

Page 1

Configuration Manual
for FOUNDATION™ Fieldbus
Fieldbus Temperature Transmitter Model T53.10
for FOUNDATION™ Fieldbus and PROFIBUS® PA
Fieldbus Temperature Transmitter Model T53.10
Page 2

2
CONTENTS
Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
This configuration manual
The Fieldbus Software
Parameter lists abbreviations
1.0 The Resource Block, Fieldbus Foundation
1.1 Introduction
1.2 Description
1.3 RESTART parameter
1.4 Non-volatile parameters
1.5 Timeout for remote cascade modes
1.6 Alert Notification
1.7 FEATURES / FEATURE_SEL parameters
1.8 Fault state for the whole resource
1.9 Write lock by software
1.10 Features being implemented
1.11 BLOCK_ERR
1.12 Supported Modes
1.13 Resource Block Parameter List, Fieldbus Foundation
2.0 The Transducer Block
2.1 The Transducer Block
2.2 The data of the Transducer Block Parameter List are grouped as follows:
2.3 Default configuration
2.4 Your application set up.
2.5 AI_Transducer Block Configuration Flowchart
2.6 - Transducer Block Examples Setup
2.6.1 Measurement of RTD with one sensor:
2.6.2 Measurement of RTD with two sensors:
2.6.3 Measurement of thermocouple with one sensor:
2.6.4 Measurement of thermocouple with two sensors:
2.6.5 Measurement of combined sensors (Sensor 1 = TC and Sensor 2 = RTD):
2.6.6 Measurement of resistance (linear) with one sensor:
2.6.7 Measurement of resistance (linear) with two sensors:
2.6.8 Measurement of potentiometer (linear) with one sensor:
2.6.9 Measurement of potentiometer (linear) with two sensors:
2.6.10 Measurement of voltage (linear) with one sensor:
2.6.11 Measurement of voltage (linear) with two sensors:
2.6.12 Measurement of 2 potentiometers (with Linear interpolation linearisation):
2.6.13 Measurement of TC (with Custom Polynomial Linearisation) on sensor 1
2.7 AI_Transducer and PR_CUST_LIN Block, Schematic
2.8 AI_TRANSDUCER Block Parameter List
2.8.1 Sensor characterising parameters
2.8.2 RTD / Resistor specific parameters
2.8.3 Thermocouple specific parameters
2.8.4 Output conditioning parameters
2.8.5 Output parameters
2.8.6 Diagnostic parameters
2.8.7 Sensor error detection parameters
2.8.8 Sensor calibration, Description
2.8.9 Sensor Calibration Parameters
2.9 PR_CUST_LIN Block Parameter List
2.9.1 Linear interpolation linearisation, Description
2.9.2 Linear Interpolation Linearisation, Parameter List.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
. . . . . . . . . . . . . . . . . . . . . . . . 7
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
. . . . . . 9
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
. . . . . . . . . . . . . . . . . . . . . . . . 13
. . . . . . . . . . . . . . . . . . . . . . 14
. . . . 14
. . . . . . . . . . . . . . . . . . . . . 14
. . . . . . . . . . . . . . . . . . . . 15
. . . . . . . . . . . . . . . . . 15
. . . . . . . . . . . . . . . . . 15
. . . . . . . . . . . . . . . . . . . . . . 16
. . . . . . . . . . . . . . . . . . . . . 16
. . 16
. . . . 17
. . . . . . . . . . . . . . . . . . . . . . . . . 18
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
. . . . . . . . . . . . . . . . . . . . . . . . . . . 25
. . . . . . . . . . . . . . . . . . . . . . 25
Page 3
2.9.3 Custom polynomial linearisation, Description
2.9.4 Custom Polynomial Linearisation, Parameter List
2.10 PR_CUST_PRIV Block Reserved Parameter List
2.10.1 Description, PR_CUST_PRIV Block
3.0 Analogue Input Blocks
3.1 Analogue Input Blocks, Fieldbus Foundation
3.2 Overview
3.3 Analogue Input Block Schematic
3.4 Description
3.5 Supported Modes
3.6 To enable the Simulation mode
3.7 Alarm Types
3.8 Mode Handling
3.9 Status Handling
3.10 Initialisation
3.11 Analogue Input Blocks Parameter List, Fieldbus Foundation
4.0 PID Control Block, Fieldbus Foundation
4.1 Introduction:
4.2 Overview
4.3 Schematic:
4.4 Description
4.5 Supported Modes
4.6 Alarm Types
4.7 Mode Handling
4.8 Status Handling
4.9 Initialization
4.10 PID Control Block Parameter List
5.0 Link Active Scheduler (LAS)
5.1 Introduction:
5.2 Overview
5.3 Description
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
. . . . . . . . . . . . . . . . . . . . . . . . . . 26
. . . . . . . . . . . . . . . . . . . . . . . 27
. . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
. . . . . . . . . . . . . . . . . . 29
3
Page 4

4
Introduction
This configuration manual
contains the necessary information for configuration of the fieldbus temperature transmitter
T53 via a host system with application software for Foundation Fieldbus™ (for PROFIBUS
HOST systems please refer to the “Configuration Manual for PROFIBUS”). The autoswitch
function of the modules ensures automatic switch to the connected protocol.
The Fieldbus Software
has been developped by WIKA according to the specifications of the Fieldbus Foundation
and the PROFIBUS Nutzerorganisation.
TM
The files for Foundation
Fieldbus are:
xxyy.ffo - Device Description binary file
xxyy.sym - Device Description symbol file
xxyyzz.cff - Capability file
xx, yy and zz refer to the version numbers of the files.
These files can be downloaded from our homepage www.wika.de.
Please follow the instructions for the application software in question when installing the
files.
Parameter lists abbreviations
In the Store column:
SRC = Static Revision Counter; N = No; D = Dynamic;
Cst = Constant. The parameter doesn’t change in a device
In the RO / R/W column:
RO = Read Only; R /W = Read Write; * = Mixed of RO and R/W; ** = Don’t care
Page 5

1.0 The Resource Block, Fieldbus Foundation
1.1 Introduction
The resource block is used to define a hardware specific characteristics of the function block
applications. It provides WIKA manufacturer’s name, device name, DD and block status and
hardware details. It also indicates how much resource (memory and CPU) is available and
controls the overall device.
1.2 Description
This block contains data that is specific to the hardware that is associated with the resource.
All data is modelled within a controlled space, so there are no outside inputs into this block
required.
This parameter “set” is intended to be the minimum required for the Function Block Applica
tion associated with the resource in which it resides. Some parameters that could be in the
set, like calibration data and ambient temperature, are more part of their respective trans
ducer blocks. The “mode” is used to control major states of the resource. O/S mode stops
all function block execution. The actual mode of the function blocks will be changed to O/S
(out of service), but the target mode will not be changed. Auto mode allows normal operation
of the resource. IMan shows that the resource is initializing or receiving a software down
load. Parameters MANUFAC_ID, DEV_TYPE, DEV_REV, DD_REV, and DD_RESOURCE are
required to identify and locate the DD so that Device Description Hosting Services can se
lect the correct DD for use with the resource. The parameter HARD_TYPES is a read only bit
string that indicates the types of hardware that are available to this resource. If an I/O block
is configured that requires a type of hardware that is not available, the result will be a block
alarm for a configuration error. The RS_STATE parameter contains the operational state of
the Function Block Application for the resource containing this resource block.
-
-
-
-
1.3 RESTART parameter
The RESTART parameter allows degrees of initialization of the resource. They are:
1 - Run: it is the passive state of the parameter
2 - Restart resource: it is intended to clear up problems for example the memory manage
ment resource.
3 - Restart with defaults: it is intended to wipe configuration memory, it works like a factory
initialization.
4 - Restart processor: it provides a way to hit the reset button on the processor associated
with the resource This parameter does not appear in a view because it returns to 1 shortly
after being written.
1.4 Non-volatile parameters
All non-volatile parameters are saved in EEPROM and therefore used if the device is restart
ed.
1.5 Timeout for remote cascade modes
SHED_RCAS and SHED_ROUT set the time limit for loss of communication from a remote
device. These constants are used by all function blocks that support a remote cascade
mode. The effect of a timeout is described in Mode Calculation. Shedding from RCAS/ROUT
shall not happen when SHED_RCAS or SHED_ROUT is set to zero.
1.6 Alert Notification
The MAX_NOTIFY parameter value is the maximum number of alert reports that this resource
can have sent without getting a confirmation, corresponding to the amount of buffer space
available for alert messages. A user can set the number lower than that, to control alert
flooding, by adjusting the LIM_NOTIFY parameter value. If LIM_NOTIFY is set to zero, then
no alerts are reported. The CONFIRM_TIME parameter is the time for the resource to wait for
confirmation of receipt of a report before trying again. If the CONFIRM_TIME = 0 the device
shall not retry.
-
-
5
Page 6

6
1.7 FEATURES / FEATURE_SEL parameters
The bit strings FEATURES and FEATURE_SEL determine optional behaviour of the resource.
The first defines the available features, and is read only. The second is used to turn on an
available feature by configuration. If a bit is set in FEATURE_SEL that is not set in FEA
TURES, the result will be a block alarm for a configuration error. The device supports the
following features: Reports supported, Fault State supported, Soft Write lock supported.
1.8 Fault state for the whole resource
If the user sets the SET_FSTATE parameter, the FAULT_STATE parameter will indicate active
and it will cause all output function blocks in the resource to go immediately to the condition
chosen by the fault state Type I/O option. It may be cleared by setting the CLR_FSTATE pa
rameter. The set and clear parameters do not appear in a view because they are momentary.
1.9 Write lock by software
The WRITE_LOCK parameter, if set, will prevent any external change to the static or non
volatile data base in the Function Block Application of the resource. Block connections and
calculation results will proceed normally, but the configuration will be locked. It is set and
cleared by writing to the WRITE_LOCK parameter. Clearing WRITE_LOCK will generate the
discrete alert WRITE_ALM, at the WRITE_PRI priority. Setting WRITE_LOCK will clear the
alert, if it exists. Before setting WRITE_LOCK parameter to Locked, it is necessary to select
the “Soft Write lock supported” option in FEATURE_SEL.
1.10 Features being implemented
The parameter CYCLE_TYPE is a bit string that defines the types of cycles that this resource
can do. CYCLE_SEL allows the configurator to choose one of them. If CYCLE_SEL contains
more than one bit, or the bit set is not set in CYCLE_TYPE, the result will be a block alarm
for a configuration error. MIN_CYCLE_T is the manufacturer specified minimum time to ex
ecute a cycle. It puts a lower limit on the scheduling of the resource.
-
-
-
MEMORY_SIZE declares the size of the resource for configuration of function blocks, in kilo
bytes. The parameter FREE_SPACE shows the percentage of configuration memory that is
still available. FREE_TIME shows the approximate percentage of time that the resource has
left for processing new function blocks, should they be configured.
1.11 BLOCK_ERR
The BLOCK_ERR of the resource block will reflect the following causes:
Device Fault State Set – When FAULT_STATE is active.
Simulate Active – When the Simulate jumper is ON.
Out of Service – When the block is in O/S mode.
1.12 Supported Modes
O/S, IMAN and AUTO
-
Page 7
Parameter
ST_REV
TAG_DESC
STRATEGY
ALERT_KEY
1.13 Resource Block Parameter List, Fieldbus Foundation
Rel.
Description Type Store
Index
Is incremented each time that there is a change in a static
1
parameter in the physical block.
Tag name of the block. This parameter must be unique in the
2
configuration.
This can be used to group a Function Block. It is a user sup
3
plied parameter for identification purpose.
4 Alert keys
Un-
signed
SRC 2 RO 0
16
-
OCTET_
STRING
signed
SRC 32 R/W »«
Un-
SRC 2 R/W 0
16
Un-
signed 8SRC 1 R/W 0
Size
byte
RO /
Min. Max. Default
R/W
MODE_BLK
BLOCK_ERR
RS_STATE
TEST_RW
DD_RESOURCE
MANUFAC_ID
DEV_TYPE
DEV_REV
DD_REV
GRANT_DENY
HARD_TYPES
RESTART
FEATURES
FEATURE_SEL
CYCLE_TYPE
CYCLE_SEL
MIN_CYLCE_T
MEMORY_SIZE
NV_CYCLE_T
FREE_SPACE
FREE_TIME
SHED_RCAS
SHED_ROUT
5 Block running mode DS-69 Mix 4 *
6 Block errors
BIT_
STRING
D 2 RO 0
1,1,
17,16
Un-
7 State of the function block application state machine
signed 8D 1 RO 0
8 Read/write test parameter used only for conformance testing DS-85 D 112 R/W 0..0
String identifying the tag of the resource which contains the
9
Device Description for this resource.
Enumeration; controlled by FF
10
Manufacturer identification number - used by an interface
device to locate the DD file for the resource.
Manufacturer’s model number associated with the resource -
11
used by interface devices to locate the DD file for the resource.
Manufacturer revision number associated with the resource
12
- used by an interface device to locate the DD file for the
resource.
Revision of the DD associated with the resource - used by an
13
interface device to locate the DD file for the resource.
VISIBLE_
STRING
Un-
signed
32
Un-
signed
16
Un-
signed
8
Un-
signed
8
SRC 32 RO » »
SRC 4 RO
SRC 2 RO
SRC 1 RO
SRC 1 RO
WIKA
0x00ec
0x03
0x01
Access Permissions. Options for controlling access of host
14
computer and local control panels to operating, tuning and
DS-70 SRC 2 R/W 0
alarm parameters of the block.
15 The types of hardware available as channel numbers.
BIT_
STRING
SRC 2 RO 0
1: Run,
2: Restart resource,
3: Restart with defaults,
16
4: Restart processor
Allows a manual restart to be initiated. Several degrees of
Un-
signed
8
D 1 R/W 1
restart are possible.
-
-
BIT_
STRING
BIT_
STRING
BIT_
STRING
BIT_
STRING
Un-
signed
32
Un-
signed
16
Un-
signed
32
Floating
Point
Floating
Point
Un-
signed
32
Un-
signed
32
SRC 2 RO 0
SRC 2 RW 0
SRC 2 RO 0xC000
SRC 2 ** 0xC000
SRC 4 RO 0
SRC 2 RO 0
SRC 4 RO 0
D 4 RO 0.0
D 4 RO 0.0
SRC 4 R/W 640000
SRC 4 R/W 640000
17 Used to show supported resource block options.
18 Used to select resource block options.
Identifies the block execution methods available for this
19
resource
20 Used to select the block execution method for this resource.
Time duration of the shortest cycle interval of which the
21
resource is capable.
Available configuration memory in the empty resource. To be
22
checked before attempting a download.
Interval between writing copies of NV parameters to non-vola
23
tile memory. Zero means never.
Percent of memory available for further configuration. Zero in a
24
preconfigured resource.
Percent of the block processing time that is free to process
25
additional blocks.
Time duration at which to give up on computer writes to func
26
tion block RCas locations.
ms time duration at which to give up on computer writes to
27
function block ROut locations.
7
Page 8
8
Parameter
FAULT_STATE
SET_FSTATE
CLR_FSTATE
MAX_NOTIFY
Rel.
Description Type Store
Index
Active E D Condition set by loss of communication to an out
put block, failure promoted to an output block or a physical
28
contact. When Fault State condition is set, Then output func
-
-
tion blocks will perform their FSAFE actions.
Allows the fault state condition to be manually initiated by
29
selecting Set.
Writing a Clear to this parameter will clear the device fault state
30
if the field condition, if any, has cleared.
31 Maximum number of unconfirmed notify messages possible.
Size
RO /
byte
Min. Max. Default
R/W
Un-
signed
N 1 RO 1
8
Un-
signed
D 1 R/W 1
8
Un-
signed
D 1 R/W 1
8
Un-
signed 8SRC 1 RO 8
LIM_NOTIFY
CONFIRM_TIME
WRITE_LOCK
UPDATE_EVT
BLOCK_ALM
ALARM_SUM
ACK_OPTION
WRITE_PRI
Maximum number of unconfirmed alert notify messages
32
allowed.
Un-
signed
8
SRC 1 R/W 8
Un-
33 Ms The minimum time between retries of alert reports.
If set, no writes from anywhere are allowed, except to clear
34
WRITE_LOCK. Block inputs will continue to be updated.
signed 32SRC 4 R/W 640000
Un-
signed
SRC 1 R/W 1
8
35 This alert is generated by any change to the static data DS-73 D 14 RO
The block alarm is used for all configuration, hardware, con
nection failure or system problems in the block. The cause
of the alert is entered in the sub code field. The first alert to
become active will set the Active status in the Status attribute.
36
As soon as the Unreported status is cleared by the alert report
-
DS-72
D 13 R/W
ing task, another block alert may be reported without clearing
the Active status, if the sub code
has changed.
The current alert status, unacknowledged states, unreported
states, and disabled states of the alarms associated with the
37
function
DS-74 Mix 8 R/W 0,0,0,0
block.
0: Auto ACK Disable
1: Auto ACK Enable
38
Selection of whether alarms associated with the block will be
BIT_
STRING
SRC 2 R/W 0
automatically acknowledged.
Un-
39 Priority of the alarm generated by clearing the write lock.
signed 8SRC 1 R/W 0
0,0,0,
0,0,9,0
0,0,0,
0,0,0,
8,0,0
WRITE_ALM
ITK_VER_NR
40 This alert is generated if the write lock parameter is cleared. DS-72 D 13 R/W
ITK Version Number
41
This parameter informs which ITK version is the device (for certified devices only).
Un-
signed
16
SRC 2 RO 4
0,0,0,
0,0,0,
10,0,0
Page 9

2.0 The Transducer Block
2.1 The Transducer Block
contains all of the manufacturer-specific parameters that define how the T53 Transmitter
functions. Selections such as setting of input type, engineering units, defining the dual func
tionality when using the dual input, and so forth, are performed in the Transducer Block.
The transducer block in T53 allows the user to select a large number of sophisticated func
tions. Therefore, the configuration of the transmitter must be carried out with the greatest
possible care.
2.2 The data of the Transducer Block Parameter List are grouped as follows:
2.8 AI_TRANSDUCER Block
2.8.1 Sensor characterising parameters
2.8.2 RTD / resistor specific parameters
2.8.3 Thermocouple specific parameters
2.8.4 Output conditioning parameters
2.8.5 Output parameters
2.8.6 Diagnostic parameters
2.8.7 Sensor error detection parameters
2.8.9 Sensor calibration parameters
2.9 PR_CUST_LIN Block
2.9.2 Linear Interpolation Linearisation
2.9.4 Custom Polynomial linearisation
2.10 PR_CUST_PRIV Block
2.10.1 PR_CUST_PRIV Block
All product-specific parameters are set off in grey background in the TB Parameter List. In
order to configure these parameters, the files mentioned in the introduction must be avail
able to the application software.
-
-
-
2.3 Default configuration
WIKA delivers the transmitters with at default configuration which will suit the customer’s
demand in many cases. The configuration task has thus been reduced considerably.
The individual default configurations are shown in the TB Parameter List, but in short the
default configuration is as follows:
Pt100 acc. to the standard EN 60 751 (2.8.1 LIN_TYPE, value 102)
°C (2.8.1 PRIMARY_VALUE_UNIT, value 1001)
3-wire connection (2.8.2 SENSOR_CONNECTION, value 1)
Only sensor 1 (2.8.4 SENSOR_MEAS_TYPE, value 220)
No sensor error detection (2.8.7 SENSOR_WIRE_CHECK_1, value 3)
2.4 Your application set up.
In the Transducer block all parameters marked R / W can be adapted to suit any measurement in temperature, ohm or mV. The way of presenting the file data mentioned in the
introduction varies greatly from one piece of application software to the other. Some pro
grams show drop down menus in which the parameters must be selected via text lines, while
other programs require the user to type in the numerical value of the parameter selection.
-
9
Page 10
10
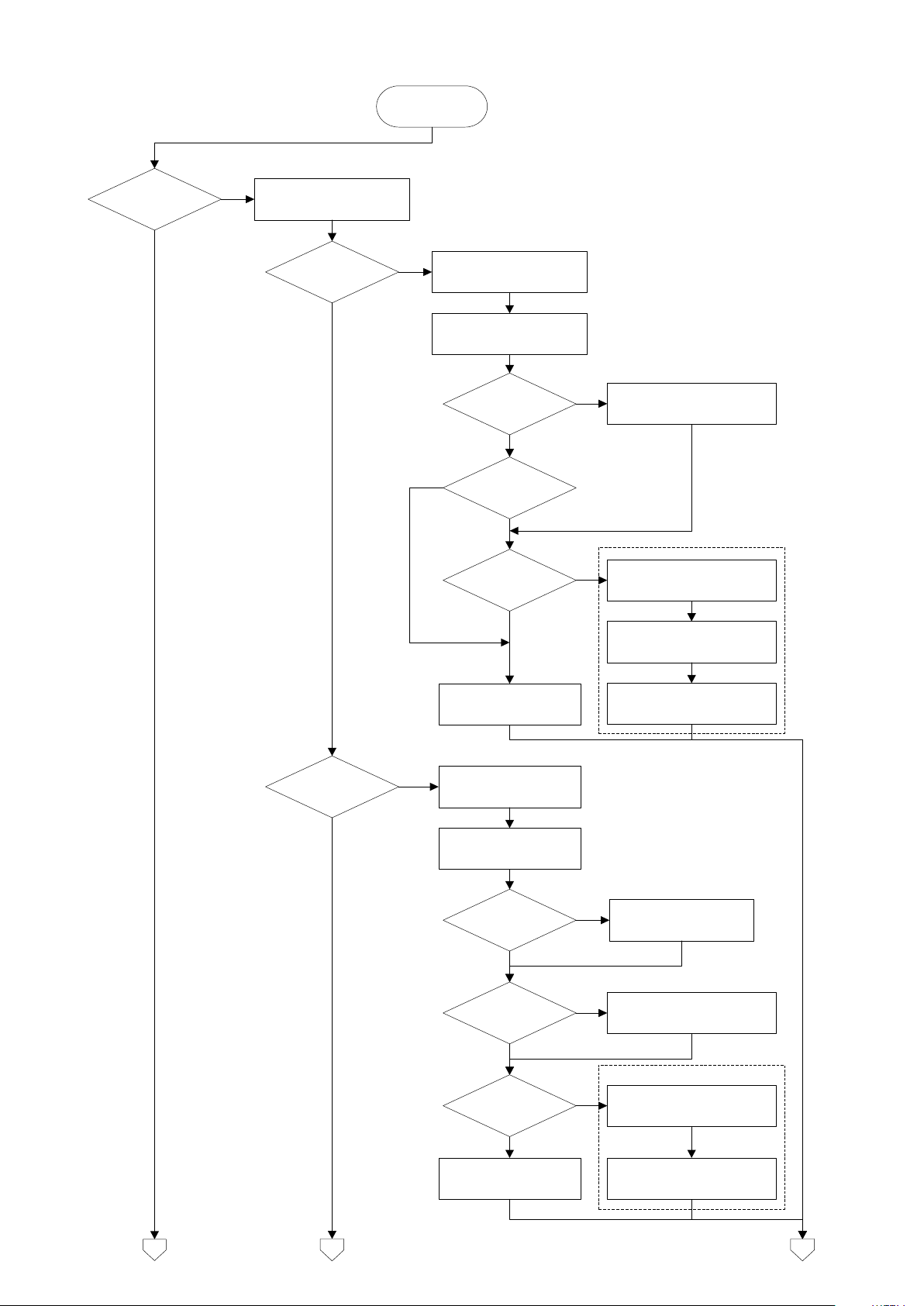
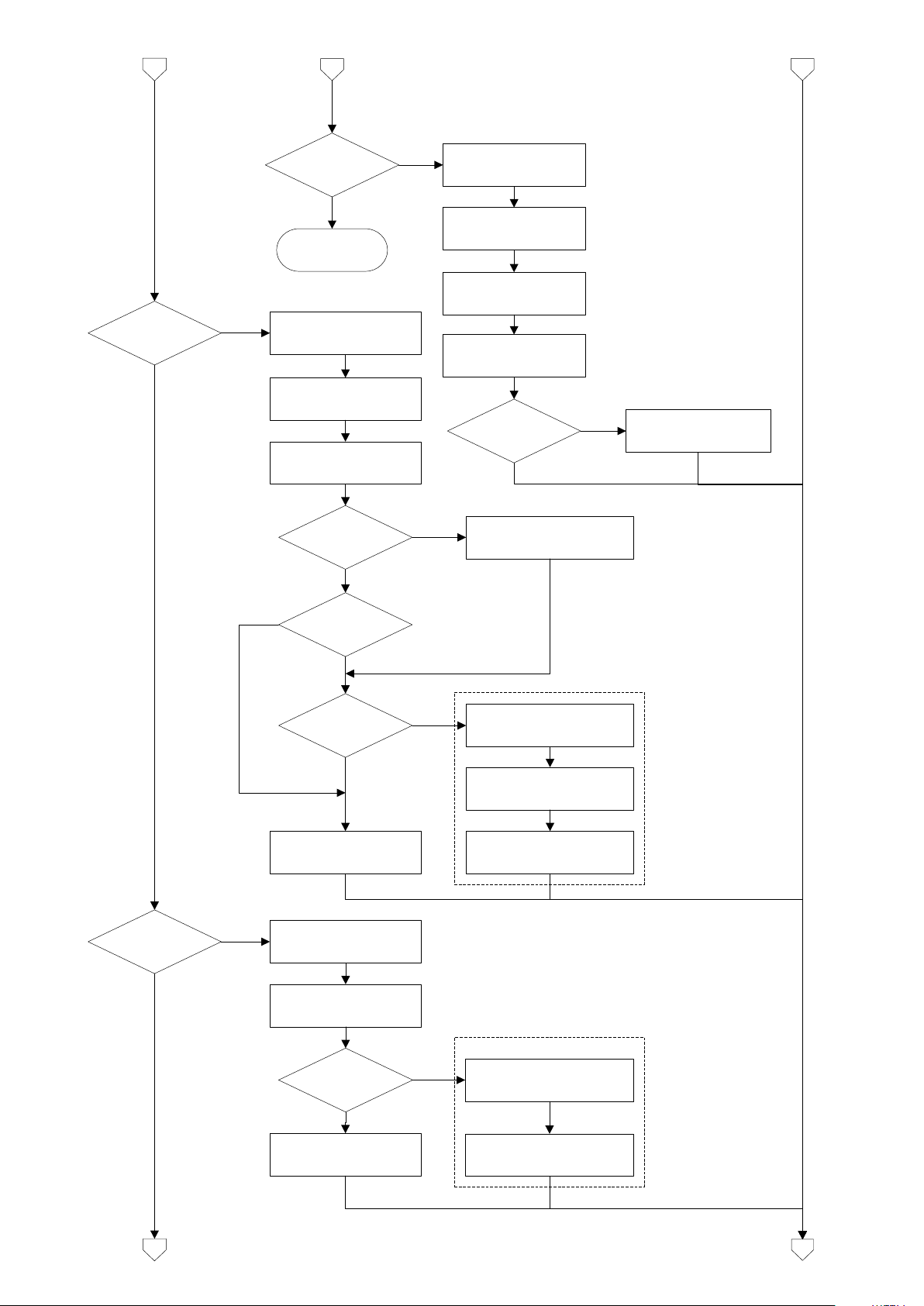
2.5 AI_Transducer Block Configuration Flowchart
Configure T53
Transducer block
Temperature
measurement?
Set
PRIMARY_VALUE_UNIT
to F,R,C or K
RTD?
Thermo-couple?
Set LIN_TYPE to RTD
type (Pt100 etc.)
4-wire?
Set
SENSOR_CONNECTION
to 2-,3- or 4-wire.
Enter wire resistance in
Ohms for both wires to
COMP_WIRE1
2-wire?
Enter wire resistance in
Ohms for both wires to
COMP_WIRE2
YES
Enter setup for sensor 2:
YES
Set LIN_TYPE to TC
type (TC K etc.)
Set RJ_TYPE (internal,
external etc.)
Set LIN_TYPE_2 to RTD
type (Pt100 etc.)
Set
SENSOR_MEAS_TYPE
to single sensor type
Dual sensor?
Enter setup for sensor 2:
Set LIN_TYPE_2 to TC type
(TC K etc.)
Enter RJ temperature to
EXTERNAL_RJ_VALUE
RJ_TYPE
external?
YES
YES
RJ_TYPE
ext. 2.wire?
Enter wire resistance in
Ohms for both wires to
COMP_WIRE_RJ
YES
YES
YES
2c
Set
SENSOR_MEAS_TYPE
to single sensor type
2b
2a
Set SENSOR_MEAS_TYPE
to dual sensor type
Set SENSOR_MEAS_TYPE
to dual sensor type
YES
Dual sensor?
YES
Page 11
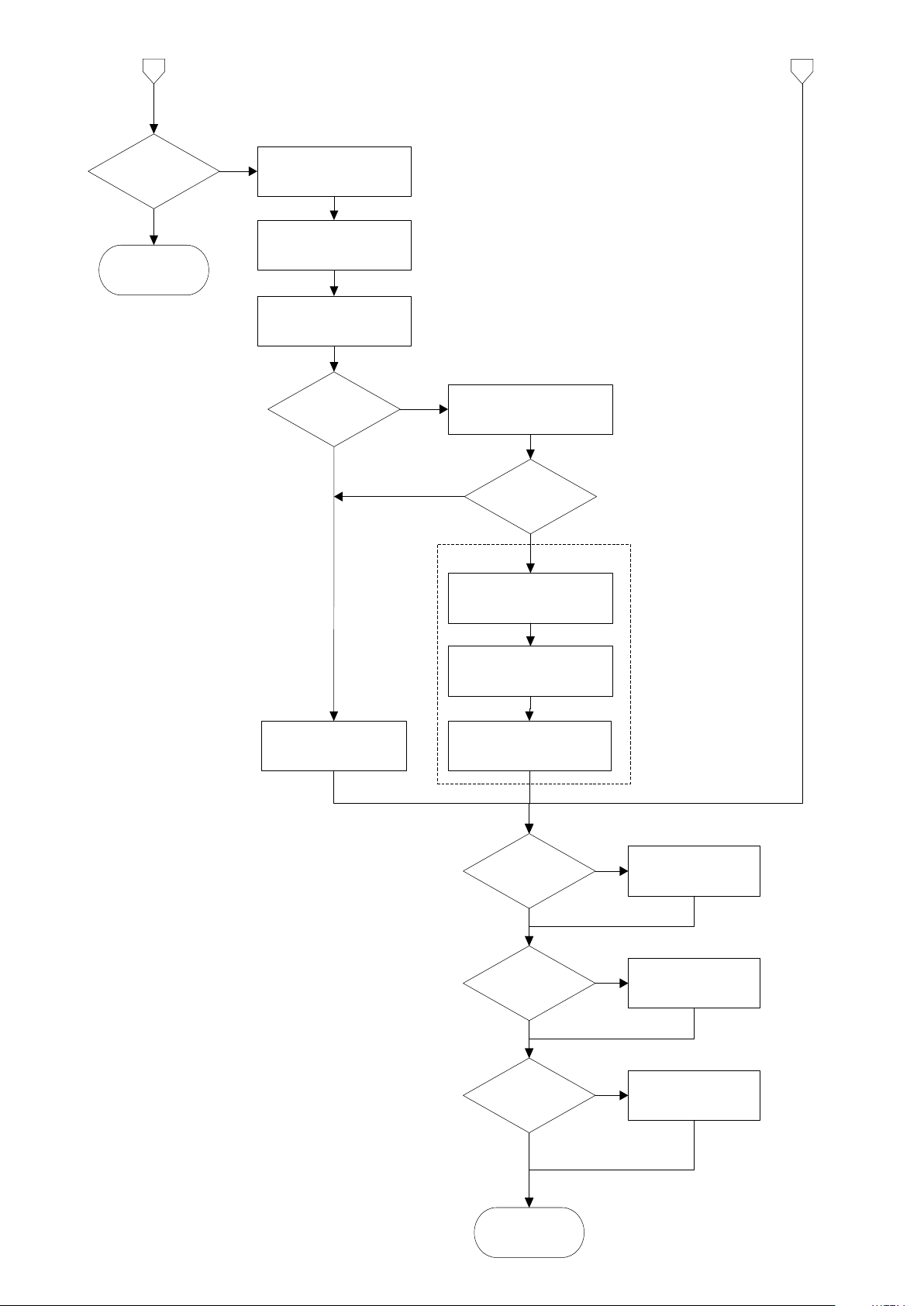
2c
RTD+Thermo-
couple?
2b
Set LIN_TYPE to TC
type (TC K etc.)
Set RJ_TYPE
(internal, external etc.)
Set
SENSOR_MEAS_TYPE
to dual sensor type
Set LIN_TYPE_2 to
RTD type (Pt100 etc.)
Enter RJ temperature to
EXTERNAL_RJ_VALUE
RJ_TYPE
external?
YES
YES
2a
Error! (try again)
Resistance?
Set
PRIMARY_VALUE_UNIT
to Ohm or kOhm
Set
SENSOR_CONNECTION
to 2-,3- or 4-wire.
Dual sensor?
Enter wire resistance in
Ohms for both wires to
COMP_WIRE1
2-wire?
YES
Enter setup for sensor 2:
YES
Set LIN_TYPE_2 to
”no linearisation” or
”linearisation table”
Set
SENSOR_MEAS_TYPE
to single sensor type
Set LIN_TYPE to
”no linearisation” or
”linearisation table”
Set SENSOR_MEAS_TYPE
to dual sensor type
Enter wire resistance in
Ohms for both wires to
COMP_WIRE2
Millivolts?
Set
PRIMARY_VALUE_UNIT
to V,mV or µV
Set LIN_TYPE to
”no linearisation” or
”linearisation table”
Dual sensor?
Set LIN_TYPE_2 to
”no linearisation” or
”linearisation table”
Set
SENSOR_MEAS_TYPE
to single sensor type
Set SENSOR_MEAS_TYPE
to dual sensor type
3b
3a
Enter setup for sensor 2:
YES
YES
YES
4-wire?
YES
11
Page 12
12
3b3a
Potentiometer?
Set
PRIMARY_VALUE_UNIT
to ”%”
Set
SENSOR_CONNECTION
to 3- or 4-wire.
Enter wire resistance in
Ohms for 2 wires to
COMP_WIRE1
3-wire?
YES
Enter setup
for sensor 2:
YES
Set LIN_TYPE_2 to
”no linearisation” or
”linearisation table”
Set
SENSOR_MEAS_TYPE
to single sensor type
Set LIN_TYPE to
”no linearisation” or
”linearisation table”
Set SENSOR_MEAS_TYPE
to dual sensor type
Enter wire resistance in
Ohms for 2 wires to
COMP_WIRE2
Error! (try again)
Finished.
Transducer block
is configured!
Enter Custom RTD
polynomial values
Linearisation
table?
Custom RTD?
Enter linearisation
table values
YES
YES
Enter Custom TC
polynomial values
Custom TC?
YES
Dual sensor?
YES
Page 13
2.6 - Transducer Block Examples Setup
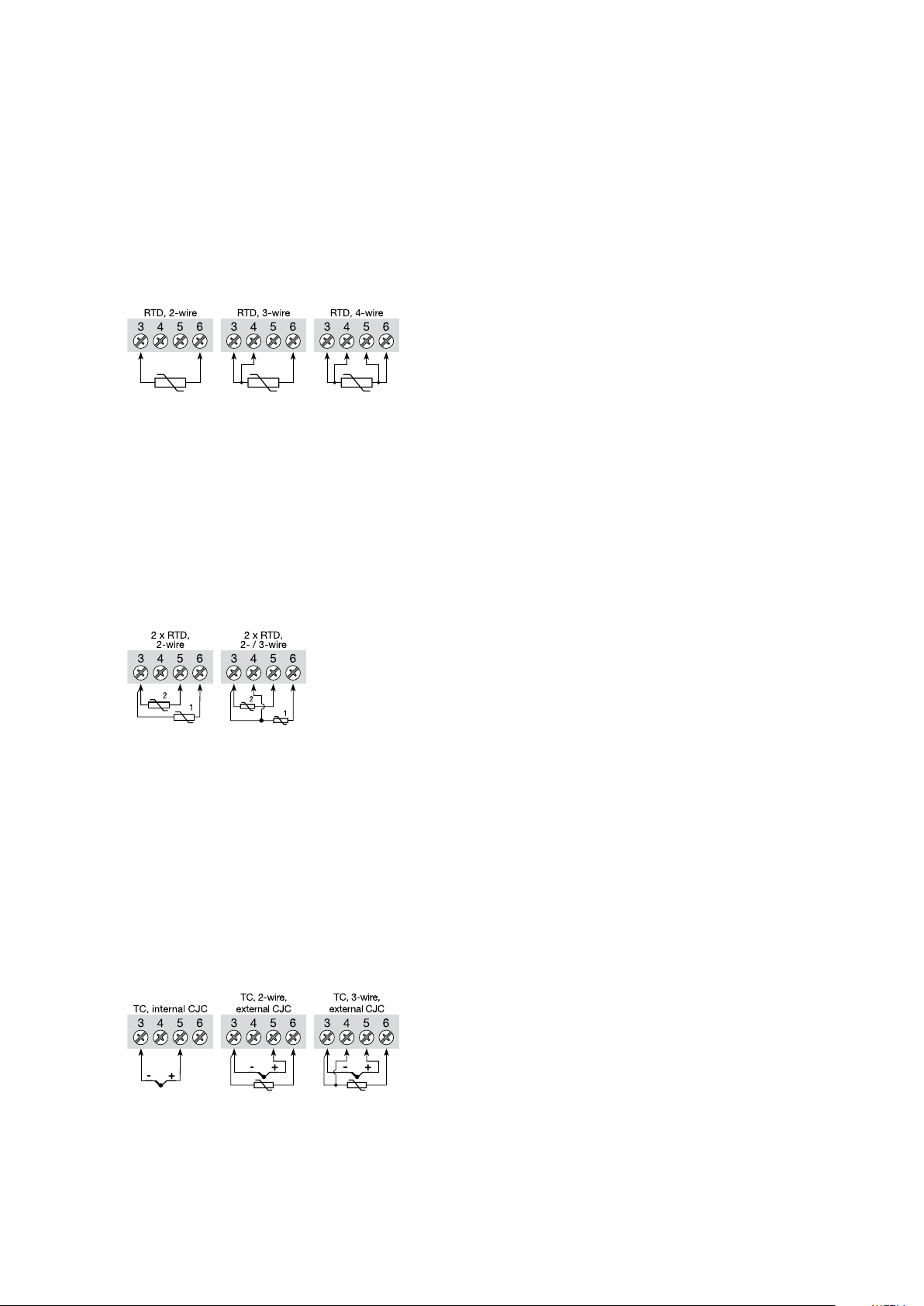
2.6.1 Measurement of RTD with one sensor:
PRIMARY_VALUE_UNIT . . . . = K, °C, °F or °R
LIN_TYPE. . . . . . . . . . . . . . . . = Any RTD
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = PV = SV_1, SV_2 not available
SENSOR_CONNECTION . . . . = 2-, 3- or 4-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
2.6.2 Measurement of RTD with two sensors:
PRIMARY_VALUE_UNIT . . . . = K, °C, °F or °R
LIN_TYPE. . . . . . . . . . . . . . . . = Any RTD
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = 2- or 3-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
. . . . . . . . . . . . . . = N/A (ignored in setup check)
. . = N/A (ignored in setup check)
. . . . . . . . . . . . . . = Any RTD
. . = Default set to 2-wire
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
2.6.3 Measurement of thermocouple with one sensor:
PRIMARY_VALUE_UNIT . . . . = K, °C, °F or °R
LIN_TYPE. . . . . . . . . . . . . . . . = Any TC
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = PV = SV_1, SV_2 not available
SENSOR_CONNECTION . . . . = N/A (ignored in setup check)
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = No Reference Junction, Internal, External (constant value),
Sensor 2-wire or Sensor 3-wire
Connections:
. . . . . . . . . . . . . . = N/A (ignored in setup check)
. . = N/A (ignored in setup check)
13
Page 14

14
2.6.4 Measurement of thermocouple with two sensors:
PRIMARY_VALUE_UNIT . . . . = K, °C, °F or °R
LIN_TYPE. . . . . . . . . . . . . . . . = Any TC
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = N/A (ignored in setup check)
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = No RJ, Internal, External (constant value) or Sensor 2-wire
Connections:
2.6.5 Measurement of combined sensors (Sensor 1 = TC and Sensor 2 = RTD):
PRIMARY_VALUE_UNIT . . . . = K, °C, °F or °R
LIN_TYPE. . . . . . . . . . . . . . . . = Any TC
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = N/A (ignored in setup check)
SENSOR_CONNECTION_2
RJ_TYPE
Connections:
. . . . . . . . . . . . . . = Any TC
. . = N/A (ignored in setup check)
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
. . . . . . . . . . . . . . = Any RTD
. . = 2- or 3-wire
. . . . . . . . . . . . . . . . = No Reference Junction, Internal, External (constant value)
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
2.6.6 Measurement of resistance (linear) with one sensor:
PRIMARY_VALUE_UNIT . . . . = Ohm or kOhm
LIN_TYPE. . . . . . . . . . . . . . . . = No linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = PV = SV_1, SV_2 not available
SENSOR_CONNECTION . . . . = 2-, 3- or 4-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
. . . . . . . . . . . . . . = N/A (ignored in setup check)
. . = N/A (ignored in setup check)
Page 15

2.6.7 Measurement of resistance (linear) with two sensors:
PRIMARY_VALUE_UNIT . . . . = Ohm or kOhm
LIN_TYPE. . . . . . . . . . . . . . . . = No linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = 2- or 3-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
2.6.8 Measurement of potentiometer (linear) with one sensor:
PRIMARY_VALUE_UNIT . . . . = %
LIN_TYPE. . . . . . . . . . . . . . . . = No linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = PV = SV_1, SV_2 not available
SENSOR_CONNECTION . . . . = 3- or 4-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
. . . . . . . . . . . . . . = No linearisation
. . = Default set to 2-wire
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
. . . . . . . . . . . . . . = N/A (ignored in setup check)
. . = N/A (ignored in setup check)
2.6.9 Measurement of potentiometer (linear) with two sensors:
PRIMARY_VALUE_UNIT . . . . = %
LIN_TYPE. . . . . . . . . . . . . . . . = No linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = Default set to 3-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
. . . . . . . . . . . . . . = No linearisation
. . = Default set to 3-wire
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
15
Page 16

16
2.6.10 Measurement of voltage (linear) with one sensor:
PRIMARY_VALUE_UNIT . . . . = µV, mV or V
LIN_TYPE. . . . . . . . . . . . . . . . = No linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = PV = SV_1, SV_2 not available
SENSOR_CONNECTION . . . . = N/A (ignored in setup check)
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
2.6.11 Measurement of voltage (linear) with two sensors:
PRIMARY_VALUE_UNIT . . . . = µV, mV or V
LIN_TYPE. . . . . . . . . . . . . . . . = No linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = N/A (ignored in setup check)
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
. . . . . . . . . . . . . . = N/A (ignored in setup check)
. . = N/A (ignored in setup check)
. . . . . . . . . . . . . . = No linearisation
. . = N/A (ignored in setup check)
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
2.6.12 Measurement of 2 potentiometers (with Linear interpolation linearisation):
PRIMARY_VALUE_UNIT . . . . = %
LIN_TYPE. . . . . . . . . . . . . . . . = Table Linearisation
LIN_TYPE_2
SENSOR_MEAS_TYPE . . . . . = Anything, but not "PV = SV_1, SV_2 not available"
SENSOR_CONNECTION . . . . = Default set to 3-wire
SENSOR_CONNECTION_2
RJ_TYPE . . . . . . . . . . . . . . . . = N/A (ignored in setup check)
Connections:
The coordinates (x,y) describing the linear interpolation linearisation must be entered in PR_
CUST_LIN Block (PA Slot 4). See 2.9.2 Linear Interpolation Linearisation, Paramter List for
further details.
Example:
The coordinates for converting the signal from a logarithmic potentiometer to a linear signal.
TAB_ACTUAL_NUMBER = 10 (number of linearisation points to follow up to max 50)
TAB_XY_VALUE1 = 0,0; -100
TAB_XY_VALUE2 = 0,1; 0
TAB_XY_VALUE3 = 0,2; 100
TAB_XY_VALUE4 = 0,4; 200
. . . . . . . . . . . . . . = Table Linearisation (same table as sensor 1)
. . = Default set to 3-wire
Connections with two sensors
can be configured for
2 measurements, difference,
average or redundancy
Page 17

TAB_XY_VALUE5 = 0,8; 300
TAB_XY_VALUE6 = 1,6; 400
TAB_XY_VALUE7 = 3,2; 500
TAB_XY_VALUE8 = 6,4; 600
TAB_XY_VALUE9 = 12,8; 700
TAB_XY_VALUE10 = 25,6; 800
(Output will readout 325% with 1,0% potentiometer value)
2.6.13 Measurement of TC (with Custom Polynomial Linearisation) on sensor 1
PRIMARY_VALUE_UNIT = K, °C, °F or °R
LIN_TYPE = Custom defined TC
LIN_TYPE_2 = N/A (ignored in setup check)
SENSOR_MEAS_TYPE = PV = SV_1, SV_2 not available
SENSOR_CONNECTION = N/A (ignored in setup check)
SENSOR_CONNECTION_2 = N/A (ignored in setup check)
RJ_TYPE = No Reference Junction, Internal, External (constant value) or
Sensor 2-wire or Sensor 3-wire
Connections:
Now enter the Custom TC parameters in PR_CUST_LIN Block (PA Slot 4). See 2.9.4 Custom
Polynomial Linearisation, Parameter List for further details.
Remember to enter values for the RJ polynomial if RJ_TYPE is any value other than “No ref
erence Junction”.
-
Example:
The parameters and coefficients for converting a special TC to a linear temperature signal.
CUSTOM_TC_NAME = Custom TC Example
CUSTOM_TC_POLY_COUNT = 5
CUSTOM_TC_MIN_IN = -6500.0
CUSTOM_TC_MIN_OUT = -100.0
CUSTOM_TC_MAX_OUT = 1200.0
max. input
CUSTOM_TC_POLY_X
CUSTOM_TC_POLY_1 -3200.0 -3.84E-13 -5.65E-9 -3.36E-5 -6.10E-2 -8.44E1
CUSTOM_TC_POLY_2 3500.0 -8.13E-15 7.29E-11 -4.18E-7 2.53E-2 -1.08E-2
CUSTOM_TC_POLY_3 10000.0 -1.35E-15 1.50E-11 1.41E-7 2.26E-2 4.18
CUSTOM_TC_POLY_4 30000.0 3.49E-18 2.19E-12 -1.53E-7 2.68E-2 -9.26
CUSTOM_TC_POLY_5 70000.0 6.27E-17 -8.76E-12 5.34E-7 8.69E-3 1.65E2
limit in µV
for POLY_X
4th degree
coefficient
for POLY_X
3th degree
coefficient
for POLY_X
2th degree
coefficient
for POLY_X
1st degree
coefficient
for POLY_X
0 degree
coefficient
for POLY_X
3th degree
coefficient
CUSTOM_TC_RJ_POLY -1.11E-4 2.65E-2 3.94E1 3.94E-1
2th degree
coefficient
1st degree
coefficient
0 degree
coefficient
A TC input of 5000 µV and an RJ temperature of 25ºC will make POLY_3 the active and the
output will be:
URJ = -3.94
-1
+ 3.94 * 101 * 25 + 2.65 * 10-2 * 252 - 1.11 * 10-4 * 253 = 1000 µV
10
*
This voltage is to be added to the TC voltage (5000 + 1000), and the resulting temperature will be:
4.18 + 2.26 * 10
-2
6000 + 1.41 * 10
*
-7
6000
*
2
+ 1.50
*
10
-11
6000
*
3
- 1.35
*
10
-15
6000
*
4
= 146.3 °C
See 2.9.3 Custom polynomial linearisation, Description for formula and further details.
17
Page 18

18
RJ
temp.
Intern
temp.
INTERN_TEMP
EXTERNAL_RJ_VALUE
LIN
R.J. Comp.
RJ_TYPE
Input
INPUT1
INPUT2
T1
T2
Linearisation
+
+ LIN
LIN
RJ_TEMP
(none)
Arithmetic
+
+
+,-, redund.
SECONDARY_VALUE_1
SECONDARY_VALUE_2
PRIMARY_VALUE
SENSOR_MEAS_TYPE
BIAS_1
BIAS_2
LIN
LIN_TYPE_1/2
SENSOR_CONNECTION_1/2
COMP_WIRE_1/2
Process
calibration
+
+
Min/Max hold
min/
max
min/
max
MIN_SENSOR_VALUE_1/2
MAX_SENSOR_VALUE_1/2
RTDX_FACTOR_1/2
CAL_POINT_HI_1/2
CAL_ACTUAL_HI_1/2
CABLE_RES1/2
RJ
RJ_COMP_WIRE
SENSOR_WIRE_CHECK_1/2
SENSOR_WIRE_CHECK_RJ
CUSTOM_TC_..
TAB_X_Y_VALUE
CUSTOM_RTD_..
(Channel_4)
(Channel_1)
(Channel_2)
(Channel_3)
AI_TRANSDUCER and PR_CUST_LIN
schematic
CAL_POINT_LO_1/2
CAL_ACTUAL_LO_1/2
2.7 AI_Transducer and PR_CUST_LIN Block, Schematic
Page 19

2.8 AI_TRANSDUCER Block Parameter List
2.8.1 Sensor characterising parameters
Rel.
Parameter
PRIMARY_VALUE_UNIT
LIN_TYPE
UPPER_SENSOR_LIMIT
LOWER_SENSOR_LIMIT
LOWER_SENSOR_LIMIT_2
UPPER_SENSOR_LIMIT_2
LIN_TYPE_2
Index FFDescription Type Store
Selects the unit code of the PRIMARY_VALUE and
other values.
1000 = K (Kelvin)
1001 = °C (degree Celsius)
1002 = °F (degree Fahrenheit)
1003 = Rk (Rankine)
14
1240 = V (volt)
1243 = mV millivolt
1244 = µV microvolt
1281 = Ohm Ohm
1284 = kOhm kiloOhm
1342 = % (percent)
Select the type of sensor 1:
0 = no linearisation
1 = linearisation table
100 = RTD Pt10 a = 0.003850 (IEC 60751)
101 = RTD Pt50 a = 0.003850 (IEC 60751)
102 = RTD Pt100 a = 0.003850 (IEC 60751))
103 = RTD Pt200 a = 0.003850 (IEC 60751))
104 = RTD Pt500 a = 0.003850 (IEC 60751))
105 = RTD Pt1000 a = 0.003850 (IEC 60751)
106 = RTD Pt10 a = 0.003916 (JIS C1604-81)
107 = RTD Pt50 a = 0.003916 (JIS C1604-81)
108 = RTD Pt100 a = 0.003916 (JIS C1604-81)
122 = RTD Ni50 a = 0.006180 (DIN 43760)
123 = RTD Ni100 a = 0.006180 (DIN 43760)
124 = RTD Ni120 a = 0.006180 (DIN 43760)
125 = RTD Ni1000 a = 0.006180 (DIN 43760)
126 = RTD Cu10 a = 0.004270
127 = RTD Cu100 a = 0.004270
18
128 = TC Type B, Pt30Rh-Pt6Rh (IEC 584)
129 = TC Type C (W5), W5-W26Rh (ASTM E 988)
130 = TC Type D (W3), W3-W25Rh (ASTM E 988)
131 = TC Type E, Ni10Cr-Cu45Ni (IEC 584)
133 = TC Type J, Fe-Cu45Ni (IEC 584)
134 = TC Type K, Ni10Cr-Ni5 (IEC 584)
135 = TC Type N, Ni14CrSi-NiSi (IEC 584)
136 = TC Type R, Pt13Rh-Pt (IEC 584)
137 = TC Type S, Pt10Rh-Pt (IEC 584)
138 = TC Type T, Cu-Cu45Ni (IEC 584)
139 = TC Type L, Fe-CuNi (DIN 43710)
140 = TC Type U, Cu-CuNi (DIN 43710)
240 = Custom-defined TC
241 = Custom-defined RTD
242 = Custom-defined RTD PtX a=0.003850
243 = Custom-defined RTD NiX a=0.006180 (X factor of Ni1)
244 = Custom-defined RTD CuX a=0.004270 (X factor of Cu1)
245 = Custom-defined RTD PtX a=0.003916 (X factor of Pt1)
Physical upper limit function of sensor1 (e.g. Pt 100 =
850°C) and input range.
21
The unit of
VALUE_UNIT.
Physical lower limit function of sensor1 (e.g. Pt 100 =
-200°C) and input range.
22
The unit of LOWER_SENSOR_LIMIT is the PRIMARY_
VALUE_UNIT.
Physical lower limit function of sensor2 (e.g. Pt 100 =
-200°C) and input range.
39
The unit of LOWER_SENSOR_LIMIT is the PRIMARY_
VALUE_UNIT.
Physical upper limit function of sensor2 (e.g. Pt 100 =
+850°C) and input range.
40
The unit of UPPER_SENSOR_LIMIT is the PRIMARY_
VALUE_UNIT.
Select the type of sensor 2:
41
See LIN_TYPE for selection and supported types
UPPER_SENSOR_LIMIT is the PRIMARY_
Size
RO /
byte
Un-
signed
signed
(X factor of Pt1)
Float N 4 RO 850
Float N 4 RO -200
Float N 4 RO -200
Float N 4 RO 850
signed
SRC 2 R/W
16
Un-
SRC 1 R/W
8
Un-
SRC 1 R/W 102
8
Min. Max. Default
R/W
1001
(°C)
102
(Pt100)
19
Page 20

20
AI_TRANSDUCER Block Parameter List
2.8.2 RTD / Resistor specific parameters
Rel.
Parameter
SENSOR_CONNECTION
COMP_WIRE1
COMP_WIRE2
SENSOR_CONNECTION_2
CABLE_RES1
CABLE_RES2
RTDX_FACTOR_1
RTDX_FACTOR_2
Index FFDescription Type Store
Connection to sensor 1, select for 2-, 3- and 4-wire
connection. Ignored if sensor 1 is not a resistive sensor.
Defined codes:
35
0 = 2 wires
1 = 3 wires
2 = 4 wires
Value in OHM to compensate line resistance when
36
Sensor 1 is a resistive sensor, connected with 2 wires.
Value in OHM to compensate line resistance when
37
Sensor 2 is a resistive sensor, connected with 2 wires.
Connection to sensor 2, select for 2-, 3- and 4-wire
connection. Ignored if sensor 2 is not a resistive sensor.
38
Defined codes:
0 = 2 wires
1 = 3 wires
For 3- or 4-wire resistance measurements.
Indicates the measured cable resistance in the wire
63
connected to terminal 3. For 3-wire measurements it is
multiplied by 2
For 4-wire resistance measurements.
64
Indicates the measured cable resistance in the wire
connected to terminal 6.
Indicates the X factor for custom defined PtX, NiX, CuX
65
for LIN_TYPE
Indicates the X factor for custom defined PtX, NiX, CuX
66
for LIN_TYPE_2
Size
RO /
byte
Un-
signed
Float SRC 4 R/W 0 100 0
Float SRC 4 R/W 0 100 0
signed
Float D 4 RO 0,0
Float D 4 RO 0,0
signed
signed
SRC 1 R/W 1
8
Un-
SRC 1 R/W 0
8
Un-
SRC 2 R/W 100
16
Un-
SRC 2 R/W 100
16
Min. Max. Default
R/W
2.8.3 Thermocouple specific parameters
Rel.
Parameter
RJ_TEMP
RJ_TYPE
EXTERNAL_RJ_VALUE
RJ_COMP_WIRE
Index FFDescription Type Store
Reference junction temperature. The unit of RJ_TEMP
is the PRIMARY_VALUE_UNIT. If PRIMARY_VALUE_
32
UNIT is no temperature unit (e.g. mV) RJ_TEMP is
stated in °C.
Select reference junction from internal to fixed value.
Ignored for sensors which are not thermocouple types.
Defined codes:
0 = No reference: Compensation is not used (e.g. for
TC type B).
1 = Internal: Reference junction temperature is
measured by the device itself, via
an internally mounted sensor.
2 = External: The fixed value EXTERNAL_RJ_
33
VALUE is used for compensation.
The reference junction must be kept
at a constant temperature (e.g. by a
reference junction thermostat).
3 = Sensor, 2-w.: Reference junction temperature is
measured by external 2-wire con nected Pt100 sensor.
4 = Sensor, 3-w: Reference junction temperature is
measured by external 3-wire con nected Pt100 sensor.
Fixed temperature value of an external reference
junction. The unit of EXTERNAL_RJ_VALUE is the
34
PRIMARY_VALUE_UNIT. If PRIMARY_VALUE_UNIT is
no temperature unit (e.g. mV) EXTERNAL_RJ_VALUE is
stated in °C.
Value in OHM to compensate line resistance when
42
External RJ sensor, connected with 2 wires is used.
Size
RO /
byte
Float D 4 RO 0
Un-
signed
Float SRC 4 R/W
Float SRC 4 R/W 0 100 0
SRC 1 R/W 0
8
Min. Max. Default
R/W
-40
(°C)
135
(°C)
0
Page 21
AI_TRANSDUCER Block Parameter List
2.8.4 Output conditioning parameters
Rel.
Parameter
SENSOR_MEAS_TYPE
BIAS_1
BIAS_2
MAX_SENSOR_VALUE_1
MIN_SENSOR_VALUE_1
MAX_SENSOR_VALUE_2
MIN_SENSOR_VALUE_2
Index FFDescription Type Store
Mathematical function to calculate PRIMARY_VALUE
(PV).
Defined codes:
0: PV = SV_1
1: PV = SV_2
128: PV = SV_1 - SV_2 Difference
129: PV = SV_2 - SV_1 Difference
192: PV = ½ * (SV_1 + SV_2) Average
193: PV = ½ * (SV_1 + SV_2) Average, but SV_1 or
17
SV_2 if the other is wrong (input_fault_x
220: PV = SV_1, SV_2 not available. Used for single
sensor applications. If selected, Sensor 2 will
not be measured. All parameters exclusively
related to Sensor 2 are not available, and no
alarms will be generated for Sensor 2.
221: PV = SV_1, but SV_2 if SV_1 is wrong
(INPUT_FAULT_1
222: PV = SV_2, but SV_1 if SV_2 is wrong
(INPUT_FAULT_2
Bias that can be algebraically added to process value
19
of sensor 1, SV1.
The unit of BIAS_1 is the PRIMARY_VALUE_UNIT.
Bias that can be algebraically added to process value
20
of sensor 2, SV2.
The unit of BIAS_2 is the PRIMARY_VALUE_UNIT.
Holds the maximum SECONDARY_VALUE_1. The unit
28
is defined in
SECONDARY_VALUE_1.
Holds the minimum SECONDARY_VALUE_1. The unit is
29
defined in
SECONDARY_VALUE_1.
30 See. MAX_SENSOR_VALUE_1 Float N 4 R/W 0
31 See. MIN_SENSOR_VALUE_1 Float N 4 R/W 0
≠0)
≠0)
Size
RO /
byte
≠0)
Un-
signed
Float SRC 4 R/W 0
Float SRC 4 R/W 0
Float N 4 R/W 0
Float N 4 R/W 0
SRC 1 R/W 220
8
Min. Max. Default
R/W
2.8.5 Output parameters
Rel.
Parameter
PRIMARY_VALUE
SECONDARY_VALUE_1
SECONDARY_VALUE_2
INTERN_TEMP
Index FFDescription Type Store
13
15
16
45
Process value, function determined by SENSOR_
MEAS_TYPE of SECONDARY_VALUE_1/2.
The unit of PRIMARY_VALUE is the PRIMARY_VALUE_
UNIT.
FF Channel 1 Output. PA Channel 280
Process value connected to sensor 1 corrected by
BIAS_1. The unit of SECONDARY_VALUE_1 is the
PRIMARY_VALUE_UNIT.
FF Channel 2 Output, PA Channel 282
Process value connected to sensor 2 corrected by
BIAS_2. The unit of SECONDARY_VALUE_2 is the
PRIMARY_VALUE_UNIT.
FF Channel 3 Output, PA Channel 283
Internal electronics temperature. The unit of INTERN_
TEMP is the PRIMARY_VALUE_UNIT. If PRIMARY_
VALUE_UNIT is no temperature unit (e.g. mV) INTERN_
TEMP is stated in °C.
FF Channel 4 Output, PA Channel 341
Size
RO /
byte
DS-33 D 5 RO 0
DS-33 D 5 RO 0
DS-33 D 5 RO 0
DS-33 D 5 RO 0
Min. Max. Default
R/W
21
Page 22

22
2.8.6 Diagnostic parameters
Rel.
Parameter
INPUT_FAULT_GEN
INPUT_FAULT_1
INPUT_FAULT_2
RJ_FAULT
HW_ERROR
Index FFDescription Type Store
Input malfunction: Diagnosis object for errors that con
cern all values
0 = device OK
Bit:
23
0 = Rj error
1 = Hardware error
2 – 4 = reserved
5 – 7 = manufacturer-specific
Input malfunction: Diagnosis object for errors that con
cern SV_1
0 = Input OK
Bit:
0 = underrange
24
1 = overrange
2 = lead breakage
3 = short circuit
4 – 5 = reserved
6 – 7 = manufacturer-specific
Input malfunction: Diagnosis object for errors that con
cern SV_2
25
0 = Input OK
Bit definition see INPUT_FAULT_1
Input malfunction: Diagnosis object for errors that con
cern RJ sensor.
0 = Input OK
Bit:
43
0 = underrange
1 = overrange
2 = lead breakage
3 = short circuit
Diagnostic bit value indicating hardware status
0 = hardware OK
Bit:
0 = Input power supply error
1 = Input initialisation error
62
2 = Input communication error
3 = Internal temperature sensor error
4 = Device not factory calibrated
5 – 6 = reserved
7 = Watchdog initiated cold start occurred
AI_TRANSDUCER Block Parameter List
-
Un-
signed
8
-
Un-
signed
8
Un-
signed
8
-
Un-
signed
8
Un-
signed
8
Size
RO /
byte
D 1 RO 0
D 1 RO 0
D 1 RO 0
D 1 RO 0
D 1 RO 0
Min. Max. Default
R/W
2.8.7 Sensor error detection parameters
Rel.
Parameter
SENSOR_WIRE_CHECK_1
SENSOR_WIRE_CHECK_2
SENSOR_WIRE_CHECK_RJ
Index FFDescription Type Store
Enables lead breakage and short circuit detection for
Sensor 1.
List of valid values:
0 = Lead breakage and short circuit detection enable.
26
1 = Lead breakage detection enable, short circuit
detection disable.
2 = Lead breakage detection disable, short circuit
detection enable.
3 = Lead breakage and short circuit detection disable.
Enables lead breakage and short circuit detection for
27
Sensor 2.
Valid values: see SENSOR_WIRE_CHECK_1.
Enables lead breakage and short circuit detection for
44
RJ Sensor.
Valid values: see SENSOR_WIRE_CHECK_1.
Un-
signed
8
Un-
signed
8
Un-
signed
8
Size
RO /
byte
SRC 1 R/W 3
SRC 1 R/W 3
SRC 1 R/W 3
Min. Max. Default
R/W
Page 23

AI_TRANSDUCER Block Parameter List
2.8.8 Sensor calibration, Description
Sensor calibration is a very useful function when the transmitter output needs to be adjusted to the sen
sor signal, e.g. when the temperature sensor does not correspond to the ideal values for the selected
temperature range. The results depend on the accuracy of the calibrator or reference equipment. In the
following a temperature sensor calibration is described, however the principle can be used for all input
types.
-
SENSOR_CAL_METHOD_1 / 2 defines the use of either “Factory trim Standard” (the factory defined val
ues calculated according to the valid norms) or “User Trim Standard” (the sensor calibrated values) in
the transmitter for sensor 1 and 2 respectively. During sensor calibration SENSOR_CAL_METHOD_1 / 2
must be set to “Factory trim Standard” = 103.
The sensor calibration function in T53 will change the slope of the linarisation curve so the curve is ad
justed to the connected sensor. To obtain accurate temperature measurement in the range e.g. 0...100
°C apply to the sensor a temperature e.g. of 5 °C as the low temperature and e.g. 95 °C as the high tem
perature through a precise temperature calibrator.
At sensor calibration the succeeding procedure must be followed precisely (Example: sensor 1):
1. SENSOR_CAL_METHOD_1 = 103
2. Apply the low temperature of the calibrator to the sensor
3. CAL_POINT_LO_1 = 5.00 (type in the low temperature of the calibrator)
4. CAL_ACTUAL_LO_1 = 1.00 (The measurement of the deviation starts by typing in a random value)
5. Apply the high temperature of the calibrator to the sensor
6. CAL_POINT_HI_1 = 95.00 (type in the high temperature of the calibrator)
7. CAL_ACTUAL_HI_1 = 1.00 (The measurement of the deviation starts by typing in a random value
and T53 calculates the curve slope according to the measured
deviations.)
8. SENSOR_CAL_METHOD_1 = 104 (the sensor calibration just carried out is used)
-
-
2.8.9 Sensor Calibration Parameters
Rel.
Parameter
CAL_POINT_LO_1
CAL_ACTUAL_LO_1
CAL_POINT_HI_1
CAL_ ACTUAL _HI_1
SENSOR_CAL_METHOD_1
SENSOR_CAL_LOC_1
SENSOR_CAL_DATE_1
SENSOR_CAL_WHO_1
CAL_POINT_LO_2
CAL_ACTUAL_LO_2
Index FFDescription Type Store
The low calibration value applied to sensor 1
46
The value from either a calibrator or a reference equip
ment.
Entering any value will force the device to automatically
47
measure and store the actual low point value. Must be
entered with the applied CAL_POINT_LO_1 value
The high calibration value applied to sensor 1
48
The value from either a calibrator or a reference equip
ment.
Entering any value will force the device to automatically
49
measure and store the actual high point value. Must be
entered with the applied CAL_POINT_HI_1 value
Enables or disables the last sensor calibration for
sensor 1
50
103 = Factory trim standard (calibration values disabled)
104 = User trim standard (calibration values enabled)
51 The last location of the calibrated sensor
52 The last date on which the calibration was performed
The name of the person responsible for the last sensor
53
calibration
The low calibration value applied to sensor 2
54
The value from either a calibrator or a reference equip
ment.
Entering any value will force the device to automatically
55
measure and store the actual low point value. Must be
entered with the applied CAL_POINT_LO_2 value
Size
RO /
byte
-
Float SRC 4 R/W -10
Float SRC 4 R/W -10
-
Float SRC 4 R/W 10
Float SRC 4 R/W 10
Un-
signed
OCTET_
STRING
7
signed
OCTET_
STRING
-
Float SRC 4 R/W -10
Float SRC 4 R/W
SRC 1 R/W
8
SRC 32 R/W ” ”
Un-
*
SRC 7 R/W
8
SRC 32 R/W ” ”
Min. Max. Default
R/W
38
38
38
38
103
0,0,0,0,
1,1,103
38
38
-10
23
Page 24

24
Parameter
CAL_POINT_HI_2
CAL_ACTUAL_HI_2
SENSOR_CAL_METHOD_2
SENSOR_CAL_LOC_2
SENSOR_CAL_DATE_2
SENSOR_CAL_WHO_2
Rel.
Index FFDescription Type Store
The high calibration value applied to sensor 2
56
The value from either a calibrator or a reference equip
-
Float SRC 4 R/W 10
ment.
Entering any value will force the device to automatically
57
measure and store the actual high point value. Must be
Float SRC 4 R/W 10
entered with the applied CAL_POINT_HI_2 value
Enables or disables the last sensor calibration for
sensor 2
58
103 = Factory trim standard (calibration values disabled)
104 = User trim standard (calibration values enabled)
59 The last location of the calibrated sensor
60
The last date on which the calibration was performed
Un-
signed
OCTET_
STRING
7
*
signed
SRC 1 R/W 103
8
SRC 32 R/W » »
Un-
SRC 7 R/W
8
The name of the person responsible for the last sensor
61
calibration
OCTET_
STRING
SRC 32 R/W » »
Size
byte
RO /
Min. Max. Default
R/W
38
38
0,0,0,0,
1,1,103
Page 25
2.9 PR_CUST_LIN Block Parameter List
2.9.1 Linear interpolation linearisation, Description
LinType 1 = “Linearisation Table” generates a customer specific linear interpolation linearisation. Linear
interpolation linearisation can be used on mV, ohmic and potentiometer signals.The linear interpolation
linearisation is defined by straight lines drawn between the entered X / Y (input / output) coordinates.
The linearisation table must consist of 10 to 50 coordinate sets. The X values of the coordinates must
be entered in ascending order. The lowest and highest X values function as the lower and the upper lim
it respectively. All X values must be entered as µV, Ohm or % for Voltage, Resistance or Potentiometer
measurements in that order. The table output will be converted to actual chosen PRMARY_VALUE_UNIT
(Example: 1000 / 3000 as X / Y values: output will read 3,00 if PRIMARY_VALUE_UNIT is set to “mV”
and 1 mV is connected to input).
2.9.2 Linear Interpolation Linearisation, Parameter List.
Parameter
TAB_MIN_NUMBER
Rel.
Index FFDescription Type Store
34 Minimum number of linearisation points allowed (10)
Un-
signed 8N 1 RO 10
Size
byte
RO /
Min. Max. Default
R/W
-
TAB_MAX_NUMBER
TAB_ACTUAL_NUMBER
TAB_X_Y_VALUE1
TAB_X_Y_VALUE2
TAB_X_Y_VALUE3
TAB_X_Y_VALUE4
TAB_X_Y_VALUE5
TAB_X_Y_VALUE6
TAB_X_Y_VALUE7
TAB_X_Y_VALUE8
TAB_X_Y_VALUE9
TAB_X_Y_VALUE10
TAB_X_Y_VALUE11
TAB_X_Y_VALUE12
TAB_X_Y_VALUE13
TAB_X_Y_VALUE14
TAB_X_Y_VALUE15
TAB_X_Y_VALUE16
TAB_X_Y_VALUE17
TAB_X_Y_VALUE18
TAB_X_Y_VALUE19
TAB_X_Y_VALUE20
TAB_X_Y_VALUE21
TAB_X_Y_VALUE22
35 Maximum number of linearisation points allowed (50)
36 Number of linearisation points in the linearisation table.
37 Linearisation x,y coordinate 1
38 Linearisation x,y coordinate 2
39 Linearisation x,y coordinate 3
40 Linearisation x,y coordinate 4
41 Linearisation x,y coordinate 5
42 Linearisation x,y coordinate 6
43 Linearisation x,y coordinate 7
44 Linearisation x,y coordinate 8
45 Linearisation x,y coordinate 9
46 Linearisation x,y coordinate 10
47 Linearisation x,y coordinate 11
48 Linearisation x,y coordinate 12
49 Linearisation x,y coordinate 13
50 Linearisation x,y coordinate 14
51 Linearisation x,y coordinate 15
52 Linearisation x,y coordinate 16
53 Linearisation x,y coordinate 17
54 Linearisation x,y coordinate 18
55 Linearisation x,y coordinate 19
56 Linearisation x,y coordinate 20
57 Linearisation x,y coordinate 21
58 Linearisation x,y coordinate 22
Un-
signed 8N 1 RO 50
Un-
signed 8SRC 1 R/W 11
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
SRC 8 R/W 0, 0
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
1000,
100
2000,
200
3000,
300
4000,
400
5000,
500
6000,
600
7000,
700
8000,
800
9000,
900
10000,
1000
25
Page 26
26
Parameter
TAB_X_Y_VALUE23
TAB_X_Y_VALUE24
TAB_X_Y_VALUE25
TAB_X_Y_VALUE26
TAB_X_Y_VALUE27
TAB_X_Y_VALUE28
TAB_X_Y_VALUE29
TAB_X_Y_VALUE30
TAB_X_Y_VALUE31
TAB_X_Y_VALUE32
TAB_X_Y_VALUE33
TAB_X_Y_VALUE34
TAB_X_Y_VALUE35
TAB_X_Y_VALUE36
TAB_X_Y_VALUE37
TAB_X_Y_VALUE38
TAB_X_Y_VALUE39
TAB_X_Y_VALUE40
TAB_X_Y_VALUE41
TAB_X_Y_VALUE42
TAB_X_Y_VALUE43
TAB_X_Y_VALUE44
TAB_X_Y_VALUE45
TAB_X_Y_VALUE46
TAB_X_Y_VALUE47
TAB_X_Y_VALUE48
TAB_X_Y_VALUE49
TAB_X_Y_VALUE50
Rel.
Index FFDescription Type Store
59 Linearisation x,y coordinate 23
60 Linearisation x,y coordinate 24
61 Linearisation x,y coordinate 25
62 Linearisation x,y coordinate 26
63 Linearisation x,y coordinate 27
64 Linearisation x,y coordinate 28
65 Linearisation x,y coordinate 29
66 Linearisation x,y coordinate 30
67 Linearisation x,y coordinate 31
68 Linearisation x,y coordinate 32
69 Linearisation x,y coordinate 33
70 Linearisation x,y coordinate 34
71 Linearisation x,y coordinate 35
72 Linearisation x,y coordinate 36
73 Linearisation x,y coordinate 37
74 Linearisation x,y coordinate 38
75 Linearisation x,y coordinate 39
76 Linearisation x,y coordinate 40
77 Linearisation x,y coordinate 41
78 Linearisation x,y coordinate 42
79 Linearisation x,y coordinate 43
80 Linearisation x,y coordinate 44
81 Linearisation x,y coordinate 45
82 Linearisation x,y coordinate 46
83 Linearisation x,y coordinate 47
84 Linearisation x,y coordinate 48
85 Linearisation x,y coordinate 49
86 Linearisation x,y coordinate 50
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
Float
array
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
SRC 8 R/W 0, 0
Size
byte
RO /
Min. Max. Default
R/W
2.9.3 Custom polynomial linearisation, Description
Polynomial linearisation can be used on mV and ohmic input signals. Polynomial linearisation is execut
ed according to the function f(x) = a
+ a
0
*
1
x2 + a
*
2
x3 + a
*
3
x4, in which a0...a4 equal the coefficients
*
4
x + a
for a fourth order polynomial and x equals the input value. This function requires that the user can ob
tain or calculate the coefficients of up to 5 fourth order polynomials. Various computer programs such as
Math Cad can calculate these coefficients. If the preceding text is unfamiliar one should use the function
table linearisation in case of customer specific linearisation.
LIN_TYPE 240 = “Custom defined TC” generates a customer specific polynomial linearisation. The func
tion is primarily suitable for specific thermo elements but also for millivolt signals if the user can accept
to enter the input and the output values of the polynomial in µV and °C respectively.
LIN_TYPE 241 = “Custom defined RTD” generates a customer specific polynomial linearisation. The
-
-
-
Page 27
function is particularly suitable for specific RTD sensors but also for non-linear ohmic signals if the user
can accept to enter the input and output values of the polynomials in ohm and °C respectively.
Please remember that polynomial linearisation is absolute. The output value is calculated continuously
according to the applied input value and the function formula. The max. input range can be limited pre
cisely to the input range in which the polynomial linearisation will be used. The PRIMARY_VALUE_UNIT
defines the unit of the values provided by the AI_TRANSDUCER BLOCK. The parameter OUT_SCALE in
the AI block can scale the values and change the unit to e.g. mV or ohm.
2.9.4 Custom Polynomial Linearisation, Parameter List
Parameter
CUSTOM_TC_NAME
CUSTUM_TC_POLY_
COUNT
CUSTOM_TC_MIN_IN
Rel.
Index FFDescription Type Store
13 Name of Custom defined TC ( LIN_TYPE = 240)
Number of 4. order polynomial parts for Custom
14
defined TC
15 Minimum input limit in µV for Custom defined TC Float SRC 4 R/W 0
OCTET_
STRING
Un-
signed
8
Size
RO /
byte
SRC 20 R/W
SRC 1 R/W 5
Min. Max. Default
R/W
-
”Linear TC;
no RJ”
CUSTOM_TC_MIN_OUT
CUSTOM_TC_MAX_OUT
CUSTOM_TC_POLY_1
CUSTOM_TC_POLY_2
CUSTOM_TC_POLY_3
CUSTOM_TC_POLY_4
CUSTOM_TC_POLY_5
CUSTOM_TC_RJ_POLY
CUSTOM_RTD_NAME
CUSTUM_RTD_POLY_
COUNT
CUSTOM_RTD_MIN_IN
CUSTOM_RTD_MIN_OUT
CUSTOM_RTD_MAX_OUT
CUSTOM_RTD_POLY_1
CUSTOM_RTD_POLY_2
CUSTOM_RTD_POLY_3
CUSTOM_RTD_POLY_4
CUSTOM_RTD_POLY_5
Minimum usable output value in °C of polynomial set
16
for Custom defined TC
Maximum usable output value in °C of polynomial set
17
for Custom defined TC
Polynomial part 1 of Custom defined TC converting µV
18
to °C. Consisting of: maximum input value in µV, a4..a0
polynomial coefficients.
Polynomial part 2 of Custom defined TC converting µV
19
to °C. Consisting of: maximum input value in µV, a4..a0
polynomial coefficients.
Polynomial part 3 of Custom defined TC converting µV
20
to °C. Consisting of: maximum input value in µV, a4..a0
polynomial coefficients.
Polynomial part 4 of Custom defined TC converting µV
21
to °C. Consisting of: maximum input value in µV, a4..a0
polynomial coefficients.
Polynomial part 5 of Custom defined TC converting µV
22
to °C. Consisting of: maximum input value in µV, a4..a0
polynomial coefficients.
RJ Polynomial part of custom defined TC, converting
23
°C to µV.: a3..a0 coefficients.
24 Name of Custom defined RTD ( LIN_TYPE = 241)
Number of 4. order polynomial parts for Custom
25
defined RTD
26 Minimum input limit in Ohm’s for Custom defined RTD Float SRC 4 R/W 0
Minimum usable output value of polynomial set for
27
Custom defined RTD
Maximum useable output value of polynomial set for
28
Custom defined RTD
Polynomial part 1 of Custom defined RTD convert
29
ing Ohm to °C. Consisting of maximum input value in
Ohms, a4..a0 polynomial coefficients.
Polynomial part 2 of Custom defined RTD convert
30
ing Ohm to °C. Consisting of maximum input value in
Ohms, a4..a0 polynomial coefficients.
Polynomial part 3 of Custom defined RTD convert
31
ing Ohm to °C. Consisting of maximum input value in
Ohms, a4..a0 polynomial coefficients.
Polynomial part 4 of Custom defined RTD convert
32
ing Ohm to °C. Consisting of maximum input value in
Ohms, a4..a0 polynomial coefficients.
Polynomial part 5 of Custom defined RTD convert
33
ing Ohm to °C. Consisting of maximum input value in
Ohms, a4..a0 polynomial coefficients.
-
-
-
-
-
Float SRC 4 R/W 0
Float SRC 4 R/W 1500,00
6*Float SRC 24 R/W
6*Float SRC 24 R/W
6*Float SRC 24 R/W
6*Float SRC 24 R/W
6*Float SRC 24 R/W
4*Float SRC 16 R/W 0;0;0;0
OCTET_
STRING
signed
Float SRC 4 R/W 0
Float SRC 4 R/W 100,00
6*Float SRC 24 R/W
6*Float SRC 24 R/W
6*Float SRC 24 R/W
6*Float SRC 24 R/W
6*Float SRC 24 R/W
SRC 20 R/W
Un-
SRC 1 R/W 5
8
30000;
0; 0; 0;
0,01; 0
60000;
0; 0; 0;
0,01; 0
90000;
0; 0; 0;
0,01; 0
120000;
0; 0; 0;
0,01; 0
150000;
0; 0; 0;
0,01; 0
”Linear
RTD”
2000;
0; 0; 0;
0,01; 0
4000;
0; 0; 0;
0,01; 0
6000;
0; 0; 0;
0,01; 0
8000;
0; 0; 0;
0,01; 0
10000;
0; 0; 0;
0,01; 0
2.10 PR_CUST_PRIV Block Reserved Parameter List
2.10.1 Description, PR_CUST_PRIV Block
The Block is private and reserved.
27
Page 28
28
3.0 Analogue Input Blocks
T53 has 2 Analogue Input Blocks to be configured individually. The constrcution of the
Blocks is in line with the standards from FOUNDATION Fieldbus and Profibus Nutzerorgani
sation respectively, and producer specific parameters have not been added. However, the
Analogue Input Blocks for Fieldbus Foundation and Profibus are dissimilar due to the parameter differences.
3.1 Analogue Input Blocks, Fieldbus Foundation
3.2 Overview
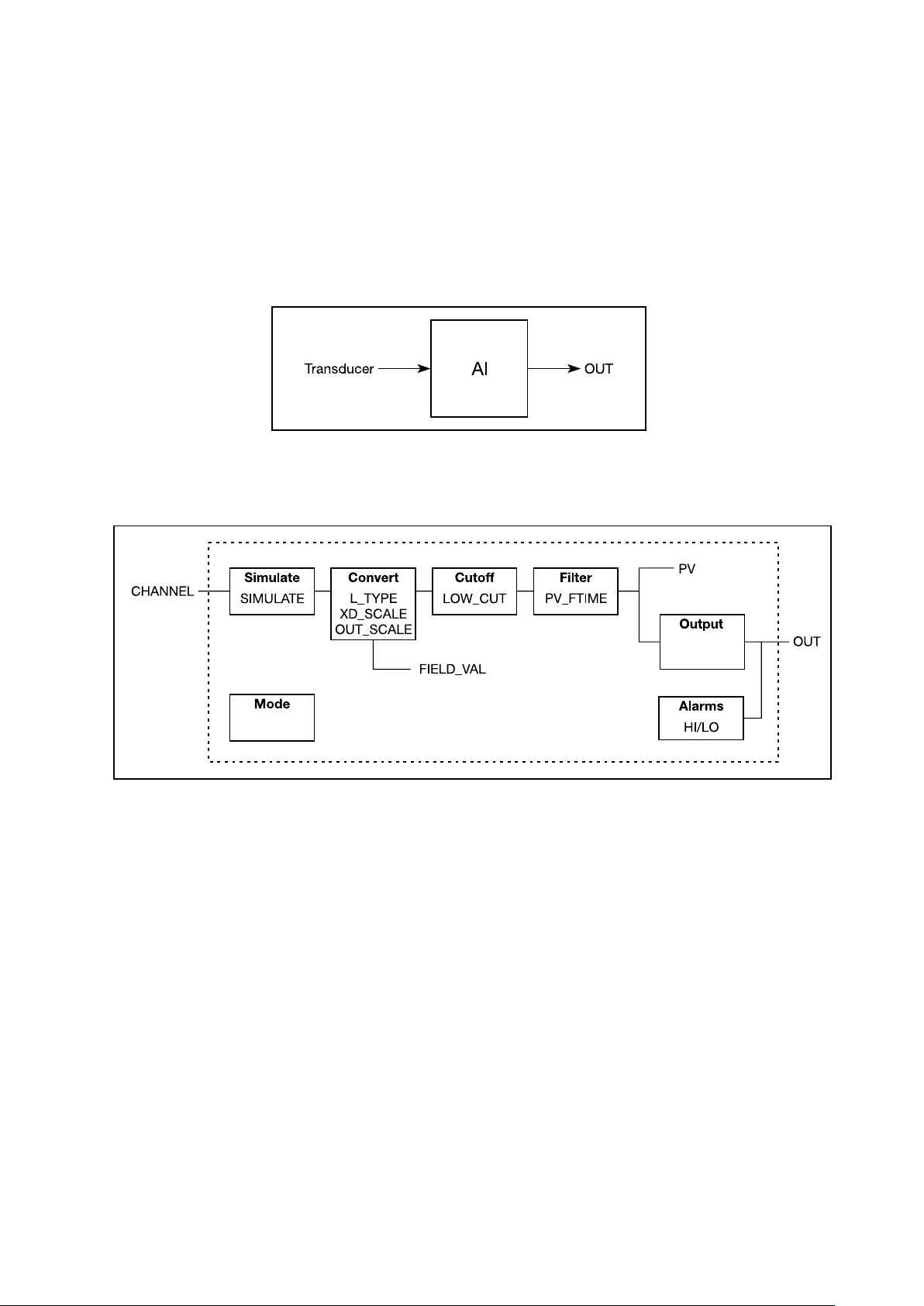
The AI block takes the manufacturer’s input data, selected by channel number, and makes it
available to other function blocks at its output.
3.3 Analogue Input Block Schematic
-
3.4 Description
Transducer scaling (XD_SCALE) is applied to the value from the channel to produce the
FIELD_VAL in percent. The XD_SCALE units code must match the channel units code (if one
exists), or the block will remain in O/S mode after being configured. A block alarm for units
mismatch will be generated. The OUT_SCALE is normally the same as the transducer, but
if L_TYPE is set to Indirect or Ind Sqr Root, OUT_SCALE determines the conversion from
FIELD_VAL to the output. PV and OUT always have identical scaling.
OUT_SCALE provides scaling for PV. The PV is always the value that the block will place in
OUT if the mode is Auto. If Man is allowed, someone may write a value to the output. The
status will prevent any attempt at closed loop control using the Man value, by setting the
Limit value to Constant.
The LOW_CUT parameter has a corresponding “Low cutoff” option in the IO_OPTS bit
string. If the option bit is true, any calculated output below the low cutoff value will be
changed to zero. This is only useful for zero-based measurement devices, such as flow. The
PV filter, whose time constant is PV_FTIME, is applied to the PV, and not the FIELD_VAL.
Page 29
Equations:
FIELD_VAL = 100*(channel value - EU@0%) / (EU@100% - EU@0%) [XD_SCALE]
Direct: PV = channel value
Indirect: PV = (FIELD_VAL/100) * (EU@100% - EU@0%) + EU@0% [OUT_SCALE]
Ind Sqr Root: PV = sqrt(FIELD_VAL/100) * (EU@100% - EU@0%) + EU@0% [OUT_SCALE]
3.5 Supported Modes
O/S, Man and Auto.
3.6 To enable the Simulation mode
The hardware lock for the simulation mode is a reed switch
mounted in the T53 transmitter. The reed switch can be activat
ed with a special designed magnet which is mounted on the bus
connection terminals pin no. 1 and pin no. 2. Magnet type no.
12557596 can be ordered at WIKA.
3.7 Alarm Types
Standard block alarm plus standard HI_HI, HI, LO, and LO_LO alarms applied to OUT.
3.8 Mode Handling
Standard transition in and out of O/S.
Standard transition from Man to Auto and back.
3.9 Status Handling
The status values described in Output Parameter Formal Model of Part 1 apply, with the ex
ception of the control sub-status values. The Uncertain - EU Range Violation status is always
set if the OUT value exceeds the OUT_SCALE range, and no worse condition exists. The fol
lowing options from STATUS_OPTS apply, where Limited refers to the sensor limits:
Propagate Fault Forward
Uncertain if Limited
BAD if Limited
Uncertain if Man mode
3.10 Initialisation
The PV filter must be initialised, but other than that, no special initialisation is required. This
is a pure calculation algorithm.
Parameter
ST_REV
TAG_DESC
STRATEGY
ALERT_KEY
MODE_BLK
BLOCK_ERR
PV
3.11 Analogue Input Blocks Parameter List, Fieldbus Foundation
Rel.
Description Type Store
Index
The revision level of the static data associated with the func
tion block. To support tracking changes in static parameter
attributes, the associated block’s static revision parameter will
1
be incremented each time a static parameter attribute value is
changed. Also, the associated block’s static revision parameter
may be incremented if a static parameter attribute is written
but the value is not changed.
2 The user description of the intended application of the block.
The strategy field can be used to identify grouping of blocks..
3
This data is not checked or processed by the block.
The identification number of the plant unit. This information
4
may be used in the host for sorting alarms, etc.
5 The actual, target, permitted, and normal modes of the block. DS-69 Mix 4 *
This parameter reflects the error status associated with the
6
hardware or software components associated with a block. It is
a bit string, so that multiple errors may be shown.
Either the primary analog value for use in executing the func
7
tion, or a process value associated with it. May also be calcu
lated from the READBACK value of an AO block.
-
Un-
signed
16
Octet
String
Un-
signed
16
Un-
signed
8
Bit
String
-
-
DS-65 D 5 RO
Size
RO /
byte
SRC 2 RO 0
SRC 32 R/W Spaces
SRC 2 R/W 0
SRC 1 R/W 1 255 0
D 2 RO
Min Max Default
R/W
-
-
1, 1, 25,
16
29
Page 30
30
Parameter
OUT
SIMULATE
XD_SCALE
OUT_SCALE
GRANT_DENY
IO_OPTS
STATUS_OPTS
CHANNEL
L_TYPE
LOW_CUT
PV_FTIME
FIELD_VAL
UPDATE_EVT
BLOCK_ALM
ALARM_SUM
ACK_OPTION
ALARM_HYS
HI_HI_PRI
Rel.
Description Type Store
Index
The primary analog value calculated as a result of executing
8
the function.
DS-65 N 5 R/W
Size
byte
Allows the transducer analog input or output to the block to be
manually supplied when simulate is enabled. When simulation
9
is disabled, the simulate value and status track the actual value
DS-82
D 11 R/W Disable
and status.
The high and low scale values, engineering units code, and
10
number of digits to the right of the decimal point used with the
DS-68 SRC 11 R/W 0-100%
value obtained from the transducer for a specified channel.
The high and low scale values, engineering units code, and
number of digits to the right of the decimal point to be used in
11
displaying the OUT parameter and parameters which have the
DS-68 SRC 11 R/W 0-100%
same scaling as OUT.
Options for controlling access of host computer and local con
12
trol panels to operating, tuning and alarm parameters of the
DS-70 SRC 2 R/W
block.
Options which the user may select to alter input and output
13
block processing.
Options which the user may select in the block processing of
14
status.
The number of the logical hardware channel that is connected
15
to this I/O block. This information defines the transducer to be
used going to or from the physical world.
Bit
String
Bit
String
Un-
signed
16
SRC 2 R/W 0
SRC 2 R/W 0
SRC 2 R/W 1 or 2
Determines if the values passed by the transducer block to the
AI block may be used directly (Direct) or if the value is in
16
different units and must be converted linearly (Indirect), or with
square root (Ind Sqr Root), using the input range defined by
Un-
signed
8
SRC 1 R/W 0
the transducer and the associated output range.
Limit used in square root processing. A value of zero percent
of scale is used in block processing if the transducer value falls
17
below this limit, in % of scale. This feature may be used to
Float SRC 4 R/W 0
eliminate noise near zero for a flow sensor.
Time constant of a single exponential filter for the PV, in sec
18
onds.
Float SRC 4 R/W 0
Raw value of the field device in percent of thePV range, with a
19
status reflecting the Transducer condition, before signal char-
DS-65 D 5 RO
acterization (L_TYPE) or filtering (PV_FTIME).
20 This alert is generated by any change to the static data. DS-73 D 14 RO
The block alarm is used for all configuration, hardware, con
nection failure or system problems in the block. The cause
of the alert is entered in the subcode field. The first alert to
become active will set the Active status in the Status attribute.
21
As soon as
DS-72
D 13 R/W
the Unreported status is cleared by the alert reporting task,
another block alert may be reported without clearing the Active
status, if the subcode has changed.
The current alert status, unacknowledged states, unreported
22
states, and disabled states of the alarms associated with the
DS-74 Mix 8 R/W
function block.
Selection of whether alarms associated with the block will be
23
automatically acknowledged.
Bit
String
SRC 2 R/W 0
Amount the PV must return within the alarm limits before the
24
alarm condition clears. Alarm Hysteresis is expressed as a per-
Float SRC 4 R/W 0% 50% 0.5%
cent of the PV span .
Un-
25 Priority of the high high alarm.
signed 8SRC 1 R/W 0 15 0
RO /
Min Max Default
R/W
HI_HI_LIM
HI_PRI
HI_LIM
LO_PRI
LO_LIM
LO_LO_PRI
LO_LO_LIM
HI_HI_ALM
HI_ALM
LO_ALM
LO_LO_ALM
26 The setting for high high alarm in engineering units. Float SRC 4 R/W +INF
Un-
27 Priority of the high alarm.
signed 8SRC 1 R/W 0 15 0
28 The setting for high alarm in engineering units. Float SRC 4 R/W +INF
Un-
29 Priority of the low alarm.
signed 8SRC 1 R/W 0 15 0
30 The setting for the low alarm in engineering units. Float SRC 4 R/W -INF
Un-
31 Priority of the low low alarm.
signed 8SRC 1 R/W 0 15 0
32 The setting of the low low alarm in engineering units. Float SRC 4 R/W -INF
33 The status for high high alarm and its associated time stamp. DS-71 D 16 R/W
34 The status for high alarm and its associated time stamp. DS-71 D 16 R/W
35 The status of the low alarm and its associated time stamp. DS-71 D 16 R/W
36 The status of the low low alarm and its associated time stamp. DS-71 D 16 R/W
Page 31
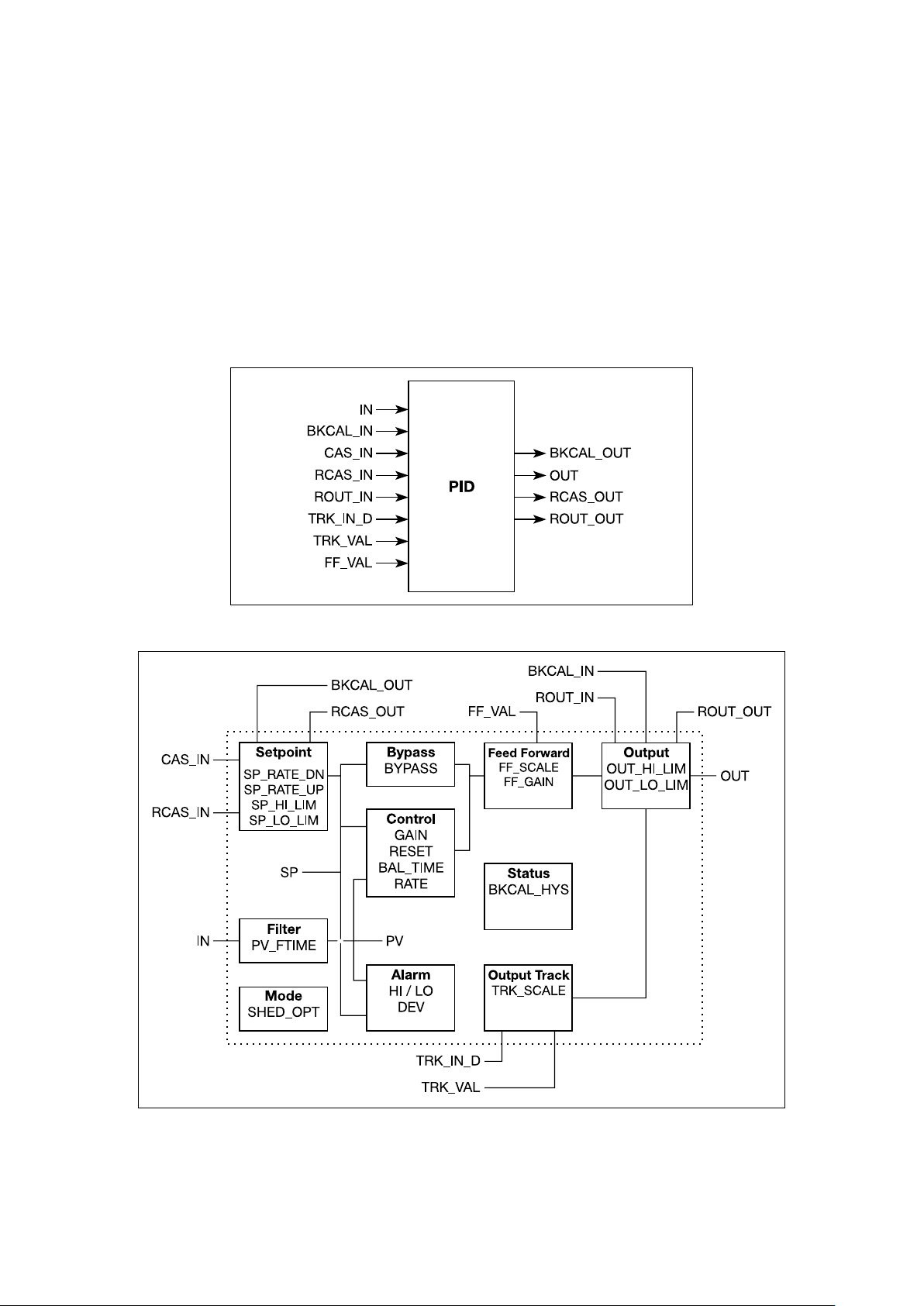
4.0 PID Control Block, Fieldbus Foundation
4.1 Introduction:
T53 is fitted with a PID Control Block which can only be used in Fieldbus Foundation installa
tions. The PID Block is constructed according to standard specifications outlined in Fieldbus
Foundation and producer specific parameters have not been added. Please notice that the
PID function is not specified in the Profibus Nutzerorganisation and thus cannot be used in
Profibus installations.
4.2 Overview
The PID block is key to many control schemes and is used almost universally, with the ex
ception of PD, which is used when the process itself does the integration. As long as an error
exists, the PID function will integrate the error, which moves the output in a direction to cor
rect the error. PID blocks may be cascaded when the difference in process time constants of
a primary and secondary process measurement makes it necessary or desirable.
-
-
-
4.3 Schematic:
4.4 Description
The Process Value to be controlled is connected to the IN input. This value is passed through
a filter whose time constant is PV_FTIME. The value is then shown as the PV, which is used
in conjunction with the SP in the PID algorithm. A PID will not integrate if the limit status of IN
is constant. A full PV and DV alarm sub-function is provided. The PV has a status, although it
is a Contained parameter.
31
Page 32

32
This status is a copy of IN’s status unless IN is good and there is a PV or block alarm.
The full cascade SP sub-function is used, with rate and absolute limits. There are additional
control options which will cause the SP value to track the PV value when the block is in an
actual mode of IMan, LO, Man or ROut. Limits do not cause SP-PV tracking.
There is a switch for BYPASS, which is available to the operator if the Bypass Enable con
trol option is true. Bypass is used in secondary cascade controllers that have a bad PV. The
Bypass Enable option is necessary because not all cascade control schemes will be stable
if BYPASS is true. BYPASS can only be changed when the block mode is Man or O/S. While
it is set, the value of SP, in percent of range, is passed directly to the target output, and the
value of OUT is used for BKCAL_OUT. When the mode is changed to Cas, the upstream
block is requested to initialize to the value of OUT. When a block is in Cas mode, then on the
transition out of bypass, the upstream block is requested to initialize to the PV value, regard
less of the »Use PV for BKCAL_OUT« option.
GAIN, RESET, and RATE are the tuning constants for the P, I, and D terms, respectively. Gain
is a dimensionless number. RESET and RATE are time constants expressed in seconds.
There are existing controllers that are tuned by the inverse value of some or all of them,
such as proportional band and repeats per minute. The human interface to these parame
ters should be able to display the user’s preference. The Direct Acting control option, if true,
causes the output to increase when the PV exceeds the SP. If false, the output will decrease
when the PV exceeds the SP. It will make the difference between positive and negative feed
back, so it must be set properly, and never changed while in an automatic mode. The setting
of the option must also be used in calculating the limit state for BKCAL_OUT.
The output supports the feed forward algorithm. The FF_VAL input brings in an external val
ue which is proportional to some disturbance in the control loop. The value is converted to
percent of output span using the values of parameter FF_SCALE. This value is multiplied by
the FF_GAIN and added to the target output of the PID algorithm. If the status of FF_VAL is
Bad, the last usable value will be used, because this prevents bumping the output. When the
status returns to good, the block will adjust its integral term to maintain the previous output.
The output supports the track algorithm.
There is an option to use either the SP value after limiting or the PV value for the BKCAL_
OUT value..
-
-
-
-
-
4.5 Supported Modes
O/S, IMan, LO, Man, Auto, Cas, RCas, and ROut.
4.6 Alarm Types
Standard block alarm plus standard HI_HI, HI, DV_HI, DV_LO, LO, and LO_LO alarms ap
plied to PV.
4.7 Mode Handling
Standard transition in and out of O/S.
4.8 Status Handling
Standard, plus the following things for the control selector If Not selected is received at
BKCAL_IN, the PID algorithm should make necessary adjustments to prevent windup.
4.9 Initialization
Standard.
-
Page 33

4.10 PID Control Block Parameter List
Parameter
ST_REV
TAG_DESC
STRATEGY
ALERT_KEY
MODE_BLK
BLOCK_ERR
PV
SP
OUT
PV_SCALE
OUT_SCALE
GRANT_DENY
CONTROL_OPTS
STATUS_OPTS
IN
PV_FTIME
BYPASS
CAS_IN
SP_RATE_DN
SP_RATE_UP
SP_HI_LIM
SP_LO_LIM
Rel.
Description Type Store
Index
Size
byte
The revision level of the static data associated with the
function block. To support tracking changes in static parameter attributes, the associated block’s static revision
1
parameter will be incremented each time a static parameter
attribute value is changed. Also, the associated block’s
Un-
signed
16
SRC 2 RO 0
static revision parameter may be incremented if a static
parameter attribute is written but the value is not changed.
The user description of the intended application of the
2
block.
The strategy field can be used to identify grouping of
3
blocks. This data is not checked or processed by the block.
Contains the identification number of the plant unit. It helps
4
to identify the location (plant unit) of an event.
Contains the current mode and the permitted and normal
5
mode of the block.
This parameter reflects the error status associated with the
6
hardware or software components associated with a block.
It is a bit string, so that multiple errors may be shown.
Octet
String
SRC 32 R/W spaces
Un-
signed
SRC 2 R/W 0
16
Un-
signed
SRC 1 R/W 1 255 0
8
DS-69 Mix 4 Mix O/S
Bit
String
D 2 RO
Either the primary analog value for use in executing the
7
function, or a process value associated with it. May also be
DS-65 D 5 RO
calculated from the READBACK value of an AO block.
8 The analog setpoint of this block. DS-65 N 5 R/W
The primary analog value calculated as a result of executing
9
the function.
DS-65 N 5 R/W
The high and low scale values, engineering units code, and
number of digits to the right of the decimal point to be used
10
in displaying the PV parameter and parameters which have
DS-68 SRC 11 R/W 0-100%
the same scaling as PV.
The high and low scale values, engineering units code, and
number of digits to the right of the decimal point to be used
11
in displaying the OUT parameter and parameters which
DS-68 SRC 11 R/W 0-100%
have the same scaling as OUT.
Options for controlling access of host computer and local
12
control panels to operating, tuning and alarm parameters of
DS-70 SRC 2 R/W
the block.
Options which the user may select to alter the calculations
13
done in a control block.
Options which the user may select in the block processing
14
of status.
The primary input value of the block, required for blocks
15
that filter the input to get the PV.
Time constant of a single exponential filter for the PV, in
16
seconds.
Bit
String
String
SRC 2 R/W 0
Bit
SRC 2 R/W 0
DS-65 N 5 R/W
Float SRC 4 R/W Positive 0
The normal control algorithm may be bypassed through this
parameter. When bypass is set, the setpoint value (in per
cent) will be directly transferred to the output. To prevent a
17
bump on transfer to/from bypass, the setpoint will automati
cally be initialized to the output value or process variable,
Un-
-
signed
SRC 1 R/W 1 2 0
8
respectively, and the path broken flag will be set for one
execution.
This parameter is the remote setpoint value, which must
18
come from another Fieldbus block, or a DCS block through
DS-65 N 5 R/W
a defined link.
Ramp rate at which downward setpoint changes are acted
on in Auto mode, in PV units per second. If the ramp rate is
set to zero, then the setpoint will be used immediately. For
19
control blocks, rate limiting will apply only in Auto. For out
Float SRC 4 R/W Positive +INF
put blocks, rate limiting will apply in Auto, Cas, and RCas
modes.
Ramp rate at which upward setpoint changes are acted on
in Auto mode, in PV units per second. If the ramp rate is set
to
20
zero, then the setpoint will be used immediately. For con
-
Float SRC 4 R/W Positive +INF
trol blocks, rate limiting will apply only in Auto. For output
blocks, rate limiting will apply in Auto, Cas, and RCas
modes.
The setpoint low limit is the lowest setpoint operator entry
21
that can be used for the block.
The setpoint high limit is the highest setpoint operator entry
22
that can be used for the block.
Float SRC 4 R/W
Float SRC 4 R/W
RO /
Min. Max. Default
R/W
PV_SCALE
±10%
OUT_SCALE
±10%
PV_SCALE
±10%
PV_SCALE
±10%
100
0
33
Page 34

34
Parameter
GAIN
RESET
BAL_TIME
RATE
BKCAL_IN
OUT_HI_LIM
OUT_LO_LIM
BKCAL_HYS
BKCAL_OUT
RCAS_IN
ROUT_IN
SHED_OPT
RCAS_OUT
ROUT_OUT
TRK_SCALE
TRK_IN_D
TRK_VAL
FF_VAL
FF_SCALE
FF_GAIN
UPDATE_EVT
BLOCK_ALM
ALARM_SUM
ACK_OPTION
ALARM_HYS
HI_HI_PRI
Rel.
Description Type Store
Index
Dimensionless value used by the block algorithm in calcu
23
lating the block output.
Float SRC 4 R/W 0
Size
byte
RO /
Min. Max. Default
R/W
24 The integral time constant, in seconds per repeat. Float SRC 4 R/W Positive +INF
This specifies the time for the internal working value of bias
or ratio to return to the operator set bias or ratio, in sec
onds. In the PID block, it may be used to specify the time
25
constant at which the integral term will move to obtain bal
-
Float SRC 4 R/W Positive 0
ance when the output is limited and the mode is Auto, Cas,
or RCas.
26 Defines the derivative time constant, in seconds. Float SRC 4 R/W Positive 0
The value and status from a lower block’s BKCAL_OUT that
27
is used to prevent reset windup and to initialize the control
DS-65 N 5 R/W
loop.
28 Limits the maximum output value. Float SRC 4 R/W
29 Limits the minimum output value. Float SRC 4 R/W
The amount that the output must change away from its out
30
put limit before the limit status is turned off, expressed as a
Float SRC 4 R/W 0 50 0.5
OUT_SCALE
±10%
OUT_SCALE
±10%
percent of the span of the output.
The value and status required by an upper block’s BKCAL_
31
IN so that the upper block may prevent reset windup and
DS-65 D 5 RO
provide bumpless transfer to closed loop control.
Target setpoint and status provided by a supervisory Host
32
to a analog control or output block.
Target output and status provided by a Host to the control
33
block for use as the output (ROut mode).
Defines action to be taken on remote control device time
34
out.
DS-65 N 5 R/W
DS-65 N 5 R/W
Un-
signed
SRC 1 R/W 0
8
Block setpoint and status after ramping - provided to a
35
supervisory Host for back calculation and to allow action to
DS-65 D 5 RO
be taken under limiting conditions or mode change.
Block output and status - provided to a Host for back
36
calculation in ROut mode and to allow action to be taken
DS-65 D 5 RO
under limited conditions or mode change.
The high and low scale values, engineering units code, and
37
number of digits to the right of the decimal point, associ-
DS-68 SRC 11 R/W 0-100%
ated with TRK_VAL.
This discrete input is used to initiate external tracking of the
38
block output to the value specified by TRK_VAL.
This input is used as the track value when external tracking
39
is enabled by TRK_IN_D.
DS-66 N 2 R/W
DS-65 N 5 R/W
40 The feed forward value and status. DS-65 N 5 R/W
The feedforward input high and low scale values, engineer
41
ing units code, and number of digits to the right of the deci
-
-
DS-68 SRC 11 R/W 0-100%
mal point.
The gain that the feed forward inpt is multiplied by before it
42
is added to the calculated control output.
Float SRC 4 R/W 0
43 This alert is generated by any change to the static data. DS-73 D 14 RO
The block alarm is used for all configuration, hardware, con
nection failure or system problems in the block. The cause
of the alert is entered in the subcode field. The first alert
to become active will set the Active status in the Status
44
attribute. As soon as the Unreported status is cleared by
DS-72
D 13 R/W
the alert reporting task, another block alert may be reported
without clearing the Active status, if the subcode has
changed.
The current alert status, unacknowledged states, unreported
45
states, and disabled states of the alarms associated with
DS-74 Mix 8 R/W
the function block.
Selection of whether alarms associated with the block will
46
be automatically acknowledged.
0 = Auto Ack Disabled; 1 = Auto Ack Enabled.
Bit
String
SRC 2 R/W 0 1 0
Amount the PV must return within the alarm limits before
47
the alarm condition clears. Alarm Hysteresis is expressed as
Float SRC 4 R/W 0 50 0.5
a percent of the PV span.
Un-
48 Priority of the high high alarm.
signed 8SRC 1 R/W 0 15 0
100
0
HI_HI_LIM
HI_PRI
49 The setting for high high alarm in engineering units. Float SRC 4 R/W
Un-
50 Priority of the high alarm.
signed 8SRC 1 R/W 0 15 0
PV_
SCALE
+INF +INF
Page 35

Parameter
HI_LIM
LO_PRI
Rel.
Description Type Store
Index
Size
byte
51 The setting for high alarm in engineering units. Float SRC 4 R/W
Un-
52 Priority of the low alarm.
signed 8SRC 1 R/W 0 15 0
RO /
Min. Max. Default
R/W
PV_
SCALE
+INF +INF
LO_LIM
LO_LO_PRI
LO_LO_LIM
DV_HI_PRI
DV_HI_LIM
DV_LO_PRI
DV_LO_LIM
HI_HI_ALM
HI_ALM
LO_ALM
LO_LO_ALM
DV_HI_ALM
DV_LO_ALM
53 The setting for the low alarm in engineering units. Float
4 R/W -INF
Un-
SRC
54 Priority of the low low alarm.
signed 8SRC 1 R/W 0 15 0
SRC
55 The setting of the low low alarm in engineering units. Float
4 R/W -INF
Un-
56 Priority of the high deviation alarm.
The setting of the high deviation alarm limit in engineering
57
units.
signed 8SRC 1 R/W 0 15 0
Float SRC 4 R/W 0
Un-
58 Priority of the low deviation alarm.
The setting of the low deviation alarm limit in engineering
59
units.
The status for high high alarm and its associated time
60
stamp.
signed 8SRC 1 R/W 0 15 0
Float SRC 4 R/W
DS-71 D 16 R/W
61 The status for high alarm and its associated time stamp. DS-71 D 16 R/W
62 The status of the low alarm and its associated time stamp. DS-71 D 16 R/W
The status of the low low alarm and its associated time
63
stamp.
The status and time stamp associated with the high devia
64
tion alarm.
The status and time stamp associated with the low devia
65
tion alarm.
DS-71 D 16 R/W
DS-71 D 16 R/W
DS-71 D 16 R/W
-PV
span
PV_
SCALE
PV_
SCALE
PV
span
0 -INF
-INF
-INF
+INF
35
Page 36

5.0 Link Active Scheduler (LAS)
5.1 Introduction:
T53 features a LAS function which is only available in Fieldbus Foundation installations.
Please note that the LAS function has not been specified by the Profibus Nutzerorganisation
and is therefore not available in Profibus installations.
5.2 Overview
5.3 Description
All links have one and only one Link Active Scheduler (LAS). The LAS operates as the bus ar
biter for the link. The LAS does the following:
Any device on the link may become the LAS, as long as it is capable. The devices that are
capable of becoming the LAS are called link master devices. All other devices are referred
to as basic devices. When a segment first starts up, or upon failure of the existing LAS, the
link master devices on the segment bid to become the LAS. The link master that wins the bid
begins operating as the LAS immediately upon completion of the bidding process. Link mas
ters that do not become the LAS act as basic devices. However, the link masters can act as
LAS backups by monitoring the link for failure of the LAS and then bidding to become the
LAS when a LAS failure is detected.
• recognizes and adds new devices to the link.
• removes non-responsive devices from the link.
• distributes Data Link (DL) and Link Scheduling (LS) time on the link. Data Link Time is a
network-wide time periodicallydistributed by the LAS to synchronize all device clocks
on the bus. Link Scheduling time is a link-specific time represented as an offset from
Data Link Time. It is used to indicate when the LAS on each link begins and repeats its
schedule. It is used by system management to synchronize function block execution
with the data transfers scheduled by the LAS.
• polls devices for process loop data at scheduled transmission times.
• distributes a priority-driven token to devices between scheduled transmissions.
-
-
36
Only one device can communicate at a time. Permission to communicate on the bus is con
trolled by a centralized token passed between devices by the LAS. Only the device with the
token can communicate. The LAS maintains a list of all devices that need access to the bus.
This list is called the “Live List.”
Two types of tokens are used by the LAS. A time-critical token, compel data (CD), is sent by
the LAS according to a schedule. A non-time critical token, pass token (PT), is sent by the
LAS to each device in ascending numerical order according to address.
-
Page 37

WIKA Global
Europe
Austria
WIKA Messgerätevertrieb Ursula Wiegand
GmbH & Co. KG
Phone: (+43) 1-86 91 631
E-mail: info@wika.at
Benelux
WIKA Benelux
Phone: (+31) 475-535 500
E-mail: info@wika.nl
Bulgaria
WIKA Bulgaria EOOD
Phone: (+359) 2 82138-10
E-Mail: t.antonov@wika.bg
Finland
WIKA Finland Oy
Phone: (+358) 9-682 49 20
E-mail: info@wika.fi
France
WIKA Instruments s.a.r.l.
Phone: (+33) 1-34 30 84 84
E-mail: info@wika.fr
Germany
WIKA Alexander Wiegand GmbH & Co. KG
Phone: (+49) 93 72-13 20
E-mail: info@wika.de
Italy
WIKA Italiana SRL
Phone: (+39) 02-93 86 11
E-mail: info@wika.it
Poland
Kujawska Fabryka Manometrow-KFM S.A.
Phone: (+48) 542 30 11 00
E-mail: gawel@manometry.com.pl
Russia
ZAO „WIKA MERA“
Phone: (+7) 495-786 21 25
E-mail: info@wika.ru
Serbia and Montenegro
WIKA Merna Tehnika d.o.o.
Phone: (+381) 11 27 63 722
Mail: info@wika.co.yu
Spain
Instrumentos WIKA, S.A.
Phone: (+34) 90-290 25 77
E-mail: info@wika.es
Switzerland
MANOMETER AG
Phone: (+41) 41-919 72 72
E-mail: info@manometer.ch
Ukraine
WIKA Pribor GmbH
Phone: (+38) 062 345 34 16
E-mail: info@wika.donetsk.ua
United Kingdom
WIKA Instruments Ltd
Phone: (+44) 17 37 64 40 08
E-mail: info@wika.co.uk
North America
Canada
WIKA Instruments Ltd. Head Office
Phone: (+1) 780-463 70 35
E-mail: info@wika.ca
WIKA Instruments Canada Ltd.
Phone: (+1) 905-337 16 11
E-mail: info@wika.ca
Mexico
Instrumentos WIKA Mexico S.A. de C.V.
Phone: (+52) 555 020 53 00
E-mail: ventas@wika.com.mx
USA
WIKA Instrument Corporation
Phone: (+1) 770-513 82 00
E-mail: info@wika.com
South America
Argentina
WIKA Argentina S.A.
Phone: (+54-11) 4730 18 00
E-mail: info@wika.com.ar
Brazil
WIKA do Brasil Ind. e Com. Ltda.
Phone: (+55) 15-3266 16 55
E-mail: marketing@wika.com.br
Africa/Middle East
Iran
WIKA Instrumentation Pars (KFZ) Ltd.
Phone: (+98-21) 8878 3514-17
E-mail: info@wika.ir
South Africa
WIKA Instruments (Pty.) Ltd.
Phone: (+27) 11-621 00 00
E-mail: sales@wika.co.za
United Arab Emirates
WIKA Middle East FZE
Phone: (+971) 4 - 883 90 90
E-mail: wikame@emirates.net.ae
Asia
China
WIKA International Trading (Shanghai) Ltd.
Phone: (+86) 21 - 53 85 25 73
E-mail: wikash@online.sh.cn
WIKA Instrumentation (Suzhou) Co., Ltd.
Phone: (+86) 512 - 68 25 98 41
E-mail: wikainst@public1.sz.js.cn
India
WIKA Instruments India Pvt. Ltd.
Phone: (+91) 20 - 27 05 29 01
E-mail: sales@wika.co.in
Japan
WIKA Japan K. K.
Phone: (+81) 3-54 39 66 73
E-mail: t-shimane@wika.co.jp
Kazakhstan
TOO WIKA Kazakhstan
Phone: (+7) 32 72 33 08 48
E-mail: wika-kazakhstan@nursat.kz
Korea
WIKA Korea Ltd.
Phone: (+82) 2 - 8 69 05 05
E-mail: info@wika.co.kr
Malaysia
WIKA Instrumentation (M) Sdn. Bhd.
Phone: (+60) 3 - 56 36 88 58
E-mail: info@wika.com.my
Singapore
WIKA Instrumentation Pte. Ltd.
Phone: (+65) 68 44 55 06
E-mail: info@wika.com.sg
Taiwan
WIKA Instrumentation Taiwan Ltd.
Phone: (+886) 034 20 60 52
E-mail: info@wika.com.tw
Australia
Australia
WIKA Australia Pty. Ltd. (NSW)
Phone: (+61) 2 - 88 45 52 22
E-mail: sales@wika.com.au
WIKA Australia Pty. Ltd. (VIC)
Phone: (+61) 3 - 88 47 20 00
E-mail: sales@wika.com.au
WIKA Alexander Wiegand GmbH & Co. KG
Alexander-Wiegand-Straße 30
63911 Klingenberg • Germany
Phone (+49) 93 72/132-0
Fax (+49) 93 72/132-406
E-Mail info@wika.de
www.wika.de
 Loading...
Loading...