

Page 1
MAVIC 2 PRO/ZOOM
Bedienungsanleitung
2018.09
v1.2
Page 2
Stichwortsuche
Suchen Sie nach Stichwörtern wie „Akku“ oder „Montage“, um das entsprechende Thema zu nden.
Wenn Sie dieses Dokument mithilfe des Adobe Acrobat Readers geönet haben, drücken Sie die
Tastenkombination Strg+F bei Windows oder Command+F bei Mac, um eine Suche zu starten.
Themensuche
Das Inhaltsverzeichnis bietet eine Liste mit allen verfügbaren Themen. Klicken Sie auf ein Thema, um
diesen Abschnitt aufzurufen.
Ausdrucken dieses Dokuments
Dieses Dokument unterstützt Drucken mit hoher Auösung.
Hinweise zu dieser Anleitung
Legende
Warnung Wichtig Hinweise und Tipps Referenz
Bitte vor dem ersten Flug lesen
Lesen Sie vor dem Gebrauch der MAVICTM 2 Pro/Zoom die folgenden Dokumente durch:
1. Mavic 2 Pro/Zoom Lieferumfang
2. Mavic 2 Pro/Zoom Bedienungsanleitung
3. Mavic 2 Pro/Zoom Kurzanleitung
4. Mavic 2 Pro/Zoom Haftungsausschluss und Sicherheitsvorschriften
5. Mavic 2 Pro/Zoom Sicherheitsvorschriften zur Intelligent Flight Battery
Es wird empfohlen, alle Tutorialvideos auf der oziellen DJITM Website anzusehen und die Mavic 2 Pro/
Zoom Haftungsausschluss und Sicherheitsrichtlinien vor der ersten Verwendung zu lesen. Bereiten Sie
sich auf die erste Verwendung vor: Lesen die Mavic 2 Pro/Zoom Kurzanleitung. Genauere Informationen
sind der Mavic 2 Pro/Zoom Bedienungsanleitung zu entnehmen.
Tutorial-Videos
Rufen Sie die unten stehende Internetadresse auf, oder scannen Sie den QR-Code rechts,
um die Video-Tutorials zur Mavic 2 Pro/Zoom anzuschauen, in denen demonstriert wird,
wie Sie die Mavic 2 Pro/Zoom sicher nutzen: http://www.dji.com/mavic-2/info#video
DJI GO 4 App herunterladen
Verwenden Sie für den Flugbetrieb bitte die DJI GOTM 4 App.* Scannen Sie den rechts
abgebildeten QR-Code, um die aktuelle Version herunterzuladen. Die Android-Version der
DJI GO 4 App ist kompatibel mit Android 4.4 und höher. Die iOS-Version der DJI GO 4
App ist kompatibel mit iOS 10.0.2 und höher.
* Aus Sicherheitsgründen sind die Flughöhe auf 30 m und die Entfernung auf 50 m beschränkt, wenn während des
Fluges keine Verbindung zur App besteht. Dies gilt für die DJI GO 4 App und alle Apps, die mit DJI Fluggeräten
kompatibel sind.
Herunterladen des DJI Assistant 2 für Mavic
Laden Sie DJI Assistant 2 für Mavic hier herunter: http://www.dji.com/mavic-2/info#downloads.
2
© 2018 DJI Alle Rechte vorbehalten
Page 3

Inhalt
Hinweise zu dieser Anleitung
Legende 2
Bitte vor dem ersten Flug lesen 2
Tutorial-Videos 2
DJI GO 4 App herunterladen 2
Herunterladen des DJI Assistant 2 für Mavic 2
Produktbeschreibung
Einführung 6
Vorbereitung der Mavic 2 Pro/Zoom 6
Fernsteuerung vorbereiten 8
Diagramm des Fluggeräts 9
Aktivierung 11
Fluggerät
Flugmodi 13
LEDs und Statusanzeige des Fluggeräts 14
Rückkehrfunktion 15
Infrarot- und Sichtsensoren 20
Intelligente Flugmodi 23
Fortschrittliches Assistenzsystem für Piloten (APAS) 32
Flugschreiber 32
Propeller anbringen und abnehmen 33
Intelligent Flight Battery 34
Gimbal und Kamera 37
Fernsteuerung
Vorbereitung der Fernsteuerung 41
Koppeln der Fernsteuerung 47
DJI GO 4 App
Produkte 49
Editor 52
SkyPixel 52
Ich 52
2
6
13
41
49
2018 DJI Alle Rechte vorbehalten
©
3
Page 4

Flug
Anforderungen an die Flugumgebung 55
Fluggrenzen und GEO-Zonen 55
Checkliste für die Flugvorbereitung 57
Automatisches Starten/Landen 57
Motoren ein-/ausschalten 58
Testug 58
Anhang
Technische Daten 61
Kompass kalibrieren 64
Firmware-Updates 65
Menüs am LCD-Bildschirm der Fernsteuerung 66
Informationen zum Kundenservice 67
55
61
4
© 2018 DJI Alle Rechte vorbehalten
Page 5

Produktbeschreibung
In diesem Abschnitt wird die Mavic 2 Pro/
Zoom beschrieben und enthält eine Liste
aller Komponenten des Fluggeräts und der
Fernsteuerung.
2018 DJI Alle Rechte vorbehalten
©
5
Page 6
Produktbeschreibung
Einführung
Die DJI Mavic 2 Pro/Zoom ist mit Sicht- und Infrarotsensoren zur omnidirektionalen Hinderniserkennung
ausgestattet. Erzielen Sie mühelos komplexe Aufnahmen mit exklusiven DJI Technologien wie der
Hinderniserkennung, sowie intelligenten Flugmodi wie Hyperlapse (Raumraer), Point of Interest,
ActiveTrackTM 2.0, TapFly, QuickShot und fortschrittlichen Assistenzsystemen für den Piloten (APAS).
Die Mavic 2 Pro verfügt über einen voll stabilisierten 3-Achsen-Gimbal, deren Kamera mit 1"-CMOS-
Sensor (in Kooperation zwischen DJI und Hasselblad entwickelt) Videos in 4K und Fotos mit 20 Megapixeln
aufnehmen kann sowie Filter unterstützt. Die Mavic 2 Zoom verfügt über eine vollständig stabilisierte
3-Achsen-Gimbal-Kamera, die 4K-Videos, 12-Megapixel-Fotos, 2-fach optischen Zoom, 24-48 mmObjektiv und Filter unterstützt.
Die Mavic 2 Pro/Zoom verwendet die neueste Technologie, um die Stabilität und die Qualität der
Aufnahmen zu verbessern. Die Winkelgenauigkeit des Gimbals der Mavic 2 Zoom liegt innerhalb von
± 0,005° und die Winkelgenauigkeit des Gimbals der Mavic 2 Pro liegt innerhalb von ± 0,01°.
In die Fernsteuerung integriert ist die DJI Langstrecken-Übertragungstechnologie OCUSYNCTM 2.0, die
eine maximale Übertragungsreichweite von 8 km und eine Videoübertragung vom Fluggerät zur DJI GO 4
App auf dem Mobilgerät mit bis zu 1080p ermöglicht. Die Fernsteuerung arbeitet sowohl mit 2,4 GHz
als auch mit 5,8 GHz und kann automatisch und latenzfrei den besten Übertragungskanal wählen.
Das Fluggerät und die Kamera können einfach mit den eingebauten Tasten gesteuert werden. Das
integrierte LCD-Display liefert in Echtzeit wichtige Informationen zum Fluggerät, und die abnehmbaren
Steuerknüppel erleichtern das Verstauen der Fernsteuerung. Die maximale Akkulaufzeit beträgt 2
Stunden und 15 Minuten. Die Mavic 2 Pro/Zoom besticht durch eine maximale Fluggeschwindigkeit von
72 km/h und eine maximale Flugzeit von 31 Minuten.
Der Hauptunterschieded zwischen der Mavic 2 Zoom und der Mavic 2 Pro ist die Kamera. Die
allgemeinen Beschreibungen in diesem Handbuch gelten für beide Modelle, die Mavic 2 Pro und
die Mavic 2 Zoom.
Die maximale Flugzeit wurde in einer Umgebung ohne Wind getestet, während mit einer
konstanten Geschwindigkeit von 25 km/h geflogen wurde. Die maximale Fluggeschwindigkeit
wurde auf Meeresflughöhe ohne Wind getestet. Diese Werte dienen nur als Referenz.
Die Fernsteuerung erreicht ihre maximale Übertragungsreichweite (FCC) im offenem Gelände
ohne elektromagnetische Störquellen bei einer Flughöhe von ca. 120 m. Die maximale Laufzeit
wurde unter Laborbedingungen getestet. Dieser Wert dient nur als Referenz.
In einigen Regionen kann 5,8 GHz nicht genutzt werden. Bitte beachten Sie die lokalen Gesetze
und Vorschriften.
Vorbereitung der Mavic 2 Pro/Zoom
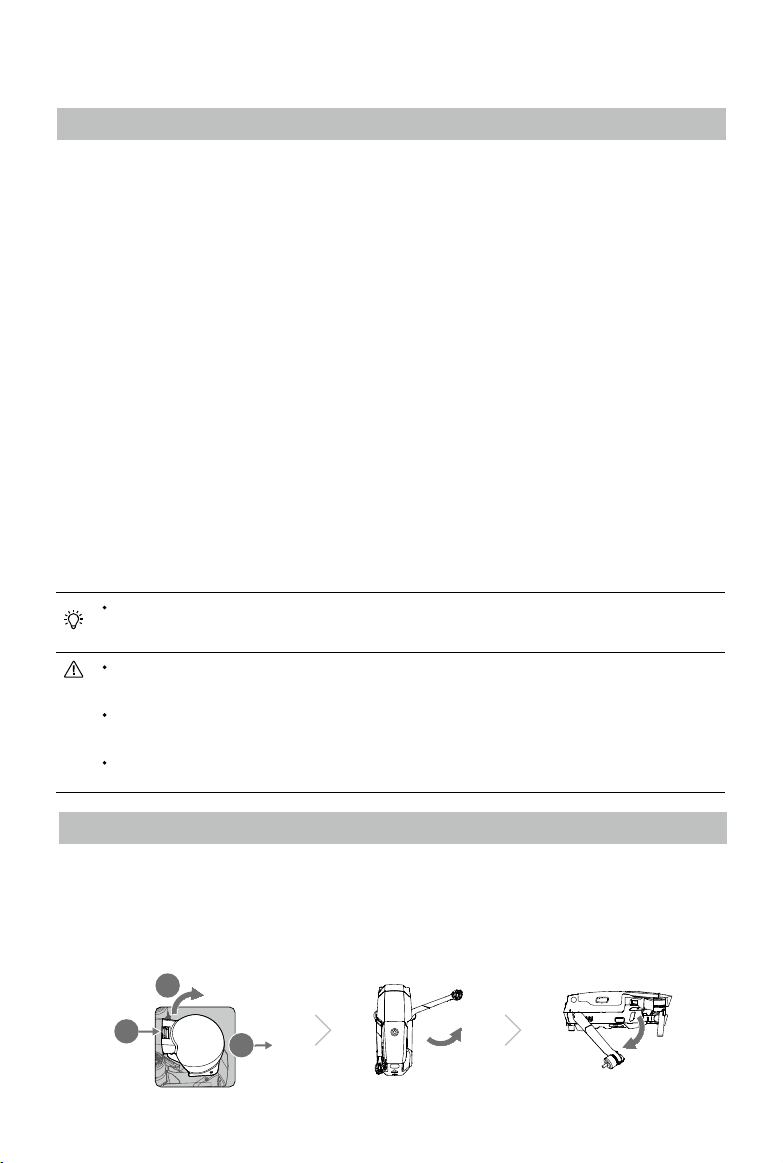
Fluggerät vorbereiten
Alle Arme des Fluggeräts werden vor dem Verpacken in der Fabrik gefaltet. Befolgen Sie die folgenden
Schritte, um das Fluggerät auszufalten.
1. Entfernen Sie die Gimbal-Abdeckung von der Kamera.
2. Entfalten Sie die vorderen Arme und dann die hinteren Arme.
2
1
6
© 2018 DJI Alle Rechte vorbehalten
3
Page 7
Mavic 2 Pro/Zoom Bedienungsanleitung
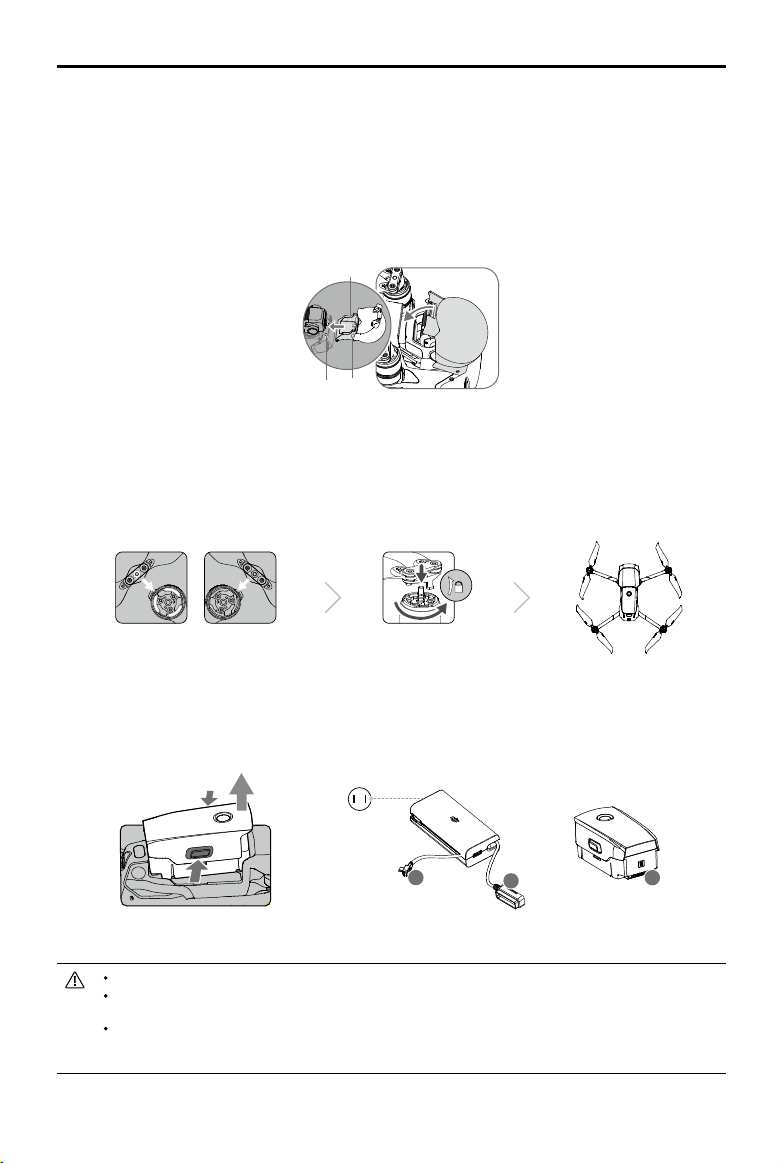
* Befestigen Sie die Gimbal-Abdeckung, wenn sie nicht benutzt wird.
1) Halten Sie den Gimbal fest, und setzen die Gimbal-Klammer zwischen dem Fluggerät und dem
Gimbal ein.
2) Achten Sie darauf, dass die Haken am Gimbal-Schutz fest in den Rillen am Fluggerät sitzen. Ziehen
Sie anschließend den Gimbal-Schutz über den Gimbal, und sichern ihn mit dem Verschluss. Der
Verschluss rastet mit einem Klicken ein, wenn er sicher angebracht wurde.
Gimbal-Klammer
Rillen Haken
3. Anbringen der Propeller.
Bringen Sie die Propeller mit den weißen Markierungen an den Motoren mit den weißen Markierungen
an. Drücken Sie den Propeller auf die Motoren und drehen ihn, bis er fest sitzt. Befestigen Sie die
anderen Propeller an den unmarkierten Motoren. Falten Sie die Propellerblätter auf.
4. Die Intelligent Flight Battery wird aus Gründen der Sicherheit vor dem Versand stets in den Ruhemodus
versetzt. Für die erstmalige Auadung und Aktivierung der Intelligent Flight Battery verwenden Sie bitte
den beiliegenden AC-Netzadapter. Um die Intelligent Flight Battery nach dem Flug zu laden, müssen
Sie diese aus dem Fluggerät entnehmen und mit dem AC-Netzadapter verbinden.
Steckdose
100-240 V
B
Klappen Sie die vorderen Arme und die Propeller aus, bevor Sie die hinteren ausklappen.
Es ist normal, dass das ausfalten der Arme der Mavic 2 Pro/Zoom, aufgrund des Faltdesigns,
etwas schwergängig anfühlt.
Vergewissern Sie sich, dass die Gimbal-Abdeckung entfernt ist und alle Arme und Propeller
entfaltet sind, bevor Sie das Fluggerät einschalten. Andernfalls kann dies die Selbstdiagnose
des Fluggeräts beeinträchtigen.
A
Ca. 1 Std. 30 Minuten
2018 DJI Alle Rechte vorbehalten
©
A
Ladezeit:
7
Page 8
Mavic 2 Pro/Zoom Bedienungsanleitung
Fernsteuerung vorbereiten
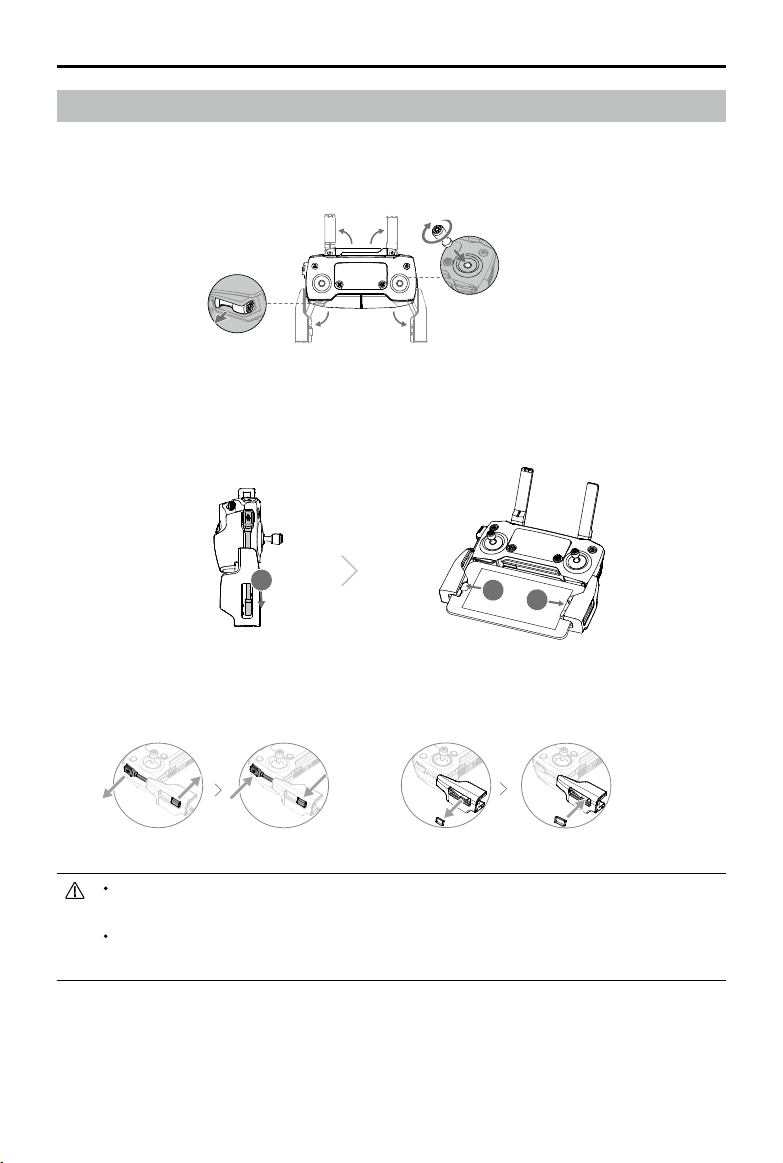
1. Klappen Sie den Mobilgerätehalter und die Antennen aus.
2. Entnehmen Sie die Steuerknüppel aus den zur Aufbewahrung vorgesehenen Fächern an der
Fernsteuerung und schrauben Sie diese auf die vorgesehenen Stellen.
3. Wählen Sie ein für das Mobilgerät geeignetes RC-Kabel aus. Ein Kabel mit einem Lightning-Anschluss
ist standardmäßig mit dem Kabel Slider verbunden. Micro-USB- und USB-C-Kabel sind ebenfalls im
Lieferumfang enthalten. Verbinden Sie das Ende des RC-Kabels mit Ihrem Mobilgerät. Befestigen Sie
Ihr Mobilgerät, indem Sie beide Klammern nach innen drücken.
1
2
3
Der Austausch des RC-Kabels ist hier abgebildet Der Kabel-Slider muss ersetzt werden, wenn Sie ein
USB-C-Kabel verwenden.
Sie können Ihr Mobilgerät auch mit einem USB-Kabel an die Fernsteuerung anschließen, wenn
das Mobilgerät zu groß ist, um es in die Klemmen zu stecken. Stecken Sie ein Ende des Kabels
in das Mobilgerät und das andere Ende in den USB-Anschluss unten an der Fernsteuerung.
Verwenden Sie die Micro-USB- und USB-Anschlüsse nie gleichzeitig für die Videoverbindung.
Trennen Sie alle Geräte von einem Anschluss, bevor Sie ein Gerät zur Videoverbindung an einen
anderen Anschluss anschließen.
8
© 2018 DJI Alle Rechte vorbehalten
Page 9
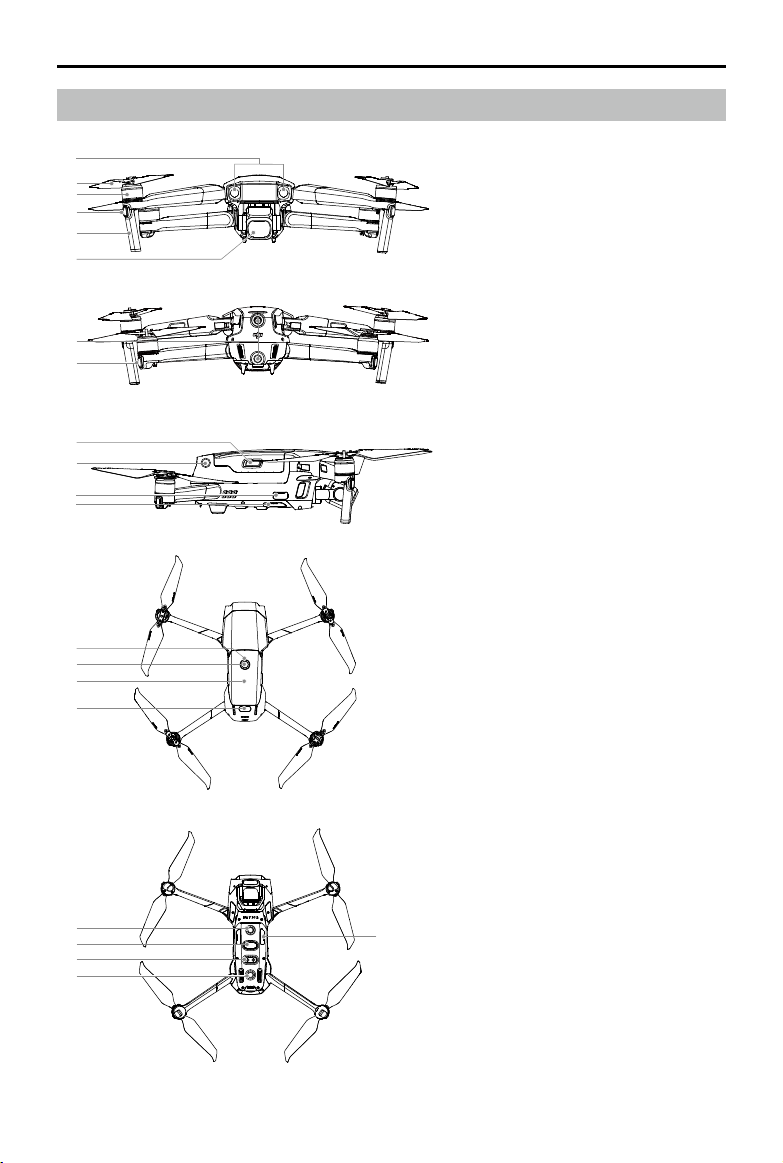
Diagramm des Fluggeräts
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
Mavic 2 Pro/Zoom Bedienungsanleitung
1. Vorwärts gerichtete Sichtsensoren
2. Propeller
3. Motoren
4. Front-LEDs
5. Antennen
6. Gimbal und Kamera
7. Rückwärts gerichtete
Sichtsensoren
8. Statusindikator des Fluggerätes
9. Akkuklammern
10. Seitliche Sichtsensoren
11. USB-C-Anschluss
12. Kopplungstaste/Kopplungsstatus-
LED
13. Akkuladestands-LED
14. Ein/Aus-Taste
15. Intelligent Flight Battery
16. Nach oben gerichtete
Infrarotsensoren
17. Abwärts gerichtete Sichtsensoren
18. Einschub für die microSD-Karte
19. Nach unten gerichtete
Infrarotsensoren
20. Untere Zusatzbeleuchtung
17
19
20
17
18
2018 DJI Alle Rechte vorbehalten
©
9
Page 10
Mavic 2 Pro/Zoom Bedienungsanleitung
1
2
3
4
5
6
7
8
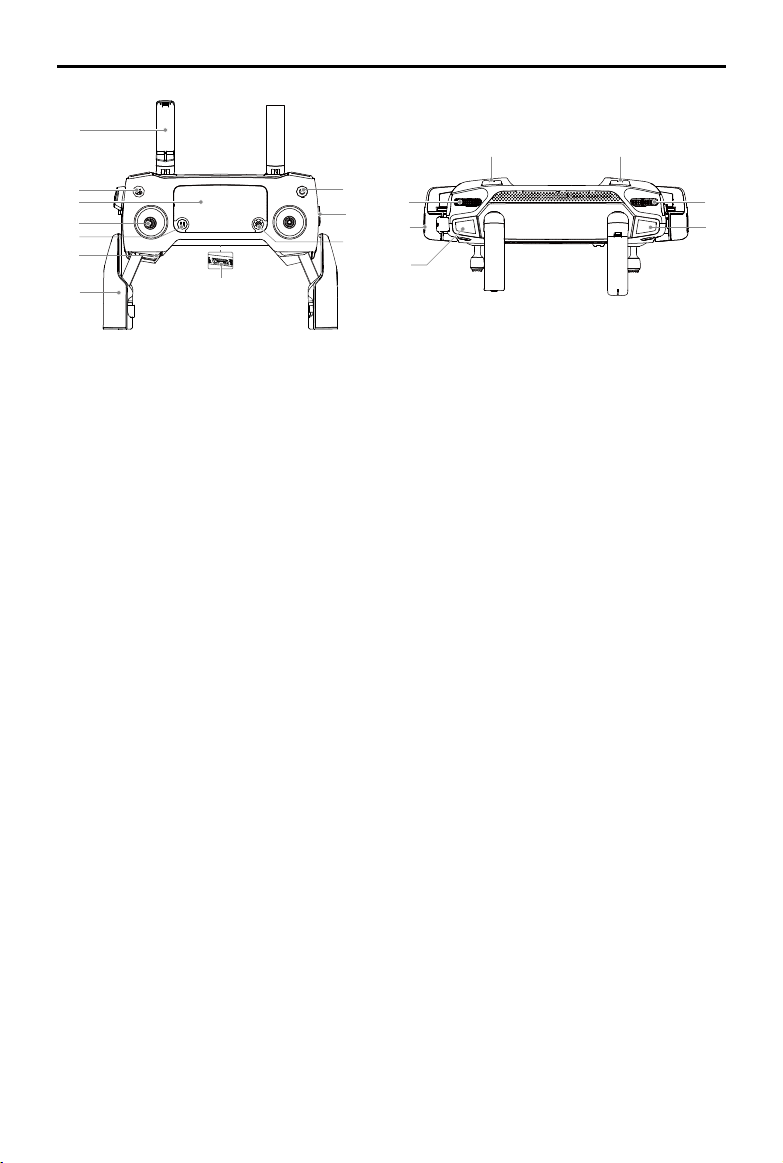
1. Antennen
Kabellose Übertragung der Flugsteuerungsund Videosignale.
2. Rückkehrtaste
Halten Sie diese Taste gedrückt, um die
Rückkehrfunktion (RTH) zu aktivieren. Das
Fluggerät iegt den zuletzt aufgezeichneten
Startpunkt an. Zum Abbrechen der
Rückkehrfunktion drücken Sie die Taste
erneut.
3. LCD-Bildschirm
Zeigt den Systemzustand des Fluggeräts und
der Fernsteuerung an.
4. Abnehmbare Steuerknüppel
Die abnehmbaren Steuerknüppel sind einfach
zu verstauen. Die Standard-Flugsteuerung
wird als Modus 2 bezeichnet. Stellen Sie die
Standard-Flugsteuerung in der DJI GO 4ein.
5. Taste zum Pausieren des Fluges
Drücken Sie diese Taste, um das Fluggerät zu
stoppen und an Ort und Stelle zu schweben
(nur verfügbar bei GPS oder aktiven
Sichtsensoren). Die Flugpausentaste bietet
verschiedene Funktionen in verschiedenen
intelligenten Flugmodi. Einzelheiten nden Sie
im Abschnitt Intelligenter Flugmodus.
6. Staufach für Steuerknüppel
Zum Aufbewahren der Steuerknüppel.
7. Mobilgeräteklammern
Befestigen Sie das Mobilgerät sicher an der
Fernsteuerung.
12
11
13
10
14
9
15
18
17
16
8. Reserve-Video-Downlink-Anschluss (USB)
Schließen Sie ein Mobilgerät an, um den
Video-Downlink über ein Standard-USBKabel zu nutzen.
9. 5D-Taste
Die Standardbelegung ist unten aufgeführt.
Die Belegung kann basierend auf Ihren
Einstellungen in DJI GO 4 angepasst
werden.
Nach links: EV-Wert verringern.
Nach rechts: EV-Wert erhöhen.
Nach oben: Gimbal zentrieren/Gimbal nach
unten ausrichten.
Nach unten: Gimbal zentrieren/Gimbal nach
unten ausrichten.
Drücken: Önet standardmäßig die
Intelligenten Flugmodi in DJI GO 4
10. Flugmodusschalter
Zum Umschalten zwischen den Modi „S“,
„P“ und „T“.
11. Ein/Aus-Taste
Drücken Sie die Taste einmal, um den
Akkuladestand zu überprüfen. Drücken
Sie die Taste noch einmal, und halten Sie
diese gedrückt, um die Fernsteuerung
ein-/auszuschalten.
12. C1-Taste (Individualisierbar)
Die Standardbelegung ist der Fokus auf
die Bildmitte. Passen Sie die Belegung in
DJI GO 4 basierend auf Ihren Einstellungen
an.
10
© 2018 DJI Alle Rechte vorbehalten
Page 11

Mavic 2 Pro/Zoom Bedienungsanleitung
13. Gimbalrädchen
Steuerung der Kameraneigung
14. Video-Downlink-/Lade-Anschluss (Micro-USB)
Verbindung mit einem Mobilgerät für die
Videoverbindung über das RC-Kabel.
Verbindung mit dem AC-Netzadapter, um den
Akku der Fernsteuerung zu laden.
15. Videoaufnahmetaste
Startet und beendet Videoaufnahme. Drücken
Sie diese erneut, um die Aufnahme zu beenden.
16. Taste für Fokus/Fototaste
Drücken Sie halb, um den Autofokus
zu betätigen. Drücken Sie einmal, um
Fotos entsprechend des in der DJI GO 4
ausgewählten Modus aufzunehmen.
17. Einstellrädchen für Blende/Verschlusszeit
(Mavic 2 Pro)
Drehen Sie das Wahlrad, um die
Belichtungskorrektur (im Modus „P“), die
Blende (im Blendenprioritätsmodus und im
manuellen Modus) oder den Verschluss (im
Modus „S“) einzustellen.
Zoom-Einstellrädchen (Mavic 2 Zoom)
Drehen Sie das Rädchen, um den Zoom der
Mavic 2 Zoom Kamera anzupassen.
18. C2-Taste (Individualisierbar)
Die Standardbelegung ist die Wiedergabe.
Passen Sie die Belegung in DJI GO 4
basierend auf Ihren Einstellungen an.
Aktivierung
Die Mavic 2 Pro/Zoom muss vor dem ersten Gebrauch aktiviert werden. Folgen Sie den Anweisungen auf
dem Bildschirm, um die Mavic 2 Pro/Zoom mit der DJI GO 4 App zu aktivieren.
2018 DJI Alle Rechte vorbehalten
©
11
Page 12

Fluggerät
In diesem Abschnitt werden der Flugregler,
die vorwärts, rückwärts und abwärts
gerichteten Sichtsensoren sowie die
Intelligent Flight Battery beschrieben.
12
© 2018 DJI Alle Rechte vorbehalten
Page 13
Fluggerät
Zur Mavic 2 Pro/Zoom gehören der Flugregler, die Sichtsensoren, der Video-Downlink, das Antriebssystem
und die Intelligent Flight Battery. Weitere Informationen nden Sie in der Abbildung des Fluggeräts im
Abschnitt Produktbeschreibung.
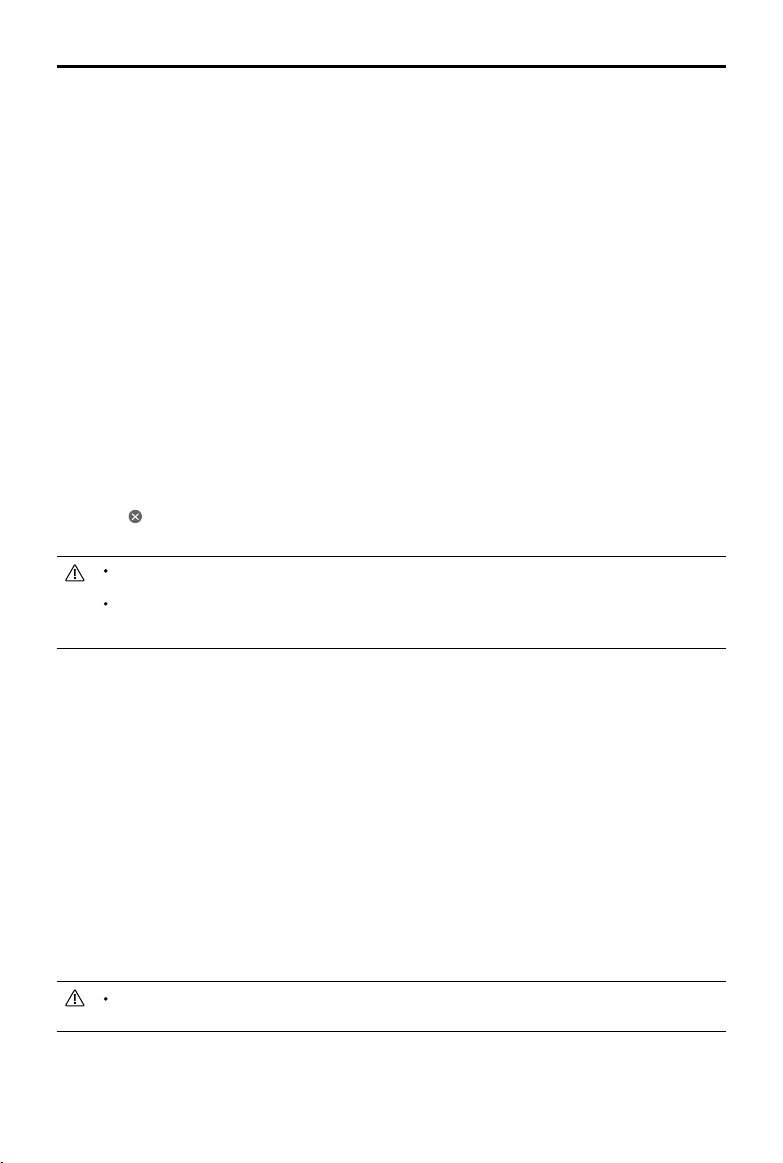
Flugmodi
Die Mavic 2 Pro/Zoom verfügt über drei Flugmodi sowie einen vierten Flugmodus, zu dem das Fluggerät
unter bestimmten Umständen wechselt:
Modus „P“ (Positionsbestimmung): Der Modus „P“ sollte gewählt werden, wenn das GPS-Signal
ausreichend stark ist. Durch das GPS und die Sichtsensoren kann sich das Fluggerät lokalisieren,
stabilisieren und Hindernisse umiegen. Intelligente Flugmodi sind in diesem Modus verfügbar.
Wenn die vorwärts- und rückwärts gerichteten Sichtsensoren aktiviert sind und die Lichtbedingungen
ausreichend sind, beträgt der maximale Anstellwinkel 25°, die maximale Vorwärtsuggeschwindigkeit
beträgt 50 km/h und die maximale Rückwärtsuggeschwindigkeit 43 km/h.
Hinweis: Im Modus „P“ müssen die Steuerknüppel weiter bewegt werden, um höhere Geschwindigkeiten
zu erreichen.
Das Fluggerät wechselt automatisch in den Atti-Modus (Attitude Mode), wenn die Sichtsensoren nicht
verfügbar oder deaktiviert sind und das GPS-Signal schwach oder der Kompass gestört ist. Wenn die
Sichtsensoren nicht verfügbar sind, kann sich das Fluggerät nicht selbst positionieren oder bremsen, was
das Risiko potenzieller Gefahren erhöht. Im Atti-Modus kann das Fluggerät leicht durch seine Umgebung
beeinträchtigt werden. Umweltfaktoren wie Wind können zu horizontalen Verschiebungen führen, was
besonders in beengten Bereichen zu Abstürzen führen kann.
Modus „S“ (Sport): Im Modus „S“ verwendet das Fluggerät GPS nur für die Positionierung, die vorwärts
und rückwärts gerichteten Sichtsensoren sind deaktiviert. Die maximale Fluggeschwindigkeit beträgt
72 km/h. Das Fluggerät ist nicht in der Lage, Hindernisse zu erkennen und zu umiegen, und die
intelligenten Flugmodi sind nicht verfügbar.
Hinweis: Im Modus „S“ ist die Flugweise des Fluggeräts auf Wendigkeit und Geschwindigkeit ausgerichtet,
sodass es stärker auf die Knüppelbewegungen reagiert.
Modus „T“ (Stativmodus): Der Modus „T“ basiert auf dem Modus „P“ und begrenzt die
Fluggeschwindigkeit, damit ist das Fluggerät während der Aufnahme stabiler. Die maximale Flug-,
Steigug- und Sinkuggeschwindigkeit beträgt 1 m/s. Intelligente Flugmodi sind im Modus „T“ nicht
verfügbar.
Die Sichtsensoren nach vorne, hinten, oben, unten, links und rechts, sowie Infrarot-Sensoren
nach oben sind im Modus „S“ deaktiviert, d. h. das Fluggerät kann Hindernisse auf seiner Route
nicht automatisch wahrnehmen.
Die Maximalgeschwindigkeit und der Bremsweg des Fluggeräts sind im Modus „S“ deutlich
erhöht. Bei Windstille beträgt der Bremsweg mindestens 30 m.
Die Sinkgeschwindigkeit wird im Modus „S“ deutlich erhöht.
Das Ansprechverhalten des Fluggeräts wird in dem Modus „S“ deutlich verbessert. Das
bedeutet, dass eine nur geringfügige Bewegung des Knüppels an der Fernsteuerung zu einer
weiten Flugstrecke des Fluggeräts führt. Fliegen Sie vorsichtig, und halten Sie angemessene
Freiräume für Ihre Flugmanöver ein.
Mit dem Flugmodusschalter an der Fernsteuerung wechseln Sie zwischen den Flugmodi.
Aktivieren Sie den Multi-Flugmodus in DJI GO 4, um zwischen den Flugmodi zu wechseln.
2018 DJI Alle Rechte vorbehalten
©
13
Page 14
Mavic 2 Pro/Zoom Bedienungsanleitung
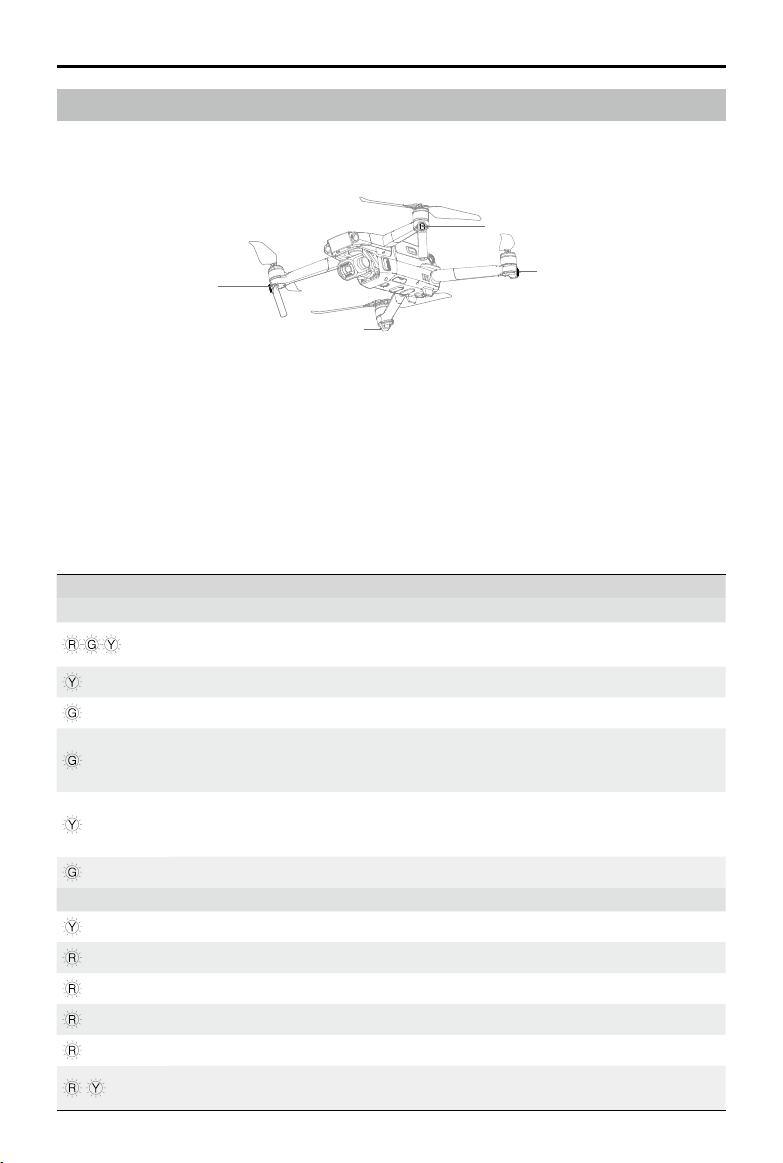
LEDs und Statusanzeige des Fluggeräts
Die Mavic 2 Pro/Zoom verfügt über Front-LEDs und einen Statusindikator des Fluggerätes, wie in der
folgenden Abbildung dargestellt.
Front-LEDs
Front-LEDs
Statusindikator des Fluggerätes
Die Front-LEDs zeigen die Ausrichtung des Fluggeräts und leuchten rot, wenn das Fluggerät eingeschaltet
wird, um die Vorderseite des Fluggeräts anzuzeigen (sie können in der DJI GO 4 App ausgeschaltet
werden).
Der Statusindikator des Fluggerätes zeigt den jeweiligen Zustand des Flugsteuerungssystems und der
Intelligent Flight Battery an. Die folgende Tabelle enthält weitere Informationen zu den Statusindikatoren
des Fluggerätes. Die Statusindikatoren des Fluggerätes blinken auch, wenn der Startpunkt, wie im
Abschnitt zum Rückkehrug beschrieben, aufgezeichnet wird.
Statusindikator des Fluggerätes
Zustände der Statusindikatoren des Fluggerätes
Farbe Blinkt/Durchgehend Beschreibung des Fluggerätezustands
Normalbetrieb
Abwechselnd rot,
grün und gelb
Warnungen
14
© 2018 DJI Alle Rechte vorbehalten
Gelb Blinkt viermal Aufwärmphase
Grün Blinkt langsam Modus „P“ mit GPS
Grün
Gelb Blinkt langsam
Grün
Gelb Blinkt schnell Signal der Fernsteuerung unterbrochen
Rot Blinkt langsam Schwache Akkuladung
Rot Blinkt schnell Akkuladestand sehr niedrig
Rot Blinken Störung im Inertialsensor (IMU)
Rot Durchgehend Schwerer Fehler
Abwechselnd rot
und gelb
Blinken
Blinkt in
regelmäßigen
Abständen zweimal
Blinkt schnell Bremsvorgang
Blinkt schnell Kalibrierung des Kompass notwendig
Einschalten und Durchführung der
Eigendiagnose
Modus „P“ mit vorwärts- und
abwärtsgerichteten Sichtsensoren
Kein GPS, vorwärts gerichtete
Sichtsensoren oder abwärts gerichtete
Sichtsensoren
Page 15
Mavic 2 Pro/Zoom Bedienungsanleitung
Rückkehrfunktion
Die Rückkehrfunktion (kurz: RTH für „Return To Home“) führt das Fluggerät zum zuletzt aufgezeichneten
Startpunkt zurück. Es gibt drei Rückkehrfunktionen (RTH): Intelligente Rückkehrfunktion (Smart RTH),
akkustandsbedingte Rückkehrfunktion (Low Battery RTH) und sicherheitsbedingte Rückkehrfunktion
(Failsafe RTH). In diesem Kapitel werden diese drei Szenarien genauer beschrieben.
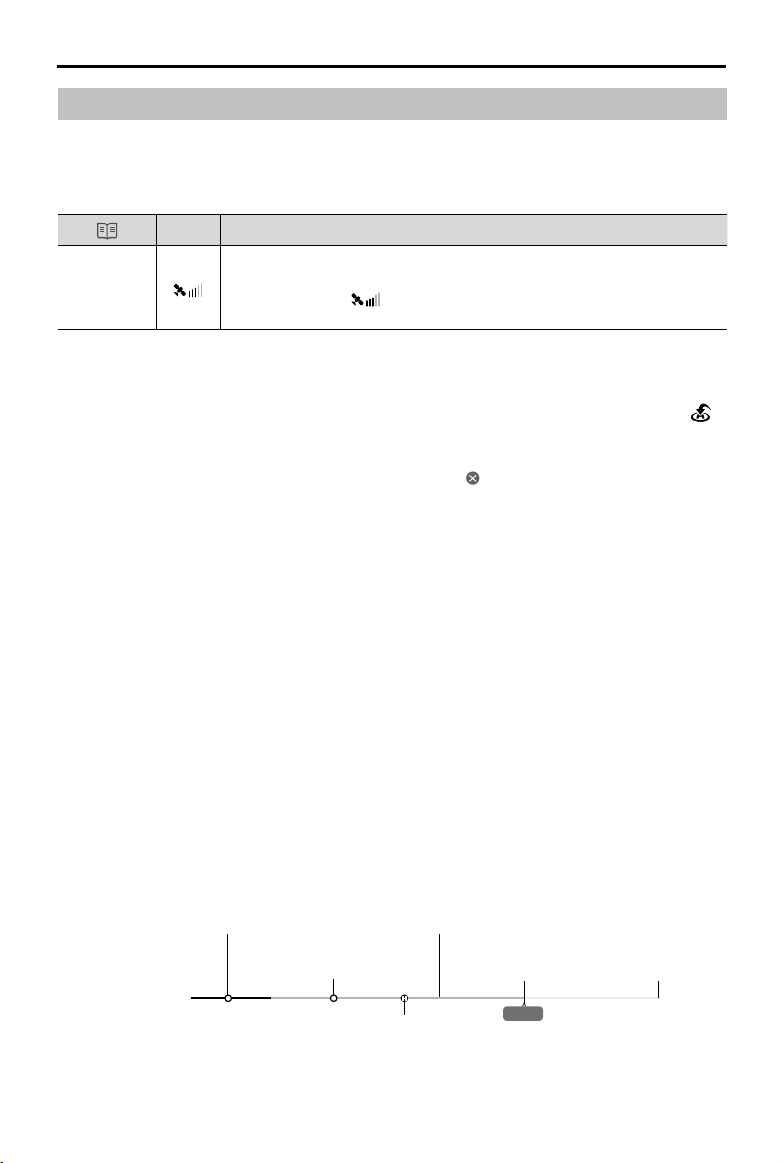
GPS
Wenn vor dem Start ein starkes GPS-Signal empfangen wurde, wird der
Startpunkt
Standort beim Start als Startpunkt aufgezeichnet. Die GPS-Signalstärke ist
am GPS-Symbol ( ) zu erkennen. Der Statusindikator des Fluggerätes
blinkt schnell grün, wenn der Startpunkt aufgezeichnet wird.
Intelligente Rückkehrfunktion (Smart RTH)
Wenn das GPS-Signal stark genug ist, kann die intelligente Rückkehrfunktion genutzt werden, um das
Fluggerät zurück zum Startpunkt zu bringen. Smart RTH wird gestartet, indem Sie entweder auf in
der DJI GO 4 App tippen (und die Bildschirmanweisungen befolgen) oder die Rückkehrtaste (RTH) auf der
Fernbedienung drücken und gedrückt halten.
Die intelligente Rückkehrfunktion wird beendet, indem Sie auf in der DJI GO 4 App tippen oder die
Rückkehrtaste (RTH) auf der Fernbedienung drücken.
Akkustandsbedingte Rückkehr
Die akkustandsbedingte Rückkehrfunktion wird ausgelöst, wenn die Intelligent Flight Battery so schwach
ist, dass eine sichere Rückkehr des Fluggeräts nicht mehr gewährleistet ist. Kehren Sie sofort zurück,
oder landen Sie das Fluggerät sofort, wenn die Auorderung erfolgt. DJI GO 4 zeigt eine Warnung an,
wenn der Akkuladestand niedrig ist. Wenn Sie nach zehn Sekunden nicht reagiert haben, kehrt das
Fluggerät selbsttätig zum Startpunkt zurück. Sie können die Rückkehrfunktion abbrechen, indem Sie die
Rückkehrtaste oder die Flugpausentaste auf der Fernsteuerung drücken.
Wenn die Rückkehrfunktion (RTH) abgebrochen wird, weil eine Warnung wegen eines niedrigen
Akkuladestands angezeigt wird, verfügt die Intelligent Flight Battery möglicherweise nicht über
ausreichend Ladung, damit das Fluggerät sicher landen kann. Dies kann zu einem Absturz oder zum
Verlust des Fluggeräts führen. Die Toleranzwerte für die Warnmeldungen zum niedrigen Akkuladestand
werden automatisch festgelegt und sind abhängig von der aktuellen Höhe und der Entfernung des
Fluggeräts vom Startpunkt.
Das Fluggerät landet selbsttätig, wenn der Akkuladestand aufgrund der aktuellen Flughöhe nur noch den
Landeanug zulässt. Mit der Fernsteuerung kann das automatische Landen nicht abgebrochen werden,
jedoch kann beim Landevorgang die Fluglage beeinusst werden.
Beschreibung
Warnung: Akkustand sehr niedrig (rot)
Warnung: Akkustand
niedrig (gelb)
Akkustand ist ausreichend (grün)
Restugzeit
Benötigter Mindestakkustand,
um zum Startpunkt zurückzukehren
Akkustandsanzeige in DJI GO 4
12:29
2018 DJI Alle Rechte vorbehalten
©
15
Page 16
Mavic 2 Pro/Zoom Bedienungsanleitung
Die geschätzte Restflugzeit ist an Farbe und Kennzeichnung der Akkustandsanzeige in DJI GO 4
zu erkennen. Die Anzeige richtet sich nach dem aktuellen Standort und Zustand des Fluggeräts.
Wenn der aktuelle Akkustand nur dazu reicht, das Fluggerät dabei zu unterstützen, aus der
aktuellen Höhe herabzusinken, wird eine Warnung über einen sehr niedrigen Akkustand
ausgelöst, und das Fluggerät sinkt ab und landet automatisch. Dies kann nicht abgebrochen
werden. Wenn die Gefahr eines Zusammenstoßes besteht, drücken Sie den Steuerknüppel nach
oben und navigieren das Fluggerät an einen anderen Ort.
Wenn der Akkustand ausreichend ist, zeigt die Akkustandsanzeige in der DJI GO 4 App die
geschätzte Flugzeit an, basierend auf dem aktuellen Ladestand des Akkus.
Wenn eine Warnung zum Akkustand angezeigt wird, gehen Sie wie in der folgenden Tabelle beschrieben
vor.
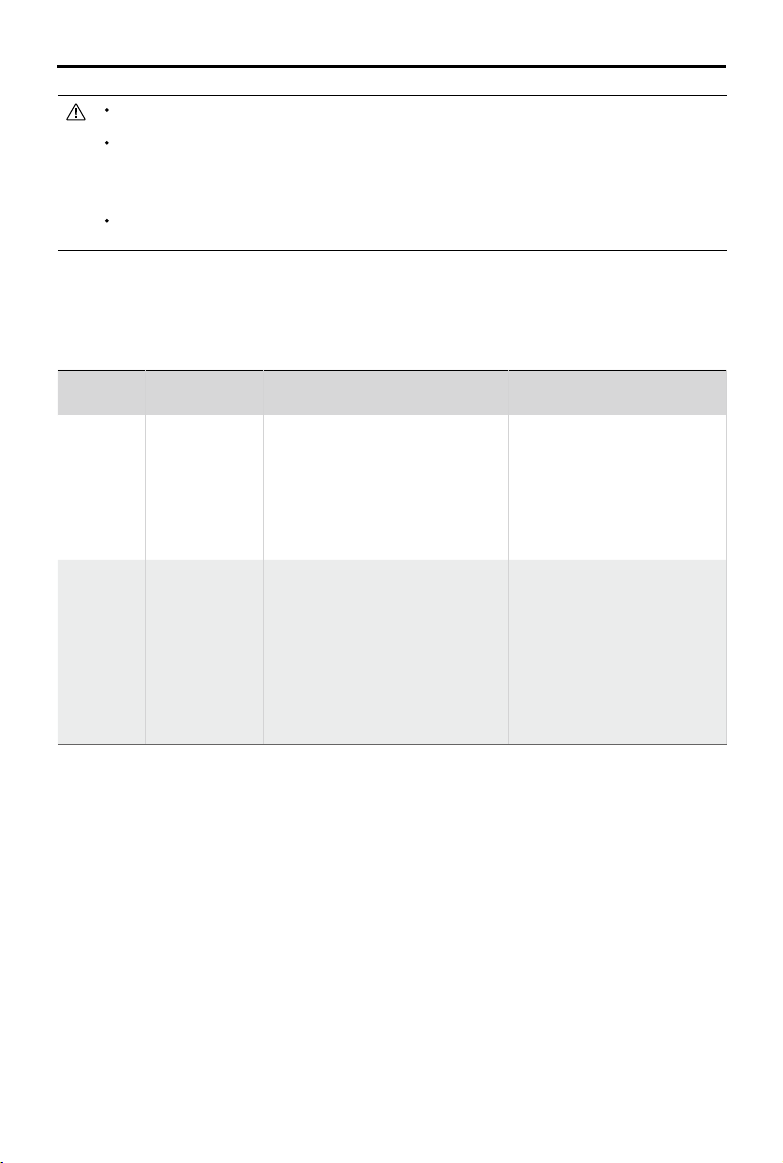
RTH und Warnung zum Akkustand (bei Verwendung der Firmware v00.06.00.00)
Warnung
Niedriger
Akkustand
Sehr
niedriger
Akkustand
Status Fluggerät
Anzeige
DJI GO 4 App Bemerkungen/Anweisungen
Bietet die Option, automatisch zum
Blinkt langsam
rot
Startpunkt zurückzukehren oder
den normalen Flug fortzusetzen.
Wenn Sie nicht innerhalb von
10 Sekunden reagieren, iegt
das Fluggerät automatisch den
Startpunkt an.
Blinkt schnell rot Die Anzeige blinkt rot.
Der Akkustand ist niedrig.
Fliegen Sie das Fluggerät
umgehend zum Startpunkt
zurück, landen es, schalten die
Motoren aus, und ersetzen den
Akku.
Das Fluggerät tritt den Sinkug
an und landet automatisch.
Dieser Vorgang kann nicht
abgebrochen werden. Wenn die
Gefahr eines Zusammenstoßes
besteht, drücken Sie den
Steuerknüppel nach oben und
navigieren das Fluggerät an
einen anderen Ort.
16
© 2018 DJI Alle Rechte vorbehalten
Page 17
Mavic 2 Pro/Zoom Bedienungsanleitung
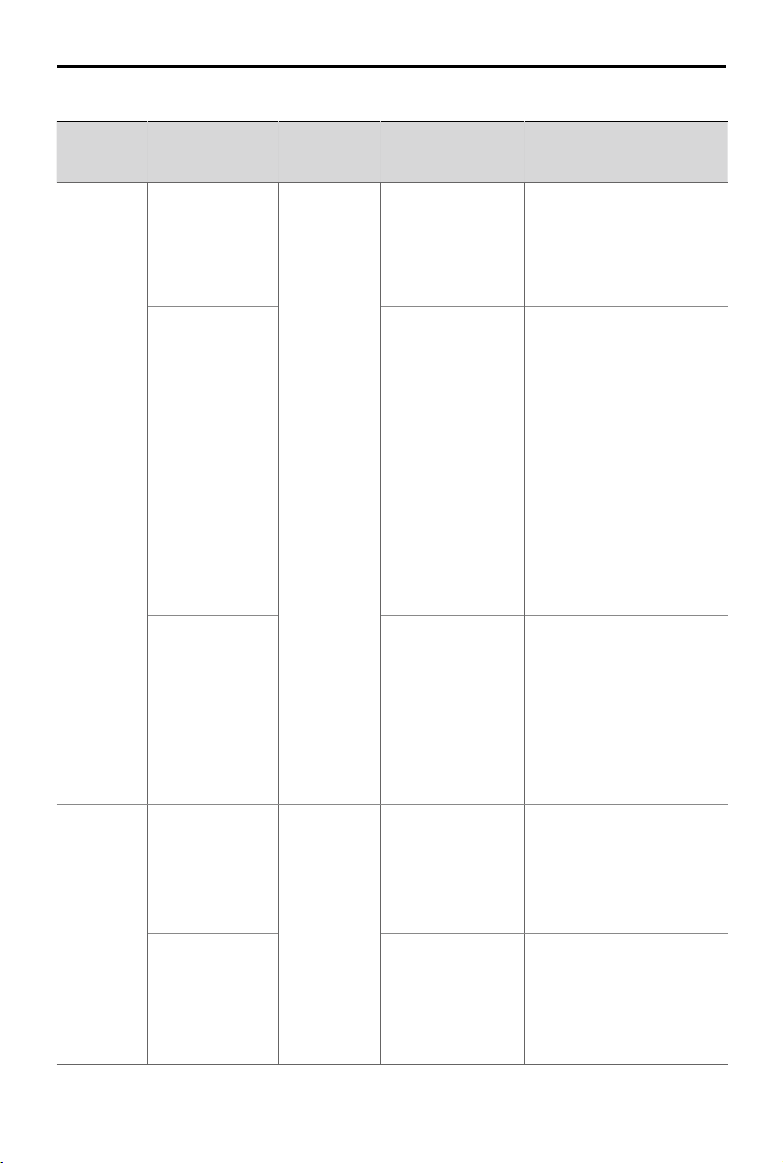
RTH und Warnungen zum Akkustand (bei Verwendung der aktualisierten Firmware v01.00.00.00)
Warnung Anleitung
Der verbleibende
Akkustand
ermöglicht
problemlos RTH.
Der verbleibende Akkustand
ermöglicht die
sicherheitsbedingte Rück-
kehr (bei RTH,
Niedriger
Akkustand
Sehr
niedriger
Akkustand
Verbindung zum
Fluggerät und
einer Flughöhe
von mehr als
50 m).
Der verbleiben-
de Akkustand
erlaubt die
automatische
Landung (bei
RTH, mit einem
ausreichenden
Fernsteuerungs-
signal).
Das Fluggerät
landet nach
10 Sekunden
(im Flug, bei
niedrigem
Akkustand).
Das Fluggerät
landet
automatisch (im
Flug, bei extrem
niedrigem
Akkustand).
Status
Fluggerät
Anzeige
Blinkt
langsam rot
Blinkt
schnell rot
DJI GO 4 App Aktion
Wählen Sie eine
Wählen Sie RTH
oder fahren Sie mit
dem normalen Flug
fort.
Wählen Sie die
sicherheitsbedingte Rückkehr oder
setzen RTH fort.
Fluggerät landet.
Aktion kann nicht
abgebrochen
werden.
Fluggerät
landet nach
10 Sekunden.
Aktion kann nicht
abgebrochen
werden.
Fluggerät landet
jetzt automatisch.
Aktion kann nicht
abgebrochen
werden.
Option aus. Wenn
keine Maßnahmen
ergriffen werden, startet
das Fluggerät die
Rückkehrfunktion (RTH).
Wählen Sie eine
Option aus. Die
sicherheitsbedingte
Rückkehr beginnt
(Fluggerät geht auf 50 m
Flughöhe und kehrt zum
Startpunkt zurück) oder
setzt RTH fort (Fluggerät
fliegt zum Startpunkt ohne
die Flughöhe zu ändern).
Wenn keine Maßnahmen
ergriffen werden, beginnt
das Fluggerät mit der
sicherheitsbedingten
Rückkehr.
Fluggerät landet jetzt
automatisch.
Fluggerät landet nach
10 Sekunden.
Fluggerät landet jetzt
automatisch.
2018 DJI Alle Rechte vorbehalten
©
17
Page 18
Mavic 2 Pro/Zoom Bedienungsanleitung
Sicherheitsbedingte Rückkehr
Mit den vorwärts gerichteten Sichtsensoren kann das Fluggerät während des Flugs eine Echtzeitkarte
der Flugroute erstellen. Wenn der Startpunkt erfolgreich aufgezeichnet worden ist und der Kompass
korrekt funktioniert, wird die Rückkehrfunktion ausgelöst, falls das Fernsteuerungssignal für mehr als drei
Sekunden unterbrochen wird.
Bei aktivierter sicherheitsbedingter Rückkehrfunktion beginnt das Fluggerät damit, die ursprüngliche
Heimkehrroute entlangzuiegen. Wenn das Fernsteuerungssignal bei aktivierter sicherheitsbedingter
Rückkehrfunktion innerhalb von 60 Sekunden wieder aufgenommen wird, schwebt das Fluggerät
10 Sekunden an der aktuellen Position und wartet auf Befehle des Piloten. Der Benutzer kann auf
in der DJI GO 4 App tippen oder die Rückkehrtaste (RTH) auf der Fernsteuerung drücken, um die
sicherheitsbedingte Rückkehrfunktion abzubrechen und die Steuerung wieder zu übernehmen. Wenn
kein Befehl durch den Piloten erfolgt, iegt das Fluggerät auf geradem Weg zum Startpunkt zurück. Wenn
nach der Aktivierung der sicherheitsbedingten Rückkehr das Fernsteuerungssignal nicht innerhalb von
60 Sekunden wieder aufgenommen wird, beendet das Fluggerät den Flug entlang der ursprünglichen
Heimkehrroute und iegt auf geradem Weg zum Startpunkt zurück.
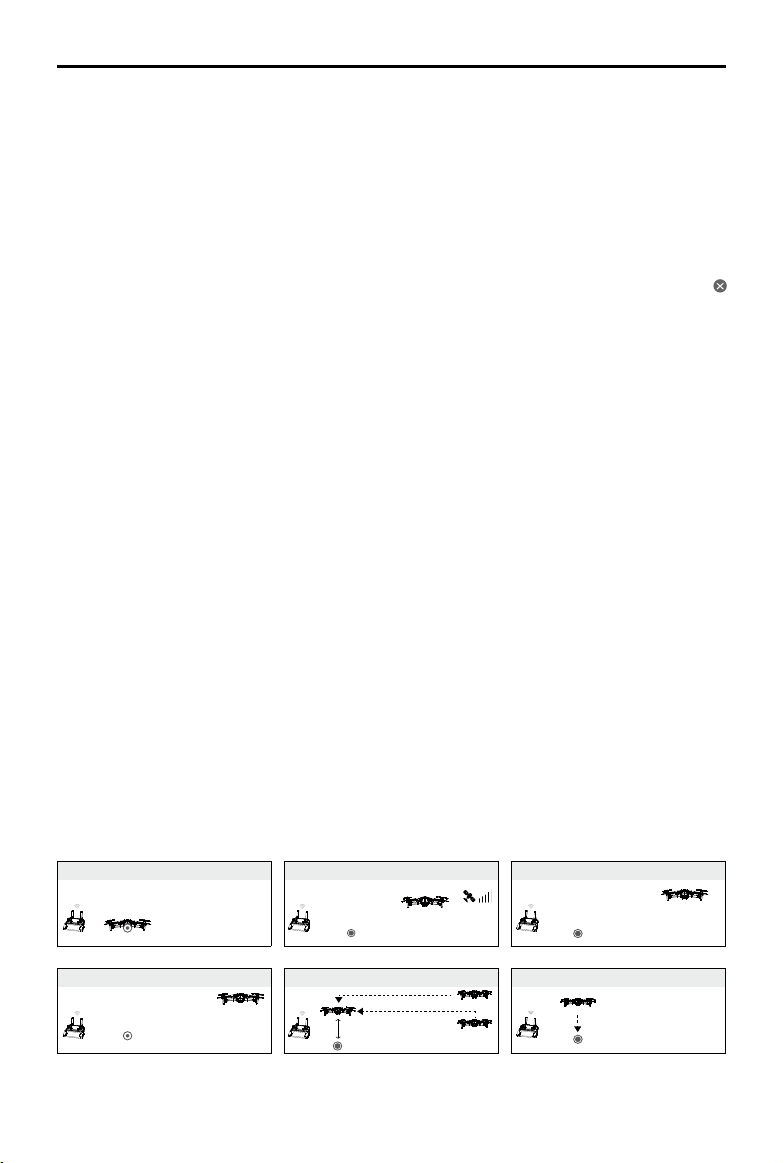
Rückkehrfunktion (RTH)
In der intelligenten Rückkehrfunktion und bei der akkubedingter Rückkehrfunktion sowie der
sicherheitsbedingten Rückkehrfunktion ist der Vorgang wie folgt:
1. Das Fluggerät passt seine Ausrichtung an.
2. a. Bendet sich das Fluggerät zu Beginn des RTH-Verfahrens mehr als 20 m vom Startpunkt entfernt,
steigt es auf die voreingestellte RTH-Flughöhe auf und iegt dann mit einer Geschwindigkeit von
12 m/s zum Startpunkt. Wenn die aktuelle Höhe höher als die RTH-Flughöhe ist, iegt das Fluggerät
auf der aktuellen Höhe zum Startpunkt. Vorwärts- und Rückwärts gerichtete Sichtsensoren sind
aktiviert.
b. Wenn das Fluggerät zwischen 5 m und 20 m vom Startpunkt entfernt ist, wenn der RTH-Vorgang
beginnt:
i. Wenn die Option „Rückkehrfunktion (RTH) bei aktueller Höhe“ aktiviert ist, iegt das Fluggerät
zum Startpunkt in der aktuellen Höhe, es sei denn, die aktuelle Höhe beträgt weniger als 2 m,
in diesem Fall steigt das Fluggerät auf 2 m und iegt dann mit einer Geschwindigkeit von 3 m/s
zum Startpunkt.
ii. Wenn die Option „Rückkehrfunktion (RTH) bei aktueller Höhe“ deaktiviert ist, landet das Fluggerät
sofort.
c. Wenn das Fluggerät sich weniger als 5 m vom Startpunkt entfernt bendet, landet es sofort, wenn
der RTH Prozess beginnt.
3. Nach Erreichen des Startpunktes landet das Fluggerät und die Motoren stoppen.
1 Startpunkt aufzeichnen 2 Startpunkt bestätigen
4 Längere Signalunterbrechung
×
18
© 2018 DJI Alle Rechte vorbehalten
5 Rückkehrfunktion (RTH) (einstellbare Flughöhe)
Höhe über SP > Rückkehrughöhe
×
Steigen auf Rückkehrughöhe
Sicherheitsbedingte Rückkehrughöhe
Höhe über SP ≤ Rückkehrughöhe
3 Fernsteuerungssignal unterbrochen
×
6 Landung
×
Page 19
Mavic 2 Pro/Zoom Bedienungsanleitung
Hindernisvermeidung beim Rückkehrflug
Die Mavic 2 Pro/Zoom kann Hindernisse erkennen und aktiv versuchen, diese beim Rückkehrug
zu umiegen. Grundvoraussetzung sind geeignete Lichtverhältnisse für die vorwärts und rückwärts
gerichteten Sichtsensoren. Die Hindernisvermeidung erfolgt folgendermaßen:
1. Das Fluggerät verlangsamt seine Geschwindigkeit, wenn ein Hindernis erkannt wird.
2. Das Fluggerät hält an und schwebt, und steigt vertikal auf, bis kein Hindernis mehr erkannt wird.
3. Die Rückkehrfunktion (RTH) wird fortgesetzt. Das Fluggerät iegt auf der neuen Flughöhe zum
Startpunkt zurück.
Das Fluggerät kann bei schwachem oder fehlendem GPS-Signal nicht automatisch zum
Startpunkt zurückkehren.
Bei der intelligenten und akkustandsbedingten Rückkehr steigt das Fluggerät automatisch auf
eine Höhe von 20 m. Wenn die Flughöhe 20 m oder mehr beträgt, erfolgt über die Bewegung
des Steuerknüppels zur Beschleunigung der Befehl an das Fluggerät, das Ansteigen zu beenden
und in der aktuellen Flughöhe zum Startpunkt zurückzukehren.
Das Fluggerät ist bei der sicherheitsbedingten Rückkehr nicht in der Lage, Hindernisse zu
umfliegen, wenn die vorwärts und rückwärts gerichteten Sichtsensoren nicht verfügbar sind. Vor
jedem Flug muss eine angemessene Flughöhe für die Rückkehr angegeben werden. Starten Sie
die DJI GO 4 App, tippen Sie auf , und stellen Sie die Rückkehrflughöhe ein.
Während des Rückkehrflugs können Geschwindigkeit und Höhe des Fluggeräts mithilfe der
Fernsteuerung oder der DJI GO 4 App gesteuert werden, die Ausrichtung und Flugrichtung
werden jedoch über den Flugregler gesteuert.
Während des Rückkehrflugs können Hindernisse auf beiden Seiten des Fluggeräts nicht erkannt
oder vermieden werden.
Landeschutz
Der Landeschutz wird während der Intelligenten Rückkehrfunktion aktiviert und das Fluggerät verhält
sich wie folgt:
1. Wenn der Landeschutz erkennt, dass der Untergrund für eine Landung geeignet ist, wird das Fluggerät
sanft gelandet.
2. Wenn der Landeschutz erkennt, dass der Untergrund nicht für eine Landung geeignet ist, verbleibt
das Fluggerät im Schwebeug und wartet auf Bestätigung durch die App.
3. Wenn der Landeschutz nicht funktionsbereit ist, zeigt die DJI GO 4 App eine Landeauorderung an,
sobald das Fluggerät auf eine Flughöhe von unter 0,5 m gesunken ist. Ziehen Sie den Steuerknüppel
zur Beschleunigung nach unten, oder verwenden Sie den entsprechenden Schieber in der App für
eine automatische Landung.
Der Landeschutz ist bei akkustandsbedingter und sicherheitsbedingter Rückkehr aktiviert. Das Fluggerät
verhält sich wie folgt:
Während der akkustandsbedingten und sicherheitsbedingten Rückkehr schwebt das Fluggerät in 2 m
Höhe über dem Boden und wartet auf die Bestätigung des Piloten, dass der Ort zum landen geeignet ist.
Ziehen Sie den Steuerknüppel zur Beschleunigung nach unten, oder verwenden Sie den entsprechenden
Schieber in der App für eine automatische Landung. Der Landeschutz wird aktiviert und das Fluggerät
führt die oben aufgeführten Schritte aus.
Die Sichtsensoren sind während der Landung deaktiviert. Achten Sie darauf, das Fluggerät mit
Vorsicht zu landen.
2018 DJI Alle Rechte vorbehalten
©
19
Page 20
Mavic 2 Pro/Zoom Bedienungsanleitung
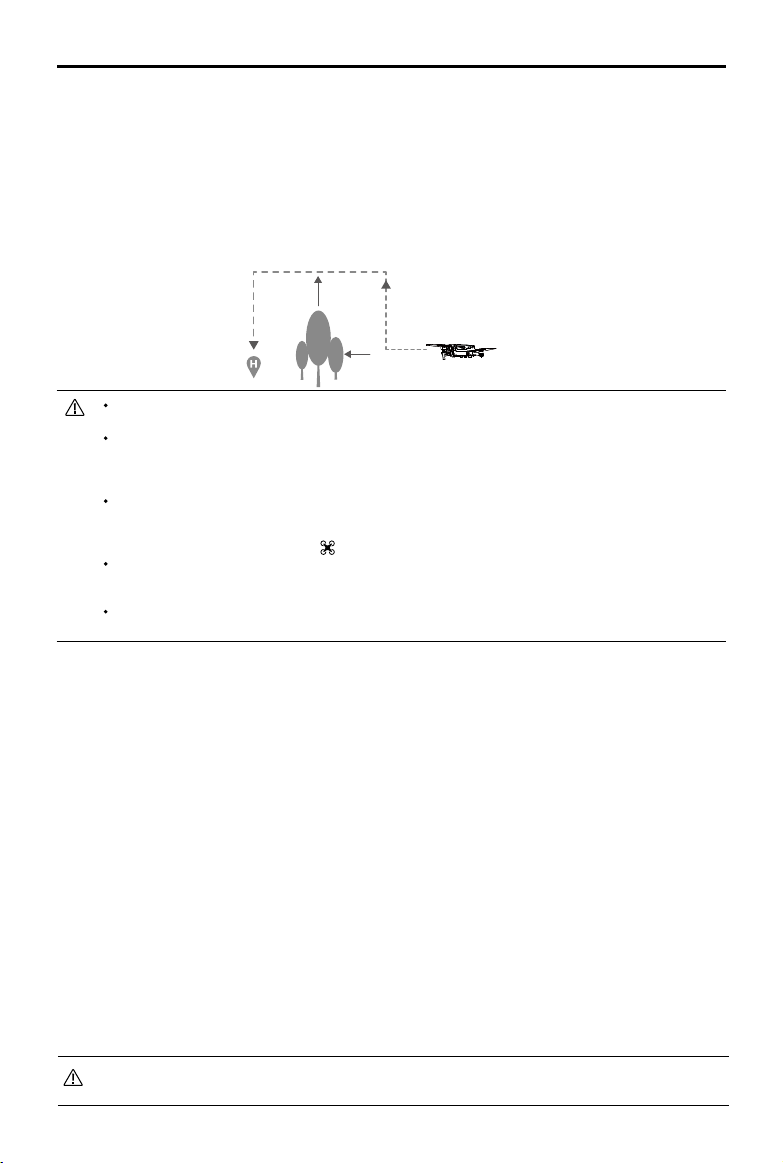
Infrarot- und Sichtsensoren
Die Mavic 2 Pro/Zoom ist mit Sichtsensoren nach vorne, hinten, oben, unten, links und rechts, sowie
Infrarot-Sensoren nach oben und unten ausgestattet, die eine omnidirektionale Hinderniserfassung
ermöglichen (wenn die Beleuchtungsbedingungen ausreichend sind).
Die Hauptkomponenten der vorwärts und rückwärts gerichteten Sichtsensoren sind sechs Kameras am
Bug, der Unterseite und der Rückseite des Fluggeräts. Die Sensoren nach links und rechts bestehen aus
zwei Kameras auf jeder Seite des Fluggeräts.
Die wichtigsten Komponenten der Hinderniserkennung nach oben und unten sind zwei
3D-Infrarotsensoren an der Ober- und Unterseite des Fluggeräts.
Die nach unten gerichteten Kamera- und Infrarotsensoren helfen dem Fluggerät, seine aktuelle Lage
beizubehalten und präziser zu schweben, zudem werden sie genutzt, wenn kein GPS-Signal verfügbar
ist, wie etwa in Innenräumen. Darüber hinaus verbessert die untere Zusatzbeleuchtung des Fluggeräts die
Erkennung der abwärts gerichteten Sensoren.
Vorwärts gerichtete
Sichtsensoren
Nach oben gerichtete Infrarotsensoren
Abwärts gerichtete
Sichtsensoren
Seitliche Sichtsensoren
Abwärts gerichtete Sichtsensoren
Untere Zusatzbeleuchtung
Nach unten gerichtete Infrarotsensoren
Rückwärts gerichtete Sichtsensoren
Seitliche Sichtsensoren
Erfassungsbereich
Der Erfassungsbereich der vorwärts- und abwärtsgerichteten Sichtsensoren ist unten dargestellt. Beachten
Sie, dass das Fluggerät keine Hindernisse erkennt, die sich nicht innerhalb des Erfassungsbereichs
benden.
40°
40° 40°
3°
80°
77°
77°
80°
60°
4°
4°
3°
100°100°
70°
5°
65°
6°
83°
65°
6°
20
© 2018 DJI Alle Rechte vorbehalten
Page 21
Mavic 2 Pro/Zoom Bedienungsanleitung
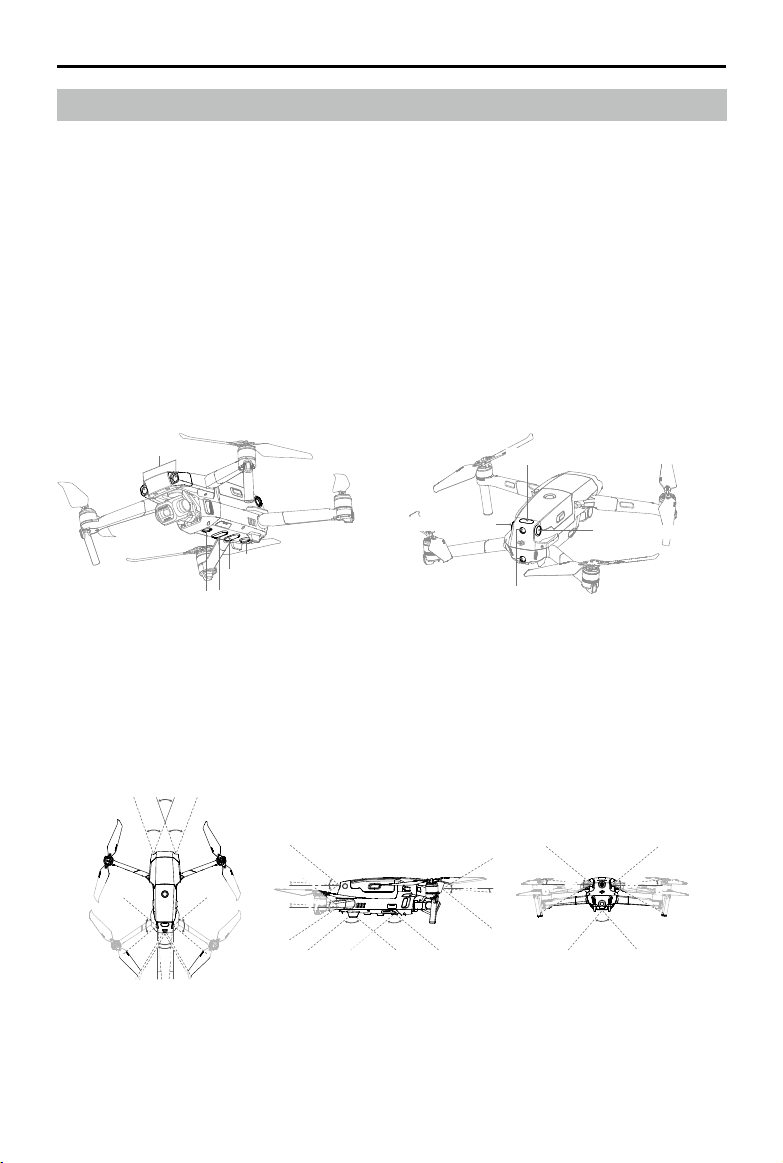
Die Sichtsensoren kalibrieren
Die Sichtsensoren sind werkseitig kalibriert. Wenn das Fluggerät jedoch eine Kollision erleidet, kann eine
Kalibrierung über den DJI Assistant 2 für Mavic oder DJI GO 4 erforderlich sein.
Die Kalibrierung der Sichtsensoren ist am genauesten, wenn der DJI Assistant 2 für Mavic verwendet
wird. Befolgen Sie die unten aufgeführten Schritte zur Kalibrierung der vorwärts gerichteten Sensoren,
wiederholen Sie die Schritte dann zur Kalibrierung der anderen Sichtsensoren.
Richten Sie das Fluggerät auf den
01
Bildschirm aus
02
Richten Sie die Ecken aus
Schwenken und neigen Sie das Fluggerät
03
Wenn eine Kalibrierung der Sichtsensoren erforderlich ist, sendet DJI GO 4 eine Benachrichtigung. Bendet
sich ein Computer jedoch nicht in der Nähe, kann in der App eine schnelle Kalibrierung durchgeführt
werden. Tippen Sie auf Aircraft Status und Sichtsensoren, um die Schnellkalibrierung zu starten.
Die Schnellkalibrierung dient als Sofortmaßnahme bei Problemen mit den Sichtsensoren.
Nach Möglichkeit sollte das Fluggerät aber an einen Computer angeschlossen werden, um die
komplette Kalibrierung über den DJI Assistant 2 für Mavic durchzuführen.
Führen Sie die Kalibrierung nur bei idealen Lichtverhältnissen über Oberflächen mit deutlichen
Konturen (z. B. Rasen) durch.
Kalibrieren Sie das Fluggerät nicht über stark reflektierenden Oberflächen (z. B. Marmor,
Keramik).
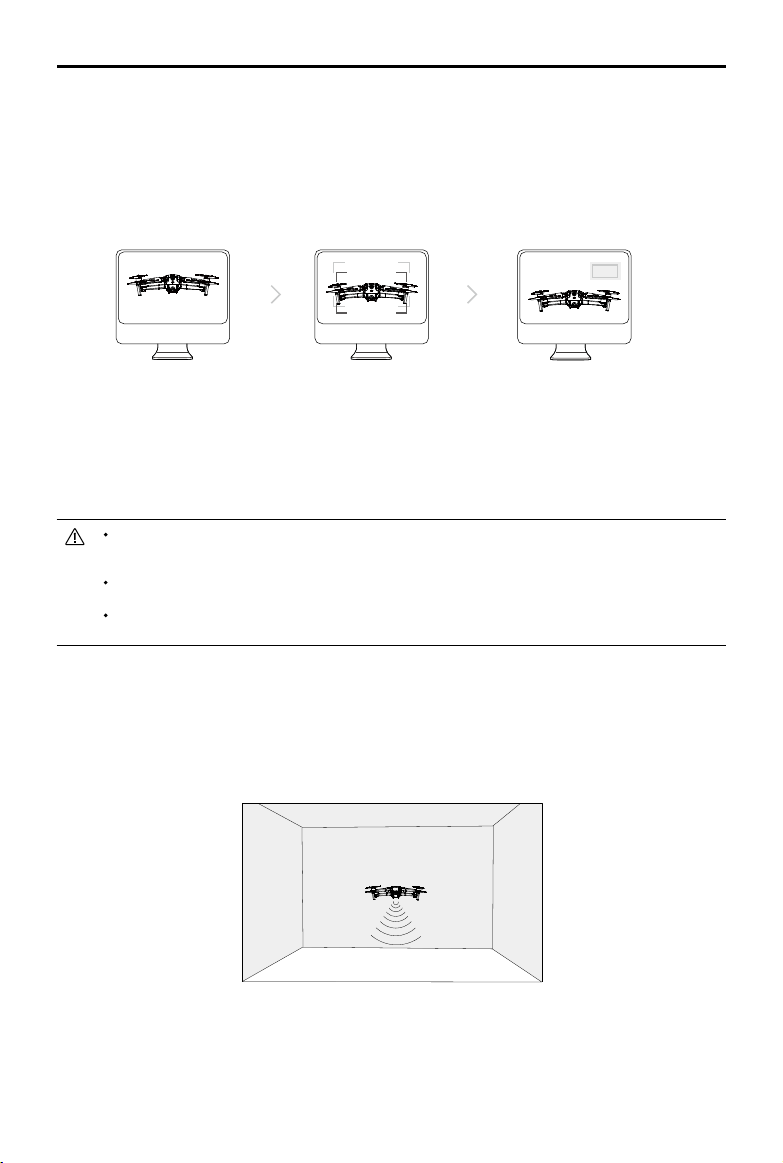
Die Sichtsensoren verwenden
Die abwärtsgerichteten Sicht- und Infrarotsensoren werden beim Einschalten des Fluggeräts automatisch
aktiviert. Sie müssen keine Änderungen vornehmen. Mithilfe der nach unten gerichteten Sichtsensoren
kann sich das Fluggerät auch ohne GPS exakt im Schwebeug halten.
Die nach unten gerichteten Sichtsensoren werden zur Erkennung meist in Innenräumen ohne GPSEmpfang genutzt. Die nach unten gerichteten Sichtsensoren funktionieren am besten bei einer Flughöhe
zwischen 0,5 und 11 m. Bitte beachten Sie, dass die Sichtpositionierung beeinträchtigt werden kann,
wenn die Höhe des Fluggeräts über 11 m liegt.
2018 DJI Alle Rechte vorbehalten
©
21
Page 22

Mavic 2 Pro/Zoom Bedienungsanleitung
2m以上
Die nach unten gerichteten Sichtsensoren können Sie wie folgt aktivieren:
1. Das Fluggerät muss im Modus „P“ und auf einer ebenen Fläche abgestellt sein.
T P
S
Beachten Sie, dass die abwärtsgerichteten Sichtsensoren nur auf Flächen mit
deutlich wechselhaftem Muster funktionsfähig sind.
2. Schalten Sie das Fluggerät ein. Das Fluggerät schwebt nach dem Start auf der
Stelle. Wenn die Statusindikatoren des Fluggerätes zweimal grün blinken, sind die abwärts gerichteten
Sichtsensoren arbeitsbereit.
Mithilfe der vorwärts und rückwärts gerichteten Sichtsensoren kann das Fluggerät aktiv abbremsen, wenn
es vor sich ein Hindernis erkennt. Die vorwärts und rückwärts gerichteten Sichtsensoren arbeiten am
zuverlässigsten bei idealen Lichtverhältnissen und klar denierten oder konturierten Hindernissen. Um
genügend Zeit zum Bremsen zu lassen, sollte das Fluggerät nicht schneller als 50 km/h vorwärts oder
42 km/h rückwärts iegen.
Die Sensoren nach links und rechts benötigen bessere Lichtverhältnisse und klarer denierte oder
konturierte Hindernisse, sie können keine dynamischen Objekte, wie Personen, Fahrzeuge, Äste
oder blinkende Lichter erfassen. Die Sensoren nach links und rechts sind nur bei ActiveTrack 2.0
und im Stativmodus verfügbar. Die Winkelgeschwindigkeit ist auf 24°/s begrenzt und die seitliche
Fluggeschwindigkeit ist auf 29 km/h begrenzt.
Die Sensoren nach links und rechts sind nur bei ActiveTrack 2.0 und im Stativmodus verfügbar.
Die Sensoren nach links und rechts haben eine begrenzte Fähigkeit, Hindernisse zu erkennen
und zu vermeiden, ihre Leistungsfähigkeit kann durch Umgebungsbedingungen beeinträchtigt
werden. Achten Sie darauf, die Sicht zum Fluggerät beizubehalten und achten Sie auf
Aufforderungen in DJI GO 4. DJI übernimmt keine Verantwortung für Fluggeräte, die bei der
Verwendung der Sensoren nach links und rechts beschädigt werden oder verloren gehen.
Die Sichtsensoren können nicht ordnungsgemäß auf Oberflächen arbeiten, die KEINE klaren
Musterunterschiede aufweisen. Die Sichtsensoren funktionieren nur auf 0,5 bis 50 Metern
Flughöhe. Beachten Sie bitte, dass die Sichtpositionierung beeinträchtigt werden kann, wenn
die Höhe des Fluggeräts mehr als 11 m beträgt.
Die Untere Zusatzbeleuchtung wird automatisch aktiviert, wenn das Umgebungslicht zu schwach
ist. Bitte beachten Sie, dass die Leistung der Sichtsensoren beeinträchtigt werden kann, wenn
die Zusatzbeleuchtung aktiviert ist. Fliegen Sie vorsichtig, wenn das GPS-Signal schwach ist.
Über Wasser oder Schnee funktionieren die Sichtsensoren möglicherweise NICHT problemlos.
Bei zu hohen Fluggeschwindigkeiten funktionieren die Sichtsensoren unter Umständen NICHT
richtig. Bei Flügen über 10 m/s bei 2 m oder über 5 m/s bei 1 m ist Vorsicht geboten.
Steuern Sie das Fluggerät in folgenden Situationen mit erhöhter Vorsicht:
a. Beim Überfliegen einfarbiger Flächen (z. B. nur schwarz, nur weiß, nur rot, nur grün)
b. Beim Überfliegen stark reflektierender Flächen.
c. Beim Überfliegen von Gewässern oder durchsichtigen/durchscheinenden Flächen.
d. Beim Überfliegen beweglicher Flächen und Objekte.
e. In Bereichen mit häufigem oder starkem Lichtwechsel.
f. Beim Überfliegen sehr dunkler (< 10 Lux ) oder heller (> 40.000 Lux ) Flächen.
g. Beim Überfliegen von Flächen, die Infrarotwellen stark reflektieren oder absorbieren (z. B.
Spiegel).
h. Beim Überfliegen von Flächen ohne Muster oder Strukturen.
i. Beim Überfliegen von Flächen mit sich wiederholenden Mustern oder Konturen (z. B. Fliesen
mit identischem Dekor).
j. Beim Überfliegen von Hindernissen mit kleinen Flächen (z. B. Äste).
22
© 2018 DJI Alle Rechte vorbehalten
Page 23

Mavic 2 Pro/Zoom Bedienungsanleitung
ISO
VERSCHLUSSEVWB
KAPAZITÄT
P
Kursverriegelung
Wegpunkt
Halten Sie die Sensoren stets sauber. Die Sensoren dürfen NICHT manipuliert werden. Die
Infrarotsensoren nicht abdecken.
Bei schlechten Lichtverhältnissen (unter 100 Lux) erkennen die Sichtsensoren möglicherweise
keine Muster am Boden.
Wenn die Fluggerätgeschwindigkeit 50 km/h überschreitet, haben die Sichtsensoren nicht
genügend Zeit, um das Fluggerät in sicherer Entfernung von einem Hindernis abzubremsen und
anzuhalten.
Wenn das Fluggerät eine Kollision erfährt, ist eine Kamerakalibrierung erforderlich. Kalibrieren
Sie die vorderen Kameras, falls DJI GO 4 Dich dazu aufgefordert.
Fliegen Sie nicht an regnerischen, diesigen oder Tagen mit unklarer Sicht.
Überprüfen Sie jedes Mal vor dem Start Folgendes:
a. Vergewissern Sie sich, dass sich keine Aufkleber oder andere Hindernisse auf dem Schutzglas
der Infrarot- und Sichtsensoren befinden.
b. Wenn sich Schmutz, Staub oder Wasser auf dem Glas der Infrarot- und Sichtsensoren
befinden, reinigen Sie es mit einem weichen Tuch. Verwenden Sie keine Reinigungsmittel, die
Alkohol enthalten.
c. Wenden Sie sich an den DJI-Support, wenn das Glas der Infrarot- oder Sichtsensoren
beschädigt ist.
Der aufwärts gerichtete Infrarotsensor erkennt nur geradlinige Entfernungen direkt über dem
Sensor und nicht oberhalb des gesamten Fluggeräts. Außerdem können große Hindernisse wie
Dächer erkannt werden, winzige Hindernisse wie Blätter oder elektrische Drähte jedoch nicht.
Fliegen Sie vorsichtig und verlassen Sie sich nicht ausschließlich auf den nach oben gerichteten
Infrarotsensor zur Erkennung von Hindernissen über dem Fluggerät.
Blockieren Sie vor dem Start nicht die nach unten gerichteten Sicht- und Infrarotsensoren.
Andernfalls kann das Fluggerät nach der Landung nicht mehr starten und muss neu gestartet
werden.
Intelligente Flugmodi
Die Mavic 2 Pro/Zoom unterstützt intelligente Flugmodi wie Hyperlapse (Raumraer), QuickShots,
ActiveTrack 2.0, POI 2.0 (Point-of-Interest), Wegpunkt (in Kürze), TapFly und Cinematic-Modus. Wählen
Sie einen intelligenten Flugmodus in DJI GO 4. Vergewissern Sie sich, dass der Akkustand ausreichend
ist und das Fluggerät im Modus „P“ arbeitet, wenn Sie die intelligenten Flugmodi verwenden.
Hyperlapse (Raumraffer)
Hyperlapse-Aufnahmemodi umfassen Frei, Kreisen, Kursverriegelung und Wegpunkt.
12
Position
09:29
1600 0.31/8000 4K/244K/25
Hyperlapse
Im Flug (GPS)
Frei Kreisen
61%
2018 DJI Alle Rechte vorbehalten
©
23
Page 24

Mavic 2 Pro/Zoom Bedienungsanleitung
Frei
Das Fluggerät macht automatisch Fotos auf und erzeugt ein Zeitraer-Video. Der freie Modus kann
verwendet werden, während das Fluggerät auf dem Boden steht. Steuern Sie nach dem Start die Höhe
des Fluggeräts, die Fluggeschwindigkeit und den Gimbalwinkel mit der Fernsteuerung. Halten Sie die
Steuerknüppel und beschleunigen Sie mit einer gleichmäßigen Geschwindigkeit für zwei Sekunden
und drücken dann die C1-Taste. Die Geschwindigkeit ist festgelegt und das Fluggerät iegt während
der Aufnahme von Fotos weiterhin mit dieser Geschwindigkeit. Die Ausrichtung des Fluggeräts kann
während dieser Zeit noch kontrolliert werden. Verwenden Sie den Modus Frei wie folgt:
1. Stellen Sie die Intervallzeit und die Videodauer ein. Der Bildschirm zeigt die Anzahl der Fotos an, die
aufgenommen werden und wie lange die Aufnahmezeit dauert.
2. Tippen Sie auf den Fototaste, um zu beginnen.
Kreisen
Das Fluggerät nimmt automatisch Fotos auf, während es um das ausgewählte Motiv iegt, um ein
Zeitraer-Video zu erstellen. Der Kreis kann so gewählt werden, dass er entweder im oder gegen den
Uhrzeigersinn läuft. Bitte beachten Sie, dass das Fluggerät den Modus Kreisen beendet, wenn ein Befehl
von der Fernsteuerung empfangen wird. Verwenden Sie den Modus Kreisen wie folgt:
1. Stellen Sie die Intervallzeit und die Videodauer ein. Der Bildschirm zeigt die Anzahl der Fotos an, die
aufgenommen werden und wie lange die Aufnahmezeit dauert.
2. Wählen Sie ein Motiv auf dem Bildschirm.
3. Tippen Sie auf den Fototaste, um zu beginnen.
Kursverriegelung
Mit der Mavic 2 Pro/Zoom kann die Kursverriegelung auf zwei Arten verwendet werden. In erster Linie ist
die Orientierung des Fluggeräts festgelegt, aber ein Gegenstand kann nicht ausgewählt werden. In der
zweiten Art ist die Orientierung des Fluggeräts festgelegt und das Fluggerät iegt um ein ausgewähltes
Objekt herum. Gehen Sie wie folgt vor, um die Kursverriegelung zu verwenden:
1. Stellen Sie die Intervallzeit und die Videodauer ein. Der Bildschirm zeigt die Anzahl der Fotos an, die
aufgenommen werden und wie lange die Aufnahmezeit dauert.
2. Legen Sie eine Flugrichtung fest.
3. Wählen Sie ein Motiv (falls zutreend).
4. Tippen Sie auf den Fototaste, um zu beginnen.
Wegpunkt
Das Fluggerät fotograert automatisch auf einer Flugroute von zwei bis fünf Wegpunkte und erzeugt ein
Zeitraer-Video. Das Fluggerät kann in der Reihenfolge vom Wegpunkt Nr. 1 bis Nr. 5 oder Nr. 5 bis Nr.
1 iegen. Bitte beachten Sie, dass das Fluggerät die Wegpunktroute verlässt, wenn ein Befehl von der
Fernsteuerung empfangen wird. Befolgen Sie die folgenden Schritte, um die Wegpunkte zu verwenden.
1. Stellen Sie die gewünschten Wegpunkte und die Objektivrichtung ein.
2. Stellen Sie die Intervallzeit und die Videodauer ein. Der Bildschirm zeigt die Anzahl der Fotos an, die
aufgenommen werden und wie lange die Aufnahmezeit dauert.
3. Tippen Sie auf den Fototaste, um zu beginnen.
Das Fluggerät erzeugt automatisch ein Zeitraer-Video mit einer Auösung von 1080p mit 25 fps, welches
im Wiedergabemenü angezeigt werden kann. Sie können in den Kameraeinstellungen auswählen, ob
das Material im JPEG- oder RAW-Format gespeichert werden soll und ob das Filmmaterial in einem
integrierten Speicher oder auf einer microSD-Karte abgelegt werden soll.
24
© 2018 DJI Alle Rechte vorbehalten
Page 25

Mavic 2 Pro/Zoom Bedienungsanleitung
Für eine optimale Leistung wird empfohlen, Hyperlapse (Raumraffer) in einer Flughöhe von
mehr als 50 m zu verwenden und eine Differenz zwischen Intervallzeit und Verschlusszeit von
mindestens zwei Sekunden einzustellen.
Zudem wird empfohlen, ein statisches Objekt (z. B. Hochhäuser, bergiges Gelände) nur in
sicherer Entfernung vom Fluggerät (mehr als 15 m) auszuwählen. Wählen Sie kein Motiv, das zu
nah am Fluggerät ist.
Das Fluggerät bremst und schwebt, wenn bei Hyperlapse (Raumraffer) ein Hindernis erkannt
wird.
Das Fluggerät erzeugt nur dann ein Video, wenn es mindestens 25 Fotos aufgenommen hat.
Dies ist die Menge, die benötigt wird, um ein Ein-Sekunden-Video zu erzeugen. Das Video
wird generiert, wenn ein Befehl von der Fernsteuerung gegeben wird oder wenn der Modus
unerwartet beendet wird (z. B. wenn die akkustandsbedingte Rückkehr ausgelöst wird).
Aufgabenbibliothek (in Kürze)
Verwenden Sie die Aufgabenbibliothek, um problemlos Flugrouten aufzuzeichnen, die später wiederholt
werden können.
QuickShots
QuickShots-Aufnahmemodi umfassen Dronie, Kreisen, Helix, Rocket, Boomerang, Asteroid und Dolly-
Zoom (nur erhältlich bei Mavic 2 Zoom). Die Mavic 2 Pro/Zoom zeichnet ein Video entsprechend des
gewählten Aufnahmemodus auf und erzeugt dann automatisch ein kurzes 10-Sekunden-Video. Das
Video kann über das Wiedergabemenü angesehen, bearbeitet oder in sozialen Medien geteilt werden.
Dronie: Das Fluggerät unternimmt einen Rückwärts- und Steigug, wobei die Kamera fest auf Ihr
Objekt ausgerichtet ist.
Kreisen: Das Fluggerät kreist um das Objekt herum.
Helix: Das Fluggerät steigt auf und dreht sich spiralförmig um das Objekt herum.
Rocket: Das Fluggerät unternimmt einen Steilug mit nach unten gerichteter Kamera.
Boomerang: Das Fluggerät iegt um das Ojekt in ovaler Fluglinie herum und steigt auf, dabei
entfernt es sich vom Startpunkt und sinkt beim Rückug. Der Startpunkt des Fluggeräts bildet ein
Ende der Längsachse der ovalen Flugroute, während sich das andere Ende der Längsachse auf
der gegenüberliegenden Seite des Objekts vom Startpunkt aus bendet.
Stellen Sie sicher, dass bei der Verwendung von Boomerang genügend Platz zur Verfügung steht:
Sorgen Sie für einen horizontalen Radius von mindestens 30 m um das Fluggerät herum und
mindestens 10 m über dem Fluggerät.
Asteroid: Das Fluggerät iegt rückwärts und aufwärts und nimmt verschiedene Fotos auf, dann
iegt es zurück zu seinem Startpunkt. Das erzeugte Video beginnt mit einer Panoramaaufnahme
an höchster Position und zeigt dann den Sinkug. Stellen Sie sicher, dass bei der Verwendung von
Asteroid ausreichend Platz vorhanden ist. Hinter dem Fluggerät müssen mindestens 40 m und
über dem Fluggerät 50 m Platz sein.
Dolly-Zoom: Die Mavic 2 Zoom iegt nach hinten und oben. Er passt den Zoom während des
Fluges an, um das ausgewählte Motiv bei wechselndem Hintergrund gleich zu halten.
Wenn Sie Dolly Zoom verwenden möchten, wählen Sie zuerst den Abstand zwischen dem
Fluggerät und dem Motiv aus. Stellen Sie sicher, dass mindestens die dreifache Distanz auf der
Rückseite des Fluggeräts vorhanden ist, damit genug Platz zum Fliegen ist.
QuickShots verwenden
Vergewissern Sie sich, dass das Fluggerät im Modus „P“ und die Intelligent Flight Battery ausreichend
aufgeladen ist.
Verwenden Sie QuickShots wie folgt:
2018 DJI Alle Rechte vorbehalten
©
25
Page 26

Mavic 2 Pro/Zoom Bedienungsanleitung
ISO
VERSCHLUSSEVWB
KAPAZITÄT
1. Lassen Sie das Fluggerät abheben und mindestens 2 m über dem Boden schweben.
2 m
2. Tippen Sie in DJI GO 4 auf , wählen dann QuickShots aus, und befolgen Sie die angezeigten
Anweisungen.
12
Im Flug (GPS)
Position
09:29
1600 0.31/8000 4K/25
Asteroid Dolly-ZoomDronie HelixKreisen Rocket Boomerang
61%
AFC/MF
AE
3. Wählen Sie Ihr Objekt in der Kameraansicht aus (tippen Sie den Kreis auf das Objekt, oder ziehen
Sie ein Feld um das Objekt), und wählen Sie einen Aufnahmemodus aus. Berühren Sie „GO“, um die
Aufnahme zu starten. Nach dem Abschluss der Aufnahmen iegt das Fluggerät zu seinem Startpunkt
zurück.
4. Tippen Sie auf , um das Video aufzurufen.
QuickShots beenden
Wechseln Sie den Flugmodusschalter in den Modus „S“ oder „T“, um QuickShots jederzeit während
der Aufnahme zu verlassen (wenn in DJI GO 4 die Option „Multi-Flugmodus“ aktiviert ist). Drücken Sie
die Flugpausentaste auf der Fernsteuerung oder tippen Sie auf in DJI GO 4 zum sofortigen Anhalten.
Nutzen Sie diese Funktion nur in Gegenden ohne Gebäude und andere Hindernisse. Achten Sie
darauf, dass sich keine Personen, Tiere oder andere Hindernisse in der Flugroute befinden. Das
Fluggerät bremst und schwebt, wenn ein Hindernis erkannt wird.
Achten Sie stets auf Objekte rund um das Fluggerät, und verwenden Sie die Fernsteuerung, um
Unfälle (wie etwa Kollisionen) mit dem Fluggerät zu vermeiden.
Seien Sie besonders vorsichtig, wenn Sie QuickShot in den folgenden Situationen verwenden:
a. Der Zielgegenstand war längere Zeit verborgen oder nicht in der Sichtlinie.
b. Der Zielgegenstand ist mehr als 50 m vom Fluggerät entfernt.
c. Der Zielgegenstand ist hinsichtlich Farbe und Muster ähnlich der Umgebung.
d. Der Zielgegenstand befindet sich in der Luft.
e. Wenn sich das Motiv schnell bewegt.
f. Die Umgebung ist sehr dunkel (< 300 Lux) oder sehr hell (> 10.000 Lux).
Verwenden Sie QuickShots NICHT an Orten in der Nähe von Gebäuden oder wenn das
GPS-Signal schwach ist. Andernfalls ist die Flugroute möglicherweise nicht stabil.
Beachten Sie bei der Verwendung der QuickShots die lokalen gesetzlichen Bestimmungen zum
Schutz der Privatsphäre.
Beachten Sie, dass die seitlichen Sichtsensoren bei Nutzung der QuickShots nicht verfügbar
sind.
26
© 2018 DJI Alle Rechte vorbehalten
Page 27

Mavic 2 Pro/Zoom Bedienungsanleitung
ISO
VERSCHLUSSEVWB
KAPAZITÄT
ActiveTrack 2.0
Mit ActiveTrack 2.0 können Sie ein Objekt auf Ihrem Mobilgerätbildschirm auswählen. Das Fluggerät
passt seine Flugroute an, um das Objekt zu verfolgen. Dafür wird kein externes Ortungsgerät benötigt.
Mavic 2 Pro/Zoom kann automatisch bis zu 16 Objekte identizieren und verfolgt verschiedene Tracking-
Strategien, um Personen, Fahrzeuge und Boote zu verfolgen.
Verwenden von ActiveTrack 2.0
Vergewissern Sie sich, dass das Fluggerät im Modus „P“ und die Intelligent Flight Battery ausreichend
aufgeladen ist. Befolgen Sie diese Schritte für die Verwendung von ActiveTrack 2.0:
1. Lassen Sie das Fluggerät abheben und mindestens 2 m über dem Boden schweben.
2 m
2. Tippen Sie in DJI GO 4 auf , und wählen Sie dann ActiveTrack 2.0 aus.
12
Im Flug (GPS)
ActiveTrack
09:29
1600 0.31/8000 4K/244K/25
61%
Verfolgen
SpotlightProfil
3. Für eine optimale Leistung wird empfohlen, ein Motiv auszuwählen, das vom Fluggerät automatisch
erkannt wird. Wählen Sie dazu ein auf dem Bildschirm erkanntes Zielmotiv aus und tippen Sie
darauf, um Ihre Auswahl zu bestätigen. Wenn das gewünschte Motiv vom Fluggerät nicht erkannt
wurde, ziehen Sie eine Auswahl auf dem Bildschirm und tippen darauf, um es manuell auszuwählen.
Wenn das Motiv jedoch manuell ausgewählt wird, kann die Fähigkeit des Fluggeräts, das Objekt zu
verfolgen, beeinträchtigt werden. Wenn das Feld rot wird, kann das Objekt nicht identiziert werden
und muss erneut ausgewählt werden.
4. Das Fluggerät weicht in diesem Modus automatisch Hindernissen auf seiner Flugroute aus. Wenn das
Fluggerät die Objektxierung verliert, weil sich das Objekt zu schnell bewegt oder es verdeckt wird,
wählen Sie das Objekt erneut, um die Verfolgung wiederherzustellen.
2018 DJI Alle Rechte vorbehalten
©
27
Page 28

Mavic 2 Pro/Zoom Bedienungsanleitung
ActiveTrack 2.0 hat folgende untergeordnete Modi:
Verfolgen Prol Spotlight
Das Fluggerät hält den Abstand
zum xierten Objekt konstant. Mit
dem Rollknüppel und dem Neigeknüppel an der Fernsteuerung
bzw. dem Schieber in DJI GO 4
können Sie das Objekt umkreisen.
Mit dem linken Steuerknüppel
und dem Gimbalrädchen wird das
Objekt im Bild positioniert.
Wenn ein Hindernis in diesem
Untermodus erkannt wird, verhält
sich das Fluggerät wie folgt:
1. Wenn eine Aktion an der Fernsteuerung durchgeführt wird,
Das Fluggerät verfolgt das
Objekt von vorne und von der
Seite mit gleichbleibendem
Winkel und Abstand. Mit dem
Rollhebel an der Fernbedienung können Sie das Objekt
umkreisen. Mit dem linken
Steuerknüppel und dem Gimbalrädchen wird das Objekt im
Bild positioniert.
In diesem Untermodus bremst
und schwebt das Fluggerät,
sobald ein Hindernis erkannt
wird.
Das Fluggerät verfolgt das
Objekt nicht automatisch,
sondern erfasst es im Flug
ständig mit der Kamera. Mit
der Fernsteuerung können Sie
das Fluggerät lenken, wobei
die Ausrichtungssteuerung
inaktiv ist. Mit dem linken
Steuerknüppel und dem Gimbalrädchen wird das Objekt im
Bild positioniert. Das Fluggerät
bremst sofort, wenn in diesem
Untermodus ein Hindernis
erkannt wird.
nachdem ein Hindernis erkannt
wurde, bremst das Fluggerät
und schwebt an Ort und Stelle.
2. Wenn keine Maßnahmen er-
grien werden, versucht das
Fluggerät, das Hindernis zu
umiegen.
Verwenden Sie ActiveTrack 2.0 NICHT in Bereichen mit Menschen, Tieren, kleinen oder feinen
Objekten (z. B. Baumzweige oder Stromleitungen) oder mit durchsichtigen Objekten (z. B. Glas
oder Gewässer).
Bedienen Sie das Fluggerät manuell (drücken Sie die Flugpausentaste, oder stellen Sie mit dem
Flugmodusschalter den Modus „S“ auf der Fernsteuerung ein), oder tippen Sie auf in
DJI GO 4 bei einem Notfall.
Seien Sie besonders achtsam, wenn Sie ActiveTrack 2.0 in den folgenden Situationen verwenden:
a. Das fixierte Objekt bewegt sich nicht auf einer ebenen Fläche.
b. Das fixierte Objekt ändert während der Bewegung drastisch seine Form.
c. Das fixierte Objekt ist für längere Zeit außer Sichtweite.
d. Das fixierte Objekt bewegt sich auf einer schneebedeckten Fläche.
e. Das fixierte Objekt hat eine ähnliche Farbe oder Oberfläche wie die Umgebung.
f. Die Umgebung ist zu dunkel (< 300 Lux) oder zu hell (> 10.000 Lux).
Beachten Sie bei der Verwendung von ActiveTrack 2.0 die lokalen gesetzlichen Bestimmungen
zum Schutz der Privatsphäre.
Wir empfehlen als Ziel nur Personen (jedoch keine Kinder), Fahrzeuge und Boote zu definieren.
Fliegen Sie mit Vorsicht, wenn Sie andere Objekte verfolgen.
Das verfolgte Objekt kann versehentlich auf ein anderes Objekt wechseln, wenn die beiden nah
aneinander vorbeikommen.
Es gibt zwei Optionen bei der Auswahl der Geschwindigkeitsbegrenzung während der
Verfolgung. Bei schnell („FAST“) liegt die Geschwindigkeit bei maximal 20 m/s, bei langsam
(„SLOW“) liegt diese bei maximal 12 m/s. Zum Wechseln tippen Sie bitte auf die Einblendung
„FAST“/„SLOW“. Bitte beachten Sie, dass das Fluggerät Hindernissen nicht ausweichen kann,
wenn die Geschwindigkeit 12 m/s überschreitet.
28
© 2018 DJI Alle Rechte vorbehalten
Page 29

Mavic 2 Pro/Zoom Bedienungsanleitung
ISO
VERSCHLUSSEVWB
KAPAZITÄT
GO
8m/s
Geschwindigkeit
50m
Höhe
--m
Radius
P-GPS
P
ActiveTrack 2.0 beenden.
Drücken Sie die Flugpausentaste an der Fernsteuerung. Tippen Sie auf auf dem Bildschirm, oder
stellen Sie mit dem Flugmodusschalter den Modus „S“ auf der Fernsteuerung ein, um ActiveTrack 2.0 zu
beenden. Nachdem ActiveTrack 2.0 beendet wurde, schwebt das Fluggerät auf der Stelle. Jetzt können
Sie manuell weiteriegen, ein anderes Objekt verfolgen oder den Rückkehrug antreten.
Point-of-Interest 2.0 (POI 2.0)
Wählen Sie ein statisches Subjekt als Point-of-Interest aus. Legen Sie den Kreisradius, die Flughöhe
und die Fluggeschwindigkeit fest. Das Fluggerät iegt entsprechend diesen Einstellungen um das Motiv
herum. Mavic 2 Pro/Zoom unterstützt die Auswahl des POI durch GPS-Positionierung und Auswahl auf
dem Bildschirm.
12
Im Flug (GPS)
1. Wählen Sie POI auf dem Bildschirm aus: Ziehen Sie ein Kästchen um das gewünschte Motiv und
tippen Sie auf das Symbol „GO“ auf dem Bildschirm. Das Fluggerät beginnt, den Standort des Objekts
zu messen, und iegt um das Objekt, sobald es den Standort erfolgreich gemessen hat. Verwenden
Sie das Gimbal-Einstellrad, um den Motivrahmen einzustellen. Der Kreisradius, die Flughöhe und die
Fluggeschwindigkeit können auch während des Fluges angepasst werden.
Es wird empfohlen, ein statisches Objekt (z. B. Hochhäuser, bergiges Gelände) in sicherer
Entfernung vom Fluggerät (mehr als 10 m) auszuwählen. Wählen Sie kein Motiv, das zu nah am
Fluggerät ist.
Vermeiden Sie die Auswahl eines Motivs ohne ein klares Muster (z. B. einen klaren blauen
Himmel).
Vermeiden Sie die Auswahl von zu kleinen Motiven.
Wählen Sie ein Motiv mit einer klaren Umrisslinie aus. Andernfalls ist das Motiv möglicherweise
nicht richtig auf dem Bildschirm zentriert.
Das Fluggerät kann zwar nicht kontrolliert werden, während der Standort gemessen wird, aber
die Messung kann mit den Steuerknüppeln, der Flugpausentaste, dem Flugmodusschalter und
dem „Stopp“-Symbol angehalten werden.
2. Wählen Sie ein Motiv durch GPS-Positionierung: Steuern Sie das Fluggerät manuell über dem Objekt
und drücken Sie dann die Taste C1 oder wählen Sie DJI GO 4, um das Objekt zu bestätigen. Fliegen Sie
das Fluggerät mindestens 5 m vom Point-of-Interest entfernt. Die Fluggeschwindigkeit und die Kreis
Richtung können in DJI Go 4 eingestellt werden. Zum Start des Fluges auf „GO“ tippen. Verwenden
Sie das Gimbal-Einstellrad, um den Motivrahmen einzustellen. Der Kreisradius, die Flughöhe und die
Fluggeschwindigkeit können auch während des Fluges angepasst werden.
Die GPS-Positionierung hat keine Höhenmessung.
Es wird empfohlen, die Gimbal-Neigung auf -90° einzustellen, um die Messung der GPS-Position
zu erleichtern.
Position
09:29
1600 0.31/8000 4K/244K/25
Point of Interest
61%
2018 DJI Alle Rechte vorbehalten
©
29
Page 30
Mavic 2 Pro/Zoom Bedienungsanleitung
Flugparameter-Einstellungen
1. Fluggeschwindigkeit: Der Fluggeschwindigkeitsbereich beträgt 0-10 m/s, der „+“-Wert bedeutet, dass
das Fluggerät den Punkt gegen den Uhrzeigersinn umkreist, und der „–“-Wert bedeutet, dass das
Fluggerät den Punkt im Uhrzeigersinn umkreist. Passen Sie die Geschwindigkeit durch Justierung des
Schiebereglers auf dem Bildschirm an, oder verwenden Sie den Rollknüppel auf der Fernsteuerung,
um den Wert zu erhöhen.
2. Kreis Radius: Passen Sie den Radius an, indem Sie den Schieberegler auf dem Bildschirm bewegen,
oder verwenden Sie die Tilt-Steuerung der Fernsteuerung, um den Wert zu erhöhen.
3. Kreis Fluglage: Passen Sie die Fluglage an, indem Sie den Schieberegler auf dem Bildschirm bewegen,
oder verwenden Sie den Steuerknüppel zur Beschleunigung der Fernsteuerung, um den Wert zu
erhöhen.
4. Gimbal-Winkel: Benutzen Sie den Giersteuerknppel um das Gieren des Gimbals zu steuern, und
benutzen Sie das Gimbalrädchen, um die Neigung des Gimbals zu steuern. Durch Antippen des
Symbols wird der Gimbal neu zentriert (wenn die GPS-Positionierung zur Auswahl des POI verwendet
wird, wird nur der Gierwinkel zurückgesetzt. Wenn der Point of Interest auf dem Bildschirm ausgewählt
ist, werden sowohl der Gier- als auch der Neigungswinkel zurückgesetzt).
5. Richtung im Modus Kreisen: Wählen Sie die Richtung durch Wechseln des Schiebereglers auf dem
Bildschirm aus.
Point-of-Interest Modus verlassen
Tippen Sie auf dem Bildschirm oder drücken Sie die Flugpausentaste, um den Point-of-Interest Modus
zu unterbrechen. Drücken Sie und halten die Flugpausentaste zum Verlassen des Point of Interest-Modus.
Das Fluggerät bremst und schwebt an Ort und Stelle, sobald ein Hindernis während des POI
erkannt wird.
Wenn der Bug des Fluggerätes während des Fluges auf den Point-of-Interest ausgerichtet ist,
kann das Fluggerät evtl. nicht in der Lage sein, Hindernisse zu vermeiden. Nutzen Sie den
Point-of-Interest Modus in einem weiten, offenen Bereich.
Wegpunkte (demnächst verfügbar)
Das Fluggerät iegt gemäß Einstellungen zu den Wegpunkten. Die Flugausrichtung und Geschwindigkeit
kann während des Fluges kontrolliert werden. Sie können Wegpunkte auswählen, indem Sie die Mavic 2
Pro/Zoom zu den Wegpunkten iegen und diese einzeln aufzeichnen. Die Wegpunkte können auch vor
dem Start in der Karte ausgewählt und bearbeitet werden:
1. Fügen Sie Wegpunkte und Point-of-Interest in der Karte hinzu. Die Kamera des Fluggeräts zeigt auf
den Point-of-Interest, wenn sie durch die Wegpunkte iegt.
2. Tippen Sie auf die Wegpunkte und den Point-of-Interest, um die Höhe, die Fluggeschwindigkeit und
andere Parameter einzustellen.
3. Verschieben Sie die Wegpunkte und den Point of Interest, um die Positionen anzupassen.
4. Fluggeschwindigkeit, Failsafe-Einstellungen und das Verhalten des Fluggeräts können nach Setzen
der Wegpunkte konguriert werden.
5. Wegpunkte und Point of Interest Informationen können während der Bearbeitung in der Karte in der
App gespeichert und die Flugroute aufgezeichnet und wiederholt werden.
In anspruchsvollen Umgebungen, wie solchen mit umgebenden Hochhäusern, empfehlen wir
Wegpunkte durch manuelles abfliegen eines jeden Wegpunkts zu definieren.
30
© 2018 DJI Alle Rechte vorbehalten
Page 31

Mavic 2 Pro/Zoom Bedienungsanleitung
ISO
VERSCHLUSSEVWB
KAPAZITÄT
TapFly
TapFly bietet drei untergeordnete Modi: Vorwärts, Rückwärts und Frei. Unter der Voraussetzung, dass die
Lichtverhältnisse geeignet sind, vermeidet das Fluggerät automatisch Hindernisse, die es erfasst.
Vorwärts: Das Fluggerät iegt auf ein Ziel zu, wobei die vorwärts gerichteten Sichtsensoren zur
Hinderniserkennung genutzt werden.
Rückwärts: Das Fluggerät iegt vom Ziel weg in die entgegengesetzte Richtung, wobei die rückwärts
gerichteten Sichtsensoren Hindernisse erkennen.
Frei: Das Fluggerät iegt auf das Ziel zu. Mit der Fernsteuerung können Sie die Ausrichtung des Fluggeräts
frei steuern. Das Fluggerät kann Hindernisse in diesem Modus nicht umgehen. Bitte vorsichtig iegen.
Fliegen mit TapFly
Vergewissern Sie sich, dass das Fluggerät im Modus „P“ und die Intelligent Flight Battery ausreichend
aufgeladen ist. Verwenden Sie TapFly wie folgt:
1. Lassen Sie das Fluggerät abheben und mindestens 1 m über dem Boden schweben.
1 m
2. Tippen Sie in DJI GO 4 auf , wählen dann TapFly und anschließend einen untergeordneten Modus
aus. Befolgen Sie die angezeigten Anweisungen.
12
Im Flug (GPS)
TapFly
1600 0.31/8000
12
09:29
61%
2.4G
4K/2420GB
GO
正向
Rückwärts FreiVorwärts
3. Tippen Sie einmal auf das Ziel und warten Sie, bis die Schaltäche „GO“ eingeblendet wird. Tippen
Sie zum Bestätigen Ihrer Auswahl erneut auf „GO“ und das Fluggerät iegt automatisch zum Objekt.
Eine Auorderung wird angezeigt, wenn das Ziel nicht erreicht werden kann. Wählen Sie dann ein
anderes Ziel und versuchen Sie es erneut. Das Ziel kann während des Fluges durch tippen auf den
Bildschirm geändert werden.
TapFly beenden
Drücken Sie auf der Fernsteuerung die Flugpausentaste, oder ziehen Sie den Steuerknüppel entgegen der
Flugrichtung, dadurch bremst das Fluggerät und schwebt auf der Stelle. Tippen Sie auf den Bildschirm,
um TapFly wieder zu starten. Tippen Sie auf , oder wechseln Sie mithilfe des Flugmodusschalter in den
Modus „S“, um TapFly zu beenden.
2018 DJI Alle Rechte vorbehalten
©
31
Page 32

Mavic 2 Pro/Zoom Bedienungsanleitung
Verwenden Sie TapFly NICHT in Bereichen mit Menschen, Tieren, kleinen oder feinen Objekten
(z. B. Baumzweige oder Stromleitungen) oder mit durchsichtigen Objekten (z. B. Glas oder
Gewässer). Über Gewässern oder schneebedeckten Flächen ist die Funktion des TapFly-Modus
möglicherweise beeinträchtigt.
Die tatsächliche Flugroute kann von der mit TapFly eingegebenen Flugroute abweichen.
Der Auswahlbereich für die Zielrichtung ist begrenzt. Am oberen und unteren Bildschirmrand
können Sie keine Zielauswahl vornehmen.
Cinematic-Modus
Tippen Sie auf DJI GO 4, um den Cinematic-Modus auszuwählen. Im Cinematic-Modus hat das Fluggerät
einen längeren Bremsweg, und seine Drehgeschwindigkeit ist gedrosselt. Das Fluggerät sinkt langsam
ab, bis es anhält, führt eine weiche und stabile Kamerafahrt durch, selbst bei unruhigen Steuereingaben.
Fortschrittliches Assistenzsystem für Piloten (APAS)
Das fortschrittliche Assistenzsystem für den Piloten ist im Modus „P“ verfügbar. Wenn APAS aktiviert ist,
reagiert das Fluggerät weiterhin auf Benutzerbefehle und plant die Flugroute basierend auf Eingaben über
die Steuerknüppel und auf den Flugumgebungen. APAS erleichtert das Umiegen von Hindernissen,
sorgt für eine weichere Kamerafahrt und ein benutzerfreundliches Flugerlebnis.
Wenn APAS aktiviert ist, wird das Fluggerät angehalten, indem die Flugpausentaste auf der Fernsteuerung
gedrückt oder in der DJI GO 4 App angetippt wird. Das Fluggerät schwebt drei Sekunden und wartet
auf Pilotenbefehle.
Zum Aktivieren von APAS tippen Sie in der DJI GO 4 App auf
Die Funktion APAS wird automatisch deaktiviert, wenn intelligente Flugmodi verwendet werden.
Die Funktion wird automatisch wieder aufgenommen, nachdem die intelligenten Flugmodi
beendet werden.
Die APAS-Funktion ist nur verfügbar, wenn vorwärts und rückwärts geflogen wird. Wenn das
Fluggerät nach links oder rechts fliegt, ist APAS deaktiviert.
Das Fluggerät schwebt an Ort und Stelle, wenn ein Hindernis erkannt wird, welches nicht
vermieden werden kann. Das Fluggerät kann Hindernisse, die sich unter ihm befinden, nicht
erkennen und vermeiden.
Stellen Sie sicher, dass Sie APAS verwenden, wenn die Sichtsensoren dies erlauben.
Vergewissern Sie sich, dass sich entlang der gewünschten Flugroute keine Menschen, Tiere,
kleine und dünne Objekte (z. B. Zweige oder Leitungen) oder durchsichtige Objekte (z. B.
Wasser und Glas) befinden.
Über Wasser oder Schnee funktioniert APAS möglicherweise nicht problemlos.
Seien Sie besonders achtsam, wenn Sie bei extremer Dunkelheit (< 300 lux) oder extremer
Helligkeit (> 10.000 lux) fliegen.
In der Nähe ihrer Fluggrenzen oder GEO-Zonen funktioniert APAS möglicherweise nicht
problemfrei.
Achten Sie auf die Statusanzeige des Fluggeräts in DJI GO 4 und stellen Sie sicher, dass das
Fluggerät im APAS-Modus normal arbeitet.
.
APAS
Flugschreiber
Flugdaten wie Telemetriedaten, Statusinformationen zum Fluggerät und weitere Parameter werden
automatisch im internen Datenspeicher des Fluggeräts gespeichert. Diese Daten können über den DJI
Assistant 2 aufgerufen werden.
32
© 2018 DJI Alle Rechte vorbehalten
Page 33

Mavic 2 Pro/Zoom Bedienungsanleitung
Propeller anbringen und abnehmen
Die Mavic 2 Pro/Zoom verwendet geräuscharme Propeller. Es gibt zwei Propellervarianten, die sich in
zwei verschiedene Richtungen drehen. Weiße Markierungen zeigen an, welche Propeller an welchen
Motoren angebracht werden sollten.
Markiert Nicht markiert
Auf Motoren mit weißen Markierungen montieren
Auf Motoren ohne weiße Markierungen
montieren
Drehen Sie die Propeller zum Anbringen und Sichern in die Pfeilrichtung.
Propeller anbringen
Befestigen Sie die Propeller mit den weißen Markierungen an den Motoren mit weißen Markierungen
und die unmarkierten Propeller an den Motoren ohne Markierungen. Drücken Sie jeden Propeller auf den
Motor und drehen Sie ihn, bis er fest sitzt.
Markiert Nicht markiert
Propeller abnehmen
Drücken Sie die Propeller nach unten auf die Motormontageplatte, und drehen Sie sie in Löserichtung.
Propellerblätter sind scharfkantig. Handhaben Sie die Teile mit großer Vorsicht.
Verwenden Sie nur originale DJI Propeller. Verwenden Sie stets Propeller des gleichen Typs.
Vergewissern Sie sich vor jedem Flug, dass die Propeller in gutem Zustand sind. Alte,
beschädigte oder defekte Propeller dürfen nicht verwendet werden.
Vergewissern Sie sich vor jedem Flug, dass die Propeller und Motoren fest und richtig befestigt
sind.
Zum Schutz vor Verletzungen müssen ausreichend Abstand zu den Propellern halten und dürfen
die drehenden Propeller NICHT berühren.
Legen Sie das Fluggerät in der angezeigten Richtung in die Tragekoffer für einen sicheren
Transport und zum Verstauen, um Beschädigungen der Propeller zu vermeiden. Die Propeller
dürfen nicht gedrückt oder gebogen werden. Wenn Propeller beschädigt sind, ist die
Flugleistung beeinträchtigt.
Vergewissern Sie sich, dass die Motoren sicher befestigt sind und frei drehen. Wenn ein Motor
klemmt und nicht mehr frei dreht, landen Sie unverzüglich das Fluggerät.
Schützen Sie die Motoren vor Staub.
Nehmen Sie keine Änderungen am Motor vor.
Nach dem Flugbetrieb sind die Motoren u. U. heiß und dürfen nicht mit den Händen oder
anderen Körperteilen in Berührung kommen.
Verschließen oder blockieren Sie NIEMALS die Belüftungsöffnungen am Gehäuse des
Fluggeräts.
Beim Einschalten müssen die elektronischen Drehzahlregler normal klingen.
2018 DJI Alle Rechte vorbehalten
©
33
Page 34

Mavic 2 Pro/Zoom Bedienungsanleitung
Intelligent Flight Battery
Die Intelligent Flight Battery der Mavic 2 ist ein 15,4 V, 3850 mAh-Akku mit intelligenter Lade-/
Entladungsfunktion. Verwenden Sie nur einen von DJI zugelassenen AC-Netzadapter, um den Akku
aufzuladen.
Intelligent Flight Battery AC-Netzadapter
Akkumerkmale
1. Akkuladestand: Die LED-Ladezustandsanzeige zeigt den aktuellen Akkustand an.
2. Automatische Entladungsfunktion: Um ein Aufblähen des Akkus zu verhindern, entlädt der Akku sich
nach 10 Tagen außer Betrieb automatisch auf unter 60 % seiner Gesamtkapazität. Das Entladen auf
65 % dauert etwa 3 Tage. Beim Entladen gibt der Akku spürbar Wärme ab.
3. Spannungsangleichung: Die Spannungen der Akkuzellen werden während des Ladevorgangs
automatisch ausgeglichen.
4. Überladungsschutz: Der Ladevorgang wird automatisch beendet, sobald der Akku vollständig
geladen ist.
5. Temperaturmessung: Der Akku wird nur geladen, wenn die Temperatur zwischen 5 und 40 °C liegt.
6. Überstromschutz: Der Akku bricht das Laden ab, wenn eine zu hohe Stromstärke erkannt wird.
7. Tiefentladungsschutz: Das Entladen wird automatisch abgebrochen, um eine Tiefenentladung zu
verhindern.
8. Schutz vor Kurzschlüssen: Die Stromversorgung wird automatisch abgebrochen, wenn ein
Kurzschluss erkannt wird.
9. Akkuzellenschutz: Bei einer beschädigten Akkuzelle zeigt die DJI GO 4 einen Warnhinweis an.
10. Schlafmodus: Der Akku schaltet die Stromversorgung nach 20 Minuten Inaktivität ab, um Strom
zu sparen. Wenn der Akkuladezustand weniger als 10 % beträgt, wechselt der Akku in den
Ruhemodus, um eine Tiefenentladung zu verhindern. Im Ruhemodus leuchten die Anzeigen zum
Akkustand nicht. Laden Sie den Akku auf, um ihn aus dem Ruhemodus aufzuwecken.
11. Kommunikation: Informationen zu Akkuspannung, Kapazität, Stromstärke usw. werden an das
Fluggerät gesendet.
Lesen Sie vor dem Gebrauch die Sicherheitsvorschriften zur Intelligent Flight Battery für die
Mavic 2. Der Anwender des Geräts ist allein verantwortlich für alle Vorgänge und Einsätze.
Funktionen des Akkus
Akkuladestands-LED
34
© 2018 DJI Alle Rechte vorbehalten
Ein/Aus-Taste
Niedrig
Hoch
Page 35

Mavic 2 Pro/Zoom Bedienungsanleitung
Überprüfen des Akkuladestands
Die Akkuladestands-LEDs am Akku zeigen an, wie viel Ladung noch übrig ist. Drücken Sie im
ausgeschalteten Zustand des Akkus einmal die Netztaste. Die LEDs zeigen den Akkuladestand an
Ein- und Ausschalten
Um den Akku ein- oder auszuschalten, halten Sie 2 Sekunden lang die Ein/Aus-Taste gedrückt.
Bei Kälte zu beachten
1. Beim Flugbetrieb in kalten Umgebungen (-10 bis +5 °C) ist die Akkukapazität erheblich eingeschränkt.
Es wird empfohlen, das Fluggerät eine Weile im Schwebeug zu betreiben, um den Akku aufzuheizen.
Stellen Sie sicher, dass Sie den Akku vor dem Start vollständig auaden.
2. Der Akku darf bei extremer Kälte, unter -10 °C nicht betrieben werden.
3. Beenden Sie den Flugbetrieb sofort, wenn die DJI GO 4 App bei Kälte die Meldung „Warnung:
Niedriger Akkustand“ anzeigt.
4. Damit der Akku optimal funktioniert, ist die Temperatur des Akkugehäuses über 20 °C zu halten.
5. Die verringerte Akkukapazität in Umgebungen mit niedriger Temperatur verringert die Beständigkeit
des Fluggeräts gegenüber Wind, weshalb besondere Vorsicht geboten ist. Fliegen Sie vorsichtig.
6. Fliegen Sie mit besonderer Vorsicht in extremen Höhen (etwa im Hochgebirge).
Setzen Sie den Akku bei Kälte in das Akkufach ein, und schalten Sie das Fluggerät zum
Warmlaufen etwa 1 bis 2 Minuten vor dem Abfliegen an.
Laden des Akkus
Die Intelligent Flight Battery muss vor dem ersten Gebrauch komplett geladen sein:
1. Schließen Sie den AC-Netzadapter an eine Stromquelle an (100 - 240 V, 50/60 Hz).
2. Schließen Sie die Intelligent Flight Battery mithilfe des Akkuladekabels bei ausgeschaltetem Akku am
AC-Netzadapter an.
3. Beim Laden und Entladen zeigen die Akkuladestands-LEDs den Fortschritt der Ladung an.
4. Wenn alle Akkuladestands-LEDs erloschen sind, ist die Intelligent Flight Battery vollständig geladen.
Trennen Sie den AC-Netzadapter, sobald der Akku vollständig geladen ist.
Ladezeit: 1 Stunde und 30 Minuten.
Laden Sie die Intelligent Flight Battery NICHT unmittelbar nach dem Flugbetrieb auf.
Möglicherweise ist der Akku noch zu warm. Warten Sie, bis er vor dem erneuten Laden auf
Raumtemperatur abgekühlt ist.
Wenn die Akkuzellentemperatur außerhalb des Betriebsbereichs, 5 bis 40 °C liegt, stoppt der ACNetzadapter den Ladevorgang. Die ideale Ladetemperatur liegt zwischen 22 und 28 °C.
Die optional erhältliche Akkuladestation lädt bis zu vier Akkus auf. Weitere Informationen erhalten
Sie im offiziellen DJI Online Store.
Steckdose
AC-Netzadapter
Intelligent Flight Battery
2018 DJI Alle Rechte vorbehalten
©
35
Page 36

Mavic 2 Pro/Zoom Bedienungsanleitung
Akkuladestands-LEDs während des Ladevorgangs
LED 1 LED 2 LED 3 LED 4
Akkuladestands-LEDs während des
Ladevorgangs
Akkustand 0 % – 25 % 25 % – 50 % 50 % – 75 %
Vollständig
geladen
Akkuschutz
Akkuschutzmechanismus
LED 1 LED 2 LED 3 LED 4 Blinkfolge Akkuschutzeinrichtung
LED 2 blinkt zweimal pro
Sekunde
LED 2 blinkt dreimal pro
Sekunde
LED 3 blinkt zweimal pro
Sekunde
LED 3 blinkt dreimal pro
Sekunde
LED 4 blinkt zweimal pro
Sekunde
LED 4 blinkt dreimal pro
Sekunde
Überhöhte Stromstärke
Kurzschluss
Überladung
Überhöhte Spannung am
Ladegerät
Ladetemperatur zu niedrig
Ladetemperatur zu hoch
Die Intelligent Flight Battery einsetzen
Setzen Sie die Intelligent Flight Battery in das Akkufach. Vergewissern Sie sich, dass die
Intelligent Flight Battery sicher befestigt ist und dass die Akkuverriegelungen eingerastet sind.
Klick
Entnehmen der Intelligent Flight Battery
Schieben Sie die Akkuverriegelungen in Richtung der Seiten der Intelligent Flight Battery, sodass das
Akkufach herausspringt.
Im eingeschalteten Zustand darf der Akku nicht eingesetzt oder herausgenommen werden.
Vergewissern Sie sich, dass der Akku sicher befestigt ist.
36
© 2018 DJI Alle Rechte vorbehalten
Page 37

Mavic 2 Pro/Zoom Bedienungsanleitung
Gimbal und Kamera
Gimbal
Der 3-Achsen-Gimbal der Mavic 2 Pro/Zoom ist eine stabilisierte Halterung für die Kamera, damit
Sie Fotos und Videos aufnehmen können, ohne die Aufnahmen zu verwackeln. Der Gimbal hat einen
Neigungsachsenbereich von -90° bis +30°. Weitere Gimbal-Einstellungen, wie der Gimbal-Modus und die
automatische Gimbal-Kalibrierung können auch ausgewählt werden, indem Sie auf tippen.
Steuern Sie die Neigung der Kamera durch das Gimbal-Rädchen an der Fernsteuerung. Rufen Sie
alternativ die Kameraansicht in der DJI GO 4 App auf. Tippen Sie auf den Bildschirm Ihres Mobilgeräts,
bis ein blauer Kreis erscheint, ziehen Sie zur Steuerung der Kameraneigung den Kreis nach oben und
unten. Durch Ziehen des Kreises nach links und rechts wird die Ausrichtung des Fluggeräts gesteuert.
Gimbal-Betriebsmodi
Der Gimbal bietet zwei Betriebsmodi. In den Kameraeinstellungen der DJI GO 4 App können Sie zwischen
diesen Betriebsmodi umschalten.
Folgemodus: Der Winkel zwischen der Gimbal-Ausrichtung und dem Fluggerätebug ist immer gleich.
FPV-Modus: Der Gimbal passt sich den Bewegungen des Fluggeräts an und simuliert dadurch eine Ich-
Perspektive (FPV, First-Person-View).
Bei eingeschaltetem Fluggerät darf der Gimbal nicht berührt oder angestoßen werden. Zum
Schutz des Gimbals während des Starts muss stets von einem flachen, offenen Untergrund aus
gestartet werden.
Bei Kollisionen und Stößen können die Präzisionsteile im Gimbal beschädigt werden, sodass der
Gimbal unter Umständen nicht mehr einwandfrei funktioniert.
Vermeiden Sie, dass Staub oder Sand in den Gimbal kommen, insbesondere in die GimbalMotoren.
In folgenden Fällen kann es zu einer Störung am Gimbal-Motor kommen:
a. Das Fluggerät wurde auf einer unebenen Oberfläche abgestellt, oder der Gimbal ist in seiner
Bewegungsfreiheit eingeschränkt.
b. Der Gimbal erfährt übermäßige externe Kraft, wie während einer Kollision.
Bewegen Sie den Gimbal NIEMALS durch äußere Krafteinwirkung, wenn er eingeschaltet ist.
Belasten Sie den Gimbal NICHT mit zusätzlichen Anbauten oder gewichten, da er sonst in seiner
Funktion gestört oder eventuell der Motor beschädigt wird.
Entfernen Sie vor dem Einschalten des Fluggeräts die Gimbal-Abdeckung. Stellen Sie außerdem
sicher, dass Sie den Gimbal-Schutz anbringen, wenn das Fluggerät nicht in Gebrauch ist.
Im Flugbetrieb bei dichter Nebelbildung oder Bewölkung kann der Gimbal feucht werden und
kurzzeitig ausfallen. Nach dem Abtrocknen funktioniert der Gimbal wieder einwandfrei.
Kamera
Die Mavic 2 Pro verwendet eine Kamera mit einem 1" CMOS-Sensor (diese wurde gemeinsam von DJI
und Hasselblad entwickelt), sie verfügt über ein Objektiv mit einer einstellbaren Blende von F2.8 bis F11.
Die Kamera bietet einen Autofokus, der Fokusbereich liegt zwischen 1 m und unendlich. Die Filter an der
Kamera können ausgetauscht werden. Die Mavic 2 Pro Kamera nimmt Videos mit bis zu 4K 30fps und
Fotos mit bis zu 20 Megapixel auf. Sie unterstützt Aufnahmemodi wie Einzelbild, Serienbildaufnahme,
Intervall, Panorama, Zeitlupe und erweitertes HDR.
Die Mavic 2 Zoom verwendet eine Kamera mit einem 1 / 2,3" CMOS-Sensor, durch das 24-48 mm
Objektiv (äquivalent zu 35 mm) ergibt sich ein 2-fach optischer Zoom. Die Kamera bietet einen Autofokus,
der Fokusbereich liegt zwischen 0,5 m und unendlich. Die Filter an der Kamera können ausgetauscht
werden. Die Mavic 2 Pro Kamera nimmt Videos mit bis zu 4K 30fps und Fotos mit bis zu 12 Megapixel
auf. Sie unterstützt Aufnahmemodi wie Einzelaufnahme, Serienbildaufnahme, Intervall, Panorama,
Zeitlupe und erweitertes HDR. Mavic 2 Zoom bietet einen 2-fach optischen Zoom und 2-fach digitalen
Zoom bei der Aufnahme von Video in 1080p 24/25/30.
2018 DJI Alle Rechte vorbehalten
©
37
Page 38

Mavic 2 Pro/Zoom Bedienungsanleitung
Stellen Sie sicher, dass Temperatur und Luftfeuchtigkeit während der Verwendung und Lagerung
für die Kamera angemessen sind.
Reinigen Sie das Objektiv mit einem Linsenreiniger, um Beschädigungen zu vermeiden.
Verschließen oder blockieren Sie NIEMALS die Belüftungsöffnungen an der Kamera. Durch die im
Betrieb entstehende Wärme können Personenschäden oder Sachschäden entstehen.
Speichern der Fotos und Videos
Die Mavic 2 Pro/Zoom verfügt über einen internen Speicher mit 8 GB und unterstützt auch die
Verwendung einer microSD-Karte zum Speichern von Fotos und Videos. Es ist eine microSD-Karte mit
UHS Geschwindigkeitsklasse 3 erforderlich, da die hohen Lese- und Schreibgeschwindigkeiten dieser
Karten auch für hochauösende Videodaten geeignet sind.
Bei eingeschaltetem Fluggerät darf die microSD-Karte nicht entfernt werden. Andernfalls könnte
die microSD-Karte beschädigt werden.
Um die Stabilität des Kamerasystems zu gewährleisten, ist die Länge der einzelnen
Aufzeichnungen auf 30 Minuten begrenzt.
Überprüfen Sie die Kameraeinstellungen vor der Verwendung, um sicherzustellen, dass sie wie
gewünscht konfiguriert sind.
Bevor Sie wichtige Bilder oder Videos aufnehmen machen Sie einige Bilder, um zu testen, ob die
Kamera ordnungsgemäß funktioniert.
Fotos und Videos können nur bei eingeschalteter Intelligent Flight Battery aus der Kamera
exportiert werden.
Vergewissern Sie sich, dass die Intelligent Flight Battery korrekt ausgeschaltet ist. Andernfalls
werden Ihre Kameraparameter NICHT gespeichert und eventuell aufgenommene Videos können
beschädigt werden. Hinweis: Unabhängig von der Ursache übernimmt DJI keine Verantwortung
für die nicht erfolgreiche Aufzeichnung von Bildern oder Videos, die nicht von einem
elektronischen Gerät lesbar sind.
Video bearbeiten
Die Mavic 2 Pro unterstützt die Videoformate MP4 und MOV und bietet die Farbmodi Normal, D-Log und
HLG. Im Normalmodus werden Codecs H.264 und H.265 unterstützt. Im D-Log- oder HLG-Modus wird
nur H.265 unterstützt.
Bei der Mavic 2 Pro reduziert die Aufnahme mit Full FOV das Sichtfeld des 5,5K Sensors nur geringfügig
und erzielt die 4K Auösung durch Interpolation. Die Aufnahme mit HQ nutzt nur die Pixel in der Mitte des
Sensors zur Aufzeichnung von 4K. Dies bietet durch die exakte Pixelabbildung ein bessere Bildqualität
auf kosten eines geringeren Sichtfeldes. Das Sichtfeld bei 4K Full FOV beträgt 75°. Bei 4K HQ beträgt
dieses 55°. Man kann jederzeit zwischen beiden Modi wechseln.
Die Mavic 2 Zoom unterstützt die Videoformate MP4 und MOV und unterstützt die Farbmodi Normal und
D-Cinelike. Die Codecs H.264 und H.265 werden unterstützt.
Die folgende Software wurde von DJI getestet und wird zum Abspielen oder Bearbeiten von Videos
empfohlen.
Software Mac Version Windows Version
Adobe Premiere Pro CC 2018 v12.1.1 (10) v12.1.1 (10)
DaVinci Resolve v15.0 free v14.3 Studio
Apple Final Cut Pro X v10.4.3 n. v.
Apple QuickTime v10.4 (928.5.1) n. v.
Apple iMovie v10.4.2 n. v.
VLC Player v3.0.2 v3.0.2
38
© 2018 DJI Alle Rechte vorbehalten
Page 39

Mavic 2 Pro/Zoom Bedienungsanleitung
Verzeichnungskorrektur für Videos
Die Mavic 2 Pro und Mavic 2 Zoom können 8-Bit-Videos aufnehmen und dabei automatisch die im
Medium übliche Bildverzerrung korrigieren. Die Mavic 2 Pro Videos jedoch auch mit 10-Bit aufzeichnen.
10-Bit-Videos bieten weichere Farbübergänge als 8-Bit-Videos, was für die Farbkorrektur in der
Nachbearbeitung von Vorteil ist. Bitte beachten Sie, dass die automatische Verzeichnungskorrektur für
10-Bit-Videos auf der Mavic 2 Pro nicht verfügbar ist.
Zur Verzeichnungskorrektur stehen verschiedene Softwareprogramme zur Verfügung, z. B. DaVinci
Resolve, Adobe Premiere und Apple Final Cut Pro X. Videos mit unterschiedlichen Auösungen weisen
unterschiedliche Arten von Verzerrungen auf. In der folgenden Tabelle sind die empfohlenen Werte zur
Korrektur der Verzerrung bei Verwendung unterschiedlicher Software aufgeführt. Bitte beachten Sie, dass
durch die Korrektur der Verzerrung die Gesamtqualität des Videos abnimmt.
DaVinci Resolve Adobe Premiere * Apple Final Cut Pro X
4K HQ-Aufnahme 0,180 -4 0,02
4K Full FOV-Aufnahme 0,245 -9 0,05
2.7K 0,240 -8 0,05
Full HD 1080p 24/25/30/48/60 fps 0,245 -9 0,05
Full HD 120 fps 0,180 -4 0,02
* Adobe Premiere verwendet voreingestellte Parameter für die Verzerrungskorrektur. Benutzer müssen den Wert
nicht manuell eingeben, sondern lediglich den Videomodus auswählen.
2018 DJI Alle Rechte vorbehalten
©
39
Page 40

Fernsteuerung
In diesem Kapitel werden die Funktionen
der Fernsteuerung und die Bedienung von
Fluggerät und Kamera beschrieben.
40
© 2018 DJI Alle Rechte vorbehalten
Page 41

Fernsteuerung
In die Fernsteuerung integriert ist DJIs Langstrecken-Übertragungstechnologie OcuSync 2.0. OcuSync
2.0 erlaubt eine maximale Übertragungsweite von 8 km und die Videoübertragung mit bis zu 1080p vom
Fluggerät an die DJI GO 4 App. Steuern Sie das Fluggerät und die Kamera mit den Onboard-Tasten. Das
integrierte LCD-Display liefert in Echtzeit wichtige Informationen zum Fluggerät, und die abnehmbaren
Steuerknüppel erleichtern das Verstauen der Fernsteuerung.
Auf oenem Gelände und ohne elektromagnetische Störungen erlaubt OcuSync 2.0 Videoübertragungen
mit bis zu 1080p, unabhängig von der Fluglage. Die Fernsteuerung arbeitet sowohl mit 2,4 GHz als auch
5,8 GHz und wählt automatisch den besten Übertragungskanal aus. OcuSync 2.0 reduziert die Latenz
auf 120-130 ms, erreicht wird dies durch eine leistungsstärkere Hardware in der Drohne, verbesserte
Video-Decoding-Algorithmen und optimierte Übertragungsverfahren.
Der Autofokus arbeitet auch bei schlechten Lichtverhältnissen. Die Mavic 2 Pro unterstützt die Blendenund Verschlusseinstellung und die Mavic 2 Zoom unterstützt das Herein- und Herauszoomen mit dem
Zoom-Einstellrad.
Der eingebaute Akku bietet eine Kapazität von 3950 mAh und damit eine maximale Laufzeit von 2
Stunden und 15 Minuten. Die Fernsteuerung lädt das Mobilgerät über USB mit bis zu 500 mA bei 5 V
auf. Die Fernsteuerung lädt Android-Geräte automatisch auf. Stellen Sie bei iOS-Geräten zunächst sicher,
dass das Laden in DJI GO 4 aktiviert ist. Der Ladevorgang für iOS-Geräte ist standardmäßig deaktiviert
und muss bei jedem Einschalten der Fernsteuerung aktiviert werden.
Vorbereitung der Fernsteuerung
Drücken Sie die Netztaste, um den aktuellen Akkuladestand auf dem LCD-Bildschirm anzuzeigen. Drücken
Sie die Taste einmal, und halten sie diese gedrückt, um die Fernsteuerung ein- oder auszuschalten.
2018 DJI Alle Rechte vorbehalten
©
41
Page 42

Mavic 2 Pro/Zoom Bedienungsanleitung
Laden des Akkus
Schließen Sie den mitgelieferten AC-Netzadapter an den Stromanschluss der Fernsteuerung an. Das
vollständige Auaden des Akkus der Fernsteuerung nimmt ca. 2 Stunden und 15 Minuten in Anspruch.
Das Fernsteuerungskabel muss vor dem Auaden entfernt werden.
Steckdose
AC-Netzadapter
USB-Adapter
Kamera steuern
Stellen Sie mit dem Blenden- / Verschluss-Einstellrad die Blenden- und Verschlusseinstellungen ein (nur
Mavic 2 Pro).
Tippen Sie auf die Videoaufnahmetaste, um die Aufzeichnung zu starten.
Verwenden Sie die Fokus-/Fototaste, um den Autofokus zu nutzen und Fotos aufzunehmen.
Verwenden Sie das Zoom-Einstellrad zum Herein- und Herauszoomen (nur Mavic 2 Zoom).
Einstellrädchen für Blende/
Verschlusszeit (Mavic 2 Pro)
Zoom-Einstellrädchen
(Mavic 2 Zoom)
Videoaufnahmetaste
Taste für Fokus/Fototaste
42
© 2018 DJI Alle Rechte vorbehalten
Page 43
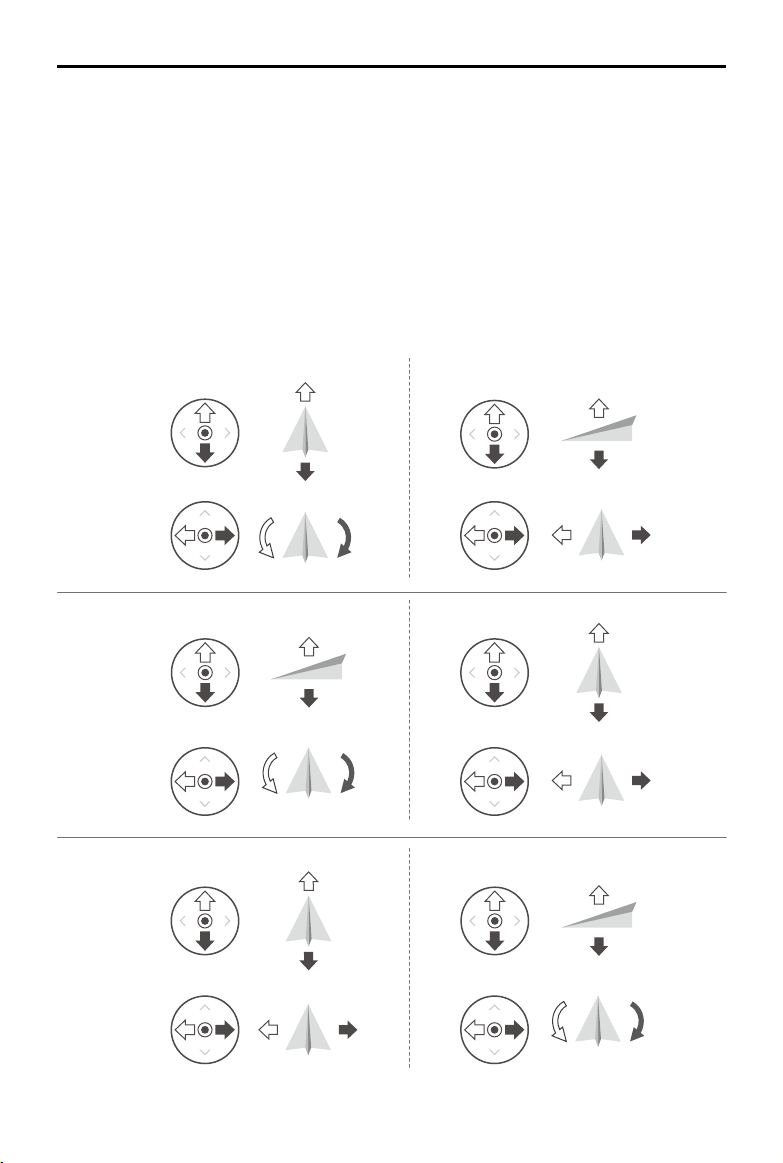
Mavic 2 Pro/Zoom Bedienungsanleitung
Bedienung und Steuerung des Fluggeräts
Die Steuerknüppel werden verwendet, um die Ausrichtung (Gieren), die Vor-/Rückwärtsbewegung
(Nicken), die Höhe (Beschleunigung) und die Links-/Rechts-Bewegung (Rollen) des Fluggeräts
zu steuern. Die Funktion jedes einzelnen Steuerknüppels wird durch die Auswahl des Modus des
Steuerknüppels bestimmt. Es stehen vorab programmierte Modi zur Verfügung (Modus 1, Modus 2 und
Modus 3), benutzerdenierte Modi können in der DJI GO 4 App konguriert werden. Der Standardmodus
ist Modus 2.
In allen drei vorprogrammierten Modi schwebt die Mavic 2 konstant auf der Stelle, wenn beide Knüppel
zentriert sind. Wenn ein Steuerknüppel aus der zentrierten Position herausgedrückt wird, werden die in
der folgenden Abbildung gezeigten Funktionen ausgeführt.
Modus 1
Modus 2
Modus 3
Linker Hebel
Linker Hebel Rechter Hebel
Vorwärts
Rückwärts
RechtsdrehungLinksdrehung
Nach oben
Nach unten
RechtsdrehungLinksdrehung
Vorwärts
Rechter Hebel
Rechter HebelLinker Hebel
Nach oben
Nach unten
RechtsLinks
Vorwärts
Rückwärts
RechtsLinks
Nach oben
Rückwärts
Nach unten
RechtsLinks
2018 DJI Alle Rechte vorbehalten
©
RechtsdrehungLinksdrehung
43
Page 44
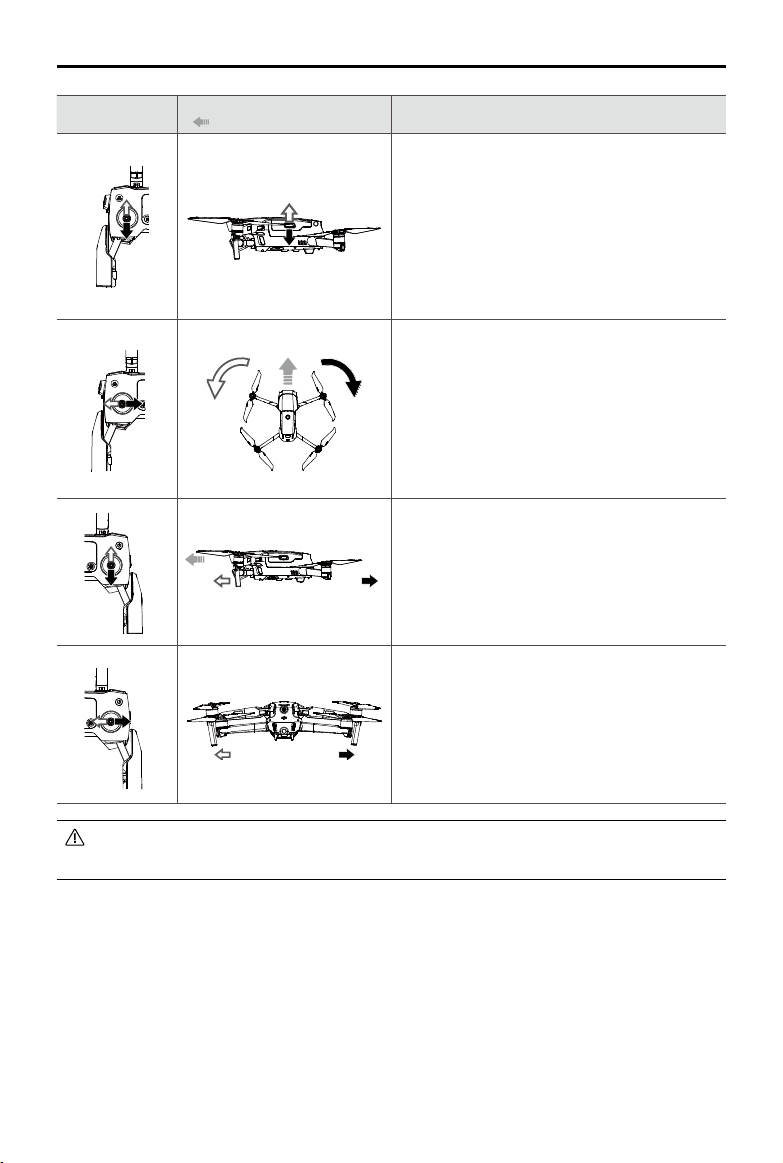
Mavic 2 Pro/Zoom Bedienungsanleitung
Fernsteuerung
(Modus2)
( Zeigt die Flugrichtung an)
Fluggerät
Bemerkung
Durch ein Verstellen des linken Steuerknüppels
nach oben oder nach unten wird die Flughöhe
geändert. Knüppel nach oben, um zu steigen,
Steuerknüppel nach unten, um zu sinken. Je weiter
der Steuerknüppel aus der Mittellage bewegt wird,
desto schneller ändert das Fluggerät die Flughöhe.
Bewegen Sie den Knüppel stets sanft, um abrupte
und unerwartete Flughöhenänderungen zu
vermeiden.
Durch Verstellen des linken Knüppels nach links
oder rechts wird der Gierwinkel des Fluggeräts
geändert. Bewegen Sie den Knüppel nach links,
erfolgt eine Drehung des Fluggeräts gegen den
Uhrzeigersinn, bewegen Sie den Knüppel nach
rechts, erfolgt eine Drehung im Uhrzeigersinn. Je
weiter der Knüppel aus der Mittellage bewegt wird,
desto schneller dreht sich das Fluggerät.
Durch ein Verstellen des rechten Steuerknüppels
nach oben und nach unten wird der Nickwinkel
des Fluggeräts geändert. Knüppel nach oben, um
nach vorne zu iegen, Knüppel nach unten, um
rückwärts zu iegen. Je weiter der Knüppel aus
der Mittellage bewegt wird, desto schneller bewegt
sich das Fluggerät.
Wird der rechte Knüppel nach links oder rechts
bewegt, ändert sich die Rolleigenschaft des
Fluggeräts. Bewegen Sie den Knüppel nach
links, um nach links zu iegen, bewegen Sie den
Knüppel nach rechts, um nach rechts zu iegen.
Je weiter der Knüppel aus der Mittellage bewegt
wird, desto schneller bewegt sich das Fluggerät.
Es wird empfohlen, dass die Steuerknüppel für den Transport und zur Aufbewahrung demontiert
und in den dafür vorgesehenen Steckplätzen an der Fernsteuerung aufbewahrt werden, um
Beschädigungen zu vermeiden.
44
© 2018 DJI Alle Rechte vorbehalten
Page 45

Mavic 2 Pro/Zoom Bedienungsanleitung
Flugmodusschalter
Mit diesem Schalter können Sie den gewünschten
Flugmodus auswählen.
Stellung Flugmodus
S Modus „S“
S
T P
P Modus „P“
T Modus „T“
Unabhängig davon, auf welcher Position sich der Schalter auf der Fernsteuerung bendet, beginnt die
Mavic 2 Pro/Zoom standardmäßig im Modus „P“. Um den Flugmodus zu ändern, önen Sie die Kamera-
Ansicht in der „DJI GO 4“-App, tippen Sie auf , und aktivieren den „Multi-Flugmodus“. Nachdem Sie
den „Multi-Flugmodus“ aktiviert haben, stellen Sie den Schalter auf P und anschließend auf S, um den
Sportmodus zu aktivieren.
Rückkehrtaste (RTH)
Halten Sie die Rückkehrtaste gedrückt, um die Rückkehr zum Startpunkt (Return To Home) zu starten,
bei der das Fluggerät zum zuletzt aufgezeichneten Startpunkt zurückkehrt. Wenn Sie diese Taste erneut
drücken, wird die Rückkehr abgebrochen, und Sie können das Fluggerät wieder selbst steuern. Eine
ausführliche Beschreibung zum Rückkehrug nden Sie im Abschnitt „Rückkehrfunktion (RTH)“.
C1- und C2-Taste
Die Funktionen der Tasten C1 und C2 werden über die DJI GO 4 gesetzt. Die Standardbelegung für die
C1-Taste ist Zentralfokus und die Standardbelegung für die C2-Taste ist Playback.
Fernsteuerungsalarm
Die Fernsteuerung gibt während des Rückkehrugs oder bei niedrigem Akkuladestand (6 % bis 15 %)
einen Alarm aus. Die akkustandsbedingte Rückkehr und die Alarmstufe bei niedrigem Akkustand können
durch Drücken der Ein-/Austaste aufgehoben werden. Der Alarm zum sehr niedrigen Akkustand (weniger
als 6 %) kann jedoch nicht unterdrückt werden.
Optimaler Sendebereich
Das Signal zwischen Fluggerät und Fernsteuerung erreicht die höchste Zuverlässigkeit, wenn die
Antennen relativ zum Fluggerät ausgerichtet sind. Siehe nachstehende Abbildung.
2018 DJI Alle Rechte vorbehalten
©
45
Page 46

Mavic 2 Pro/Zoom Bedienungsanleitung
Stark
Schwach
Halten Sie das Fluggerät stets im optimalen Sendebereich. Für die Beibehaltung der optimalen
Sendeleistung passen Sie die Fernsteuerung und die Antennen entsprechend den Angaben in der obigen
Abbildung an.
LCD-Bildschirm
Am LCD-Bildschirm werden verschiedene Systemzustände wie Flugtelemetrie und Akkustand in Echtzeit
angezeigt. Die einzelnen Symbole am LCD-Bildschirm sind nachfolgend erklärt.
Systemstatus-Anzeige
Fluggeschwindigkeit
RC Akkuladestand
Abstand zum Boden
GPS-Signalstärke
Flugmodus*
Sichtsensoren
Akkuladestand
Fluggerät
Signalstärke der
Fernsteuerung
Entfernung zum Fluggerät
Belichtungskorrektur
Steig-/Sinkug
Flughöhe
Kamerastatus
Motordrehzahl
microSD-Karte
Sportmodus
* Auf dem Bildschirm der primären Fernsteuerung wird „MCTL“ angezeigt, während auf dem Bildschirm der sekundären
Fernsteuerung der Flugmodus angezeigt wird.
46
© 2018 DJI Alle Rechte vorbehalten
Page 47

Mavic 2 Pro/Zoom Bedienungsanleitung
Koppeln der Fernsteuerung
Bei der Lieferung sind Fernsteuerung und Fluggerät miteinander gekoppelt. Die Geräte müssen nur dann
erneut gekoppelt werden, wenn Sie erstmalig eine neue Fernsteuerung in Betrieb nehmen. Gehen Sie
wie folgt vor:
1. Schalten Sie Fluggerät und Fernsteuerung ein.
2. DJI GO 4 starten.
3. Gehen sie zur „Liveansicht“ und tippen Sie auf und anschließend auf die Schaltäche, um zu
bestätigen. Die Fernsteuerung ist bereit zum Koppeln.
4. Die Abbildung unten zeigt die Kopplungstaste seitlich am Fluggerät. Drücken Sie die Kopplungstaste,
um die Geräte miteinander zu koppeln. Sobald die Fernsteuerung mit dem Fluggerät gekoppelt ist,
leuchtet die Kopplungsstatus-LED durchgehend grün, und am LCD-Bildschirm an der Fernsteuerung
werden die Fluggerätedaten angezeigt.
Kopplungstaste
Kopplungsstatus-LED
Vergewissern Sie sich, dass sich die Fernsteuerung während des Koppelns in einem Radius von
0,5 m vom Fluggerät befindet.
Wenn eine neue Fernsteuerung mit dem Fluggerät gekoppelt wird, trennt die bisherige
Fernsteuerung ihre Verbindung zum Fluggerät.
Vergewissern Sie sich sich vor jedem Flug, dass der Akku der Fernsteuerung vollständig geladen
ist.
Wenn die Fernsteuerung eingeschaltet ist und fünf Minuten NICHT verwendet wird, ertönt ein
Alarmsignal. Nach 10 Minuten schaltet sie automatisch ab. Bewegen Sie die Steuerknüppel, um
den Alarm abzubrechen.
Stellen Sie die Halterung für das Mobilgerät so ein, dass das mobile Gerät sicher ist.
Damit die optimale Sendeleistung gewährleistet ist, fahren Sie die Antennen der Fernsteuerung
aus, und stellen diese richtig ein.
Wenn die Fernsteuerung defekt ist, muss sie repariert oder ggf. ersetzt werden. Durch Schäden
an der Antenne wird die Sendeleistung der Fernsteuerung stark beeinträchtigt.
Aus Wartungsgründen muss der Akku mindestens alle drei Monate komplett aufgeladen werden.
Vergewissern Sie sich, dass die Steuerknüppel sicher montiert sind.
2018 DJI Alle Rechte vorbehalten
©
47
Page 48

DJI GO 4 App
Dieser Abschnitt beschreibt die
Hauptfunktionen der DJI GO 4 App.
48
© 2018 DJI Alle Rechte vorbehalten
Page 49

DJI GO 4 App
Mit dieser App können Sie den Gimbal, die Kamera und andere Funktionen des Fluggeräts steuern. Die
App bietet in den Bereichen „Produkte“, „Editor“, „SkyPixel“ und „Ich“ Tools zum Kongurieren Ihres
Fluggeräts sowie zum Bearbeiten und Teilen Ihrer Fotos und Videos.
Produkte
Produktauswahl
Sofern noch nicht ausgewählt, wählen Sie Mavic 2 Pro/Zoom aus der Produktauswahl oben im Startbild
aus.
Funktionsmenü
Tippen Sie oben rechts in der Bildschirmecke auf , um das Funktionsmenü zu önen. Dieses Menü
hat fünf Optionen:
QR-Code scannen: Scannen Sie einen QR-Code, um eine Verbindung zu einem Fluggerät herzustellen.
Academy: Verwenden Sie den Flugsimulator, sehen Sie sich Tutorials an, und lesen Sie Produkthandbücher.
Flugaufzeichnung: Greifen Sie auf all Ihre Flugaufzeichnungen zu.
GEO-Zonen: Lesen Sie Informationen zu GEO-Zonen.
Meine Drohne nden: Erhalten Sie die Kartenkoordinaten zum letzten aufgezeichneten Standort Ihres
Fluggeräts, und befehlen Sie dem Fluggerät, die LEDs blinken zu lassen und einen Piepton auszugeben.
Kameramenü
Önen Sie das Kameramenü durch tippen auf „LIVEANSICHT“, sobald Ihr Mobilgerät mit dem Fluggerät
verbunden ist.
25
24
23
22
21
Im Flug (GPS)
APAS
09:29
Position
ISO VERSCHLUSS
200 1/100
12
EV KAPAZITÄT
WB AUTO
-0.3 5600K RAW 21
10 118 97654321
61%
12
AE
13
14
15
16
17
20
H 10.0MD 30M
VS 2.0M/S VPS 2.0MH.S 10.0 M/S
19
18
1. Systemstatusleiste
Im Flug (GPS)
: Das Symbol zeigt den Flugzustand des Fluggeräts sowie verschiedene Warnmeldungen
an.
2. Status der Hinderniserkennung
: Wenn sich das Fluggerät in der Nähe eines Hindernisses aufhält, werden rote Balken
angezeigt. Wenn sich das Hindernis im Erfassungsbereich bendet, werden orangefarbene Balken
angezeigt.
2018 DJI Alle Rechte vorbehalten
©
49
Page 50

Mavic 2 Pro/Zoom Bedienungsanleitung
3. Akkustandsanzeige
: Zeigt dynamisch den jeweils aktuellen Akkustand an. Die Farbbereiche an der
Akkustandsanzeige geben die erforderliche Restkapazität zur Ausführung der verschiedenen
Funktionen an.
4. Flugmodus
: Neben diesem Symbol wird der aktuelle Flugmodus als Text angezeigt.
Tippen Sie das Symbol an, um die Einstellungen des Flugreglers zu kongurieren. Hier können Sie
Grenzwerte für den Flugbetrieb einrichten und die Verstärkungswerte einstellen.
5. Kameraparameter
Zeigt die Kameraparameter und die Kapazität des internen Speichers und der microSD-Karte an.
ISO VERSCHLUSS
200 1/100
EV KAPAZITÄT
WB AUTO
-0.3
5600K RAW 21
Mavic 2 Pro:
Zeigt die Kameraparameter und die Kapazität des internen Speichers und der microSD-Karte an.
Zeigt außerdem den Fokusmodus der Kamera, den AE-Wert und die Fokusparameter an.
Mavic 2 Zoom:
Zeigt die Kameraparameter und die Kapazität des internen Speichers und der microSD-Karte an.
Zeigt auch Fokusparameter an.
6. GPS-Signalstärke
: Zeigt die GPS-Signalstärke. Weiße Balken bedeuten eine ausreichende GPS-Signalstärke.
7. Status der Hinderniserkennung
: Tippen Sie auf diese Schaltäche, um die von den Sichtsensoren bereitgestellten Funktionen
zu aktivieren oder zu deaktivieren, und es zeigt den Status der Hinderniserkennung an. Das grüne
Symbol zeigt an, dass die entsprechenden Sichtsensoren verfügbar sind. Das rote Symbol zeigt an,
dass das entsprechenden Sichtsensoren nicht verfügbar sind.
8. Fernsteuerungssignal
: An diesem Symbol ist die Fernsteuerungsignalsstärke zu erkennen. Das Symbol blinkt, wenn
während des Flugs eine Störung erkannt wird. Wenn in DJI GO 4 keine zusätzlichen Warnmeldungen
angezeigt werden, bedeutet dies, dass der Flugbetrieb und das Flugerlebnis insgesamt durch die
Störung nicht beeinträchtigt werden.
9. Signalstärke des HD-Videolinks
: An diesem Symbol ist die Signalstärke des HD-Video-Downlinks zwischen Fluggerät und
Fluggerät zu erkennen. Das Symbol blinkt, wenn während des Flugs eine Störung erkannt wird.
Wenn in DJI GO 4 keine zusätzlichen Warnmeldungen angezeigt werden, bedeutet dies, dass der
Flugbetrieb und das Flugerlebnis insgesamt durch die Störung nicht beeinträchtigt werden.
10. Akkueinstellungen
: Zeigt den aktuellen Ladezustand des Akkus an. Wenn Sie hier tippen, wird ein Menü
61%
mit Informationen zum Akku geönet, in dem Sie die verschiedenen Warnschwellen für den
Akkuladestand einstellen und den Verlauf der Akkuwarnmeldungen einsehen können.
50
© 2018 DJI Alle Rechte vorbehalten
Page 51

Mavic 2 Pro/Zoom Bedienungsanleitung
11. Schaltäche für Fokus und Belichtungsmessung
/ : Mit diesem Symbol schalten Sie zwischen Fokussierung und Belichtungsmessung um. Mit
diesem Symbol wählen Sie das zu fokussierende bzw. zu messende Objekt aus. Nach Aktivierung
des Autofokus (AF) wird der kontinuierliche Autofokus (AFC) automatisch, abhängig vom Status des
Fluggeräts und der Kamera ausgelöst.
12. Allgemeine Einstellungen:
: Tippen Sie auf das Menü der allgemeinen Einstellungen, um die Maßeinheiten festzulegen, den
Livestream zu aktivieren/deaktivieren und die Anzeige der Flugroute einzustellen.
13. Automatische Belichtungssperre (AEL)
AE : Mit diesem Symbol speichern Sie das Ergebnis der Belichtungsmessung.
14. Gimbal-Schieber
: Zeigt den Gimbal-Neigewinkel an.
15. Umschalten zwischen Foto/Video
: Tippen Sie, um zwischen Foto- und Videoaufnahme umzuschalten.
16. Foto-/Videoaufnahmetaste
/ : Tippen Sie, um das Foto aufzunehmen bzw. die Videoaufzeichnung zu starten.
17. Kameraeinstellungen
: Berühren, um das Kameraeinstellungsmenü zu önen.
Tippen Sie auf , um ISO, Verschlusszeit und die Belichtungsreihe der Kamera einzustellen.
Tippen Sie auf , um die Bildaufnahmemodi auszuwählen. Die Mavic 2 unterstützt
Einzelaufnahmen, Serienaufnahmen, Intervallaufnahmen und verschiedene Panoramamodi.
Berühren Sie , um das Kameraeinstellungsmenü zu önen.
18. Wiedergabe
: Tippen Sie, um das Wiedergabemenü zu önen, damit Sie Ihre Fotos und Videos direkt nach
der Aufnahme einsehen können.
19. Flugtelemetrie
D 30 m: Entfernung des Fluggeräts vom Startpunkt.
H 10,0 m: Höhe vom Startpunkt aus.
H.S 10,0 m/s: Horizontalgeschwindigkeit des Fluggeräts.
V.S 2,0 m/s: Vertikalgeschwindigkeit des Fluggeräts.
20. Karte
Tippen Sie hier, um die Karte zu önen.
2018 DJI Alle Rechte vorbehalten
©
51
Page 52
Mavic 2 Pro/Zoom Bedienungsanleitung
21. Erweiterte Pilotenassistenzsysteme
: Tippen Sie auf dieses Symbol, um die APAS-Funktion zu aktivieren/deaktivieren. Die APAS-
APAS
Funktion wird deaktiviert, wenn die vorwärts und rückwärts gerichteten Sichtsensoren deaktiviert/
nicht verfügbar sind.
22. Intelligente Flugmodi
: Tippen Sie hier, um die intelligenten Flugmodi auszuwählen.
23. Intelligente Rückkehrfunktion (Smart RTH)
: Tippen Sie zum Initialisieren der intelligenten Rückkehrfunktion auf dieses Symbol, sodass das
Fluggerät zum zuletzt aufgezeichneten Startpunkt zurückkehrt.
24. Automatisches Starten/Landen
/ : Wenn Sie dieses Symbol antippen, wird die automatische Start- und Landefunktion aktiviert.
25. Zurück
: Dieses Symbol führt Sie wieder zum Hauptmenü.
Beachten Sie Folgendes, wenn Sie den Panoramamodus verwenden:
Verwenden Sie den Panoramamodus in einer statischen Szene. Wenn sich das Motiv während
der Aufnahme bewegt, kann das endgültige Panoramafoto Anomalien oder Geisterbilder
aufweisen.
Verwenden Sie Panorama in offenem Gelände und schießen die Bilder in einer Flughöhe von 5 m
oder mehr.
Verwenden Sie Panorama in einem Bereich mit vielen Motiven und vermeiden Sie Aufnahmen
über Wasser oder Schnee.
Verwenden Sie Panorama, wenn das Fluggerät gleichmäßig schweben kann. Verwenden Sie
diesen Modus nicht im Atti-Modus oder bei starkem Wind.
Editor
DJI GO 4 enthält einen intelligenten Video-Editor. Nachdem Sie mehrere Videoclips aufgenommen und
auf das Mobilgerät heruntergeladen haben, önen Sie den Editor auf der Startseite. Dann können Sie
eine Vorlage und eine vorgegebene Anzahl Clips auswählen, aus denen automatisch ein kurzer Film
zusammengestellt wird, den Sie sofort teilen können.
SkyPixel
Auf der SkyPixel-Seite können Sie Ihre Fotos und Videos ansehen und teilen.
Ich
Wenn Sie bereits ein DJI-Konto haben, können Sie an Forumsdiskussionen teilnehmen und Ihr Bildmaterial
mit der Community teilen.
52
© 2018 DJI Alle Rechte vorbehalten
Page 53

Mavic 2 Pro/Zoom Bedienungsanleitung
Vor dem Start von DJI GO 4. muss das Mobilgerät vollständig geladen sein.
Für die Nutzung von DJI GO 4 empfehlen wir die Nutzung einer Mobildatenverbindung.
Datentarife erfragen Sie bitte bei Ihrem Mobilfunkanbieter.
Wenn Sie ein Mobiltelefon als mobiles Anzeigegerät verwenden, nehmen Sie KEINE Telefonanrufe
an oder nutzen die SMS-Funktionen während des Fluges.
Lesen Sie alle angezeigten Sicherheitshinweise, Warnhinweise und Haftungsausschlüsse
aufmerksam durch. Machen Sie sich mit den entsprechenden Vorschriften in Ihrer Region
vertraut. Sie allein sind verantwortlich für die Einhaltung aller einschlägigen Vorschriften und für
das entsprechende Flugverhalten.
a. Lesen Sie aufmerksam alle Warnhinweise, bevor Sie die automatische Start- bzw.
Landefunktion nutzen.
b. Lesen Sie aufmerksam den Warnhinweis und den Haftungsausschluss, bevor Sie die
voreingestellte Flughöhenbegrenzung überschreiten.
c. Lesen Sie aufmerksam die Warnhinweise und den Haftungsausschluss, bevor Sie in einen
anderen Flugmodus schalten.
d. Lesen Sie aufmerksam die Warnhinweise und den Haftungsausschluss in der Nähe oder
innerhalb der Flugverbotszonen (GEO-Zonen).
e. Lesen Sie aufmerksam die Warnhinweise, bevor Sie die intelligenten Flugmodi nutzen.
Wenn in der App eine Alarmmeldung angezeigt wird, muss das Fluggerät sofort an einer sicheren
Stelle gelandet werden.
Überprüfen Sie alle Warnmeldungen auf der Checkliste, die vor jedem Flug in der App angezeigt
wird.
Wenn Sie das Fluggerät zum ersten Mal steuern oder nicht ausreichend Erfahrung für die
souveräne Bedienung des Fluggeräts haben, üben Sie das Fliegen mit dem Flugsimulator in der
App.
Beim erstmaligen Starten der App ist standardmäßig der Anfängermodus aktiv. Im
Anfängermodus sind Höhe und Flugstrecke des Fluggeräts begrenzt. Wir empfehlen, Ihre
Flugkünste im Anfängermodus zu verfeinern. Deaktivieren Sie den Anfängermodus nur dann,
wenn Sie das Fluggerät zuverlässig bedienen können.
Speichern Sie vor jedem Flug die Kartendaten des geplanten Einsatzgebiets, indem Sie eine
Verbindung zum Internet herstellen.
Die App soll Sie bei der Bedienung unterstützen. Bitte verwenden Sie das Fluggerät mit der
nötigen Umsicht, und verlassen Sie sich bei der Bedienung keinesfalls allein auf die App.
Die Verwendung der App unterliegt den Nutzungsbedingungen der DJI GO 4 App und den
Datenschutzrichtlinien von DJI. Bitte lesen Sie die entsprechenden Angaben in der App.
2018 DJI Alle Rechte vorbehalten
©
53
Page 54

Flug
Dieser Abschnitt enthält Informationen
zum Thema Flugsicherheit und
Fluggrenzen.
54
© 2018 DJI Alle Rechte vorbehalten
Page 55

Flug
Sobald das Fluggerät für den ersten Einsatz vorbereitet ist, sollten Sie mit dem Flugsimulator in DJI GO 4
Ihre Flugkünste trainieren und das sichere Fliegen üben. Fliegen Sie nur in oenen Bereichen Lesen Sie
die Abschnitte zur Fernsteuerung und zu DJI GO 4, um Informationen zur Verwendung der Fernsteuerung
und der App zum Steuern des Fluggeräts zu erhalten.
Anforderungen an die Flugumgebung
1. Betreiben Sie das Fluggerät nicht bei widrigen Wetterverhältnissen, also z. B. bei Regen, Schnee,
Nebel, Smog oder Windgeschwindigkeiten über 10 m/s.
2. Fliegen Sie in oenen Bereichen. Hohe Gebäude und Bauten aus Stahl oder anderen Metallen können
den Bordkompass und das GPS-System stören.
3. Vermeiden Sie Flüge über Menschenmengen, Hochspannungsleitungen, Bäumen und Gewässern
und weichen Sie Hindernissen aus.
4. Senken Sie das Risiko durch Störsignalen, indem Sie Bereiche mit erhöhter elektromagnetischer Strahlung
meiden, z. B. Bereiche in der Nähe von Stromleitungen, Basisstationen, Umspannungsstationen und
Sendemasten.
5. Die Leistung von Fluggerät und Akku ist abhängig von Umgebungsbedingungen wie der Luftdichte und
der Lufttemperatur. Ab einer Flughöhe von 6000 m über dem Meeresspiegel werden die Funktionen
von Akku und Fluggerät möglicherweise beeinträchtigt.
6. In Polarregionen kann die Mavic 2 kein GPS verwenden. Verwenden Sie die abwärts gerichteten
Sichtsensoren, wenn Sie in solchen Bereichen iegen
Fluggrenzen und GEO-Zonen
Halten Sie beim Fliegen Ihrer Mavic 2 Pro/Zoom alle Gesetze und Vorschriften ein. Flugbegrenzungen
sind standardmäßig aktiviert, um die Benutzer dabei zu unterstützen, dieses Produkt sicher und
gesetzeskonform zu nutzen. Zu den Flugbegrenzungen gehören unter anderem Flughöhe, Flugradius
und die GEO-Zonen.
Im Modus „P“ ist der Flugbetrieb aus Sicherheitsgründen in Höhe und Radius sowie durch GEO-Zonen
eingeschränkt.
Flughöhen- und Flugdistanzbegrenzungen
Flughöhen- und Flugdistanzbegrenzungen können in DJI GO 4 geändert werden. Die Einstellung der
maximalen Flughöhe darf 500 m nicht übersteigen. Mit diesen Einstellungen iegt das Fluggerät nur
innerhalb des unten dargestellten zylindrischen Bereichs:
Max. Flughöhe
Flughöhe beim
Einschalten
Maximaler Radius
Startpunkt
2018 DJI Alle Rechte vorbehalten
©
55
Page 56

Mavic 2 Pro/Zoom Bedienungsanleitung
GPS-Signal stark
Max. Höhe
Max. Reichweite
GPS-Signal schwach
Fluggrenzen DJI GO 4 App
Bei schwachem GPS-Signal und
aktivierten abwärts gerichteten
Sichtsensoren ist die Höhe auf 5 Meter
Max. Höhe
Max.
Reichweite
begrenzt. Bei schwachem GPS-Signal
und deaktivierten abwärts gerichteten
Sichtsensoren ist die Höhe auf 30 m
begrenzt.
Keine Einschränkung
Außerhalb des Grenzbereichs lässt sich das Fluggerät zwar weiterhin steuern, aber nicht
weiter weg vom Standort des Piloten.
Wenn das Fluggerät den maximalen Radius verlässt, kehrt es automatisch in den zulässigen
Bereich zurück, sofern das GPS-Signal stark genug ist.
Fliegen Sie aus Sicherheitsgründen nie in der Nähe von Flughäfen, Schnellstraßen, Bahnhöfen,
Bahnstrecken, Stadtzentren oder ähnlichen sicherheitskritischen Bereichen. Behalten Sie das
Fluggerät stets im Blick.
Blinkt grün
Fluggrenzen DJI GO 4 App
Die Flughöhe darf den
Vorgabewert nicht
überschreiten.
Die Entfernung muss
innerhalb des maximalen
Radius liegen.
Blinkt gelb
Warnung:
Maximale
Flughöhe erreicht.
Warnung:
Maximale
Entfernung
erreicht.
Warnung:
Maximale
Flughöhe
erreicht.
Statusindikator des
Fluggerätes
n. v.
n. v.
Statusindikator des
Fluggerätes
n. v.
GEO-Zonen
Die GEO-Zonen sind auf der oziellen DJI Website aufgeführt: http://www.dji.com/ysafe. GEO-Zonen
sind in verschiedene Kategorien unterteilt und umfassen Orte wie Flughäfen und Flugfelder, in denen
bemannte Fluggeräte in niedrigen Flughöhen eingesetzt werden, Ländergrenzen und empndliche Orte
wie Kraftwerke.
56
© 2018 DJI Alle Rechte vorbehalten
Page 57
Mavic 2 Pro/Zoom Bedienungsanleitung
Checkliste für die Flugvorbereitung
1. Vergewissern Sie sich, dass Fernsteuerung, Mobilgerät und die Intelligent Flight Battery vollständig
aufgeladen sind.
2. Vergewissern Sie sich, dass die Intelligent Flight Battery und die Propeller sicher befestigt sind.
3. Vergewissern Sie sich, dass die Arme des Fluggeräts und Propeller entfaltet sind.
4. Vergewissern Sie sich, dass der Gimbal und die Kamera ordnungsgemäß funktionieren.
5. Vergewissern Sie sich, dass nichts die Motoren behindert und die Motoren normal funktionieren.
6. Vergewissern Sie sich, dass DJI GO 4 mit dem Fluggerät gekoppelt ist.
7. Überprüfen Sie, ob Kameraobjektiv und Sichtsensoren sauber sind.
8. Nur DJI-Originalteile oder Teile mit DJI-Freigabe verwenden Nicht freigegebene Teile oder Teile von
Fremdherstellern können Systemstörungen verursachen und die Betriebssicherheit des Produkts
beeinträchtigen.
Automatisches Starten/Landen
Automatisches Starten
1. Starten Sie DJI GO 4 und tippen auf „FLIEGEN“, um die Kameraansicht zu önen.
2. Arbeiten Sie die Checkliste für die Flugvorbereitung durch.
3. Tippen Sie auf .
4. Wenn die Bedingungen für den Start sicher sind, schieben Sie den Schieberegler zur Bestätigung.
Das Fluggerät startet und schwebt 1,2 Meter über dem Boden.
Der Statusindikator des Fluggeräts zeigt an, ob das Fluggerät GPS und/oder die abwärts
gerichteten Sichtsensoren zur Flugsteuerung verwendet. Lesen Sie den Abschnitt zu den LEDs
und zur Statusanzeige des Fluggeräts, um weitere Informationen zu erhalten. Es wird empfohlen,
solange zu warten, bis das Fluggerät ein starkes GPS-Signal hat, bevor Sie den automatischen
Start verwenden.
Automatische Landung
Nur wenn die Statusindikatoren des Fluggerätes grün blinken, können Sie das Fluggerät automatisch
starten lassen. Die automatische Landung können Sie wie folgt einleiten:
1. Tippen Sie auf .
2. Falls die Umgebungsbedingungen sicher sind, bewegen Sie den Schieberegler zur Bestätigung. Das
Fluggerät beginnt mit der automatischen Landung. Warnungen werden in DJI GO 4 angezeigt, sobald
das Fluggerät Bedingungen erkennt, die nicht für eine Landung geeignet sind. Stellen Sie sicher sofort
reagieren zu können.
Die automatische Landung kann durch Antippen in der DJI GO 4 App jederzeit sofort
abgebrochen.
2018 DJI Alle Rechte vorbehalten
©
57
Page 58

Mavic 2 Pro/Zoom Bedienungsanleitung
Motoren ein-/ausschalten
Motoren einschalten
Die Motoren werden gestartet, indem Sie den Steuerknüppelkombinationsbefehl (CSC) geben. Drücken
Sie beide Knüppel schräg in die inneren oder äußeren Ecken, um die Motoren einzuschalten. Sobald die
Motoren zu laufen beginnen, lassen Sie beide Steuerknüppel gleichzeitig los.
ODER
Motoren ausschalten
Es gibt zwei Möglichkeiten, die Motoren auszuschalten.
Methode 1: Ziehen Sie nach der Landung den linken Steuerknüppel nach unten, und halten ihn in dieser
Stellung. Nach drei Sekunden werden die Motoren ausgeschaltet.
Methode 2: Wenn das Fluggerät gelandet ist führen Sie den Steuerknüppelkombinationsbefehl (CSC)
durch, wie beim Starten der Motoren (siehe oben). Die Motoren werden sofort ausgeschaltet.
Sobald die Motoren ausgeschaltet sind, lassen Sie beide Knüppel los.
ODER
Methode 1 Methode 2
Die Motoren im Flug ausschalten
Wenn Sie die Motoren während des Fluges ausschalten, stürzt das Fluggerät ab. Die Motoren dürfen
während des Flugs nur in Notfällen ausgeschaltet werden, zum Beispiel nach einem Zusammenstoß oder
wenn das Fluggerät außer Kontrolle gerät und sehr schnell aufsteigt/absteigt, in der Luft rollt oder ein
Motor ausgefallen ist. Zum Ausschalten der Motoren während des Fluges müssen Sie wie beim Starten
der Motoren beide Steuerknüppel ziehen.
Testflug
Start-/Landeverfahren
1. Stellen Sie das Fluggerät auf einer oenen, ebenen Fläche so ab, dass der Statusindikator des
Fluggerätes zu Ihnen weist.
2. Schalten Sie das Fluggerät und die Fernsteuerung ein.
3. Starten Sie die „DJI GO“-App, und önen Sie das Kameramenü durch tippen auf „FLIEGEN“
4. Warten Sie, bis der Statusindikator des Fluggerätes grün blinkt, wodurch angezeigt wird, dass der
Startpunkt aufgenommen wurde und es sicher ist zu starten.
5. Drücken Sie zum Starten langsam den Steuerknüppel zur Beschleunigung oder heben Sie mithilfe der
Funktion automatisches Starten ab.
6. Ziehen Sie den Steuerknüppel zur Beschleunigung, oder verwenden Sie die Funktion zum
automatischen Landen, um das Fluggerät zu landen.
7. Schalten Sie das Fluggerät und die Fernsteuerung aus.
58
© 2018 DJI Alle Rechte vorbehalten
Page 59

Mavic 2 Pro/Zoom Bedienungsanleitung
Vorschläge und Tipps für Videoaufnahmen
1. Die Checkliste für die Flugvorbereitung ist dazu konzipiert, Sie bei einem sicheren Flug zu unterstützen
und sicherzustellen, dass Sie Videos während des Flugs aufnehmen können. Gehen Sie vor jedem
Flug die gesamte Checkliste durch.
2. Stellen Sie in DJI GO 4 den gewünschten Gimbal-Betriebsmodus ein.
3. Zeichnen Sie Videos nur in den Modi „P“ oder „T“ auf.
4. Fliegen Sie NICHT bei schlechtem Wetter, wenn es regnet oder windig ist.
5. Wählen Sie die Kameraeinstellungen, die Ihren Anforderungen gerecht werden. Das Fotoformat und
die Belichtungskorrektur lassen sich ebenfalls einstellen.
6. Führen Sie Testüge durch, um Flugrouten aufzustellen und um eine Vorschau von Bildszenen zu
erstellen.
7. Drücken Sie die Steuerknüppel sanft, um die Bewegungen des Fluggeräts weich und stabil zu halten.
2018 DJI Alle Rechte vorbehalten
©
59
Page 60

Anhang
60
© 2018 DJI Alle Rechte vorbehalten
Page 61

Anhang
Technische Daten
Fluggerät
Startgewicht 907 g (Mavic 2 Pro); 905 g (Mavic 2 Zoom)
Abmessungen Gefaltet:
214×91×84 mm (L×B×H)
Entfaltet:
322×242×84 mm (L×B×H)
Diagonalabstand 354 mm
Max. Steiggeschwindigkeit 5 m/s (Modus „S“), 4 m/s (Modus „P“)
Max. Sinkgeschwindigkeit 3 m/s (Modus „S“), 3 m/s (Modus „P“)
Max. Fluggeschwindigkeit 72 km/h (Modus „S“, in der Nähe des Meeresspiegels, ohne Wind)
Max. Flughöhe über dem
Meeresspiegel
Max. Flugzeit 31 Minuten (bei konstant 25 km/h und Windstille)
Max. Schwebezeit 29 Minuten (bei Windstille)
Flugzeit 25 Minuten (Im normalen Flug, Akkuentladung auf 15 %)
Max. Flugstrecke 18 km (ohne Wind bei konstant 50 km/h)
Max. Beständigkeit
gegenüber Wind
Max. Neigungswinkel 35° (Modus „S“ mit Fernsteuerung); 25° (Modus „P“)
Max.
Winkelgeschwindigkeit
Betriebstemperatur
GNSS
Schwebegenauigkeit Vertikal:
Betriebsfrequenz 2,400 – 2,4835 GHz; 5,725 – 5,850 GHz
Strahlungsleistung (EIRP) 2,4 GHz
Interner Speicher 8 GB
Gimbal
Mechanischer Bereich Neigung: -135 bis 45°, Schwenken: -100 bis 100°, Rolle: -45 bis 45°
Kontrollierter Bereich Neigen: -90 bis 30°, Schwenken: -75 bis 75°
Stabilisierung 3-achsig (Neigen, Rollen, Schwenken)
Max. Steuergeschwindig-
keit (Neigen)
Kontrollierte
Winkelgenauigkeit
6000 m
29 - 38 km/h
200°/s
-10 °C bis 40 °C
GPS + GLONASS
± 0,1 m (bei aktiver Sichtpositionierung)
± 0,5 m (mit GPS-Positionierung)
Horizontal:
± 0,3 m (bei aktiver Sichtpositionierung)
± 1,5 m (mit GPS-Positionierung)
FCC: ≤26 dBm; CE: ≤20 dBm; SRRC: ≤20 dBm; MIC: ≤20 dBm
5,8 GHz
FCC: ≤26 dBm; CE: ≤14 dBm; SRRC: ≤26 dBm
120°/s
± 0,01° (Mavic 2 Pro); ± 0,005° (Mavic 2 Zoom)
2018 DJI Alle Rechte vorbehalten
©
61
Page 62

Mavic 2 Pro/Zoom Bedienungsanleitung
Hinderniserfassungssystem
System Omnidirektionale Hinderniserkennung
Sichtfeld (FOV) Vorwärts: Horizontal: 40°; vertikal: 70°
Hinderniserfassungsbereich
Betriebsbedingungen
Geschwindigkeitsbereich
Höhenbereich
Betriebsbereich
Kamera
Sensor 1“ CMOS
Objektiv Sichtfeld (FOV): Ca. 77°
ISO-Bereich Video: 100 – 6400
Belichtungszeit Elektronischer Verschluss:
Bildgröße
Fotomodi Einzelaufnahme
Videoauösung 4K: 3840×2160 24/25/30p
62
© 2018 DJI Alle Rechte vorbehalten
Rückwärts: Horizontal: 60°; vertikal: 77°
Nach unten: Nach vorne und hinten: 100°, links und rechts: 83°
Seitlich: Horizontal: 80°; vertikal: 65°
Vorwärts: Präzisionsmessentfernung: 0,5 – 20 m
Erfassungsbereich: 20 - 40 m
Eektive Erfassungsgeschwindigkeit: ≤ 14 m/s
Rückwärts: Präzisionsmessentfernung: 0,5 – 16 m
Erfassungsbereich: 16 - 32 m
Eektive Erfassungsgeschwindigkeit: ≤ 12 m/s
Aufwärts: Präzisionsmessentfernung: 0,1 – 8 m
Nach unten: Präzisionsmessentfernung: 0,5 – 11 m
Erfassungsbereich: 11 - 22 m
Seitlich: Präzisionsmessentfernung: 0,5 – 10 m
Eektive Erfassungsgeschwindigkeit: ≤ 8 m/s
Oberäche mit deutlichen Konturen und ausreichender Beleuchtung (Lux > 15)
Erkennt dius reektierende Oberächen (>20 %) (Wände, Bäume,
Menschen usw.)
≤ 50 km/h auf 2 m Flughöhe
0,1 – 11 m
0,3 – 50 m
Mavic 2 Pro Mavic 2 Zoom
Eektive Pixel: 20 Millionen
Entspricht im 35 mm Format: 28 mm
Blende: F2.8 – F11
Aufnahmebereich: 1 m bis ∞
Foto: 100 – 3200 (automatisch)
100 – 12800 (manuell)
8 – 1/8000 s
5472×3648 4000×3000
Serienbildaufnahmen: (3/5 Bilder)
Automatische Belichtungskorrektur
(AEB): 3/5 fokussierte Bilder bei einer
Lichtwert-Stufenabweichung von 0,7
Intervall (JPEG:
2/3/5/7/10/15/20/30/60s;
RAW: 5/7/10/15/20/30/60s)
2,7K: 2688x1512
24/25/30/48/50/60p
Full HD: 1920×1080
24/25/30/48/50/60/120p
1/2,3” CMOS
Eektive Pixel: 12 Millionen
Sichtfeld: Ca. 83° (24 mm)
Ca. 48° (48 mm)
Entspricht im 35 mm Format:
24 – 48 mm
Blende: F2.8 (bei 24 mm) – F11
(bei 48 mm)
Aufnahmebereich: 0,5 m bis ∞
Video: 100 – 3200
Foto: 100 – 1600 (automatisch)
100 – 3200 (manuell)
Elektronischer Verschluss:
8 – 1/8000 s
Einzelaufnahme
Serienbildaufnahmen: 3/5/7 Bilder
Automatische Belichtungskorrektur
(AEB): 3/5 fokussierte Bilder bei einer
Lichtwert-Stufenabweichung von 0,7
Intervall (JPEG:
2/3/5/7/10/15/20/30/60s;
RAW: 5/7/10/15/20/30/60s)
4K: 3840×2160 24/25/30p
2,7K: 2688×1512
24/25/30/48/50/60p
Full HD: 1920×1080
24/25/30/48/50/60/120p
Page 63

Mavic 2 Pro/Zoom Bedienungsanleitung
Farbmodus Dlog-M (10 Bit), unterstützt HDR
Max. Video-Bitrate
Unterstützte Dateisysteme FAT32 ≤ 32 GB
Fotoformate
Videoformate MP4 / MOV (MPEG-4 AVC/H.264,
Unterstützte SDSpeicherkarten
Betriebstemperatur
HDR
HyperLight
Panorama Pano (3×1):
Fernsteuerung
Betriebsfrequenz
Max.
Übertragungsreichweite
Betriebstemperatur
Akku
Strahlungsleistung (EIRP) 2,400 - 2,4835 GHz
Betriebsstrom/
Betriebsspannung
Unterstützte Größen für
Mobilgeräte
Unterstützte
USB-Anschlusstypen
Ladegerät
Eingang
Ausgang Hauptausgang: 17,6 V 3,41 A oder 17,0 V 3,53 A
Spannung
Nennleistung
video (HLG 10 Bit)
100 MBit/s 100 MBit/s
exFAT: > 32 GB
JPEG/DNG (RAW) JPEG/DNG (RAW)
HEVC/H.265)
microSD
Unterstützt microSD-Karten mit einer
Kapazität von bis zu 128 GB und
einer Schreib-/Lesegeschwindigkeit
der UHS Geschwindigkeitsklasse 3
-10 °C bis 40 °C -10 °C bis 40 °C
Erweitertes HDR (eHDR), 14 EV HDR, 13 EV
8 dB SNR 8 dB SNR
4000×6000 (40°×80°)
W (3×3):
8000×6000 (113°×80°)
180° (3×7):
8192×2840 (240°×76°)
Sphäre (3×8 +1):
8192×4096 (360°×126°, 360°×180°)
2,400 - 2,4835 GHz; 5,725 - 5,850 GHz
FCC: 8000 m; CE: 5000 m; SRRC: 5000 m; MIC: 5000 m
(Ohne Hindernisse und Interferenzen)
0 °C - 40 °C
3950 mAh
FCC: ≤26 dBm; CE: ≤20 dBm; SRRC: ≤20 dBm; MIC: ≤20 dBm
5,725 - 5,850 GHz
FCC: ≤26 dBm; CE: ≤14 dBm; SRRC:≤26 dBm
1800 mA bei 3,83 V
Max Länge: 160 mm; Max. Dicke: 6,5 – 8,5 mm
Lightning, Micro-USB (Typ B), USB-C
100 bis 240 V, 50/60 Hz, 1,8 A
USB: 5 V 2 A
17,6 ± 0,1 V oder 17,0 V ± 0,1 V
60 W
D-Cinelike
FAT32 ≤ 32 GB
exFAT: > 32 GB
MP4 / MOV (MPEG-4 AVC/H.264,
HEVC/H.265)
microSD
Unterstützt microSD-Karten mit einer
Kapazität von bis zu 128 GB und
einer Schreib-/Lesegeschwindigkeit
der UHS Geschwindigkeitsklasse 3
Pano (3×1):
4000×6000 (41°×93°)
W (3×3):
8000×6000 (117°×93°)
180° (3×7):
8192×2840 (249°×87°)
Sphäre: (3×8+1) 8192×4096
(360°×126°, 360°×180°)
Super Resolution): 8000×6000
(24 mm äquivalentes FOV)
2018 DJI Alle Rechte vorbehalten
©
63
Page 64

Mavic 2 Pro/Zoom Bedienungsanleitung
Intelligent Flight Battery
Kapazität
Spannung
Max. Ladespannung
Akkutyp
Energie
Eigengewicht
Ladetemperatur
Max. Ladeleistung
APP
Video-Übertragungssystem OcuSync 2.0
Bezeichnung DJI GO 4
Qualität der
Liveübertragung
Latenz (abhängig von
Umweltfaktoren und dem
verwendeten Mobilgerät)
Benötigtes Betriebssystem
3850 mAh
15,4 V
17,5 V
LiPo 4S
59,29 Wh
297 g
5 ºC - 40 ºC
80 W
Fernsteuerung: 720p bei 30 fps, 1080p bei 30 fps
DJI Goggles: 720p bei 30fps / 1080p bei 30fps
DJI Goggles RE: 720p bei 30fps / 1080p bei 30fps
120 - 130 ms
iOS 10.0.2 oder höher
Android 4.4 oder höher
Kompass kalibrieren
Es wird empfohlen, dass der Kompass in den folgenden Situationen kalibriert wird, wenn im Freien
geogen werden soll:
1. Sie iegen an einem Ort, der weiter als 50 km vom letzten Flugort entfernt liegt.
2. Das Fluggerät wurde mehr als 30 Tage lang nicht geogen.
3. In DJI GO 4 wurde eine Kompassstörung angezeigt, und/oder der Statusindikator des Fluggerätes
blinkt abwechselnd schnell rot und gelb.
Kalibrieren Sie den Kompass NICHT, wenn eine magnetische Störung aufgetreten ist, z. B.
in der Nähe von Magnetitlagerstätten oder größeren Metallstrukturen wie Parkhäusern,
stahlverstärkte Fundamente, Brücken, Autos oder Gerüste.
Tragen Sie während der Kalibrierung des Fluggeräts KEINE Objekte (wie Handys) bei sich, die
ferromagnetische Materialien beinhalten.
Für Flüge im Innenbereich ist keine Kalibrierung des Kompasses notwendig.
Kalibrierverfahren
Führen Sie die hier beschriebenen Kalibrierverfahren stets im oenen Gelände durch.
1. Tippen Sie in DJI GO 4 auf die System-Statusleiste, wählen Sie „Kalibrieren“, und befolgen Sie die
Anweisungen auf dem Bildschirm.
2. Halten Sie das Fluggerät in der Hand, und drehen Sie es horizontal um 360 Grad. Der Statusindikator
des Fluggerätes leuchtet durchgehend grün.
3. Halten Sie das Fluggerät senkrecht mit dem Bug nach unten, und drehen Sie es um 360 Grad um die
vertikale Achse.
4. Wenn der Statusindikator des Fluggerätes rot blinkt, ist die Kalibrierung fehlgeschlagen. Ändern Sie
Ihren Standort, und führen Sie den Kalibrierungsvorgang erneut durch.
64
© 2018 DJI Alle Rechte vorbehalten
Page 65

Mavic 2 Pro/Zoom Bedienungsanleitung
Horizontale Kalibrierung
Das Fluggerät kann sofort nach Abschluss der Kalibrierung starten. Wenn Sie nach der
Kalibrierung länger als drei Minuten warten, müssen Sie möglicherweise erneut kalibrieren. Es ist
möglich, dass eine andere Kompassinterferenzwarnung erscheint, während sich das Fluggerät
auf dem Boden befindet. Dies wird dadurch angezeigt, dass sich der aktuelle Standort nicht
zum Fliegen des Fluggeräts eignet, da die magnetische Störung zu stark ist.
Vertikale Kalibrierung
Firmware-Updates
Aktualisieren Sie die Firmware des Fluggeräts mit DJI GO 4 oder mit DJI Assistant 2 für Mavic.
DJI GO 4 verwenden
Beim Koppeln des Fluggeräts oder der Fernsteuerung mit DJI GO 4 werden Sie benachrichtigt, sobald ein
neues Firmware-Update verfügbar ist. Um das Update zu starten, verbinden Sie das Mobilgerät mit dem
Internet, und befolgen die Anweisungen auf dem Bildschirm. Beachten Sie bitte, dass Sie die Firmware
nicht aktualisieren können, wenn die Fernsteuerung nicht mit dem Fluggerät gekoppelt ist.
Verwendung des DJI Assistant 2 für Mavic
Der USB-C-Anschluss wird verwendet, wenn das Fluggerät mit einem Computer verbunden wird, um die
Firmware zu aktualisieren.
Befolgen Sie zur Aktualisierung der Firmware mit DJI Assistant 2 für Mavic die Anweisungen unten:
1. Sobald das Fluggerät ausgeschaltet ist, verbinden Sie es über den Micro-USB-Anschluss und ein
Micro-USB-Kabel mit einem Computer.
2. Schalten Sie das Fluggerät ein.
3. Starten Sie DJI Assistant 2, und melden Sie sich mit Ihrem DJI-Konto an.
4. Wählen Sie „Mavic 2“, und klicken Sie im linken Feld auf „Firmware Updates“.
5. Wählen Sie die Firmwareversion, die Sie aktualisieren möchten.
6. Warten Sie, bis die Firmware heruntergeladen ist. Die Aktualisierung der Firmware startet automatisch.
7. Starten Sie das Fluggerät nach Abschluss der Firmware-Aktualisierung neu.
2018 DJI Alle Rechte vorbehalten
©
65
Page 66

Mavic 2 Pro/Zoom Bedienungsanleitung
Vergewissern Sie sich vor dem Einschalten, dass das Fluggerät mit dem Computer verbunden
ist.
Die Aktualisierung der Firmware nimmt ca. 15 Minuten in Anspruch. Es ist normal, dass bei
diesem Vorgang der Gimbal ausfährt, der Statusindikator des Fluggerätes blinkt und das
Fluggerät neu startet. Warten Sie bitte mit Geduld, bis die Aktualisierung abgeschlossen ist.
Der Computer muss Zugang zum Internet haben.
Vor der Ausführung einer Aktualisierung muss der Akkuladestand der Intelligent Flight Battery
mindestens 50 % betragen und der der Fernsteuerung mindestens 30 %.
Trennen Sie das Fluggerät während der Aktualisierung der Firmware nicht vom Computer.
Aus Sicherheitsgründen muss die Firmware immer aktualisiert werden, sobald in DJI GO 4 ein
Upgrade angekündigt wird.
Bei der Ankündigung von Firmware-Upgrades werden Sie aufgefordert, die Firmware
unverzüglich, spätestens aber nach drei Tagen, zu aktualisieren. Wenn Sie das aktuelle
Firmware-Upgrade nicht installieren, müssen Sie den angezeigten Haftungsausschluss
bestätigen. Weiterhin erklären Sie sich einverstanden, dass die Daten (insbesondere
Flugtelemetriedaten und Anwenderauswahlprotokolle) ggf. auf einen von DJI betriebenen Server
hochgeladen und dort verwaltet werden.
Nach der Aktualisierung sind das Fluggerät und die Fernsteuerung möglicherweise nicht mehr
gekoppelt. Koppeln Sie die Fernsteuerung wieder mit dem Fluggerät.
Prüfen Sie vor der Durchführung des Firmware-Upgrades unbedingt alle Anschlüsse, und
nehmen Sie die Propeller von den Motoren ab. Trennen Sie während der Aktualisierung der
Firmware NICHT das Fluggerät oder die Fernsteuerung vom Computer oder Internet.
Menüs am LCD-Bildschirm der Fernsteuerung
Status der Fernsteuerung
BAT xx PCT Akkuladestand der Fernsteuerung
SHUTDOWN_ Fernsteuerung wird abgeschaltet
CHARGING_ Fernsteuerung wird geladen
USB PLUGGED Mavic 2 wurde an einen Computer angeschlossen
FC U-DISK Flugcontroller liest Daten
UPGRADING Firmware wird aktualisiert
BINDING Fluggerät wird mit Fernsteuerung gekoppelt.
Flugbetrieb vorbereiten
CONNECTING_ Die Fernsteuerung wird mit dem Fluggerät gekoppelt.
SYS INITING System wird gestartet.
READY TO GO System startbereit.
Flugmodus
BEGINNER Anfängermodus aktiv.
GPS MODE „P-GPS“-Modus aktiv.
OPTI MODE „P-OPTI“-Modus aktiv.
ATTI MODE „P-Atti“-Modus aktiv.
SPORT MODE Sportmodus aktiv.
TRIPOD Stativmodus aktiv.
Flugstatus
TAKING OFF Fluggerät startet.
LANDING Fluggerät landet.
66
© 2018 DJI Alle Rechte vorbehalten
Page 67

Mavic 2 Pro/Zoom Bedienungsanleitung
GOING HOME Rückkehrug wird durchgeführt.
MAX ALT. Fluggerät hat maximale Flughöhe erreicht.
MAX RADIUS Fluggerät hat maximalen Radius erreicht.
OBSTACLE Hindernis wurde erkannt.
GEO-ZONEN / NO FLY ZONE Fluggerät bendet sich in Flugverbotszone.
Status intelligenter Flugmodus
APAS MODE Fortschrittliches Assistenzsystem für Piloten (APAS) aktiv.
HYPERLAPSE Raumraer aktiv.
QUICKSHOT QuickShots verwenden.
ACTIVETRACK ActiveTrack aktiv.
TAP FLY TapFly aktiv.
POI MODE Point of Interest aktiv
WAY POINT Wegpunkt-Modus aktiv
Systemwarnungen und Fehlerinformationen
SYS WARNING+CHECK APP Systemwarnung Weitere Informationen siehe DJI GO 4
UNACTIVATED+CHECK APP Fluggerät nicht aktiviert. Weitere Informationen siehe DJI GO 4
MAG INTERF + CHECK APP Störung am Kompass. Weitere Informationen siehe DJI GO 4
BATTERY ERR+CHECK APP Störung am Akku. Weitere Informationen siehe DJI GO 4
SD ERR+CHECK APP Störung an der microSD-Karte. Weitere Informationen siehe
CALIBRATING IMU wird kalibriert/Fluggerät wurde nach Kalibrierung nicht neu
STICK ERR+RE-CTR STCK Steuerknüppel nicht mittig. Loslassen, damit er auf die
WHEEL ERR+RE-CTR WHEL Linkes Rädchen an der Fernsteuerung nicht mittig. Loslassen,
STICK ERR Störung an einem Steuerknüppel. Steuerknüppel mit DJI GO 4
MECH ERR Störung an der Fernsteuerung. Fernsteuerung mit DJI GO 4
SD FULL Die microSD-Karte ist voll beschrieben.
NO PROP Propeller nicht montiert.
BAT TEMP HI Intelligent Flight Battery überhitzt.
BATTERY ERR Störung an der Intelligent Flight Battery.
BAT TEMP LO Intelligent Flight Battery unterkühlt.
LOW BATTERY Ladezustand der Intelligent Flight Battery schwach.
RC LOW BAT Niedriger Akkuladestand der Fernsteuerung.
NO RC SIGNL Fernsteuerungssignal unterbrochen.
RC TEMP HI Fernsteuerung überhitzt.
NO RTH Rückkehrug nicht möglich.
DJI GO 4
gestartet.
Mittelposition zurückfällt.
damit er auf die Mittelposition zurückfällt.
kalibrieren
kalibrieren. Wenn das Problem weiterhin besteht, DJI-Support
kontaktieren
Informationen zum Kundenservice
Besuchen Sie die Website https://www.dji.com/support, um weitere Informationen zu
Kundenservicerichtlinien, Reparaturservices und Support zu erhalten.
2018 DJI Alle Rechte vorbehalten
©
67
Page 68

DJI Support
http://www.dji.com/support
Änderungen vorbehalten.
Die aktuelle Fassung finden Sie unter
http://www.dji.com/mavic-2
Bei Fragen zu diesem Dokument wenden Sie sich bitte per
E-Mail an DJI unter DocSupport@dji.com.
MAVIC ist eine Marke von DJI.
Copyright © 2018 DJI OSMO. Alle Rechte vorbehalten.
 Loading...
Loading...