

Baldor SD23H2A03–E, SD23H2A04–E, SD23H2A04–W, SD23H2A07–E, SD23H2A10–E Installation & Operating Manual
...Page 1
SERIES 23H
AC Servo Control
Installation & Operating Manual
9/03 MN723
Page 2

Table of Contents
Section 1
Quick Start Guide 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 2
General Information 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Overview 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Limited W arranty 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Safety Notice 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 3
Receiving & Installation 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Receiving & Inspection 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Physical Location 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Installation 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Installation Procedure 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Optional Remote Keypad Installation 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electrical Installation 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
System Grounding 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Line Impedance 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Line Reactors 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Load Reactors 3-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AC Main Circuit Considerations 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Protection Devices 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power Disconnect 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Wire Size and Protection Devices 3-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
AC Line Connections 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reduced Input Voltage Derating 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
380-400 VAC Operation 3-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Three Phase Input Power 3-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Single Phase Input Power Considerations 3-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Single Phase Control Derating 3-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size A, B and B2 Single Phase Power Installation 3-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size C2 Single Phase Power Installation 3-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size C and D Single Phase Power Installation 3-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size D2 Single Phase Power Installation 3-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size E Single Phase Power Installation 3-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size F Single Phase Power Installation 3-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Motor Connections 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
M-Contactor 3-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Optional Dynamic Brake Hardware 3-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electrical Installation 3-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resolver Feedback 3-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Simulated Encoder Output 3-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Home (Orient) Switch Input 3-22. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table of Contents iMN723
Page 3

Operating Modes 3-23. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Inputs 3-24. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Outputs 3-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Serial Operating Mode 3-26. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Operating Mode 3-27. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Standard Run 3 Wire Operating Mode 3-28. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15 Speed 2-Wire Operating Mode 3-29. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Speed Analog 2 Wire Operating Mode 3-30. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3 Speed Analog 3 Wire Operating Mode 3-31. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Bipolar Speed or Torque Operating Mode 3-32. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Multiple Parameter Sets 3-33. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Process Operating Mode 3-34. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electronic Pot 2 Wire Operating Mode 3-35. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electronic Pot 3 Wire Control Mode 3-36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
External Trip Input 3-36. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Opto-Isolated Inputs 3-37. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Opto-Isolated Outputs 3-38. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Pre-Operation Checklist 3-39. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Power-Up Procedure 3-40. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 4
Programming and Operation 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Overview 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Display Mode 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Adjusting Display Contrast 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Display Mode Screens 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagnostic Information Access 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Fault Log Access 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Program Mode 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameter Blocks Access for Programming 4-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Changing Parameter Values when Security Code Not Used 4-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Reset Parameters to Factory Settings 4-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Initialize New Software 4-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameter Definitions 4-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
ii Table of Contents MN723
Page 4

Section 5
Troubleshooting 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Overview 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
No Keypad Display - Display Contrast Adjustment 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
How to Access Diagnostic Information 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
How to Access the Fault Log 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
How to Clear the Fault Log 5-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resolver Troubleshooting 5-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Electrical Noise Considerations 5-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Relay and Contactor Coils 5-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Wires between Controls and Motors 5-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Special Drive Situations 5-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Enclosures 5-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Special Motor Considerations 5-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Signal Wires 5-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 6
Manual Tuning the Series 23H Control 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Manually Tuning the Control 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Current Prop Gain Parameter 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Current INT Gain Parameter 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Speed Prop Gain Parameter 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Speed Int Gain Parameter 6-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PI Controller 6-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Section 7
Specifications, Ratings & Dimensions 7-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Specifications 7-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating Conditions 7-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Resolver Feedback 7-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Keypad Display 7-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Control Specifications 7-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Differential Analog Input 7-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Analog Outputs 7-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Digital Inputs 7-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Digital Outputs 7-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Diagnostic Indications 7-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Ratings 7-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Terminal Tightening Torque Specifications 7-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Table of Contents iiiMN723
Page 5

Dimensions 7-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size A Control 7-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size B Control 7-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size B2 Control 7-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size C Control 7-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size C2 Control 7-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size C2 Control – Through–Wall Mounting 7-11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size D Control 7-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size D2 Control 7-13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size D2 Control – Through–Wall Mounting 7-14. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size E Control 7-15. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size F Control 7-16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Size G Control 7-17. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix A A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Dynamic Braking (DB) Hardware A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RGA Assemblies A-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RBA Assemblies A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
RTA Assemblies A-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix B B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parameter Values B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Appendix C C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Remote Keypad Mounting Template C-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
iv Table of Contents MN723
Page 6
Section 1
Quick Start Guide
Overview If you are an experienced user of Baldor controls, you are probably already familiar with
the keypad programming and keypad operation methods. If so, this quick start guide has
been prepared for you. This procedure will help get your system up and running in the
Keypad mode quickly. This will allow motor and control operation to be verified. This
procedure assumes that the control, motor and dynamic brake hardware are correctly
installed (see Section 3 for procedures) and that you have an understanding of the
keypad programming & operation procedures. It is not necessary to wire the terminal
strip to operate in the keypad mode (Section 3 describes terminal strip wiring
procedures). The quick start procedure is as follows:
1. Read the Safety Notice and Precautions in section 2 of this manual.
2. Mount the control. Refer to Section 3 “Physical Location” procedure.
3. Connect AC power, refer to Section 3 “Three Phase Motor and Control
Connections”.
4. Connect the motor, refer to Section 3 “Three Phase Motor and Control
Connections”.
5. Connect the resolver, refer to Section 3 “Resolver Feedback”.
6. Install dynamic brake hardware, if required. Refer to Section 3 “Optional
Dynamic Brake Hardware”.
7. Connect the keypad to the keypad connector of the main control board. Refer
to Section 3 “Keypad Installation Procedure”.
Quick Start Checklist Check of electrical items.
CAUTION: After completing the installation but before you apply power, be
sure to check the following items.
1. Verify AC line voltage at source matches control rating.
2. Inspect all power connections for accuracy, workmanship and torque as well as
compliance to codes.
3. Verify control and motor are grounded to each other and the control is
connected to earth ground.
4. Check all signal wiring for accuracy.
5. Be certain all brake coils, contactors and relay coils have noise suppression.
This should be an R-C filter for AC coils and reverse polarity diodes for DC
coils. MOV type transient suppression is not adequate.
WARNING: Make sure that unexpected operation of the motor shaft during start
up will not cause injury to personnel or damage to equipment.
Check of Motors and Couplings
1. Verify freedom of motion of the motor shaft.
2. Verify that all motor couplings are tight without backlash.
3. Verify the holding brakes if any, are properly adjusted to fully release and set to
the desired torque value.
Quick Start Guide 1-1MN723
Page 7

Section 1
General Information
Quick Start Procedure
Initial Conditions
Be sure the 23H control, motor and dynamic brake hardware are installed and wired
according to the procedures in Section 3 of this manual.
Become familiar with the keypad programming and keypad operation of the control as
described in Section 4 of this manual.
1. Disconnect the load (including coupling or inertia wheels) from the motor shaft,
if possible.
2. Verify that any enable inputs to J1-8 are open. Be sure Level 2 Protection
block, Local Enable INP is OFF and Level 2 Protection block, External Trip is
OFF.
3. Turn power on. Be sure no errors are displayed.
4. Set the Level 1 Input block, Operating Mode parameter to “KEYPAD”.
5. Set the Level 2 Output Limits block, “OPERATING ZONE” parameter as desired
(STD CONST TQ, STD VAR TQ, QUIET CONST TQ or QUIET VAR TQ).
6. Enter the following motor data in the Level 2 Motor Data block parameters:
Motor Rated Amps (IC)
Motor Poles
Resolver Speeds (Pre-set is one speed)
7. If external dynamic brake hardware is used, set the Level 2 Brake Adjust block
“Resistor Ohms” and “Resistor Watts” parameters.
8. If the load was not disconnected in step 1, refer to Section 6 and manually tune
the control. After manual tuning, perform steps 11 and 12 then continue with
step 16.
9. At the Level 2 Motor Data block, press ENTER, at CALC PRESETS select YES
(using the key) and let the control calculate preset values for the parameters
that are necessary for control operation.
WARNING: The motor shaft will rotate during the autotune procedure. Be
certain that unexpected motor shaft movement will not cause injury
to personnel or damage to equipment.
10. Go to Level 2 Autotune block, and perform the following tests:
CMD OFFSET TRIM
CUR LOOP COMP
RESOLVER ALIGN
11. Set the Level 2 Output Limits block, “MIN OUTPUT SPEED” parameter.
12. Set the Level 2 Output Limits block, “MAX OUTPUT SPEED” parameter.
13. Remove all power from the control.
14. Couple the motor to its load.
15. Turn power on. Be sure no errors are displayed.
16. Perform the SPD CNTRLR CALC test in the Level 2 Autotune block.
17. Run the drive from the keypad using the arrow keys for direct speed control, a
keypad entered speed or the JOG mode.
18. Select and program additional parameters to suit your application.
The control is now ready for use the in keypad mode. If a different operating mode is
desired, refer to Section 3 Control Connections and Section 4 Programming and
Operation.
1-2 Quick Start Guide MN723
Page 8
Section 2
General Information
Overview The Baldor Series 23H PWM control uses a closed loop control scheme using an
algorithm to adjust the phase of voltage and current applied to a three phase permanent
magnet synchronous motor. The servo control adjusts the motor current to produce
maximum torque from base speed down to and including zero speed. The frequency of
the voltage applied to the motor follows the electrical cycles per revolution based on the
mechanical speed of the rotor. This provides instantaneous adjustment of the voltage
and current phasing in response to speed and position feedback from a resolver mounted
to the motors’ shaft.
General Information 2-1MN723
Page 9
Limited Warranty
For a period of two (2) years from the date of original purchase, BALDOR will
repair or replace without charge controls and accessories which our
examination proves to be defective in material or workmanship. This
warranty is valid if the unit has not been tampered with by unauthorized
persons, misused, abused, or improperly installed and has been used in
accordance with the instructions and/or ratings supplied. This warranty is in
lieu of any other warranty or guarantee expressed or implied. BALDOR
shall not be held responsible for any expense (including installation and
removal), inconvenience, or consequential damage, including injury to any
person or property caused by items of our manufacture or sale. (Some
states do not allow exclusion or limitation of incidental or consequential
damages, so the above exclusion may not apply.) In any event, BALDOR’s
total liability, under all circumstances, shall not exceed the full purchase
price of the control. Claims for purchase price refunds, repairs, or
replacements must be referred to BALDOR with all pertinent data as to the
defect, the date purchased, the task performed by the control, and the
problem encountered. No liability is assumed for expendable items such as
fuses.
Goods may be returned only with written notification including a BALDOR
Return Authorization Number and any return shipments must be prepaid.
2-2 General Information MN723
Page 10
Safety Notice This equipment contains voltages that may be as high as 1000 volts! Electrical shock
can cause serious or fatal injury. Only qualified personnel should attempt the start–up
procedure or troubleshoot this equipment.
This equipment may be connected to other machines that have rotating parts or parts
that are driven by this equipment. Improper use can cause serious or fatal injury. Only
qualified personnel should attempt the start–up procedure or troubleshoot this equipment.
PRECAUTIONS
WARNING: Do not touch any circuit board, power device or electrical
connection before you first ensure that power has been
disconnected and there is no high voltage present from this
equipment or other equipment to which it is connected. Electrical
shock can cause serious or fatal injury. Only qualified personnel
should attempt the start–up procedure or troubleshoot this
equipment.
WARNING: This unit has an automatic restart feature that will start the motor
whenever input power is applied and a RUN (FWD or REV)
command is issued. If an automatic restart of the motor could
cause injury to personnel, the automatic restart feature should be
disabled by changing the Level 2 Miscellaneous block, Restart
Auto/Man parameter to Manual.
WARNING: Do not remove cover for at least five (5) minutes after AC power is
disconnected to allow capacitors to discharge. Dangerous voltages
are present inside the equipment. Electrical shock can cause
serious or fatal injury.
WARNING: Be sure that you are completely familiar with the safe operation of
this equipment. This equipment may be connected to other
machines that have rotating parts or parts that are controlled by
this equipment. Improper use can cause serious or fatal injury.
Only qualified personnel should attempt the start–up procedure or
troubleshoot this equipment.
WARNING: Be sure the system is properly grounded before applying power.
Do not apply AC power before you ensure that all grounding
instructions have been followed. Electrical shock can cause
serious or fatal injury.
WARNING: Improper operation of control may cause violent motion of the
motor shaft and driven equipment. Be certain that unexpected
motor shaft movement will not cause injury to personnel or damage
to equipment. Certain failure modes of the control can produce
peak torque of several times the rated motor torque.
WARNING: Motor circuit may have high voltage present whenever AC power is
applied, even when motor is not rotating. Electrical shock can
cause serious or fatal injury.
WARNING: Dynamic brake resistors may generate enough heat to ignite
combustible materials. Keep all combustible materials and
flammable vapors away from brake resistors.
WARNING: The motor shaft will rotate during the autotune procedure. Be
certain that unexpected motor shaft movement will not cause injury
to personnel or damage to equipment.
Continued on next page
General Information 2-3MN723
Page 11
Section 1
General Information
Caution: Disconnect motor leads (T1, T2 and T3) from control before you
perform a “Megger” test on the motor. Failure to disconnect motor
from the control will result in extensive damage to the control. The
control is tested at the factory for high voltage / leakage resistance
as part of Underwriter Laboratory requirements.
Caution: Suitable for use on a circuit capable of delivering not more than the
RMS symmetrical short circuit amperes listed here at rated voltage.
Horsepower rms Symmetrical Amperes
1–50 5,000
51–200 10,000
201–400 18,000
401–600 30,000
601–900 42,000
Caution: Do not supply any power to the External Trip (motor thermostat)
leads at J1-16 and 17. Power on these leads can damage the
control. Use a dry contact type that requires no external power to
operate.
Caution: Do not connect AC power to the Motor terminals T1, T2 and T3.
Connecting AC power to these terminals may result in damage to
the control.
Caution: Baldor recommends not using “Grounded Leg Delta” transformer
power leads that may create ground loops. Instead, we recommend
using a four wire Wye.
Caution: If the DB hardware mounting is in any position other than vertical,
the DB hardware must be derated by 35% of its rated capacity.
Caution: If an M-Contactor is installed, the control must be disabled for at
least 20msec before the M-Contactor is opened. If the M-Contactor
is opened while the control is supplying voltage and current to the
motor, the control may be damaged.
Caution: Do not connect any shields to the motor frame. At a minimum,
resolver signal integrity will be compromised and damage to the
control may result. The resolver shields must be connected at
J1-28 only.
2-4 General Information MN723
Page 12

Section 3
Receiving & Installation
Receiving & Inspection When you receive your control, there are several things you should do immediately.
1. Observe the condition of the shipping container and report any damage
immediately to the commercial carrier that delivered your control.
2. Verify that the part number of the control you received is the same as the part
number listed on your purchase order.
3. If the control is to be stored for several weeks before use, be sure that it is
stored in a location that conforms to published storage temperature and
humidity specifications. (Refer to Section 7 of this manual).
Physical Location The mounting location of the control is important. It should be installed in an area that is
protected from direct sunlight, corrosives, harmful gases or liquids, dust, metallic
particles, shock and vibration.
Several other factors should be carefully evaluated when selecting a location for
installation:
1. For effective cooling and maintenance, the control should be mounted vertically
on a flat, smooth, non-flammable vertical surface. Table 3-1 lists the Watts
Loss ratings for enclosure sizing.
2. At least two inches clearance must be provided on all sides for air flow.
3. Front access must be provided to allow the control cover to be opened or
removed for service and to allow viewing of the Keypad Display.
Controls packaged in a floor mounted enclosure must be positioned with
clearance to open the enclosure door. This clearance will also provide
sufficient air space for cooling.
4. Altitude derating. Up to 3300 feet (1000 meters) no derating required. Above
3300 ft, derate the continuous and peak output current by 2% for each 1000 ft.
5. Temperature derating. Up to 40°C no derating required. Above 40°C, derate
the continuous and peak output current by 2% per °C. Maximum ambient is
55°C.
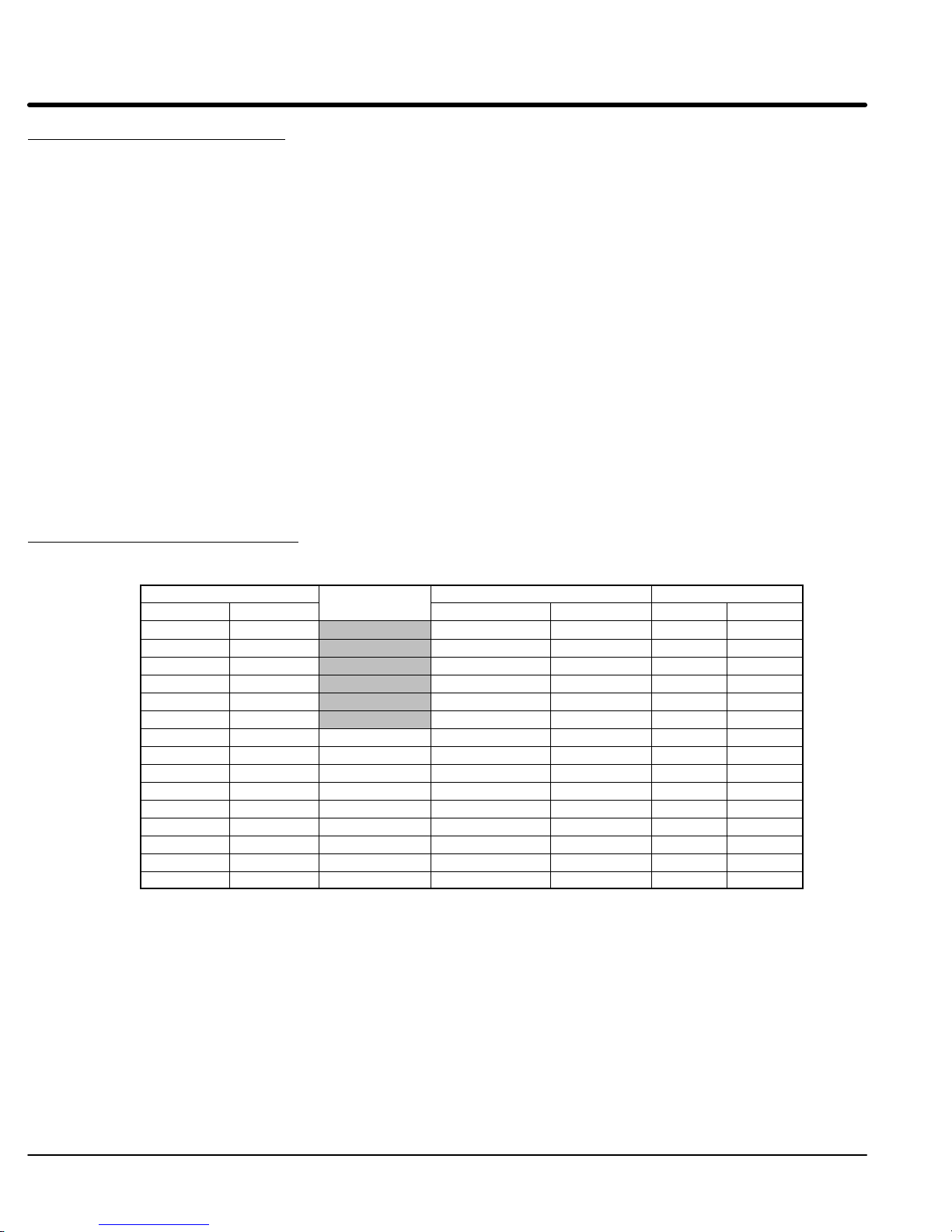
Table 3-1 Series 23H Watts Loss Ratings
Enclosure Size 230 VAC 460 VAC
2.5KHz
PWM
A, B and B2 14 Watts/
Amp
C, C2, D, D2, E, and F 12 Watts/
Amp
G 15 Watts/
8.0KHz
PWM
17 Watts/
Amp
15 Watts/
Amp
2.5KHz
PWM
17 Watts/
Amp
15 Watts/
Amp
Amp
8.0KHz
PWM
26 Watts/
Amp
23Watts/
Amp
Receiving & Installation 3-1MN723
Page 13
Control Installation The control must be securely fastened to the mounting surface at the mounting holes.
Shock Mounting
If the control will be subjected to levels of shock greater than 1G or vibration greater than
0.5G at 10 to 60Hz, the control should be shock mounted.
Keypad Installation Procedure
1. Refer to the optional remote keypad installation procedure and mount the
keypad.
2. Connect the keypad cable to the keypad connector on the main control board.
Refer to Figure 3-30 for the connector location.
3-2 Receiving & Installation MN723
Page 14

Optional Remote Keypad Installation The keypad may be remotely mounted using the optional Baldor keypad
extension cable. The keypad assembly (white - DC00005A-01; grey - DC00005A-02)
comes complete with the screws and gasket required to mount it to an enclosure. When
the keypad is properly mounted to a NEMA Type 4X enclosure, it retains the Type 4X
rating.
Tools Required:
• Center punch, tap handle, screwdrivers (Phillips and straight) and crescent
wrench.
• 8-32 tap and #29 drill bit (for tapped mounting holes) or #19 drill (for clearance
mounting holes).
1
• 1-
/4″ standard knockout punch (1-11/16″ nominal diameter).
• RTV sealant.
• (4) 8-32 nuts and lock washers.
• Extended 8-32 screws (socket fillister) are required if the mounting surface is
thicker than 12 gauge and is not tapped (clearance mounting holes).
• Remote keypad mounting template. A tear out copy is provided at the end of
this manual for your convenience.
Mounting Instructions: For tapped mounting holes
1. Locate a flat 4″ wide x 5.5″ minimum high mounting surface. Material should
be sufficient thickness (14 gauge minimum).
2. Place the template on the mounting surface or mark the holes as shown.
3. Accurately center punch the 4 mounting holes (marked A) and the large
knockout (marked B).
4. Drill four #29 mounting holes (A). Thread each hole using an 8-32 tap.
5. Locate the 1-1/4″ knockout center (B) and punch using the manufacturers
instructions.
6. Debur knockout and mounting holes making sure the panel stays clean and flat.
7. Apply RTV to the 4 holes marked (A).
8. Assemble the keypad to the panel. Use 8–32 screws, nuts and lock washers.
9. From the inside of the panel, apply RTV over each of the four mounting screws
and nuts. Cover a 3/4″ area around each screw while making sure to completely
encapsulate the nut and washer.
Mounting Instructions: For clearance mounting holes
1. Locate a flat 4″ wide x 5.5″ minimum high mounting surface. Material should
be sufficient thickness (14 gauge minimum).
2. Place the template on the mounting surface or mark the holes as shown on the
template.
3. Accurately center punch the 4 mounting holes (marked A) and the large
knockout (marked B).
4. Drill four #19 clearance holes (A).
5. Locate the 1-1/4″ knockout center (B) and punch using the manufacturers
instructions.
6. Debur knockout and mounting holes making sure the panel stays clean and flat.
7. Apply RTV to the 4 holes marked (A).
8. Assemble the keypad to the panel. Use 8–32 screws, nuts and lock washers.
9. From the inside of the panel, apply RTV over each of the four mounting screws
and nuts. Cover a 3/4″ area around each screw while making sure to completely
encapsulate the nut and washer.
Receiving & Installation 3-3MN723
Page 15
Electrical Installation Interconnection wiring is required between the motor control, AC power source, motor,
host control and any operator interface stations. Use listed closed loop connectors that
are of appropriate size for wire gauge being used. Connectors are to be installed using
crimp tool specified by the manufacturer of the connector. Only Class 1 wiring should be
used.
Baldor Series H controls feature UL approved adjustable motor overload protection
suitable for motors rated at no less than 50% of the output rating of the control. Other
governing agencies such as NEC may require separate over–current protection. The
installer of this equipment is responsible for complying with the National Electric Code
and any applicable local codes which govern such practices as wiring protection,
grounding, disconnects and other current protection.
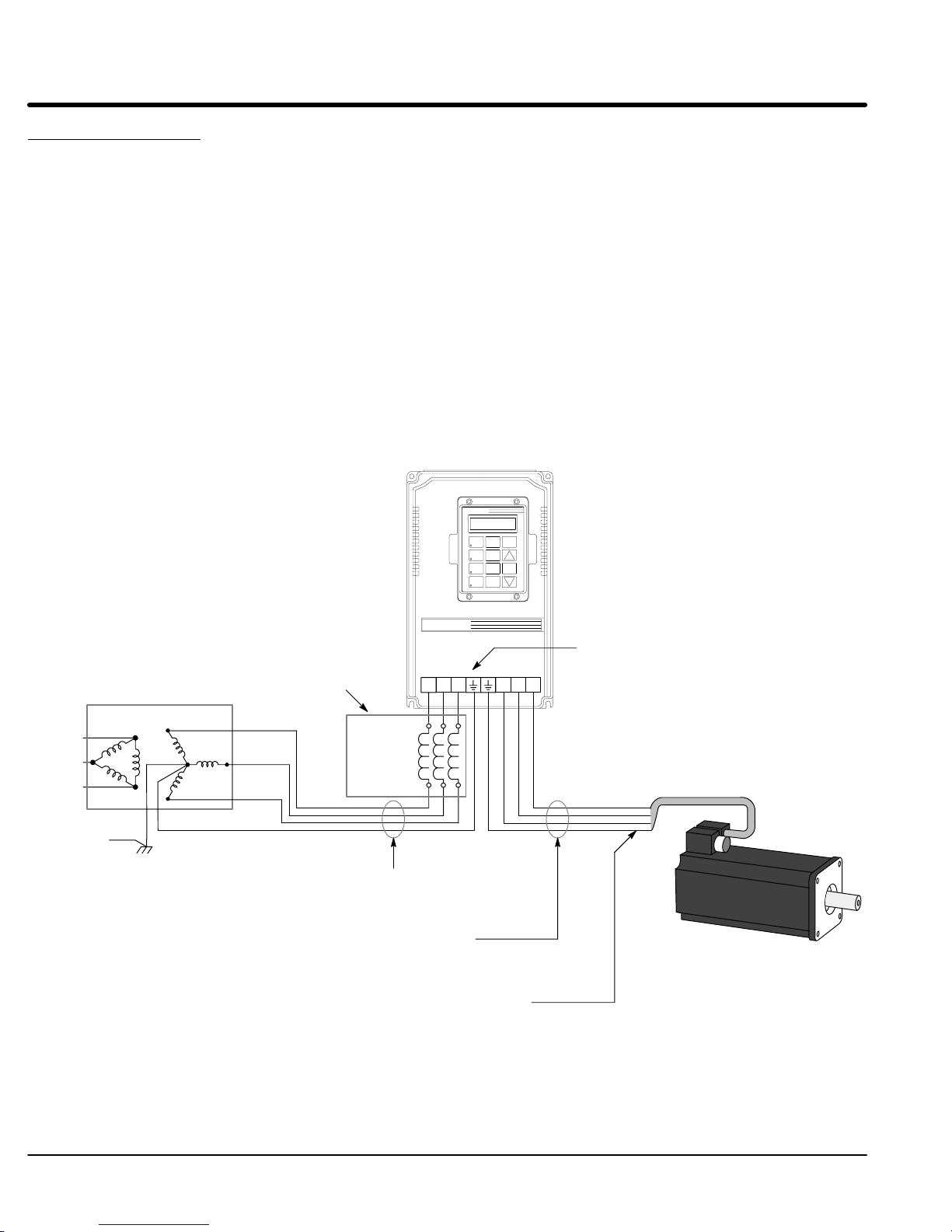
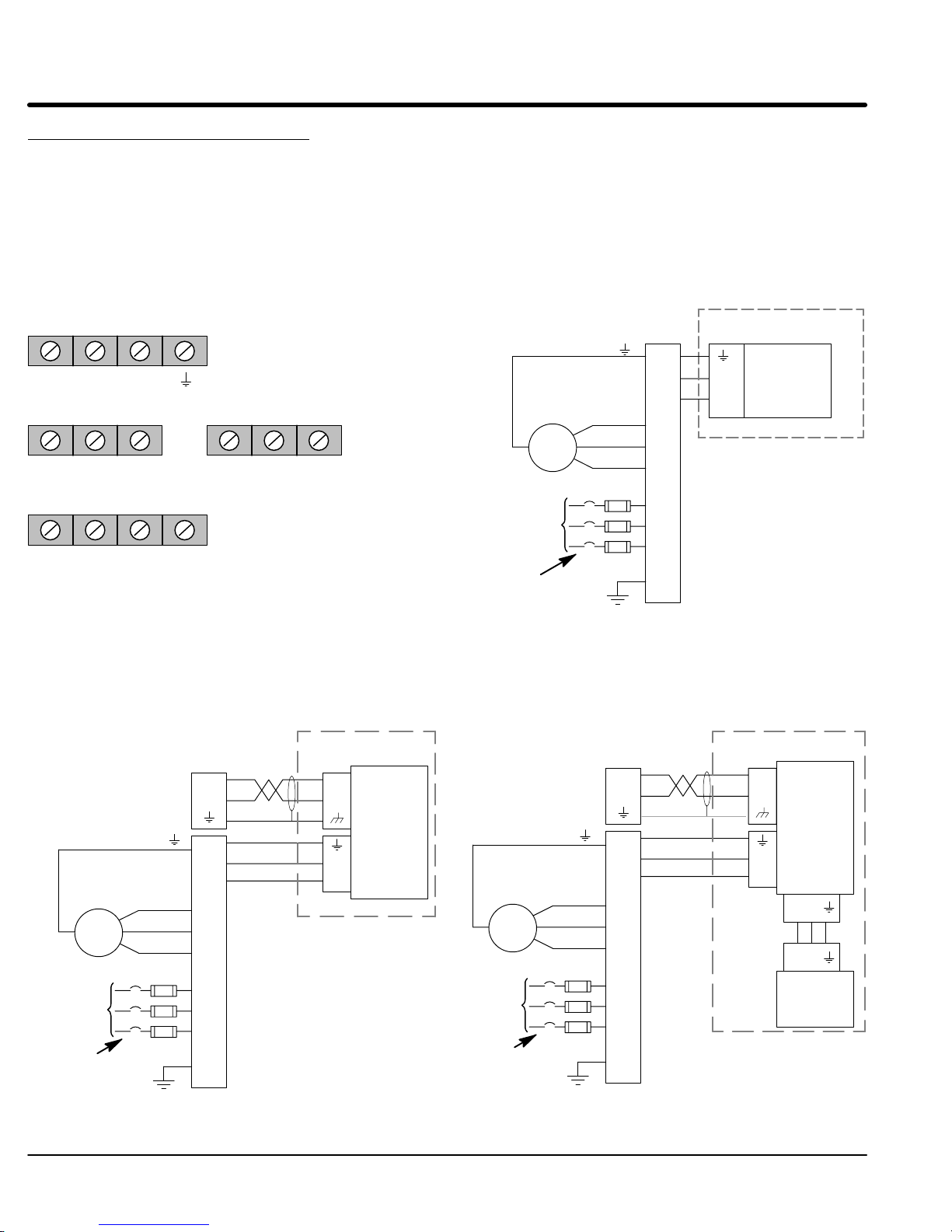
System Grounding Baldor Controls are designed to be powered from standard three phase lines that are
electrically symmetrical with respect to ground. System grounding is an important step in
the overall installation to prevent problems. The recommended grounding method is
shown in Figure 3-1.
Figure 3-1 Recommended System Grounding
LOCAL
PROG
JOG
DISP
FWD
SHIFT
ENTER
REV
RESET
STOP
AC Main
Supply
Safety
Ground
Note: A line reactor is recommended
and must be ordered separately.
L1
L2
L3
Earth
Four Wire
“Wye”
Driven Earth
Ground Rod
(Plant Ground)
Route all 4 wires L1, L2, L3 and Earth
(Ground) together in conduit or cable.
Route all 4 wires T1, T2, T3 and Motor
Ground together in conduit or cable.
Series H
L1
L2 L3 T1 T2 T3
Optional
Line
Reactor
Connect all wires (including motor ground)
inside the motor terminal box.
Note: Wiring shown for clarity of grounding
method only. Not representative of
actual terminal block location.
Ground per NEC and
Local codes.
3-4 Receiving & Installation MN723
Page 16
System Grounding Continued
Ungrounded Distribution System
With an ungrounded power distribution system it is possible to have a continuous current
path to ground through the MOV devices. To avoid equipment damage, an isolation
transformer with a grounded secondary is recommended. This provides three phase AC
power that is symmetrical with respect to ground.
Input Power Conditioning
Baldor controls are designed for direct connection to standard three phase lines that are
electrically symmetrical with respect to ground. Certain power line conditions must be
avoided. An AC line reactor or an isolation transformer may be required for some power
conditions.
If the feeder or branch circuit that provides power to the control has
permanently connected power factor correction capacitors, an input AC line
reactor or an isolation transformer must be connected between the power factor
correction capacitors and the control.
If the feeder or branch circuit that provides power to the control has power
factor correction capacitors that are switched on line and off line, the capacitors
must not be switched while the control is connected to the AC power line. If the
capacitors are switched on line while the control is still connected to the AC
power line, additional protection is required. TVSS (Transient Voltage Surge
Suppressor) of the proper rating must be installed between the AC line reactor
or an isolation transformer and the AC input to the control.
Line Impedance The Baldor control requires a minimum line impedance. If the impedance of the incoming
power does not meet the requirement for the control, a 3 phase line reactor can be used
to provide the needed impedance in most cases. Line reactors are optional and are
available from Baldor.
Control Size A, B, C, D, E B2, C2, D2, F, G
Line Impedance Required 3% 1%
The input impedance of the power lines can be determined as follows:
Measure the line to line voltage at no load and at full rated load.
Use these measured values to calculate impedance as follows:
%Impedance +
(Volts
No Load Speed
(Volts
* Volts
No Load Speed
Full Load Speed
)
)
100
Line Reactors Three phase line reactors are available from Baldor. The line reactor to order is based on
the full load current of the motor (FLA). If providing your own line reactor, use the
following formula to calculate the minimum inductance required.
(V
0.03)
L +
L*L
(I 3Ǹ 377)
Where: L Minimum inductance in Henries.
V
L-L
0.03 Desired percentage of input impedance.
I Input current rating of control.
377 Constant used with 60Hz power.
Input volts measured line to line.
Use 314 if input power is 50Hz.
Load Reactors Line reactors may be used at the control output to the motor. When used this way, they
are called Load Reactors. Load reactors serve several functions that include:
Protect the control from a short circuit at the motor.
Limit the rate of rise of motor surge currents.
Slowing the rate of change of power the control delivers to the motor.
Load reactors should be installed as close to the control as possible. Selection should be
based on the motor nameplate FLA value.
Receiving & Installation 3-5MN723
Page 17
AC Main Circuit Considerations
Protection Devices Be sure a suitable input power protection device is installed. Use the recommended
circuit breaker or fuses listed in Tables 3-2 through 3-3 (Wire Size and Protection
Devices). Input and output wire size is based on the use of copper conductor wire rated
at 75 °C. The table is specified for NEMA B motors.
Circuit Breaker: 1 phase, thermal magnetic.
Equal to GE type THQ or TEB for 230 VAC
3 phase, thermal magnetic.
Equal to GE type THQ or TEB for 230 VAC or
GE type TED for 460 VAC.
Fast Action Fuses: 230 VAC, Buss KTN
460 VAC, Buss KTS to 600A (KTU 601 - 1200A)
Very Fast Action: 230 VAC, Buss JJN
460 VAC, Buss JJS
Time Delay Fuses: 230 VAC, Buss FRN
460 VAC, Buss FRS to 600A (KLU 601 - 1200A)
Power Disconnect A power disconnect should be installed between the input power service and the control
for a fail safe method to disconnect power. The control will remain in a powered-up
condition until all input power is removed from the control and the internal bus voltage is
depleted.
Wire Size and Protection Devices
Table 3-2 230VAC Controls (3 Phase) Wire Size and Protection Devices
Control Output Rating
Amps HP
3 0.75 5 4 14 2.5
4 1 6 5 14 2.5
7 2 10 9 14 2.5
10 3 15 12 14 2.5
16 5 25 20 12 3.31
22 7.5 30 30 10 5.26
28 10 40 45 35 8 8.37
42 15 60 70 60 6 13.3
54 20 70 80 70 6 13.3
68 25 90 100 90 4 21.2
80 30 100 125 110 3 26.7
104 40 150 175 150 1 42.4
130 50 175 200 175 1/0 53.5
145 60 200 225 200 2/0 67.4
192 75 250 300 250 4/0 107.0
Input Breaker
Input Breaker
(Amps)
Input Fuse (Amps) Wire Gauge
Fast Acting Time Delay AWG mm
2
Note: All wire sizes are based on 75°C copper wire. Higher temperature smaller gauge wire may be used per NEC
and local codes. Recommended fuses/breakers are based on 40°C ambient, maximum continuous control
output current and no harmonic current.
3-6 Receiving & Installation MN723
Page 18

T able 3-3 460VAC Controls (3 Phase) Wire Size and Protection Devices
Control Output Rating Input Breaker Input Fuse (Amps) Wire Gauge
Amps HP
2 0.75 2 2 14 2.5
2 1 3 2.5 14 2.5
4 2 6 5 14 2.5
5 3 8 7 14 2.5
8 5 12 10 14 2.5
11 7.5 20 15 14 2.5
14 10 25 20 12 3.31
21 15 30 30 25 10 5.26
27 20 40 40 35 10 5.26
34 25 50 50 45 8 8.37
40 30 50 60 50 8 8.37
52 40 70 80 70 6 13.3
65 50 90 100 90 4 21.2
77 60 100 125 100 3 26.7
96 75 125 150 125 2 33.6
124 100 175 200 175 1/0 53.5
(Amps)
Fast Acting Time Delay AWG mm
2
Note: All wire sizes are based on 75°C copper wire. Higher temperature smaller gauge wire may be used per NEC
and local codes. Recommended fuses/breakers are based on 40°C ambient, maximum continuous control
output current and no harmonic current.
Receiving & Installation 3-7MN723
Page 19
AC Line Connections
Reduced Input Voltage Derating All power ratings stated in Section 7 are for the stated nominal AC input
voltages (230 or 460VAC). The power rating of the control must be reduced when
operating at a reduced input voltage. The amount of reduction is the ratio of the voltage
change.
Examples:
A 10HP, 230VAC control operating at 208VAC has a reduced power rating of 9.04HP.
10HP
Likewise, a 10HP, 460VAC control operating at 380VAC has a reduced power rating of
8.26HP.
10HP
To obtain the full output rating of 10HP in either case requires a 15HP Control.
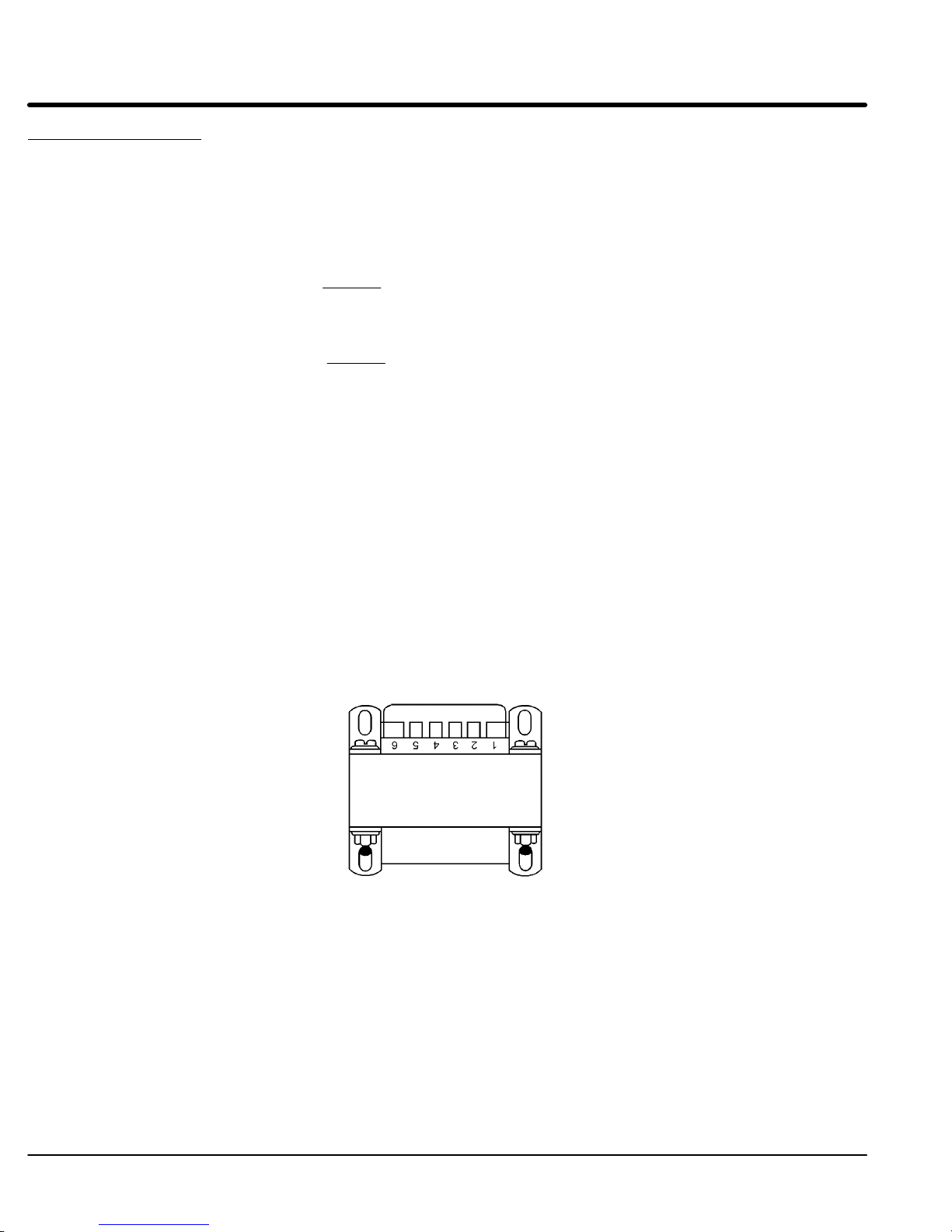
380-400 VAC Operation Size A, B, B2, C2 and D2 460VAC controls may be used directly with a 380-400 VAC
power source, control modification is not necessary.
Size C, D, E, F and G 460VAC controls all require modification for operation on the
reduced line voltage. Specifically, the control transformer must have the wire on terminal
5 (for 460V) moved to terminal 4 (for 380-400V).
208VAC
230VAC
380VAC
460VAC
1. Be sure drive operation is terminated and secured.
2. Remove all power sources from the control. If power has been applied, wait at
least 5 minutes for bus capacitors to discharge.
3. Remove or open the front cover.
4. Remove the wire from terminal 5.
5. Place the wire that was removed from terminal 5 onto terminal 4.
6. Install or close the front cover.
+ 9.04HP
+ 8.26HP
Figure 3-2 Control Transformer Identification
3-8 Receiving & Installation MN723
Page 20
Tap Change Procedure (size G controls). See Figure 3-3.
Figure 3-3 Size G - Control Transformer Terminal Block
460VAC 380-400VAC
Three Phase Input Power
Three phase AC power connections are shown in Figure 3-4. The 23H control has an
electronic I2t motor overload protection. If motor overloads are desired, they should be
sized according to the manufacturers specifications and installed between the motor and
the T1, T2 and T3 terminals of the control.
1. Be sure drive operation is terminated and control is disabled.
2. Remove all power sources from the control. If power has been applied, wait at
least 5 minutes for bus capacitors to discharge.
3. Remove or open the front cover and locate the control transformer (Figure 3-3).
4. Remove the wires from the two right side terminals.
5. Place the wires on the center terminals as shown.
6. Install or close the front cover.
Note: Use same gauge wire for earth ground as is used for L1, L2 and L3
connections. Refer to the wire size and protection devices tables shown
previously in this section.
Note 1
Note 3
Note 4
Note 3
* Circuit
Breaker
*Optional
Line
Reactor
L1 L2 L3
A1 B1 C1
A2 B2 C2
L1 L2 L3
Baldor
Series 23H
Control
Figure 3-4 Three Phase AC Power Connections
Earth
Note 2
Alternate *
Fuse
Connection
L1 L2 L3
Note 1
A1 B1 C1
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
See Recommended Tightening Torques in Section 7.
Receiving & Installation 3-9MN723
Page 21
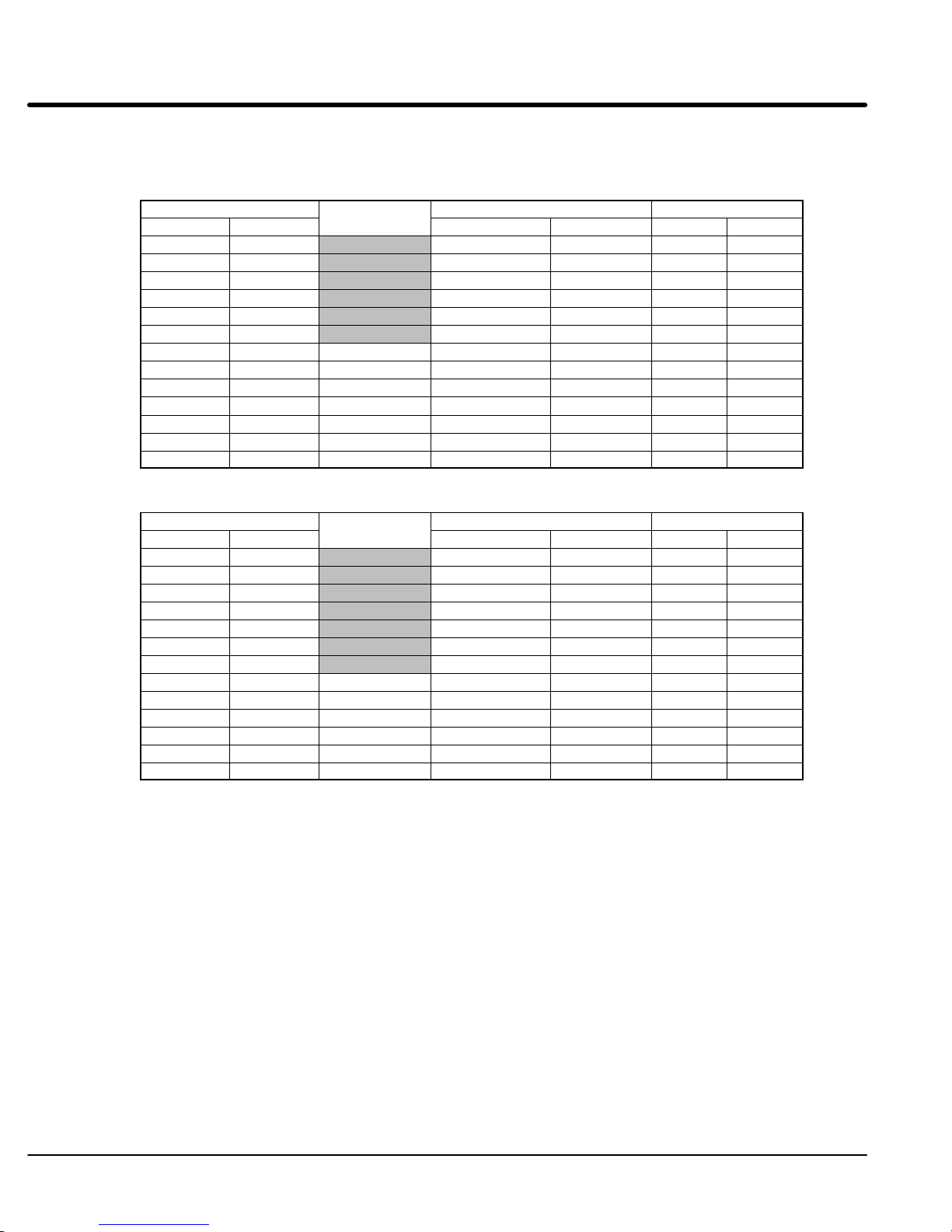
Table 3-4 and 3-5 list the wire size for the input AC power wires. Motor leads should be
sized from the 3 phase tables.
Table 3-4 Single Phase Rating Wire Size and Protection Devices - 230 VAC Controls*
Control Output Rating
Amps HP
6.9 0.75 10 9 14 2.5
8.0 1 12 10 14 2.5
12 2 20 17.5 14 2.5
17 3 25 25 12 3.31
28 5 45 35 10 5.26
40 7.5 60 50 8 8.37
50 10 70 80 70 6 13.3
68 15 90 110 90 4 21.2
88 20 110 150 125 3 26.7
110 25 150 175 150 2 33.6
136 30 175 200 175 1/0 53.5
176 40 225 250 250 3/0 85.0
216 50 275 350 300 (2) 1/0 (2) 53.5
Input Breaker
Input Breaker
(Amps)
Input Fuse (Amps) Wire Gauge
Fast Acting Time Delay AWG mm
2
Table 3-5 Single Phase Rating Wire Size and Protection Devices - 460 VAC Controls*
Control Output Rating
Amps HP
3.5 0.75 5 5 14 2.5
4.0 1 6 5.6 14 2.5
6.0 2 10 8 14 2.5
8.5 3 15 12 14 2.5
14 5 20 20 12 3.31
20 7.5 30 25 10 5.26
25 10 40 30 10 5.26
34 15 45 50 45 8 8.37
44 20 60 70 60 8 8.37
55 25 70 80 70 6 13.3
68 30 90 100 90 4 21.2
88 40 110 150 125 3 26.7
108 50 150 175 150 2 33.6
Input Breaker
Input Breaker
(Amps)
Input Fuse (Amps) Wire Gauge
Fast Acting Time Delay AWG mm
2
*Note:All wire sizes are based on 75°C copper wire. Higher temperature smaller gauge wire may be used per NEC
and local codes. Recommended fuses/breakers are based on 40°C ambient, maximum continuous control
output current and no harmonic current.
3-10 Receiving & Installation MN723
Page 22
Single Phase Input Power Considerations Single phase operation of G and H size controls is not possible.
Single phase AC input power can be used to power the control instead of three phase for
control sizes A, B, B2, C, C2, D, D2, E and F. The specifications and control sizes are
listed in Section 7 of this manual. If single phase power is to be used, the rated
Horsepower of the control may have to be reduced (derated). In addition, power wiring
and jumper changes are required.
Single phase rating wire size and protection devices are listed in Tables 3-4 and 3-5.
Single Phase Control Derating: Single phase power derating requires that the continuous and peak current ratings
of the control be reduced by the following percentages:
1. 3–10A 230 and 2–5A 460 VAC controls:
No derating required.
2. 15–28A (Size B and B2) 230 and 5–15A 460 VAC controls:
Derate HP by 40% of the nameplate rating.
3. 42–55A (Size C) and Larger 230 and 460 VAC controls:
Derate HP by 50% of the nameplate rating.
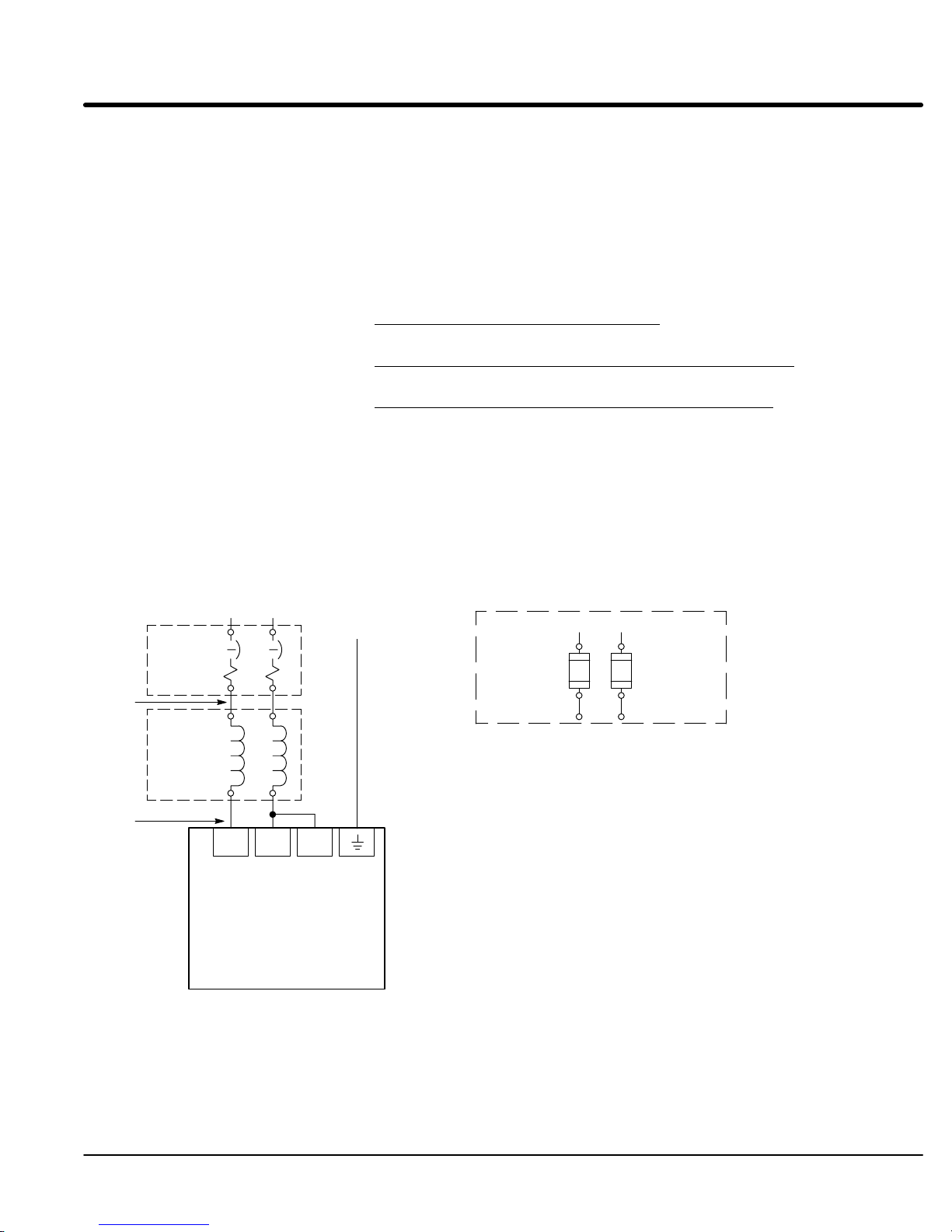
Size A, B and B2 Single Phase Power Installation (See Figure 3-5.)
Jumper Configuration
Size A, B and B2 controls, no jumper changes required.
Note 1
Note 3
Note 4
Note 3
Figure 3-5 Size A, B and B2 Single Phase 230/460VAC Power Connections
* Circuit
Breaker
*Optional
Line
Reactor
L1 L2
A1 B1
A2 B2
L1 L2 L3
Baldor
Control
Earth
L1 L2
* Fuse
Connection
Note 2
A1 B1
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
See Recommended Tightening Torques in Section 7.
Note 1
Receiving & Installation 3-11MN723
Page 23
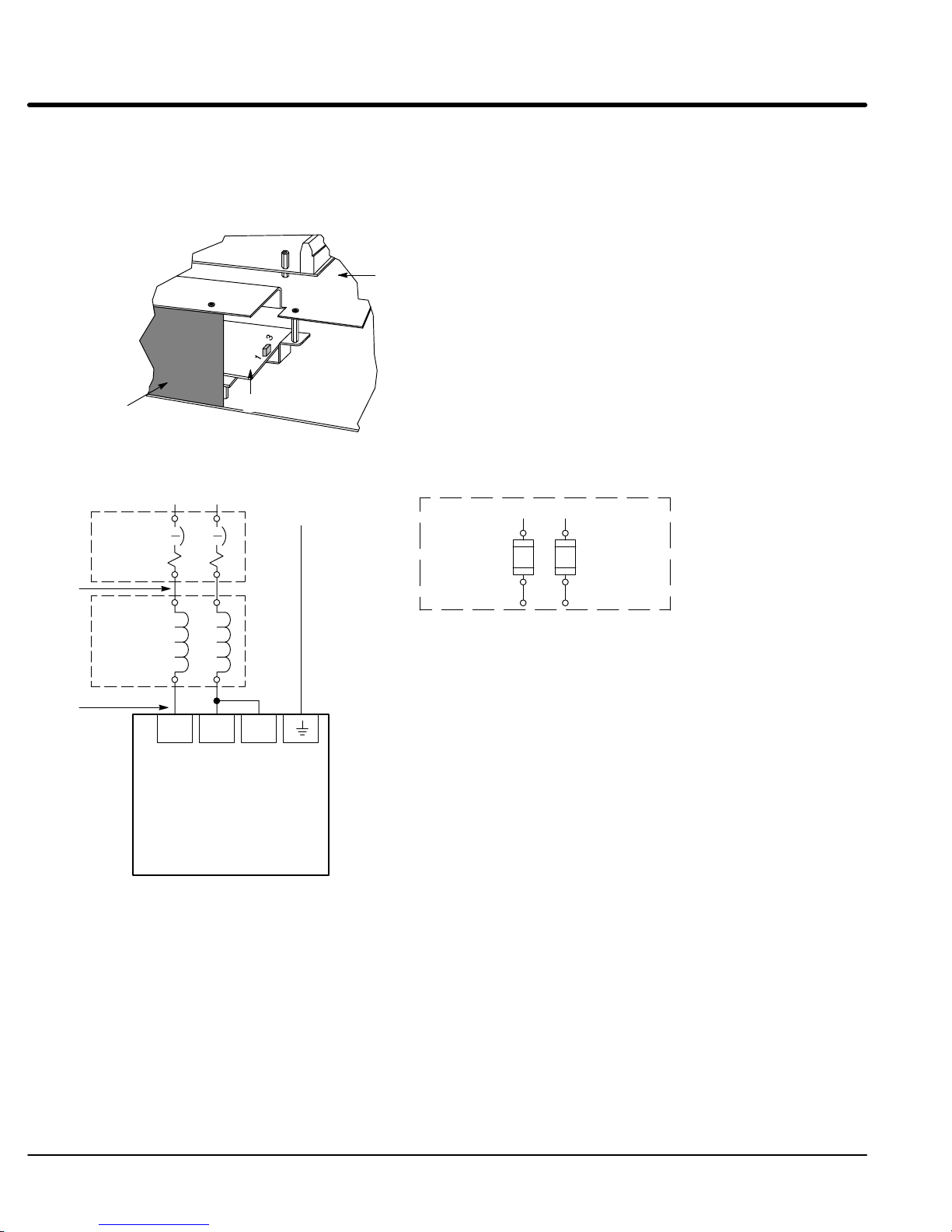
Size C2 Single Phase Power Installation (See Figure 3-7.)
Jumper Configuration
Locate the Interface board, and place JP7 on pins 2 & 3 for single phase operation.
Figure 3-6 Jumper Configuration
Control Board
Bend plastic insulator upward
to access the Interface Board.
L1 L2
Note 1
Note 3
Note 4
Note 3
* Circuit
Breaker
*Optional
Line
Reactor
A1 B1
A2 B2
L1 L2 L3
JP7
Interface Board
JP7
Pins 1 & 2 = Three Phase
Pins 2 & 3 = Single Phase
Figure 3-7 Size C2 Single Phase 230/460VAC Power Connections
Baldor
Control
Earth
* Fuse
Connection
Note 2
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
L1 L2
Note 1
A1 B1
See Recommended Tightening Torques in Section 7.
3-12 Receiving & Installation MN723
Page 24
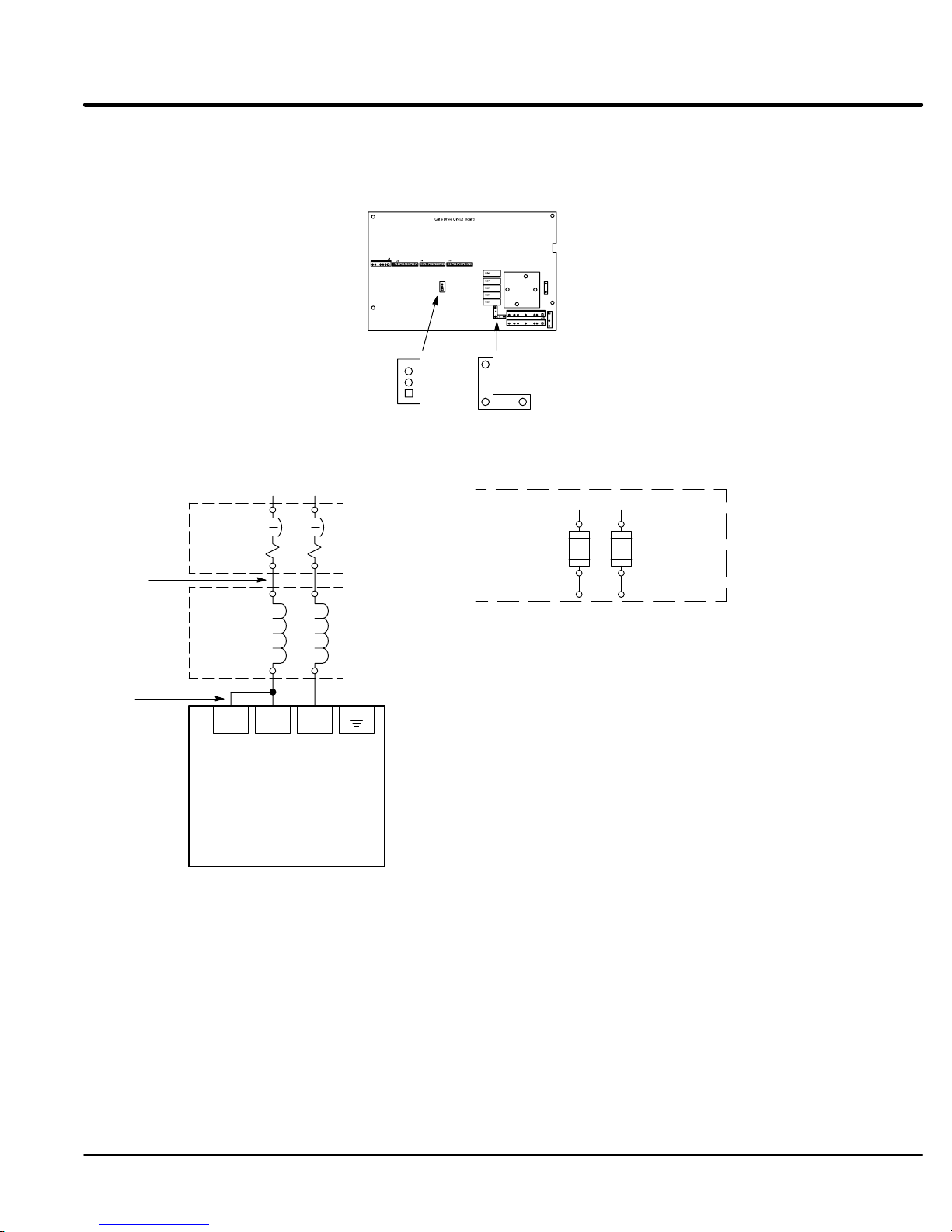
Size C and D Single Phase Power Installation (See Figure 3-9.)
Figure 3-8 Jumper Configuration
Place JP2 on pins 1 & 2 for control single phase operation.
Place JP3 in position B for fan single phase operation.
Note 1
Note 3
Note 4
Note 3
JP2
Pins 1 & 2 = Single Phase
Pins 2 & 3 = Three Phase
Figure 3-9 Size C & D Single Phase 230/460VAC Power Connections
L1 L2
* Circuit
Breaker
B1 C1
*Optional
Line
Reactor
B2 C2
L1 L2 L3
Baldor
Control
JP3
Position A = Three Phase
Position B = Single Phase
JP2
1
JP3
A
B
Earth
Note 2
* Fuse
Connection
L1 L2
Note 1
B1 C1
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
See Recommended Tightening Torques in Section 7.
Receiving & Installation 3-13MN723
Page 25
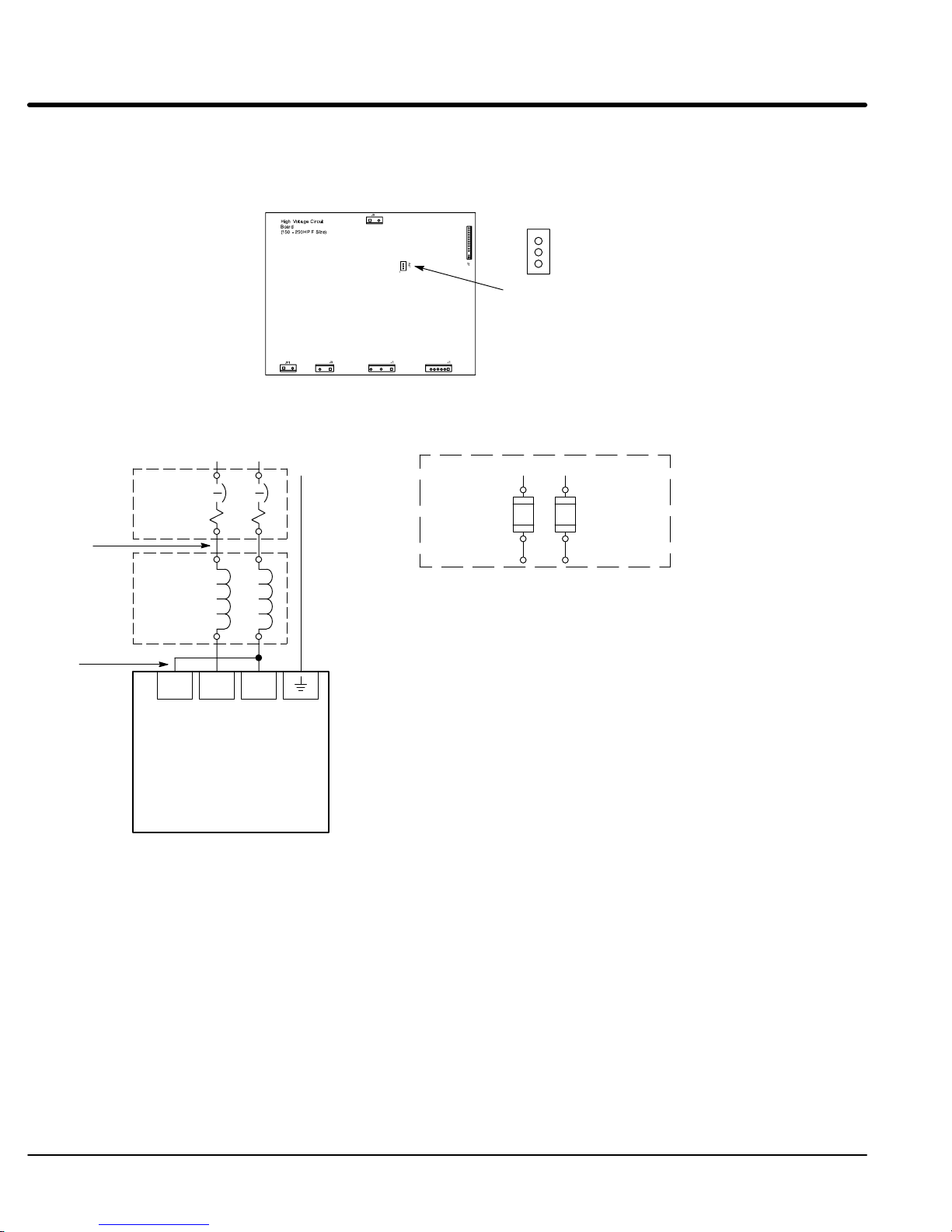
Size D2 Single Phase Power Installation (see Figure 3-11)
Jumper Configuration
Locate the Interface board, and place J100 on pins 2 & 3 for single phase operation.
Figure 3-10 Jumper Configuration
Note 1
Note 3
Note 4
Note 3
* Circuit
Breaker
*Optional
Line
Reactor
J100
Pins 1 & 2 = Three Phase
Pins 2 & 3 = Single Phase
1
2
3
J100
Figure 3-11 Size D2 Single Phase 230/460VAC Power Connections
L1 L2
A1 B1
A2 B2
L1 L2 L3
Baldor
Control
Earth
L1 L2
* Fuse
Connection
Note 2
A1 B1
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
Note 1
See Recommended Tightening Torques in Section 6.
3-14 Receiving & Installation MN723
Page 26
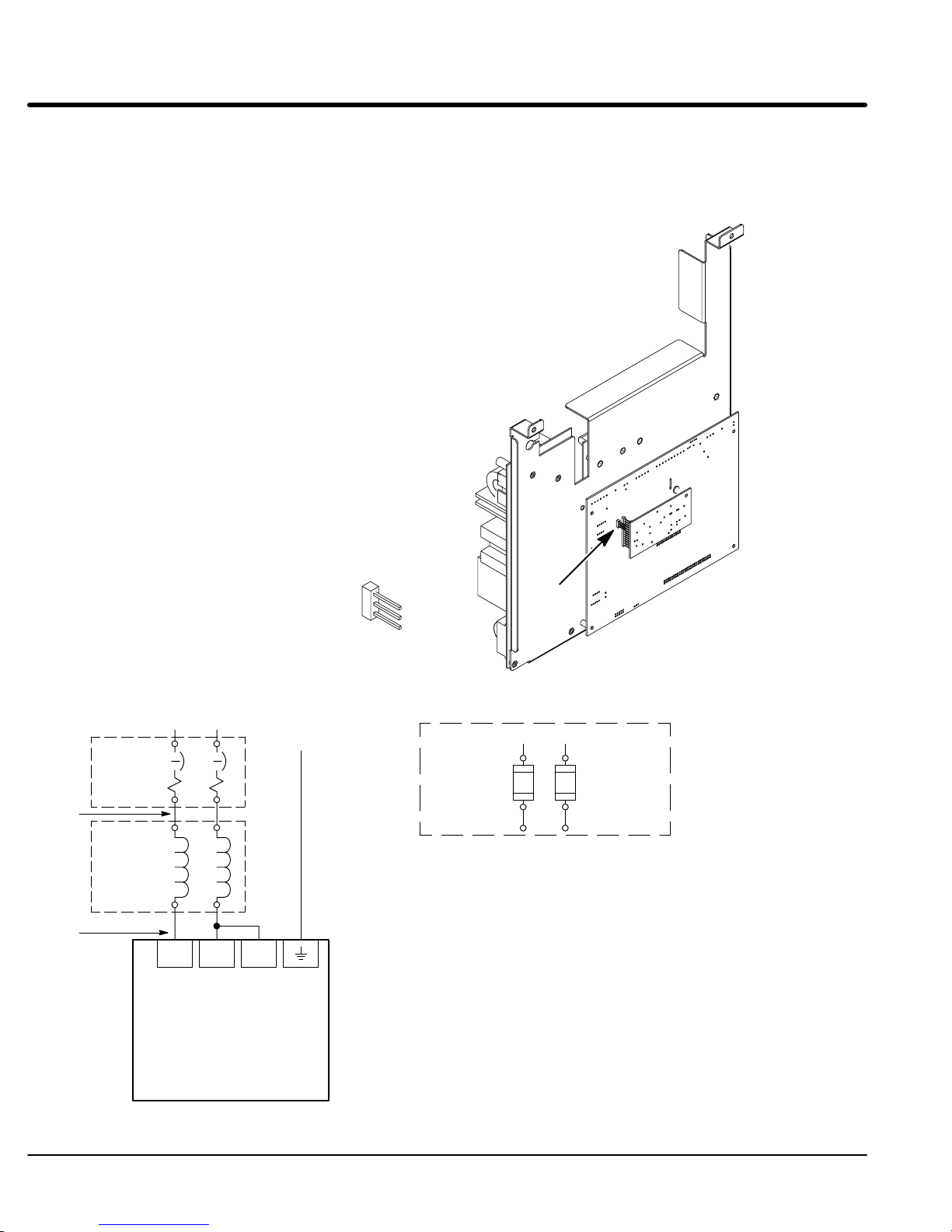
Size E Single Phase Power Installation (See Figure 3-13.)
Figure 3-12 Jumper Configuration
Place JP1 on the High Voltage Circuit Board across pins 1 and 2.
Note 1
Note 3
Note 4
Note 3
* Circuit
Breaker
*Optional
Line
Reactor
JP1
Pins 1 & 2 = Single Phase
Pins 2 & 3 = Three Phase
1
JP1
Figure 3-13 Size E Single Phase 230/460VAC Power Connections
L1 L2
A1 B1
A2 B2
L1 L2 L3
Baldor
Control
Earth
L1 L2
* Fuse
Connection
A1 B1
Note 1
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
See Recommended Tightening Torques in Section 7.
Receiving & Installation 3-15MN723
Page 27
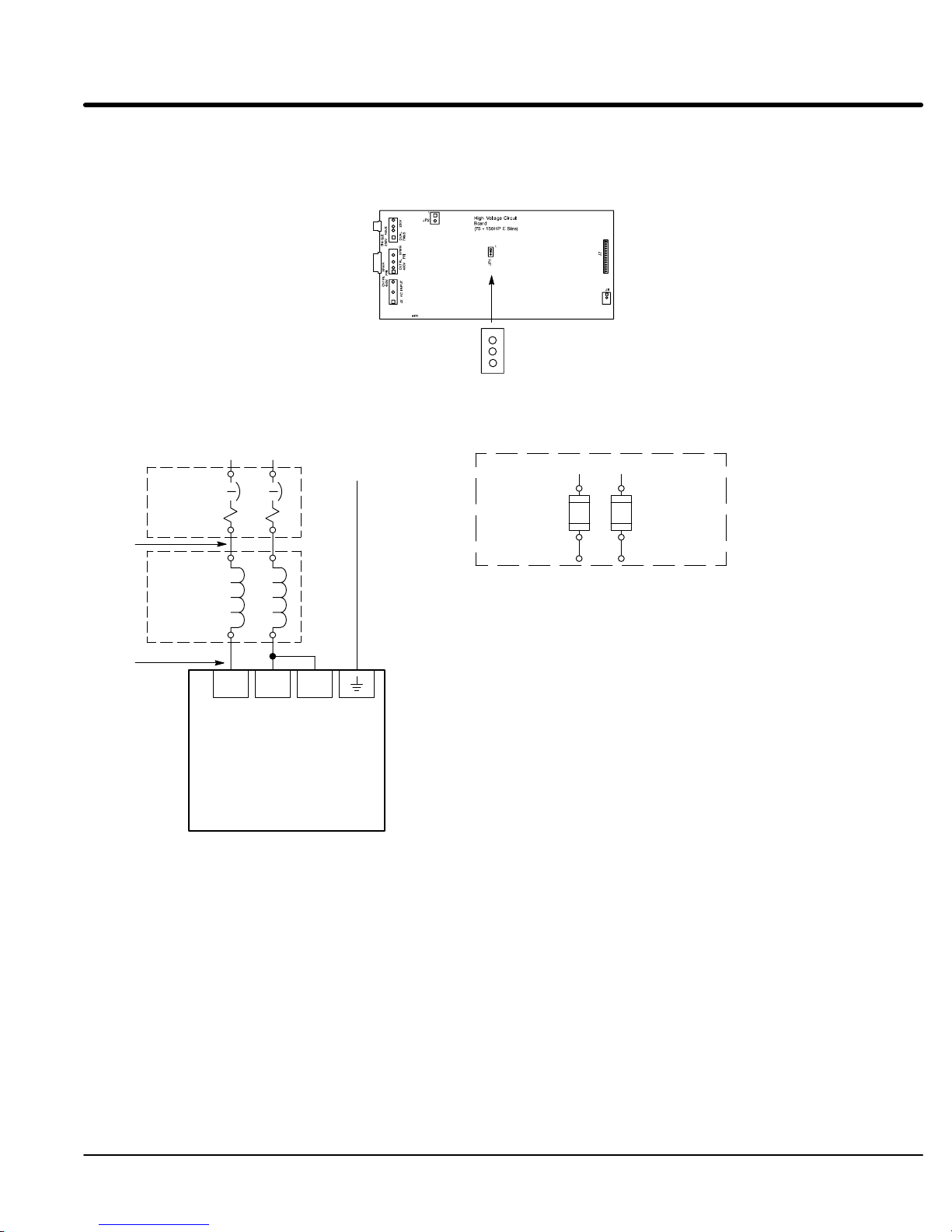
Size F Single Phase Power Installation (See Figure 3-15.)
Figure 3-14 Jumper Configuration
Place JP2 on the High Voltage Circuit Board across pins 1 and 2.
Figure 3-15 Size F Single Phase 230/460VAC Power Connections
Note 1
L1 L2
* Circuit
Breaker
Earth
Note 2
* Fuse
Connection
JP2
1
JP2
Pins 1 & 2 = Single Phase
Pins 2 & 3 = Three Phase
L1 L2
Note 1
Note 3
Note 4
Note 3
B1 C1
*Optional
Line
Reactor
B2 C2
L1 L2 L3
Control
Baldor
B1 C1
* Optional components not provided with control.
Notes:
1. See “Protective Devices” described previously in this section.
2. Use same gauge wire for Earth ground as is used for L1, L2 and L3.
3. Metal conduit should be used. Connect conduits so the use of a
Reactor or RC Device does not interrupt EMI/RFI shielding.
4. See Line/Load Reactors described previously in this section.
See Recommended Tightening Torques in Section 7.
3-16 Receiving & Installation MN723
Page 28
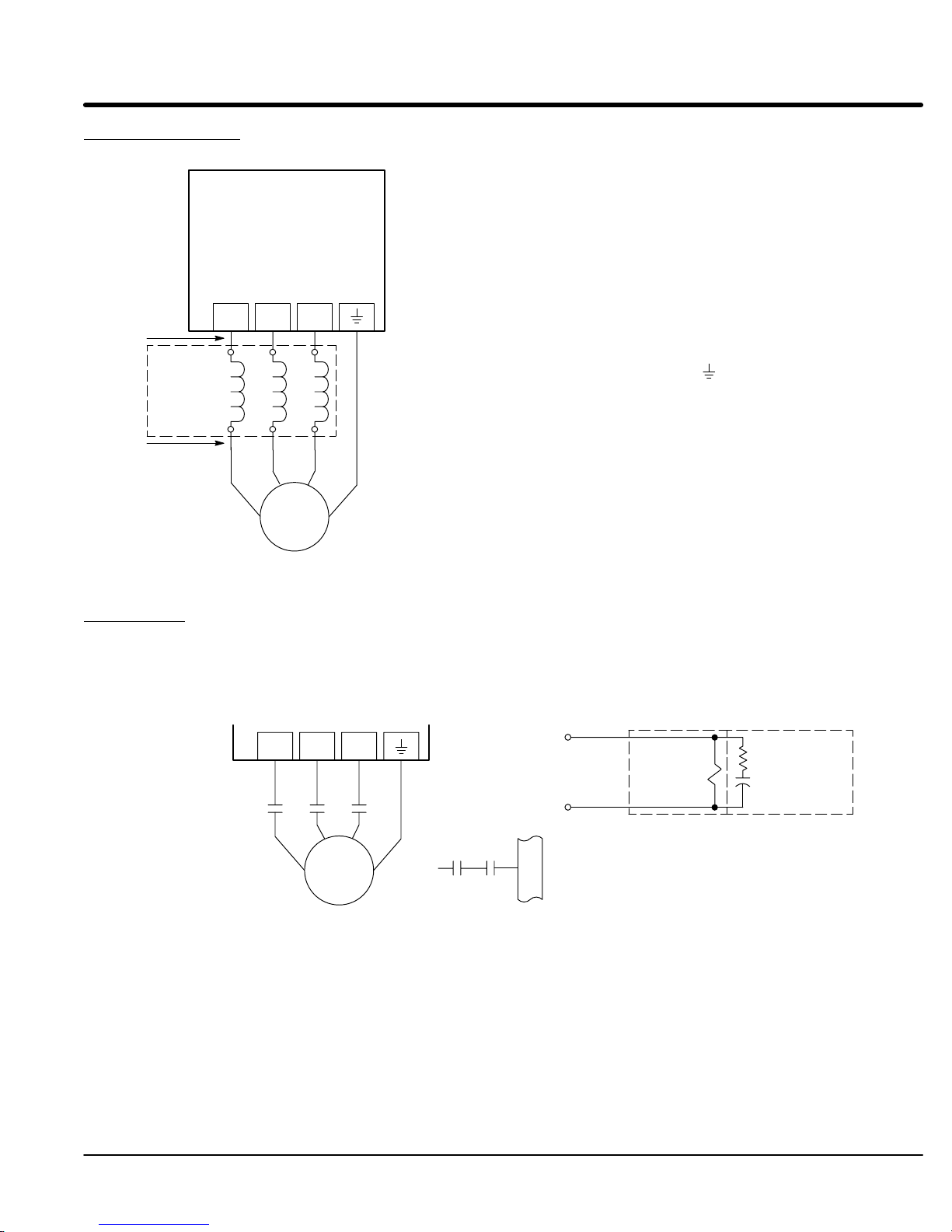
Motor Connections Motor connections are shown in Figure 3-16.
Figure 3-16 Motor Connections
Notes:
1. Metal conduit should be used. Connect conduits so the use of Load
Reactor or RC Device does not interrupt EMI/RFI shielding.
2. See Line/Load Reactors described previously in this section.
3. Use same gauge wire for Earth ground and motor leads (from the 3
phase wire size tables).
4. Motors are phase sensitive. If the motor leads are labeled 1, 2, 3
then lead 1 must be connected to T1 etc. If the motor leads are
labeled U, V, W then lead U must be connected to T1 etc.
5. Connect the motor ground lead to the of the control.
Note 1
Note 2
Note 1
*Optional
Load
Reactor
Baldor
Control
T1 T2 T3
A1 B1 C1
A2 B2 C2
* Optional components not provided with control.
T2 T3
T1
G
Note 3
See Recommended Tightening Torques in Section 7.
* AC Motor
M-Contactor If required by local codes or for safety reasons, an M-Contactor (motor circuit contactor)
may be installed. However, incorrect installation or failure of the M-contactor or wiring
may damage the control. If an M-Contactor is installed, the control must be disabled for
at least 20msec before the M-Contactor is opened or the control may be damaged.
M-Contactor connections are shown in Figure 3-17.
Figure 3-17 Optional M-Contactor Connections
T1 T2 T3
MMM
M=Contacts of optional M-Contactor
T2 T3
T1
* Motor
To Power Source
(Rated Coil Voltage)
J1
*
M Enable
G
7
Note: Close “Enable”
8
after “M” contact closure.
9
* M-Contactor
See Recommended Tightening Torques in Section 7.
* Optional
RC Device
Electrocube
RG1781-3
Receiving & Installation 3-17MN723
Page 29
Optional Dynamic Brake Hardware
Dynamic Brake (DB) Hardware must be installed on a flat, non-flammable, vertical
surface for effective cooling and operation. Refer to MN701 (for RGA, RBA and RTA
assemblies) or MN782 (for RUA assemblies) for additional information.
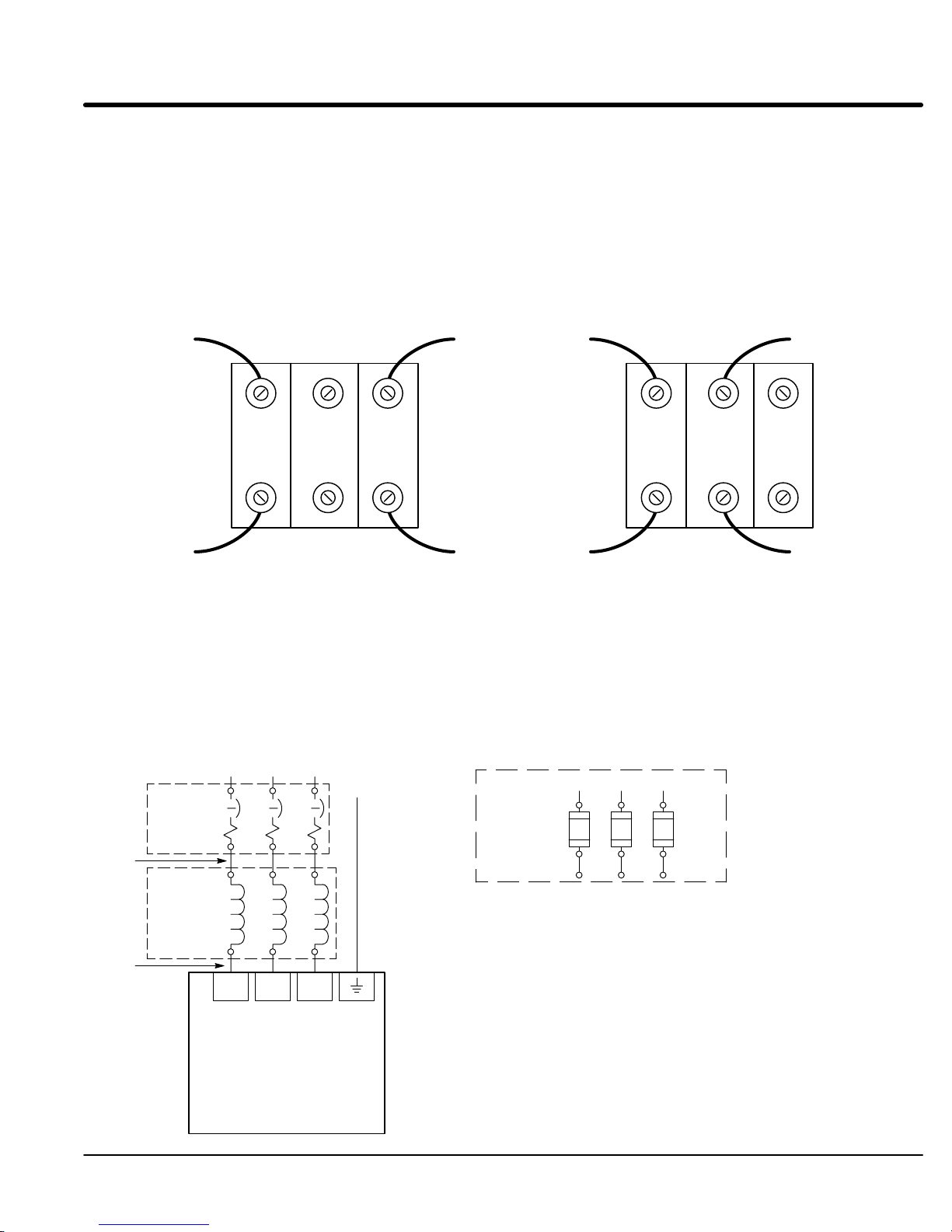
Electrical Installation Terminal connections for DB hardware is determined by the control model number suffix
(E, EO, ER or MO). See Figure 3-18 for terminal identification. Refer to Tables 3-6 and
3-7 for wire size information.
Figure 3-18 DB Terminal Identification Figure 3-19 Wiring for RGA Assembly (–E, –W, –ER)
“E” or “W” suffix
Note: Although not shown, metal
conduit should be used to shield all
R2 B+/R1 B-
power wires and motor leads.
“EO” or “MO” suffix
B+ B- GND D1 D2 GND
(May be labeled GND or )
MOTOR
T3
GND
T2
T1
Control
Terminals
GND
R2
B+/R1
T3
T2
T1
DB Terminals
Optional
Dynamic Brake
R2
R1
(RGA)
“ER” suffix
R2 B+/R1 B- GND
50/60 Hz
3 Phase
Power
Optional Customer Supplied
Breaker or Fuse Protection -
Subject to Local Codes
L3
L2
L1
GND
See recommended Terminal Tightening Torques in Section 7.
Figure 3-20 Wiring for RBA Assembly (–EO, –MO) Figure 3-21 Wiring for RTA Assembly (–EO, –MO)
DB Assembly
Terminals
D1
D2
Dynamic Brake
B-
B+
Optional
(RTA)
R2R1
R2R1
Optional
RGA
Assembly
(May be labeled GND or )
MOTOR
T3
GND
T2
T1
50/60 Hz
3 Phase
Power
Optional Customer Supplied
Breaker or Fuse Protection -
Subject to Local Codes
Control
Terminals
D1
D2
GND
B-
B+
T3
T2
T1
L3
L2
L1
GND
Shielded
Twisted Pair
DB Assembly
Terminals
D1
D2
Dynamic Brake
B-
B+
Optional
(RBA)
Note: Although not shown, metal
conduit should be used to shield all
power wires and motor leads.
See recommended Terminal
Tightening Torques in Section 7.
(May be labeled GND or )
MOTOR
T3
GND
T2
T1
50/60 Hz
3 Phase
Power
Optional Customer Supplied
Breaker or Fuse Protection -
Subject to Local Codes
Control
Terminals
D1
D2
GND
B-
B+
T3
T2
T1
L3
L2
L1
GND
Shielded
Twisted Pair
See recommended Terminal
Tightening Torques in Section 7.
3-18 Receiving & Installation MN723
Page 30
Control
Assembly
Control Terminals
See recommended
Terminal Tightening
Torques in Section 7.
The RUA Dynamic Brake assembly is designed for controls that have built in dynamic
brake hardware. Be sure to disconnect the internal resistor wires from control terminals.
These factory installed wires must be removed and the wire ends insulated with electrical
tape to prevent contact with other components. The braking capability may also need to
be disabled in software. For Baldor controls, reduce the resistor ohms to the lowest value
and increase the resistor watts to greatest value. Be sure to select the proper size kit
based on the dissipation rating of the resistor(s) to handle the average watts of the
overhauling or cyclic load.
Figure 3-22 Wiring for RUA Assembly
Use Baldor cables:
LD5157A05 – 5 Ft.
LD5157A10 – 10 Ft.
LD5157A20 – 20 Ft.
LD5157A30 – 30 Ft.
LD5157A50 – 50 Ft.
GND
B–B+/R1R2
NC Thermal
NC Thermal
Chassis must be
grounded to Earth.
B+
S+
No Connection
S–
B–
200°C Thermal Switch
Normally Closed contact
(mounted on chassis).
Dynamic
Brake
Assembly
Note: Sense lines S+ and S– must be shielded, twisted pair wire.
Terminate shields at control end only.
Table 3-6 Terminal Torques & Wire Size for RUA Assemblies
Braking
Control
Rating
VAC
VAC
Braking
Option
Watts
Max.
AWG mm
230 746 16 1.31 300 9 1 20 0.51 300 9 1
230 1492 16 1.31 300 9 1 20 0.51 300 9 1
230 1865 16 1.31 300 9 1 20 0.51 300 9 1
230 2238 14 2.08 300 9 1 20 0.51 300 9 1
230 3730 14 2.08 300 9 1 20 0.51 300 9 1
230 5600 14 2.08 300 9 1 20 0.51 300 9 1
460 746 16 1.31 600 9 1 20 0.51 600 9 1
460 1492 16 1.31 600 9 1 20 0.51 600 9 1
460 1865 16 1.31 600 9 1 20 0.51 600 9 1
460 2238 16 1.31 600 9 1 20 0.51 600 9 1
460 3730 14 2.08 600 9 1 20 0.51 600 9 1
460 5600 14 2.08 600 9 1 20 0.51 600 9 1
B+ and B– Terminals S+ and S– Terminals
Shielded
Wire Size
AC
Volt
2
Tightening
Torque
Lb–in Nm AWG mm
Shielded
Wire Size
See recommended Terminal Tightening
Torques and wire sizes in Table 3-6.
AC
Volt
2
Tightening
Torque
Lb–in Nm
Receiving & Installation 3-19MN723
Page 31

Table 3-7 Dynamic Brake Wire Size for RGA, RBA and RTA Assemblies
Control
Voltage Rating
VAC
Braking Option
Braking Option
Watts Rating
B+ / B- and R1 / R2 /
Terminals
Wire Size Wire Size
AWG mm
2
Volt
AWG mm
D1 / D2 /
Terminals
2
Volt
230 <2,000 16 1.31 600 20-22 0.5 600
230 2,100 – 5,000 14 2.08 600 20-22 0.5 600
230 5,100 – 10,000 10 6 600 20-22 0.5 600
230 >10,000 8 10 600 20-22 0.5 600
460 <4,000 16 1.31 600 20-22 0.5 600
460 4,100 – 10,000 14 2.08 600 20-22 0.5 600
460 10,100 – 20,000 10 6 600 20-22 0.5 600
460 >20,000 8 10 600 20-22 0.5 600
Resolver Feedback The resolver connections are made at the J1 connector as shown in Figure 3-23. The
resolver cable must be shielded twisted pair #22 AWG (0.34mm2) wire minimum. The
cable must also have an overall shield and not exceed 150 feet (45m) in length.
Maximum wire-to-wire or wire-to-shield capacitance is 50pf per foot (maximum of 7500pf
for 150 ft). See electrical noise considerations in Section 5 of this manual.
Resolver wiring must be separated from power wiring. Separate parallel runs of resolver
and power cables by at least 3″. Cross power wires at right angles only. Insulate or tape
ungrounded end of shields to prevent contact with other conductors or ground.
Figure 3-23 Resolver Cable Connections
R2
R1
P
= Twisted Pair
See recommended Terminal Tightening Torques in Section 7.
S2
S4
S1S3
P
P
P
J1
23 SINE+
24 SINE–
25 COSINE+
26 COSINE–
27 EXCITATION +
28 EXCITATION –
Figure 3-24 Baldor Resolver Cable Lead Identification
Red EXCITATION+
Blue EXCITATION–
Green COSINE+
Shield EXCITATION–
Yellow COSINE–
Pink SINE+
Gray SINE–
3-20 Receiving & Installation MN723
Page 32

Simulated Encoder Output The control provides a simulated encoder output at connector J1 as shown in Figure
3-25. This output provides position information to the host controller. Use twisted pair
wire with an overall shield.
This output simulates a 1024 ppr encoder with quadrature outputs. Counting in
quadrature will provide 4096 ppr with one index marker (CHC) per revolution. It is
recommended that this output only drive one circuit load. Driving multiple loads is not
recommended (to avoid ground loops).
Figure 3-25 Simulated Encoder Output
From
Processor
IN A
IN B
IN C
IN D
26LS31
J1
A
31
A
A
B
B
C
C
32
33
34
35
36
38
A
B
B
C
C
DGND
See recommended Terminal Tightening Torques in Section 7.
P
P
To Host Position
P
Controller
P
= Twisted Pair
Receiving & Installation 3-21MN723
Page 33

Home (Orient) Switch InputTo use the internally generated index pulse for homing, no external connections are
required. However, to use an external index input a jumper must be moved and the
external index signal must be connected to J1-29 and 30.
External Index Jumper
Refer to Figure 3-30. The resolver feedback module must be removed from the main
control board to change the JP1 position. Use the following procedure.
1. Use a grounded wrist strap.
2. Firmly grasp the Resolver Feedback Module and remove it from its connectors
on the main control board. Be careful not to bend the pins by twisting or lifting
the module unevenly.
3. Place the jumper in the desired position, refer to Figure 3-30.
4. Insert the Resolver Feedback Module back into its connectors on the main
control board. Be careful not to bend the pins by twisting or lifting the module
unevenly. Be sure the module is fully seated (pushed into) the connectors.
Connections for External Index Signal
The Home or Orient function causes the motor shaft to rotate to a predefined home
position. The homing function allows shaft rotation in the drive forward direction only.
The home position is located when a machine mounted switch or “Index” pulse is
activated (closed). Home is defined by a rising signal edge at terminal J1-29. The shaft
will continue to rotate only in a “Drive Forward” direction for a user defined offset value.
The offset is programmed in the Level 2 Miscellaneous Homing Offset parameter. The
speed at which the motor will “Home” or orient is set with the Level 2 Miscellaneous
Homing Speed parameter.
A machine mounted switch may be used to define the Home position or “index” channel.
A differential line driver output from a solid state switch is preferred for best noise
immunity. Connect this differential output to terminals J1-29 and J1-30.
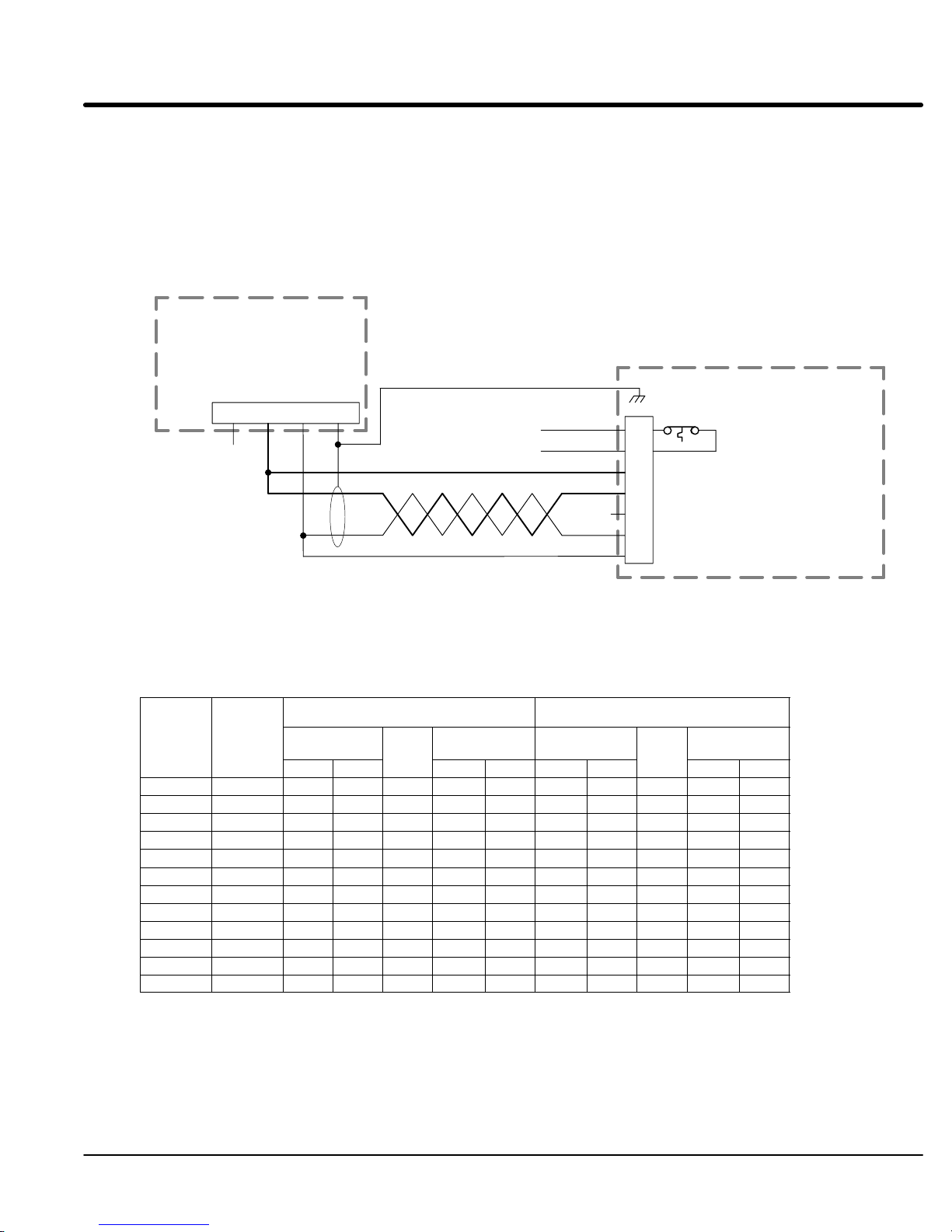
A single ended solid-state switch or limit switch should be wired as shown in Figure 3-26.
Regardless of the type of switch used, clean rising and falling edges at J1-29 are required
for accurate positioning.
Note: Control requires dynamic brake hardware for Orient (Homing) function to
work. Control will trip without dynamic brake hardware installed. Size A and B
controls ( “–E” suffix) are shipped with factory installed dynamic brake
hardware.
Figure 3-26 Typical Home or Orient Switch Connections
Customer Provided
+5VDC to +12VDC
Limit Switch (Closed at HOME).
3-22 Receiving & Installation MN723
J1
29
30
INDEX
Common
See recommended Terminal Tightening
Torques in Section 7.
Page 34

Operating Modes Ten operating modes are available. These modes define the basic motor control setup
and the operation of the input and output terminals. After the circuit connections are
completed, the operating mode is selected by programming the Operating Mode
parameter in the Level 1 Input Programming Block. Operating modes include:
• Keypad
• Standard Run, 3 Wire
• 15 Speed, 2 Wire
• 3 SPD ANA 2 Wire
• 3 SPD ANA 3 Wire
• Bipolar Speed or Torque
• Process Control
• Serial
• Electronic Pot 2 Wire
• Electronic Pot 3 Wire
Each mode requires connections to the J1 terminal strip (except the keypad mode, all
connections are optional). The J1 terminal strip is shown in Figure 3-27. The connection
of each input or output signal is described in the following pages.
Figure 3-27 Control Signal Connections
J1
Refer to Analog Inputs
Refer to Analog Outputs
Refer to opto isolated Inputs
Refer to opto isolated Outputs
See recommended terminal tightening torques in Section 7.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Input #1
Input #2
Input #3
Input #4
Input #5
Input #6
Input #7
Input #8
Input #9
Opto In Common
Opto Out #1 Return
Opto Out #1
Opto Out #2
Opto Out #3
Opto Out #4
1
23
Sine
2
24
Sine
3
25
Cosine
4
26
Cosine
5
27
Excitation
6
28
Excitation
7
29
Index
8
30
Common
9
31
A
10
32
A
11
33
B
12
34
B
13
35
INDEX
14
36
INDEX
15
37
Not Used
16
38
Common
17
39
18
40
19
41
Opto Out #1 Return
20
42
Opto Out #2 Return
21
43
Opto Out #3 Return
22
44
Opto Out #4 Return
Refer to Resolver Installation
Refer to Home Switch Input
Refer to Simulated Encoder Output
+24VDC
Opto In Power
J1-39 & 40 Jumper as shown to power the opto inputs
from the internal +24VDC supply.
Note: J1-18 and J1-41 are connected together
on the control circuit board.
Receiving & Installation 3-23MN723
Page 35

Analog Inputs Two analog inputs are available: analog input #1 (J1-1 and J1-2) and analog input #2
(J1-4 and J1-5) as shown in Figure 3-28. Either analog input may be selected in the
Level 1 INPUT block, Command Select parameter value. Analog input #1 is selected if
the parameter value is “Potentiometer”. Analog input #2 is selected if the parameter
value is “+/-10Volts, +/-5 Volts or 4-20mA”. Figure 3-29 shows the equivalent circuits of
the Analog Inputs.
Figure 3-28 Analog Inputs
J1
Analog GND
Command Pot or
0-10VDC
±5VDC, ±10VDC or 4-20 mA Input
5KW
See recommended terminal tightening torques in Section 7.
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Input #1 When using a potentiometer as the speed command, process feedback or setpoint
(Single Ended) source, the Level 1 Input block COMMAND SELECT parameter must be set to
“POTENTIOMETER”.
Note: A potentiometer value of 5kW to 10kW, 0.5 watt may be used.
Parameter Selection
The single ended analog input #1 can be used in one of three ways:
1. Speed or Torque command (Level 1 Input block, Command Select=Potentiometer).
2. Process Feedback (Level 2 Process Control block, Process Feedback=Potentiometer).
3. Setpoint Source (Level 2 Process Control block, Setpoint Source=Potentiometer).
When using Analog Input #1, the respective parameter must be set to
“POTENTIOMETER”.
1
2
3
4
5
Analog Input 1
Analog Input 2
Analog Input #2 Analog input #2 accepts a differential command ±5VDC, ±10VDC or 4-20 mA.
(Differential) If pin J1-4 is positive with respect to pin 5, the motor will rotate in the forward direction.
If pin J1-4 is negative with respect to pin 5, the motor will rotate in the reverse direction.
JP1 must be set for voltage or current operation as required. Analog Input #2 can be
connected for single ended operation by grounding either of the inputs, provided the
common mode voltage range is not exceeded.
Note: The common mode voltage can be measured with a voltmeter. Apply the
maximum command voltage to analog input 2 (J1-4, 5). Measure the AC and
DC voltage across J1-1 to J1-4. Add the AC and DC readings together.
Measure the AC and DC voltage from J1-1 to J1-5. Add the AC and DC
readings together.
If either of these measurement totals exceeds a total of ±15 volts, then the
common mode voltage range has been exceeded. To correct this condition,
either change the command source or isolate the command signal with a
signal isolator.
3-24 Receiving & Installation MN723
Page 36

Figure 3-29 Analog Inputs Equivalent Circuits
J1
–
+
.033 mF
5KW
Notes:
To Microprocessor
+
–
All OP Amps are TL082 or TL084
Analog Ground is separated from
Chassis Ground. Electrically they
are separated by an RC network.
1
-15VDC
30KW
20KW
2
3
4
5
(on main control board)
Refer to Table 3-8
for jumper placement information.
(on main control board)
Resolver Feedback Module
JP2
JP1
JP1
4-20mA
X N/C
123
123
1.96KW
500W
+15VDC
10KW 10KW
+
–
10KW
10KW
To Microprocessor
See recommended terminal tightening torques in Section 7.
Figure 3-30 Control Board Jumper Locations
JP1 (on bottom side of resolver
123
feedback module)
1–2 Internal Index
2–3 External Index
Jumper Jumper Position Description of Jumper Position Setting
JP1
JP2
See recommended terminal tightening torques in Section 7.
Table 3-8 Control Board Jumper
1-2 Voltage Speed Command Signal. (Factory Setting)
2-3 4-20mA Speed Command input at Analog #2
1-2 Factory Setting
2-3 Not used.
Receiving & Installation 3-25MN723
Page 37

Analog Outputs Two programmable analog outputs are provided on J1-6 and J1-7. See Figure 3-31.
These outputs are scaled 0 - 5 VDC (1mA maximum output current) and can be used to
provide real-time status of various control conditions. The output conditions are defined
in Section 4 of this manual.
The return for these outputs is J1-1 analog ground. Each output is programmed in the
Level 1 Output block.
Figure 3-31 Analog Outputs Equivalent Circuits
J1
1
From Microprocessor
From Microprocessor
Serial Operating Mode
10KW
.033 mf
10KW
.033 mf
+
–
10KW
+
–
10KW
50W
50W
6
Notes:
+
7
See recommended terminal tightening torques in Section 7.
–
All OP Amps are TL082 or TL084
Analog Ground is separated from
Chassis Ground. Electrically they
are separated by an RC network.
The Serial operating mode requires one of the optional Serial Interface expansion boards
(RS232, RS422 or RS485). Installation and operation information for these serial
expansion boards is provided in Serial Communications expansion board manual
MN1310. This manual is shipped with the serial expansion boards.
3-26 Receiving & Installation MN723
Page 38

Keypad Operating Mode
The Keypad operating mode allows the control to be operated from the keypad. This
mode requires no connections to J1. However, the Enable, Stop and External Trip inputs
may optionally be used. All other opto inputs remain inactive. The analog outputs and
opto-outputs remain active at all times.
Parameter Selection
For operation in Keypad mode, set the Level 1 Input block, Operating Mode parameter to
Keypad. The STOP key can operate in two ways:
Press STOP key one time to brake or coast to stop.
Press STOP key two times to disable control.
To use the Enable input, J1-8 must be connected and the Local Enable INP parameter in
the Level 2 Protection block must be set to ON. The Enable line is normally closed.
When opened, the motor will COAST to a stop. When the enable line is again closed, the
motor will not start until a new direction command is received from the keypad.
To use the Stop input, J1-11 must be connected and the Level 1 Keypad Setup block,
LOC. Hot Start parameter must be set to ON. The Stop line is normally closed. When
opened, the motor will COAST or REGEN to a stop depending upon the setting of Level 1
Keypad Setup block Keypad Stop Mode parameter value. Closing the input will
immediately start the motor.
The External Trip input causes a fault condition during a motor over temperature
condition (when normally closed input opens). The External Trip input (J1-16) must be
connected and the External Trip parameter in the Level 2 Protection block must be set to
“ON”. When J1-16 is opened, an external trip fault occurs. The control will disable and
the motor coasts to a stop. An external trip fault is displayed on the keypad display (also
logged into the fault log).
Figure 3-32 Keypad Control Connection Diagram
J1-8 If J1-8 is connected, you must set Level 2 Protection block, Local Enable INP
parameter to “ON” to activate the opto input.
CLOSED allows normal operation.
OPEN disables the control and motor coasts to a stop.
J1-11 If J1-11 is connected, you must set Level 1 Keypad Setup block,
Loc. Hot Start parameter to “ON” to activate the opto input.
CLOSED allows normal operation.
OPEN motor decels to stop (depending on Keypad Stop mode). The motor
will restart when J1-11 closes after open (if the keypad FWD or REV key is
still pressed).
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault log).
Refer to Figure 3-41.
See recommended terminal tightening torques in Section 7.
No Connection
Programmable Output
Programmable Output
Enable
Stop
External Trip
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Input #1
Input #2
Input #3
Input #4
Input #5
Input #6
Input #7
Input #8
Input #9
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Receiving & Installation 3-27MN723
Page 39

Standard Run 3 Wire Operating Mode
In Standard Run mode, the control is operated by the opto isolated inputs at J1-8 through
J1-16 and the analog command input. The opto inputs can be switches as shown in
Figure 3-33 or logic signals from another device.
Figure 3-33 Standard Run 3-Wire Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control and motor coasts to a stop.
J1-9 MOMENTARY CLOSED starts motor operation in the Forward direction. In
JOG mode (J1-12 CLOSED), continuous CLOSED jogs motor in the Forward
direction.
J1-10 MOMENTARY CLOSED starts motor operation in the Reverse direction. In
JOG mode (J1-12 CLOSED), CONTINUOUS closed JOGS motor in the
Reverse direction.
J1-11 MOMENTARY OPEN motor decels to stop (depending on Keypad Stop
mode).
J1-12 CLOSED places control in JOG mode, Forward and Reverse run are used to
jog the motor.
J1-13 CLOSED selects ACC / DEC / S-CURVE group 2.
OPEN selects ACC / DEC / S-CURVE group 1.
J1-14 CLOSED selects preset speed #1, (J1-12, will override this preset speed).
OPEN allows speed command from Analog input #1 or #2.
J1-15 CLOSED to reset fault condition.
OPEN to run.
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault log).
Command Pot or
0-10VDC
5KW
Programmable Output
Programmable Output
Refer to Figure 3-41.
See recommended terminal
tightening torques in Section 7.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Run
Reverse Run
Stop
Jog
Accel/Decel
Preset Speed #1
Fault Reset
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
3-28 Receiving & Installation MN723
Page 40

15 Speed 2-Wire Operating Mode
Operation in the 15 Speed 2-Wire mode is controlled by the opto isolated inputs at J1-8
through J1-16. The opto inputs can be switches as shown in Figure 3-34 or logic signals
from another device.
Switched inputs at J1-11 through J1-14 allow selection of 15 preset speeds and provide
Fault Reset as defined in Table 3-9.
Figure 3-34 15 Speed 2-Wire Control Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control and motor coasts to a stop.
J1-9 CLOSED operates the motor in the Forward direction (with J1-10 open).
OPEN motor decels to stop (depending on Keypad Stop mode).
J1-10 CLOSED operates motor in the Reverse direction (with J1-9 open).
OPEN motor decels to stop (depending on Keypad Stop mode).
J1-11-14 Selects programmed preset speeds as defined in Table 3-9.
J1-15 CLOSED selects ACC / DEC / S-CURVE group 2.
OPEN selects ACC / DEC / S-CURVE group 1.
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault log).
See recommended terminal tightening torques in Section 7.
No Connection
Programmable Output
Programmable Output
Refer to Figure 3-41.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Run
Reverse Run
Switch 1
Switch 2
Switch 3
Switch 4
Accel/Decel
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Table 3-9 Switch Truth Table for 15 Speed, 2 Wire Control Mode
Function J1-11 J1-12 J1-13 J1-14
Preset 1 Open Open Open Open
Preset 2 Closed Open Open Open
Preset 3 Open Closed Open Open
Preset 4 Closed Closed Open Open
Preset 5 Open Open Closed Open
Preset 6 Closed Open Closed Open
Preset 7 Open Closed Closed Open
Preset 8 Closed Closed Closed Open
Preset 9 Open Open Open Closed
Preset 10 Closed Open Open Closed
Preset 11 Open Closed Open Closed
Preset 12 Closed Closed Open Closed
Preset 13 Open Open Closed Closed
Preset 14 Closed Open Closed Closed
Preset 15 Open Closed Closed Closed
Fault Reset Closed Closed Closed Closed
Receiving & Installation 3-29MN723
Page 41

3 Speed Analog 2 Wire Operating Mode
Allows selection of 3 preset speeds with 2 wire inputs. The opto inputs can be switches
as shown in Figure 3-35 or logic signals from another device.
The values of the preset speeds are set in the Level 1 Preset Speeds block, Preset
Speed #1, Preset Speed #2 and Preset Speed #3.
Figure 3-35 3 SPD ANA 2 Wire Control Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control and the motor coasts to a stop.
J1-9 CLOSED operates the motor in the Forward direction (with J1-10 open).
OPEN motor decels to stop (depending on Keypad Stop mode).
J1-10 CLOSED operates the motor in the Reverse direction (with J1-9 open).
OPEN motor decels to stop (depending on Keypad Stop mode).
Note: Closing both J1-9 and J1-10 at the same time will reset a fault condition.
J1-11 CLOSED selects Analog Input #1.
OPEN selects Level 1 Input block, Command Select parameter.
Note: If Command Select (Level 1 Input block) is set to Potentiometer, then Analog
Input #1 is always selected regardless of this switch position.
J1-12 CLOSED selects STOP/START and Reset commands from terminal strip.
OPEN selects STOP/START and Reset commands from Keypad.
J1-13 CLOSED selects Level 1 Input block, Command Select parameter.
OPEN selects speed commanded from Keypad.
Note: When changing from Terminal Strip to Keypad (J1-12 or J1-13) the motor speed
and direction will remain the same after the change.
J1-14 Selects preset speeds as defined in the Speed Select Table (Table 3-10).
J1-15 Selects preset speeds as defined in the Speed Select Table (Table 3-10).
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to “ON”
to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor coasts
to a stop. An external trip fault is displayed (also logged in the fault log).
Programmable Output
Programmable Output
Command Pot or
0-10VDC
5KW
Refer to Figure 3-41.
See recommended terminal
tightening torques in Section 7.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Run
Reverse Run
Analog Input Select
Run Command
Speed Command
Switch 1
Switch 2
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Table 3-10 Speed Select Table
J1-14 J1-15 Command
OPEN
CLOSED
OPEN
CLOSED
OPEN
OPEN
CLOSED
CLOSED
3-30 Receiving & Installation MN723
Analog Input (Command Select)
Preset #1
Preset #2
Preset #3
Page 42

3 Speed Analog 3 Wire Operating Mode
Allows selection of 3 preset speeds with 3 wire inputs. The opto inputs can be switches
as shown in Figure 3-36 or logic signals from another device.
The values of the preset speeds are set in the Level 1 Preset Speeds block, Preset
Speed #1, Preset Speed #2 and Preset Speed #3.
Figure 3-36 3 SPD ANA 3 Wire Control Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control and the motor coasts to a stop.
J1-9 MOMENTARY CLOSED starts motor operation in the Forward direction.
J1-10 MOMENTARY CLOSED starts motor operation in the Reverse direction.
Note: Closing both J1-9 and J1-10 at the same time will reset a fault condition.
J1-11 Momentary OPEN motor decels to stop (depending on Keypad Stop mode).
J1-12 CLOSED selects STOP/START and Reset commands from terminal strip.
OPEN selects STOP/START and Reset commands from Keypad.
J1-13 CLOSED selects Level 1 Input block, Command Select parameter.
OPEN selects speed commanded from Keypad.
Note: When changing from Terminal Strip to Keypad (J1-12 or J1-13) the motor
speed and direction will remain the same after the change.
J1-14 Selects preset speeds as defined in the Speed Select Table (Table 3-11).
J1-15 Selects preset speeds as defined in the Speed Select Table (Table 3-11).
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor coasts
to a stop. An external trip fault is displayed (also logged in the fault log).
Command Pot or
0-10VDC
5KW
Programmable Output
Programmable Output
Refer to Figure 3-41.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Run
Reverse Run
Stop
Run Command
Speed Command
Switch 1
Switch 2
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Table 3-11 Speed Select Table
J1-14 J1-15 Command
OPEN
CLOSED
OPEN
CLOSED
OPEN
OPEN
CLOSED
CLOSED
Analog Input (Command Select)
Preset #1
Preset #2
Preset #3
See recommended terminal
tightening torques in Section 7.
Receiving & Installation 3-31MN723
Page 43

Bipolar Speed or Torque Operating Mode
Provides bipolar speed or torque control. Also, you may store up to four (4) complete
sets of operating parameters. This is important if you wish to store and use different
acceleration rates, speed commands, jog speeds or to store tuning parameter values for
different motors etc. The opto inputs can be switches as shown in Figure 3-37 or logic
signals from another device.
Note: In Bipolar mode, the pot input can only be used in the forward direction.
To operate in either direction, Analog Input 2 must be used.
Figure 3-37 Bipolar Speed or Torque Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control & motor coasts to a stop.
J1-9 CLOSED to enable operation in the Forward direction.
OPEN TO DISABLE Forward operation (drive will brake to a stop if a Forward
command is still present).
Reverse operation is still possible if J1-10 is closed.
J1-10 CLOSED to enable operation in the Reverse direction.
OPEN to disable Reverse operation (drive will brake to a stop if a Reverse
command is still present).
Forward operation is still possible if J1-9 is closed.
Note: If J1-9 and J1-10 are both opened, the drive will brake to a stop.
J1-11 CLOSED causes the motor to rotate in the forward direction until the load
reaches a marker or external switch location.
OPEN allows normal operation.
J1-12 CLOSED puts the control in torque (current) command mode.
OPEN puts the control in speed (velocity) command mode.
Note: If a stop command is issued while in the torque (current) mode, the
control will stop but will not maintain position (zero current). This is
different than zero speed operation for the velocity mode.
J1-13 & 14 Select from four parameter tables as defined in Table 3-12.
J1-15 Momentary CLOSED to reset fault condition.
OPEN allows normal operation.
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault log).
Command Pot or
0-10VDC
5KW
Programmable Output
Programmable Output
Refer to Figure 3-41.
See recommended terminal
tightening torques in Section 7.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Enable
Reverse Enable
Homing
Speed/Torque
Switch 1
Switch 2
Fault Reset
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Table 3-12 Bipolar Mode Table Select Truth Table
Function J1-13 J1-14
Parameter Table #0 Open Open
Parameter Table #1 Closed Open
Parameter Table #2 Open Closed
Parameter Table #3 Closed Closed
Note: See multiple parameter sets.
3-32 Receiving & Installation MN723
Page 44

Multiple Parameter Sets
The following procedure allows you to program up to four complete sets of parameter
values and to use these multiple parameter sets. When programming each parameter
set, use the ENTER key to accept and automatically save parameter values.
Note: The control can be programmed in the REMOTE mode with the drive enabled.
The control must be disabled to change the operating mode parameter and
the operating mode can not be stored in a parameter table.
Note: Preset speed does not apply to table select.
1. If this is a new installation, do this procedure after the Pre-Operation Checklist
and Power-Up Procedures at the end of this section.
2. Set the Level 1 INPUT block, Operating Mode parameter value to BIPOLAR in
each of the parameter sets.
3. Set switches J1-13 and J1-14 to Parameter Table #0 (both switches open). Be
sure switches J1-9 and J1-10 are OPEN, J1-8 is CLOSED. Enter all parameter
values, and autotune as instructed in Section 3 of this manual. This creates
and saves the first parameter set which is numbered Table#0.
4. Set switches J1-13 and J1-14 to Parameter Table #1. Be sure switches J1-9
and J1-10 are OPEN, J1-8 is CLOSED. Enter all parameter values, and
autotune as instructed in Section 3 of this manual. This creates and saves the
second parameter set which is numbered Table#1.
5. Set switches J1-13 and J1-14 to Parameter Table #2. Be sure switches J1-9
and J1-10 are OPEN, J1-8 is CLOSED. Enter all parameter values, and
autotune as instructed in Section 3 of this manual. This creates and saves the
third parameter set which is numbered Table#2.
6. Set switches J1-13 and J1-14 to Parameter Table #3. Be sure switches J1-9
and J1-10 are OPEN, J1-8 is CLOSED. Enter all parameter values, and
autotune as instructed in Section 3 of this manual. This creates and saves the
final parameter set which is numbered Table#3.
7. Remember that to change the value of a parameter in one of the parameter
tables, you must first select the table using the switches. You cannot change a
value in a table until you have first selected that table.
Receiving & Installation 3-33MN723
Page 45

Process Operating Mode
ËËËË
ËËËË
Figure 3-38 Process Mode Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control & motor coasts to a stop.
J1-9 CLOSED to enable operation in the Forward direction.
OPEN TO DISABLE Forward operation (drive will brake to a stop if a Forward
command is still present). Reverse operation is still possible if J1-10 is closed.
J1-10 CLOSED to enable operation in the Reverse direction.
OPEN to disable Reverse operation (drive will brake to a stop if a Reverse
command is still present). Forward operation is still possible if J1-9 is closed.
Note: If J1-9 and J1-10 are both opened, the drive will brake to a stop.
J1-11 CLOSED = TABLE 1, OPEN = TABLE 0. (See multiple parameter sets.)
J1-12 CLOSED, the control is in torque (current) command mode.
OPEN, the control is in speed (velocity) command mode.
Note: If a stop command is issued while in the torque (current) mode, the control
will stop but will not maintain position (zero current). This is different than
zero speed operation for the velocity mode.
J1-13 CLOSED to enable the Process Mode.
J1-14 CLOSED places control in JOG mode. The control will only JOG in the forward
direction.
J1-15 CLOSED to reset a fault condition.
OPEN to run.
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault log).
See recommended terminal tightening torques in Section 7.
Command Pot or
0-10VDC
5KW
Programmable Output
Programmable Output
Process Mode Enable
Refer to Figure 3-41.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Enable
Reverse Enable
Table Select
Speed/Torque
Jog
Fault Reset
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Table 3-13 Process Mode Input Signal Compatibility
Setpoint or
Feedforward
J1-1 & 2 J1-4 & 5
5V EXB 10V EXB
J1-1 & 2
J1-4 & 5
5V EXB
10V EXB
4-20mA EXB
3-15 PSI EXB
DC Tach EXB
EXB PULSE FOL
Serial
Requires expansion board EXB007A01 (High Resolution Analog I/O EXB).
Requires expansion board EXB004A01 (4 Output Relays/3-15 PSI Pneumatic Interface EXB).
Requires expansion board EXB006A01 (DC Tachometer Interface EXB).
Requires expansion board EXB005A01 (Master Pulse Reference/Isolated Pulse Follower EXB).
Used for Feedforward only. Must not be used for Setpoint Source or Feedback.
Requires expansion board EXB001A01 (RS232 Serial Communication EXB). or
Requires expansion board EXB002A01 (RS422/RS485 High Speed Serial Communication EXB).
Conflicting inputs. Do not use same input signal multiple times.
Conflicting level 1 or 2 expansion boards. Do not use!
Feedback
4-20mA
EXB
3-15 PSI
EXB
DC
Tach EXB
3-34 Receiving & Installation MN723
Page 46

Electronic Pot 2 Wire Operating Mode
Provides speed Increase and Decrease inputs to allow EPOT operation with 2 wire
inputs. The opto inputs can be switches as shown in Figure 3-39 or logic signals from
another device. The values of the preset speeds are set in the Level 1 Preset Speeds
block, Preset Speed #1 or Preset Speed #2.
Figure 3-39 EPOT, 2 Wire Control Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control and motor coasts to a stop.
J1-9 CLOSED starts motor operation in the Forward direction.
OPEN motor decels to stop (depending on Keypad Stop mode).
J1-10 CLOSED starts motor operation in the Reverse direction.
OPEN motor decels to stop (depending on Keypad Stop mode).
Note: Closing both J1-9 and J1-10 at the same time will reset a fault condition.
J1-11 Selects preset speeds as defined in the Speed Select Table (Table 3-14).
J1-12 Selects preset speeds as defined in the Speed Select Table (Table 3-14).
J1-13 CLOSED selects ACC / DEC / S-CURVE group 2.
OPEN selects ACC / DEC / S-CURVE group 1.
J1-14 Momentary CLOSED increases motor speed while contact is closed.
J1-15 Momentary CLOSED decreases motor speed while contact is closed.
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip
to “ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault
log).
Command Pot or
0-10VDC
5KW
Programmable Output
Programmable Output
Refer to Figure 3-41.
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Run
Reverse Run
Switch 1
Switch 2
Accel/Decel
Increase
Decrease
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Table 3-14 Speed Select Table
J1-11 J1-12 Function
OPEN
CLOSED
OPEN
CLOSED
* Command Select refers to the Level 1 Command Select parameter.
OPEN
OPEN
CLOSED
CLOSED
Electronic Pot
Command Select *
Preset #1
Preset #2
See recommended terminal
tightening torques in Section 7.
Receiving & Installation 3-35MN723
Page 47

Electronic Pot 3 Wire Control Mode
Provides speed Increase and Decrease inputs to allow EPOT operation with 3 wire
inputs. The opto inputs can be switches as shown in Figure 3-40 or logic signals from
another device.
Figure 3-40 EPOT, 3 Wire Control Connection Diagram
J1-8 CLOSED allows normal operation.
OPEN disables the control and motor coasts to a stop.
J1-9 Momentary CLOSED starts motor operation in the Forward direction.
J1-10 Momentary CLOSED starts motor operation in the Reverse direction.
Note: Closing both J1-9 and J1-10 at the same time will reset a fault condition.
J1-11 Momentary OPEN motor decels to stop (depending on Keypad Stop mode).
J1-12 CLOSED selects Level 1 Command Select parameter value.
OPEN selects EPOT.
J1-13 CLOSED selects ACC / DEC / S-CURVE group 2.
OPEN selects ACC / DEC / S-CURVE group 1.
J1-14 Momentary CLOSED increases motor speed while contact is closed.
J1-15 Momentary CLOSED decreases motor speed while contact is closed.
J1-16 If J1-16 is connected, you must set Level 2 Protection block, External Trip to
“ON” to activate the opto input.
CLOSED allows normal operation.
OPEN causes an external trip fault. The control will disable and the motor
coasts to a stop. An external trip fault is displayed (also logged in the fault log).
See recommended terminal
tightening torques in Section 7.
Command Pot or
0-10VDC
Programmable Output
Programmable Output
Refer to Figure 3-41.
5KW
EPOT/Command Select
Analog GND
Analog Input 1
Pot Reference
Analog Input +2
Analog Input -2
Analog Out 1
Analog Out 2
Enable
Forward Run
Reverse Run
Stop
Accel/Decel
Increase
Decrease
External Trip
Opto In Common
J1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
External Trip Input Terminal J1-16 is available for connection to a normally closed thermostat or overload
relay in all operating modes as shown in Figure 3-41. The thermostat or overload relay
should be a dry contact type with no power available from the contact. If the motor
thermostat or overload relay activates, the control will automatically shut down and give
an External Trip fault. The optional relay (CR1) shown provides the isolation required
and the N.O. contact is open when power is applied to the relay and the motor is cold. If
the motor thermostat is tripped, CR1 is de-energized and the N.O. contact closes.
Connect the External Trip Input wires (N.O. relay contact) to J1-16 and J1-17. Do not
place these wires in the same conduit as the motor power leads.
To activate the External Trip input, the External Trip parameter in the Level 2 Protection
Block must be set to “ON”.
Figure 3-41 Motor Temperature Relay
See recommended terminal
tightening torques in Section 7.
T2
T1
* Motor
T3
G
Motor Thermostat Leads
Customer Provided
Source Voltage
*
CR1
Do not run these wires in same conduit
as motor leads or AC power wiring.
Note: Add appropriately rated protective
device for AC relay (snubber)
or DC relay (diode).
J1
16
External Trip
17
* Optional hardware. Must be ordered separately.
3-36 Receiving & Installation MN723
Page 48

Opto-Isolated Inputs The equivalent circuit of the nine opto inputs is shown in Figure 3-42. The function of
each input depends on the operating mode selected and are described previously in this
section. This Figure also shows the connections using the internal opto input Supply.
Figure 3-42 Opto-Input Connections (Using Internal Supply)
J1
Opto In #1
Opto In #2
Opto In #3
Opto In #4
Opto In #5
Opto In #6
Opto In #7
Opto In #8
Opto In #9
Opto In Common
8
9
10
11
12
13
14
15
16
17
+24VDC @ 200mA
(supply terminal 39).
Jumper terminals 39 to 40
(Factory Installed)
Figure 3-43 Opto-Input Connections (Using External Supply)
* User VCC (-)
* User VCC (+)
Opto In #1
Opto In #2
Opto In #3
Opto In #4
Opto In #5
Opto In #6
Opto In #7
Opto In #8
Opto In #9
39
40
6.8K 6.8K 6.8K 6.8K 6.8K 6.8K 6.8K 6.8K 6.8K
See recommended terminal tightening torques in Section 7.
J1
10
11
12
13
14
15
16
17
8
9
Opto In #1
Opto In #2
Opto In #3
Opto In #4
Opto In #5
Opto In #6
Opto In #7
Opto In #8
Opto In #9
J1
8
9
10
11
12
13
14
15
16
17
* User VCC (+)
39
40
* User VCC (-)
39
40
Opto Inputs Closing to Ground Opto Inputs Closing to +VCC
* User VCC = 10 - 30VDC External Power Source
See recommended terminal
tightening torques in Section 7.
Receiving & Installation 3-37MN723
Page 49

Opto-Isolated Outputs Four programmable opto isolated outputs are available at terminals J1-19 through J1-22.
See Figure 3-44. Each output may be programmed to represent one output condition.
The output conditions are defined in Section 4 of this manual.
The opto isolated outputs may be configured for sinking or sourcing 60 mA each, as
shown in Figure 3-44. However, all must be configured the same. The maximum voltage
from opto output to common when active is 1.0 VDC (TTL compatible). The equivalent
circuit for the opto isolated outputs is shown in Figure 3-45.
If the opto outputs are used to directly drive a relay, a flyback diode rated at 1A, 100 V
(IN4002 or equivalent) minimum should be connected across the relay coil.
Each opto output is programmed in the Output programming block.
Figure 3-44 Opto-isolated Output Configurations
Optional
Customer
Supplied
Relays &
Diodes
(Sinking the Relay Current)
-
Optional Customer Supplied
10VDC to 30VDC Source
+
Optional
Customer
Supplied
Relays &
Diodes
(Sinking the Relay Current)
24Com
17
18
19
20
21
22
Using Internal Supply
17
18
19
20
21
22
Using External Supply
See recommended terminal tightening torques in Section 7.
39
41
42
43
44
39
41
42
43
44
+24VDC
Optional Customer Supplied
10VDC to 30VDC Source
-
+
24Com
17
39
18
19
20
21
22
Using Internal Supply
(Sourcing the Relay Current)
17
41
42
43
44
39
18
19
20
21
22
Using External Supply
(Sourcing the Relay Current)
41
42
43
44
+24VDC
Optional
Customer
Supplied
Relays &
Diodes
Optional
Customer
Supplied
Relays &
Diodes
3-38 Receiving & Installation MN723
Page 50

PC865
50mA max
Figure 3-45 Opto-Output Equivalent Circuit
J1
18
Opto Output 1
19
Opto Output 2
20
Opto Output 3
21
Opto Output 4
22
PC865
50mA max
See recommended Terminal Tightening Torques in Section 7.
PC865
50mA max
PC865
50mA max
Opto Out 1 Return
41
Opto Out 2 Return
42
Opto Out 3 Return
43
Opto Out 4 Return
44
10 – 30VDC
Opto Outputs
Pre-Operation Checklist Check of Electrical Items
1. Verify AC line voltage at source matches control rating.
2. Inspect all power connections for accuracy, workmanship and torque as well as
compliance to codes.
3. Verify control and motor are grounded to each other and the control is
connected to earth ground.
4. Check all signal wiring for accuracy.
5. Be certain all brake coils, contactors and relay coils have noise suppression.
This should be an R-C filter for AC coils and reverse polarity diodes for DC
coils. MOV type transient suppression is not adequate.
Check of Motors and Couplings
1. Verify freedom of motion of the motor shaft.
2. Verify that the motor coupling is tight without backlash.
3. Verify the holding brakes if any, are properly adjusted to fully release and set to
the desired torque value.
Receiving & Installation 3-39MN723
Page 51

Power-Up Procedure Be sure the 23H control, motor and dynamic brake hardware are installed and wired
according to the procedures in Section 3 of this manual.
Become familiar with the keypad programming and keypad operation of the control as
described in Section 4 of this manual.
1. Disconnect the load (including coupling or inertia wheels) from the motor shaft,
if possible.
2. Verify that any enable inputs to J1-8 are open. Be sure Level 2 Protection
block, Local Enable INP is OFF and Level 2 Protection block, External Trip is
OFF.
3. Turn power on. Be sure no errors are displayed.
4. Set the Level 1 Input block, Operating Mode parameter to “KEYPAD”.
5. Set the Level 2 Output Limits block, “OPERATING ZONE” parameter as desired
(STD CONST TQ, STD VAR TQ, QUIET CONST TQ or QUIET VAR TQ).
6. Enter the following motor data in the Level 2 Motor Data block parameters:
Motor Rated Amps (IC)
Motor Poles
Resolver Speeds (Pre-set is one speed)
7. If external dynamic brake hardware is used, set the Level 2 Brake Adjust block
“Resistor Ohms”, “Resistor Watts” and “DC Brake Current” parameters.
8. If the load was not disconnected in step 1, refer to Section 6 and manually tune
the control. After manual tuning, perform steps 11 and 12 then continue with
step 16.
9. At the Level 2 Motor Data block, press ENTER, at CALC PRESETS select YES
(using the key) and let the control calculate preset values for the parameters
that are necessary for control operation.
WARNING: The motor shaft will rotate during the autotune procedure. Be
certain that unexpected motor shaft movement will not cause injury
to personnel or damage to equipment.
10. Go to Level 2 Autotune block, and perform the following tests:
CMD OFFSET TRIM
CUR LOOP COMP
RESOLVER ALIGN
11. Set the Level 2 Output Limits block, “MIN OUTPUT SPEED” parameter.
12. Set the Level 2 Output Limits block, “MAX OUTPUT SPEED” parameter.
13. Remove all power from the control.
14. Couple the motor to its load.
15. Turn power on. Be sure no errors are displayed.
16. Perform the SPD CNTRLR CALC test in the Level 2 Autotune block.
17. Run the drive from the keypad using the arrow keys for direct speed control, a
keypad entered speed or the JOG mode.
18. Select and program additional parameters to suit your application.
The control is now ready for use the in keypad mode. If a different operating mode is
desired, refer to Section 3 Control Connections and Section 4 Programming and
Operation.
3-40 Receiving & Installation MN723
Page 52

Section 4
Programming and Operation
Overview The keypad is used to program the control parameters, to operate the motor and to
monitor the status and outputs of the control by accessing the display options, the
diagnostic menus and the fault log.
Figure 4-1 Keypad
JOG - (Green) lights when Jog is active.
FWD - (Green) lights when FWD direction is commanded.
REV - (Green) lights when REV direction is commanded.
STOP - (Red) lights when motor STOP is commanded.
Indicator Lights
Keypad Display - Displays status
information during Local or Remote
operation. It also displays information
during parameter setup and fault or
Diagnostic Information.
PROG - Press PROG to enter the
JOG - Press JOG to select the
preprogrammed jog speed. After the jog
key has been pressed, use the FWD or
REV keys to run the motor in the
direction that is needed. The JOG key is
only active in the local mode.
FWD - Press FWD to initiate forward
rotation of the motor.
REV - Press REV to initiate reverse
rotation of the motor.
STOP - Press STOP one time to initiate
a stop sequence. Depending on the
Keypad Stop Mode, the motor will either
REGEN or COAST to a stop. This key is
operational in all modes of operation
unless disabled by the Keypad Stop
parameter in the Keypad (programming)
Setup Block. Press STOP twice to
disable control (coast to stop).
LOCAL - Press LOCAL to change
between the local (keypad) and remote
operation. When the control is in the
local mode all other external commands
to the J1 terminal strip will be ignored
with the exception of the external trip
input.
DISP - Press DISP to return to display
mode from programming mode. Provides
operational status and advances to the
next display menu item including the
Diagnostic Screens.
SHIFT - Press SHIFT in the program
mode to control cursor movement.
Pressing the SHIFT key once moves the
blinking cursor one character position to
the right. While in program mode, a
parameter value may be reset to the
factory preset value by pressing the
SHIFT key until the arrow symbols at the
far left of the keypad display are flashing,
then press an arrow key. In the display
mode the SHIFT key is used to adjust
the keypad contrast.
RESET - Press RESET to clear all fault
messages (in local mode). Can also be
used to return to the top of the block
programming menu without saving any
parameter value changes.
program mode. While in the program
mode the PROG key is used to edit a
parameter setting.
- (UP Arrow).
Press to change the value of the
parameter being displayed. Pressing
increments the value to the next greater
value. Also, when the fault log or
parameter list is displayed, the key will
scroll upward through the list. In the
local mode pressing the key will
increase motor speed to the next greater
value.
ENTER - Press ENTER to save
parameter value changes and move
back to the previous level in the
programming menu. In the display mode
the ENTER key is used to directly set the
local speed reference. It is also used to
select other operations when prompted
by the keypad display.
- (Down Arrow)
Press to change the value of the
parameter being displayed. Pressing
decrements the value to the next lesser
value. Also, when the fault log or
parameter list is displayed, the key will
scroll downward through the list. In the
local mode pressing the key will
decrease motor speed to the next lower
value.
Programming & Operation 4-1MN723
Page 53

Section 1
General Information
Display Mode The control is in the DISPLAY MODE at all times except when parameter values are
changed (Programming mode). The Keypad Display shows the status of the control as in
the following example.
Motor Status
Control Operation
Output Condition
Value and Units
The DISPLAY MODE is used to view operating status, Diagnostic INFO, the Fault Log
and to adjust the Display contrast. The description of how to do these tasks are
described on the following pages.
Adjusting Display Contrast When AC power is applied to the control, the keypad should display the status of the
control. If there is no visible display, use the following procedure to adjust the contrast of
the display. Contrast may be adjusted in display mode when motor is stopped or running.
Action Description Display Comments
Apply Power No visible display
Press DISP Key Places control in display mode
Press SHIFT SHIFT Allows display contrast
Press or Key
Press ENTER Saves level of contrast and exits
adjustment
Adjusts display intensity
Typical display
to display mode
Display Mode Screens
Action Description Display Comments
Apply Power Logo display for 5 seconds.
Display mode showing motor
speed.
Press DISP key Display Frequency First Display Mode Screen.
Press DISP key Display Current
Press DISP key Display Voltage
No faults present. Local keypad
mode. If in remote/serial mode,
press local for this display.
Press DISP key Combined Display
Press DISP key Screen to enter Fault Log
Press DISP key Screen to enter Diagnostic Menu
4-2 Programming & Operation MN723
Page 54
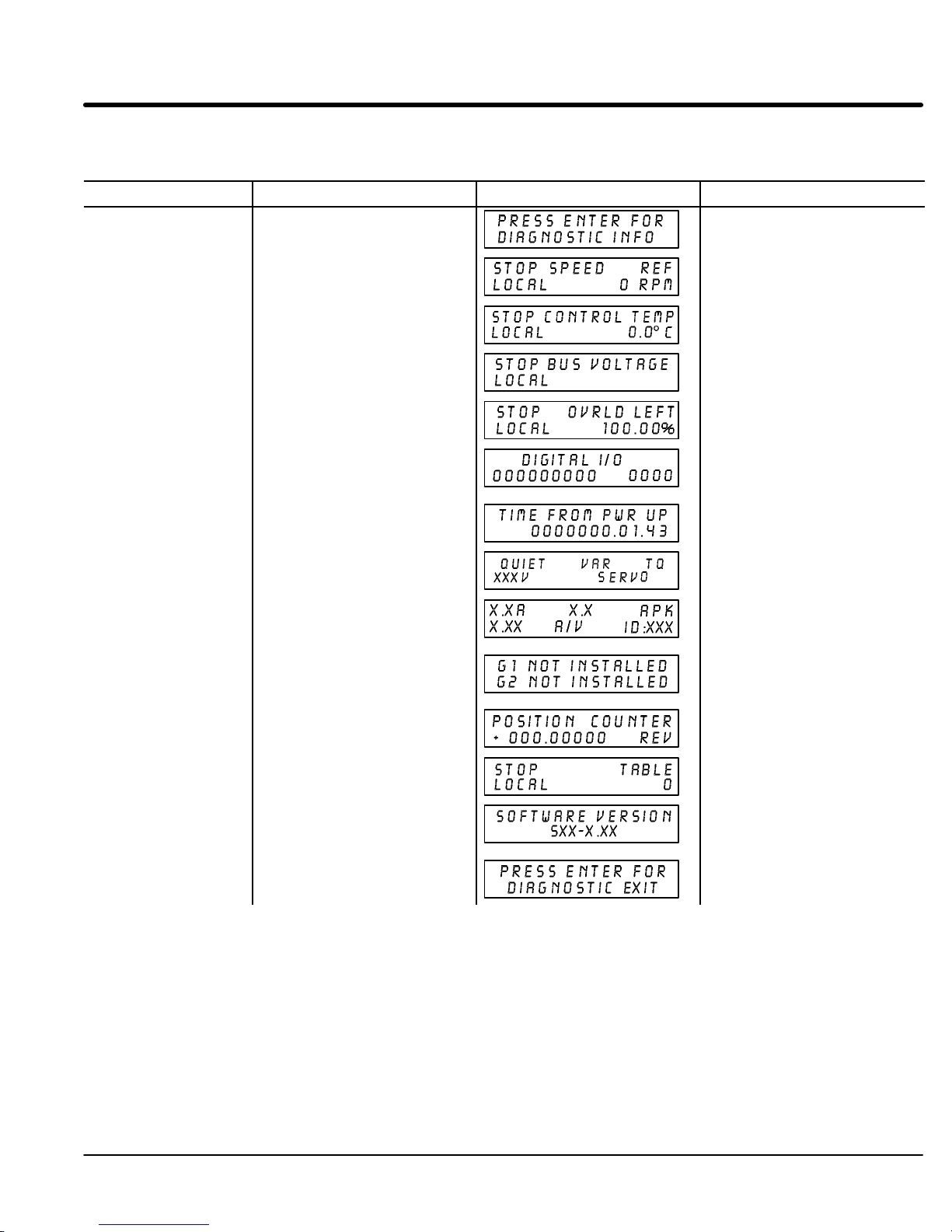
Section 1
General Information
Display Mode Continued
Diagnostic Information Access
Action Description Display Comments
Press DISP key Scroll to Diagnostic Information
screen
Diagnostic Access screen.
Press ENTER key Access diagnostic information. First Diagnostic Information
Press DISP key Display mode showing control
Press DISP key Display mode showing bus
Press DISP key Display mode showing %
Press DISP key Display mode showing opto
Press DISP key Display mode showing actual time
Press DISP key Display mode showing operating
Press DISP key Display mode showing continuous
Press DISP key Display mode showing which
Press DISP key Display mode showing position
temperature.
voltage.
overload current remaining.
inputs & outputs states.
(0=Open, 1=Closed.)
the drive has been powered up.
zone, voltage and control type.
amps; PK amps rating; amps/volt
scale of feedback, power base ID.
Group1 or 2 expansion boards
are installed and recognized.
counter contents.
XXXV
screen.
Opto Inputs states (Left);
Opto Outputs states (Right).
HR.MIN.SEC format.
Typical display.
In this case, no expansion boards
are installed.
Press DISP key Display mode showing parameter
Press DISP key Display mode showing software
Press DISP key Displays exit choice. Press ENTER to exit diagnostic
table selected.
version and revision installed in
the control.
information.
Programming & Operation 4-3MN723
Page 55

Section 1
General Information
Display Mode Continued
Fault Log Access When a fault condition occurs, motor operation stops and a fault code is displayed on the
Keypad display. The control keeps a log of up to the last 31 faults. If more than 31 faults
have occurred, the oldest fault will be deleted from the fault log to make room for the
newest fault. To access the fault log perform the following procedure:
Action Description Display Comments
Apply Power Logo display for 5 seconds.
Display mode showing motor
speed.
Press DISP key Scroll to the Fault Log screen Fault Log access screen.
Press ENTER key Display first fault type and time
Press key
Press ENTER key Return to display mode. Display mode. Stop key LED is
fault occurred.
Scroll through fault messages.
Display mode.
1=Most recent fault displayed.
2=Second most recent fault, etc.
If no messages, the fault log exit
choice is displayed.
on.
4-4 Programming & Operation MN723
Page 56

Section 1
General Information
Program Mode The Program Mode is used to:
1. Enter motor data.
2. Autotune the drive.
3. Customize the drive (Control and Motor) parameters to your application.
From the Display Mode press the PROG key to access the Program Mode.
Note: When a parameter is selected, alternately pressing the Disp and Prog keys
will toggle between the Display Mode and the selected parameter. When a
parameter is selected for programming, the keypad display gives you the
following information:
Parameter
Parameter Status
Parameter Status. All programmable parameters are displayed with a “P:” in the lower
left corner of the keypad display. If a parameter is displayed with a “V:”, the parameter
value may be viewed but not changed while the control is enabled. If the parameter is
displayed with an “L:”, the value is locked and the security access code must be entered
before its’ value can be changed.
Parameter Blocks Access for Programming
Use the following procedure to access parameter blocks to program the control.
Value and Units
Action Description Display Comments
Apply Power Keypad Display shows this
Press PROG key Press ENTER to access Preset
Press or key
Press or key
Press ENTER key First Level 2 block display.
Press or key
Press ENTER key Return to display mode.
opening message.
If no faults and programmed for
LOCAL operation.
If no faults and programmed for
REMOTE operation.
Scroll to the ACCEL/DECEL
block.
Scroll to the Level 2 Block.
Scroll to Programming Exit menu.
Logo display for 5 seconds.
Display mode.
If fault is displayed, refer to the
Troubleshooting section of this
manual.
Speed parameters.
Press ENTER to access Accel
and Decel rate parameters.
Press ENTER to access Level 2
Blocks.
Press ENTER to return to Display
mode.
Programming & Operation 4-5MN723
Page 57

Section 1
General Information
Program Mode Continued
Changing Parameter Values when Security Code Not Used
Use the following procedure to program or change a parameter already programmed into
the control when a security code is not being used.
The example shown changes the operating mode from Keypad to Bipolar.
Action Description Display Comments
Apply Power Keypad Display shows this
opening message.
Logo display for 5 seconds.
If no faults and programmed for
LOCAL operation.
Press PROG key Access programming mode.
Press or key
Press ENTER key Access Input Block. Keypad mode shown is the
Press ENTER key Access Operating Mode
Press key
Press ENTER Save selection to memory. Press ENTER to save selection.
Press key
Press ENTER key Return to Input Block.
Press DISP key Return to Display Mode. Typical display mode.
Scroll to Level 1 Input Block.
parameter.
Scroll to change selection.
Scroll to menu exit.
Display mode. Stop LED on.
Press ENTER to access INPUT
block parameter.
factory setting.
Keypad mode shown is the
factory setting.
At flashing cursor, select desired
mode, BIPOLAR in this case.
4-6 Programming & Operation MN723
Page 58

Section 1
General Information
Program Mode Continued
Reset Parameters to Factory Settings
Sometimes it is necessary to restore the parameter values to the factory settings. Follow
this procedure to do so. Be sure to change the Level 2 Motor Data block “Motor Rated
Amps” to the correct value after this procedure (restored factory setting is 999).
Note: All parameter values are changed when the control is reset to factory settings.
Note: After factory settings have been restored, the drive must again be tuned.
Action Description Display Comments
Apply Power Keypad Display shows this
opening message.
Logo display for 5 seconds.
If no faults and programmed for
LOCAL operation.
Press PROG key Enter program mode.
Press or key
Press ENTER key Select Level 2 Blocks.
Press or key
Press ENTER key Select Miscellaneous block.
Press key
Press ENTER key Access Factory Settings
Press key
Press ENTER key Restores factory settings. “Loading Presets” is first message
Press key
Scroll to Level 2 Blocks.
Scroll to the Miscellaneous block.
Scroll to Factory Settings
parameter.
parameter.
Scroll to YES, to choose original
factory settings.
Scroll to menu exit.
Display mode. Stop LED on.
represents blinking cursor.
“Operation Done” is next
“No” is displayed last.
Exit Level 2 blocks.
Press ENTER key Return to Level 1 blocks. Exit Level 2 blocks.
Press or key
Press ENTER key Return to display mode. Display mode. Stop LED on.
Scroll to Programming exit.
Exit Programming mode and
return to Display mode.
Programming & Operation 4-7MN723
Page 59

Section 1
General Information
Program Mode Continued
Initialize New Software
When new software is installed, the control must be initialized to the new software version
and memory locations. Use the following procedure to initialize the software.
Note: All parameter values are changed when the control is reset to factory settings.
Note: After factory settings have been restored, the drive must again be tuned.
Action Description Display Comments
Apply Power Keypad Display shows this
opening message.
Logo display for 5 seconds.
If no faults and programmed for
LOCAL operation.
Press PROG key Enter program mode.
Press or key
Press ENTER key Select Level 2 Blocks.
Press or key
Press ENTER key Select Miscellaneous block.
Press key
Press ENTER key Access Factory Settings
Press key
Press ENTER key Restores factory settings. “Loading Presets” is first message
Press key
Scroll to Level 2 Blocks.
Scroll to the Miscellaneous block.
Scroll to Factory Settings
parameter.
parameter.
Scroll to YES, to choose original
factory settings.
Scroll to menu exit.
Display mode. Stop LED on.
represents blinking cursor.
“Operation Done” is next
“No” is displayed last.
Press ENTER key Return to display mode. Display mode. Stop LED on.
Press key
Press ENTER key Access diagnostic information. Displays commanded speed,
Press DISP key Display mode showing software
Press DISP key Displays exit choice. Press ENTER to exit diagnostic
Scroll to diagnostic info block.
version and revision installed in
the control.
direction of rotation, Local/
Remote and motor speed.
Verify new software version.
XXX-X.XX
information.
4-8 Programming & Operation MN723
Page 60

Section 1
General Information
Parameter Definitions To make programming easier, parameters have been arranged into the two level
structure shown in Table 4-1. Press the PROG key to enter the programming mode and
the “Preset Speeds” programming block will be displayed. Use the Up () and Down
() arrows to scroll through the parameter blocks. Press ENTER to access parameters
within a programming block.
Tables 4-2 and 4-3 provide an explanation of each parameter. A complete Parameter
Block Values list is located at the end of this manual. This list defines the programmable
range and factory preset value for each parameter. The list has a space to record your
settings for future reference.
Table 4-1 List of Parameters (Version 3.12)
LEVEL 1 BLOCKS LEVEL 2 BLOCKS
Preset Speeds Input Output Limits Brake Adjust
Preset Speed #1 Operating Mode Operating Zone Resistor Ohms
Preset Speed #2 Command Select Min Output Speed Resistor Watts
Preset Speed #3 ANA CMD Inverse Max Output Speed
Preset Speed #4 ANA CMD Offset PK Current Limit Process Control
Preset Speed #5 ANA 2 Deadband PWM Frequency Process Feedback
Preset Speed #6 ANA1 CUR Limit CUR Rate Limit Process Inverse
Preset Speed #7 Setpoint Source
Preset Speed #8 Output Custom Units Setpoint Command
Preset Speed #9 Opto Output #1 Max. Decimal Places Set PT ADJ Limit
Preset Speed #10 Opto Output #2 Value at Speed Process ERR TOL
Preset Speed #11 Opto Output #3 Units of Measure Process PROP Gain
Preset Speed #12 Opto Output #4 Process INT Gain
Preset Speed #13 Zero SPD Set PT Protection Process DIFF Gain
Preset Speed #14 At Speed Band Overload Follow I:O Ratio
Preset Speed #15 Set Speed External Trip Follow I:O OUT
Analog Out #1 Local Enable INP Master Encoder
Accel / Decel Rate Analog Out #2 Following Error
Accel Time #1 Analog #1 Scale Communications
Decel Time #1 Analog #2 Scale Miscellaneous Protocol
S-Curve #1 Position Band Restart Auto/Man Baud Rate
Accel Time #2 Restart Fault/Hr Drive Address
Decel Time #2 Brushless Control Restart Delay
S-Curve #2 Resolver Align Factory Settings Auto-Tuning
Speed Filter Homing Speed CALC Presets
Jog Settings Feedback Align Homing Offset CMD Offset Trim
Jog Speed Current PROP Gain CUR Loop Comp
Jog Accel Time Current INT Gain Security Control Feedback Align
Jog Decel Time Speed PROP Gain Security State SPD CNTRLR Calc
Jog S-Curve Time Speed INT Gain Access Timeout
Speed DIFF Gain Access Code
Keypad Setup Position Gain
Keypad Stop Key Motor Data
Keypad Stop Mode Motor Rated Amps
Keypad Run Fwd Motor Poles
Keypad Run Rev Resolver Speeds
Keypad Jog Fwd CALC Presets
Keypad Jog Rev
Local Hot Start
Programming & Operation 4-9MN723
Page 61

Section 1
General Information
Table 4-2 Level 1 Parameter Block Definitions
Block Title Parameter Description
PRESET
SPEEDS
ACCEL/DECEL
RATE
JOG SETTINGS Jog Speed Jog Speed is the programmed speed used for jog. Jog can be initiated from the keypad
Preset Speeds
#1 – #15
Allows selection of 15 predefined motor operating speeds.
Each speed may be selected using external switches connected to terminals at J1.
For motor operation, a motor direction command must be given along with a preset
speed command.
Accel Time #1,2 Accel time is the number of seconds required for the motor to increase at a linear rate
from 0 RPM to the RPM specified in the “Max Output Speed” parameter in the Level 2
Output Limits block.
Output Limits block.
Decel Time #1,2
Decel time is the number of seconds required for the motor to decrease at a linear rate
from the speed specified in the “Max Output Speed” parameter to 0 RPM.
S-Curve #1,2 S-Curve is a percentage of the total Accel and Decel time and provides smooth starts
and stops. Half of programmed S-Curve % applies to Accel and half to Decel ramps.
0% represents no “S” and 100% represents full “S” with no linear segment.
Note: Accel #1, Decel #1 and S-Curve #1 are associated together. Likewise,
Accel #2, Decel #2 and S-Curve #2 are associated together. These
associations can be used to control any Preset Speed or External Speed
command.
Note: If drive faults occur during rapid Accel or Decel, selecting an S-curve may
eliminate the faults.
or terminal strip. At the Keypad, press the JOG key then press and hold the FWD or
REV key. At the terminal strip,close the JOG input (J1-12) then close the FWD or
REV input (J1-9 or J1-10).
Jog Accel Time
Jog Decel Time
Jog S-Curve
0%
Curve
20
%
Output Speed
Accel Time0Max
Accel S-Curves
40%
Curve
In Process Mode, if the Jog key is pressed or J1-12 is closed the drive will move in
the direction of the error without pressing FWD or REV.
Jog Accel Time changes the Slope of the Jog Accel ramp. It is the time in seconds from
zero speed to maximum speed.
Jog Decel Time changes the Slope of the Jog Decel ramp. It is the time in seconds from
maximum speed to zero speed.
Jog S-Curve changes the S-Curve to a new preset value for jog mode.
Figure 4-2 40% S-Curve Example
40%
Curve
20
%
20
%
Output Speed
Decel S-Curves
0%
Curve
20
%
Decel Time0Max
4-10 Programming & Operation MN723
Page 62

Section 1
General Information
Table 4-2 Level 1 Parameter Block Definitions - Continued
Block Title Parameter Description
KEYPAD SETUP Keypad Stop Key
Keypad Stop Mode
Keypad Run FWD
Keypad Run REV
Keypad Jog FWD
Keypad Jog REV
Loc. Hot Start
INPUT Operating Mode
Command Select
ANA CMD Inverse “OFF” will cause a low input voltage (e.g. 0VDC) to be a low motor speed command and
ANA CMD Offset Provides an offset to the Analog Input to minimize signal drift. For example, if the
ANA 2 Deadband Allows a defined range of voltage to be a deadband. A command signal within this
ANA 1 CUR Limit Allows the 5V input at J1-2 (referenced to J1-1) to be used for reduction of the
Allows keypad STOP key to initiate motor stop during remote or serial operation (if Stop
key is set to Remote ON in Standard Run, 15 Speed, Bipolar, Serial and Process
Control modes). If active, pressing STOP automatically selects Local mode and initiates the stop command.
Selects if the Stop command causes the motor to COAST to a stop or REGEN to a stop.
In COAST, the motor is turned off and allowed to coast to a stop. In REGEN, the voltage and frequency to the motor is reduced at a rate set by Decel Time.
age and frequency to the motor is reduced at a rate set by Decel Time.
ON makes the keypad FWD key active in Local mode.
ON makes the keypad REV key active in Local mode.
ON makes the keypad FWD key active in Local Jog mode.
ON makes the keypad REV key active in Local Jog mode.
The STOP input at J1-11 in the Keypad mode is enabled (when ON).
Ten “Operating Modes” are available. Choices are: Keypad, Standard Run, 15SPD,
Serial, Bipolar, Process, 3 SPD ANA 2 wire, 3 SPD ANA 3 wire, EPOT - 2 Wire and
EPOT - 3 Wire. External connections to the control are made at the J1 terminal strip
(wiring diagrams are shown in Section 3 “Control Circuit Connections”).
Selects the external speed reference to be used.
The easiest method of speed control is to select POTENTIOMETER and connect a 5KW
pot to J1-1, J1-2, and J1-3.
±5, ±10VDC or 4-20mA input command can be applied to J1-4 and J1-5.
If long distance is required between the external speed control and the control, the 4-20mA
selections at J1-4 and J1-5 should be considered. Current loop allows long cable lengths
without attenuation of the command signal.
10 VOLT W/T ORQ FF - when a differential command is present at J1-4 and 5, allows addi-
tional 5V torque feedforward input at J1-1, 2 and 3 to set a predetermined amount of
torque inside the rate loop with high gain settings.
EXB PULSE FOL - selects optional Master Pulse Reference/Isolated Pulse Follower ex-
pansion board if installed.
5VOLT EXB - selects optional High Resolution I/O expansion board if installed.
10VOLT EXB - selects optional High Resolution I/O expansion board if installed.
4-20mA EXB - selects optional High Resolution I/O expansion board if installed.
3-15 PSI EXB selects optional 3-15 PSI expansion board if installed.
Tachometer EXB- selects optional DC Tachometer expansion board if installed.
Serial -selects optional Serial Communications expansion board if installed.
None - Used in Process Control mode, two input configuration with no Feedforward input.
Note: When using the 4-20mA input, the JP2 jumper on the main control board
a maximum input voltage (e.g. 10VDC) to be a maximum motor speed command.
“ON” will cause a low input voltage (e.g. 0VDC) to be a maximum motor speed command
and a maximum input voltage (e.g. 10VDC) to be a low motor speed command.
minimum speed signal is 1VDC (instead of 0VDC) the ANA CMD Offset can be set to
-10% so the minimum voltage input is seen by control as 0VDC. The value of this
parameter is automatically adjusted during Autotune “CMD Offset Trim” test.
range will not affect the control output. The deadband value is the voltage above and
below the zero command signal level.
programmed current limit parameter for torque trimming during operation.
must be moved to the left two pins “A”.
Programming & Operation 4-11MN723
Page 63

Section 1
General Information
Table 4-2 Level 1 Parameter Block Definitions - Continued
Block Title Parameter Description
OUTPUT OPTO OUTPUT
#1 – #4
Zero SPD Set PT Sets the speed at which the Zero Speed opto output becomes active (turns on). When the
At Speed Band The At Speed Band serves two Opto Output Conditions and the Level 2 Protection block
Set Speed Sets the speed that the At Set Speed opto output becomes active (turns on). When the
Four optically isolated digital outputs that have two operating states, logical High or Low.
Each output may be configured to any of the following conditions:
Condition Description
Ready - Active when power is applied and no faults are present.
Zero Speed - Active when motor RPM is below the value of the Level 1 Output
At Speed - Active when output speed is within the speed range defined by
Note: In the torque command mode, the At Speed opto output is always in the
Overload - Active during an Overload fault caused by a time out when
Keypad Control - Active when control is in Local keypad control.
At Set Speed - Active when output speed is at or above the Level 1 Output
Fault - Active when a fault condition is present.
Following ERR - Active when the motor speed is outside the user specified
Motor Direction - Active High when REV direction command received. Active Low
Drive On - Active when control is “Ready” (has reached excitation level and
CMD Direction - Active at all times. Logical output state indicates Forward or
At Position - Active during a positioning command when control is within the
Over Temp Warn - Active when control heat sink is within 3°C of Int Overtemp.
Process Error - Active when process feedback signal is outside the range
Drive Run - Active when drive is Ready, Enabled, Speed or Torque command
Serial - Active when drive is in the Serial mode.
speed is less than the ZERO SPD SET PT, the Opto Output becomes active. This is useful when a motor brake is to interlock operation with a motor.
Following Error:
Sets the speed range in RPM at which the At Speed opto output turns on and remains
active within the range.
Sets the Following Error Tolerance Band for the Level 1 OUTPUT, Opto Output condition
Following ERR. The opto output is active if the motor speed is outside this band.
Sets the no fault operating speed range of the drive. This value is used by the Level 2
Protection block, Following Error parameter (if it is set to ON). If the drive speed falls
out of this band, the Level 2 Protection block, Following Error parameter will shut
down the drive (if it is set to ON).
speed is greater than the Level 1 Output SET SPEED parameter, the Opto Output
becomes active. This is useful when another machine must not start or stop until the
motor exceeds a predetermined speed.
“Zero SPD Set Pt” parameter.
the Level 1 Output “At Speed Band” parameter.
“OFF” state.
output current is greater than Rated Current.
“Set Speed” parameter.
tolerance band defined by the At Speed Band parameter.
when FWD direction command received.
capable of producing torque).
Reverse direction. High=FWD, Low=REV.
position band parameter tolerance.
specified by the Level 2 Process Control block, AT Setpoint
Band parameter. Turns off when process feedback error is
eliminated.
received with FWD/REV direction issued.
4-12 Programming & Operation MN723
Page 64

Section 1
General Information
Table 4-2 Level 1 Parameter Block Definitions - Continued
Block Title Parameter Description
OUTPUT
(Continued)
Analog Output
Two Analog 0-5VDC linear outputs may be configured to represent any of the following
#1 and #2
Condition Description
ABS Speed - Represents the absolute motor speed where 0VDC = 0 RPM and
ABS Torque - Represents the absolute value of torque where
Speed Command - Represents the absolute value of commanded speed where
PWM Voltage - Represents the amplitude of PWM voltage where
Flux Current - Flux Current Feedback. Useful with CMD Flux CUR.
CMD Flux CUR - Commanded Flux Current.
Load Current - Load current feedback is 2.5V centered, 5V = maximum peak
CMD Load Current - Commanded load current 2.5V centered, 5V = maximum peak
Motor Current - Amplitude of continuous current including motor excitation current.
Load Component - Amplitude of load current not including the motor excitation
Quad Voltage - Load controller output. Useful when diagnosing control problems.
Direct Voltage - Flux controller output.
AC Voltage - PWM control voltage which is proportional to AC line to line motor
Bus Voltage - 5V = 1000VDC.
Torque - Bipolar torque output. 2.5V centered, 5V = Max Positive Torque,
Power - Bipolar power output. 2.5V = Zero Power, 0V = negative rated peak
Velocity - Represents motor speed scaled to 0V = negative max RPM,
Overload - (Accumulated current)
PH 2 Current - Sampled AC phase 2 motor current. 2.5V = zero amps,
PH 3 Current - Sampled AC phase 3 motor current. 2.5V = zero amps,
Process Feedback - Represents the selected Process Feedback scaled input. 2.5V
Position - Position within a single revolution +5V = 1 Complete Revolution.
Setpoint Command - Represents the selected Setpoint Command scaled. 2.5V
Serial - 0-5VDC level that represents a value programmed by a serial
Analog Scale #1 Scale factor for the Analog Output voltage. Useful to set the zero value or full scale
range for external meters.
Position Band Sets the acceptable range in digital counts (pulses) at which the AT Position Opto
becomes active (turns on).
conditions:
+5VDC = MAX RPM.
+5VDC = Torque at CURRENT LIMIT and 0VDC=0 Torque.
+5VDC = MAX RPM and 0VDC=0 RPM
+5VDC = MAX AC Voltage.
positive load current, 0V = maximum peak negative load current.
positive load current, 0V = maximum peak negative load current.
2.5V = rated Current, 0VDC=0 Current and 5VDC=Peak Current.
current. 2.5V = rated Current, 0VDC=MAG Current and
5VDC=Peak Current.
terminal voltage. 2.5V centered.
0V = Max negative torque.
power, +5V = Positive rated peak power.
+2.5V = Zero Speed, +5V = positive max RPM.
2
x (time), Overload occurs at +5V.
0V = negative rated peak amps, +5V = positive rated peak amps.
0V = negative rated peak amps, +5V = positive rated peak amps.
centered, 5V = maximum positive feedback, 0V = maximum
negative feedback.
The counter is reset to 0 each revolution.
centered, 5V = maximum positive setpoint command, 0V =
maximum negative setpoint command.
command.
Programming & Operation 4-13MN723
Page 65

Section 1
General Information
Table 4-2 Level 1 Parameter Block Definitions - Continued
Block Title Parameter Description
Brushless Control Resolver Align
Speed Filter
Feedback Align
Current Prop Gain
Current Int Gain
Speed Prop Gain
Speed Int Gain
Speed Diff Gain
Position Gain
LEVEL 2 BLOCK ENTERS LEVEL 2 MENU
A numerical alignment value. The autotune procedure aligns the motor and resolver
positions. 22.3 degrees is correct for all Baldor BSM motors.
The number of input samples taken by the control microprocessor over which to filter
and determine the resolver speed. It is automatically set to suit the resolver
resolution. The preset filter may be reduced to obtain smoother slow speed
operation. The greater the number, the more filtered the signal becomes and the
bandwidth is also reduced.
Sets the electrical direction of rotation of the resolver.
May be set to forward or reverse to match the motor rotation.
Sets the current loop proportional gain.
Sets the current loop integral gain.
Sets the speed (velocity) loop proportional gain.
Sets the speed (velocity) loop integral gain.
Sets the speed (velocity) loop differential gain.
Sets the position loop proportional gain.
4-14 Programming & Operation MN723
Page 66

Section 1
General Information
Table 4-3 Level 2 Parameter Block Definitions
Block Title Parameter Description
OUTPUT LIMITS Operating Zone Sets the PWM operating zone to Standard 2.5KHz or Quiet 8.0KHz output carrier
MIN Output Speed Sets the minimum motor speed in RPM. During operation, the motor speed will not be
MAX Output Speed Sets the maximum motor speed in RPM.
PK Current Limit The maximum output peak current to the motor. Values above 100% of the rated current
PWM Frequency The frequency that the output transistors are switched. PWM frequency is also referred
Current Rate Limit Limits the rate of torque change in response to a torque command.
frequency. Two output power modes are also selectable: Constant Torque and
Variable Torque.
Constant Torque allows 170 - 200% for 3 seconds overload or 150% for 60 seconds
overload.
Variable Torque allows 115% peak overload for 60 seconds.
allowed to go below this value except for motor starts from 0 RPM or during dynamic
braking to a stop or in Process mode.
are available depending upon the operating zone selected.
to as “Carrier” frequency. PWM should be as low as possible to minimize stress on
the output transistors and motor windings. It is recommended that the PWM
frequency be set to approximately 16 times the maximum output frequency of the
control. Ratios less than 16 will result in non-Sinusoidal current waveforms. See
Figure 4-3.
Figure 4-3 Maximum Output Frequency vs PWM Frequency
It is recommended that the PWM frequency parameter be set
to approximately16 times the maximum output frequency of
500
400
300
OUTPUT FREQUENCY
200
100
HZ
50
1.00KHz 8.00KHz 16.00KHz
the control. The greater the ratio, the more sinusoidal the
output current waveform will be.
Note: The output current rating of the control must be
derated for operation between 8KHz and 16KHz PWM
frequency. Derating is 10% from 2.5kHz to 5kHz and
is linear from 10% at 8KHz to a 30% reduction of
rated output current at 16KHz PWM operation.
PWM FREQUENCY
Programming & Operation 4-15MN723
Page 67

Section 1
General Information
Table 4-3 Level 2 Parameter Block Definitions Continued
Block Title Parameter Description
CUSTOM UNITS Max Decimal
Places
Value At Speed
Value DEC Places
Value Speed REF
Units of Measure
Units of MEAS 2
PROTECTION Overload Sets the protection mode to Fault (trip off during overload condition) or to Foldback
External Trip OFF - External Trip is Disabled.
Local Enable INP OFF - Ignores J1-8 switched input when in the “LOCAL” mode.
Following Error This parameter determines if the control is to monitor the amount of following error
The number of decimal places of the Output Rate display on the Keypad display. This
value will be automatically reduced for large values. The output rate display is only
available if the “Value At Speed” parameter value is non-zero.
Sets the desired output rate value per motor RPM. Two numbers are displayed on the
keypad display (separated by a slash “/”). The first number (left most) is the value you
want the keypad to display at a specific motor speed (second number, right most). A
decimal may be inserted into the numbers by placing the flashing cursor over the
up/down arrow.
Serial Only. *
Serial Only. *
Allows you to specify units of measure to be displayed on the Output Rate display. Use
the shift and arrow keys to scroll to the first and successive characters. If the
character you want is not displayed, move the flashing cursor over the special
up/down character arrow on the left side of the display. Use the up/down arrows and
the shift key to scroll through all 9 character sets. Use the ENTER key to save your
selection.
Serial Only. *
(automatically reduce the output current below the continuous output level) during an
overload. Foldback is the choice if continuous operation is desired. Fault will require
the control be “Reset” manually or automatically after an overload.
ON - External Trip is enabled. If a normally closed contact at J1-16 is opened, an
External Trip fault will occur and cause the drive to shut down.
ON - Requires J1-8 Enable input to be closed to enable the control when in the
“LOCAL” mode.
that occurs in an application. Following Error is the programmable tolerance for the
AT Speed Opto output as defined by the Level 1 Output block, AT Speed Band
parameter. Operation outside the speed range will cause a fault and the drive will
shut down.
* Note: Serial Commands. When using the serial command option, the “Value AT Speed”, “Value DEC Places”, and “Value
Speed REF” parameters must be set. The Value AT Speed parameter sets the desired output rate per increment of
motor speed. The Value DEC Places sets the desired number of decimal places of the Value AT Speed number. The
Value Speed REF sets the increment of motor speed for the desired output rate.
The Units of Measure parameter sets the two left-most characters of the custom units display while the Units of MEAS
2 parameter sets the two right most characters. For example, if “ABCD” is the custom units, “AB” is set in the Level 2
Custom Units block, Units of Measure parameter and “CD” is set in the Level 2 Custom Units block, Units of MEAS 2
parameter.
Note: Custom Display Units. The output rate display is only available if the Value AT Speed parameter has been changed
from a value of 0 (zero). To access the Output Rate display, use the DISP key to scroll to the Output Rate display.
4-16 Programming & Operation MN723
Page 68

Section 1
General Information
Caution: If an automatic restart of the motor control could cause injury to
personnel, the automatic restart feature should be disabled by
changing the Level 2 Miscellaneous block, Restart Auto/Man
parameter to manual.
Table 4-3 Level 2 Parameter Block Definitions Continued
Block Title Parameter Description
MISCELLANEOUS Restart Auto/Man Manual - If a fault or power loss occurs, the control must be manually reset to resume
Restart Fault/Hr The maximum number of automatic restart attempts before requiring a manual restart.
Restart Delay The amount of time allowed after a fault condition for an automatic restart to occur.
Factory Settings Restores factory settings for all parameter values. Select YES and press “ENTER” key
Homing Speed In Bipolar and Serial modes, this parameter sets the speed that the motor shaft will
Homing Offset In Bipolar and Serial modes, this parameter sets the number of digital encoder counts
SECURITY
CONTROL
Security State Off - No security Access Code required to change parameter values.
Access Timeout The time in seconds the security access remains enabled after leaving the programming
Access Code A 4 digit number code. Only persons that know the code can change secured Level 1
operation.
Automatic - If a fault or power loss occurs, the control will automatically reset to
resume operation.
After one hour without reaching the maximum number of faults or if power is turned
off and on again, the fault count is rest to zero.
Useful to allow sufficient time to clear a fault before restart is attempted.
to restore factory parameter values. The keypad Display will show “Operation Done”
then return to “NO” when completed.
Note: When factory settings are reset, the Motor Rated Amps value is reset to
999.9 amps. This Level 2 Motor Data block parameter value must be
changed to the correct value (located on the motor rating plate) before
attempting to start the drive.
rotate to a “Home” position when the orient input switch is closed (J1-11).
past home at which the motor stop command is issued. Quadrature encoder pulses
are 4 times the number of encoder lines per revolution. The recommended minimum
number is 100 encoder counts to allow for deceleration distance to allow the motor to
stop smoothly.
Note: Homing direction is always forward.
Local - Requires security Access Code to be entered before changes can be made
using the Keypad.
Serial - Requires security Access Code to be entered before changes can be made
using the Serial Link.
Total - Requires security Access Code to be entered before changes can be made
using the Keypad or serial link.
Note: If security is set to Local, Serial or Total you can press PROG and scroll
through the parameter values that are programmed but you are not allowed
to change them unless you enter the correct access code.
mode. If you exit and go back into the program Mode within this time limit, the
security Access Code does not have to be re-entered. This timer starts when leaving
the Program Mode (by pressing DISP). Access Timeout is operational only in Local
security mode.
Note: This feature is not available when using the Serial operating mode or if
power is cycled.
and Level 2 parameter values. A loss of power to the control will automatically
require the secured access code for parameter adjustments.
Note: Please record your access code and store it in a safe place. If you cannot
gain entry into parameter values to change a protected parameter, please
contact Baldor. Be prepared to give the 5 digit code shown on the lower
right side of the Keypad Display at the Security Control Access Code
parameter prompt.
Programming & Operation 4-17MN723
Page 69

Section 1
General Information
Table 4-3 Level 2 Parameter Block Definitions Continued
Block Title Parameter Description
MOTOR DATA Motor Rated Amps The full load motor current (listed on the motor nameplate). If the motor current exceeds
Motor Poles The number of motor poles. Factory setting is 4 poles. The values shown here are for
Resolver Speed The resolver speed. All standard BSM motors use 1 speed resolvers.
CALC Presets Loads operating values into memory. These values are based on information
BRAKE ADJUST Resistor Ohms The dynamic braking resistor value in ohms. Refer to dynamic braking manual or call
Resistor Watts The dynamic braking resistor watts rating. Refer to dynamic braking manual or call
PROCESS
CONTROL
Process Feedback
Process Inverse
Setpoint Source
Setpoint Command
Set PT ADJ Limit
Process ERR TOL
Process PROP
Gain
Process INT Gain
Process DIFF Gain
this value for a period of time, an Overload fault will occur.
standard Baldor BSM motors.
MOTOR
BSM63, BSM80 4
BSM90, BSM100 8
BSM4F, BSM6F, BSM8F 8
BSM2R, BSM3R, BSM4R 4
BSM6R 6
programmed into the Level 2 Output Limits and Motor Data parameter values.
CALC Presets must be run before Autotuning or manually tuning the drive.
Baldor for additional information.
Baldor for additional information.
Sets the type of signal used for the process feedback signal.
Causes the process feedback signal to be inverted. Used with reverse acting processes
that use a unipolar signal such as 4-20mA. If “ON”, 20mA will decrease motor speed
and 4mA will increase motor speed.
Sets the source input signal to which the process feedback will be compared.
If “Setpoint CMD” is selected, the fixed value of the set point is entered in the Setpoint
Command parameter value.
Sets the value of the setpoint the control will try to maintain by adjusting motor speed.
This is only used when the Setpoint Source is a fixed value “Setpoint CMD” under
Setpoint Source.
Sets the maximum speed correction value to be applied to the motor (in response to the
maximum feedback setpoint error). For example, if the max motor speed is 1750
RPM, the setpoint feedback error is 100% and the setpoint adjustment limit is 10%,
the maximum speed the motor will run in response to the setpoint feedback error is
±175 RPM. If at the process setpoint, the motor speed is 1500 RPM, the maximum
speed adj limits is then 1325 to 1675 RPM.
Sets the width of the comparison band (% of setpoint) with which the process input is
compared. The result is that if the process input is within the comparison band the
corresponding Opto Output will become active.
Sets the PID loop proportional gain. This determines how much adjustment to motor
speed (within the Set PT ADJ Limit) is made to move the analog input to the setpoint.
Sets the PID loop Integral gain. This determines how quickly the motor speed is
adjusted to correct long term error.
Sets the PID loop differential gain. This determines how much adjustment to motor
speed (within the Set PT ADJ Limit) is made for transient error.
NUMBER OF
POLES
4-18 Programming & Operation MN723
Page 70
Section 1
General Information
Table 4-3 Level 2 Parameter Block Definitions Continued
Block Title Parameter Description
PROCESS
CONTROL
(Continued)
COMMUNICATIONS Protocol Sets the type of communication the control is to use, RS-232 ASCII, RS-485 ASCII,
AUTO TUNING
LEVEL 1 BLOCK ENTERS LEVEL 1 MENU
Follow I:O Ratio
Follow I:O Out
Master Encoder
Baud Rate Sets the speed at which communication is to occur.
Drive Address Sets the address of the control for communication with other microprocessors.
CALC Presets
CMD Offset Trim
CUR Loop COMP
Resolver Align
SPD CNTRLR
CALC
Sets the ratio of the Master to the Follower in Master/Follower configurations. Requires
the Master Pulse Reference/ Isolated Pulse Follower expansion board. For example,
the master encoder you want to follow is a 1024 count encoder. The follower motor
you wish to control also has a 1024 count encoder on it. If you wish the follower to
run twice the speed of the master, a 1:2 ratio is entered. Fractional ratios such as
0.5:1 are entered as 1:2. Ratio limits are 65,535:1 to 1:20.
Note: The Master Encoder parameter must be defined if a value is entered in the
Follow I:O Ratio parameter.
Note: When using Serial Communications to operate the control, this value is the
MASTER portion of the ratio. The FOLLOWER portion of the ratio is set in
the Follow I:O Out parameter.
This parameter is visible for use only when Serial Communication is used to operate the
control. A Master Pulse Reference/ Isolated Pulse Follower expansion board is
required. This parameter represents the FOLLOWER portion of the ratio.
The MASTER portion of the ratio is set in the Follow I:O Ratio parameter.
Only used if an optional Master Pulse Reference/Isolated Pulse Follower expansion
board is installed. Defines the number of pulses per revolution of the master encoder.
Only used for follower drives.
RS-232 BBP or RS-485 BBP protocol.
The Auto Tune procedure is used to automatically measure and calculate certain
parameter values. Occasionally, the Auto Tune procedure cannot be run due to
various circumstances such as the load cannot be uncoupled from the motor. The
control can be manually tuned by entering the parameter values based on
calculations you have made. Refer to “Manually Tuning the Control” in the
Troubleshooting section of this manual.
This procedure loads preset values into memory that are required to perform Auto Tune.
Always run CALC Presets as the first step of Auto Tune.
This procedure trims offset voltage at the differential analog input at J1A-4 and J1A-5.
Measures current response while running motor at one half the rated motor current.
This procedure checks the electrical alignment of the resolver with respect to the motor
stator. This test locks the motor rotor into a reference position and proceeds to check
are re-adjust if necessary.
Should be performed with the load coupled to the motor shaft. Sets the motor current to
acceleration ratio, Integral gain and Differential gain values. If done under no load,
the Integral gain will be too large for high inertia loads if the PK Current Limit is set too
low. If the control is too responsive when the motor is loaded, adjust the PK Current
Limit parameter to a greater value and repeat this test.
Programming & Operation 4-19MN723
Page 71

Section 1
General Information
4-20 Programming & Operation MN723
Page 72

Section 5
Troubleshooting
Overview
The Baldor Series 23H Control requires very little maintenance and should provide years
of trouble free operation when installed and applied correctly. Occasional visual
inspection and cleaning should be considered to ensure tight wiring connections and to
remove dust, dirt, or foreign debris which can reduce heat dissipation.
Operational failures called “Faults” will be displayed on the Keypad Display as they occur.
A comprehensive list of these faults, their meaning and how to access the fault log and
diagnostic information is provided later in this section. Troubleshooting information is
provided later in this section.
Before attempting to service this equipment, all input power must be removed from the
control to avoid the possibility of electrical shock. The servicing of this equipment should
be handled by a qualified electrical service technician experienced in the area of high
power electronics.
It is important to familiarize yourself with the following information before attempting any
troubleshooting or service of the control. Most troubleshooting can be performed using
only a digital voltmeter having an input impedance exceeding 1 megohm. In some cases,
an oscilloscope with 5 MHZ minimum bandwidth may be useful. Before consulting the
factory, check that all power and control wiring is correct and installed per the
recommendations given in this manual.
No Keypad Display - Display Contrast Adjustment
At power up, the display may be blank if the contrast is improperly set. Use the following
procedure to adjust the display contrast.
Action Description Display Comments
Apply Power No visible display.
Press DISP key Ensures control in Display mode. Display mode.
Press SHIFT key 2 times Allows display contrast
Press or key
Press ENTER key Saves display contrast
adjustment.
Adjusts display contrast
(intensity).
adjustment level and exits to
display mode.
Troubleshooting 5-1MN723
Page 73

Section 1
General Information
How to Access Diagnostic Information
Action Description Display Comments
Apply Power Logo display for 5 seconds.
Display mode showing motor
speed.
Press DISP key 6 times Scroll to Diagnostic Information
screen
Press ENTER key Access diagnostic information. First Diagnostic Information
Press DISP key Display showing control
temperature.
Press DISP key Display showing bus voltage.
No faults present. Local keypad
mode. If in remote/serial mode,
disable drive then press local for
this display.
Diagnostic Access screen.
screen.
XXXV
Press DISP key Display showing % overload
Press DISP key Display showing real time opto
Press DISP key Display showing actual drive
Press DISP key Display showing operating zone,
current remaining.
input & output states.
(0=Open, 1=Closed).
running time.
voltage and control type.
Opto Inputs states (Left);
Opto Outputs states (Right).
HR.MIN.SEC format.
Press DISP key Display showing continuous
amps; PK amps rating; amps/volt
scale of feedback, power base ID.
Press DISP key Display showing which Group1 or
2 expansion boards are installed
and recognized.
Press DISP key Display showing software version
and revision installed in the
control.
Press DISP key Displays exit choice. Press ENTER to exit diagnostic
ID is a hexadecimal value.
In this case, no expansion boards
are installed.
information.
5-2 Troubleshooting MN723
Page 74

How to Access the Fault Log When a fault condition occurs, motor operation stops and a fault code is displayed on
the Keypad display. The control keeps a log of up to the last 31 faults. If more than 31
faults have occurred, the oldest fault will be deleted from the fault log to make room for
the newest fault. To access the fault log use the following procedure:
Action
Apply Power Logo display for 5 seconds.
Display mode showing output
frequency
Press DISP key 5 times Use DISP key to scroll to the
Press ENTER key Display first fault type and time
Press key
Press ENTER key Return to display mode. Display mode. Stop key LED is
Fault Log entry point.
fault occurred.
Scroll through fault messages.
Description Display Comments
Display mode.
Typical display.
If no messages, the fault log exit
choice is displayed.
on.
How to Clear the Fault Log Use the following procedure to clear the fault log and reset the internal clock.
Action Description Display Comments
Apply Power Logo display for 5 seconds.
Display mode showing output
frequency.
Display mode.
Press DISP key Press DISP to scroll to the Fault
Press ENTER key Displays most recent message. 1 = most recent fault
Press SHIFT key
Press RESET key
Press SHIFT key
Press ENTER key Fault log is cleared. No faults in fault log and the
Press or key
Press ENTER key Return to display mode.
Log entry point.
2 = second most recent fault, etc.
internal clock is reset.
Scroll Fault Log Exit.
Troubleshooting 5-3MN723
Page 75

Table 5-1 Fault Messages
FAULT MESSAGE DESCRIPTION
Current Sens FLT Defective phase current sensor or open circuit detected between control board and current
sensor.
DC Bus High Bus over voltage condition occurred.
DC Bus Low Bus under voltage condition occurred.
External Trip An open circuit on J1-16 typically indicating an external over temperature condition
occurred.
GND FLT Low impedance path detected between an output phase and ground.
INT Over-Temp Temperature of control heatsink exceeded safe level.
Invalid Base ID Control does not recognize power base ID.
Inverter Base ID Control board installed on power base without current feedback.
Line Regen FLT Only applies to Series 21H and 22H Line Regen controls.
Logic Supply FLT Logic power supply not working properly.
Lost User Data Battery backed RAM parameters have been lost or corrupted.
When fault cleared (Reset), the control should reset to factory preset values.
Low INIT Bus V Insufficient bus voltage on startup.
Memory Error EEPROM error occurred. Contact Baldor.
New Base ID Control board sensed a different power base since last time it was powered up.
No Faults Fault log is empty.
No EXB Installed Programmed operating parameter requires an expansion board that is not installed or is
not recognized.
Over Current FLT Instantaneous over current condition detected by bus current sensor.
Overload - 1 min Output current exceeded 1 minute rating.
Overload - 3 sec Output current exceeded 3 second rating.
Over speed Motor RPM exceeded 110% of programmed MAX Motor Speed.
mP Reset
PWR Base FLT Desaturation of power device occurred or bus current threshold was exceeded. (On B2
Regen R PWR FLT Regen power exceeded DB resistor rating.
User Fault Text Custom software operating fault occurred.
Co–Processor Fault Co-Processor hardware fault occurred. Contact Baldor.
Power cycled before the residual Bus voltage reached 0VDC.
size controls, a desat error can indicate any of the following: low line impedance, brake
transistor failure or excessive internal temperature at the output transistors.)
5-4 Troubleshooting MN723
Page 76

Section 1
General Information
Resolver Troubleshooting
SYMPTOM POSSIBLE CAUSE CORRECTIVE ACTION
Continuous Overspeed Fault displayed on
keypad.
Intermittent Overspeed Fault displayed on
keypad.
When commanded to run, the motor will
not rotate and the keypad current display
is in excess of the motor rated amps.
Resolver coupling has failed.
Resolver wiring connection is
disconnected, a wire broken or miswired.
Missing or miswired shield.
Resolver wiring connection is intermittent.
Missing or miswired shield.
Resolver signal is outside of specification.
The resolver has failed or is not connected
properly. Resolver is not aligned properly.
Inspect and repair the resolver wiring.
Terminate shield properly @ J1–28
Inspect and repair the resolver wiring.
Terminate shield properly @ J1–28.
The resolver output Sine and Cosine
maximum voltage must be 2VAC RMS
±10% at the J1 terminal strip. This high
frequency voltage (5kHz) can only be
measured with a Fluke 87 or equivalent
meter or an oscilloscope. Rotate the
resolver to find the max voltage.
Verify the resolver is connected and wired
properly.
Disable control and rotate motor by hand.
If the position display in the keypad
diagnostic menu shows a position change,
then the resolver is probably working.
Run the auto tune test to align the resolver.
Replace resolver coupling.
The fourth auto–tuning step (Resolver Align) can be used to effectively troubleshoot the system. The
purpose of the test procedure is to adjust the electrical alignment of the resolver with respect to the motor
stator. There are four steps that the auto tuning procedure performs:
1 . This test initially displays the calculated number of counts per motor pole pair. For example, if using a
BSM4F motor, with the MOTOR POLES parameter set to 8 and a standard 1 speed resolver, the initial
keypad display will be 1024. The equation is: [4096 counts / (8 motor poles/2) = 1024].
HELPFUL HINT: If the resolver speed (or poles) is unknown, a simple test can be useful to determine the
number of resolver speed. Temporarily set the resolver speed parameter to 10. With the resolver wired to
the motor control, apply power to the motor control. Go to the diagnostic menu and select the position
display. Rotate the motor shaft by hand until the display indicates approximately 0000:0000. Rotate the
motor shaft by hand exactly 1 revolution. If the keypad display shows approximately 4096, the resolver is
a 1 speed resolver, approximately 8,192 = 2 speed, approximately 12,288 = 3 speed and 16,192 = 4
speed, etc. in multiples of 4096. When the resolver speed is known, set the resolver speed parameter to
the proper number before starting the auto–tune test.
2. The control then locks the motor rotor into a reference position using 50% of motor rated current
and then proceeds to check and re–adjust if necessary, the factory setting of the resolver
alignment parameter. This is similar to setting a clock to the local time. This parameter is
scaled in degrees.
3. From the reference position, the control slowly rotates the motor through a 360° electrical cycle
of current using 50% motor rated current. The number of counts from the resolver is compared
against the number calculated in step 1. From the above example with the BSM4F motor, if the
control receives approximately 1024 counts (±10%) from the resolver, then the test will pass.
This portion of the test will take approximately 6 to 12 seconds.
HELPFUL HINT: If the motor poles are unknown, this test can be useful to determine the number of motor
poles. A 2 pole motor will mechanically rotate the motor shaft 360°, a 4 pole motor will rotate 180°, a 6
pole motor will rotate 120°, a 8 pole motor will rotate 90°. Observing the mechanical rotation will indicate
the number of motor poles.
4. As part of step 3, the resolver rotation is determined and the feedback alignment parameter is
adjusted to the appropriate direction, FWD or REV.
Troubleshooting 5-5MN723
Page 77

Section 1
General Information
Table 5-2 Troubleshooting
INDICATION POSSIBLE CAUSE CORRECTIVE ACTION
No Display Lack of input voltage. Check input power for proper voltage.
Loose connections. Check input power termination.
Adjust display contrast. See Adjust Display Contrast in this section.
Current Sense FLT Open circuit between control board
and current sensor.
Defective current sensor. Replace current sensor.
DC Bus High Excessive dynamic braking power. Increase the DECEL time.
Dynamic brake wiring problem. Check dynamic brake hardware wiring.
Input voltage too high.
Too fast a Decel rate.
DC Bus Low Input voltage too low. Disconnect dynamic brake hardware and repeat operation.
External Trip Motor ventilation insufficient. Clean motor air intake and exhaust.
Motor draws excessive current. Check motor for overloading.
No thermostat connected. Connect thermostat.
Poor thermostat connections. Check thermostat connections.
External trip parameter incorrect. Verify connection of external trip circuit at J1-16.
GND FLT Improper wiring.
Wiring shorted in conduit.
Motor winding shorted.
INT Over-Temp Drive Overloaded. Correct motor loading.
Ambient temperature too high. Relocate control to cooler operating area.
Cooling fans clogged or restricted
air path.
Verify fuses are good (or breaker is not tripped).
Verify connection of operator keypad.
Check connections between control board and current sensor.
Check dynamic brake watt and resistance parameter values.
Add optional dynamic braking hardware.
Verify proper AC line voltage.
Use step down isolation transformer if needed.
Use line reactor to minimize spikes.
Increase Decel time parameter value.
Verify proper AC line voltage.
Use step up isolation transformer if needed.
Check power line disturbances (sags caused by start up of
other equipment).
Monitor power line fluctuations with date and time imprint
to isolate power problem.
Check external blower for operation.
Verify motor’s internal fan is coupled securely.
Verify proper sizing of control and motor.
Verify connection of all external trip circuits used with thermostat.
Disable thermostat input at J1-16 (External Trip Input).
Set external trip
at J1-16.
Disconnect wiring between control and motor. Retry test.
If GND FLT is cleared, reconnect motor leads and retry the test.
Rewire as necessary.
Repair motor.
If GND FLT remains, contact Baldor.
Verify proper sizing of control and motor.
Add cooling fans or air conditioner to control cabinet.
Clean fans and air path.
parameter to “OFF” if no connection made
5-6 Troubleshooting MN723
Page 78

Section 1
General Information
Table 5-2 Troubleshooting Continued
INDICATION POSSIBLE CAUSE CORRECTIVE ACTION
Invalid Base ID Control does not recognize HP and
Inverter Base ID Power base with no output phase
Logic Supply FLT Power supply malfunctioned. Replace logic power supply.
Lost User Data Battery backed memory failure. Parameter data was erased. Disconnect power to control and
Low INIT Bus V Improper AC line voltage. Disconnect Dynamic Brake hardware and retry test.
Memory Error EEPROM memory fault occurred. Press “RESET” key on keypad. If fault remains, call Baldor.
mP Reset
Motor has wrong
response to
Speed Command
Motor Will Not Not enough starting torque. Increase Current Limit setting.
Start
Motor Will Not Max Output Speed set too low. Adjust MAX Output Speed parameter value.
Reach Maximum
Speed
Motor Will Not
Stop Rotation
Voltage configuration.
current sensors being used.
Power was cycled before Bus
voltage reached 0VDC.
Analog input common mode voltage
may be excessive.
Motor overloaded. Check for proper motor loading.
Control not in local mode of
operation.
Motor may be commanded to run
below minimum frequency setting.
Incorrect Command Select
parameter.
Incorrect speed command. Verify control is receiving proper command signal at J1.
Motor overloaded. Check for mechanical overload. If unloaded motor shaft does not rotate
Improper speed command. Verify control is set to proper operating mode to receive speed command.
Speed potentiometer failure. Replace potentiometer.
MIN Output Speed parameter set
too high.
Improper speed command. Verify control is receiving proper command signal at input terminals.
Speed potentiometer failure. Replace potentiometer.
Analog input common mode voltage
may be excessive.
Analog offset trim set incorrectly. Adjust the Level 1 Input block, ANA CMD Offset parameter value to obtain
Press “RESET” key on keypad. If fault remains, call Baldor.
Replace power base with one that has output phase current
feedback. Contact Baldor.
apply power (cycle power). Enter all parameters.
Cycle power. If problem persists, contact Baldor.
Check input AC voltage level.
Press “RESET” key on keypad.
Disconnect power and allow at least 5 minutes for Bus capacitors to
discharge before applying power. If fault remains, call Baldor.
Connect control input source common to control common to minimize
common mode voltage. Maximum common mode voltage at terminals
J1-4 and J1-5 is ±15VDC referenced to chassis common.
Check couplings for binding.
Verify proper sizing of control and motor.
Place control in local mode.
Increase speed command or lower minimum frequency setting.
Change Command Select parameter to match wiring at J1.
freely, check motor bearings.
Verify control is receiving proper command signal at input terminals.
Check velocity loop gains.
Adjust MIN Output Speed parameter value.
Verify control is set to receive speed command.
Connect control input source common to control common to minimize
common mode voltage. Maximum common mode voltage at terminals
J1-4 and J1-5 is ±15VDC referenced to chassis common.
zero speed with a zero value input command.
Troubleshooting 5-7MN723
Page 79

Section 1
General Information
Table 5-2 Troubleshooting Continued
INDICATION POSSIBLE CAUSE CORRECTIVE ACTION
New Base ID Software parameters are not
No EXB Installed Parameter incorrectly set. Change Level 1 Input block, Command Select parameter and Level 2
Over Current FLT Current Limit parameter set lower
Overload - 3 Sec
FLT
Overload - 1 Min
FLT
initialized on newly installed
control board.
Need expansion board. Install the correct expansion board for selected operating mode.
Incorrect software Revision Software does not support the revision level of the board installed. Update
than drive rating.
ACCEL/DECEL time too short. Increase ACCEL/DEC parameters in the Level 1
Electrical noise from external DC
coils.
Electrical noise from external AC
coils.
Excessive load. Reduce the motor load.
Excessive motor current. Verify motor leads are properly connected to control. (Motor is phase
Peak output current exceeded 3
second rating.
Excessive motor current. Verify motor leads are properly connected to control. (Motor is phase
Peak output current exceeded 1
minute rating.
Excessive motor current. Verify motor leads are properly connected to control. (Motor is phase
Press “RESET” key on keypad to clear the fault condition. Cycle power
(turn power OFF then ON). Reset parameter values to factory settings.
Access diagnostics and compare power base ID number to list in Table 5-3
to ensure a match. Re-enter the Parameter Block Values you recorded in
the User Settings at the end of this manual. Autotune the control.
Process Control block, Process Feedback and Setpoint Source
parameters, to selections that do not require an expansion board.
software.
Increase PK Current Limit parameter in the Level 2
Output Limits block, not to exceed drive rating.
ACCEL/DECEL Rate block.
Install reverse biased diodes across all external DC relay coils as shown in
the Opto Output circuit examples of this manual. See Electrical Noise
Considerations in this Section.
Install RC snubbers on all external AC coils. See Electrical Noise
Considerations in this Section.
Verify proper sizing of control and motor.
sensitive, refer to Section 3 for connection information).
Check PK Current Limit parameter in the Level 2
Output Limits block.
Change Overload parameter In the Level 2 Protection block
from Fault to Foldback.
Check motor for overloading.
Increase ACCEL time.
Reduce motor load.
Verify proper sizing of control and motor.
sensitive, refer to Section 3 for connection information).
Verify Level 2 Motor Data is correct.
Check PK Current Limit parameter in the Level 2
Output Limits block.
Change Overload parameter In the Level 2 Protection block
from Fault to Foldback.
Check motor for overloading.
Increase ACCEL/DECEL times.
Reduce motor load.
Verify proper sizing of control and motor.
sensitive, refer to Section 3 for connection information).
5-8 Troubleshooting MN723
Page 80

Section 1
General Information
Table 5-2 Troubleshooting Continued
INDICATION POSSIBLE CAUSE CORRECTIVE ACTION
Power Module Power supply failure. Press “RESET” key on keypad. If fault remains, call Baldor.
PWR Base FLT Improper ground Be sure control has separate ground wire to earth ground.
Excessive current. Disconnect motor leads from control and retry test. If fault remains, call
Electrical noise from external DC
coils.
Electrical noise from external AC
coils.
Excessive load. Correct motor load.
Excessive power in dynamic brake
circuit.
Regen R PWR
FLT
Unknown Fault Fault occurred but cleared before its
User Fault Text Fault detected by custom software. Refer to custom software fault list.
Co-Processor
Fault
Incorrect dynamic brake parameter. Check Resistor Ohms and Resistor Watts parameters in the Level 2 Brake
Regen power exceeded dynamic
brake resistor rating.
Input voltage too high. Verify proper AC line voltage.
source could be identified.
Fault detected. Contact Baldor.
Panel grounding or conduit connection is not sufficient.
Baldor.
Install reverse biased diodes across all external DC relay coils as shown in
the Opto Output circuit examples of this manual. See Electrical Noise
Considerations in this Section.
Install RC snubbers on all external AC coils. See Electrical Noise
Considerations in this Section.
Verify proper sizing of control and motor.
Verify proper Ohm and Watt parameters of DC Injection Braking.
Increase decel time.
Add optional dynamic braking hardware.
Adjust block.
Add optional dynamic braking hardware.
Use step down transformer if needed.
Use line reactor to minimize spikes.
Check AC line for high frequency noise.
Check input switch connections and switching noise.
Troubleshooting 5-9MN723
Page 81

Section 1
General Information
Table 5-3 Power Base ID - Series 23H
230VAC 460VAC
Catalog
No.
2A03–E A 823 4A04–E A A3D
2A04–E A 824 4A05–E A A41
2A04–W A 824 4A08–E A A3E
2A07–E A 833 4A11–E B A07
2A10–E A 826 4A11–E B2 A4A
2A10–W A 826 4A14–E B A42
2A15–E B2 82D 4A14–E B2 A4B
2A16–E B 827 4A15–E B A42
2A16–E B2 82D 4A15–E B2 A4B
2A22–E B 828 4A15–ER C A10
2A22–E B2 82E 4A21–E B2 A4C
2A28–E B 81A 4A21–EO C2 A11
2A28–E B2 82F 4A22–ER C 8A11
2A30–ER C 4810 4A27–ER C2 A12
2A42–E B2 830 4A30–ER C 4A0B
2A42–EO C2 811
2A45–ER C 2811
2A54–ER C2 81D
2A55–ER C 6809
Size
Power
Base ID
Catalog
No.
Size
Power
Base ID
Note: The Power Base ID number of a control is displayed in a Diagnostic
Information screen as a hexadecimal value.
5-10 Troubleshooting MN723
Page 82

Section 1
General Information
Electrical Noise Considerations
All electronic devices are vulnerable to significant electronic interference signals
(commonly called “Electrical Noise”). At the lowest level, noise can cause intermittent
operating errors or faults. From a circuit standpoint, 5 or 10 millivolts of noise may cause
detrimental operation. For example, analog speed and torque inputs are often scaled at 5
to 10VDC maximum with a typical resolution of one part in 1,000. Thus, noise of only 5
mV represents a substantial error.
At the extreme level, significant noise can cause damage to the drive. Therefore, it is
advisable to prevent noise generation and to follow wiring practices that prevent noise
generated by other devices from reaching sensitive circuits. In a control, such circuits
include inputs for speed, torque, control logic, and speed and position feedback, plus
outputs to some indicators and computers.
Relay and Contactor Coils
Among the most common sources of noise are the coils of contactors and relays. When
these highly inductive coil circuits are opened, transient conditions often generate spikes
of several hundred volts in the control circuit. These spikes can induce several volts of
noise in an adjacent wire that runs parallel to a control-circuit wire. Figure 5-1 illustrates
noise suppression for AC and DC relay coils.
Figure 5-1 AC and DC Coil Noise Suppression
AC Coil
Wires between Controls and Motors
Output leads from a typical 460VAC drive controller contain rapid voltage rises created by
power semiconductors switching 650V in less than a microsecond, 1,000 to 10,000 times
a second. These noise signals can couple into sensitive drive circuits. If shielded pair
cable is used, the coupling is reduced by nearly 90%, compared to unshielded cable.
Even input AC power lines contain noise and can induce noise in adjacent wires. In some
cases, line reactors may be required.
To prevent induced transient noise in signal wires, all motor leads and AC power lines
should be contained in rigid metal conduit, or flexible conduit. Do not place line
conductors and load conductors in same conduit. Use one conduit for 3 phase input
wires and another conduit for the motor leads. The conduits should be grounded to form
a shield to contain the electrical noise within the conduit path. Signal wires - even ones in
shielded cable should never be placed in the conduit with motor power wires.
RC snubber
0.47 mf
33 W
+
DC Coil
-
Diode
Troubleshooting 5-11MN723
Page 83

Section 1
General Information
Special Drive Situations
For severe noise situations, it may be necessary to reduce transient voltages in the wires
to the motor by adding load reactors. Load reactors are installed between the control and
motor.
Reactors are typically 3% reactance and are designed for the frequencies encountered in
PWM drives. For maximum benefit, the reactors should be mounted in the drive
enclosure with short leads between the control and the reactors.
Control Enclosures Motor controls mounted in a grounded enclosure should also be connected to earth
ground with a separate conductor to ensure best ground connection. Often grounding
the control to the grounded metallic enclosure is not sufficient. Usually painted surfaces
and seals prevent solid metallic contact between the control and the panel enclosure.
Likewise, conduit should never be used as a ground conductor for motor power wires or
signal conductors.
Special Motor Considerations
Motor frames must also be grounded. As with control enclosures, motors must be
grounded directly to the control and plant ground with as short a ground wire as possible.
Capacitive coupling within the motor windings produces transient voltages between the
motor frame and ground. The severity of these voltages increases with the length of the
ground wire. Installations with the motor and control mounted on a common frame, and
with heavy ground wires less than 10 ft. long, rarely have a problem caused by these
motor–generated transient voltages.
Analog Signal Wires Analog signals generally originate from speed and torque controls, plus DC tachometers
and process controllers. Reliability is often improved by the following noise reduction
techniques:
• Use twisted-pair shielded wires with the shield grounded at the drive end only.
• Route analog signal wires away from power or control wires (all other wiring types).
• Cross power and control wires at right angles (90°) to minimize inductive noise
coupling.
5-12 Troubleshooting MN723
Page 84

Section 6
Manual Tuning the Series 23H Control
Manually Tuning the Control In some applications the drive cannot be accurately auto-tuned. In these cases, it is
necessary to calculate the values needed to tune the drive and manually enter these
calculated parameter values.
Current Prop Gain Parameter This parameter is located in the Level 1, Brushless Control Block. The Current
Prop Gain parameter is normally autotuned when motor inductance is not known. Where
autotuning can’t be used, the proper manual setting for the proportional gain can be
calculated by:
ƪ
Current PROP Gain +
Where:
L = Line to neutral leakage inductance of the motor in mH
VAC = Nominal line volts
A/V = The amps/volt scaling of the current feedback
Motor line to neutral leakage inductance can be obtained either from the motor
manufacturer or for WYE connected motors, by measuring the line–to–line inductance
and dividing the measured value by two.
The A/V scaling for the controller can be found in the diagnostic information located in the
DISPLAY MODE.
For most applications setting the Current Prop Gain parameter to a value of 20 will yield
adequate performance.
Current INT Gain Parameter This parameter is located in the Level 1, Brushless Control Block. The factory setting is
suitable for essentially all systems. Do not change without factory approval.
Speed Prop Gain Parameter
The Speed Prop Gain parameter is located in the Level 1 Brushless Control Block. This
gain may be increased or decreased to suit the application. Increasing the Speed Prop
Gain parameter will result in faster response, excessive proportional gain will cause
overshoot and ringing. Decreasing the Speed Prop Gain parameter will cause slower
response and decrease overshoot and ringing caused by excessive proportional gain.
740xLxǒAńV
VAC
Ǔ
ƫ
Manual Tuning the Series 23H Control 6-1MN723
Page 85

Section 1
General Information
Speed Int Gain Parameter
The Speed Int Gain parameter located in the Level 1 Brushless Control Block may be set
to any value from zero to 9.99 Hz. See also, PI Controller later in this section.
Setting the Speed Int Gain parameter to 0Hz removes integral compensation that results
in a proportional rate loop. This selection is ideal for systems where overshoot must be
avoided and substantial stiffness (ability of the controller to maintain commanded speed
despite varying torque loads) isn’t required.
Increasing values of the Speed Int Gain parameter increases the low frequency gain and
stiffness of the controller, an excessive integral gain setting will cause overshoot for
transient speed commands and may lead to oscillation. If the Speed Prop Gain
parameter and the Speed Int Gain parameter are set too high, an overshoot condition
can also occur.
To manually tune the control, the following procedure is used:
1. Set the speed Int Gain parameter = 0 (remove integral gain).
2. Increase the Speed Prop Gain parameter setting until adequate response to
step speed commands is attained.
3. Increase the Speed Int Gain parameter setting to increase the stiffness of the
drive.
Note: It is convenient to monitor speed step response with a strip chart recorder or
storage oscilloscope connected to J1–6 or –7 with Level 1, Output Block
Analog Out #1 or #2 set to ABS SPEED, 0 VDC = zero speed. See Section 3
for a discussion of analog outputs.
PI Controller
Both the current and rate control loops are of the Proportional plus Integral type. If “E” is
defined to be the error signal,
E = Command – Feedback
then the PI controller operated on “E” as
Output = (Kp * E) + (Ki s E dt)
where Kp is the proportional gain of the system and Ki is the integral gain of the system.
The transfer function (output /E) of the controller using 1/s (Laplace Operator) to denote
the integral,
Output/E = Kp + Kl / s = Kp (s + Ki/Kp) /s.
The second equation shows that the ratio of Ki/Kp is a frequency in radians/sec. In the
Baldor Control, the integral gain has been redefined to be,
Kl = (Ki / Kp) / (2p) Hz,
and the transfer function is,
Output/E = Kp (s + 2pKl) / s.
This sets the integral gain as a frequency in Hz. As a rule of thumb, set this frequency
about 1/10 of the bandwidth of the control loop.
The proportional gain sets the open loop gain of the system, the bandwidth (speed of
response) of the system. If the system is excessively noisy, it is most likely due to the
proportional gain being set too high.
6-2 Manual Tuning the Series 23H Control MN723
Page 86

Section 7
Specifications, Ratings & Dimensions
Specifications:
Power 0.75 - 37.2kW (1-50 HP) @ 230VAC
0.75 - 186.5kW (1-250 HP) @ 460VAC
Input Frequency 50/60 HZ ± 5%
Output Voltage 0 to Maximum Input VAC
Output Current See Ratings Table
Service Factor 1.0
Duty Continuous
Overload Capacity Constant Torque Mode: 170-200% for 3 secs
150% for 60 secs
Variable Torque Mode: 115% for 60 secs
Speed Command Potentiometer 5k or 10k ohm, 0.5Watt
Operating Conditions:
Voltage Range: 230 VAC Models
460 VAC Models
Input Line Impedance: Size A, B, C, D, E requires 3% Minimum
Ambient Operating Temperature: –10 to +40 °C
Rated Storage Temperature: – 30 °C to +65 °C
Enclosure: NEMA 1: E and EO (suffix) Models
Humidity: NEMA 1: 10 to 90% RH Non-Condensing
Altitude: Sea level to 3300 Feet (1000 Meters)
Shock: 1G
Vibration: 0.5G at 10Hz to 60Hz
180-264 VAC 3f 60 Hz / 180-230 VAC 3f 50 Hz
340-528 VAC 3f 60 Hz / 380-415 VAC 3f 50 Hz
Size B2, C2, D2, F and G requires 1% Minimum
Derate Output 2% per °C over 40 °C to 55 °C Max
NEMA 4X: W (suffix) Models
NEMA 4X: To 100% RH
Derate 2% per 1000 Feet (303 Meters) above 3300 Feet
Resolver Feedback:
Sine & Cosine Inputs 2V
Excitation (Reference Voltage) 4V
Resolver Transformation Ratio TR = 0.5 only
±10% (Maximum Coupled)
RMS
@ 10kHz
RMS
Specifications, Ratings & Dimensions 7-1MN723
Page 87

Section 1
General Information
Keypad Display:
Display Backlit LCD Alphanumeric
2 Lines x 16 Characters
Keys 12 key membrane with tactile response
Functions Output status monitoring
Digital speed control
Parameter setting and display
Diagnostic and Fault log display
Motor run and jog
Local/Remote toggle
LED Indicators Forward run command
Reverse run command
Stop command
Jog active
Remote Mount 100 feet (30.3m) max from control
Control Specifications:
Control Method PWM
Command Input ±10VDC
Command Signal Resolution 9 bits + Sign
Feedback Resolution 12 bit
Velocity Loop Bandwidth Adjustable to 30 Hz
Current Loop Bandwidth Adjustable to 1500 Hz
Maximum Output Frequency 500 Hz
Quiet PWM Frequency Setting Full rating 1-8 kHz PWM frequency,
Adjustable to 16 kHz with linear derating (between 8 - 16kHz)
to 30% at 16 kHz
Standard PWM Frequency Setting Full rating 1-2.5 kHz PWM frequency,
Adjustable to 5 kHz with linear derating (between 2.5 - 5kHz)
to 10% at 5 kHz
Selectable Operating Modes Keypad
Standard Run
15 SPD
3SPD ANA 2 Wire
3SPD ANA 3 Wire
Serial
Bipolar Speed
Process
EPOT 2 Wire
EPOT 3 Wire
Differential Analog Input:
Common Mode Rejection 40 db
Full Scale Range ±5VDC, ±10VDC, 4-20 mA
Auto-selectable Resolutions 9 bits + sign
7-2 Specifications, Ratings & Dimensions MN723
Page 88

Section 1
General Information
Other Analog Input:
Full Scale Range 0 - 10 VDC (0 to –10VDC and 0 to +10VDC are valid inputs)
Resolution 9 bits + sign
Analog Outputs:
Analog Outputs 2 Assignable
Full Scale Range 0 - 5 VDC
Source Current 1 mA maximum
Resolution 8 bits
Digital Inputs:
Opto-isolated Logic Inputs 9 Assignable
Rated Voltage 10 - 30 VDC (closed contacts std)
Input Impedance 6.8 k Ohms
Leakage Current
10 mA maximum
Digital Outputs:
Opto-isolated Logic Outputs 4 Assignable
ON Current Sink 60 mA Max
ON Voltage Drop 2 VDC Max
Maximum Voltage 30 VDC
Diagnostic Indications:
No Faults No EXB Installed
Current Sense Fault Overload - 1 minute Logic Supply Fault
Ground Fault Overload - 3 seconds Invalid Base ID
Overcurrent FLT Inverter Base ID
Line Power Loss DC Bus High New Base ID
Microprocessor Reset DC Bus Low PWR Base FLT
Coprocessor Fault Lost User Data Regen R PWR FLT
Over temperature (Motor or Control) Low INIT Bus V Line Regen FLT
Over speed Memory Error User FLT T ext
Note: All specifications are subject to change without notice.
Specifications, Ratings & Dimensions 7-3MN723
Page 89

Section 1
General Information
Ratings Series 23H Stock Products
CATALOG
NO.
NO. VOLT
SD23H2A03–E 230 A 3 6 .56 .75 4 5 .75 1 4 8 .75 1 7 8 1.5 2
SD23H2A04–E, W 230 A 4 8 .75 1 7 8 1.5 2 7 14 1.5 2 10 12 2.2 3
SD23H2A07–E 230 A 7 14 1.5 2 10 12 2.2 3 10 20 2.2 3 16 19 3.7 5
SD23H2A10–E, W 230 A 10 20 2.2 3 16 19 3.7 5 16 32 3.7 5 22 25 5.5 7.5
SD23H2A16–E 230 B 16 32 3.7 5 22 25 5.5 7.5 22 44 5.5 7.5 28 32 7.4 10
SD23H2A22–E 230 B 22 44 5.5 7.5 28 32 7.4 10 28 56 7.4 10 42 48 11.1 15
SD23H2A28–E 230 B 28 56 7.4 10 42 48 11.1 15 42 84 11.1 15 42 48 11.1 15
SD23H2A42–EO 230 C2 42 92 11.1 15 54 62 14.9 20 55 110 14.9 20 68 78 18.6 25
SD23H2A54–ER 230 C2 54 92 14.9 20 68 78 18.6 25 68 116 18.6 25 80 92 22.3 30
SD23H4A04–E 460 A 4 8 1.5 2 5 6 2.2 3 5 10 2.2 3 8 10 3.7 5
SD23H4A05–E 460 A 5 10 2.2 3 8 10 3.7 5 8 16 3.7 5 11 13 5.5 7.5
SD23H4A08–E 460 A 8 16 3.7 5 11 13 5.5 7.5 11 22 5.5 7.5 14 17 7.4 10
SD23H4A11–E 460 B 11 22 5.5 7.5 14 16 7.4 10 14 28 7.4 10 21 24 11.1 15
SD23H4A15–E 460 B 15 30 7.4 10 21 24 11.1 15 21 42 11.1 15
SD23H4A21–EO 460 C2 21 46 11.1 15 27 31 14.9 20 27 50 14.9 20 34 39 18.6 25
SD23H4A27–ER 460 C2 27 46 14.9 20 34 39 18.6 25 34 58 18.6 25 40 46 22.3 30
INPUT
VOLT
SIZE
CONSTANT TORQUE VARIABLE TORQUE CONSTANT TORQUE VARIABLE TORQUE
IC IP KW HP IC IP KW HP IC IP KW HP IC IP KW HP
QUIET 8.0 kHz PWM STANDARD 2.5 kHz PWM
Note: –E, –EO= NEMA 1 Enclosure
–W= NEMA 4X Enclosure
–MO= Protected Chassis (not NEMA1)
7-4 Specifications, Ratings & Dimensions MN723
Page 90
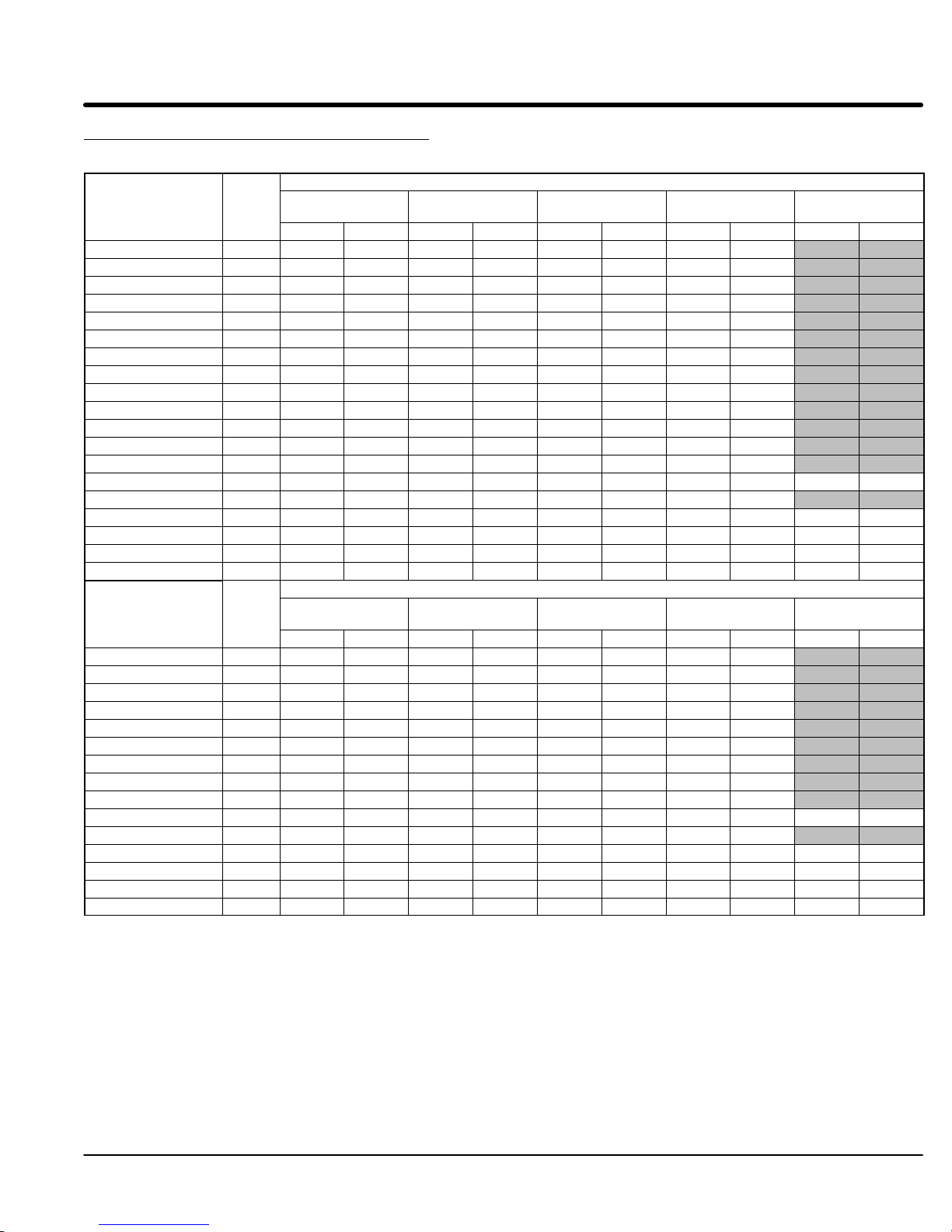
Section 1
General Information
Terminal Tightening Torque Specifications
Table 7-4 Tightening Torque Specifications
230VAC
Catalog Numbers
Catalog Numbers
Size
SD23H2A03–E A
SD23H2A04–E A
SD23H2A04–W A
SD23H2A07–E A
SD23H2A10–E A
SD23H2A10–W A
SD23H2A15–E B2
SD23H2A16–E B
SD23H2A16–E B2
SD23H2A22–E B
SD23H2A22–E B2
SD23H2A28–E B
SD23H2A28–E B2
SD23H2A30–ER C
SD23H2A42–E B2
SD23H2A42–EO C2
SD23H2A45–ER C
SD23H2A54–ER C2
SD23H2A55–ER C
460VAC
Catalog Numbers
Catalog Numbers
Size
SD23H4A04–E A
SD23H4A05–E A
SD23H4A08–E A
SD23H4A11–E B
SD23H4A11–E B2
SD23H4A14–E B
SD23H4A14–E B2
SD23H4A15–E B
SD23H4A15–E B2
SD23H4A15–ER C
SD23H4A21–E B2
SD23H4A21–EO C2
SD23H4A22–ER C
SD23H4A27–ER C2
SD23H4A30–ER C
Power TB1 Ground Control J1
Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
35 4.0 35 4.0 4.5 0.5 50 5.6 32 3.6
20 2.5 15 1.7 4.5 0.5 20 2.5
50 5.6 50 5.6 4.5 0.5 50 5.6 32 3.6
35 4.0 35 4.0 4.5 0.5 50 5.6 32 3.6
50 5.6 50 5.6 4.5 0.5 50 5.6 32 3.6
35 4.0 35 4.0 4.5 0.5 50 5.6 32 3.6
Power TB1 Ground Control J1
Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm Lb-in Nm
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
8 0.9 15 1.7 4.5 0.5 8 0.9
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
20 2.5 15 1.7 4.5 0.5 20 2.5
35 4.0 35 4.0 4.5 0.5 50 5.6 32 3.6
20 2.5 15 1.7 4.5 0.5 20 2.5
50 5.6 50 5.6 4.5 0.5 50 5.6 32 3.6
35 4.0 35 4.0 4.5 0.5 50 5.6 32 3.6
50 5.6 50 5.6 4.5 0.5 50 5.6 32 3.6
35 4.0 35 4.0 4.5 0.5 50 5.6 32 3.6
Tightening Torque
Tightening Torque
B+/R1; B+; B–;
or R2
B+/R1; B+; B–;
or R2
D1/D2
D1/D2
Specifications, Ratings & Dimensions 7-5MN723
Page 91

Section 1
General Information
Dimensions
Size A Control
7.20
(182.9mm)
LOCAL
JOG
DISP
FWD
SHIFT
REV
RESET
STOP
Air
7.120
0.25
(180.8mm)
(6.4mm)
PROG
ENTER
11.50
(292.1mm)
Outlet
12.00
(304.8mm)
KP5000
.25
(6.4mm)
7.20
(182.9mm)
Air Inlet
0.88 Dia.
(22.35 mm)
7.70
(195.6mm)
7-6 Specifications, Ratings & Dimensions MN723
Page 92

Section 1
General Information
Dimensions Continued
Size B Control
9.25
(225.0mm)
JOG
FWD
REV
STOP
0.28 TYP
(7.1mm)
LOCAL
PROG
DISP
SHIFT
ENTER
RESET
7.120
(180.9mm)
Air
Outlet
14.65
(372.1mm)
15.40
(391.2mm)
0.88 Dia.
(22.35 mm)
KP5002
.28 TYP
(7.1mm)
9.25
(235.0mm)
Air Inlet
1.12 Dia.
(28.45 mm)
10.00
(254.0mm)
Specifications, Ratings & Dimensions 7-7MN723
Page 93

Section 1
General Information
Dimensions Continued
Size B2 Control
7.20
(182.9mm)
JOG
FWD
REV
STOP
0.28 TYP
(7.1mm)
LOCAL
PROG
DISP
SHIFT
ENTER
RESET
Air Outlet
8.73
(221.7mm)
12.15
(308.6mm)
.28 TYP
(7.1mm)
1.12 Dia.
(28.45 mm)
7.20
(182.9mm)
11.50
(292.1mm)
Air Inlet
7.20
(182.9mm)
8.07
(205.0mm)
10.92
(277.5mm)
8.00
11.50
(292.1mm)
Cutout for through
wall mounting
(203.2mm)
8.70
(221.0mm)
0.280 (7mm) Dia. hole
through wall 4 Places
OM0001A15
7-8 Specifications, Ratings & Dimensions MN723
Page 94

Section 1
General Information
Dimensions Continued
Size C Control
.38
(9.5 mm)
.38
(9.5 mm)
18.50
(470.0 mm)
17.75
(451 mm)
17.00
(433.0 mm)
11.50
(292.0 mm)
10.75
(273.0 mm)
JOG
FWD
REV
STOP
9.50
(241.5 mm)
9.50
(241.5 mm)
.28 (7.0mm)
Air
Outlet
2 Places
LOCAL
PROG
DISP
SHIFT
ENTER
RESET
V8525
0.875 Dia.
(22.23 mm)
1.734 Dia.
(44.04 mm)
.28 (7.0mm)
2 Places
0.50 Dia.
(12.70 mm)
0.875 Dia.
(22.23 mm)
One or Two Fan(s)
(119mm)
Customer
Power Connections
Air Inlet
Specifications, Ratings & Dimensions 7-9MN723
Page 95

Section 1
General Information
Dimensions Continued
Size C2 Control
0.000
0.916
16.568
16.075
15.665
0.280 Dia.
2 Places
LOCAL
JOG
DISP
FWD
SHIFT
REV
RESET
STOP
Air Outlet
8.675
PROG
ENTER
16.98
(431.3)
0.903
0.493
0.00
2.207 Dia.
(56.06 mm)
1.734 Dia.
(44.04 mm)
OM0012A00D1
EH0073A00D1
0.000
0.260
0.916
10.50
(266.7)
0.250 Dia.
2 Places
8.675
9.340
4.95
(125.7)
4.71
(119.6)
9.66
(245.4)
0.875 Dia.
(22.23 mm)
0.5 Dia
(12.7 mm)
Through Wall
Mtg. Flange
Wall Mount
Mtg. Flange
Air Inlet
7-10 Specifications, Ratings & Dimensions MN723
Page 96

Section 1
General Information
Dimensions Continued
Size C2 Control – Through–Wall Mounting
0.00
15.50 (393,7)
15.25 (387,4)
14.91 (378,1)
0.00
0.33 (8,4)
Note: Throughwall mounting provides NEMA 4 protection.
1.00 (25,4)
AB AB
0.280 Dia. hole
through wall 4
Places coded “A”
Cutout for through
wall mounting
0.280 Dia. hole
through wall 4
Places coded “B”
ABAB
0.00
1.00 (25,4)
2.75 (69,8)
For clarity, cover and inside components not shown.
9.76 (247,9)
8.76 (222,5)
7.01 (178.0)
8.76 (222,5)
1/4-20 or M6 self sealing
bolt and flat washer 4 places
each (holes coded “A”)
Control
Assembly
Customer’s Panel (Cutout)
Cut single coated vinyl foam tape
(3M #4726–0.4062x36 yds.) and
apply to the perimeter to seal
installation of the drive assembly.
Specifications, Ratings & Dimensions 7-11MN723
Page 97

Section 1
General Information
Dimensions Continued
Size D Control
25.00
(635.0mm)
24.25
(616.0mm)
14.50
(368.5mm)
13.50
(343.0mm)
Air
Outlet
LOCAL
PROG
JOG
DISP
FWD
SHIFT
ENTER
REV
RESET
STOP
23.12
(587.0mm)
0.875 Dia.
(22.23 mm)
.31
(8.0mm)
2.469 Dia.
(62.71 mm)
0.50 Dia.
(12.70 mm)
0.875 Dia.
(22.23 mm)
CUSTOMER
POWER
CONNECTIONS
10.00
(254.0mm)
10.20
(259.0mm)
AIR INLET
V8526
EH0001A38
7-12 Specifications, Ratings & Dimensions MN723
Page 98

Dimensions Continued
Size D2 Control
24.00
(607)
23.00
(585)
13.00 (330)
9.50 (241)
0.375 Dia.
4 Places
21.00
(535)
9.09 (231)
Through Wall
Mounting Flange
OM0001A01
EH0001A16
2.45 Dia.
2 Places
Wall Mounting
Flange
6.09 (155)
3.09 (78)
11.035 (280)
2.00
Dia.
12.24 (311)
11.91 (303)
0.50
Dia.
6.885
(175)
0.875 Dia.
2 Places
7.864
(200)
8.464
(215)
9.114
(232)
10.00 (254)
10.33 (263)
Specifications, Ratings & Dimensions 7-13MN723
Page 99
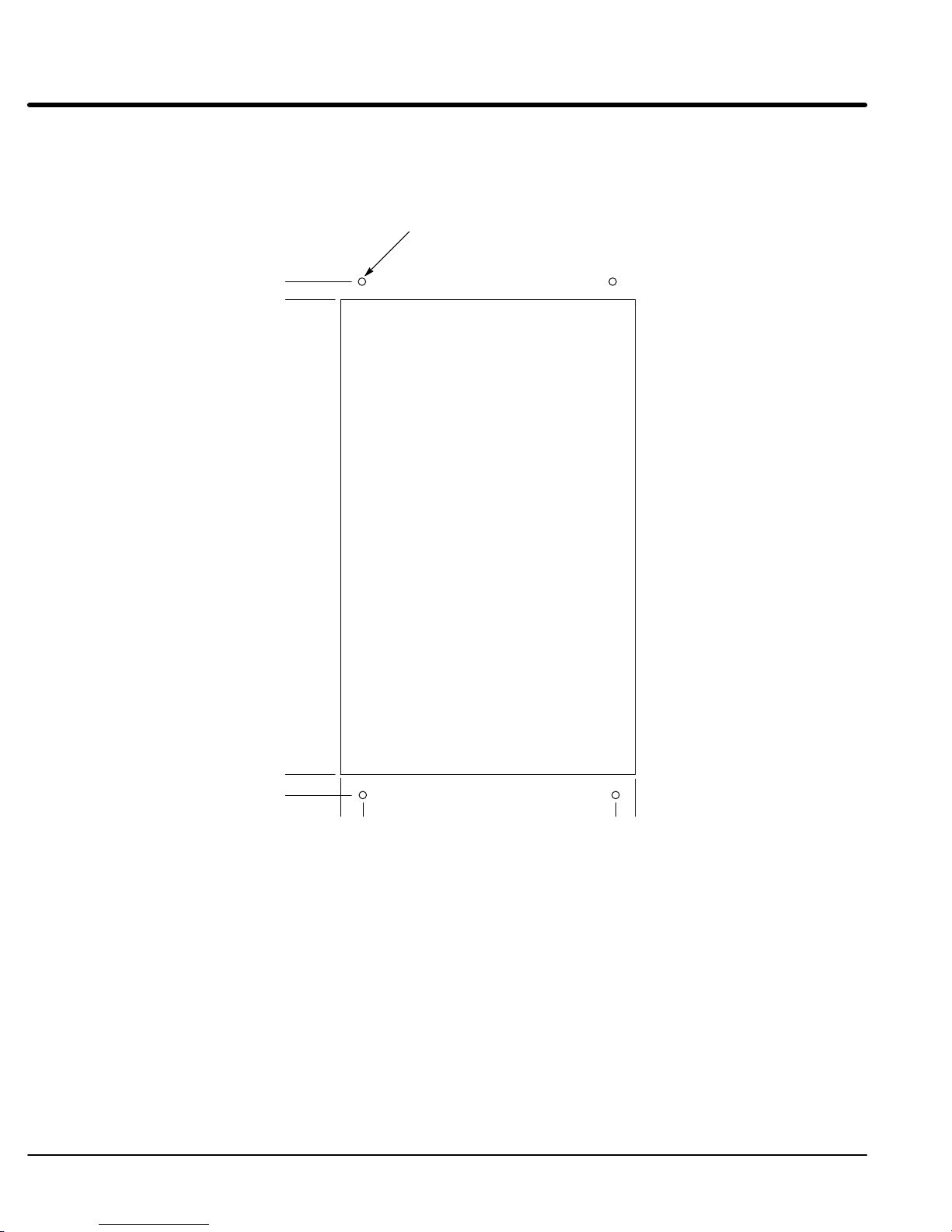
Dimensions Continued
Size D2 Control – Through–Wall Mounting
22.25 (565)
21.50 (546)
Mounting hole locations for Thru-Wall or surface mounting.
Recommended .31 – 18 Tap. (4 Places)
Cutout for thru–wall mounting
.00
0.75 (19)
.00
1.50 (38)
11.00 (280)
12.50 (317)
7-14 Specifications, Ratings & Dimensions MN723
Page 100

Section 1
General Information
Dimensions Continued
Size E Control
Air
Outlet
30.00
(762mm)
.38
(9.5mm)
2 Places
.38 (9.5mm) 2 Places
17.70
(450mm)
Thru–wall
Mounting Flange
(146mm)
5.75
Surface
Mounting
Flange
6.25
(159mm)
2.469 Dia.
(62.71 mm)
0.875 Dia.
(22.23 mm)
3 places
V8316
EH0001A43
Air Inlet
0.50 Dia.
(12.70 mm)
0.875 Dia.
(22.23 mm)
Specifications, Ratings & Dimensions 7-15MN723
 Loading...
Loading...