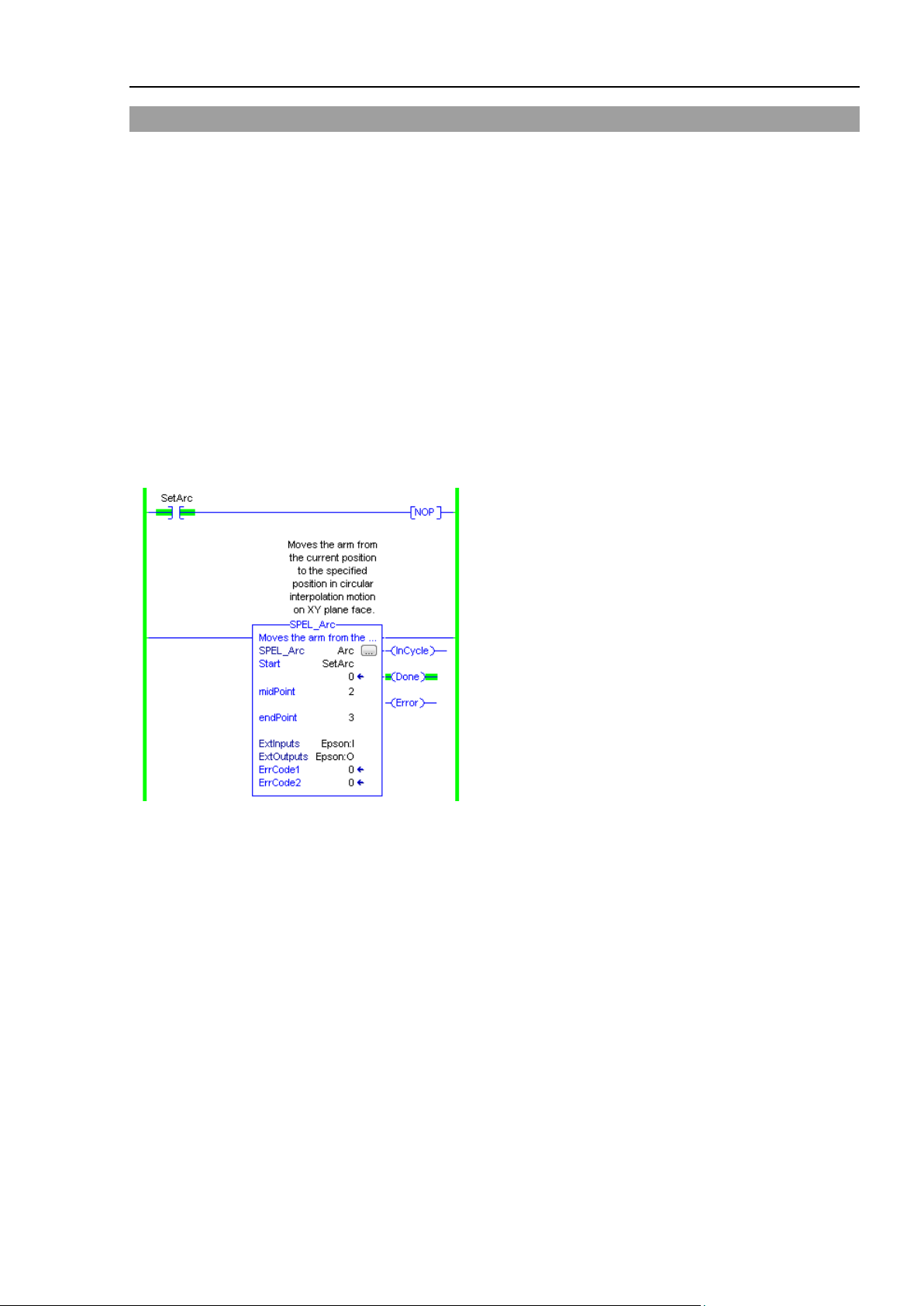
SPEL_Arc
Description
Moves the arm from the current position to the specified position in circular interpolation motion on XY plane
face.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
midPoint INT middle point in Arc command.
endPoint INT end point in Arc command.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Arc Statement in the SPEL+ Language Reference manual.
Example
To move from current position passing through P2 and ending at P3, in a circular motion.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 17
Page 26
5. SPEL AOI Reference
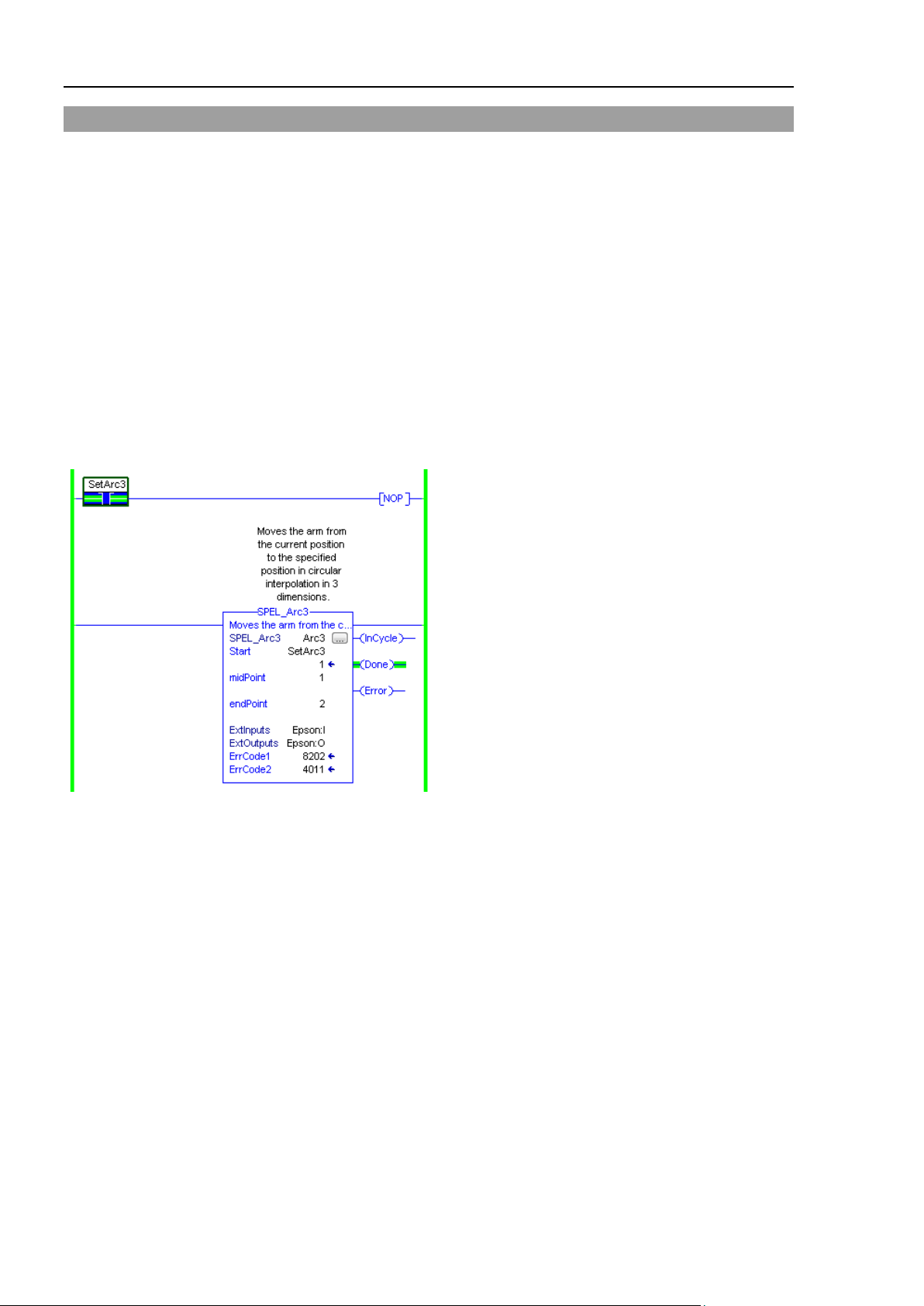
SPEL_Arc3
Description
Moves the arm from the current position to the specified position in circular interpolation in 3 dimensions.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
midPoint INT middle point in Arc3 command.
endPoint INT end point in Arc3 command.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Arc3 Statement in the SPEL+ Language Reference manual.
Example
To move from current position passing through P1 and ending at P2, in a circular motion.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
18
Page 27

5. SPEL AOI Reference
SPEL_ArchGet
Description
Gets the Arch parameter.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
ArchNum INT desired Arch number.
Outputs
DepartDist INT departing distance of the given Arch number.
ApproachDist INT approaching distance of the given Arch number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Arch Function in the SPEL+ Language Reference manual.
Example
To get the current values of approach and depart distances of given Arch, set the Arch number.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 19
Page 28

5. SPEL AOI Reference
SPEL_ArchSet
Description
Sets the Arch parameter.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
ArchNum INT desired Arch number.
DepartDist REAL departing distance of the given Arch number.
ApproachDist REAL approaching distance of the given Arch number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Arch Statement in the SPEL+ Language Reference manual.
Example
To set 60.0, 60.0 as depart and approach distances respectively of Arch 2, see below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
20
Page 29

5. SPEL AOI Reference
SPEL_BaseGet
Description
Gets the base coordinate system.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
NumAxes INT number of robot axes. For a SCARA robot, use 4. For a 6-axis robot, use 6.
Outputs
BaseX REAL base value of coordinate X.
BaseY REAL base value of coordinate Y.
BaseZ REAL base value of coordinate Z.
BaseU REAL base value of coordinate U.
BaseV REAL base value of coordinate V.
BaseW REAL base value of coordinate W.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Base Statement in the SPEL+ Language Reference manual.
Example
To get the base values of X through W coordinates for SCARA robot, plug 4 for NumAxes. Base values will
update as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 21
Page 30

5. SPEL AOI Reference
SPEL_BaseSet
Description
Sets the base coordinate system.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
NumAxes INT number of robot axes. For a SCARA robot, use 4. For a 6-axis robot, use 6.
BaseX REAL base value of coordinate X.
BaseY REAL base value of coordinate Y.
BaseZ REAL base value of coordinate Z.
BaseU REAL base value of coordinate U.
BaseV REAL base value of coordinate V.
BaseW REAL base value of coordinate W.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Base Statement in the SPEL+ Language Reference manual.
Example
To set the base value of a SCARA robot, set NumAxes = 4. Enter the base coordinate value for each axis, as
shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
22
Page 31

SPEL_Below
Description
Sets the elbow orientation of the specified point to Below.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Elbow Statement in the SPEL+ Language Reference manual.
Example
To set orientation of P2 to below, enter 2 as point. As shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 23
Page 32

5. SPEL AOI Reference
SPEL_CPOff
Description
Turns off Continuous Path parameter.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to CP Statement in the SPEL+ Language Reference manual.
Example
To set CP to off, run the AOI like as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
24
Page 33

SPEL_CPOn
Description
Turns on Continuous Path parameter.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to CP Statement in the SPEL+ Language Reference manual.
Example
To set CP to On, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 25
Page 34

5. SPEL AOI Reference
SPEL_ExecCmd
Description
The SPEL_ExecCmd AOI is used by other AOIs to execute a command in the robot controller.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
26
Page 35

SPEL_FineGet
Description
Gets the setting of positioning end judgement range for all joints.
Outputs
Axis INT position accuracy for each joint in encoder pulses.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Fine Function in the SPEL+ Language Reference manual.
Example
To get the position accuracy for the robot, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 27
Page 36

5. SPEL AOI Reference
SPEL_FineSet
Description
Sets the positioning end judgement range for all joints.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Axis1..Axis6 INT position accuracy for each joint in encoder pulses.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Fine Statement in the SPEL+ Language Reference manual.
Example
To set the position accuracy for the robot, enter the Axis values and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
28
Page 37

5. SPEL AOI Reference
SPEL_Flip
Description
Sets the wrist orientation of the specified point to Flip.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Wrist Statement in the SPEL+ Language Reference manual.
Example
To set orientation of robot point P2 to flip, enter 2 as the point number and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 29
Page 38

5. SPEL AOI Reference
SPEL_Go
Description
Moves from the current position to the specified position in PTP motion.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Go Statement in the SPEL+ Language Reference manual.
Example
To move the robot to point 0 using PTP motion, enter “0” as the point and run the AOI, as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
30
Page 39

SPEL_In
Description
Reads a byte of input.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT desired input byte port number.
Outputs
Value INT value of the desired input port.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to In Function in the SPEL+ Language Reference manual.
Example
To read input port number 66, set [PortNum] to “66”.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 31
Page 40

5. SPEL AOI Reference
SPEL_InertiaGet
Description
Gets the load inertia.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Outputs
Inertia REAL acquired Inertia.
Eccentricity REAL acquired Eccentricity.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Inertial Function in the SPEL+ Language Reference manual.
Example
To read load Inertia and Eccentricity, run the AOI, as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
32
Page 41

5. SPEL AOI Reference
SPEL_InertiaSet
Description
Sets the load inertia.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Inertia REAL desired Inertia.
Eccentricity REAL desired Eccentricity.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Inertia Statement in the SPEL+ Language Reference manual.
Example
To set load Inertia and Eccentricity to 0.01, 0.01 respectively, enter the values and run the AOI.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 33
Page 42

5. SPEL AOI Reference
SPEL_Init
Description
Initializes the PLC program for SPEL AOI execution. It is required to execute SPEL_Init before executing any
other AOIs.
Note: If the controller has a system error, then it must be reset before SPEL_Init and other SPEL AOIs can
execute successfully.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Example
As shown below, toggle [
Init Switch] to high to start the AOI.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
34
Page 43

5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 35
Page 44

5. SPEL AOI Reference
SPEL_InW
Description
Returns the status if an input word.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT desired port number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to InW Function in the SPEL+ Language Reference manual.
Example
To read content of port number 33, enter the value and run the AOI.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
36
Page 45

5. SPEL AOI Reference
SPEL_Jog
Description
Jogs the robot.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
JogMode INT desired mode. 0=World, 1=Joint.
Axis INT desired axis.
Distance REAL value:
World:
X,Y,Z in mm.
U,V,W in deg.
Joint: J1-J6 in deg.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Example
To move robot in -Y direction for 40mm, enter values and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 37
Page 46

5. SPEL AOI Reference
SPEL_Jump
Description
Moves the arm using gate motion for a SCARA robot.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Jump Statement in the SPEL+ Language Reference manual.
Example
To move the robot to point P2 using gate trajectory, enter the value for Point and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
38
Page 47

5. SPEL AOI Reference
SPEL_Jump3
Description
Moves the arm with 3D gate motion for a 6-axis robot. This is a combination of two CP motion and one PTP
motion.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
DepartPoint INT desired depart point.
ApproPoint INT desired approach point.
DestPoint INT desired destination point.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Jump3CP Statement in the SPEL+ Language Reference manual.
Example
To move the robot to point P2 using gate trajectory, enter the values for the points and run the AOI as shown
below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 39
Page 48

5. SPEL AOI Reference
SPEL_Jump3CP
Description
Moves the arm with 3D gate motion for a 6-axis robot. This is a combination of three CP motions.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
DepartPoint INT desired depart point.
ApproPoint INT desired approach point.
DestPoint INT desired destination point.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Jump3CP Statement in the SPEL+ Language Reference manual.
Example
To move the robot to point P2 using gate trajectory, enter the values for the points and run the AOI as shown
below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
40
Page 49

5. SPEL AOI Reference
SPEL_Lefty
Description
Sets the hand orientation of the specified point to Lefty.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Hand Statement in the SPEL+ Language Reference manual.
Example
To change P2’s hand orientation to Lefty, enter values and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 41
Page 50

5. SPEL AOI Reference
SPEL_LimZ
Description
Sets the initial Joint #3 height (Z coordinate value) in Jump command.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Height REAL desired Z limit in mm.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to LimZ Statement in the SPEL+ Language Reference manual.
Example
To set LimZ value of 10mm, enter values and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
42
Page 51

5. SPEL AOI Reference
SPEL_LocalGet
Description
Gets data for a given local coordinate system.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
NumAxes INT number of axes in the robot. For SCARA, use 4, for Articulate robot, use 6.
LocalNum INT desired local number you want to get.
Outputs
LocalX REAL the coordinate value of that axis.
LocalY REAL the coordinate value of that axis.
LocalZ REAL the coordinate value of that axis.
LocalU REAL the coordinate value of that axis.
LocalV REAL the coordinate value of that axis.
LocalW REAL the coordinate value of that axis.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Local Statement in the SPEL+ Language Reference manual.
Example
To get the coordinate values for local number 3 of a SCARA robot, enter values and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 43
Page 52

5. SPEL AOI Reference
SPEL_LocalSet
Description
Sets the local coordinate number.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
NumAxes INT number of axes in the robot. For SCARA, use 4, for Articulate robot, use 6.
LocalNum INT desired local number you want to get.
LocalX REAL the desired coordinate value of X axis.
LocalY REAL the desired coordinate value of Y axis.
LocalZ REAL the desired coordinate value of Z axis.
LocalU REAL the desired coordinate value of U axis.
LocalV REAL the desired coordinate value of V axis.
LocalW REAL the desired coordinate value of W axis.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Local Statement in the SPEL+ Language Reference manual.
Example
To set the coordinate values for local number 3 of a SCARA robot, enter values and run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
44
Page 53

SPEL_MemIn
Description
Reads a byte of memory IO.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT port number to be read. Port number refers to byte number.
Outputs
Value INT value of the port.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemIn Function in the SPEL+ Language Reference manual.
Example
To read port number 0 of memory I/O, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 45
Page 54

5. SPEL AOI Reference
SPEL_MemInW
Description
Reads a word of memory IO.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT port number to be read.
Outputs
Value INT value of the port.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemInW Function in the SPEL+ Language Reference manual.
Example
To read port number 0 as word, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
46
Page 55

SPEL_MemOff
Description
Turns a memory IO bit off.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Bit INT bit number to be turned off.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemOff Statement in the SPEL+ Language Reference manual.
Example
To turn off memory bit number 3, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 47
Page 56

5. SPEL AOI Reference
SPEL_MemOn
Description
Turns a memory IO bit on.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Bit INT bit number to be turned on.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemOn Statement in the SPEL+ Language Reference manual.
Example
To turn on memory bit number 3, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
48
Page 57

SPEL_MemOut
Description
Sets a byte of memory IO.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT desired output port number.
OutData INT value of the data to be sent to output port.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemOut Statement in the SPEL+ Language Reference manual.
Example
To send 99 to port number 4, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 49
Page 58

5. SPEL AOI Reference
SPEL_MemOutW
Description
Sets a word of memory IO.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT desired output port number.
OutData INT value of the data need to be sent to output port.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemOutW Statement in the SPEL+ Language Reference manual.
Example
To send 99 to port number 15, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
50
Page 59

SPEL_MemSw
Description
Reads a single bit of memory IO.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Bit INT desired memory bit number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to MemSw Function in the SPEL+ Language Reference manual.
Example
To read memory bit number 5, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 51
Page 60

5. SPEL AOI Reference
SPEL_MotorOff
Description
Turns robot motors off.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Motor Statement in the SPEL+ Language Reference manual.
Example
To turn off motors, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
52
Page 61

SPEL_MotorOn
Description
Turns robot motors on.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Motor Statement in the SPEL+ Language Reference manual.
Example
To turn on motors, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 53
Page 62

5. SPEL AOI Reference
SPEL_Move
Description
Moves the arm from the current position to the specified position in a linear interpolation motion.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Move Statement in the SPEL+ Language Reference manual.
Example
To move the end effector to point P1, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
54
Page 63

SPEL_NoFlip
Description
Sets the wrist orientation of the specified point to NOFLIP.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Wrist Statement in the SPEL+ Language Reference manual
Example
To set point P2 orientation to NoFlip, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 55
Page 64

5. SPEL AOI Reference
SPEL_Off
Description
Turns an output bit off.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Bit INT desired output bit number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Off Statement in the SPEL+ Language Reference manual.
Example
To turn off bit number 4, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
56
Page 65

SPEL_On
Description
Turns an output bit on.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Bit INT desired output bit number.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to On Statement in the SPEL+ Language Reference manual.
Example
To turn on bit number 4, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 57
Page 66

5. SPEL AOI Reference
SPEL_Out
Description
Sets an output byte to a given value.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT desired output port number.
outData INT desired output port value.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Out Statement in the SPEL+ Language Reference manual.
Example
To set port number 1 with value of 99, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
58
Page 67

SPEL_OutW
Description
Sets an output word to a given value.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
PortNum INT desired output port number.
outData INT desired output port value.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to OutWStatement in the SPEL+ Language Reference manual.
Example
To set port number 0 with value of 99, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 59
Page 68

5. SPEL AOI Reference
SPEL_PowerHigh
Description
Sets the power level of robot to high.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Power Statement in the SPEL+ Language Reference manual.
Example
To set power high to the robot, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
60
Page 69

SPEL_PowerLow
Description
Sets the power level of robot to low.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Power Statement in the SPEL+ Language Reference manual.
Example
To set power low to the robot, run the AOI as shown below..
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 61
Page 70

5. SPEL AOI Reference
SPEL_ResetError
Description
Reset the robot controller AOI error state. After an error has occurred while executing a SPEL AOI, you must
execute SPEL_ResetError successfully before you can execute another AOI.
Note: If the controller has a system error, then it must be reset before SPEL_Init and other SPEL AOIs can
execute successfully.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
62
Page 71

SPEL_Righty
Description
Sets the hand orientation of the specified point to Righty.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Hand Statement in the SPEL+ Language Reference manual
Example
To set orientation of P2 to Righty, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 63
Page 72

5. SPEL AOI Reference
SPEL_SavePoints
Description
Saves the current point data in robot controller memory to the default point file for robot 1 (robot1.pts) in the
robot controller. To use this command, a valid RC+ project must exist in the controller. Typically,
SavePoints is used to save points taught using the SPEL_Teach AOI. When the controller starts up, it loads
the project and the default point file, so the saved points are in memory.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to SavePoints Statement in the SPEL+ Language Reference manual
Example
To save all points in robot controller memory to the file robot1.pts in the robot controller, run the AOI as
shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
64
Page 73

SPEL_Speed
Description
Sets the arm speed setting for PTP motion.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Speed INT desired speed.
ApproSpeed INT desired approach speed, units are %.
DepartSpeed INT desired depart speed, units are %.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Speed Statement in the SPEL+ Language Reference manual.
Example
To set Speed to 100%, Approach, Depart Speed to 50%, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 65
Page 74

5. SPEL AOI Reference
SPEL_SpeedS
Description
Sets the arm speed setting of CP motion. This will set the depart, and approach speed as well.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Speed INT desired speed.
ApproSpeed INT desired approach speed.
DepartSpeed INT desired depart speed.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to SpeedS Statement in the SPEL+ Language Reference manual.
Example
To set Speed to 100, Approach, Depart Speed to 40, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
66
Page 75

SPEL_Sw
Description
Reads the status of an input bit.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Bit INT desired input bit.
Outputs
Value INT the value of the input bit.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Sw Function in the SPEL+ Language Reference manual.
Example
To read the value of input bit number 514, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 67
Page 76

5. SPEL AOI Reference
SPEL_Teach
Description
Teaches specified robot point in the robot controller to the current robot position.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
Point INT desired point.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Here Statement in the SPEL+ Language Reference manual.
Example
To teach current robot position for robot point P5, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
68
Page 77

SPEL_ToolGet
Description
Gets the tool selection status.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Outputs
ToolNum INT the tool selected.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Tool Function in the SPEL+ Language Reference manual.
Example
To read the selected tool by the robot, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 69
Page 78

5. SPEL AOI Reference
SPEL_ToolSet
Description
Sets the tool.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
ToolNum INT the tool to be set.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Tool Statement in the SPEL+ Language Reference manual.
Example
To set current tool to 3, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
70
Page 79

SPEL_WeightGet
Description
Gets the hand weight and arm length parameters.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
HandWeight REAL weight of the hand.
ArmLength REAL length of the arm.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Weight Function in the SPEL+ Language Reference manual.
Example
To get the current hand weight and arm length, run the AOI as shown below.
5. SPEL AOI Reference
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 71
Page 80

5. SPEL AOI Reference
SPEL_WeightSet
Description
Sets the weight parameter.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
HandWeight REAL weight of the hand.
ArmLength REAL length of the arm.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to Wait Statement in the SPEL+ Language Reference manual.
Example
To set the hand weight and arm length, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
72
Page 81

5. SPEL AOI Reference
SPEL_XYLimGet
Description
Gets the value of the allowable motion area by specifying the lower and upper limit positions.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Outputs
XLower REAL X lower limit.
Xupper REAL X upper limit.
YLower REAL Y lower limit.
Yupper REAL Y upper limit.
ZLower REAL Z lower limit.
Zupper REAL Z upper limit.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to XYLim Function in the SPEL+ Language Reference manual.
Example
To get the upper and lower limits of X,Y and Z, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 73
Page 82

5. SPEL AOI Reference
SPEL_XYLimSet
Description
Sets the allowable motion area by specifying the lower and upper limit positions.
Common Inputs and Outputs
Refer to section 2.4 SPEL AOI Common Inputs and Outputs.
Inputs
XLower REAL X lower limit.
Xupper REAL X upper limit.
YLower REAL Y lower limit.
Yupper REAL Y upper limit.
ZLower REAL Z lower limit.
Zupper REAL Z upper limit.
Operation
Refer to section 2.5 SPEL AOI General Operation.
Refer to XYLim Statement in the SPEL+ Language Reference manual.
Example
To set the upper and lower limits of X,Y and Z, run the AOI as shown below.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
74
Page 83

6. Error Codes
0x200A
(8202)
A robot controller error has occurred.
ErrCode2 is the robot controller error.
See the section SPEL+ Error Messages in
the SPEL+ Language Reference manual.
Command not accepted by the controller
The controller is in a state where it cannot
controller.
AOI execution timeout
Ethernet communications was lost during
took too long to execute.
Cannot execute instruction because of
controller is low.
After any error has occurred,
0x3000
(12288)
0x280C
(10252)
Cannot execute instruction because of
invalid robot controller configuration.
Check that Remote I/O and PLC Vendor
settings are correct in the robot controller.
0x3000
(12288)
A robot controller error has occurred.
ErrCode2 is the robot controller error.
See the section SPEL+ Error Messages in
the SPEL+ Language Reference manual.
Each AOI has an Error output bit and two INT error codes: ErrCode1 and ErrCode2. The error
output is set to high when an error has occurred, and ErrCode1, ErrCode2 indicate which error
has occurred as described in the table below.
6. Error Codes
ErrCode1 ErrCode2
1 -9999
0x200B
(8203)
0x3000
(12288)
0x3000
(12288)
0
0x280A
(10250)
0x280B
(10251)
1 -9999
previous error or ExtReset input in the
Description
Cause/Remedy
accept commands. Power cycle the
command execution, or the command
SPEL_ResetError must be executed.
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1 75
Page 84

6. Error Codes
EPSON RC+ 7.0 Option AOI (Add-On Instructions) Rev.1
76
 Loading...
Loading...