

Page 1
''6
Page 2
序言
韧体版本 1.07
感谢您采用台达同步门机交流马达驱动器 VFD-DD 系列。VFD-DD 系采用高质量之组件、材料及融合最
新的微电脑控制技术制造而成。
此产品说明提供给使用者安装、参数设定、异常诊断、排除及日常维护交流马达驱动器相关注意事项。为
了确保能够正确地安装及操作交流马达驱动器,请在装机之前,详细阅读本产品说明,并请妥善保存随机
附赠之光盘内容及交由该机器的使用者。
交流马达驱动器乃精密的电力电子产品,为了操作者及机械设备的安全,请务必交由专业的电机工程人员
安装试车及调整参数,本产品说明中有 [ 危险 ] 、 [ 注意 ] 等符号说明的地方请务必仔细研读,若有任
何疑虑的地方请连络本公司各地的代理商洽询,我们的专业人员会乐于为您服务。
以下各事项请使用者在操作本产品时特别留意
DANGER
; 实施配线,务必关闭电源。
; 切断交流电源后,交流马达驱动器 POWER 指示灯未熄灭前,表示交流马达驱动内
部仍有高压十分危险,请勿触摸内部电路及零组件。安全检修方式,请先用三用电表
量测 L1, L2 之间电压需低于 25Vdc,才可进行操作。
; 交流马达驱动器的内部电路板有 CMOS IC 极易受静电的破坏,故在未做好防静电措
施前请勿用手触摸电路板。
; 绝对不可以自行改装交流马达驱动器内部的零件或线路。
; 交流马达驱动器端子 E
; 本系列是用于控制三相感应马达的驱动装置,不能用于单相马达或作其它用途。
; 本系列不能使用危及人身安全的场合。
; 请防止小孩或一般无关民众接近交流马达驱动器。
; 交流电源绝不可输入至交流马达驱动器输出端子 U/T1、V/T2、W/T3 中。
; 请勿对交流马达驱动器内部的零组件进行耐压测试,因交流马达驱动器所使用的半导
体易受高压击穿而损坏。
; 即使三相交流马达是停止的,交流马达驱动器的主回路端子仍然可能带有危险的高
压。
务必正确的接地。230V 系列采用第三种接地。
; 只有合格的电机专业人员才可以安装、配线及修理保养交流马达驱动器。
; 当交流马达驱动器使用外部端子为运转命令来源时,可能在输入电源后会立即让马达
开始运转,此时若有人员在现场易造成危险。
Page 3
; 请选择安全的区域来安装交流马达驱动器,防止高温及日光直接照射,避免湿气和水
滴的泼溅。
; 交流马达驱动器安装时请符合安装注意事项,未经认可的使用环境可能导致火灾、气
爆、感电等事件。
; 当交流马达驱动器与电动机之间的配线过长时,对马达的层间绝缘可能产生破坏,请
改用交流马达驱动器专用的交流马达,或在驱动器及交流马达之间加装电抗器(请参
考附录 B ),避免造成交流马达因绝缘破坏而烧毁。
; 驱动器所安装之电源系统额定电压 230 系列机种不可高于 240V,电流不可超大于
5000A RMS。
NOTE
本说明书中为了详尽解说产品细部,会将外壳拿开或将安全遮盖物拆解后,以图文方式作为描述。至于本产品在运转中,务
必依照规定装好外壳及配线正确,参照说明书操作运行,确保安全。
说明书内文的图标,为了方便说明事例,会与拿到产品稍有不同,但不会影响客户权益。
由于产品精益求精,当内容规格有所修正时,请洽询代理商或至台达网站( http://www.delta.com.tw/industrialautomation/ )下
载最新版本。
交流马达驱动器有时会简称为变频器或是驱动器,若内文叙述有提及变频器一词,便是指交流马达驱动器。
Page 4

目录
一、 使用及安装
1-1 产品外观………………………………………………………………………………………………1-2
1-2 产品安装………………………………………………………………………………………………1-5
1-3 产品尺寸……………………………………………………………………………………...…..….1-6
二、 配线
2-1 配线说明………………………………………………………………………………………………2-2
2-2 主回路端子说明………………………………………………………………………………………2-5
2-3 控制回路端子说明………………………………………………………………………………..…..2-6
三、 简易面板与运转
3-1 运转方式……………………………………………………………………………………………..3-2
3-2 试运转…………………………………………………………………………………………………3-3
四、 参数功能说明
4-1参数功能一览表…………………………………………………………………………………..……4-2
00 系统参数…………………………………………………………………………………..…..….4-2
01 电机参数…………………………………………………………………………………..………4-4
02 输出/入功能参数…………….…………..…………………………………………………..……4-6
03 回授参数………………………………………………………………………………………..…4-8
04 开门动作参数……..…………… ……………………………………… …………………….…4 -9
05 关门动作参数… ……………… ……………………… ……………… ……………………….4- 10
06 保护及特殊功能参数………………………………………………………………………….4-11
07 控制参数……………………………………………………………………………………..….4-13
08 多段速参数………………………………………………………………………………..….…4-14
09 通讯参数…………………………………………………………………………………..….....4-15
10 用户自定参数设定………………………………………………………………………..….....4-16
11 查阅用户参数设定………………………………………………………………………..….....4-17
4-2 参数功能详细说明…………………………………………………………………………………..4-18
00 系统参数………………………………………………………………………………………...4-18
01
电机参数………………………………………………………………………………………...4-23
02 输出/入功能参数…………………………..…………………………………………………….4-29
03 回授参数…………….……………………...…………………………………………………...4-34
04 开门动作参数… ……………………………………… ……………………………………..4-3 7
05 关门动作参数…………………………………………………………………………………...4-40
Page 5

06 保护及特殊功能参数………………………………………………………………….………..4-44
07 控制参数………………………………………………………………………………………...4-49
08 多段速参数……………………………………………………………………………………...4-51
09 通讯参数…………………………………………………………………………………….…..4-52
10 用户自定参数设定………………………………………………………………………..….....4-60
11 查阅用户参数设定………………………………………………………………………..….....4-65
五、 异常诊断方式
5-1 过电流 OC…………………………………………………………………………………………..…5-2
5-2 对地短路故障 GFF……………………………………………………………………………………5-3
5-3 过电压 OV……………………………………………………………………………………………..5-4
5-4 电压不足 Lv……………………………………………………………………………………………5-5
5-5 过热 OH1……….……………………………………………………………………………………..5-6
5-6 过载 OL………………………………………………………………………………………………..5-7
5-7 数字操作器异常………………………………………………………………………….………….5-8
5-8 电源欠相 PHL…………………………………………………………………………………………5-9
5-9 马达无法运转………………………………………………………………………………………5-10
5-10 马达速度无法变更…………………………………………………………………………………5-11
5-11 马达失速………………………………………………………………………………………….5-12
5-12 马达异常……………………………………………………………………………………………5-13
5-13 电磁杂音、感应杂音之对策……………………………………………………………………….5-14
5-14 设置的环境措施……………………………………………………………………………………5-15
5-15 防止交流马达驱动器影响其它机器………………………………………………………………5-16
六、 保护及检查
6-1 保护动作一览表……………… …………… …………… …………… …………… …………… ……6-2
6-2 定期维护检查………………… ……………………………………… ……………………………6 -11
附录 A 标准规格……………………………………………………………………………………………..…A-1
附录 B 选择合适的交流马达驱动器
B-1 交流马达驱动器容量计算方式………………………………………………………………………B-2
B-2 选用交流马达驱动器注意事项……………………………………………………………………...B-4
B-3 马达选用……………………………………………………………………………………………...B-5
Page 6
一、使用及安装
一、使用及安装
1-1 产品外观
1-2 产品安装
1-3 产品尺寸
客户收到本产品时必须置于其包装箱内。若该机器暂时不使用,为了日后维护的安全起见及符合本公司的
保固范围内,储存时务必注意下列几点
; 必须置于通风、无尘垢、干燥之位置。
; 储存位置的环境温度必须在 -20℃ 到 +60℃ 范围内。
; 储存位置的相对湿度必须在 0% 到 90% 范围内,且无结露。
; 避免储存于含有腐蚀性气、液体之环境中。
; 避免放置于地面上,应置于合适的台架上且若周围环境恶劣,则应在包装袋中放置干
燥剂。
; 避免安装在阳光直射的地方或有振动的场所。
; 即使湿度满足规范要求,如温度发生急遽变化,则亦可能发生结露和结冰,应避免存
放在这种场所。
; 若为开封使用时并且超过 3 个月时,保存环境周围温度不得高于 30℃。这是因为考虑
到电解电容器不通电存放时,当环境温度过高,其特性易劣化。请勿在无通电的状态
下放置一年以上。
; 交流马达驱动器安装在装置或控制盘内不用时(尤其是在建筑工地或潮湿而且灰尘特
别多的场所), 应将交流马达驱动器拆下,移放于符合以上所述的储存条件的合适环
境中。
1-1
Page 7
1-1 产品外观
每部 VFD-DD 交流马达驱动器在出厂前,均经严格之品管,并做强化之防撞包装处理。客户在交流
马达驱动器拆箱后,请即刻进行下列检查步骤。
; 检查交流马达驱动器是否在运输过程中造成损伤。
; 拆封后检查交流马达驱动器机种型号是否与外箱登录数据相同。
如有任何登录数据与您订货数据不符或产品有任何问题,请您与接洽之代理商或经销商联络。
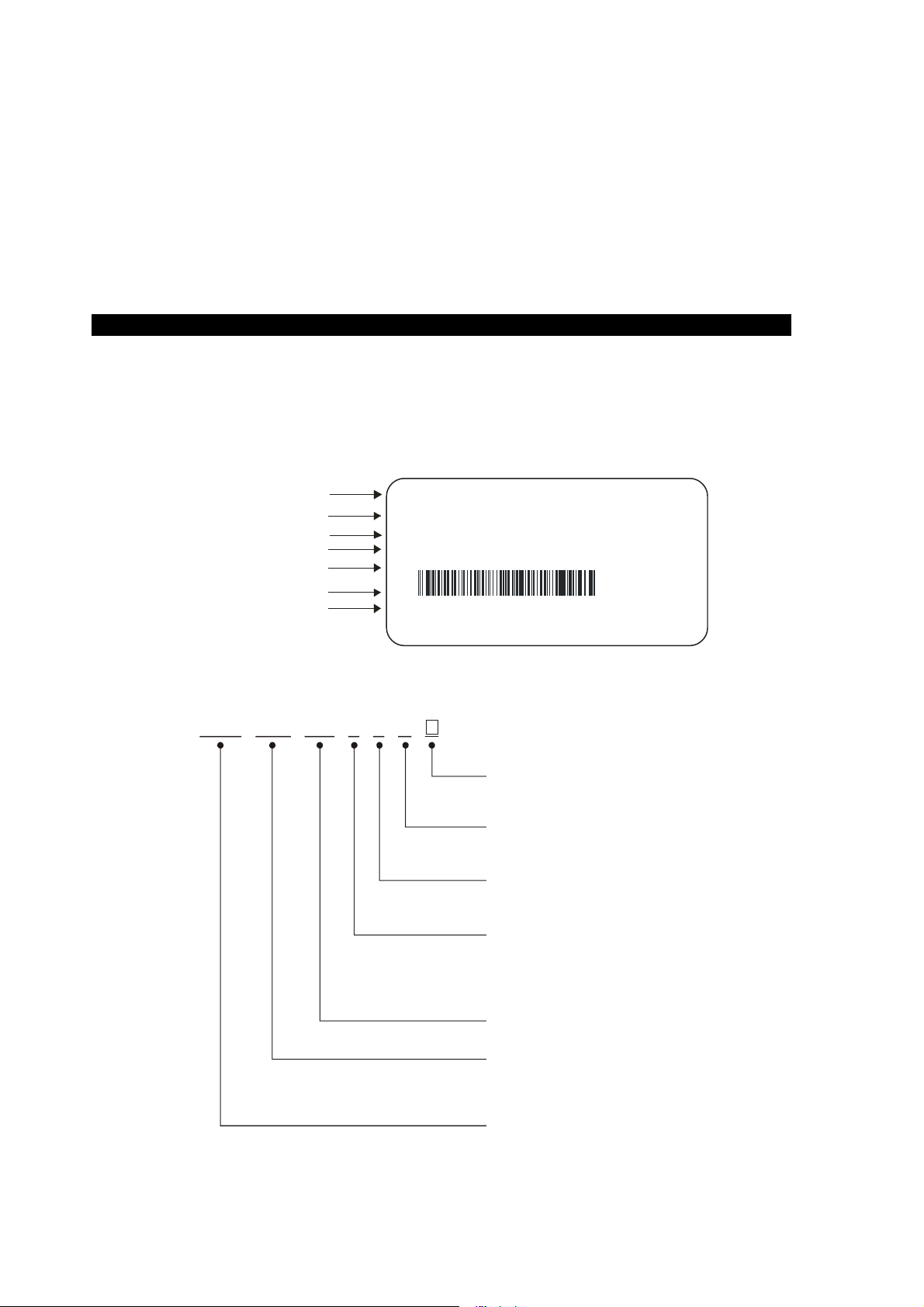
铭牌说明
以 0.2kW/0.25HP 230V 1-Phase 为例
型号说明
型號
輸入電源規格
輸出電源規格
輸出頻率
MODEL: VFD002DD21A
INPUT: 1PH 200-240V 50/60Hz 4.9A
OUTPUT: 3PH 0-240V 1.5A 0.6kVA 0.2kW/0.25HP
FREQUENCY RANGE: 0.1-120Hz
Version: 01.00
韌體版本
條碼
生產管制序號
DELTA ELECTRON ICS, INC.
MADE IN TAIWAN
VFD 002 DD 2 1 A 5
02DD21A0T0330003
功能選項
設計版本
電源相數
輸入電源電壓
B: : 有煞車功能
空白 無煞車功能
A:
標準版
C: CANopen
內建
3: 3
1: 相單相
6: 696V
4: 460V
2: 230V
1: 115V
1-2
門控專用型驅動器
驅動器功率
交流馬達驅動器產品
002: 0.2kW 0.25HP
004: 0.4kW 0.5HP
007: 0.7kW 1HP
Page 8
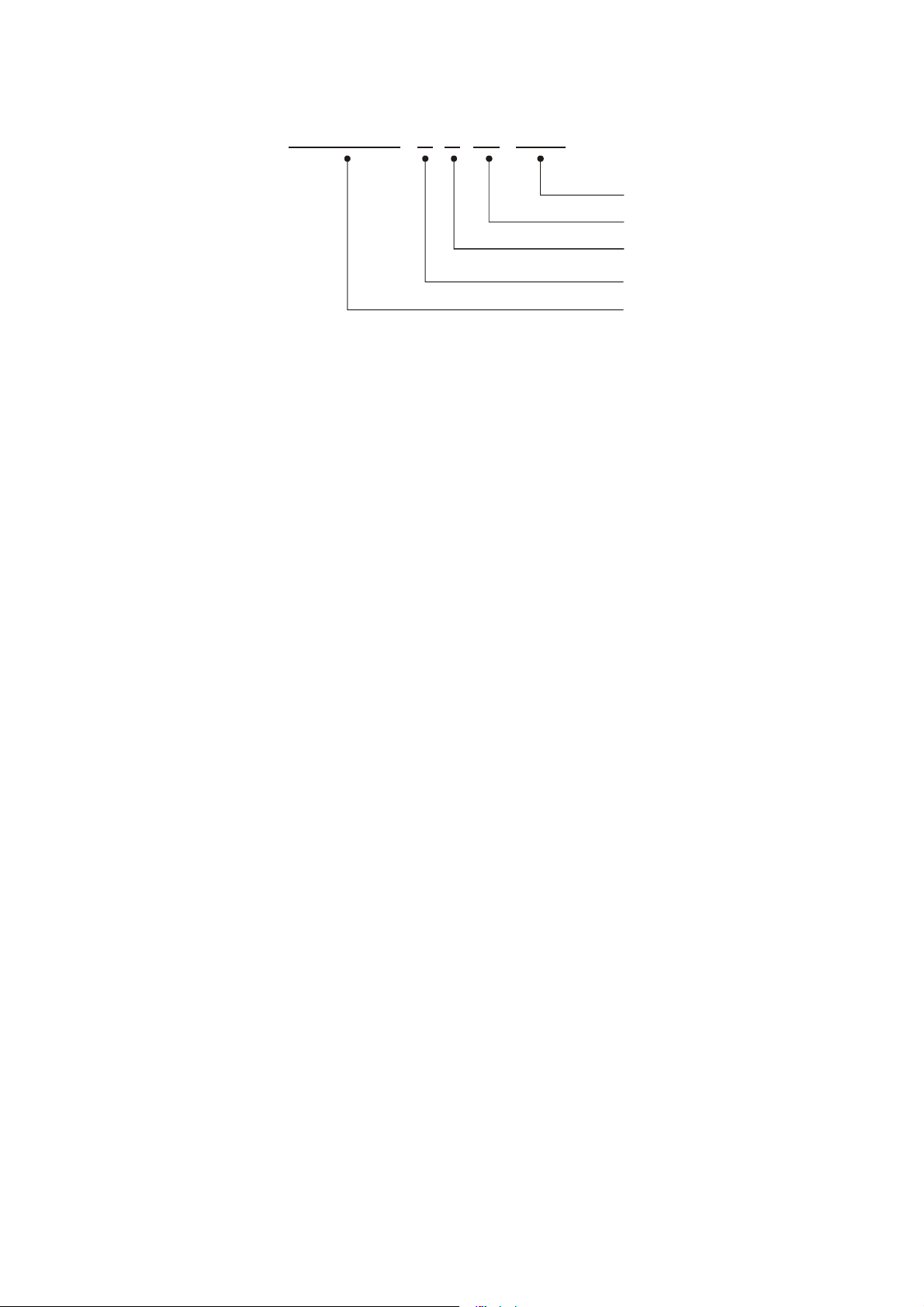
序号说明
02DD21A0 T 0 33 0003
桃園廠 :吳江廠
T: W
230V 1-PHASE 0.25HP(0.2kW)
製造序號
生產周次
生產年份
製造工廠
生產機種
一、使用及安装
1-3
Page 9
1-2 产品安装
请将交流马达驱动器内装在下列的环境条件中进行,以确保产品使用安全:
操作环境条件 环境温度
相对湿度
压力
安装高度
震动
储存及
运送环境条件
环境温度
相对湿度
压力
震动
-10℃~ +45℃
<90%,无结霜
86 ~ 106 kPa
<1000m
<20Hz: 9.80 m/s
2
(1G) max; 20~50H:5.88 m/s2 (0.6G) max
-20℃~ +60℃ (-4°F ~ 140°F)
<90%,无结霜
86 ~ 106 kPa
<20Hz: 9.80 m/s
2
(1G) max; 20 ~ 50Hz: 5.88 m/s2 (0.6G) max
污染保护等级 二级:适用中低污染之工厂环境
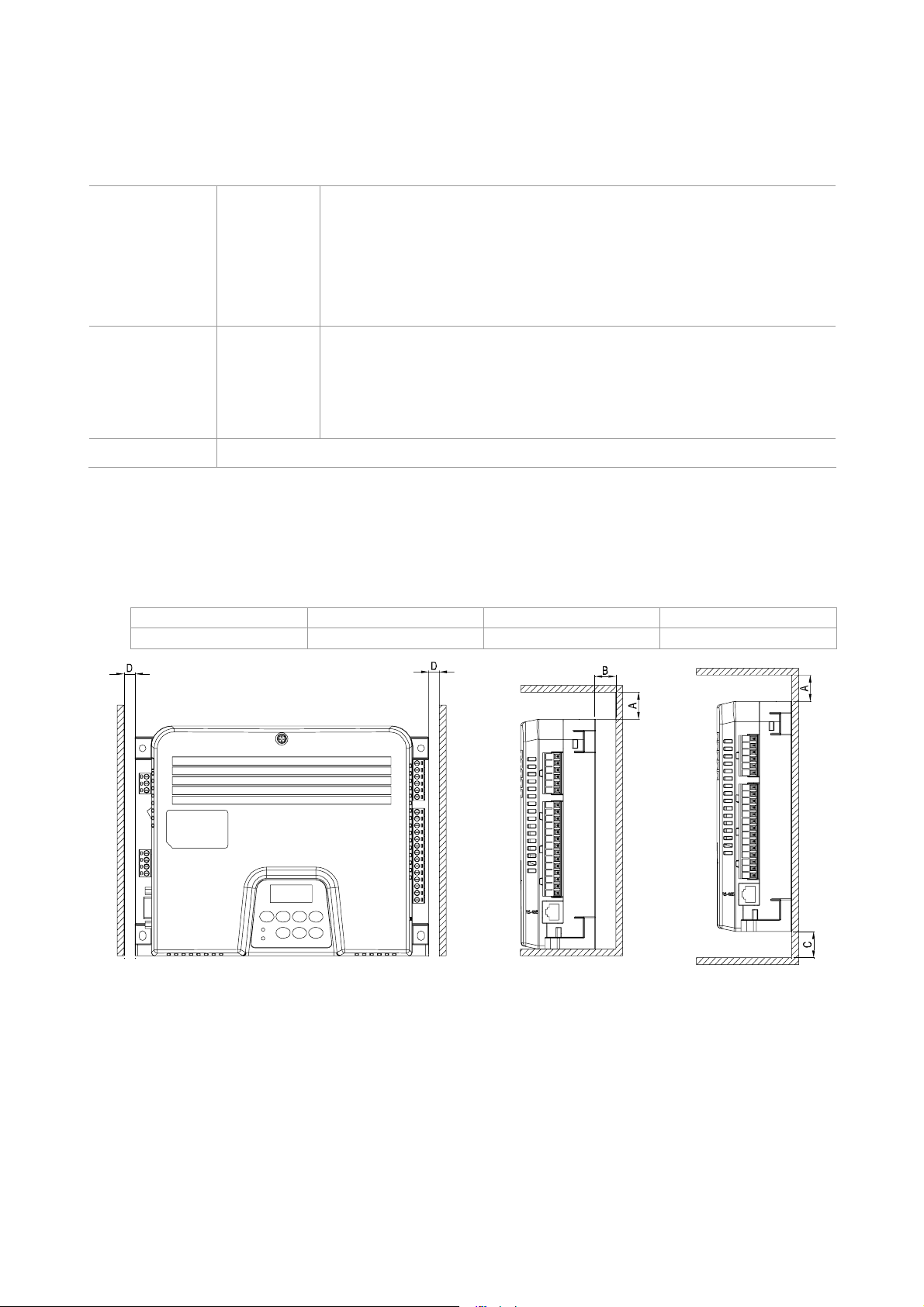
安装空间
; 安装方式有两种安装:平面、壁面。下图由左至右分别为:安装于平面图、平面的背面图、壁面
图。无论采取何种安装方式,都需要保持通风距离
A B C D
20mm 15mm 20mm 8mm
; 交流马达驱动器应使用螺钉垂直安装,于牢固的结构体上,请勿倒装斜装或水平安装。
; 交流马达驱动器运转时会产生热量,为确保冷却空气的通路应如图所示。设计留有一定的空间,
产生的热量向上散发;所以不要安装在不耐热的设备的下方。若安装在控制盘内时,更需要考虑
通风散热,保证交流马达驱动器的周围温度不超过规范值。 请勿将交流马达驱动器安装在通风
散热不良的密闭箱中,容易机器故障。
; 交流马达驱动器运转时,散热板的温度会随环境温度及负载量而改变,最高温度会上升到接近
90℃。所以,交流马达驱动器背面的安装面必须要用能承受较高温度的材质。
; 在同一个控制盘中安装多台交流马达驱动器时,为了减少相互间的热影响,建议应横向并排安装。
如必须上下安装,则必须设置分隔板,以减少下部产生的热量对上部的影响。
1-4
Page 10

NOTE
请勿让各种纤维、纸片、木片(屑)或金属碎块等异物进入交流马达驱动器内或粘附于散热风扇上。
一、使用及安装
应安装于如金属等不会燃烧的控制盘中,否则容易发生火灾事故。
1-5
Page 11
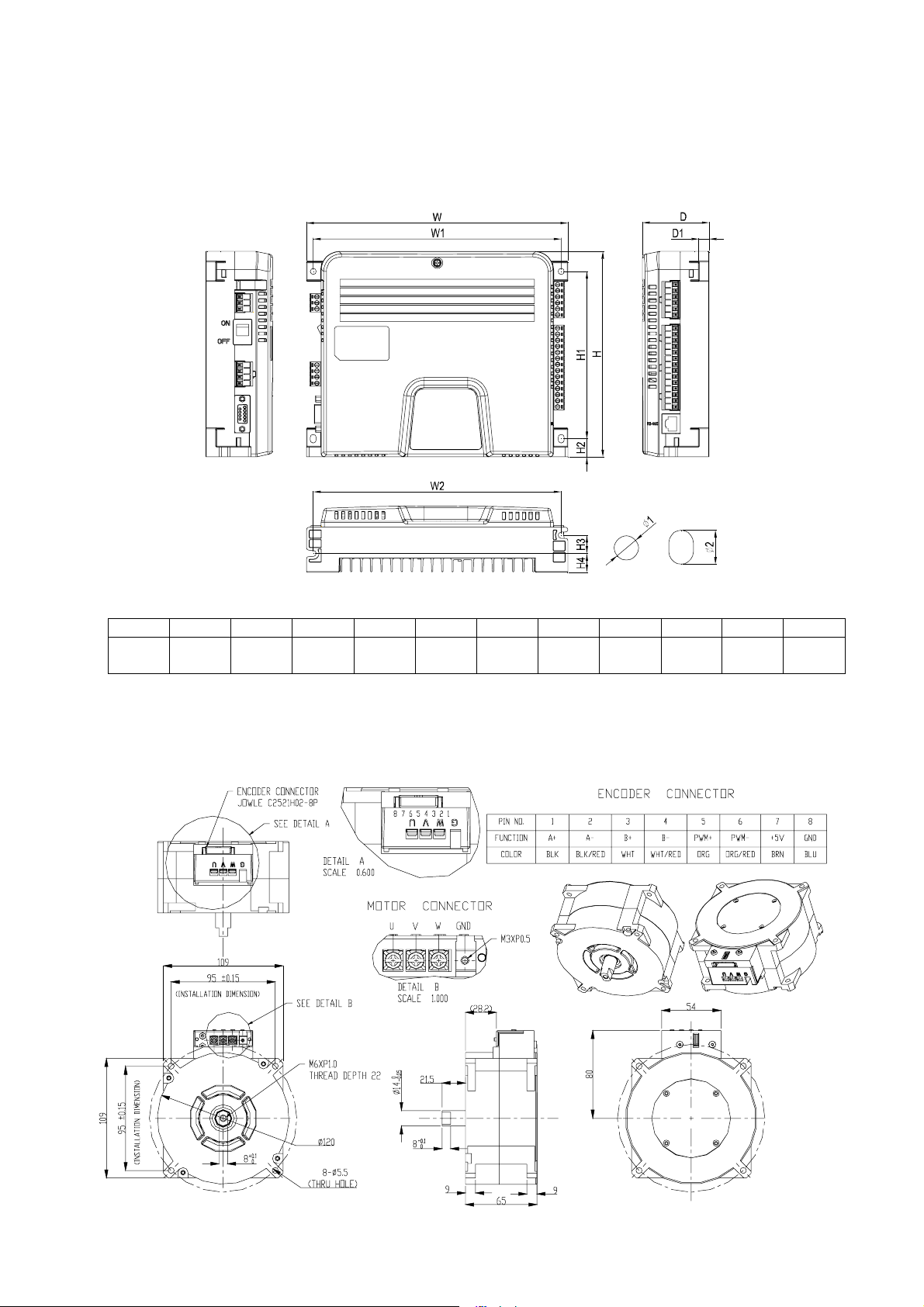
1-3 产品尺寸
VFD002DD21A; VFD002DDDD21AB; VFD002DD21C; VFD002DD21CB; VFD004DD21A;
VFD004DD21AB; VFD004DD21C; VFD004DD21CB;
Unit: mm [inch]
W W1 W2 H H1 H2 H3 H4 D D1 Φ1 Φ2
215.0
[8.46]
204.0
[8.03]
204.0
[8.03]
170.0
[6.69]
138.5
[5.45]
15.0
[0.59]
15.1
[0.59]
15.5
[0.61]
55.0
[2.17]
8.5
[0.34]
[0.20]
马达尺寸
ECMD-B9120GMS
5.0
7.0
[0.28]
1-6
Page 12
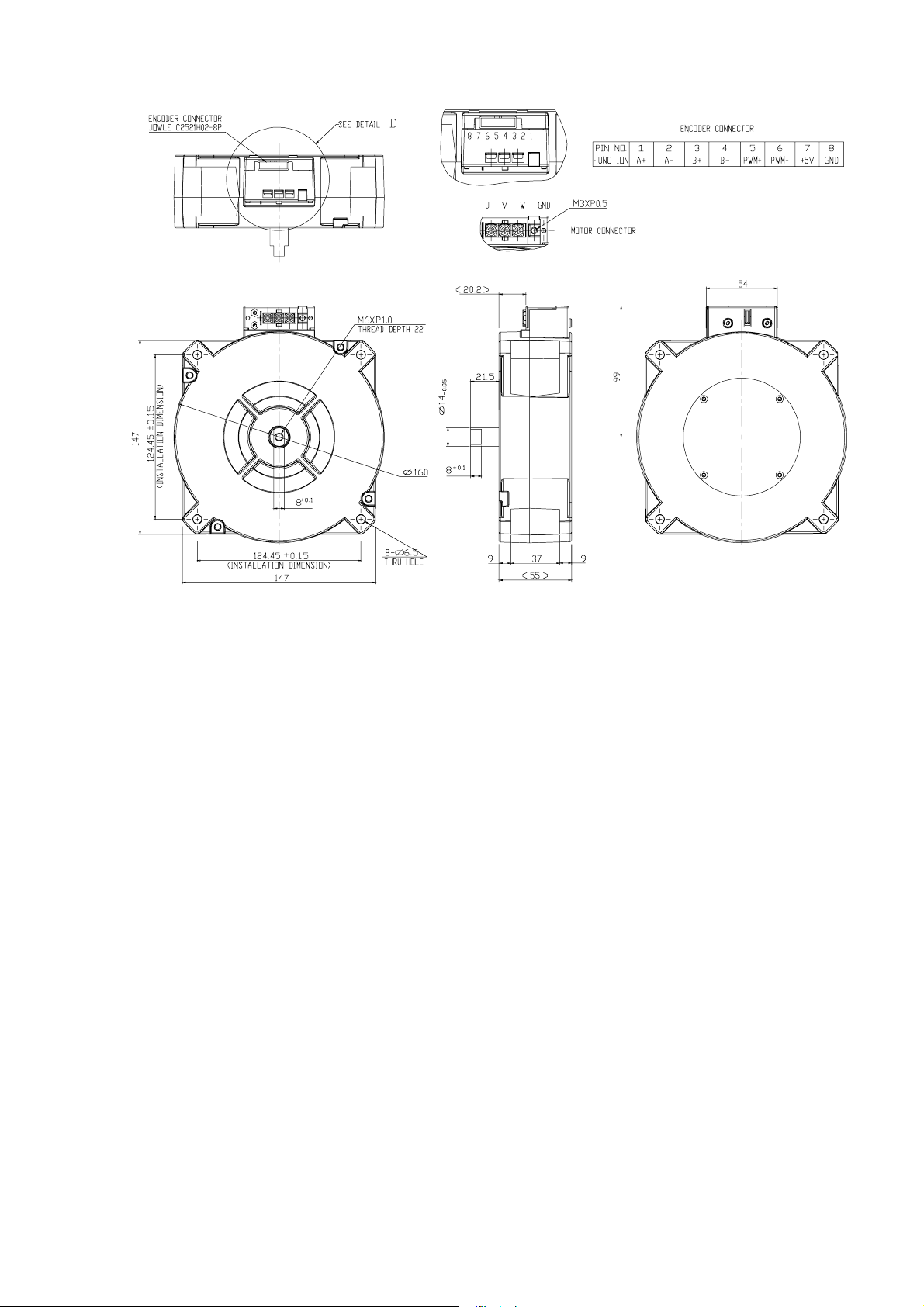
ECMD-B9160GMS
一、使用及安装
1-7
Page 13
二、配线
二、配线
2-1 配线说明
2-2 主端子回路说明
2-3 控制端子回路说明
检查各主回路电路及控制回路电路之端子是否标示清楚及接线时注意以下各项说明,千万不要接错线。
; 交流马达驱动器的主回路电源端子 L1、L2 是输入电源端。如果将电源错误连接于其它端子,则将损
坏交流马达驱动器。另外应确认电源应在铭牌标示的允许电压/电流范围内(参考 1-1 产品外观之铭牌
说明)。
; 接地端子必须良好接地,一方面可以防止雷击或感电事故,另外能降低噪声干扰。
; 各连接端子与导线间的螺丝请确实锁紧,以防震动松脱产生火花。
; 若要改变接线,首先应关掉运转的变频器电源,因为内部回路直流部分滤波电容器完
成放电需要一定时间。为避免危险,客户可以看充电指示灯(READY 灯)熄灭完全,
DANGER
再用直流电压表作测试。确认电压值小于 25Vdc 安全电压值后,才能开始进行配线。
若使用者未让变频器充分时间放电,内部会有残留电压,此时进行配线会造成电路
短路并发生火花现象,所以请使用者最好在无电压条件下进行作业以确保自身安全。
; 配线作业应由专业人员进行。确认电源断开(OFF)后才可作业,否则可能发生感电
事故。
; 配线时,配线线径规格之选定,请依照电工法规之规定施行配线,以策安全。
; 完成电路配线后,请再次检查以下几点:
1. 所有连接是否都正确无误?
2. 有无遗漏接线?
3. 各端子和连接线之间是否有短路或对地短路?
2-1
Page 14
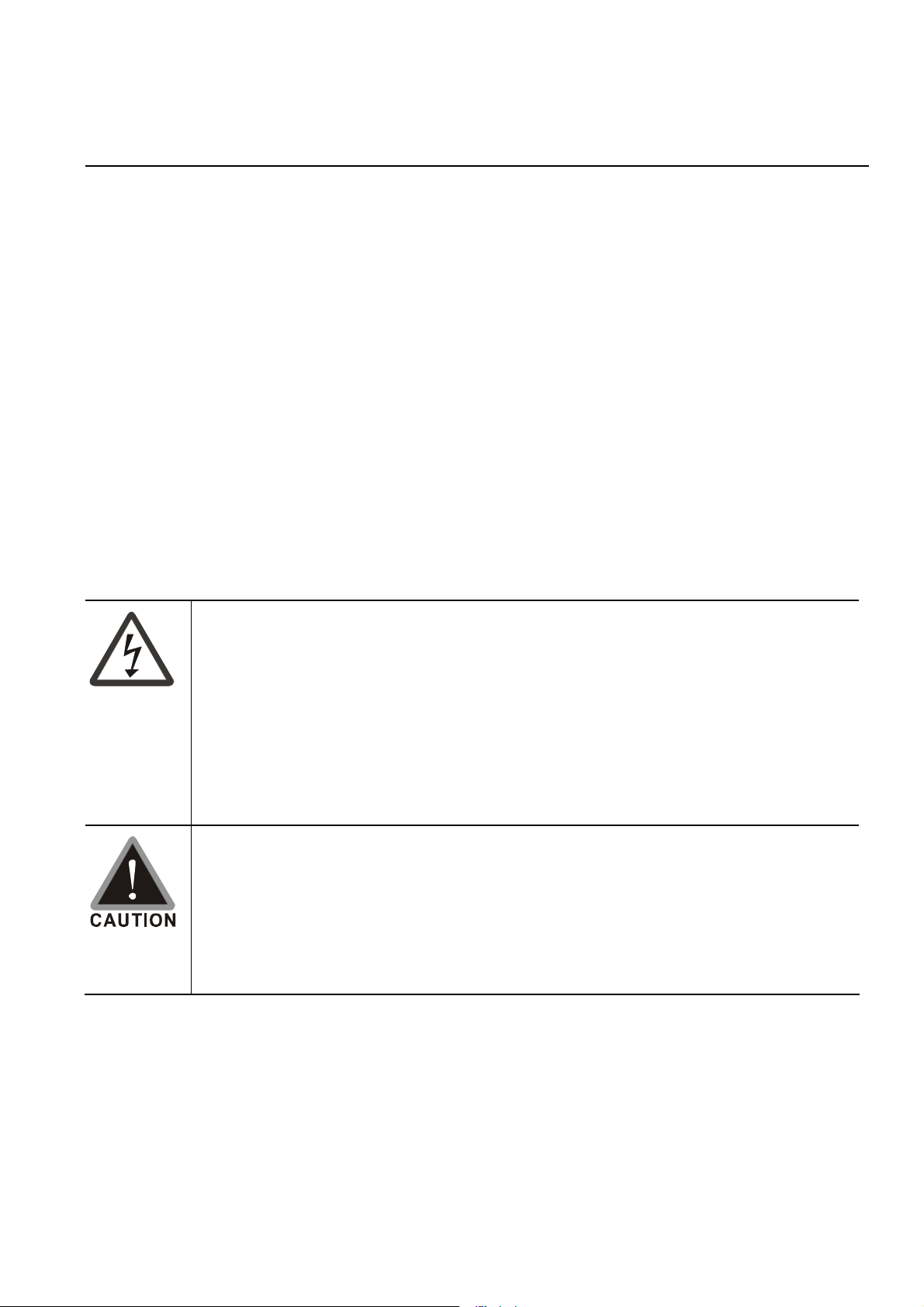
2-1 配线说明
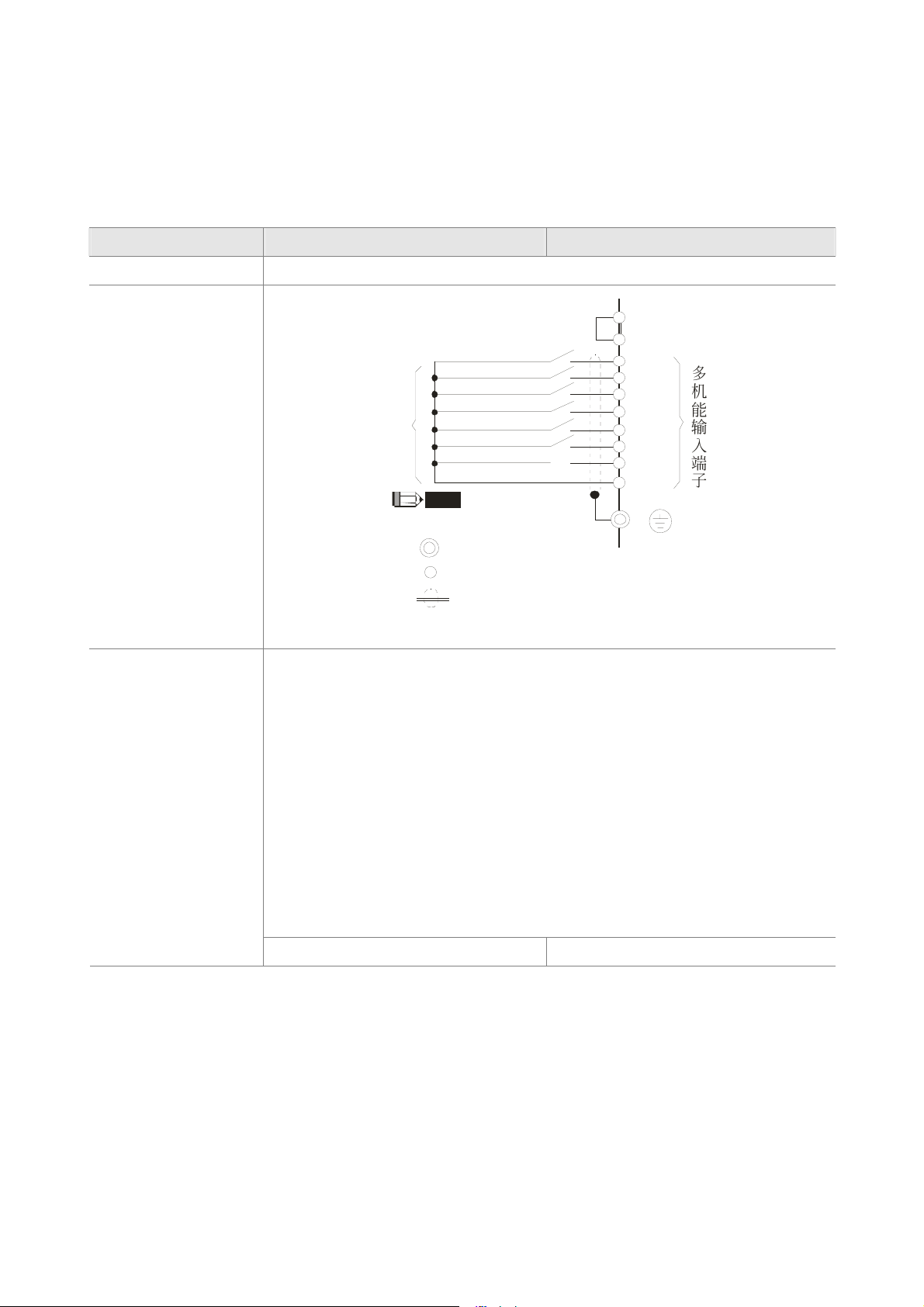
交流马达驱动器配线部份,分为主回路及控制回路,用户必须依照下列之配线回路确实连接。
VFD-DD 出厂时交流马达驱动器的标准配线图
L1
L2
開門
關門
開門極限輸入
關門極限輸入
開門換速度接點
關門換速度接點
無功能
數位信號共同端子
NOTE
以上信號不可直接加入電壓
PIN1:CAN_H
PIN2:CAN_L
PIN3:GND
PIN4:SGPIN5:SG+
PIN6, 7:保留
PIN8:EV
L1
L2
E
24V
COM
OD
CD
MI1
MI2
MI3
MI4
MI5
DCM
E
1-8
串列通信
RS-485
U/T1
V/T2
馬達
IM/PM
W/T3
E
*
1
多機能輸入 端子
2 1
5 4 3
RA1
RB1
RC1
RA2
RB2
RC2
6789
PG
多機能接點輸出 1
240VAC 3A
120VAC 3A
24VDC 3A
出廠設定為關門極限信號檢出
多機能接點輸出 2
240VAC 3A
120VAC 3A
24VDC 3A
出廠設定為開門極限信號檢出
MO1
MO2
48Vdc 50mA
多機能接點輸出
()
光耦合器
多機能接點輸出
()
光耦合器
()繼電器
()繼電器
3
4
主回路端子
控制回路端子
隔離線
多功能端子电源提供说明
由內部提供電源
(+24Vdc)
MI1
MI2
~
MI5
COM
+24V
MO3
MCM
客戶由外部接電源提供端子使用
MI1
MI2
多機能接點輸出
()
光耦合器
光耦合輸出共同端
~
MI5
+
COM
外接 電源
+24V
+24V
5
2-2
Page 15
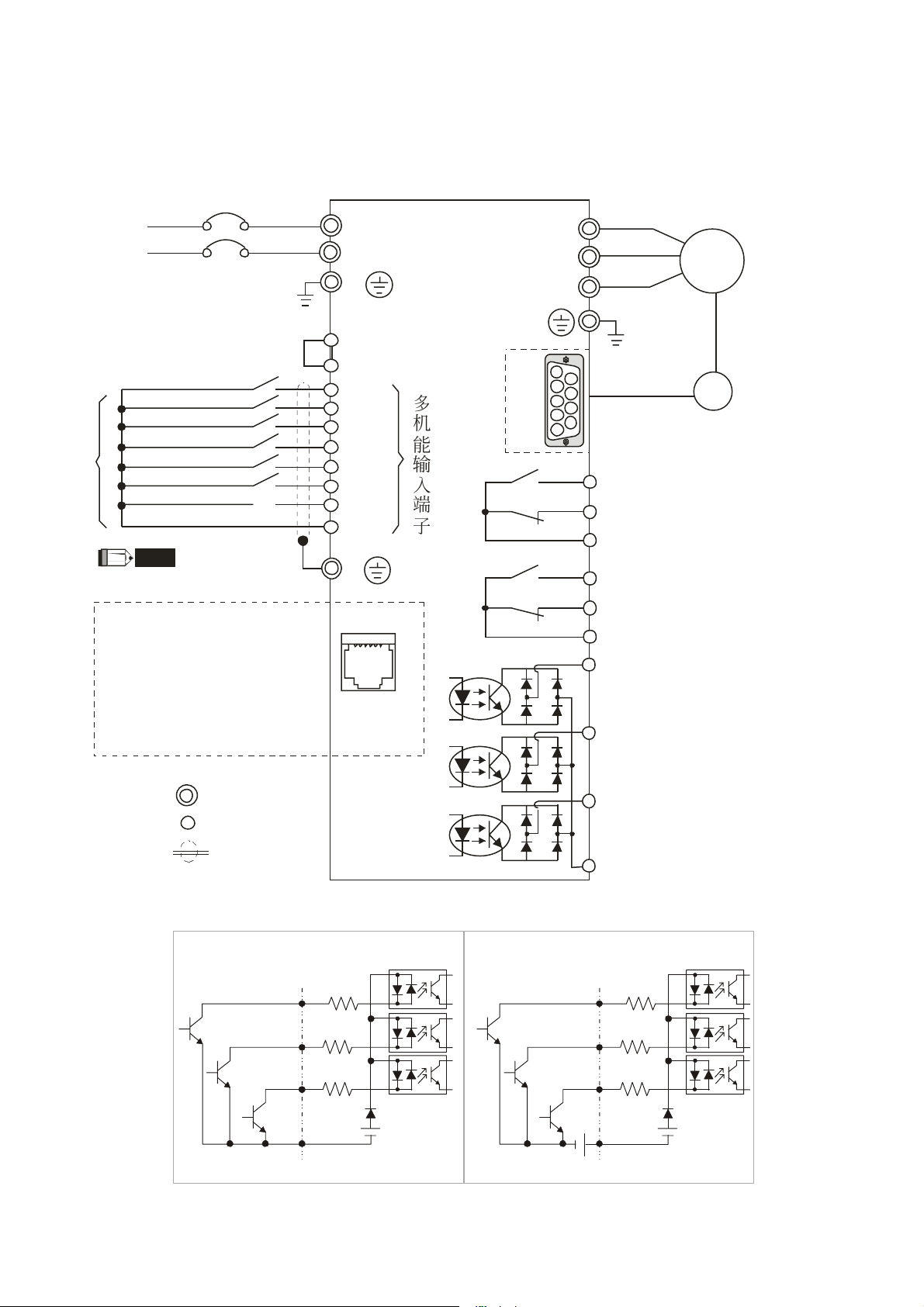
*1
二、配线
GND
A
Z-
Z
+12V
6
B
感应马达:A, B, +5V, GND
7
89
4 3 2 1
5
+5V
; 主回路配线与控制回路的配线必需隔离,以防止发生误动作。
; 控制配线请尽量使用隔离线,端子前的隔离网剥除段请勿露出。
; 电源配线请使用隔离线或线管,并将隔离层或线管两端接地。
; 通常控制线都没有较好的绝缘。如果因某种原因导致绝缘体破损,则有可能因高
压进入控制电路(控制板),造成电路损毁或设备事故及人员危险。
; 交流马达驱动器、马达和配线等会造成噪声干扰。注意周围的传感器(sensor)
和设备是否有误动作以防止事故发生。
; 交流马达驱动器输出端子按正确相序连接至3相马达。如马达旋转方向不对,则
可交换U/T1、V/T2、W/T3中任意两相的接线。
; 交流马达驱动器和马达之间配线很长时,由于线间分布电容产生较大的高频电
流,可能造成交流马达驱动器过电流跳机。另外,漏电流增加时,电流值的精度
同步马达:A, B, Z, Z-, +5V, GND
会相对的变差。如配线很长时,则要连接输出侧交流电抗器。
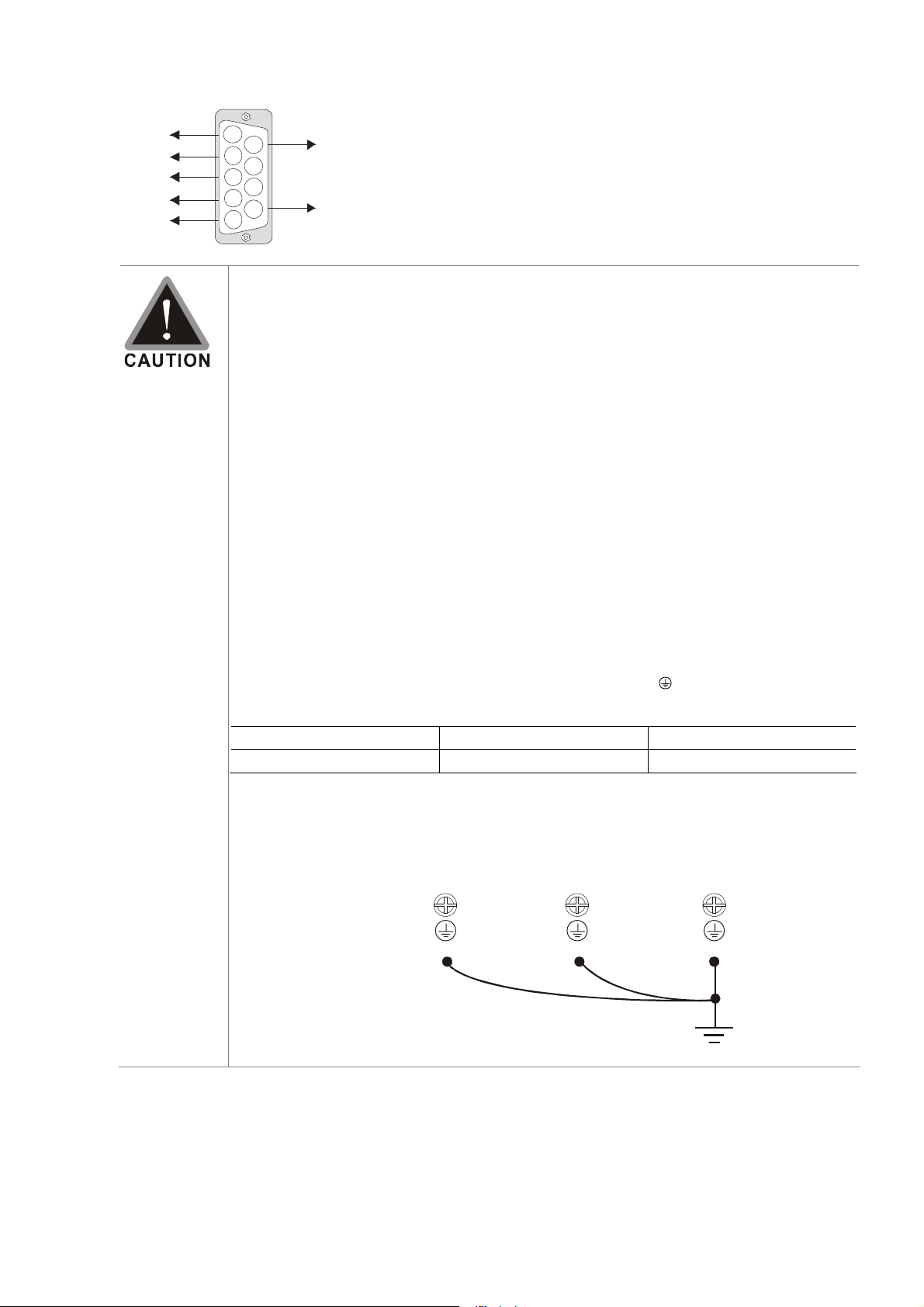
; 交流马达驱动器接地线不可与电焊机、大马力马达等大电流负载共同接地,而必
须分别接地。
; 为了安全和减少噪声,230V 系列采用第三种接地(E
),(接地阻抗 10Ω以下)。
此说明为根据电工法规第一章第八节第二十七条之规范。
电压系列 接地工事的种类 接地抵抗
230V
第三种接地工事 100Ω以下
; 为了防止雷击和感电事故,电气设备的金属外接地线要粗而短,并且应连接于变
频器系统的专用接地端子。
; 多台的变频器被安装在一起时,所有变频器必须直接连接到共同接地端。请参考
下列图示并确定接地端子间不会形成回路。
接地端子
最佳接地線配線方式
2-3
Page 16
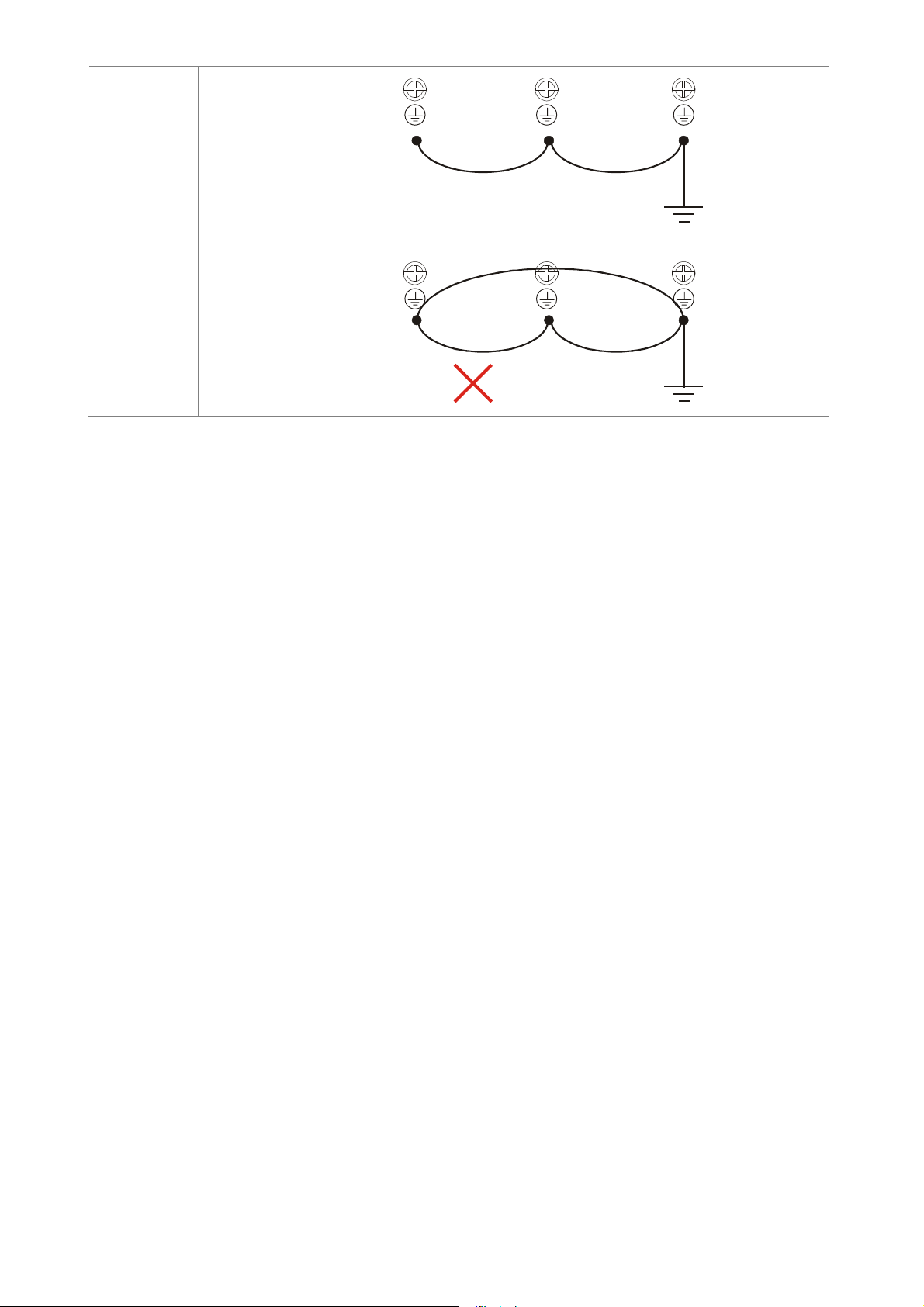
接地端子
尚可接地線配線方式
接地端子
錯誤方式
2-4
Page 17
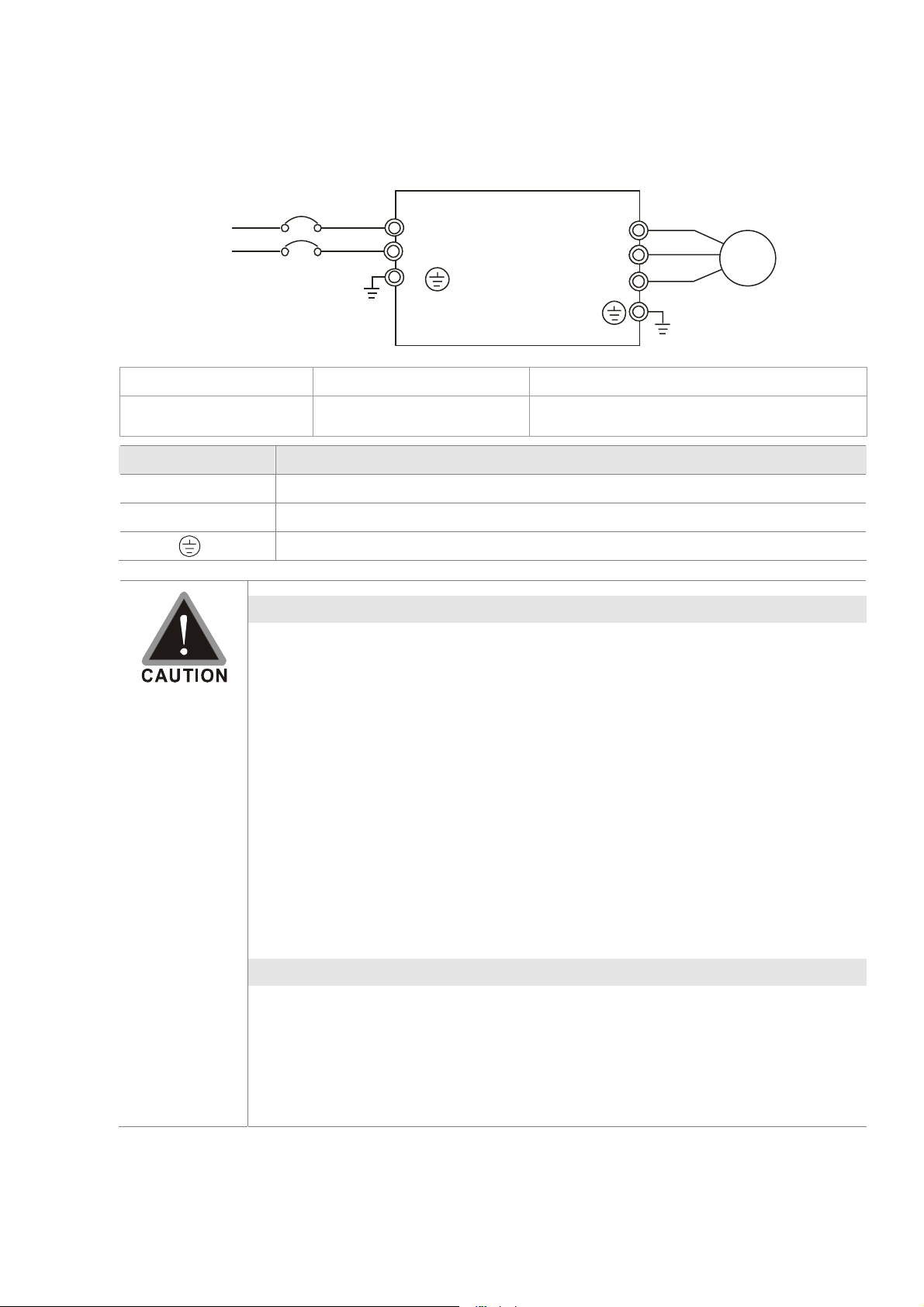
2-2 主回路端子说明
主回路端子图
二、配线
(2.075-3.332mm
端子记号 内容说明
U/T1, V/T2, W/T3
L1
L2
L1
L2
E
U/T1
V/T2
W/T3
E
线径 扭力 线种类
14-12 AWG.
L1, L2
2
)
商用电源输入端
5.2kgf-cm (4.5in-lbf)
Stranded copper only,75℃
交流马达驱动器输出,连接3相感应马达
E
接地端子,请依电工法规230V系列用第三种接地
主回路电源输入端子部分:
; 输入电源 L1、L2 并无顺序分别,可任意连接使用。
馬達
IM/PM
; 主回路端子的螺丝请确实锁紧,以防止因震动松脱产生火花。
; 确定电源电压及可供应之最大电流。请参考附录 A 标准规格说明。
; 交流马达驱动器若有加装一般漏电断路器以作为漏电故障保护时,为防止漏电
断路器误动作,请选择感度电流在200mA以上,动作时间为0.1秒以上者。使
用交流马达驱动器专用漏电断路器时,请选择感度电流在30mA以上。
; 电源配线请使用隔离线或线管,并将隔离层或线管两端接地。
; 不要采用主回路电源ON/OFF方法控制交流马达驱动器的运转和停止。应使用
控制回路端子OD,CD或是键盘面板上的RUN和STOP键控制交流马达驱动器
的运转和停止。如一定要用主电源ON/OFF方法控制交流马达驱动器的运转,
则每小时约只能进行一次。
主回路输出端子部分:
; 若交流马达驱动器输出侧端子U/T1、V/T2、W/T3 有必要加装噪声滤波器时,
必需使用电感式L-滤波器,不可加装进相电容器或L-C、R-C式滤波器。
; 交流马达驱动器输出侧不能连接进相电容器和突波吸收器。
; 请使用强化绝缘的马达,以避免马达漏电。
2-5
Page 18
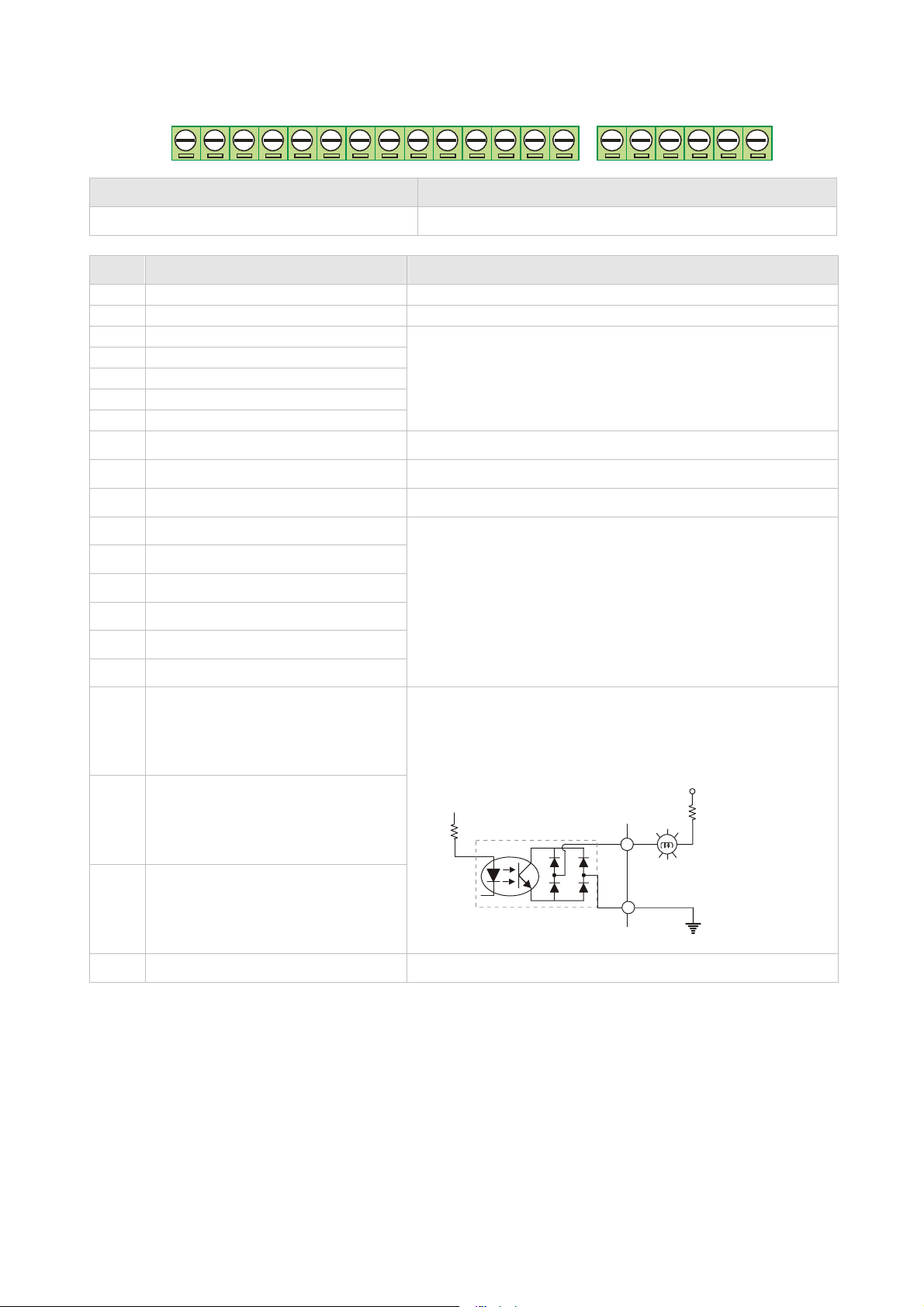
2-3 控制回路端子说明
扭力 线径
5 kgf-com (6.9 in-lbf) 18-12 AWG (0.8107-3.332mm2)
端子 功能说明 出厂设定(NPN 模式)
OD
开门
CD
MI1
MI2
MI3
MI4
MI5
COM
+E24V
DCM
RA1
RB1
RC1
RA2
停止指令
-
关门-停止指令
多功能输入选择一
多功能输入选择二
多功能输入选择三
多功能输入选择四
多功能输入选择五
数字控制信号的共同端
数字控制信号的共同端
数字控制信号的共同端
多功能输出接点
多功能输出接点
多功能输出接点共同端
多功能输出接点
CD-DCM
1(Relay
1(Relay
2(Relay
常开
a)
常闭
b)
(Relay)
常开
a)
OD-DCM
端子
择
导通时
3.75kΩ
多功能输入端子的共同端子
+24V 80mA
多功能输入端子的共同端子
电阻式负载
5A(N.O.)/3A(N.C.) 240VAC; 5A(N.O.)/3A(N.C.) 24VDC
电感性负载
1.5A(N.O.)/0.5A(N.C.) 240VAC; 1.5A(N.O.)/0.5A(N.C.) 24VDC
:导通
:导通
MI1~MI5
(ON)
;断路时
;开门:断路
(ON)
;关门:断路
(ON)
的功能选择可参考参数
时,输入电压为
(OFF)
24Vdc(Max: 30Vdc)
,容许漏电流为10μ
(OFF)
(OFF)
02.01~02.05
RA1RB1RC1RA2RB2RC2MO1MO2MO3MCMMI1MI2MI3MI4MI5CDOD24VCOMDCM
,减速停止
,减速停止
多功能输入选
,输入阻抗为
A
RB2
RC2
MO1
MO2
MO3
MCM
多功能输出接点
多功能输出接点共同端
多功能输出端子一 (光耦合
多功能输出端子二 (光耦合
多功能输出端子三 (光耦合
多功能输出端子共同端(光耦合
2(Relay
常闭
b)
(Relay)
)
)
)
)
输出各种监视讯号,如运转中、频率到达、过载指示等信号。详
细请参考参数
交流马达驱动器以晶体管开集极方式输出各种监视讯号。如运转
中,频率到达,过载指示等等信号。详细请参考参数
能输出端子选择。
Max 48Vdc 50mA
02.08~02.12
內部線路
* 模拟控制讯号线规格:18 AWG (0.75 mm
多功能输出端子选择。
Max: 48Vdc/50mA
MO1~MO3
MCM
2
),遮避隔离绞线
接点输入端子(FWD, REV, MI1~MI8, COM)
; 接点输入控制时,为防止发生接触不良,应使用对弱信号接触可靠性高的接点。
03.01
多功
晶体管输出端子(MO1, MO2, MO3, MCM)
; 应正确连接外部电源的极性。
; 连接控制继电器时,在激磁线圈两端应并联突波吸收器,请注意连接极性的正确性。
2-6
Page 19
三、简易面板与运转
三、简易面板与运转
; 运转前请再次核对接线是否正确。尤其是交流马达驱动器的输出端子 U/T1、V/T2、
W/T3 不能输入电源,应确认接地端子 E
; 确认马达没有连接负载机械装置。
; 潮湿的手禁止操作开关。
; 确认端子间或各暴露的带电部位没有短路或对地短路情况。
; 确认端子连接,插接式连接器(PG 卡)和螺丝等均紧固无松动。
; 上盖安装好后才能接通电源。
; 如交流马达驱动器和马达的运转发生异常,则应立即停止运转,并参照”故障诊断”,
检查发生异常情况的原因。交流马达驱动器停止输出后,在未断开主电路电源端子 L1,
L2 这时,如触碰交流马达驱动器的输出端子 U/T1, V/T2, W/T3, 则可能会发生雷击。
3-1 运转方式
3-2 数字操作器说明
接地良好。
3-1
Page 20
3-1 运转方式
VFD-DD 系列出厂时,设定运转方式是由控制端子做控制。运转方式可藉由通讯、控制端子设定及数
字操作器功能做运转功能。使用者可依照自己需要选择适合的运转方式。
运转方式 频率命令来源 运转命令来源
通讯 请参考通讯协议的参数地址定义 2000H 及 2119H 地址设定
24V
COM
OD
CD
MI1
MI2
MI3
MI4
MI5
DCM
E
多機 能輸入端子
控制端子
外部信号操作
開門
關門
開門極限輸入
關門極限輸入
開門換速度接點
關門換速度接點
無功能
數位信號共同端子
NOTE
以上信號不可直接加入電壓
数字操作器
主回路端子
控制回路端子
隔離線
图 3-1
图 3-2
如图的上下键 如图中 CD/OD、STOP/RESET 键
3-2
Page 21
3-2 数字操作器说明
键盘面板外观
三、简易面板与运转
關門指示
關門到位指示
故障報警指示
選擇參數 修改參數、
顯示驅動器狀態 定值
上/下鍵
編輯/功能鍵
、設
及參數變更使用
指示燈
電源指示燈
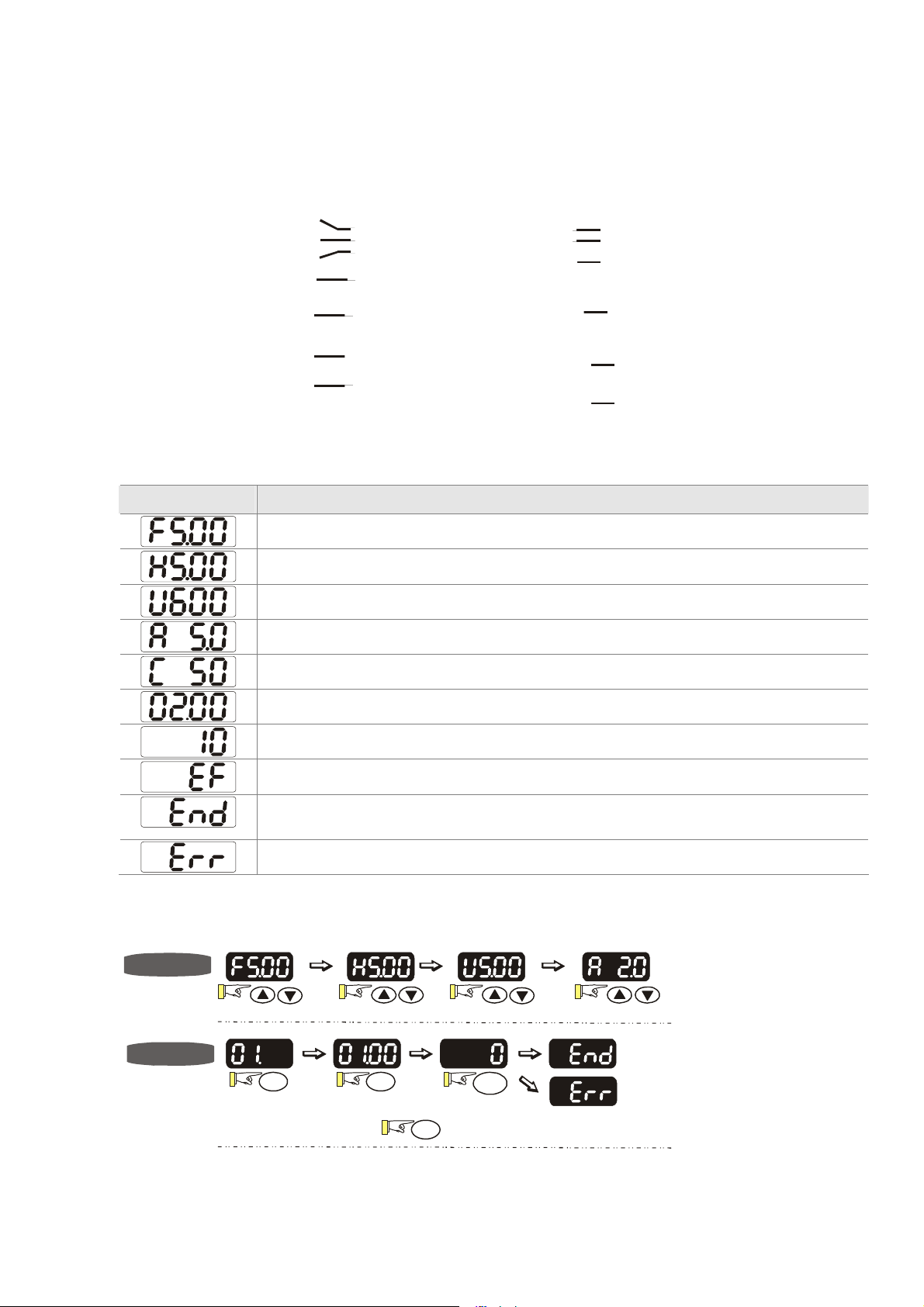
功能显示项目说明
显示项目 说明
显示驱动器目前的设定频率。
显示驱动器实际输出到马达的频率。
显示用户定义之物理量 (U = F x 00-05)
显示负载电流
显示计数值
显示参数项目
显示参数内容值
外部异常显示
若由显示区读到 End 的讯息(如左图所示)大约一秒钟,表示数据已被接受并自动
存入内部存贮器
開門指示
開門到位指示
顯示區
可顯示輸出頻率、電流、
各參數設定值及異常內容
參數資料設定鍵
用以讀取修改驅動器的各項參數設定
停止/重置鍵
可令驅動器停止運轉及異常重置
關門/開門鍵
若设定的资料不被接受或数值超出时即会显示
键盘面板操作流程
ST A R T
畫面選擇
參數設定
MODE MODE
在參數設定模式中
重點:
ENTER
可返回畫面選擇模式
MODE
GO START
正確
錯誤
3-3
Page 22
四、参数功能说明
四、参数功能说明
4-1 参数功能一览表
4-2 参数功能详细说明
依参数的属性区分为 12 个参数群,使参数设定上更加容易。在大部份的应用中,使用者可根据参数群中
相关的参数设定,完成启动前的设定。12 个参数群如下所示:
00 : 系统参数
01 : 马达参数
02 : 输入及输出功能参数
03:回授参数
04:开门动作参数
05:关门动作参数
06:保护及特殊功能参数
07:控制参数
08:多段数参数
09:通讯参数
10:用户自订参数设定
11:查阅用户设定参数
4-1
Page 23

4-1 参数功能一览表
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
00 系统参数 a表示可在运转中执行设定功能
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
0
0
2
0
0
0
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
00.00
00.01
00.02
a00.03
a00.04
00.05
a00.06
a00.07
00.08
驱动器机种代码识别 0:200w
2:400w
驱动器额定电流显示 0:1.50A
2:2.50A
参数重置设定 0:无功能
1:参数锁定
8:键盘锁定
10:所有参数的设定值重置为出厂值 (50Hz,
230V)
开机预设显示画面 0:F(频率指令)
1:H(实际频率)
2:U(使用者定义)
3:A(输出电流)
多功能显示选择 0:显示输出电流(A )
1:显示实际频率(Hz)
2:显示 DC-BUS 电压( U)
3:显示输出电压( E )
4:显示功因角度(n.)
5:显示输出之功率(kW)
6:显示马达角速度(HU)
7:显示驱动器估算之输出转矩 (kg-m)
8:显示脉波输入位置 PG
9:显示电气角
10:显示 IGBT 温度(oC)
11:显示数字输入 ON/OFF 状态
12:显示数字输出 ON/OFF 状态
13:显示正在执行多段速的段速
14:显示数字输入对应之 CPU 脚位状态
15:显示数字输出对应之 CPU 脚位状态
16:当发生异常错误时,实际输出电压
17:当发生异常错误时,实际 DC-BUS 电压
18:当发生异常错误时,实际输出频率
19:当发生异常错误时,实际输出电流
20:当发生异常错误时,实际频率命令
21:门宽百分比或段速
22:门宽(pulse)
23:过调变指示
软件版本 只读(依出厂版本显示)
参数保护解碼输入
0~9999
0~02:记录密码错误次数
参数保护密码设定
0~9999
0:未设定密码锁或 00.07 密码输入成功
1:参数已被锁定
控制模式 0:V/F 控制
1:V/F 控制+编码器(Encoder)(VFPG)
2:无感测向量控制(SVC)
3:FOC 向量控制+编码器(Encoder)(FOCPG)
8:FOC PM控制(FOCPM)
只读
只读
#.##
FOCPM
4-2
Page 24
参数码 参数功能 设定范围 出厂值
00.09
a00.10
a00.11
a00.12
a00.13
a00.14
a00.15
门机控制模式 0:距离控制模式
1:保留
2:多段速控制模式
3:速度控制模式
驱动器输出方向 0:与设定方向相同
1:与设定方向相反
PWM 载波频率选择
02~15 kHz 10
自动稳压功能(AVR) 0:自动稳压功能
1:无自动稳压功能
2:减速时取消自动稳压功能
运转指令来源设定 0:由数字操作器输入
1:由外部端子操作
2:由 RS-485 通信界面操作
演示模式 0:无效
1:演示模式
测试频率命令
0~120.00 Hz 0
3
0
0
1
0
四、参数功能说明
VF
VFPG
SVC
FOCPG
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
FOCPM
4-3
Page 25
01 马达参数 a表示可在运转中执行设定功能
○
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
01.00
01.01
01.02
01.03
01.04
01.05
01.06
01.07
01.08
01.09
01.10
01.11
01.12
01.13
01.14
01.15
01.16
01.17
01.18
01.19
01.20
a01.21
a01.22
a01.23
a01.24
a01.25
a01.26
a01.27
a01.28
01.29
01.30
01.31
01.32
01.33
01.34
a01.35
01.36
a01.37
PM 电机参数自动量测 0:无功能
1:PM 马达参数量测(煞车锁住)
2:仅在无载时,自动量测 PG 原点偏移角度
(01.09)
3:自动量测 PG 原点偏移角度(01.09)
PM 电机满载电流 (40~120%)*00.01 Amps
PM 电机额定功率
PM 电机额定转速(rpm)
PM 电机极数
0.00~655.35kW 0.06
0~65535 250
2~96 16
PM 电机参数 Rs 0.0~655.35Ω
PM 电机参数 Ld
PM 电机参数 Lq
PM 反电动势
0.0~6553.5mH 169.4
0.0~6553.5mH 169.4
0.0~6553.5Vrms 0.0
PM 磁极与 PG 原点偏移角度 0.0~360.0°
PM 磁极重新定位 0:无功能
1:重新设定磁极定位
IM 电机参数自动量测 0:无功能
1:动态测试
2:静态测试
3:保留
IM 电机满载电流 (40~120%)*00.01 Amps
IM 电机额定功率
IM 电机额定转速(rpm)
IM 电机极数
0.00~655.35kW 0.16
0~65535 1710
2~48 4
IM 电机无载电流 00~参数 01.12 出厂设定值
IM 电机参数 Rs 0.000~65.535mΩ
IM 电机参数 Rr 0.000~65.535mΩ
IM 电机参数 Lm
IM 电机参数 Lx
0.0~6553.5mH 0.0
0.0~6553.5mH 0.0
转矩补偿低通滤波时间 0.001~10.000 秒
转差补偿低通滤波时间 0.001~10.000 秒
转矩补偿增益 00~10
滑差补偿增益 0.00~10.00
滑差误差准位 00~1000% (0:不检测)
滑差误差检测时间 0.0~10.0 秒
过滑差检出选择 0:警告并继续运转
1:警告且减速停车
2:警告且自由停车
震荡补偿因子 00~10000 (0:不动作)
累计电机运转时间(分钟)
累计电机运转时间(天数)
最大操作频率
第一输出频率设定
0~1439 0
0~65535 0
10.00~120.00Hz 50
0.00~120.00Hz 50
(基底频率/电机额定频率)
第一输出电压设定
0.0V~240.0V 220.0
(基底电压/电机额定电压)
第二输出频率设定
第二输出电压设定
第三输出频率设定
第三输出电压设定
0.00~120.00Hz 0.50
0.0V~240.0V 5.0
0.00~120.00Hz 0.50
0.0V~240.0V 5.0
0
1.00
13.900
360.0
0
0
1.00
#.##
0.000
0.000
0.020
0.100
0
0.00
0
1.0
0
2000
○ ○
○ ○ ○ ○
○ ○
○ ○ ○
○ ○ ○ ○
○ ○ ○
○ ○
○ ○
○ ○
○ ○
○
○
○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○ ○
○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○
○ ○
○ ○
○ ○
○
○
○
○
○
○
○
○
○
○
FOCPM
4-4
Page 26

参数码 参数功能 设定范围 出厂值
01.38
a01.39
第四输出频率设定
第四输出电压设定
0.00~120.00Hz 0.00
0.0V~240.0V 0.0
四、参数功能说明
VF
VFPG
SVC
FOCPG
○ ○ ○ ○
○ ○
FOCPM
4-5
Page 27
02 输入及输出功能参数 a表示可在运转中执行设定功能
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
○ ○ ○
02.00
02.01
02.02
02.03
02.04
02.05
a02.06
a02.07
a02.08
a02.09
a02.10
a02.11
a02.12
二线/三线式运转控制 0:2 线式模式 1, 电源启动运转控制动作
1:2 线式模式 1, 电源启动运转控制不动作
2:2 线式模式 2, 电源启动运转控制动作
3:2 线式模式 2, 电源启动运转控制不动作
多功能输入指令一(MI1) 0:无功能
多功能输入指令二(MI2) 1:多段速指令一
多功能输入指令三(MI3) 2:多段速指令二
多功能输入指令四(MI4) 3:多段速指令三
多功能输入指令五(MI5) 4:多段速指令四
5:异常复归指令 Reset
6:低速运转
7:低速运转方向选择(正/反转)
8:第一、二加减速时间切换
9:强制停止(NO)输入
10:演示模式(Demo)
11:紧急停止(NO)输入
12:运转命令选择(Keypad/外部端子)
13:参数锁定致能(NC)
14:开门极限信号输入
15:关门极限信号输入
16:开门换速度接点信号
17:关门换速度接点信号
18:允许开门信号输入
19:光幕信号输入
20:第二段开关门曲线信号输入
21:重新定位信号输入
数字端子输入响应时间
0.001~30.000sec 0.005
数字输入工作方向 0~65535
多功能输出(Relay1) 0:无功能
多功能输出(Relay2) 1:运转中指示
多功能输出(MO1) 2:零速含 STOP(频率命令)
多功能输出(MO2) 3:驱动器准备完成
多功能输出(MO3) (通讯) 4:低电压警报(Lv)
5:故障指示
6:过热警告(06.09)
7:煞车晶体动作检出
8:警告输出
9:过电压警告
10:正转命令
11:反转命令
12:演示模式运转中指示
13:演示模式完成开关指示
14:强制停止指示
15:紧急停止指示
16:关门极限信号检出
17:开门极限信号检出
18:关门受阻信号输出
19:定位完成信号输出
20:位置检出信号 1(仅关门时有效)
21:位置检出信号 2(仅关门时有效)
0
○ ○ ○
14
○ ○ ○
15
○ ○ ○
16
○ ○ ○
17
○ ○ ○
0
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
60
○ ○ ○
16
○ ○ ○
17
○ ○ ○
0
○ ○ ○
0
○ ○ ○
0
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
FOCPM
4-6
Page 28
参数码 参数功能 设定范围 出厂值
a02.13
a02.14
a02.15
a02.16
22:位置检出信号 3(仅关门时有效)
23:位置检出信号 1(仅开门时有效)
24:位置检出信号 2(仅开门时有效)
25:位置检出信号 3(仅开门时有效)
26:PG 回授信号异常
多功能输出方向 0~65535
位置检出信号 1
位置检出信号 2
位置检出信号 3
0.0~100.0% 25.0
0.0~100.0% 12.5
0.0~100.0% 7.5
0
四、参数功能说明
VF
VFPG
SVC
FOCPG
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
FOCPM
4-7
Page 29
03 回授参数 a表示可在运转中执行设定功能
○ ○
○ ○
○ ○
○ ○
○ ○
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
03.00
03.01
03.02
a03.03
a03.04
编码器(Encoder)种类选择 0:无功能
1:ABZ
7:PWM 脉波
编码器(Encoder)每转产生之脉波
1~25000 256
点数
编码器(Encoder)输入型式设定 0:无功能
1:A/B 相脉波列 A 相超前 B 相 90 度为正转
2:A/B 相脉波列 B 相超前 A 相 90 度为正转
3:A 相为脉波列,B 相为方向符号 L 为反转 H 为
正转
4:A 相为脉波列,B 相为方向符号 L 为正转 H 为
反转
5:单相输入
编码器(Encoder)回授讯号错误处
理
(PGF1、PGF2)
0:警告并继续低速运转
1:警告且减速停车
2:警告且停止运转
编码器(Encoder)回授讯号错误时间 0.0~10.0 秒
7
1
2
1.0
○
○
○
○
○
FOCPM
a03.05
a03-06
a03.07
a03.08
a03.09
03.10
03.11
03.12
03.13
编码器(Encoder) 失速位准
0~120% (0:无功能)
(PGF3)
编码器(Encoder)失速侦测时间 0.0~2.0 秒
编码器(Encoder) 转差范围
0~50% (0:无功能)
(PGF4)
编码器(Encoder)转差侦测时间 0.0~10.0 秒
编码器(Encoder)失速及转差异常
处理
0:警告并继续运转
1:警告且减速停车
2:警告且停止运转
门宽自学习频率
0.10~120.00Hz 5.0
门宽自学习功能设定 0:无功能
1:自学习模式
门宽低位脉冲数设定
1~9999 8800
门宽高位脉冲数设定 0~9999 (单位:10000)
1 15
0.1
50
0.5
2
0
0
○ ○ ○ ○
○ ○ ○ ○
○ ○ ○ ○
○ ○ ○ ○
○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
4-8
Page 30
四、参数功能说明
04 开门动作参数 a表示可在运转中执行设定功能
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
FOCPM
a04.00
a04.01
a04.02
a04.03
a04.04
a04.05
a04.06
a04.07
a04.08
a04.09
a04.10
a04.11
a04.12
a04.13
a04.14
a04.15
a04.16
04.17
a04.18
a04.19
a04.20
a04.21
a04.22
a04.23
a04.24
开门初速
0.00~120.0Hz 2.00
开门初速运转距离 0~65535 (单位为脉冲数)
开门初速运转时间
第一开门高速
0~20.0s 1.0
0.00~120.0Hz 15.00
开门尾速开始 0.0~100.0% (门宽度用%表示)
开门尾速
0.00~120.0Hz 5.00
开门到位保持速度开始 0.0~100.0% (门宽度用%表示)
开门到位保持速度
0.00~120.0Hz 2.00
第一开门加速时间 0.1~3600 秒
第一开门减速时间 0.1~3600 秒
第一开门到位至保持转矩准位设
0.0~150.0% (电机额定电流)
定
开门到位保持转矩 0.0~100.0% (电机额定电流)
开门到位保持转矩响应时间 0.01~10.00 秒
第二开门高速
0.00~400.0Hz 30.00
第二开门加速时间 0.1~3600 秒
第二开门减速时间 0.1~3600 秒
第二开门到位至保持转矩准位设
0.0~150.0% (电机额定电流)
定
开门逾时侦测时间 0.0~180.0 秒 (0.0 秒:不侦测开门逾时)
OD 端子命令保持时间 0.0~999.9 秒 (999.9 秒为永久保持)
开门 S1 曲线加速时间 0.0~10.0 秒
开门 S2 曲线加速时间 0.0~10.0 秒
开门直流制动电流准位
00~100% 0
开门启动直流制动时间 0.0~60.0 秒
开门停止直流制动时间 0.0~60.0 秒
开门直流制动起始频率
0.00~120.00Hz 0.00
300
90.0
95.0
1.0
1.0
50.0
30.0
0.20
1.0
1.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○
4-9
Page 31

05 关门动作参数 a表示可在运转中执行设定功能
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
FOCPM
a05.00
a05.01
a05.02
a05.03
a05.04
a05.05
a05.06
a05.07
a05.08
a05.09
a05.10
a05.11
a05.12
a05.13
a05.14
a05.15
a05.16
a05.17
a05.18
a05.19
a05.20
a05.21
a05.22
a05.23
a05.24
05.25
a05.26
a05.27
05.28
a05.29
a05.30
a05.31
a05.32
a05.33
a05.34
关门初速
0.00~120.0Hz 2.00
关门初速运转距离 0~65535 (单位为脉冲数)
关门初速运转时间
第一关门高速
0~20.0s 0
0.00~120.0Hz 15.00
关门尾速开始 0.0~100.0% (门宽度用%表示)
关门尾速
0.00~120.0Hz 5.00
关门到位保持速度开始 0.0~100.0% (门宽度用%表示)
关门到位保持速度
0.00~120.0Hz 2.00
第一关门加速时间 0.1~3600 秒
第一关门减速时间 0.1~3600 秒
第一关门到位至保持转矩准位设
0.0~150.0% (电机额定电流)
定
关门到位保持转矩 0.0~100.0% (电机额定电流)
关门到位保持转矩响应时间 0.01~10.00 秒
第二关门高速
0.00~120.0Hz 30.00
第二关门加速时间 0.1~3600 秒
第二关门减速时间 0.1~3600 秒
第二关门到位至保持转矩准位设
0.0~150.0% (电机额定电流)
定
关门逾时侦测时间 0.0~180.0 秒 (0.0 秒:不侦测关门逾时)
FWD 端子命令保持时间 0.0~999.9 秒 (999.9 秒为永久保持)
关门 S1 曲线加速时间 0.0~10.0 秒
关门 S2 曲线加速时间 0.0~10.0 秒
关门直流制动电流准位
0~100% 0
关门启动直流制动时间 0.0~60.0 秒
关门停止直流制动时间 0.0~60.0 秒
关门直流制动起始频率
0.00~120.00Hz 0.00
第一重开门电流准位 0.0~150.0% (电机额定电流)
第一加速区重开门电流准位 100~200%(100%为 05.25 设定值)
第一低速区重开门电流准位 0.0~150.0%(电机额定电流)
第二重开门电流准位 0.0~150.0%(电机额定电流)
第二加速区重开门电流准位 100~200%(100%为 05.28 设定值)
第二低速区重开门电流准位 0.0~150.0% (电机额定电流)
重开门低速区范围 1.0~99.0%(100%为总门宽,不侦测区为
0%~05.31)
重开门加速区范围 8.0~97.0%(100%为门宽度,加速区为
05.32~100%)
关门受阻减速时间 0.1~3600 秒
重开门检测时间 0~10.0 秒
100.0
100.0
100.0
0
10.0
5.0
1.0
1.0
50.0
30.0
0.20
1.0
1.0
0.0
0.0
0.0
0.0
0.0
0.0
0.0
150
150
100
2.0
70.0
0.4
0.2
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
4-10
Page 32

四、参数功能说明
06 保护及特殊功能参数 a表示可在运转中执行设定功能
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
FOCPM
a06.00
a06.01
a06.02
a06.03
a06.04
a06.05
a06.06
a06.07
a06.08
a06.09
06.10
a06.11
a06.12
a06.13
06.14
06.15
06.16
06.17
06.18
06.19
06.20
06.21
06.22
软件煞车晶体放电位准设定
煞车电阻 ED 值设定
电流限制 0~250%
正转电动转矩限制 0~300%
正转回生转矩限制 0~300%
反转电动转矩限制 0~300%
反转回生转矩限制 0~300%
紧急或强制停机的减速方式 0:自由运转停车
低电压位准
OH 过热警告温度准位 0.0~110.0℃
门运行异常动作设定 Bit0=0 不侦测限位信号异常
定位控制模式 0:无极限信号,利用 PG 数或电流准位侦测
定位电流准位 0.0~200.0% (驱动器额定电流)
演示模式开关门到位保持时间 0.0~999.9 秒
演示模式开关门运行次数纪录 L
演示模式开关门运行次数纪录 H
清除演示运行次数 0:无功能
最近第一异常记录 0:无异常记录
最近第二异常记录 1:ocA 加速中过电流
最近第三异常记录 2:ocd 减速中过电流
最近第四异常记录 3:ocn 恒速中过电流
最近第五异常记录 4:保留
最近第六异常记录 5:保留
350.0~450.0Vdc 380.0
0~100% 50
1:依照第一减速时间
2:依照第二减速时间
3:依照参数 05.33 设定值
160.0~220.0Vdc 180.0
Bit0=1 侦测限位信号异常
Bit1=0 关门受阻时重新开门
Bit1=1 关门受阻时不重新开门
Bit2=0 重开门时开启 S 曲线功能
Bit2=1 重开门时关闭 S 曲线功能
Bit3=0 开门到位时,不重置门位置为 100.0%
Bit3=1 开门到位时,重置门位置为 100.0%
1:仅有开门极限信号,关门利用 PG 数或电流准
位侦测
2:仅有关门极限信号,开门利用 PG 数或电流准
位侦测
3:有开关门极限信号
4:利用 PG 脉冲数侦测,同时也接受外部开关门
极限信号
5: 无极限信号,利用 PG 数或电流准位侦测
(00-09=3 速度控制模式使用)
0~9999 0
0~9999 0
1:清除演示运行次数(06.14&06.15)
6:ocS 停止中过电流
7:ovA 加速中过电压
8:ovd 减速中过电压
9:ovn 恒速中过电压
10:ovS 停止中过电压
11:LvA 加速中低电压
12:Lvd 减速中低电压
200
200
200
200
200
3
85.0
2
0
30.0
2.0
0
0
0
0
0
0
0
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
4-11
Page 33

参数码 参数功能 设定范围 出厂值
○ ○
○ ○
○ ○
a06.23
a06.24
a06.25
a06.26
电子热电驿选择 0:变频专用电机
热电驿作用时间 30.0~600.0 秒
异常再启动次数
异常再启动次数回归时间
13:Lvn 恒速中低电压
14:LvS 停止中低电压
15:PHL 欠相保护
16:oH1 (IGBT 散热器过热)
17:保留
18:tH1o (IGBT 过热保护线路异常)
19~20:保留
21:oL (150% 1Min, 驱动器过载)
22:EoL1 (电机过载)
23~29:保留
30:cF1 内存写入异常
31:cF2 内存读出异常
32:cd0 Isum 电流侦测异常
33:cd1 U 相电流侦测异常
34:cd2 V 相电流侦测异常
35:cd3 W 相电流侦测异常
36:Hd0 cc 电流侦测异常
37:Hd1 oc 电流侦测异常
38:Hd2 ov 电压侦测异常
39:Hd3 接地电流侦测异常
40:AuE 电机参数自动调适失败
41:保留
42:PGF1 PG 回授异常
43:PGF2 PG 回授断线
44:PGF3 PG 回授失速
45:PGF4 PG 转差异常
46~48:保留
49:EF 外部错误讯号输入
50~51:保留
52:PcodE 密码错误
53:ccodE 软件错误
54:cE1 通讯异常
55:cE2 通讯异常
56:cE3 通讯异常
57:cE4 通讯异常
58:cE10 通讯 Time Out
59:cP10 PU 面板 Time out
60:bF 煞车晶体异常
61~67:保留
68:dtu 门宽自学习异常
69:dot 开门过时
1:标准电机
2:无电子热电驿
0~10 10
0.1~600.0 60.0
2
60.0
VF
VFPG
○ ○ ○
○ ○ ○
○ ○ ○
SVC
FOCPG
FOCPM
4-12
Page 34

四、参数功能说明
07 控制参数 a表示可在运转中执行设定功能
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
a07.00
a07.01
a07.02
a07.03
a07.04
a07.05
a07.06
a07.07
a07.08
a07.09
07.10
07.11
07.12
07.13
07.14
07.15
07.16
零速 ASR 增益 P
0.0~500.0% 1.5
零速 ASR 积分时间 I 0.000~10.000 秒
ASR 增益 P1
0.0~500.0% 1.5
ASR 积分时间 I1 0.000~10.000 秒
ASR 增益 P2
0.0~500.0% 3.0
ASR 积分时间 I2 0.000~10.000 秒
ASR 1/ASR2 切换频率 0.00~400.00Hz (0:无功能)
ASR 主低通滤波器增益 0.000~0.350 秒
零速/ASR1 宽度调整
ASR1/ASR2 宽度调整
机械齿轮比
惯量百分比
零速频宽
低速频宽
高速频宽
PDFF 增益值
速度控制前馈增益
0.00~400.00Hz 2.00
0.00~400.00Hz 5.00
1~100 1
1~300% 100
0~40Hz 20
0~40Hz 20
0~40Hz 20
0~200% 0
0~500 0
0.008
0.05
0.05
0.10
2.00
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○
○ ○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
FOCPM
4-13
Page 35

08 多段速参数 a表示可在运转中执行设定功能
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
FOCPM
a08.00
a08.01
a08.02
a08.03
a08.04
a08.05
a08.06
a08.07
a08.08
a08.09
a08.10
a08.11
a08.12
a08.13
a08.14
a08.15
零段速
第一段速
第二段速
第三段速
第四段速
第五段速
第六段速
第七段速
第八段速
第九段速
第十段速
第十一段速
第十二段速
第十三段速
第十四段速
第十五段速
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
0.00~120.00Hz 0.00
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
4-14
Page 36

四、参数功能说明
09 通讯参数 a表示可在运转中执行设定功能
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
FOCPM
a09.00
a09.01
a09.02
a09.03
a09.04
a09.05
通讯地址
01~254 1
通讯传送速度 4.8~115.2Kbps
传输错误处理 0:警告并继续运转
1:警告且减速停车
2:保留
3:不处理也不显示
逾时检出 0.0~100.0 秒
通讯格式
0: 7N1 (ASCII)
1: 7N2 (ASCII)
2: 7E1 (ASCII)
3: 7O1 (ASCII)
4: 7E2 (ASCII)
5: 7O2 (ASCII)
6: 8N1 (ASCII)
7: 8N2 (ASCII)
8: 8E1 (ASCII)
9: 8O1 (ASCII)
10: 8E2 (ASCII)
11: 8O2 (ASCII)
12: 8N1 (RTU)
13: 8N2 (RTU)
14: 8E1 (RTU)
15: 8O1 (RTU)
16: 8E2 (RTU)
17: 8O2 (RTU)
通讯响应延迟时间
0.0~200.0ms 2.0
19.2
3
0.0
13
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
4-15
Page 37

10 用户自定参数设定 a表示可在运转中执行设定功能
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
○ ○
提供使用者自行设定常用的参数功能,开放范围:参数群 00~09
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
FOCPM
a10.00
a10.01
a10.02
a10.03
a10.04
a10.05
a10.06
a10.07
a10.08
a10.09
a10.10
a10.11
a10.12
a10.13
a10.14
a10.15
a10.16
a1017
a10.18
a10.19
a10.20
a10.21
a10.22
a10.23
a10.24
a10.25
a10.26
a10.27
a10.28
a10.29
a10.30
a10.31
开机预设显示画面
最大操作频率
马达额定频率
马达额定电压
第二输出频率设定(中间频率)
第二输出电压设定(中间电压)
第三输出频率设定(中间频率)
第三输出电压设定(中间电压)
第四输出频率设定(最低频率)
第四输出电压设定(最低电压)
第一开门加速时间
第一开门减速时间
第二关门加速时间
第二关门减速时间
测试频率命令
开门初速运转时间
开门初速
开门高速
开门尾速
开门到位至转矩保持准位
开门到位保持转矩
关门高速
关门尾速
关门到位至转矩保持准位
关门到位保持转矩
多功能输入端子方向
多功能输入指令 1
多功能输入指令 2
多功能输入指令 3
多功能输入指令 4
多功能输出 RY1
多功能输出 RY2
0003
0131
0132
0133
0134
0135
0136
0137
0138
0139
0408
0409
0508
0509
0015
0402
0400
0403
0405
0410
0411
0503
0505
0510
0511
0207
0201
0202
0203
0204
0208
0209
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
只读
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
○ ○ ○
4-16
Page 38

四、参数功能说明
11 查阅用户参数设定 a表示可在运转中执行设定功能
参数码 参数功能 设定范围 出厂值
VF
VFPG
SVC
FOCPG
1 1.00
~
1 1.31
查阅使用者自行设定参数的内容 目前参数群 00.00~09.05
○ ○ ○ ○ ○
-
FOCPM
4-17
Page 39

4-2 功能参数详细说明
00 系统参数 a表示可在运转中执行设定功能
控制模式
交流马达驱动器机种代码识别
VFPG SVC FOCPG FOCPM
VF
出厂设定值:只读
设定范围 0:200w
控制模式
交流马达驱动器额定电流显示
VF
1:400w
VFPG SVC FOCPG FOCPM
出厂设定值:只读
设定范围 0:1.50A
00.00 参数决定驱动器容量,在出厂时已设定于本参数内。同时,可读取参数(00.01)的电流值是否为该
机种的额定电流。参数 00.00 对应参数 00.01 电流的显示值。
控制模式
参数重置设定
VF
0:2.50A
VFPG SVC FOCPG FOCPM
出厂设定值:0
设定范围 0:无功能
设定内容若为“1”时,参数 00.00~00.07 可以设定,其它的参数只提供只读;且可搭配密码的参数的设定
可防止因误操作而误修改了参数内容。
若欲将参数恢复出厂值时,可将此参数设为“10”即可恢复出厂设定值。若有设定密码时必须先译码后,
1:参数不可写入
8:面板操作无效
10:所有参数的设定值重置为出厂值 (50Hz)
才能恢复出厂值,同时也将密码清除。
设定内容若为“8”时,面板操作设定无效。除了参数 00.02 及 00.07 可提供设定外,其余参数接无法操作。
a
控制模式
开机预设显示画面
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
设定范围 0:F(频率指令)
此参数设定开机显示的画面内容。使用者定义的选项内容是依照 00.04 的设定来显示。
a
控制模式
多功能显示选择
VFPG SVC FOCPG FOCPM
VF
1:H(实际频率)
2:U(使用者定义)
3:A(输出电流)
出厂设定值:2
设定范围 0:显示输出电流(A )
1:显示实际频率(Hz)
2:显示 DC-BUS 电压( U)
3:显示输出电压( E )
4:显示功因角度(n.)
5:显示输出之功率(kW)
6:显示马达角速度(HU)
7:显示驱动器估算之输出转矩 (kg-m)
8:显示脉波输入位置 PG ※
9:显示电气角
10:显示 IGBT 温度(oC)
11:显示数字输入 ON/OFF 状态
12:显示数字输出 ON/OFF 状态
13:显示正在执行多段速的段速
4-18
Page 40

四、参数功能说明
此参数是因参数 00.03 设定为 02 时,可依照客户需求选取显示内容。
※功能 09 说明
[(
rpm
XPPR)/1000]X10=
60
rpm=马达转速;PPR=编码器(Encoder)每转产生之脉波数;1000= 1 秒有 1000 个毫秒;10:每十毫秒的
脉波数。
在此页面下,按
控制模式
软件版本
VF
14:显示数字输入对应之 CPU 脚位状态
15:显示数字输出对应之 CPU 脚位状态
16:当发生异常错误时,实际输出电压
17:当发生异常错误时,实际 DC-BUS 电压
18:当发生异常错误时,实际输出频率
19:当发生异常错误时,实际输出电流
20:当发生异常错误时,实际频率命令
21:门宽百分比或段速
22:门宽(pulse)
23:过调变指示
Pulse/10ms
键可依序显示参数 00.04 内 0~23 设定所对应之内容。
VFPG SVC FOCPG FOCPM
出厂设定值:#.##
设定范围 只读(依出厂版本显示)
a
控制模式
设定范围
a
控制模式
设定范围
当参数 00.08 有设定参数保护密码时,输入原先设定的密码,即可解开参数密码保护修改设定各项参数。此
参数保护解碼输入
VFPG SVC FOCPG FOCPM
VF
0~9999
参数保护密码设定
VF
0~2:记录密码错误次数
VFPG SVC FOCPG FOCPM
00~9999
0:未设定密码锁或 00.07 密码输入成功
1:参数已被锁定
出厂设定值:0
出厂设定值:0
密码有三次输入限制,请勿随便乱试密码,连续输入三次错误后会出现” PcdE”闪烁,须重新开机,才能再
次输入。因此当您设定密码后,务必记下来以免造成日后的不便。
此参数为设定密码保护,第一次可以直接设定密码,设定完后内容值会变为 01,此时表示密码保护生效。
反之内容值为 00 表示无密码保护功能,可以修改设定各项参数(包含此参数,也就是重新设定参数保护密
码)。当内容值为 01 时,欲修改任何参数,务必先至参数 00.07,输入正确密码,解开密码后,此参数会变
成 00,即可设定任何参数。注意:此参数如果被重新设定密码为 00,表示取消密码保护。以后开机也不会
有密码保护。反之,设定一非 00 的密码,此密码永久有效,每次开机都会生效。当开机后有需要更改任何
参数时,请至参数 00.07,输入正确密码,解开密码后,即可设定任何参数。当密码打开后如何关闭。
此参数用意是防止非维护操作人员误设定其它参数。
方法 1:重新输入原先密码于此参数中(如果输入非原先密码表示您欲更改密码,请务必把此密码记下来)。
方法 2:重新开机,密码保护立即恢复原先设定。
方法 3:在参数 00.07 输入非密码之值。(参数 00.07 无论输入密码是否正确均显示 End。)
解碼流程图:
4-19
Page 41

00.08
00.07
在參數 輸入正確
密碼後, 會顯示
控制模式
00.07
00.08 00
控制模式
VFPG SVC FOCPG FOCPM
VF
设定范围 0:V/F控制
此参数决定此交流马达驱动器的控制模式。
1:V/F 控制+编码器(Encoder)(VFPG)
2:无感测向量控制(SVC)
3:FOC 向量控制+编码器(Encoder)(FOCPG)
8:FOC PM控制(FOCPM)
密碼正確
00.08
在參數 輸入
正確密碼後,
00.08 00
00.07
會顯示
密碼不正確
00.07
只有 次輸入密碼機會。
3
第 次輸入不正確時會顯示 ,
101
第 次輸入不正確則顯示 ,
202
第 次會一直閃爍
3" Pcde "
假如三次輸入不正確的
密碼後,則面板會被
鎖住,必須重開啟電源
後,才能再次輸入密碼。
出厂设定值:0
0:V/F 控制,使用者可依需求自行设计 V/F 的比例,且可同时控制多台电机。
1:V/F 控制+编码器(Encoder),使用者可选购 PG 卡配合编码器做闭回路的速度控制。
2:无感测向量控制,可藉由电机参数的调适(Auto-tunning)求得最佳的控制特性。
3:FOC 向量控制+编码器除可提高转矩外,其速度控制的精确度更加准确。(1:1000)。
8:FOC 向量控制+编码器除可提高转矩外,其速度控制的精确度更加准确。(1:1000)。此设定值是搭配
永磁马达作控制。其它设定则使用感应马达。
控制模式
门机控制模式
VFPG SVC FOCPG FOCPM
VF
设定范围 0:距离控制模式
0:距离控制模式
正确设置编码器脉冲,以确保门宽的精度。需自学习门宽,门运行过程中,藉由编码器进行实际脉冲计数,
利用计数值与设定值比较判断,实现换速及到位的处理。此模式下,当每次驱动器断电再上电后,驱动器会
执行定位功能,依运转方向,低速运行至门宽 0%或 100%之位置。
1:保留
2:多段速控制模式
3:速度控制模式
出厂设定值:3
4-20
Page 42

04.00
開門初速
04.03
04.08
開門加速時間
開門
(REV)
開門高速
04.09
開門減速時間
04.05
開門尾速
四、参数功能说明
04.07
開門到底
保持速度
05.07
關門到底
保持速度
關門到底
極限信號
0.0%
04.01
05.06
到底保持
速度開始
開門高速開始
05.05
關門尾速
關門
05.04
尾速開始
05.09
關門減速時間
關門
關門
05.03
(FWD)
04.04
開門
尾速開始
05.08
關門加速時間
關門高速
04.06
開門到底
保持速度開始
05.00
關門初速
05.01
關門
高速開始
開門到底
極限信號
100.0 %
多段速控制模式
门运行过程中,通过三个多段速端子(保持型)搭配门运转方向组合逻辑实现换速处理(第四段逻辑信号,
开门为 0、关门为 1),并透过极限开关信号来进行到位处理(如下图)
開門
(REV)
08.03
4
08.00
段速
08.02
段速
3
08.01
段速
2
段速
1
08.04
段速
5
08.05
6
段速
08.06
段速
7
08.07
段速
8
15
08.15
段速
開門到底
極限信號
16
08.08
段速
關門到底
極限信號
08.09
9
段速
10
08.10
段速
11
08.11
段速
12
關門
08.12
13
段速
(FWD)
08.13
段速
08.14
段速
14
速度控制模式
门运行过程,透过换速接点依序实现换速处理并透过极限开关信号来进行到位处理(如下图)。此模式下,
每当变频器停止后,需重新运行至关门到位位置,当侦测到关门极限信号后,才可实现换速处理。
開門
(REV)
04.03
開門高速
04.07
04.00
開門初速
04.08
開門加速時間
04.09
開門減速時間
04.05
開門尾速
開門到底
保持速度
開門換速接點信號
04.02 sec
開門高速開始( )
開門到位信號
05.07
關門到底
保持速度
關門到位
接線信號
05.05
關門尾速
開門換速接點信號
05.09
關門減速時間
05.03
05.0 8
關門加速時間
關門高速
05.00
關門初速
05.02
關門高速
sec
開始( )
關門
(FWD)
4-21
Page 43

a
控制模式
驱动器输出方向
VFPG SVC FOCPG FOCPM
VF
设定范围 0:与设定方向相同
1:与设定方向相反
a
控制模式
设定范围
此参数可设定 PWM 输出的载波频率。
載波頻率 電磁噪音 雜音、洩漏電流
由上表可知 PWM 输出的载波频率对于马达的电磁噪音有绝对的影响。驱动器的热散逸及对环境的干扰也有
影响;所以,如果周围环境的噪音已大过马达噪音,此时将载波频率调低对驱动器有降低温升的好处;若
载波频率高时,虽然得到安静的运转,相对的整体的配线,干扰的防治都均须考虑。
PWM 载波频率选择
VFPG SVC FOCPG FOCPM
VF
2~15kHz
1kHz
8kHz
15kHz
大
小
小
大
熱散逸
小
大
電流波形
出厂设定值:0
出厂设定值:10
a
控制模式
自动稳压功能(AVR)
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
设定范围 0:自动稳压功能
通常电动机的额定不外乎 AC220V/200V、60Hz/50Hz;交流马达驱动器的输入电压可自 AC180V~264V、
50Hz/60Hz;所以交流马达驱动器若没有 AVR 自动稳压输出的功能时,若输入交流马达驱动器电源为
AC250V 则输出到马达的电压也为 AC250V,马达在超过额定电压 12%~20%的电源运转,造成马达的温升
增加、绝缘能力遭破坏、转矩输出不稳定,长期下来将使马达寿命缩短,造成损失。
交流马达驱动器的自动稳压输出可在输入电源超过马达额定电压时,自动将输出电源稳定在马达的额定电
压。例如 V/F 曲线的设定为 AC200V/50Hz,此时若输入电源在 AC200~264V 时,输出至电动机的电压会
自动稳定在 AC200V/50Hz,绝不会超-出所设定的电压。若输入的电源在 AC180~200V 变动,输出至电
动机的电压会正比于输入电源。
我们发现当电动机在减速煞车停止时,将自动稳压 AVR 的功能关闭会缩短减速的时间,再加上搭配自动加
减速优异的功能,电动机的减速更加快速。
a
控制模式
运转指令来源设定
VFPG SVC FOCPG FOCPM
VF
1:无自动稳压功能
2:减速时取消自动稳压功能
出厂设定值:1
设定范围 0:运转指令由数字操作器控制
此参数设定驱动器运转命令来源。
1:运转指令由外部端子控制
2:运转指令由通讯接口 RS485 操作
a
控制模式
演示模式
VF
VFPG SVC FOCPG FOCPM
设定范围 0:无效
a
控制模式
测试频率命令
VFPG SVC FOCPG FOCPM
VF
设定范围
4-22
1:演示模式
0~120.00Hz
出厂设定值:0
出厂设定值:0
Page 44

测试频率不为 0 时,取消门运行动作。仅以测试频率持续运转。
四、参数功能说明
4-23
Page 45

01 马达参数 a表示可在运转中执行设定功能
控制模式
PM 电机参数自动量测
FOCPM
出厂设定值:0
设定范围 0:无功能
此参数设定值为 2 时,可自动量测 PG 原点偏移角度。但量测时请注意以下三点:
1. 进行 Tuning 前,请先卸载。
2. 若煞车控制来自驱动器,则在完成配线及煞车控制参数设定后,进行 Tuning 时,驱动器会依正常时序动
3. 若煞车控制来自上位控制器,则在 Tuning 时,须确定煞车为释放的状态。
此参数设定值为 3 时,可自动量测 PG 原点偏移角度。但量测时请注意以下三点:
1. 进行 Tuning 前,可卸载或是负载。
2. 若煞车控制来自驱动器,则在完成配线及煞车控制参数设定后,进行 Tuning 时,驱动器会依正常时序动
3. 若煞车控制来自上位控制器,则在 Tuning 时,须确定煞车为释放的状态。
4. 请确认编码器输入型式参数 03.02 设定正确,此参数 03.02 设定错误会造成磁极位置误判,导致原点偏
此参数设定值为 1 时,可进行电机参数自动量测,此时只要按下【Run】键,立即执行自动量测工作,量测
后的数值分别填入 01.05,01.07(Rs、Lq),01.08(Back EMF)。
电机参数调适 AUTO-Tuning 的程序:(静态量测)
1. 驱动器的所有参数设定为出厂值且电机连接正确。
2. 电机:将电机满载电流 01.01、电机额定功率 01.02、电机额定转速 01.03
3. 将参数 01.00 设定为 1,然后按数字操作器 RUN 键 ,此时立即执行电机调适的动作(注意:电机会运
4. 执行完毕后,请检查电机(01.05,01.07)参数是否已自动将量测的数据填入。
作并完成 Tuning。
作并完成 Tuning。
移角参数 01.09 学习错误。
填入数值,加减速时间请依电机容量调整。
转,需用外力将电机轴心锁住)。
NOTE
; 额定转速输入不能大于或等于 120f/p。
; 在自动量测过程中,数字操作器面板会显示”Auto tuning”警告,直到量测完毕时,面板会停止显示警告画面并且会将量测的
结果存入参数 01.09。
; 当量测过程中因变频器异常或人为因素停止运转,数字操作器面板显示”Aut o T u ni ng E rr”,表示侦测失败,请检查变频器配
线是否连接妥当。当数字操作器面板显示”PG Fb k Error”,请变更设定参数 03.02(例如:原先设定值为 01,改为设定值为
02)。当数字操作器面板显示”PG Fbk Lo ss”,请检查 Z 相脉冲回授是否正常。
1:PM 马达参数量测(煞车锁住)
2:仅在无载时,自动量测 PG 原点偏移角度(01.09)
3:自动量测 PG 原点偏移角度(01.09)
、电机极数 01.04,分别正确
控制模式
PM 电机满载电流
FOCPM
单位:安培
出厂设定值:1.00
设定范围 (40~120%)*00.01 Amps
此参数设定时,使用者可以根据电机的铭牌规格设定电机满载电流范围。出厂默认值为驱动器额定电流的
90%。
例如: 400W 的额定电流为 2.5。客户可以设定的范围是 1.0 ~3.0A 之间。
2.5*40%=1.0 2.5*120%=3.0
控制模式
设定范围
设定电机额定功率,出厂设定值为驱动器之功率值。
控制模式
设定范围
PM 电机额定功率
0.00~655.35 kW
PM 电机额定转速(rpm)
0~65535
FOCPM
FOCPM
出厂设定值:0.06
出厂设定值:250
4-24
Page 46

此参数可设定电机之额定转速,必须根据电机的铭牌规格设定。
四、参数功能说明
控制模式
设定范围
此参数设定电机的极数(不可为奇数)。
控制模式
设定范围
控制模式
设定范围
控制模式
设定范围
控制模式
设定范围
PM 电机极数
2~96
PM 电机参数 Rs
0.0~655.35Ω
PM 电机参数 Ld
0.0~6553.5mH
PM 电机参数 Lq
0.0~6553.5mH
PM 反电动势
0.0~6553.5Vrms
FOCPM
FOCPM
FOCPM
FOCPM
FOCPM
马达在额定转速时的反电动势(相-相 RMS 值)
出厂设定值:16
出厂设定值:13.900
出厂设定值:169.4
出厂设定值:169.4
出厂设定值:0.0
可利用马达参数自动量测(参数 01.00=1)得知 RMS 值.
控制模式
PM 磁极与 PG 原点偏移角度
FOCPM
出厂设定值:360.0
设定范围 0.0~360.0°
PG 的原点对应马达的偏移角度。
控制模式
PM 磁极重新定位
FOCPM
出厂设定值:0
设定范围 0:无功能
未进行编码器原点校正(参数 01.09=360.0)的情形下,电机的运转效率仅能保证在最佳效率的 86%。此情
况下,当运转效率不佳时,使用者可重新上电或设定参数 01.10=1 以重新侦测磁极。
控制模式
IM 电机参数自动量测
1:重新设定磁极定位
SVC FOCPG
出厂设定值:0
设定范围 0:无功能
此参数设定值为 1、2 时,可进行电机参数自动量测,此时只要按下【Run】键,立即执行自动量测工作,
量测后的数值分别填入 01.17~20(无载电流、Rs、Rr、Lm、Lx)。
1:动态测试
2:静态测试
3:保留
电机参数调适 AUTO-Tuning 的程序:(动态量测)
1. 驱动器的所有参数设定为出厂值且电机连接正确。
2. 调适前建议将电机与负载脱离,即电机只有单独出力轴没有任何的皮带或减速机。若无法将电机与负
载脱离,建议使用静态量测※。
3. 将电机额定电压 01.33、电机额定频率 01.32、电机满载电流 01.11、电机额定功率 01.13、电机额定
转速 01.14、电机极数 01.15,分别正确填入数值,加减速时间请依电机容量调整。
4. 将参数 01.11 设定为 1 然后按数字操作器 RUN 键 ,此时立即执行电机调适的动作(注意:电机会
4-25
Page 47

运转)。
5. 执行完毕后,请检查电机(01.16~01.20)参数是否已自动将量测的数据填入。
6. 电机等效电路
參數
Rs
01.17
參數
Lx
01.20
I
V
S
※ 当设定范围为 02 的静态量测,必须输入电机无载电流 01.16。
NOTE
; 转矩/向量控制模式不适用多台电机并联运转的应用。
; 转矩/向量控制模式不适用电机与驱动器匹配时马力差距过大。
; 无载电流一般为额定电流之 20~50%。
; 额定转速输入不能大于或等于 120f/p(f:额定频率 01.32;p:极数 01.15)。
控制模式
IM 电机满载电流
VF
VFPG SVC FOCPG
Lm
參數
01.19
Rr
參數
01.18
单位:安培
出厂设定值:1.00
设定范围 (40~120%)*00.01 Amps
此参数设定时,使用者可以根据电机的铭牌规格设定电机满载电流范围。出厂默认值为驱动器额定电流的
90%。
例如: 400W)的额定电流为 2.5A。客户可以设定的范围是 1.0 ~3.0A 之间。
2.5*40%=1.0 2.5*120%=3.0
控制模式
设定范围
设定电机额定功率,出厂设定值为驱动器之功率值。
IM 电机额定功率
SVC FOCPG
0.00~655.35 kW
出厂设定值:0.06
控制模式
设定范围
此参数可设定电机之额定转速,必须根据电机的铭牌规格设定。
控制模式
设定范围
此参数设定电机的极数(不可为奇数)。
控制模式
IM 电机额定转速(rpm)
VFPG SVC FOCPG
0~65535
IM 电机极数
VF
VFPG SVC FOCPG
2~96
IM 电机无载电流
VFPG SVC FOCPG
设定范围 00~参数 01.12 出厂设定值
出厂设定值为驱动器额定电流的 40%。
控制模式
设定范围
IM 电机参数 Rs
IM 电机参数 Rs
SVC FOCPG
0.000~65.535mΩ
出厂设定值:250
出厂设定值:16
出厂设定值:#.##
出厂设定值:0.000
4-26
Page 48

四、参数功能说明
设定范围
设定范围
设定范围
a
控制模式
控制模式
控制模式
控制模式
IM 电机参数 Lm
IM 电机参数 Lx
转矩补偿低通滤波时间
SVC FOCPG
0.0~65.535mH
SVC FOCPG
0.0~6553.5mH
SVC FOCPG
0.0~6553.5mH
SVC
出厂设定值:0.000
出厂设定值:0.0
出厂设定值:0.0
出厂设定值:0.020
设定范围 0.001~10.000 秒
a
控制模式
转差补偿低通滤波时间
SVC
出厂设定值:0.100
设定范围 0.001~10.000 秒
可经由设定参数 01.21 和 01.22 来改变补偿的响应时间。
当参数 01.21 和 01.22 设定为 10 秒,则补偿响应最慢,但若设定为太短时,则可能会造成系统不稳定。
a
控制模式
转矩补偿增益
VF
VFPG
出厂设定值:0
设定范围 0~10
此参数设定驱动器在运转时自动输出额外的电压以得到较高的转矩。
a
控制模式
滑差补偿增益
VF
VFPG SVC
出厂设定值:0.00
设定范围 0.00~10.00
当驱动器驱动异步电机时,负载增加,滑差会增大,此参数可设定补正频率,降低滑差,使电机在额定电流
下运转速度更能接近同步转速。当驱动器输出电流大于电机无载电流,驱动器会根据此一参数将频率补偿。
若实际的速度比期望值慢则提高设定值设,反之则减少设定值。
此参数在 SVC 模式下有效。
a
控制模式
滑差误差准位
VFPG SVC FOCPG
出厂设定值:0
设定范围 0~1000% (0:不检测)
a
控制模式
滑差误差检测时间
VFPG SVC FOCPG
出厂设定值:1.0
设定范围 0.0~10.0 秒
a
控制模式
过滑差检出选择
VFPG SVC FOCPG
出厂设定值:0
设定范围 0:警告并继续运转
参数 01.25~01.27 定义驱动器运转时,可允许之滑差量及当超出设定值时之应执行之动作。
1:警告且减速停车
2:警告且自由停车
a
震荡补偿因子
4-27
Page 49

设定范围 0~10000 (0:不动作)
控制模式
电机于某一特定区会有电流波动现象。此时调整此参数值,可有效改善此情况。(高频或附 PG 运转时可调整
为 0,大马力时,电流波动区出现在低频时,可加大 01.28 值)。
VF
VFPG SVC
出厂设定值:2000
设定范围
设定范围
设定范围
设定范围
控制模式
控制模式
记录马达运转的时间,设定值 00 便可清除为 0。当运转时间小于 60 秒则不纪录。
控制模式
设定驱动器最高的操作频率范围。此设定为对应到模拟输入频率设定信号的最大值(0 ~ 10V,4 ~ 20mA,
±10V)对应此一频率范围。
控制模式
通常此设定值为根据电机铭牌上所订定的规格,电机额定运转电压频率设定。若使用的电机为 60Hz 则设定
60Hz,若为 50Hz 的电机则设定 50Hz。
累计电机运转时间(分钟)
VF
VFPG SVC FOCPG
0~1439
累计电机运转时间(天数)
VF
VFPG SVC FOCPG
0~65535
最大操作频率
VF
VFPG SVC FOCPG FOCPM
10.00~120.00Hz
第一输出频率设定(基底频率/电机额定频率)
VF
VFPG SVC FOCPG FOCPM
0.00~120.00Hz
出厂设定值:0
出厂设定值:0
出厂设定值:50
出厂设定值:50
设定范围
设定范围
a
设定范围
设定范围
a
设定范围
控制模式
通常此设定值为根据电机铭牌上电机额定运转电压设定。若使用的电机为 220V 则设定 220.0V,若为 200V
的电机则设定 200.0V。
目前市售的电机种类繁多,各国家的电源系统也不一样,解决这个问题最经济且最方便的方法就是安装交流
电机驱动器。可解决电压、频率的不同,发挥电机原有的特性与寿命。
控制模式
控制模式
控制模式
控制模式
第一输出电压设定(基底电压/电机额定电压)
VF
VFPG SVC FOCPG FOCPM
0.0V~240.0V
第二输出频率设定
VF
VFPG
第二输出电压设定
VF
VFPG
第三输出频率设定
VF
VFPG
第三输出电压设定
VF
VFPG
第四输出频率设定
0.00~120.00Hz
0.0V~240.0V
0.00~120.00Hz
0.0V~240.0V
出厂设定值:220.0
出厂设定值:0.50
出厂设定值:5.0
出厂设定值:0.50
出厂设定值:5.0
4-28
Page 50

四、参数功能说明
设定范围
a
设定范围
控制模式
控制模式
V/F 曲线的设定值通常根据电机容许的负载特性来设定。若负载的特性超出了电机所能负荷的负载时,必须
特别注意电机的散热能力、动态平衡与轴承润滑。
V/F 曲线中的频率设定必须依循 01.32≥01.34≥01.36≥01.38,电压的设定则无限制;但若在低频时电压的设
定太高时可能将电机烧毁、过热,或发生失速防止动作、过电流保护等现象。所以,使用者在设定电压值时
务必小心以免造成电机损坏或驱动器异常。
VF
VFPG SVC FOCPG
0.00~120.00Hz
第四输出电压设定
VF
VFPG
電壓
第電壓
1
01.33
第電壓
2
01.35
第電壓
3
01.37
0.0V~240.0V
頻率輸出限制範圍
出厂设定值:0.00
出厂设定值:0.0
第電壓
4
01.39
01.38
第頻率
4
01.36 01.34 01.32
第頻率
3
曲線相關參數圖
V/F
第頻率
2
第頻率
1
01.31
最高操作頻率
頻率
4-29
Page 51

02 输入及输出功能参数 a表示可在运转中执行设定功能
控制模式
二线/三线式运转控制
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
设定范围 0:2 线式模式 1, 电源启动运转控制动作
当此参数的功能设定电源锁定运转,电源输入时电机不会运转。但可能受到机械的震动或开关零件的不良,
产生开关的弹跳现象而造成电机运转。
此参数设定驱动器外部控制运转的组态,共有三种不同的控制模式:
1:2 线式模式 1, 电源启动运转控制不动作
2:2 线式模式 2, 电源启动运转控制动作
3:2 线式模式 2, 电源启动运转控制不动作
02-00 外部端子控制回路
设定值为:0、1
REV
"開":停止,"閉" 正轉 運轉
"開":停止,"閉" 反轉 運轉
二线式
正转/停止
反转/停止
FWD/STOP
REV/STOP
FWD
COM
设定值为:2、3
"開":停止 ,"閉" 運 轉
二线式
反转/正转
RUN/STO P
FWD/REV
FWD
"開":正轉 ,"閉" 反 轉
REV
运转/停止
多功能输入端子一(MI1)
多功能输入端子二(MI2)
多功能输入端子三(MI3)
多功能输入端子四(MI4)
多功能输入端子五(MI5)
设定范围
0:无功能
1:多段速指令一
2:多段速指令二
3:多段速指令三
4:多段速指令四
5:异常复归指令 Reset
6:低速运转
7:低速运转方向选择(正/反转)
8:第一、二加减速时间切换
9:强制停止(NO)输入
10:演示模式(Demo)
11:紧急停止(NO)输入
12:运转命令选择(Keypad/外部端子)
13:参数锁定致能(NC)
14:开门极限信号输入
COM
出厂设定值:14
出厂设定值:15
出厂设定值:16
出厂设定值:17
出厂设定值:0
控制模式 VF VFPG SVC FOCPG FOCPM
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
4-30
Page 52

四、参数功能说明
15:关门极限信号输入
16:开门换速度接点信号
17:关门换速度接点信号
18:允许开门信号输入
19:光幕信号输入
20:第二段开关门曲线信号输入
21:重新定位信号输入
此参数由使用者依据需求设定规划所需外部端子输入功能。
功能一览表
设定值 功能 说明
0
无功能
1
多段速指令一
2
多段速指令二
3
多段速指令三
4
多段速指令四
5
异常复归指令 Reset 当驱动器故障现象排除后,可利用此端子将驱动器重新复置。
6
低速运转
7
低速运转方向
第一/二开关门加减速时间切换 此信号输入时,驱动器可执行一、二开关门加减速时间的切换
8
此设定可使端子处于无功能的状态,即使有信号输入驱动器也不作
任何动作。可将未使用的端子设定为无功能可防止误接或误动作。
当设定门控制模式为多段速模式运行时(参数 00.09 设定 2),可藉由
此四个端子的数字状态共可作 16 段速的设定;
执行低速运转时需在交流马达驱动器完全停止的状态下才可以执
行,运转时可改变转向,并接受数字操作器上的〔STOP〕键;当外
接端子的接点 OFF 时马达便依低速运转减速时间停止。
外部端子低速运转时才有效,低速运转时外接端子接点 ON/OFF可
改变运转方向。
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
9
强制停止
10
演示模式
11
紧急停止
运转命令选择
12
数字操作器/外部端子
13
参数锁定致能
14
开门极限信号输入
15
关门极限信号输入
16
开门换速度接点信号
17
关门换速度接点信号
18
允许开门信号输入
19
光幕信号输入
20
第二段开关门曲线信号输入
21
重新定位信号输入 此信号输入时,驱动器重新执行定位动作。
a
控制模式
数字端子输入响应时间
VF
VFPG SVC FOCPG FOCPM
设定范围
0.001~30.000sec
此功能可使驱动器接受来自配电系统的紧急停止接点或其它故障讯
号,无任何异常输出显示。不需 RESET,若为面板操作模式,停止
后运转信号需再次输入才能运转。
当此端子的开关动作时,驱动器的输出频率将依开关门曲线反复运
行。直到端子 OFF 驱动器才停止输出。可藉由反复开关门调适最适
当开关门曲线。
此功能可使驱动器接受来自配电系统的紧急停止信号接点或其它故
障讯号。显示 EF,需 RESET信号输入后,驱动器才能运转。
设定此参数时,参数 00.14 的设定自动失效,改由端子的状态来决
定。端子接点断路(open)为数字操作器,端子接点导通(close)为外
部端子。
当设定为此参数之端子接点导通时,所有参数内容读取值将为 00。
改变此端子接点为断路状态, 才可读取参数内容。
定位模式设定有开门极限信号时(06.11=01/03),驱动器将依此信号
作为开门到底之依据。
定位模式设定有关门极限信号时(06.11=02/03),驱动器将依此信号
作为关门到底之依据。
当设定门控制模式为速度控制模式运行时(参数 00.09 设定 3),此信
方可做为换速使用。
当设定门控制模式为速度控制模式运行时(参数 00.09 设定 3),此信
方可做为换速使用。
此端子设定时,若无讯号输入,则电梯门禁止开启,可用于着床区
信号之输入。
此信号输入时,驱动器可执行第二段开关门曲线,以第二段开关门
高速、加减速时间、关门受阻之准位运行。
出厂设定值:0.005
4-31
Page 53

此参数功能是将数字输入端子讯号做延迟及确认处理,1 个单位为 2.5ms,延迟时间即是确认时间,可防止
某些不明干扰,导致数字端子输入误动作的情况下,此参数确认处理可以有效地改善,但响应时间会有些
延迟。
a
控制模式
数字输入工作方向
VF
VFPG SVC FOCPG FOCPM
出厂设定值:60
设定范围 0~65535
此参数可设定输入信号动作的准位。
bit 0 为 CD 端子,bit 1 为 OD 端子,bit 2~bit 6 分别对应 MI1~MI5。
使用者可以通讯方式输入相对应之数值达到改变端子 ON/OFF 状态之目的。
例如:MI1 设定为 1(多段速指令一);MI2设定为 2(多段速指令二)。
关门+第二段速命令=1001(2)=9(10)。
只要由通讯输入”9”进入此参数便可达成正转第二段速的要求而无需任何多功能端子的配线。
bit6 bit5 bit4 bit3 bit2 bit1 bit0
MI5 MI4 MI3 MI2 MI1 OD CD
a
a
a
a
a
设定范围
0:无功能
1:运转中指示
2:零速含 STOP(频率命令)
3:驱动器准备完成
4:低电压警报(Lv)
5:故障指示
6:过热警告(06.09)
7:煞车晶体动作检出
8:警告输出
9:过电压警告
10:正转命令
11:反转命令
12:演示模式运转中指示
13:演示模式完成开关指示
14:强制停止指示
15:紧急停止指示
16:关门极限信号检出
17:开门极限信号检出
18:关门受阻信号输出
19:定位完成信号输出
20 : 位置检出信号 1(仅关门时有效)
21:位置检出信号 2(仅关门时有效)
22:位置检出信号 3(仅关门时有效)
23:位置检出信号 1(仅开门时有效)
多功能输出(Relay 1)
多功能输出(Relay 2)
多功能输出(MO1)
多功能输出(MO2)
多功能输出(MO3)
出厂设定值:16
出厂设定值:17
出厂设定值:0
出厂设定值:0
出厂设定值:0
控制模式 VF VFPG SVC FOCPG FOCPM
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
4-32
Page 54

四、参数功能说明
24:位置检出信号 2(仅开门时有效)
25:位置检出信号 3(仅开门时有效)
26:PG 回授信号异常
此参数由使用者依据需求设定规划所需外部端子输出功能。
功能一览表
设定值 功能 说明
0
无功能 输出端子无任何功能
01
运转中指示 当驱动器有输出电压或运转指令输入时接点会“闭合”。
2
零速含 STOP(频率命令) 零速输出信号(含 STOP)
3
驱动器准备完成
4
低电压警报(Lv) 当驱动器侦测到输入电压过低,该接点会“闭合”
5
故障指示 当驱动器侦测有异常状况发生时,该接点会“闭合”。
6
过热警告(06.09)
7
煞车晶体动作检出
8
警告输出 当驱动器侦测有警告状况发生时,该接点会“闭合”。
9
过电压警告 当驱动器侦测有过电压状况发生时,该接点会“闭合”。
10
正转命令 当驱动器为运转方向命令为正转时,该接点会“闭合”。
11
反转命令 当驱动器为运转方向命令为反转时,该接点会“闭合”。
12
演示模式运转中指示 当驱动器执行演示模式时,此接点会“闭合〞
13
演示模式完成开关指示 演示模式完成一次开关门动作时,此接点会闭合,但只维持 0.5s
14
强制停止指示 外部强制停止端子动作时,此接点会“闭合”
15
紧急停止指示 当驱动器执行紧急停止时此接点”闭合”
驱动器开机后若无任何异常状态,或驱动器异常但状态已恢复,
可执行清除动作时接点”闭合"。
当散热片过热时,发出一个讯号,防止 OH 关机的预前准备动作。
>85℃ ON, <80℃ OFF。
当驱动器执行软件煞车时此接点”闭合”,此信号可作为煞车模块
VFDB 的连动信号或指示用
若定位模式设定为无关门极限信号,当门关最终行程小于 05.06
○ ○ ○ ○ ○
○ ○ ○ ○ ○
○ ○ ○ ○ ○
设定值时,此接点闭合
若定位模式设定为有关门极限信号,当外部关门极限信号输入时,
此接点闭合
若定位模式设定为无开门极限信号,当门开最终行程大于 04.06
设定值时,此接点闭合
若定位模式设定为有开门极限信号,当外部开门极限信号输入时,
此接点闭合
当驱动器上电或 PGEr 后,执行定位完成,此接点闭合。此功能
在门机控制方式为距离控制(00.10=00)时有效
出厂设定值:0
a
16
17
18
19
20
21
22
23
24
25
26
控制模式
关门极限信号检出
开门极限信号检出
关门受阻信号输出 关门受阻而造成异常时,不论是否重开门,此接点皆会闭合
定位完成信号输出
位置检出信号 1(仅关门时有效) 当门关最终行程小于参数 06.14 时,此接点闭合,仅关门时有效
位置检出信号 2(仅关门时有效) 当门关最终行程小于参数 06.15 时,此接点闭合,仅关门时有效
位置检出信号 3(仅关门时有效) 当门关最终行程小于参数 06.16 时,此接点闭合,仅关门时有效
位置检出信号 1(仅开门时有效) 当门关最终行程小于参数 06.14 时,此接点闭合,仅开门时有效
位置检出信号 2(仅开门时有效) 当门关最终行程小于参数 06.15 时,此接点闭合,仅开门时有效
位置检出信号 3(仅开门时有效) 当门关最终行程小于参数 06-16 时,此接点闭合,仅开门时有效
PG 回授信号异常 当驱动器检测出回授信号异常时,该接点闭合。
数字输出工作方向
VF
VFPG SVC FOCPG FOCPM
设定范围 00~65535
此功能的设定为位设定,若位的内容为 1 时代表多机能输出的动作为反向;例 02.08 设定为 1(运转中指示),
a
若为正向输出位设为 0 时驱动器运转时 Relay 1才动作(ON),驱动器停止时 Relay 1 Off。反之若设定反向
动作位设为 1 时,运转时 Relay 1 Off,停止时 Relay 1 ON。
位置检出信号 1
4-33
Page 55

设定范围
a
设定范围
a
设定范围
控制模式
控制模式
控制模式
VF
VFPG SVC FOCPG FOCPM
0.0~100.0%
位置检出信号 2
VF
VFPG SVC FOCPG FOCPM
0.0~100.0%
位置检出信号 3
VF
VFPG SVC FOCPG FOCPM
0.0~100.0%
出厂设定值:25.0
出厂设定值:12.5
出厂设定值:7.5
多功能输出端子设定 16~18 时,门位置到达 02.14~02.16 所设定的位置时会输出一信号。
4-34
Page 56

四、参数功能说明
A
03 回授参数 a表示可在运转中执行设定功能
控制模式
编码器(Encoder)种类选择
VFPG
FOCPG FOCPM
设定范围 0:无功能
磁极侦测方式:
(1) 设定值=1:驱动器会输出短路电流侦测磁极,此时马达会发出咚咚声响。
编码器(Encoder) & Tuning 对应表
控制模式
参数设定 编码器种类 参数 01.00=01 参数 01.00=03
10.00=1 A, B, Z
10.00=7 PMM
编码器(Encoder)每转产生之脉波点数
设定范围
此参数可设定编码器 Encoder 之每转脉波数(PPR)。
控制模式
编码器(Encoder)输入型式设定
1:ABZ
7:PWM 脉波
VFPG
1~25000
VFPG
FOCPG FOCPM
FOCPG FOCPM
马达会转动 马达会转动
马达会转动 马达会转动
设定范围 0:无功能
1:A/B 相脉波列 A 相超前 B 相 90 度为正转
正轉
2:A/B 相脉波列 B 相超前 A 相 90 度为正转
A
B
A
正轉
正轉
出厂设定值:7
出厂设定值:256
出厂设定值:1
反轉
反轉
正轉
B
正确的脉波型式输入设定,对于控制的稳定性有绝对的帮助。
a
控制模式
编码器(Encoder)回授讯号错误处理(PGF1、PGF2)
3:A 相为脉波列,B 相为方向符号 L 为反转 H 为正转
A
正轉
B
4:A 相为脉波列,B 相为方向符号 L 为正转 H 为反转
A
正轉
B
5:单相输入
正轉
VFPG
FOCPG
设定范围 0:警告并继续运转
1:警告且减速停车
2:警告且停止运转
正轉
正轉
反轉
反轉
出厂设定值:2
4-35
Page 57

a
控制模式
编码器(Encoder)回授讯号错误时间
VFPG
FOCPG FOCPM
出厂设定值:1.0
设定范围 0.0~10.0 秒
当编码器(Encoder)断线、编码器讯号、脉波讯号设定错误或讯号异常时,如错误时间超出编码器(Encoder)
回授讯号错误时间(03.04)则产生编码器(Encoder)回授讯号错误,处理方式参考:编码器(Encoder)
回授讯号错误处理(03.03)。
a
控制模式
编码器(Encoder)失速位准(PGF3)
VFPG SVC FOCPG FOCPM
出厂设定值:115
设定范围 0~120% (0:无功能)
此参数为编码器回授讯号错误之依据(最大输出频率 01.00=100%)。
a
控制模式
编码器(Encoder)失速侦测时间
VFPG SVC FOCPG FOCPM
出厂设定值:0.1
设定范围 0.0~2.0 秒
a
控制模式
编码器(Encoder)转差范围(PGF4)
编码器回授讯号错误之依据(最大输出频率 01.31=100%)
VFPG SVC FOCPG FOCPM
出厂设定值:50
设定范围 0~50% (0:无功能)
a
控制模式
编码器(Encoder)转差侦测时间
编码器回授讯号错误之依据(最大输出频率 01.31=100%)
VFPG SVC FOCPG FOCPM
出厂设定值:0.5
设定范围 0.0~10.0 秒
a
控制模式
编码器(Encoder)失速及转差异常处理
编码器回授讯号错误之依据(最大输出频率 01.31=100%)
VFPG SVC FOCPG
出厂设定值:2
设定范围 编码器回授讯号错误之依据(最大输出频率 01.31=100%)
当转速频率与电机频率之差值超出编码器回授讯号错误之依据(最大输出频率 01.31=100%)转差范围
00:警告并继续运转
01:警告且减速停车
02:警告且停止运转
(03.07),错误时间超出编码器回授讯号错误之依据(最大输出频率 01.31=100%)转差侦测时间(03.08)
或电机频率值超出编码器回授讯号错误之依据(最大输出频率 01.31=100%)失速位准(03.05)开始累计
时间,错误时间超出编码器回授讯号错误之依据(最大输出频率 01.31=100%)失速侦测时间,则产生编码
器回授讯号错误之依据(最大输出频率 01.31=100%)回授讯号错误,处理方式参考:编码器回授讯号错误
之依据(最大输出频率 01.31=100%)失速及转差异常处理(03.09)。
控制模式
设定范围
门宽自学习频率
VFPG SVC FOCPG FOCPM
VF
0.10~120.00Hz
出厂设定值:5.0
此参数表示当门宽自学习功能动作时,电机运转频率速度。
控制模式
门宽自学习功能设定
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
设定范围 0:无功能
1:自学习模式
每一电梯门系统依使用上门宽都会有所不同,如货梯其门宽就会比客梯宽上许多,故每一电梯门系统在调机
时都必须测量门的宽度,才可做出正确的定位及开关门动作。此参数适用于门控制模式为距离控制模式
4-36
Page 58

四、参数功能说明
點
(00.10=0)时适用。
门宽自学习动作流程
(1) 首先关门到底,确定门全关之定位点,接着开门到底计算门宽度,最后关门到底确认门宽是否相同。
(2) 当自动测量完门宽后,门宽值会自动填入参数 03.12 及 03.13。
關門( )
FWD
確定門全關之定位
開門( )
RE V
計算門寬度
關門( )
關門到底 . %
控制模式
设定范围
控制模式
设定范围 0~9999 (单位:10000)
门宽自学习动作完成后会将所测量出的门宽脉冲数自动填入此参数,也可依据电梯门特性自行输入修正门
门宽低位脉冲数设定
VFPG SVC FOCPG FOCPM
VF
门宽高位脉冲数设定
VFPG SVC FOCPG FOCPM
VF
00
1~9999
FWD
檢測門寬是否正確
開門到底 . %
100 0
出厂设定值:8800
出厂设定值:0
宽脉冲数。
4-37
Page 59

04 开门动作参数 a表示可在运转中执行设定功能
a
控制模式
设定范围
a
控制模式
开门初速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
开门初速运转距离
VFPG SVC FOCPG FOCPM
VF
出厂设定值:2.00
出厂设定值:300
设定范围 0~65535 (单位为脉冲数)
a
控制模式
设定范围
a
控制模式
设定范围
a
控制模式
开门初速运转时间
VFPG SVC FOCPG FOCPM
VF
0~20.0s
第一开门高速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
开门尾速开始
VFPG SVC FOCPG FOCPM
VF
出厂设定值:1.0
出厂设定值:15.00
出厂设定值:90.0
设定范围 0.0~100.0% (门宽度用%表示)
a
控制模式
设定范围
a
控制模式
开门尾速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
开门到位保持速度开始
VFPG SVC FOCPG FOCPM
VF
出厂设定值:5.00
出厂设定值:95.0
设定范围 0.0~100.0% (门宽度用%表示)
a
控制模式
设定范围
a
控制模式
开门到位保持速度
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
第一开门加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:2.00
出厂设定值:1.0
设定范围 0.1~3600 秒
a
控制模式
第一开门减速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:1.0
设定范围 0.1~3600 秒
a
控制模式
第一开门到位保持转矩准位设定
VFPG SVC FOCPG FOCPM
VF
出厂设定值:50.0
设定范围 0.0~150.0% (电机额定电流)
关门到底 0.0%到开门高速开始的距离,一般为门刀的长度,为方便输入参数 04.01,所以单位为脉冲数,
换算为百分比后需小于 04.04。
使用者可依据下图开关门曲线示意图作适当调整。
4-38
Page 60

%
%
04.00
開門初速
04-03
04.08
開門加速時間
開門
(REV)
開門高速
04.09
開門減速時間
04.05
開門尾速
四、参数功能说明
04.07
開門到底
保持速度
04.01
05.07
關門到底
保持速度
05.06
到底保持
速度開始
05.31
重開門低速區
關門到底
極限信號
0.0
a
控制模式
开门到位保持转矩
VFPG SVC FOCPG FOCPM
VF
開門高速開始
05.05
關門尾速
關門
05.04
尾速開始
05.09
關門減速時間
關門
ㄧ般重開門區
關門
05.03
(FWD)
04.04
開門
尾速開始
05.08
關門加速時間
關門高速
设定范围 0.0~100.0% (电机额定电流)
a
控制模式
开门到位保持转矩响应时间
VFPG SVC FOCPG FOCPM
VF
设定范围 0.01~10.00 秒
当开门于极限位置时必须将门保持于极限点,为避免马达过载故需限制其电流。
04.06
開門到底
保持速度開始
05.00
關門初速
05.01
關門
高速開始
05.32
重開門高速區
開門到底
極限信號
100.0
出厂设定值:30.0
出厂设定值:0.20
a
控制模式
设定范围
a
控制模式
第二开门高速
VFPG SVC FOCPG FOCPM
VF
0.00~400.0Hz
第二开门加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:30.00
出厂设定值:1.0
设定范围 0.1~3600 秒
a
控制模式
第二开门减速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:1.0
设定范围 0.1~3600 秒
a
控制模式
第二开门到位至保持转矩准位设定
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~150.0% (电机额定电流)
a
控制模式
开门逾时侦测时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~180.0 秒 (0.0 秒:不侦测开门逾时)
a
控制模式
OD 端子命令保持时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~999.9 秒 (999.9 秒为永久保持)
此参数功能为在开门到位之后,去除开门端子信号,在设定的保持时间内,驱动器会保持运转状态;保持
4-39
Page 61

时间大于此设定值后,驱动器停止运转。未到达开门到位的位置,此保持功能无效。
在保持时间内依然可以下达 CD(关门)命令,使驱动器执行关门动作。
当 04.18 设为 999.9 时 OD 端子命令永久保持,需利用操作器上 STOP/RESET 键来停止驱动器。
a
控制模式
开门 S1 曲线加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~10.0 秒
a
控制模式
开门 S2 曲线加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~10.0 秒
此参数可用来设定驱动器在开门加速时作无冲击性的缓启动,加速曲线由设定值可调整不同程度
的 S 加减速曲线。启动 S 曲线缓加减速,驱动器会依据原加减速时间作不同速率的加减速曲线。
当设定 0.0 时为直线加减速。
实际加速时间 = 被选择开门加速时间 + (参数 04.19 + 参数 04.20)/2
頻率
04.20=S2
04.08
加速時間
04.19=S1
a
控制模式
设定范围
此参数设定启动及停止时送入电机直流制动电流准位。直流制动电流百分比乃是以驱动器额定电流为 100%。
所以当设定此一参数时,务必由小慢慢增大,直到得到足够的制动转矩;但不可超过电机的额定电流,以免
烧毁电机,所以请不要使用驱动器的直流制动作为机械保持,可能造成伤害事故。
当为 FOCPG/FOCPM 控制模式时,不须设定任意值,即可致能直流制动功能。
a
控制模式
开门直流制动电流准位
VFPG SVC
VF
0~100%
开门启动直流制动起始时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
出厂设定值:0.0
设定范围 0.0~60.0 秒
此参数设定驱动器启动时,送入电机直流制动电流持续的时间。
a
控制模式
开门停止直流制动起始时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~60.0 秒
此参数设定煞车时送入电机直流制动电流持续的时间。
a
控制模式
设定范围
驱动器减速至停止前,此参数设定直流制动起始频率。当该设定值小于启动频率(01.09)时,直流制动起
始频率以最低频率开始。
4-40
开门直流制动起始频率
VFPG SVC FOCPG
VF
0.00~120.00Hz
出厂设定值:0.00
Page 62

四、参数功能说明
05 关门动作参数 a表示可在运转中执行设定功能
a
控制模式
设定范围
a
控制模式
关门初速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
关门初速运转距离
VFPG SVC FOCPG FOCPM
VF
设定范围 0~65535 (单位为脉冲数)
a
控制模式
设定范围
a
控制模式
设定范围
a
控制模式
关门初速运转时间
VFPG SVC FOCPG FOCPM
VF
0.0~20.0s
第一关门高速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
关门尾速开始
VFPG SVC FOCPG FOCPM
VF
设定范围 0.0~100.0% (0.0%表关门到底,100.0%表开门到底)
a
控制模式
设定范围
a
控制模式
关门尾速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
关门到位保持速度开始
VFPG SVC FOCPG FOCPM
VF
设定范围 0.0~100.0% (0.0%表关门到底,100.0%表开门到底)
a
控制模式
设定范围
a
控制模式
关门到位保持速度
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
第一关门加速时间
VFPG SVC FOCPG FOCPM
VF
设定范围 0.1~3600 秒
a
控制模式
第一关门减速时间
VFPG SVC FOCPG FOCPM
VF
设定范围 0.1~3600 秒
a
控制模式
第一关门到位保持转矩准位设定
VFPG SVC FOCPG FOCPM
VF
设定范围 0.0~150.0% (电机额定电流)
使用者可依据下方开关门曲线示意图作适当调整。
出厂设定值:2.00
出厂设定值:0
出厂设定值:0
出厂设定值:15.00
出厂设定值:10.0
出厂设定值:5.00
出厂设定值:5.0
出厂设定值:2.00
出厂设定值:1.0
出厂设定值:1.0
出厂设定值:50.0
a
控制模式
关门到位保持转矩
VFPG SVC FOCPG FOCPM
VF
设定范围 0.0~100.0% (电机额定电流)
a
控制模式
关门到位保持转矩响应时间
VFPG SVC FOCPG FOCPM
VF
设定范围 0.01~10.00 秒
当关门于极限位置时必须将门保持于极限点,为避免马达过载故需限制其电流。
a
控制模式
设定范围
第二关门高速
VFPG SVC FOCPG FOCPM
VF
0.00~120.0Hz
出厂设定值:30.0
出厂设定值:0.20
出厂设定值:30.00
4-41
Page 63

a
控制模式
第二关门加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:1.0
设定范围 0.1~3600 秒
a
控制模式
第二关门减速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:1.0
设定范围 0.1~3600 秒
a
控制模式
第二关门到位至保持转矩准位设定
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~150.0% (电机额定电流)
a
控制模式
关门逾时侦测时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~180.0 秒 (0.0 秒:不侦测开门逾时)
当关门时间超过此参数所设定的时间,驱动器会自动重新开门。
a
控制模式
CD 端子命令保持时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~999.9 秒 (999.9 秒为永久保持)
此参数功能为在关门到位之后,去除关门端子信号,在设定的保持时间内,驱动器保持运转状态;保持时
间大于此设定值后,驱动器停止运转。未到达关门到位的位置,此保持功能无效。
在保持时间内依然可以下达 OD(开门)命令,使驱动器执行开门动作。
当 05.18 设为 999.9 时 CD 端子命令永久保持,需利用操作器上 STOP/RESET 键来停止驱动器。
a
控制模式
关门 S1 曲线加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~10.0 秒
a
控制模式
关门 S2 曲线加速时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~10.0 秒
此参数可用来设定驱动器在开门加速时作无冲击性的缓启动,加速曲线由设定值可调整不同程度
的 S 加减速曲线。启动 S 曲线缓加减速,驱动器会依据原加减速时间作不同速率的加减速曲线。
当设定 0.0 时为直线加减速。
实际加速时间 = 被选择关门加速时间 + (参数 05.19 + 参数 05.20)/2
頻率
05.20=S2
05.08
加速時間
05.19=S1
a
控制模式
设定范围
此参数设定启动及停止时送入电机直流制动电流准位。直流制动电流百分比乃是以驱动器额定电流为 100%。
所以当设定此一参数时,务必由小慢慢增大,直到得到足够的制动转矩;但不可超过电机的额定电流,以免
烧毁电机,所以请不要使用驱动器的直流制动作为机械保持,可能造成伤害事故。
4-42
关门直流制动电流准位
VFPG SVC
VF
00~100%
出厂设定值:0
Page 64

四、参数功能说明
当为 FOCPG/FOCPM 控制模式时,不须设定任意值,即可致能直流制动功能。
a
控制模式
关门启动直流制动起始时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0.0
设定范围 0.0~60.0 秒
此参数设定驱动器启动时,送入电机直流制动电流持续的时间。
a
控制模式
关门停止直流制动起始时间
VFPG SVC FOCPG FOCPM VF
VF
出厂设定值:0.0
设定范围 0.0~60.0 秒
此参数设定煞车时送入电机直流制动电流持续的时间。
a
控制模式
设定范围
驱动器减速至停止前,此参数设定直流制动起始频率。当该设定值小于启动频率(01.09)时,直流制动起
始频率以最低频率开始。
关门直流制动起始频率
VFPG SVC FOCPG
VF
0.00~120.00Hz
出厂设定值:0.00
控制模式
第一重开门电流准位
VFPG SVC FOCPG FOCPM
VF
出厂设定值:100.0
设定范围 0.0~150.0% (电机额定电流)
a
控制模式
第一加速区重开门电流准位
VFPG SVC FOCPG FOCPM
VF
出厂设定值:150
设定范围 100~200%(100%为 05.25 设定值)
a
控制模式
第一低速区重开门电流准位
VFPG SVC FOCPG FOCPM
VF
出厂设定值:100.0
设定范围 0.0~150.0%(电机额定电流)
控制模式
第二重开门电流准位
VFPG SVC FOCPG FOCPM
VF
出厂设定值:100.0
设定范围 0.0~150.0%(电机额定电流)
a
控制模式
第二加速区重开门电流准位
VFPG SVC FOCPG FOCPM
VF
出厂设定值:150
设定范围 100~200%(100%为 05.28 设定值)
a
控制模式
第二低速区重开门电流准位
VFPG SVC FOCPG FOCPM
VF
出厂设定值:100
设定范围 0.0~150.0% (马达额定电流)
a
控制模式
重开门低速区范围
VFPG SVC FOCPG FOCPM
VF
出厂设定值:2.0
设定范围 1.0~99.0%(100%为总门宽)
a
控制模式
重开门加速区范围
VFPG SVC FOCPG FOCPM
VF
出厂设定值:70.0
设定范围 8.0~97.0%(100%为门宽度,加速区为 05.32~100%)
关门时,在侦测范围内,门遇到阻碍物(马达堵转电流超过 05.25/05.26/05.28/05.29 设定),驱动器会重开
门运行至开门到位,再重新关门。当在重开门运行至开门到位期间,不接受关门命令。
参数 05.33(异常减速时间)为重开门发生时,当前的关门速度减速至 0 Hz 之减速时间。建议在不过电流的
情况下,此参数尽可能设一极小值,以确保重开门时快速返回,保障人身安全。
开关门起动时,加速时电流会比较大,因此在加速区,需要较大的关门受阻电流准位。关门受阻电流及加
速区范围的设定方法如下:
4-43
Page 65

%
04.00
開門初速
04.01
04.03
04.08
開門加速時間
開門高速開始
開門
(REV)
開門高速
04.0 9
開門減速時間
04.05
開門尾速
04.04
開門
尾速開始
04.07
開門到底
保持速度
04.06
開門到底
保持速度開始
05.07
關門到底
保持速度
05.31
關門異常
不偵測範圍
關門到底
限位信號
0.0
05.05
關門尾速
05.06
關門
到底保持
速度開始
05.04
尾速開始
a
控制模式
关门受阻减速时间
VFPG SVC FOCPG FOCPM
VF
设定范围 0.1~3600 秒
a
控制模式
重开门检测时间
VFPG SVC FOCPG FOCPM
VF
设定范围 0~10.0 秒
05.09
關門減速時間
關門
05.03
關門
(FWD)
關門異常偵測範圍
05.08
關門加速時間
關門高速
05.00
關門初速
05.01
關門
高速開始
05.32
關門異常加速
區偵測範圍
05.25x4-11/100
關門受阻加
速區電流準位
05.25
關門受阻
電流準位
開門到底
限位信號
100.0 %
出厂设定值:0.4
出厂设定值:0.2
4-44
Page 66

四、参数功能说明
06 保护及特殊功能参数 a表示可在运转中执行设定功能
a
控制模式
设定范围
此参数为软件设定来控制煞车的位准,参考值为 DC-BUS 上的直流电压值。
a
控制模式
设定范围
a
控制模式
设定范围
此参数为设定驱动器的最大输出电流。
a
控制模式
设定范围
a
控制模式
设定范围
a
控制模式
设定范围
a
控制模式
设定范围
电机额定转矩为 100%。06.03~06.06 的设定值,转矩限制示意图。
软件煞车晶体放电位准设定
VFPG SVC FOCPG FOCPM
VF
350.0~450.0Vdc
煞车电阻 ED 值设定
VFPG SVC FOCPG FOCPM
VF
0~100%
电流限制
0~250%
正转电动转矩限制
0~300%
正转回生转矩限制
0~300%
反转电动转矩限制
0~300%
反转回生转矩限制
0~300%
FOCPG FOCPM
FOCPG FOCPM
FOCPG FOCPM
FOCPG FOCPM
FOCPG FOCPM
出厂设定值:380.0
出厂设定值:50
出厂设定值:200
出厂设定值:200
出厂设定值:200
出厂设定值:200
出厂设定值:200
a
速度
控制模式
正向轉矩
反轉發電模式 正轉電動模式
06.02
06.02
電流限制
反轉回生扭力限制 正轉電動扭力限制
06.02
電流限制
反轉電動模式
06.06
第二象限
第三象限
06.05 06 . 04
負向轉矩
06.03
第一象限
第四象限
正轉回生扭力限制反轉電動扭力限制
電流限制
06.02
電流限制
正轉發電模式
紧急或强制停机的减速方式
VFPG SVC FOCPG FOCPM
VF
三層的轉矩限制最後
取最小值為最終的轉
矩限制位準
速度
出厂设定值:3
4-45
Page 67

设定范围 0:自由运转停车
使用者的多功能输入端子设定为 09 或 11 时,当端子动作(导通)时,驱动器便会依据 06.07 设定动作。
a
控制模式
低电压位准
VFPG SVC FOCPG FOCPM
VF
设定范围
此参数为设定驱动器的最大输出电流。
a
控制模式
OH 过热警告温度准位
VFPG SVC FOCPG FOCPM
VF
1:依照第一减速时间
2:依照第二减速时间
3:依照参数 05-33 设定值
160.0~220.0Vdc
出厂设定值:180.0
出厂设定值:85.0
设定范围 0.0~110.0℃
控制模式
门运行异常动作设定
VFPG SVC FOCPG FOCPM
VF
出厂设定值:2
设定范围 Bit0=0 不侦测限位信号异常
Bit0=1 侦测限位信号异常
Bit1=0 关门受阻时重新开门
Bit1=1 关门受阻时不重新开门
Bit2=0 重开门时开启 S 曲线功能
Bit2=1 重开门时关闭 S 曲线功能
Bit3=0 开门到位时,不重置门位置为 100.0%
Bit3=1 开门到位时,重置门位置为 100.0%
Bit 0=1 时,在距离控制模式下,变频器侦测到开关门限位信号异常;如将多功能输出端子功能设
定 8,则此时会输出警告信号。
距离控制模式下,变频器判断开关门限位信号异常的方法如下:
開門
(REV)
開門極限信號進入
04.04
開門
關門極限
信號未進入
關門到底
限位信號
0.0%
關門
05.06
到位位置
05.04
關門
尾速開始
關門
尾速開始
關門極限信號進入
(FWD)
1. 关门限位信号异常:
a. 门位置>05.04,关门限位信号进入
b. 门位置<05.06,关门限位信号未进入
2. 开门限位信号异常:
信號未進入
04.06
開門
到位位置
開門極限
開門到底
限位信號
100.0 %
a. 门位置<04.04,开门限位信号进入
b. 门位置>04.06,开门限位信号未进入
Bit 1=1 时,变频器侦测到关门时转矩超过关门受阻准位 05.25(05.28)设定时,不会执行重开
门动作。
4-46
Page 68

Bit 3=1 时,当门机进入开门到位保持转矩状态时,门位置自动重置为 100.0%。
四、参数功能说明
a
控制模式
定位控制模式
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
设定范围 0:无极限信号,利用 PG 数或电流准位侦测
设定为有开/关门极限信号且 06.12 设定不为 0 时,定位时判断开/关门到底,需开/关门极限信号进入,以及
门堵转电流超过 06.12 设定值,才会定义为开/关门到底。
此参数设定为 0 无开门/关门极限开关时,检测开关门到底之方法如下:
a. 定位电流准位(06.12)设 为 0:定 位 /运转过程门堵转造成 PG 回授频率过低时,定义为开门或关门到底。
b. 定位电流准位(06.12)不为 0:定位/运转过程门堵转造成电流上升超过此电流准位时,驱动器定义此时
此功能仅适用于在距离控制模式;多段速模式下,仅能使用极限信号检测开关门到位。
a
控制模式
为开门或关门到底。
NOTE
易打滑之传动机构,建议使用方法 b.之定位方式。
定位电流准位
VF
1:仅有开门极限信号,关门利用 PG 数或电流准位侦测
2:仅有关门极限信号,开门利用 PG 数或电流准位侦测
3:有开关门极限信号
4:利用 PG 脉冲数侦测,同时也接受外部开关门极限信号
5:利用换速开关与时间计数
VFPG SVC FOCPG FOCPM
出厂设定值:30.0
设定范围 0.0~200.0% (驱动器额定电流)
此参数决定开关门到位定位电流准位,配合参数 06.11 使用。
a
控制模式
演示模式开关门到位保持时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:2.0
设定范围 0.0~999.9 秒
当执行演示模式时,开门到位或关门到位时的保持时间,经过此时间才会进行下一次演示动作。
a
控制模式
设定范围
a
控制模式
设定范围
演示模式开关门运行次数纪录 L
VFPG SVC FOCPG FOCPM
VF
0~9999
演示模式开关门运行次数纪录 H
VFPG SVC FOCPG FOCPM
VF
0~9999
出厂设定值:0
出厂设定值:0
当执行演示模式时,完成一次开关门动作就计数 1 次。
a
控制模式
清除演示运行次数
VFPG SVC FOCPG FOCPM
VF
出厂设定值:0
设定范围 0:无功能
1:清除演示运行次数(06.14&06.15)
选择 1 时,可将参数 06.14&06.15 演示模式开关门运行次数内容值归零。
a
a
a
a
a
最近第一次异常纪录
最近第二次异常纪录
最近第三次异常纪录
最近第四次异常纪录
最近第五次异常纪录
4-47
Page 69

a
控制模式
最近第六次异常纪录
VFPG SVC FOCPG FOCPM
VF
出厂设定值:00
设定范围 0:无异常记录
只要发生 fault且强迫停机者,就要记录。停机时 LV (LV 警告,不纪录)。运转中 LV (LV 错误,纪录)。
1:ocA 加速中过电流
2:ocd 减速中过电
3:ocn 恒速中过电流
4:保留
5:保留
6:ocS 停止中过电流
7:ovA 加速中过电压
8:ovd 减速中过电压
9:ovn 恒速中过电压
10:ovS 停止中过电压
11:LvA 加速中低电压
12:Lvd 减速中低电压
13:Lvn 恒速中低电压
14:LvS 停止中低电压
15:PHL 欠相保护
16:oH1 (IGBT 散热器过热)
17:保留
18:tH1o (IGBT 过热保护线路异常)
19~20:保留
21:oL (150% 1Min, 驱动器过载)
22:EoL1 (电机过载)
23~29:保留
30:cF1 内存写入异常
31:cF2 内存读出异常
32:cd0 Isum 电流侦测异常
33:cd1 U 相电流侦测异常
34:cd2 V 相电流侦测异常
35:cd3 W 相电流侦测异常
36:Hd0 cc 电流侦测异常
37:Hd1 oc 电流侦测异常
38:Hd2 ov 电压侦测异常
39:Hd3 接地电流侦测异常
40:AuE 电机参数自动调适失败
41:保留
42:PGF1 PG 回授异常
43:PGF2 PG 回授断线
44:PGF3 PG 回授失速
45:PGF4 PG 转差异常
46~48:保留
49:EF 外部错误讯号输入
50~51:保留
52:PcodE 密码错误
53:ccodE 软件错误
54:cE1 通讯异常
55:cE2 通讯异常
56:cE3 通讯异常
57:cE4 通讯异常
58:cE10 通讯 Time Out
59:cP10 PU 面板 Time out
60:bF 煞车晶体异常
61~67:保留
68:dtu 门宽自学习异常
69:dot 开门过时
4-48
Page 70

四、参数功能说明
a
控制模式
电子热电驿选择
VFPG SVC FOCPG FOCPM
VF
出厂设定值:2
设定范围 0:变频专用电机
为预防自冷式电机在低转速运转时发生电机过热现象,使用者可设定电子式热动电驿,限制驱动器可容许的
输出功率。
a
控制模式
热电驿作用时间
VF
1:标准电机
2:无电子热电驿
VFPG SVC FOCPG FOCPM
出厂设定值:60.0
设定范围 30.0~600.0 秒
电子热动电驿的功能是按照驱动器的输出频率、电流和运转时间保护电机,防止电机过热。设定电流值的 150
%以 06.23(热时间常数)所设定的时间流通时,保护功能动作。
操作時間(分鐘)
5
4
3
60Hz
負載率
(%)
出厂设定值:0
a
控制模式
异常再启动次数
VFPG SVC FOCPG FOCPM
VF
设定范围
2
1
0 50 100 150 200
0~10
异常后(允许异常状况:过电流 oc、过电压 ov,occ),驱动器自动重置∕启动次数最大可设定
10 次。若设定为 0,则异常后不执行自动重置/启动功能。当异常再自动时,驱动器会以由上往下
作速度追踪的方式启动驱动器。
若发生异常之次数超出参数 06.25 设定且时间少于参数 06.26 设定时间,驱动器拒绝再启动,需
使用者输入”RESET”才可以继续运转。
a
控制模式
异常再启动次数回归时间
VFPG SVC FOCPG FOCPM
VF
出厂设定值:60.0
设定范围 0.1~600.0 秒
异常再启动发生时,驱动器会依此参数设定值开始计数。若到达设定值时间未再发生异常再启动,
则参数 06.25异常再启动次数,会恢复到该原先设定值。
4-49
Page 71

07 控制参数 a表示可在运转中执行设定功能
z
a
控制模式
设定范围
a
控制模式
零速 ASR 增益 P
VFPG SVC FOCPG FOCPM
VF
0.0~500.0%
零速 ASR 积分时间 I
VFPG SVC FOCPG FOCPM
VF
设定范围 0.000~10.000 秒
a
控制模式
设定范围
a
控制模式
ASR 增益 P 1
VFPG SVC FOCPG FOCPM
VF
0.0~500.0%
ASR 积分时间 I 1
VFPG SVC FOCPG FOCPM
VF
设定范围 0.000~10.000 秒
a
控制模式
设定范围
a
控制模式
ASR 增益 P 2
VFPG SVC FOCPG FOCPM
VF
0.0~500.0%
ASR 积分时间 I 2
VFPG SVC FOCPG FOCPM
VF
设定范围 0.000~10.000 秒
a
控制模式
ASR 1/ASR 2 切换频率
VFPG SVC FOCPG FOCPM
VF
设定范围 0.00~400.00Hz (0:无功能)
ASR P 决定误差值的增益。ASR I定义为于积分器的积分时间。
出厂设定值:1.5
出厂设定值:0.05
出厂设定值:1.5
出厂设定值:0.05
出厂设定值:3.0
出厂设定值:0.10
出厂设定值:2.00
积分时间设定 00 时积分无效。07.06定义为 ASR1(07.02,07.03)、ASR2(07.04,07.05)切换
频率点。
PI
07.04
07.05
07.02
07.03
07.00
07.01
07.09
07.06
Hz
出厂设定值:0.008
出厂设定值:2.00
出厂设定值:5.00
a
控制模式
ASR 主低通滤波器增益
VFPG SVC FOCPG FOCPM
VF
设定范围 0.000~0.350 秒
ASR 命令的滤波时间。
a
控制模式
设定范围
a
控制模式
设定范围
零速/ASR1 宽度调整
VFPG
0.00~400.00Hz
ASR1/ASR2 宽度调整
VFPG
0.00~400.00Hz
FOCPG FOCPM
FOCPG FOCPM
07.08
0H
4-50
Page 72

此参数决定从 0 速到低速、07.06 到高速的 ASR 命令的斜坡宽度。如上图所示。
四、参数功能说明
控制模式
设定范围
控制模式
设定范围
此参数可调整计算所得之负载惯量百分比。
控制模式
设定范围
控制模式
设定范围
控制模式
设定范围
使用者完成惯量估测后,依据速度响应需求分别调整参数 07.12、07.13、07.14。设定值越大,表示响应越
机械齿轮比
惯量百分比
零速频宽
低速频宽
高速频宽
1~100
1~300%
0~40Hz
0~40Hz
0~40Hz
FOCPG FOCPM
FOCPG FOCPM
FOCPG FOCPM
FOCPG FOCPM
FOCPG FOCPM
出厂设定值:1
出厂设定值:100
出厂设定值:20
出厂设定值:20
出厂设定值:20
快。参数 07.06 为低速高速频宽的切换频率。
控制模式
设定范围
调整参数 07-15/07-16 可抑制超调,但容易提早转折现象,请使用者依实际运转情形斟酌调整 PDFF 增益值。
速度控制回路除了传统 PI 控制架构,另外提供 PDFF 控制架构,以减少过冲的发生。
1. 使用计算所得之系统惯量
2. 调整 07.15/07.16(数值越大,抑值过冲越好,但容易发生提早转折现象)
控制模式
设定范围
PDFF 增益值
0~200%
速度控制前馈增益
0~500
FOCPG FOCPM
PI
建議有 切換上的應用時,
可以關掉此功能
FOCPG FOCPM
PDFF
ASR1/ASR2
07.15 =0
出厂设定值:0
出厂设定值:0
4-51
Page 73

08 多段速参数 a表示可在运转中执行设定功能
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
a
设定范围
控制模式
利用多功能输入端子(参数 02.01~02.05)可选择多段速运行(含主速,最多为十六段速)。多
零段速
第一段速
第二段速
第三段速
第四段速
第五段速
第六段速
第七段速
第八段速
第九段速
第十段速
第十一段速
第十二段速
第十三段速
第十四段速
第十五段速
VFPG SVC FOCPG FOCPM
VF
0.00~120.00Hz
出厂设定值:0.00
段速频率分别在 08.00~08.15设定。
4-52
Page 74

四、参数功能说明
09 通讯参数 a表示可在运转中执行设定功能
串列通信
1
使用通訊介面做控制時,需使用
或是 通訊轉換器,作為驅動器與
IFD8500 PC
IFD85 30
連接使用。
8
RS-485
PIN1, 2, 6, 7:
PIN3: G ND
PIN4:SGPIN5:SG+
PIN8:+EV
保留
a
控制模式
设定范围
当系统使用 RS-485 串联通讯接口控制或监控时,每一台驱动器必须设定其通讯地址且每一个连结网中每个
地址均为”唯一”不可重复。
a
控制模式
通讯地址
VFPG SVC FOCPG FOCPM
VF
01~254
通讯传送速度
VF
VFPG SVC FOCPG FOCPM
出厂设定值:1
出厂设定值:19.2
设定范围 4.8~115.2Kbps
利用使计算机经由其内部 RS-485 串行埠,可设定及修改驱动器内参数及控制驱动器运转,并可监测驱动器
的运转状态。此参数用来设定计算机与驱动器彼此的传输速率。
a
控制模式
传输错误处理
VFPG SVC FOCPG FOCPM
VF
出厂设定值:3
设定范围 0:警告并继续运转
此参数用来设定通讯时若有传输超时错误(如断线)时驱动器的处置状态。
1:警告且减速停车
2:保留
3:不处理也不显示
a
控制模式
逾时检出
VFPG SVC FOCPG FOCPM
VF
设定范围 0.0~100.0 秒
此参数用来设定通讯和 keypad传输超时的时间。
a
控制模式
设定范围
通讯格式
VFPG SVC FOCPG FOCPM
VF
0: 7N1 (ASCII)
1: 7N2 (ASCII)
2: 7E1 (ASCII)
3: 7O1 (ASCII)
4: 7E2 (ASCII)
5: 7O2 (ASCII)
6: 8N1 (ASCII)
7: 8N2 (ASCII)
8: 8E1 (ASCII)
9: 8O1 (ASCII)
10: 8E2 (ASCII)
11: 8O2 (ASCII)
12: 8N1 (RTU)
13: 8N2 (RTU)
14: 8E1 (RTU)
15: 8O1 (RTU)
16: 8E2 (RTU)
17: 8O2 (RTU)
出厂设定值:0.0
出厂设定值:13
4-53
Page 75

计算机控制 Computer Link
使用 RS-485 串联通讯接口时,每一台驱动器必须预先在参数 09.00 指定其通讯地址,计算机便根据其个别
的地址实施控制。
通讯协议以 MODBUS ASCII(American Standard Code for Information Interchange)模式:每 byte 是由 2
个 ASCII 字符组合而成。例如:数值是 64 Hex,ASII 的表示方式为”64”,分 别 由”6”(36Hex)、”4”(34Hex)
组合而成。
1. 编码意义
通讯协议属于 16 进位制,ASCII 的讯息字符意义:”0”…”9”,”A”…”F”每个 16 进位制代表每个 ASCII 的讯
息字符。例如:
字符 ‘0’ ‘1’ ‘2’ ‘3’ ‘4’ ‘5’ ‘6’ ‘7’
ASCII code 30H 31H 32H 33H 34H 35H 36H 37H
字符 ‘8’ ‘9’ ‘A’ ‘B’ ‘C’ ‘D’ ‘E’ ‘F’
ASCII code 38H 39H 41H 42H 43H 44H 45H 46H
2. 字符结构
10-bit 字符框(For ASCl l)
(数据格式 7 , N , 2)
Start
bit
01
(数据格式 7 , E , 1)
Start
bit
01
(数据格式 7 , O , 1)
Start
bit
01234
11-bit 字符框(For RTU)
(数据格式 8 , N , 2)
Start
bit
0
12
2
3456
7-data bits
10-bits character frame
2
3456
7-data bits
10-bits character frame
7-data bits
10-bits character frame
3456
Stop
bit
Stop
bit
Even
parity
Stop
bit
5
Odd
6
parity
Stop
bit
Stop
7
bit
Stop
bit
4-54
(数据格式 8 , E , 1)
Start
bit
(数据格式 8 , O , 1)
8-data bits
1 1-bits character frame
0
12
3456
Even
7
parity
Stop
bit
8-data bits
11-bits chara cter fra m e
Page 76

四、参数功能说明
Start
bit
3. 通信数据结构
数据格式框
ASCII 模式:
Address Hi
Address Lo
Function Hi
Function Lo
DATA (n-1)
DATA 0
LRC CHK Hi
01
2
11-bits character frame
3456
8-data bits
STX 起始字符 = ‘:’ (3AH)
通信地址:
8-bit 地址由 2 个 ASCll 码组合
功能码:
8-bit 功能码由 2 个 ASCll 码组合
数据内容:
…….
n×8-bit 数据内容由 2n 个 ASCll 码组合
n<=16,最大 32 个 ASCII 码(20 笔资料)
LRC 检查码:
Odd
7
parity
Stop
bit
LRC CHK Lo
END Hi
END Lo
RTU 模式:
START 保持无输入讯号大于等于 10 ms
Address 通信地址:8-bit 二进制地址
Function 功能码:8-bit 二进制地址
DATA (n-1)
…….
DATA 0
CRC CHK Low
CRC CHK High
END 保持无输入讯号大于等于 10 ms
通信地址(Address)
00H:所有驱动器广播(Broadcast)
01H:对第 01 地址驱动器
8-bit 检查码由 2 个 ASCll 码组合
结束字符:
END Hi = CR (0DH), END Lo = LF(0AH)
数据内容:
n×8-bit 资料, n<=16
CRC 检查码:
16-bit CRC 检查码由 2 个 8-bit 二进制组合
0FH:对第 15 地址驱动器
10H:对第 16 地址驱动器,以此类推﹒﹒﹒﹒﹒﹒,最大可到 254( FEH)。
功能码(Function)与数据内容(Data Characters)
03H:读出缓存器内容
06H:写入一笔数据至缓存器
例如:对驱动器地址 01H,读出 2 个连续于缓存器内的数据内容如下表示:起始缓存器地址 2102H
ASCII 模式:
4-55
Page 77

询问讯息字符串格式: 响应讯息字符串格式:
STX
Address
Function
‘:’
‘0’ ‘0’
‘1’
‘0’ ‘0’
‘3’
‘2’ ‘0’
Starting address
‘1’
‘0’ ‘1’
‘2’ ‘7’
Content of starting
‘0’ ‘7’
Number of data
(count by word)
LRC Check
END
‘0’
‘0’ ‘0’
‘2’ ‘0’
‘D’ ‘0’
Content of address 2103H
‘7’
CR ‘7’
LF
CR
STX
Address
Function
Number of data
(count by byt e)
address 2102H
LRC Check
END
‘:’
‘1’
‘3’
‘4’
‘0’
‘0’
‘1’
LF
RTU 模式:
询问讯息字符串格式: 响应讯息字符串格式:
Address 01H Address 01H
Function 03H Function 03H
Starting data address
21H
02H
00H 17H Number of data
(count by world)
02H
CRC CHK Low 6FH 00H
CRC CHK High F7H
Number of data
(count by byt e)
Content of data
address 2102H
Content of data
address 2103H
04H
70H
00H
CRC CHK Low FEH
CRC CHK High 5CH
功能码 06H:写入一笔数据至缓存器(最多可同时写入 20 笔数据至连续之缓存器)
例如:对驱动器地址 01H,写入 6000(1770H)至驱动器内部设定参数 0100H。
ASCII 模式:
询问讯息字符串格式: 响应讯息字符串格式:
STX ‘:’ STX ‘:’
Address
Function
‘0’ ‘0’
‘1’
‘0’ ‘0’
‘6’
Address
Function
‘0’ ‘0’
Data address
‘1’ ‘1’
‘0’ ‘0’
Data address
‘0’
‘1’ ‘1’
Data content
‘7’ ‘7’
‘7’ ‘7’
Data content
‘0’
LRC Check
END
‘7’ ‘7’
‘1’
CR CR
LF
LRC Check
END
RTU 模式:
询问讯息字符串格式: 响应讯息字符串格式:
Address 01H Address 01H
Function 06H Function 06H
Data address 01H Data address 01H
‘1’
‘6’
‘0’
‘0’
‘1’
LF
4-56
Page 78

四、参数功能说明
00H 00H
Data content
CRC CHK High
17H 17H
70H
86H 86H CRC CHK Low
22H
Data content
CRC CHK Low
CRC CHK High
命令码:10H,连续写入数笔资料
例如,变更驱动器(地址 01H)的多段速设定 04-00=50.00(1388H),04-01=40.00(0FA0H)
ASCII 模式:
命令讯息: 响应讯息:
STX ‘:’ STX ‘:’
ADR 0
‘0’ ‘0’ ADR 1
‘1’
ADR 1
ADR 0
CMD 1 ‘1’ CMD 1 ‘1’
CMD 0 ‘0’ CMD 0 ‘0’
‘0’ ‘0’
资料
起始地址
‘5’ ‘5’
‘0’ ‘0’
数据地址
‘0’
‘0’ ‘0’
资料量
(Word)
‘0’ ‘0’
‘0’ ‘0’
资料量
(Word)
‘2’
资料量
(Byte)
第一笔
资料
‘0’ ‘E’
‘4’
‘1’ CR
‘3’
LRC Check
END
‘8’
‘8’
‘0’
第二笔
资料
‘F’
‘A’
‘0’
LRC Check
END
‘9’
‘A’
CR
LF
70H
22H
‘1’
‘0’
‘2’
‘8’
LF
RTU 模式:
命令讯息: 响应讯息:
ADR 01H ADR 01H
CMD 10H CMD 1 10H
资料
起始地址
资料量
05H
00H
00H
资料
起始地址
资料量
05H
00H
00H
(Word) 02H (Word) 02H
资料量(Byte)
第一笔
资料
第二笔
资料
04 CRC Check Low 41H
13H CRC Check High 04H
88H
0FH
A0H
CRC Check Low ‘9’
CRC Check High ‘A’
ASCII 模式的检查码(LRC Check)
检查码(LRC Check)由 Address 到 Data Content 结束加起来的值。例如上面 3.3.1 询问讯息的检查码:
01H + 03H + 21H + 02H + 00H + 02H = 29H,然后取 2 的补码 = D7H。
RTU 模式的检查码(CRC Check)
4-57
Page 79

检查码由 Address到 Data content 结束。其运算规则如下:
步骤 1:令 16-bit 缓存器 (CRC 缓存器) = FFFFH.
步骤 2:Exclusive OR 第一个 8-bit byt e 的讯息指令与低位 16-bi t CRC 缓存器, 做 Exclusive OR ,将结
果存入 CRC 缓存器内。
步骤 3:右移一位 CRC 缓存器,将 0 填入高位处。
步骤 4:检查右移的值,如果是 0, 将步骤 3 的新值存入 CRC 缓存器内, 否则 Exclusive OR A001H 与 CRC
缓存器,将结果存入 CRC 缓存器内。
步骤 5:重复步骤 3~步骤 4,将 8-bit 全部运算完成。
步骤 6:重复步骤 2~步骤 5,取下一个 8-bit 的讯息指令,直到所有讯息指令运算完成。最后,得到的 CRC
缓存器的值,即是 CRC 的检查码。值得注意的是 CRC 的检查码必须交换放置于讯息指令的检查
码中。
以下为用C语言所写的 CRC 检查码运算范例:
unsigned char* data Å // 讯息指令指针
unsigned char lengt h Å // 讯息指令的长度
unsigned int cr c _c hk ( unsi gned c har * data, unsigned char length)
{
int j;
unsigned int r eg_c r c= 0Xffff ;
while(length--){
reg_crc ^= *data++;
for(j=0;j<8;j++){
if(reg_crc & 0x01){ /* LSB(b0)=1 */
reg_crc=(r eg_c r c> >1) ^ 0Xa001;
}else{
reg_crc=reg_crc >>1;
}
}
}
return reg_crc; // 最后回传 CRC 缓存器的值
4. 通信协议的参数地址定义
定 义 参数地址 功 能 说 明
驱动器内部设定参数
对驱动器的命令
GGnnH
2000H
GG 表示参数群,nn 表示参数号码。例如:04.01 由 0401H 来表示。
Bit0~3
Bit4~5
Bit6~7
0:无功能
1:停止
2:启动
3:JOG 启动
00B:无功能
01B:正方向指令
10B:反方向指令
11B:改变方向指令
00B:第一段加减速
01B:第二段加减速
10B:第三段加减速
11B:第四段加减速
4-58
Page 80

四、参数功能说明
监视驱动器状态
2001H
2002H Bit0
Bit1
Bit2
Bit3~5
2100H
2119H Bit0
Bit08~11
0000B:主速度
0001B:第一段速度
0010B:第二段速度
001 1B:第三段速度
0100B:第四段速度
0101B:第五段速度
01 10B:第六段速度
0111B:第七段速度
1000B:第八段速度
1001B:第九段速度
1010B:第十段速度
101 1B:第十一段速度
1 100B:第十二段速度
1 101B:第十三段速度
1 110B:第十四段速度
1111B:第十五段速度
Bit12
Bit13~14
Bit15
1:致能 Bit06-11的功能
00B:无功能
01B:运转指令由数字操作器操作
10B:运转指令由参数设定(00.14)
11B:改变运转指令来源
保留
频率命令
1:E.F. ON
1:Reset 指令
1:外部中断(B.B)ON
保留
错误码(Error code):参考 06.16~06.21
00:停止
Bit1
01:减速
10:运转待机
11:运转
Bit3
Bit2
Bit4
1:寸动
00:正转命令、正转输出
01:正转命令、反转输出
10:反转命令、正转输出
11:保留
2102H
2103H
2104H
2105H
2106H
2107H
2116H
2120H
2121H
2122H
2123H
2124H
Bit5~7
Bit8
Bit9
Bit10
Bit11
Bit12
Bit13~15
保留
1:主频率来源由通讯界面
1:主频率来源由模拟/外部端子信号输入(EXT)
1:运转指令由通讯界面(PU)
1:参数锁定
1:数字操作器复制参数功能致能
保留
频率指令(F)
输出频率(H)
输出电流(AXXX.X)
DC-BUS 电压(UXXX.X)
输出电压(EXXX.X)
多段速指令目前执行的段速
多机能显示(00.04)
异常时频率命令
异常时输出频率
异常时输出电流
异常时马达频率
异常时输出电压
4-59
Page 81

2125H
驅動器回覆訊息
2126H
2127H
2128H
2129H
212AH
212BH
2201H
2203H
2204H
2205H
2206H
2207H
2208H
2209H
5. 错误通信时的额外回应
当驱动器做通信连接时,如果产生错误,此时驱动器会响应错误码且将命令码的最高位(bit7)设为 1(即
Function code AND 80H)响应给主控系统,让主控系统知道有错误产生。并且于驱动器的键盘显示器上显
示 CE-XX,作为警告讯息,XX为当时的错误码。参考错误通信时错误码的意义。
例如:
ASCII 模式: RTU 模式:
STX ‘:’ Address 01H
Address
Function
Exception code
LRC CHK
END
异常时直流侧电压
异常时输出功率
异常时输出转矩
异常时功率模块 IGBT 温度
异常时多功能端子输入状态(格式与参数 00.04=16 相同)
异常时多功能端子输出状态(格式与参数 00.04=17 相同)
异常时驱动器状态(格式与 2119H 相同)
00-05 使用者定义比例设定
AUI1 百分比
ACI 百分比
AUI2 百分比
IGBT温度
散热片温度(40HP 以上才会有此功能)
数字输入状态
数字输出状态
‘0’ Function 86H
‘1’ Exception code 02H
‘8’ CRC CHK Low C3H
‘6’ CRC CHK High A1H
‘0’
‘2’
‘7’
‘7’
CR
LF
错误码的意义:
错误码 说明
1
2
3
4
10
a
控制模式
通讯响应延迟时间
VFPG SVC FOCPG FOCPM
VF
设定范围
因应上位机未完成转态(传送~接收)时而利用设定此参数以延迟交流马达驱动器回传的时间。
RS-485 BUS
PC PLC
数据内容值错误:数据内容值太大,不是驱动器所能辨识的内容值。
参数地址错误:参数的地址驱动器无法辨识。
密码锁定:参数不可改
参数于运转中不可改
传输超时
0.0~200.0ms
或命令
變頻器處理時間
回應延遲時間
出厂设定值:2.0
4-60
Page 82

四、参数功能说明
10 用户自定参数设定 a表示可在运转中执行设定功能
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0003
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0131
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0132
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0133
默认值「开机预设显示画面」
默认值「最大操作频率」
默认值「马达额定频率」
默认值「马达额定电压」
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0134
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0135
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0136
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0137
默认值「第二输出频率设定(中间频率)」
默认值「第二输出电压设定(中间电压)」
默认值「第三输出频率设定(中间频率)」
默认值「第三输出电压设定(中间电压)」
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0138
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0139
默认值「第四输出频率设定(最低频率)」
默认值「第四输出电压设定(最低电压)」
出厂设定值:#.##
出厂设定值:#.##
4-61
Page 83

a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0408
默认值「第一开门加速时间」
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0409
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0508
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0509
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0015
默认值「第一开门减速时间」
默认值「第二关门加速时间」
默认值「第二关门减速时间」
默认值「测试频率命令」
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0402
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0400
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0403
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0405
默认值「开门初速运转时间」
默认值「开门初速」
默认值「开门高速」
默认值「开门尾速」
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0410
4-62
默认值「开门到位至转矩保持准位」
出厂设定值:#.##
Page 84

四、参数功能说明
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0411
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0503
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0505
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0510
默认值「开门到位保持转矩」
默认值「关门高速」
默认值「关门尾速」
默认值「关门到位至转矩保持准位」
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0511
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0207
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0201
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0202
默认值「关门到位保持转矩」
默认值「多功能输入端子方向」
默认值「多功能输入指令 1」
默认值「多功能输入指令 2」
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0203
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
显示地址 0204
默认值「多功能输入指令 3」
默认值「多功能输入指令 4」
出厂设定值:#.##
出厂设定值:#.##
4-63
Page 85

a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
多功能输出 RY1
显示地址 0208
出厂设定值:#.##
a
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
多功能输出 RY2
出厂设定值:#.##
显示地址 0209
~
提供用户自行设定常用的参数
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
设定范围 -
此参数群功能:客户可将参数群 00~09 的设定值输入到此参数群中,但仅提供 32 个参数的设
定值。可以设定参数,亦可使用通讯协议参数地址(须将十六进制换成十进制)。
用户自行设定参数使用说明:
例如一:
若在数字操作器输入参数 10.00,将参数 10.-00 设定值输入 0800后,参数群 11 中的
参数 11.00 会直接显示参数 08.00 的设定值内容。(数字操作器的操作方式,如下图所
示)
MODE
出厂设定值:#.##
例如二:
MODE
MODE
輸入
0800
ENTER
MODE
MODEMODE
若需以数字操作器输入通讯参数地址 2102H、211BH,须先将 211BH 转换成 2 进制才
能作输入
2102H设定方式
4-64
Page 86

MODE
四、参数功能说明
MODE
MODE
211BH设定方式
211BH 由 16 进制转换成 2 进制计算式:
2 1 1B
10
111x16 + x16 = 16+11=
27
輸入
MODE
2127
輸入
2102
ENTER
MODE
MODEMODE
MODE
MODE
輸入
2127
ENTER
MODE
MODEMODE
4-65
Page 87

11 查阅用户设定参数 a表示可在运转中执行设定功能
~
提供查阅用户自行设定常用的参数的内容
控制模式 VF VFPG SVC FOCPG TQCPG FOCPM
设定范围 -
如同参数群 10 之说明。
出厂设定值:#.##
4-66
Page 88

五、異常診斷方式
五、異常診斷方式
5-1 過電流 OC
5-2 對地短路故障 GFF
5-3 過電壓 OV
5-4 電壓不足 Lv
5-5 過熱 OH1
5-6 過載 OL
5-7 數字操作器異常
5-8 電源欠相 PHL
5-9 電機無法運轉
5-10 電機速度無法變更
5-11 電機失速
5-12 電機異常
5-13 電磁雜音、感應雜音之對策
5-14 設置的環境措施
5-15 防止交流電機驅動器影響其他機器
; 須技術人員做檢查工作,以防止意外發生。
Page 89

5-1 過電流 oc
解除短路原因
減小負載或增大
流驅動器電機
能否減小轉
否
矩提升量
減小轉矩提升量
容量
是
交
ocA
加速時過電流
是
否
電機連接端子 、 、 電路有無相間短路或對地短路
轉矩提升量
是否合適
ocA
是
UVW
是
ocd
減速時過電流
否
負載是否過大
否
oc
恆速時過電流
可能是
故障或由於雜訊造成
流驅動器
請與台達聯繫
交流 驅動器
電機
電機
減小轉矩提升量
誤動作,
減小負載變化
或增加
機
否
交
是
交流
驅動器
按負載慣量,
加速時間是否
設定過短
是
是否能設定較
長的加速時間
否
電
容量
按負載慣量,
否
減速時間是否
設定過短
是
是否能設定較
長的減速時間
ocd
是
否
oc
否
負載是否有突變
是
減小負載變化或增加
容量交流 驅動器電機
5-2
必須檢查制動方
法,請與台達聯繫
Page 90

5-2 對地短路故障 GFF
GFF
對地短路故障
五、異常診斷方式
交流 驅動器電機 輸出
電路 電纜或電機 是否
()
對地短路
消除接地故障
是
否
可能是 電機 故障
或雜訊引起 電機
誤動作。請與台達電子聯繫
交流 驅動器
交流 驅動器
5-3
Page 91

5-3 過電壓 ov
減小電源電壓制的
上限範圍內。
OV
否
電源電壓是否
在規範的範圍內
過電壓
是
可能是 電機
故障或雜訊引起 電
機 誤動作。請與
台達電子聯繫
交流 驅動器
交流
驅動器
增加設定時間
OV
否
動作時 的電壓值
是否大於保護值
否
是否在急加速
終止時動作
是
能否增加設定
的加速時間
是否在無負載時動作
否
DC BUS
是是
是
是
是否能增加設
定的減速時間
否
是
5-4
否
否
能否減小負載的慣性力矩
否
是否使用制動單元或直流制動功能
是
必須再檢查控制方法,
請與台達電子聯繫
考慮使用制動單元
和直流制動功能減小慣性力矩
否
Page 92

5-4 電壓不足 Lv
Lv
電壓不足
五、異常診斷方式
是否停電(包括瞬時停電)
否
供電電路是否有器
件故障或連接不良
否
電源電壓是否在規定
範圍內
在同一電源系統中是否
有較大啟動電流的負載
?
是
否
是
?
否
是
復歸再啟動
更換故障零件和改正連接
改變供電系統使符合規範要求
是否 在斷路器和電
Lv
磁接觸器 時動作
主電路直流電壓 與
之間是否大於 設定
變頻器控制電路故障或由於雜訊
造成誤動作。請與台達電子聯繫。
ON
否
+1/+2 -
06-00 ?
是
是
否
供電變壓器容量是否合適
可能是交流電機驅動器故障。
請與台達電子聯繫
否
是
5-5
Page 93

5-5 過熱 oH1
交流 驅動器電機 內過熱
散熱片過熱
散熱片溫度是否大於 ℃
是
負載是否過大
否
冷卻風扇是否正常運轉
是
冷卻風扇的通路是否堵塞
否
環境溫度是否在規定範圍內
是
90
是
否
是
否
否
電路版上溫度檢測電路誤動作。
請與台達電子聯繫。
減小負載
更換冷卻風扇
清除堵塞
可能是 電機 故障或雜訊
引起 電機 誤動作。請與
台達電子聯繫
交流 驅動器
交流 驅動器
調整環境溫度至規定範圍內
5-6
Page 94

5-6 過載 oL
五、異常診斷方式
OL
電機 過載交流 驅動器
EoL1, ot1
電子熱繼電器的設定值是否合適
負載是否過大
電機過載
是
否
是
否
改正設定值
可能 電機 故障
交流 驅動器
或由於雜訊造成誤動作
減小負載或增大交流電機驅動器容量
5-7
Page 95

5-7 數字操作器面板異常
顯示器顯示不正常或無顯示
切斷電源,等待顯示器
熄滅後再接通電源
是否正常顯示數據
交流 驅動器電機 正常
,可以繼續運轉
是
否
所有連接器和插座是否緊固
以及附近沒有噪音源嗎
否
交流 驅動器電機 故障,
請與台達電子聯繫
是
固定連接器
和消除雜訊
5-8
Page 96

5-8 電源欠相 PHL
五、異常診斷方式
電源欠相
主電路電源端子 是否全部連接完整
端子台螺絲是否都已緊固
三相電源電壓是否很不平衡
R, S, T
PHL
是
否
是
是
否
否
將三相全部連接好
鎖緊全部端子台螺絲
電源異常請檢查配
線和電源系統
可能是交流電機驅動器故障或雜訊引起交
流電機驅動器誤動作。請與台達電子聯繫
5-9
Page 97

5-9 電機無法運轉
電機不啟動運轉
消除警報原因,
警報 ,復歸後
再運轉
無異常時可
能繼續運轉
按
RUN
是否運轉
按
UP
設定頻率
是
按電機
UP
是否啟動
否
改正設定頻率
操作面板是
否顯示
是
LED
警報模式畫面
通過鍵盤面板
由控制端子輸
入運轉指令
否
是否已輸入正轉
或逆轉運轉指令
是否已設定頻率
是否上限頻率和
是
設定頻率低於最
低輸出頻率
是
是否顯示
否
是
是
是
否
電源側斷路器
和電磁接觸器
是否接通
電源輸入端的
電壓是否正常
端子 間
否
可能是 故障或雜訊
引起 誤動作。請與
台達電子聯繫
否
否否
+1-+2/B1
是否連接有短路
片或直流電抗器
驅動器
驅動器
控制端子
MI2-COM
外部電路配線
連接是否正確
模擬訊號和多
段速功能參數
設定及配線是
否正確
是
是
是
MI1,
否
間的
否
否
否
是
是
使其接通
確認有無電壓低
, ,
下欠相連接不
良等故障
連接短路片或
直流電抗器
更換不良的開
關或繼電器
改正連接
更換不良的頻率
設定器,信號轉
換器等開關和繼電
器接點
5-10
電機故障
負載是否過大
轉矩提升量
設定是否合適
提高轉矩提升量
否
是
否
是
是
否
UVW
、、 端子
是否有輸出電壓
是
電動機連接
是否正確
負載過大和電機鎖住,應減小負載。
如有機械鎖住,則檢查其是否已鬆開
否
否
可能 電機 故障。
請與台達電子聯繫
改正連接
交流 驅動器
Page 98

5-10 電機速度無法改變
電機運轉但不
能改變速度
是
最高頻率設定
值是否太低
否
五、異常診斷方式
改變設定值
是
定時設定值
是否過長
是
模式運轉
是否結束
是
各模式段的速度
設定是否都相同
是
否
否
否
是否頻率的下上
限限制在起作用
否
是否為程序運轉,
是
若不是時頻率設定
方法為哪種:鍵盤
面板模擬信號 多段
頻率 方式
up/down
否
端子 ∼ 的外
MI1 MI8-C OM
部電路配線是否正確
多段頻率選擇的各段
頻率是否都不一樣
是
是
是
,
否
改正連接
否
是否超過頻率上下限值
按鍵
up/down
速度是否變化
頻率設定信號
(-10-+10v, 4-20
是否變化
mA)
否
否
控制端子的外部
配線連接是否正確
是
是
是
改變設定頻率
更換不良的電位計
可能是 電機
故障或雜訊引起 電
機 誤動作。請與
台達電子聯繫
交流 驅動器
交流
驅動器
否
/
加 減速時間設定
值是否非常長
是
按負載慣量設定合
適的加 減速時間
/
5-11
Page 99

5-11 電機失速
電機加速時失速
電機和 電機
動器
加粗或縮短距離
減小負載轉矩或增大
電機 容量交流 驅動器
交流 驅
之間的連接線
加速時間設定過短
否
電機和負載的
慣量矩很大
否
是
電機端子的
電壓是否降低
否
是
負載轉矩是否太大
否
轉矩提升量是否合適
否
是
是
增加設定時間
是
是否使用特殊電機
否
減小負載轉矩或
增大變頻器容量
是
增加轉矩提升量
可能是 電機
故障或雜訊引起 電
機 誤動作。請與
台達電子聯繫
交流 驅動器
交流
驅動器
5-12
Page 100

5-12 電機異常
五、異常診斷方式
電機異常
設定的 特性以及
轉矩提升是否合適
交流 驅動器電機 輸出電壓
端子三相是否平衡
可能是 電機 故障
或雜訊引起 電機
誤動作。請與台達電子聯繫。
V/F
否
是否連續低速運行
否
負載是否過大
否
否
交流 驅動器
交流 驅動器
是
是
是
調整 特性和
V/F
降低轉矩提升量
應使用變頻專用電機
減小負載或增大電機容量
是
電機故障
5-13
 Loading...
Loading...