

Page 1

Delta Electronics, Inc
www.delta.com.tw/industrialautomation
®
РУКОВОДСТВО ПО ЭКСПЛУАТАЦИИ
преобразователей частоты серии
VFD-V
(380 В 0.75 – 75 кВт)
2004г.
Page 2

Руководство по эксплуатации преобразователей VFD-V стр. 2
Преобразователи частоты VFD компании Delta Electronics, Inc. содержат 7 моделей:
VFD-E, B, F, S, M, L, V для асинхронных двигателей мощностью от 40 Вт до 132 кВт.
Ежемесячно заводы компании изготавливают порядка 75’000 преобразователей, что гарантирует
хорошую отработку изделия и повторяемость характеристик. Все заводы сертифицированы по
стандарту ISO9002. Преобразователи маркируются знаком CE соответствия Европейским нормам и
UL – тестирование независимой лабораторией.
При производстве VFD используются качественные комплектующие известных
производителей:
• главный процессор 32-битный RISC,
• силовые IGBT и диодные модули фирмы MITSUBISHI, EUPEC,
• электролитические конденсаторы фирмы NICHICON.
Преобразователи частоты (далее по тексту, ПЧ) серии VFD-V предназначены для
управления скоростью вращения трехфазных асинхронных электродвигателей с короткозамкнутым
ротором мощностью от 0,75 до 75 кВт в составе такого оборудования как, насосы, вентиляторы,
миксеры, экструдеры, транспортирующие и
Модель VFD-V имеет максимум функций и возможностей в линейке преобразователей
частоты, выпускаемых компанией и отличается:
• высокоразвитым алгоритмом векторного управления при работе в разомкнутой и
замкнутой системах, что обеспечивает высокие динамические характеристики, которые
позволяют использовать преобразователь в сервоприводе;
• съемным пультом управления с функциями копирования настроек одного VFD-V на
другой, который может быть вынесен с помощью кабеля, например, на дверь
электрошкафа. Этот пульт подключается к порту RS-485 и может быть вынесен на
расстояние до 300 м;
• широкими возможностями конфигурации ПЧ (имеется 245 параметров, значения
которых пользователь может изменять с пульта управления или через последовательный
интерфейс RS-485 с компьютера).
Настоящее руководство по
хранения, монтажа, подключения, эксплуатации, профилактического обслуживания, использования
встроенной системы диагностики неисправностей. В РЭ приводится перечень программируемых
параметров преобразователей с версией программного обеспечения 01.22. В настоящем РЭ
отсутствует развернутое описание программируемых параметров, а также некоторые другие
подробности, которые приведены в дополнении к РЭ:
− описание
программируемых параметров преобразователей частоты VFD-V.
эксплуатации (далее по тексту РЭ) описывает порядок
подъемные механизмы и другого.
Внимание!
Во избежание несчастных случаев и выхода ПЧ из строя строго соблюдайте следующие
требования:
ПРЕДУПРЕЖДЕНИЕ! Перед включением ПЧ обязательно изучите настоящее руководство
по эксплуатации.
ПРЕДОСТЕРЕЖЕНИЕ! ПЧ должен использоваться только с трехфазными асинхронными
электродвигателями.
ОПАСНОСТЬ! ПЧ должен быть отсоединен от сети переменного тока (обесточен) перед
любым обслуживанием, связанным со снятием (открыванием) защитных крышек,
соединениями силовых или управляющих цепей. Обслуживание ПЧ должно
выполняться квалифицированным персоналом, изучившим
настоящее РЭ.
ПРЕДОСТЕРЕЖЕНИЕ! В ПЧ имеются электронные компоненты, чувствительные к
статическому электричеству. Чтобы избежать повреждений этих компонентов
электростатическим разрядом, не касайтесь компонентов или печатных плат
Page 3
Руководство по эксплуатации преобразователей VFD-V стр. 3
инструментом или голыми руками.
ОПАСНОСТЬ! После отключения сети конденсаторы промежуточной цепи DC некоторое
время (до 5 мин) остаются под напряжением опасным для жизни, поэтому не
открывайте крышек ПЧ, закрывающих токонесущие элементы ПЧ. Визуальным
признаком опасного напряжения на конденсаторах является свечение LED
индикаторов на панели управления ПЧ. Под опасным напряжением находятся не
только элементы
ПЧ, но кабели двигателя, сети и тормозного резистора!
ПРЕДОСТЕРЕЖЕНИЕ! Обязательно заземляйте ПЧ через соответствующую клемму.
Сопротивление заземляющего контура - не более 100 Ом.
ОПАСНОСТЬ! Не подключайте сеть к клеммам U, V, и W, предназначенным для
подсоединения двигателя. Если это случиться, ПЧ будет выведен из строя, а
потребитель лишится гарантии!
ОПАСНОСТЬ! Не производите испытание повышенным
напряжением (мегомметром и др.)
каких-либо частей ПЧ. До начала измерений на кабеле или двигателе
отсоедините кабель двигателя от преобразователя.
ПРЕДОСТЕРЕЖЕНИЕ! ПЧ имеет степень защиты IP20 и является электрическим
оборудованием, предназначенным для установки в шкафы управления или
аналогичные закрытые рабочие пространства со степенью защиты
обеспечивающей требуемые условия эксплуатации.
ПРЕДОСТЕРЕЖЕНИЕ! Циклическое снятие и
подача напряжения питания на ПЧ может
привести к его повреждению. Интервал между снятием и подачей напряжения
питания должен быть не менее 3 мин.
ПРЕДОСТЕРЕЖЕНИЕ! Радиатор ПЧ во время работы может нагреться до температуры
более 70ºC . Не касайтесь радиатора во избежание ожога. Не закрывайте
радиатор предметами, препятствующими свободной конвекции воздуха.
ПРЕДОСТЕРЕЖЕНИЕ! Каждый
последующий пуск двигателя от ПЧ должен осуществляться
не ранее, чем через 10 минут при следующих условиях:
- выходной ток при пуске двигателя Iвых=150%Iном в течение 60 сек, далее
работа ПЧ при номинальном токе;
- температура охлаждающего ПЧ воздуха + 40°С.
Это предельная циклограмма повторно-кратковременной работы ПЧ, которая
обеспечивает предельно-допустимый нагрев кристаллов IGBT.
При
необходимости осуществления пуска двигателя чаще, чем 1 раз за 10 мин нужно
выбрать ПЧ большего номинала или работать при менее тяжелом режиме
(меньший пусковой ток при меньшем времени пуска, работа с выходным током
меньше номинального, низкая температуры окружающего воздуха). В любом
случае необходимо проконсультироваться с поставщиком.
Невыполнение требований, изложенных в настоящем РЭ, может привести к отказам, вплоть до выхода
ПЧ из строя.
При невыполнении потребителем требований и рекомендаций настоящего руководство Поставщик
снимает с себя гарантийные обязательства по ремонту отказавшего преобразователя!
Поставщик также не несёт гарантийной ответственности по ремонту при несанкционированной
модификации ПЧ, ошибочной настройке параметров ПЧ и
выборе неверного алгоритма работы.
Page 4

Руководство по эксплуатации преобразователей VFD-V стр. 4
С О Д Е Р Ж А Н И Е
1. ПОЛУЧЕНИЕ И ОСМОТР .................................................................................................................................5
2. УСЛОВИЯ ТРАНСПОРТИРОВАНИЯ, ХРАНЕНИЯ И ЭКСПЛУАТАЦИИ ................................................ 6
3. МОНТАЖ............................................................................................................................................................. 8
Базовая схема подключения.......................................................................................................................................................... 8
Назначение терминалов силового клеммника............................................................................................................................. 9
Назначение управляющих терминалов ...................................................................................................................................... 10
Требования к внешним устройствам, подключаемым к ПЧ..................................................................................................... 11
Указания по монтажу................................................................................................................................................................... 13
4. ЦИФРОВАЯ ПАНЕЛЬ УПРАВЛЕНИЯ.......................................................................................................... 14
Описание цифровой панели управления PU05........................................................................................................................ 14
Рекомендации по настройке и первому включению................................................................................................................. 16
5. ОПИСАНИЕ ПРОГРАММИРУЕМЫХ ПАРАМЕТРОВ...............................................................................17
Группа 0: Системные параметры................................................................................................................................................ 17
Группа 1: Основные параметры.................................................................................................................................................. 24
Группа 2: Параметры дискретных входов/выходов.................................................................................................................. 28
Группа 3: Параметры аналоговых входов/выходов .................................................................................................................. 34
Группа 4: Параметры дискретного управления скоростью и режима PLC (автоматического пошагового управления) ... 39
Группа 5: Параметры двигателя ................................................................................................................................................ 44
Группа 6: Параметры защиты ................................................................................................................................................... 47
Группа 7: Специальные параметры........................................................................................................................................... 51
Группа 8: Параметры PID-регулятора..................................................................................................................................... 55
Группа 9: Параметры коммуникации..................................................................................................................................... 57
Группа 10: Параметры обратной связи по скорости ................................................................................................................. 65
6. ОБСЛУЖИВАНИЕ............................................................................................................................................ 72
Периодический осмотр и обслуживание.................................................................................................................................... 72
Формование конденсаторов в цепи постоянного тока.............................................................................................................. 72
7. ПОИСК НЕИСПРАВНОСТЕЙ И ИНФОРМАЦИЯ ОБ ОШИБКАХ............................................................73
8. СВОДНАЯ ТАБЛИЦА ПАРАМЕТРОВ..........................................................................................................77
9. ХАРАКТЕРИСТИКИ ........................................................................................................................................97
10. ПЛАТА РАСШИРЕНИЯ PG-04. ......................................................................................................................98
11. ГАБАРИТНО-СТЫКОВОЧНЫЕ ЧЕРТЕЖИ................................................................................................ 101
Page 5
Руководство по эксплуатации преобразователей VFD-V стр. 5
1. ПОЛУЧЕНИЕ И ОСМОТР
Проверьте полученный комплект, который, в базовом варианте, должен состоять из:
• собственно преобразователя частоты;
• руководства по эксплуатации (краткого или полного);
• противопылевых резиновых (для герметизации кабельных вводов) заглушек;
• гарантийного талона, который может быть в составе настоящего РЭ.
Осмотрите ПЧ на предмет отсутствия повреждений. Удостоверьтесь, что типономинал
преобразователя, указанный на шильдике полученного образца, соответствует заказанному.
Система обозначения ПЧ следующая:
Серия "V"
Версия
VFD 007 V 43 A
Частотно-
регулируемый привод
Обозначение
мощности двигателя:
007 = 0.75 кВт
015 = 1.5 кВт
022 = 2.2 кВт
037 = 3.7 кВт
055 = 5.5 кВт
075 = 7.5 кВт
110 = 11 кВт
150 = 15 кВт
185 = 18.5 кВт
220 = 22 кВт
300 = 30 кВт
370 = 37 кВт
450 = 45 кВт
550 = 55 кВт
750 = 75 кВт
Обозначение
напряжения сети:
43: трехфазное 380В.
Page 6
Руководство по эксплуатации преобразователей VFD-V стр. 6
2. УСЛОВИЯ ТРАНСПОРТИРОВАНИЯ, ХРАНЕНИЯ И ЭКСПЛУАТАЦИИ
ПЧ должны храниться в заводской упаковке. Во избежание утраты гарантии на бесплатный
ремонт, необходимо соблюдать условия транспортирования, хранения и эксплуатации
преобразователей:
Условия транспортирования:
• температура среды - в диапазоне от - 20 до +60ºC;
• относительная влажность - до 90% (без образования конденсата);
• атмосферное давление - от 86 до 106кПа.
• допустимая вибрация – не более 9,86м/сек
частотах в диапазоне от 20 до 50Гц.
2
(1g) на частотах до 20Гц и не более 5,88 м/сек2 на
Условия хранения:
• хранить в сухом и чистом помещении;
• при температуре среды от - 20 до +60ºC;
• при относительной влажности до 90% (без образования конденсата);
• при атмосферном давлении от 86 до 106кПа;
• не хранить в условиях, благоприятствующих коррозии;
• не хранить на неустойчивых поверхностях.
Условия эксплуатации:
• сухое закрытое помещение;
• отсутствие прямого попадания брызг и выпадения конденсата влаги (после нахождения ПЧ под
минусовыми температурами, с целью устранения кондесата, необходимо выдержать преобразователь
при комнатной температуре в течение нескольких часов до подачи на него питающего напряжения);
• отсутствие воздействия прямых солнечных лучей и других источников нагрева;
• отсутствие
• отсутствие токопроводящей пыли;
• содержание нетокопроводящей пыли и частиц должно быть не более 0.7 мг/м
• отсутствие вибраций и ударов;
• отсутствие сильных электромагнитных полей со стороны другого оборудования;
• температура окружающей среды – от минус 10 до + 40°C (до +50°C без противопылевых заглушек);
• относительная влажность воздуха – до 90% (без образования конденсата);
• атмосферное давление – 86 – 106 кПа;
• высота над уровнем моря – до 1000м;
• допустимая вибрация – не более 9,86м/
частотах в диапазоне от 20 до 50Гц.
воздействия агрессивных газов и паров, жидкостей, пылеобразных частиц и т.д.;
3
;
сек2 (1g) на частотах до 20Гц и не более 5,88 м/сек2 на
Page 7
Руководство по эксплуатации преобразователей VFD-V стр. 7
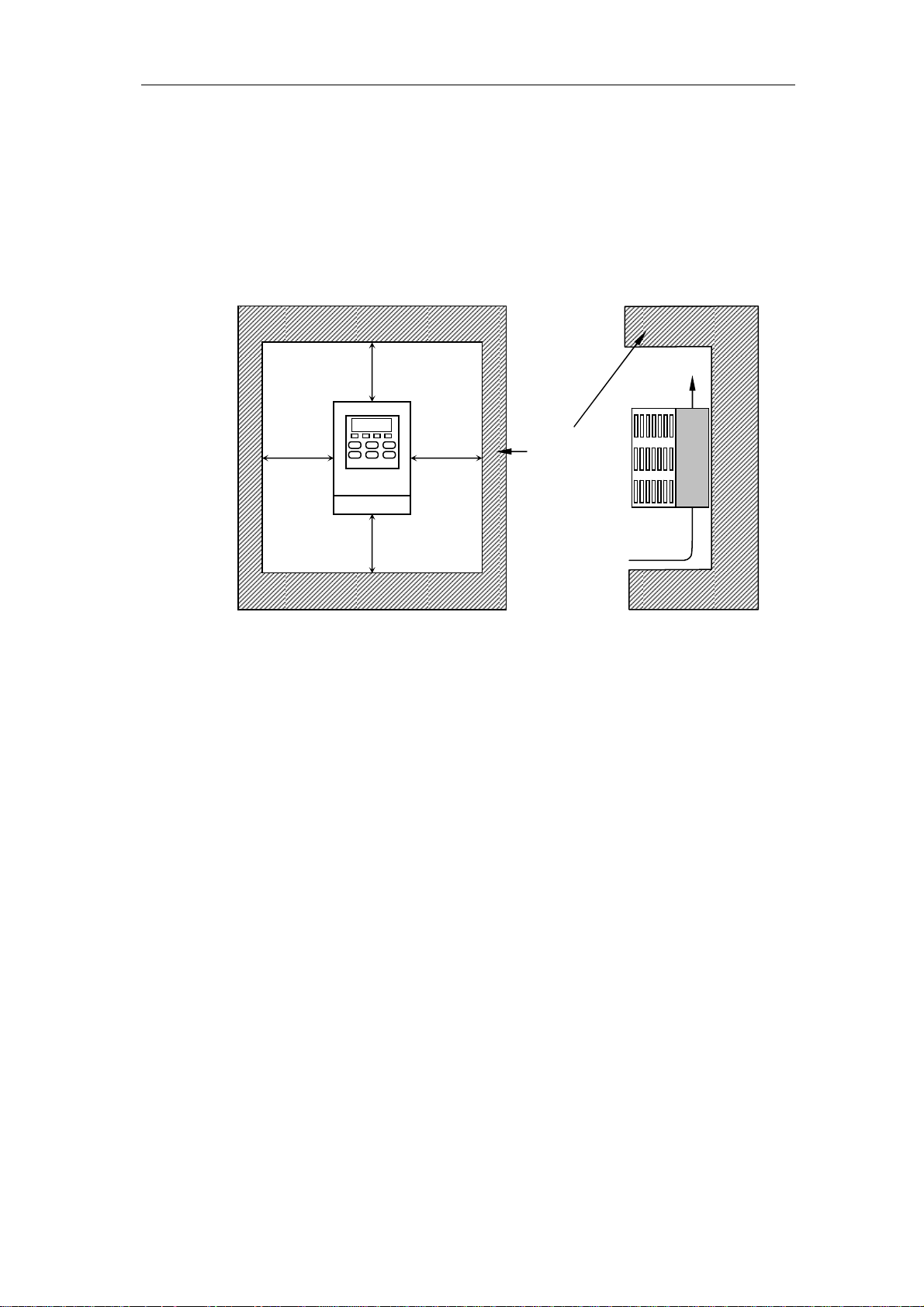
Для обеспечения нормального теплового режима ПЧ, его необходимо устанавливать в
вертикальном положении (допускается отклонение от вертикали до 5
0
в любую сторону), обеспечив
свободную конвекцию воздуха в воздушном коридоре: с боков – не менее 50мм, - сверху и снизу –
не менее 150 мм, как показано на рисунке. Расстояние от передней панели до передней стенки
шкафа – не менее 50 мм. Если шкаф не предусматривает вентиляционных отверстий для свободного
конвенктивного движения воздуха или не имеет
принудительного охлаждения, то размер шкафа и
его компоновка определяются исходя из обеспечения допустимого теплового режима эксплуатации
ПЧ. Методика расчета геометрии шкафа для любых случаев имеется у Поставщика и может быть
предоставлена потребителю по запросу.
120 мм и более
50 мм 50 мм
и более и более
120 мм и более
VFDV
Металлический
шкаф
Воздух
Page 8
Руководство по эксплуатации преобразователей VFD-V стр. 8
)
3. МОНТАЖ
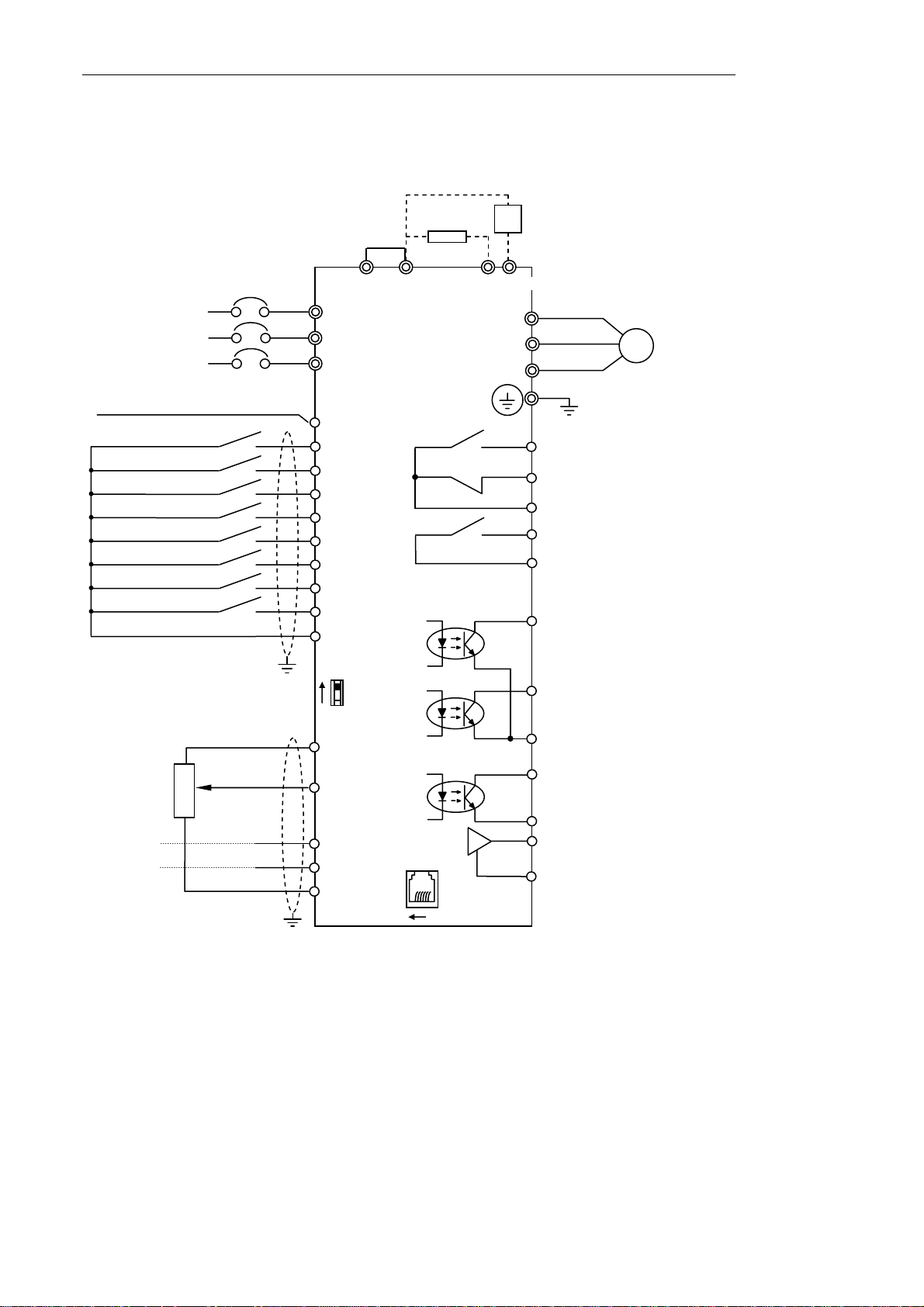
Базовая схема подключения
Перемычка
Тормозной
резистор(опция)
Тормозной модуль
(опция для 11кВт и
выше)
Напряжение
питания 3х380В,
50Гц
Предохранители
R
S
T
+1 +2/B1 B2 -(минус
R(L1)
S(L2)
T(L3)
U(Т1)
V(Т2)
W(Т3)
Асинхронный
двигатель
M
3~
Питание внешн. устройств управления
Прямо/Стоп
Реверс/Стоп
Многофункц. вход 1
Многофункц. вход 2
Многофункц. вход 3
Многофункц. вход 4
Многофункц. вход 5
Многофункц. вход 6
Цифровая земля
Не подавайте напряжение
более указанного
3
5 кОм
2
1
4 – 20 мА
-10 - +10В
Аналоговая земля
+24V
FWD
REV
Mi1
Mi2
Mi3
Mi4
Mi5
Mi6
DCM
Sink
Заводская
Sw1
установка:
sink
Source
+10V
Электропитание
+10V 20 mA
AVI
Задаваемая частота
0 – 10V 47 кОм
ACI
AUI
ACM
RA
Многофункциональный выход с “сухими”
контактами реле 120В АС 5А
RB
28В DC 5А, 240В АС 2,5А
Завод. устан.: индикация ошибки
RC
MRA
MRC
Мо1
Мо2
МСМ
6 1
RJ-11 коммутационный порт с
RS-485 последовательным интерфейсом,
где 1: +EV
2:GND
3:SG 4: SG+
Завод. устан.: индикация работы
Многофункциональный
оптотранзисторный индикатор
48В DC 50мА
Завод. устан.: индикация достижения
заданной частоты
Завод. устан.: индикация готовности к
работе
Общий для оптронных выходов
Цифровой выход частоты
DFM
Завод. устан.: 1:1 режим работы =50% 10V DC
DCM
Цифровая земля
Многофункц. аналоговый выход
Завод. устан.: аналоговый измеритель частота/ток
AFM
0-10V DC/2мА
Аналоговая земля
ACM
Данная схема не является готовой для практического использования, а лишь показывает назначение и
возможные соединения терминалов, выходные цепи ПЧ.
Page 9

Руководство по эксплуатации преобразователей VFD-V стр. 9
Назначение терминалов силового клеммника
Обозначение Назначение
R(L1), S(L2), T(L3)
U(T1), V(T2), W(T3)
+1, +2/B1
+2/B1, B2
+2/B1, -
Соединение тормозного резистора в моделях:
VFD007V43A
VFD015V43A
VFD022V43A
VFD037V43A, VFD055V43A,
VFD075V43A
Соединение тормозного модуля в моделях:
VFD110V43A, VFD150V43A, VFD185V43A,
VFD220V43A,
VFD300V43A, VFD370V43A, VFD450V43A,
VFD550V43A, VFD750V43A
питающая сеть
асинхронный двигатель
дроссель в цепь DC (опция)
тормозной резистор (опция)
тормозной модуль (опция)
заземляющий провод (не подсоединять аналоговую и цифровые общие
провода)
Тормозной резистор (опция)
Перемычка
+1 +2/B1 B2
VFDB
Перемычка
+1 +2/B1 -
BR
Page 10

Руководство по эксплуатации преобразователей VFD-V стр. 10
Назначение управляющих терминалов
Обозначение
терминала
FWD
REV
МI1
MI2
MI3
MI4
MI5
MI6
DFM
+24В
DCM
RA
RB
RC
MRA
MRC
M01
M02
MCM
+10В
AVI
AC I
AUI
AFM
ACM
Функции терминала
вперед-стоп
назад-стоп
многофункциональный вход 1 предустановленная скорость 1
многофункциональный вход 2 предустановленная скорость 2
многофункциональный вход 3 предустановленная скорость 3
многофункциональный вход 4 предустановленная скорость 4
многофункциональный вход 5 сброс ошибки (RESET)
многофункциональный вход 6 внешняя ошибка (EF)
выходной терминал цифровой частоты 1:1
источник питания внешних устройств
управления *
цифровая земля
многофункциональное реле:
нормально разомкнутый контакт
нормально замкнутый контакт
общий провод контактов реле
многофункциональное реле c нормально
разомкнутым контактом
многофункциональный выходной
терминал 1 (оптронный)
многофункциональный выходной
терминал 2 (оптронный)
Общий для многофункциональных выходных
терминалов
Источник питания потенциометра регулировки
скорости
вход для управления скоростью напряжением
вход для управления скоростью током
дополнительный вход для управления
скоростью напряжением
выход с напряжением пропорциональным
выходной частоте
аналоговая земля
Заводская уставка функции
терминала
+24В, 20мА (относительно
DCM)
240В АС 2,5А
120В АС 5А
24В DC 5А
индикация готовности привода
к работе
индикация достижения
заданной частоты
Макс. 48В DC 50мА
+10В 20мА
0…+10В (макс. выходная
частота)
4…20мА (макс. выходная
частота)
-10…+10В (макс. выходная
частота)
-10…+10В (макс. выходная
частота)
* При использовании внутреннего источника +24 В дли питания входных терминалов (положительная
логика управления) надо установить переключатель Sw1, расположенный на плате управления в
положение Source (DCM). При использовании внутреннего источника +24 В дли питания датчиков
обратной связи ПИД-регулятора надо соединить перемычкой цифровую землю (DCM) и аналоговую
землю (ACM).
Page 11
Руководство по эксплуатации преобразователей VFD-V стр. 11
Требования к внешним устройствам, подключаемым к ПЧ
3.1.1. Источник питания (сеть переменного тока).
Показатели качества источника питания должны соответствовать требованиям ГОСТ 13109.
Напряжение – 3х(342 …528)В, частотой 47 … 63 Гц.
3.1.2. Предохранители (автоматы защиты).
ПЧ должен быть защищен быстродействующими предохранителями или автоматом защиты с
электромагнитным расцепителем с кратностью срабатывания 3-5 (класса B). Рекомендуемый
номинальный ток и тип предохранителя для каждого ПЧ приведен в табл
Типономинал ПЧ
VFD007V43 A (380В, 0.75кВт) 4 3 10 JJS-10
VFD015V43A (380В, 1.5кВт) 5.7 4.2 15 JJS-15
VFD022V43A (380В, 2.2кВт) 7.3 6 20 JJS-20
VFD037V43A (380В, 3.7кВт) 9.9 8.5 30 JJS-30
VFD055V43A (380В, 5.5кВт) 12.2 13 50 JJS-50
VFD075V43A (380В, 7.5кВт) 17.2 18 70 JJS-70
VFD110V43A (380В, 11 кВт) 23 24 90 JJS-90
VFD150V43A (380В, 15 кВт) 38 32 125 JJS-125
VFD185V43A (380В, 18.5 кВт) 55 38 150 JJS-150
VFD220V43A (380В, 22 кВт) 56 45 175 JJS-175
VFD300V43A (380В, 30 кВт) 60 60 225 JJS-225
VFD370V43A (380В, 37кВт) 73 73 250 JJS-250
VFD450V43A (380В, 45кВт) 91 91 350 JJS-350
VFD550V43A (380В, 45кВт) 130 110 400 JJS-400
VFD750V43A (380В, 45кВт) 175 150 600 JJS-600
Ном. ток ПЧ, А
входной выходн.
Ном. ток
предохранителя, А
3.1.3. AC реактор на входе ПЧ (опция)
AC реактор улучшает коэффициент мощности, защищает выпрямительные диоды ПЧ от
больших токов при набросах сетевого напряжения и рекомендуется, если мощность источника
питания более 500кВА и превышает по мощности в 6 и более раз мощность ПЧ, или длина кабеля
между источником питания и преобразователем частоты менее 10 м. В любом случае
использование сетевого дросселя
полезно для устойчивости преобразователя к аварийным
отклонениям питающего напряжения.
3.1.4. Дроссель в цепи шины DC (опция).
Дроссель в цепи шины DC может понадобиться при необходимости фильтрации гармоник в
потребляемом от сети токе, увеличении коэффициента мощности и других случаях.
3.1.5. Тормозной резистор и устройство торможения (опции).
Тормозной резистор или тормозной модуль применяются при необходимости быстрой
остановки двигателя или быстрого снижения его скорости (особенно, для нагрузок с большим
моментом инерции
). Преобразователи VFD007V …075B (до 7.5кВт включительно) имеют
встроенное устройство торможения, а для остальных - внешнее (опция), поставляемое за
отдельную плату. Необходимый номинал сопротивления и его мощности рассеяния тормозного
резистора рассчитывается индивидуально в каждом конкретном случае.
Для оптимального выбора резисторов торможения необходимо определить:
• кинетическую энергию вращающихся масс и время, за которое ее необходимо довести до нуля или
какого-то меньшего уровня. Или приведенный к валу момент инерции, скорость предшествующую
торможению, скорость после торможения;
• длительность времени до следующего торможения или циклограмму работы привода.
Исходные требования направляются в НПО "СТОИК ЛТД" для выбора оборудования и
рекомендаций по настройке ПЧ при использовании динамического торможения.
.
Тип предохранителя
(Bussman P/N)
Page 12

Руководство по эксплуатации преобразователей VFD-V стр. 12
3.1.6. Электромагнитный фильтр (опция).
Электромагнитный фильтр необходим в случае достижения электромагнитной
совместимости (ЭМС) с другим оборудованием, питающимся от той же сети, что и ПЧ.
Электромагнитный фильтр подавляет радиочастотные гармоники помех, передающихся от ПЧ в
сеть.
3.1.7. Выходной дроссель (опция).
Выходной дроссель необходим для снижения емкостных токов при работе ПЧ на
длинный
кабель, соединяющий с двигателем, а так же для ограничения пиковых перенапряжений на
двигателе. (применение дросселя становится актуальным при длине кабеля более 30м).
Использование выходного дросселя зависит от длины кабеля его конструкции (погонной емкости) и
значения несущей частоты ШИМ.
3.1.8. Пульт дистанционного управления.
В составе дополнительного оборудования (опций) имеется фирменный пульт
дистанционного
управления. Пульт предназначен для удаленного (до 20м) управления ПЧ (пуск, стоп, реверс и
регулировка скорости) по проводам.
3.1.9. Потенциометр регулировки выходной частоты.
Внешний потенциометр (см. базовую схему подключения) должен иметь номинальное
сопротивление от 4.7 до 10кОм, мощность рассеяния – не менее 0,5Вт. Рекомендуется линейная
зависимость изменения сопротивления от угла поворота. Потенциометр
не входит в поставочный
комплект.
Page 13
Руководство по эксплуатации преобразователей VFD-V стр. 13
Указания по монтажу
Внимание. Монтаж ПЧ должен проводится с соблюдением требований настоящего РЭ, а
также ПУЭ-98 и СНиП - 4.6. – 82.
1. Предостережение! Не подсоединяйте провода сети к контактам U, V и W, предназначенным
для подсоединения двигателя.
2. Внимание! Затягивайте винты, зажимающие провода с усилием, рекомендуемым РЭ.
3. При проведении монтажа и подключении ПЧ руководствуйтесь правилами эксплуатации
электроустановок и
4. Для подключения кабелей к силовым клеммникам используйте кабельные наконечники.
5. Закрепите подводящие силовые и сигнальные провода возле ввода в ПЧ, чтобы предотвратить
разрушения силовых клеммников и клеммников управления.
6. Убедитесь, что защитные устройства (автомат защиты или быстродействующие плавкие
вставки) включены между питающей сетью и ПЧ
7. Убедитесь, что ПЧ заземлен, а сопротивление заземляющей цепи не превышает 100 Ом.
Убедитесь, что ни один из проводов управляющих цепей не имеет гальванического соединения с
силовыми клеммами. Все управляющие входы и выходы ПЧ имеют гальваническую развязку от
силовых цепей (фазного потенциала сети) с целью электробезопасности.
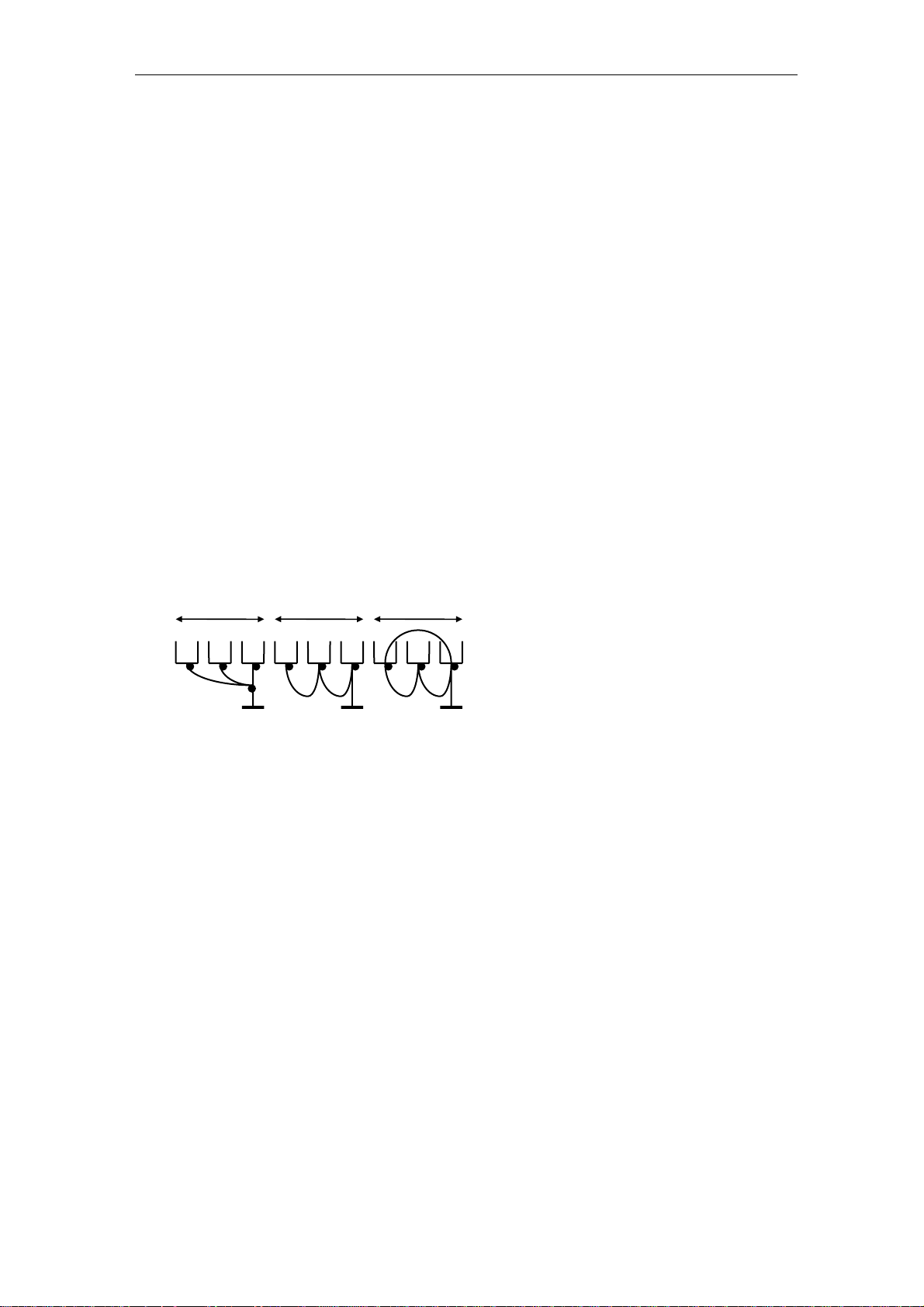
8. Заземление ПЧ и двигателя
9. При использовании нескольких ПЧ, установленных рядом, их заземляющие клеммы можно
соединить параллельно, но так, чтобы из заземляющих проводов не образовывались петли.
нормами безопасности, действующими в РФ.
.
выполняйте в соответствии с требованиями ПУЭ.
Правильно
Правильно Неправильно
10. Для изменения направления вращения двигателя достаточно поменять местами два провода,
соединяющих двигатель с ПЧ.
11. Убедитесь, что питающая сеть способна обеспечить необходимое напряжение на клеммах ПЧ,
при полной нагрузке двигателя. Удостоверьтесь также, что ток короткого замыкания питающей
сети в точках подсоединения ПЧ превышает не менее, чем в 3 раза номинальный ток
автомата-
защиты.
12. Не подсоединяйте и не отсоединяйте провода преобразователя при поданном напряжении
питающей сети.
13. Не контролируйте (измерением) сигналы на печатных платах во время работы привода.
14. Не пытайтесь подключать к преобразователю однофазный двигатель.
15. Рекомендуется прокладывать провода управляющих цепей под углом примерно 90° к силовым
проводам.
16. Для уменьшения
помех, создаваемых ПЧ, используйте фильтр электромагнитных помех (опция)
и снижайте несущую частоту (частоту ШИМ).
17. Для уменьшения токов утечки при работе на длинный кабель используйте индуктивный фильтр,
который подсоединяется непосредственно на выход ПЧ. Не применяйте емкостные и
содержащие емкости фильтры на выходе ПЧ.
18.При использовании устройства защитного отключения (УЗО) рекомендуется
выбирать УЗО с
током отключения не менее 200мА и временем отключения не менее 0,1 с, так как при более
чувствительном УЗО возможны ложные срабатывания.
Page 14
Руководство по эксплуатации преобразователей VFD-V стр. 14
V
4. ЦИФРОВАЯ ПАНЕЛЬ УПРАВЛЕНИЯ
Этот раздел описывает устройство и работу цифровой панели управления/индикации типа
VFD-PU05. Он должен быть прочитан перед настройкой и включением преобразователя.
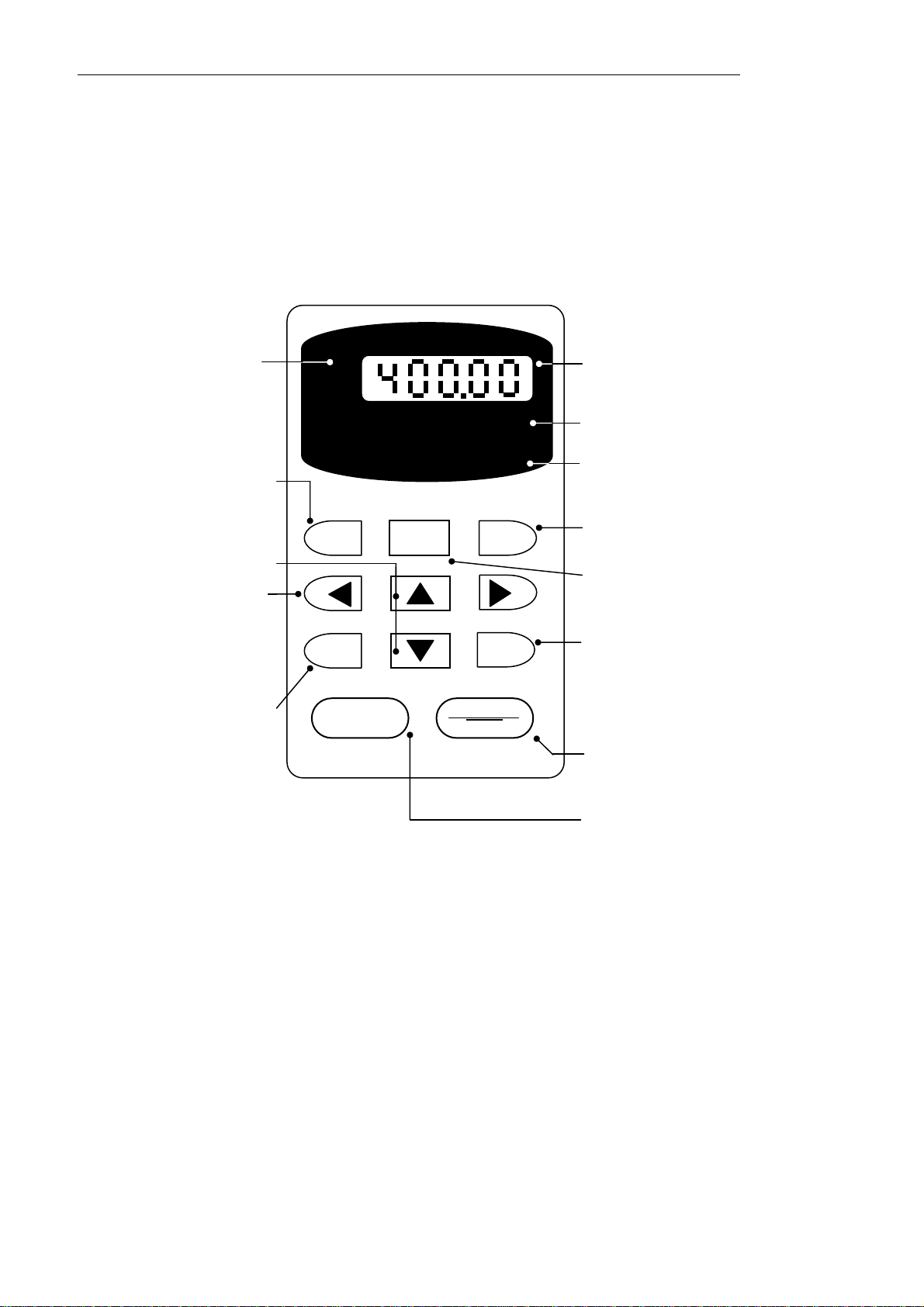
Описание цифровой панели управления PU05
LED индикаторы –
указатели величины
индуцируемой на LED
дисплее
Кнопка «JOG» – Кнопкой
Jog инициализируется
операция Jog (переход на
более низкую
предустановленную
частоту).
Кнопки ▲ и ▼ -
устанавливают частоту,
параметр и его значение.
Кнопки ◄и - выбирают
разряд числа, значение
которого будет изменено
клавишами ▲ и ▼.
Кнопка «FVD/REV» –
изменяет направление
вращения привода
▲
F
H
U
FD-PU05
RUN STOP JOG FWD REV EXT PU
JOG
FWD
REV
JOG FWD REV
MODE
R U N
PROG
DATA
STOP
PU
LED дисплей – светодиодный
дисплей индицирует значения
частоты, напряжения, тока,
параметров и их значений
Обозначение модели пульта
LED индикаторы – указатели
режима работы привода RUN.
STOP, JOG, FWD, REV, EXT,PU
Кнопка «MODE» - выбор
источника управления приводом
Кнопка «MODE» - выбор
различных режимов индикации.
Кнопка “PROG/DATA” –
программирование параметров и
введение информации.
Кнопка “STOP/RESET” –
останавливает привод и
сбрасывает блокировку после
возникновения аварии.
Кнопка “RUN” – запускает
привод.
Page 15
Руководство по эксплуатации преобразователей VFD-V стр. 15
Индикация дисплея
F
Заданная частота (master frequency).
H
Напряжение на двигателе
U
Фактическая частота 1-ой гармоники напряжения на выходных
терминалах U, V, и W.
Описание
Выходной ток преобразователя.
Функция копирования параметров из ПЧ в пульт: при нажатии и
удерживании в течение 2…3 сек кнопки
копирование параметров из ПЧ в пульт PU05.
вызывает функцию "SAVE".
Функция копирования параметров из пульта PU05 в ПЧ: при нажатии и
удерживании в течение 2…3 сек кнопки
копирование параметров из пульта PU05 в ПЧ.
вызывает функцию "READ".
PROG/DATA, начнется
Нажатие кнопки ▲ или ▼
PROG/DATA, начнется
Нажатие кнопки ▲ или ▼
Номер параметра.
Значение параметра.
"End" сообщение, появляющееся на дисплее в течение 1 секунды, после
того, как введено допустимое значение параметра. Введенное значение
автоматически сохраняется в памяти преобразователя. Для
корректировки вводимого значения используются клавиши ▼ и ▲.
'Err" сообщение, появляющееся на дисплее, если введено недопустимое
значение параметра. Например, превышающее диапазон допустимых
значений.
Page 16
Руководство по эксплуатации преобразователей VFD-V стр. 16
Рекомендации по настройке и первому включению
Подключите преобразователь в соответствии с требованиями настоящего документа. Убедитесь в
том, что
двигатель, проверьте и, при необходимости скорректируйте настройку следующих параметров, (эти
параметры обеспечивают нормальное электропитание и защиту подключенного двигателя):
равно номинальному. По сути, это номинальная частота питающего напряжения двигателя. Ее
значение устанавливается равным номинальной частоте, приведенной на шильдике или в
технической документации на подключенный двигатель. Например, если номинальная частота
двигателя 60Гц, значит значение этого параметра должно быть 60.
на двигатель на частоте более или равной значению параметра 1-01. Значение этого параметра
должно равняться номинальному напряжению питания двигателя, приведенному на шильдике или
в технической документации на подключенный двигатель. Например, если номинальное
напряжение 380В, то значение этого параметра должно быть 380.
:
• устройство защиты (автоматический выключатель или быстродействующий плавкий
предохранитель) включены в цепь питания ПЧ и их номиналы и тип соответствуют
требованиям настоящего документа.
• подаваемое напряжение питания соответствует требованиям спецификации ПЧ.
• команда пуск не будет подана на ПЧ одновременно с подачей питающего напряжения.
• при наличии вентиляторов охлаждения, они могут
заработать сразу после подачи
напряжения или в момент перегрева радиатора (зависит от версии software ПЧ).
После того, как вы тщательно выполнили монтаж всего привода, перед тем, как запустить
Pr.1-01: Этот параметр задает частоту,
Pr.1-02: Этот параметр задает номинальное напряжение питание
при которой напряжение питания двигателя будет
, которое будет подаваться
Примечание. Выходное напряжение ПЧ принципиально не может быть
выше текущего
напряжения питающей сети.
Pr.5-01: Этот параметр устанавливает номинальный ток двигателя. Корректная установка
значения этого параметра позволит корректно осуществлять функцию защиты ПЧ (электронное
термореле) от перегрева двигателя.
Если есть необходимость и вы осознаете возможные последствия, измените заводские
значения (уставки), то есть сконфигурируйте ПЧ под свою конкретную задачу. Обратите внимание
на формирование зависимости выходного напряжения преобразователя от выходной частоты U =
f(F). В основе частотного регулирования скорости асинхронного двигателя является важное
соотношение U/F = const. Например, для двигателя с номинальными параметрами U=380В и
F=50Гц U/F=7,6В*сек. Поэтому, для частоты F=10Гц U должно быть равным 7,6*10 = 76В. От
правильного формирования этой характеристики зависит КПД ПЧ и двигателя, нагрев ПЧ
и
двигателя, возможности двигателя развить требуемый момент и преодолеть момент нагрузки, и,
наконец, работоспособность ПЧ (возможен выход из строя).
Page 17
Руководство по эксплуатации преобразователей VFD-V стр. 17
5. ОПИСАНИЕ ПРОГРАММИРУЕМЫХ ПАРАМЕТРОВ
Группа 0: Системные параметры
00-00
Идентификационный код преобразователя Заводская уставка: ###
Диапазон допустимых значений: 4…33
Параметр доступен только для чтения
00-01
Номинальный ток преобразователя Заводская уставка: ###
Диапазон допустимых значений: - Дискретность установки: 0,1А
Параметр доступен только для чтения. Допустимые значения параметров 00-01 приведены в табл.
Мощность
двигателя, кВт
Код
Номинальный ток
при работе с
постоянным
моментом, A
Номинальный ток
при работе с
переменным
моментом, A
Макс. частота ШИМ 15 кГц 10 кГц 6 кГц
0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75
5 7 9 11 13 15 17 19 21 23 25 27 29 31 33
3.0 4.2 6 8.5 13 18 24 32 38 45 60 73 91 110 150
3.8 5.3 7.5 10.6 16.3 22.5 30 40 47.5 56.3 75 91.3 113.8 138 188
380В
00-02
значения
Уставка в
двоичном
коде
Сброс настроек пользователя Заводская уставка: 0
Диапазон допустимых значений: 0…10
10 Возврат к заводским уставкам для 60Гц. Возможные
9 Возврат к заводским уставкам для 50Гц.
бит 0 1 Блокировка чтения параметров 2
бит 1 1 Блокировка изменения выходной частоты и момента 2
бит 2 1 Блокировка управления приводом со встроенного пульта 2
0
1
1
2
2
4
• Метод задания значений параметров в двоичном коде имеет то преимущество, что в одном
десятичном числе можно задать значения нескольких функций. Однако необходимо правильно
производить преобразование двоичного числа в десятичное. В нижеприведенных примерах
показано, как правильно вводить значения параметров заданных в двоичном коде.
• Пример 1
изменения выходной частоты и момента " (бит 1 = 1). Для этого надо двоичное число 010
перевести в десятичное: бит2 х 2
: Допустим надо в параметре 00-02 запрограммировать функцию " Блокировка
2
+ бит1 х 21 + бит0 х 20 = 0 х 22 + 1 х 21 + 0 х 20 = 21 = 2, т.е. в
параметр 00-02 надо ввести значение "2".
• Пример 2
: Допустим надо в параметре 00-02 запрограммировать функцию " Блокировка
изменения выходной частоты и момента " (бит 1 = 1) и "Блокировка управления приводом со
встроенного пульта "(бит 2 = 1). Для этого надо двоичное число 110 перевести в десятичное:
бит2 х 2
2
+ бит1 х 21 + бит0 х 20 = 1 х 22 + 1 х 21 + 0 х 20 = 22 + 21 = 4+2 = 6, т.е. в параметр 00-02
надо ввести значение "6".
• Если ввести значение "1", то доступ ко всем параметрам за исключением 00-00…00-08 будет
заблокирован.
• Если ввести значения "9" или "10", то все параметры вернутся к заводским установкам,
соответственно для сети с частотой 50 Гц и 60 Гц.
Page 18
Руководство по эксплуатации преобразователей VFD-V стр. 18
*00-03
Выбор параметра, значение которого будет
Заводская уставка: 0
индицироваться при включении ПЧ.
Возможные значения: 0: заданная частота (F);
1: фактическая частота (Н);
2: величина определенная параметром 0-04 (U);
3: выходной ток.
*00-04
0: выходное напряжение;
1: напряжение на шине DC;
2: управляющее напряжение;
3: дискретная скорость;
4: скорость шага PLC;
5: время оставшееся до окончания цикла PLC;
6: число возможных рестартов;
7: значение счетчика;
8: момент нагрузки;
9: коэффициент мощности (±1.000);
10: угол сдвига между напряжением и током (0…180);
11: выходная мощность (кВт);
12: полная выходная мощность (кВА);
13: скорость двигателя (об/мин)
14: температура
15: температура тормозного резистора;
16: состояние входных цифровых терминалов;
17: сигнал задания ПИД-регулятора;
18: сигнал обратной связи ПИД-регулятора;
19: напряжение по оси q;
20: напряжение по оси d;
21: магнитный поток;
22: время перегрузки OL;
23: время перегрузки по I
24: время выполнения PLC;
25: стадия неподвижности;
26: время перегрузки по OL2;
27: время торможения постоянным током;
28: напряжение компенсации;
29: частота компенсации скольжения;
30: число импульсов энкодера (канал1);
31: местоположение по датчику импульсов (в режиме позиционирования);
32: количество импульсов до нулевой позиции;
33: недопустимо высокое напряжение на шине DC;
34: недопустимо высокое выходное напряжение;
35: недопустимо высокая выходная
36: недопустимо высокий выходной ток;
37: недопустимо высокая заданная частота;
38: количество дней работы привода;
39: часы, минуты;
40: максимальная частота;
41: уровень превышения момента;
42: уровень ограничения тока;
43: коэффициент компенсации момента;
44: ограничение момента (Pr.6-12);
45: ток по оси q;
46: частота от датчика импульсов (канал1);
49: величина рассогласования ПИД-регулятора;
51: напряжение на входе AVI;
52: ток
53: напряжение на входе AUI;
Параметр, выводимый на дисплей Заводская уставка: 0
Возможные значения: 0…46.
силового IGBT-модуля;
2
t;
частота;
на входе AСI;
Page 19
Руководство по эксплуатации преобразователей VFD-V стр. 19
55: значение дополнительной частоты;
60: состояние входов на цифровых терминалах;
61: состояние выходов на цифровых терминалах;
84: частота входных импульсов (канал2);
85: местоположение в импульсах (канал2);
86: таймер OL3.
*00-05
Пользовательский коэффициент К Заводская уставка: 0
Диапазон допустимых значений: 0…9999 Дискретность установки: 1
бит 4 0…3: число дополнительных разрядов.
бит
3…0
40…9999: величина, которая должна соответствовать максимальной рабочей
выходной частоте.
Пользовательский коэффициент используется для перевода выходной частоты в скорость в
об/мин.
Пример1:
Для стандартного 4-х полюсного асинхронного двигателя частота 50 Гц соответствует
1500 об/мин. В параметре 0-05 надо вести "01500".
Пример2:
Для 400 Гц 2-х полюсного асинхронного двигателя частота 400 Гц соответствует 24000
об/мин. В параметре 0-05 надо вести "12400".
00-06
Версия программного обеспечения Заводская уставка: ####
Этот параметр доступен только для чтения
*00-07
Входной пароль Заводская уставка: 0
Возможные значения: 0 … 9999 Дискретность установки: 1
Если параметр 00-08 не равен 0, все параметры будут заблокированы при включении напряжения
питания. Для чтения/записи параметров используйте правильный входной пароль. Количество попыток
ввода неправильного пароля ограничено 3 разами. Если 3 раза введен не верный пароль, то на дисплей
будет выведен код, который означает, что надо снять питание и подать его вновь для повтора
попытки
ввода правильного пароля.
Индикация состояния ПЧ на дисплее: 0: нет пароля или правильный пароль;
1: параметры заблокированы.
*00-08
Установка пароля Заводская уставка: 0
Диапазон возможных значений: 0 … 9999 Дискретность установки: 1
При установке параметра в 0 пароль не назначается. Для изменения установленного пароля должен
быть введен правильный пароль в параметр 00-07 для активации этой функции.
Индикация состояния ПЧ на дисплее: 0: нет пароля;
1: пароль установлен.
*00-09
Задание частоты и метод работы пульта PU05 Заводская уставка: 00000
xxxx0
xxxx1
Частота/момент изменяются кнопками пульта ∇, ∆ только после нажатия кнопки
"data/prog"
Частота/момент изменяются кнопками ∇, ∆ пульта PU05 сразу.
xxx0x Частота/момент заданные от PU05 и RS485 сохраняются в памяти
xxx1x Частота/момент заданные от PU05 и RS485 не сохраняются в памяти
xx0xx
xx1xx
Частота/момент заданные от внешних терминалов UP/DOWN сохраняются в
памяти
Частота/момент заданные от внешних терминалов UP/DOWN не сохраняются в
памяти
x0xxx Изменение направления вращения сохраняется в памяти
x1xxx Изменение направления вращения не сохраняется в памяти
0xxxx Значение данного параметра сохраняется в памяти
1xxxx
Значение данного параметра не сохраняется в памяти, действует до выключения
ПЧ из питающей сети
Page 20
Руководство по эксплуатации преобразователей VFD-V стр. 20
00-10
Метод управления Заводская уставка: 0
Возможные значения: 0: Частотный способ – U/f;
1: U/f + импульсный датчик обр. связи по скорости (PG control);
2: Векторное управление;
3: Векторное управление + имп. датчик обр. связи по скорости;
4: Управление моментом;
5: Управление моментом + PG.
Pr.00-10. Этот параметр используется для выбора метода управления асинхронным двигателем.
0: Частотный способ – U/f: пользователь может сам формировать различные зависимости U=f(F),
используя параметры Pr.1-00 … 1-08, для конкретных задач и можно одновременно управлять
несколькими двигателями;
1: U/f + импульсный датчик обр. связи по скорости (PG control): частотный способ управления в
замкнутом контуре с обратной связью по скорости, что позволяет получить большую
точность
поддержания скорости;
2: Векторное управление: позволяет автоматически получить оптимальный выходную
характеристику (до 200%ном. момента на 0.5 Гц) на низких скоростях. Для использования режима
векторного управления необходимо провести автотестирование двигателя и настроить параметры
группы 5.
3: Векторное управление + имп. датчик обр. связи по скорости: позволяет получить высокую
точность (0,02%) в широком диапазоне регулирования (1:1000);
4: Управление
моментом: позволяет напрямую задавать необходимый вращающий момент. Все
команды задания частоты становятся командами задания момента;
5: Управление моментом + PG: увеличенная точность управления моментом.
00-11
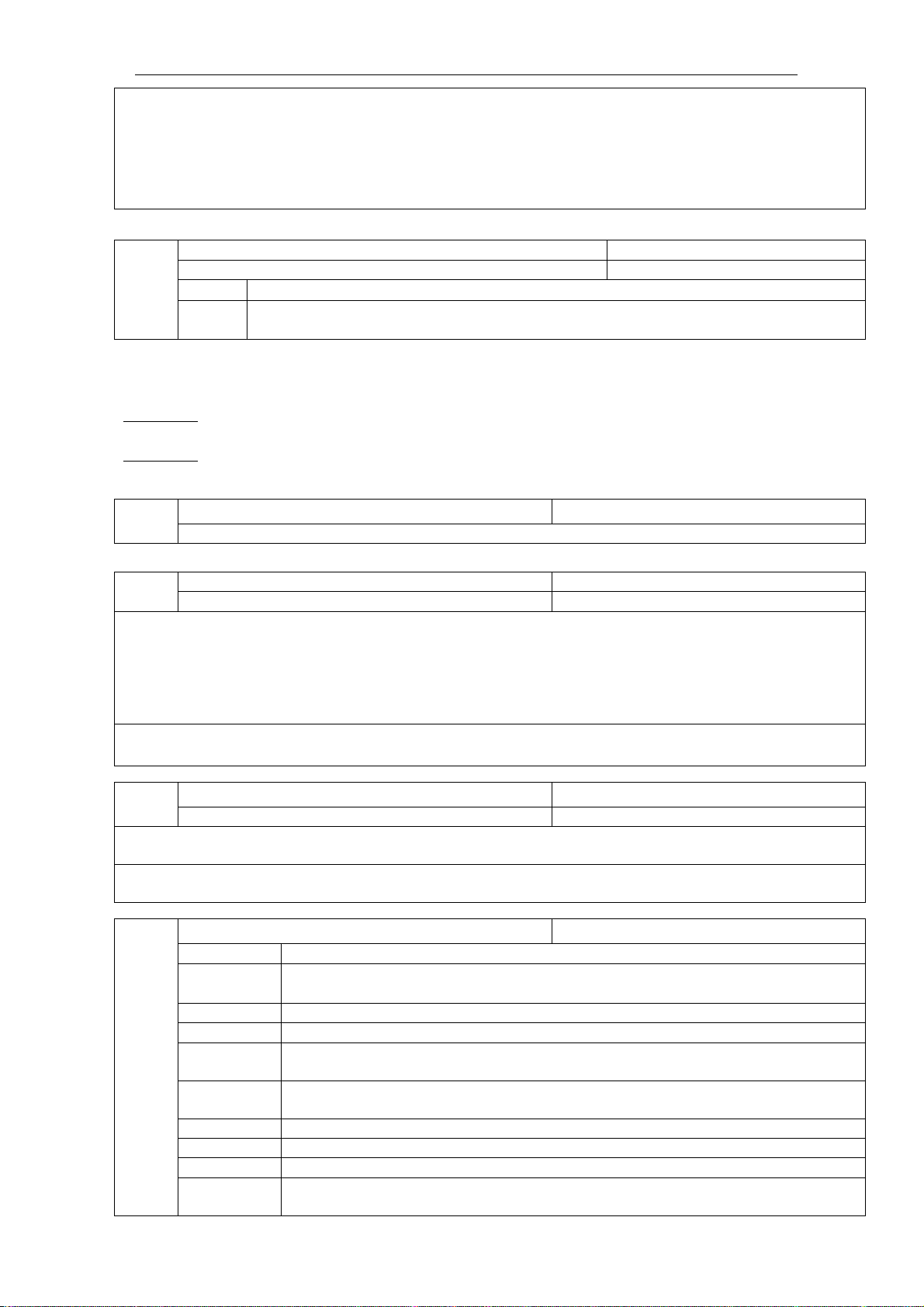
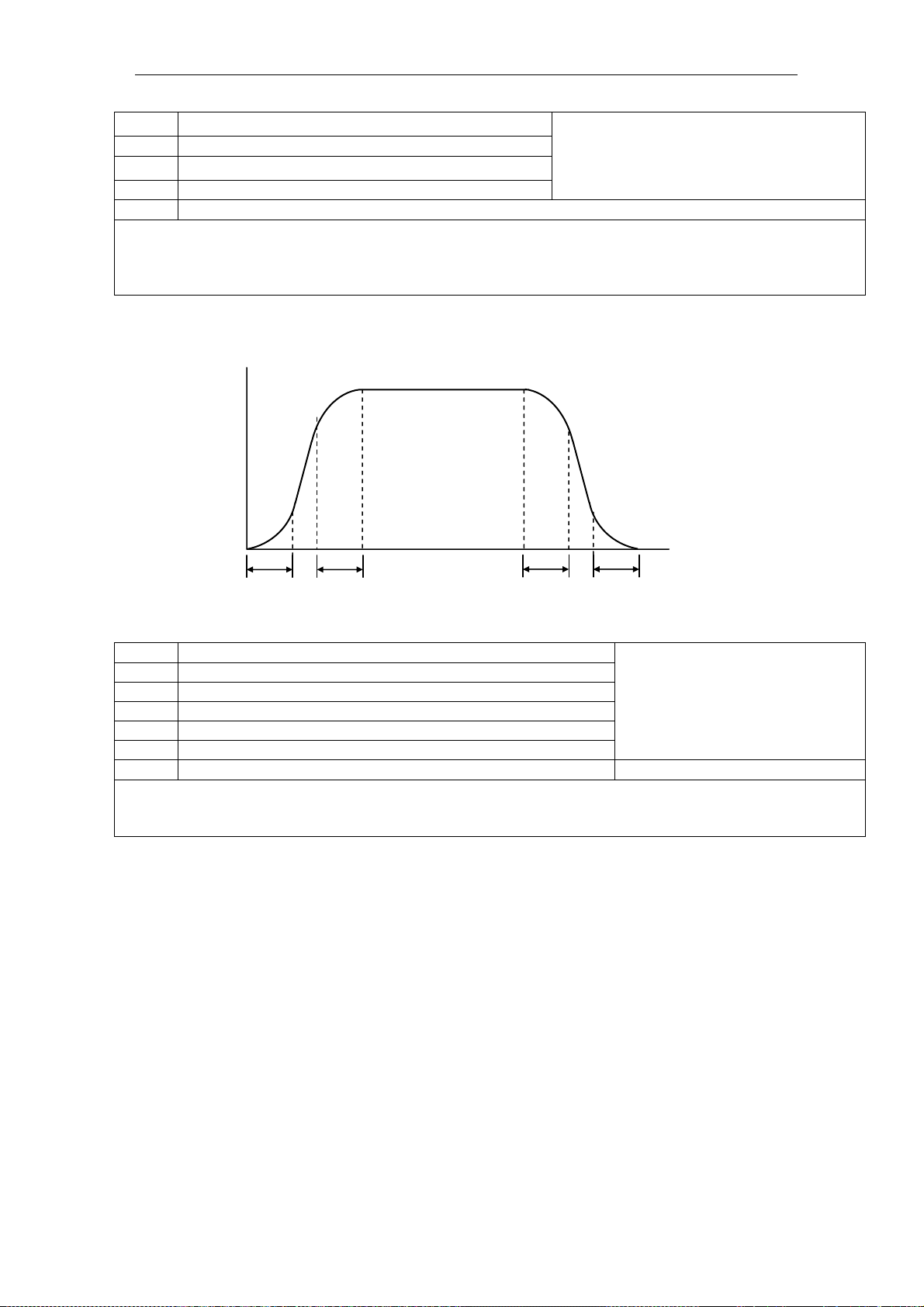
Выбор зависимости U=f(F) Заводская уставка: 0
0: Определяется параметрами группы 1 (без учета начальной частоты Pr. 1-09 при изменении
направления вращения);
1: Определяется параметрами группы 1 (c учетом начальной частоты Pr. 1-09 при изменении
направления вращения);
2: Зависимость U от F в степени 1.5(без учета начальной частоты Pr. 1-09 при изменении
направления вращения);
3: Зависимость U от F в степени 1.5(c учетом начальной частоты Pr. 1-09 при изменении
направления вращения);
4: Зависимость U от F в
степени 2(без учета начальной частоты Pr. 1-09 при изменении
направления вращения);
5: Зависимость U от F в степени 2(c учетом начальной частоты Pr. 1-09 при изменении
направления вращения).ё
Частота
Pr.0-11 = 0, 2, 4
Начальная
частота
Pr. 1-09
Начальная
частота
Pr. 1-09
FWD
Pr.0-11 = 1, 3, 5
FWD
Плавный переход через
Время
REV
Переход через ноль скачком
Время
REV
Page 21
Руководство по эксплуатации преобразователей VFD-V стр. 21
*00-12
Выбор коэффициента перегрузки (OL) при
управлении моментом.
0: Перегрузка (OL) отсчитывается от 100% - работа с постоянным моментом;
1: Перегрузка (OL) отсчитывается от 125% - работа с переменным моментом.
При выборе 0-12 = 1 обеспечивается большая перегрузочная способность при работе с
переменным моментом.
Заводская уставка: 0
*00-13
Если выбран режим (Pr.00-13=3) автоматического определения времени разгона или замедления, будет
выбран самый быстрый темп разгона или замедления, при котором еще не сработает защита от
сверхтока или перенапряжения в звене DC.
При Pr.00-13 = 4 время разгона/замедления будет больше или равно соответствующим значениям
параметров Pr.01-12…01-19.
Функция автоматического выбора времени
разгона/замедления
0: Линейный разгон/замедление;
1: Автоматический выбор времени разгона, линейное замедление;
2: Линейный разгон, автоматический выбор времени замедления;
3: Автоматический выбор времени разгона/замедления;
4: Автоматический выбор времени разгона/замедления (Taccel/ Tdecel ≥ Pr.01-12…01-19).
Заводская уставка: 0
00-14
Этот параметр определяет дискретность задания времени разгона/замедления (Pr.01-12…01-19),
времени разгона/замедления JOG-частоты(Pr.01-20…01-21) и уставки кривой S (Pr.01-24…01-27) .
Дискретность задания времени
разгона/замедления и уставки кривой S
0: Дискретность уставки: 0.01 сек;
1: Дискретность уставки: 0.1 сек.
Заводская уставка: 0
*00-15
*00-16
*00-17
Частота ШИМ определяет частоту переключения транзисторов силового модуля и влияет на факторы
приведенные в нижеприведенной таблице.
Если нижний уровень ограничения частоты ШИМ больше верхнего уровня, то привод будет работать со
значением верхнего уровня.
При работе с "мягкой" ШИМ акустический шум будет менее раздражающим при тех же значениях
ШИМ.
Несущая частота будет
В таблице приведены положительные и отрицательные стороны той или иной частоты несущей
ШИМ, которые следует учитывать при выборе ее значения.
Верхний уровень ограничения частоты ШИМ Заводская уставка: 15 кГц
0: "мягкая" ШИМ
1…15 кГц
Нижний уровень ограничения частоты ШИМ Заводская уставка: 10 кГц
1…15 кГц
Центральная частота "мягкой" ШИМ Заводская уставка: 3 кГц
Возможные значения: 1…7 кГц
автоматически уменьшаться при увеличении температуры силового модуля.
Значение
fc, кГц
1
↨
15
Акустический
шум
существенный
↨
минимальный
Электромагнитные помехи
и токовые утечки
минимальные
↨
существенные
Динамические потери
в силовых транзисторах
преобразователя
минимальные
↨
существенные
Page 22
Руководство по эксплуатации преобразователей VFD-V стр. 22
Ч
астота
ШИМ
Pr.00-15
Pr.00-16
Зависимость несущей частоты ШИМ от выходной частоты
Pr.1-00
Выходная частота
*00-18
Автоматическое регулирование напряжения (Automatic Voltage
Заводская уставка: 0
Regulation (AVR))
Возможные значения: 0: Функция AVR разрешена;
1: Запрещена;
2: Запрещена на этапе замедления.
AVR функция позволяет автоматически поддерживать заданное максимальное выходное напряжение
(Pr.1-02), при повышении питающего напряжения сети. Например, если Pr.1-02 = 380В, то оно будет
поддерживаться неизменным при сетевом напряжении от примерно 380 до 460В, что очень
благоприятно сказывается на двигателе. При выключенной функции AVR выходное напряжение будет
изменяться вместе с изменением входного. Установка параметра со значением 2 позволит
быстрее
останавливать двигатель, если функция AVR разрешена.
*00-19
Автоматическое энергосбережение Заводская уставка: 00010
хххх0
хххх1
ххх0х
ххх1х
Функция энергосбережения запрещена;
Функция энергосбережения разрешена
Максимальной выходное напряжение эквивалентно входному
Максимальной выходное напряжение может быть выше входного (возможна
перемодуляция)
Выходное напряжение
100%
При разрешенной функции энергосбережения ПЧ
70% автоматически снижает выходное напряжение в случае
Выходное напряжение
Базовая частота
снижения нагрузки. При этом снижается ток двигателя
за счет реактивной составляющей. Максимальное
выходное напряжение может быть на 30 % ниже, чем
установленное выходное напряжение.
Page 23
Руководство по эксплуатации преобразователей VFD-V стр. 23
*00-20
Источник управления выходной частотой Заводская уставка: 0
Возможные
значения: 0: Ведущая частота задается с цифровой панели управления (пульт PU05);
1: Ведущая частота задается с последовательного интерфейса RS-485;
2: Ведущая частота задается с внешних аналоговых терминалов ACI, AVI, AUI;
3: Ведущая частота задается с внешних многофункциональных входов
(UP/Down);
4: Ведущая частота и направление задаются тактовыми импульсами с PG-карты;
5: Ведущая частота задается с посл. интерфейса RS-485 и с
пульта PU05;
6: Ведущая частота задается тактовыми импульсами с PG-карты, с установкой
направления вращения в Pr.10-12.
*00-21
Источник управления приводом Заводская уставка: 0
Возможные
значения: 0: RS-485 / цифровая панель управления (выбор кнопкой PU на пульте);
1: От внешних терминалов планки ДУ / цифровая панель управления (выбор
кнопкой PU на пульте);
2: Цифровая панель управления.
При управлении ПЧ от внешнего источника см. детальное объяснение функций группы 4.
*00-22
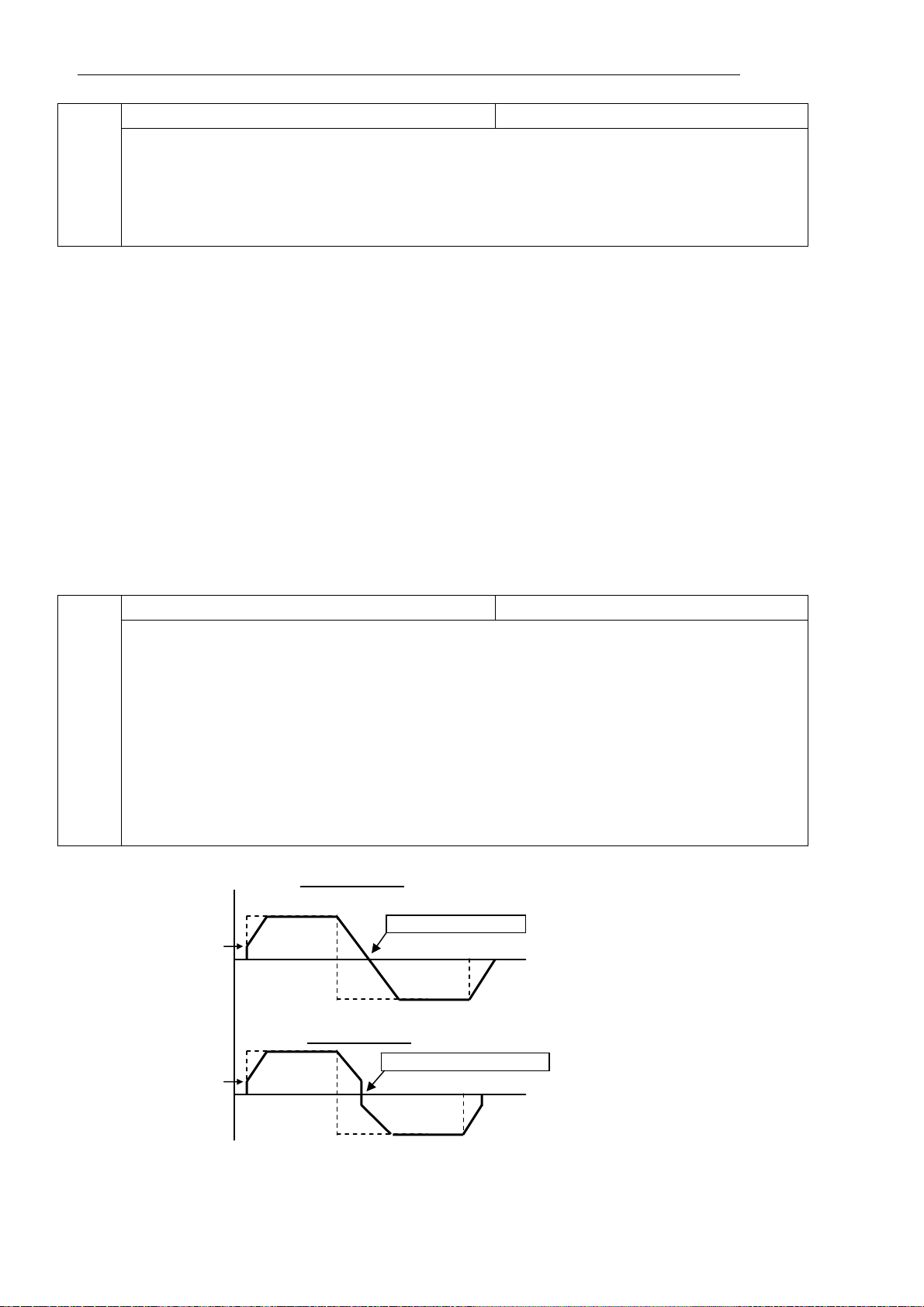
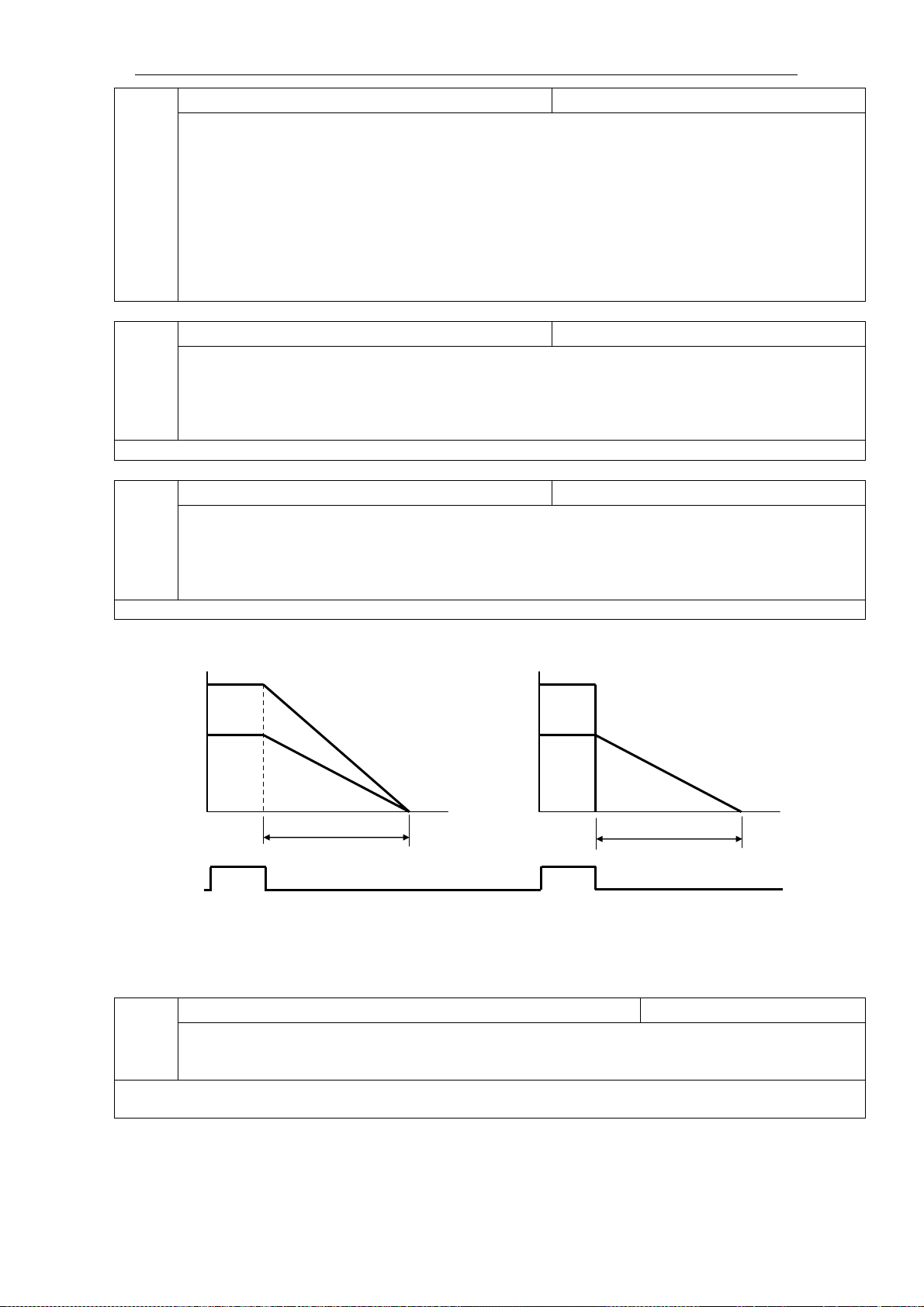
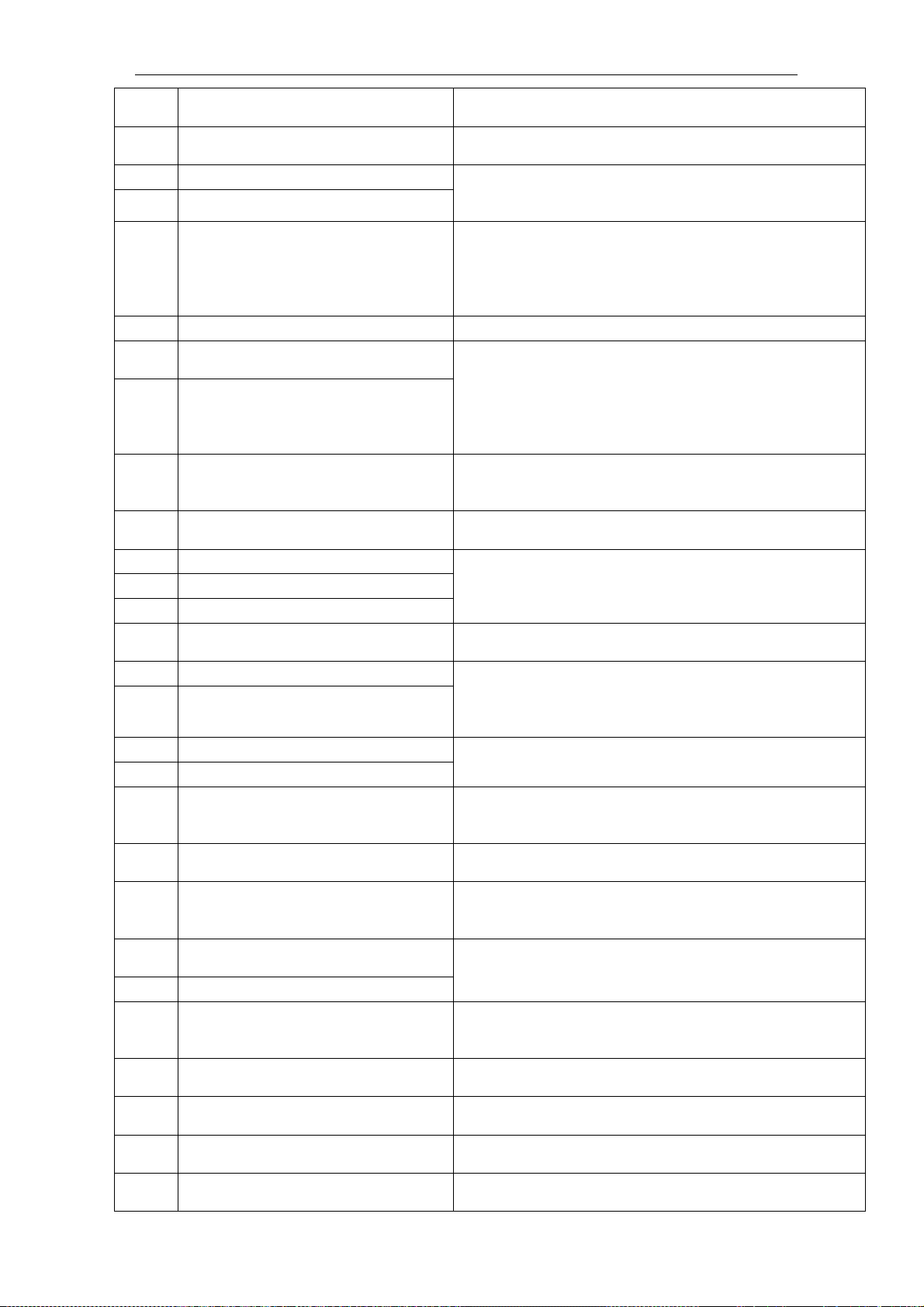
Способ остановки двигателя Заводская уставка: 0
Возможные
значения: 0: Остановка с замедлением выходной частоты (Pr.01-05) за время установленное
параметрами Pr.01-10 и Pr.01-12;
1: Остановка с моментальным обесточиванием двигателя и замедлением на
свободном выбеге.
Этот параметр определяет способ остановки двигателя после получения команды STOP.
Частота
Скорость
двигателя
Команда
торможения
Гц
ON
Ramp
Останов двигателя согласно
заданному времени.
Время
Время торможения
OFF
Частота
Скорость
двигателя
Гц
ON
Coast
Останов двигателя на выбеге.
Время
?
OFF
00-23
Блокировка изменения направления вращения Заводская уставка: 0
Возможные значения: 0: Реверс возможен;
1: Реверс заблокирован;
2: Прямое направление вращения (FWD) заблокировано.
Этот параметр позволяет предотвратить разрушение механизма от ошибочного изменения направления
вращения двигателя пользователем.
Page 24
Руководство по эксплуатации преобразователей VFD-V стр. 24
Группа 1: Основные параметры
01-00
Максимальная выходная частота Заводская уставка: 60.0/50.00
Диапазон установки: 50 … 400. Дискретность: 0.01 Гц
Этот параметр определяет максимальную выходную частоту ПЧ. Все входные аналоговые сигналы
(0 … +10В, 4 … 20мА) масштабируются, чтобы соответствовать диапазону выходной частоты ПЧ.
01-01
Базовая частота Заводская уставка: 60.0/50.00
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
Значение этого параметра должно быть установлено равным номинальной частоте, указанной на
шильдике двигателя. Значения параметров 01-01 и 01-02 определяют номинальный магнитный поток
двигателя через значение В*сек, например, если параметр 01-02 = 380В, а параметр 01-01 = 50Гц, то
380/50 = 7,66В*сек. 7,66В*сек это значение интеграла полуволны синусоидального напряжения 380В
50Гц, которое обеспечивает номинальный магнитный поток
двигателя, рассчитанного на номинальное
питание 380В 50Гц. Если задать настройки таким образом, что этот интеграл будет меньше 7,66, то
поток двигателя пропорционально уменьшится и, соответственно, пропорционально уменьшится
максимальный момент, который может развить двигатель. Если этот интеграл увеличивать, то вместе с
увеличением момента возникнет опасность технического насыщения стали магнитопровода двигателя.
При формировании
характеристики U от F учитывайте значение интеграла на характеристики
двигателя. Значение этого параметра должно быть больше промежуточных частот.
01-02
Максимальное выходное напряжение Заводская уставка: 440.0
Диапазон установки: 0.0 … 510 Дискретность: 0.1 В
Этот параметр определяет максимальное выходное напряжение ПЧ. Это напряжение должно
устанавливаться ≤ номинального напряжения, указанного на шильдике двигателя и более
промежуточных напряжений
01-03
Промежуточная частота 1 Заводская уставка: 0.5
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
01-04
Промежуточное напряжение 1 Заводская уставка: 10.0
Диапазон установки: 0.0 … 510 Дискретность: 0.1 В
01-05
Промежуточная частота 2 Заводская уставка: 0.5
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
01-06
Промежуточное напряжение 2 Заводская уставка: 10
Диапазон установки: 0.0 … 510. Дискретность: 0.1 В
01-07
Минимальная выходная частота Заводская уставка: 0.0
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
01-08
Минимальное выходное напряжение Заводская уставка: 0
Диапазон установки: 0.0 … 510. Дискретность: 0.1 В
Эти параметры устанавливает точки характеристики U/f. Значения этих параметров должны
распределяться следующим образом: Pr.1-01 ≥ Pr.1-03 ≥ Pr.1-05 ≥ Pr.1-07
От правильного формирования этой характеристики зависит КПД ПЧ и двигателя, нагрев ПЧ и
двигателя, возможности двигателя развить требуемый момент и преодолеть момент нагрузки, и,
наконец, работоспособность ПЧ. При неграмотной установке этих параметров возможны нарушения
работоспособности привода
и выход из строя преобразователя.
*01-09
Начальная выходная частота (Fstart) Заводская уставка: 0.5
Диапазон установки: 0.1 … 400. Дискретность: 0.01 Гц
Этот параметр устанавливает выходную частоту ПЧ, которая действует сразу после получения команды
пуска двигателя.
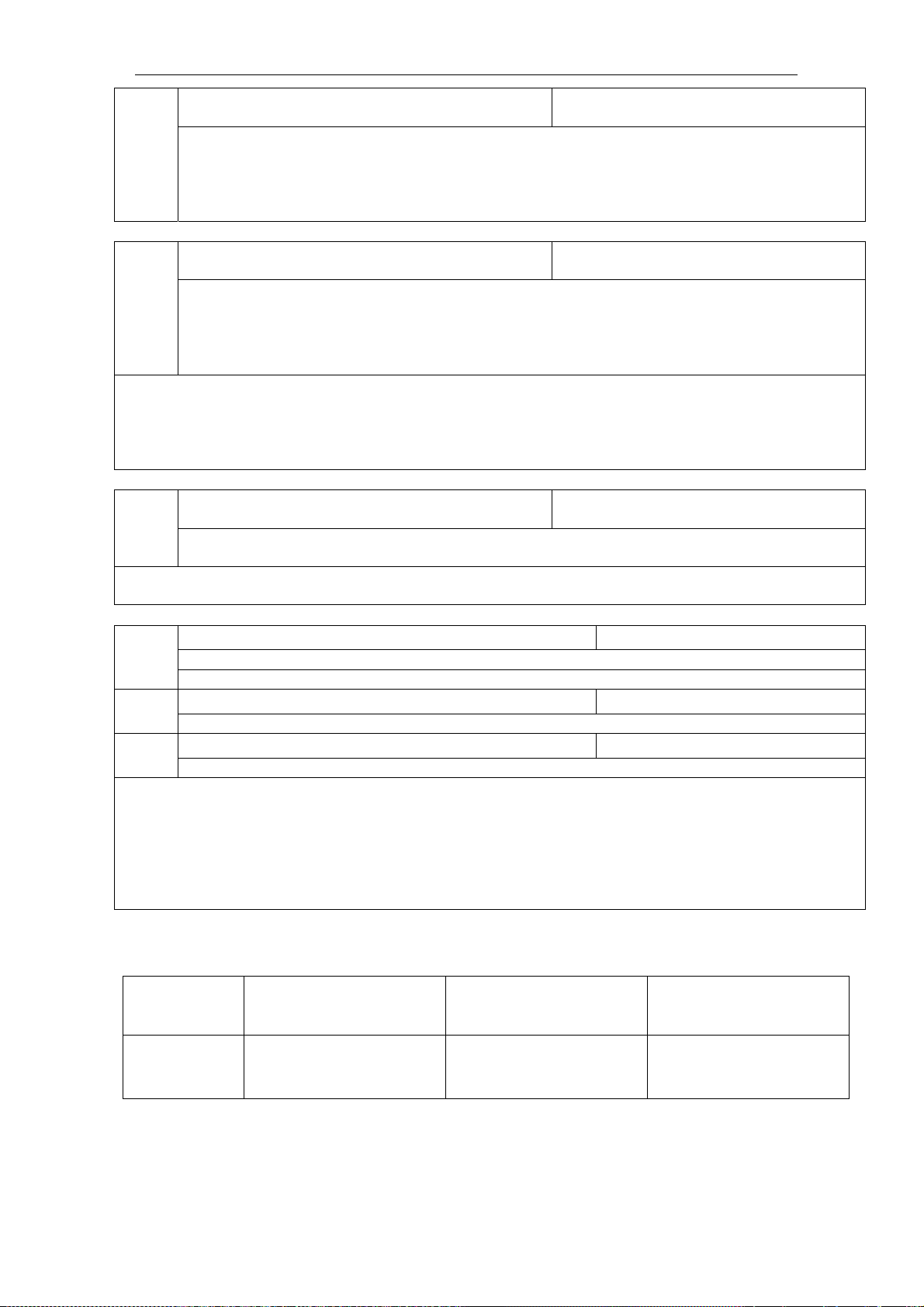
*01-10
Верхний уровень ограничения выходной частоты Заводская уставка: 100
Диапазон установки: 1 … 110. Дискретность: 1 %
*01-11
Нижний уровень ограничения выходной частоты Заводская уставка: 0
Диапазон установки: 0 … 100. Дискретность: 1 %
Page 25
Руководство по эксплуатации преобразователей VFD-V стр. 25
b
Верхнее/нижнее ограничение должно обеспечивать защиту от повреждения двигателя в случае
неправильной установки максимальной и минимальной частот. Реальная выходная частота ПЧ будет
находится в пределах верхнего и нижнего ограничений, не зависимо от ведущей частоты. Нижний
уровень должен быть ≤ верхнего уровня ограничения выходной частоты. Значение верхнего
ограничения выходной частоты = (Pr.01-00 X Pr.01-10)/100.
Типовая зависимость выходного напряжения от частоты U=f(F).
Pr.1-11
Напряжение
Pr.1-02
U
max
Pr.1-04
U
1
Pr.1-06
U
2
Pr.1-08
U
min
Нижняя граница
выходной частоты
Pr.1-07
F
min
Pr.1-09
F
start
Ограничения
Pr.1-10
Верхняя граница
выходной частоты
Pr.1-05
F
2
Pr.1-03
F
1
Pr.1-01
F
Частота
Pr.1-00
F
0 max
*01-12
*01-13
*01-14
*01-15
*01-16
*01-17
*01-18
*01-19
*01-20
*01-21
1-ое время разгона (Ta1)
1-ое время замедления (Td1)
2-ое время разгона (Ta2)
2-ое время замедления (Td2)
3-ое время разгона (Ta3)
3-ое время замедления (Td3)
4-ое время разгона (Ta4)
4-ое время замедления (Td4)
Время разгона JOG
Время замедления JOG
Заводская уставка:
10.00/60.00
Диапазон установки: 0.00 … 600/0.0 … 6000. Дискретность: 0.1 сек
Этот параметр можно изменять при работе привода
Pr.01-12. Этот параметр используется для задания времени нарастания выходной частоты ПЧ
от 0 до максимальной выходной частоты (Pr. 01-00). Темп нарастания частоты – линейный, если
функция S-образной кривой разгона запрещена.
Pr.01-13. Этот параметр используется для задания времени спада выходной частоты ПЧ от
максимальной выходной частоты (Pr. 01-00) до 0. Темп спада частоты – линейный, если функция Sобразной кривой разгона
запрещена.
Page 26
Руководство по эксплуатации преобразователей VFD-V стр. 26
Ч
2-ое, 3-ое и 4-ое время разгона/замедления определяет те же функции, что и 1-ое, только
настройки могут быть другие. Многофункциональные входные терминалы должны быть
запрограммированы на выбор 2-ого, 3-го и 4-го времени замыканием входных контактов. Смотри
Pr.02-01 … Pr.02-06.
На диаграмме, приведенной ниже, время разгона/замедления выходной частоты ПЧ – время
между 0 Гц
и максимальной выходной частотой (Pr. 01-00).
Частота
Макс.
выходная
частота
Pr. 1-00
Jog частота
Время
разгона
Pr.01-12
Pr.01-14
Pr.01-16
Pr.01-18
Pr.01-20
Время
замедл.
Pr.01-13
Pr.01-15
Pr.01-17
Pr.01-19
Pr.01-21
Время
*01-22
JOG функция (ползучая скорость) может быть выбрана с помощью входного терминала JOG или
клавиши JOG на цифровой панели управления. Когда JOG терминал замкнут ПЧ обеспечивает
нарастание выходной частоты от минимальной (Pr.01-09) до JOG частоты (Pr.01-22). Когда JOG
терминал разомкнут ПЧ замедляет выходную частоту до 0. Время разгона/замедления определяется
JOG временем (Pr.01-20, Pr.01-21). При работе ПЧ не может исполнять команду JOG. Во время
команды JOG ПЧ не может исполнять другие команды, кроме FORWARD, REVERSE и STOP с
цифровой панели управления.
JOG частота Заводская уставка: 6.00
Диапазон установки: 1.0 … 400. Дискретность: 0.01 Гц
Этот параметр можно изменять при работе привода
действия
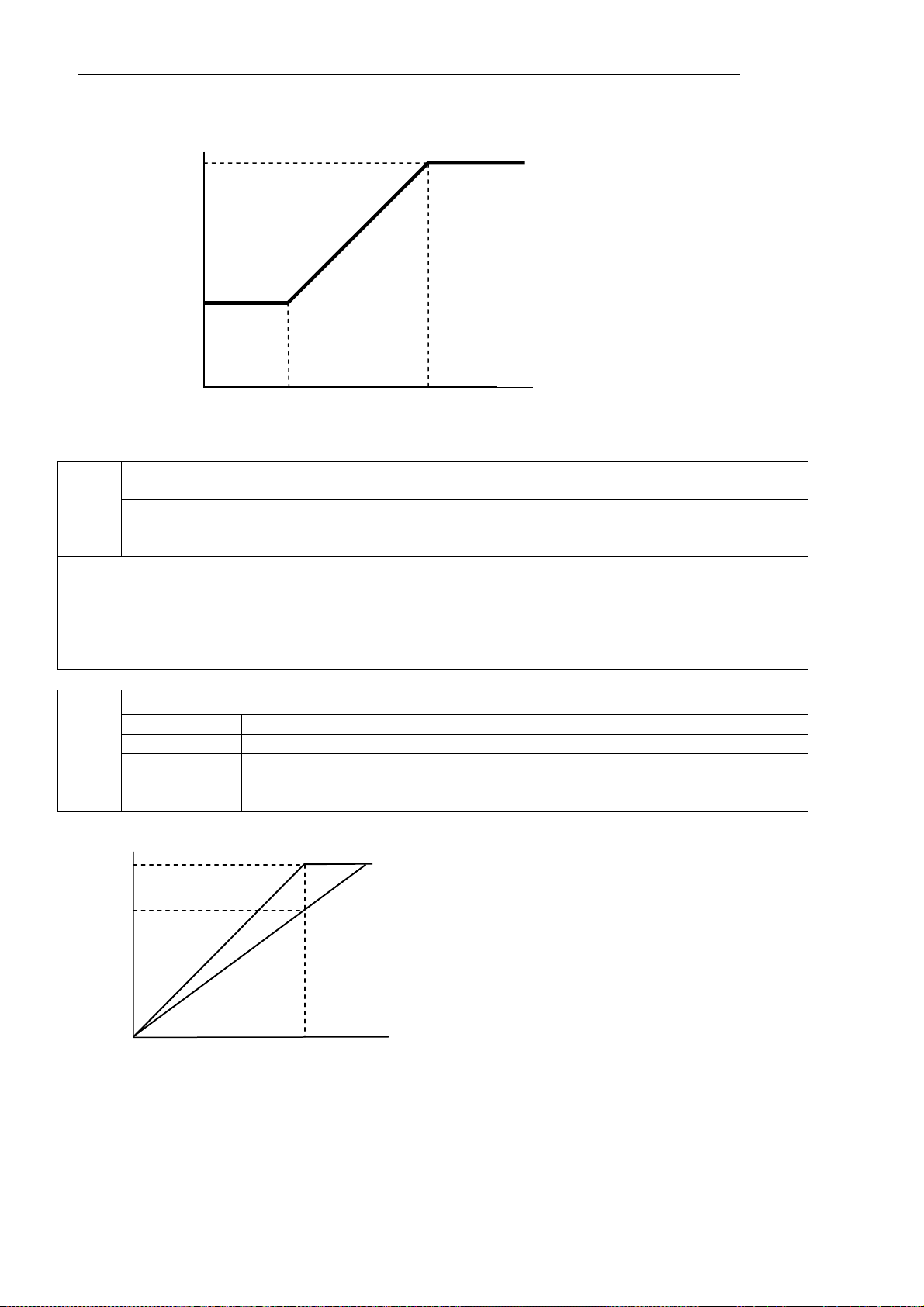
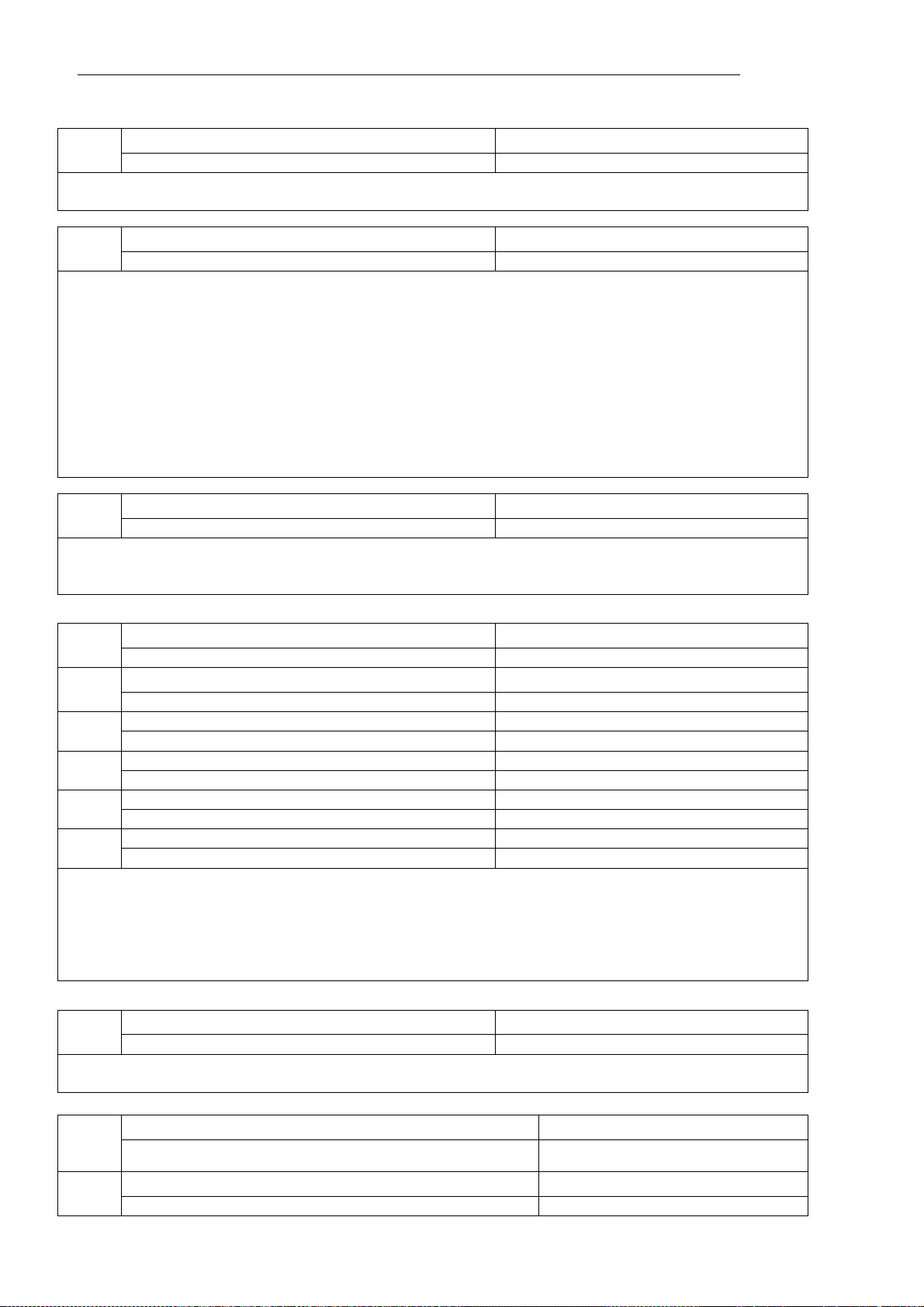
*01-23
Частота переключения 1-го/4-го времени
разгона/торможения
Диапазон установки: 0.0 … 400. Дискретность: 0.01 Гц
Этот параметр можно изменять при работе привода
Задается частота при достижении которой время разгона автоматически поменяется с 4-го на 1-е, а
время замедления - с 1-го на 4-е.
Внешние терминалы будут иметь приоритет при выборе времени разгона/замедления, если они
запрограммированы на эту функцию.
Заводская уставка: 0
Частота
Время
торм. 1
Время
торм. 4
Время
Pr. 01-23
астота
переключения
Время
разгона 1
Время
разгона 4
Page 27
Руководство по эксплуатации преобразователей VFD-V стр. 27
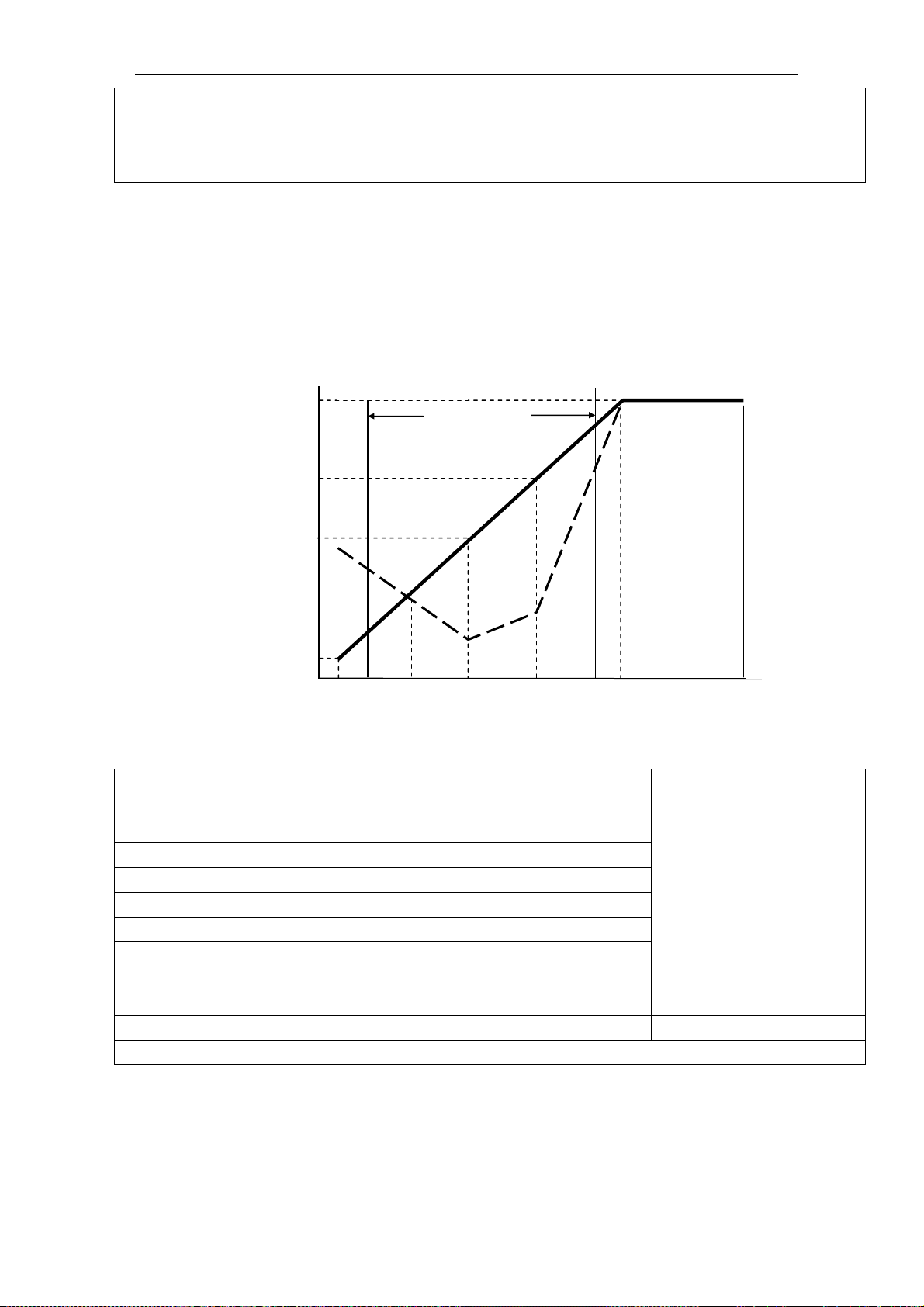
*01-24
*01-25
*01-26
*01-27
Время 1 S-характеристики разгона
Время 2 S-характеристики разгона
Время 1 S-характеристики замедления
Время 2 S-характеристики замедления
Диапазон установки: 0.00 … 25 сек/0.0….250 сек
Заводская уставка: 0
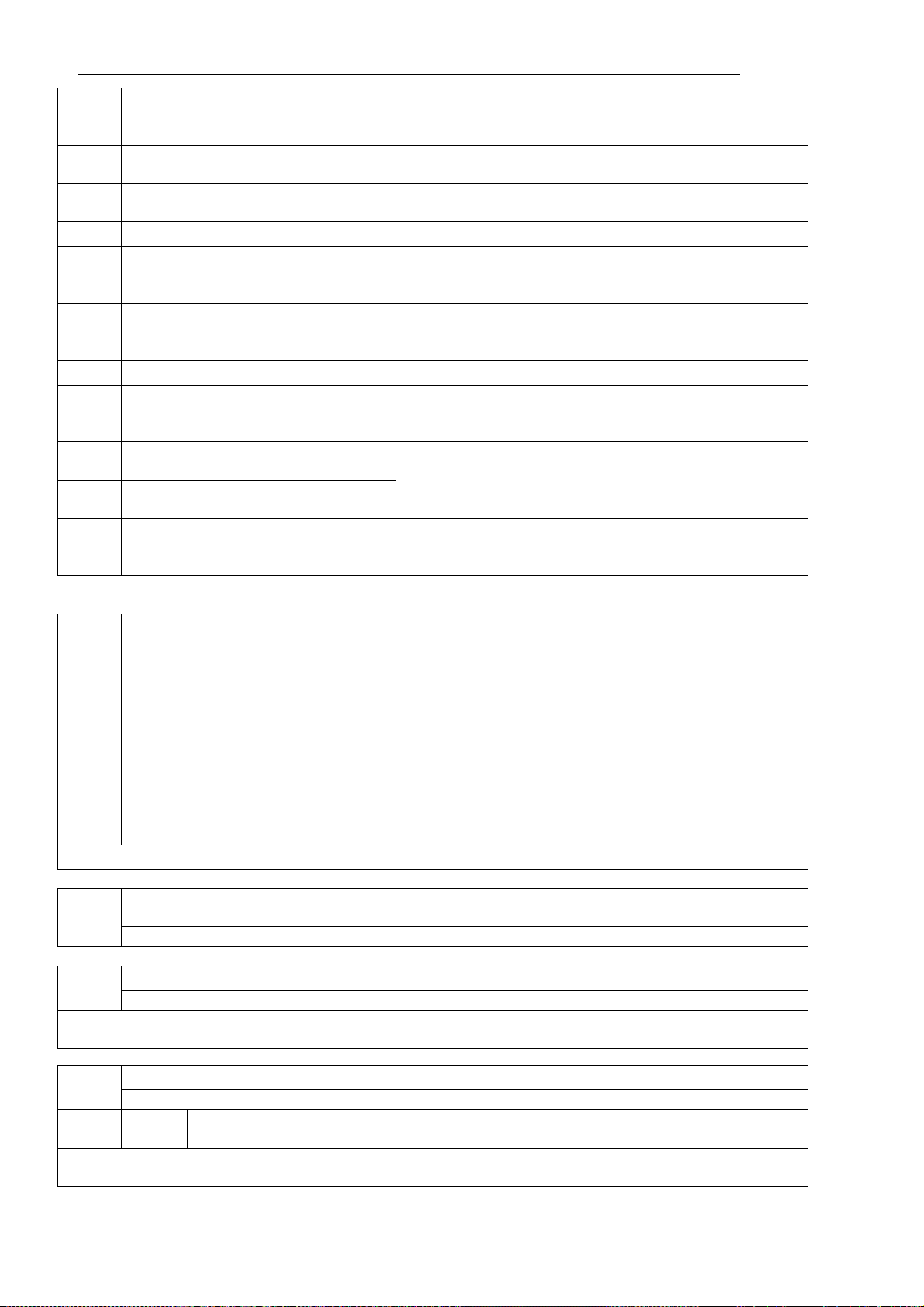
Эти параметры обеспечивают разгон/торможение при минимальном ускорении (dω/dt), т. е. сглаживают
траекторию ускорения/замедления. При активизации функции S-образной характеристики время
разгона/замедления численно не будут соответствовать значениям заданным параметрами Pr.01-09 …
Pr.01-12.
На диаграмме приведена S-образной кривая разгона/торможения.
Частота
Время
01-28
01-29
01-30
01-31
01-32
01-33
1-24 1-25
Верхняя граница пропускаемой частоты 1
Нижняя граница пропускаемой частоты 1
Верхняя граница пропускаемой частоты 2
Нижняя граница пропускаемой частоты 2
Верхняя граница пропускаемой частоты 3
Нижняя граница пропускаемой частоты 3
Диапазон установки: 0.0 … 400 Дискретность: 0.1 Гц
1-26 1-27
Заводская установка: 0.0
Эти параметры определяют пропускаемые частоты для предотвращения механического резонанса
механизма. ПЧ будет пропускать три диапазона выходной частоты. Значения параметров нижних
границ должны быть меньше соответствующих значений верхних границ.
Page 28
Руководство по эксплуатации преобразователей VFD-V стр. 28
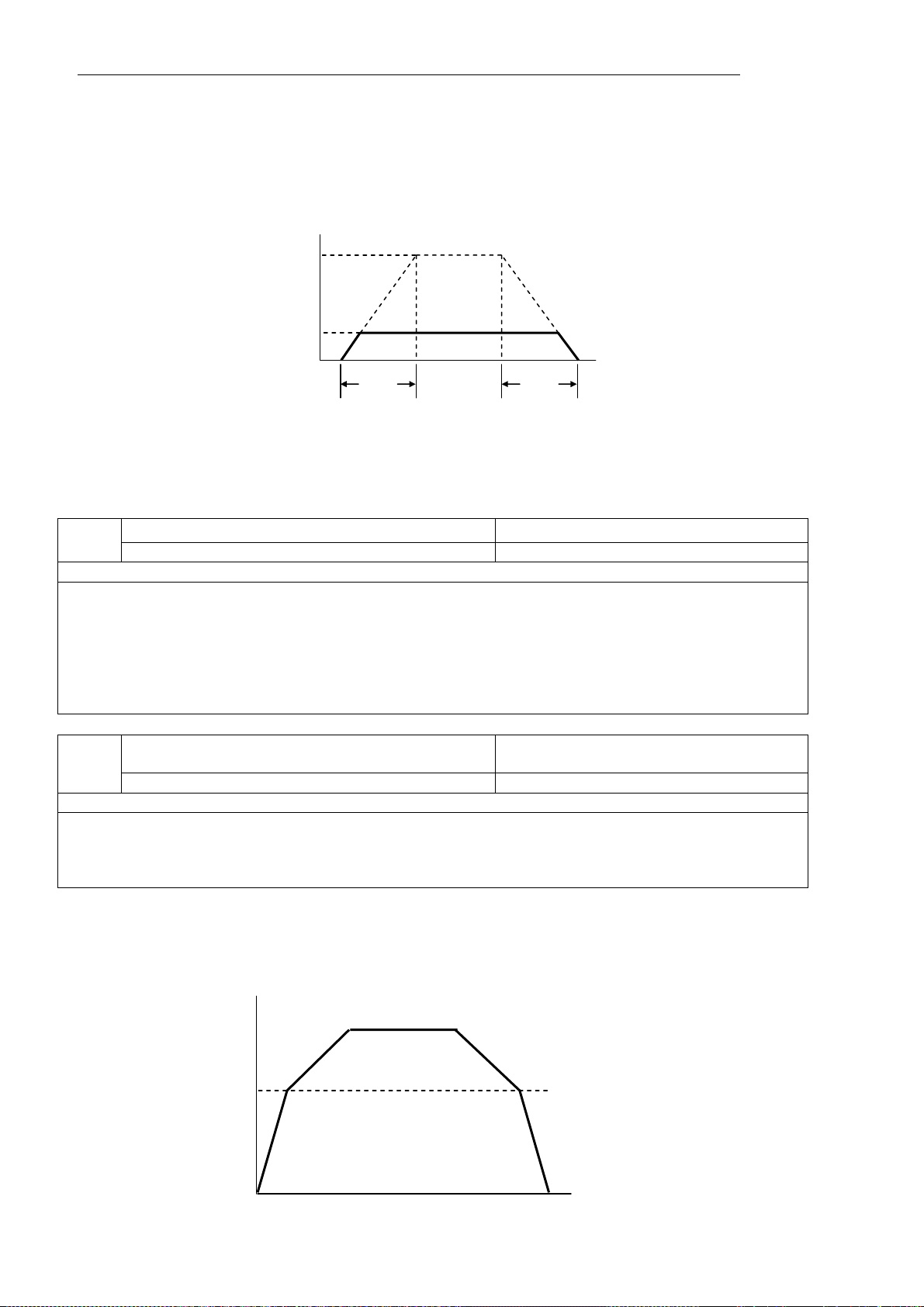
Группа 2: Параметры дискретных входов/выходов
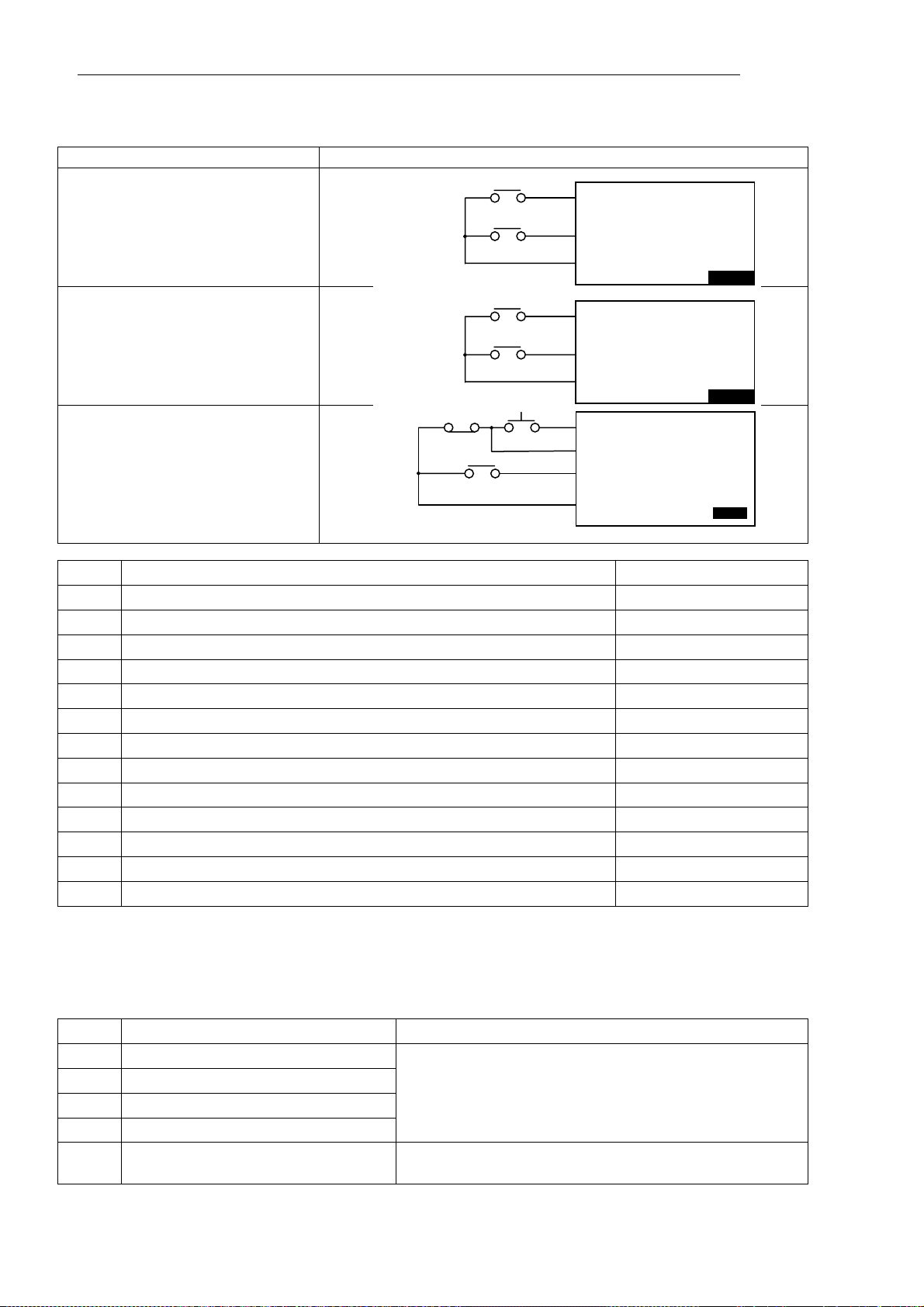
02-00
0: 2х-проводная схема (FWD / STOP
REV / STOP
1: 2х-проводная схема (
REV / STOP
).
FWD / STOP
) с блокировкой
линейного старта.
3: 2х-проводная схема (RUN / STOP
FWD/REV
4: 2х-проводная схема (
FWD/REV
).
RUN / STOP
) с блокировкой
линейного старта.
5: 3х-проводная схема (кнопки
без фиксации).
6: 3х-проводная схема (кнопки
без фиксации) с блокировкой
линейного старта.
Выбор схемы управления приводом от внешних терминалов
FWD / STOP
REV / STOP
RUN/ STOP
FWD/REV
STOP RUN
STOP RUN
FWD/REV
FWD: («Разомкнут»: STOP)
(«Замкнут»: FWD)
REV: («Разомкнут»: STOP)
(«Замкнут»: REV Run)
DCM
VFD-V
FWD: («Разомкнут»: STOP)
(«Замкнут»: RUN)
REV: («Разомкнут»: FWD)
(«Замкнут»: REV )
DCM
VFD-V
FWD: («Замкнут»: RUN)
EF/MI1: («Разомкнут»: STOP)
REV: («Разомкнут»: FWD)
(«Замкнут»: REV)
DCM
VFD-VV
02-01
02-02
02-03
02-04
02-05
02-06
02-23
02-24
02-25
02-26
02-27
02-28
02-29
02-30
Многофункциональный входной терминал 1 (МI1) Заводская уставка: 01
Многофункциональный входной терминал 2 (МI2) Заводская уставка: 02
Многофункциональный входной терминал 3 (МI3) Заводская уставка: 03
Многофункциональный входной терминал 4 (МI4) Заводская уставка: 04
Многофункциональный входной терминал 5 (МI5) Заводская уставка: 05
Многофункциональный входной терминал 6 (МI6) Заводская уставка: 10
Многофункциональный входной терминал 7 Заводская уставка: 00
Многофункциональный входной терминал 8 Заводская уставка: 00
Многофункциональный входной терминал 9 Заводская уставка: 00
Многофункциональный входной терминал 10 Заводская уставка: 00
Многофункциональный входной терминал 11 Заводская уставка: 00
Многофункциональный входной терминал 12 Заводская уставка: 00
Многофункциональный входной терминал 13 Заводская уставка: 00
Многофункциональный входной терминал 14 Заводская уставка: 00
Терминалы 1…6 расположены на планке дистанционного управления и активизируются сигналами на
соответствующих входах МI1 – МI6. Терминалы 7…14 являются виртуальными и могут быть
активизированы в Pr.2-10 (бит 8 - 15) с пульта PU05 или через RS-485.
Возможные значения параметров 02-01 …02-06 и 02-23 …02-30 и определяемые ими функции.
00 Нет функции Работа терминала заблокирована
01 Дискретное управление скоростью 1
02 Дискретное управление скоростью 2
03 Дискретное управление скоростью 3
Входные терминалы программируются на выполнение
функции дискретного управления скоростью. Значения
15-ти возможных предустановленных скоростей
(частот) задаются в параметрах 4-00…4-14.
04 Дискретное управление скоростью 4
05 Внешний сброс ошибки
Возвращает ПЧ в состояние готовности после
аварийной блокировки.
Page 29
Руководство по эксплуатации преобразователей VFD-V стр. 29
06 JOG-частота
07
Запрещение функции
разгона/замедления
08 Выбор 2 времени разг./замедл.
09 Выбор 3 времени разг./замедл.
10 Внешнее отключение (EF)
11 Запрещение векторного режима
12
13
14
15
Команда паузы (контакт норм.
открытый)
Команда паузы (контакт норм.
замкнутый)
Отмена функции автоматического
выбора времени разгона/замедления
Переключение между 1-м/2-м
двигателями
16 Задание скорости от входа AVI
17 Задание скорости от входа ACI
18 Задание скорости от входа AUI
19 Аварийный стоп
20 Увеличение ведущей частоты
21 Уменьшение ведущей частоты
22 Запуск PLC программы
23 Пауза PLC программы
24 Блокировка ПИД-регулятора
25 Сброс счетчика
26 Вход счетчика
27
JOG-скорость в прямом
направлении вращения
28 JOG-скорость в обр. напр. вращения
29 Сбой тормозного модуля.
30 Режим позиционирования
31
32
33
Запрещение функции управления от
платы PG
Переключение режимов управления
скоростью и моментом
Запрещение сохранения текущих
параметров в ПЗУ
Активизирует JOG-частоту (ползучую скорость)
значение которой задано в Pr. 1-02
Разгон или замедление прекращается и преобразователь
работает с постоянной выходной частотой
Происходит выбор соответствующей интенсивности
разгона/замедления. Когда активны обе функции
выбирается 4 время разг./замедл.
Если на входной терминал поступает данный сигнал,
двигатель мгновенно обесточивается, ПЧ блокируется, а
на дисплей выводится "E.F.". Если внешняя ошибка
устранена, то функционирование привода
восстанавливается подачей сигнала сброса (reset).
При получении команды ПАУЗА двигатель
моментально обесточивается (на дисплее b.b.) и
замедляется на свободном выбеге. Если команда
ПАУЗА не активна, привод стартует и начинает
синхронизировать выходную частоту преобразователя с
частотой вращения двигателя..
При замкнутом терминале будет линейный
разгон/замедление, а при разомкнутом – в соответствии
с Pr.01-13.
Использует когда ПЧ работает с разными двигателями в
режиме векторного управления
Данные функции определяют аналоговые входы (AVI,
ACI или AUI) по которым будет осуществляться
задание выходной частоты.
Если на входной терминал поступает данный сигнал,
двигатель мгновенно обесточивается, ПЧ блокируется
Многофункциональные входные терминалы
программируются на выполнение функции
увеличения/уменьшения частоты при каждом
поступлении команды.
Терминалы программируются для режима
автоматического пошагового управления (PLC).
При замыкании соответствующего терминала ПИДрегулирование прекращается и источником мастерчастоты становится сигнал выбранный в Pr.0-20
При замыкании соответствующего терминала
произойдет обнуление внутреннего счетчика
Вход счетчика может быть соединен с внешним
генератором импульсов для подсчета технологических
шагов или количества материала.
Выбирается направление вращения JOG-частоты
Если на входной терминал поступает сигнал о сбое
тормозного модуля, двигатель мгновенно
обесточивается.
Активизируется режим позиционирования при
использовании платы PG03/ PG04
Page 30
Руководство по эксплуатации преобразователей VFD-V стр. 30
Замещение функции нулевой
34
скорости функцией торможения
постоянным током
35
Запрещение функции параметров
Pr.4-35, 4-36
36 Режим позиционирования 2
Применяется для уменьшения вибрации, когда
двигатель не соответствует преобразователю.
Активизируется режим позиционирования по тактовым
импульсам на входе CH2 платы PG04
37 Запрещение "спящего" режима
При замыкании соответствующего терминала привод
38 Стоп привода
будет остановлен, а при размыкании работа привода
возобновится
Активизируется режим автоматического
позиционирования по 8 заданным точкам (при
использовании платы PG04)
39
Режим автоматического управления
позиционированием (P2P)
40 Пауза в режиме P2P
При замыкании соответствующего терминала привод
41 Поиск начальной позиции (FWD)
выйдет в позицию установленную в Pr.10-09. Вращение
будет осуществляться в прямом направлении.
42
43
Вход датчика крайнего положения в
направлении FWD в режиме P2P
Вход датчика крайнего положения в
направлении REV в режиме P2P
При замыкании соответствующего терминала двигатель
будет остановлен на свободном выбеге
При замыкании соответствующего терминала привод
44 Поиск начальной позиции (REV)
выйдет в позицию установленную в Pr.10-09. Вращение
будет осуществляться в реверсивном направлении.
*02-07
Способ изменения скорости от терминалов UP/DOWN Заводская уставка: 0
Возможные
значения: 1: Скорость от терминалов UP/DOWN изменяется в соответствие с заданным
временем разгона/замедления.
2: Скорость от терминала UP увеличивается с фиксированным темпом, заданным
в Pr. 2-11, а от терминала DOWN изменяется в соответствие с заданным временем
замедления.
3: Скорость от терминала DOWN уменьшается с фиксированным темпом,
заданным в Pr. 2-11, а от UP изменяется в соответствие с заданным временем
разгона.
4: Скорость от терминалов UP/DOWN изменяется с фиксированным темпом,
заданным в Pr. 2-11.
Максимальный темп разгона / замедления 10 Гц/сек.
*02-08
Фиксированный темп разгона/замедления при управлении
Заводская уставка: 0.01
приводом от кнопок на терминалах UP/DOWN.
Диапазон установки: 0.01 … 1 Гц/мсек Дискретность: 0.01Гц/мсек
*02-09
Время опроса входных цифровых терминалов Заводская уставка: 0.005
Диапазон установки: 0.001 … 30.000 сек Дискретность: 1мс
Этот параметр используется для исключения передачи помех от входных цифровых терминалов
(исключение "дребезга" контактов).
*02-10
Текущий логический уровень на дискретных входах Заводская уставка: 0
Диапазон установки: 0…65535
0 Низкий активный уровень (контакт разомкнут) бит
0…15
1 Высокий активный уровень (контакт замкнут)
Этот параметр отображает и определяет уровень на дискретных входных терминалах MI1- MI6 и
виртуальных входах 7 – 14.
Page 31

Руководство по эксплуатации преобразователей VFD-V стр. 31
*02-11
Многофункциональный выходной терминал1 RA, RB, RC
Заводская уставка: 0
(реле1)
*02-12
Многофункциональный выходной терминал 2 МRA, MRC
Заводская уставка: 0
(реле2)
*02-13
*02-14
Многофункциональный выходной терминал 3 МО1 Заводская уставка: 0
Многофункциональный выходной терминал 4 МО1 Заводская уставка: 0
00 Нет функции Работа терминала заблокирована
01 Привод работает
Индикация работы преобразователя по
наличию выходного напряжения
02 Заданная частота 1 достигнута
03 Заданная частота 2 достигнута
04
05
06
07
10 Нулевая скорость
Сигнальная частота 1 достигнута (двухсторонняя
индикация)
Сигнальная частота 1 достигнута (односторонняя
индикация)
Сигнальная частота 2 достигнута (двухсторонняя
индикация)
Сигнальная частота 3 достигнута (односторонняя
индикация)
Терминал будет активизирован при
выходной частоте < минимальной частоты
11 Обнаружение перегрузки OL2 см. Pr.6-08
12
13 ПЧ готов к работе
Индикация отключения ПЧ внешней командой
паузы (b.b.)
Терминал активизирован, если на ПЧ
подано питание и не обнаружено аварии
14 Индикация пониженного напряжения (LU) см. Pr.6-00
15 Индикация аварии
16 Индикация ДУ
Терминал активизирован если ПЧ
управляется через входные терминалы
17 PLC программа запущена
18 Программа PLC приостановлена
19 Шаг PLC программы выполнен
20 Программа PLC выполнена
21 Предельное значение счетчика достигнуто см. Pr.2-16
22 Предварительное значение счетчика достигнуто см. Pr.2-17
23 Предупреждение о перегреве радиатора
Терминал будет активизирован при
температуре радиатора > Pr.6-15)
24 Выходная частота достигла заданного значения 1
25 Выходная частота достигла заданного значения 2
26
27
28
29
Предустановленная частота 1 достигнута
(двухсторонняя индикация)
Предустановленная частота 1 достигнута
(односторонняя индикация)
Предустановленная частота 2 достигнута
(двухсторонняя индикация)
Предустановленная частота 3 достигнута
(односторонняя индикация)
Выход активизируется в режиме
30 Сигнал включения тормозного прерывателя
торможения, когда напряжение на шине DC
превысит значение Pr.7-00
31 Заданное положение достигнуто
Page 32

Руководство по эксплуатации преобразователей VFD-V стр. 32
32-47 Индикация текущего шага программы PLC
48-63
64
65
Индикация текущей дискретной скорости
пошагового режима работы
Потеря сигнала обратной связи по скорости (PG
Fault)
Низкое значение сигнала обратной связи по
скорости (PG Stall)
Выход активизируется при
соответствующем шаге (0-15) режима PLC
Выход активизируется при
соответствующем шаге (0-15) пошагового
режима
69 Обнаружение перегрузки OL3 см. Pr.6-09
70 Нулевая скорость (стоп)
71 Заданная позиция 1 достигнута см. Pr.10-10
72 Заданная позиция 2 достигнута см. Pr.10-23
Примечание. При наличии или достижении состояния, соответствующего выбранному значению,
соответствующий выходной терминал принимает активное состояние.
*02-15
Выбор активного логического уровня
Заводская уставка: 0
многофункциональных выходов (реле1, реле2,
МО1, МО2)
Диапазон установки: 0…15
0 Низкий активный уровень (контакт нормально разомкнут) бит
0…3
1 Высокий активный уровень (контакт нормально замкнут)
В таблице даны варианты установки параметра для получения заданного логического состояния
дискретных выходов (NO- контакт нормально разомкнутый; NС- контакт нормально замкнутый).
Значение
параметра
Содержание
битов
Реле 1
(Pr.3-07)
Реле 2
(Pr.3-08)
MO1
(Pr.3-09)
MO2
(Pr.3-10)
0 0000 NO NO NO NO
1 0001 NO NO NO NC
2 0010 NO NO NC NO
3 0011 NO NO NC NC
4 0100 NO NC NO NO
5 0101 NO NC NO NC
6 0110 NO NC NC NO
7 0111 NO NC NC NC
8 1000 NC NO NO NO
9 1001 NC NO NO NC
10 1010 NC NO NC NO
11 1011 NC NO NC NC
12 1100 NC NC NO NO
13 1101 NC NC NO NC
14 1110 NC NC NC NO
15 1111 NC NC NC NC
*02-16
Предельное значение счетчика Заводская уставка: 0
Диапазон установки: 0 … 65500. Дискретность: 1
Параметр определяет предельное значение внутреннего счетчика. Внутренний счетчик может быть
запущен с внешнего терминала TRG. При достижении счетчиком заданного предельного значения,
соответствующий выходной терминал будет активизирован (Pr.02-11, Pr.02-14=21) и затем счет
начнется заново.
*02-17
Предварительное значение счетчика Заводская уставка: 0
Диапазон установки: 0 … 65500. Дискретность: 1
Когда значение счетчика увеличилось от "1" до заданного значения этого параметра,
соответствующий многофункциональный выход будет замкнут, если установлен в 22. Временная
диаграмма показана ниже:
Page 33

Руководство по эксплуатации преобразователей VFD-V стр. 33
0,5мс
Дисплей
Pr.0-04= 07
Сигнал счетного триггера на многофункц. входном
Выходной сигнал (Pr.2-12= 22)
достижения счетчиком (Pr.2-16=3)
предварительного значения
Выходной сигнал (Pr.2-13= 21)
достижения счетчиком (Pr.2-17=5)
предельного значения
терминале
0,5мс
Длительность импульса долж-на
быть более 0,5 мс (<2000 Гц)
*02-18
Коэффициент цифрового выхода частоты Заводская уставка: 1
Диапазон установки: 1 … 40. Дискретность: 1
Этот параметр определяет коэффициент передачи фактической выходной частоты для частоты
импульсов, выводимой на терминалы (DFM-DCM). Частота импульсов на терминалах равна
выходной частоте ПЧ, умноженной на значение параметра Pr.02-18.
*02-19
Сигнальная частота 1 Заводская уставка: 60/50
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
*02-20
Диапазон определения сигнальной частоты 1 Заводская уставка: 2
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
*02-21
Сигнальная частота 2 Заводская уставка: 60/50
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
*02-22
Диапазон определения сигнальной частоты 2 Заводская уставка: 2
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
Если многофункциональный вых. терминал запрограммирован на функцию индикации достижения
сигнальной частоты (Pr.02-10 … 02-13 = 2-7 или 24-27), то соответствующие терминалы будут
активизированы при достижении, заданном параметрами 02-19, 02-21, частоты в диапазоне, заданном
параметрами 02-20, 02-22.
Pr.2-20,
Pr.2-22
Pr.2-11…14 = 2, 3
Заданная
частота
Pr.2-20,
Pr.2-22
Pr.2-20,
Pr.2-22
Заданная
частота
Pr.2-11…14 = 4, 6
Pr.2-19,
Pr.2-21
Pr.2-20,
Pr.2-22
Pr.2-19,
Pr.2-21
Pr.2-20,
Pr.2-22
Pr.2-11…14 = 5, 7
Page 34

Руководство по эксплуатации преобразователей VFD-V стр. 34
Группа 3: Параметры аналоговых входов/выходов
*03-00
*03-01
*03-02
Возможные значения параметров 03-00 …03-02 и определяемые ими функции.
0
1
2
3
4
5
6
7
8
9 Дополнительное задание частоты по AVI
10 Дополнительное задание частоты по ACI
11 Дополнительное задание частоты по AUI
12
13
*03-03
Этот параметр можно изменять при работе привода. Он устанавливает начальное значение
управляющего напряжения, соответствующее минимальному значению выходной частоты
преобразователя (0Гц).
*03-04
Этот параметр можно изменять при работе привода. Он устанавливает начальное значение
управляющего тока, соответствующее минимальному значению выходной частоты преобразователя (0
Гц).
03-05
Этот параметр можно изменять при работе привода. Он устанавливает начальное значение
управляющего напряжения, соответствующее минимальному значению выходной частоты
преобразователя (0Гц).
*03-06
*03-07
*03-08
Аналоговый входной терминал 1 (AVI) Заводская уставка: 1
Аналоговый входной терминал 2 (ACI) Заводская уставка: 0
Аналоговый входной терминал 3 (AUI) Заводская уставка: 0
Нет функций
Задание частоты/момента
Ограничение момента (Pr.6-12)
Регулировка времени разгона/замедления
Установка верхнего ограничения задания частоты (Pr.1-10)
Уровень тока перегрузки (Pr.6-07)
Величина компенсации момента (Pr.5-03/ Pr.5-13)
Уровень предотвращения сверхтока во время работы (Pr.6-04)
Величина компенсации момента в векторном режиме
Смещение ПИД-регулятора
Дополнительная мастер-частота
Начальное смещение управляющего сигнала по входу AVI Заводская уставка: 0.00
Диапазон установки: -10.00… +10.00 Дискретность: 0.01В
Начальное смещение управляющего сигнала по входу AСI Заводская уставка: 4.00
Диапазон установки: 0.00…20.00 мА Дискретность: 0.01мА
Начальное смещение управляющего сигнала по входу AUI Заводская уставка: 0.00
Диапазон установки: -10.00… +10.00 Дискретность: 0.01В
Разрешение реверса управляющим сигналом по входу AVI Заводская уставка: 0
Возможные значения: 0: возможно положительное и отрицательное направление вращения;
1: только прямое направление вращения (FWD);
2: только обратное направление вращения (REV);
3: абсолютные значения прямого и обратного направлений.
Разрешение реверса управляющим сигналом по входу AСI Заводская уставка: 0
Возможные значения: 0: возможно положительное и отрицательное направление вращения;
1: только прямое направление вращения (FWD);
2: только обратное направление вращения (REV);
3: абсолютные значения прямого и обратного направлений.
Разрешение реверса управляющим сигналом по входу AUI Заводская уставка: 0
Возможные значения: 0: возможно положительное и отрицательное направление вращения;
1: только прямое направление вращения(FWD);
2: только обратное направление вращения (REV);
3: абсолютные значения прямого и обратного направлений.
Page 35

Руководство по эксплуатации преобразователей VFD-V стр. 35
Передаточные характеристики при разных значениях параметров Pr.3-06…3-08
F, Гц
F, Гц
F, Гц
F, Гц
-10В
REV
Pr.3-06…3-08 = 0
FWD
-10В
10В
Pr.3-06…3-08 = 1
10В
FWD
-10В
REV
Pr.3-06…3-08 = 2
10В
-10В
Pr.3-06…3-08 = 3
*03-09
Коэффициент передачи выходной частоты к управляющему
Заводская уставка: 100
сигналу по входу AVI
Диапазон установки: -500 … 500% Дискретность: 1%
*03-10
Коэффициент передачи выходной частоты к управляющему
Заводская уставка: 125
сигналу по входу ACI
Диапазон установки: -500 … 500% Дискретность: 1%
*03-11
Коэффициент передачи выходной частоты к управляющему
Заводская уставка: 100
сигналу по входу AUI
Диапазон установки: -500 … 500% Дискретность: 1%
Параметры Pr.3-09…3-11 определяют величину наклона передаточной характеристики.
*03-12
Разрешение сложения сигналов задания с аналоговых входов Заводская уставка: 0
Возможные значения: 0: сложение запрещено;
1: сложение разрешено.
Этот параметр устанавливает возможность сложения сигналов с аналоговых входов AVI, ACI и AUI.
При запрещении сложения приоритет входов следующий: AVI > ACI > AUI.
Ниже приведены примеры формирования различных передаточных характеристик.
Пример 1:
FWD
10В
60 Гц
Pr.3-03 = 0 В
Pr.3-06 = 0
Pr.3-09 = 100 %
10 В
Пример 2:
0 В
60 Гц
Pr.3-03 = 1 В
Pr.3-06 = 1
Pr.3-09 = 10В/8В = 125 %
0 1В
9В 10 В
Page 36

Руководство по эксплуатации преобразователей VFD-V стр. 36
Пример 3:
Пример 4:
Пример 5:
60 Гц
10 Гц
60 Гц
10 Гц
60 Гц
0
0
Pr.3-06 = 1
Pr.3-09 = (50Гц/9В) / (60Гц/10В) х 100 = 92.5 %
Pr.3-03 = -1.8В
50/9 = 60/Х ⇒ Х=10.8 ⇒ Pr.3-03 = 9 -10.8 = -1.8
9В 10 В
Pr.3-06 = 1
Pr.3-09 = (50Гц/10В) / (60Гц/10В) х 100 = 83.3 %
Pr.3-03 = -2В
50/10 = 60/Х ⇒ Х=12 ⇒ Pr.3-03 = 9 -12 = -2
10 В
Pr.3-03 = 1 В
Pr.3-06 = 1
Pr.3-09 = (60Гц/9В) / (60Гц/10В) х 100 = 111.1 %
0 1В
10 В
Пример 6:
60 Гц
30 Гц
0
Pr.3-03 = 0В
Pr.3-06 = 0
Pr.3-09 = (60Гц/9В) / (60Гц/10В) х 100 = 111.1 %
10 В
Пример 7:
0 В
60 Гц
5 В
Pr.3-03 = 5В
Pr.3-06 = 3
Pr.3-09 = (120Гц/20В) / (60Гц/10В) х 100 = 100 %
10 В
Page 37

Руководство по эксплуатации преобразователей VFD-V стр. 37
Пример 8:
60 Гц
Pr.3-03 = 10В
Pr.3-06 = 0
Pr.3-09 = -100 %
Пример 9:
0 В
Пример 10:
60 Гц
REV
60 Гц
0 В
FWD
5 В
60 Гц
FWD
10 В
Pr.3-03 = 5В
Pr.3-06 = 0
Pr.3-09 = (120Гц/10В) / (60Гц/10В) х 100 = 200 %
10 В
Pr.3-05 = 0В
Pr.3-08 = 0
Pr.3-09 = (120Гц/20В) / (60Гц/10В) х 100 = 100 %
-10 В
5 В
REV
60 Гц
10 В
*03-13
Постоянная времени фильтра сигналов на аналоговых входах Заводская уставка: 0.10
Диапазон установки: 0.00…2.00 сек Дискретность: 0.01сек
Этот параметр позволяет исключить помехи в сигнале на аналоговых входных терминалах. Чем выше
постоянная времени фильтра, тем лучше фильтрация, но больше время передачи сигнала.
*03-14
Реакция преобразователя на неверное значение сигнала по
Заводская уставка: 0
входу ACI
Возможные значения: 0: нет реакции;
1: продолжение работы по последней правильной команде;
2: замедление до 0 Гц;
3: немедленный останов с выводом на дисплей сообщения «EF».
Этот параметр определяет поведение привода при потере сигнала по входу ACI.
Page 38

Руководство по эксплуатации преобразователей VFD-V стр. 38
*03-15
Выбор параметра, выводимого аналоговым напряжением
0 …10В по выходу AFM-ACM
Возможные
значения: 0: Измерение вых. частоты (от 0 до макс. вых. частоты);
1: Заданная частота (от 0 до макс. частоты);
2: Вых. скорость двигателя (от 0 до макс. частоты);
3: Измерение вых. тока (от 0 до 100% номинального);
4: Вых. напряжение (от 0 до максимума);
5: Напряжение на шине DC (800В = 100%);
6: Коэффициент мощности (от Cosθ=90° до Cosθ=0°);
7: Мощность (ном. мощность ПЧ = 100%);
8: Момент (от 0 до максимума);
9: Сигнал на AVI (0…10В = 0…100%);
10: Сигнал на ACI (0…20мА = 0…100%);
11: Сигнал на AUI (-10…+10В = 0…100%);
12: Сигнал текущего момента (ном. ток ПЧ = 100%);
13: Оценка текущего момента (ном. ток ПЧ = 100%);
14: Ток намагничивания (ном. ток ПЧ = 100%);
15: Магнитный поток (ном. ток ПЧ = 100%);
16: Напряжение по оси q (400В=100%);
17: Напряжение по
оси d (400В=100%);
18: Измеренная ошибка векторного регулятора (от 0 до макс. вых. частоты);
19: Текущая ошибка ПИД-регулятора (от 0 до макс. вых. частоты);
20: Ошибка ПИД-регулятора (от 0 до макс. вых. частоты);
21: Полная ошибка ПИД-регулятора (от 0 до макс. вых. частоты);
22: Сигнал задания момента (Полный момент = 100%);
23: Частота измеренная импульсным датчиком скорости (Pr1.00=100%);
Сигнал напряжения (400В=100%).
24:
Заводская уставка: 0
*03-16
Масштаб аналогового напряжения Заводская уставка: 100
Диапазон установки: -900.0 … 900.0 Дискретность: 0.1%
Параметр устанавливает диапазон напряжения на терминале AFM. Аналоговое напряжение на этом
выходе прямопропорционально измеряемой величине. С помощью этого параметра можно изменить
масштаб выходного напряжения на выводе AFM по отношению к измеряемой величине. Расчет
значения параметра производится по формуле Pr.03-16 = Uмакс х 10%. Например, если требуется чтобы
Uмакс было равно 5В, то значение параметра должно
быть 50%.
AFM ACM
Аналоговый вольтметр
*03-17
Напряжение смещения сигнала на аналоговом выходе Заводская уставка: 0.00
Диапазон установки: -10.00… +10.00 Дискретность: 0.01В
Этот параметр можно изменять при работе привода.
*03-18
Разрешение отрицательных сигналов на аналоговом выходе Заводская уставка: 0
Возможные
значения: 0: Абсолютные значения;
1: При реверсе – на аналоговом выходе 0В;
2: При реверсе – на аналоговом выходе отрицательное напряжение.
Page 39

Руководство по эксплуатации преобразователей VFD-V стр. 39
Группа 4: Параметры дискретного управления скоростью и режима PLC
(автоматического пошагового управления)
4-00
4-01
4-02
4-03
4-04
4-05
4-06
4-07
4-08
4-09
4-10
4-11
4-12
4-13
4-14
Частота 1-ого шага
Частота 2-ого шага
Частота 3-ого шага
Частота 4-ого шага
Частота 5-ого шага
Частота 6-ого шага
Частота 7-ого шага
Частота 8-ого шага
Заводская уставка: 0.0
Частота 9-ого шага
Частота 10-ого шага
Частота 11-ого шага
Частота 12-ого шага
Частота 13-ого шага
Частота 14-ого шага
Частота 15-ого шага
Диапазон установки: 0.00 … 400 Дискретность: 0.01Гц
Эти параметры могут быть установлены в процессе работы привода.
Многофункциональные входные терминалы (см. параметры 2-01 … 2-06) используются для выбора
предустановленных параметрами 4-00 … 4-14 выходных частот ПЧ.
Выходная частота
Мастер-частота
Сигнал RUN
1-й шаг скорости многофункц.
терминала Pr.02-01 – 02-06
(MI1 – MI16)
2-й шаг скорости многофункц.
терминала Pr.02-01 – 02-06
(MI1 – MI16)
3-й шаг скорости многофункц.
терминала Pr.02-01 – 02-06
(MI1 – MI16)
4-й шаг скорости многофункц.
терминала Pr.02-01 – 02-06
(MI1 – MI16)
JOG частота
04-07
04-06
04-05
04-04
04-03
04-02
04-01
04-00
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
ON ONONONON ONON ON
ON ON ON ON
04-08
04-09
04-10
04-11
04-12
04-13
04-14
ON
ON ON
ON
Дискретное управление скоростью через терминалы ДУ
JOG-частота
01-22
ON
Page 40

Руководство по эксплуатации преобразователей VFD-V стр. 40
4-15
4-16
4-17
4-18
4-19
4-20
4-21
4-22
4-23
4-24
4-25
4-26
4-27
4-28
4-29
4-30
Длительность работы на мастер-частоте
Длительность шага 1-ой скорости
Длительность шага 2-ой скорости
Длительность шага 3-ой скорости
Длительность шага 4-ой скорости
Длительность шага 5-ой скорости
Длительность шага 6-ой скорости
Длительность шага 7-ой скорости
Длительность шага 8-ой скорости
Длительность шага 9-ой скорости
Длительность шага 10-ой скорости
Длительность шага 11-ой скорости
Длительность шага 12-ой скорости
Длительность шага 13-ой скорости
Длительность шага 14-ой скорости
Длительность шага 15-ой скорости
Заводская установка: 0
Диапазон значений: 0 … 65500 сек Дискретность: 1 сек
Параметры Pr.4-15 … Pr.4-30 передают время действия каждого шага скорости заданные
параметрами 4-00 … 4-14 в режим PLC. Максимальное значение этих параметров 65500 сек.
Примечание: Если параметр = 0 (0 сек), шаг пропускается. Это используется для уменьшения
числа шагов программы.
4-31
Множитель для задания длительности шагов режима PLC Заводская уставка: 10
Диапазон установки: 1… 10 Дискретность: 1
Время длительности каждого шага будет умножено на значение данного параметра
4-32
Задание направления вращения каждого шага в режиме PLC Заводская уставка: 0
Диапазон установки: 0 … 32767. Дискретность: 1
Этот параметр устанавливает направление вращения для частоты, задаваемой параметрами Pr.4-00 …
Pr.4-14 и ведущей частоты для PLC режима. Все другие команды на изменение направления вращения в
течение работы PLC режима не действительны.
Примечание: Для программирования направления вращения ведущей и каждой из 15-ми частот
используется соответствующий 15-nи разрядный номер. Этот номер должен быть переведен в
десятичный эквивалент, а затем введен.
14 213 212 211 210
2
Вес
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
бита
29 28 27 26 25 24 23 22 21 2
0
0=FWD
1=REV
направление вращения на скорости 1-го шага для Pr.4-00.
направление вращения на скорости 2-го шага для Pr.4-01.
направление вращения на скорости 3-го шага для Pr.4-02.
направление вращения на скорости 4-го шага для Pr.4-03.
направление вращения на скорости 5-го шага для Pr.4-04.
направление вращения на скорости 6-го шага для Pr.4-05.
направление вращения на скорости 7-го шага для Pr.4-06.
направление вращения
направление вращения на скорости 9-го шага для Pr.4-08.
направление вращения на скорости 10-го шага для Pr.4-09.
направление вращения на скорости 11-го шага для Pr.4-10.
направление вращения на скорости 12-го шага для Pr.4-11.
направление вращения на скорости 13-го шага для Pr.4-12.
направление вращения на скорости 14-го шага для Pr.4-13.
направление вращения на
на скорости 8-го шага для Pr.4-07.
скорости 15-го шага для Pr.4-14.
Page 41

Руководство по эксплуатации преобразователей VFD-V стр. 41
14 213 212 211 210
2
бит
0 1 0 0 1 1 0 0 0 1 1 1 0 0 1 0
29 28 27 26 25 24 23 22 21 2
0
0=FWD
1=REV
направление вращения для Pr.4-00, 1-я скорость = Forward.
направление вращения для Pr.4-01, 2-я скорость = Reverse.
направление вращения для Pr.4-02, 3-я скорость = Forward.
направление вращения для Pr.4-03, 4-я скорость = Forward
направление вращения для Pr.4-04, 5-я скорость = Reverse.
направление вращения для Pr.4-05, 6-я скорость = Reverse.
направление вращения для Pr.4-06, 7-я скорость = Reverse.
направление вращения для Pr.4-07, 8-яскорость = Forward.
направление вращения для Pr.4-08, 9-я скорость = Forward.
направление вращения для Pr.4-09, 10-я скорость = Forward.
направление вращения для Pr.4-10, 11-я скорость = Reverse.
направление вращения для Pr.4-11, 12-я скорость = Reverse.
направление вращения для Pr.4-12, 13-я скорость = Forward.
направление вращения для Pr.4-13, 14-я скорость = Forward.
направление вращения для Pr.4-14, 15-я скорость = Reverse.
Установленные значения= bit14 x214 + bit13x213 +......+bit2x22 +bit1 x21 +bit0x20 =
14
=1x2
+1x211 +1x210 +1x26 + 1x25 + 1x24 + 1x21=
=16384+2048+1024+64+32+16+2 =19570
Pr. 04-32 = 19570
Примечание:
214 =16384 213 =8192 212 =4096 211 =2048 210 =1024
29 =512 28 =256 27 =128 26=64 25 =32
24 =16 23 =8 22 =4 21 =2 20 =1
04-33
Режим PLC (автоматический режим пошагового
управления скоростью)
xxxx0 бит0=0: направление вращения определяется в Pr.4-32
xxxx1 бит0=1: направление вращения определяется мастер-частотой
xxx0x бит1=0: непрерывное выполнение циклов
xxx1x бит1=1: выполнение одного программного цикла
xx0xx бит2=0: непрерывное выполнение без интервалов
xx1xx бит2=1: между шагами замедление до нулевой скорости
x0xxx бит3=0: замедление до 0 Гц после выполнения программы
x1xxx бит3=1: работа на мастер-частоте после выполнения программы
0xxxx бит4=0: режим PLC запрещен
1xxxx бит4=1: режим PLC разрешен
Этот параметр выбирает режим работы PLC для ПЧ. PLC программа может использоваться вместо
внешнего логического управления, различных реле и переключателей. В соответствии с PLC
программой ПЧ будет изменять частоту и направление вращения двигателя.
04-34
Режим пошагового управления скоростью Заводская уставка: 0
xxxx0 бит0=0: направление вращения определяется в Pr.4-32
xxxx1 бит0=1: направление вращения определяется мастер-частотой
xxx0x бит1=0: время выполнения шагов не ограничено
xxx1x бит1=1: время выполнения шагов задается параметрами Pr.4-15…4-30
xx0xx бит2=0: непрерывное выполнение без интервалов
xx1xx бит2=1: между шагами замедление до нулевой скорости
Заводская уставка: 0
Page 42

Руководство по эксплуатации преобразователей VFD-V стр. 42
Частота 04-07
04-06
04-08
04-05
04-09
04-04
04-10
04-03
04-11
04-02
04-12
04-01
04-13
04-00
04-14
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
ON
Команда запуска
программы
OFF
ON
Индикация работы
программы
Индикация выполнения
шага программы OFF
Индикация выполнения
OFF
Примечание: Приведенная выше диаграмма показывает выполнение одного цикла программы.
Частота
Выполнение одного цикла PLC программы по шагам.
04-03
04-02
04-01
04-00
1 2 3 4
Время
04-16 t 04-17 t 04-18 t 04-19
Команда запуска
программы OFF
Индикация работы
программы OFF
Индикация выполнения
шагов программы OFF
ON
ON
Page 43

Руководство по эксплуатации преобразователей VFD-V стр. 43
04-35
Частота скачкообразного изменения скорости Заводская уставка: 0.00
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
04-36
Порог плавного изменения скорости Заводская уставка: 0.00
Диапазон установки: 0.00 … 400. Дискретность: 0.01 Гц
Частота верхней точки Fup = мастер частота F + Pr.4-35 + Pr.4-36
Частота нижней точки Fdown = мастер частота F - Pr.4-35 + Pr.4-36
Pr.4-35
Fup
Мастер
частота (F)
Pr.4-36
Pr.4-36
Pr.4-35
Fdown
С помощью параметров Pr.4-35 и Pr.4-36 можно задать амплитуду незатухающих колебаний
выходной частоты относительно заданной частоты F, как показано на рисунке.
Page 44

Руководство по эксплуатации преобразователей VFD-V стр. 44
Группа 5: Параметры двигателя
05-00
Автотестирование двигателя Заводская уставка: 0
Возможные значения: 0: Запрещено;
1: Разрешено (измеряются: R1, R2, Lm, Lc, ток холостого хода);
2: Разрешено (измеряются: R1, R2, Lc);
3: Разрешено (измеряются: R1, R2, Lm, Lc, а ток холостого хода
рассчитывается)
Если автотестирование разрешено – (1, 2, 3), то при старте (нажатии кнопки RUN) запустится функция
автотестирования, двигатель будет вращаться в течение 2 мин. Автоматически будет выполнено
измерение и установка параметров 05-02, Pr. 05-06~09 (Pr. 05-12, Pr. 05-16~19). Процедура
автотестирования должна выполнятся на ненагруженном двигателе.
Автотестирование нельзя проводить для нескольких двигателей одновременно.
Автотестирование может не получиться, когда ПЧ и двигатель сильно отличаются по мощности.
тестирования двух двигателей поочередно надо переключить контакт на многофункциональном
Для
входе, запрограммированном на функцию " Переключение между 1-м/2-м двигателями ".
Проведение автотестирования:
• Убедитесь, что введены номинальные значения параметров двигателя, и что двигатель
корректно подключен;
• Убедитесь, что вал электродвигателя не находится под механической нагрузкой, например, не
присоединен к редуктору;
• Корректно
введите значения параметров 01-01, 01-02;
• После введения параметра 05-00 значений 1, 2 или 3, сразу после нажатия «RUN» происходит
автотестирование двигателя. Время автотестирования = 2мин;
• После окончания автотестирования проверьте значения параметров 05-02, Pr. 05-06~09 (Pr. 05-
12, Pr. 05-16~19). При отсутствии в этих параметрах значений, повторите процедуру
автотестирования. Установите остальные необходимые параметры работы ПЧ.
05-01
Номинальный ток двигателя 1 Заводская уставка: ####
Диапазон установки: xxxxA (30 … 120%). Дискретность: 0.01A
Этот параметр используется ПЧ для корректной работы тепловой защиты двигателя. Если
номинальный ток двигателя меньше ном. тока ПЧ, то значение параметра можно рассчитать по
формуле: Pr.5-01 =(Iном двигателя * 100%)/Iном ПЧ. Этим параметром можно снизить порог
срабатывания тепловой защиты, в случае недогрузки двигателя. В этом случае необходимо знать
фактический максимальный ток двигателя в
установившемся режиме и подставить его в формулу
вместо номинального тока двигателя.
05-02
Ток холостого хода двигателя 1 Заводская уставка: ####
Диапазон установки: xxxA (5 … 90%). Дискретность: 0.01A
Номинальный ток ПЧ – 100%. Правильная установка тока холостого хода необходима для
использования функции компенсации скольжения. Значение этого параметра должно быть меньше, чем
у параметра 5-01.
*05-03
Компенсация момента двигателя 1 (только для режима
Заводская уставка: 0.0
U=f(F))
Диапазон установки: 0.0 … 25.0 Дискретность: 1%
Соответствующей настройкой этого параметра можно повысить момент двигателя на низких
частотах вращения путем повышения выходного напряжения ПЧ.
При высоких значениях параметра и длительной работе на низких частотах может произойти перегрев
двигателя.
*05-04
Компенсация скольжения двигателя 1 (только для режима
Заводская уставка: 0.0
U=f(F))
Диапазон установки: 0.0 … 10.0 Дискретность: 0.1%
Page 45

Руководство по эксплуатации преобразователей VFD-V стр. 45
При увеличении нагрузки двигателя возрастает и скольжение или снижение скорости вращения
двигателя относительно синхронной скорости вращения поля статора. Настройкой этого параметра
можно компенсировать скольжение в диапазоне от 0 до 10%. Если при разгоне ток двигателя превысит
установленное значение параметра Pr.5-02, преобразователь установит выходную частоту в
соответствии со значением этого параметра.
Компенсация скольжения будет
эффективной при правильном значении Pr.5-06.
05-05
Число полюсов двигателя 1 Заводская уставка: 4
Диапазон установки: 2 … 10 (только четные значения) Дискретность: 2
Значение этого параметра должно соответствовать числу полюсов подключенного двигателя.
05-06
Сопротивление линии обмотки статора двигателя 1 (R1) Заводская уставка: XXX
Диапазон установки: 0 … 65535 Дискретность: 1 мОм
Пользователь может установить это значение сам или оно будет установлено преобразователем
автоматически при самотестировании (см. Pr.5-00).
05-07
Эквивалентное сопротивление ротора двигателя 1 (R2) Заводская уставка: ХХХ
Диапазон установки: 0 … 200 Дискретность: 1мОм
Пользователь может установить это значение сам или оно будет установлено преобразователем
автоматически при самотестировании (см. Pr.5-00).
05-08
Индуктивность ротора двигателя 1 (Lm) Заводская уставка: ХХХ
Диапазон установки: ХХХ Дискретность: 1мГн
Пользователь может установить это значение сам или оно будет установлено преобразователем
автоматически при самотестировании (см. Pr.5-00).
05-09
Индуктивность статора двигателя 1 (Lс) Заводская уставка: ХХХ
Диапазон установки: ХХХ Дискретность: 1мГн
Пользователь может установить это значение сам или оно будет установлено преобразователем
автоматически при самотестировании (см. Pr.5-00).
*05-10
Потери в стали двигателя 1 Заводская уставка: 0
Диапазон установки: 0…10.0% Дискретность: 0.1%
Мощность потерь в стали сердечника статора в % от номинальной мощности.
05-11
Номинальный ток двигателя 2 Заводская уставка: ####
Диапазон установки: xxxxA (30 … 120%). Дискретность: 0.01A
05-12
Ток холостого хода двигателя 2 Заводская уставка: ####
Диапазон установки: xxxA (5 … 90%). Дискретность: 0.01A
*05-13
Компенсация момента двигателя 2 (только для режима U=f(F)) Заводская уставка: 0.0
Диапазон установки: 0.0 … 25.0 Дискретность: 1%
*05-14
Компенсация скольжения двигателя 2 (только для режима
Заводская уставка: 0.0
U=f(F))
Диапазон установки: 0.0 … 10.0 Дискретность: 0.1%
05-15
Число полюсов двигателя 2 Заводская уставка: 4
Диапазон установки: 2 … 10 (только четные значения) Дискретность: 2
05-16
Сопротивление линии обмотки статора двигателя 2 (R1) Заводская уставка: ХХХ
Диапазон установки: 0 … 65535 Дискретность: 1 мОм
05-17
Эквивалентное сопротивление ротора двигателя 2 (R2) Заводская уставка: ХХХ
Диапазон установки: 0 … 200 Дискретность: 1мОм
05-18
Индуктивность ротора двигателя 2 (Lm) Заводская уставка: ХХХ
Диапазон установки: ХХХ Дискретность: 1мГн
05-19
Индуктивность статора двигателя 2 (Lс) Заводская уставка: ХХХ
Page 46

Руководство по эксплуатации преобразователей VFD-V стр. 46
Диапазон установки: ХХХ Дискретность: 1мГн
*05-20
Потери в стали двигателя 2 Заводская уставка: 0
Диапазон установки: 0…10.0% Дискретность: 0.1%
*05-21
Пропорциональная составляющая 1 регулятора скорости Заводская уставка: 25
Диапазон установки: 0.0 … 500.0 Дискретность: 0.1%
*05-22
Время интегрирования 1 регулятора скорости Заводская уставка: 0.25
Диапазон установки: 0.000 … 10.000 сек Дискретность: 0.001сек
*05-23
Пропорциональная составляющая 2 регулятора скорости Заводская уставка: 25
Диапазон установки: 0.0 … 500.0 Дискретность: 0.1%
*05-24
Время интегрирования 2 регулятора скорости Заводская уставка: 0.25
Диапазон установки: 0.000 … 10.000 сек Дискретность: 0.001сек
Эти коэффициенты определяют настройки автоматических регуляторов скорости ASR1 и ASR2, что
является полезным в режиме векторного управления и при работе с обратной связью по скорости.
*05-25
Частота при которой происходит переключение между ASR1 и
Заводская уставка: 7.00
ASR2.
Диапазон установки: 0.0…400.0 Гц Дискретность: 0.1 Гц
*05-26
Компенсация потерь в обмотках статора на низкой
Заводская уставка: 30
скорости
Диапазон установки: 0… 100% Дискретность: 1%
Функция эффективна в режиме векторного управления.
*05-27
Компенсация потерь на низкой скорости в режиме
Заводская уставка: 50
управления моментом
Диапазон установки: 0… 100% Дискретность: 1%
Функция эффективна в режиме прямого управления моментом при работе на низкой скорости.
*05-28
Задержка контура управления моментом Заводская уставка: 0.010
Диапазон установки: 0.000… 2.000сек Дискретность: 0.001сек
Это цифровой фильтр для контура управления моментом.
*05-29
Компенсация колебаний (качания) двигателя на низкой
Заводская уставка: 100
скорости в режиме векторного управления.
Диапазон установки: 0… 10000 Дискретность: 1
Чем больше значение параметра, тем больше будет эффект демпфирования.
*05-30
Активация детектирования R1 в режиме векторного
Заводская уставка: 0
управления при каждом пуске двигателя.
Возможные значения: 0: Запрещено;
1: Разрешено.
Если Pr.5-30=1, то сопротивление статора R1 двигателя будет измеряться при каждой поданной
команде "RUN" (Пуск двигателя)
*05-31
Коэффициент динамического отклика при резком
Заводская уставка: 0.0
увеличении нагрузки
Диапазон установки: 0… 100% Дискретность: 0.1%
Параметр используется для избежания уменьшения выходной частоты при резком увеличении
нагрузки.
*05-32
Коэффициент сглаживания при работе на низких частотах
Заводская уставка: 10
в режиме управления моментом
Диапазон установки: 0… 100% Дискретность: 1%
Параметр используется совместно с 05-28 для увеличения плавности работы на низкой скорости и
при частых пусках-стопах.
Page 47

Руководство по эксплуатации преобразователей VFD-V стр. 47
Группа 6: Параметры защиты
*06-00
Уровень обнаружения низкого напряжения питания Заводская уставка: 360
Диапазон установки: 320 … 440. Дискретность: 1В
Параметр устанавливает уровень напряжения питания ниже которого сработает защита LU.
*06-01
Уровень обнаружения перенапряжения шине DC Заводская уставка: 760
Диапазон установки: 700 … 900. Дискретность: 1В
Уровень напряжения на шине постоянного тока при достижении которого начнет действовать функция
предотвращение останова привода из-за перенапряжения шине DC.
Во время замедления двигателя, напряжение шины DC может подняться до уровня
срабатывания защиты от перенапряжения и тогда ПЧ будет блокирован. Рост напряжения на шине DC
происходит вследствие интенсивного торможения двигателя преобразователем. При этом двигатель
переходит в режим работы генератора. Ток, вырабатываемый двигателем заряжает конденсаторы
фильтра преобразователя.
Функция предотвращения разрешена не допускается срабатывание защиты, так как при нарастании
напряжения до уровня меньшего, чем необходимо для срабатывания защиты, выходная частота
перестает уменьшаться, напряжение на конденсаторах уменьшается и процесс замедления
возобновляется. Процесс замедления двигателя с разрешенной функцией
приведен на рисунке ниже.
Как следует из рисунка время замедления увеличивается по сравнению с заданным.
Примечание: С умеренным моментом инерции нагрузки перенапряжения на шине DC не будет,
поэтому время замедления должно быть равно времени установленному параметром Pr.01-13. Если
требуется малое время торможения двигателя, то следует использовать тормозной резистор.
Выходная частота
Время торможения
Pr.01-13, 1-15,1-17 или 1-19
Тормозные характеристики, когда функция
предотвращения останова привода из-за
перенапряжения разрешена
Задержка
частоты
Время
Защита от пропадания фазы питающего напряжения Заводская уставка: 0
Возможные значения: 0: Предупреждение и продолжение работы, если выходной ток меньше
*06-02
половины номинального;
1: Предупреждение и остановка с заданным темпом замедления;
2: Предупреждение и остановка на выбеге.
Работа ПЧ на двух фазах питающего напряжения негативно скажется на динамических характеристиках
привода и при длительной работе с высокими нагрузками может привести к выходу преобразователя из
строя. Работа на двух фазах возможна при выходном токе меньше 50% номинального тока ПЧ.
*06-03
Токоограничение при разгоне двигателя Заводская уставка: 170
Диапазон установки: 20 … 250. Дискретность: 1%
Page 48

Руководство по эксплуатации преобразователей VFD-V стр. 48
Значение 100% устанавливает уровень равный номинальному току преобразователя. В течение разгона
выходной ток ПЧ может вырасти более значения, установленного параметром Pr.6-03, из-за слишком
быстрого разгона или большого момента нагрузки на двигателе. Если при разгоне двигателя выходной
ток превысит заданное этим параметром значение, то выходная частота ПЧ перестанет увеличиваться до
тех пор, пока
Уровень Ток
обнаружения
сверхтока
06-03
Предотвращение
сверхтока при Выходная частота
разгоне;
Задержка частоты
Предотвращение останова привода из-за большого тока при разгоне двигателя
ток не снизится, а затем процесс разгона возобновиться. См. рисунок, приведенный ниже.
Время
*06-04
Токоограничение при работе на ведущей частоте Заводская уставка: 170
Диапазон установки: 20 … 250. Дискретность: 1%
Значение 100% устанавливает уровень равный номинальному току преобразователя. Если в течение
установившегося режима выходной ток ПЧ превысит значение, установленное этим параметром,
выходная частота будет уменьшаться до того момента, пока ток не уменьшится. После чего выходная
частота будет доведена до значения ведущей. См. рисунок, приведенный ниже.
Уровень Выходной ток
обнаружения
сверхтока
06-04
Предотвращение Выходная частота
сверхтока в уст.
режиме; выходная
частота снижается
Предотвращение останова привода в течение установившегося режима
(на ведущей частоте)
Время
*06-05
Время замедления при токоограничении на ведущей частоте Заводская уставка: 3
Диапазон установки: 0.050 … 600. Дискретность: 0.001сек
Page 49

Руководство по эксплуатации преобразователей VFD-V стр. 49
*06-06
Режим обнаружения перегрузки (OL2) Заводская уставка: 00
Возможные значения: 00: Запрещение режима обнаружения перегрузки;
01: Разрешение обнаружения перегрузки в установившемся режиме
(OL2) и продолжение работы привода после обнаружения.
02: Разрешение обнаружения перегрузки в установившемся режиме и
останов привода после обнаружения перегрузки;
03: Разрешение обнаружения перегрузки в течение работы привода и
продолжение работы после обнаружения.
04: Разрешение обнаружения перегрузки в течение
времени работы
привода и останов привода после обнаружения перегрузки.
*06-07
Уровень обнаружения перегрузки (OL2) Заводская уставка: 150
Диапазон установки: 20 … 250. Дискретность: 1%
Значение 100% устанавливает уровень тока равный номинальному току преобразователя.
*06-08
Лимит продолжительности действия перегрузки (OL2) Заводская уставка: 0.1
Диапазон установки: 0.0 … 60.0. Дискретность: 0.1 сек
Если многофункциональный выходной терминал установлен на функцию индикации перегрузки и
выходной ток ПЧ превысил уровень заданный параметром 6-07 (заводская уставка 150), то выход
терминала активизируется после истечения времени, установленного этим параметром.
*06-09
Режим обнаружения перегрузки 2 (OL3) Заводская уставка: 00
Возможные значения: 00: Запрещение режима обнаружения перегрузки;
01: Разрешение обнаружения перегрузки в установившемся режиме
(OL3) и продолжение работы привода после обнаружения.
02: Разрешение обнаружения перегрузки в установившемся режиме и
останов привода после обнаружения перегрузки;
03: Разрешение обнаружения перегрузки в течение работы привода и
продолжение работы после обнаружения.
04: Разрешение обнаружения перегрузки в течение
времени работы
привода и останов привода после обнаружения перегрузки.
*06-10
Уровень обнаружения перегрузки (OL3) Заводская уставка: 150
Диапазон установки: 10 … 250. Дискретность: 1%
*06-11
Лимит продолжительности действия перегрузки (OL3) Заводская уставка: 0.1
Диапазон установки: 0.0 … 60.0. Дискретность: 0.1 сек
*06-12
Ограничение момента Заводская уставка: 150
Диапазон установки: 0 … 250% Дискретность: 1%
Этот параметр устанавливает ограничение момента в режимах управления моментом, U/f и векторном.
При использовании аналогового входа для ограничения момента в параметре будет индицироватся
фактическая уставка ограничения момента. Значение параметра базируется на номинальном токе ПЧ,
принятым за 100%.
6-13
Выбор режимов работы электронного теплового реле (OL1) Заводская уставка: 2
Возможные значения: 0: Для специального двигателя с независимой вентиляцией;
1: Для стандартного самовентилируемого двигателя;
2: Запрещение действия реле.
Эта функция используется для корректировки режима работы реле в зависимости от предполагаемого
режима нагрузки подключенного самовентилируемого двигателя на низких скоростях вращения.
*06-14
Электронная тепловая характеристика реле Заводская уставка: 60
Диапазон установки: 30 … 600. Дискретность: 1 сек
Page 50

Руководство по эксплуатации преобразователей VFD-V стр. 50
Этот параметр может устанавливаться во время работы привода. Параметр определяет время,
необходимое для подсчета интеграла I
2
*t (выходной ток ПЧ на время) и активации функции
электронной тепловой защиты двигателя от перегрева. На графике, приведенном ниже, приведены
интегральные кривые для различных частот вращения двигателя при заводской установке - 150% в
течение 1 минуты.
Время
действия
(мин.)
5
4
3
2
1
0 20 40 60 80 100 120 140 160 180 200
60 Гц и более
50 Гц
10 Гц
5 Гц
Коэф.
нагрузки, %
*06-15
Уровень обнаружения перегрева радиатора Заводская уставка: 85
0
Диапазон установки: 0.0 … 110.0 Дискретность: 0.1
С
Уровень температуры радиатора при котором активизируется выходной терминал Pr.2-10…2-13 = 23
*06-16
Нижняя граница предотвращения останова Заводская уставка: 120
Диапазон установки: 0 … 250% Дискретность: 1%
*06-17
*06-18
*06-19
*06-20
Последняя запись об аварии
Предпоследняя запись об аварии
Третья запись об аварии
Четвертая запись об аварии
Заводская установка: 0
Page 51

Руководство по эксплуатации преобразователей VFD-V стр. 51
Значения: 00: Аварий зафиксировано не было;
01: Превышение выходного тока (о.с.);
02: Перенапряжение (o.v.);
03: Перегрев ПЧ (o.H.);
04: Перегрузка ПЧ (o.L.);
05: Перегрузка двигателя (o.L1.);
06: Внешняя ошибка (E.F.);
07: Сбой CPU (процессора ПЧ) (C.F3);
08: Отказ аппаратной защиты (H.P.F);
09: Сверхток при разгоне (o.c.A);
10: Сверхток при замедлении (o.c.d);
11: Сверхток в установившемся режиме (o.c.n);
12: Замыкание выходной фазы на землю (G.F.F);
13: Ошибка PG-платы (PG);
14: Низкое напряжение
(L.v);
15: Ошибка чтения процессором ПЧ (C.F1);
16: Ошибка записи процессором ПЧ (C.F2);
17: Внешняя команда ПАУЗА (Base blok) остановила привод (b.b);
18: Двигатель перегружен (o.L2);
19: Защита IGBT (sc);
20: Выход из строя тормозного транзистора;
21: Двигатель перегружен (o.L3);
22: Перегрев тормозного ключа;
23: Предохранитель;
24: Датчик тока 2 (СТ2);
25: Датчик тока 1 (СТ1);
26: Сбой IGBT;
27: Ошибка автотестирования;
28: Ошибка ПИД-регулятора;
29: Ошибка сигнала по входу
ACI;
31: Выход из строя транзисторов силового модуля (CC);
33: R1 в векторном режиме вышло из диапазона (Pr.5-30);
34: Ошибка цифровой панели управления;
35: Ошибка интерфейса RS-485;
36: Неисправность вентилятора;
37: Потеря фазы питающего напряжения.
Группа 7: Специальные параметры
*07-00
При замедлении скорости двигателя напряжение на шине DC повышается, вследствие регенерации
энергии двигателя в энергию заряженных конденсаторов фильтра. Когда уровень напряжения на шине
DC достигнет значения этого параметра шина DC будет подключена через терминалы В1 и В2 к
тормозному резистору. Тормозной резистор будет рассеивать энергию, поступающую в конденсаторы.
*07-01
Этот параметр устанавливает уровень постоянного тока при торможении во время запуска и останова
двигателя. При установке уровня ном. выходной ток принимается за 100%. Рекомендуется начинать с
установки низкого уровня, а затем его увеличивать, пока не будет достигнут желаемый тормозной
момент.
*07-02
Этот параметр устанавливает время торможения при разгоне двигателя. Торможение будет применяться
до тех пор пока во время разгона не будет достигнута начальная выходная частота.
Напряжение динамического торможения Заводская уставка: 760
Диапазон установки: 700 … 900 Дискретность: 1 В
Уровень тока при торможении постоянным током Заводская уставка: 0
Диапазон установки: 0 … 100 Дискретность: 1 %
Время торможения постоянным током при старте Заводская уставка: 0.0
Диапазон установки: 0.0 … 60.0 Дискретность: 0.1 сек
Page 52

Руководство по эксплуатации преобразователей VFD-V стр. 52
r
*07-03
Время торможения постоянным током при остановке Заводская уставка: 0.0
Диапазон установки: 0.0 … 60.0 Дискретность: 0.1 сек
Этот параметр устанавливает время торможения при остановке.
*07-04
Стартовая точка начала торможения при замедлении Заводская уставка: 0.0
Диапазон установки: 0.0 … 400.0 Дискретность: 0.01 Гц
Этот параметр устанавливает частоту, при которой во время замедления, начнется торможение пост.
током.
Выходная частота
Время
RUN/STOP ON OFF
Длительность
торможения
постоянным
током при
старте
07-02
Начальная
выходная
частота
.01-09
P
Стартовая
точка торможения
при замедлении
07-04
Длительность торможения
постоянным током при
остановке
07-03
Примечание:
1. Торможение двигателя перед стартом используется при работе с нагрузками которые
сами могут вызвать вращение вала двигателя перед стартом, например, вентиляторы и
насосы. Направление вращения может быть противоположным тому, что будет после
старта. Торможение обеспечит фиксацию вала двигателя перед стартом и,
соответственно снижение пусковых токов и перенапряжений.
2. Торможение
во время остановки используется для уменьшения времени остановки, а
также для фиксации вала двигателя. Для высокоинерционных нагрузок при быстром
торможении может понадобится тормозной резистор.
*07-05
Уровень напряжения при торможении постоянным током Заводская уставка: 30
Диапазон установки: 1 … 500 Дискретность: 1В
Этот параметр устанавливает уровень постоянного напряжения при торможении во время запуска и
останова двигателя.
*07-06
Выбор реакции ПЧ на кратковременное пропадание
Заводская уставка: 0
питающего напряжения
Возможные
значения: 0: Остановка привода после пропадания напряжения;
1: После появления напряжения работа привода возобновляется с установленного
значения ведущей частоты;
2: После появления напряжения работа привода возобновляется с минимальной
частоты.
*07-07
Максимальное время реакции на потерю питающего
Заводская уставка: 2.0
напряжения
Диапазон установки: 0.1 … 5.0 Дискретность: 0.1 сек
Если время отсутствия питающего напряжения меньше времени, заданного этим параметром, то привод
будет реагировать в соответствии с уставкой параметра 7-06, иначе, - ПЧ отключит привод.
*07-08
Время задержки после перед поиском скорости Заводская уставка: 0.5
Диапазон установки: 0.1 … 5.0 Дискретность: 0.1 сек
Page 53

Руководство по эксплуатации преобразователей VFD-V стр. 53
При появлении питающего напряжения, перед тем как начать поиск скорости ПЧ выдерживает паузу,
задаваемую этим параметром. Пауза должна быть достаточна для снижения выходного напряжения
почти до нуля. Этот параметр также определяет время поиска, когда выполняется пауза внешней
команды и сброса аварии.
*07-09
Максимально-допустимый уровень выходного тока при поиске
Заводская уставка: 150
скорости
Диапазон установки: 20 … 200 Дискретность: 1 %
После сбоя питания ПЧ запустит функцию поиска скорости, только при выходном токе большем, чем
установленном параметром 8-09. Если выходной ток меньше, чем установленный параметром 8-09, то
выходная частота ПЧ – «точка скоростной синхронизации». ПЧ начнет разгонять или замедлять
выходную частоту к значению, которое было до сбоя питания.
*07-10
Время замедления при поиске скорости Заводская уставка: 3.00
Диапазон установки: 0.50 … 600.00 Дискретность: 0.01 сек
Это время замедления при поиске скорости, когда ток выше максимально-допустимого уровня
выходного тока.
*07-11
Количество авторестартов после аварий Заводская уставка: 0
Диапазон установки: 0 … 10 Дискретность: 1
После таких аварий как сверхток (o.c) и перенапряжение (o.v) ПЧ может автоматически сбросить
аварийную блокировку и стартовать до 10 раз. Установка параметра в 0 запрещает авторестарт. Если
функция разрешена, то ПЧ стартует с ведущей частоты. После сброса аварийной блокировки
выдерживается пауза после чего начинается поиск скорости.
*07-12
Подхват вращающегося двигателя Заводская уставка: 0
Возможные значения: 0: Подхват вращающегося двигателя отключен
1: Подхват вращающегося двигателя включен в заданном направлении
вращении;
2: Подхват вращающегося двигателя включен, определяется только
положительная частота вращения (FWD);
3: Подхват вращающегося двигателя включен, определяется только
отрицательная частота вращения (REV);
4: Подхват вращающегося двигателя включен, определяется
положительная и отрицательная частота вращения (FWD/ REV);
5: Подхват вращающегося двигателя включен, определяется
отрицательная и положительная частота вращения (REV /FWD);
*07-13
Положительная частота с которой начинается поиск скорости,
Заводская уставка: 50
если установлена PG-плата и 07-12 = 2 или 4
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 Гц
*07-14
Отрицательная частота с которой начинается поиск скорости,
Заводская уставка: 50
если установлена PG-плата и 07-12 = 3 или 5
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 Гц
*07-15
Время задержки при разгоне Заводская уставка: 0.00
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 сек
*07-16
Частота при которой происходит задержка при разгоне Заводская уставка: 6.00
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 Гц
*07-17
Время задержки при торможении Заводская уставка: 0.00
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 сек
*07-18
Частота при которой происходит задержка при торможении Заводская уставка: 6.00
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 Гц
Данные параметры позволяют стабилизировать выходную частоту при работе с тяжелой, инерционной
нагрузкой и предотвратить перегрузку при разгоне/торможении.
Page 54

Руководство по эксплуатации преобразователей VFD-V стр. 54
Частота
Ведущая частота
Pr.7-16
Pr.7-16
Pr.7-18
Задержка
разгона
Pr.7-15
Задержка замедления
Pr.7-17
Время
*07-19
Работа внешних терминалов после сбоя и сброса ошибки Заводская уставка: 0
Возможные
значения: 0: Необходим перезапуск терминалов;
1: Сигналы на включенных терминалах будут восприняты без перезапуска.
Когда 07-19 = 1, при сбое и отключении привода если привод управляется от внешних терминалов и
команда RUN остается активной, при сбросе ошибки кнопкой RESET, привод возобновит работу и
двигатель автоматически запустится.
Когда 07-19 = 0, автоматический перезапуск двигателя командой RESET не произойдет. Необходимо
снять и повторно подать команду RUN.
Page 55

Руководство по эксплуатации преобразователей VFD-V стр. 55
Группа 8: Параметры PID-регулятора
Эти параметры используются для регулирования различного рода процессов, таких как
поддержание постоянного воздушного потока, расхода, давления и скорости с помощью подачи
сигналов обратной связи с соответствующего датчика.
*08-00
Выбор входных терминалов для подключения отрицательной
обратной связи по аналоговому сигналу
Возможные 0: Запрещение функции PID регулятора;
значения: 1: Сигнал обратной связи (0…+10В) от терминала AVI;
2: Сигнал обратной связи (4 … 20мА) от терминала ACI;
3: Сигнал обратной связи (-10В…+10В) от терминала AUI;
4: Цифровой сигнал обратной связи от PG-карты (FWD/REV определяется мастер-
частотой;
5: Цифровой сигнал обратной связи от PG-карты (FWD/REV определяется углом
сдвига A/B;
Опорная (ведущая) частота задается с другого (незанятого) источника, выбираемого Pr.00-20.
*08-01
Коэффициент усиления пропорциональной составляющей (Р)
сигнала обратной связи
Диапазон установки: 0.0 … 500.0 Дискретность: 0.1%
Этот параметр задает коэффициент усиления сигнала разности ∆f между опорной и приведенной
частотой обратной связи (Р). Если коэффициенты усиления по интегральной (I) и дифференциальной
(D) составляющим будут установлены в 0, то все равно пропорциональное регулирование будет
эффективно. Увеличение коэффициента передачи пропорционального регулятора увеличивает
чувствительность системы (ускоряет отклик на отклонение). Однако чрезмерное его увеличение
привести к нежелательным последствиям, таким как автоколебания.
*08-02
Время интегрирования (I) сигнала обратной связи Заводская уставка: 1.00
Диапазон установки: (0.00 … 100.00)сек Дискретность: 0.01
Этот параметр задает усиление интегральной составляющей сигнала обратной связи (I). Выходная
частота равна интегралу отклонения сигнала разности по времени. Введение интегральной
составляющей улучшает статическую точность, но снижает быстродействие системы.
Устраняются все отклонения, оставшиеся после пропорционального контроля (функция коррекции
остаточных отклонений). Увеличение И- коэффициента в большей степени подавляет отклонения.
Однако чрезмерное его увеличение
может привести к нежелательным последствиям, таким как
автоколебания.
*08-03
Время дифференцирования (D) сигнала обратной связи Заводская уставка: 0.00
Диапазон установки: (0.00 … 1.00)сек Дискретность: 0.01
Этот параметр задает усиление дифференциальной составляющей сигнала обратной связи (D).
Выходная частота равна производной по времени от входного отклонения ∆f/∂t. Введение
дифференциальной по отклонению способствует повышению быстродействия системы автоматического
регулирования и быстрому затуханию колебаний, но следует учитывать возможность перекомпенсации.
*08-04
Верхняя граница интегрирования Заводская уставка: 100
Диапазон установки: 0 … 100 Дискретность: 1 %
Этот параметр определяет верхнюю границу или усиление для интегральной составляющей (I) и
поэтому ограничивает выходную частоту интегратора = Pr.01-00 x Pr.8-04.
*08-05
Ограничение выходной частоты PID-регулятора Заводская уставка: 100
Диапазон установки: (0 … 100) % Дискретность: 1
Этот параметр задает предел максимальной выходной частоты при PID управлении согласно формуле:
F
*08-06
= Pr.01-00 х Pr.8-05.
вых макс
Отклонение выходной частоты PID-регулятора Заводская уставка: 0
Диапазон установки: (-100 … 100) % Дискретность: 1
Заводская уставка: 0
Заводская уставка: 80.0
может
Page 56

Руководство по эксплуатации преобразователей VFD-V стр. 56
*08-07
Выходной фильтр (время задержки) Заводская уставка: 0
Диапазон установки: (0 … 0.005) сек Дискретность: 0.001
Позволяет сглаживать пульсации на выходе ПИД-регулятора.
Блок схема PID-регулятора приведена ниже:
Значение на
дисплее
Pr.00-04=17
Значение на
дисплее
Pr.00-04=18
Сигнал
задания
частоты
−
Сигнал
о. с.
Pr.8-00
Сигнал ошибки
(∆f)
Pr.03-15=20
P
Pr.08-01
I
Pr.08-02
D
Pr.08-03
Ограничение
усиления I
Pr.08-04
Отклонение
вых. частоты
Pr.8-06
Сигнал полной
ошибки (∆f)
Pr.03-15=21
Вых.
фильтр
Pr.8-07
Предел вых.
частоты
Pr.8-05
Мастер
частота
*08-08
Время обнаружения сигнала обратной связи Заводская уставка: 0
Диапазон установки: 0.0 … 6000.0 Дискретность: 0.1 сек
Это время в течение которого ПЧ обнаруживает аварийно малый или отсутствие сигнала обратной
связи, например, для ACI менее 4мА.
*08-09
Реакция на обнаруженную ошибку в передаче сигнала
Заводская уставка: 0
обратной связи
Возможные значения: 0: Предупреждение и продолжение работы;
1: Предупреждение и остановка двигателя с замедлением;
2: Предупреждение и остановка двигателя на выбеге.
Пользователь задает действия ПЧ на отсутствие сигнала обр. связи при работе с PID.
*08-10
Нижний граница ПИД-регулирования Заводская уставка: 0
Диапазон установки: 0.0 … 400.0 Дискретность: 0.1 Гц
Это частота ниже которой выходная частота становится равной нулю через период поддержания нижней
границы ПИД-регулирования.
*08-11
Граница возобновления ПИД-регулирования Заводская уставка: 0
Диапазон установки: 0.0 … 400.0 Дискретность: 0.1 Гц
Это частота выше которой возобновляется ПИД-регулирование.
*08-12
Период поддержания нижней границы ПИД-регулирования Заводская уставка: 0
Диапазон установки: 0.0 … 6000.0 Дискретность: 0.1 сек
Это частота ниже которой выходная частота становится равной нулю через период поддержания нижней
границы ПИД-регулирования.
Page 57

Руководство по эксплуатации преобразователей VFD-V стр. 57
Pr. 08-11
Pr. 08-12
Pr. 08-10
0 Гц
Команда задания частоты Выходная частота
*08-13
Метод охлаждения ПЧ Заводская уставка: 0
Возможные значения: 0: Вентилятор работает всегда;
1: Вентилятор включается при пуске двигателя и останавливается при
останове двигателя.
Пользователь задает режим работы встроенного вентилятора.
Группа 9: Параметры коммуникации
*9-00
Коммуникационный адрес Заводская уставка: 1
Диапазон установки: 1 … 254 Дискретность: 1
Если привод управляется по последовательному интерфейсу, то адрес привода для связи управляющим
устройством (компьютер или контроллер) должен быть установлен этим параметром.
RS-485
Компьютер 1 2 3 . . .
V
V
V
*9-01
Скорость передачи данных Заводская уставка: 9.6
Возможные значения: 4.8 – 115.2 (кбит/сек).
Этот параметр устанавливает скорость передачи между ПЧ и управляющим устройством.
*9-02
Обработка сбоя передачи Заводская уставка: 3
Возможные значения: 0: Предупреждение и продолжение работы;
1: Предупреждение и остановка привода с замедлением;
2: Предупреждение и остановка привода на выбеге;
3: Нет обнаружения ошибки.
*9-03
Время обнаружения сбоя передачи Заводская уставка: 0
Возможные значения: 0: Функция запрещена;
1 - 100 сек.
Этот параметр используется для ASCII режима. Если время между приемом очередного символа более
значения этого параметра, то ПЧ поступает в соответствии со значением параметра 9-02.
Page 58

Руководство по эксплуатации преобразователей VFD-V стр. 58
*9-04
Протокол коммуникации Заводская уставка: 00
Диапазон установки: 0: Modbus ASCII режим, протокол <7, N, 1>;
1: Modbus ASCII режим, протокол <7, N, 2>;
2: Modbus ASCII режим, протокол <7, E, 1>;
3: Modbus ASCII режим, протокол <7, 0, 1>;
4: Modbus ASCII режим, протокол <7, E, 2>;
5: Modbus ASCII режим, протокол <7, 0, 2>;
6: Modbus ASCII режим, протокол <8, N, 1>;
7: Modbus ASCII режим, протокол <8, N, 2>;
8: Modbus ASCII режим, протокол <8, E, 1>;
9: Modbus ASCII режим, протокол <8, 0, 1>;
10: Modbus ASCII режим, протокол <8, E, 2>;
11: Modbus ASCII режим, протокол <8, 0, 2>;
12: Modbus RTU режим, протокол <8, N, 1>;
13: Modbus RTU режим, протокол <8, N, 2>;
14: Modbus RTU режим, протокол <8, E, 1>;
15: Modbus RTU режим, протокол <8, 0, 1>;
16: Modbus RTU режим, протокол <8, E, 2>;
17: Modbus RTU режим, протокол <8, 0, 2>
1. Управление преобразователем от компьютера:
Связь компьютера с ПЧ осуществляется по последовательному интерфейсу через разъем RJ-11,
расположенный планке управляющих терминалов. Назначение контактов
2: GND
3: SG 4: SG+
5: +5V
6 ← 1
разъема приведено ниже:
Каждый ПЧ имеет индивидуальный коммуникационный адрес,
устанавливаемый с помощью параметра Pr.9-00. Компьютер управляет
каждым ПЧ, различая их по адресу.
Преобразователь VFD-V может быть настроен для связи в Modbus сетях,
использующих один из следующих режимов: ASCII (Американский
Стандартный Код для Информационного Обмена) или RTU (Периферийное устройство). Пользователи
могут выбирать режим наряду с протоколом связи последовательного порта, используя параметр Pr.9-
04.
Режим ASCII:
Каждый 8-bit блок данных есть комбинация двух ASCII символов. Для примера, 1- байт
данных: 64 Hex, показан как ‘64’ в ASCII, состоит из ‘6’ (З6 Нех) и ‘4’ (34Hex).
Символ ‘0’ ‘1’ ‘2’ ‘3’ ‘4’ ‘5’ ‘6’ ‘7’
ASCII код 30H 31H 32H 33H 34H 35H 36H 37H
Символ ‘8’ ‘9’ ‘A’ ‘B’ ‘C’ ‘D’ ‘E’ ‘F’
ASCII код 38H 39H 41H 42H 43H 44H 45H 46H
2. Формат данных:
2.1. 10-bit кадр передачи (для 7-битного блока данных)
(7, N, 2)
Start 0 1 2 3 4 5 6 Stop Stop
bit bit bit
7-bit блок данных
10-bit кадр передачи
(7, E, 1) с проверкой на четность (even parity)
Start 0 1 2 3 4 5 6 Even Stop
bit parity bit
7-bit блок данных
10-bit кадр передачи
Page 59

Руководство по эксплуатации преобразователей VFD-V стр. 59
(7, 0, 1) с проверкой на нечетность (odd parity)
Start 0 1 2 3 4 5 6 Odd Stop
bit parity bit
7-bit блок данных
10-bit кадр передачи
2.2. 11 -bit кадр (для 8-bit блока данных):
(8, N ,2)
Start 0 1 2 3 4 5 6 7 Stop Stop
bit bit bit
8-bit блок данных
11-bit кадр передачи
(8, E, 1) с проверкой на четность (even parity)
Start 0 1 2 3 4 5 6 7 Even Stop
parity bit
8-bit блок данных
11-bit кадр передачи
(8, 0, 1) с проверкой на нечетность (odd parity)
Start 0 1 2 3 4 5 6 7 Odd Stop
bit parity bit
8-bit блок данных
11-bit кадр передачи
3. Протокол коммуникации
3.1. Коммуникационный блок данных:
ASCII режим:
STX Стартовый символ ‘:’ (3AH)
ADR1 Коммуникационный адрес:
ADR0 8-bit адрес, состоящий из 2 ASCII кодов
CMD1 Командный код:
CMD0 8-bit адрес, состоящий из 2 ASCII кодов
DATA (n-1) Содержание данных:
n x 8-bit данных, состоящих из 2-х ASCII кодов
DATA0 n<=16, максимум 32 ASCII кодов
LRC CHK 1 LRC контрольная сумма:
LRC CHK 0 8-bit контрольная сумма, состоящая из 2 ASCII кодов
END1 Конец символов:
END0 END1= CR (ODH), ENDO= LF(OAH)
RTU режим:
START интервал молчания - более 10 мс
ADR Адрес коммуникации: 8-bit адрес
CMD Код команды:
Page 60

Руководство по эксплуатации преобразователей VFD-V стр. 60
8-bit команда
DATA (n-1) Содержание данных:
………….. n x 8-bit данных. n<=16
DATA0
CRC CHK Low CRC контрольная сумма:
CRC CHK High 16-bit контрольная сумма из 2-ух 8-bit символов
END интервал молчания - более 10 мс
3.2. ADR (Коммуникационный адрес):
Допустимый коммуникационный адрес должен быть выбран из диапазона 0 ... 254.
Коммуникационный адрес равный 0 – средство трансляции всем ПЧ (VFD) одновременно, в этом
случае, ПЧ не будут отвечать ни на какое сообщение ведущему устройству.
Для примера, связь VFD с адресом 16 decimal:
ASCII режим: (ADR 1, ADR 0)=’1’,’0’ => ‘1’=31H, '0'=30H
RTU режим: (ADR)=10H
3.3. CMD (код команды) и DATA (символы данных):
Формат символов данных зависит от
командных кодов. Доступные командные коды - 03H,
чтение N слов. Максимальное значение N это 12. Для примера, чтение непрерывных 2 слов от
начального адреса 2102H VFD с адресом 01H.
ASCII режим:
Командное сообщение: Ответное сообщение:
STX ‘:’ STX ‘:’
ADR 1 ‘0’ ADR 1 ‘0’
ADR 0 ‘1’ ADR 0 ‘1’
CMD 1 ‘0’ CMD 1 ‘0’
CMD 0 ‘3’ CMD 0 ‘3’
Стартовый ‘2’ Число данных ‘0’
адрес ‘1’ (в байтах) ‘4’
данных ‘0’ Содержание данных ‘1’
‘2’ по стартовому ‘7’
Число ‘0’ адресу ‘7’
(в словах) ‘0’ 2102H ‘0’
‘0’ Содержание данных ‘0’
‘2’ по адресу 2103H ‘0’
LRC CHK
‘D’ ‘0’
LRC CHK ‘7’ ‘0’
END 1 CR LRC CHK 1 ‘7’
END 0 LF LRC CHK 0 ‘1’
END 1 CR
END 0 LF
RTU режим:
Командное сообщение: Ответное сообщение:
ADR 01H ADR 01H
CMD 03H CMD 03H
данных
21H Стартовый адрес
02H
Число данных
в байтах
04H
Page 61

Руководство по эксплуатации преобразователей VFD-V стр. 61
00Н 17H Число данных в
словах
CRC CHK Low 6FH 00Н
CRC CHK High F7H
CRC CHK Low FEH
CRC CHK High 5CH
Код команды: 06H, запись 1 слово.
Для примера, запись 6000(1770H) в адрес 0100Н AMD с адреса 01H.
ASCII режим:
Сообщение команды: Ответное сообщение:
STX ‘:’ STX ‘:’
ADR0
CMD0
Адрес данных
Содержание данных
LRC CHK 1
END0
RTU режим:
Сообщение команды: Ответное сообщение:
02H
‘0’ ‘0’ ADR1
‘1’
‘0’ ‘0’ CMD1
‘6’
‘0’ ‘0’
‘1’ ‘1’
‘0’ ‘0’
‘0’
‘1’ ‘1’
‘7’ ‘7’
‘7’
‘0’
‘7’ ‘7’ LRC CHK 1
‘1’
CR CR END1
LF
Содержание данных
по адресу 2102H
Content of data address
2103H
ADR1
ADR0
CMD1
CMD0
Адрес данных
Содержание данных
LRC CHK 1
LRC CHK 0
END1
END0
70H
00Н
‘1’
‘6’
‘0’
‘7’
‘0’
‘1’
LF
ADR 01H ADR 01H
CMD 08H CMD 08H
Адрес данных 00H Адрес данных 00H
00Н 00Н
Содержание команды 12H Содержание команды 17H
ABH 70H
CRC CHK Low ADH CRC CHK Low ADH
CRC CHK High 14H CRC CHK High 14H
3.4. CHK (проверка суммы)
ASCII режим:
LRC (продольная проверка избыточности) рассчитана в итоге, модуль 256, значение байтов от
ADR1 до последнего символа данных, тогда вычисление шестнадцатеричного представления 2-ух
дополнений отрицание суммы. Для примера, читая 1 слово с адреса 0401H преобразователя с
адресом 01H.
‘0’
Число данных ‘0’
'0’
‘1’
LRC CHK 1 ‘F’
LRC CHK 0 ‘6’
END1 CR
END0 LF
STX ‘:’
ADR1 ‘0’
ADR0 ‘1’
CMD1 ‘0’
CMD0 ‘3’
Стартовый ‘0’
адрес ‘4’
данных ‘0’
‘1’
Page 62

Руководство по эксплуатации преобразователей VFD-V стр. 62
01H+03H+04H+01H+00H+01H=0AH,
2-ух дополнений отрицание 0AH есть F6
RTU Режим:
H.
ADR 01H
CMD 03H
Начальный адрес 21H
02H
Число данных 00Н
(Индекс слова) 02H
CRC CHK Low 6FH
CRC CHK High F7H
CRC (циклическая проверка по избыточности) рассчитанная следующими шагами:
Шаг 1 : Загрузка 16-bit регистра (называемого CRC регистром) с FFFFH;
Шаг 2: Исключающее ИЛИ первому 8-bit байту из командного сообщения с байтом младшего
порядка из 16-bit регистра CRC, помещение результата в CRC регистр.
Шаг 3: Сдвиг одного бита регистра CRC вправо с MSB нулевым заполнением. Извлечение и
исследование LSB.
Шаг 4: Если LSB CRC регистра равно 0, повторите шаг 3, в
противном случае исключающее
ИЛИ CRC регистра с полиномиальным значением A001H.
Шаг 5: Повторяйте шаг 3 и 4, до тех пор, пока восемь сдвигов не будут выполнены. Затем,
полный 8-bit байт будет обработан.
Шаг 6: Повторите шаг со 2 по 5 для следующих 8-bit байтов из командного сообщения.
Продолжайте пока все байты не будут обработаны. Конечное содержание CRC регистра CRC
значение. При передачи
значения CRC в сообщении, старшие и младшие байты значения CRC должны
меняться, то есть сначала будет передан младший байт.
На следующем примере приведена CRC генерация с использованием языка С. Функция берет
два аргумента:
Unsigned char* data <- a pointer to the message buffer
Unsigned char length <- the quantity of bytes in the message buffer
The function returns the CRC value as a type of unsigned integer.
Unsigned int crc_chk(unsigned char* data, unsigned char length){int j;
unsigned int reg cre=0xFFFF;
while(length--){
reg_crc ^= *data++;
for(j=0;j<8;j++){
if(reg_crc & 0х01){ /*LSB(b0)=1 */
reg_crc=(reg_crc>>1) ^ 0xA001;
}else{
reg crc=reg_crc>>1;
}
}
}
return reg_crc;
}
3.5. Адресный список:
Содержание доступных адресов показано ниже :
Содержание: Aдрес:
Функция:
Page 63

Руководство по эксплуатации преобразователей VFD-V стр. 63
Параметры
Запись
команды
Чтение
статуса
привода
ПЧ
GGnnH
Номер параметра, для примера, адрес 0401H параметра
Pr.4-01.
При чтении параметра командным кодом 03H, только один
GG – группа параметра, nn – параметр.
параметр может читаться в одно и тоже время.
Bit 0-3 0: Никакая функция;
1: Stop;
2: Run;
3: Jog+Run;
Bit 4-5 Не используется;
2000H
Bit 4-5 00B: Никакая функция;
01B: FWD;
10B: REV;
11B: Изменение направления вращения;
Bit 8-9
00B: Нет функции;
01B: Управление ПЧ с цифровой панели;
10B: Управление ПЧ по RS485 или внешних терминалов;
11B: Изменение выбранного источника управления;
Bit 6-7
Bit 12-15
Не используется;
Не используется;
2001H Управление частотой/моментом;
Bit 0 1: EF (внешняя ошибка) on;
2002H
Bit1 1: Сброс;
Bit 2-15 Не используется;
2100Н
2101H
Код ошибки:
см. Pr.6-10…6-13
Статус VFD-В
Bit 0-4
1: команда RUN;
1: состояние RUN;
1: команда JOG;
1: команда REV;
1: состояние REV.
Bit 8 1: Управление ведущей частотой по
последовательному интерфейсу.
Bit 9 1: Управление ведущей частотой аналоговым
сигналом.
Bit 10 1: Управление ПЧ по RS485/внешним терминалам.
Bit 11 1: Параметры заблокированы.
Bit 14-15 Не используется.
2102H Ведущая частота/момент (F);
2103H Выходная фактическая частота/момент (H);
2104H Выходной ток (АXXX.X);
2105H Напряжение на шине DC U (XXX.XX);
2106H Выходное напряжение E (XXX.XX);
2107H Номер шага дискретного управления скоростью;
2108H Номер шага PLC программы
2109H Время действия PLC
2116H Многофункциональный дисплей (Pr.00-04)
2120H Pr.00-04=0
2122H Pr.00-04=1
217EH Pr.00-04=47
3.6. Исключительная ситуация по ответу:
Ниже приводятся ситуации в которых преобразователь не дает нормального ответа
Page 64

Руководство по эксплуатации преобразователей VFD-V стр. 64
управляющему устройству, например, компьютеру.
Если ПЧ не принимает сообщения из-за ошибки связи и не отвечает компьютеру, то компьютер
исчерпает лимит времени ожидания.
ПЧ принимает сообщение без ошибки, но не может его обработать, ответ исключения
возвратится ведущему устройству, а сообщение об ошибке "CExx" будет выведено на цифровой панели
преобразователя. “хх” в сообщении
"CExx" есть десятичный код равный коду исключения, который
описан ниже.
В ответе исключения, старший значащий бит первоначального кода команды установлен в 1, и
код исключения объясняет условие, которое вызвало исключение.
Пример ответа исключения с кодом команды 06Н и кодом исключения 02Н:
ASCII режим: RTU режим:
STX ‘:’ ADR 01H
‘0’ CMD 86H ADR 1
ADR 0
CMD 0
‘1’ Код исключения 02H
‘8’ CRC CHK Low C3H CMD 1
‘6’
‘0’ Код исключения
CRC CHK High A1H
‘2’
LRC CHK 0
END 0
‘7’ LRC CHK 1
‘7’
CR END 1
LF
Значение кода исключения:
Коды
ошибки
01
Код запрещенной команды:
Код команды, полученный в командном сообщении, не доступный для понимания
Описание
ПЧ.
02
Недоступный адрес данных:
Адрес данных, полученный в командном сообщении, не доступный для понимания
ПЧ.
03
Не допустимое значение данных:
Значение данных, полученное в командном сообщении, не доступное для понимания
ПЧ.
04 Ошибка в ведомом устройстве (компьютере):
ПЧ не может выполнить требуемое действие.
ПЧ принимает сообщение, но обнаруживает ошибку, ни кокого ответа не дает, но на дисплей
цифровой панели будет выведен код ошибки сообщения "CExx". Компьютер в конце концов исчерпает
лимит ожидания ответа. “хх” в сообщении "CExx" есть децимальный код равный коду исключения,
который описан ниже.
Сообщение
Значение
об ошибке
05 Не используемый.
06
ПЧ занят:
Временной интервал между командами слишком короток. Сохраните интервал 10мс
после возвращения из команды. Если ответ на команду не поступает, сохраните
интервал 10мс по той же причине.
07 и 08 Не используемые.
09 Ошибка контрольной суммы.
Проверьте правильность контрольной суммы.
10 Не используемый.
Page 65

Руководство по эксплуатации преобразователей VFD-V стр. 65
11 Ошибка кадра:
Проверьте, соответствует ли скорость передачи формату данных.
12 Сообщение команды слишком короткое.
13 Длина сообщения более допустимой.
14
Сообщения команды включают данные, не принадлежащие символам '0' … '9', 'A' …
'F ' кроме символов старта и конца (только для Modbus режима ASCII).
*9-05
Обработка сбоя связи ПЧ с пультом управления Заводская уставка: 3
Возможные значения: 0: Предупреждение и продолжение работы;
1: Предупреждение и остановка привода с замедлением;
2: Предупреждение и остановка привода на выбеге;
Группа 10: Параметры обратной связи по скорости
10-00
10-01
Количество линий (импульсов на оборот) датчика обр. связи по
скорости
Диапазон установки: 1 … 20000 Дискретность: 1
Тип входных сигналов в канале 1 платы PG. Заводская уставка: 0
FWD: А опережает В;
REV: B опережает A; (включение по фронту)
FWD REV
0
A
B
FWD: B опережает A;
REV: A опережает B; (включение по фронту)
FWD REV
1
A
B
А: импульсный сигнал, В: направление (высокий уровень–FWD, низкий уровень-REV)
FWD REV
2
A
B
А: импульсный сигнал, В: направление (высокий уровень–REV, низкий уровень- FWD)
FWD REV
3
A
B
FWD: A: импульсный сигнал, В: направление (H); REV: B: импульсный сигнал, A:
4
направление (H);
Заводская уставка: 600
Page 66

Руководство по эксплуатации преобразователей VFD-V стр. 66
FWD REV
A
B
FWD: B: импульсный сигнал, A: направление (H);
REV: A: импульсный сигнал, B: направление (H);
FWD REV
5
A
B
Фаза А опережает В в прямом (FWD) направлении вращения (включение по уровню);
FWD REV
6
A
B
Фаза В опережает А в прямом (FWD) направлении вращения (включение по уровню).
FWD REV
7
A
B
Этот параметр используется для указания типа сигналов на входах A1, B1 платы PG-04.
H – это сигнал высокого уровня, L – сигнал низкого уровня.
10-02
Реакция на обнаруженную ошибку в передаче сигнала
Заводская уставка: 0
обратной связи
Возможные значения: 0: Предупреждение и продолжение работы;
1: Предупреждение и остановка двигателя с замедлением;
2: Предупреждение и остановка двигателя на выбеге.
Пользователь задает действия ПЧ на отсутствие сигнала обр. связи по скорости.
10-03
Время обнаружения сигнала обратной связи Заводская уставка: 0
Диапазон установки: 0.0 … 10.0 Дискретность: 0.1 сек
Если различие между выходной частотой и частотой вращения двигателя превышает допустимый
диапазон (Pr. 10-05) или частотой вращения двигателя больше уровня (Pr. 10-06), то реакция на данную
ошибку последует через время заданной в этом параметре.
*10-04
Время фильтрации сигнала обратной связи Заводская уставка: 0.010
Диапазон установки: (0.001 … 1.000) сек Дискретность: 0.001
10-05
Диапазон разницы между выходной частотой и частотой
Заводская уставка: 10
вращения двигателя (максимальное скольжение).
Диапазон установки: 0.0 … 50.0 Дискретность: 0.1 %
10-06
Уровень ограничения скорости. Заводская уставка: 110
Диапазон установки: 0.0 … 115.0 Дискретность: 0.1 %
Максимальная скорость = Pr.10-06 x Pr.01-00
10-07
Числитель передаточного отношения Заводская уставка: 1
Page 67

Руководство по эксплуатации преобразователей VFD-V стр. 67
Диапазон установки: 1 … 5000 Дискретность: 1
10-08
Знаменатель передаточного отношения Заводская уставка: 1
Диапазон установки: 1 … 5000 Дискретность: 1
Частота вращения = (Частота импульсов/Pr.10-00) * Pr.10-07/ Pr.10-08
10-09
Нулевое положение Заводская уставка: 0
Диапазон установки: 0 … 20000 Дискретность: 1
Параметр задает точку в которой будет всегда останавливаться вал двигателя при задании нулевой
скорости в режиме позиционирования (см.рис.10-2)
10-10
Диапазон сигнализации достижения заданного положения. Заводская уставка: 10
Диапазон установки: 0 … 20000 Дискретность: 1
Соответствующий выходной терминал будет замкнут при достижении заданной позиции в диапазоне
заданном в данном параметре.
Фактический диапазон = 2 х Pr.10-10. Если Pr.10-10 = 20, тогда полный диапазон = 40 импульсов (20
импульсов снизу и 20 импульсов сверху заданной позиции)
Опорная частота
*10-11
Используется для фильтрации цифрового сигнала задания частота через PG-карту и позволяет
избавиться от помех.
10-12
Р
Pr. 05-21
05-23
Переключ.
ASR1/2
Pr.5-25
Pr.10-04
I
Pr. 05-22
05-24
Pr.10-07;
Pr.10-08
+
+
Pr.10-05
Pr.10-00;
Pr.10-01;
Pr.5-05;
Pr.5-15;
Pr.10-06
Векторное
управление
Pr.1-10
АД
PG
Сигнал обратной
+
-
связи по скорости
Цифровой фильтр Заводская уставка: 0.003
Диапазон установки: (0.001 … 1.000) сек Дискретность: 0.001
Тип входных сигналов в канале 2 платы PG. Заводская уставка: 0
FWD: А опережает В;
REV: B опережает A; (включение по фронту)
FWD REV
0
A
B
FWD: B опережает A;
1
REV: A опережает B; (включение по фронту)
FWD REV
Page 68

Руководство по эксплуатации преобразователей VFD-V стр. 68
A
B
А: импульсный сигнал, В: направление (высокий уровень–FWD, низкий уровень-REV)
FWD REV
2
A
B
А: импульсный сигнал, В: направление (высокий уровень–REV, низкий уровень- FWD)
FWD REV
3
A
B
FWD: A: импульсный сигнал, В: направление (H); REV: B: импульсный сигнал, A:
направление (H);
FWD REV
4
A
B
FWD: B: импульсный сигнал, A: направление (H);
REV: A: импульсный сигнал, B: направление (H);
FWD REV
5
A
B
Этот параметр используется для указания типа сигналов на входах A2, B2 платы PG-04.
H – это сигнал высокого уровня, L – сигнал низкого уровня.
Параметры позиционирования:
*10-13
Пропорциональный коэффициент (Р) Заводская уставка: 50.0
Диапазон установки: 0.0 … 500.0 % Дискретность: 0.1 %
*10-14
Время интегрирования (I) Заводская уставка: 1.00
Диапазон установки: 0.00 … 100.00 Дискретность: 0.01 сек
*10-15
Время дифференцирования (D) Заводская уставка: 0.00
Диапазон установки: (0.00 … 1.00)сек Дискретность: 0.01
*10-16
Скорость ориентации Заводская уставка: 5.00
Диапазон установки: 0.0 … 400.00 Дискретность: 0.01 Гц
*10-17
Точка включения "ползучей" скорости Заводская уставка: 50
Диапазон установки: 0…20000 Дискретность: 1
Page 69

Руководство по эксплуатации преобразователей VFD-V стр. 69
*10-18
"Ползучая" скорость Заводская уставка: 1
Диапазон установки: 0.00 … 400.00 Дискретность: 0.01 Гц
*10-19
Точка включения окончательного замедления Заводская уставка: 10
Диапазон установки: 1… 20000 Дискретность: 1
*10-20
Коэффициент масштабирования задающего энкодера платы
Заводская уставка: 1
PG-04 (знаменатель)
Диапазон установки: 1… 128 Дискретность: 1
Параметр определяет сколько импульсов задающего энкодера должно приходиться на один импульс
энкодера обратной связи, т.е. во сколько раз скорость ведомого привода должна быть меньше скорости
ведущего.
Скорость ориентации
Pr.10-16
Точка включения ползучей
скорости Pr.10-17
Ведущая частота
Нулевая скорость
Режим позиционирования
Многофункц. вход (Pr.2-01…2-06 = 30)
Заданное положение достигнуто
Многофункц. выход (Pr.2-11…2-14 = 31)
FWD/REV
Скорость ориентации 10-16
Ползучая скорость 10-18
Нулевая метка
Z-фаза энкодера
Нулевое положение
Pr.10-09
Точка включения
окончательного замедления
Pr.10-19
Ползучая скорость
Pr.10-18
Pr.10-17
Pr.10-19
Pr.10-09
Нулевое
положение
Page 70

Руководство по эксплуатации преобразователей VFD-V стр. 70
*10-21
Прямое задание Заводская уставка: 5.0
Диапазон установки: 0.0 … 100.0 % Дискретность: 0.1 %
*10-22
Коэффициент усиления скорости в режиме позиционирования Заводская уставка: 90.0
Диапазон установки: 0.0 … 100.0 % Дискретность: 0.1 %
Используется для коррекции скорости в режиме позиционирования. На этот коэффициент умножается
выходная частота.
*10-23
Заданная позиция 2 Заводская уставка: 0
Диапазон установки: 0 … 20000 Дискретность: 1
Параметр задает точку при достижении которой будет активизирован соответствующий выходной
терминал (в режиме P2P)
*10-24
Время разгона в режиме P2P Заводская уставка: 0.1
Диапазон установки: (0.00 … 100.00) сек Дискретность: 0.01 сек
*10-25
Время торможения в режиме P2P Заводская уставка: 0.1
Диапазон установки: (0.00 … 100.00) сек Дискретность: 0.01 сек
*10-26
Время задержки для команд позиционирования Заводская уставка: 0.1
Диапазон установки: (0.00 … 100.00) сек Дискретность: 0.01 сек
*10-27
Пропорциональный коэффициент 2 (Р) Заводская уставка: 50.0
Диапазон установки: 0.0 … 1500.0 % Дискретность: 0.1 %
*10-28
Время интегрирования 2 (I) Заводская уставка: 0.050
Диапазон установки: 0.000 … 10.000 Дискретность: 0.001 сек
*10-29
Выбор метода отсчета в режиме P2P Заводская уставка: 0
Возможные значения: 0: Относительные координаты;
1: Абсолютные координаты.
Пользователь выбирает метод отсчета в режиме автоматического позиционирования.
*10-30
Направления вращения каждого шага в режиме P2P Заводская уставка: 0
Диапазон установки: 0…255 (Pr.10-33…40) Дискретность: 1
Параметр задает направления шагов в режиме автоматического пошагового позиционирования (P2P) в
абсолютных координатах.
*10-31
Ограничение вращения в прямом (FWD) направлении в
Заводская уставка: 0
режиме P2P
Диапазон установки: 0 … 60000
Дискретность: 1
0: нет ограничения
*10-32
Ограничение вращения в обратном (REV) направлении в
Заводская уставка: 0
режиме P2P
Диапазон установки: 0 … 60000
Дискретность: 1
0: нет ограничения
Параметры используются для задания крайних позиций в режиме P2P в абсолютных координатах.
*10-33
Команда 0 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
*10-34
Команда 1 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
*10-35
Команда 2 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
*10-36
Команда 3 в режиме P2P Заводская уставка: 0
Page 71

Руководство по эксплуатации преобразователей VFD-V стр. 71
Диапазон установки: 0…50000 Дискретность: 1
*10-37
Команда 4 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
*10-38
Команда 5 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
*10-39
Команда 6 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
*10-40
Команда 7 в режиме P2P Заводская уставка: 0
Диапазон установки: 0…50000 Дискретность: 1
Задаются величины перемещений каждого шага в режиме P2P
*10-31
Количество импульсов на оборот в режиме P2P Заводская уставка: 0
Диапазон установки: 0 … 20000 Дискретность: 1
*10-32
Количество мм в импульсе в кол-ве импульсов (Pr.10-41) для
Заводская уставка: 0
режима P2P
Диапазон установки: 0 … 20000 Дискретность: 1
Page 72

Руководство по эксплуатации преобразователей VFD-V стр. 72
6. ОБСЛУЖИВАНИЕ
VFD-V современный цифровой преобразователь частоты, рассчитанный на долголетнюю работу
в круглосуточном режиме. Для продления ресурса работы ПЧ необходимо выполнять профилактические
мероприятия, описанные ниже.
Перед проверкой, связанной с открыванием защитных крышек и отсоединением проводников,
необходимо отключить питающую сеть и подождать не менее 10 мин до полного разряда конденсаторов
преобразователя.
Периодический осмотр и обслуживание
Перечень основных проверок, которые рекомендуется проводить не реже одного раза в 6 месяцев:
1. Проверьте крепление проводов на силовых клеммниках и планке дистанционного управления, при
необходимости затяните их, соблюдая рекомендованное усилие.
2. Проверьте провода и кабели и их изоляцию на отсутствие повреждений.
3. Произведите визуальный осмотр ПЧ и убедитесь, что в нем нет
4. Очистите от пыли и грязи (пропылесосьте или продуйте сухим сжатым воздухом под давлением 46 кг/см
места скопления пыли. Помните, что пыль и грязь могут уменьшить срок службы преобразователя
или привести к его отказу.
5. Проверьте тепловой режим ПЧ и двигателя. Обратите внимание на работу вентилятора (свободу
вращения, шум, нагрев, загрязненность).
6. Если преобразователь длительное время не
включать (можно и без двигателя) и формовать его электролитические конденсаторы, а также
подтверждать сохранение функциональных способностей.
Примечание: Невыполнение данных требований может привести к отказам и преждевременному
выходу из строя преобразователя частоты.
2
) радиатор, силовые элементы, элементы конструкции, панель управления, разъемы и другие
включался, необходимо не реже одного раза в год его
посторонних предметов.
Формование конденсаторов в цепи постоянного тока
Формование конденсаторов – это плавное повышение напряжение заряда конденсатора от нуля до
номинального значения. Эта процедура необходима, если срок хранения ПЧ превысил 1 год.
Вам необходимо отключить от сети ПЧ и медленно (в течение 1 часа) повышать напряжение заряда
конденсаторов от нуля до номинального значения.
Формование должен производить квалифицированный электрик с помощью автотрансформатора
ЛАТРа).
(
Page 73

Руководство по эксплуатации преобразователей VFD-V стр. 73
7. ПОИСК НЕИСПРАВНОСТЕЙ И ИНФОРМАЦИЯ ОБ ОШИБКАХ
Преобразователи VFD-V имеют защиту от многих аварийных и нештатных режимов:
• от токов недопустимой перегрузки и короткого замыкания по выходу, в том числе от
замыкания выходной фазы на "землю";
• от недопустимых перенапряжений по питанию и на шине DC;
• перегрева радиатора;
• от недопустимых отклонений и не штатного исчезновения напряжения питающей сети
• от недопустимых отклонений технологического параметра;
• от несанкционированного доступа к программируемым параметрам (защита паролем);
• и т. д.
Несмотря на наличие разнообразных защит, неправильная эксплуатация ПЧ может привести
к выходу его из строя, нанести ущерб здоровью человека. Наиболее частой причиной выхода из
строя ПЧ при неправильной эксплуатации является
его работа с частыми повторными пусками при
срабатывании защит, связанных с перегрузками (коды аварий: o.c., o.u., o.H., o.L. и др.). При
возникновении каждой перегрузки и срабатывании защиты происходит повышенный локальный
разогрев кристаллов силовых транзисторов и диодов. Ни одна из защит прямо не контролирует
температуру кристаллов. После нескольких повторных пусков за короткий промежуток времени
при срабатывании
защит, связанных с перегрузками, происходит недопустимый перегрев и
разрушение силового элемента ПЧ. Такая эксплуатация ПЧ является недопустимой. На ПЧ,
который эксплуатируется при подобных условиях, не распространяются гарантийные
обязательства по его ремонту.
При срабатывании любой защиты и блокировке ПЧ необходимо проанализировать причину
блокировки и принять соответствующие меры согласно требованиям настоящей инструкции
разгрузить привод, выбрать ПЧ большей мощности, изменить циклограмму работы, увеличить
время разгона/замедления, изменить характеристику U/f, устранить причину коротких замыканий и
т.д. В случае, если требования данного раздела настоящей инструкции выполнены, но
аварийная защита сработала, следует отключить ПЧ от схемы и передать его в Сервисную
службу Поставщика для прохождения диагностики
в рамках гарантийных обязательств. В
противном случае на ПЧ не распространяются гарантийные обязательства по ремонту.
Часто причиной выхода из строя оборудования является эксплуатация ПЧ без
применения дополнительных устройств: дроссели, радиофильтры, тормозные резисторы и т. д.
Рекомендации по применению дополнительных устройств даны в настоящем руководстве.
;
:
Не понимание каких-либо вопросов, связанных с
настройкой, подключением,
эксплуатацией ПЧ не будет рассматриваться как оправдание при отказах ПЧ. Преобразователи VFD
являются сложным промышленным электронным оборудованием, поэтому ввод в эксплуатацию и
надзор за правильной эксплуатацией должен осуществляться только специалистами. Поставщик не
несет ответственности за последствия не грамотной эксплуатации ПЧ.
Преобразователь частоты имеет развитую диагностическую систему, которая включает
несколько способов индикации и сообщений о характере аварии. Как только аварийное состояние
обнаружено, защита будет активизирована и все транзисторы инвертора закроются, т. е. двигатель
будет обесточен. Ниже описаны сообщения, выводимые на дисплей при блокировке
преобразователя по причине аварии. Четыре последних сообщения могут быть
прочитаны на
цифровом дисплее при просмотре значений параметров 6-15 … 6-18.
Примечание. После устранения причины аварии нажмите кнопку RESET для сброса блокировки.
Page 74

Руководство по эксплуатации преобразователей VFD-V стр. 74
р
д
м
п
м
Описание кодов аварий, выводимых на цифровой дисплей,
и необходимых действий по их устранению.
Код Описание Необходимые действия по устранению
o.c.
o.u.
o.H1
L.u.
o.L.
o.L1
o.L2
o.c.A
o.c.d
Выходной ток (мгновенное
значение) преобразователя
превысил допустимое значение.
Напряжение на шине DC
преобразователя превысило
допустимое значение (800B).
Датчик температуры
зафиксировал превышение
допустимой температуры IGBT
модуля.
Напряжение на шине DC ниже
допустимого уровня.
Перегрузка преобразователя по
току. ПЧ может выдержать ток
>150%Iном в течение макс. 60сек
Перегрузка двигателя по току
зафиксированная электронным
тепловым реле ПЧ.
Перегрузка двигателя
(превышение момента).
Проверьте установки параметров
Pr.6-06 … 6-08.
Обнаружение сверхтока при
азгоне:
1. Короткое замыкание в
вигателе.
2. Момент нагрузки слишком
большой.
3. Время разгона слишком
аленькое.
4. Выходная мощность
рименяемого двигателя слишком
аленькая.
Обнаружение сверхтока при
торможении:
1.Короткое замыкание в
двигателе.
2.Время замедления слишком
1. Проверьте мощность (номинальный ток) двигателя не превышает ли она допустимую.
2. Проверьте соединения двигателя и преобразователя,
сопротивление обмоток двигателя на отсутствие К. З.
3. Увеличьте время разгона.
4. Проверьте нагрузку двигателя.
1. Проверьте напряжение сети, – не превышает ли оно
допустимое значение.
2. Убедитесь в отсутствии выбросов напряжения сети.
3. Повышение напряжения на шине DC может быть
следствием чрезмерной регенерации энергии двигателя.
В этом случае, увеличьте время разгона или используйте
соответствующий тормозной резистор.
4. Проверьте энергию торможения, соответствует ли
расчетному значению.
1. Проверьте температуру окружающей среды.
2. Удостоверьтесь, что вентилятор работает нормально,
радиатор не загрязнен и требования по необходимому
воздушному коридору выполнены.
1. Проверьте входное напряжение, наличия напряжения
на всех трех фазах.
1. Проверьте нагрузку двигателя.
2. Уменьшите уровень компенсации момента (Pr.5-03).
3. Используйте преобразователь с более высоким
номиналом выходного тока.
1. Проверьте не перегружен ли двигатель.
2. Проверьте установленные параметры электронного
термореле, соответствуют ли они реальным
условиям эксплуатации.
3. Проверьте соотвествует ли номинальная мощность
двигателя нагрузке.
4. Установите истиное значение номинального тока
двигателя в Pr.5-01.
1.Уменьшите нагрузку двигателя.
2.Установите уровень обнаружения перегрузки,
соответствующим реальной эксплуатации (Pr.06-06 …
Pr.06-08).
1. Проверьте состояние изоляции в выходном кабеле и
двигателе.
2. Уменьшите подъем момента в Pr.5-03.
3. Увеличьте время разгона.
4. Замените двигатель на двигатель с большей мощностью.
1. Проверьте состояние изоляции в выходном кабеле и
двигателе.
2. Увеличьте время торможения.
3. Замените двигатель на двигатель большей мощности.
она
Page 75

Руководство по эксплуатации преобразователей VFD-V стр. 75
o.c.n
E.F
G.F.F
PG
c.F1
c.F2
c.F3
H.P.F
FUSE
b.b.
S.c
b.F
o.H2
c.t1
c.t1
PId
AcI.
c.c.
uEc
FAn
PHL
короткое.
3.Мощность двигателя слишком
мала.
Обнаружение сверхтока в
установившемся режиме:
1.Короткое замыкание в
двигателе.
2.Наброс момента.
3.Не достаточная мощность
двигателя.
Внешний терминал
EF – GND замкнут.
Замыкание на землю:
Если при повторных коротких
замыканиях выходной ток ПЧ
превышал номинальный более
чем на 50%, то силовые IGBT
модули могут быть повреждены.
Обрыв датчика обратной связи
по скорости
Микросхемы внутренней памяти
ПЧ не программируются
Микросхемы внутренней памяти
ПЧ не читаются
Авария во внутренней схеме ПЧ
Отказ аппаратной защиты ПЧ
Сгорел предохранитель в цепи
постоянного тока
Внешняя команда задержки или
паузы.
Короткое замыкание на выходе
инвертора
Выход из строя тормозного
транзистора
Перегрев тормозного
транзистора
Ошибка датчика тока D1 Выход из строя контроллера или датчика тока.
Ошибка датчика тока D2 Выход из строя контроллера или датчика тока.
Ошибка ПИД-регулятора 1.Проверьте соединения между ПЧ и датчиком обратной
Ошибка сигнала по входу ACI 1.Проверьте соединения входного терминала ACI.
Сверхток на остановленном
приводе
Ошибка измерения
сопротивления статора R1.
Неисправность вентилятора. 1. Проверьте отсутствие посторонних предметов в
Потеря фазы питающего 1. Проверьте наличие напряжения на всех трех входных
1. Проверьте состояние изоляции в выходном кабеле и
двигателе.
2. Проверьте не остановился ли двигатель.
3. Замените двигатель на более мощный.
Проверьте соответствует ли замкнутое состояние
терминала EF – GND схеме управления.
1.Проверьте исправность силовых модулей.
2.Проверьте сопротивление изоляции выходного кабеля
и двигателя.
1.Проверьте соединение и работоспособность датчика
обратной связи по скорости PG-платы.
1.Верните их изготовителю.
2.Проверьте микросхемы EEPROM на плате управления.
1.Верните их изготовителю.
2.Сбросьте установки пользователя к заводским.
1.Возвратите ПЧ изготовителю.
1.Возвратите ПЧ изготовителю.
1. Проверьте соединения двигателя и преобразователя,
сопротивление обмоток двигателя на отсутствие К. З. и
замыкания на землю.
2. Замените предохранитель.
1. Если на внешний терминал поступает команда все
выходы ПЧ закрываются.
2. Блокируйте эту команду и привод заработает снова.
1. Измерьте сопротивление обмоток двигателя.
1. Обратитесь к поставщику
1.Проверьте функционирование вентилятора,
температуру окружающей среды.
2. Проверьте номинал тормозного резистора.
Обратитесь к поставщику
Обратитесь к поставщику
связи.
2.Проверьте настройки параметров ПИД-регулятора.
1. Вышли из строя транзисторы силового модуля.
Обратитесь к поставщику
Проведите заново функцию автотестирования или
введите значение R1, если оно известно.
вентиляторе.
2. Свяжитесь с поставщиком.
Page 76

Руководство по эксплуатации преобразователей VFD-V стр. 76
напряжения терминалах R(L1), S(L2), T(L3).
ErtUn
C.E-
Er-26
ErPU
Er485
Ошибка автотестирования Проверьте соединение ПЧ с двигателем.
Ошибка связи 1.Проверьте соединения между ПЧ и компьютером.
2.Проверьте настройки параметров связи ПЧ и
компьютера.
Сбой IGBT Свяжитесь с поставщиком.
Ошибка цифровой панели
управления
Ошибка коммуникации RS485 Проверьте связь компьютерf с ПЧ.
Проверьте связь цифровой панели с ПЧ.
Page 77

Руководство по эксплуатации преобразователей VFD-V стр. 77
2
4
2
2
2
2
2
2
2
2
2
2
8. СВОДНАЯ ТАБЛИЦА ПАРАМЕТРОВ
Примечание. Установка параметра, обозначенного *, может быть произведена во время
работы привода.
Сводная таблица параметров.
Обо-
значение
Описание Диапазон установки, примечания
Группа 0: Системные параметры
уставка
Завод.
00-00
00-01
00-02
*00-03
*00-04
Идентификационный код
преобразователя частоты
Номинальный выходной
ток ПЧ
Сброс настроек
пользователя
Выбор параметра
отображаемого на
дисплее при старте
Параметр, выводимый на
дисплей
Параметр доступен только для просмотра #
Параметр доступен только для просмотра ##.#
9: Возврат к заводским уставкам для 50Гц;
10: Возврат к заводским уставкам для 60Гц
бит 0 = 1: Блокировка изменения параметров;
бит 1 = 1: Блокировка изменения выходной
частоты и момента;
бит 2 = 1: Блокировка управления приводом со
встроенного пульта.
0: заданная частота (F);
1: фактическая частота (Н);
2: величина определяемая параметром 0-04 (U);
3: выходной ток.
0: выходное напряжение;
1: напряжение на шине DC;
: управляющее напряжение;
3: дискретная скорость;
: скорость шага PLC;
5: время оставшееся до окончания цикла PLC;
6: число возможных рестартов;
7: значение счетчика;
8: момент нагрузки;
9: коэффициент мощности (±1.000);
10: угол сдвига между напряжением и током
(0…180);
11: выходная мощность (кВт);
12: полная выходная мощность (кВА);
13: скорость двигателя (об/мин)
14: температура силового IGBT-модуля;
15: температура тормозного резистора;
16: состояние входных цифровых терминалов;
сигнал задания ПИД-регулятора;
17:
18: сигнал обратной связи ПИД-регулятора;
19: напряжение по оси q;
0: напряжение по оси d;
1: магнитный поток;
2: время перегрузки OL;
3: время перегрузки по I2t;
4: время выполнения PLC;
5: стадия неподвижности;
6: время перегрузки по OL2;
7: время торможения постоянным током;
8: напряжение компенсации;
9: частота компенсации скольжения;
30: число импульсов энкодера (канал1);
31: местоположение по датчику импульсов (в
0
0
0
Page 78

Руководство по эксплуатации преобразователей VFD-V стр. 78
4
4
4
4
4
4
4
4
режиме позиционирования);
32: количество импульсов до нулевой позиции;
33: недопустимо высокое напряжение на шине
DC;
34: недопустимо высокое выходное напряжение;
35: недопустимо высокая выходная частота;
36: недопустимо высокий выходной ток;
37: недопустимо высокая заданная частота;
38: количество дней работы привода;
39: часы, минуты;
0: максимальная частота;
1: уровень превышения момента;
2: уровень ограничения тока;
3: коэффициент компенсации момента;
4: ограничение момента (Pr.6-12);
5: ток по оси q;
6: частота от датчика импульсов (канал1);
9: величина рассогласования ПИД-регулятора;
51: напряжение на входе AVI;
52: ток на входе AСI;
53: напряжение на входе AUI;
55: значение дополнительной частоты;
60: состояние входов на цифровых терминалах;
61: состояние выходов на цифровых терминалах;
84: частота входных импульсов (канал2);
85: местоположение в импульсах (канал2);
86: таймер OL3.
бит3-0: 40 – 9999
бит4: позиция десятичной точки
(0 - 3)
Параметр доступен только для просмотра #.#
бит0=0: Частота/момент изменяются кнопками
∇, ∆ пульта PU05 сразу;
бит0=1: Частота/момент изменяются кнопками
пульта ∇, ∆ только после нажатия кнопки
"data/prog";
бит1=0: Частота/момент заданные от PU05 и
RS485 сохраняются в памяти;
бит1=1: Частота/момент заданные от PU05 и
RS485 не сохраняются в памяти;
бит2=0: Частота/момент заданные
терминалов UP/DOWN сохраняются в памяти;
бит2=1: Частота/момент заданные от внешних
терминалов UP/DOWN не сохраняются в
памяти;
бит3=0: Изменение направления вращения
сохраняется в памяти;
бит3=1: Изменение направления вращения не
сохраняется в памяти;
бит4=0: Значение данного параметра
сохраняется в памяти;
бит4=1: Значение данного параметра не
сохраняется в памяти.
0: Частотный способ – U/f;
1: U/f + импульсный датчик обр. связи по
скорости (PG control);
от внешних
*00-05
00-06
*00-07
*00-08
*00-09
00-10
Пользовательский
коэффициент К
Версия программного
обеспечения.
Входной пароль 0 – 9999 0
Установка пароля 0 – 9999 0
Задание частоты и метод
работы пульта PU05
Метод управления
0
00000
0
Page 79

Руководство по эксплуатации преобразователей VFD-V стр. 79
2: Векторное управление;
3: Векторное управление + имп. датчик обр.
связи по скорости;
4: Управление моментом;
5: Управление моментом + PG.
0: Определяется параметрами группы 1 (без
учета начальной частоты Pr. 1-09 при
изменении направления вращения);
1: Определяется параметрами группы 1 (c
учетом начальной частоты Pr. 1-09 при
изменении направления вращения);
2: Зависимость U от F в степени 1.5(без учета
начальной частоты Pr. 1-09 при изменении
00-11
*00-12
*00-13
00-14
*00-15
*00-16
*00-17
*00-18
*00-19
*00-20
Выбор зависимости
U=f(F)
Выбор коэффициента
перегрузки (OL) при
управлении моментом.
Функция
автоматического выбора
времени
разгона/замедления
Дискретность задания
времени
разгона/замедления и
уставки кривой S
Верхний уровень
ограничения частоты
ШИМ
Нижний уровень
ограничения частоты
ШИМ
Центральная частота
"мягкой" ШИМ
Автоматическое
регулирование
напряжения (AVR)
Автоматическое
энергосбережение
Источник управления
выходной частотой
направления вращения);
3: Зависимость U от F в степени 1.5(c учетом
начальной частоты Pr. 1-09 при изменении
направления вращения);
4: Зависимость U от
начальной частоты Pr. 1-09 при изменении
направления вращения);
5: Зависимость U от F в степени 2(c учетом
начальной частоты Pr. 1-09 при изменении
направления вращения).
0: Перегрузка (OL) отсчитывается от 100% - работа
с постоянным моментом;
1: Перегрузка (OL) отсчитывается от 125% - работа
с переменным моментом.
0: Линейный разгон/замедление;
1: Автоматический выбор времени разгона,
линейное замедление;
2: Линейный разгон, автоматический выбор
времени замедления;
3: Автоматический выбор времени
разгона/замедления;
4: Линейный разгон/замедление с функцией
предотвращения перегрузки и перенапряжения.
0: Дискретность уставки: 0.01 сек;
1: Дискретность уставки: 0.1 сек.
0: "мягкая" ШИМ;
1…15 кГц
1…15 кГц 10
1…7 кГц 3
0: Функция AVR разрешена;
1: Запрещена;
2: Запрещена на этапе замедления.
бит0=0: Функция энергосбережения запрещена;
бит0=1: Функция энергосбережения разрешена;
бит1=0: Максимальной выходное напряжение
эквивалентно входному;
бит1=1: Максимальной выходное напряжение
может быть выше входного (возможна сверхмодуляция).
0: Ведущая частота задается с цифровой панели
управления (пульт PU05);
F в степени 2(без учета
0
0
0
0
15
0
00010
0
Page 80

Руководство по эксплуатации преобразователей VFD-V стр. 80
1: Ведущая частота задается с
последовательного интерфейса RS-485;
2: Ведущая частота задается с внешних
аналоговых терминалов ACI, AVI, AUI;
3: Ведущая частота задается с внешних
многофункциональных входов (UP/Down);
4: Ведущая частота и направление задаются
тактовыми импульсами с PG-карты;
5: Ведущая частота задается с посл. интерфейса
RS-485 и с пульта PU05;
6: Ведущая частота задается тактовыми
импульсами с PG-карты, с установкой
направления вращения в Pr.10-12.
0: RS-485 / цифровая панель управления (выбор
кнопкой PU на пульте);
*00-21
*00-22
*00-23
Источник управления
приводом
Способ остановки
двигателя
Блокировка изменения
направления вращения
1: От внешних терминалов планки ДУ /
цифровая панель управления (выбор кнопкой
PU на пульте);
2: Цифровая панель управления.
0: Остановка с замедлением выходной частоты
(Pr.01-05) за время установленное параметрами
Pr.01-10 и Pr.01-12;
1: Остановка с моментальным обесточиванием
двигателя и замедлением на свободном выбеге.
0: Реверс возможен;
1: Реверс заблокирован;
2: Прямое направление вращения (FWD)
заблокировано.
0
0
0
01-00
01-01
01-02
01-03
*01-04
01-05
*01-06
01-07
*01-08
01-09
*01-10
*01-11
*01-12
*01-13
*01-14
*01-15
Группа 1: Основные параметры
Макс. выходная частота (Fo
max)
Базовая частота (F1)
(номинальная частота
двигателя)
Базовое напряжение (U1) (0.0 – 460) В 380
Промежуточная частота 1 (0.00 – 400) Гц 0.5
Промежуточное
напряжение1
Промежуточная частота 2
Промежуточное
напряжение2
Минимальная выходная
частота
Минимальное выходное
напряжение
Начальная выходная частота
(Fstart)
Верхний предел выходной
частоты
Нижний предел выходной
частоты
Время разгона 1 (Ta1)
Время замедления 1 (Td1)
Время разгона 2 (Tl 2)
Время замедления 2 (Td 2)
(50.0 – 400) Гц 60.0/50.00
(0.00 – 400) Гц 60.0/50.00
(0.0 – 460) В 5
(0.00 - 400.0) Гц 0.5
(0.0 – 460) В 0.0
(0.00 - 400.0) Гц 0.0
(0.0 – 460) В 0.0
(0.0 – 460) В 0.5
(0 – 110) % 100
(0 – 100) % 0
(0.00 … 600/0.0 … 6000) сек
10.00
/60.00
Page 81

Руководство по эксплуатации преобразователей VFD-V стр. 81
*01-16
*01-17
*01-18
*01-19
*01-20
*01-21
*01-22
*01-23
*01-24
*01-25
*01-26
*01-27
01-28
01-29
01-30
01-31
01-32
01-33
Время разгона 3
Время замедления 3
Время разгона 4
Время замедления 4
Jog время разгона
Jog время замедления
Jog частота (0.1 - 400) Гц 6.0
Частота переключения 1-го/
4-го времени разгона/
торможения
Время 1 S-характеристики
разгона
Время 2 S-характеристики
разгона
Время 1 S-характеристики
замедления
Время 2 S-характеристики
замедления
Верхняя граница
пропускаемой частоты 1
Нижняя граница
пропускаемой частоты 1
Верхняя граница
пропускаемой частоты 2
Нижняя граница
пропускаемой частоты 2
Верхняя граница
пропускаемой частоты 3
Нижняя граница
пропускаемой частоты 3
(0.0 - 400) Гц 0
0.00 … 25 сек/0.0….250 сек 0
0.00 … 25 сек/0.0….250 сек 0
0.00 … 25 сек/0.0….250 сек 0
0.00 … 25 сек/0.0….250 сек 0
(0.00 - 400) Гц 0
(0.00 - 400) Гц 0
(0.00 - 400) Гц 0
(0.00 - 400) Гц 0
(0.00 - 400) Гц 0
(0.00 - 400) Гц 0
02-00
02-01
02-02
02-03
02-04
Группа 2: Параметры дискретных входов/выходов.
Выбор схемы управления
приводом от внешних
терминалов
Многофункциональный
входной терминал1 (МI1)
Многофункциональный
входной терминал2 (МI2)
Многофункциональный
входной терминал3 (МI3)
Многофункциональный
входной терминал4 (МI4)
0: 2х-проводная схема (FWD / STOP
REV / STOP).
1: 2х-проводная схема (FWD / STOP
REV / STOP) с блокировкой линейного
старта;
2: 2х-проводная схема (RUN / STOP
FWD/REV).
3: 2х-проводная схема (RUN / STOP
FWD/REV) с блокировкой линейного
старта;
4: 3х-проводная схема (кнопки без
фиксации).
5: 3х-проводная схема (кнопки без
фиксации) с блокировкой линейного
старта.
0: терминал не используется;
1: дискретное управление скоростью 1;
2: дискретное управление скоростью 2;
3: дискретное управление скоростью 3;
4: дискретное управление скоростью 4;
5: внешний сброс (RESET);
6: JOG-скорость;
7: запрещение функции разгона/замедл.;
0
1
2
3
4
Page 82

Руководство по эксплуатации преобразователей VFD-V стр. 82
02-05
02-06
02-23
02-24
02-25
02-26
02-27
02-28
02-29
02-30
*02-07
Многофункциональный
входной терминал5 (МI5)
Многофункциональный
входной терминал6 (МI6)
Многофункциональный
входной терминал7
Многофункциональный
входной терминал8
Многофункциональный
входной терминал9
Многофункциональный
входной терминал10
Многофункциональный
входной терминал11
Многофункциональный
входной терминал12
Многофункциональный
входной терминал13
Многофункциональный
входной терминал14
Способ изменения скорости
от терминалов UP/DOWN.
8: выбор 1 или 2 времени разг./замедл;
9: выбор 3 или 4 времени разг./замедл;
10: внешнее отключение (EF);
11: запрещение векторного режима;
12: команда паузы (контакт норм.
открытый);
13: команда паузы (контакт норм. замкн.);
14: отмена функции автоматического
выбора времени разгона/замедления;
15: переключение между 1-м/2-м
двигателями;
16: задание скорости от входа AVI;
17: задание скорости
18: задание скорости от входа AUI;
19: аварийный стоп;
20: увеличение ведущей частоты (UP);
21: уменьшение ведущей частоты (DOWN)
22: запуск PLC программы;
23: пауза PLC программы;
24: блокировка ПИД-регулятора;
25: сброс счетчика;
26: вход счетчика;
27: JOG-скорость в прямом напр.
вращения;
28: JOG-скорость в обр. напр. вращения;
29: Сбой тормозного модуля.
30: Режим позиционирования;
31: Запрещение функции управления
платы PG;
32: Переключение между режимами
управления моментом / скоростью;
33: Запрещение сохранения текущих
параметров в ПЗУ;
34: Режим торможения постоянным током;
35: Замещение функции нулевой скорости
функцией торможения постоянным
током
36: Режим позиционирования 2 (P2P)
37: Запрещение "спящего" режима
38: Стоп привода
39: Режим автоматического управления
позиционированием (P2P)
40: Пауза в режиме P2P
41: Поиск начальной позиции (FWD)
42: Вход датчика
направлении FWD в режиме P2P
43: Вход датчика крайнего положения в
направлении REV в режиме P2P
44: Поиск начальной позиции (REV)
бит0=0: Скорость от терминалов
UP/DOWN изменяется в соответствие с
заданным временем разгона/замедления.;
бит0=1: Скорость от терминала UP
увеличивается с фиксированным темпом,
заданным в Pr. 2-11, а от терминала
DOWN изменяется в соответствие с
заданным временем замедления;
бит1=0: Скорость от терминала DOWN
уменьшается с фиксированным темпом,
заданным в Pr. 2-11, а от UP изменяется
от входа ACI;
от
крайнего положения в
в
5
10
00000
Page 83

Руководство по эксплуатации преобразователей VFD-V стр. 83
соответствие с заданным временем
разгона;
бит1=1: Скорость от терминалов
UP/DOWN изменяется с фиксированным
темпом, заданным в Pr. 2-11.
Фиксированный темп
разгона/замедления при
*02-08
*02-09
*02-10
*02-11
*02-12
*02-13
*02-14
управлении приводом от
кнопок на терминалах
UP/DOWN.
Время опроса входных
цифровых терминалов
Текущий логический
уровень на дискретных
входах 1 - 14
Многофункциональный
выходной терминал1 RA,
RB, RC (реле1)
Многофункциональный
выходной терминал 2 МRA,
MRC (реле2)
Многофункциональный
выходной терминал 3 МО1
Многофункциональный
выходной терминал 4 МО1
(0.01 … 1) Гц/сек 0.01
(0.001 … 30.000) сек 0.005
0…65535.
бит 0…15 = 0: Низкий активный уровень
соответствующего входа (контакт
нормально разомкнут);
бит 0…15 = 1: Высокий активный уровень
соответствующего входа (контакт
нормально замкнут)
0: Работа терминала заблокирована;
1: Индикация работы преобразователя по
наличию выходного напряжения;
2: Скорость достигла заданного значения1;
3: Скорость достигла заданного значения2;
4: Сигнальная частота 1 достигнута
(двухсторонняя индикация);
5: Сигнальная частота 1 достигнута
(односторонняя индикация);
6: Сигнальная частота 2 достигнута
(двухсторонняя индикация);
7: Сигнальная частота 3 достигнута
(односторонняя индикация);
10: Нулевая скорость (
частоте < минимальной выходной
частоты);
11: Обнаружение перегрузки OL2 (см.
Pr.6-08);
12: Индикация отключения ПЧ внешней
командой паузы (b.b.);
13: ПЧ готов к работе (на ПЧ подано
питание и не обнаружено аварии);
14: Индикация пониженного напряжения
(LU);
15: Индикация аварии;
16: Индикация ДУ (если ПЧ управляется
через входные терминалы);
17: PLC программа запущена;
18: Программа PLC приостановлена;
19: Шаг PLC
20: Программа PLC выполнена;
21: Предельное значение счетчика
достигнуто;
22: Предварительное значение счетчика
достигнуто;
23: Предупреждение о перегреве
радиатора (при t > 85 °C);
24: Выходная частота достигла заданного
значения 1.
25: Выходная частота достигла заданного
значения 2;
программы выполнен;
при заданной
0
15
1
2
13
Page 84

Руководство по эксплуатации преобразователей VFD-V стр. 84
26: Предустановленная частота 1
достигнута (двухсторонняя индикация);
27: Предустановленная частота 1
достигнута (односторонняя индикация);
28: Предустановленная частота 2
достигнута (двухсторонняя индикация);
29: Предустановленная частота 3
достигнута (односторонняя индикация);
30: Сигнал включения тормозного
устройства (выход активизируется в
режиме торможения при необходимости
подключения тормозной нагрузки);
31: Заданное положение достигнуто;
32…47: Индикация текущего шага
программы PLC;
48…63: Индикация текущей дискретной
работы;
*02-15
*02-16
*02-17
*02-18
*02-19
*02-20
*02-21
*02-22
скорости пошагового режима
64: Потеря сигнала обратной связи по
скорости (PG Fault)
65: Низкое значение сигнала обратной
связи по скорости (PG Stall)
69: Обнаружение перегрузки OL3 (см.
Pr.6-09)
70: Нулевая скорость (стоп)
71: Заданная позиция 1 достигнута
72: Заданная позиция 2 достигнута
Выбор активного
логического уровня
многофункциональных
выходов (реле1, реле2, МО1,
МО2)
Предельное значение
счетчика
Предварительное значение
счетчика
Коэффициент цифрового
выхода частоты
Сигнальная частота 1 (0.00 … 400) Гц 60/50
Диапазон определения
сигнальной частоты 1
Сигнальная частота 2 (0.00 … 400) Гц 60/50
Диапазон определения
сигнальной частоты 2
0…15.
бит 0…3 = 0: Низкий активный уровень
соответствующего выхода (контакт
нормально разомкнут);
бит 0…3 = 1: Высокий активный уровень
соответствующего выхода (контакт
нормально замкнут)
0 … 65500 0
0 … 65500 0
1 … 40 1
(0.00 … 400) Гц 2
(0.00 … 400) Гц 2
0
Группа 3: Параметры аналоговых входов/выходов.
0: Терминал не используется;
*03-00
*03-01
Аналоговый входной
терминал 1 (AVI)
Аналоговый входной
терминал 2 (ACI)
1: Задание частоты/момента;
2: Ограничение момента (Pr.6-12);
3: Регулировка времени
разгона/замедления;
4: Установка верхнего ограничения
задания частоты;
5: Уровень тока перегрузки (Pr.6-07);
1
0
Page 85

Руководство по эксплуатации преобразователей VFD-V стр. 85
6: Величина компенсации момента;
7: Уровень предотвращения сверхтока во
время работы (Pr.6-04);
8: Величина компенсации момента в
векторном режиме;
9: Дополнительное задание частоты по
AVI;
10: Дополнительное задание частоты по
ACI;
11: Дополнительное задание частоты по
AUI;
12: Смещение ПИД-регулятора
13: Дополнительная мастер-частота
(-10.00… +10.00)В 0
(0.00…20.00) мА 4.00
(-10.00… +10.00)В 0
0: возможно положительное и
отрицательное смещение;
1: отрицательное смещение;
2: положительное смещение;
3: абсолютные значения положительного
и отрицательного смещения.
(-500 … +500)% 100
(-500 … +500)% 100
(-500 … +500)% 125
0: сложение запрещено;
1: сложение разрешено.
(0.00…2.00) сек 0.010
0: нет реакции;
1: продолжение работы по последней
правильной команде;
2: замедление до 0 Гц;
3: немедленный останов с выводом на
дисплей сообщения «EF».
0: Измерение вых. частоты (от 0 до макс.
вых. частоты);
1: Заданная частота (от 0 до макс.
частоты);
*03-02
*03-03
*03-04
*03-05
*03-06
*03-07
*03-08
*03-09
*03-10
*03-11
*03-12
*03-13
*03-14
*03-15
Аналоговый входной
терминал 3 (AUI)
Начальное смещение
управляющего сигнала по
входу AVI
Начальное смещение
управляющего сигнала по
входу AСI
Начальное смещение
управляющего сигнала по
входу AUI
Полярность (знак)
начального смещения по
входу AVI
Полярность (знак)
начального смещения по
входу AСI
Полярность (знак)
начального смещения по
входу AUI
Коэффициент передачи
выходной частоты к
управляющему сигналу по
входу AVI
Коэффициент передачи
выходной частоты к
управляющему сигналу по
входу ACI
Коэффициент передачи
выходной частоты к
управляющему сигналу по
входу ACI
Разрешение сложения
сигналов задания с
аналоговых входов
Постоянная времени
фильтра сигналов на
аналоговых входах
Реакция на неверное задание
сигнала по входу ACI
Выбор параметра,
выводимого аналоговым
напряжением 0 …10В
по выходу AFM-ACM
0
0
0
0
0
0
0
Page 86

Руководство по эксплуатации преобразователей VFD-V стр. 86
2: Вых. скорость двигателя (от 0 до макс.
частоты);
3: Измерение вых. тока (от 0 до 100%
номинального);
4: Вых. напряжение (от 0 до максимума);
5: Напряжение на шине DC (800В = 100%);
6: Коэффициент мощности (от Cosθ=90°
до Cosθ=0°);
7: Мощность (ном. мощность ПЧ = 100%);
8: Момент (от 0 до максимума);
9: Сигнал на AVI (0…10В = 0…100%);
10: Сигнал на ACI (0…20мА = 0…100%);
AUI (-10…+10В = 0…100%);
0
*03-16
*03-17
*03-18
Масштаб аналогового
напряжения
Напряжение смещения
сигнала на аналоговом
выходе
Разрешение отрицательных
сигналов на аналоговом
выходе
11: Сигнал на
12: Сигнал текущего момента (ном. ток ПЧ
= 100%);
13: Оценка текущего момента (ном. ток
ПЧ = 100%);
14: Ток намагничивания (ном. ток ПЧ =
100%);
15: Магнитный поток (ном. ток ПЧ =
100%);
16: Напряжение по оси q (400В=100%);
17: Напряжение по оси d (400В=100%);
18: Измеренная ошибка векторного
регулятора (от 0 до макс. вых. частоты);
19: Текущая ошибка ПИД-регулятора (от
до макс. вых. частоты);
20: Ошибка ПИД-регулятора (от 0 до макс.
вых. частоты);
21: Полная ошибка ПИД-регулятора (от 0
до макс. вых. частоты);
22: Сигнал задания момента (Полный
момент = 100%);
23: Частота измеренная импульсным
датчиком скорости (Pr1.00=100%);
24: Сигнал напряжения (400В=100%).
(-900.0 … 900.0) %
(-10.00… +10.00) В 0
0: Абсолютные значения;
1: При реверсе – на аналоговом выходе
0В;
2: При реверсе – на аналоговом выходе
отрицательное напряжение.
100
0
Page 87

Руководство по эксплуатации преобразователей VFD-V стр. 87
Группа 4: Параметры многоступенчатого управления скоростью
и plc (управления логическим процессом)
*04-00
*04-01
*04-02
*04-03
*04-04
*04-05
*04-06
*04-07
*04-08
*04-09
*04-10
*04-11
*04-12
*04-13
*04-14
*04-15
*04-16
*04-17
*04-18
*04-19
*04-20
*04-21
*04-22
*04-23
*04-24
*04-25
*04-26
*04-27
*04-28
*04-29
*04-30
*04-31
*04-32
Частота 1-ой скорости
Частота 2-ой скорости
Частота 3-ей скорости
Частота 4-ой скорости
Частота 5-ой скорости
Частота 6-ой скорости
Частота 7-ой скорости
Частота 8-ой скорости
Частота 9-ой скорости
Частота 10-ой скорости
Частота 11-ой скорости
Частота 12-ой скорости
Частота 13-ой скорости
Частота 14-ой скорости
Частота 15-ой скорости
Длительность работы на
мастер-частоте в PLCрежиме
Длительность шага 1
Длительность шага 2
Длительность шага 3
Длительность шага 4
Длительность шага 5
Длительность шага 6
Длительность шага 7
Длительность шага 8
Длительность шага 9
Длительность шага 10
Длительность шага 11
Длительность шага 12
Длительность шага 13
Длительность шага 14
Длительность шага 15
Кратность времени PLC 1…10 10
Вращение в прямом (FWD)
или обратном (REV)
направлении в режиме PLC
(0.00 – 400) Гц
0.00
(0.0 – 65500) сек
0.0
0 – 32767 (0: FWD; 1: REV)
0
Page 88

Руководство по эксплуатации преобразователей VFD-V стр. 88
бит0=0: направление вращения определяется
в Pr.4-32;
бит0=1: направление вращения определяется
мастер-частотой;
бит1=0: непрерывное выполнение циклов;
бит1=1: выполнение одного программного
цикла;
бит2=0: непрерывное выполнение без
интервалов;
бит2=1: между шагами замедление до
нулевой скорости;
бит3=0: замедление до 0 Гц после
выполнения программы;
бит3=1: работа на мастер-частоте после
выполнения программы;
бит4=0: режим PLC запрещен;
бит4=1: режим PLC разрешен.
бит0=0: направление вращения определяется
в Pr.4-32;
бит0=1: направление вращения определяется
мастер-частотой;
бит1=0: непрерывное выполнение циклов;
бит1=1: выполнение одного программного
цикла;
бит2=0: непрерывное выполнение без
интервалов;
бит2=1: между шагами замедление до
нулевой скорости;
0.00 – 400 Гц 0.00
0.00 – 400 Гц 0.00
*04-33
*04-34
04-35
04-36
Режим PLC (автоматический
режим пошагового
управления скоростью)
Режим пошагового
управления скоростью
Амплитуда скачкообразных
колебаний скорости
относительно заданной
Амплитуда плавных
колебаний скорости
относительно заданной
00000
0
05-00
05-01
05-02
*05-03
*05-04
05-05
05-06
05-07
Группа 5: Параметры двигателя
0: Запрещено;
1: Разрешено (измеряются: R1, R2, Lm, Lc,
Автотестирование двигателя
Номинальный ток двигателя 1
Ток холостого хода двигателя
1
Компенсация момента
двигателя 1 (только для
режима U=f(F))
Компенсация скольжения
двигателя 1 (только для
режима U=f(F))
Число полюсов двигателя 1 2…10 4
Сопротивление линии
обмотки статора двигателя 1
(R1)
Эквивалентное сопротивление
ротора двигателя 1 (R2)
ток холостого хода);
2: Разрешено (измеряются: R1, R2, Lc);
3: Разрешено (измеряются: R1, R2, Lm, Lc, а
ток холостого хода рассчитывается)
###A (30 – 120) % ###
###A (5 – 90) % ###
(0.0 - 25.0) % 0.0
(0.0 - 10.0) % 0.0
(0.00 – 655.35) мОм ###
(0 – 200) мОм ###
0
Page 89

Руководство по эксплуатации преобразователей VFD-V стр. 89
05-08
05-09
*05-10
05-11
05-12
*05-13
*05-14
05-15
05-16
05-17
05-18
05-19
*05-20
*05-21
*05-22
*05-23
*05-24
*05-25
*05-26
*05-27
*05-28
*05-29
*05-30
*05-31
*05-32
Индуктивность ротора
двигателя 1 (Lm)
Индуктивность статора
двигателя 1 (Lс)
Потери в стали двигателя 1
Номинальный ток двигателя 2
Ток холостого хода двигателя
2
Компенсация момента
двигателя 2 (только для
режима U=f(F))
Компенсация скольжения
двигателя 2 (только для
режима U=f(F))
Число полюсов двигателя 2 2…10 4
Сопротивление линии
обмотки статора двигателя 2
(R1)
Эквивалентное сопротивление
ротора двигателя 2 (R2)
Индуктивность ротора
двигателя 2 (Lm)
Индуктивность статора
двигателя 2 (Lс)
Потери в стали двигателя 2
Пропорциональная
составляющая 1 регулятора
скорости
Время интегрирования 1
регулятора скорости
Пропорциональная
составляющая 2 регулятора
скорости
Время интегрирования 2
регулятора скорости
Частота при которой
происходит переключение
между ASR1 и ASR2.
Компенсация потерь в
обмотках статора на низкой
скорости
Компенсация потерь на
низкой скорости в режиме
управления моментом
Задержка контура управления
моментом
Компенсация колебаний
(качания) двигателя на низкой
скорости в режиме векторного
управления.
Разрешение измерения R1
при каждом пуске двигателя.
Коэффициент динамического
отклика при резком
увеличении нагрузки
Коэффициент сглаживания
при работе на низких частотах
мГн ###
мГн ###
(0 – 10.0)% 0
###A (30 – 120) % ###
###A (5 – 90) % ###
(0.0 - 25.0) % 0.0
(0.0 - 10.0) % 0.0
(0.00 – 65535) мОм ###
(0 – 200) мОм ###
мГн ###
мГн ###
(0 – 10.0)% 0
(0…500) % 25
(0.000 … 10.000) сек 0.25
(0…500) % 25
(0.000 … 10.000) сек 0.25
(0.0…400.0) Гц 7
(0…100) % 30
(0…100) % 50
(0.000… 2.000)сек 0.01
0…10000 100
0: Запрещено;
1: Разрешено.
(0…100) % 0
(0…100) % 10
0
Page 90

Руководство по эксплуатации преобразователей VFD-V стр. 90
Группа 6: Параметры защиты
*06-00
*06-01
*06-02
*06-03
*06-04
*06-05
*06-06
*06-07
*06-08
*06-09
*06-10
*06-11
Уровень обнаружения низкого
напряжения питания
Уровень обнаружения
перенапряжения шине DC
Защита от пропадания фазы
питающего напряжения
Предотвращение останова
привода из-за большого тока при
разгоне двигателя
Предотвращение останова
привода из-за большого тока при
работе на ведущей частоте
Время замедления при
предотвращении останова
привода из-за большого тока при
работе на ведущей частоте
Режим обнаружения перегрузки
(OL2)
Уровень обнаружения
перегрузки
Лимит продолжительности
действия перегрузки
Режим обнаружения перегрузки
(OL3)
Уровень обнаружения
перегрузки
Лимит продолжительности
(320 – 440) В 360
(700 – 900) В 760
0: Предупреждение и продолжение работы,
если выходной ток меньше половины
номинального;
1: Предупреждение и остановка с заданным
темпом замедления;
2: Предупреждение и остановка на выбеге.
(20 … 250) % 170
(20 … 250) % 170
(0.050 … 600) сек 3
00: Запрещение режима обнаружения
перегрузки;
01: Разрешение обнаружения перегрузки в
установившемся режиме (OL2) и
продолжение работы привода после
обнаружения.
02: Разрешение обнаружения перегрузки в
установившемся режиме и останов привода
после обнаружения перегрузки;
03: Разрешение обнаружения перегрузки в
течение работы привода и продолжение
работы после обнаружения.
04: Разрешение обнаружения перегрузки в
течение
привода после обнаружения перегрузки.
(10 … 250) % 150
(0.0 … 60.0) сек 0.1
00: Запрещение режима обнаружения
перегрузки;
01: Разрешение обнаружения перегрузки в
установившемся режиме (OL2) и
продолжение работы привода после
обнаружения.
02: Разрешение обнаружения перегрузки в
установившемся режиме и останов привода
после обнаружения перегрузки;
03: Разрешение обнаружения перегрузки в
течение работы привода и продолжение
работы после обнаружения.
04: Разрешение обнаружения перегрузки в
течение
привода после обнаружения перегрузки.
(10 … 250) % 150
(0.0 … 60.0) сек 0.1
времени работы привода и останов
времени работы привода и останов
0
0
0
Page 91

Руководство по эксплуатации преобразователей VFD-V стр. 91
действия перегрузки
*06-12
*06-13
*06-14
*06-15
06-16
06-17
06-18
06-19
06-20
Ограничение момента 0 … 250% 150
Выбор режимов работы
электронного теплового реле
(OL1)
Электронная тепловая
характеристика реле
Уровень обнаружения перегрева
радиатора
Нижняя граница предотвращения
останова
Последняя запись об аварии
Предпоследняя запись об аварии
Третья запись об аварии
Четвертая запись об аварии
0: Для специального двигателя с независимой
вентиляцией;
1: Для стандартного самовентилируемого
двигателя;
2: Запрещение действия реле.
(30 … 600) сек 60
0
(0.0 … 110.0)
0 … 250% 120
00: Аварий зафиксировано не было;
01: Превышение выходного тока (о.с.);
02: Перенапряжение (o.v.);
03: Перегрев ПЧ (o.H.);
04: Перегрузка ПЧ (o.L.);
05: Перегрузка двигателя (o.L1.);
06: Внешняя ошибка (E.F.);
07: Сбой CPU (процессора ПЧ) (C.F3);
08: Отказ аппаратной защиты (H.P.F);
09: Сверхток при разгоне (o.c.A);
10: Сверхток при замедлении (o.c.d);
11: Сверхток в установившемся режиме (o.c.n);
12: Замыкание выходной фазы на землю
(G.F.F);
13: Ошибка
14: Низкое напряжение (L.v);
15: Ошибка чтения процессором ПЧ (C.F1);
16: Ошибка записи процессором ПЧ (C.F2);
17: Внешняя команда ПАУЗА (Base blok)
остановила привод (b.b);
18: Двигатель перегружен (o.L2);
19: Защита IGBT (sc);
20: Выход из строя тормозного транзистора;
21: Двигатель перегружен (o.L3);
22: Перегрев тормозного ключа;
23: Предохранитель;
24: Датчик тока 2 (СТ2);
25: Датчик тока 1 (СТ1);
26: Сбой IGBT;
27: Ошибка автотестирования;
28: Ошибка ПИД-регулятора;
Ошибка сигнала по входу ACI;
29:
31: Выход из строя транзисторов силового
модуля (CC);
33: R1 в векторном режиме вышло из
диапазона (Pr.5-30);
34: Ошибка цифровой панели управления;
35: Ошибка интерфейса RS-485;
36: Неисправность вентилятора;
37: Потеря фазы питающего напряжения.
С 85
PG-платы (PG);
2
0
Page 92

Руководство по эксплуатации преобразователей VFD-V стр. 92
Группа 7: Специальные параметры
*07-00
*07-01
*07-02
*07-03
*07-04
*07-05
*07-06
*07-07
*07-08
*07-09
*07-10
*07-11
*07-12
*07-13
*07-14
*07-15
*07-16
*07-17
Напряжение включения
тормозного резистора
Уровень тока при торможении
постоянным током
Время торможения постоянным
током при старте
Время торможения постоянным
током при остановке
Стартовая точка начала
торможения при замедлении
Уровень напряжения при
торможении постоянным током
Выбор реакции ПЧ на
кратковременное пропадание
питающего напряжения
Максимальное время реакции на
потерю питающего напряжения
Время задержки перед поиском
скорости
Максимально-допустимый
уровень выходного тока при
поиске скорости
Время замедления при поиске
скорости
Количество авторестартов после
аварий
Подхват вращающегося
двигателя
Положительная частота с
которой начинается поиск
скорости, если установлена PG и
7-12=2 или 4
Отрицательная частота с которой
начинается поиск скорости, если
установлена PG и 07-12 = 3 или 5
Время задержки при разгоне
Частота при которой происходит
задержка при разгоне
Время задержки при торможении
(700 – 900) В 760
(0 – 100) % 0
(0.0 – 60.0) сек 0.0
(0.0 – 60.0) сек 0.0
(0.0 – 400) Гц 0
(1 – 500) В 30
0: Остановка привода после пропадания
напряжения;
1: После появления напряжения работа привода
возобновляется с установленного значения
ведущей частоты;
2: После появления напряжения работа привода
возобновляется с минимальной частоты.
(0.1 – 5.0) сек 2.0
(0.1 – 5.0) сек 0.5
(20 – 200) % 150
(0.50 – 600.00) сек 3
0 - 10 0
0: Подхват вращающегося двигателя отключен
1: Подхват вращающегося двигателя включен в
заданном направлении вращении;
2: Подхват вращающегося двигателя включен,
определяется только положительная частота
вращения (FWD);
3: Подхват вращающегося двигателя включен,
определяется только отрицательная частота
вращения (REV);
4: Подхват вращающегося двигателя включен,
определяется положительная и отрицательная
частота вращения (FWD/ REV);
5: Подхват вращающегося двигателя включен,
определяется
частота вращения (REV /FWD)
(0.00 – 400) Гц 50
(0.00 – 400) Гц 50
(0.00 – 400) сек 0
(0.00 – 400) Гц 6
(0.00 – 400) сек 0
отрицательная и положительная
0
0
Page 93

Руководство по эксплуатации преобразователей VFD-V стр. 93
*07-18
*07-19
*08-00
*08-01
*08-02
*08-03
*08-04
*08-05
*08-06
*08-07
*08-08
*08-09
*08-10
*08-11
*08-12
*08-13
Частота при которой происходит
задержка при торможении
Работа внешних терминалов
после сбоя и сброса ошибки
Группа 8. Параметры PID регулятора
Выбор входных терминалов для
подключения отрицательной
обратной связи по аналоговому
сигналу
Коэффициент усиления
пропорциональной составляющей (Р)
сигнала обратной связи
Время интегрирования (I) сигнала
обратной связи
Время дифференцирования (D)
сигнала обратной связи
Верхняя граница интегрирования
Ограничение выходной частоты PIDрегулятора
Отклонение выходной частоты PIDрегулятора
Выходной фильтр (время задержки)
Время обнаружения сигнала
обратной связи
Реакция на обнаруженную ошибку в
передаче сигнала обратной связи
Нижняя граница ПИДрегулирования (вход с спящий
режим)
Граница возобновления ПИДрегулирования(выход из спящего
режима)
Период поддержания нижней
границы ПИД-регулирования
(задержка перед входом в спящий
режим)
Метод охлаждения радиатора
(0.00 – 400) Гц 6
0: Необходим перезапуск терминалов;
1: Сигналы на включенных терминалах будут
восприняты без перезапуска.
0: Запрещение функции PID регулятора;
1: Сигнал обратной связи (0…+10В) от
терминала AVI;
2: Сигнал обратной связи (4 … 20мА) от
терминала ACI;
3: Сигнал обратной связи (-10В…+10В) от
терминала AUI;
4: Цифровой сигнал обратной связи от PG-
карты (FWD/REV определяется мастерчастотой;
5: Цифровой сигнал обратной связи от PG-
(FWD/REV определяется углом
карты
сдвига A/B;
(0.0 … 500.0)% 80
(0.00 … 100.00) сек 1
(0.00 … 1.00) сек 0
(0…100) % 100
(0…100) % 100
(-100…+100) % 0
(0 … 0.005) сек 0.001
(0.0 … 6000.0) сек 0
0: Предупреждение и продолжение
работы;
1: Предупреждение и остановка двигателя
с замедлением;
2: Предупреждение и остановка двигателя
на выбеге.
(0.0 … 400.0) Гц 0
(0.0 … 400.0) Гц 0
(0.0 … 6000.0) сек 0
0: Вентилятор работает всегда;
1: Вентилятор включается при пуске
двигателя и останавливается при останове
двигателя.
0
0
0
0
Page 94

Руководство по эксплуатации преобразователей VFD-V стр. 94
Группа 9. Параметры коммуникации
*09-00
*09-01
*09-02
*09-03
*09-04
*09-05
Коммуникационный адрес ПЧ 1 - 254 1
Скорость передачи (4.8 … 125) кбит/с 9.6
0: Предупреждение и продолжение;
1: Предупреждение и остановка двигателя
Реакция преобразователя на потерю
связи
Обнаружение превышения времени
ответа
Протокол коммуникации
с замедлением;
2: Предупреждение и мгновенное
обесточивание двигателя;
3: Продолжение с отсутствием
предупреждения.
0: Запрещено;
(1…100) сек
0: 7,N,1 (ASCII);
1: 7,N,2 (ASCII);
2: 7,E,1 (ASCII);
3: 7,0,1 (ASCII);
4: 7,E,2 (ASCII);
5: 7,0,2 (ASCII);
6: 8,N,1 (ASCII);
7: 8,N,2 (ASCII);
8: 8,E,1 (ASCII);
9: 8,0,1 (ASCII);
10: 8,E,2 (ASCII);
11: 8,0,2 (ASCII);
12: 8,N,1 (RTU);
13: 8,N,2 (RTU);
14: 8,E,1 (RTU);
15: 8,O,1 (RTU);
16: 8,E,2 (RTU);
3
0
0
17: 8,O,2 (RTU).
0: Предупреждение и продолжение;
Реакция преобразователя на ошибки в
режиме коммуникации
1: Предупреждение и остановка двигателя
с замедлением;
2: Предупреждение и мгновенное
обесточивание двигателя.
0
Группа 10. Параметры обратной связи по скорости
10-00
10-01
Количество линий (импульсов на
оборот) датчика обр. связи по скорости
Тип импульсного датчика обр. связи по
скорости
1 … 20000 600
0: Фаза А опережает В в прямом (FWD)
направлении вращения (включение по
фронту);
1: Фаза В опережает А в прямом (FWD)
направлении вращения (включение по
фронту);
2: А: импульсный сигнал, В: направление
(H – FWD, L - REV);
3: А: импульсный сигнал, В: направление
(H – REV, L - FWD);
4: FWD: A: импульсный сигнал, В:
направление (H);
REV: B: импульсный сигнал, A:
направление (H);
5: FWD: B: импульсный
направление (H);
REV: A: импульсный сигнал, B:
направление (H);
сигнал, A:
0
Page 95

Руководство по эксплуатации преобразователей VFD-V стр. 95
6: Фаза А опережает В в прямом (FWD)
направлении вращения (включение по
уровню);
7: Фаза В опережает А в прямом (FWD)
направлении вращения (включение по
работы;
с замедлением;
на выбеге.
сигнал, A:
10-02
10-03
*10-04
10-05
10-06
10-07
10-08
10-09
10-10
*10-11
10-12
Параметры позиционирования:
*10-13
*10-14
*10-15
*10-16
*10-17
*10-18
*10-19
Реакция на обнаруженную ошибку в
передаче сигнала обратной связи
Время обнаружения сигнала обратной
связи
Время фильтрации сигнала обратной
связи
Диапазон разницы между выходной
частотой и частотой вращения
двигателя.
Уровень ограничения скорости.
Числитель передаточного отношения
Знаменатель передаточного отношения
Нулевое положение
Диапазон сигнализации достижения
нулевого положения.
Цифровой фильтр (0.001 … 1.000) сек 0.003
Тип входных сигналов в канале 2 платы
PG.
Пропорциональный коэффициент (Р)
Время интегрирования (I)
Время дифференцирования (D)
Скорость ориентации
Точка включения "ползучей" скорости
"Ползучая" скорость
Точка включения окончательного
замедления
уровню).
0: Предупреждение и продолжение
1: Предупреждение и остановка двигателя
2: Предупреждение и остановка двигателя
(0.00 … 10.0) сек 0
(0.001 … 1.000) сек 0.01
(0.0 … 50.0) % 10
(0.0 … 115.0) % 110
1 … 5000 1
1 … 5000 1
0 … 20000 0
0 … 20000 10
0: Фаза А опережает В в прямом (FWD)
направлении вращения (включение по
фронту);
1: Фаза В опережает А в прямом (FWD)
направлении вращения (включение по
фронту);
2: А: импульсный сигнал, В: направление
(H – FWD, L - REV);
3: А: импульсный сигнал, В: направление
(H – REV, L - FWD).
4: FWD: A: импульсный сигнал, В:
направление (H);
REV: B: импульсный сигнал, A:
направление (H);
5: FWD: B: импульсный
направление (H);
REV: A: импульсный сигнал, B:
направление (H)
(0.0 … 500.0) % 50
(0.00 … 100.00) сек 1
(0.00 … 1.00) сек 0
(0.0 … 400.00) Гц 5
0…20000 50
(0.0 … 400.00) Гц 1
1… 20000 10
0
0
Page 96

Руководство по эксплуатации преобразователей VFD-V стр. 96
*10-20
*10-21
*10-22
*10-23
*10-24
*10-25
*10-26
*10-27
*10-28
*10-29
*10-30
*10-31
*10-32
*10-33
*10-34
*10-35
*10-36
*10-37
*10-38
*10-39
*10-40
*10-41
*10-42
Масштабирование задающего энкодера
платы PG-04 (знаменатель)
Прямое задание 0.0 … 100.0 % 5.0
Коэффициент усиления скорости в
режиме позиционирования
Заданная позиция 2 0 … 20000 0
Время разгона в режиме P2P (0.00 … 100.00) сек 0.1
Время замедления в режиме P2P (0.00 … 100.00) сек 0.1
Время задержки для команд
позиционирования
Пропорциональный коэффициент 2 (Р)
Время интегрирования 2 (I)
Режим автоматического управления
позиционированием (P2P)
Направления вращения каждого шага в
режиме P2P
Ограничение вращения в прямом
(FWD) направлении в режиме P2P
Ограничение вращения в обратном
(REV) направлении в режиме P2P
Команда 0 в режиме P2P 0…50000 0
Команда 1 в режиме P2P 0…50000 0
Команда 2 в режиме P2P 0…50000 0
Команда 3 в режиме P2P 0…50000 0
Команда 4 в режиме P2P 0…50000 0
Команда 5 в режиме P2P 0…50000 0
Команда 6 в режиме P2P 0…50000 0
Команда 7 в режиме P2P 0…50000 0
Количество импульсов в режиме P2P
Количество мм в импульсе в кол-ве
импульсов (Pr.10-41) для режима P2P
1… 128 1
0.0 … 100.0 % 90.0
(0.00 … 100.00) сек 0.1
(0.0 … 1500.0) % 50
(0.00 … 10.00) сек 1
0: Абсолютные координаты
1: Относительные координаты
0…255 (Pr.10-33…40) 0
1 – 60000
0 – нет ограничения
1 – 60000
0 – нет ограничения
1 … 20000 1
1 … 20000 1
0
0
0
Page 97

Руководство по эксплуатации преобразователей VFD-V стр. 97
9. ХАРАКТЕРИСТИКИ
Класс напряжения 380 В
Модель VFD-V43
Макс. мощность
двигателя, кВт
Макс. выходная
мощность ПЧ, кВА
Ном. выходной ток при
постоянном моменте, A
Ном. выходной ток при
переменном моменте, A
Ном. входной ток ПЧ, А 4 5.7 7.3 9.9 12.2 17.2 25 32 39 49 60 73 91 130 175
Входное напряжение, B 3 фазы (340 … 500) В
Частота питающей сети 47 … 63 Гц
Макс. выходное
напряжение
Диапазон вых. частоты Регулируется от 0.00 до 400.00 Гц (выходной ток синусоидальный)
Метод управления 1. Векторное управление; 2. Прямое управление моментом; 3. Вольт-частотное (U=f(F))
Характеристики момента Пусковой момент может быть 150% на частоте 0.5 Гц (при векторном управлении)
Диапазон регулирования
скорости
Точность поддержания
скорости
Точность задания
выходной частоты
Разрешение задания 0.01 Гц (дискретное задание); 10 бит (аналоговое задание)
Ограничение момента Макс. допустимый момент: 200%
Точность момента ±5%
Тормозной момент Примерно 20%
Время разг./замедления 0.00 - 600.00 сек / 0.1 – 6000.0 сек
Характеристика U/F Устанавливается пользователем по 4 точкам
Источник управления 1. Цифровая клавиатура (кнопки RUN, STOP, JOG).
Сигнал задания выходной
частоты
Работа по циклограмме Задание 15 независимых частот, времени действия и направления вращения, возможна работа
Управление позиционированием (режим P2P)
Перегрузочная
способность
Защитные функции Защита от повышенного и пониженного напряжения, от пропадания фазы питающего
Работа в режиме с
замкнутой обратной
связью
Другие функции S-образная кривая разгона/замедления, автоматическая стабилизация выходного напряжения,
Степень защиты NEMA 1 / IP20
Температура хранения и
транспортировки
Рабочая температура -100С…+400С для UL (+500С для CE)
Относительная влажность не более 90% (без образования конденсата)
Допустимая вибрация 9.81м/с2 (1G) до 20Гц, 5.88м/с2 (0.6G) – 20…50Гц
Охлаждение воздушное принудительное с помощью вентиляторов
007 015 022 037 055 075 110 150 185 220 300 370 450 550 750
0.75 1.5 2.2 3.7 5.5 7.5 11 15 18.5 22 30 37 45 55 75
2.3 3.2 4.6 6.5 9.9 13.7 18 24 29 34 46 56 69 84 114
3.0 4.2 6 8.5 13 18 24 32 38 45 60 73 91 110 150
3.8 5.3 7.5 10 16 22 30 40 47 56 75 91 113 138 188
Равно входному (для Uвх = 380В максимальное выходное напряжение равно 380В)
1:100 (векторное управление в разомкнутом контуре);
1:1000 (векторное управление в замкнутом контуре)
0.5%(векторное управление в разомкнутом контуре);
0.02% ( векторное управление в замкнутом контуре).
0.005%(дискретное задание);
0.5% (аналоговое задание).
2. Дискретные входы (FWD, REV, трехпроводное управление, JOG, и др.);
4. Последовательный интерфейс RS-485 (MODBUS)
1. Цифровая клавиатура (кнопки ▼, ▲).
2. Аналоговые входы: AVI (0…10В); ACI( 4…20мА); AUI (-10…+10В);
3. Дискретные входы (предустановленные скорости, функции JOG, UP и DOWN);
4. Импульсный вход (прямоугольные импульсы на плате PG04/05)
4. Последовательный интерфейс RS-485 (MODBUS)
под управлением внутреннего программируемого логического процессора
8 заданных положений, ограничение перемещений, выход в ноль, работа в абсолютных или
относительных координатах
150% номинального тока ПЧ в течение 1 мин; 200% - 2 сек
напряжения, от перегрева, от перегрузки по току инвертора и двигателя, от короткого
замыкание на землю, сверхтока, от внешнего аварийного сигнала, от ошибки передачи
данных по RS-485, а также электронная тепловая защита двигателя, и др.
По технологическому параметру (давлению, температуре и т.д.) с ПИД-регулятором. С
импульсным датчиком скорости – с дополнительной платой, устанавливаемой внутрь
корпуса. Здесь возможен контроль за фактическим направлением вращения.
токоограничение, настройка аналоговых входов, запись отказов, торможение постоянным
током, авторестарт после аварий и пропадания напряжения, подхват вращающегося
двигателя, автотестирование двух двигателей, ПИД-регулятор, пароль на вход в
программирование, запрещение реверса, счетчик импульсов, выбор протоколов
коммуникации и т. д.
0
С…+600С
-20
Page 98

Руководство по эксплуатации преобразователей VFD-V стр. 98
р
10. ПЛАТА РАСШИРЕНИЯ PG-04.
Плата PG04 предназначена для установки в преобразователи частоты серии VFD-V (Delta
Electronics) для обеспечения работы привода в замкнутой системе регулирования с обратной связью
по скорости и для синхронизации с другими приводами по импульсным входам/выходам.
1. Внешний вид платы и описание терминалов.
Импульсные выходы:
терминалы A/O, B/O, Z/O
Импульсный вход 1:
терминалы A1, A1, B1, B1,
Z1, Z1
Источник питания датчиков
(12B DC, 200 мА):
те
миналы VP, DCM
Обозначение Описание
VP
DCM
A1, A1
B1, B1
Z1, Z1
Положительный терминал источника питания энкодера
+12В DC, 200 мА
Общий терминал источника питания и сигналов с энкодера
Входы для подключения импульсного датчика обратной связи по
скорости (тип энкодера выбирается микропереключателем FJP1).
Можно использовать как однофазный энкодер так и двухфазный.
Максимальная частота следования импульсов: 500 кГц
A2, A2
B2, B2
Входы для подключения задающего энкодера или другого
импульсного источника задания частоты (тип выбирается
микропереключателем FJP4). Можно использовать как однофазный
энкодер так и двухфазный. Максимальная частота следования
импульсов: 500 кГц
A/O, B/O
Z/O
Импульсный выход с частотой пропорциональной частоте с
импульсного входа 1 (делитель устанавливается в параметре 10-20).
Открытый коллектор: 24B DC, 300 мА
Клемма заземления
Импульсный вход 2:
терминалы A2, A2, B2, B2,
Z2, Z2
Page 99

Руководство по эксплуатации преобразователей VFD-V стр. 99
2. Схема внешних соединений
Предохранители
Напряжение
питания 3х380В,
50Гц
Прямо/Стоп
Реверс/Стоп
Многофункц. вход 1
Многофункц. вход 2
Многофункц. вход 3
Многофункц. вход 4
Многофункц. вход 5
Многофункц. вход 6
Цифровая земля
R
S
T
R(L1)
S(L2)
T(L3)
+24V
FWD
REV
Mi1
Mi2
Mi3
Mi4
Mi5
Mi6
DCM
VFD-V
U(Т1)
V(Т2)
W(Т3)
DCM
Z1
VP
A1
A1
B1
B1
Z1
Асинхронный
двигатель
M
3~
PG
Инкрементальный
энкодер
VP
DCM
A/O
B/O
Z/O
Задающий энкодер или
другое устройство с
импульсным выходом
(например контроллер)
VP
A2
A2
B2
B2
DCM
PG04
− Рекомендуется использовать экранированный кабель с проводниками сечением (0.21…0.81)
мм
2
.
− Для избежания влияния сети переменного тока, силовые и управляющие кабели
рекомендуется прокладывать отдельно.
− Длина кабеля между ПЧ и энкодером не должна превышать значений указанных в
нижеприведенной таблице и при увеличении длины кабеля должно быть увеличено сечение
проводников.
Тип выхода энкодера Макс. длина кабеля Сечение проводников
Выходное напряжение
Открытый коллектор
Линейный драйвер 300 м
Комплиментарный 70 м
50 м
1.25 мм
2
и выше
Page 100

Руководство по эксплуатации преобразователей VFD-V стр. 100
3. Положение микропереключателей FJP1 и FJP4 в зависимости от типа энкодера.
Тип энкодера
VCC
O/P
Микропереключатели FJP1 и FJP4
FJP1 FJP4
TP
TP
Выходное
напряжение
0 B
VCC
O/P
коллектор
Открытый
драйвер
Линейный
0 B
Q
Q
OC
TP
OC
TP
OC
OC
TP
OC
TP
OC
VCC
O/P
TP
OC
TP
OC
Комплиментарн.
0 B
 Loading...
Loading...