

Page 1

Frequency Inverter
CFW-09
Convertidor de Frecuencia
CFW-09
Inversor de Freqüência
CFW-09
Frequenzumrichter
CFW-09
Variateur de Vitesse
CFW-09
Frequentie-Omzetter
CFW-09
Frekvensomriktare
CFW-09
Преобразователь частоты
CFW-09
User´s Guide
Manual del Usuario
Manual do Usuário
Bedienungsanleitung
Guide d'instalation et d'exploitation
Installatie en gebruikshandleiding
Bruksanvisning
Руководство по эксплуатации
Motors | Automation | Energy | Coatings
Page 2
FREQUENCY
INVERTER
MANUAL
ATTENTION!
It is very important to check if the
inverter software version is the same
as indicated above.
09/2008
Series:
CFW-09
Software:
version 4.0X
Language:
English
Document:
0899.5306 / 12
Page 3
Revision
Description
Section
1
FirstEdition.
-2Inclusion of the functions Fieldbus and Serial Communication.
Refer to item
8.12 and 8.13
2
Inclusion of the Spare Part List.
Refer to item
7.52DimensionChanging.
Refer to item
3.1.2 and 9.4
3
Inclusion of thePID Regulator.
Refer to
item 6
4
Inclusion of the German Language - Ride-through and Flying
S
tart functions.
Refer to
item 6
4
Inclusionof DBW-01;KITKME; DC LinkInductor.
Refer to
item 8
5
Inclusion of
I
tem 3.3 -CE Installation.
Refer to
item 3
5
Inclusion of new functions such as Ride-Through for Vector Control, Motor Phase Loss.
Refer to item 6
5
New I/O Expansion Boards EBB.04 and EBB.05.
Refer to item 8
6
General Revision.
-7Inclusion of the models from 2.9 to 32 A / 500-600 V.
Refer to items 2.4; 3.1;
3.2.1; 3.3; 4.2; 6.2; 6.3; 7.1;
7.2; 7.4; 7.5; 8.7.1; 8.10.1;
9.1 and 9.1.3
8
Inclusion of new functions:
Refer to item 6
Control Type of the Speed Regulator, SpeedRegulator Differential Gain, Stop Mode Selection,
Access to the parameters with different content than default, Hysteresis for Nx/Ny, kWh
Counter,Load User 1 and 2 the factory Hours Hx, via DIx, Parameter Setting Disable via DIx,
Help Message for E24, “P406 = 2 in Vector Control”, Automatic SensorLess Set of P525, Last
10 errors indication, Motor Torque indication via AOx.
8
New optional boards: EBC and PLC1.
Refer to
item 8
8
Newmodel CFW-09 SHARKNEMA 4X/IP56.
Refer to item 8
8
New models for voltages, currents and powers: Models 500-600 V.
Refer to items 1 to 9
8
Inclusion of the items 8.14 Modbus-RTU,8.17 CFW-09 Supplied by the DC Link - Line HD,
Refer to item 8
8.18 CFW-09 RB Regenerative Converter.
8
Updating of the SparePart List.
79Inclusion of new functions:
-
Overcurrent Protection, Default factory reset 50 Hz, Timer Relay, Ramp Holding.
9
New lines of the current and
power supply
.-9
PID Regulator to “Academic” Changing.
-10General revision and update of the software version (2.6X to 3.1X):
-
Change on the maximum value of P156 and P401 for some models; Change on the maximum
value of P331; Change on the factory default value of P404.
11
New functions;
Incorporation of the Mechanical Brake Logic for cranes, Load Detection Logic and addition of
Refer to items I, 6, 7 and 8
option “Indication of Torque Current Polarity” at the DOx and RLx outputs; VVW Control; DC
Braking for VVW and Sensorless; Flying Start function for the Sensorless Control; support for
EtherNet/IP communication board; read/write function for the PLC board parameters through
Modbus; Indication of the Analog Outputs values in read only parameters P027 to P030;
Simultaneous indication of the speed and current in parameter P070; P313 = 4 (Changes to
LOCAL mode keeping the commands);Regulation of the maximum torque current through
options AI1+AI2 and AI2+AI3; function F > Fx; function ready 2.
12
Updating of the software version to V4.0X.
-
Updating of the parameters P309 and P313.
Addition of new parameters: P335, P336, P337, P338, P340, P341, P342, P343, P344 and P346.
New options for fault Reset.
General revision.
Summaryof Revisions
The table below describes all revisions made to this manual.
Page 4
Summary
Quick Parameter Reference, Fault and Status Messages
I.
Parameters
.......................................................................................
09
II.
FaultMessages
....................................................................................
33
III.Other Messages
.................................................................................
34
CHAPTER
1
Safety Notices
1.1 Safety Notices in the Manual
.............................................................
35
1.2 Safety Notices on the Product
...........................................................
35
1.3PreliminaryRecommendations
..........................................................
35
CHAPTER
2
General Information
2.1About this Manual
..............................................................................
37
2.2SoftwareVersion
................................................................................
37
2.3About the CFW-09
.............................................................................
37
2.4CFW-09IdentificationLabeland CodeNumber
..................................
39
2.5ReceivingandStorage
.......................................................................
41
CHAPTER
3
Installation and Connection
3.1Mechanical Installation
......................................................................
42
3.1.1EnvironmentConditions
...............................................................
42
3.1.2Dimensionalof CFW-09
...............................................................
42
3.1.3Mounting Specifications
...............................................................
43
3.1.3.1Mounting Inside a Panel
.....................................................
44
3.1.3.2Mounting onSurface
..........................................................
45
3.1.3.3Mounting withthe Heatsink Through aSurface
..................
46
3.1.4Keypad(HMI)andCoverRemoval
................................................
48
3.2 Electrical Installation
..........................................................................
49
3.2.1Power/GroundingTerminals
.........................................................
49
3.2.2Locationof thePower/Grounding/ControlConnections
................
51
3.2.3 RatedVoltageSelection
..............................................................
53
3.2.4
Power/GroundingWiringand Fuses
............................................
54
3.2.5
PowerConnections
.....................................................................
57
3.2.5.1AC InputConnection
...........................................................
57
3.2.5.2Output Connections
............................................................
58
3.2.5.3GroundingConnections
.......................................................
58
3.2.5.4ITNetworks
.........................................................................
59
3.2.6
ControlWiring
..............................................................................
61
3.2.7
TypicalTerminalConnections
......................................................
64
3.3EuropeanEMC Directive- Requirementsfor ConformingInstallations
67
3.3.1Installation
...................................................................................
67
3.3.2 Epcos Filters
...............................................................................
68
3.3.3Schaffner Filters
...........................................................................
71
3.3.4 EMC Filter Characteristics
...........................................................
74
Page 5
Summary
CHAPTER
4
Keypad (HMI) Operation
4.1 D
e
scription of the Keypad
..................................................................
86
4.2 Useof theKeypad(HMI)
....................................................................
88
4.2.1
KeypadOperation
........................................................................
88
4.2.2
"Read-Only"Variablesand Status
...............................................
89
4.2.3
ParameterViewingandProgramming
.........................................
90
CHAPTER
5
Start-up
5.1
Pre-Power Checks
............................................................................
93
5.2
InitialPower-up
.................................................................................
93
5.3
Start-up
.............................................................................................
98
5.3.1
Type of Control:V/F60 Hz - Operation via Keypad(HMI)
............
99
5.3.2Typeof Control: Sensorless or Vector with Encoder
(OperationVia Keypad(HMI))
.....................................................
102
5.3.3
TypeofControl: VVW - KeypadOperation
.................................
109
CHAPTER
6
Detailed Parameter Description
6.1Access and Read Only Parameters - P000 to P099
.........................
118
6.2 RegulationParameters - P100 to P199
.............................................
124
6.3Configuration Parameters-P200 to P399
.........................................
147
6.3.1
ParametersforCraneApplicationsand forTorqueMaster/Slave
Function - P351 to P368
..........................................................
208
6.4 Motor Parameters - P400 to P499
....................................................
214
6.5 SpecialFunctions Parameters - P500 to P699
.................................
220
6.5.1
PIDRegulator
.............................................................................
220
6.5.2
Description
.................................................................................
220
CHAPTER
7
Diagnostics and Troubleshooting
7.1 Faults and Possible Causes
.............................................................
228
7.2Troubleshooting
................................................................................
233
7.3 ContactingWEG
...............................................................................
235
7.4PreventiveMaintenance
....................................................................
235
7.4.1CleaningInstructions
..................................................................
236
7.5 SparePart List
..................................................................................
237
CHAPTER
8
CFW-09 Options and Accessories
8.1 I/O ExpansionBoards
.......................................................................
248
8.1.1 EBA(I/O Expansion BoardA)
.....................................................
248
Page 6

Summary
8.1.2 EBB (I/O Expansion Board B)
....................................................
251
8.1.3 EBE
............................................................................................
254
8.2IncrementalEncoder
.........................................................................
254
8.2.1 EBA/EBB Boards
.......................................................................
254
8.2.2EBC1 Board
................................................................................
256
8.3 Keypad with LEDs Only
....................................................................
258
8.4RemoteKeypad and Cables
.............................................................
258
8.5Blank Covers
....................................................................................
262
8.6RS-232 PC Communication Kit
........................................................
262
8.7Line Reactor/DC BusChoke
.............................................................
263
8.7.1Application Criteria
......................................................................
264
8.7.2 DC Link Inductor Built in
.............................................................
266
8.8Load Reactor
....................................................................................
267
8.9 RFIFilter
...........................................................................................
267
8.10Dynamic Braking
............................................................................
268
8.10.1 DB Resistor Sizing
..................................................................
268
8.10.2Installation
...............................................................................
270
8.10.3DynamicBraking Module-DBW-01and DBW-02
.....................
271
8.10.3.1DBW-01and DBW-02 IdentificationLabel
...................
272
8.10.3.2Mechanical Installation
................................................
272
8.10.3.3Installation/Connection
................................................
275
8.11
ThroughSurfaceMountingKit
.........................................................
277
8.12
Fieldbus
...........................................................................................
277
8.12.1 Installation of the
Fieldbus
Kit
.................................................
278
8.12.2Profibus DP
.............................................................................
281
8.12.3ProfibusDP-V1
.......................................................................
283
8.12.4DeviceNet
................................................................................
284
8.12.5DeviceNetDriveProfile
............................................................
286
8.12.6EtherNet/IP
.............................................................................
287
8.12.7Use to the Fieldbus/RelatedParameters of the CFW-09
.........
294
8.12.7.1VariablesReadfrom the Inverter
..................................
294
8.12.7.2VariablesWritten inthe Inverter
...................................
296
8.12.7.3 Fault Indications
..........................................................
298
8.12.7.4Addressing of the CFW-09Variables in the
FieldbusDevices
.........................................................
299
8.13SerialCommunication
.....................................................................
300
8.13.1Introduction
.............................................................................
300
8.13.2InterfacesDescription
..............................................................
301
8.13.2.1RS-485
.........................................................................
301
8.13.2.2RS-232
.........................................................................
302
8.13.3Protocol Definitions
.................................................................
302
8.13.3.1UsedTerms
..................................................................
302
8.13.3.2Parameters/VariablesResolution
..................................
303
8.13.3.3CharactersFormat
........................................................
303
8.13.3.4Protocol
........................................................................
303
8.13.3.5
Execution
andTelegram Test
.......................................
305
8.13.3.6TelegramSequence
......................................................
306
8.13.3.7Variable Code
...............................................................
306
8.13.4Telegram Examples
.................................................................
306
8.13.5Variablesand Errorsof the Serial Communication
..................
307
8.13.5.1 Basic Variables
............................................................
307
8.13.5.2Examples of Telegrams withBasic Variables
...............
310
8.13.5.3Parameters Related tothe Serial Communication
........
311
8.13.5.4Errors Related to theSerial Communication
.................
312
Page 7

Summary
8.13.6Timesfor Read/Writeof Telegrams
..........................................
312
8.13.7 PhysicalConnectionof theRS-232and RS-485Interface
........
313
8.14
Modbus-RTU
....................................................................................
314
8.14.1Introductionin theModbus-RTU Protocol
................................
314
8.14.1.1TransmissionModes
....................................................
314
8.14.1.2Message Structurein RTUMode
..................................
314
8.14.2Operationof theCFW-09 inthe Modbus-RTUNetwork
...........
316
8.14.2.1Interface RS-232andRS-485Description
.....................
316
8.14.2.2InverterConfigurationinthe Modbus-RTUNetwork
......
317
8.14.2.3Access to the Inverter Data
...........................................
317
8.14.3Detailed FunctionDescription
...................................................
320
8.14.3.1 Function 01- Read Coils
..............................................
321
8.14.3.2Function 03 -Read Holding Register
............................
321
8.14.3.3 Function 05 - Write Single Coil
.....................................
322
8.14.3.4 Function 06 - Write SingleRegister
..............................
323
8.14.3.5 Function 15 - Write Multiple Coils
.................................
324
8.14.3.6 Function 16 - Write Multiple Registers
.........................
325
8.14.3.7Function43 - ReadDevice Identification
.......................
326
8.14.4CommunicationErrors
.............................................................
327
8.14.4.1Error Messages
............................................................
327
8.15KIT KME (for ExtractableMounting)
................................................
329
8.16CFW-09 SHARKNEMA4X
.............................................................
330
8.16.1Enclosure Specifications
.........................................................
330
8.16.2Mechanical Installation
............................................................
330
8.16.3 Electrical Installation
...............................................................
332
8.16.4Closingthe
Inverter
..................................................................
332
8.16.5 How to Specify
........................................................................
333
8.17 CFW-09 Supplied by the DC Link - Line HD
...................................
333
8.18CFW-09RBRegenerativeConverter
...............................................
333
8.19PLC Board
......................................................................................
335
CHAPTER 9
Technical Specification
9.1Power Data
......................................................................................
336
9.1.1
PowerSupplySpecifications
......................................................
336
9.1.2220-230V Power Supply
............................................................
337
9.1.3380-480V Power Supply
............................................................
337
9.1.4500-600V Power Supply
............................................................
338
9.1.5660-690V Power Supply
............................................................
340
9.2Electronics/General Data
..................................................................
343
9.2.1Applicable Standards
..................................................................
344
9.3OptionalDevices
...............................................................................
345
9.3.1 I/O Expansion Board EBA
..........................................................
345
9.3.2 I/O Expansion Board EBB
..........................................................
345
9.4Mechanical Data
...............................................................................
346
Page 8
CFW-09-
QUICKPARAMETER REFERENCE
9
QUICK PARAMETER REFERENCE, FAULT AND STATUS MESSAGES
Software:V
4.0X
Application:
CFW-09 Model:
SerialNumber:
Responsible:
Date:
//.
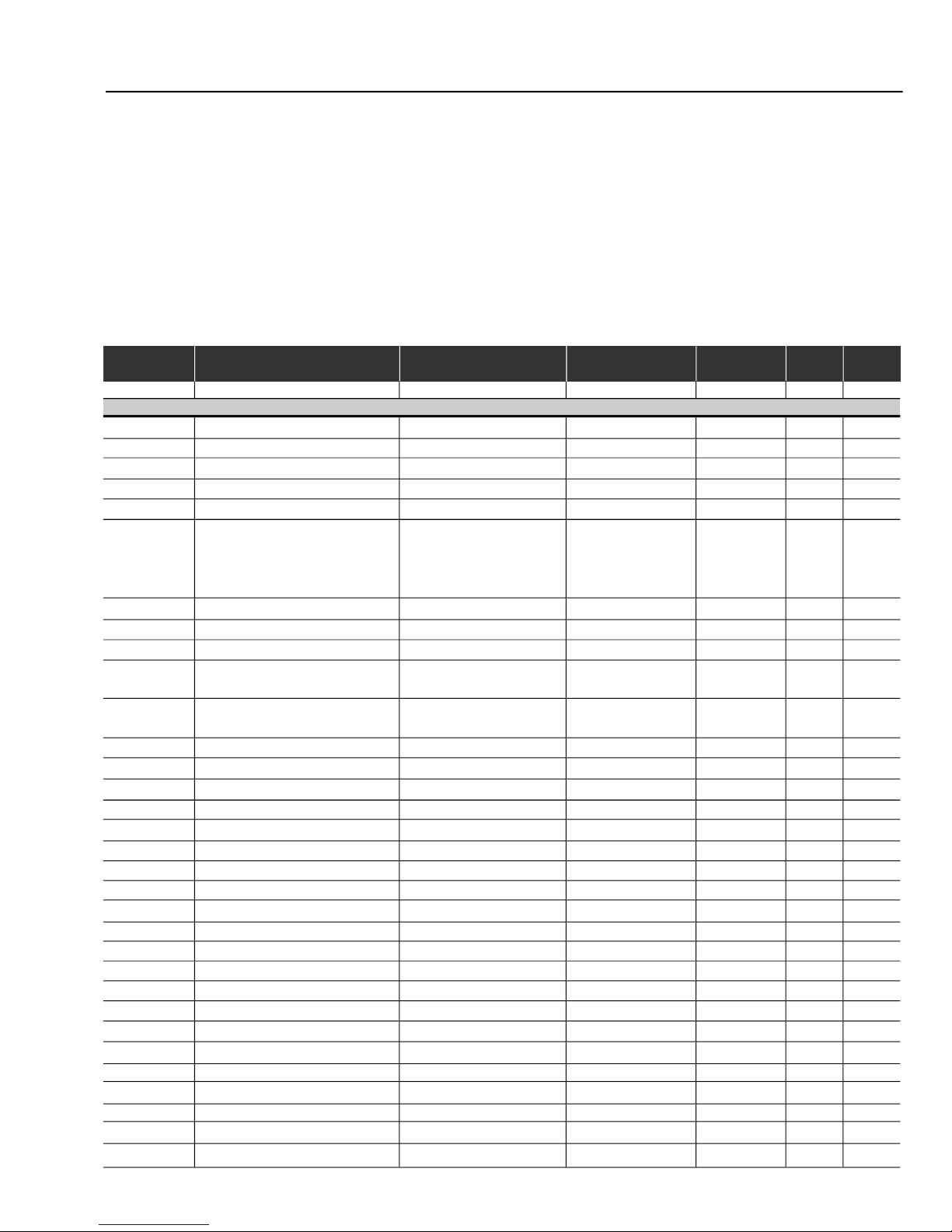
I.Parameters
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
P000
Parameter Access
0 to 999
0-118
READONLY PARAMETERS
P001 to
P099
P001
Speed Reference
0.0 to P134
rpm
118
P002
MotorSpeed
0.0 to P134
rpm
118
P003
Motor Current
0.0 to 2600
A (rms)
118
P004
DCLink Voltage
0.0 to 1235
V
119
P005
Motor Frequency
0.0 to 1020
Hz
119
P006
Inverter Status
rdy-119
run
Sub
Exy
P007
Motor Voltage
0 to 800
V
119
P009
Motor Torque
0.0 to 150.0
%
119
P010
Output Power
0.0 to
3276kW119
P012
DigitalInputsDI1 ... DI8Status
0 = Inactive (Open)
-
119
1 = Active (Closed)
P013
DigitalandRelayOutputsDO1,DO2,
0 = Inactive (Dropped-out)
-
120
RL1, RL2, and RL3 Status
1 = Active (Picked-up)
P014
Last Fault
0 to 71
-
121
P015
Second Previous Fault
0 to 71
-
121
P016
Third Previous Fault
0 to 71
-
121
P017
Fourth Previous Fault
0 to 71
-
121
P018
Analog InputAI1’ Value
-100 to +100
%
121
P019
Analog InputAI2’ Value
-100 to +100
%
121
P020
Analog InputAI3’ Value
-100 to +100
%
121
P021
Analog InputAI4’ Value
-100 to +100
%
121
P022
WEGUse
--121
P023
Software Version
V4.0X
-
121
P024
A/D Conversion Value of AI4
-32768 to +32767
-
121
P025
A/D Conversion Value of Iv
0 to 1023
-
121
P026
A/D Conversion Value of Iw
0 to 1023
-
121
P027
AO1 Value
0.0 to 100
%
122
P028
AO2 Value
0.0 to 100
%
122
P029
AO3 Value
-100 to +100
%
122
P030
AO4 Value
-100 to +100
%
122
P040
PID Process Variable
0 to 100
%
122
P042
Powered Time
0 to 65535
h
122
P043
Enabled Time
0 to 6553.5
h
122
P044
kWh Counter
0 to 65535
kWh
123
Page 9

CFW-09-
QUICKPARAMETER REFERENCE
10
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
(*)
P136 has different functions for V/F and Vector Control.
P060
Fifth Error
0 to 71
-
123
P061
Sixth Error
0 to 71
-
123
P062
Seventh Error
0 to 71
-
123
P063
EighthError
0 to 71
-
123
P064
Ninth Error
0 to 71
-
123
P065
Tenth Error
0 to 71
-
123
P070
Motor Current and Motor Speed
0 to 2600
A (rms)
123
0 to P134
rpm
P071
CommandWord
0 a 65535
-
123
P072
Fieldbus Speed Reference
0 a 65535
-
123
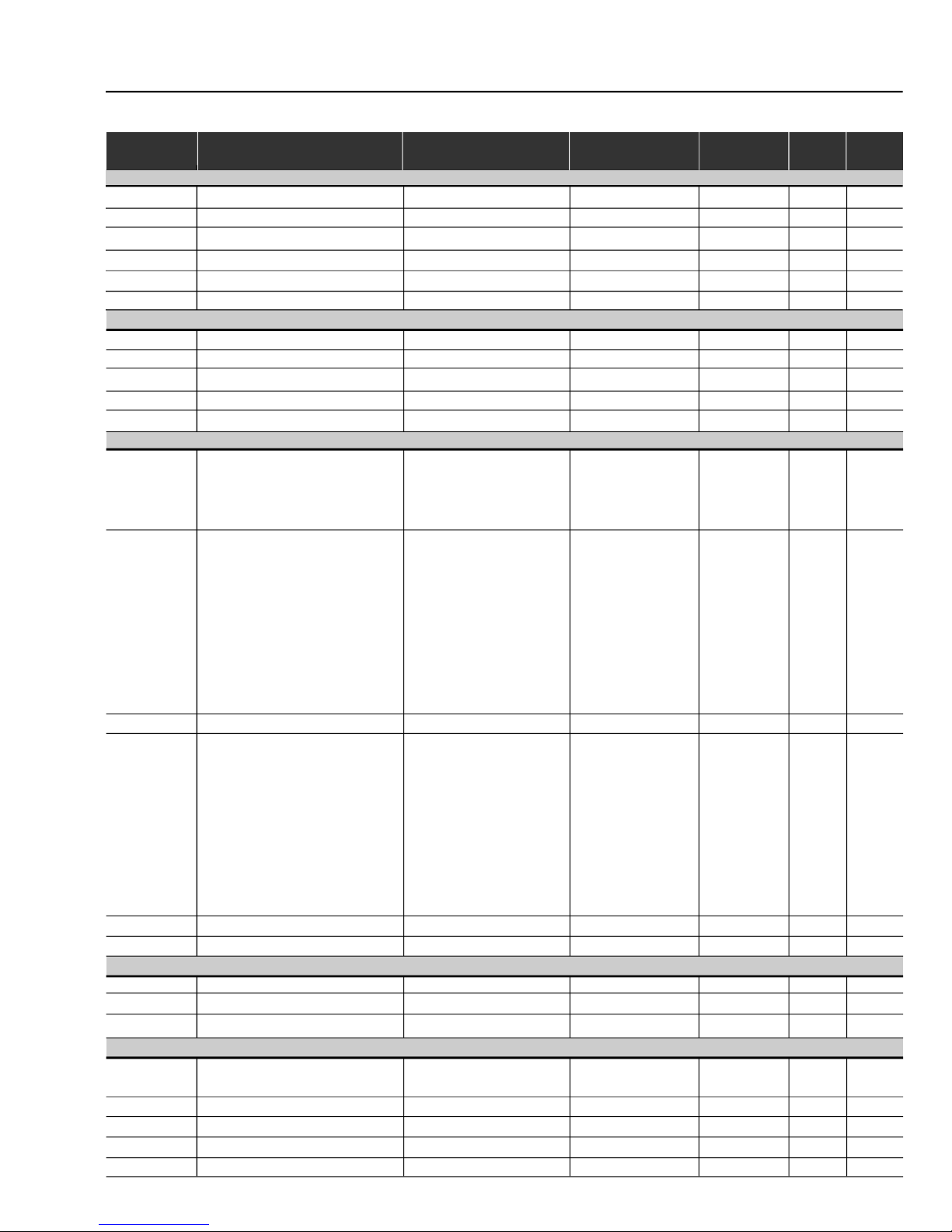
REGULATIONPARAMETERS
P100 to P199
Ramps
P100
Acceleration Time
0.0 to 999
20.0s124
P101
DecelerationTime
0.0 to 999
20.0s124
P102
Acceleration Time 2
0.0 to 999
20.0s124
P103
DecelerationTime 2
0.0 to 999
20.0s124
P104
SRamp
0 = Inactive (Linear)
0 = Inactive
-
124
1 = 50 %
2 = 100 %
Speed References
P120
Speed Reference Backup
0 = Inactive
1 = Active
-
124
1 = Active
P121
Keypad Speed Reference
P133 to P134
90
rpm
125
P122
(2)(11)
JOG or JOG+ Speed Reference
00 to P134
150 (125)
rpm
125
P123
(2)(11)
JOG- Speed Reference
00 to P134
150 (125)
rpm
125
P124
(2)(11)
Multispeed Reference 1
P133 to P134
90 (75)
rpm
126
P125
(2)(11)
Multispeed Reference 2
P133 to P134
300 (250)
rpm
126
P126
(2)(11)
Multispeed Reference 3
P133 to P134
600 (500)
rpm
126
P127
(2)(11)
Multispeed Reference 4
P133 to P134
900 (750)
rpm
126
P128
(2)(11)
Multispeed Reference 5
P133 to P134
1200 (1000)
rpm
126
P129
(2)(11)
Multispeed Reference 6
P133 to P134
1500 (1250)
rpm
126
P130
(2)(11)
Multispeed Reference 7
P133 to P134
1800 (1500)
rpm
126
P131
(2)(11)
Multispeed Reference 8
P133 to P134
1650 (1375)
rpm
126
Speed Limits
P132
(1)
Maximum Overspeed Level
(0 to 99) x P134
10%127
100 = Disabled
P133
(2)(11)
MinimumSpeedReference
0 to (P134-1)
90 (75)
rpm
127
P134
(2)(11)
Maximum Speed Reference
(P133+1) to (3.4 x P402)
1800 (1500)
rpm
127
I/F Control
P135
(2)
Speedtransition to I/F Control
0 to 90
18
rpm
128
P136
(*)
Current Reference (I*)
0= Imr1 = 1.11 x I
mr
-
128
for I/F Control
1 = 1.11 x I
mr
2 = 1.22 x I
mr
3 = 1.33 x I
mr
4 = 1.44 x I
mr
5 = 1.55 x I
mr
6 = 1.66 x I
mr
7 = 1.77 x I
mr
8 = 1.88 x I
mr
9 = 2.00 x I
mr
Page 10
CFW-09-
QUICKPARAMETER REFERENCE
11
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
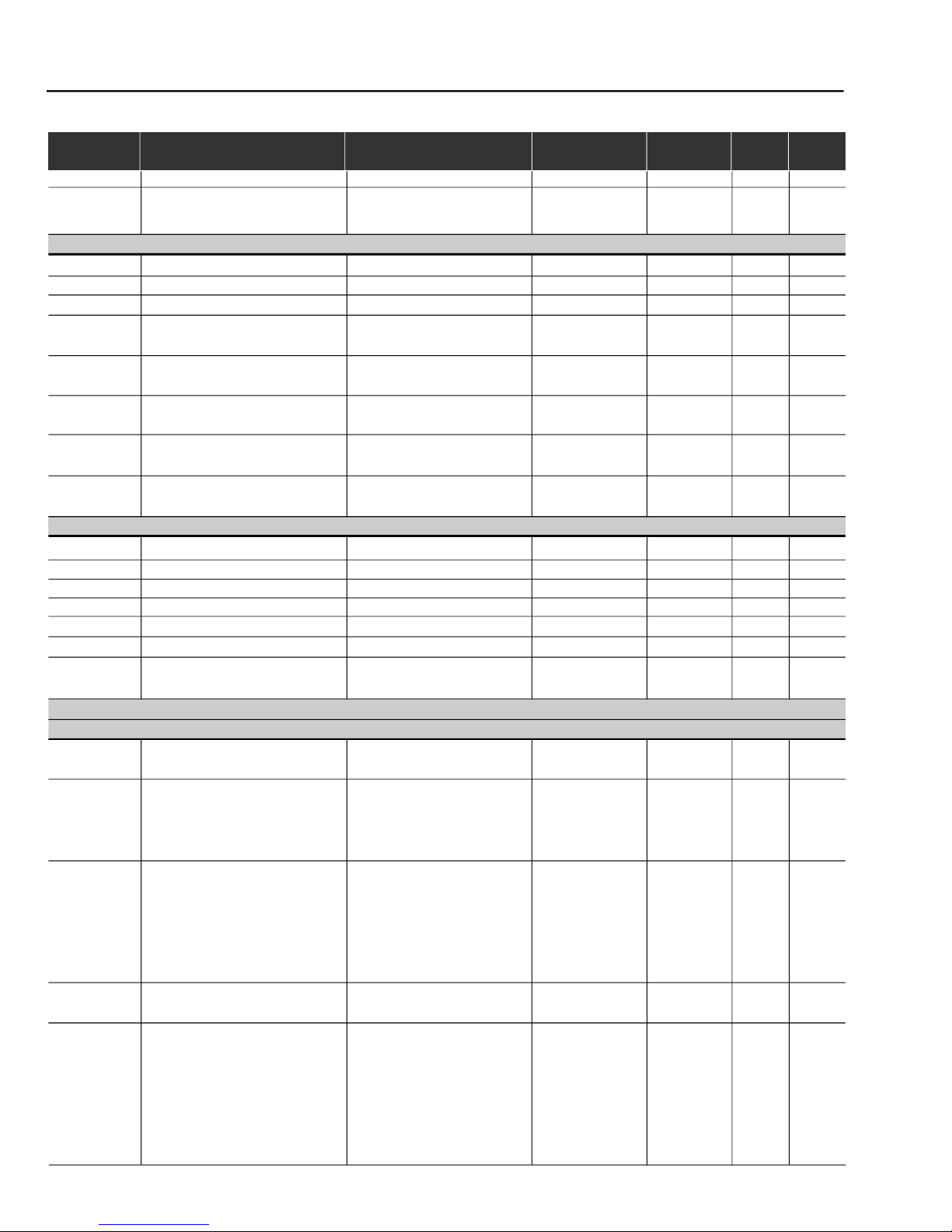
(*)
P151 has different function for V/F or Vector Control.
V/F Control
P136
(*)
Manual Boost Torque
0 to 9
1-129
P137
Autommatic Torque Boost
0.00 to 1.00
0.00-130
P138
SlipCompensation
-10.0 to +10.0
0.0%130
P139
Output Current Filter
0.00 to 16.00
1.00s131
P140
Dwell Time at Start
0.0 to 10.0
0.0s131
P141
Dwell Speed at Start
0 to 300
90
rpm
131
Adjustable V/F
P142
(1)
MaximumOutputVoltage
0.0 to 100.0
100.0
%
132
P143
(1)
Intermediate Output Voltage
0.0 to 100.0
50.0%132
P144
(1)
Output Voltage at 3 Hz
0.0 to 100.0
8.0%132
P145
(1)
FieldWeakeningSpeed
P133 (> 90) to P134
1800
rpm
132
P146
(1)
IntermediateSpeed
90 to P145
900
rpm
132
DC Link Voltage Regulation
P150
(1)
DCLink VoltageRegulationMode
0 = With Losses
1 = Without Losses
-
133
1 = Without Losses
2= Enable/Disable
viaDI3...DI8
P151
(6) (*)
DC Link VoltageRegulation Level
339 to 400 (P296 = 0)
400V133 and
(V/F Control / Vector Control
585 to 800 (P296 = 1)
800
136
with optimal braking)
616 to 800 (P296 = 2)
800
678 to 800 (P296 = 3)
800
739 to 800 (P296 = 4)
800
809 to 1000 (P296 = 5)
1000
885 to 1000 (P296 = 6)
1000
924 to 1000 (P296 = 7)
1000
1063 to 1200 (P296 = 8)
1200
P152
ProportionalGain
0.00 to 9.99
0.00-137
P153
(6)
Dynamic Braking Level
339 to 400 (P296 = 0)
375V137
585 to 800 (P296 = 1)
618
616 to 800 (P296 = 2)
675
678 to 800 (P296 = 3)
748
739 to 800 (P296 = 4)
780
809 to 1000 (P296 = 5)
893
885 to 1000 (P296 = 6)
972
924 to 1000 (P296 = 7)
972
1063 to 1200 (P296 = 8)
1174
P154
Dynamic Braking Resistor
0.0 to 500
0.0138
P155
DB Resistor Power Rating
0.00 to 650
2.60kW138
Overload Currents
P156
(2)(7) (12)
Overload Current 100 % Speed
P157 to 1.3 x P295
1.1 x P401
A
139
P157
(2) (7)
Overload Current 50 % Speed
P156to P158
0.9 x P401
A
139
P158
(2) (7)
Overload Current 5 % Speed
(0.2 x P295) to P157
0.55 x P401
A
139
Speed Regulator
P160
(1)
Optimization of the
0= Normal
0= Normal
-
140
SpeedRegulator
1 = Saturated
P161
(3)
ProportionalGain
0.0 to 63.9
7.4-142
P162
(3)
IntegralGain
0.000 to 9.999
0.023
-
142
P163
Local Speed Reference Offset
-999 to +999
0-143
P164
Remote Speed Reference Offset
-999 to +999
0-143
Page 11
CFW-09-
QUICKPARAMETER REFERENCE
12
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
P165
SpeedFilter
0.012 to 1.000
0.012
s
143
P166
Speed Regulator Differential Gain
0.00 to 7.99
0.00 (without
-
143
differential action)
Current Regulator
P167
(4)
ProportionalGain
0.00 to 1.99
0.50-143
P168
(4)
IntegralGain
0.000 to 1.999
0.010
-
143
P169
(*) (7)
Maximum Output Current(V/FControl)
(0.2 x P295) to
(1.8 x P295)
1.5 x P295
A
144
P169
(*) (7)
Maximum Forward Torque Current
0 to 180
125%144
(Vector Control)
P170
Maximum Reverse Torque Current
0 to 180
125%144
(Vector Control)
P171
Maximum ForwardTorque Current at
0 to 180
125%145
MaximumSpeed(P134)
P172
Maximum Reverse Torque Current at
0 to 180
125%145
MaximumSpeed(P134)
P173
Curve Type of the Max. Torque
0= Ramp
0= Ramp
-
145
1 = Step
Flux Regulator
P175
(5)
ProportionalGain
0.0 to 31.9
2.0-146
P176
(5)
IntegralGain
0.000 to 9.999
0.020
-
146
P177
MinimumFlux
0 to 120
0%146
P178
NominalFlux
0 to 120
100%146
P179
MaximumFlux
0 to 120
120%146
P180
FieldWeakenigStartPoint
0 to 120
95%146
P181
(1)
MagnetizationMode
0 = General Enable
0 = General Enable
-
146
1 = Start/Stop
CONFIGURATION PARAMETERS
P200 to P399
Generic Parameters
P200
Password
0 = Off
1 = On
-
147
1 = On
P201
(11)
Language Selection
0 = Português
0, 1, 2, 3
(11)
-
147
1= English
2 = Español
3 = Deutsch
P202
(1)(2) (11)
Type of Control
0 = V/F 60 Hz
0 (1)-147
1 = V/F 50 Hz
2 = V/F Adjustable
3 = Sensorless Vector
4 = Vector with Encoder
5 = VVW (Voltage Vector WEG)
P203
(1)
SpecialFunction Selection
0 = None
0 = None
-
147
1= PID Regulator
P204
(1)(10)
Load/Save Parameters
0 = Not Used
0 = Not Used
-
148
1 = Not Used
2 = Not Used
3 = Reset P043
4 = Reset P044
5 = LoadsFactory Default-60Hz
6 = LoadsFactory Default-50Hz
(*)
P169 has different function for V/F or Vector Control.
Page 12
CFW-09-
QUICKPARAMETER REFERENCE
13
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
7 = Loads User Default 1
8 = Loads User Default 2
9 = Not Used
10 = Save User Default 1
11 = Save User Default 2
P205
Display Default Selection
0=P005 (Motor Frequency)
2 = P002
-
149
1 = P003 (Motor Current)
2 = P002 (Motor Speed)
3 = P007 (Motor Voltage)
4 = P006 (Inverter Status)
5 = P009 (Motor Torque)
6 = P070
(Motor Speed and
Motor Current)
7 = P040
(PID Process
Variable)
P206
Auto-Reset Time
0 to 255
0s150
P207
Reference Engineering Unit 1
32 to 127 (ASCII)
114= r
-
150
A, B, ... , Y, Z
0, 1, ... , 9
#, $, %, (, ), *, +, ...
P208
(2)(11)
Reference Scale Factor
1 to 18000
1800 (1500)
-
150
P209
(1)
Motor Phase Loss Detection
0 = Off
0 = Off
-
151
1 = On
P210
DecimalPoint of the SpeedIndication
0 to 3
0-151
P211
(1)
Zero Speed Disable
0 = Off
0 = Off
-
151
1 = On
P212
Condition to Leave Zero
0 = N* or N>P291
0 = N* or N>P291
-
152
SpeedDisable
1= N*>P291
P213
Time Delay for Zero Speed Disable
0 to 999
0s152
P214
(1) (9)
Line Phase Loss Detection
0 = Off
1 = On
-
152
1 = On
P215
(1)
Keypad Copy Function
0 = Off
0 = Off
-
152
1 = Inverter Keypad
2 = Keypad Inverter
P216
Reference Engineering Unit 2
32 to 127 (ASCII)
112= p
-
154
A, B, ... , Y, Z
0, 1, ... , 9
#, $, %, (, ), *, +, ...
P217
Reference Engineering Unit 3
32 to 127 (ACSII)
109 = m
-
154
A, B, ... , Y, Z
0, 1, ... , 9
#, $, %, (, ), *, +, ...
P218
LCD Display Contrast
0 to 150
127-154
Adjustment
Local/Remote Definition
P220
(1)
Local/Remote Selection Source
0 = Always Local
2 = Keypad
-
154
1 = Always Remote
(Default Local)
2 = Keypad (Default Local)
3 = Keypad (
DefaultRemote
)
Page 13
CFW-09-
QUICKPARAMETER REFERENCE
14
4 = DI2 to DI8
5 = Serial (L)
6 = Serial (R)
7 = Fieldbus (L)
8 = Fieldbus (R)
9 = PLC (L)
10 = PLC (R)
P221
(1)
Local Speed Reference Selection
0 = keypad
0 = Keypad
-
155
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 =Add AI > 0
6 =Add AI
7=E.P.
8 = Multispeed
9 = Serial
10 = Fieldbus
11= PLC
P222
(1)
Remote SpeedReference
0 = keypad
1 = AI1
-
155
Selection
1 = AI1
2 = AI2
3 = AI3
4 = AI4
5 =Add AI > 0
6 =Add AI
7= E.P.
8 = Multispeed
9 = Serial
10 = Fieldbus
11= PLC
P223
(1) (8)
LocalFWD/REV Selection
0 = Always Forward
2 = Keypad
-
156
1 = Always Reverse
(DefaultFWD)
2 = Keypad (Default FWD)
3 = Keypad (Default REV)
4= DI2
5 = Serial (Default FWD)
6 = Serial (Default REV)
7 = Fieldbus (Default FWD)
8 = Fieldbus (Default REV)
9 = PolarityAI4
10= PLC (FWD)
11= PLC(REV)
P224
(1)
Local Start/Stop Selection
0 = [I] and [O] Keys
0 = [I] and [O] Keys
-
156
1 = DIx
2 = Serial
3 = Fieldbus
4=PLC
P225
(1) (8)
Local JOG Selection
0 = Disable
1 = Keypad
-
156
1 = Keypad
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
Page 14
CFW-09-
QUICKPARAMETER REFERENCE
15
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
2 = DI3 to DI8
3 = Serial
4 = Fieldbus
5=PLC
P226
(1) (8)
RemoteFWD/REVSelection
0 = Always Forward
4= DI2
-
157
1 = Always Reverse
2 = Keypad (Default FWD)
3 = Keypad (Default REV)
4= DI2
5 = Serial (Default FWD)
6 = Serial (Default REV)
7 = Fieldbus (Default FWD)
8 = Fieldbus (Default REV)
9 = PolarityAI4
10= PLC (FWD)
11= PLC(REV)
P227
(1)
RemoteStart/StopSelection
0 = [I] and [O] Keys
1 = DIx
-
157
1 = DIx
2 = Serial
3 = Fieldbus
4=PLC
P228
(1) (8)
RemoteJOG Selection
0 = Disable
2 = DI3 to DI8
-
157
1 = Keypad
2 = DI3 to DI8
3 = Serial
4 = Fieldbus
5=PLC
Stop Model Definition
P232
(1)
StopMode Selection
0 =
Ramp to Stop
0 = Ramp to Stop
-
163
1 = Coast to Stop
2 =
Fast Stop
Analog Inputs
P233
Analog Inputs Dead Zone
0 = Off
0 = Off
-
163
1 = On
P234
Analog Input AI1 Gain
0.000 to 9.999
1.000
-
164
P235
(1)
Analog Input AI1 Signal
0 = (0 to 10) V / (0 to 20) mA
0 = (0 to 10) V /
-
165
1 = (4 to 20) mA
(0 to 20) mA
2 = (10 to 0) V / (20 to 0) mA
3 = (20 to 4) mA
P236
Analog Input AI1 Offset
-100.0 to +100.0
0.0%165
P237
(1) (8)
Analog Input AI2 Function
0= P221/P222
0= P221/P222
-
165
1 = N* without ramp
2=MaximumTorqueCurrent
3 = PID Process Variable
4=MaximumTorqueCurrent
(AI2 + AI1)
P238
Analog Input AI2 Gain
0.000 to 9.999
1.000
-
166
Page 15
CFW-09-
QUICKPARAMETER REFERENCE
16
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
P239
(1)
Analog Input AI2 Signal
0 = (0 to 10) V / (0 to 20) mA
0 = (0 to 10) V /
-
166
1 = (4 to 20) mA
(0 to 20) mA
2 = (10 to 0) V / (20 to 0) mA
3 = (20 to 4) mA
P240
Analog Input AI2 Offset
-100.0 to +100.0
0.0%167
P241
(1) (8)
Analog Input AI3 Function
0= P221/P222
0= P221/P222
-
167
(Requires Optional I/O Expansion
1 = Without ramp
Board EBB)
2 =
MaximumTorqueCurrent
3 = PID Process Variable
4=MaximumTorqueCurrent
(AI3 + AI2)
P242
Analog Input AI3 Gain
0.000 to 9.999
1.000
-
168
P243
(1)
Analog Input AI3 Signal
0 = (0 to 10) V / (0 to 20) mA
0 = (0 to 10) V /
-
168
1 = (4 to 20) mA
(0 to 20) mA
2 = (10 to 0) V / (20 to 0) mA
3 = (20 to 4) mA
P244
Analog Input AI3 Offset
-100.0 to +100.0
0.0%168
P245
Analog Input AI4 Gain
0.000 to 9.999
1.000
-
168
P246
(1)
Analog Input AI4 Signal
0 = (0 to 10) V / (0 to 20) mA
0 = (0 to 10) V /
-
168
(Requires Optional I/O Expansion
1 = (4 to 20) mA
(0 to 20) mA
Board EBA)
2 = (10 to 0) V / (20 to 0) mA
3 = (20 to 4) mA
4 = (-10 to +10) V
P247
Analog Input AI4 Offset
-100.0 to +100.0
0.0%169
P248
InputFilterAI2
0.0 to 16.0
0.0s169
Analog Outputs
P251
Analog OutputAO1 Function
0 = Speed Reference
2 = Real Speed
-
169
(CC9 or EBB board)
1 = Total Reference
2 = Real Speed
3 = Torque Current
Reference (Vector)
4=Torque Current (Vector)
5 = Output Current
6 = PID Process Variable
7 = Active Current (V/F)
8 = Power (kW)
9= PID Setpoint
10=PositiveTorque Current
11= Motor Torque
12= PLC
13 =
Dead Zone for
SpeedIndication
14 = Motor Voltage
P252
Analog Output AO1 Gain
0.000 to 9.999
1.000
-
169
P253
Analog OutputAO2 Function
0 = Speed Reference
5 = Output Current
-
169
(CC9 or EBB board)
1 = Total Reference
2 = Real Speed
3 = Torque Current
Reference (Vector)
Page 16
CFW-09-
QUICKPARAMETER REFERENCE
17
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
4 = Torque Current (Vector)
5 = Output Current
6 = PID Process Variable
7 = Active Current (V/F)
8 = Power (kW)
9= PID Setpoint
10=PositiveTorque Current
11= Motor Torque
12= PLC
13 = Dead Zone for
SpeedIndication
14 = Motor Voltage
P254
Analog Output AO2 Gain
0.000 to 9.999
1.000
-
169
P255
Analog Output AO3 Function
0 = Speed Reference
2 = Real Speed
-
169
(Requires Optional I/O Expansion
1 = Total Reference
Board EBA)
2 = Real Speed
3 = Torque Current
Reference (Vector)
4=Torque Current (Vector)
5 = Output Current
6 = PID Process Variable
7 = Active Current (V/F)
8 = Power (kW)
9= PID Setpoint
10
=PositiveTorqueCurrent
11= Motor Torque
12= PLC
13 =
Not Used
14 = Motor Voltage
15to 63= ExclusiveWEG use
P256
Analog Output AO3 Gain
0.000 to 9.999
1.000
-
170
P257
Analog Output AO4 Function
0 = Speed Reference
5 = Output Current
-
170
(Requires optional I/O Expansion
1 = Total Reference
Board EBA)
2 = Real Speed
3 = Torque Current
Reference (Vector)
4 = Torque Current (Vector)
5 = Output Current
6 = PID Process Variable
7 = Active Current (V/F)
8 = Power (kW)
9= PID Setpoint
10=PositiveTorqueCurrent
11= Motor Torque
12= PLC
13 = Not Used
14 = Motor Voltage
15to 63= ExclusiveWEG use
P258
Analog Output AO4 Gain
0.000 to 9.999
1.000
-
170
P259
Dead Zone for Speed Indication
0 to P134
1000
rpm
171
Page 17
CFW-09-
QUICKPARAMETER REFERENCE
18
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
Digital Inputs
P263
(1)
DigitalInput DI1 Function
0 = Not Used
1 = Start/Stop
-
172
1 = Start/Stop
2 = General Enable
3 = Fast Stop
P264
(1)
DigitalInput DI2 Function
0=FWD/REV
0=FWD/REV
-
172
1= Local/Remote
2 = Not Used
3 = Not Used
4 = Not Used
5 = Not Used
6 = Not Used
7 = Not Used
8 = Reverse Run
P265
(1) (8)
DigitalInput DI3 Function
0 = Not Used
0 = Not Used
-
172
1 = Local/ Remote
2 = General Enable
3 = JOG
4 = No ExternalFault
5 = Increase E.P.
6 = Ramp 2
7 = Not Used
8 = Forward Run
9 = Speed/Torque
10= JOG+
11= JOG-
12 = Reset
13 = Fieldbus
14 = Start (3 wire)
15 = Man/Auto
16 = Not used
17 = Disables Flying Start
18 = DC VoltageRegulator
19 = Parameter Setting
Disable
20 = Load user
21 = Timer (RL2)
22 = Timer (RL3)
P266
(1)
DigitalInput DI4 Function
0 = Not used
0 = Not Used
-
172
1 = Local/ Remote
2 = General Enable
3 = JOG
4 = No external Fault
5 = Decrease E.P.
6 = Ramp 2
7 = Multispeed (MS0)
8 = Reverse Run
9 = Speed/Torque
10= JOG+
Page 18
CFW-09-
QUICKPARAMETER REFERENCE
19
11= JOG-
12 = Reset
13 = Fieldbus
14 = Stop (3 wire)
15 = Man/Auto
16 = Not used
17 = Disables Flying Start
18 = DC voltage regulator
19 = Parameter Setting
Disable
20 = Load User
21 = Timer (RL2)
22 = Timer (RL3)
P267
(1)
DigitalInput DI5 Function
0 = Not Used
3 = JOG
-
172
1 = Local/ Remote
2 = General Enable
3 = JOG
4 = No ExternalFault
5 = Increase E.P.
6 = Ramp 2
7 = Multispeed (MS1)
8 = Fast Stop
9 = Speed/Torque
10= JOG+
11= JOG-
12 = Reset
13 = Fieldbus
14 = Start (3 wire)
15 = Man/Auto
16 = Not Used
17 = Disables Flying Start
18 = DC VoltageRegulator
19 = Parameter Setting
Disable
20 = Load User
21 = Timer (RL2)
22 = Timer (RL3)
P268
(1)
DigitalInput DI6 Function
0 = Not Used
6 = Ramp 2
-
173
1 = Local/ Remote
2 = General Enable
3 = JOG
4 = No ExternalFault
5 = Decrease E.P.
6 = Ramp 2
7 = Multispeed (MS2)
8 = Fast Stop
9 = Speed/Torque
10= JOG+
11= JOG-
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
Page 19
CFW-09-
QUICKPARAMETER REFERENCE
20
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
12 = Reset
13 = Fieldbus
14 = Stop (3 wire)
15 = Man/Auto
16 = Not Used
17 = Disables Flying Start
18 = DC voltage regulator
19 = Parameter setting
disable
20 = Load user
21 = Timer (RL2)
22 = Timer (RL3)
P269
(1)
DigitalInput DI7 Function
0 = Not Used
0 = Not used
-
173
(Requiresoptional I/O
1 = Local/ Remote
expansion board EBA or EBB)
2 = General Enable
3 = JOG
4 = No ExternalFault
5 = Not Used
6 = Ramp 2
7 = Not Used
8 = Fast Stop
9 = Speed/Torque
10= JOG+
11= JOG-
12 = Reset
13 = Fieldbus
14 = Start (3 wire)
15 = Man/Auto
16 = Not Used
17 = Disables Flying Start
18 = DC VoltageRegulator
19 = Parameter Setting
Disable
20 = Load User
21 = Timer (RL2)
22 = Timer (RL3)
P270
(1)
DigitalInput DI8 Function
0 = Not used
0 = Not used
-
173
(Requiresoptional I/O
1= Local/Remote
expansion board EBA or EBB)
2 = General Enable
3 = JOG
4 = No ExternalFault
5 = Not Used
6 = Ramp 2
7 = Not Used
8 = Fast Stop
9 = Speed/Torque
10= JOG+
11= JOG-
12 = Reset
Page 20
CFW-09-
QUICKPARAMETER REFERENCE
21
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
13 = Fieldbus
14 = Stop (3 wire)
15 = Man/Auto
16 = Motor Thermistor
17 = Disables Flying Start
18 = DC VoltageRegulator
19 = Parameter Setting
Disable
20 = Not Used
21 = Timer (RL2)
22 = Timer (RL3)
Digital Outputs
P275
(1)
DigitalOuputDO1Function
0 = Not used
0 = Not Used
-
180
(requires optional I/O
1 = N* > Nx
expansion board EBA or EBB)
2 = N > Nx
3 = N < Ny
4 = N = N*
5 = Zero Speed
6 = Is > Ix
7 = Is < Ix
8 = Torque > Tx
9 = Torque < Tx
10= Remote
11= Run
12 = Ready
13 = No Fault
14 = No E00
15= NoE01+E02+E03
16 = No E04
17 = No E05
18 = (4 to 20) mA OK
19 = Fieldbus
20= FWD
21 = Proc.Var. > VPx
22 = Proc. Var. < VPy
23 = Ride-Through
24 = Pre-charge OK
25 = Fault
26 = Enabled Hours > Hx
27 = Not Used
28 = Not Used
29 = N > Nx and Nt > Nx
30 = Brake (Actual Speed)
31 =
Brake (Total Reference)
32 = Overweight
33 = Slack Cable
34 = Torque Polarity +/-
Page 21
CFW-09-
QUICKPARAMETER REFERENCE
22
35 = Torque Polarity -/+
36 = F > Fx _ 1
37 = F > Fx _ 2
38 = Set Point = Process
Variable
39 = No E32
40 = Ready 2
P276
(1)
DigitalOutputDO2 Function
0 = Not Used
0 = Not used
-
180
(Requiresoptional I/O
1 = N* > Nx
expansion board EBA or EBB)
2 = N > Nx
3 = N < Ny
4 = N = N*
5 = Zero Speed
6 = Is > Ix
7 = Is < Ix
8 = Torque > Tx
9 = Torque < Tx
10= Remote
11= Run
12 = Ready
13 = No Fault
14 = No E00
15= NoE01+E02+E03
16 = No E04
17 = No E05
18 = (4 to 20) mA OK
19 = Fieldbus
20= FWD
21 = Proc.Var. > VPx
22 = Proc. Var. < VPy
23 = Ride-Through
24 = Pre-charge OK
25 = Fault
26 = Enabled Hours > Hx
27 = Not Used
28 = Not Used
29 = N > Nx and Nt > Nx
30 = Brake (Actual Speed)
31 = Brake
(Total Reference)
32 = Overweight
33 = Slack Cable
34 = Torque Polarity +/-
35 = Torque Polarity -/+
36 = F > Fx _ 1
37 = F > Fx _ 2
38 = Set Point = Process
Variable
39 = No E32
40 = Ready 2
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
Page 22
CFW-09-
QUICKPARAMETER REFERENCE
23
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
P277
(1)
Relay Output RL1 Function
0 = Not Used
13 = No Fault
-
180
1 = N* > Nx
2 = N > Nx
3 = N < Ny
4 = N = N*
5 = Zero Speed
6 = Is > Ix
7 = Is < Ix
8 = Torque > Tx
9 = Torque < Tx
10= Remote
11= Run
12 = Ready
13 = No Fault
14 = No E00
15= NoE01+E02+E03
16 = No E04
17 = No E05
18 = (4 to 20) mA OK
19 = Fieldbus
20= FWD
21 = Proc.Var. > VPx
22 = Proc. Var. < VPy
23 = Ride-Through
24 = Pre-charge OK
25 = Fault
26 = Enabled Hours > Hx
27= PLC
28 = Not Used
29 = N > Nx and Nt > Nx
30 = Brake (Actual Speed)
31 = Brake
(Total Reference)
32 = Overweight
33 = Slack Cable
34 = Torque Polarity +/-
35 = Torque Polarity -/+
36 = F > Fx _ 1
37 = F > Fx _ 2
38 = Set Point = Process
Variable
39 = No E32
40 = Ready 2
P279
(1)
Relay Output RL2 Function
0 = Not used
2 = N > Nx
-
180
1 = N* > Nx
2 = N > Nx
3 = N < Ny
4 = N = N*
5 = Zero Speed
Page 23
CFW-09-
QUICKPARAMETER REFERENCE
24
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
6 = I
s > Ix
7 = Is < Ix
8 = Torque > Tx
9 = Torque < Tx
10= Remote
11= Run
12 = Ready
13 = No Fault
14 = No E00
15= NoE01+E02+E03
16 = No E04
17 = No E05
18 = (4 to 20) mA OK
19 = Fieldbus
20= FWD
21 = Proc.Var. > VPx
22 = Proc. Var. < VPy
23 = Ride-Through
24 = Pre-charge OK
25 = Fault
26 = Enabled Hours > Hx
27= PLC
28= Timer
29 = N > Nx and Nt > Nx
30 = Brake (Actual Speed)
31 = Brake
(Total Reference)
32 = Overweight
33 = Slack Cable
34 = Torque Polarity +/-
35 = Torque Polarity -/+
36 = F > Fx _ 1
37 = F > Fx _ 2
38 = Set Point = Process
Variable
39 = No E32
40 = Ready 2
P280
(1)
Relay Output RL3 Function
0 = Not used
1 = N* > Nx
-
180
1 = N* > Nx
2 = N > Nx
3 = N < Ny
4 = N = N*
5 = Zero Speed
6 = Is > Ix
7 = Is < Ix
8 = Torque > Tx
9 = Torque < Tx
10= Remote
11= Run
12 = Ready
13 = No Fault
Page 24
CFW-09-
QUICKPARAMETER REFERENCE
25
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
14 = No E00
15= NoE01+E02+E03
16 = No E04
17 = No E05
18 = (4 to 20) mA OK
19 = Fieldbus
20= FWD
21 = Proc.Var. > VPx
22 = Proc. Var. < VPy
23 = Ride-Through
24 = Pre-charge OK
25 = Fault
26 = Enabled Hours > Hx
27= PLC
28= Timer
29 = N > Nx and Nt > Nx
30 = Brake (Actual Speed)
31 = Brake
(Total Reference)
32 = Overweight
33 = Slack Cable
34 = Torque Polarity +/-
35 = Torque Polarity -/+
36 = F > Fx _ 1
37 = F > Fx _ 2
38 = Set Point = Process
Variable
39 = No E32
40 = Ready 2
P283
Time for RL2ON
0.0 to 300
0.0s186
P284
Timefor RL2 OFF
0.0 to 300
0.0s186
P285
Time for RL3ON
0.0 to 300
0.0s186
P286
Timefor RL3 OFF
0.0 to 300
0.0s186
Nx, Ny, Ix, Zero Speed Zone, N = N* and Tx
P287
Hysteresis for Nx/Ny
0.0 to 5.0
1.0%193
P288
(2)(11)
Nx Speed
0 to P134
120 (100)
rpm
193
P289
(2)(11)
Ny Speed
0 to P134
1800 (1500)
rpm
193
P290
(7)
Ix Current
(0 to 2.0) x P295
1.0 x P295
A
193
P291
Zero Speed Zone
1 to 100
1%193
P292
N = N* Band
1 to 100
1%193
P293
Tx Torque
0 to 200
100%193
P294
Hours Hx
0 to 6553
4320h193
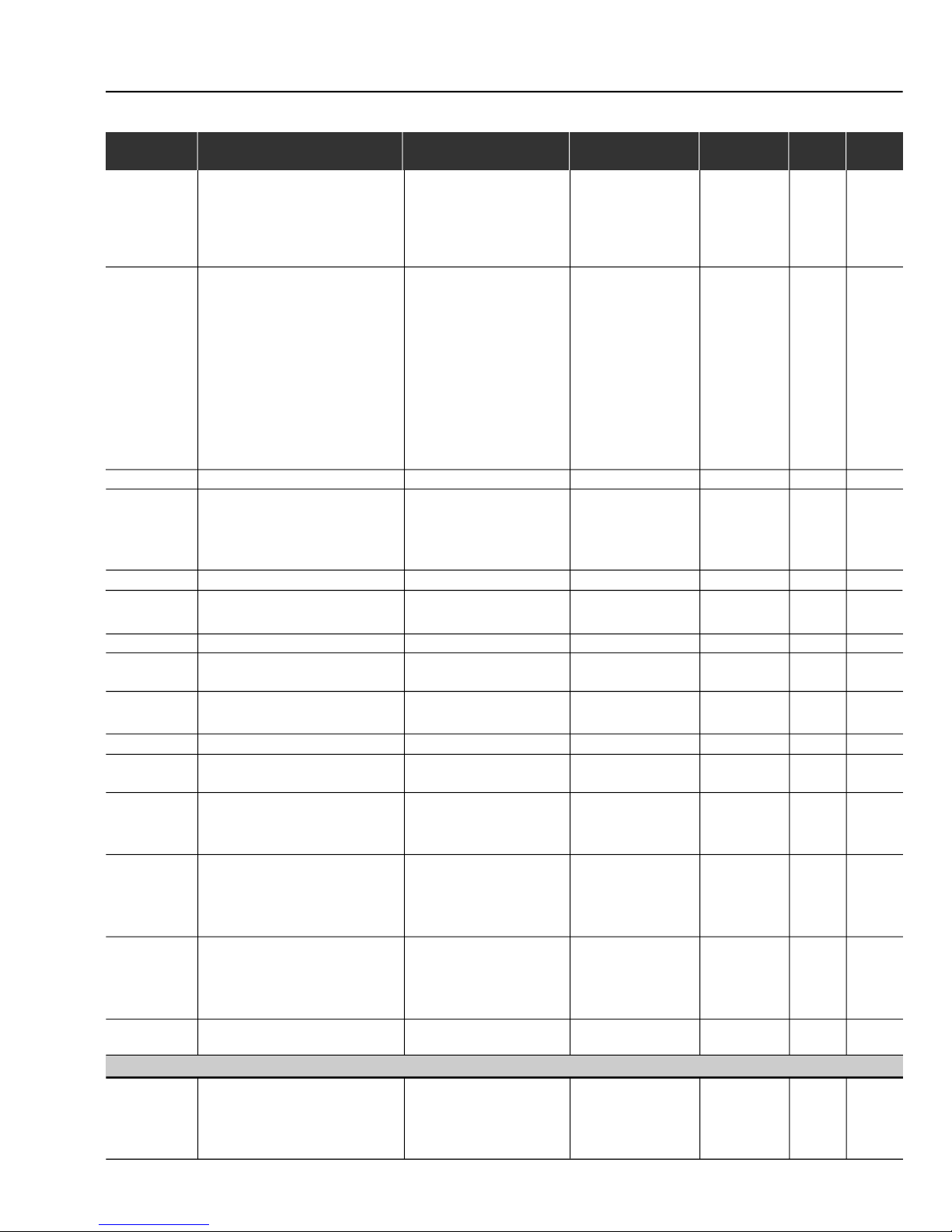
Inverter Data
P295
(1)
Inverter Rated Current
According to
-
194
Inverter Model
3 = 6 A
4 = 7 A
6 = 10 A
7 = 13 A
8 = 16 A
9 = 24 A
220-230 V Models
10 = 28 A
13 = 45 A
14 = 54 A
16 = 70 A
17 = 86 A
18 = 105 A
19 = 130 A
Page 25
CFW-09-
QUICKPARAMETER REFERENCE
26
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
0 = 3.6 A
1 = 4 A
2 = 5.5 A
5 = 9 A
7 = 13 A
8 = 16 A
9 = 24 A
11= 30 A
12 = 38 A
13 = 45 A
15 = 60 A
16 = 70 A
17 = 86 A
18 = 105 A
20 = 142 A
21 = 180 A
55 = 211A
22 = 240 A
67 = 312 A
23 = 361 A
24 = 450 A
69 = 515 A
25 = 600 A
33 = 686 A
34 = 855 A
35 = 1140A
36 = 1283 A
37 = 1710 A
82 = 1468 A
39 = 2.9 A
40 = 4.2 A
4 = 7 A
6 = 10 A
41 = 12 A
42 = 14 A
43 = 22 A
44 = 27 A
45 = 32 A
46 = 44 A
47 = 53 A
48 = 63 A
49 = 79 A
25 = 600 A
72 = 652 A
73 = 794 A
76 = 897 A
78 = 978 A
79 = 1191A
81 = 1345 A
51 = 107 A
53 = 147 A
55 = 211A
57 = 247 A
60 = 315 A
62 = 343 A
63 = 418 A
65 = 472 A
50 = 107 A
52 = 127 A
54 = 179 A
56 = 225 A
58 = 259 A
59 = 305 A
61 = 340 A
64 = 428 A
68 = 492 A
70 = 580 A
71 = 646 A
74 = 813 A
75 = 869 A
77 = 969 A
80 = 1220 A
38 = 2 A
66 = 33 A
26 = 200 A
27 = 230 A
28 = 320 A
SpecialModels
29 = 400 A
30 = 570 A
31 = 700 A
32 = 900 A
380-480 V
Models
500-600 V
Models
500-690 V
Models
660-690 V Models
Page 26
CFW-09 -
QUICK PARAMETER REFERENCE
27
Parameters
Function
Adjustable Range
Factory
Unit
User's
Page
Setting
Setting
0 = for models
220-230 V
3 = for models
380-480 V
6 = for models
500-600 V and
500-690 V
8 = for models
660-690 V
P296
(1) (11)
Inverter Rated Voltage
0 = 220-230 V
-
195
(Rated Input Voltage)
1 = 380 V
2 = 400-415 V
3 = 440-460 V
4 = 480 V
5 = 500-525 V
6 = 550-575 V
7 = 600 V
8 = 660-690 V
P297
(1) (2)
Switching Fr equency
0 = 1.25
2 = 5.0
kHz
195
1 = 2.5
2 = 5.0
3 = 10.0
DC Br aking
P300
DC Braking Time
0.0 to 15.0
0.0s196
P301
DC Braking Start Speed
0 to 450
30
rpm
197
P302
DC Braking Voltage
0.0 to 10.0
2.0%197
Skip Speed
P303
Skip Speed 1
P133 to P134
600
rpm
197
P304
Skip Speed 2
P133 to P134
900
rpm
197
P305
Skip Speed 3
P133 to P134
1200
rpm
197
P306
Skip Band
0 to 750
0
rpm
197
Serial Communication
P308
(1)
Inverter Address
1 to 30
1-198
P309
(1)
Fieldbus
0 = Disable
0 = Disable
-
198
1 = Profibus DP/DP-V1 2 I/O
2 = Profibus DP/DP-V1 4 I/O
3 = Profibus DP/DP-V1 6 I/O
4 = DeviceNet 2 I/O
5 = DeviceNet 4 I/O
6 = DeviceNet 6 I/O
7 =EtherNet/IP 2 I/O
8 =EtherNet/IP 4 I/O
9 =EtherNet/IP 6 I/O
10 = DeviceNet Drive Profile
P310
(1)
STOP Detection in a Profibus
0 = Off
0 = Off
198
Networ k
1 = On
P312
(1)
Type of Serial Protocol
0 = WBUS Protocol
0 = W EG Protocol
-
199
1 = Modbus-RTU, 9600 bps,
no parity
2 = Modbus-RTU, 9600 bps,
odd parity
3 = Modbus-RTU, 9600 bps,
even parity
4 = Modbus-RTU, 19200 bps,
no parity
5 = Modbus-RTU, 19200 bps,
odd parity
Attention!
Refer to
item
3.2.3 to
do the
voltage
selection
Page 27
CFW-09-
QUICKPARAMETER REFERENCE
28
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
6= Modbus-RTU,19200bps,
even parity
7= Modbus-RTU,38400bps,
no parity
8= Modbus-RTU,38400bps,
odd parity
9= Modbus-RTU,38400bps,
even parity
P313
(1)
Typeof disabling by E28/E29/E30
0 = Disable via Start/Stop
0 = Disablevia Start/Stop
-
199
1 = Disable via General
Enable
2 = Not Used
3 = Changes to LOCAL 1
4 = Changes to LOCAL 2
5 = Causes Fatal Error
P314
(1)
Time for Serial Watchdog
0.0 = Disable
0.0 = Disabled
s
200
Action
0.1 to 999.0 = Enable
P318
Watchdog detection for the
0 = Off
0 = Off
200
PLCboard
1 = On
Flying Start/Ride-Through
P320
(1)
FlyingStart/Ride-Through
0 = Inactive
0 = Inactive
-
200
1 = Flying Start
2 =
FlyingStart/Ride-Through
3 = Ride-Through
P321
(6)
Ud Line Loss Level
178 to 282 (P296 = 0)
252V200
307 to 487 (P296 = 1)
436
324 to 513 (P296 = 2)
459
356 to 564 (P296 = 3)
505
388 to 615 (P296 = 4)
550
425 to 674 (P296 = 5)
602
466 to 737 (P296 = 6)
660
486 to 770 (P296 = 7)
689
559 to 885 (P296 = 8)
792
P322
(6)
UdRide-Through
178 to 282 (P296 = 0)
245V201
307 to 487 (P296 = 1)
423
324 to 513 (P296 = 2)
446
356 to 564 (P296 = 3)
490
388 to 615 (P296 = 4)
535
425 to 674 (P296 = 5)
588
466 to 737 (P296 = 6)
644
486 to 770 (P296 = 7)
672
559 to 885 (P296 = 8)
773
P323
(6)
Ud Line Recover Level
178 to 282 (P296 = 0)
267V202
307 to 487 (P296 = 1)
461
324 to 513 (P296 = 2)
486
356 to 564 (P296 = 3)
534
388 to 615 (P296 = 4)
583
425 to 674 (P296 = 5)
638
466 to 737 (P296 = 6)
699
486 to 770 (P296 = 7)
729
Page 28
CFW-09-
QUICKPARAMETER REFERENCE
29
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
559 to 885 (P296 = 8)
838
P325
Ride-ThroughProportional Gain
0.0 to 63.9
22.8-203
P326
Ride-ThroughIntegralGain
0.000 to 9.999
0.128
-
203
P331
VoltageRamp
0.2 to 60.0
2.0s204
P332
DeadTime
0.1 to 10.0
1.0s204
DeviceNet Drive Profile
P335
DeviceNet I/O Instances
0 = Instances 20/70
0 = Instances 20/70
-
206
1 = Instances 21/71
2 = Instances 100/101
3 = Instances 102/103
P336
Input Word #3
0 to 749
0-206
P337
Input Word #4
0 to 749
0-206
P338
Input Word #5
0 to 749
0-206
P339
Input Word #6
0 to 749
0-206
P340
Input Word #7
0 to 749
0-206
P341
Output Word #3
0 to 749
0-207
P342
Output Word #4
0 to 749
0-207
P343
Output Word #5
0 to 749
0-207
P344
Output Word #6
0 to 749
0-207
P345
Output Word #7
0 to 749
0-207
P346
I/O Words Quantity
2 to 7
2-207
PARAMETERS FOR CRANEAPPLICATIONS AND FOR MASTER/SLAVE FUNCTION
- P351 to P399
Logic for the Mechanical Braking Operation
P351
(1)
Delay for E33
0.0 to 99.9
99.9s208
P352
(1)
Delay for E34
0 to 999
999s208
P353
(1)
Delay for N < Nx - Brake Activation
0.0 to 20.0
0.0s208
P354
(1)
Delay for Resetting the Integrator
0.0 to 10.0
2.0s208
of the Speed Regulator
P355
(1)
Delay for Accepting New
0.0 to 10.0
1.0s208
“Start/Stop”Commands
P356
(1)
Delayfor Ramp Enable
0.0 to 10.0
0.0s209
Indication of the Torque Current Polarity
P357
(1)
Torque Current (Iq) Filter
0.00 to 9.99
0.00s209
P358
(1)
Torque Current (Iq) Hysteresis
0.00 to 9.99
2.00%209
Parameters for Load Detection
P361
(1)
Load Detection
0 = Off
0 = Off
-
209
1 = On
P362
(1)
StabilizationSpeed
0 to P134
90
rpm
209
P363
(1)
StabilizationTime
0.1 to 10.0
0.1s210
P364
(1)
SlackCableTime
0.0 to 60.0
0.0s210
P365
(1)
Slack Cable Level
0.0 to 1.3 x P295
0.1 x P295
A
210
P366
(1)
Lightweight Level
0.0 to 1.3 x P295
0.3 x P295
A
210
P367
(1)
Overweight Level
0.0 to 1.8 x P295
1.1 x P295
A
210
P368
(1)
Speed Reference Gain
1.000 to 2.000
1.000
-
210
Fx
P369
(2)
(11)
Frequency Fx
0.0 to 300.0
4.0Hz210
P370
Hysteresis for Fx
0.0 to 15.0
2.0Hz213
DC Braking
P371
DCBrakingTime at Start
0.0 to 15.0
0.0s213
P372
DC Braking Current Level
0.0 to 90.0
40.0%213
Page 29
CFW-09-
QUICKPARAMETER REFERENCE
30
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
According to
the motor rated
power factor
(P404)
VVW Control
P398
(1)
SlipCompensationDuring
0 = Off
1 = On
-
213
Regeneration
1 = On
P399
(1)
(2)
Motor Rated Efficiency
50.0 to 99.9
%
213
MOTORPARAMETERS
P400 to P499
Motor Nameplate Data
P400
(1) (6)
Motor Rated Voltage
0 to 690
P296V214
P401
(1)(12)
Motor Rated Current
(0.0 to 1.30) x P295
(12)
1.0 x P295
A
214
P402
(1)(2) (11)
MotorRatedRPM
0 to 18000
1750 (1458)
rpm
214
(P202 = 0, 1, 2 and 5)
0 to 7200 (P202 = 3 and 4)
P403
(1)(11)
Motor Rated Frequency
0 to 300 (P202 = 0,1,2 and5)
60 (50)
Hz
214
30 to 120 (P202 = 3 and 4)
P404
(1)
Motor Rated hp
0 = 0.33 hp/0.25 kW
4 = 1.5 hp/1.1 kW
-
214
1 = 0.50 hp/0.37 kW
2 = 0.75 hp/0.55 kW
3 = 1.0 hp/0.75 kW
4 = 1.5
hp
/1.1 kW
5 = 2.0
hp
/1.5 kW
6 = 3.0
hp
/2.2 kW
7 = 4.0
hp
/3.0 kW
8 = 5.0
hp
/3.7 kW
9 = 5.5
hp
/4.0 kW
10 = 6.0
hp
/4.5 kW
11= 7.5
hp
/5.5 kW
12 = 10.0
hp
/7.5 kW
13 = 12.5
hp
/9.0 kW
14 = 15.0
hp
/11.0kW
15 = 20.0
hp
/15.0 kW
16 = 25.0
hp
/18.5 kW
17 = 30.0
hp
/22.0 kW
18 = 40.0
hp
/30.0 kW
19 = 50.0
hp
/37.0 kW
20 = 60.0
hp
/45.0 kW
21 = 75.0
hp
/55.0 kW
22 = 100.0
hp
/75.0 kW
23 = 125.0
hp
/90.0 kW
24 = 150.0
hp
/110.0kW
25 = 175.0
hp
/130.0 kW
26 = 180.0
hp
/132.0 kW
27 = 200.0
hp
/150.0 kW
28 = 220.0
hp
/160.0 kW
29 = 250.0
hp
/185.0 kW
30 = 270.0
hp
/200.0 kW
31 = 300.0
hp
/220.0 kW
32 = 350.0
hp
/260.0 kW
Page 30
CFW-09-
QUICKPARAMETER REFERENCE
31
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
According to the
motor rated power
(P404)
33 = 380.0
hp
/280.0 kW
34 = 400.0
hp
/300.0 kW
35 = 430.0 hp/315.0 kW
36 = 440.0 hp/330.0 kW
37 = 450.0
hp
/335.0 kW
38 = 475.0 hp/355.0 kW
39 = 500.0
hp
/375.0 kW
40 = 540.0 hp/400.0 kW
41 = 600.0
hp
/450.0 kW
42 = 620.0 hp/460.0 kW
43 = 670.0 hp/500.0 kW
44 = 700.0
hp
/525.0 kW
45 = 760.0
hp
/570.0 kW
46 = 800.0
hp
/600.0 kW
47 = 850.0 hp/630.0 kW
48 = 900.0 hp/670.0 kW
49 = 1100.0 hp/820.0 kW
50 = 1600.0 hp/1190.0 kW
P405
(1)
Encoder PPR
250 to 9999
1024
ppr
215
P406
(1)
Motor Ventilation Type
0 = Self Ventilated
0 = Self Ventilated
-
215
1 = Separate Ventilation
2= Optimal Flux
3 = Increased Protection
P407
(1) (2)
Motor Rated Power Factor
0.50 to 0.99
-
216
Measured Parameters
P408
(1)
Self-Tuning
0 = No
0 = No
-
216
1 = No Rotation
2 = Run for I
mr
3 = Run for Tm
4=EstimateTm
P409
(1)
Motor Stator Resistance (Rs)
0.000 to 77.95
0.000
217
P410
Motor Magnetizing Current (I
mr
)
(0.0 to 1.25) x P295
0.0A218
P411
(1)
MotorFluxLeakage Inductance( LS)
0.00 to 99.99
0.00mH218
P412
LR/RRConstant(RotorTime
0.000 to 9.999
0.000
s
218
Constant (Tr))
P413
(1)
Tm
Constant(MechanicalTime
0.00 to 99.99
0.00s219
Constant)
SPECIAL FU
NCTION PARAMETERSP520
to
P538
PID Regulator
P520
PIDProportionalGain
0.000 to 7.999
1.000
-
223
P521
PIDIntegralGain
0.000 to 7.999
0.043
-
223
P522
PIDDifferentialGain
0.000 to 3.499
0.000
-
223
P523
PIDRampTime
0.0 to 999
3.0s223
P524
(1)
Selection of PIDFeedback
0 = AI2 (P237 to P240)
0=AI2 (P237toP240)
-
223
1 = AI3 (P241 to P244)
P525
PIDSetpoint
0.0 to 100.0
0.0%224
P526
Process Variable Filter
0.0 to 16.0
0.1s224
Page 31

CFW-09-
QUICKPARAMETER REFERENCE
32
Parameters
Function
AdjustableRange
Factory
Unit
User's
Page
Setting
Setting
P527
PIDAction
0 = Direct
0 = Direct
-
224
1 = Reverse
P528
Process Variable Scale Factor
0 to 9999
1000-225
P529
Decimal Point of Proc. Var.
0 to 3
1
225
P530
Engineering Unit of Proc. Var. 1
32 to 127 (ASCII)
37 = %
-
226
A, B, ... , Y, Z
0, 1, ... , 9
#, $, %, (, ), *, +, ...
P531
Engineering Unit of Proc. Var. 2
32 to 127 (ASCII)
32 = blank
-
226
A, B, ... , Y, Z
0, 1, ... , 9
#, $, %, (, ), *, +, ...
P532
Engineering Unit of Proc. Var. 3
32 to 127 (ASCII)
32 = blank
-
226
A, B, ... , Y, Z
0, 1, ... , 9
#, $, %, (, ), *, +, ...
P533
Value of Proc. Var. X
0.0 to 100
90.0%226
P534
Value of Proc. Var. Y
0.0 to 100
10.0%226
P535
Wake Up Band
0 to 100
0%227
P536
(1)
Automatic Setting of P525
0 = Active
0 = Active
-
227
1 = Inactive
P537
Hysteresis for Set point =
1 to 100
1%227
Process Variable
P538
Hysteresis for VPx/VPy
0.0 to 50.0
1.0%227
Notes presented on Quick Parameter Description:
(1)
Parameter can be changed only with the inverter disabled
(motor stopped).
(2)
Values may change as a function of the “Motor Parameters”.
(3)
Values may change as a function of P413 (Tm Constant - obtained during
Self-tuning).
(4)
Values may change as a function of P409 and P411 (obtained during Self-
tuning).
(5)
Values may change as a function of P412 (Tr Constant - obtained during
Self-tuning).
(6)
Values may change as a function of P296.
(7)
Values may change as a function of P295.
(8)
Values may change as a function of P203.
(9)
Values may change as a function of P320.
(10)
User’s Standard (for new inverters) = without parameter.
(11)
The inverter will be delivered with settings according to the market,
consideringthe HMI language,V/F 50 Hz or 60 Hz and the required voltage.
Thereset of the standard factorysetting may changethe parameters related
to the frequency (50 Hz/60 Hz). Valueswithin parenthesis mean the factory
setting for 50 Hz.
(12)
The maximum value of P156 and P401 is 1.8 x P295 for model 4.2 A/500-
600 V and 1.6 xP295 for models 7 Aand 54A/220-230 V; 2.9A and7 A/500-
600V;107A, 147A and 247A/500-690 V;100A, 127Aand340A/660-690V.
Page 32

CFW-09-
QUICKPARAMETER REFERENCE
33
Table 1
- Interdependence among parameters: parameters that change the settings of
others when modified versus parameters that are automatically modified as a function of a
parameter setting (during start-up and/or normal operation)
II.FaultMessages
Display
Description
Page
E00
Output Overcurrent/Short-Circuit
228
E01
DC Link Overvoltage
228
E02
DCLink Undervoltage
228
E03
Power Supply Undervoltage/Phase Loss
229
E04
(*)
Inverter Overtemperature/Pre-charge Circuit
229
Failure
E05
Output Overload (I x t Function)
229
E06
ExternalFault
229
E07
Encoder Fault
229
Valid for P202 = 4 (Vector with Encoder)
E08
CPU Error (watchdog)
229
E09
ProgramMemory Error
229
E10
Error in the Copy Function
229
E11
Output Ground Fault
229
E12
Dynamic Braking Resistor Overload
230
E13
Motor or Encoder with Inverted Wires
230
(Self-Tuning) (Valid for P202 = 4)
E15
Motor Phase Loss
230
E17
Overspeed Fault
230
E24
ProgrammingError
230
E28 to E30
Serial communication error
230
E31
Keypad Connection Fault
230
E32
Motor Overtemperature
230
E33
Speed without control
230
E34
Long period at torque limitation
230
E41
Self-Diagnosis Fault
230
E70
Internal DC Supply Undervoltage
231
E71
PLC Watchdog Error
231
(*)
E04 can be "Pre-charge Circuit Failure" only in the following models:
86 A/380-480 V,
70 A/220-230 V,
44 A/500-600 V and for all 500-690 V and
660-690 V models. E04 can also occur when signal with inverted polarity is applied
at analog inputsAI1/AI2. The E04 fault message can also occur in the models up to
130 A/ 200-230 V, 142 A/380-480 V and 63 A/500-600 V when the temperature at
the heatsink is lower than -10 ºC.
Condition where it occurs
Parameters that
affectothers
when set
Parameters that are affected
andmodifiedautomatically
During the
oriented
start-up
During
normal
operation
P203
P223, P225, P226, P228, P237,
P265NOYES
P295
P156, P157, P158, P169 (V
/F),
P290, P365, P366, P367
NO
YES
P151, P153, P321, P322, P323
YES
YES
P296
P400
YESNOP320
P214NOYES
P156, P157, P158
YESNOP401
P297
YES
NO
P402
P122, P123, P124, P125, P126,
P127, P128, P129, P130, P131,
P133, P134,
P135,
P208,P288,
P289YES
YES
P403
P369, P402
YESNOP404
P399, P407
YES
YES
P406
P156, P157, P158
YES
NO
Page 33

CFW-09-
QUICKPARAMETER REFERENCE
34
III.OtherMessages
Display
Description
rdy
Inverter is Ready to be Enabled
run
Inverter is Enabled
Sub
Power Supply Voltage is Too Low for the Inverter Operation
(Undervoltage)
dCbr
Inverter in DC Braking Mode. (Refer to P300)
Page 34

35
SAFETY NOTICES
This Manual contains all necessary information for the correct installation
andoperationof theCFW-09VariableFrequency
Inverter.
The CFW-09 Instruction Manual has been written for qualified personnel
with suitable training or technical qualifications to operate this type of
equipment.
The following Safety Notices will be used in this Manual:
DANGER!
Ifthe recommendedSafetyInstructionsarenotstrictlyobserved,it can lead
toserious or fatalinjuriesof personneland/or equipment damage.
ATTENTION!
Failureto observetherecommendedSafetyProcedurescanleadtomateri-
aldamage.
NOTE!
The content of this Manual supplies important information for the correct
understandingofoperationandproperperformanceof theequipment.
The following symbols may be attached to the product, serving as Safety
Notice:
High Voltages.
Components are sensitive to electrostatic discharge. Do not touch
them without following proper grounding procedures.
Mandatory connection to ground protection (PE).
Shield connection to ground.
DANGER!
Onlyqualified personnel should plan orimplement the installation,startup,
operation and maintenance of this equipment. Personnel must review this
entireManual before attempting to install,operate or troubleshoot the
CFW-09.
These personnel must follow all safetyinstructions included in this Manual
and/ordefined bylocal regulations.
Failureto complywiththeseinstructionsmayresultin personnel injuryand/
orequipmentdamage.
1.3
PRELIMINARY
RECOMMENDA
TIONS
1.2
SAFETYNOTICES
ONTHEPRODUCT
CHAPTER
1
1.1
SAFETYNOTICESIN
THEMANUAL
Page 35

36
CHAPTER 1 - SAFETY NOTICES
NOTE!
In thisManual, qualified personnelare defined as people thataretrained to:
1.
Install,ground,powerupandoperatetheCFW-09 accordingtothisManual
andthe local requiredsafety procedures;
2.
Use of safety equipment according to the local regulations;
3.
Administer Cardio PulmonaryResuscitation(CPR) and FirstAid.
DANGER!
Alwaysdisconnectthesupplyvoltagebeforetouching anyelectricalcomponent
insidetheinverter.
Manycomponentsare chargedwithhighvoltages,even aftertheincomingAC
powersupplyhasbeendisconnectedorswitched OFF.Waitat least10minutes
for the totaldischargeof the power capacitors.
Alwaysconnect theframe of theequipment to theground (PE) at thesuitable
connectionpoint.
ATTENTION!
All electronic boards have components that are sensitive to electrostatic
discharges.Nevertouchanyoftheelectricalcomponentsorconnectorswithout
followingpropergroundingprocedures.Ifnecessarytodoso,touchtheproperly
groundedmetallicframe oruse a suitable groundstrap.
NOTE!
Inverterscan interferewithotherelectronic equipment.In order toreduce this
interference,adopt themeasuresrecommended in
chapter
3“Installation
and
Connection
”.
NOTE!
ReadthisentireManualcarefullyand completelybeforeinstallingor operating
theCFW-09.
Do not apply High Voltage (High Pot) Test on the Inverter!
If this test is necessary, contact
WEG
.
Page 36

37
GENERAL
INFORMA
TION
Thischapterdefinesthecontentsandpurposeof thismanualanddescribes
themaincharacteristics ofthe CFW-09frequencyinverter.Identification of
theCFW-09,receivingandstorage requirementsare alsoprovided.
ThisManual isdividedinto 9Chapters, providinginformation tothe useron
howto receive, install, start-up andoperate the CFW-09:
Chapter1:
Safety Notices;
Chapter2:
GeneralInformationandReceivingtheCFW-09;
Chapter3:
Information about the CFW-09 physical installation, electrical
connection(powerandcontrolcircuit)andinstallationofoptional
devices;
Chapter4:
Keypad(HMI)Operation(Human-MachineInterface-keyboard-
display);
Chapter5:
Start-up(Step-by-step);
Chapter6:
DetailedProgramming ParametersDescription;
Chapter7:
Diagnostics,troubleshooting,cleaninginstructions andpreventive
maintenance;
Chapter8:
Technical description of CFW-09 optional devices and
accessories;
Chapter9:
Technical specifications (electricaland mechanical).
This Manual provides information for the correct use of the CFW-09. The
CFW-09is veryflexibleandallowsfortheoperationinmanydifferentmodes
as described in this manual.
As theCFW-09 can be applied in severalways,it is impossible to describe
here all of the application possibilities. WEG does not accept any
responsibilitywhen the CFW-09 is not used according to this Manual.
No part of this Manual may be reproduced in any form, without the written
permission of WEG.
It isimportantto note theSoftwareVersion installedin the VersionCFW-09,
sinceitdefinesthefunctionsandtheprogrammingparametersoftheinverter.
ThisManualrefersto theSoftwareversionindicatedontheinsidecover.For
example, the Version 1.0X applies to versions 1.00 to 1.09, where “X” is a
variable that will change due to minor software revisions. The operation of
theCFW-09withthese softwarerevisionsarestillcoveredbythisversionof
theManual.
The SoftwareVersioncan be readin the Parameter P023.
TheCFW-09is ahighperformanceVariableFrequency
Inverter
thatpermits
the control of speed and torque of a three-phase AC induction motor. The
technologicaladvantageof the CFW-09 is due to the “Vectrue”technology
thatprovidesthe followingbenefits:
Programmablescalar(volts/Hz)orVectorControlwiththesame product;
VectorControl can beprogrammed for“Sensorless” (that means that
standardmotorscanbecontrolledwithout encoderfeedback),or “Closed
Loop” (with an encoder attached to the motor shaft);
2.1
ABOUTTHISMANUAL
CHAPTER
2
2.3
ABOUTTHECFW-09
2.2
SOFTW
AREVERSION
Page 37

38
CHAPTER2 - GENERALINFORMATION
Sensors:
-Groundfault
-Phase-fault
=Phase-faultonly
fromsize 3 and up.
Analog
Inputs
(AI1...AI2)
PC
PLC
DCS
Digital
Inputs
(DI1... DI6)
Internalelectronics powersuppliesand
control/powerinterfaces
RS-232
(optional)
PC
POWER
CONTROL
Three-phase
rectifier
Motor
IGBT
Inverter
Power
Supply=DCLinkchokeconnection(optional)
onlyfromsize2 andup.
=DB resistorconnection.Up tosize 7
only.Option for sizes4 to7.
=DCLink connection.
Pre-
charge
SuperDrive Software
Capacitor
Bank
RFI filter
Keypad
FIELDBUS(Optional):
-Profibus DP
-DeviceNet
-EtherNet/IP
"CC9"
Control
Boardw/
32bits
"RISC"
CPU
EBA/EBBEXPANSION:
(optional)
- isolatedRS-485
-1 digital input
A
1x 14bit anal.input
2x 14bitanal.outputs
B
1isola. 4to 20 mA In.
2isola. 4 to 20mA out.
-2 digital outputs
-1 encoderIn/Out.
-1 PTC input
{
{
External
Control
Analog
Outputs
(AO1...AO2)
Relay
Outputs
(RL1... RL3)
Keypad
(remote)
DCLink
Feedbacks:
-voltage
-current
PEPEModbus-RTU
Figure 2.1
- CFW-09 block diagram
Human- MachineInterface
The Sensorless Vector Control permits high torques and quick response,
evenat very lowspeedsandduring the starting of the motor;
The“OptimalBraking”functionallowscontrolledmotorbraking withoutusing
a Dynamic Braking (DB) resistor;
“Self-tuning”auto-tunefunctionwithVectorControl,permittingautomatic setting
of the control regulators and control parameters by means of the automatic
identification of the motor and the loadparameters.
Technical specifications for each modelof CFW-09 are describedin chapter 9.
Theblock diagram belowgives a generalviewof theCFW-09:
Page 38

39
CHAPTER2 - GENERALINFORMATION
2.4
CFW
-09IDENTIFICA
TIONLABEL
ANDCODENUMBER
Locationofthe CFW-09Nameplate:
FRONTVIEW
VIEW-A
Figure 2.2
- CFW-09 identification
Nominal Output Current and
Switching Frequency for VT and
CT Loads
Nominal Output Data
(Voltage, Frequency)
CFW-09 Model
Serial Number
WEG Part
Number
Nominal Input Data
(Phase, Current and Frequency)
Software
Revision
Page 39

40
Manual
language:P=Portuguese
E = English
S = Spanish
Options:
S = standard
O = with options
(refer to note)
Enclosure
degree of
protection:
Blank =
Standard
N4 = NEMA 4
IP56(Refer to
chapter 8)
HOWTO SPECIFYTHE CFW-09MODEL:
CFW-09
0016T3848EO
_ _
_ _
_ _
_ _
_ _
_ _
_ _
Z
Keypad (HMI):
Blank =
Standard
IL = Keypad
LED display
only
SI = without
keypad(Refer to
note)
Braking:
Blank =
Standard
RB =
Regenerative
Converter
(Active Front
end unit).
DB =
Dynamic
Braking(Refer to
chapter 8)
Expansion
Boards:
Blank= Standard
A1 = EBA Board
Complete
B1 = EBB Board
Complete
C1 = EBC1
Board
Complete
E1 = EBE Board
complete
P1 = PLC 1.01
Board
P2 = PLC2.00
Board
Refer to
chapter 8 for
other
Configurations
Fieldbus
Communication
Boards:
Blank= Standard
DN = DeviceNet
PD = ProfibusDPDD
=
DeviceNet
Profile
EN = EtherNet/IP
V1= Profibus
DP-V1
Special
Hardware:
Blank =
Standard
HN = Without
DC Link
inductor
(only valid for
500-690V
and
660-690V
models)
HD = DC Link
supply (refer
to chapter8)
HC, HV = DC
Link inductor
(
Refer to
chapter 8)
(
Refer to
note)
220-230V:
0006 = 6A0007 = 7 A
0010 = 10A0013 = 13A0016 = 16 A
0024 = 24 A
0028 = 28 A
0045 = 45 A
0054 = 54 A
0070 = 70 A
0086 = 86 A
0105 = 105 A
0130 = 130 A
380-480V:
0003 = 3.6 A
0004 = 4 A
0005 = 5.5 A
0009 = 9 A
0013 = 13 A
0016 = 16 A
0024 = 24 A
0030 = 30 A
0038 = 38 A
0045 = 45 A
0060 = 60 A
0070 = 70 A
0086 = 86 A
0105 = 105 A
0142 = 142 A
0180 = 180 A
0211= 211A
0240 = 240 A
0312 = 312 A
0361 = 361 A
0450 = 450 A
0515 = 515 A
0600 = 600 A
Three-phase
power
supply.
Power
supply
voltage:
3848=
380-480V
2223=
220-230V
5060=
500-600V
5069=
500-690V
6669=
660-690V
500-600V:
0002 = 2.9 A
0004 = 4.2 A
0007 = 7 A
0010 = 10 A
0012 = 12 A
0014 = 14 A
0022 = 22 A
0027 = 27 A
0032 = 32 A
0044 = 44 A
0053 = 53 A
0063 = 63 A
0079 = 79 A
500-690V:
0107 = 107 A
0147 = 147 A
0211= 211A
0247 = 247 A
0315 = 315 A
0343 = 343 A
0418 = 418 A
0472 = 472 A
660-690V:
0100 = 100 A
0127 = 127 A
0179 = 179 A
0225 = 225 A
0259 = 259 A
0305 = 305 A
0340 = 340 A
0428 = 428 A
Note:
- For rated output current specification of variable torque (VT), refer to chapter 9.
- The rated output current indicated for the models 500-690 V is only valid for 500 V to 600 V supply.
- For rated output current specification (CT and VT) of the models with supply voltage higher than 600 V, refer to chapter 9.
Note:
The option field (S or O) defines if the CFW-09 is a standard version or if it is equipped with any optional devices. If the standard version is required, the code ends here. The model
code number always has the letter Z at the end. For example:
CFW090045T2223ESZ = Standard 45 A CFW-09 inverter - three phase input at 220-230 V, with the Manual in English.
If the CFW-09 is equipped with any optional devices, you must fill out the fields in accordance to the optional devices desired in the correct sequence up to the last optional device
desired, then the model code number is completed with the letter Z.
Thus, for instance, if a product of the example above is required with an EBA expansion board, indicate:
CFW090045T2223EOA1Z = 45 A CFW-09 inverter – three-phase input at 220-230 V, with the manual in English and with the optional EBA.01 board.
Output rated current -
constant torque CT:
WEG
Series 09
Frequency
Inverter
Special
Software:
Blank =
Standard
S1 to Sn =
Special
Software
Version
SF = Metasys
N2 Protocol
SQ = Special
version for
DeviceNet
Drive Profile
Kit (indicate
option DD for
the Fieldbus
Communication
Board)
End of Code(refer to
note)
Page 40

41
CHAPTER2 - GENERALINFORMATION
Thestandardproduct is definedas describedhere:
Degree of protection:
NEMA1/ IP20: 3.6 Ato 240 A/380-480 V models and all 220-230 V and
500-600V models.
Protected chassis / IP20: 361Ato 600 A/380-480 V models and all 500-
690 Vand660-690V models.
Human Machine Interface:
HMI-CFW09-LCD(withLED andLCDdisplays)
Braking:
DBTransistorforDBResistorbrakingincorporated inthefollowingmodels:
6A to 45 A/220-230 V
3.6A to 30 A/380-480 V
2.9A to 14 A/500-600 V
DCLink:
TheDC Link chokeisincludedin the standardproductfor 44A,53A, 63A
and 79A/500-600 V, all models 500-690 V and 660-690 V models.
DB Transistor can be incorporatedas anoptionin the following models:
54A to 130A/220-230 V
38A to 142A/380-480 V
22A to 79 A/500-600 V
Models 180A to 600A/380-480 V, 107 Ato 472 A/500-690 V and 100Ato
428A/660-690V, do not havethe capabilityto use an internal DBTransistor.
In this case, use the external DB Transistor option (refer to item 8.10.3 -
Dynamic Braking Module - DBW-01 and DBW-02).
NOTE!
It is necessary to connect an external braking resistor regardless if the DB
Transistor is built in, optional built in or an external module (DBW).
TheCFW-09issuppliedincardboardboxesuptosize3(
referto
item9)andfor
modelsabove,thepackingwillbe withwoodpalletandwoodbox.
Theoutsideofthepackingcontainerhasanameplatethatisidenticalto thaton
theCFW-09.Pleasecheckif thenameplate datamatchestheorderedones.
The boxesup to size7 must be placedandopened on atable (sizes above3
withthehelpof two persons).
Openthe box, remove thecardboard or expandedpolystyreneprotection.
Theboxes of sizesabove7mustbe openedonthefloor.Openthe
wood
box,
removethe e
xpandedpolystyreneprotection
.The CFW-09mustbe handled
with hoist.
Check if:
CFW-09 nameplatedata matches thepurchase order;
Theequipment hasnot beendamaged duringtransport.
If any problem is detected, contact the carrier immediately.
If the CFW-09 is not to be installed immediately, store it in a clean and dry
room (Storage temperatures between -25°C and 60°C). Cover it to prevent
dust,dirt or other contamination of theinverter.
ATTENTION!
If theinverter isstoredfor long periods,we recommend to powerit up oncea
yearduring1 hour. For220-230Vand 380-480Vmodelsapplysupplyvoltage
of approximately 220 Vac, three-phase or single-phase input, 50 or 60 Hz,
without connecting motor at output. After this energization, wait 24 hours
before installingit. For 500-600 V, 500-690 V and 660-690V models usethe
same procedureapplying a voltagebetween 300 and 330
Vac to the inverter
input.
2.5
RECEIVINGAND
STORAGE
Page 41

42
INSTALLATION AND CONNECTION
This chapterdescribes the procedures for theelectricaland mechanical
installationof the CFW-09.
Theseguidelinesmust befollowedforproperCFW-09 operation.
The location of the CFW-09 installation is an important factor to assure
good
performanceand highproduct reliability.
For proper installation of the inverter, we make the following
recommendations:
Avoiddirect exposure to sunlight, rain, high moisture and sea air.
.
Avoidexposure togasesor explosiveor corrosive liquids.
Avoidexposure to excessive vibration,dust, oil or any(conductive
particlesor materials).
Allowed environmental conditions:
Temperature: 0 ºC to 40 ºC (32 ºF to 104 ºF) - nominal conditions.
From 40 ºC to 55 ºC (104 ºFto 131ºF) - with 2 % current derating for
each 1ºC
(33.8 ºF)degreeabove 40 ºC (104 ºF).
RelativeAir Humidity: 5 % to 90 %, non-condensing.
MaximumAltitude: 1000 m (3.300 ft) – nominal conditions.
From 1000 m to 4000 m (3.300 ft to 13.200 ft) – with 1 % current
reductionfor
each100 m (330 ft) above1000 m (3.300ft).
Pollution Degree: 2 (according to EN50178 and UL508C) (It is not
allowed
the presence of water, condensation or conductive dust/
particles in the air).
3.1
MECHANICAL
INSTALLATION
3.1.1
EnvironmentConditions
CHAPTER
3
3.1.2Dimensional of CFW-09
Externaldimensionsand mountingholesare accordingto figure3.1 and
table 3.1.
Sizes 3 to 10, 8E and 10E
ALP
B
DCH
A
AALPCDC
DBB
H
Sizes 1 and 2
Sizes 9, 10 and 10E
Sizes 3 to 8, 8E
Figure 3.1
- Mounting dimensional drawings of CFW-09
Page 42

43
CHAPTER3- INSTALLATIONAND CONNECTION
Model
Height
Width
Depth
Mounting
Degree of
HLPABCD
Screw
Weight
Protection
mmmmmmmmmmmmmmmmKg
(in)
(in)
(in)
(in)
(in)
(in)
(in)
(in)
(lb)
Size 1
210
143
196
121
180119.5M53.5
NEMA1/
(8.27)
(5.63)
(7.72)
(4.76)
(7.09)
(0.43)
(0.37)
(3/16)
(7.7)
IP20
Size 2
290
182
196
161
260
10.5
9.5M56.0
(11.42)
(7.16)
(7.72)
(6.34)
(10.24)
(0.41)
(0.37)
(3/16)
(13.2)
Size 3
390
223
274
150
375
36.55M6
19.0
(15.35)
(8.78)
(10.79)
(5.90)
(14.76)
(1.44)
(0.20)
(1/4)
(41.9)
Size 4
475
250
274
150
4505010M622.5
(18.70)
(9.84)
(10.79)
(5.90)
(17.72)
(1.97)
(0.39)
(1/4)
(49.6)
Size 5
550
335
274
200
525
67.510M841(21.65)
(13.19)
(10.79)
(7.87)
(20.67)
(2.66)
(0.39)
(5/16)
(90.4)
Size 6
675
335
300
200
650
67.510M855(26.57)
(13.19)
(11.77)
(7.87)
(25.59)
(2.66)
(0.39)
(5/16)
(121.3)
Size 7
835
335
300
200
810
67.510M870(32.87)
(13.19)
(12.20)
(7.87)
(31.89)
(2.66)
(0.39)
(5/16)
(154.3)
Size 8
975
410
370
175
950
67.510M8
100
(38.38)
(16.14)
(14.57)
(10.83)
(37.40)
(2.66)
(0.39)
(5/16)
(220.5)
Size8E
1145
410
370
275
1120
67.510M8
115
(45.08)
(16.14 )
(14.57)
(10.83)
(44.09)
(2.66)
(0.39)
(5/16)
(253)
Size 9
1020
688
492
275
9856915
M10
216
IP20
(39.37)
(27.56)
(19.33)
(10.83)
(37.99)
(2.95)
(0.59)
(3/8)
(476.2)
Size 10
1185
700
492
275
11506915
M10
259
(46.65)
(27.56)
(19.33)
(10.83)
(45.27)
(2.95)
(0.59)
(3/8)
(571)
Size10E
1185
700
582
275
11506915
M10
310
(46.65)
(27.56)
(22.91)
(10.83)
(45.27)
(2.95)
(0.59)
(3/8)
(682)
Table 3.1 -
Installation data – Refer to item 9.1
For installing the CFW-09, leave at least the minimum free spaces around the
inverteraccordingtofigure3.2.Thedimensionsofthesefreespacesaredescribed
on table 3.2.
Install the inverter in the vertical position according to the following
recommendations:
1)
Installthe inverter ona flat surface.
2)
Donotinstallheatsensitivecomponentsimmediatelyabovetheinverter.
3)
For the inverters 45A to 130 A/220-230 V, 30 Ato 600A/380-480 V, 22 A
to 32 A/ 500-600 V, 44Ato 79A/500-600 V,107A to 472A/500-690 V and
100 A to 428 A/660-690 V:
-
First partially tighten the bolts on the surface, then install the inverter
andscrew-downthe bolts.
4)
For inverters 6 Ato 28A/220-230 V, 3.6 Ato 24A/380-480 V and 2.9Ato
14A/500-600 V:
-
Install the 2 bottom mounting bolts first, rest the inverter on the base and
then mount the 2 top bolts.
3.1.3
MountingSpecifications
Page 43

44
CHAPTER3- INSTALLATIONAND CONNECTION
Table 3.2
- Recommended free spaces
ABC
mm(in)
mm(in)
mm(in)
403050
(1.57)
(1.18)
(2)
10040130
(4)
(1.57)
(5.12)
55 (2.17)
150
250
(6)80(10)
(3.15)
Model
CFW-09
6 A to 28 A/220-230 V
3.6 A to 24 A/380-480 V
2.9 A to 14 A/500-600 V
45 A to 130 A/220-230 V
30 A to 142 A/380-480 V
22 A to 79 A/500-600 V
180 A to 361 A/380-480 V
450 A to 600 A/380-480 V
107 A to 472 A/500-690 V
100 A to 428 A/660-690 V
When inverters are installedin panelsor closed metallic boxes, adequate
cooling is required to ensure that the temperature around the inverter will
not
exceedthemaximum allowedtemperature.Referto DissipatedPower
in item
9.1.
Forreference,table 3.3shows the coolingairflowforeachinverter model.
3.1.3.1MountingInsidea Panel
ATTENTION!
When inverters are installed side by side, maintain the minimum
recommended distance B. When inverters are installed top and bottom,
maintainthe minimumrecommendeddistanceA+ Cand deflectthehot air
comingfrominverterbelow.
ATTENTION!
Provideindependentconduitsforsignal,controlandpowerconductors(Refer
to item 3.2: Electrical Installation).
ABC
B
50mm
2in
Figure 3.2
- Free space for cooling
Page 44

45
CHAPTER3- INSTALLATIONAND CONNECTION
Size
CFM
I/s
m3/min11990.5232150.9370332.0489422.55117553.36138653.97286
135
8.18265
125
7.58E8E9852
402
24.110795
375
22.5
10E
10E
CFW-09 Inverter Model
6 A to 13 A/220-230 V
3.6 A to 9 A/380-480 V
2.9 A to 14 A/500-600 V
16 A to 28 A/220-230 V
13 A to 24 A/380-480 V
45 A/220-230 V
30 A/380-480 V
54 A/220-230 V
38 A and 45 A/380-480 V
22 A to 32 A/500-600 V
70 A and 86 A/220-230 V
60 A and 70 A/380-480 V
105 A and 130 A/220-230 V
86 A and 105 A/380-480 V
44 A to 79 A/500-600 V
142 A/380-480 V
180 A to 240 A/380-480 V
107 A to 211 A/500-690 V
100 A to 179 A/660-690 V
312A and 361A/380-480V
450 A to 600 A/380-480 V
247 A to 472 A/500-690 V
225 A to 428A/660-690 V
Table 3.3
- Cooling air flow requirements
Figure 3.3 shows the installationof the CFW-09 on a mounting plate.
3.1.3.2Mountingon Surface
a) Sizes 1 and 2
b) Sizes 3 to 8
Figure 3.3 a) and b)
- Mounting procedure for the CFW-09 on a surface
InverterCooling Method:
Internalfan, flowdirectionfromthe bottomto thetop.
Page 45

46
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.3 c) and d)
- Mounting procedure for the CFW-09 on a surface
c) Sizes 9 and 10
d) Positioning (for all Sizes)
AirFlow
The CFW-09 can alsobe installed withthe heatsink throughthe mounting
plate, as shown in figure 3.4.
Inthiscase,refertoinstallationdrawingsshownin figure3.4c) andmaintain
the distances indicated in table 3.4.
NOTE!
When installing the heatsink through the mounting surface, according to
figure 3.4,
the degree of protection behind this surface is NEMA 1 / IP20.
NEMA1 rating
does not protect against dust and water.
3.1.3.3
Mountingwiththe
HeatsinkThrough
aSurface
Page 46

47
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.4 a) to c)
- Mounting procedure for the CFW-09 with the heatsink through the mounting surface
a) Sizes 1 and 2
Step3
Step 1
Step 2
Air
Flow
4mm(1/6in)max.
Step2
Step 3
Step 1
Air
Flow
4mm(1/6in)max.
Sizes1 and2
Sizes3to 8
b) Sizes 3 to 8E
c) Cutout Dimensions (Refer to table 3.4)
Kit-KMF
Top Support
Kit-KMF
BottonSupport
Page 47

48
CHAPTER3- INSTALLATIONAND CONNECTION
CFW-09
L1H1A1B1C1D1Emim.
KitKMF
(*)
SizemmmmmmmmmmmmmmThrough
(in)
(in)
(in)
(in)
(in)
(in)
(in)
Surface Mounting
item nº
Size 1
139
196
127
19162.56------------
(5.47)
(7.72)
(5.00)
(7.52)
(0.24)
(0.10)
(0.24)
Size 2
178
276
167
27162.56------------
(7.00)
(10.87)
(6.57)
(10.67)
(0.24)
(0.10)
(0.24)
Size 3
225
372
150
400
37.5148
417102514
(7.00)
(14.64)
(6.57)
(15.75)
(1.44)
(0.59)
(0.31)
Size 4
252
452
150
48051148417102515
(9.92)
(17.79)
(5.91)
(18.90)
(1.97)
(0.59)
(0.31)
Size 5
337
527
200
555
68.51410
417102516
(13.27)
(20.75)
(7.87)
(21.85)
(2.70)
(0.59)
(0.35)
Size 6
13.27
652
200
680
68.51410
417102517
(13.27)
(25.67)
(7.87)
(26.77)
(2.70)
(0.59)
(0.39)
Size 7
337
812
200
840
68.51410
417102518
(13.27)
(31.97)
(7.87)
(33.07)
(2.70)
(0.59)
(0.39)
Size 8
412
952
275
980
68.51410
417102519
(16.22)
(37.48)
(10.38)
(38.58)
(2.70)
(0.59)
(0.39)
Size8E
412
1122
275
1150
68.51410
(16.22)
(44.17)
(10.83)
(45.27)
(2.70)
(0.59)
(0.39)
(*)
The Through Surface Mounting kit (kit-KMF) is a set of supports for the CFW-09 as shown on
figure 3.4 b).
a) Sizes 1 and 2
3.1.4
Keypad(HMI)and
CoverRemoval
b) Sizes 3 to 8 and 8E
Screw
Figure 3.5 a) and b)
– Keypad (HMI) and cover removal procedure
Table 3.4
- Cutout dimensions and kits for CFW-09 through surface mounting
Page 48

49
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.5 c)
– Keypad (HMI) and cover removal procedure
c) Sizes 9 and 10, 10E
Screw
3.2
ELECTRICAL
INSTALLATION
DANGER!
The informationbelow willbea guide toachieve a proper installation.Follow
also all applicable local standards for electrical installations.
DANGER!
Be sure that theAC input power is disconnected before making any terminal
connection.
DANGER!
The CFW-09 frequencyinverter cannot be used as an emergencystop device.
Provideanother devicesfor thisfunction.
Thepower connectionterminalscan be of differentsizes andconfigurations,
dependingon theinverter model asshownin figure 3.6.
Terminals:
R, S, T:AC supply line. Models up to 10A at 220-230 V can be operated
withtwo phases (single-phaseoperation) withoutcurrentderating. In this
case the AC supply can be connected to any 2 of the 3 input terminals.
U, V, W: Motor connection.
-UD: Negativepole of the DC Link circuit.
BR: Dynamic Braking resistor connection.
+UD: Positive pole of the DC Link circuit.
DCR: Connectionto the external DC Linkchoke (optional).
PE: Ground Safety.
3.2.1Power/Grounding
Terminals
Page 49

50
CHAPTER3- INSTALLATIONAND CONNECTION
a) Size 1 models
b) Size 2 models
c) Size 3, 4 and 5 models
d) Size 6 and 7 (220-230 V and 380-480 V models)
g) Size 9 and 10 (380-480 V models)
f) Size 8 (380-480 V models)
e) Size 7 (500-600 V models)
h) Size 8E (500-690 V and 660-690 V models)
Figure 3.6 a) to h)
- Power terminals
Page 50

51
CHAPTER3- INSTALLATIONAND CONNECTION
i) Size10E (500-690 V and 660-690 V models)
Figure 3.6 i)
- Power terminals
3.2.2
Locationofthe Power/
Grounding/Control
Connections
GROUNDING
POWER
CONTROL
a) Size 1 and 2 models
b) Size 3, 4 and 5 models
Note:
No voltage selection needed for these models
Figure 3.7 a) and b)
- Location of the power/grounding/control connections and rated voltage
Page 51

52
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.7 c) to g)
- Location of the power/grounding/control connections and rated voltage
c) Size 6 and 7 models
RATEDVOLTAGE
SELECTION
CONTROL
GROUNDING
GROUNDING
RATEDVOLTAGE
SELECTION
GROUNDING
e) Size 9 and 10 models
d) Size 8 models
CONTROL
CONTROL
POWER
POWER
POWER
RATEDVOLTAGE
SELECTION
g) Size 10E
GROUNDING
POWER
CONTROL
RATEDVOLTAGE
SELECTION
f) Size 8E
GROUNDING
CONTROL
RATEDVOLTAGE
SELECTION
POWER
AUXILIARY
CIRCUITFUSES
AUXILIARY
CIRCUITFUSES
Page 52

53
CHAPTER3- INSTALLATIONAND CONNECTION
Thefollowingmodelsof CFW-09inverterseries haveajumper forrated voltage
selection:
-86A/380-480 V.
-44A/500-600 V.
-500-690V models.
ATTENTION!
It isnecessaryto adjustthejumper in models380-480V when the power
supply
voltageisdifferentfrom440V and460V.Alsoinmodels500-600 Vand500-690 V
whenthepower supplyvoltageis differentfrom550 V, 575 V and600 V.
PROCEDURE:
380-480V models:
Removejumperon the LVS1board (or from theCIP2 for models
180A)
frompositionXC60 (440-460V)and insertitontheproper positionaccording
to theapplication line voltage.
500-600V models:
Removejumper on theLVS2 boardfrompositionXC62(550V, 575V,600V)
and insert it on the proper position according to the line voltage.
500-690V models:
Removejumper ontheCIP3 boardfrom positionXC62 (550 V, 575 V,600 V)
and insert it on the proper position according to the line voltage.
3.2.3
RatedVoltageSelection
RATEDVOLTAGESELECTION
RATEDVOLTAGE
SELECTION
a) LVS1(size 6 and 7, 380-480 V)
b) CIP2 (size 8, 9 and 10, 380-480 V)
Figure 3.8 a) and
b)
- Rated voltage selection on boards LVS1, CIP2, LVS2 and CIP3
AUXILIARY
CIRCUITFUSES
AUXILIARY
CIRCUITFUSES
Page 53

54
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.8 c) and
d)–Rated voltage selection on
boards LVS1, CIP2, LVS2 and CIP3
RATEDVOLTAGESELECTION
RATEDVOLTAGESELECTION
c) LVS2 (size 7, 500-600 V)
d) CIP3 (size 8E and 10E, 500-690 V)
ATTENTION!
Sensitiveequipment(PLCs, temperaturecontrollers,thermocouples,etc.)
and its wiring must stay at a minimum distance of 10 in (0.25 m) from the
frequencyinverters,thereactorsandfromtheinputandmotorpowercables.
ATTENTION!
When flexible wires areusedforpower and grounding connectionsit is
necessarytoprovide appropriatecrimp terminals.
Use wire sizing and fuses as recommended in table 3.5.
3.2.4
Power/GroundingWiring
andFuses
AUXILIARY
CIRCUITFUSES
Page 54

55
CHAPTER3- INSTALLATIONAND CONNECTION
CFW-09Rating
A/volts
CTVT2.9/500-600
4.2/500-600
3.6/380-480
-
4.0/380-480
-
4.2/500-600
7.0/500-600
5.5/380-480
-
6.0/220-230
-
7.0/220-230
-
7.0/500-600
10/500-600
9.0/380-480
-
10/220-230
-
10/500-600
12/500-600
12/500-600
14/500-600
13/220-230
-
13/380-480
14/500-600
-
16/220-230
-
16/380-480
22/500-600
27/500-600
24/220-230
-
24/380-480
-
27/500-600
32/500-600
28/220-230
-
30/380-480
36/380-480
32/500-600
-
38/380-480
45/380-480
44/500-600
53/500-600
45/220-230
-
45/380-480
54/380-480
53/500-600
63/500-600
54/220-230
68/220-230
60/380-480
70/380-480
63/500-600
79/500-600
70/220-230
86/220-230
70/380-480
86/380-480
79/500-600
99/500-600
86/220-230
105/220-230
86/380-480
105/380-480
100/660-690
127/660-690
105/220-230
130/220-230
105/380-480
130/380-480
107/500-690
147/500-690
127/660-690
179/660-690
130/220-230
150/220-230
142/380-480
174/380-480
147/500-690
196/500-690
179/660-690
179/660-690
180/380-480
-
211/380-480
-
211/500-690
-
225/660-690
259/660-690
240/380-480
-
247/500-690
315/500-690
259/660-690
305/660-690
305/660-690
340/660-690
312/380-480
-
315/500-690
343/500-690
340/660-690
428/660-690
343/500-690
418/500-690
361/380-480
-
418/500-690
472/500-690
428/660-690
428/660-690
472/500-690
555/500-690
450/380-480
-
515/380-480
-
600/380-480
-
Power Cables
mm2(AWG/MCM)
CTVT1.5 (14)
1.5 (14)
1.5 (14)
-
1.5 (14)
-
1.5 (14)
2.5 (12)
1.5 (14)
-
2.5 (12)
-
2.5 (12)
-
2.5 (12)
2.5 (12)
2.5 (12)
-
2.5 (12)
*1
-
4.0 (12)
*2
2.5 (12)
2.5 (12)
2.5 (12)
2.5 (12)
2.5 (12)
-
2.5 (12)
-
2.5 (12)
-
4.0 (10)
6.0 (8)
4.0 (10)
-
4.0 (10)
-
6.0 (8)
16 (6)
6.0 (8)
-
6.0 (8)
16 (6)
16 (6)
-
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
25 (4)
25 (4)
16 (6)
25 (4)
25 (4)
25 (4)
25 (4)
25 (3)
25 (4)
35 (2)
25 (3)
50 (1)
35 (2)
50 (1)
35 (2)
50 (1)
50 (1)
70 (1/0)
50 (1)
70 (1/0)
50 (1)
70 (1/0)
70 (1/0)
95 (3/0)
70 (1/0)
95 (3/0)
70 (2/0)
95 (3/0)
95 (3/0)
95 (3/0)
95 (3/0)
-
150 (300)
-
150 (300)
185 (300)
150 (300)
185 (300)
150 (300)
-
150 (300)
2x70 (2x2/0)
150 (300)
2x70 (2x2/0)
2x70 (2x2/0)
2x120 (2x4/0)
2x70 (2x2/0)
-
2x70 (2x2/0)
2x150 (2x250)
2x120 (2x4/0)
2x150 (2x250)
2x120 (2x4/0)
2x150 (2x250)
2x120 (2x4/0)
-
2x120 (2x4/0)
2x150 (2x250)
2x150 (2x250)
2x150 (2x250)
2x150 (2x250)
3x120 (3x4/0)
2x150 (2x250)
-
3x120 (3x4/0)
-
3x150 (3x250)
-
Grounding Cables
mm2(AWG/MCM)
CTVT2.5 (12)
2.5 (12)
2.5 (12)
-
2.5 (12)
-
2.5 (12)
2.5 (12)
2.5 (12)
-
2.5 (12)
-
2.5 (12)
-
2.5 (12)
2.5 (12)
2.5 (12)
-
2.5 (12)
-
2.5 (12)
2.5 (12)
2.5 (12)
4.0 (10)
2.5 (12)
-
4.0 (10)
-
4.0 (10)
-
4.0 (10)
6.0 (8)
4.0 (10)
-
4.0 (10)
-
6.0 (8)
16 (6)
6.0 (8)
-
6.0 (8)
16 (6)
16 (6)
-
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
16 (6)
25 (4)
16 (6)
25 (4)
16 (6)
25 (4)
25 (4)
35 (2)
25 (4)
35 (2)
25 (4)
35 (2)
35 (2)
50 (1)
35 (2)
50 (1)
35 (2) 50 (1)
50 (1)
50 (1)
70 (1/0)
-
70 (1/0)
70 (1/0)
70 (1/0)
70 (1/0)
70 (1/0)
-
70 (1/0)
70 (2/0)
2x70 (2x2/0)
70 (2/0)
70 (2/0)
120 (4/0)
70 (2/0)
-
70 (2/0)
120 (4/0)
120 (4/0)
1x150(1x250)
120 (4/0)
1x150(1x250)
120 (4/0)
-
120 (4/0)
1x150(1x250)1x150(1x
250)1x150(1x
250)1x150(1x
250)
2x95 (2x3/0)
150 (250)
-
2x70 (2x2/0)
-
2x95 (2x3/0)
-
HighSpeed
Semiconductor
Fuse - A
151515152525252525
25*135*22535353535503535505050505063636380808080100
125
125
125
250
250
250
250
250
250
250
250
315
250
315
315
500
500
500
500
500
700
700
500
700
700
900
700
900
900
Fuse
I2t@25°C
A2s
450
450
450
450
450
450
450
450
450
450
450
500
500
500
500
7200
500
1250
7200
1250
2100
7200
7200
14400
2450
7200
14400
7200
14400
14400
14400
21600
14400
21600
320000
21600
320000
320000
21600
320000
320000
320000
320000
320000
320000
320000
320000
414000
414000
414000
414000
1051000
414000
414000
1051000
1445000
1445000
1051000
1445000
1445000
Table 3.5
– Recommended wiring/fuses - Use 75 ºC copper wires only
CT
- Constant Torque /
VT
- Variable Torque
*1
- Three phase connection /
*2
- Single phase connection
Max. Power
Terminal Cable Size
mm2(AWG/MCM)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
4.0 (10)
2.5 (12)
4.0 (10)
25 (4)
4.0 (10)
4.0 (10)
25 (4)
6.0 (8)
16 (6)
25 (4)
25 (4)
120 (250)
25 (4)
25 (4)
120 (250)
50 (1)
50 (1)
120 (250)
50 (1)
120 (250)
50 (1)
120 (250)
150 (300)
120 (250)
150 (300)
150 (300)
120 (250)
150 (300)
150 (300)
150 (300)
150 (300)
2x240 (2x500)
150 (300)
2x240 (2x500)
2x240 (2x500)
2x240 (2x500)
240 (500)
2x240 (2x500)
2x240 (2x500)
2x240 (2x500)
240 (500)
2x240 (2x500)
2x240 (2x500)
2x240 (2x500)
2x240 (2x500)
2x240 (2x500)
2x240 (2x500)
Page 55

56
CHAPTER3- INSTALLATIONAND CONNECTION
NOTE!
The wire sizing indicatedintable3.5 are reference values only. The exact
wire sizing depends on the installation conditions and the maximum
acceptablelinevoltagedrop.
The tightening torque is as indicated in table 3.6. Use 75ºC copper wire
only.
Table 3.6
- Recommended tightening torque for power and
grounding connections
Grounding
Wiring
N.m (Ibf.in)
1.00 (8.85)
2.00 (17.70)
4.50 (39.83)
4.50 (39.83)
4.50 (39.83)
15.50 (132.75)
15.50 (132.75)
30.00 (265.50)
CFW-09Rating
A/Volts
6 A to 13 A/220-230 V
3.6 A to 13 A/380-480 V
16 A to 28 A/220-230 V
16 A to 24 A/380-480 V
2.9 A to 14 A/500-600 V
30 A/380-480 V
45 A/220-230 V
38 A to 45 A/380-480 V
22 A to 32 A/500-600 V
54 A to 86 A/220-230 V
60 A to 86 A/380-480 V
105A to 130 A/220-230 V
105A to 142 A/380-480 V
44 A to 79 A/500-600 V
180A to 240 A/380-480 V
312A to 600 A/380-480 V
107A to 472 A/500-690 V
100A to 428 A/660-690 V
Power Cables
N.m (Ibf.in)
1.76 (15.58)
2.00 (17.70)
1.40 (12.30)
1.40 (12.30)
3.00 (26.10)
15.50 (132.75)
30.00 (265.50)
60.00 (531.00)
LineFuses
For protecting the input rectifier diodes and the wiring, use UR Type
(Ultra-Rapid) fuses with i
2
t equalor lower than indicated in table 3.5.
Standard fuses may be used optionally at the input with currents as
indicated in table 3.5, or circuit breakers dimensioned for 1.2 x rated
inverterinputcurrentforthe CTor the VToperation(refer toitems9.1.2
to 9.1.5).
Howeverinthiscase,onlytheinstallationwillbeprotectedagainstshort-
circuit,butnot thediodes ofthe rectifierbridgeat theinverterinput.This
optionmaydamagethe inverterin caseof short-circuitof some internal
component.
Page 56

57
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.9
- Power/grounding connections
Fuses
Power
Supply
Shielding
PE
Disconnect
RST
PE
R S T
U V W
PE
PE W V U
3.2.5
PowerConnections
DANGER!
Provide an AC input disconnecting switch to switch OFF input power to the
inverter.
Thisdeviceshall disconnecttheinverterfrom theACinputsupplywhen required
(e.g.duringmaintenanceservices).Howeveritcannotbe usedasan emergency
stopdevice.
ATTENTION!
TheneutralconductoroftheACinputfortheinvertermustbephysicallygrounded,
butdo not use itfor grounding purposeof the inverter(s).
ATTENTION!
Acontactor or another device that frequently disconnects and reapplies theAC
supplyto the inverter in order to start andstop themotor maycause damage to
theinverterpowersection.Thedriveisdesignedtouse controlsignalsfor starting
andstoppingthe motor.If used,theinput devicemust not exceedone operation
every6 minutes otherwisetheinverter may bedamaged.
ATTENTION!
Setjumper toselect therated linevoltage380-480V, for inverters86Aor
higher.
Refer to item 3.2.3.
NOTE!
TheAC inputvoltagemustbecompatiblewiththe inverter ratedvoltage.
Supply line capacity
:
TheCFW-09is suitableforusein circuitscapableofsupplyingnotmorethan
30.000A(rms) symmetrical (230 V/480 V/600 V/690 V).
TheCFW-09canbeinstalledonpowersupplieswithahigherfaultlevelprovided
thatadequateprotection is provided by the fuses or circuit breaker.
DC Link Inductor/Line Reactor
Referto
item8.7 relatingto therequirement forusingthe LineReactor /DC Link
Inductor.
NOTE!
Capacitors for powerfactor correctionare not required at the input(R, S,
T) and
they MUST not be connected at the output (U, V, W).
3.2.5.1
ACInput
Connection
Page 57

58
CHAPTER3- INSTALLATIONAND CONNECTION
Theinverteris providedwithelectronicprotection againstmotoroverload.
This protection must be set according the specific motor.When the same
inverterdrivesseveral motors,useindividualoverloadrelaysfor each
motor. Maintainthe electrical continuity of the motor cable shield.
ATTENTION!
If a disconnect switch or a contactor is inserted in the motor supply line,
DO NOT operate the disconnect switch with the motor running or when
inverter
is enabled. Maintain the electrical continuity of the motor cable
shield.
DynamicBraking (DB)
With the Dynamic Braking (DB) option, the DB resistor shall be mounted
externally. Figure 8.22 shows how to connect the DB resistor. Size it
according to the application, not exceeding the maximum current of the
braking circuit.
Use twisted cable for the connection between inverter
and DB resistor.
Providephysical separationbetween this cable andthe
signaland control
cables. When the DB resistor is mounted inside the
panel, consider the
watt loss generated when the enclosure size and
ventilation required are
calculated.
DANGER!
Invertersmust begrounded forsafety purposes(PE).Theearth orground
connectionmustcomplywiththelocalregulations.Forgroundinguse
cables
with cross section as indicated in table 3.5. Make the ground
connection
toa groundingbar ortothegeneralgroundingpoint(resistance
10ohms).
DANGER!
Do not share the ground wiring with other equipment that operates with
highcurrent (for instance, highvoltagemotors, welding
machines, etc.).If
severalinvertersareused together, referto figure3.10.
3.2.5.3
GroundingConnections
Figure 3.10
- Grounding connections for more than one inverter
Grounding bar
Internal to the panel
CFW-091
CFW-092
CFW-09N
CFW-092
CFW-091
3.2.5.2
OutputConnections
Page 58

59
CHAPTER3- INSTALLATIONAND CONNECTION
ATTENTION!
Do notuse the neutral from the main power supplyto ground the inverter.
EMI
When electromagnetic interference (EMI), generated by the inverter,
causes
problems with other equipment, use shielded wires or install the
motor wires in
metallic conduits. Connect one end of the shielding to the
inverter grounding
point andthe other end to the motor frame.
Motor frame
Alwaysgroundthemotorframe. Groundthemotorinthepanelwhere
theinverter
is installed or ground it to the inverter. The inverter output
wiring must be laid
separatelyfrom the input wiring, as well as from the
control and signal cables.
ATTENTION!
ForIT networks (alsoknown asungrounded orhigh earthingimpedance
networks) it is necessary to consider the following:
Models 180 A to 600 A/380-480 V,2.9 A to 79 A/500-600 V, 107A to 472 A/
500-690 V and 100 A to 428 A/660-690 V have a varistor and capacitor
connectedbetween inputphase and groundthat must be disconnectedif
an
IT networkis used for that, remove the jumper as shown infigure 3.11.
In 500-600V/500-690V/660-690 V models, the jumper is accessible taking
out (models 2.9A to 14 A/500-600 V) or opening (models 22 Ato 79A/500-
600 V, 107 A to 211 A/500-690 V and 100 A to 179 A/660-690 V) the front
coveror takingouttheconnectionscover(247Ato 472A/500-600Vand 225A
to
428A/660-690 V).
In models 180Ato600A/380-480 V, besides opening or
taking outthefront
cover(s),it is required toremovethe control board
mountingplate (shield).
The externalRFIfiltersthat are necessary in orderto fulfill the requirements
of European EMC Directive as stated in item 3.3, cannot be used with IT
networks.
The user must check and assume the responsibilityof personnel electrical
shock risk when usinginverters in IT networks.
Aboutthe useof a differential relayat the inverter input:
-The indicationof phase-to-groundshort-circuitmust beprocessedby
theuser,
in order to indicate onlya fault message or to turn off the
inverter.
-Check withthe relaymanufacturerits properoperationwith frequency
inverters,
becauseof the existinghigh-frequencyleakage currents flowing
throughthe
inverter, cable and motor parasitic capacitancestotheearth.
3.2.5.4
ITNetworks
Page 59

60
CHAPTER3- INSTALLATIONAND CONNECTION
g) Models 247 A to 472 A/500-600 V and 225 A to 428 A/660-690 V
Figure 3.11 a) to g)
- Location of jumper to disconnect the varistor and capacitor between input phase and ground -
necessary only in models when IT network is used
For IT networks
remove the jumper
a) Models 180 A to 240 A/380-480 V
b) Models 312 A to 600 A/380-480 V
J8 jumper position:
X11 - Grounded network
X9 - IT network
c) Models 2.9 A to 14 A/500-600 V
d) Models 22 A to 32 A/500-600 V
e) Models 44 A to 79 A/500-600 V
f) Models 107 A to 211A/500-600 V and 100 A to 179 A/660-690 V
For IT networks
remove the jumper
For IT networks
remove the jumper
For IT networks
remove the jumper
For IT networks
remove the jumper
For IT networks
remove the jumper
Page 60

61
CHAPTER3- INSTALLATIONAND CONNECTION
Thecontrolwiring(analoginputs/outputs,digitalinputs/outputsandrelayoutputs)
is made on the following terminal blocks of the Electronic Control Board CC9
(refer to location in figures 3.7, item 3.2.2).
XC1:
Digital and Analog Signals
XC1A:
RelayOutputs
3.2.6ControlWiring
Figure 3.12 a)
- XC1/XC1A control terminals description (CC9 board) - Active high digital inputs
Note:
NC
= normally closed contact,
NO
=
normally open contact,
C
= common
(*)
Factory default jumper
Factory Default Function
Start/ Stop
FWD / REV Section (RemoteMode)
No function
No function
JOG(RemoteMode)
Ramp2 Selection
DigitalInputsCommon
DigitalInputsCommon
Digital inputs 24 Vdc source
0 V Reference of the 24 Vdc Source
Positive Reference for Potentiometer
Analog Input 1:
Speed Reference (Remote Mode)
Negative Reference for Potentiometer
Analog Input 2:
NoFunction
Analog Output 1: Speed
0 V Reference for Analog Outputs
Analog Output: Motor Current
0 V Reference for Analog Outputs
Factory Default Function
Relay Output - No Fault
Relay Output - Speed > P288 (N > Nx)
Relay Output - No Fault
Relay Output - Speed > P288 (N > Nx)
Relay Output - Speed Reference >
P288 (N* > Nx)
Terminal XC1
1
DI1
2
DI23DI3
4
DI4
5
DI56DI6
7
COM
8
COM924 Vdc
10
GND
11
+REF
12
AI1+13AI1-14-REF15AI2+16AI2-17AO1
18
GND(AO1)
19
AO220GND
(AO2)
Terminal
XC1A
21
RL1NC
22
RL1NO
23
RL2NO
24
RL1C
25
RL2C
26
RL2NC
27
RL3NO
28
RL3C
Specifications
6Isolated Digital Inputs
Minimum High Level: 18 Vdc
Maximum Low Level: 3 Vdc
Maximum Voltage: 30 Vdc
Input Current:
11 mA @ 24 Vdc
Isolated 24 Vdc
±
8 %, Capac: 90 mA
Grounded by a 249 resistor
+ 5.4 Vdc 5 %, Capacity: 2 mA
Valid for AI1 and AI2 differential,
resolution: 10 bits, (0 to 10) Vdc or
(0 to 20) mA / (4 to 20) mA
-4.7 Vdc
±
5 %, Capacity: 2 mA
Valid for AI1 and AI2
Impedance: 400 k
[(0 to 10) Vdc]
500[(0 to 20) mA / (4 to 20) mA]
(0 to 10) Vdc, R
L
10 k
(Max load.)
resolution: 11bits
Grounded by a 5.1 resistor
(0 to 10) Vdc, R
L
10 k
(Max load.)
resolution: 11 bits
Grounded by a 5.1
resistor
Specification
Contact capacity:
1 A
240 Vac
±rpmACCW
5 kCW
The following diagram shows the control wiring with the digital inputs as active
highas setonfactory(jumper betweenXC1:8 andXC1:10).
(*)
Page 61

62
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.12 b)
- XC1/XC1A control terminals description (CC9 board) - active low digital inputs
Note:
NC
= normally closed contact,
NO
=
normally open contact,
C
= common
Factory Default Function
Start/ Stop
FWD / REV Section (RemoteMode)
No function
No function
JOG(RemoteMode)
Ramp2 Selection
DigitalInputsCommon
DigitalInputsCommon
Digital inputs 24 Vdc source
0 V Reference of the 24 Vdc Source
Positive Reference for Potentiometer
Analog Input 1:
Speed Reference (Remote Mode)
Negative Reference for Potentiometer
Analog Input 2:
NoFunction
Analog Output 1: Speed
0 V Reference for Analog Outputs
Analog Output: Motor Current
0 V Reference for Analog Outputs
Factory Default Function
Relay Output - No Fault
Relay Output - Speed > P288 (N > Nx)
Relay Output - No Fault
Relay Output - Speed > P288 (N > Nx)
Relay Output - Speed Reference > P288
(N* > Nx)
TerminalXC1
1
DI12DI23DI34DI45DI56DI67COM8COM924 Vdc
10
GND11+REF
12
AI1+
13
AI1-14-REF15AI2+16AI2-17AO118GND(AO1)
19
AO220GND(AO2)
Terminal
XC1A
21
RL1NC
22
RL1NO
23
RL2NO
24
RL1C
25
RL2C
26
RL2NC
27
RL3NO
28
RL3C
Specifications
6Isolated Digital Inputs
Minimum High Level: 18 Vdc
Maximum Low Level: 3 Vdc
Maximum Voltage: 30 Vdc
Input Current:
11 mA @ 24 Vdc
Isolated 24 Vdc
±
8 %,Capac: 90 mA
Grounded by a 249 resistor
+ 5.4 Vdc
±
5 %, Capacity: 2 mA
Valid for AI1 and AI2
differential, resolution: (0 to 10) Vdc or
(0 to 20) mA / (4 to 20) mA
-4.7 Vdc
±
5 %, Capacity: 2 mA
Valid for AI1 and AI2
Impedance: 400 k [(0 to 10) Vdc]
500 [(0 to 20) mA / (4 to 20) mA]
(0 to 10) Vdc, R
L
10 k (Max load.)
resolution: 11 bits
Grounded by a 5.1
resistor
(0 to 10) Vdc, R
L
10 k
(Max. Load)
Resolution: 11 bits
Grounded by a 5.1
resistor
Specification
Contact capacity:
1 A
240 Vac
rpm
A
CCW
5 kCW
Thefollowingdiagramshowsthe controlwiringwith thedigitalinputs asactive
low(withouta jumperbetweenXC1:8 andXC1:10).
NOTE!
Forusing the digitalinputs asactivelowit is necessaryto remove thejumper
betweenXC1:8 andXC1:10andplaceit betweenXC1:7 andXC1:9.
Page 62

63
CHAPTER3- INSTALLATIONAND CONNECTION
Related Parameters: P221, P222, P234 to P240.
During the signal and control wire installation you must follow these
guidelines:
1)
Cable Cross Section: 0.5 mm² (20AWG) to 1.5 mm² (14 AWG );
2)
Max.Torque:0.50 N.m (4.50 lbf.in);
3)
XC1 wiringmust be connectedwith shielded cables and installed
separatelyfrom other wiring (power, control at 110V/220 Vac,etc.),
according to table 3.8.
Table 3.8
- Wiring separation distances
Figure 3.13
- Dip switch position for
(0 to 10) V or (0 to 20) mA/(4 to 20) mA selection
Table 3.7
- Dip switch configuration
If the crossing of these cables is unavoidable, install them perpendicular,
maintaining a minimum separation distance of 5 cm (2 in) at the crossing
point.
*Can be usedfor grounding
ofthesignal
andcontrolcableshields
CC9Board
Wiring
Length
100 m (330 ft)
> 100 m (330 ft)
30 m (100 ft)
> 30 m (100 ft)
Min.Separation
Distance
10 cm (4 in)
25 cm (10 in)
10 cm (4 in)
25 cm (10 in)
Inverter Model
Output current
24 A
Output current
28 A
Analog
Input
AI1
AI2
Factory Default
Function
Speed Reference
NoFunction
Dip
Switch
S1.2
S1.1
Selection
OFF
(
0 to 10
)
V (
Factory Default
)ON(4 to 20) mA / (0 to 20) mA
OFF
(
0 to 10
)
V (
Factory Default
)ON(4 to 20) mA / (0 to 20) mA
As a default the analogue inputs are selected as (0 to 10) V. This can be
changed using the
dip switch
S1 on the control board.
Page 63

64
CHAPTER3- INSTALLATIONAND CONNECTION
4)
For wiring distances longer than 50 m (150 ft), it is necessary to use
galvanicisolatorsfor theXC1:11to
XC1:20analogsignals.
5)
Relays, contactors, solenoids or electromagnetic braking coils installed
near inverters can generate interference in the control circuit. In order to
eliminate this interference, connect RC suppressors in parallel with the
coils of ACrelays.Connect a free - wheeling diode in case of DC relays/
coils.
6)
When anexternal keypad(HMI) isused (Refer tochapter 8),separate the
cable thatconnectsthekeypadtotheinverterfromothercables,maintaining
a minimum distance of 10 cm (4 in) between them.
Connection 1
– Keypad Start/Stop (LocalMode)
With the
factory default setting
, you can operate the inverter in the local
mode.Thisoperationmodeis recommended foruserswho areoperating the
inverter for the first time; without additional control connections. For start-up
according tothis operation mode,followchapter 5.
3.2.7
TypicalTerminal
Connections
Connect the shield as shown in figure 3.14.
Screw located on the CC9 Board and on support plate of the CC9 Board
Figure 3.14
- Shield connection
Connect to Ground:
Do Not Ground
Inverter
Side
Insulate with Tape
Connection2
-
2-Wire ControlStart/Stop(RemoteMode)
Validfor
factorydefaultsetting
andinverteroperatingin
remotemode
.For
thefactory default programming, the selectionof the operationmode(Local/
Remote) is made via the key (default is Local).
Pass default of the key
to remote P220 = 3.
Page 64

65
CHAPTER3- INSTALLATIONAND CONNECTION
Figure 3.15
- XC1 (CC9)
w
iring for connection 2
Connection3
-3-Wire ControlStart/Stop
Selection of function Start/Stop with 3 wire control.
Parameterstobe programmed:
Set DI3 to START
P265 = 14
Set DI4 to STOP
P266 = 14
Program P224 = 1 (DIx) if you want the 3 wire control in local mode.
Program P227 = 1 (DIx) if you want the 3 wire control in remote mode.
To program therotationselectionvia DI2
Set P223 = 4
if in Local Mode
or
Set P226 = 4
if in Remote Mode.
S1 and S2 are
momentary push buttons,
NO contact for Start and NC contact
forStop.
Thespeed referencecanbe viaAnalogInputAI (as in
Connection2),
via
keypad
(HMI) (as in Connection 1),
or via any other source. The function Start/Stop is
described in
chapter
6 in this manual.
C
onnector XC1
1
DI12DI23DI34DI45DI56DI67COM8COM924 Vdc
10
GND11+REF12AI1 +13AI1 -14-REF
Start/Stop
FWD/REV
JOG
CCWCW5 k
Figure 3.16
- XC1 (CC9) wiring for connection 3
Connector XC1
1
DI12DI23DI34DI45DI56DI67COM8COM924 Vdc
10
GND
Start
FWD/REV
Stop
Page 65

66
CHAPTER3- INSTALLATIONAND CONNECTION
Connection 4
-FWD Run/REVRun
SelectionfunctionFWD/REV.
Parameterstobe programmed:
Set DI3 to FORWARDRun
P265 = 8
Set DI4 to REVERSE Run
P266 = 8
When the FWD Run / REV Run Function is programmed, the function is
alwaysactive, in both local and remote operation modes.
At the same time, the keys
and
remaininactive (even when
P224 =
0
or
P227=
0)
The direction of rotationis defined automatically by the FWD Run / REV Run
commands.
Clockwiserotationfor Forwardand CounterClockwise rotationfor Reverse.
The speedreference can befrom anysource (as inConnection 3).
Figure 3.17
- XC1 (CC9) wiring for connection 4
Connector XC1
1
DI12DI23DI34DI4
5
DI5
6
DI67COM8COM924 Vdc
10
GND
REV Run S2
FWD Run S1
Page 66

67
CHAPTER3- INSTALLATIONAND CONNECTION
3.3
European EMCDirective -
Requirementsfor
ConformingInstallations
TheCFW-09 inverterserieswas designedtaking inconsiderationsafetyand
EMC aspects. The CFW-09 units do not have an intrinsic function until
connectedwithothercomponents(e.g.a motor).Therefore,thebasicproduct
isnot CE marked for compliancewith theEMCDirective. Theend user takes
personal responsibility for the EMC compliance of the whole installation.
However, when installedaccording tothe recommendations described inthe
product manual and including the recommended filters/EMC measures the
CFW-09 fulfillallrequirementsof the EMCDirective(89/336/EEC)asdefined
bythe ProductStandardEN61800-3“Adjustablespeedelectricalpowerdrives
systems”, specific for variable speed drives systems.
Compliance of the whole series of the CFW-09 is based on testing some
representative models. A Technical Construction File was checked and
approvedbya Competent Body.
The CFW-09 inverter series are intended for professional applications only.
Therefore,theharmoniccurrentemissionsdefinedbythestandardsEN61000-
3-2 and EN61000-3-2/A14do not apply.
NOTE!
The 500-600 V models are intended to be connected to an industrial low
voltage power supply network, or public network which does not supply
buildings used for domestic purpose - second environment according to
theEN61800-3standard.
Thefiltersspecifiedin items 3.3.2and 3.3.3 donot applyto the 500-600V
models.
For installing the frequency inverters in accordance to the
Product Standard
EN61800-3the followingitemsarerequired:
1.
Output cables (motor wiring) must be flexible armored or to be installed
inside a metallic conduit or in a tray with equivalent attenuation.
2.
The control (inputs and outputs) and signal wiring must be shielded or
installed inside a metallic conduit or a tray with equivalent attenuation.
3.
It is essential to follow the grounding recommendations presented in this
manual.
4.
Forfirst environment(low-voltage public network)
:installan RFI filter
(radio-frequencyinterferencefilter)atinverterinput.
5.
For second environment (industrial areas) and unrestricted
distribution(EN61800-3)
:install anRFI filter at inverterinput.
NOTE!
Theuse of a filterrequires:
Thecable’sshieldingmust besolidly connectedtothecommon backplane,
using brackets.
The inverterandthe filter must be mounted incloseproximity, electrically
connected, to one another, on the same metallic backplane. The wiring
between them should be kept as short as possible.
Twofiltersaresuggested:EpcosandSchaffner,detailedonthefollowingitems
3.3.2and3.3.3.Figures3.18 and3.19presenta connectiondiagramfor EMC
filters,Epcos and Schaffnerrespectively.
3.3.1Installation
Page 67

68
CHAPTER3- INSTALLATIONAND CONNECTION
ATTENTION!
For installation with inverters that complies class A1 (first environment
restricted distribution), note that this is a product of the restricted sales
distribution class according to IEC/EN61800-3 (1996) +A11 (2000). In a
domestic environment this productmaycause radio interference in which
case the user may be required to take adequate measures.
ATTENTION!
Forinstallationwith invertersthatcompliesclassA2 (second environment
unrestricted distribution), note that this product is not intendedtobeused
ona low-voltagepublic networkwhich suppliesdomestic premises. Radio
frequencyinterference is expectedif usedonsuchanetwork.
Descriptionofconductedemissionclassesaccordingto thestandard
EN61800-3:
ClassB:first environment, unrestricted distribution
ClassA1:first environment,restricted distribution
ClassA2: second environment,unrestricted distribution
3.3.2
Epcos Filters
The followingtables 3.9,3.10 and 3.11showthe Epcos filters forCFW-09
frequencyinverterswith380-480V,500-600Vand660-690V powersupply
respectively,themaximummotorcablelengthforconductedemissionclas-
ses A1, A2 and B (according to EN61800-3) and the electromagnetic
radiationdisturbancelevel.
Figure 3.18
- Epcos EMC filters connection in CFW-09 frequency inverters
Controlingand Signal Wiring
Transforme
Ground Rod/Grid or
BuildingSteel
Structure
Panel or MetallicEnclosure
Protective Grounding - PE
Motor
PE
CFW -09
UWVL2L1L3EF1F2F3PE
FilterQ1XC1
1 to 28
EL3L2L1PEXRT
S
Page 68

69
CHAPTER3- INSTALLATIONAND CONNECTION
380-480V power supply:
N/A = Not Applicable – The inverters were not tested with these limits.
Notes:
(1)
The RFI filter suggested above for model 600 A/380-480 V considers a power supply with 2 % voltage drop. For a power supply with 4 %
voltage drop it’s possible to use B84143B600S20 RFI filter. In this case, consider the same motor cable lengths and radiated emission data
as shown in table above.
(2)
Minimum output frequency = 2.9 Hz.
(3)
Minimum output frequency = 2.4 Hz.
Table 3.9 -
Epcos filters list for CFW-09 inverter series with 380-480 V power supply
Maximum motor cable length
according to conducted emission
class (EN61800
-3)Inverter
Model
Load Type
Epcos Input Filter
Class A2
Class A1
Class B
Inside metallic
panel
Electromagnetic radiation
disturbance level (Product
Standard EN61800
-3(1996)+A11 (2000))
3.6
A
(2)
CT/VT
First environment, restricted
distribution
4
A
(2)
CT/VT
Second environment,
unrestricted distribution
5.5A
(2)
CT/VT
B84143A8R105
Second environment,
unrestricted distribution
9
A
(2)
CT/VT
100m50m20mSecond environment,
unrestricted distribution
13ACT/VT
B8414
3A16R105
First environment, restricted
distribution
16ACT/VT
B84143A25R105
First environment, restricted
distribution
24ACT/VT
N/A
100m35mFirst environment, res
tricted
distribution
CT
B84143A36R105
30
AVT85
m
First environment, restricted
distribution
CT
B84143A50R105
38
A
(3)
VT
First environment, restricted
distribution
CT45A
(3)
VT
B84143A66R105
100
m
50mNO
First environment, restricted
distr
ibution
CT60AVTSecond environment,
unrestricted distribution
CT
B84143A90R105
70AVT
Second environment,
unrestricted distribution
CT
B84143A120R105
86AVT
First environment, restricted
distribution
CT
B84143G150R110
105AVT
First environment, restricted
distribution
CT
142
A
(3)
VT
100m25mFirst environment, restricted
distribution
180ACT/VT
First environment, restricted
distribution
211ACT/VT
B84143G220R110
First environment, restricted
distribution
240ACT/VT
N/A
100mFirst environment, restricted
distribution
312
A
(3)
CT/VT
B84143B320S20
First environment, restricted
distribution
361
A
(3)
CT/VT
B84143B400S20
First environment
, restricted
distribution
450ACT/VT
First environment, restricted
distribution
515ACT/VT
B84143B600S20
First environment, restricted
distribution
600ACT/VT
B84143B1000S20
(1)
100m25mN/AYES
First environment, restricted
distribution
Page 69

70
CHAPTER3- INSTALLATIONAND CONNECTION
Maximum motor cable length
according to conducted
emission class (EN61800
-3)Inverter Model
Load
Type
Epcos Input Filter
ClassA2ClassA1ClassBInside metallic
panel
Electromagnetic radiation
disturbance level
(Product Standard
EN61800
-
3 (1996)+A11
(2000))
CT
107
A/500
-
690VVT
First environment,
restricted distribution
CT
B84143B150S21
147
A/500
-
690VVT
First environment,
restricted distribution
211
A/500
-
690VCT/VT
B84143B250S21
First environment
,
restricted distribution
CT
247
A/500
-
690VVT
Second environment,
unrestricted distribution
CT
315
A/500
-
690VVT
Second environment,
unrestricted distribution
CT
343
A/500
-
690VVT
B84143B400S125
Second environment,
unrestr
icted distribution
CT
418
A/500
-
690VVT
Second environment,
unrestricted distribution
CT
472
A/500
-
690VVT
B84143B600S125
100m25mN/AYES
Second environment,
unrestricted distribution
500-600V power supply:
Table 3.10
- Epcos filters list for CFW-09 inverter series with 500-600 V power supply
N/A = Not Applicable – The inverters were not tested with these limits.
Note:
Minimum output frequency = 2.4 Hz.
Maximum motor cable
length according to
conducted emission class
(EN61800
-3)Inverter Model
Load
Type
Epcos Input Filter
ClassA2Class
A1
ClassBInside metallic
panel
Electromagnetic
radiation disturbance
level (Product Standard
EN61800
-
3 (1996)+A11
(2000))
CT
100
A/660
-
690
V and
107
A/500
-
690VVT
First environment,
restricted distribution
CT
B84143B150S21
127
A/660
-
690
V and
147
A/500
-
690VVT
First environment,
restricted distribution
179A/660-690
V and
211
A/500
-
690VCT/VT
B84143B180S21
First environment,
restricted distribution
CT
225
A/660
-
690
V and
247
A/500
-
690VVT
Second environment,
unrestricted distribution
CT
259
A/660
-
690
V and
315
A/500
-
690VVT
Second env
ironment,
unrestricted distribution
CT
305
A/660
-
690
V and
343
A/500
-
690VVT
Second environment,
unrestricted distribution
CT
B84143B400S125
340
A/660
-
690
V and
418
A/500
-
690VVT
Second environment,
unrestricted distribution
428
A/660
-
690
V and
472
A/500
-
690VCT/VT
B84143B600S
125
100m25mN/AYES
Second environment,
unrestricted distribution
660-690V power supply:
Table 3.11
- Epcos filters list for CFW-09 inverter series with 660-690 V power supply
N/A = Not Applicable – The inverters were not tested with these limits.
Note:
Minimum output frequency = 2.4 Hz.
Page 70

71
CHAPTER3- INSTALLATIONAND CONNECTION
The following tables 3.12 and 3.13 show the Schaffner filters list for CFW-09
inverterseries with 380-480V and 220-230V power supply, respectively.
3.3.3SchaffnerFilters
Figure 3.19
- Schaffner EMC filters connection in CFW-09 frequency inverters
Controlingand Signal Wiring
OutputCM
Choke
Transformer
Ground Rod/Grid or
BuildingSteel
Structure
Panel or MetallicEnclosure
Protective Grounding - PE
Motor
PE
CFW -09
UWVL2L1L3EF1F2F3PE
FilterQ1XC1
1 to 28
FilterInput
Filter
Output
EL3L2L1PEXRTSInputCMChoke
FN-3258-7-45
FN-3258-7-45
FN-3258-16-45
FN-3258-16-45
FN-3258-30-47
FN-3258-55-52
FN-3258-55-52
FN-3258-100-35
3.6 A
4 A, 5 A
9 A
13 A
16 A
24 A
30 A
30 A
38 A
45 A
RS-232
EBARS-485
Serial Interface
EBARS-485
Serial Interface
NoNoEBB
RS-485 Serial
Interface
NoNoModel
Optional Device
Input
filter
InputCMChoke
Output
CM
Choke
NoNoNoNoNoNoNoNoNoNoNoNoNo
YesNoNo
Inside
Metallic
PanelElectromagnetic radiation
disturbance level
(Product Standard
EN61800-3 (1996)
+ A11 (2000)
(1)
Conducted
Emission
Class
(2)
BBBBBA1A1
A1
380-480V power supply:
First environment, restricted
distribution
Second environment,
unrestricted distribution
Second environment,
unrestricted distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
NoNoNoNoNo
Schaffner 203 (1151-
042) -
2 turns (filter input
side)No2 x Schaffner 203
(1151-042) - (filter
input/output
sides)
Table 3.12
- Schaffner filters list for CFW-09 inverter series with 380-480 V power supply
Page 71

72
CHAPTER3- INSTALLATIONAND CONNECTION
FN-3258-100-35
FN-3258-100-35
FN-3258-100-35
FN-3258-100-35
FN-3359-150-28
FN-3359-250-28
FN-3359-250-28
FN-3359-400-99
FN-3359-600-99
FN-3359-1000-99
45 A
45 A
45 A
60 A
70 A
86 A
105 A
142 A
180 A
211A
240 A
312 A
361 A
450 A
515 A
600 A
EBA
RS-485
Serial Interface
EBB
RS-485
Serial Interface
ProfibusDP
12 MBaud
NoNoNoNoNoNoNoNoNoNoNo
2 X
Schaffner
203
(1151-042)
(UVW)
2 X
Schaffner
167
(1151-043)
(UVW)
Schaffner
159
(1151-044)
(UVW)
Schaffner
159
(1151-044)
(UVW)
Schaffner
159
(1151-044)
(UVW)
Schaffner
159
(1151-044)
(UVW)
NoNoNo
Yes
Yes
Yes
Yes
Yes
Yes
YesA1A1A1A1A1A1A1A1A1A1
380-480V power supply:
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
Second environment,
unrestricted distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
2 x Schaffner 203
(1151-042) - (filter
input/ output
sides)
2 x Schaffner 203
(1151-042) - (filter
input/output
sides)
Schaffner 203 (1151-
042) 2 turns in the
control
cable
2 x Schaffner 203
(1151-042) - (filter
input/output
sides)
No
2 X Schaffner 203
(1151-042)
Output filter side
2 X Schaffner 167
(1151-043)
output filter side
Schaffner 159
(1151-044)
output filter side
Schaffner 159
(1151-044)
Output filter side
Schaffner 159
(1151-044)
Output filter side
Schaffner 159
(1151-044)
Output filter side
Table 3.12 (cont.)
- Schaffner filters list for CFW-09 inverter series with 380-480 V power supply
Model
Optional Device
Input
filter
InputCMChoke
Output
CM
Choke
Inside
Metallic
Panel
Electromagnetic radiation
disturbance level
(Product Standard
EN61800-3 (1996)
+ A11 (2000)
(1)
Conducted
Emission
Class
(2)
Notes:
(1) - First environment/restricted distribution (Basic Standard CISPR 11):
30 to 230 MHz: 30 dB (uV/m) in 30 m
230 to 1000 MHz: 37 dB (uV/m) in 30 m
Second environment/unrestricted distribution (Basic Standard CISPR 11: Group 2, class A):
30 to 230 MHz: 40 dB (uV/m) in 30 m
230 to 1000 MHz: 50 dB (uV/m) in 30 m
(2) - Motor shielded cable length:
20 m.
Page 72

73
CHAPTER3- INSTALLATIONAND CONNECTION
220-230V power supply:
Electromagnetic radiation
disturbance level
(Product StandardEN61800-
3 (1996)
+ A11 (2000))
(1)
FN-3258-7-45
FN-3258-16-45
FN-3258-30-47
FN-3258-55-52
FN-3258-100-35
FN-3258-100-35
FN-3258-100-35
FN-3258-100-35
FN-3258-100-35
FN-3258-130-35
FN-3359-150-28
FN-3359-250-28
NoNoNoNo2 x Schaffner 203
(1151-042) - (filter
input/output sides)
2 x Schaffner 203
(1151-042) - (filter
input/output sides)
2 x Schaffner 203
(1151-042) - (filter
input/output sides)
Schaffner 203 (1151-
042)choke- 2 turns
in the control
cable
2 x Schaffner 203
(1151-042) -
(filter input/output
sides)
No
2 X Schaffner 203
(1151-042)
Filter output side
2 X Schaffner 203
(1151-042)
Filter output side
2 X Schaffner 167
(1151-043)
Filter output side
6 A
7 A
10 A
13 A
16 A
24 A
28 A
45 A
45 A
45 A
45 A
54 A
70 A
86 A
105 A
130 A
NoNoNoNoNo
EBA
RS-485
Serial Interface
EBB
RS-485
Serial Interface
ProfibusDP
12 MBaud
NoNoNoNoModel
Optional
Device
Input
filter
Commonmode Ferrite
(Input)
NoNoNoNoNoNoNoNoNo
2 X
Schaffner
203
(1151-042)
(UVW)
2 X
Schaffner
203
(1151-042)
(UVW)
2 X
Schaffner
167
(1151-043)
(UVW)
NoNoNo
YesNoNoNoNo
Yes
Yes
Yes
Yes
Inside
Metallic
Panel
Conducted
Emission
Class
(2)
BBBA1A1A1A1A1A1A1A1A1First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
Second environment,
unrestricted distribution
First environment, restricted
distribution
First environment, restricted
distribution
First environment, restricted
distribution
Common
mode Ferrite
(Output)
Notes:
(1) - First environment/restricted distribution (Basic Standard CISPR 11):
30 to 230 MHz: 30 dB (uV/m) in 30 m
230 to 1000 MHz: 37 dB (uV/m) in 30 m
Second environment/unrestricted distribution (Basic Standard CISPR 11: Group 2, class A):
30 to 230 MHz: 40 dB (uV/m) in 30 m
230 to 1000 MHz: 50 dB (uV/m) in 30 m
(2) - Motor shielded cable length:
20 m.
Table 3.13
- Schaffner filters list for CFW-09 inverter series with 220-230 V power supply
Page 73

74
CHAPTER3- INSTALLATIONAND CONNECTION
Table 3.14showsthe maintechnicalcharacteristicsof Epcosand Shaffner
filters used in CFW-09 inverter series. Figure 3.20 presents drawings of
these filters.
3.3.4
EMC Filter Characteristics
WEG
P/N
Filter
Manufacturer
Nominal
current [A]
Power
l
osses [W]
Weight
[kg]
Drawing
(figure
3.20)
Connector
type
0208.2126
B84143A8R105
860.58a0208.2127
B84143A16R105
1690.90b0208.2128
B84143A25R105
25121.10
c
0208.2129
B84143A36
R1053618
1.75
0208.2130
B84143A50R105
50151.75d0208.2131
B84143A66R105
66202.7e0208.2132
B84143A90R105
90274.2f0208.2133
B84143A120R105
120394.9g0208.2134
B84143G150R110
150488.0h0208.2135
B84143G220R110
2206011.5i
0208.2136
B84143B320S20
320
(*)
21210208.2137
B84143B400S20
4003321j0208.2138
B84143B600S20
6005722k0208.2139
B84143B1000S20
10009928l0208.2140
B84143B150S21
1501213
0208.2141
B84143B180S21
1801413m0208.2142
B8
4143B250S21
2501415n0208.2143
B84143B400S125
4003321o0208.2144
B84143B600S125
Epcos
6005722p-
0208.2075
FN3258
-7-457
3.8
0.5
/45
0208.2076
FN3258
-16-451660.8
/45
0208.2077
FN3258
-30-4730121.2
/47
0208.2078
FN3258
-55-525526
1.8
/52
0208.2079
FN3258
-
100-35
100354.3
/35
0208.2080
FN3258
-
130-35
130434.5s/35
0208.2081
FN3359
-
150-28
150286.5
/28
0208.2082
FN3359
-
250-28
250577.0
/28
0208.2083
FN3359
-
400-99
4005010.5
0208.2084
FN3359
-
600-99
6006511
0208.2085
FN3359
-
1000-99
10009118tBus
/99
0208.2086
1151-042
0208.2087
1151-043
0208.2088
1151-044
Schaffner
-----
Table 3.14
- Technical specifications of EMC filters for the CFW-09 inverter series
(*)
According to the manufacturer, this filter can be used up to 331 A.
Page 74

75
CHAPTER3- INSTALLATIONAND CONNECTION
a)EPCOS B84143A8R105Filter
Figure 3.20 a) and b)
- EMC filters for CFW-09 inverter series [dimensions in mm]
b)EPCOS B84143A16R105Filter
PE M4 x 11
133.7
8
Terminals 4 mm²
L1L2L3
Marking
LINE
LOAD
155
165
L1'
L2'
L3'
503851.4
4.5
6.3
1.5
PE M5 x 15
L1L2L3
L1'
L2'
L3'
LINE
LOAD
Marking
38
4.5
1.5
70
199.5
Terminals 4 mm²
221
231
9
60
46.4
Page 75

76
CHAPTER3- INSTALLATIONAND CONNECTION
c)EPCOS B84143A25R105 Filter
Figure 3.20 c) and d)
- EMC filters for CFW-09 inverter series [dimensions in mm]
d) EPCOS B84143A36R105 and B84143A50R105Filter
PE M5 x 15
L1L2L3
L1'
L2'
L3'
LINE
LOAD
Marking
38
4.5
1.5
83
199.5
PE M6 x 14
221
231
9
60
46.4
PE M6 x 14
L1L2L3
L1'
L2'
L3'
LINE
LOAD
Marking
35
4.5
1.5
90
200
Terminals 10 mm²
255
265
8
70
58
Page 76

77
CHAPTER3- INSTALLATIONAND CONNECTION
e)EPCOS B84143A66R105Filter
f) EPCOS B84143A90R105 Filter
Figure 3.20 e) and f)
- EMC filters for CFW-09 inverter series [dimensions in mm]
Terminals 35 mm²
Terminals 16 mm²
PE M6 x 14
L1L2L3
L1'
L2'
L3'LINE
LOAD
Marking
35
4.5
1.5
141.5
200
255
265
8
58
120
PE M10 x 34
L1L2L3
L1'
L2'
L3'
LINE
LOAD
Marking
1.5
4.6
240
290
255
25
135
100
6.56063
80
13
Page 77

78
CHAPTER3- INSTALLATIONAND CONNECTION
g)EPCOS B84143A120R105Filter
h)EPCOSB84143G150R110Filter
Figure 3.20 g) and h)
- EMC filters for CFW-09 inverter series [dimensions in mm]
Terminals 35 mm²
PE M10 x 34
L1
L2L3L1'
L2'
L3'
LINE
LOAD
Marking
1.5
240
290
255
25
150
6.56563
901346
100
PE M10 x 35
L1L2L3
LINE
LOAD
Marking
6.5
0.5
350
L3'
200
1004078
Terminal
blocks
50mm
2
380
365±0.5
86
65±0.3
Litz wire markings
Wire end ferrule
500±10
Litz wire
L2'
L1'PE90
Page 78

79
CHAPTER3- INSTALLATIONAND CONNECTION
i)EPCOSB84143G220R110 Filter
j) EPCOS B84143B320S20and B84143B400S20 Filters
Figure 3.20 i) and j)
- EMC filters for CFW-09 inverter series [dimensions in mm]
PE M10 x 35
L1L2L3
LINE
LOAD
Marking
6.5
0.5
400
L3'
220
1103079
430
415±0.5
106
85±0.3
Litz wire markings
500±10
Litz wire
L2'
L1'PE110
Terminal blocks 95 mm
2
Wire end ferrule
PE M10 x 30
L3
LINE
Marking
25
12060220
260
360±2
16
85±0.5
4 x M6 mm deep
36
30060240±1
235±1L2L1
LOAD
L2
L1
12151542±211
42±22116
30
180±0.5
210
91
Page 79

80
CHAPTER3- INSTALLATIONAND CONNECTION
k)EPCOSB84143B600S20Filter
l)EPCOSB84143B1000S20Filter
Figure 3.20 k) and l)
- EMC filters for CFW-09 inverter series [dimensions in mm]
LINE
Marking
30
30
350
5
L3
1512
410±2.5
260
235±1
91
4 x M6 / mm deep
290±1
60
42±3
L2
L1
42±3
L3L2L1
LOAD
PE M10 x 30
15
60
120
85±0.5
116162
180±0.5
210
3611
LINE
Marking
40
40
350
8
L3
2012
420±2.5
300
275±1
141
290±1
65
52±3
L2
L1
52±3
L3L2L1
LOAD
PE M12 x 30
2065135±0.8
166162.5
220±0.8
250
6114
160
4 x M6 / 6 mm deep
Page 80

81
CHAPTER3- INSTALLATIONAND CONNECTION
n) EPCOS B84143B250S21 Filter
Figure 3.20 m) and n)
- EMC filters for CFW-09 inverter series [dimensions in mm]
m) EPCOS B84143B150S21andB84143B180S21Filters
LINE
Marking
30
20
260
3
L3
109
170
155±2
91
150
32±1
97.5
L2
L1
97.2
L3L2L1
LOAD
10
141812
120
1403680
32±1
115±0.2
310±2
6.6
PE M10 x 30
2 x M5 / mm deep
LINE
Marking
30
25
300
5
L3
1511
190
165
91
60
L2L1L3L2L1
LOAD
116
2
110
1403680
60
42±1
360±2
PE M10 x 30
240±0.6
1242±1152 x M6 / 6 mm deep
Page 81

82
CHAPTER3- INSTALLATIONAND CONNECTION
o)EPCOS B84143B400S125Filter
Figure 3.20 o)
- EMC filters for CFW-09 inverter series [dimensions in mm]
40±31511
L125330±2
210±0.515940±3L2
L35270±3
L3'
L2'
L1'
220±1
240
116
100
200
78.2
2
Page 82

83
CHAPTER3- INSTALLATIONAND CONNECTION
p)EPCOS B84143B600S125Filter
Figure 3.20 p)
- EMC filters for CFW-09 inverter series [dimensions in mm]
39±31511L130370±2
240±1
15
39±3L2L38310±3
L3'
L2'
L1'
265
390140
120
250±0.5
21512
Page 83

84
CHAPTER3- INSTALLATIONAND CONNECTION
q) Schaffner FN3258-7-45, FN3258-16-45, FN3258-30-47, FN3258-55-52, FN3258-100-35 and FN3258-130-35 filters
Type/35- Terminalblockforflexibleand
rigidcable of 50mm
2
orAWG 1/0.
Max.Torque: 8 Nm
Type/45-Terminal blockfor6 mm
2
solid
cable,4 mm
2
flexiblecableAWG 12.
Type/47-Terminal blockfor 16mm
2
solidwires,10mm
2
flexiblewires
AWG8.
Type/52- Dimesionsinmm(inch)
Terminalblock for 25mm
2
solid
wires,16mm
2
flexiblewiresAWG6.
FRONTVIEW
MECHANICALDATASIDEVIEW
Connector
Rated Current
Top
Figure 3.20 q)
- EMC filters for CFW-09 inverter series [dimensions in mm (in)]
Page 84

85
CHAPTER3- INSTALLATIONAND CONNECTION
r) Schaffner FN3359-150-28, FN3359-250-28, FN3359-400-99, FN3359-600-99 and FN3359-1000-99 filters
Types 150 A to 250 A
Types 400 A to 1000 A
Type/28
M10bolt
Top
Bus bar connection(Type/99)
Series FN 2259
These filters are supplied with M12
bolts for the grounding connection.
Top
Connector
RATED CURRENT
Figure 3.20 r)
- EMC filters for CFW-09 inverter series [dimensions in mm]
NOTE!
Thedeclaration ofconformityCEisavailableonthewebsitewww.weg.net
or on the CD, which comes with the products.
Page 85

86
KEYP
AD (HMI) OPERA
TION
4.1
DESCRIPTION
OFTHE KEYPAD
ThischapterdescribestheCFW-09operationviathestandardKeypador
Human-MachineInterface(HMI),providingthefollowinginformation:
GeneralKeypadDescription;
Use of the Keypad;
ParameterProgramming;
Description of the StatusIndicators.
Thestandard CFW-09Keypadhas tworeadout displays:a LED readout
witha 4 digit,seven-segmentdisplay anda LCDdisplay withtwo linesof
16alphanumeric characters.Therearealso4indicatorLEDsand 8keys.
Figure4.1 shows the frontview of theKeypadandindicates the position
of the readouts, keys and status LEDs.
Functionsof the LEDDisplay:
The LED Display shows the fault codes, inverter status, the parameter
numberandits value.For unitsof current, voltageor frequency, the LED
display shows the unit in the right side digit (L.S.D.) as shown here.
Acurrent (A)
Uvoltage(V)
Hfrequency(Hz)
Blank
speedand other parameters
NOTE!
Whenthe indicationis higherthan 9999 (forinstanceinrpm)thenumber
corresponding to the ten of thousand will not be displayed (ex.: 12345
rpm will be read as 2345 rpm). The correct indication will be displayed
only on the LCD display.
CHAPTER
4
Figure 4.1
- CFW-09 standard keypad
RedLED "Remote"
Green LED "Local"
LCD-Display
LEDsDisplay
Green LED "Forward"
Red LED "Reverse"
Functionsof the LCD Display:
The LCD Display shows the parameter number and its value
simultaneously, without requiringthe toggling of the
key. It also
provides a brief description of each parameter function, fault code and
inverterstatus.
Page 86

87
CHAPTER4 - KEYPAD (HMI)OPERATION
Figure 4.2
- Direction of rotation (FWD / REV) LEDs
LOCAL andREMOTELEDs:
Inverterin Local Mode:
Green LEDONand Red LED OFF.
Inverterin RemoteMode:
GreenLED OFF and Red LED ON.
DirectionofRotation (FWD/REV)LEDs:
Referto figure4.2 below.
BasicFunctionsof the Keys:
The functions describedbelow are validfor factory default programming and
LocalModeoperation. Theactual functionof thekeysmayvary ifparameters
P220throughP228are re-programmed.
Startstheinvertervia accelerationramp.Afterstarting,thedisplaysequences
through these units at each touch of the Start key in the order shown here
(refer to item 4.2.2 a):
Stops (disables) the inverter via deceleration ramp. Also resets the inverter
after afault has occurred.
TogglestheLEDdisplaybetweentheparameternumberanditsvalue(Number/
Value).
Increasesthe speed,the parameternumber or theparameter value.
Decreasesthe speed,the parameternumber or theparameter value.
Reversesthe directionofmotor rotationbetweenForward/Reverse.
Toggles betweentheLOCALand REMOTEmodesof operation.
Performsthe JOG functionwhenpressed.
Any DIx programmed for General Enable must be closed (and the CFW-09
must be stopped)toenable JOG function.
rpm
Volts
Status
Torque
HzA%
Speed
ON
OFF
FLASHING
Forward
Forward
Reverse
FWD / REVCommand (Key orDI2)
Page 87

88
CHAPTER4 - KEYPAD (HMI)OPERATION
4.2.1
KeypadOperation
4.2
USE OF THE KEYPAD
(HMI)
The keypadis used for programmingand operating the CFW-09allowingthe
followingfunctions:
Indicationof theinverterstatus andoperationvariables;
FaultIndicationand Diagnostics;
Viewingandprogrammingparameters;
Operation.
Allfunctions relatingto the CFW-09 operation (Start,Stop,Motor Direction of
Rotation,JOG,Increment/Decrementof theSpeedReferenceandSelectionof
LocalMode/RemoteMode)canbe performedthroughthe Keypad.This isvalid
withthefactorydefaultprogrammingof theinverter.Allkeypadkeysareenabled
when the Local Mode has been selected. These same functions can be
performed in Remote Modeby means of digitaland analog inputs.
Flexibilityis providedthroughthe abilityto programthe parameters thatdefine
the input and outputfunctions.
Keypad keys operation description:
Both
and
keysare enabledwhenP224= 0 (I,O Key)for LocalMode
and/or P227 = 0 (I, O Key) for Remote Mode.
Startsinverter via Acceleration Ramp.
StopstheinverterviaDecelerationRamp.
NOTE!
Itresets theinverter after a FaultTrip (alwaysactive).
When the Jog key is pressed, it accelerates the motor according to the
AccelerationRampup to theJOG speed programmed inP122 (defaultis 150
rpm). When released, the motor decelerates according to the Deceleration
Ramp and stops.
EnabledwhenP225= 1(Keypad)for LocalModeand/orP228=1(Keypad)for
RemoteMode.
Ifa DigitalInput isset to GeneralEnable(P263toP270= 2) ithas to beclosed
to allowthe JOG function.
Selects the control input and speed reference source, toggling between LO-
CALMode andREMOTEMode.
EnabledwhenP220 = 2 (Keypad LOC) or 3 (Keypad REM).
Reversesthe motor directionof rotation.
Enabled when P223 = 2 (Keypad FWD) or 3 (Keypad REV) for Local Mode
and/or P226= 2 (KeypadFWD) or 3 (Keypad REV) for Remote Mode.
The keys described below are enabled when P221 = 0 (Keypad) for Local
Modeand/orP222=0(Keypad)forRemoteMode.TheparameterP121 contains
the speed reference set by the keypad.
When pressed it increasesthe speed reference.
When pressed itdecreases the speed reference.
Page 88

89
CHAPTER4 - KEYPAD (HMI)OPERATION
4.2.2
“Read-Only”Variables
andStatus
ParametersP002to P099arereservedforthe displayof “read-only”values.The
factorydefaultdisplaywhen poweris appliedto theinverterisP002.Motor speed
inrpm.The usercan scroll through thevarious read-onlyparametersor use the
factory configured display of the key values. This is done by pressing the start
key.a)
Someselected“read-only” variablescan beviewedfollowingthe
procedurebelow:
The “read-only” variable to be shown afterAC power is applied to the inverter
is
definedinParameterP205:
P205
InitialMonitoringParameter
0
P005 (Motor Frequency)
1
P003 (Motor Current)
2
P002 (Motor Speed)
3
P007 (Output Voltage)
4
P006 (Inverter Status)
5
P009 (Motor Torque)
6
P070 (motor speed and motor current)
7
P040 (PID process variable)
Table 4.1
- Choosing the initial monitoring parameter
NOTE!
Reference Backup
The last frequency Reference set by the keys and is stored
whenthe
inverter is stopped or t
he
AC power is removed, provided P120= 1
(Reference
Backup activeis the factorydefault).Tochangethe frequency reference before
startingthe inverter,the valueof parameter P121 must bechanged.
Output
Voltage
P007=460VVFDStatusP00
6 =runMotorFrequencyP005=60.0Hz
Motor
Current
P003= 24.3 A
Process Valiable
P040 = 53
.
4 %
(Only if P203 = 1)
Press
Press
Press
MotorTorqueP009=73.2%
Press
Press
Press
Press
Mot
or SpeedP002=1
800 rpm
Press
Current = 24.3 A
P002=1800 rpm
Page 89

90
CHAPTER4 - KEYPAD (HMI)OPERATION
D
C LinkUnderVoltag
e
4.2.3
Parameter Viewing and
Programming
b)InverterStatus:
InverterisREADY to be started
(NoFault condition)
Inverterhas beenstarted
(Runcondition)
Linevoltagein toolowfor inverteroperation
(Undervoltagecondition)
c) LED display flashing:
The displayflashes in the following conditions:
Duringthe DCInjection braking;
Tryingto change a parameter value when itis not allowed;
Inverterin acurrent overloadcondition(Referto chapter7 - Diagnostics
andTroubleshooting);
Inverterin Fault condition(Referto chapter 7 - Diagnosticsand
Troubleshooting).
All CFW-09 settings are made through the parameters. The parameters are
shown on the display with the letter
P
followed by a number.
Example(P101):
101 = Parameter Number
Decel.
TimeP10
1 =10.0sVFDready
Eachparameter isassociatedto a numerical value(parametercontent),that
correspondsto an optionselected among thoseoptions thatareavailablefor
thisparameters.
Thevaluesof theparametersdefinethe inverterprogrammingorthe valueof
avariable(e.g. current,frequency,voltage).For inverterprogramming you
shouldchangetheparameter content(s).
To allow the reprogramming of any parameter value it is required to change
parameterP000 tothepasswordvalue.The factorydefaultpasswordvalueis
5.Otherwiseyoucanonlyreadtheparametervaluesandnotreprogramthem.
For more detail
refer to
P000 descriptionin chapter 6.
VFDStatusP006=ru
n
Page 90

91
CHAPTER4 - KEYPAD (HMI)OPERATION
ACTION
LED DISPLAY
Comments
LCD DISPLAY
Accel.
Time
P10
0 = 5
.0s
Motor
Spee
d
P002=0rpm
Press the key
Use the and keys to
reachP100
Press the key
Use the and keys to
setthe new value
Press the key
Selectthe desiredparameter
Numeric valueassociated to the
parameter
(4)
Setsthe new desired value.
(1) (4)
(1) (2) (3)
Accel.
Time
P10
0 = 5
.0sAccel.Time
P10
0 = 6
.
1 s
NOTES:
(1)
For parameters that can be changed with the motor running, the inverter
will use the new value immediatelyafter it has been set. For the parameters
that can be changed only with motor stopped, the inverter will use this new
set value only after the key is pressed.
(2)
Bypressing the keyafter the reprogramming, the new programmed
value will be stored automatically and will remain stored until a new value is
programmed.
(3)
Ifthelastvalueprogrammedin theparameteris notfunctionallycompatible
withotherparametervaluesalreadyprogrammed,anE24-ProgrammingError
- will be displayed.
Exampleof programmingerror:
Programming two digital inputs (DIx) with the same function. Refer to table
4.2 forthe list of programmingerrors that will generate anE24 Programming
Error.
Accel.
Time
P10
0 = 6
.
1 s
Page 91

92
CHAPTER4 - KEYPAD (HMI)OPERATION
Table 4.2
- Incompatibility between parameters - E24
(4)
To allowthereprogrammingofanyparametervalueit isrequiredtochange
parameterP000 tothepasswordvalue.The factorydefaultpasswordvalueis
5.Otherwiseyoucanonlyreadtheparametervaluesandnotreprogramthem.
For more detail
refer to
P000 descriptionin chapter 6.
1)
Twoor more parameters between P264 or P265 or P266 or P267 or P268 or P269 and P270 equal to 1 (LOC/REM).
2)
Twoor more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 6 (Ramp 2).
3)
Two or more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 9 (Speed/Torque).
4)
P265 equal to 8 and P266 different than 8 or vice versa (FWD Run / REV Run).
5)
P221 or P222 equal to 8 (Multispeed) and P266
7 and P267
7 and P268
7.6)
[P221 = 7 or P222 = 7] and [(P265
5 and P267
5) or (P266
5 and P268
5)].
(with reference = E.P. and without DIx = increase E.P. or without DIx = decrease E.P.).
7)
P264 and P266 equal to 8 (Reverse Run).
8)
[P2217 and P222
7] and [(P265 = 5 or P267 = 5 or P266 = 5 or P268 = 5)].
(without reference = E.P. and with DIx = increase E.P. or with DIx = decrease E.P.).
9)
P265 or P267 or P269 equal to 14 and P266 and P268 and P270 different than 14 (with DIx = Start and DIx
Stop).
10)
P266 or P268 or P270 equal to 14 and P265 and P267 and P269 different than 14 (with DIx
Start and DIx = Stop).
11)
P220 > 1 and P224 = P227 = 1 without any DIx set for Start/Stop or DIx = Fast Stop or General Enable.
12)
P220 = 0 and P224 = 1 and without DIx = Start/Stop or Fast Stop and without DIx = General Enable.
13)
P220 = 1 and P227 = 1 and without DIx = Start/Stop or Fast Stop and without DIx = General Enable.
14)
DIx = STARTand DIx = STOP, but P224
1 and P227
1.15)
Twoor more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 15 (MAN/AUT).
16)
Two or more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 17 (Disables
Flying Start).
17)
Twoor more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 18 (DC Voltage Regulator).
18)
Two or more parameters between
P265 or P266 or P267 or P268 or P269 and P270
equal to 19 (ParameterSetting Disable)
.
19)
Two or more parameters between P265, P266, P267, P268 and P269 equal to 20 (Load user via DIx).
20)
P296 = 8 and P295 = 4, 6, 39, 40, 41, 42, 43, 44, 45, 46, 47, 48, or 49 (P295 incompatible with inverter model – To avoid damages
of the internal inverter components).
21)
P296 = 5, 6, 7 or 8 and P297 = 3 (P297 incompatible with inverter model).
22)
Twoor more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 21 (Timer RL2).
23)
Twoor more parameters between P265 or P266 or P267 or P268 or P269 and P270 equal to 22 (Timer RL3).
24)
P265 or P266 or P267 or P268 or P269 or P270 = 21 and P279
28.
25)
P265 or P266 or P267 or P268 or P269 or P270 = 22 and P280
28.
26)
P279 = 28 and P265 or P266 or P267 or P268 or P269 or P270
21.
27)
P280 = 28 and P265 or P266 or P267 or P268 or P269 or P270
22.
28)
P2022 and P237 = 1 or P241 = 1 or P265 to P270 = JOG+ or P265 to P270 = JOG-.
29)
P203 = 1 and P211 = 1 and [P224 = 0 or P227 = 0]
30)
P220 = 0 and P224 = 1 and P227 = 0 or P227 = 1 and P263 = 0
31)
P220 = 1 and P224 = 0 or P224 = 1 and P227 = 1 and P263 = 0
32)
P220 = 2 and P224 = 0 or P224 = 1and P227 = 0 or P227 = 1 and P263 = 0
E24 - Incompatibility between parameters
Page 92

93
Thischapterprovidesthefollowinginformation:
Howtocheckand preparetheinverterbefore power-up;
Howto power-upandcheck for properoperation;
Howto operatetheinverter.
Theinvertershallbeinstalledaccordingtochapter3:Installation
andConnection.
DANGER!
DisconnecttheACinputpowerbefore making anyconnections.Evenwhen the
inverter project is different from the suggested connections, the following
recommendationsare applicable.
1)
Check all connections
Check if thepower,grounding and controlconnections are correct and
welltightened.
2)
Clean the inside of the inverter
Removeall shippingmaterialfrom the insideofthe inverter orcabinet.
3)
Check if theselectedinverterAC poweris correct(
r
efer to
item
3.2.3)4)Check the motor
Check allmotor connectionsand verify if itsvoltage, current and frequency
match theinverter specifications.
NOTES!
OperationinVT mode
Whenthemotordataissetproperlyduringthefirstpower-uproutine,
the inverter automatically sets the additional parameters used for
the correct operationunder this control mode.
5)
Uncouple the load from the motor
If the motor cannot be uncoupled, make sure that the direction of rotation
(FWD/REV) cannot cause damage to the machine.
6)
Close the inverter cover or cabinet doors
After theinverter has been checked,AC power canbe applied:
1)
Check the supply voltage
Measurethe linevoltage andcheck if it iswithinthespecified range(referto
item 9.1).
2) Power-up the AC input
Close the input circuit breaker or disconnect switch.
3) Check if the power-up has been successful
When the inverterispowered upforthe first timeorwhen thefactory default
parameter values areloaded (P204 = 5),astart-upsub-routineis run. This
sub-routinerequests theuser toprogramsomebasic parameters toensure
properoperationandmotorprotection.
Astart-up programming exampleisshown below:
CHAPTER
5
START-UP
5.1PRE-POWER
CHECKS
5.2
INITIAL
POWER-UP
Inverter
Line:CFW-09
RatedCurrent: 9A
Rated Voltage: 380 V to 480 V
Model:CFW090009T3848ESZ
Cooling:Self-ventilated
Motor
WEG IP55
Power:5 hp
rpm: 1730, 4 POLE
RatedCurrent: 7.9A
Rated Voltage: 460 V
Frequency:60 Hz
Cooling:Self-ventilated
Page 93

94
CHAPTER5 -START-UP
ORIENTED START-UP
Initial Power-up - Programming via Keypad (HMI) (Based on the example above):
languageP201=English
LanguageSelection:
After power-up,the displayshows
0 = Português
thefollowingmessage
1 = English
2 = Español
3 = Deutsch
Press the key to enter the
programming mode
Entertheprogrammingmode
Use the and keys to
SelectedLanguage:
select the language
1 = English
Press the key to save the
selected option and exit the
Exitthe programming mode
programming mode
InverterRated VoltageSelection:
0 = 220 V/230 V
1 = 380 V
Press the key to go to the
2 = 400 V/415 V
nextparameter
3 = 440 V/460 V
4 = 480 V
5 = 500 V/525 V
6 = 550 V/575 V
7 = 600 V
8 = 660 V/690 V
Press the key to enter the
Entertheprogrammingmode
programming mode
languageP201=EnglishlanguageP201=EnglishlanguageP201=EnglishVFDRated Volt.P296=440/
460VVFDRate
d Volt.P296=440/
460
V
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Page 94

95
CHAPTER5 -START-UP
SelectedInverterRatedVoltage:
1 =
380 V
Exitthe programming mode
MotorRated Voltage:
0 to 690 V
Entertheprogrammingmode
ProgrammedMotorRated Voltage:
380 V
Exitthe programming mode
MotorRatedCurrentRange:
(0.0 to 1.30) x P295
(1)
Entertheprogrammingmode
Press the key to save the
selected option and exit the
programming mode
Press the key to go to the next
parameter
Press the key to enter the
programming mode
Use the and keys to set
thecorrect motorrated voltagevalue
Press the key to save the
programmed value and exit the
programming mode
Press the key to go to the next
parameter
Press the key to enter the
programming mode
MotorRatedVoltP400=440VMotorRatedCur.P401=9.0A
Use the and keys to
selecttheinverterpowersupplyvoltage
VFDRatedVolt.P296=
380 V
VFDRatedVolt.P296=
380 V
MotorRatedVoltP400=440VMotorRatedVoltP400=
380 V
MotorRatedVoltP400=380 V
MotorRatedCu
r.
P401=9.0
A
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Page 95

96
CHAPTER5 -START-UP
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Motor
Rated
rpmP402
= 1750rpm
Use the and keys to set
thecorrect motor ratedcurrent value
Press the key to save the
programmed value and exit the
programming mode
Press the key to go to the next
parameter
Press the key to enter the
programming mode
Use the and keysto set the
correctmotor ratedfrequencyvalue
Press the key to save the
programmedvalueand exitthe
programming mode
Press the key to go to the next
parameter
Press the key to enter the
programming mode
ProgrammedMotor RatedCurrent:
7.9 A
Exitthe programming mode
MotorRatedFrequencyRange:
0 to 300 Hz
Entertheprogrammingmode
ProgrammedMotorRated Frequency:
60 Hz
Exitthe programming mode
MotorRatedrpmRange:
0 to18000 rpm
Entertheprogrammingmode
MotorRate
d FreqP403=60Hz
MotorRatedCu
r.
P401=7.9 AMotorRatedCur.P401=7.
9 AMotorRated FreqP403=60HzMotorRated Fre
q
P403=60Hz
MotorRate
d FreqP403=60HzMotorRated
rpmP402
= 1750rpm
Page 96

97
CHAPTER5 -START-UP
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
MotorRatedHPP404=0.33HP
Use the and keys to set
thecorrect motor ratedrpmvalue
Press the key to save the
programmed value and exit the
programming mode
Press the key to go to the next
parameter
Press the key to enter the
programming mode
Use the and keys to select
themotor ratedpower
Press the key to save the
selected option and exit the
programming mode
Press the key to go to the next
parameter
Press the key to enter the
programming mode
ProgrammedMotorRatedrpm:
1730rpm
Exitthe programming mode
MotorRated hpRange:
1 to 1600.0 hp
1 to 1190.0 kW
Entertheprogrammingmode
SelectedMotor Rated Power:
5.0 hp/3.7 kW
Exitthe programming mode
Motor VentilationTypeSelection:
0 = Self Ventilated
1 = Separate Ventilation
3 = Increased Protection
Entertheprogrammingmode
Motor
Rated
r
pm
P402
= 1730rpmMotorRatedHPP404=0.33HPMotorRatedHPP404=5.0HPMotorRatedHPP404=5.0HPMotor
Rated
rpmP402
= 1730rpm
Ventilation Type
P406=
Self Vent.
Ventilation Type
P406=
Self Vent.
Page 97

98
CHAPTER5 -START-UP
ATTENTION!
Opentheinputcircuitbreakerordisconnectswitchtoshutdownthe CFW-09.
NOTES!
To repeatthe initialpower-upprocedure:
Set the parameter
P204 = 5 or 6
(this loads the factorydefault parameters)
andfollow theinitialpower-up sub-routineagain;
The initial power-up sub-routine described above automatically sets some
parameters accordingtotheentereddata.Formore details,referto chapter6.
Modificationof motor characteristics after thefirstpower up:
a)
Insert the motor data at parameters P400 to P407;
b)
Foroperationin the vector mode runthe self-tuning routine (P408 >0);
c)
Set P156, P157, P158, P169, P170, P171, and P172;
d)
Powerthe inverter down and up for the new settingsto take place andfor
thepropermotoroperation.
Modificationof motorcharacteristics after thefirst powerup, for operation in
VTmode:
Followthe previous procedures and also set parameter P297 to 2.5 kHz.
5.3
START-UP
This
item
describes thestart-upprocedurewhenoperatingviatheKeypad(HMI).
Four types of control willbe considered:
V/F 60 Hz, Sensorless Vector, Vector
with Encoder Feedback and VVW (Voltage Vector
WEG
).
DANGER!
Even after theAC input is disconnected, high voltages may still be present.
Wait at least 10 minutes after powering down to allow a full discharge of the
capacitors.
VFDready
SelectedMotor VentilationType:
0 = Self Ventilated
Exitthe programming mode
Thefirst power-uproutine isfinished.
Inverteris readytooperate
Use the and keysto select
themotor ventilationtype
Press the key to save the
selected option and exit the
programming mode
Refer to item 5.3
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Ventilatio
n Type
P406=
Self Vent.
Ventilation
TypeP406=Self Vent.
NOTE!
(1)
P401 maximum value is 1.8 x P295 for model 4.2 A/500-600 V and 1.6 x
P295for models7Aand 54A/220-230V;2.9Aand
7A/500-600V;107A, 147A
and 247A/500-690 V; 100A, 127 Aand 340 A/660-690 V.
Page 98

99
CHAPTER5 -START-UP
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Power-uptheinverter
Press the key. Press the keys
or until P000 is reached
Press the
key to enter the
programming mode
Use the and keys to set
thepasswordvalue
Press the
key to save the
programmedvalueand exitthe
programming mode
Press the keys or until
P202is reached
Inverteris readyto beoperated
Enablestheaccesstochangeparameters
content.
With the factory default programming
[P200= 1 (PasswordActive)],P000must
be set to 5 to allow parameters changes
Entertheprogrammingmode
Passwordvalue(factorydefault =5)
Exitthe programming mode
Typeof Control Selection:
0 = V/F 60 Hz
1 = V/F 50 Hz
2 = V/F Adjustable
3 = Sensorless Vector
4 = Vector with Encoder
5 = VVW
VFDreadyParameterAccessP00
0 = 0
ParameterAccessP000 = 0
T
ypeofcont
rolP202=V/F60HzParameterAccessP000 = 5
ParameterAccessP000 = 5
5.3.1
Typeof Control:
V/F60 Hz - Operation
ViaKeypad(HMI)
The
V/F or Scalar
Control is recommended in the following cases:
Severalmotorsdriven bythesameinverter;
Motorrated current lowerthan 1/3 of theinverter ratedcurrent;
For test purposes, without a motor connected to the inverter.
TheV/F Controlcan alsobe usedinapplicationsthat donotrequire fastdynamic
responses,accuratespeedregulationorhigh startingtorque(speederror willbe
a function of the motor slip).
When parameter
P138
(RatedSlip)is programmed,speedaccuracy of1 % can
beobtained.
Thesequencebelowis validfortheConnection1(referto
item
3.2.7).
Theinverter
mustbealreadyinstalledandpowered upaccordingto
c
hapter 3
and
item
5.2.
Page 99

100
CHAPTER5 -START-UP
Motor Speed
P002=0rpm
Press the key to enter the
programming mode
Use the and keys to
select the type of control
Press the key to save the
selected option and exit the
programming mode
Press the keys or until
P002is reached
Entertheprogrammingmode
If the option V/F 60 Hz (value = 0) is
already programmed, ignore this
action
Exitthe programming mode
MotorSpeed(rpm)
T
ypeofcont
rolP202=V/F60HzT
ypeofcont
rolP202=V/F60HzT
ypeofcont
rolP202=V/F60H
z
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Thisis a read-onlyparameter
Motor accelerates from 0 to 90 rpm*
(Minimum Speed), in the Forward (CW)
directionof rotation
(1)
* for 4 pole motors
Motoraccelerates upto 1800
rpm*
(2)
* for 4 pole motors
Motor decelerates
(3)
down to 0 rpm and
thenreverses thedirectionof rotation
acceleratingback up to 1800rpm
Press the key
Press the Start key
Press the key and hold until
1800rpm is reached
Press the FWD / REV key.
Obs.:
TheLEDsonthekeypadshow
whether the motor is running FWD
or REV.
Motor Speed
P002=0rpm
Motor Speed
P002=90rpm
Motor Speed
P002=
1800
rpm
Motor Speed
P002=
1800
rpm
Page 100

101
CHAPTER5 -START-UP
ACTION
LED DISPLAY
DESCRIPTION
LCD DISPLAY
Press the Stop key
Press the key and hold it
Release the key
Motor deceleratesdown to 0 rpm
Motor accelerates from 0 rpm up to
the JOG speed set at P122
Ex
.: P122 = 150 rpm
CCW directionof rotation
Motor deceleratesdown to 0 rpm
VFDready
Motor Speed
P002=
150rpmVFDready
NOTE!
The last frequencyreferencevalueset via the and keysis saved.
Ifyouwishtochangethisvaluebeforeenabling theinverter, changeparameter
P121
(KeypadReference).
OBSERVATIONS:
(1)
If the rotation direction of the motor is not correct, switch off the inverter.
Wait 10 minutes toallow acomplete dischargeof the capacitors andthen
swap any two wires at the motor output.
(2)
If the acceleration current becomes too high,speciallyat low frequencies
(< 15 Hz), adjust the TorqueBoost at
P136
.
Increase/decrease the content of
P136
graduallyuntil youobtain an
operationwithconstant current overthe entirefrequencyrange.
Refer to P136 inchapter 6.
(3)
If E01faultoccurs duringdeceleration,increase the deceleration time at
P101
/
P103
.
 Loading...
Loading...