

Page 1

ACS850
Quick Start-up Guide
Standard Control Program
English . . . . . . . . . . . . . . . 3
Dansk . . . . . . . . . . . . . . . 17
Deutsch. . . . . . . . . . . . . . 31
Español. . . . . . . . . . . . . . 47
Français . . . . . . . . . . . . . 61
Italiano . . . . . . . . . . . . . . 77
Nederlands . . . . . . . . . . . 91
Português (Brasil). . . . . 107
Suomi . . . . . . . . . . . . . . 121
Svenska . . . . . . . . . . . . 135
Türkçe. . . . . . . . . . . . . . 149
Русский . . . . . . . . . . . . 163
中文. . . . . . . . . . . . . . . . 181
3AUA0000045498 Rev D
Effective: 2012-08-06
2012 ABB Oy.
All rights reserved.
Page 2
ACS850 drive manuals
*The delivery includes a multilingual quick installation guide.
DRIVE HARDWARE MANUAL*
ACS850-04 Drive Modules (0.37 to 45 kW) Hardware Manual – 3AUA0000045496 (English)
ACS850-04 Drive Modules (55 to 160 kW, 75 to 200 hp) Hardware Manual – 3AUA0000045487
(English)
ACS850-04 Drive Modules (200 to 500 kW, 250 to 600 hp) Hardware Manual – 3AUA0000026234
(English)
ACS850-04 Drive Modules (400 to 560 kW, 450 to 700 hp) Hardware Manual – 3AUA0000081249
(English)
DRIVE FIRMWARE MANUALS
ACS850 Standard Control Program Firmware Manual – 3AUA0000045497 (English).
OPTION MANUALS
Manuals for I/O Extension Modules, Fieldbus Adapters, etc.*
APPLICATION GUIDES
Application programming for ACS850 drives – 3AUA0000078664 (English)
ATEX certified safe disconnection function for ACS850 drives – 3AUA0000074343 (English)
Common DC configuration application guide – 3AUA0000073108 (English)
Safe torque off function for ACSM1, ACS850 and ACQ810 drives – 3AFE68929814 (English)
Page 3
Quick Start-up Guide for ACS850 with Standard Control Program 3
Quick Start-up Guide for ACS850 with Standard Control Program
About this guide
This guide contains the basic procedure that needs to be followed to start up an
ACS850 drive (with Standard Control Program). During the procedure, the drive is set
up using the ACS850 Control Panel.
Note: Only the functions of the Control Panel needed during the procedure are
described in the guide. The complete instructions for using the Control Panel are
included in the ACS850 Standard Control Program Firmware Manual
(3AUA0000045497 [English]).
Safety instructions
WARNING! All electrical installation and maintenance work on the drive
should be carried out by qualified electricians only.
Never work on the drive, the braking chopper circuit, the motor cable or the motor
when input power is applied to the drive. Always ensure by measuring that no voltage
is actually present.
Page 4
4 Quick Start-up Guide for ACS850 with Standard Control Program
00 A
00 Hz
0 %0.
0.
0.
REM
DIR
MENU
0.00rpm
LOC
REM
00 A
00 Hz
0 %0.
0.
0.
LOC
DIR
MENU
0.00rpm
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
MAIN MENU 1
LOC
Start-up procedure
Safety
The start-up may only be carried out by a qualified electrician.
The safety instructions must be followed during the start-up procedure. See the
safety instructions on the first pages of the appropriate hardware manual.
Check the installation. See the installation checklist in the appropriate hardware
manual.
Check that the starting of the motor does not cause any danger.
De-couple the driven machine if
• there is a risk of damage in case of an incorrect direction of rotation, or
• a normal ID run is required during the drive start-up, when the load torque is higher
than 20% or the machinery is not able to withstand the nominal torque transient
during the ID run.
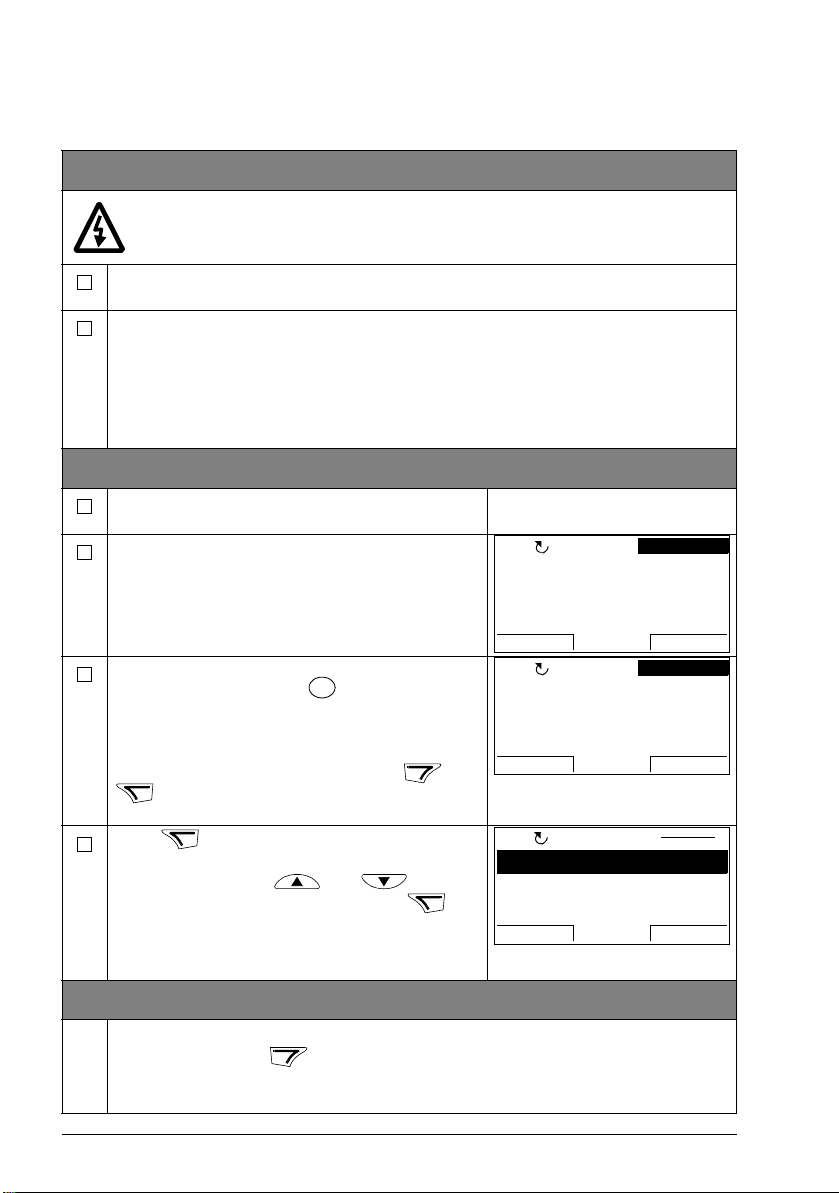
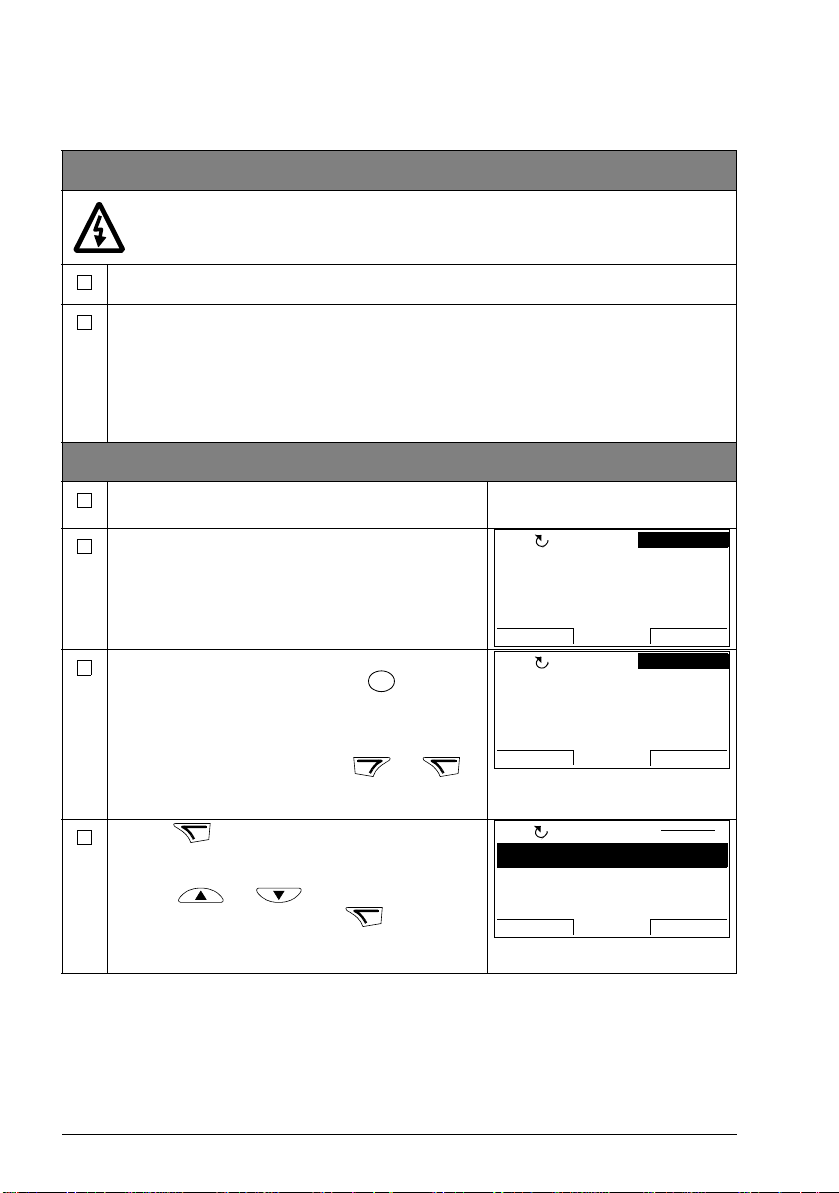
Power-up, control panel basics
Connect the control panel to the drive using an
appropriate Category 5E cable.
Power up the drive. After a few moments, the panel
shows the Output mode (right).
Note: The Output mode display will alternate with
“Alarm 2021 NO MOTOR DATA” until motor data is
entered later in this procedure.
Switch to local control to ensure that external control
is disabled by pressing the key on the control
panel. Local control is indicated by the text “LOC” on
the top row on the display.
The two boxes on the bottom row of the display
indicate the function of the two soft keys and
. The contents of the boxes depend on the
visible menu choices.
Press (MENU) to access the Main menu.
Within any menu, the desired selection is
highlighted. Press the and keys to
make a new choice; activate by pressing
(ENTER).
The Main menu is the starting point for the
procedures described below.
Notes:
• At any point, press (CANCEL or EXIT) to return to the previous level.
• By default, not all parameters are visible. Set parameter 16.15 Menu set sel to Load
long to make all parameters visible.
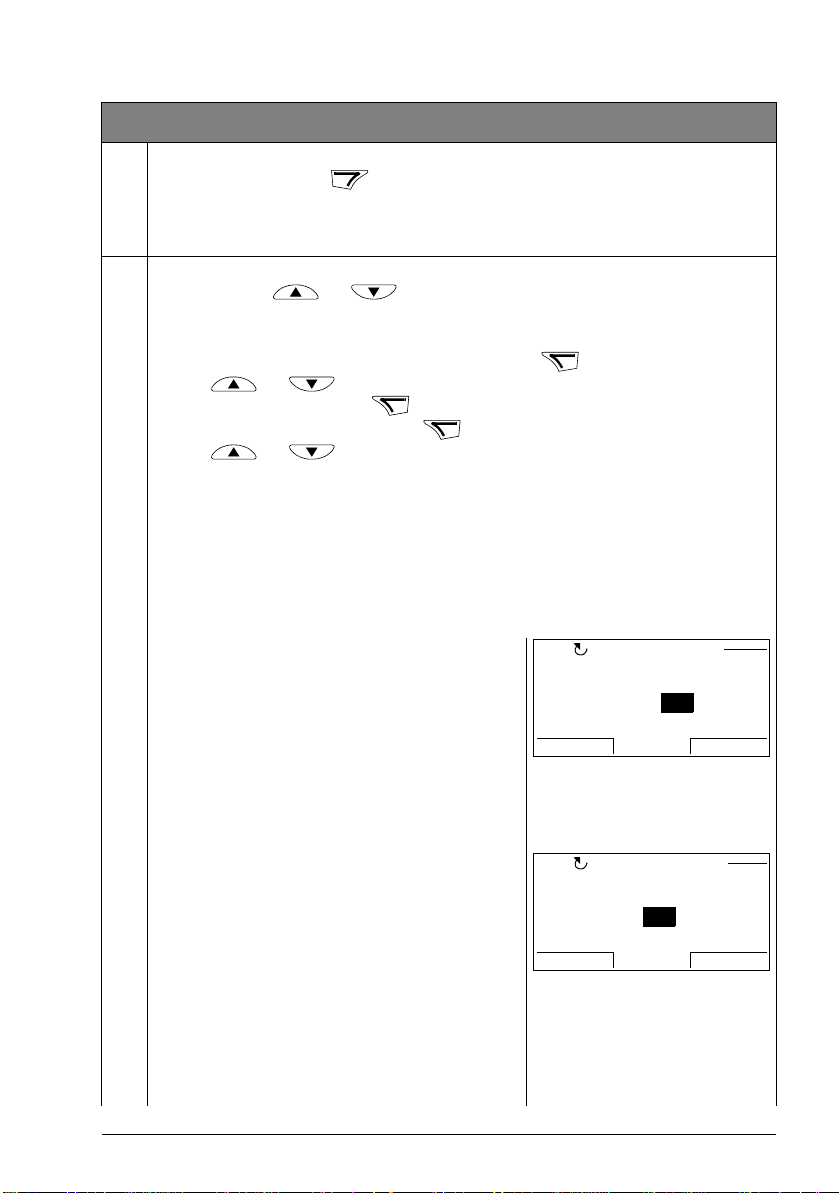
Adjusting parameter values
Page 5
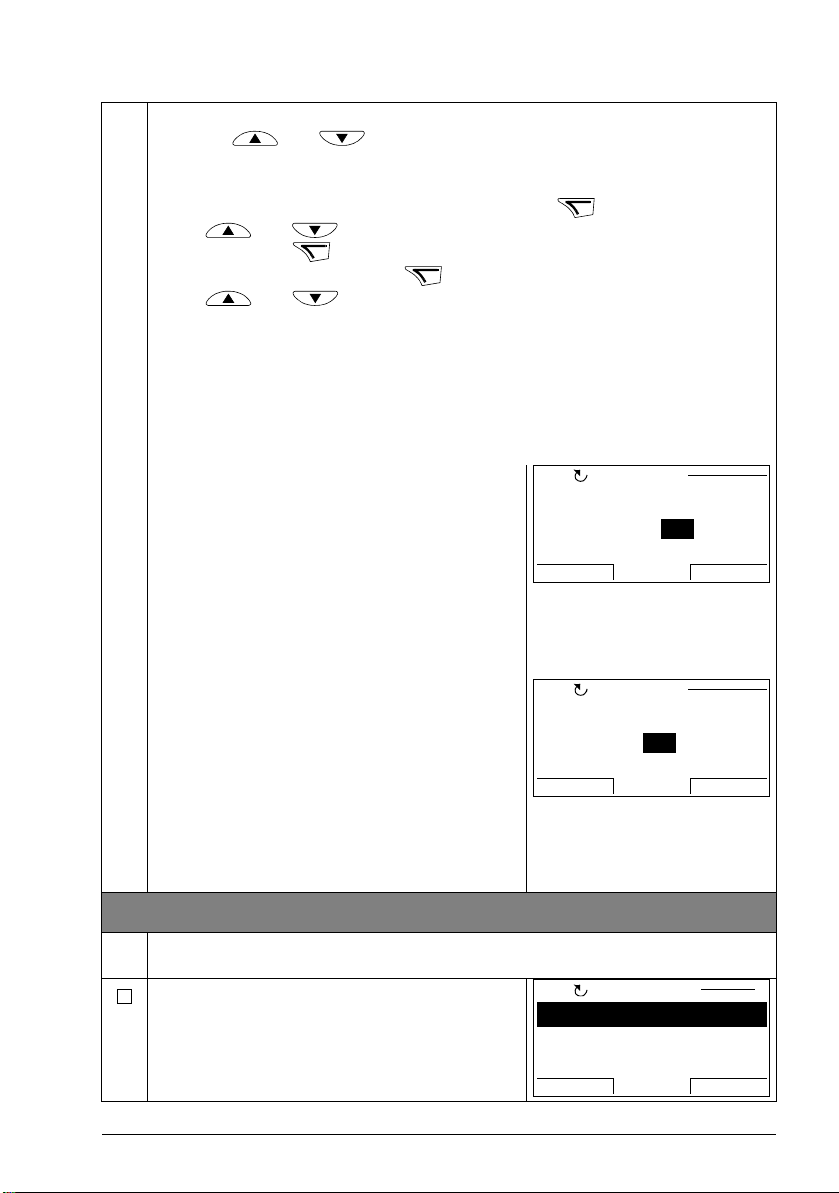
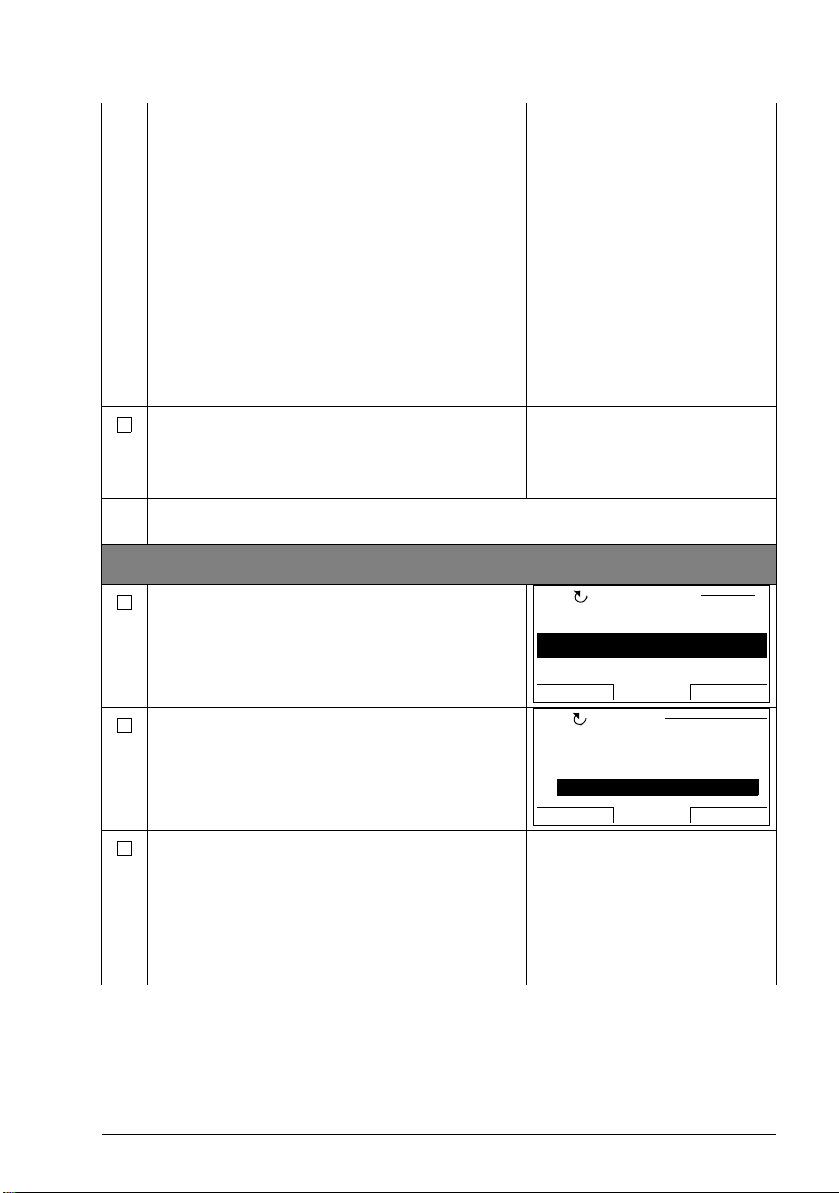
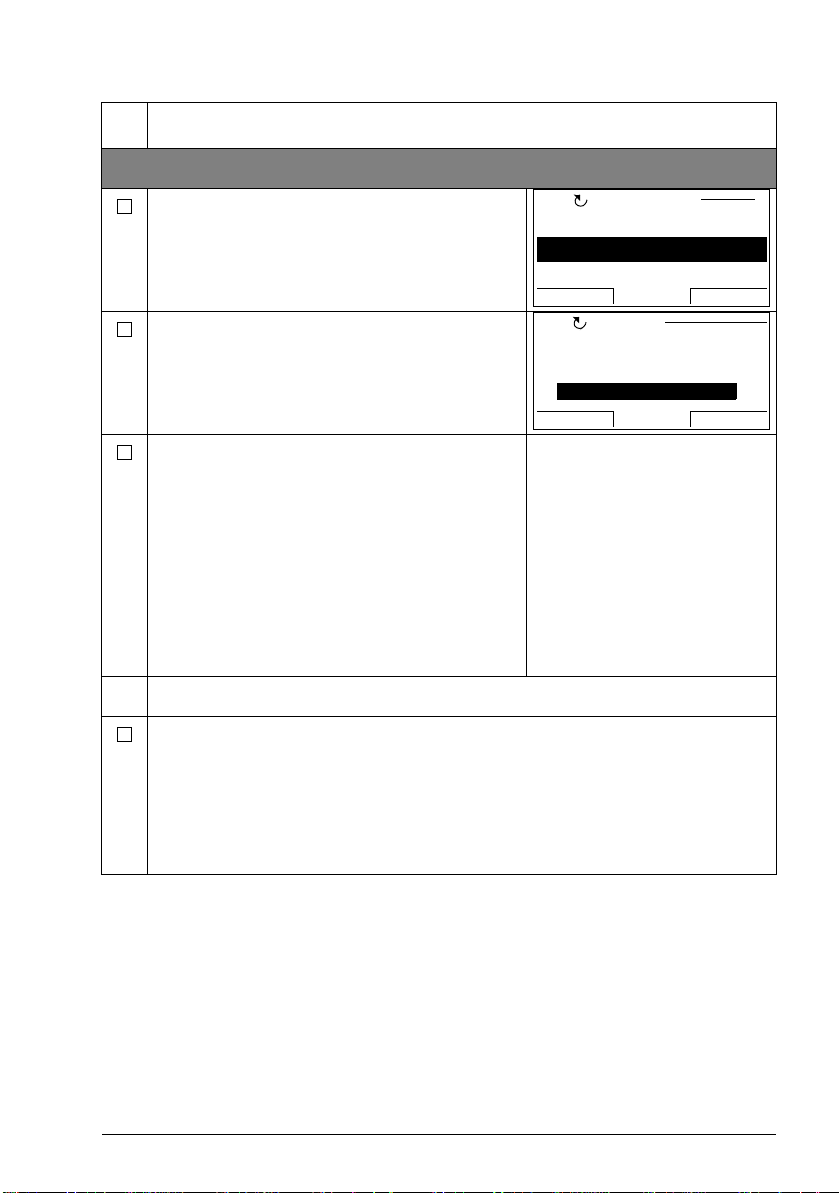
To adjust a parameter within an assistant:
1501 AO1 src
P.01.06
PAR EDIT
CANCEL
SAVE
0106 Motor torque
LOC
1002 Ext1 start in1
P.02.01.00
PAR EDIT
CANCEL
NEXT
0201 DI status
LOC
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
MAIN MENU 1
LOC
• Use the and keys to adjust the setting. Press SAVE to accept the
setting shown and to proceed to the next parameter.
To adjust a parameter at any other time:
• In the Main menu, highlight PARAMETERS and press (ENTER).
• Use and to browse the list of parameter groups. Highlight the desired
group and press (SEL) to display the parameters within that group.
• Highlight a parameter and press (EDIT) to adjust the setting.
• Use and to adjust the setting. Press SAVE to accept the setting
shown. Press EXIT twice to return to the Main menu.
Notes for more complicated edits:
• With parameters that define a digital source, the setting Const can be used to fix the
value to constant 1 (C.TRUE) or 0 (C.FALSE).
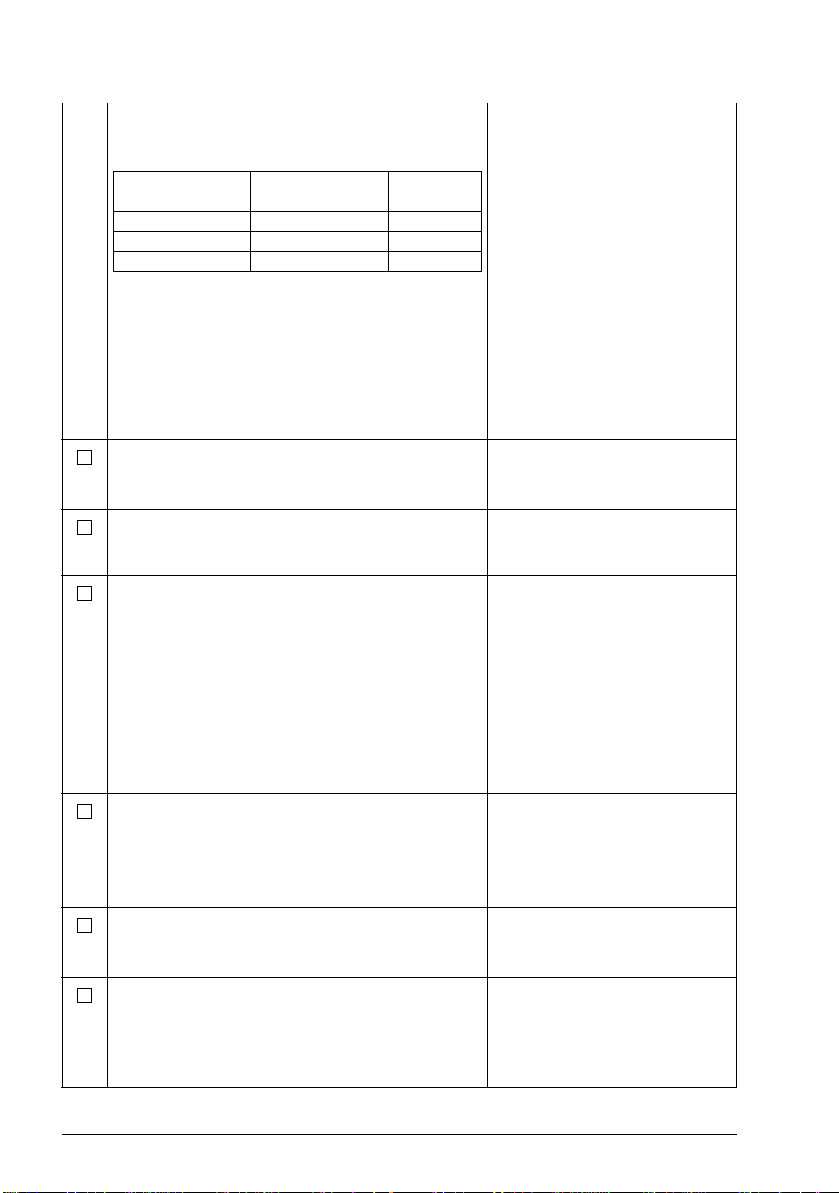
• With parameters that define an analog or digital source, the setting Pointer can be
used to freely choose any parameter value (analog) or a specific bit of a packed
boolean parameter (digital) as the source:
• With an analog source, the parameter group
and parameter index are specified. After
selecting the group, press NEXT to move to the
index setting.
The text below the cursor reflects the current
setting.
After setting the index, press SAVE to accept
the value. Press CANCEL at any point to
discard any changes and to return to the
parameter list.
• With a digital source, the parameter group,
parameter index, and bit number are specified.
After setting an item, press NEXT to move to
the next.
The text below the cursor reflects the current
setting.
After the bit number is set, press SAVE to
accept the value. Press CANCEL at any point
to discard any changes and to return to the
parameter list.
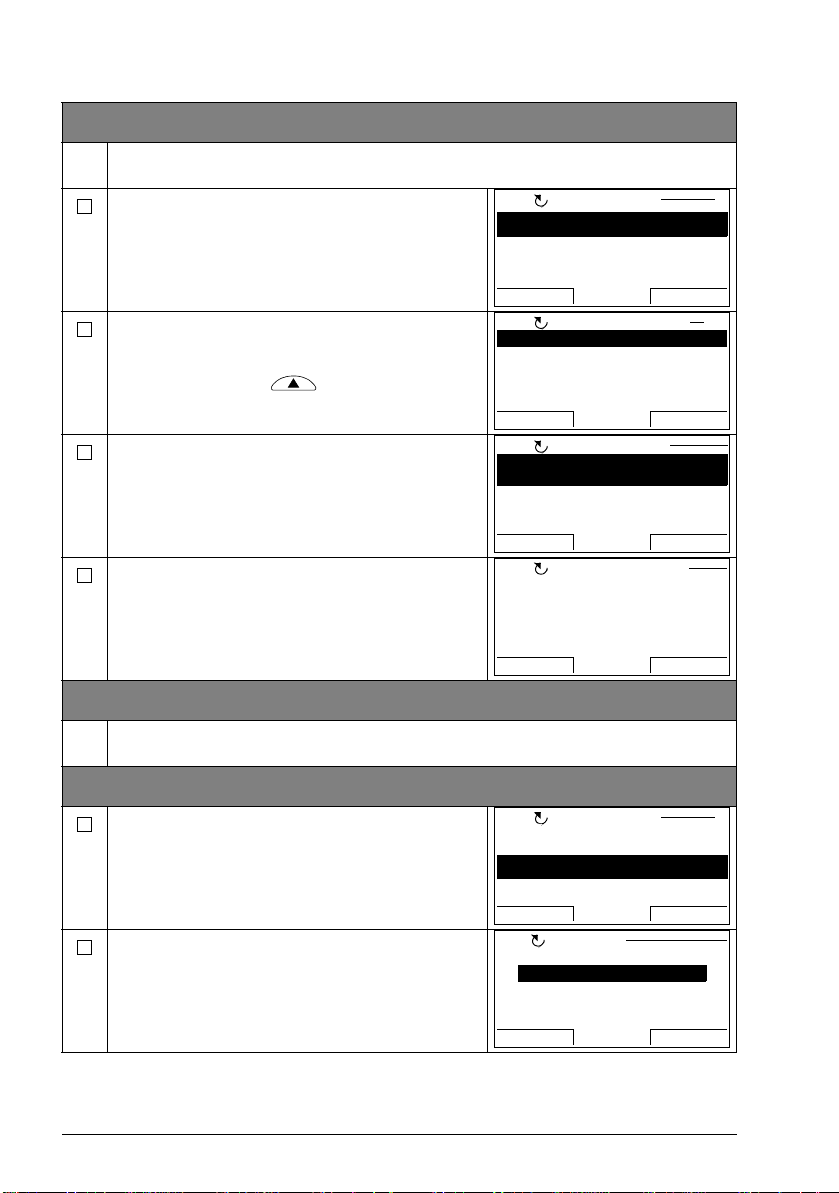
By default, the language of the text shown is English. If desired, the language can be
changed as follows.
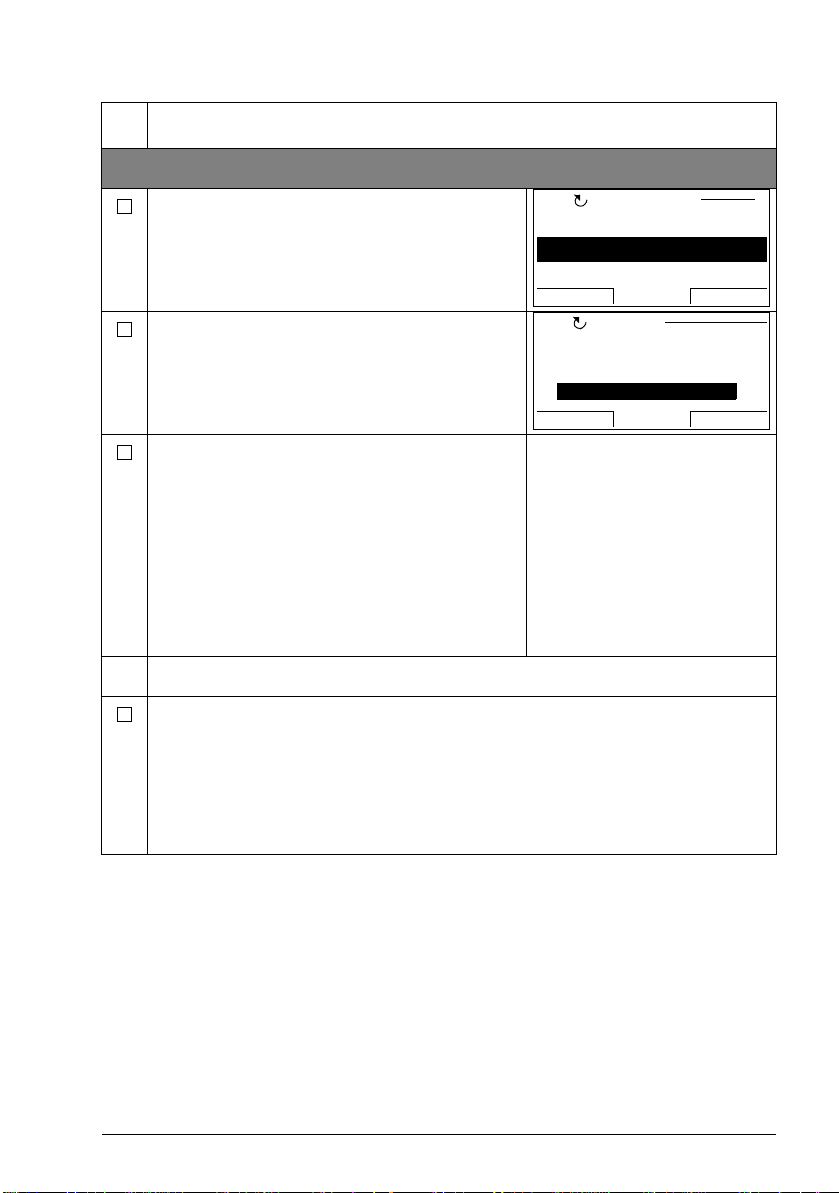
In the Main menu, make sure PARAMETERS is
highlighted, and press ENTER.
Quick Start-up Guide for ACS850 with Standard Control Program 5
Changing the language
Page 6
6 Quick Start-up Guide for ACS850 with Standard Control Program
99 Start-up data
01 Actual values
02 I/O values
03 Control values
04 Appl values
EXIT
SEL
PAR GROUPS 99
LOC
9901 Language
English
9904 Motor type
9905 Motor ctrl mode
9906 Mot nom current
PARAMETERS
EXIT
EDIT
LOC
9901 Language
Deutsch
PAR EDIT
CANCEL
SAVE
[0407 hex]
LOC
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
MAIN MENU 1
LOC
Select assistant
Application Macro
Motor Set-up
Start/Stop Control
EXIT
OK
CHOICE
LOC
Navigate to parameter group 99 Start-up data and
press SEL. Note that the list will wrap around in
either direction between groups 99 and 01 – it is
quicker to press for group 99.
Make sure parameter “9901 Language” is
highlighted and press EDIT.
Select the desired language and press SAVE.
Press EXIT twice to return to the Main menu.
Assistants
The start-up procedures described below make use of assistants. These are routines
that guide the user through the essential parameter settings.
1 – Application macro selection
In the Main menu, highlight ASSISTANTS and press
ENTER.
Highlight Application Macro and press OK.
Page 7
Quick Start-up Guide for ACS850 with Standard Control Program 7
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
MAIN MENU 1
LOC
Select assistant
Application Macro
Motor Set-up
Start/Stop Control
EXIT
OK
CHOICE
LOC
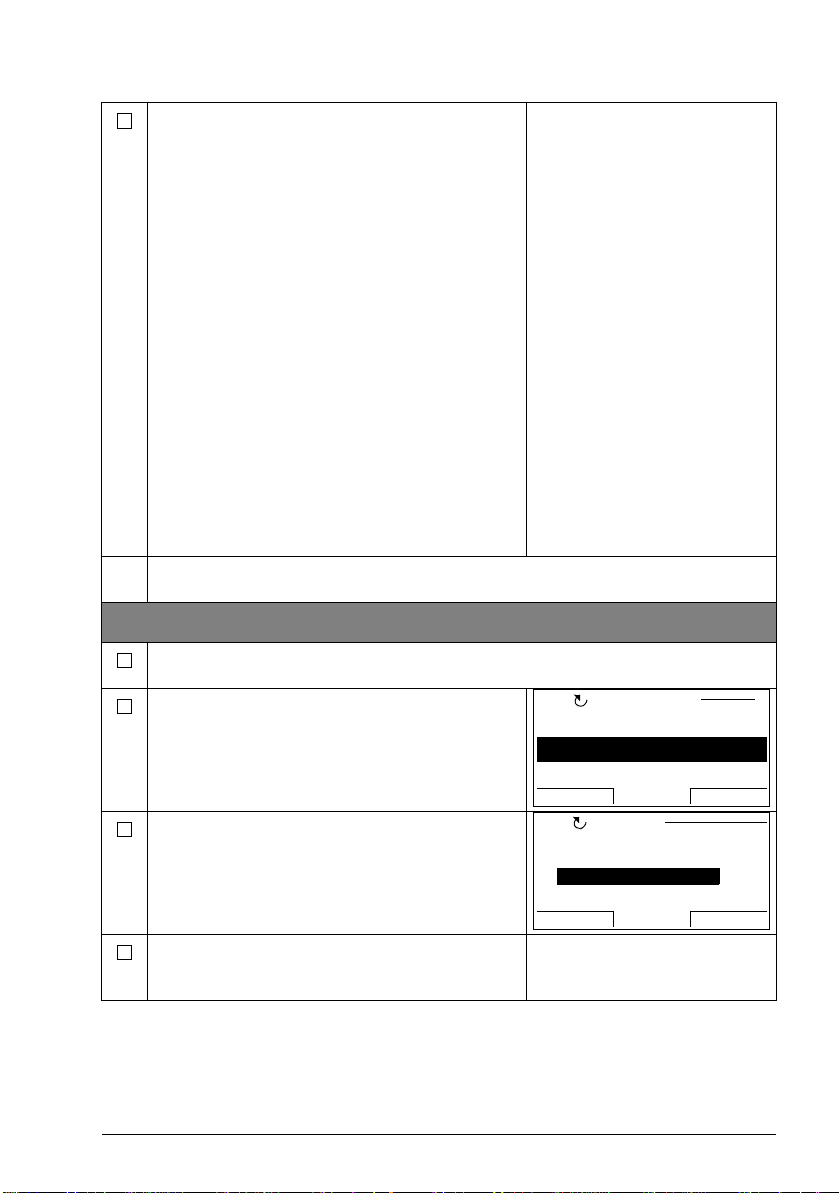
Application macros are pre-defined parameter
settings that can be used as a basis for user
applications. The following macros are available:
• Factory (for speed control applications where a
simple start/stop interface is required)
• Hand/Auto (for speed control applications where
two external control devices are used)
• PID control (for process control applications
such as closed-loop pressure, level or flow control
systems)
• Torque control (for torque and/or speed control
of motor)
• Sequential control (for speed control
applications in which multiple constant speeds
and acceleration/deceleration ramps are needed
and are sequenced).
More information on the macros is available in the
Firmware Manual.
Highlight one of the macros and press OK.
After the text “Done OK” appears on the control panel, press OK to complete the
firmware assistant.
Parameter defaults for the macro
are applied.
2 – Motor set-up
Ensure you have the motor nameplate and encoder data (if needed) at hand.
In the Main menu, highlight ASSISTANTS and press
ENTER.
Highlight Motor Set-up and press OK.
The assistant will guide you through the motor set-
up.
Select the motor type, AM (asynchronous squirrel
cage AC motor) or PMSM (permanent magnet
synchronous motor).
99.04 Motor type
Page 8
8 Quick Start-up Guide for ACS850 with Standard Control Program
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
Select the motor control mode. DTC is suitable for
most cases.
Scalar mode is recommended if
• the nominal current of the motor is less than 1/6
of the nominal current of the drive,
• the drive is used for test purposes with no motor
connected, or
• the drive controls multiple motors and the number
of motors connected is variable.
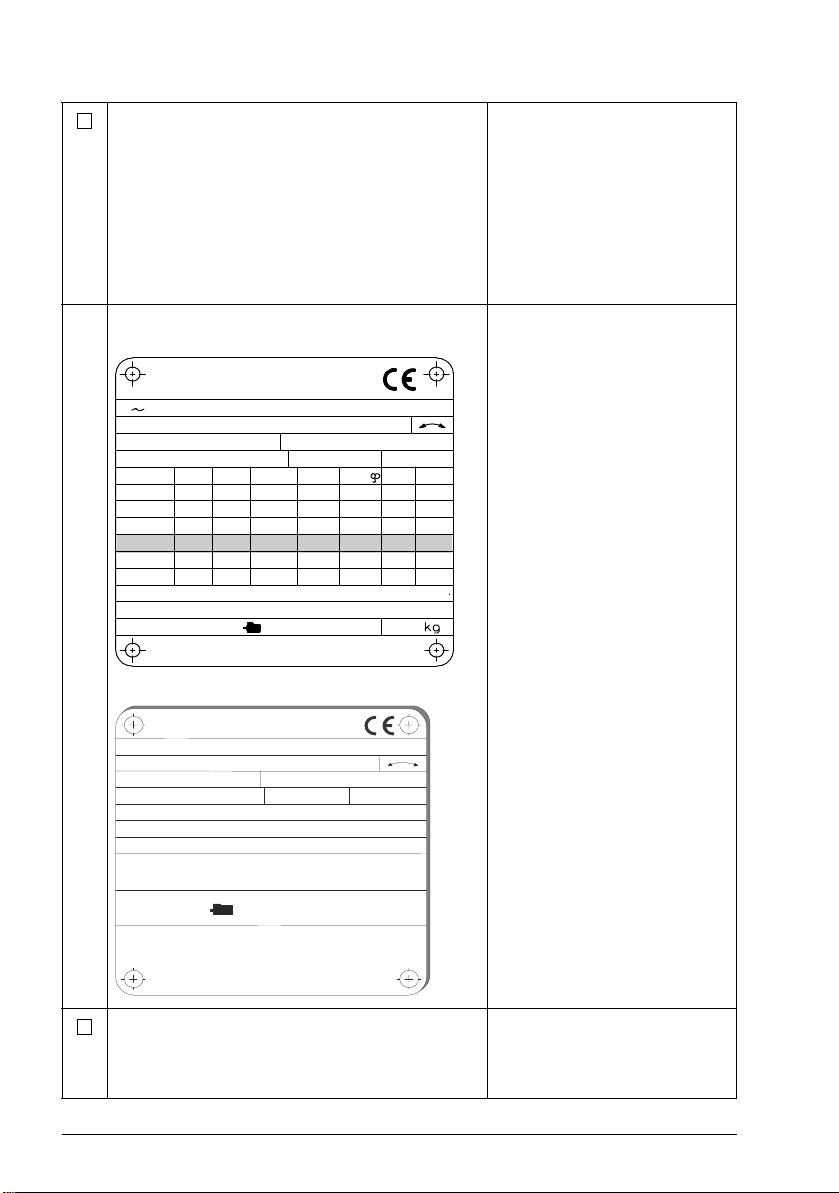
Enter the motor data from the motor nameplate.
Asynchronous motor nameplate example:
Permanent magnet motor nameplate example:
99.05 Motor ctrl mode
Note: Set the motor data to
exactly the same value as on the
motor nameplate. For example, if
the motor nominal speed is 1470
rpm on the nameplate, setting the
value of parameter 99.09 Mot
nom speed to 1500 rpm results in
incorrect operation of the drive.
If D (delta) data is chosen, then
connect the motor in delta.
If Y (star) data is selected, then
connect the motor in star.
• motor nominal current
Allowed range: approximately 1/6 × I
the drive (0…2 × I
mode = Scalar).
Hd
… 2 × IHd of
if parameter 99.05 Motor ctrl
Hd
99.06 Mot nom current
Page 9
Quick Start-up Guide for ACS850 with Standard Control Program 9
• motor nominal voltage
Allowed range: 1/6 × U
… 2 × U
N
of the drive. (UN
N
99.07 Mot nom voltage
refers to the highest voltage in each nominal voltage
range).
With permanent magnet motors, the nominal
voltage is the BackEMF voltage (at motor nominal
speed). If the voltage is given as voltage per rpm,
e.g. 60 V per 1000 rpm, the voltage for 3000 rpm
nominal speed is 3 × 60 V = 180 V.
Note that the nominal voltage is not equal to the
equivalent DC motor voltage (E.D.C.M.) value given
by some motor manufacturers. The nominal voltage
can be calculated by dividing the E.D.C.M. voltage
by 1.7 (= square root of 3).
• motor nominal frequency
99.08 Mot nom freq
With permanent magnet motor: If the frequency is
not given on the motor nameplate, it has to be
calculated using the following formula:
f = n × p /60
where p = number of pole pairs, n = motor nominal
speed.
• motor nominal speed 99.09 Mot nom speed
• motor nominal power 99.10 Mot nom power
The following motor data parameters can be set to improve control accuracy. If not
known, set the values to 0.
• motor nominal cos
(not applicable for permanent
99.11 Mot nom cosfii
magnet motors)
• motor nominal shaft torque 99.12 Mot nom torque
The following parameters define operation limits to protect the driven equipment.
• maximum speed
20.01 Maximum speed
For the Normal and Reduced ID runs (see below),
this value should be higher than 55% of the motor
nominal speed defined earlier.
• minimum speed
20.02 Minimum speed
For the Normal and Reduced ID runs (see below),
this value should be less than or equal to 0 rpm.
• maximum current
20.05 Maximum current
This value should be higher than the motor nominal
current defined earlier.
Page 10
10 Quick Start-up Guide for ACS850 with Standard Control Program
Forward
When drive output phases U2,
V2 and W2 are connected to the
corresponding motor terminals:
Reverse
• maximum torque
For the Normal ID run (see below), this value should
be at least 100% of motor nominal torque defined
earlier.
• minimum torque 20.08 Minimum torque1
The question “Do you want to perform id-run now?” is displayed. The ID run
(identification run) will identify the characteristics of the motor for optimum control.
If you do not wish to perform the ID run at this point, select No to complete the Motor
Set-up firmware assistant. Proceed to section 3 – Start/Stop configuration.
If you wish to perform the ID run, continue with the following steps BEFORE selecting
Yes.
WARNING! With Normal or Reduced ID run the motor will run at up to
approximately 50…100% of the nominal speed during the ID run. ENSURE
THAT IT IS SAFE TO RUN THE MOTOR BEFORE PERFORMING THE ID
RUN!
Check the direction of rotation of the motor. During
the run (Normal or Reduced), the motor will rotate in
the forward direction.
Ensure the Safe Torque Off and emergency stop
circuits (if present) are closed.
Select Yes and press OK.
20.07 Maximum torque1
Select the ID run method.
The ID run will be performed at the next start of the
drive.
NORMAL ID run should be selected whenever
possible.
Note: The driven machinery must be de-coupled
from the motor with Normal ID run:
• if the load torque is higher than 20%, or
• if the machinery is not able to withstand the
nominal torque transient during the ID run.
The REDUCED ID run should be selected instead of
the Normal ID run if the mechanical losses are
higher than 20%, i.e. the motor cannot be
de-coupled from the driven equipment, or full flux is
required to keep the motor brake open (conical
motor).
99.13 Idrun mode
Page 11
Quick Start-up Guide for ACS850 with Standard Control Program 11
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
MAIN MENU 1
LOC
Select assistant
Application Macro
Motor Set-up
Start/Stop Control
EXIT
OK
CHOICE
LOC
The STANDSTILL ID run should be selected only if
the Normal or Reduced ID run is not possible due to
the restrictions caused by the connected mechanics
(e.g. with lift or crane applications).
Notes:
• The motor shaft must NOT be locked and the load
torque must be < 20% during Normal or Reduced
ID run. With permanent magnet motor this
restriction also applies when Standstill ID run is
selected.
• Mechanical brake is not opened by the logic for
the ID run.
• The ID run cannot be performed if parameter
99.05 Motor ctrl mode = Scalar.
Start the motor (by pressing the START button) to
activate the ID run.
ID run is indicated by alarm ID-RUN on the panel
display.
After the text “Done OK” appears on the control panel, press OK to complete the
firmware assistant.
Alarm: ID-RUN
3 – Start/Stop configuration
In the Main menu, highlight ASSISTANTS and press
ENTER.
Highlight Start/Stop Control and press OK.
The following parameters will be set.
Note: Depending on the selections you make, the
routine may skip some of the parameters listed
below.
Select the start/stop function and signal sources for
external control location 1 (EXT1). First, program
parameter 10.01 (start function), then 10.02 and
10.03 to choose the sources of the start signal.
The choices for parameter 10.01 are:
In1: The signal defined in parameter 10.02 is the
source for the start signal (0 = Stop, 1 = Start).
10.01 Ext1 start func
10.02 Ext1 start in1
10.03 Ext1 start in2
Page 12
12 Quick Start-up Guide for ACS850 with Standard Control Program
State of source 1
(via par. 10.02)
State of source 2
(via par. 10.03)
Command
0 -> 1 1 Start
Any 1 -> 0 Stop
Any 0 Stop
3-wire: Start/Stop commands are determined on the
basis of the two sources selected by parameters
10.02 and 10.03.
In1F In2R: The signal defined in parameter 10.02
starts the drive in the forward direction, and the
signal defined in 10.03 will start the drive in reverse.
In1St In2Dir: The signal defined in parameter 10.01
will start the drive (0 = Stop, 1 = Start). The signal
defined in 10.03 will change the motor direction
(0 = forward, 1 = reverse).
Select the start/stop function and signal sources for
external control location 2 (EXT2).
The selections are as with EXT1 above.
Define the signal source to switch between external
control locations EXT1 and EXT2 (0 = EXT1, 1 =
EXT2).
Select the motor start function.
Automatic is the best all-round setting that also
enables flying start (starting when the motor is
rotating).
Fast involves pre-magnetization of the motor and
should be selected if a high break-away torque is
required.
Const time should be selected if a constant premagnetization time is required. The time is set by
parameter 11.02 DC-magn time.
Select the stop mode.
Coast: The power to the motor is cut off. The motor
is left to coast to a stop.
Ramp: The motor is stopped by decelerating along
the active deceleration ramp (to be defined later).
Select the source of the run enable signal.
If the signal is switched off, the drive will not start, or
coasts to stop if running. 1 = Run enable signal on.
Select the source of the emergency stop OFF3
signal.
If the signal is removed (in other words, changes to
0), the drive will stop along the emergency stop
ramp (defined by parameter 22.12 Em stop time).
10.04 Ext2 start func
10.05 Ext2 start in1
10.06 Ext2 start in2
12.01 Ext1/Ext2 sel
11.01 Start mode
11.03 Stop mode
10.11 Run enable
10.13 Em stop off3
Page 13
Quick Start-up Guide for ACS850 with Standard Control Program 13
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
MAIN MENU 1
LOC
Select assistant
Motor Set-up
Start/Stop Control
Reference select
EXIT
OK
CHOICE
LOC
After the text “Done OK” appears on the control panel, press OK to complete the
firmware assistant.
4 – Reference selection
In the Main menu, highlight ASSISTANTS and press
ENTER.
Highlight Reference select and press OK.
The following parameters will be set.
Note: Depending on the selections you make, the
routine may skip some of the parameters listed
below.
Select the control mode for external control
locations EXT1 and EXT2.
Speed: Speed control.
Tor que : Torque control.
Min, Max, Add: Torque reference and speed
controller output are compared and the
mathematical function is applied (smaller, greater,
addition).
Depending on the selections, the speed or torque
reference source (or both) is defined next.
Speed reference set-up
Choose the number of constant speeds (if any) to use.
If you select any constant speeds, you are asked if the start direction should affect the
constant speed direction.
No: The sign of the constant speed directly determines the running direction when the
constant speed is activated.
Yes: The sign of the constant speed is multiplied by the value of the Direction signal to
determine the running direction when the constant speed is activated.
12.03 Ext1 ctrl mode
12.05 Ext2 ctrl mode
Page 14
14 Quick Start-up Guide for ACS850 with Standard Control Program
Source defined by
par. 26.02
Source defined by
par. 26.03
Source defined by
par. 26.04
Constant speed active
000None
1 0 0 Constant speed 1
0 1 0 Constant speed 2
1 1 0 Constant speed 3
0 0 1 Constant speed 4
1 0 1 Constant speed 5
0 1 1 Constant speed 6
1 1 1 Constant speed 7
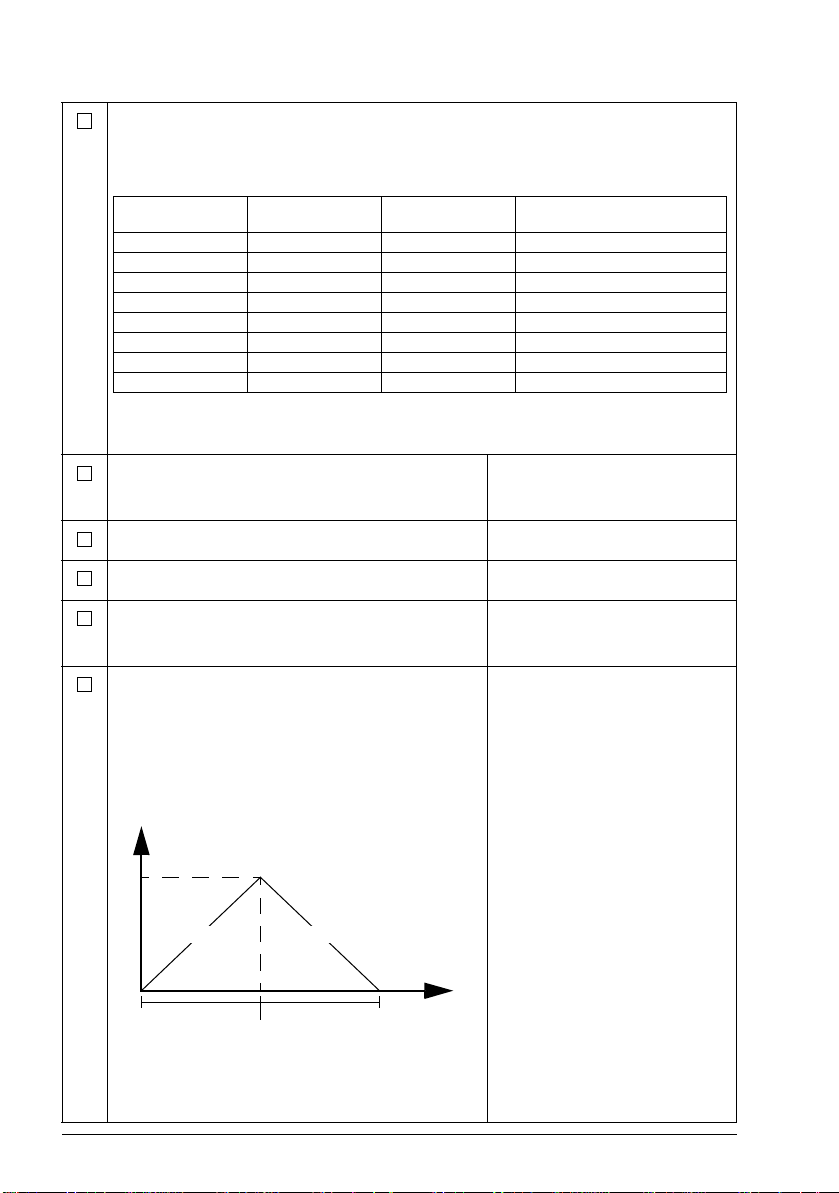
Time
Speed
19.01
22.02 or
22.04
22.03 or
22.05
Acc. Dec.
0
You are now asked if each constant speed selector should activate one constant speed.
No: Constant speeds 1…7 are activated by the sources selected by parameters 26.02,
26.03 and 26.04 as follows:
Yes: Constant speeds 1…3 are activated by the sources selected by parameters 26.02,
26.03 and 26.04 respectively.
Set the constant speed selector sources. 26.02 Const speed sel1
26.03 Const speed sel2
26.04 Const speed sel3
Enter the constant speeds. 26.06 Const speed1…
Select the source of the speed reference signal. 21.01 Speed ref1 sel
Define the absolute minimum limit for the speed
reference. This limit applies for both the positive and
negative ranges.
Define the speed scaling used for the acceleration/
deceleration times. Define the acceleration/
deceleration times.
The diagram below shows the effect of parameter
19.01 Speed scaling on the acceleration/
deceleration times.
Note: Acceleration/deceleration times may be
automatically extended by the existing torque limits.
21.09 SpeedRef min abs
19.01 Speed scaling
22.02 Acc time1
22.04 Acc time2
22.03 Dec time1
22.05 Dec time2
Page 15
Quick Start-up Guide for ACS850 with Standard Control Program 15
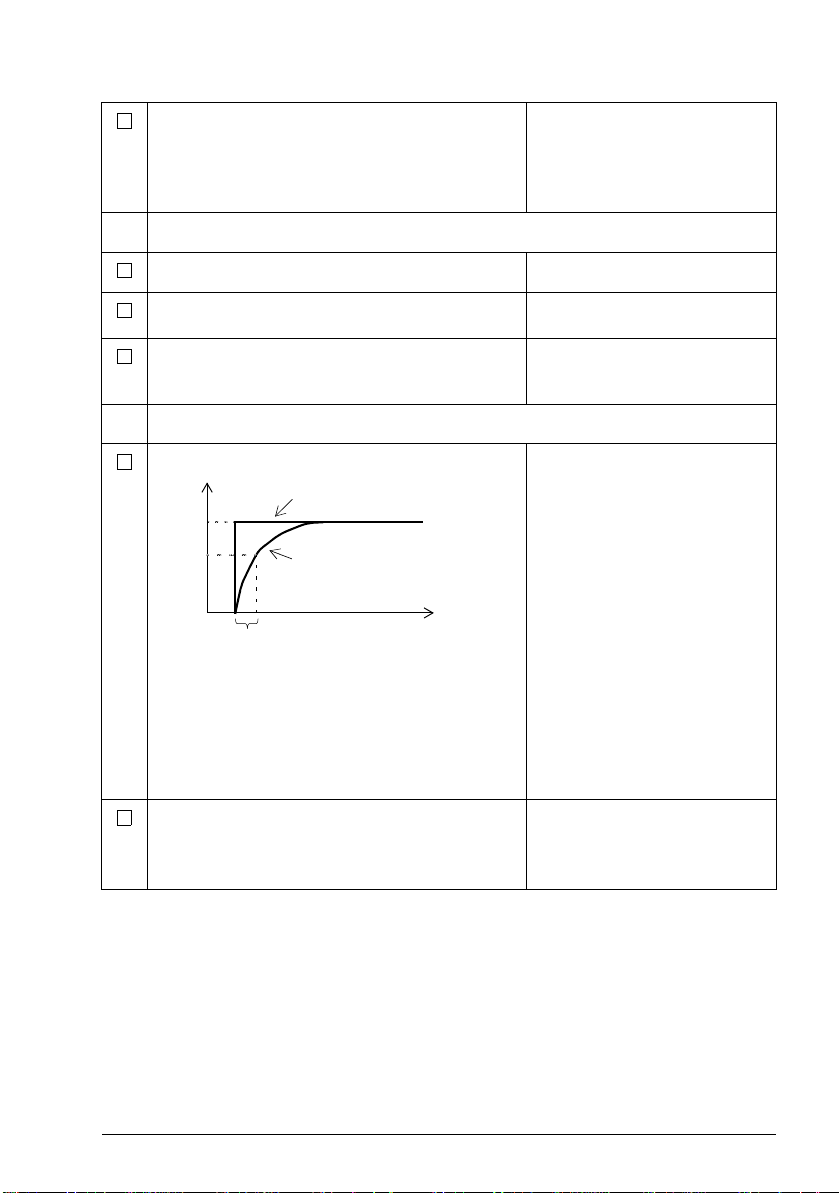
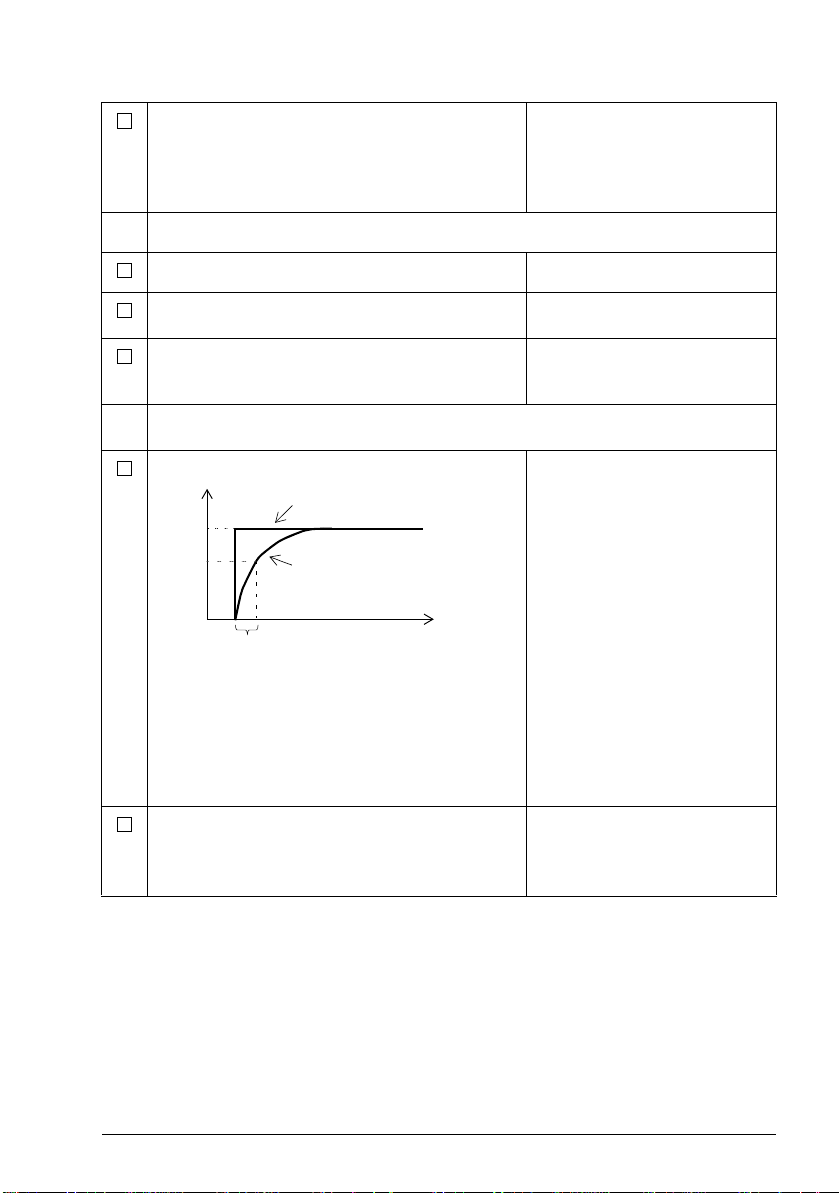
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = filter input (step)
O = filter output
t = time
T = filter time constant
Unfiltered signal
Filtered signal
Select the source to switch between acceleration/
22.01 Acc/Dec sel
deceleration ramp pairs 1 and 2.
0 = Acceleration time 1/Deceleration time 1 are in
force, 1 = Acceleration time 2/Deceleration time 2
are in force.
Torque reference set-up
Select the source of the torque reference signal. 24.01 Torq ref1 sel
Define the maximum and minimum torque
references.
Define the times for the torque reference to increase
from zero to nominal motor torque (ramp up) and
24.03 Maximum torq ref
24.04 Minimum torq ref
24.06 Torq ramp up
24.07 Torq ramp down
vice versa (ramp down).
Analog input AI1/AI2 set-up (if either is selected as speed or torque reference source)
Define the filter time constant for the analog input. 13.01 AI1 filt time or
13.06 AI2 filt time
Define the maximum and minimum values for the
analog input.
13.02 AI1 max or
13.07 AI2 max
13.03 AI1 min or
13.08 AI2 min
Page 16
16 Quick Start-up Guide for ACS850 with Standard Control Program
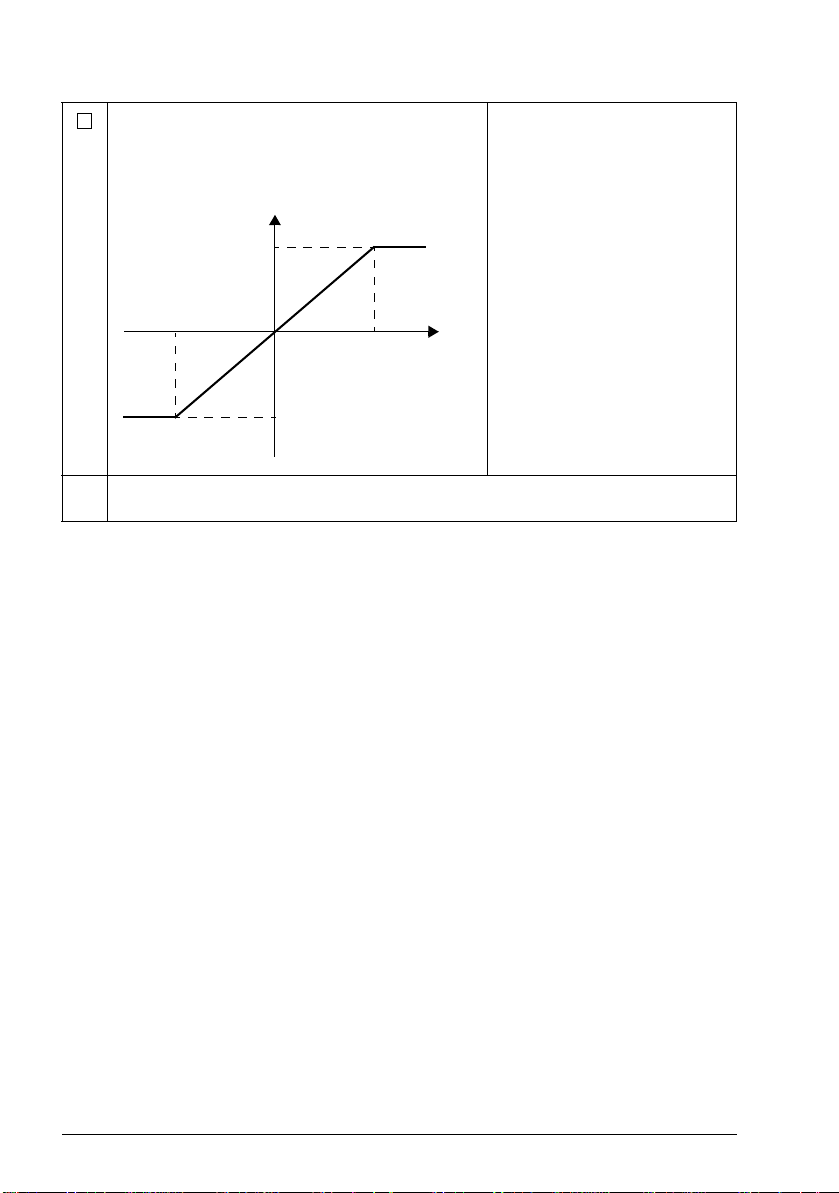
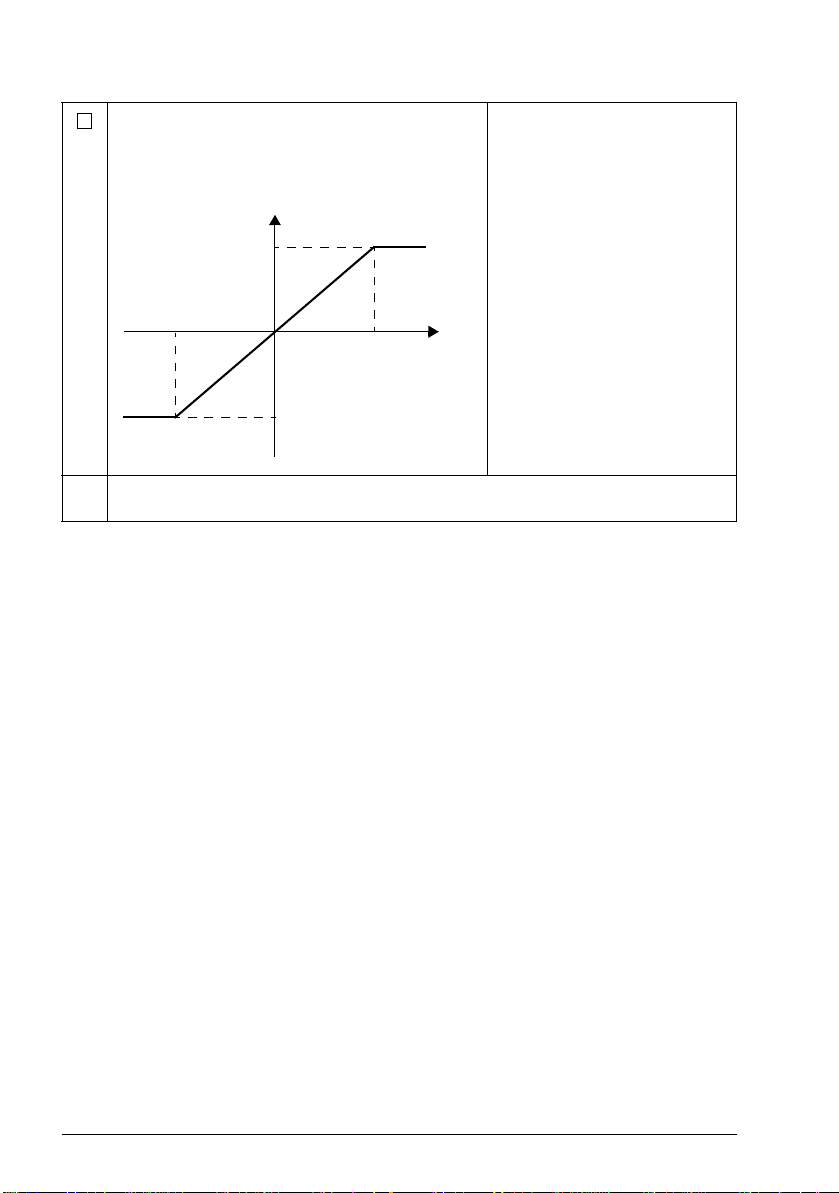
AI (scaled)
AI (mA/V)
13.04/13.09
13.02/13.07
13.03/13.08
13.05/13.10
Define the scaled values that correspond to the
maximum and minimum values defined at the
previous step. This is useful if full speed is required
at lower analog input values.
13.04 AI1 max scale or
13.09 AI2 max scale
13.05 AI1 min scale or
13.10 AI2 min scale
After the text “Done OK” appears on the control panel, press OK to complete the
firmware assistant and the start-up procedure.
Page 17
Quick Start-up Guide til ACS850 med Standard Control Program 17
Quick Start-up Guide til ACS850 med Standard Control Program
Om denne vejledning
Denne vejledning indeholder den grundlæggende procedure, der skal følges ved
opstart af et ACS850-drev (med Standard Control Program). Under proceduren er
drevet aktiveret ved hjælp af ACS850-betjeningspanelet.
Bemærk! Det er kun de af betjeningspanelets funktioner, der er nødvendige under
proceduren, som er beskrevet. Alle oplysningerne om brugen af af betjeningspanelet
findes i ACS850-standardstyreprogram Firmwaremanual (3AUA0000054535 (på
dansk)).
Sikkerhedsinstruktioner
ADVARSEL! Al elektrisk installation og alt vedligeholdelsesarbejde på
drevet må kun udføres af en autoriseret installatør.
Arbejd aldrig på drevet, bremsechopperkredsen, motorkablet eller motoren, når
netspændingen er tilsluttet drevet. Sørg altid for at sikre dette ved at måle, at der ikke
er nogen spænding til stede.
Page 18
18 Quick Start-up Guide til ACS850 med Standard Control Program
00 A
00 Hz
0 %0.
0.
0.
REM
RETNING
MENU
0,00rpm
LOK
REM
00 A
00 Hz
0 %0.
0.
0.
LOK
RETNING
MENU
0,00rpm
PARAMETRE
ASSISTENT
ÆNDRET PAR
EXIT ENTER
HOVEDMENU 1
LOK
Opstartsprocedure
Sikkerhed
Opstartsproceduren må kun gennemføres af en kvalificeret elektriker.
Sikkerhedsinstruktionerne skal følges under opstartsproceduren. Se
sikkerhedsinstruktionerne på de første sider af den tilhørende hardwaremanual.
Kontroller installationen. Se installationstjeklisten i den tilhørende hardware-manual.
Kontroller, at start af motoren ikke medfører fare.
Belastningsmaskinen frakobles, hvis:
• Der er risiko for ødelæggelse i tilfælde af forkert omløbsretning, eller
• en normal identifikationstest kræves under opstarten af drevet, hvis
belastningsmomentet er højere end 20 %, eller hvis maskinen ikke kan tåle det
nominelle transiente moment under identifikationstesten.
Opstart, grundlæggende om betjeningspanel
Slut betjeningspanelet til drevet ved hjælp af det
tilhørende Kategori 5E-kabel.
Start drevet op. Efter nogle få øjeblikke viser panelet
Outputmode (højre).
Bemærk! Outputmode vises skiftevis med "Alarm
2021 MOTORDATA MANGLER", indtil en assistent
startes senere i proceduren.
Skift til lokal styring for at sikre, at ekstern styring er
deaktiveret, ved at trykke på tasten på
betjeningspanelet. Lokalstyring indikeres med
teksten "LOK" i den øverste række på displayet.
De to bokse i den nederste række af visningen
angiver funktionen af de to taster og .
Indholdet af boksene afhænger af de synlige
menuvalg.
Tryk på (MENU) for at få adgang til
hovedmenuen.
Det ønskede valg markeres i menuen. Tryk på
tasterne og for at foretage et nyt
valg, og aktivér ved at trykke på (ENTER).
Hovedmenuen er startpunktet for de procedurer, der
er beskrevet herunder.
Page 19
Quick Start-up Guide til ACS850 med Standard Control Program 19
1501 AO1 signalkilde
P.01.06
PAR ÆNDRING
CANCEL
GEM
0106 Motor moment
LOK
1002 EKS1 startKilde1
P.02.01.00
PAR ÆNDRING
CANCEL
NÆSTE
0201 DI-Status
LOK
Bemærk!
• Du kan altid trykke på (CANCEL eller EXIT) for at vende tilbage til det forrige
niveau.
• Som standard er det ikke alle parametre, der er synlige. Angiv parameteren 16.15
Param liste valg til Load lang for at gøre alle parametre synlige.
Sådan justeres en parameter i en assistent:
• Brug tasterne og for at justere indstillingen. Tryk på GEM for at
acceptere den viste indstilling og fortsætte til den næste parameter.
Sådan justeres en parameter på ethvert tidspunkt:
• Fremhæv i hovedmenuen PARAMETRE, og tryk på (ENTER).
• Brug og til at søge i listen over parametergrupper. Fremhæv den
ønskede gruppe, og tryk på (VALG) for at få vist parametrene i gruppen.
• Fremhæv en parameter, og tryk på (REDIGER) for at justere indstillingen.
• Brug og til at justere indstillingen. Tryk på GEM for at acceptere den
viste indstilling. Tryk på EXIT to gange for at gå tilbage til hovedmenuen.
Bemærkninger til mere komplicerede redigeringer:
• Når det drejer sig om parametre, der definerer en digital kilde, kan indstillingen
Konstant bruges til at fastsætte værdien til konstanten 1 (C.SAND) eller
0 (C.FALSK).
• Når det drejer sig om parametre, der definerer en analog eller digital kilde, kan
indstillingen Pointer bruges til frit at vælge enhver parameterværdi (analog) eller en
specifik del af en pakket boolesk parameter (digital) som kilden:
• Når det drejer sig om en analog kilde, er
parametergruppen og parameterindekset
angivet. Når gruppen er valgt, trykkes der på
NÆSTE for at flytte til indeksindstillingerne.
Teksten under markøren angiver den aktuelle
indstilling.
Når indekset er indstillet, trykkes der på GEM
for at acceptere værdien. Tryk på CANCEL på
ethvert tidspunkt for at kassere eventuelle
ændringer og vende tilbage til parameterlisten.
• Med en digital kilde er parametergruppen,
parameterindekset og bitnummeret
specificeret. Når et element er indstillet, skal
der trykkes på NÆSTE for at gå videre til det
næste.
Teksten under markøren angiver den aktuelle
indstilling.
Når bitnummeret er indstillet, trykkes der på
GEM for at acceptere værdien. Tryk på
CANCEL på ethvert tidspunkt for at kassere
eventuelle ændringer og vende tilbage til
parameterlisten.
Justering af parameterværdier
Page 20
20 Quick Start-up Guide til ACS850 med Standard Control Program
PARAMETRE
ASSISTENT
ÆNDRET PAR
EXIT ENTER
HOVEDMENU 1
LOK
99 Opstartsdata
01 Aktuel værdi
02 I/O værdi
03 Kontrol værdi
04 Applikations værdi
EXIT
SEL
PAR GRUPPER 99
LOK
9901 Sprog
Engelsk
9904 Motor type
9905 Motor styre mode
9906 Mot nom strøm
PARAMETRE
EXIT
ÆNDRE
LOK
9901 Sprog
Deutsch
PAR ÆNDRING
CANCEL
GEM
[0407 hex]
LOK
PARAMETRE
ASSISTENT
ÆNDRET PAR
EXIT ENTER
HOVEDMENU 1
LOK
Vælg assistent
Application Macro
Motoropsætning
Start/Stop styring
EXIT
OK
VALG
LOK
Ændring af sproget
Engelsk er standardsproget for den viste tekst. Hvis det ønskes, kan sproget ændres på
følgende måde.
Kontrollér, at PARAMETRE er markeret i
hovedmenuen, og tryk på ENTER.
Naviger til parametergruppe 99 Opstartsdata, og
tryk på VALG. Bemærk, at listen fortsætter i hver
retning mellem grupperne 99 og 01 – det er
hurtigere at trykke på for gruppe 99.
Kontrollér, at parameter "9901 Sprog" er markeret,
og tryk på REDIGER.
Vælg det ønskede sprog, og tryk på GEM.
Tryk på EXIT to gange for at gå tilbage til
hovedmenuen.
Opstartsprocedurerne, der er beskrevet herunder, gør brug af assistenter. Dette er
rutiner, der guider brugeren gennem de vigtigste parameterindstillinger.
Markér ASSISTENT i hovedmenuen, og tryk på
ENTER.
Markér Application Macro, og tryk på OK.
Assistenter
1 – Valg af applikationsmakro
Page 21
Quick Start-up Guide til ACS850 med Standard Control Program 21
PARAMETRE
ASSISTENT
ÆNDRET PAR
EXIT ENTER
HOVEDMENU 1
LOK
Vælg assistent
Application Macro
Motoropsætning
Start/Stop styring
EXIT
OK
VALG
LOK
Programmakroer er foruddefinerede
parameterindstillinger, der kan bruges som grundlag
for brugerprogrammer. Følgende makroer er
tilgængelige:
• Factory (til hastighedsstyringsprogrammer, hvor
et enkelt start-/stopinterface er påkrævet)
• Hånd/Auto (til hastighedsstyringsprogrammer,
hvor to eksterne styreenheder bruges)
• PID reguler. (til processtyringsprogrammer
såsom lukket sløjfe, niveau- og
flowstyringssystemer)
• Moment styring (til moment- og/eller
hastighedsstyring af motor)
• Sequential control (til
hastighedsstyringsprogrammer, hvor flere
forskellige konstante hastigheder og
accelerations-/decelerationsramper er påkrævet
og sekvenseret).
Flere oplysninger om makroer kan ses i Firmware
Manual.
Markér en af makroerne, og tryk på OK.
Når teksten "Done OK" vises i betjeningspanelet, skal der trykkes på OK for at fuldføre
firmwareassistenten.
Der anvendes
parameterstandarder for
makroen.
2 – Motoropsætning
Kontrollér, at du har data fra motormærkepladen og encoder til rådighed (om
nødvendigt).
Markér ASSISTENT i hovedmenuen, og tryk på
ENTER.
Markér Motoropsætning, og tryk på OK.
Assistenten guider dig gennem motoropsætningen.
Vælg motortypen, AM (asynkron ACkortslutningsmotor) eller PMSM (synkron
permamagnetmotor).
99.04 Motor type
Page 22
22 Quick Start-up Guide til ACS850 med Standard Control Program
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
Vælg motorstyremode. DTC er egnet i de fleste
tilfælde.
Skalarmode anbefales, hvis
• motorens nominelle strøm er mindre end 1/6 af
drevets nominelle strøm
• drevet anvendes til test, hvor der ikke er tilsluttet
en motor til drevet, eller
• drevet styrer flere motorer, og antallet af
tilsluttede motorer er variabelt.
Indtast motordata, som aflæses fra motorens
mærkeplade.
Eksempel på asynkron motormærkeplade:
99.05 Motor styring
Bemærk! Motordataene sættes
til præcist den samme værdi som
på motorens mærkeplade. Hvis
motorens omløbstal f.eks. er
1470 på mærkepladen, vil
indstilling af værdien for
parameter 99.09 Mot nom
hastigh til 1500 o/min resultere i
forkert drift af drevet.
Hvis D-data (delta) vælges,
tilsluttes motoren i delta.
Hvis Y-data (stjerne) vælges,
tilsluttes motoren i stjerne.
Eksempel på permamagnetmotor med
mærkeplade:
Page 23
Quick Start-up Guide til ACS850 med Standard Control Program 23
• nominel motorstrøm
Tilladt område: ca. 1/6 × I
(0…2 × I
Skalar).
, hvis parameter 99.05 Motor styring =
Hd
• nominel motorspænding
Tilladt område: 1/6 × U
… 2 × U
N
… 2 × IHd af drrevet
Hd
af drevet. (UN
N
99.06 Mot nom strøm
99.07 Mot nom spænding
refererer til den højeste spænding i hver
spændingsgruppe).
Med permanmagnetmotorer er den nominelle
spænding BackEMF-spændingen (ved motorens
nominelle hastighed). Hvis spændingen er angivet
som spænding pr. o/min, f.eks. 60 V pr. 1000 o/min,
er spændingen for 3000 o/min ved nominel
hastighed 3 × 60 V = 180 V.
Bemærk, at den nominelle spænding ikke svarer til
den tilsvarende DC-motorspændingsværdi
(E.D.C.M.), der angives af nogle motorproducenter.
Den nominelle spænding kan beregnes ved at
dividere E.D.C.M.-spændingen med 1,7 (=
kvadratroden af 3).
• nominel motorfrekvens
99.08 Mot nom frekv
Med permamagnetmotor: Hvis frekvensen ikke er
angivet på motorens mærkeplade, skal den
beregnes med denne formel:
f = n × p /60
hvor p = antal polpar, n = den nominelle
motorhastighed.
• nominel motorhastighed 99.09 Mot nom hastigh
• nominel motoreffekt 99.10 Mot nom effekt
Følgende motordataparametre kan indstilles til at forbedre styrenøjagtigheden. Hvis
den ikke kendes, indstilles værdierne til 0.
• motornominel cos
(ikke anvendelige for
99.11 Mot nom cosfii
permamagnetmotorer).
• motorens nominelle akselmoment 99.12 Mot nom moment
Følgende parametre definerer driftsgrænserne for at beskytte det drevne udstyr.
• maks. hastighed
20.01 Maks hastighed
For reduceret og normal ID-kørsel gælder (se
herunder), at værdien skal være højere end 55 % af
motorens tidligere definerede nominelle hastighed.
• min. hastighed
20.02 Min hastighed
For reduceret og normal ID-kørsel gælder (se
herunder), at værdien skal være mindre end eller lig
med 0 o/min.
Page 24
24 Quick Start-up Guide til ACS850 med Standard Control Program
Forlæns
Når drevets udgangsfrekvens er
i fasen U2, er V2 og W2 tilsluttet
de tilsvarende motorterminaler:
Baglæns
• maks. strøm
Denne værdi skal være højere end motorens
tidligere definerede nominelle strøm.
• maks. moment
For normal ID-kørsel gælder (se herunder), at
værdien skal være mindst 100% af motorens
tidligere definerede nominelle moment.
• min. moment 20.08 Min moment 1
Spørgsmålet "Vil du udføre Id run?" vises. Id-kørslen (identifikationen) identificerer
motorens karakteristika for derved at optimere styringen.
Hvis du ikke vil udføre denne id-kørsel på dette tidspunkt, skal Nej vælges for at afslutte
firmwareassistenten til motoropsætning. Fortsæt til afsnittet 3 – Konfiguration af start/
stop.
Hvis du ønsker at udføre id-kørslen, skal du fortsætte med følgende trin, FØR du
vælger Ja.
ADVARSEL! Med id-kørslen Normal eller Reduceret ID vil motoren køre ved
op til ca. 50…100 % af den nominelle hastighed under id-kørslen.
KONTROLLÉR, AT DET ER SIKKERT AT KØRE MED MOTOREN, INDEN
ID-KØRSLEN PÅBEGYNDES!
Kontroller motorens omløbsretning. Under idkørslen (Normal eller Reduceret) vil motoren rotere
forlæns.
20.05 Maks strøm
20.07 Maks moment 1
Sørg for, at Safe Torque Off- og
nødstopskredsløbene (hvis sådanne findes) er
lukkede.
Vælg Ja, og tryk på OK.
Vælg id-kørselsmetoden.
Id-kørslen udføres ved den næste start af drevet.
NORMAL ID-kørsel bør altid vælges, når det er
muligt.
Bemærk! Det drevne maskinanlæg skal frakobles
motoren med Normal ID-kørsel:
• hvis belastningsmomentet er højere end 20 %,
eller
• hvis maskinanlægget ikke kan tåle det nominelle
transiente moment under id-kørslen.
99.13 Idrun mode
Page 25

Quick Start-up Guide til ACS850 med Standard Control Program 25
PARAMETRE
ASSISTENT
ÆNDRET PAR
EXIT ENTER
HOVEDMENU 1
LOK
Vælg assistent
Application Macro
Motoropsætning
Start/Stop styring
EXIT
OK
VALG
LOK
REDUCERET ID-kørsel bør vælges i stedet for idkørslen Normal, hvis de mekaniske tab er højere
end 20 %, dvs. hvis motoren ikke kan fra-kobles det
drevne udstyr, eller der kræves fuld flux for at holde
motorbremsen åben (konisk motor).
STANDSTILL ID-kørsel bør kun vælges, hvis idkørslen Normal eller Reduced ikke er mulig på
grund af begrænsningerne, der skyldes den
tilsluttede teknik (f.eks. med lift eller kran).
Bemærk!
• Motorakslen må IKKE låses, og
belastningsmomentet skal være < 20 % under idkørslen Normal eller Reduceret ID. Med
permamagnetmotor gælder denne begrænsning
også, når id-kørslen Standstill er valgt.
• Mekanisk bremsning åbnes ikke af logikken for idkørslen.
• Id-kørslen kan ikke udføres, hvis parameteren
99.05 Motor styreing = Skalar.
Start motoren (ved at trykke på knappen START) for
at aktivere id-kørslen.
Id-kørslen angives af alarmen ID-RUN i
paneldisplayet.
Når teksten "Done OK" vises i betjeningspanelet, skal der trykkes på OK for at fuldføre
firmwareassistenten.
Alarm: ID-RUN
3 – Konfiguration af start/stop
Markér ASSISTENT i hovedmenuen, og tryk på
ENTER.
Markér Start/Stop, og tryk på OK.
Følgende parametre indstilles.
Bemærk! Afhængigt af de valg du foretager, kan
rutinen springe over nogle af de parametre, der er
angivet herunder.
Vælg start- og stopfunktionen og signalkilderne for
det eksterne styrested 1 (EXT1). Programmér først
parameteren 10.01 (startfunktion) og derefter 10.02
og 10.03 for at vælge kilderne til startsignalet.
Valgmulighederne for parameteren 10.01 er:
In1: Det signal, som er defineret i parameteren
10.02, er kilden for startsignalet (0 = Stop, 1 = Start).
10.01 Ext1 start valg
10.02 Ext1 start in1
10.03 Ext1 start in2
Page 26

26 Quick Start-up Guide til ACS850 med Standard Control Program
Kildestatus 1 (via
par. 10.02)
Kildestatus 2 (via
par. 10.03)
Kommando
0 -> 1 1 Start
Alle 1 -> 0 Stop
Alle 0 Stop
3-wire: Start/stop-kommandoerne bestemmes ud
fra de to kilder, der er valgt via parametrene 10.02
og 10.03.
In1F In2R: Det signal, der er defineret i
parameteren 10.02, starter drevet i forlæns
omløbsretning, og signalet, der er defineret i 10.03 ,
starter drevet i modsat omløbsretning.
In1St In2Dir: Det signal, der er defineret i
parameteren 10.01, starter drevet (0 = Stop, 1 =
Start). Det signal, der er defineret i 10.03, ændrer
motorens omløbsretning (0 = fremad, 1 = tilbage).
Vælg start- og stopfunktionen og signalkilderne for
det eksterne styrested 2 (EXT2).
Valgene er de samme som ved EXT1 herover.
Definer signalkilden for at skifte mellem de eksterne
styresteder EXT1 og EXT2 (0 = EXT1, 1 = EXT2).
Vælg motorens startfunktion.
Automatisk er den bedste generelle indstilling, der
også giver mulighed for flyvende start (starter, når
motorer er i omløb).
Hurtig indebærer formagnetisering af motoren og
skal vælges, hvis der kræves et højt
løsrivelsesmoment.
Konstanttid skal vælges, hvis der kræves en
konstant formagnetiseringstid. Tiden indstilles via
parameteren 11.02 DC magn tid.
Vælg stopmetode.
Friløb stop: Strømmen til motoren afbrydes.
Motoren får lov til at stoppe ved udløb.
Rampe: Motoren stoppes ved at decelerere langs
den aktive decelerationsrampe (defineres på et
senere tidspunkt).
Vælg kilden for startfrigivelsesignal.
Hvis signalet udkobles, vil drevet ikke starte, og hvis
det kører, vil det stoppe ved udløb. 1 =
Startfrigivelsessignalet er aktivt.
Vælg kilden for nødstopsignalet OFF3.
Hvis signalet fjernes (med andre ord ændres til 0),
stopper drevet langs nødstopsrampen (defineret via
parameteren 22.12 Emerg. Stop tid).
10.04 Ext2 start valg
10.05 Ext2 start in1
10.06 Ext2 start in2
12.01 EKS1/EKS2 valg
11.01 Start metode
11.03 Stop metode
10.11 Drift frigivet
10.13 Em stop off3
Page 27
Quick Start-up Guide til ACS850 med Standard Control Program 27
PARAMETRE
ASSISTENT
ÆNDRET PAR
EXIT ENTER
HOVEDMENU 1
LOK
Vælg assistent
Motoropsætning
Start/Stop styring
Referencevalg
EXIT
OK
VALG
LOK
Når teksten "Done OK" vises i betjeningspanelet, skal der trykkes på OK for at fuldføre
firmwareassistenten.
4 – Referencevalg
Markér ASSISTENT i hovedmenuen, og tryk på
ENTER.
Markér Referencevalg, og tryk på OK.
Følgende parametre indstilles.
Bemærk! Afhængigt af de valg du foretager, kan
rutinen springe over nogle af de parametre, der er
angivet herunder.
Vælg styretilstande for de eksterne styresteder
EXT1 og EXT2.
Hastighed: Hastighedsstyring.
Moment: Momentstyring.
Min, Maks, Tillæg: Momentreference og
hastighedsregulatorudgang sammenlignes, og den
matematiske funktion anvendes (mindre, større,
addition).
Afhængigt af valgene defineres hastigheden eller
momementreferencekilden (eller begge) i det
følgende.
Opsætning af hastighedsreference
Vælg det antal konstante hastigheder (om nogen), der skal bruges.
Hvis du vælger en konstant hastighed, skal du angive, om startretningen skal påvirke
retningen af den konstante hastighed.
Nej: Tegnet for den konstante hastighed bestemmer direkte kørelsesretningen, når den
konstante hastighed er aktiveret.
Ja: Tegnet for den konstante hastighed ganges med værdien af retningssignalet for at
bestemme kørselsretningen, når den konstante hastighed er aktiveret.
12.03 Ext1 ctrl mode
12.05 Ext2 ctrl mode
Page 28
28 Quick Start-up Guide til ACS850 med Standard Control Program
Kilde defineret
med par. 26.02
Kilde defineret
med par. 26.03
Kilde defineret
med par. 26.04
Konstant hastighed aktiv
0 0 0 Ingen
1 0 0 Konstant hastighed 1
0 1 0 Konstant hastighed 2
1 1 0 Konstant hastighed 3
0 0 1 Konstant hastighed 4
1 0 1 Konstant hastighed 5
0 1 1 Konstant hastighed 6
1 1 1 Konstant hastighed 7
Tid
Hastighed
19.01
22.02 eller
22.04
22.03 eller
22.05
Acc. Dec.
0
Du skal nu angive, om hver vælger til konstant hastighed skal aktivere en konstant
hastighed.
Nej: De konstante hastigheder 1…7 aktiveres via de kilder, der er valgt via parametrene
26.02, 26.03 og 26.04. Det sker på følgende måde:
Ja: De konstante hastigheder 1…3 aktiveres via de kilder, der henholdsvist er valgt via
parametrene 26.02, 26.03 og 26.04.
Indstil kilderne for vælgeren til konstante
hastigheder.
Angiv de konstante hastigheder. 26.06 Konst hast1…
Vælg kilden for hastighedsreferencesignalet. 21.01 Hast. Ref1 valg
26.02 Konst hast valg1
26.03 Konst hast valg2
26.04 Konst hast valg3
Definer den absolutte minimumsgrænse for
hastighedsreferencen. Denne grænse gælder både
for det positive og det negative område.
Definer den hastighedsskalering, der anvendes til
accelerations/-decelerationstider. Definer
accelerations-/decelerationstiderne.
Diagrammet herunder viser effekten af parameteren
19.01 Hastighedsskaler på accelerations-/
decelerationstiderne.
Bemærk: Accelerations-/decelerationstiderne kan
automatisk blive forlænget af de eksisterende
momentgrænser.
21.09 SpeedRef min abs
19.01 Hastighedsskaler
22.02 Acc tid1
22.04 Acc tid2
22.03 Dec tid1
22.05 Dec tid2
Page 29
Quick Start-up Guide til ACS850 med Standard Control Program 29
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = filterindgang (trin)
O = filterudgang
t = tid
T = filtertidskonstant
Ufiltreret signal
Filtreret signal
Vælg kilden for at skifte mellem accelerations-/
22.01 Acc/Dec valg
decelerationsrampeparrene 1 og 2.
0 = Accelerationstid 1/decelerationstid 1 er
aktiverede, 1 = Accelerationstid 2/decelerationstid 2
er aktiverede.
Opsætning af momentreference
Vælg kilden for momentreferencesignalet. 24.01 Moment ref1 valg
Definer maksimum- og
minimummomentreferencerne.
Definer tiderne, hvor momentreferencen skal øges
fra nul til det nominelle motormoment (rampe op) og
24.03 Maks. Mom. Valg
24.04 Min. Moment valg
24.06 Moment ramp op
24.07 Moment ramp ned
omvendt (rampe ned).
Opsætning af analogindgang AI1/AI2 (hvis en af dem er valgt som hastighed eller
kilde for momentreference)
Definer filtertidskonstanten for analogindgangen. 13.01 AI1 filter tid eller
13.06 AI2 filter tid
Definer minimum- og maksimumværdierne for
analogindgangen.
13.02 AI1 maks. eller
13.07 AI2 maks.
13.03 AI1 min. eller
13.08 AI2 min.
Page 30
30 Quick Start-up Guide til ACS850 med Standard Control Program
AI (skaleret)
AI (mA/V)
13.04/13.09
13.02/13.07
13.03/13.08
13.05/13.10
Definer de skalerede værdier, der svarer til de
maksimum- og minimumværdier, der er defineret i
det forrige trin. Dette er nyttigt, hvis der kræves fuld
hastighed ved lavere værdier for analogindgang.
13.04 AI1 maks skala eller
13.09 AI2 maks skala
13.05 AI1 min skala eller
13.10 AI2 min skala
Når teksten "Done OK" vises i betjeningspanelet, skal der trykkes på OK for at fuldføre
firmwareassistenten og startproceduren.
Page 31

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
31
Kurzanleitung für die Inbetriebnahme des ACS850
mit Standard-Regelungsprogramm
Informationen über diese Anleitung
In dieser Anleitung wird die Vorgehensweise bei der Inbetriebnahme des ACS850
Frequenzumrichters (mit Standard-Regelungsprogramm) dargestellt. Die Eingaben
und Einstellungen für die Inbetriebnahme werden mit dem ACS850 Bedienpanel
vorgenommen.
Hinweis: In dieser Anleitung werden nur die Funktionen des Bedienpanels
beschrieben, die für die Inbetriebnahme gebraucht werden. Die vollständigen
Anweisungen für die Verwendung des Bedienpanels enthält das Firmware-Handbuch
ACS850 Standard-Regelungsprogramm (3AUA0000049379).
Sicherheitsvorschriften
WARNUNG! Alle elektrischen Installations- und Wartungsarbeiten an dem
Antrieb dürfen nur von qualifiziertem Fachpersonal durchgeführt werden.
Arbeiten Sie niemals bei eingeschalteter Spannung an dem Frequenzumrichter, dem
Brems-Chopper, dem Motorkabel oder dem Motor. Stellen Sie immer durch eine
Messung sicher, dass keine Spannung anliegt.
Page 32

32 Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-
00 A
00 Hz
0 %0.
0.
0.
REM
DREHRTG
MENU
0.00U/
LOC
REM
00 A
00 Hz
0 %0.
0.
0.
LOC
DREHRTG
MENU
0.00U/
PARAMETER
ASSISTENTEN
GEÄND PARAM
ZURÜCK AUSWAHL
HAUPTMENU 1
LOC
Regelungsprogramm
Vorgehensweise bei der Inbetriebnahme
Sicherheit
Die Inbetriebnahme darf nur durch qualifiziertes Fachpersonal vorgenommen
werden. Die Sicherheitsvorschriften müssen bei der Inbetriebnahme befolgt
werden. Siehe die Sicherheitsvorschriften auf den ersten Seiten des jeweiligen
Hardware-Handbuchs.
Prüfung der Installation. Siehe Installations-Checkliste im jeweiligen HardwareHandbuch.
Prüfen Sie, dass durch den Start des Motors keine Gefährdungen entstehen.
Koppeln Sie die angetriebene Maschine ab, wenn:
• durch eine falsche Drehrichtung des Motors eine Gefährdung entstehen kann, oder
• bei der Inbetriebnahme des Antriebs ein normaler ID-Lauf erforderlich ist, wenn das
Lastmoment höher ist als 20% oder die angetriebene Maschine den Lastwechseln
mit Nennmoment während des ID-Laufs nicht standhält.
Spannungsversorgung einschalten, Bedienpanel-Bedienung
Das Bedienpanel mit einem geeigneten Kabel der
Kategorie 5E an den Frequenzumrichter
anschließen.
Den Frequenzumrichter einschalten. Nach kurzer
Zeit wird auf dem Bedienpanel der Anzeige-Modus
aktiviert (siehe rechts).
Hinweis: Im Anzeige-Modus wird abwechselnd die
Warnmeldung “Alarm 2021 Keine Motordaten”
angezeigt bis die Motordaten während des
Inbetriebnahmevorgangs eingegeben worden sind.
Sicherstellen, dass die externe Steuerung
deaktiviert ist, Umschalten mit Taste auf dem
Bedienpanel. Lokalsteuerung wird durch die
Anzeige von “LOC” in der oberen Zeile des Displays
angezeigt.
In den zwei Rahmen in der unteren Zeile der
Anzeige werden die Funktionsbelegungen der
beiden Funktionstasten und
angezeigt. Der Inhalt der Rahmen ist von den
angezeigten Menü-Auswahlmöglichkeiten
abhängig.
Mit Taste (MENU) das Hauptmenü aufrufen.
Innerhalb eines Menüs wird die aktuelle Auswahl
invertiert dargestellt. Mit den Tasten und
eine neue Auswahl treffen und dann mit
Taste (AUSWAHL) aktivieren.
Das Hauptmenü ist der Startpunkt für die
nachfolgend beschriebene Inbetriebnahme.
Page 33

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
1501 AO1 Signalquelle
P.01.06
PAR
ABBRUCH
SPEICHE
0106 Motor-Drehmoment
LOC
33
Einstellung der Parameterwerte
Hinweise:
• An jedem Punkt gelangen Sie mit (ABBRUCH oder ZURÜCK) zurück zur
vorhergehenden Ebene.
• Nicht alle Parameter werden in der Grundeinstellung angezeigt. Parameter 16.15
Wahl Param.liste auf Langlist.lad einstellen, um alle Parameter angezeigt zu
bekommen.
Zum Einstellen eines Parameters innerhalb eines Assistenten:
• Mit den Tasten und den Einstellwert ändern. Mit Funktionstaste
SPEICHE den angezeigten Wert übernehmen und dann den nächsten Parameter
aufrufen.
Einstellen eines Parameters ohne Benutzung des Assistenten:
• Im Hauptmenü PARAMETER auswählen und mit Taste (AUSWAHL) aufrufen.
• Mit den Tasten und die Liste der Parametergruppen durchblättern.
Die gewünschte Gruppe markieren und (AUSWAHL) drücken, um die
Parameter innerhalb der Gruppe anzuzeigen.
• Den gewünschten Parameter markieren und (ÄNDERN) drücken, um den
Wert einzustellen.
• Mit den Tasten und den Einstellwert ändern. Mit Funktionstaste
SPEICHE die angezeigte Einstellung übernehmen. Durch zweimaliges Drücken von
ZURÜCK kehren Sie zum Hauptmenü zurück.
Hinweise zu komplexeren Einstellungsänderungen:
• Bei Parametern, mit denen eine Digitalsignalquelle eingestellt wird, kann die
Einstellung Konst benutzt werden, um den Wert konstant auf 1 (C.Wahr) oder
0 (C.Falsch) zu setzen.
• Bei Parametern, mit denen eine Analog- oder Digitalsignalquelle eingestellt wird,
kann die Einstellung Zeiger für die freie Auswahl eines beliebigen Parameterwerts
(analog) oder eines speziellen Bits eines gepackten booleschen Parameters (digital)
als Quelle benutzt werden:
• Bei einer analogen Quelle, werden die
Parametergruppe und der Parameterindex
angezeigt. Nach Auswahl der Gruppe, mit
Taste WEITER zur nächsten Indexeinstellung.
Der invers dargestellte Text zeigt die aktuelle
Einstellung an.
Nach Einstellung des Index den Wert mit Taste
SPEICHE übernehmen. Mit Taste ABBRUCH
können jederzeit Änderungen verworfen
werden und man kehrt zur Parameterliste
zurück.
Page 34

34 Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-
1002 Ext1 Start Quel1
P.02.01.00
PAR ÄNDERN
ABBRUCH
WEITER
0201 DI-Status
LOC
PARAMETER
ASSISTENTEN
GEÄND PARAM
ZURÜCK AUSWAHL
HAUPTMENU 1
LOC
99 IBN-/Motor-Daten
01 Istwertsignale
02 E/A-Werte
03 Signale Regelung
04 Signale Applikat
ZURÜCK
AUSWAHL
PAR GRUPPEN 99
LOC
9901 Wahl Sprache
Deutsch
9904 Motorart
9905 Motor-Regelmodus
9906 Motor-Nennstrom
PARAMETER
ZURÜCK
ÄNDERN
LOC
9901 Wahl Sprache
Deutsch
PAR ÄNDERN
ABBRUCH
SPEICHE
[0407 hex]
LOC
Regelungsprogramm
• Bei einer digitalen Quelle werden die
Parametergruppe, der Parameterindex und die
Bitnummer spezifiziert. Nach Einstellung eines
Werts mit Taste WEITER zum nächsten Wert.
Der invers dargestellte Text zeigt die aktuelle
Einstellung an.
Nach Einstellung der Bitnummer den Wert mit
Taste SPEICHE übernehmen. Mit Taste
ABBRUCH können jederzeit Änderungen
verworfen werden und man kehrt zur
Parameterliste zurück.
Ändern der Spracheneinstellung
Standardmäßig ist Englisch die Sprache für die Textanzeigen. Die Spracheneinstellung
kann folgendermaßen geändert werden.
Im Hauptmenü PARAMETER auswählen und mit
Taste AUSWAHL aufrufen.
Zur Parametergruppe 99 IBN-/Motor-Daten blättern
und mit Taste AUSWAHL öffnen. Beachten Sie,
dass die Liste in beiden Richtungen nach den
Gruppen 99 und 01 durchblättert werden kann – es
geht mit Taste schneller zu Gruppe 99.
Sicherstellen, dass Parameter “9901 Language/
Wahl Sprache” hervorgehoben ist und dann Taste
ÄNDERN drücken.
Die gewünschte Sprache auswählen und mit Taste
SPEICHE bestätigen.
Durch zweimaliges Drücken von ZURÜCK kehren
Sie zum Hauptmenü zurück.
Mit der im Folgenden beschriebenen Vorgehensweise nutzen Sie die Assistenten für
die Inbetriebnahme. Mit diesen Inbetriebnahme-Routinen wird der Benutzer durch die
wichtigen Parametereinstellungen geführt.
Assistenten
Page 35

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
PARAMETER
ASSISTENTEN
GEÄND PARAM
ZURÜCK AUSWAHL
HAUPTMENU 1
LOC
Assistent auswählen
Applikationsmakros
Motor-Inbetriebnahm
Start/Stopp-Steuerun
ZURÜCK
OK
WAHL
LOC
PARAMETER
ASSISTENTEN
GEÄND PARAM
ZURÜCK AUSWAHL
HAUPTMENU 1
LOC
35
1 – Auswahl eines Applikationsmakros
Im Hauptmenü ASSISTENTEN auswählen und mit
Taste AUSWAHL aufrufen.
Applikationsmakros markieren und Taste OK
drücken.
Applikationsmakros sind voreingestellte Parametersätze, die als Basis benutzerspezifischer Anwendungen benutzt werden können. Die folgenden
Makros sind verfügbar:
• Standard (für Anwendungen mit Drehzahlrege-
lung mit einer einfachen Start/Stop-Schnittstelle)
• Hand/Auto (für Drehzahregelungsapplikationen,
bei denen zwei externe Steuerplätze benutzt werden).
• Prozess-Regelung (für Prozessregelungsappli-
kationen wie Druckregelung, Füllstands- oder
Durchflussregelungssysteme)
• Momenten-Regelung (für die Drehmoment- und/
oder Drehzahlregelung von Motoren)
• Sequenz-Regelung (für Drehzahlregelungsappli-
kationen in denen mehrere Konstantdrehzahlen
und Beschleunigungs-/Verzögerungsrampen in
einer bestimmten Abfolge erforderlich sind).
Weitere Informationen zu den Makros enthält das
Firmware-Handbuch.
Eines der Makros markieren und Taste OK drücken.
Nach der Anzeige von “Fertig ok!” auf dem Bedienpanel die Taste OK drücken, um den
Assistenten zu schließen.
Die ParameterStandardeinstellungen des
ausgewählten Makros werden
aktiviert.
2 – Motor-Inbetriebnahme
Vor Beginn der Inbetriebnahme sicherstellen, dass die Daten von Motor-Typenschild
und Drehgebern (falls benutzt) bereit liegen.
Im Hauptmenü ASSISTENTEN auswählen und mit
Taste AUSWAHL aufrufen.
Page 36

36 Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-
Assistent auswählen
Applikationsmakros
Motor-Inbetriebnahm
Start/Stopp-Steuerun
ZURÜCK
OK
WAHL
LOC
Regelungsprogramm
Motor-Inbetriebnahm markieren und Taste OK
drücken.
Der Assistent führt Sie jetzt durch die MotorInbetriebnahme.
Auswahl des Motortyps, AM (AsynchronKäfigläufer-AC-Motor) oder PMSM
(Permanentmagnet-Synchronmotor).
Auswählen des Motorregelungsmodus. DTC ist für
die meisten Anwendungen geeignet.
Skalarregelung wird empfohlen, wenn
• der Nennstrom des Motors weniger als 1/6 des
Nennausgangsstroms des Frequenzumrichters
beträgt.
• der Frequenzumrichter ohne angeschlossenen
Motor betrieben wird (z.B. für Prüfzwecke) oder
• der Frequenzumrichter mehrere Motoren regelt
und die Anzahl der angeschlossenen Motoren
variabel ist.
99.04 Motorart
99.05 Motor-Regelmodus
Page 37

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
37
Eingabe der Motordaten vom Motor-Typenschild:
Beispiel für das Typenschild eines
Asynchronmotors:
Beispiel für das Typenschild eines
Permanentmagnetmotors:
Hinweis: Die Motordaten mit
exakt den selben Werten eingeben, die auf dem Motor-Typenschild eingetragen sind. Wenn
zum Beispiel die Motor-Nenndrehzahl auf dem Motorschild
1470 U/min ist, und Sie geben in
Parameter 99.09 Mot-Nenndreh-
zahl 1500 U/min ein, führt dies zu
einem fehlerhaften Betrieb des
Antriebs.
Bei Benutzung der Dreieck-Daten
(D) muss auch der Motoranschluss im Dreiecksanschluss
ausgeführt werden.
Bei Benutzung der Stern-Daten
(Y) muss auch der Motoranschluss im Stern ausgeführt werden.
• Motor-Nennstrom
Zulässiger Bereich: ungefähr 1/6 × I
des Frequenzumrichter-Nennstroms
(0…2 × I
99.05 Motor-Regelmodus = Skalar ist).
Hd
, wenn Parameter
… 2 × IHd
Hd
99.06 Motor-Nennstrom
Page 38

38 Kurzanleitung für die Inbetriebnahme des ACS850 mit StandardRegelungsprogramm
• Motor-Nennspannung
Zulässiger Bereich: 1/6 × U
quenzumrichters. (U
jeweiligen Spannungsbereich).
N
ist die höchste Spannung im
N
… 2 × U
des Fre-
N
99.07 Mot-Nennspannung
Bei Permanentmagnetmotoren ist die Nennspannung die Gegen-EMK-Spannung (bei Motornenndrehzahl). Wenn die Spannung als Spannung
bezogen auf Drehzahl (U/min) angegeben ist, z.B.
60 V pro 1000 U/min, dann ist die Spannung für
Nenndrehzahl 3000 U/min gleich 3 × 60 V = 180 V.
Beachten Sie, dass die Nennspannung nicht gleich
der äquivalenten DC-Motorspannung (E.D.C.M.) ist,
deren Wert von einigen Motorenherstellern angegeben wird. Die Nennspannung kann durch Division
der E.D.C.M.-Spannung durch 1,7 (= Quadratwurzel
von 3) berechnet werden.
• Motor-Nennfrequenz
99.08 Mot-Nennfrequenz
Bei Permanentmagnet-Motoren: Ist die Frequenz
nicht auf dem Motor-Typenschild angegeben, muss
sie mit der folgenden Formel berechnet werden:
f = n × p /60
dabei sind:
p = Anzahl der Polpaare,
n = Motornenndrehzahl.
• Motor-Nenndrehzahl 99.09 Mot-Nenndrehzahl
• Motor-Nennleistung 99.10 Mot-Nennleistung
Die folgenden Motordaten-Parameter können zur Erhöhung der Regelgenauigkeit
eingestellt werden. Wenn die Daten nicht bekannt sind, die Werte auf 0 setzen.
• Motor-Nenn-cos
(nicht für
99.11 Mot-CosPhi
Permanentmagnetmotoren).
• Motorwellen-Nennmoment. 99.12 Mot-Nennmoment
Mit den folgenden Parametern werden Betriebsgrenzwerte zum Schutz der
Antriebseinrichtung eingestellt.
• Maximaldrehzahl
20.01 Maximal-Drehzahl
Für den ID-Lauf in den Alternativen Normal und
Reduziert (siehe unten), sollte dieser Wert höher
sein als 55% der zuvor eingestellten MotorNenndrehzahl.
• Minimaldrehzahl
20.02 Minimal-Drehzahl
Für den ID-Lauf in den Alternativen Normal und
Reduziert (siehe unten), sollte dieser Wert kleiner
oder gleich 0 U/min sein.
Page 39

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
Vorwärts
Wenn die Ausgangsphasen U2,
V2 und W2 des Frequenzumrichters an die entsprechenden Klemmen im MotorKlemmenkasten angeschlossen
sind:
Rückwärts
39
• Maximalstrom
Der Wert sollte höher sein als 55% des vorher
eingestellten Motornennstroms.
• Maximaldrehmoment
Für den ID-Lauf Normal (siehe unten) sollte dieser
Wert mindestens 100% des vorher eingestellten
Motor-Nenndrehmoments betragen.
• Mindestdrehmoment 20.08 Min.Moment 1
Folgende Frage wird angezeigt “ID-Lauf ausführen?”. Während des ID-Laufs
(Identifizierungslauf) ermittelt der Frequenzumrichter die Charakteristik des Motors für
eine optimale Motorregelung.
Wenn der ID-Lauf jetzt nicht ausgeführt werden soll, wählen Sie Nein, um die MotorInbetriebnahme mit dem Firmware-Assistenten zu beenden.
Weiter mit Abschnitt 3 – Start/Stop-Konfiguration.
Wenn der ID-Lauf ausgeführt werden soll, prüfen Sie zunächst die folgenden Schritte,
BEVOR Sie mit Ja bestätigen.
WARNUNG! Der Motor beschleunigt auf ungefähr 50…100% der
Nenndrehzahl während des ID-Laufs Normal oder Reduziert.
STELLEN SIE VOR DEM ID-LAUF SICHER, DASS DER MOTOR OHNE
GEFÄHRDUNGEN ANGETRIEBEN WERDEN KANN!
Prüfen Sie die Drehrichtung des Motors. Während
des ID-Laufs (Normal oder Reduziert) dreht der
Motor in Drehrichtung vorwärts.
20.05 Maximal-Strom
20.07 Max.Moment 1
Sicherstellen, dass die Schaltkreise für das sicher
abgeschaltete Drehmoment (STO) und für Notstopp
(falls vorhanden) geschlossen sind.
Danach mit Auswahl Ja und Taste OK den ID-Lauf
aktivieren.
Auswahl des Modus, in dem der ID-Lauf erfolgen
soll.
Der ID-Lauf wird beim nächsten Start des
Frequenzumrichters ausgeführt.
99.13 Mot ID-Laufmodus
Page 40

40 Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-
PARAMETER
ASSISTENTEN
GEÄND PARAM
ZURÜCK AUSWAHL
HAUPTMENU 1
LOC
Regelungsprogramm
Normal sollte immer, wenn möglich, gewählt
werden.
Hinweis: Die angetriebene Maschine muss beim
ID-Lauf "Normal" vom Motor abgekoppelt werden:
• wenn das Lastmoment höher ist als 20% oder
• wenn die angetriebene Maschine beim ID-Lauf
den Lastwechseln mit Nenndrehmoment nicht
standhält.
Der ID-Lauf Reduziert sollte anstelle des ID-Laufs
"Normal" gewählt werden, wenn die mechanischen
Verluste höher sind als 20%, d.h., wenn der Motor
nicht von der angetrieben Einrichtung abgekoppelt
werden kann oder ein voller Fluss erforderlich ist,
um die Motorbremse geöffnet zu halten
(Verschiebeanker-Motor).
Der ID-Lauf Stillstand sollte nur gewählt werden,
wenn der ID-Lauf Normal oder Reduziert unter
Rücksichtnahme auf die Art der angetriebenen
Mechanik nicht möglich ist (z.B. bei Hub- oder KranApplikationen).
Hinweise:
• Die Motorwelle darf nicht blockiert sein und das
Lastmoment muss < 20% betragen, wenn der IDLauf Normal oder Reduziert ausgeführt wird.
Diese Bedingungen gelten bei Permanentmagnetmotoren auch bei Auswahl des Stillstand-IDLaufs.
• Eine mechanische Bremse wird durch die
Schaltlogik für den ID-Lauf nicht geöffnet.
• Der ID-Lauf kann nicht ausgeführt werden, wenn
Parameter 99.05 Motor-Regelmodus auf Skalar
eingestellt ist.
Starten des Motors (durch Drücken der STARTTaste), um den ID-Lauf zu aktivieren.
Die Ausführung des ID-Laufs wird durch die
Warnmeldung ID-Lauf auf dem Bedienpanel
angezeigt.
Nach der Anzeige von “Fertig ok!” auf dem Bedienpanel die Taste OK drücken, um den
Assistenten zu schließen.
Warnmeldung: ID-Lauf
3 – Start/Stop-Konfiguration
Im Hauptmenü ASSISTENTEN auswählen und mit
Taste AUSWAHL aufrufen.
Page 41

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
Assistent auswählen
Applikationsmakros
Motor-Ibetriebnahm
Start/Stop Steuerun
ZURÜCK
OK
WAHL
LOC
Status von Quelle
1
(Par. 10.02)
Status von Quelle
2
(Par. 10.03)
Befehl
0 -> 1 1 Start
Jeder 1 -> 0 Stopp
Jeder 0 Stopp
41
Start/Stop Steuerun markieren und Taste OK
drücken.
Die folgenden Parameter werden eingestellt.
Hinweis: Abhängig von der Auswahl werden einige
der nachfolgend aufgelisteten Parameter
übergangen.
Auswahl der Start/Stop-Funktion und der
Signalquellen für den externen Steuerplatz 1
(EXT1). Zuerst Parameter 10.01 (Start-Funktion)
einstellen, dann 10.02 und 10.03, um die Quellen
für das Startsignal einzustellen.
Die Auswahlalternativen für Parameter 10.01 sind:
Quelle 1: Das Signal gemäß Einstellung von
Parameter 10.02 ist die Quelle für das Startsignal
(0 = Stopp, 1 = Start).
3-Draht: Start/Stop-Befehle werden auf Basis des
Status der zwei, mit den Parametern 10.02 und
10.03 eingestellten Quellen ausgeführt.
10.01 Ext1 Start Wahl
10.02 Ext1 Start Quel1
10.03 Ext1 Start Quel2
Qu1F Qu2R: Das Signal gemäß Parameter 10.02
startet den Antrieb in Drehrichtung vorwärts und das
Signal gemäß Parameter 10.03 startet den Antrieb
rückwärts.
Qu1St Qu2R: Das Signal gemäß Einstellung von
Parameter 10.01 ist die Quelle für das Startsignal (0
= Stopp, 1 = Start). Das Signal gemäß 10.03 ändert
die Drehrichtung des Motors (0 = vorwärts,
1 = rückwärts).
Auswahl der Start/Stop-Funktion und Signalquellen
für den externen Steuerplatz 2 (EXT2).
Auswahl und Einstellungen wie bei EXT1 oben.
Einstellung der Signalquelle für den Wechsel
zwischen den externen Steuerplätzen EXT1 und
EXT2 (0 = EXT1, 1 = EXT2).
10.04 Ext2 Start Wahl
10.05 Ext2 Start Quel1
10.06 Ext2 Start Quel2
12.01 Ext1/Ext2-Wahl
Page 42

42 Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-
PARAMETER
ASSISTENTEN
GEÄND PARAM
ZURÜCK AUSWAHL
HAUPTMENU 1
LOC
Assistent auswählen
Motor-Inbetriebnahm
Start/Stop Steuerun
Sollwertauswahl
ZURÜCK
OK
WAHL
LOC
Regelungsprogramm
Auswählen der Motor-Startfunktion.
Automatisch ist die beste Universal-Einstellung,
die auch einen fliegenden Start (Start bei
drehendem Motor) unterstützt.
Schnell beinhaltet die Vormagnetisierung des
Motors und sollte gewählt werden, wenn ein hohes
Startmoment erforderlich ist.
Konstantzeit sollte gewählt werden, wenn eine
konstante Vormagnetisierungszeit erforderlich ist.
Die Zeit wird mit Parameter 11.02 DC-Magnet.zeit
eingestellt.
Auswählen der Motor-Stopp-Methode.
Trudeln: Die Spannungsversorgung des Motors
wird abgeschaltet. Der Motor trudelt aus bis zum
Stillstand.
Rampe: Der Motor wird entlang einer aktiven
Verzögerungsrampe gestoppt (Definition folgt).
Wählt die Quelle des Reglerfreigabe-Signals aus.
Ist/wird das Freigabesignal abgeschaltet, startet der
Frequenzumrichter nicht oder der Motor trudelt aus,
falls er dreht. 1 = Freigabesignal aktiv.
Wählt die Quelle für das Stoppsignal AUS3 aus.
Wenn das Signal abgeschaltet wird (d.h. es
wechselt auf 0), stoppt der Antrieb entlang der
AUS3-Stopprampe (Einstellung mit Parameter
22.12 AUS3 Stopzeit).
Nach der Anzeige von “Fertig ok!” auf dem Bedienpanel die Taste OK drücken, um den
Assistenten zu schließen.
11.01 Start-Methode
11.03 Stop-Methode
10.11 Reglerfreig Quel
10.13 AUS3 Quelle
4 – Sollwert-Auswahl
Im Hauptmenü ASSISTENTEN auswählen und mit
Taste AUSWAHL aufrufen.
Sollwertauswahl markieren und Taste OK drücken.
Die folgenden Parameter werden eingestellt.
Hinweis: Abhängig von der Auswahl werden einige
der nachfolgend aufgelisteten Parameter
übergangen.
Page 43

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
Quelle eingestellt
mit Par. 26.02
Quelle eingestellt
mit Par. 26.03
Quelle eingestellt
mit Par. 26.04
Aktivierte Konstantdrehzahl
0 0 0 Keine Konstantdrehzahl
1 0 0 Konstantdrehzahl 1
0 1 0 Konstantdrehzahl 2
1 1 0 Konstantdrehzahl 3
0 0 1 Konstantdrehzahl 4
1 0 1 Konstantdrehzahl 5
0 1 1 Konstantdrehzahl 6
1 1 1 Konstantdrehzahl 7
43
Auswahl der Regelungsart für die externen
Steuerplätze EXT1 und EXT2.
12.03 Ext1 Betriebsart
12.05 Ext2 Betriebsart
Drehzahl-Reg: Drehzahlregelung.
Drehmom-Reg: Drehmomentregelung
Min, Max, Addieren: Drehmomentsollwert und
Drehzahlreglerausgang werden verglichen und die
mathematische Funktion wird angewendet (kleiner,
größer, Addition).
Abhängig von der getroffenen Auswahl werden im
nächsten Schritt Drehzahl- oder DrehmomentSollwertquelle (oder beide) definiert.
Drehzahlsollwert-Einstellung
Auswahl des Werts der zu benutzenden Konstantdrehzahlen (wenn zutreffend).
Bei jeder Konstantdrehzahl-Einstellung wird abgefragt, wie die Eingabe die
Drehrichtung der Konstandrehzahl beeinflusst.
Nein: Das Vorzeichen der Konstantdrehzahl bestimmt die Drehrichtung, wenn die
Konstantdrehzahl aktiviert wird.
Ja: Das Vorzeichen der Konstantdrehzahl wird multipliziert mit dem Wert des
Drehrichtungssignals und bestimmt dadurch die Drehrichtung, wenn die
Konstantdrehzahl aktiviert wird.
Jetzt werden Sie gefragt, ob jeder Konstantdrehzahl-Selektor eine Konstantdrehzahl
aktivieren soll.
Nein: Die Konstantdrehzahlen 1…7 werden durch die mit den Parametern 26.02, 26.03
und 26.04 eingestellten Quellen wie folgt aktiviert:
Ja: Die Konstantdrehzahlen 1…3 werden einzeln entsprechend durch die mit den
Parametern 26.02, 26.03 und 26.04 eingestellten Quellen aktiviert.
Einstellen der Quellen des KonstantdrehzahlSelektors.
Eingabe der Konstantdrehzahlen. 26.06 Konst.Drehzahl 1…
Auswahl der Quelle des Drehzahlsollwert-Signals. 21.01 Wahl Drehz-Soll1
26.02 Wahl 1 Konst.DZ
26.03 Wahl 2 Konst.DZ
26.04 Wahl 3 Konst.DZ
Page 44

44 Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-
Zeit
Drehzahl
19.01
22.02 oder
22.04
22.03 oder
22.05
Beschleunigung Verzögerung
0
Regelungsprogramm
Einstellung der absoluten Minimum-Grenze des
Drehzahlsollwerts. Diese Grenze gilt sowohl für den
positiven als auch den negativen Bereich.
Einstellung der Drehzahl-Skalierung für die
Beschleunigungs-/Verzögerungszeiten. Einstellung
der Beschleunigungs-/Verzögerungszeiten.
Das folgende Diagramm stellt die Wirkung der Einstellung von Parameter 19.01 Drehzahl Skalier auf
die Beschleunigungs-/Verzögerungszeiten dar.
Hinweis: Die Beschleunigungs-/Verzögerungszeiten können sich automatisch durch die eingestellten
Drehmoment-Grenzwerte verlängern.
Einstellen der Quelle für das Umschaltsignal zwischen den Beschleunigungs-/Verzögerungsrampenpaaren 1 und 2.
0 = Beschleunigungszeit 1/Verzögerungszeit 1 aktiv,
1 = Beschleunigungszeit 2/Verzögerungszeit 2 aktiv.
Drehmomentsollwert-Einstellung
Auswahl der Quelle des Drehmomentsollwert-Signals.
Einstellen der oberen und unteren Grenze des
Drehmomentsollwerts.
Einstellung der Zeiten für den Anstieg des Drehmomentsollwerts von Null auf das Motor-Nenndrehmoment (Rampe auf) und umgekehrt (Rampe ab).
21.09 Min.DZ-Soll.abs
19.01 Drehzahl Skalier
22.02 Beschleun.zeit 1
22.04 Beschleun.zeit 2
22.03 Verzöger.zeit 1
22.05 Verzöger.zeit 2
22.01 Wahl Beschl/Verz
24.01 Wahl Mom.Soll1
24.03 Max.Mom.Soll
24.04 Min.Mom.Soll
24.06 Mom.Rampe auf
24.07 Mom.Rampe ab
Page 45

Kurzanleitung für die Inbetriebnahme des ACS850 mit Standard-Regelungsprogramm
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = Filtereingang (Sprung)
O = Filterausgang
t = Zeit
T = Filterzeitkonstante
Ungefiltertes Signal
Gefiltertes Signal
AI (skaliert)
AI (mA/V)
13.04/13.09
13.02/13.07
13.03/13.08
13.05/13.10
45
Einstellungen der Analogeingänge AI1/AI2 (wenn einer davon als Quelle des
Drehzahl- oder Drehmomentsollwerts ausgewählt wurde)
Einstellung der Filterzeitkonstante für den
Analogeingang.
13.01 AI1 Filterzeit oder
13.06 AI2 Filterzeit
Einstellen der Maximal- und Minimalwerte des
Analogeingangs.
Einstellung der skalierten Werte, die den Maximalund Minimalwerten entsprechen, die im vorhergehenden Schritt eingestellt wurden. Dieses ist nützlich, wenn die volle Drehzahl bei niedrigen
Analogeingangswerten erforderlich ist.
Nach der Anzeige von “Fertig, ok!” auf dem Bedienpanel die Taste OK drücken, um den
Firmware-Assistenten zu schließen und die Inbetriebnahme zu beenden.
13.02 AI1 max oder
13.07 AI2 max
13.03 AI1 min oder
13.08 AI2 min
13.04 AI1 max Skalieru oder
13.09 AI2 max Skalieru
13.05 AI1 min Skalieru oder
13.10 AI2 min Skalieru
Page 46

46 Kurzanleitung für die Inbetriebnahme des ACS850 mit StandardRegelungsprogramm
Page 47

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 47
Guía rápida de puesta en marcha del ACS850 con programa de control estándar
Acerca de esta guía
Esta guía contiene el procedimiento básico que debe seguirse para la puesta en
marcha de un convertidor ACS850 (con programa de control estándar). El
convertidor se configura a lo largo del procedimiento con ayuda del panel de control
del ACS850.
Nota: En la guía solamente se describen las funciones del panel de control
necesarias durante el procedimiento. Las instrucciones completas para el uso del
panel de control se incluyen en el Manual de Firmware del programa de control
estándar del ACS850 (3AUA0000054538 [
Instrucciones de seguridad
¡ADVERTENCIA! Todos los trabajos de instalación eléctrica y
mantenimiento realizados en el convertidor deben ser ejecutados
únicamente por electricistas cualificados.
Español]).
Nunca trabaje en el convertidor, el circuito del chopper de frenado, el cable de motor
o el motor con la alimentación del convertidor conectada. Realice siempre una
medición para verificar que no exista tensión.
Page 48

48 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
00 A
00 Hz
0 %0.
0.
0.
REM
DIR
MENU
0.00rpm
LOC
REM
00 A
00 Hz
0 %0.
0.
0.
LOC
DIR
MENU
0.00rpm
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
MENU PRPAL 1
LOC
Procedimiento de puesta en marcha
Seguridad
La puesta en marcha sólo puede ser efectuada por un electricista cualificado.
Deben seguirse las instrucciones de seguridad durante todo el procedimiento de
puesta en marcha. Lea las instrucciones de seguridad incluidas en las primeras
páginas del manual de hardware correspondiente.
Compruebe la instalación. Lea la lista de comprobación de la instalación en el manual
de hardware correspondiente.
Compruebe que la puesta en marcha del motor no suponga ningún peligro.
Desacople la maquinaria accionada si:
• existe riesgo de daños en caso de una dirección de giro incorrecta, o
• se necesita una marcha de ID Normal durante la puesta en marcha del convertidor,
cuando el par de carga es superior al 20% o la maquinaria no es capaz de soportar el
par nominal momentáneo durante la marcha de ID.
Alimentación, funciones básicas del panel de control
Conecte el panel de control al convertidor mediante
un cable de categoría 5E adecuado.
Ponga en marcha el convertidor. Tras unos
instantes, el panel muestra el modo de Salida
(derecha).
Nota: La pantalla del modo de Salida se alternará
con el mensaje "Alarma 2021 SIN DATOS MOTOR"
hasta que más adelante se introduzcan los datos
del motor en este procedimiento.
Cambie a control local para asegurarse de que se
ha inhabilitado el control externo. Para ello pulse la
tecla en el panel de control. El control local se
indica a través del texto "LOC" que aparece en la
fila superior de la pantalla.
Los dos recuadros de la fila inferior de la pantalla
indican la función de las teclas multifunción y
. El contenido de los recuadros depende de
las elecciones del menú que se muestran.
Pulse (MENU) para acceder al menú
principal.
Dentro de cualquier menú, la selección deseada se
muestra resaltada. Pulse las teclas y
para cambiar su selección; valídela
pulsando (INTRO).
El menú principal sirve como punto de inicio de
todos los procedimientos descritos a continuación.
Page 49

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 49
1501 SA1 Funcion
P.01.06
EDICION PAR
CANCELA
GUARDAR
0106 Par
LOC
1002 Ext1 Marcha 1
P.02.01.00
EDICION PAR
CANCELA
SIGUI
0201 Estado ED
LOC
Notas:
• Pulse (CANCELA o SALIR) siempre que desee volver al nivel anterior.
• Por defecto, no están visibles todos los parámetros. Ajuste el parámetro 16.15 Selec
Menu Param a Lista Larga para visualizar todos los parámetros.
Para ajustar un parámetro dentro de un asistente:
• Utilice las teclas y para ajustar la configuración. Pulse GUARDAR
para guardar la configuración mostrada y proseguir con el siguiente parámetro.
Para ajustar un parámetro en cualquier otro momento:
• En el menú principal, vaya a PARAMETROS y pulse (INTRO).
• Utilice las teclas y para examinar la lista de grupos de parámetros.
Seleccione el grupo deseado y pulse (SEL) para que se muestren en pantalla
los parámetros de ese grupo.
• Seleccione un parámetro y pulse (EDITAR) para ajustar su configuración.
• Utilice las teclas y para ajustar la configuración. Pulse GUARDAR
para guardar la configuración mostrada. Pulse SALIR dos veces para volver al menú
principal.
Notas para realizar configuraciones más complejas:
• En el caso de parámetros que definen una fuente digital, el ajuste Const puede
utilizarse para fijar el valor a la constante 1 (C.TRUE) o 0 (C.FALSE).
• En el caso de parámetros que definen una fuente digital o analógica, el ajuste
Puntero puede utilizarse para seleccionar con libertad cualquier valor del parámetro
(analógico) o un bit específico de un parámetro booleano compacto (digital) como
fuente:
• En una fuente analógica, el grupo de
parámetros y el índice de parámetros están
especificados. Tras seleccionar el grupo, pulse
SIGUI para acceder a la configuración del
índice.
Bajo el cursor se muestra el texto con la
configuración actual.
Tras configurar el índice, pulse GUARDAR
para aceptar el valor. Pulse CANCELA en
cualquier momento para descartar los cambios
realizados y volver a la lista de parámetros.
• En una fuente digital, el grupo de parámetros,
el índice de parámetros y el número de bit
están especificados. Tras seleccionar un
elemento, pulse SIGUI para pasar al siguiente.
Bajo el cursor se muestra el texto con la
configuración actual.
Tras ajustar el número de bit, pulse GUARDAR
para aceptar el valor. Pulse CANCELA en
cualquier momento para descartar los cambios
realizados y volver a la lista de parámetros.
Ajuste de los valores de los parámetros
Page 50

50 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
MENU PRPAL 1
LOC
99 Datos de partida
01 Valores actuales
02 estado E/S
03 Señales de control
04 Señales aplicación
SALIR
SEL
GRUPOS PARAM 99
LOC
9901 Idioma
English
9904 Tipo motor
9905 Modo ctrl motor
9906 Intens nom motor
PARAMETROS
SALIR
EDITAR
LOC
9901 Idioma
Deutsch
EDICION PAR
CANCELA
GUARDAR
[0407 hex]
LOC
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
MENU PRPAL 1
LOC
Seleccionar asistente
Macro de aplicacion
Config de motor
Control Marcha / Paro
SALIR ACEPTAR
ELECCION
LOC
Cambio del idioma
Por defecto, los textos se muestran en inglés. Si lo desea, puede cambiar el idioma de
la siguiente manera.
En el menú principal, asegúrese de seleccionar
PARAMETROS y pulse INTRO.
Desplácese hasta el grupo de parámetros 99 Datos
de partida y pulse SEL. Recuerde que la lista se
muestra de forma continua en ambas direcciones
entre los grupos 99 y 01 (resulta más rápido pulsar
para llegar al grupo 99).
Asegúrese de haber seleccionado el parámetro
"9901 Idioma" y pulse EDITAR.
Seleccione el idioma deseado y pulse GUARDAR.
Pulse SALIR dos veces para volver al menú
principal.
Los procedimientos de puesta en marcha descritos a continuación se sirven de los
asistentes. Son rutinas que guían al usuario a lo largo de los ajustes esenciales de los
parámetros.
1 – Selección de la macro de la aplicación
En el menú principal, vaya a ASISTENTES y pulse
INTRO.
Seleccione Macro de aplicacion y pulse
ACEPTAR.
Asistentes
Page 51

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 51
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
MENU PRPAL 1
LOC
Seleccionar asistente
Macro de aplicacion
Config de motor
Control Marcha / Paro
SALIR ACEPTAR
ELECCION
LOC
Las macros de aplicación son ajustes predefinidos
de los parámetros que pueden utilizarse como base
para las aplicaciones del usuario. Tiene a su
disposición las siguientes macros:
• Fabrica (para aplicaciones de control de la
velocidad en que es necesaria una interfaz
sencilla de marcha/paro)
• Manual / Auto (para aplicaciones de control de la
velocidad en que se utilizan dos dispositivos de
control externos)
• Control PID (para aplicaciones de control de
procesos tales como sistemas de control del flujo,
del nivel o de la presión en un bucle cerrado)
• Control de Par (para el control de la velocidad
y/o el par del motor)
• Control Secuencial (para aplicaciones de
control de la velocidad en que son necesarias y
se secuencian múltiples velocidades constantes y
rampas de aceleración/deceleración).
Encontrará más información sobre las macros en el
Manual de Firmware.
Seleccione una de las macros y pulse ACEPTAR.
Tras mostrarse el mensaje "Realizado" en el panel de control, pulse ACEPTAR para
finalizar el asistente del firmware.
Se aplican a la macro los valores
por defecto de los parámetros.
2 – Config de motor
Asegúrese de tener a mano la información del encoder (si es necesario) y de la placa
de características del motor.
En el menú principal, vaya a ASISTENTES y pulse
INTRO.
Seleccione Config de motor y pulse ACEPTAR.
El asistente le guiará durante el procedimiento de
ajuste del motor.
Seleccione el tipo de motor, AM (motor asíncrono
de CA de jaula de ardilla) o PMSM (motor síncrono
de imanes permanentes, del inglés Permanent
Magnet Synchronous Motor).
99.04 Tipo Motor
Page 52

52 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
Seleccione el modo de control del motor. El DTC es
adecuado en la mayoría de los casos.
Se recomienda el modo escalar si:
• la intensidad nominal del motor es inferior a 1/6
de la intensidad nominal del convertidor,
• el convertidor se usa con fines de prueba sin un
motor conectado, o
• el convertidor controla diferentes motores y el
número de motores conectados varía.
Introduzca los datos del motor que figuran en la
placa de características del motor.
Ejemplo de placa de características de un motor
asíncrono:
99.05 Modo Ctrl Motor
Nota: Ajuste los datos del motor
exactamente al mismo valor que
aparece en la placa de
características. Por ejemplo, si la
velocidad nominal del motor es
de 1470 rpm en la placa, el ajuste
del valor del parámetro 99.09
Veloc Nom Motor a 1500 rpm da
lugar a un funcionamiento
incorrecto del convertidor.
Si se seleccionan los datos D
(delta, triángulo), conecte el
motor en triángulo.
Si se seleccionan los datos Y
(estrella), conecte el motor en
estrella.
Ejemplo de placa de características de un motor de
imanes permanentes:
Page 53

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 53
• Intensidad nominal del motor
Intervalo permitido: aproximadamente 1/6 × I
× I
del convertidor (0…2 × IHd si el parámetro
Hd
99.05 Modo Ctrl Motor = Escalar).
Hd
• Tensión nominal del motor
Intervalo permitido: 1/6 × U
convertidor. (U
elevada en cada uno de los intervalos de tensión
hace referencia a la tensión más
N
… 2 × U
N
del
N
99.06 Intens Nom Motor
… 2
99.07 Tens Nom Motor
nominal).
En el caso de motores de imanes permanentes, la
tensión nominal es la tensión BackEMF (a la
velocidad nominal del motor). Si la tensión se indica
en forma de tensión por rpm, p. ej., 60 V por cada
1000 rpm, la tensión correspondiente a una
velocidad nominal de 3000 rpm es 3 × 60 V = 180 V.
Tenga en cuenta que la tensión nominal no es igual
al valor de tensión equivalente de un motor de CC
(E.D.C.M., equivalent DC motor) que proporcionan
algunos fabricantes de motores. La tensión nominal
puede calcularse mediante la división de la tensión
E.D.C.M. entre 1,7 (= raíz cuadrada de 3).
• Frecuencia nominal del motor
99.08 Frec Nom Motor
Para motores de imanes permanentes: Si la
frecuencia no aparece en la placa de características
del motor, debe calcularse con ayuda de la
siguiente formula:
f = n × p /60
donde p = número de pares de polos
y n = velocidad nominal del motor.
• Velocidad nominal del motor 99.09 Veloc Nom Motor
• Potencia nominal del motor 99.10 Potencia Nom Mot
Los siguientes parámetros de datos del motor pueden ajustarse para mejorar la
precisión de su control. Si los desconoce, ajuste los valores a 0.
•cos
nominal del motor (no aplicable en motores
99.11 Coseno phi nom
de imanes permanentes).
• Par nominal del eje del motor 99.12 Par nom Motor
Los siguientes parámetros definen límites de funcionamiento fijados para proteger el
equipo accionado.
• Velocidad máxima
20.01 Velocidad maxima
Para marchas de ID normales y reducidas (véase a
continuación), este valor debe ser superior al 55%
de la velocidad nominal del motor definida
anteriormente.
Page 54

54 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
Avance
Cuando las fases de salida U2,
V2 y W2 del convertidor están
conectadas a los terminales
correspondientes:
Retroceso
• Velocidad mínima
Para marchas de ID normales y reducidas (véase a
continuación), este valor debe ser igual o inferior a
0rpm.
• Intensidad máxima
Este valor debe ser superior a la intensidad nominal
del motor definida anteriormente.
• Par máximo
Para la marcha de ID normal (véase la información
que aparece a continuación), este valor debe ser al
menos el 100% del par nominal del motor definido
anteriormente.
• Par mínimo 20.08 Par minimo 1
Se muestra en pantalla la pregunta "¿Quiere hacer la Id-Run ahora?". La marcha de ID
(marcha de identificación) identifica las características del motor para un control óptimo
del mismo.
Si no desea realizar en este momento la marcha de ID, seleccione No para finalizar el
asistente del firmware para el ajuste del motor. Pase al apartado 3 – Configuración de
marcha/paro.
Si desea llevar a cabo la marcha de ID, continúe con los siguientes pasos ANTES de
seleccionar Si.
¡ADVERTENCIA! El motor funciona aproximadamente entre un 50…100%
de la velocidad nominal durante la marcha de ID normal o reducida.
VERIFIQUE QUE SEA SEGURO ACCIONAR EL MOTOR ANTES DE
EFECTUAR LA MARCHA DE ID.
Compruebe la dirección de giro del motor. Durante
la marcha (normal o reducida), el motor girará en la
dirección de avance.
20.02 Velocidad minima
20.05 Intensidad max
20.07 Par maximo 1
Asegúrese de que los circuitos de la función Safe
Torque Off y de paro de emergencia estén cerrados
(si los hubiere).
Seleccione Si y pulse ACEPTAR.
Seleccione el método de la marcha de ID.
La marcha de ID se efectuará la siguiente vez que
se conecte el convertidor.
99.13 Marcha Ident Mot
Page 55

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 55
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
MENU PRPAL 1
LOC
Debe seleccionarse la marcha de identificación
NORMAL siempre que sea posible.
Nota: La maquinaria accionada debe desacoplarse
del motor para la marcha de identificación normal:
• si el par de carga es superior al 20%, o
• si la maquinaria no puede resistir la oscilación del
par nominal durante la marcha de identificación.
La marcha REDUCED ID (ID reducida) debe
seleccionarse en lugar de la marcha de ID normal si
las pérdidas mecánicas son superiores al 20%, es
decir, el motor no puede desacoplarse del equipo
accionado o es necesaria la totalidad del flujo para
mantener abierto el freno del motor (motor cónico).
La marcha STANDSTILL ID (ID en reposo) sólo
debe seleccionarse en el caso de que ni la marcha
de ID normal ni la reducida sean posibles por
restricciones derivadas de los mecanismos
conectados (aplicaciones de elevación o con
grúas).
Notas:
• El eje del motor NO debe bloquearse y el par de
carga debe ser del < 20% durante la marcha de
ID normal o reducida. En el caso de un motor de
imanes permanentes, esta restricción también se
aplica cuando se selecciona la marcha de ID en
reposo.
• El freno mecánico no es abierto por la lógica para
la marcha de ID.
• La marcha de ID no puede realizarse si el
parámetro 99.05 Modo Ctrl Motor = Escalar.
Arranque el motor (pulse el botón INICIO) para
activar la marcha de ID.
La marcha de ID se indica mediante la alarma
MARCHA ID que se muestra en la pantalla del
panel.
Tras mostrarse el mensaje "Realizado" en el panel de control, pulse ACEPTAR para
finalizar el asistente del firmware.
Alarma: ID-RUN
3 – Configuración de marcha/paro
En el menú principal, vaya a ASISTENTES y pulse
INTRO.
Page 56

56 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
Seleccionar asistente
Macro de aplicacion
Config de motor
Control Marcha / Paro
SALIR
ACEPTAR
ELECCION
LOC
Estado de la
fuente 1 (a través
del par. 10.02)
Estado de la
fuente 2 (a través
del par. 10.03)
Orden
0 -> 1 1 Marcha
Cualquiera 1 -> 0 Paro
Cualquiera 0 Paro
Seleccione Control Marcha / Paro y pulse
ACEPTAR.
Se ajustarán los siguientes parámetros.
Nota: En función de las selecciones que realice, la
rutina podría saltarse algunos de los parámetros
enumerados a continuación.
Seleccione la función de marcha/paro y las fuentes
de las señales para el lugar de control externo 1
(EXT1). En primer lugar programe el parámetro
10.01 (función de marcha), luego 10.02 y 10.03
para seleccionar las fuentes de la señal de marcha.
Las opciones para el parámetro 10.01 son:
In1: La señal definida en el parámetro 10.02 es la
fuente para la señal de marcha (0 = Paro, 1 =
Marcha).
3 hilos: Los comandos de marcha/paro se
determinan en función de las dos fuentes
seleccionadas mediante los parámetros 10.02 y
10.03.
10.01 Ext1 Mar/Paro/D
10.02 Ext1 Marcha 1
10.03 Ext1 Marcha 2
M1 A / M2 R: La señal definida en el parámetro
10.02 pone en marcha el convertidor en dirección
de avance y la señal definida en 10.03 lo pondrá en
marcha en dirección retroceso.
M1 St/M2 Dir: La señal definida en el parámetro
10.01 pondrá en marcha el convertidor (0 = Paro, 1
= Marcha). La señal definida en 10.03 cambiará la
dirección del motor (0 = avance, 1 = retroceso).
Seleccione la función de marcha/paro y las
fuentes de las señales para el lugar de control
externo 2 (EXT2).
Las selecciones son las mismas que las anteriores
con EXT1.
Defina la fuente de las señales para cambiar
entre los lugares de control externos EXT1 y EXT2
(0 = EXT1, 1 = EXT2).
10.04 Ext2 Mar/Paro/D
10.05 Ext2 Marcha 1
10.06 Ext2 Marcha 2
12.01 Selec EXt1/EXT2
Page 57

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 57
PARAMETROS
ASISTENTES
PAR CAMBIADO
SALIR INTRO
MENU PRPAL 1
LOC
Seleccionar asistente
Config de motor
Control Marcha / Paro
Selec de Referencia
SALIR
ACEPTAR
ELECCION
LOC
Seleccione la función de marcha del motor.
Automatico es el mejor ajuste de tipo general, y
también permite el arranque "flying" (arranque con
el motor girando).
Magn CC implica una magnetización previa del
motor y debe seleccionarse si se requiere un
elevado par de arranque.
Magn CC cnst debe seleccionarse si es necesario
un tiempo constante de magnetización previa. El
tiempo se ajusta mediante el parámetro 11. 02
Tiempo MagnConst.
Seleccione el modo de paro.
Paro libre: Se desconecta la alimentación del
motor. El motor va decelerando hasta que se para
por sí solo.
Rampa: El motor se detiene por deceleración a lo
largo de la rampa de deceleración activa (se explica
más adelante).
Seleccione la fuente de la señal de permiso de
marcha.
Si la señal está desconectada, el convertidor no se
pone en marcha o decelera hasta detenerse si está
en marcha. 1 = Señal de permiso de marcha activa.
Seleccione la fuente de la señal OFF3 de paro de
emergencia.
Si se elimina la señal (es decir, si cambia a 0), el
convertidor se detendrá a lo largo de la rampa de
paro de emergencia (definida mediante el
parámetro 22.12 Tiemp Emerg Stop).
Tras mostrarse el mensaje "Realizado" en el panel de control, pulse ACEPTAR para
finalizar el asistente del firmware.
11.01 Función Marcha
11.03 Funcion Paro
10.11 Habil. Funcion
10.13 EM stop off3
4 – Selección de las referencias
En el menú principal, vaya a ASISTENTES y pulse
INTRO.
Seleccione Selec de Referencia y pulse
ACEPTAR.
Se ajustarán los siguientes parámetros.
Nota: En función de las selecciones que realice, la
rutina podría saltarse algunos de los parámetros
enumerados a continuación.
Page 58

58 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
Fuente definida
mediante el par.
26.02
Fuente definida
mediante el par.
26.03
Fuente definida
mediante el par.
26.04
Velocidad constante activa
0 0 0 Ninguno
1 0 0 Velocidad constante 1
0 1 0 Velocidad constante 2
1 1 0 Velocidad constante 3
0 0 1 Velocidad constante 4
1 0 1 Velocidad constante 5
0 1 1 Velocidad constante 6
1 1 1 Velocidad constante 7
Seleccione el modo de control para los lugares de
control externos EXT1 y EXT2.
12.03 Modo Ctrl EXT1
12.05 Modo Ctrl EXT2
Velocidad: Control de velocidad.
Par: Control del par.
Min, Max, Suma: Se comparan la salida del
controlador de velocidad y la referencia de par y se
aplica la función matemática (menor, mayor, suma).
En función de las selecciones, la fuente de la
referencia de par o de velocidad (o ambas) se
define a continuación.
Ajuste de la referencia de velocidad
Seleccione el número de velocidades constantes (si las hubiere) que se van a utilizar.
Si selecciona algunas velocidades constantes, se le preguntará si la dirección de
arranque debe afectar a la dirección de las velocidades constantes.
No: El signo de la velocidad constante determina de forma directa la dirección de
marcha cuando la velocidad constante está activa.
Sí: El signo de la velocidad constante se multiplica por el valor de la señal de Dirección
para determinar la dirección de marcha cuando la velocidad constante está activa.
Ahora se le preguntará si cada selector de velocidad constante debe activar una
velocidad constante.
No: Las velocidades constantes 1…7 son activadas por las fuentes seleccionadas
mediante los parámetros 26.02, 26.03 y 26.04 de la forma siguiente:
Sí: Las velocidades constantes 1…3 son activadas por las fuentes seleccionadas
mediante los parámetros 26.02, 26.03 y 26.04 respectivamente.
Ajuste las fuentes del selector de velocidades
constantes.
Introduzca las velocidades constantes. 26.06 Veloc Const 1…
Seleccione la fuente de la señal de referencia de la
velocidad.
Defina el límite mínimo absoluto para la referencia
de velocidad. Este límite se aplica tanto a intervalos
positivos como a negativos.
26.02 Sel Veloc Cons 1
26.03 Sel Veloc Cons 2
26.04 Sel Veloc Cons 3
21.01 Sel Ref1 vel
21.09 Lim min abs vel
Page 59

Guía rápida de puesta en marcha del ACS850 con programa de control estándar 59
Tiempo
Velocidad
19.01
22.02 ó
22.04
22.03 ó
22.05
Acel. Decel.
0
Defina el escalado de velocidad utilizado para los
períodos de aceleración/deceleración. Defina los
períodos de aceleración/deceleración.
El diagrama que se encuentra a continuación
muestra el efecto del parámetro 19.01 Escala
velocidad sobre los períodos de aceleración/
deceleración.
Nota: Los períodos de aceleración/deceleración
pueden ampliarse de forma automática mediante
los límites de par existentes.
Seleccione la fuente para cambiar entre los pares
de rampas de aceleración/deceleración 1 y 2.
0 = los períodos de aceleración 1/deceleración 1
están activados, 1 = los períodos de aceleración 2/
deceleración 2 están activados.
Ajuste de la referencia de par
Seleccione la fuente de la señal de referencia de
par.
Defina las referencias de par máxima y mínima. 24.03 Ref Par Maximo
Defina los períodos para el incremento de la
referencia de par desde cero hasta el par nominal
del motor (rampa ascendente) y viceversa (rampa
descendente).
19.01 Escala velocidad
22.02 Tiempo Aceler 1
22.04 Tiempo Aceler 2
22.03 Tiempo Deceler 1
22.05 Tiempo Deceler 2
22.01 Sel Acel/Decel
24.01 Sel Ref Par 1
24.04 Ref Par Minimo
24.06 Aument Rampa Par
24.07 Dismin Rampa Par
Page 60

60 Guía rápida de puesta en marcha del ACS850 con programa de control estándar
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = entrada de filtro (escalón)
O = salida de filtro
t = tiempo
T = constante de tiempo de filtrado
Señal sin filtrar
Señal filtrada
EA (escalada)
EA (mA/V)
13.04/13.09
13.02/13.07
13.03/13.08
13.05/13.10
Ajuste de las entradas analógicas EA1/EA2 (si se ha seleccionado alguna de las dos
como fuente de la referencia de par o de velocidad)
Defina la constante de tiempo del filtro para la
entrada analógica.
13.01 EA1 Filtro, o bien
13.06 EA2 Filtro
Defina los valores máximo y mínimo de la entrada
analógica.
Defina los valores escalados que corresponden a
los valores máximo y mínimo definidos en el paso
anterior. Resulta útil si es necesaria la velocidad
máxima con valores menores en la entrada
analógica.
Tras mostrarse el mensaje "Realizado" en el panel de control, pulse ACEPTAR para
finalizar el asistente del firmware y el procedimiento de puesta en marcha.
13.02 EA1 Maximo, o bien
13.07 EA2 Maximo
13.03 AI1 min, o bien
13.08 EA2 Minimo
13.04 EA1 Escala max, o bien
13.09 EA2 Escala max
13.05 EA1 Escala min, o bien
13.10 EA2 Escala min
Page 61
Guide de mise en route de l'ACS850 avec le programme de commande Standard 61
Guide de mise en route de l'ACS850 avec le programme de commande Standard
Introduction
Ce guide reprend l'essentiel des consignes de mise en route d'un variateur ACS850
avec le programme de commande Standard. Au cours de la mise en route, le
variateur est configuré avec la micro-console ACS850.
N.B. : Seules les fonctions de la micro-console nécessaires à la mise en route sont
décrites ici. Vous trouverez les consignes complètes d'utilisation de la micro-console
dans le Manuel d'exploitation ACS850 - Programme de commande Standard
(3AUA0000054539).
Consignes de sécurité
ATTENTION ! Seuls des électriciens qualifiés sont autorisés à procéder à
l'installation et à la maintenance du variateur.
N'intervenez jamais sur le variateur, le circuit du hacheur de freinage, le câble moteur
ou le moteur lorsque le variateur est sous tension. Vous devez toujours vérifier
l'absence effective de tension par une mesure.
Page 62

62 Guide de mise en route de l'ACS850 avec le programme de commande Standard
00 A
00 Hz
0 %0.
0.
0.
DIS
SENS
MENU
0.00rpm
LOC
REM
00 A
00 Hz
0 %0.
0.
0.
LOC
SENS
MENU
0.00rpm
PARAMETRES
ASSISTANT
PARAM MODIF
SORTIE ENTRER
MENU PRINCIP 1
LOC
Procédure de mise en route
Sécurité
La mise en route doit uniquement être réalisée par un électricien qualifié.
Les consignes de sécurité doivent être respectées pendant toute la procédure. Ces
consignes figurent au début du manuel d’installation.
Vérification de l'installation de l'appareil. Cf. liste des points à vérifier dans le manuel
d’installation correspondant.
Vérifiez que le moteur peut être démarré en toute sécurité.
Vous devez désaccoupler la machine entraînée dans les cas suivants :
• si elle risque d'être endommagée en cas d'erreur de sens de rotation du moteur ou
• si une identification normale du moteur est requise : si le couple de charge est
supérieur à 20 % ou si la mécanique n’est pas capable de supporter le couple
nominal sur une période transitoire lors de l’exécution de la fonction d’identification
moteur.
Mise sous tension du variateur et utilisation de la micro-console
Raccordez la micro-console au variateur avec un
câble de catégorie 5E approprié.
Mettez le variateur sous tension. Après quelques
instants, la micro-console affiche le mode Output
(Affichage, cf. colonne de droite).
N.B. : L'affichage alternera entre le mode Output et
«Alarme 2021 ALM DONNEES MOTEUR» jusqu'à
ce que vous saisissiez les données moteur plus tard
dans la procédure.
Sélectionnez le mode de commande Local pour
vous assurer que la commande à distance est
désactivée. Pour cela, enfoncez la touche de
la micro-console. Lorsque le mode Local est
sélectionné, «LOC» apparaît sur la ligne supérieure
de l’affichage.
Les coins inférieurs indiquent les fonctions réalisées
par les deux touches multifonctions et .
Les valeurs affichées dépendent des choix
possibles dans le menu.
Enfoncez la touche (MENU) pour accéder au
menu principal.
La valeur sélectionnée dans un menu est en
surbrillance. Sélectionnez une nouvelle valeur avec
les touches et puis validez votre
sélection en appuyant sur (ENTRER).
Toutes les procédures décrites ci-après s'effectuent
à partir du menu principal.
Page 63

Guide de mise en route de l'ACS850 avec le programme de commande Standard 63
1501 Srce Sortie Ana1
P.01.06
EDIT PARAM
SUPPRIM
SAUVE
0106 Couple Moteur
LOC
Paramétrages
N.B. :
• À tout moment, un appui sur (SUPPRIM ou SORTIE) vous ramène à l'écran
précédent.
• Tous les paramètres ne sont pas visibles à la première mise sous tension. Réglez le
paramètre 16.15 Sel Liste Param sur Liste Longue pour pouvoir visualiser tous les
paramètres.
Réglage d'un paramètre avec un assistant :
• Réglez la valeur souhaitée avec les touches et . Sélectionnez SAUVE
pour sauvegarder le réglage et passer au paramètre suivant.
Réglage d'un paramètre à un autre moment :
• Dans le menu principal, sélectionnez PARAMETRES puis enfoncez
(ENTRER).
• Faites défiler la liste des groupes de paramètres avec les touches et .
Mettez le groupe souhaité en surbrillance et enfoncez (SELECT) pour afficher
les paramètres de ce groupe.
• Mettez le paramètre en surbrillance puis enfoncez la touche (EDITION) pour
modifier sa valeur.
• Réglez la valeur souhaitée avec et . Sauvegardez votre réglage avec
SAUVE. Enfoncez deux fois la touche SORTIE pour revenir au menu principal.
N.B. : pour les réglages plus complexes :
• Lorsque le paramètre sélectionne une source logique, le réglage Fixe fixe la valeur à
1 (C.TRUE) ou 0 (C.FALSE).
• Lorsque le paramètre sélectionne une source analogique ou logique, le réglage
Pointeur permet de sélectionner librement la valeur de n’importe quel paramètre
(analogique) ou un bit d'un paramètre booléen compressé (logique) comme source :
• Source analogique : le groupe et le numéro du
paramètre sont indiqués. Après avoir
sélectionné le groupe, enfoncez la touche
SUIVANT pour passer au réglage du numéro.
Le texte sous le curseur indique le réglage
actuel.
Après avoir réglé le numéro, sauvegardez la
valeur en enfonçant la touche SAUVE. À tout
moment, un appui sur la touche SUPPRIM
annule les modifications et vous ramène à la
liste des paramètres.
Page 64

64 Guide de mise en route de l'ACS850 avec le programme de commande Standard
Src1 Demarr Ext1
P.02.01.00
EDIT PARAM
SUPPRIM
SUIVANT
0201 Etat Entr Logiq
LOC
PARAMETRES
ASSISTANT
PARAM MODIF
SORTIE ENTRER
MENU PRINCIP 1
LOC
99 Donnees initial
01 Valeurs actives
02 Valeurs E/S
03 Valeurs regulation
04 Valeurs applic
SORTIE
SELECT
GROUPE PAR 99
LOC
9901 Langue
English
9904 Type moteur
9905 Mode cde moteur
9906 I nominal moteur
PARAMETRES
SORTIE
EDITION
LOC
9901 Langue
Deutsch
EDIT PARAM
SUPPRIM
SAUVE
[0407 hex]
LOC
• Source logique : le groupe et le numéro du
paramètre ainsi que le numéro du bit sont
précisés. Une fois un paramètre réglé,
enfoncez la touche SUIVANT pour passer au
suivant.
Le texte sous le curseur indique le réglage
actuel.
Après avoir réglé le numéro du bit,
sauvegardez la valeur en appuyant sur
SAUVE. À tout moment, un appui sur la touche
SUPPRIM annule les modifications et vous
ramène à la liste des paramètres.
Modifier la langue
Le préréglage usine de la langue est l'anglais. Il peut, au besoin, être modifié comme
suit.
Dans le menu principal, assurez-vous que
PARAMETRES est en surbrillance puis enfoncez la
touche ENTRER.
Accédez au groupe de paramètres 99 Donnees
Initial et enfoncez la touche SELECT. La liste défile
dans les deux sens entre les groupes 99 et 01 ; il
est donc plus rapide d'appuyer sur pour
accéder au groupe 99.
Assurez-vous que le paramètre «9901 Langue» est
mis en surbrillance et enfoncez la touche EDITION.
Sélectionnez la langue souhaitée et enfoncez la
touche SAUVE.
Enfoncez deux fois la touche SORTIE pour revenir
au menu principal.
Les procédures de mise en route décrites ci-après font appel à des assistants, c'est-àdire des séquences d'action aidant l'utilisateur à régler les paramètres de base.
Assistants
Page 65

Guide de mise en route de l'ACS850 avec le programme de commande Standard 65
PARAMETRES
ASSISTANT
PARAM MODIF
SORTIE ENTRER
MENU PRINCIP 1
LOC
Sélectionner
l'assistant
MacroProgramme
Réglage Val Moteur
Fonction Demarr/
SORTIE
OK
CHOIX
LOC
1 – Sélection d'un macroprogramme d'application
Dans le menu principal, mettez en surbrillance
ASSISTANT puis enfoncez la touche ENTRER.
Mettez en surbrillance MacroProgramme et
enfoncez la touche OK.
Les macroprogrammes d'application sont des
préréglages pouvant être utilisés comme point de
départ pour des applications utilisateur. Les
macroprogrammes suivants sont disponibles :
• Usine (pour les applications de régulation de
vitesse avec interface simple de démarrage/
arrêt) ;
• Manuel/Auto (pour les applications de régulation
de vitesse avec deux dispositifs de commande
externe) ;
• Regulation PID (pour les applications de
régulation de procédé ; ex., régulation de
pression, de niveau ou de débit en boucle
fermée) ;
• Regulation Couple (pour la régulation du couple
et/ou de la vitesse d'un moteur) ;
• Cde Sequentielle (pour les applications de
régulation de vitesse avec plusieurs vitesses
constantes et des rampes d'accélération/
décélération en séquence).
Pour en savoir plus sur les macroprogrammes
disponibles, cf. Manuel d'exploitation.
Mettez en surbrillance un des macroprogrammes et
enfoncez la touche OK.
Lorsque la micro-console affiche «DONE OK», enfoncez la touche OK pour quitter
l'assistant.
Les préréglages usine des
paramètres du macroprogramme
s'appliquent.
2 – Saisie des données moteur
Avant de poursuivre, relevez les données de la plaque signalétique du moteur et du
codeur (si nécessaire).
Page 66

66 Guide de mise en route de l'ACS850 avec le programme de commande Standard
PARAMETRES
ASSISTANT
PARAM MODIF
SORTIE ENTRER
MENU PRINCIP 1
LOC
Sélectionner
l'assistant
MacroProgramme
Réglage Val Moteur
Fonction Demarr/
SORTIE
OK
CHOIX
LOC
Dans le menu principal, mettez en surbrillance
ASSISTANT puis enfoncez la touche ENTRER.
Mettez en surbrillance Réglage Val Moteur et
enfoncez la touche OK.
L'assistant va vous guider pendant la procédure de
saisie des données moteur.
Sélectionnez le type de moteur : moteur asynchrone
triphasé à cage d’écureuil (AM) ou moteur
synchrone à aimants permanents (PMSM).
Sélectionnez le mode de commande du moteur. Le
mode DTC est parfaitement adapté à la plupart des
applications.
Le mode Scalaire est préconisé si :
• le courant nominal du moteur est inférieur à 1/6
du courant de sortie nominal du variateur ;
• le variateur est utilisé à des fins d’essais sans
moteur raccordé ;
• le variateur commande plusieurs moteurs et le
nombre de moteurs raccordés est variable.
99.04 Type Moteur
99.05 Mode Cde Moteur
Page 67

Guide de mise en route de l'ACS850 avec le programme de commande Standard 67
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
Entrez les données de la plaque signalétique du
moteur.
Exemple de plaque signalétique d'un moteur
asynchrone :
Exemple de plaque signalétique d'un moteur à
aimants permanents :
N.B. : Vous devez entrer très
exactement les valeurs figurant
sur la plaque signalétique. Ex., si
la vitesse nominale moteur de la
plaque signalétique est 1470 tr/
min et que vous réglez le
paramètre 99.09 Vitesse Nom
Mot sur 1500 tr/min, votre
entraînement fonctionnera de
manière incorrecte.
Si le couplage choisi est D
(triangle), raccordez le moteur en
triangle.
Si Y (étoile) est sélectionné,
raccordez le moteur en étoile.
• Courant nominal moteur
Plage admise : environ 1/6 × I
variateur (0…2 × I
Cde Moteur = Scalaire)
si le paramètre 99.05 Mode
int
int
… 2 × I
99.06 I Nominal Moteur
du
int
Page 68

68 Guide de mise en route de l'ACS850 avec le programme de commande Standard
• Tension nominale moteur
Plage admise : 1/6 × U
… 2 × U
N
du variateur (UN
N
99.07 U Nominal Moteur
correspond à la tension la plus élevée de chaque
plage).
Moteurs à aimants permanents : la tension
nominale est la tension inverse FEM (BackEMF) à
la vitesse nominale. Si la tension est donnée en
fonction du nombre de tours/minute, (ex., 60 V par
1000 tr/min), la tension pour une vitesse nominale
de 3000 tr/min est 3 × 60 V = 180 V.
Vous noterez que la tension nominale n’est pas
égale à la valeur de tension d’un moteur c.c.
équivalent donnée par certains constructeurs de
moteurs. Elle peut être calculée en divisant cette
tension équivalente par 1,7 (= racine carrée de 3).
• Fréquence nominale moteur
99.08 Freq Nom Moteur
Moteur à aimants permanents : si la fréquence
nominale ne figure pas sur la plaque signalétique du
moteur, elle doit être calculée avec la formule
suivante :
f = n × p /60
avec p = nombre de paires de pôles et n = vitesse
nominale moteur.
• Vitesse nominale moteur 99.09 Vitesse Nom Mot
• Puissance nominale moteur 99.10 Puissanc Nom Mot
Vous pouvez régler les données suivantes pour améliorer la précision de la commande.
Sinon, réglez les valeurs sur zéro.
•Cos
nominal moteur (ne s’applique pas aux
99.11 Cosfi Nom Moteur
moteurs à aimants permanents)
• Couple nominal à l'arbre du moteur 99.12 Couple Nom Mot
Les paramètres suivants règlent les limites de fonctionnement du variateur pour
protéger la machine entraînée.
• Vitesse maxi
20.01 Vitesse Maxi
Pour une identification Partielle ou Normal (cf. ciaprès), la valeur doit être supérieure à 55 % de la
vitesse nominale du moteur réglée précédemment.
• Vitesse mini
20.02 Vitesse Mini
Pour une identification Partielle ou Normal (cf. ciaprès), cette valeur doit être inférieure ou égale à 0
tr/min.
• Courant maxi
20.05 Imax Moteur
Doit être supérieur au courant nominal moteur réglé
précédemment.
Page 69

Guide de mise en route de l'ACS850 avec le programme de commande Standard 69
Avant
Lorsque le câble moteur est
raccordé sur les bornes U2, V2 et
W2 du variateur et sur les bornes
correspondantes du moteur :
Arrière
• Couple maxi
20.07 Couple Maxi 1
Pour une identification Normal (cf. ci-après), cette
valeur doit être égale au moins à 100 % du couple
nominal moteur réglé précédemment.
• Couple mini 20.08 Couple Mini 1
La question «Exécuter fonction d'identification moteur maintenant?» s'affiche. Cette
fonction identifie les caractéristiques du moteur dans le but d’optimiser la commande du
variateur.
Si vous ne souhaitez pas procéder à l'identification maintenant, sélectionnez Non pour
quitter l'assistant de réglage des données moteur. Passez à la section 3 – Fonction
Démarrage/Arrêt.
Si vous souhaitez procéder à l'identification moteur, exécutez les étapes suivantes
AVANT de sélectionner Oui.
ATT ENT ION ! Si vous sélectionnez une identification Normale ou Partielle,
le moteur atteindra 50 à 100 % de sa vitesse nominale pendant l’exécution
de la fonction. VOUS DEVEZ VOUS ASSURER QUE LE MOTEUR PEUT
FONCTIONNER EN TOUTE SÉCURITÉ AVANT DE LANCER LA
PROCÉDURE D’IDENTIFICATION MOTEUR !
Vérifiez le sens de rotation du moteur. Pendant son
exécution (Normale ou Partielle), le moteur tournera
dans le sens avant.
Vérifiez que les éventuels circuits Safe torque off
(Interruption sécurisée du couple, STO) et d’arrêt
d’urgence sont fermés.
Sélectionnez Oui puis enfoncez la touche OK.
Sélectionnez la méthode d'identification moteur.
L'identification sera réalisée au prochain démarrage
du variateur.
L'identification Normal doit être sélectionnée
chaque fois que cela est possible.
N.B. : La machine entraînée doit être désaccouplée
du moteur pendant l’exécution d’une identification
Normal :
• si le couple de charge est supérieur à 20 % ou
• si la machine n’est pas capable de supporter le
couple nominal sur une période transitoire lors de
l’exécution de la fonction.
99.13 Type Identif Mot
Page 70

70 Guide de mise en route de l'ACS850 avec le programme de commande Standard
PARAMETRES
ASSISTANT
PARAM MODIF
SORTIE ENTRER
MENU PRINCIP 1
LOC
Sélectionner
l'assistant
Réglage Val Moteur
Fonction Demarr/Arret
SORTIE OK
CHOIX
LOC
L'identification Partielle doit être sélectionnée plutôt
que l’identification normale si les pertes mécaniques
sont supérieures à 20 %, c’est-à-dire si le moteur ne
peut être désaccouplé de la machine entraînée ou
si le flux complet est requis pour maintenir le frein
moteur ouvert (moteur à rotor conique).
L’identification moteur arrêté (Mot Arrete) doit être
sélectionnée uniquement si l’identification normale
ou partielle n’est pas possible du fait des restrictions
liées aux organes mécaniques raccordés (ex.,
applications de levage).
N.B. :
• La rotation de l’arbre moteur NE DOIT PAS être
bloquée et le couple de charge doit être < 20 % si
vous avez sélectionné une identification normale
ou partielle. Avec un moteur à aimants
permanents, cette restriction s’applique
également si vous avez sélectionné une
identification moteur arrêté.
• Le frein mécanique n'est pas ouvert par la logique
de la fonction d'identification moteur.
• La fonction d’identification moteur ne peut être
exécutée si le paramètre 99.05 Mode Cde Moteur
est réglé sur Scalaire.
Démarrez le moteur (appui sur la touche START)
pour lancer la fonction d'identification moteur.
La fonction est indiquée par l'alarme ID-RUN sur
l'affichage de la micro-console.
Lorsque la micro-console affiche «DONE OK», enfoncez la touche OK pour quitter
l'assistant.
Alarme : ID-RUN
3 – Fonction Démarrage/Arrêt
Dans le menu principal, mettez en surbrillance
ASSISTANT puis enfoncez la touche ENTRER.
Mettez en surbrillance Fonction Demarr/Arret et
enfoncez la touche OK.
Les paramètres suivants doivent être réglés.
N.B. : En fonction de vos choix, l'assistant affichera
ou non certains paramètres.
Page 71
Guide de mise en route de l'ACS850 avec le programme de commande Standard 71
État de la source
1 (via par. 10.02)
État de la source
2 (via par. 10.03)
Commande
0 -> 1 1 Démarrage
Tous 1 -> 0 Arrêt
Tous 0 Arrêt
Sélectionnez la fonction de démarrage/arrêt et les
sources des signaux pour le dispositif de
commande externe 1 (EXT1). Commencez par
régler le paramètre 10.01 (démarrage), puis les
paramètres 10.02 et 10.03 pour sélectionner les
sources du signal de démarrage.
Réglages possibles du paramètre 10.01 :
Source1 : le signal sélectionné au paramètre 10.02
est la source du signal de démarrage (0 = Arrêt, 1 =
Démarrage).
3 fils : les commandes de démarrage et d'arrêt sont
réglées par deux sources sélectionnées aux
paramètres 10.02 et 10.03.
Src1AVSrc2AR : le signal sélectionné au
paramètre 10.02 démarre le moteur en sens avant
et celui réglé au paramètre 10.03 en sens arrière.
Src1DeSrc2SE : le signal sélectionné au paramètre
10.01 démarre le moteur (0 = Arrêt, 1 =
Démarrage). Le signal réglé au paramètre 10.03
change le sens de rotation du moteur (0 = avant,
1 = arrière).
Sélectionnez la fonction de démarrage/arrêt et les
sources des signaux pour le dispositif de
commande externe 2 (EXT2).
Les réglages sont identiques à ceux pour EXT1.
Sélectionnez la source du signal de permutation
entre les dispositifs de commande externe EXT1 et
EXT2 (0 = EXT1, 1 = EXT2).
Sélectionnez le type de démarrage du moteur.
Automatique : le réglage le plus polyvalent. Il
autorise de plus un démarrage par reprise au vol
(démarrage d'un moteur en rotation).
Rapide : prémagnétisation du moteur. Ce réglage
doit être sélectionné si un couple de démarrage
élevé est requis.
Temps Fixe : doit être sélectionné si un temps de
prémagnétisation constant est requis. Ce temps est
réglé au paramètre 11.02 Tps Premag Fixe.
10.01 Sel Src Dem Ext1
10.02 Src1 Demarr Ext1
10.03 Src2 Demarr Ext1
10.04 Sel Src Dem Ext2
10.05 Src1 Demarr Ext2
10.06 Src2 Demarr Ext2
12.01 Sel Ext1 / Ext2
11.01 Type Demarrage
Page 72

72 Guide de mise en route de l'ACS850 avec le programme de commande Standard
PARAMETRES
ASSISTANT
PARAM MODIF
SORTIE ENTRER
MENU PRINCIP 1
LOC
Fonction Demarr/
Selection Reference
Sélectionner
l'assistant
SORTIE
OK
CHOIX
LOC
Sélectionnez le type d'arrêt.
Roue Libre : coupure de l'alimentation moteur. Le
moteur s'arrête en roue libre.
Rampe : arrêt du moteur par décélération sur la
rampe active (à régler ultérieurement).
Sélectionnez la source du signal Validation marche.
Si le signal est désactivé, le variateur ne démarrera
pas ou s’arrêtera en roue libre s’il est en marche. 1
= Signal activé.
Sélectionnez la source du signal d'arrêt d'urgence
OFF3.
Si le signal disparaît (passe à 0), le variateur
s'arrête sur la rampe d'arrêt d'urgence (réglée au
paramètre 22.12 Tps Arret Urgenc).
Lorsque la micro-console affiche «DONE OK», enfoncez la touche OK pour quitter
l'assistant.
11.03 Type Arret
10.11 Validat Marche
10.13 Arr Urgence OFF3
4 – Sélection des références
Dans le menu principal, mettez en surbrillance
ASSISTANT puis enfoncez la touche ENTRER.
Mettez en surbrillance Reference select et
enfoncez la touche OK.
Les paramètres suivants doivent être réglés.
N.B. : En fonction de vos choix, l'assistant affichera
ou non certains paramètres.
Sélectionnez le type de régulation pour les
dispositifs de commande externe EXT1 et EXT2.
Vitesse : régulation de vitesse
Couple : régulation de couple
Mini, Maxi, Ajout : le variateur compare la
référence de couple et la sortie du régulateur de
vitesse et applique une fonction mathématique
(mini, maxi, addition).
En fonction du réglage, la source de la référence de
vitesse, celle de la référence de couple, ou les deux,
sont ensuite réglées.
12.03 Type Regul Ext1
12.05 Type Regul Ext2
Page 73

Guide de mise en route de l'ACS850 avec le programme de commande Standard 73
Source réglée au
par. 26.02
Source réglée au
par. 26.023
Source réglée au
par. 26.04
Vitesse constante active
000Aucune
1 0 0 Vitesse constante 1
0 1 0 Vitesse constante 2
1 1 0 Vitesse constante 3
0 0 1 Vitesse constante 4
1 0 1 Vitesse constante 5
0 1 1 Vitesse constante 6
1 1 1 Vitesse constante 7
Réglage de la référence de vitesse
Sélectionnez le nombre de vitesses constantes (le cas échéant) à utiliser.
Si vous indiquez une vitesse constante, vous devez indiquer si le sens de démarrage a
une influence sur le sens de la vitesse.
Non : le signe de la vitesse constante détermine directement le sens de rotation lorsque
la vitesse constante est activée.
Oui : le signe de la vitesse constante est multiplié par la valeur du signal de sens de
rotation pour déterminer ce sens lorsque la vitesse constante est activée.
Vous devez maintenant indiquer si chaque sélecteur de vitesse constante doit activer
une vitesse constante.
Non : les vitesses constantes 1…7 sont activées par les sources sélectionnées aux
paramètres 26.02, 26.03 et 26.04 comme suit :
Oui : les vitesses constantes 1…3 sont activées par les sources sélectionnées
respectivement aux paramètres 26.02, 26.03 et 26.04.
Sélectionnez les sources du sélecteur de vitesse
constante.
Entrez les vitesses constantes. 26.06 Vitesse Const1…
26.02 Sel Src Vit Cst1
26.03 Sel Src Vit Cst2
26.04 Sel Src Vit Cst3
Sélectionnez la source du signal de référence de
vitesse.
Réglez la limite mini absolue de la référence de
vitesse. Cette limite s'applique aux plage de
vitesses positives et négatives.
21.01 Sel Ref Vitesse1
21.09 Mini Abs Ref Vit
Page 74

74 Guide de mise en route de l'ACS850 avec le programme de commande Standard
Temps
Vitesse
19.01
22.02 ou
22.04
22.03 ou
22.05
Acc. Déc.
0
Réglez la mise à l'échelle de la vitesse utilisée pour
les temps d'accélération/de décélération. Réglez les
temps d'accélération/de décélération.
Le schéma suivant illustre l'incidence du paramètre
19.01 Echelle Vitesse sur les temps d'accélération/
de décélération.
N.B. : Les temps d'accélération/de décélération
peuvent être automatiquement prolongés par les
limites de couple existantes.
Sélectionnez la source de permutation entre les
paires de rampe d'accélération/de décélération 1 et
2.
0 = temps d'accélération 1/temps de décélération 1
activés, 1 = temps d'accélération 2/temps de
décélération 2 activés.
Réglage de la référence de couple
Sélectionnez la source du signal de référence de
couple.
Réglez les références de couple mini et maxi. 24.03 Ref Couple Maxi
Réglez le temps nécessaire à la référence de
couple pour passer de zéro au couple nominal
moteur (temps de rampe de montée) et vice-versa
(temps de rampe de descente).
19.01 Echelle Vitesse
22.02 Temps Accel 1
22.04 Temps Accel 2
22.03 Temps Decel 1
22.05 Temps Decel 2
22.01 Sel Acc/Dec
24.01 Sel Ref Couple 1
24.04 Ref Couple Mini
24.06 Rampe Montee Cpl
24.07 Ramp Descent Cpl
Page 75

Guide de mise en route de l'ACS850 avec le programme de commande Standard 75
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = entrée filtre (échelon)
O = sortie filtre
t = temps
T = constante de temps de filtrage
Signal non filtré
Signal filtré
AI (mise à l'échelle)
AI (mA / V)
13.04/13.09
13.02/13.07
13.03/13.08
13.05/13.10
Réglages des entrées analogiques 1 et/ou 2 (AI1/AI2) (si une des deux est
sélectionnée comme source de référence de vitesse ou de couple)
Réglez la constante de temps de filtrage pour
l’entrée analogique.
13.01 Tps Filt EntAna1 ou
13.06 Tps Filt EntAna2
Réglez les valeurs mini et maxi de l'entrée
analogique.
Réglez les valeurs mises à l'échelle correspondant
aux valeurs mini et maxi réglées à l'étape
précédente. Ce réglage est utile si la vitesse maxi
est requise aux faibles valeurs d'entrée analogique.
Lorsque la micro-console affiche «DONE OK», enfoncez la touche OK pour quitter
l'assistant et mettre fin à la procédure de mise en route.
13.02 Maxi Ent Analog1 ou
13.07 Maxi Ent Analog2
13.03 Mini Ent Analog1 ou
13.08 Mini Ent Analog2
13.04 Ech EntAna1 Maxi ou
13.09 Ech EntAna2 Maxi
13.05 Ech EntAna1 Mini ou
13.10 Ech EntAna2 Mini
Page 76

76 Guide de mise en route de l'ACS850 avec le programme de commande Standard
Page 77

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 77
Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
Informazioni sulla guida
Questa guida illustra la procedura base da seguire per avviare un convertitore di
frequenza ACS850 (con Programma di controllo standard). Durante la procedura il
convertitore viene impostato utilizzando il pannello di controllo dell’ACS850.
Nota: in questa guida sono descritte solo le funzioni del pannello di controllo che
occorrono per l’avviamento del convertitore. Le istruzioni complete per l’utilizzo del
pannello di controllo sono contenute nel Manuale firmware del Programma di
controllo standard dell’ACS850 (3AUA0000049380 [Italiano]).
Norme di sicurezza
AVVERTENZA! L’installazione elettrica e gli interventi di manutenzione sul
convertitore di frequenza devono essere eseguiti solo da elettricisti
qualificati.
Non intervenire mai sul convertitore, sul circuito del chopper di frenatura, sul cavo
motore o sul motore quando il convertitore è sotto tensione. Verificare sempre che
non sia presente tensione.
Page 78

78 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
00 A
00 Hz
0 %0.
0.
0.
REM
DIR
MENU
0.00rpm
LOC
REM
00 A
00 Hz
0 %0.
0.
0.
LOC
DIR
MENU
0.00rpm
PARAMETRI
ASSISTENTE
PAR MODIFIC
ESCI ENTER
MENU PRINCIP 1
LOC
Procedura di avviamento
Sicurezza
L’avviamento deve essere eseguito solo da elettricisti qualificati.
È necessario rispettare le istruzioni di sicurezza durante la procedura di
avviamento. Leggere le norme di sicurezza riportate nelle prime pagine del
Manuale hardware del convertitore.
Controllare l’installazione. Vedere la checklist di installazione nel Manuale hardware.
Controllare che l’avviamento del motore non determini situazioni di pericolo.
Disaccoppiare la macchina comandata se
• vi è il rischio di danni in caso di direzione di rotazione non corretta, o
• è necessario eseguire una routine di identificazione (ID run) normale all’avviamento
del convertitore, quando la coppia di carico è superiore al 20% o la macchina non è in
grado di sostenere il transitorio della coppia nominale durante l’ID run.
Accensione, operazioni base con il pannello di controllo
Collegare il pannello di controllo al convertitore
utilizzando un cavo idoneo di categoria 5E.
Accendere il convertitore. Dopo qualche istante, sul
pannello compare la visualizzazione del modo
Output (a destra).
Nota: la visualizzazione del modo Output si alterna
con l’allarme “2021 DATI MOTORE ASSENTI”
finché non vengono inseriti i dati del motore nelle
fasi successive della procedura.
Passare al controllo locale per assicurarsi che il
controllo esterno sia disabilitato premendo il tasto
sul pannello di controllo. Quando il controllo
locale è attivo, in alto sul display compare la scritta
“LOC”.
I due riquadri a destra e a sinistra in basso sul
display indicano la funzione dei due tasti software
e . Il contenuto dei riquadri dipende
dalle opzioni disponibili per il menu visualizzato.
Premere (MENU) per accedere al menu
principale.
In tutti i menu, l'opzione selezionata viene
evidenziata. Premere i tasti e per
effettuare una nuova scelta; premere
(ENTER) per confermare.
Il menu principale è il punto di partenza per le
procedure che verranno descritte di seguito.
Page 79

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 79
1501 Selez funz AO1
P.01.06
CAMBIA PARAM
CANCEL
SALVA
0106 Coppia
LOC
1002 Ext1 start in1
P.02.01.00
CAMBIA PARAM
CANCEL
PROSSIM
0201 Stato DI
LOC
Note:
• Premendo (CANCEL o ESCI) in qualsiasi momento, si ritorna al livello
precedente.
• Di default, non tutti i parametri sono visibili. Impostare il parametro 16.15 Sel Menu
Param su Sel M Esteso per rendere visibili tutti i parametri.
Per modificare un parametro quando si utilizza la funzione assistente:
• Regolare l’impostazione con i tasti e . Premere SALVA per accettare
l'impostazione visualizzata e passare al parametro successivo.
Per modificare un parametro in qualsiasi altro momento:
• Dal menu principale, selezionare PARAMETRI e premere (ENTER).
• Scorrere l’elenco dei gruppi di parametri con i tasti e . Selezionare il
gruppo desiderato e premere (SELEZ) per visualizzare i parametri
appartenenti a quel gruppo.
• Selezionare un parametro e premere (SCRIVI) per modificarne il valore.
• Modificare l’impostazione con i tasti e . Premere SALVA per confermare
l'impostazione visualizzata. Premere due volte ESCI per tornare al menu principale.
Note per modifiche più complesse:
• Con i parametri che definiscono una sorgente digitale, l’impostazione Costante può
essere utilizzata per fissare il valore sulla costante 1 (C.TRUE) o 0 (C.FALSE).
• Con i parametri che definiscono una sorgente analogica o digitale, l’impostazione
Puntatore può essere utilizzata per selezionare liberamente il valore di qualsiasi
parametro (analogico) o uno specifico bit di un parametro booleano compresso
(digitale) come sorgente:
• Nel caso delle sorgenti analogiche, vanno
specificati il gruppo e l’indice del parametro.
Dopo aver selezionato il gruppo, premere
PROSSIM per passare all'impostazione
dell'indice.
Il testo evidenziato dal cursore è l'impostazione
valida al momento.
Impostare l'indice e premere SALVA per
confermare il valore. Premendo CANCEL in
qualsiasi momento, si annullano le modifiche
effettuate e si torna all'elenco dei parametri.
• Nel caso delle sorgenti digitali, vanno specificati
il gruppo di parametri, l'indice del parametro e il
numero del bit. Dopo aver impostato una voce,
premere PROSSIM per passare alla successiva.
Il testo evidenziato dal cursore è l'impostazione
valida al momento.
Impostare il numero di bit e premere SALVA
per confermare il valore. Premendo CANCEL
in qualsiasi momento, si annullano le modifiche
effettuate e si torna all'elenco dei parametri.
Modificare i valori dei parametri
Page 80

80 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
PARAMETRI
ASSISTENTE
PAR MODIFIC
ESCI ENTER
MENU PRINCIP 1
LOC
99 Dati start-up
01 Valori attuali
02 VALORI i/o
03 Valori controllo
04 Valori ctrl posiz
ESCI
SELEZ
GRUPPI PARAM 99
LOC
9901 Lingua
English
9904 Tipo motore
9905 Controllo motore
9906 Corrente nomin
PARAMETRI
ESCI
SCRIVI
LOC
9901 Lingua
Italiano
CAMBIA PARAM
CANCEL
SALVA
[0407 hex]
LOC
PARAMETRI
ASSISTENTE
PAR MODIFIC
ESCI ENTER
MENU PRINCIP 1
LOC
Seleziona assistente
Macro Applicativa
Set-up motore
Controllo start/st
ESCI
OK
SELEZIONE
LOC
Modificare la lingua
Di default, il testo sul display viene visualizzato in lingua inglese. Per modificare la
lingua, procedere come descritto di seguito.
Dal menu principale, selezionare PARAMETRI e
premere ENTER.
Navigare fino al gruppo di parametri 99 Dati start-
up e premere SELEZ. L'elenco dei gruppi è
continuo, da 99 a 01, e consultabile in entrambe le
direzioni – il modo più rapido per selezionare il
gruppo 99 è premere .
Selezionare il parametro “9901 Lingua” e premere
SCRIVI.
Selezionare la lingua desiderata e premere SALVA.
Premere due volte ESCI per tornare al menu
principale.
Le procedure di avviamento descritte di seguito prevedono l'utilizzo degli assistenti,
ovvero routine che guidano l’utente passo per passo nelle impostazioni parametriche
principali.
Dal menu principale, selezionare ASSISTENTE e
premere ENTER.
Selezionare Macro Applicativa e premere OK.
Modo Assistente
1 – Selezione della macro applicativa
Page 81

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 81
PARAMETRI
ASSISTENTE
PAR MODIFIC
ESCI ENTER
MENU PRINCIP 1
LOC
Seleziona assistente
Macro Applicativa
Set-up motore
Controllo start/sto
ESCI
OK
SELEZIONE
LOC
Le macro applicative sono impostazioni
parametriche predefinite che possono essere
utilizzate come base per le applicazioni dell'utente.
Sono disponibili le seguenti macro:
• Fabbrica (per le applicazioni di controllo di
velocità che richiedono una semplice interfaccia
di avviamento/arresto)
• Manuale/Auto (per le applicazioni di controllo di
velocità dove vengono utilizzati due dispositivi di
controllo esterno)
• Controllo PID (per le applicazioni di controllo di
processo, come sistemi di controllo di flusso, di
livello o di pressione ad anello chiuso)
• Controllo coppia (per il controllo di coppia e/o di
velocità del motore)
• Controllo sequenziale (per le applicazioni di
controllo di velocità dove occorrono e dove
vengono sequenziate diverse velocità costanti e
rampe di accelerazione/decelerazione)
Per ulteriori informazioni sulle macro, vedere il
Manuale firmware.
Selezionare una macro e premere OK.
Quando sul pannello di controllo compare il messaggio “Done OK”, premere OK per
completare l’assistente firmware.
Vengono applicate le
impostazioni parametriche di
default della macro (impostazioni
di fabbrica).
2 – Set-up del motore
Assicurarsi di avere a portata di mano i dati di targa del motore.
Dal menu principale, selezionare ASSISTENTE e
premere ENTER.
Selezionare Set-up motore e premere OK.
La funzione assistente guiderà l'utente nelle varie
fasi di impostazione del motore.
Selezionare il tipo di motore: AM (motore asincrono
in c.a. a gabbia di scoiattolo) o PMSM (motore
sincrono a magneti permanenti).
99.04 Tipo motore
Page 82

82 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
Selezionare la modalità di controllo del motore. Il
modo DTC è adatto nella maggior parte dei casi.
Il modo scalare è raccomandato se
• la corrente nominale del motore è inferiore a 1/6
della corrente nominale del convertitore di
frequenza,
• il convertitore viene utilizzato a scopo di collaudo
senza un motore collegato, o
• il convertitore controlla più motori e il numero di
motori collegati è variabile.
Inserire i dati del motore ricavandoli dalla targa.
Esempio di targa di motore asincrono:
99.05 Controllo motore
Nota: impostare i dati del motore
esattamente sugli stessi valori
riportati sulla targa. Ad esempio,
se la velocità nominale del
motore riportata sulla targa è
1470 rpm, impostando il valore
del parametro 99.09 Velocità
nomin su 1500 rpm il convertitore
di frequenza andrà incontro a
problemi di funzionamento.
Se si scelgono dati D (delta),
collegare il motore a triangolo.
Se si scelgono dati Y (stella),
collegare il motore a stella.
Esempio di targa di motore a magneti permanenti:
• corrente nominale del motore
Range consentito: circa 1/6 × I
convertitore (0…2 × I
Controllo motore = Scalare).
se il parametro 99.05
Hd
… 2 × IHd del
Hd
99.06 Corrente nomin
Page 83

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 83
• tensione nominale del motore
Range consentito: 1/6 × U
convertitore. (U
range di tensione nominale.)
è la tensione più elevata in ciascun
N
… 2 × U
N
del
N
99.07 Tensione nomin
Con i motori a magneti permanenti, la tensione
nominale è la tensione controelettromotrice (alla
velocità nominale del motore). Se la tensione è
espressa come tensione per rpm, es. 60 V per
1000 rpm, la tensione per una velocità nominale di
3000 rpm è 3 × 60 V = 180 V.
Si noti che la tensione nominale non è uguale al
valore della tensione equivalente del motore in c.c.
(EDCM) fornito da alcuni costruttori di motori. La
tensione nominale può essere calcolata dividendo la
tensione EDCM per 1.7 (= radice quadrata di 3).
• frequenza nominale del motore
99.08 Frequenza nomin
Con i motori a magneti permanenti: se la frequenza
non è indicata sulla targa del motore, va calcolata
con la formula seguente:
f = n × p /60
dove p = numero di coppie di poli, n = velocità
nominale del motore.
• velocità nominale del motore 99.09 Velocità nomin
• potenza nominale del motore 99.10 Potenza nomin
Per migliorare la precisione di controllo, è possibile impostare i seguenti parametri
relativi ai dati del motore. Se il valore non è noto, impostarlo su 0.
•cos
nominale motore (non valido per i motori a
99.11 Cos fii nomin
magneti permanenti)
• coppia nominale dell'albero motore 99.12 Coppia nomin
I seguenti parametri definiscono i limiti operativi per proteggere le macchine
comandate.
• velocità massima
20.01 Velocità massima
In caso di routine di identificazione normale o ridotta
(vedere oltre), questo valore deve essere superiore
al 55% della velocità nominale del motore definita in
precedenza.
• velocità minima
20.02 Velocità minima
In caso di routine di identificazione normale o ridotta
(vedere oltre), questo valore deve essere inferiore o
uguale a 0 rpm.
• corrente massima
20.05 Corrente massima
Questo valore deve essere superiore alla corrente
nominale del motore definita in precedenza.
Page 84

84 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
Avanti
Quando le fasi di uscita del
convertitore U2, V2 e W2 sono
collegate ai rispettivi morsetti del
motore:
Indietro
• coppia massima
In caso di routine di identificazione normale (vedere
oltre), questo valore deve essere pari almeno al
100% della coppia nominale del motore definita in
precedenza.
• coppia minima 20.08 Coppia minima 1
Sul display compare la domanda "Vuoi effettuare la id-run, adesso?". Durante la routine
di identificazione (ID run) il convertitore di frequenza identifica le caratteristiche del
motore per un controllo ottimale dello stesso.
Se non si vuole eseguire l'ID run a questo punto, selezionare No per completare la
funzione assistente firmware Set-up motore. Passare alla sezione 3 – Configurazione
avviamento/arresto.
Se si vuole eseguire l'ID run, passare ai punti successivi PRIMA di selezionare Sì.
AVVERTENZA! Durante l'ID run normale o ridotta, il motore ruota a velocità
che possono raggiungere circa il 50…100% della velocità nominale.
VERIFICARE CHE SI POSSA AVVIARE IL MOTORE IN SICUREZZA
PRIMA DI ESEGUIRE LA ROUTINE DI IDENTIFICAZIONE!
Controllare la direzione di rotazione del motore.
Durante l'ID run (normale o ridotta) il motore ruota in
direzione avanti.
20.07 Coppia massima 1
Verificare che il circuito della funzione Safe Torque
Off e il circuito di arresto di emergenza (se presenti)
siano chiusi.
Selezionare Sì e premere OK.
Selezionare il tipo di ID run.
L'ID run sarà eseguita al successivo avviamento del
convertitore di frequenza.
Se possibile, eseguire sempre la routine di
identificazione NORMALE.
Nota: la macchina comandata deve essere
disaccoppiata dal motore durante la routine di
identificazione normale:
• se la coppia di carico è superiore al 20%, o
• se la macchina non è in grado di sostenere il
transitorio della coppia nominale durante l'ID run.
99.13 Modalità id-run
Page 85

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 85
PARAMETRI
ASSISTENTE
PAR MODIFIC
ESCI ENTER
MENU PRINCIP 1
LOC
Seleziona assistente
Macro applicativa
Set-up motore
Controllo start/sto
ESCI
OK
SELEZIONE
LOC
Selezionare RIDOTTO invece di Normale se le
perdite meccaniche sono superiori al 20%, cioè se il
motore non può essere disaccoppiato dalla
macchina comandata, oppure se è richiesto il flusso
completo per tenere aperto il freno motore (motore
conico).
Selezionare STATICO solo se non è possibile
eseguire una routine normale o ridotta per via di
limitazioni determinate dai dispositivi meccanici
collegati (es. in applicazioni di sollevamento o con
gru).
Note:
• L'albero motore NON deve essere bloccato e la
coppia di carico deve essere < 20% durante l'ID
run normale o ridotta. Con i motori a magneti
permanenti questa limitazione è valida anche
quando si seleziona l'ID run statica.
• Il freno meccanico non viene aperto dalla logica
per l'ID run.
• La routine di identificazione non può essere
eseguita se il parametro 99.05 Controllo motore =
Scalare.
Avviare il motore (premendo il pulsante START) per
attivare l'ID run.
L'esecuzione della routine viene indicata
dall'allarme ID-RUN sul display del pannello.
Quando sul pannello di controllo compare il messaggio “Done OK”, premere OK per
completare l’assistente firmware.
Allarme: ID-RUN
3 – Configurazione avviamento/arresto
Dal menu principale, selezionare ASSISTENTE e
premere ENTER.
Selezionare Controllo start/stop e premere OK.
Si dovranno impostare i seguenti parametri.
Nota: in base alle impostazioni effettuate, la routine
potrà saltare alcuni dei parametri elencati qui di
seguito.
Page 86

86 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
Stato della
sorgente 1 (par.
10.02)
Stato della
sorgente 2 (par.
10.03)
Comando
0 -> 1 1 Marcia
Tutti 1 -> 0 Arresto
Tutti 0 Arresto
Selezionare la funzione di avviamento/arresto e le
sorgenti dei segnali per la postazione di controllo
esterna 1 (EST1). Innanzi tutto, programmare il
parametro 10.01 (funzione di avviamento), poi i
parametri 10.02 e 10.03 per selezionare le sorgenti
del segnale di avviamento.
Le opzioni per il parametro 10.01 sono:
In1: il segnale definito dal parametro 10.02 è la
sorgente del segnale di avviamento (0 = arresto, 1 =
avviamento).
3-Fili: i comandi di avviamento/arresto sono
determinati sulla base delle due sorgenti
selezionate dai parametri 10.02 e 10.03.
In1F In2R: il segnale definito dal parametro 10.02
avvia il convertitore in direzione “avanti” e il segnale
definito da 10.03 avvia il convertitore in direzione
“indietro”.
In1St In2Dir: il segnale definito dal parametro 10.01
avvia il convertitore (0 = arresto, 1 = avviamento). Il
segnale definito da 10.03 cambia la direzione del
motore (0 = avanti, 1 = indietro).
Selezionare la funzione di avviamento/arresto e le
sorgenti dei segnali per la postazione di controllo
esterna 2 (EST2).
Le selezioni sono le stesse di EST1 (vedere sopra).
Definire la sorgente del segnale per la
commutazione tra le postazioni di controllo esterne
EST1 ed EST2 (0 = EST1, 1 = EST2).
Selezionare la funzione di avviamento del motore.
Automatico è l’impostazione generalmente più
adatta, che consente anche l’avviamento al volo
(avviamento con motore in rotazione).
Veloce comporta la premagnetizzazione del motore
e va selezionata quando occorre avere un’elevata
coppia di spunto.
Cost Tempo va selezionata quando è richiesto un
tempo di premagnetizzazione costante. Il tempo si
imposta con il parametro 11.02 Tempo magnetizz.
10.01 Ext1 start func
10.02 Ext1 start in1
10.03 Ext1 start in2
10.04 Ext2 start func
10.05 Ext2 start in1
10.06 Ext2 start in2
12.01 Selez Ext1/Ext2
11.01 Modalità marcia
Page 87

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 87
PARAMETRI
ASSISTENTE
PAR MODIFIC
ESCI ENTER
MENU PRINCIP 1
LOC
Seleziona assistente
Set-up motore
Controllo start/sto
Reference select
ESCI
OK
SELEZIONE
LOC
Selezionare la modalità di arresto.
Inerzia: interruzione dell’alimentazione del motore.
Il motore si arresta per inerzia.
Rampa: il motore si arresta decelerando lungo la
rampa di decelerazione attiva (da definire in
seguito).
Selezionare la sorgente del segnale di abilitazione
marcia.
Se il segnale è disattivato, il convertitore non parte
o, se è in funzione, si arresta per inerzia. 1 =
segnale abilitazione marcia attivo.
Selezionare la sorgente del segnale di arresto di
emergenza OFF3.
Se il segnale viene annullato (ossia se diventa
uguale a 0), il convertitore di frequenza si arresta
lungo la rampa di arresto di emergenza (definita dal
parametro 22.12 Tempo stop emerg).
Quando sul pannello di controllo compare il messaggio “Done OK”, premere OK per
completare l’assistente firmware.
11.03 Modalità arresto
10.11 Abilit marcia
10.13 Stop em off3
4 – Selezione dei riferimenti
Dal menu principale, selezionare ASSISTENTE e
premere ENTER.
Selezionare Reference select e premere OK.
Si dovranno impostare i seguenti parametri.
Nota: in base alle impostazioni effettuate, la routine
potrà saltare alcuni dei parametri elencati qui di
seguito.
Selezionare la modalità di controllo per le postazioni
di controllo esterne EST1 ed EST2.
Velocità: controllo di velocità.
Coppia: controllo di coppia.
Min, Max, Add: il riferimento di coppia e l’uscita del
regolatore di velocità vengono messi a confronto e
viene applicata la funzione matematica (minore,
maggiore, addizione).
In base alle selezioni effettuate, a questo punto si
definisce la sorgente del riferimento di velocità o di
coppia (o di entrambi).
12.03 Modalità Ext1
12.05 Modalità Ext2
Page 88

88 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
Sorgente definita
dal par. 26.02
Sorgente definita
dal par. 26.03
Sorgente definita
dal par. 26.04
Velocità costante attiva
0 0 0 Nessuna
1 0 0 Velocità costante 1
0 1 0 Velocità costante 2
1 1 0 Velocità costante 3
0 0 1 Velocità costante 4
1 0 1 Velocità costante 5
0 1 1 Velocità costante 6
1 1 1 Velocità costante 7
Impostazione del riferimento di velocità
Selezionare il numero delle velocità costanti da utilizzare (se utilizzate).
Se si selezionano delle velocità costanti, il programma chiederà di determinare se la
direzione di avviamento deve influire o meno sulla direzione della velocità costante.
No: il segno della velocità costante determina direttamente la direzione di marcia
quando viene attivata la velocità costante.
Sì: il segno della velocità costante viene moltiplicato per il valore del segnale di
direzione per determinare la direzione di marcia quando viene attivata la velocità
costante.
A questo punto viene chiesto se i singoli selettori di velocità devono attivare una
velocità costante.
No: le velocità costanti 1…7 sono attivate dalle sorgenti selezionate dai parametri
26.02, 26.03 e 26.04 nel modo seguente:
Sì: le velocità costanti 1…3 sono attivate dalle sorgenti selezionate rispettivamente dai
parametri 26.02, 26.03 e 26.04.
Impostare le sorgenti dei selettori delle velocità
costanti.
Specificare le velocità costanti. 26.06 Vel Costante 1…
Selezionare la sorgente del segnale del riferimento
di velocità.
Definire il limite minimo assoluto per il riferimento di
velocità. Questo limite si applica a entrambi i range
positivo e negativo.
26.02 Sel Vel Cost 1
26.03 Sel Vel Cost 2
26.04 Sel Vel Cost 3
21.01 Sel vel ref1
21.09 Lim min abs vel
Page 89

Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard 89
Temp o
Velocità
19.01
22.02 o
22.04
22.03 o
22.05
Acc. Dec.
0
Definire l’adattamento con fattore di scala della
velocità utilizzato per i tempi di accelerazione/
decelerazione. Definire i tempi di accelerazione/
decelerazione.
Il diagramma seguente mostra l’effetto del
parametro 19.01 Scala Velocità sui tempi di
accelerazione/decelerazione.
Nota: i tempi di accelerazione/decelerazione
possono essere automaticamente prolungati dai
limiti di coppia esistenti.
Selezionare la sorgente per la commutazione tra le
coppie di rampe di accelerazione/decelerazione 1 e
2.
0 = sono validi i tempi di accelerazione 1/
decelerazione 1, 1 = sono validi i tempi di
accelerazione 2/decelerazione 2.
Impostazione del riferimento di coppia
Selezionare la sorgente del segnale del riferimento
di coppia.
Definire i riferimenti di coppia minimo e massimo. 24.03 Max Rif Coppia
Definire i tempi impiegati dal riferimento di coppia
per passare da zero alla coppia nominale del
motore (rampa di salita) e viceversa (rampa di
discesa).
19.01 Scala Velocità
22.02 Tempo Accel 1
22.04 Tempo Accel 2
22.03 Tempo Decel 1
22.05 Tempo Decel 2
22.01 Sel Ram Acc/Dec
24.01 Sel Rif Coppia 1
24.04 Min Rif Coppia
24.06 Rampa Inc R Cop
24.07 Rampa Dec R Cop
Page 90

90 Guida rapida all’avviamento per l’ACS850 con Programma di controllo standard
63
%
100
T
t
O = I × (1 - e
-t/T
)
I = ingresso filtro (gradino)
O = uscita filtro
t = tempo
T = costante di tempo del filtro
Segnale non filtrato
Segnale filtrato
AI (scalato)
AI (mA/V)
13.04/13.09
13.02/13.07
13.03/13.08
13.05/13.10
Impostazione degli ingressi analogici AI1/AI2 (se selezionati come sorgente dei
riferimenti di velocità o di coppia)
Definire la costante di tempo del filtro per l'ingresso
analogico.
13.01 AI1 tempo filtr o
13.06 AI2 tempo filtr
Definire i valori minimo e massimo per l’ingresso
analogico.
Definire i valori adattati con fattore di scala che
corrispondono ai valori minimo e massimo definiti al
punto precedente. Questo passaggio è utile se è
necessario avere la velocità massima in
corrispondenza di bassi valori dell'ingresso
analogico.
Quando sul pannello di controllo compare il messaggio “Done OK”, premere OK per
completare l’assistente firmware e la procedura di avviamento.
13.02 AI1 max o
13.07 AI2 max
13.03 AI1 min o
13.08 AI2 min
13.04 AI1 max scala o
13.09 AI2 max scala
13.05 AI1 min scala o
13.10 AI2 min scala
Page 91

Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma 91
Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma
Inleiding
Deze gids bevat de basisprocedure die gevolgd moet worden om een ACS850
omvormer (met standaard besturingsprogramma) op te starten. Tijdens de procedure
wordt de omvormer ingesteld via het bedieningspaneel van de ACS850.
Opmerking: Alleen de functies op het bedieningspaneel die nodig zijn tijdens de
procedure worden in de gids beschreven. De volledige instructies voor het gebruik
van het bedieningspaneel staan in de Firmwarehandleiding ACS850
Standaardbesturingsprogramma (3AUA0000054541 [Nederlands]).
Veiligheidsvoorschriften
WAARSCHUWING! Alle werkzaamheden wat betreft elektrische installatie
en onderhoud van de omvormer mogen alleen door gekwalificeerde
elektriciens uitgevoerd worden.
Voer nooit werkzaamheden uit aan de omvormer, het remchoppercircuit, de
motorkabel of de motor wanneer de omvormer onder spanning staat. Verzeker u er
altijd van dat er geen spanning aanwezig is door meting.
Page 92

92 Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma
00 A
00 Hz
0 %0.
0.
0.
REM
DR RICH
MENU
0.00rpm
LOC
REM
00 A
00 Hz
0 %0.
0.
0.
LOC
DR RICH
MENU
0.00rpm
PARAMETERS
ASSISTANT
GEWIJZ PAR
EXIT ENTER
HOOFDMENU 1
LOC
Opstartprocedure
Veiligheid
Het opstarten mag uitsluitend worden uitgevoerd door een gekwalificeerd
elektricien.
Gedurende het opstarten moeten de veiligheidsinstructies worden opgevolgd. Zie
de veiligheidsinstructies op de eerste pagina's van de betreffende
hardwarehandleiding.
Controleer de installatie. Zie de installatiechecklist in de betreffende hardwarehandleiding.
Controleer of het starten van de motor geen gevaar oplevert.
Ontkoppel de aangedreven machine als
• er een risico van schade bestaat bij een eventueel verkeerde draairichting of
• een normale ID-run vereist is tijdens het opstarten van de omvormer, wanneer het
lastkoppel hoger is dan 20% of de machine niet bestand is tegen de nominale koppelpiek tijdens de ID-run.
Inschakelen van de voeding, grondbeginselen van het
bedieningspaneel
Sluit het bedieningspaneel aan op de omvormer met
een geschikte kabel van categorie 5E.
Schakel de voeding van de omvormer in. Even later
toont het paneel de Output modus (rechts).
Opmerking: Het display in de Output modus zal
afwisselend "Alarm 2021 GEEN MOTORGEG"
tonen totdat later in deze procedure motorgegevens
ingevoerd worden.
Schakel over op lokale besturing om er zeker van te
zijn dat externe besturing geblokkeerd is door op de
-toets op het bedieningspaneel te drukken.
Lokale besturing wordt aangegeven met de tekst
"LOC" op de bovenste regel van het display.
De twee vakken op de onderste regel van het
display geven de functie aan van de twee soft keys
en . De inhoud van de vakken hangt af
van de zichtbare menukeuzes.
Druk op (MENU) voor toegang tot het
Hoofdmenu.
Bij elk menu is de gewenste keuze gemarkeerd.
Druk op de en toetsen om een
nieuwe keuze te maken; activeren door op
(ENTER) te drukken.
Het hoofdmenu is het startpunt voor de hieronder
beschreven procedures.
Page 93

Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma 93
1501 AO1 bron
P.01.06
PAR WIJZIGEN
CANCEL
OPSLAAN
0106 Motorkoppel
LOC
Aanpassen van parameterwaarden
Opmerkingen:
• Op elk punt kunt u naar het vorige niveau terugkeren door op (CANCEL of
EXIT) te drukken.
• Standaard zijn niet alle parameters zichtbaar. Stel parameter 16.15 Kies param lijst in
op Load long om alle parameters zichtbaar te maken.
Om een parameter aan te passen binnen een assistent:
• Gebruik de en toetsen om de instelling aan te passen. Druk op
OPSLAAN om de getoonde instelling te accepteren en verder te gaan naar de
volgende parameter.
Om een parameter aan te passen op enig ander moment:
• Markeer, in het hoofdmenu, PARAMETERS en druk op (ENTER).
• Gebruik en om door de lijst van parametergroepen te bladeren.
Markeer de gewenste groep en druk op (KEUZE) om de parameters binnen
die groep weer te geven.
• Markeer een parameter en druk op (EDIT) om de instelling aan te passen.
• Gebruik en om de instelling aan te passen. Druk op OPSLAAN om de
getoonde instelling te accepteren. Druk tweemaal op EXIT om naar het Hoofdmenu
terug te keren.
Opmerkingen voor meer gecompliceerde aanpassingen:
• Bij parameters die een digitale bron definiëren, kan de instelling Const gebruikt
worden om de waarde vast te leggen op de constante 1 (C.TRUE) of 0 (C.FALSE).
• Bij parameters die een analoge of digitale bron definiëren, kan de instelling Pointer
gebruikt worden om elke parameterwaarde (analoog) of een specifiek bit van een
packed boolean parameter (digitaal) vrijelijk te kiezen als de bron:
• Bij een analoge bron worden de
parametergroep en parameter-index
gespecificeerd. Druk, na de groep gekozen te
hebben, op NEXT om naar de index-instelling
te gaan.
De tekst onder de cursor geeft de huidige
instelling aan.
Druk, na het instellen van de index, op
OPSLAAN om de waarde te accepteren. Op
elk punt kunt u CANCEL indrukken om alle
wijzigingen ongedaan te maken en naar de
parameterlijst terug te keren.
Page 94

94 Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma
1002 Ext1 Start Bron1
P.02.01.00
PAR WIJZIGEN
CANCEL
NEXT
0201 DI status
LOC
PARAMETERS
ASSISTANT
GEWIJZ PAR
EXIT ENTER
HOOFDMENU 1
LOC
99 Opstartgegevens
01 Actuele waarden
02 I/O waarden
03 Regelwaarden
04 Proceswaarden
EXIT
KEUZE
PAR 99
LOC
9901 Language
English
9904 Motor type
9905 Motor regelmodus
9906 Motor nom.stroom
PARAMETERS
EXIT
EDIT
LOC
9901 Language
Deutsch
PAR WIJZIGEN
CANCEL
OPSLAAN
[0407 hex]
LOC
• Bij een digitale bron worden de
parametergroep, parameter-index, en het
bitnummer gespecificeerd. Druk, na het
instellen van een item, op NEXT om naar het
volgende item te gaan.
De tekst onder de cursor geeft de huidige
instelling aan.
Druk, na het instellen van het bitnummer, op
OPSLAAN om de waarde te accepteren. Op
elk punt kunt u CANCEL indrukken om alle
wijzigingen ongedaan te maken en naar de
parameterlijst terug te keren.
Wijzigen van de taal
Standaard is Engels de taal van de getoonde tekst. Desgewenst kan de taal als volgt
gewijzigd worden.
Markeer, in het hoofdmenu, PARAMETERS en druk
op ENTER.
Navigeer naar parametergroep 99
Opstartgegevens en druk op KEUZE. Merk op dat
de lijst in beide richtingen doorloopt tussen de
groepen 99 en 01 – het is sneller om voor groep 99
op te drukken.
Zorg dat parameter "9901 Language" gemarkeerd is
en druk op EDIT.
Selecteer de gewenste taal en druk op OPSLAAN.
Druk tweemaal op EXIT om naar het Hoofdmenu
terug te keren.
De hieronder beschreven opstart-procedures maken gebruik van assistenten. Dit zijn
routines die de gebruiker door de essentiële parameter-instellingen leiden.
Assistant
Page 95

Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma 95
PARAMETERS
ASSISTANT
GEWIJZ PAR
EXIT ENTER
HOOFDMENU 1
LOC
Kies assistant
Applicatiemacro
Motorinstellingen
Start/Stop regeling
EXIT OK
KEUZE
LOC
PARAMETERS
ASSISTANT
GEWIJZ PAR
EXIT ENTER
HOOFDMENU 1
LOC
1 – Selectie van applicatiemacro
Markeer, in het hoofdmenu, ASSISTANT en druk op
ENTER.
Markeer Applicatiemacro en druk op OK.
Applicatiemacro's zijn voorgedefinieerde
parameterinstellingen die gebruikt kunnen worden
als basis voor gebruikers-applicaties. De volgende
macro's zijn beschikbaar:
• Fabriek (voor toepassingen met toerenregeling
waarbij een eenvoudige start/stop interface nodig
is)
• Hand/Auto regeling (voor toepassingen met
toerenregeling waarbij twee externe
stuurapparaten gebruikt worden)
• PID procesregeling (voor toepassingen met
procesregeling, zoals closed-loop druk-, niveauof volumestroomregelsystemen)
• Koppelregeling (voor koppel- en/of
toerenregeling van motor)
• Sequentiele regeling (voor toepassingen met
toerenregeling waarin meerdere constante
toerentallen en acceleratie-/deceleratiehellingen
nodig zijn in een bepaalde volgorde).
Meer informatie over de macro's is te vinden in de
Firmware-handleiding.
Markeer een van de macro's en druk op OK.
Nadat de tekst “Klaar, OK” op het bedieningspaneel verschijnt, drukt u op OK om de
firmware-assistent te voltooien.
Standaard parameter-instellingen
van de macro worden toegepast.
2 – Motorinstellingen
Zorg dat u het motortypeplaatje en de pulsgeverdata (indien nodig) bij de hand heeft.
Markeer, in het hoofdmenu, ASSISTANT en druk op
ENTER.
Page 96

96 Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma
Kies assistant
Applicatiemacro
Motorinstellngen
Start/Stop regeling
EXIT OK
KEUZE
LOC
Markeer Motorinstellingen en druk op OK.
De assistent zal u door het instellen van de motor
leiden.
Kies het motortype, AM (asynchrone kooianker AC
motor) of PMSM (synchrone
permanentmagneetmotor).
Kies de motorbesturing. DTC voldoet in de meeste
gevallen.
Scalarmodus wordt aanbevolen indien
• de nominale motorstroom minder is dan 1/6 van
de nominale stroom van de omvormer,
• de omvormer voor testdoeleinden zonder
aangesloten motor wordt gebruikt, of
• de omvormer meerdere motoren bestuurt en het
aantal aangesloten motoren variabel is.
99.04 Motor type
99.05 Motor regelmodus
Page 97

Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma 97
M2AA 200 MLA 4
1475
1475
1470
1470
1475
1770
32.5
56
34
59
54
59
0.83
0.83
0.83
0.83
0.83
0.83
3GAA 202 001 - ADA
180
IEC 34-1
6210/C36312/C3
Cat. no
35
30
30
30
30
30
50
50
50
50
50
60
690 Y
400 D
660 Y
380 D
415 D
440 D
V
Hz kW
r/min A
cos
IA/IN
t
E/s
Ins.cl. F
IP 55
No
IEC 200 M/L 55
3
motor
ABB Motors
3 ~ motor M2BJ 280SMB 10 B3
No 3424522
A
BB Motors
Ins.cl. F IP 55
V
400 DHz50kW55
r/min
600A103
cos
M
0.97
IA/IN
t
E/s
Prod. code 2GBJ285220-ADA405445477
6316/C3
6316/C3
630kg
IEC 34-1
S1 SPEC INSUL.
JK-21640-1
Voer de motorgegevens vanaf het motortypeplaatje
in:
Voorbeeld typeplaatje van asynchrone motor:
Voorbeeld typeplaatje van
permanentmagneetmotor:
Opmerking: Stel de
motorgegevens op precies
dezelfde waarde in als op het
typeplaatje. Als het nominale
toerental van de motor op het
typeplaatje bijvoorbeeld 1470
rpm bedraagt, dan zal instellen
van de waarde van parameter
99.09 Motor nom. TT op 1500
rpm een verkeerde werking van
de omvormer tot gevolg hebben.
Als D (driehoek) data gekozen is,
sluit dan de motor in driehoek
aan.
Als Y (ster) data gekozen is, sluit
dan de motor in ster aan.
• nominale motorstroom
Toegestaan bereik: ongeveer 1/6 × I
van de omvormer (0…2 × I
Motor regelmodus = Scalar).
99.06 Motor nom.stroom
… 2 × IHd
Hd
als parameter 99.05
Hd
Page 98

98 Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma
• nominale motorspanning
Toegestaan bereik: 1/6 × U
omvormer. (U
elk van de nominale spanningsbereiken).
verwijst naar de hoogste spanning in
N
… 2 × U
N
N
van de
99.07 Motor nom.spann.
Bij permanentmagneetmotoren is de nominale
spanning de BackEMF spanning (bij nominaal
toerental van de motor). Als de spanning gegeven is
als spanning per rpm, bijv. 60 V per 1000 rpm, dan
is de spanning voor nominaal toerental van 3000
rpm 3 × 60 V = 180 V.
Merk op dat de nominale spanning niet gelijk is aan
de waarde van de equivalente DC motorspanning
(E.D.C.M.) die door sommige motorfabrikanten
wordt gegeven. De nominale spanning kan
berekend worden door de E.D.C.M. spanning te
delen door 1,7 (= wortel uit 3).
• nominale motorfrequentie
99.08 Motor nom.freq.
Bij permanentmagneetmotor: Als de frequentie niet
op het motortypeplaatje wordt gegeven, moet deze
berekend worden met de volgende formule:
f = n × p /60
waarbij p = aantal poolparen, n = nominaal
motortoerental.
• nominaal motortoerental 99.09 Motor nom. TT
• nominaal vermogen van de motor 99.10 Motor nom.verm.
De volgende motordata-parameters kunnen ingesteld worden om de nauwkeurigheid
van de besturing te verbeteren. Stel de waarden op 0 in indien de parameters niet
bekend zijn.
• nominale cos
van de motor (niet van toepassing
99.11 Motor nom.cosphi
bij permanentmagneetmotoren)
• nominaal askoppel van de motor 99.12 Motor nom.koppel
De volgende parameters definiëren bedrijfslimieten ter bescherming van de
aangedreven apparatuur.
• maximum toerental
20.01 Max toerental
Bij Normale of Gereduceerde ID-run (zie hieronder)
dient deze waarde hoger te zijn dan 55% van het al
eerder gedefinieerde nominale motortoerental.
• minimum toerental
20.02 Min toerental
Bij Normale of Gereduceerde ID-run (zie hieronder)
dient deze waarde kleiner dan of gelijk aan 0 rpm te
zijn.
Page 99

Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma 99
Voorwaarts
Wanneer de uitgangsfasen U2,
V2 en W2 van de omvormer
aangesloten zijn op de corresponderende motorklemmen:
Achterwaarts
• maximum stroom
Deze waarde dient hoger te zijn dan de al eerder
gedefinieerde nominale motorstroom.
• maximum koppel
Bij Normale ID-run (zie hieronder), dient deze
waarde tenminste 100% van het al eerder
gedefinieerde nominale motorkoppel te zijn.
• minimum koppel 20.08 Min koppel1
De vraag "ID-Run uitvoeren?" wordt weergegeven. De ID-run (identificatie-run) zal de
motorkarakteristieken identificeren voor een optimale besturing.
Als u op dit punt de ID-run niet uit wilt voeren, kies dan Nee om de firmware-assistent
"Motorinstellingen" te voltooien. Ga verder naar de sectie 3 – Start/Stop configuratie.
Als u de ID-run uit wilt voeren, ga dan door naar de volgende stappen VOORDAT u Ja
selecteert.
WAARSCHUWING! Bij Normale of Gereduceerde ID-run zal de motor
draaien bij ongeveer 50…100% van het nominale toerental tijdens de
identificatierun. ZORG DAT HET VEILIG IS OM DE MOTOR TE LATEN
DRAAIEN ALVORENS DE IDENTIFICATIERUN UIT TE VOEREN!
Controleer de draairichting van de motor. De motor
draait tijdens de run (Normaal of Gereduceerd)
vooruit.
20.05 Maximale stroom
20.07 Max koppel1
Zorg er voor dat de Safe Torque Off- en
noodstopcircuits (indien aanwezig) gesloten zijn.
Selecteer Ja en druk op OK.
Kies de ID-run methode.
De ID-run zal uitgevoerd worden bij de volgende
start van de omvormer.
NORMALE ID run dient gekozen te worden
wanneer mogelijk.
Opmerking: De aangedreven machines moeten
van de motor ontkoppeld zijn bij een Normale IDrun:
• als het lastkoppel hoger is dan 20%, of
• als de machines niet bestand zijn tegen de
nominale koppelpiek tijdens de ID-run.
99.13 ID run modus
Page 100

100 Beknopte opstartgids voor de ACS850 met standaard besturingsprogramma
PARAMETERS
ASSISTANT
GEWIJZ PAR
EXIT ENTER
HOOFDMENU 1
LOC
Kies assistant
Applicatiemacro
Motorinstellingen
Start/Stop regeling
EXIT
OK
KEUZE
LOC
De GEREDUCEERDE ID run dient gekozen te
worden in plaats van de Normale ID-run als de
mechanische verliezen hoger zijn dan 20%, d.w.z.
dat de motor niet ont-koppeld kan worden van de
aangedreven apparatuur, of dat volledige flux
vereist is om de motorrem open te houden
(conische motor).
De STILSTAND ID run dient alleen gekozen te
worden als de Normale of Gereduceerde ID-run niet
mogelijk is vanwege de beperkingen veroorzaakt
door de aangesloten machines (bijv. bij hijs- of
heftoepassingen).
Opmerkingen:
• De motoras mag NIET vergrendeld zijn en het
lastkoppel dient < 20% te zijn tijdens Normale of
Gereduceerde ID-run. Bij een
permanentmagneetmotor is deze beperking ook
van toepassing wanneer Stilstand ID-run gekozen
is.
• De mechanische rem wordt niet geopend door de
logica voor de ID-run.
• De ID-run kan niet uitgevoerd worden als
parameter 99.05 Motor regelmodus = Scalar.
Start de motor (door op de START-knop te drukken)
om de ID-run te activeren.
ID-run wordt aangegeven door het alarm ID-RUN op
het display van het bedieningspaneel.
Nadat de tekst “Klaar, OK” op het bedieningspaneel verschijnt, drukt u op OK om de
firmware-assistent te voltooien.
Alarm: ID-RUN
3 – Start/Stop configuratie
Markeer, in het hoofdmenu, ASSISTANT en druk op
ENTER.
Markeer Start/Stop regeling en druk op OK.
De volgende parameters zullen ingesteld worden.
Opmerking: Afhankelijk van de keuzes die u maakt,
zal de routine enkele van de hieronder opgesomde
parameters overslaan.
 Loading...
Loading...