

Page 1
HA13536F
Three-Phase Brushless DC Motor Driver IC
ADE-207-111B (Z)
3rd Edition
July 1996
Description
The HA13536F is a 3-phase brushless DC motor driver IC with digital speed control. It is being developed
for direct drive of the spindle motor of 5 V floppy disk drives with a height of 3/4" or less. It has the following functions and features.
Functions
• 1.0 A per phase, 3-phase drive circuit (current driver)
• Digital speed control circuit
• FG Amp
• Index circuit
• Current limiter circuit
• Over-temperature shutdown circuit (OTSD)
Features
• Low saturation voltage, typically 1.15 V (at 0.7 A)
• Soft switching drive circuit
• No need for an output snubber circuit
Page 2
HA13536F
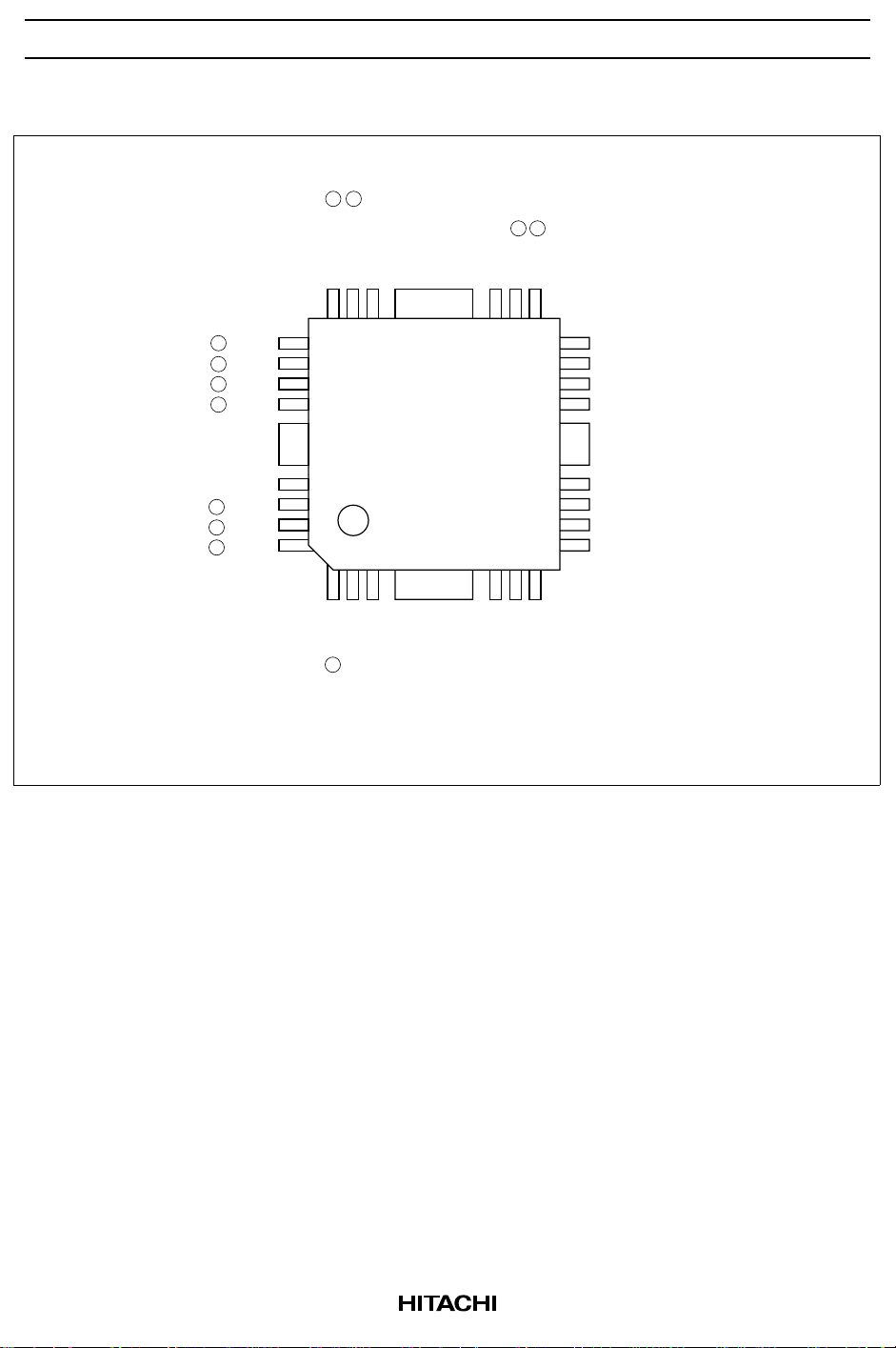
Pin Arrangement
CC
U phase – input
U phase + input
V
Hall bias
Bias – pin
Bias + pin
V phase + input
V phase – input
W phase + input
W phase – input
AGC
Index + input
Index – input
FG + input
18
19
20
21
22
23
24
TAB
25
26
27
28
123
RPM SEL
FG – input
TAB
TAB
Index adjust
(Top view)
16 15
17
14
13
12
11
TAB
10
456
CE
Index Vreg
Index output
Bias output
U phase output
V phase output
Current detection
W phase output
9
Phase compensation
8
Charge pump output
7
CLK input
2
Page 3
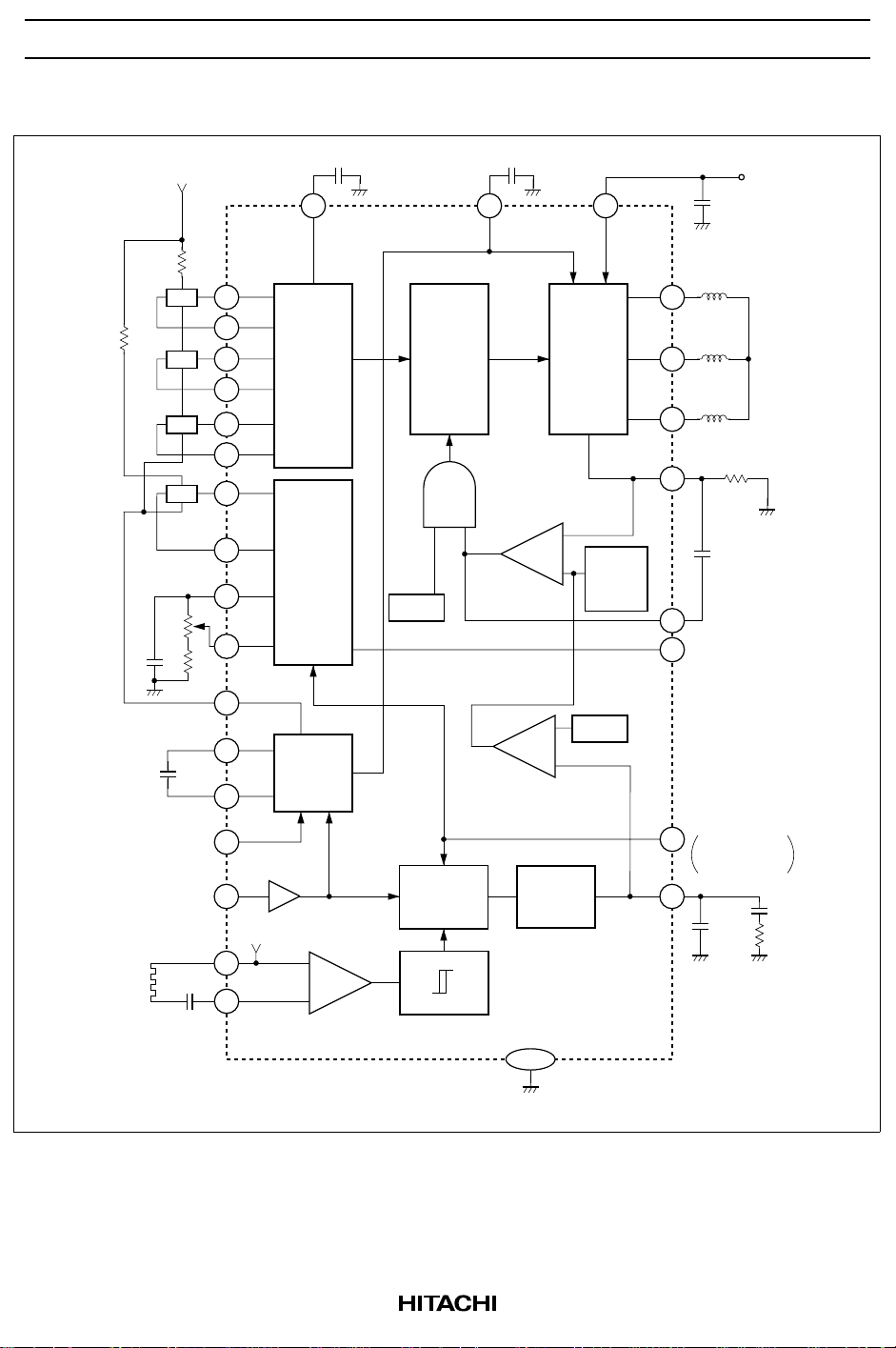
Block Diagram
HA13536F
R102
60 ppr
R101
Ct
C104
FG
V
CC
Hu
Hv
Hw
Hi
Rt1
CE
CLK
1 MHz
C103
Rt2
19
20
21
22
23
24
26
27
17
16
15
28
3
4
6
7
1
1.6 V
C102 C105
25 14 18
u (+)
u (-)
Hall
v (+)
v (-)
w (+)
w (-)
(+)
(-)
Index
circuit
Bias
FG Amp.
Amp
+
–
OTSD
Speed
discrim-
inator
Matrix
Control Amp.
–
+
–
+
Buffer Amp.
Charge
pump
Output
Amp
Current
limitter
Vref2
U
V
W
Vref1
C101
13
12
10
11
Rnf
C106
9
Index output
5
(Open collector)
RPM select
2
H: 360 rpm
L: 300 rpm
8
C1
V
CC
5 V
C2
R2
Note : Pin arrangement is preliminary specification.
TAB
3
Page 4
HA13536F
O
Pin Function
Pin Number Pin Name Function Pin Voltage
1 FG (–) input FG Amp. (–) input terminal
2 RPMSEL Change terminal for motor rotation speed
“L” → 300 rpm, “H” → 360 rpm
3 Index adjustment Terminal to set up burst time of index circuit 0 V Min, 1.2 V Max
4 Index Vreg Output terminal for fixed voltage of index circuit 1.5 V Typ
5 Index output Index output terminal (Open collector) V
6 CE Chip enable terminal
“L”: enable, “H”: disable
7 CLK input CLK input terminal VTH = 1.4 V Typ
8 C-PUMP output Speed error Integration and Phase compensation of
speed control
9 Phase compensation To prevent the parastic oscillation of output, insert
the capacitor between pin 9 and pin 11.
10 W phase output W phase output
11 Current detection Output current detection and terminal which is con-
nected with phase compensation capacitor for car-
rent control.
12 V phase output V phase output
13 U phase output U phase output
14 Bias output Bias output terminal
15 Bias (+) pin Bias (+) pin terminal
16 Bias (–) pin Bias (–) pin terminal
17 Hall bias Hall bias terminal
CE = “L” → Bias,
CE = “H” → High impedance
18 V
CC
Power supply 4.25 V Min, 6.5 V
19 U phase (+) input U phase (+) input terminal 2.0 V Min,
20 U phase (–) input U phase (–) input terminal 2.0 V Min,
21 V phase (+) input V phase (+) input terminal 2.0 V Min,
22 V phase (–) input V phase (–) input terminal 2.0 V Min,
23 W phase (+) input W phase (+) input terminal 2.0 V Min,
24 W phase (–) input W phase (–) input terminal 2.0 V Min,
25 AGC Hall amp output wave form adjustment terminal
(Insert capacitor C102 between GND)
VTH = 1.4 V Typ
= 0.14 V Typ
L
(@I
= 2 mA)
O
VTH = 1.4 V Typ
2.2 V Typ
(@I = 10 mA)
Max
V
– 0.5 V Max
CC
V
– 0.5 V Max
CC
V
– 0.5 V Max
CC
V
– 0.5 V Max
CC
V
– 0.5 V Max
CC
V
– 0.5 V Max
CC
4
Page 5
HA13536F
Pin Function (cont)
Pin Number Pin Name Function Pin Voltage
26 Index (+) input Index amp (+) input terminal 1.4 V Min,
– 0.5 V Max
V
CC
27 Index (–) input Index amp (–) input terminal 1.4 V Min,
V
– 0.5 V Max
CC
28 FG (+) input FG amp (+) input terminal DC bias 1.6 V Typ
External Parts
Part Number Recommended Value Purpose Notes
R2 — Integration constant 1
R101 — Hall bias
R102 — Index hall bias
Rnf — Current detection and limitation 2
Rt1 0 to 50 kΩ Index burst adjustment 3
Rt2 100 kΩ Index pulse width setting
C1, C2 — Integration constants 1
C101 ≥ 0.1 µF Power supply bypass 4
C102 0.1 µF AGC filter 5
C103 0.47 µF FG amp. coupling 5
C104 0.1 µF Bias
C105 ≥ 0.1 µF Bias 7
C106 0.1 µF Phase compensation 4
Ct 0.1 µF Index setting 3, 6
Notes: 1. Determine the integration constants from the following formulas:
2πf
ω
O
R2 =
C1 =
FG
≤
20
Jω
K
ω
O
N
O
Gctl Icp
T
1
R2
O
1
9.55
1
10
.
Rnf
(rad/s)
(Ω)
(F)
C2 = 10C1
(F)
5
Page 6

HA13536F
In the above formulas:
ω
O
f
FG
N
O
J = Motor moment of inertia in kg•cm•s
KT= Motor torque constant in kg•cm/A
Rnf = Current detection in Ω
Gctl= Control amp gain (see Electrical Characteristics)
Icp = Charge pump output current (see Electrical Characteristics)
2. The current limiter operates according to the following formula:
I
OMAX =
where Vref1 is the current limiter reference voltage (see Electrical Characteristics)
3. The burst time t1 is defined as follows:
t1 ≈ – Ct × Rt1’ × ln (1 – Vth1 (L) / Vreg) (RPM select input low)
t1 ≈ – Ct × Rt1’ × ln (1 – Vth1 (H) / Vreg) (RPM select input high)
where Rt1’ is resistance value inter 3 to 4 pin.
4. Place as close to the IC as possible.
5. Determine C102 and C103 according to the following formulas:
C102 >
= Time constant of servo loop
= FG frequency in Hz
= Motor speed in rpm
Vref1
Rnf
200
N P
O
(A)
(µF)
2
C103 >
100
f
FG
(µF)
where
P = Number of motor poles
6. The index pulse width t2 is determined as follows:
t2 ≈ – Ct × Rt2’ × ln (Vth1 / Vth2)
where Vth2 is the threshold voltage (see Electrical Characteristics).
Rt2’ : Rt1 (max) + Rt2
7. If the circuit is affected by noise, a large capacitance value should be set.
6
Page 7

Timing Waveforms
Hall Amp Input vs. Output Voltage and Current
HA13536F
+
*1
Hall amp input
Output voltage
Output current
Notes: 1. 2.The input waveforms to the hall amp should be sine waves with a third
0
–
V
CC
*2
0
+
*2
0
–
harmonic content of less than 20%.
Only the U phase output is shown.
UV W
U
U
7
Page 8

HA13536F
Index Amp Input vs. Output
• Application 1
Index amp input
Pin 3 voltage
+
20 to 100 mV
0
20 to 100 mV
–
0
Vth1
t1 t2
Vth2
• Application 2
Index output
Index amp
differential input
Pin 3 voltage
Index output
V
CC
0
+
20 to 100 mV
0
20 to 100 mV
–
0
V
CC
0
Vth1
t1 t2
Vth2
8
Page 9

HA13536F
Absolute Maximum Ratings (Ta = 25°C)
Item Symbol Value Unit Notes
Power supply voltage V
CC
Input voltage Vin 0 to VCC + 0.3 V 2
Peak output current I
Normal output current I
Power dissipation P
OP
O
T
Junction temperature Tj +150 °C1
Storage temperature range Tstg –55 to +125 °C
Notes: 1. The operating ranges is:
V
= 4.25 to 6.5 V
CC
Tjopr = 0 to +125°C
2. Applied to the CE, CLK, and RPM SEL pins.
3. Permissible value when Tpin = 113°C and thermal resistance is as follows:
θ
≤ 25°C/W
j–pin
θ
≤ 55°C/W (when mounted on a metal substrade)
j–a1
θ
≤ 80°C/W (when mounted on a glass epoxy substrade)
j–a2
7V1
1.0 A
0.7 A
1.5 W 3
9
Page 10

HA13536F
Electrical Characteristics (Ta = 25°C, VCC = 5 V)
Item Symbol Min Typ Max Unit
Quiscent
current
Logic input Input current
(6 pin)
Input current
(2 pin)
Input current
(7 pin)
Input low
voltage
Input high
voltage
Logic output
Output low
voltage
Leakage
current
Hall amp Input
resistance
Common-
mode input
voltage
range
Differential
input voltage range
Output
amp
Leakage
current
Saturation
voltage
FG amp
and detector
Input
voltage
range
Noise
margin
I
CCO
I
CC
I
I1
I
I2
I
I3
V
IL
V
IH
V
OL
I
OH
— — 0.45 mA CE = H, VCC =
— 9 13 mA CE = L, VCC =
–80 — 2 µA VCE = 0 to 6.5V2, 6, 7
–2 — 100 µAV
–2 — 450 µAV
0 — 0.8 V
2.0 — 5.5 V
— — 0.4 V IO = 2 mA 5
——±10 µAV
Rhi7 1013kΩ 19 to 24
V
H
2.0 — VCC – 0.5 V
Vh 30 — 160 mV
I
CER(H)
I
CER(L)
0—5mAV
——±100 µAV
Vsat1 — 1.15 1.65 V IO = 0.7 A 1
Vsat2 — 0.6 0.85 V IO = 0.35 A
Vfg 2 — 20 mV
nd — — 0.5 mV
nc — — 0.5 V COMMON
Test conditions Pin
6.5 V
6.5 V
RPM
CLK
CE
PP
= 7.0 V 10, 12,
O
= 0 V
O
PP
Differential
PP
Noise
Noise
Notes
Nos.
18
= 5.5 V
= 5.5 V
= 7.0 V
13
1, 28
10
Page 11

Electrical Characteristics (Ta = 25°C, VCC = 5 V) (cont)
Item Symbol Min Typ Max Unit
Speed
discriminator and
charge
pump
Current
control
Index circuit
Hall bias Output
Number of
counts
Operating
frequency
Leakage
current
Output
current
Threshold
voltage
Voltage gain Gctl –12 –10 –8 dB 11
Current
limitter
voltage
Input
voltage
(common)
Input
voltage
(different)
Hysteresis hys — 14 — mV
Input current — — ±2 µA3
Threshold
voltage
Ct discharge
threshold
voltage
Bias Vreg 1.3 1.5 1.7 V IO = –0.2 mA 4
voltage
N — 1666.5 — — PRMSEL = L
— 1388.5 — — PRMSEL = H
f
CLK
Ioff — — ±50 nA V8 = 0.8 V 8
Icp+ 7 10 13 µA Speed reduc-
Icp– –7 –10 –13 µA Acceleration
Vref2 0.55 0.63 0.71 V 8 2
Vref1 157 175 193 mV RNF = 0.47 Ω
Vindex 1.4 — VCC – 0.5 V 26, 27 3
Vindex 40 — 300 mVpp
Vth1 0.60 ×
Vth2 0.50 ×
Vhb 1.9 2.2 2.5 V Ih = 10 mA, CE
0.9 1.0 1.1 MHz 7
Vreg
0.54 ×
Vreg
Vreg
0.44 ×
Vreg
0.64 ×
Vreg
0.58 ×
Vreg
0.54 ×
Vreg
0.48 ×
Vreg
0.68 ×
Vreg
0.62 ×
Vreg
0.58 ×
Vreg
0.52 ×
Vreg
V RPM select = L
V RPM select = H
V RPMSEL = L 3 3
V RPMSEL = H
HA13536F
Test conditions Pin
Nos.
tion full scale
full scale
17
= L
Notes
11
Page 12

HA13536F
Electrical Characteristics (Ta = 25°C, VCC = 5 V) (cont)
Item Symbol Min Typ Max Unit
Hall bias Leakage
current
OTSD Operating
temperature
Notes: 1. Total of sink and source.
2. See figure 1. Gctl = ∆Vrnf/∆Vcp.
3. Refer to the timing chart.
4. Design parameter only (No test).
Ihof — — ±10 µA CE = H, Vhb =
Tsd 125 150 — °C4
Vrnf (Pin 11)
Vref1
Vrnf
Vcp
Test conditions Pin
Nos.
17
7.0 V
Notes
Vref2
0
Vcp (8 pin)
Figure 1
12
Page 13

Reference Data
HA13536F
20
15
(mA)
CC
10
I
CC
5
Quiscent current I
I
CCO
0246
Power supply voltage V
2.0
VCC = 5 V
1.5
1.0
sink + source
CC
source
(V)
8
1.00
0.75
0.50
0.25
190
(mA)
CCO
180
170
160
Quiscent current I
Current limitter voltage Vref1 (mV)
150
0.2 0.4 0.6
20
15
10
VCC = 5 V
RNF (Ω)
VCC = 5 V
0.8
1.0
0.5
Output saturation voltage Vsat (V)
0 0.5 1.0
Output current I
O
sink
(A)
1.5
5
Hall bias current Ih (mA)
01234
Hall bias voltage Vhb (V)
13
Page 14

HA13536F
Mount Waveform Characteristics
Hall input (+)
(50 mV / div)
Output
(1 V / div)
Charge pump output
(0.5 V / div)
Phase compensation
(0.5 V / div)
0V
0V
0V
0V
Time (20 ms / div)
Index input (+)
(0.1 V / div)
Index Vreg
(1 V / div)
Index adjust
(0.5 V / div)
Index output
(5 V / div)
0V
0V
0V
0V
Time (2 ms / div)
14
Page 15

Package Dimensions
21
28
9.0 ± 0.2
0.3 ± 0.1
9.0 ± 0.2
7.0
20 15
1
HA13536F
Unit: mm
0.65
14
7
6
M
0.13
1.0
1.7 Max
0.17 ± 0.05
0 – 10°
2.25 ± 0.1
0.1
0.95 ± 0.1
0.22 Max
0.08 Min
Hitachi code
EIAJ code
JEDEC code
0.5 ± 0.2
FP-28T
—
—
15
Page 16

Cautions
1. Hitachi neither warrants nor grants licenses of any rights of Hitachi’s or any third party’s patent,
copyright, trademark, or other intellectual property rights for information contained in this document.
Hitachi bears no responsibility for problems that may arise with third party’s rights, including
intellectual property rights, in connection with use of the information contained in this document.
2. Products and product specifications may be subject to change without notice. Confirm that you have
received the latest product standards or specifications before final design, purchase or use.
3. Hitachi makes every attempt to ensure that its products are of high quality and reliability. However,
contact Hitachi’s sales office before using the product in an application that demands especially high
quality and reliability or where its failure or malfunction may directly threaten human life or cause risk
of bodily injury, such as aerospace, aeronautics, nuclear power, combustion control, transportation,
traffic, safety equipment or medical equipment for life support.
4. Design your application so that the product is used within the ranges guaranteed by Hitachi particularly
for maximum rating, operating supply voltage range, heat radiation characteristics, installation
conditions and other characteristics. Hitachi bears no responsibility for failure or damage when used
beyond the guaranteed ranges. Even within the guaranteed ranges, consider normally foreseeable
failure rates or failure modes in semiconductor devices and employ systemic measures such as failsafes, so that the equipment incorporating Hitachi product does not cause bodily injury, fire or other
consequential damage due to operation of the Hitachi product.
5. This product is not designed to be radiation resistant.
6. No one is permitted to reproduce or duplicate, in any form, the whole or part of this document without
written approval from Hitachi.
7. Contact Hitachi’s sales office for any questions regarding this document or Hitachi semiconductor
products.
Hitachi, Ltd.
Semiconductor & Integrated Circuits.
Nippon Bldg., 2-6-2, Ohte-machi, Chiyoda-ku, Tokyo 100-0004, Japan
Tel: Tokyo (03) 3270-2111 Fax: (03) 3270-5109
URL NorthAmerica : http:semiconductor.hitachi.com/
For further information write to:
Hitachi Semiconductor
(America) Inc.
179 East Tasman Drive,
San Jose,CA 95134
Tel: <1> (408) 433-1990
Fax: <1>(408) 433-0223
Europe : http://www.hitachi-eu.com/hel/ecg
Asia (Singapore) : http://www.has.hitachi.com.sg/grp3/sicd/index.htm
Asia (Taiwan) : http://www.hitachi.com.tw/E/Product/SICD_Frame.htm
Asia (HongKong) : http://www.hitachi.com.hk/eng/bo/grp3/index.htm
Japan : http://www.hitachi.co.jp/Sicd/indx.htm
Hitachi Europe GmbH
Electronic components Group
Dornacher Stra§e 3
D-85622 Feldkirchen, Munich
Germany
Tel: <49> (89) 9 9180-0
Fax: <49> (89) 9 29 30 00
Hitachi Europe Ltd.
Electronic Components Group.
Whitebrook Park
Lower Cookham Road
Maidenhead
Berkshire SL6 8YA, United Kingdom
Tel: <44> (1628) 585000
Fax: <44> (1628) 778322
Hitachi Asia Pte. Ltd.
16 Collyer Quay #20-00
Hitachi Tower
Singapore 049318
Tel: 535-2100
Fax: 535-1533
Hitachi Asia Ltd.
Taipei Branch Office
3F, Hung Kuo Building. No.167,
Tun-Hwa North Road, Taipei (105)
Tel: <886> (2) 2718-3666
Fax: <886> (2) 2718-8180
Copyright ' Hitachi, Ltd., 1999. All rights reserved. Printed in Japan.
Hitachi Asia (Hong Kong) Ltd.
Group III (Electronic Components)
7/F., North Tower, World Finance Centre,
Harbour City, Canton Road, Tsim Sha Tsui,
Kowloon, Hong Kong
Tel: <852> (2) 735 9218
Fax: <852> (2) 730 0281
Telex: 40815 HITEC HX
 Loading...
Loading...