

Baldor SD23H2A04-E, SD23H2A10-E, SD23H2A15-E, SD23H2A22-E, SD23H2A45-ER Installation & Operating Manual
...Page 1
$25.00
SERIES 23H
AC Servo Control
INSTALLATION & OPERATING MANUAL
10/95 MN723
MN723H-10/95 11/28/95 1:04 AM Page 1 (Black plate)
Page 2
Table of Contents
Section 1
General Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
Warranty . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
Safety Notice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-2
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-3
Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-7
Section 2
Installation
Location and Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
Altitude Derating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
Temperature Derating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
Main Circuit Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
AC Line Impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-2
AC Power Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-4
Wiring and Protective Devices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
Operating 460 VAC Control on 380-400 VAC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-11
Operating Control with Single Phase Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-11
Single Phase Derating . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-12
Motor Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-12
Dynamic Braking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-14
Resolver Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-19
Incremental Position Output . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-21
Remote Keypad Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-22
Logic and Control Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-24
Analog Inputs and Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-25
External Trip Input . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-27
Opto-isolated Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-28
Opto-isolated Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-30
Operating Mode Connection Diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-32
Keypad Only Operating Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-32
Standard Run 3 Wire Control Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-33
15 Speed, Two Wire Control Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-34
Bipolar Speed or Torque Control Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-36
Process Control Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-37
Pre-Operation Checklist . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-41
Minimum Parameter and Control Setup Checklist . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-42
TABLE OF CONTENTS
MN723H-10/95 11/28/95 1:04 AM Page 3 (Black plate)
Page 3
Section 3
Keypad Programming and Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-1
Using the Keypad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-1
Parameter List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-3
Display Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-5
Adjusting Display Contrast . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-5
Program Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-6
Control Software Parameter Descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-6
Accessing Parameter Blocks for Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-19
Programming or Changing Parameters when Security Code Not Used . . . . . . . . . . . . . . . .3-20
System Security . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-21
Program or Change Security System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-22
Program or Change Security System Access Timeout Parameter . . . . . . . . . . . . . . . .3-23
Program or Change Parameter with Security Code in Use . . . . . . . . . . . . . . . . . . . . . . . . .3-24
Operating the Control from the Keypad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-25
Accessing Jog Command . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-25
Keypad Entered Speed Adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-26
Arrow Key Speed Adjustment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-27
Reset Control to Factory Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-28
Display Key Functions and Screens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-29
Section 4
Diagnostic Info and Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1
How to Access Diagnostic Information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1
No Keypad Display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-3
How to Access The Fault Log . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-4
Troubleshooting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-7
Fault Symptoms and Possible Causes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-8
Improper Motor Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-13
Manually Tuning the Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-13
Appendix A Baldor District Offices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
Appendix B Control Watts Loss for Enclosure Sizing . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-2
Appendix C Terminal Torque Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-3
Appendix D Recommended Wire Sizes and Protective Devices . . . . . . . . . . . . . . . . . . .5-4
Appendix E Short Circuit Current Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-8
Appendix F Mounting Dimensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-10
Appendix G Parameter List . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-18
TABLE OF CONTENTS
MN723H-10/95 11/28/95 1:04 AM Page 4 (Black plate)
Page 4
Section 1
General Information
Intr
oduction
The Baldor Series 23H PWM control uses flux vector technology. Flux vector technology is a closed
loop control scheme using an algorithm to adjust the phase of voltage and current applied to a three
phase permanent magnet synchronous motor. The servo control separates the current into it's flux
and torque producing components. They are independently adjusted and vectorially added to
maintain a 90 degree relationship between them. This produces maximum torque from base speed
down to and including zero speed. Above base speed, the flux component is reduced for constant
horsepower operation.
The control should be sized to the motor using the rated output current of the control.
The Baldor Series 23H control may be used in many different applications. It may be programmed
by the user to operate in four different operating zones; 2.5 KHz PWM or 8.0 KHz PWM constant
torque or variable torque. It can also be configured to function in a number of modes depending
upon what the application requires and user preference.
It is the responsibility of the user to determine the optimum operating zone and mode to interface
the control to the application. These choices can be made through the keypad on the face of the
controller as explained in Section 3 of this manual.
Warranty
BALDOR warrants that the products sold will be free from defects in material and workmanship and
perform to BALDOR's applicable published specifications for a period of two (2) years from the date
of shipment from BALDOR's plant. BALDOR extends this limited warranty to each buyer of the
control for the purpose of resale and to the original purchaser for use. (Use shall be defined as
installation and application of power.) The liability of BALDOR hereunder shall be limited to replacing
or repairing, at its option, any defective units or parts thereof which are returned F.O.B. BALDOR's
plant. In no event shall BALDOR be liable for any consequential or incidental damages.
Equipment or parts which have been subjected to abuse, misuse, accident, alteration, neglect,
unauthorized repair or installation are not covered by warranty. BALDOR shall make the final
determination as to the existence and cause of any alleged defect. No liability is assumed for
expendable items such as fuses. No warranty is made with respect to custom equipment or
products produced to Buyers specifications except as specially stated in writing by BALDOR in the
contract for such custom equipment.
This warranty is the only warranty made by BALDOR with respect to the goods delivered hereunder,
and may be modified or amended only by a written agreement signed by a duly authorized officer of
BALDOR and accepted by Buyer.
Warranty of any product purchased by BALDOR from others is limited in time and scope to any
warranty given BALDOR by such suppliers.
Except as hereinabove provided. BALDOR MAKES NO WARRANTIES, EXPRESS OR IMPLIED,
INCLUDING ANY WARRANTY OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR
PURPOSE.
1-1GENERAL INFORMATION
MN723H-10/95 11/28/95 1:04 AM Page 5 (Black plate)
Page 5
Safety Notice
THIS EQUIPMENT CONTAINS VOLTAGES WHICH MAY BE AS HIGH AS 1000 VOLTS AND
ROTATING PARTS ON MOTORS AND DRIVEN MACHINES. HIGH VOLTAGE AND
MOVING PARTS CAN CAUSE SERIOUS OR FATAL INJURY. ONLY QUALIFIED
PERSONNEL FAMILIAR WITH THIS MANUAL AND ANY DRIVEN MACHINERY SHOULD
ATTEMPT TO START-UP OR TROUBLESHOOT THIS EQUIPMENT.
OBSERVE THESE PRECAUTIONS:
USE EXTREME CAUTION, DO NOT TOUCH ANY CIRCUIT BOARD, POWER DEVICE OR
ELECTRICAL CONNECTION WITHOUT INSURING THAT HIGH VOLTAGE IS NOT
PRESENT.
THE UNIT MUST BE PROPERLY GROUNDED. DO NOT APPLY AC POWER BEFORE
FOLLOWING GROUNDING INSTRUCTIONS.
DO NOT OPEN COVER FOR 5 MINUTES AFTER REMOVING AC POWER, TO ALLOW
CAPACITORS TO DISCHARGE.
IMPROPER CONTROL OPERATION MAY CAUSE VIOLENT MOTION OF MOTOR SHAFT
AND DRIVEN EQUIPMENT. BE CERTAIN THAT UNEXPECTED MOTOR SHAFT
MOVEMENT WILL NOT CAUSE INJURY TO PERSONNEL OR DAMAGE TO EQUIPMENT.
PEAK TORQUES OF SEVERAL TIMES RATED MOTOR TORQUE CAN OCCUR DURING A
CONTROL FAILURE.
MOTOR CIRCUIT MAY HAVE HIGH VOLTAGE PRESENT WHENEVER AC POWER IS
APPLIED, EVEN WHEN MOTOR IS NOT ROTATING.
SUITABLE FOR USE ON A CIRCUIT CAPABLE OF DELIVERING NOT MORE THAN THE
MAXIMUM LINE SHORT CIRCUIT CURRENT AMPERES LISTED IN APPENDIX E,
230 VAC OR 460 VAC MAXIMUM PER CONTROLLER RATING.
1-2 GENERAL INFORMATION
MN723H-10/95 11/28/95 1:04 AM Page 6 (Black plate)
Page 6
Specifications
Power .75 - 37.2 KW (1 - 50 HP) @ 230 VAC
.75 - 186.5 KW (1 - 250 HP) @ 460 VAC
Input Frequency 50 / 60 HZ
Output Voltage 0 to max input VAC
Output Current See Control Rating Table
Service Factor 1.0
Duty Continuous
Overload Capacity Constant Torque: 200% for 3 secs
150% for 60 secs
Variable Torque: 115% for 60 secs
Operating Conditions:
Rated Input Voltages and Frequencies:
(Jumper Selectable)
230 VAC Models 180 - 264 VAC @ 60 Hz
180 - 230 VAC @ 50 Hz
460 VAC Models 340 - 457 VAC @ 50 Hz
400 - 528 VAC @ 60 Hz
Input Line Impedance 3% Minimum Required
Ambient Temperature Operating: 0 to +40 deg C
Storage: -30 to +65 deg C
Humidity 10 to 90 % non-condensing
Altitude Sea level to 3300 feet without derating
Keypad Display:
Display Backlit LCD alpha-numeric, 2 lines
x 16 characters each line
Keys 12 key membrane with tactile feel
1-3GENERAL INFORMATION
MN723H-10/95 11/28/95 1:04 AM Page 7 (Black plate)
Page 7
Functions Output status monitoring
Digital speed control
Parameter setting and display
Fault log display
Motor run and jog
Local / Remote toggle
LED Indicators Forward run command
Reverse run command
Stop command
Jog active
Remote Mount 100 feet max from control
Control Specifications:
Control Method PWM
Velocity Loop Bandwidth Adjustable to 60 Hz
Current Loop Bandwidth Adjustable to 400 Hz
Maximum Output Frequency 500 Hz
8.0 KHz PWM Frequency Full rating 1-8 KHz PWM frequency, adjustable to
16 KHz with derating- See note preceding Ratings
Tables
Selectable Operating Modes Keypad
Standard 3 Wire Control
Two Wire Control w / 15 Preset Speeds
Bipolar Speed / Torque Control
Serial
Process
Dif
ferential Analog Input:
Common Mode Rejection 40 db
Full Scale Range +/-5VDC, +/-10VDC, 4-20 mA
Auto-selectable Resolutions 12 bits + sign below 1VDC command
9 bits + sign above 1VDC command
Update rate 2.0 msec in speed mode
1.0 msec in torque mode
1-4 GENERAL INFORMATION
MN723H-10/95 11/28/95 1:04 AM Page 8 (Black plate)
Page 8
Other Analog Input:
Full Scale Range 0 - 10 VDC
Resolution 9 bits + sign
Update Rate 2.0 msec
Analog Outputs: 2 Assignable
Full Scale Range 0 - 5 VDC
Resolution 8 bits
Update Rate 2.0 msec
Digital Inputs:
Opto-isolated Logic Inputs 9 Assignable
Rated Voltage 10 - 30 VDC (closed contacts std)
Input Impedance 6.8 K Ohms
Update Rate 8 msec
Digital Outputs:
Opto-isolated Logic Outputs 4 Assignable
ON Current Sink 60 mA Max
ON Voltage Drop 2 VDC Max
Update Rate 8 msec
1-5GENERAL INFORMATION
MN723H-10/95 11/28/95 1:04 AM Page 9 (Black plate)
Page 9
Diagnostic Indications:
Current Sense Fault Regeneration (DB) Overload
Ground Fault Soft Start Fault
Instantaneous Overcurrent Undervoltage
Invalid Power Base ID Ready
Line Power Loss Parameter Loss
Microprocessor Failure Overload
Overtemperature (Motor or Control) Overvoltage
Overspeed
Following Error
NOTE: ALL SPECIFICATIONS ARE SUBJECT TO CHANGE WITHOUT NOTICE.
Control Ratings
Ratings Tables follow
NOTE: DERATE THE CONTINUOUS AND PEAK CURRENT OUTPUT RATINGS BY
30% 16 KHz PWM FREQUENCY. DERATE PROPORTIONALLY BETWEEN
8.0 KHz AND 16 KHz.
1-6 GENERAL INFORMATION
MN723H-10/95 11/28/95 1:05 AM Page 10 (Black plate)
Page 10

Ratings Series 23H Stock Products
1-7GENERAL INFORMATION
QUIET 8.0 kHz PWM STANDARD 2.5 kHz PWM
CATALOG INPUT CONSTANT TORQUE VARIABLE TORQUE CONSTANT TORQUE VARIABLE TORQUE
NO. VOLT SIZE IC IP KW HP IC IP KW HP IC IP KW HP IC IP KW HP
SD23H2A03-E 230 A 3 6 .56 .75 3.6 4.2 .75 1 4 8 .75 1 6.8 7.8 1.5 2
SD23H2A04-E 230 A 4 8 .75 1 6.8 7.8 1.5 2 7 14 1.5 2 9.6 11 2.2 3
SD23H2A07-E 230 A 7 14 1.5 2 9.6 11 2.2 3 10 20 2.2 3 15.2 17.5 3.7 5
SD23H2A10-E 230 A 10 20 2.2 3 15.2 17.5 3.7 5 15 30 3.7 5 15.2 17.5 3.7 5
SD23H2A15-E 230 B 15 30 3.7 5 22 25 5.5 7.5 22 44 5.5 7.5 28 32 7.4 10
SD23H2A22-E 230 B 22 44 5.5 7.5 28 32 7.4 10 28 56 7.4 10 28 32 7.4 10
SD23H2A30-ER 230 C 30 60 7.4 10 42 48 11.1 15 42 72 11.1 15 54 62 14.9 20
SD23H2A45-ER 230 C 45 90 11.1 15 54 62 14.9 20 55 100 14.9 20 68 78 18.6 25
SD23H2A55-ER 230 C 55 122 14.9 20 54 62 14.9 20 55 130 14.9 20 54 62 14.9 20
Ratings 23H Custom Products
QUIET 8.0 kHz PWM STANDARD 2.5 kHz PWM
CATALOG INPUT CONSTANT TORQUE VARIABLE TORQUE CONSTANT TORQUE VARIABLE TORQUE
NO. VOLT SIZE IC IP KW HP IC IP KW HP IC IP KW HP IC IP KW HP
SD23H4A02-E 460 A 2 4 .75 1 3.4 3.9 1.5 2 3.5 7 1.5 2 4.8 5.5 2.2 3
SD23H4A04-E 460 A 4 8 1.5 2 4.8 5.5 2.2 3 5 10 2.2 3 7.6 8.7 3.7 5
SD23H4A05-E 460 A 5 10 2.2 3 7.6 8.7 3.7 5 7 15 3.7 5 7.6 8.7 3.7 5
SD23H4A08-E 460 B 8 16 3.7 5 11 12.7 5.5 7.5 11 22 5.5 7.5 14 16.1 7.4 10
SD23H4A11-E 460 B 11 22 5.5 7.5 14 16.1 7.4 10 14 28 7.4 10 14 16.1 7.4 10
SD23H4A15-E 460 C 15 30 7.4 10 21 24 11.1 15 21 36 11.1 15 27 31 14.9 20
SD23H4A22-ER 460 C 22 44 11.1 15 27 31 14.9 20 27 54 14.9 20 34 39 18.6 25
SD23H4A30-ER 460 C 30 60 14.9 20 27 31 14.9 20 30 70 14.9 20 34 39 18.6 25
MN723H-10/95 11/28/95 1:07 AM Page 11 (Black plate)
Page 11
1-8 GENERAL INFORMATION
MN723H-10/95 11/28/95 1:07 AM Page 12 (Black plate)
Page 12
Section 2
Installation
This section covers all instructions for proper mounting and wiring of the Baldor Series 23H servo
control. All tools required for normal installation should be available from any electrical service
technician. If problems arise after installation, please refer to Section 4 Diagnostics and
Troubleshooting.
Location and Mounting
Select a mounting surface for the control that will allow the control to be mounted in a vertical
position using the mounting holes provided. The area selected should allow for free air circulating
around the control. Provide for at least two inches of clearance on all sides for maximum cooling
efficiency.
CAUTION: AVOID LOCATING CONTROL IMMEDIATELY ABOVE OR BESIDE HEAT
GENERATING EQUIPMENT, OR DIRECTLY BELOW WATER OR STEAM
PIPES.
The control is designed for panel mounting. Mount in a clean dry enclosure with an ambient
temperature less than +40 deg C. DO NOT mount control above transformer or other sources of
heat. DO provide 2" minimum clear area above and below the control to allow free flow of air over
heatsink on the back of the enclosure.
Provide access to the front of the enclosure to adjust parameters and to observe the keypad. Allow
room to remove the front cover to gain access to the power components. Mounting dimensions are
provided in Section 5.
ALTITUDE DERATING: Control ratings apply to 3300 feet (1000 meters) altitude without
derating required. For installations at higher altitudes derate the
continuous and peak output currents of the control by 2% for
each 1000 feet above 3300 feet.
TEMPERATURE DERATING: Control ratings apply to 40°C ambient. Derate output by 2%/°C
above 40°C, up to a maximum of 60°C.
Main Cir
cuit Wiring
Inter-connection wiring is required between the vector control, AC power source, host controller and
any optional control stations. Use UL Listed closed loop connectors sized for the wire gage involved.
Connectors are to be installed using the crimp tool specified by the connector manufacturer.
CAUTION: SERIES 23H CONTROLS FEATURE UL APPROVED ADJUSTABLE MOTOR
OVERLOAD PROTECTION SUITABLE FOR MOTORS NO LESS THAN 50%
OF THE OUTPUT RATING OF THE CONTROL. OTHER GOVERNING ENCIES
SUCH AS NEC MAY REQUIRE SEPARATE OVER-CURRENT PROTECTION.
THE INSTALLER OF THIS EQUIPMENT IS RESPONSIBLE FOR COMPLYING
WITH THE NATIONAL ELECTRIC CODE AND ANY APPLICABLE LOCAL
2-1INSTALLATION
MN723H-10/95 11/28/95 1:07 AM Page 13 (Black plate)
Page 13
CODES WHICH GOVERN SUCH PRACTICES AS WIRING PROTECTION,
GROUNDING, DISCONNECTS AND OTHER CURRENT PROTECTION.
SEE APPENDIX E FOR MAXIMUM AC LINE SHORT CIRCUIT CAPACITIES
FOR ALL CONTROL CATALOG LISTINGS.
AC Line Impedance
The Baldor Series 23H servo control requires a minimum line impedance of 3%. If the incoming
power line does not have a minimum of 3% impedance, the addition of a line reactor will provide the
needed impedance in most cases. Use the formula below to calculate the size of the line reactor you
must provide. Line reactors are available from Baldor. Note: Continuous input currents for Series 23H
controls provided in Table 2.0 which follows.
L = (V L-L x .03) / (I x 1.732 x 377)
Where: L = minimum line inductance in henrys
V
L-L = input voltage measured from line to line
.03 = desired percentage of impedance
I = the continuous input current rating of the control
1.732 = square root of three
377 = constant used if the input frequency is 60 Hz. Use 314 if the Input
frequency is 50 Hz.
The controller is self protected from normal AC line transients and surges provided input impedance
from the AC line is at least 3% (voltage drop at the input is 3%minimum when the control draws
rated input current). Additional external protection may be required if high energy surges are present
on the incoming power source. These surges could be caused by sharing a power source with arc
welding equipment, large motors being started across the line, or other industrial equipment
requiring large surge currents. To prevent control damage due to power source disturbances the
following should be considered:
a. Connect the control on a feeder line with a line impedance of 3% minimum.
b. Supply power to the control through a 3% minimum impedance line reactor or
transformer.
Line reactors serve several purposes:
1) minimize voltage spikes from the power line that may cause the control to trip on overvoltage spikes.
2) minimize voltage harmonics from the control to the power line.
3) provide additional short circuit capability at the control.
CAUTION: DO NOT USE POWER FACTOR CORRECTION CAPACITORS ON THE INPUT
POWER LINES TO THE CONTROL OR DAMAGE TO THE CONTROL MAY
RESULT.
2-2 INSTALLATION
MN723H-10/95 11/28/95 1:07 AM Page 14 (Black plate)
Page 14
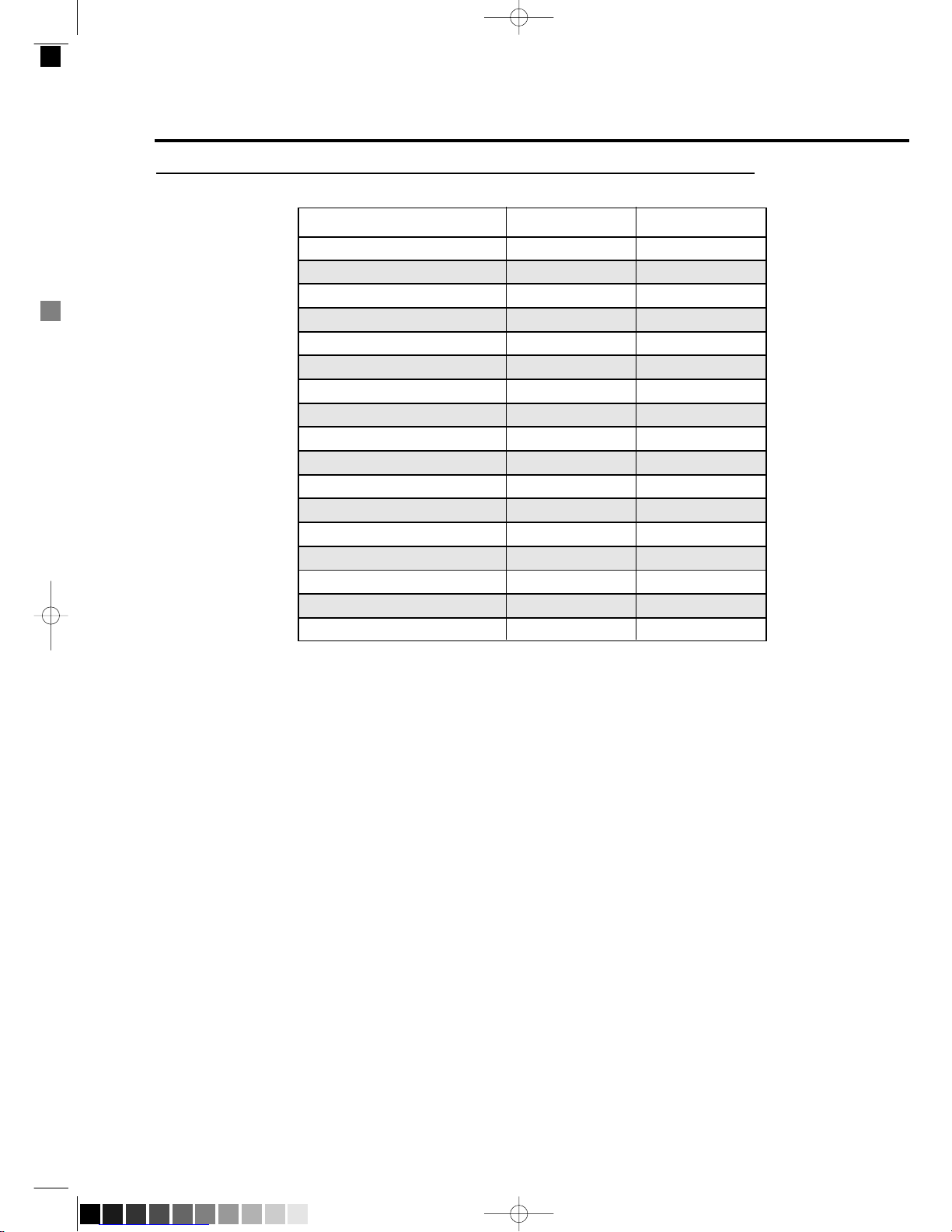
Table 2.0A Input Current Requirements - Series 23H Stock Products
2-3INSTALLATION
Catalog Number Line Voltage Input Current
SD23H2A03-E 230 6.8
SD23H2A04-E 230 9.6
SD23H2A07-E 230 15.2
SD23H2A10-E 230 15.2
SD23H2A15-E 230 28
SD23H2A22-E 230 28
SD23H2A30-ER 230 54
SD23H2A45-ER 230 68
SD23H2A55-ER 230 54
SD23H4A02-E 460 4.8
SD23H4A04-E 460 7.6
SD23H4A05-E 460 7.6
SD23H4A08-E 460 14
SD23H4A11-E 460 14
SD23H4A15-ER 460 27
SD23H4A22-ER 460 34
SD23H4A30-ER 460 34
MN723H-10/95 11/28/95 1:07 AM Page 15 (Black plate)
Page 15
AC Power Connections
The control requires input power protection in the form of either a circuit breaker or fuses. Circuit
breakers are recommended. See Table 2.1 for fuse and breaker sizing. Connect the fused three
phase AC power lines to the input power terminals L1, L2, and L3. The phase rotation of the
incoming power source is unimportant as the control is not phase sensitive.
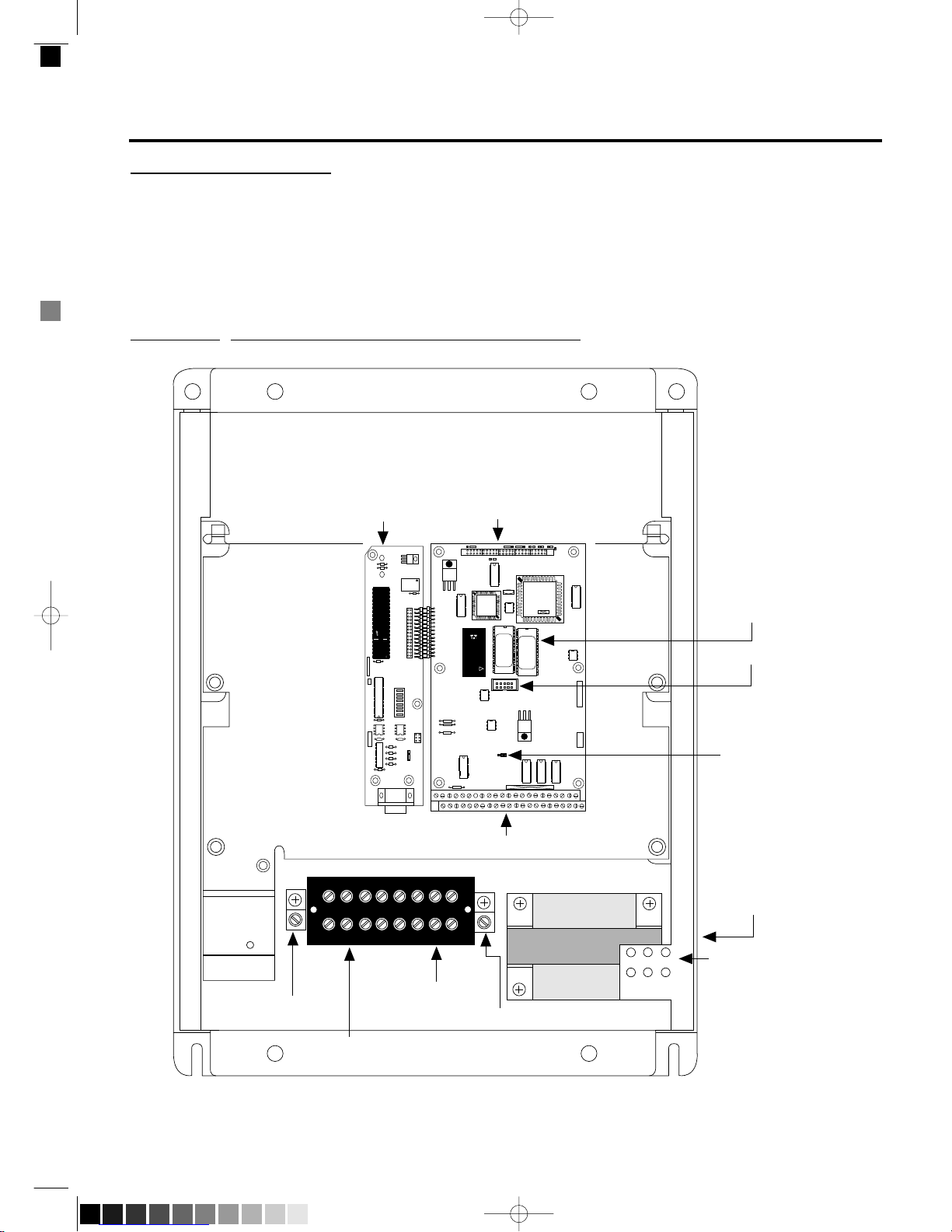
Figure 2-1 Series 23H Control with Cover Removed
2-4 INSTALLATION
DS1225Y-200
NONVOLATILE SRAM
9232D1 025313
DALLAS
59312
PC 16880CN
NE18550 FN
PATENTED
AG
X0-54B
3.6864 MHz
Dale
93-40
C7
04
C8
U6
C14
C10
C11
C12
C13
OTHER
RS232
JP3
2 WIRE
4 WIRE
C9
05
S1
SERIAL NO.
1 2 3 4 5 6 7 8
C6
C2
C3
C1
C4
+
+
U1
C5
VR1
U8
1
9
J4
19
29
VR1
J2
X1
RXD16
BALDOR SWEO DRIVE
SERIAL NO.
U10
ASSY NO 00839
JP1
U10
U9
Optional
Expansion Board
Control Board
J1 Control Connections
L1 L2 L3 T1 T2 T3 B+/R1 R2
(Labeled B+ and B- for
the “EO” controls
Main Circuit Connections
Control
Transformer T1
Keypad Connector
Software EPROMS
(Example shown is the “C” size controller. Other enclosure sizes vary
slightly in terminal sizes, transformer location, etc.
Power Ground
Motor Ground
JP1 Jumper
for 4-20mA
D1
D2
GND
Braking Logic
connections for
size C,D,E,F
“EO” Controls
(Not present on
Size A and B, “E”
Controls)
MN723H-10/95 11/28/95 1:07 AM Page 16 (Black plate)
Page 16
Wiring and Protective Devices
This control must be provided with a suitable input power protection device. Use the recommended
fuses or circuit breaker listed in Tables which follow. Input and output wire size is based on the use of
75 degree C rated copper conductor wire. The table is specified for NEMA B motors.
Circuit Breaker 3 phase, thermal magnetic. Equal to GE type THQ or
TEB for 230 VAC or GE type TED for 460 VAC.
Fast Action Fuses Buss KTN on 230 VAC, Buss KTS on 460 VAC or equivalent.
Time Delay Fuses Buss FRN on 230 VAC or Buss FRS on 460 VAC or equivalent.
2-5INSTALLATION
MN723H-10/95 11/28/95 1:07 AM Page 17 (Black plate)
Page 17
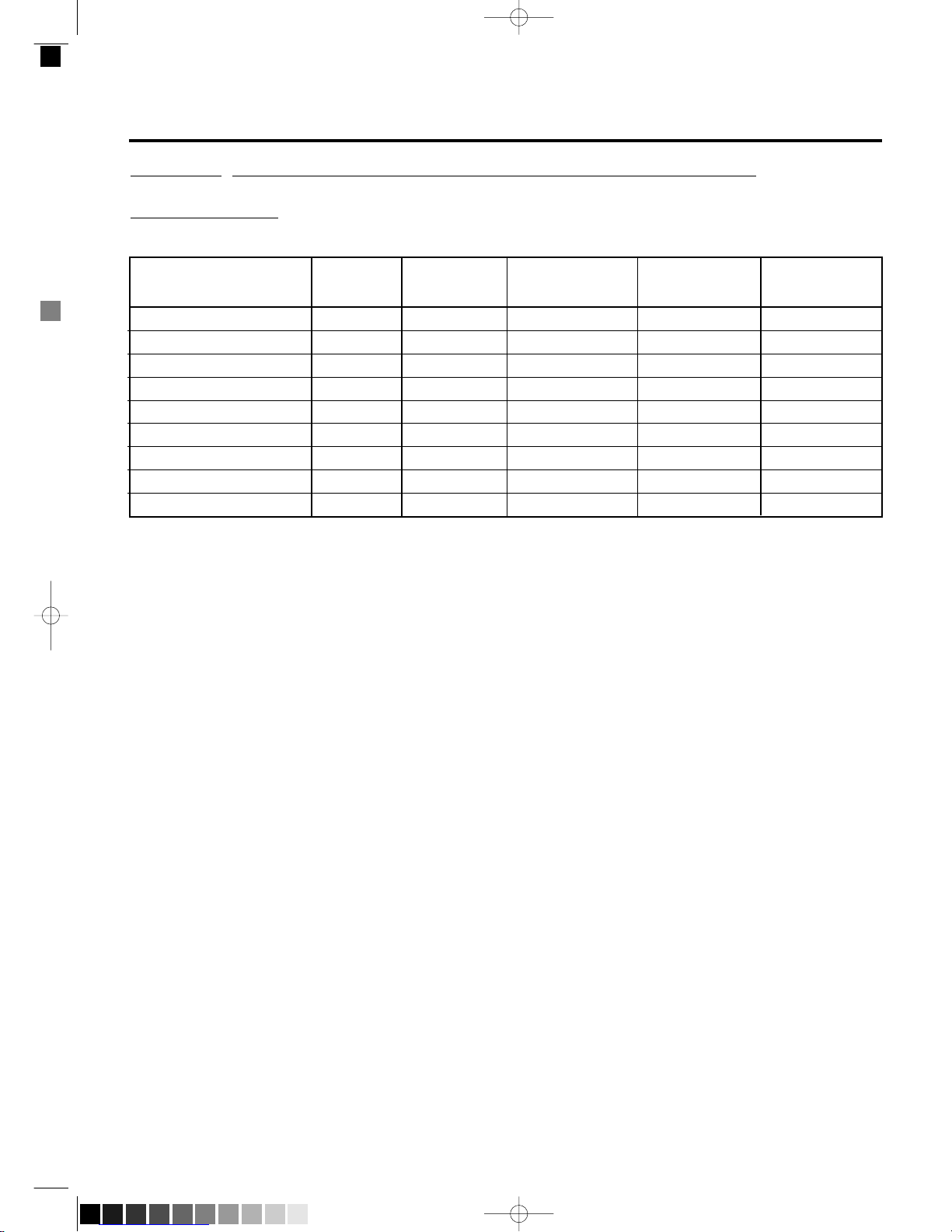
Table 2.1A Series 23H Stock Product Wire Size and Protection Devices
230VAC Controls
Catalog No. Max CT Input Input Fuse Input Fuse Wire Gauge
HP Breaker Fast Acting Time Delay AWG
SD23H2A03-E 1 15A 15A 15A 14
SD23H2A04-E 2 20A 20A 15A 14
SD23H2A07-E 3 30A 30A 15A 14
SD23H2A10-E 5 40A 40A 20A 12
SD23H2A15-E 7.5 60A 60A 30A 10
SD23H2A22-E 10 80A 80A 40A 8
SD23H2A30-ER 15 60A 60A 60A 4
SD23H2A45-ER 20 75A 75A 75A 3
SD23H2A55-ER 25 100A 100A 100A 2
NOTE: ALL WIRE SIZES BASED ON 75° C COPPER WIRE, 40°C AMBIENT, 3% LINE
IMPEDANCE. HIGHER TEMPERATURE SMALLER GAUGE WIRE MAY BE USED
PER NEC AND LOCAL CODES.
2-6 INSTALLATION
MN723H-10/95 11/28/95 1:08 AM Page 18 (Black plate)
Page 18
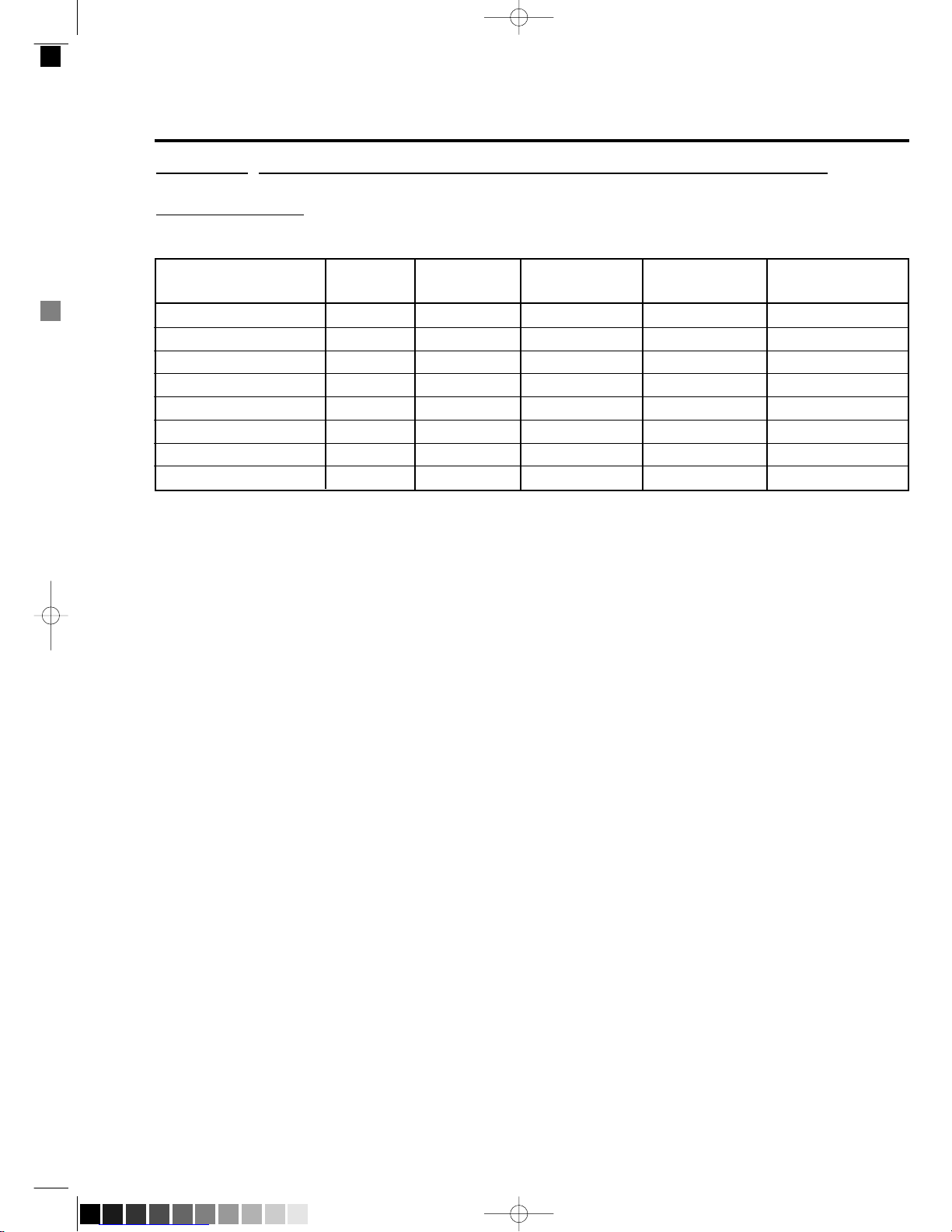
Table 2.1B Series 23H Product Wire Size and Protection Devices (Continued)
460VAC Controls
Catalog No. Max CT Input Input Fuse Input Fuse Wire Gauge
HP Breaker Fast Acting Time Delay AWG
SD23H4A02-E 2 10A 10A 10A 14
SD23H4A04-E 3 15A 15A 15A 14
SD23H4A05-E 5 20A 20A 15A 14
SD23H4A08-E 7.5 30A 30A 15A 14
SD23H4A11-E 10 40A 20A 20A 12
SD23H4A15-ER 15 30A 30A 30A 8
SD23H4A22-ER 20 40A 40A 40A 8
SD23H4A30-ER 25 50A 50A 50A 6
NOTE: ALL WIRE SIZES BASED ON 75° C COPPER WIRE, 40°C AMBIENT, 3% LINE
IMPEDANCE. HIGHER TEMPERATURE SMALLER GAUGE WIRE MAY BE USED
PER NEC AND LOCAL CODES.
2-7INSTALLATION
MN723H-10/95 11/28/95 1:08 AM Page 19 (Black plate)
Page 19
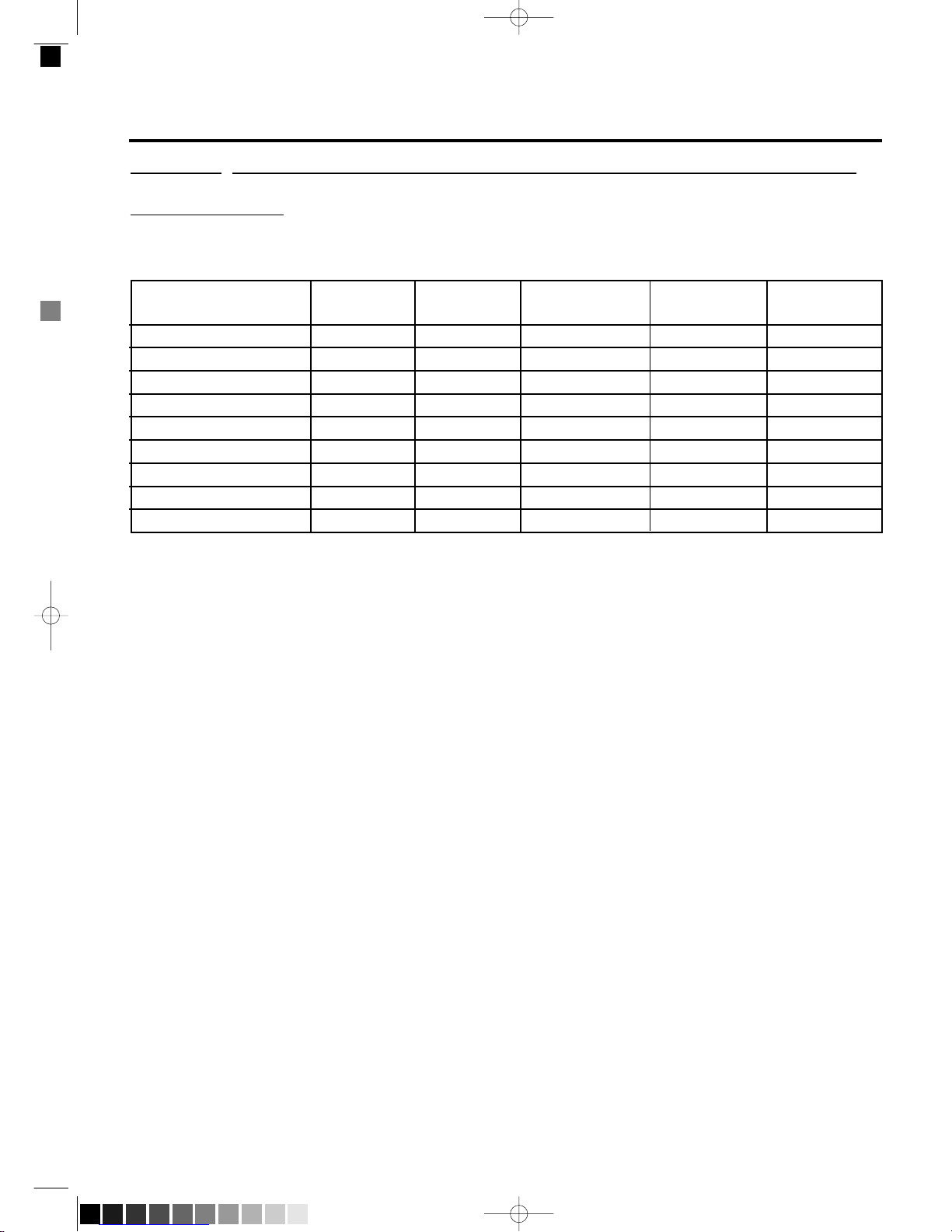
Table 2.2A Series 23H Stock Single Phase Rating Wire Size and Protection Devices
230 VAC Controls
Catalog No. Max CT Input Input Fuse Input Fuse Wire Gauge
HP Breaker Fast Acting Time Delay AWG
SD23H2A03-E 1 15A 15A 15A 14
SD23H2A04-E 2 15A 15A 15A 14
SD23H2A07-E 3 15A 15A 15A 14
SD23H2A10-E 5 15A 15A 15A 14
SD23H2A15-E 7.5 20A 20A 20A 12
SD23H2A22-E 10 30A 30A 30A 10
SD23H2A30-ER 15 40A 40A 40A 8
SD23H2A45-ER 20 60A 60A 60A 4
SD23H2A55-ER 25 75A 75A 75A 4
NOTE: ALL WIRE SIZES BASED ON 75° C COPPER WIRE, 40°C AMBIENT, 3% LINE
IMPEDANCE. HIGHER TEMPERATURE SMALLER GAUGE WIRE MAY BE USED
PER NEC AND LOCAL CODES.
2-8 INSTALLATION
MN723H-10/95 11/28/95 1:08 AM Page 20 (Black plate)
Page 20
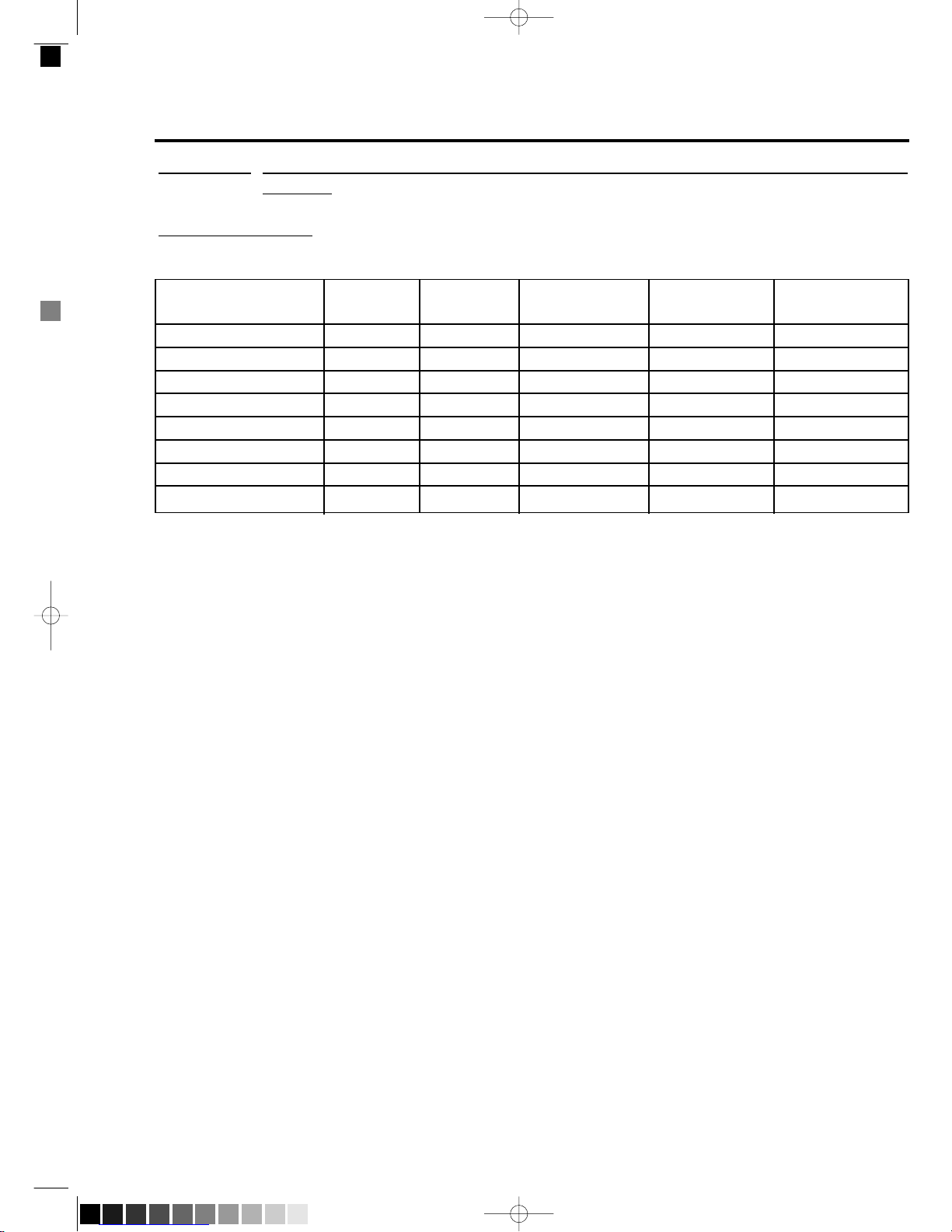
Table 2.2B Series 23H Custom Single Phase Rating Product Wire Size and Protection
Devices
460 VAC Controls
Catalog No. Max CT Input Input Fuse Input Fuse Wire Gauge
HP Breaker Fast Acting Time Delay AWG
SD23H4A02-E 2 15A 15A 15A 14
SD23H4A04-E 3 15A 15A 15A 14
SD23H4A05-E 5 15A 15A 15A 14
SD23H4A08-E 7.5 15A 15A 15A 14
SD23H4A11-E 10 15A 15A 15A 14
SD23H4A15-ER 15 25A 25A 25A 10
SD23H4A22-ER 20 30A 30A 30A 8
SD23H4A30-ER 25 40A 40A 40A 8
NOTE: ALL WIRE SIZES BASED ON 75° C COPPER WIRE, 40°C AMBIENT, 3% LINE
IMPEDANCE. HIGHER TEMPERATURE SMALLER GAUGE WIRE MAY BE USED
PER NEC AND LOCAL CODES.
2-9INSTALLATION
MN723H-10/95 11/28/95 1:08 AM Page 21 (Black plate)
Page 21
Connect an earth ground to the control according to applicable local electrical codes. The earth
ground should be connected to the control chassis ground lug. Also connect motor ground to
control ground lug.
The use of a power disconnect is recommended between the input power and the control to provide
a fail safe method to disconnect the control from the input power. The control will remain in a
powered-up condition until all input power is removed from the control and the internal bus voltage is
depleted.
CAUTION: DO NOT ATTEMPT TO SERVICE THIS EQUIPMENT WHILE BUS VOLTAGE IS
PRESENT WITHIN THE CONTROL. REMOVE INPUT POWER AND WAIT AT
LEAST 5 MINUTES FOR THE RESIDUAL VOLTAGE IN THE BUS
CAPACITORS TO DISSIPATE.
CAUTION: THIS UNIT HAS AN AUTOMATIC RESTART FEATURE THAT WILL START
THE CONTROL WHENEVER INPUT POWER IS APPLIED AND A
MAINTAINED EXTERNAL RUN (FWD OR REV) COMMAND IS GIVEN TO THE
CONTROL. IF AN AUTOMATIC RESTART OF THE CONTROL COULD CAUSE
PERSONAL INJURY OR HARM, THE AUTO RESTART FEATURE OF THE
CONTROL SHOULD BE DISABLED BY EXTERNAL CONTROL WIRING
BREAKING THE ENABLE OR RUN SWITCH INPUTS.
2-10 INSTALLATION
MN723H-10/95 11/28/95 1:08 AM Page 22 (Black plate)
Page 22
Operating a 460 VAC Control on 380-400 VAC
Size A and B controls may be used directly with a 380-400 VAC power source, no reconfiguration of
the control is necessary.
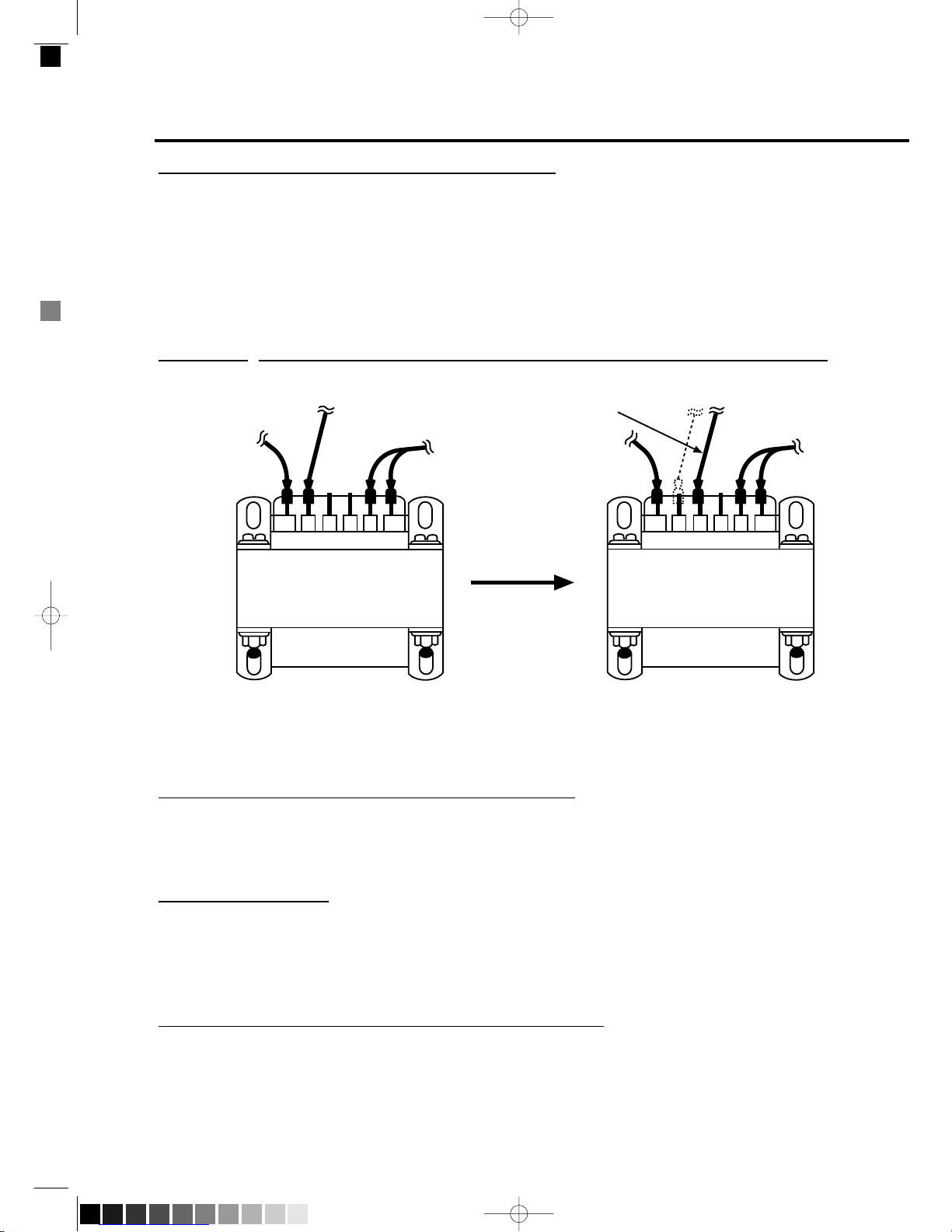
Control sizes C, D, E, and F all must be reconfigured for operation on the reduced line voltage.
Specifically, the control transformer (see Figure 2-2) must have the wire on terminal 5 moved to
terminal 4 as shown below. Remove the front cover to gain access to the control transformer.
Figure 2-2 Configuring the Control Transformer for 380 - 400 VAC Operation
Operating the Control with a Single Phase Input
Single phase AC input power can be provided to the control instead of three (3) phase input to the
controls when the changes listed below have been made.
Power Connections
Connect the incoming power to input terminals L1 and L2. Place a jumper between control input
terminals L2 and L3. Size this jumper wire the same as the incoming line to L1. Change circuit board
jumpers as instructed below.
Hardware Jumpers Changes for Single Phase Input
1-50 HP 230 VAC controls: No hardware jumper changes to control necessary.
1-10 HP 460 VAC controls: No hardware jumper changes to control necessary.
2-11INSTALLATION
1 2 3 4 5 6
460V
1 2 3 4 5 6
380V/400V
NOTE: WIRES 3 & 6
MAY NOT BE PRESENT
ON ALL MODELS
MOVE WIRE FROM
POSITION 5 TO 4
MN723H-10/95 11/28/95 1:08 AM Page 23 (Black plate)
Page 23
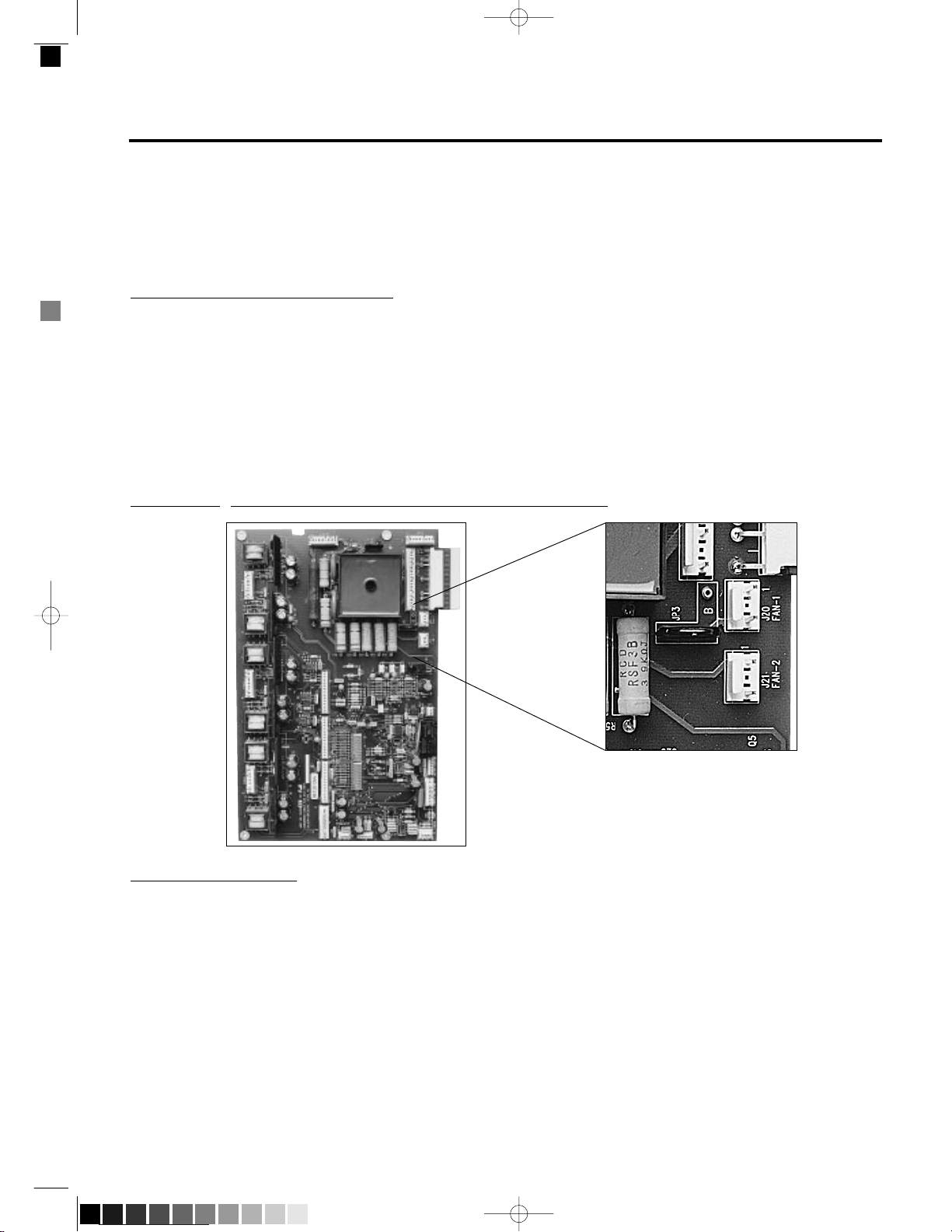
15-60 HP 460 VAC controls: Jumper JP3 on the gate drive circuit board (Figure 2-3) must be moved
from position "A" to position "B". The gate drive circuit board is under the main control board. For
controls equipped with gate drive board No. 083051 only, no jumper changes required.
75-250 HP 460 VAC controls: No hardware jumper change required for these controls.
Single Phase Control Derating
No derating is required for 1 and 2 HP controls.
3-10 HP controls must be derated by 40% of their nameplated rating for single phase operation.
15 HP and larger controls must be derated by 50% of their nameplated rating for single phase
operation.
Figure 2-3 Gate Driver Circuit Board with JP3 Jumper.
Motor Connections
Connect the three phase power leads of the AC permanent magnet motor to terminals T1, T2, and
T3 of the control power terminal strip. Motor power connections are not phase sensitive. The motor
ground lead or case ground should be connected to the control chassis ground screw. Connection
of motor temperature sensor switch to the external trip input, J1-16 located on the J1 terminal strip
is optional. The motor thermostat must be a dry contact (N.C.) type requiring no external power to
operate.
CAUTION: VOLTAGE MAY BE PRESENT AT THE MOTOR WHENEVER THE CONTROL
IS RECEIVING INPUT POWER. REMOVE ALL POWER FROM THE CONTROL
BEFORE ATTEMPTING ANY SERVICE OF THE MOTOR.
2-12 INSTALLATION
MN723H-10/95 11/28/95 1:09 AM Page 24 (Black plate)
Page 24
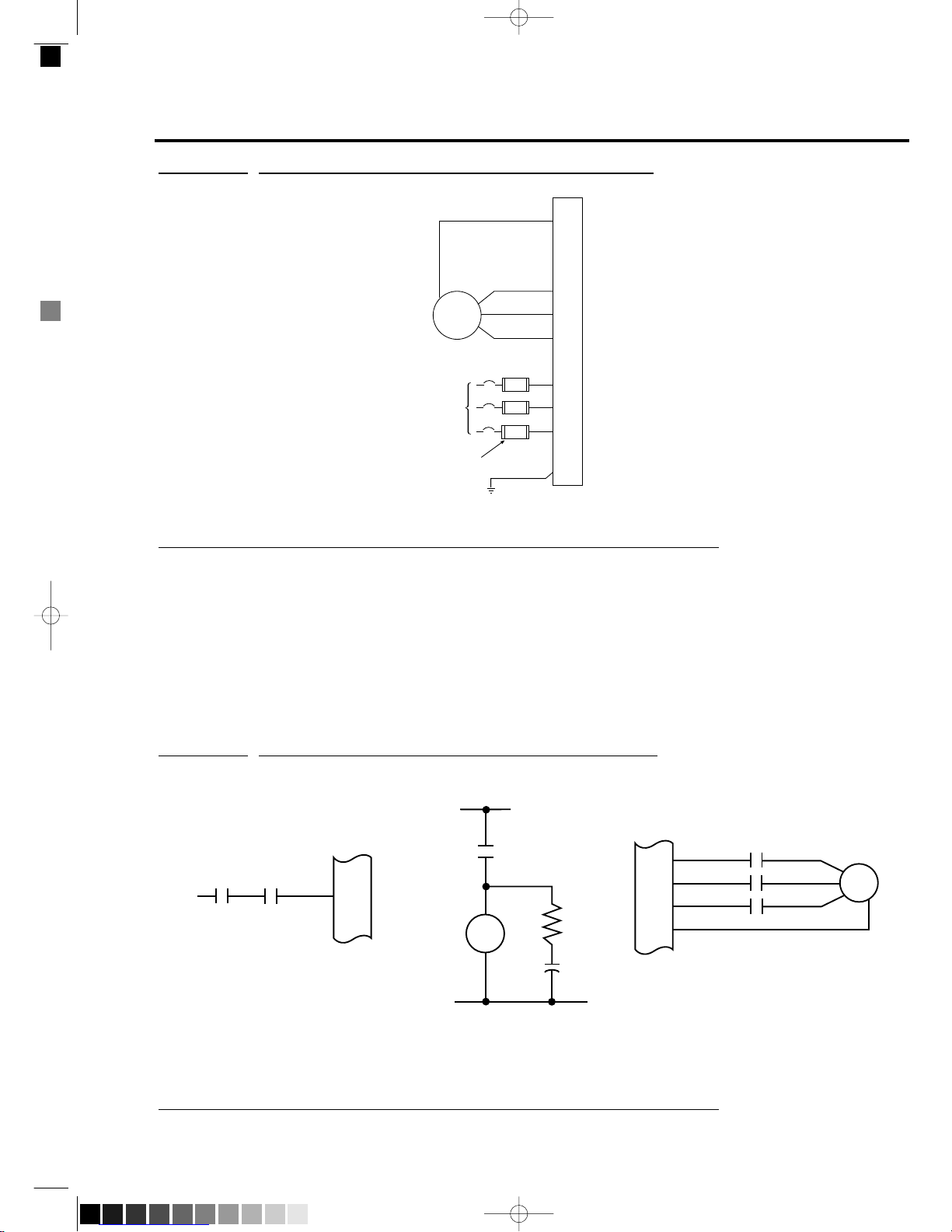
Figure 2-4 Motor Connections without Output Contactor
See Appendix C For Recommended Terminal Tightening Torques
A motor circuit contactor is recommended to provide a positive disconnection to prevent motor
rotation which could pose a safety hazard to personnel or equipment. Open the Enable input to J1
terminal strip at least 20 msec before main M-contacts open to prevent arcing at contacts. This
greatly increases contactor life and allows use of IEC rated contactors. See Figure 2-5 for motor
connection with M-contactor.
Figure 2-5 Typical Connection using Output M-Contactor
See Appendix C For Recommended Terminal Tightening Torques
2-13INSTALLATION
50/60 HZ
3 Phase
Power
MOTOR
GND
T3
T2
T1
Breaker or Fuse Protection -
Customer Option, Subject
to Local Codes
GND
R2
B+\R1
T3
T2
T1
L3
L2
L1
GND
ENABLE
7
8
9
J1-8 CONNECTION
M
J1
ENABLE
M
T1
T2
T3
GND
M
MN723H-10/95 11/28/95 1:09 AM Page 25 (Black plate)
Page 25
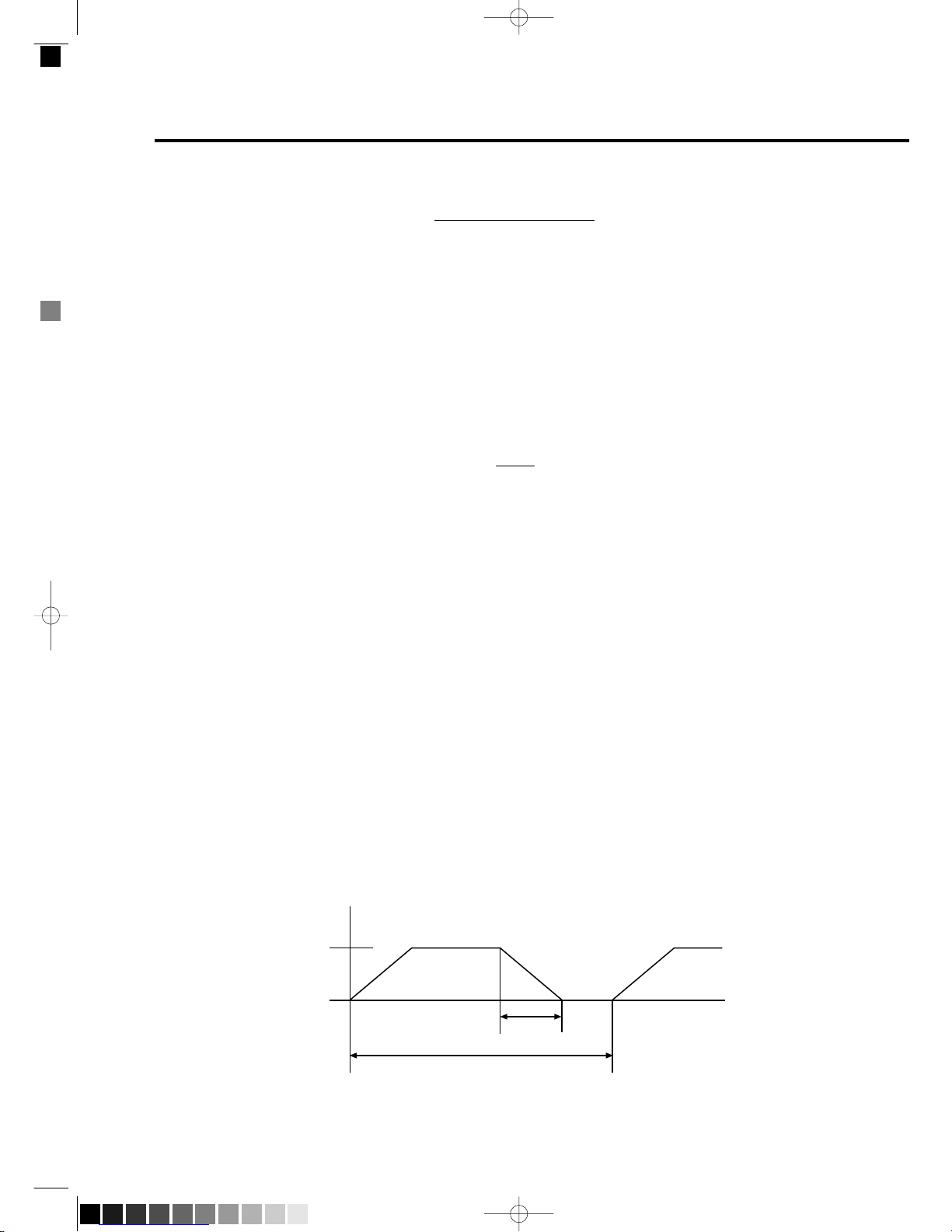
Dynamic Braking (DB) Selection
General Procedure
Use the following steps for proper selection of dynamic braking hardware:
1. Calculate the watts to be dissipated per the formulas to follow.
2. Identify the middle number of the controller and determine which dynamic brake hardware is
required based on the model number suffix (-E, -ER).
3 Select the required hardware from the Baldor Electric Company 501 catalog or from the
hardware listings that follow.
Sizing Procedure
For either general machinery or hoisting applications, the same sizing procedure (with different
formulas) is used:
1. Determine TDEC (Deceleration Torque or weight to be lowered)
2. Determine D r(Dynamic Braking Duty Cycle)
3. Determine W r(Regenerated Watts)
4. Use External Dynamic Brake Resistor Assemblies Table to select the part number for braking
hardware.
General Machinery
To determine deceleration torque, use the formula:
Where:
T
DEC = deceleration torque in lb-ft
∆RPM = change in speed
WK
2
= inertia in lb-ft
2
t = seconds
Hoisting Applications:
To determine hoist braking duty cycle use the formula:
Where:
Dr = duty cycle
LT = lowering time
TCT = total cycle time
2-14 INSTALLATION
∆RPM x WK
2
308 x t
T
DEC
=
LT
TCT
Dr=
MN723H-10/95 11/28/95 1:09 AM Page 26 (Black plate)
Page 26
2-15INSTALLATION
To determine average regenerated watts caused by lowering a load, use the formula:
where:
lbs = weight to be lowered
FPM = speed in ft/minute
EFF = mechanical efficiency as a decimal
To determine dynamic braking duty cycle, use the formula:
where:
Dr = duty cycle
BT = braking time required to decelerate
TCT = total cycle time
To determine the watts to be dissipated, use the formula:
where:
Sr = maximum speed regenerating (RPM)
Sm = minimum speed regenerating (RPM)
NOTE: TO PROVIDE MAXIMUM LIFE AND ALLOW FOR UNANTICIPATED LOADS,
MULTIPLY THE REGENERATED WATTS (Wr) RATING BY 1.25.
Drx lbs x FPM x EFF
44
Wr=
wr= T
DEC
x (Sr+ Sm) x Drx (0.0712)
Braking Time (BT)
Total Cycle Time (TCT)
Sr
Sm
BT
TCT
Dr=
MN723H-10/95 11/28/95 1:09 AM Page 27 (Black plate)
Page 27
If the application requires dynamic braking to dissipate motor generated energy, an optional external
braking assembly or kit will be required. The type of dynamic braking assembly or kit depends on the
specific control model and user preference. The available assemblies and kits that will fit a given
control depend on the control catalog number suffix.
CAUTION: DB SHOULD NOT BE USED IN APPLICATIONS REQUIRING CONTINUOUS
BRAKING (REGENERATION).
Control Catalog Numbers with an "E" Suffix
These controls come equipped with both the dynamic braking transistor and braking resistor factory
installed. This configuration is capable of providing 100% braking torque for 6 seconds of a 20%
braking duty cycle. Should additional braking capacity be required an optional externally mounted
braking resistor hardware is required.
This hardware is available in two configurations:
1) RG Kit-includes braking resistors mounted on brackets and the resistors are wired
together for the correct equivalent resistance required by the braking transistor.
2) RGA Assemblies-includes braking resistors on brackets, wired together for correct
resistance and mounted in a NEMA 1 screened enclosure.
A listing of RGA assemblies available follows in Table 2.3.
Control Catalog Numbers with an "ER" Suffix
These controls have the dynamic braking transistor installed at the factory but no dynamic braking
resistors. Should you need dynamic braking capacity optional separately mounted external braking
resistor kits or assemblies are available from Baldor.
One hardware configuration is the RG kit which comes with resistors mounted on brackets and the
resistors wired together for the correct resistance required by the control's DB transistor. These
resistors must be mounted in an enclosure by the customer.
The other DB hardware configuration available is the RGA Assembly. It includes the resistors on
brackets and the resistors wired together all mounted in a NEMA 1 screened enclosure.
A listing of available RGA assemblies follows in Table 2.3.
2-16 INSTALLATION
MN723H-10/95 11/28/95 1:09 AM Page 28 (Black plate)
Page 28
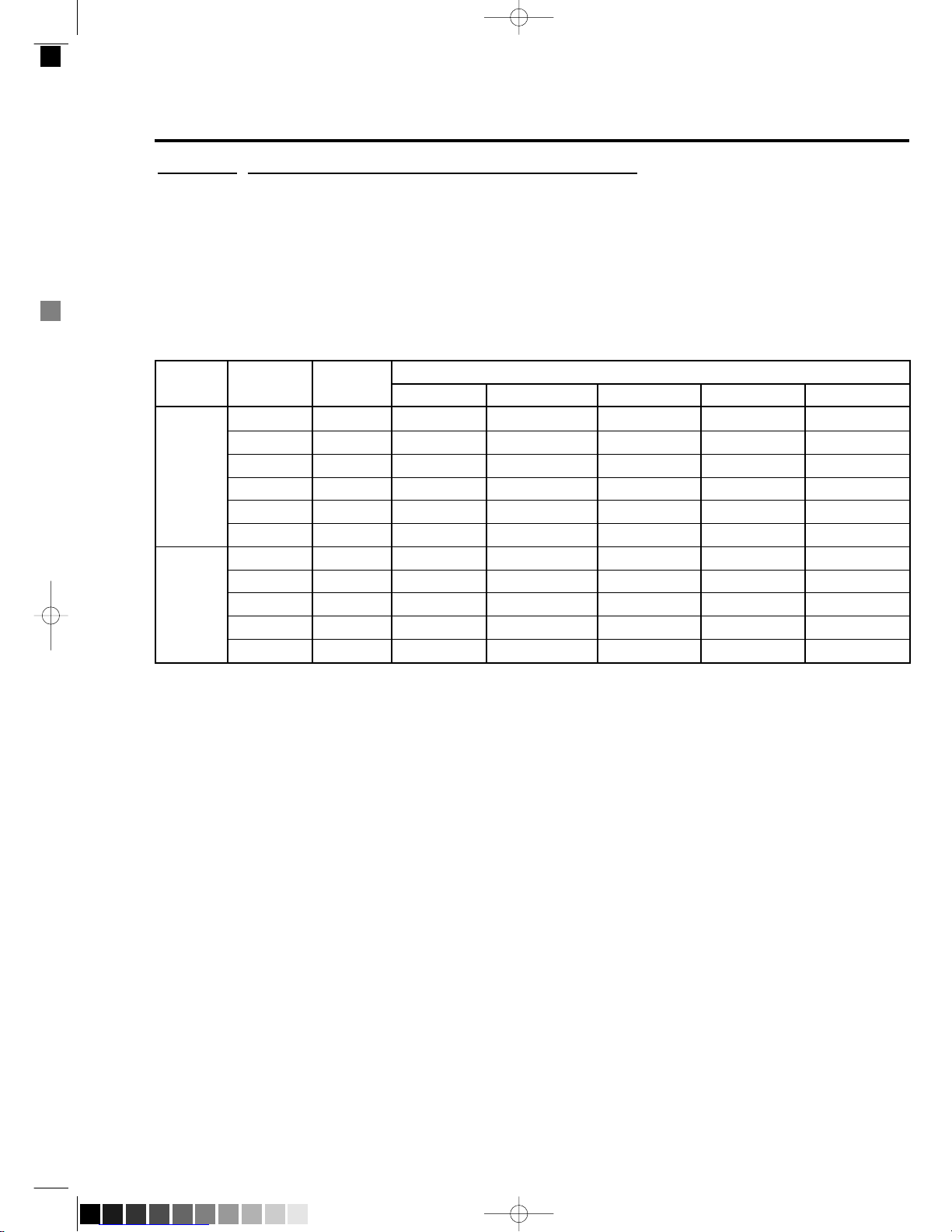
Table 2.3 Dynamic Braking Resistor Assemblies (RGA)
RGA Assemblies include braking resistors completely assembled and mounted in a NEMA 1
enclosure. For 1-10 HP (E) controls select braking resistor that has the correct ohm value for the
control and adequate continuous watts capacity. For 15 HP and above (EO, ER, and MO controls)
select braking resistor from table with matching ohms for the RTA selected and adequate continuous
watts capacity. Note: Can use RBA assembly instead of separate RTA and RGA assemblies. See
Figure 2-6 for RGA connection diagram.
Input
HP
Total Continuous Rated Watts
Volts OHMs 600 1200 2400 4800 6400
230 1-3 20 RGA620 RGA1220 RGA2420 RGA4820
5 14 RGA614 RGA1214 RGA2414 RGA4814
7.5-20 6 RGA606 RGA1206 RGA2406 RGA4806
25-30 4 RGA604 RGA1204 RGA2404 RGA4804
40 3 RGA1203 RGA2403 RGA4803
50 2 RGA1202 RGA2402 RGA4802 RGA6402
460 1-5 56 RGA656 RGA1256 RGA2456 RGA4856
7.5-10 24 RGA624 RGA1224 RGA2424 RGA4824
15-25 20 RGA620 RGA1220 RGA2420 RGA4820
30-60 10 RGA610 RGA1210 RGA2410 RGA4810
75-250 4 RGA2404 RGA4804 RGA6404
2-17INSTALLATION
MN723H-10/95 11/28/95 1:09 AM Page 29 (Black plate)
Page 29
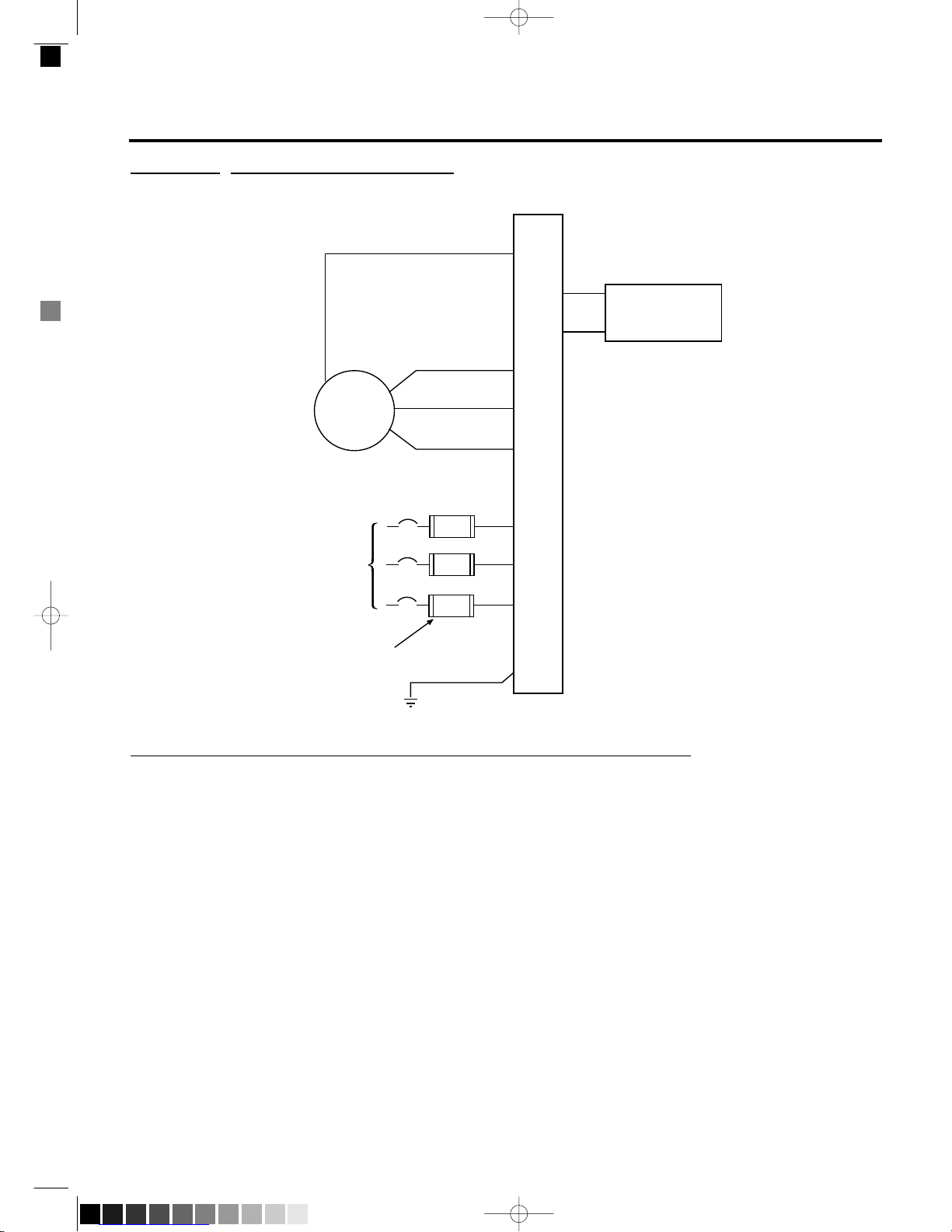
Figure 2-6 Wiring for RGA Assembly
See Appendix C For Recommended Terminal Tightening Torques
2-18 INSTALLATION
50/60 HZ
3 Phase
Power
MOTOR
GND
T3
T2
T1
Breaker or Fuse Protection Customer Option
Optional
Dynamic Brake
(RGA)
GND
R2
B+\R1
T3
T2
T1
L3
L2
L1
GND
MN723H-10/95 11/28/95 1:09 AM Page 30 (Black plate)
Page 30
Resolver Wiring
The 23H control requires the use of resolver feedback from the motor shaft. The resolver power and
signal connections are made to the control's J1 terminal strip.
Resolver wiring must be twisted shielded pairs, #22 AWG minimum size, 150' maximum, with an
insulated overall shield. Connect all shields to J1-29. Maximum wire-to-wire or wire-to-shield
capacity shall not exceed 7500 picofarads per pair (50 pf/foot at 150' length).
2-19INSTALLATION
MN723H-10/95 11/28/95 1:09 AM Page 31 (Black plate)
Page 31

Connecting the Resolver
CAUTION: DO NOT CONNECT ANY SHIELDS TO THE MOTOR FRAME. THE
RESOLVER POWER SUPPLY OUTPUT PROVIDED BY THE CONTROL AT J127 IS REFERENCED TO CIRCUIT BOARD COMMON. DO NOT CONNECT
THIS OUTPUT TO GROUND OR ANOTHER POWER SUPPLY OR DAMAGE
TO THE CONTROL MAY RESULT.
Resolver wiring must be separated from power wiring. Separate parallel runs of resolver cable by at
least 3" from power wires. Cross power wires at right angles only. Insulate or tape off ungrounded
end of shields to prevent contact with other conductors or ground.
Figure 2-10 Resolver Connections
See Appendix C For Recommended Terminal Tightening Torques
2-20 INSTALLATION
RESOLVER
R2
R1
S3
S4
S2
S1
P
P
P
J1
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
SINE + 2V RMS
SINE COS + 2V RMS
COS EXCITATION + 4V RMS, 10 KHz
EXCITATION – (COMMON)
SHIELD
NOT USED
A OUT
A OUT
B OUT
B OUT
INDEX OUT (C)
INDEX OUT (C)
NOT USED
COMMON
CONTROL BOARD
P
= TWISTED PAIR
INCREMENTAL POSITION OUTPUT
MN723H-10/95 11/28/95 1:09 AM Page 32 (Black plate)
Page 32

Incremental Position Output
The control provides a simulated encoder output of the motor mounted resolver on terminal strip J1
pins 31-38 as shown in Figure 2-10. This output simulates a 1024 line encoder with quadrature
outputs. Counting in quadrature will provide 4096 pulses per revolution of the motor shaft when
using a standard single speed resolver. This output may be used by external hardware to monitor the
motor position. Splitting this output is not recommended.
This output also provides one (1) index marker (“C” channel marker) per resolver speed. For
example, a single speed resolver will have one pulse generated per one shaft revolution. A two
speed resolver will have two pulses generated per one revolution of the shaft with 180˚ mechanical
separation.
Figure 2-11 Optional Resolver Filter for High Noise Environment
See Appendix C For Recommended Terminal Tightening Torques
2-21INSTALLATION
RESOLVER
R2
R1
S3
S4
S2
S1
P
P
P
J1
23
24
25
26
27
28
SINE + 2V RMS
SINE COS + 2V RMS
COS EXCITATION + 4V RMS, 10KHz
COMMON
CONTROL BOARD
RESOLVER FILTER P/N 0088801
SINE +
SINE COS +
COS -
EXC +
COM.
MN723H-10/95 11/28/95 1:09 AM Page 33 (Black plate)
Page 33

Remote Keypad Mounting
Instructions for Remote Keypad Mounting Using Optional Baldor Keypad Extension
Cable
The keypad assembly (DC00005A-00) comes complete with the screws and gasket required to
mount it to an enclosure. When the keypad is properly mounted to a NEMA Type 4 enclosure, it
retains the Type 4 rating.
Tools Required:
Drill, center punch, tap handle, screwdrivers: Phillips and straight, crescent wrench.
8-32 tap and #29 drill (if threading mounting surface).
1-1/4 standard knockout punch (1-11/16" nominal diameter).
RTV sealant.
(4) 8-32 nuts and lock washers.
Extended 8-32 screws (socket ,phillister) will be required if the mounting surface is thicker than
12 gage and is not tapped (through hole approach).
Remote keypad mounting template. (See next page for template)
Mounting Instructions: For tapped mounting holes
1. Locate a flat 4" wide x 5.5" minimum high mounting surface. Material should be sufficient
gage (14 minimum).
2. Place the template provided on the mounting surface or mark the holes as shown on the
template.
3. Accurately center punch the 4 mounting holes (marked A) and the large knockout (marked B).
4. Drill the four mounting holes (A) with a #29 bit. Tap an 8-32 thread.
5. Locate the 1-1/4" knockout center(B) and punch using the manufacturers instructions.
6. Debur knockout and mounting holes making sure the panel stays clean and flat.
7. Apply RTV to the 4 holes marked (A).
8. Assemble the keypad to the panel.
9. From the inside of the panel, apply RTV over each of the four mounting screws. Cover a 3/4"
area around each screw.
Mounting Instructions: For Clearance mounting holes replace numbered steps above
with the following:
4. Drill four # 19 clearance holes (A).
8. Hold the keypad in place on the panel and tighten the (4) 8-32 nuts over a locking washer.
9. From the inside of the panel, apply RTV over each of the four mounting screws and nuts.
Cover a 3/4" area around each screw while making sure to completely encapsulate the nut
and washer.
2-22 INSTALLATION
MN723H-10/95 11/28/95 1:09 AM Page 34 (Black plate)
Page 34

Figure 2-12 Remote Keypad Mounting Template
2-23INSTALLATION
4.000
2.500
FOUR PLACES
8-32 TAP USE DRILL #29
8-32 CLEARANCE USE #19 OR 0.166"
1-11/16" DIAMETER HOLE
USE 1.25" CONDUIT KNOCKOUT
(A)
(A)
(A)
(A)
(B)
1.250
1.340
4.810
5.500
SCALE NOT TO BE ALTERED
DIMENSIONS CAN BE DISTORTED DUE TO REPRODUCTION
MN723H-10/95 11/28/95 1:09 AM Page 35 (Black plate)
Page 35

Logic and Control Wiring
All logic and control connections are made at the 44 pin terminal strip J1. The terminal strip is divided
into a lower and an upper row. The lower row carries pins numbered 1-22 with the upper row being
23-44.
Wire with Class 1 wiring. All external control wiring to the control should be run in a conduit,
separated from all other wiring. The use of shielded wire is recommended for all control wiring. The
shield of the control wiring should be connected to the J1 analog ground of the control only. The
other end of the shield should be taped to the wire jacket to prevent electrical shorts and ground
loops.
Figure 2-13 23H Control Terminal Strip J-1
See Appendix C For Recommended Terminal Tightening Torques
2-24 INSTALLATION
ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT + 2
ANALOG INPUT - 2
ANALOG OUT 1
ANALOG OUT 2
ENABLE
OPTO INPUT
OPTO INPUT
OPTO INPUT
OPTO INPUT
OPTO INPUT
OPTO INPUT
OPTO INPUT
EXTERNAL TRIP
INPUT COMMON
USER COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
+ 24V
OPTO IN POWER
OPTO OUT RETURN #1
OPTO OUT RETURN #2
OPTO OUT RETURN #3
OPTO OUT RETURN #4
A
A
B
B
INDEX
INDEX
NOT USED
COMMON
SINE +
SINE –
COSINE +
COSINE –
EXCITATION +
COMMON
SHIELD
NOT USED
123
224
325
426
527
628
729
830
931
10 32
11 33
12 34
13 35
14 36
15 37
16 38
17 39
18 40
19 41
20 42
21 43
22 44
INCREMENTAL
POSITION
OUTPUT
RESOLVER
INPUT
J1
MN723H-10/95 11/28/95 1:10 AM Page 36 (Black plate)
Page 36

Analog Inputs and Outputs
Figure 2-14 Analog Inputs and Outputs
See Appendix C For Recommended Terminal Tightening Torques
Analog Inputs
Two analog inputs are available on J1; analog input #1 or pot input(J1-J3) and analog input #2 (J14-J1-5). (If using a 4-20mA command signal, jumper JP1 located above the J1 terminal strip on the
main control board MUST be moved from the middle and right pins to the left and middle pins.)
Analog input #1 is used when the controller is set to Standard Three Wire Control, Process, or
Bipolar Control. In this mode the reference comes from an external 5KOhm potentiometer
connected so that the full resistance is connected from J1-1 to J1-3. The wiper of the pot should be
connected at terminal J1-2 as shown in Figure 2-14. The command will be recognized at terminals
J1-1 and J1-2. When using a potentiometer as the speed command, process feedback or setpoint
source, the ANA CMD select parameter must be programmed for "POT". An absolute 0-10VDC
speed command signal may also be connected on J1-1 and J1-2.
Analog input #2 accepts a differential command +/-5VDC, +/-10VDC or 4-20 mA as selected by the
user in the ANA CMD Select programming block. This input is buffered to provide 40 db common
mode isolation with up to +/- 15 volts common mode relative to common. Analog input #2 is used
with Bipolar control.
Either analog input may be grounded provided the common mode range is not exceeded.
NOTE: NO ANALOG INPUTS ARE USED FOR THE 15 SPEED TWO WIRE CONTROL
OR THE SERIAL CONTROL MODES.
2-25INSTALLATION
1 ANALOG GND
2 ANALOG INPUT 1
3 POT REFERENCE
4 ANALOG INPUT + 2
5 ANALOG INPUT - 2
6 ANALOG OUT 1
7 ANALOG OUT 2
COMMAND POT 5K OHM
or 0-10 VDC ON PINS 1 & 2
PROGRAMMABLE 0-5V (FACTORY PRESET: SPEED)
DIFFERENTIAL ± 5V, ±10V
or 4-20 mA INPUT
PROGRAMMABLE 0-5V (FACTORY PRESET : CURRENT)
J1
MN723H-10/95 11/28/95 1:10 AM Page 37 (Black plate)
Page 37

Analog Outputs
Two programmable analog outputs are provided on J1-6 and J1-7. These outputs are scaled 0 - 5
VDC (1ma Max output current) and can be used to provide real-time status of various control
conditions. The return for theses outputs is J1-1 Analog ground. An explanation of the different
conditions follows. The state of these outputs is programmed in the Level 1, Output Block.
Name Description of Programmable Analog Outputs
ABS SPEED Absolute value of speed with +5 VDC = MAX RPM. Useful as a speed meter
output.
ABS TORQUE Absolute value of torque with +5 VDC = torque at CURRENT LIMIT.
SPEED COMMAND Absolute value of the commanded speed with +5 VDC = MAX RPM.
PWM VOLTAGE Amplitude of PWM voltage. 0 - Max AC voltage.
FLUX CURRENT Flux current feedback. Useful with CMD FLUX CUR.
CMD FLUX CUR Commanded flux current.
MOTOR CURRENT Amplitude of control continuous current including motor excitation current.
2.5V = rated current.
LOAD COMPONENT Amplitude of load current not including the motor excitation current. 2.5V =
rated current.
QUAD VOLTAGE Load controller output. Useful in diagnosing control problems.
DIRECT VOLTAGE Flux controller output.
AC VOLTAGE PWM control voltage which is oproportional to AC line to line motor terminal
voltage. 2.5V centered.
BUS VOLTAGE 5V = 1000VDC.
TORQUE Bipolar torque output. 2.5V centered, 5V = max positive torque, 0V = max
negative torque.
POWER Bipolar power output. +2.5V = zero power, 0V = negative rated peak power,
+5V = positive rated peak power.
VELOCITY Motor speed scaled +2.5V = zero speed, 0V = negative maximum RPM,
+5V = positive maximum RPM.
2-26 INSTALLATION
MN723H-10/95 11/28/95 1:10 AM Page 38 (Black plate)
Page 38

OVERLOAD Accumulated current 2X time, OVERLOAD occurs at +5V.
PH 2 CURRENT Sampled AC phase 2 motor current, 2.5V = zero current, 0V = negative
rated peak current, +5V = positive rated peak current.
PH 3 CURRENT Sampled AC phase 2 motor current, 2.5V = zero current, 0V = negative
rated peak current, +5V = positive rated peak current.
POSITION Position within a single revolution. 5V = 1 complete revolution. (The counter
will reset to 0 once every revolution.)
External Trip Input
Terminal J1-16 is available for connection to a normally closed thermostat in all operating modes.
This connection is available for connection to a motor thermostat or overload relay. The thermostat
or overload relay should be a dry contact type with no power available from the contact. If the motor
thermostat or overload relay should ever open the circuit indicating an over-temperature condition,
the control will automatically shut down and give an External Trip fault. In order for the External Trip
to be activated, the External Trip parameter in the programming Protection Block must be set to
"ON".
2-27INSTALLATION
MN723H-10/95 11/28/95 1:10 AM Page 39 (Black plate)
Page 39

Opto-isolated Outputs
Four programmable Opto-isolated outputs are available at terminals J1-19 through J1-22. These
outputs can be used to monitor various control conditions.
Powering the Opto-isolated Outputs
The Opto-isolated outputs may be configured as sinking or sourcing. All must be configured the
same. The Opto-isolated outputs will sink up to 60 mA or current each. The maximum voltage from
opto output to common when active is 1.0 VDC (TTL compatible). The Opto-isolated outputs may be
connected in different ways as shown in Figure 2-15.
Figure 2-15 Opto-isolated Output Connection Configurations
See Appendix C For Recommended Terminal Tightening Torques
2-28 INSTALLATION
SHOWS TYPICAL FLYBACK DIODE RATED AT 1 AMP - 100V (1N4002) MINIMUM ACROSS
RELAY (IF RELAY DOESN'T HAVE ONE BUILT-IN). USE FLYBACK DIODE ON EACH RELAY.
USING EXTERNAL SUPPLY
(SINKING THE RELAY)
USING EXTERNAL SUPPLY
(SOURCING THE RELAY)
EXTERNAL USER SUPPLY
RETURN (-)
EXTERNAL USER SUPPLY
RETURN (-)
TYPICAL
EXTERNAL USER
SUPPLY + 10-30 VDC
39
40
41
42
43
44
17
18
19
20
21
22
EXTERNAL USER
SUPPLY + 10-30 VDC
39
40
41
42
43
44
17
18
19
20
21
22
TYPICAL
USING INTERNAL SUPPLY
(SOURCING THE RELAY)
TYPICAL
39
40
41
42
43
44
17
18
19
20
21
22
+ 24 VDC
(INTERNAL)
USING INTERNAL SUPPLY
(SINKING THE RELAY)
+ 24 VDC
(INTERNAL)
39
40
41
42
43
44
17
18
19
20
21
22
TYPICAL
Customer
Supplied
Relays
Customer
Supplied
Relays
Customer
Supplied
Relays
Customer
Supplied
Relays
MN723H-10/95 11/28/95 1:10 AM Page 40 (Black plate)
Page 40

Opto-Isolated Output Selection
Four independent programmable opto-isolated outputs are available on the J1 connector for
external monitoring of drive conditions. These outputs are available on terminals J1-19 thru J1-22.
These outputs require 5-30 VDC to operate. Each will sink up to 60mA maximum. The voltage drop
across the output may be as high as 1VDC (TTL compatible). These outputs may be configured as
shown in Figure 2-15. The output state for each of these outputs is programmed in the Output
(programming) Block. If the opto outputs are used to directly drive a relay, a flyback diode rated at
1A, 100 V minimum should be connected across the relay coil.
Name Description of Opto-isolated Output
AT SETPOINT Closed when motor speed equals setpoint command.
READY Open if a fault exists or AC power is not applied.
ZERO SPEED Closed when the motor speed is less than the user specified speed
threshold, otherwise open.
AT SPEED Closed whenever the motor speed is within the user specified tolerance
band of the commanded speed, open outside tolerance band.
OVERLOAD Closed when an RMS current overload has not occurred, open upon
overload.
KEYPAD CONTROL Closed when the control is under LOCAL keypad control.
AT SET SPEED Closed whenever the motor speed is above the user specified "set
speed", open below set speed.
FAULT Closes when a FAULT is present.
FOLLOWING ERROR Closed when the motor speed is outside the user specified tolerance
band of the Acc-Dec and S-Curve conditioned commanded speed.
Open when the motor speed is within tolerance band of conditioned
speed command.
DRIVE ON Closed when the motor current has reached excitation level and capable
of producing torque.
CMD DIRECTION Closed when reverse input direction command is received, open for
forward.
AT POSITION Closed during a positioning command when the control is within the
tolerance band.
2-29INSTALLATION
MN723H-10/95 11/28/95 1:10 AM Page 41 (Black plate)
Page 41

OVER-TEMP WARN Closed when the control heat sink detector senses the control is within
3 Deg C of tripping on INT OVER-TEMP.
MOTOR DIRECTION Closed when reverse input direction command is received, open for
forward.
Opto-isolated Inputs
Nine Opto-isolated inputs are available at terminals J1-8 through J1-16 to command various output
conditions. The available command input may change depending on the operating mode selected.
Opto-isolated Input Power
The opto-isolated inputs (J1 connector pins 8-16) are normally operated by closing contacts or
switches between them and pin J1-17, input common. The voltage rating of the opto inputs is 10-30
VDC. The opto inputs may be configured as sinking or sourcing provided all of the inputs are
configured the same.
See Figure 2-16 below for opto-input power configuration options.
NOTE: IF THE CONTROL'S INTERNAL 24VDC SUPPLY IS TO BE USED TO POWER
THE OPTO INPUTS, CONNECTOR PIN J1-39 MUST BE JUMPERED TO
J1-40 AND ALL RETURNS TERMINATED AT J1-17.
2-30 INSTALLATION
MN723H-10/95 11/28/95 1:10 AM Page 42 (Black plate)
Page 42

Figure 2-16 Opto Input Power Configurations
See Appendix C For Recommended Terminal Tightening Torques
2-31INSTALLATION
USER +10-30VDC
RETURN
N/C
OPTO IN POWER
8
9
10
11
12
13
14
15
16
17
J1
39
40
ENABLE
FORWARD
REVERSE
INPUT #1
INPUT #2
INPUT #3
INPUT #4
INPUT #5
INPUT #6
INPUT COMMON
USER +10-30VDC
OPTO INPUTS CLOSING TO GROUND
OPTO IN POWER
8
9
10
11
12
13
14
15
16
17
J1
39
40
ENABLE
FORWARD
REVERSE
INPUT #1
INPUT #2
INPUT #3
INPUT #4
INPUT #5
INPUT #6
INPUT COMMON
OPTO INPUTS USING INTERNAL POWER SUPPLY
USER +10-30VDC
RETURN
N/C
OPTO IN POWER
8
9
10
11
12
13
14
15
16
17
J1
39
40
ENABLE
FORWARD
REVERSE
INPUT #1
INPUT #2
INPUT #3
INPUT #4
INPUT #5
INPUT #6
INPUT COMMON
USER +10-30VDC
OPTO INPUTS CLOSING TO +VDC
+24V
+24V
+24V
MN723H-10/95 11/28/95 1:10 AM Page 43 (Black plate)
Page 43

Operating Mode Connection Diagrams
Six different operating modes are available in the Series 23H servo control. These operating modes
define the basic motor control setup and the operation of the input and output terminals. These
operating modes are selected by programming the Operating Mode parameter in the Input
programming Block. Available operating modes include:
Keypad Only Operation
Standard Run, 3 Wire Control
15 Speed, 2 Wire Control
Bipolar Speed or Torque
Process Control
Serial
NOTE: THE SERIAL OPERATING MODE REQUIRES THE OPTIONAL RS-232 OR
THE OPTIONAL RS422/485 SERIAL EXPANSION BOARD. ITS OPERATION
IS NOT COVERED IN THIS MANUAL. CONNECTION OF AND
INSTRUCTIONS FOR SERIAL EXPANSION BOARDS IS PROVIDED IN
SERIAL COMMUNICATIONS EXPANSION BOARD MANUAL NO. MN1310.
THIS MANUAL IS SHIPPED WITH ALL SERIAL EXPANSION BOARDS.
Connection diagrams for each operating mode follow.
Keypad Only Operating Mode
For Keypad Only operation, program the Operating Mode parameter in the Input programming block.
Then set the keypad itself to LOCAL pressing the LOCAL key with the motor stopped (LOCAL key
toggles between the LOCAL and REMOTE mode of operation). The word "LOCAL" should appear in
the keypad display.
When in the Keypad Only operating mode the only opto-input that is active is the External Trip input
on J1-16. The analog inputs and opto-outputs remain active.
Figure 2-17 Keypad Only Operation Connection Diagram
If the External Trip parameter is programmed “on”, wire as shown.
See Appendix C For Recommended Terminal Tightening Torques
J1-16...OPEN causes an External Trip to be received by the control. The control will
disable and display external trip when it is programmed “on”. Factory preset is “off”.
2-32 INSTALLATION
OPTO INPUT
16
17
18
19
J1
COMMON
+24V
38
39
40
41
INPUT COMMON
MN723H-10/95 11/28/95 1:10 AM Page 44 (Black plate)
Page 44

Standard Run 3 Wire Control Mode
Figure 2-18 Standard Run 3-Wire Connection Diagram
See Appendix C For Recommended Terminal Tightening Torques
NOTE: FOR 4-20MA INPUT MOVE JUMPER JP1 ON THE MAIN CONTROL BOARD
TO THE LEFT TWO PINS.
J1-8 OPEN disables the control and motor coasts to a stop. CLOSED allows current to
flow in the motor and produce torque.
J1-9 MOMENTARY CLOSED starts motor operation in the Forward direction. In JOG mode
(J1-12 CLOSED), continuous CLOSED jogs motor in the Forward direction.
J1-10 MOMENTARY CLOSED starts motor operation in the Reverse direction. In JOG
mode(J1-12 CLOSED), CONTINUOUS closed JOGS motor in the Reverse direction.
J1-11 When OPEN control removes power from motor and disables. Coasts or brakes to
stop depending on Keypad Stop Mode parameter setting.
J1-12 CLOSED places control in JOG mode, Forward and Reverse run are used to jog the
motor.
J1-13 OPEN selects ACC / DEC / S-CURVE group 1. CLOSED selects group 2.
J1-14 CLOSED selects preset speed #1, (J1-12, will override this), OPEN allows speed
command from Analog input #1 or #2.
J1-15 OPEN to run, CLOSED to reset fault condition.
J1-16 OPEN causes an external trip to be received by control. The control will disable and
display external trip when programmed "on". Factory preset is "off".
2-33INSTALLATION
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
SINE +
SINE –
COSINE +
COSINE –
EXCITATION +
COMMON
SHIELD
NOT USED
A
A
B
B
INDEX
INDEX
NOT USED
COMMON
+24V
OPTO IN POWER
OPTO OUT RETURN #1
OPTO OUT RETURN #2
OPTO OUT RETURN #3
OPTO OUT RETURN #4
ENABLE
FORWARD RUN
REVERSE RUN
STOP
CLOSED = JOG SPEED
ACCEL/DECEL/SELECT
PRESET SPEED #1
FAULT RESET
EXTERNAL TRIP
INPUT COMMON
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: SPEED)
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: CURRENT)
J1
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
0-5VDC OR
0-10VDC OR
4-20 mA
ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT -2
ANALOG OUT 1
ANALOG OUT 2
USER COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
5kOhm COMMAND POT
REFER TO POWERING THE
OPTO-ISOLATED OUTPUTS
BOTH CLOSED =
FORWARD
RESOLVER
INPUT
INCREMENTAL
POSITION
OUTPUT
MN723H-10/95 11/28/95 1:10 AM Page 45 (Black plate)
Page 45

15 Speed 2-Wire Control Mode
Figure 2-19 15 Speed 2-Wire Control Connection Diagram
See Appendix C For Recommended Terminal Tightening Torques
J1-8 OPEN disables the control & motor coasts to a stop. CLOSED allows current to flow
in the motor and produce torque.
J1-9 CLOSED operates the motor in the Forward direction (with J1-10 open). OPEN coasts
or brakes to stop depending on Keypad Stop motor parameter setting.
J1-10 CLOSED operate motor in the Reverse direction (with J1-9 open). OPEN coasts or
brakes to stop depending on Keypad Stop mode parameter setting.
J1-11-14 Selects programmed preset speeds per table below.
J1-15 Selects ACC/DEC group. OPEN selects group 1. CLOSED selects group 2.
J1-16 OPEN causes External Trip to be received by the control. Control will disable and
display external trip when programmed to be"on". Factory preset is "off".
See Switch T
ruth Table on next page.
2-34 INSTALLATION
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
SINE +
SINE –
COSINE +
COSINE –
EXCITATION +
COMMON
SHIELD
NOT USED
A
A
B
B
INDEX
INDEX
NOT USED
COMMON
+24V
OPTO IN POWER
OPTO OUT RETURN #1
OPTO OUT RETURN #2
OPTO OUT RETURN #3
OPTO OUT RETURN #4
ENABLE
CLOSED = FORWARD
CLOSED = REVERSE
SWITCH 1
SWITCH 2
SWITCH 3
SWITCH 4
ACC/DEC/“S” SELECT 1
EXTERNAL TRIP
INPUT COMMON
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: SPEED)
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: CURRENT)
J1
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
ANALOG OUT 1
ANALOG OUT 2
USER COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
RESOLVER
INPUT
INCREMENTAL
POSITION
OUTPUT
REFER TO POWERING THE
OPTO-ISOLATED OUTPUTS
BOTH CLOSED = FORWARD
BOTH OPEN = STOP
NO CONNECTIONS
ALL CLOSED =
FAULT RESET
MN723H-10/95 11/28/95 1:10 AM Page 46 (Black plate)
Page 46

Switch Truth Table for 15 Speed, 2 Wire Control Mode
FUNCTION J1-11 J1-12 J1-13 J1-14
Preset 1 Open Open Open Open
Preset 2 Closed Open Open Open
Preset 3 Open Closed Open Open
Preset 4 Closed Closed Open Open
Preset 5 Open Open Closed Open
Preset 6 Closed Open Closed Open
Preset 7 Open Closed Closed Open
Preset 8 Closed Closed Closed Open
Preset 9 Open Open Open Closed
Preset 10 Closed Open Open Closed
Preset 11 Open Closed Open Closed
Preset 12 Closed Closed Open Closed
Preset 13 Open Open Closed Closed
Preset 14 Closed Open Closed Closed
Preset 15 Open Closed Closed Closed
Fault Reset Closed Closed Closed Closed
2-35INSTALLATION
MN723H-10/95 11/28/95 1:10 AM Page 47 (Black plate)
Page 47

Bipolar Speed or Torque Control Mode
In addition to individual motor bipolar speed or torque control, this mode of operation allows the user
to store up to four (4) different complete sets of motor parameters. Why multiple parameter sets?
An example might be to run a motor connected Wye and then to run it at another time connected
Delta; or to run each of (up to) 4 different motors at different times. To program multiple parameter
sets:
1. Access a parameter table using switches J1-13 and J1-14 per Table 2.3.
2. Program, auto-tune and adjust parameters for one configuration.
3. Access second parameter set using J1-13 and J1-14 switches per Table 2.3.
4. Program, auto-tune and adjust parameters for second configuration.
5. Repeat steps 3-5 for third and fourth parameter sets.
The parameter sets may be accessed for operation using external switch closures at J1-13 and
J1-14 per the truth table provided in Table 2.3 which follows.
Figure 2-20 Bipolar Speed or Torque Connection Diagram
See Appendix C For Recommended Terminal Tightening Torques
2-36 INSTALLATION
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
SINE +
SINE –
COSINE +
COSINE –
EXCITATION +
COMMON
SHIELD
NOT USED
A
A
B
B
INDEX
INDEX
NOT USED
COMMON
+24V
OPTO IN POWER
OPTO OUT RETURN #1
OPTO OUT RETURN #2
OPTO OUT RETURN #3
OPTO OUT RETURN #4
ENABLE
FORWARD ENABLE
REVERSE ENABLE
CLOSED = ORIENT
OPEN=SPEED, CLOSED=TORQUE
TABLE SELECT
TABLE SELECT
FAULT RESET
EXTERNAL TRIP
INPUT COMMON
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: SPEED)
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: CURRENT)
J1
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
DIFFERENTIAL ± 5VDC, ± 10VDC
OR 4-20 mA
ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT -2
ANALOG OUT 1
ANALOG OUT 2
USER COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
5kOhm COMMAND POT
REFER TO POWERING THE
OPTO-ISOLATED OUTPUTS
RESOLVER
INPUT
INCREMENTAL
POSITION
OUTPUT
MN723H-10/95 11/28/95 1:10 AM Page 48 (Black plate)
Page 48

NOTE: FOR 4-20MA INPUT MOVE JUMPER JP1 ON THE MAIN CONTROL BOARD
TO THE LEFT TWO PINS.
J1-8 OPEN disables the control & motor coasts to a stop. CLOSED allows current to flow
in the motor and produce torque.
J1-9 CLOSED to enable operation in the Forward direction. OPEN TO DISABLE Forward
operation (drive will brake to a stop if a Forward command is still present).
J1-10 CLOSED to enable operation in the Reverse direction. OPEN to disable Reverse
operation (drive will brake to a stop if a Reverse command is still present).
J1-11 Causes the motor shaft to orient to the index marker (or home offset).
J1-12 CLOSED puts the control in torque mode.
J1-13 &14 Select from four parameter tables per truth Table 2.3.
J1-15 OPEN to run, CLOSED to reset fault condition.
J1-16 OPEN causes an external trip to be received by the control. Control will disable and
display fault.
Table 2.3 Truth Table for Bipolar Speed or Torque Control Mode
Multiple Parameter Tables
Function J1-13 J1-14
Parameter Table #0 Open Open
Parameter Table #1 Closed Open
Parameter Table #2 Open Closed
Parameter Table #3 Closed Closed
Process Control Mode
The process control mode is a secondary closed loop system which includes a general purpose set
point PID control. It may be setup in two different ways. One uses a programmable preset set point
and the other uses an external command set point input. In either case a process feedback signal
will be required.
The selection of the set point command and the process feedback signal is located in the Process
Control programming block under the Set point Source Parameter and Process Feedback
Parameter respectively.
The programmable preset set point PID control mode can be used for most general closed loop
systems. This is generally known as feedback control. This method compares the value of the
programmed preset variable with the process variable. The difference between them is the process
error. The process error is then converted to a signal that adjusts the speed or torque of the motor
to eliminate the error. A large process error will result in a large change in the rate of speed or
amount of torque generated by the motor. Likewise, a small error signal will produce a small change
in the rate of speed or amount of torque generated by the motor. The end result is the PID control
2-37INSTALLATION
MN723H-10/95 11/28/95 1:10 AM Page 49 (Black plate)
Page 49

will adjust the motor speed or torque to force the process variable to be as close as possible to the
programmed preset setpoint.
The external command setpoint input PID control mode is used for more complex applications
having a large external disturbance that can affect the process variable. This is useful for processes
that have significant time lag between a process disturbance and the generation of a process error
signal from the process sensor. This mode uses a feedforward command to anticipate changes in
the process. This feedforward signal directly changes the motor speed or torque without having to
develop a process error signal first.
Figure 2-21 shows a block diagram of the Process Mode control system. The user must make the
determination of which technique to implement.
Figure 2-21 Simplified Process Control Feedback System Diagram
NOTE: EXB = OPTIONAL EXPANSION BOARD
2-38 INSTALLATION
∑
∑
∑
∑
PROCESS FEEDBACK
Select The Source Through
Parameter Adjustment.
Available Sources:
POTENTIOMETER
+/-10 VOLTS
+/-5 VOLTS
4 TO 20 mA
10V EXB
4 TO 20 mA EXB
3 TO 15 psi EXB
TACHOMETER EXB
SERIAL EXB
NONE=FACTORY PRESET
COMMAND SELECT
Select The Source Through
Parameter Adjustment.
Available Sources:
POTENTIOMETER = F.P.
+/-10VOLTS
+/-5VOLTS
4 TO 20 mA
10V W/EXT CL
EXB PULSE FOL
10V EXB
4 TO 20 mA EXB
3 TO 15 psi EXB
TACHOMETER EXB
SERIAL EXB
NONE
Setpoint
Command
Parameter
Closed When Process
Mode is Enabled (J1-13)
ACC/DEC
S-Curve
Profiler
Differentiator
EXB Pulse
Follower Only
s
s
Proportional
Gp
Gp
Proportional
Differential
Differential
Amp
Gd s
Gd s
Integral
Integral
Motor
Enc.
Gi
s
Gi
s
Setpoint Adjustment Limit
w/ Integral Clamp To
Max Limit Value
Existing Baldor Control System
Differentiator
–
–
+
+
+
+
“PROCESS FEEDBACK”
“PROCESS FEEDFORWARD”
MN723H-10/95 11/28/95 1:11 AM Page 50 (Black plate)
Page 50

Figure 2-22 Process Mode Connection Diagram
See Appendix C For Recommended Terminal Tightening Torques
NOTE: FOR 4-20MA INPUT MOVE JUMPER JP1 ON THE MAIN CONTROL BOARD
TO THE LEFT TWO PINS.
J1-8 OPEN disables the control & motor coasts to a stop. Closed allows current to flow in
the motor and produce torque.
J1-9 CLOSED to enable operation in the Forward direction. OPEN to disable Forward
operation. Coasts or brakes to stop depending on Keypad Stop mode parameter setting.
J1-10 CLOSED to enable operation in the Reverse direction. OPEN to disable Reverse
operation. Coasts or brakes to stop depending on Keypad Stop mode parameter setting.
J1-11 OPEN = TABLE Ø, CLOSED = TABLE 1
J1-12 CLOSED puts the control in torque mode. OPEN puts the control in velocity mode.
J1-13 CLOSED to enable the closed loop feature of the Process Mode.
J1-14 CLOSED places control in JOG mode. The control will only JOG in the forward
direction.
J1-15 OPEN to run. CLOSED to reset a fault condition.
J1-16 OPEN causes and external trip to be received by the control. The control will disable and
display the fault.
2-39INSTALLATION
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
SINE +
SINE –
COSINE +
COSINE –
EXCITATION +
COMMON
SHIELD
NOT USED
A
A
B
B
INDEX
INDEX
NOT USED
COMMON
+24V
OPTO IN POWER
OPTO OUT RETURN #1
OPTO OUT RETURN #2
OPTO OUT RETURN #3
OPTO OUT RETURN #4
ENABLE
FORWARD ENABLE
REVERSE ENABLE
TABLE = SELECT
OPEN=SPEED, CLOSED=TORQUE
CLOSED=PROCESS MODE ENABLED
CLOSED = JOG FORWARD
FAULT RESET
EXTERNAL TRIP
INPUT COMMON
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: SPEED)
PROGRAMMABLE 0-5V OUTPUT (FACTORY PRESET: CURRENT)
J1
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
DIFFERENTIAL ± 5VDC, ± 10VDC
OR 4-20 mA INPUT
ANALOG GND
ANALOG INPUT 1
POT REFERENCE
ANALOG INPUT +2
ANALOG INPUT -2
ANALOG OUT 1
ANALOG OUT 2
USER COMMON
OPTO OUT #1
OPTO OUT #2
OPTO OUT #3
OPTO OUT #4
5kOhm COMMAND POT
REFER TO POWERING THE
OPTO-ISOLATED OUTPUTS
RESOLVER
INPUT
INCREMENTAL
POSITION
OUTPUT
MN723H-10/95 11/28/95 1:11 AM Page 51 (Black plate)
Page 51

Process Mode Control Example
This example shows an inverter or a vector drive controlling an HVAC process where the control will
try to keep the air pressure in the building plenum at a constant pressure regardless of intake or
exhaust restrictions.
This is a "Feedback" only type of control. The air pressure converts the pressure signal to a 4-20 mA
signal to the control. The control is driving a motor. The motor is direct driving a centrifugal fan.
The "Setpoint Potentiometer Adjustment" is used as the "Setpoint Source". It is used to set the
desired air pressure. The control will then try to adjust the "Process Feedback" from the 4-20 mA
transducer to equal the "Setpoint Source".
The advantage of this system over a damper is the cost savings from operation of the motor at
reduced speeds. In a damper system, the motor is running at full speed with all of the associated
motor losses at 60 hertz. This loss is the "no-load" power that it takes to turn the motor at full
speed. This occurs if the damper is fully closed. The best efficiency is obtained with the damper
fully opened with maximum flow. With a variable speed system, such as the inverter, the motor
losses are reduced with a reduction in motor speed. The best motor efficiency is obtained at all
speeds with the variable speed system.
Figure 2-23 HVAC Process Mode Example
2-40 INSTALLATION
Setpoint
Potentiometer
Adjustment
4-20 mA Signal
Setpoint
Source
J1-1,2,3
Baldor Vector/Inverter Drive
Motor
Enc
Available Only
W/Vector
Motor
Output
Motor
Feedback
Process
Feedback
J1-4,5
Third Party
Transducer
Air Pressure Sensor
Output: 4-20 mA
1/4" Hose
Air Pressure
Sense Port
Building Plenum
HVAC Blower
Intake Plenum
MN723H-10/95 11/28/95 1:11 AM Page 52 (Black plate)
Page 52

Pre-Operation Checklist
Check of Electrical Items
CAUTION: AFTER COMPLETING THE INSTALLATION STEPS AND BEFORE APPLYING
LINE POWER TO THE SYSTEM, DOUBLE CHECK THE FOLLOWING ITEMS:
1. Verify AC line voltage at source matches control rating.
2. Inspect all power terminations for accuracy, workmanship and tightness.
3. Verify control and motor are grounded to each other and the control is connected to earth
ground.
4. Check all signal wiring for accuracy.
5. Be certain all brake coils, contactors and relay coils have noise suppression. This should be
an R-C filter for AC coils and reverse polarity diodes for DC coils. MOV type transient
suppression is not adequate.
WARNING: MAKE SURE THAT UNEXPECTED OPERATION OF THE MOTOR SHAFT
DURING START-UP WILL NOT CAUSE INJURY TO PERSONNEL OF
DAMAGE TO EQUIPMENT.
Check of Motors and Couplings
1. Verify freedom of motion for all motor shafts and that all motor couplings are tight without
backlash.
2. Verify the holding brakes if any, are properly adjusted to fully release and set to the desired
torque value.
Temporary Application of Power
1. Double check electrical and mechanical connections before applying power to the control.
2. Verify that any Enable inputs to J1-8 are open.
3. Temporarily apply power and observe that the display is on. If this indication does not occur,
double check all connections and verify input voltage. If fault indication occurs, refer to the
fault table in Section 4 of this manual.
2-41INSTALLATION
MN723H-10/95 11/28/95 1:11 AM Page 53 (Black plate)
Page 53

Minimum Required Parameter Settings and Control Set-up Checklist
If you are familiar with programming Baldor controls continue below. If not, proceed to Section 3
before applying power to the drive.
NOTE: THIS LIST IS THE MINIMUM REQUIRED PROCEDURE TO PROGRAM THE
CONTROL FOR OPERATION OF THE CONTROL FROM THE KEYPAD FOR
INITIAL START-UP.
1. Set the operating mode to KEYPAD at the Level 1 Input block Operating Mode parameter.
2. Select the desired operating zone for your application into the Level 2 Output Limits block
Operating Zone parameter.
3. Enter the minimum speed in the Level 2 Output Limits block, Minimum Speed parameter.
4. Enter the maximum speed in the Level 2 Output Limits block, Maximum Speed parameter.
5. Enter the following motor data in the Level 2 Motor Data block parameters:
Refer to Section 3-15 Motor Data Block
Motor Rated Amps (IC)
Motor Poles
Resolver Speeds (Pre-set is one speed)
6. Go to the Calc(ulate) Presets parameter in the Auto-tuning parameter block on Level 2. Select
"Yes" for the control to calculate preset values for those parameters you have not
programmed that are necessary for the control to run the motor.
7. Disconnect the motor from the load (including any coupling and/or inertia wheels).
8. Run the following Auto-tuning tests:
Cmd Offset Trim
Cur Loop Comp
Resolver Align
Spd Cntrlr Calc
9. Couple the motor to the load. Then rerun the Spd Control Calc auto-tuning test.
10. Run the drive from the keypad using either the JOG mode, keypad entered speed commands
or speed commands using the arrow keys.
11. Select and program additional parameters to suit your application.
2-42 INSTALLATION
MN723H-10/95 11/28/95 1:11 AM Page 54 (Black plate)
Page 54

Section 3
Keypad Programming and Operation
Using the Keypad
The programming and basic operation of the control is done with simple keystrokes on the keypad
located on the face of the control. The keypad is used to program the control parameters; to
operate the motor when programmed for the KEYPAD ONLY MODE or the local mode when the
control is programmed to operate in one of the remote modes or the SERIAL MODE; and to
monitor the status and outputs of the control by accessing the display options, diagnostic menus
and the fault log.
3-1KEYPAD PROGRAMMING AND OPERATION
JOG LOCAL PROG
FWD DISP
REV SHIFT ENTER
RESETSTOP
Indicator Lights
JOG - Green Lamp lights
when JOG Speed is active.
FWD - Green Lamp lights when
FWD direction is commanded.
REV - Green Lamp lights when
REV direction is commanded.
STOP - Red Lamp lights when
motor STOP is commanded.
Displays control status including
LOCAL or REMOTE operation,
motor direction command, set
value of each parameter/function,
monitoring values such as output
frequency and current, also
displays fault conditions and log.
LCD DISPLAY
JOG
FWD
REV
STOP
LOCAL
DISP
SHIFT
RESET
PROG
UP
ENTER
DOWN
Used to run
preprogrammed
JOG speed.
Used to initiate a
reverse direction run
of the motor.
Used to toggle
between LOCAL
and REMOTE
operation.
Used to take
access the block
programming area.
Used to initiate a
forward direction
run of the motor.
Used to initiate
a motor stop
command.
Depressing this
key changes the
displayed control
status. Also used
to bring the lower
block programming
menu back to the
monitoring menu.
Used to move
the blinking
cursor over
one space for
each push of
the SHIFT key.
Used to initiate a logical
reset after a fault
condition and to take the
block programming menu
up one level.
Used to take
the block
programming
menu down one
level while saving
any changes.
Used to change
the display
parameter or
parameter value
down one increment.
Used to change
the display
parameter or
parameter value
up one increment.
JOG
MN723H-10/95 11/28/95 1:11 AM Page 55 (Black plate)
Page 55

Keypad Key Functions
JOG Used to run the motor at the preprogrammed jog speed. After the jog key has
been pressed, use the FWD or REV keys to run the motor in the direction that
is needed. The JOG key is only active in the LOCAL MODE.
FWD Used to initiate a forward direction of motor operation. This key is only active in
the LOCAL MODE.
REV Used to initiate a reverse direction of motor rotation. This key is active only in
the LOCAL MODE.
STOP Used to command a stop. Depending on the setup of the control, the motor will
either ramp or coast to a stop. This key is operational in all modes of operation
unless it has been disabled by the keypad stop parameter in the Keypad
(programming) Setup Block.
NOTE: IF THE CONTROL IS OPERATING IN A REMOTE MODE AND THE STOP KEY
IS PRESSED THE CONTROL WILL CHANGE TO THE LOCAL MODE WHEN
THE STOP COMMAND IS INITIATED. TO RESUME OPERATION IN THE
REMOTE MODE, PRESS THE LOCAL KEY.
LOCAL Push this key to change from REMOTE to LOCAL (keypad) or Local to Remote
operation. When the control is in the LOCAL mode all other external commands
to the J1 terminal strip will be ignored with the exception of the external
trip input.
DISP DISPLAY MODE. Provides operational status and advances to the next menu
item. When in the PROGRAM MODE the DISP key is used to return to the
DISPLAY MODE.
SHIFT Used in the PROGRAM MODE and the output speed setting adjustment. The
SHIFT key moves the blinking cursor one digit for each push of the SHIFT key.
While in PROGRAM MODE, the factory preset value may be reset for any
parameter by pressing the SHIFT key until the arrow symbols at the far left of
the keypad display are flashing, and then pressing an ARROW key. In the
DISPLAY MODE the SHIFT key is used to adjust the keypad contrast.
RESET Used to clear a fault and return to the previous display.
PROG PROGRAM MODE. While in the PROGRAM MODE the PROG key is used to
edit a parameter setting.
3-2 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 56 (Black plate)
Page 56

ARROW KEYS In the LOCAL MODE the ARROW keys are used to increase or decrease the
motor speed. In the PROGRAM MODE the ARROW keys are used to scroll
through the parameter options and to change parameter values.
ENTER Used to provide movement between programming blocks and saving user
entered data. In the DISPLAY MODE it is used to set the speed reference.
AC Servo Parameters
LEVEL 1 BLOCKS
Preset Speeds Jog Settings Input
Preset Speed #1 Jog Speed Operating Mode
Preset Speed #2 Jog Accel Ana Cmd Select
Preset Speed #3 Jog Decel Ana Cmd Inverse
Preset Speed #4 Jog S-curve Ana Cmd Offset
Preset Speed #5 Ana 2 Deadband
Preset Speed #6 Keypad Setup
Preset Speed #7 Keypad Stop Key
Preset Speed #8 Keypad Stop Mode
Preset Speed #9 Keypad Run Fwd
Preset Speed #10 Keypad Run Rev
Preset Speed #11 Keypad Jog Fwd
Preset Speed #12 Keypad Jog Rev
Preset Speed #13 Brushless Control
Preset Speed #14 Output Resolver Align
Preset Speed #15 Opto Output #1 Speed Filter
Opto Output #2 Feedback Align
Accel / Decel Rate Opto Output #3 Current Prop Gain
Accel #1 Opto Output #4 Current Int Gain
Decel #1 Zero Spd Set Pt Speed Prop Gain
S-curve #1 At Speed Band Speed Int Gain
Accel #2 Set Speed Speed Diff Gain
Decel #2 Analog Out #1 Position Gain
S-curve #2 Analog Out #2
Analog #1 Scale
Analog #2 Scale
Position Band
3-3KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 57 (Black plate)
Page 57

LEVEL 2 BLOCKS
Output Limits Security Auto Tuning
Operating Zone Security State Calc Presets
Min Output Speed Access Timeout Cmd Offset Trim
Max Output Speed Access Code Cur Loop Comp
Pk Current Limit Resolver Align
PWM Frequency Motor Data Spd Control Calc
Torque Rate Limit Motor Rated Amps
Motor Poles Process Control
Custom Units Resolver Speeds Process Feedback
Decimal Places Process FB Invert
Value at Speed Brake Adjust Set Point Source
Units of Measure Resistor Ohms Set Point Cmd
Resistor Watts Set Point Trim
Protection Proc Err Tolerance
Overload Proc Prop Gain
External Trip Proc Int Gain
Following Error Proc Diff Gain
Follower Input: Output
Miscellaneous Mstr Enc. Lines / Rev
Restart Auto/Man
Restart Fault/Hr
Restart Delay
Factory Settings
Homing Speed
Homing Offset
3-4 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 58 (Black plate)
Page 58

Display Mode
During normal operation the controller is in the DISPLAY MODE and the keypad displays the status
of the control. There are several output status values that can be monitored. When the control is in
the DISPLAY MODE the information shown below is displayed.
In addition, the DISPLAY MODE offers a combined display that gives the value of all output
conditions simultaneously. The DISPLAY MODE also gives the user the ability to view diagnostic
information and the FAULT LOG.
When AC power is applied to the control the keypad should display the status of the control. Also
the fans should be running (if equipped with fans). If there is no display visible , check to make sure
that the brightness and contrast settings for the keypad display are correctly set. Use the following
procedure to adjust the brightness and contrast of the display.
Motor Status Output Condition
Control Operation Value and Units
Adjusting Display Contrast
(Contrast may be adjusted in display mode when motor is stopped or running)
3-5KEYPAD PROGRAMMING AND OPERATION
Action Description Display Comments
Apply Power No visible display
Press DISP Key Ensures control in
display mode
Press SHIFT SHIFT Enables display
contrast adjustment
Press or Key Adjusts display
intensity
Typical display
Press ENTER Saves level of contrast
and exits to display Typical display
BLANK
BLANK
BLANK
STPMOTOR SPEED
LOCAL 0 PRM
STPMOTOR SPEED
LOCAL 0 PRM
OFFMOTOR SPEED
LOCAL Ø RPM
MN723H-10/95 11/28/95 1:11 AM Page 59 (Black plate)
Page 59

Program Mode
Use the PROGRAM MODE to customize the control to suit a variety of applications by programming
the operating parameters. From the DISPLAY MODE press the PROG key to access the PROGRAM
MODE. To return to the DISPLAY MODE, press the DISP key. Parameters may be programmed in
any operating mode. When a parameter is selected for programming, the keypad display gives you
the following information:
Parameter
Parameter Access: Value and Units
P = Programmable
V = Factory Preset
L = Locked
All programmable parameters are displayed with a P: in the lower left hand corner of the keypad
display. If a parameter is displayed with a V:, the setting is pre-set at the factory and may be viewed
but not changed while the control is enabled. If the parameter is displayed with an L:, the setting is
locked and the security access code must be entered before any changes can be made.
Control Software Descriptions
The following parameters are available within the Series 23H servo control to allow custom tailoring
the drive for different applications. Detailed programming instructions follow the parameter list.
Level 1 Programming Blocks
Preset Speed Block
Preset Speeds #'s 1-15 - These parameters select the preset speed to be output from the
control when the J1 control terminal strip is wired to use preset speeds with an external control
device. A preset speed only sets an operating speed so a motor direction command is required to
start motor rotation. The range of adjustment is from 0 - MAX OUTPUT SPEED.
Accel/Decel Rate Block
Accel Time #1 and Accel Time #2 - Sets the time in seconds for the output speed of the
control to increase linearly to the RPM specified in the MAX OUTPUT SPEED parameter. The range
of adjustment is from 0 - 3600 seconds from minimum speed to maximum speed with a resolution of
0.1 seconds.
3-6 KEYPAD PROGRAMMING AND OPERATION
PRESET SPEED
#1
MN723H-10/95 11/28/95 1:11 AM Page 60 (Black plate)
Page 60

Decel Time #1 and Decel Time #2 - Sets the time in seconds for the output speed command
to decrease linearly from the maximum speed specified in the MAX OUTPUT SPEED parameter to 0
RPM. The range of adjustment is from 0-3600 seconds with a resolution of 0.1 seconds.
S-Curve #1 and S-Curve #2 - Sets the ACCEL/DECEL rate as a percent of the total time
programmed for acceleration and deceleration. Acceleration is equal to one-half the "S" curve
percentage and deceleration is equal to the remaining one-half of the "S" curve percentage. Adding
"S" curve to a linear ramp will smooth the start from 0 speed; will smooth the transition from
accelerating to running speed; and vice-versa. The range of adjustment is OFF - 100%. OFF
represents no "S" with 100% being full "S" with no linear segment between the beginning and
ending "S" segments.
Jog Settings Block
Jog Speed - This is the speed command in RPM the control outputs when a JOG command is
given from a remote input or the keypad JOG key.
NOTE: THE JOG COMMAND ONLY SETS THE JOG SPEED DESIRED. THE JOG
FUNCTION WILL NOT START UNTIL A DIRECTION OF ROTATION
(FWD/REV) COMMAND IS PROVIDED AT EITHER THE KEYPAD WHEN
OPERATING IN THE LOCAL MODE OR AT THE J1 TERMINAL STRIP WHEN
OPERATING IN THE REMOTE MODE. THE RANGE OF ADJUSTMENT IS
0 - MAX OUTPUT SPEED PARAMETER SETTING.
Jog Accel Time - Sets the time in seconds for the JOG speed to linearly increase from 0 RPM to
the RPM set in the MAX OUTPUT SPEED parameter. The range of adjustment is 0 - 3600 seconds
with a resolution of 0.1 seconds.
Jog Decel Time - Sets the time in seconds for the JOG speed to decrease linearly from the MAX
OUTPUT SPEED parameter setting to 0 RPM. The range of adjustment is 0-3600 seconds with a
resolution of 0.1 seconds.
Jog S-Curve Time - Set the ACCEL/DECEL rate of the JOG speed command as a percent of the
total time programmed for JOG acceleration and deceleration. Acceleration is equal to one-half the
"S" curve percentage and deceleration is equal to the remaining one-half of the "S" curve
percentage Adding "S" curve to a linear ramp will smooth the start from 0 speed; will smooth the
transition from accelerating to running speed; and vice-versa. The range of adjustment is OFF 100%. OFF represents no "S" with 100% being full "S" with no linear segment between the
beginning and ending "S" segments.
Keypad Setup Block
Keypad Stop Key - This parameter enables or disables the keypad stop key when operating the
control remotely through the J1 terminal strip. The selection available is Remote On or Remote Off.
3-7KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 61 (Black plate)
Page 61

The factory preset is Remote On. Pressing the Stop Key (if programmed active) while in remote
control automatically selects LOCAL mode of operation to prevent a restart command.
Keypad Stop Mode - Selects if the motor will "coast" or "regen" to a stop. In the coast mode
power to the motor will be turned off and the motor will coast to a stop. In the regen mode, the
motor will be decelerated to a stop within the time specified in the DECEL TIME parameter.
NOTE: IN THE REGEN MODE THERE IS A POSSIBILITY OF CAUSING AN OVER
VOLTAGE TRIP CAUSED BY DECELERATING THE MOTOR AT A RATE
FASTER THAN IT WOULD COAST TO A STOP. UNDER THESE CONDITIONS,
THE MOTOR GENERATES POWER BACK INTO THE CONTROL. IF A FAULT
IS EXPERIENCED, INCREASE THE DECEL TIME PARAMETER. IF A FAULT
STILL EXISTS AT THE MAXIMUM DECEL TIME ALLOWABLE IN YOUR
APPLICATION, AN OPTIONAL EXTERNAL DYNAMIC BRAKING KIT OR
ASSEMBLY IS REQUIRED.
Keypad Run FWD - Enables or disables the FWD key during LOCAL operation. The choice is
ON or OFF.
Keypad Run REV - Enables or disables the REV key during LOCAL operation. The choice is
ON or OFF.
Keypad Jog FWD - Enables or disables the "FWD" key during a LOCAL jog operation. The
choice is ON or OFF.
Keypad Jog REV - Enables or disables the REV key during a LOCAL jog operation. The
choice is ON or OFF.
Input Block
Operating Mode - Selects the basic operation of the control including functions of the input and
output terminals on the J1 terminal strip. The Series 23H control has several modes of operation to
suit various application requirements. Please refer to the servo control connection diagrams to
determine which operating mode is right for your application. The choices from which you can select
are: Keypad (only), Standard Run, 15 speed, Bipolar, Process and Serial. The factory preset is
Keypad.
Command Select - Selects and scales the type of external speed reference command you input to
the control. The possible values are Potentiometer, +/- 10 vdc, +/- 5 vdc, 4-2OmA, 10 volt W/EXT
CL (with differential command present at J1-4 and J1-5 this selection allows additional input at J1-1,
2, and 3 which allows reduction in programmed current limit for torque trimming during operation),
10Volt W/TORQ FF (with differential command at J1-4 and J1-5 this selection allows additional
torque feedforward input at J1-1, 2, and 3 to set predetermined amount of torque inside the rate
loop with high gain settings), EXB PULSE FOL (pulse follower expansion board), 10Volt EXB (high
resolution expansion board), 3-15PSI (expansion board), Tachometer (expansion board), Serial
Communication (expansion board), Fixed parameter (process mode), or none. The factory preset is
+/- 10 vdc.
3-8 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 62 (Black plate)
Page 62

NOTE: WHEN USING A 4-2OMA INPUT, JUMPER JP1 ON THE MAIN CONTROL
BOARD MUST BE MOVED TO THE LEFT TWO PINS.
ANA CMD Inverse - This parameter inverts the analog input command. Choice is ON or OFF.
When set to ON the control recognizes a high level command signal as a low speed output
command and a low level command signal as a high speed output command. When OFF low signal
is low speed and high signal is high speed output command. The factory preset is OFF.
ANA CMD Offset - This parameter permits the adjustment of the analog input command zero
reference point on Analog Input No. 2 at J1-4 and J1-5. The setable range is -20% to + 20%. The
factory preset is 0%. Used to set 4mA equal to zero speed.
ANA 2 Deadband - Sets a band above and below the zero command signal level to which the
control will not respond. The available range is 0-10.00 Volts. The factory preset is 0.00 volts.
Output Block
Opto Output #I- #4 - These parameters select the output of the optically isolated outputs
available at the J1 control terminal strip to represent various control operating conditions. The opto
outputs are digital outputs meaning there are two possible operating states, either on or off. The
opto outputs are useful in applications where a higher level controller is monitoring the operation of
the control to make process decisions based on the operating status of the control.
These outputs can also interlock with auxiliary hardware including mechanical brakes, bypass
contactors or to signal an operator when various operating conditions are present. Available outputs
include; Ready, Zero speed, At speed, At set speed, Overload, Keypad control, Fault, Following err,
Drive on, Cmd direction, At position, Overtemp, Warn, and Motor direction. The factory preset
selections for each opto output are: Ready, Zero speed, At speed, and Fault.
Zero Speed SPD Set Pt - Sets the speed in RPM at which an opto output programmed to output
zero speed, will turn on. When the output speed of the control goes below the speed programmed
into the zero speed setpoint parameter the opto output will turn on. The range of adjustment is 0MAX OUTPUT SPEED. Factory preset value is 200 RPM.
At Speed Band - Sets the speed tolerance in RPM of the Set Speed Point at which the opto turns
on. If the Set speed point is 1000 RPM and the At Speed Band is 100 RPM the At Speed opto
output will turn on at 900 RPM. The range of adjustment is 0-1000 RPM. Factory preset value is
100 RPM.
Set Speed Point - Sets the output speed where the Set Speed opto output turns on. When the
speed of the drive goes above the programmed Set Speed Point, the opto output will turn on. The
range of adjustment is 0-MAX OUTPUT SPEED. The factory preset is rated motor speed.
Analog Out #1 and #2 - These parameters set the operating condition (programmable choice
from list below) at which the analog output(s) located on the J1 terminal strip will provide a linear 0-5
vdc signal response. The analog outputs are useful in applications for monitoring current operating
conditions in some higher level controller or to drive remote analog meters for operator reference.
3-9KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 63 (Black plate)
Page 63

Available selections include; ABS Speed, ABS Torque, Speed command, PWM voltage, Flux
current, CNM flux current, Load current, Motor current, Load component, Quad voltage, Direct
voltage, AC voltage, Bus voltage, Torque, Power, Velocity, Overload, PH2 current, PH3 current, and
position.
Analog Scale #1 and #2 - Scales the percent of maximum 5 vdc output to represent the max
condition value. This feature is useful to set a zero value on remote meters or changing the scale
value of digital meters. The range is 10-100 % of the 5 vdc output. Factory preset is 100%.
Position Band - This parameter sets the acceptable range in digital counts (pulses) at which the
At-Position opto output turns on. The range of adjustment is 0-32767 counts. Factory preset is a
calculated value based on the pulse count of the encoder being used.
Brushless Control Block
Resolver Alignment - A numerical alignment value between the motor and the resolver set by the
auto tuning procedure. The factory preset value is 22.3 degrees and is correct for all standard Baldor
BSM motors.
Speed Filter - Sets the number of scans by the control microprocessor to filter the resolver signal
input to the control. It is automatically set to suit the resolver resolution. The preset filter may be
reduced to obtain smoother low speed operation. The higher the number, the more filtered the signal
but at the cost of reduced bandwidth. Preset value is calculated by the control. The range of
adjustment is 0 - 7.
Feedback Align - Sets the resolver’s electrical direction of rotation to match that of the motor. It
can be either forward or reverse. The factory preset is forward.
Current Prop Gain - This parameter sets the current loop proportional gain. The range of
adjustment is 0-255. The factory preset is 20.
Current lnt Gain - This parameter sets the current loop integral gain. The range of adjustment is
0-100. The factory preset is 50.
Speed Prop Gain - This parameter sets the speed (velocity) loop proportional gain. The range of
adjustment is 0-255. The factory preset is 10.
Speed Int Gain - This parameter sets the speed (velocity) loop integral gain. The range of
adjustment is 0-9.99 Hz. The factory preset is 1.00 Hz.
Speed DIFF Gain - This parameters sets the speed (velocity) loop differential gain. The range of
adjustment is 0-100 with the factory preset being 0.
Position Gain - This parameter sets the position loop proportional gain. The range of adjustment is
0-9999. The factory preset is a calculated value.
3-10 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 64 (Black plate)
Page 64

Level 2 Programming Blocks
Output Limits Block
Operating Zone - This parameter sets up the Operating Zone of the control for Standard PWM
output bridge carrier frequency (2.5KHz) or Quiet PWM output bridge carrier frequency (8.0KHz) in a
Constant Torque mode which has a 200% 3 second with a 150% 60 second peak overload capacity
or a Variable Torque mode which has a 115% peak overload capacity for 60 seconds. Selection of
an Operating Zone automatically sets the PWM frequency, motor rated amps and peak current limits
to the values listed on the control's nameplate output rating for the zone selected. Note, the
control's power rating can change depending on which zone is selected.
Standard PWM zones should be selected for applications requiting maximum power output from the
control. Quiet PWM operating zones should be selected if quiet motor operation is desired.
Constant Torque zones should be selected if the application requires overload current of more than
115% of the control's rating. Variable Torque zones should be selected if the application requires
minimal overload current of 115% or less of the control continuous rating.
The available Operating Mode selections are STD CONST TQ, STD VAR TQ, QUIET CONST TQ,
QUIET VAR TQ. The factory preset is QUIET CONST TQ.
Min Output Speed - Sets the desired minimum motor speed in RPM. The available range is
0-maximum speed. The scaling of an external speed command signal will also be affected to the
extent that a minimum speed command will represent will represent the minimum output speed.
During operation, the output speed will not be allowed to go below the minimum output speed
unless the motor is starting from 0 RPM or is ramped (dynamically braked) to a stop. The factory
preset is 0 RPM.
Max Output Speed - Sets the desired maximum motor speed in RPM. The scaling of an external
speed command signal will also be affected to the extent that a maximum speed command will
represent the maximum output speed. The available range is 0-32767 RPM. The factory preset is
Rated Motor Speed.
Pk Current Limit - Sets the maximum output current in amps that will be provided to the motor.
The adjustable range is peak rated current. Values above 100% of the rated continuous current are
available depending upon selected operating Zone. The factory preset is the Constant Torque
Operating Zone peak current rating for the control.
PWM Frequency - Sets the switching rate of the output (inverter) section power transistors. The
PWM frequency can be increased to minimize audible noise that may be present at the motor. In
general, the PWM frequency should be set as low as possible to minimize the stress on the output
transistors and motor windings. PWM frequency is also called "carrier frequency". This parameter is
set initially when the Operating Zone is programmed. This setting can be changed to the limits of
the operating zone which are: 1-5KHz in the Std Const Tq and Std Var Tq zones and; 1-16KHz in
the Quiet Const Tq and Quiet Var Tq operating zones. The factory preset is 8.0KHz which is the
nominal value for the Quiet Const Tq operating zone.
3-11KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 65 (Black plate)
Page 65

Torque Rate Limit - Limits the rate of change of a torque command. The adjustable range is from
0-10.00 seconds. The factory preset is 0.00 seconds.
Custom Units Block
The custom units block parameters are used to set up a keypad Output Rate display of units that are
meaningful to your operation. The Output Rate display is only available if the Value At Speed
parameter has been changed from a value of 0. To see the Output Rate display press the Display
key until Output Rate is shown. The following parameters are used to set up the Output Rate
display:
Decimal places - This parameter sets the maximum number of decimal places that will be shown I
the Output Rate keypad display. The Output Rate display is only available if the Value At Speed
parameter has been changed from a value of 0 . To see the Output Rate display depress the Display
key scrolling though the displays that are there until Output Rate is shown.
The number of decimal places will automatically be reduced for large values in the Output Rate
display. The actual number displayed is determined by the value programmed into the Value At
Speed parameter. The range of available decimal places is 0-5. The factory setting is 0.
Value at Speed - Sets the desired output rate per RPM of motor speed. There are two numbers
displayed on the keypad that are separated by a slash. The left number is set first. It is the value
you want the keypad to display at a specific motor speed. Then set the right number to the RPM
corresponding to the units in the left number. A decimal may be inserted into the numbers by
placing the flashing cursor over the up/down arrow. The left and right numbers may range from 0-
65535. The factory set values are 0/0.
Units of Measure - This parameter allows customization of the units of measure displayed in the
Output Rate display. To adjust, first select the character to be programmed by scrolling through the
available selection using the SHIFT key and the arrow keys.
If the desired selection is not shown in the character set in the display, move the flashing cursor to
the special Up/Down arrow character on the far left side of this keypad display using the SHIFT key.
Once the cursor is on the special Up/Down arrow character in the display, the Up/Down arrow keys
themselves can be used to select a different character set that will appear on the top line of the
keypad display. There are 9 different character sets that can be accessed. Now the desired
character can be programmed using the SHIFT and the arrow keys along with the ENTER key to
save your selection.
Pr
otection Block
Overload - This parameter setting determines if the control will trip off (FAULT), or automatically
reduce the output current below the continuous output level (FOLDBACK) if a motor overload
condition occurs. If "FAULT" is selected the control will need to be Reset if an overload condition
occurs and the control trips off. If continuous operation is desired, even in momentary overload
conditions, the control should be set to "FOLDBACK". If the Overload parameter is set to
"FOLDBACK" the output current will automatically reduce below the continuous output level until the
overload condition is corrected or eliminated. The factory preset is "FAULT".
3-12 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 66 (Black plate)
Page 66

NOTE: THE FOLDBACK SELECTION MAY NOT BE AVAILABLE ON SOME EARLY
VERSIONS OF SOFTWARE.
External Trip - This parameter programs the control to expect to see a Normally Closed (NC)
switch at the external trip input terminal at the main control board's terminal strip. The choice is to
turn it ON or turn it OFF. If tur ned ON, the control will shut down if the circuit tied into the External
Trip Input opens. This is useful for connecting a motor overload thermostat.
Following Error - Following error is the programmable tolerance for the At Speed opto-isolated
output. This parameter determines if the control will monitor the amount of following error that
occurs in an application or it will ignore it. This parameter can be set to ON or OFF. The factory
setting is OFF.
Miscellaneous Block
Restart Auto/Man - Used to set the restart feature of the control to be AUTOMATIC or MANUAL
when a fault or a power failure occurs. MANUAL should be chosen to disable the auto restart
function. The factory preset is MANUAL.
Restart Fault/Hr - Sets the maximum number of automatic restart attempts that will be allowed
before the control will require a manual restart. This feature is useful in applications that require
unattended operation and automatic operation even in the event of various fault conditions such as
unscheduled power outages. After one hour without reaching the programmed maximum # of
faults, the number of allowable restarts will be reset to the value specified in the # of Restarts
parameter. The range of adjustment is 0-10 restart faults/hr. The factory preset is 0.
Restart Delay - Sets the amount of time in seconds between a fault and an attempted automatic
restart. This feature is useful in setting a sufficient time period for a fault to be cleared before an auto
restart is attempted. The range of adjustment is 0-120 seconds. The factory preset is 0 seconds.
Factory Settings - This parameter can be activated by selecting YES which is done by pressing
the Up arrow key followed by an ENTER keystroke. This function is used to reset all parameters to
the factory preset values should drive operation become unstable, erratic or unpredictable. The
display will say "operation done" when the values have been reset. This parameter is not preset or
permanently programmable. It must be accessed each time a return to factory settings is desired.
Homing Speed - In the BIPOLAR and SERIAL Operating Modes, this control features an ability to
rotate (ORIENT) the motor shaft to a "home" position when the Orient input switch on the controls
main terminal strip is activated. This parameter sets the speed at which the motor will rotate in the
Forward direction when the Orient input switch is closed. The speed can be faster or slower than
your "normal" operating speed. The range of adjustment is 0-MAX SPEED. The factory preset is
100 RPM.
3-13KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 67 (Black plate)
Page 67

Homing Offset - This parameter sets distance past the index marker at which the motor will stop.
The distance is set by the number of digital pulses that the control expects before stopping motor
rotation. The 23H control has 4096 digital pulses per resolver speed per revolution of the motor
shaft. The recommended minimum offset is at least 100 encoder counts to provide deceleration
distance to allow the motor to smoothly stop. The range of adjustment is 0-65535 counts.
Security Control Block
Security State - This parameter determines if a security code will be required to change protected
programming parameters. There are three levels of security code that may be imposed with this
parameter as well as the option to turn this function OFF. The three levels of security are LOCAL,
SERIAL AND TOTAL.
If set to LOCAL security, a security code must be entered before parameter changes can be made
from the keypad.
NOTE: THE USER CAN PRESS THE PROG KEY AND SCROLL THROUGH THE
PARAMETERS ALREADY PROGRAMMED BUT CAN NOT CHANGE THEM.
THE USER WILL BE PROMPTED FOR THE SECURITY ACCESS CODE
BEFORE THE CONTROL WILL ACCEPT A PARAMETER CHANGE.
If set to SERIAL security, a security code must be entered before parameter changes can be made
through the serial communication link.
NOTE: THE USER CAN PRESS THE PROG KEY AND SCROLL THROUGH THE
PARAMETERS ALREADY PROGRAMMED BUT CAN NOT CHANGE THEM.
THE USER WILL BE PROMPTED FOR THE SECURITY ACCESS CODE
BEFORE THE CONTROL WILL ACCEPT A PARAMETER CHANGE.
If set to TOTAL security, a security code must be entered from the keypad or the serial
communication link before changes can be made to protected parameters.
NOTE: THE USER CAN PRESS THE PROG KEY AND SCROLL THROUGH THE
PARAMETERS ALREADY PROGRAMMED BUT CAN NOT CHANGE THEM.
THE USER WILL BE PROMPTED FOR THE SECURITY ACCESS CODE
BEFORE THE CONTROL WILL ACCEPT A PARAMETER CHANGE.
Setting the Security State to OFF will defeat the security system. The factory setting for this
parameter is OFF.
Access Timeout - With any of the 3 types of security enabled, the security access code is
required before Parameter changes will be accepted in the Program mode. Assuming the security
code has been entered and parameters have been changed and accepted, the user can verify the
effect the parameter change(s) have on control operation by going to the display mode by pressing
the DISP key. If additional changes then need to be made, the Access Timeout feature allows the
3-14 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 68 (Black plate)
Page 68

user some time to make the change without having to re-enter the security code. The amount of
time allowed is this Access Timeout parameter. The parameter sets the amount of time the user will
have to make changes without re-entering the security code. The amount of time is user
programmable and may be anywhere from 0-600 seconds. The programmed time starts upon
leaving the Program mode. The factory preset time is 0 seconds, which disables the Access
Timeout.
Access Code - This parameter sets the security access code. If you choose to implement a
security access code be sure to write the number down in a secure location. The security access
code can be any number from 0000-9999. When changing the Access Code number parameter
the new number will not be displayed. The factory preset is 9999. If you cannot gain entry into the
security area to change a parameter. Please contact BALDOR. Be prepared to give the five digit
code located on the lower right hand side of the keypad display when prompted for a security code.
We can then assist in determining your access code number.
Motor Data Block
Motor Rated Amps - Program in the motor's nameplate continuous rated current. This
parameter also sets the continuous output current to the motor. If the output current fed to the
motor exceeds the value in the Motor Rated Amps parameter for an extended period of time, the
control will trip off with an overcurrent or overload fault. The factory setting is the continuous current
rating of the control for the factory set operating zone.
Motor Poles - Program in the number of motor poles. Factory setting is 4 poles. The listing below
is a table for standard Baldor BSM motors.
Resolver Speed - This parameter sets the speed of the resolver. The range of resolver speeds that
can be selected are 0 - 10. The factory setting is 1 speed. All standard BSM motors use 1 speed
resolvers and this parameter would not normally need to be changed.
3-15KEYPAD PROGRAMMING AND OPERATION
NUMBER OF
MOTOR POLES
BSM63, BSM80 4
BSM90, BSM100 8
BSM4F, BSM6F,
8
BSM8F
BSM2R, BSM3R,
4
BSM4R
BSM6R 6
MN723H-10/95 11/28/95 1:11 AM Page 69 (Black plate)
Page 69

Brake Adjust Block
Resistor Ohms - This sets the Dynamic Braking Resistor value in Ohms. The dynamic braking
resistor can be internal (-E models) or external using optional RG, RGA or RBA assemblies. Care
should be exercised in selecting the proper amount of minimum resistance. Refer to Section 2 of
this manual for dynamic braking information. If dynamic braking is not used set the Resistor Ohms
to 0. The range of adjustment is 0-255 Ohms. The factory preset is 0. The last 2 digits of On RG,
RGA or RBA assembly catalog number is the resistor ohms.
Resistor Watts - This sets the wattage value of the dynamic braking resistor(s). The dynamic
braking resistor can be internal (-E models) or external using optional RG, RGA or RBA assemblies.
Care should be taken in selecting the proper amount of power dissipation in watts. Refer to Section
2 of this manual for dynamic braking information. If dynamic braking is not used set the Resistor
Watts to 0. The range of adjustment is 0-32767 watts. The factory preset value is 0. The first 2 digits
of RG, RGA, or RBA assembly catalog number times 100 is the resistor watts.
Process Control Block
Process Feedback - This parameter sets the source that will be used for process feedback input
to the control. The available selection includes: potentiometer, +/- 10 vdc, +/- 5 vdc, 4-20mA when
using the standard control without optional expansion boards; 0-10 vdc or 4-2OmA via the optional
High Resolution Expansion board, 3-15 PSI via an optional expansion board, or the optional
Tachometer expansion board.
Process Inverse - This parameter inverts the feedback source in a unipolar fashion. This
parameter is intended to be used with reverse acting processes that use a unipolar signal such as 420mA where 20mA will decrease speed and 4mA will increase motor speed. This parameter can be
turned ON or OFF. The factory preset is OFF.
Setpoint Source - This parameter selects the source to which the process feedback will be
compared and controlled. The available choices are: potentiometer, +/- 10 vdc, +/- 5 vdc, 4-2OmA
when using the standard control without optional expansion boards; 0-10 vdc or 4-20mA via the
optional High Resolution Expansion board, 3-15 PSI via an optional expansion board, a tachometer
via an expansion board, serial via an optional serial communication expansion board or a FIXED
(software) PARAMETER which requires implementing the Setpoint Command parameter. The factory
preset is FIXED PARAMETER.
Setpoint Command - This parameter is used only when the Setpoint Source is a FIXED
PARAMETER. This parameter is the input setpoint value that the control will try to maintain by
adjusting the motor speed. This parameter is scaled as a percentage of the process feedback input.
The programmable range is -100% to +100.0 % . The factory preset is 0.00%.
3-16 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:11 AM Page 70 (Black plate)
Page 70

Set Pt Adj Limit - This parameter sets the maximum speed correction the motor will make in
response to the maximum feedback setpoint error. The parameter is programmed as a +/percentage of the Max Motor Speed parameter. For example, if the Max Motor Speed is 175O
RPM, the setpoint feedback error is 100% and the Setpoint Adjustment Limit is programmed to be
10%, the maximum speed the motor will run in response to the setpoint feedback error is +/- 175
RPM. The range of adjustment is 0-100%. The factory preset value is 10%.
Procss Err Tol - Sets the width of the band above and below the setpoint command value with
which the process input is compared to turn on an opto-isolated output. When the process input is
within the band, the "AT SETPOINT" logic output will be closed. This function is useful for indicating
an out of control process. The range of adjustment is 0-100%. The factory preset value is 10%.
Process Prop Gain - This parameter adjusts how much the control will adjust the motor speed
to move the analog input to the setpoint value proportional to the error. The range of adjustment is
0-2000. The factory setting is 0.
Process Int Gain - This parameter adjusts how fast the control will adjust the motor speed to
move the analog input to the setpoint value for the steady state error. The adjustable range is 0 to
9.99 Hz. The factory preset is 0.00 Hz.
Process Diff Gain - This parameter adjusts how much the control will adjust the motor speed to
move the analog input to the setpoint value proportional to the rate of change of the dynamic error.
The range of adjustment is 0-100. The factory setting is 0.
Follow l:O Ratio - This parameter is only used when the optional Master Reference Isolated
Pulse Follower expansion board is used. It sets the ratio for a "follower" in encoder quadrature
counts that are received on the Master Pulse Reference /Isolated Pulse Follower board to the
commanded motor quadrature counts. For example, suppose the encoder you are following (which
would be called the master) has a 1024 count encoder on it and the motor on the follower control
you are now programming also has a 1024 count encoder on it. If you want to run twice the speed
of the master motor, you would program a 2:1 ratio in the follower control. The range of ratios is
1-65535:1-65535. The factory setting is 1:1. In the Serial mode this parameter sets only the Master
of the Ratio. In the Serial mode the follower of the ratio is set in the Follow I:O out parameter.
Follow I:O Out - This parameter is used only in the Serial Operating mode when using the optional
Master Reference/Isolated Pulse Follower expansion board. It sets the Follower ratio of encoder
counts that are output to the motor as the command. The Master ratio is set by the Follow I:O Ratio
parameter in the Serial Mode.
Master Encoder - This parameter is only used when the optional Master Reference/Isolated
Pulse Follower optional expansion board is used. This parameter defines the pulses per revolution
the Master Encoder has. This parameter is required to program the Follower Input:Output ratio
parameter. The range of encoder pulses per rev is 20-65535. The factory preset is 1024.
3-17KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:12 AM Page 71 (Black plate)
Page 71

Auto-Tuning Block
NOTE: OCCASIONALLY THE AUTO-TUNING TESTS CANNOT BE RUN ON AN
APPLICATION. THIS MAY BE BECAUSE THE LOAD CANNOT BE
UNCOUPLED FROM THE MOTOR OR SOME OTHER REASON. IF THIS IS
THE CASE, THE CONTROL CAN BE MANUALLY TUNED BY
PROGRAMMING IN THE NECESSARY PARAMETER VALUES BASED ON
CALCULATIONS YOU DO. REFER TO MANUALLY TUNING THE CONTROL
IN TROUBLESHOOTING SECTION 4 OF THIS MANUAL FOR INFORMATION
ON HOW TO DO THIS.
ALL AUTOTUNING PROCEDURES DESCRIBED BELOW SHOULD BE RUN IN
A NO-LOAD CONFIGURATION. THE LOAD SHOULD THEN BE COUPLED TO
THE MOTOR AND THE LAST TEST RERUN WITH THE MOTOR LOADED.
Calc Presets - This procedure loads into memory the Factory preset values for parameters that are
not required to be loaded by the customer but are needed to run these tests. This test must always
be run.
Cmd Offset Trim - This is the second autotuning test. It trims out any voltage offsets on the
differential input command at main control board terminals J1-4 and J1-5. It does not trim the
analog pot input at terminals J1-1, J1-2 and J1-3.
Cur Loop Comp - This is the third autotuning test. This procedure measures current response to
commanded pulses of one-half the rated motor current.
Resolver Align - This fourth auto-tuning test procedure checks the electrical alignment of the
resolver with respect to the motor stator. this test locks the motor rotor into a reference position and
then proceeds to check and re-adjust if necessary, the factory setting of the resolver.
SPD Cntrlr Calc - This last autotuning test. If possible, it should be performed with the load
coupled to the drive. This procedure accelerates the motor to measure the current to acceleration
ratio. It also adjusts Speed Controller Integral Gain and Speed Controller Differential Gain. If this
autotuning procedure is done with no load, it will generally set the Speed Controller Integral Gain too
high for high inertia motors and loads if the Current Limit parameter is set too low. If the control is
too responsive when the drive is loaded, set the Current Limit to the proper higher value and rerun
this procedure.
3-18 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:12 AM Page 72 (Black plate)
Page 72

Accessing Parameter Blocks for Programming
Use the following procedure to access parameter blocks to program the control.
3-19KEYPAD PROGRAMMING AND OPERATION
Action Description Display Comments
Apply Power Display illuminates Logo display for
for 5 seconds
If no fault present and
programmed for local
Display Mode
operation
If no fault present and
programmed for remote Display Mode
operation
If fault is displayed see
troubleshooting chapter
Program block
Press PROG Key [ENTER] accesses
preset speed
adjustments
Press or Key Scroll to next program
block desired
[ENTER] accesses
level 2 blocks
Press ENTER Return to display [ENTER] returns to
Key mode display mode
Returned to display Typical Display
mode
B A L D O R
MOTORS & DRIVES
STPMOTOR SPEED
LOCAL 0 RPM
STPMOTOR SPEED
REMOTE 0 RPM
PRESS ENTER
FOR
PRESS ENTER
FOR
PRESS ENTER
FOR
PRESS ENTER
FOR
STOP MOTOR
SPEED
MN723H-10/95 11/28/95 1:12 AM Page 73 (Black plate)
Page 73

Programming or Changing Parameters
when Security Code Not Used
Use the following procedure to program or change a parameter already programmed into the control
when a security code is not being used. Example below changes operating mode from keypad to
bipolar.
3-20 KEYPAD PROGRAMMING AND OPERATION
Action Description Display Comments
Apply Power Display illuminates Logo display for
for 5 seconds
Press PROGKey Enter program mode
First programming
Press or Key Scroll to INPUT block display
[ENTER] accesses
Press ENTER Key
INPUT block
parameters
Press PROGKey Allows operating mode Keypad mode is
selection factory preset
Press Key Scroll through
available range to Typical selection
make selection
Press ENTER or Saves selected parameter
PROG Key to memory
Press Key Scroll to EXIT
block
Press ENTER Key Return to start
of Input block
Press DISP Key Return to display Typical display
mode
B A L D O R
MOTORS & DRIVES
STPMOTOR SPEED
LOCAL 0 RPM
STPMOTOR SPEED
REMOTE 0 RPM
PRESS ENTER
FOR
OPERATINGMODE
P: KEYPAD
OPERATINGMODE
P: BIPOLAR
PRESS ENTER
FOR
PRESS ENTERFOR
INPUT
PRESS ENTER
FOR
OPERATING MODE
P: BIPOLAR
STP 0V 0
RPM
MN723H-10/95 11/28/95 1:12 AM Page 74 (Black plate)
Page 74

System Security
Access to programmed parameters can be protected by use of the security code feature. Security is
enabled, and the security code is defined by setting the parameters in the Level 2 Security Control
programming block.
The type of security is selected by choosing either OFF, LOCAL, SERIAL, or TOTAL in the Security
State parameter. Selection of the type of security state dictates the type of operating mode that is
protected by the security system.
Parameters that are restricted by system security will be marked with an L: in the lower left corner of
the keypad display. To program or change a locked parameter refer to the "Programming or
Changing Parameters with a Security Code in Use" procedure in this section.
NOTE: THE ACCESS TIMEOUT PARAMETER SETS THE AMOUNT OF TIME THE
USER CAN EXIT THE PROGRAM MODE TO GO TO THE DISPLAY MODE
AND THEN RETURN TO THE PROGRAM MODE WITHOUT HAVING TO
RE-ENTER THE SECURITY CODE (NORMAL SEQUENCE TO SEE THE
EFFECT OF PROGRAMMING CHANGE). THE AMOUNT OF TIME ALLOTTED
IS PROGRAMMABLE AND BEGINS UPON EXITING THE PROGRAM MODE.
To implement and access the system security use the procedures which follow.
3-21KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:12 AM Page 75 (Black plate)
Page 75

Program or Change Security System
3-22 KEYPAD PROGRAMMING AND OPERATION
ACTION DESCRIPTION DISPLAY COMMENTS
Logo display
Apply Power
5 seconds
No faults present,
Local keypad mode.
Display mode
If in Remote/Serial mode,
Press LOCAL for this display
First display in
Press PROG Key Enter programming mode program mode
Press Key
Scroll to LEVEL 2 BLOCK
entry display
Press ENTER Key
Access LEVEL 2 programming
blocks
Press Key
Scroll to SECURITY
CONTROL block
Press ENTER Key
Enter SECURITY CONTROL
block
Press Key Scroll to ACCESS CODE
Press ENTER Key
Enter ACCESS CODE
parameter
Press Key Select ACCESS CODE
- denotes blinking
Example: 8999
cursor
Press ENTER Key Save ACCESS CODE parameter
Display will not show
user access code record for future
Press Key Scroll back to SECURITY STATE reference
Press ENTER Key
Access security parameter - denotes
blinking
cursor
Press Key Select LOCAL SECURITY
option
Can select total
or serial security
Press ENTER Key Save LOCAL SECURITY
ACCESS CODE
P: 8 999 9999
SECURITY STATE
LOCAL
SECURITY STATE
P : OFF
B A L D O R
M O T O R S & D R
STOP MOTOR
SPEED
PRESS ENTER
FOR
PRESS ENTER
FOR
SECURITY STATE
L : LOCAL
ACCESS CODE
P: 9999 9999
ACCESS CODE
P: 9999
STOP MOTOR
SPEED
ACCESS CODE
P: 9999
SECURITY STATE
P: OFF
PRESS ENTER
FOR
PRESS ENTER
FOR
SECURITY STATE
OFF
Action Description Display Comments
MN723H-10/95 11/28/95 1:12 AM Page 76 (Black plate)
Page 76

Program or Change the Security System
Access Timeout Parameter
3-23KEYPAD PROGRAMMING AND OPERATION
ACTION DESCRIPTION DISPLAY COMMENTS
Logo display
Apply Power
5 seconds
No faults present,
Local keypad mode.
Display mode
If in Remote/Serial mode,
Press LOCAL for this display
First display in
Press PROG Key Enter programming mode program mode
Press Key
Scroll to LEVEL 2 BLOCK
entry display
Press ENTER Key
Access level 2 programming
blocks
Press Key
Scroll to SECURITY
CONTROL block
Security state previously
set to LOCAL security
Press ENTER Key Enter security control
All parameters are locked
block
Press Key Scroll to ACCESS
- Denotes blinking
TIMEOUT Parameter
cursor.
Press ENTER Key Attempt to enter ACCESS Ignore the 5 numbers
TIMEOUT Parameter to the right.
Enter your SECURITY
Press Key
CODE Example: 8999
Press ENTER Key Scroll to ACCESS
TIMEOUT parameter.
Press ENTER Key Enter ACCESS Security code correct.
TIMEOUT parameter. All parameters unlocked.
Using the SHIFT and
Press SHIFT Key Move cursor one arrow keys, it is
character to right. possible to enter any
value between 0 and
Press Key “Dial in” the value 3. 600 seconds.
3 times Example: 30
Press ENTER Key Save new value into
ACCESS TIMEOUT
SECURITY STATE
P : LOCAL
ACCESS
TIMEOUT
ACCESS
TIMEOUT
B A L D O R
M O T O R S & D R
STOP MOTOR
SPEED
PRESS ENTER
FOR
PRESS ENTER
FOR
ACCESS
TIMEOUT
ACCESS CODE?
: 8 9 9 923956
ACCESS
TIMEOUT
STOP MOTOR
SPEED
ACCESS CODE?
: 9 9 9 923956
SECURITY STATE
L : LOCAL
PRESS ENTER
FOR
PRESS ENTER
FOR
ACCESS
TIMEOUT
Action Description Display Comments
MN723H-10/95 11/28/95 1:12 AM Page 77 (Black plate)
Page 77

Programming or Changing Parameters
with a Security Code in Use
Use the following procedure to program or change a parameter already programmed into the control
that has a security code enabled.
3-24 KEYPAD PROGRAMMING AND OPERATION
Apply Power Display illuminates
Logo display
for 5 seconds
No faults present local
Typical display
keypad mode. If in remote/
mode
serial mode, press LOCAL
key for this display
Press PROG Key Enter program mode
Press Key Scroll to INPUT block
ENTER accesses
INPUT block
parameters
Press ENTER Key
Press PROG Key
Allows operating mode
Keypad mode is
selection
factory preset
With security ON,
parameters cannot be Typical display
changed
Press Key and/or
Enter security code Typical security code
Press SHIFT Key
Denotes blinking
cursor
Press ENTER Key
Scroll through available
Press Key
range to make selection Typical selection
Saves selected parameter
Press ENTER or PROG Key
to memory
Typical selection
Press Key Scroll to exit block
Press ENTER Key Returns to start of
Security Control
Press DISP Key Return to display mode Typical display mode
B A L D O
or
STP MOTOR SPEED
Action Description Display Comments
PRESS ENTER
PRESS ENTER
OPERATING MODE
OPERATING MODE
ENTER CODE
ENTER CODE
OPERATING MODE
OPERATING MODE
OPERATING MODE
PRESS ENTER
PRESS ENTER
STPMOTOR SPEED
MN723H-10/95 11/28/95 1:12 AM Page 78 (Black plate)
Page 78

Operating the Control from the Keypad
The control can operate the motor in three (3) different ways from the keypad.
1. JOG Command
2. Speed adjustment with Keypad entered values.
3. Speed adjustment using the Keypad arrow keys.
The following keypad key sequence procedures outline each.
Accessing the JOG Command
3-25KEYPAD PROGRAMMING AND OPERATION
ACTION DESCRIPTION DISPLAY COMMENTS
Apply Power
Logo display
for 5 seconds
No faults present,
Display mode
Local keypad mode.
Stop key LED on
If in remote/serial mode,
Press LOCAL for this display
Press JOG Key
Enable programmed JOG
Jog key LED
speed
illuminates
Press and hold
Enable forward or reverse
Motor runs while key is
FWDor REV Key
motor movement at JOG
depressed Jog & FWD
speed
key LED illuminated
Press JOG Key Disables JOG mode
Jog key LED off
STOP MOTOR
SPEED
B A L D O R
M O T O R S & D R
STOP MOTOR
SPEED
F W D MOTOR
SPEED
STOP MOTOR
SPEED
Action Description Display Comments
MN723H-10/95 11/28/95 1:12 AM Page 79 (Black plate)
Page 79

Operating the Control From the Keypad Keypad Entered Speed Adjustment
3-26 KEYPAD PROGRAMMING AND OPERATION
ACTION DESCRIPTION DISPLAY COMMENTS
Apply Power
Logo display
for 5 seconds
No faults present local
Display mode
keypad mode. If in remote/
Stop key LED on
serial mode, press LOCAL
for this display
Press ENTER Key Access Keypad Entered Keypad entered
Speed Adjust speed display
Press SHIFT Key
Move blinking cursor - denotes blinking
right one digit cursor
Press Key
Increase preset
value one digit
Press ENTER Key
Save new value and
Return to previous
Display mode
FWD
Commands forward or
Press
or
Key
reverse motor rotation
FWD or REV key LED
REV
at selected speed
Illuminates
Stop key LED
illuminates
Press STOP Key
Commands motor to
when motor 0 speed is
STOP MOTOR
SPEED
B A L D O R
M O T O R S & D R
MOTOR SPEED
0 0000 0
STOP MOTOR
SPEED
STOP MOTOR
SPEED
F W D MOTOR
SPEED
MOTOR SPEED
0 1 000 0
MOTOR SPEED
0 0 000 0
MN723H-10/95 11/28/95 1:12 AM Page 80 (Black plate)
Page 80

Operating the Control from the Keypad Arrow Key Speed Adjustment
3-27KEYPAD PROGRAMMING AND OPERATION
ACTION DESCRIPTION DISPLAY COMMENTS
Apply Power
Logo display
for 5 seconds
No faults present local
Display mode
keypad mode. If in remote/
Stop key LED on
serial mode, press LOCAL
for this display
FWD
Press or Key
Commands forward or
FWD key LED
REV
reverse motor rotation
illuminated
at selected speed
Press Key Increase motor speed
Display mode
Press Key Decrease motor speed
Stop key LED illuminates
Press STOP Key
Command motor to stop when motor 0 speed is
reached
FWD Enable forward or reverse
Motor returns to
Press
or
Key
rotation at previous
previous set speed
REV
speed command
STOP MOTOR
SPEED
B A L D O R
M O T O R S & D R
STOP MOTOR
SPEED
F W D MOTOR
SPEED
F W D MOTOR
SPEED
F W D MOTOR
SPEED
F W D MOTOR
SPEED
MN723H-10/95 11/28/95 1:12 AM Page 81 (Black plate)
Page 81

Reset Control to Factory Settings
Sometimes it is necessary to recover the factory preset parameter values. Follow this procedure to
do so. Note that all of your specific application parameters will be lost when resetting the control to
factory presets.
3-28 KEYPAD PROGRAMMING AND OPERATION
Apply Power
Logo display
for 5 seconds
No faults present local
Display mode
keypad mode. If in remote/
Stop LED on
serial mode, press LOCAL
for this display
Press PROG Key
Press Key Scroll to select level 2 block
Press ENTER Key
Select level 2 blocks
Press Key
Scroll to select
miscellaneous block
Press ENTER Key
Scroll to factory
No will be displayed
Press Key
settings parameter
if any parameters were
changed from factory
Press PROG Key
Access to
denotes blinking
parameter adjustment
cursor
Scroll to YES to select
Press Key reset to original factory
parameter settings
Resets factory parameters
First displays “loading
Press ENTER Key
to memory
presets,” then “operation
done” (security code will
not be reset if changed,
display will still say NO)
Press Key Scroll to menu exit
STOP MOTOR
SPEED
B A L D O
R
FACTORY SETTINGS
YES
PRESS ENTER
FOR
RESTART
AUTO/MAN
FACTORY SETTING
P: YES
STOP MOTOR
SPEED
PRESS ENTER
FOR
FACTORY SETTINGS
NO
FACTORY SETTINGS
P: N O
PRESS ENTER
FOR
PRESS ENTER
FOR
PRESS ENTER
FOR
Action Description Display Comments
MN723H-10/95 11/28/95 1:12 AM Page 82 (Black plate)
Page 82

Display Key
Functions: The display key can be used to view different operating conditions, fault log information
and diagnostic information.
Accessing Display Scr
eens
3-2
9
KEYPAD PROGRAMMING AND OPERATION
Shows motor speed; direction
Press DISP Key of rotation; Local or Remote
Operation
Shows output rate in user Units
Press DISP Key
programmed in Custom Units
block; direction of rotation;
Local or Remote operation
Shows output frequency;
Press DISP Key
direction of rotation; Local or
Remote operation
Press DISP Key
Shows output current; direction
of rotation; Local or Remote
STOP MOTOR
SPEED
STOP FREQUENCY
LOCAL 0.00 HZ
STOP OUTPUT RATE
LOC 0.000 ****
STOPCURRENT OUT
LOCAL 0.0 A
Action Description Display Comments
Shows output voltage, direction
Press DISP Key of rotation, Local or Remote
Operation
Combined display shows
Press DISP Key
direction of rotation, output
volts, motor speed, output
amps, output frequency, Local
or Remote operation
Press DISP Key
Accesses Fault log
Press DISP Key
Accesses diagnostic Information
Press DISP Key Returns to first DISP screen
STOP VOLTAGE
OUT
PRESS ENTER
FOR
STOP 0V O
RPM
PRESS ENTER
FOR
STOP MOTOR
SPEED
MN723H-10/95 11/28/95 1:13 AM Page 83 (Black plate)
Page 83

3-30 KEYPAD PROGRAMMING AND OPERATION
MN723H-10/95 11/28/95 1:13 AM Page 84 (Black plate)
Page 84

Section 4
Diagnostic Info and Troubleshooting
How to Access Diagnostic Information
Diagnostic Menu
Continued on next page
4-1DIAGNOSTIC INFO AND TROUBLESHOOTING
Apply Power
Logo display
for 5 seconds
No faults present local
Display mode
keypad mode. If in remote/
serial mode, press LOCAL
for this display
Shows direction of rotation,
Press DISP Key Access DISP Screens user Units programmed in
Custom Units block. Not
displayed if not programmed
Press Key Scroll to Diagnostic Info block
First Diagnostic screen.
Press ENTER Key
Accesses Diagnostic Info
Shows speed command to
screens
control, direction of rotation,
Local/Remote operation,
and motor speed
Press DISP Key
Actual operating
temperature in degrees C
STOP MOTOR
SPEED
B A L D O
R
STOP OUTPUT
RATE
STOP SPEEDREF
LOCAL 0 RPM
PRESS ENTER
FOR
STOP CONTROL
TMP
Action Description Display Comments
MN723H-10/95 11/28/95 1:13 AM Page 85 (Black plate)
Page 85

Diagnostic Menu Continued
4-2 DIAGNOSTIC INFO AND TROUBLESHOOTING
Press DISP Key
Access next diagnostic screen
Displays operating DC bus
voltage, and direction of
rotation
Display % of overload current
Press DISP Key Access next diagnostic screen remaining & direction of
rotation
Display of opto-isolated inputs
Press DISP Key Access next diagnostic screen & outputs. Pins J1-8 to J1-16
on left, J1-19 to J1-22 on
right. I = on, O = off
Press DISP Key
Access next diagnostic screen
Actual control running time
Press DISP Key Access next diagnostic screen
Display operating zone,
voltage and control type
Display continuous amps; pk
Press DISP Key
Access next diagnostic screen
amps ratings; amps per volts
scale of feedback, power
STOP OVR LD
LEFT
DIGITAL I/ O
000000000 0000
QUIET VAR TQ
XXX V FLUX
TIME FROMP W R
UP
X.X A X.X
APK
Action Description Display Comments
Displays which Group 1 or
Press DISP Key Access next screen
Group 2 Expansion Board
Installed
Displays motor shaft
Press DISP Key Access next screen
revolutions from the
0000.00000 Rev home set
point
Press DISP Key Access next screen
Displays software version
installed in control
Press DISP Key
POSITIONCOUNTER
+ 000.00000REV
SOFTWARE
VERSION
PRESS ENTER
FOR
STOP BUS
VOLTAGE
G1 NOT
INSTALLED
MN723H-10/95 11/28/95 1:13 AM Page 86 (Black plate)
Page 86

No Keypad Display
There can be no display in the keypad depending upon the level of contrast for which the display is
set. The following procedure provides the steps necessary to adjust the contrast of the display.
4-3DIAGNOSTIC INFO AND TROUBLESHOOTING
Action Description Display Comments
Apply Power No visible display
Press DISP Key Ensures control in
display mode
Press SHIFT SHIFT Enables display
contrast adjustment
Press or Key Adjusts display
intensity
Typical display
Press ENTER Saves level of contrast
and exits to display Typical display
BLANK
BLANK
BLANK
STPMOTOR SPEED
LOCAL 0 PRM
STPMOTOR SPEED
LOCAL 0 PRM
MN723H-10/95 11/28/95 1:13 AM Page 87 (Black plate)
Page 87

How to Access the Fault Log
When a fault condition occurs, motor operation stops and a fault code is displayed on the Keypad
display. The control keeps a log of up to the last 31 faults. If more than 31 faults have occurred the
oldest fault will be deleted from the fault log to make room for the newest fault. To access the fault
log perform the following procedure:
4-4 DIAGNOSTIC INFO AND TROUBLESHOOTING
Logo display
Apply Power
5 seconds
No faults present,
Local keypad mode.
Display mode
If in Remote/Serial mode,
Press ENTER for this display
Press DISP key to scroll
Press DISP Key
to FAULT LOG
Press ENTER Key Typical Display
Press Key
Scroll through If no messages, you
fault messages will return to display
Press ENTER Key Return to display mode
Display mode stop key
B A L D O R
M O T O R S & D R
STOP MOTOR
SPEED
TACH
LOSS
STOP MOTOR
SPEED
PRESS ENTER
FOR
PRESS ENTER
FOR
Action Description Display Comments
MN723H-10/95 11/28/95 1:13 AM Page 88 (Black plate)
Page 88

Clearing the Fault Log
Use the following procedure to clear the Fault Log.
4-5DIAGNOSTIC INFO AND TROUBLESHOOTING
Logo display
Apply Power Display illuminates
5 seconds
No faults present,
Local keypad mode.
Display mode
If in Remote/Serial mode,
Press ENTER for this display
Press DISP Key Press DISP key to scroll
to FAULT LOG
Press ENTER Key
Enters the Fault Log Last fault displayed
(typical display)
Press SHIFT Key Last fault displayed
Press RESET Key Last fault displayed
Press SHIFT Key Last fault displayed
Press ENTER Key Fault Log Cleared Display for no
recorded fault
Press Key
Go to Fault Log Menu
exit
B A L D O R
M O T O R S & D R
STOP MOTOR
SPEED
STOP MOTOR
SPEED
EXTERNAL TRIP
I: 0:00:30
EXTERNAL TRIP
I: 0:00:30
PRESS ENTER
FOR
FAULT
LOG
EXTERNAL TRIP
I: 0:00:30
EXTERNAL TRIP
I: 0:00:30
PRESS ENTER
FOR
Action Description Display Comments
MN723H-10/95 11/28/95 1:13 AM Page 89 (Black plate)
Page 89

Fault Messages
When a fault condition occurs, motor operation stops and a fault is displayed on the operator
keypad. A list of the possible faults and their descriptions follows. Refer to the Troubleshooting
section which follows for recommended corrective actions.
Fault Displayed Fault Description
CURRENT SENS FLT Defective phase current sensor or open circuit detected between control board and current
sensor.
DC BUS HIGH Bus overvoltage condition occurred.
DC BUS LOW Bus undervoltage condition occurred.
FEEDBACK LOSS Resolver slipping; noise on resolver lines or resolver power supply loss.
EXTERNAL TRIP An external overtemperature or open circuit occurred on J1-16.
FOLLOWING ERR Excessive following error detected between command and feedback signals.
GND FLT Low impedance path between an output phase and ground detected.
INT OVER-TEMP Control heatsink exceeded safe operating level.
INVALID BASE ID Control board does not recognize power base ID.
INVERTER BASE ID Control board installed on power base w/o current feedback.
LINE REGEN FLT Applies to Series 21 and 22 Line Regen controls only.
LOGIC SUPPLY FLT Logic power supply not working properly.
LOST USER DATA Battery backed RAM parameters have been lost or corrupted. When fault cleared control
will reset factory presets.
LOW INIT. BUS V Insufficient bus voltage upon startup.
MEMORY ERROR EPROM error occurred. Contact factory.
NEW BASE ID Control board changed since last operation.
NO FAULTS Fault log has no recorded faults.
NO EXB INSTALLED Programmed operating mode requires expansion board.
OVER-CURRENT FLT Instantaneous over current condition detected by bus current sensor.
OVERLOAD - 1 MIN Output current exceeded allowable 1 minute rating.
OVERLOAD - 3 SEC Output current exceeded allowable 3 second rating.
OVERSPEED Motor speed exceeded 110% of programmed max RPM.
mP RESET Power cycled before bus bled completely down.
POWER MODULE Affects shared bus multiaxis systems only. Indicates power supply not working properly.
PWR BASE FLT Desaturation of power device occurred or bus current threshold exceeded.
REGEN PWR FLT Regen power exceeded DB resistor rating.
USER FAULT TEXT Custom software operating fault occurred.
4-6 DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:13 AM Page 90 (Black plate)
Page 90

Troubleshooting
It is important to familiarize yourself with the following information before attempting any
troubleshooting or service of the control. Most troubleshooting can be performed using only a digital
voltmeter having an input impedance exceeding 1 megohm. In some cases an oscilloscope with 5
MHZ minimum bandwidth may be useful. Before consulting the factory, double check that all power
and control wiring is correct and installed per the recommendations given in this manual.
WARNING: THIS EQUIPMENT CONTAINS VOLTAGES WHICH MAY BE AS HIGH AS 800
VOLTS AND ROTATING PARTS ON MOTORS AND DRIVEN MACHINES.
HIGH VOLTAGE AND MOVING PARTS CAN CAUSE SERIOUS OR FATAL
INJURY. ONLY QUALIFIED PERSONNEL FAMILIAR WITH THIS MANUAL
AND ANY DRIVE MACHINERY SHOULD ATTEMPT TO START-UP OR
TROUBLESHOOT THIS EQUIPMENT.
OBSERVE THESE PRECAUTIONS:
USE EXTREME CAUTION, DO NOT TOUCH ANY CIRCUIT BOARD, POWER
DEVICE OR ELECTRICAL CONNECTION WITHOUT INSURING THAT HIGH
VOLTAGE IS NOT PRESENT.
THE UNIT MUST BE PROPERLY GROUNDED. DO NOT APPLY AC POWER
BEFORE FOLLOWING GROUNDING INSTRUCTIONS.
DO NOT OPEN COVER FOR 5 MINUTES AFTER REMOVING AC POWER, TO
ALLOW CAPACITORS TO DISCHARGE.
IMPROPER CONTROL OPERATION MAY CAUSE VIOLENT MOTION OF MOTOR
SHAFT AND DRIVEN EQUIPMENT. BE CERTAIN THAT UNEXPECTED MOTOR
SHAFT MOVEMENT WILL NOT CAUSE INJURY TO PERSONNEL OR DAMAGE TO
EQUIPMENT. PEAK TORQUES OF SEVERAL TIMES RATED MOTOR TORQUE
CAN OCCUR DURING A CONTROL FAILURE.
MOTOR CIRCUIT MAY HAVE HIGH VOLTAGE PRESENT WHENEVER AC POWER
IS APPLIED, EVEN WHEN MOTOR IS NOT ROTATING.
4-7DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:13 AM Page 91 (Black plate)
Page 91

Faults and Possible Causes
SYMPTOM POSSIBLE CAUSE CORRECTIVE ACTION
BASE ID FLT Invalid power base ED number. Press RESET key. If fault remains call factory.
CURRENT SENS FLT Open circuit between control board and check connections from control board to current
current sensor. sensors.
Defective current sensor. Replace current sensor.
DC BUS HIGH Excessive dynamic braking power. Check DYNAMIC BRAKING parameters for
correct wattage and resistance values.
Lengthen deceleration time.
Increase or add external dynamic braking
resistors RGA kit or dynamic braking resistor/
transistor RBA assembly.
Dynamic brake wiring problem. Check dynamic brake hardware wiring.
Input voltage too high. Verify proper incoming line voltage.
Use transformer to step down voltage.
Use line reactor to minimize voltage spikes.
DC BUS LOW FAULT Insufficient input voltage. Disconnect DB hardware and re-try.
Verify proper incoming line voltage.
Use transformer to step up voltage.
Check power line disturbances due to starting
other equipment.
Monitor power line for correlation of time/date
and power fluctuations.
FEEDBACK LOSS Resolver power supply loss. Check 4 VAC supply at terminal strip
Excessive noise on resolver lines. Check resolver connections. Separate resolver
leads from power wiring. Cross power leads at
90°.
EXTERNAL TRIP EXTERNAL TRIP Parameter set to “ON” Verify connection of external trip circuits to
and no connection made at J1-16. control terminal strip.
Set EXTERNAL TRIP parameter to “OFF” if
circuit not used.
Motor ventilation insufficient. Check external motor blower for proper operation.
No thermostat connected. Connect thermostat.
Disable EXTERNAL TRIP parameter to “OFF”
if thermostat not used.
Poor thermostat connections. Check thermostat connections.
Motor drawing excessive current. Check motor for overloading.
Verify sizing of motor and control for application.
Continued on next page...
4-8 DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:13 AM Page 92 (Black plate)
Page 92

SYMPTOM POSSIBLE CAUSE CORRECTIVE ACTION
MOTOR WILL NOT Improper speed command. Verify control is receiving proper command
START signal at input terminal strip.
Incorrect COMMAND SELECT parameter. Match COMMAND SELECT parameter with
user interface.
MAX OUTPUT SPEED parameter set to 0. Check MAX OUTPUT SPEED parameter.
Not enough starting torque. Increase CURRENT LIMIT setting.
Motor overloaded. Check couplings for binding.
Check for proper motor loading.
Verify sizing of motor and control for application.
MOTOR WILL NOT MAX OUTPUT SPEED parameter set too Reprogram MAX OUTPUT SPEED parameter.
REACH MAXIMUM low.
SPEED Improper speed command. Verify control is receiving proper speed command
at input terminals.
Verify control set to proper operating mode to
receive speed command.
Motor overloaded. Check motor for free rotation.
Speed potentiometer failure. Replace potentiometer.
MOTOR WILL NOT MIN OUTPUT SPEED parameter set too Check MIN OUTPUT SPEED parameter.
STOP ROTATION high.
Improper speed command. Verify control is receiving proper speed command
at input terminals.
Verify control set to proper operating mode to
receive speed command.
Speed potentiometer failure. Replace potentiometer.
NEW BASE ID Software parameters not initialized on Push RESET to initialize parameters and retry.
newly installed control board. Contact factory if fault remains.
NO DISPLAY Incorrect display contrast setting. Adjust display contrast. Refer to Section 3-
Adjusting Display Contrast.
Loose Connections. Check keypad to control board connection.
Check input power connections.
Lack of input voltage. Check input power for proper voltage.
NO EXB INSTALLED Incorrect mode of operation programmed. Change OPERATING MODE parameter to one
which does not require expansion board.
Need expansion board. Install correct optional expansion board for mode
of operation selected.
Continued on next page...
4-9DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 93 (Black plate)
Page 93

SYMPTOM POSSIBLE CAUSE CORRECTIVE ACTION
FOLLOWING ERROR Speed proportional gain too low. Increase SPEED PROP GAIN parameter setting.
FAULT Current limit set too low. Increase CURRENT LIMIT parameter setting.
Accel/decel time(s) too short. Lengthen ACCEL/DECEL parameter time(s).
Excessive load. Verify sizing of motor and control for application.
FAILS RESOLVER Resolver miswired. Check wiring.
AUTO Excessive noise on resolver lines. Check resolver connections.Separate resolver
TUNING TEST leads from power wiring. Cross power leads at
90°.
GND FAULT Improper wiring. Disconnect wiring between control and motor.
Retry. If cleared, reconnect motor and control
and try again. Call factory if problem remains.
INT-OVERTEMP FLT Motor overloaded. Correct motor loading.
Verify sizing of motor and control for application.
Ambient temperature too high. Relocate control to cooler operating area.
Add cooling fans or air conditioner to control
cabinet.
INVERTER BASE ID Power base with no output leg current Replace power base with one having output leg
sensors being used. current feedback. Contact factory.
LOGIC SUPPLY FLT Power supply malfunctioned. Replace logic power supply.
LOW INIT. BUS V Improper line voltage. Disconnect DB hardware and retry.
Check input voltage level.
LOST USER DATA Battery backed Ram parameters lost or Reload all parameters and cycle input power.
corrupted. Call factory if problem remains.
MEMORY ERROR FLT EPROM error occurred. Push RESET key. Contact factory if fault
remains.
mP RESET Power was cycled before bus bled Press RESET key. Contact factory if fault
completely down. remains. Allow time between power cycling for
bus to bleed completely down.
Continued on next page...
4-10 DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 94 (Black plate)
Page 94

SYMPTOM POSSIBLE CAUSE CORRECTIVE ACTION
POWER BASE FLT Broken or misaligned encoder coupling. Check encoder coupling: align or replace.
Encoder bearing failure. Replace encoder and align during installation.
Excessive current draw. Disconnect motor wiring and retry. Contact
Power device desaturated. factory if fault remains.
Excessive noise on encoder signals. Check encoder connections. Separate encoder
leads from power leads. Cross power leads at
90°. Isolate encoder from motor electrically.
Install optional Isolated Encoder Feedback
expansion board.
Electrical noise from external DC coils. Install diodes on all external DC relay coils. See
manual, Opto-Isolated Outputs.
Electrical noise from external AC coils. Install RC snubbers on all external AC coils.
Drive overloaded. Verify sizing of motor and control for
application.
POWER MODULE FLT Power supply malfunction in multiaxis Push RESET key. If problem remains replace
shared bus system. power supply module.
REGEN PWR FLT Incorrect Dynamic Braking parameter Check RESISTOR OHMS and RESISTOR
settings. WATTS settings in Level 2 BRAKE ADJUST
parameter block.
Regen power exceeded Dynamic Braking Resize and replace DB resistor(s).
resistor rating.
Input voltage too high. Verify proper incoming line voltage.
Use transformer to step down voltage.
Use line reactor to minimize voltage spikes.
UNKNOWN FAULT Fault occurred but was not sustained Check AC line for high frequency noise and input
long enough to record the source of fault. switches for good contact.
USER FAULT TEXT Fault peculiar to custom software Refer to custom software fault list.
detected.
WRONG RESPONSE Input common mode voltage may be Connect control input source common to control
TO SPEED COMMAND excessive. common to minimize common mode voltage.
Continued on next page...
4-11DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 95 (Black plate)
Page 95

SYMPTOM POSSIBLE CAUSE CORRECTIVE ACTION
OVERCURRENT FLT CURRENT LIMIT parameter set too low. Increase CURRENT LIMIT parameter setting.
Accel/Decel time(s) too short. Increase ACCEL/DECEL parameter time(s).
Broken or misaligned encoder coupling. Check encoder coupling: align or replace.
Encoder bearing failure. Replace encoder and align during installation.
Excessive noise on resolver signals. Check resolver connections. Separate resolver
leads from power leads. Cross power leads at
90°.
Electrical noise from external DC coils. Install diodes on all external DC relay coils. See
manual, Opto-Isolated Outputs.
Electrical noise from external AC coils. Install RC snubbers on all external AC coils.
Excessive load. Verify sizing of motor and control for application.
OVERLOAD 3-SEC Excessive current draw. Change EXTERNAL TRIP parameter in level 2
FAULT Protection Block to FOLDBACK instead of TRIP.
Increase time allowed for acceleration.
Reduce load.
OVERLOAD 1 MIN Excessive current draw. Change EXTERNAL TRIP parameter in Level 2
FAULT Protection Block to foldback instead of
trip. Increase time allowed for acceleration and
deceleration.
Drive overloaded. Verify sizing of motor and control for application.
OVERSPEED FLT Motor exceeded 110% of programmed Increase max speed parameter to match
max speed. application requirement.
Increase SPEED PROPORTIONAL GAIN
parameter setting under BRUSHLESS CONTROL
programming block.
4-12 DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 96 (Black plate)
Page 96

Improper Motor Operation
Wrong Response to Speed Commands
Input common mode voltage may be exceeded. Maximum common mode voltage at terminals J1-4
and J1-5 is ± 15 volts relative to chassis common. Connect control input source common to the
control common to minimize common mode voltage.
MANUALLY TUNING THE CONTROLLER
Occasionally the controller cannot be accurately auto-tuned for a particular system. In these cases it
is necessary to calculate the values needed to tune the controller.
Current Prop Gain Parameter
This parameter is located in the Level 1, Brushless Control Block. The Current Prop Gain parameter
is normally preset for pre-tuned systems or auto-tuned where motor parameters aren't known.
Where auto-tuning can't be used, the proper manual setting for the proportional gain can be
calculated by:
Current Prop Gain = [740 x L x (A/V)]
VAC
Where: L = Line to neutral leakage inductance of the motor in mH
VAC = Nominal line volts
A/V = The amps/volt scaling of the current feedback
Motor line to neutral leakage inductance can be obtained either from the motor manufacturer or by
measuring the line-to-line inductance and dividing by two.
The A/V scaling for the controller can be found in the diagnostic information located in the DISPLAY
MODE.
For most applications setting the Current Prop Gain parameter to a value of 20 will yield adequate
performance.
Curr
ent Int gain Parameter
This parameter is located in the Level 1, Brushless Control Block. The Current Int Gain parameter is
factory preset at 50 hz. This setting is suitable for essentially all systems. DO NOT CHANGE
WITHOUT FACTORY APPROVAL.
4-13DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 97 (Black plate)
Page 97

Speed Prop Gain Parameter
This parameter is located in the Level 1, Brushless Control Block. The Speed Prop Gain parameter
is normally preset or auto-tuned. This gain may be increased or decreased to suit the application.
Increasing the Speed Prop Gain parameter will result in faster response, excessive proportional gain
will cause overshoot and ringing. Decreasing the Speed Prop Gain parameter will cause slower
response and decrease overshoot and ringing caused by excessive proportional gain.
Speed Int Gain Parameter
This parameter is located in the Level 1, Brushless Control Block. The Speed Int Gain parameter in
hertz, as discussed under PI Controller later in this section, may be set at any value from zero to 10
hertz.
Setting the Speed Int Gain parameter - 0 removes integral compensation, resulting in a proportional
rate loop. This selection is ideal for systems where overshoot must be avoided and substantial
stiffness (ability of the controller to maintain commanded speed despite torque loads) isn't required.
Increasing values of the Speed Int Gain parameter increases the low frequency gain and stiffness of
the controller, an excessive integral gain setting will cause overshoot for transient speed commands
and may lead to oscillation. Typical setting is 4 hertz. If the Speed Prop Gain parameter and the
Speed Int Gain parameter are set too close together, and overshoot condition can also occur.
CAUTION: DO NOT SET THE SPEED INT GAIN PARAMETER ABOVE 10 HERTZ OR
SUBSTANTIAL OVERSHOOT WILL OCCUR.
To manually tune the speed controller:
1. Set the speed Int Gain parameter = 0 (remove integral gain).
2. Increase the Speed Prop Gain parameter setting until adequate response to step speed
commands is attained.
3. Increase the Speed Int Gain parameter setting to increase the stiffness of the drive.
NOTE: IT IS CONVENIENT TO MONITOR SPEED STEP RESPONSE WITH A STRIP
CHART RECORDER OR STORAGE OSCILLOSCOPE CONNECTED TO J1-6
OR -7 WITH LEVEL 1, OUTPUT BLOCK ANALOG OUT #1 OR #2 SET TO
ABS SPEED, 0 VDC = ZERO SPEED. SEE SECTION 2 FOR A DISCUSSION
OF ANALOG OUTPUTS.
4-14 DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 98 (Black plate)
Page 98

PI Controller
Both the current and rate control loops are of the Proportional plus Integral type. If "E" is defined to
be the error signal,
E = Command - Feedback
then the PI controller operated on "E" as
Output = (Kp * E) + (Ki E dt)
where Kp is the proportional gain of the system and Ki is the integral gain of the system.
The transfer function (output /E) of the controller using 1/s (Laplace Operator) to denote the integral,
Output/E = Kp + KI / s = Kp (s + Ki/Kp) /s.
The second equation shows that the ratio of Ki/Kp is a frequency in radians/sec. In the Baldor
series 18H AC vector controller, the integral gain has been redefined to be,
KI = (Ki / Kp) / (2 ) Hz,
and the transfer function is,
Output/E = Kp (s + 2 KI) / s.
This sets the integral gain as a frequency in hertz. As a rule of thumb, set this frequency about 1/10
of the bandwidth of the control loop.
The proportional gain sets the open loop gain of the system, the bandwidth (speed of response) of
the system. If the system is excessively noisy, it is most likely due to the proportional gain being set
too high.
4-15DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 99 (Black plate)
Page 99

4-16 DIAGNOSTIC INFO AND TROUBLESHOOTING
MN723H-10/95 11/28/95 1:14 AM Page 100 (Black plate)
Page 100

Appendix A
Baldor District Offices
5-1APPENDIX A
MEXICO
CALLE PABLO UCELLO NO. 27
COL. NOCHE BUENA
03710 MEXICO D.F., MX
PHONE: (52) (5) 6119920
FAX: (52) (5) 6117084
SINGAPORE
51 KAKI BUKIT ROAD 2
K B WAREHOUSE COMPLEX
SINGAPORE 417863
PHONE: (65) (74) 42572
FAX: (65) (74) 71708
SWEDEN
KOPPMEKATRON
RUSKVADERSGATAN 7
S-418 34 GOTEBORG
SWEDEN
PHONE: 46 31 530335
FAX: 46 31 538930
SWITZERLAND
POSTFACH 73
SCHUTZENSTRASSE 59
CH-8245 FEUERTHALEN
SWITZERLAND
PHONE: (41) (53) 292343
FAX: (41) (53) 292394
THAILAND
573/90 RAMKAMHAENG 39
PRACHA-U-TIT ROAD WANGTONGLANG
BANGKHAPI BANGKOK 10310
PHONE: (662) 5590770/1 (662) 5593805
FAX: (662) 5593806
UNITED KINGDOM
UNIT 13, CHARLWOODS ROAD
EAST GRINSTEAD
WEST SUSSEX, ENGLAND RH192JB
PHONE: (44) (3) 42315977
FAX: (44) (3) 42328930
VENEZUELA
AV.MILAN 1016-B1
CALIFONIA SUR 61053
APARTADO 61053 CHACAO
CARACAS, VENEZUELA
PHONE: (58) (2) 224489
FAX: (58) (2) 222002
INTERNATIONAL SALES
FORT SMITH, AR
BALDOR ELECTRIC CO
FORT SMITH, AR 72902
PHONE: 501 646-4711
FAX: 501-648-5895
CANADA - EDMONTON, ALBERTA
9816-45 AVENUE
EDMONTON, ALBERTA T6E5C5
PHONE: 403-434-4900
FAX: 403-438-2600
BURLINGTON, ONTARIO
1175 APPLEBY LINE UNIT A-1
BURLINGTON, ONTARIO L7L5H9
PHONE: 905-332-6166
FAX: 905-332-3525
MONTREAL, QUEBEC
1844 WILLIAM STREET
MONTREAL, QUEBEC H3J1R5
PHONE: 514-933-2711
FAX: 514-933-8639
VANCOUVER, BRITISH COLUMBIA
4157 McCONNELL DRIVE
BURNABY, BRITISH COLUMBIA
V5A3J7
PHONE 604-421-2822
FAX: 604-421-3113
CANADA - WINNIPEG, MANITOBA
54 PRINCESS STREET
WINNIPEG, MANITOBA R3B1K2
PHONE: 204-942-5205
FAX: 204-956-4251
ARGENTINA
HUBAC 6960
1439 CAPITOL
BUENOS AIRES, ARGENTINA
PHONE: 54-1-687-2534
FAX: 54-1-442 1426
AUSTRALIA
UNIT 3, 6 STANTON ROAD
SEVEN HILLS, NSW 2147, AUSTRALIA
PHONE: (61) (2) 6745455
FAX: (61) (2) 6742495
UNIT 3-73 MAIN ROAD
CLAYTON VIC 3168, AUSTRALIA
PHONE: (61) (3) 5624555
FAX: (61) (3 5624822
BRAZIL
RUA ALFREDO GUEDES, 85-SANTANA-SP
SAO PAULO-SP BRAZIL
PHONE: 55-11-9509228
FAX: 55-11-950-8924
CHILE
FERRETERIA AMUNATEGUI S.A.
AV. LIBERTADOR BERNARDO O’HIGGINS
1395 ESQUINA AMUNATEGUI
CASILLA 2457-SANTIAGO L
SANTIAGO - CHILE
PHONE: 56-2-696-8244
FAX: 56-2-672-1492
GERMANY
DIESELSTRASSE 22
D-85551 KIRCHHEIM - MUNICH, GERMANY
PHONE: (49) (89) 90508 - 0
FAX: (49) (89) 90508 - 491
INDONESIA
GEDUNG PUTERA 8TH FLOOR
JLN. GUNUNG SAHARI RAYA NO. 39
JAKARTA PUSAT 10720
PHONE: (62) (21) 6009089 EXT.134 OR 135
FAX: (62) (21) 6591826
NEW JERSEY
PHILADELPHIA
100 W NARBERTH TERRACE
P O BOX 597
COLLINGSWOOD, NJ 08108
PHONE: 609-854-5533
FAX: 609-854-1856
NEW YORK CITY METRO
1114 GOFFLE ROAD
HAWTHORNE, NJ 07506
PHONE: 201-423-3333
FAX: 201-423-3322
NEW YORK
AUBURN
ONE GOULDS DRIVE
AUBURN, NY 13021
PHONE: 315-255-3403
FAX: 315-253-9923
NORTH CAROLINA
GREENSBORO
1220 ROTHERWOOD ROAD
GREENSBORO, NC 27406
P O BOX 16500
GREENSBORO, NC 27416
PHONE: 910-272-6104
FAX: 910-273-6628
OHIO
CINCINNATI
7815 REDSKY DRIVE
CINCINNATI, OH 45249
PHONE: 513-489-0550
FAX: 513-489-0525
CLEVELAND
4562 EAST 71ST STREET
CUYAHOGA HTS, OH 44105
PHONE: 216-883-9800
FAX: 216-883-3837
OKLAHOMA
TULSA
10830 EAST 45TH STREET SUITE 307
TULSA, OK 74146
PHONE: 918-366-4268
FAX: 918-366-4269
OREGON
PORTLAND
20393 SW AVERY COURT
TUALATIN, OR 97062
PHONE: 503-691-9010
FAX: 503-691-9012
TENNESSEE
MEMPHIS
4000 WINCHESTER ROAD
MEMPHIS, TN 38118
PHONE: 901-365-2020
FAX: 901-365-3914
TEXAS
HOUSTON
4647 PINE TIMBERS
SUITE # 135
HOUSTON, TX 77041
PHONE: 713-895-7062
FAX: 713-690-4540
DALLAS
P O BOX 561048
3020 QUEBEC
DALLAS, TX 75247
PHONE: 214-634-7271
FAX: 214-634-8874
ODESSA
6968 EAST COMMERCE
ODESSA, TX 79760
PHONE: 915-367-2707
FAX: 915-367-9877
WISCONSIN
MILWAUKEE
2855 SOUTH 163RD STREET
NEW BERLIN, WI 53151
PHONE: 414-784-5940
FAX: 414-784-1215
UNITED STATES
ARIZONA
PHOENIX
4211 S 43RD PLACE
PHOENIX, AZ 85040
PHONE: 602-470-0407
FAX: 602-470-0464
CALIFORNIA
LOS ANGELES
6480 FLOTILLA
COMMERCE, CA 90040
PHONE: 213-724-6771
FAX: 213-721-5859
HAYWARD
20303 MACK STREET
HAYWARD, CA 94545
PHONE: 510-785-9900
FAX: 510-785-9910
COLORADO
DENVER
2520 W BARBERRY PLACE
DENVER, CO 80204
PHONE: 303-623-0127
FAX: 303-595-3772
CONNECTICUT
WALLINGFORD
65 SOUTH TURNPIKE ROAD
WALLINGFORD, CT 06492
PHONE: 203-269-1354
FAX: 203-269-5485
FLORIDA
TAMPA/PUERTO RICO
3906 EAST 11TH AVENUE
TAMPA, FL 33605
PHONE: 813-248-5078
FAX: 813-247-2984
GEORGIA
ATLANTA
62 TECHNOLOGY DR.
ALPHARETTA, GA 30202
PHONE: 770-772-7000
FAX: 770-772-7200
ILLINOIS
CHICAGO
255 CORTLAND AVENUE
LOMBARD IL 60148
PHONE: 708-629-4900
FAX: 708-629-4911
INDIANA
INDIANAPOLIS
550 SOUTH CAPITOL AVENUE
INDIANAPOLIS, IN 46225
PHONE: 317-634-9034
FAX: 317-634-9038
IOWA
DES MOINES
1901 BELL AVENUE, SUITE 7
DES MOINES, IA 50315
PHONE: 515-244-9996
FAX: 515-244-6124
MICHIGAN
DETROIT
55 OAKMAN BLVD
HIGHLAND PARK, MI 48203
PHONE: 313-883-5700
FAX: 313-883-6116
MINNESOTA
MINNEAPOLIS
21080 134TH AVE. NORTH
ROGERS, MN 55374
PHONE: 612-428-3633
FAX: 612-428-4551
MISSOURI
ST LOUIS
141 CHESTERFIELD BLVD
P O BOX 304
CHESTERFIELD, MO 63006
PHONE: 314-532-0880
FAX: 314-532-8449
KANSAS CITY
915 N W PLATTE VALLEY DR
KANSAS CITY, MO 64150
PHONE: 816-587-0272
FAX: 816-587-3735
MN723H-10/95 11/28/95 1:14 AM Page 101 (Black plate)
 Loading...
Loading...