

Page 1

ACS850
Yazılım El Kitabı
ACS850 Standart Kontrol Programı
Page 2
İlgili el kitapları listesi
ACS850-04 el kitapları
Sürücü donanım el kitapları ve kılavuzları Kod (İngilizce) Kod (Türkçe)
ACS850-04 Drive Modules (0.37 to 45 kW) Hardware
Manual
ACS850-04 Drive Modules (0.37 to 45 kW) Quick
Installation Guide
ACS850-04 Drive Modules (55 to 200 kW, 60 to 200 hp)
Hardware Manual
ACS850-04 Drive Modules (55 to 200 kW, 60 to 200 hp)
Quick Installation Guide
ACS850-04 Drive Modules (200 to 500 kW, 250 to
600 hp) Hardware Manual
ACS850-04 Drive Modules (160 to 560 kW, 200 to
700 hp) Hardware Manual
Sürücü yazılım el kitapları ve kılavuzları
ACS850 Standard Control Program Firmware Manual 3AUA0000045497 3AUA0000054552
ACS850 Standard Control Program Quick Start-up
Guide
ACS850-04 drives with SynRM motors (option +N7502)
supplement
Seçenek el kitapları ve kılavuzları
Application programming for ACS850 and ACQ810
drives application guide
ATEX-certified Safe disconnection function for ACS850
drives (+Q971) application guide
Common DC configuration for ACS850-04 drives
application guide
Safe torque off function for ACSM1, ACS850 and
ACQ810 drives application guide
Manuals and quick guides for I/O extension modules,
fieldbus adapters, etc.
3AUA0000045496 3AUA0000054939
3AUA0000045495 3AUA0000045495
3AUA0000045487 3AUA0000071015
3AUA0000045488 3AUA0000045488
3AUA0000026234 3AUA0000068290
3AUA0000081249 3AUA0000097804
3AUA0000045498 3AUA0000045498
3AUA0000123521
3AUA0000078664
3AUA0000074343
3AUA0000073108
3AFE68929814
El kitaplarını ve diğer ürün belgelerini PDF formatında Internet'te bulabilirsiniz. Arka kapağın iç
kısmında Internet'teki Belge Kütüphanesi bölümüne bakın. Belge kütüphanesinde mevcut olmayan
el kitapları için, yerel ABB temsilcinizle bağlantıya geçin.
Page 3

Yazılım El Kitabı
ACS850 Standart Kontrol Programı
İçindekiler
3AUA0000054552 Rev I
TR
GEÇERLİLİK TARİHİ: 2014-01-22
2014 ABB Oy. Tüm Hakları Saklıdır.
Page 4

Page 5

İçindekiler 5
İçindekiler
1. Kılavuz hakkında
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Uyumluluk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Güvenlik talimatları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Okuyucu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
İçindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
İlgili kılavuzlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2. ACS850 kontrol paneli
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Özellikler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Kurulum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Mekanik kurulum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Elektrik kurulumu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Düzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Durum satırı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Çalışma bilgileri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Çalıştırma temel bilgileri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Görevler listesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Yardım ve panel sürümü – Herhangi bir mod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Temel işlemler – Herhangi bir mod . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Çıkış modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Parametreler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Asistanlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Değiştirilen Parametreler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Hata Kayıt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Zaman ve Tarih . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Parametre Yedekleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
I/O Ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Reference Edit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Sürücü Bilgi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Parametre Değişiklik Günlüğü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Safety
3. Kontrol konumları ve çalışma modları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Lokal kontrol – harici kontrol karşılaştırması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Lokal kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Harici kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Sürücü çalışma modları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Hız kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Moment kontrolü modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Özel kontrol modları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Page 6

6 İçindekiler
4. Program özellikleri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Sürücü konfigürasyonu ve programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Parametreler üzerinden programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Uygulama programlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Denetleme arabirimleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programlanabilir analog girişler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programlanabilir analog çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programlanabilir dijital girişler ve çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Programlanabilir I/O uzatmaları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Programlanabilir röle çıkışları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Fieldbus kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Sabit hızlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Kritik hızlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Hız kontrol cihazı ayarı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Enkoder desteği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Joglama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Skaler motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Kullanıcı tanımlı yük eğrisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Kullanıcı tanımlı U/f eğrisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Otomatik fazlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Akı frenleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Uygulama kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Uygulama makroları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Proses PID kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Mekanik fren kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Zamanlayıc
DC gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Yüksek gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Düşük gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Gerilim kontrolü ve açma limitleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Fren kıyıcısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Güvenlik ve korumalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Acil stop . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Termik motor koruma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Programlanabilir koruma fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Otomatik hata resetlemeleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Diyagnostik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Sinyal denetimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Bakım sayaçları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Enerji tasarrufu hesaplayıcı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Yük analizörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Diğer konular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Sürücü içeriğinin yedeklenmesi ve geri yüklenmesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Veri depolama parametreleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Sürücü - sürücü bağlantısı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
ılar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Page 7

İçindekiler 7
5. Uygulama makroları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Genel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Fabrikasyon makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
Fabrikasyon makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . 93
El/Oto makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
El/Oto makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
PID kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
PID kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . . . 97
Moment kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
Moment kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . 99
Sıralı kontrol makrosu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
Sıralı kontrol makrosu için varsayılan kontrol bağlantıları . . . . . . . . . . . . . . . . . . . . . . . . 102
6. Parametreler
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
Parametre grupları hakkında kısa bilgi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
Parametrelerin listesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
01 Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
02 I/O değerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
03 Kontrol değerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
04 Uygulama değerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
06 Sürücü durumu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
08 Alarmlar & hatalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
09 Sistem bilgisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
10 Start/stop/yön . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
11 Start/stop modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
12 Çalışma modu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
13 Analog girişleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
14 Dijital I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
15 Analog çıkışlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
16 Sistem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
19 Hız hesaplama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
20 Limitler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
21 Hız ref . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
22 Hız ref rampası . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
23 Hız kontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182
24 Moment referansı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 190
25 Kritik hızlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
26 Sabit hızlar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 192
27 Proses PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 194
30 Hata fonksiyonları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 199
31 Motor termik korum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 202
32 Otomatik reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
33 Denetim . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 209
34 Kull. Yük eğrisi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213
35 Proses değişkeni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 215
36 Zaman fonksiyonu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221
Page 8

8 İçindekiler
38 Akı referansı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 226
40 Motor kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 227
42 Mekanik fren kont. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 230
44 Bakım . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234
45 Enerji verimliliği . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 240
47 Gerilim kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
48 Fren kıyıcı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 241
49 Veri depolama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 242
50 Fieldbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 243
51 FBA ayarları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
52 FBA data giriş . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
53 FBA data çıkış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
56 Panel gösterimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 247
57 D2D haberleşme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 249
58 Gömülü Modbus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251
64 Yük analizörü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 255
74 Uygulama programı . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 258
90 Enc modül seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 259
91 Mutlak enc konfig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
92 Resolver konfg . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 263
93 Pulse enc konfig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264
94 Harici I-O konfig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
95 Donanım konfig . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265
97 Kull motor par . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 266
99 Start up data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 268
7. Ek parametre verileri
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Terimler ve kısaltmalar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273
Fieldbus eşdeğerleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
Fieldbus haberleşmesinde pointer parametre biçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
32 bit tamsayı değerli işaretler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
32 bit tamsayı bit işaretleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275
Parametre grupları 1…9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 277
Parametre grupları 10…99 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 281
8. Hata izleme
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
Güvenlik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
Resetleme nasıl yapılır . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 301
Hata tarihçesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
Sürücü tarafından oluşturulan alarm mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 303
Sürücü tarafından oluşturulan hata mesajları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 311
9. Dahili fieldbus (haberleşme ağı) arayüzü aracılığıyla kontrol
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325
Sisteme genel bir bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 326
Dahili fieldbus'ı sürücüye bağlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Page 9

İçindekiler 9
Dahili fieldbus arayüzünü ayarlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 328
Sürücü kontrol parametrelerini ayarlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 330
Dahili fieldbus arayüzünün temelleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332
Kontrol Word’u ve Durum Word’u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Veri giriş/çıkışları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
Kayıt adresleme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333
EFB haberleşme profilleri hakkında . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
ABB Sürücüleri klasik profili ve ABB Sürücüleri geliştirilmiş profili . . . . . . . . . . . . . . . . . . . . 336
ABB Sürücüleri profili için Kontrol Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336
ABB Sürücüleri profilleri için Durum Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 338
ABB Sürücüleri profili için durum geçiş şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 340
ABB Sürücüleri profili için referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 341
ABB Sürücüleri profili için gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342
ABB Sürücüleri klasik profili için Modbus kayıt adresleri . . . . . . . . . . . . . . . . . . . . . . . . . 343
ABB Sürücüleri geliştirilmiş profili için Modbus kayıt adresleri . . . . . . . . . . . . . . . . . . . . 344
DCU 16-bitli profil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
DCU 16-bitli profil için Kontrol ve Durum sözcükleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
DCU 16 bitli profil için Durum Word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
DCU 16-bitli profil için Durum geçiş şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
DCU 16 bitli profil için referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
DCU 16 bitli profil için gerçek sinyaller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
DCU 16 bitli profil için Modbus kayıt adresleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 346
DCU 32 bitli profil . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
DCU 32 bitli profil için Kontrol ve Durum sözcükleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
DCU 32 bitli profil için Durum word'ü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
DCU 32 bitli profil için Durum geçiş şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
DCU 32 bitli profil için referanslar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 348
DCU 32 bitli profil için gerçek sinyaller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349
DCU 32 bitli profil için Modbus kayıt adresleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 350
Modbus fonksiyon kodları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 351
Modbus harici kodları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352
10. Fieldbus adaptörü ile kontrol
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353
Sisteme genel bir bakış . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354
Bir fieldbus adaptör modülü yoluyla haberleşmeyi kurmak . . . . . . . . . . . . . . . . . . . . . . . . . . 355
Sürücü kontrol parametrelerini ayarlama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 357
Fieldbus adaptör arayüzünün temelleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
Kontrol Word’u ve Durum Word’u . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
Gerçek değerler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
FBA haberleşme profili . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
Fieldbus referansları . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 360
Durum şeması . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 361
11. Sürücü - sürücü bağlantısı
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
Genel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
Page 10
10 İçindekiler
Kablolama . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
Verisetleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 364
Mesajlaşma tipleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
Master noktadan noktaya mesajlaşma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 365
Uzaktan oku mesajlaşma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366
Follower noktadan noktaya mesajlaşma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 366
Standart çoklu yayın mesajlaşma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 367
Yayın mesajlaşma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
Zincirli çoklu yayın mesajlaşma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 370
12. Kontrol zinciri ve sürücü logic sistemi şemaları
Bu bölümün içindekiler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
Hız geri beslemesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 374
Hız referansı değiştirme ve rampa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
Hız hatası yönetimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376
Moment referansı değiştirme, çalışma modu seçimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 377
Proses PID . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 378
Sürücü start/stop mantığı – I/O ve D2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 379
Sürücü start/stop mantığı – Fieldbus arabirimleri . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
Doğrudan moment kontrolü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 381
Daha fazla bilgi 383
Ürün ve servis ile ilgili sorular . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
Ürün eğitimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
ABB Sürücü el kitapları hakkında geri bildirimde bulunulması . . . . . . . . . . . . . . . . . . . . . . . 383
Internet'teki Belge Kütüphanesi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383
Page 11
Kılavuz hakkında 11
1
Kılavuz hakkında
Bu bölümün içindekiler
Bu bölümde, kılavuzun içindekiler açıklanmaktadır. Bölüm ayrıca; uyumluluk,
güvenlik ve hedef kitle ile ilgili bilgiler içermektedir.
Uyumluluk
Bu kılavuz şunlarla uyumludur:
• ACS850 standart kontrol programının UIFI2700 ve daha sonraki sürümleri
• ACS850 senkron relüktans motor kontrol programı (opsiyon +N7502).
Güvenlik talimatları
Sürücüyle gelen tüm güvenlik talimatlarına uyun.
• Sürücünün montajını yapma, devreye alma ve kullanma işlemlerinden önce tüm
güvenlik talimatlarını okuyun. Tüm güvenlik talimatları Donanım Kılavuzunun
başında yer almaktadır.
• Fonksiyonun varsayılan değiştirmeden önce yazılım fonksiyonu özel uyarı ve
notlarını okuyunuz. Her fonksiyon için uyarı ve notlar bu kılavuzun kullanıcı
tarafından ayarlanabilir ilgili parametrelerini açıklayan bölümde verilmiştir.
Okuyucu
Bu kılavuzun okuyucusunun, standart elektrik kablo bağlantıları, elektronik
komponentler ve elektriksel semboller hakkında pratik bir ön bilgi sahibi olduğu
varsayılır.
Page 12
12 Kılavuz hakkında
İçindekiler
Kılavuz aşağıdaki bölümlerden oluşur:
• ACS850 kontrol paneli, kontrol panelinin kullanımı için açıklamalar ve talimatlar
sağlar.
• Kontrol konumları ve çalışma modları bölümünde sürücünün kontrol konumları ve
çalışma modları açıklanmaktadır.
• Program özellikleri bölümünde, ACS850 standart kontrol programı özelliklerinin
açıklamaları yer alır.
• Uygulama makroları bir bağlantı şemasıyla birlikte her makronun kısa bir
açıklamasını içerir.
• Parametreler bölümü, sürücünün parametrelerini açıklar.
• Ek parametre verileri, parametrelerle ilgili daha fazla bilgi içerir.
• Hata izleme alarm (uyarı) ve hata mesajlarını olası neden ve çözüm önerileri ile
birlikte listeler.
• Dahili fieldbus (haberleşme ağ
fieldbus arayüzü kullanılarak bir fieldbus ağı ile iletişim açıklanır.
• Fieldbus adaptörü ile kontrol bölümünde, isteğe bağlı fieldbus adaptör modülü
kullanılarak bir fieldbus ağı ile iletişim açıklanır.
• Sürücü - sürücü bağlantısı bölümünde sürücü-sürücü bağlantısı ile birbirine
bağlanmış sürücüler arasındaki iletişim anlatılmaktadır.
• Kontrol zinciri ve sürücü logic sistemi şemaları.
ı) arayüzü aracılığıyla kontrol bölümünde, dahili
İlgili kılavuzlar
Sürücüyle birlikte çok dilli Hızlı Devreye Alma Kılavuzu sağlanır.
İlgili kılavuzların tam listesi, ön kapağın iç kısmına basılmıştır.
Terimler ve kısaltmalar
Ter im/ kısaltma Tanımı
AI Analog giriş; analog giriş sinyalleri için arayüz
AO Analog çıkış; analog çıkış sinyalleri için arayüz
DC bağlantısı Doğrultucu ve çevirici arasındaki DC devresi
DI Dijital giriş; dijital giriş sinyalleri için arayüz
DO Dijital çıkış; dijital çıkış sinyalleri için arayüz
DTC Doğrudan moment kontrolü
EFB Dahili fieldbus
FBA Fieldbus adaptör
FEN-01 ACS850 için opsiyonel TTL enkoder arabirimi modülü
FEN-11 ACS850 için opsiyonel mutlak enkoder arabirimi modülü
FEN-21 ACS850 için opsiyonel resolver arabirimi modülü
FEN-31 ACS850 için opsiyonel HTL enkoder arabirimi modülü
Page 13
Kılavuz hakkında 13
Terim/kısaltma Tanımı
FIO-01 ACS850 için opsiyonel dijital I/O genişleme modülü
FIO-11 ACS850 için opsiyonel analog I/O genişleme modülü
FIO-21 ACS850 için opsiyonel analog/dijital I/O genişleme modülü
FCAN-0x ACS850 için opsiyonel CANopen adaptörü
FDNA-0x ACS850 için opsiyonel DeviceNet adaptörü
FECA-01 ACS850 için opsiyonel EtherCAT® adaptörü
FENA-0x ACS850 için opsiyonel Ethernet/IP adaptörü
FLON-0x ACS850 için opsiyonel L
ONWORKS
FPBA-0x ACS850 için opsiyonel PROFIBUS DP adaptörü
FSCA-0x ACS850 için opsiyonel Modbus adaptörü
HTL Üst eşik mantığı
ID run Motor tanımlama çalıştırması. Tanımlama çalıştırması sırasında sürücü,
optimum motor kontrolü için motor karakteristiklerini tanımlar.
IGBT Yalıtımlı geçit iki kutuplu transistörü; kolay kontrol edilebilmeleri ve
yüksek anahtarlama frekansları nedeniyle yaygın şekilde çeviricilerle
kullanılan gerilim kontrollü yarı iletken tip
I/O Giriş/Çıkış
JCU Sürücü modülünün kumanda ünitesi. JCU, güç ünitesinin üzerine monte
edilmiştir. Harici I/O kontrol sinyalleri JCU'ya ya da üzerine monte edilmiş
olan isteğe bağlı I/O uzatmalarına bağlanmıştır.
JMU Sürücü kumanda ünitesine eklenmiş olan bellek ünitesi
JPU Güç birimi; aşağıdaki tanıma bakın.
LSB En önemsiz bit
LSW En önemsiz word
MSB En önemli bit
MSW En önemli word
Parametre Sürücünün kullanıcı taraf
tarafından ölçülen veya hesaplanan sinyal
PI kontrolörü Oransal-integral kontrolör
PID kontrolörü Oransal-integral-türev kontrolör. Sürücü hız kontrolü PID algoritmasına
dayanır.
PLC Programlanabilir lojik kontrolör
Güç birimi Sürücü modülünün güç elektroniği ve bağlantılarını içerir. JCU güç
birimine bağlıdır.
PTC Pozitif sıcaklık katsayısı
RFG Rampalı Fonksiyon Jeneratörü
RO Röle çıkışı; dijital çıkış sinyali için arayüz. Bir röle ile uygulanır.
SSI Senkron seri arabirim
STO STO AKTİF
TTL Transistörler arası mantık
UIFI xxxx ACS850 sürücüsünün yazılımı
UPS Kesintisiz güç kaynağı; güç kesintisi esnasında çıkış gerilimini korumak
için pilli güç kaynağı ekipmanı
®
adaptörü
ından ayarlanabilir çalışma talimatı, veya sürücü
Page 14

14 Kılavuz hakkında
Page 15
ACS850 kontrol paneli 15
2
ACS850 kontrol paneli
Bu bölümün içindekiler
Bu bölümde, ACS850 kontrol panelinin özellikleri ve çalışması açıklanmaktadır.
Sürücüyü kontrol etmek, durum verilerini okumak ve parametreleri ayarlamak için
kontrol panelini kullanabilirsiniz.
Özellikler
• LCD ekranlı alfanümerik kontrol paneli
• kopyalama fonksiyonu – Parametreler, daha sonra başka sürücülere aktarmak
veya belirli bir sistemi yedeklemek amacıyla kontrol paneli belleğine
kopyalanabilir.
•koşullara duyarlı yardım
• gerçek zamanlı saat.
Page 16
16 ACS850 kontrol paneli
Kurulum
Mekanik kurulum
Montaj seçenekleri için sürücünün Donanım Kılavuzu 'na başvurun.
Kontrol panelini bir pano kapısına monte etme talimatları ACS-CP-U Kontrol Paneli
IP54 Montaj Platform Seti Kurulum Kılavuzu (3AUA0000049072 [İngilizce]) içinde
bulunmaktadır.
Elektrik kurulumu
Maksimum 3 metre uzunluğunda bir CAT5 düz ağ kablosu kullanın. Uygun kablolar
ABB’den temin edilebilir.
Sürücü üzerindeki kontrol paneli konektör konumu için bkz. sürücünün Donanım
Kılavuzu.
Page 17
Düzen
30.10Hz
LOC
DIR 12:45 MENU
400RPM
1200 RPM
12.4 A
405 dm3/s
3
4
5
67 8
9 10
30.00rpm
50 A
10 Hz
7 %10
.
0
.
49
.
LOC
DIR
MENU
00:00
1
2a
2b
2c
30.00rpm
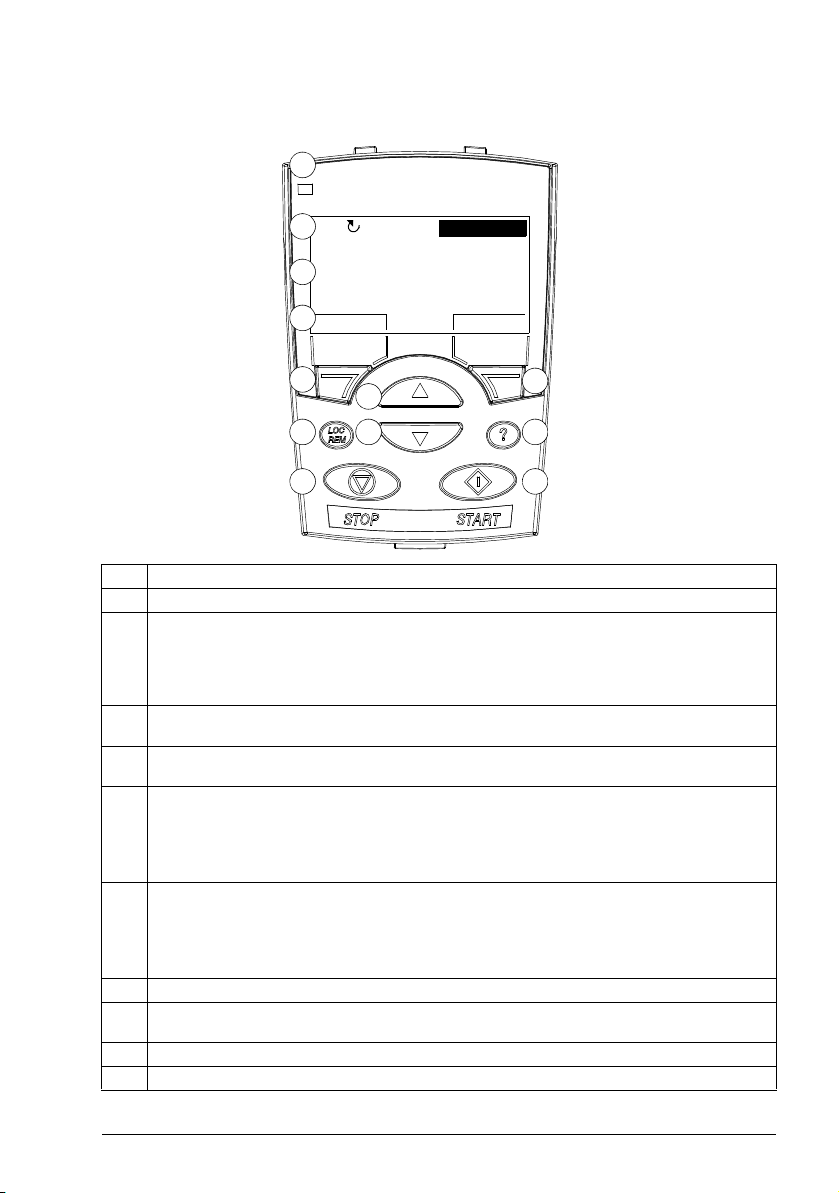
No. Kullanımı
1 Durum LED'i – Yeşil = normal çalışma; yeşil yanıp sönüyor = bir alarm etkin; kırmızı = bir hata etkin.
2 LCD ekran – Üç ana alana ayrılmıştır:
Durum satırı – çalışma moduna göre değişir, bkz. Durum satırı bölümü, sayfa 18.
Orta – değişken; genelde, sinyal ve parametre değerlerini, menüleri veya listeleri gösterir. Hataları ve
alarmları da gösterir.
Alt satır – iki fonksiyon butonunun akım fonksiyonunu ve etkinleştirilmişse saati gösterir.
3 Fonksiyon butonu 1 – Fonksiyon koşullara bağlıdır. LCD ekranın sol alt köşesindeki metin fonksiyonu
gösterir.
4 Fonksiyon butonu 2 – Fonksiyon koşullara bağlıdır. LCD ekranın sağ alt köşesindeki metin
fonksiyonu gösterir.
5 Yukarı –
LCD ekranın ortasında gösterilen menü veya listede yukarı doğru ilerlemek için kullanılır.
Bir parametre seçilmişse, değeri artırmak için kullanılır.
Sağ üst köşe vurgulanmış ise referans değerini artırır.
Tuşun aşağı doğru tutulması değerin daha hızlı şekilde değişmesine neden olur.
6Aşağı –
7 LOC/REM – Sürücü çalışma modunu lokal kontrolden uzaktan kumandaya değiştirir.
8Yardım – Tuşa basıldığında, koşullara duyarlı bilgileri gösterir. Gösterilen bilgiler, ekranın ortasındaki
9 STOP – Sürücüyü lokal kontrolde durdurur.
10 START – Sürücüyü lokal kontrolde başlatır.
LCD ekranın ortasında gösterilen menü veya listede aşağı doğru ilerlemek için kullanılır.
Bir parametre seçilmişse, değeri azaltmak için kullanılır.
Sağ üst köşe vurgulanmış ise referans de
Tuşun aşağı doğru tutulması değerin daha hızlı şekilde değişmesine neden olur.
alanda vurgulanan öğeyi açıklar.
ACS850 kontrol paneli 17
ğerini azaltır.
Page 18
18 ACS850 kontrol paneli
30.00rpmLOC
1 2 4
LOC ANA MENÜ 1
1 2 3 4
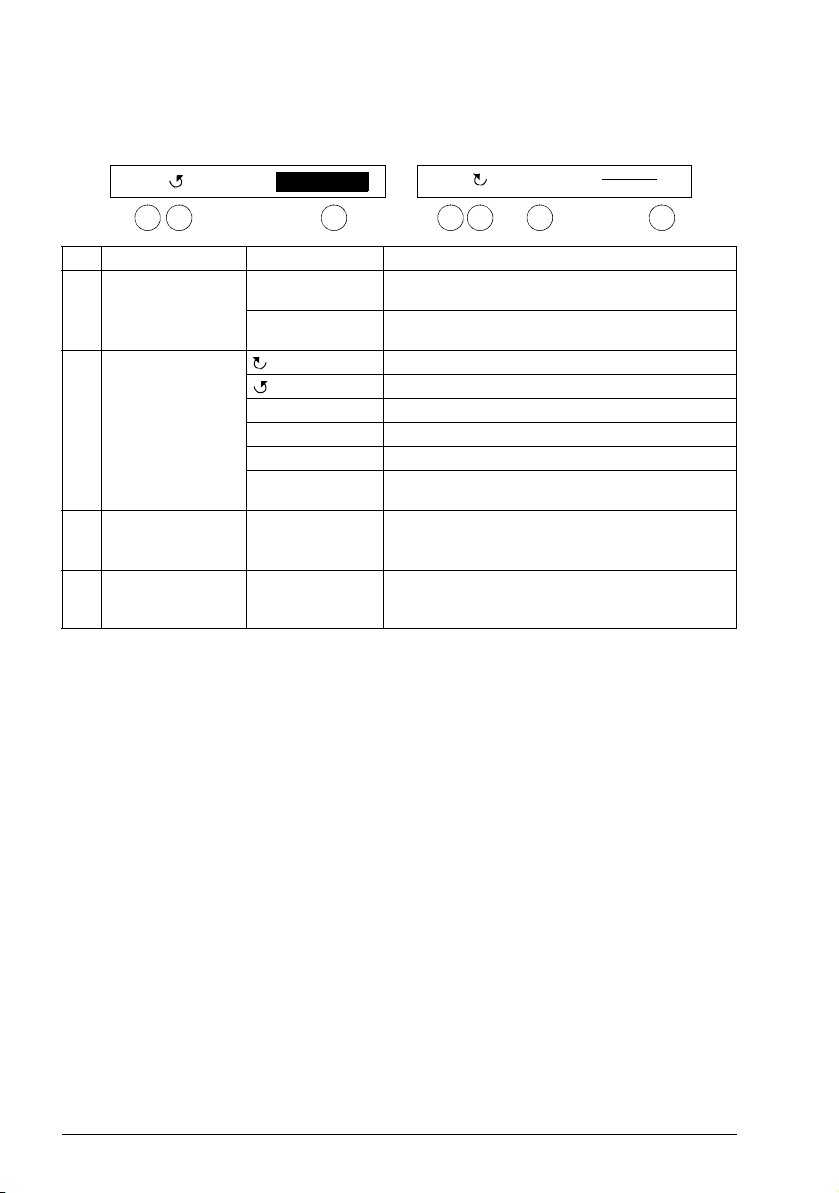
Durum satırı
LCD ekranın üst satırında sürücünün temel durum bilgileri gösterilir.
No. Saha Seçenekler Anlamı
1 Göstergede Kontrol
yeri
2Durum Şaft yönü ileri
3 Panel çalışma modu • Akım modun adı
4 Seçilen madde için
referans değer ya da
numara
LOC Sürücü kontrolü lokal, yani kontrol panelinde.
REM Sürücü kontrolü, sürücü I/O'ları ve fieldbus gibi
Dönen ok Sürücü referansta çalışır durumda.
Noktalı dönen ok Sürücü çalışır durumda ancak referansta değildir.
Sabit ok Sürücü durur.
Noktalı sabit ok Başlat komutu var ama motor, örn. start izni sinyali
uzaktandır.
Şaft yönü geri
olmadığından çalışmıyor.
• Görüntülenen liste ya da menünün adı
• Çalışma durumunun adı, örn. PAR YAZMA.
• Çıkış modunda referans değer
• Vurgulanan maddenin numarası, örn. mod, parametre
grubu ya da hata.
Page 19
ACS850 kontrol paneli 19
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER00:00
ANA MENÜ 1
LOC
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU
00:00
30.00rpm
Çalışma bilgileri
Çalıştırma temel bilgileri
Kontrol panelini menüler ve tuşlar yardımıyla çalıştırabilirsiniz. Tuşlar arasında, akım
işlevleri üstlerindeki göstergedeki metinle belirtilen iki adet içeriğe duyarlı program
tuşu bulunmaktadır.
Çalışma modu ya da parametre gibi bir seçeneği seçmek için, fonksiyon butonu 2'yi
kullanarak MENU durumuna geçin ve sonra da seçenek vurgulanana kadar ve
ok tuşları ile hareket edin ve ilgili program tuşuna basın. Sağ program tuşu
genellikle mod girmek, bir seçeneği onaylamak ya da değişiklikleri kaydetmek için
kullanılır. Sol program tuşu yapılan değişiklikleri iptal etmek ve önceki çalışma
düzeyine geri dönmek için kullanılır.
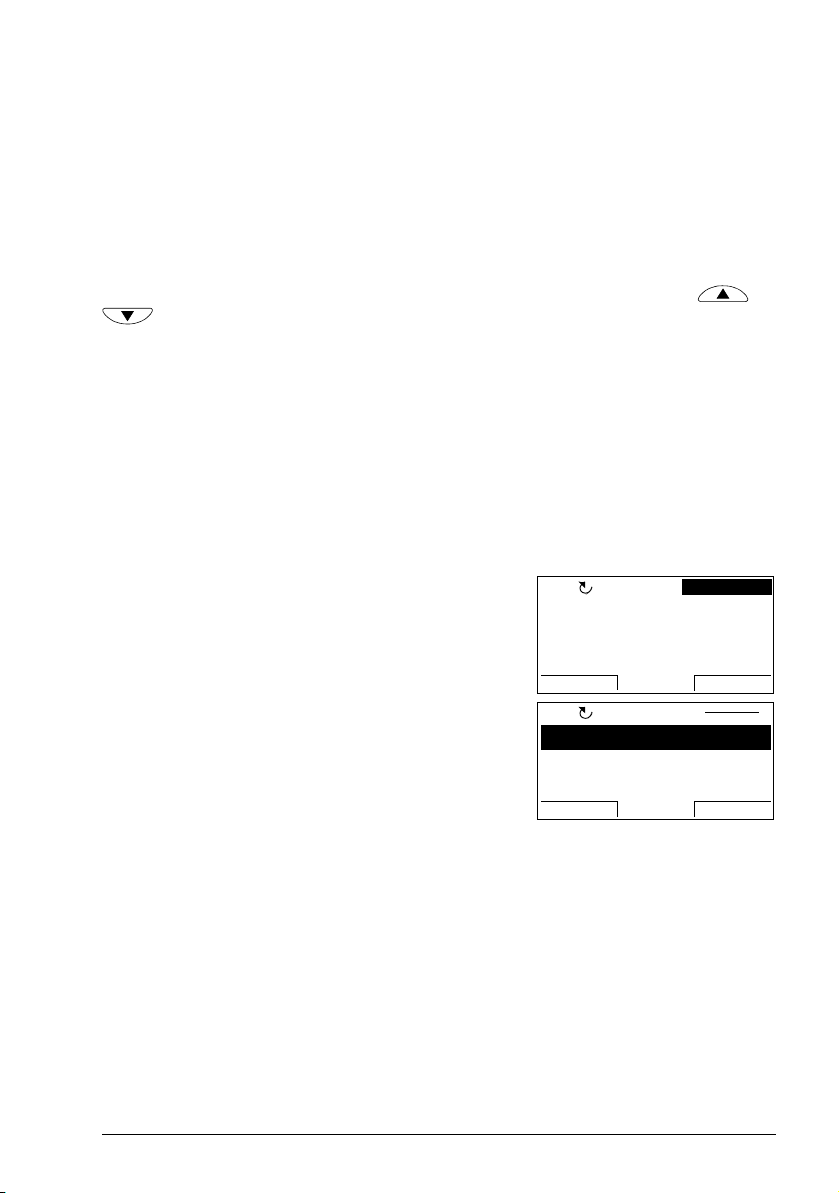
Kontrol Panelinin Ana menüsünde on seçenek bulunmaktadır: Parametreler,
Asistanlar, Değişen Par, Hata Kayıt, Zaman ve Tarih, Parametre Yedekleme, I/O
Ayarları, Referans Yazma, Sürücü Bilgi ve Parametre Değişiklikleri Günlüğü. Ayrıca,
kontrol panelinde varsay
bir hata ya da alarm meydana geldiğinde panel, hata veya alarmı gösteren Hata
moduna otomatik olarak geçer. Çıkış veya Hata modunda hatayı resetleyebilirsiniz.
Bu modlar ve seçeneklerin çalıştırılma yöntemi bu bölümde anlatılmaktadır.
İlk olarak panel çalıştırabileceğiniz, durdurabileceğiniz,
yönü değiştirebileceğiniz, lokal ve uzaktan kumanda
arasında geçiş yapabileceğiniz, referans değeri
değiştirebileceğiniz ve üç adete kadar gerçek değeri
izleyebileceğiniz Çıkış modundadır. Diğer görevleri
gerçekleştirmek için ilk olarak Ana menüye gidin ve
menüde uygun seçeneği seçin. Durum satırı (bkz.
bölüm Durum satırı, sayfa 18) akım menü, mod,
madde ya da durumun adını gösterir.
ılan olarak kullanılan bir Çıkış modu bulunmaktadır. Ayrıca,
Page 20
20 ACS850 kontrol paneli
Görevler listesi
Aşağıdaki tabloda genel görevler, bunları gerçekleştirebileceğiniz modlar, Ana
menüdeki seçeneklerin kısaltmaları ve söz konusu görevler hakkında ayrıntılı
bilgilerin sağlandığı sayfa numaraları verilmektedir.
Görev Mod/Ana menü
Yar dım alma Herhangi bir - 21
Panel sürümünü bulma Herhangi bir - 21
Sürücü start/stop Çıkış - 22
Lokal ve uzaktan kontrol arasında geçiş Herhangi bir - 22
Motor dönme yönünün değiştirilmesi Herhangi bir - 23
Çıkış modunda hız, frekans veya moment
referansının ayarlanması
Ekran kontrastını ayarlama Çıkış - 24
Parametre değerinin değiştirilmesi Parametreler PARAMETRELER 25
Değer işareti parametrelerinin değerinin değiştirilmesi Parametreler PARAMETRELER 26
Bit pointer parametrelerinin değerinin değiştirilmesi Parametreler PARAMETRELER 28
Bit pointer parametresinin değeri sabit 0 (YANLIŞ)
veya 1 (DOĞRU) olarak nasıl değiştirilir
İzlenen sinyallerin seçilmesi Parametreler PARAMETRELER 31
Asistanlarla yönlendirmeli görevlerin (ilgili parametre
setinin spesifikasyonları) gerçekleştirilmesi
Değiştirilen parametrelerin görüntülenmesi ve
düzenlenmesi
Hataları görüntüleme Hata Kayıt HATA KAYIT 35
Hataların ve alarmların resetlenmesi Hata Kayıt HATA KAYIT 36
Saati görüntüleme/gizleme, tarih ve saat formatlarını
değiştirme, saati ayarlama ve gün ışığından
yararlanma değişiklerinde saatin otomatik olarak
ayarlanmasını devreye alma/devre dışı bırakma
Parametrelerin sürücüden kontrol paneline
kopyalanması
Parametrelerin kontrol panelinden sürücüye geri
yüklenmesi
Yedekleme bilgilerini görüntüleme Parametre
I/O terminalleriyle ilişkili olarak parametre ayarlarını
düzenleme ve değiştirme
Referans değeri nasıl düzenlenir Reference Edit REF YAZMA 49
Sürücü bilgileri nasıl görüntülenir Sürücü Bilgi SÜRÜCÜ BİLGİ 50
Yak ın zamanda değiştirilen parametrelerin
görüntülenmesi ve düzenlenmesi
* Ana menü seçenekleri kontrol panelinde gösterilir.
seçeneği
Çıkış - 23
Parametreler PARAMETRELER 30
Asistanlar ASİSTANLAR 32
Değiştirilen
Parametreler
Zaman ve Tarih ZAMAN ve TARİH 37
Parametre
Yedekleme
Parametre
Yedekleme
Yedekleme
I/O Ayarları I/O AYARLARI 47
Parametre Değişiklik
Günlüğü
Ana menü
seçeneklerinin
kısaltmaları*
DEĞİŞEN PAR 33
PAR YEDEKLE 39
PAR YEDEKLE 39
PAR YEDEKLE 45
PAR DE ĞŞ LOG 51
Sayfa
Page 21
Yardım ve panel sürümü – Herhangi bir mod
?
ZAMAN FORMATI
TARİH FORMATI
ZAMANI GİR
TARİHİ GİR
GÜNIŞIĞI TASARRUFU
ZAMAN ve TARİH
6
ÇIKIŞ SEL
00:00
LOC
ÇIKIŞ
00:00
Gün ışığı
tasarrufundan
yararlanmak için
saatin otomatik olarak
YARDIM
LOC
ÇIKIŞ
00:00
Gün ışığından
yararlanma
değişiklerinde saatin
otomatik olarak
ayarlanmasını devreye
YARDIM
LOC
ÇIKIŞ
ZAMAN FORMATI
TARİH FORMATI
ZAMANI GİR
TARİHİ GİR
GÜNIŞIĞI TASARRUFU
ZAMAN ve TARİH
6
ÇIKIŞ SEL
00:00
LOC
?
?
Panel SW: x.xx
Rom CRC: xxxxxxxxxx
Flash Rev: x.xx
xxxxxxxxxxxxxxxxxxxxx
xxxxxxxxxxxxxxxxxxxxx
PANEL VERSION INFO
Yardım alma
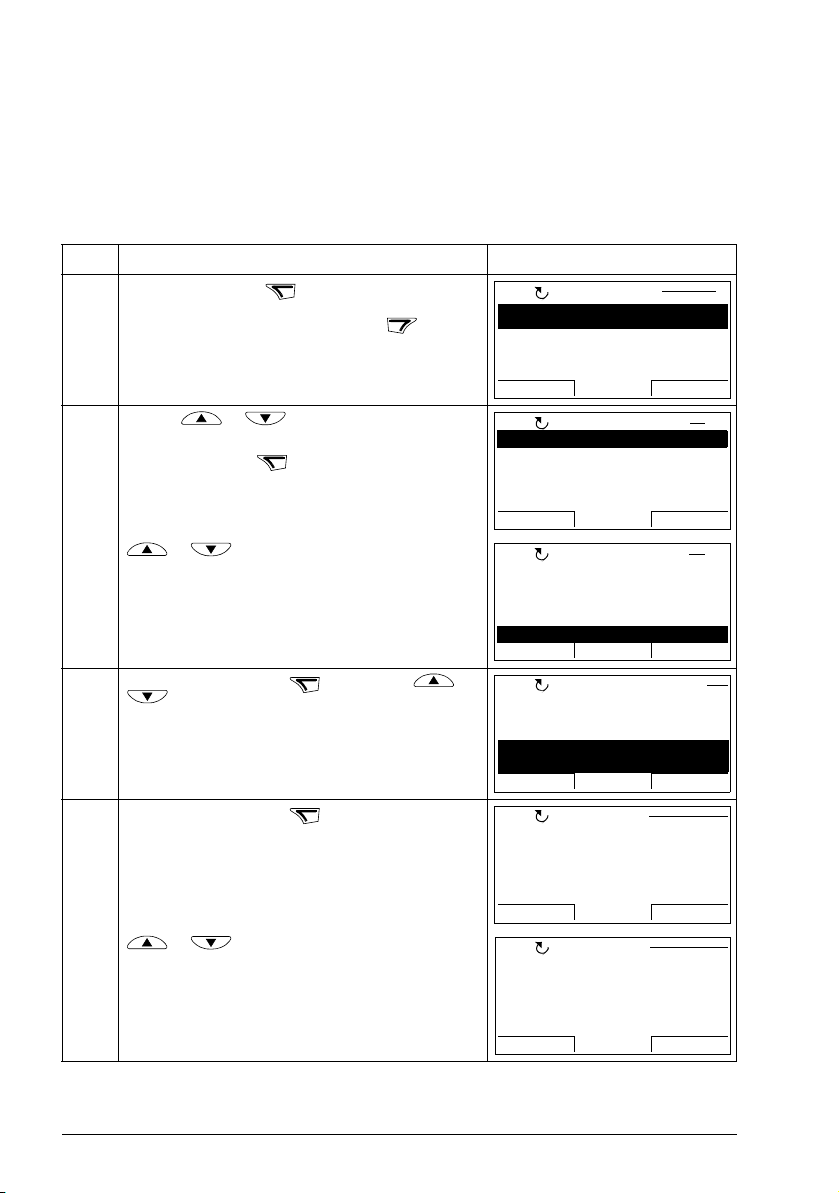
Adım Eylem Ekran
1. Vurgulanmış olan madde ile ilgili içeriğe duyarlı yardım
metinlerini görüntülemek için tuşuna basın.
Eğer madde ile ilgili yardım metni bulunuyorsa, ekranda
görüntülenir.
2. Metnin tamamı görüntülenmiyorsa, ve
tuşları ile satırları kaydırın.
ACS850 kontrol paneli 21
3. Metni okuduktan sonra önceki ekrana dönmek için, bas
.
Panel sürümünü bulma
Adım Eylem Ekran
1. Eğer güç açıksa kapatın.
- Panel kablosu kolay bir şekilde çıkarılamıyorsa panel
kablosunu kontrol panelinden çıkarın VEYA
- panel kablosu kolay bir şekilde çıkarılamıyorsa kontrol
kartını veya sürücüyü kapatın.
2. Gücü açarken ve bilgileri okurken tuşunu basılı
tutun. Ekranda aşağıdaki panel bilgileri görüntülenir:
Panel SW: Panel yazıl
ROM CRC: Panel ROM kontrol değeri
Flash Rev: Flash içeriği versiyonu
Flash içeriği yorumu.
tuşunu bıraktığınızda, panel Çıkış moduna geçer.
ım sürümü
Page 22
22 ACS850 kontrol paneli
LOC
REM
00:00
Lokal kontrol
moduna geçiş.
MESAJ
LOC
LOC
REM
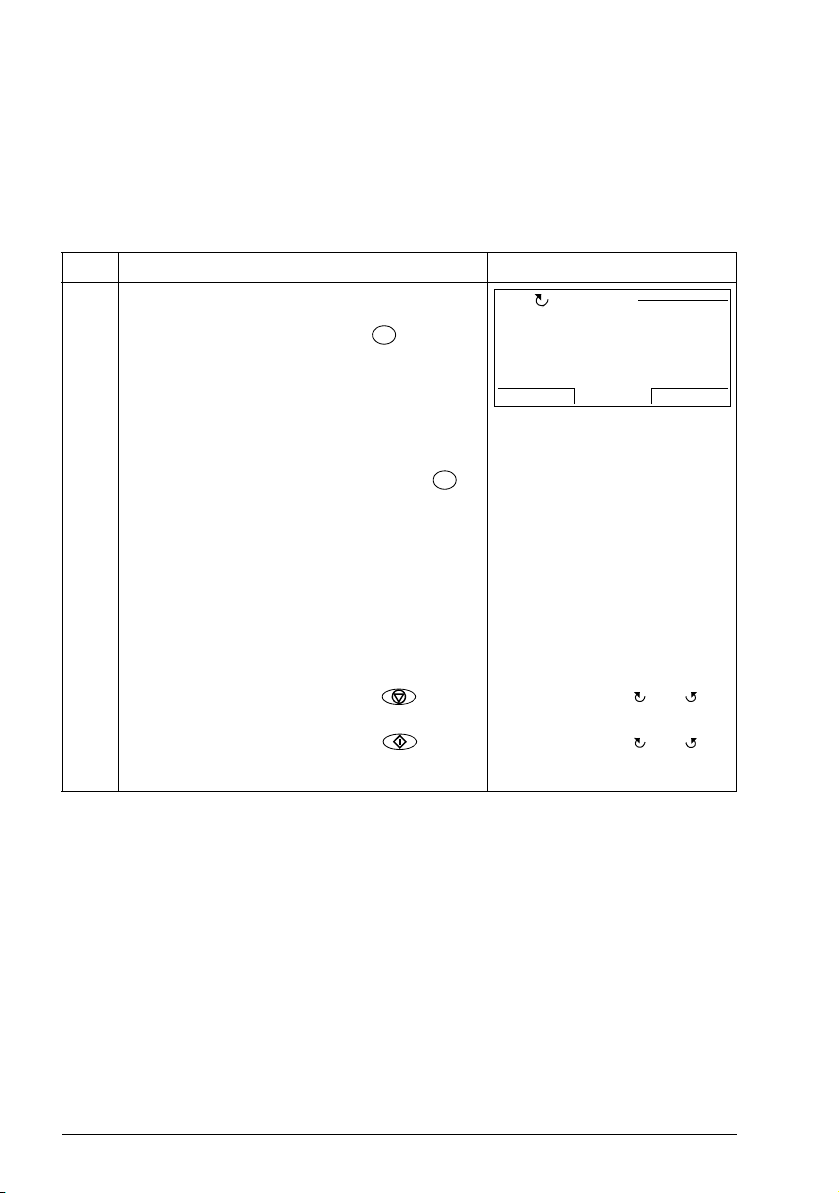
Temel işlemler – Herhangi bir mod
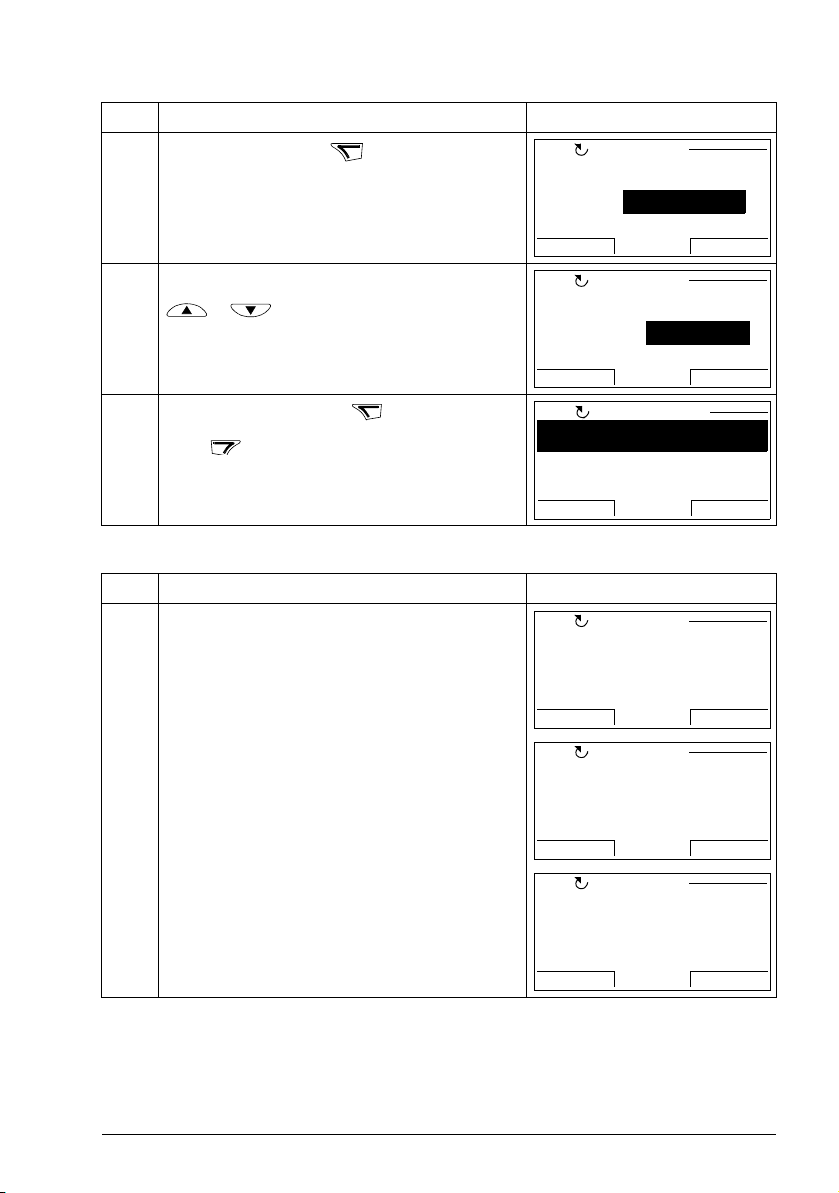
Start/stop ve lokal/uzaktan kontroller arasında geçiş
İstediğiniz mod içinde start/stop edebilir ve lokal ve uzaktan modları arasında geçiş
yapabilirsiniz. Kontrol panelini kullanarak sürücüyü start veya stop etmek için
sürücünün lokal kontrolde olması gerekir.
Adım Eylem Ekran
1. Uzaktan kontrol (durum satırında REM gösterilmektedir)
ve lokal kontrol (durum satırında LOC gösterilmektedir)
arasında geçiş yapmak için, tuşa basın .
Not: Lokal kontrole geçiş, 16.01 Lokal kilit parametresi ile
engellenebilir.
Sürücü ilk kez açıldığında uzaktan kontroldedir (REM) ve
sürücünün I/O terminalleri ile kontrol edilir. Lokal kontrol
(LOC) moduna geçmek ve sürücülü kontrol panelini
kullanarak kontrol etmek için aşağıdakilere basın .
Sonuç, tuşa ne kadar süre boyunca bastığınıza göre
değişir:
Tuşu hemen bırakırsanız (ekranda “Lokal kontrol
moduna geçiliyor” ifadesi yanıp söner) sürücü durur.
Kontrol referansını sayfa 23'de anlatılan şekilde
ayarlayın.
“Çalıştırmaya Devam” metni görüntülenene kadar tuşa
basılı tutarsanız sürücü eskisi gibi çal
eder. Sürücü, çalışma/durma durumu ve referans için
akım uzaktan kumanda değerlerini kopyalar ve bunları ilk
lokal kontrol ayarları olarak kullanır.
Lokal kontrolde sürücüyü durdurmak için tuşuna
basın.
Lokal kontrolde sürücüyü çalıştırmak için tuşuna
basın.
ışmaya devam
Durum satırındaki ok ( veya )
dönmeyi durdurur.
Durum satırındaki ok ( veya )
dönmeye başlar. Sürücü set
noktasına ulaşana kadar noktalıdır.
Page 23
ACS850 kontrol paneli 23
ÇIKIŞ
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
ÇIKIŞ
50 A
10 Hz
7 %10.
0.
49.
REM
DIR
MENU
00:00
30.00rpm
LOC
REM
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
DIR
ÇIKIŞ
50 A
10 Hz
7 %10.
0.
49.
REM
DIR
MENU00:00
30.00rpm
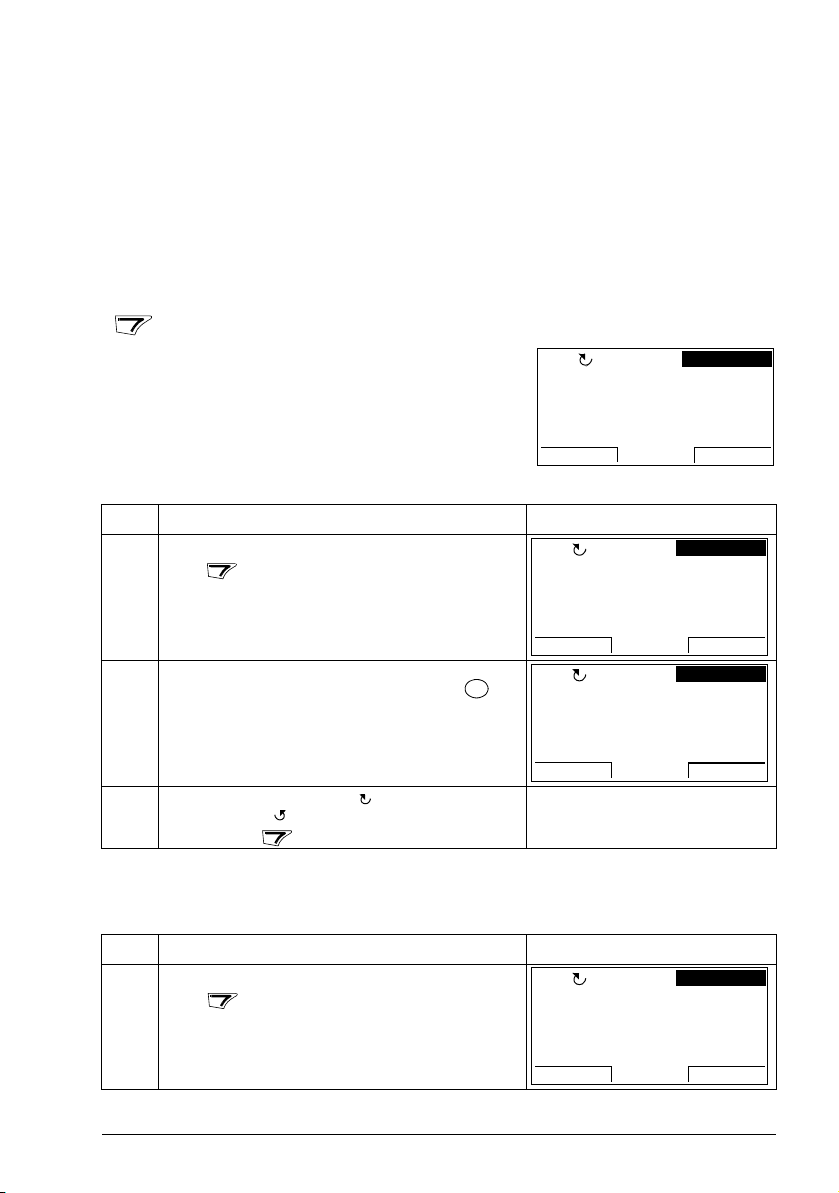
Çıkış modu
Çıkış modunda aşağıdakileri gerçekleştirebilirsiniz:
• üç adete kadar sinyalin gerçek değerini izleme
• motor dönme yönünü değiştirme
•hız, frekans veya moment referansını ayarlama
• ekran kontrastını ayarlama
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
tuşuna arka arkaya basarak Çıkış moduna geçebilirsiniz.
Ekranın sağ köşesinde referans değeri görüntülenir.
Orta kısım üç adete kadar sinyal değerini ya da
çubuk grafiği görüntüleyecek şekilde konfigüre
edilebilir; izlenen sinyallerin seçilmesi ve
değiştirilmesi ile ilgili talimatlar için bkz. sayfa 31.
Motor dönme yönünün değiştirilmesi
Adım Eylem Ekran
1. Eğer Çıkış modunda değilseniz, Çıkış moduna geçene
kadar tuşuna basın.
2. Sürücü, uzaktan kontroldeyse (durum satırında REM
gösterilir), lokal kontrole geçmek için tuşa basın .
Ekranda mod değiştirilmesi ile ilgili kısa bir mesaj
görüntülenir ve Çıkış moduna dönülür.
3. Yönü ileriden (durum satırında görüntülenir) geriye
(durum satırında görüntülenir) almak ya da tam tersi
için tuşa basın .
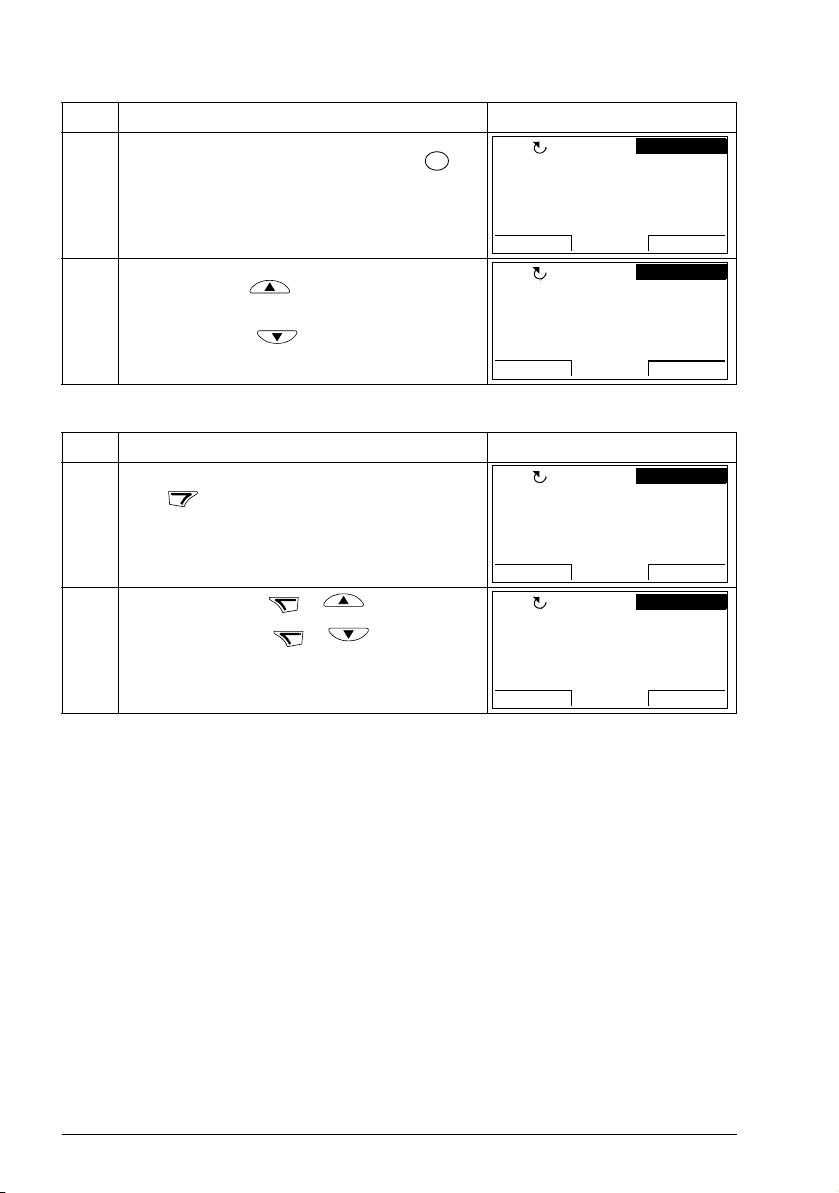
Çıkış modunda hız, frekans veya moment referansının ayarlanması
Ayrı
ca, bkz. Reference Edit bölümü, sayfa 49.
Adım Eylem Ekran
1. Eğer Çıkış modunda değilseniz, Çıkış moduna geçene
kadar tuşuna basın.
Page 24
24 ACS850 kontrol paneli
LOC
REM
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU
00:00
30.00rpm
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
31.00rpm
ÇIKIŞ
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU
00:00
30.00rpm
MENU
MENU
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENU00:00
30.00rpm
Adım Eylem Ekran
2. Sürücü, uzaktan kontroldeyse (durum satırında REM
gösterilir), lokal kontrole geçmek için tuşa basın .
Ekranda mod değiştirilmesi ile ilgili kısa bir mesaj
görüntülenir ve Çıkış moduna dönülür.
3. Ekranın sağ üst köşesinde görüntülenen vurgulanan
değeri artırmak için tuşuna basın. Değer hemen
değişir. Sürücünün kalıcı belleğinde saklanır ve
kapatıldığında otomatik olarak geri yüklenir.
Değeri azaltmak için tuşuna basın.
Ekran kontrastını ayarlama
Adım Eylem Ekran
1. Eğer Çıkış modunda değilseniz, Çıkış moduna geçene
kadar tuşuna basın.
2. Kontrastı artırmak için ve tuşlarına aynı
anda basın.
Kontrastı azaltmak için ve tuşlarına aynı
anda basın.
Page 25
ACS850 kontrol paneli 25
MENU
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER
00:00
ANA MENÜ 1
LOC
ENTER
01 Gerçek değerler
02 I/O değerleri
03 Kontrol değerleri
04 Uygulama değerleri
06 Sürücü durumu
ÇIKIŞ
SEL
00:00
PAR GRUPLAR 01
LOC
99 Start-up data
01 Gerçek değerler
02 I/O değerleri
03 Kontrol değerleri
04 Uygulama değerleri
ÇIKIŞ
SEL00:00
PAR GRUPLAR 99
LOC
SEL
9901 Dil
English
9904 Motor tipi
9905 Motor kntrl mod
9906 Mot nom akimi
PARAMETREL
ÇIKIŞ
EDIT00:00
LOC
9901 Dil
9904 Motor tipi
9905 Motor kntrl mod
9906 Mot nom akimi
0.0 A
PARAMETRELER
ÇIKIŞ
EDIT
00:00
LOC
EDIT
9906 Mot nom akımı
PAR YAZ
0.0 A
İptal KAYDET
00:00
LOC
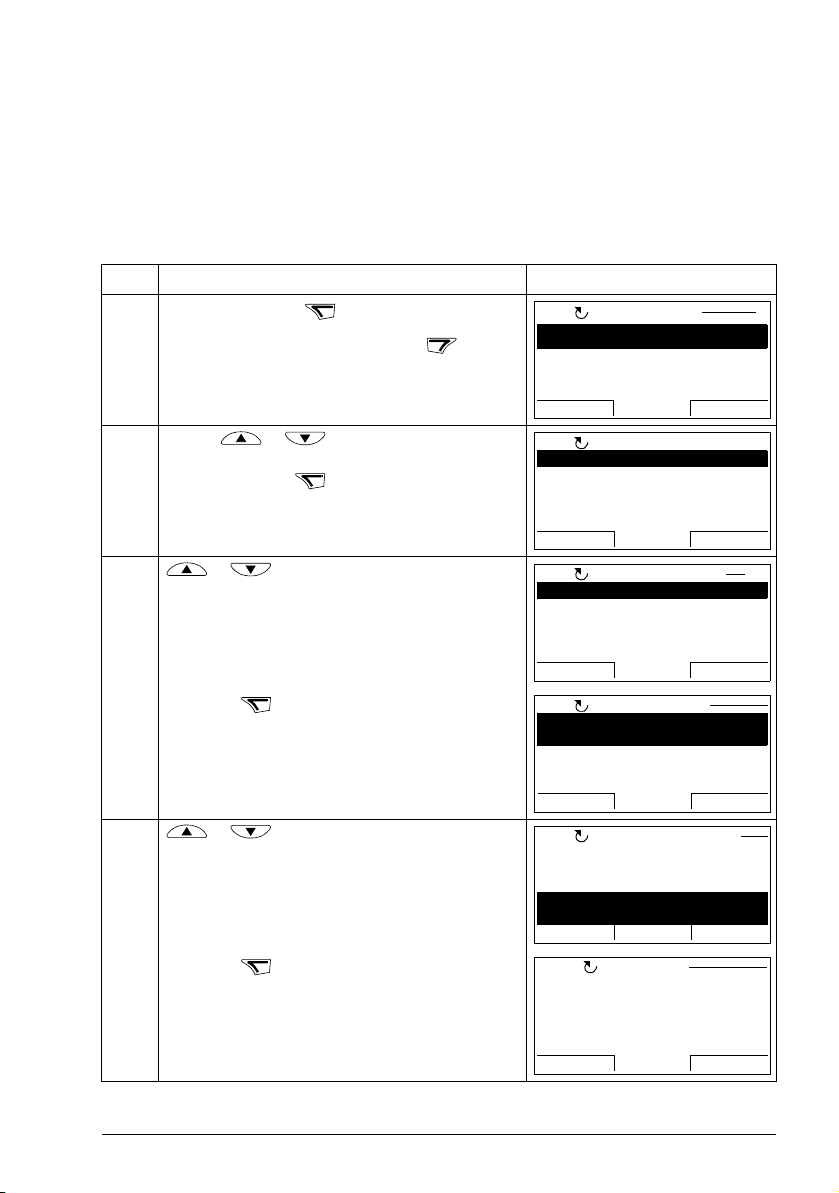
Parametreler
Parametreler seçeneğinde aşağıdakileri gerçekleştirebilirsiniz:
• parametre değerlerini görüntüleme ve değiştirme
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
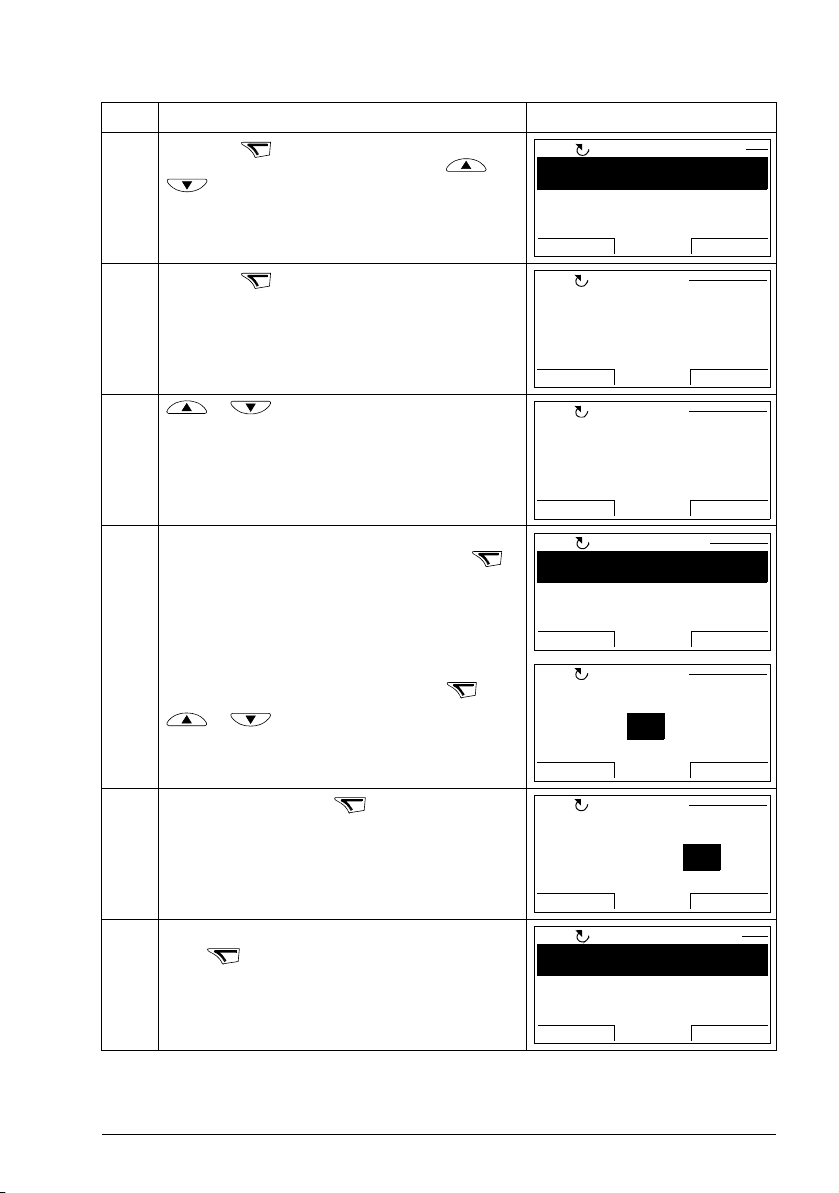
Parametre seçme ve değerini değiştirme
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşlarına basarak
PARAMETRELER'i seçin ve Parametreler seçeneğine
geçin, ve tuşa basın .
3. ve tuşlarını kullanarak uygun parametre
grubunu seçin.
Tuşa basın .
4. ve tuşlarını kullanarak uygun parametreyi
seçin. Akım parametre değeri, seçilen parametrenin
altında görüntülenir. Burada 99.06 Mot nom akımı
parametresi, bir örnek olarak kullanılmıştır.
Tuşa basın .
Page 26
26 ACS850 kontrol paneli
9906 Mot nom akımı
PAR YAZ
3.5 A
İptal KAYDET
00:00
LOC
KAYDET
İptal
9906 Mot nom akımı
3.5 A
9907 Mot nom volt
9908 Mot nom fre
9909 Mot nom hızı
PARAMETRELER
ÇIKIŞ
EDIT
00:00
LOC
MENU
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER
00:00
ANA MENÜ 1
LOC
ENTER
01 Gerçek değerler
02 I/O değerleri
03 Kontrol değerleri
04 Uygulama değerleri
06 Sürücü durumu
ÇIKIŞ
SEL
00:00
PAR GRUPLAR 01
LOC
15 Analog çıkışlar
16 Sistem
19 Hız hesaplama
20 Limitler
21 Hız ref
ÇIKIŞ
SEL00:00
PAR GRUPLAR 21
LOC
Adım Eylem Ekran
5. ve tuşlarını kullanarak parametre için yeni
bir değer belirleyin.
Ok tuşuna bir kez basıldığında değer artar ya da azalır.
Tuşa bir süre basılması, ilk başta imleç sola doğru bir
hareket edene kadar akım basamağı değiştirir. Bu, tuş
serbest bırakılana kadar tekrarlanır.
Tuş serbest bırakıldıktan sonra akım basamağın adım
adım ayarlanması mümkün olur. Bir süre boyunca hiçbir
tuşa basılmazsa imleç, her seferinde sağa doğru bir
hareket eder.
İki tuşa da aynı anda basıldığında görüntülenen değer,
varsayılan de
6. Yeni değeri kaydetmek için tuşa basın .
Yeni değeri iptal etmek ve orijinali saklamak için tuşa
basın .
ğerle değiştirilir.
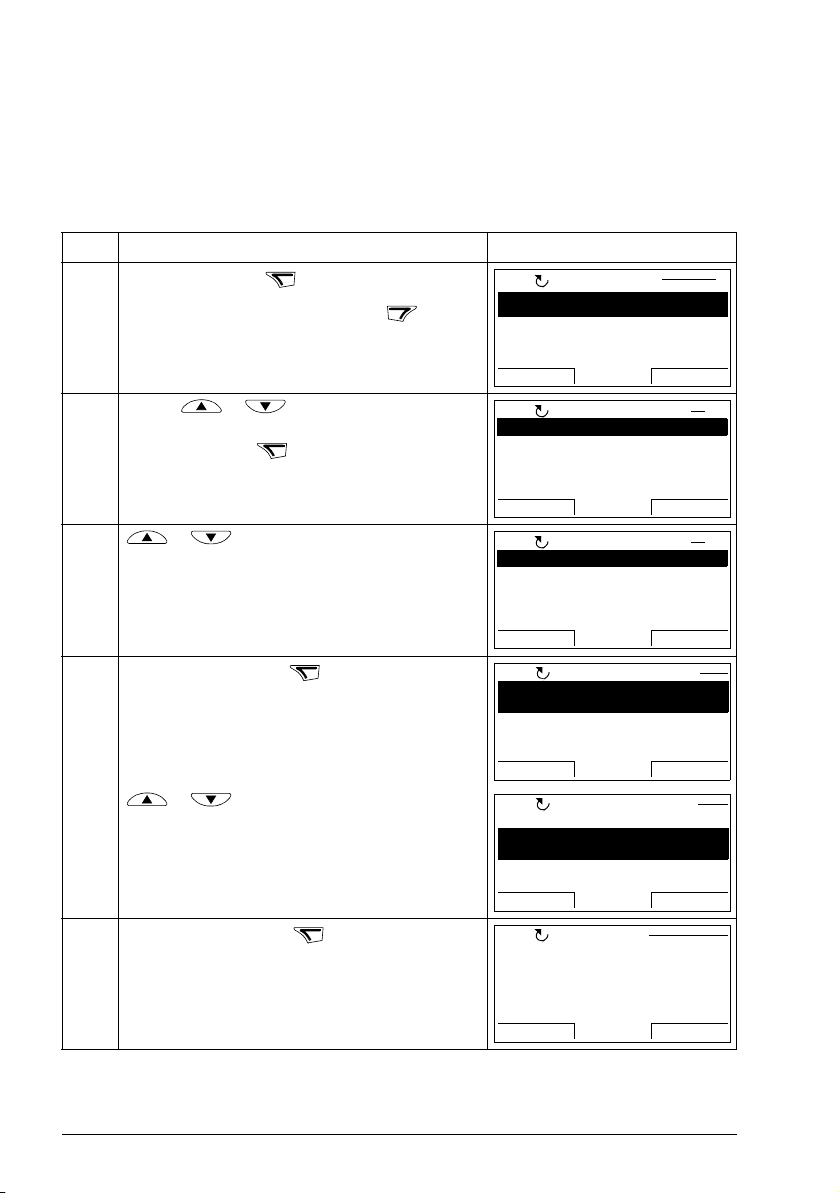
Değer işareti parametrelerinin değerinin değiştirilmesi
Yukarıda gösterilen parametrelere ek olarak iki tür pointer parametresi
bulunmaktadır; değer işareti parametreleri ve bit işareti parametreleri. Değer işaret
parametresi, bir başka parametrenin değerini işaret eder.
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşlarına basarak
PARAMETRELER'i seçin ve Parametreler seçeneğine
geçin, ve tuşa basın .
3. ve tuşlarını kullanarak uygun parametre
grubunu seçin. Burada değer işareti parametresi 21.01
Hız ref1 sçm bir örnek olarak kullanılmıştır.
Page 27
Adım Eylem Ekran
SEL
2101 Hız ref1 sçm
AI2 skala
2102 Hız ref2 sçm
2103 Hız ref1 fonk
2104 Hız ref1/2 fonk
PARAMETRELER
ÇIKIŞ
EDIT00:00
LOC
EDIT
2101 Hız ref1 sçm
AI1 skala
PAR YAZ
İptal
SEL00:00
[P.02.05]
LOC
2101 Hız ref1 sçm
FBA ref1
PAR YAZ
İptal
SEL
00:00
[P.02.26]
LOC
SEL
2101 Hız ref1 sçm
FBA ref1
2102 Hız ef2 sçm
2103 Hız ref1 fonk
2104 Hız ref1/2 fonk
PARAMETREL
ÇIKIŞ
YAZ00:00
LOC
NEXT
2101 Hız ref1 sçm
PAR YAZ
İPTAL
KAYDET00:00
02 I/O değerleri
LOC
P.02.05
SONRAKİ
2101 Hız ref1 sçm
PAR YAZ
İPTAL
KAYDET
00:00
0207 AI2 skala
LOC
P.02.07
KAYDET
2101 Hız ref1 sçm
AI2 skala
2102 Hız ref2 sçm
2103 Hız ref1 fonk
2104 Hız ref1/2 fonk
PARAMETRELER
ÇIKIŞ
YAZ00:00
LOC
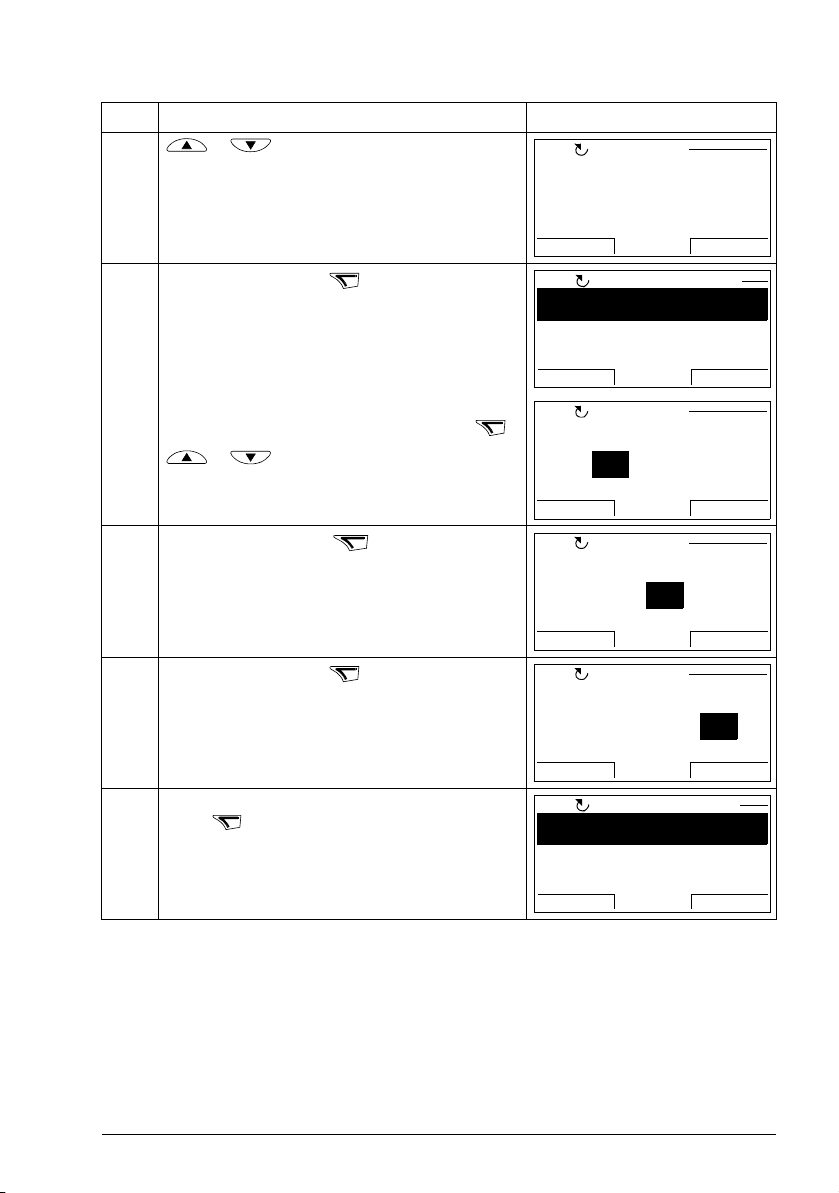
4. Tuşa basın tuşuna uygun parametre grubunu
seçmek için. Uygun parametreyi seçmek için ve
tuşlarını kullanın; her parametrenin akım değeri
alt kısımda gösterilir.
5. Tuşa basın . Geçerli işaret parametresinin akım
değeri ve ayrıca işaret ettiği parametre görüntülenir.
6. ve tuşlarını kullanarak yeni bir değer
belirleyin. Değer işareti parametresinin işaret ettiği
parametre uygun şekilde değişir.
7. Önceden seçilmiş değerlerden herhangi birini kabul
etmek ve parametreler listesine geri dönmek için
tuşuna basın.
Yeni değer parametre listesinde gösterilir.
ACS850 kontrol paneli 27
Bir analog sinyali değer olarak serbest şekilde
tanımlamak için Pointer'i seçin ve tuşa basın .
Parametre grubu ve dizin gösterilecektir.
seçin. İmleç altındaki metin seçili olan parametre
grubunu görüntüler.
8. Ana menüye dönmek için tuşuna basın.
İmlecin altındaki metin geçerli ayarı gösterir.
9. Pointer parametresinin yeni değerini kaydetmek için tuşa
basın .
Yeni değer parametre listesinde gösterilir.
ve tuşlarını
kullanarak parametre grubunu
Page 28
28 ACS850 kontrol paneli
MENÜ
ÇIKIŞ
PARAMETRELER
ASISTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR00:00
ANA MENÜ 1
LOC
GİR
01 Gerçek değerler
02 I/O değerleri
03 Kontrol değerleri
04 Uygulama değerleri
06 Sürücü durumu
ÇIKIŞ
SEÇ00:00
PAR GRUPLAR 01
LOC
10 Start/stop/yön
11 Start/stop modu
12 Çalışma modu
13 Analog girişler
14 Dijital I/O
ÇIKIŞ
SEÇ
00:00
PAR GRUPLAR 10
LOC
SEL
1001 Har1 start fonk
In1
1002 Har1 start grş1
1003 Har1 start grş2
1004 Har2 start fonk
PARAMETRELER
ÇIKIŞ
YAZ
00:00
LOC
1001 Har1 start fonk
1002 Har1 start grş1
DI1
1003 Har1 start grş2
1004 Har2 start fonk
PARAMETRELER
ÇIKIŞ
YAZ
00:00
LOC
YAZ
1002 Har1 start grş1
DI1
PAR YAZ
İPTAL
SEÇ
00:00
[P.02.01.00]
LOC
Bit pointer parametrelerinin değerinin değiştirilmesi
Bit pointer parametresi, bir başka sinyal içindeki bitin değerini işaret eder veya 0
(YANLIŞ) ya da 1 (DOĞRU) olarak sabitlenebilir. Sonraki seçenek için bkz. sayfa 30.
Bir bit pointer parametresi, 32 bit sinyaldeki bir bitin bit değerini (0 veya 1) gösterir.
Soldaki ilk bitin bit numarası 31'dir ve sağdaki ilk bitin bit numarası 0'dır.
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşlarına basarak
PARAMETRELER'i seçin ve Parametreler seçeneğine
geçin, ve tuşa basın .
3. ve tuşlarını kullanarak uygun parametre
grubunu seçin. Burada bit pointer parametresi 10.02
Har1 start grş1 bir örnek olarak kullanılmıştır.
4. Ana menüye dönmek için tuşuna basın. Her
parametrenin geçerli akım değerini, adının altında
gösterilir.
ve tuşlarını kullanarak 10.02 Har1 start
grş1 parametresini seçin.
5. Ana menüye dönmek için .
Page 29
Adım Eylem Ekran
1002 Har1 start grş1
DI6
PAR YAZ
İPTAL
SEÇ
00:00
[P.02.01.05]
LOC
SEL
1002 Har1 start grş1
DI6
1003 Har1 start grş2
1004 Har2 start fonk
1005 Har2 start grş1
PARAMETRELER
ÇIKIŞ
YAZ00:00
LOC
NEXT
1002 Har1 start grş1
P.02.01.00
PAR YAZ
İPTAL
KAYDET
00:00
02 I/O değerleri
LOC
SONRAKİ
1002 Har1 start grş1
P.02.01.00
PAR YAZ
İPTAL
KAYDET
00:00
0201 DI durumu
LOC
NEXT
1002 Har1 start grş1
P.02.01.01
PAR YAZ
İPTAL
KAYDET00:00
01 DI2
LOC
KAYDET
1002 Har1 start grş1
P.02.01.01
1003 Har1 start grş2
1004 Har2 start fonk
1005 Har2 start grş1
PARAMETRELER
ÇIKIŞ
YAZ
00:00
LOC
6. ve tuşlarını kullanarak yeni bir değer
belirleyin. İmleç altındaki metin, karşılık gelen parametre
grubu, dizin ve biti gösterir.
7. Ana menüye dönmek için tuşuna basın.
İkili parametrenin bir bitini değer olarak serbest şekilde
tanımlamak için İşaretleyici'yi seçin ve tuşa basın .
Parametre grubu, dizin ve gösterilecektir.
ve tuşlarını kullanarak parametre grubunu
seçin. İmleç altındaki metin seçili olan parametre
grubunu görüntüler.
8. Ana menüye dönmek için tuşuna basın.
İmlecin altındaki metin geçerli ayarı gösterir.
ACS850 kontrol paneli 29
9. Ana menüye dönmek için tuşuna basın.
İmlecin altındaki metin geçerli ayarı gösterir.
10. Pointer parametresinin yeni değerini kaydetmek için tuşa
basın .
Yeni değer parametre listesinde gösterilir.
Page 30
30 ACS850 kontrol paneli
MENÜ
ÇIKIŞ
PARAMETRELER
ASISTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR00:00
ANA MENÜ 1
LOC
GİR
01 Gerçek değerler
02 I/O değerleri
03 Kontrol değerleri
04 Uygulama değerleri
06 Sürücü durumu
ÇIKIŞ
SEÇ00:00
PAR GRUPLAR 01
LOC
10 Start/stop/yön
11 Start/stop modu
12 Çalışma modu
13 Analog girişler
14 Dijital I/O
ÇIKIŞ
SEÇ
00:00
PAR GRUPLAR 14
LOC
SEL
1404 DIO1 Ton9901
1405 DIO1 Toff
1406 DIO2 konf
1407 DIO2 çkş kaynağı
P.06.02.03
PARAMETRELER
ÇIKIŞ
YAZ
00:00
LOC
YAZ
1407 DIO2 çkş kaynağı
PAR YAZ
Pointer
İPTAL SONRAKİ
00:00
LOC
1407 DIO2 çkş kaynağı
PAR YAZ
Sabit
İPTAL SONRAKİ00:00
LOC
Bit pointer parametresinin değeri sabit 0 (YANLIŞ) veya 1 (DOĞRU) olarak nasıl değiştirilir
Bit pointer parametresi, 0 (YANLIŞ) veya 1 (DOĞRU) sabit değerine ayarlanabilir.
Bit pointer parametresini kontrol paneli üzerinde ayarlarken, değeri 0 (C.YANLIŞ
olarak görüntülenir) veya 1 (C.DOĞRU) olarak sabitlemek için SABİT seçilir.
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşlarına basarak
PARAMETRELER'i seçin ve Parametreler seçeneğine
geçin, ve tuşa basın .
ve tuşlarını kullanarak uygun parametre
grubunu seçin. Burada bit pointer parametresi 14.07
DIO2 çıkış kaynağı bir örnek olarak kullanılmıştır.
3. Ana menüye dönmek için tuşuna basın. ve
4. Ana menüye dönmek için .
tuşlarını kullanarak uygun parametreyi seçin. Her
parametrenin geçerli akım değerini, adının altında
gösterilir.
ve tuşlarını kullanarak SABİT'i seçin.
Page 31
Adım Eylem Ekran
1407 DIO2 çkş kaynağı
PAR YAZ
İPTAL
KAYDET
00:00
[0]
LOC
C.YANLIŞ
1407 DIO2 çkş kaynağı
PAR YAZ
İPTAL
KAYDET00:00
[1]
LOC
C.DOĞRU
İptal
1407 DIO2 çkş kaynağı
C.DOĞRU
1408 DIO2 Ton
1409 DIO2 Toff
1410 DIO3 konf
PARAMETREL
ÇIKIŞ
YAZ
00:00
LOC
5601 Sinyal1 param
PAR YAZ
01.03
İPTAL SONRAKİ
00:00
LOC
5602 Sinyal2 param
PAR YAZ
01.04
İPTAL SONRAKİ00:00
LOC
5603 Sinyal3 param
PAR YAZ
01.06
İPTAL SONRAKİ
00:00
LOC
5. Ana menüye dönmek için .
6. Bit pointer parametresi için bir yeni sabit değeri (DOĞRU
veya YANLIŞ)
ve tuşlarıyla belirtin.
7. Devam etmek için tuşa basın .
Yeni değeri iptal etmek ve orijinali saklamak için tuşa
basın .
Yeni değer parametre listesinde gösterilir.
İzlenen sinyallerin seçilmesi
Adım Eylem Ekran
Çıkış modunda hangi sinyallerin izleneceğini ve nasıl
1.
görüntüleneceğini 56 Panel gösterimi grubu
parametreleriyle seçebilirsiniz. Parametre değerlerinin
değiştirilmesi hakkında daha fazla bilgi için, bkz. sayfa 25.
Not: 56.01…56.03 parametrelerinden birini sıfır olarak
ayarlarsanız çıkış modunda geri kalan iki sinyalin adlarını
görebilirsiniz. 56.04…56.06 mod parametrelerinden birini
Devre Dışı olarak ayarlarsanız da adlar gösterilecektir.
ACS850 kontrol paneli 31
Page 32

32 ACS850 kontrol paneli
MENÜ
ÇIKIŞ
PARAMETRELER
ASISTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR00:00
ANA MENÜ 1
LOC
ENTER
Asistanı seçin
Uygulama Makrosu
Motor Kurulumu
Motor Start/Stop
Kontrol
ÇIKIŞ
Tamam00:00
SEÇİM
LOC
1/5
Tamam
9904 Motor tipi
PAR YAZ
AM
ÇIKIŞ KAYDET
00:00
[0]
LOC
9904 Motor tipi
PAR YAZ
PMSM
ÇIKIŞ KAYDET00:00
[1]
LOC
KAYDET
ÇIKIŞ
9905 Motor kntrl mod
PAR YAZ
DTC
ÇIKIŞ KAYDET
00:00
[0]
LOC
Asistanlar
Asistanlar, örneğin uygulama makrosu seçimi, motor verilerini veya referans seçimini
girme gibi belirli bir görevle ilgili temel parametre ayarları hakkında yol gösteren rutinlerdir.
Asistan modunda aşağıdakileri gerçekleştirebilirsiniz:
•
asistanları kullanarak bir temel parametre setinin spesifikasyonları ile ilgili yardım alma
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
Asistanları kullanma
Aşağıdaki tabloda, asistanların nasıl kullanıldığı gösterilmektedir. Motor Ayarları
Asistanı burada örnek olarak kullanılmıştır.
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Asistanlar moduna geçmek için, ve
tuşlarını kullanarak menüde ASİSTANLAR seçeneğini
belirtin ve şu tuşa basın: .
3. Motor Ayarları asistanı örnek olarak kullanılmıştır.
4. ve tuşlarını kullanarak uygun motor tipini
5. Yeni değeri onaylamak ve sonraki parametrenin
ve tuşlarını kullanarak Motor Ayarları'nı
seçin ve şu tuşa basın: .
seçin.
ayarlanması işlemiyle devam etmek için şu tuşa basın:
.
Asistanın tüm parametreleri ayarlandıktan sonra ana
menü görüntülenir. Bir baş
prosedürü 2. adımdan itibaren tekrarlayın.
Bir asistanı iptal etmek için istediğiniz noktada
tuşuna basın.
ka asistanla işlem yapmak için
Page 33

ACS850 kontrol paneli 33
MENU
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER00:00
ANA MENÜ 1
LOC
ENTER
00:00
Parametre yok
MESAJ
LOC
9906 Mot nom akımı
3.5 A
9907 Mot nom volt
9908 Mot nom fre
9909 Mot nom hızı
DEĞİŞEN PAR
ÇIKIŞ
EDIT
00:00
LOC
EDIT
9906 Mot nom akımı
PAR YAZ
3.5 A
İptal KAYDET
00:00
LOC
9906 Mot nom akımı
PAR YAZ
3.0 A
İptal KAYDET
00:00
LOC
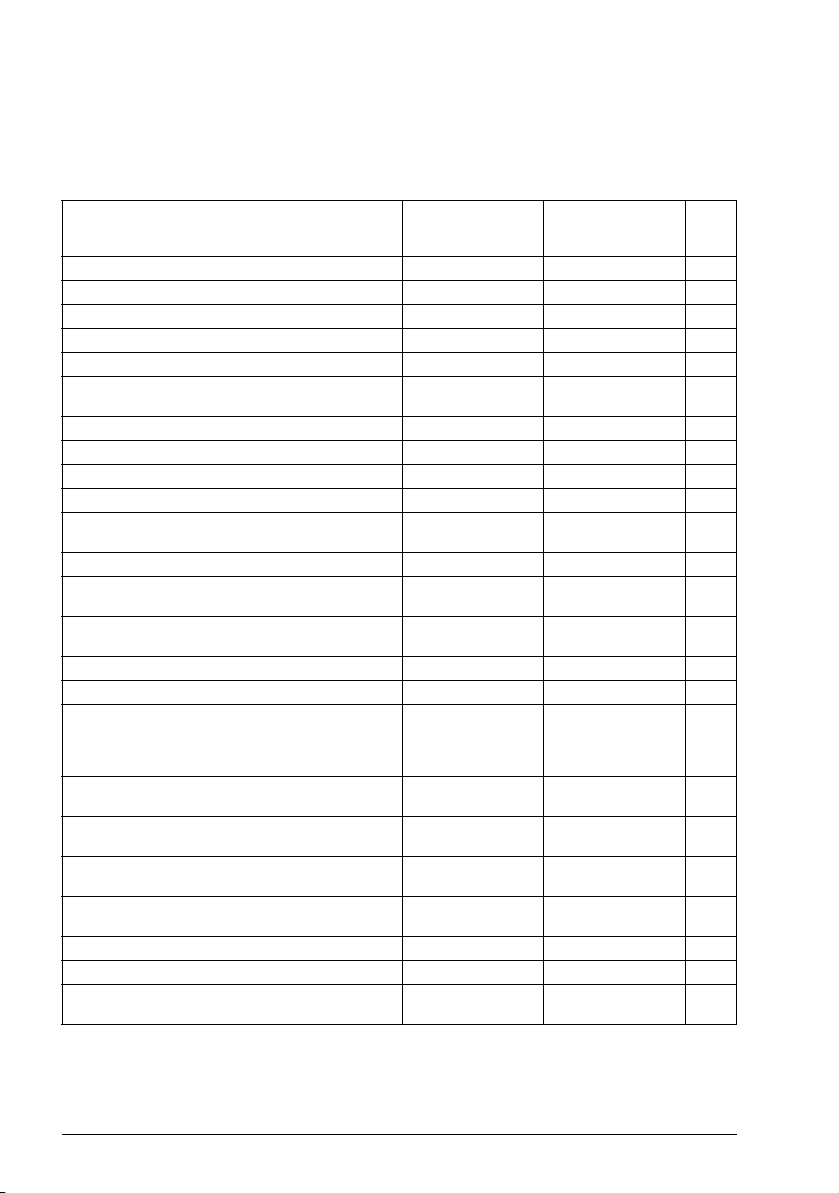
Değiştirilen Parametreler
Değiştirilmiş parametreler modunda aşağıdakileri gerçekleştirebilirsiniz:
• makro varsayılan değerlerinden değiştirilmiş tüm parametrelerin listesini
görüntüleme
• bu parametreleri değiştirme
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
Değiştirilen parametrelerin görüntülenmesi ve düzenlenmesi
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşları ve tuşuna basarak
CHANGED PAR seçeneğini seçin ve Değiştirilen
Parametreler moduna geçin .
Geçmişte değiştirilmiş parametre yoksa ilgili metin
gösterilecektir.
Parametreler değiştiyse bunların listesi
görüntülenecektir. ve tuşlarını kullanarak
değiştirilen parametreyi listede seçin. Seçilen
parametrenin değeri parametrenin altında görüntülenir.
3. Değeri değiştirmek için tuşuna basın.
4. ve tuşlarını kullanarak parametre için yeni
bir değer belirleyin.
Tuşa bir kez basıldığında de
aşağı doğru tutulması değerin daha hızlı şekilde
değişmesine neden olur. Tuşlara aynı anda basıldığında
görüntülenen değer, varsayılan değerle değiştirilir.
ğer artar ya da azalır. Tuşun
Page 34

34 ACS850 kontrol paneli
İptal
9906 Mot nom akımı
3.0 A
9907 Mot nom volt
9908 Mot nom fre
9909 Mot nom hızı
DEĞİŞEN PAR
ÇIKIŞ
EDIT00:00
LOC
Adım Eylem Ekran
5. Yeni değeri kabul etmek için tuşa basın . Eğer yeni
değer varsayılan değer ise parametre, değiştirilen
parametreler listesinden çıkarılır.
Yeni değeri iptal etmek ve orijinali saklamak için tuşa
basın .
Page 35

ACS850 kontrol paneli 35
MENU
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER00:00
ANA MENÜ 1
LOC
ENTER
Hata geçmişi yok
bulunamadı
MESAJ
LOC
36: LOCAL CTRL LOSS
29.04.08 10:45:58
HATA KAYIT
ÇIKIŞ
DETAIL
00:00
LOC
1
DETAIL
ÇIKIŞ
ZAMAN
10:45:58
HATA KODU
36
HATALI UZATMA KODU
LOCAL CTRL LOSS
ÇIKIŞ
DIAG
00:00
LOC
DIAG
‘30.0
3 Lokal kontrol
kaybı’
parametresinin
ayarını kontrol edin.
ÇIKIŞ Tamam
LOC
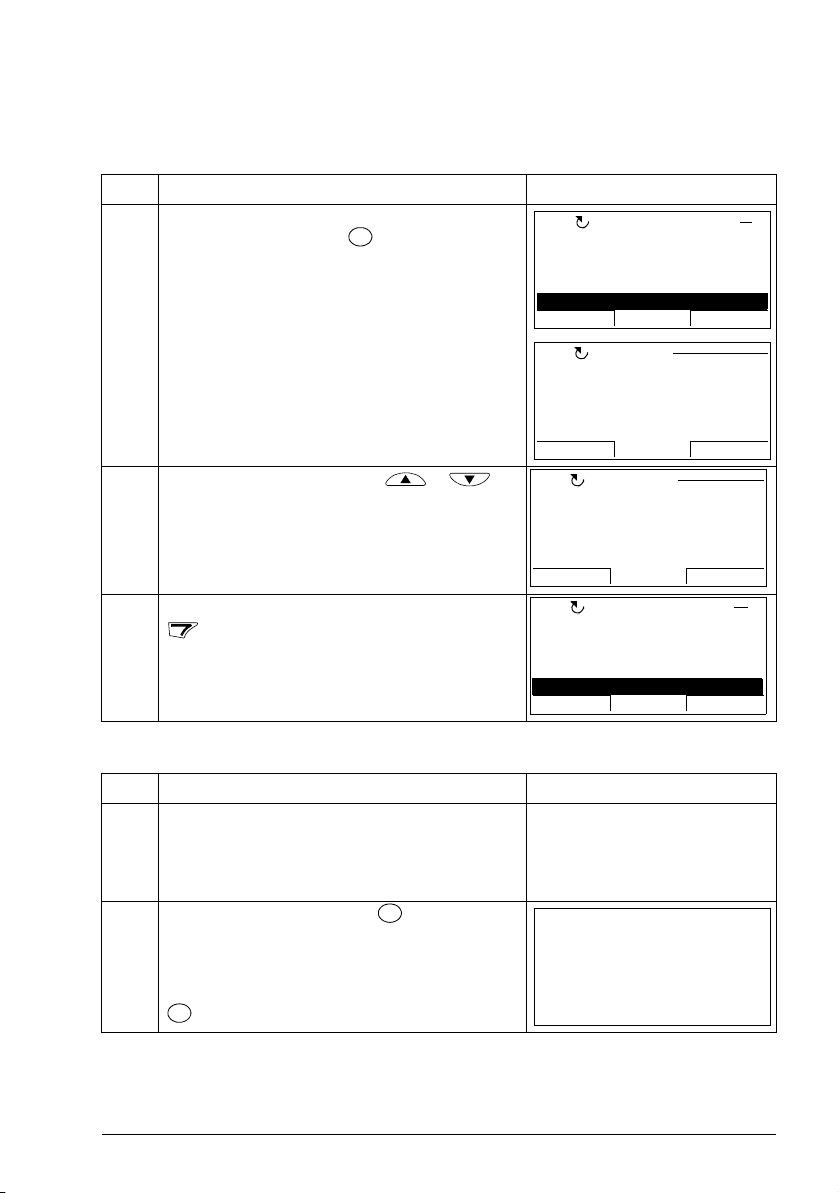
Hata Kayıt
Hata Kayıt seçeneğinde aşağıdakileri gerçekleştirebilirsiniz:
• sürücü hata tarihçesini görüntüleyebilir
• en yakın zamandaki hatalar hakkındaki tüm ayrıntılarını görüntüleme
• hata ile ilgili yardım metnini okuma ve düzeltici işlemler yapma
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
Hataları görüntüleme
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşları ve tuşa basarak HATA
KAYIT'ı seçin ve Hata Kayıt seçeneğine geçin .
Hata geçmişinde hata yoksa ilgili metin gösterilecektir.
Hata geçmişi varsa ekranda en yeni hatayla başlayan
hata günlüğü gösterilir. Sırada görüntülenen rakam, Hata
izleme bölümünde listelenen nedenler ve çözüm yolları
arasından uygun olanını seçebileceğiniz hata kodudur
(sayfa 301).
3. Hatanın ayrıntılarını görüntülemek için ve
tuşlarıyla seçin ve tuşa basın .
ve tuşlarına basarak metnin içinde
ilerleyin.
Önceki ekrana dönmek için tuşa basın .
4. Hata tespitinde yardım istiyorsanı
z tuşa basın .
Page 36

36 ACS850 kontrol paneli
Tamam
3003 Lokal kont kaybı
PAR YAZ
Hata
ÇIKIŞ KAYDET
00:00
[1]
LOC
KAYDET
ÇIKIŞ
3003 Lokal kont kaybı
PAR YAZ
Güvenli hız
ÇIKIŞ KAYDET00:00
[2]
LOC
RESET
ÇIKIŞ
HATA 36
LOCAL CTRL LOSS
HATA
RESET
ÇIKIŞ
LOC
Adım Eylem Ekran
5. Tuşa basın . Panel, hatayı düzeltmek için gereken
parametreleri düzenlemenizi sağlar.
6. ve tuşlarını kullanarak parametre için yeni
bir değer belirleyin.
Yeni değeri kabul etmek için tuşa basın .
Yeni değeri iptal etmek ve orijinali saklamak için tuşa
basın .
Hata resetleme nasıl yapılır
Adım Eylem Ekran
1. Bir hata oluştuğunda hatayı tanımlayan bir metin
gösterilir.
Hatayı resetlemek için, tuşa basın .
Önceki ekrana dönmek için tuşa basın .
Page 37

ACS850 kontrol paneli 37
MENU
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER
00:00
ANA MENÜ 1
LOC
ENTER
SAAT GÖRÜNÜRLÜK
ZAMAN FORMATI
TARİH FORMATI
ZAMANI GİR
TARİHİ GİR
ÇIKIŞ
SEL
00:00
ZAMAN ve TARİH
1
LOC
SEL
SEL
ÇIKIŞ
Saat göster
Saat sakla
ÇIKIŞ
SEL
00:00
SAAT GÖRÜNÜR 1
LOC
SEL
SEL
İptal
24-saat
12-saat
İptal
SEL00:00
ZAMAN FORMATI 1
LOC
Zaman ve Tarih
Zaman ve Tarih seçeneğinde yapabilecekleriniz:
• saati görüntüleme ya da gizleme
• tarih ve saat görüntüleme formatını değiştirme
• tarih ve saat ayarı yapmak
• gün ışığından yararlanma değişiklerinde saatin otomatik olarak ayarlanmasını
devreye alma/devre dışı bırakma
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
Kontrol Panelinde, panele sürücü tarafından enerji sağlanmadığı durumlarda da
saatin çalışmasını sağlayan bir pil bulunmaktadır.
Saati görüntüleme veya gizleme, ekran formatlarını değiştirme, tarih ve saati ayarlama ve gün ışığından yararlanma değişiklerinde saatin otomatik olarak ayarlanmasını devreye alma veya devre dışı bırakma
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Zaman ve Tarih seçeneğine moduna geçmek için
menüde ve tuşları ile ZAMAN ve TARİH'i
seçin ve tuşa basın .
3. Saati görüntülemek (gizlemek) için menüde CLOCK
VISIBILITY seçeneğini seçin, tuşuna basın,
ve tuşlarıyla Saat göster (Saat sakla)
seçeneklerini seçin
ve tuşuna basın ya da değişiklik yapmadan önceki
ekrana dönmek için, tuşa basın .
Saat formatını belirlemek için menüde TIME FORMAT
seçeneğini seçin, tuşuna basın ve ve
tuşlarıyla uygun bir format seçin. Değişiklikleri
kaydetmek için tuşuna veya iptal etmek için
tuşuna basın.
Page 38

38 ACS850 kontrol paneli
SEL
Tamam
İptal
gg.aa.yy
aa/gg/yy
gg.aa.yyyy
aa/gg/yyyy
İptal
Tamam
00:00
TARİH FORMATI 3
LOC
SEL
Tamam
Tamam
İptal
15:41
ZAMANI GİR
İptal
Tamam
LOC
SEL
Tamam
Tamam
İptal
19.03.2008
TARİHİ GİR
İptal
Tamam
00:00
LOC
SEL
?
ÇIKIŞ
SEL
SEL
ÇIKIŞ
Kapalı
EU
US
Australia1:NSW,Vict..
Australia2:Tasmania..
ÇIKIŞ
SEL00:00
GÜN IŞIK TAS 1
LOC
ÇIKIŞ
00:00
EU:
Açık: Mar last Sunday
Kapalı: Oct last Sunday
US:
YARDIM
LOC
Adım Eylem Ekran
Tarih formatını belirlemek için menüde DATE FORMAT
seçeneğini seçin, tuşuna basın ve uygun bir format
seçin.
Değişiklikleri kaydetmek için tuşuna veya iptal
etmek için tuşuna basın.
Saati ayarlamak için menüde SET TIME seçeneğini seçin
ve tuşa basın .
ve tuşlarına basarak saati ayarlayın ve
tuşa basın .
Daha sonra dakikaları belirtin. Değişiklikleri kaydetmek için
tuşuna veya iptal etmek için tuşuna basın.
Tarihi ayarlamak için menüde SET DATE seçeneğini
seçin ve tuşa basın .
ve tuşlarını kullanarak tarihin ilk bölümünü
(seçilen tarih formatına göre değişir) ayarlayın ve tuşa
basın . Aynı işlemi ikinci kısım için tekrarlayın. Yılı
ayarladıktan sonra tuşa basın . Değişiklikleri iptal
etmek için tuşa basın .
Gün ışığından yararlanma değişiklerinde saatin otomatik
olarak ayarlanmasını devreye almak veya devre dışı
bırakmak için menüde DAYLIGHT SAVING seçeneğini
seçin ve tuşa basın .
tuşuna basıldığında, izlenmesi için seçebileceğiniz gün
ışığından yararlanma değişikliklerinin uygulandığı ülke ya da
bölgelerdeki günışığından yararlanma döneminin başlangıç
ve bitiş tarihlerinin görüntülendiği yardım açılır. ve
tuşlarına basarak metnin içinde ilerleyin. Önceki
ekrana dönmek için tuşa basın .
Gün ışığından yararlanma değişiklerinde saatin otomatik
olarak ayarlanmasını devre dışı bırakmak için Kapalı
seçeneğini seçin ve tuşa basın .
Saatin otomatik olarak ayarlanmasını etkinleştirmek için,
gün ışığından yararlanma değişiklikleri izlenecek olan
ülke veya bölgeyi seçin ve tuşa basın .
Değişiklik yapmadan önceki ekrana dönmek için tuşa
basın .
Page 39

ACS850 kontrol paneli 39
MENU
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ ENTER
00:00
ANA MENÜ 1
LOC
Parametre Yedekleme
Parametre Yedekleme seçeneği, sürücü parametrelerinin yedeğinin alınması için bir
sürücüden başka bir sürücüye verilmesi işlemidir. Karşıya yükleme, dört adete kadar
kullanıcı seti de dahil olmak üzere tüm sürücü parametrelerini Kontrol panelinde
kaydeder. Yedekleme dosyasının seçilebilir alt setleri daha sonra kontrol panelinden
aynı sürücüye veya aynı türdeki bir başka sürücüye geri yüklenebilir/yüklenebilir.
Parametre Yedekleme seçeneğinde aşağıdakileri gerçekleştirebilirsiniz:
• PANELE YEDEKLEME AL ile tüm parametrelerin sürücüden kontrol paneline
kopyalanması. Bunların arasında kullanıcı parametre setleri ve ID Run tarafından
oluşturulanlar gibi dahili (kullanıcı tarafından değiştirilemeyen) parametreler de
bulunmaktadır.
• SHOW BACKUP INFO (yedekleme bilgisi göster) ile kontrol paneline kaydedilmiş
yedekleme hakkındaki bilgileri görüntüleyin. Bu, paneldeki geçerli yedekleme
dosyasının örneğin sürüm bilgilerini içerir. TÜM PAR GERİ YÜKLEME ile
parametreleri bir başka sürücüye geri yükleyeceğiniz zaman sürücülerin uyumlu
olduğundan emin olmak amacıyla bu bilgilerin kontrol edilmesi faydal
• TÜM PAR GERİ YÜKLEME komutunu kullanarak tam parametre setinin kontrol
panelinden sürücüye geri yüklenmesi. Dahili, kullanıcı tarafından değiştirilemeyen
motor parametreleri de dahil olmak üzere tüm parametreler sürücüye yazılır. Bu,
kullanıcının parametre setlerini İÇERMEZ.
Not: Bu fonksiyonu sadece bir yedekten gelen parametreleri geri yüklemek veya
uyumlu olan sistemlere parametreleri geri yüklemek için kullanın.
• Motor verileri hariç tüm parametreleri IDRUN HARİÇ PAR GERİ YÜKLEME ile
sürücüye geri yükleyin.
• Sadece motor veri parametrelerini IDRUN PAR GERİ YÜKLEME ile sürücüye geri
yükleyin.
• TÜM KULLANICI SETLERİNİ GERİ YÜKLE ile tüm kullanıcı setlerini sürücüye
geri yükleyin.
• KULLANICI SETİ 1'İ GERİ YÜKLE…KULLANICI SETİ 4'Ü GERİ YÜKLE ile
sadece kullanıcı seti 1…4'ü sürücüye geri yükleyin.
ı olacaktır.
Parametrelerin yedeklenmesi ve geri yüklenmesi
Kullanılabilir tüm yedekleme ve geri yükleme fonksiyonları için bkz. sayfa 39.
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
Page 40

40 ACS850 kontrol paneli
ENTER
PANELE YEDEKLEME AL
BACKUP BİLGİSİ GÖSTER
TÜM PAR GERİ YÜKLEME
ID RUN HARİÇ PAR GERİ
YÜKLEME
ÇIKIŞ
SEL
00:00
PAR YEDEKLE 1
LOC
SEL
ABORT
ABORT
PAR YEDEKLE
LOC
Kopyalıyor 1/2
00:00
Tamam
Tamam
Parametre geri
yükleme başarılı
MESAJ
LOC
00:00
PANELE YEDEKLEME AL
BACKUP BİLGİSİ GÖSTER
TÜM PAR GERİ YÜKLEME
ID RUN HARİÇ PAR GERİ
YÜKLEME
ÇIKIŞ
SEL
PAR YEDEKLE 3
LOC
00:00
SEL
Param geri yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
Devam
İptal
Param geri yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
Sürücü açılıyor
PAR YEDEKLE
LOC
00:00
Adım Eylem Ekran
2. Menüde ve tuşlarıyla PAR YEDEKLE'yi
seçerek Parametre Yedekleme seçeneğine geçin, tuşa
basın .
Tüm parametreleri (kullanıcı setleri ve dahili parametreler
de dahil olmak üzere) sürücüden kontrol paneline
yüklemek için ve tuşlarını kullanarak
Yedekleme parametresinde PANELE YEDEKLEME AL'ı
seçin ve tuşa basın . İşlem başlatılır. İşlemi
durdurmak istiyorsanız tuşuna basın.
Yedekleme işlemi tamamlandıktan sonra ekranda
bununla ilgili bir mesaj görüntülenir. Par Backup
menüsüne dönmek için tuşuna basın.
Geri yükleme fonksiyonlarını gerçekleştirmek için
(burada TÜM PARAMETRE GERİ YÜKLEME örnek
olarak verilmiştir) ve tuşlarını kullanarak
Parametre Yedekleme menüsünde uygun işlemi seçin.
Tuşa basın . Geri yükleme başlar.
Devam etmek isterseniz tuşa basın . İşlemi
durdurmak istiyorsanı
devam ediyorsa ekranda bununla ilgili bir mesaj
görüntülenir.
Yükleme devam eder ve sürücü baştan başlatılır.
z tuşuna basın. Yükleme
Page 41

ACS850 kontrol paneli 41
PAR YEDEKLE
LOC
5 0 %
Tüm parametreleri
geri yükle/yükle
Geri yükleme işlemi
tamamlanıyor
PAR YEDEKLE
LOC
Param geri yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
YAZILIM SÜRÜMÜ
UIFI, 2020, 0,
UIFI, 1010, 0,
Tamam
ÜRÜN ÇEŞİDİ
İPTAL Devam
SÜRÜM KONT
LOC
1
00:00
Devam
İptal
YAZILIM SÜRÜMÜ
ÜRÜN ÇEŞİDİ
3
3
TAMAM
İPTAL CONT
SÜRÜM KONT
LOC
2
00:00
Param geri yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
Adım Eylem Ekran
Aktarma durumu ekranda tamamlama yüzdesi olarak
gösterilir.
Yükleme sonlanır.
Parametre hatası
Farklı yazılım sürümleri arasında parametreleri yedeklemeyi ve geri yüklemeyi
denerseniz panelde aşağıdaki parametre hatası bilgileri görüntülenir:
Adım Eylem Ekran
1. Geri yükleme işlemi normal bir şekilde başlatılır.
2. Yazılım sürümü kontrol edilir.
Panelde, yazılım sürümlerinin aynı olmadığını
görebilirsiniz.
ilerleyin.
Devam etmek için tuşa basın . İşlemi durdurmak
için tuşuna basın.
3. Yükleme devam ediyorsa ekranda bununla ilgili bir mesaj
görüntülenir.
ve tuşlarına basarak metnin içinde
Page 42
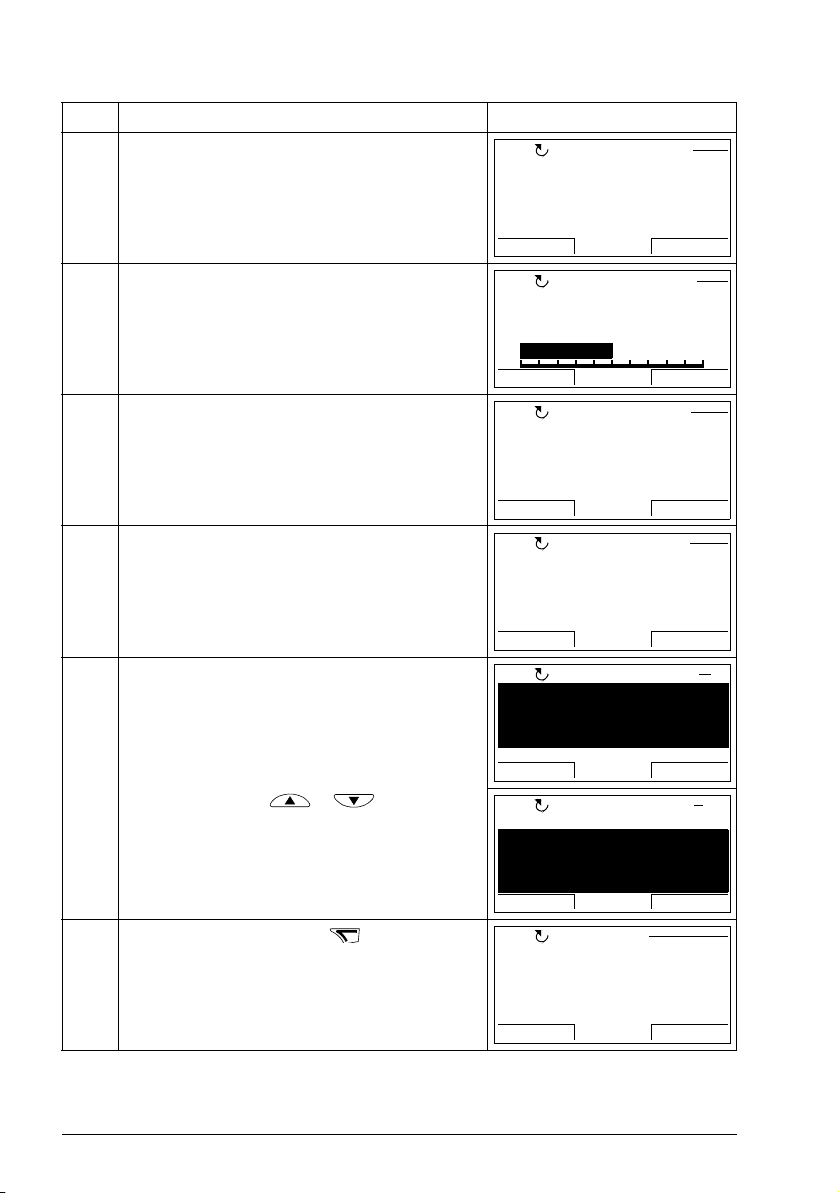
42 ACS850 kontrol paneli
Sürücü açılıyor
PAR YEDEKLE
LOC
00:00
PAR YEDEKLE
LOC
5 0 %
Tüm parametreleri
geri yükle/yükle
Sürücü açılıyor
PAR YEDEKLE
LOC
00:00
Geri yükleme işlemi
tamamlanıyor
PAR YEDEKLE
LOC
9401 Har IO1 seç
0
?
YANLIŞ DEĞER TİPİ
9402 Har IO2 seç
HAZIR
PARAM HATASI
LOC
1
00:00
21110
21201
1
?
PARAM BULUNAMADI
HAZIR
PARAM HATASI
LOC
13
00:00
EDIT
9501 Cntr bord kay
PAR YAZ
Harici 24V
İPTAL KAYDET
00:00
[1]
LOC
Adım Eylem Ekran
Yükleme devam eder ve sürücü baştan başlatılır.
Aktarma durumu ekranda tamamlama yüzdesi olarak
gösterilir.
Yükleme devam eder.
Yükleme sonlanır.
4. Panelde hatalı parametrelerin listesi gösterilir.
Parametreler arasında ve tuşlarını
kullanarak gezinebilirsiniz. Parametre hatasının nedeni
de gösterilir.
5. YAZ komutu görünür olduğunda tuşuna basarak
parametreleri düzenleyebilirsiniz. 95.01 Cntr bord kay
parametresi örnek olarak kullanılmıştır.
Parametreyi, Parametreler bölümü, sayfa 25'te
gösterildiği gibi düzenleyin.
Page 43

ACS850 kontrol paneli 43
İptal
9501 Cntr bord kay
PAR YAZ
Dahili 24V
İptal KAYDET
00:00
[0]
LOC
HAZIR
9501 Cntr bord kay
0
0
YANLIŞ DEĞER TİPİ
9503
HAZIR YAZ
PARAM HATASI
LOC
9
00:00
Param geri yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
YAZILIM SÜRÜMÜ
UIFI, 2020, 0,
UIFI, 1010, 0,
Tamam
ÜRÜN ÇEŞİDİ
İptal Devam
SÜRÜM KONT
LOC
1
00:00
YAZILIM SÜRÜMÜ
ÜRÜN ÇEŞİDİ
3
3
TAMAM
İPTAL CONT
SÜRÜM KONT
LOC
2
00:00
Parametre geri
yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
Adım Eylem Ekran
6. Ana menüye dönmek için tuşuna basın.
Hatalı parametrelerin listesine dönmek için tuşuna
basın.
7. Seçtiğiniz parametre değeri parametre adı altında
görüntülenir.
Parametreleri değiştirmeyi tamamladığınızda
tuşuna basın.
Farklı yazılım sürümleri arasında bir kullanıcı setini geri yüklemeye çalışma
Farklı yazılım sürümleri arasında bir kullanıcı setini yedeklemeyi ve geri yüklemeyi
denerseniz panelde aşağıdaki alarm bilgileri görüntülenir:
Adım Eylem Ekran
1. Geri yükleme işlemi normal bir şekilde başlatılır.
2. Sürüm kontrolü tamam.
Panelde, yazılım sürümlerinin aynı olmadığını
görebilirsiniz.
Metinde ve tuşlarını kullanarak
gezinebilirsiniz.
3. Yükleme devam ediyorsa ekranda bununla ilgili bir mesaj
görüntülenir.
Page 44

44 ACS850 kontrol paneli
Sürücü açılıyor
PAR YEDEKLE
LOC
00:00
PAR YEDEKLE
LOC
5 0 %
Kullanıcı seti 1
geri yükle/yükle
Param geri yükleme
işlemi başlatılıyor
PAR YEDEKLE
LOC
00:00
Sürücü açılıyor
PAR YEDEKLE
LOC
00:00
Geri yükleme işlemi
tamamlanıyor
PAR YEDEKLE
LOC
ALARM 2036
GERİ YÜKLEME
ALARM
ÇIKIŞ
LOC
Adım Eylem Ekran
4. Yükleme devam eder ve sürücü baştan başlatılır.
5. Aktarma durumu ekranda tamamlama yüzdesi olarak
gösterilir.
6. Yükleme devam eder.
7. Yükleme devam eder ve sürücü baştan başlatılır.
8. Yükleme sonlanır.
9. Panelde, alarmı tanımlayan bir metin gösterilir ve Par
Yedeklemeye geri dönülür.
Page 45
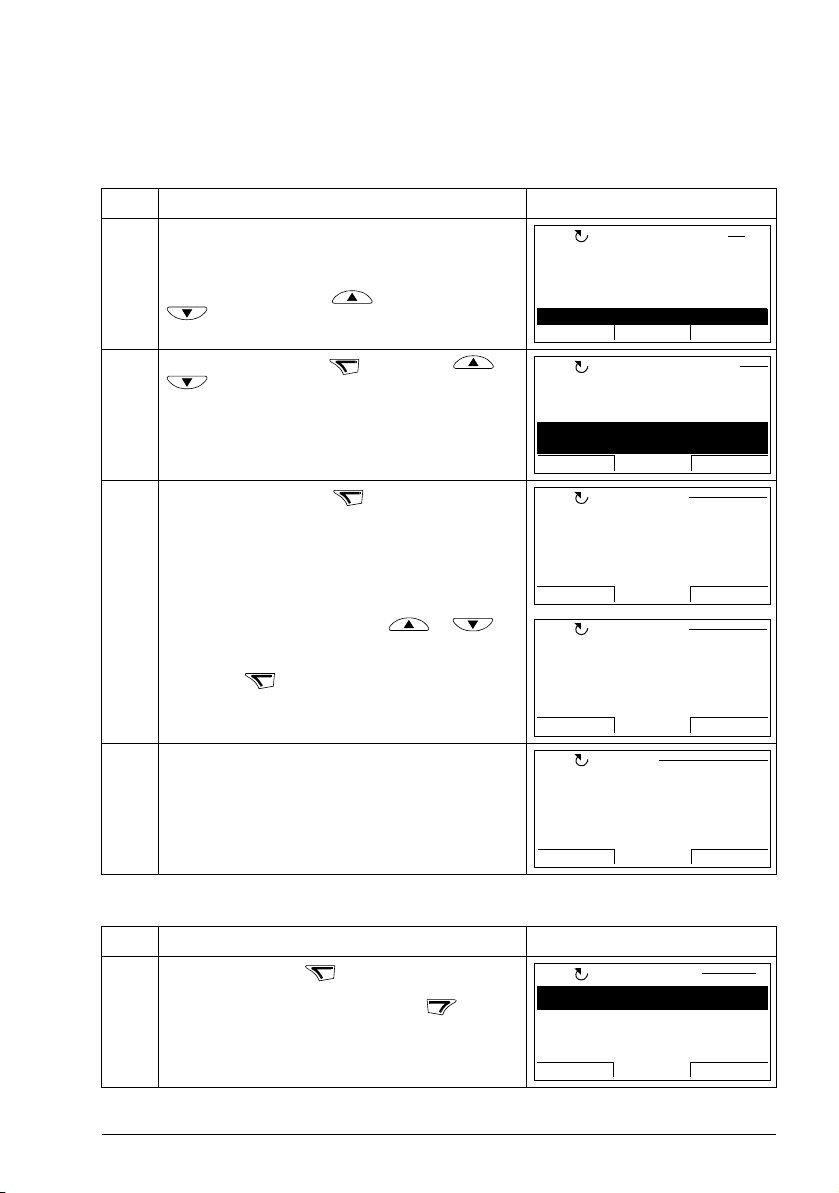
ACS850 kontrol paneli 45
ÇIKIŞ SEÇ00:00
12 Çalışma modu
13 Analog girişler
14 Dijital I/O
15 Analog çıkışlar
16 Sistem
PAR GRUPLAR 16
LOC
SEÇ
1603 Şifre kodu9901
1604
Param geri yükleme
1607 Param kaydetme
1609 Kull ayar sçm
İstek yok
PARAMETRELER
ÇIKIŞ
YAZ00:00
LOC
YAZ
1609 Kull ayar sçm
PAR YAZ
İstek yok
İPTAL KAYDET00:00
[1]
LOC
1609 Kull ayar sçm
PAR YAZ
Set1 yükle
İPTAL KAYDET
00:00
[2]
LOC
HATA 310
KULL SET YÜKLE
HATA
RESET
ÇIKIŞ
LOC
MENÜ
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR
00:00
ANA MENÜ 1
LOC
Farklı yazılım sürümleri arasında bir kullanıcı setini yüklemeye çalışma
Farklı yazılım sürümleri arasında bir kullanıcı setini yüklemeyi denerseniz panelde
aşağıdaki hata bilgileri görüntülenir:
Adım Eylem Ekran
1. Bölüm Parametreler, sayfa 25'da gösterildiği gibi ana
menüdeki PARAMETRELER'i seçerek Parametreler
seçeneğine gidin.
16.09 Kull ayar sçm parametresi üzerinden bir kullanıcı
seti yüklenir. 16 Sistem ve tuşlarını kullanarak
parametre grubunu seçin.
2. Ana menüye dönmek için tuşuna basın. ve
3. Ana menüye dönmek için .
4. Panelde, hatayı tanımlayan bir metin gösterilir.
tuşlarını kullanarak 16.09 Kull ayar sçm
parametresini seçin. Her parametrenin geçerli akım
değerini, adının altında gösterilir.
Yüklemek istediğiniz kullanıcı setini ve
tuşlarıyla seçin.
Tuşa basın .
Yedekleme bilgilerinin görüntülenmesi
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tu
basın.
şuna
Page 46

46 ACS850 kontrol paneli
GİR
PANELE YEDEKLEME AL
BACKUP BİLGİSİ GÖSTER
TÜM PAR GERİ YÜKLEME
ID RUN HARİÇ PAR GERİ
YÜKLEME
ÇIKIŞ
SEÇ
00:00
PAR YEDEKLE 2
LOC
SEL
LOC
ÇIKIŞ
00:00
YEDEKLEME ARAYÜZÜ
SÜRÜMÜ
0.4
0.4
YAZILIM SÜRÜMÜ
YEDEKLEME BİLGİSİ
ÇIKIŞ
00:00
YAZILIM SÜRÜMÜ
UIFI,2020,0,
UIFI,1010,0,
ÜRÜN ÇEŞİDİ
3
YEDEKLEME BİLGİSİ
LOC
ÇIKIŞ
PANELE YEDEKLEME AL
BACKUP BİLGİSİ GÖSTER
TÜM PAR GERİ YÜKLEME
ID RUN HARİÇ PAR GERİ
YÜKLEME
ÇIKIŞ
SEÇ00:00
PAR YEDEKLE 1
LOC
Adım Eylem Ekran
2.
Menüde ve tuşlarıyla PAR YEDEKLE'yi
seçerek Par Yedekleme seçeneğine geçin, tuşa basın .
ve tuşlarıyla YEDEKLEME BİLGİSİ'ni
seçin.
3. Ana menüye dönmek için . Ekranda, yedeklemenin
yapıldığı sürücü ile ilgili aşağıdaki bilgiler görüntülenir:
YEDEKLEME ARAYÜZÜ SÜRÜMÜ: Yedekleme
dosyasının format sürümü
YAZILIM SÜRÜMÜ: Yazılım ile ilgili bilgi
UIFI: ACS850 sürücüsünün yazılımı
2020: Yazılım sürümü
0: Yazılım yama sürümü
ÜRÜN ÇEŞİDİ:
3: ACS850 (Standard kontrol programı)
Bilgiler arasında ve tuşlarını kullanarak
gezinebilirsiniz.
4. Ana menüye dönmek için tuşuna basın.
Page 47

ACS850 kontrol paneli 47
MENÜ
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR
00:00
ANA MENÜ 1
LOC
GİR
Analog çıkışlar
Analog girişler
Dijital I/O'lar
Dijital girişler
Röle çıkışları
ÇIKIŞ
SEÇ
00:00
I/O AYARLARI 1
LOC
Analog çıkışlar
Analog girişler
Dijital I/O'lar
Dijital girişler
Röle çıkışları
ÇIKIŞ
SEÇ00:00
I/O AYARLARI 4
LOC
SEL
DI1
1002 Har1 start grş1
DI2
DI3
1010 Hata reset sçm
I/O AYARLARI 1
LOC
ÇIKIŞ INFO
00:00
INFO
ÇIKIŞ
LOC
ÇIKIŞ
00:00
I/O SAYISI
0
YUVA NUMARASI
0
NOD NUMARASI
I/O BİLGİSİ
I/O Ayarları
I/O Ayarları modunda aşağıdaki işlemleri gerçekleştirebilirsiniz:
• sürücünün I/O'larını konfigüre eden parametre ayarlarını kontrol etme
• kaynak veya hedef olarak seçilmiş bir giriş veya çıkışa sahip parametreleri kontrol
etme
• parametre ayarını düzenleme
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
I/O terminalleriyle ilişkili olarak parametre ayarlarını düzenleme ve değiştirme
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. I/O Ayarları moduna geçmek için ve
tuşlarını kullanarak menüde I/O AYARLARI seçeneğini
seçin ve tuşa basın .
ve tuşlarını kullanarak I/O grubunu, örn.
Dijital girişler'i seçin.
3. Ana menüye dönmek için . Kisa bir duraklamanin
ardindan, seçiminizle ilgili geçerli ayar ekranda gösterilir.
dijital girişler ve parametreler arasında ve
tuşlarını kullanarak gezinebilirsiniz.
4. Ana menüye dönmek için . Panelde, seçili I/O'yla
ilgili bilgiler görüntülenir (bu durumda, DI1).
bilgiler arasında ve tuşlarını kullanarak
gezinebilirsiniz.
Ana menüye dönmek için tuşa basın.
Page 48

48 ACS850 kontrol paneli
DI1
1002 Har1 start grş1
DI2
DI3
1010 Hata reset sçm
I/O AYARLARI 1
LOC
ÇIKIŞ YAZ
00:00
YAZ
1002 Har1 start grş1
PAR YAZ
DI1
İPTAL SEÇ00:00
[P.02.01.00]
LOC
1002 Har1 start grş1
PAR YAZ
DI04
İPTAL SEÇ
00:00
[P.02.03.03]
LOC
SEL
İPTAL
DI1
1002 Har1 start grş1
DI2
DI3
1010 Hata reset sçm
I/O AYARLARI 1
LOC
ÇIKIŞ YAZ
00:00
Adım Eylem Ekran
5. ve tuşlarıyla ayarı seçin (parametre
numarası olan bir satır). Parametreyi düzenleyebilirsiniz
(BİLGİ seçimi, DÜZENLE seçimine dönüşür).
6. Ana menüye dönmek için .
7. ve tuşlarını kullanarak ayar için yeni bir
değer belirleyin.
Tuşa bir kez basıldığında değer artar ya da azalır. Tuşun
aşağı doğru tutulması değerin daha hızlı şekilde
değişmesine neden olur. Tuşlara aynı anda basıldığında
görüntülenen değer, varsayılan değerle değişir.
8. Yeni değeri kaydetmek için tuşa basın .
Yeni değeri iptal etmek ve orijinali saklamak için tuşa
basın .
Page 49

ACS850 kontrol paneli 49
LOC
REM
Referans yazma
sadece lokal kontrol
modunda
yapılabilir
MESAJ
REM
00:00
MENÜ
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR00:00
ANA MENÜ 1
LOC
GİR
0000.00 rpm
+
REF YAZMA
İPTAL
SONRAKİ
00:00
LOC
SONRAKİ
1250.00 rpm
-
REF YAZMA
İPTAL
KAYDET
00:00
LOC
ÇIKIŞ
-1250.00rpm
50 A
10 Hz
7 %10.
0.
49.
LOC
DIR
MENÜ00:00
Reference Edit
Referans Düzenleme seçeneğinde aşağıdakileri gerçekleştirebilirsiniz:
• yerel referans değerini doğru olarak kontrol etme,
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
Referans değeri nasıl düzenlenir
Adım Eylem Ekran
1. Panel uzaktan kontrol modundaysa (durum satırında
REM gösterilir), tuşa basarak lokal kontrole (durum
satırında LOC gösterilir) geçin . (Yerel ve uzaktan
kontrol modları arasında geçiş hakkında daha fazla bilgi
için bkz. sayfa 22.)
Not: Var sa yılan olarak, panelden referans düzenleme
işlemi sadece lokal kontrol modunda mümkündür.
Uzaktan kontrol modunda, referans sadece etkin harici
referansın kaynağı olarak tanımlanmışsa kontrol
panelinden düzenlenebilir (yani, 02.34 Panel ref
parametresi).
Eğer referans panel aracılığıyla düzenlenemiyorsa, sağ
tarafta gösterilen mesaj görüntülenir.
2. Aksi takdirde çıkış modundaysanız tuşuna basarak
Ana menüye gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
Menüde ve tuşlarıyla REF YAZMA'yı seçerek
3.
Reference Edit seçeneğine geçin, tuşa basın .
4. ve tuşlarıyla doğru işareti seçin ve tuşa
basın . ve tuşlarıyla doğru
numaraları seçin ve her numara seçildikten sonra tuşa
basın .
5. Son numara seçildikten sonra tuşa basın . Çıkış
moduna gitmek için tuşa basın . Seçilen referans
değeri, durum satırında gösterilir.
Page 50

50 ACS850 kontrol paneli
MENÜ
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR
00:00
ANA MENÜ 1
LOC
GİR
ÇIKIŞ
00:00
SÜRÜCÜ İSMİ
SÜRÜCÜ TİPİ
ACS850
SÜRÜCÜ MODELİ
SÜRÜCÜ BİLGİ
LOC
ÇIKIŞ
ÇIKIŞ 00:00
YAZILIM SÜRÜMÜ
UIFI, 2020, 0,
ÇÖZÜM PROGRAMI
TEMEL ÇÖZÜM PROGRAMI
SÜRÜCÜ BİLGİ
LOC
Sürücü Bilgi
Sürücü Bilgileri seçeneğinde aşağıdakileri gerçekleştirebilirsiniz:
• sürücü hakkındaki bilgileri görüntüleme,
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
Sürücü bilgileri nasıl görüntülenir
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşlarıyla SÜRÜCÜ BİLGİ'yi
seçerek Sürücü Bilgi seçeneğine geçin, tuşa basın .
3. Ekranda sürücü hakkında bilgiler görüntülenir. Bilgiler
arasında ve tuşlarını kullanarak
gezinebilirsiniz. Not: Gösterilen bilgiler, sürücünün
yazılım sürümüne göre değişebilir.
SÜRÜCÜ İSMİ: DriveStudio devreye alma ve bakım
aracında metin olarak tanımlanmış sürücü ismi
SÜRÜCÜ TİPİ: örn. ACS850
SÜRÜCÜ MODELİ: Sürücünün tip kodu
YAZILIM SÜRÜMÜ: Bkz. sayfa 45.
ÇÖZÜM PROGRAMI: Aktif uygulama programının sürüm
bilgileri
TEMEL ÇÖZÜM PROGRAMI: Uygulama programı
şablonunun sürüm bilgileri
STANDART KÜTÜPHANE: Standart kütüphanenin
sürüm bilgileri
TEKNOLOJİ KÜTÜPHANE: ACS850 için uygulanamaz
GÜÇ BİRİMİ SERİ NO: Güç aşamasının (JPU) seri
numarası
HAF ÜNİT DONANIM SERİ NO: Bellek ünitesinin (JMU)
üretimindeki seri numarası
HAF ÜNİT KONFİG SERİ NO: Bellek ünitesinin (JMU)
konfigürasyonundaki seri numarası.
Ana menüye geri dönmek için tuşuna basın.
Page 51

ACS850 kontrol paneli 51
MENÜ
ÇIKIŞ
PARAMETRELER
ASİSTANLAR
DEĞİŞEN PAR
ÇIKIŞ GİR00:00
ANA MENÜ 1
LOC
ENTER
Parametre yok
yok
MESAJ
LOC
00:00
9402 Har IO2 seç
Yok
11.09.2008 12:04:55
9401 Har IO1 seç
9402 Har IO2 seç
SON DEĞİŞEN
ÇIKIŞ
YAZ
00:00
LOC
1
YAZ
9402 Har IO2 seç
PAR YAZ
Yok
İPTAL KAYDET00:00
[0]
LOC
KAYDET
İPTAL
9402 Har IO2 seç
PAR YAZ
FIO-01
İPTAL KAYDET
00:00
[1]
LOC
Parametre Değişiklik Günlüğü
Parametre Değişiklik Günlüğü seçeneğinde aşağıdakileri gerçekleştirebilirsiniz:
• kontrol paneli veya bilgisayar aracıyla yapılmış en son parametre değişiklilerini
görüntüleme,
• bu parametreleri düzenleme,
• start, stop, yön değiştirme ve lokal ve uzaktan kontroller arasında geçiş yapma.
En son değiştirilen parametrelerin görüntülenmesi
Adım Eylem Ekran
1. Çıkış modundaysanız tuşuna basarak Ana menüye
gidin.
Aksi takdirde Ana menüye ulaşana kadar tuşuna
basın.
2. Menüde ve tuşlarıyla PAR DEĞŞ LOG'u
seçerek Change Log Parametresi seçeneğine geçin,
tuşa basın .
Geçmişte parametre değişikliği yoksa ilgili metin
gösterilecektir.
Geçmişte parametre değişikliği varsa panelde, en son
değişiklikten başlamak üzere son parametre
değişikliklerinin listesi görüntülenir. Değişiklik sırası üst
sağ köşedeki bir numarayla gösterilir (1, en son
değişikliği; 2, en son ikinci değişikliği göstermektedir). Bir
parametre iki kez değiştirilmişse listede bir de
olarak görüntülenir. Parametrenin akım değeri ve
parametre değişiklik tarihi ve saati de seçili parametre
altında görüntülenir. Parametreler arasında ve
tuşlarını kullanarak gezinebilirsiniz.
3.
Bir parametreyi düzenlemek için ve tuşlarını
kullanarak parametreyi seçin ve tuşa basın .
4. ve tuşlarını kullanarak parametre için yeni
bir değer belirleyin.
Yeni değeri kaydetmek için tuşa basın .
Yeni değeri iptal etmek ve orijinali saklamak için tuşa
basın .
ğişiklik
Page 52

52 ACS850 kontrol paneli
9402 Har IO2 seç
FIO-01
12.09.2008 15:09:33
9402 Har IO2 seç
9401 Har IO1 seç
SON DEĞİŞEN
ÇIKIŞ
YAZ00:00
LOC
1
Adım Eylem Ekran
5. Parametre değişikliği, son parametre değişiklikleri
listesinde birinci olarak gösterilir.
Not: Parametre değişiklik günlüğünü, 16.14 Rst değş par
log parametrelerini Reset şeklinde ayarlayarak
resetleyebilirsiniz.
Page 53

Kontrol konumları ve çalışma modları 53
3
Kontrol konumları ve çalışma modları
Bu bölümün içindekiler
Bu bölümde sürücünün kontrol konumları ve çalışma modları açıklanmaktadır.
Page 54

54 Kontrol konumları ve çalışma modları
Kontrol paneli veya PC aracı
(DriveStudio)
(isteğe bağlı)
Fieldbus adaptör
Fxxx, Yuva 3
1) Yuva 1/2'ye opsiyonel I/O genişletme modülleri (FIO-xx) takılarak ekstra giriş/çıkış eklenebilir.
2) Enkoder ya da çözücü arabirimi modülü (FEN-xx) Yuva 1/2'ye takılır
3) Aynı tipten iki enkoder/çözücü arabirim modülü kullanılamaz.
MOTOR
PLC
(= Programlanabilir
lojik kontrolör)
M
3~
I/O
1) 3)
Sürücü - sürücü
bağlantısı veya EFB
Harici kontrol
Lokal kontrol
Enkoder
2) 3)
ACS850
Lokal kontrol – harici kontrol karşılaştırması
Sürücünün iki temel kontrol konumu bulunur: harici ve lokal. Kontrol konumu, kontrol
panelindeki LOC/REM tuşuyla veya PC aracıyla seçilin (Al/Bırak düğmesi).
Lokal kontrol
Kontrol komutları, sürücü yerel kontroldeyken kontrol paneli tuş takımından veya
DriveStudio bulunan bir PC'den verilir. Lokal kontrol konumunda hız ve moment
kontrolü modları bulunmaktadır.
Lokal kontrol genellikle devreye alma ve bakım sırasında kullanılır. Kontrol paneli,
lokal kontrolde kullanıldığında, her zaman için harici kontrol sinyal kaynaklarından
öncelikli konumdadır. Kontrol konumunun lokal olarak değiştirilmesi 16.01 Lokal kilit
parametresi ile devre dışı bırakılabilir.
Kullanıcı, bir (30.03 Lokal knt kaybı) parametresi ile sürücünün kontrol paneli veya
PC aracı ile iletişimin kesilmesine nasıl tepki vereceğini ayarlayabilir.
Page 55

Kontrol konumları ve çalışma modları 55
Harici kontrol
Sürücü harici kontroldeyken, kontrol komutları fieldbus arabirimi (dahili fieldbus
arabirimi veya opsiyonel fieldbus adaptör modülü üzerinden), I/O terminalleri (dijital
ve analog girişler), opsiyonel I/O genişletme modülleri veya sürücü-sürücü bağlantısı
aracılığıyla verilir. Harici referanslar fieldbus arabirimi, analog girişler, sürücü-sürücü
bağlantısı ve enkoder girişleri aracılığıyla verilir.
İki harici kontrol konumu bulunmaktadır; EXT1 ve EXT2. Kullanıcı her iki harici kontrol
konumu için kontrol sinyallerini (örn. başlat ve durdur) ve kontrol modlarını seçebilir.
Kullanıcının seçimine bağlı olarak EXT1 veya EXT2 etkin olur. EXT1/EXT2 seçimi
dijital girişler veya fieldbus kontrol word'ü aracılığıyla yapılır.
Sürücü çalışma modları
Sürücü, birden fazla kontrol modunda çalışabilir.
Hız kontrolü modu
Motor, sürücüye verilen hız referansına orantılı bir hızda döner. Bu mod, geri besleme
olarak tahmini hız ile veya daha yüksek hız hassaslığı sağlamak amacıyla enkoder ya
da resolver ile kullanılabilir.
Hız kontrolü modu lokal ve harici kontrolde bulunmaktadır.
Moment kontrolü modu
Motor torku, sürücüye verilen moment referansına orantılıdır. Bu mod enkoder veya
resolver ile veya onlar olmadan kullanılabilir. Bir enkoder veya resolver ile
kullanıldığında bu mod daha hassas ve dinamik motor kontrolü sağlar.
Moment kontrolü modu lokal ve harici kontrolde bulunmaktadır.
Özel kontrol modları
Yukarıda bahsedilen kontrol modlarına ek olarak aşağıdaki özel kontrol modları da
bulunmaktadır:
• Acil stop modları OFF1 ve OFF3: Sürücü tanımlanan yavaşlama rampasında
durur ve sürücü modülasyonu durur.
• Joglama modu: Sürücü joglama sinyali etkinleştirildiğinde çalışır ve tanımlanan
değere kadar hızlanır.
Daha fazla bilgi için bkz. 10 Start/stop/yön parametre grubu, sayfa 129.
Page 56

56 Kontrol konumları ve çalışma modları
Page 57

4
Program özellikleri
Uygulama programı
Yazılım
Hız kontrolü
Moment kontrolü
Sürücü logic sistemi
I/O arabirimi
Fieldbus arabirimi
Korumalar
Geri Besleme
Standart
blok kütüphanesi
Fonksiyon bloğu
programı
Sürücü kontrol programı
Yaz ılım
blokları
(parametre
ve sinyal
arabirimi)
M
E
Bu bölümün içindekiler
Bu bölümde, kontrol programının özellikleri açıklanmaktadır.
Sürücü konfigürasyonu ve programlama
Sürücü kontrol programı iki bölüme ayrılır:
•yazılım programı
• uygulama programı
Program özellikleri 57
Yaz ılım programı; hız ve moment kontrolü, sürücü logic sistemi (başlatma/durdurma),
I/O, geri besleme, iletişim ve koruma işlevleri gibi ana kontrol işlevlerini gerçekleştirir.
Yaz ılım işlevleri parametreler ile konfigüre edilir ve programlanır.
Page 58

58 Program özellikleri
Parametreler üzerinden programlama
Parametreler aşağıdakiler aracılığıyla ayarlanabilir:
• kontrol paneli (ACS850 kontrol paneli bölümünde açıklandığı gibi)
• DriveStudio bilgisayar aracı (DriveStudio Kullanım Kılavuzu 3AFE68749026
[İngilizce] içinde açıklandığı gibi) veya
• fieldbus arabirimi (Dahili fieldbus (haberleşme ağı) arayüzü aracılığıyla kontrol ve
Fieldbus adaptörü ile kontrol bölümlerinde açıklandığı gibi)
Tüm parametre ayarları otomatik olarak sürücünün kalıcı belleğine depolanır.
Parametre değişikliğinden sonra, kontrol ünitesinin gücünü kapatmadan önce 16.07
Parametre kaydet parametresi kullanılarak kayıt işleminin zorlanması önemle tavsiye
edilir.
Gerekirse, varsayılan parametre değerleri 16.04 Par geri yükleme parametresi ile geri
yüklenebilir.
Not: Parametrelerin sadece bir kısmının görülebildiği durumlarda, 16.15 Menü seçimi
parametresini Uzunm yükle olarak ayarlayın.
Uygulama programlama
Yazılım programının işlevleri uygulama programlama aracılığıyla genişletilebilir.
(Standart koşullarda uygulama programı sürücü ile birlikte verilmemektedir.)
Uygulama programları, IEC-61131 standardına dayalı olarak fonksiyon bloklarından
oluşturulabilir. Bazı sürücü parametreleri yazılım fonksiyon bloğu girişleri olarak
kullanılır ve dolayısıyla, uygulama programı aracılığıyla da değiştirilebilirler.
Uygulama programı aracıyla yapılmış parametre değişiklilerinin, DriveStudio PC
aracıyla yapılmış değişikliklere göre önceliği bulunduğuna dikkat edin.
Daha fazla bilgi için aşağ
• Uygulama kılavuzu: ACS850 sürücüler için uygulama programlama
(3AUA0000078664 [İngilizce]) ve
• DriveSPC Kullanım kılavuzu (3AFE68836590 [İngilizce])
ıdaki konulara bakın:
Uygulama programını lisanslama ve koruma
DriveSPC aracı kullanılarak, sürücüye kimlik ve paroladan oluşan bir uygulama
lisansı atanabilir. Benzer şekilde, DriveSPC aracında oluşturulan uygulama programı
da bir kimlik ve parola ile korunabilir.
Korunan bir uygulama programı lisanslı bir sürücüye karşıdan yüklenirse, uygulama
ile sürücünün kimlik ve parola bilgileri eşleşmelidir. Korunan bir uygulama, lisanslı
olmayan bir sürücüye karşıdan yüklenemez. Diğer taraftan, korunmayan bir
uygulama lisanslı bir sürücüye karşıdan yüklenebilir.
DriveStudio, uygulama lisansının kimliğini, sürücü yazılımı özelliklerinde APPL LİSANS
olarak görüntülenir. Değer 0 ise, sürücüye herhangi bir lisans atanmamış demektir.
Page 59

Program özellikleri 59
Notlar:
• Uygulama lisansı bağımsız bir kontrol birimine değil, yalnızca tam bir sürücüye
atanabilir.
• Korunan bir uygulama bağımsız bir kontrol birimine değil, yalnızca tam bir
sürücüye karşıdan yüklenebilir.
Denetleme arabirimleri
Programlanabilir analog girişler
Sürücünün iki adet programlanabilir analog girişi bulunmaktadır. Her giriş bağımsız
şekilde, JCU Kumanda Ünitesi üzerindeki bir jumper ile gerilim (0/2…10 V veya
-10…10 V) veya akım (0/4…20 mA) girişi olarak ayarlanabilir. Her giriş filtrelenebilir,
ters çevrilebilir ve ölçeklendirilebilir. Analog giriş sayısı, FIO-xx I/O uzatmaları
kullanılarak artırılabilir.
Ayarlar
13 Analog girişleri parametre grubu (sayfa 139).
Programlanabilir analog çıkışlar
Sürücünün iki adet akım analog çıkışı bulunmaktadır. Her çıkış filtrelenebilir, ters
çevrilebilir ve ölçeklendirilebilir. Analog çıkış sayısı, FIO-xx I/O uzatmaları kullanılarak
artırılabilir.
Ayarlar
15 Analog çıkışlar parametre grubu (sayfa 159).
Programlanabilir dijital girişler ve çıkışlar
Sürücüde altı dijital giriş, bir dijital start kilidi girişi ve iki dijital giriş/çıkış bulunmaktadır.
Bir dijital giriş (DI6), bir PTC termistör girişi olarak iki katına çıkar. Bkz. Termik motor
koruma bölümü, sayfa 81.
Dijital giriş/çıkışlardan biri frekans girişi, diğeri frekans çıkışı olarak kullanılabilir.
Dijital giriş/çıkış sayısı, FIO-xx I/O uzatmaları kullanılarak artırılabilir.
Ayarlar
14 Dijital I/O parametre grubu (sayfa 146).
Page 60

60 Program özellikleri
Programlanabilir I/O uzatmaları
Giriş ve çıkış sayısı, FIO-xx I/O uzatmaları kullanılarak artırılabilir. Sürücü I/O
konfigürasyon parametreleri (parametre grupları 13, 14 ve 15) farklı FIO-xx
kombinasyonları ile kullanılabilecek maksimum sayıda DI, DIO, AI, AO ve RO içerir.
Aşağıdaki tabloda sürücünün olası I/O kombinasyonları gösterilmektedir:
Konum
JCU Kumanda Ünitesi 72223
FIO-01 - 4 - - 2
FIO-11 -231 -
FIO-21 1 - 1 - 2
Dijital
girişler
(DI)
Sayısal I/O
(DIO)
Analog
girişler
(AI)
Analog
çıkışlar
(AO)
Röle
çıkışları
(RO)
Örneğin, FIO-01 ve FIO-21 sürücüye bağlı iken DI1…8, DIO1…6, AI1…3, AO1…2 ve
RO1…7'ti kontrol eden parametreler kullanımdadır.
Ayarlar
Parametre grupları 13 Analog girişleri (sayfa 139), 14 Dijital I/O (sayfa 146), 15
Analog çıkışlar (sayfa 159) ve 94 Harici I-O konfig (sayfa 265).
Programlanabilir röle çıkışları
Sürücünün üç adet röle çıkışı bulunmaktadır. Çıkışlar tarafından gösterilecek olan
sinyal, parametreler ile seçilebilir.
FIO-xx I/O uzatmaları kullanılarak röle çıkışları eklenebilir.
Ayarlar
14 Dijital I/O parametre grubu (sayfa 146).
Fieldbus kontrol
Sürücü, fieldbus arabirimi aracılığıyla birçok farklı otomasyon sistemine bağlanabilir.
Bkz. bölüm Dahili fieldbus (haberleşme ağı) arayüzü aracılığıyla kontrol (sayfa 325)
ve Fieldbus adaptörü ile kontrol (sayfa 353).
Ayarlar
Parametre grupları
giriş
(sayfa
50 Fieldbus
247
),
53 FBA data çıkış
(sayfa
(sayfa
243
),
51 FBA ayarları
247
(sayfa
) ve
58 Gömülü Modbus
245
),
(sayfa
52 FBA data
251
).
Page 61

Program özellikleri 61
Motor kontrolü
Sabit hızlar
Önceden 7'ye kadar sabit hız tanımı yapılabilir. Sabit hızlar, örneğin, dijital girişler
yoluyla etkinleştirilebilir. Sabit hızlar hız referansını geçersiz kılar.
Ayarlar
26 Sabit hızlar parametre grubu (sayfa 192).
Kritik hızlar
Kritik hızlar fonksiyonu, örneğin, mekanik rezonans sorunları sebebiyle belli motor
hızları veya hız aralıklarından kaçınmanın gerektiği uygulamalarda kullanılabilir.
Ayarlar
25 Kritik hızlar parametre grubu (sayfa 191).
Hız kontrol cihazı ayarı
Sürücünün hız kontrol cihazı, autotune fonksiyonu kullanılarak otomatik olarak
ayarlanabilir (23.20 PI ayar modu parametresi). Autotuning, motorun ve makinenin
yükünü ve ataletini temel alır. Ayrıca, kontrol cihazı kazancını, integral süresini ve
türev süresini manuel olarak ayarlamak mümkündür.
Otomatik ayarlama, 23.20 PI ayar modu parametresinin ayarına bağlı olarak dört
farklı şekilde yapılabilir. Sarsıntısız, Orta ve Dinamik seçimleri, sürücü moment
referansının ayar işlemi sonrasında hız referans adımına nasıl tepki vermesi
gerektiğini tanımlar. Sarsıntısız seçimi yavaş bir tepki oluştururken, Dinamik seçimi
hızlı bir tepki sağlar. Kullanıcı
parametreleri genelinde özelleştirilmiş kontrol hassasiyet ayarı sağlar. Ayrıntılı
ayarlama durumu bilgilerini 06.03 Hız kntr durumu parametresi verir. Otomatik
ayarlama rutini başarısız olursa, yaklaşık 15 saniye süreyle HIZ KNTL AYAR HATASI
alarmı verilir. Otomatik ayarlama işlemi sırasında sürücüye bir durma komutu verilirse
rutin iptal edilir.
seçimi, 23.21 Ayar bant genş ve 23.22 Ayar değeri
Page 62

62 Program özellikleri
A: Yetersiz kompanzasyon
B: Normal ayarlı (otomatik ayar)
C: Normal ayarlı (manuel ayar) B’dekinden daha iyi dinamik performans
D: Fazla kompanzasyon hız kontrol cihazı
%
t
n
C
B
D
n
N
A
Otomatik ayar rutini gerçekleştirmek için ön koşullar şunlardır:
•Tanımlama çalışması başarıyla tamamlanmıştır.
•Hız, moment, akım ve hızlanma limitleri (20 Limitler ve 22 Hız ref rampası
parametre grupları) ayarlanmıştır.
•Hız geri beslemesi filtreleme, hız hatası filtreleme ve sıfır hız ayarlanmıştır (19 Hız
hesaplama ve 23 Hız kontrol parametre grupları).
• Sürücü durdurulmuştur.
Otomatik ayar rutinini otomatik olarak parametrelere aktarılır:
• 23.01 Oransal kazanç P (hız kontrol cihazının oransal kazanımı)
•
23.02 İntegral süre (hız kontrol cihazının entegral süresi)
• 01.31 Mek zm sabiti (makinenin mekanik zaman sabiti)
Aşağıdaki şekil bir hız referans adımındaki hız tepkilerini göstermektedir
(genelde %1…20).
Page 63
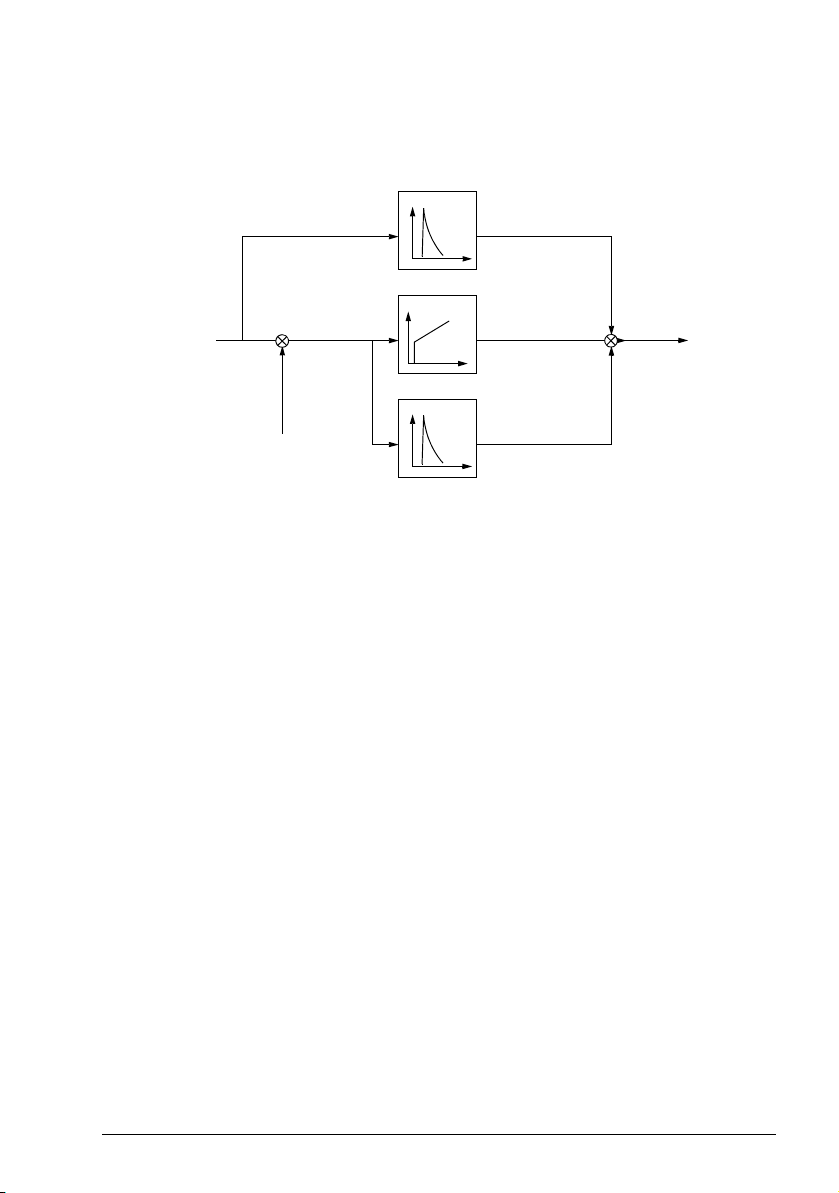
Program özellikleri 63
Türev
Oransal,
dahili
Türev
hızlanma
kompanzasyonu
Moment
referansı
Hız
referansı
Gerçek hız
Hata
değeri
-
+
+
+
+
Aşağıdaki şekil hız kontrol cihazının sadeleştirilmiş blok şemasıdır. Kontrol cihazı
çıkışı moment kontrolörü için referanstır.
Ayarlar
23 Hız kontrol parametre grubu (sayfa 182).
Enkoder desteği
Program iki enkoder (veya resolver) için destek sağlar; enkoder 1 ve 2. Çok dönüşlü
enkoderler yalnızca enkoder 1 olarak desteklenir. Dört adet opsiyonel arabirim
modülü mevcuttur:
• TTL Enkoder Arabirimi FEN-01: iki TTL girişi, TTL çıkışı (enkoder emülasyonu ve
eko için) ve pozisyon mandallama için iki adet dijital giriş
• Mutlak Enkoder Arabirimi FEN-11: mutlak enkoder girişi, TTL girişi, TTL çıkışı
(enkoder emülasyonu ve eko için) ve pozisyon mandallama için iki adet dijital giriş
• Resolver Arabirimi FEN-21: resolver girişi, TTL girişi, TTL çıkışı (enkoder
emülasyonu ve eko için) ve pozisyon mandallama için iki adet dijital giriş
• HTL Enkoder Arabirimi FEN-31: HTL enkoder girişi, TTL çıkışı (enkoder
emülasyonu ve eko için) ve pozisyon mandallama için iki adet dijital giriş
Arabirim modülü sürücü seçenek Yuva 1 veya 2'ye bağlıdır. Not: Aynı tipten iki
enkoder arabirim modülü kullanılamaz.
Ayarlar
91 Mutlak enc konfig parametre grupları (sayfa 260), 92 Resolver konfg (sayfa 263)
ve 93 Pulse enc konfig (sayfa 264).
Page 64

64 Program özellikleri
Zaman
Hız
12 3456789 1011 1213141516
Joglama örneği
Joglama
İki joglama işlevi (1 veya 2) bulunmaktadır. Bir joglama işlevi etkinleştirildiğinde sürücü
start edilir ve tanımlanmış joglama hızlanma rampasında tanımlanmış joglama hızına
kadar hızlanır. İşlev devre dışı bırakıldığında sürücü tanımlanmış joglama yavaşlama
rampasında stop edene kadar yavaşlar. Joglama sırasında bir buton sürücüyü start ve
stop etmek için kullanılabilir. Joglama işlevi genelde bir makineyi lokal olarak kontrol
etmek amacıyla servis işlemleri veya devreye alma için kullanılır.
1 ve 2 joglama işlevleri bir parametre veya fieldbus aracılığıyla etkinleştirilir. Fieldbus
aracılığıyla etkinleştirme için, bkz.
02.22 FBA main CW
parametresi.
Aşağıdaki şekil ve tablo, sürücünün joglama sırasındaki çalışmasını gösterir.
(Devreye almama sinyali gerektirdiklerinden fieldbus aracılığıyla direk joglama
komutlarına uygulanamayacaklarını unutmayın; bkz. parametre 10.09 Jog devrede.)
Aynı zamanda sürücü start komutu verildiğinde sürücünün normal çalışmaya (=
joglama pasif) nasıl geçtiğini gösterir. Jog kom = Joglama girişi durumu; Jog devrede
= Joglama 10.09 Jog devrede parametresi tarafından ayarlanan kaynak aracılığıyla
devrede; Start cmd = Sürücü start komutunun durumu.
veya
02.36 EFB ana cw
Faz
1-2 1 1 0 Sürücü, joglama fonksiyonunun hızlanma rampası
2-3 1 1 0 Sürücü joglama hızında çalışır.
3-4 0 1 0 Sürücü joglama fonksiyonunun yavaşlama rampası
4-5 0 1 0 Sürücü durduruldu.
5-6 1 1 0 Sürücü, joglama fonksiyonunun hızlanma rampası
6-7 1 1 0 Sürücü joglama hızında çalışır.
7-8 x 0 1
Jog
komutu
Jog
devrede
Start
komutu
Açıklama
boyunca joglama hızına hızlanır.
boyunca sıfır hıza yavaşlar.
boyunca joglama hızına hızlanır.
Jog devreye alma etkin değil; normal çalışma devam eder.
Page 65

Program özellikleri 65
Faz
8-9 x 0 1 Normal çalışma joglamaya göre önceliklidir. Sürücü
9-10 x 0 0 Sürücü aktif yavaşlama rampası boyunca sıfır hıza
10-11 x 0 0 Sürücü durduruldu.
11- 12 x 0 1 N ormal ça lışma joglamaya göre önceliklidir. Sürücü
12-13 1 1 1 Start komutu jog devreye alma sinyalini geçersiz kılar.
13-14 1 1 0 Sürücü, joglama fonksiyonunun yavaşlama rampası
14-15 1 1 0 Sürücü joglama hızında çalışır.
15-16 x 0 0 Sürücü joglama fonksiyonunun yavaşlama rampası
Jog
komutu
Jog
devrede
Start
komutu
Açıklama
hız referansını takip eder.
yavaşlar.
aktif hızlanma rampası boyunca hız referansına
hızlanır.
boyunca joglama hızına yavaşlar.
boyunca sıfır hıza yavaşlar.
Not: Sürücü devreye alma komutu açıksa veya sürücü lokal kontroldeyse joglama
çalışmaz.
Not: Rampa biçim süresi joglama sırasında sıfıra ayarlanır.
Skaler motor kontrolü
Doğrudan Moment Kontrol’ü (DTC-Doğrudan Moment Kontrolü) yerine motor kontrol
yöntemi olarak skaler kontrolü seçmek de mümkündür. Skaler kontrol modunda
sürücü bir frekans referansı ile kontrol edilir. Ancak, skaler kontrolde üstün DTC
performansı elde edilemez.
Aşağıdaki durumlarda skaler motor kontrol modunun etkinleştirilmesi önerilir:
• Çoklu motor sürücülerinde: 1) eğer yük motorlar arasında eşit olarak
dağıtılmamışsa, 2) motorların boyutları farklıysa veya 3) motorlar motor
tanımlama (ID run) yapıldıktan sonra değiştirilecekse
• Motorun nominal akım değeri sürücünün nominal çıkış akımının 1/6’sından da
küçükse
•Eğer sürücü bir motora bağlanmadan kullanılıyorsa (örneğin, test amaçlı olarak)
• Sürücü, step-up transformatörü aracılığıyla orta gerilim motorunu çalıştırıyorsa.
Skaler kontrolde bazı
standart özellikler kullanılamaz.
Page 66

66 Program özellikleri
f (Hz)
Motor Gerilimi
Kompanzasyon yok
IR Kompanzasyonu
f (Hz
)
Yük (%)
Par. 34.03 Par. 34.04 Par. 34.05 Par. 34.06 Par. 34.07
İzin verilen çalışma aralığı
Aşırı yük alanı
Düşük yük alanı
34.13
34.14
34.15
34.16
34.17
34.08
34.09
34.10
34.11
34.12
Skaler kontrolde IR kompanzasyonu
IR kompanzasyonu, sadece motor
kontrol modu Skaler olduğunda aktiftir.
IR kompanzasyonu aktifleştirildiğinde
sürücü düşük hızlarda motora ekstra
gerilim yüklemesi yapar. IR
kompanzasyonu, yüksek moment
gerektiren uygulamalarda faydalıdır.
Doğrudan Moment Kontrol’ünde (DTC),
IR kompanzasyonu mümkün veya
gerekli değildir.
Kullanıcı tanımlı yük eğrisi
Sürücü çıkışı, kullanıcı tanımlı yük eğrisi tanımlayarak sınırlandırılabilir. Pratikte
kullanıcı yük eğrisi, hiçbiri zorunlu olmamasına rağmen bir aşırı yük ve bir düşük yük
eğrisinden oluşmaktadır. Her eğri, frekansın bir fonksiyonu olarak çıkış akımını veya
momenti temsil eden beş nokta tarafından oluşturulur.
Eğri aşıldığında oluşturulması için bir alarm veya hata ayarlanabilir. Ayrıca üst sınır
(aşırı yük eğ
risi), moment veya akım sınırlayıcı olarak kullanılabilir.
Ayarlar
34 Kull. Yük eğrisi parametre grubu (sayfa 213).
Page 67

Program özellikleri 67
f (Hz
)
Özel U/f oranı Gerilim (V)
Par. 38.13
Par. 38.12
Par. 38.11
Par. 38.10
Par. 38.09
Par. 38.04 Par. 38.05 Par. 38.06 Par. 38.07 Par. 38.08
Kullanıcı tanımlı U/f eğrisi
Kullanıcı, özel bir U/f eğrisi belirleyebilir (frekansın fonksiyonu olarak çıkış gerilimi).
Bu eğri, doğrusal ve karesel U/f oranlarının yeterli olmadığı özel uygulamalarda
kullanılmaktadır (örn. motor kırılma momentinin artırılması gerektiğinde).
Not: U/f eğrisi sadece skaler kontrolde kullanılabilir, örneğin, 99.05 Motor kontl modu
ayarı Skaler ise.
Not: Kullanıcı tanımlı noktaların her biri, bir önceki noktaya göre daha yüksek
frekansa ve daha yüksek gerilime sahip olmalıdır.
UYARI! Düşük frekanslarda yüksek gerilim, aşırı ısınma nedeniyle düşük
performansa veya motorun hasar görmesine yol açabilir.
Ayarlar
38 Akı referansı parametre grubu (sayfa 226).
Page 68

68 Program özellikleri
Rotor
Mutlak enkoder
/resolver
N
S
Otomatik fazlama
Otomatik fazlama, sabit mıknatıslı senkron motorun manyetik akısının veya bir
senkron relüktans motorun manyetik ekseninin açısal pozisyonunu belirlemek için
kullanılan otomatik bir ölçüm rutinidir. Motor kontrolü, motor torkunu doğru bir şekilde
kontrol etmek için rotor akısının mutlak pozisyonunu gerektirir.
Mutlak enkoder ve resolver gibi sensörler, rotorun sıfır açısı ile sensörün sıfır açısı
arasında ofset tesis edildikten sonra her zaman rotor pozisyonunu gösterirler. Diğer
taraftan, standart bir puls enkoder dönerken rotorun pozisyonunu belirler, ancak ilk
pozisyon bilinmemektedir. Bununla birlikte, puls enkoder Hall sensörleri ile
donatıldığında bir mutlak enkoder gibi kullanılabilse de, ilk pozisyonu kabaca bir
doğrulukla belirler. Hall sensörleri bir devir sırasında konumlarını altı kez değiştiren
sözde iletişim pulsları oluşturduğundan, yalnızca ilk pozisyonun tam bir devrin hangi
60°’lik sektöründe olduğu bilinebilir.
Sabit mıknatıslı
senkron motorlarda veya senkron relüktans motorlarda otomatik
fazlama rutini aşağıdaki durumlarda gerçekleştirilir:
1. Mutlak enkoder, resolver veya iletişim sinyalli enkoder kullanıldığında, rotor ve
enkoder pozisyon farkının bir kerelik ölçümünde
2. Artımlı enkoder kullanıldığında her güç verilişinde
3. Açık çevrim motor kontrolünde, her çalıştırmada rotor pozisyonunun tekrarlanan
ölçümünde
Açık çevrim modunda, start öncesinde rotorun sıfır açısı belirlenir. Kapalı çevrim
modunda, sensör sıfır açısını gösterdiğinde, otomatik fazlama ile rotorun gerçek açısı
belirlenir. Sensörün ve rotorun gerçek sıfır açıları genellikle uyuşmadığından, açının
ofsetinin belirlenmesi gerekir. Otomatik fazlama modu hem açık çevrimde hem de
kapalı çevrimde bu i
şlemin nasıl gerçekleştirildiğini belirler.
Page 69

Program özellikleri 69
Not: Açık çevrim modunda, şaft artık mıknatıslanma akısına doğru döndüğünden,
motor start edildiğinde mutlaka dönme hareketi yapar.
Motor kontrolünde kullanılan bir rotor konumu ofseti, kullanıcı tarafından da
belirlenebilir. Bkz. parametre 97.20 PM açı ofseti.
Not: Aynı parametre, sonucu çoğunlukla 97.20 PM açı ofseti parametresine yazılan
otomatik fazlama rutini tarafından kullanılır. Kullanıcı modu etkinleştirilmemiş olsa
dahi, otomatik fazlama ID run sonuçları güncellenir (bkz. parametre 97.01 Kull motor
par).
Çok sayıda otomatik fazlama modu bulunmaktadır (bkz. parametre 11. 07 Otofaz
modu).
En güvenilir ve doğru yöntem olduğundan, durum 1 (yukarıdaki listeye bakınız) için
özellikle turning modu önerilir. Turning modunda, rotor konumunu belirlemek için
motor ş
aftı geri ve ileri (±360/kutup çifti)° çevrilir. Durum 3'te (açık çevrim kontrolü),
şaft sadece bir yöne çevrilir ve açı daha küçüktür.
Standstill modları, motor çevrilemiyorsa kullanılabilir (örneğin, yük bağlıyken).
Motorların ve yüklerin özellikleri değişiklik gösterdiğinden, en uygun standstill
modunu bulmak için test yapılmalıdır.
Sürücü, açık çevrim veya kapalı çevrim modlarında çalışan bir motorla devreye
alındığında rotor konumunu belirleyebilir. Bu durumda, Otofaz modu 11.07
parametresinin ayarı etkisizdir.
Otomatik fazlama rutini başarısız olabilir ve bu nedenle otomatik fazlama rutininin
birkaç defa gerçekleştirilmesi ve 97.20 PM açı ofseti parametresi değerinin kontrol
edilmesi önerilir.
Tahmini rotor açısı ölçülen rotor açısından çok farklıysa, çalışan bir motorda otomatik
fazlama hatası meydana gelebilir. Tahmini ve ölçülen açılar arasındaki fark
nedenlerinden biri, motor aksına olan enkoder bağlantısında bir kayma olmasıdır.
Otomatik fazlama hatasının bir diğer nedeni başarısız bir otomatik fazlama rutinidir.
Bir başka deyişle, başlangıçtan itibaren 97.20 PM açı ofseti parametresinde yanlış bir
değer bulunmaktadır.
Çalışan bir motorda otomatik fazlama hatasının üçüncü nedeni ise, kontrol
programına yanlış motor tipi girilmiştir ya da motor ID run başarısız olmuştur.
ın
Ayrıca, 11. 07 Otofaz modu parametresi Dönerek olarak ayarlanırsa, otomatik fazlama
rutini sırasında 0026 OTOFAZ YAPILACAK hatası meydana gelebilir. Turning
modunda, otomatik fazlama rutini sı rası
veya kolayca hareket edemiyorsa ya da harici güç kullanılarak çevriliyorsa, otomatik
fazlama hatası tetiklenir. Seçilen moddan bağımsız olarak, otomatik fazla rutini
başlamadan önce rotor dönüyorsa, otomatik fazlama hatası meydana gelir.
nda rotorun çevrilebilmesi gerekir. Rotor kilitli
Page 70
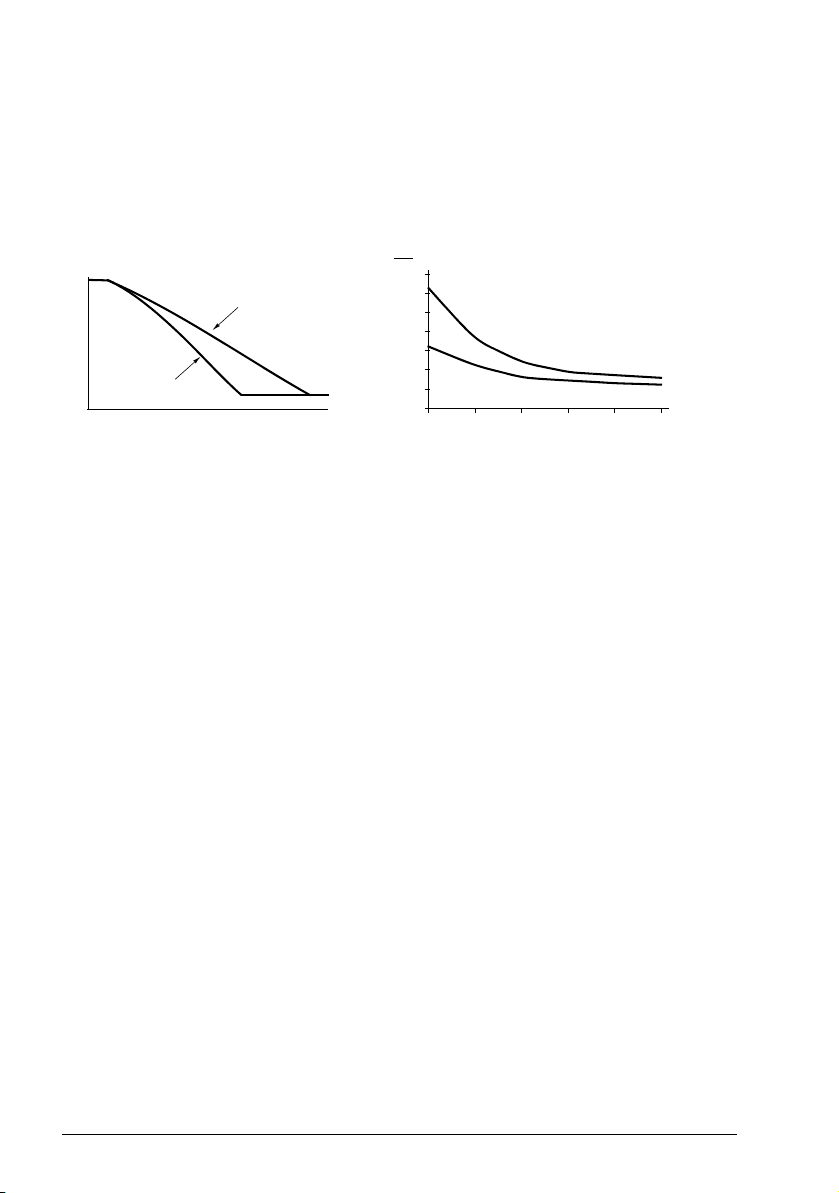
70 Program özellikleri
T
Br
T
N
20
40
60
(%)
Motor hızı
Akı frenleme yok
Akı frenleme
T
Br
= Frenleme momenti
T
N
= 100 Nm
Akı frenleme
Akı frenleme yok
t (s)
f (Hz)
Akı frenleme
Sürücü, motordaki mıknatıslama seviyesini arttırarak daha iyi bir yavaşlama sağlar.
Motor akısını arttırarak motorda frenleme sırasında üretilen enerji motor termik
enerjisine dönüştürülebilir.
Sürücü sürekli olarak, aynı zamanda akı frenleme sırasında da, motor durumunu
izler. Bu sebeple akı frenleme hem motoru stop ettirme hem de hız değiştirmede
kullanılabilir. Akı frenlemenin diğer faydaları şunlardır:
• Frenleme bir stop komutu verildikten hemen sonra başlar. Fonksiyon frenlemeyi
başlatmadan önce akının azalmasını beklemek zorunda değildir.
• Endüksiyon motorunun soğutması verimlidir. Akı frenleme sırasında motorun
rotor akımı değil, stator akımı artar. Stator rotordan çok daha verimli bir şekilde
soğur.
•Akı frenleme endüksiyon motorlarıyla ve sabit mıknatıslı senkron motorlarla
kullanılabilir.
İki frenleme gücü seviyesi bulunmaktadır:
• Orta frenleme akı frenlemenin devre dışı olduğu durumlara kıyasla daha hızlı
yavaşlama sağlar. Motorun aşırı derecede ısınmasını önlemek için motorun akı
seviyesi sınırlandırılmıştır.
• Tam frenleme, mekanik frenleme enerjisini motor termik enerjisine dönüştürmek
için neredeyse mevcut tüm akımı kullanır. Frenleme süresi orta frenlemeye göre
daha kısadır. Döngüsel kullanımda motor fazla ısınabilir.
Ayarlar
Parametre 40.10 Akı frenleme (sayfa 229)
Page 71

Program özellikleri 71
Proses
PID
AI1
Proses
gerçek
değerleri
AI2
• • •
D2D
FBA
Set değeri
Uygulama kontrolü
Uygulama makroları
Bkz. bölüm Uygulama makroları (sayfa 91).
Proses PID kontrolü
Sürücüde dahili bir PID kontrol cihazı bulunur. Kontrol cihazı basınç, akış veya sıvı
seviyesi gibi proses değişkenlerini kontrol etmek için kullanılabilir.
Proses PID kontrolünde, sürücüye hız referansı yerine bir proses referansı (set
değeri) bağlanır. Aynı zamanda bir gerçek değer bilgisi (proses geri besleme) de
sürücüye geri verilir. Proses PID kontrolü, ölçülen proses miktarını (gerçek değer)
istenen seviyede (set değeri) tutabilmek için sürücü hızını ayarlar.
Aşağıdaki sadeleştirilmiş blok şeması, proses PID kontrolünü göstermektedir.
Daha ayrıntılı bir blok şeması için bkz. sayfa 378.
Proses PID kontrol cihazının hızlı konfigürasyonu
1. Set değeri kaynağı seçin (27.01 PID Set seçimi).
2. Geri besleme kaynağı seçin ve minimum ile maksimum seviyelerini ayarlayın
(27.03 PID grbls 1 kayn, 27.05 PID Grbs1 maks, 27.06 PID Gbrs1 min). İkinci bir
geri besleme kaynağı kullanılıyorsa, 27.02 PID gr besl fonk, 27.04 PID grbls 2
kayn, 27.07 PID grbs2 maks ve 27.08 PID grbs2 min parametrelerini de ayarlayın.
3.
Kazanç, integral süre, türetme süresi ve PID çıkış seviyelerini ayarlayın (
,
kazancı
4. PID kontrol cihazı çıkışı 04.05 PID çıkış parametresi ile gösterilir. Bunu, örneğin,
21.01 Hız ref1 sçm veya 24.01 Tork ref1 sçm kaynağı olarak seçin.
27.13 PID I zm, 27.14 PID D zm, 27.18 PID maks
ve
27.12 PID
27.19 PID min
).
Page 72

72 Program özellikleri
t<t
d
t
d
UYKU MODU
t
wd
t
wd
Motor hızı
t
d
= Uyku gecikmesi (27.24)
t
wd
= Uyanma gecikmesi (27.26)
Uyku
seviyesi
(27.23)
STOP START
Gerçek değer
Gerçek değer
Uyanma seviyesi
(27.25)
Zaman
Zaman
Zaman
Uyanma seviyesi
(27.25)
Ters çevrilmemiş (27.16 kaynağı = 0)
Ters çevrilmiş (27.16 kaynağı = 1)
Proses PID kontrolü için Uyku fonksiyonu
Aşağıdaki örnek, zaman çizelgesi uyku fonksiyonunun çalışmasını
görselleştirmektedir.
Sürücü, bir basınç güçlendirme pompasını kontrol eder. Su tüketimi gece boyunca
düşer. Bunun sonucunda proses PID kontrol cihazı motor hızını düşürür. Ancak,
borulardaki doğal kayıplar ve düşük hızlarda santrifüjlü pompanın düşük verimliliği
dolayısıyla motor dönüşü kesinlikle durmaz. Uyku fonksiyonu yavaş dönüşü tespit
eder ve uyku gecikmesi geçtikten sonra oluşan gereksiz pompalamayı stop ettirir.
Sürücü uyku moduna geçer ancak basıncı izlemeye devam eder. Basınç izin verilen
minimum limitin altına düşünce ve uyanma gecikmesi geçtikten sonra pompalama
devam eder.
Ayarlar
Parametre grubu
186
).
27 Proses PID
(sayfa
194
) ve parametre
23.08 Hız ekleme
(sayfa
Page 73

Program özellikleri 73
BSM = Fren Durumu Makinesi
* 42.12 Fren hata fonk parametresi
ayarına bağlı olarak
0/0/1/1
0/1/1/1
1/1/0/0
1/1/0/0
0/1/1/0
5)
7)13)
12)
11)
10)
9)
6)
1)
2)
3)
4)
Herhangi bir
BSM
STOPPED
BSM
START
FREN
AÇ
RELEASE
RAMP
CLOSE
BRAKE
Hata/Alarm*
FREN KAPAMADI
Hata/Alarm*
FREN AÇMADI
Hata/Alarm*
FREN KAPAMADI
Alarm/hata*
FREN START TORK
8)
EXTENDED
RUN
14)
NN
W/X/Y/Z
PID kontrol makrosu, ASİSTANLAR – Yazılım asistanları – Uygulama Makrosu – PID
kontrolü seçenekleri seçilerek kontrol paneli ana menüsünden etkinleştirilebilir. Ayrıca
bkz. sayfa 96.
Mekanik fren kontrolü
Sürücü stop ettiğinde veya güç olmadığında, motor ve çalıştırılan makineyi sıfır hızda
tutmak için bir mekanik fren kullanılabilir.
03.15 Fren tork hafz ve 03.16 Fren komutu parametreleri sırasıyla, fren kapatma
komutu alındığında saklanan moment değerini ve fren komutunun değerini gösterir.
Ayarlar
42 Mekanik fren kont. parametre grubu (sayfa 230).
Durum (Sembol )
- NN: Durum adı
- W/X/Y/Z: Durum çıkışları/çalışmalar
W: 1 = Fren açma komutu etkin. 0 = Fren kapatma komutu etkin. (03.16 Fren komutu sinyali
ile seçilen dijital/röle çıkışı aracılığıyla kontrol edilir.)
Page 74
74 Program özellikleri
X: 1 = Zorunlu start (inverter modülasyonda). Fonksiyon dahili start komutu fren, harici stop
komutunun durumuna rağmen kapanana kadar açık tutar. Yalnızca stop modu olarak
rampa stop seçilmiş olduğunda etkilidir (11. 03 Stop modu). Çalışma izni ve hatalar
zorunlu starta göre önceliklidir. 0 = Zorunlu start yok (normal çalışma).
Y: 1 = Sürücü kontrol modu hız/skaler olarak zorlanır.
Z: 1 = Referans rampa jeneratörü çıkışı sıfıra zorlanmış. 0 = Referans rampa jeneratörü
çıkışı devrede (normal çalışma).
Durum değişim koşulları (Simge )
1) Fren kontrolü etkin (42.01 Fren kontrol = Sensörlü veya Sensörsüz) VEYA sürücü
modülasyonunu durması talep edilmiş. Sürücü kontrol modu hız/skaler olarak zorlanır.
2) Harici start komutu açık VE fren açma talebi açık (42.10 Fren kapa isteği tarafından
seçilen kaynak 0) VE tekrar açma gecikmesi (42.07 Tekrar açma gec) aşılmış.
3) Fren bırakma sı
torku) VE fren tutma etkin değil (42.11 Fren aç kmt tut). Not: Skaler kontrol ile
tanımlanan start momenti etkisizdir.
4) Fren açık (42.02 Fren sensörü par. tarafından seçilen bilgilendirme kaynağı 1) VE fren
kapama gecikmesi aşılmış (42.03 Açma gecikmesi). Start = 1.
5) 6) Start = 0 VEYA fren kapama komutu etkin VE gerçek motor hızı < fren kapama hızı
(42.05 Kapama hızı) VE kapama komutu gecikmesi (42.06 Kapa komut gecik) aşılmış.
7) Fren kapalı (bilgilendirme = 0) VE fren kapama gecikmesi (42.04 Kapama gecikmesi)
aşılmış. Start = 0.
8) Start = 1 VE fren açma talebi açık (42.10 Fren kapa isteği taraf
VE tekrar açma gecikmesi aşılmış.
9) Fren açık (bilgilendirme = 1) VE fren kapanma gecikmesi aşılmış.
10) Fren bırakmada tanımlanan start momentine ulaşılmadı.
11) Fren kapalı (bilgilendirme = 0) VE fren açma gecikmesi aşılmış.
12) Fren kapalı (bilgilendirme = 0).
13) Fren açık (bilgilendirme = 1) VE fren kapanma gecikmesi aşılmış. Fren kapama hata
gecikmesinin (42.13 Kapa hata gec) aşılmasından sonra hata oluşturuldu.
14) Fren kapalı (bilgilendirme = 1) VE uzatılmış çalışma gecikmesi (42.14 İlave çalışma zm)
aşılmış. Start = 0.
rasında gerekli olan başlangıç momentine ulaşıldı (42.08 Fren açma
ından seçilen kaynak 0)
Page 75

T
s
Fren açmada start momenti (parametre 42.08 Fren açma torku)
T
mem
Fren kapanmasında saklanan moment değeri (03.15 Fren tork hafz sinyali)
t
md
Motor mıknatıslama gecikmesi
t
od
Fren açma gecikmesi (parametre 42.03 Açma gecikmesi)
n
cs
Fren kapama hızı (parametre 42.05 Kapama hızı)
t
ccd
Fren kapama komutu gecikmesi (parametre 42.06 Kapa komut gecik)
t
cd
Fren kapama gecikmesi (parametre 42.04 Kapama gecikmesi)
t
ex
Uzatılmış çalışma süresi
Start komutu
(06.02 b0)
Modülasyonda
(06.02 b3)
Ref_Çalışma
(06.02 b4)
Fren açma
komutu
(03.16)
Referans
rampası
çıkışı (03.05)
Moment ref
Referans
rampası girişi
(03.03)
Zaman
t
cd
T
mem
n
cs
T
s
t
od
t
md
123 4
56
7
8
t
ex
Program özellikleri 75
Çalışma zaman çizelgesi
Aşağıdaki sadeleştirilmiş zaman çizelgesi, fren kontrol fonksiyonunun çalışmasını
görüntüler.
Page 76

76 Program özellikleri
Motor
M
230 VAC
JCU ünitesi
Mekanik fren
Fren kontrol
donanımı
Acil fren
X2
1 RO1
2 RO1
3 RO1
X3
11 DI5
13 +24 V
Fren açma/kapatma 03.16 Fren komutu sinyali üzerinden kontrol edilir. Fren denetimi kaynağı
42.02 Fren sensörü parametresi ile seçilir.
Fren kontrol donanımı ve bağlantılar kullanıcı tarafından yapılmalıdır.
• Röle/dijital çıkış üzerinden fren açma/kapama kontrolü.
• Seçilen dijital giriş üzerinden fren denetlemesi.
• Fren kontrol devresinde acil fren anahtarı.
• Röle çıkış üzerinden fren açma/kapatma kontrolü (yani 14.42 RO1 kaynağı parametresi
ayarı P.03.16.00 = 03.16 Fren komutu şeklinde).
• DI5 dijital girişi aracılığıyla fren denetimi (yani 42.02 Fren sensörü parametresi ayarı
P.02.01.04 = 02.01 DI durumu, bit 4 şeklinde)
Örnek
Aşağıdaki şekil, bir fren kontrol uygulama örneği verir.
UYARI! İçine fren kontrol fonksiyonlu bir sürücü entegre edilmiş olan
makinenin personel güvenlik düzenlemelerine uyduğundan emin olun.
Sürücünün (IEC 61800-2’de tanımlanan Tam bir Sürücü Modülü veya Temel
Sürücü Modülü) Avrupa Makine Yönergesi ve ilgili uyumlu hale getirilmiş
standartlarda bahsedilen bir güvenlik cihazı olarak göz önünde
bulundurulmayacağını unutmayın. Bu durumda tüm makinenin personel
güvenliği, belli bir sürücü özelliğine bağlı olmamalıdır (fren kontrol
fonksiyonu gibi) ancak uygulamaya özel düzenlemelerde tanımlandığı gibi
gerçekleştirilmelidir.
Page 77

Program özellikleri 77
Pazartesi
Salı
Çarşamba
Perşembe
Cuma
Cumartesi
Pazar
Pazartesi
Salı
Çarşamba
Zaman periyodu 1: Start zamanı 00:00:00; Stop zamanı 00:00:00 veya 24:00:00; Start günü
Salı; Stop günü Pazar
Zaman periyodu 2: Start zamanı 03:00:00; Stop zamanı 23:00:00; Start günü Çarşamba; Stop
günü Çarşamba
Zaman periyodu 3: Start zamanı 21:00:00; Stop zamanı 03:00:00; Start günü Salı; Stop günü
Cumartesi
Zaman periyodu 4: Start zamanı 12:00:00; Stop zamanı 00:00:00 veya 24:00:00; Start günü
Perşembe; Stop günü Salı
Perşembe
Zaman periyodu 1:
(haftalık)
Zaman periyodu 4:
(günlük)
Zaman periyodu 4:
(haftalık)
Zaman periyodu 1:
(günlük)
Zaman periyodu 2:
(haftalık)
Zaman periyodu 2:
(günlük)
Zaman periyodu 3:
(haftalık)
Zaman periyodu 3:
(günlük)
Zamanlayıcılar
Dört farklı günlük veya haftalık zaman periyodu tanımlamak mümkündür. Zaman
periyodları, dört farklı zamanlayıcıyı kontrol etmek için kullanılabilir. Dört
zamanlayıcının açık/kapalı durumları, sinyalin bir bit pointer ayarı ile herhangi bir
parametreye bağlanabileceği, 06.14 Zamanlı fonk parametresinin 0…3 bitleri ile
gösterilir (bkz. sayfa 104). Ayrıca, zamanlayıcılardan herhangi biri açıksa, 06.14
parametresindeki bit 4 açıktır.
Her zaman periyodu, birden fazla zamanlayıcıya atanabilir; aynı şekilde, bir
zamanlayıcı birden fazla zaman periyodları ile kontrol edilebilir.
Aşağıdaki şekil, farklı zaman periyodlarının günlük ve haftalık modlarda nasıl etkin
unu göstermektedir.
olduğ
Page 78
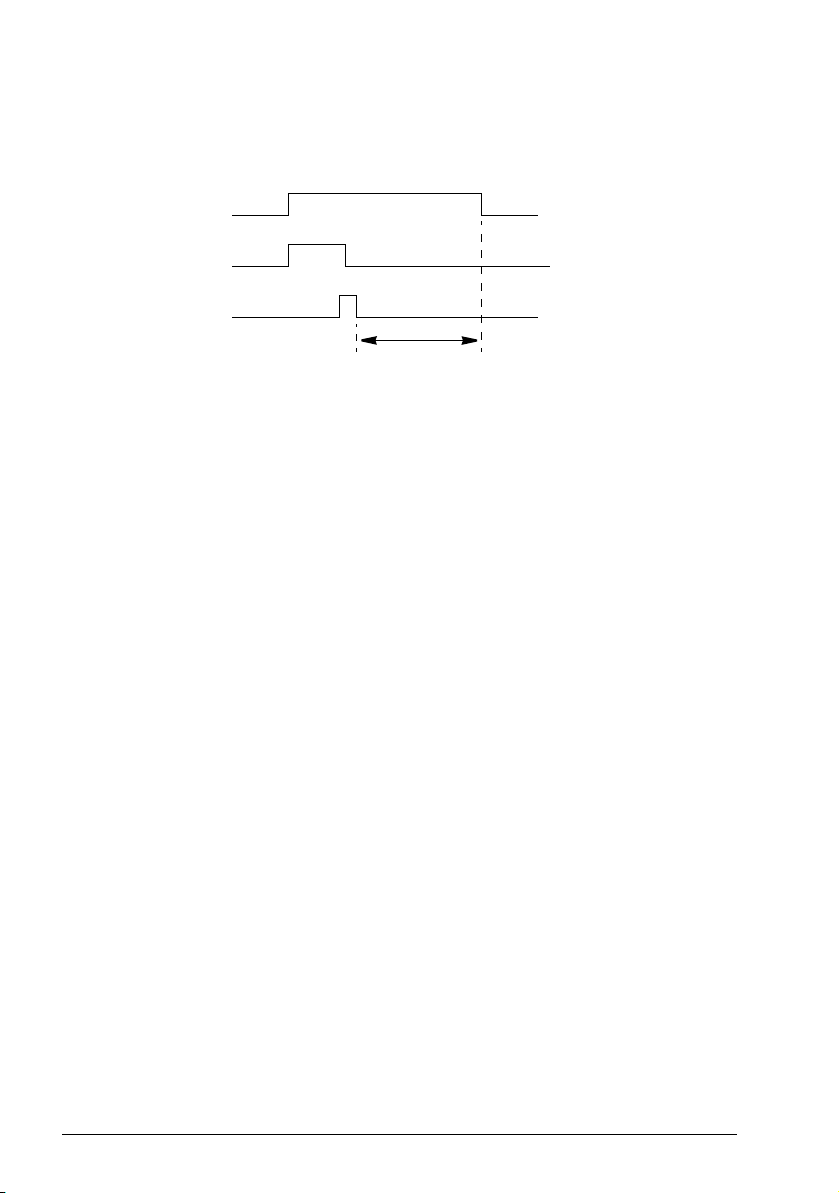
78 Program özellikleri
Zamanlayıcı etkin
Zamanlayıcı izin
sinyali
Ek süre sinyali
Ek süre
Ayrıca, zamanlayıcıların etkinleştirilmesi için bir “yükseltme” fonksiyonu
bulunmaktadır: parametre tarafından ayarlanabilen bir zaman periyodunun
etkinleştirme süresini uzatmak için bir sinyal kaynağı seçilebilir.
Ayarlar
36 Zaman fonksiyonu parametre grubu (sayfa 221).
DC gerilim kontrolü
Yüksek gerilim kontrolü
Motor üretici çeyrek içinde çalışırken iki çeyrek hat yanı dönüştürücünün bulunması
halinde ara DC bağlantısının yüksek gerilim kontrolü gereklidir. DC geriliminin aşırı
akım kontrol sınırını aşmasının engellenmesi için yüksek gerilim kontrol cihazı, sınıra
ulaşıldığında otomatik olarak oluşturulan momenti azaltır.
Düşük gerilim kontrolü
Eğer gelen besleme gerilimi kesilirse sürücü dönen motorun kinetik enerjisinden
faydalanarak çalışmaya devam edecektir. Motor döndüğü ve sürücüye enerji ürettiği
sürece, sürücü çalışmaya devam eder. Eğer ana kontaktör kapalı kalmışsa sürücü
kesilmeden sonra çalışmaya devam edebilir.
Page 79

Program özellikleri 79
130
260
390
520
1.6 4.8 8 11.2 14.4
t (s)
U
DC
f
out
T
M
UDC= sürücünün ara devre gerilimi, f
out
= sürücünün çıkış frekansı,
T
M
= motor torku
Nominal yükte besleme gerilim kaybı (f
out
= 40 Hz). Ara devre DC gerilimi minimum limite düşer. Kontrol
cihazı şebeke kapalı olduğu sürece gerilimi sabit tutar. Sürücü motoru jeneratör modunda çalıştırır. Motor
hızı düşer ancak motor yeterli kinetik enerjiye sahip olduğu sürece sürücü çalışabilir.
U
şebeke
20
40
60
80
40
80
120
160
U
DC
(V DC)
f
out
(Hz)
T
M
(Nm)
Not: Ana kontaktör bulunan ünitelerde, kısa süreli besleme kesintilerinde kontaktör
kontrol devresini kapalı tutan bir tutma devresi (örn. UPS) bulunmalıdır.
Gerilim kontrolü ve açma limitleri
Ara DC gerilim regülatörü kontrol ve açma limitleri, kullanıcı tarafından sağlanan
besleme gerilimine veya otomatik belirlenen bir besleme gerilimine bağlıdır. Gerçek
gerilim 01.19 Besleme voltajı parametresi ile gösterilir. DC gerilimi (U
1,35 katına eşittir.
Besleme geriliminin otomatik belirlenmesi, sürücü her çalıştırıldığında gerçekleştirilir.
Otomatik belirleme 47.03 Besl ger oto tan parametresi ile devre dışı bırakılabilir;
kullanıcı 47.04 Besleme ger parametresinde gerilimi tanımlayabilir.
), bu değerin
DC
Page 80

80 Program özellikleri
01.07 Dc voltaj
Düşük gerilim kontrol seviyesi (0,8 × U
DC
; 400 V min.)
Düşük gerilim hata seviyesi (U
DC
düşük - 50 V; 350 V min.)
Yüksek gerilim kontrol seviyesi (1,25 × U
DC
; 810 V maks.)
Yüksek gerilim hata seviyesi (UDCyüksek + 70 V; 880 V maks.)*
U
DC
= 1,35 × 01.19 Besleme voltajı
U
DC
, yüksek = 1.25 × U
DC
UDC, düşük = 0,8 × U
DC
*230 V besleme gerilimine sahip sürücüler (ACS850-04-xxxx-2): Yüksek gerilim
hata seviyesi 500 V olarak ayarlanmıştır.
Ara DC devresi, kapasitörlerin şarjlı olduğu kabul edildiğinde ve gerilim
dengelendiğinde, baypas edilen dahili bir direnç üzerinden şarj edilir.
Ayarlar
47 Gerilim kontrolü parametre grubu (sayfa 241).
Fren kıyıcısı
Sürücünün dahili fren kıyıcısı, yavaşlayan motor tarafından üretilen enerjiyi yönetmek
için kullanılabilir.
Fren kıyıcı devrede ve direnç bağlı iken sürücünün DC bağlantı gerilimi U
V'ye ulaştığında kıyıcı iletime başlayacaktır. Maksimum fren gücüne U
V'de ulaşılır.
U
= 1,35 × 1,25 × 01.19 Besleme voltajı.
DC_BR
Ayarlar
48 Fren kıyıcı parametre grubu (sayfa 241).
DC_BR
DC_BR
- 30
+ 30
Page 81

Program özellikleri 81
Güvenlik ve korumalar
Acil stop
Not: Gerekli acil durdurma kategorisi sınıflarının karşılanması amacıyla acil
durdurma cihazlarının ve ihtiyaç duyulan diğer tüm ek cihazların kurulumu
kullanıcının sorumluluğundadır. Ayrıntılı bilgi için yerel ABB temsilcinize başvurun.
Acil durdurma sinyali, acil durdurma etkinleştirme kaynağı olarak seçilmiş olan dijital
girişe bağlanmalıdır (10.13 Acil stop off3 veya 10.15 Acil stop off1 par.). Acil
durdurma aynı zamanda fieldbus aracılığıyla etkinleştirilebilir (02.22 FBA main CW
veya 02.36 EFB ana cw).
Notlar:
• Bir acil durdurma sinyali algılandığında, sinyal iptal edilse dahi acil durdurma
levi iptal edilemez.
iş
•Eğer minimum (veya maksimum) tork limiti %0 olarak ayarlanmışsa, acil
durdurma işlevi sürücüyü durduramayabilir.
Termik motor koruma
Motor aşırı ısınmaya karşı, PTC, Pt100 veya KTY84 sensörleri
• ile motor sıcaklığını ölçen motor
• termik koruma modeli devreye alınarak korunabilir. Bu, daha doğru bir motor
modeli sağlayacaktır.
Termik motor koruma modeli
Sürücü motor sıcaklığını aşağıdaki varsayımlara dayanarak hesaplar:
1) Sürücüye ilk kez güç uygulandığında motor ortam sıcaklığındadır (31.09 Mot ortam
ısısı parametresi ile tanımlanır). Bunun ardından, sürücüye güç uygulandığında,
motorun tahmini sıcaklıkta olduğu varsayılır.
2) Motor sıcaklığı, kullanıc
eğrisi kullanılarak hesaplanır. Yük eğrisi, ortam sıcaklığının 30 °C’yi aştığı durumda
ayarlanmalıdır.
Motor sıcaklığı denetimi sınırları ayarlanabilir ve aşırı sıcaklık algılandığında
sürücünün nasıl tepki vereceği seçilebilir.
Not: Motor termik modeli invertere yalnızca bir motor bağlı iken kullanılabilir.
ı tarafından ayarlanabilen motor termik süresi ve motor yük
Page 82

82 Program özellikleri
100
550
1330
4000
Ohm
T
Sıcaklık PTC direnci
Normal 0…1 kohm
Aşırı >
4 kohm*
*Motor aşırı sıcaklık algılama sınırı
2,5 kohm'dur.
PTC sensörleri kullanarak sıcaklık izleme
Sürücünün +24 V ve dijital DI6 girişi arasına veya FEN-xx opsiyonel enkoder
arabirimi modülüne bir PTC sensörü bağlanabilir.
Sensör direnci, motor sıcaklığı sensör referans sıcaklığını T
, aştığında, dirençteki
ref
gerilim ile aynı şekilde artar.
Aşağıdaki şekilde ve tabloda, tipik PTC sensör direnci değerleri, motor çalışma
sıcaklığının bir fonksiyonu olarak gösterilmiştir.
Sensörün kablo bağlantısı için sürücünün Donanım Kılavuzu'na başvurun.
Pt100 sensörleri kullanarak sıcaklık izleme
Pt100 sensörü, JCU Kontrol Birimi'ndeki AI1 ve AO1'e veya opsiyonel FIO-11 I/O
uzantı modülündeki kullanılabilir ilk AI ve AO'ya bağlanabilir.
Analog çıkış, sensör üzerinden sabit akım besler. Motor sıcaklığı arttıkça, sensör
üzerindeki gerilim gibi sensör direnci de artar. Sıcaklık ölçüm fonksiyonu, gerilimi
analog girişi üzerinden okur ve bunu santigrat dereceye dönüştürür.
Sensörün kablo bağlantısı için sürücünün Donanım K
ılavuzu'na başvurun.
Page 83

Program özellikleri 83
1000
2000
3000
Ohm
T
o
C
KTY84 ölçeklendirme
90 °C = 936 ohm
110 °C = 1063 ohm
130 °C = 1197 ohm
150 °C = 1340 ohm
-100
0
0 100 200 300
KTY84 sensörleri kullanarak sıcaklık izleme
KTY84 sensörü JCU Denetleme Birimindeki AI1 ve AO1'e ya da FEN-xx isteğe bağlı
enkoder arabirimi modülüne bağlanabilir.
Aşağıdaki şekilde ve tabloda, tipik KTY84 sensör direnci değerleri, motor çalışma
sıcaklığının bir fonksiyonu olarak gösterilmiştir.
Motor sıcaklığı denetimi sınırları ayarlanabilir ve aşırı sıcaklık algılandığında
sürücünün nasıl tepki vereceği seçilebilir.
Sensörün kablo bağlantısı için sürücünün Donanım Kılavuzu'na başvurun.
Ayarlar
31 Motor termik korum parametre grubu (sayfa 202).
Page 84

84 Program özellikleri
Programlanabilir koruma fonksiyonları
Start kilidi (10.20 parametresi)
Parametre, start kilidi sinyalinin (DIIL) kaybedilmesine sürücünün nasıl tepki
vereceğini belirler.
Dış hata (30.01 parametresi)
Bu parametre ile, dış hata sinyali için bir kaynak seçilir. Sinyal kaybolduğunda, bir
hata oluşturulur.
Lokal kontrol kaybı algılama (30.03 parametresi)
Parametre, sürücünün kontrol paneli veya PC aracı iletişim kesintisine nasıl tepki
vereceğini seçer.
Motor faz kaybı algılama (30.04 parametresi)
Parametre, motor faz kaybı algılandığında sürücünün nasıl tepki vereceğini seçer.
Toprak hatası algılama (30.05 parametresi)
Toprak hatası algılama fonksiyonu, toplam akım ölçümünü temel alır. Aşağıdakilere
dikkat edin
• besleme kablosundaki bir toprak hatası korumayı aktifleştirmez
• topraklanmış bir beslemede, koruma 200 milisaniyede etkinleşir.
• topraklanmamış bir beslemede, besleme kapasitansı
olmalıdır
• 300 metreye kadar blendajlı motor kablolarının neden olduğu kapasitif akımlar
korumayı etkinleştirmez
• sürücü durdurulduğunda koruma devre dışı bırakılır.
1 mikrofarad veya üzeri
Besleme faz kaybı algılama (30.06 parametresi)
Parametre, besleme faz kaybı algılandığında sürücünün nasıl tepki vereceğini seçer.
STO AKTİFalgılama (30.07 parametresi)
Sürücü, STO AKTİF girişinin durumunu izler. STO AKTİF işlevi ile ilgili daha fazla bilgi
için bkz. sürücünün Donanım Kılavuzu ve Uygulama kılavuzu - ACSM1, ACS850 ve
ACQ810 sürücüler için STO AKTİF işlevi (3AFE68929814 [İngilizce]).
Değiştirilmiş besleme ve motor kabloları (30.08 parametresi)
Sürücü, besleme ve motor kablolar
beslemenin sürücü motor bağlantısına bağlanması). Parametre, bir hata oluşturulup
oluşturulmayacağını seçer.
ı kazara değiştirilmesini algılayabilir (örneğin,
Page 85

Program özellikleri 85
Sıkışma koruması (30.09…30.12 parametreleri)
Motor mil sıkışması durumunda sürücü motoru korur. Denetim limitlerini (akım,
frekans ve süre) ayarlamak ve sürücünün bir motor sıkışma durumuna nasıl tepki
vereceğini seçmek mümkündür.
Otomatik hata resetlemeleri
Sürücü, aşırı akım, yüksek gerilim, düşük gerilim, harici ve “minimumun altında
analog giriş” hataları sonrasında kendini otomatik olarak resetler. Varsayılan olarak
otomatik resetler kapalıdır ve kullanıcı tarafından ayrı olarak etkinleştirilmelidir.
Ayarlar
32 Otomatik reset parametre grubu (sayfa 209).
Diyagnostik
Sinyal denetimi
Bu fonksiyon tarafından denetlenecek üç sinyal seçilebilir. Sinyal önceden
tanımlanmış bir limiti aşarsa (veya bunun altına düşerse), bir 06.13 Denetim durumu
biti etkinleştirilir. Mutlak değerler kullanılabilir.
Ayarlar
33 Denetim parametre grubu (sayfa 209).
Bakım sayaçları
Programda, sayaç önceden belirlenmiş bir limite ulaştığında bir alarm verecek şekilde
konfigüre edilebilen altı farklı bakım sayacı bulunmaktadır. Sayaç, herhangi bir
parametreyi izlemek için ayarlanabilir. Bu özellik, bir servis hatırlatıcısı olarak özellikle
kullanışlıdır.
Üç sayaç tipi vardır:
•Açık süre sayacı. Bir dijital kaynağın (örneğin, durum word'deki bit) çalışma
süresini ölçer.
•
Yükselen kenar sayacı. Bu sayaç, izlenen dijital kaynak durumu 0'dan 1'e geçerse artar.
•Değer sayacı. Bu sayaç, entegrasyon ile, izlenen parametreyi ölçer. Sinyal
tepesinin altındaki ölçülen alan, kullanıcı tanımlı bir limiti geçerse alarm verilir.
Ayarlar
44 Bakım parametre grubu (sayfa 234).
Page 86

86 Program özellikleri
Enerji tasarrufu hesaplayıcı
Bu özellik üç işlevden oluşur:
• Motor akısını, toplam verimliliği maksimum düzeye çıkaracak şekilde ayarlayan
bir enerji optimize edici
• Motor tarafından kullanılan ve tasarruf edilen enerjiyi izleyen ve bunları kWh, para
birimi veya CO
• Sürücünün yük profilini gösteren bir yük analizörü (bkz. sayfa 86).
Not: Enerji tasarrufları hesaplamasının doğruluğu, 45.08 Referans gücü
parametresinde verilen referans motor gücünün doğruluğuna direk bağlıdır.
Ayarlar
45 Enerji verimliliği parametre grubu (sayfa 240).
emisyon hacmi olarak görüntüleyen bir sayaç ve
2
Yük analizörü
Tep e değer günlüğü
Kullanıcı, tepe değer günlüğü ile izlenecek bir sinyal seçebilir. Günlük, tepenin
meydana geldiği zaman ile birlikte sinyalin tepe değerini ve ayrıca tepe sırasındaki
motor akımını, DC gerilimini ve motor hızını kaydeder.
Genişlik günlükleri
Sürücüde iki genişlik günlüğü bulunmaktadır.
Genişlik günlüğü için kullanıcı, sürücü çalışırken 200 msn aralıklarla örneklenmesi
için bir sinyal seçebilir ve % 100'e karşılık gelen bir değer belirleyebilir. Toplanan
örnekler, genişliklerine bağlı olarak 10 salt okunur parametre olarak sıralanır. Her
parametre, yüzde 10'luk bir genişlik aralığını temsil eder ve bu aralığa denk düşen
toplanmış örneklerin yüzdesini gösterir.
Page 87

Program özellikleri 87
Örneklerin yüzdesi
0…10%
10…20%
20…30%
30…40%
40…50%
50…60%
60…70%
70…80%
80…90%
>90%
Genişlik aralıkları ( 64.24…64.33
parametreleri)
Genişlik günlüğü 1, motor akımını izlemek üzere sabitlenmiştir ve resetlenemez.
Genişliği günlüğü 1 ile %100, sürücünün maksimum çıkış akımına karşılık gelir
).
(I
Maks
Ayarlar
64 Yük analizörü parametre grubu (sayfa 255).
Diğer konular
Sürücü içeriğinin yedeklenmesi ve geri yüklenmesi
Genel
Sürücü, pek çok ayarı ve konfigürasyonu bilgisayar dosyası gibi harici depolama
öğelerine (DriveStudio aracını kullanarak) ve kontrol panelinin dahili belleğine
yedekleme olanağı sağlar. Bu ayarlar ve konfigürasyonlar daha sonra sürücüye veya
birkaç sürücüye geri yüklenebilir.
DriveStudio aracını kullanarak yedekleme aşağıdakileri kapsar:
• Parametre ayarları
• Kullanıcı parametre setleri
• Uygulama programı
Page 88

88 Program özellikleri
Sürücü kontrol panelini kullanarak yedekleme aşağıdakileri kapsar:
• Parametre ayarları
• Kullanıcı parametre setleri
Yedekleme/Geri yükleme yapılmasıyla ilgili ayrıntılı talimatlar için 39 sayfaya ve
DriveStudio belgelerine bakın.
Sınırlamalar
Yedekleme işlemi sürücünün çalışmasını engellemeden yapılabilir, ancak yedekler geri
yüklenirken kontrol birimi her zaman sıfırlandığından ve yeniden başlatıldığından, sürücü
çalışır durumdayken geri yükleme yapılması mümkün değildir.
Yedekleme dosyalarının bir yazılım sürümünden bir diğer sürüme geri yüklenmesi
riskli olarak kabul edildiğinden, bu işlem ilk kez yapıldığında sonuçlar dikkatle
gözlenmeli ve doğrulanmalıdır. Parametreler ve uygulama desteği yazılım sürümleri
arasında değişiklik gösterir ve yedekleme/geri yükleme aracı geri yüklemeye izin
verse bile, yedeklemeler diğer yazılım sürümleriyle her zaman uyumlu değildir.
Yedekleme/Geri yükleme işlevlerini farklı yazılım sürümleri arasında kullanmadan
önce, her bir sürümün sürüm notlarına bakın.
Uygulamalar, farklı yazılım sürümleri arasında aktarılmamalıdır. Yeni bir yazılım
sürümü için güncellenmesi gerektiğinde uygulamanın tedarikçisiyle görüşün.
Parametreleri geri yükleme
Parametreler, birlikte veya ayrı ayrı geri yüklenebilen üç farklı gruba ayrılır:
• Motor konfigürasyon parametreleri ve tanımlama (ID) çalışması sonuçları
• Fieldbus adaptör ve enkoder ayarları
•Diğer parametreler
Örneğin, varolan tanımlama çalışması sonuçlarının sürücüde tutulması yeni bir
tanımlama çalışması gerçekleştirmeyi gereksiz kılacaktır.
Tek tek parametrelerin geri yüklenmesi aşağıdaki nedenlerle başarısız olabilir:
• Geri yüklenen değer sürücü parametresinin minimum ve maksimum limitleri
aralığına düşmeyebilir.
• Geri yüklenen parametrenin türü sürücüdeki parametrenin türünden farklı olabilir.
• Geri yüklenen parametre sürücüde mevcut olmayabilir (yeni bir yazılım
sürümünün parametrelerini eski bir sürümün bulunduğu sürücüye yüklerken sık
yaşanan bir durumdur).
• Yedekleme dosyası sürücü parametresine ait bir değeri içermiyor olabilir (eski bir
yazılım sürümünün parametrelerini daha yeni bir sürümün bulunduğu sürücüye
yüklerken sık yaşanan bir durumdur).
Bu gibi durumlarda parametre geri yüklenmez; yedekleme/geri yükleme aracı
kullanıcıyı uyarır ve parametreyi manuel olarak ayarlama olanağı sunar.
Page 89

Program özellikleri 89
Kullanıcı parametre setleri
Sürücünün, kalıcı belleğe kaydedilebilen ve sürücü parametreleri kullanılarak geri
çağrılabilen dört kullanıcı parametre seti vardır. Farklı kullanıcı parametre setleri
arasında geçiş yapmak için dijital girişler kullanılması da mümkündür. Parametre
açıklamalarına bkz. 16.09…16.12.
Bir kullanıcı parametre seti, 10 ile 99 arası parametre gruplarının tüm değerlerini
(fieldbus adaptörü iletişim konfigürasyon ayarları dışında) içerir.
Motor ayarları kullanıcı parametre setlerine dahil olduğundan, bir kullanıcı setini geri
çağırmadan önce ayarların uygulamada kullanılan motora uyduğundan emin olun.
Tek bir sürücüyle farklı motorları
çalışmasının her bir motor için gerçekleştirilmesi ve farklı kullanıcı setlerine
kaydedilmesi gerekir. Daha sonra, motor değiştirildiğinde uygun set geri çağrılabilir.
Ayarlar
16 Sistem parametre grubu (sayfa 166).
n kullanıldığı bir uygulamada, motor tanımlama
Veri depolama parametreleri
Dört 16 bitli ve dört 32 bitli parametre veri depolama için tahsis edilmiştir. Bu
parametreler bağımsızdır ve bağlantı oluşturma, test etme ve devreye alma
amaçlarıyla kullanılabilirler. Diğer parametrelerin pointer ayarları kullanılarak
yazılabilir ve okunabilirler.
Ayarlar
49 Veri depolama parametre grubu (sayfa 242).
Sürücü - sürücü bağlantısı
Sürücü-sürücü bağlantısı, bir master ve birden fazla follower ile temel master/follower
iletişimini mümkün kılan bir halkalı zincirli RS-485 iletişim hattıdır.
Bkz. bölüm Sürücü - sürücü bağlantısı (sayfa 363).
Ayarlar
57 D2D haberleşme parametre grubu (sayfa 249).
Page 90

90 Program özellikleri
Page 91
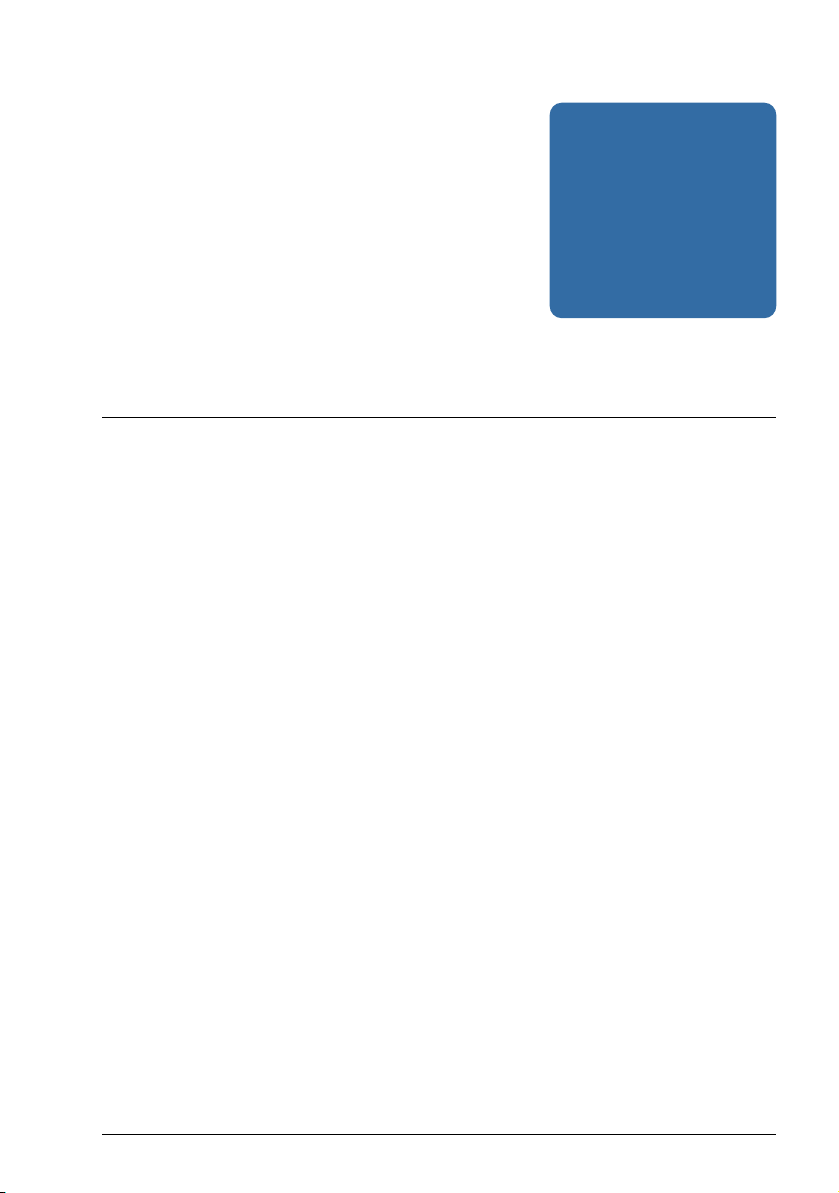
Uygulama makroları 91
5
Uygulama makroları
Bu bölümün içindekiler
Bu bölümde uygulama makrolarının kullanım amaçları, çalışması ve varsayılan
kontrol bağlantıları açıklanır.
JCU kumanda ünitesi bağlantıları ile ilgili daha ayrıntılı bilgi, sürücü Donanım
Kılavuzunda bulunmaktadır.
Genel
Uygulama makroları, önceden tanımlanmış parametre setleridir. Kullanıcı, sürücüyü
çalıştırırken, genellikle makrolardan birini temel olarak seçer, gerekli değişiklikleri
yapar ve sonucu kullanıcı parametre ayarı olarak kaydeder.
Uygulama makroları, ASISTANLAR – Uygulama Makrosu seçenekleri seçilerek
kontrol paneli ana menüsünden etkinleştirilir. Kullanıcı parametre ayarları, 16 Sistem
grubundaki parametrelerle yönetilir.
Page 92

92 Uygulama makroları
Fabrikasyon makrosu
Fabrikasyon makrosu; konveyörler, pompalar ve fanlar ve test düzenekleri gibi
görece kolay hız kontrol uygulamalarına uygundur.
Harici kontrolde kontrol yeri EXT1’dir. Sürücü hız kontrollüdür; referans sinyali AI1
analog girişine bağlanır. Referansın işareti, çalışma yönünün belirler. Start/stop
komutları, DI1 dijital girişi üzerinden verilir. Hatalar DI3 yoluyla resetlenir.
Fabrikasyon makrosu için varsayılan parametre ayarları Ek parametre verileri
bölümünde listelenmiştir (sayfa 273).
Page 93
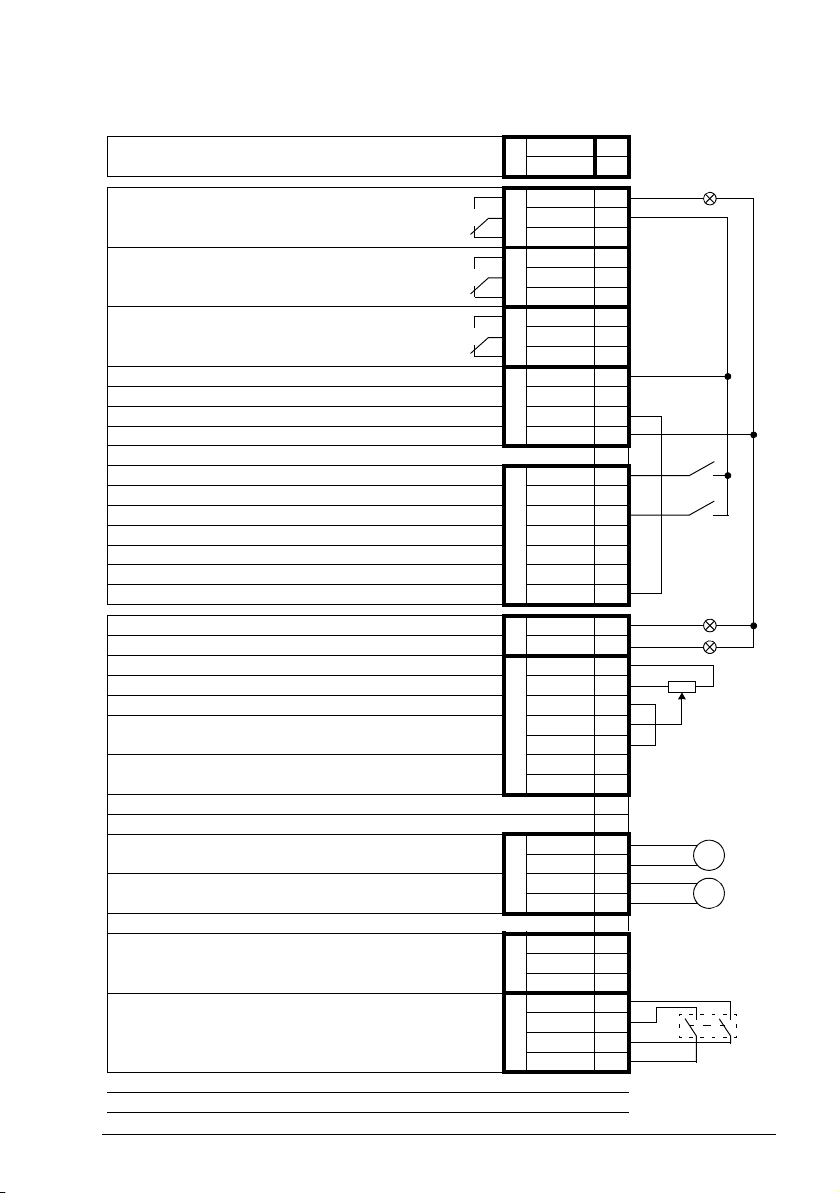
Uygulama makroları 93
Harici güç girişi
24 V DC, 1.6 A
XPOW
+24VI 1
GND 2
Röle çıkışı RO1 [Hazır]
250 V AC / 30 V DC
2 A
XRO1
HAYIR 1
COM 2
NC 3
Röle çıkışı RO2 [Modülasyonda]
250 V AC / 30 V DC
2 A
XRO2
NO 4
COM 5
NC 6
Röle çıkışı RO3 [Hata (-1)]
250 V AC / 30 V DC
2 A
XRO3
HAYIR 7
COM 8
NC 9
+24 V DC
XD24
+24VD 1
Dijital giriş toprak hattı DIGND 2
+24 V DC +24VD 3
Dijital giriş/çıkış toprak hattı DIOGND 4
DI/DIO topraklama seçim jumper'ları
Dijital giriş DI1 [Stop/Start]
XDI
DI1 1
Dijital giriş DI2 DI2 2
Dijital giriş DI3 [Reset] DI3 3
Dijital giriş DI4 DI4 4
Dijital giriş DI5 DI5 5
Dijital giriş DI6 veya termistör girişiDI66
Start kilidi (0 = Stop) DIIL A
Dijital giriş/çıkış DIO1 [Çıkış: Hazır]
XDIO
DIO1 1
Dijital giriş/çıkış DIO2 [Çıkış: Çalışıyor] DIO2 2
Referans gerilim (+)
XAI
+VREF 1
Referans gerilim (–) -VREF 2
Toprak AGND 3
Analog giriş AI1 [Hız referansı 1]
(Akım veya gerilim, jumper AI1 ile seçilebilir)
AI1+ 4
AI1- 5
Analog giriş AI2 (Akım veya gerilim, jumper AI2 ile seçilebilir)
AI2+ 6
AI2- 7
AI1 akım/gerilim seçim jumper'ı AI1
AI2 akım/gerilim seçim jumper'ı AI2
Analog çıkış AO1 [Akım %]
XAO
AO1+ 1
AO1- 2
Analog çıkış AO2 [Hız %]
AO2+ 3
AO2- 4
Sürücü - sürücü bağlantısı sonlandırma jumper'ı T
Sürücü - sürücü bağlantısı
XD2D
B1
A2
BGND 3
STO AKTİF Sürücünün başlaması için her iki devre kapatılmalıdır.
XSTO
OUT1 1
OUT2 2
IN1 3
IN2 4
Kontrol paneli bağlantısı
Bellek ünitesi bağlantısı
Fabrikasyon makrosu için varsayılan kontrol bağlantıları
Page 94

94 Uygulama makroları
El/Oto makrosu
El/Oto makrosu, iki harici kontrol cihazının kullanıldığı hız kontrol uygulamaları için
uygundur.
Sürücü, EXT1 ve EXT2 harici kontrol konumlarından hız kontrollüdür. Kontrol
konumları arasındaki seçim, DI3 dijital girişi yoluyla yapılır.
EXT1 için start/stop sinyali, DI1'e bağlanırken, çalışma yönü DI2 tarafından belirlenir.
EXT2 için, start/stop komutları DI6 yoluyla, yön DI5 yoluyla verilir.
EXT1 ve EXT2 için referans sinyalleri, sırasıyla AI1 ve AI2 analog girişlerine bağlanır.
DI4 yoluyla sabit devir (300 rpm) etkinleştirilebilir.
El/Oto makrosu için varsayılan parametre ayarları
Aşağıda, Ek parametre verileri bölümünde listelenenlerden farklı olan varsayılan
parametre değerlerinin listesi bulunmaktadır (sayfa 273).
Parametre
No. Adı
10.01 Har1 start fonk In1St In2yön
10.03 Har1 start grş2DI2
10.04 Har2 start fonk In1St In2yön
10.05 Har2 start grş1DI6
10.06 Har2 start grş2DI5
10.10 Hata reset sçm C.YANLIŞ
12.01 Har1/Har2 sçm DI3
13.05 AI1 min skala 0,000
13.09 AI2 maks skala 1500,000
13.10 AI2 min skala 0,000
21.02 Hız ref2 sçm AI2 skala
21.04 Hız ref1/2 fonk DI3
26.02 Sabit hz sçm1 DI4
26.06 Sabit hz1 300 rpm
El/Oto makrosu
varsayılan
Page 95
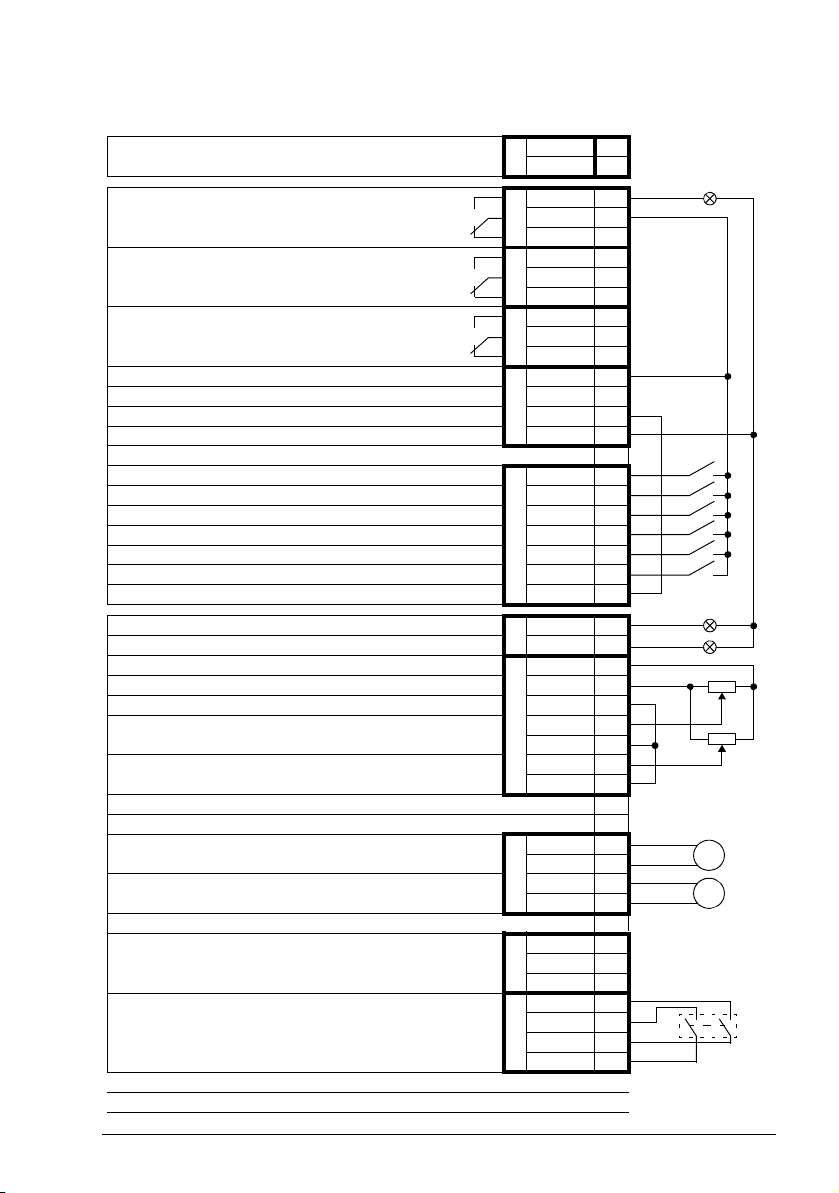
Uygulama makroları 95
Harici güç girişi
24 V DC, 1,6 A
XPOW
+24VI 1
GND 2
Röle çıkışı RO1 [Hazır]
250 V AC / 30 V DC
2 A
XRO1
NO 1
COM 2
NC 3
Röle çıkışı RO2 [Modülasyonda]
250 V AC / 30 V DC
2 A
XRO2
NO 4
COM 5
NC 6
Röle çıkışı RO3 [Hata (-1)]
250 V AC / 30 V DC
2 A
XRO3
HAYIR 7
COM 8
NC 9
+24 V DC
XD24
+24VD 1
Dijital giriş toprak hattı DIGND 2
+24 V DC +24VD 3
Dijital giriş/çıkış toprak hattı DIOGND 4
DI/DIO topraklama seçim jumper'ları
Dijital giriş DI1 [EXT1 Stop/Start]
XDI
DI1 1
Dijital giriş DI2 [EXT1 Yön] DI2 2
Dijital giriş DI3 [EXT1/EXT2 seçimi] DI3 3
Dijital giriş DI4 [Sabit hız 1] DI4 4
Dijital giriş DI5 [EXT2 Yön] DI5 5
Dijital giriş DI6 veya termistör girişi [EXT2 Stop/Start] DI6 6
Start kilidi (0 = Stop) DIIL A
Dijital giriş/çıkış DIO1 [Çıkış: Hazır]
XDIO
DIO1 1
Dijital giriş/çıkış DIO2 [Çıkış: Çalışıyor] DIO2 2
Referans gerilim (+)
XAI
+VREF 1
Referans gerilim (–) -VREF 2
Toprak AGND 3
Analog giriş AI1 [EXT1 Referansı (Hız ref1)]
(Akım veya gerilim, jumper AI1 ile seçilebilir)
AI1+ 4
AI1- 5
Analog giriş AI2 [EXT2 Referansı (Hız ref2]
(Akım veya gerilim, jumper AI2 ile seçilebilir)
AI2+ 6
AI2- 7
AI1 akım/gerilim seçim jumper'ı AI1
AI2 akım/gerilim seçim jumper'ı AI2
Analog çıkış AO1 [Akım %]
XAO
AO1+ 1
AO1- 2
Analog çıkış AO2 [Hız %]
AO2+ 3
AO2- 4
Sürücü - sürücü bağlantısı sonlandırma jumper'ı T
Sürücü - sürücü bağlantısı.
XD2D
B1
A2
BGND 3
STO AKTİF Sürücünün başlaması için her iki devre kapatılmalıdır.
XSTO
OUT1 1
OUT2 2
IN1 3
IN2 4
Kontrol paneli bağlantısı
Bellek ünitesi bağlantısı
El/Oto makrosu için varsayılan kontrol bağlantıları
Page 96

96 Uygulama makroları
PID kontrol makrosu
PID kontrol makrosu, örneğin, kapalı çevrim basıncı, seviye veya akış kontrol
sistemleri proses kontrol uygulamaları için uygundur
• şehir su kaynağı sistemlerinde basınç yükseltme pompaları
• su rezervuarlarında seviye kontrol pompaları
• bölgesel ısıtma sitemlerinde basınç yükseltme pompaları
• bir konveyör hattında madde akış kontrolü.
Proses referans sinyali AI1 analog girişine ve proses geri besleme sinyali AI2'ye
bağlanır. Alternatif olarak AI1 ile sürücüye direk bir hız referansı da verilebilir. Sonra
PID hız kontrol cihazı baypaslanır ve sürücü artık proses değişkenini kontrol edemez.
Direk hız kontrolü (kontrol konumu EXT1) ve proses değişken kontrolü (EXT2)
arasındaki seçim DI3 dijital girişi ile yapılır.
EXT1 ve EXT2 için start/stop sinyalleri, sırasıyla DI1 ve DI6 analog çıkışlarına
bağlanır.
DI4 yoluyla sabit devir (300 rpm) etkinle
PID kontrol makrosu için varsayılan parametre ayarları
Aşağıda, Ek parametre verileri bölümünde listelenenlerden farklı olan varsayılan
parametre değerlerinin listesi bulunmaktadır (sayfa 273).
ştirilebilir.
Parametre
No. Adı
10.04 Har2 start fonk In1
10.05 Har2 start grş1DI6
10.10 Hata reset sçm C.YANLIŞ
12.01 Har1/Har2 sçm DI3
13.05 AI1 min skala 0.000
13.09 AI2 maks skala 1500.000
13.10 AI2 min skala 0.000
21.02 Hız ref2 sçm PID çıkış
21.04 Hız ref1/2 fonk DI3
26.02 Sabit hz sçm1 DI4
26.06 Sabit hz1 300 rpm
PID kontrol makrosu
varsayılan
Page 97

Uygulama makroları 97
Harici güç girişi
24 V DC, 1,6 A
XPOW
+24VI 1
GND 2
Röle çıkışı RO1 [Hazır]
250 V AC / 30 V DC
2 A
XRO1
NO 1
COM 2
NC 3
Röle çıkışı RO2 [Modülasyonda]
250 V AC / 30 V DC
2 A
XRO2
NO 4
COM 5
NC 6
Röle çıkışı RO3 [Hata (-)]
250 V AC / 30 V DC
2 A
XRO3
HAYIR 7
COM 8
NC 9
+24 V DC
XD24
+24VD 1
Dijital giriş toprak hattı DIGND 2
+24 V DC +24VD 3
Dijital giriş/çıkış toprak hattı DIOGND 4
DI/DIO topraklama seçim jumper'ları
Dijital giriş DI1 [EXT1 Stop/Start]
XDI
DI1 1
Dijital giriş DI2 DI2 2
Dijital giriş DI3 [Hız veya Proses kontrolü] DI3 3
Dijital giriş DI4 [Sabit hız 1] DI4 4
Dijital giriş DI5 DI5 5
Dijital giriş DI6 veya termistör girişi [EXT2 Stop/Start] DI6 6
Start kilidi (0 = Stop) DIIL A
Dijital giriş/çıkış DIO1 [Çıkış: Hazır]
XDIO
DIO1 1
Dijital giriş/çıkış DIO2 [Çıkış: Çalışıyor] DIO2 2
Referans gerilim (+)
XAI
+VREF 1
Referans gerilim (–) -VREF 2
Toprak AGND 3
Analog giriş AI1 [Proses ve Hız referansı]
(Akım veya gerilim, jumper AI1 ile seçilebilir)
AI1+ 4
AI1- 5
Analog giriş AI2 [Proses geri besleme]
(Akım veya gerilim, jumper AI2 ile seçilebilir)
AI2+ 6
AI2- 7
AI1 akım/gerilim seçim jumper'ı AI1
AI2 akım/gerilim seçim jumper'ı AI2
Analog çıkış AO1 [Akım %]
XAO
AO1+ 1
AO1- 2
Analog çıkış AO2 [Hız %]
AO2+ 3
AO2- 4
Sürücü - sürücü bağlantısı sonlandırma jumper'ı T
Sürücü - sürücü bağlantısı.
XD2D
B1
A2
BGND 3
STO AKTİF Sürücünün başlaması için her iki devre kapatılmalıdır.
XSTO
OUT1 1
OUT2 2
IN1 3
IN2 4
Kontrol paneli bağlantısı
Bellek ünitesi bağlantısı
PT
PID kontrol makrosu için varsayılan kontrol bağlantıları
Page 98

98 Uygulama makroları
Moment kontrol makrosu
Bu makro motorun moment kontrolünün yapılması gerektiği uygulamalarda kullanılır.
Moment referansı AI2 analog girişi yoluyla, genellikle (nominal motor momentinin %
0…100'üne karşılık gelen) 0…20 mA aralığında akım sinyali olarak verilir.
Start/stop sinyali DI1 dijital girişine, yön sinyali DI2'ye bağlanır. DI3 ile moment
kontrolü yerine hız kontrolünü seçmek mümkündür.
DI4 yoluyla sabit devir (300 rpm) etkinleştirilebilir.
Moment kontrol makrosu için varsayılan parametre ayarları
Aşağıda, Ek parametre verileri bölümünde listelenenlerden farklı olan varsayılan
parametre değerlerinin listesi bulunmaktadır (sayfa 273).
Parametre
No. Adı
10.01 Har1 start fonk In1St In2yön
10.03 Har1 start grş2DI2
10.04 Har2 start fonk In1St In2yön
10.05 Har2 start grş1DI1
10.06 Har2 start grş2DI2
10.10 Hata reset sçm C.YANLIŞ
12.01 Har1/Har2 sçm DI3
12.05 Har2 kont modu Moment
13.05 AI1 min skala 0.000
13.10 AI2 min skala 0.000
22.01 Kalkş/duruş seç DI5
26.02 Sabit hz sçm1 DI4
26.06 Sabit hz1 300 rpm
Moment kontrol
makrosu varsayılan
Page 99

Uygulama makroları 99
Harici güç girişi
24 V DC, 1,6 A
XPOW
+24VI 1
GND 2
Röle çıkışı RO1 [Hazır]
250 V AC / 30 V DC
2 A
XRO1
NO 1
COM 2
NC 3
Röle çıkışı RO2 [Modülasyonda]
250 V AC / 30 V DC
2 A
XRO2
NO 4
COM 5
NC 6
Röle çıkışı RO3 [Hata (-1)]
250 V AC / 30 V DC
2 A
XRO3
HAYIR 7
COM 8
NC 9
+24 V DC
XD24
+24VD 1
Dijital giriş toprak hattı DIGND 2
+24 V DC +24VD 3
Dijital giriş/çıkış toprak hattı DIOGND 4
DI/DIO topraklama seçim jumper'ları
Dijital giriş DI1 [Stop/Start]
XDI
DI1 1
Dijital giriş DI2 [Yön] DI2 2
Dijital giriş DI3 [Hız/Moment kontrol seçimi] DI3 3
Dijital giriş DI4 [Sabit hız 1] DI4 4
Dijital giriş DI5 [Hız/Yav rampası 1/2 seçimi] DI5 5
Dijital giriş DI6 veya termistör girişiDI66
Start kilidi (0 = Stop) DIIL A
Dijital giriş/çıkış DIO1 [Çıkış: Hazır]
XDIO
DIO1 1
Dijital giriş/çıkış DIO2 [Çıkış: Çalışıyor] DIO2 2
Referans gerilim (+)
XAI
+VREF 1
Referans gerilim (–) -VREF 2
Toprak AGND 3
Analog giriş AI1 [EXT1 Referansı (Hız ref1)]
(Akım veya gerilim, jumper AI1 ile seçilebilir)
AI1+ 4
AI1- 5
Analog giriş AI2 [EXT2 Referansı (Torq ref1]
(Akım veya gerilim, jumper AI2 ile seçilebilir)
AI2+ 6
AI2- 7
AI1 akım/gerilim seçim jumper'ı AI1
AI2 akım/gerilim seçim jumper'ı AI2
Analog çıkış AO1 [Akım %]
XAO
AO1+ 1
AO1- 2
Analog çıkış AO2 [Hız %]
AO2+ 3
AO2- 4
Sürücü - sürücü bağlantısı sonlandırma jumper'ı T
Sürücü - sürücü bağlantısı.
XD2D
B1
A2
BGND 3
STO AKTİF Sürücünün başlaması için her iki devre kapatılmalıdır.
XSTO
OUT1 1
OUT2 2
IN1 3
IN2 4
Kontrol paneli bağlantısı
Bellek ünitesi bağlantısı
Moment kontrol makrosu için varsayılan kontrol bağlantıları
Page 100

100 Uygulama makroları
Yav aşlama rampası
boyunca stop etme
Hız
Zaman
Hız ramp1 Hız ramp1 Hız ramp2 Yav ramp2
Start/Stop
Hız ramp1/Yav ramp1
Hız 1
Hız 2
Hız ramp2/Yav ramp2
Hız 3
Hız 1
Hız 2
Hız 3
Sıralı kontrol makrosu
Sıralı kontrol makrosu; hız referansı, çoklu sabit hızlar ve iki hızlanma ve yavaşlama
rampasının kullanılabildiği hız kontrol uygulamaları için uygundur.
Makro, DI4…DI6 dijital girişleri tarafından aktifleştirilebilen yedi ön ayarlı sabit hız
önerir (bkz. 26.01 Sabit hz fonk parametresi). İki hızlanma/yavaşlama rampası, DI3
yoluyla seçilebilir.
Bir harici hız referansı AI1 analog girişi üzerinden verilir. Referans sadece, sabit hız
etkinleştirilmediğinde etkindir (DI4…DI6 dijital girişlerinin tamamı kapalı). Ayrıca
kontrol panelinden çalışma komutları verilebilir.
Çalışma şeması
Aşağıdaki şekil makro kullanımını
n bir örneğini göstermektedir.
 Loading...
Loading...