

a
Low Voltage Temperature Sensors
TMP35/TMP36/TMP37
FEATURES
Low Voltage Operation (+2.7 V to +5.5 V)
Calibrated Directly in 8C
10 mV/8C Scale Factor (20 mV/8C on TMP37)
628C Accuracy Over Temperature (typ)
60.58C Linearity (typ)
Stable with Large Capacitive Loads
Specified –408C to +1258C, Operation to +1508C
Less than 50 mA Quiescent Current
Shutdown Current 0.5 mA max
Low Self-Heating
APPLICATIONS
Environmental Control Systems
Thermal Protection
Industrial Process Control
Fire Alarms
Power System Monitors
CPU Thermal Management
PRODUCT DESCRIPTION
The TMP35, TMP36 and TMP37 are low voltage, precision
centigrade temperature sensors. They provide a voltage output
that is linearly proportional to the Celsius (Centigrade) temperature. The TMP35/TMP36/TMP37 do not require any
external calibration to provide typical accuracies of ±1°C at
+25°C and ±2°C over the –40°C to +125°C temperature range.
The low output impedance of the TMP35/TMP36/TMP37, and
its linear output and precise calibration simplify interfacing to
temperature control circuitry and A/D converters. All three devices
are intended for single-supply operation from 2.7 V to 5.5 V maximum. Supply current runs well below 50 µA providing very low
self-heating—less than 0.1°C in still air. In addition, a shutdown
function is provided to cut supply current to less than 0.5 µA.
The TMP35 is functionally compatible with the LM35/LM45
and provides a 250 mV output at +25°C. The TMP35 reads
temperatures from +10°C to +125°C. The TMP36 is specified from –40°C to +125°C, provides a 750 mV output at
+25°C and operates to +125°C from a single 2.7 V supply. The
TMP36 is functionally compatible with the LM50. Both the
TMP35 and TMP36 have an output scale factor of +10 mV/°C.
The TMP37 is intended for applications over the range +5°C to
+100°C, and provides an output scale factor of 20 mV/°C. The
TMP37 provides a 500 mV output at +25°C. Operation extends
to +150°C with reduced accuracy for all devices when operating
from a 5 V supply.
The TMP35/TMP36/TMP37 are all available in low cost 3-pin
TO-92, and SO-8 and 5-pin SOT-23 surface mount packages.
FUNCTIONAL BLOCK DIAGRAM
+Vs (2.7V to 5.5V)
TMP35
SHUTDOWN
TMP36
TMP37
V
OUT
PACKAGE TYPES AVAILABLE
RT-5 (SOT-23)
V
1
OUT
+V
2
S
(Not to Scale)
NC
3
NC = NO CONNECT
TOP VIEW
GND
5
4
SHUTDOWN
SO-8
V
1
OUT
NC
2
(Not to Scale)
3
NC
GND
4
NC = NO CONNECT
TOP VIEW
+V
8
S
7
NC
6
NC
5
SHUTDOWN
TO-92
2
1 3
BOTTOM VIEW
(Not to Scale)
PIN 1 - +Vs, PIN 2 - V
, PIN 3 - GND
OUT
REV. A
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 617/329-4700 World Wide Web Site: http://www.analog.com
Fax: 617/326-8703 © Analog Devices, Inc., 1997
(V
= +2.7 V to +5.5 V, –408C ≤ TA ≤ +1258C
S
1
TMP35/TMP36/TMP37F/G–SPECIFICATIONS
unless otherwise noted)
Parameter Symbol Conditions Min Typ Max Units
ACCURACY
TMP35/TMP36/TMP37F T
TMP35/TMP36/TMP37G T
= +25°C ±1 ±2 °C
A
= +25°C ±1 ±3 °C
A
TMP35/TMP36/TMP37F Over Rated Temperature ±2 ±3 °C
TMP35/TMP36/TMP37G Over Rated Temperature ±2 ±4 °C
Scale Factor, TMP35 +10°C ≤ T
Scale Factor, TMP36 –40°C ≤ T
Scale Factor, TMP37 +5°C ≤ T
+5°C ≤ T
3.0 V ≤ +V
Load Regulation 0 µA ≤ I
Power Supply Rejection Ratio PSRR T
= +25°C 30 100 m°C/V
A
PSRR 3.0 V ≤ +V
≤ +125°C +10 +9.8/+10.2 mV/°C
A
≤ +125°C +10 +9.8/+10.2 mV/°C
A
≤ +85°C +20 +19.6/+20.4 mV/°C
A
≤ +100°C +20 +19.6/+20.4 mV/°C
A
≤ 5.5 V
S
≤ 50 µA120m°C/µA
L
≤ 5.5 V 50 m°C/V
S
Linearity 0.5 °C
Long-Term Stability T
= +150°C for 1 kHrs 0.4 °C
A
SHUTDOWN
Logic High Input Voltage V
Logic Low Input Voltage V
IH
IL
VS = 2.7 V 1.8 V
VS = 5.5 V 400 mV
OUTPUT
TMP35 Output Voltage T
TMP36 Output Voltage T
TMP37 Output Voltage T
= +25°C 250 mV
A
= +25°C 750 mV
A
= +25°C 500 mV
A
Output Voltage Range 100 2000 mV
Output Load Current I
Short-Circuit Current I
Capacitive Load Driving C
Device Turn-On Time Output within ±1°C 0.5 1 ms
L
SC
Note 2 250 µA
L
No Oscillations
100 kΩi100 pF Load
2
2
050µA
1000 10000 pF
POWER SUPPLY
Supply Range +V
Supply Current I
Supply Current (Shutdown) I
NOTES
1
Does not consider errors caused by self-heating.
2
Guaranteed but not tested.
Specifications subject to change without notice.
S
SY (ON)
SY (OFF)
2.7 5.5 V
Unloaded 50 µA
Unloaded 0.01 0.5 µA
–2–
REV. A
TMP35/TMP36/TMP37
WAFER TEST LIMITS
(VS = +5 V, GND = O V, TA = +258C, unless otherwise noted)
Parameter Symbol Conditions Min Typ Max Units
ACCURACY
Scale Factor Deviation T
Power Supply Rejection Ratio PSRR 2.7 V ≤ +V
= +25°C ±2 °C
A
≤ 5.5 V 30 m°C/V
S
SHUTDOWN
Logic High Input Voltage V
Logic Low Input Voltage V
IH
IL
VS = 2.7 V 1.8 V
VS = 5.5 V 400 mV
OUTPUT
TMP35 Output Voltage T
TMP36 Output Voltage T
TMP37 Output Voltage T
Short-Circuit Current I
SC
Device Turn-On Time Output within ±1°C 0.5 1 ms
= +25°C 250 mV
A
= +25°C 750 mV
A
= +25°C 500 mV
A
V
= 5.5 V 250 µA
S
100 kΩi100 pF Load
1
POWER SUPPLY
Supply Range V+ 2.7 5.5 V
Supply Current I
Supply Current (Shutdown) I
NOTES
Electrical tests are performed at wafer probe to the limits shown. Due to variations in assembly methods and normal yield loss, yield after packaging is not guaranteed
for standard product dice. Consult factory to negotiate specifications based on dice lot qualification through sample lot assembly and testing.
1
Guaranteed but not tested.
(ON) Unloaded at +5 V 50 µA
SY
(OFF) Unloaded at +5 V 0.5 µA
SY
DICE CHARACTERISTICS
Die Size 0.027 × 0.030 inch, 810 sq. mils
(0.685 × 0.762 mm, 0.522 sq. mm)
TRANSISTOR COUNT: 25
Substrate is connected to +V
S
1. V
OUT
1 4
32
2. GND
3. SHUTDOWN
4. +V
S
For additional DICE ordering information, refer to databook.
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the TMP35/TMP36/TMP37 features proprietary ESD protection circuitry, permanent
damage may occur on devices subjected to high energy electrostatic discharges. Therefore, proper
ESD precautions are recommended to avoid performance degradation or loss of functionality.
WARNING!
ESD SENSITIVE DEVICE
REV. A
–3–
TMP35/TMP36/TMP37
SHDN
+V
OUT
+V
S
3X
25µA
2X
Q2
1X
R1
R2
R3
7.5µA
Q3
2X
GND
Q4
Q1
10X
6X
ABSOLUTE MAXIMUM RATINGS*
Supply Voltage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . +7 V
Shutdown Pin . . . . . . . . . . . . . . GND
Output Pin . . . . . . . . . . . . . . . . . . . . . . GND # V
≤
SHUTDOWN ≤ +V
# +V
OUT
S
S
Operating Temperature Range . . . . . . . . . . –55°C to +150°C
Dice Junction Temperature . . . . . . . . . . . . . . . . . . . . . +175°C
Storage Temperature Range . . . . . . . . . . . . –65°C to +160°C
Lead Temperature (Soldering, 60 sec) . . . . . . . . . . . . +300°C
*CAUTION
1. Stresses above those listed under Absolute Maximum Ratings
may cause permanent damage to the device. This is a stress
rating only; functional operation at or above this specification is not implied. Exposure to the above maximum rating
conditions for extended periods may affect device
reliability.
2. Digital inputs are protected; however, permanent damage may
occur on unprotected units from high-energy electrostatic fields.
Keep units in conductive foam or packaging at all times until
ready to use. Use proper antistatic handling procedures.
3. Remove power before inserting or removing units from their
sockets.
Package Type u
JA
u
JC
Units
TO-92 (T9 Suffix) 162 120 °C/W
SO-8 (S Suffix) 158 43 °C/W
SOT-23 (RT Suffix) 300 180 °C/W
θJA is specified for device in socket (worst case conditions).
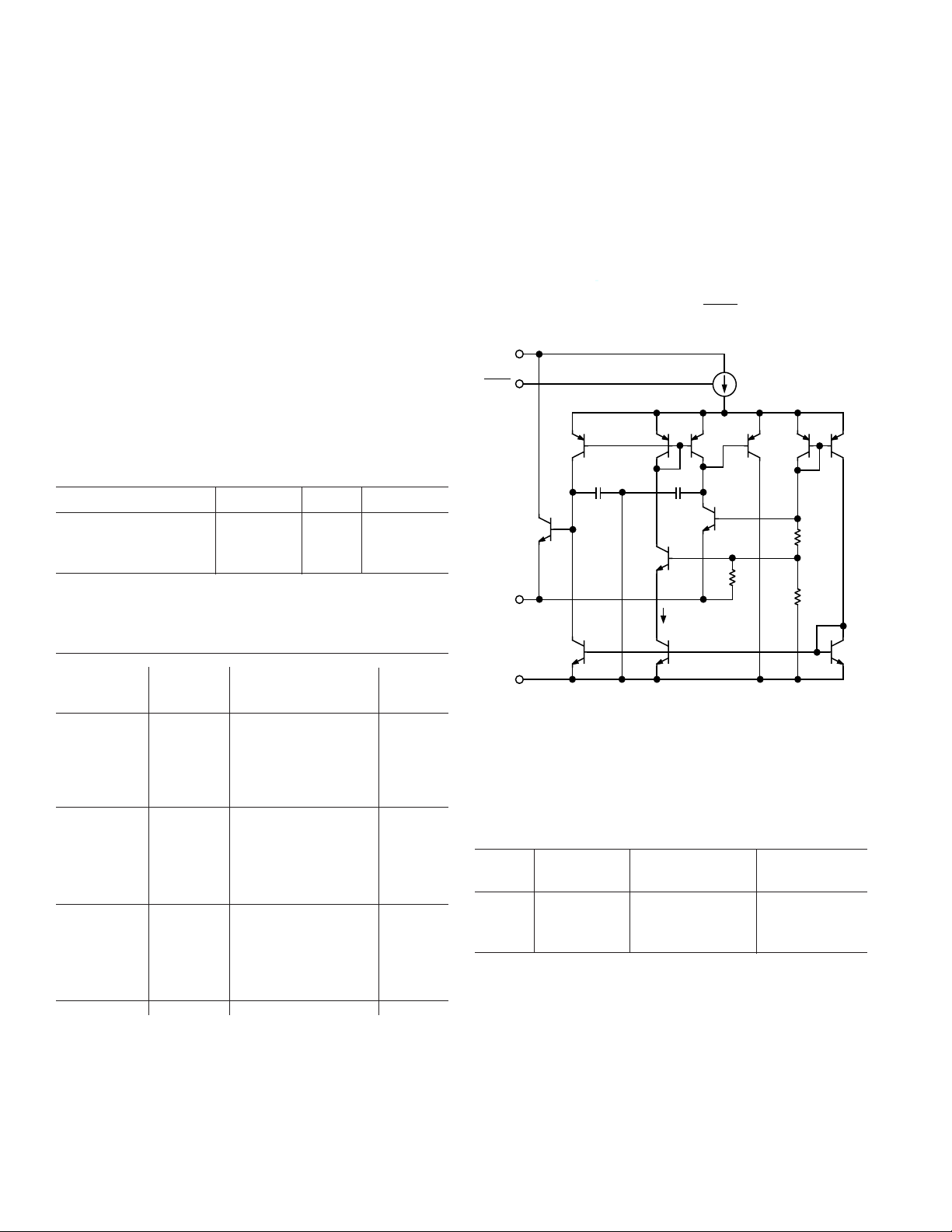
FUNCTIONAL DESCRIPTION
An equivalent circuit for the TMP3x family of micropower,
centigrade temperature sensors is shown in Figure 1. At the
heart of the temperature sensor is a bandgap core, which is
comprised of transistors Q1 and Q2, biased by Q3 to approximately 8 µA. The bandgap core operates both Q1 and Q2 at the
same collector current level; however, since the emitter area of
Q1 is 10 times that of Q2, Q1’s V
and Q2’s VBE are not equal
BE
by the following relationship:
A
∆VBE=VT× ln
E,Q1
A
E,Q2
ORDERING GUIDE
Accuracy Linear
at 258C Operating Package
Model (8C max) Temperature Range Options
TMP35FT9 ±2.0 +10°C to +125°C TO-92
TMP35GT9 ± 3.0 +10°C to +125°C TO-92
TMP35FS ±2.0 +10°C to +125°C SO-8
TMP35GS ±3.0 +10°C to +125°C SO-8
TMP35GRT
2
±3.0 +10°C to +125°C RT-5
TMP36FT9 ±2.0 –40°C to +125°C TO-92
TMP36GT9 ± 3.0 –40°C to +125°C TO-92
TMP36FS ±2.0 –40°C to +125°C SO-8
TMP36GS ±3.0 –40°C to +125°C SO-8
TMP36GRT
2
±3.0 –40°C to +125°C RT-5
TMP37FT9 ±2.0 +5°C to +100°C TO-92
TMP37GT9 ± 3.0 +5°C to +100°C TO-92
TMP37FS ±2.0 +5°C to +100°C SO-8
TMP37GS ±3.0 +5°C to +100°C SO-8
TMP37GRT
NOTES
1
SO = Small Outline; RT = Plastic Surface Mount; TO = Plastic.
2
Consult factory for availability.
2
±3.0 +5°C to +100°C RT-5
1
Figure 1. Temperature Sensor Simplified Equivalent Circuit
Resistors R1 and R2 are used to scale this result to produce the
output voltage transfer characteristic of each temperature sensor
and, simultaneously, R2 and R3 are used to scale Q1’s V
an offset term in V
. Table I summarizes the differences
OUT
between the three temperature sensors’ output characteristics:
Table I. TMP3x Output Characteristics
Offset Output Voltage Output Voltage
Sensor Voltage (V) Scaling (mV/8C) @ 258C
TMP35 0 10 250 mV
TMP36 0.5 10 750 mV
TMP37 0 20 500 mV
The output voltage of the temperature sensor is available at the
emitter of Q4, which buffers the bandgap core and provides load
current drive. Q4’s current gain, working with the available base
current drive from the previous stage, sets the short-circuit
current limit of these devices to 250 µA.
–4–
as
BE
REV. A
TMP35/TMP36/TMP37
FREQUENCY – Hz
100
0.01
20 100k100 1k 10k
31.6
10
3.16
1
0.32
0.1
0.032
POWER SUPPLY REJECTION – 8C/V
2.0
1.8
1.6
1.4
1.2
1.0
0.8
0.6
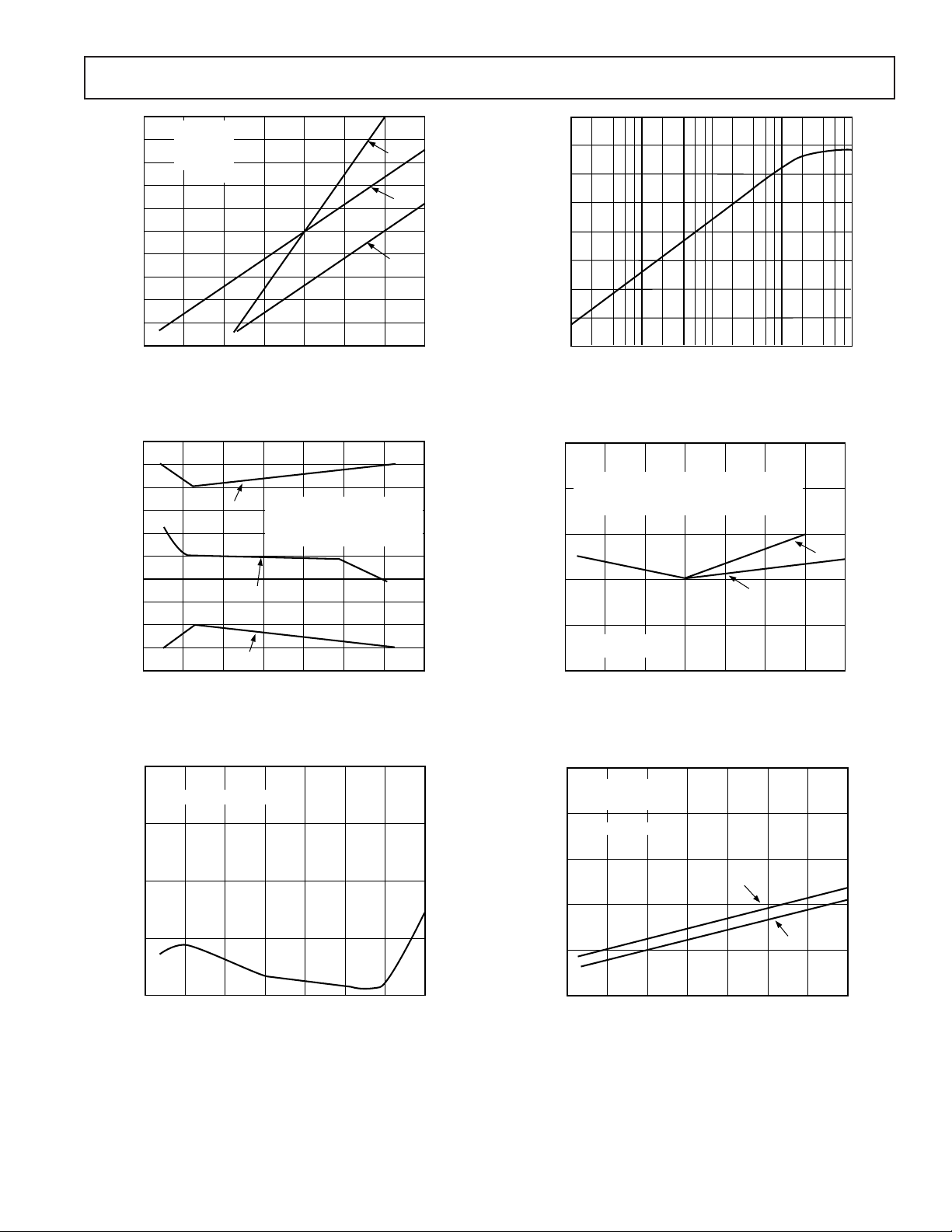
OUTPUT VOLTAGE – Volts
0.4
0.2
0
250 225 0 25 50 75 100 125
a. TMP35
b. TMP36
c. TMP37
VS = 3V
c
a
TEMPERATURE – 8C
Figure 2. Output Voltage vs. Temperature
5
4
3
a. MAXIMUM LIMIT ( G GRADE )
2
1
0
21
22
ACCURACY ERROR – 8C
23
24
25
0 20 40 60 80 100 120 140
a
b. TYPICAL ACCURACY ERROR
c. MINIMUM LIMIT ( G GRADE )
b
c
TEMPERATURE – 8C
Figure 3. Accuracy Error vs. Temperature
b
Figure 5. Power Supply Rejection vs. Frequency
5
MINIMUM SUPPLY VOLTAGE REQUIRED TO MEET
4
DATA SHEET SPECIFICATION
NO LOAD
3
b
2
1
MINIMUM SUPPLY VOLTAGE – Volts
a. TMP35/TMP36
b. TMP37
0
250 125225 0 25 50 75 100
TEMPERATURE – 8C
a
Figure 6. Minimum Supply Voltage vs. Temperature
0.4
V+ = +3V to +5.5V, NO LOAD
0.3
0.2
0.1
POWER SUPPLY REJECTION – 8C/V
0
250 125225 0 25 50 75 100
Figure 4. Power Supply Rejection vs. Temperature
REV. A
TEMPERATURE – 8C
–5–
60
a. V+ = 5V
50
40
30
SUPPLY CURRENT – µA
20
10
b. V+ = 3V
NO LOAD
a
b
250 125225 0 25 50 75 100
TEMPERATURE – 8C
Figure 7. Supply Current vs. Temperature

TMP35/TMP36/TMP37
50
TA = +25°C, NO LOAD
40
30
20
SUPPLY CURRENT – µA
10
0
07123456
SUPPLY VOLTAGE – Volts
8
Figure 8. Supply Current vs. Supply Voltage
50
a. V+ = 5V
b. V+ = 3V
40
NO LOAD
30
20
SUPPLY CURRENT – nA
10
0
250 125225 0 25 50 75
TEMPERATURE – 8C
a
b
100
Figure 9. Supply Current vs. Temperature (Shutdown = 0 V)
400
= SHUTDOWN PIN
HIGH TO LOW (3V TO 0V)
300
200
RESPONSE TIME – µs
100
0
250 125225 0 25 50 75
Figure 11. V
OUT
TEMPERATURE – 8C
Response Time for Shutdown Pin vs.
= SHUTDOWN PIN
LOW TO HIGH (0V TO 3V)
V
SETTLES WITHIN ±1°C
OUT
Temperature
1.0
0.8
0.6
0.4
0.2
0
1.0
0.8
0.6
OUTPUT VOLTAGE – Volts
0.4
0.2
0
250 2500 10050 150 200 300 350 400 450
Figure 12. V
OUT
= 25°C
T
A
V+ = 3V
SHUTDOWN =
SIGNAL
T
= 25°C
A
V+ AND SHUTDOWN =
SIGNAL
TIME – µs
Response Time to Shutdown and V+
Pins vs. Time
100
400
300
200
RESPONSE TIME – µs
100
0
250 125225 0 25 50 75
Figure 10. V
Response Time for V+ Power-Up/Power-
OUT
Down vs. Temperature
= V+ AND SHUTDOWN PINS
HIGH TO LOW (3V TO 0V)
= V+ AND SHUTDOWN PINS
LOW TO HIGH (0V TO 3V)
V
SETTLES WITHIN ±1°C
OUT
TEMPERATURE – 8C
100
–6–
110
100
90
80
70
60
50
40
30
PERCENT OF CHANGE – %
20
10
0
0
a
b
a. TMP35 SOIC SOLDERED TO .5" x .3" Cu PCB
b. TMP36 SOIC SOLDERED TO .6" x .4" Cu PCB
c. TMP35 TO-92 IN SOCKET SOLDERED TO
1" x .4" Cu PCB
100
c
200 300 400 500 600
TIME – sec
VIN = +3V, +5V
Figure 13. Thermal Response Time in Still Air
REV. A

140
a
b
FREQUENCY – Hz
2400
1000
0
10 10k100 1k
2200
2000
1600
1800
1400
1200
800
600
400
200
a. TMP35/36
b. TMP37
VOLTAGE NOISE DENSITY – nV/ Hz
120
100
a. TMP35 SOIC SOLDERED TO .5" x .3" Cu PCB
b. TMP36 SOIC SOLDERED TO .6" x .4" Cu PCB
c. TMP35 TO-92 IN SOCKET SOLDERED TO
1" x .4" Cu PCB
TMP35/TMP36/TMP37
10mV
100
90
1ms
80
60
40
TIME CONSTANT – sec
20
0
0 100 200 300 400 500 600
VIN = +3V, +5V
b
c
a
700
AIR VELOCITY – FPM
Figure 14. Thermal Response Time Constant in Forced Air
110
100
90
80
70
60
50
CHANGE – %
40
30
20
10
0
a
c
b
a. TMP35 SOIC SOLDERED TO .5" x .3" Cu PCB
b. TMP36 SOIC SOLDERED TO .6" x .4" Cu PCB
c. TMP35 TO-92 IN SOCKET SOLDERED TO
1" x .4" Cu PCB
10
0
VIN = +3V, +5V
20 30 40 50 60
TIME – sec
Figure 15. Thermal Response Time in Stirred Oil Bath
VOLT/DIVISION
10
0%
TIME/DIVISION
Figure 16. Temperature Sensor Wideband Output
Noise Voltage. Gain = 100, BW = 157 kHz
Figure 17. Voltage Noise Spectral Density vs. Frequency
APPLICATIONS SECTION
Shutdown Operation
All TMP3x devices include a shutdown capability that reduces
the power supply drain to less than 0.5 µA, maximum. This
feature, available only in the SO-8 and the SOT-23 packages, is
TTL/CMOS level compatible, provided that the temperature
sensor supply voltage is equal in magnitude to the logic supply
voltage. Internal to the TMP3x at the SHUTDOWN pin, a
pull-up current source to V
SHUTDOWN pin to be driven from an open-collector/drain
driver. A logic LOW, or zero-volt condition on the SHUTDOWN
pin, is required to turn the output stage OFF. During shutdown, the output of the temperature sensors becomes a high
impedance state where the potential of the output pin would
then be determined by external circuitry. If the shutdown feature is not used, it is recommended that the SHUTDOWN pin
be connected to V
The shutdown response time of these temperature sensors is
illustrated in Figures 10, 11 and 12.
REV. A
is connected. This permits the
IN
(Pin 8 on the SO-8, Pin 2 on the SOT-23).
IN
Mounting Considerations
If the TMP3x temperature sensors are thermally attached and
protected, they can be used in any temperature measurement
application where the maximum temperature range of the medium is between –40°C to +125°C. Properly cemented or glued
to the surface of the medium, these sensors will be within 0.01°C
of the surface temperature. Caution should be exercised, especially with TO-92 packages, because the leads and any wiring to
the device can act as heat pipes, introducing errors if the surrounding air-surface interface is not isothermal. Avoiding this
condition is easily achieved by dabbing the leads of the temperature sensor and the hookup wires with a bead of thermally conductive epoxy. This will ensure that the TMP3x die temperature
is not affected by the surrounding air temperature.
Because plastic IC packaging technology is used, excessive mechanical stress should be avoided when fastening the device with
a clamp or a screw-on heat tab. Thermally conductive epoxy or
glue, which must be electrically nonconductive, is recommended
under typical mounting conditions.
–7–

TMP35/TMP36/TMP37
These temperature sensors, as well as any associated circuitry,
should be kept insulated and dry to avoid leakage and corrosion.
In wet or corrosive environments, any electrically isolated metal
or ceramic well can be used to shield the temperature sensors.
Condensation at very cold temperatures can cause errors and
should be avoided by sealing the device, using electrically nonconductive epoxy paints or dip or any one of many printed
circuit board coatings and varnishes.
Thermal Environment Effects
The thermal environment in which the TMP3x sensors are used
determines two important characteristics: self-heating effects
and thermal response time. Illustrated in Figure 18 is a thermal
model of the TMP3x temperature sensors that is useful in understanding these characteristics.
T
P
D
C
CH
θ
J
JC
T
C
C
θ
C
CA
T
A
Figure 18. TMP3x Thermal Circuit Model
In the TO-92 package, the thermal resistance junction-to-case,
θ
, is 120°C/W. The thermal resistance case-to-ambient, θ
JC
is the difference between θ
and θ
JA
, and is determined by
JC
CA
,
the characteristics of the thermal connection. The temperature sensor’s power dissipation, represented by P
, is the
D
product of the total voltage across the device and its total supply
current (including any current delivered to the load). The rise in
die temperature above the medium’s ambient temperature is
given by:
T
= PD×θJC+θ
J
()
+T
CA
A
Thus, the die temperature rise of a TMP35 “RT” package
mounted into a socket in still air at 25°C and driven from a
+5 V supply is less than 0.04°C.
The transient response of the TMP3x sensors to a step change
in the temperature is determined by the thermal resistances and
the thermal capacities of the die, C
thermal capacity of the case, C
, and the case, CC. The
CH
, varies with the measurement
C
medium since it includes anything in direct contact with the
package. In all practical cases, the thermal capacity of the case is
the limiting factor in the thermal response time of the sensor
and can be represented by a single-pole RC time constant response. Figures 13 and 15 illustrate the thermal response time
of the TMP3x sensors under various conditions. The thermal
time constant of a temperature sensor is defined as the time
required for the sensor to reach 63.2% of the final value for a
step change in the temperature. For example, the thermal time
constant of a TMP35 “S” package sensor mounted onto a 0.5"
by 0.3" PCB is less than 50 sec in air, whereas in a stirred oil
bath the time constant is less than 3 sec.
Basic Temperature Sensor Connections
The circuit in Figure 19 illustrates the basic circuit configuration for the TMP3x family of temperature sensors. The table
shown in the figure illustrates the pin assignments of the temperature sensors for the three package types. For the SOT-23,
Pin 3 is labeled as “NC” are as Pins 2, 3, 6 and 7 on the SO-8
package. It is recommended that no electrical connections be
made to these pins. If the shutdown feature is not needed on the
SOT-23 or the SO-8 package, the SHUTDOWN pin should be
connected to V
.
S
2.7V < Vs < 5.5V
0.1µF
V
s
V
V
SHDN
OUT
V
S
TMP3x
GND
GND
SHDN
PIN ASSIGNMENTS
PACKAGE
SO-8 8 4 1 5
SOT-23-5 2 5 1 4
TO-92 1 3 2 NA
OUT
Figure 19. Basic Temperature Sensor Circuit Configuration
Note the 0.1 µF bypass capacitor on the input. This capacitor
should be a ceramic type, have very short leads (surface mount
would be preferable), and located as close a physical proximity
to the temperature sensor supply pin as practical. Since these
temperature sensors operate on very little supply current and
could be exposed to very hostile electrical environments, it is
important to minimize the effects of RFI (Radio-Frequency
Interference) on these devices. The effect of RFI on these temperature sensors in specific and analog ICs in general is manifested as abnormal dc shifts in the output voltage due to the
rectification of the high frequency ambient noise by the IC. In
those cases where the devices are operated in the presence of
high frequency radiated or conducted noise, a large value tantalum capacitor (.2.2 µF) placed across the 0.1 µF ceramic may
offer additional noise immunity.
Fahrenheit Thermometers
Although the TMP3x temperature sensors are centigrade temperature sensors, a few components can be used to convert the
output voltage and transfer characteristics to directly read Fahrenheit temperatures. Shown in Figure 20a is an example of a
simple Fahrenheit thermometer using either the TMP35 or the
TMP37. This circuit can be used to sense temperatures from
41°F to 257°F, with an output transfer characteristic of 1 mV/°F
using the TMP35, and from 41°F to 212°F using the TMP37
with an output characteristic of 2 mV/°F. This particular approach does not lend itself well to the TMP36 because of its
inherent 0.5 V output offset. The circuit is constructed with an
AD589, a 1.23 V voltage reference, and four resistors whose values
for each sensor are shown in the figure table. The scaling of the
–8–
REV. A

TMP35/TMP36/TMP37
output resistance levels was to ensure minimum output loading
on the temperature sensors. A generalized expression for the
circuit’s transfer equation is given by:
V
OUT
=
R1+R2
R1
TMP 35
()
R3
+
R3+R4
AD589
()
where: TMP35 = Output voltage of the TMP35, or the TMP37,
at the measurement temperature, T
M
, and
AD589 = Output voltage of the reference = 1.23 V.
Note that the output voltage of this circuit is not referenced to
the circuit’s common. If this output voltage were to be applied
directly to the input of an ADC, the ADC’s common should be
adjusted accordingly.
V
S
0.1mF
TMP35/37
AD589
1.23V
V
S
GND
R1
V
OUT
R2
V
OUT
R3
R4
V
S
V
S
V
GND
OUT
R1
45.3k
R2
10k
@ –408F = 18mV
V
OUT
@ 2578F = 315mV
V
@ 1mV/8F – 588F
V
OUT
0.1µF
TMP36
Figure 20b. TMP36 Fahrenheit Thermometer Version 1
At the expense of additional circuitry, the offset produced by the
circuit in Figure 20b can be avoided by using the circuit in
Figure 20c. In this circuit, the output of the TMP36 is conditioned by a single-supply, micropower op amp, the OP193.
Although the entire circuit operates from a single +3 V supply,
the output voltage of the circuit reads the temperature directly,
with a transfer characteristic of 1 mV/°F, without offset. This is
accomplished through the use of an ADM660, a supply voltage
inverter. The +3 V supply is inverted and applied to the P193’s
V– terminal. Thus, for a temperature range between –40°F and
257°F, the output of the circuit reads –40 mV to 257 mV. A
general expression for the circuit’s transfer equation is given by:
PIN ASSIGNMENTS
TCV
R1 (kV)
SENSOR
TMP35 1mV/8F 45.3 10 10 374
TMP37 2mV/8F 45.3 10 10 182
OUT
R2 (kV) R3 (kV) R4 (kV)
Figure 20a. TMP35/TMP37 Fahrenheit Thermometers
The same circuit principles can be applied to the TMP36, but
because of the TMP36’s inherent offset, the circuit uses two
less resistors as shown in Figure 20b. In this circuit, the output
voltage transfer characteristic is 1 mV/°F, but is referenced to
the circuit’s common; however, there is a 58 mV (58°F) offset
in the output voltage. For example, the output voltage of the
circuit would read 18 mV, were the TMP36 placed in –40°F
ambient environment, and 315 mV at 257°F.
OUT
=
R5+R6
V
R6
R4
1+
TMP 36
()
R3
R4
−
R3
V
S
2
Average and Differential Temperature Measurement
In many commercial and industrial environments, temperature
sensors are often used to measure the average temperature in a
building, or the difference in temperature between two locations
on a factory floor or in an industrial process. The circuits in
Figures 21a and 21b demonstrate an inexpensive approach to
average and differential temperature measurement. In Figure
21a, an OP193 is used to sum the outputs of three temperature
sensors to produce an output voltage scaled by 10 mV/°C that
represents the average temperature at three locations. The circuit can be extended to as many temperature sensors as required
as long as the circuit’s transfer equation is maintained. In this
application, it is recommended that one temperature sensor type
be used throughout the circuit; otherwise, the output voltage of
the circuit will not produce an accurate reading of the various
ambient conditions.
REV. A
–9–

TMP35/TMP36/TMP37
V
S
V
10mF/0.1mF
TMP36
OUT
GND
ELEMENT
R2 258.6k
R4 10k
R5 47.7k
R6 10k
50kV
R2
50kV
+3V
R1
C1
10mF
TMP36
NC
10mF
R3 R4
2
1
2
4
3
R5
R6
8
ADM660
3
5
6
7
Figure 20c. TMP36 Fahrenheit Thermometer Version 2
8
OP193
4
0.1mF
–3V
10mF
NC
V
@ 1mV/8F
6
OUT
–408F # T
# 2578F
A
7
OP193
< 5.5V
S
4
0.1mF
V
TEMP(AVG)
@ 10mV/8C FOR TMP35/36
@ 20mV/8C FOR TMP35/36
1
R5
100kV
R6
7.5kV
TMP3x
R1
300kV
R2
300kV
2.7V < +V
2
3
TMP3x
FOR R1 = R2 = R3 = R;
= 1 (TMP3x1 + TMP3x2+ TMP3x3)
TEMP(AVG)
3
3
TMP3x
R3
300kV
7.5kV
V
R5 = R1
R4
R4 = R6
Figure 21a. Configuring Multiple Sensors for Average
Temperature Measurements
The circuit in Figure 21b illustrates how a pair of TMP3x sensors
can be used with an OP193 configured as a difference amplifier
to read the difference in temperature between two locations. In
these applications, it is always possible that one temperature
sensor would be reading a temperature below that of the other
sensor. To accommodate this condition, the output of the OP193
is offset to a voltage at one-half the supply via R5 and R6. Thus,
the output voltage of the circuit is measured relative to this point,
as shown in the figure. Using the TMP36, the output voltage of
the circuit is scaled by 10 mV/°C. To minimize error in the difference between the two measured temperatures, a common, readily
available thin-film resistor network is used for R1–R4.
< 5.5V
2.7V < V
S
0.1mF
0.1mF
0° # TA # 125°C
TMP36
@T1
TMP36
@T2
*R1–R4, CADDOCK T914–100k–100, OR EQUIVALENT
R8
25kV
R3*
R9
25kV
CENTERED AT
R4*
R5
100kV
2
3
1mF
R6
100kV
OP193
R2*R1*
0.1mF
7
6
4
= T2 – T1 @ 10mV/8C
V
OUT
CENTERED AT
V
R7
100kV
V
2
OUT
S
Figure 21b. Configuring Multiple Sensors for Differential
Temperature Measurements
–10–
REV. A

TMP35/TMP36/TMP37
Microprocessor Interrupt Generator
These inexpensive temperature sensors can be used with a voltage reference and an analog comparator to configure an interrupt generator useful in microprocessor applications. With the
popularity of fast 486 and Pentium* laptop computers, the need
to indicate a microprocessor over-temperature condition has
grown tremendously. The circuit illustrated in Figure 22 demonstrates one way to generate an interrupt using a TMP35, a
CMP402 analog comparator, and a REF191, a 2 V precision
voltage reference.
The circuit has been designed to produce a logic HIGH interrupt signal if the microprocessor temperature exceeds 80°C.
This 80°C trip point was arbitrarily chosen (final value set by
the microprocessor thermal reference design) and is set using an
R3-R4 voltage divider of the REF191’s output voltage. Since
the output of the TMP35 is scaled by 10 mV/°C, the voltage at
the CMP402’s inverting terminal is set to 0.8 V.
Since temperature is a slowly moving quantity, the possibility
for comparator chatter exists. To avoid this condition, hysteresis
is used around the comparator. In this application, a hysteresis
of 5°C about the trip point was arbitrarily chosen; the ultimate
value for hysteresis should be determined by the end application. The output logic voltage swing of the comparator with R1
and R2 determine the amount of comparator hysteresis. Using a
3.3 V supply, the output logic voltage swing of the CMP402 is
2.6 V; thus, for a hysteresis of 5°C (50 mV @ 10 mV/°C), R1 is
set to 20 kΩ and R2 is set to 1 MΩ. An expression for this circuit’s
hysteresis is given by:
R1
V
=
HYS
V
()
LOGIC SWING,CMP402
R2
Since the likelihood that this circuit would be used in close
proximity to high speed digital circuits, R1 is split into equal
values and a 1000 pF is used to form a low-pass filter on the
output of the TMP35. Furthermore, to prevent high frequency
noise from contaminating the comparator trip point, a 0.1 µF
capacitor is used across R4.
*All trademarks are the property of their respective holders.
3.3V
Thermocouple Signal Conditioning with Cold-Junction
Compensation
The circuit in Figure 23 conditions the output of a Type K
thermocouple, while providing cold-junction compensation, for
temperatures between 0°C and 250°C. The circuit operates
from single +3.3 V to +5.5 V supplies and has been designed to
produce an output voltage transfer characteristic of 10 mV/°C.
A Type K thermocouple exhibits a Seebeck coefficient of
approximately 41 µV/°C; therefore, at the cold junction, the
TMP35, with a temperature coefficient of 10 mV/°C, is used
with R1 and R2 to introduce an opposing cold-junction temperature coefficient of –41 µV/°C. This prevents the isothermal,
cold-junction connection between the circuit’s PCB tracks and
the thermocouple’s wires from introducing an error in the measured temperature. This compensation works extremely well for
circuit ambient temperatures in the range of 20°C to 50°C.
Over a 250°C measurement temperature range, the thermocouple produces an output voltage change of 10.151 mV. Since
the required circuit’s output full-scale voltage is 2.5 V, the gain
of the circuit is set to 246.3. Choosing R4 equal to 4.99 kΩ sets
R5 equal to 1.22 MΩ. Since the closest 1% value for R5 is
1.21 MΩ, a 50 kΩ potentiometer is used with R5 for fine trim of
the full-scale output voltage. Although the OP193 is a superior
single-supply, micropower operational amplifier, its output stage
is not rail-to-rail; as such, the 0°C output voltage level is 0.1 V. If
this circuit were to be digitized by a single-supply ADC, the ADC’s
common should be adjusted to 0.1 V accordingly.
Using TMP3x Sensors in Remote Locations
In many industrial environments, sensors are required to operate in the presence of high ambient noise. These noise sources
take on many forms; for example, SCR transients, relays, radio
transmitters, arc welders, ac motors, et cetera. They may also be
used at considerable distance from the signal conditioning circuitry. These high noise environments are very typically in the
form of electric fields, so the voltage output of the temperature
sensor can be susceptible to contamination from these noise
sources.
REV. A
0.1mF
V
TMP35
GND
S
V
OUT
R5
100k
REF191
3
R1A
10kV
0.1mF
2
6
4
1mF
1
C1 = CMP402
4
C
L
1000pF
R3
16kV
R1B
10kV
R4
10kV
V
REF
0.1mF
Figure 22. Pentium Over-Temperature Interrupt Generator
–11–
R2
1MV
0.1mF
3
6
5
4
C1
13
2
14
<808C
INTERRUPT
>808C

TMP35/TMP36/TMP37
3.3V < V
< 5.5V
S
TYPE K
THERMO
COUPLE
0.1mF
CHROMEL
ALUMEL
08C # T # 2508C
V
S
TMP35
GND
COLD
JUNCTION
ISOTHERMAL
BLOCK
V
OUT
R1*
24.9kV
CU
CU
R2*
102V
R3
R4
10MV
4.99kV
5%
NOTE: ALL RESISTORS 1%
UNLESS OTHERWISE NOTED
2
3
7
OP193
R5*
1.21MV
0.1mF
6
4
50kV
R6
100kV
5%
P1
V
0 – 2.5V
OUT
Figure 23. A Single-Supply, Type K Thermocouple Signal Conditioning Circuit with Cold-Junction Compensation
Illustrated in Figure 24 is a way to convert the output voltage of
a TMP3x sensor into a current to be transmitted down a long
twisted-pair shielded cable to a ground referenced receiver. The
temperature sensors do not possess the capability of high output
current operation; thus, a garden variety PNP transistor is used
to boost the output current drive of the circuit. As shown in the
table, the values of R2 and R3 were chosen to produce an arbitrary full-scale output current of 2 mA. Lower values for the
full-scale current are not recommended. The minimum-scale
output current produced by the circuit could be contaminated
by nearby ambient magnetic fields operating in vicinity of the
circuit/cable pair. Because of the use of an external transistor,
the minimum recommended operating voltage for this circuit is
+5 V. Note, to minimize the effects of EMI (or RFI) both the
circuit’s and the temperature sensor’s supply pins are bypassed
with good quality, ceramic capacitors.
A Temperature to 4–20 mA Loop Transmitter
In many process control applications, two-wire transmitters are
used to convey analog signals through noisy ambient environments. These current transmitters use a “zero-scale” signal
current of 4 mA that can be used to power the transmitter’s
signal conditioning circuitry. The “full-scale” output signal in
these transmitters is 20 mA.
A circuit that transmits temperature information in this fashion
is illustrated in Figure 25. Using a TMP3x as the temperature
sensor, the output current is linearly proportional to the temperature of the medium. The entire circuit operates from the
+3 V output of the REF193. The REF193 requires no external
trimming for two reasons: (1) the REF193’s tight initial output
voltage tolerance and (2) the low supply current of TMP3x, the
OP193 and the REF193. The entire circuit consumes less than
3 mA from a total budget of 4 mA. The OP193 regulates the
output current to satisfy the current summation at the noninverting node of the OP193. A generalized expression for the
KCL equation at the OP193’s Pin 3 is given by:
I
=
OUT
R 7
×
R1
TMP 3x ×R3
1
× R3
V
REF
+
R2
For each of the three temperature sensors, the table below illustrates the values for each of the components, P1, P2 and R1–R4:
0.1mF
0.01mF
R1
4.7kV
TMP3x
+5V
2N2907
V
S
V
OUT
V
OUT
R3
GND
SENSOR R2 R3
TMP35 634 634
TMP36 887 887
TMP37 1k 1k
R2
TWISTED PAIR
BELDEN TYPE 9502
OR EQUIVALENT
Figure 24. A Remote, Two-Wire Boosted Output Current
Temperature Sensor
Table II. Circuit Element Values for Loop Transmitter
Sensor R1(V) P1(V) R2(V) P2(V) R3(V) R4(V)
TMP35 97.6 k 5 k 1.58 M 100 k 140 k 56.2 k
TMP36 97.6 k 5 k 931 k 50 k 97.6 k 47 k
TMP37 97.6 k 5 k 10.5 k 500 84.5 k 8.45 k
–12–
REV. A

TMP35/TMP36/TMP37
The 4 mA offset trim is provided by P2, and P1 provides the
circuit’s full-scale gain trim at 20 mA. These two trims do not
interact because the noninverting input of the OP193 is held at
a virtual ground. The zero-scale and full-scale output currents
of the circuit are adjusted according to the operating temperature range of each temperature sensor. The Schottky diode, D1,
is required in this circuit to prevent loop supply power-on transients from pulling the noninverting input of the OP193 more
than 300 mV below its inverting input. Without this diode, such
transients could cause phase reversal of the operational amplifier
and possible latchup of the transmitter. The loop supply voltage
compliance of the circuit is limited by the maximum applied
input voltage to the REF193 and is from +9 V to +18 V.
A Temperature to Frequency Converter
Another common method of transmitting analog information
from a remote location is to convert a voltage to an equivalent in
the frequency domain. This is readily done with any of the low
cost, monolithic voltage-to-frequency converters (VFCs) available. These VFCs feature a robust, open-collector output transistor for easy interfacing to digital circuitry. The digital signal
produced by the VFC is less susceptible to contamination from
external noise sources and line voltage drops because the only
important information is the frequency of the digital signal. As
long as the conversions between temperature and frequency are
done accurately, the temperature data from the sensors can be
reliably transmitted.
The circuit in Figure 26 illustrates a method by which the outputs of these temperature sensors can be converted to a frequency using the AD654. The output signal of the AD654 is a
square wave that is proportional to the dc input voltage across
Pins 4 and 3. The transfer equation of the circuit is given by:
f
OUT
V
=
− V
TMP
10 × RT×C
OFFSET
()
T
+5V
*
C
T
7
6
8
AD654
2
5
NB: ATTA (min),
*
RT & CT – SEE TABLE
T
1.7nF
1.8nF
2.1nF
R
PU
5kV
1
f
OUT
f
= 0Hz
OUT
10mF/0.1mF
TMP3x
100kV
P2
V
S
V
OUT
GND
R
*
T
+5V
R
OFF1
470V
SENSOR R
TMP35
TMP36
TMP37
0.1mF
4
3
R1
P1
f
OUT
OFFSET
R
OFF2
10V
(R1 + P1) C
T
11.8kV + 500V
16.2kV + 500V
18.2kV + 1kV
Figure 26. A Temperature to Frequency Converter
An offset trim network (f
circuit to set f
at 0 Hz when the temperature sensor’s mini-
OUT
OFFSET ) is included with this
OUT
mum output voltage is reached. Potentiometer P1 is required to
calibrate the absolute accuracy of the AD654. The table in the
figure illustrates the circuit element values for each of the three
sensors. The nominal offset voltage required for 0 Hz output
from the TMP35 is 50 mV; for the TMP36 and TMP37, the
offset voltage required is 100 mV. In all cases for the circuit
values shown, the output frequency transfer characteristic of the
circuit was set at 50 Hz/°C. At the receiving end, a frequencyto-voltage converter (FVC) can be used to convert the frequency back to a dc voltage for further processing. One such
FVC is the AD650.
For complete information on the AD650 and AD654, please
consult the individual data sheets for those devices.
REV. A
TMP3x
V
S
GND
R1*
V
OUT
* SEE TEXT
FOR VALUES
P1*
20mA
ADJUST
R3*
R2*
P2*
4mA
ADJUST
3
2
D1
R4*
D1 : HP5082–2810
A1 : OP193
+3V
6
REF193
1mF
0.1mF
7
4
R5
100kV
4
R6
100kV
2
R7
100V
Figure 25. A Temperature to 4-to-20 mA Loop Transmitter
–13–
Q1
2N1711
I
L
V
LOOP
+9V TO +18V
V
OUT
R
L
250V

TMP35/TMP36/TMP37
Driving Long Cables or Heavy Capacitive Loads
Although the TMP3x family of temperature sensors is capable
of driving capacitive loads up to 10,000 pF without oscillation,
output voltage transient response times can be improved with
the use of a small resistor in series with the output of the temperature sensor, as shown in Figure 27. As an added benefit,
this resistor forms a low-pass filter with the cable’s capacitance,
which helps to reduce bandwidth noise. Since the temperature
sensor is likely to be used in environments where the ambient
noise level can be very high, this resistor helps to prevent rectification by the devices of the high frequency noise. The combination of this resistor and the supply bypass capacitor offers the
best protection.
+V
S
750V
V
0.1mF
TMP3x
GND
OUT
LONG CABLE OR
HEAVY CAPACITIVE
LOADS
Figure 27. Driving Long Cables or Heavy Capacitive Loads
Commentary on Long-Term Stability
The concept of long-term stability has been used for many years
to describe by what amount an IC’s parameter would shift during its lifetime. This is a concept that has been typically applied
to both voltage references and monolithic temperature sensors.
Unfortunately, integrated circuits cannot be evaluated at room
temperature (25°C) for 10 years or so to determine this shift. As
a result, manufacturers very typically perform accelerated lifetime testing of integrated circuits by operating ICs at elevated
temperatures (between 125°C and 150°C) over a shorter period
of time (typically, between 500 and 1000 hours).
As a result of this operation, the lifetime of an integrated circuit
is significantly accelerated due to the increase in rates of reaction within the semiconductor material. A well-understood, and
universal, model used by the semiconductor industry, that
relates the change in rates of reaction to a change in elevated
temperatures, is the Arrhenius model. From the Arrhenius
model, an acceleration factor can be calculated and applied to
the parameter specified. For example, this acceleration factor
can be used to reduce a temperature sensor’s long-term stability
(e.g., 0.4°C after 1000 hours at T
= 150°C) to an observed
J
shift in that parameter at 25°C. For any semiconductor device,
the acceleration factor is expressed as:
F = exp
E
1
a
×
k
T1
1
−
T 2
where F = Calculated acceleration factor;
E
= Activation energy in eV = 0.7 eV;
a
k = Boltzmann’s constant = 8.63 × 10
T1 = Test temperature in Kelvin, T
–5
eV/K;
= 150°C = 423.15 K;
J
and
T2 = Desired operating temperature in Kelvin,
T
= 25°C = 298.15 K
J
For example, if the desired operating temperature of an IC is
25°C and has been subjected to test temperature of 150°C, the
acceleration factor is:
F = 3.23 × 10
−4
With this background information, the TMP3x family’s longterm stability can be mapped to what its equivalent observed
shift would be at T
= 25°C. As quoted in the data sheet, the
A
long-term stability of these temperature sensors after 1000 hours
at 150°C is 0.4°C. This shift is equivalent to 0.01°C/day at
T
= 150°C. To determine what the observed shift would be at
J
T
= 25°C is a matter of applying the acceleration factor calcu-
A
lated above to this result:
0.01°C / day ×3.23 ×10−4=0.003m°C / day @25°C
Thus, if any of the TMP3x devices were to be used at 25°C, the
observed shift would be no more than 0.003 m°C per day, or
0.1 m°C per month. Calculating the observed shift for any other
operating temperature is simply a matter of calculating a new
acceleration factor.
–14–
REV. A

OUTLINE DIMENSIONS
Dimensions shown in inches and (mm).
TMP35/TMP36/TMP37
3-Lead Plastic Package
(TO-92)
0.135
(3.43)
MIN
SEATING
PLANE
0.500
(12.70)
MIN
0.105 (2.66)
0.095 (2.42)
0.105 (2.66)
0.080 (2.42)
0.105 (2.66)
0.080 (2.42)
123
BOTTOM VIEW
0.205 (5.20)
0.175 (4.96)
0.210 (5.33)
0.170 (4.38)
0.050
(1.27)
MAX
0.019 (0.482)
0.016 (0.407)
SQUARE
0.055 (1.39)
0.045 (1.15)
0.165 (4.19)
0.125 (3.94)
0.1574 (4.00)
0.1497 (3.80)
0.0098 (0.25)
0.0040 (0.10)
0.0669 (1.70)
0.0590 (1.50)
PIN 1
0.0512 (1.30)
0.0354 (0.90)
0.0059 (0.15)
0.0019 (0.05)
PIN 1
SEATING
PLANE
8-Lead SOIC
(SO-8)
0.1968 (5.00)
0.1890 (4.80)
8
5
0.2440 (6.20)
41
0.2284 (5.80)
0.0688 (1.75)
0.0532 (1.35)
0.0500
(1.27)
BSC
0.0192 (0.49)
0.0138 (0.35)
0.0098 (0.25)
0.0075 (0.19)
5-Lead Surface Mount
RT-5 (SOT-23 Type)
0.1181 (3.00)
0.1102 (2.80)
4 5
0.1181 (3.00)
1 3
2
0.0748 (1.90)
BSC
0.0197 (0.50)
0.0138 (0.35)
0.1024 (2.60)
0.0374 (0.95) BSC
0.0571 (1.45)
0.0374 (0.95)
SEATING
PLANE
0.0196 (0.50)
0.0099 (0.25)
8°
0°
0.0500 (1.27)
0.0160 (0.41)
10°
0°
x 45°
0.0079 (0.20)
0.0031 (0.08)
0.0217 (0.55)
0.0138 (0.35)
REV. A
–15–

C2116a–6–6/97
–16–
PRINTED IN U.S.A.
 Loading...
Loading...