

ABB ACS850 Firmware Manual

ACS850
Firmware Manual
ACS850 Standard Control Program
List of related manuals
ACS850-04 manuals
Drive hardware manuals a
CS850-04 Drive Modules (0.37 to 45 kW) Hardware
A
Manual
ACS850-04 Drive Modules (0.37 to 45 kW) Quick
Installation Guide
ACS850-04 Drive Modules (55 to 200 kW, 60 to 200 hp)
Hardware Manual
ACS850-04 Drive Modules (55 to 200 kW, 60 to 200 hp)
Quick Installation Guide
ACS850-04 Drive Modules (200 to 500 kW, 250 to
600 hp) Hardware Manual
ACS850-04 Drive Modules (160 to 560 kW, 200 to
700 hp) Hardware Manual
Drive firmware manuals and guides
ACS850 Standard Control Program Firmware Manual 3AUA0000045497
ACS850 Standard Control Program Quick Start-up
Guide
ACS850-04 drives with SynRM motors (option +N7502)
supplement
nd guides Code (English)
3AUA0000045496
3AUA0000045495
3AUA0000045487
3AUA0000045488
3AUA0000026234
3AUA0000081249
3AUA0000045498
3AUA0000123521
Option manuals and guides
Application programming for ACS850 and ACQ810
drives application guide
ATEX-certified Safe disconnection function for ACS850
drives (+Q971) application guide
Common DC configuration for ACS850-04 drives
application guide
Safe torque off function for ACSM1, ACS850 and
ACQ810 drives application guide
Manuals and quick guides for I/O extension modules,
fieldbus adapters, etc.
You can find manuals and other product documents in PDF format on the Internet. See section
Document library on the Internet on the inside of the back cover. For manuals not available in the
Document library, contact your local ABB representative.
3AUA0000078664
3AUA0000074343
3AUA0000073108
3AFE68929814
Firmware Manual
ACS850 Standard Control Program
Table of contents
3AUA0000045497 Rev H
EN
EFFECTIVE: 2013-01-15
© 2013 ABB Oy. All Rights Reserved.


Table of contents 5
Table of contents
1. About the manual
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Compatibility . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Safety instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Reader . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Related manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Terms and abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. The ACS850 control panel
Safety
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Mechanical installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Electrical installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Layout . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Status line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Operating instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Basics of operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
List of tasks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Help and panel version – Any mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Basic operations – Any mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Output mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Assistants . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Changed Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Fault Logger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Time & Date . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Parameter Backup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
I/O Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Reference Edit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Drive Info . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Parameter Change Log . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3. Control locations and operating modes
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Local control vs. external control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Local control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
External control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Operating modes of the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Speed control mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Torque control mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Special control modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6 Table of contents
4. Program features
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Drive configuration and programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Programming via parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Application programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Control interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programmable analog inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programmable analog outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programmable digital inputs and outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programmable I/O extensions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Programmable relay outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Fieldbus control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Motor control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Constant speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Critical speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Speed controller tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Encoder support . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Jogging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Scalar motor control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
User-definable load curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
User-definable U/f curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Autophasing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Flux braking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Application control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Application macros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Process PID control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Mechanical brake control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Timers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
DC voltage control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Overvoltage control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Undervoltage control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Voltage control and trip limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Brake chopper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Safety and protections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Emergency stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Thermal motor protection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Programmable protection functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Automatic fault resets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Diagnostics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Signal supervision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Maintenance counters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Energy saving calculator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Load analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Miscellaneous . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Backup and restore of drive contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Data storage parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Drive-to-drive link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89

Table of contents 7
5. Application macros
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Factory macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Default control connections for the Factory macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Hand/Auto macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Default control connections for the Hand/Auto macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
PID control macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Default control connections for the PID control macro . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Torque control macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Default control connections for the Torque control macro . . . . . . . . . . . . . . . . . . . . . . . . 99
Sequential control macro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Default control connections for the Sequential control macro . . . . . . . . . . . . . . . . . . . . . 102
6. Parameters
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Terms and abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Summary of parameter groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Parameter listing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
01 Actual values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
02 I/O values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
03 Control values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
04 Appl values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
06 Drive status . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
08 Alarms & faults . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123
09 System info . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
10 Start/stop/dir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
11 Start/stop mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
12 Operating mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
13 Analogue inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
14 Digital I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
15 Analogue outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
16 System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
19 Speed calculation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
20 Limits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
21 Speed ref . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
22 Speed ref ramp . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
23 Speed ctrl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
24 Torque ref . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 188
25 Critical speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 189
26 Constant speeds . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
27 Process PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
30 Fault functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 197
31 Motor therm prot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
32 Automatic reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
33 Supervision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
34 User load curve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211
35 Process variable . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
36 Timed functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219

8 Table of contents
38 Flux ref . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224
40 Motor control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 225
42 Mech brake ctrl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
44 Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 231
45 Energy optimising . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 237
47 Voltage ctrl . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
48 Brake chopper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 238
49 Data storage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 239
50 Fieldbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
51 FBA settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
52 FBA data in . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
53 FBA data out . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
56 Panel display . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
57 D2D communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 246
58 Embedded Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 248
64 Load analyzer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252
74 Appl programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
90 Enc module sel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 256
91 Absol enc conf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
92 Resolver conf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
93 Pulse enc conf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 261
94 Ext IO conf . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
95 Hw configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 262
97 User motor par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
99 Start-up data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
7. Additional parameter data
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
Terms and abbreviations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 271
Fieldbus equivalents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
Pointer parameter format in fieldbus communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
32-bit integer value pointers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272
32-bit integer bit pointers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Parameter groups 1…9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
Parameter groups 10…99 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
8. Fault tracing
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
How to reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 297
Fault history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 298
Alarm messages generated by the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 299
Fault messages generated by the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 307
9. Control through the embedded fieldbus interface
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 319
System overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 320
Connecting the embedded fieldbus to the drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 321

Table of contents 9
Setting up the embedded fieldbus interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 322
Setting the drive control parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 324
Basics of the embedded fieldbus interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
Control Word and Status Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Actual values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Data inputs/outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Register addressing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
About the EFB communication profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 329
ABB Drives classic profile and ABB Drives enhanced profile . . . . . . . . . . . . . . . . . . . . . . . . 330
Control Word for the ABB Drives profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330
Status Word for the ABB Drives profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
State transition diagram for the ABB Drives profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334
References for the ABB Drives profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
Actual values for the ABB Drives profiles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
Modbus register addresses for the ABB Drives classic profile . . . . . . . . . . . . . . . . . . . . 337
Modbus register addresses for the ABB Drives enhanced profile . . . . . . . . . . . . . . . . . . 338
DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
Control and Status words for the DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
Status Word for the DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
State transition diagram for the DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
References for the DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
Actual signals for the DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 339
Modbus register addresses for the DCU 16-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . 340
DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
Control and Status words for the DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
Status word for the DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
State transition diagram for the DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
References for the DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
Actual signals for the DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343
Modbus register addresses for the DCU 32-bit profile . . . . . . . . . . . . . . . . . . . . . . . . . . 344
Modbus function codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
Modbus exception codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 346
10. Control through a fieldbus adapter
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
System overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
Setting up communication through a fieldbus adapter module . . . . . . . . . . . . . . . . . . . . . . . 349
Setting the drive control parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
Basics of the fieldbus adapter interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
Control Word and Status Word . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Actual values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
FBA communication profile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Fieldbus references . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354
State diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355
10 Table of contents
11. Drive-to-drive link
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
Wiring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
Datasets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
Types of messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
Master point-to-point messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
Read remote messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
Follower point-to-point messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
Standard multicast messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
Broadcast messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362
Chained multicast messaging . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364
12. Control chain and drive logic diagrams
What this chapter contains . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
Speed feedback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
Speed reference modification and ramping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
Speed error handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
Torque reference modification, operating mode selection . . . . . . . . . . . . . . . . . . . . . . . . . . 371
Process PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372
Start/stop logic of the drive – I/O and D2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
Start/stop logic of the drive – Fieldbus interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
Direct torque control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Further information
Product and service inquiries . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Product training . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Providing feedback on ABB Drives manuals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Document library on the Internet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
1
About the manual
About the manual 11
What this chapter contains
The chapter describes the contents of the manual. It also contains information on the
compatibility, safety and intended audience.
Compatibility
The manual is compatible with:
• ACS850 standard control program version UIFI2500 and later
• ACS850 synchronous reluctance motor control program (option +N7502).
Safety instructions
Follow all safety instructions delivered with the drive.
• Read the complete safety instructions before you install, commission, or use
the drive. The complete safety instructions are given at the beginning of the
Hardware Manual.
• Read the software function specific warnings and notes before changing the
default settings of the function. For each function, the warnings and notes are
given in this manual in the section describing the related user-adjustable
parameters.
Reader
The reader of the manual is expected to know the standard electrical wiring practices,
electronic components, and electrical schematic symbols.
12 About the manual
Contents
The manual consists of the following chapters:
• The ACS850 control panel provides a description and instructions for use of the
control panel.
• Control locations and operating modes describes the control locations and
operation modes of the drive.
• Program features contains descriptions of the features of the ACS850 standard
control program.
• Application macros contains a short description of each macro together with a
connection diagram.
• Parameters describes the parameters of the drive.
• Additional parameter data contains further information on the parameters.
• Fault tracing lists the alarm (warning) and fault messages with possible causes
and remedies.
• Control through the embedded fieldbus interface describes the communication to
and from a fieldbus network using an embedded fieldbus interface.
• Control through a fieldbus adapter describes the communication to and from a
fieldbus network using an optional fieldbus adapter module.
• Drive-to-drive link describes the communication between drives connected
together by the drive-to-drive link.
• Control chain and drive logic diagrams.
Related manuals
The delivery of the drive includes a multilingual Quick Start-up Guide.
A complete list of related manuals is printed on the inside of the front cover.
Terms and abbreviations
Term/abbreviation Definition
AI Analog input; interface for analog input signals
AO Analog output; interface for analog output signals
DC link DC circuit between rectifier and inverter
DI Digital input; interface for digital input signals
DO Digital output; interface for digital output signals
DTC Direct torque control
EFB Embedded fieldbus
FBA Fieldbus adapter
FEN-01 Optional TTL encoder interface module for the ACS850
FEN-11 Optional absolute encoder interface module for the ACS850
FEN-21 Optional resolver interface module for the ACS850
About the manual 13
Term/abbreviation Definition
FEN-31 Optional HTL encoder interface module for the ACS850
FIO-01 Optional digital I/O extension module for the ACS850
FIO-11 Optional analog I/O extension module for the ACS850
FIO-21 Optional analog/digital I/O extension module for the ACS850
FCAN-0x Optional CANopen adapter for the ACS850
FDNA-0x Optional DeviceNet adapter for the ACS850
FECA-01 Optional EtherCAT® adapter for the ACS850
FENA-0x Optional Ethernet/IP adapter for the ACS850
FLON-0x Optional L
ONWORKS
FPBA-0x Optional PROFIBUS DP adapter for the ACS850
FSCA-0x Optional Modbus adapter for the ACS850
HTL High-threshold logic
ID run Motor identification run. During the identification run, the drive will identify
the characteristics of the motor for optimum motor control.
IGBT Insulated gate bipolar transistor; a voltage-controlled semiconductor type
widely used in inverters due to their easy controllability and high
switching frequency
®
adapter for the ACS850
I/O Input/Output
JCU Control unit of the drive module. The JCU is installed on top of the power
unit. The external I/O control signals are connected to the JCU, or
optional I/O extensions mounted on it.
JMU Memory unit attached to the control unit of the drive
JPU Power unit; see the definition below.
LSB Least significant bit
LSW Least significant word
MSB Most significant bit
MSW Most significant word
Parameter User-adjustable operation instruction to the drive, or signal measured or
calculated by the drive
PI controller Proportional-integral controller
PID controller Proportional–integral–derivative controller. Drive speed control is based
on PID algorithm.
PLC Programmable logic controller
Power unit Contains the power electronics and connections of the drive module. The
JCU is connected to the power unit.
PTC Positive temperature coefficient
RFG Ramp Function Generator
RO Relay output; interface for a digital output signal. Implemented with a
relay.
SSI Synchronous serial interface
STO Safe torque off
TTL Transistor-transistor logic
UIFI xxxx Firmware of the ACS850 drive

14 About the manual
Term/abbreviation Definition
UPS Uninterruptible power supply; power supply equipment with battery to
maintain output voltage during power failure

The ACS850 control panel 15
2
The ACS850 control panel
What this chapter contains
This chapter describes the features and operation of the ACS850 control panel.
The control panel can be used to control the drive, read status data, and adjust
parameters.
Features
• alphanumeric control panel with an LCD display
• copy function – parameters can be copied to the control panel memory for later
transfer to other drives or for backup of a particular system.
• context sensitive help
• real time clock.

16 The ACS850 control panel
Installation
Mechanical installation
For mounting options, see the Hardware Manual of the drive.
Instructions for mounting the control panel onto a cabinet door are available in
ACS-CP-U Control Panel IP54 Mounting Platform Kit Installation Guide
(3AUA0000049072 [English]).
Electrical installation
Use a CAT5 straight-through network cable with a maximum length of 3 meters.
Suitable cables are available from ABB.
For the control panel connector location on the drive, see the Hardware Manual of the
drive.
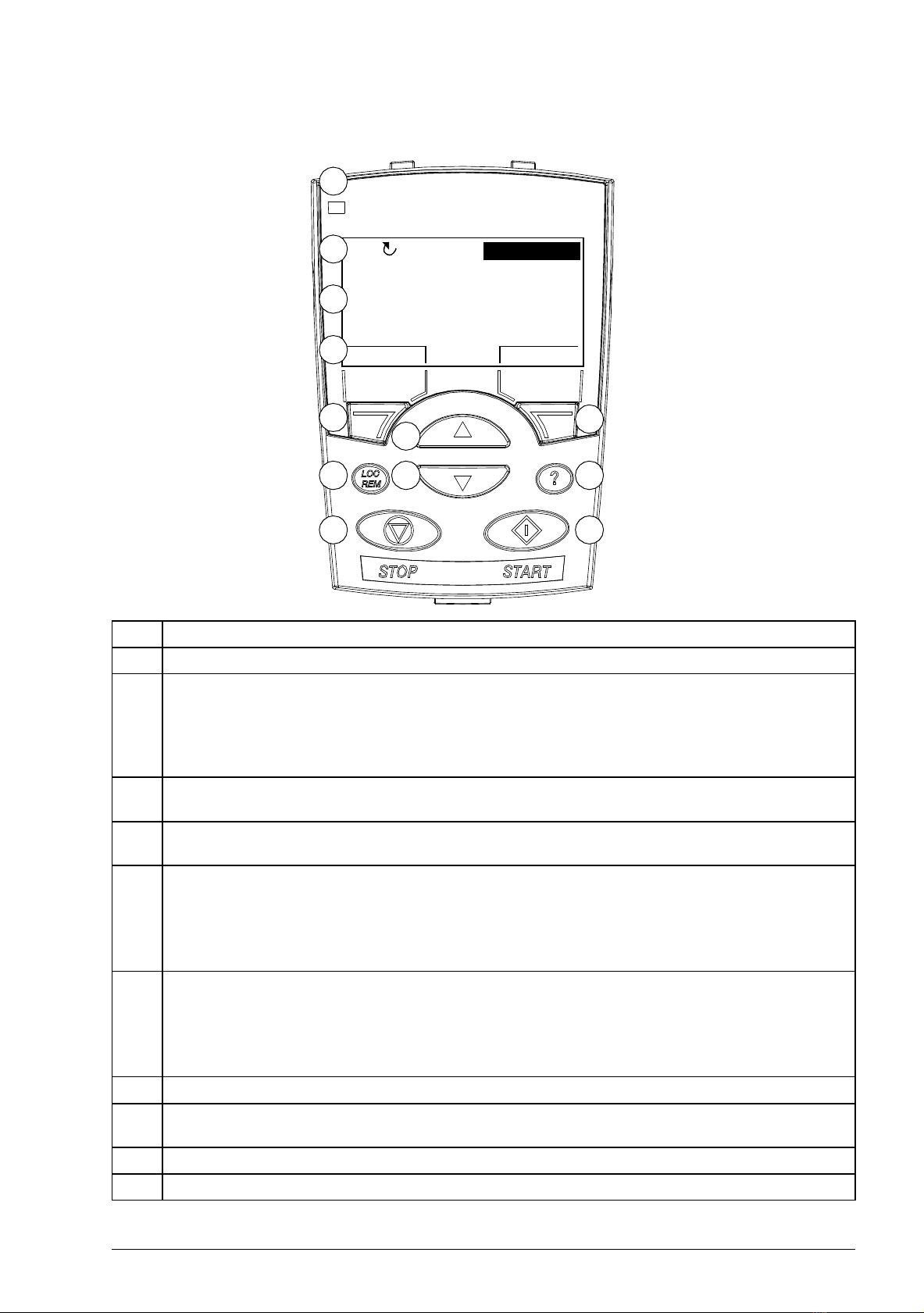
Layout
30.10Hz
LOC
DIR 12:45 MENU
400RPM
1200 RPM
12.4 A
405 dm3/s
3
4
5
67 8
9 10
30.00rpm
50 A
10 Hz
7 %10
.
0
.
49
.
LOC
DIR
MENU00:00
1
2a
2b
2c
30.00rpm
The ACS850 control panel 17
No. Use
1 Status LED – Green = normal operation; blinking green = an alarm is active; red = a fault is active.
2 LCD display – Divided into three main areas:
Status line – variable, depending on the mode of operation, see section Status line on page 18.
Center – variable; in general, shows signal and parameter values, menus or lists. Shows also faults
and alarms.
Bottom line – shows current functions of the two soft keys and, if enabled, the clock display.
3 Soft key 1 – Function depends on the context. The text in the lower left corner of the LCD display
indicates the function.
4 Soft key 2 – Function depends on the context. The text in the lower right corner of the LCD display
indicates the function.
5 Up –
Scrolls up through a menu or list displayed in the center of the LCD display.
Increments a value if a parameter is selected.
Increments the reference value if the upper right corner is highlighted.
6 Down –
7 LOC/REM – Changes between local and remote control of the drive.
8 Help – Displays context sensitive information when the key is pressed. The information displayed
9 STOP – Stops the drive in local control.
10 START – Starts the drive in local control.
Holding the key down changes the value faster.
Scrolls down through a menu or list displayed in the center of the LCD display.
Decrements a value if a parameter is selected.
Decrements the reference value if the upper right corner is highlighted.
Holding the key down changes the value faster.
describes the item currently highlighted in the center of the display.
18 The ACS850 control panel
30.00rpmLOC
1 2 4
LOC MAIN MENU 1
1 2 3 4
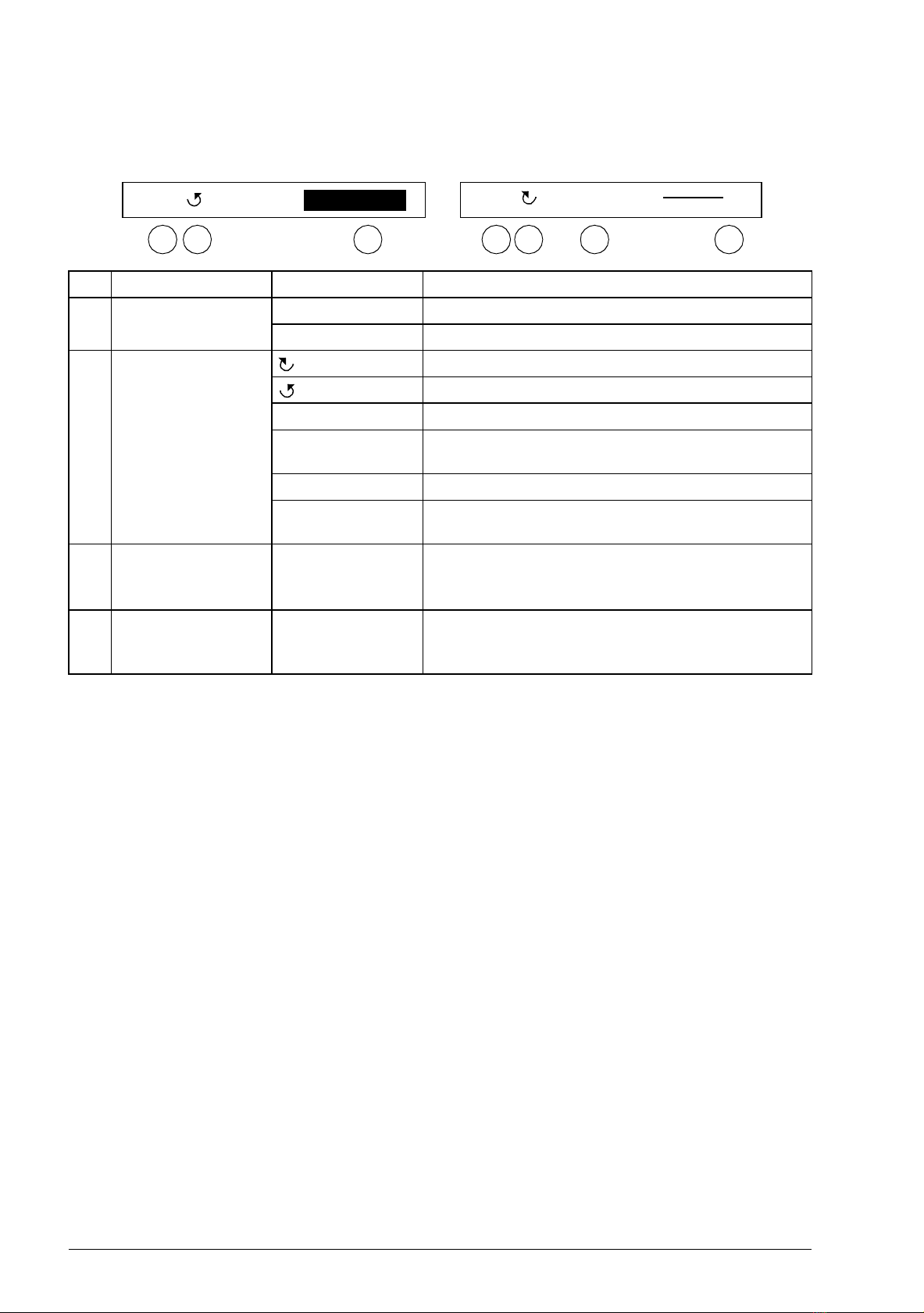
Status line
The top line of the LCD display shows the basic status information of the drive.
No. Field Alternatives Significance
1 Control location LOC Drive control is local, that is, from the control panel.
REM Drive control is remote, such as the drive I/O or fieldbus.
2 State Forward shaft direction
Reverse shaft direction
Rotating arrow Drive is running at reference.
Dotted rotating
arrow
Stationary arrow Drive is stopped.
Dotted stationary
arrow
3 Panel operation mode • Name of the current mode
4 Reference value or
number of the
selected item
Drive is running but not at reference.
Start command is present, but the motor is not running,
e.g. because start enable signal is missing.
• Name of the list or menu shown
• Name of the operation state, e.g. REF EDIT.
• Reference value in the Output mode
• Number of the highlighted item, e.g mode, parameter
group or fault.
The ACS850 control panel 19
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER00:00
MAIN MENU 1
LOC
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
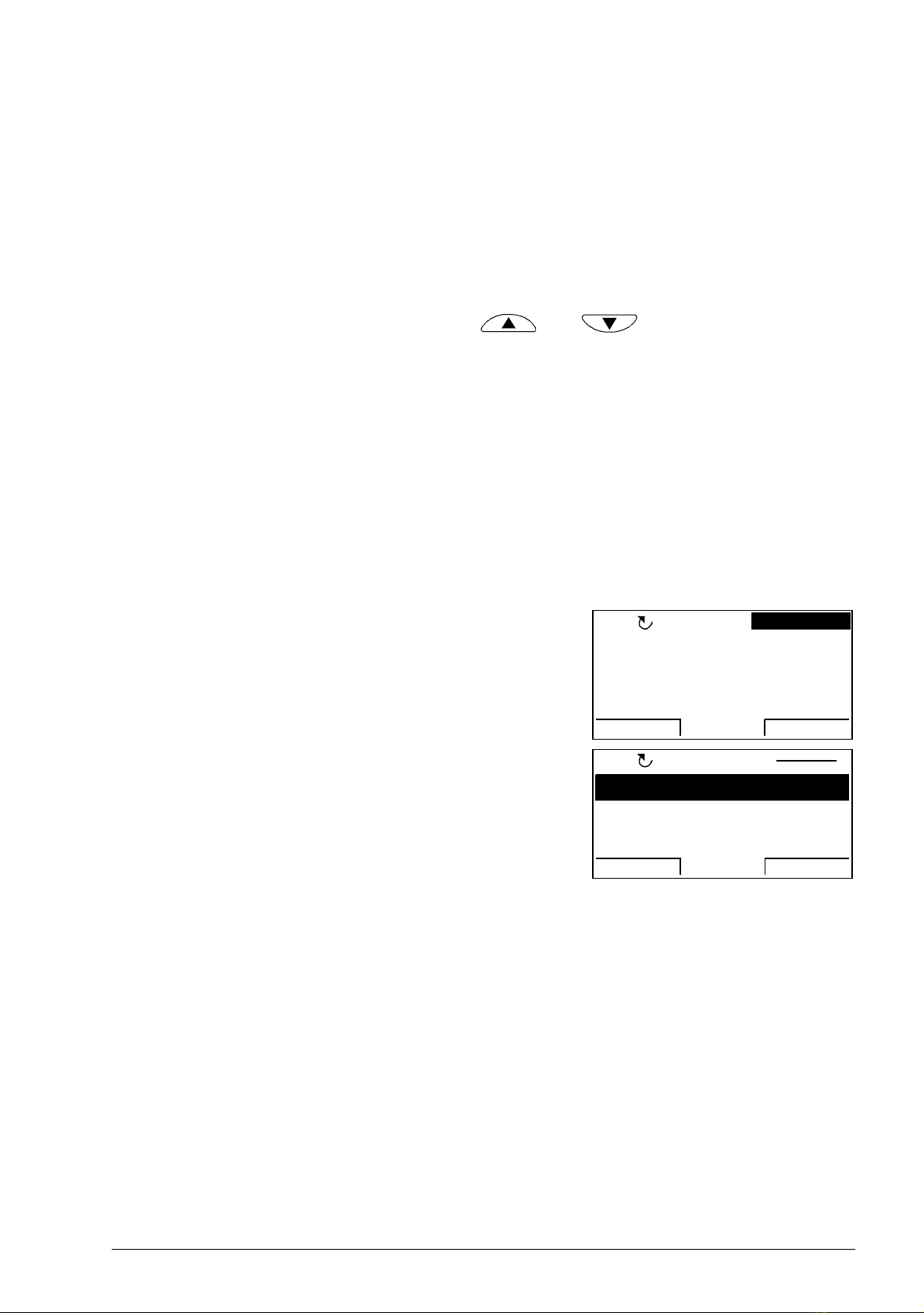
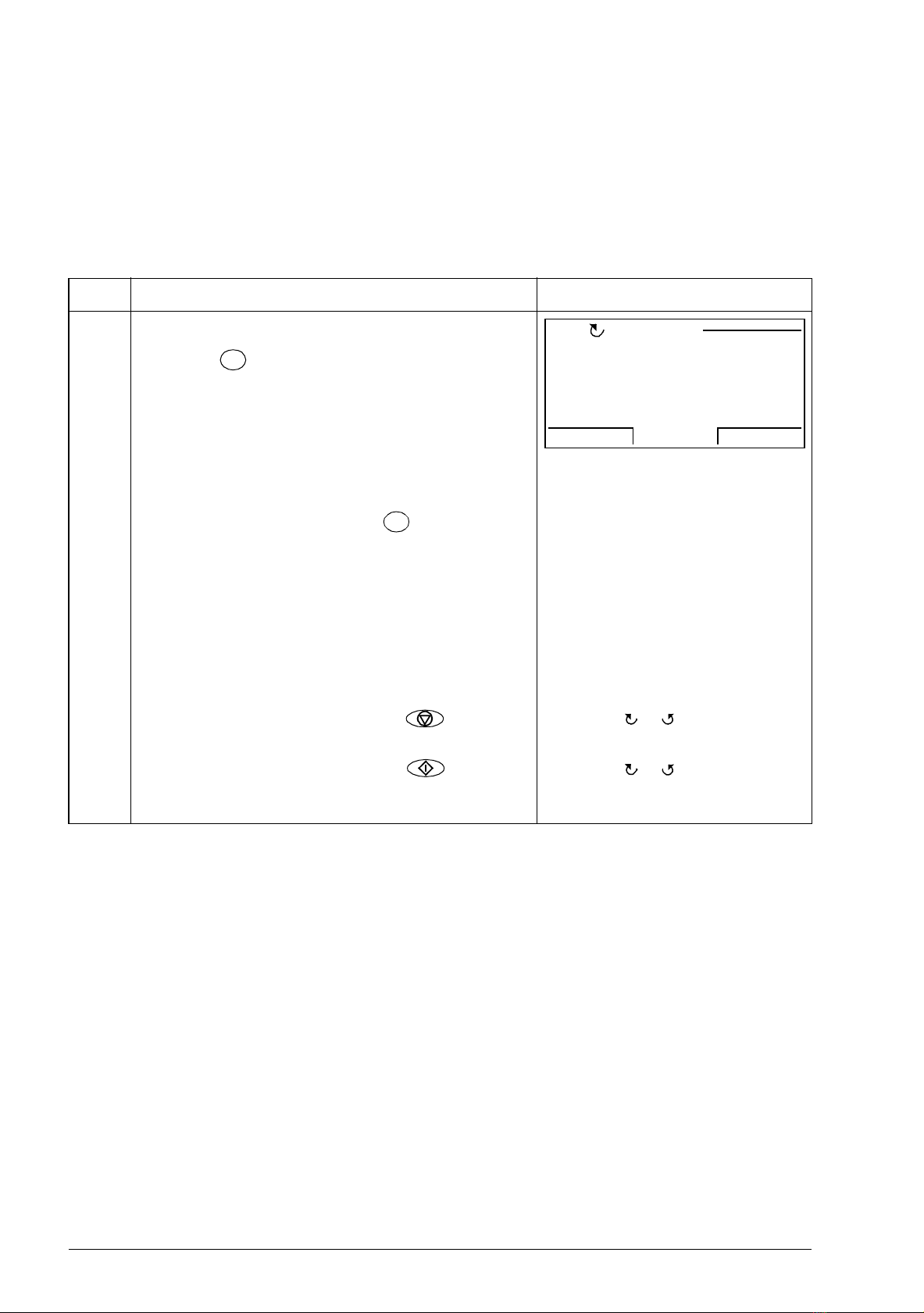
Operating instructions
Basics of operation
You operate the control panel with menus and keys. The keys include two contextsensitive soft keys, whose current function is indicated by the text shown in the
display above each key.
You select an option, e.g. operation mode or parameter, by entering the MENU state
using soft key 2, and then by scrolling the and arrow keys until the
option is highlighted and then pressing the relevant soft key. With the right soft key
you usually enter a mode, accept an option or save the changes. The left soft key is
used to cancel the made changes and return to the previous operation level.
The Control Panel has ten options in the Main menu: Parameters, Assistants,
Changed Par, Fault Logger, Time & Date, Parameter Backup, I/O Settings, Reference
Edit, Drive Info and Parameter Change Log. In addition, the control panel has an
Output mode, which is used as default. Also, when a fault or alarm occurs, the panel
goes automatically to the Fault mode showing the fault or alarm. You can reset the
fault in the Output or Fault mode. The operation in these modes and options is
described in this chapter.
Initially, the panel is in the Output mode, where you
can start, stop, change the direction, switch between
local and remote control, modify the reference value
and monitor up to three actual values. To do other
tasks, go first to the Main menu and select the
appropriate option on the menu. The status line (see
section Status line on page 18) shows the name of
the current menu, mode, item or state.
20 The ACS850 control panel
List of tasks
The table below lists common tasks, the mode in which you can perform them,
abbreviations of the options in the Main menu and the page number where the steps
to do the task are described in detail.
Task Mode / Main menu
option
How to get help Any - 21
How to find out the panel version Any - 21
How to start and stop the drive Output - 22
How to switch between local and remote control Any - 22
How to change the direction of the motor rotation Any - 23
How to set the speed, frequency or torque reference
in the Output mode
How to adjust the display contrast Output - 24
How to change the value of a parameter Parameters PARAMETERS 25
Output - 23
Abbreviations of
the Main menu
options *
Page
How to change the value of value pointer parameters Parameters PARAMETERS 26
How to change the value of bit pointer parameters Parameters PARAMETERS 28
How to change the value of bit pointer parameter to
fixed 0 (FALSE) or 1 (TRUE)
How to select the monitored signals Parameters PARAMETERS 31
How to do guided tasks (specification of related
parameter sets) with assistants
How to view and edit changed parameters Changed Parameters CHANGED PAR 33
How to view faults Fault Logger FAULT LOGGER 35
How to reset faults and alarms Fault Logger FAULT LOGGER 36
How to show/hide the clock, change date and time
formats, set the clock and enable/disable automatic
clock transitions according to the daylight saving
changes
How to copy parameters from the drive to the control
panel
How to restore parameters from the control panel to
the drive
How to view backup information Parameter Backup PAR BACKUP 45
How to edit and change parameter settings related to
I/O terminals
How to edit reference value Reference Edit REF EDIT 49
Parameters PARAMETERS 30
Assistants ASSISTANTS 32
Time & Date TIME & DATE 37
Parameter Backup PAR BACKUP 39
Parameter Backup PAR BACKUP 39
I/O Settings I/O SETTINGS 47
How to view drive info Drive Info DRIVE INFO 50
How to view and edit recently changed parameters Parameter Change
Log
* Main menu options actually shown in the control panel.
PAR CHG LOG 51
The ACS850 control panel 21
?
TIME FORMAT
DATE FORMAT
SET TIME
SET DATE
DAYLIGHT SAVING
TIME & DATE 6
EXIT
SEL00:00
LOC
EXIT 00:00
Use Daylight saving
to enable or disable
automatic clock
adjustment according
to daylight saving
HELP
LOC
EXIT 00:00
to enable or disable
automatic clock
adjustment according
to daylight saving
changes
HELPLOC
EXIT
TIME FORMAT
DATE FORMAT
SET TIME
SET DATE
DAYLIGHT SAVING
TIME & DATE 6
EXIT SEL00:00
LOC
?
?
Panel SW: x.xx
Rom CRC: xxxxxxxxxx
Flash Rev: x.xx
xxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxx
PANEL VERSION INFO
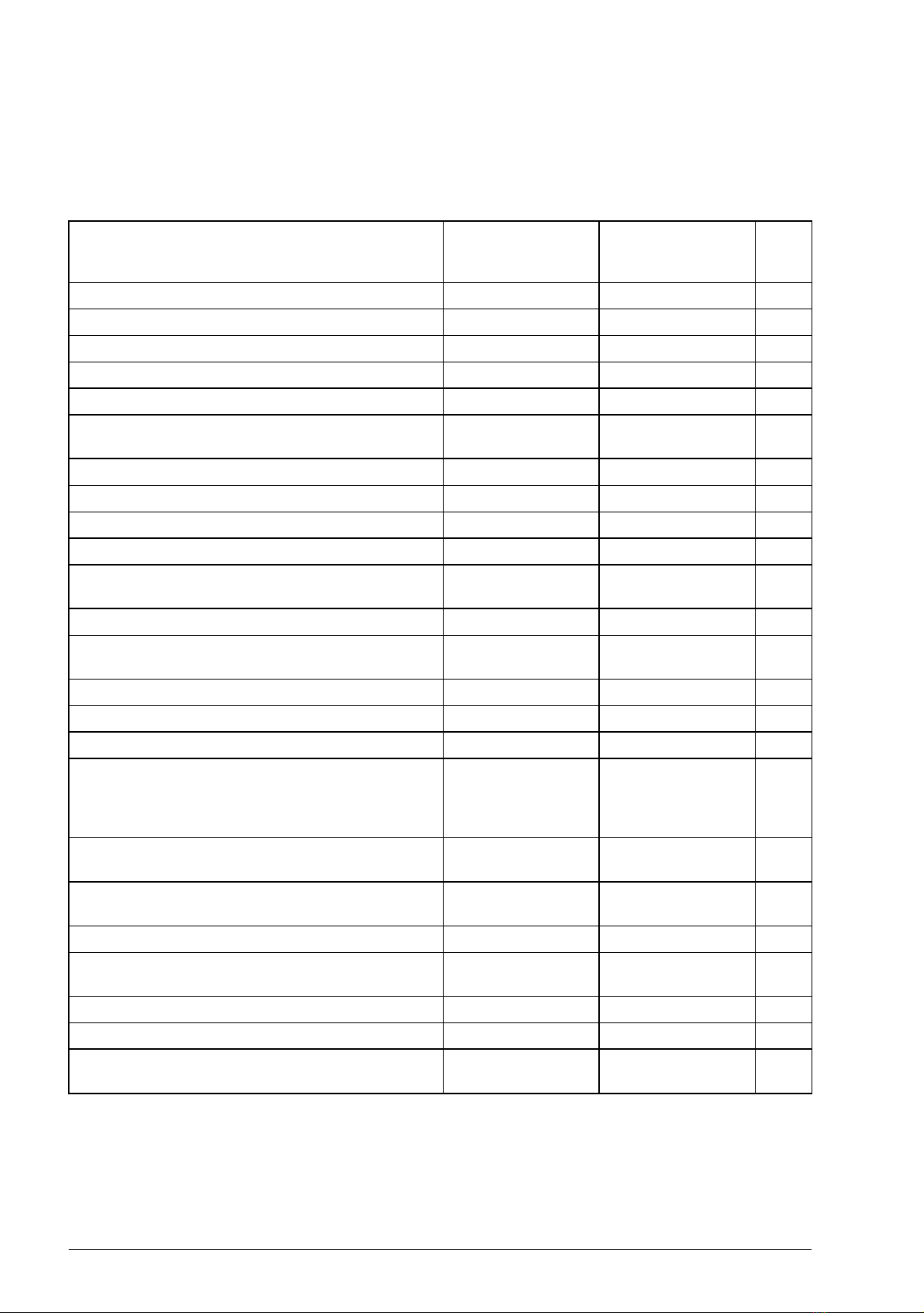
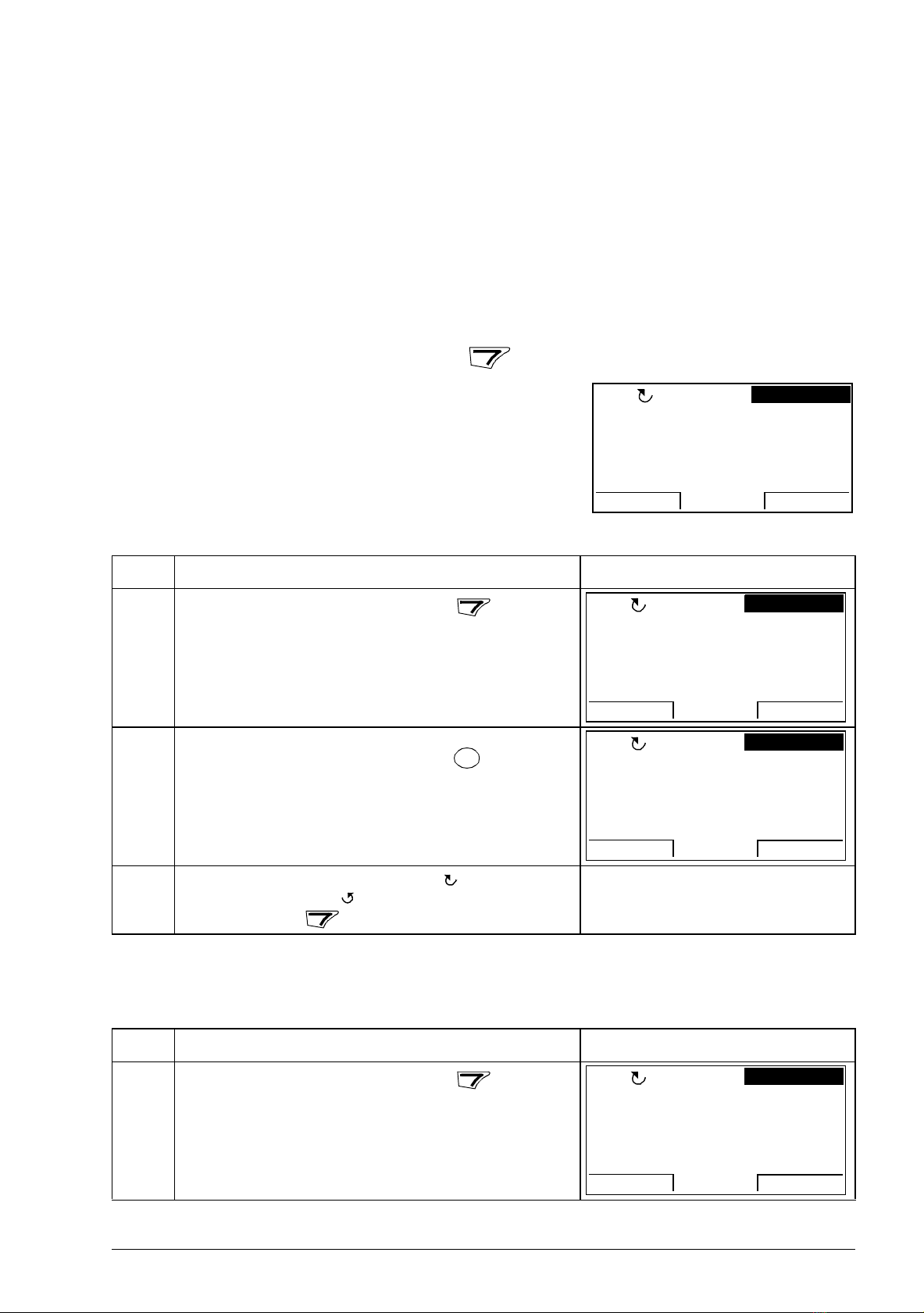
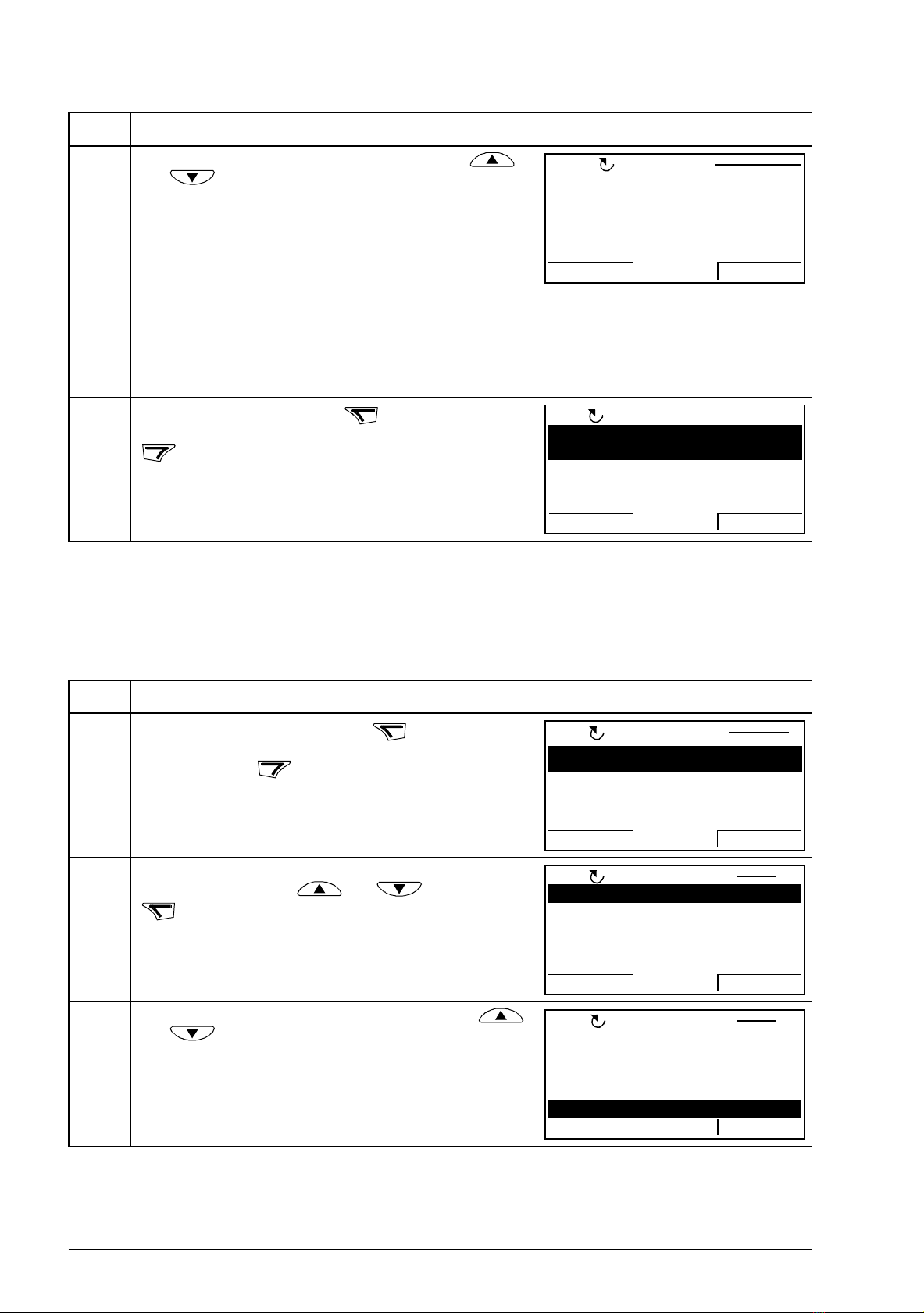
Help and panel version – Any mode
How to get help
Step Action Display
1. Press to read the context-sensitive help text for the
item that is highlighted.
If help text exists for the item, it is shown on the display.
2. If the whole text is not visible, scroll the lines with keys
and .
3. After reading the text, return to the previous display by
pressing .
How to find out the panel version
Step Action Display
1. If the power is switched on, switch it off.
- If the panel cable can be disconnected easily, unplug
the panel cable from the control panel, OR
- if the panel cable can not be disconnected easily, switch
off the control board or the drive.
2. Keep key depressed while you switch on the power
and read the information. The display shows the
following panel information:
Panel SW: Panel firmware version
ROM CRC: Panel ROM check sum
Flash Rev: Flash content version
Flash content comment.
When you release the key, the panel goes to the
Output mode.
22 The ACS850 control panel
LOC
REM
00:00
Switching to the
local control mode.
MESSAGE
LOC
LOC
REM
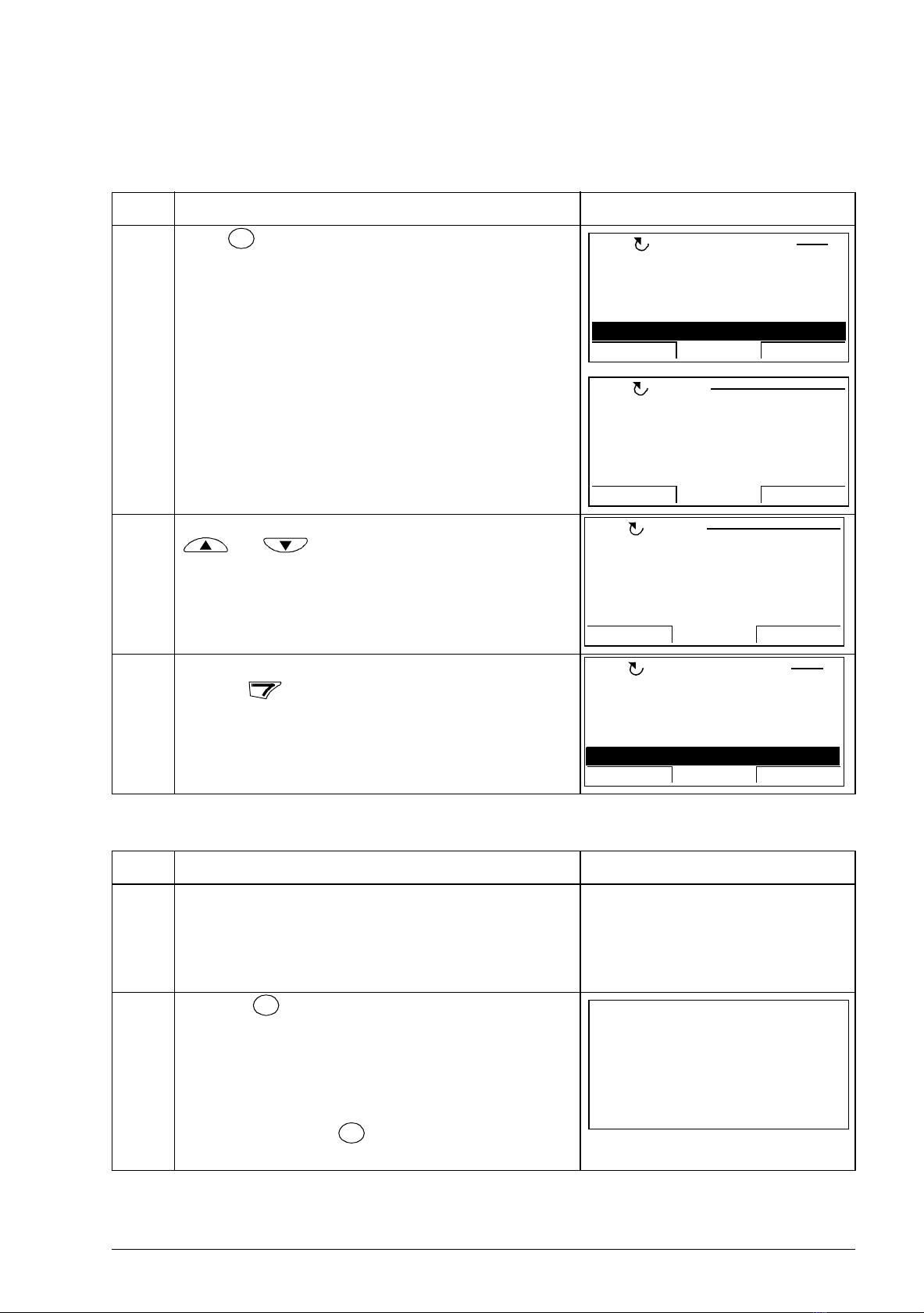
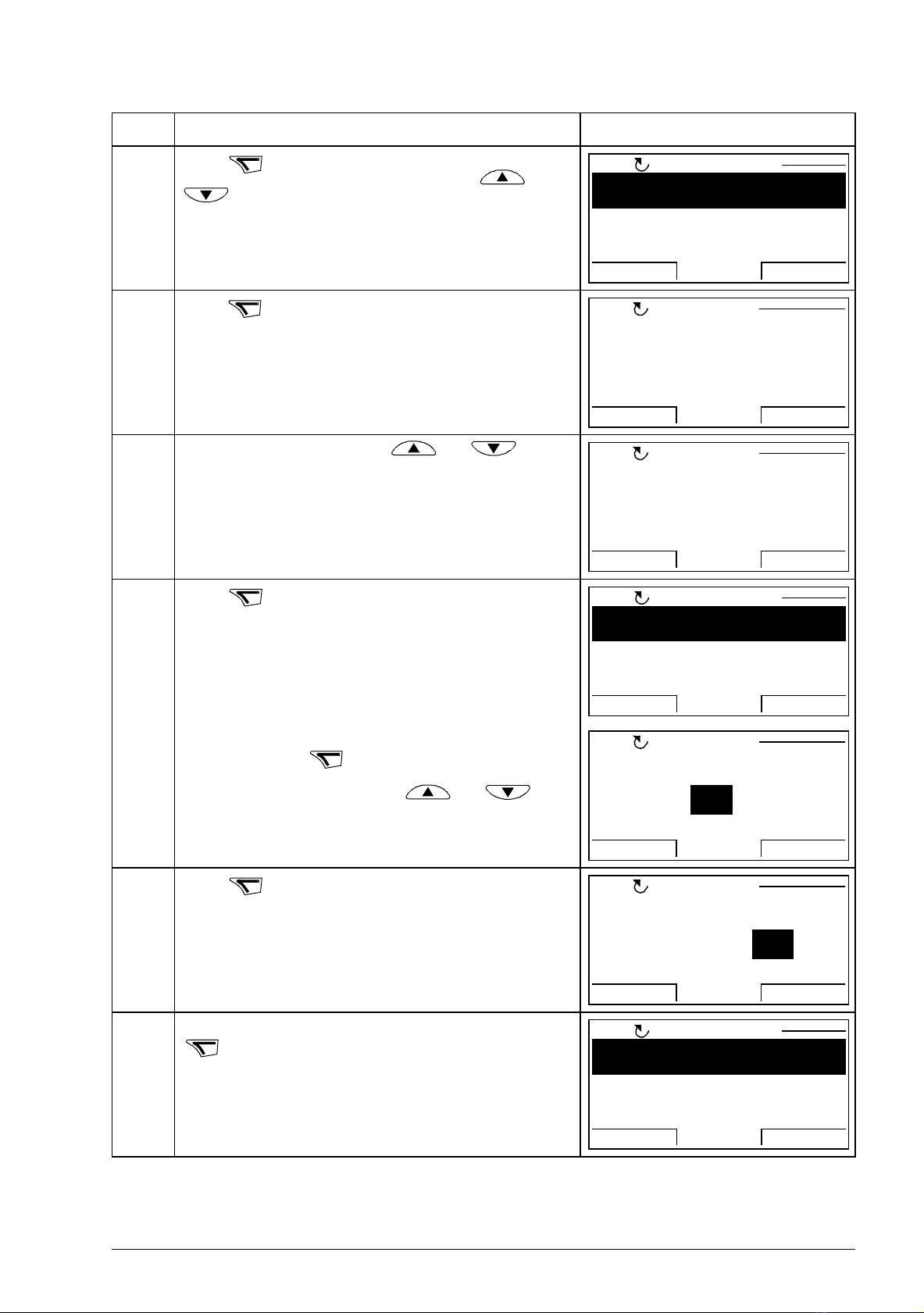
Basic operations – Any mode
How to start, stop and switch between local and remote control
You can start, stop and switch between local and remote control in any mode. To be
able to start or stop the drive by using the control panel, the drive must be in local
control.
Step Action Display
1. To switch between remote control (REM shown on the
status line) and local control (LOC shown on the status
line), press .
Note: Switching to local control can be prevented with
parameter 16.01 Local lock.
The very first time the drive is powered up, it is in remote
control (REM) and controlled through the drive I/O
terminals. To switch to local control (LOC) and control the
drive using the control panel, press . The result
depends on how long you press the key:
If you release the key immediately (the display flashes
“Switching to the local control mode”), the drive stops.
Set the local control reference as instructed on page 23.
If you press the key until the text “Keep running” appears,
the drive continues running as before. The drive copies
the current remote values for the run/stop status and the
reference, and uses them as the initial local control
settings.
To stop the drive in local control, press . The arrow ( or ) on the status line
stops rotating.
To start the drive in local control, press . The arrow ( or ) on the status line
starts rotating. It is dotted until the
drive reaches the setpoint.
The ACS850 control panel 23
EXIT
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
EXIT
50 A
10 Hz
7 %10.
0.
49.
REM
DIR
MENU00:00
30.00rpm
LOC
REM
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU
00:00
30.00rpm
DIR
EXIT
50 A
10 Hz
7 %10.
0.
49.
REM
DIR
MENU00:00
30.00rpm
Output mode
In the Output mode, you can:
• monitor actual values of up to three signals
• change the direction of the motor rotation
• set the speed, frequency or torque reference
• adjust the display contrast
• start, stop, change the direction and switch between local and remote control.
You get to the Output mode by pressing repeatedly.
The top right corner of the display shows the
reference value. The center can be configured to
show up to three signal values or bar graphs; see
page 31 for instructions on selecting and modifying
the monitored signals.
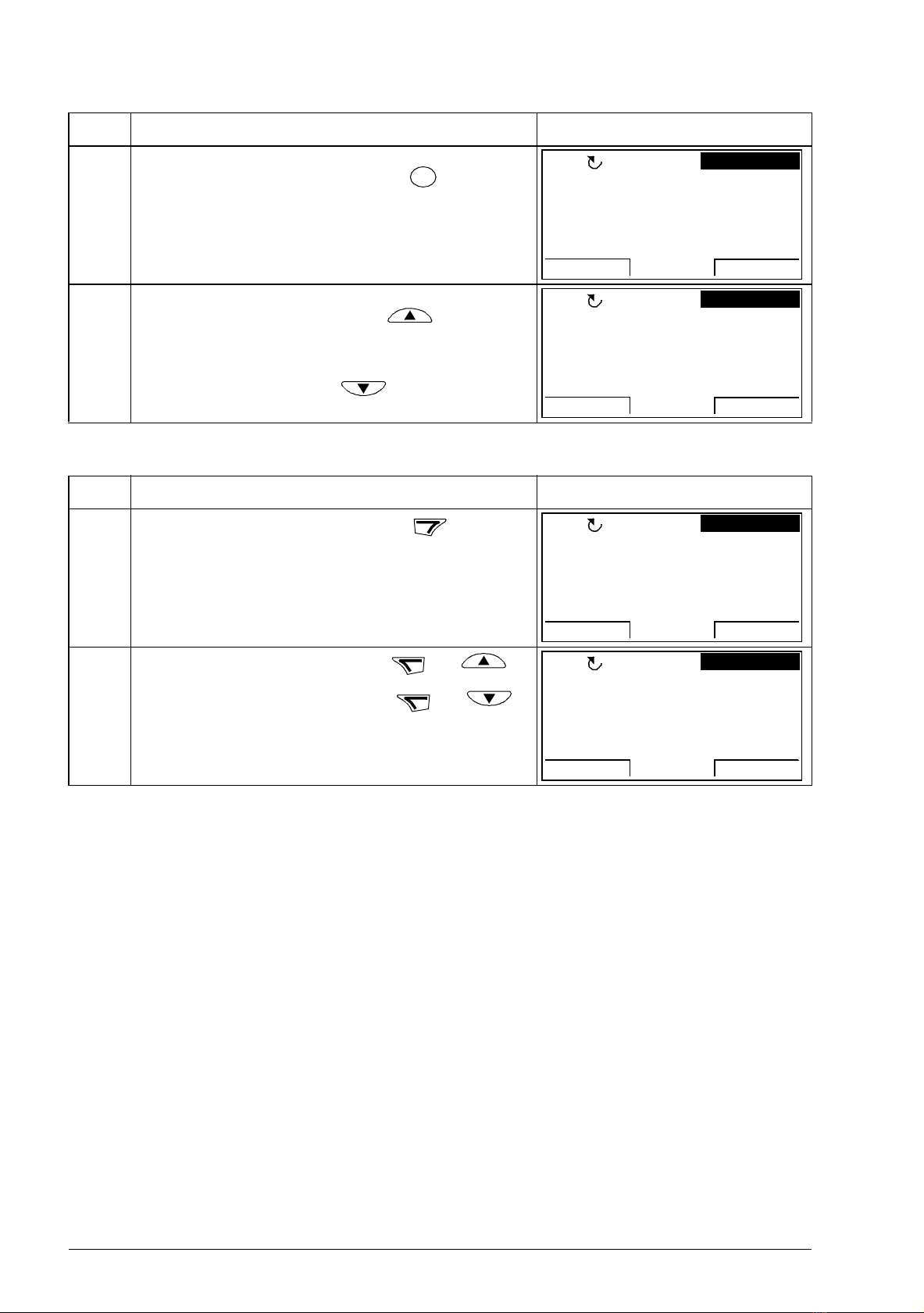
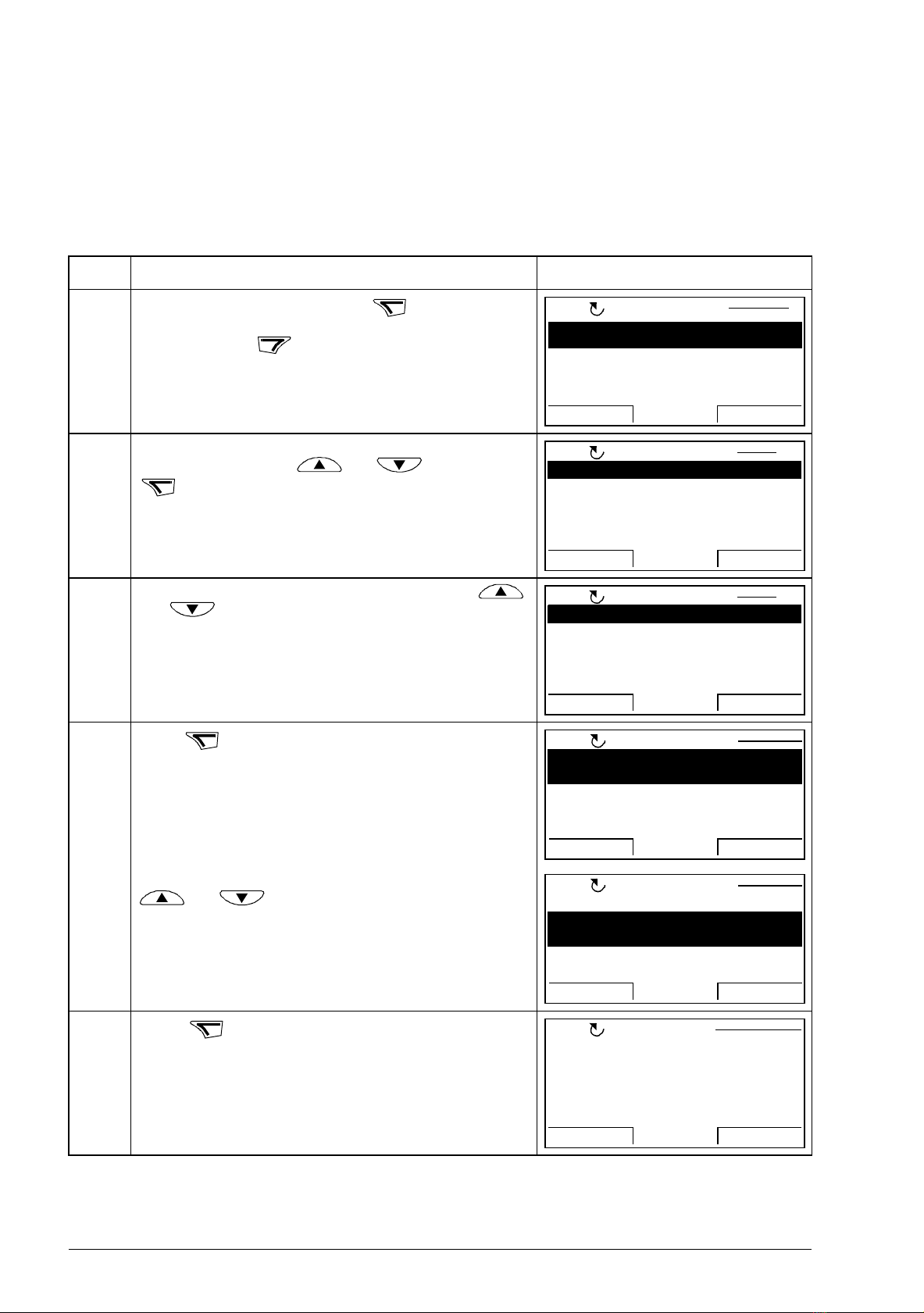
How to change the direction of the motor rotation
Step Action Display
1. If you are not in the Output mode, press repeatedly
until you get there.
2. If the drive is in remote control (REM shown on the status
line), switch to local control by pressing . The display
briefly shows a message about changing the mode and
then returns to the Output mode.
3. To change the direction from forward ( shown on the
status line) to reverse ( shown on the status line), or
vice versa, press .
How to set the speed, frequency or torque reference in the Output mode
See also section Reference Edit on page 49.
Step Action Display
1. If you are not in the Output mode, press repeatedly
until you get there.
24 The ACS850 control panel
LOC
REM
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
31.00rpm
EXIT
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
MENU
MENU
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
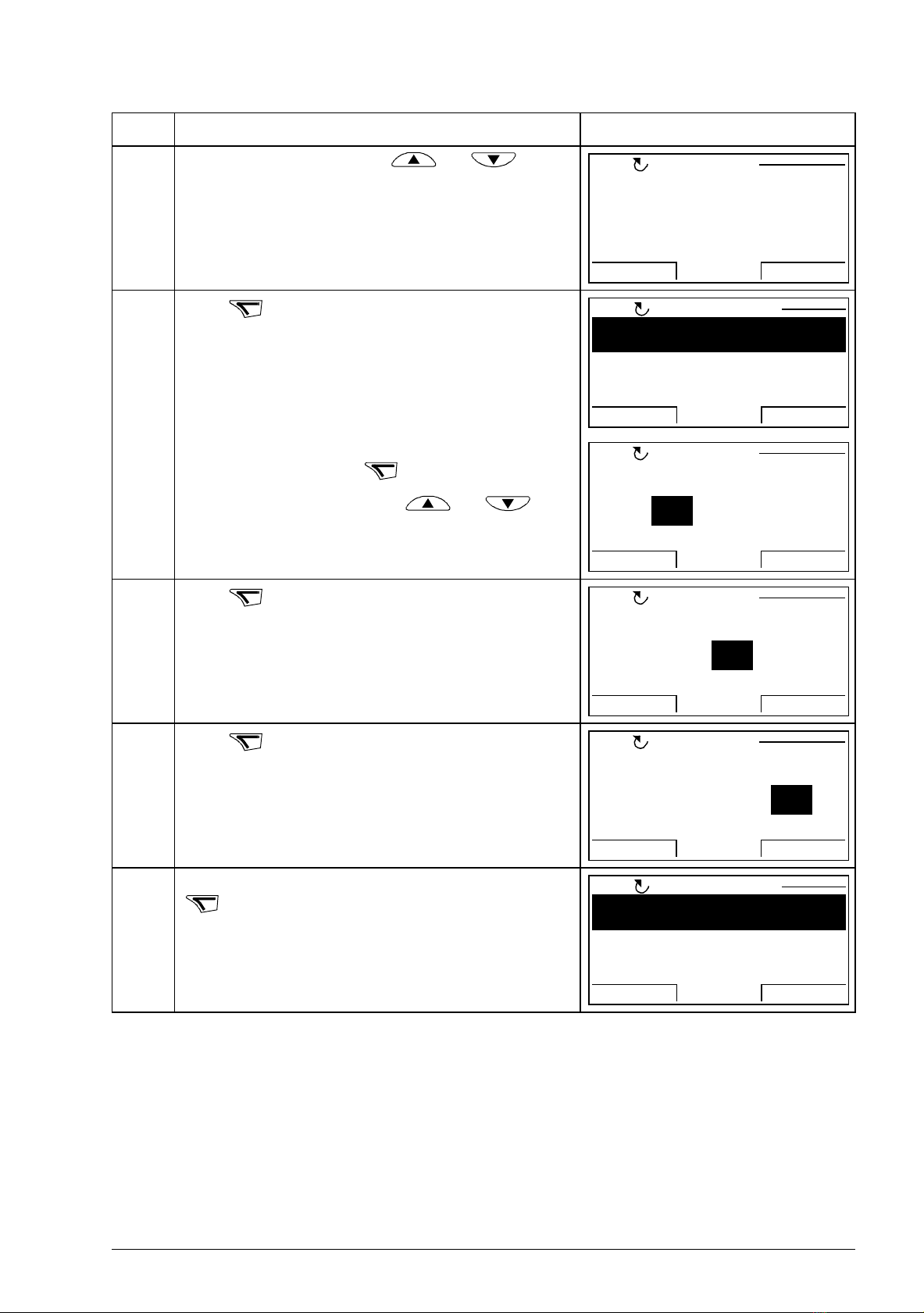
Step Action Display
2. If the drive is in remote control (REM shown on the status
line), switch to local control by pressing . The display
briefly shows a message about changing the mode and
then returns to the Output mode.
3. To increase the highlighted reference value shown in the
top right corner of the display, press . The value
changes immediately. It is stored in the permanent
memory of the drive and restored automatically after
power switch-off.
To decrease the value, press .
How to adjust the display contrast
Step Action Display
1. If you are not in the Output mode, press repeatedly
until you get there.
2. To increase the contrast, press keys and
simultaneously.
To decrease the contrast, press keys and
simultaneously.
The ACS850 control panel 25
MENU
EXIT
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER00:00
MAIN MENU 1
LOC
ENTER
01 Actual values
02 I/O values
03 Control values
04 Appl values
06 Drive status
EXIT
SEL00:00
PAR GROUPS 01LOC
99 Start-up data
01 Actual values
02 I/O values
03 Control values
04 Appl values
EXIT
SEL00:00
PAR GROUPS 99LOC
SEL
9901 Language
English
9904 Motor type
9905 Motor ctrl mode
9906 Mot nom current
PARAMETERS
EXIT EDIT00:00
LOC
9901 Language
9904 Motor type
9905 Motor ctrl mode
9906 Mot nom current
0.0 A
PARAMETERS
EXIT EDIT00:00
LOC
EDIT
9906 Mot nom current
PAR EDIT
0.0 A
CANCEL SAVE00:00
LOC
Parameters
In the Parameters option, you can:
• view and change parameter values
• start, stop, change the direction and switch between local and remote control.
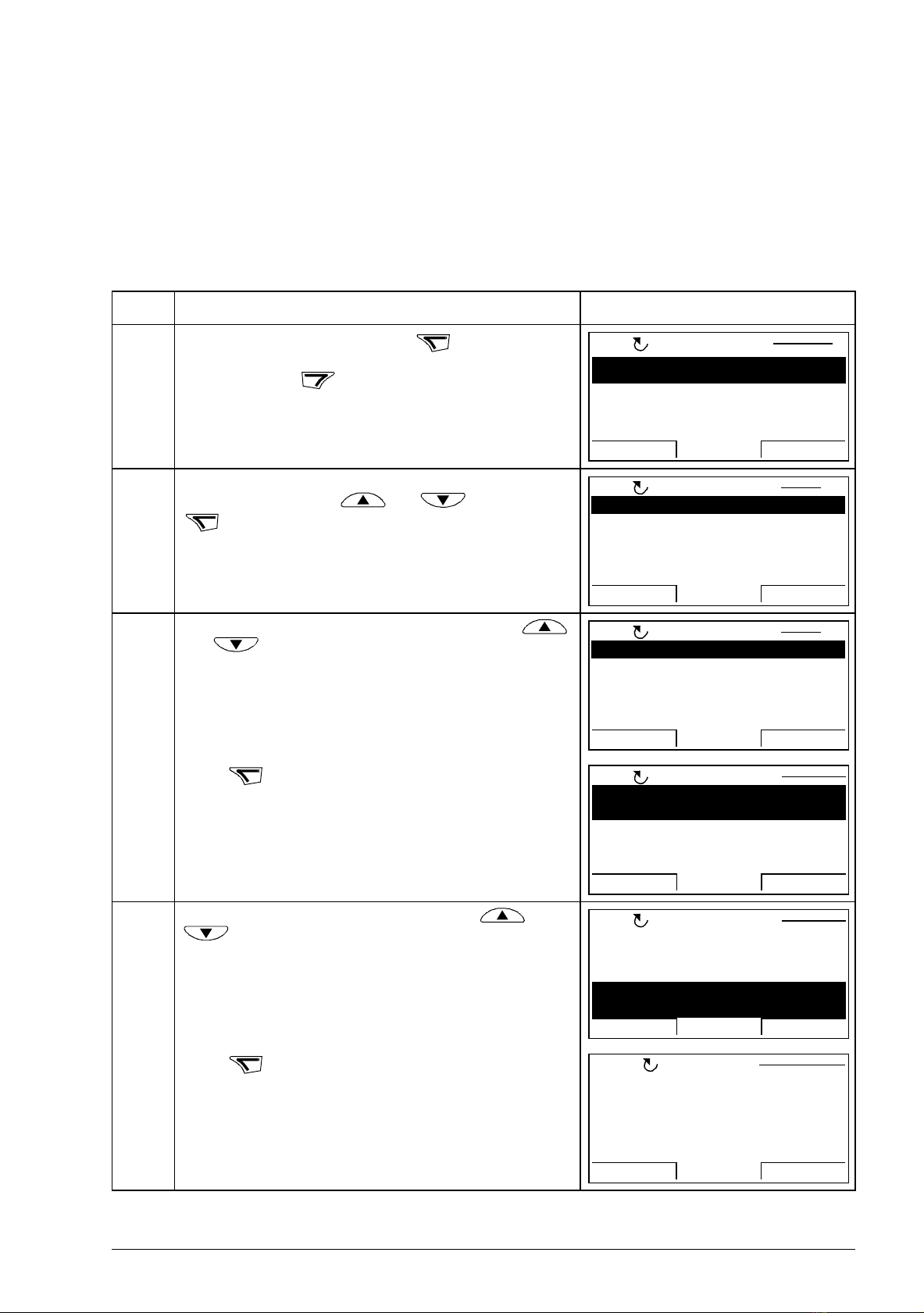
How to select a parameter and change its value
Step Action Display
1. Go to the Main menu by pressing if you are in the
Output mode.
Otherwise press repeatedly until you get to the
Main menu.
2. Go to the Parameters option by selecting PARAMETERS
on the menu with keys and , and pressing
.
3. Select the appropriate parameter group with keys
and .
Press .
4. Select the appropriate parameter with keys and
. The current value of the parameter is shown
below the selected parameter. Here the parameter 99.06
Mot nom current is used as an example.
Press .
26 The ACS850 control panel
9906 Mot nom current
PAR EDIT
3.5 A
CANCEL SAVE00:00
LOC
SAVE
CANCEL
9906 Mot nom current
3.5 A
9907 Mot nom voltage
9908 Mot nom freq
9909 Mot nom speed
PARAMETERS
EXIT EDIT
00:00
LOC
MENU
EXIT
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER00:00
MAIN MENU 1
LOC
ENTER
01 Actual values
02 I/O values
03 Control values
04 Appl values
06 Drive status
EXIT
SEL00:00
PAR GROUPS 01LOC
15 Analogue outputs
16 System
19 Speed calculation
20 Limits
21 Speed ref
EXIT
SEL00:00
PAR GROUPS 21LOC
Step Action Display
5. Specify a new value for the parameter with keys
and .
Pressing an arrow key once increments or decrements
the value. Keeping the key depressed for a while first
quickly changes the current digit until the cursor moves
left one position. This is repeated until the key is
released.
After the key is released, step-by-step adjustment of the
current digit is possible. If neither key is pressed for a
while, the cursor returns to the right one position at a
time.
Pressing both keys simultaneously replaces the
displayed value with the default value.
6. To save the new value, press .
To cancel the new value and keep the original, press
.
How to change the value of value pointer parameters
In addition to the parameters shown above, there are two kinds of pointer
parameters; value pointer parameters and bit pointer parameters. A value pointer
parameter points to the value of another parameter.
Step Action Display
1. Go to the Main menu by pressing if you are in the
Output mode.
Otherwise press repeatedly until you get to the
Main menu.
2. Go to the Parameters option by selecting PARAMETERS
on the menu with keys and , and pressing
.
3. Select the appropriate parameter group with keys
and . Here the value pointer parameter 21.01
Speed ref1 sel is used as an example.
The ACS850 control panel 27
SEL
2101 Speed ref1 sel
AI2 scaled
2102 Speed ref2 sel
2103 Speed ref1 func
2104 Speed ref1/2 sel
PARAMETERS
EXIT EDIT00:00
LOC
EDIT
2101 Speed ref1 sel
AI1 scaled
PAR EDIT
CANCEL SEL00:00
[P.02.05]
LOC
2101 Speed ref1 sel
FBA ref1
PAR EDIT
CANCEL SEL00:00
[P.02.26]
LOC
SEL
2101 Speed ref1 sel
FBA ref1
2102 Speed ref2 sel
2103 Speed ref1 func
2104 Speed ref1/2 sel
PARAMETERS
EXIT EDIT00:00
LOC
NEXT
2101 Speed ref1 sel
P.02.05
PAR EDIT
CANCEL
SAVE
00:00
02 I/O values
LOC
NEXT
2101 Speed ref1 sel
P.02.07
PAR EDIT
CANCEL SAVE
00:00
0207 AI2 scaled
LOC
SAVE
2101 Speed ref1 sel
AI2 scaled
2102 Speed ref2 sel
2103 Speed ref1 func
2104 Speed ref1/2 sel
PARAMETERS
EXIT EDIT00:00
LOC
Step Action Display
4. Press to select the appropriate parameter group.
Select the appropriate parameter with keys and
, current value of each parameter is shown below
it.
5. Press . Current value of the value pointer parameter
is shown, as well as the parameter it points to.
6. Specify a new value with keys and . The
parameter the value pointer parameter points to changes
respectively.
7. Press to accept any of the preselected values and
to return to the parameters list.
The new value is shown in the parameters list.
To freely define an analog signal as the value, choose
Pointer and press . The parameter group and index
will be shown.
Select the parameter group with and . The
text below the cursor displays the currently-selected
parameter group.
8. Press to select the parameter index.
Again, the text below the cursor reflects the current
setting.
9. To save the new value for the pointer parameter, press
.
The new value is shown in the parameters list.
28 The ACS850 control panel
MENU
EXIT
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER00:00
MAIN MENU 1
LOC
ENTER
01 Actual values
02 I/O values
03 Control values
04 Appl values
06 Drive status
EXIT
SEL00:00
PAR GROUPS 01LOC
10 Start/stop/dir
11 Start/stop mode
12 Operating mode
13 Analogue inputs
14 Digital I/O
EXIT
SEL00:00
PAR GROUPS 10LOC
SEL
1001 Ext1 start func
In1
1002 Ext1 start in1
1003 Ext1 start in2
1004 Ext2 start func
PARAMETERS
EXIT EDIT00:00
LOC
1001 Ext1 start func
1002 Ext1 start in1
DI1
1003 Ext1 start in2
1004 Ext2 start func
PARAMETERS
EXIT EDIT00:00
LOC
EDIT
1002 Ext1 start in1
DI1
PAR EDIT
CANCEL SEL00:00
[P.02.01.00]
LOC
How to change the value of bit pointer parameters
The bit pointer parameter points to the value of a bit in another signal, or can be fixed
to 0 (FALSE) or 1 (TRUE). For the latter option, see page 30. A bit pointer parameter
points to a bit value (0 or 1) of one bit in a 32-bit signal. The first bit from the left is bit
number 31, and the first bit from the right is bit number 0.
Step Action Display
1. Go to the Main menu by pressing if you are in the
Output mode.
Otherwise press repeatedly until you get to the
Main menu.
2. Go to the Parameters option by selecting PARAMETERS
on the menu with keys and , and pressing
.
3. Select the appropriate parameter group with keys
and . Here the bit pointer parameter 10.02 Ext1
start in1 is used as an example.
4. Press to select the appropriate parameter group.
Current value of each parameter is shown below its
name.
Select the parameter 10.02 Ext1 start in1 with keys
and .
5. Press .
The ACS850 control panel 29
1002 Ext1 start in1
DI6
PAR EDIT
CANCEL SEL00:00
[P.02.01.05]
LOC
SEL
1002 Ext1 start in1
DI6
1003 Ext1 start in2
1004 Ext2 start func
1005 Ext2 start in1
PARAMETERS
EXIT EDIT00:00
LOC
NEXT
1002 Ext1 start in1
P.02.01.00
PAR EDIT
CANCEL SAVE00:00
02 I/O values
LOC
NEXT
1002 Ext1 start in1
P.02.01.00
PAR EDIT
CANCEL SAVE00:00
0201 DI status
LOC
NEXT
1002 Ext1 start in1
P.02.01.01
PAR EDIT
CANCEL
SAVE
00:00
01 DI2
LOC
SAVE
1002 Ext1 start in1
P.02.01.01
1003 Ext1 start in2
1004 Ext2 start func
1005 Ext2 start in1
PARAMETERS
EXIT
EDIT00:00
LOC
Step Action Display
6. Specify a new value with keys and . The
text below the cursor shows the corresponding
parameter group, index and bit.
7. Press to accept any of the preselected values and
to return to the parameters list.
To freely define a bit of a binary parameter as the value,
choose Pointer and press . The parameter group,
index and bit will be shown.
Select the parameter group with and . The
text below the cursor displays the currently-selected
parameter group.
8. Press to select the parameter index.
Again, the text below the cursor reflects the current
setting.
9. Press to select the bit.
Again, the text below the cursor reflects the current
setting.
10. To save the new value for the pointer parameter, press
.
The new value is shown in the parameters list.
30 The ACS850 control panel
MENU
EXIT
PARAMETERS
ASSISTANTS
CHANGED PAR
EXIT ENTER
00:00
MAIN MENU 1LOC
ENTER
01 Actual values
02 I/O values
03 Control values
04 Appl values
06 Drive status
EXIT
SEL00:00
PAR GROUPS 01
LOC
10 Start/stop/dir
11 Start/stop mode
12 Operating mode
13 Analogue inputs
14 Digital I/O
EXIT
SEL
00:00
PAR GROUPS 14
LOC
SEL
1404 DIO1 Ton9901
1405 DIO1 Toff
1406 DIO2 conf
1407 DIO2 out src
P.06.02.03
PARAMETERS
EXIT EDIT00:00
LOC
EDIT
1407 DIO2 out src
PAR EDIT
Pointer
CANCEL NEXT00:00
LOC
1407 DIO2 out src
PAR EDIT
Const
CANCEL NEXT00:00
LOC
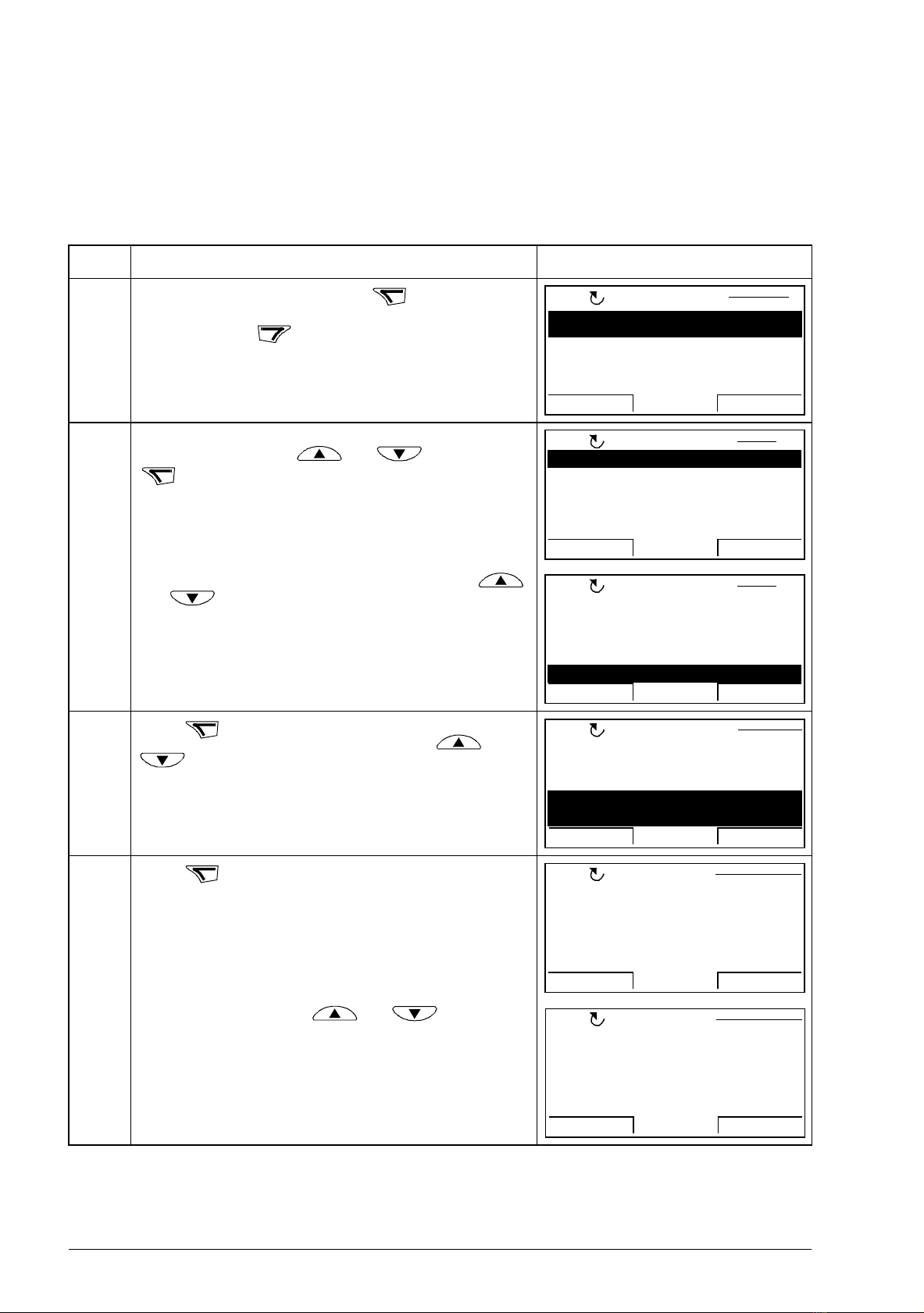
How to change the value of bit pointer parameter to fixed 0 (FALSE) or 1 (TRUE)
The bit pointer parameter can be fixed to constant value of 0 (FALSE) or 1 (TRUE).
When adjusting a bit pointer parameter on the control panel, CONST is selected in
order to fix the value to 0 (displayed as C.FALSE) or 1 (C.TRUE).
Step Action Display
1. Go to the Main menu by pressing if you are in the
Output mode.
Otherwise press repeatedly until you get to the
Main menu.
2. Go to the Parameters option by selecting PARAMETERS
on the menu with keys and , and pressing
.
Select the appropriate parameter group with keys
and . Here the bit pointer parameter 14.07 DIO2
out src is used as an example.
3. Press to select the appropriate parameter group.
Select the appropriate parameter with keys and
. Current value of each parameter is shown below
its name.
4. Press .
Select CONST with keys and .
 Loading...
Loading...