

Page 1
Rev.4 EM208S4405F
EPSON RC+ 7.0 Opção
Part Feeding 7.0
Depósito alimentador e controlador
do depósito alimentador
CPD-60403
Page 2

EPSON RC+ 7.0 Opção Part Feeding
7.0 Depósito alimentador e controlador do depósito alimentador R
ev.4
Page 3
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 i
EPSON RC+ 7.0 Opção
Part Feeding 7.0 Depósito alimentador e controlador do
depósito alimentador
Rev.4
Copyright © 2018-2020 SEIKO EPSON CORPORATION. Todos os direitos reservados.
Page 4

ii Part Feeding 7.0 Hopper & Hopper Controller Rev.4
PREFÁCIO
Obrigado por adquirir nosso sistema robótico.
Este manual contém as informações necessárias para o uso correto da opção Part Feeding
do EPSON RC+ 7.0.
Leia cuidadosamente este manual e os outros manuais relacionados antes de instalar o
sistema robótico.
Mantenha sempre este manual à mão para fácil acesso.
GARANTIA
O sistema robótico e suas partes opcionais são entregues a nossos clientes somente após
serem submetidos aos mais rígidos controles de qualidade, testes e inspeções para certificar
sua conformidade com nossos altos padrões de desempenho.
Os defeitos do produto resultantes do manuseio ou operação normal serão reparados sem
custos durante o período de garantia normal. (Entre em contato com o fornecedor de sua
região para informações sobre o período de garantia).
No entanto, os clientes serão cobrados pelos reparos nos seguintes casos (mesmo se estes
ocorrerem durante o período de garantia):
1.
Avaria ou mal funcionamento causado por uso inadequado que não esteja descrito no
manual, ou uso descuidado.
2.
Defeitos causados por desmontagem não autorizada realizada pelo cliente.
3.
Avaria devido a ajustes inadequados ou tentativas de reparo não autorizadas.
4.
Avaria causada por desastres naturais, tal como terremoto, enchente, etc.
Avisos, Perigos, Uso:
1.
Se o equipamento associado ao sistema robótico for utilizado fora das condições de uso
e especificações do produto descritas nos manuais, esta garantia fica sem efeito.
2.
Se não forem seguidos os AVISOS e PERIGOS contidos neste manual, não poderemos
nos responsabilizar por qualquer mau funcionamento ou acidente, mesmo se o
resultado for ferimento ou morte.
3.
Não podemos prever todos os perigos e consequências possíveis. Portanto, este manual
não pode avisar o usuário de todos os perigos possíveis.
Page 5

Part Feeding 7.0 Hopper & Hopper Controller Rev.4 iii
MARCAS REGISTRADAS
Microsoft, Windows, o logotipo do Windows, Visual Basic e Visual C++ são marcas
comerciais registradas ou marcas comerciais da Microsoft Corporation nos Estados Unidos
e/ou outros países. Outras marcas e nomes de produtos são marcas comerciais ou marcas
comerciais registradas dos respectivos detentores.
REPRESENTAÇÃO DAS MARCAS REGISTRADAS NESTE
MANUAL
Sistema operacional Microsoft® Windows® 8
Sistema operacional Microsoft® Windows® 10
Em todo este manual, Windows 8 e Windows 10 referem-se aos respectivos sistemas
operacionais acima. Em alguns casos, Windows refere-se genericamente ao Windows 8 e
Windows 10.
AVISO
Nenhuma parte deste manual pode ser copiada ou reproduzida sem autorização.
O conteúdo deste manual está sujeito a alteração sem aviso.
Favor notificar-nos se encontrar algum erro neste manual ou se tiver algum comentário
relacionado ao seu conteúdo.
FABRICANTE
INFORMAÇÕES PARA CONTATO
As informações para contato são descritas em “FORNECEDORES” nas páginas iniciais do
seguinte manual:
Sistema robótico Segurança e instalação Leia este manual primeiro
Page 6

iv Part Feeding 7.0 Hopper & Hopper Controller Rev.4
Page 7
Índice
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 v
Hardware (Depósito alimentador)
1. Dados técnicos 3
2. Instruções de segurança 4
3. Construção e função do alimentador linear 6
4. Transporte e montagem 7
5. Início 8
5.1 Ajuste ............................................................................................ 8
6. Especificações para o desenho da esteira 13
7. Manutenção 14
8. Peças sobressalentes (Peças de manutenção) 14
9. O que fazer se... (Instruções para resolução de problemas) 14
Page 8

Índice
vi Part Feeding 7.0 Hopper & Hopper Controller Rev.4
Hardware (Controlador do depósito alimentador)
1. Dados técnicos 19
1.1 Descrição funcional ..................................................................... 19
1.2 Conformidade com a CE ............................................................ 19
1.3 Dados técnicos ........................................................................... 19
2. Notas de segurança 20
3. Informações para iniciar 20
3.1 Explicações sobre o termo MODO DE OPERAÇÃO ................. 21
3.2 Comutação para uma tensão de rede elétrica diferente ............ 22
3.3 Ajuste da tensão de saída mínima e máxima ............................ 22
3.4 Comutação para uma tensão de rede elétrica diferente ............ 23
3.5 Liberação da função por componentes externos ....................... 23
3.6 Alteração no tempo da partida suave ......................................... 23
4. Planta mostrando a posição dos elementos operacionais
nas placas 24
5. Desenho em escala 25
6. Diagrama de conexão 25
Page 9

Hardware (Depósito alimentador)
Page 10

Page 11
1. Dados técnicos
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 3
1. Dados técnicos
Alimentador do tipo linear
SLL 400-400
Dimensões C × B 2) × A (mm)
430 × 84 × 103
Peso
6,5
Tipo de proteção
IP54
Comprimento do cabo conector (m)
1,5
Consumo de energia 1) (VA)
120
Consumo de corrente 1) (A)
0,6
Tensão nominal do magneto 1) / Frequência (V / Hz)
200 / 50
Número de magnetos
1
Tipo de magneto
WZAW 040
Cor do magneto
preto
Folga de ar (mm)
1,0
Frequência da vibração Hz
100 Hz
Número de conjuntos de molas
2
Número de molas padrão
Número por conjunto de molas
2 ×2,0
3 × 3,0
Dimensões da mola (mm)
Comprimento (calibre para furos de broca) × largura
70(56) × 40(18)
Tamanho da mola (mm)
2,0 e 3,0
Qualidade dos parafusos de fixação da mola
8,8
Momento de aperto dos parafusos de fixação da mola
15 N·m
Peso máximo das unidades oscilantes (esteira linear) dependendo
do momento de inércia da massa e da velocidade de movimento
necessária
Aprox. 5 kg
Comprimento máximo da esteira (mm)
700
Peso útil máximo do alimentador linear dependendo do momento
de inércia da massa e da velocidade de movimento necessária
1,5 – 2 kg
1)
Em valores de conexão especiais (tensão/frequência) veja a placa de tipo do magneto
2)
Dimensão da largura para o projeto, B (= largura)
Page 12

2. Instruções de segurança
4 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
2. Instruções de segurança
A concepção e produção de nossos alimentadores lineares foi realizada com muito cuidado
para garantir a operação sem problemas e segura. Você também pode dar uma importante
contribuição para a segurança do serviço. Portanto, leia completamente estas breves
instruções de operação antes de iniciar a máquina. Sempre observe as instruções de
segurança.
Certifique-se de que todas as pessoas que trabalham com esta máquina ou perto dela leiam
e observem atentamente as instruções de segurança a seguir.
Esta mão aponta para informações que dão dicas úteis para
a operação do alimentador linear.
ATENÇÃO
Este triângulo de sinalização marca as instruções de
segurança.
A não observância desses avisos pode resultar em ferimentos
sérios ou fatais.
Perigos que ocorrem na máquina
- As partes mais perigosas da máquina são as instalações elétricas do alimentador linear.
Caso o alimentador linear fique úmido, há perigo de choque elétrico.
- Certifique-se de que o terra de proteção da fonte de alimentação elétrica esteja em
perfeitas condições.
Uso pretendido
O uso pretendido do alimentador linear é o acionamento das esteiras transportadoras. Estas
são utilizadas para o transporte linear e a alimentação das peças produzidas em massa
posicionadas corretamente, assim como para a alimentação proporcionada do material a
granel. O uso pretendido também inclui a observância das instruções de operação e
manutenção.
Verifique os dados técnicos de seu alimentador linear na tabela descrita em 1. Dados
técnicos. Certifique-se de que a carga conectada do alimentador linear, da unidade de
controle e da fonte de alimentação sejam compatíveis.
O alimentador linear só pode ser operado quando em
perfeitas condições.
O alimentador linear não pode ser operado em área explosiva ou úmida.
O alimentador linear só pode ser operado na configuração com unidade de acionamento,
unidade de controle e unidade oscilante, conforme especificado pelo fabricante.
Nenhuma carga adicional pode atuar sobre o alimentador linear, exceto o material a ser
transportado, para o qual o tipo especial é projetado.
ATENÇÃO
É estritamente proibido colocar qualquer um dos dispositivos
de segurança fora de operação.
NOTA
NOTA
Page 13

2. Instruções de segurança
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 5
Exigências para o usuário
- Para todas as atividades (operação, manutenção, reparo, etc.) os detalhes das instruções
de operação devem ser observados.
- O operador deve evitar qualquer método de trabalho que possa prejudicar a segurança
do alimentador linear.
- O operador deve tomar cuidado para que somente pessoal autorizado trabalhe no
alimentador linear.
- O usuário é obrigado a informar imediatamente ao operador sobre quaisquer alterações
nas condições do alimentador linear que possam colocar a segurança em risco.
ATENÇÃO
O alimentador linear só pode ser instalado, colocado em
operação e reparado por pessoal especializado. A
regulamentação compulsória para a qualificação dos
eletricistas e do pessoal com formação em engenharia
elétrica é válida, conforme definido no IEC 364 e DIN VDE
0105 parte 1.
PERIGO
Como o campo eletromagnético pode ter um impacto nas
pessoas portadoras de marca-passos, é recomendado
manter uma distância mínima de 25 cm.
PERIGO
- Desconecte o plugue de energia principal ao
conectar/desconectar o cabo.
- Desconecte o plugue de energia principal ao efetuar ajustes
e manutenção.
Emissão de ruído
O nível de ruído no local de operação depende do equipamento completo e o material a ser
transportado. A determinação do nível de ruído de acordo com os regulamentos da CE em
“Maquinaria” só pode, portanto, ser realizada no local de operação.
Se o nível de ruído no local de operação exceder o limite permitido, podem ser utilizadas
capelas de proteção contra ruído, que oferecemos como peças acessórias (veja o catálogo).
Normas e regulamentos
O dispositivo foi construído de acordo com as seguintes normas e regulamentos:
- Diretiva para baixa tensão 2014/35/EU
- Diretiva para EMC 2014/30/EU
Presumimos que nossos produtos vão ser integrados em uma máquina fixa. As disposições
da diretiva para EMC 2014/30/EU devem ser consideradas pelo usuário.
- Normas harmonizadas aplicáveis
EN 60204-1
Page 14

3. Construção e função do alimentador linear
6 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
3. Construção e função do alimentador linear
Os alimentadores lineares são utilizados para o acionamento do equipamento transportador.
O acionamento é realizado por um eletromagneto. O seguinte diagrama esquemático mostra
a função de um alimentador linear:
O alimentador linear é um dispositivo da família de bacias alimentadoras vibratórias. No
entanto, ele é equipado com um transportador linear. As vibrações eletromagnéticas são
convertidas em vibrações mecânicas e usadas para transportar o material B. Se o magneto
D, que é firmemente conectado ao contrapeso F, for alimentado com corrente, ele gera uma
energia que, dependendo da frequência de vibração da alimentação elétrica, atrai e libera a
armadura E. Dentro de um período de 50 Hz da rede de CA, o magneto adquire sua força de
atração máxima duas vezes, pois isto é independente da direção de condução da corrente. A
frequência de vibração é, portanto, 100 Hz. Caso metade da onda seja bloqueada, ela será
de 50 Hz. Verifique a frequência de vibração de seu alimentador linear na tabela descrita
em 1. Dados técnicos
O alimentador linear é um sistema ressonante (sistema mola-massa). O resultado é que o
ajuste feito em fábrica raramente vai atender aos seus requisitos. O Capítulo 5 descreve em
detalhes como seu alimentador linear é adaptado aos seus requisitos.
O controle do alimentador linear ocorre por uma unidade de controle eletrônico de baixa
perda tipo ESG 1000. No painel frontal, ele é provido de uma conexão plug-in de 7 polos,
pela qual ele é conectado ao alimentador linear.
A atribuição dos pinos do soquete é mostrada na tabela descrita em 1. Dados técnicos.
Para mais informações sobre a faixa completa de unidades
de controle, consulte Hardware (Controlador do depósito
alimentador).
Todas as unidades de controle são providas de dois elementos operacionais principais:
- O alimentador linear é ligado ou desligado pelo interruptor de energia.
- A capacidade de transporte da unidade de transporte é definida pelo botão giratório
NOTA
A Esteira transportadora e peso oscilante
B Material a ser transportado
C Conjunto de molas
D Magneto de acionamento
E Armadura
F Contrapeso
G Amortecedor
H Contramassa
Page 15

4. Transporte e montagem
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 7
4. Transporte e montagem
Transporte
Tenha cuidado para que o alimentador linear não arremeta contra
outros objetos durante o transporte.
O peso do alimentador linear é obtido na tabela descrita em 1. Dados técnicos
Montagem
O alimentador linear deve ser montado em uma subestrutura estável (disponível como peça
acessória) no local onde vai ser utilizado. A subestrutura deve ser dimensionada de modo
que nenhuma vibração do alimentador linear possa ser transmitida.
Os alimentadores lineares são presos aos amortecedores por baixo (parte G no desenho geral
em 3. Construção e função do alimentador linear).
A tabela a seguir apresenta um resumo dos dados dos furos para os vários tipos:
Alimentador do
tipo linear
Comprimento em
mm
Largura em mm
Rosca do
amortecedor
SLL 400– 400
200
100
M6
Certifique-se de que o alimentador linear não possa entrar em contato com outros
dispositivos durante a operação.
Para mais detalhes sobre a unidade de controle (plano dos furos, etc.), consulte Hardware
(Controlador do depósito alimentador).
ATENÇÃO
Tenha cuidado para não prender as mãos, os dedos ou os
pés e/ou ter o equipamento danificado por queda do depósito
alimentador ou do controlador do depósito alimentador. Ao
trabalhar, use equipamento de proteção, incluindo sapatos de
segurança.
NOTA
Page 16

5. Início
8 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
5. Início
Assegure que a estrutura (suporte, base, estrutura, etc.)
esteja conectada com o fio terra (PE). Se necessário, deve
ser providenciado aterramento de proteção no local.
Verifique se
- o alimentador linear fica em uma posição isolada e seguramente não seja atingido por
um corpo sólido
- a esteira linear está aparafusada e ajustada
- o cabo conector do alimentador linear está conectado na unidade de controle.
ATENÇÃO
A conexão elétrica do alimentador linear só pode ser feita por
pessoal treinado (eletricistas). Caso sejam feitas
modificações na conexão elétrica, é absolutamente
necessário observar as instruções de operação das “unidades
de controle”.
- a tensão da alimentação disponível (frequência, tensão, saída) está de acordo com os
dados de conexão da unidade de controle (veja a placa de tipo na unidade de controle).
Conecte o cabo da unidade de controle na rede elétrica e ligue a unidade de controle pelo
interruptor de energia.
A faixa operacional ideal do alimentador linear é na posição do controlador de 80% na
unidade de controle. No caso de desvios maiores (>=±15%), deve ser feito um reajuste.
5.1 Ajuste
É feito com os conjuntos de molas para um peso da esteira transportadora que é
aproximadamente 25 % menor do que o peso máximo da esteira descrito em 1. Dados
técnicos, e uma velocidade de movimento de 4 - 6 m/min. Caso sejam instaladas esteiras
transportadoras mais leves ou mais pesadas ou forem necessárias velocidades de transporte
consideravelmente mais rápidas ou mais lentas, os conjuntos de molas devem ser
modificados. Para isso, as seguintes regras básicas devem ser observadas:
Primeiramente, deve ser feito um ajuste aproximado na
velocidade de transporte (ajuste da frequência natural), que
é seguido pelo ajuste do comportamento do movimento.
Finalmente, é feito o ajuste da velocidade do transporte
(frequência natural).
NOTA
NOTA
Page 17

5. Início
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 9
5.1.1 Ajuste da velocidade do movimento necessária
Caso não seja atingida a velocidade de movimento com o conjunto de molas padrão,
primeiramente deve ser encontrada a faixa de ajuste atual do sistema oscilante, ou a
frequência natural abaixo de 50 ou 100 Hz ou a frequência natural acima de 50 ou 100 Hz.
Para isso, são desmontadas uma ou duas chapas do contrapeso móvel para testar. Se for
reconhecida uma alteração na velocidade do movimento da esteira transportadora, pode ser
verificado na tabela abaixo se as molas devem ser instaladas ou removidas. A posição do
controlador na unidade de controle não pode ser alterada durante este teste. Os diferentes
tamanhos são equipados em fábrica.
Alteração na
velocidade do
movimento na
esteira
transportadora
após a
desmontagem do
contrapeso
A velocidade do
movimento
necessária deve
ser aumentada
A velocidade do
movimento
necessária deve
ser reduzida
Posição da
frequência
natural
Mais lenta
1. Instale contrapeso
2. Desmonte molas
1. Instale contrapeso
2. Instale molas
> 50 ou 100 Hz
Mais rápida
1. Instale contrapeso
2. Instale molas
1. Instale contrapeso
2. Desmonte molas
< 50 ou 100 Hz
O seguinte gráfico mostra a curva de ressonância de um alimentador linear:
A curva de ressonância do alimentador linear pode não
corresponder à frequência da rede elétrica.
Ao trocar as molas, a valência dos vários tamanhos de feixes de molas deve ser considerada.
Como o tamanho da mola entra na força da mola ao quadrado, os seguintes exemplos devem
ser observados:
- Tamanho de mola de 2,5 mm = força da mola 6,25
- Tamanho de mola de 3,0 mm = força da mola 9,0
- Tamanho de mola de 3,5 mm = força da mola 12,25
NOTA
A Velocidade do transporte
B Frequência natural
C Curva da ressonância (não fiel à escala)
D Força das molas (número de molas)
Page 18
5. Início
10 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
Um feixe de molas de 3,5 mm tem aproximadamente a mesma valência que dois feixes de
mola de 2,5 mm. Por esse motivo, é recomendável efetuar o ajuste final ou fino sempre com
feixes de mola finos.
Ao mudar as massas do contrapeso e do peso oscilante
(instalação ou desmontagem do contrapeso ou peso
adicional) a velocidade do movimento ou a frequência neutra
do alimentador linear é alterada. Se necessário, feixes de
molas devem ser adicionados ou removidos.
Troca do conjunto de molas para alimentadores lineares tipo SLL 400
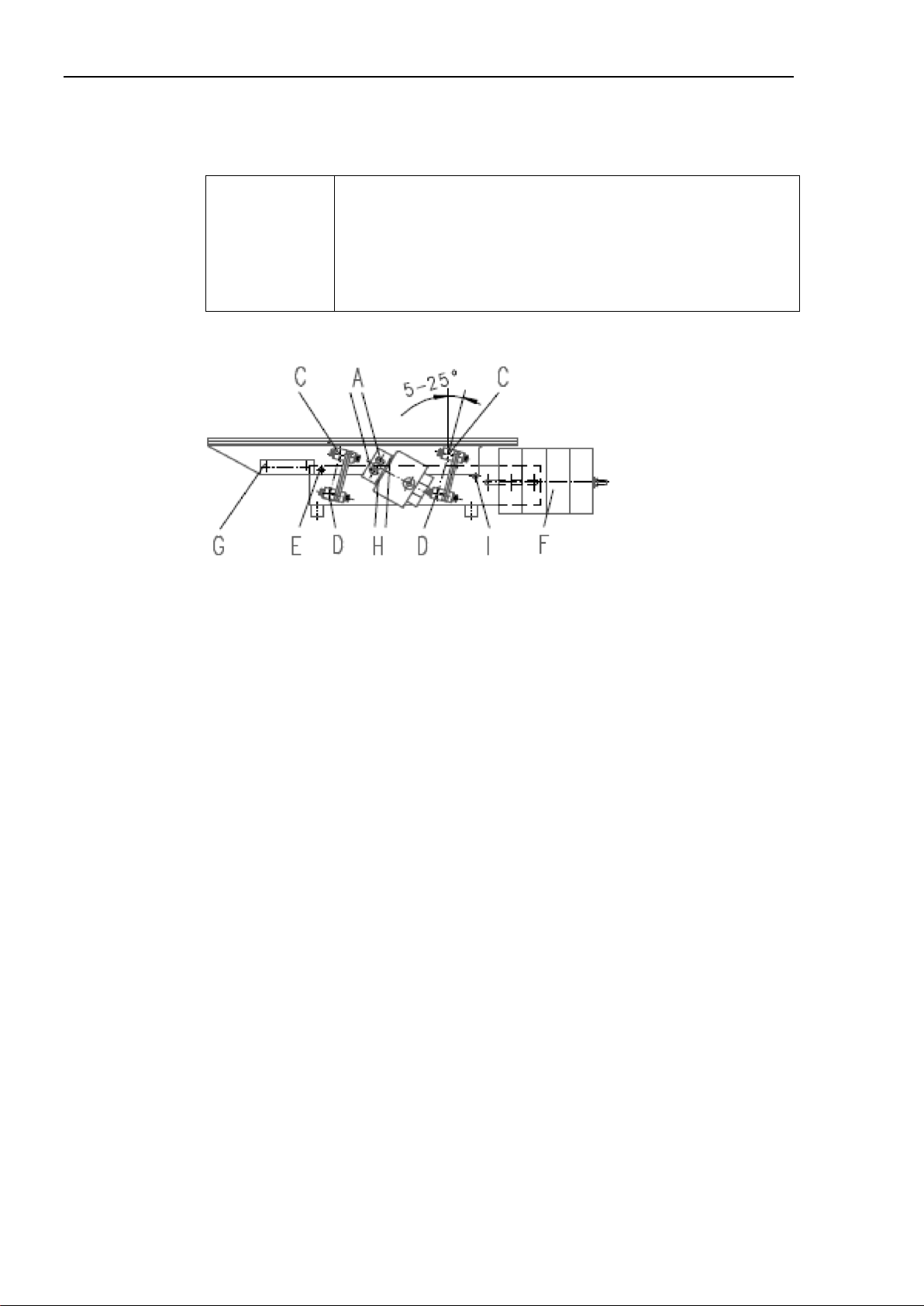
Desaparafuse os 4 ou 6 parafusos de fixação laterais superiores da mola (“C”) (M6 DIN
912). O oscilador completo com a esteira montada pode então ser erguido. Remova o
conjunto de molas desejado liberando os parafusos de fixação laterais inferiores (“D”) (M6
DIN 912).
Antes de remover o conjunto de molas, o condutor de proteção do lado da alimentação deve
ser removido do dispositivo de fixação de mola inferior.
Aparafuse o conjunto de molas removido no dispositivo de montagem para encaixar molas
tamanho 400 e prenda-o em uma morsa. Ao instalar e remover as molas laminadas,
certifique-se de que existem pequenas chapas de distanciamento entre as molas.
Se você não tiver um dispositivo de montagem para conjuntos de molas, proceda como
segue:
Prenda o conjunto de molas desmontado horizontalmente em uma morsa paralela com
mordentes de aperto lisos e execute os ajustes desejados. Ao apertar os conjuntos de molas,
certifique-se de que eles estejam em alinhamento paralelo.
O dispositivo de montagem alinha os dois porta-molas um com o outro. Os parafusos de
fixação das molas devem ser apertados com um torque de 12,5 Nm.
Reinstalação do conjunto de molas completo
Para restaurar o alinhamento anterior do alimentador linear, o furo de ajuste localizado na
extremidade da contramassa superior (“E”) deve ser alinhado ao oscilador com um pino (6
mm de diâmetro com comprimento mínimo de 70 mm).
No lado da alimentação, o oscilador é alinhado próximo do contrapeso inserindo outro pino
(6 mm de diâmetro com comprimento mínimo de 70 mm) no furo de ajuste (“I”).
Depois de ter ajustado o ângulo das molas para a posição desejada, os parafusos de fixação
laterais são apertados novamente com um torque de 12,5 Nm.
Antes de colocar em operação novamente, lembre-se de remover os pinos centralizadores.
NOTA
Page 19

5. Início
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 11
5.1.2 Ajuste do comportamento do movimento necessário ou do sincronismo da esteira do alimentador linear
Para obter sincronismo da esteira do alimentador linear, o ângulo das molas deve ser
ajustado de forma idêntica ao ângulo do centro de gravidade. O ângulo do centro de
gravidade é determinado pela posição dos dois centros de gravidade do peso oscilante e do
contrapeso.
Exemplo com um ângulo do centro de gravidade de 12,5°
Ângulo das molas igual ao ângulo do centro de gravidade
A direção da força das molas é iniciada exatamente no centro de gravidade do vibrador.
Consequência: A amplitude da altura é a mesma no lado da alimentação e no lado da
descarga.
Ângulo das molas maior do que o ângulo do centro de gravidade
A direção da força das molas é iniciada antes do centro de gravidade do vibrador.
Consequência: A amplitude da altura é maior na área de alimentação do que na área de
descarga.
Page 20

5. Início
12 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
Ângulo das molas menor do que o ângulo do centro de gravidade
A direção da força das molas é iniciada atrás do centro de gravidade do vibrador.
Consequência: A amplitude da altura é menor na área de alimentação do que na área de
descarga.
Caso os ângulos não sejam os mesmos, as esteiras transportadoras estão se movimentando
irregularmente. No caso de desvios muito altos desse ângulo, a esteira transportadora pode
até exibir deflexões laterais (oscilações).
Os centros ou ângulos de gravidade podem ser influenciados pelas seguintes medidas:
- Adicionar ou deslocar contrapeso (“F”)
- Escolher uma posição e altura da esteira de modo que seja obtido um centro de
gravidade favorável
- Manter o peso da esteira o mais baixo possível para manter o centro de gravidade do
vibrador o mais baixo possível.
- Instalar um contrapeso adicional na área de descarga do vibrador (“G”).
- Ajustar o ângulo das molas para o ângulo do centro de gravidade
O ângulo das molas dos alimentadores lineares tipo SLL 400 pode ser ajustado entre 5° e
25°. Se o ângulo do centro de gravidade estiver fora desta área, o sincronismo dessa esteira
será impossível. Neste caso, devem ser feitas modificações nos centros de gravidade do
contrapeso e do peso oscilante de acordo com os pontos relacionados acima.
Ajuste do ângulo das molas
Fixe o vibrador contra a contramassa (consulte 5.1 Ajuste). Depois disso, as quatro fixações
das molas laterais (“C” + “D”) podem ser afrouxadas para movimentar o conjunto de molas
para o ângulo das molas desejado. Depois disso, aperte os parafusos de fixação das molas
com o torque de aperto admissível (consulte 1. Dados técnicos) e remova os parafusos de
ajuste, as chapas de distanciamento ou as cavilhas.
Ajuste da folga de ar do magneto
A folga de ar entre a armadura e o magneto ajustada em fábrica pode ser verificada em 1.
Dados técnicos.
O ajuste da folga de ar pode ser feito pelo lado de fora, sem desmontar nenhuma peça
componente. Afrouxe levemente ambos os parafusos de fixação da armadura (“A” ou “A”
+ “B”) (M5 DIN 912 no alimentador linear tipo SLL 400:). Em ambos os furos localizados
no perfil oscilante (“H”) deve ser afixado um pino cilíndrico (Φ1mm, 80 mm de
comprimento no SLL400). Pressionando e subsequentemente apertando ambos os parafusos
de fixação da armadura contra a direção do movimento, a folga magnética especificada é
ajustada (consulte 1. Dados técnicos). Depois disso, remova os pinos cilíndricos. Caso não
haja pinos cilíndricos, a folga magnética pode ser ajustada por baixo (talvez após desmontar
o alimentador linear completo da estrutura de suporte ou da mesa de suporte) por meio de
um calibre ou peças de distanciamento de acordo com a folga magnética prescrita.
Com o botão giratório da unidade de controle na posição de
100% e uma folga magnética ajustada corretamente, o
magneto não arremeterá contra a armadura. Caso isso
aconteça, proceda de acordo com o ponto 5.1 Ajuste (remova
as molas).
O objetivo do ajuste é:
NOTA
Page 21

6. Especificações para o desenho da esteira
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 13
Se a velocidade do transporte necessária for obtida a uma posição do controlador de 80%, a
velocidade do transporte deverá sempre aumentar quando uma chapa de peso for removida.
Tome cuidado para que o número de molas por conjunto de
molas não difira em mais de 2-3 molas.
6. Especificações para o desenho da esteira
Como o vibrador é suficientemente flexível em razão do uso do perfil de alumínio, as
esteiras transportadoras deve ter um desenho bem leve. Somente no caso de as esteiras
transportadoras se projetarem acima do vibrador (na área de alimentação máximo 100 mm,
na área de descarga máximo 200 mm) o desenho da esteira transportadora deve ser
correspondentemente inflexível à distorção. Para obter inflexibilidade à distorção lateral
adicional, uma chapa de suporte inteiriça de alumínio de 4 - 6 mm de espessura deve ser
aparafusada nos perfis do alimentador linear. Substituindo os perfis do alimentador linear
você obtém o tipo de construção pequeno “P” ou amplo “A”.
Quanto maior for a velocidade da alimentação, maior deve ser o espaço entre a borda
superior da peça a ser transportada e a borda inferior da tampa da esteira transportadora. Se
possível, o espaço deve ser ajustado para a maior medida admissível. Ao instalar e fixar as
esteiras transportadoras, os seguintes pontos devem ser observados:
- Instale bem junto à borda superior do vibrador
- Se possível, coloque-as no centro do perfil de alumínio
- Escolha parafusos rígidos e sólidos (mínimo M5)
- Para conseguir uma velocidade de transporte maior, o alimentador linear pode ser
instalado com uma leve inclinação de aproximadamente 3-5°.
- Sob nenhuma circunstância use tampas soltas, articuladas ou não aparafusadas.
A esteira transportadora pode também consistir em várias seções curtas, que são montadas
e aparafusadas no vibrador. No lado da alimentação, chanfraduras planas facilitam a
passagem da peça de trabalho de uma seção para outra da esteira transportadora.
A construção compreendendo várias seções é especialmente recomendada para o uso de
esteiras transportadoras reforçadas ou com superfície reforçada (fabricação com baixa
distorção).
Esteiras transportadoras bem leves podem ser obtidas usando trilhos ou perfis de alumínio.
A necessária resistência à abrasão pode ser obtida por segmentos feitos de banda de aço
reforçada que são aparafusados. Esses segmentos estão disponíveis a pedido junto ao
fabricante.
NOTA
Page 22

7. Manutenção
14 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
7. Manutenção
Os alimentadores lineares são geralmente isentos de manutenção. No entanto, eles devem
ser minuciosamente limpos caso estejam consideravelmente sujos ou após terem sido
derramados líquidos sobre eles.
- Para isso, desconecte o plugue da rede elétrica.
- Limpe o interior do alimentador linear, especialmente a folga magnética.
Folga magnética
- Depois de o plugue da rede elétrica ser conectado, o alimentador linear estará pronto
para a operação novamente
8. Peças sobressalentes (Peças de manutenção)
Entre em contato com o fornecedor de sua região.
9. O que fazer se... (Instruções para resolução de problemas)
ATENÇÃO
A unidade de controle ou a caixa de terminais de conexão só
podem ser abertas por um eletricista. Antes de abrir os
dispositivos mencionados acima, o plugue da rede elétrica
deve ser desconectado.
Caso a esteira transportadora não tenha velocidade de movimento constante ou amplitude
de altura, mas uma velocidade de movimento ou amplitude de altura maior no lado da
descarga do que no lado da alimentação, o ângulo da mola foi ajustado incorretamente para
o ângulo do centro de gravidade (consulte 5.1.2 Ajuste do comportamento do movimento
necessário ou do sincronismo da esteira do alimentador linear). Neste caso, proceda como
segue:
- Ajuste para um ângulo de mola maior em todos os conjuntos de molas
- Desloque o contrapeso “F” contra a direção do movimento
- Instale chapas de peso adicionais no contrapeso
- Instale o peso adicional “G” no perfil oscilante
Caso a esteira transportadora não tenha velocidade de movimento constante ou amplitude
de altura, mas uma velocidade de movimento ou amplitude de altura maior no lado da
alimentação do que no lado da descarga, o ângulo da mola foi ajustado incorretamente para
o ângulo do centro de gravidade (consulte 5.1.2 Ajuste do comportamento do movimento
Page 23

9. O que fazer se... (Instruções para resolução de problemas)
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 15
necessário ou do sincronismo da esteira do alimentador linear). Neste caso, proceda como
segue:
- Ajuste para um ângulo de mola menor em todos os conjuntos de molas
- Desloque o contrapeso “F” na direção do movimento
- Desmonte as chapas de peso adicionais no contrapeso
- Desmonte o peso adicional “G” do perfil oscilante
Se o comportamento do movimento for instável em uma velocidade da esteira
transportadora estável e se o material a ser transportado salta demais entre a superfície de
sustentação e a tampa, o ângulo do centro de gravidade e o ângulo das molas ajustado do
sistema total é muito grande e consequentemente a amplitude da altura muito grande. Neste
caso, proceda como segue:
- Mude o ângulo do centro de gravidade (torne-o mais “plano”), deslocando o contrapeso
“F” contra a direção do movimento, instalando chapas de peso adicionais no contrapeso,
instalando um peso adicional no perfil oscilante e escolhendo um desenho mais leve
para a esteira transportadora, se necessário.
- Ajuste o ângulo das molas de acordo com o ângulo do centro de gravidade.
Se o comportamento do movimento for instável, especialmente em material a ser
transportado com superfície grande ou que esteja sujo de óleo, o ângulo do centro de
gravidade e o ângulo das molas ajustadas do sistema total é muito pequeno. A amplitude da
altura é muito pouca.
Devido a isso, o movimento da projeção não pode ocorrer e, no caso de peças de trabalho
oleosas, o poder adesivo é maior do que o poder de propulsão, isto é, a peça de trabalho não
pode ser levantada.
Neste caso, proceda como segue:
- Mude o ângulo do centro de gravidade (torne-o mais “íngreme”), deslocando o
contrapeso “F” na direção do movimento, desmontando as chapas de peso adicionais
no contrapeso, desmontando o peso adicional do perfil oscilante.
- Ajuste o ângulo da mola de acordo com o novo ângulo do centro de gravidade
Caso a esteira transportadora não possa ser ajustada de acordo com os critérios mencionados
acima e se ocorrerem, por exemplo, vibrações laterais ou, em certas áreas, “pontos mortos”,
a rigidez da esteira é insuficiente. Os pontos de impacto ou separação atuam uns contra os
outros ou peças estruturais assimétricas da esteira levam a um comportamento instável do
movimento. Neste caso, proceda como segue:
- Monte barras de enrijecimento
- Conecte os pontos de impacto ou separação com aparafusamento
- Providencie peças estruturais assimétricas com contrapesos ou substitua-as por
materiais mais leves.
Page 24

9. O que fazer se... (Instruções para resolução de problemas)
16 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
Problema
Causa possível
Solução
O alimentador linear não
inicia quando é ligado
- Interruptor de energia
desligado
- Ligue o interruptor de
energia
- O plugue da rede elétrica
da unidade de controle
não está conectado
- Conecte o plugue da rede
elétrica
- O cabo de conexão entre
o alimentador linear e a
unidade de controle não
está conectado
- Conecte o plugue de 5
polos na unidade de
controle
- O fusível da unidade de
controle está com defeito
- Substitua o fusível
O alimentador linear
vibra levemente
- O botão giratório da
unidade de controle está
ajustado para 0%
- Ajuste o controlador para
80%
- O dispositivo de fixação
para transporte não foi
removido
- Remova o dispositivo de
fixação para transporte
- Frequência de vibração
incorreta
- Verifique se o código do
plugue do alimentador
linear é o correto (veja a
placa do tipo e 1. Dados
técnicos)
PERIGO
Caso o alimentador linear SLL 400 esteja operando
sem uma ponte em um plugue de 7 polos, a unidade
de controle e o magneto estarão em perigo.
Depois de um tempo de
operação mais longo, o
alimentador linear não
chega mais até a
capacidade de transporte
necessária
- Os parafusos de fixação
da esteira linear
afrouxaram
- Reaperte os parafusos
- Os parafusos de um ou
dois conjuntos de molas
afrouxaram
- Aperte os parafusos (Para
aos torques de aperto,
consulte 1. Dados
técnicos)
- Folga magnética
desajustada
- Reajuste a folga
magnética (para a largura
da folga, consulte 1.
Dados técnicos)
- O vibrador se deslocou
em direção à
contramassa
- Reajuste o vibrador
(consulte 5.1.1 Ajuste da
velocidade de movimento
necessária)
O alimentador linear
produz um ruído forte
- Corpos estranhos na
folga magnética
- Desligue o alimentador
linear e remova os corpos
estranhos, depois verifique
o ajuste da folga
magnética
Não é possível ajustar o
alimentador linear para
uma velocidade de
transporte constante
- A constante das molas
do sistema oscilatório
mudou. O alimentador
linear funciona próximo
ao ponto de ressonância
- Reajuste o alimentador
linear. As molas devem
ser removidas.
(Consulte 5. Início)
Page 25

Hardware (Controlador do depósito alimentador)
Page 26

Page 27
1. Dados técnicos
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 19
1. Dados técnicos
1.1 Descrição funcional
O desenho compacto da unidade de controle pode suprir todas as unidades de controle com
uma corrente de carga de até 6 amperes. Ela é destinada à instalação individual diretamente
no drive oscilante e é completamente conectável. A faixa de correção para o potenciômetro
na chapa frontal foi ajustada em fábrica por um drive de referência e permite o ajuste da
tensão de saída de 40 a 280 volts efetivo.
O interruptor basculante iluminado na chapa frontal separa a unidade de controle com 2
polos da rede elétrica. Para comutação ou operação frequente com uma unidade de controle
subordinante, há a possibilidade de desconexão sem energia por meio de um contato sem
potencial, assim como pelo sinal de tensão de 16-30VCC. A intervenção no dispositivo
necessária para isso é descrita em 3.5 Liberação da função através de componentes externos.
A energia é suprida quando tiver decorrido o tempo ajustado (aprox. 0,5 segundo) após ligar
a energia.
1.2 Conformidade com a CE
O dispositivo de controle corresponde aos seguintes regulamentos:
- Diretiva para baixa tensão 2014/35/EU
- Diretiva para EMC 2014/30/EU
Normas harmonizadas aplicadas:
- DIN EN 60204-1
- EN 61439-1
O dispositivo de controle corresponde também aos regulamentos do UL/ CSA.
1.3 Dados técnicos
Conexão com a rede elétrica
230 Volts CA, 50 ou 60 Hz, +10 −15% ou
115 Volts CA, 50 ou 60 Hz, +10 −15%
Tensão de saída
40...208 Volts (efet.) ajustável, (rede elétrica 230 V)
20...105 Volts (efet.) ajustável, (rede elétrica 115 V)
Corrente de carga
máx. 6 Amp. (efet.)
Modos de operação
1. operação simétrica em onda completa
(frequência da oscilação = dobro da frequência da rede)
2. operação assimétrica em meia onda
(frequência da oscilação = frequência da rede)
Seleção do modo de operação
Ponte codificadora no plugue de carga
Liberação da função
Selecionável por jumpers internos
Liberação por sinal externo
Entrada reversa protegida por bateria, nível 16...30 VCC
a 24 Volts aprox. 8 mA
Partida suave
Ajustável internamente, padrão aprox. 0,5 seg.
Tipo de proteção
IP54
Supressão de
radiointerferência
de acordo com os regulamentos de EMC
Dimensões
104 × 213 × 153 (largura × altura× profundidade)
Page 28

2. Notas de segurança
20 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
2. Notas de segurança
As notas de segurança deverão ser lidas e compreendidas em qualquer caso. Sua observância
garante a conservação de material valioso e evita prejuízos à saúde.
PERIGO
Perigo elétrico, p. ex., no trabalho sob tensão
PERIGO
O trabalho no equipamento elétrico da máquina/equipamento
só pode ser realizado por eletricista qualificado ou por pessoal
treinado sob a direção e supervisão de um eletricista
qualificado de acordo com os regulamentos para eletricidade.
Todas as notas de segurança e de perigo da
máquina/equipamento devem ser observadas.
O equipamento elétrico de uma máquina/equipamento deve
ser examinado regularmente. Falhas, p. ex., conexões
frouxas ou cabos danificados devem ser imediatamente
eliminados.
PERIGO
Antes de abrir o dispositivo, desconecte o plugue de energia.
PERIGO
Desconecte o plugue de energia principal ao
conectar/desconectar o cabo. Desconecte o plugue de
energia principal ao efetuar ajustes e manutenção.
3. Informações para iniciar
PERIGO
Antes de a conexão com a rede elétrica ser feita e a unidade
de controle ser ligada, os seguintes pontos devem ser
verificados em qualquer situação:
- A unidade de controle está corretamente fechada e com
todos os parafusos?
- Os dispositivos de fixação do plugue existentes estão
travados no lugar/aparafusados?
- Todos os cabos e dutos estão livres de danos?
- O USO PRETENDIDO está garantido?
- A indicação da tensão da rede elétrica está de acordo com
a rede de fornecimento de energia local?
- A indicação da frequência da rede elétrica no drive oscilante
está de acordo com a rede de fornecimento de energia
local?
- A unidade de controle está configurada com o modo de
operação correto?
(sobre isso, leia a explicação sobre o modo de operação)
Somente se todas as perguntas acima puderem ser respondidas positivamente, a unidade de
controle pode ser colocada em operação.
Page 29

3. Informações para iniciar
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 21
PERIGO
Na primeira inicialização ou na inicialização após um trabalho
de reparo ou troca das unidades de controle/drives oscilantes,
a saída mínima deve ser configurada na unidade de controle
antes de ligar o dispositivo. Ao aumentar a saída, deve-se ter
cuidado quanto à função correta.
3.1 Explicações sobre o termo MODO DE OPERAÇÃO
Os drives oscilantes são vibradores de mola mecânicos que, de acordo com o peso e/ou
tamanho, são ajustados para uma frequência da oscilação próxima da frequência da rede
elétrica. Dois modos de operação são possíveis:
1. Operação assimétrica em meia onda - o drive oscilante opera com a frequência da rede
elétrica.
2. Operação simétrica em onda completa - o drive oscilante opera com o dobro da
frequência da rede elétrica.
A partir disso, os seguintes detalhes resultam para a frequência da oscilação:
Frequência da rede
elétrica
50 Hz
60 Hz
Modo de operação 1
Frequência da oscilação
50 Hz =3000 min -1
Frequência da oscilação
60 Hz =3600 min -1
Modo de operação 2
Frequência oscilante
100 Hz =6000 min -1
Frequência da oscilação
120 Hz =7200 min -1
Em uma rede elétrica de 50 Hz somente drives oscilantes com frequência de oscilação de
50 Hz ou 100 Hz podem ser operados; em uma rede elétrica de 60 Hz, somente drives
oscilantes com frequência de oscilação de 60 Hz ou 120 Hz. A unidade de controle pode
operar em ambos os modos de operação. Ela deve, no entanto, ser comutada no modo de
operação correto. A frequência da rede elétrica não tem importância para a unidade de
controle.
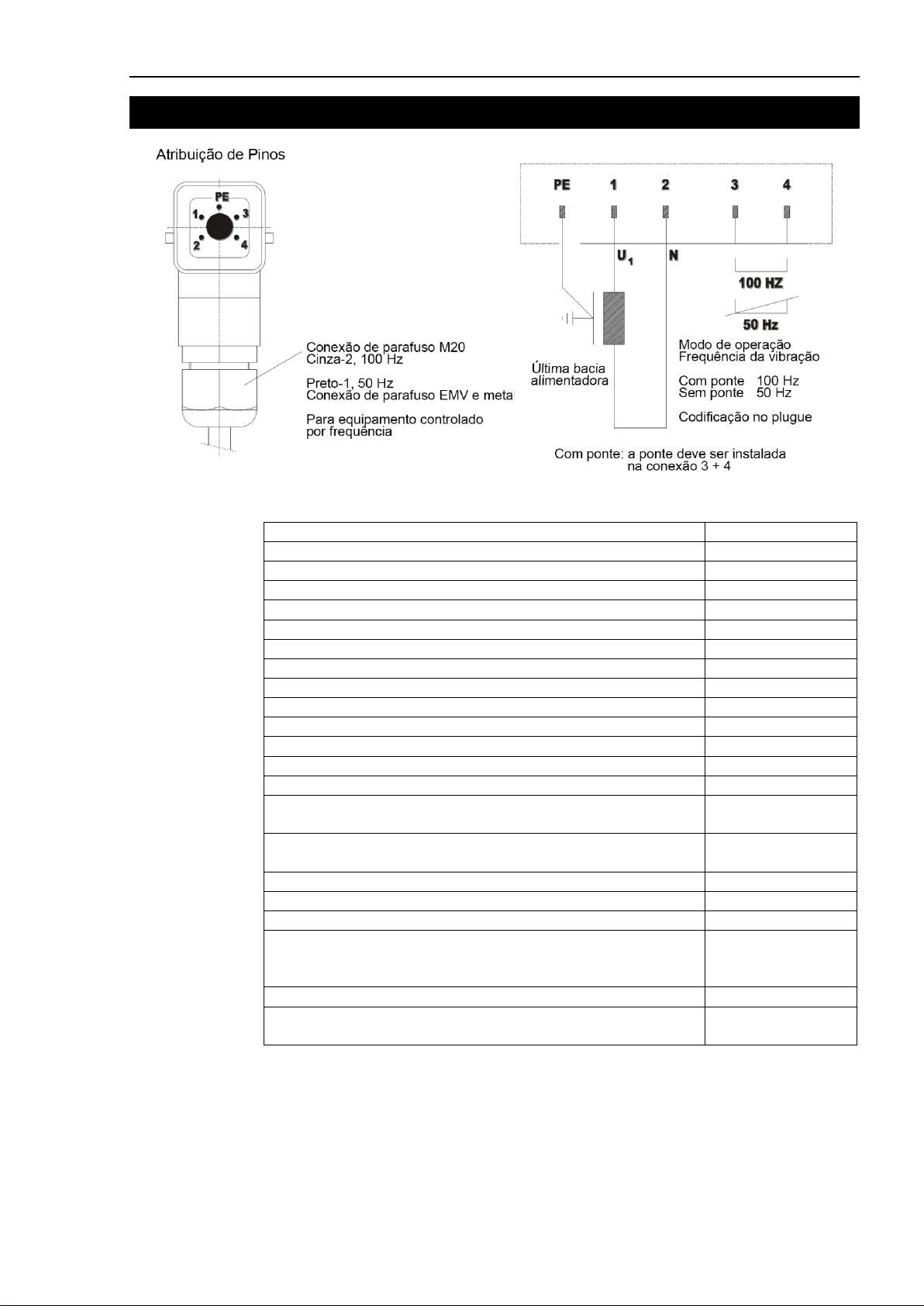
Encaixe rosqueado M20
cinza – 2, frequência de oscilação
de 100 Hz
preto – 1,frequência de oscilação
de 50 Hz
encaixe rosqueado EMC metálico
para dispositivos regulados por
frequência
Page 30
3. Informações para iniciar
22 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
3.2 Comutação para uma tensão de rede elétrica diferente
A seleção do modo de operação ocorre inserindo um código no plugue de carga do drive
oscilante. Um jumper no plugue da conexão 3 para a 4 comuta a unidade de controle para o
modo de operação 2: 100 ou 120 Hz. Se esta conexão estiver faltando, a unidade de controle
operará no modo de operação 1: 50 ou 60 Hz.
Como padrão, as unidades de transporte oscilantes são providas com o código correto no
plugue. Para auxiliar o usuário, o adaptador de cabo rosqueado tem cores distintas na tomada
do conector para melhor reconhecimento do PRETO para o modo de operação 1, 50 Hz ou
60 Hz, CINZA para o modo de operação 2, 100 Hz ou 120 Hz.
3.3 Ajuste da tensão de saída mínima e máxima
As unidades de controle foram ajustadas em fábrica por um drive de referência. Em casos
especiais, ou após modificações, pode vir a ser necessário um reajuste. Neste caso, o
seguinte deve ser observado:
A tensão de saída só pode ser medida com um drive oscilante
conectado.
O dispositivo de medição deve ser projetado para medição
efetiva real (True-RMS), outros dispositivos de medição
indicam valores aleatórios. O plugue de carga deve ser
conectado, pois do contrário a medição possivelmente
ocorrerá no modo de medição incorreto.
Como o ajuste da tensão de saída requer alimentação da tensão da rede elétrica, a seguinte
nota de segurança é muito importante.
PERIGO
Alimente a tensão de alimentação somente por meio de um
transformador de segurança. Realize as medições nas
salas/zonas permitidas para isso. Essa medição requer o
emprego de profissionais qualificados. Depois das medições,
o dispositivo de controle deve ser colocado de volta na
condição original, pois do contrário a liberação da série é
cessada.
É importante observar que os dispositivos de ajuste da tensão de saída são reativos entre si.
Isto é, com uma alteração na tensão máxima, a tensão mínima é ligeiramente alterada
também - e vice-versa. Isso possivelmente significa um ajuste repetido de ambos os
potenciômetros de ajuste.
NOTA
Page 31

3. Informações para iniciar
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 23
3.4 Comutação para uma tensão de rede elétrica diferente
A unidade de controle pode ser operada a 230 V, 50/60 Hz assim como a 115 V, 50/60 Hz,
mas deve, no entanto, ser comutada para essa tensão.
Troca de 230V para 115V:
Retire o plugue da tomada e abra o dispositivo do lado direito. Alterne o interruptor e feche
a lateral do dispositivo. Faça um teste. U MAX pode ter que ser reajustado.
(Consulte 4. Planta mostrando a posição dos elementos operacionais nas placas e 5.
Desenho em escala.)
3.5 Liberação da função por componentes externos
O ajuste padrão da unidade de controle faz com que o drive oscilante inicie quando o
interruptor de energia é ligado.
Se for preferido que a unidade de controle funcione no modo de operação liga-desliga, então
ela deve ser aberta — observando todas as medidas de precaução relacionadas acima — e o
jumper S1 reconectado.
Consulte 4. Planta mostrando a posição dos elementos operacionais nas placas e 5.
Desenho em escala.
Remova os plugues cegos da lateral do gabinete e instale um adaptador de cabo rosqueado
M16 com alívio de tensão; o cabo será alimentado através daqui para a liberação. A liberação
é obtida de dois modos possíveis:
Liberação por um contato
Esta solução simples e econômica funciona de tal modo que a unidade de controle seja
liberada ao fazer contato e o drive oscilante opera. A conexão é feita nos terminais 33 - 34.
Alguns pontos devem ser observados:
- A conexão é alimentada com a tensão da rede elétrica. O tipo e cor do cabo, os
regulamentos de isolação, o contato deve ser sem potencial.
- A partir de 2 m, o cabo deve ser blindado; a blindagem fica situada em um lado da
unidade de controle, no condutor de aterramento de proteção.
- O comprimento do cabo não deve exceder 5 metros.
- O cabo não pode ser instalado na vizinhança imediata de equipamento de comutação de
alta energia ou fortes campos de interferência.
3.6 Alteração no tempo da partida suave
A partida suave, o aumento da saída para o valor ajustado controlado por tempo, é uma
proteção eficaz para o drive oscilante contra impactos do magneto. Em drives oscilantes
pequenos, que iniciam com altos tempos de ciclo, o tempo padrão não é necessário em
nenhum caso, ele nem mesmo impede o fluxo da produção. No compensador SOFT START,
o tempo de execução pode ser ajustado. Como o gabinete também deve ser aberto para essa
alteração, as notas de segurança mencionadas acima devem ser observadas.
Page 32

4. Planta mostrando a posição dos elementos operacionais nas placas
24 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
4. Planta mostrando a posição dos elementos
operacionais nas placas
Ao substituir o fusível, o valor pré-ajustado de M 6,3 A deve
ser usado em qualquer caso. Um fusível com capacidade
nominal muito alta pode levar a avaria da unidade de
controle.
Liberação por sinal de tensão
A conexão é feita nos conectores 31 (GND) e 32 (+24 VCC). O drive inicia quando é
alimentado um sinal entre 10 e 30 volts de corrente contínua na polaridade correta. A entrada
é protegida contra polaridade incorreta. O uso de um acoplador óptico na unidade de
controle torna a entrada sem potencial e permite a instalação com cabos não blindados de
praticamente qualquer comprimento. Aqui interferências de energia muito altas devem ser
evitadas.
NOTA
Sinal
Comentário
S0
Interruptor
110 V – 230 V
Tensão elétrica
S1
Liberação externa
Page 33

5. Desenho em escala
Part Feeding 7.0 Hopper & Hopper Controller Rev.4 25
5. Desenho em escala
6. Diagrama de conexão
O jumper deve ser invertido para permitir a liberação
externa.
ATENÇÃO! Os conectores dos contatos de liberação estão
sob tensão!
A bacia alimentadora opera quando o sinal de liberação é
passado ou quando o contato de liberação é fechado.
Seleção da operação:
Conectores XS 1/3 -> 4 conectados
frequência da oscilação = o dobro da frequência da corrente
Conectores Xs 1/3 ->4 abertos, frequência da oscilação =
frequência da corrente
Page 34

6. Diagrama de conexão
26 Part Feeding 7.0 Hopper & Hopper Controller Rev.4
 Loading...
Loading...