

Page 1
3.1 Standard Connection Diagram
3.1 Standard Connection Diagram
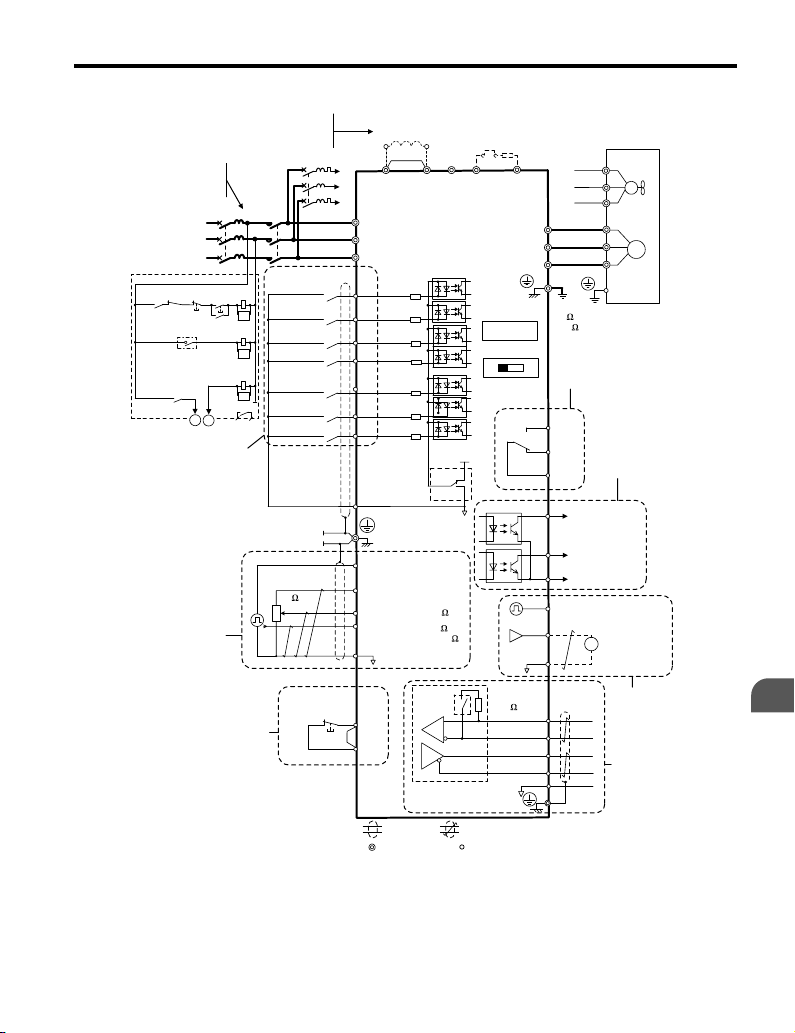
Connect the drive and peripheral devices as shown in Figure 3.1. It is possible to run the drive
via the digital operator without connecting digital I/O wiring. This section does not discuss
drive operation; Refer to Start-Up Programming & Operation on page 51 for instructions
on operating the drive.
NOTICE: Inadequate branch short circuit protection could result in damage to the drive. Install adequate
branch circuit short circuit protection per applicable codes. The drive is suitable for circuits capable of
delivering not more than 30,000 RMS symmetrical amperes, 240 Vac maximum (200 V Class) and 480 Vac
maximum (400 V Class).
NOTICE: When the input voltage is 480 V or higher or the wiring distance is greater than 100 meters, pay
special attention to the motor insulation voltage or use a drive duty motor. Failure to comply could lead to
motor insulation breakdown.
NOTICE: Do not connect AC control circuit ground to drive enclosure. Improper drive grounding can cause
control circuit malfunction.
NOTICE: The minimum load for the multi-function relay output MA-MB-MC is 10 mA. If a circuit requires less
than 10 mA (reference value), connect it to a photocoupler output (P1, P2, PC). Improper application of
peripheral devices could result in damage to the photocoupler output of the drive.
30
YASKAWA ELECTRIC TOEP C710606 14C YASKAWA AC Drive – V1000 Quick Start Guide
Page 2
3.1 Standard Connection Diagram
Terminals +1, +2, , B1, and B2
are for connecting options.
Never connect power supply
lines to these terminals.
For single phase 200 V
power supply, use
R/L1 and S/L2.
R/L1
Three phase
power supply
S/L2
200 to 240 V
T/L3
THRX
2 MCCB
OFF
Thermal relay for
motor cooling fan
MC
MC MA
Digital inputs
(default setting)
Main speed
frequency
reference.
Multi-function
programmable
1 MCCB
MC
ON
SA
MC
THRX
SA
TRX
SA
TRX
Fault relay
Safe Disable
Input
2 MCCB
MC
Forward run/stop
Reverse run/stop
External fault
Fault reset
Multi-step
speed 1
main/aux switch
Multi-step
speed 2
Jog reference
2 k
Safety switch
<4>
Jumper
DC reactor
(option)
<3>
r1
s1
t1
R/L1
S/L2
T/L3
S1
S2
S3
S4
S5
S6
S7
<5>
DIP
switch S3
SC
Shield ground
terminal
Pulse train input
RP
(max. 32 kHz)
Setting power supply
+V
+10.5 max. 20 mA
A1
0 to +10 V (20 k )
A2
0 to +10 V (20 k )
(0)4 to 20 mA (250 )
AC
HC
<7>
H1
shielded line
main circuit terminal
<1>
Jumper
V1000
Main circuit
Control circuit
DIP
switch
S2
<2>
Thermal relay
(option)
-
B1+1+2 B2
Option card
connector
DIP switch S1
+
24 V 8mA
24 V
Sink
Source
0 V
Cable shield ground
twisted-pair shielded line
control terminal
Braking resistor
(option)
U/T1
V/T2
W/T3
V I
Termination
resistor
120 , 1/2 W
FU
r1
FV
s1
FW
t1
U
V
W
Ground
10 or less (400 V class)
100 or less (200 V class)
Digital output
250 Vac, 10 mA to 1 A
30 Vdc, 10 mA to 1 A
(default setting)
Fault
MA
During Run
(photocoupler 1)
Frequency agree
(photocoupler 2)
Pulse train output
0 to 32 kHz
Comm.
connector
+
-
+
-
S
Digital output
5 ~ 48 Vdc
2 to 50 mA
(default setting)
Photocoupler
output common
+
AM
-
MB
MC
P1
P2
PC
MP
AM
AC
R
R
S
IG
Motor
Cooling fan
M
M
<6>
Analog monitor
output
0 to +10 Vdc
(2 mA)
Monitor
output
MEMOBUS/
Modbus comm.
RS-485/422
Electrical Installation
3
Figure 3.1 Drive Standard Connection Diagram
<1> Remove the jumper when installing an optional DC reactor.
YASKAWA ELECTRIC TOEP C710606 14C YASKAWA AC Drive – V1000 Quick Start Guide
31
Page 3

3.1 Standard Connection Diagram
<2> The MC on the input side of the main circuit should open when the thermal relay is
triggered.
<3> Self-cooled motors do not require separate cooling fan motor wiring.
<4> Connected using sequence input signal (S1 to S7) from NPN transistor; Default: sink
mode (0 V com).
<5> Use only a +24 V internal power supply in sinking mode; the source mode requires
an external power supply Refer to I/O Connections on page 44.
<6> Monitor outputs work with devices such as analog frequency meters, ammeters,
voltmeters and wattmeters; they are not intended for use as a feedback-type of signal.
<7> Disconnect the wire jumper between HC and H1 when utilizing the safety input. Refer
to Wiring Procedure on page 41 for details on removing the jumper. The wire length
for the Safe Disable input should not exceed 30 m.
WARNING! Sudden Movement Hazard. Do not close the wiring for the control circuit unless the multifunction
input terminal parameter is properly set (S5 for 3-Wire; H1-05 = “0”). Improper sequencing of run/stop circuitry
could result in death or serious injury from moving equipment.
WARNING! Sudden Movement Hazard. Ensure start/stop and safety circuits are wired properly and in the
correct state before energizing the drive. Failure to comply could result in death or serious injury from moving
equipment. When programmed for 3-Wire control, a momentary closure on terminal S1 may cause the drive
to start.
WARNING! When 3-Wire sequence is used, set the drive to 3-Wire sequence before wiring the control
terminals and ensure parameter b1-17 is set to 0 (drive does not accept a run command at power up (default).
If the drive is wired for 3-Wire sequence but set up for 2-Wire sequence (default) and if parameter b1-17 is
set to 1 (drive accepts a Run command at power up), the motor will rotate in reverse direction at power up of
the drive and may cause injury.
WARNING! When the application preset function is executed (or A1-06 is set to any value other than 0) the
drive I/O terminal functions change. This may cause unexpected operation and potential damage to
equipment or injury.
Figure 3.2 illustrates an example of a 3-Wire sequence.
Stop relay (N.C.)
Run relay (N.O.)
S1
Run command (run on momentary close)
S2
Stop command (stop on momentary open)
S5
Foward/reverse command
(multi-function input: H1-05 = 0)
SC
Sequence input common
Drive
Figure 3.2 3-Wire Sequence
32
YASKAWA ELECTRIC TOEP C710606 14C YASKAWA AC Drive – V1000 Quick Start Guide
 Loading...
Loading...