

Page 1
INSTRUCTION MANUAL
for
DGC-500
DIGITAL GENSET CONTROLLER
Publication: 9 3554 00 990
Revision: D 03/04
Page 2
INTRODUCTION
This manual provides information concerning the operation and installation of the Basler DGC-500 Digital
Genset Controller. To accomplish this, the following information is provided.
• Specifications
• Functional Description
• Communication Software Description
• Installation Information
• Troubleshooting Information
WARNING!
To avoid personal injury or equipment damage, only qualified personnel should
perform the procedures presented in this manual.
DGC-500 Introduction i
Page 3
First Printing: March 2002
Printed in USA
Copyright © 2004 Basler Electric, Highland, Illinois 62249 USA
March 2004
CONFIDENTIAL INFORMATION
Of Basler Electric. It is loaned for confidential use, subject to return on request,
and with the mutual understanding that it will not be used in any manner
detrimental to the interest of Basler Electric.
It is not the intention of this manual to cover all details and variations in equipment, nor does this manual
provide data for every possible contingency regarding installation or operation. The availability and design of
all features and options are subject to modification without notice. Should further information be required,
contact Basler Electric.
BASLER ELECTRIC
ROUTE 143, BOX 269
HIGHLAND, IL 62249 USA
http://www.basler.com, info@basler.com
PHONE 618-654-2341 FAX 618-654-2351
ii DGC-500 Introduction
Page 4
PRODUCT REVISION HISTORY
The following information provides a historical summary of the changes made to the embedded firmware,
communication software (BESTCOMS), and hardware of this device. The corresponding revisions made to
this instruction manual are also summarized. This revision history is separated into four categories: Firmware
Version, BESTCOMS Version, Hardware Version, and Manual Version. All revisions are listed in reverse
chronological order.
Firmware Version Summary
2.04.XX - 10/03
2.03.XX - 03/03
2.01.XX - 07/02
1.00.XX - 03/02
BESTCOMS Version Summary
1.03.XX - 10/03
1.02.XX - 03/03
1.01.XX - 07/02
1.00.XX - 03/02
C Added Engine Start/Stop Configuration setting to accommodate Volvo
Penta EDC applications. Added CANBus Address setting and Genset kW
Rating setting.
C Added support for SAE J1939 interface and 400 Hz operation
C Increased the maximum Sender Failure Alarm time delay setting from 10
seconds to 30 seconds.
C Initial release
C Added Engine Start/Stop Configuration setting to accommodate Volvo
Penta EDC applications. Added CANBus Address setting and Genset kW
Rating setting.
C Added settings for support of SAE J1939 interface and 400 Hz operation.
C Increased the maximum setting of the Global Sender Failure Alarm Time
Delay from 10 seconds to 30 seconds.
C Initial release
Hardware Version
(Standard Order P/N) Summary
L - 10/03
K - 09/03
J - 07/03
I
H - 06/03
G - 04/02
DGC-500 Introduction iii
C Implemented firmware version 2.04.XX and BESTCOMS version 1.03.XX
C Added reference to instruction manual on parts list
C Implemented firmware version 2.03.XX and BESTCOMS version 1.02.XX
C Not implemented
C Circuit board layout revised to improve manufacturing process
C Initial release
Page 5
Hardware Version
(Special Order P/N) Summary
D - 10/03
C - 09/03
B - 07/03
A - 06/03
Manual Version Summary
D - 03/04
C - 09/03
C Implemented firmware version 2.04.XX and BESTCOMS version 1.03.XX
C Added reference to instruction manual on parts list
C Implemented firmware version 2.03.XX and BESTCOMS version 1.02.XX
C Circuit board layout revised to improve manufacturing process
C Added suitability and warning statements concerning compliance of part
numbers 9 3554 00 113 and 9 3554 00 114 with cURus Standard 1604.
C Added descriptions associated with new settings: CANBus Address,
Engine Stop/Start Configuration, and Genset’s kW Rating.
C Added information pertaining to DGC Isolator Kits.
C Added Volvo Penta EDC application information and diagrams.
C Updated Pre-Alarm and Alarm information in Section 3, Functional
Description to include metric equivalents for settings.
B - 03/03
C Revised style chart to show NFPA compliance as standard, J1939 support
as optional.
C Added coverage for part numbers 9 3554 00 111, 112, 113, and 114.
C Added information about J1939 interface, ECU support, and state
machine operation where appropriate.
C Revised BESTCOMS section to accommodate new ECU settings.
C Created new appendix of settings list with range for each setting.
A - 07/02
— - 02/02
C Added instructions to Section 3, Functional Description for viewing
firmware version.
C Revised the maximum setting of Sender Failure Alarm Time from 10
seconds to 30 seconds in Tables 3-1 and 3-2.
C Replaced actual BESTCOMS version number in Figure 4-2 with generic
version number.
C Initial release
iv DGC-500 Introduction
Page 6

CONTENTS
SECTION 1 • GENERAL INFORMATION................................................ 1-1
SECTION 2 • HUMAN-MACHINE INTERFACE ........................................... 2-1
SECTION 3 • FUNCTIONAL DESCRIPTION ............................................. 3-1
SECTION 4 • BESTCOMS SOFTWARE................................................. 4-1
SECTION 5 • INSTALLATION......................................................... 5-1
SECTION 6 • MAINTENANCE AND TROUBLESHOOTING ................................. 6-1
APPENDIX A • PARAMETERS AND SETTINGS .......................................... A-1
APPENDIX B • DGC-500 SETTINGS RECORD ........................................... B-1
DGC-500 Introduction v
Page 7

SECTION 1 • GENERAL INFORMATION
TABLE OF CONTENTS
SECTION 1 • GENERAL INFORMATION................................................ 1-1
DESCRIPTION ................................................................. 1-1
FEATURES.................................................................... 1-1
FUNCTIONS ................................................................... 1-1
OUTPUTS..................................................................... 1-1
OPTIONAL EQUIPMENT ......................................................... 1-1
STYLE AND PART NUMBERS .................................................... 1-2
Style Numbers .............................................................. 1-2
Part Numbers ............................................................... 1-2
SPECIFICATIONS .............................................................. 1-3
Current Sensing .......................................................... 1-3
Voltage Sensing .......................................................... 1-3
Frequency .............................................................. 1-3
Contact Sensing ......................................................... 1-3
Engine System Inputs ..................................................... 1-3
Calculated Data .......................................................... 1-3
Output Contacts .......................................................... 1-3
Horn Output ............................................................. 1-4
Communication Interface................................................... 1-4
Environment............................................................. 1-4
Type Tests .............................................................. 1-4
UL Recognition .......................................................... 1-4
CSA Certification ......................................................... 1-4
NFPA Compliance ........................................................ 1-4
Physical ................................................................ 1-4
Figures
Figure 1-1. DGC-500 Style Number Chart ............................................... 1-2
DGC-500 General Information i
Page 8
SECTION 1 • GENERAL INFORMATION
DESCRIPTION
The DGC-500 Digital Genset Controller provides integrated engine-generator set control, protection, and
metering in a single package. Microprocessor based technology allows for exact measurement, setpoint
adjustment, and timing functions. Front panel controls and indicators enable quick and simple DGC-500
operation. Basler Electric communication software (BESTCOMS-DGC500-32) allows units to be easily
customized for each application. Because of the low sensing burden in the DGC-500, neither dedicated
potential transformers (PTs) nor current transformers (CTs) are required. A wide temperature-range liquid
crystal display (LCD) with backlighting allows the display to be viewed under a wide range of ambient light and
temperature conditions.
An optional, SAE J1939 interface provides high-speed communication between the DGC-500 and the engine
control unit (ECU) on an electronically controlled engine. This interface provides access to oil pressure,
coolant temperature, and engine speed data by reading these parameters directly from the ECU. When
available, engine diagnostic data can also be accessed.
FEATURES
DGC-500 Digital Genset Controllers have the following features.
C Resistant to high moisture, salt fog, humidity, dust, dirt, and chemical contaminants
C Resistant to the entrance of insects and rodents
C Suitable for mounting in any top mount enclosure
C Suitable for controlling isolated generating systems or paralleled generating systems
C Serial link communications and BESTCOMS software eases access to setup parameters
C Compliant with National Fire Prevention Association (NFPA) Standard 110
C Optional SAE J1939 interface provides high-speed communication with the ECU on electronically
controlled engines
FUNCTIONS
DGC-500 Digital Genset Controllers perform the following functions.
C Engine cranking control
C Generator voltage metering
C Generator frequency metering
C Generator current metering
C Engine coolant temperature metering
C Engine coolant temperature protection
C Engine oil pressure metering
C Engine oil pressure protection
C Fuel level sensing
C Fuel level sender protection
C Fuel leak detector
C Engine cool down
C VA metering
C Engine rpm metering
C Engine run time metering
C Battery voltage metering
C Battery condition monitoring
C Engine maintenance monitoring
C Engine diagnostic reporting
OUTPUTS
Five isolated, form A output contacts are provided: Engine Crank, Fuel Solenoid, Pre-Start, and two userprogrammable outputs.
OPTIONAL EQUIPMENT
An optional Remote Annunciation Display Panel (RDP-110) is available for use with the DGC-500.
Applications that require remote annunciation can use the Remote Display Panel, RDP-110. This display panel
annunciates all DGC-500 alarms, pre-alarms, and operating conditions.
DGC-500 General Information 1-1
Page 9
STYLE AND PART NUMBERS
Standard-order DGC-500 controllers are identified by a style number. Special-order DGC-500 controllers are
specified by ten-digit part numbers
Style Numbers
The electrical characteristics and operational features of a standard-order DGC-500 are defined by a
combination of letters and numbers that make up the style number. The model number, together with the style
number, describe the options included in a specific device. Figure 1-1 illustrates the DGC-500 style number
identification chart.
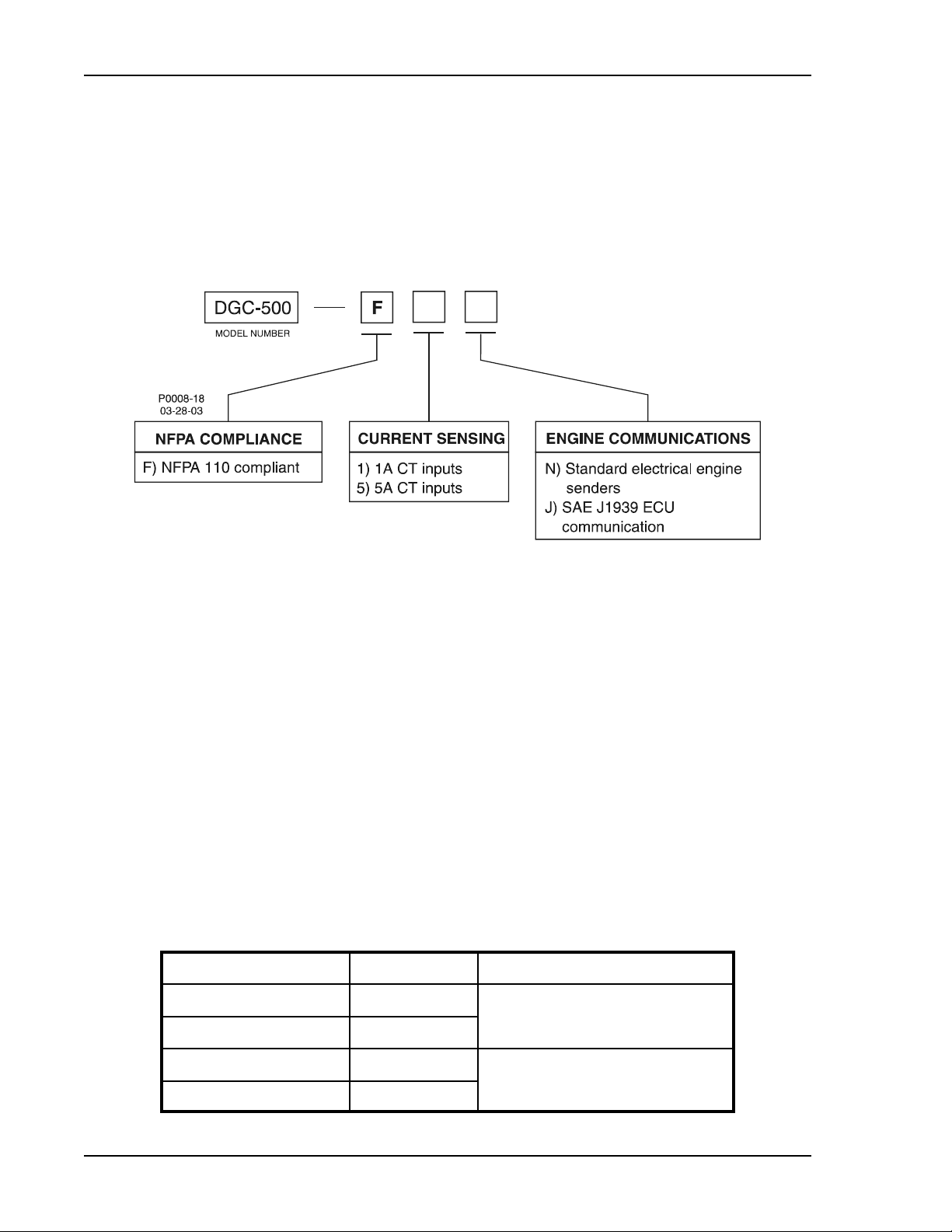
Figure 1-1. DGC-500 Style Number Chart
For example, if a DGC-500 style number is F5J, the device has the following characteristics and operating
features.
F.... Compliance to NFPA Standard 110
5 .... 5 ampere current sensing inputs
J .... ECU communication through the SAE J1939 protocol
The DGC-500 style number is printed on a label located on the circuit board near the voltage and current input
connections. Upon receipt of a unit, be sure to check the style number against the requisition and the packing
list to ensure that they agree.
Part Numbers
A ten-digit part number specifies the electrical characteristics and operational features of special-order
DGC-500 controllers. Table 1-1 lists the special-order DGC-500 controllers available along with descriptions
of their operating features.
Table 1-1. Special-Order DGC-500 Controllers
Part Number Style Number Special Features
9 3554 00 111 F5J 400 Hz nominal frequency
9 3554 00 112 F1J
9 3554 00 113 F5N cURus recognized for use in
9 3554 00 114 F1J
hazardous locations
DGC-500 General Information1-2
Page 10
SPECIFICATIONS
Current Sensing
Accuracy: ±1% of full scale or ±2 A,
whichever is greater
Burden: 1 VA
Terminals: P10, P11 (A-phase)
P12, P14 (B-phase)
P15, P17 (C-phase)
1 Ampere Inputs
Continuous Rating: 0.02 to 1.0 A
1 Second Rating: 2 A
5 Ampere Inputs
Continuous Rating: 0.1 to 5.0 A
1 Second Rating: 10 A
Voltage Sensing
Accuracy: ±1% of full scale or ±2 V,
whichever is greater
Burden: 1 VA
Range: 12 to 576 V rms, line-to-line
1 Second Rating: 720 V rms
Terminals: P23 (A-phase), P26 (B-phase),
P29 (C-phase), P30 (Neutral)
Frequency
Accuracy: ±0.25% of reading or ±0.2 Hz,
whichever is greater
Display Range: 4 to 70 Hz
4 to 450 Hz (P/N 9355400111,
112 only)
Contact Sensing
Emergency Stop Input
Type: Normally-closed dry contacts
Terminals: P35, P39
Programmable Inputs (3)
Type: Normally-open dry contacts
Terminals: P2, P21 (Input 1)
P3, P21 (Input 2)
P4, P21 (Input 3)
Engine System Inputs
t Stated accuracies are subject to the accuracy of
the senders used.
Fuel Level Sensing
Accuracy: ±3% of indication or ±2% t
Range: 33 to 240 S nominal
Terminals: P16, P19 (common)
Coolant Temperature Sensing
Accuracy: ±3% of indication (37°C to
115°C (99°F to 239°F))
±2°, whichever is greater at
25°C (77°F)
Range: 62.6 to 637.5 S nominal
Terminals: P18, P19 (common)
t
Oil Pressure Sensing
Accuracy: ±3% of indication (0 to 690
kPa) or ±12 kPa, whichever is
greater at 25°C (77°F)
±3% of indication (0 to 100 psi)
or ±2 psi, whichever is greater
Range: 34 to 240
Terminals: P13, P19 (common)
Battery Voltage Sensing
Accuracy: ±3% of indication or ±0.2 V,
whichever is greater
Nominal: 12 or 24 Vdc
Range: 8 to 32 Vdc (battery dip ride-
through to 6 Vdc for 0.75 sec)
Burden: 16 W maximum
Magnetic Pickup Sensing
Voltage Range: 3 V to 35 V peak continuous
into 13 k
Frequency Range: 32 to 10,000 Hz
Terminals: P39 (+), P40 (–)
Engine RPM Sensing
Accuracy: ±0.5% of indication or ±2 rpm,
whichever is greater at 25°C
(77°F)
Range: 750 to 3,600 rpm
Calculated Data
Voltamperes
Accuracy: ±2% of indication or ±2 kVA,
whichever is greater
Range: 0 to 9,999 kVA
Engine Run Time
Accuracy: ±0.5% of reading or ±1 hour,
whichever is greater at 25°C
(77°F)
Range: 0 to 99,999 hours
Maintenance Interval
Accuracy: ±0.5% of reading or ±1 hour,
whichever is greater at 25°C
(77°F)
Range: 0 to 5,000 hours
Output Contacts
Engine Crank, Fuel Solenoid, and Pre-Start Relays
Rating: 30 A at 28 Vdc, make, break,
and carry
Terminals: K1-N.O., COM (Engine Crank)
K2-N.O., COM (Fuel Solenoid)
K3-N.O., COM (Pre-Start)
S nominal
S (during cranking)
t
t The contact rating is reduced to 3 A for part
numbers 9 3554 00 113 and 9 3554 00 114 when
used in a hazardous location.
DGC-500 General Information 1-3
Page 11
Output Contacts—continued
Programmable Relays (2)
Rating: 2 A at 30 Vdc, make break, and
carry
Terminals: P33, P34 (Output 1)
P36, P38 (Output 2)
Horn Output
Voltage: 24 Vdc or battery voltage,
whichever is less
Current: 15 mAdc maximum
Compatible Device: Basler P/N 29760
Terminals: P24 (+), P25 (–)
UL Recognition
All DGC-500 controllers are UL recognized per
Standard 508, Standard for Industrial Control
Equipment (UL File E97035).
Part Numbers 9 3554 00 113 and 9 3554 00 114
cURus recognized per Standard 1604, Electrical
Equipment for Use in Class I and II, Division 2, and
Class III Hazardous (Classified) Locations, Class I,
Division 2, Groups A, B, C, D, Zone 2, Temperature
Code T5.
This equipment is suitable for use in Class I, Division
2, Groups A, B, C, D, or nonhazardous locations only.
Communication Interface
Full Duplex RS-232
Connection: Female DB-9 connector (J1)
Baud: 1200 or 2400
Data Bits: 8
Parity: None, Odd, or Even
Stop Bit: 1
SAE J1939 Interface
Differential
Bus Voltage: 1.5 to 3 Vdc
Maximum Voltage: –32 to 32 Vdc (with respect to
negative battery terminal)
Communication Rate: 250 kb/s
Environment
Temperature Range
Operating: –20°C to 60°C (–4°F – 140°F)
Storage: –40°C to 85°C (–40°F – 185°F)
Type Tests
Shock
15 G in 3 perpendicular planes
Vibration
Swept over the following ranges for 12 sweeps in
each of three mutually perpendicular planes with each
15 minute sweep consisting of the following:
5 to 29 to 5 Hz: 1.5 G peak for 5 min.
29 to 52 to 29 Hz: 0.036" DECS-A for 2.5 min.
52 to 500 to 52 Hz: 5 G peak for 7.5 min.
Salt Fog
Tested per ASTM-117B-1989
Radio Interference
Type tested using a 5 W, hand-held transceiver
operating at random frequencies centered around 144
and 440 MHz with the antenna located within 150 mm
(6") of the device in both vertical and horizontal
planes.
Dielectric Strength
2,352 Vac at 50/60 Hz for 1 second between voltage
sensing inputs and all other circuits.
500 Vac at 50/60 Hz for 1 minute between any of the
following groups.
C Current Sensing Inputs: 8 mA
C RS-232 Port: 6 mA
WARNING! – EXPLOSION HAZARD
(9 3554 00 113 and 9 3554 00 114 only)
Substitution of components may impair suitability
for Class I, Division 2.
Do not disconnect equipment unless power has
been switched off or the area is known to be nonhazardous.
CSA Certification
Certified per Standard CAN/CSA-C22.2,
Number 14-95, CSA File LR 23131 (excludes P/N
9 3554 00 113, 114)
NFPA Compliance
All DGC-500 controllers comply with NFPA Standard
110, Standard for Emergency and Standby Power
Systems.
Physical
Weight: 680 g (1.5 lb)
DGC-500 General Information1-4
Page 12

SECTION 2 • HUMAN-MACHINE INTERFACE
TABLE OF CONTENTS
SECTION 2 • HUMAN-MACHINE INTERFACE ........................................... 2-1
INTRODUCTION ............................................................... 2-1
FRONT PANEL................................................................. 2-1
REAR PANEL .................................................................. 2-2
Figures
Figure 2-1. DGC-500 Front Panel HMI .................................................. 2-1
Figure 2-2. DGC-500 Rear Panel HMI .................................................. 2-3
Tables
Table 2-1. DGC-500 Front Panel HMI Descriptions ........................................ 2-2
Table 2-2. DGC-500 Rear Panel HMI Descriptions ......................................... 2-3
DGC-500 HMI i
Page 13
SECTION 2 • HUMAN-MACHINE INTERFACE
INTRODUCTION
This section describes the components of the DGC-500 human-machine interface (HMI). DGC-500 HMI
components are located on the front panel (controls and indicators) and the rear panel (terminals and
connectors).
FRONT PANEL
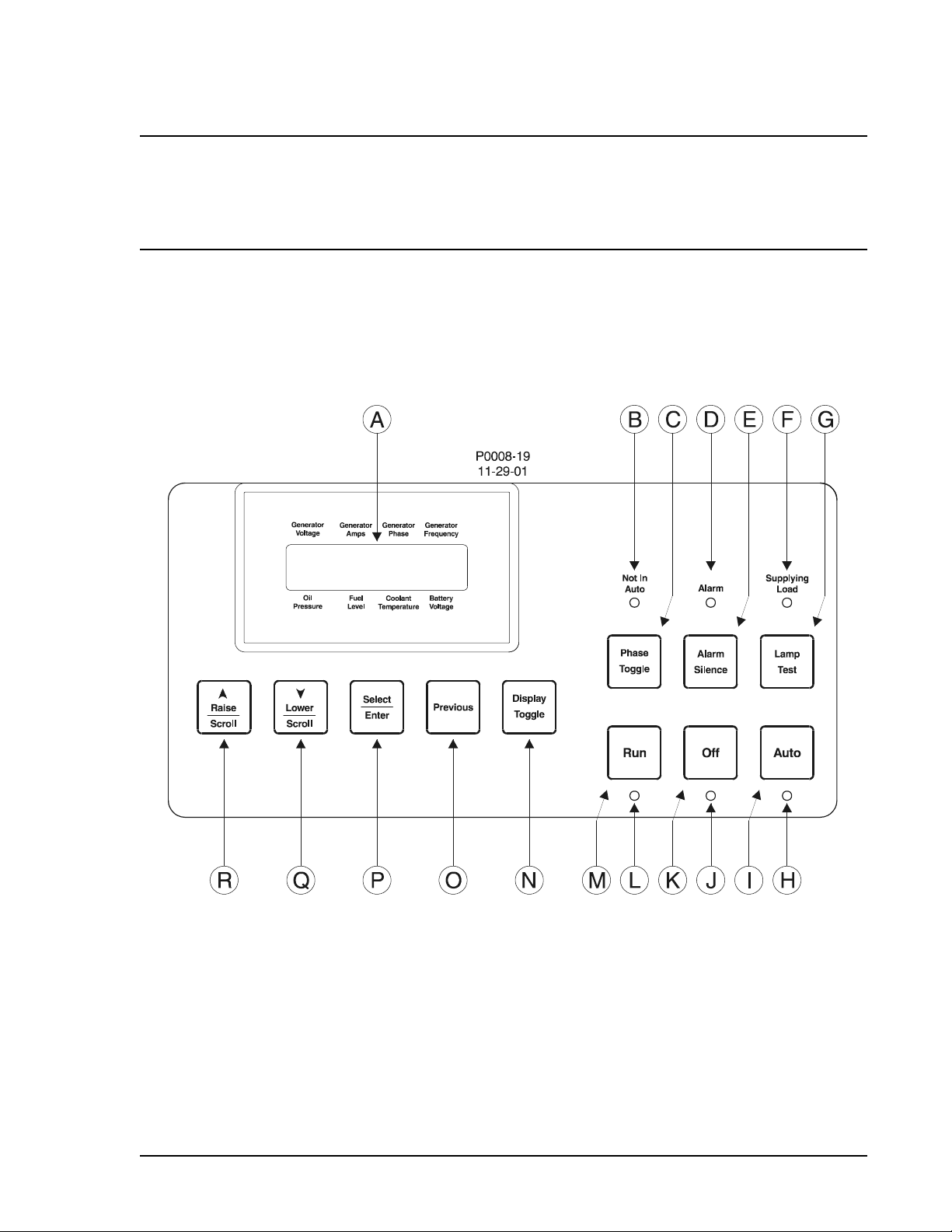
Figure 2-1 illustrates the front panel HMI of the DGC-500. Table 2-1 lists the call-outs of Figure 2-1 along with
a description of each HMI component.
Figure 2-1. DGC-500 Front Panel HMI
DGC-500 HMI 2-1
Page 14
Table 2-1. DGC-500 Front Panel HMI Descriptions
Call-Out Description
A Liquid Crystal Display. The backlit, two line by 16 character LCD is the primary interface
for metering, alarms, pre-alarms, and protective functions. The LCD has three standard
display modes (Normal, Alternate, and Menu) and one optional display mode (ECU
Parameters). In Normal mode, the displayed parameters correspond to one of the eight
labels surrounding the LCD. In Alternate mode, the LCD displays parameters and the
corresponding labels. In Menu mode, the LCD scrolls through the DGC-500 setup
parameters. In the optional ECU Parameters mode, the LCD scrolls through genset
parameters (metered from the ECU) and engine configuration parameters.
B Not in Auto Indicator. This red LED lights when the DGC-500 is not operating in Auto
mode.
C Phase Toggle Pushbutton. Pressing this control scrolls through the parameters available
in Normal display mode.
D Alarm Indicator. This red LED lights continuously during alarm conditions and flashes
during pre-alarm conditions.
E Alarm Silence Pushbutton. Pressing this control resets the DGC-500 audible alarm.
F Supplying Load Indicator. This green LED lights when the generator is supplying more
than two percent of rated current.
G Lamp Test Pushbutton. Pressing this control tests the DGC-500 indicators by exercising
all LCD segments and lighting all LEDS.
H Auto Mode Indicator. This green LED lights when the DGC-500 is operating in Auto mode.
I Auto Pushbutton. Pressing this control places the DGC-500 in Auto mode.
J Off Mode Indicator. This red LED lights when the DGC-500 is in Off mode.
K Off Pushbutton. Pressing this control places the DGC-500 in Off mode.
L Run Mode Indicator. This green LED lights when the DGC-500 is operating in Run mode.
M Run Pushbutton. Pressing this control places the DGC-500 in Run mode.
N Display Toggle Pushbutton. Pressing this control scrolls through the display modes.
O Previous Pushbutton. Pressing this control scrolls through the LCD display modes.
P Select/Enter Pushbutton. This control is pressed to enter menu sub-levels and select
setpoints.
Q Lower/Scroll Pushbutton. This control is pressed to scroll backward through menus or
decrement setpoints.
R Raise/Scroll Pushbutton. This control is pressed to scroll forward through menus or
increment setpoints.
REAR PANEL
All DGC-500 interface terminals are located on the rear panel. DGC-500 units have two types of terminals:
quarter-inch, male, quick-connect terminals and a DB9 serial communication connector. Figure 2-2 illustrates
the DGC-500 rear-panel HMI. Table 2-2 lists the call-outs of Figure 2-2 along with a description of each rearpanel HMI component.
DGC-500 HMI2-2
Page 15
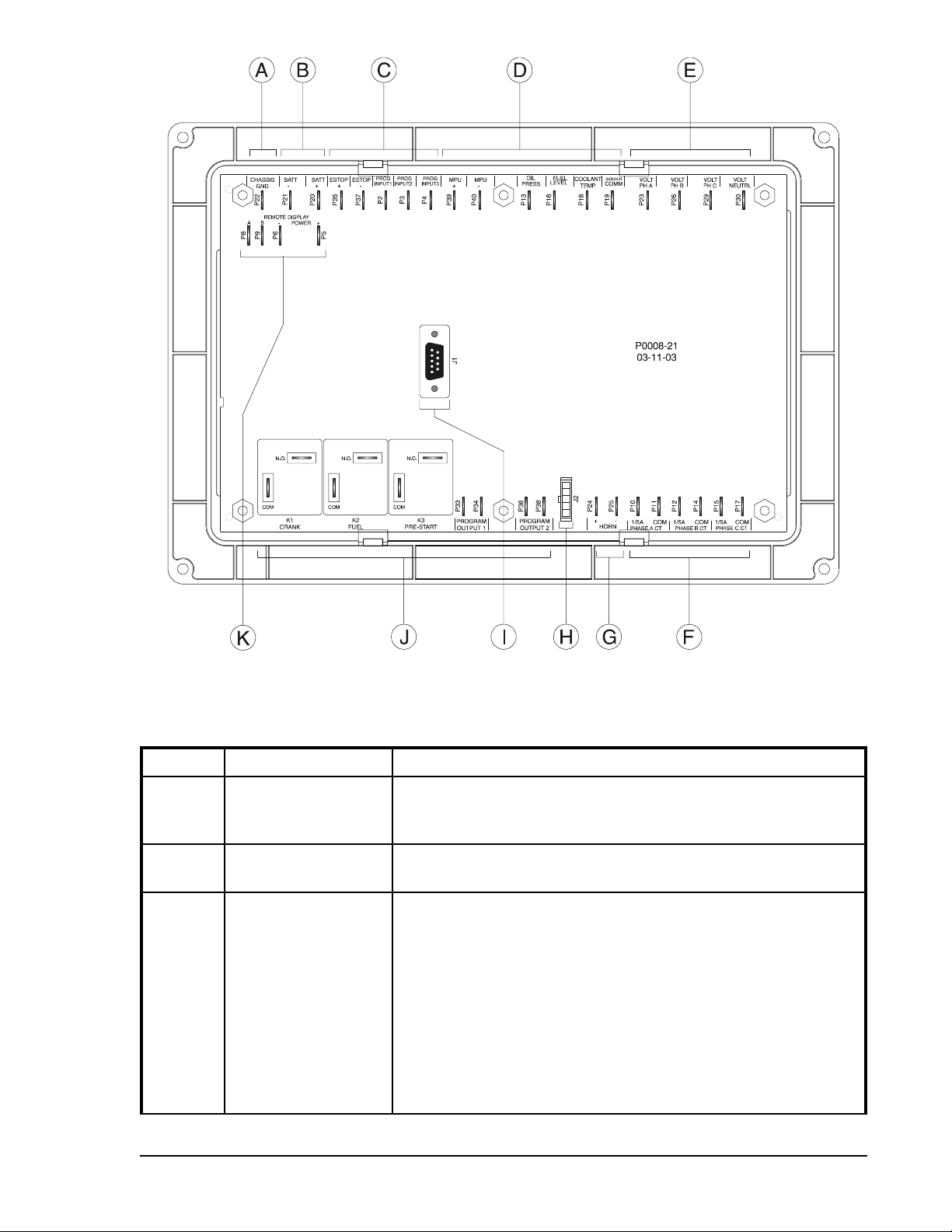
Figure 2-2. DGC-500 Rear Panel HMI
Table 2-2. DGC-500 Rear Panel HMI Descriptions
Call-Out Terminals Description
AP22 CHASSIS GND. This terminal provides the chassis ground
connection. The DGC-500 must be hard-wired to earth ground with
no smaller than 12 AWG copper wire.
B P20 (+), P21 (–) BATT. DGC-500 operating power is applied to these terminals. The
DGC-500 accepts a nominal input of 12 Vdc or 24 Vdc.
C
P35 (+), P37 (–)
P2, P3, P4
DGC-500 HMI 2-3
Contact Sensing Terminals
ESTOP. These terminals function as the Emergency Stop input.
Power is removed from all DGC-500 output relays when this input is
open.
PROG INPUT1, PROG INPUT2, PROG INPUT3. These three inputs
can be independently programmed to function as an auto transfer
switch input, single-phase override input, low coolant level input, fuel
leak detection input, battery charger failure input, or an auxiliary
input. The inputs accept normally-open contacts connected between
terminals P2 (PROG INPUT1), P3 (PROG INPUT2), or P4 (PROG
INPUT3) and terminal P21 (BATT –).
Page 16
Call-Out Terminals Description
D
P39 (+), P40 (–)
Transducer Terminals
MPU. These terminals accept the output from a magnetic pickup.
Voltage applied to this input is scaled and conditioned for use as a
speed signal.
P13
OIL PRESS. The output from an oil pressure transducer is applied to
this input. A current signal lower than 5 mA can be applied between
terminal P13 and P19 (SENDER COMM).
P16
FUEL LEVEL. The output from a fuel level transducer is applied to
this input. The DGC-500 supplies a transducer current signal of less
than 30 mA to terminals P13 and P19 (SENDER COMM).
P18
COOLANT TEMP. The output from a coolant temperature transducer
is applied to this input. The DGC-500 supplies a transducer current
signal of less than 5 mA to terminals P16/P18 and P19 (SENDER
COMM).
P19
SENDER COMM. This terminal functions as the common return line
for all of the transducer inputs.
E
P23
P26
P29
P30
Voltage Sensing Terminals
VOLT PH A. This terminal senses the A-phase generator voltage.
VOLT PH B. This terminal senses the B-phase generator voltage.
VOLT PH C. This terminal senses the C-phase generator voltage.
VOLT NEUTRAL. This terminal connects to the generator Neutral in
phase-to-neutral sensing applications.
F
P10(
1/5A), P11(COM)
1/5A), P14(COM)
P12(
1/5A), P17(COM)
P15(
Current Sensing Terminals
PHASE A CT. These terminals sense the A-phase generator current.
PHASE B CT. These terminals sense the B-phase generator current.
PHASE C CT. These terminals sense the C-phase generator current.
G P24 (+), P25(–) HORN. This output supplies power to an external horn. The voltage
supplied is 24 Vdc or the battery voltage, whichever is less. A
maximum current of 15 mAdc is available.
HJ2 SAE J1939 Connector. This connector is enabled on controllers with
a style number of FXJ
and provides high-speed communication
between the DGC-500 and the ECU on an electronically controlled
engine.
IJ1 RS-232 COMMUNICATION PORT. This DB9 connector uses serial
communication to enhance DGC-500 setup. A standard serial cable
connects the DGC-500 to a PC.
J
K1-N.O., K1-COM
Output Contact Terminals
CRANK. This output is closed when the DGC-500 is initiating engine
cranking.
K2-N.O., K2-COM
FUEL. This output closes when engine cranking is initiated and
remains closed until a stop command is received by the DGC-500.
K3-N.O., K3-COM
PRE-START. This output closes to energize the glow plugs prior to
engine cranking. Depending on system setup, the Pre-Start output
may open upon engine startup or stay closed during engine
operation.
P33, P34
PROGRAM OUTPUT1. This output closes when a userprogrammable condition is detected by the DGC-500.
P36, P38
PROGRAM OUTPUT2. This output closes when a userprogrammable condition is detected by the DGC-500.
2-4
DGC-500 HMI
Page 17
Call-Out Terminals Description
K
P5 (+), P6 (–)
P8 (A), P9 (B)
Remote Display Terminals
Power. These terminals provide operating power to the optional
Remote Display Panel (RDP-110).
Communication. These terminals provide an RS-485 interface for
communication with the optional Remote Display Panel (RDP-110).
DGC-500 HMI
2-5
Page 18

SECTION 3 • FUNCTIONAL DESCRIPTION
TABLE OF CONTENTS
SECTION 3 • FUNCTIONAL DESCRIPTION ............................................. 3-1
INTRODUCTION ............................................................... 3-1
DGC-500 FUNCTION BLOCKS .................................................... 3-1
Power Supply ............................................................... 3-1
Battery Voltage Sensing .................................................... 3-1
Microprocessor.............................................................. 3-1
Zero Crossing Detection .................................................... 3-2
Analog-to-Digital Converter .................................................. 3-2
Voltage Sensing Inputs ....................................................... 3-2
Current Sensing Inputs ........................................................ 3-2
Transducer Inputs ........................................................... 3-2
Oil Pressure.............................................................. 3-2
Coolant Temperature....................................................... 3-2
Fuel Level ............................................................... 3-2
Speed Signal Inputs .......................................................... 3-3
Voltage Sensing Inputs ..................................................... 3-3
Magnetic Pickup Input ...................................................... 3-3
Contact Input Circuitry ........................................................ 3-3
Emergency Stop Input ...................................................... 3-3
Programmable Inputs ...................................................... 3-3
Front Panel HMI ............................................................. 3-3
LCD .................................................................... 3-3
LEDs ................................................................... 3-3
Pushbuttons.............................................................. 3-4
Remote Display Panel ........................................................ 3-4
RS-232 Communication Port ................................................... 3-4
SAE J1939 Interface (Optional) ................................................. 3-4
Diagnostic Trouble Codes (DTCs) ............................................ 3-6
Horn Output ................................................................ 3-7
Output Contacts ............................................................. 3-7
Pre-Start ................................................................ 3-7
Crank ................................................................... 3-7
Fuel .................................................................... 3-7
Programmable ............................................................ 3-8
SOFTWARE OPERATION ........................................................ 3-8
Power-Up Sequence ......................................................... 3-8
Cranking ................................................................... 3-8
Continuous Cranking ....................................................... 3-9
Cycle Cranking ........................................................... 3-9
Pre-Alarms ................................................................. 3-9
Low Oil Pressure .......................................................... 3-9
Low Fuel ................................................................ 3-9
High Coolant Temperature .................................................. 3-9
Low Coolant Temperature................................................... 3-9
Battery Overvoltage........................................................ 3-9
Low Battery Voltage ....................................................... 3-9
Weak Battery Voltage ..................................................... 3-10
Maintenance Interval ...................................................... 3-10
Battery Charger Failure .................................................... 3-10
Fuel Level Sender Failure .................................................. 3-10
MPU Failure............................................................. 3-10
DGC-500 Functional Description i
Page 19

Active DTC ..............................................................3-10
CAN Failure ............................................................. 3-10
Audible Alarm ............................................................3-10
Alarms ....................................................................3-10
Low Oil Pressure .........................................................3-11
Low Fuel Level ...........................................................3-11
High Coolant Temperature .................................................. 3-11
Overspeed ..............................................................3-11
Loss of Generator Voltage ..................................................3-11
Oil Pressure Sender Failure .................................................3-11
Coolant Temperature Sender Failure .......................................... 3-11
Speed Source Failure ......................................................3-11
CAN Failure ............................................................. 3-12
DISPLAY OPERATION .......................................................... 3-12
Normal Mode ............................................................... 3-12
Firmware Version .........................................................3-12
Alternate Mode ............................................................. 3-12
Diagnostic Trouble Codes (DTCs) ............................................3-12
ECU Parameters Mode .......................................................3-14
Engine Configuration Parameters ............................................ 3-16
Menu Mode ................................................................ 3-17
Menu 1 .................................................................3-17
Menu 2 .................................................................3-17
Menu 3 .................................................................3-17
Menu 4 .................................................................3-17
Exiting Menu Mode ........................................................3-17
Changing Settings ........................................................... 3-22
Key Code.................................................................. 3-22
ENGINE CONTROL UNIT (ECU) SUPPORT .........................................3-22
Enabling ECU Support .......................................................3-22
ECU Constraints ............................................................ 3-23
The DGC-500 Solution .....................................................3-23
Alarms and Pre-Alarms .......................................................3-23
Fuel Solenoid Relay .........................................................3-23
Display Values (ECU Support Enabled) ..........................................3-24
ECUs with an External Fuel Solenoid ............................................ 3-24
STATE MACHINES .............................................................3-24
System Configuration ........................................................3-25
Operating States ............................................................ 3-25
State Transitions ............................................................ 3-25
Normal Program Control ......................................................3-25
ECU Power Support Program Control ............................................ 3-26
Initial State - Power Up/Reset ..................................................3-26
Ready State ................................................................ 3-27
Going to Off or Auto-Off ....................................................3-27
Pulsing State ...............................................................3-28
Connecting State ............................................................3-28
Pre-Start State..............................................................3-29
Cranking State..............................................................3-29
Resting State ............................................................... 3-30
Running State ..............................................................3-30
Cooling State ............................................................... 3-31
Shutting Down State .........................................................3-31
Alarm State ................................................................ 3-32
DGC-500 Functional Descriptionii
Page 20
Figures
Figure 3-1. DGC-500 Function Block Diagram ............................................ 3-1
Figure 3-2. Display Mode Navigation .................................................. 3-12
Figure 3-3. Alternate Mode Navigation ................................................. 3-13
Figure 3-4. Lamp Status Screen ...................................................... 3-13
Figure 3-5. DTC Screen Example ..................................................... 3-14
Figure 3-6. ECU Parameters Navigation ................................................ 3-15
Figure 3-7. Engine Configuration Menu Navigation ....................................... 3-16
Figure 3-8. Menu Mode Navigation .................................................... 3-17
Figure 3-9. Menu 1 Navigation ....................................................... 3-18
Figure 3-10. Menu 2 Navigation ...................................................... 3-19
Figure 3-11. Menu 3 Navigation ...................................................... 3-20
Figure 3-12. Menu 4 Navigation ...................................................... 3-21
Figure 3-13. Setting Change Example ................................................. 3-22
Figure 3-14. Screens Shown Following Unsuccessful Information Update from ECU ............. 3-24
Figure 3-15. Normal Program Control Diagram .......................................... 3-26
Figure 3-16. ECU Power Support Program Control Diagram ................................ 3-26
Figure 3-17. Power Up/Reset State Diagram ............................................ 3-27
Figure 3-18. Ready State Diagram .................................................... 3-28
Figure 3-19. Pulsing State Diagram ................................................... 3-28
Figure 3-20. Connecting State Diagram ................................................ 3-29
Figure 3-21. Pre-Start State Diagram .................................................. 3-29
Figure 3-22. Cranking State Diagram .................................................. 3-30
Figure 3-23. Resting State Diagram ................................................... 3-30
Figure 3-24. Running State Diagram ................................................... 3-31
Figure 3-25. Cooling State Diagram ................................................... 3-31
Figure 3-26. Shutting down State Diagram .............................................. 3-32
Figure 3-27. Alarm State Diagram..................................................... 3-32
Tables
Table 3-1. ECU Parameters Obtained from CAN Interface ................................... 3-5
Table 3-2. Engine Configuration Parameters Obtained from CAN Interface ...................... 3-6
Table 3-3. Diagnostic Information Obtained Over the CAN Interface ........................... 3-7
DGC-500 Functional Description iii
Page 21
SECTION 3 • FUNCTIONAL DESCRIPTION
INTRODUCTION
This section describes how the DGC-500 functions and explains its operating features. A detailed description
of each function block is provided in the paragraphs under the heading of DGC-500 Function Blocks.
DGC-500 operating features are described under the heading of Software Operation.
DGC-500 FUNCTION BLOCKS
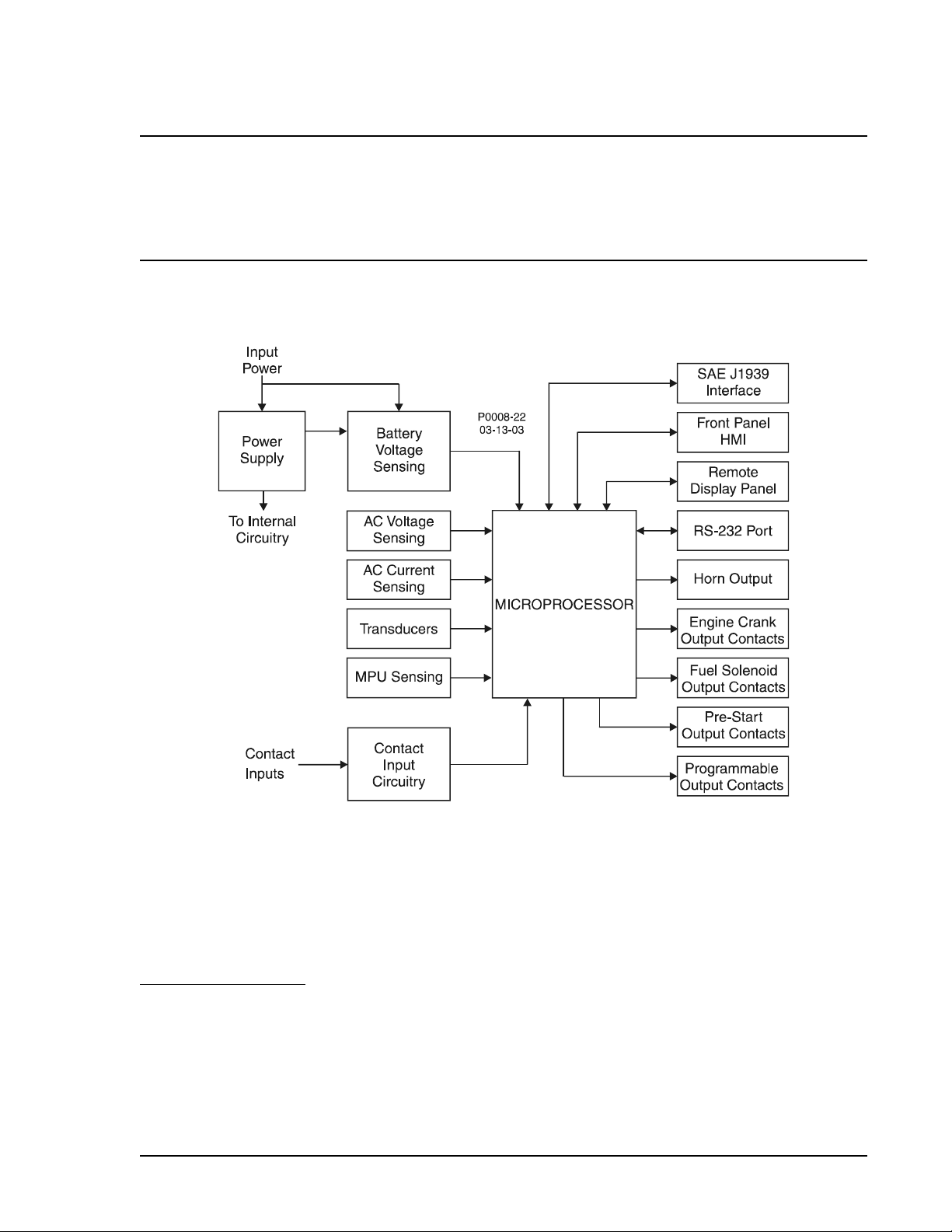
To ease understanding, DGC-500 functions are illustrated in the block diagram of Figure 3-1. The following
paragraphs describe each function in detail.
Figure 3-1. DGC-500 Function Block Diagram
Power Supply
The internal, switch-mode power supply uses the applied battery voltage to generate operating power for the
internal circuitry of the DGC-500. The power supply accepts a nominal battery voltage of 12 or 24 Vdc and
has an operating range of 8 to 32 Vdc. Battery voltage is applied to terminals P20 (+) and P21 (–).
Battery Voltage Sensing
Voltage applied to the power supply is filtered and reduced to a suitable level for sensing by the
microprocessor.
Microprocessor
The microprocessor controls the overall functionality of the DGC-500 and makes decisions based on
programming and system inputs.
DGC-500 Functional Description 3-1
Page 22
Circuits relating to the microprocessor inputs are described in the following paragraphs.
Zero Crossing Detection
The zero crossing of A-phase to B-phase line voltage is detected and used to calculate the generator
frequency.
Analog-to-Digital Converter
Scaled and conditioned signals representing the sensing voltage, sensing current, coolant temperature, fuel
level, oil pressure, and battery voltage are digitized by the microprocessor’s 10-bit analog-to-digital converter.
The digitized information is stored in random access memory (RAM) and used by the microprocessor for all
metering and protection functions.
Voltage Sensing Inputs
Generator voltages applied to the voltage sensing inputs are scaled to levels suitable for use by the internal
circuitry. Voltage sensing configuration is menu-selectable.
The voltage sensing inputs accept a maximum voltage of 576 Vrms, line-to-line. Sensing voltage is applied
to terminals P23 (A-phase), P26 (B-phase), P29 (C-phase), and P30 (Neutral).
Current Sensing Inputs
Generator currents are sensed and scaled to values suitable for use by the internal circuitry. Isolation is
provided by internal current transformers (CTs).
DGC-500–X1 units accept a maximum current value of 1 Aac. DGC-500–X5 units accept a maximum current
value of 5 Aac. Sensing current is applied to terminals P10 and P11 (A-phase), P12 and P14 (B-phase), and
P15 and P17 (C-phase).
Transducer Inputs
Programmable transducer inputs of the give the DGC-500 user the flexibility to select the transducer to be
used in an application. Information about programming the transducer inputs is provided in Section 6,
BESTCOMS Software.
Oil Pressure
A current of less than 30 milliamperes is provided to the oil pressure transducer. The developed voltage is
measured and scaled for use by the internal circuitry. Oil pressure transducers that are compatible with the
DGC-500 include Isspro model R8919, Stewart-Warner models 279BF, 279C, 411K, and 411M, and VDO
models 360025 and 360811. Other senders may be used. BESTCOMS software allows for the programming
of sender characteristics. See Section 4, BESTCOMS Software for more information.
Oil pressure transducer connections are provided at terminals P13 and P19 (sender common).
Coolant Temperature
A current of less than 1.2 milliamperes is provided to the coolant temperature transducer. The developed
voltage is measured and scaled for use by the internal circuitry. Coolant temperature transducers that are
compatible with the DGC-500 include Isspro model R8959 and Stewart-Warner 334-P. Other senders may
be used. BESTCOMS software allows for the programming of sender characteristics. See Section 4,
BESTCOMS Software for more information.
Coolant temperature transducer connections are provided at terminals P18 and P19 (sender common).
Fuel Level
A current of less than 5 milliamperes is provided to the fuel level transducer. The developed voltage is
measured and scaled for use by the internal circuitry. An open circuit or short circuit across the fuel level
transducer terminals will cause the DGC-500 to indicate a failed fuel level transducer. Fuel level transducers
that are compatible with the DGC-500 include Isspro model R8925. Other senders may be used. BESTCOMS
DGC-500 Functional Description3-2
Page 23

software allows for the programming of sender characteristics. See Section 4, BESTCOMS Software for more
information.
Fuel level transducer connections are provided at terminals P16 and P19 (sender common).
Speed Signal Inputs
The DGC-500 uses signals from the voltage sensing inputs and magnetic pickup input to detect machine
speed.
Voltage Sensing Inputs
Generator voltage applied to the DGC-500 voltage sensing inputs is used to measure frequency and can be
used to measure machine speed.
Sensing voltage is applied to terminals P23 (A-phase), P26 (B-phase), P29 (C-phase), and P30 (Neutral).
Magnetic Pickup Input
The voltage received from the magnetic pickup is scaled and conditioned for use by the internal circuitry as
a speed signal source.
Magnetic pickup connections are provided at terminals P39 (+) and P40 (–).
Contact Input Circuitry
The DGC-500 has four contact sensing inputs: Emergency Stop and three programmable inputs.
Emergency Stop Input
This input accepts Form A, dry contacts. An open circuit at this continuously monitored input initiates an
emergency stop. An emergency stop removes operating power from all DGC-500 output relays.
Emergency stop contact connections are provided at terminals P35 and P37.
Programmable Inputs
Each programmable input (PROG INPUT1, PROG INPUT2, and PROG INPUT3) can be independently
configured as an auto transfer switch input, single-phase override input, low coolant level input, fuel leak
detection input, battery charger failure input, or an auxiliary input. By default, each programmable input is
disabled.
The programmable inputs accept normally open, Form A contacts. A contact is connected between a
programmable input and the negative side of the battery voltage. Through BESTCOMS software, each
programmable contact input can be assigned a name (eight characters, maximum) and configured as an
alarm input, a pre-alarm input, or neither. The default names for the inputs are AUX IN 1, AUX IN 2, and AUX
IN 3. When a programmable contact input is closed, the front panel display shows the name of the closed
input if it was programmed as an alarm or pre-alarm input. Alarm inputs are annunciated through the Normal
display mode screens of the front panel. Pre-alarm inputs are annunciated through the Alternate display mode
screens of the front panel. If neither is programmed, no indication is given. Programming an input as neither
is useful when a programmable input is used to close one of the DGC-500's programmable outputs.
Connections for the programmable inputs are provided at terminals P2 (PROG INPUT1), P3 (PROG INPUT2),
and P4 (PROG INPUT3). The negative side of the battery voltage (terminal P21) serves as the return
connection for the programmable inputs.
Front Panel HMI
The front panel HMI provides a convenient interface for viewing system parameters and for controlling the
DGC-500 and generator operation. Front panel HMI components include an LCD (liquid crystal display), LEDS
(light emitting diodes), and pushbuttons.
LCD
The backlit LCD provides metering, pre-alarm, and alarm information. Detailed information about the LCD is
provided in the Software Operation sub-section.
DGC-500 Functional Description 3-3
Page 24
LEDs
The LEDs indicate pre-alarm and alarm conditions along with DGC-500 status and generator status.
Pushbuttons
The pushbuttons are used to scroll through and select parameters displayed on the LCD, change setpoints,
start and stop the generator, and reset alarms.
Remote Display Panel
Applications that require remote annunciation can use Basler Electric’s Remote Display Panel, RDP-110.
Using the RDP-110 with the DGC-500 meets the requirements of NFPA Standard 110. The RDP-110 uses
a standard, two-terminal RS-485 interface to communicate with the DGC-500 and receives operating power
from the DGC-500. Remote indication of many pre-alarm and alarm conditions is provided by the RDP-110.
The following pre-alarm conditions are indicated by LEDs on the RDP-110 front panel.
C Low coolant temperature
C High coolant temperature
C Low oil pressure
C Weak battery
C Battery overvoltage
C Battery charger failure
C Low fuel level
The following alarm conditions are indicated by LEDs and an audible alarm on the RDP-110 front panel.
C Low coolant level
C High coolant temperature
C Low oil pressure
C Overcrank
C Overspeed
C Emergency stop
C Fuel leak/fuel level sender failure
C Engine sender unit failure
Additionally, the RDP-110 indicates when the DGC-500 is not operating in Auto mode and when the generator
is supplying load.
For more information about the RDP-110, request Basler Product Bulletin SNE-2.
RS-232 Communication Port
The communication port, located on the rear panel, consists of an optically isolated female DB-9 connector.
The RS-232 connector serves as a communication interface for enhances DGC-500 setup. Communication
requires a standard 9-pin serial communication cable connected between the RS-232 communication port and
a PC operating with BESTCOMS-DGC500-32. BESTCOMS is a Windows® based communication software
package that is supplied with the DGC-500. A detailed description of BESTCOMS is provided in Section 4,
BESTCOMS Software for Windows® .
SAE J1939 Interface (Optional)
A Controller Area Network (CAN) is a standard interface that allows communication between multiple
controllers on a common network using a standard message protocol. DGC-500 controllers with a style
number of FXJ
Applications using an engine-driven generator set controlled by a DGC-500 may also have an Engine Control
Unit (ECU). The CAN interface allows the ECU and DGC-500 to communicate. The ECU reports operating
information to the DGC-500 through the CAN interface. Operating parameters and diagnostic information, if
supported by the ECU, are decoded and displayed for monitoring.
The primary use of the CAN interface is to obtain engine operating parameters for monitoring speed, coolant
temperature, oil pressure, coolant level, and engine hours without the need for direct connection to individual
senders. Table 3-1 lists the ECU parameters and Table 3-2 lists the engine configuration parameters
supported by the DGC-500 CAN interface. These parameters are transmitted via the CAN interface at preset
intervals. The columns labeled Update Rate show the parameter transmission rates. This information can also
be transmitted upon user request.
have a CAN interface that supports the SAE J1939 message protocol.
DGC-500 Functional Description3-4
Page 25
Table 3-1. ECU Parameters Obtained from CAN Interface
t
SPN
ECU Parameter
Metric
Units
English
Units
Update
Rate
Decimal
Place
Throttle (accelerator pedal) position % % 50 ms 10
th
91
Percent load at current rpm % % 50 ms none 92
Actual engine percent torque % % engine
none 513
speed
dependent
Engine speed rpm rpm engine
none 190
speed
dependent
Injection control pressure MPa psi 500 ms none 164
Injector Metering Rail Pressure Mpa psi 500 ms none 157
Total engine hours hours hours requested
100
th
247
1.5 s
Trip fuel liters gallons requested
none 182
1.5 s
Total fuel used liters gallons requested
none 250
1.5 s
Engine coolant temperature °C °F 1 s none 110
Fuel temperature °C °F 1 s none 174
Engine oil temperature °C °F 1 s 10
th
175
Engine intercooler temperature °C °F 1 s none 52
Fuel delivery pressure kPa psi 500 ms 10
Engine oil level % % 500 ms 10
Engine oil pressure kPa psi 500 ms 10
Coolant pressure kPa psi 500 ms 10
Coolant level % % 500 ms 10
Fuel rate liter/hr gal/hr 100 ms 100
Barometric pressure kPa psi 1 s 10
Ambient air temperature °C °F 1 s 10
th
th
th
th
th
th
th
th
94
98
100
109
111
183
108
171
Air inlet temperature °C °F 1 s none 172
Boost pressure kPa psi 500 ms none 102
Intake manifold temperature °C °F 500 ms none 105
Air filter differential pressure kPa psi 500 ms 100
Exhaust gas temperature °C °F 500 ms 10
Battery voltage Vdc Vdc 1 s 10
Switched battery voltage (at ECU) Vdc Vdc 1 s 10
th
107
th
th
th
173
168
158
t SPN is Suspect Parameter Number
DGC-500 Functional Description 3-5
Page 26
Table 3-2. Engine Configuration Parameters Obtained from CAN Interface
t
Engine Configuration Parameter
Metric
Units
English
Units
Update
Rate
Decimal
Place SPN
Engine speed at idle point 1 rpm rpm 5 s none 188
Percent torque at idle point 1 % % 5 s none 539
Engine speed at point 2 rpm rpm 5 s none 528
Percent torque at point 2 % % 5 s none 540
Engine speed at point 3 rpm rpm 5 s none 529
Percent torque at point 3 % % 5 s none 541
Engine speed at point 4 rpm rpm 5 s none 530
Percent torque at point 4 % % 5 s none 542
Engine speed at point 5 rpm rpm 5 s none 531
Percent torque at point 5 % % 5 s none 543
Engine speed at high idle point 6 rpm rpm 5 s none 532
Gain (KP) of endspeed governor %/rpm %/rpm 5 s 100
th
545
Reference engine torque Nm ft-lb 5 s none 544
Maximum momentary engine
rpm rpm 5 s none 533
override speed point 7
Maximum momentary engine
seconds seconds 5 s 10
th
override time limit
Requested speed control range
rpm rpm 5 s none 535
lower limit
Requested speed control range
rpm rpm 5 s none 536
upper limit
Requested torque control range
% % 5 s none 537
lower limit
Requested torque control range
% % 5 s none 538
upper limit
t Press the Select pushbutton to enter the Engine Configuration submenu. Press the Previous
pushbutton to exit the submenu.
CAUTION
When the CAN interface is enabled, the DGC-500 will ignore the following
sender inputs: oil pressure, coolant temperature, and magnetic pickup.
534
Diagnostic Trouble Codes (DTCs)
The DGC-500 obtains the diagnostic condition of the transmitting electronic components. The DGC-500 will
receive an unsolicited message of a currently active diagnostic trouble code (DTC). Previously active DTCs
are available upon request. Active and previously active DTCs can be cleared on request. Table 3-3 lists the
diagnostic information that the DGC-500 obtains over the CAN interface.
DGC-500 Functional Description3-6
Page 27
Table 3-3. Diagnostic Information Obtained Over the CAN Interface
Transmission
Parameter
Active diagnostic trouble code 1 s
Lamp status 1 s
Previously active diagnostic trouble code on request
Request to clear previously active DTCs on request
Request to clear active DTCs on request
DTCs are reported in coded diagnostic information that includes the Suspect Parameter Number (SPN),
Failure Mode Identifier (FMI), and Occurrence Count (OC). All parameters have an SPN and are used to
display or identify the items for which diagnostics are being reported. The FMI defines the type of failure
detected in the subsystem identified by an SPN. The reported problem may not be an electrical failure but a
subsystem condition needing to be reported to an operator or technician. The OC contains the number of
times that a fault has gone from active to previously active.
Horn Output
This output connects to a user-supplied audible signal device. A change in operating status or an alarm
condition energizes the horn output continuously and a pre-alarm condition pulses the horn output on and off.
The annunciation continues until the condition subsides or until the front-panel Alarm Silence pushbutton is
pressed.
Repetition Rate
The horn output supplies 15 mAdc maximum at the lesser of 24 Vdc or the battery voltage level. A horn
compatible with the DGC-500 is available from Basler Electric as part number 29760. Horn output connections
are located at terminals P24 (+) and P25 (–).
Output Contacts
All output contacts are electrically isolated from each other and from the DGC-500 internal circuitry. Output
contact operation is controlled by the operating mode of the DGC-500 and the system. The output contacts
are also affected by the status of the Emergency Stop contact input. When the Emergency Stop contact input
is open (emergency stop condition), all output contacts open. When the Emergency Stop contact input is
closed, all output contacts operate normally.
Five output contacts are available: Pre-Start, Engine Crank, Fuel Solenoid, and two Programmable output
contacts.
Pre-Start
This output closes to energize the engine glow plugs. The Pre-Start output can be programmed to close up
to 30 seconds prior to engine cranking. The Pre-Start output can also be programmed to open upon engine
startup or remain closed as long as the engine is operating.
Crank
This output closes when engine cranking is initiated by the DGC-500. The length of time that the contacts
remain closed is determined by the cranking style selected (either continuous or cycle). Cranking continues
until the magnetic pickup or generator frequency indicates that the engine has started.
Fuel
This output closes when engine cranking is initiated by the DGC-500. The Fuel output remains closed until
an off command is issued and the engine stops.
DGC-500 Functional Description 3-7
Page 28
Programmable
Two programmable outputs (PROGRAM OUTPUT1, 2) can be user-configured to close for a variety of
conditions.
Either programmable output can be programmed to close during any of the following operating conditions.
C Cooldown timer active
C EPS supplying load
C Pre-start condition in effect
C Programmable Input 1 closed
C Programmable Input 2 closed
C Programmable Input 3 closed
C Switch not in Auto
Either of the programmable outputs can be configured to give a pre-alarm indication by closing during any of
the following pre-alarm conditions.
C Battery charger failure
C Battery overvoltage
C Fuel leak
C Fuel leak/sender failure
C High coolant temperature
C Low battery voltage
Either of the programmable outputs can be configured to give an alarm indication by closing during any of the
following alarm conditions.
C Battery charger
C Coolant temperature sender failure
C Emergency stop
C Fuel leak
C High coolant temperature
C Loss of voltage sender failure
C Low coolant level
C Low coolant temperature
C Low fuel
C Low oil pressure
C Scheduled maintenance due
C Weak battery voltage
C Low fuel
C Low oil pressure
C MPU speed sender failure
C Oil pressure sender failure
C Overcrank
C Overspeed
C Low coolant level
SOFTWARE OPERATION
Embedded software controls all aspects of DGC-500 operation. DGC-500 software controls power-up
initiation, HMI configuration, engine cranking, contact input monitoring, fault detection and annunciation,
system parameter monitoring, output contact control, and communication.
Power-Up Sequence
When battery power is applied, the DGC-500 initiates a power-up sequence. During power-up, DGC-500
memory is checked and the LCD displays the embedded software version. Then, all configuration data stored
in nonvolatile EEPROM (electronically erasable programmable read-only memory) is brought into main
memory and the DGC-500 begins operating in Normal mode. When operating in Normal mode, all enabled
functions are active and all inputs are monitored.
NOTE
The run-time counter and maintenance timer values are updated in volatile memory once per
minute. Updated values are saved to nonvolatile memory when the Auto/Off/Run mode of
operation is changed. Additionally, while the engine is running, the run-time counter value is
saved to nonvolatile memory every 15 minutes. If the battery power source fails during DGC500 operation, these values are not updated and the changes made after the last save
operation to nonvolatile memory are irretrievably lost.
Cranking
The DGC-500 can be programmed for either continuous engine cranking or cycle engine cranking.
DGC-500 Functional Description3-8
Page 29
Continuous Cranking
If desired, engine cranking can be delayed from zero to 30 seconds after initiating engine startup. When
continuous engine cranking is initiated, cranking is sustained for a user-adjustable period of one to 60
seconds. A crank disconnect limit setting (10 to 100% of nominal engine speed) selects the desired engine
speed above which cranking is terminated.
Cycle Cranking
If desired, engine cranking can be delayed from zero to 30 seconds after initiating engine startup. When cycle
engine cranking is initiated, five to 15 seconds of cranking is followed by an equal number of seconds of rest.
A maximum of seven cranking cycles (five cycles for NFPA compliant units) are allowed by the DGC-500. A
crank disconnect limit setting (10 to 100% of nominal engine speed) selects the desired engine speed above
which cranking is terminated.
Pre-Alarms
A pre-alarm is annunciated when a condition programmed to trigger a pre-alarm is met. When a pre-alarm
condition exists, the front panel Alarm indicator flashes on and off and the Horn output (if enabled through
BESTCOMS) alternates between an energized and de-energized state. The audible alarm is reset by pressing
the front panel Alarm Silence pushbutton.
Active pre-alarms for oil pressure, fuel level, coolant temperature, and battery voltage are displayed on the
main display of the LCD. The LCD annunciates an active pre-alarm by alternating between the current
parameter value and a blacked-out field for that value. All other pre-alarms are displayed in sequence through
the alternate mode display.
Each DGC-500 pre-alarm is described in the following paragraphs.
Low Oil Pressure
A low oil pressure pre-alarm occurs when the engine oil pressure decreases below the setpoint programmed
in BESTCOMS. The low oil pressure pre-alarm has a setting range of 3 to 150 psi or 20 to 1,035 kPa. A 10
second activation time delay prevents low oil pressure annunciation during engine startup.
Low Fuel
A low fuel pre-alarm occurs when the fuel level decreases below the setpoint programmed in BESTCOMS.
The low fuel pre-alarm has a setting range of 10 to 100 percent.
High Coolant Temperature
A high coolant temperature pre-alarm occurs when the engine coolant temperature exceeds the setpoint
programmed in BESTCOMS. The high coolant temperature pre-alarm has a setting range of 100 to 280°F or
38 to 138°C. A 60 second activation time delay prevents high coolant temperature annunciation during system
startup.
Low Coolant Temperature
A low coolant temperature pre-alarm occurs when the engine coolant temperature decreases below the
setpoint programmed in BESTCOMS. The low coolant temperature pre-alarm has a setting range of 50 to
100°F or 10 to 38°C.
Battery Overvoltage
A battery overvoltage pre-alarm occurs when the battery overvoltage pre-alarm function is enabled in
BESTCOMS and the battery voltage level exceeds 30 Vdc for 24 Vdc system or 15 Vdc for 12 Vdc systems.
Low Battery Voltage
A low battery voltage pre-alarm occurs when the battery voltage decreases below the low battery voltage
setpoint for the duration of the low battery voltage time delay setting. Both settings are made in BESTCOMS.
The low battery voltage setpoint has a setting range of 12 to 24 Vdc for 24 Vdc systems and 6 to 12 Vdc for
12 Vdc systems. The low battery voltage time delay has a setting range of 1 to 10 seconds.
DGC-500 Functional Description 3-9
Page 30
Weak Battery Voltage
A weak battery voltage pre-alarm occurs when the battery voltage decreases below the weak battery voltage
setpoint for the duration of the weak battery voltage time delay setting. Both settings are made in BESTCOMS.
The weak battery voltage setpoint has a setting range of 8 to 16 Vdc for 24 Vdc systems and 4 to 8 Vdc for
12 Vdc systems. The weak battery voltage time delay has a setting range of 1 to 10 seconds.
Maintenance Interval
A maintenance interval pre-alarm occurs when the DGC-500 maintenance timer counts down to zero from
the maintenance interval setting programmed in BESTCOMS. The maintenance interval duration has a setting
range of zero to 5,000 hours.
Battery Charger Failure
A battery charger failure pre-alarm occurs when one of the three DGC-500 programmable contact inputs
detects a contact closure due to a battery charger failure. In order for a battery charger failure pre-alarm to
occur, the battery charger failure pre-alarm function must be enabled in BESTCOMS and one of the three
programmable inputs must be programmed as a battery charger failure pre-alarm input. Refer to Section 4,
BESTCOMS Software for information about configuring the programmable contact inputs.
Fuel Level Sender Failure
A fuel level sender failure pre-alarm occurs when an open circuit or short circuit is detected across the DGC500 fuel level transducer terminals and a fuel level sender failure is programmed in BESTCOMS to cause a
pre-alarm.
MPU Failure
An MPU (magnetic pickup) failure pre-alarm occurs when MPU-GEN is selected as the generator speed signal
source, the MPU signal is lost, and the Global Sender Failure Alarm time delay expires.
Active DTC
When CAN and DTC support are both enabled, an “active DTC” pre-alarm may be enabled (through
BESTCOMS) to announce the presence of an condition that is causing a DTC to be sent from the ECU to the
DGC-500.
CAN Failure
A CAN failure annunciation may be enabled only when the CAN interface is enabled. The CAN interface is
enabled through BESTCOMS. When configured to alarm, annunciation occurs when CAN communication
stops due to a lost connection between the DGC-500 and ECU, or an ECU malfunction. If CAN
communication is lost and the annunciation is a pre-alarm, a screen stating the pre-alarm will appear in the
Alternate Display menu. This screen will be viewable only when the pre-alarm is active.
Audible Alarm
A pre-alarm is annunciated through the DGC-500 Horn output when the audible alarm feature is enabled in
BESTCOMS. When the audible alarm is enabled, a pre-alarm condition causes the horn output to alternate
between an energized and de-energized state.
Alarms
An alarm is annunciated when a condition programmed to trigger an alarm is detected. When an alarm
condition exists, the front panel Alarm indicator lights, the Horn output energizes, and the cause of the alarm
is displayed on the LCD.
An alarm condition stops the engine by opening the Fuel output contact.
Each DGC-500 alarm is described in the following paragraphs.
DGC-500 Functional Description3-10
Page 31

Low Oil Pressure
A low oil pressure alarm occurs when the engine oil pressure decreases below the low oil pressure alarm
setpoint for the duration of the low oil pressure time delay setting. Both settings are made in BESTCOMS.
When a low oil pressure alarm occurs, the LCD indicates LOW OIL PRESSURE and the current low oil
pressure alarm setting. A 10 second activation time delay prevents low oil pressure annunciation during
engine startup.
The low oil pressure setpoint has a setting range of 3 to 150 psi or 20 to 1,035 kPa and the low oil pressure
time delay has a setting range of 5 to 15 seconds.
Low Fuel Level
A low fuel level alarm occurs when the fuel level decreases below the setpoint programmed in BESTCOMS.
When a low fuel level alarm occurs, the LCD indicates LOW FUEL LEVEL and the current low fuel level alarm
setting.
The low fuel level setpoint has a setting range of zero to 100 percent.
High Coolant Temperature
A high coolant temperature alarm occurs when the coolant temperature exceeds the setpoint programmed
in BESTCOMS. When a high coolant temperature alarm occurs, the LCD indicates HIGH COOLANT TEMP
and the current high coolant temperature setting. A 60 second activation time delay prevents high coolant
temperature annunciation during system startup.
The high coolant temperature setpoint has a setting range of 100 to 280°F or 38 to 138°C.
Overspeed
An overspeed alarm occurs when the engine speed exceeds the overspeed setpoint for the duration of the
overspeed time delay. Both settings are made in BESTCOMS. When an overspeed alarm occurs, the LCD
indicates OVERSPEED and the current overspeed setting.
The overspeed setpoint has a setting range of 105 to 140 percent and the overspeed time delay has a setting
range of zero to 500 milliseconds.
Loss of Generator Voltage
A loss of generator voltage alarm can occur only when the loss of generator voltage alarm is enabled in
BESTCOMS. When the sensed generator voltage decreases below 1.5 Vac for the duration of the global
sender failure alarm time delay, a loss of generator voltage alarm occurs. The global sender failure alarm time
delay is adjustable from 1 to 10 seconds.
Oil Pressure Sender Failure
An oil pressure sender failure alarm occurs when the DGC-500 oil pressure transducer input senses a sender
failure for the duration of the global sender failure alarm time delay. The oil pressure sender failure alarm is
enabled and the global sender failure alarm time delay is set in BESTCOMS.
Coolant Temperature Sender Failure
A coolant temperature sender failure alarm occurs when the DGC-500 coolant temperature transducer input
senses a sender failure for the duration of the coolant temperature alarm delay time. The coolant temperature
sender failure alarm is enabled and the coolant temperature alarm delay is set in BESTCOMS. The coolant
temperature alarm delay is adjustable from 5 to 30 minutes in 5 minute increments.
Speed Source Failure
A speed source failure can occur for either of two conditions. If MPU (magnetic pickup) is selected as the
generator speed signal source and the MPU signal is lost, a speed source failure alarm will occur. If GEN
FREQ (generator frequency) is selected as the generator speed signal source and a loss of generator
frequency is detected, a speed source failure alarm will occur.
DGC-500 Functional Description 3-11
Page 32

CAN Failure (If Equipped)
A CAN failure annunciation may be enabled only when the CAN interface is enabled. The CAN interface is
enabled through BESTCOMS. When configured to pre-alarm, annunciation occurs when CAN communication
stops due to a lost connection between the DGC-500 and ECU, or an ECU malfunction. If CAN
communication is lost and the annunciation is configured as an alarm, then a normal alarm sequence will
occur, including a CANBUS FAILURE message that appears on the HMI display.
DISPLAY OPERATION
The DGC-500 has three standard display modes: Normal, Alternate, and Menu. The optional ECU Parameters
mode is present only on controllers with a style number of F1J or F5J. Pressing the Display Toggle
pushbutton scrolls through the active screen of each available display mode. Figure 3-2 illustrates the top-level
screen of the standard and optional display modes.
Figure 3-2. Display Mode Navigation
Normal Mode
Normal mode displays various engine and generator parameters. Each parameter is displayed adjacent to
the corresponding label on the front panel overlay.
Firmware Version
Normal mode also displays the firmware version of the DGC-500.
The DGC-500 firmware version is viewed in Normal mode by pressing and holding either the Raise/Scroll
pushbutton or Lower/Scroll pushbutton. Releasing either pushbutton returns the display to the current Normal
mode screen.
Alternate Mode
Press the Raise/Scroll or Lower/Scroll pushbuttons while viewing the top-level Alternate mode screen
(Figure 3-2) to scroll through the available engine and generator metering values. Figure 3-3 illustrates the
Alternate mode screens for a DGC-500 configured for three-phase, line-to-neutral operation. Units configured
for three-phase, line-to-line operation do not display the GEN A-N VOLTS, GEN B-N VOLTS, and GEN C-N
VOLTS screens. Units configured for single-phase, A-phase to B-phase operation do not display the GEN B-C
VOLTS, GEN C-A VOLTS, and GEN C-N VOLTS screens.
Diagnostic Trouble Codes (DTCs)
When the optional SAE J1939 communication is enabled, access to the Diagnostic Trouble Codes (DTCs)
is available through the Alternate Display mode. The DTCs are the last two screens in the Alternate mode
display list.
If there are no DTCs to be sent to the DGC-500, pressing the Select/Enter pushbutton will have no effect,
and the messages ACTIVE DTC LIST and NO DTCS TO VIEW will be displayed. If at least one DTC is
communicating with the DGC-500, pressing the Select/Enter pushbutton will display ACTIVE DTC LIST and
VIEW WITH SELECT.
Pressing the Select/Enter pushbutton when ACTIVE DTC LIST and VIEW WITH SELECT is displayed places
the DGC-500 in DTC mode. The next screen to appear will display the diagnostic lamp status information
obtained from the ECU. One of five possible lamp status messages will be displayed. The lamp status
messages, in decreasing order of priority, are listed below.
DGC-500 Functional Description3-12
Page 33

1. ENG STOP LAMP ON
2. WARNING LAMP ON
3. MALFUNC LAMP ON
4. PROTECT LAMP ON
5. NO LAMP IS ON
Figure 3-3. Alternate Mode Navigation
Only one lamp status will be displayed on the front panel—the highest priority one that is true. An example
of the lamp status screen is shown in Figure 3-4. BESTCOMS may also be used to view the status of all
lamps.
Figure 3-4. Lamp Status Screen
To be notified that a lamp status exists, the pre-alarm for active DTCs must be enabled through BESTCOMS.
When one or more active DTCs exist in the ECU, a lamp status indicating the severity of the combined DTCs
should exist. After the pre-alarm is annunciated (by LED indicator, horn, and/or dial-out), the operator will
know to check the lamp status, active system DTCs, and what relationship the DTCs have with the
parameters. To check the DTC/parameter relationship at the front panel, access the ECU Parameters menu
of the HMI. In BESTCOMS, hover the mouse pointer over the DTC to see its related parameter.
To use the HMI to view the list of active DTCs, press the Raise/Scroll pushbutton. The next screen to appear
will display the first DTC, the number of DTCs, the Suspect Parameter Number (SPN), the Failure Mode
Indicator (FMI) and the Occurrence Count (OC).
DGC-500 Functional Description 3-13
Page 34

NOTE
Always refer to the engine manual for the meaning of SPN and FMI combinations,
especially for proprietary DTC descriptions.
In the DTC screen example of Figure 3-5, the first DTC of five is displayed.
The SPN is 111 (coolant level), the FMI is 1 (low voltage from the sender,
thus we have low coolant level), and the OC is 2 (the engine has had a low
coolant level twice before). Refer to the engine manufacturer CAN interface
documentation for specific descriptions of codes.
After viewing the last DTC, screen 5 of 5, VIEWED ALL ACTIVE and USESELECT TO CLEAR will be
displayed. This also applies when viewing previous DTCs.
Clearing the active or previous DTCs, by pressing the Select/Enter pushbutton, will give one of four
responses.
1. A positive acknowledgment which causes ACTIVE DTC(S) HAVE BEEN ERASED to be displayed.
2. A negative acknowledgment which causes ERROR - NEGATIVE ACK and CANNOT ERASE DTC(S) to
be displayed.
3. A timeout for acknowledgment which causes ERROR - ACK TIME OUT and CANNOT ERASE DTC(S)
to be displayed. This occurs when approximately two seconds have elapsed with CAN working and no
positive or negative acknowledgment received.
4. A CAN communication failure causes ERROR - DISCONNECTED and CANNOT ERASE DTC(S) to be
displayed. This occurs when CAN is disconnected or the ECU is not functioning properly.
After viewing the response, the only way to back out of the screen is to press the Previous pushbutton. The
user is then taken back to the Alternate Display mode. Pressing the Display Toggle pushbutton will take the
user to the Menu mode screens. This also applies when viewing previous DTCs.
Figure 3-5. DTC
Screen Example
ECU Parameters Mode
When the optional J1939 communication is enabled, access to the ECU Parameters menu is available. This
menu displays parameters metered from the ECU. Only parameters related to genset applications are
metered from the ECU and displayed here. A submenu for viewing the engine configuration parameters is also
accessible from the ECU Parameters menu.
If a parameter is never sent after communication is established, or the ECU has sent information notifying the
DGC-500 that the parameter is not supported (non-applicable), then the parameter’s screen will be hidden
and skipped when scrolling from screen to screen in the ECU Parameters menu.
If a DTC is associated with one of the parameters, then the screens will function like the Pre-Alarm screens
of the Alternate mode display. When scrolling through the menu, the user is taken to the new DTC-related
screens first. The DTC-related screen will then blink while alternating between the parameter’s value and the
DTC information.
NOTE
If no ECU support is required, then parameters are updated within the DGC-500
only when “pulsing” the ECU and while the engine is running.
The following list includes all of the engine system monitoring parameters read from the ECU (if supported)
in the order in which they appear when pressing the Raise/Scroll pushbutton, having started from the ECU
Parameters menu.
1. Throttle position
2. Percent load at current rpm
3. Actual engine percent torque
4. Engine speed
5. Injection control pressure
6. Injector metering rail pressure
7. Total engine hours
8. Trip fuel
t
DGC-500 Functional Description3-14
Page 35

9. Total fuel used
10. Engine coolant temperature
11. Fuel temperature
12. Engine oil temperature
13. Engine intercooler temperature
14. Fuel delivery pressure
15. Engine oil level
16. Engine oil pressure
17. Coolant pressure
18. Coolant level
19. Fuel rate
20. Barometric pressure
t
21. Ambient air temperature
22. Air inlet temperature
23. Boost pressure
24. Intake manifold temperature
25. Air filter differential pressure
26. Exhaust gas temperature
27. Battery voltage
28. Battery voltage (at ECU), switched
29. Active diagnostic codes
30. Previously active diagnostic codes
t
t This parameter may be monitored either directly by the DGC-500 itself or by the DGC-500 and the
appropriate analog sender when the SAE J1939 interface is disabled.
Figure 3-6 illustrates the screens of the ECU Parameters menu after the DGC-500 has established
communication with the ECU.
Figure 3-6. ECU Parameters Navigation
DGC-500 Functional Description 3-15
Page 36

Engine Configuration Parameters
Engine configuration parameters can be accessed from the ECU Parameters menu. To view these parameters
read from the ECU, press the Select/Enter pushbutton while viewing the Engine Configuration (ENGINE
CONFIG.) screen. The following list of all engine configuration parameters is presented in the order in which
they appear when pressing the Raise/Scroll pushbutton.
1. Engine speed at idle, point 1
2. Percent torque at idle, point 1
3. Engine speed at point 2
4. Percent torque at point 2
5. Engine speed at point 3
6. Percent torque at point 3
7. Engine speed at point 4
8. Percent torque at point 4
9. Engine speed at point 5
10. Percent torque at point 5
Figure 3-7 illustrates the Engine Configuration Parameter menus after the DGC-500 has established
communication with the ECU.
11. Engine speed at high idle, point 6
12. Gain (KP) of the end-speed governor
13. Reference engine torque
14. Maximum momentary engine override speed,
point 7
15. Maximum momentary override time limit
16. Requested speed control range lower limit
17. Requested speed control range upper limit
18. Requested torque control range lower limit
19. Requested torque control range upper limit
Figure 3-7. Engine Configuration Menu Navigation
DGC-500 Functional Description3-16
Page 37

Menu Mode
Press the Select/Enter pushbutton while viewing the top-level Menu mode screen (shown in Figure 3-2), to
access the four menu branches illustrated in Figure 3-8. Press the Lower/Scroll or Raise/Scroll pushbuttons
to view the top of each menu branch. Within Menu 1, 2, 3, or 4, use the Select/Enter pushbutton to move
right, the Previous pushbutton to move left, the Raise/Scroll pushbutton to move up, and the Lower/Scroll
pushbutton to move down.
Figure 3-8. Menu Mode Navigation
Menu 1
DGC-500 pre-alarms and alarms are viewed and configured in Menu 1. Figure 3-9 illustrates the Menu 1
screens.
Menu 2
System configuration settings are viewed and configured in Menu 2. Figure 3-10 illustrates the Menu 2
screens.
Menu 3
DGC-500 calibration, transformer ratios, and transducer failure alarms, are viewed and configured in Menu
3. Figure 3-11 illustrates the Menu 3 screens. The menu screens associated with the calibration process are
illustrated in Section 5, Installation, Calibration.
Menu 4
Engine cool-down time and cranking parameters are viewed and configured in Menu 4. Figure 3-12 illustrates
the Menu 4 screens.
Exiting Menu Mode
Pressing the Display Toggle pushbutton exits the Menu mode from any level and branch. When the Display
Toggle pushbutton is used to exit Menu mode, the user’s place within the menu tree is saved. The display
will return to the same screen the next time that Menu mode is entered. If the Display Toggle pushbutton is
pressed before a new setting is saved, the existing setting is retained.
Using the Previous pushbutton to back out of Menu mode ensures that the top-level Menu mode screen is
viewed the next time Menu mode is entered.
DGC-500 Functional Description 3-17
Page 38

Figure 3-9. Menu 1 Navigation
DGC-500 Functional Description3-18
Page 39

Figure 3-10. Menu 2 Navigation
DGC-500 Functional Description 3-19
Page 40

Figure 3-11. Menu 3 Navigation
DGC-500 Functional Description3-20
Page 41

Figure 3-12. Menu 4 Navigation
DGC-500 Functional Description 3-21
Page 42

Changing Settings
A setting change consists of the following steps. The number of each step
corresponds to the numbered call-outs in the setting change example of Figure
3-13.
1. Use the HMI pushbuttons to navigate to the screen of the setting to be
changed.
2. Press the Select/Enter key to access the ENTER KEYCODE screen.
3. Enter the key code by pressing the appropriate HMI pushbuttons in the
proper sequence. Key code entries appear as asterisks on the ENTER
KEYCODE screen. Refer to the Key Code paragraph for details about using
key codes.
4. Press the Select/Enter pushbutton to access the setting to be changed.
5. Use the Raise/Scroll and Lower/Scroll pushbuttons to increment and
decrement the setting as needed.
6. Press the Select/Enter pushbutton to save and view the setting change.
Figure 3-13. Setting
Key Code
The DGC-500 is delivered with a key code consisting of the following pushbutton
sequence.
1. Raise/Scroll
2. Lower/Scroll
3. Select/Enter
4. Previous
5. Display Toggle
6. Select/Enter
7. Select/Enter
The key code can be changed by accessing the CHANGE KEYCODE screen of Menu 2. Observe the
following guidelines when changing the key code.
Change Example
C Allowable key code pushbuttons are Raise/Scroll, Lower/Scroll, Select/Enter, Previous, Display Toggle,
Phase Toggle, Alarm Silence, and Lamp Test.
C A key code entry must be followed by two presses of the Select/Enter pushbutton.
C A key code can consist of one to eight presses of the allowable key code pushbuttons.
C A key code cannot contain consecutive presses of the Previous pushbutton.
ENGINE CONTROL UNIT (ECU) SUPPORT
The following paragraphs describe the support provided by the DGC-500 for operation with an engine control
unit (ECU).
Enabling ECU Support
To enable ECU support, the user must access the SYST menu in BESTCOMS and select Enable ECU
Support under the box entitled CANBus/J1939 Interface. After resending the settings, the DGC-500 will ignore
the analog inputs for coolant temperature, oil pressure and engine speed, and it will no longer calculate engine
run-time. Once the DGC-500 establishes communication with an ECU, the engine run-time, coolant level,
coolant temperature, oil pressure, and engine speed will be updated with the ECU values.
DGC-500 Functional Description3-22
Page 43

NOTE
With Enable ECU Support selected, there is a non-programmable Coolant Level
Sender Fail alarm that can annunciate when the engine is either off or running.
Coolant level is metered and displayed only when Enable ECU Support is
selected in BESTCOMS.
ECU Constraints
An external source cannot always turn the engine off without removing power from the ECU. Removing power
from the ECU is the only way to remove fuel from the engine and shut it down. Different ECU manufacturers
have their own rpm setpoints for reapplying fuel to an engine. For example, if the ECU is powered up and the
engine is still spinning above 60 rpm, the ECU may automatically turn the fuel on.
Not being able to stop the engine without removing power from the ECU causes two problems. The first
problem is that the only way to stop the engine is to turn the ECU off and wait for the engine speed to
decrease below 60 rpm before reapplying ECU operating power. Otherwise, the engine will resume running.
The second problem is that while the ECU is off, you can no longer meter and update coolant level, coolant
temperature, oil pressure, and engine speed values, effectively disabling features like low coolant temperature
alarm/pre-alarm and crank control.
The DGC-500 Solution
The DGC-500 resolves ECU constraints by using four user-programmable timers that are accessed through
BESTCOMS. Each timer setting is described in the following paragraphs.
Pulse Cycle Time. This timer setting establishes the time, in minutes, that the DGC-500 waits before pulsing
the ECU again.
Response Timeout. This timer setting defines the length of time, in seconds, that the DGC-500 attempts
communication with the ECU when the DGC-500 is in the Pulsing state or Connecting state.
Settling Time. This timer setting controls the length of time, in tenths of seconds, that the DGC-500 gathers
data after connecting to the ECU during the Pulsing state. This allows all metered values to be sent and
ramped up to their steady state values. Metered values are sent out by the ECU at different rates as
designated by the J1939 protocol. ECU values initially sent are low and the ECU takes time to average out
its own data values.
Engine Shut Down. This timer setting determines the length of time, in seconds, that the DGC-500 remains
disconnected from the ECU when going from Running to Shutdown before starting the first pulse. This timer
should allow enough time for the engine to slow down so that when the DGC-500 pulses, the ECU will not
restart the engine.
Alarms and Pre-Alarms
If ECU communication is not established during the Connecting state or is lost during the Pre-Start, Cranking,
Resting, Running or Cooling states, then a non-programmable ECU Communications Fail alarm is
annunciated. If the last pulse was unsuccessful (ECU communication was not established), then the ECU
Communications Fail pre-alarm will annunciate. The pre-alarm is checked only after the Pulsing state and is
annunciated only during the Ready state.
To clear Coolant Level alarms when ECU power support is needed, the user must first correct the condition
causing the alarm and then pulse the ECU to update the data. The user may pulse the ECU remotely through
BESTCOMS or locally by pressing the front panel pushbuttons in the ordered sequence of Auto, Off.
Fuel Solenoid Relay
Because there is no external fuel solenoid to connect to, the fuel solenoid relay has been designated to control
ECU operating power. For example, Detroit Diesel's ECU applies fuel to the engine only after engine speed
rises above 60 rpm. The following timers control the fuel solenoid relay when the engine is not running.
DGC-500 Functional Description 3-23
Page 44

C Pulse Cycle Time - fuel solenoid is open
C Response Timeout - fuel solenoid is closed
C Settling Time - fuel solenoid is closed
C Engine Shut Down - fuel solenoid is open
NOTE
When ECU support is enabled during Pre-start and Resting, the fuel solenoid is
closed.
Display Values (ECU Support Enabled)
The ECU is able to give the DGC-500 in-depth information about the values it sends. This makes it possible
for the DGC-500 to display accurate information when metering these values from the ECU. After successfully
pulsing the unit, the last values gathered when powering-off the ECU are displayed until the next pulse. The
following is a list of display values:
C Value - the actual value is displayed if the last pulse was successful or the engine is running.
C No Communications (abbreviated as NC) - displayed if the last pulse was unsuccessful.
C Not Applicable (abbreviated as NA) - the ECU does not monitor this data value.
C ECU Data Not Sent (abbreviated as NS) - data was not sent in the time designated by the J1939 protocol.
C Sender Failure (abbreviated as SF) - the ECU has determined a sender failure for that metered value.
ECUs with an External Fuel Solenoid
The DGC-500 supports ECUs that are able to cut-off fuel from the engine without powering the ECU off. The
DGC-500 requests engine run-time every minute to keep the ECU from going into a sleep mode. After the
Pulse Cycle Timer expires, the DGC-500 checks whether ECU communication exists. If so, the DGC-500 will
not pulse the ECU. The same goes for Connecting, except that the DGC-500 remembers if it skipped the
Connecting state. If it did, then the DGC-500 will also skip the Engine Shutting Down state when it stops the
engine.
For ECUs that have an external fuel solenoid, it is recommended that the Engine Shut Down timer be set to
its minimum value. This ensures that, if the DGC-500 temporarily loses power while running, the unit will go
straight into the Run state and go to the Shutting Down state when the unit goes to Off. It is also
recommended that the Response Timeout Timer be set to its minimum value in order to set the ECU
Communications Fail pre-alarm as soon as possible.
The HMI screens shown in Figure 3-14 are displayed if the last attempt to pulse the ECU for an information
update was unsuccessful.
Figure 3-14. Screens Shown Following Unsuccessful Information Update from ECU
STATE MACHINES
A state machine is any device that stores the status of something at a given time. An input change can change
the status and/or cause an action or output to occur for any given change. A finite state machine can be used
to solve problems and describe the solution for system maintainers. State machine illustration methods range
from simple tables to graphically animated illustrations.
The following paragraphs describe how the DGC-500 functions as a state machine.
DGC-500 Functional Description3-24
Page 45

System Configuration
C RUN, OFF and AUTO are selectable through the front panel HMI and OFF and AUTO are selectable
through BESTCOMS. However, for clarity, the term AUTO will not be used in this section. Auto-Run and
Auto-Off will be used instead. Auto-Run means the unit is in Auto while the automatic transfer switch
(ATS) is closed, or the user started the engine remotely through BESTCOMS. Auto-Off means the unit
is in Auto while the ATS is open, or the user stopped the engine remotely through BESTCOMS. The
system configuration settings for the DGC-500 are Run, Off, Auto-Run and Auto-Off.
C If BESTCOMS remotely started the engine before a reset occurred or the system configuration goes to
Off, then the Remote Start setting in BESTCOMS is set to Stop.
C If ECU support is enabled when the engine is running and the system configuration goes to Off, then the
unit will go to the Shut Down state. Otherwise, it will transition to the Ready state and pulse the ECU.
C If ECU support is disabled and system configuration goes to Off, then the unit will always transition to the
Ready state.
Operating States
The DGC-500 supports 11 operating states. Each operating state is illustrated by a flowchart later in this
section.
C Restart/Power-Up. The initial state.
C Ready. The DGC-500 is in the Off or Auto-Off mode.
C Pulsing. ECU Only—pulses (momentarily powers up) the ECU for updated information.
C Connecting. ECU Only—the system configuration just changed to Run or Auto-Run.
C Pre-Start. Closes the pre-start relay or pauses the DGC-500 while it is not safe to crank.
C Cranking. Cranks the engine until it is above the crank disconnect speed.
C Resting. Occurs between crank cycles and does not crank the engine.
C Running. The unit is now running and no longer cranking.
C Cooling. Cool down running engine if a load is or was applied when going to Auto-Off mode.
C Shutting Down. ECU Only—wait for engine to stop rotating before "pulsing".
C Alarm. Alarm was triggered, wait for the alarm to clear.
State Transitions
Criteria used for deciding state transitions are based on the following input events.
C System Configuration (Run, Off, in Auto with ATS closed, in Auto with ATS open)
C Analog/ECU sender data (example: Engine Speed)
C Programmable auxiliary inputs
C Switch data (Coolant Level Switch, ATS, Emergency Stop Button)
C ECU-specific data (example clearing/requesting diagnostics)
C Various programmable timers (run-time, cycles, delays, time-out length)
C Programmable I/O settings
C Alarm settings (thresholds, enabling and timers)
C Other settings selectable through BESTCOMS.
Input events are used in deciding the following output events.
C Output relays on the DGC-500 control the generator and other devices connected to the DGC-500.
C LED output is controlled by the system configuration setting, active alarm/pre-alarms, and by the
supplying load criteria.
C The LCD is controlled by the value of data being displayed, the state of the DGC-500, and by the viewing
mode (Normal, Alternate Display, ECU Parameters, or Menu).
C The horn (or buzzer) is controlled by the Alarm Silence, Run, or Off pushbuttons, and by the Alarm and
Pre-Alarm conditions.
Normal Program Control
If an engine does not have an ECU, then ECU Support should be disabled so that the DGC-500 uses analog
sender data. An engine with ECU support disabled or ECU support enabled with a constant power supply and
accessible fuel solenoid will follow the normal program control flowchart of Figure 3-15.
DGC-500 Functional Description 3-25
Page 46

Figure 3-15. Normal Program Control Diagram
ECU Power Support Program Control
If an engine has an ECU, then ECU support should be enabled so that the DGC-500 uses sender data
transmitted from the ECU over the J1939 interface. If the engine can be shut down only by powering off the
ECU, then the genset will need ECU power support enabled. An engine with ECU support enabled and a need
for ECU power support through the fuel solenoid will follow the ECU power support diagram of Figure 3-16.
NOTE
ECU power support is not a selectable option. The DGC-500 will decide between
using the fuel solenoid output relay or controlling the fuel to provide ECU power
support. This is derived through the following method.
After the Pulse Cycle timer expires, the DGC-500 checks to see if ECU
communication is active. If so, then the DGC-500 will not pulse the ECU. The
same goes for Connecting, except the DGC-500 remembers if it skipped the
Connecting state. If it did, then it will also skip the Engine Shutting Down state
when the DGC-500 stops the engine.
Figure 3-16. ECU Power Support Program Control Diagram
Initial State - Power Up/Reset
This state begins after cycling power to the DGC-500, or after a software reset (i.e. a watchdog timeout) has
occurred. The unit will stay in reset for a short time. During this time, the firmware version number appears
on the front panel LCD and the DGC-500 averages out enough data counts to calculate accurate analog data.
During the Power Up/Reset state, if the previous system configuration was Run or Auto-Run with the ATS
closed and ECU support enabled, the fuel solenoid will close. This works to keep the engine running if the unit
temporarily losses power, and to gather engine speed data from the ECU to determine if it should go to Off
or stay in Run.
DGC-500 Functional Description3-26
Page 47

After a short time, the old system configuration from the last time the unit was not in reset is checked. If the
old system configuration was set to Run or Auto-Run with the ATS closed, then the engine speed is checked
against Crank-Disconnect (the rpm value used in deciding when to disengage the starter).
If engine speed is above Crank-Disconnect, then the Power Up/Reset state goes to the Running state.
If the speed is below Crank-Disconnect, the DGC-500 goes to the Ready state and immediately pulses the
ECU (if ECU support is enabled). If the previous system configuration was set to RUN, the System
configuration will be set to OFF. If the previous system configuration was set to Auto-Run (with the ATS
closed), the unit will still go to the Ready state. But then, the Ready state will transition into the Pre-Start state
and the Pre-Start state will eventually transition into the Cranking state, and so forth.
Figure 3-17 illustrates the Power Up Reset flowchart.
Figure 3-17. Power Up/Reset State Diagram
Ready State
The DGC-500 will be in Ready state when system configuration is Off/Auto-Off. If the system configuration
changes to Run/Auto-Run, then it will check to see if it needs to go to the Connecting, Pre-Start or Running
state. If ECU support is selected and there is no ECU communication and the Pulse Cycle Timer has expired,
the Ready state will transition into Pulsing. The Pulse Cycle Timer can be set to expire and force a Pulsing
state. There are three ways to force a pulse.
C When a user logs on to a unit through BESTCOMS, if the unit is in Ready state, a pulse is forced to
update the internal variables used to meter ECU data.
C User attempts to clear DTCs from the ECU while the DGC-500 is in Ready (therefore, the ECU is probably
powered off).
C Manually force a pulse and update the internal variables. The user can do so in BESTCOMS or locally
pulse the ECU by pressing the front panel pushbuttons in the ordered sequence: Auto, Off.
Going to Off or Auto-Off
If the DGC-500 is in the Connecting, Pre-Start, Resting or Cooling state when the unit goes to Off or Auto-Off
mode, then the state will transition to the Ready state. If ECU support is enabled, then the unit will go to the
Pulsing state immediately after transitioning to the Ready state.
Figure 3-18 illustrates the Ready state flowchart.
DGC-500 Functional Description 3-27
Page 48

Figure 3-18. Ready State Diagram
Pulsing State
The Pulsing State follows the sequence of events shown in Figure 3-19. The Pulsing state will momentarily
power up the ECU to update the DGC-500 internal variables. Once a connection is established with the ECU,
GATHERING DATA will appear on the LCD for the duration of the settling time. During settling time, the unit
processes any previous request for clearing DTCs from the ECU. The Pulsing state always transitions to the
Ready state unless the System configuration changes to Run/Auto-Run. Then, it will transition to the
Connecting state as a result of pulsing and will follow the ECU Power Support diagram.
Figure 3-19. Pulsing State Diagram
Connecting State
The Connecting State follows the sequence of events shown in Figure 3-20. If ECU communication is not
established by the time the Response Timeout expires, then the ECU Communications Failure Flag is set to
trigger the Alarm state. The Connecting state will power up the ECU. Once it reads the engine speed, it
checks if it is above Crank-Disconnect. If it is, then it will go to the Running state. Otherwise, it will go to the
Pre-Start state.
DGC-500 Functional Description3-28
Page 49

Figure 3-20. Connecting State Diagram
Pre-Start State
This state will transition immediately to the Running state if the engine speed is above Crank-Disconnect.
Otherwise, it will wait here and close the Pre-heat relay for the pre-start time delay duration. If engine speed
is below Safe-To-Restart (the rpm value used in deciding when to engage the starter) and the Pre-start time
delay is expired or set to zero, then it will transition to the Cranking state. If engine speed falls in the range
between Crank-Disconnect and Safe-To-Restart, the state will pause and display NOT SAFE TO CRANK
along with the rpm value until the engine speed moves out of this range. If it is not safe to crank and there is
a pre-start time delay, then the Pre-heat relay will stay closed because it was closed when it was waiting for
the pre-start time delay to expire. If Pre-start time delay was set to zero, then the Pre-heat relay was never
closed. Therefore, it would remain open while it is not safe to crank. Figure 3-21 illustrates the Pre-Start state
flowchart.
Figure 3-21. Pre-Start State Diagram
Cranking State
This state will engage the starter and transition to the Running state once engine speed is above
crank-disconnect. During the Cranking state, the crank-type is checked. If the crank-type is Cycle Crank, then
the unit will transition to the Resting state when the crank time expires. If the crank-type is Continuous Crank
or is on the last crank cycle when the crank timer expires, then the Over-Crank flag is set to trigger the Alarm
state. If system configuration goes to Off/Auto-Off, the unit transitions to the Cooling state. In the Cooling
state, if ECU power support is needed, it will go to the Shutting Down state. The Cranking state flowchart is
illustrated in Figure 3-22.
DGC-500 Functional Description 3-29
Page 50

Figure 3-22. Cranking State Diagram
Resting State
If the rest period has ended, the unit will transition back to the Cranking state. If the State Machine is following
the ECU Power Support diagram, the Fuel Solenoid relay will be closed during the Resting state. Thus, there
is a possibility for the engine to start running during this state. Therefore, when the ECU Power Support
diagram is being followed, engine speed is checked to see if it is above crank-disconnect. If it is, the unit will
transition into the Running state. Figure 3-23 illustrates the Resting State flowchart.
Figure 3-23. Resting State Diagram
Running State
If the System configuration changes to Off/Auto-Off, then the unit transitions to the Cooling state. If System
configuration is set to Auto-Run, then the Cool-Down Timer is reset or incremented here if a load is applied
and removed from the engine. If Pre-Start Contact After Disconnect was enabled in BESTCOMS, then during
the course of this state, the Pre-Start relay will remain closed, otherwise it will be opened. Figure 3-24
illustrates the Running State flowchart.
DGC-500 Functional Description3-30
Page 51

Figure 3-24. Running State Diagram
Cooling State
This state is available only if the unit is in Auto/Off with an unexpired Cool-Down time or if the unit was in the
Cranking state when the unit went to Off. If system configuration changes back to Auto-Run, this state will
transition straight into the Running state since the engine should already be running while it is in the Cooling
state. If System configuration is Off, then the unit was either in the Cranking or Running state and the unit will
verify if it should go to the Ready or Shutting Down state. If there is a load applied to the engine or one was
applied and then removed, but the engine wasn't running long enough after it was removed to expire the
Cool-Down Time, the unit will stay in this state until the Cool-Down timer expires. After the Cool-Down timer
expires, if the unit is following the ECU Power Support diagram, the state will transition to the Shutting Down
state. Otherwise, it will go to the Ready state. Figure 3-25 illustrates the Cooling state flowchart.
Figure 3-25. Cooling State Diagram
Shutting Down State
The Shutting Down State follows the sequence of events shown in Figure 3-26. If the Engine Shut Down timer
expires, the unit transitions to the Ready state. If system configuration changes back to Run/Auto-Run, then
this state will transition to the Connecting state, because if the unit is in a Shutting Down state, it will continue
to follow the ECU Power Support diagram.
DGC-500 Functional Description 3-31
Page 52

Figure 3-26. Shutting Down State Diagram
Alarm State
All states except Reset can transition to the Alarm state. The State Machine frequently checks for alarms and
pre-alarms before running through each state. If an alarm is flagged in the initial alarm check, then the unit
goes into an Alarm state and waits there for the alarm to clear. If it is in Run/Auto-Run, then the alarm can be
cleared only by going to Off. When the alarm clears, the Alarm state will transition to the Shutting Down state
and then go to the Ready state. If ECU Support is enabled, the unit will go to the Pulsing state immediately
after transitioning to the Ready state. If in Off/Auto-Off, the alarm can be cleared only if the alarm condition
ceases or the user disables the alarm through BESTCOMS. Figure 3-27 illustrates the Alarm State flowchart.
NOTE
With ECU Support enabled, if an alarm was tripped by an ECU value, then it will
not clear. This is because in the Alarm state, the fuel solenoid is open, causing
the ECU to not have power to update the internal variables. To clear an alarm in
this event, the user must remotely put the unit in Off through BESTCOMS or go
from Auto-Off to Off via the front panel HMI to force a pulse of the ECU.
Figure 3-27. Alarm State Diagram
DGC-500 Functional Description3-32
Page 53

SECTION 4 • BESTCOMS SOFTWARE
TABLE OF CONTENTS
SECTION 4 • BESTCOMS SOFTWARE................................................. 4-1
INTRODUCTION ............................................................... 4-1
INSTALLATION ................................................................ 4-1
Installing BESTCOMS-DGC500-32 .............................................. 4-1
Connecting the DGC-500 and PC ............................................... 4-1
STARTING BESTCOMS ......................................................... 4-1
Establishing Communication ................................................... 4-2
CHANGING SETTINGS .......................................................... 4-3
SENDING AND RECEIVING SETTINGS ............................................. 4-3
Sending Settings ............................................................ 4-3
Receiving Settings ........................................................... 4-3
SETTING DEFINITIONS ......................................................... 4-3
Sensing Transformers ........................................................ 4-3
Pre-Alarms ................................................................. 4-4
Low Fuel-Low Cool-Batt. OverVolt Tab ........................................ 4-4
Low Oil-Low Batt Volt-Weak Batt Volt Tab ..................................... 4-5
Audible-Battery Charger-Fuel Level Sender Tab ................................. 4-6
Maint. Interv.-Hi Cool Tab .................................................. 4-7
Alarms .................................................................... 4-7
Hi Cool-Low Fuel-Low Oil Tab............................................... 4-7
Overspeed-Sender Fail Tab ................................................ 4-8
Engine Cranking ............................................................. 4-9
System ................................................................... 4-10
Programmable Inputs and Outputs ............................................. 4-12
Input Setup Tab ......................................................... 4-12
Output Setup Tab ....................................................... 4-12
PROGRAMMABLE SENDERS.................................................... 4-12
Fuel Level Type ............................................................ 4-15
ENGINE RUN TIME ............................................................ 4-15
SETTINGS FILES .............................................................. 4-15
Printing Settings Files........................................................ 4-15
New Settings File ........................................................... 4-15
Saving Settings Files ........................................................ 4-16
Opening Settings Files ....................................................... 4-16
RS-232 CONFIGURATION ...................................................... 4-16
ENGINE CONTROL UNIT (ECU) TIMERS .......................................... 4-16
PASSWORD PROTECTION ..................................................... 4-17
Changing Passwords ........................................................ 4-17
TERMINATING COMMUNICATION................................................ 4-18
EMBEDDED FIRMWARE ........................................................ 4-18
Updating the Firmware ....................................................... 4-18
Figures
Figure 4-1. Basler Electric Folder Contents .............................................. 4-1
Figure 4-2. BESTCOMS Title and Version ............................................... 4-2
Figure 4-3. Sensing Transformers Screen ............................................... 4-2
Figure 4-4. Communication Initiation Screen ............................................. 4-2
Figure 4-5. Password Dialog Box ...................................................... 4-2
Figure 4-6. Sensing Transformers Screen ............................................... 4-4
Figure 4-7. Pre-Alarm Screen, Low Fuel-Low Cool-Batt. OverVolt Tab ......................... 4-5
Figure 4-8. Pre-Alarm Screen, Low Oil-Low Batt Volt-Weak Batt Volt Tab ....................... 4-5
Figure 4-9. Pre-Alarms Screen, Audible-Battery Charger-Fuel Level Sender Tab ................. 4-6
DGC-500-500 BESTCOMS Software i
Page 54

Figures - continued
Figure 4-10. Pre-Alarms Screen Maint. Interv.-Hi Cool Tab ................................... 4-7
Figure 4-11. Alarms Screen, Hi Cool-Low Fuel-Low Oil Tab ..................................4-8
Figure 4-12. Alarms Screen, Overspeed-Sender Fail Tab ....................................4-9
Figure 4-13. Engine Cranking Screen .................................................. 4-10
Figure 4-14. System Settings Screen...................................................4-11
Figure 4-15. Settings Screen, Input Setup Tab ........................................... 4-12
Figure 4-16. Settings Screen, Output Setup Tab ..........................................4-13
Figure 4-17. Programmable Senders Screen, Coolant Temperature Tab .......................4-14
Figure 4-18. Run Time Dialog Box ..................................................... 4-15
Figure 4-19. Communications Configure Dialog Box .......................................4-16
Figure 4-20. ECU Timers Menu Selection ............................................... 4-16
Figure 4-21. ECU Timers Dialog Box ................................................... 4-17
Figure 4-22. Change Password Dialog Box ..............................................4-17
Figure 4-23. Embedded File Information ................................................4-18
Figure 4-24. Firmware File Information .................................................4-19
Figure 4-25. File Transfer Status ...................................................... 4-19
DGC-500 BESTCOMS Softwareii
Page 55

SECTION 4 • BESTCOMS SOFTWARE
INTRODUCTION
BESTCOMS-DGC500-32 software provides a user-friendly communication link between the DGC-500 and
the user. An IBM-compatible PC running BESTCOMS can be used to configure the following parameters.
C Sensing transformer ratios
C Programmable contact inputs and programmable outputs
C Engine and system settings
C Engine cranking type and settings
C Pre-alarm and alarm triggers
C Sender data for coolant temperature, oil pressure, and fuel level
C Communication settings
Within BESTCOMS, DGC-500 settings can be saved in a computer file and used later to configure other
controllers with the same settings.
INSTALLATION
BESTCOMS-DGC500-32 software operates with IBM compatible personal computers (PCs) using Microsoft®
Windows® 95 or later operating systems. The minimum recommended operating requirements are listed
below.
C IBM compatible PC, 486DX2 or faster (100 MHz or higher microprocessor is recommended)
C One available serial port
C CD-ROM Drive
Installing BESTCOMS-DGC500-32
BESTCOMS software contains a setup utility that installs the application on your PC. An uninstall utility is
loaded with the program and can be used to remove BESTCOMS from your PC if desired. Use the following
procedure to install BESTCOMS-DGC500-32.
1. Insert the CD-ROM into the PC CD-ROM drive.
2. When the DGC-500 Setup and Documentation CD menu appears, click the Install button for the
BESTCOMS PC Program. The setup utility automatically installs BESTCOMS-DGC500-32 on your PC.
When BESTCOMS is installed, a Basler Electric folder
is added to the Windows® program menu. This folder
is accessed by clicking the Start button and pointing
to Programs. As illustrated in Figure 4-1, the Basler
Electric folder contains icons for the BESTCOMSDGC500-32 program and a utility to remove
BESTCOMS.
Connecting the DGC-500 and PC
Connect a communication cable between the rear RS-232 connector of the DGC-500 and the appropriate
communication port of the PC. Refer to Figure 2-2 for the location of the DGC-500 RS-232 connector and
Figure 5-4 for the required connections between the DGC-500 and a PC.
Figure 4-1. Basler Electric Folder Contents
STARTING BESTCOMS
BESTCOMS is started by clicking the Windows® Start button, pointing to Programs, the Basler Electric
folder, and then clicking the DGC 500 icon. At startup, a dialog box with the program title and version number
is displayed briefly (Figure 4-2). After this dialog box is displayed, the Sensing Transformers screen is
displayed (Figure 4-3).
DGC-500 BESTCOMS Software 4-1
Page 56

Basler Electric Digital Genset
Controller 500
Version X.XX.XX
Copyright 2001 Basler Electric
Figure 4-2. BESTCOMS Title and Version
Figure 4-3. Sensing Transformers Screen
Establishing Communication
Communication between BESTCOMS and the DGC-500 must be established before reading or changing
settings. BESTCOMS screen settings are updated only after communication is opened or the communication
settings have been changed.
Open the DGC-500 communication port by clicking C
When O
pen is selected, the Communication Initiation screen of Figure 4-4 appears. Select the appropriate
communication port for your PC (Comm 1, 2, 3, or 4) and click the I
ommunications on the menu bar and clicking Open.
nitialize button. Information about altering
the baud and parity settings is provided in the RS-232 Configuration sub-section. When the Password dialog
box of Figure 4-5 appears, enter the appropriate password and click O
K. The DGC-500 is delivered with the
following default passwords.
C DGC. This limited-access password allows all DGC-500 settings to be read, but prevents any changes
to settings.
C DGC500. This full-access password allows all DGC-500 settings to be read and allows all settings except
Engine Runtime to be changed.
C OEMLVL. This OEM-access password allows all DGC-500 settings to be read and allows all settings to
be changed. It also allows the DGC-500 embedded firmware to be upgraded.
Passwords are case-sensitive; all default passwords are upper-case. More information about passwords is
provided in the Password Protection sub-section.
The Unit ID number displayed in the password dialog box indicates the identification number of the DGC-500.
Information about changing the unit ID for polled communication is provided in the RS-232 Configuration subsection.
Once the password is entered, a dialog box appears and confirms that communication was established and
DGC-500 data was received by BESTCOMS.
Figure 4-4.Communication Initiation Screen
Figure 4-5. Password Dialog Box
DGC-500 BESTCOMS Software4-2
Page 57

CHANGING SETTINGS
DGC-500 settings are arranged into six groups.
C Sensing Transformers
C Pre-Alarms
C Alarms
Each setting group has a corresponding button (shown in Figure 4-3) that can be selected to access that
group of settings. The six setting groups can also be accessed by clicking S
selecting the desired setting group from the list. Once a setting group is accessed, the individual settings of
the group can be viewed and changed.
A setting is changed by clicking within the setting field and typing the new setting. If the new setting is outside
the prescribed setting range, a dialog box showing the acceptable range appears when another setting field
is accessed or when attempting to send the new setting to the DGC-500. The following paragraphs describe
how settings are sent to the DGC-500.
C Engine Cranking
C System
C Programmable Inputs and Outputs
creens on the menu bar and then
SENDING AND RECEIVING SETTINGS
When communication is enabled, DGC-500 settings can be sent or received through BESTCOMS.
Sending Settings
Setting changes are sent to the DGC-500 by clicking the Send Settings button. This causes all settings to
become the DGC-500 settings. Settings can also be sent to the DGC-500 by clicking C
the menu bar and clicking S
Receiving Settings
end to DGC.
ommunications on
DGC-500 settings are retrieved by clicking the Get Settings button. This causes the current settings of the
DGC-500 to be loaded into BESTCOMS. Settings can also be received from the DGC-500 by clicking
C
ommunications on the menu bar and clicking Get from DGC . Settings are also automatically retrieved
when logging on.
SETTING DEFINITIONS
Each of the six setting groups has a corresponding BESTCOMS screen. The settings of each screen are
categorized by one or more tabs. In the following paragraphs, settings are arranged and defined according
to the organization of the BESTCOMS screens and tabs.
Sensing Transformers
The button with the transformer icon on it is clicked to access the Sensing Transformers screen. The Sensing
Transformers screen can also be accessed by clicking S
T
ransformers.
Sensing Transformer settings are shown in Figure 4-6 and are described in the following paragraphs.
Generator PT - Primary (Volts). This setting selects the rating of the primary side of the transformer used to
sense generator voltage. The primary voltage setting is adjustable from 1 to 999 Vac.
Generator PT - Secondary (Volts). This setting selects the rating of the secondary side of the transformer used
to sense generator voltage. The secondary voltage setting is adjustable from 1 to 480 Vac.
Generator CT - Primary (Amps). This setting selects the rating of the primary side of the transformer used to
sense generator current. The primary current setting is adjustable from 1 to 5,000 Aac.
creens on the menu bar and clicking Sensing
DGC-500 BESTCOMS Software 4-3
Page 58

Pre-Alarms
Figure 4-6. Sensing Transformers Screen
Click the Pre Alarm button to access the Pre-Alarms screen or click S
Alarm Settings.
The Pre-Alarms screen consists of four tabs: Low Fuel-Low Cool-Batt. OverVolt., Low Oil-Low Batt Volt-Weak
Batt Volt, Audible-Battery Charger-Fuel Level Sender, and Maint. Interv.-Hi Cool.
Low Fuel-Low Cool-Batt. OverVolt Tab
The Low Fuel-Low Cool-Batt. OverVolt. tab settings of the Pre-Alarms screen are shown in Figure 4-7. Each
tab setting is described in the following paragraphs.
Low Fuel Pre-Alarm - Enable. This setting enables and disables annunciation of a low fuel pre-alarm. The Low
Fuel Pre-Alarm is deactivated when certain fuel types are selected. The Programmable Senders sub-section
provides more information about selecting the fuel type.
Low Fuel Pre-Alarm - Threshold (% Full Tank). This setting selects the fuel level that will trigger a low fuel prealarm. A threshold setting of 10 to 100 percent may be entered. The Low Fuel Pre-Alarm is deactivated when
certain fuel types are selected. The Programmable Senders sub-section provides more information about
selecting the fuel type.
Low Cool Temperature Pre-Alarm - Enable. This setting enables and disables annunciation of a low coolant
temperature pre-alarm.
Low Cool Temperature Pre-Alarm - Threshold (Deg F). This setting selects the coolant temperature that will
trigger a low coolant temperature pre-alarm. A threshold setting of 50 to 100 degrees Fahrenheit or 10 to 38
degrees Celsius may be entered.
Battery Over Voltage Pre-Alarm - Enable. This setting enables and disables annunciation of a battery
overvoltage pre-alarm.
creens on the menu bar and click Pre-
Battery Over Voltage Pre-Alarm - Threshold (Volts). This read-only setting displays the voltage level that will
trigger a battery overvoltage pre-alarm. The threshold setting is fixed at 15 Vdc for systems operating at 12
Vdc and 30 Vdc for systems operating at 24 Vdc.
DGC-500 BESTCOMS Software4-4
Page 59

Figure 4-7. Pre-Alarm Screen, Low Fuel-Low Cool-Batt. OverVolt Tab
Low Oil-Low Batt Volt-Weak Batt Volt Tab
The Low Oil-Low Batt Volt-Weak Batt Volt Tab settings are shown in Figure 4-8. Each tab setting is described
in the following paragraphs.
Figure 4-8. Pre-Alarm Screen, Low Oil-Low Batt Volt-Weak Batt Volt Tab
Low Oil Pressure Pre-Alarm - Enable. This setting enables and disables annunciation of a low oil pressure
pre-alarm. A 10 second activation time delay prevents low oil pressure annunciation during engine startup.
DGC-500 BESTCOMS Software 4-5
Page 60

Low Oil Pressure Pre-Alarm - Threshold (PSI). This setting selects the oil pressure level that will trigger a low
oil pressure pre-alarm. A threshold setting of 3 to 150 psi or 20 to 1,035 kPa may be entered. A 10 second
activation time delay prevents low oil pressure annunciation during engine startup.
Low Battery Voltage Pre-Alarm - Enable. This setting enables and disables annunciation of a low battery
voltage pre-alarm.
Low Battery Voltage Pre-Alarm - Threshold (Volts). This setting selects the voltage level that will trigger a low
battery voltage pre-alarm. The threshold setting is adjustable from 6 to 12 Vdc for 12 Vdc systems and 12 to
24 Vdc for 24 Vdc systems.
Low Battery Voltage Pre-Alarm - Activation Time Delay (Sec). This setting selects the time delay from when
low battery voltage is detected until a pre-alarm is annunciated. A time delay of 1 to 10 seconds may be
entered.
Weak Battery Voltage Pre-Alarm - Enable. This setting enables and disables annunciation of a weak battery
voltage pre-alarm.
Weak Battery Voltage Pre-Alarm - Threshold (Volts). This setting selects the voltage level that will trigger a
weak battery voltage pre-alarm. The threshold setting is adjustable from 4 to 8 Vdc for 12 Vdc systems and
8 to 16 Vdc for 24 Vdc systems.
Weak Battery Voltage Pre-Alarm - Activation Time Delay (Sec). This setting selects the time delay from when
weak battery voltage is detected until a pre-alarm is annunciated. A time delay of 1 to 10 seconds may be
entered.
Audible-Battery Charger-Fuel Level Sender Tab
The Audible-Battery Charger-Fuel Level Sender Tab settings are shown in Figure 4-9. Each tab setting is
described in the following paragraphs.
Figure 4-9. Pre-Alarms Screen, Audible-Battery Charger-Fuel Level Sender Tab
Audible Alarm. This setting enables and disables an audible pre-alarm and alarm annunciation.
Battery Charger Failure Pre-Alarm. This setting enables and disables annunciation of a battery charger failure
pre-alarm.
Fuel Level Sender Failure Pre-Alarm. This setting enables and disables annunciation of a fuel level sender
failure pre-alarm.
DGC-500 BESTCOMS Software4-6
Page 61

Maint. Interv.-Hi Cool Tab
The Maint. Interv.-Hi Cool Tab settings are shown in figure 4-10. Each tab setting is described in the following
paragraphs.
Figure 4-10. Pre-Alarms Screen, Maint. Interv.-Hi Cool Tab
Maintenance Interval Pre-Alarm - Enable. This setting enables and disables annunciation of a maintenance
interval pre-alarm.
Maintenance Interval Pre-Alarm - Threshold (Hours). This setting selects the length of the maintenance
interval. An interval of zero to 5,000 hours may be selected. Refer to the Maintenance Interval Timer Reset
paragraph of the System sub-section for information about resetting the Maintenance Interval Pre-Alarm.
Hi Coolant Temperature Pre-Alarm - Enable. This setting enables and disables annunciation of a high coolant
temperature pre-alarm. A 60 second activation delay prevents a Hi Coolant Temperature Pre-Alarm from
occurring at engine startup.
Hi Coolant Temperature Pre-Alarm Threshold (Deg F). This setting selects the coolant temperature that will
trigger a high coolant temperature pre-alarm. A threshold setting of 100 to 280 degrees Fahrenheit or 38 to
138 degrees Celsius may be entered. A 60 second activation delay prevents a Hi Coolant Temperature PreAlarm from occurring at engine startup.
Alarms
Click the Alarm button to access the Alarms screen or click S
Settings.
The Alarms screen consists of two tabs: Hi Cool-Low Fuel-Low Oil and Overspeed-Sender Fail.
Hi Cool-Low Fuel-Low Oil Tab
creens on the menu bar and click Alarm
The Hi Cool-Low Fuel-Low Oil Tab settings are shown in Figure 4-11. Each tab setting is described in the
following paragraphs.
Hi Cool Temperature Alarm - Alarm Enable. This setting enables and disables annunciation of a high coolant
temperature alarm and engine shutdown. A 60 second activation delay prevents a Hi Coolant Temperature
Alarm from occurring at engine startup.
DGC-500 BESTCOMS Software 4-7
Page 62

Figure 4-11. Alarms Screen, Hi Cool-Low Fuel-Low Oil Tab
Hi Cool Temperature Alarm - Threshold (Deg F). This setting selects the coolant temperature that will trigger
a high coolant temperature alarm. A threshold setting of 100 to 280 degrees Fahrenheit or 38 to 138 degrees
Celsius may be entered. A 60 second activation delay prevents a Hi Coolant Temperature Alarm from
occurring at engine startup.
Hi Cool Temperature Alarm - Arming Delay (Sec). This read-only setting displays the time delay between
when high coolant temperature is detected and an alarm is annunciated and the engine is shut down. The
arming delay is fixed at 60 seconds.
Low Oil Pressure Alarm - Alarm Enable. This setting enables and disables annunciation of a low oil pressure
alarm and engine shutdown. A 10 second activation time delay prevents low oil pressure annunciation during
engine startup.
Low Oil Pressure Alarm - Threshold (PSI). This setting selects the oil pressure level that will trigger a low oil
pressure alarm and engine shutdown. A threshold of 3 to 150 psi or 20 to 1,035 kPa may be entered. A 10
second activation time delay prevents low oil pressure annunciation during engine startup.
Low Oil Pressure Alarm - Arming Delay (Sec). This setting selects the time delay between when low oil
pressure is detected and an alarm is annunciated and the engine is shut down. A time delay of 5 to 15
seconds may be entered. A 10 second activation time delay prevents low oil pressure annunciation during
engine startup.
Low Fuel Level Alarm - Alarm Enable. This setting enables and disables alarm annunciation and engine
shutdown for a low fuel level.
Low Fuel Level Alarm - Threshold (% Full Tank). This setting selects the fuel level that will trigger a low fuel
level alarm. A threshold of zero to 100 percent may be entered.
Overspeed-Sender Fail Tab
The Overspeed-Sender Fail Tab settings are shown in Figure 4-12. Each tab setting is described in the
following paragraphs.
Overspeed Alarm - Alarm Enable. This setting enables and disables alarm annunciation and engine shutdown
for an overspeed condition.
Overspeed Alarm - Threshold (% of Rated). This setting selects the percentage of overspeed that triggers an
overspeed alarm and engine shutdown. The threshold is adjustable from 105 to 140 % of nominal speed.
DGC-500 BESTCOMS Software4-8
Page 63

Figure 4-12. Alarms Screen, Overspeed-Sender Fail Tab
Overspeed Alarm - Alarm Activation (MilliSecond). This setting adjusts the time delay from when an overspeed
alarm condition is detected until it is annunciated and the engine is shut down. A time delay of zero to 500
milliseconds may be entered.
Sender Failure Alarm - Cool Temp. Send Fail Alarm. This setting enables and disables alarm annunciation
and engine shutdown for a coolant temperature sender failure.
Sender Failure Alarm - Coolant Temp Alarm Delay. This setting adjusts the time delay from when a coolant
temperature sender failure is detected until it is annunciated and the engine is shut down. A time delay of 5,
10, 15, 20, 25, or 30 minutes may be selected.
Sender Failure Alarm - Oil Press. Sender Fail Alarm. This setting enables and disables alarm annunciation
and engine shutdown for an oil pressure sender failure. An oil pressure sender failure alarm is annunciated
and engine shutdown is initiated when the Global Sender Failure Alarm Time Delay expires.
Sender Failure Alarm - Loss of Gen. Voltage Alarm. This setting enables and disables alarm annunciation and
engine shutdown for a loss of generator voltage. A loss of generator voltage alarm is annunciated when the
generator voltage decreases below 1.5 Vac and the Global Sender Failure Alarm Time Delay expires. This
setting does not disable a Sender Failure Alarm for the speed signal source when generator frequency is
selected as the speed signal source.
Sender Failure Alarm - Global Sender Failure Alarm Time Delay (Sec). This setting selects the time delay
between when an oil pressure sender failure, loss of generator voltage failure, or MPU sender failure is
detected and alarm annunciation and engine shutdown.
Engine Cranking
Click the Crank button to access the Engine Cranking screen or click S
C
rank Settings.
Engine Cranking settings are shown in Figure 4-13 and are described in the following paragraphs.
Cranking Style. This setting selects the cranking method as either continuous or cycle.
Crank Disconnect Limit (% of Rated). This setting selects the percentage of rated engine speed at which
cranking is terminated. A disconnect limit of 10 to 100 percent may be entered.
DGC-500 BESTCOMS Software 4-9
creens on the menu bar and click
Page 64

Figure 4-13. Engine Cranking Screen
Pre-Crank Delay (Sec). This setting adjusts the time delay between initiating engine starting and beginning
engine cranking. A delay of zero to 30 seconds may be entered.
Pre-Start Contact After Disconnect. This setting selects whether or not the pre-start contact remains closed
after disconnect occurs.
Cycle - Number of Crank Cycles. This setting, available only if cycle cranking is selected, selects the number
of engine cranking attempts before an overcrank condition occurs and cranking is terminated. The crank
cycles setting range is 1 to 7.
Cycle - Cycle Crank Time (Sec). This setting, available only if cycle cranking is selected, controls the duration
of each cranking cycle. Each cranking period is separated by a resting period of equal length. A crank time
of 5 to 15 may be entered.
Continuous - Continuous Crank Time (Sec). This setting, available only if continuous cranking is selected,
selects the duration of a single engine cranking attempt before an overcrank condition occurs. A continuous
crank time of 1 to 60 seconds may be entered.
System
Click the SYST button to access the System Settings screen or click S
S
ystem Settings.
creens on the menu bar and click
System settings are shown in Figure 4-14 and are described in the following paragraphs.
Genset’s kW Rating. The generator power rating is entered in this field. A genset kW rating of 5 to 9999 may
be entered.
Cool Down Time. This setting selects the time delay time for any of the following three conditions.
C The generator load is removed and engine shutdown is permitted.
C The Auto Transfer Switch is opened while operating in Auto mode and engine shutdown occurs.
C A remote shutdown is initiated and engine shutdown occurs.
A cool-down time of zero (0) to 60 minutes may be entered.
DGC-500 BESTCOMS Software4-10
Page 65

Figure 4-14. System Settings Screen
Rated Engine RPM. This setting selects the rated rotating speed of the engine. A value of 750 to 3,600 rpm
may be entered.
Maintenance Interval Timer Reset. Selecting this checkbox terminates the maintenance interval pre-alarm
and resets the maintenance interval timer back to the programmed value. The Send Settings button must be
clicked for the reset to take effect.
Battery Volts. This setting selects either 12 Vdc or 24 Vdc as the starting battery nominal voltage.
NFPA Level. This setting selects whether or not NFPA requirements are in effect. If NFPA (National Fire
Prevention Association) compliance is not required, a setting of zero (0) can be selected to disable the feature.
Selecting NFPA level one (1) or two (2) affects DGC-500 operation in the following ways.
C The number of crank cycles is fixed at 3.
C Crank cycle time is fixed at 15 seconds.
C Continuous crank time is fixed at 45 seconds.
C The low coolant temperature pre-alarm setting is fixed at 70°F.
# Flywheel Teeth. This setting selects the number of teeth on the engine flywheel. A value of 50 to 500 may
be entered.
Speed Signal Source. This setting selects from three sources for obtaining the engine speed. The speed
signal source can be obtained from the magnetic pickup (MPU), generator frequency, or derived from both
the MPU and generator frequency. When both the MPU and generator frequency are selected as the speed
signal source, the MPU has priority. If both MPU and generator frequency are selected and the MPU fails,
generator frequency is used and a non-programmable MPU sender failure pre-alarm is annunciated.
Embedded Firmware Version. This read-only field displays the firmware version of the DGC-500.
Generator Connection. This setting selects the configuration of the generator voltage sensing circuitry. Either
three-phase line-to-line, three-phase line-to-neutral, or single-phase A-phase to B-phase sensing may be
selected.
Generator Frequency. This setting selects either 50 hertz or 60 hertz as the nominal generator frequency.
Unit System. This setting selects either the English or Metric unit system for displaying the oil pressure and
coolant temperature parameters in BESTCOMS, the DGC-500 HMI, and the optional Remote Annunciation
Display Panel (RDP-110).
DGC-500 BESTCOMS Software 4-11
Page 66

CANBus/J1939 Interface - Enable ECU Support. This setting enables and disables the DGC-500 CAN
interface. When enabled, the CAN interface allows the DGC-500 to communicate with the engine control unit
(ECU). This setting must be enabled in order to enable DTC support.
CANBus/J1939 Interface - Enable DTC Support. This setting enables and disables the viewing of diagnostic
trouble codes (DTCs) reported by the ECU. Both the Enable ECU Support and Enable DTC Support settings
must be enabled to view DTCs.
CANBus/J1939 Interface - Unit CANBus Address. This setting selects the address to be used by the DGC-500
for J1939 communication. A value of 0 to 253 may be entered.
CANBus/J1939 Interface - Engine Start/Stop Config. This setting selects one of two engine start/stop
configurations. Selecting Volvo Penta configures the DGC-500 for starting and stopping of the engine using
the J1939 communication interface. (The Enable ECU Support setting must be enabled.) Selecting Not
Configured disables this feature.
Programmable Inputs and Outputs
Click the PROG I/O button to access the Programmable Inputs and Outputs screen or click S
menu bar and click I
The Programmable Inputs and Outputs screen consists of two tabs: Input Setup and Output Setup.
Input Setup Tab
The Input Setup tab settings of the Programmable Inputs and Outputs screen consist of three identical groups
of settings for each of the three programmable inputs. Tab settings are shown in Figure 4-15. Each tab setting
is described in the following paragraphs.
nput/Output Settings.
creens on the
Figure 4-15. Settings Screen, Input Setup Tab
Programmable Input - Function. This setting selects the function type that is used to trigger the corresponding
programmable input. The functions available for triggering a programmable input are listed below.
C Auto Transfer Switch
C Auxiliary Input
C Battery Charger Fail
C Low Coolant Level
C No Function
C Single-Phase Override
C Fuel Leak Detect
DGC-500 BESTCOMS Software4-12
Page 67

Programmable Input - Alarm/Pre-Alarm. Either of these check boxes can be selected to annunciate an alarm
or pre-alarm when the selected function triggers the programmable input. Alarm or pre-alarm annunciation
is available only when one the following functions are selected: Auxiliary Input, Battery Charger Fail, Fuel Leak
Detect, or Low Coolant Level.
Programmable Input - Auxiliary Input Label. This setting field is active only when Auxiliary Input is selected
as the programmable input function. An user-assigned label (eight characters, maximum) can be entered for
the corresponding programmable input.
Output Setup Tab
The Output Setup Tab settings of the Settings screen are shown in Figure 4-16. (Not all settings are visible
in the illustration.) Each tab setting is described in the following paragraphs.
The Output Setup tab consists of a list of pre-alarms, alarms, and conditions that can be assigned to close
either Programmable Output 1 or 2. An output selected by clicking the checkbox in the appropriate row and
column. The following pre-alarms, alarms, and conditions can be assigned to one of the two programmable
outputs.
C Battery Charger Failure Alarm
C Battery Charger Failure Pre-alarm
C Battery Overvoltage Pre-alarm
C Coolant Temperature Sender Failure Alarm
C Cooldown Timer Active
C Emergency Stop Alarm
C EPS Supplying Load
C Fuel Leak Alarm
C Fuel Leak Pre-alarm
C Fuel Sender Failure Pre-alarm
C High Coolant Temperature Pre-alarm
C High Coolant Temperature Alarm
C Loss of Voltage Sender Failure Alarm
C Low Battery Voltage Pre-alarm
C Low Coolant Level Pre-alarm
C Low Coolant Level Alarm
C Low Coolant Temperature Pre-alarm
C Low Fuel Alarm
C Low Fuel Pre-alarm
C Low Oil Pressure Alarm
C Low Oil Pressure Pre-alarm
C Speed Sender Failure Alarm
C Oil Pressure Sender Failure Alarm
C Overcrank Alarm
C Overspeed Alarm
C Pre-start Condition in Effect
C Programmable Input 1 Closed
C Programmable Input 2 Closed
C Programmable Input 3 Closed
C Scheduled Maintenance Pre-alarm
C Switch Not in Auto
C Weak Battery Voltage Pre-alarm
Figure 4-16. Settings Screen, Output Setup Tab
DGC-500-500 BESTCOMS Software 4-13
Page 68

PROGRAMMABLE SENDERS
Click Configure on the menu bar and click Programmable Senders to access the Programmable Senders
screen.
The Programmable Senders screen has three tabs: Coolant Temperature, Oil Pressure, and Percent Fuel
Level. Because the setting fields and buttons of each tab are so similar, only the Coolant Temperature tab
settings are described here.
The Coolant Temperature tab settings of the Programmable Senders screen are shown in Figure 4-17. Each
tab setting is described in the following paragraphs.
Figure 4-17. Programmable Senders Screen, Coolant Temperature Tab
Get Cool. Data From DGC. If communication with a DGC-500 is enabled, clicking this button retrieves the
sender data points from the DGC-500 and refreshes the graph.
Send Cool. Data to DGC. Clicking this button sends the displayed data points to the DGC-500.
Load Cool. Settings File. Clicking this button displays an Open dialog box where a sender file containing
sender data points can be retrieved. Some standard data point files for the three senders are included with
BESTCOMS. Coolant temperature sender files have a CS5 extension, oil pressure sender files have an OS5
extension, and fuel level sender files have an FS5 extension.
Create Cool. Settings File. Clicking this button displays a Save As dialog box where the transducer data points
created in BESTCOMS can be saved in a sender file. While it is possible to create individual sender files for
each transducer, it is not necessary. The data for all three senders is automatically saved with the DGC-500
configuration file. The Settings Files sub-section contains information about creating DGC-500 configuration
files.
Resistance. The 11 resistance points in this column are not adjustable. The DGC-500 has been factory
calibrated at these points to maximize accuracy.
Degrees F/Degrees C. Temperature values entered in this column must always maintain a descending order.
If English units are used, adjacent coolant temperature points must be separated by at least 2°F. If metric units
are used, adjacent oil pressure points must be separated by at least 7 kilopascals. The coolant temperature
DGC-500 BESTCOMS Software4-14
Page 69

setting range is 32 to 400°F or 0 to 240°C. The oil pressure setting range is 0 to 250 psi or 0 to 1,725
kilopascals. The fuel level setting range is 0 to 100 percent.
Sender Slope. If a sender requires a positive slope, Positive can be selected to invert the values in the
Resistance column.
Reset Factory Settings. Clicking this button restores the factory-default data points in the Degrees
F/Degrees C column and graph. This does not update the data points in the DGC-500. The DGC-500 is
updated by clicking the Send Cool. Data to DGC button.
NOTE
When metric values are used and changes are made to the oil pressure sender
data points, undesirable internal rounding of some data points can occur. For
example, select 700 kilopascals for one data point, create a sender file, and the
value is rounded to 697. Rounding that occurs will never be greater than 4
kilopascals.
Fuel Level Type
This setting, located on the Percent Fuel Level tab, allows the selection of four fuel types: Percent, Natural
Gas, Propane, and Disabled. Selecting a fuel type other than Percent will disable any fuel level indication,
alarm, and pre-alarm and disable the percent fuel level values of the Percent Fuel Level tab.
ENGINE RUN TIME
The amount of accumulated running time for an
engine can be adjusted by accessing the Run Time
dialog box. Click Co
E
ngine Runtime to view the Run Time dialog box.
Unless access is gained by using the OEM-access
default password, the E
not appear under the Co
Enter the accumulated engine running time as hours
and minutes in the appropriate fields. The Run Time
dialog box is illustrated in Figure 4-18. Click the
Update DGC A
to save the time value to the DGC-500.
nfigure on the menu bar and click
ngine Runtime selection will
nfigure pull-down menu.
Figure 4-18. Run Time Dialog Box
ccumulated Engine Runtime button
SETTINGS FILES
BESTCOMS software enables you to print a list of DGC-500 settings, save DGC-500 settings to a file, and
open a settings file and upload those settings to a DGC-500.
Printing Settings Files
A printout of DGC-500 settings can be useful for record keeping or comparison purposes. Click the Print
Settings File button or click F
screen. This print screen contains a print-preview pane and settings for selecting the printer, content of the
printout, and the printout orientation. DGC-500 settings are divided into three print sections: General Settings,
Programmable I/O Settings, and Input Sender Settings. Any combination of sections can be selected for
printing.
ile on the menu bar and click Print to access the Print DGC-500 Settings
New Settings File
Clicking this button resets the settings displayed in BESTCOMS to the factory-default values. If changes to
settings have not been saved, you will be given the opportunity to save the changes in a DGC-500 settings
file.
DGC-500-500 BESTCOMS Software 4-15
Page 70

Saving Settings Files
Saving DGC-500 settings to a file for uploading to other DGC-500 units saves setup time when configuring
multiple units to the same configuration. A settings file can also be created in BESTCOMS without being
connected to a DGC-500. The settings of the desired screens can be changed and these settings can then
be saved to a file.
A settings file is created by clicking the Save Settings File button or clicking F
S
ave. A file properties box appears and allows you to enter generator information and other pertinent notes
about the settings. Next, a Save As dialog box prompts you to select the name and location of the settings
file. All DGC-500 settings files are automatically given a DG5 file extension by BESTCOMS.
Opening Settings Files
To open a DGC-500 settings file, click the Open Settings File button or click F
O
pen. An Open dialog box will appear and enable you to select a DGC-500 settings file (DG5 extension) for
retrieval into BESTCOMS.
ile on the menu bar and clicking
ile on the menu bar and click
RS-232 CONFIGURATION
When communication is established between a PC and DGC-500, changes in BESTCOMS to the
communication configuration settings affect both the PC and DGC-500. When communication between a PC
and DGC-500 is closed, changes in BESTCOMS to the communication configuration settings affect only the
PC.
The communication configuration settings are viewed
and adjusted through the Communications Configure
dialog box. This dialog box is accessed by clicking
Co
nfigure on the menu bar and clicking RS232. The
Communications Configure dialog box settings are
illustrated in Figure 4-19 and described in the
following paragraphs.
Baud Rate. This setting selects the communication
rate. A baud rate of 1200, 2400, or 9600 can be
selected.
Parity. This setting enables and disables summation
checking of data transmitted between the PC and
DGC-500. A setting of No Parity, Odd Parity, or Even
Parity can be selected.
Unit ID. This setting allows an identification number to be assigned to a DGC-500 for polled communication.
A number between 1 and 247 may be used.
Figure 4-19. Communications
Configure Dialog Box
ENGINE CONTROL UNIT (ECU) TIMERS
Four timers are provided to customize the timing of
pulsing the ECU for periodic updates. These timers
are adjusted through the ECU Timers dialog box.
This dialog box is accessed by clicking Co
on the menu bar and clicking ECU T
Figure 4-20).
The ECU-related time values of the ECU Timers
dialog box are shown in Figure 4-21 and described
in the following paragraphs.
nfigure
imers (see
Figure 4-20. ECU Timers Menu Selection
DGC-500 BESTCOMS Software4-16
Page 71

Figure 4-21. ECU Timers Dialog Box
Engine Shut Down (Sec.). When going from Running to Shut Down, this setting adjusts the length of time that
the DGC-500 stays disconnected from the ECU before starting the first pulse. The Engine Shut Down setting
range is 1 to 60 seconds.
Setting Time (Millisec.). This setting adjusts the time to gather data after connecting to the ECU during the
Pulsing state. This allows all metered values to be sent and ramp up. Metered values are sent by the ECU
at different rates as designated by the J1939 protocol. Values sent by the ECU may be low initially; the ECU
takes time to average its own data. The Setting Time setting range is 5,500 to 30,000 milliseconds.
Pulse Cycle Time (Min.). This setting adjusts the time that the DGC-500 waits to pulse the ECU again. The
Pulse Cycle Time setting range is 1 to 60 minutes.
Response Timeout (Sec.). This setting controls the time that communication is attempted with the ECU while
the DGC-500 is in the Pulsing or Connecting state. The Response Timeout setting range is 1 to 60 seconds.
PASSWORD PROTECTION
Password protection guards against unauthorized changing of DGC-500 settings. DGC-500 passwords are
case-sensitive. Three levels of password protection are available. Each level is described in the following
paragraphs.
C Limited Access. This password level allows all DGC-500 settings to be read, but prevents any changes
to settings. The default, limited-access password is DGC.
C Full Access. This password level allows all DGC-500 settings to be read and allows all settings except
Engine Runtime to be changed. The default, full-access password is DGC500.
C OEM Access. This password allows all DGC-500 settings to be read and allows all settings to be
changed. It also allows the DGC-500 embedded firmware to be upgraded. The default, OEM-access
password is OEMLVL.
Changing Passwords
Passwords can be changed only after communication between the
PC and DGC-500 is established. Changes to passwords are made
through the Change Password dialog box. To access the Change
Password dialog box, click C
click Change P
The content of the Change Password dialog box depends on the
password level used when accessing the dialog box. For example,
someone logged-in with a full-access password will be able to
change only the limited-access and full-access passwords—not the
OEM-access password. Figure 4-22 shows the Change Password
dialog box with all three access levels shown.
A password is changed by selecting the access level, entering the
new password, and then re-entering the new password to confirm
the entry.
DGC-500-500 BESTCOMS Software 4-17
assword.
ommunications on the menu bar and
Figure 4-22. Change
Password Dialog Box
Page 72

Once a password is changed, it should be stored in a secure location. If a user-defined password is lost or
forgotten, contact Basler Electric for instructions on regaining password access.
TERMINATING COMMUNICATION
DGC-500 communication is terminated by clicking Communications on the menu bar and clicking Close.
If unsaved settings changes were made, you are prompted to save the changes in a new or existing settings
file. When you execute the close communication command (with or without saving settings), communication
with the DGC-500 is terminated. If you choose to exit BESTCOMS (by clicking F
Ex
it) without first closing communication, you are still given the opportunity to save any settings changes.
ile on the menu bar and then
EMBEDDED FIRMWARE
Embedded firmware is the operating program that controls the actions of the DGC-500. The DGC-500 stores
firmware in nonvolatile flash memory that can be reprogrammed through the RS-232 communication port. It
is not necessary to replace EPROM chips when updating the firmware with a newer version.
Updating the Firmware
Future enhancements to DGC-500 functionality may make a firmware update desirable. Because default
settings are loaded when DGC-500 firmware is updated, your settings should be saved in a file prior to
upgrading firmware. DGC-500 embedded firmware can be updated by performing the following steps.
CAUTION
If power is lost or communication is interrupted during file transfer, the DGC-500
will not recover and will cease operating.
1. Connect a communication cable between the rear RS-232 connector of the DGC-500 and the appropriate
communication port of your PC. Start BESTCOMS-DGC500-32, open communication, and gain password
access with the OEM-access password.
2. Click Co
Firmware is clicked, the Embedded Firmware Upgrade dialog box (Figure 4-23) appears.
nfigure on the menu bar and click Upgrade Embedded Firmware. When Upgrade Embedded
Figure 4-23. Embedded Firmware Upgrade Dialog Box
DGC-500 BESTCOMS Software4-18
Page 73

3. Click the S
extension) to be used for updating the DGC-500 firmware. The file details are displayed in the File
Information section of the Embedded Firmware Upgrade dialog box (Figure 4-24).
elect New Application Code button and then navigate to and select the file (S19 file
Figure 4-24. Firmware File Information
4. Click the Start Firmware U
Before You Continue!!!! dialog boxes appear and confirm that you want to continue. Click Y
dialog boxes to begin transferring the firmware file to the DGC-500. The file transfer status is displayed
in the Embedded Firmware Upgrade dialog box (Figure 4-25).
pgrade Process button. The Erase Application Code!!!! and Save Settings
es in both
Figure 4-25. File Transfer Status
5. Once the file transfer is complete, close the Embedded Firmware Upgrade dialog box, open
communication between the PC and DGC-500, and gain password access to the DGC-500 with the
appropriate password.
DGC-500-500 BESTCOMS Software 4-19
Page 74

SECTION 5 • INSTALLATION
TABLE OF CONTENTS
SECTION 5 • INSTALLATION......................................................... 5-1
GENERAL..................................................................... 5-1
HARDWARE ................................................................... 5-1
MOUNTING ................................................................... 5-1
DGC-500 Isolator Kit ......................................................... 5-2
CONNECTIONS ................................................................ 5-3
DGC-500 Terminations ....................................................... 5-3
Serial Communication Port..................................................... 5-3
CAN Connections ............................................................ 5-4
DGC-500 Connections for Typical Applications ..................................... 5-5
Volvo Penta EDC Applications .................................................. 5-9
CALIBRATION ................................................................ 5-14
Equipment Required ......................................................... 5-14
Entering Calibration Mode .................................................... 5-14
Calibration Procedure ........................................................ 5-14
Figures
Figure 5-1. DGC-500 Cutout Dimensions ................................................ 5-1
Figure 5-2. DGC-500 Overall Dimensions ................................................ 5-2
Figure 5-3. Communication Port Pin Assignments ......................................... 5-3
Figure 5-4. Personal Computer to DGC-500 Connections ................................... 5-4
Figure 5-5. CAN Cable Assembly ...................................................... 5-4
Figure 5-6. Typical DGC-500 CAN Interface Connections ................................... 5-5
Figure 5-7. Single-Phase DGC-500 Connections .......................................... 5-5
Figure 5-8. Three-Phase Delta DGC-500 Connections ..................................... 5-6
Figure 5-9. Three-Phase Wye DGC-500 Connections ...................................... 5-7
Figure 5-10. Three-Phase Wye and SAE J1939 DGC-500 Connections ........................ 5-8
Figure 5-11. Calibration Mode Navigation ................................................ 5-9
Figure 5-12. Successful and Unsuccessful Calibration Screens ............................... 5-9
Figure 5-13. Calibration Mode Navigation ............................................... 5-14
Figure 5-14. Successful and Unsuccessful Calibration Screens .............................. 5-14
Tables
Table 5-1. Communication Port Pin Functions ............................................ 5-3
Table 5-2. CAN Cable Assembly Termination Assignments .................................. 5-4
DGC-500 Installation i
Page 75

SECTION 5 • INSTALLATION
GENERAL
DGC-500 Digital Genset Controllers are delivered in sturdy cartons to prevent shipping damage. Upon receipt
of a system, check the part number against the requisition and packing list for agreement. Inspect for damage,
and if there is evidence of such, immediately file a claim with the carrier and notify the Basler Electric Regional
Sales Office, your Sales Representative, or a Sales Representative at Basler Electric, Highland, Illinois.
If the device is not installed immediately, store it in the original shipping package in a moisture and dust-free
environment.
HARDWARE
DGC-500 controllers are packaged for mounting in any top-mount enclosure. The front panel is resistant to
moisture, salt fog, humidity, dust, dirt, and chemical contaminants. It also inhibits insect and rodent entrance.
DGC-500 controllers are mounted using the four permanently attached 10-32 studs.
MOUNTING
Case cutout dimensions are shown in Figure 5-1. Overall dimensions are shown in Figures 5-2. All dimensions
are shown in inches and millimeters (in parenthesis).
Figure 5-1. DGC-500 Cutout Dimensions
DGC-500 Installation 5-1
Page 76

Figure 5-2. DGC-500 Overall Dimensions
DGC-500 Isolator Kit
The optional DGC Isolator Kit provides an economical way to reduce the level of shock and vibration
transmitted from a generator to the DGC-500. The DGC Isolator Kit eliminates the need to mount an isolator
box on top of the generator conduit box and simplifies wiring considerations. Isolator kits are available with
either black- or gray-colored gaskets. Kit part number 9 3554 06 100 is supplied with a black gasket and kit
part number 9 3554 06 101 is supplied with a gray gasket.
The DGC Isolator Kit provides vibration dampening at frequencies greater than 48 hertz. Above 90 hertz,
vibration transmissibility is less than 10 percent of the input magnitude.
DGC-500 Installation5-2
Page 77

CONNECTIONS
DGC-500 connections are dependent on the application. Incorrect wiring may result in damage to the
controller.
NOTE
Be sure that the DGC-500 is hard-wired to earth ground with no smaller than 12
AWG copper wire attached to the chassis ground terminal (P22) on the rear of the
controller.
Operating power from the battery must be of the correct polarity. Although reverse
polarity will not cause damage, the DGC-500 will not operate.
DGC-500 Terminations
All DGC-500 terminals are located on the rear panel of the controller. There are three types of interface
terminals.
J1, a DB9 connector, is used as a temporary communication interface with IBM compatible PCs.
J2, a five-terminal header, is an SAE J1939 interface used for high-speed communication with a CAN-enabled
engine control unit (ECU). J2 is enabled only on DGC-500 controllers with style numbers of F1J
All other connections consist of quarter-inch, quick-connect terminals. Amp part numbers 154718-3 (positivelock receptacle) and 154719-1 (nylon housing) are the recommended components for making connections
at the quick-connect terminals. Wires performing common functions, such as voltage sensing leads, should
be grouped together.
or F5J.
All connections (except chassis ground and communication) should be made with wire no smaller than 14
AWG.
Serial Communication Port
The RS-232 port on the rear panel uses a DB9 female connector. Figure 5-3 illustrates the pin assignments
of the communication port and Table 5-1 identifies the RS-232 connector pin functions. A standard
communication cable terminated with a DB9 male connector is used for PC interface with the DGC-500 as
shown in Figure 5-4.
Figure 5-3. DGC-500 Communication Port Pin Assignments
Table 5-1. DGC-500 Communication Port Pin Functions
Pin Function Name Direction
1 N/C — N/A
2 Transmit Data TXD From DGC-500
3 Receive Data RXD To DGC-500
4 N/C — N/A
5 Signal Ground GND N/A
6, 7, 8, 9 N/C — N/A
DGC-500 Installation 5-3
Page 78

Figure 5-4. Personal Computer to DGC-500 Connections
CAN Connections
The CAN connector (J2) on the rear panel mates with the cable assembly (Basler P/N 9 3589 00 002)
provided with the DGC-500. Only units with style numbers F1J
and have connector J2 enabled. The cable assembly is shown in Figure 5-5 and the termination assignments
are listed in Table 5-2. Figure 5-6 illustrates typical DGC-500 CAN interface connections.
Figure 5-5. CAN Cable Assembly
Table 5-2. CAN Cable Assembly Termination Assignments
J2 Terminations Function User Terminations
AND F5J are supplied with the cable assembly
Pin 1
Termination Resistor
Pin 2
Pin 3 CAN High Red Wire
Pin 4 CAN Low Black Wire
Pin 5 Drain Uninsulated Wire †
t
t If the DGC-500 is not providing one end of the J1939 backbone, cut the jumper
connected across pins 1 and 2 to disconnect the internal terminating resistor.
† The J1939 drain (shield) should be grounded at one point only. If grounded
elsewhere, cut the drain connection to the DGC-500.
Note: If the DGC-500 is not part of the J1939 backbone, the stub connecting the
DGC-500 to the backbone should not exceed 914 mm (3 ft) in length.
DGC-500 Installation5-4
Page 79

Figure 5-6. Typical DGC-500 CAN Interface Connections
DGC-500 Connections for Typical Applications
Figures 5-7 through 5-9 illustrate typical applications using the DGC-500. Figure 5-7 shows a DGC-500
application using single-phase sensing. Figure 5-8 shows a DGC-500 application using three-phase, delta
sensing. Figure 5-9 shows a DGC-500 application using three-phase, wye sensing.
DGC-500 Installation 5-5
Page 80

Pick-Up
2
3
4
Magnetic
12V/24 V
+
480V
1 A
GENERATOR
6
L1
CIRCUIT
BREAKER
GENERATOR
L2
N
P13
P16
P18
P40
P39
P20
P19
-
+
P21
-
+
03-31-03
P0008-23
MPU
NEUT.
Oil Pressure
Fuel Level
Coolant Temp
1
1
P30
P26 P29
P23
VOLT. VOLT. VOLT. VOLT.
1A
P10
or 5A
COM
1A
or 5A
P14 P11
COM
1A
or 5A
P15 P12
P17
COM
P24P25
-+
Sender Common
PH C
PH B
Sending
A CT
PHASE
B CT
Phase
C CT
Phase
Units
Relays
Output
PH A
DGC-500
Horn
BATTERY
K1
Com
Crank
K1
N.O.
K2
Com
Fuel
K2
N.O.
K3
Com
Pre-Start
K3
N.O.
Output 2
Programmable
P36 P38P33 P34
7 7
Output 1
Programmable
Jumper terminals P35 and P37 if not
5
START
SOLENOID
FUEL
SOLENOID
GLOW
PLUGS
using an Emergency Stop switc h.
Connect near engine block (negat ive
battery terminal) side of senders.
Programmable input and output
functions are described in Section 3,
Functional Description.
6
7
To
Contact
Sensing
7
7
7
Input 1
Programmable
Emergency
Stop
P37
P35
Programmable
Input 2
Programmable
Input 3
P4
P3
P2
N.C.
5
Bus/Load
Figure 5-7. Single-Phase DGC-500 Connections
Ground
Chassis
P22
Current inputs are 1 ampere or 5
ampere, depending upon style.
Mechanical oil pressure sender not
supplied by Basler.
Mechanical fuel level sender not
supplied by Basler.
Mechanical coolant temperature
sender not supplied by Basler.
1
2
3
4
DGC-500 Installation5-6
Page 81

Pick-Up
2
3
Magnetic
12 V/24 V
+
N
480V
4
1 A
GENERATOR
6
A
B
C
P13
P16
P18
P40
P39
P20
P19
-
+
P21
-
+
03-06-02
P0013-02
MPU
NEUT.
Oil Pressure
Fuel Level
Coolant Temp
Sending
Sender Common
Units
Relays
Output
P30
PH C
PH B
P26 P29
PH A
P23
VOLT. VOLT. VO LT. VOLT.
1A
P10
or 5A
1
COM
1A
or 5A
1
A CT
PHASE
B CT
Phase
BATTERY
K1
Com
Crank
K1
N.O.
K2
Com
Fuel
K2
N.O.
K3
Com
Pre-Start
K3
N.O.
START
FUEL
GLOW
SOLENOID
SOLENOID
PLUGS
GENERATOR
CIRCUIT
BREAKER
COM
1A
or 5A
P15 P1 2
1
P17 P14 P11
COM
P24P25
-+
Emergency
Stop
P37
P35
C
A
B
N
C CT
Phase
DGC-500
Horn
Contact
Sensing
7
7
Input 1
Programmable
Programmable
Input 2
P3
P2
7
Programmable
Input 3
P4
Output 2
Programm able
P36 P3 8P33 P34
7 7
Output 1
Programm able
Jumper terminals P35 and P37 if not
using an Emergency Stop switch.
Connect near engine block (negative
battery terminal) side of senders.
Programmable input and output
functions are described in Section 3,
Functional Description.
6
ampere, depending upon style.
Mechanical oil pressure sender not
supplied by Basler .
2
7
Mechanical fuel level sender not
supplied by Basler .
Mechanical coolant temperature
sender not supplied by Basler.
3
4
5
Ground
Chassis
P22
Current inputs are 1 ampere or 5
1
N.C.
To
5
Bus/Load
Figure 5-8. Three-Phase Delta DGC-500 Connections
DGC-500 Installation 5-7
Page 82

Pick-Up
2
3
Magnetic
12V/24 V
+
N
480V
4
1 A
GENERATOR
6
A
B
C
P13
P16
P18
P19
P40
-
P39
+
P20
+
P21
-
03-31-03
P0018-02
MPU
NEUT.
Oil Pressure
Fuel Level
Coolant Temp
P30
PH C
PH B
P26 P29
PH A
P23
VOLT. VOLT. VOLT. VOLT.
1A
P10
or 5A
1
COM
1A
or 5A
1
A CT
PHASE
B CT
Phase
Sender Common
Sending
Units
Relays
Output
BATTERY
K1
Com
Crank
K1
N.O.
K2
Com
Fuel
K2
N.O.
K3
Com
Pre-Start
K3
N.O.
START
FUEL
GLOW
SOLENOID
SOLENOID
PLUGS
COM
1A
P15 P12
or 5A
1
P17 P14 P11
COM
CIRCUIT
BREAKER
GENERATOR
P24P25
-+
Emergency
Stop
P37
P35
A
B
N
C
C CT
Phase
DGC-500
Horn
Contact
Sensing
7
7
7
Input 1
Programmable
Programmable
Input 2
Programmable
Input 3
P4
P3
P2
Chassis
P22
Output 2
Programmable
P36 P38P33 P34
7 7
Output 1
Programmable
Jumper terminals P35 and P37 if not
using an Emergency Stop switch.
Connect near engine block (negative
battery terminal) side of senders.
Programmable input and output
functions are described in Section 3,
Functional Description.
6
5
Ground
Current inputs are 1 ampere or 5
1
7
ampere, depending upon style.
Mechanical oil pressure sender not
supplied by Basler.
Mechanical fuel level sender not
supplied by Basler.
Mechanical coolant temperature
sender not supplied by Basler.
2
3
4
N.C.
To
5
Bus/Load
Figure 5-9. Three-Phase Wye DGC-500 Connections
DGC-500 Installation5-8
Page 83

Volvo Penta EDC Applications
Engines equipped with Volvo Penta EDC controllers can receive engine control commands (such as start and
stop) from the DGC-500 through the SAE J1939 communication interface. To invoke this feature, the EDC
must receive a J1939 message containing engine control information within one second of waking (exiting
sleep mode). If the EDC does not receive an engine control message within the prescribed time, it will enter
the stand-alone mode and ignore any J1939 control messages. If this occurs, the EDC must be forced back
into sleep mode by pressing the auxiliary stop pushbutton on the engine or by momentarily disconnecting EDC
power.
The interconnection diagrams of Figures 5-10, 5-11, and 5-12 illustrate the DGC-500 and EDC connections
that allow the DGC-500 to awaken the EDC and start the engine, or simply acquire engine status information.
Wake-up of the EDC is initiated by using the DGC-500 Fuel output contacts to apply battery power to the
EDC. To stop the engine, the DGC-500 issues a sleep command through the J1939 interface to the EDC and
opens the Fuel output contacts. This causes the EDC to stop the engine and enter the sleep mode.
In order for the DGC-500 to communicate with the EDC, two DGC-500 settings must be changed from their
default values.
C The J1939 address of the DGC-500 must be set at 17
C The engine start/stop configuration setting must be set for Volvo Penta
Both settings are configured on the System Settings screen of BESTCOMS. Section 4, BESTCOMS Software
has information about adjusting DGC-500 settings through BESTCOMS.
DGC-500 Installation 5-9
Page 84

Engine-
Mounted,
8-Pole,
Deutsch
Connector
Customer-
Supplied
Mating
Connector
2
08-27-03
P0019-13
EDC
PENTA
VOLVO
1 2 3 4 5
1 2 3 4 5
Red
Black
Bare
3
4
Magnetic
Pick-Up
12/24 V
+
1 A
9
J1939 Cable
Provided With Unit
12345
480V
12345
GENERATOR
N
L2
L1
CIRCUIT
BREAKER
GENERATO R
Termination
1
1
Resistor
CAN High
P30
P26 P29
P23
VOLT. VOLT. VOLT. VOLT.
1A
P10
or 5A
COM
1A
or 5A
P14 P11
COM
1A
or 5A
P15 P12
P17
COM
P24P25
-+
8
6
P40
P39
P20
P13
P16
P18
P19
-
+
CAN Low
NEUT.
Oil Pressure
Fuel Level
Coolant Temp
Sender Common
PH C
PH B
Sending
A CT
PHASE
B CT
Phase
C CT
Phase
Units
PH A
MPU
Relays
Output
P21
-
+
BATTERY
K1
Com
Crank
K1
N.O.
K2
Com
Fuel
K2
N.O.
K3
Com
Pre-Start
K3
N.O.
Output 2
Programmable
P36 P38P33 P34
GLOW
PLUGS
DGC-500
7 7
Output 1
Programmable
Connect near engine block (negative
battery terminal) side of senders.
Programmable input and output func tions
are described in Section 3, Funct ional
Description.
J1939 shield should be grounded at only
one point. If grounded elsewhere, cut
J1939 shield connection to unit.
If unit is not providing one end of the
J1939 backbone, the stub connecting the
unit to the backbone should not exceed 3
feet in length.
6
7
8
9
Horn
Contact
Sensing
7
7
7
Input 1
Programmable
Emergency
Stop
P37
P35
Programmable
Input 2
Programmable
Input 3
Ground
Chassis
P4
P3
P2
P22
Current inputs are 1 ampere or 5
ampere, depending upon style.
Mechanical oil press ure sender not
supplied by Basler.
2
1
N.C.
To
5
Bus/Load
Figure 5-10. Single-Phase Connections, Volvo Penta EDC Application
DGC-500 Installation5-10
Mechanical fuel level sender not
3
supplied by Basler.
Mechanical coolant temperat ure
sender not supplied by Basler.
Jumper terminals P35 and P37 if not
using an Emergency Stop switch.
5
4
Page 85

Engine-
Mounted,
8-Pole,
Deutsch
Connector
Customer-
Supplied
Mating
Connector
2
08-28-03
P0019-14
EDC
PENTA
VOLVO
1 2 3 4 5
1 2 3 4 5
Red
Black
Bare
3
4
Magnetic
Pick-Up
12/24 V
+
1 A
9
J1939 Cable
Provided With Uni t
N
480V
12345
12345
GENERATOR
C
B
A
CIRCUIT
BREAKER
GENERATOR
Termination
11
1
Resistor
CAN High
P30
P23 P26 P29
VOLT. VOLT. VOLT. V OLT.
1A
P10
or 5A
1A
or 5A
1A
or 5A
P15 P12
P17 P14 P11
P24P25
-+
8
6
P40
P39
P20
P13
P16
P18
P19
-
+
CAN Low
NEUT.
Oil Pressure
Fuel Level
Coolant Temp
Sender Common
PH C
PH B
Sending
A CT
PHASE
B CT
Phase
C CT
Phase
Units
DGC-500
PH A
COM
COM
COM
Horn
MPU
Relays
Output
P21
-
+
BATTERY
K1
Com
Crank
K1
N.O.
K2
Com
Fuel
K2
N.O.
K3
Com
Pre-Start
K3
N.O.
Output 2
Programmable
P36 P38P33 P34
7 7
Output 1
Programmable
GLOW
PLUGS
Connect near engine block (negative
battery terminal) side of senders.
Programmable input and output functions
are described in Section 3, Functional
Description.
J1939 shield should be grounded at only
one point. If grounded elsewhere, cut
J1939 shield connection to unit.
If unit is not providing one end of the
J1939 backbone, the stub c onnecting the
unit to the backbone s hould not exceed 3
feet in length.
6
7
8
9
Contact
Sensing
7
7
7
Input 1
Programmable
Emergency
Stop
P37
P35
C
B
A
N
Programmable
Input 2
Programmable
Input 3
Ground
Chassis
P4
P3
P2
P22
Current inputs are 1 ampere or 5
ampere, depending upon style.
Mechanical oil pressure sender not
supplied by Basler.
Mechanical fuel level sender not
supplied by Basler.
Mechanical coolant temperature
sender not supplied by Basler.
Jumper terminals P35 and P37 if not
using an Emergency Stop switch.
2
1
3
5
4
N.C.
To
5
Bus/Load
Figure 5-11. Three-Phase, Delta Connections, Volvo Penta EDC Application
DGC-500 Installation 5-11
Page 86

Engine-
Mounted,
8-Pole,
Deutsch
Connector
Customer-
Supplied
Mating
Connector
2
08-28-03
P0019-15
EDC
PENTA
VOLVO
1 2 3 4 5
1 2 3 4 5
Red
Black
Bare
3
4
Magnetic
Pick-Up
12/24 V
+
1 A
9
J1939 Cable
Provided With Uni t
N
480V
12345
12345
GENERATOR
C
B
A
CIRCUIT
BREAKER
GENERATOR
Termination
11
1
Resistor
CAN High
P30
P23 P26 P29
VOLT. VOLT. VOLT. V OLT.
1A
P10
or 5A
1A
or 5A
1A
or 5A
P15 P12
P17 P14 P11
P24P25
-+
8
6
P40
P39
P20
P13
P16
P18
P19
-
+
CAN Low
NEUT.
Oil Pressure
Fuel Level
Coolant Temp
Sender Common
PH C
PH B
Sending
A CT
PHASE
B CT
Phase
C CT
Phase
Units
DGC-500
PH A
COM
COM
COM
Horn
MPU
Relays
Output
P21
-
+
BATTERY
K1
Com
Crank
K1
N.O.
K2
Com
Fuel
K2
N.O.
K3
Com
Pre-Start
K3
N.O.
Output 2
Programmable
P36 P38P33 P34
7 7
Output 1
Programmable
GLOW
PLUGS
Connect near engine block (negative
battery terminal) side of senders.
Programmable input and output functions
are described in Section 3, Functional
Description.
J1939 shield should be grounded at only
one point. If grounded elsewhere, cut
J1939 shield connection to unit.
If unit is not providing one end of the
J1939 backbone, the stub c onnecting the
unit to the backbone s hould not exceed 3
feet in length.
6
7
8
9
Contact
Sensing
7
7
7
Input 1
Programmable
Emergency
Stop
P37
P35
C
B
A
N
Programmable
Input 2
Programmable
Input 3
Ground
Chassis
P4
P3
P2
P22
Current inputs are 1 ampere or 5
ampere, depending upon style.
Mechanical oil pressure sender not
supplied by Basler.
Mechanical fuel level sender not
2
1
3
N.C.
To
5
Bus/Load
Figure 5-12. Three-Phase, Wye Connections, Volvo Penta EDC Application
DGC-500 Installation5-12
supplied by Basler.
Mechanical coolant temperature
sender not supplied by Basler.
Jumper terminals P35 and P37 if not
using an Emergency Stop switch.
5
4
Page 87

CALIBRATION
Prior to delivery, each DGC-500 is factory calibrated and subjected to thorough testing to ensure quality,
accuracy, and performance. DGC-500 units should not require field calibration. However, the following
procedure is provided for those users desiring to perform field calibration of their DGC-500.
Equipment Required
C Single-phase 240 Vac source
C Single-phase 2 Aac source
C Resistance box, 25 - 800 ohms
Entering Calibration Mode
Calibration is accomplished by performing the instructions called out on each of the HMI calibration menu
screens. The calibration menu screens reside in a branch of Menu 3: Sensing Devices. Figure 5-13 illustrates
the process of entering the calibration mode and the following steps describe the process.
1. Navigate to Menu 3: Sensing Devices and scroll up or down to the screen labeled INPUT CALIBRATE
FUNCTION.
2. Perform the steps illustrated by Figure 5-12 to enable calibration (screen indicates FEATURE IS ON).
Use the Select/Enter pushbutton to move right. Use the Raise/Scroll pushbutton to move up.
Figure 5-13. Calibration Mode Navigation
Calibration Procedure
Once calibration is enabled, the following steps are performed to calibrate the DGC-500.
After each calibration step is performed, a screen indicating the success of the previous step is displayed.
Figure 5-14 shows the screens resulting from a successful calibration step and an unsuccessful calibration
step.
Figure 5-14. Successful and Unsuccessful Calibration Screens
1. While viewing the FEATURE IS ON screen (illustrated in Figure 5-13), press
the Select/Enter pushbutton to begin the calibration process. The first
calibration screen (displayed at right) appears. Apply 240 Vac to the voltage
sensing inputs for phase A (terminal P23) and Neutral (terminal P30). Press
the Lower/Scroll pushbutton.
2. Press the Raise/Scroll pushbutton. The screen at right is displayed. Apply
240 Vac to the voltage sensing inputs for phase B (P26) and Neutral (P30).
Press the Lower/Scroll pushbutton.
3. Press the Raise/Scroll pushbutton. The screen at right is displayed. Apply
240 Vac to the voltage sensing inputs for phase C (P29) and Neutral (P30).
Press the Lower/Scroll pushbutton.
DGC-500 Installation 5-13
Page 88

4. Press the Raise/Scroll pushbutton. The screen at right is displayed. Apply
2 Aac to the current sensing inputs for phase A (P10 and P11). Press the
Lower/Scroll pushbutton.
5. Press the Raise/Scroll pushbutton. The screen at right is displayed. Apply
2 Aac to the current sensing inputs for phase B (P12 and P14). Press the
Lower/Scroll pushbutton.
6. Press the Raise/Scroll pushbutton. The screen at right is displayed. Apply
2 Aac to the current sensing inputs for phase V (P15 and P17). Press the
Lower/Scroll pushbutton.
7. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 30 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
8. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 60 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
9. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 100 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
10. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 150 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
11. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 200 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
12. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 300 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
13. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 400 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
14. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 600 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
15. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 800 ohms across the coolant temperature sender
input (P18 and P19). Press the Lower/Scroll pushbutton.
16. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 25 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
17. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 50 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
18. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 75 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
19. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 100 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
DGC-500 Installation5-14
Page 89

20. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 125 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
21. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 150 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
22. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 175 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
23. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 200 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
24. Press the Raise/Scroll pushbutton. The screen at right is displayed.
Connect a resistance of 225 ohms across the oil pressure sender input (P13
and P19). Press the Lower/Scroll pushbutton.
After step 24 is completed successfully and the Raise/Scroll pushbutton is pressed, the INPUT CALIBRATE
FUNCTION screen appears and signals that calibration is complete.
DGC-500 Installation 5-15
Page 90

SECTION 6 • MAINTENANCE AND
TROUBLESHOOTING
PREVENTATIVE MAINTENANCE
The only preventative maintenance required on the DGC-500 is to periodically check that the connections
between the DGC-500 and the system are clean and tight. DGC-500 units are manufactured using state-ofthe-art, surface-mount technology. As such, Basler Electric recommends that no repair procedures be
attempted by anyone other than Basler Electric personnel.
TROUBLESHOOTING
If you do not get the results that you expect from the DGC-500, first check the programmable settings for the
appropriate function. Use the following troubleshooting procedures when difficulties are encountered in the
operation of your genset control system.
Incorrect Display of Battery Voltage, Coolant Temperature, Oil Pressure, or Fuel Level
Step 1. Verify that all wiring is properly connected. Refer to Figures 5-5 through 5-7.
Step 2. Confirm that the SENDER COMM terminal (P19) is connected to the negative battery terminal and
the engine-block side of the senders. Current from other devices sharing this connection can cause
erroneous readings.
Step 3. If the displayed battery voltage is incorrect, ensure that the proper voltage is present between the
BATT+ terminal (P20) and the SENDER COMM terminal (P19).
Step 4. Verify that the correct senders are being used.
Step 5. Verify that the correct sender curves are being used.
Step 6. Ensure that the senders are operating properly.
Incorrect Display of Generator Voltage
Step 1. Verify that all wiring is properly connected. Refer to Figures 5-5 through 5-7.
Step 2. Ensure that the proper voltage is present at the DGC-500 voltage sensing inputs (P23, P26, P29,
and P30).
Step 3. Verify that the voltage transformer ratio and sensing configuration is correct.
Step 4. Confirm that the voltage sensing transformers are correct and properly installed.
Incorrect Measurement or Display of Generator Current
Step 1. Verify that all wiring is properly connected. Refer to Figures 5-5 through 5-7.
Step 2. Ensure that the proper current is present at the DGC-500 current sensing inputs (P10 - P17).
Step 3. Verify that the current sensing transformer ratios are correct.
Step 4. Confirm that the current sensing transformers are correct and properly installed.
Incorrect Display of Engine RPM
Step 1. Verify that all wiring is properly connected. Refer to Figures 5-5 through 5-7.
Step 2. Verify that the flywheel teeth setting is correct.
Step 3. Confirm the nominal frequency setting.
Step 4. Verify that the prime mover governor is operating properly.
Step 5. Verify that the measured frequency of the voltage at the MPU input (P39 and P40) is correct.
Step 6. If the MPU is shared with the governor, verify that the polarity of the MPU input to the governor
matches the polarity of the MPU input to the DGC-500.
DGC-500 Maintenance and Troubleshooting 6-1
Page 91

Programmable Inputs Do Not Operate as Expected
Step 1. Verify that all wiring is properly connected. Refer to Figures 5-5 through 5-7.
Step 2. Confirm that the inputs are programmed properly.
Step 3. Ensure that the input at the DGC-500 is actually connected to the BATT– terminal (P21).
Programmable Outputs Do Not Operate as Expected
Step 1. Verify that all wiring is properly connected. Refer to Figures 5-5 through 5-7.
Step 2. Confirm that the outputs are programmed properly.
Communication Port Does Not Operate Properly
Step 1. Verify that the proper port of your computer is being used.
Step 2. Confirm that the correct baud rate is being used.
Step 3. Verify that the connection between the computer and the DGC-500 is correct. Ensure that a
straight-through serial cable is being used.
DGC-500 Maintenance and Troubleshooting6-2
Page 92

APPENDIX A • PARAMETERS AND SETTINGS
INTRODUCTION
This appendix lists all DGC-500 parameters along with the setting range/selections for each parameter.
FRONT PANEL ADJUSTABLE PARAMETERS
Table A-1 lists the DGC-500 settings that can be adjusted through the HMI.
Table A-1. HMI Adjustable Settings
Parameter Range
Cool-Down Time Delay 0 - 60 min
Engine Maintenance Cycle Hours Pre-Alarm Reset/Normal
LCD Contrast 25 - 75%
Low Fuel Alarm 0 - 100%
Low Fuel Pre-Alarm 10 - 100%
Metric Conversion On/Off
Pre-Crank Time Delay 0 - 30 sec
Pre-Start Contact Status After Disconnect On/Off
Sender Failure Alarm Time 1 - 30 sec
ALL PARAMETERS
Table A-2 lists each DGC-500 parameter in alphabetical order. The setting range or nomenclature used by
the HMI and the BESTCOMS interface is listed beside each parameter.
Table A-2 DGC-500 Settings
Parameter Setting Range
Accumulated Engine Runtime 0 - 99,999 hrs, 59 min
Battery Charger Failure Pre-Alarm Enable Off or On
Battery Overvoltage Pre-Alarm Enable On or Off
Battery Overvoltage Pre-Alarm Threshold Off, 15 Vdc, or 30 Vdc
Battery Voltage 12 Vdc or 24 Vdc
CANBus Address 0 - 253
Communication Baud Rate 1200, 2400, or 9600
Communication Parity None, Odd, or Even
Continuous Crank Time 1 - 60 sec
Coolant Temperature Sender Fail Alarm Enable Off or On
Coolant Temperature Sender Fail Alarm Delay 5, 10, 15, 20, 25, or 30 min
DGC-500 Appendix A-1
Page 93

Parameter Setting Range
Crank Disconnect Limit 10 - 100%
Cranking Style Continuous or Cycle
Cycle Crank Time 5 - 15 sec
DTC Support On or Off
ECU Pulse Cycle Time 1 - 60 min
ECU Response Time-out 1 - 60 sec
ECU Settling Time 5,500 - 30,000 msec
ECU Support On or Off
Engine Maintenance Cycle Pre-Alarm Level 0 - 5,000 hrs
Engine Shutdown Time 1 - 60 sec
Engine Start/Stop Configuration Not Configured or
Volvo Penta
Fuel Level Sender Failure Pre-Alarm Enable On or Off
Generator Connection 3-phase L-L
3-phase L-N
1-phase A-B
Generator CT Primary Amps 1- 5,000 Aac
Generator Frequency 50 Hz or 60 Hz
Generator kW Rating 5 - 9,999 kW
Generator PT Primary Volts 1 - 999 Vac
Generator PT Secondary Volts 1- 480 Vac
Generator Rotation ABC or ACB
Global Sender Failure Alarm Delay 1 - 30 sec
High Coolant Temperature Alarm Delay 60 sec
High Coolant Temperature Alarm Enable On or Off
High Coolant Temperature Pre-Alarm Enable On or Off
High Coolant Temperature Pre-Alarm Threshold 100 - 280°F
High Coolant Temperature Alarm Threshold 100 - 280°F
LCD Contrast 25 -75%
Loss of Generator Voltage Alarm Enable On or Off
Low Battery Pre-Alarm Delay 1 - 10 sec
Low Battery Voltage Pre-Alarm Enable On or Off
A-2
Low Battery Voltage Pre-Alarm Threshold 6 - 12 Vdc or 12 - 24 Vdc
Low Coolant Temperature Pre-Alarm Enable On or Off
Low Coolant Temperature Pre-Alarm Threshold 50 - 100°F
Low Fuel Level Alarm Enable On or Off
DGC-500 Appendix
Page 94

Parameter Setting Range
Low Fuel Level Alarm Threshold 0 - 100%
Low Fuel Level Pre-Alarm Enable On or Off
Low Fuel Level Pre-Alarm Level 10 - 100%
Low Oil Pressure Arming Delay 5 - 15 sec
Low Oil Pressure Pre-Alarm Enable On or Off
Low Oil Pressure Pre-Alarm Threshold 3 - 150 psi
Low Oil Pressure Alarm Enable On or Off
Low Oil Pressure Alarm Threshold 3 - 150 psi
Maintenance Interval Pre-Alarm Enable On or Off
Maintenance Interval Pre-Alarm Threshold 0 - 5,000 hrs
NFPA Level 0, 1, or 2
No-Load Cool-Down Delay 1 - 60 min
Number of Crank Cycles 1- 7
Number of Flywheel Teeth 50 - 500
Oil Pressure Sender Fail Alarm Off or On
Overspeed Alarm Delay 0 - 500 msec
Overspeed Alarm Enable On or Off
Overspeed Alarm Threshold 105 - 140%
Pre-Alarm Buzzer Enable Off or On
Pre-Crank Time Delay 0 - 30 sec
Pre-Start Contact after Disconnect Off or On
Rated Engine rpm 750 - 3,600
Sender Failure Alarm Time Delay 1 - 10 sec
Speed Signal Source MPU, Gen Freq, or MPU-Gen
Unit ID 1 - 247
Unit System English or Metric
Weak Battery Voltage Pre-Alarm Delay 1 - 10 sec
Weak Battery Voltage Pre-Alarm Enable On or Off
Weak Battery Voltage Pre-Alarm Threshold 4 - 8 Vdc or 8 - 16 Vdc
DGC-500 Appendix
A-3
Page 95

APPENDIX B • DGC-500 SETTINGS RECORD
INTRODUCTION
This appendix provides a complete list of DGC-500 settings. This list is provided in the form of a settings
record that you can use to record information relative to your application. DGC-500 settings are organized in
the following groups.
C Sensing Transformers
C System
C Cranking
C Pre-Alarms
C Alarms
C Serial Communication
C J1939 Interface
C Miscellaneous
DGC-500 Appendix B-1
Page 96

DGC-500 SETTINGS RECORD
Genset ID Date
DGC-500 Serial Number Firmware Version
Sensing Transformer Settings
Parameter Setting
Generator CT Primary Amps
Generator PT Primary Volts
Generator PT Secondary Volts
System Settings
Battery Voltage
Generator Connection
Generator Frequency
Generator kW Rating
Generator Rotation
NFPA Level
No-Load Cool-Down Delay
Number of Flywheel Teeth
Rated Engine RPM
Speed Signal Source
Unit System
Cranking Settings
Parameter Setting
Crank Disconnect Limit
Cranking Style
Cycle Crank Time
Pre-Crank Time Delay
Pre-Start Contact after Disconnect
DGC-500 AppendixB-2
Page 97

Pre-Alarm Settings
Parameter Setting
Battery Charger Failure Pre-Alarm Enable
Battery Overvoltage Pre-Alarm Enable
Battery Overvoltage Pre-Alarm Threshold
Engine Maintenance Cycle Pre-Alarm Level
Fuel Level Sender Failure Pre-Alarm Enable
High Coolant Temperature Pre-Alarm Enable
High Coolant Temperature Pre-Alarm Threshold
Low Battery Pre-Alarm Delay
Low Battery Voltage Pre-Alarm Enable
Low Battery Voltage Pre-Alarm Threshold
Low Coolant Temperature Pre-Alarm Enable
Low Coolant Temperature Pre-Alarm Threshold
Low Fuel Level Pre-Alarm Enable
Low Fuel Level Pre-Alarm Level
Low Oil Pressure Pre-Alarm Enable
Low Oil Pressure Pre-Alarm Threshold
Maintenance Interval Pre-Alarm Enable
Maintenance Interval Pre-Alarm Threshold
Pre-Alarm Buzzer Enable
Weak Battery Voltage Pre-Alarm Delay
Weak Battery Voltage Pre-Alarm Enable
Weak Battery Voltage Pre-Alarm Threshold
Alarm Settings
Parameter Setting
Coolant Temperature Sender Fail Alarm Enable
Coolant Temperature Sender Fail Alarm Delay
Global Sender Failure Alarm Delay
High Coolant Temperature Alarm Enable
High Coolant Temperature Alarm Threshold
Loss of Generator Voltage Alarm Enable
DGC-500 Appendix B-3
Page 98

Alarm Settings – Continued
Parameter Setting
Low Fuel Level Alarm Enable
Low Fuel Level Alarm Threshold
Low Oil Pressure Alarm Enable
Low Oil Pressure Alarm Threshold
Oil Pressure Sender Fail Alarm
Overspeed Alarm Delay
Overspeed Alarm Enable
Overspeed Alarm Threshold
Sender Failure Alarm Time Delay
Communication Settings
Parameter Setting
Baud Rate
Parity
Unit ID
J1939 Interface
Parameter Setting
CANBus Address
ECU Support
DTC Support
Engine Shutdown Timer
Engine Start/Stop Configuration
Settling Time
Pulse Cycle Time
Response Timeout
Miscellaneous Settings
Parameter Setting
Accumulated Engine Runtime
LCD Contrast
DGC-500 AppendixB-4
 Loading...
Loading...