

Low Noise, High Throughput
a
FEATURES
24-Bit Sigma-Delta ADC
16 Bits p-p Resolution at 800 Hz Output Rate
Programmable Output Rates up to 6.4 kHz
Programmable Gain Front End
60.0015% Nonlinearity
Buffered Differential Inputs
Programmable Filter Cutoffs
FAST
Step™* Mode for Channel Sequencing
Single Supply Operation
APPLICATIONS
Process Control
PLCs/DCS
Industrial Instrumentation
24-Bit Sigma-Delta ADC
AD7731
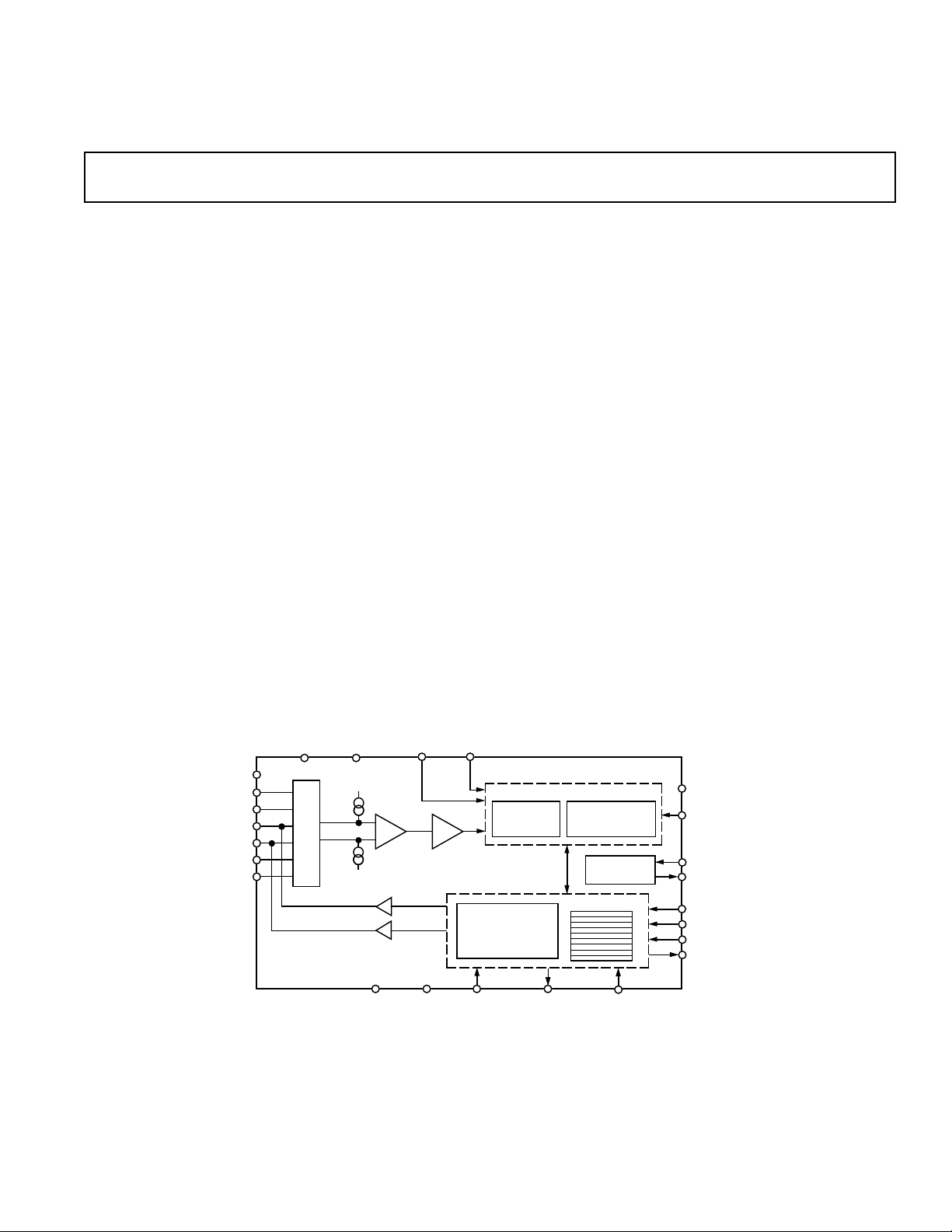
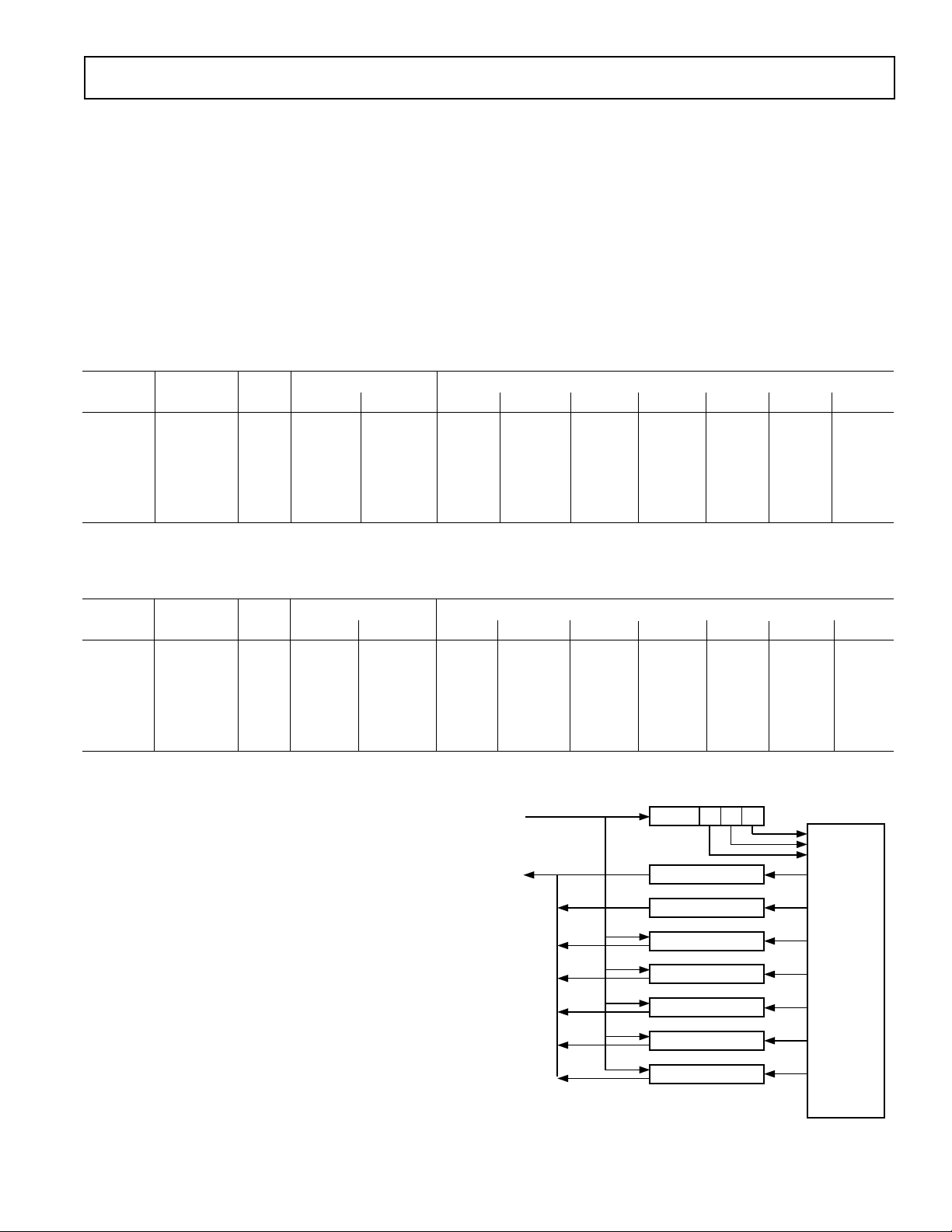
GENERAL DESCRIPTION
The AD7731 is a complete analog front-end for process control
applications. The device has a proprietary programmable gain
front end that allows it to accept a range of input signal ranges,
including low level signals, directly from a transducer. The sigmadelta architecture of the part consists of an analog modulator
and a low pass programmable digital filter, allowing adjustment
of filter cutoff, output rate and settling time.
The part features three buffered differential programmable gain
analog inputs (which can be configured as five pseudo-differential
inputs), as well as a differential reference input. The part operates from a single +5 V supply and accepts seven unipolar analog input ranges: 0 to +20 mV, +40 mV, +80 mV, +160mV,
+320 mV, +640 mV and +1.28 V, and seven bipolar ranges:
±20 mV, ±40 mV, ± 80 mV, ±160 mV, ±320 mV, ±640 mV and
±1.28 V. The peak-to-peak resolution achievable directly from
the part is 16 bits at an 800 Hz output rate. The part can switch
between channels with 1 ms settling time and maintain a performance level of 13 bits of peak-to-peak resolution.
The serial interface on the part can be configured for three-wire
operation and is compatible with microcontrollers and digital
signal processors. The AD7731 contains self-calibration and
system calibration options and features an offset drift of less
than 5 nV/°C and a gain drift of less than 2ppm/°C.
The part is available in a 24-lead plastic DIP, a 24-lead SOIC
and 24-lead TSSOP package.
FUNCTIONAL BLOCK DIAGRAM
AV
DD
NC
AIN1
AIN2
AIN3
AIN4
AIN5
AIN6
*FASTStep is a trademark of Analog Devices, Inc.
100nA
MUX
100nA
DV
AV
AGND
DD
DD
BUFFER
REF IN(–)
DGNDAGND
REF IN(+)
PGA
SERIAL INTERFACE
AND CONTROL LOGIC
MICROCONTROLLER
REV. 0
Information furnished by Analog Devices is believed to be accurate and
reliable. However, no responsibility is assumed by Analog Devices for its
use, nor for any infringements of patents or other rights of third parties
which may result from its use. No license is granted by implication or
otherwise under any patent or patent rights of Analog Devices.
AD7731
SIGMA-DELTA A/D CONVERTER
SIGMA-
DELTA
MODULATOR
CALIBRATION
POL
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.
Tel: 617/329-4700 World Wide Web Site: http://www.analog.com
Fax: 617/326-8703 © Analog Devices, Inc., 1997
PROGRAMMABLE
REGISTER BANK
RDY
DIGITAL
FILTER
CLOCK
GENERATION
RESET
STANDBY
SYNC
MCLK IN
MCLK OUT
SCLK
CS
DIN
DOUT
(AVDD = +5 V, DVDD = +3 V or +5 V; REF IN(+) = +2.5 V; REFIN(–) = AGND; AGND =
AD7731–SPECIFICA TIONS
Parameter B Version
STATIC PERFORMANCE (CHP = 0)
No Missing Codes
Output Noise and Update Rates
Integral Nonlinearity 15 ppm of FSR max
Offset Error
Offset Drift vs. Temperature
Offset Drift vs. Time
Positive Full-Scale Error
Positive Full-Scale Drift vs. Temp
Positive Full-Scale Drift vs. Time
Gain Error
Gain Drift vs. Temperature
Gain Drift vs. Time
Bipolar Negative Full-Scale Error
Negative Full-Scale Drift vs. Temp
Power Supply Rejection
Power Supply Rejection
Common-Mode Rejection (CMR)
2, 9
2
2
2
2
5
2, 6
2, 7, 8
5
2, 7, 10
5
2
2, 7
11
11
11
24 Bits min SKIP = 0
See Tables I and II
See Note 4 Offset Error and Offset Drift Refer to Both
0.5 µV/°C typ Input Range = 20 mV, 40 mV, 80 mV, 160 mV
1/2/5 µV/°C typ Input Range = 320 mV/640 mV/1.28 V
2.5 µV/1000 Hr
See Note 4
0.6 µV/°C typ Input Range = 20 mV, 40 mV, 80 mV, 160 mV
1.5/3/6 µV/°C typ Input Range = 320 mV/640 mV/1.28 V
3 µV/1000 Hr
See Note 4
2 ppm/°C typ
10 ppm/1000 Hr
See Note 4
1 µV/°C typ
90 dB typ Input Range = 20 mV
60 dB typ Input Range = 1.28 V
DGND = 0 V; f
1
On AIN 95 dB typ At DC. Input Range = 20 mV
On AIN 85 dB typ At DC. Input Range = 1.28 V
On REF IN 120 dB typ
Analog Input DC Bias Current
Analog Input DC Bias Current Drift
Analog Input DC Offset Current
2
2
2
60 nA max
150 pA/°C typ
30 nA max
Analog Input DC Offset Current Drift2100 pA/°C typ
STATIC PERFORMANCE (CHP = 1)
2
No Missing Codes 24 Bits min
Output Noise and Update Rates See Tables III and IV
Integral Nonlinearity 15 ppm of FSR max
Offset Error See Note 4 Offset Error and Offset Drift Refer to Both
Offset Drift vs. Temperature 5 nV/°C typ Unipolar Offset and Bipolar Zero Errors
Offset Drift vs. Time
Positive Full-Scale Error
Positive Full-Scale Drift vs. Temp
Positive Full-Scale Drift vs. Time
Gain Error
9
Gain Drift vs. Temperature
Gain Drift vs. Time
5
6
7, 8
5
7, 10
5
25 nV/1000 Hr typ
See Note 4
2 ppm of FS/°C max
10 ppm of FS/1000 Hr
See Note 4
2 ppm/°C max
10 ppm/1000 Hr
Bipolar Negative Full-Scale Error See Note 4
Negative Full-Scale Drift vs. Temp 2 ppm of FS/°C max
Power Supply Rejection
Power Supply Rejection
Common-Mode Rejection (CMR)
11
11
11
110 dB typ Input Range = 20 mV
85 dB typ Input Range = 1.28 V
On AIN 110 dB typ At DC. Input Range = 20 mV
On AIN 85 dB typ At DC. Input Range = 1.28 V
On REF IN 120 dB typ
Analog Input DC Bias Current 50 nA max
Analog Input DC Bias Current Drift 100 pA/°C typ
Analog Input DC Offset Current 10 nA max
Analog Input DC Offset Current Drift 50 pA/°C typ
= 4.9152 MHz. All specifications T
CLK IN
MIN
to T
Units Conditions/Comments
3
unless otherwise noted.)
MAX
ANALOG INPUTS/REFERENCE INPUTS
Normal Mode 50 Hz/60 Hz Rejection
Common-Mode 50 Hz/60 Hz Rejection
Analog Inputs
Differential Input Voltage Ranges
2
2
12
88 dB min 50 Hz/60 Hz ±1 Hz. SKIP = 0
120 dB min 50 Hz/60 Hz ±1 Hz. SKIP = 0
Assuming 2.5 V or 5 V Reference with HIREF
Bit Set Appropriately
0 to +20 or ±20 mV nom RN2, RN1, RN0 of Mode Register = 0, 0, 1
0 to +40 or ±40 mV nom RN2, RN1, RN0 of Mode Register = 0, 1, 0
0 to +80 or ±80 mV nom RN2, RN1, RN0 of Mode Register = 0, 1, 1
0 to +160 or ±160 mV nom RN2, RN1, RN0 of Mode Register = 1, 0, 0
0 to +320 or ±320 mV nom RN2, RN1, RN0 of Mode Register = 1, 0, 1
0 to +640 or ±640 mV nom RN2, RN1, RN0 of Mode Register = 1, 1, 0
0 to +1.28 or ±1.28 V nom RN2, RN1, RN0 of Mode Register = 1, 1, 1
–2–
REV. 0
AD7731
Parameter B Version
Absolute/Common-Mode Voltage
13
AGND + 1.2 V V min
AV
1
– 0.95 V V max
DD
Units Conditions/Comments
Reference Input
REF IN(+) – REF IN (–) Voltage +2.5 V nom HIREF Bit of Mode Register = 0
REF IN(+) – REF IN (–) Voltage +5 V nom HIREF Bit of Mode Register = 1
Reference DC Input Current 5.5 µA max HIREF Bit of Mode Register = 0
Reference DC Input Current 10 µA max HIREF Bit of Mode Register = 1
Absolute/Common-Mode Voltage
14
AGND – 30 mV V min
+ 30 mV V max
AV
DD
NO REF Trigger Voltage 0.3 V min NO REF Bit Active If VREF Below This Voltage
0.65 V max NO REF Bit Inactive If VREF Above This Voltage
LOGIC INPUTS
Input Current ±10 µA max
All Inputs Except SCLK and MCLK IN
, Input Low Voltage 0.8 V max DVDD = +5 V
V
INL
, Input Low Voltage 0.4 V max DVDD = +3 V
V
INL
, Input High Voltage 2.0 V min
V
INH
SCLK Only (Schmitt Triggered Input)
V
T+
V
T+
V
T–
V
T–
– V
V
T+
T–
– V
V
T+
T–
1.4/3 V min/V max DVDD = +5 V
0.95/2.5 V min/V max DVDD = +3 V
0.8/1.4 V min/V max DVDD = +5 V
0.4/1.1 V min/V max DVDD = +3 V
0.4/0.85 V min/V max DVDD = +5 V
0.4/0.8 V min/V max DVDD = +3 V
MCLK IN Only
, Input Low Voltage 0.8 V max DVDD = +5 V
V
INL
, Input Low Voltage 0.4 V max DVDD = +3 V
V
INL
, Input High Voltage 3.5 V min DVDD = +5 V
V
INH
V
, Input High Voltage 2.5 V min DVDD = +3 V
INH
LOGIC OUTPUTS (Including MCLK OUT)
, Output Low Voltage 0.4 V max I
V
OL
, Output Low Voltage 0.4 V max I
V
OL
, Output High Voltage 4.0 V min I
V
OH
, Output High Voltage DVDD – 0.6 V V min I
V
OH
Floating State Leakage Current ±10 µA max
Floating State Output Capacitance
TRANSDUCER BURNOUT
3
17
6 pF typ
= 800 µA Except for MCLK OUT15.
SINK
16
= +5 V
V
DD
= 100 µA Except for MCLK OUT15.
SINK
16
= +3 V
V
DD
= 200 µA Except for MCLK OUT15.
SOURCE
16
= +5 V
V
DD
= 100 µA Except for MCLK OUT15.
SOURCE
16
= +3 V
V
DD
AIN1(+) Current –100 nA nom
AIN1(–) Current 100 nA nom
Initial Tolerance @ 25°C ±10 % typ
Drift 0.1 %/°C typ
SYSTEM CALIBRATION
Positive Full-Scale Calibration Limit
Negative Full-Scale Calibration Limit
Offset Calibration Limit
Input Span
19
19
18
1.05 × FS V max FS Is the Nominal Full-Scale Voltage (20 mV,
18
–1.05 × FS V max
40 mV, 80 mV, 160 mV, 320 mV, 640 mV, 1.28 V)
–1.05 × FS V min
0.8 × FS V min
2.1 × FS V max
POWER REQUIREMENTS
Power Supply Voltages
– AGND Voltage +5 V nom
AV
DD
Voltage +2.7 to +5.25 V min to V max With AGND = 0 V
DV
DD
Power Supply Currents External MCLK. Digital I/Ps = 0 V or DV
AVDD Current (Normal Mode) 10.3 mA max
Current (Normal Mode) 1.7 mA max DVDD of 2.7 V to 3.3 V
DV
DD
Current (Normal Mode) 3.2 mA max DVDD of 4.75 V to 5.25 V
DV
DD
+ DVDD Current (Standby Mode) 25 µA max Typically 10 µA. External MCLK IN = 0 V or DV
AV
DD
Power Dissipation AV
DD
= DV
= +5 V. Digital I/Ps = 0 V or DV
DD
Normal Mode 67.5 mW max
Standby Mode 125 µW max Typically 50µW. External MCLK IN = 0 V or DV
DD
DD
DD
DD
–3–REV. 0
AD7731
NOTES
1
Temperature Range: –40°C to +85°C.
2
Sample tested during initial release.
3
No missing codes performance with CHP = 0 and SKIP = 1 is 22 bits.
4
The offset (or zero) numbers with CHP = 0 can be up to 1 mV precalibration. Internal zero-scale calibration reduces this to 2 µV typical. Offset numbers with CHP = 1 are typically
3 µV precalibration. Internal zero-scale calibration reduces this by about 1 µV. System zero-scale calibration reduces offset numbers with CHP = 0 and CHP = 1 to the order of the
noise. Gain errors can be up to 3000 ppm precalibration with CHP = 0 and CHP = 1. Performing internal full-scale calibrations on all input ranges except the 20 mV and 40 mV input
range reduces the gain error to less than 100 ppm. When operating on the 20 mV or 40mV range, an internal full-scale calibration should be performed on the 80 mV input range with
a resulting gain error of less than 250 ppm. System full-scale calibration reduces the gain error on all input ranges to the order of the noise. Positive and Negative Full-Scale Errors can
be calculated from the offset and gain errors.
5
These numbers are generated during life testing of the part.
6
Positive Full-Scale Error includes Zero-Scale Errors (Unipolar Offset Error or Bipolar Zero Error) and applies to both unipolar and bipolar input ranges. See Terminology.
7
Recalibration at any temperature will remove these errors.
8
Full-scale drift includes Zero-Scale Drift (Unipolar Offset Drift or Bipolar Zero Drift) and applies to both unipolar and bipolar input ranges.
9
Gain Error is a measure of the difference between the measured and the ideal span between any two points in the transfer function. The two points use to calculate the gain error are
positive full-scale and negative full-scale. See Terminology.
10
Gain Error Drift is a span drift and is effectively the drift of the part if zero-scale calibrations only were performed.
11
Power Supply Rejection and Common-Mode Rejection are given here for the upper and lower input voltage ranges. The rejection can be approximated to varying linearly (in dBs)
between these values for the other input ranges.
12
The analog input voltage range on the AIN(+) inputs is given here with respect to the voltage on the respective AIN(–) input.
13
The common-mode voltage range on the input pairs applies provided the absolute input voltage specification is obeyed.
14
The common-mode voltage range on the reference input pair (REF IN(+) and REF IN(–)) applies provided the absolute input voltage specification is obeyed.
15
These logic output levels apply to the MCLK OUT output only when it is loaded with a single CMOS load.
16
VDD refers to DVDD for all logic outputs expect D0 and D1 where it refers to AVDD. In other words, the output logic high for these two outputs is determined by AVDD.
17
See Burnout Current section.
18
After calibration, if the input voltage exceeds positive full scale, the converter will output all 1s. If the input is less than negative full scale, then the device outputs all 0s.
19
These calibration and span limits apply provided the absolute input voltage specification is obeyed. The offset calibration limit applies to both the unipolar zero point and the bipolar
zero point.
Specifications subject to change without notice.
(AVDD = +4.75 V to +5.25 V; DVDD = +2.7 V to +5.25 V; AGND = DGND = 0 V;
1, 2
f
TIMING CHARACTERISTICS
Limit at T
Parameter (B Version) Units Conditions/Comments
Master Clock Range 1 MHz min For Specified Performance
5 MHz max
t
1
t
2
50 ns min SYNC Pulse Width
50 ns min RESET Pulse Width
Read Operation
t
3
t
4
4
t
5
0 ns min RDY to CS Setup Time
0 ns min CS Falling Edge to SCLK Active Edge Setup Time
0 ns min SCLK Active Edge to Data Valid Delay
60 ns max DVDD = +4.75 V to +5.25 V
4, 5
t
5A
80 ns max DV
0 ns min CS Falling Edge to Data Valid Delay
60 ns max DVDD = +4.75 V to +5.25 V
80 ns max DV
t
6
t
7
t
8
6
t
9
100 ns min SCLK High Pulse Width
100 ns min SCLK Low Pulse Width
0 ns min CS Rising Edge to SCLK Inactive Edge Hold Time
10 ns min Bus Relinquish Time after SCLK Inactive Edge
80 ns max
t
10
100 ns max SCLK Active Edge to RDY High
Write Operation
t
11
t
12
t
13
t
14
t
15
t
16
NOTES
1
Sample tested during initial release to ensure compliance. All input signals are specified with tr = tf = 5 ns (10% to 90% of DVDD) and timed from a voltage level of 1.6 V.
2
See Figures 15 and 16.
3
SCLK active edge is falling edge of SCLK with POL = 1; SCLK active edge is rising edge of SCLK with POL = 0.
4
These numbers are measured with the load circuit of Figure 1 and defined as the time required for the output to cross the V
5
This specification only comes into play if CS goes low while SCLK is low (POL = 1) or if CS goes low while SCLK is high (POL = 0). It is required primarily for interfacing to
DSP machines.
6
These numbers are derived from the measured time taken by the data output to change 0.5 V when loaded with the circuit of Figure 1. The measured number is then extrapolated back to remove effects of charging or discharging the 50 pF capacitor. This means that the times quoted in the timing characteristics are the true bus relinquish times of the
part and as such are independent of external bus loading capacitances.
7
RDY returns high after the first read from the device after an output update. The same data can be read again, if required, while RDY is high, although care should be taken that
subsequent reads do not occur close to the next output update.
0 ns min CS Falling Edge to SCLK Active Edge Setup Time
30 ns min Data Valid to SCLK Edge Setup Time
25 ns min Data Valid to SCLK Edge Hold Time
100 ns min SCLK High Pulse Width
100 ns min SCLK Low Pulse Width
0 ns min CS Rising Edge to SCLK Edge Hold Time
MIN
= 4.9152 MHz; Input Logic 0 = 0 V, Logic 1 = DVDD unless otherwise noted)
CLK IN
, T
MAX
= +2.7 V to +3.3 V
DD
= +2.7 V to +3.3 V
DD
or VOH limits.
OL
–4–
3
3
3
3
3
3, 7
3
REV. 0
AD7731
WARNING!
ESD SENSITIVE DEVICE
ABSOLUTE MAXIMUM RATINGS*
(TA = +25°C unless otherwise noted)
AVDD to AGND . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
AV
to DGND . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
DD
DV
to AGND . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
DD
DV
to DGND . . . . . . . . . . . . . . . . . . . . . . . –0.3 V to +7 V
DD
AGND to DGND . . . . . . . . . . . . . . . . . . . . . . –5 V to +0.3 V
AV
to DVDD . . . . . . . . . . . . . . . . . . . . . . . . . . –2 V to +5 V
DD
Analog Input Voltage to AGND . . . . –0.3 V to AV
Reference Input Voltage to AGND . . –0.3 V to AV
DD
DD
+ 0.3 V
+ 0.3 V
AIN/REF IN Current (Indefinite) . . . . . . . . . . . . . . . . . 30 mA
Digital Input Voltage to DGND . . . . –0.3 V to DV
Digital Output Voltage to DGND . . . –0.3 V to DV
Output Voltage (D0, D1) to DGND . . –0.3 V to AV
+ 0.3 V
DD
+ 0.3 V
DD
+ 0.3 V
DD
Operating Temperature Range
Industrial (B Version) . . . . . . . . . . . . . . . . –40°C to +85°C
Storage Temperature Range . . . . . . . . . . . –65°C to +150°C
Junction Temperature . . . . . . . . . . . . . . . . . . . . . . . . . +150°C
ORDERING GUIDE
Model Temperature Range Package Description Package Options
AD7731BN –40°C to +85°C Plastic DIP N-24
AD7731BR –40°C to +85°C Small Outline R-24
AD7731BRU –40°C to +85°C Thin Shrink Small Outline (TSSOP) RU-24
EVAL-AD7731EB Evaluation Board
Plastic DIP Package, Power Dissipation . . . . . . . . . . 450 mW
θ
Thermal Impedance . . . . . . . . . . . . . . . . . . . . . 105°C/W
JA
Lead Temperature (Soldering, 10 sec) . . . . . . . . . . . +260°C
TSSOP Package, Power Dissipation . . . . . . . . . . . . . 450 mW
θ
Thermal Impedance . . . . . . . . . . . . . . . . . . . . . 128°C/W
JA
Lead Temperature, Soldering
Vapor Phase (60 sec) . . . . . . . . . . . . . . . . . . . . . . +215°C
Infrared (15 sec) . . . . . . . . . . . . . . . . . . . . . . . . . . +220°C
SOIC Package, Power Dissipation . . . . . . . . . . . . . . . 450 mW
θ
Thermal Impedance . . . . . . . . . . . . . . . . . . . . . . 75°C/W
JA
Lead Temperature, Soldering
Vapor Phase (60 sec) . . . . . . . . . . . . . . . . . . . . . . +215°C
Infrared (15 sec) . . . . . . . . . . . . . . . . . . . . . . . . . . +220°C
*Stresses above those listed under Absolute Maximum Ratings may cause perma-
nent damage to the device. This is a stress rating only; functional operation of
the device at these or any other conditions above those listed in the operational
sections of this specification is not implied. Exposure to absolute maximum rating
conditions for extended periods may affect device reliability.
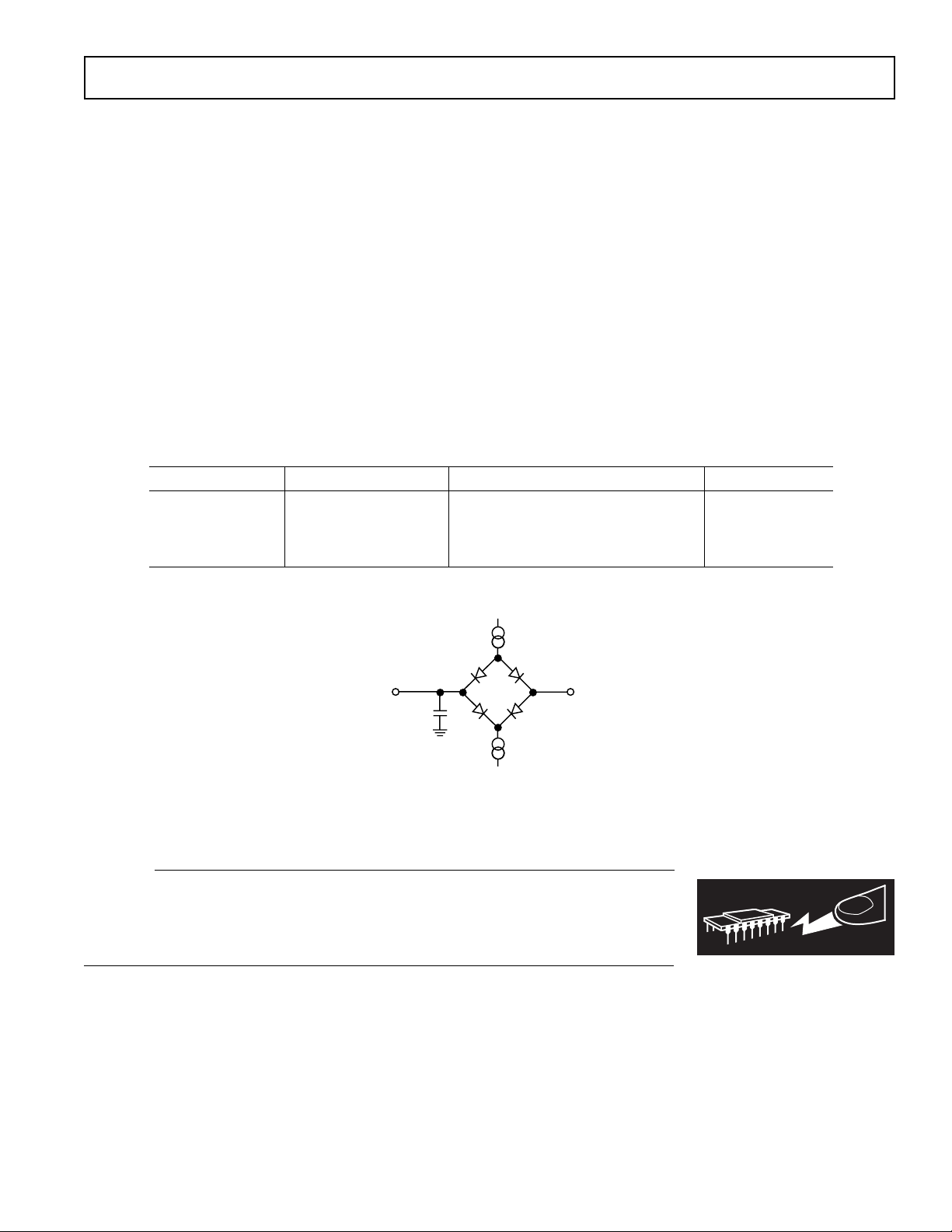
I
TO OUTPUT
PIN
50pF
(800µA AT DV
SINK
100µA AT DV
I
(200µA AT DVDD = +5V
SOURCE
100µA AT DV
+1.6V
DD
DD
= +5V
= +3V)
DD
= +3V)
Figure 1. Load Circuit for Access Time and Bus Relinquish Time
CAUTION
ESD (electrostatic discharge) sensitive device. Electrostatic charges as high as 4000 V readily
accumulate on the human body and test equipment and can discharge without detection.
Although the AD7731 features proprietary ESD protection circuitry, permanent damage may
occur on devices subjected to high energy electrostatic discharges. Therefore, proper ESD
precautions are recommended to avoid performance degradation or loss of functionality.
–5–REV. 0
AD7731
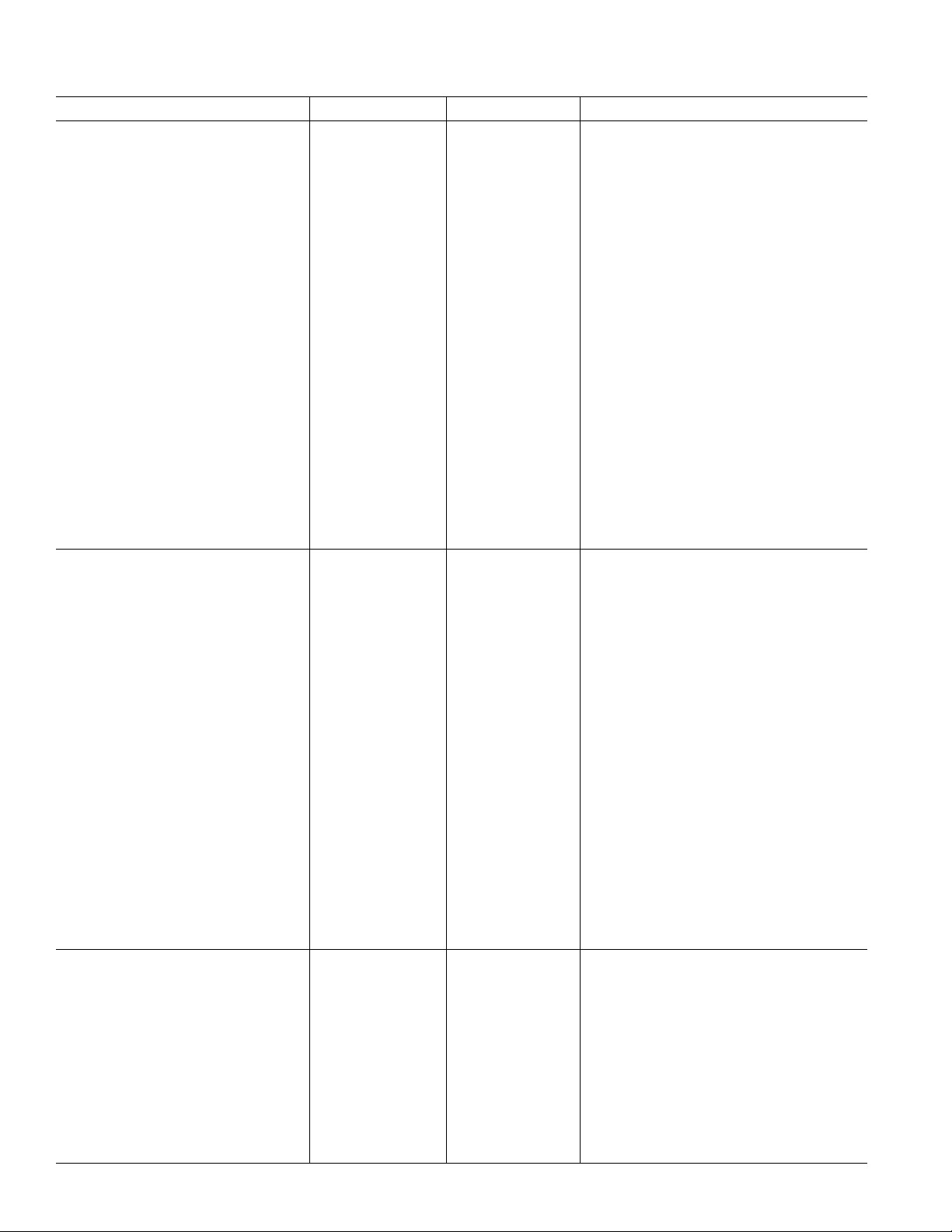
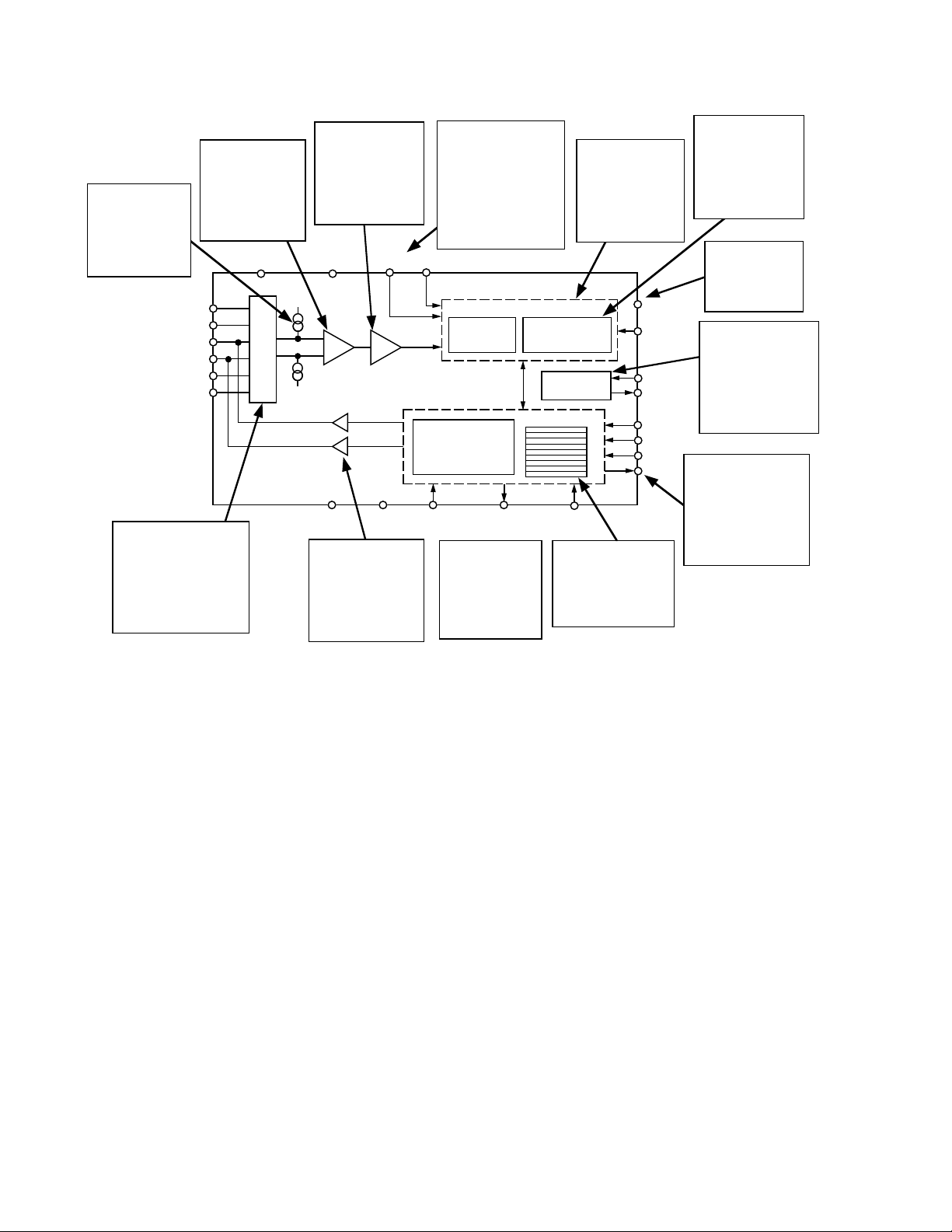
BURNOUT CURRENTS
TWO 100nA BURNOUT
CURRENTS ALLOW THE
USER TO EASILY DETECT
IF A TRANSDUCER HAS
BURNT OUT OR GONE
OPEN-CIRCUIT
SEE PAGE 23
AIN3/D1
AIN4/D0
ANALOG MULTIPLEXER
A DIFFERENTIAL MULTIPLEXER
ALLOWS SELECTION OF THREE
FULLY DIFFERENTIAL PAIRS OR
FIVE PSEUDO-DIFFERENTIAL INPUT
PAIRS TO BE SWITCHED TO THE
BUFFER AMPLIFIER. THE
MULTIPLEXER IS CONTROLLED
VIA THE SERIAL INTERFACE
SEE PAGE 23
BUFFER AMPLIFIER
THE BUFFER AMPLIFIER
PRESENTS A HIGH
IMPEDANCE INPUT STAGE
FOR THE ANALOG INPUTS
ALLOWING SIGNIFICANT
EXTERNAL SOURCE
IMPEDANCES
SEE PAGE 23
AIN1
AIN2
MUX
AIN5
AIN6
AV
DD
AD7731
PROGRAMMABLE GAIN
THE PROGRAMMABLE
GAIN AMPLIFIER ALLOWS
SEVEN UNIPOLAR AND
SEVEN BIPOLAR INPUT
RANGES FROM +20mV TO
DV
DD
AV
DD
AMPLIFIER
+1.28V
SEE PAGE 23
REF IN(–)
PGA
REF IN(+)
DIFFERENTIAL
REFERENCE
THE REFERENCE INPUT TO THE
PART IS DIFFERENTIAL AND
FACILITATES RATIOMETRIC
OPERATION. THE REFERENCE
VOLTAGE CAN BE SELECTED TO
BE NOMINALLY +2.5V OR +5V.
REFERENCE DETECT CIRCUITRY
TESTS FOR OPEN OR SHORTED
REFERENCES
SEE PAGE 24
SIGMA-DELTA A/D CONVERTER
SIGMADELTA
MODULATOR
PROGRAMMABLE
BUFFER
AGND
SERIAL INTERFACE
AND CONTROL LOGIC
REGISTER BANK
CALIBRATION
MICROCONTROLLER
DGNDAGND
OUTPUT DRIVERS
THE AIN3 AND AIN4 INPUT
CHANNELS CAN BE
RECONFIGURED TO BECOME
TWO OUTPUT DIGITAL PORT
LINES THAT CAN BE
PROGRAMMED OVER THE
SERIAL INTERFACE
SEE PAGE 32
POL
CALIBRATION
MICROCONTROLLER
THE AD7731 OFFERS A
NUMBER OF DIFFERENT
CALIBRATION OPTIONS
INCLUDING SELF AND
SYSTEM CALIBRATION
SEE PAGE 28
RDY
Figure 2. Detailed Functional Block Diagram
SIGMA-DELTA ADC
THE SIGMA-DELTA
ARCHITECTURE ENSURES
24 BITS NO MISSING
CODES. THE ENTIRE
SIGMA-DELTA ADC CAN BE
CHOPPED TO REMOVE
DRIFT ERRORS
SEE PAGE 24
DIGITAL
FILTER
CLOCK
GENERATION
RESET
REGISTER BANK
TWELVE REGISTERS CONTROL
ALL FUNCTIONS ON THE PART
AND PROVIDE STATUS
INFORMATION AND
CONVERSION RESULTS
SEE PAGE 20
*SPI IS A TRADEMARK OF MOTOROLA, INC.
TWO STAGE FILTER THAT
ALLOWS PROGRAMMING OF
OUTPUT UPDATE RATE AND
SETTLING TIME AND THAT
HAS A FASTSTEP
STANDBY
SYNC
THE CLOCK SOURCE FOR THE
MCLK IN
MCLK OUT
PART CAN BE PROVIDED BY
CLOCK OR BY CONNECTING A
SCLK
CS
DIN
DOUT
SERIAL INTERFACE
SPI*-COMPATIBLE OR DSP-
INTERFACE THAT CAN BE
OPERATED FROM JUST THREE
WIRES. ALL FUNCTIONS ON THE
PART (APART FROM MASTER
RESET) CAN BE ACCESSED VIA
THE SERIAL INTERFACE
PROGRAMMABLE
DIGITAL FILTER
TM
(SEE FIGURE 3)
MODE
SEE PAGE 24
STANDBY MODE
THE STANDBY MODE
REDUCES POWER
CONSUMPTION TO 50mW
SEE PAGE 32
CLOCK OSCILLATOR
CIRCUIT
AN EXTERNALLY-APPLIED
CRYSTAL OR CERAMIC
RESONATOR ACROSS THE
CLOCK PINS
SEE PAGE 31
COMPATIBLE SERIAL
SEE PAGE 33
–6–
REV. 0
AD7731
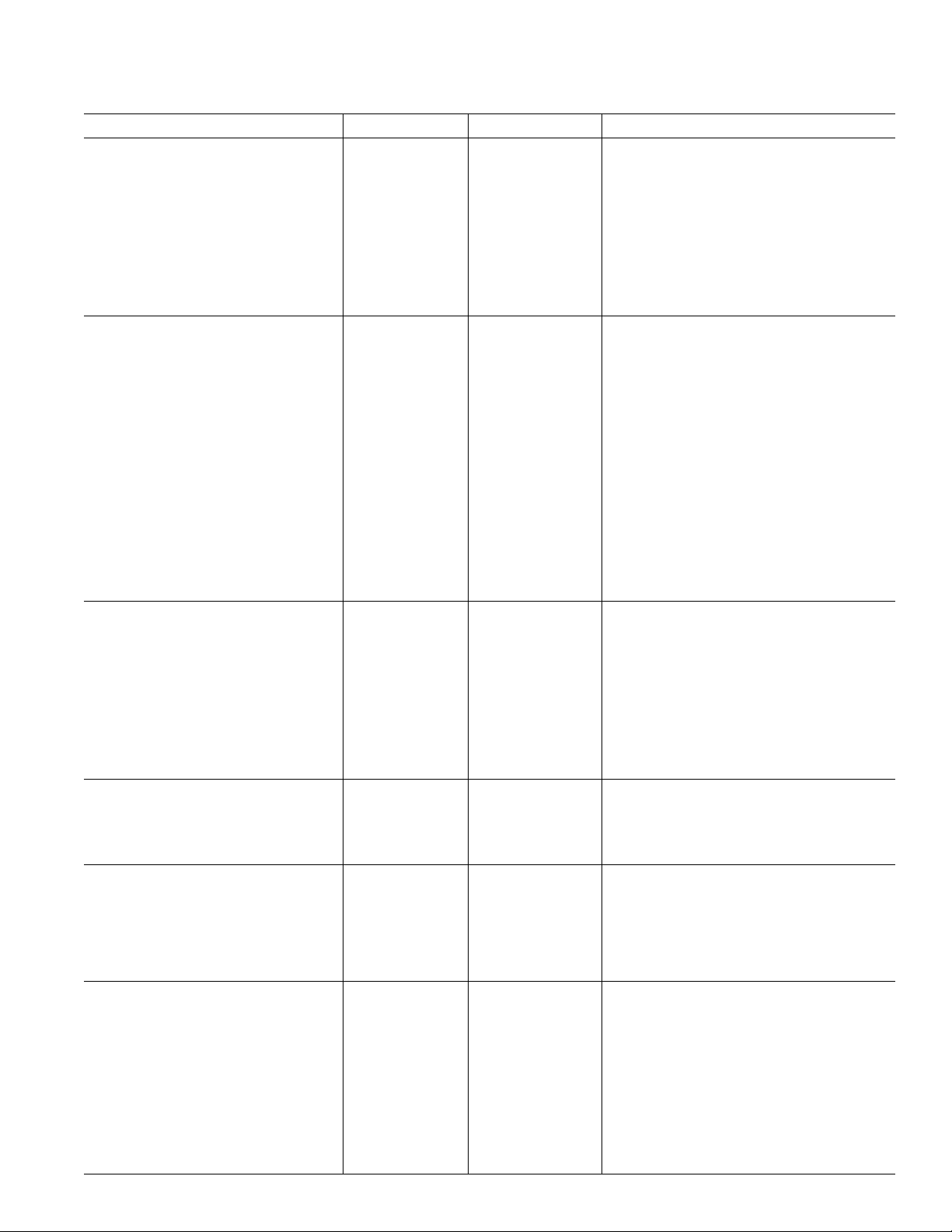
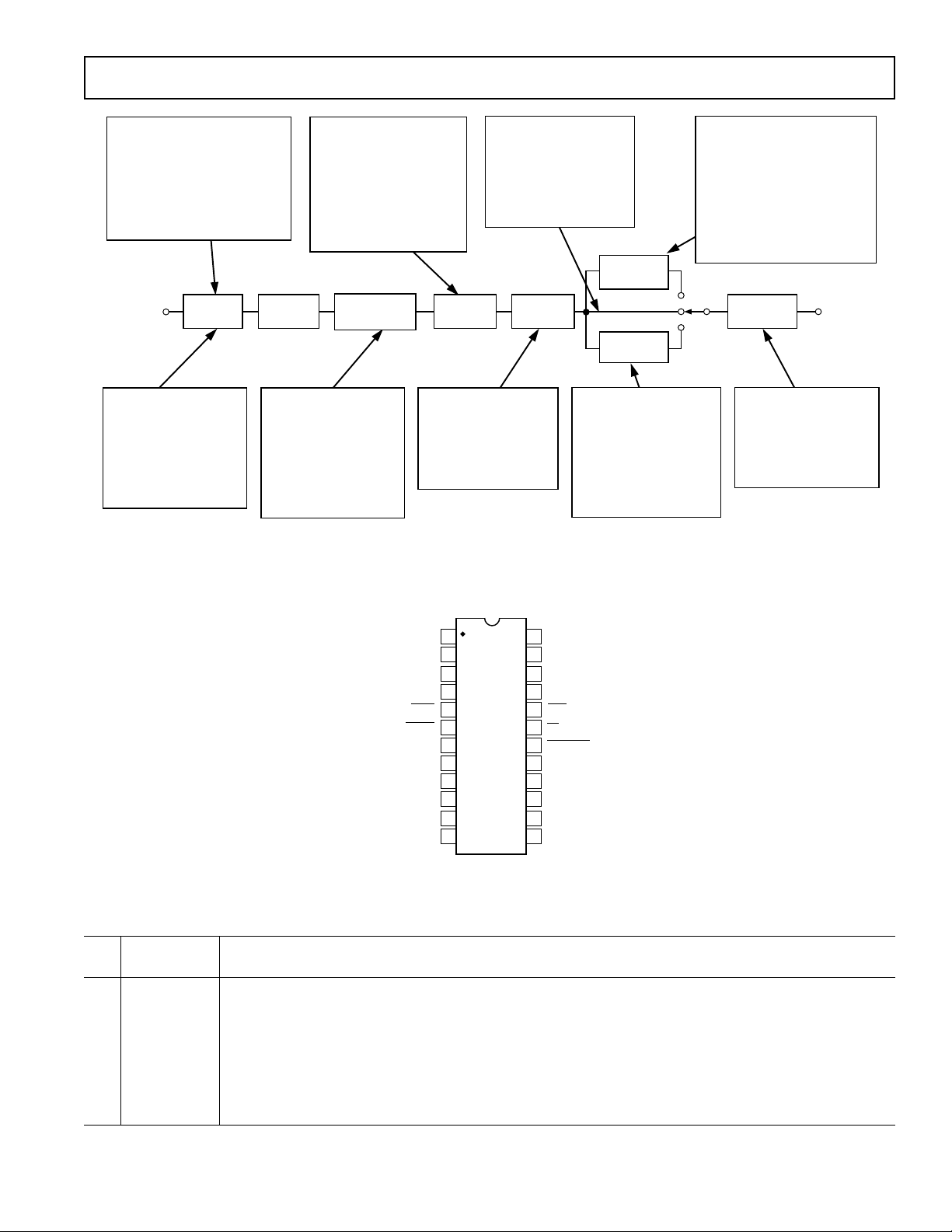
FASTSTEP™
FILTER
CHOP
ANALOG
INPUT
DIGITAL
OUTPUT
BUFFER
SKIP
OUTPUT
SCALING
22-TAP
FIR FILTER
THE ANALOG INPUT TO THE PART
CAN BE CHOPPED. IN CHOPPING MODE,
THE INPUT IS CHOPPEDAND THE OUTPUT OF
THE FIRST STAGE FILTER IS CHOPPED
REMOVING ERRORS IN THAT PATH.
THE DEFAULT CONDITION IS
CHOPPING DISABLED
THE FIRST STAGE OF THE DIGITAL
FILTERING ON THE PART IS THE
SINC
3
FILTER. THE OUTPUT UPDATE
RATE AND BANDWIDTH OF THIS
FILTER CAN BE PROGRAMMED. IN
SKIP MODE, THE SINC
3
FILTER IS
THE ONLY FILTERING PERFORMED
ON THE P3T.
IN SKIP MODE, THERE IS NO
SECOND STAGE OF FILTERING ON
THE PART. THE SINC
3
FILTER IS
THE ONLY FILTERING PERFORMED
ON THE PART. THIS IS THE
SECOND STAGE FILTER
WITH SKIP DISABLED, THE NORMAL
OPERATING MODE OF THE SECOND STAGE
OF THE DIGITAL FILTERING ON THE PART IS
A FIXED 22-TAP FIR FILTER. IN SKIP MODE,
THIS FIR FILTER IS BYPASSED. WHEN
FASTSTEP™
MODE IS ENABLED AND A
STEP INPUT IS DETECTED, THE SECOND
STAGE FILTERING IS PERFORMED BY THE
FAST STEP FILTER UNTIL THE OUTPUT OF
THIS FILTER HAS FULLY SETTLED
THE OUTPUT WORD FROM THE
DIGITAL FILTER IS SCALED BY THE
CALIBRATION COEFFICIENTS
BEFORE BEING PROVIDED AS THE
CONVERSION RESULT
WHEN FASTSTEP™ MODE IS
ENABLED AND A STEP CHANGE ON
THE INPUT HAS BEEN DETECTED,
THE SECOND STAGE FILTERING IS
PERFORMED BY THE FASTSTEP™
FILTER UNTIL THE FIR FILTER HAS
FULLY SETTLED.
THE OUTPUT OF THE FIRST STAGE
OF FILTERING ON THE PART CAN
BE CHOPPED. THE DEFAULT
CONDITION IS CHOPPING
DISABLED
THE PROGRAMMABLE GAIN
CAPABILITY OF THE PART IS
INCORPORATED AROUND THE
SIGMA DELTA MODULATOR.THE
MODULATOR PROVIDES A HIGH-
FREQUENCY 1-BIT DATA STREAM
TO THE DIGITAL FILTER.
THE INPUT SIGNAL IS BUFFERED
ON-CHIP BEFORE BEING APPLIED
TO THE SAMPLING CAPACITOR OF
THE SIGMA DELTA MODULATOR.
THIS ISOLATES THE SAMPLING
CAPACITOR CHARGING CURRENTS
FROM THE ANALOG INPUT PINS
PGA &
SIGMA-DELTA
MODULATOR
SINC
3
FILTER
CHOP
INPUT CHOPPING
SINC
3
FILTER SKIP MODE 22-TAP FIR FILTER
OUTPUT SCALING
FASTSTEP™
FILTER
YY
OUTPUT CHOPPING
PGA & SIGMA-DELTA
MODULATOR
BUFFER
SEE PAGE 25
SEE PAGE 25
SEE PAGE 25
SEE PAGE 26
SEE PAGE 29
SEE PAGE 28
SEE PAGE 25
SEE PAGE 24
SEE PAGE 23
Pin Pin
No. Mnemonic Function
1 SCLK Serial Clock. Schmitt-Triggered Logic Input. An external serial clock is applied to this input to transfer
2 MCLK IN Master Clock signal for the device. This can be provided in the form of a crystal/resonator or external clock.
serial data to or from the AD7731. This serial clock can be a continuous clock with all data transmitted in a
continuous train of pulses. Alternatively, it can be a noncontinuous clock with the information being transmitted to or from the AD7731 in smaller batches of data.
A crystal/resonator can be tied across the MCLK IN and MCLK OUT pins. Alternatively, the MCLK IN
pin can be driven with a CMOS-compatible clock and MCLK OUT left unconnected. The part is specified
with a clock input frequency of 4.9152 MHz.
Figure 3. Signal Processing Chain
PIN CONFIGURATION
SCLK
MCLK IN
MCLK OUT
SYNC
RESET
AGND
AV
AIN3/D1
PIN FUNCTION DESCRIPTIONS
POL
NC
1
2
3
4
5
AD7731
6
TOP VIEW
7
(Not to Scale)
24
23
22
21
20
19
18
817
916
DD
10 15
AIN1
AIN2
11
14
12 13
NC = NO CONNECT
–7–REV. 0
DGND
DV
DD
DIN
DOUT
RDY
CS
STANDBY
AIN6
AIN5
REF IN(–)
REF IN(+)
AIN4/D0
AD7731
PIN FUNCTION DESCRIPTIONS (Continued)
Pin Pin
No. Mnemonic Function
3 MCLK OUT When the master clock for the device is a crystal/resonator, the crystal/resonator is connected between
MCLK IN and MCLK OUT. If an external clock is applied to the MCLK IN, MCLK OUT provides an
inverted clock signal. This clock can be used to provide a clock source for external circuits and MCLK OUT
is capable of driving one CMOS load.
4 POL Clock Polarity. Logic Input. This determines the polarity of the serial clock. If the active edge for the proces-
sor is a high-to-low SCLK transition, this input should be low. In this mode, the AD7731 puts out data on
the DATA OUT line in a read operation on a low-to-high transition of SCLK and clocks in data from the
DATA IN line in a write operation on a high-to-low transition of SCLK. In applications with a noncontinuous
serial clock (such as most microcontroller applications), this means that the serial clock should idle low
between data transfers. If the active edge for the processor is a low-to-high SCLK transition, this input
should be high. In this mode, the AD7731 puts out data on the DATA OUT line in a read operation on a
high-to-low transition of SCLK and clocks in data from the DATA IN line in a write operation on a low-tohigh transition of SCLK. In applications with a noncontinuous serial clock (such as most microcontroller
applications), this means that the serial clock should idle high between data transfers.
5 SYNC Logic Input that allows for synchronization of the digital filters and analog modulators when using a number
of AD7731s. While SYNC is low, the nodes of the digital filter, the filter control logic and the calibration
control logic are reset and the analog modulator is also held in its reset state. SYNC does not affect the
digital interface but does reset RDY to a high state if it is low. While SYNC is asserted, the Mode Bits may
be set up for a subsequent operation that will commence when the SYNC pin is deasserted.
6 RESET Logic Input. Active low input that resets the control logic, interface logic, digital filter, analog modulator and
all on-chip registers of the part to power-on status. Effectively, everything on the part except for the clock
oscillator is reset when the RESET pin is exercised.
7 NC No Connect. The user is advised not to connect anything to this pin.
8 AGND Ground reference point for analog circuitry.
9AV
DD
10 AIN1 Analog Input Channel 1. Programmable-gain analog input that can be used as a pseudo-differential input
11 AIN2 Analog Input Channel 2. Programmable-gain analog input that can be used as a pseudo-differential input
12 AIN3/D1 Analog Input Channel 3 or Digital Output 1. This pin can be used as either an analog input or a digital
13 AIN4/D0 Analog Input Channel 4 or Digital Output 0. This pin can be used as either an analog input or a digital
14 REF IN(+) Reference Input. Positive terminal of the differential reference input to the AD7731. REF IN(+) can lie
15 REF IN(–) Reference Input. Negative terminal of the differential reference input to the AD7731. The REF IN(–) can lie
16 AIN5 Analog Input Channel 5. Programmable-gain analog input which can be used is the positive input of a differ-
17 AIN6 Analog Input Channel 6. Reference point for AIN1 through AIN4 in pseudo-differential mode or as the
18 STANDBY Logic Input. Taking this pin low shuts down the analog and digital circuitry, reducing current consumption
19 CS Chip Select. Active low Logic Input used to select the AD7731. With this input hardwired low, the
Analog Positive Supply Voltage. The AVDD to AGND differential is 5 V nominal.
when used with AIN6 or as the positive input of a differential pair when used with AIN2.
when used with AIN6 or as the negative input of a differential pair when used with AIN1.
output bit as determined by the DEN bit of the Mode Register. When selected as a programmable-gain
analog input, it can be used as a pseudo-differential input when used with AIN6 or as the positive input of a
differential pair when used with AIN4. When selected as a digital output, this output can be programmed
over the serial interface using bit D1 of the Mode Register.
output bit as determined by the DEN bit of the Mode Register. When selected as a programmable-gain
analog input, it can be used as a pseudo-differential input when used with AIN6 or as the negative input of a
differential pair when used with AIN3. When selected as a digital output, this output can be programmed
over the serial interface using bit D0 of the Mode Register.
anywhere between AV
and AGND. The nominal reference voltage (i.e., the differential voltage between
DD
REF IN(+) and REF IN(–)) should be +2.5 V when the HIREF bit of the Mode Register is 0 and is +5 V
when the HIREF bit of the Mode Register is 1.
anywhere between AV
and AGND.
DD
ential pair when used with AIN6.
negative input of a differential input pair when used with AIN5.
to the 10 µA range. The on-chip registers retain all their values when the part is in standby mode.
AD7731 can operate in its three-wire interface mode with SCLK, DIN and DOUT used to interface to the
device. CS can be used to select the device in systems with more than one device on the serial bus or as a
frame synchronization signal in communicating with the AD7731.
–8–
REV. 0
AD7731
PIN FUNCTION DESCRIPTIONS (Continued)
Pin Pin
No. Mnemonic Function
20 RDY Logic output. Used as a status output in both conversion mode and calibration mode. In conversion mode, a
logic low on this output indicates that a new output word is available from the AD7731 data register. The
RDY pin will return high upon completion of a read operation of a full output word. If no data read has
taken place after an output update, the RDY line will return high prior to the next output update, remain
high while the update is taking place and return low again. This gives an indication of when a read operation
should not be initiated to avoid initiating a read from the data register as it is being updated. In calibration
mode, RDY goes high when calibration is initiated and returns low to indicate that calibration is complete. A
number of different events on the AD7731 set the RDY high and these are outlined in Table XVII.
21 DOUT Serial Data Output with serial data being read from the output shift register on the part. This output shift
register can contain information from the calibration registers, mode register, status register, filter register or
data register depending on the register selection bits of the Communications Register.
22 DIN Serial Data Input with serial data being written to the input shift register on the part. Data from this input
shift register is transferred to the calibration registers, mode register, communications register or filter register depending on the register selection bits of the Communications Register.
23 DV
DD
24 DGND Ground reference point for digital circuitry.
Digital Supply Voltage, +3 V or +5 V nominal.
TERMINOLOGY
INTEGRAL NONLINEARITY
This is the maximum deviation of any code from a straight line
passing through the endpoints of thetransferfunction. The endpoints of the transfer function are zero scale (not to be confused
with bipolar zero), a point 0.5 LSB belowthefirstcode transition (000 . . . 000 to 000 . . . 001) and full scale, a point 0.5LSB
above the last code transition (111 .. .110to 111...111). The
error is expressed as a percentage of full scale.
POSITIVE FULL-SCALE ERROR
Positive Full-Scale Error is the deviation of the last code transition (111 . . . 110 to 111 . .. 111) from the ideal AIN(+) voltage
(AIN(–) + V
/GAIN – 3/2 LSBs). It applies to both unipolar
REF
and bipolar analog input ranges.
UNIPOLAR OFFSET ERROR
Unipolar Offset Error is the deviation of the first code transition
from the ideal AIN(+) voltage (AIN(–) + 0.5 LSB) when operating in the unipolar mode.
BIPOLAR ZERO ERROR
This is the deviation of the midscale transition (0111...111
to 1000 . . . 000) from the ideal AIN(+) voltage (AIN(–) –
0.5 LSB) when operating in the bipolar mode.
GAIN ERROR
This is a measure of the span error of the ADC. It is a measure
of the difference between the measured and the ideal span between any two points in the transfer function. The two points
used to calculate the gain error are positive full scale and negative full scale.
POSITIVE FULL-SCALE OVERRANGE
Positive Full-Scale Overrange is the amount of overhead available to handle input voltages on AIN(+) input greater than
AIN(–) + V
/GAIN (for example, noise peaks or excess volt-
REF
ages due to system gain errors in system calibration routines)
without introducing errors due to overloading the analog modulator or overflowing the digital filter.
NEGATIVE FULL-SCALE OVERRANGE
This is the amount of overhead available to handle voltages on
AIN(+) below AIN(–) – V
/GAIN without overloading the
REF
analog modulator or overflowing the digital filter.
OFFSET CALIBRATION RANGE
In the system calibration modes, the AD7731 calibrates its
offset with respect to the analog input. The Offset Calibration
Range specification defines the range of voltages the AD7731
can accept and still accurately calibrate offset.
FULL-SCALE CALIBRATION RANGE
This is the range of voltages that the AD7731 can accept in the
system calibration mode and still accurately calibrate full scale.
INPUT SPAN
In system calibration schemes, two voltages applied in sequence
to the AD7731’s analog input define the analog input range.
The input span specification defines the minimum and maximum input voltages from zero to full scale that the AD7731 can
accept and still accurately calibrate gain.
BIPOLAR NEGATIVE FULL-SCALE ERROR
This is the deviation of the first code transition from the ideal
AIN(+) voltage (AIN(–) – V
/GAIN + 0.5 LSB) when operat-
REF
ing in the bipolar mode. Negative full-scale error is a summation
of zero error and gain error.
–9–REV. 0
AD7731
OUTPUT NOISE AND RESOLUTION SPECIFICATION
The AD7731 has a number of different modes of operation of the on-chip filter and chopping features. These options are discussed
in more detail in later sections. The part can be programmed either to optimize the throughput rate and settling time or to optimize
noise and drift performance. Noise tables for two of the primary modes of operation of the part are outlined below for a selection of
output rates and settling times. The first mode, where the AD7731 is configured with CHP = 0 and SKIP mode enabled, provides
fast settling time while still maintaining high resolution. The second mode, where CHP = 1 and the full second filter is included,
provides very low noise numbers with lower output rates. Settling time refers to the time taken to get an output that is 100% settled
to the new value after a channel change or exercising SYNC.
Output Noise (CHP = 0, SKIP = 1)
Table I shows the output rms noise for some typical output update rates and –3 dB frequencies for the AD7731 when used in
nonchop mode (CHP of Filter Register = 0) and with the second filter bypassed (SKIP of Filter Register = 1). The table is generated
with a master clock frequency of 4.9152 MHz. These numbers are typical and generated at a differential analog input voltage of 0V.
The output update rate is selected via the SF0 to SF11 bits of the Filter Register. Table II, meanwhile, shows the output peak-topeak resolution in bits (rounded to the nearest 0.5 LSB) for the same output update rates. It is important to note that the numbers in
Table II represent the resolution for which there will be no code flicker within a six-sigma limit. They are not calculated based on
rms noise but on peak-to-peak noise.
The numbers are generated for the bipolar input ranges. When the part is operated in unipolar mode, the output noise will be the
same as the equivalent bipolar input range. As a result, the numbers in Table I will remain the same for unipolar ranges. To calculate
the numbers for Table II for unipolar input ranges simply subtract one from the peak-to-peak resolution number in bits.
Table I. Output Noise vs. Input Range and Update Rate (CHP = 0, SKIP = 1)
Typical Output RMS Noise in mV
Output –3 dB SF Settling Input Range
Data Rate Frequency Word Time 61.28 V 6640 mV 6320 mV 6160 mV 680 mV 640 mV 620 mV
150 Hz 39.3 Hz 2048 20 ms 2.6 1.45 0.87 0.6 0.43 0.28 0.2
200 Hz 52.4 Hz 1536 15 ms 3.0 1.66 1.02 0.69 0.48 0.32 0.22
300 Hz 78.6 Hz 1024 10 ms 3.7 2 1.26 0.84 0.58 0.41 0.28
400 Hz 104.8 Hz 768 7.5 ms 4.2 2.3 1.46 1.0 0.69 0.46 0.32
600 Hz 157 Hz 512 5 ms 5.2 2.9 1.78 1.2 0.85 0.58 0.41
800 Hz 209.6 Hz 384 3.75 ms 6 3.3 2.1 1.4 0.98 0.66 0.47
1200 Hz 314 Hz 256 2.5 ms 7.8 4.3 2.6 1.8 1.27 0.82 0.57
1600 Hz 419.2 Hz 192 1.87 ms 10.9 5.4 3.5 2.18 1.51 0.94 0.64
2400 Hz 629 Hz 128 1.25 ms 27.1 13.9 7.3 3.5 2.22 1.24 0.83
3200 Hz 838.4 Hz 96 0.94 ms 47 24.4 11.4 5.3 3.1 1.9 1.0
4800 Hz 1260 Hz 64 0.625 ms 99 50.3 24.5 12.5 6.5 3.3 1.7
6400 Hz 1676 Hz 48 0.47 ms 193 97 48 24 11.8 6.6 3.0
Table II. Peak-to-Peak Resolution vs. Input Range and Update Rate (CHP = 0, SKIP = 1)
Peak-to-Peak Resolution in Bits
Output –3 dB SF Settling Input Range
Data Rate Frequency Word Time 61.28 V 6640 mV 6320 mV 6160 mV 680 mV 640 mV 620 mV
150 Hz 39.3 Hz 2048 20 ms 17.5 17 17 16.5 16 15.5 15
200 Hz 52.4 Hz 1536 15 ms 17 17 16.5 16.5 16 15.5 15
300 Hz 78.6 Hz 1024 10 ms 17 16.5 16.5 16 15.5 15 14.5
400 Hz 104.8 Hz 768 7.5 ms 16.5 16.5 16 15.5 15.5 15 14.5
600 Hz 157 Hz 512 5 ms 16.5 16 16 15.5 15 14.5 14
800 Hz 209.6 Hz 384 3.75 ms 16 16 15.5 15 14.5 14.5 14
1200 Hz 314 Hz 256 2.5 ms 15.5 15.5 15.5 15 14.5 14 13.5
1600 Hz 419.2 Hz 192 1.87 ms 15 15.5 15 14.5 14 14 13.5
2400 Hz 629 Hz 128 1.25 ms 14 14 14 14 13.5 13.5 13
3200 Hz 838.4 Hz 96 0.94 ms 13 13 13 13 13 13 12.5
4800 Hz 1260 Hz 64 0.625 ms 12 12 12 12 12 11.5 12
6400 Hz 1676 Hz 48 0.47 ms 11 11 11 11 11 11 11
–10–
REV. 0
AD7731
RS2 RS1 RS0
REGISTER
SELECT
DECODER
STATUS REGISTER
DATA REGISTER
MODE REGISTER
FILTER REGISTER
OFFSET REGISTER (x3)
GAIN REGISTER (x3)
TEST REGISTER
COMMUNICATIONS REGISTER
DINDIN
DIN
DIN
DIN
DIN
DIN
DOUT
DOUT
DOUT
DOUT
DOUT
DOUT
DOUT
DOUT
Output Noise (CHP = 1, SKIP = 0)
Table III shows the output rms noise for some typical output update rates and –3 dB frequencies for the AD7731 when used in
chopping mode (CHP of Filter Register = 1) and with the second filter included in the loop. The numbers are generated with a master clock frequency of 4.9152 MHz. These numbers are typical and generated at a differential analog input voltage of 0 V. The output update rate is selected via the SF0 to SF11 bits of the Filter Register. Table IV, meanwhile, shows the output peak-to-peak
resolution in bits (rounded to the nearest 0.5 LSB) for the same output update rates. It is important to note that the numbers in
Table IV represent the resolution for which there will be no code flicker within a six-sigma limit. They are not calculated based on
rms noise but on peak-to-peak noise.
The numbers are generated for the bipolar input ranges. When the part is operated in unipolar mode, the output noise will be the
same as the equivalent bipolar input range. As a result, the numbers in Table III will remain the same for unipolar ranges. To calculate the number for Table IV for unipolar input ranges simply subtract one from the peak-to-peak resolution number in bits.
Table III. Output Noise vs. Input Range and Update Rate (CHP = 1, SKIP = 0)
Typical Output RMS Noise in nV
Output –3 dB SF Settling Time Input Range
Data Rate Frequency Word Normal Fast Step 61.28 V 6640 mV 6320 mV 6160 mV 680 mV 640 mV 620 mV
50 Hz 1.97 Hz 2048 440 ms 40 ms 700 425 265 170 120 85 55
100 Hz 3.95 Hz 1024 220 ms 20 ms 980 550 330 230 190 115 90
150 Hz 5.92 Hz 683 147 ms 13.3 ms 1230 700 445 270 210 140 100
200 Hz 7.9 Hz 512 110 ms 10 ms 1260 840 500 340 245 170 105
400 Hz 15.8 Hz 256 55 ms 5 ms 2000 1230 690 430 335 215 160
800 Hz 31.6 Hz 128 27.5 ms 2.5 ms 3800 2100 1400 760 590 345 220
Table IV. Peak-to-Peak Resolution vs. Input Range and Update Rate (CHP = 1, SKIP = 0)
Peak-to-Peak Resolution in Bits
Output –3 dB SF Settling Time Input Range
Data Rate Frequency Word Normal Fast Step 61.28 V 6640 mV 6320 mV 6160 mV 680 mV 640 mV 620 mV
50 Hz 1.97 Hz 2048 440 ms 40 ms 19 19 18.5 18.5 18 17.5 17
100 Hz 3.95 Hz 1024 230 ms 30 ms 19 18.5 18.5 18 17 17 16
150 Hz 5.92 Hz 683 147 ms 13.3 ms 18.5 18 18 17.5 17 16.5 16
200 Hz 7.9 Hz 512 110 ms 10 ms 18.5 18 17.5 17.5 17 16.5 16
400 Hz 15.8 Hz 256 55 ms 5 ms 17.5 17.5 17 17 16.5 16 15.5
800 Hz 31.6 Hz 128 27.5 ms 2.5 ms 17 16.5 16 16 15.5 15 15
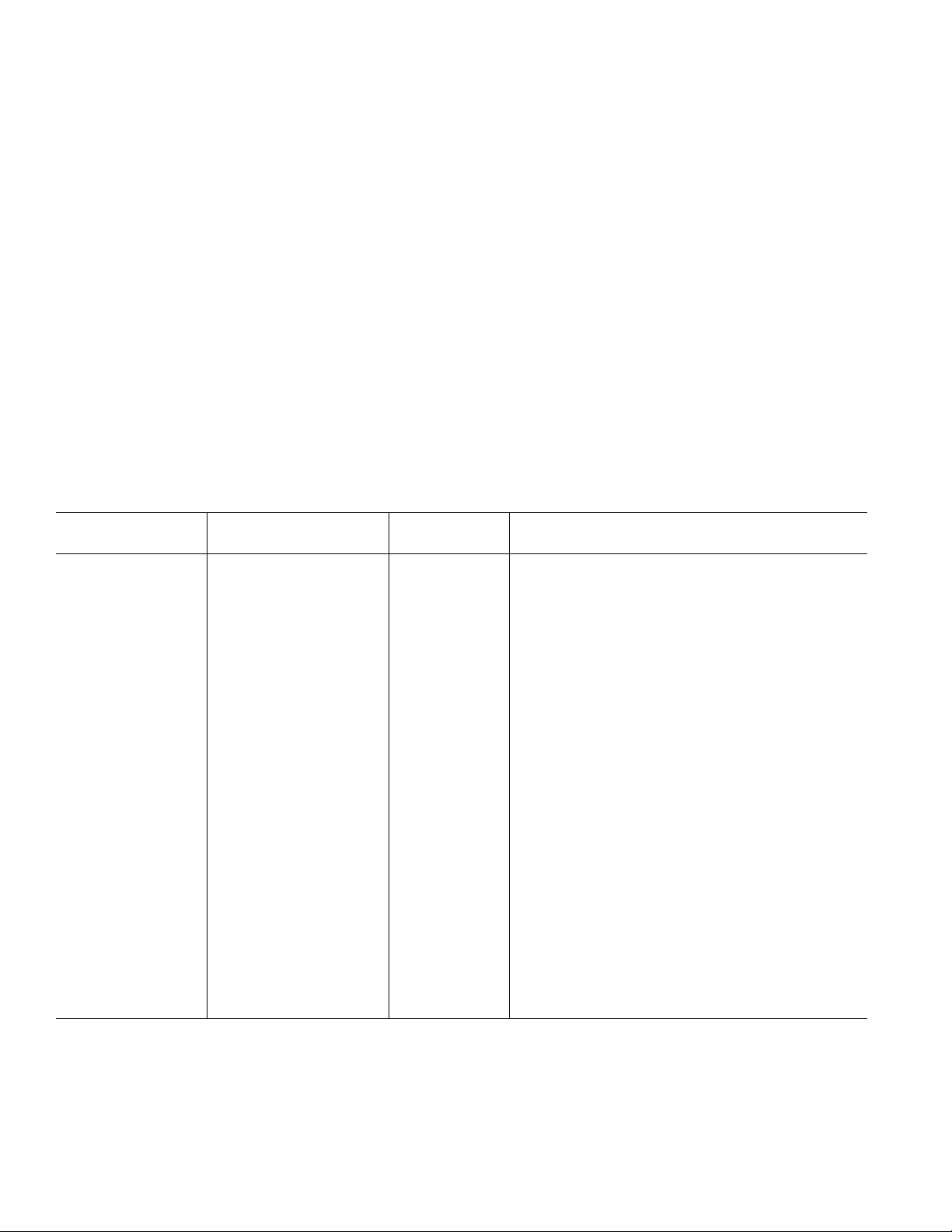
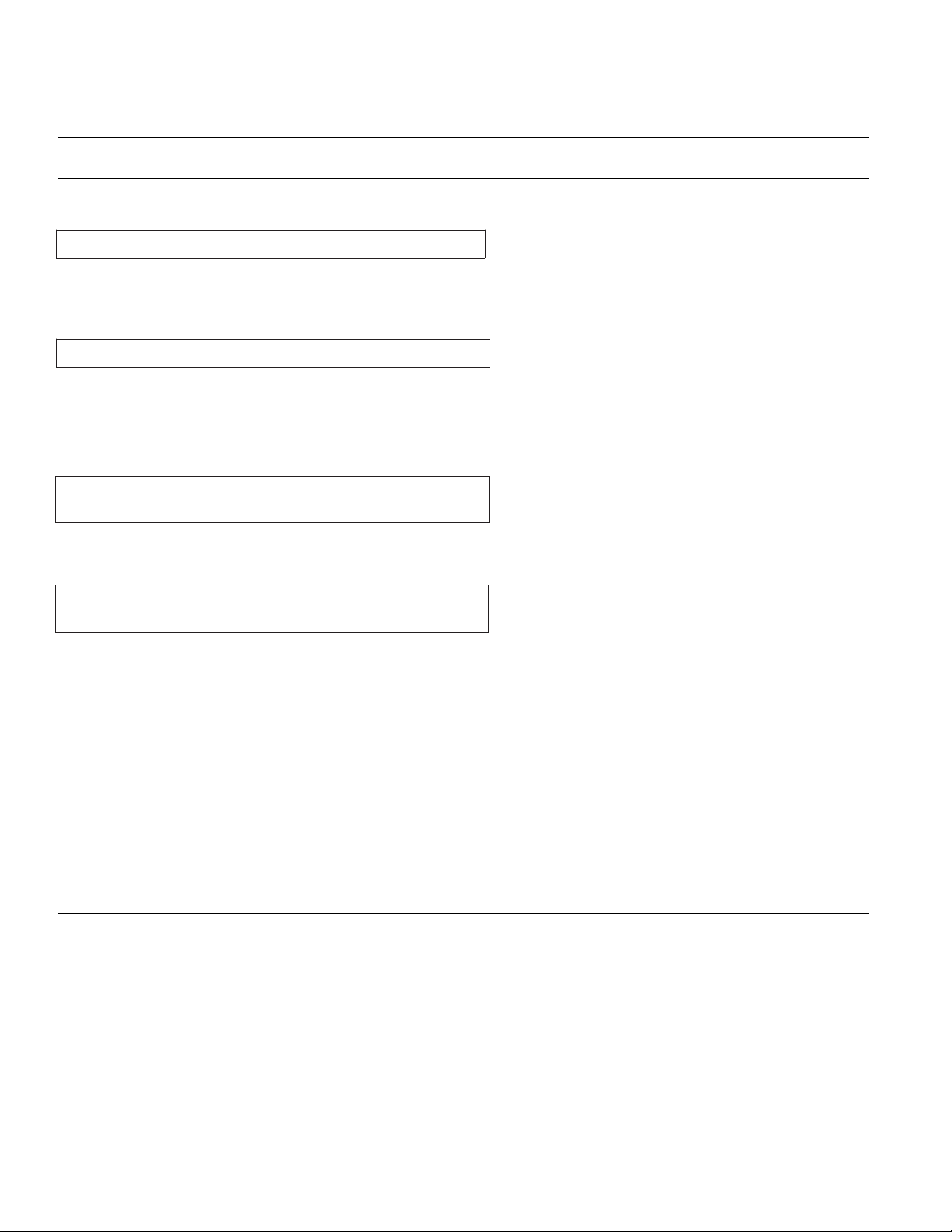
ON-CHIP REGISTERS
The AD7731 contains 12 on-chip registers that can be accessed
via the serial port of the part. These registers are summarized in
Figure 4 and in Table V, and described in detail in the following
sections.
Figure 4. Register Overview
–11–REV. 0
AD7731
Table V. Summary of On-Chip Registers
Power-On/Reset
Register Name Type Size Default Value Function
Communications Write Only 8 Bits Not Applicable All operations to other registers are initiated through
Register the Communications Register. This controls whether
NEW
OREZ1WR0WROREZ2SR1SR0SR
Status Register Read Only 8 Bits CX Hex Provides status information on conversions, calibra-
YDRYDTS
YBTSFERON3SM2SM1SM0SM
Data Register Read Only 16 Bits or 24 Bits 000000 Hex Provides the most up-to-date conversion result from
Mode Register Read/Write 16 Bits 0174 Hex Controls functions such as mode of operation, uni-
2DM1DM0DM
FERIH2NR1NR0NROB2HC1HC0HC
BU/
NED1D0DLW
Filter Register Read/Write 16 Bits 2002 Hex Controls the amount of averaging in the first stage
11FS01FS9FS8FS7FS6FS5FS4FS
3FS2FS1FS0FSOREZPHCPIKSTSAF
subsequent operations are read or write operations
and also selects the register for that subsequent operation. Most subsequent operations return control to
the Communications Register except for the continuous read mode of operation.
tions, settling to step inputs, standby operation and
the validity of the reference voltage.
the part. Register length can be programmed to be
16 bit or 24 bit.
polar/bipolar operation, controlling the function of
AIN3/D1 and AIN4/D0, burnout current and Data
Register word length. It also contains the reference
selection bit, the range selection bits and the channel
selection bits.
filter, selects the fast step and skip modes and controls the chopping modes on the part.
Offset Register Read/Write 24 Bits Contains a 24-bit word which is the offset calibration
coefficient for the part. The contents of this register
are used to provide offset correction on the output
from the digital filter. There are three Offset Registers on the part and these are associated with input
channel pairs as outlined in Table XIII.
Gain Register Read/Write 24 Bits Contains a 24-bit word which is the gain calibration
coefficient for the part. The contents of this register
are used to provide gain correction on the output
from the digital filter. There are three Gain Registers
on the part and these are associated with input channel pairs as outlined in Table XIII.
Test Register Read/Write 24 Bits 000000 Hex Controls the test modes of the part which are used
when testing the part. The user is advised not to
change the contents of this register.
–12–
REV. 0

AD7731
Communications Register (RS2-RS0 = 0, 0, 0)
The Communications Register is an 8-bit write-only register. All communications to the part must start with a write operation to the
Communications Register. The data written to the Communications Register determines whether the next operation is a read or
write operation, the type of read operation and to which register this operation takes place. For single-shot read or write operations,
once the subsequent read or write operation to the selected register is complete, the interface returns to where it expects a write operation to the Communications Register. This is the default state of the interface, and on power-up or after a RESET, the AD7731 is
in this default state waiting for a write operation to the Communications Register. In situations where the interface sequence is lost, a
write operation of at least 32 serial clock cycles with DIN high, returns the AD7731 to this default state by resetting the part. Table
VI outlines the bit designations for the Communications Register. CR0 through CR7 indicate the bit location, CR denoting the bits
are in the Communications Register. CR7 denotes the first bit of the data stream.
Table VI. Communications Register
7RC
NEW
Bit Bit
Location Mnemonic Description
CR7 WEN Write Enable Bit. A 0 must be written to this bit so the write operation to the Communica-
CR6 ZERO A zero must be written to this bit to ensure correct operation of the AD7731.
CR5, CR4 RW1, RW0 Read Write Mode Bits. These two bits determine the nature of the subsequent read/write
6RC5RC4RC3RC2RC1RC0RC
OREZ1WR0WROREZ2SR1SR0SR
tions Register actually takes place. If a 1 is written to this bit, the part will not clock on to
subsequent bits in the register. It will stay at this bit location until a 0 is written to this bit.
Once a 0 is written to the WEN bit, the next seven bits will be loaded to the Communications Register.
operation. Table VII outlines the four options.
Table VII. Read/Write Mode
RW1 RW0 Read/Write Mode
0 0 Single Write to Specified Register
0 1 Single Read of Specified Register
1 0 Start Continuous Read of Specified Register
1 1 Stop Continuous Read Mode
With 0, 0 written to these two bits, the next operation is a write operation to the register
specified by bits RS2, RS1, RS0. Once the subsequent write operation to the specified register has been completed, the part returns to where it is expecting a write operation to the
Communications Register.
With 0, 1 written to these two bits, the next operation is a read operation of the register specified
by bits RS2, RS1, RS0. Once the subsequent read operation to the specified register has been
completed, the part returns to where it is expecting a write operation to the Communications
Register.
Writing 1, 0 to these bits, sets the part into a mode of continuous reads from the register
specified by bits RS2, RS1, RS0. The most likely registers which the user will want to use this
function with are the Data Register and the Status Register. Subsequent operations to the
part will consist of read operations to the specified register without any intermediate writes to
the Communications Register. This means that once the next read operation to the specified
register has taken place, the part will be in a mode where it is expecting another read from
that specified register. The part will remain in this continuous read mode until 30 Hex has
been written to bits RW1 and RW0.
When 1, 1 is written to these bits (and 0 written to bits CR3 through CR0), the continuous
read mode is stopped and the part returns to where it is expecting a write operation to the
Communications Register. Note, the part continues to look at the DIN line on each SCLK
edge during the continuous read mode so that it can determine when to stop the continuous
read mode. Therefore, the user must be careful not to inadvertently exit the continuous read
mode or reset the part by writing a series of 1s to the part. The easiest way to avoid this is to
place a logic 0 on the DIN line while the part is in continuous read mode.
–13–REV. 0
AD7731
Bit Bit
Location Mnemonic Description
CR3 ZERO A zero must be written to this bit to ensure correct operation of the AD7731.
CR2-CR0 RS2-RS0 Register Selection Bits. RS2 is the MSB of the three selection bits. The three bits select to which
one of eight on-chip registers the next read or write operation takes place as shown in Table VIII.
Table VIII. Register Selection
RS2 RS1 RS0 Register
0 0 0 Communications Register (Write Operation)
0 0 0 Status Register (Read Operation)
0 0 1 Data Register
0 1 0 Mode Register
0 1 1 Filter Register
1 0 0 No Register Access
1 0 1 Offset Register
1 1 0 Gain Register
1 1 1 Test Register
Status Register (RS2-RS0 = 0, 0, 0); Power-On/Reset Status: CX Hex
The Status Register is an 8-bit read-only register. To access the Status Register, the user must write to the Communications Register
selecting either a single-shot read or continuous read mode and load bits RS2, RS1, RS0 with 0, 0, 0. Table IX outlines the bit desig nations for the Status Register. SR0 through SR7 indicate the bit location, SR denoting the bits are in the Status Register. SR7 denotes the first bit of the data stream. Figure 5 shows a flowchart for reading from the registers on the AD7731. The number in brackets
indicates the power-on/reset default status of that bit.
Table IX. Status Register
7RS6RS5RS4RS3RS2RS1RS0RS
YDR)1(YDTS)1(
Bit Bit
Location Mnemonic Description
SR7 RDY Ready Bit. This bit provides the status of the RDY flag from the part. The status and func-
tion of this bit is the same as the RDY output pin. A number of events set the RDY bit high
as indicated in Table XVII.
SR6 STDY Steady Bit. This bit is updated when the filter writes a result to the Data Register. If the filter
is in FASTStep™ mode (see Filter Register section), and responding to a step input, the
STDY bit remains high as the initial conversion results become available. The RDY output
and bit are set low on these initial conversions to indicate that a result is available. However,
if the STDY is high, it indicates that the result being provided is not from a fully settled
second-stage FIR filter. When the FIR filter has fully settled, the STDY bit will go low coincident with RDY. If the part is never placed into its FASTStep™ mode, the STDY bit will go
low at the first Data Register read and it is not cleared by subsequent Data Register reads.
A number of events set the STDY bit high as indicated in Table XVII. STDY is set high
along with RDY by all events in the table except a Data Register read.
SR5 STBY Standby Bit. This bit indicates whether the AD7731 is in its Standby Mode or normal mode
of operation. The part can be placed in its standby mode using the STANDBY input pin or
by writing 011 to the MD2 to MD0 bits of the Mode Register. The power-on/reset status of
this bit is 0 assuming the STANDBY pin is high.
SR4 NOREF No Reference Bit. If the voltage between the REF IN(+) and REF IN(–) pins is below 0.5 V
or either of these inputs is open-circuit, the NOREF bit goes to 1. If NOREF is active on
completion of a conversion, the Data Register is loaded with all 1s. If NOREF is active on
completion of a calibration, updating of the calibration registers is inhibited.
SR3-SR0 MS3-MS0 These bits are for factory use. The power-on/reset status of these bits varies depending on the
factory-assigned number.
)0(YBTS)0(FERON)X(3SM)X(2SM)X(1SM)X(0SM
–14–
REV. 0
 Loading...
Loading...