

Step
1
Step
2
Step
3
Step
4
The following
procedure is a
supplement to
other
documentation
supplied with this
equipment and will
guide the user in
properly wiring the
A1000 and motor.
It will also show
the user how to
configure the
A1000 in open
loop vector mode
for a general
purpose
application.
Danger: Improper
wiring can and
will cause bodily
harm as well as
damage to the
equipment.
When installing the
system, be sure to
follow good wiring
practices and all
applicable codes.
Ensure that the
mounting of
components is
secure and that
the environment,
such as extreme
dampness, poor
ventilation, etc. will
not cause system
degradation.
Please read this
cheat sheet and
other
documentation
provided with the
A1000 thoroughly
before attempting
any installation.
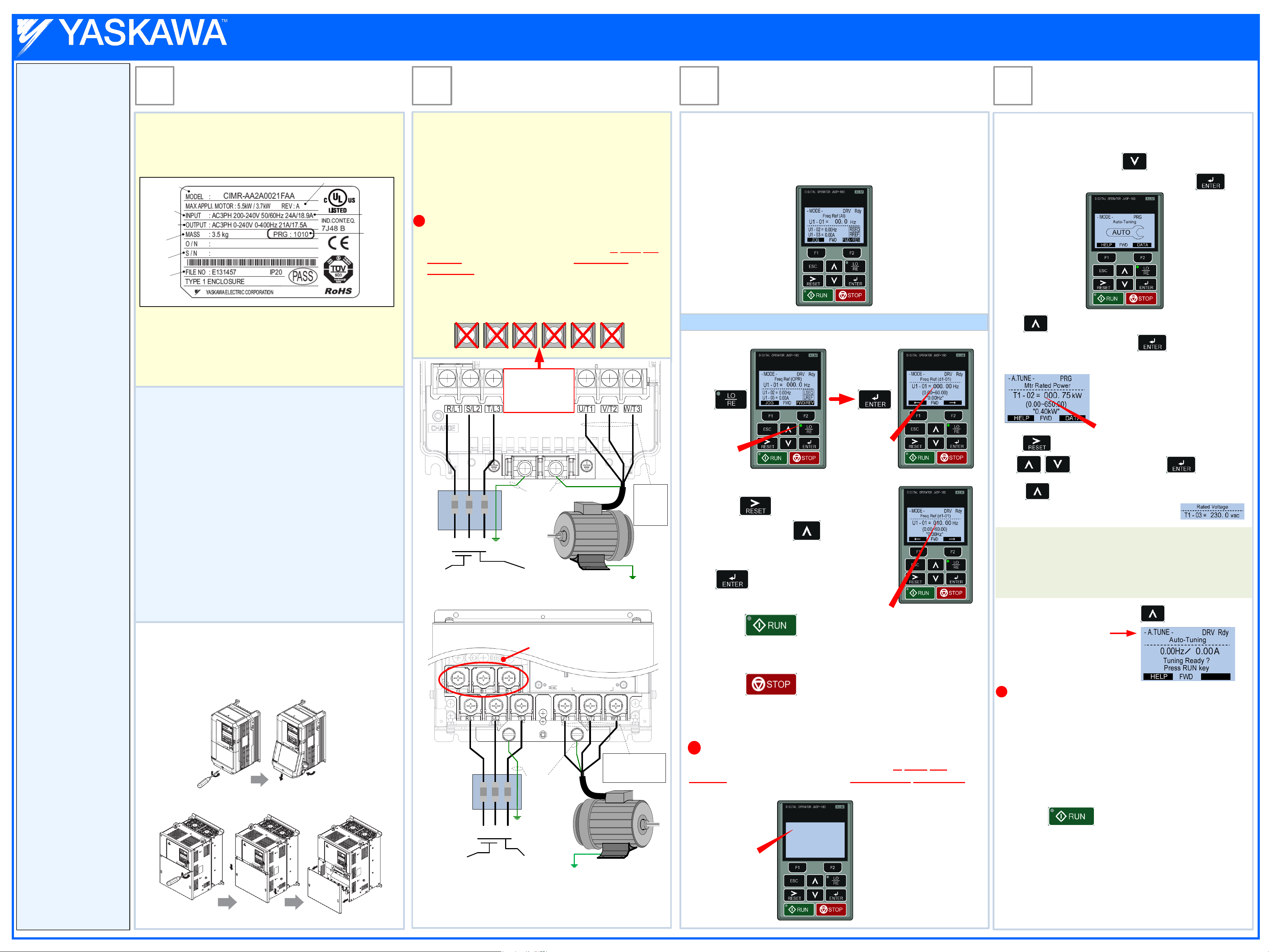
Motor Rotation Test
In this step the motor is checked for proper direction and operation.
This test is to be performed solely from the digital operator. Apply
power to the A1000 after all the electrical connections have been
made and protective covers have been re-attached. At this point,
DO NOT RUN THE MOTOR, the Digital Operator should display as
shown in Fig. 3.
Fig. 3
Digital Operator
Use precaution, and
refer to Fig.1 or 2, swap
any two of the three
output leads to the motor
(U/T1, V/T2 and W/T3).
After the wiring change,
repeat Step 3 and
recheck motor direction.
After the power has been turned OFF, wait at least five
minutes until the charge indicator extinguishes completely
before touching any wiring, circuit boards or components.
DANGER
If motor rotation is not correct, then either reverse “Phase
Order” using parameter b1-14 or power down the drive, wait
five minutes and swap 2 motor leads.
!
Next, press to move the cursor one
position to the right and to increase the
frequency reference (d1-01) to 10.00 Hz.
Press to save frequency reference.
Next, press on the Digital Operator. The motor
should now be operating at low speed running in the correct
forward (clockwise) direction.
Next, press on the Digital Operator.
Digital Operator
turned off.
First Digit
Flashing
Press
Green LED
turns on.
10.00 Hz
In this step the A1000 is setup for use with the motor. Make sure
all protective covers have been re-attached then apply power to
the A1000. DO NOT RUN THE MOTOR.
From the main reference press once until the Digital
Operator shows the Auto-Tuning menu then press
Press once until the Digital Operator shows parameter
T1-02 Mtr Rated Power then press
Digit Flashing
Press to select the digit you would like to change and
use to adjust value and press to save.
Enter Motor Power in kW (Kilowatt)
Motor HP to kW = HP x 0.746
Example: 10HP = 10 x 0.746 = 7.46 kW
T1-04 Rated Voltage (e.g. 230 V, 460 V)
T1-04 Rated current (e.g. 11.0 A, 22.0 A)
T1-05 Rated Frequency (e.g. 60.0 Hz)
T1-06 Number of Poles (e.g. 4 Poles)
For standard AC motors
use the default setting for
motor base frequency
(60Hz), motor poles (4) and
motor rated speed.
T1-07 Rated Speed (e.g. 1750 rpm)
Press to select the next parameter and follow the same
procedure described above to adjust its value.
Warning! Sudden movement hazard. The A1000 and
motor may start unexpectedly during Auto-Tuning.
Warning! Electric Shock Hazard. High voltage will be
supplied to the motor when stationary Auto-Tuning is
performed. Do not touch the motor during auto-tuning.
Notice: Auto-Tuning will not function properly when a
brake is engaged on the load. Ensure the motor shaft
can freely rotate. Never perform an Auto-Tune with
motor connected to a load.
!
After setting parameter T1-07 press to select the
Auto-Tuning start command.
Next, press on the Digital Operator. The A1000
will now start the Auto-tuning procedure.
The display will show message ―Tune Successful‖ when the
Auto-Tuning procedure has been successfully completed.
Please reference the A1000 User Manual or repeat the
procedure again if the display shows an error message.
WARNING DO NOT CONNECT ANY OF THE
FOLLOWING TERMINALS TO EARTH GROUND
B1 B2
-
+1 +2 +3
NOT USED
Fig.1 & 2 below show the electrical connections for the
input power and motor terminals for various A1000 models.
Select the proper diagram for the model you are installing
(see Step 1). WITH POWER OFF make the appropriate
connections.
Make sure to follow good wiring practices and all
applicable codes. Ensure that the equipment is
grounded properly as shown in fig. 1
DANGER; LETHAL VOLTAGES ARE PRESENT- Before
applying power to the A1000, ensure that the terminal
cover is fastened and all wiring connections are secure.
After the power has been turned OFF, wait at least five
minutes until the charge indicator extinguishes
completely before touching any wiring, circuit boards or
components.
!
Make sure the A1000 has been properly sized for single phase input
power. For best performance, the drive input supply voltage must be at
least equal to or greater than the motor rated voltage.
3Ø Induction
motor
Connect
frame to
ground
Input
Protection
(Fuse or Circuit
Breaker)
To change direction of motor
rotation swap any two of the
three motor leads
(See Step 2)
Fig. 2 Input Power and Output Motor Electrical Connections for
Models: 2_0110 & Larger and 4_0058 & Larger
(R/L1) (S/L2)
(T/L3)
(U/T1)
(V/T2)
(W/T3)
Connect to
chassis
ground
Use L1, L2, L3 for
3Ø Input Power
L1
L2
L3
Use L1, L2 for
1Ø Input Power
*
BUS TERMINALS:
DO NOT CONNECT TO GROUND
Use L1, L2, L3 for
3Ø Input Power
To change
direction of
motor rotation
swap any two
of the three
motor leads
(See Step 2)
Fig. 1 Input Power and Output Motor Electrical Connections for
Models: 2_0004 - 2_0056, 4_0002 - 4_0044 and 5_0003 - 50011
Use L1, L2 for
1Ø Input Power
3Ø Induction
motor
Connect
frame to
ground
Input
Protection
(Fuse or Circuit
Breaker)
L1
L2
L3
(R/L1)
(S/L2)
(T/L3)
(U/T1)
(V/T2)
(W/T3)
Connect to
chassis ground
*
DC Bus terminals
location varies by
model.
*
To make sure you received the correct model, it is
essential to verify the A1000 nameplate with your order
and make sure the A1000 has the correct rating so it can
be used with your motor. Please check the nameplate
information as shown in the example below.
· Check that the available power will meet the input
power requirements.
· Ensure that the output power from the A1000 is
compatible with the motor requirements.
Mounting the A1000
· In the case of systems with more than one A1000, follow
the above procedure for each A1000 and motor.
The mounting of the A1000 is extremely important regarding
environment and accessibility. Depending on your system,
there are various models available and the mounting
dimensions (footprint) may be different. Because the
mounting procedure is fairly extensive, it is beyond the scope
of this document; the user is referred to the A1000 User
Manual (Document No. SIEP C710606 21A) received with
the A1000, Section 2.2 Mechanical Installation. Match the
model that you received and follow the procedure described
in the manual to ensure a safe and functional installation. In
cases where the system has more than one A1000, refer to
the proper clearances required for adequate ventilation.
Please pay particular attention to:
· The clearances to be maintained around the enclosure
for adequate ventilation.
· The environmental specifications such as avoiding
excessive dampness, extreme temperatures, chemical
exposure, corrosive areas, etc. to avoid damage to the
equipment and to maintain safety.
Removing and Attaching the Terminal Cover
Improper removal of the A1000 terminal cover as well as
front cover can cause extensive damage to the A1000. To
avoid damage to these items, please pay particular attention
to the A1000 User Manual, Document No. SIEP C710606
21A, Section 3.5, Removing and Attaching the Terminal
Cover.
Open Chassis
NEMA 1
Drive Model
Number
Input Power
Rating
Output
Power
Rating
Serial
Number
UL File
Number
Drive Spec Number
Weight
Software
Version
Normal /
Heavy Duty
Amps
A1000 Model
Identification and Mounting
A1000 Cheat Sheet (Open Loop Vector)
Connect Motor and
Line Power
(Motor uncoupled from Load)
Check Motor Direction
Page 1 of 2
Rotational Auto-tuning
(De-couple Motor from Load)
Step
5
Step
6
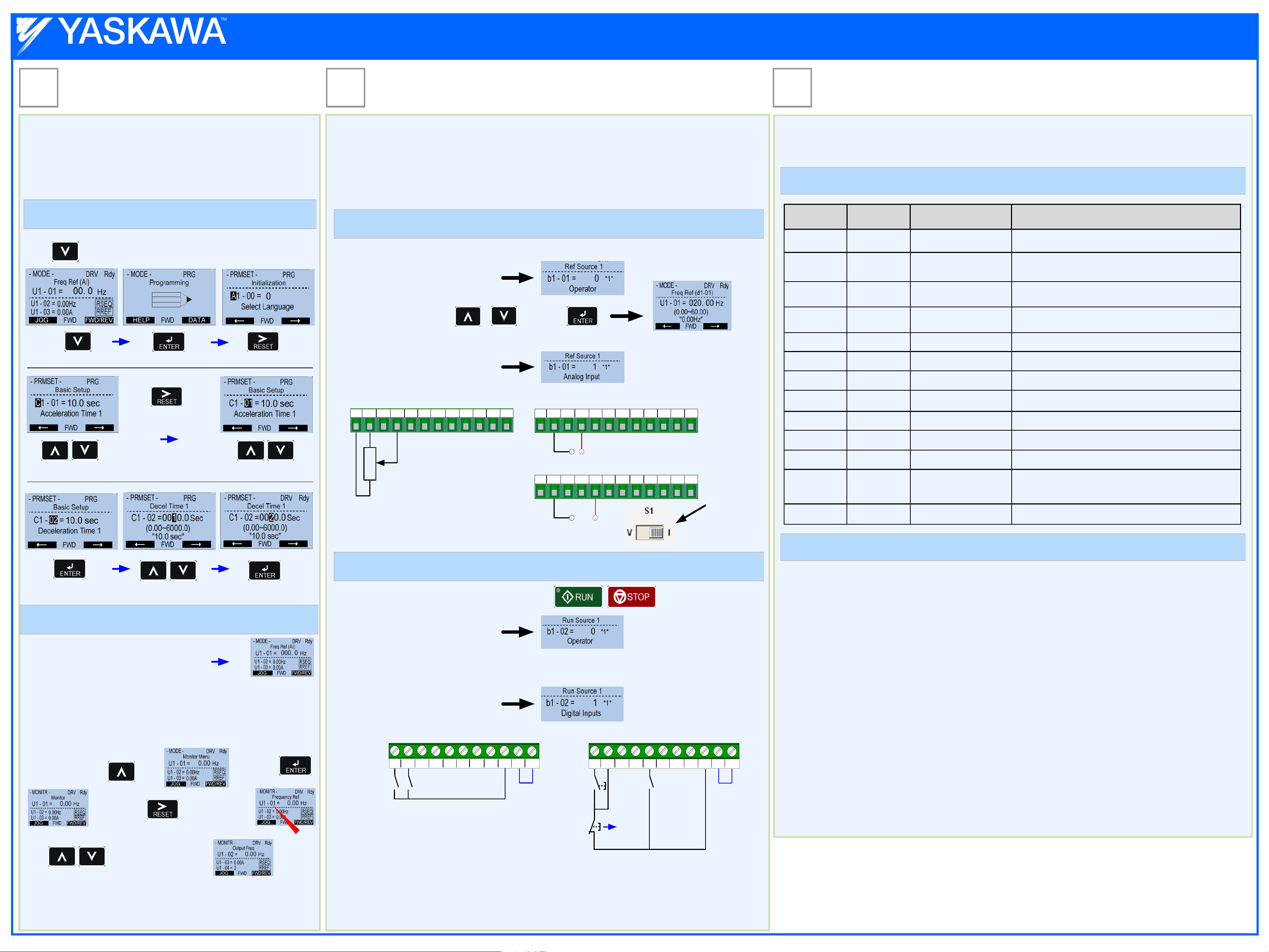
The following table lists the general purpose application parameters as well as frequently asked questions.
This section may require you to change one or more A1000 parameters. Please refer to Step 5 for a
detailed explanation on how to change parameters.
FREQUENTLY ASKED QUESTIONS
GENERAL PURPOSE APPLICATION PARAMETERS
Question: How do I reset the drive back to factory default settings?
Answer: Go to parameter A1-03 and set value 2220 for 2 wire control or 3330 for 3 wire control
(Please refer to Step 6 for wiring diagram)
Question: How do I adjust the time it takes the motor to speed up or slow down?
Answer: Adjust the acceleration time parameter C1-01 and deceleration time C1-02.
Question: How do I prevent my drive from tripping on an OV fault (overvoltage) while my motor is ramping down?
Answer: Increase deceleration time parameter C1-02.
Question: How do I prevent my drive from tripping on an OL1 fault (overload) while my motor is ramping down?
Answer: Verify motor rated current parameter E2-01 and motor overload parameter settings
L1-01 Motor overload selection, L1-02 Motor overload protection time.
Question: I want to run my motor above the nominal motor speed?
Answer: Increase the value of parameter E1-04 Maximum Frequency
Warning! Verify that the motor and system allow for this.
Yaskawa America, Inc.
2121 Norman Drive South
Waukegan, IL 60085
(800) YASKAWA (927-5292) Fax (847) 887-7310
DrivesHelpDesk@yaskawa.com www.yaskawa.com
Document Number: TM.A1000.01 1/4/2011 © Yaskawa America, Inc.
Step
7
This step shows how to access and modify a A1000 parameter as
well as how to monitor A1000 signals such as output frequency
and motor current.
Make sure all protective covers have been re-attached and power
is turned on. DO NOT RUN THE MOTOR.
Press two times until the digital operator shows the parameter menu.
Select Digit
Access Parameter Menu and Change Parameter Value
Monitor Motor Frequency and Motor Current
To monitor output frequency and motor current or other signals
individually, press once, the press
. Next press to select monitor
Use to select monitor signal.
Please refer to the A1000 User Manual, (Document No.
SIEP C710606 21A) on how to access other drive monitors.
U1-02 Output Frequency
2X
2X
Inc./Dec. Selection Inc./Dec. SelectionGo to Next Digit
Switch to Edit Mode Save New ValueModify Value
A1000 Digital Operator power-up state
Output Frequency and Motor Current can be monitored
simultaneously.
Digits
Flashing
This step shows how to setup the sequence and reference method of the A1000. The sequence
method determines how the A1000 drive receives its start and stop command and the reference
method determines how the speed of the motor is controlled. Make sure all protective covers have
been re-attached and power is turned on. DO NOT RUN THE MOTOR.
This section may require you to change one or more A1000 parameters. Please refer to Step 5
for a detailed explanation on how to change parameters.
SELECT START / STOP CONTROL METHOD
1. Start / Stop Control from Digital Operator
Go to parameter b1-02, set value to
b1-02
2. Start / Stop Control from external terminals (switch or relay contact)
Go to parameter b1-02, set value to
( Factory Default)
NOTE: It is beyond the scope of this document to program the A1000 drive for network communication control.
Please refer to the refer to the A1000 User Manual, (Document No. SIEP C710606 21A) for this selection.
SELECT SPEED METHOD
b1-01
(Factory Default)
1. Adjust motor speed / frequency from the Digital Operator
Go to parameter b1-01, set value to
2. Adjust motor speed / frequency from external terminals (0 - 10V / 4 - 20mA Signal)
Go to parameter b1-01, set value to
(Factory Default)
+
Located inside
the drive on the
terminal board
To adjust frequency use / and press .
V+ AC
V-
A1
A2 A3 FM AM AC
MP
Potentiometer
2K Ohm
User Terminals
RP
AC
V+ AC
V-
A1
A2 A3 FM AM AC
MP
User Terminals
RP
AC
0 ~ 10Vdc
+
V+ AC
V-
A1
A2 A3 FM AM AC
MP
RP
AC
4 ~ 20mA
Note: 2nd row of terminal board is shown here.
S3 S5 S6 S7 S8 SN SC SPS2 S4S1
Wiring Diagram: 2-Wire Control
Forward
Reverse
Wiring Diagram: 3-Wire Control
Use for momentary contacts
Use for maintained contacts
User Terminals User Terminals
(Set Parameter A1-03 to 3330)
Note: 3rd row of terminal board is shown here.
Link
S3 S5 S6 S7 S8 SN SC SPS2 S4S1
Start
Switch
Reverse
Stop
Switch
Normally
Open
Normally
Closed
Link
A1000 Cheat Sheet (Open Loop Vector)
Changing Parameters and
Selecting Start/Stop and Speed Method
Monitoring the A1000
Parameter
Default Value
Quick Start Parameters
Description
Page 2 of 2
Comments
b1-01
b1-02
b1-03
b1-04
C1-01
C1-02
C6-01
d1-01
d2-01
d2-02
1
1
1 Stop Method Selection
0 Reverse Operation
10.0 sec. Acceleration Time The time it takes to ramp up from 0 to maximum motor speed.
10.0 sec. Deceleration Time The time it takes to ramp down from maximum motor speed to 0.
0 Heavy / Normal Duty
0.00 Hz Frequency Reference Frequency setting when speed is set from the keypad.
100.0 % Frequency Upper Limit Maximum motor speed allowed (e.g. 100 % = Max rpm)
0.0 % Frequency Lower Limit Minimum motor speed allowed (e.g. 100 % = Max rpm)
Reference Source
Speed Control Method
Run Source /
Start/Stop Control Method
0 = Digital Operator (Adjust Motor Speed from keypad)
1 = Terminals (Speed Pot. / 0 – 10V / 4—20mA)
0 = Digital Operator (Start/Stop motor from keypad)
1 = Terminals (Start/Stop using external contact / switch)
0 = Ramp to stop (Motor ramps down at stop command)
1 = Coast to stop (Motor freewheels at stop command)
0 = Allow motor to run in reverse direction
1 = Reverse direction prohibited
0 = Heavy Duty (Use for conveyor, mixer, applications)
1 = Normal Duty (Use for fan and pump applications)
E2-01
L1-01
L1-02
* Motor Rated Current Motor nameplate current
0 = Disabled
1 Motor Overload Selection
1.0 min Motor Overload Time Sets the motor thermal overload protection time.
1 = Standard Fan Cooled Motor
2 = Standard Blower Cooled Motor
3 = Vector Duty Motor

Step
1
To make sure you received the correct model, it is
essential to verify the A1000 nameplate with your order
and make sure the A1000 has the correct rating so it can
be used with your motor. Please check the nameplate
information as shown in the example below.
· Check that the available power will meet the input
power requirements.
· Ensure that the output power from the A1000 is
compatible with the motor requirements.
Mounting the A1000
· In the case of systems with more than one A1000, follow
the above procedure for each A1000 and motor.
The mounting of the A1000 is extremely important regarding
environment and accessibility. Depending on your system,
there are various models available and the mounting
dimensions (footprint) may be different. Because the
mounting procedure is fairly extensive, it is beyond the scope
of this document; the user is referred to the A1000 User
Manual (Document No. SIEP C710606 21A) received with
the A1000, Section 2.2 Mechanical Installation. Match the
model that you received and follow the procedure described
in the manual to ensure a safe and functional installation. In
cases where the system has more than one A1000, refer to
the proper clearances required for adequate ventilation.
Please pay particular attention to:
· The clearances to be maintained around the enclosure
for adequate ventilation.
· The environmental specifications such as avoiding
excessive dampness, extreme temperatures, chemical
exposure, corrosive areas, etc. to avoid damage to the
equipment and to maintain safety.
Removing and Attaching the Terminal Cover
Improper removal of the A1000 terminal cover as well as
front cover can cause extensive damage to the A1000. To
avoid damage to these items, please pay particular attention
to the A1000 User Manual, Document No. SIEP C710606
21A, Section 3.5, Removing and Attaching the Terminal
Cover.
Open Chassis
NEMA 1
Drive Model
Number
Input Power
Rating
Output
Power
Rating
Serial
Number
UL File
Number
Drive Spec Number
Weight
Software
Version
Normal /
Heavy Duty
Amps
Step
2
Step
3
The following
procedure is a
supplement to
other
documentation
supplied with this
equipment and will
guide the user in
properly wiring the
A1000, motor and
encoder. It will also
show the user how
to configure the
A1000 in closed
loop mode
operation using a
PG-X3 card for a
dedicated
applications.
Danger: Improper
wiring can and
will cause bodily
harm as well as
damage to the
equipment.
When installing the
system, be sure to
follow good wiring
practices and all
applicable codes.
Ensure that the
mounting of
components is
secure and that
the environment,
such as extreme
dampness, poor
ventilation, etc. will
not cause system
degradation.
Please read this
cheat sheet and
other
documentation
provided with the
A1000 thoroughly
before attempting
any installation.
In this step the PG-X3 encoder feedback card is installed. WITH POWER OFF install the PG-X3 card as shown below. Make sure
to follow good wiring practices and all applicable codes. Ensure that the feedback card is grounded properly as shown in
fig. 3 item H.
This option card can be inserted into either the CN5-B or CN5-C connectors located on the drive’s control board. If only one option
card is connected to the drive, use the CN5-C connector. If two option cards are connected, use both CN5-B and CN5-C.
See the A1000 User Manual, Document No. SIEP C710606 21A, Section 3.5, for directions on removing the front cover.
Insert the PG-X3 card (connector CN5) into the matching CN5 connector on the A1000 control card. Next use the screws to fasten
the card into place. Connect one of the ground lead lines to the ground terminal with one of the screws. Two separate ground lead
lines have been included with the option card. Use the longer one when the option card is plugged into connector CN5-C on the
A1000 control card side and use the shorter one if the PG-X3 card is plugged into connector CN5-B.
PG-X3 Option Card
Option Card Installation
B+ Z+ Z- SD FEA- B-A+
PG-X3 Terminals
a+ a- b- z+IG SGIP
b+
z+
TB1
TB2
PG
Single Channel Feedback (A Only)
Set F1-37 = 0 (default)
+
-
Encoder
Signals
B+ Z+ Z- SD FEA- B-A+
PG-X3 Terminals
a+ a- b- z+IG SGIP
b+
z+
TB1
TB2
Quadrature / Dual Channel Feedback (A & B)
Set F1-37 = 1
+
-
Encoder
Power
Encoder Signals
PG
Encoder Connection
Select Encoder Power Supply
(IP + IG TB2) with Jumper CN3.
Encoder Power Supply
(Max. 200mA)
Default
Connect Encoder (PG) signals to TB1 terminals of the PG-X3 card as shown below.
Connect power supply from the PG-X3 card (TB1 – Terminals IP and IG) to the Encoder (PG).
IMPORTANT: Verify Encoder
Power Supply Rating
Encoder
Power
PG-X3 Encoder Wiring
!
A single channel encoder can only be used in V/f + PG control mode (A1-02 = 1). It is required
to use a quadrature encoder in Flux Vector control mode (A1-02 = 3).
– Connector CN5-C
– Connector CN5-B
– Connector CN5-A
– Drive grounding terminal (FE)
– Insert connector CN5 here
– Option card
– Mounting screw
– Lead line Ground
– Use wire cutters to create an opening for cable lines
– Front cover
– Digital Operator
– Terminal cover
A
B
C
D
E
F
G
H
I
J
K
L
– Terminal block TB1
– Ground terminal (installation hole)
– Jumper for PG power supply voltage (CN3)
– Terminal block TB2
– Model number
– Installation hole
– Connector (CN5)
A
B
C
D
E
F
G
Fig. 3
Ground Lead
Suitable only for
V/f with Feedback.
(Required for FLUX Vector Operation)
Suitable for V/f or Flux Vector with Feedback.
WARNING DO NOT CONNECT ANY OF THE
FOLLOWING TERMINALS TO EARTH GROUND
B1 B2
-
+1 +2 +3
NOT USED
Fig.1 & 2 below show the electrical connections for the
input power and motor terminals for various A1000 models.
Select the proper diagram for the model you are installing
(see Step 1). WITH POWER OFF make the appropriate
connections.
Make sure to follow good wiring practices and all
applicable codes. Ensure that the equipment is
grounded properly as shown in fig. 1
DANGER; LETHAL VOLTAGES ARE PRESENT- Before
applying power to the A1000, ensure that the terminal
cover is fastened and all wiring connections are secure.
After the power has been turned OFF, wait at least five
minutes until the charge indicator extinguishes
completely before touching any wiring, circuit boards or
components.
!
Make sure the A1000 has been properly sized for single phase input
power. For best performance, the drive input supply voltage must be at
least equal to or greater than the motor rated voltage.
3Ø Induction
motor
Connect
frame to
ground
Input
Protection
(Fuse or Circuit
Breaker)
To change direction of motor
rotation swap any two of the
three motor leads
(See Step 2)
Fig. 2 Input Power and Output Motor Electrical Connections for
Models: 2_0110 & Larger and 4_0058 & Larger
(R/L1) (S/L2)
(T/L3)
(U/T1)
(V/T2)
(W/T3)
Connect to
chassis
ground
Use L1, L2, L3 for
3Ø Input Power
L1
L2
L3
Use L1, L2 for
1Ø Input Power
*
BUS TERMINALS:
DO NOT CONNECT TO GROUND
Use L1, L2, L3 for
3Ø Input Power
To change
direction of
motor rotation
swap any two
of the three
motor leads
(See Step 2)
Fig. 1 Input Power and Output Motor Electrical Connections for
Models: 2_0004 - 2_0056, 4_0002 - 4_0044 and 5_0003 - 50011
Use L1, L2 for
1Ø Input Power
3Ø Induction
motor
Connect
frame to
ground
Input
Protection
(Fuse or Circuit
Breaker)
L1
L2
L3
(R/L1)
(S/L2)
(T/L3)
(U/T1)
(V/T2)
(W/T3)
Connect to
chassis ground
*
DC Bus terminals
location varies by
model.
*
A1000 Cheat Sheet (Closed Loop Operation)
A1000 Model
Identification and Mounting
Page 1 of 3
Connect Motor and
Install PG-X3 Feedback Card and wire encoder feedback
Line Power

Step
4
In this step the A1000 is setup for use with the motor in closed loop operation. Make sure the following has been done:
· Encoder (PG) connected correctly to the PG-X3 Card
· All protective covers have been re-attached
· Ensure the motor can spin freely and any connected mechanical brake is released
· Connected machinery should be allowed to rotate the motor
IMPORTANT:
To achieve optimal drive performance use rotational Auto-Tuning with the load decoupled from the motor. If motor and load can not be decoupled,
reduce the motor load so that it is no greater than 30% of the rated load. Performing rotational Auto-Tuning with a higher load can result in incorrect
motor parameters and may cause irregular motor rotation.
Next apply power to the A1000. DO NOT RUN THE MOTOR.
From the main reference press once until the Digital Operator
shows the Auto-Tuning menu then press .
Press once until the Digital Operator shows parameter
T1-02 Mtr Rated Power then press
Digit Flashing
Press to select the digit you would like to change and
use to adjust value and press to save.
Enter Motor Power in kW (Kilowatt)
Motor HP to kW = HP x 0.746
Example: 10HP = 10 x 0.746 = 7.46 kW
T1-03 Rated Voltage (e.g. 230 V, 460 V)
T1-04 Rated current (e.g. 11.0 A, 22.0 A)
T1-05 Rated Frequency (e.g. 60.0 Hz)
T1-06 Number of Poles (e.g. 4 Poles)
For standard AC motors
use the default setting for
motor base frequency
(60Hz), motor poles (4) and
motor rated speed.
T1-07 Rated Speed (e.g. 1750 rpm)
Press to select the next parameter and follow the same
procedure described above to adjust its value.
Warning! Sudden movement hazard. The A1000 and
motor may start unexpectedly during Auto-Tuning.
Warning! Electric Shock Hazard. High voltage will be
supplied to the motor when stationary Auto-Tuning is
performed. Do not touch the motor during auto-tuning.
Notice: Auto-Tuning will not function properly when a
brake is engaged on the load. Ensure the motor shaft
can freely rotate. Never perform an Auto-Tune with
motor connected to a load.
!
After setting parameter T1-08 press to select the
Auto-Tuning start command.
Next, press on the Digital Operator. The A1000
will now start the Auto-tuning procedure.
The display will show message “Tune Successful” when the
Auto-Tuning procedure has been successfully completed.
Please refer to the A1000 User Manual or repeat the
procedure again if the display shows an error message.
Select Closed Loop Control Method
A1-02
Select Closed Loop Control Method
Go to parameter A1-02,
Select V/f with PG Method
or Closed Loop Vector
Control Method
To adjust control method use / and press .
V/f with PG
Control method suitable for
applications that require accurate
motor speed regulation (0.02%) but do
not require a high speed response.
Closed Loop Vector
Control method suitable for applications
that medium to high speed control
accuracy, high torque response and full
torque at 0 speed.
(Recommended)
Auto-tuning Procedure
T1-08 Encoder / PG Number of Pulses per Rev. (e.g. 1024)
Continue
Start here
!
Encoder Direction
Check the motor speed monitor U1-05 while turning the motor manually in forward direction (CW). If the sign displayed
is negative, power down the drive, wait at least five minutes until the charge indicator extinguishes completely
then swap encoder wires A+ with A- on the PG-X3 card. Next power-up the drive and repeat this test. Or reverse the
encoder direction with parameter F1-05. For encoders with only A & B outputs, exchange A & B.
Step
5
Step
6
Motor Rotation Test
In this step the motor is checked for proper direction and operation.
This test is to be performed solely from the digital operator. Apply
power to the A1000 after all the electrical connections have been
made and protective covers have been re-attached. At this point,
DO NOT RUN THE MOTOR, the Digital Operator should display as
shown in Fig. 3.
Fig. 3
Digital Operator
Use precaution, and
refer to Fig.1 or 2, swap
any two of the three
output leads to the motor
(U/T1, V/T2 and W/T3).
After the wiring change,
repeat Step 3 and
recheck motor direction.
After the power has been turned OFF, wait at least five
minutes until the charge indicator extinguishes completely
before touching any wiring, circuit boards or components.
DANGER
If motor rotation is not correct, then either reverse “Phase
Order” using parameter b1-14 or power down the drive, wait
five minutes and swap 2 motor leads.
!
Next, press to move the cursor one
position to the right and to increase the
frequency reference (d1-01) to 10.00 Hz.
Press to save frequency reference.
Next, press on the Digital Operator. The motor
should now be operating at low speed running in the correct
forward (clockwise) direction.
Next, press on the Digital Operator.
Digital Operator
turned off.
First Digit
Flashing
Press
Green LED
turns on.
10.00 Hz
This step shows how to access and modify a A1000 parameter as
well as how to monitor A1000 signals such as output frequency
and motor current.
Make sure all protective covers have been re-attached and power
is turned on. DO NOT RUN THE MOTOR.
Press two times until the digital operator shows the parameter menu.
Select Digit
Access Parameter Menu and Change Parameter Value
Monitor Motor Frequency and Motor Current
To monitor output frequency and motor current or other signals
individually, press once, the press
. Next press to select monitor
Use to select monitor signal.
Please refer to the A1000 User Manual, (Document No.
SIEP C710606 21A) on how to access other drive monitors.
U1-02 Output Frequency
2X
2X
Inc./Dec. Selection Inc./Dec. SelectionGo to Next Digit
Switch to Edit Mode Save New ValueModify Value
A1000 Digital Operator power-up state
Output Frequency and Motor Current can be monitored
simultaneously.
Digits
Flashing
A1000 Cheat Sheet (Closed Loop Operation)
Check Motor Rotation in Open Loop
(Motor uncoupled from Load)
Changing Parameters and
Monitoring the A1000
Page 2 of 3
Rotational Auto-Tuning Closed Loop
(De-couple Motor from Load)

Step
8
Step
7
The following tables show how to fine tune motor operation for V/f with PG and Closed Loop Vector Operation.
Please refer to the A1000 User Manual (Document No. SIEP C710606 21A) for additional information.
Yaskawa America, Inc.
2121 Norman Drive South
Waukegan, IL 60085
(800) YASKAWA (927-5292) Fax (847) 887-7310
DrivesHelpDesk@yaskawa.com www.yaskawa.com
Document Number: TM.A1000.02 1/4/2011 © Yaskawa America, Inc.
This step shows how to setup the run and reference source of the A1000. The run source determines
how the A1000 drive receives its start and stop command and the reference source determines how
the speed of the motor is controlled. Make sure all protective covers have been re-attached and power
is turned on. DO NOT RUN THE MOTOR.
This section may require you to change one or more A1000 parameters. Please refer to Step 5
for a detailed explanation on how to change parameters.
SELECT RUN SOURCE
1. Start / Stop Control from Digital Operator
Go to parameter b1-02, set value to
b1-02
2. Start / Stop Control from external terminals (switch or relay contact)
Go to parameter b1-02, set value to
( Factory Default)
NOTE: It is beyond the scope of this document to program the A1000 drive for network communication control.
Please refer to the refer to the A1000 User Manual, (Document No. SIEP C710606 21A) for this selection.
SELECT REFERENCE SOURCE
b1-01
(Factory Default)
1. Adjust motor speed / frequency from the Digital Operator
Go to parameter b1-01, set value to
2. Adjust motor speed / frequency from external terminals (0 - 10V / 4 - 20mA Signal)
Go to parameter b1-01, set value to
(Factory Default)
+
Located inside
the drive on the
terminal board
To adjust frequency use / and press .
V+ AC
V-
A1
A2 A3 FM AM AC
MP
Potentiometer
2K Ohm
User Terminals
RP
AC
V+ AC
V-
A1
A2 A3 FM AM AC
MP
User Terminals
RP
AC
0 ~ 10Vdc
+
V+ AC
V-
A1
A2 A3 FM AM AC
MP
RP
AC
4 ~ 20mA
Note: 2nd row of terminal board is shown here.
Wiring Diagram: 2-Wire Control
S3 S5 S6 S7 S8 SN SC SPS2 S4S1
Wiring Diagram: 3-Wire Control
Start
Switch
Reverse
Stop
Switch
Normally
Open
Normally
Closed
Use for momentary contacts
Use for maintained contacts
User Terminals
(Set Parameter A1-03 to 3330)
Note: 3rd row of terminal board is shown here.
S3 S5 S6 S7 S8 SN SC SPS2 S4S1
Forward
Reverse
User Terminals
Link
Link
A1000 Cheat Sheet (Closed Loop Operation)
Selecting Start/Stop and Speed Reference Sources
V/f Control with encoder feedback (A1-02 = 1)
Problem
· Motor is hunting and oscillation at speeds between 10 and 40Hz.
· Motor noise
· Motor hunting and oscillation at speed up to
40Hz
n1-02 Hunting Prevention Gain
C6-02 Carrier Frequency Selection
Parameter
Page 3 of 3
Motor Performance Fine Tuning
· If insufficient motor torque relative to the size of the load causes
hunting reduce the setting.
· When motor hunting and oscillation occur with a light load increase
setting.
· Lower this setting if hunting occurs when using a motor with a
relatively low inductance such as a high-frequency motor or a motor
with a larger frame size.
· If the motor noise is too loud increase the carrier frequency.
· When motor hunting and oscillation occur at speeds up to 40 Hz
lower the carrier frequency.
· The default setting for the carrier frequency depends on the drive
capacity (o2-04) and the Duty Selection (C6-01).
Action
Default
1.00 0.10 to 2.00
1 (2 kHz) 1 to max. setting
Suggested Setting
· Poor torque or speed response
· Motor hunting and oscillation
· Poor motor torque at speeds below 10 Hz
· Motor hunting and oscillation
· Poor motor torque at low speeds
· Motor instability at motor start
· Poor speed precision
C4-02 Torque Compensation Primary Delay Time
C4-01 Torque Compensation Gain
E1-08 Mid Output Voltage A
E1-10 Minimum Output Voltage
C5-01 ASR Proportional Gain 1 <3>
C5-02 ASR Integral Time 1 <4>
Closed Loop Vector Control (A1-02 = 3)
Problem
C5-01 ASR Proportional Gain 1 <4>
· Poor torque or speed response
· Motor hunting and oscillation
C5-03 ASR Proportional Gain 1 <4>
C5-02 ASR Integral Time 1 <4>
C5-04 ASR Integral Time 2 <4>
Parameter
· If motor torque and speed response are too slow, decrease the
setting.
· If motor hunting and oscillation occur, increase the setting.
· If motor torque is insufficient at speeds below 10 Hz, increase the
setting.
· if motor hunting and oscillation with a relatively light load, decrease
the setting.
· If motor torque is insufficient at speeds below 10 Hz, increase the
setting.
· If motor instability occurs at motor start, decrease the setting.
Note: The recommended setting value shown is for 200 V class drives.
Multiply value x 2 for 400V class drives and x 2.875 for 575V class
drives.
Adjust the ASR proportional gain 1 (C5-01) and the ASR integral
time 1 (C5-02).
Action
· If motor torque and speed response are too slow, gradually increase the ASR gain setting by 5.
· If motor hunting and oscillation occur, decrease the setting.
· Parameter C5-03 needs to be adjusted only if C5-07 > 0.
· Perform ASR Auto-Tuning if possible
· If motor torque and speed response are too slow, decrease the
setting.
· If motor hunting and oscillation occur, increase the setting.
· Parameter C5-04 needs to be adjusted only if C5-07 > 0.
200 ms <1>
1.00 0.50 to 1.50
E1-08: 15.0 V <2>
E1-10: 9.0 V <2>
C5-01: 0.20
C5-02: 0.200
Default
20.00 10.00 to 50.00
0.500 s 0.300 to 1.000 s
100 to 1000 ms
Default setting ±5 V
Prop. gain = 0.10 to 1.00
Int. time = 0.100 to 2.000
Suggested Setting
· Trouble maintaining the ASR proportional gain
or the integral time at the low or high end of
the speed range
· Motor hunting and oscillation
· Motor noise
· Motor hunting and oscillation occurs at speeds
below 3 Hz
· Overshoot or undershoot when the speed
changes with high inertia load
<1> Default setting value is dependent on parameter A1-02, Control Method Selection, and o2-04, Drive Model Selection.
<2> Default settings change when the Control Method is changed (A1-02) or a different V/f pattern is selected using parameter E1-03.
<3> ASR in V/f Control with PG only controls the output frequency, and therefore does not allow for high gain settings like in Close Loop Vector control.
<4> Refer to C5: Automatic Speed Regulator (ASR) in the A1000 User Manual (Document No. SIEP C710606 21A) for details on Automatic Speed Regulator (ASR).
C5-07 ASR Gain Switching Frequency <4>
C5-06 ASR Primary Delay Time Constant <4>
C6-02 Carrier Frequency Selection
Use S-Curve: C2-01, C2-02, C2-03, C2-04 0 1
Have the drive switch between two different ASR proportional gain and
integral time settings based on the output frequency.
· If motor torque and speed response are too slow, gradually
decrease the setting by 0.01.
· If the load is less rigid and subject to oscillation, increase this
setting.
· If there is too much motor noise, the carrier frequency is too low.
· If motor hunting and oscillation occur at low speeds, reduce the
carrier frequency.
Note: The default setting for the carrier frequency depends on the drive
capacity (o2-04) and Drive Duty Selection (C6-01).
0.0 Hz 0.0 to max. freq. output
0.004 s 0.004 to 0.020s
1 2KHz to max. setting
 Loading...
Loading...