

Page 1

YASKAWA
Mechatronics Solutions
Engineering Europe
Machine
Inverter type
Motor type
Station
HT25G
CIMR-VMC23P72
UAJPEA-15BJ20
12
HT30G
CIMR-VMC23P72
UAJPEA-15BJ20
12
HT40G
CIMR-VMC22P2
UAJPEA-08BJ20
12
HT50G
CIMR-VMC22P2
UAJPEA-08BJ20
12
STEP1.
Change parameter as below
>
SET pm109=1 [ NC parameter edit valid ]
>
PRM pm7015bit0=1 [ Zero return mode valid ]
>
Inverter parameter C5-18bit6=1 [ Turret zero position offset auto measurement valid]
STEP2.
Press TURRET VALID PB and TURRET INDEX PB at the same time.
>
Check method that turret indexes like below.
>
Turret no1 ->4 ->7 ->10 ->1 (Normally turret indexes like left whenever press index PB)
>
If turning method is different from above mention, it's necessary to change C5-01. Refer to STEP3.
>
If the turret doesn’t turn, check that turret must be clamp condition.
>
If the turret doesn’t clamp, first press EMG STOP PB.
After that press SPINDLE STOP PB and TAPE PB at the same time.
Whenever press these switches, turret is switched clamp and unclamp.
STEP3.
Inverter parameter C5-01 should have set automatically. (Zero return complete)
>
If turning method different from above (1>4>7>10>1).
In case of turret turned 2>5>8>11>2, add +16284 to actual C5-01’s value.
In case of turret turned 3>6>9>12>3, add +8192 to actual C5-01’s value.
STEP4.
Change back to original parameter.
>
PRM pm7015bit0=0 [ Zero return mode invalid ]
>
SET pm109=0 [ NC parameter edit invalid ]
>
Inverter parameter C5-18bit6=0 [ Turret zero position offset auto measurement invalid]
STEP5.
Turn the machine breaker off and turn on.
STEP6.
Release User’s alarm: 5105 POWER OFF WHEN TURRET INDEX. (Do the SET-UP)
>
Press SPINDLE STOP PB and VALID PB (Under the TAPE PB) and FEED HOLD PB at the same time.
STEP7.
Test run by MDI mode.
>
Confirm that indexing tool number and T command are correct.
Varispeed 626VM3C drive station indexing function
This function can be used software NSC620025 or more.
This function is available at C1-39 bit1=1 [station indexing type]
This function is set by C5-** station indexing constant
Hitachi seiki machine: HT25G, HT30G, HT40G, HT50G are using this function for turret index.
Procedure: How to tune-up Turret for VM3C with Hitachi HT25/30/40/50G.
It’s necessary to tune-up turret after exchange inverter.
__________________________________________________________________________________
ETY030104 VM3C Turret station indexing function - C5 Params 1/9
Page 2

YASKAWA
Mechatronics Solutions
Engineering Europe
Parameter
Constant Name for station indexing
Abbreviation
Min Range
Max Range
Unit
Default
HT25G
Online
setting
(RUN)
Online
setting
(STOP)
Offline setting
(STOP)
OFF/ON!
C1-09
Torque reference filter time constant
0.0
5.0
ms
1.0
2.0
OK
OK
OK
C1-39
Select signal 4
SEL4
0000 0000
1111 1111
HEX1
0000 0000
0000 0010
No
No
OK
C5-01
Home position offset
HOMEOFS 0 32767
Pulse
0
OK
OK
OK
C5-02
Position Control Proportional Gain 1
KPSTTN 1 99
1/sec
10
11
OK
OK
OK
C5-03
Speed Control Proportional Gain
KVSTTN 1 255
%/Hz
10
30
OK
OK
OK
C5-04
Speed Control Integral Time Constant
TISTTN 5 1000
ms
100
70
OK
OK
OK
C5-05
Acceleration time
STSFST
0.00
0.50
sec
0.30
0.15
No
OK
OK
C5-06
Positioning Completion Cancel Width
COINSET 0 255
Pulse
10
50
No
OK
OK
C5-07
Position Completion Detection Width
SOINRST 0 255
Pulse
10
50
No
OK
OK
C5-08
Station near range
NEARBND 0 32767
Pulse
100
100
No
OK
OK
C5-09
Zero speed signal level
ZSPDST 3 60
rpm
30
30
No
OK
OK
C5-10
1st speed (AUTO mode)
AUTOSPD1
50
MAXRPM
rpm
500
1500
No
OK
OK
C5-11
2nd speed (AUTO mode)
AUTOSPD2
50
MAXRPM
rpm
500
1500
No
OK
OK
C5-12
JOG speed
MANUSPD
50
MAXRPM
rpm
100
500
No
OK
OK
C5-13
Zero return speed
HOMESPD
50
200
rpm
100
100
No
OK
OK
C5-14
Motor code
STMOTOR
A0
FF
HEX1
A0
A1
No
No
OK
C5-15
Station number
STNUM 1 63 8
12
No
No
OK
C5-16
Gear ratio m (Motor side) *1
GRMTR 1 100 1
24
No
No
OK
C5-17
Gear ratio k (Load axis side) *1
GRMCH 1 100 1
1
No
No
OK
C5-18
Indexing control select signal 1
SELP 1
0000 0000
1111 1111
0000 0000
1000 0000
No
OK
OK
C5-19
Indexing control select signal 2
SELP 2
0000 0000
1111 1111
0000 0000
0000 0100
No
OK
OK
C5-20
Pending point offset
PEOFS 0 32767
Pulse
0
0
No
OK
OK
C5-21
C5-22
Position Control Proportional Gain 3
KPSTA 0 99
1/sec
0
23
OK
OK
OK
C5-23
Position Control Proportional Gain 2
KPSTB 0 99
1/sec
0
13
OK
OK
OK
C5-24
Starting point of Position Control Proportional
Gain 2
PESTB 0 32767
Pulse 0 2000
OK
OK
OK
C5-25
Arrival speed of soft start (starting) *2
VSFW 0 250
rpm
0
200
OK
OK
OK
C5-26
Time of soft start (starting) *2
TSFW 0 200
ms
0
75
OK
OK
OK
C5-18 b0
Position reference mode
PRMODE
0: Absolute
1: Incremental
b1
Incremental mode direction
INCDIR
0: Increase direction station number
1: decrease direction station number
b2
Zero return mode direction
HMDIR
0: Increase direction station number
1: decrease direction station number
b3
Jog mode direction
MANDIR
0: Increase direction station number
1: decrease direction station number
b4
b5
b6
Home position offset automatic measurement
HMAUTO
0: Invalid
1: Valid
b7
Motor direction
MTRDIR
0: Forward
1: Reverse
C5-19 b0
b1
b2
Variable KP control mode
VKPEN
0: Invalid
1: Valid (available C5-22~24)
b3
b4
b5
b6
Indication for Motor B(C8) constant
BMTRDSP
0: Invalid
1: Valid
b7
Parameter for station indexing function
ETY030104 VM3C Turret station indexing function - C5 Params 2/9
Page 3

YASKAWA
Mechatronics Solutions
Engineering Europe
U5
NAME
ABBR.
UNIT
CONTENTS
U5-01
Input signal status [1CN]
NCIN3WD
HEX1
1CN Sequence input signal ON/OFF
status.
U5-02
Input signal status [5CN]
STTNIN
HEX1
5CN Sequence input signal ON/OFF
status.
U5-03
Output signal status [1CN]
STOUTWD
HEX1
1CN Sequence output signal ON/OFF
status.
U5-04
Station number reference
STNOCMD
Station number.
U5-05
Station number monitor
STNORSP
Actual number.
U5-06
U5-07
U5-08
Position deviation
SPERRL
Pulse
Difference between command stop
position and current stop position in pulses
U5-09
Positioning time
SPETIME
msec
Completion time in Auto mode
b1
b0
EMG
SSCB
SVON
DATSEL
START
MOTSEL
ZRN
SPDSEL
RST
U5-01 [1CN] Sequence Input Signal Status Display
STN1
STN32
MANU
STN2
STN4
ZLS
STN8
CLUMP
STN1
SETUP
U5-02 [5CN] Sequence Input Signal Status Display
U5-03 [1CN ] Sequence output Signal Status Display
COIN
POS1
NEAR
ZSP
DATSTS
MOTSTS
FLT
POS0
TAM
POS2
b2
b4
b9
bE
b3
Additional Variable for station indexing function
ETY030104 VM3C Turret station indexing function - C5 Params 3/9
Page 4

YASKAWA
Mechatronics Solutions
Engineering Europe
35
EMG
Emergency stop
Close: Operation ready (MC ON, Main capacitor is charged)
Open: Quickly stopped by regenerative breaking during run.
36
SVON
Servo on
Close: Ready, gate block release
Open: Gate block, shut down motor current( C1-37bit2,3 select)
37 START
Run command
Close: Indexing starts even inverter read station no and stops.
( At EMG, SVON is close condition )
Open: When signal is switched to open, motor stops nearest to next station.
39
SPDSEL
Speed select
Close: 2nd speed: C5-11 (AUTO mode)
Open: 1st speed: C5-10 (AUTO mode)
40
SSC
Soft start cancel
Close: Soft start (C1-10) is cancelled also C5-05 is cancelled. (at C1-36bit3=0)
Open: -
41
DATASEL
Data select for POS0,1,2
Close: Select 3bit of high-rank(H) for output station no (32,16,8, 4,2,1)
Open: Select 3bit of low-rank(L) for output station no (32,16,8 4,2,1)
42
MOTSEL
Motor change command
Close: Always must be closed for indexing control
Open: Do not select
43
ZRN
Zero return
Close: Zero return mode
Open: -
44
RST
Error reset
Close: Reset inverter ALM (close-> open) same as digital operator reset
Open:
33
34
COM
Input common
Close: common for CN1-35~44
Open: -
1
STN1
Close: 1
Open: 0
2
STN2
Station number input (Binary)
(~6 bits~ 000 000 )
1,2,3, bits are L side bit
4,5,6, bits are H side bit
Close: 2
Open: 0
3
STN4
Close: 4
Open: 0
4
STN8
Close: 8
Open: 0
5
STN16
Close: 16
Open: 0
6
STN32
Close: 32
Open: 0
8
ZLS Close: Inverter detects this signal by open to close.
9
CLUMP
Clamp condition
Close: unclamp
Open: clamp
10
SETUP
Set up
Close: Set-up starts even reads station no and pre-sets station no input value.
(If station number 0 is inputted, ALM F-d32 appears)
11
MANU
Run mode selection
Close: JOG
Open: AUTO
13
COM
Input common
Close: common for orientation card
25
COIN
Fin signal
Close: Positioning complete. According to C5-6, C5-7
26
NEAR
Near signal
Close: Near. According to C5-8.
27
ZSPD
Zero speed
Close: Zero speed. According to C5-9.
29
POS0
Station number
Close: 1 or 8 (Depending on DATSEL H or L)
30
POS1
Close: 2 or 16 (Depending on DATSEL H or L)
31
POS2
Close: 4 or 32 (Depending on DATSEL H or L)
32
DATSTS
Station data select for POS0,1,2
Close: H
Open: L
45
COM
Common
Close: Common for output 1CN-25~32
9
ALM
Inverter ALM output
Close: Inverter ALM
Open: normal
10
Close: Normal
Open: inverter ALM
11
Common for inverter ALM output
1CN
INPUT
5CN
INPUT
1CN
OUTPUT
Sequence INPUT /OUTPUT signal explanation
ETY030104 VM3C Turret station indexing function - C5 Params 4/9
Page 5

YASKAWA
Mechatronics Solutions
Engineering Europe
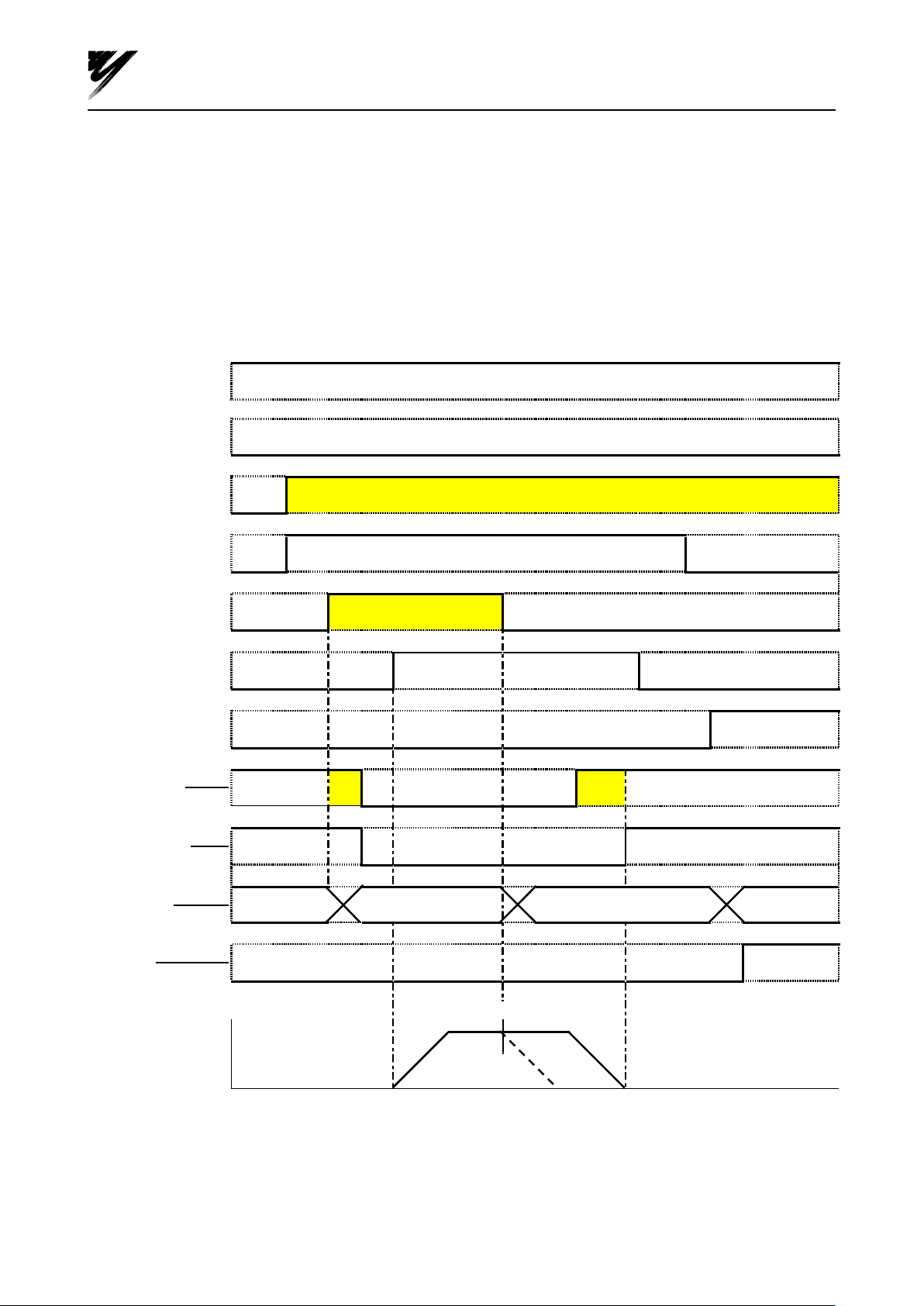
EMG
Open
SVON
Open
CLUMP
Open
ZRN
Open
C5-13 speed
START
Open
disregard ZLS
ZLS
Open
DATASEL
Open
Encoder Pulse
NEAR
Open
COIN
Open
POS0-2
Station number L side=0
DATASTS
Open
Zero position offset (C5-01)
Station near range (C5-08)
Timing chart
ZERO RETURN
Timing chart
ETY030104 VM3C Turret station indexing function - C5 Params 5/9
Page 6

YASKAWA
Mechatronics Solutions
Engineering Europe
EMG
SETUP can be executed regardless of EMG condition
SVON
Open
CLUMP
Open
START
Open
STN1-32
Station number command
SETUP
DATASEL
Open
POS0-2
DATASTS
Open
COIN
Within 5ms
10ms or more
5ms or more
SET UP
Timing chart
ETY030104 VM3C Turret station indexing function - C5 Params 6/9
Page 7
YASKAWA
Mechatronics Solutions
Engineering Europe
EMG
Close
ZRN
Open
MANU
Open
SVON
Open
START
Open
CLUMP
Open
DATASEL
NEAR
COIN
POS0-2
Station L side=0
Target point=2
DATASTS
Open
Speed
Jog speed(C5-12)
Station number
No.1 No.2
(Impossible to stop)
JOG
Timing chart
ETY030104 VM3C Turret station indexing function - C5 Params 7/9
Page 8

YASKAWA
Mechatronics Solutions
Engineering Europe
EMG
Close
ZRN
Open
MANU
Open
SVON
Open
STN1-32
Station number
command
START
Open
CLUMP
Open
SPDSEL
Open
C5-10 speed
DATASEL
Open
NEAR
COIN
POS0-2
Station number L side
H side
DATASTS
Open
Speed
1st speed(C5-10)
AUTO
Timing chart
ETY030104 VM3C Turret station indexing function - C5 Params 8/9
Page 9

YASKAWA
Mechatronics Solutions
Engineering Europe
ALM
NAME
CONTENTS
F-d30
ZERO RETURN ERROR
ZLS signal hasn’t come.
F-d31
SET UP INCOMPLETE
Auto mode was executed at set-up incomplete condition.
F-d32
STATION NUMBER ERROR
Unknown number was inputted.
F-d33
BRAKE PG SIGNAL FOR INDEXING
Encoder cable was broken or wrong connection.
F-d34
STATION INDEXING CARD CONNECTING ERROR
No Card inside. (Needed Initialise)
Additional ALARM for station indexing function
ETY030104 VM3C Turret station indexing function - C5 Params 9/9
 Loading...
Loading...