

Page 1

1-49
H
Intelligent Power Module and
Gate Drive Interface Optocouplers
Technical Data
Features
• Performance Specified for
Common IPM Applications
over Industrial Temperature
Range: -40°C to 100°C
• Fast Maximum Propagation
Delays
t
PHL
= 400 ns
t
PLH
= 550 ns
• Minimized Pulse Width
Distortion (PWD = 450 ns)
• 15 kV/µs Minimum Common
Mode Transient Immunity at
VCM = 1500 V
• CTR > 44% at IF = 10 mA
• Safety Approval
UL Recognized - 2500 V rms
for 1 minute (5000 V rms for
1 minute for HCNW4506 and
HCPL-4506 Option 020) per
UL1577
CSA Approved
VDE 0884 Approved
-V
IORM
= 630 V peak for
HCPL-4506 Option 060
-V
IORM
= 1414 V peak for
HCNW4506
BSI Certified (HCNW4506)
Applications
• IPM Isolation
• Isolated IGBT/MOSFET Gate
Drive
• AC and Brushless DC Motor
Drives
• Industrial Inverters
Description
The HCPL-4506 and HCPL-0466
contain a GaAsP LED while the
HCNW4506 contains an AlGaAs
LED. The LED is optically
coupled to an integrated high gain
photo detector. Minimized propa-
The connection of a 0.1 µF bypass capacitor between pins 5 and 8 is recommended.
gation delay difference between
devices make these optocouplers
excellent solutions for improving
inverter efficiency through
reduced switching dead time.
An on chip 20 kΩ output pull-up
resistor can be enabled by shorting output pins 6 and 7, thus
eliminating the need for an
external pull-up resistor in
common IPM applications. Specifications and performance plots
are given for typical IPM
applications.
HCPL-4506
HCPL-0466
HCNW4506
Functional Diagram
Truth Table
LED V
O
ON L
OFF H
8
7
6
1
3
SHIELD
5
2
4
20 kΩ
NC
ANODE
CATHODE
NC
V
CC
V
L
V
O
GND
CAUTION: It is advised that normal static precautions be taken in handling and assembly of this component to
prevent damage and/or degradation which may be induced by ESD.
Selection Guide
Operating Temperature
T
A
[°C] Single Channel Packages
8-Pin DIP Small Outline Widebody
Min. Max. (300 Mil) SO-8 (400 Mil) Hermetic*
-40 100 HCPL-4506 HCPL-0466 HCNW4506
-55 125 HCPL-5300
HCPL-5301
*Technical data for these products are on separate HP publications.
5965-3603E
Page 2

1-50
0.635 ± 0.25
(0.025 ± 0.010)
12° NOM.
9.65 ± 0.25
(0.380 ± 0.010)
0.635 ± 0.130
(0.025 ± 0.005)
7.62 ± 0.25
(0.300 ± 0.010)
5
6
7
8
4
3
2
1
9.65 ± 0.25
(0.380 ± 0.010)
6.350 ± 0.25
(0.250 ± 0.010)
1.016 (0.040)
1.194 (0.047)
1.194 (0.047)
1.778 (0.070)
9.398 (0.370)
9.906 (0.390)
4.826
(0.190)
TYP.
0.381 (0.015)
0.635 (0.025)
PAD LOCATION (FOR REFERENCE ONLY)
1.080 ± 0.320
(0.043 ± 0.013)
4.19
(0.165)
MAX.
1.780
(0.070)
MAX.
1.19
(0.047)
MAX.
2.54
(0.100)
BSC
DIMENSIONS IN MILLIMETERS (INCHES).
LEAD COPLANARITY = 0.10 mm (0.004 INCHES).
0.254
+ 0.076
- 0.051
(0.010
+ 0.003)
- 0.002)
9.65 ± 0.25
(0.380 ± 0.010)
1.78 (0.070) MAX.
1.19 (0.047) MAX.
HP XXXXZ
YYWW
DATE CODE
1.080 ± 0.320
(0.043 ± 0.013)
2.54 ± 0.25
(0.100 ± 0.010)
0.51 (0.020) MIN.
0.65 (0.025) MAX.
4.70 (0.185) MAX.
2.92 (0.115) MIN.
DIMENSIONS IN MILLIMETERS AND (INCHES).
5678
4321
5° TYP.
OPTION CODE*
UL
RECOGNITION
UR
0.254
+ 0.076
- 0.051
(0.010
+ 0.003)
- 0.002)
7.62 ± 0.25
(0.300 ± 0.010)
TYPE NUMBER
* MARKING CODE LETTER FOR OPTION NUMBERS.
"L" = OPTION 020
"V" = OPTION 060
OPTION NUMBERS 300 AND 500 NOT MARKED.
6.35 ± 0.25
(0.250 ± 0.010)
Package Outline Drawings
Figure 2. HCPL-4506 Gull Wing Surface Mount Option #300 Outline Drawing.
Figure 1. HCPL-4506 Outline Drawing (Standard DIP Package).
Ordering Information
Specify Part Number followed by Option Number (if desired).
Example:
HCPL-4506#XXX
020 = UL 5000 V rms/1 Minute Option*
060 = VDE 0884 V
IORM
= 630 V peak Option*
300 = Gull Wing Surface Mount Option†
500 = Tape and Reel Packaging Option
Option data sheets are available. Contact your Hewlett-Packard sales representative or authorized
distributor for information.
*For HCPL-4506 only. Combination of Option 020 and
Option 060 is not available.
†Gull wing surface mount option applies to through
hole parts only.
Page 3

1-51
1.00 ± 0.15
(0.039 ± 0.006)
7° NOM.
12.30 ± 0.30
(0.484 ± 0.012)
0.75 ± 0.25
(0.030 ± 0.010)
11.00
(0.433)
5
6
7
8
4
3
2
1
11.15 ± 0.15
(0.442 ± 0.006)
9.00 ± 0.15
(0.354 ± 0.006)
1.3
(0.051)
12.30 ± 0.30
(0.484 ± 0.012)
6.15
(0.242)
TYP.
0.9
(0.035)
PAD LOCATION (FOR REFERENCE ONLY)
1.78 ± 0.15
(0.070 ± 0.006)
4.00
(0.158)
MAX.
1.55
(0.061)
MAX.
2.54
(0.100)
BSC
DIMENSIONS IN MILLIMETERS (INCHES).
LEAD COPLANARITY = 0.10 mm (0.004 INCHES).
0.254
+ 0.076
- 0.0051
(0.010
+ 0.003)
- 0.002)
MAX.
5
6
7
8
4
3
2
1
11.15 ± 0.15
(0.442 ± 0.006)
1.78 ± 0.15
(0.070 ± 0.006)
5.10
(0.201)
MAX.
1.55
(0.061)
MAX.
2.54 (0.100)
TYP.
DIMENSIONS IN MILLIMETERS (INCHES).
7° TYP.
0.254
+ 0.076
- 0.0051
(0.010
+ 0.003)
- 0.002)
11.00
(0.433)
9.00 ± 0.15
(0.354 ± 0.006)
MAX.
10.16 (0.400)
TYP.
HP
HCNWXXXX
YYWW
DATE CODE
TYPE NUMBER
0.51 (0.021) MIN.
0.40 (0.016)
0.56 (0.022)
3.10 (0.122)
3.90 (0.154)
XXX
YWW
8765
4321
5.842 ± 0.203
(0.236 ± 0.008)
3.937 ± 0.127
(0.155 ± 0.005)
0.381 ± 0.076
(0.016 ± 0.003)
1.270
(0.050)
BSG
5.080 ± 0.127
(0.200 ± 0.005)
3.175 ± 0.127
(0.125 ± 0.005)
1.524
(0.060)
45° X
0.432
(0.017)
0.228 ± 0.025
(0.009 ± 0.001)
TYPE NUMBER
(LAST 3 DIGITS)
DATE CODE
0.305
(0.012)
MIN.
DIMENSIONS IN MILLIMETERS (INCHES).
LEAD COPLANARITY = 0.10 mm (0.004 INCHES).
0.152 ± 0.051
(0.006 ± 0.002)
7°
Figure 3. HCPL-0466 Outline Drawing (8-Pin Small Outline Package).
Figure 4a. HCNW4506 Outline Drawing (8-Pin Widebody Package).
Pin Location (for reference only)
Figure 4b. HCNW4506 Outline Drawing (8-Pin Widebody Package with Gull Wing Surface Mount Option 300).
Page 4
1-52
Insulation and Safety Related Specifications
8-Pin DIP Widebody
(300 Mil) SO-8 (400 Mil)
Parameter Symbol Value Value Value Units Conditions
Minimum External L(101) 7.1 4.9 9.6 mm Measured from input terminals
Air Gap (External to output terminals, shortest
Clearance) distance through air.
Minimum External L(102) 7.4 4.8 10.0 mm Measured from input terminals
Tracking (External to output terminals, shortest
Creepage) distance path along body.
Minimum Internal 0.08 0.08 1.0 mm Through insulation distance,
Plastic Gap conductor to conductor, usually
(Internal Clearance) the direct distance between the
photoemitter and photodetector
inside the optocoupler cavity.
Minimum Internal NA NA 4.0 mm Measured from input terminals
Tracking (Internal to output terminals, along
Creepage) internal cavity.
Tracking Resistance CTI 200 200 200 Volts DIN IEC 112/VDE 0303 Part 1
(Comparative
Tracking Index)
Isolation Group IIIa IIIa IIIa Material Group
(DIN VDE 0110, 1/89, Table 1)
Option 300 - surface mount classification is Class A in accordance with CECC 00802.
Regulatory Information
The devices contained in this data
sheet have been approved by the
following organizations:
UL
Recognized under UL 1577,
Component Recognition
Program, File E55361.
CSA
Approved under CSA Component
Acceptance Notice #5, File CA
88324.
VDE
Approved according to VDE
0884/06.92 (HCNW4506 and
HCPL-4506 Option 060 only).
BSI
Certification according to
BS451:1994
(BS EN60065:1994);
BS EN60950:1992
(BS7002:1992) and
EN41003:1993 for Class II
applications (HCNW4506 only).
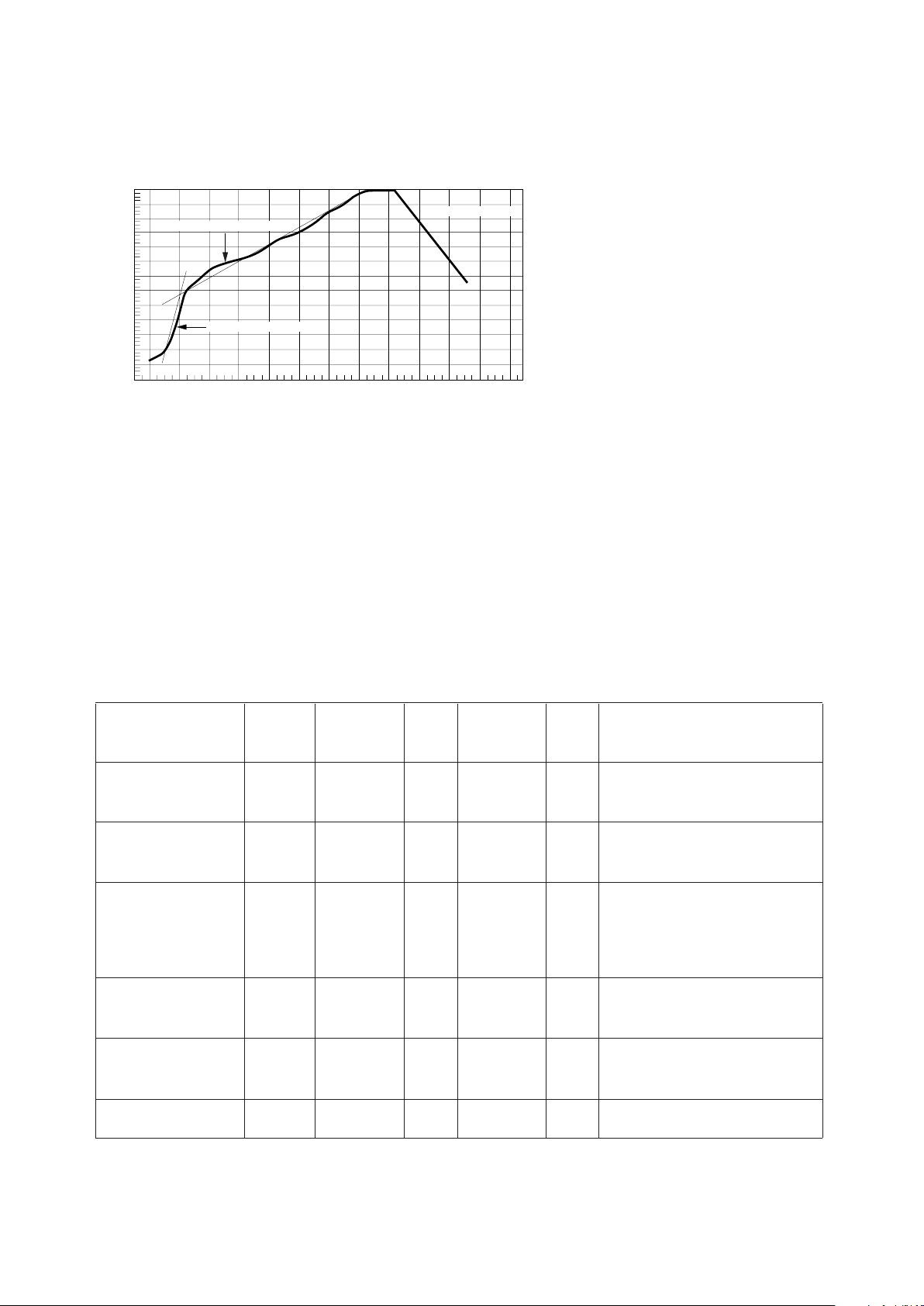
Note: Use of nonchlorine activated fluxes is recommended.
240
∆T = 115°C, 0.3°C/SEC
0
∆T = 100°C, 1.5°C/SEC
∆T = 145°C, 1°C/SEC
TIME – MINUTES
TEMPERATURE – °C
220
200
180
160
140
120
100
80
60
40
20
0
260
123456789101112
Solder Reflow Temperature Profile
Page 5

1-53
VDE 0884 Insulation Related Characteristics
(HCPL-4506 OPTION 060 ONLY)
Description Symbol Characteristic Units
Installation classification per DIN VDE 0110/1.89, Table 1
for rated mains voltage ≤ 300 V rms I-IV
for rated mains voltage ≤ 450 V rms I-III
Climatic Classification 55/100/21
Pollution Degree (DIN VDE 0110/1.89) 2
Maximum Working Insulation Voltage V
IORM
630 V peak
Input to Output Test Voltage, Method b*
V
IORM
x 1.875 = VPR, 100% Production Test with tm = 1 sec, V
PR
1181 V peak
Partial Discharge < 5 pC
Input to Output Test Voltage, Method a*
V
IORM
x 1.5 = VPR, Type and sample test, V
PR
945 V peak
tm = 60 sec, Partial Discharge < 5 pC
Highest Allowable Overvoltage*
(Transient Overvoltage, t
ini
= 10 sec) V
IOTM
6000 V peak
Safety Limiting Values
(Maximum values allowed in the event of a failure,
also see Figure 18, Thermal Derating curve.)
Case Temperature T
S
175 °C
Input Current I
S,INPUT
230 mA
Output Power P
S,OUTPUT
600 mW
Insulation Resistance at TS, VIO = 500 V R
S
≥ 10
9
Ω
VDE 0884 Insulation Related Characteristics (HCNW4506 ONLY)
Description Symbol Characteristic Units
Installation classification per DIN VDE 0110/1.89, Table 1
for rated mains voltage ≤ 600 V rms I-IV
for rated mains voltage ≤ 1000 V rms I-III
Climatic Classification 55/100/21
Pollution Degree (DIN VDE 0110/1.89) 2
Maximum Working Insulation Voltage V
IORM
1414 V peak
Input to Output Test Voltage, Method b*
V
IORM
x 1.875 = VPR, 100% Production Test with tm = 1 sec, V
PR
2652 V peak
Partial Discharge < 5 pC
Input to Output Test Voltage, Method a*
V
IORM
x 1.5 = VPR, Type and sample test, V
PR
2121 V peak
tm = 60 sec, Partial Discharge < 5 pC
Highest Allowable Overvoltage*
(Transient Overvoltage, t
ini
= 10 sec) V
IOTM
8000 V peak
Safety Limiting Values
(Maximum values allowed in the event of a failure,
also see Figure 18, Thermal Derating curve.)
Case Temperature T
S
150 °C
Input Current I
S,INPUT
400 mA
Output Power P
S,OUTPUT
700 mW
Insulation Resistance at TS, VIO = 500 V R
S
≥ 10
9
Ω
*Refer to the front of the optocoupler section of the current catalog, under Product Safety Regulations section (VDE 0884), for a
detailed description.
Note: Isolation characteristics are guaranteed only within the safety maximum ratings which must be ensured by protective circuits in
application.
Page 6

1-54
Electrical Specifications
Over recommended operating conditions unless otherwise specified:
TA = -40°C to +100°C, V
CC
= +4.5 V to 30 V, I
F(on)
= 10 mA to 20 mA, V
F(off)
= -5 V to 0.8 V†
Parameter Symbol Min. Typ.* Max. Units Test Conditions Fig. Note
Current Transfer Ratio CTR 44 90 % IF = 10 mA, VO = 0.6 V 5
Low Level Output Current I
OL
4.4 9.0 mA IF = 10 mA, VO = 0.6 V 5,6
Low Level Output Voltage V
OL
0.3 0.6 V IO = 2.4 mA
Input Threshold Current I
TH
1.5 5.0 mA VO = 0.8 V, IO = 0.75 mA 5 14
High Level Output Current I
OH
550µAVF = 0.8 V 7
High Level Supply Current I
CCH
0.6 1.3 mA VF = 0.8 V, VO = Open 14
Low Level Supply Current I
CCL
0.6 1.3 mA IF = 10 mA, VO = Open 14
Input Forward Voltage V
F
1.5 1.8 V HCPL-4506 IF = 10 mA 8
HCPL-0466
1.6 1.85 HCNW4506 9
Temperature Coefficient ∆VF/∆T
A
-1.6 mV/°C HCPL-4506 IF = 10 mA
of Forward Voltage HCPL-0466
-1.3 HCNW4506
Input Reverse Breakdown BV
R
5 V HCPL-4506 IR = 100 µA
Voltage HCPL-0466
3 HCNW4506
Input Capacitance C
IN
60 pF HCPL-4506 f = 1 MHz,
HCPL-0466 VF = 0 V
72 HCNW4506
Internal Pull-up Resistor R
L
14 20 25 kΩ TA = 25°C10,11
Internal Pull-up Resistor ∆RL/∆T
A
0.014 kΩ/°C
Temperature Coefficient
*All typical values at 25°C, VCC = 15 V.
†V
F(off)
= -3 V to 0.8 V for HCNW4506.
Recommended Operating Conditions
Parameter Symbol Min. Max. Units
Power Supply Voltage V
CC
4.5 30 Volts
Output Voltage V
O
0 30 Volts
Input Current (ON) I
F(on)
10 20 mA
Input Voltage (OFF) V
F(off)
* -5 0.8 V
Operating Temperature T
A
-40 100 °C
*Recommended V
F(OFF)
= -3 V to 0.8 V for HCNW4506.
Absolute Maximum Ratings
Parameter Symbol Min. Max. Units
Storage Temperature T
S
-55 125 °C
Operating Temperature T
A
-40 100 °C
Average Input Current
[1]
I
F(avg)
25 mA
Peak Input Current
[2]
(50% duty cycle, ≤ 1 ms pulse width) I
F(peak)
50 mA
Peak Transient Input Current (<1 µs pulse width, 300 pps) I
F(tran)
1.0 A
Reverse Input Voltage (Pin 3-2) HCPL-4506, HCPL-0466 V
R
5 Volts
HCNW4506 3
Average Output Current (Pin 6) I
O(avg)
15 mA
Resistor Voltage (Pin 7) V
7
-0.5 V
CC
Volts
Output Voltage (Pin 6-5) V
O
-0.5 30 Volts
Supply Voltage (Pin 8-5) V
CC
-0.5 30 Volts
Output Power Dissipation
[3]
P
O
100 mW
Total Power Dissipation
[4]
P
T
145 mW
Lead Solder Temperature (HCPL-4506) 260°C for 10 s, 1.6 mm below seating plane
Lead Solder Temperature (HCNW4506) 260°C for 10 s (up to seating plane)
Infrared and Vapor Phase Reflow Temperature See Package Outline Drawings Section
(HCPL-0466 and Option 300)
Page 7
1-55
Switching Specifications (R
L
= 20 kΩ External)
Over recommended operating conditions unless otherwise specified:
TA = -40°C to +100°C, V
CC
= +4.5 V to 30 V, I
F(on)
= 10 mA to 20 mA, V
F(off)
= -5 V to 0.8 V†
Parameter Symbol Min. Typ.* Max. Units Test Conditions Fig. Note
Propagation Delay t
PHL
I
F(on)
= 10 mA, 10, 9,
Time to Low V
F(off)
= 0.8 V, 12, 12,
Output Level 14-17 14
Propagation Delay t
PLH
Time to High
Output Level
Pulse Width PWD 200 450 ns CL = 100 pF 18
Distortion
Propagation Delay t
PLH-tPHL
-150 200 450 ns 15
Difference Between
Any 2 Parts
Output High Level |CMH|15 30 kV/µsIF = 0 mA, VCC = 15.0 V, 11 16
Common Mode VO > 3.0 V CL = 100 pF,
Transient Immunity VCM = 1500 V
P-P
Output Low Level |CML|15 30 kV/µsIF = 10 mA 17
Common Mode VO < 1.0 V
Transient Immunity
Switching Specifications (RL = Internal Pull-up)
Over recommended operating conditions unless otherwise specified:
TA = -40°C to +100°C, V
CC
= +4.5 V to 30 V, I
F(on)
= 10 mA to 20 mA, V
F(off)
= -5 V to 0.8 V†
Parameter Symbol Min. Typ.* Max. Units Test Conditions Fig. Note
Propagation Delay t
PHL
20 200 400 ns I
F(on)
= 10 mA, V
F(off)
= 0.8 V, 10, 9-12,
Time to Low VCC = 15.0 V, CL = 100 pF, 13 14
Output Level V
THLH
= 2.0 V, V
THHL
= 1.5 V
Propagation Delay t
PLH
220 450 650 ns
Time to High
Output Level
Pulse Width PWD 250 500 ns 18
Distortion
Propagation Delay t
PLH-tPHL
-150 250 500 ns 15
Difference Between
Any 2 Parts
Output High Level |CMH|30 kV/µsIF = 0 mA, VCC = 15.0 V, 11 16
Common Mode VO > 3.0 V CL = 100 pF,
Transient Immunity VCM = 1500 V
P-P
,
Output Low Level |CML| 30 kV/µsIF = 16 mA, 17
Common Mode VO < 1.0 V
Transient Immunity
Power Supply PSR 1.0 V
P-P
Square Wave, t
RISE
, t
FALL
14
Rejection > 5 ns, no bypass capacitors
*All typical values at 25°C, VCC = 15 V.
†V
F(off)
= -3 V to 0.8 V for HCNW4506.
VCC = 15.0 V,
V
THLH
= 2.0 V,
V
THHL
= 1.5 V
130 CL = 10 pF
30 200 400 ns CL = 100 pF
100 ns CL = 10 pF
270 400 550 ns CL = 100 pF
TA = 25°C
TA = 25°C
Page 8

1-56
Package Characteristics
Over recommended temperature (TA = -40°C to 100°C) unless otherwise specified.
Parameter Sym. Min. Typ.* Max. Units Test Conditions Fig. Note
Input-Output Momentary V
ISO
2500 V rms HCPL-4506 RH < 50%, 6, 7, 8
Withstand Voltage
†
HCPL-0466 t = 1 min.
5000 HCNW4506 6, 8, 13
Option 020
5000 HCNW4506 6, 8
Resistance R
I-O
10
12
Ω HCPL-4506 V
I-O
= 500 Vdc 6
(Input-Output) HCPL-0466
101210
13
HCNW4506
Capacitance C
I-O
0.6 pF HCPL-4506 f = 1 MHz 6
(Input-Output) HCPL-0466
0.5 HCNW4506
*All typical values at 25°C, VCC = 15 V.
†The Input-Output Momentary Withstand Voltage is a dielectric voltage rating that should not be interpreted as an input-output
continuous voltage rating. For the continuous voltage rating refer to the VDE 0884 Insulation Related Characteristics Table (if
applicable), your equipment level safety specification or HP Application Note 1074 entitled “Optocoupler Input-Output Endurance
Voltage,” publication number 5963-2203E.
Notes:
1. Derate linearly above 90°C free-air
temperature at a rate of 0.8 mA/°C.
2. Derate linearly above 90°C free-air
temperature at a rate of 1.6 mA/°C.
3. Derate linearly above 90°C free-air
temperature at a rate of 3.0 mW/°C.
4. Derate linearly above 90°C free-air
temperature at a rate of 4.2 mW/°C.
5. CURRENT TRANSFER RATIO in
percent is defined as the ratio of
output collector current (IO) to the
forward LED input current (IF) times
100.
6. Device considered a two-terminal
device: Pins 1, 2, 3, and 4 shorted
together and Pins 5, 6, 7, and 8
shorted together.
7. In accordance with UL 1577, each
optocoupler is proof tested by
applying an insulation test voltage
≥ 3000 V rms for 1 second (leakage
detection current limit, I
I-O
≤ 5 µA).
This test is performed before the
100% Production test shown in the
VDE 0884 Insulation Related
Characteristics Table, if applicable.
8. For option 020, in accordance with
UL 1577, each optocoupler is proof
tested by applying an insulation test
voltage ≥ 6000 V rms for 1 second
(leakage detection current limit, I
I-O
≤ 5 µA). This test is performed before
the 100% Production test for partial
discharge (method b) shown in the
VDE 0884 Insulation Related
Characteristics Table, if applicable.
9. Pulse: f = 20 kHz, Duty Cycle = 10%.
10. The internal 20 kΩ resistor can be
used by shorting pins 6 and 7
together.
11. Due to tolerance of the internal
resistor, and since propagation delay
is dependent on the load resistor
value, performance can be improved
by using an external 20 kΩ 1% load
resistor. For more information on
how propagation delay varies with
load resistance, see Figure 12.
12. The RL = 20 kΩ, CL = 100 pF load
represents a typical IPM (Intelligent
Power Module) load.
13. See Option 020 data sheet for more
information.
14. Use of a 0.1 µF bypass capacitor
connected between pins 5 and 8 can
improve performance by filtering
power supply line noise.
15. The difference between t
PLH
and t
PHL
between any two devices under the
same test condition. (See IPM Dead
Time and Propagation Delay
Specifications section.)
16. Common mode transient immunity in
a Logic High level is the maximum
tolerable dVCM/dt of the common
mode pulse, VCM, to assure that the
output will remain in a Logic High
state (i.e., VO > 3.0 V).
17. Common mode transient immunity in
a Logic Low level is the maximum
tolerable dVCM/dt of the common
mode pulse, VCM, to assure that the
output will remain in a Logic Low
state (i.e., VO< 1.0 V).
18. Pulse Width Distortion (PWD) is
defined as |t
PHL
- t
PLH
| for any given
device.
TA = 25° C
Page 9

1-57
Figure 8. HCPL-4506 and HCPL-0466
Input Current vs. Forward Voltage.
Figure 9. HCNW4506 Input Current
vs. Forward Voltage.
Figure 6. Normalized Output Current
vs. Temperature.
Figure 5. Typical Transfer
Characteristics.
Figure 7. High Level Output
Current vs. Temperature.
Figure 10. Propagation Delay Test Circuit.
I
O
– OUTPUT CURRENT – mA
0
IF – FORWARD LED CURRENT – mA
6
4
2
5
10
10 15 20
VO = 0.6 V
8
0
100 °C
25 °C
-40 °C
NORMALIZED OUTPUT CURRENT
TA – TEMPERATURE – °C
0.95
0.90
0.85
0 40 60 100
IF = 10 mA
V
O
= 0.6 V
1.00
-40 -20
20
80
1.05
0.80
I
F
– FORWARD CURRENT – mA
1.10
0.001
VF – FORWARD VOLTAGE – VOLTS
1.60
10
1.0
0.1
1.20
1000
1.30 1.40 1.50
TA = 25°C
I
F
V
F
+
–
0.01
100
0.1 µF
V
CC
= 15 V
20 k
Ω
I
F(ON)
=10 mA
V
OUT
CL*
+
–
*TOTAL LOAD CAPACITANCE
+
–
I
f
V
O
V
THHL
t
PHL
t
PLH
t
f
t
r
90%
10%
90%
10%
V
THLH
8
7
6
1
3
SHIELD
5
2
4
5 V
20 kΩ
I
F
– INPUT FORWARD CURRENT – mA
0.001
VF – INPUT FORWARD VOLTAGE – V
1
0.1
0.01
1.0
100
1.4 1.8 2.0
TA = 25 °C
10
0.8 1.2 1.6
I
F
V
F
+
–
I
OH
– HIGH LEVEL OUTPUT CURRENT – µA
TA – TEMPERATURE – °C
15.0
10.0
5.0
0 40 60 100
20.0
-40 -20
20
80
0
4.5 V
30 V
VF = 0.8 V
V
CC
= VO = 4.5 V OR 30 V
Page 10

1-58
Figure 12. Propagation Delay with
External 20 kΩ RL vs. Temperature.
Figure 13. Propagation Delay with
Internal 20 kΩ RL vs. Temperature.
Figure 14. Propagation Delay vs. Load
Resistance.
Figure 11. CMR Test Circuit. Typical CMR Waveform.
Figure 17. Propagation Delay vs. Input
Current.
Figure 15. Propagation Delay vs. Load
Capacitance.
Figure 16. Propagation Delay vs.
Supply Voltage.
0.1 µF
V
CC
= 15 V
20 kΩ
A
I
F
V
OUT
100 pF*
+
–
*100 pF TOTAL
CAPACITANCE
+
–
+
–
B
V
FF
V
CM
= 1500 V
8
7
6
1
3
SHIELD
5
2
4
20 kΩ
V
CM
∆t
OV
V
O
V
O
SWITCH AT A: IF = 0 mA
SWITCH AT B: I
F
= 10 mA
V
CC
V
OL
V
CM
∆t
δV
δt
=
t
P
– PROPAGATION DELAY – ns
TA – TEMPERATURE – °C
400
300
200
0 40 60 100
500
-40 -20
20
80
t
PLH
t
PHL
IF = 10 mA
V
CC
= 15 V
CL = 100 pF
RL = 20 kΩ
(EXTERNAL)
100
t
P
– PROPAGATION DELAY – ns
RL – LOAD RESISTANCE – K Ω
600
400
200
30 50
800
010
20
40
t
PLH
t
PHL
IF = 10 mA
V
CC
= 15 V
CL = 100 pF
T
A
= 25 °C
t
P
– PROPAGATION DELAY – ns
0
CL – LOAD CAPACITANCE – pF
800
600
400
100
1400
200 300 400
IF = 10 mA
V
CC
= 15 V
RL = 20 kΩ
T
A
= 25°C
200
1000
t
PLH
t
PHL
1200
0 500
t
P
– PROPAGATION DELAY – ns
0
V
CC
– SUPPLY VOLTAGE – V
800
600
400
10
1400
15 20 25
IF = 10 mA
CL = 100 pF
RL = 20 kΩ
T
A
= 25°C
200
1000
t
PLH
t
PHL
530
1200
t
P
– PROPAGATION DELAY – ns
100
IF – FORWARD LED CURRENT – mA
300
10
500
15
VCC = 15 V
CL = 100 pF
RL = 20 kΩ
T
A
= 25°C
200
400
t
PLH
t
PHL
5020
t
P
– PROPAGATION DELAY – ns
TA – TEMPERATURE – °C
400
300
200
0 40 60 100
500
-40 -20
20
80
t
PLH
t
PHL
IF = 10 mA
V
CC
= 15 V
CL = 100 pF
RL = 20 kΩ
(INTERNAL)
100
Page 11

1-59
Figure 20. Optocoupler Input to
Output Capacitance Model for
Unshielded Optocouplers.
Figure 19. Recommended LED Drive Circuit.
Figure 18. Thermal Derating Curve, Dependence of Safety Limiting Value with
Case Temperature per VDE 0884.
Figure 22. LED Drive Circuit with Resistor Connected to LED
Anode (Not Recommended).
Figure 21. Optocoupler Input to
Output Capacitance Model for
Shielded Optocouplers.
0.1 µF
V
CC
= 15 V
20 kΩ
CMOS
310 Ω
+5 V
V
OUT
100 pF
+
–
*100 pF TOTAL
CAPACITANCE
8
7
6
1
3
SHIELD
5
2
4
20 kΩ
8
7
6
1
3
SHIELD
5
2
4
C
LEDP
C
LEDN
20 kΩ
8
7
6
1
3
SHIELD
5
2
4
C
LEDP
C
LEDN
C
LED01
C
LED02
20 kΩ
0.1 µF
V
CC
= 15 V
20 kΩ
CMOS
310 Ω
+5 V
V
OUT
100 pF
+
–
*100 pF TOTAL
CAPACITANCE
8
7
6
1
3
SHIELD
5
2
4
20 kΩ
OUTPUT POWER – P
S
, INPUT CURRENT – I
S
0
0
TS – CASE TEMPERATURE – °C
175
1000
50
400
12525 75 100 150
600
800
200
100
300
500
700
900
PS (mW)
I
S
(mA)
HCNW4506
OUTPUT POWER – P
S
, INPUT CURRENT – I
S
0
0
TS – CASE TEMPERATURE – °C
20050
400
12525 75 100 150
600
800
200
100
300
500
700
PS (mW)
I
S
(mA)
HCPL-4506 OPTION 060
175
(230)
Figure 23. AC Equivalent Circuit for Figure 22 During
Common Mode Transients.
20 kΩ
* THE ARROWS INDICATE THE DIRECTION OF CURRENT
FLOW FOR +dV
CM
/dt TRANSIENTS.
310 Ω
V
OUT
100 pF
+
–
I
TOTAL*
V
CM
8
7
6
1
3
SHIELD
5
2
4
20
kΩ
C
LEDN
C
LED01
C
LED02
I
CLEDP
I
F
C
LEDP
I
CLED01
Page 12

1-60
Figure 27. Recommended LED Drive
Circuit for Ultra High CMR.
Figure 24. AC Equivalent Circuit for Figure 19 During
Common Mode Transients.
Figure 25. Not Recommended Open
Collector LED Drive Circuit.
Figure 26. AC Equivalent Circuit for Figure 25 During
Common Mode Transients.
Q1
+5 V
8
7
6
1
3
SHIELD
5
2
4
20 kΩ
20 kΩ
* THE ARROWS INDICATE THE DIRECTION OF CURRENT
FLOW FOR +dV
CM
/dt TRANSIENTS.
V
OUT
100 pF
+
–
V
CM
8
7
6
1
3
SHIELD
5
2
4
20
kΩ
C
LEDP
C
LEDN
C
LED01
C
LED02
I
CLEDN*
Q1
+5 V
8
7
6
1
3
SHIELD
5
2
4
20 kΩ
20 kΩ
* THE ARROWS INDICATE THE DIRECTION OF CURRENT
FLOW FOR +dV
CM
/dt TRANSIENTS.
** OPTIONAL CLAMPING DIODE FOR IMPROVED CMH
PERFORMANCE. V
R
< V
F (OFF)
DURING +dVCM/dt.
V
OUT
100 pF
+
–
V
CM
8
7
6
1
3
SHIELD
5
2
4
20
kΩ
C
LEDP
C
LEDN
C
LED01
C
LED02
I
CLEDN*
310 Ω
+ VR** –
Figure 28. Typical Application Circuit.
0.1 µF
20 kΩ
CMOS
310 Ω
+5 V
V
OUT1
I
LED1
V
CC1
M
HCPL-4506
HCPL-4506
HCPL-4506
HCPL-4506
HCPL-4506
Q2
Q1
-HV
+HV
IPM
8
7
6
1
3
SHIELD
5
2
4
20 k
Ω
HCPL-4506
0.1 µF
20 kΩ
CMOS
310 Ω
+5 V
V
OUT2
I
LED2
V
CC2
8
7
6
1
3
SHIELD
5
2
4
20 k
Ω
HCPL-4506
Page 13

1-61
Figure 30. Waveforms for Dead Time Calculation.
Figure 29. Minimum LED Skew for Zero Dead Time.
V
OUT1
V
OUT2
I
LED2
t
PLH MAX.
PDD* MAX. =
(t
PLH-tPHL) MAX. = tPLH MAX. - tPHL MIN.
t
PHL
MIN.
I
LED1
Q1 ON
Q2 OFF
Q1 OFF
Q2 ON
*PDD = PROPAGATION DELAY DIFFERENCE
NOTE: THE PROPAGATION DELAYS USED TO CALCULATE
PDD ARE TAKEN AT EQUAL TEMPERATURES.
V
OUT1
V
OUT2
I
LED2
t
PLH
MIN.
MAXIMUM DEAD TIME
(DUE TO OPTOCOUPLER)
= (t
PLH MAX.
-
t
PLH MIN.
) + (t
PHL MAX.
-
t
PHL MIN.
)
= (t
PLH MAX.
-
t
PHL MIN.
) - (t
PLH MIN.
-
t
PHL MAX.
)
= PDD* MAX. - PDD* MIN.
t
PHL
MIN.
I
LED1
Q1 ON
Q2 OFF
Q1 OFF
Q2 ON
*PDD = PROPAGATION DELAY DIFFERENCE
t
PLH
MAX.
t
PHL
MAX.
PDD*
MAX.
MAX.
DEAD TIME
NOTE: THE PROPAGATION DELAYS USED TO CALCULATE THE MAXIMUM
DEAD TIME ARE TAKEN AT EQUAL TEMPERATURES.
LED Drive Circuit
Considerations for Ultra
High CMR Performance
Without a detector shield, the
dominant cause of optocoupler
CMR failure is capacitive coupling
from the input side of the optocoupler, through the package, to
the detector IC as shown in
Figure 20. The HCPL-4506,
HCPL-0466 and HCNW4506
improve CMR performance by
using a detector IC with an optically transparent Faraday shield,
which diverts the capacitively
coupled current away from the
sensitive IC circuitry. However,
this shield does not eliminate the
capacitive coupling between the
LED and the optocoupler output
pins and output ground as shown
in Figure 21. This capacitive
coupling causes perturbations in
the LED current during common
mode transients and becomes the
major source of CMR failures for
a shielded optocoupler. The main
design objective of a high CMR
LED drive circuit becomes keeping the LED in the proper state
(on or off) during common mode
transients. For example, the
recommended application circuit
(Figure 19), can achieve 15 kV/µs
CMR while minimizing component
complexity. Note that a CMOS
gate is recommended in Figure 19
to keep the LED off when the gate
is in the high state.
Another cause of CMR failure for
a shielded optocoupler is direct
coupling to the optocoupler
output pins through C
LEDO1
and
C
LEDO2
in Figure 21. Many factors
influence the effect and magnitude of the direct coupling including: the use of an internal or
external output pull-up resistor,
the position of the LED current
setting resistor, the connection of
the unused input package pins,
and the value of the capacitor at
the optocoupler output (CL).
Techniques to keep the LED in
the proper state and minimize the
effect of the direct coupling are
discussed in the next two
sections.
CMR with the LED On
(CMRL)
A high CMR LED drive circuit
must keep the LED on during
common mode transients. This is
achieved by overdriving the LED
current beyond the input
threshold so that it is not pulled
below the threshold during a
transient. The recommended
minimum LED current of 10 mA
provides adequate margin over
the maximum ITH of 5.0 mA (see
Figure 5) to achieve 15 kV/µs
CMR. Capacitive coupling is
higher when the internal load
resistor is used (due to C
LEDO2
)
and an IF = 16 mA is required to
obtain 10 kV/µs CMR.
The placement of the LED current
setting resistor effects the ability of
the drive circuit to keep the LED on
during transients and interacts with
the direct coupling to the
optocoupler output. For example,
the LED resistor in Figure 22 is
connected to the anode. Figure 23
shows the AC equivalent circuit for
Figure 22 during common mode
transients. During a +dVcm/dt in
Figure 23, the current available at
the LED anode (Itotal) is limited by
the series resistor. The LED current
(I
F
) is reduced from its DC value by
an amount equal to the current that
flows through C
LEDP
and C
LEDO1
.
The situation is made worse
Page 14

1-62
because the current through C
LEDO1
has the effect of trying to pull the
output high (toward a CMR failure)
at the same time the LED current is
being reduced. For this reason, the
recommended LED drive circuit
(Figure 19) places the current setting resistor in series with the LED
cathode. Figure 24 is the AC equivalent circuit for Figure 19 during
common mode transients. In this
case, the LED current is not
reduced during a +dVcm/dt transient because the current flowing
through the package capacitance is
supplied by the power supply.
During a -dVcm/dt transient, however, the LED current is reduced by
the amount of current flowing
through C
LEDN
. But, better CMR
performance is achieved since the
current flowing in C
LEDO1
during a
negative transient acts to keep the
output low.
Coupling to the LED and output
pins is also affected by the connection of pins 1 and 4. If CMR is
limited by perturbations in the LED
on current, as it is for the recommended drive circuit (Figure 19),
pins 1 and 4 should be connected to
the input circuit common. However,
if CMR performance is limited by
direct coupling to the output when
the LED is off, pins 1 and 4 should
be left unconnected.
CMR with the LED Off
(CMRH)
A high CMR LED drive circuit must
keep the LED off (V
F
≤ V
F(OFF)
)
during common mode transients.
For example, during a +dVcm/dt
transient in Figure 24, the current
flowing through C
LEDN
is supplied
by the parallel combination of the
LED and series resistor. As long as
the voltage developed across the
resistor is less than V
F(OFF)
the LED
will remain off and no common
mode failure will occur. Even if the
LED momentarily turns on, the 100
pF capacitor from pins 6-5 will
keep the output from dipping below
the threshold. The recommended
LED drive circuit (Figure 19) provides about 10 V of margin between
the lowest optocoupler output
voltage and a 3 V IPM threshold
during a 15 kV/µs transient with
V
CM
= 1500 V. Additional margin
can be obtained by adding a diode
in parallel with the resistor, as
shown by the dashed line connection in Figure 24, to clamp the
voltage across the LED below
V
F(OFF)
.
Since the open collector drive circuit, shown in Figure 25, cannot
keep the LED off during a +dVcm/
dt transient, it is not desirable for
applications requiring ultra high
CMR
H
performance. Figure 26 is
the AC equivalent circuit for Figure
25 during common mode
transients. Essentially all the
current flowing through C
LEDN
during a +dVcm/dt transient must
be supplied by the LED. CMR
H
failures can occur at dV/dt rates
where the current through the LED
and C
LEDN
exceeds the input
threshold. Figure 27 is an
alternative drive circuit which does
achieve ultra high CMR
performance by shunting the LED
in the off state.
IPM Dead Time and
Propagation Delay
Specifications
The HCPL-4506, HCPL-0466 and
HCNW4506 include a Propagation
Delay Difference specification
intended to help designers minimize
“dead time” in their power inverter
designs. Dead time is the time
period during which both the high
and low side power transistors (Q1
and Q2 in Figure 28) are off. Any
overlap in Q1 and Q2 conduction
will result in large currents flowing
through the power devices between
the high and low voltage motor rails.
To minimize dead time the designer
must consider the propagation
delay characteristics of the optocoupler as well as the characteristics of the IPM IGBT gate drive
circuit. Considering only the delay
characteristics of the optocoupler
(the characteristics of the IPM
IGBT gate drive circuit can be
analyzed in the same way) it is
important to know the minimum
and maximum turn-on (t
PHL
) and
turn-off (t
PLH
) propagation delay
specifications, preferably over the
desired operating temperature
range.
The limiting case of zero dead time
occurs when the input to Q1 turns
off at the same time that the input
to Q2 turns on. This case
determines the minimum delay
between LED1 turn-off and LED2
turn-on, which is related to the
worst case optocoupler propagation
delay waveforms, as shown in
Figure 29. A minimum dead time of
zero is achieved in Figure 29 when
the signal to turn on LED2 is
delayed by (t
PLH max
- t
PHL min
) from
the LED1 turn off. Note that the
propagation delays used to calculate PDD are taken at equal temperatures since the optocouplers under
consideration are typically mounted
in close proximity to each other.
(Specifically, t
PLH max
and t
PHL min
in the previous equation are not the
same as the t
PLH max
and t
PHL min
,
over the full operating temperature
range, specified in the data sheet.)
This delay is the maximum value for
the propagation delay difference
specification which is specified at
450 ns for the HCPL-4506, HCPL0466 and HCNW4506 over an
operating temperature range of
-40°C to 100°C.
Delaying the LED signal by the
maximum propagation delay difference ensures that the minimum
dead time is zero, but it does not
tell a designer what the maximum
dead time will be. The maximum
dead time occurs in the highly
unlikely case where one optocoupler with the fastest t
PLH
and another
with the slowest t
PHL
are in the
same inverter leg. The maximum
dead time in this case becomes the
sum of the spread in the t
PLH
and
t
PHL
propagation delays as shown in
Figure 30. The maximum dead time
is also equivalent to the difference
between the maximum and minimum propagation delay difference
specifications. The maximum dead
time (due to the optocouplers) for
the HCPL-4506, HCPL-0466 and
HCNW4506 is 600 ns (= 450ns -
(-150 ns)) over an operating
temperature range of -40°C to
100°C.
 Loading...
Loading...