

Page 1
Rev.6 EM204R4257F
ROBÔ SCARA
Série LS10-B
MANUAL DO MANIPULADOR
CPD-60411
Page 2

MANUAL DO MANIPULADOR
Série LS10-B Rev.6
Page 3
LS10-B Rev.6 i
ROBÔ SCARA
Manual do manipulador da Série LS10-B
Rev.6
Copyright © 2018-2020 SEIKO EPSON CORPORATION. Todos os direitos reservados.
Page 4

ii LS10-B Rev.6
PREFÁCIO
Obrigado por adquirir nossos produtos robóticos.
Este manual contém as informações necessárias para o uso correto do manipulador.
Leia cuidadosamente este manual e os outros manuais relacionados antes de instalar o
sistema robótico.
Mantenha sempre este manual à mão para fácil acesso.
GARANTIA
O manipulador e suas partes opcionais são entregues a nossos clientes somente após serem
submetidos aos mais rígidos controles de qualidade, testes e inspeções para certificar sua
conformidade com nossos altos padrões de desempenho.
Os defeitos do produto resultantes do manuseio ou operação normal serão reparados sem
custos durante o período de garantia normal. (Entre em contato com o fornecedor de sua
região para informações sobre o período de garantia).
No entanto, os clientes serão cobrados pelos reparos nos seguintes casos (mesmo se estes
ocorrerem durante o período de garantia):
1.
Avaria ou mal funcionamento causado por uso inadequado que não esteja descrito no
manual, ou uso descuidado.
2.
Defeitos causados por desmontagem não autorizada realizada pelo cliente.
3.
Avaria devido a ajustes ou tentativas de reparo inadequadas.
4.
Avaria causada por desastres naturais, tal como terremoto, enchente, etc.
Avisos, Cuidados, Uso:
1.
Se o manipulador ou o equipamento associado for utilizado fora das condições de uso e
especificações do produto descritas nos manuais, esta garantia fica sem efeito.
2.
Se não forem seguidos os AVISOS e CUIDADOS contidos neste manual, não poderemos
nos responsabilizar por qualquer mau funcionamento ou acidente, mesmo se o resultado
for ferimento ou morte.
3.
Não podemos prever todos os perigos e consequências possíveis. Portanto, este manual
não pode prevenir o usuário de todos os perigos possíveis.
Page 5

LS10-B Rev.6 iii
MARCAS REGISTRADAS
Microsoft, Windows e o logotipo Windows são marcas comerciais registradas ou marcas
comerciais da Microsoft Corporation nos Estados Unidos e/ou outros países. Outras
marcas e nomes de produtos são marcas comerciais ou marcas comerciais registradas dos
respectivos detentores.
AVISO
Nenhuma parte deste manual pode ser copiada ou reproduzida sem autorização.
O conteúdo deste manual está sujeito a alteração sem aviso.
Favor notificar-nos se encontrar algum erro neste manual ou se tiver algum comentário
relacionado ao seu conteúdo.
FABRICANTE
INFORMAÇÕES PARA CONTATO
As informações para contato são descritas em “FORNECEDORES” nas páginas iniciais do
seguinte manual:
Sistema robótico Segurança e instalação Leia este manual primeiro
Page 6
iv LS10-B Rev.6
Sobre o descarte das baterias
O símbolo da lixeira com um X sobre ela indicando descarte proibido que pode ser
encontrado em nosso produto indica que este produto e as baterias incorporadas não devem
ser descartados através do fluxo de resíduos domésticos normal. Para evitar os possíveis
danos para o meio ambiente ou a saúde humana, separe este produto e suas baterias de outros
resíduos para assegurar que eles possam ser reciclados de modo ambientalmente correto.
Para mais detalhes sobre as instalações de coleta, entre em contato com a agência
governamental local ou o distribuidor onde você adquiriu este produto. O uso dos símbolos
químicos Pb, Cd ou Hg indica que esses metais são utilizados na bateria.
Estas informações são aplicáveis somente aos clientes da União Europeia, de acordo com a
DIRETIVA 2006/66/EC DO PARLAMENTO E DO CONSELHO EUROPEU de 6 de
setembro de 2006 sobre baterias e acumuladores e resíduos de baterias e acumuladores, que
revoga a Diretiva 91/157/EEC, e a legislação que a transpõe e implementa nos vários
sistemas legais nacionais.
Para outros países, entre em contato com o governo local para investigar a possibilidade de
reciclar seu produto.
O procedimento de remoção/substituição da bateria é descrito nos seguintes manuais:
Manual do controlador seção Manutenção
Page 7
LS10-B Rev.6 v
Antes de ler este manual
Esta seção descreve o que é preciso saber antes de ler este manual.
Estrutura do sistema de controle
Os manipuladores das séries LS10-B podem ser utilizados com as seguintes combinações
de controladores e software.
Controlador: RC90-B
Software: EPSON RC+ 7.0 Ver.7.4.2 ou posterior
Ligar/Desligar o controlador
Quando você vir a instrução “Ligue/desligue o controlador” neste manual, certifique-se de
ligar/desligar todos os componentes de hardware. Para a composição do controlador,
consulte a tabela abaixo.
Formato dos motores
O formato dos motores utilizados para o manipulador que você está usando pode ser
diferente do formato dos motores descritos neste manual devido às especificações.
Configuração usando o software
Este manual contém os procedimentos de configuração usando o software. Eles são
marcados com o seguinte ícone.
Figuras neste manual
As figuras dos manipuladores indicados neste manual são basicamente o manipulador do
modelo padrão. A não ser que sejam fornecidas instruções especiais, as especificações do
modelo padrão e do modelo para sala limpa são as mesmas.
Imagens neste manual
As imagens e ilustrações do manipulador neste manual podem diferir do manipulador que
está sendo usado dependendo da data da remessa e das especificações.
EPSON
RC+
Page 8

vi LS10-B Rev.6
Page 9
ÍNDICE
LS10-B Rev.6 vii
Configuração e operação
1. Segurança 3
1.1 Convenções.............................................................................................. 3
1.2 Segurança do projeto e da instalação ..................................................... 4
1.2.1 Resistência da chaveta do fuso de esferas ................................. 5
1.3 Segurança da operação ........................................................................... 6
1.4 Parada de emergência ............................................................................. 8
1.5 Movimento em emergência sem energia de acionamento .................... 10
1.6 Configuração de ACCELS para movimento CP ..................................... 11
1.7 Etiquetas de advertência ........................................................................ 12
2. Especificações 14
2.1 Características dos manipuladores da série LS10-B............................. 14
2.2 Número do modelo ................................................................................. 15
2.3 Nomes das peças e dimensões externas .............................................. 16
2.3.1 Modelo padrão (LS10-B***S) ..................................................... 16
2.3.2 Modelo para sala limpa (LS10-B***C) ........................................ 18
2.4 Especificações ....................................................................................... 20
2.5 Como definir o modelo ........................................................................... 22
3. Ambientes e instalação 23
3.1 Condições ambientais ............................................................................ 23
3.2 Mesa base .............................................................................................. 24
3.3 Dimensões de montagem ...................................................................... 25
3.4 Desembalagem e transporte .................................................................. 26
3.5 Procedimento de instalação ................................................................... 27
3.5.1 Modelo padrão ............................................................................ 27
3.5.2 Modelo para sala limpa .............................................................. 28
3.6 Conexão dos cabos ................................................................................ 28
3.7 Fios e tubos pneumáticos para o usuário .............................................. 30
3.8 Mudança de local e armazenamento ..................................................... 31
3.8.1 Precauções para mudança de local e armazenamento ............ 31
3.8.2 Mudança de local ....................................................................... 32
4. Configuração dos atuadores da extremidade 33
4.1 Acoplamento do atuador da extremidade .............................................. 33
4.2 Acoplar câmeras e válvulas ................................................................... 34
4.3 Configurações de peso e inércia............................................................ 35
4.3.1 Configuração de WEIGHT.......................................................... 35
4.3.2 Configuração de INERTIA .......................................................... 37
4.4 Precauções para a aceleração/desaceleração automática da
Articulação3 ........................................................................................... 42
5. Faixa de movimento 43
5.1 Configuração da faixa de movimento pela faixa de pulsos ...................... 43
Page 10

ÍNDICE
viii LS10-B Rev.6
5.1.1 Faixa de pulsos máxima da Articulação 1 .................................. 44
5.1.2 Faixa de pulsos máxima da Articulação 2 .................................. 44
5.1.3 Faixa de pulsos máxima da Articulação 3 .................................. 45
5.1.4 Faixa de pulsos máxima da Articulação 4 .................................. 45
5.2 Configuração da faixa de movimento por batentes mecânicos ................ 46
5.2.1 Configuração dos batentes mecânicos das Articulações 1 e 2 ...... 47
5.2.2 Configuração do batente mecânico da Articulação 3 ................. 49
5.3 Configuração da faixa cartesiana (retangular) no sistema de
coordenadas XY do manipulador ........................................................... 51
5.4 Faixa de movimento padrão ................................................................... 52
Manutenção ............................................................................................ 55
Manutenção
1. Manutenção com segurança 57
2. Manutenção geral 58
2.1 Inspeção de manutenção ........................................................................ 58
2.1.1 Programação para inspeção de manutenção ............................. 58
2.1.2 Ponto de inspeção ...................................................................... 59
2.2 Reparo (Substituição de peças) ............................................................. 60
2.3 Engraxamento ......................................................................................... 62
2.4 Aperto de parafusos Allen ....................................................................... 63
2.5 Compatibilização de origens ................................................................... 63
2.6 Layout das peças de manutenção .......................................................... 64
3. Tampas 65
3.1 Tampa superior do braço ........................................................................ 66
3.2 Tampa inferior do braço .......................................................................... 67
3.3 Chapa de conectores .............................................................................. 67
3.4 Sub-chapa de conectores ....................................................................... 69
3.5 Chapa do usuário .................................................................................. 70
4. Cabo 71
4.1 Substituição da unidade de cabos .......................................................... 72
4.2 Diagramas de fiação ............................................................................... 77
4.2.1 Cabo de sinal ............................................................................. 77
4.2.2 Cabo de energia .......................................................................... 78
4.2.3 Cabo do usuário .......................................................................... 79
4.2.4 Cor dos cabos ............................................................................. 79
4.3 Substituição do cabo M/C ....................................................................... 80
5. Articulação 1 85
5.1 Substituição do motor da Articulação 1 .................................................. 86
5.2 Substituição da unidade de engrenagens de redução da Articulação 1 ..... 90
Page 11

ÍNDICE
LS10-B Rev.6 ix
6. Articulação 2 93
6.1 Substituição do motor da Articulação 2 .................................................. 94
6.2 Substituição da unidade de engrenagens de redução da Articulação 2 .... 98
7. Articulação 3 102
7.1 Substituição do motor da Articulação 3 ................................................ 103
7.2 Substituição da correia dentada........................................................... 107
7.3 Substituição do freio .............................................................................. 111
7.4 Verificação da tensão da correia dentada (Correia Z)............................. 115
8. Articulação 4 116
8.1 Substituição do motor da Articulação 4 ................................................. 117
8.2 Substituição da correia dentada........................................................... 121
8.2.1 Correia U2 ................................................................................ 122
8.2.2 Correia U1 ................................................................................ 128
8.3 Substituição do freio ............................................................................. 132
8.4 Verificação da tensão da correia dentada (Correia U1, U2) ................ 135
9. Fole 136
10. Unidade da chaveta do fuso de esferas 138
10.1 Engraxamento da unidade de chaveta do fuso de esferas ............... 138
10.1.1 Modelo padrão........................................................................ 139
10.1.2 Modelo para sala limpa .......................................................... 140
10.2 Substituição da unidade da chaveta do fuso de esferas ................... 141
11. Placas 144
11.1 Substituição da placa do conversor ................................................. 145
11.2 Substituição da placa de controle ...................................................... 147
12. Lâmpada LED 148
13. Calibração 149
13.1 Sobre a calibração ............................................................................. 149
13.2 Procedimento de calibração ............................................................... 150
13.3 Calibração da articulação 2 com precisão ......................................... 160
13.4 Procedimento de calibração sem usar o assistente de calibração ... 162
14. Lista de peças de manutenção 166
Page 12

ÍNDICE
x LS10-B Rev.6
Page 13

Configuração e operação
Este volume contém informações para a instalação e operação dos manipuladores da série LS10-B.
Leia detalhadamente este volume antes de configurar e operar os manipuladores.
Page 14

Page 15
Configuração e operação 1. Segurança
LS10-B Rev.6 3
1. Segurança
A instalação e o transporte dos manipuladores e do equipamento robótico deve ser feita por
pessoal qualificado e em conformidade com todos os códigos nacionais e locais. Leia este
manual e os outros manuais relacionados antes de instalar o sistema robótico ou antes de
conectar os cabos.
Mantenha sempre este manual à mão para fácil acesso.
1.1 Convenções
Importantes considerações de segurança são indicadas em todo o manual pelos seguintes
símbolos. Leia todas as descrições mostradas com cada símbolo.
ATENÇÃO
Este símbolo indica que existe um perigo de possível lesão séria
ou morte se as instruções associadas não forem seguidas
corretamente.
ATENÇÃO
Este símbolo indica que existe o perigo de possível ferimento
sério ou morte causado por choque elétrico se as instruções
associadas não forem seguidas corretamente.
CUIDADO
Este aviso indica que existe o perigo de possível ferimento nas
pessoas ou dano físico no equipamento e nas instalações se as
instruções associadas não forem seguidas corretamente.
Page 16
Configuração e operação 1. Segurança
4 LS10-B Rev.6
1.2 Segurança do projeto e da instalação
Somente pessoal treinado deve projetar e instalar o sistema robótico. Pessoal
treinado é definido como as pessoas que tiveram treinamento em sistemas
robóticos e em manutenção mantido pelo fabricante, o fornecedor ou a empresa
representante local, ou aquelas que entendem profundamente os manuais e
tenham o mesmo nível de conhecimento e aptidão que aquelas que completaram
os cursos de treinamento.
Para garantir a segurança, deve ser instalado um sistema de proteção de
segurança para o sistema robótico. Para detalhes sobre a proteção de segurança,
consulte Precauções de instalação e de projeto no capítulo Segurança do Guia do
usuário do EPSON RC+.
Os itens a seguir são precauções de segurança para o pessoal de desenvolvimento
do projeto:
ATENÇÃO
■
O pessoal que projeta e/ou constrói o sistema robótico com este produto deve ler
o capítulo Segurança no Guia do usuário do EPSON RC+ para entender os
requisitos de segurança antes de projetar e/ou construir o sistema robótico.
Projetar e/ou construir o sistema robótico sem entender os requisitos de
segurança é extremamente perigoso, pode resultar em sérias lesões corporais
e/ou danos graves ao equipamento do sistema robótico e causar sérios
problemas de segurança.
■
O manipulador e o controlador devem ser utilizados dentro das condições
ambientais descritas em seus respectivos manuais. Esse produto foi projetado e
fabricado estritamente para uso em um ambiente interno normal. Usar o produto
em um ambiente que exceda as condições ambientais especificadas pode não
só encurtar a vida útil do produto, mas também causar sérios problemas de
segurança.
■
O sistema robótico deve ser utilizado dentro dos requisitos de instalação descritos
nos manuais. Usar o sistema robótico fora dos requisitos de instalação pode não
só encurtar a vida útil do produto, mas também causar sérios problemas de
segurança.
Precauções adicionais para a instalação são mencionados no capítulo
Configuração e operação: 3. Ambientes e instalação. Leia esse capítulo
cuidadosamente para entender os procedimentos de instalação seguros antes de
instalar o robô e o equipamento robótico.
Page 17
Configuração e operação 1. Segurança
LS10-B Rev.6 5
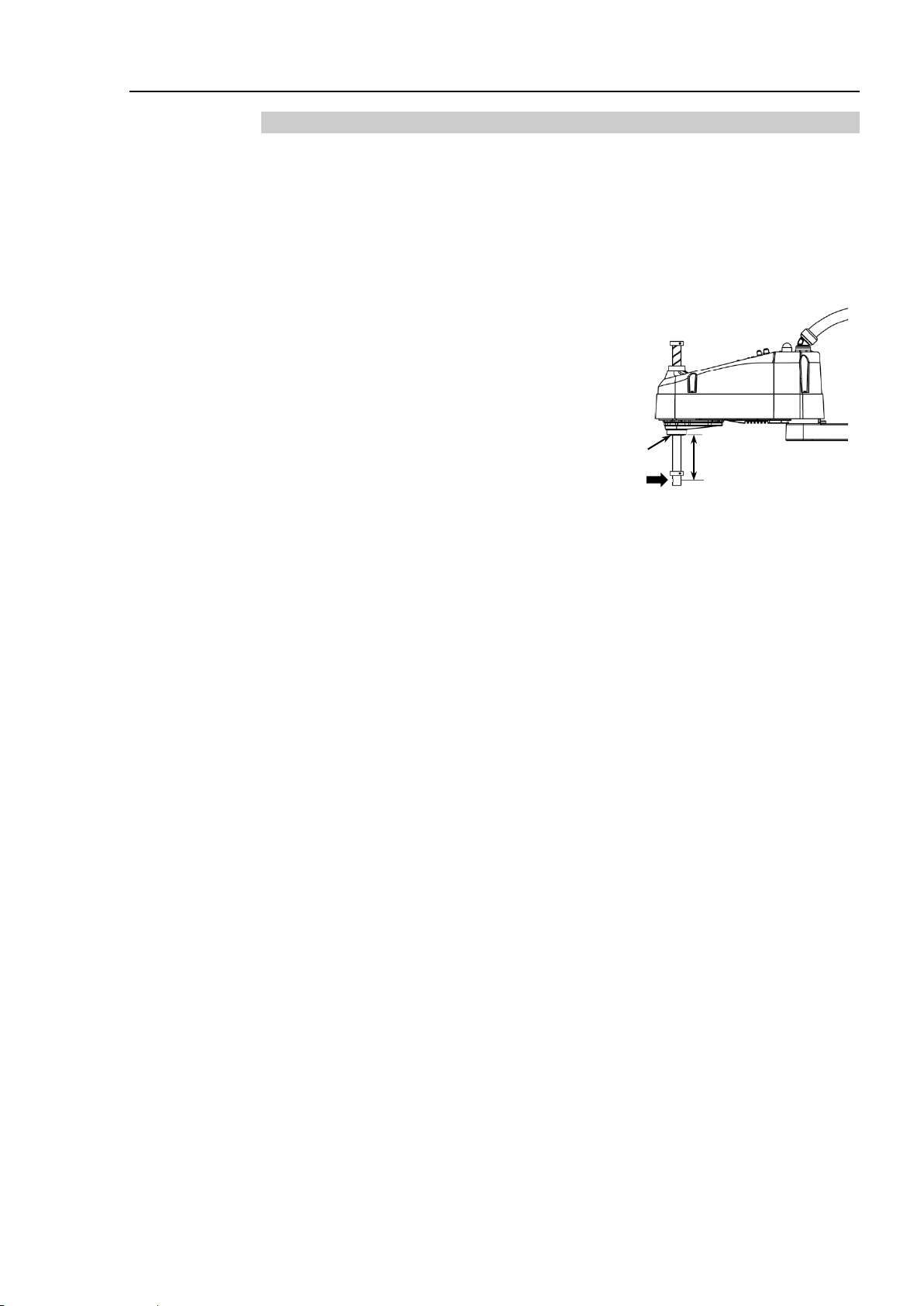
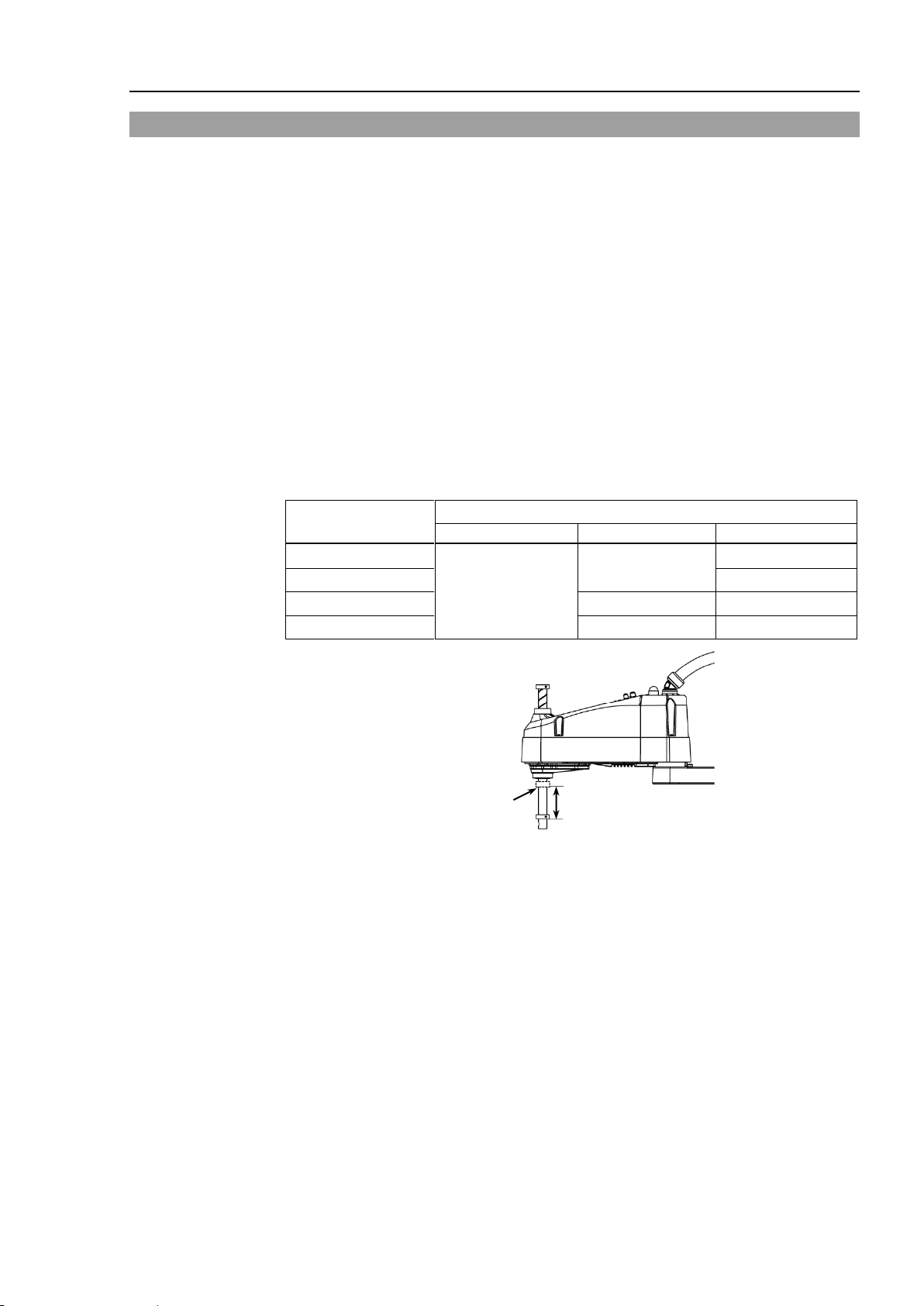
1.2.1 Resistência da chaveta do fuso de esferas
Se uma carga excedente ao valor permitido for aplicada à chaveta do fuso de esferas, ela
poderá não funcionar corretamente devido a deformação ou ruptura do eixo. Se a chaveta do
fuso de esferas tiver uma carga aplicada que excede o valor permitido, será necessário
substituir unidade de chaveta do fuso de esferas.
As cargas aplicadas permitidas diferem dependendo da distância onde a carga é aplicada.
Para calcular a carga permitida, veja a fórmula de cálculo abaixo.
[Momento fletor permitido]
M=50,000 N∙mm
[Momento]
M=F∙L=100∙200=20.000 N∙mm
Exemplo:
Se uma carga de 100 N (10,2kgf)
é aplicada a 200 mm da
extremidade da porca da chaveta
Extremidade
da porca da
chaveta
F
L
Page 18
Configuração e operação 1. Segurança
6 LS10-B Rev.6
1.3 Segurança da operação
Os itens seguintes são precauções de segurança para o pessoal de operação
qualificado:
ATENÇÃO
■
Leia cuidadosamente o item Requisitos relacionados à segurança no capítulo
Segurança do manual Segurança e instalação antes de operar o sistema robótico.
Operar o sistema robótico sem entender os requisitos de segurança é
extremamente perigoso e pode resultar em sérias lesões corporais e/ou danos
graves ao equipamento do sistema robótico.
■
Não entre na área de operação do manipulador enquanto a energia para o
sistema robótico estiver ligada. Entrar na área de operação com a energia ligada
é extremamente perigoso e pode causar sérios problemas de segurança, pois o
manipulador pode se mover mesmo se parecer estar parado.
■
Antes de operar o sistema robótico, assegure-se de que não haja ninguém dentro
da área de proteção de segurança. O sistema robótico pode ser operado no modo
para ensinar mesmo quando houver alguém dentro da área de proteção de
segurança.
O movimento do manipulador é sempre no estado restrito (velocidade baixa e
potência baixa) para garantir a segurança do operador. No entanto, operar o
sistema robótico enquanto alguém está dentro da área de proteção de segurança
é extremamente perigoso e pode causar sérios problemas de segurança caso o
manipulador se mova inesperadamente.
■
Pressione imediatamente o interruptor de parada de emergência sempre que o
manipulador se mover de modo anormal enquanto o sistema robótico estiver
sendo operado. Continuar a operação enquanto o manipulador se move de modo
anormal é extremamente perigoso e pode resultar em sérias lesões corporais
e/ou danos graves no sistema robótico.
ATENÇÃO
■
Para desligar a energia do sistema robótico, desconecte o plugue de alimentação
da fonte de energia. Conecte o cabo de energia de CA em uma tomada de
energia.
NÃO o conecte diretamente à fonte de energia da fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o controlador
e o equipamento relacionado e então desconecte o plugue de alimentação da
fonte de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
■
Não conecte ou desconecte os conectores do motor enquanto a energia para o
sistema robótico estiver ligada. Conectar ou desconectar os conectores do motor
com a energia ligada é extremamente perigoso e pode resultar em sérias lesões
corporais, pois o manipulador pode se mover de modo anormal, e também pode
resultar em choque elétrico e/ou mau funcionamento no sistema robótico.
Page 19
Configuração e operação 1. Segurança
LS10-B Rev.6 7
CUIDADO
■
Sempre que possível, somente uma pessoa deverá operar o sistema robótico. Se
for necessário operar o sistema robótico com mais de uma pessoa, assegure-se
de que todo o pessoal envolvido comunique aos outros o que está fazendo e tome
as precauções necessárias.
■
Articulação 1, 2 e 4:
Se as articulações forem operadas repetidamente com o ângulo de operação
menor do que 5 graus, elas podem ficar danificadas prematuramente pois é
provável que os mancais causem redução da película de óleo nessa situação.
Para evitar a avaria prematura, mova as articulações em mais de 50 graus por
cerca de cinco a dez vezes por dia.
Articulação 3:
Se o movimento para cima e para baixo da mão for menor que LS10-B: 50 mm,
mova a articulação para a metade do curso máximo por cinco a dez vezes por
dia.
■
Pode ocorrer oscilação (ressonância) continuamente no movimento do
manipulador em baixa velocidade (velocidade: aprox. 5 a 20%), dependendo da
combinação da orientação do Braço e da carga no atuador da extremidade. A
oscilação resulta da frequência da oscilação natural do braço e pode ser
controlada com as medidas a seguir.
Mudando a velocidade do manipulador
Mudando os pontos de ensino
Mudando a carga do atuador da extremidade
Page 20

Configuração e operação 1. Segurança
8 LS10-B Rev.6
1.4 Parada de emergência
Se o manipulador se mover de modo anormal durante a operação, pressione imediatamente
o interruptor de parada de emergência. Isso interrompe o fornecimento de energia para o
motor e paralisa o braço em uma distância mais curta com o freio dinâmico e o freio
mecânico.
Não pressione o interruptor de parada de emergência desnecessariamente enquanto o
manipulador estiver operando. Pressionar o interruptor durante a operação faz os freios
funcionarem. Isto encurtará a vida útil dos freios devido ao desgaste das placas de fricção.
Ciclo de vida normal dos freios: Cerca de 2 anos (quando o freio é usado 100 vezes/dia)
Para colocar o sistema no modo de emergência durante a operação normal, pressione o
interruptor de parada de emergência quando o manipulador não estiver se movendo.
Consulte o manual do controlador para instruções de como conectar o circuito do interruptor
de parada de emergência.
Não desligue o controlador enquanto o manipulador estiver operando.
Se você tentar parar o manipulador em situações de emergência tal como em “Proteção de
segurança aberta”, certifique-se de pará-lo usando o interruptor de parada de emergência do
controlador.
Se o manipulador for parado desligando o controlador enquanto estiver operando, os
seguintes problemas podem:
Redução da vida útil e danos na unidade de engrenagens de redução
Diferença na posição das articulações
Além disso, se ocorreu desligamento forçado do controlador por blecautes e ocorrências do
tipo enquanto o manipulador estava operando, certifique-se de verificar os seguintes pontos
após a restauração da energia:
Se a engrenagem de redução está danificada
Se as articulações estão em suas posições corretas
Se houver uma diferença na posição, faça a calibração consultando Manutenção 13.
Calibração neste manual.
Antes de usar o interruptor de parada de emergência, esteja ciente do seguinte:
- O interruptor de parada de emergência (E-STOP) deve ser usado para parar o
manipulador somente em caso de emergências.
- Para parar o manipulador que está operando o programa, exceto em uma emergência,
use os comandos Pause (interromper) ou STOP (parar o programa).
Os comandos Pause e STOP não desligam os motores. Portanto, o freio não funciona.
- Para o sistema de proteção de segurança, não use o circuito de parada de emergência.
Para detalhes sobre o sistema de proteção de segurança, consulte os seguintes manuais.
Guia do Usuário do EPSON RC+
2. Segurança - Precauções de instalação e projeto - Sistema de proteção de
segurança
Segurança e instalação
2.6 Conexão ao conector de EMERGENCY
Para verificar problemas com os freios, consulte os seguintes manuais.
Manual do manipulador Manutenção
2.1.2 Ponto de inspeção - Inspeção com a energia ligada
(Manipulador operando)
Segurança e instalação
5.1.1 Manipulador - Inspeção com a energia ligada
(Manipulador operando)
Page 21
Configuração e operação 1. Segurança
LS10-B Rev.6 9
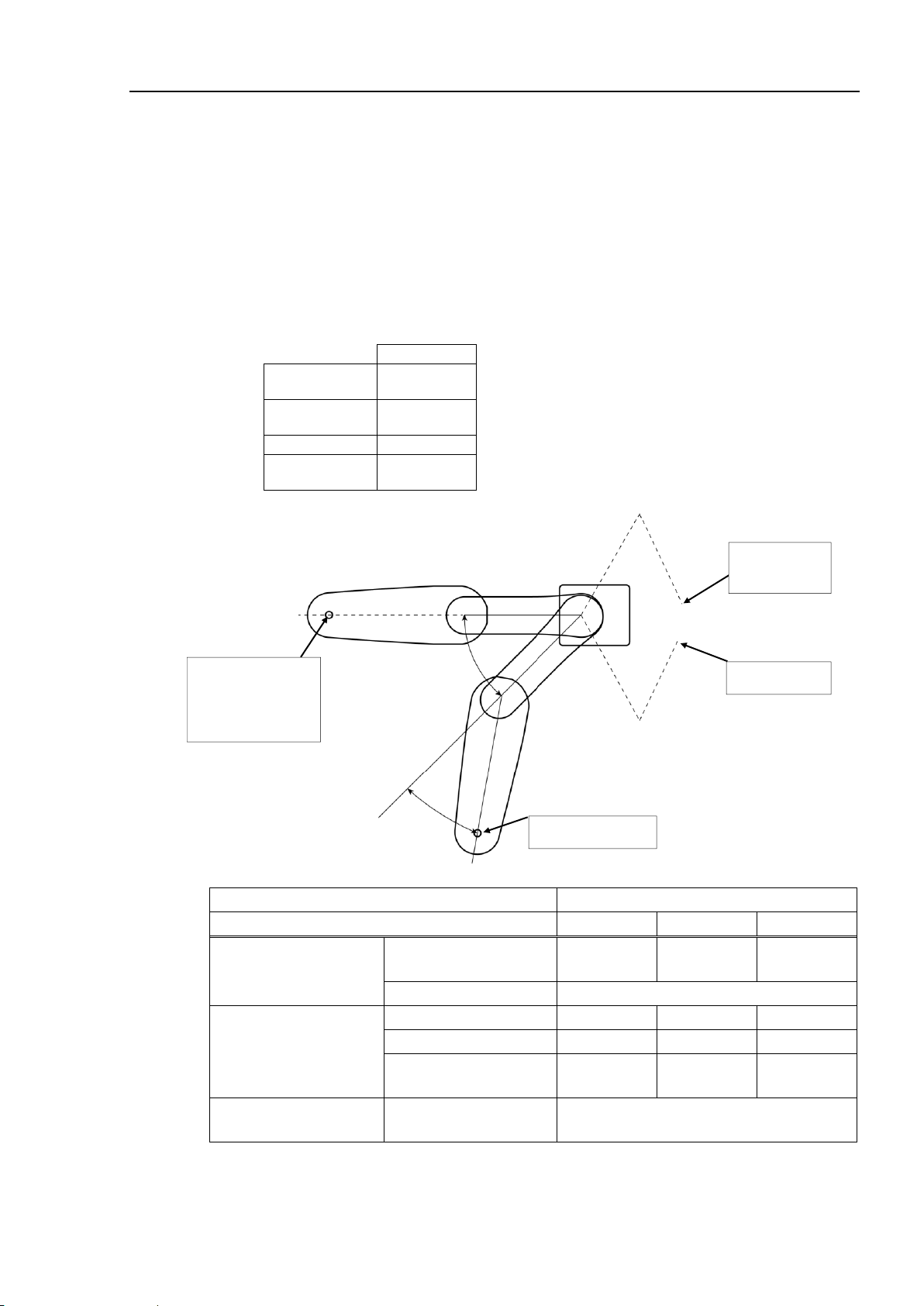
Distância do movimento livre em emergência
A operação do manipulador não pode parar imediatamente após o interruptor de parada de
emergência ser pressionado.
O tempo/ângulo/distância do movimento livre do manipulador é mostrado abaixo. No
entanto, lembre-se de que os valores variam de acordo com as condições seguintes.
Peso do atuador da extremidade Configuração do peso
Peso da peça de trabalho Configuração da velocidade
Posição operacional Configuração da aceleração
Condições para a medição
LS10-B****
Configuração da
aceleração
100
Configuração da
velocidade
100
Carga [kg]
10
Configuração do
peso
10
Articulação 1
Ponto de parada
Ponto onde o
sinal de parada
de emergência foi
inserido
Ponto alvo
Ponto inicial
da operação
Articulação 2
Controlador
RC90-B
Manipulador
LS10-B60**
LS10-B70**
LS10-B80**
Tempo do movimento livre
Articulação 1 +
Articulação 2 [seg.]
0.7
0.9
0.7
Articulação 3 [seg.]
0.2
Ângulo do movimento livre
Articulação 1 [°]
35
75
65
Articulação 2 [°]
115
105
55
Articulação 1 +
Articulação 2 [°]
120
135
90
Distância do movimento
livre
Articulação 3 [mm]
50
Page 22
Configuração e operação 1. Segurança
10 LS10-B Rev.6
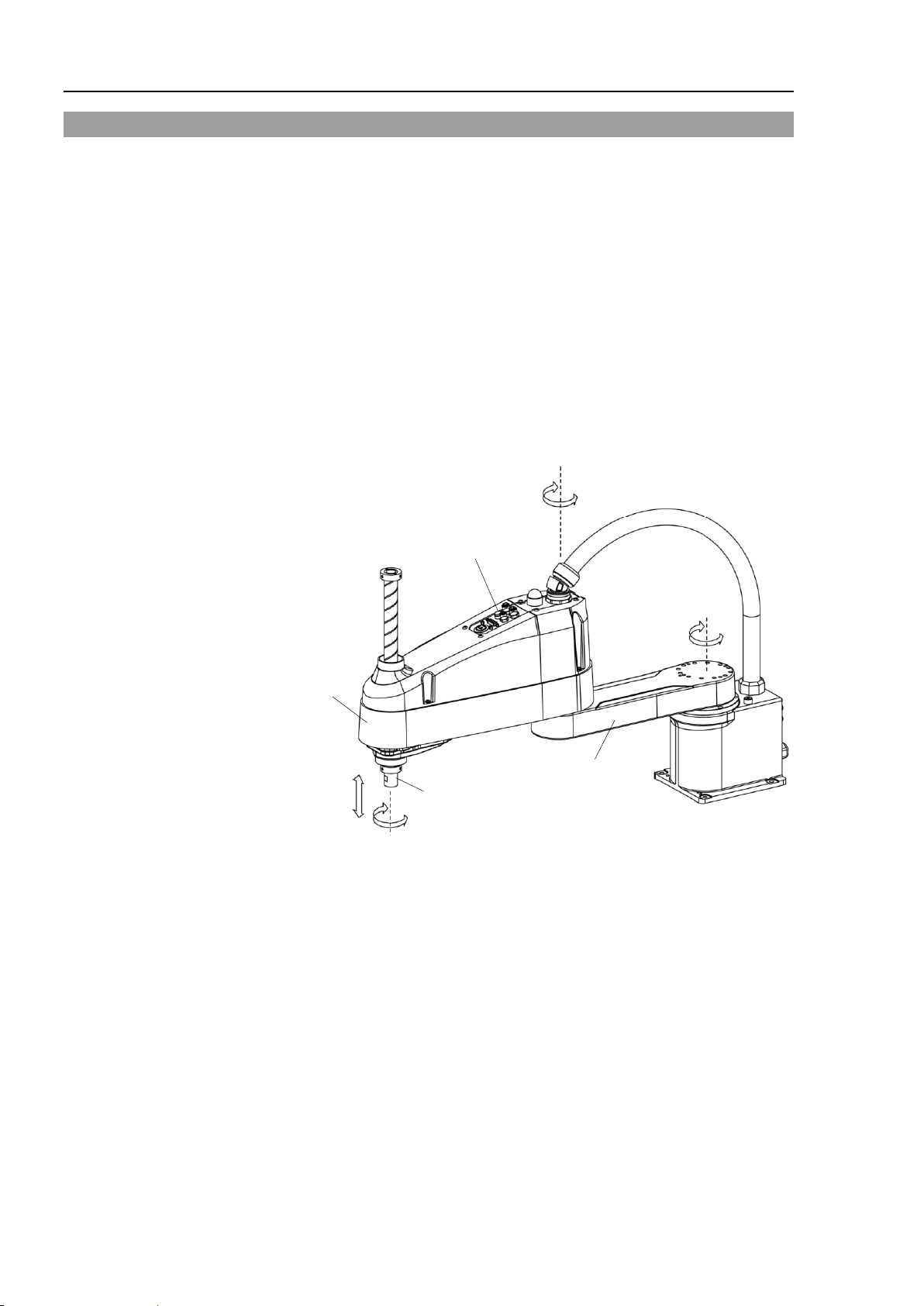
1.5 Movimento em emergência sem energia de acionamento
Quando o sistema é colocado no modo de emergência, empurre o braço ou a articulação do
manipulador manualmente como é mostrado abaixo:
Braço 1 Empurre o braço manualmente.
Braço 2 Empurre o braço manualmente.
Articulação 3 A articulação não pode ser movida para cima/para baixo
manualmente até que o freio eletromagnético aplicado à articulação
seja liberado. Mova a articulação para cima/para baixo enquanto
pressiona o interruptor de liberação do freio.
Articulação 4 O eixo não pode ser girado manualmente até que o freio
eletromagnético aplicado ao eixo seja liberado. Mova o eixo
enquanto pressiona o interruptor de liberação do freio.
Interruptor de liberação do
freio das Articulações 3, 4
Articulação 1
(rotative)
Articulação 2
(rotativa)
Articulação 3
(para cima e
para baixo)
Articulação 4
(rotativa)
Braço 1
Braço 2
+
−
+ − + − +
−
Shaft
(Figura: LS10-B702S)
O interruptor de liberação do freio afeta as Articulações 3 e 4. Quando o interruptor de liberação
do freio é pressionado no modo de emergência, os freios das Articulações 3 e 4 são liberados
simultaneamente.
Tenha cuidado com a queda e rotação do eixo enquanto o interruptor de liberação do freio está
sendo pressionado porque ele pode ser baixado com o peso do atuador da extremidade.
NOTA
Page 23
Configuração e operação 1. Segurança
LS10-B Rev.6 11
1.6 Configuração de ACCELS para movimento CP
Ao operar o manipulador no movimento CP:
A aceleração/desaceleração pode ser ajustada automaticamente dependendo da carga da
ponta e a altura do eixo Z para evitar danos à chaveta do fuso de esferas.
A correção de ACCELS é feita pela configuração WEIGHT. Se a configuração do peso não
for adequada para a carga da ponta, o seguinte problema ocorre.
- Diminuição da vida útil e danos à chaveta do fuso de esferas
Exemplo:
O valor máximo de ACCELS é corrigido automaticamente dependendo da altura do eixo
Z.
O que segue é um exemplo de valores que são corrigidos por 100 mm (altura do eixo Z).
Valores máximos de correção de ACCELS pela altura do eixo Z e a carga da
ponta
Altura do eixo Z
(mm)
Carga da ponta
3kg
6kg
10kg
Z = 0
25000 ou menos
25000 ou menos
25000 ou menos
Z = −100
18000 ou menos
Z = −200
18000 ou menos
11000 ou menos
Z = −300
13000 ou menos
7500 ou menos
Z
Altura do eixo Z 0
(Posição de
origem)
Se o manipulador for operado em movimento CP com os valores configurados errados, não
deixe de verificar o seguinte.
- Se o eixo da chaveta do fuso de esferas está deformado ou torto
NOTA
Page 24
Configuração e operação 1. Segurança
12 LS10-B Rev.6
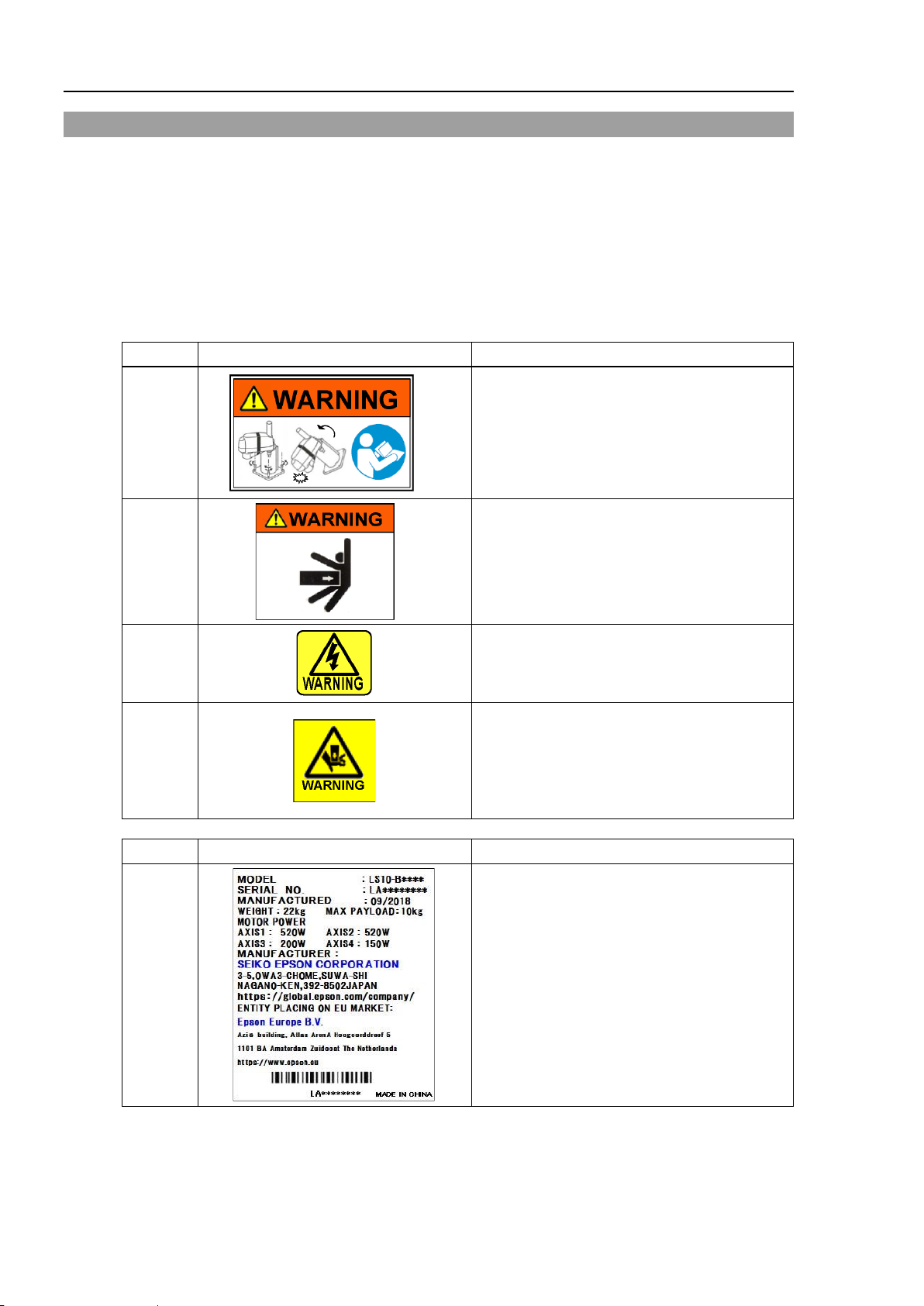
1.7 Etiquetas de advertência
O manipulador tem as seguintes etiquetas de advertência.
As etiquetas de advertência são afixadas ao redor dos locais onde existem perigos
específicos.
Não deixe de seguir as descrições e avisos contidos nas etiquetas para operar e manter o
manipulador com segurança.
Não rasgue, danifique ou remova as etiquetas de advertência. Tenha extremo cuidado ao
manusear as peças ou unidades às quais as seguintes etiquetas de advertência estão afixadas,
bem como nas áreas próximas.
Local
Etiqueta de advertência
NOTA
A
Antes de afrouxar os parafusos de montagem da
base, segure o braço e prenda-o firmemente
com uma faixa para evitar que as mãos ou os
dedos sejam prensados no manipulador.
B
Não entre na área de operação enquanto o
manipulador estiver se movimentando. O braço
do robô pode colidir com o operador. Isso é
extremamente perigoso e pode resultar em
sérios problemas de segurança.
C
Existem voltagens perigosas enquanto o
manipulador está ligado. Para evitar choques
elétricos, não toque em quaisquer peças
elétricas internas.
D
Você pode prender a mão ou os dedos entre os
eixos e tampas ao aproximar suas mãos de
peças móveis.
* Os manipuladores com foles não têm esta
etiqueta pois não há perigo de suas mãos ou
dedos serem presos.
Local
Etiqueta de identificação
NOTA
E
Número de série do manipulador
Page 25
Configuração e operação 1. Segurança
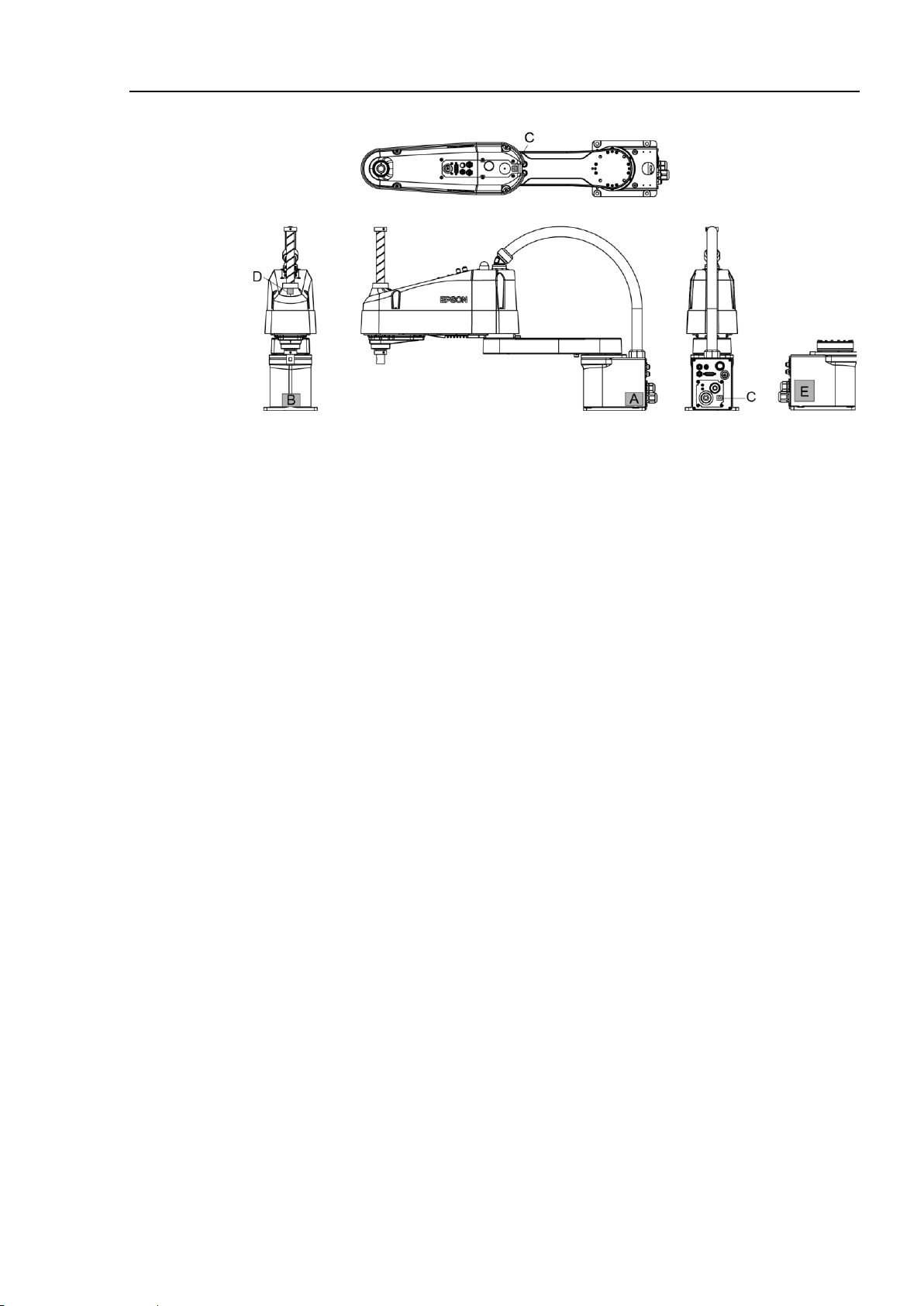
LS10-B Rev.6 13
LS10-B
(Figura: LS10-B702S)
Page 26

Configuração e operação 2. Especificações
14 LS10-B Rev.6
2. Especificações
2.1 Características dos manipuladores da série LS10-B
Os manipuladores da série LS10-B são manipuladores avançados que buscam alta
velocidade e alto desempenho de custos. As características dos manipuladores da série
LS10-B são as seguintes:
Grande capacidade
Ele suporta momento permitido do eixo U de até 0.30 kg·m2.
Manuseia cargas grandes com estabilidade através do controle otimizado com base em
cada carga.
Melhoramento do ritmo de produção por unidade devido ao movimento em alta
velocidade
Aprimora o ritmo de produção por unidade dos movimentos em longa distâncias
reajustando a velocidade mais alta.
Melhora o ritmo de produção por unidade de movimentos delicados pela velocidade
aceleração/desaceleração otimizada para cada carga útil e a tecnologia de parada curta.
É equipado como padrão com o conector Ethernet para o cabo da câmera
É equipado com conector Ethernet no braço 2 e na base do manipulador como padrão.
Mais fácil para equipar uma câmera (opcional: Vision Guide) que nos modelos
convencionais.
Simplifica a conexão e desconexão do cabo M/C
Conecta o cabo M/C e o cabo dentro do manipulador com conector.
Fácil de conectar e desconectar o cabo M/C e mais fácil de transportar o manipulador
que os modelos convencionais.
Page 27
Configuração e operação 2. Especificações
LS10-B Rev.6 15
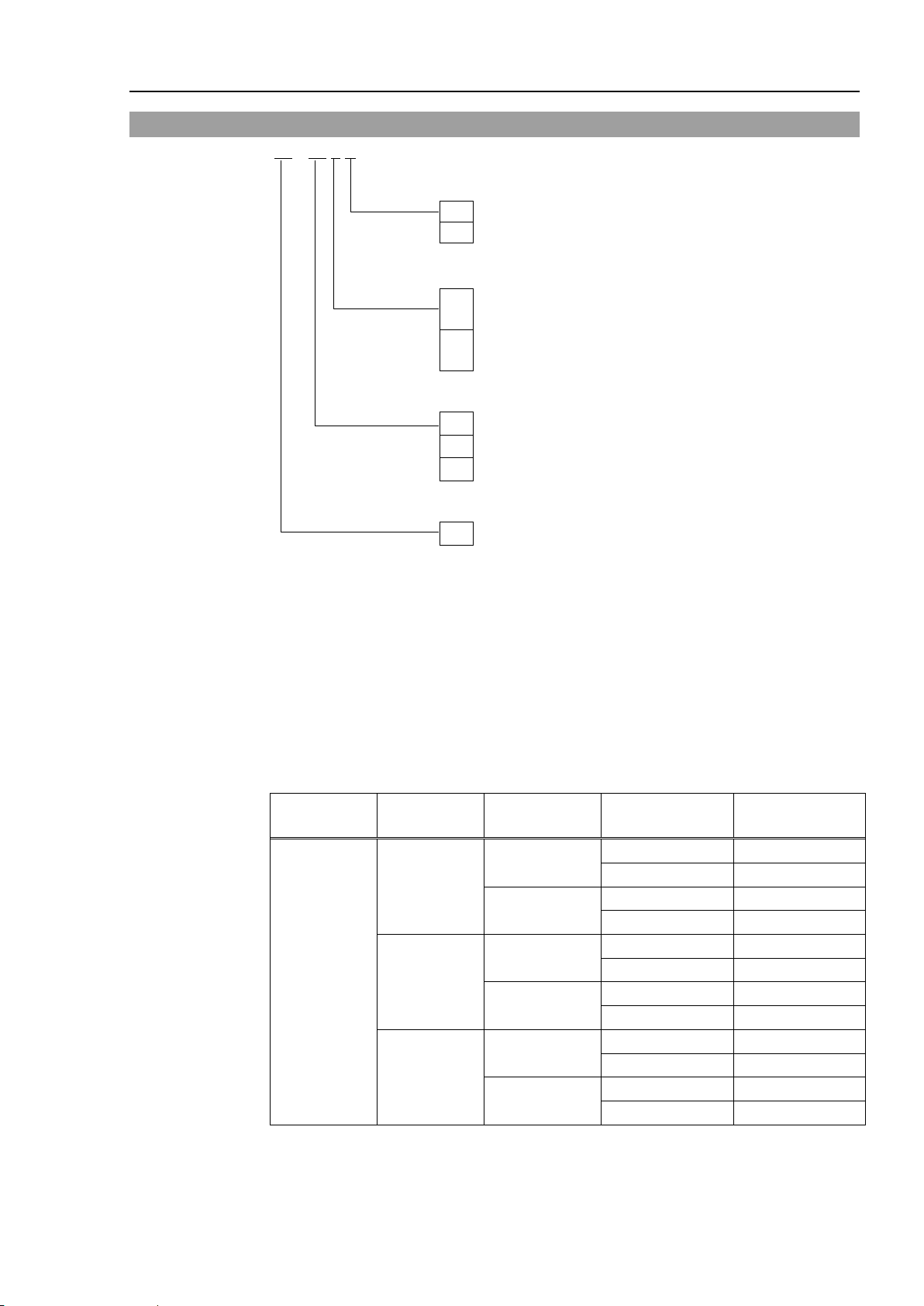
2.2 Número do modelo
LS10-B60 2 S
Ambiente
S
Padrão
C
: Para sala limpa
Curso da Articulação 3
2
: 200 mm : Modelo padrão
: 170 mm : Modelo para sala limpa (com fole)
3
: 300 mm : Modelo padrão
: 270 mm : Modelo para sala limpa (com fole)
Comprimento do braço
60
: 600 mm
70
: 700 mm
80
: 800 mm
Carga útil
10
: 10 kg
Ambiente
Modelo para sala limpa
Este modelo tem recursos adicionais que reduzem a poeira emitida pelo manipulador
para permitir o uso em um ambiente de sala limpa.
Para detalhes sobre as especificações, consulte Configuração e operação:
2.4 Especificações.
Modelo
Carga útil
Compriment
o do braço
Ambiente
Curso da
Articulação 3
Número do
modelo
10 kg
600 mm
Padrão
200 mm
LS10-B602S
300 mm
LS10-B603S
Para sala limpa
170 mm
LS10-B602C
270 mm
LS10-B603C
700 mm
Padrão
200 mm
LS10-B702S
300 mm
LS10-B703S
Para sala limpa
170 mm
LS10-B702C
270 mm
LS10-B703C
800 mm
Padrão
200 mm
LS10-B802S
300 mm
LS10-B803S
Para sala limpa
170 mm
LS10-B802C
270 mm
LS10-B803C
Page 28
Configuração e operação 2. Especificações
16 LS10-B Rev.6
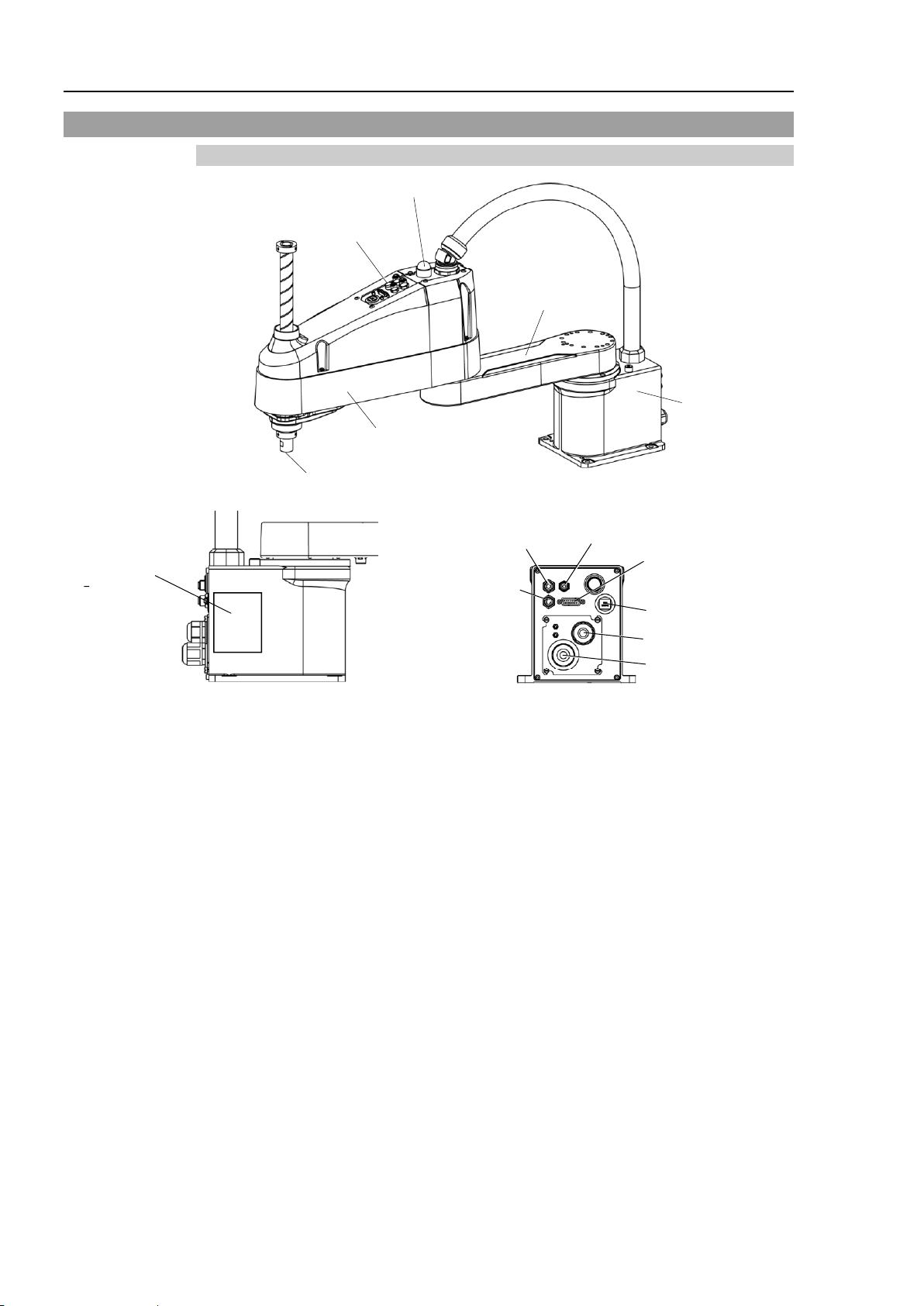
2.3 Nomes das peças e dimensões externas
2.3.1 Modelo padrão (LS10-B***S)
Interruptor de parada de
emergência das articulações 3, 4
Braço 1
Braço 2
Base
Eixo
Lâmpada LED
Etiqueta de
identificação
(N
o
de série
do manipulador)
Cabo de energia
Cabo de sinal
Encaixe (azul)
para tubo pneumático de ø6 mm
Encaixe (azul)
para tubo pneumático
de ø6 mm
Encaixe (branco)
para tubo pneumático
de ø6 mm
Conector do usuário
(Conector D-sub de
15 pinos)
Conector Ethernet
- O interruptor de liberação do freio afeta as Articulações 3 e 4. Quando o interruptor de
liberação do freio é pressionado no modo de emergência, os freios das Articulações 3 e
4 são liberados simultaneamente.
- Quando a lâmpada LED está acesa, está sendo aplicada corrente ao manipulador.
Executar qualquer trabalho de substituição com a alimentação de energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou funcionamento incorreto
do sistema robótico. Assegure-se de desligar a energia do controlador antes do trabalho
de manutenção.
NOTA
Page 29
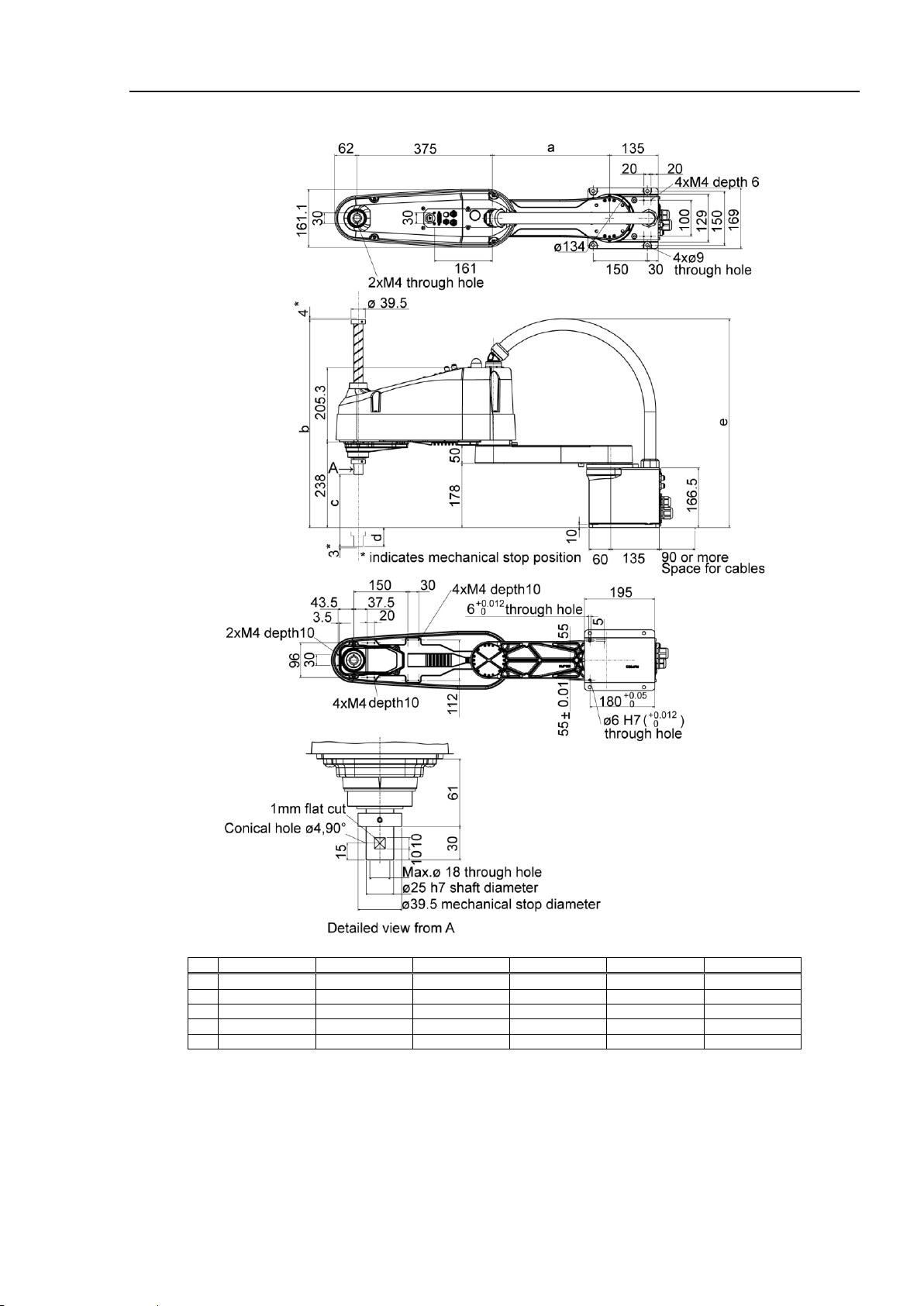
Configuração e operação 2. Especificações
LS10-B Rev.6 17
LS10-B***S (Modelo padrão)
LS10-B602S
LS10-B702S
LS10-B802S
LS10-B603S
LS10-B703S
LS10-B803S
a
225
325
425
225
325
425 b 577
577
577
677
677
677 c 200
200
200
300
300
300 d 53
53
53
153
153
153 e 565
580
580
565
580
580
Page 30
Configuração e operação 2. Especificações
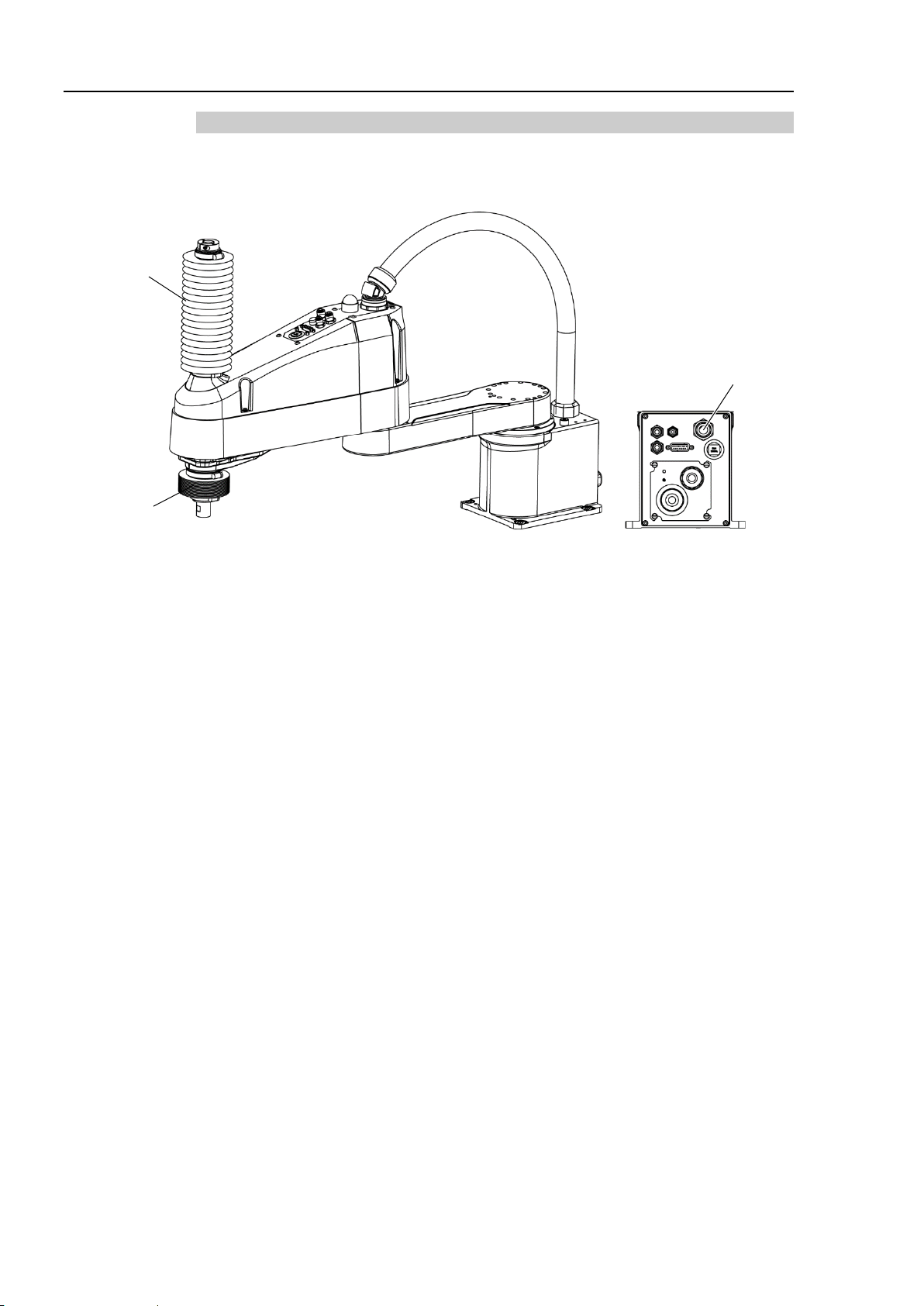
18 LS10-B Rev.6
2.3.2 Modelo para sala limpa (LS10-B***C)
As figuras seguintes mostram as peças e especificações adicionais para o modelo para sala
limpa comparado na aparência com o modelo padrão.
Fole superior
Fole inferior
Porta de exaustão
Page 31

Configuração e operação 2. Especificações
LS10-B Rev.6 19
LS10-B***C (Modelo para sala limpa)
LS10-B602C
LS10-B702C
LS10-B802C
LS10-B603C
LS10-B703C
LS10-B803C
a
225
325
425
225
325
425 b 627
627
627
727
727
727 c 170
170
170
270
270
270 d 53
53
53
153
153
153 e 565
580
580
565
580
580
Page 32

Configuração e operação 2. Especificações
20 LS10-B Rev.6
2.4 Especificações
Item
LS10-B60**
LS10-B70**
LS10-B80**
Comprimento do braço
Braço 1 + 2
600 mm
700 mm
800 mm
Braço 1
225 mm
325 mm
425 mm
Braço 2
375 mm
Velocidade de operação
máxima *1
Articulações 1 + 2
9100 mm/s
9800 mm/s
10500 mm/s
Articulação 3
1100 mm/s
Articulação 4
2700 °/s
Repetibilidade
Articulações 1 + 2
0.02 mm
0.025 mm
Articulação 3
0.01 mm
Articulação 4
0,01 °
Carga útil (Carga)
Nominal
5 kg
Máx.
10 kg
Momento de inércia
admissível na
Articulação 4 *2
Nominal
0,02 kg·m
2
Máx.
0,3 kg·m2
Resolução
Articulação 1
0,000275 °/pulso
Articulação 2
0,000439 °/pulso
Articulação 3
0,000740 mm/pulso
Articulação 4
0,001674 °/pulso
Mão
Diâmetro do eixo
ø 25 mm
Furo passante
ø 18 mm
Furo de montagem
150 150 mm
4-M8
Peso (cabos não incluídos)
22 kg (48,5 lbs.)
22 kg (48,5 lbs.)
23 kg (50,7 lbs.)
Método de
acionamento
Todas as
articulações
Servomotor de CA
Capacidade nominal do
motor
Articulação 1
520 W
Articulação 2
520 W
Articulação 3
200 W
Articulação 4
150 W
Opcional
Ambiente de instalação
Sala limpa *3
Força descendente da Articulação 3
200 N
Fio instalado
para uso do cliente
15 (15 pinos: D-sub)
Equivalente a 8 pinos (RJ45) Cat.5e
Tubo pneumático instalado
para uso do cliente
2 tubos pneumáticos (ø6 mm) : 0,59 MPa (6 kgf/cm2 : 86 psi)
1 tubo pneumático (ø4 mm) : 0,59 MPa (6 kgf/cm2 : 86 psi)
Requisitos
ambientais
Temperatura ambiente
5 a 40 °C (com variação mínima da temperatura)
Umidade relativa do
ambiente
10 a 80% (sem condensação)
Nível de ruído *4
L
Aeq
= 70 dB (A) ou abaixo
Controlador aplicável
RC90-B
Valor atribuído
( ) Valores padrão
Velocidade
1 ~ (4) ~ 100
Aceleração *5
1 ~ (10) ~ 120
SpeedS
1 ~ (50) ~ 2000
AccelS
1 ~ (200) ~ 25000
Fine
0 ~ (1250) ~ 65535
Peso
0.375 ~ (5.375) ~ 10.375
Padrão de segurança
Marcação CE
Diretiva EMC, Diretiva de maquinaria, Diretiva RoHS
Marcação KC, Marcação KCs
ANSI/RIA R15.06
NFPA 79
Page 33

Configuração e operação 2. Especificações
LS10-B Rev.6 21
Item
LS10-B**2S
LS10-B**2C
LS10-B**3S
LS10-B**3C
Faixa de
movimento
máxima
Articulação 1
132 °
Articulação 2
150°
Articulação 3
200 mm
170 mm
300 mm
270 mm
Articulação 4
360 °
Faixa de pulsos
máxima
Articulação 1
− 152918 ~ 808278
Articulação 2
341334
Articulação 3
− 270336 ~ 0
− 229786 ~ 0
− 405504 ~ 0
− 364954 ~ 0
Articulação 4
215040
*1: No caso de comando PTP.
A velocidade de operação máxima para o comando CP é de 2000 mm/s no plano horizontal.
*2: No caso em que o centro de gravidade está no centro da Articulação 4.
Se o centro de gravidade não estiver no centro da Articulação 4, defina o parâmetro usando a configuração
de INERTIA.
*3: O sistema de exaustão no modelo de manipulador para sala limpa extrai ar do interior da base e do interior
da tampa do braço ao mesmo tempo.
Uma fenda ou outra abertura na unidade da base pode causar perda da pressão de ar negativa na parte externa
do braço, o que pode ocasionar aumento da emissão de poeira.
Nível de limpeza : Classe ISO 4 (ISO14644-1)
Sistema de exaustão : Diâmetro da porta de exaustão: Diâmetro interno: ø12 mm
Tubo exaustor : Tubo de poliuretano
Diâmetro externo: ø12 mm (Diâmetro interno : ø8 mm)
Taxa de fluxo de exaustão recomendada: aprox. 1000 cm3/s
(Normal)
*4: As condições do manipulador durante a medição são as seguintes:
Condições de operação : Sob carga nominal, movimento simultâneo das 4 articulações, velocidade
máxima, aceleração/desaceleração máxima e taxa de 50%.
Ponto de medição : Traseira do manipulador, 1000 mm além da faixa de movimento, 50 mm acima
da superfície da base instalada.
*5: No uso geral, a configuração da aceleração em 100 é a configuração ideal que mantém o equilíbrio da
aceleração e a vibração durante o posicionamento. Embora valores acima de 100 possam ser definidos para
a aceleração, é recomendado minimizar o uso de valores altos para os movimentos necessários, uma vez
que operar o manipulador continuamente com uma configuração alta de aceleração pode encurtar
consideravelmente a vida útil do produto.
Page 34

Configuração e operação 2. Especificações
22 LS10-B Rev.6
2.5 Como definir o modelo
O modelo do manipulador para seu sistema já foi definido em fábrica antes da remessa.
Normalmente não é necessário mudar o modelo quando você recebe seu sistema.
CUIDADO
■
Quando precisar mudar a configuração do modelo do manipulador, certifique-se
de definir o modelo corretamente. A configuração incorreta do modelo do
manipulador pode resultar em operação anormal ou nenhuma operação do
manipulador e/ou causar problemas de segurança.
Se o número das especificações personalizadas (MT***) for descrito em MODEL da
etiqueta de identificação (etiqueta do N/S), o manipulador tem especificações
personalizadas. (Uma etiqueta com apenas o número das especificações personalizadas pode
ser afixada, dependendo do prazo da expedição.)
As especificações personalizadas podem exigir um procedimento de configuração diferente;
verifique o número das especificações personalizadas (MT***) e entre em contato com o
fornecedor de sua região, quando necessário.
O modelo do manipulador pode ser definido através do software.
Consulte o capítulo Configuração do robô no Guia do usuário do EPSON RC+.
NOTA
Page 35

Configuração e operação 3. Ambientes e instalação
LS10-B Rev.6 23
3. Ambientes e instalação
3.1 Condições ambientais
É necessário um ambiente adequado para o sistema robótico funcionar adequadamente e
com segurança. Instale o sistema robótico em um ambiente que atenda às seguintes
condições:
Item
Condições
Temperatura ambiente*
5 a 40°C (com variação mínima da temperatura)
Umidade relativa do
ambiente
10 a 80% (sem condensação)
Ruído de ruptura com
transiente rápido
1 kV ou menos (Fio de sinal)
Ruído eletrostático
4 kV ou menos
Ambiente
· Instale em local fechado.
· Mantenha longe da luz solar direta.
· Mantenha afastado de pó, fumaça oleosa, salinidade, pó
de metal e outros contaminantes.
· Mantenha afastado de solventes e gases inflamáveis ou
corrosivos.
· Mantenha afastado de água.
· Mantenha afastado de choques ou vibrações.
· Mantenha afastado de fontes de ruído elétrico.
Os manipuladores não são adequados para operação em ambientes adversos, tal como áreas
de pintura, etc. Quando utilizar os manipuladores em ambientes inadequados que não
atendam às condições acima, entre em contato com o fornecedor de sua região.
* As condições da temperatura ambiente são somente para os manipuladores. Quanto ao
controlador ao qual os manipuladores estão conectados, consulte o manual do controlador.
Condições ambientais especiais
A superfície do manipulador tem resistência geral a óleo. No entanto, se seus requisitos
especificam que o manipulador deve suportar certos tipos de óleo, contate o fornecedor
de sua região.
Mudança rápida na temperatura e umidade pode causar condensação dentro do
manipulador.
Se seus requisitos especificam que o manipulador manuseia alimentos, contate o
fornecedor de sua região para verificar se o manipulador irá danificar o alimento ou não.
O manipulador não pode ser usado em ambiente corrosivo onde são usados ácidos ou
alcalinos. Em um ambiente salino onde a ferrugem é provável de ocorrer, o manipulador
é suscetível à ferrugem.
ATENÇÃO
■
Use um disjuntor de aterramento no cabo de energia de CA do controlador para
evitar choque elétrico e colapso do circuito por curto-circuito.
Prepare o disjuntor de fuga para a terra pertencente ao controlador que você está
usando.
Para detalhes, consulte o manual do controlador.
CUIDADO
■
Ao limpar o manipulador, não esfregue fortemente com álcool ou benzina.
Ele pode perder o brilho da face revestida.
NOTA
Page 36

Configuração e operação 3. Ambientes e instalação
24 LS10-B Rev.6
3.2 Mesa base
A mesa base para fixação do manipulador não é fornecida. Faça ou obtenha uma mesa base
para o seu manipulador. O formato e o tamanho da mesa base diferem, dependendo do uso
do sistema robótico. Para sua consulta, relacionamos aqui alguns requisitos para a mesa do
manipulador.
A mesa base deve não só poder sustentar o peso do manipulador, mas também suportar o
movimento dinâmico do manipulador quando ele opera na aceleração/desaceleração
máxima. Assegure que haja resistência suficiente na mesa base acoplando materiais de
reforço tais como traves mestras.
A força de torque e reação produzidas pelo movimento do manipulador são as seguintes:
LS10-B
Torque de reação máximo na chapa horizontal
550
N·m
Força de reação horizontal máxima
3200
N
Força de reação vertical máxima
1500
N
Os furos rosqueados necessários para montar a base do manipulador são do tipo M8. Use
parafusos de montagem com especificações em conformidade com a ISO898-1 classe de
propriedade: 10.9 ou 12.9.
Para detalhes, consulte Configuração e operação: 3.3 Dimensões de montagem.
A chapa para a face de montagem do manipulador deve ter 20 mm de espessura ou mais e
ser feita de aço para reduzir a vibração. A aspereza da superfície da placa de aço deverá ser
de 25 μm ou menos.
A mesa deve ser presa ao piso ou à parede para evitar que ela se mova.
O manipulador deve ser instalado horizontalmente.
Ao usar um nivelador para ajustar a altura da mesa base, use um parafuso com diâmetro
M16 ou mais.
Se estiver passando cabos através dos furos da mesa base, veja as figuras abaixo.
Conector do cabo
de energia
Conector do cabo
de sinal
44
18
63
15
Cabos M/C
(Unid : mm)
40
80
Não remova os cabos M/C do manipulador.
Quanto às condições ambientais relacionadas ao espaço ao colocar o controlador na mesa
base, consulte o manual do controlador.
ATENÇÃO
■
Para garantir a segurança, deve ser instalado um sistema de proteção de
segurança para o sistema robótico.
Para detalhes sobre o sistema de proteção de segurança, consulte o Guia do
Usuário do EPSON RC+.
NOTA
Page 37

Configuração e operação 3. Ambientes e instalação
LS10-B Rev.6 25
3.3 Dimensões da montagem
O espaço máximo (R) inclui o raio do atuador da extremidade. Se ele exceder 60 mm, defina
o raio como a distância até a borda externa do espaço máximo.
Se uma câmera ou válvula solenoide se estender para fora do braço, configure a faixa
máxima incluindo o espaço incluindo o espaço que ela deverá alcançar.
Certifique-se de deixar os espaços extra seguintes, além do espaço necessário para
montagem do manipulador, do controlador e do equipamento periférico.
Espaço para o ensino
Espaço para manutenção e inspeções
(Assegure um espaço para abrir as tampas e chapas para manutenção).
Espaço para cabos
O raio de curvatura do cabo de energia é 90 mm. Ao instalar o cabo, certifique-se de manter
distância suficiente dos obstáculos. Além disso, deixe espaço suficiente para outros cabos
para que estes não sejam forçados a curvar.
Assegure que a distância para a proteção de segurança da faixa de movimento máxima seja
acima de 100 mm.
Page 38

Configuração e operação 3. Ambientes e instalação
26 LS10-B Rev.6
3.4 Desembalagem e transporte
A INSTALAÇÃO DEVE SER REALIZADA POR PESSOAL QUALIFICADO E
ESTAR DE ACORDO COM TODOS OS CÓDIGOS LOCAIS E NACIONAIS.
ATENÇÃO
■
Somente pessoal autorizado deverá executar o trabalho de erguer e operar uma
empilhadeira. Quando essas operações são executadas por pessoal não
autorizado, isso é extremamente perigoso e pode resultar em sérias lesões
corporais e/ou danos graves ao equipamento do sistema robótico.
CUIDADO
■
Usando um carrinho ou equipamento similar, transporte o manipulador nas
mesmas condições em que ele foi entregue.
■
Após remover os parafusos que prendem o manipulador ao equipamento de
entrega, o manipulador pode cair. Seja cuidadoso para não ter as mãos e ou
dedos prensados.
■
O braço é preso com um prendedor de fios. Deixe o prendedor de fios preso até
concluir a instalação de modo a não prender as mãos ou os dedos.
■
Para transportar o manipulador, obtenha a ajuda de 2 ou mais pessoas e prenda
o manipulador ao equipamento de entrega ou segure com as mãos nas áreas
indicadas em cinza na figura (parte inferior do Braço 1 e parte inferior da base).
Ao segurar a parte inferior da base com a mão, seja muito cuidadoso para não
prender a mão ou os dedos.
LS10-B60**: aprox. 22 kg: 48,5 lbs.
LS10-B70**: aprox. 22 kg: 48,5 lbs.
LS10-B80**: aprox. 23 kg: 50,7 lbs.
■
Estabilize o manipulador com as mãos ao içá-lo.
■
Ao transportar o manipulador por uma longa distância, prenda-o diretamente ao
equipamento de entrega para que ele nunca tombe.
Se necessário, embale o manipulador no mesmo estilo em que ele foi entregue.
Page 39

Configuração e operação 3. Ambientes e instalação
LS10-B Rev.6 27
3.5 Procedimento de instalação
CUIDADO
■
O sistema robótico deve ser instalado de modo a evitar a interferência com
edifícios, estruturas, utilidades, outras máquinas e equipamentos que possam
criar um risco de aprisionamento ou pontos de compressão.
■
Pode ocorrer oscilação (ressonância) durante a operação, dependendo da rigidez
da mesa de instalação.
Se ocorrer oscilação, melhore a rigidez da mesa ou mude as configurações de
velocidade, ou de aceleração e desaceleração.
3.5.1 Modelo padrão
CUIDADO
■
Instale o manipulador de montagem sobre a mesa com a ajuda de duas ou mais
pessoas.
Os pesos dos manipuladores são os seguintes. Tenha cuidado para não prender
as mãos, dedos ou pés e/ou ter o equipamento danificado por queda do
manipulador.
LS10-B60** : aprox. 22 kg :48,5 lbs.
LS10-B70** : aprox. 22 kg :48,5 lbs.
LS10-B80** : aprox. 23 kg :50,7 lbs.
(1)
Prenda a base à mesa base com
quatro parafusos.
Use parafusos de montagem com
especificações em conformidade
com a ISO898-1 classe de
propriedade: 10.9 ou 12.9.
Torque de aperto:
32,0 N·m (326 kgf·m)
10 mm
Furo de parafuso com
profundidade de
(20 mm ou mais)
4-M825
Arruela de pressão
Arruela plana
(2)
Usando alicates, corte o prendedor
de arame que liga o eixo e o suporte
retentor do braço na base.
Prendedor de fios
Parafuso: M4
Parafuso
: M4
(3)
Remova os parafusos que prendem
os prendedores de arame removidos
na etapa (2).
Remova a folha de fixação de
transporte afixada no braço.
Certifique-se de remover o
prendedor de arame para proteção do
batente mecânico.
NOTA
NOTA
Page 40

Configuração e operação 3. Ambientes e instalação
28 LS10-B Rev.6
3.5.2 Modelo para sala limpa
(1) Desembale o manipulador fora da sala limpa.
(2) Prenda o manipulador no equipamento de entrega, tal como um palete, com parafusos,
para que o manipulador não tombe.
(3) Limpe a poeira no manipulador com um pouco de álcool ou água destilada em um pano
que não solte fiapos.
(4) Transporte o manipulador para a sala limpa.
(5) Consulte o procedimento de instalação de cada modelo de manipulador e instale-o.
(6) Conecte um tubo de exaustão à porta de exaustão.
3.6 Conexão dos cabos
ATENÇÃO
■
Para desligar a energia do sistema robótico, desconecte o plugue de alimentação
da fonte de energia. Conecte o cabo de energia de CA em uma tomada de energia.
NÃO o conecte diretamente à fonte de energia da fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o controlador
e o equipamento relacionado e então desconecte o plugue de alimentação da fonte
de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
■
Certifique-se de conectar os cabos corretamente. Não aplique força desnecessária
nos cabos. (Não coloque objetos pesados sobre os cabos. Não dobre ou puxe os
cabos aplicando força excessiva). A tensão desnecessária nos cabos pode resultar
em danos aos cabos, desconexão e/ou falha nos contatos.
Cabos danificados, desconexão ou falha nos contatos são extremamente
perigosos e podem resultar em choque elétrico e/ou funcionamento incorreto no
sistema robótico.
■
O aterramento do manipulador é feito conectando-o com o controlador. Certifiquese de que o controlador está aterrado e os cabos estão corretamente conectados.
Se o fio terra for conectado incorretamente à terra, isso pode resultar em incêndio
ou choque elétrico.
Page 41

Configuração e operação 3. Ambientes e instalação
LS10-B Rev.6 29
CUIDADO
■
Ao conectar o manipulador ao controlador, certifique-se de que os números de
série de cada equipamento sejam correspondentes. A conexão incorreta entre o
manipulador e o controlador pode não só causar funcionamento incorreto do
sistema robótico, mas também sérios problemas de segurança. O método de
conexão varia de acordo com o controlador utilizado. Para mais detalhes sobre a
conexão, consulte o manual do controlador.
Quando o manipulador é um modelo para sala limpa, fique atento ao seguinte.
Para o manipulador do modelo para sala limpa, use-o com um sistema de exaustão.
Para detalhes, consulte Configuração e operação: 2.4 Especificações.
Conexões dos cabos
Conecte o cabo de energia e o conector do sinal do cabo M/C ao controlador como é
mostrado abaixo.
Conector de sinal
Conector de energia
Conexão e desconexão do cabo M/C
Na série LS10-B, você pode conectar e desconectar facilmente o cabo M/C ao/do
manipulador.
Para detalhes, consulte Manutenção: 4.3 Substituição do cabo M/C.
NOTA
Page 42

Configuração e operação 3. Ambientes e instalação
30 LS10-B Rev.6
3.7 Fios e tubos pneumáticos para o usuário
CUIDADO
■
Somente pessoal autorizado ou certificado deve ter permissão de instalar a
fiação. A instalação da fiação por pessoal não autorizado ou não certificado pode
resultar em ferimento corporal e/ou mau funcionamento do sistema robótico.
Os fios elétricos e tubos pneumáticos para o usuário estão contidos na unidade de cabos.
Fios elétricos
Voltagem nominal
Corrente
admissível:
Fios
Área seccional nominal
Nota
CA/CC 30 V
1 A
15
0,211 mm2
Par trançado
ATENÇÃO
■
Não aplique corrente maior que 1A ao manipulador.
Fabr.
Padrão
15
pinos
Conector adequado
JAE
DA-15PF-N
(Tipo soldado)
Braçadeira
JAE
DA-C8-J10-F2-1R
(Parafuso de fixação do conector:
4-40 NC)
São conectados os pinos com o mesmo número, indicado nos conectores em ambas as
extremidades dos cabos.
Tubos pneumáticos
Pressão pneumática utilizável
máxima
Tubos pneumáticos
Diâmetro externo × Diâmetro interno
0,59 MPa (6 kgf/cm2 : 86 psi)
2
ø 6 mm ø 4 mm
1
ø 4 mm ø 2,5 mm
Encaixes para tubos pneumáticos de ø6 mm e ø4 mm (diâmetro externo) são fornecidos em
ambos os lados dos tubos pneumáticos.
Encaixe (azul) para tubo
pneumático de ø4 mm
Encaixe (azul) para tubo
pneumático de ø6 mm
Conector do usuário
(Conector D-sub de 15 pinos)
Conector do usuário
(Conector D-sub de 15 pinos)
Encaixe (branco) para tubo
pneumático de ø6 mm
Detalhe visto de A
Detalhe visto de B
Interruptor de liberação
do freio da Articulação 3
Encaixe (branco) para tubo
pneumático de ø6 mm
Encaixe (azul) para tubo
pneumático de ø6 mm
Encaixe (azul) para tubo
pneumático de ø4 mm
Porta de exaustão
(Somente para o modelo
para sala limpa)
Conector RJ45
(EtherNet)
Conector RJ45
(EtherNet)
Page 43

Configuração e operação 3. Ambientes e instalação
LS10-B Rev.6 31
3.8 Mudança de local e armazenamento
3.8.1 Precauções para mudança de local e armazenamento
Observe o que segue ao transferir de local, armazenar e transportar os manipuladores.
A INSTALAÇÃO DEVE SER REALIZADA POR PESSOAL QUALIFICADO E
ESTAR DE ACORDO COM TODOS OS CÓDIGOS LOCAIS E NACIONAIS.
ATENÇÃO
■
Somente pessoal autorizado deverá executar o trabalho de erguer e operar uma
empilhadeira. Quando essas operações são executadas por pessoal não
autorizado, isso é extremamente perigoso e pode resultar em sérias lesões
corporais e/ou danos graves ao equipamento do sistema robótico.
CUIDADO
■
Antes de mudar o manipulador de local, dobre o braço e prenda-o firmemente
com um prendedor de fios para evitar que as mãos ou os dedos sejam prensados
no manipulador.
■
Ao remover os parafusos de fixação, apoie o manipulador para prevenir queda.
Remover os parafusos de fixação sem apoio pode resultar em queda do
manipulador, e ter suas mãos, dedos ou pés prensados.
■
Para transportar o manipulador, obtenha a ajuda de 2 ou mais pessoas e prenda
o manipulador ao equipamento de entrega ou segure com as mãos nas áreas
sombreadas (parte inferior do Braço 1 e parte inferior da base). Ao segurar a parte
inferior da base com a mão, seja muito cuidadoso para não prender a mão ou os
dedos.
LS10-B60**: aprox. 22 kg: 48,5 lbs.
LS10-B70**: aprox. 22 kg: 48,5 lbs.
LS10-B80**: aprox. 23 kg: 50,7 lbs.
■
Estabilize o manipulador com as mãos ao içá-lo. O içamento instável é
extremamente perigoso e pode resultar em queda do manipulador.
Ao transportar o manipulador por uma longa distância, prenda-o diretamente ao
equipamento de entrega para que ele não tombe.
Se necessário, embale o manipulador no mesmo modo em que ele foi entregue.
Quando o manipulador for novamente utilizado para um sistema robótico após
armazenamento por longo prazo, execute um teste de funcionamento para
verificar se ele está funcionando adequadamente e então opere-o completamente.
Transporte e armazene o manipulador em uma faixa de temperatura de −25 C a
+55 C.
É recomendado umidade dentro de 10% a 90%.
Quando ocorre condensação no manipulador durante o transporte ou
armazenamento, ligue a energia somente após a condensação secar.
Evite choques ou vibração excessiva no manipulador durante o transporte.
Page 44

Configuração e operação 3. Ambientes e instalação
32 LS10-B Rev.6
3.8.2 Mudança de local
CUIDADO
■
Instale ou transfira de lugar o manipulador com a ajuda de duas ou mais pessoas.
Os pesos dos manipuladores são os seguintes. Tenha cuidado para não prender
as mãos, dedos ou pés e/ou ter o equipamento danificado por queda do
manipulador.
LS10-B60** : aprox. 22 kg :48,5 lbs.
LS10-B70** : aprox. 22 kg :48,5 lbs.
LS10-B80** : aprox. 23 kg :50,7 lbs.
(1) Desligue a energia em todos os dispositivos e desconecte os cabos.
Remova os batentes mecânicos se os estiver usando para limitar a faixa de
movimento das Articulações 1 e 2. Para detalhes sobre a faixa de movimento,
consulte Configuração e operação: 5.2 Configuração da faixa de movimento por
batentes mecânicos.
(2) Cubra o braço com uma folha de proteção de modo que ele não seja danificado.
Consulte a seguinte figura para prender o braço.
Prendedor
de fios
Parafuso: M4
Parafuso
: M4
Exemplo de postura do braço fixado
(3) Segure a parte inferior do Braço 1 com a mão e desparafuse os parafusos de fixação.
Em seguida, remova o manipulador da mesa base.
NOTA
Page 45

Configuração e operação 4. Configuração dos atuadores da extremidade
LS10-B Rev.6 33
4. Configuração dos atuadores da extremidade
4.1 Acoplamento do atuador da extremidade
Os usuários são responsáveis por fazer seus próprios atuadores de extremidade. Antes de
acoplar o atuador da extremidade, observe estas diretrizes.
CUIDADO
■
Se você usa um atuador da extremidade com uma pinça ou mandril, conecte os
fios e/ou tubos pneumáticos corretamente de modo que a pinça não libere a peça
de trabalho quando a energia para o sistema robótico for desligada. A conexão
incorreta dos fios e/ou tubos pneumáticos pode danificar o sistema robótico e/ou
peças de trabalho se elas forem liberadas quando o interruptor de parada de
emergência for pressionado.
As saídas de I/O são configuradas em fábrica de modo a desligar
automaticamente (0) na desconexão da energia, pelo interruptor de parada de
emergência ou pelos recursos de segurança do sistema robótico.
Eixo
-
Conecte um atuador da extremidade a extremidade inferior do eixo.
Para as dimensões do eixo e as dimensões gerais do manipulador, consulte
Configuração e operação: 2. Especificações
-
Não mova o batente mecânico de limite superior na parte inferior do eixo. De outra
forma, quando “Jump motion” for executado, o batente mecânico de limite superior
poderá atingir o Manipulador e o sistema robótico poderá não funcionar corretamente.
-
Use um acoplamento tipo luva partida, com um parafuso M4 ou maior para acoplar o
atuador da extremidade ao eixo.
Interruptor de liberação do freio
-
A Articulação 3 e 4 não podem ser movidas para cima/para baixo porque o freio
eletromagnético é aplicado à articulação enquanto a energia para o sistema robótico
está desligada.
Isso evita que o eixo atinja equipamento periférico no caso de o eixo ser baixado pelo
peso do atuador da extremidade quando a energia é desconectada durante a operação,
ou quando o motor é desligado mesmo quando a energia está ligada.
Para mover a Articulação 3 para cima/para baixo ou girar a Articulação 4 enquanto um
atuador da extremidade está acoplado, ligue o controlador e mova para cima e para
baixo ou gire a articulação enquanto pressiona o interruptor de liberação do freio.
Esse interruptor de pressão é do tipo momentâneo; o freio é liberado somente enquanto
o interruptor está sendo pressionado.
-
Tenha cuidado com o eixo enquanto o interruptor de liberação do freio está sendo
pressionado porque o eixo pode ser baixado pelo peso do atuador da extremidade.
Interruptor de liberação do freio
O eixo pode ser baixado
pelo peso do atuador da
extremidade.
Page 46

Configuração e operação 4. Configuração dos atuadores da extremidade
34 LS10-B Rev.6
Layout :
-
Quando você opera o manipulador com um atuador da extremidade, ele pode interferir
com o Manipulador devido ao diâmetro externo do atuador da extremidade, o tamanho
da peça de trabalho ou a posição dos braços. Ao projetar o layout do seu sistema, preste
atenção à área de interferência do atuador da extremidade.
4.2 Acoplar câmeras e válvulas
A base do Braço 2 possui furos rosqueados como mostrado na figura abaixo. Use esses furos
para acoplar câmeras, válvulas e outros equipamentos.
[Unidade: mm]
*: Pela superfície de instalação base
Page 47

Configuração e operação 4. Configuração dos atuadores da extremidade
LS10-B Rev.6 35
4.3 Configurações de peso e inércia
Para assegurar o desempenho ideal do Manipulador, é importante se assegurar de que a carga
(peso do atuador da extremidade e da peça de trabalho) e o momento de inércia da carga
estão dentro da classificação máxima do Manipulador, e que a Articulação 4 não se torne
excêntrica.
Se a carga ou o momento de inércia exceder a classificação ou se a carga se tornar excêntrica,
siga as etapas abaixo, “4.3.1 Configuração do peso” e “4.3.2 Configuração de inércia”, para
configurar os parâmetros.
Configurar os parâmetros torna o movimento PTP do Manipulador opcionais, reduz a
vibração para encurtar o tempo de operação e aumenta a capacidade para cargas maiores.
Além disso, ele reduz a vibração persistente quando o momento de inércia do atuador da
extremidade e da peça de trabalho é maior que a configuração padrão.
4.3.1 Configuração de WEIGHT
CUIDADO
■
O peso total do atuador da extremidade e da peça de trabalho não deve exceder
10 kg. Os manipuladores da série LS10-B não são projetados para trabalhar com
cargas que excedam 10 kg. Configure sempre os parâmetros Weight de acordo
com a carga. Configurar um valor menor do que a carga real pode causar erros,
choque excessivo e função insuficiente do manipulador. Além disso, o ciclo de
vida das peças serão encurtados e ocorrerão saltos de dentes da correia o que
levará ao deslocamento da posição.
A capacidade de peso aceitável (atuador da extremidade e peça de trabalho) na série LS10B é:
Classificação padrão: 5 kg
Máximo : 10 kg
Quando a carga (peso do atuador da extremidade e da peça de trabalho) exceder a
classificação, mude a configuração do parâmetro Weight.
Após a configuração ser mudada, a velocidade de aceleração/desaceleração máxima do
sistema robótico no movimento PTP correspondente a “Weight Parameter” é configurada
automaticamente.
Carga no eixo
A carga (peso do atuador da extremidade e da peça de trabalho) no eixo pode ser configurada
pelo parâmetro Weight.
EPSON
RC+
Insira um valor na caixa de texto [Load inertia:] (Inércia da carga:) no painel [Inertia]
(Inércia) ([Tools]-[Robot Manager]). (Você também pode executar o comando Inertia pela
[Command Window] (Janela de comando)) .
Page 48

Configuração e operação 4. Configuração dos atuadores da extremidade
36 LS10-B Rev.6
Carga no Braço
Quando você acoplar uma câmera ou outros dispositivos ao braço, calcule o peso como o
equivalente do eixo. Então, adicione isso à carga e insira o peso total no parâmetro Weight.
Fórmula do peso equivalente
Quando você acopla o equipamento próximo do
Braço 2:
Quando você acopla o equipamento à extremidade do
Braço 2:
WM = M (L1)2/(L1+L2)2
WM = M (LM)2/(L2)2
WM
M
L1
L2
LM
: peso equivalente
: peso da câmera etc.
: comprimento do braço 1
: comprimento do braço 2
: distância do centro de rotação da Articulação 2 até o centro de gravidade
da câmera, etc.
<Exemplo>
Uma câmera “1 kg” é acoplada à extremidade do braço da série LS10-B (475 mm distante do
centro de rotação da Articulação 2) com um peso de carga de “1 kg”.
M=1
L2=375
LM=475
WM=14752/3752=1.604
→ 1.7 (arredondado)
W+WM=1+1,7=2,7
Insira “2,7” para o parâmetro Weight.
Eixo
Peso da câmera
M=1kg
W=1kg
L
2
=375 mm
L
M
=475 mm
Articulação 2
Configuração da velocidade automática definida por Weight
140
120
100
80
60
40
20
0 2 4 6 8 10 12 (kg) Configuração do peso
(%)
* A porcentagem no gráfico é
baseada na velocidade com o
peso classificado (5 kg) como
100%.
120
116
100
LS10-B60**
LS10-B70**
LS10-B80**
112
111
110
85
80
65
80
70
54
Peso do atuador
da extremidade
(kg)
Configuração automática da velocidade por
Weight (%)
LS10-B60**
LS10-B70**
LS10-B80**
0
120
120
120 1 111
116
116 2 110
112
112 5 100
100
100 8 85
80
65
10
80
70
54
Page 49

Configuração e operação 4. Configuração dos atuadores da extremidade
LS10-B Rev.6 37
Configuração automática da aceleração/desaceleração por Weight
180
160
140
120
100
80
60
0 2 4 6 8 10 12 (kg) Configuração do peso
(%)
* A porcentagem no gráfico
é baseada na
aceleração/desaceleração
com o peso classificado
(5 kg) como 100%.
170
164
100
LS10-B60**
LS10-B70**
LS10-B80**
160
125
75
64
60
51
≈
150
Peso do atuador
da extremidade
(kg)
Configuração automática da aceleração/desaceleração
por Weight (%)
LS10-B60**
LS10-B70**
LS10-B80**
0
170
160
160 1 164
150
150 2 125
125
125 5 100
100
100 8 75
64
75
10
60
51
60
4.3.2 Configuração da inércia
Momento de inércia e a configuração da inércia
O momento de inércia é definido como “o raio do torque aplicado a um corpo rígido e sua
resistência ao movimento”. Esse valor normalmente é designado como “momento de
inércia”, “inércia” ou “GD2”. Quando o manipulador opera com objetos adicionais (tal como
um atuador da extremidade) acoplado ao eixo, o momento de inércia da carga deve ser
considerado.
CUIDADO
■
O momento de inércia da carga (peso do atuador da extremidade e da peça de
trabalho) deve ser no máximo 0,30 kg·m2. Os manipuladores da série LS10-B não
são projetados para trabalhar com um momento de inércia que exceda 0,30
kg·m2.
Configure sempre os parâmetros Weight de acordo com a carga. Configurar um
valor menor do que a carga real pode causar erros, choque excessivo e função
insuficiente do manipulador. Além disso, o ciclo de vida das peças é encurtado e
ocorrerá diferença posicional devido ao choque nos dentes da correia.
O momento de inércia aceitável da carga para um manipulador da série LS10-B é
Classificação padrão: 0,02 kg·m2
Máximo : 0,30 kg·m2
Quando o momento de inércia da carga exceder a nominal, mude a configuração do
parâmetro do momento de inércia do comando Inertia. Após a configuração ser mudada, a
velocidade de aceleração/desaceleração da Articulação 4 no movimento PTP correspondente
ao valor de “moment of inertia” (momento de inércia) é configurado automaticamente.
Page 50

Configuração e operação 4. Configuração dos atuadores da extremidade
38 LS10-B Rev.6
Momento de inércia da carga no eixo
O momento de inércia da carga (peso do atuador da extremidade e da peça de trabalho) no
eixo pode ser configurado pelo parâmetro “moment of inertia” do comando Inertia.
EPSON
RC+
Insira um valor na caixa de texto [Load inertia:] (Inércia da carga:) no painel [Inertia]
(Inércia) ([Tools]-[Robot Manager]). (Você também pode executar o comando Inertia pela
[Command Window] (Janela de comando)) .
Configuração automática da aceleração/desaceleração da Articulação 4 por
Inércia (moment of inertia)
0 0.05 0.1 0.15 0.2 0.25 0.3 (kg·m
2
) Configuração do momento
de inércia
120
100
80
60
40
20
(%)
113
60
30
10
100
Configuração do
momento de inércia
(kg·m2)
Configuração automática da
aceleração/desaceleração da Articulação 4
por Inércia (moment of inertia) (%)
0.01
113
0.02
100
0.05
60
0.1
30
0.3
10
Page 51

Configuração e operação 4. Configuração dos atuadores da extremidade
LS10-B Rev.6 39
Quantidade de excentricidade da configuração de inércia
CUIDADO
■
A quantidade de excentricidade da carga (peso do atuador da extremidade e da
peça de trabalho) deve ser 200 mm ou menos. Os manipuladores da série LS10B não são projetados para trabalhar com quantidade de excentricidade que
exceda 200 mm.
Sempre configure o parâmetro Weight de acordo com a carga. Configurar um
valor menor do que a carga real pode causar erros, choque excessivo e função
insuficiente do manipulador. Além disso, o ciclo de vida das peças é encurtado e
ocorrerá diferença posicional devido ao choque nos dentes da correia.
A quantidade de excentricidade aceitável da carga na série LS10-B é 0 mm na classificação
padrão e 200 mm no máximo. Quando quantidade de excentricidade da carga exceder a
nominal, mude a configuração do parâmetro da quantidade de excentricidade do comando
Inercia. Após a configuração ser mudada, a velocidade de aceleração/desaceleração máxima
do Manipulador no movimento PTP correspondente a “eccentric quantity” (quantidade de
excentricidade) é configurada automaticamente.
Posição do centro de gravidade da carga
Centro de rotação
Quantidade de excentricidade (200 mm
ou menos)
Quantidade de
excentricidade
Quantidade de excentricidade da carga no eixo
A quantidade de excentricidade da carga (peso do atuador da extremidade e da peça de
trabalho) no eixo pode ser configurada pelo parâmetro “eccentric quantity” do comando
Inertia.
EPSON
RC+
Insira um valor na caixa de texto [Eccentricity:] (Excentricidade:) no painel [Inertia]
([Tools]-[Robot Manager]). (Você também pode executar o comando Inertia pela
[Command Window].)
Page 52

Configuração e operação 4. Configuração dos atuadores da extremidade
40 LS10-B Rev.6
Configuração automática da aceleração/desaceleração por Inertia (eccentric
quantity)
* A porcentagem no gráfico
é baseada na
aceleração/desaceleração
na excentricidade
classificada
(0 mm) como 100%.
120
100
80
60
40
20
0 50 100 150 200 250 (mm) Configuração da
excentricidade
60
26
(%)
100
15
Parâmetro da
quantidade de
excentricidade (mm)
Configuração automática da
aceleração/desaceleração por Inertia
(eccentric quantity) (%)
0
100
50
60
100
26
200
15
Cálculo do momento de inércia
Consulte os exemplos de fórmulas seguintes para calcular o momento de inércia da carga
(atuador da extremidade com a peça de trabalho). O momento de inércia de toda a carga é
calculado pela soma de cada parte (a), (b) e (c).
Peça de
trabalho (b)
Peça de
trabalho (c)
Atuador da
extremidade (a)
Eixo da
Articulação 3
Centro de rotação
Momento de
inércia total
Momento de
inércia do atuador
da extremidade (a)
=
+
Momento de
inércia da peça
de trabalho (c)
+
Momento de
inércia da peça de
trabalho (b)
Page 53

Configuração e operação 4. Configuração dos atuadores da extremidade
LS10-B Rev.6 41
Os métodos para calcular o momento de inércia para (a), (b) e (c) são mostrados abaixo.
Calcule o momento total de inércia usando as fórmulas básicas.
(a) Momento de inércia de um paralelepípedo retangular
h
b
L
m
Centro de gravidade do
paralelepípedo retangular
Centro de rotação
m
+ m L
2
b
2
+ h
2
12
(b) Momento de inércia de um cilindro
m
+ m L
2
r
2
2
m
L
r
Centro de gravidade do cilíndro
Centro de rotação
(c) Momento de inércia de uma esfera
m
r 2+ m L
2
2
5
Centro de gravidade da
esfera
r
m
L
Centro de rotação
Page 54

Configuração e operação 4. Configuração dos atuadores da extremidade
42 LS10-B Rev.6
4.4 Precauções para a aceleração/desaceleração automática da Articulação 3
Quando você move o Manipulador no movimento PTP horizontal com a Articulação 3 (Z)
em uma posição alta, o tempo do movimento será mais rápido.
Quando a Articulação 3 chega abaixo de um certo ponto, então a aceleração/desaceleração
automática é usada para reduzir a aceleração/desaceleração. (Consulte a figura abaixo)
Quanto mais alto for a posição do eixo, mais rápido será a aceleração/desaceleração do
movimento. No entanto, leva mais tempo para mover a Articulação 3 para cima e para baixo.
Ajuste a posição da Articulação 3 para o movimento do Manipulador após considerar a
relação entre a posição atual e a posição de destino. O limite superior da Articulação 3
durante o movimento horizontal usando o comando Jump pode ser definido pelo comando
LimZ.
Aceleração/desaceleração automática versus posição da Articulação 3
* Os números no gráfico (%) são a
proporção da velocidade de
aceleração/desaceleração na posição do
limite superior do eixo.
100
60
100
LS10-B60**
LS10-B70**
LS10-B80**
120
100
80
60
40
20
0 -100 -200 -300 (mm) Altura do eixo
(%)
20
70
40
Ao mover o Manipulador horizontalmente enquanto o eixo está sendo baixado, isso pode
causar ultrapassagem no momento do posicionamento final.
Altura do
eixo
(mm)
Aceleração/desaceleração
LS10-B60**
LS10-B70**
LS10-B80**
0
100
100
−100
100
100
−200
60
70
−300
20
40
NOTA
Page 55

Configuração e operação 5. Faixa de movimento
LS10-B Rev.6 43
5. Faixa de movimento
CUIDADO
■
Ao configurar a faixa de movimento por razões de segurança, tanto a faixa do
pulso como os batentes mecânicos devem ser sempre definidos ao mesmo
tempo.
A faixa de movimento é pré-configurada na fábrica conforme explicado em Configuração e
operação: 5.4 Faixa de movimento padrão. Essa é a faixa de movimento máxima do
manipulador.
Há três métodos para configurar a faixa de movimento descritos como segue:
1. Configurar pela faixa de pulsos (para todas as articulações)
2. Configurar pelos batentes mecânicos (para as Articulações 1 a 3)
3. Configurar a faixa cartesiana (retangular) no sistema de coordenadas X, Y do
Manipulador (para as Articulações 1 e 2)
Batente
mecânico
Configuração da faixa retangular
Faixa de pulso
Faixa de movimento
Batente
mecânico
Quando a faixa de movimento for mudada para eficiência do layout ou por segurança, siga
as descrições em 5.1 a 5.3 para definir a faixa.
5.1 Configuração da faixa de movimento pela faixa de pulsos
Os pulsos são a unidade básica de movimento do manipulador. A faixa de movimento do
Manipulador é controlada pela faixa de pulsos entre o limite inferior e o limite superior do
pulso de cada articulação.
Os valores de pulso são lidos pela saída do codificador do servo motor.
Para a faixa de pulsos máxima, consulte as seções seguintes.
A faixa de pulsos deve ser configurada dentro da faixa do batente mecânico.
5.1.1 Faixa de pulsos máxima da Articulação 1
5.1.2 Faixa de pulsos máxima da Articulação 2
5.1.3 Faixa de pulsos máxima da Articulação 3
5.1.4 Faixa de pulsos máxima da Articulação 4.
Assim que o manipulador recebe um comando de operação, ele verifica se a posição alvo
especificada pelo comando está dentro da faixa de pulsos antes de efetuar a operação. Se a
posição alvo estiver fora da faixa de pulsos configurada, ocorre um erro e o manipulador
não se move.
A faixa de pulsos pode ser configurada no painel [Range] (Faixa) mostrado ao selecionar
[Tools]-[Robot Manager]. (Você também pode executar o comando Range pela
[Command Window].)
EPSON
RC+
NOTA
Page 56

Configuração e operação 5. Faixa de movimento
44 LS10-B Rev.6
5.1.1 Faixa de pulsos máxima da Articulação 1
A posição do pulso 0 (zero) da Articulação 1 é a posição onde o Braço 1 está voltado para a
direção positiva (+) no eixo da coordenada X.
Quando o pulso 0 é um ponto inicial, o valor do pulso no sentido anti-horário é definido
como positivo (+) e o valor do pulso no sentido horário é definido como negativo (-).
+Y
+X Pulso 0
+ B
− B
+ A
− A
A: Faixa de movimento
máxima
B: Faixa de pulsos máxima
LS10-B
132°
− Pulso 152918 ~ 808278
5.1.2 Faixa de pulsos máxima da Articulação 2
A posição do pulso 0 (zero) da Articulação 2 é a posição onde o Braço 2 está alinhado com
o Braço 1. Com o pulso 0 como um ponto inicial, o valor do pulso no sentido anti-horário é
definido como positivo (+) e o valor do pulso no sentido horário é definido como negativo
(-).
− B
+ B
Pulso 0
− A
+ A
A: Faixa de movimento
máxima
B: Faixa de pulsos máxima
LS10-B
150°
pulso 341334
Page 57

Configuração e operação 5. Faixa de movimento
LS10-B Rev.6 45
5.1.3 Faixa de pulsos máxima da Articulação 3
A posição do pulso 0 (zero) da Articulação 3 é a posição onde o eixo está no seu limite
superior.
O valor do pulso é sempre negativo porque a Articulação 3 sempre se move mais baixo que
a posições do pulso 0.
Limite superior: Pulso 0
Curso da Articulação 3
Pulso do limite inferior
LS10-B***S (Modelo padrão)
200 mm
−pulso 270336
300 mm
−pulso 405504
LS10-B***C (Modelo para sala
limpa)
170 mm
−pulso 229786
270 mm
−pulso 364954
Para o modelo para sala limpa, a faixa de movimento configurada com o batente mecânico
da Articulação 3 não pode ser mudada.
5.1.4 Faixa de pulsos máxima da Articulação 4
A posição do pulso 0 (zero) da Articulação 4 é a posição onde o plano próximo da
extremidade do eixo está voltado para a extremidade do Braço 2. Com o pulso 0 como um
ponto inicial, o valor do pulso no sentido anti-horário é definido como positivo (+) e o valor
do pulso no sentido horário é definido como negativo (-).
+X Pulso 0 215040
+Y
Sentido horário (valor-)
Sentido anti-horário (valor +)
NOTA
Page 58

Configuração e operação 5. Faixa de movimento
46 LS10-B Rev.6
5.2 Configuração da faixa de movimento pelos batentes mecânicos
Os batentes mecânicos limitam fisicamente a área absoluta na qual o manipulador pode se
movimentar.
Tanto a Articulação 1 como a 2 possuem furos rosqueados nas posições correspondentes ao
ângulo para as configurações dos batentes mecânicos. Instale os parafusos nos furos
correspondentes ao ângulo que você deseja configurar.
A Articulação 3 pode ser configurada para qualquer distância menor que o curso máximo.
Batente mecânico da
Articulação 2 (Fixo)
Batente mecânico da
Articulação 1 (Ajustável)
Batente mecânico da Articulação 3
(Batente mecânico de limite inferior)
(Não mude a posição do batente
mecânico do limite superior)
Batente mecânico
da Articulação 1
(Fixo)
Batente mecânico
da Articulação 2
(Ajustável)
Page 59

Configuração e operação 5. Faixa de movimento
LS10-B Rev.6 47
5.2.1 Configuração dos batentes mecânicos das Articulações 1 e 2
Tanto a Articulação 1 como a 2 possuem furos rosqueados nas posições correspondentes ao
ângulo para as configurações dos batentes mecânicos. Instale os parafusos nos furos
correspondentes ao ângulo que você deseja configurar.
Instale os parafusos para o batente mecânico nas posições seguintes.
Vista por baixo do braço 1
a
b
Batente mecânico da Articulação 1
a
b
LS10-B
Ângulo de
configuração (°)
115
−115
Valor do pulso
(pulse)
746382
−91022
Vista por cima do Braço 1
b
a
Batente mecânico da Articulação 2
a
b
LS10-B
Ângulo de
configuração (°)
125
−125
Valor do pulso
(pulse)
284444
−284444
(1)
Desligue o controlador.
(2)
Instale o parafuso Allen no furo correspondente ao ângulo configurado, e aperte-o.
Articulação
Parafuso Allen
(totalmente rosqueado)
O número
de parafusos
Torque de aperto
recomendado
1
M8 × 10
1 parafuso / lado
12.3 Nm (125 kgfcm)
Page 60

Configuração e operação 5. Faixa de movimento
48 LS10-B Rev.6
(3)
Ligue o controlador.
(4)
Configure a faixa de pulsos que corresponda as novas posições dos batentes mecânicos.
Cerifique-se de configurar a faixa de pulsos dentro das posições da faixa do batente
mecânico.
Exemplo: LS10-B602S
O ângulo da Articulação 1 é configurado de −110° a +110°.
O ângulo da Articulação 2 é configurado de − 110° a +110°.
Execute os comandos seguintes pela [Command Window].
>JRANGE 1, -72817, 728177 ' Configura a faixa de pulsos da
Articulação1
>JRANGE 2,-250331, 250331 ' Configura a faixa de pulsos da
Articulação 2
>RANGE ' Verifica a configuração usando Range
-72817, 728177, -250311, 250311, -270336, 0,
-215040, 215040
(5)
Mova os braços com a mão até que ele toque nos batentes mecânicos e assegure-se de
que os braços não atinjam quaisquer equipamentos periféricos durante a operação.
(6)
Opere a articulação mudada em velocidades baixas até que ela alcance as posições das
faixas de pulso mínima e máxima. Assegure-se de que o braço não atinja os batentes
mecânicos. (Verifique a posição do batente mecânico e a faixa de movimento que você
configurou).
Exemplo: LS10-B602S
O ângulo da Articulação 1 é configurado de −110° a +110°.
O ângulo da Articulação 2 é configurado de − 110° a +110°.
Execute os comandos seguintes pela [Command Window].
>MOTOR ON ' Liga o motor
>POWER LOW ' Entra no modo de potência baixa
>SPEED 5 ' Configura em velocidades baixas
>PULSE -72817,0,0,0 ' Move para a posição do pulso mínimo
da Articulação 1
>PULSE 728177,0,0,0 ' Move para a posição do pulso máximo
da Articulação 1
>PULSE 327680,-250311,0,0 ' Move para a posição do pulso mínimo
da Articulação 2
>PULSE 327680,250311,0,0 ' Move para a posição do pulso máximo
da Articulação 2
O comando Pulse (Comando Go Pulse) move todas as articulações de uma vez para a
posição especificada. Especifica posições seguras após considerar o movimento não só
das articulações cujas faixas de pulso foram mudadas, mas também das outras
articulações.
Nesse exemplo, a Articulação 1 é movida para a posição 0 onde fica mais próximo do
centro da sua faixa de movimento (valor do pulso: 327680) ao verificar a Articulação
2.
Se o braço estiver atingindo os batentes mecânicos ou se ocorrer um erro após o braço
atingir os batentes mecânicos, restaure a faixa de pulsos para uma configuração mais
estreita ou estenda as posições dos batentes mecânicos dentro do limite.
EPSON
RC+
EPSON
RC+
NOTA
Page 61

Configuração e operação 5. Faixa de movimento
LS10-B Rev.6 49
5.2.2 Configuração do batente mecânico da Articulações 3
Este método se aplica somente ao manipulador de modelo padrão.
Para o modelo para sala limpa, a faixa de movimento configurada com o batente mecânico
da Articulação 3 não pode ser mudada.
(1)
Ligue o controlador e desligue os motores usando o comando Motor OFF.
(2)
Empurre o eixo para cima enquanto
pressiona o interruptor de liberação do
freio.
Não empurre o eixo até o seu limite
superior ou isso dificultará que a tampa
superior do braço seja removida.
Empurre o eixo para cima até uma
posição onde o batente mecânico da
Articulação 3 possa ser mudado.
Parafuso do batente
mecânico do limite
inferior
Parafuso de fixação:
2-M56
Interruptor de
liberação do freio
Eixo
Quando você pressiona o interruptor de liberação do freio, o eixo pode baixar devido
ao peso do atuador da extremidade. Não deixe de segurar o eixo com a mão enquanto
pressiona o botão.
(3)
Desligue o controlador.
(4)
Afrouxe os parafusos do batente mecânico do limite inferior (Parafuso de fixação: 2M56).
Um batente mecânico é montado tanto no topo como na base da Articulação 3. No
entanto, somente a posição do batente mecânico do limite inferior no topo pode ser
mudada
Não remova o batente mecânico do limite inferior na base porque o ponto de
calibração da Articulação 3 é especificado usando o batente.
(5)
A extremidade superior do eixo define o curso máximo. Mova o batente mecânico
do limite inferior para baixo pelo comprimento que você deseja para o limite do
curso.
Por exemplo, quando o batente mecânico do limite inferior é configurado para o
curso de “200 mm”, o valor da coordenada Z do limite inferior será “−200”. Para
mudar o valor para “−180”, mova o batente mecânico do limite inferior para baixo
em “20 mm”. Use calibres para medir a distância ao ajustar o batente mecânico.
Meça esta
distância
NOTA
NOTA
NOTA
Page 62

Configuração e operação 5. Faixa de movimento
50 LS10-B Rev.6
(6)
Aperte firmemente o parafuso do batente mecânico do limite inferior
(Parafuso de fixação: 2-M56).
Torque de aperto recomendado: 3,9 N·m (39,8 kgf·m)
(7)
Ligue o controlador.
(8)
Mova a Articulação 3 para o seu limite inferior enquanto pressiona o interruptor de
liberação do freio e então verifique a posição do limite inferior. Não baixe
demasiadamente o batente mecânico. De outro modo, a articulação pode não alcançar
uma posição alvo.
(9)
Calcule o valor do pulso do limite inferior da faixa de pulsos usando a fórmula
mostrada abaixo e configure o valor.
O resultado do cálculo será sempre negativo porque o valor da coordenada Z do limite
inferior é negativo.
Limite inferior do pulso (pulso)
= valor da coordenada Z do limite inferior (mm) / Resolução (mm/pulse)
** Para a resolução da Articulação 3,
consulte a seção Configuração e operação 2.4 Especificações.
Execute os seguintes comandos pela [Command Window]. Insira o valor calculado
em X.
>JRANGE 3,X,0 ' Configura a faixa de pulsos da Articulação 3
(10)
Usando o comando Pulse (comando Go Pulse), mova a Articulação 3 para a posição de
limite inferior da faixa de pulsos em velocidade baixa. Se a faixa do batente mecânico
for menor que a faixa de pulso, a Articulação 3 atingirá o batente mecânico e ocorrerá
um erro. Quando ocorrer o erro, mude a faixa de pulsos para uma configuração mais
baixa ou estenda a posição do batente mecânico dentro do limite.
Se for difícil verificar se a Articulação 3 atinge um batente mecânico, desligue o
controlador e erga a tampa superior do braço para verificar pela lateral a condição que
causou o problema.
Execute os comandos seguintes pela [Command Window]. Insira o valor calculado na
Etapa (9) em X.
>MOTOR ON ' Liga o motor
>SPEED 5 ' Define velocidade baixa
>PULSE 0,0,X,0 ' Move a posição do pulso do limite inferior da Articulação 3.
(Nesse exemplo, todos os pulsos exceto aqueles para a Articulação 3 são
“0”. Substitua esses “0s” com os outros valores de pulso especificando
uma posição onde não haja interferência mesmo ao baixar a Articulação
3).
EPSON
RC+
EPSON
RC+
NOTA
Page 63

Configuração e operação 5. Faixa de movimento
LS10-B Rev.6 51
5.3 Configuração da faixa cartesiana (retangular) no sistema de coordenadas XY do manipulador
(para as articulações 1 e 2)
Use esse método para configurar os limites superior e inferior das coordenadas X e Y.
Essa configuração é obrigatória somente por software. Portanto, ela não muda a faixa física.
A faixa física máxima é baseada na posição dos batentes mecânicos.
Defina a configuração XYLim no painel [XYZ Limits] mostrado selecionando [Tools][Robot Manager].
(Você também pode executar o comando XYLim pela [Command Window]).
EPSON
RC+
Page 64

Configuração e operação 5. Faixa de movimento
52 LS10-B Rev.6
5.4 Faixa de movimento padrão
Os diagramas “motion range” (faixa de movimento) seguintes mostram a especificação
(máxima) padrão. Quando cada motor de articulação está sob controle do servo, o centro do
ponto mais baixo da Articulação 3 (do eixo) se move nas áreas mostradas na figura.
“Área limitada por batente mecânico” é a área onde o centro do ponto mais baixo da
Articulação 3 pode ser movido quando cada motor de articulação não está sob controle do
servo.
“Batente mecânico” define a faixa de movimento limitado de modo que o centro da
Articulação 3 não possa se mover mecanicamente além da área.
“Espaço máximo” é a área que contém o alcance mais longo dos braços. Se o raio máximo
do atuador da extremidade for superior a 60 mm, adicione “Área limitada por batente
mecânico” e “raio do atuador da extremidade”. O valor total é especificado como área
máxima.
A
Centro da Articulação 3
B
Faixa de movimento
C
Faixa máxima
D
Face de montagem da base
E
Área limitado por um batente
mecânico
LS10-B60**
LS10-B70**
LS10-B80**
a
Comprimento do Braço 1 + Braço 2 [mm]
600
700
800
b
Comprimento do Braço 1 [mm]
225
325
425
c
Comprimento do Braço 2 [mm]
375
d
Ângulo de movimento da Articulação 1 [°]
132
e
Ângulo de movimento da Articulação 2 [°]
150
f
(Faixa de movimento)
212
188
213
g
(Faixa de movimento na traseira)
526
592
659
h
Ângulo do batente mecânico da Articulação 1 [°]
2.0
i
Ângulo do batente mecânico da Articulação 2 [°]
2.0
j
(Área do batente mecânico)
206
176
200
k
(Área do batente mecânico na traseira)
531
601
670
m
(Faixa de movimento da
Articulação 3)
LS10-B**2S
200
LS10-B**3S
300
LS10-B**2C
170
LS10-B**3C
270
n
(Distância da face de montagem da
base)
LS10-B**2*
53
LS10-B**3*
153
p
(Extremidade superior da área do
batente mecânico da Articulação 3)
LS10-B*** S
4
LS10-B*** C
1
q
(Extremidade inferior da área do batente mecânico da
Articulação 3)
3
Page 65

Configuração e operação 5. Faixa de movimento
LS10-B Rev.6 53
Modelo padrão LS10-B*** S
Page 66

Configuração e operação 5. Faixa de movimento
54 LS10-B Rev.6
Modelo para sala limpa LS10-B*** C
Page 67

Manutenção
Este volume contém procedimentos de manutenção com as precauções de segurança para
os manipuladores da série LS10-B.
Page 68

Page 69

Manutenção 1. Manutenção com segurança
LS10-B Rev.6 57
1. Manutenção com segurança
Leia atentamente este capítulo, este manual e outros manuais relevantes para entender os
procedimentos de manutenção seguros antes de efetuar manutenção de rotina.
Somente pessoal autorizado que tenha tido treinamento de segurança deve ter
permissão para fazer manutenção no sistema robótico.
Treinamento de segurança é o programa para operadores de robôs industriais
que segue as leis e regulamentos de cada país.
O pessoal que tem treinamento em segurança adquire conhecimento sobre os
robôs industriais (operações, ensino, etc.), conhecimento sobre inspeções e
sobre as regras e regulamentos relacionados.
Somente pessoal que tenha completado o curso de treinamento e manutenção
de sistemas robóticos mantido pelo fabricante, fornecedor ou empresa
incorporada localmente é autorizado a efetuar a manutenção do sistema robótico.
ATENÇÃO
■
Não remova quaisquer peças que não estejam cobertas neste manual. Siga
estritamente o procedimento de manutenção conforme descrito neste manual. A
remoção incorreta de peças ou manutenção incorreta pode não só causar
funcionamento incorreto do sistema robótico, mas também sérios problemas de
segurança.
■
Fique afastado do manipulador enquanto a energia está ligada se não tiver feito
os cursos de treinamento. Não entre na área de operação enquanto a energia
estiver ligada. Entrar na área de operação com a energia ligada é extremamente
perigoso e pode causar sérios problemas de segurança, pois o manipulador pode
se mover mesmo se ele parecer estar parado.
■
Quando verificar a operação do manipulador após a substituição de peças, façao enquanto estiver fora da área protegida. Verificar a operação do manipulador
estando dentro da área protegida pode causar sérios problemas de segurança,
pois o manipulador pode se mover inesperadamente.
■
Antes de operar o sistema robótico, certifique-se de que tanto os interruptores de
parada de emergência como o interruptor da proteção de segurança funcionam
corretamente. Operar o sistema robótico quando os interruptores não estão
funcionando corretamente é extremamente perigoso e pode resultar em sérias
lesões corporais e/ou sérios danos ao sistema robótico pois os interruptores não
podem cumprir suas funções pretendidas em uma emergência.
ATENÇÃO
■
Para desligar a energia do sistema robótico, desconecte o plugue de alimentação
da fonte de energia. Conecte o cabo de energia de CA em uma tomada de
energia.
NÃO o conecte diretamente à fonte de energia da fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o controlador
e o equipamento relacionado e então desconecte o plugue de alimentação da
fonte de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
Page 70

Manutenção 2. Manutenção geral
58 LS10-B Rev.6
CUIDADO
■
Certifique-se de conectar os cabos corretamente. Não aplique força
desnecessária nos cabos. (Não coloque objetos pesados sobre os cabos. Não
dobre ou puxe os cabos aplicando força excessiva). A tensão desnecessária nos
cabos pode resultar em danos aos cabos, desconexão e/ou falha nos contatos.
Cabos danificados, desconexão ou falha nos contatos são extremamente
perigosos e podem resultar em choque elétrico e/ou funcionamento incorreto no
sistema robótico.
2. Manutenção geral
Este capítulo descreve as inspeções e procedimentos de manutenção. Executar as inspeções
e procedimentos de manutenção apropriadamente é essencial para prevenir problemas e
garantir a segurança.
Não deixe de executar as inspeções de manutenção de acordo com a programação.
2.1 Inspeção de manutenção
2.1.1 Programação para inspeção de manutenção
Os pontos de inspeção são divididos em cinco estágios: diário, mensal, trimestral, semestral
e anual. Os pontos de inspeção são adicionados a cada estágio.
Se o manipulador for operado por 250 horas ou mais por mês, os pontos de inspeção devem
ser adicionados a cada 250 horas, 750 horas, 1.500 horas, e 3.000 horas de operação.
Ponto de inspeção
Inspeção
diária
Inspeção
mensal
Inspeção
trimestral
Inspeção
semestral
Inspeção
anual
Reparo
(substituição)
1 mês (250 h)
Inspeção todo dia
√
2 meses (500 h)
√
3 meses (750 h)
√ √
4 meses (1000 h)
√
5 meses (1250 h)
√
6 meses (1500 h)
√ √ √
7 meses (1750 h)
√
8 meses (2000 h)
√
9 meses (2250 h)
√ √
10 meses (2500 h)
√
11 meses (2750 h)
√
12 meses (3000 h)
√ √ √ √
13 meses (3250 h)
√
20.000 h
√
h = hora
Page 71

Manutenção 2. Manutenção geral
LS10-B Rev.6 59
2.1.2 Pontos de inspeção
Inspeção com a energia desligada (o manipulador não está operando)
Ponto de inspeção
Local da inspeção
Diária
Mensal
Trimestral
Semestral
Anual
Verifique a frouxidão ou folga dos
parafusos.
Aperte-os se necessário.
(Para o torque de aperto, consulte
Manutenção: 2.4 Aperto de
parafusos Allen).
Parafusos de montagem do
atuador da extremidade
√ √ √ √ √
Parafusos de montagem do
manipulador
√ √ √ √ √
Parafusos de retenção de
cada braço
√ √ √ √ √
Parafusos em torno do eixo
√
Parafusos, parafusos que
prendem motores, unidades
de engrenagens de redução,
etc.
√
Verifique a frouxidão dos
conectores.
Se os conectores estiverem
frouxos, empurre-os firmemente ou
aperte-os.
Conectores externos no
manipulador (nas chapas de
conectores etc.)
√ √ √ √ √
Unidade de cabos do
manipulador
√ √ √ √
Inspecione visualmente quanto a
defeitos externos.
Limpe se necessário.
Aparência externa do
manipulador
√ √ √ √ √
Cabos externos
√ √ √ √
Verifique quanto a dobras ou
localização incorreta. Repare ou
realoque adequadamente se
necessário.
Proteção de segurança etc.
√ √ √ √ √
Verifique a tensão das correias
dentadas.
Tensione-as se necessário.
Dentro do Braço 2
√ √
Condições do engraxamento
Consulte Manutenção: 2.3 Engraxamento.
Inspeção com a energia ligada (o manipulador está operando)
Ponto de inspeção
Local da inspeção
Diária
Mensal
Trimestral
Semestral
Anual
Verifique a faixa de movimento
Cada articulação
√
Verifique se há a ocorrência de
sons ou vibrações não usuais.
Completo
√ √ √ √ √
Meça a precisão repetidamente
com um calibrador.
Completo
√
Ligue e desligue o interruptor de
liberação do freio e verifique o som
do freio eletromagnético. Se não
houver som algum, substitua o freio.
Freio √ √ √ √
√
Page 72

Manutenção 2. Manutenção geral
60 LS10-B Rev.6
2.2 Reparo (Substituição de peças)
CUIDADO
■
O tempo para reparo é baseado na suposição de que todas as articulações são
operadas por uma distância igual. Se uma articulação particular tiver uma alta
taxa de uso ou alta carga, é recomendado reparar todas as articulações (tantas
quanto possível) antes de exceder 20.000 horas de operação com a articulação
como base.
As peças das articulações do manipulador podem causar diminuição na precisão ou mau
funcionamento devido a deterioração do manipulador resultante do uso por longo tempo.
Para usar o manipulador por um longo tempo, é recomendado reparar as peças (substituição
de peças).
O tempo entre reparos é, aproximadamente, de 20.000 horas de operação do Manipulador.
No entanto, isto pode variar dependendo das condições de uso e do grau de carga (tal como
quando é operado com a velocidade de movimento máxima e aceleração/desaceleração
máxima em operação contínua) aplicada ao manipulador.
O tempo de substituição recomendado para peças sujeitas a manutenção (motores,
unidades de engrenagens de redução e correias dentadas) pode ser verificado na caixa de
diálogo [Maintenance] do EPSON RC+ 7.0.
Para detalhes, consulte o seguinte manual.
Controlador do robô RC90/RC90-B Manutenção 6. Alarme
Nota:
O tempo de substituição recomendado para as peças de manutenção é quando a peça
alcança a vida L10 (tempo até 10% de probabilidade de falha). Na caixa de diálogo
[Maintenance], a vida L10 é exibida como 100%.
NOTA
Page 73

Manutenção 2. Manutenção geral
LS10-B Rev.6 61
As horas de operação do manipulador podem ser verificadas na caixa de diálogo [Controller
Status Viewer]-[Motor On Hours].
(1) Selecione o menu EPSON RC+ -[Tools]-[Controller] para exibir a caixa de diálogo
[Controller Tools].
(2) Clique no botão <View Controller Status> para abrir a caixa de diálogo [Browse For
Folder].
(3) Selecione a pasta onde a informação está armazenada.
(4) Clique em <OK> para visualizar a caixa de diálogo [Controller Status Viewer].
(5) Selecione [Robot] no menu em árvore no lado esquerdo.
Para as peças sujeitas a reparo, consulte Manutenção 14. Lista de peças de manutenção.
Para detalhes sobre a substituição de cada peça, consulte a seção Manutenção.
Entre em contato com o fornecedor de sua região para obter mais informações.
Page 74

Manutenção 2. Manutenção geral
62 LS10-B Rev.6
2.3 Engraxamento.
As unidades de chaveta do fuso de esferas e as engrenagens de redução precisam ser
engraxadas regularmente. Use somente a graxa especificada na tabela seguinte.
CUIDADO
■
Mantenha graxa suficiente no manipulador. Operar o Manipulador com graxa
insuficiente danificará as peças deslizantes e/ou resultará em funcionamento
insuficiente do Manipulador. Se as peças forem danificadas, um grande volume
de tempo e dinheiro será necessário para os reparos.
CUIDADO
■
Se a graxa entrar em contato com os seus olhos, boca ou sua pele, siga as
instruções abaixo.
Se graxa entrar em contato com os seus olhos
: Lave-os completamente com água limpa e então consulte um
médico imediatamente.
Se graxa entrar em contato com sua boca
: Se engolir, não provoque vômito. Consulte um médico
imediatamente.
: Se a graxa apenas entrar em contato com sua boca, lave-a
profundamente com água.
Se graxa entrar em contato com sua pele
: Lave completamente a área com água e sabão.
Peça que requer
engraxe
Intervalo de
engraxamento
Graxa
Consulte Manutenção:
Articulação 1
Unidades de
engrenagens de
redução
Tempo para reparo
SK-1A
5 Articulação 1
Articulação 2
SK-1A
6 Articulação 2
Articulação 3
Unidade de
chaveta do fuso
de esferas
Em 100 km de
operação
(50 km para o primeiro
engraxamento)
AFB
10. Engraxamento da
unidade de chaveta do
fuso de esferas
Unidades de engrenagens de redução das Articulações 1 e 2
Como uma indicação aproximada, execute o engraxamento ao mesmo tempo do reparo.
No entanto, isto pode variar dependendo das condições de uso e o grau de carga (tal como
quando é operado com a velocidade de movimento máxima e aceleração/desaceleração
máxima em operação contínua) aplicada ao Manipulador.
Unidade de chaveta do fuso de esferas da Articulação 3
O intervalo de engraxamento recomenda é de 100 km de operação. No entanto, o tempo de
engraxamento também pode ser verificado pela condição da graxa. Execute o
engraxamento se a graxa estiver descolorida ou ficar seca.
Graxa normal Graxa descolorida
Execute o engraxamento em 50 km de operação para o primeiro engraxamento.
O tempo de substituição recomendado para a graxa na unidade da chaveta do fuso de
esferas pode ser verificado na caixa de diálogo [Maintenance] do EPSON RC+ 7.0.
Para detalhes, consulte o seguinte manual.
Manutenção do Controlador de robô RC90 / RC90-B 6. Alarme
NOTA
Page 75

Manutenção 2. Manutenção geral
LS10-B Rev.6 63
2.4 Aperto de parafusos Allen
Os parafusos Allen são usados em locais onde é necessária resistência mecânica. (Um
parafuso Allen será chamado de “parafuso” neste manual). Esses parafusos são apertados
com os torques de aperto mostrados na tabela a seguir.
Quando for necessário reapertar estes parafusos em alguns procedimentos neste manual
(exceto em casos especiais conforme observado), use uma chave de torque de modo que os
parafusos sejam apertados com os torques de aperto apropriados como é mostrado abaixo.
Parafuso
Torque de aperto
Consulte abaixo para o parafuso de fixação.
M2.5
1,4± 0,1 Nm
(14 ± 1 kgfcm)
Parafuso
Torque de aperto
M3
2,0± 0,1 Nm
(21 ± 1 kgfcm)
M3
0,7± 0,1 Nm
(7,1 ± 1
kgfcm)
M4
4,0± 0,2 Nm
(41 ± 2 kgfcm)
M4
2,4± 0,1 Nm
(26 ± 1 kgfcm)
M5
8,0± 0,4 Nm
(82 ± 4 kgfcm)
M5
3,9± 0,2 Nm
(40 ± 2 kgfcm)
M6
13,0± 0,6 Nm
(133 ± 6 kgfcm)
M8
32,0± 1,6 Nm
(326 ± 16 kgfcm)
M10
58,0± 2,9 Nm
(590 ± 30 kgfcm)
M12
100,0± 5,0 Nm
(1.020 ± 51 kgfcm)
Os parafusos alinhados em uma circunferência devem ser apertados em um padrão cruzado
como é mostrado na figura abaixo.
1 5 3
7 2 6
4
8
Furo de
parafuso
Não aperte todos os parafusos firmemente de uma
vez. Divida o aperto dos parafusos em duas ou três
vezes e aperte-os firmemente com uma chave
hexagonal. Em seguida, use uma chave de torque de
modo que os parafusos sejam apertados com os
torques de aperto mostrados na tabela acima.
2.5 Compatibilizando origens
Após peças serem substituídas (motores, unidades de engrenagens de redução, um freio,
correias dentadas, uma unidade de chaveta do fuso de esferas, etc.), o manipulador não pode
operar corretamente porque existirá uma divergência entre a origem armazenada em cada
motor e sua origem correspondente armazenada no controlador. Após substituir as peças, é
necessário compatibilizar estas origens.
Para a calibração, os valores de pulso de uma posição específica devem ser registrados de
antemão.
Antes de substituir peças, selecione os dados de cada ponto (posição) dos dados de ponto
registrados para verificar a precisão. Em seguida, siga as etapas abaixo para exibir os valores
de pulso e registrá-los.
Execute os seguintes comandos pela [Command Window].
>PULSE
PULSE: [Valor do pulso da Articulação 1] pls [Valor do pulso da Articulação 2] pls
[Valor do pulso da Articulação 3] pls [Valor do pulso da Articulação 4] pls
EPSON
RC+
Page 76

Manutenção 2. Manutenção geral
64 LS10-B Rev.6
2.6 Layout das peças de manutenção
Modelo padrão
Cabo de energia
Unidade do cabo
Freio da Articulação 3
Cabo de sinal
Interruptor de
liberação do freio
Lâmpada LED
Unidade da
chaveta do fuso
de esferas
Tampa superior
do braço
Motor da Articulação 4
Correia Z
Correia U2
Correia U1
Motor da Articulação 2
Unidade de engrenagens
de redução da
Articulação 2
Unidade de
engrenagens
de redução da
Articulação 1
Motor da
Articulação 1
Motor da Articulação 3
(Figura: LS10-B602S)
Placa de
controle
Tampa inferior do braço
Freio da
Articulação 4
Polia
intermediária
Placa do
conversor
Modelo para sala limpa (com fole opcional)
Para o modelo para sala limpa, as seguintes peças são adicionadas ao modelo padrão.
Fole
Fole
Braçadeira de fita
(Figura: LS10-B602C)
Braçadeira de fita
Braçadeira de fita
Page 77

Manutenção 3. Tampas.
LS10-B Rev.6 65
3. Tampas.
Todos os procedimentos para remoção e instalação das tampas na manutenção são descritos
neste capítulo.
ATENÇÃO
■
Não conecte ou desconecte os conectores do motor enquanto a energia para o
sistema robótico estiver ligada. Conectar ou desconectar os conectores do motor
com a energia ligada é extremamente perigoso e pode resultar em sérias lesões
corporais, pois o manipulador pode se mover de modo anormal, e também pode
resultar em choque elétrico e/ou mau funcionamento no sistema robótico.
■
Para desligar a energia do sistema robótico, desconecte o plugue de alimentação
da fonte de energia. Conecte o cabo de energia de CA em uma tomada de
energia.
NÃO o conecte diretamente à fonte de energia da fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o controlador
e o equipamento relacionado e então desconecte o plugue de alimentação da
fonte de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
■
Tenha cuidado para não deixar entrar quaisquer substâncias estranhas no
manipulador, conectores e pinos durante a manutenção. Desligue a energia
quando existirem quaisquer substâncias estranhas no sistema robótico, pois isso
é extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento do sistema robótico.
Tampa inferior
Chapa do
conector
Sub-chapa do
conector
Chapa do
usuário
(Figura: LS10-B702S)
Tampa superior
do braço
Page 78

Manutenção 3. Tampas.
66 LS10-B Rev.6
3.1 Tampa superior do braço
CUIDADO
■
Não force a remoção da tampa superior do braço. Remover a tampa com força
pode resultar em danos aos cabos, desconexão e/ou falha nos contatos. Cabos
danificados, desconexão ou falha nos contatos são extremamente perigosos e
podem resultar em choque elétrico e/ou funcionamento incorreto no sistema
robótico.
■
Ao montar a tampa, tenha cuidado para não deixar que os cabos interfiram na
montagem da tampa e não dobre esses cabos com força para empurrá-los para
dentro da tampa. Tensão desnecessária nos cabos pode resultar em danos nos
cabos, desconexão e/ou falha nos contatos. Cabos danificados, desconexões, ou
falhas de contato são extremamente perigosos e isso pode resultar em choque
elétrico e/ou funcionamento incorreto no sistema robótico.
Ao rotear os cabos, observe a localização após remover a tampa. Certifique-se
de colocar os cabos de volta em seus locais originais.
Remoção da
tampa superior
do braço
Afrouxe os parafusos de montagem da tampa
superior do braço e então erga a tampa.
Quando o fole estiver instalado no manipulador,
remova o fole superior e então remova a tampa
superior do braço. Para a remoção do fole,
consulte Manutenção 9. Fole.
Tenha cuidado com fios e tubos ao remover a
tampa.
Parafuso SEM
duplo 4-M416
Suporte
6-M48
Tampa superior
do braço
Instalação da
tampa superior
do braço
Coloque a tampa superior do braço no braço e prenda com os parafusos de montagem da
tampa superior do braço.
Após prender a tampa superior do braço, assegure-se de que o batente mecânico de limite
inferior não esteja tocando a parte cilíndrica da tampa superior do braço.
Quando o fole estiver instalado no manipulador, instale a tampa superior do braço e então
ajuste o fole superior. Para a instalação do fole, consulte Manutenção 9. Fole.
NOTA
NOTA
Page 79

Manutenção 3. Tampas.
LS10-B Rev.6 67
3.2 Tampa inferior do braço
Afrouxe os parafusos de montagem da tampa inferior do
braço e então remova a tampa.
Tenha cuidado com o atuador da extremidade. Quando o
atuador da extremidade estiver instalado, a tampa inferior
do braço não poderá ser removida do eixo.
Quando você substituir a unidade de chaveta do fuso de
esferas, precisa remover o atuador da extremidade para
remover completamente a tampa inferior do braço.
Quando você pode trabalhar (manutenção, inspeção) sem
remover completamente a tampa, mova o eixo para o limite
inferior e baixe a tampa inferior do braço.
Quando o fole estiver instalado no manipulador, remova ou
puxe para baixo o fole inferior e então remova a tampa
inferior do braço. Para a remoção do fole, consulte
Manutenção 9. Fole.
4-M410
Tampa inferior
do braço
3.3 Chapa de conectores
CUIDADO
■
Não force a remoção da chapa de conectores. Remover a chapa de conectores
com força pode resultar em danos nos cabos, desconexão e/ou falha nos
contatos. Cabos danificados, desconexão ou falha nos contatos são
extremamente perigosos e podem resultar em choque elétrico e/ou
funcionamento incorreto no sistema robótico.
■
Ao montar a chapa de conectores, tenha cuidado para não deixar que os cabos
interfiram com a montagem da placa não entorte estes cabos com força para
empurrá-los para dentro da tampa.
Tensão desnecessária nos cabos pode resultar em danos nos cabos, desconexão
e/ou falha nos contatos. Cabos danificados, desconexões, ou falhas de contato
são extremamente perigosos e isso pode resultar em choque elétrico e/ou
funcionamento incorreto no sistema robótico.
Ao rotear os cabos, observe a localização após remover a chapa do conector.
Certifique-se de colocar os cabos de volta em seus locais originais.
NOTA
Page 80

Manutenção 3. Tampas.
68 LS10-B Rev.6
Afrouxe os parafusos de montagem da
chapa do conector e remova a chapa.
4-M410
Chapa do
conector
Ao montar a chapa do conector, tenha cuidado com o seguinte.
Evite que o tubo de ar seja curvado acentuadamente dentro
do manipulador. Além disso, não bloqueie o fluxo de ar.
Se houver uma dobra no tubo de ar, o fluxo de ar será
bloqueado enquanto o manipulador estiver operando
podendo causar um problema.
Coloque o tubo de ar ao longo da parede lateral esquerda
como mostrado na figura.
ADEQUADO: Curvada
INADEQUADO: Dobrado
NOTA
Page 81

Manutenção 3. Tampas.
LS10-B Rev.6 69
3.4 Sub-chapa de conectores
CUIDADO
■
Não force a remoção da sub-chapa de conectores. Remover a sub-chapa de
conectores com força pode resultar em danos aos cabos, desconexão e/ou falha
nos contatos. Cabos danificados, desconexão ou falha nos contatos são
extremamente perigosos e podem resultar em choque elétrico e/ou funcionamento
incorreto no sistema robótico.
■
Ao montar a sub-chapa de conectores, tenha cuidado para não deixar que os
cabos interfiram com a montagem da placa não entorte estes cabos com força
para empurrá-los para dentro da tampa.
Tensão desnecessária nos cabos pode resultar em danos nos cabos, desconexão
e/ou falha nos contatos. Cabos danificados, desconexões, ou falhas de contato
são extremamente perigosos e isso pode resultar em choque elétrico e/ou
funcionamento incorreto no sistema robótico.
Ao rotear os cabos, observe a localização após remover a sub-chapa de
conectores. Certifique-se de colocar os cabos de volta em seus locais originais.
Afrouxe os parafusos de
montagem da sub-chapa de
conectores e remova a chapa.
Consulte
Configuração e operação 3.6
Conexão dos cabos.
Sub-chapa
do conector
4-M3
Parafusos de aperto manual
(Não é necessário
desaparafusar os parafusos)
Page 82

Manutenção 3. Tampas.
70 LS10-B Rev.6
3.5 Chapa do usuário
Remoção da
placa do
usuário
(1)
Remova a tampa superior do braço.
Consulte Manutenção: 3.1 Tampa superior do braço.
(2)
Afrouxe os parafusos de montagem da chapa
do usuário e então remova a placa.
2-M410
Chapa do
usuário
Instalação da
placa do
usuário
(1)
Coloque a chapa do usuário no braço e prenda usando os parafusos de montagem.
(2)
Monte a tampa superior do braço.
Consulte Manutenção: 3.1 Tampa superior do braço.
Page 83

Manutenção 4. Cabo
LS10-B Rev.6 71
4. Cabo
ATENÇÃO
■
Não conecte ou desconecte os conectores do motor enquanto a energia para o
sistema robótico estiver ligada. Conectar ou desconectar os conectores do motor
com a energia ligada é extremamente perigoso e pode resultar em sérias lesões
corporais, pois o manipulador pode se mover de modo anormal, e também pode
resultar em choque elétrico e/ou mau funcionamento no sistema robótico.
■
Para desligar a energia do sistema robótico, desconecte o plugue de alimentação
da fonte de energia. Conecte o cabo de energia de CA em uma tomada de
energia.
NÃO o conecte diretamente à fonte de energia da fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o controlador
e o equipamento relacionado e então desconecte o plugue de alimentação da
fonte de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
■
Tenha cuidado para não deixar entrar quaisquer substâncias estranhas no
manipulador, conectores e pinos durante a manutenção. Desligue a energia
quando existirem quaisquer substâncias estranhas no sistema robótico, pois isso
é extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento do sistema robótico.
CUIDADO
■
Certifique-se de conectar os cabos corretamente. Não aplique força
desnecessária nos cabos. (Não coloque objetos pesados sobre os cabos. Não
dobre ou puxe os cabos aplicando força excessiva). A tensão desnecessária nos
cabos pode resultar em danos aos cabos, desconexão e/ou falha nos contatos.
Cabos danificados, desconexão ou falha nos contatos são extremamente
perigosos e podem resultar em choque elétrico e/ou funcionamento incorreto no
sistema robótico.
Page 84

Manutenção 4. Cabo
72 LS10-B Rev.6
4.1 Substituição da unidade de cabos
O manipulador da série LS10-B não têm baterias. Os dados de posição são memorizados
pelo motor. Ao substituir cabos a calibração não é necessária.
Nome
Qtde
Nota
Peças de
manutenção
Unidade de cabos
1
LS10-B60** : 2196931
LS10-B70** : 2196932
LS10-B80** : 2196933
Ferramentas
Chave
hexagonal
largura entre as faces
planas: 3 mm
1
Para parafusos M4
Chave de
porca
largura entre as faces
planas: 5 mm
1
Para remoção do conector
D-Sub
Chave de
porca
largura entre as faces
planas: 5 mm
1
Para remoção do conector
D-Sub
Chave de torque
1
Alicate
1
Para cortar o prendedor de
fios
Material
Prendedor de fios
-
Unidade do cabo
(Figura: LS10-B602S)
NOTA
Page 85

Manutenção 4. Cabo
LS10-B Rev.6 73
CUIDADO
■
Se os conectores tiverem sido desconectados durante a substituição da unidade
de cabos, reconecte-os em suas posições apropriadas. Consulte os diagramas
de blocos.
A conexão incorreta do conector pode resultar em funcionamento anormal do
sistema do robótico.
Para detalhes sobre as conexões, consulte Manutenção: 4.2 Diagramas de
fiação.
■
Ao instalar a tampa, tenha cuidado para não deixar que os cabos interfiram na
montagem da tampa e não dobre esses cabos com força para empurrá-los para
dentro da tampa. Tensão desnecessária nos cabos pode resultar em danos aos
cabos, desconexão e/ou falha nos contatos. Cabos danificados, desconexões, ou
falhas de contato são extremamente perigosos e isso pode resultar em choque
elétrico e/ou funcionamento incorreto no sistema robótico.
Ao rotear os cabos, observe a localização após remover a tampa. Certifique-se
de colocar os cabos de volta em seus locais originais.
■
Certifique-se de conectar os cabos corretamente. Não aplique força
desnecessária nos cabos. (Não coloque objetos pesados sobre os cabos. Não
dobre ou puxe os cabos aplicando força excessiva). A tensão desnecessária nos
cabos pode resultar em danos aos cabos, desconexão e/ou falha nos contatos.
Cabos danificados, desconexão ou falha nos contatos são extremamente
perigosos e podem resultar em choque elétrico e/ou funcionamento incorreto no
sistema robótico.
Um freio é montado no motor das Articulações 3 e 4 para evitar que o eixo abaixe e gire
devido ao peso do atuador da extremidade enquanto a energia para o controlador está
desligada ou enquanto o motor está no status desligado (MOTOR OFF).
Mova o eixo para baixo até o seu limite inferior antes do procedimento de substituição
seguindo as etapas de remoção.
NOTA
Page 86

Manutenção 4. Cabo
74 LS10-B Rev.6
Remoção da
unidade de
cabos
(1)
Desligue o controlador e mude o status do motor para desligado (MOTOR OFF).
(2)
Pressione e mantenha pressionado o interruptor de liberação do freio para permitir que
o eixo abaixe. Certifique-se de que haja espaço suficiente para evitar que o atuador da
extremidade atinja qualquer equipamento periférico.
O interruptor de liberação do freio é aplicado em ambas as Articulações 3 e 4.
Quando o interruptor de liberação do freio é pressionado, os freios respectivos das
Articulações 3 e 4 são liberados.
Tenha cuidado com a queda e rotação do eixo enquanto o interruptor de liberação do
freio está sendo pressionado porque ele pode ser baixado com o peso do atuador da
extremidade.
(3)
Desligue o controlador.
(4)
Remova a sub-chapa de conectores da chapa de conectores.
Para detalhes, consulte Manutenção 3.4 Chapa de conectores
(5)
Desconecte o cabo M/C.
Para detalhes, consulte Configuração e Operação 3.6 Conectando os cabos - Conexão
e desconexão do cabo M/C.
(6)
Remova a chapa do conector.
Para detalhes, consulte Manutenção: 3.3 Chapa de conectores.
(7)
Remova o seguinte que está conectado (dentro) à chapa de
conectores e à sub-chapa de conectores.
Tubo de ar
Cabo D-sub
Cabo Ethernet (RJ45)
Conectores
: X11, X111, X121, CV11, CV12, CV13
Para os conectores fixos na base de montagem,
desconecte-os segurando a presilha.
(8)
Corte o prendedor de fios que prende os cabos no lado da
base da chapa de fixação do cabo.
NOTA
NOTA
Page 87

Manutenção 4. Cabo
LS10-B Rev.6 75
(9)
Remova os sete fios terras que estão presos na base de
montagem.
Tenha cuidado para não perder o espaçador que prende os
fios terra.
(10)
Corte o prendedor de fios que prende os cabos no lado da base.
(11)
Remova a tampa superior do braço.
Para detalhes, consulte Manutenção: 3.1 Tampa superior do braço.
(12)
Remova a chapa do usuário.
Para detalhes, consulte Manutenção: 3.5 Chapa do usuário.
(13)
Desconecte os 10 conectores no lado do Braço.
Conectores: X22, X33,X42, X43, X44, X51, BR, X221, X231, X241
(14)
Desconecte os dois conectores localizados dentro da base.
Conectores: X41, X211
(15)
Desconecte o cabo D-sub, o tubo de ar e o cabo Ethernet (RJ45) da chapa do usuário.
Os parafusos de montagem para o cabo D-sub são muito pequenos. Tenha o cuidado
de guardar os parafusos.
Pressione o anel da conexão para puxar o tubo de ar para fora. (ø62, ø41)
Não esqueça o layout dos cabos ao reconectar as peças desconectadas após a
substituição.
(16)
Remova os dois fios terra da chapa do usuário.
Desparafuse a braçadeira de cabo que prende os cabos na lateral do Braço e remova-
o, bem como a lâmina de proteção.
(17)
Seja cuidadoso para não perder a braçadeira de cabo, a lâmina de proteção e os
parafusos de fixação.
(18)
Remova a porca que prende a conexão do duto do
cabo à chapa do usuário. Gire a porca para removê-la
e puxe os cabos da chapa do usuário para fora.
(16)
(17)
(19)
Gire a conexão do duto do cabo para remover a porca
que o prende à base e puxe os cabos para fora da base.
NOTA
NOTA
Page 88

Manutenção 4. Cabo
76 LS10-B Rev.6
Instalação da
unidade de
cabos
(1)
Passe os cabos novos através da base, da chapa de
fixação do cabo e da porca. Então, gire a conexão para
prender os cabos.
(2)
(1)
Chapa de
fixação do
cabo
(2)
Passe os novos cabos localizados na lateral da chapa
do usuário, através da chapa do usuário e a porca e
gire a porca para prender os cabos.
(3)
Substitua o prendedor de fios cortados na etapa de remoção (8), por um novo prendedor
de fios.
(4)
Conecte os dois conectores localizados dentro da base.
Conectores: X41, X211
(5)
Conecte as peças seguintes para montar a base e a chapa do conector.
Tubo de ar, cabo D-sub, Cabo Ethernet (RJ45)
Conectores: X11, X111, X121, CV11, CV12, CV13
(6)
Conecte o fio terra no lado da base na base de montagem.
(7)
Conecte o tubo de ar, o cabo D-sub e o cabo Ethernet (RJ45) à chapa do usuário.
(8)
Prenda os dois fios terra na chapa do usuário.
(9)
Monte a chapa do usuário.
Para detalhes, consulte Manutenção: 3.5 Chapa do usuário.
(10)
Conecte os conectores.
Conectores: X22, X33,X42, X43, X44, X51, BR, X221, X231, X241
(11)
Como com o prendedor de fios cortados na etapa de remoção (15), prenda os cabos com
um novo prendedor de fios.
(12)
Monte a chapa de conectores.
Para detalhes, consulte Manutenção: 3.3 Chapa de conectores.
(13)
Coloque e prenda a tampa superior do braço sem que os cabos sejam presos.
Para detalhes, consulte Manutenção: 3.1 Tampa superior do braço.
Page 89

Manutenção 4. Cabo
LS10-B Rev.6 77
4.2 Diagramas de fiação
4.2.1 Cabo de sinal
Page 90

Manutenção 4. Cabo
78 LS10-B Rev.6
4.2.2 Cabo de energia
Page 91

Manutenção 4. Cabo
LS10-B Rev.6 79
4.2.3 Cabo do usuário
4.2.4 Cor dos cabos
A tabela a seguir mostra os códigos e cores dos cabos indicados nas atribuições dos pinos.
4.2.1 Cabo de sinal
4.2.2 Cabo de energia
4.2.3 Cabo do usuário
Código
Cor do cabo
B
Preto
W
Branco
R
Vermelho
G
Verde
Y
Amarelo
BR
Marrom
L
Azul
V
Violeta
O
Laranja
P
Pink
SB
Azul celeste
GY
Cinza
Page 92

Manutenção 4. Cabo
80 LS10-B Rev.6
4.3 Substituição do cabo M/C
O manipulador da série LS10-B não têm baterias. Os dados de posição são memorizados
pelo motor. Ao substituir cabos a calibração não é necessária.
Nome
Qtde
Nota
Peças de
manutenção
Cabo M/C
1
3 m: 2196934
5 m: 2196935
10 m: 2196936
Ferramentas
Chave de fenda
1 Chave de torque
1
(Figura: LS10-B602S)
Cabo M/C
CUIDADO
■
Se os conectores tiverem sido desconectados durante a substituição da unidade
de cabos, reconecte-os em suas posições apropriadas. Consulte os diagramas
de blocos.
A conexão incorreta do conector pode resultar em funcionamento anormal do
sistema do robótico.
Para detalhes sobre as conexões, consulte Maintenance: 4.2 Diagramas de
fiação.
■
Ao instalar a tampa, tenha cuidado para não deixar que os cabos interfiram na
montagem da tampa e não dobre esses cabos com força para empurrá-los para
dentro da tampa. Tensão desnecessária nos cabos pode resultar em danos aos
cabos, desconexão e/ou falha nos contatos. Cabos danificados, desconexões, ou
falhas de contato são extremamente perigosos e isso pode resultar em choque
elétrico e/ou funcionamento incorreto no sistema robótico.
Ao rotear os cabos, observe a localização após remover a tampa. Certifique-se
de colocar os cabos de volta em seus locais originais.
■
Certifique-se de conectar os cabos corretamente. Não aplique força
desnecessária nos cabos. (Não coloque objetos pesados sobre os cabos. Não
dobre ou puxe os cabos aplicando força excessiva). A tensão desnecessária nos
cabos pode resultar em danos aos cabos, desconexão e/ou falha nos contatos.
Cabos danificados, desconexão ou falha nos contatos são extremamente
perigosos e podem resultar em choque elétrico e/ou funcionamento incorreto no
sistema robótico.
NOTA
Page 93

Manutenção 4. Cabo
LS10-B Rev.6 81
Remoção do
cabo M/C
(1)
Desligue o controlador.
(2)
Desconecte os seguintes conectores do controlador.
Conector do cabo de energia Conector do cabo de sinal
(3)
Afrouxe os parafusos de fixação da chapa.
Você não precisa removê-los
completamente.
Para detalhes, consulte Manutenção:
3.3 Chapa de conectores.
Parafusos
de aperto
manual
4-M310
(4)
Deslize a chapa para removê-la da base.
Não puxe o cabo M/C após remover a chapa.
Os cabos M/C são conectados pelos
conectores. Isso pode resultar em
desconexão dos cabos.
(5)
Como mostrado à direita, puxe os cabos do
manipulador.
(6)
Desconecte os conectores na ordem
mostrada à direita.
As presilhas dos conectores são as posições
marcadas com △ na figura.
Empurre as presilhas para desconectar o
conector.
2
1
3
NOTA
Page 94

Manutenção 4. Cabo
82 LS10-B Rev.6
O conector (branco) do cabo de energia é difícil de desconectar por motivo de
segurança.
Para desconectar o conector, empurre a presilha firmemente.
Se você não conseguir desconectá-la, empurre o conector e então desconecte-o
empurrando a presilha.
Não puxe os cabos. Isso pode resultar em desconexão.
Não remova os cabos M/C da chapa.
NOTA
Page 95

Manutenção 4. Cabo
LS10-B Rev.6 83
Cabo M/C
Instalação do
(1)
Coloque o cabo M/C como mostrado à
direita.
Tenha cuidado para não colocar a chapa na
direção errada.
(2)
Conecte os conectores na ordem mostrada
à direita.
2
3
1
(3)
Deslise a chapa para instalá-la.
Parafusos de aperto manual: 4-M310
Torque de aperto: 0,60,1 N· m
Parafusos
de aperto
manual
4-M310
Deslize a placa até que ela esteja paralela com a mesa base.
Tenha cuidado para não apertar os parafusos com os cabos presos na chapa.
(4)
Conecte os seguintes conectores ao controlador.
Conector do cabo de energia Conector do cabo de sinal
(5)
Ligue o controlador.
NOTA
NOTA
Page 96

Manutenção 4. Cabo
84 LS10-B Rev.6
Orientação da sub-chapa de conectores
Ao instalar a chapa, tenha cuidado com a orientação.
A orientação correta é quando as letras: WARNING da etiqueta de advertência de choque
elétrico estiverem paralelas com a mesa base.
Se a chapa for instalada na orientação errada, os cabos dentro do manipulador ficarão
torcidos e poderá resultar em desconexão.
Correta: Os cabos não estão torcidos
Errado: Os cabos estão torcidos
Page 97

Manutenção 5. Articulação 1
LS10-B Rev.6 85
5. Articulação 1
ATENÇÃO
■
Não conecte ou desconecte os conectores do motor enquanto a energia para o
sistema robótico estiver ligada. Conectar ou desconectar os conectores do motor
com a energia ligada é extremamente perigoso e pode resultar em sérias lesões
corporais, pois o manipulador pode se mover de modo anormal, e também pode
resultar em choque elétrico e/ou mau funcionamento no sistema robótico.
■
Para desligar a energia do sistema robótico, desconecte o plugue de alimentação
da fonte de energia. Conecte o cabo de energia de CA em uma tomada de
energia.
NÃO o conecte diretamente à fonte de energia da fábrica.
■
Antes de executar qualquer procedimento de substituição, desligue o controlador
e o equipamento relacionado e então desconecte o plugue de alimentação da
fonte de energia.
Executar qualquer procedimento de substituição com a energia ligada é
extremamente perigoso e pode resultar em choque elétrico e/ou mau
funcionamento no sistema robótico.
CUIDADO
■
Tenha cuidado para não aplicar choque excessivo ao eixo do motor ao substituir
os motores. O choque pode encurtar o ciclo de vida dos motores e do codificador
e/ou danificá-los.
■
Nunca desmonte o motor e o codificador. A desmontagem do motor e do
codificador causará uma diferença posicional e eles não poderão ser usados
novamente.
Após peças serem substituídas (motores, unidades de engrenagens de redução, freio,
correias dentadas, unidade de chaveta do fuso de esferas, etc.), o manipulador não pode
operar corretamente porque existirá uma divergência entre origem armazenada em cada
motor e sua origem correspondente armazenada no controlador.
Após substituir as peças, é necessário compatibilizar estas origens.
O processo de alinhamento das duas origens é chamado de “Calibração”.
Consulte Manutenção: 13. Calibração para executar a calibração.
Unidade das engrenagens de
redução da Articulação 1
Motor da Articulação 1
Page 98

Manutenção 5. Articulação 1
86 LS10-B Rev.6
5.1 Substituição do motor da Articulação 1
Nome
Qtde
Nota
Peças de
manutenção
Servomotor de CA 520W
1
2197984 (com vedação de óleo)
O-ring
1
1213266 (CO0543A)
1
1520371 (CO0538A)
1
1510528 (CO0551A)
Ferramentas
Chave
hexagonal
largura entre as faces
planas: 2 mm
1
Para parafusos de fixação M4
largura entre as faces
planas: 3 mm
1
Para parafusos M4
Chave de torque
1 Pano de limpeza
1
Para limpar a graxa
Graxa
Graxa (SK-1A)
-
-
Remoção do
motor da
Articulação 1
(1)
Remova a chapa do conector.
Para detalhes, consulte Manutenção: 3.3 Chapa de conectores.
(2)
Desconecte os conectores.
Conectores: X41, X211 (Segure na presilha para remover).
(3)
Remova o parafuso de montagem do Braço 1 na lateral da Articulação 1 e remova o
braço.
Há um O-ring (CO0551A) entre a unidade da Articulação 1 e o braço. Guarde o Oring.
(4)
Remova os parafusos de montagem do flange da
Articulação 1 na base.
6-M515
(5)
Segure a unidade da Articulação 1 e remova-a da
base.
Tenha cuidado para não danificar o cabo do motor
prendendo-o na base.
(6)
Afrouxe os parafusos de montagem do flange do
motor da Articulação 1 e remova a unidade do
motor.
Há um O-ring na posição de montagem do flange
do motor e o flange da Articulação 1.
Tenha cuidado para não perder o O-ring.
4-M415
Unidade do
motor da
Articulação 1
Page 99

Manutenção 5. Articulação 1
LS10-B Rev.6 87
(7)
Remova o gerador de forma de onda do motor da
Articulação 1.
Há uma bucha de latão em um dos furos dos
parafusos de fixação. Tenha cuidado para não
perder a bucha.
A: Bucha de latão : M5
B: Parafuso de fixação : 2-M56
B: Parafuso
de fixação
A: Bucha de latão
Gerador de forma de onda
Motor da
Articulação 1
(8)
Remova os parafusos de montagem do motor
para remover o flange do motor e o O-ring
(CO0538A).
4-M412
Motor da
Articulação 1
Flange do motor
O-ring
Arruela 4-M4
Page 100

Manutenção 5. Articulação 1
88 LS10-B Rev.6
Instalação do
motor da
Articulação 1
(1)
Coloque o O-ring (CO0538A) na superfície de
montagem do motor e monte o flange do motor.
4-M412
Motor da
Articulação 1
Flange do motor
O-ring
Arruela 4-M4
(2)
Aplique graxa (SK-1A) entre o gerador de forma
de onda e o motor.
Volume de graxa: 13 g
Monte o gerador de forma de onda no motor da
Articulação 1.
Não deixe de alinhar a extremidade do gerador
de forma de onda com a extremidade do eixo do
motor.
Aperte um dos parafusos de fixação verticalmente
na face plana do eixo do motor. Insira uma bucha
no outro furo do parafuso de fixação para evitar
danos ao eixo do motor.
B: Parafuso
de fixação
A: Bucha de latão
Gerador de forma de onda
Motor da
Articulação 1
A: Bucha de latão: M5
B: Parafuso de fixação: 2-M56
CUIDADO
■
Veja a figura acima para a orientação do gerador de forma de onda. Certifique-se
de instalar o gerador de forma de onda corretamente. A instalação incorreta do
gerador de forma de onda resultará no funcionamento incorreto do manipulador.
(3)
Coloque um O-ring (CO0538A) no flange do motor e monte o motor com o flange da
Articulação 1.
Para inserir o motor, gire-o lentamente de lado a lado com a mão e empurre-o.
(4)
Monte a unidade da Articulação 1 na base.
Prenda os cabos do motor da Articulação 1 voltados para a traseira da base.
(5)
Coloque o O-ring (CO0538A) removido na etapa de remoção (3) no entalhe de Oring do braço. Em seguida, monte o braço na unidade da Articulação 1.
(6)
Conecte os conectores.
Conectores: X41, X211
(7)
Monte a chapa de conectores.
Para detalhes, consulte Manutenção: 3.3 Chapa de conectores.
 Loading...
Loading...