


Frequency Inverter
Convertidor de Frecuencia
Inversor de Freqüência
Frequenzumrichter
Variateur de Vitesse
Преодразователь частоты
Frequentie Regelaar
Frekvensomvandlare
CFW-08
User's Guide
Manual del Usuario
Manual do Usuário
Bedienungsanleitung
Manuel d'utilisation
Руководство пользователя
Gebruikers Handleiding
Användarinstruktioner
Motors | Energy | Automation | Coatings
X
MANUAL DO
A
INVERSOR DE
FREQÜÊNCI
Série: CFW-08
Software: versão 5.2
Idioma: Por tuguês
Documento: 0899.5241 / 10
02/2009
ATENÇÃO!
É muito importante conferir se a
versão de software do inversor é
igual à indicada acima.
Sumário das Revisões
g
ç
ç
A
(
)
A
g
(
)
A
A
A
(
)
A
A
ç
A
A
A
A
A
g
A
A
A
(
)
A
g
)
A
A
A
V
2
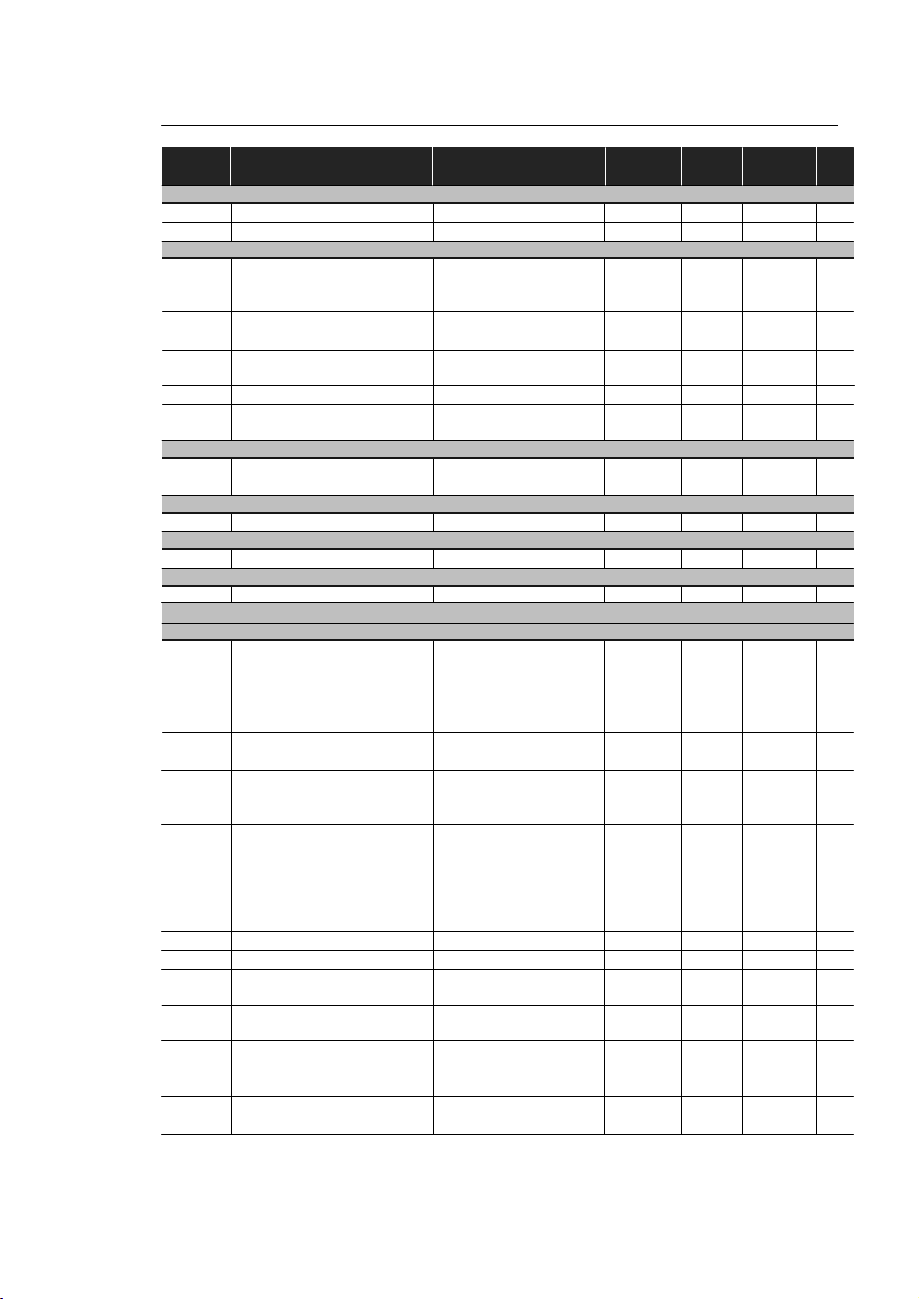
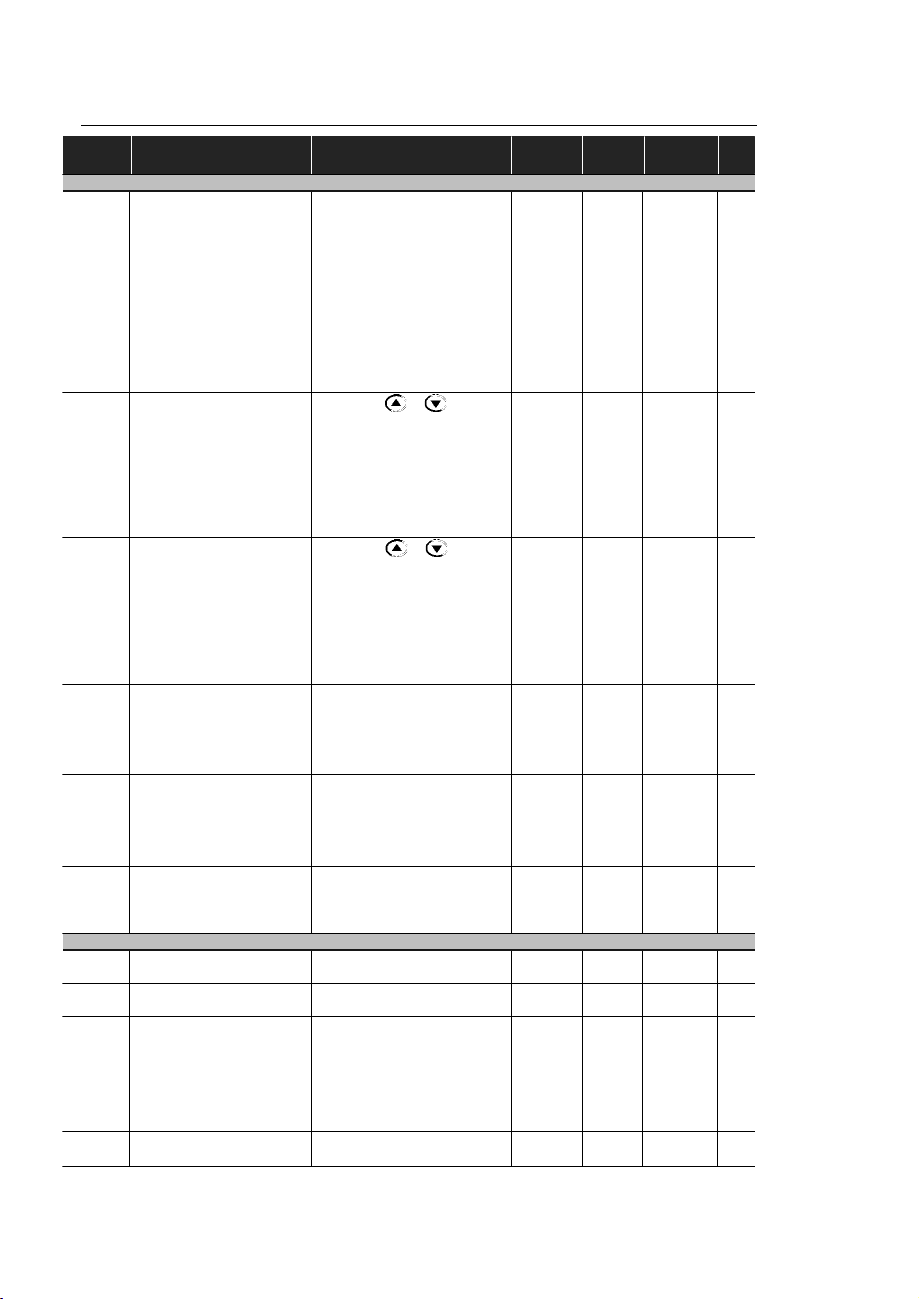
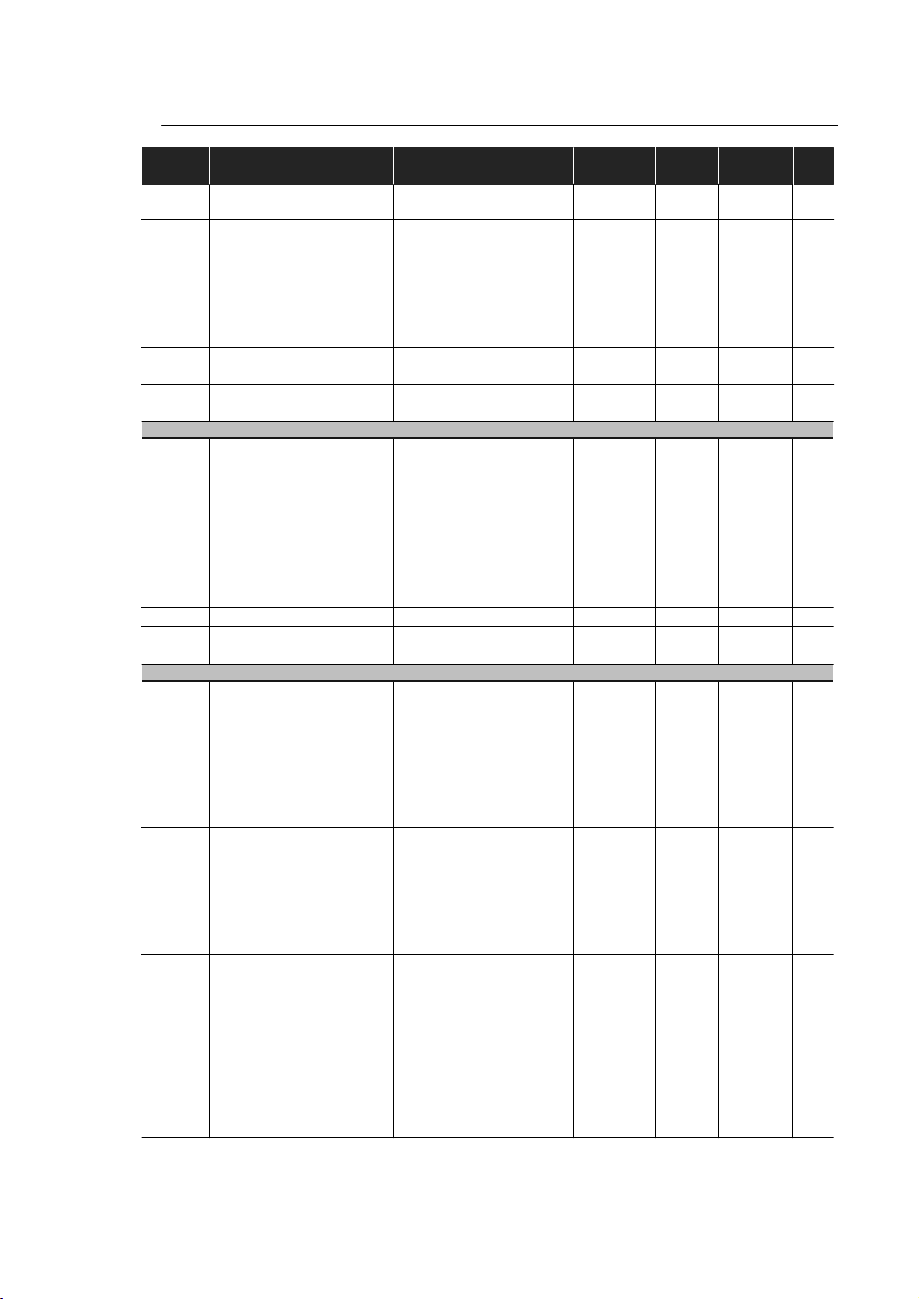
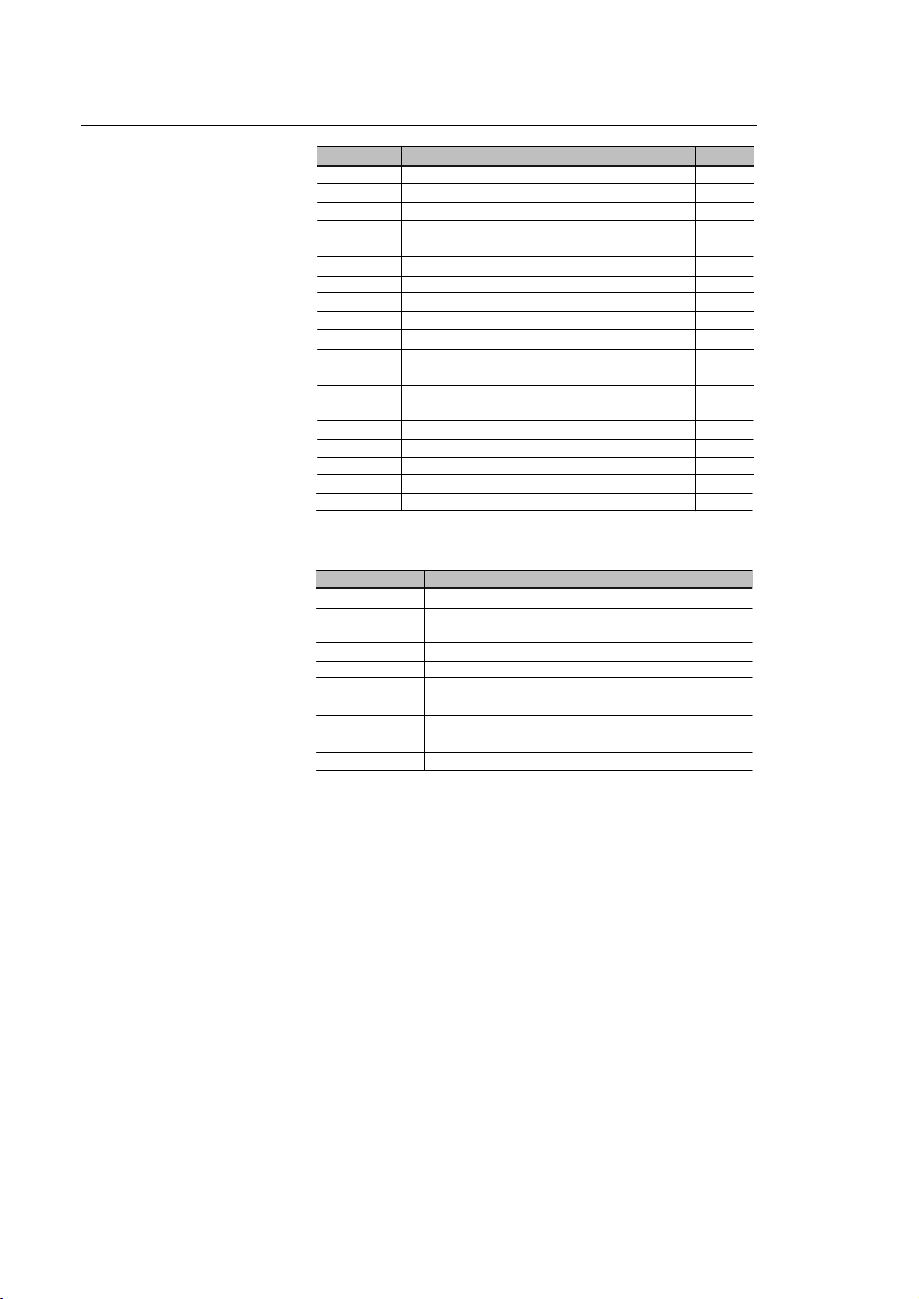
A tabela abaixo descreve as revisões ocorridas neste manual:
Revisão Descrição da Revisão Capítulo
1 Primeira Revisão 2RevisãoGeral 3RevisãoGeral 4 Inclusão do item 3.3 - Diretiva Européia Consulte o item 3.3
5 Inclusão HMIRemota Paralela, Consulte o item 8.3
6
7RevisãoGeral 8RevisãoGeral -
9RevisãoGeral
10
de Compatibilidade Eletroma
- Requisitos para Instala
Kits de Fixa
lteração do nome dos cabos da Consulte o item 8.5
Tabela de Materiais de Reposição
crescentado parâmetro P536 Consulte o item 6.3.5
Inclusão dos novos modelos
33 A/200-240 V e 24 A e 30 A/380-480 V
crescentadas novas funções de I/O Consulte o item 3.2.5
lteração na tabela de disjuntores Consulte o item 3.2.3
lteração na tabela de incompatibilidade Consulte o item 4.2.4
crescentados parâmetros P253, P267, Consulte o item 6.3
e P268 e novas fun
P235, P239, P295 e P404
lterado valor padrão de fábrica do Consulte o item 6.3.3
crescentado itens na tabela de Consulte o item 4.2.4
incompatibilidades de parâmetros
lterado itens de estoque W EG dos Consulte o capítulo 8
crescentada tabela de fluxo de ar dos Consulte o item
ventiladorespara monta
crescentado os seguintes opcionais: Consulte o capítulo 8
KRS-48 5-CFW08, KFB-CO-CFW08,
KFB-DN-CFW08 e KAC-120-CFW08
crescentado as versões A3 e A4 Consulte o item 2.4
crescentada a função Sleep Consulte o capítulo 6
parâmetros P212, P213 e P535
crescentada Zona Morta nas
EntradasAnaló
crescentados os módulos opcionais Consulte o item 8.9 e
KDC-24VR-CFW08 e KDC-24V-CFW 08 8.10
crescentados novos filtros de EMC Consulte o item 3.3.4
crescentadas notas das versões Consulte o item 2.4
CFW-08 Nema 4X e linha 575
ão e Revisão Geral Consulte o item 8.18
HMI Remota Paralela
Retirado item 7.5
e revisão
no cartão de controle
lteração no capítulo 3
Instalação e Conexão
de parâmetros
ões nos parâmetros
parâmetro P248
crescentado Erro 32 Consulte o item 7.1
dispositivos opcionais
do cartão de controle
Revisãogeral -
nética
ões
eral
22 A, 28 A e Consulte o item 9.1
em em painel 3.1.3.1
icas(P233
Í
ndic
e
Í
Í
Í
A
A
Referência Rápida dos Parâmetros,
Mensagens de Erro e Estado
I Parâmetros ................................................................... 8
II Mensagens de Erro .................................................... 16
III Outras Mensagens..................................................... 16
CAP
TULO 1
Instruções de Segurança
1.1 Avisos de Segurança no Manual.............................. 17
1.2 Avisos de Segurança no Produto ............................ 17
1.3 Recomendações Preliminares ................................ 17
CAP
TULO 2
Informações Gerais
2.1 Sobre o Manual ...................................................... 1 9
2.2 Versão de Software ................................................ 19
2.3 Sobre o CFW-08 .................................................... 20
2.4 Etiquetas de Identificação do CFW-08 .................... 24
2.5 Recebimento e Armazenamento.............................. 27
CAP
TULO 3
Instalação e Conexão
3.1 Instalaç ão Mecânica ............................................... 28
3.1.1 Ambiente.......................................................... 28
3.1.2 Dimensões do CFW-08 .................................... 28
3.1.3 Posicionamento e Fixação ............................... 30
3.1.3.1 Montagem em Painel............................... 32
3.1.3.2 Montagem em Superfície ......................... 32
3.2 Instalação Elétrica................................................... 3 3
3.2.1 Bornes de Potência e Aterramento.................... 33
3.2.2 Localização das Conexões de Potência,
terramento e Controle..................................... 35
3.2.3 Fiação de Potência/Aterramento e Disjuntores .. 36
3.2.4 Conexões de Potência ..................................... 37
3.2.4.1 Conexões da Entrada CA ........................ 39
3.2.4.2 Conexões da Saída ................................. 40
3.2.4.3 Conexões de Aterramento ....................... 40
3.2.5 Conexões de Sinal e Controle........................... 42
3.2.5.1 Entradas Digitais como Ativo Baixo
(S1:1 em OFF)........................................ 46
3.2.5.2 Entradas Digitais como Ativo Alto
(S1:1 em ON).......................................... 47
3.2.6
cionamentos Típicos ...................................... 48
Í
ndic
e
Í
I
Í
Í
o
3.3 Diretiva Européia de Compatibilidade
Eletromagnética - Requisitos para Instala ções ........ 51
3.3.1 Instalação ......................................................... 51
3.3.2 Especificação dos Níveis de Emissão e
Imunidade ........................................................ 52
3.3.3 Invers ores e Filtros............................................ 54
3.3.4 Características dos Filtros de EMC ................... 57
CAP
TULO 4
Uso da HM
4.1 Descrição da Interface Homem-Máquina ................. 67
4.2 Uso da HMI ............................................................. 68
4.2.1 Uso da HMI para Operação do Inversor ............. 6 9
4.2.2 Sinalizaç ões/Indicações no Display da HMI ....... 7 0
4.2.3 Parâmetros de Leitura ...................................... 71
4.2.4 Visualização/Alteração de Parâmetros .............. 71
CAP
TULO 5
Energização/Colocação em Funcionamento
5.1 Preparação para Energizaç ão ................................ 74
5.2 Primeira Energização ............................................. 74
5.3 Colocação em Funcionamento ................................ 75
5.3.1 Colocação em Funcionamento - Operação pel a
HMI - Tipo de Controle: V/F Linear (P202 = 0) ...... 76
5.3.2 Colocação em Funcionamento - Operação via
Bornes - Tipo de Controle: V/F Linear (P202 = 0). 77
5.3.3 Colocação em Funciona me nto - Operação
pela HMI - Tipo de Controle: Vetorial (P202 = 2). 78
CAP
TULO 6
Descrição Detalhada dos Parâmetros
6.1 Simbologia Utilizada............................................... 83
6.2 Introduçã
6.2.1 Modos de Controle (Escalar/Vetorial) ............... 83
6.2.2 Controle V/F (Escalar) ...................................... 83
6.2.3 Controle Vetorial (VVC) .................................... 84
6.2.4 Fontes de Referência de Freqüência ................ 85
6.2.5 Comandos ....................................................... 88
6.2.6 Definição das Situações de Operação
6.3 Relação dos Parâmetros ........................................ 89
6.3.1 Parâme tros de Acesso e de Leitura - P000 a P099 . 90
6.3.2 Parâmetros de Regulação - P100 a P199 ......... 92
6.3.3 Parâmetros de Configuração - P200 a P398 ... 102
6.3.4 Parâmetros do Motor - P399 a P499 ............... 128
............................................................... 83
Local/Remoto................................................... 88
Í
ndic
e
Í
Í
6.3.5 Parâmetros das Funções Especiais - P500 a P599 . 131
6.3.5.1 Introdução ............................................. 131
6.3.5.2 Descrição ............................................. 132
6.3.5.3 Guia para Colocação em Funcionamento . 134
CAP
TULO 7
Solução e Prevenção de Falhas
7.1 Erros e Possíveis Causas ..................................... 141
7.2 Solução dos Problemas mais Freqüentes ............. 144
7.3 Contato com a Assistência Técnica....................... 145
7.4 ManutençãoPreventiva......................................... 145
7.4.1 Instruções de Limpeza .................................... 146
CAP
TULO 8
Dispositivos Opcionais
8.1 HMI-CFW08-P...................................................... 149
8.1.1 Instruções para Inserção e Retirada da
HMI-CFW08-P................................................ 149
8.2 TCL-CFW08 ......................................................... 149
8.3 HMI-CFW08-RP ................................................... 150
8.3.1 Instalaçãoda HMI-CFW08-RP ........................ 1 5 0
8.4 MIP-CFW08-RP ................................................... 151
8.5 CAB-RP-1, CAB-RP-2, CAB-RP-3, CAB-RP-5,
CAB-RP-7.5, CAB-RP-10 ..................................... 151
8.6 HMI-CFW 08-RS ................................................... 151
8.6.1 Instalaçãoda HMI-CFW08-RS ........................ 1 5 2
8.6.2 Colocação em Funcionamento da
HMI-CFW08-RS ............................................. 152
8.6.3 Função Copy da HMI-CFW08-RS ................... 153
8.7 MIS-CFW08-RS ................................................... 153
8.8 CAB-RS-1, CAB-RS-2, CAB-RS-3, CAB-RS-5,
CAB-RS-7.5, CAB-RS-10 ..................................... 153
8.9 KDC-24VR-CFW08 .............................................. 15 4
8.10 KDC-24V-CFW08 .............................................. 155
8.11 KCS-CFW08 ...................................................... 156
8.11.1 Instruções para Inserçãoe Retirada da
KCS-CFW 08 .............................................. 157
8.12 KSD-CFW08 ...................................................... 157
8.13 KRS-485-CFW08 ............................................... 158
8.14 KFB-CO-CFW08 ................................................ 159
8.15 KFB-DN-CFW08................................................ 1 6 0
8.16 KAC-120-CFW 08, KAC-120-CFW08-N1M1
KAC-120-CFW08-N1M2 .................................... 16 2
8.17 KMD-CFW08-M1 ............................................... 163
8.18 KFIX-CFW08-M1, KFIX-CFW08-M2................... 16 4
8.19 KN1-CFW08-M1,KN1-CFW08-M2 .................... 16 5
8.20 Filtros Supressores de RFI ................................. 1 6 6

Í
ndic
e
8.21 Reatância de Rede............................................. 167
8.21.1 Critérios de Uso .......................................... 167
8.22 Reatância de Carga............................................ 170
8.23 Frenagem Reos tática ......................................... 171
8.23.1 Dimensionamento....................................... 171
8.23.2 Instalação ................................................... 172
8.24 Comunicação Serial ........................................... 1 7 3
8.24.1 Introdução................................................... 1 7 3
8.24.2 Descrição das Interfaces RS-485 e RS-232 ... 175
8.24.2.1 RS-485 ............................................ 175
8.24.2.2 RS-232 ............................................ 176
8.24.3 Definições .................................................. 177
8.24.3.1 Termos Utilizados ............................. 177
8.24.3.2 Resolução dos
Parâmetros/Variáveis ....................... 177
8.24.3.3 Formato dos Caracteres .................. 177
8.24.3.4 Protocolo ......................................... 178
8.24.3.5 Execução e Teste de Telegrama ....... 180
8.24.3.6 Seqüência de Telegramas ................ 180
8.24.3.7 Códigos de Variáveis ....................... 180
8.24.4 Exemplos de Telegramas ............................ 181
8.24.5 Variáveis e Erros da Comunição Serial ....... 18 2
8.24.5.1 Variáveis Básicas ............................ 182
8.24.5.2 Exemplo s de Telegramas com
Variáveis Básicas ............................. 184
8.24.5.3 Parâmetros Relacionados à
Comunicação Serial .......................... 185
8.24.5.4 Erros Relacionados à
Comunicação Serial ........................ 18 6
8.24.6 Tempos para Lei tur a/Escrita de Telegramas ... 186
8.24.7 Conexão Física RS-232 e RS-485 .............. 187
8.25 Modbus-RTU ...................................................... 188
8.25.1 Introdução ao Protocolo Modbus-RTU ........... 188
8.25.1.1 Modos de Transmissão...................... 188
8.25.1.2 EstruturadasMensagens no Modo RTU.. 188
8.25.2 Operação do CFW-08 na Rede Mod bus-RTU .. 191
8.25.2.1 Descrição das Interfaces RS-232 e
RS-485 ............................................. 191
8.25.2.2 Configurações do Inversor na Rede
Modbus-RTU ..................................... 19 2
8.25.2.3 Acesso aos Dados do Inversor ........... 192
8.25.3 Descrição Detalhada das Funções ............... 196
8.25.3.1 Função 01 - Read Coils ..................... 196
8.25.3.2 Função 03 - Read Holding Register .... 19 7
8.25.3.3 Função 05 - Write Single Coil ............. 1 9 8
8.25.3.4 Função 06 - W rite Single Register ...... 1 99
8.25.3.5 Função 15 - W rite Multiple Coils ......... 199
8.25.3.6 Função 16 - Write Multiple Registers .. 201
8.25.3.7 Função 43 - Read Device
Identification ...................................... 202
8.25.4 Erros da Comunicação Modbus-RTU ............ 2 0 3
8.25.4.1 Mensagens de Erro ........................... 204

Í
ndic
e
Í
a
CAPÍTULO 9
Características Técnicas
9.1 Dados da Potência............................................... 205
9.1.1 Rede 200-240 V ............................................. 205
9.1.2 Rede 380-480 V ............................................. 206
9.2 Dados da Eletrônica/Ger ais .................................. 209
9.3 Dados dos Motores W EG Standard IV Pólos......... 21 0
CAP
TULO 10
Garantia
Condições Gerais de Garantia para
Inversores de Freqüênci
CFW -08 ................................ 212

CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
A
ç
A
(
)
)
m
A
V
(
(
)
V
r
r
y
(
(
)
ç
ç
ç
ç
g
REFERÊNCIA RÁPIDA DOS PARÂMETROS, MENSAGENS DE ERRO E ESTADO
Software: V5.2X
plicação:
Modelo:
o
N.
de série:
Responsável:
Data://.
I. Parâmetros
Parâmetro Função
P000 Parâmetro de Acesso 0 a 4 = Leitura 0 - 90
P002 Valor Proporcional à 0 a 6553 - - 90
P003 Corrente de Saída(Motor
P004 Tensão do Circuito Intermediário 0 a 862 -
P005 Freqüência de Saída
P007 Tensãode Saída
P008 Temperatura do Dissi pado
P009
P014 Último Erro Ocorrido 00 a 41 - - 91
P023 Versão de Software x .
P040 Variávelde Processo
P100 Tempo de Ac elera
P101 Tempo de Desacelera
P102 Tempo d e Aceler a
P103 Tempo de Desacelera
P104 RampaS 0=Inativa 0 - 92
P120 Backup da Referência Di
P121 Referência de Freqüência P133 a P134 3.00 Hz 93
P122 Referência JOG 0.00 a P134 5.00 Hz 94
P124 Referência 1 Multispeed P133 a P134 3.00 Hz 94
P125 Referência 2 Multispeed P133 a P134 10.00 Hz 94
P126 Referência 3 Multispeed P133 a P134 20.00 Hz 94
P127 Referência 4 Multispeed P133 a P134 30.00 Hz 95
P128 Referência 5 Multispeed P133 a P134 40.00 Hz 95
P129 Referência 6 Multispeed P133 a P134 50.00 Hz 95
P130 Referência 7 Multispeed P133 a P134 60.00 Hz 95
P131 Referência 8 Multispeed P133 a P134 66.00 Hz 95
PARÂMETROS DE LEITUR
Freqüência
(1)
Torquedo Moto
Valor % x P528
PARÂMETROS DE REGUL AÇÃO - P100 a P199
Rampas
2ª Rampa
2ª Rampa
Referência d a Freqüência
pelas Teclas HMI
P208 x P005
Motor)0.00 a 300.0 - Hz 90
Motor
PID)0 a 6553 - - 91
ão 0.1 a 999 5.0 s 92
ão 0.1 a 999 10.0 s 92
ão da 0.1 a 999 5.0 s 92
ão da 0.1 a 999 10.0 s 92
ital 0 = Inativo 1 - 93
Faixa de Valores
5=Altera
6 a 999 = Leitura
- P002 a P099
0 a 1.5xI
0 a 600 25 a 110 - ºC 91
0.0 a 150.0 - % 91
1=50%
2 = 100 %
1=Ativo
2 = Backup por P121
ão
no
z--91
Ajuste
de Fábrica do Usuário
Unidade
-
Ajuste
Pág.
90
90
90
8
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
(
)
(
x
)
(
)
(
)
g
(
m
)
ç
V
g
m
m
A
m
m
A
r
(
)
(
)
g
g
ç
ç
r
r
y
y(
)
)
Parâmetro Função
Faixa de Valores
Ajuste
de Fábrica doUsuário
Unidade
Ajuste
Limites de Freqüência
P133 Freqüência Mínima
P134 Freqüência Máxima
P136
Boost de Torque Manual 0.0 a 30.0 5.0 ou % 96
Controle V/F
(2) (*)
Compensação IxR
(2)
P137
P138
P142
P145
Boost de TorqueAutomático 0.00 a 1.00 0.00 - 97
Compensação IxRAutomática
(2)
Compensaçãode 0.0 a 10.0 0.0 % 97
Escorre
(2) (3)
(2) (3)
amento
Tensão de Saída Máx ima 0 a 100 100 % 98
Freqüência de Início de P133 a P134 60.00 Hz 98
Enfraquecimento de Campo
Regulação Tensão CC
P151 Nível deAtua
F
min
F
ma
0.00 a P134 3.00 Hz 95
P133 a 300.0 66.00 Hz 96
2.0 ou
1.0
F
no
ão da Regulaçãoda Linha 200 V: 325 a 410 380
(*)
Tensãodo Circuito Intermediário Linha 400 V: 564 a 820 780
Corrente de Sobrecarga
P156 Correntede Sobrecar
Limitação de Corrente
P169 Corrente Máxima de Saída 0.2xI
Controle de Fluxo
(1)
P178
Fluxo Nominal 50.0 a 150 100 % 101
adoMotor0.2xI
no
no
a1.3xI
a2.0xI
no
no
1.2xP401
1.5xP295
PARÂMETROS DE CONFIGURAÇÃO - P200 a P398
P202
Tipo de Controle 0 = V/F Linea
0 - 102
Parâmetros Genéricos
(3)
Escalar
1 = V/F Quadrático
Escalar
P203
P204
(3)
Seleção de Funções Especiais 0 = Nenhuma 0 - 103
(3)
Carrega Parâmetros com 0 a 4 = Sem Função 0 - 104
Padrão de Fábrica 5 = Carre
2 = Vetorial Sensorless
1=Re
ulador PID
a Padrão de
Fábrica
P205 Sele
ão do Parâmetro 0 = P005 2 - 104
de Leitura Indicado 1 = P003
2 = P002
3 = P007
4, 5 = Sem Fun
ão
6 = P040
P206 Tempo de Auto-Reset 0 a 255 0 s 104
P208 Fator de Escala da Referência 0.00 a 99.9 1.00 - 104
P212 Freqüência paraAtivar o 0.00 a P134 0.00 Hz 105
Modo Dormi
P213 Intervalo deTempoparaAtivar0.1 a 999 2.0 s 105
P215
P219
Função Cop
(3)
Ponto de Início da Redução da 0.00 a 25.00 6.00 Hz 107
0=SemFunção 0 - 106
1=Cop
inversor o HMI
2=Paste(HMI o inversor
o Modo Dormi
(3)(4)
Freqüênciade Chaveamento
(*) O padr ão de fábric a do parâmetro P136 depende do inver sor, confor me a seguir:
- modelos 1.6-2.6-4.0-7.0 A/200-240 V e 1.0-1.6-2.6-4.0 A/380-480 V: P136 = 5.0 %;
- modelos 7.3-10-16 A/200-240 V e 2.7-4.3-6.5-10 A/380-480 V: P136 = 2.0 %;
- modelos 22-28-33 A/200-240 V e 13-16-24-30 A/380-480 V: P136 = 1.0 %.
Pág.
99
100
101
9
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
(
)
(
)
(
)
(
)
ç
ç
ç
ç
x
A
A
/
A
(
)V
A
A
Parâmetro Função
Definição Local/Remoto
(3)
P220
Seleção da Fonte 0 = Sempre Local 2 - 108
Faixa de Valores
Ajuste
de Fábrica doUsuário
Unidade
Ajuste
Pág.
Local/Remoto 1 = Sempre Remoto
2 = Tecla HMI-CFW08-P ou
HMI-CFW08-RP
default:local
3 = Tecla HMI-CFW08-P ou
HMI-CFW08-RP
default: remoto
4 = DI2 a DI4
5 = Serial ou Tecla
HMI-CFW08-RS
default:local
6 = Serial ou Tecla
P221
(3)
Seleção da Referência 0 = Teclas e HMI 0 - 109
HMI-CFW08-RS
default: remoto
de Velocidade - 1 = AI1
Situa
ão Local 2, 3 = AI2
4=E.P.
5=Serial
6 = Multispeed
7 = Soma AI t 0
P222
(3)
Seleção da Referência 0 = Teclas e HMI 1 - 109
8 = Soma AI
de Velocidade - 1 = AI1
Situa
ão Remoto 2, 3 = AI2
4=E.P.
5=Serial
6 = Multispeed
7 = Soma AI t 0
P229
(3)
Seleção de Comandos - 0 = Teclas HMI-CFW08-P ou 0 - 109
ão Local HMI-CFW08-RP
Situa
8 = Soma AI
1 = Bornes
2 = Serial ou Teclas
P230
(3)
Seleção de Comandos - 0 = Teclas HMI-CFW08-P ou 1 - 109
Situa
ão Remoto HMI-CFW08-RP
HMI-CFW08-RS
1 = Bornes
2 = Serial ou Teclas
P231
(3)
Seleção do Sentido de Giro - 0 = Horário 2 - 110
HMI-CFW08-RS
Local e Remoto 1 = Anti-horário
2 = Comandos
3=DI
Entrada (s) Analógica (s)
P233 Zona Morta das Entradas 0 = Inativa 1 - 110
nalógicas 1 = Ativa
P234 Ganho da Entrada 0.00 a 9.99 1.00 - 111
P235
Sinal da Entrada 0 =(0a10)V/(0a20)mA
nalógicaAI1
-10 a +10
(**)
0- 112
nalógicaAI1
(3) (5)
1=(4a20)m
2=DI5PNP
3=DI5NPN
4 = DI5TTL
5=PTC
P236 Offset da Entrada -999 a +999 0.0 % 113
nalógicaAI1
(**) Somente disponível no cartão de controle A2 (consulte o item 2.4). Para programação consulte a descrição detalhada do parâmetro P235.
10
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
A
/
A
(
)V
A
A
g
)
)
A
)
)
(
)
g
A
(
A
ç
ç
g
ç
(
)
g
(
)
Parâmetro Função
(6)
P238
P239
Ganho da Entrada 0.00 a 9.99 1.00 - 113
nalógicaAI2
(3)(5) (6)
Sinal da Entrada 0 =(0a10)V/(0a20)mA
nalógicaAI2
Faixa de Valores
-10 a +10
Ajuste
de Fábrica do Usuário
(**)
Unidade
0- 113
Ajuste
Pág.
1=(4a20)m
2=DI6PNP
3=DI6NPN
4 = DI6TTL
P240
(6)
Offset da Entrada -999 a +999 0.0 % 113
5=PTC
nalógicaAI2
P248 Constante de Tempo do Filtro 0 a 200 1 0 ms 113
P251
das EntradasAnaló
Saída Analógica
(6)
Função da Saída 0 = Freqüência de Saída(Fs
icas(AIs
0- 114
nalógica AO 1 = Freqüência de Entrada(Fe
2 = Corrente de Saída(Is
3, 5, 8 = Sem Função
4 = Torque
6 = Variável de Processo
PID
7 = CorrenteAtiva
(6)
P252
Ganhoda SaídaAnalógicaAO 0.00 a 9.99 1.00 - 114
P253 Sinal da Saída Analó
Entradas Digitais
(3)
P263
Função da Entrada Digital 0 = Sem Função ou Habilita 0 - 115
9 = Setpoint PID
icaAO 0 =(0a10)V/(0a20)m
1=
4a20)m
0- 114
DI1 Geral
1 a 7 e 10 a 12 = Habilita
Geral
o
8=Avan
9=Gira/Pára
P264
13 = Avan
(3)
Função da Entrada Digital 0 = Sentido de Giro 0 - 115
14 = Li
ocom2arampa
a
DI 2 1 = Local/Remoto
P265
2a6e9a12=SemFun
7 = Multispeed
8=Retorno
13 = Retorno com 2
(3) (7)
Função da Entrada Digital 0 = Sentido de Giro 10 - 115
14 = Desli
a
MS2
a
rampa
ão
DI 3 1 = Local/Remoto
2 = Habilita Geral
3=JOG
4 = Sem Erro Externo
5 = Acelera E.P.
a
6=2
Rampa
7 = Multispeed
MS1
8=SemFunção ou
Gira/Pára
(**) Somente disponível no cartão de controle A2 (consulte o item 2.4). Para programação consulte a descrição detalhada do parâmetro P235.
11
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
ç
ying
(
)
(
)
(
)
ç
ying
(
)
(
)
ç
ying
ç
(
)
ç
ç
Parâmetro Função
(3)
P266
Função da Entrada Digital 0 = Sentido de Giro 8 - 115
DI 4 1 = Local/Remoto
(3) (5)
P267
Função da Entrada Digital DI5 0 = Sentido de Giro 11 - 115
Somentevisívelse 1 = Local/Remoto
P235 = 2,3 ou 4
(3)(5) (6)
P268
Função da Entrada Digital DI6 0 = Sentido de Giro 11 - 115
Somentevisívelse 1 = Local/Remoto
P239 = 2,3 ou 4
Faixa de Valores
9=Gira/Pára
10 = Reset
11, 12 = Sem F un
13 = Desabilita Fl
14 = Multispeed
ão
Star t
MS1
com 2aRampa
15 = Manual/Automático
16 = Acelera E.P. com
a
2
Rampa
2 = Habilita Geral
3=JOG
4 = Sem Erro Externo
5 = Desacelera E.P.
a
6=2
Rampa
7 = Multispeed
MS0
8=SemFunção ou
Gira/Pára
9=Gira/Pára
10 = Reset
11,12,14e15=
Sem Fun
13 = Desabilita Fl
16 = Desacelera E.P. com
2
a
Rampa
ão
Star t
2 = Habilita Geral
3=JOG
4 = Sem Erro Externo
5 = Acelera E.P.
6=2ªRampa
7 = Multispeed
MS2
8=SemFunção ou
Gira/Pára
9=Gira/Pára
10 = Reset
11 e 1 2 = S em F un
13 = Desabilita Fl
14 e 15 = Sem Fun
ão
Star t
ão
16 = Acelera E.P.
com 2ª rampa
2 = Habilita Geral
3=JOG
4 = Sem Erro Externo
5 = Desacelera E.P.
6=2ªRampa
7=SemFun
8=SemFun
ão
ão ou
Gira/Pára
Ajuste
de Fábrica doUsuário
Unidade
PID
Ajuste
Pág.
12
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
r
A
A
A
A
A
ç
ying
ç
x
x
x
x
x
x
x
x
m
A
r
A
(
m
)
A
A
A
A
A
A
A
A
A
A
A
ç
g
g
Parâmetro Função
Faixa de Valores
Ajuste
de Fábrica do Usuário
Unidade
Ajuste
9=Gira/Pára
10 = Reset
11e12=Semfun
ão
13 = Desabilita
Fl
Star t
14 e 15 = Sem Fun
ão
16 = Desacelera E.P.
com 2ª rampa
P277
Função da Saída 0 = Fs > F
7 - 120
Saídas Digitais
(3)
aReléRL1 1=Fe >F
2=Fs=Fe
3=Is>I
4e6=SemFunção
5=Run
P279
(3) (6)
Função da Saída 0 = Fs > F
7 = Sem Erro
0 - 120
aReléRL2 1=Fe >F
2=Fs=Fe
3=Is>I
4e6=SemFunção
5=Run
7 = Sem Erro
FxeIx
P288 Freqüência F
P290 Corrente I
P295
Corrente Nominal 300 = 1.0
Dados do Inverso
(3)
do Inversor
I
no
0.00 a P134 3.00 Hz 122
0 a 1.5xI
301 = 1.6
302 = 2.6
303 = 2.7
304 = 4.0
no
312 = 22
313 = 24
314 = 28
315 = 30
316 = 33
1.0xP295
De acordo
com o
modelo do
inverso
- 122
305 = 4.3
306 = 6.5
307 = 7.0
308 = 7.3
309 = 10
310 = 13
P297
(3)
Freqüênciade Chaveamento 4 = 5.0 4 kHz 122
311 = 16
5=2.5
6=10
(*)
7=15
Frenagem CC
P300 Dura
ão da Frenagem CC 0.0 a 15.0 0.0 s 124
P301 Freqüência de Início da 0.00 a 15.00 1.00 Hz 124
em CC
Frena
P302 CorrenteAplicada na 0.0 a 130 0.0 % 124
Frena
em CC
(*) Não é possível ajustar 15 kHz quando em modo vetorial ou quando usado HMI remota serial (HMI-CFW08-RS).
Pág.
122
13
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
r
(
r
)
)
(
)
ying
ying
g
r
r
r
r
r
r
Aç
g
ç
g
r
V
r
A
Parâmetro Função
Frequências Evitadas
Faixa de Valores
Ajuste
de Fábrica do Usuário
Unidade
Ajuste
P303 Freqüência Evitad a1 P133 a P134 20.00 Hz 125
P304 Freqüência Evitad a2 P133 a P134 30.00 Hz 125
P306 Faixa Evitada 0.00 a 25.00 0.00 Hz 125
P308
P310
EndereçoSerial 1 a 30(Serial WEG
1 a 247
Flying Start e Ride-Through
(3)
FlyingStart e Ride-through 0 = Inativas 0 - 126
Modbus-RTU
1=Fl
2=Fl
start
start e Ride-through
3 = Ride-throu
h
1 - 125
Interface Serial I
(3)
P311 Rampa de Tensão 0.1 a 10.0 5.0 s 126
P312
Protocolo da Interface Serial 0 = Serial WEG 0 - 127
Interface Serial II
(3)
1 = Modbus-RTU 9600 bps
sem paridade
2 = Modbus-RTU 9600 bps
com paridade ímpa
3 = Modbus-RTU 9600 bps
com paridade pa
4 = Modbus-RTU 19200 bps
sem paridade
5 = Modbus-RTU 19200 bps
com paridade impa
6 = Modbus-RTU 19200 bps
com paridade pa
7 = Modbus-RTU 38400 bps
sem paridade
8 = Modbus-RTU 38400 bps
com paridade impa
9 = Modbus-RTU 38400 bps
com paridade pa
P313
ão do W atchdogda 0 = Desabilita por rampa 2 - 127
Serial 1 = Desabilita
eral
2 = Somente indica E28
3 = Muda para modo local
P314 Tem po de Atua
Watchdo
ão do 0.0 = Desabilitaa função 0.0 s 128
da Serial 0.1 a 99.9 = Valor ajustado
PARÂMETROS DO MOTOR - P399 a P499
Parâmetros Nominais
(1)(3)
P399
P400
P401 Corrente Nominal do Moto
P402
P403
P404
Rendimento Nominal do Motor50.0 a 99.9 % 128
(1)(3)
TensãoNominal do Moto
(1)
Velocidade Nominal do Motor0 a 9999 rpm 129
(1)(3)
Freqüência Nominal do Motor0.00 a P134 Hz 129
(1)(3)
Potência Nominal do Motor0 = 0.16 CV / 0.12 kW - 129
0 a 600
0.3xP295 a 1.3xP295
1 = 0.25 CV / 0.18 kW
2 = 0.33 CV / 0.25 kW
3 = 0.50 CV / 0.37 kW
4 = 0.75 CV / 0.55 kW
5=1CV/0.75kW
De acordo
com o
modelo
do i nverso
moto
standard
IV pólos
60 Hz casado
com inversor-
conforme
tabela do
item 9.3
Pág.
128
128
14
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
r
(
r
)
r
A
r
g
(
g
ç
r
Aj
A
r
Parâmetro Função
(3)
P407
P408
P409
P520 Ganho Proporcional PID 0.000 a 7.999 1.000 - 138
P521 GanhoInte
P522 Ganho Diferencial PID 0.000 a 9.999 0.000 - 138
P525 Setpoint
P526 Filtro da Variável de Processo 0.01 a 10.00 0.10 s 138
P527 Tipo deA
P528 Fator de Escala da 0.00 a 99.9 1.00 - 139
P535 Erro PID para Sair do 0.00 a 100.00 1.00 % 139
P536
Fator de Potência Nominal 0.50 a 0.99 - 130
do Moto
Parâmetros Medidos
(1)(3)
uto-Ajuste 0 = Não 0 - 130
(3)
Resistência do Estato
FUNÇÃO ESPECIAL - P500 a P599
Regulador PID
ral PID 0.000 a 9.999 1.000 - 138
Via Teclas)do 0.00 a 100.0 0.00 % 138
Re
ulador PID
ão do Regulador PID 0 = Direto 0 - 138
Variável de Processo
Modo Dormi
uste Automático de P525 0 = Ativo 0 - 140
Faixa de Valores
6=1.5CV/1.1kW
7=2CV/1.5kW
8=3CV/2.2kW
9=4CV/3.0kW
10 = 5 CV / 3.7 kW
11 = 5.5 CV / 4.0 kW
12 = 6 CV / 4.5 kW
13 = 7.5 CV / 5.5 kW
14 = 10 CV / 7.5 kW
15 = 12.5 CV / 9.2 kW
16 = 15 CV / 11.2 kW
17 = 20 CV / 15.0 kW
1=Sim
0.00 a 99.99 : 130
1=Reverso
1 = Inativo
Ajuste
de Fábrica do Usuário
De acordo
com o
modelo
do i nverso
moto
standard
IV pólos
60 Hz
casadocom
inversorconforme
tabela do
item 9.3
De acordo
com o
modelo do
inverso
Unidade
Ajuste
Notas encontradas na Referência Rápida dos Parâmetros:
Pág.
(1) Somente visível no modo vetorial (P202 = 2).
(2) Somente visível no modo de controle V/F (escalar) P202 = 0 ou 1.
(3) Esse parâmetro só pode ser alterado com o inversor desabilitado (motor parado).
(4) Somente acessível via HMI-CFW08-RS.
(5)
s entradas analógicas assumem valor zero quando não conectadas a um sinal externo.
Quando utilizar as AI’s como entrada digital com lógica NPN (P235 ou P239 = 3) é necessário
utilizar um resistor de 10 k: do pino 7 ao pino 6 (AI1) ou 8 (AI2) do borne de controle.
(6) Somente existentes na versão CFW-08 Plus.
(7) O valor do parâmetro muda automaticamente quando P203 = 1.
15
CFW-08 - REFERÊNCIA RÁPIDA DOS PARÂMETROS
(
(
)
r
)
(
g)
g
)
ç
y
j
(
)
ç
g
g
(
)
g
(
ção(
)
r
j
ç
g
ç
g
y
II. Mensagens de Erro
III. Outras Mensagens
Indicação Significado Página
E00 Sobrecorrente/Curto-circuito/Falta à terra na saída 141
E01 Sobretensãono circuito intermediário
E02 Subtensão no circuito intermediário
Sobretemperatura no dissipador de potência
E04
ou no ar interno do inverso
E05 Sobrecarganasaída(função Ixt
E06 Erroexterno 142
E08 Errona CPU
E09 Erro na mémoria do pro
E10 Erro da fun
Erro na rotina de auto-a
E14
E22, E25,
E26eE27
E24 Errode pro
E28 Erro de estouro do Watchdo
E31 Falha de conexão da HMI-CFW08-RS 143
E32 Sobretemperatura no motor
E41 Erro de auto-dia
Indicação Significado
estimação dos parâmetros do motor
Falhana comunica
rdy Inversor pronto
Sub
dcb
auto Inversor executando rotina de auto-a
copy
past
Srdy Inversor no modo sleep rd
Inversor com tensão de rede insuficiente para
opera
Indicação durante atuação da frenagem CC
Fun
cópiadapro
Fun
cópia da pro
Watchdo
rama(Checksum
ão cop
uste
ão serial 142
ramação 142
PTC externo
nose 143
ready)paraser habilitado
subtensão
ão copy(somente diponível na HMI-CFW08-RS)-
ramação do inversor para HMI
ão copy(somente diponível na HMI-CFW08-RS)-
ramação da HMI para o inversor
link CC)141
link CC
da serial 143
uste
141
142
142
142
142
142
142
143
16
ÇA
A
o
A
A
A
A
CAPÍTULO 1
INSTRUÇÕESDESEGURAN
Este manual contém as informações necessárias para o uso
correto do inversor de freqüência CFW-08.
Ele foi desenvolvido para ser utilizado por pessoas com treinamento ou qualificação técnica adequados para operar este
tipo de equipamento.
VISOS DE
1.1
SEGURANÇA NO
MANUAL
1.2
VISOS DE
SEGURANÇ
NO PRODUTO
Nes te man u al sã o utilizad os os s eguintes avisos de
segurança:
PERIGO!
não consideraçãodos procedimentos recomendados neste
avis
pode levar à morte, ferimento grave e danos materiais
consideráveis.
ATE N Ç ÃO!
não consideraçãodos procedimentos recomendados neste
aviso podem levar a danos materiais.
NOTA!
O texto obj etiva fornecer informações importantes para o correto entendimento e bom funcionamento do produto.
Os seguintes símbolos podem estar afixados ao produto, servindo como aviso de segurança:
T ensões elevadas presentes.
Componentes sensíveis a descarga eletrostática.
Não tocá-los.
Conexão obrigatória ao terra de proteção (PE).
Conexão da blindagem ao terra.
1.3 RECOMENDAÇÕES PRELIMINARES
PERIGO!
Somente pessoas com qualificação adequada e familiaridade com o inversor CFW-08 e equipamentos associados
devem planej ar ou implementar a instalação, partida, operação e manutenção deste equipamento.
Estas pessoas devem seguir todas as instruções de segurança contidas neste manual e/ou definidas por normas locais. Não seguir as instruções de segurança pode resultar
em risco de vida e/ou danos no equipamento.
17
CAPÍTULO 1 - INSTRUÇÕES DE SEGURANÇA
NOTA!
Para os propósitos deste manual, pessoas qualificadas são
aquelas treinadas de forma a estarem aptas para:
1. Instalar, aterrar, energizar e operar o CFW-08 de acordo
com este manual e os procedimentos legais de segurança vigentes;
2. Usar os equipamentos de proteção de acordo com as normas estabelecidas;
3. Prestar serviços de primeiros socorros.
PERIGO!
Ocircuitodecontroledoinversor(ECC3,DSP)eaHMICFW 08-P (conectada diretamente ao inversor) estão em alta
tensão e não são aterrados.
PERIGO!
Sempre desconecte a alimentação geral antes de tocar qualquer componente elétrico associado ao inversor .
Muitos componentes podem permanecer carregados com
altas tensões e/ou em movimento (ventiladores), mesmo depois que a entrada de alimentação CA foi desconectada ou
desligada. Espere pelo menos 10 minutos para garantir a
total descarga dos capacitores.
Sempre conecte a carcaça do equipamento ao terra de proteção (PE) no ponto adequa do para isto.
ATE N Ç ÃO!
Os cartões eletrônicos possuem componentes sensíveis a
descargas eletrostáticas. Não toque diretamente sobre componentes ou conectores. Caso necessário, toque antes na
carcaça metálica aterrada ou utilize pulseira de aterramento
adequada.
Não execute nenhum ensaio de tensão aplicada ao inversor!
Caso seja necessário consulte a WEG.
NOTA!
Inversores de freqüência podem interferir em outros equipamentos eletrônicos. Siga os cuidados recomendados no capítulo 3 - Instalação e Conexão, para minimizar estes efeitos.
NOTA!
Leia completamente este manual antes de instalar ou operar
este inversor.
18

o
A
A
A
CAPÍTULO
2
INFORMAÇÕES GERAIS
Este capítulo fornece informações sobre o conteúdo deste
manual e o seu propósito. Descreve as principa i s cara cter ísticas do inversor CFW-08 e como identificá-lo. Adicionalmente, informações sobre recebimento e armazenamento são
fornecidas.
2.1 SOBRE O MANUAL
Este manual tem 10 capítulos que orientam o usuário no
recebimento, instalação, programaçã o e oper ação do
CFW-08.
Cap. 1 - Informações sobre segurança.
Cap. 2 - Informações gerais e recebimento.
Cap. 3 - Informações sobre como fazer instalação mecâni-
ca e elétrica do CFW-08 e filtros de RFI.
Cap. 4 - Informações sobre como usar a HMI (Interface Ho-
mem- Máquina/teclado e display).
Cap. 5 - Informações sobre a colocação em funciona me n-
to e os passos a serem seguidos.
Cap. 6 - Descrição detalhada de todos os parâmetros de pro-
gramaçã
Cap. 7 - Informações sobre como resolver problemas, instru-
ções sobre limpeza e manutenção preventiva.
Cap. 8 - Descrição, característicastécnicas e instalação dos
equipame nto s opcionais do CFW-08.
Cap. 9 - Tabelas e informações técnicas sobre a linha de
potências do CFW-08.
Cap.10 - Informações sobre a garantia do CFW-08.
O propósito deste manual é fornecer as informações mínimas
necessárias para o bom uso do CFW-08. Devido a grande
gama de funções deste produto, é possível aplicá-lo de formas diferentes às apresentadas aqui.
Não é a intenção deste manual esgotar todas as possibilidades de aplicação do CFW-08, nem a WEG pode assumir
qualquer responsabilidade pelo uso do CFW -08 que não seja
baseado neste manual.
É proibida a reprodução do conteúdo deste manual, no todo ou
em partes, sem a permissão por escrito da W EG.
eleitura.
2.2 VERSÃO DE
SOFTW
RE
versão de software usada no CFW -08 é importante porque
é o software que define as funções e os parâmetros de programação. Este manual refere-se à versão de software conforme indicado na contra-capa. Por exemplo, a versão 3.0X
significa de 3.00 a 3.09, onde “X” representa evoluções no
software que não afetam o conteúdo deste manual.
versão de software pode ser lida no parâmetro P023.
19

CAPÍTULO 2 - INFORMAÇÕES GERAI
S
A
2.3 SOBRE O CFW -08 O inversor de freqüência CFW-08 proporciona ao usuário as opções de controle vetorial (VVC: voltage vector control) ou V/F (escalar), ambos programáveis de acordo com a aplicação.
No modo vetorial a operação é otimizada para o motor em
uso, obtendo-se um melhor desempenho em termos de torque
e regulação de velocida de. A função de “Auto-Ajuste”, disponível para o controle vetorial, permite o ajuste automático dos
parâmetros do inversor a partir da identificação (também automática) dos parâmetros do motor conectado à s aída do
inversor.
O modo V/F (escalar) é recomendado para aplicações mais
simples como o acionamento da maioria das bombas e ventiladores. Nestes casos é possível reduzir as perdas no motor e no inversor utilizando a opção “V/F Quadrática”, o que
resulta em economia de energia. O modo V/F também é utilizado quando mais de um motor é acionado por um inversor
simultaneamente (aplicações multimotores).
linha de potências e demais informações técnicas sobre
o CFW-08 estão no Capítulo 9 deste manual.
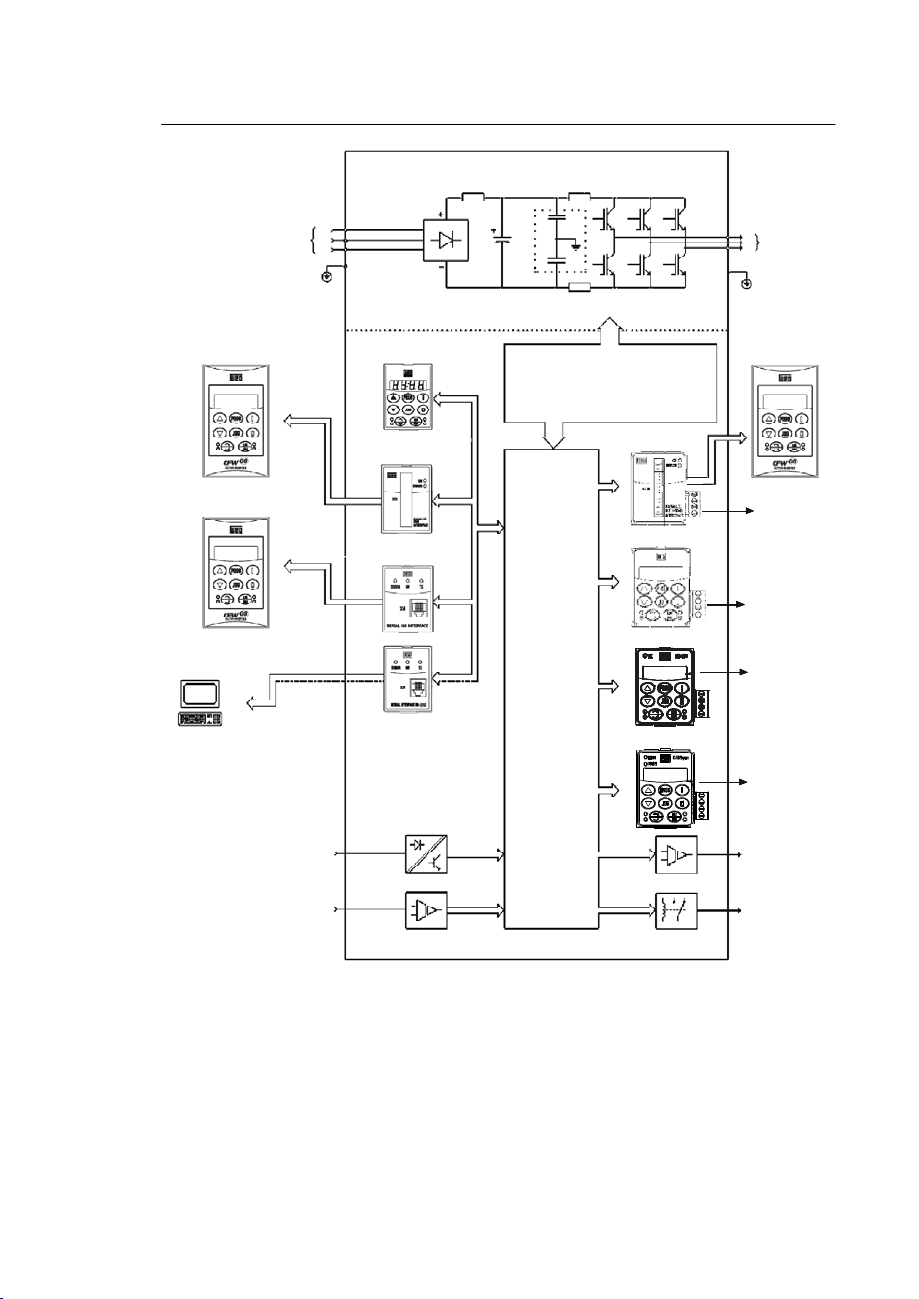
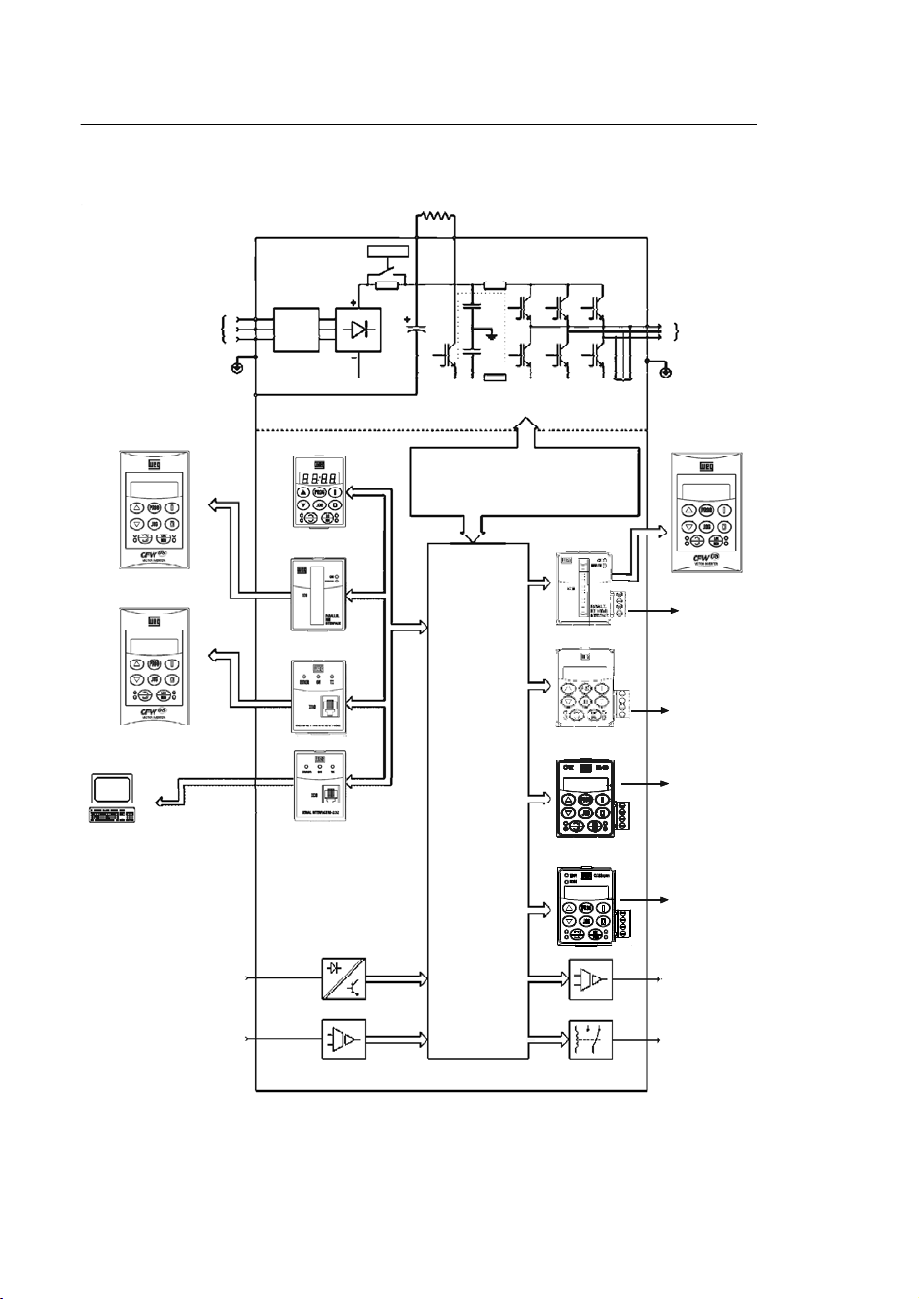
O blocodiagrama a seguir proporciona uma visão de conj unto
do CFW-08.
20
S
Rede de
A
A
(
)
g
(
)
A
A
A
r
V
A
(AO)
(
)
V
V
limentação
HMI-CFW08-RP
R
S
T
PE
POTÊNCI
CONTROLE
HMI-CFW08-P
NTC
CAPÍTULO 2 - INFORMAÇÕES GERAI
Rsh1
U
Moto
W
Filtro RFI
Rsh2
FONTES PAR
E INTERFACES ENT RE
POTÊNCIA E CONTROLE
ELET RÔNIC
PE
HMI-CFW08-RP
HMI-CFW08-RS
PC-Software
SuperDrive
ou
Interfac e
MIP-CFW08-RP
ou
Interfac e
MIS-CFW08-RS
ou
"ECC3"
CARTÃO DE
CONTROLE
COM DSP
Interfac e
RS-232 KCS-CFW 08
Entradas
itais
Di
DI1aDI4
Entradas
nalógicas
AI1 e AI2
Figura 2.1 - Diagrama de blocos para os modelos:
1.6-2.6-4.0-7.0 A/200-240 V e 1.0-1.6-2.6-4.0 A/380-480 V
KDC-24VR-CFW 08
Fonte 24
KDC-24V-CFW08
Fonte 24
KRS-485
RS-485
KFB-CO ou KFB-D N
CANopen
ou
DeviceNet
Saída
nalógica
Saídas a
Relé
RL1 e RL2
21
CAPÍTULO 2 - INFORMAÇÕES GERAI
S
A
r
A
(
)
g
(
)
A
A
r
V
gem(
)
ç
A
(AO)
(
)
V
V
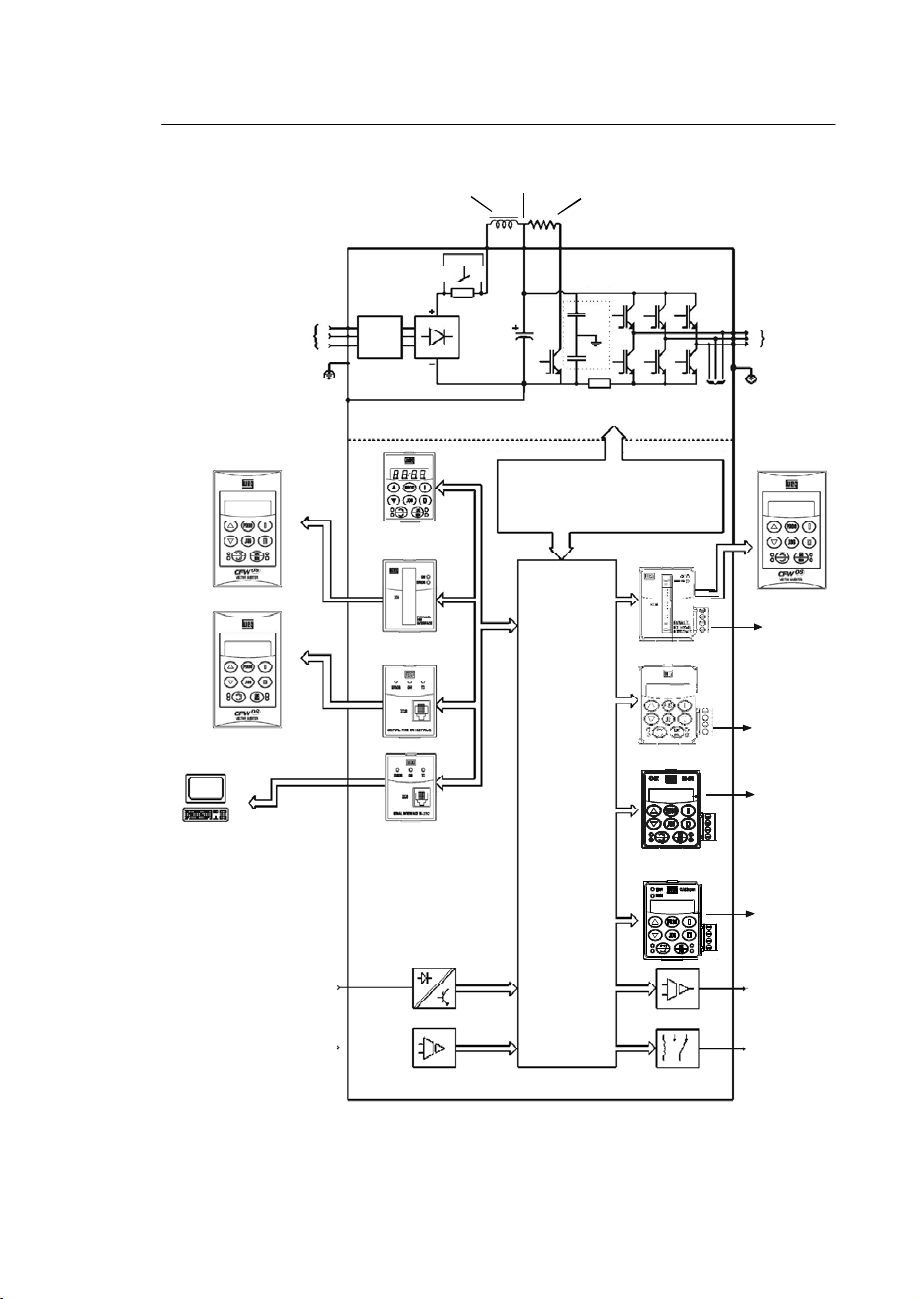
Filtro
Rede de
limentação
HMI-CFW08-RP
R
S
T
PE
-UD
Supresso
RFI
(Opcional)
HMI-CFW08-P
ou
Interfac e
MIP-CFW0 8-RP
Resistor de
Frena
+UD
Pré-Carga
RPC
POTÊNCI
CONTROLE
Opcional
BR
Rsh1
Filtro RFI
Realimenta
Rsh2
FONTESPARAELETRÔNIC
E INTERFACES ENTRE
POTÊNCIAE CONTROLE
KDC-24VR-CFW 08
ão de
Tensão
U
Moto
W
PE
HMI-CFW08-RP
HMI-CFW08-RS
PC-Software
SuperDrive
ou
Interfac e
MIS-CFW08- RS
KDC-24V-CFW08
Fonte 24
ou
"ECC3"
KRS-485
RS-485
CARTÃO DE
Interfac e
RS-232 KCS-CFW 08
CONTROLE
COM DSP
KFB-CO ou KFB-D N
CANopen
DeviceNet
Entradas
itais
Di
DI1aDI4
Entradas
nalógicas
AI1 e AI2
nalógica
Saídas a
Relé
RL1 e RL2
Figura 2.2 - Diagrama de blocos para os modelos:
7.3-10-16-22 A/200-240 V e 2.7-4.3-6.5-10-13-16 A/380-480 V
Obs.: os modelos 16 A e 22 A/200-240 V não possuem Filtro Supressor de RFI opcional.
Fonte 24
ou
Saída
22
CAPÍTULO 2 - INFORMAÇÕES GERAI
S
A
r
A
(
)
g
(
)
A
A
r
V
gem(
)
ç
(
)
A
(AO)
(
)
V
V
HMI-CFW08-RP
HMI-CFW08-RS
PC-Software
SuperDrive
Rede de
limentação
PE
R
S
T
-UD
Indutor do Link CC
Opcional
DCR
Pré-Carga
Filtro
Supresso
RFI
(Opcional)
HMI-CFW08-P
Interfac e
MIP-CFW0 8-RP
Interfac e
MIS-CFW08- RS
Interfac e
RS-232 KCS-CFW 08
RPC
ou
ou
ou
+UD
POTÊNCI
CONTROLE
Resistor de
Frena
Opcional
BR
Filtro RFI
Rsh1
Realimenta
FONTESPARAELETRÔNIC
E INTERFACES ENTRE
POTÊNCIAE CONTROLE
KDC-24VR-CFW08
KDC-24V-CFW08
KRS-485
"ECC3"
CARTÃO DE
CONTROLE
COM DSP
KFB-CO ou KFB-D N
ão de
Tensão
U
Moto
W
PE
HMI-CFW08-RP
Fonte 24
Fonte 24
RS-485
CANopen
ou
DeviceNet
Entradas
itais
Di
DI1aDI4
Entradas
nalógicas
AI1 e AI2
Saída
nalógica
Saídas a
Relé
RL1 e RL2
Figura 2.3 - Diagrama de blocos para os modelos:
28-33 A/200-240 V e 24-30 A/380-480 V
Obs.: os modelos 28 A e 33 A/200-240 V não possuem Filtro Supressor de RFI opcional.
23
CAPÍTULO 2 - INFORMAÇÕES GERAI
S
8
(
)
T
A
ç
(
)
(
)
8
(
)
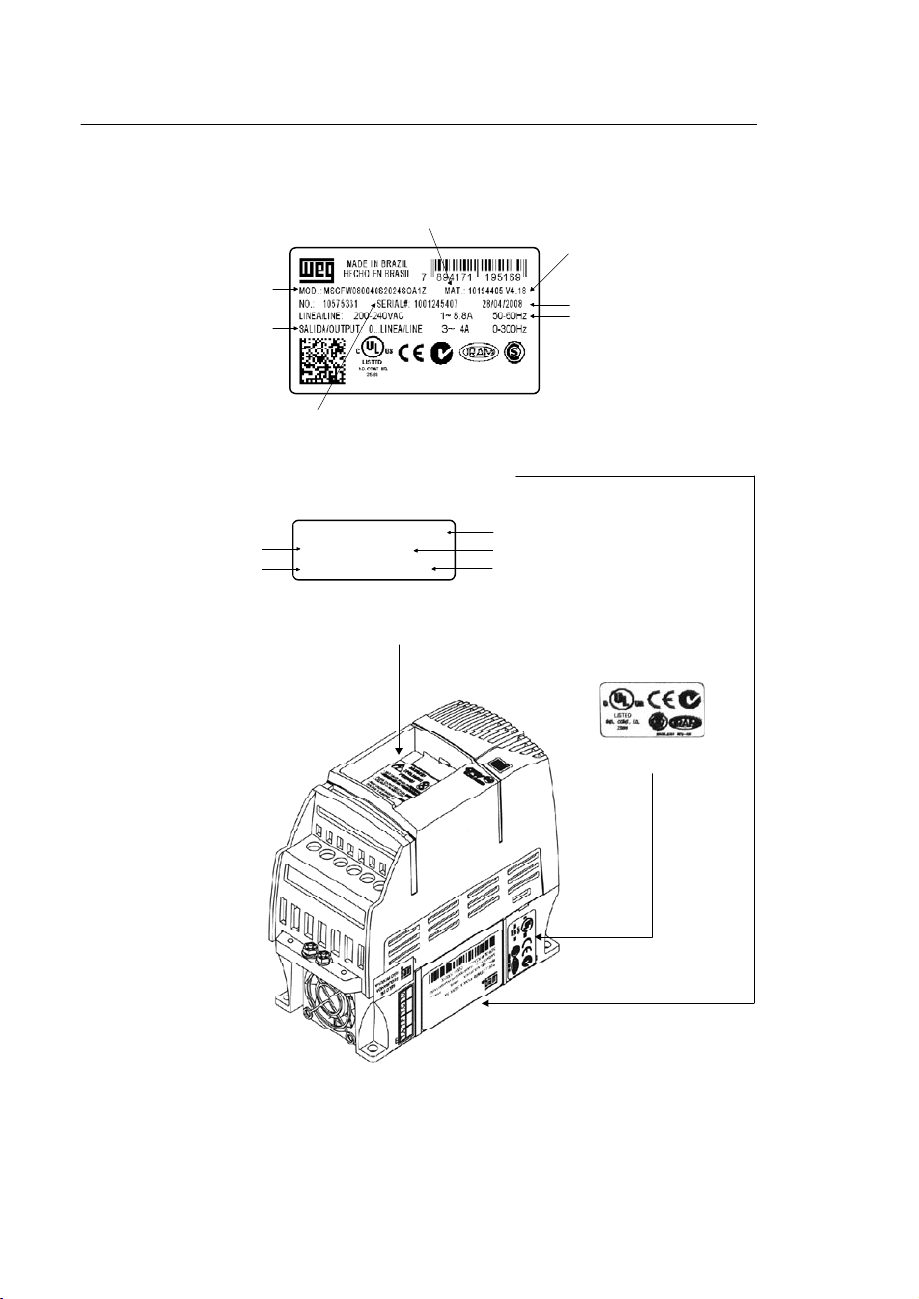
2.4 ETIQUE
SDE
IDENTIFICAÇÃO DO CFW -08
Código Inteligente do Inversor
Dados Nominais de Saída
Tensão, Freqüência
Item de Estoque WEG
Número de Série
Modelo
Obs.: Para retirar a
HMI consulte as
instruções no item
8.1.1 (figura 8.2).
Item de estoque WEG
Número de Série
Etiqueta Lateraldo CFW-0
MSCFW080100T3848SOA1Z
10194356 V 4.18
1001208557 18/04/2008
Etiqueta Frontal do CFW-08 (sob a HMI)
Ver sãode Software
Data de Fabrica
Dados Nominais de Entrada
Tensão, Corrente,etc
CódigoInteligente do Inversor
Modelo
Ver sãode Software
Data de Fabricação
Etiqueta de certificações
ão
Figura 2.4- Descrição e localização das etiquetas de identificação no CFW-0
24
CAPÍTULO 2 - INFORMAÇÕES GERAI
S
0
B
P
Z
r
X
A1=
A
V
V
Código
Final do
Software
Especial:
Em branco =
standard
Hardware
Especial:
Em branco =
standard
Filtro
Supres s o
de RF I:
Em branco =
standard
FA = f iltr o
supressorde R FI-
CategoriaC2(interno ou
footprint)
(*)
(*)
controle 1
Cartão de
Controle:
Em branco =
controle
padrão
(standar d)
(versão Plus)
A2 = control e 2
(versão Plus
com AIs
+/- 10 V)
Interfac e
Homem
Máqui na:
Em branco =
standard
SI = sem
interface
(tampa cega)
(**)
Grau de
Proteção:
Em branco =
standard
N1 = Nema 1
N4 = Nema 4
A4 = controle
A3 = controle
3(versãoPlus
com protocolo
CANopen)
(para
(**)
4(versãoPlus
com protocolo
DeviceNet)
A5 = controle
5
aplicação em
Multibomba)
O____________
Opcionais:
S = standard
O=com
opcionais
COMO ESPECIFICAR O MODELO DO CFW-08:
Língua do
Manua l:
P = por tuguês
E = inglê s
S = es panho l
=
2024
Tensão de
Alimentação:
Número de
fases na
Corrente
Nominal de
CFW-08 004
Inversorde Freqüência
(**)
500-600
3848 =
380-480V5060
2024 =
200-240
alimentação:
S = monofásico
T = trifásico
B = monofásico
ou trifás i co
Saída para
220 a 240 V:
0016 = 1.6A0026 = 2.6A0040 = 4.0A0070 = 7.0A0073 = 7.3A0100 = 10A0160 = 16A0220 = 22A0280 = 28A0330 = 33A380 a 480 V:
WEG Série 08
0010 = 1.0A0016 = 1.6A0026 = 2.6A0027 = 2.7A0040 = 4.0A0043 = 4.3A0065 = 6.5A0100 = 10A0130 = 13A0160 = 16A0240 = 24A0300 = 30
NOTA!
O campo Opcionais (S ou O) define se o CFW-08 será na versão standard ou se terá opcionais. Se for standard, aqui terminaocódigo. Colocar sempre a letra Z no final. Por exemplo:
CFW080040S2024PSZ = inversor CFW-08 standard de 4.0 A, entrada monofásica 200-240 V com manual em português.
Se tiver opcionais, deverão ser preenchidos somente os campos correspondentes aos opcionais solicitados, na seqüência
correta até o último opcional desejado, quando então o código será finalizado com a letra Z.
Por exemplo, se quisermos o produto do exemplo acima com grau de proteção Nema 1:
CFW080040S2024EON1Z = inversor CFW-08 standard de 4.0 A, entrada monofásica 200-240 V com manual em inglês e com kit
para grau de proteção Nema 1.
(*) Os cartões de controle A3 e A4 somente devem ser usados com KFB-CO-CFW08 e KFB-DN-CFW08 respectivamente (consulte os itens 8.14 e 8.15). Quando utilizadas essas versões do cartão
de c ontro le, não é poss ível utilizar HMI parale la, HMI re mota ser ial, H MI r emota para lela e proto colos serial (Modbus e WEG).
(**) Para estes modelos, consultar a W EG.
25
CAPÍTULO 2 - INFORMAÇÕES GERAI
S
A
A
A
A
A
O produto standard, para efeitos deste código, é assim concebido:
- CFW-08 com cartão de controle padrão.
- Grau de proteção: Nema 1 nos modelos 22 A, 28 A e
33 A/200-400 V e também 13 A,16 A, 24 A e 30 A/
380-480 V; IP20 nos demais modelos.
CFW-08 Plus - A1 é formado pelo inversor e cartão de
controle 1. Exemplo : CFW080040S2024PO
CFW-08 Plus - A2 é formado pelo inversor e cartão de
controle 2. Exemplo : CFW080040S2024PO
Esses modelos possuem programação de fábrica para
entradas analógicas bipolares (-10 a +10) V.
Esta conf igur açã o é despr ogram ada ao c arr egar
parâmetros com padrão de fábrica (P204 = 5). Para mais
inform aç ões cons ult e a desc ri çã o det alhada d os
parâmetros P204 e P235.
CFW-08 Plus - A3 é formado pelo inversor, Kit KFB-COCFW 08 e protocolo de comunicação CANopen.
Exemplo: CFW080040S2024PO
CFW-08 Plus - A4 é formado pelo inversor, Kit KFB-DNCFW 08 e protocolo de comunicação DeviceNet.
Exemplo: CFW080040S2024PO
1Z.
2Z.
3Z.
4Z.
CFW-08 Multibombas - A5 é formado pelo inversor e o
cartão de controle 5, utilizado para aplicações em sistemas
multibombas.
T ensão de alimentação somente trifásica para os modelos de 7.0 A, 16.0 A, 22 A, 28 A e 33 A/200-240 V e para
todos os modelos da linha 380-480 V.
Um filtro RFI Categoria C2 (opcional ) pode ser instalado
internamente ao inversor nos modelos 7.3 A e 10 A/200-240 V
(entrada monofásica) e 2.7 A, 4.3 A, 6.5 A, 10 A, 13 A,
16 A, 24 A e 30 A/380-480 V. Os modelos 1.6 A, 2.6 A e
4.0 A/200-240 V (entrada monofásica) e 1.0 A, 1.6 A,
2.6 A e 4.0 A/380-480 V podem ser fornecidos montados
sobre um filtro footprint Categoria C2 (opcional).
relação dos modelos existentes (tensão/corrente) é apre-
sentadanoitem9.1.
26
CAPÍTULO 2 - INFORMAÇÕES GERAI
S
A
A
2.5 RECEBIMENTO E
RMAZENAMENTO
O CFW -08 é fornecido embalado em caixa de papelão.
Na parte externa desta embalagem existe uma etiqueta de
iden tificação que é a mesma que está afixad a na lateral do
inversor.
Favor verificar o conteúdo desta etiqueta com o pedido de
compra. Verifique se:
etiqueta de identificação de CFW-08 corresponde ao
modelo comprado.
Não ocorreram danos durante o transporte.
Caso for detectado algum problema, contate imediatamente
a transportadora.
Se o CFW-08 não for logo instalado, armazene-o em um
lugar limpo e seco (temperatura entre -25 °C e 60 °C) com
uma cobertura para não sujar com pó.
ATE N Ç ÃO!
Quando o inversor for armazenado por longos períodos
de tempo, recomenda-se energizá-lo por 1 hora, a cada
intervalo de 1 ano. Para todos os modelos (200-240 V ou
380-480 V) utilizar: tensão de alimentação de aproximadamente 220 V, entrada trifásica ou monofásica, 50 Hz
ou 60 Hz, sem conectar o motor à sua saída. Após essa
energização manter o inversor em repouso durante 24 horas
antes de utilizá-lo.
27
CAPÍTULO
3
A
A
A
T
A
A
8
INSTALAÇÃO E CONEXÃO
Este capítulo descreve os procedimentos de instalação elétrica e
mecânica do CFW-08. As orientações e sugestões devem ser
seguidas visando o correto funcionamento do inversor .
3.1 INS
3.1.1Ambiente
3.1.2 Dimensões do
LAÇÃO
MECÂNIC
CFW-08
localiza ção dos inversores é fator determinante para a obtenção de
um funcionamento correto e uma vida normal de seus componentes.
O inversor deve ser montado em um ambiente livre de:
Exposição direta a raios solares, chuva, umidade excessiva ou
maresia;
Gases ou líquidos explosivos e/ou corrosivos;
Vibração excessiva, poeira ou partículas metálicas/óleos suspensos
no ar.
Condições ambientais permitidas:
Temperatura: 0 ºC a 40 ºC - condições nominais.
De 40 ºC a 50 ºC - redução da corrente de 2 % para cada grau
Celsius acima de 40 ºC.
Umidade relativa do ar: 5 % a 90 % sem condensação.
ltitude máxima: 1000 m - condições nominais.
De 1000 m a 4000 m - redução da corrente de 1 % para cada
100macimade1000m.
De 2000 m a 4000 m - redução da tensão de 1.1 % para cada
100 m acima de 2000 m.
Grau de poluição: 2 (conforme EN50178 e UL508C)
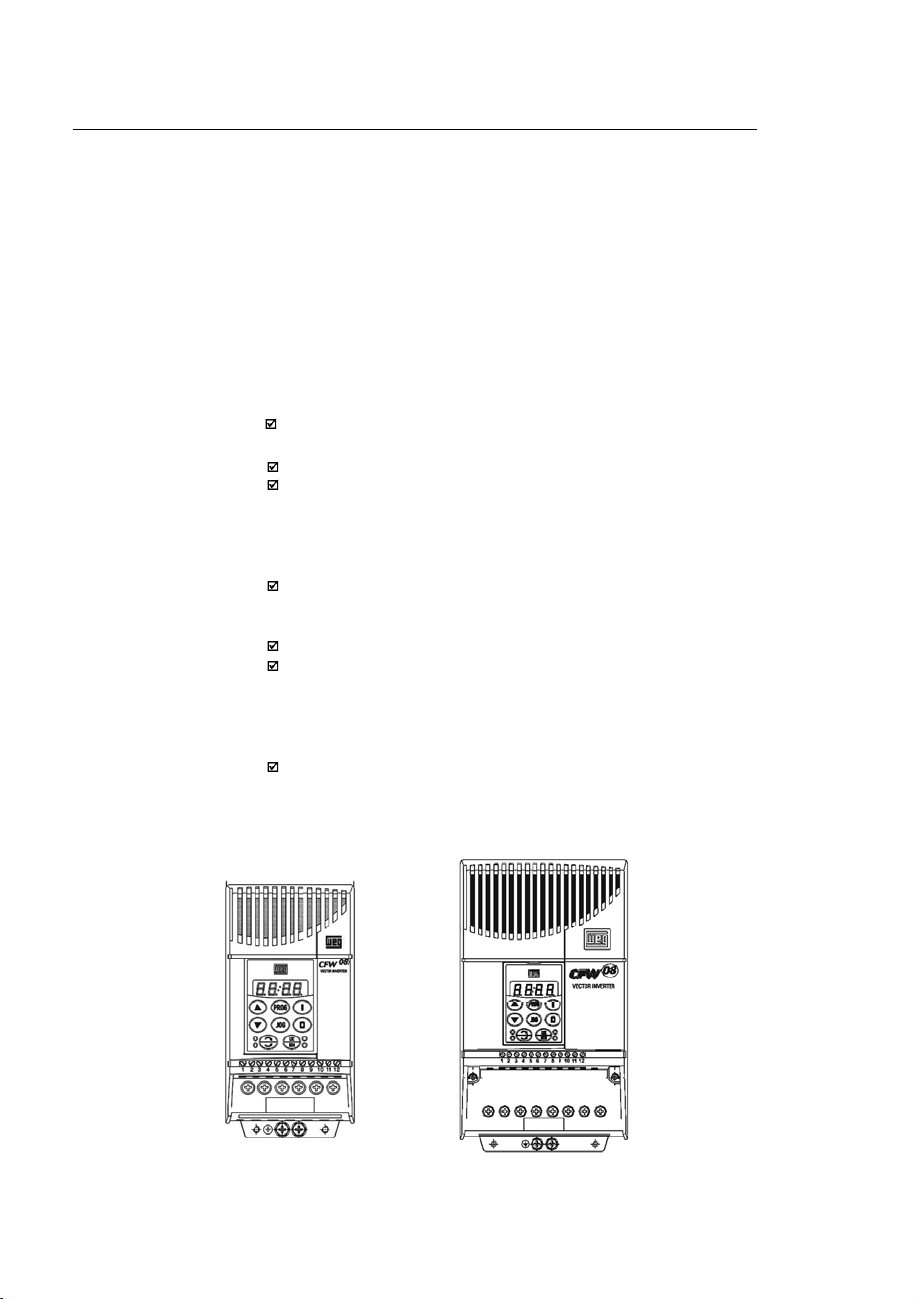
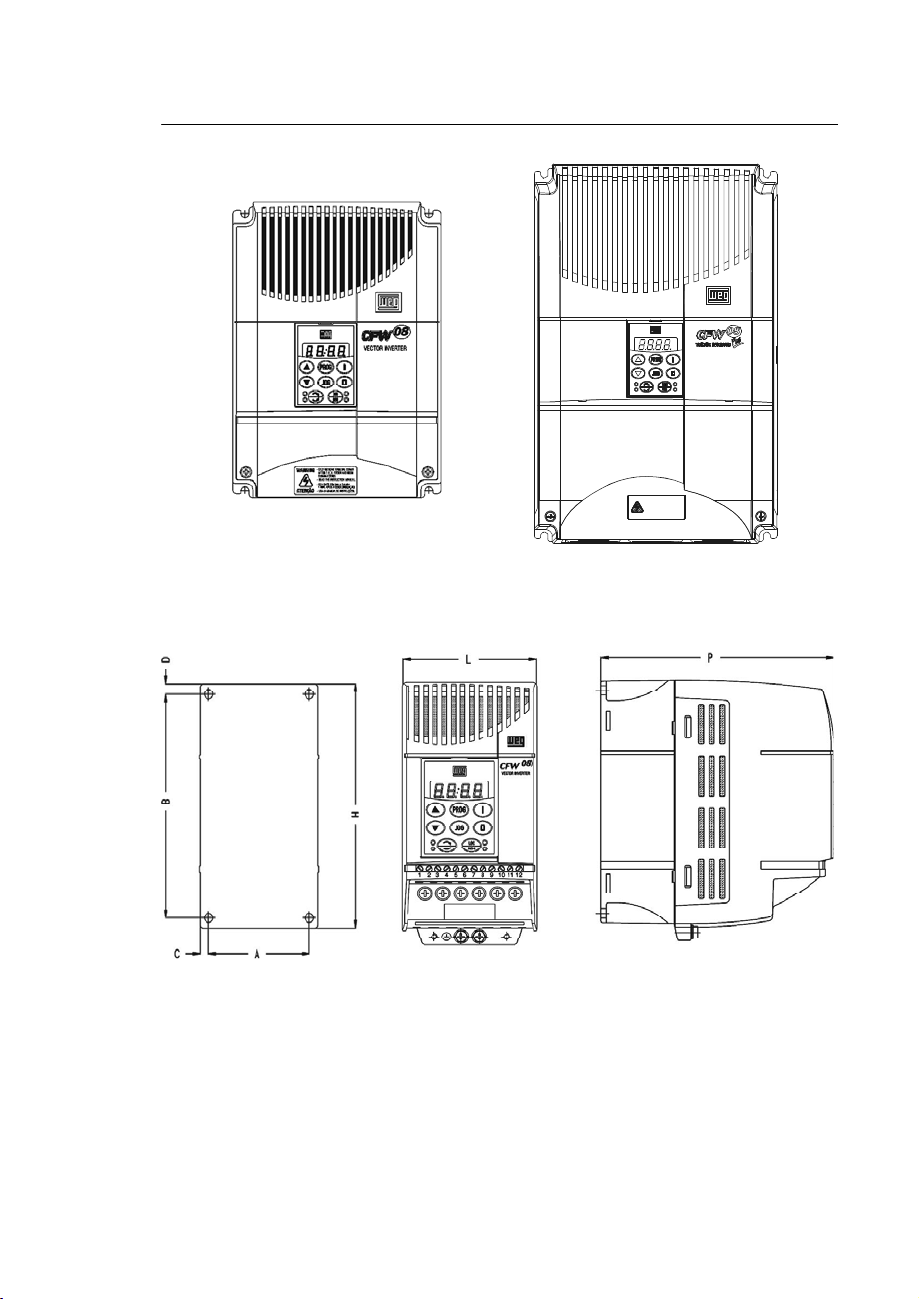
figura 3.1, em conjunto com a tabela 3.1, trazem as dimensões
externas e de furação para fixação do CFW -08.
Figura 3.1 - Dimensional do CFW-0
28
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
8
Ç
A
Ç
A
O
A
-ONLYREMOVETERMINALCOVER
WARNING
FTER1MIN.POWERHAS BEEN
DISCONNECTED.
-READT HEINSTRUCTIONSM ANUAL.
-SOMENTEREMOVAATAMPA
1MIN.APÓSADESENERGIZAÇÃO.
-LEIA OMANUALDE INSTRU
ÕES.
TENÇÃ
VISTA DA BASE
ÃO
FIXA
VIST
FRONT A L
Figura 3.1 (cont.) - Dimensional do CFW-0
VISTALATERAL
29

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
A
A
ç
g
ç
ç
A
o
Modelo
1,6 A/200-240
2,6 A/200-240
4,0 A/200-240
7,0 A/200-240
7,3 A/200-240
10A/200-240
16A/200-240
22A/200-240
28A/200-240
33A/200-240
1,0 A/380-480
1,6 A/380-480
2,6 A/380-480
2,7 A/380-480
4,0 A/380-480
4,3 A/380-480
6,5 A/380-480
10A/380-480
13A/380-480
16A/380-480
24A/380-480
30A/380-480
Dimensiona l Base de Fixa
Profundida-
L
[mm]
75
75
75
75
115
115
115
143
182
182
75
75
75
115
75
115
115
115
143
143
182
182
ltura
H
[mm]
151
151
151
151
200
200
200
203
290
290
151
151
151
200
151
200
200
200
203
203
290
290
de
P [mm]
131
131
131
131
150
150
150
165
196
196
131
131
131
150
131
150
150
150
165
165
196
196
Largura
[mm]
64
64
64
64
101
101
101
121
161
161
64
64
64
101
64
101
101
101
121
121
161
161
[mm]
129
129
129
129
177
177
177
180
260
260
129
129
129
177
129
177
177
177
180
180
260
260
ão
C
B
[mm]
[mm]
5
5
5
5
7
7
7
11
11
11
5
5
5
7
5
7
7
7
11
11
11
11
(*) Esses modelos são Nema 1 somente com opcional KN1-CFW08-MX.
Tabela 3.1 - Dimensões do CFW-08 para instalação mecânica dos diversos modelos
3.1.3 Posicionamento e
Fixaçã
Para a instalação do CFW -08 deve-se deixar no mínimo os
espaços livres ao redor do inversor conforme figura 3.2 a
seguir.
s dimensões de cada espaçamento estão descritas
na tabela 3.2.
D
6
6
6
6
5
5
5
10
10
10
6
6
6
5
6
5
5
5
10
10
10
10
Parafuso
para Fixa
M4
M4
M4
M4
M4
M4
M4
M5
M5
M5
M4
M4
M4
M4
M4
M4
M4
M4
M5
M5
M5
M5
[k
1,0
1,0
1,0
1,0
2,0
2,0
2,0
2,5
6
6
1,0
1,0
1,0
2,0
1,0
2,0
2,0
2,0
2,5
2,5
6
6
Prote
]
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
IP20/Nema1
Grau de
ão
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
(*)
Peso
ão
Instale o inversor na posição vertical de acordo com as recomendações a seguir:
1) Instale o inversor em uma superfície plana;
2) Não coloque componentes sensíveis ao calor logo acima
do inversor.
ATE N Ç ÃO!
Se os inversores forem montados um ao lado do outro, usar
a distância mínima B.
Quando um inversor for montado em cima do outro, usar a
distância mínima A+C e desviar do inversor superior o ar
quente que vem do inversor de baixo.
ATE N Ç ÃO!
Prever conduítes ou calhas independentes para a separação fí sica dos condutores de sinal, controle e potência
(consulte o item 3.2 - Instalação Elétrica).
30

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
A
Figura 3.2- Espaços livres para ventilação
ModeloCFW-08
1,6 A/200-240
2,6 A/200-240
4,0 A/200-240
7,0 A/200-240
1,0 A/380-480
1,6 A/380-480
2,6 A/380-480
4,0 A/380-480
7,3 A/200-240
10A/200-240
16A/200-240
2,7 A/380-480
4,3 A/380-480
6,5 A/380-480
10A/380-480
22A/200-240
13A/380-480
16A/380-480
28A/200-240
33A/200-240
24A/380-480
30A/380-480
BC D
30 mm 1,18 in 5 mm 0,20 in 50 mm 2 in 50 mm 2 in
35 mm 1,38 in 15 mm 0,59 in 50 mm 2 in 50 mm 2 in
40 mm 1,57 in 30 mm 1,18 in 50 mm 2 in 50 mm 2 in
50mm 2in 40mm 1,57in 60mm 2,36in 50mm 2in
Tabela 3.2- Espaços livres recomendados
31
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
8
A
A
A
A
3.1.3.1 Montagem em Painel
3.1.3.2 Montagem em Superfície
Para inversores instalados dentro de painéis ou caixas metálicas fechadas, prover exa ustão adequa da para que a temperatura fique dentro da faixapermitida. Consulte as potências
dissipadas no item 9.1 deste manual.
Como referência, a tabela3.3 apresenta o fluxo do ar de ventilação nominal para cada modelo.
Método de Refrigeração: ventilador interno com fluxo do ar
de baixo para cima.
Modelo CFW-08 CFM I/s m3/min
4.0A,7.0A/200 V
2.6
,4.0A/400 V
7.3A,10A,16A/200 V
,10A/400 V
6.5
13A,16A/400 V 18.0 8.5 0.51
22A/200 V 22.0 10.4 0.62
28A/200 V
24
/400 V
33A/200 V
/400 V
30
Tabela 3.3- Fluxo de ar do ventilador interno
6.0 2.8 0.17
18.0 8.5 0.51
36.0 17.0 1.0 2
44.0 20.8 1.2 5
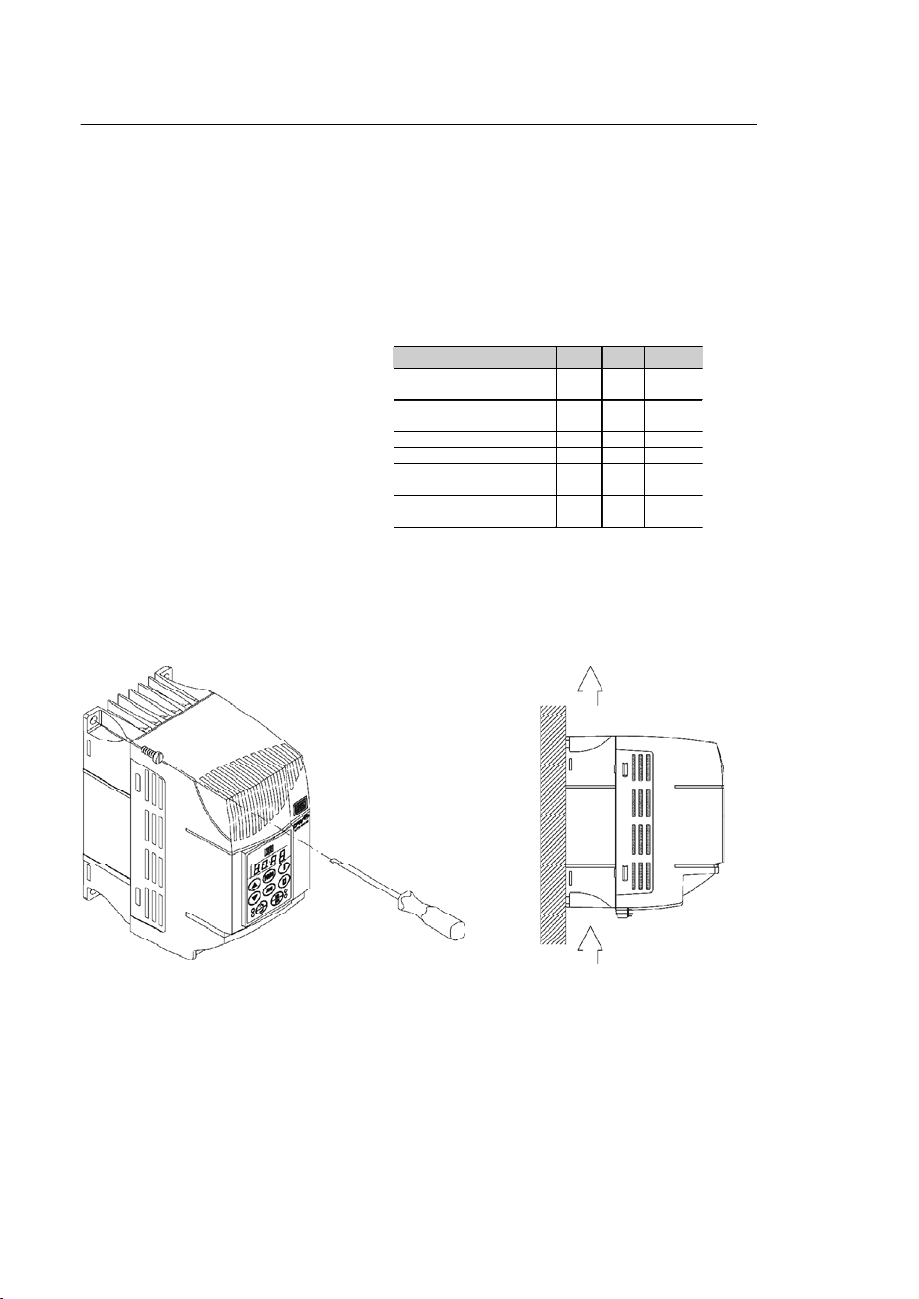
figura 3.3 ilustra o procedimento de instalação do CFW -08
na superfície de montagem.
FLUXODE AR
Figura 3.3 - Procedimento de instalação do CFW-0
32

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
T
A
A
A
A
3.2 INS
LAÇÃO
ELÉTRIC
3.2.1 Bornes de
Potência e
terramento
PERIGO!
s informações a seguir tem a intenção de servir como guia
para se obter uma instalação correta. Siga também as normas de instalações elétricas aplicáveis.
PERIGO!
Certifique-seque a redede alimentação estejadesconectada
antes de iniciar as conexões.
PERIGO!
O CFW -08 não deve ser utilizado como mecanismo para parada de emergência. Prever outros mecanismos adicionais
para este fim.
Os bornes de potência podem ser de diferentes tamanhos e
configurações, dependendo do modelo do inversor, conforme figura3.4.
Descrição dos bornes de potência:
L/L1, N/L2 e L3 (R, S, T): rede de alimentação CA.
Os modelos da linha de tensão 200-240 V (exceto 7,0 A,
16 A, 22 A, 28 A, e 33 A) podem operar em 2 fases (operação monofásica) sem redução da corrente nominal. A
tensão de alimentação CA neste caso pode ser conectada
em 2 quaisquer dos 3 terminais de entrada.
U, V, W: conexão para o motor.
-UD: pólo negativo da tensão do circuito intermediário (link
CC).
Não disponível nos modelos 1,6-2,6-4,0-7,0 A/200-240 V
e nos modelos 1,0-1,6-2,6-4,0 A/380-480 V. É utilizado
quando se deseja alimentar o inversor com tensão CC
(juntamente com o borne +UD).
Para evitar conexão incorreta do resistor de frenagem
(montado externamente ao inversor), há uma borracha de
proteção nesse borne, a qual precisa ser retirada quando
for necessário utilizar o borne -UD.
33

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
V
V
)
V
V
V
V
V
V
BR: conexão para resistor de frenagem.
Não disponível nos modelos 1,6-2,6-4,0-7,0 A/200-240 V
e nos modelos 1,0-1,6-2,6-4,0 A/380-480 V.
+UD: pólo positivo da tensão do circuito intermediário (link
CC).
Não disponível nos modelos 1,6-2,6-4,0-7,0 A/200-240 V
e nos modelos 1,0-1,6-2,6-4,0 A/380-480 V. É utilizado
para conectar o resistor de frenage m (juntamente com o
borne BR) ou quando se deseja alimentar o inversor com
tensão CC (juntamente com o borne -UD).
DCR: conexão para indutor do link CC externo (opcional).
Somente disponível nos modelos 28 A e 33 A/200-240 V e
nos modelos 24 A e 30 A/380-480 V .
a)Modelos 1,6-2,6-4,0-7,0 A/200-240 V e 1,0-1,6-2,6-4,0A/380-480
N/L2
L3 U
WL/L1
b)Modelos 7,3-10-16A/200-240 V e 2,7-4,3-6,5-10 A/380-480
U
L3L/L1 N/L2
Modelos 22 A/200-240 V e 13-16 A/380-480
c
1R2S3T4U5
Linha
MOTOR
-Ud BR +Ud
W
6W7
-UD8BR9+UD
d)Modelos 28-33 A/200-240 V e 24-30 A/380-480
1R2S3T4U5
Linha
MOTOR
6W7
-UD8BR9+UD
10
DCR
Figura 3.4 a) a d) - Bornes da potência
34

O
3.2.2 Localização das Conexões
A
V
)
V
A
de Potência, Aterramento
e Controle
Controle XC1
Potência
terramento
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
a)Modelos 1,6-2,6-4,0-7,0-7,3-10-16 A/200-240 V e
1,0-1,6-2,6-2,7-4,0-4,3-6,5-10A/380-480
Modelos 22-28-33 A/200-240 V e 13-16-24-30A/380-480
b
Controle XC1
Potência
terramento
Figura 3.5 a) e b) - Localização das conexões de potência,
aterramento e controle
35

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
A
3.2.3 Fiação de Potência/
terramento e
Disjuntores
ATE N Ç ÃO!
fastar os equipamentos e fiações sensíveis em 0,25 m do
inversor e dos cabos de ligação entre inversor e motor.
Exemplo: CLPs, cont roladores de temperatura, cabos de
termopar, etc.
Utilizar no mínimo as bitolas de fiação e os disjuntores recomendados na tabela 3.4. Use somente fiação de cobre
(70 ºC).
Tabela 3.4- Fiação e disjuntores recomendados - usar fiação de cobre (70 ºC) somente
NOTA!
Os valores das bitolas da tabela 3.4 são apenas orientativos.
Para o correto dimensionamento da fiação levar em conta
as condições de instalação e a máxima queda de tensão
permitida.
O torque de aperto do conector é indicado na tabela 3.5.
ATE N Ç ÃO!
Não é recomendável utilizar os mini disjuntores (MDU), devido ao nível de atuação do magnético.
36

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
V
ç
j
r
Modelo
1,6 A / 200-240
2,6 A / 200-240
4,0 A / 200-240
7,0 A / 200-240
7,3 A / 200-240
10,0 A / 200-240
16,0 A / 200-240
22,0 A / 200-240
28,0 A / 200-240
33,0 A / 200-240
1,0 A / 380-480
1,6 A / 380-480
2,6 A / 380-480
2,7 A / 380-480
4,0 A / 380-480
4,3 A / 380-480
6,5 A / 380-480
10,0 A / 380-480
13,0 A / 380-480
16,0 A / 380-480
24,0 A / 380-480
30,0 A / 380-480
Fiação de Aterramento
N.m Lbf.in
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
0,5 4,34
Fia
ão de Potência
N.m Lbf.in
1,0 8,68
1,0 8,68
1,0 8,68
1,0 8,68
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
1,2 10,0
1,2 10,0
1,2 10,0
1,76 15,62
1,2 10,0
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
1,76 15,62
Tipo de Chavepara
Borne de Potência
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
PozidrivNº PZ2/fenda
Pozidriv Nº PZ2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Philips Nº PH2/fenda
Pozidriv Nº PZ2/fenda
Pozidriv Nº PZ2/fenda
Tabela 3.5 - Torque de aperto recomendado para as conexões de potência e
aterramento
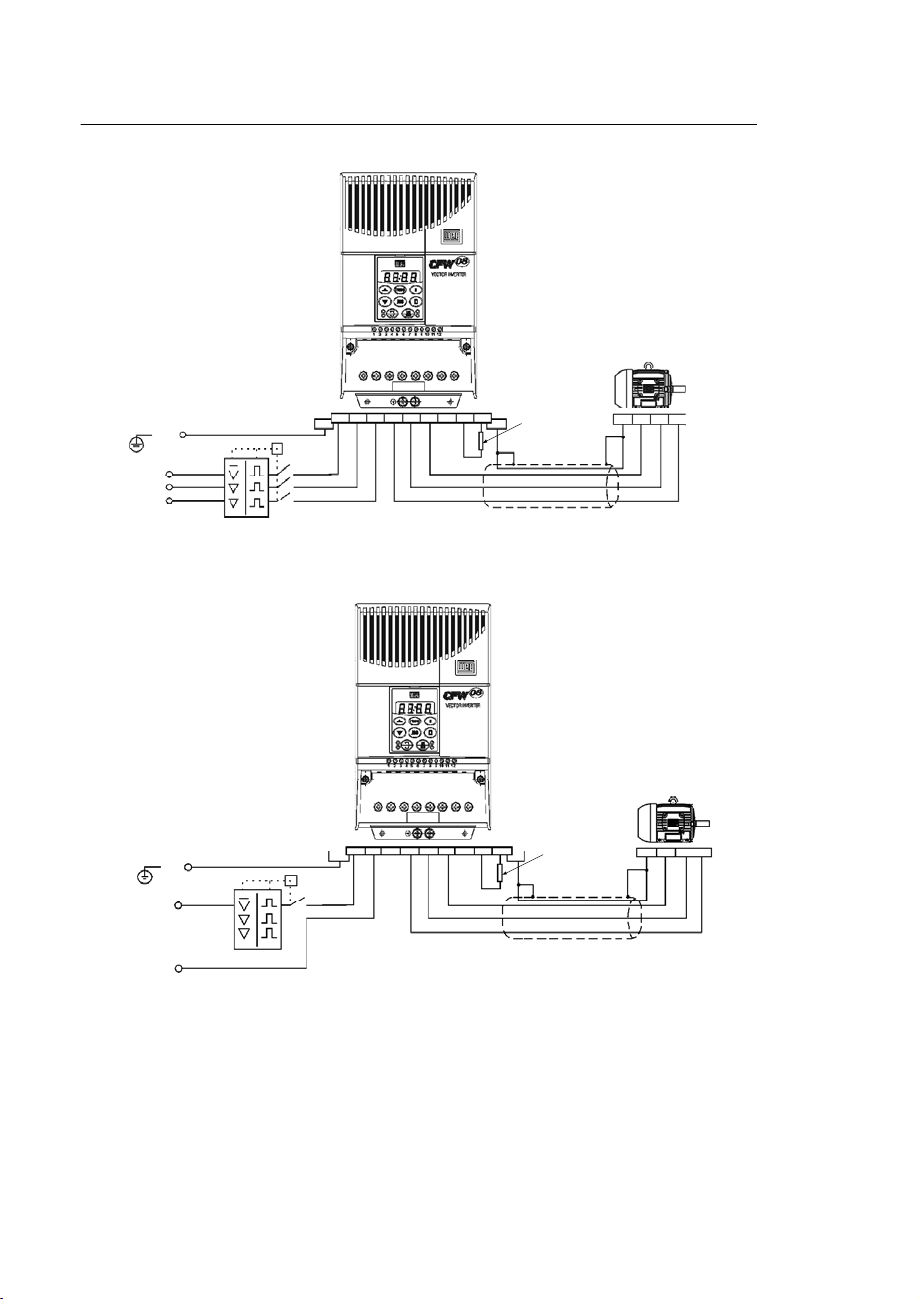
3.2.4 Conexões de Potência
a)Modelos 1,6-2,6-4,0-7,0 A/200-240 V e 1,0-1,6-2,6-4,0 A/380-480 V - Alimentação trifásica
PE
R
S
T
Rede
Dis
Q1
unto
T
RSTUVW
PE
PE
PE W V
Blindagem
U
Figura 3.6 a) - Conexões de potência e aterramento
37
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
)
)
ç
g
g
(
)
r
V
g
(
)
Modelos 7,3-10-16-22 A / 200-240 V e 2,7-4,3-6,5-10-13-16 A / 380-480 V - Alimentação trifásica
b
RS T UVW
PE
R
S
T
Rede
c
Modelos 1,6-2,6-4,0-7,3- 10 A / 200-240 V - Alimentação monofásica
Disjunto
PE
PE
Q1
T
RS TUVW
Q1
PE
T
-Ud B R +Ud
-Ud BR +Ud
Fase
Rede
Neutro
(*) No caso de alimenta
Disjuntor (*)
ão monofásica com fase e neutro, somente passar a fase pelo disjuntor.
(**) Nos modelos 1,6 A - 2,6 A e 4,0A os terminais para conexão do resistor de frena
disponíveis.
Figura 3.6 b) e c) - Conexões de potência e aterramento
Resistor de
PE
Blindagem
PE
em
Frena
consulte o
item 8.23
Resistor(**) de
em
Frena
consulte o
item 8.23
Blindagem
PE WVU
PE W
U
em não estão
38

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
A
A
V
j
r
(
)
d)Modelos 28-33 A / 200-240 V e 24-30 A / 380-480 V - Alimentação trifásica
Fase
R
S
T
Rede
PE
U
RST
PE
Q1
T
Dis
unto
Figura 3.6 d) - Conexões de potência e aterramento
Resistor de Frenagem
W
-Ud BR
+Ud
3.2.4.1 Conexões da
Entrada C
PERIGO!
Prever um equipamento para seccionamento da alimentação do
inversor. Este deve seccionar a rede de alimentação para o inversor
quando necessário (por ex.: durante trabalhos de manutenção).
DCR
PE
Blindagem
Indutor do
Link CC
Opcional
PE
WVU
ATE N Ç ÃO!
Um contator ou outro dispositivo que continuamente seccione a
alimentação do inversor para acionar e parar o motor pode causar
danos ao circuito de potência do inversor . O inversor é projetado
para usar sinais de controle para acionar e parar o motor. Se utilizado
para esse fim, esse dispositivo na entrada não pode exceder uma
operação a cada 6 minutos ou o inversor pode ser danificado.
ATE N Ç ÃO!
rede que alimenta o inversor deve ter o neutro solidamente aterrado.
NOTA!
tensão de rede deve ser compatível com a tensão nominal do
inversor.
Capacidade da rede de alimentação
30 kA rms simétricos (máximo 200-480 Vac), quando protegido
por fusíveis especificados no máximo em 200 % da corrente de
entradadoequipamento.Atensãoéamesmaqueamáxima
tensão de entrada do equipamento. Para conformidade com a
norma UL, devem ser utilizados fusíveis reconhecidos pela UL.
Caso o CFW-08 seja instalado em redes com capacidade de
corrente maior que 30.000 A rms faz-se necessário circuitos de
proteções adequados como fusíveis ou disjuntores.
39
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
A
A
Indutor do link CC/ Reatância da rede
necessidade do uso de reatância de rede ou indutor do
link CC depende de vários fatores. Consulteo item 8.21 deste manual.
NOTA!
Capacitores de correção do fator de potência não são necessários na entrada (L/L1, N/L2, L3 ou R, S, T) e não devem
ser conectados na saída (U, V, W).
3.2.4.2 Conexões da Saída
3.2.4.3 Conexões de
terramento
O inversor possui proteção eletrônica de sobrecarga do motor, que deve ser ajustada de acordo com o motor específico.
Quando diversos motores forem conectados ao mesmo inversor utilize relés de sobrecarga individuais para cada motor.
Manter a continuidade elétrica da blindagem dos cabos do
motor.
ATE N Ç ÃO!
Se uma chave isoladora ou contator for inserido na alimentação do motor nunca opere-os com o motor girando ou com o
inversor habilitado. Manter a continuidade elétrica da blindagem dos cabos do motor.
Frenagem reostática
Para os inversores com opção de f renagem reost ática o
resistor de frenagem deve ser montado externamente.
Consulte como conectá-lo na figura 8.31. Dimensionar de
acordo com a aplicação respeitando a corrente máxima do
circuito de frenagem. Utilizar cabo trançado para a conexão
entre inversor e resistor. Separar este cabo dos cabos de
sinal e controle.
Se o resistor de frenagem for montado dentro do painel, considerar o aquecim ent o provoc ado pelo mes mo no
dimensioname nto da ventilação do painel.
PERIGO!
Os inversores devem ser obrigatoriamente aterrados a um
terra de proteção (PE).
conexão de aterramento deve seguir as normas locais. Utilize no mínimo a fiação com a bitola indicada na tabela 3.4.
Conecte a uma haste de aterramento específica ou ao ponto
de aterramento geral (resistência d 10 ohms).
PERIGO!
Não compartilhe a fiação de aterramento com outros equipamentos que operem com altas correntes (ex.: motores de
alta potência, máquinas de solda, etc). Quando vários inversores forem utilizados observar a figura 3.7.
40

O
A
BARRADEATERRAMENTO
P
AINEL
INTERN AAO
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
Figura 3.7 - Conexões de aterramento para mais de um inversor
ATE N Ç ÃO!
rede que alimenta o inversor deve ter o neutro solidamente
aterrado.
EMI – Interferência eletromagnética
Quando a interferência eletromagnética gerada pelo inversor for um problema para outros equipamentos utilizar fiação blindada ou fiação protegida por conduite metálico para
a conexão de saída do inversor-motor. Conectar a blindagem em cada extremidade ao ponto de aterramento do inversor e à carcaça do motor.
Carcaça do motor
Sempre aterrar a carcaça do motor. Fazer o aterramento do
motor no painel onde o inversor está instalado ou no próprio
inversor. A fiação de saída do inversor para o motor deve ser
instalada separada da fiação de entrada da rede, bem como
da fiação de controle e sinal.
NOTA!
Não utilize o neutro para aterramento.
41

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
V
A
ç
g
g
g
g
V
g
(
)
V
(
)
(
)
g
g
g
A
A
(
(
k
)
)
ç
A
A
k
3.2.5 Conexões de Sinal e Controle
Conector XC1
1DI1
2DI2
3DI3
4DI4
5GND
CCW
:
5
CW
ConfiguraçãoPadrão
de Fábrica
Figura 3.8 - Descrição do conector XC1 do cartão de controle standard (CFW-08)
6
7+10
8GND
9
10 NF
11 C o m u m
12 N
s conexões de sinal (entradas e saídas analógicas) e controle
(entradas digitais e saídas a relé) são feitas no conector XC1 do
cartão eletrônico de controle (consulteo posicionamento na figura
3.5, item 3.2.2).
Existem duas configurações para o cartão de controle, a versão
standard (linha CFW-08) e a versão Plus (linha CFW-08 Plus),
ambas são apresentadas a seguir:
Descrição
Fun
ão Padrão de Fábrica
Entrada Di
Habilita Geral
Entrada Di
Sentido de Giro
Entrada Di
Reset
Entrada Di
Gira/Pára
Referência 0
Entrada Analógica 1 ou Entrada
Di
ital 5 ou Entrada PTC
I1 ou
DI5ou
Referência de Freqüência
PTC1
remoto
Referênc iaparao Potenciômetro
Referência 0
Sem Função
Contato NF do Relé 1
Sem Erro
Ponto Comum do Relé 1
Contato NA do Relé 1
Sem Erro
P277 = 7
P277 = 7
ital 1
ital 2
ital 3
ital 4
4 entradas di
-Ló
Nível alto mí nimo: 10 Vcc
Nível alto máximo: 30 Vcc
Nível baixo máxim o: 3 Vcc
-Ló
Nível baixo máxim o: 10 Vcc
Nível altom ínimo: 21,5Vcc
Nível alto máximo: 30 Vcc
Corrente de Entrada: -11 m
Corrente de Entrada Máxima: -20 m
Não interligada com o PE
0a10)Vcc,(0a20)mA e
4a20)mA(figura 3.10).
Impedância: 100
tensão
te
Tensãomáxima de entrada:30 Vcc
Consulte a descri
parâmetro P235
+10 Vcc, ± 5 %, capacidade: 2 m
Capacidade dos contatos:
0,5 A / 250 Vca
Especificações
itais isoladas
ica NPN
ica PNP
:(entrada em
e 500 :(entrada em corren-
. Erro de linearidade< 0,25 %
ão detalhada do
10 12
Relé 1
11
42
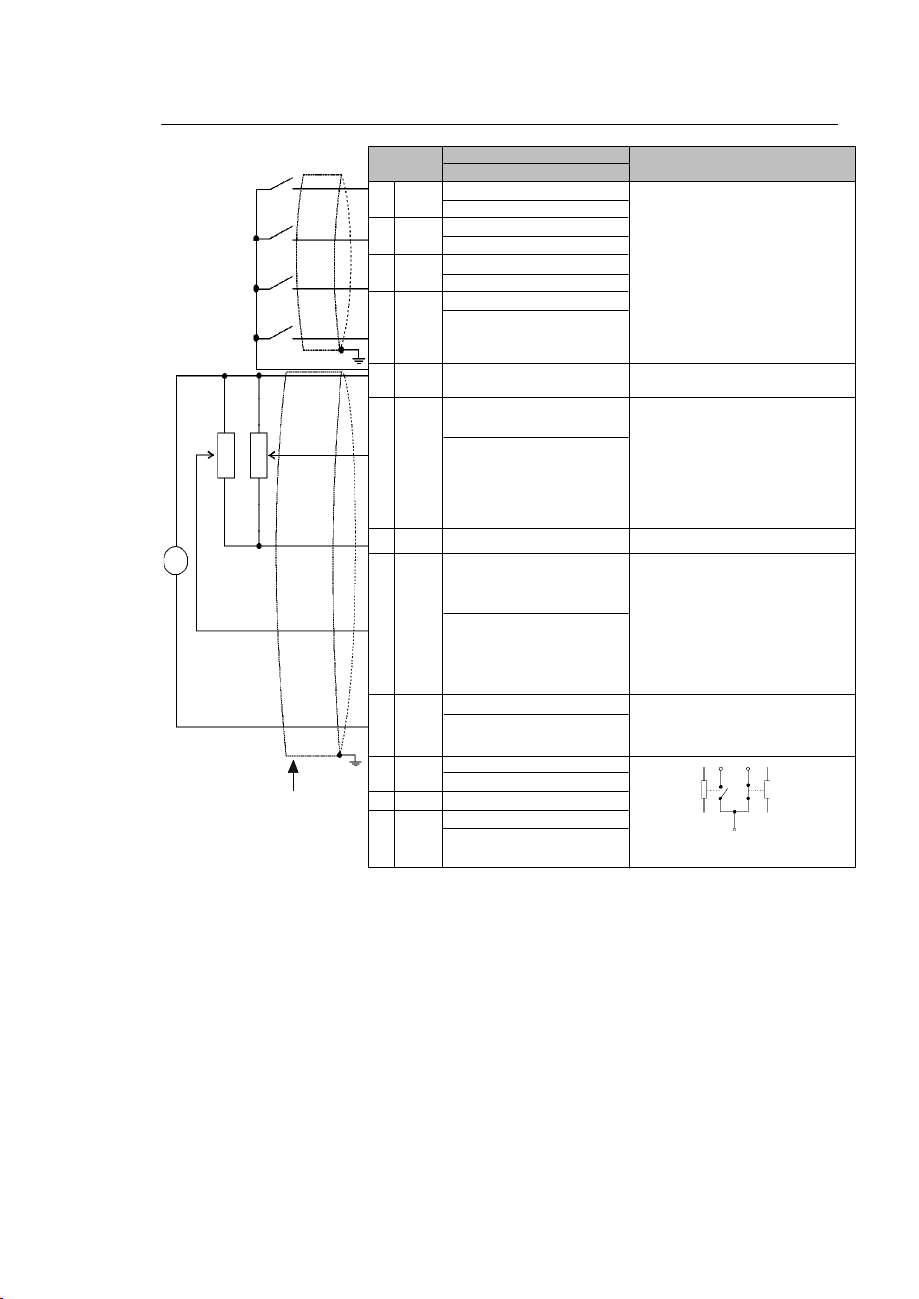
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
r
A
V
A
A
ç
g
ç
g
g
g
ç
V
g
(
)
g
g
ç
g
(Fs)
(
)
(
)
g
g
g
A
A
(
A
(fig
)
)
)
ç
A
(
A
(fig
)
)
)
ç
(
t10k
2
k
k
o
-
RPM
+
CCW
CCW
:
:
t10
t10
CW
CW
ConfiguraçãoPadrão
de Fábrica
Conecto
XC1
1DI1
2DI2
3DI3
4DI4
5GND
I1 ou
6
DI5ou
PTC1
7+10
8AI2 ou
DI6ou
PTC2
9
O
10 NF
11 Com um
12 N
Entrada Di
Sem Fun
Entrada Di
Sentido de Giro
Entrada Di
Reset
Entrada Di
Sem Fun
Referência 0
Entrada Analógica1 ou Entrada Di
Referênciade freqüência
Referênciaparao potenciômetro
Entrada Analó
da Di
Sem Fun
SaídaAnaló
Freqüência de Saída
Contato NF do Relé 2
Fs > Fx
Ponto Comum dos Relés
Contato NA do Relé 1
Sem Erro
Descrição
Fun
ão Padrão de Fábrica
ital 1
ão ou Habilita Geral
ital 2
ital 3
ital 4
ão ou Gira/Pára
ital 5 ou Entrada PTC
remoto
ital 6 ou Entrada PTC2
ão
ica
P279 = 0
P277 = 7
ica2ouEntra-
Especificações
4 entradas di
-Ló
itais isoladas
ica NPN
Nível alto mí nimo: 10 Vcc
Nível alto máximo: 30 Vcc
Nível baixo máxim o: 3 Vcc
-Ló
ica PNP
Nível baixo máxim o: 10 Vcc
Nível altom ínimo: 21,5Vcc
Nível alto máximo: 30 Vcc
Corrente de Entrada: -11 m
Correntede Entrada Máxima: -20 m
Não Interligada com o PE
0a10)Vcc ou(0a20)mAou(4a20)m
e(-10 a +10)Vcc
(*)
ura 3.10
Impedância:100k:(entrada em ten-
e 500 :(entrada em corrente
são
Erro de li nearidade < 0,25 %. Tensão
máxim a de entrada: 30 Vcc. Consulte
adescri
ão detalhadado parâmetro P235
+10 Vcc ± 5 %, capacidade: 2 m
0a10)Vcc ou(0a20)mAou(4a20)m
e(-10 a +10)Vcc
(*)
ura 3.10
Impedância: 100 k:(entrada em
tensão
e 500 :(entrada em corrente
Erro de linearidade < 0,25 %. Ten são
máxima de entrada: 30 Vcc. Consulte a
descri
ão detalhada do parâmetro P239
0a10)Vccou(0a20)mAou(4a20)mA,
:Resolução: 8bits
RL
Erro de linearidade < 0,25 %
12 10
Relé 1
Capacidade dos contatos:
Relé 2
11
0,5 A / 250 Vca
(*) Somente disponível no cartão de controle A2(consulte o item 2.4).Nesta
versão o erro de linearidade é menor que 0,50 %.
Figura 3.9 - Descrição do conector XC1 do cartão de controle A1 (CFW-08 Plus), cartão de controle A
(CFW-08 Plus com AIs -10 V a +10 V), cartão de controle A3 (CFW-08 Plus com protocolo CANopen) e cartão
de controle A4 (CFW-08 Plus com protocolo DeviceNet)
Para mais informações sobre esses cartões de controle consulte
item 2.4.
43

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
AI1A
u
a
(
A
A
AI1A
Aj
(
)
j
ç
g
(
)
(
)
(
A
(
(
(
ODIAI2
Figura 3.10 - Posi ção dos jumpers para seleção das entradas e saídas analógicas em tensão (0 a 10) Vcc
ou em corrente (0 a 20) mA / (4 a 20) mA e seleção das entradas digitais como ativo alto (PNP) o
ativo baixo (NPN) (consulte a definição da lógica das entradas digitais no item 3.2.5.1 e 3.2.5.2)
Como padrão de fábrica as entradas e as saídas analógicas
estão selecionadas para (0 a 10) Vcc e as entradas digitais
estão selecionadas como ativo baixo (lógica NPN). Isto pode
ser mudado usando o jumper S1 (mostrado na figura 3.10) e
alterando os parâmetros P235, P239 e P253 (consulte a
tabela 3.6).
I/O
DI1aDI4
O
I2
Tabela 3.6 - Configuração dos jumpers de seleção para I/O (entradas e saídas)
uste de Fábrica
Consulte os parâmetros
P263, P264, P265 e
P266
Frequência de Saída
Referência de Freqüência
modo remoto
Sem Função
Chav e
de A
uste
S1:1
OFF: entradas di
ativo baixo
ON: entradas digitais como
ativo alto
S1:2
ON:(0a10)Vcc
OFF:
S1:3
OFF:(0a10)Vcc ou DI5
ON:
4a20)mA ou(0a20)mA ou PTC
OFF:
S1:4
ON:
4a20)mA ou(0a20)mA ou PTC
ão
Sele
itais como
NPN
PNP
4a20)mA ou(0a20)m
0a10)Vcc ou DI6
NOTA!
Se for utili z ado entrad
padrão
4 a 20) mA, lembrar deajustar também os parâmetros
ou saída analógica em corrente no
P235, P239 e P253 os quais definem o tipo do sinal em AI1,
I2 e AO respectivamente.
Os parâmetros relacionados com as entradas e saídas
analógica s são: P221, P222, P234, P235, P236, P238,
P239, P240, P251, P252, P253. Consulte o capítulo6 para
uma descrição mais detalhada .
44

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
r
r
r
Na instalação da fiação de sinal e controle deve-se ter os
seguintes cuidados:
1) Bitola dos cabos 0,5 a 1,5 mm².
2) Torquemáximo:0,50 N.m (4,50 lbf.in). Para bornesde con-
trole utilizar chave fenda.
s fiações em XC1 devem ser feitas com cabo blindado e
3)
separadas das demais fiações (potência, comando em
1 10/220 V, etc.) em no mínimo 10 cm para fiações de até
100 m e, em no mínimo 25 cm para fiações acima de 100 m
de comprimento total. Caso o cruzamento destes cabos
com os demais seja inevitável, o mesmo deve ser feito de
forma perpendicular entre eles, mantendo-se um afastamentomínimode5cmnesteponto.
Conectar blindagem conforme abaix o:
Lado do
inverso
Conectar ao Terra: parafusos
localizados no dissipado
Figura 3.11- Conexão da blindagem
Isolar com fita
Não
aterra
4) Para distâncias de fiação maiores que 50 metros é ne-
cessário o uso de isoladores galvânicos para os sinais
XC1:5a9.
5) Relés, contatores , s olenói des ou bobin as de freios
eletromecânicos instalados próximos aos inversores podem eventualmentegerar interferências no circuito de controle. Para eliminar este efeito, supressores RC devem ser
conectados em paralelo com as bobinas destes dispositivos, no caso de alimentação CA, e diodos de roda-livre
no caso de alimentação CC.
6) Na utilização da HMI externa (consulte o capítulo 8), deve-
se ter o cuidado de separar o cabo que a conecta ao
inversor dos demais cabos existentes na instalação
mantendo uma distância mínima de 10 cm.
45

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
)
k
k10V
V
r
r
V
r
7) Quando utilizada referência analógica (AI1 ou AI2) e a freqüência
oscila
(problema de interferência eletromagnética), interligar
XC1:5 ao dissipador do inversor .
3.2.5.1 Entradas Digitais como Ativo Baixo (S1:1 em OFF)
Essa opção pode ser selecionada quando utilizado CLP com
saída a relé ou saída a transistor NPN (nível lógico baixo para
acionar a DI).
a)Conexão com CLP de saída a relé
Conector XC1
1DI1
2DI2
3DI3
COM
CLP saída
arelé
b)Conexão com CLP de saída NPN
CLP saída NPN GND(CLP
Figura 3.12 a) e b) - Configuração das DIs ativas em
4DI4
5GND
Conector XC1
1DI1
2DI2
3DI3
4DI4
5GND
nível lógico baixo
Nessas opções, o circuito equivalente do lado do inversor é
mostrado na figura 3.13.
S1:1 em OFF
GND
XC1:1
DI1
XC1:2
DI2
46
1
2
2
2
Figura 3.13 - Circuito equivalente - DIs ativas em nível baixo
10
SMD
OptoAcoplado
SMD
OptoAcoplado
+12
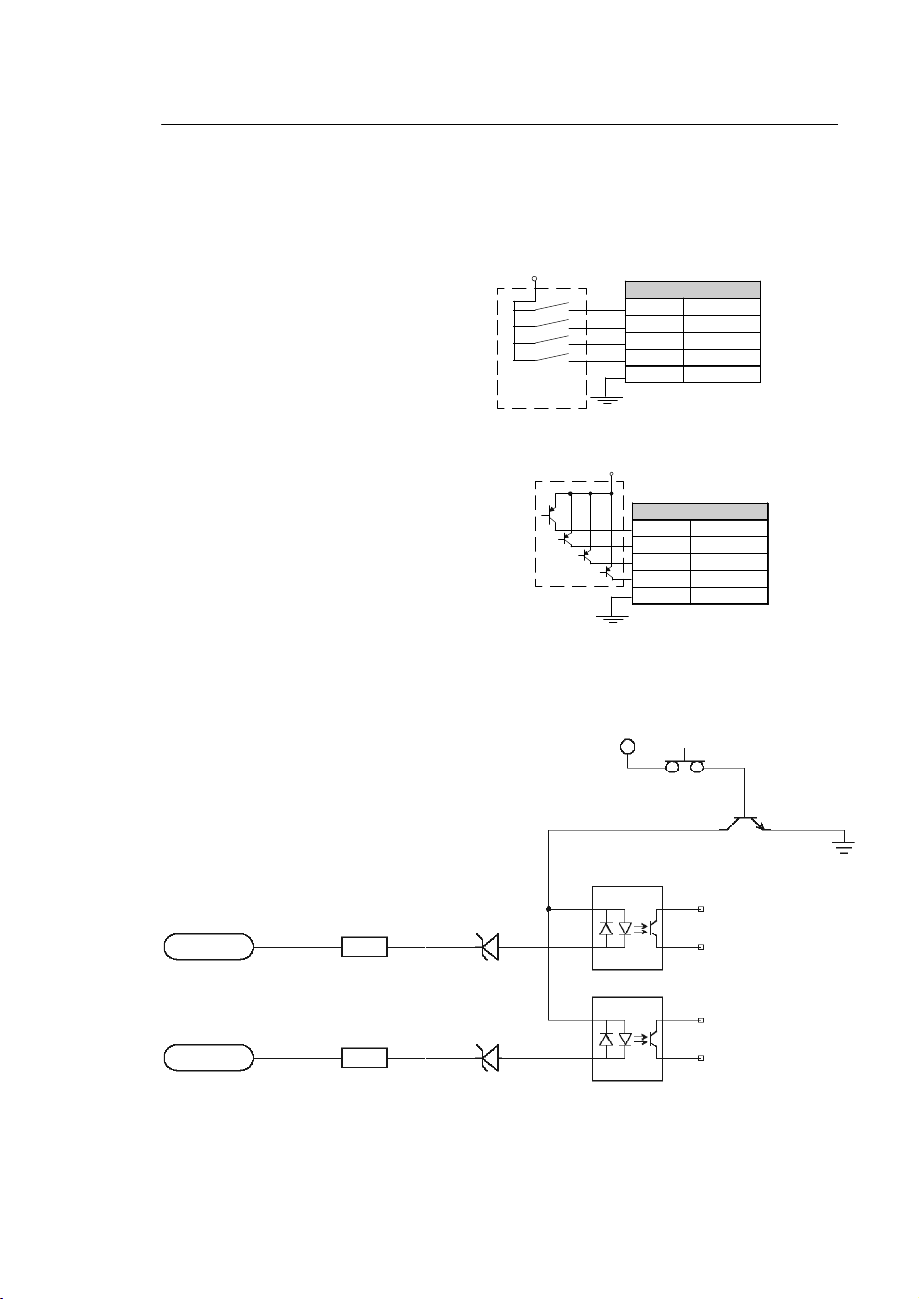
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
k
k10V
V
r
r
V
)
)
)
(
)
(
)
)
3.2.5.2 Entradas Digitais como Ativo Alto (S1:1 em ON)
Esta opção pode ser selecionada quando utilizado CLP com
saída a transistor PNP (nível lógico alto para acionar a DI) ou
CLP com saída a relé. Nesta última alternativa é necessária
uma fonte externa 24 V ± 10 %.
Conexão com CLP de saída a relé
a
24 V(externo
Conector XC1
1DI1
2DI2
3DI3
4DI4
5GND
GND
CLP saída a relé
Conexão com CLP de saída a PNP
b
CLP saída
PNP
Figura 3.14 a) e b) - Configuração das DIs ativas em nível lógico alto
fonte24V
24 V(interno CLP
Conector XC1
1DI1
2DI2
3DI3
4DI4
5GND
CLP
GND
Nestaopçãoocircuitoequivalentedoladodoinversoré
mostrado na figura 3.15
+12
XC1:1
XC1:2
1
DI1
2
DI2
2
2
Figura 3.15 - Circuito equivalente - DIs ativas em nível alto
10
SMD
OptoAcoplado
SMD
OptoAcoplado
S1:1 em ON
GND
47

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
2
r
j
A
t5K
NOTAS!
O inversor sai de fábrica com as entradas digitais ativas
em nível baixo (S1:1 em OFF). Quando as entradas digitais forem utilizadas ativas em nível alto, lembrar de ajustar o jumper S1:1 paraposição ON.
O jumper S1:1 seleciona ativo em nível alto ou ativo em
nível baixo para todas as 4 entradas digitais. Não é possível selecioná-las separadamente.
3.2.6 Acionamentos Típicos
S1: Horário/Anti-horário
S2: Reset
S3: Parar/Gira
R1: Potenciômetro de
uste de velocidade
a
Acion amento 1 - Gira/Pára via HMI (modo local):
Com a programação padrão de fábrica é possível a operação do inversor no modo local com as conexões mínimas da
figura 3.6 (Potência) e sem conexões no controle. Recomenda-seestemododeoperaçãoparausuáriosqueestejam
operando o inversor pela primeira vez, como forma de
aprendizadoinicial. Note que não é necessária nenhuma conexão nos bornes de controle.
Para colocação em funcionamento neste modo de operação
seguir capítulo 5.
Acionamento 2 - Gira/Pára via bornes (modo remoto):
Válidoparaaprogramaçãopadrãodefábricaeinversor
operando no modo remoto.
Para o padrão de fábrica, a seleção do modo de operação
(local/remoto) é feita pela tecla (default local).
figura 3.16 a seguir representa a conexão nos bornes do
inversor para este tipo de acionamento.
DI1 - Sem Função ou
Habilita Geral
DI2-SentidodeGiro
1 234 5 678 9101112
DI3 - Reset
S3S2S1
COM
AI1
DI4 - Sem Função
ou Gira/Pára
+10VAI2
AO1
NF
Comum
N
Figura 3.16 - Conexão do controle para acionamento
48

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
A
A
3
g
g
A
A
A
NOTAS!
Para o correto funcionamento do acionamento 2 deve-se
conectar o borne 5 com o borne 1 (habilita geral).
referência de freqüência pode ser via entrada analógica
I1 (como mostradona figura 3.16), via HMI-CFW08-P,ou
qualquer outra fonte (consulte a descrição dos parâmetros
P221 e P222).
Para este modo de acionamento, caso ocorrer uma falha
da rede com a chave S3 na posição “GIRAR”, no momento em que a rede voltar o motor é habilitado automaticamente.
Acionamento 3 - Liga/Desliga:
Habilitação da função Liga / Desliga (comando a três fios):
Programar DI1 para Liga: P263 = 14
Programar DI2 para Desliga: P264 = 14
Programar P229 = 1 (comandos via bornes) no caso em que
deseja-se o comando a 3 fios no modo local, ou
Programar P230 = 1 (comandos via bornes) no caso em que
deseja-se o comando a 3 fios no modo remoto.
figura 3.17 a seguir representa a conexão nos bornes do
inversor para este tipo de acionamento.
DI1 - Liga
DI2- Desliga
S1: Liga
S2: Desli
S3: Altera sentido de
a
1 2 3 4 5 6 7 8 9 10 11 12
iro
S2
S1
DI3
S3
Figura 3.17 - Conexão do controle para acionamento
COM
AI1
DI4-Sentidode
Giro
+10VAI2
AO1
NF
Comum
N
NOTAS!
Neste exemplo S1 e S2 devem ser botoeiras pulsantes, liga
(contato NA) e desliga (contato NF) respec tivamente.
referência de freqüência pode ser via entrada analógica
I1 (como mostrado no Acionamento 2), via HMI-CFW 08-P ,
ou qualquer outra f onte (consulte a des crição dos
parâmetros P221 e P222).
49

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
r
r
A
A
A
A
Para este modo de acionamento, caso ocorrer uma falha
da rede com o inversor habilitado (motor girando) e as
chaves S1 e S2 estiverem na posição de descanso (S1
aberta e S2 fechada ), no momento em que a rede voltar, o
inversor não será habilitado automaticamente somente se
a chave S1 for fechada (pulso na entrada digital liga).
função Liga/Desliga é descrita no capítulo 6 deste ma-
nual.
Acion amento 4 - Função Avanço/Retorno:
Habilitação da função Avanço/Retorno:
Programar DI1 para Avanço: P263 = 8
Programar DI2 para Retorno: P264 = 8
Fazer com que a fonte dos comandos do inversor sej a via
bornes, ou seja, fazer P229 = 1 para o modo local ou P230 = 1
para o modo remoto.
figura 3.18 a seguir representa a conexão nos bornes do
inversor para este tipo de acionamento.
DI1 - Avanço
DI2- Retorno
S1 aberta: Para
S1 fechada:Avanço
S2 aberta: Para
S2 fechada: Retorno
1234 5 678 9101112
DI3 - Reset
COM
AI1
DI4 - Sem Função
+10VAI2
AO1
NF
Comum
N
S2S1
Figura 3.18- Conexão do controle para acionamento 4
NOTAS!
Para o correto funcionamento do acionamento 4 deve-se
programar P266 para “Sem Função”.
referência de freqüência pode ser via entrada analógica
I1 (como mostrado no acionamento 2), via HMI-CFW 08-P,
ou qualquer outra f onte (consulte a descrição dos
parâmetros P221 e P222).
Para este modo de acionamento, caso ocorrer uma falha
da rede com a chave S1 ou S2 fechada, no momento em
que a rede voltar o motor é habilitado automaticamente.
50

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
P
A
T
P
ARA
T
A
A
o
A
A
r
V
3.3 DIRETIVAEUROPÉI
DE COM
TIBILIDADE
ELETROMAGN ÉTI CA REQUISI
INS
OS
LAÇÕES
Os inversores da série CFW-08 foram projetados considerando todos os aspectos de segurança e de compatibilidade eletromagnética (EMC).
Os inversores CFW-08 não possuem nenhuma função intrínseca quando não ligados com outros componentes (por
exe mplo, um motor). Por essa razão, o produto básico não
possui a certificação CE para indicar a conformidade com a
diretiva de compatibilidade eletromagnética. O usuário final
assume a responsabilidade pela compatibilidade eletromagnética da instalação completa. No entanto, quando for instalado conforme as recomendações descritas no manual do
produto, incluindo os filtros e as medidas de EMC sugeridos,
oCFW-08atendeatodososrequisitosdaDiretivade
Compatibilidade Eletromagnética (EMC Directive 89/336/
EEC), conforme definido pela norma de produto EN61800-3 -
“Adju sta bl e Speed Electrical Power Drive Systems”,norma específica para acionamentos de velocidade variável.
conformidade de toda a série CFW-08 está baseada em
testes dos modelos representativos. Um arquivo técnico de
construção (TCF - “Technical Construction File”) foi elaborado, checado e aprovado por uma entidade competente
(“Competent Body”).
3.3.1 Instalaçã
Transformador
PE
Haste de
terramento
Obs.: Modelos de entrada monofásica usam filt ros monofásicos. Neste caso apenas L1/L e L2/N são util izados.
Figura 3.19- Conexão dos filtros de EMC - condição geral
figura 3.19 mostraa conex ãodos filtros de EMC ao inversor.
Fiaç ão de Sina l e C ontro le
Tor óide
Comum
Filtro de
RFI de
Entrada
Externo
L1/L
L2/N
L3
E
L1
L2
L3
Tor óide
de Modo
Comum
XC1 1 a 1 2
L1/L
L2/N
CFW-08
E
L3
PE
Painel Metálico
(quando necessár io)
Terra de Prot eção
(Saída)
U
W
PE
de Modo
(Entrada)
Moto
Os itens a seguir são necessários para ter uma instalação
correta:
1) O cabo do motor deve ser blindado ou instalado dentro de
um conduíte (eletroduto) ou canaleta metálica de atenuação
equivalente. Aterre a malha do cabo blindado/conduíte me
51

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
(
g
)
)
g
)
(
)
y
)
g
(
(
)
)
(
P
(
)
A
A
A
tálico nos dois lados (inversor e motor).
2) Os cabos de controle e sinal devem ser blindados ou instalados dentro de um conduíte (eletroduto) ou canaleta metálica de atenuação equivalente.
3) O inversor e o filtro externo devem ser montados próximos
sobre uma chapa metálica comum. Garanta uma boa conexão elétrica entre o dissipador do inversor, a carcaça metálicadofiltroeachapademontagem.
4)
fiação entre filtro e inversor deve ser a mais curta possível.
5)
blindagem dos cabos (motor e controle) deve ser solidamente conectada à chapa de montagem, utilizando braçadeiras metálicas.
6) O aterramento deve ser feito conforme recomendado neste manual.
7) Use fiação curta para aterramento do filtro externo ou inversor. Quando for utilizado filtro externo, aterre apenas o
filtro (entrada) - a conexão do terra do inversor é feita pela
chapa de montagem.
8)
terre a chapa de montagem utilizando uma cordoalha, a
mais curta possí vel . Condu tores planos (exemplo:
cordoalhas ou braçadeiras) têm impendância menor em
altas freqüências.
9) Use luvas para conduítes (eletrodutos) sempre que possível.
3.3.2 Especificação dos Níveis de Emissão e Imunidade
Fenômeno de EMC
Emissão:
Emissão Conduzida
Disturbance Volta
Freqüência: de 150 kHz a 30 MHz
Emissão Radiada(“Electromagnetic
Radiation Disturbance” - Faixa de
Freqüência: 30 MHz a 1000 MHz
Imunidade:
a Eletrostática(ESD
Descar
Transientes Rápidos
“Fast T rans ient-Burs t”
ImunidadeConduzida(“Conducted
Radio-Frequen c
Surtos
Campo Eletroma
Freqüência
“MainsTerminal
e” - Faixa de
Common Mode”
nético de Rádio
Tabela 3.7- Especificação dos níveis de emissão e imunidade
NormaBásicapara
Método de Teste
IEC/EN61800-3
IEC 61000-4-2
IEC 61000-4-4
IEC 61000-4-6
IEC 61000-4-5
IEC 61000-4-3
“First environment”
Categoria C1, ou;
“First environment”
Categoria C2, ou;
“Second environment”
Categoria C3
“First environment”
“Second environment”
6 kV descarga por contato
4kV/2.5kHz
2 kV/5 kHz cabos de controle; 2 kV/5 kHz
capacitiva
capacitiva
0.15 a 80 MHz; 10 V; 80 % AM
motor, de controle e da HMI remota 1.2/50
1 kV acoplamento linha-linha;
2 kV acoplamento linha-terra
80 to 1000 MHz; 10 V/m; 80 % AM
Nível
(1)
, distribuição irrestrita
(1)
, distribuição restrita
(2)
, distribuição irrestrita
(1)
, distribuição restrita
(2)
, distribuição irrestrita
ponteira capacitiva)cabos de entrada;
cabo do motor; 1 kV/5 kHz(ponteira
cabo da HMI remota
1kHz)- cabos do
(3)
(4)(5)
(4)(5)
ponteira
s, 8/20Ps
1kHz
(3)(6)
(3)
52

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
Observações:
(1) “First environment” ou ambiente doméstico: inclui esta-
belecimentos diretamente conectados (sem transformadores intermediários) à rede pública de baixa tensão, a
qual alimenta locais utilizados para finalidades domésticas.
(2) “Second environment” ou ambiente industrial: inclui to-
dos os estabelecimentos não conectados diretamente à
rede pública de baixatensão. Alimenta locais usados para
finalidades industriais.
(3) Distribuição irrestrita: modo de distribuição (venda) no
qual o fornecimento do equipamento não depende da
competência em EMC do usuário para aplicação de
drives.
(4) Distribuição restrita: modo de distribuição (venda) no qual
o fabricante restringe o fornecimento do equipamento a
distribuidores, clientes e usuários que, isoladamente ou
em conjunto, tenham competência técnica nos requisitos
de EMC para aplicações de drives.
(fonte: essas definições foram extraídas da norma de produto IEC/EN61800-3 (1996) + A11 (2000))
(5) Para instala çõe s em ambientes residenciais com nível
de emissão conduzida Categoria C2, conforme a tabela
3.7, considerar:
Esse é um produto de classe de distribuição de vendas
restrita, conforme a norma de produto IEC/EN61800-3
(1996) + A1 1(2000). Na aplicação em áreas residencia i s,
este produto pode causar radio interferência, e neste caso
poderá ser necessário que o usuário tome medidas adequadas.
(6) Para as instalações com inversores que atenderem o nível
de emissão c onduzida C at egoria C 3, ou s eja, para
ambient e indus trial e distribuição irrestrita, obser ve a
tabela 3.7.
Esse produto foi projetado especificamente para uso em
linhas de alimentação industrial de baixa tensão (linha de
alimentação pública), a qual não seja construída para uso
doméstico. Se este produto for utilizado em redes de uso
doméstico, existe a possibilidade de interferências de
rádio freqüência.
53
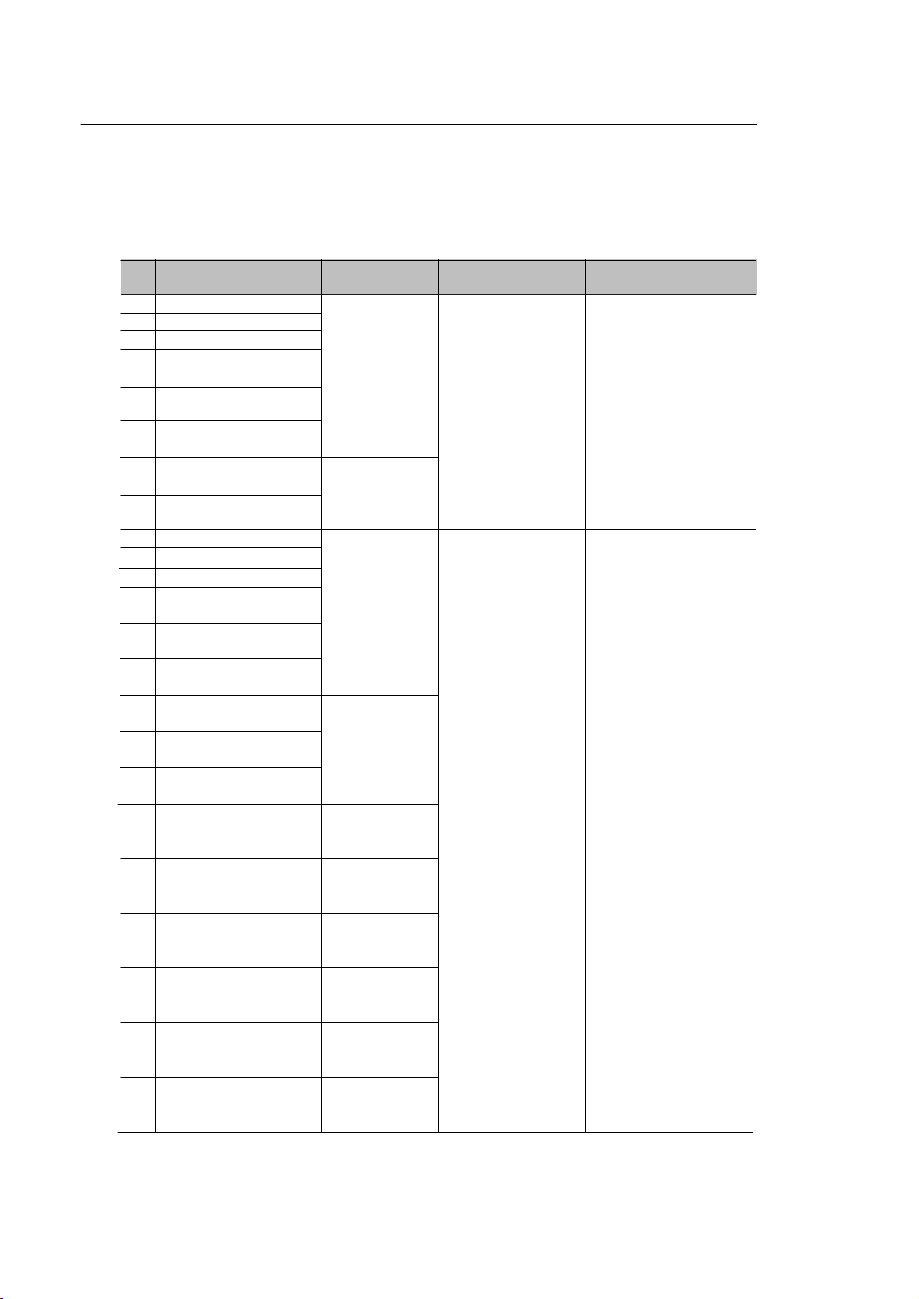
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
A
r
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
g
g
g
g
g
8
C
3.3.3 Inversores e Filtros
Nº Model o do Inverso
1 CFW 080016S2024...FAZ
2 CFW 080026S2024...FAZ
3 CFW 080040S2024...FAZ
CFW080016B2024...FAZ
4
entradamonofásica
CFW080026B2024...FAZ
5
entradamonofásica
CFW080040B2024...FAZ
6
entradamonofásica
CFW080073B2024...FAZ
7
entradamonofásica
CFW080100B2024...FAZ
8
entradamonofásica
9 CFW 080016S2024...
10 CFW080026S2024...
11 CFW080040S2024...
CFW080016B2024...
12
entradamonofásica
CFW080026B2024...
13
entradamonofásica
CFW080040B2024...
14
entradamonofásica
CFW080016B2024...
15
entrada trifásica
CFW080026B2024...
16
entrada trifásica
CFW080040B2024...
17
entrada trifásica
18 CFW080070T2024...
CFW080073B2024...
19
entradamonofásica
CFW080073B2024...
20
entrada trifásica
CFW080100B2024...
21
entradamonofásica
CFW080100B2024...
22
entrada trifásica
23 CFW080160T2024...
Tabela 3.
tabela 3.8 abaixo apresenta os modelos de inversores, seus
respectivos filtros e a categoria EMC em que se enquadram.
descrição de cadauma das categoria s EMC é apresenta da
no item 3.3.2 e as características dos filtros footprint e externos
são apresentadas no item 3.3.4.
Filtro RFI de
Entrada
FEX1-CFW 08
filtro footprint
FiltroInterno
FS6007 -16-06 ou
B84142-A30-R122
filtro externo
FN3258-7-45 ou
B84143-B8-R110
filtro externo
FN3258-16-45 ou
B84143-B16-R110
filtro externo
FS6007 -25-08 ou
B84142-A30-R122
filtro externo
FN3258-16-45 ou
B84143-B25-R110
filtro externo
FS6007 -36-08 ou
B84142-A30-R122
filtro externo
FN3258-16-45 ou
B84143-B25-R110
filtro externo
FN3258-30-47 ou
B84143-B36-R110
filtro externo
- Relação dos modelos de inversor, filtros e categorias EM
Níveis de Emissão
Conduzida
Cate
oria C2 ou
Cate
oria C3
Cate
oria C1
Níveis de Emissão
Radiada
Cate
Cate
oria C3
oria C2
54

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
r
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
g
g
g
g
g
g
g
g
g
g
g
g
C
Nº Model o do Inverso
24 CFW080220T2024...
25 CFW080280T2024...
26 CFW 080330T2024...
27 CFW080010T3848...FAZ
28 CFW080016T3848...FAZ
29 CFW080026T3848...FAZ
30 CFW080040T3848...FAZ
31 CFW080027T3848...FAZ
32 CFW080043T3848...FAZ
33 CFW080065T3848...FAZ
34 CFW080100T3848...FAZ
35 CFW080130T3848...FAZ
36 CFW080160T3848...FAZ
37 CFW080010T3848...
38 CFW080016T3848...
39 CFW080026T3848...
40 CFW080040T3848...
41 CFW080027T3848...
42 CFW080043T3848...
43 CFW080065T3848...
44 CFW080100T3848...
45 CFW080130T3848...
46 CFW080160T3848...
47 CFW080240T3848...
48 CFW080300T3848...
49 CFW080240T3848...FAZ
50 CFW080300T3848...FAZ
Tabela3.8 (cont.) - Relação dos modelos de inversor, filtros e categorias EM
Filtro RFI de
Entrada
B84143-B36-R110
filtro externo
B84143-B50-R110
filtro externo
B84143-B50-R110
filtro externo
FEX2-CFW 08
filtro footprint
FiltroInterno
FN3258-7-45 ou
B84143-B8-R110
filtro externo
FN3258-16-45 ou
B84143-B25-R110
filtro externo
FN3258-16-45 ou
B84143-G36-R110
filtro externo
FN3258-30-47 ou
B84143-G36-R110
filtro externo
FN-3258-30-47 ou
B84143-B50-R110
filtro externo
FN-3258-55-52 ou
B84143-B50-R110
filtro externo
Filtrointerno
Níveis de Emissão
Conduzida
Cate
oria C1
oria C2 ou
Cate
Cate
oria C3
Cate
oria C1
Cate
oria C1
Cate
oria C1
Cate
oria C3
Níveis de Emissão
Radiadas
Cate
oria C2
oria C3
Cate
Cate
oria C2
oria C3
Cate
Cate
oria C3
Para os modelos apresentados na tabela 3.8, seguem as seguintes
observações:
1) Os inversores com nível de emissão conduzida Categoria C1 devem
ser montados dentro de painel metálico de modo que as emissões
radiadas estej am dentro dos limites para ambiente residencial (“first
environment”) e distribuição restrita (consulte o item 3.3.2).
Os inversores com nível de emissão conduzida Categoria C2 não
requerem o painel metálico. Exceção: model os 7 e 8, que precisam
ser montados dentro de painel para passar no teste de emissão radiada
para ambiente industrial (“second environment”) e distribuição irrestrita
55

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
A
A
(consulte o item 3.3.2). Quando for necessário utilizar painel metálico, o máximo comprimento do cabo da HMI remota é 3 m.
Nesse caso, a HMI remota e a fiação de controle e sinal devem
estar contidos dentro do painel (HMI pode estar na porta do painel
conforme descrito nos itens 8.6.1 e 8.8).
2)
máxima freqüência de chaveamento é 10 kHz. Exceção: 5 kHz
para os modelos 27 até 36 e modelos 47 a 50. Para sistemas
CategoriaC2consultetambémanota7aseguir.
3) O comprimento máximo do cabo de ligação do motor é 50 m para
os modelos 49 e 50, 20 m para os modelos de 9 a 26, 37 a 40, 47
e 48, 10 m para os modelos de 1 a 8, 27 a 30 e 41 a 46 e 5 m
para os modelos de 31 a 36. Para sistemas da Categoria C2
consulte também a nota 7 a seguir .
4) Nos modelos de 31 a 34 (consulte também a nota 7), um indutor de
modocom um (“CMchoke”) na saídadoinve r sor énecessário: TOR1CFW08, 1 espira. O toróide é mo ntado dentro do kit N1, o qual é
fornecido com esses modelos. Para ins talação consulte a figura 3.19.
5) Nos modelos de 41 a 46 um indutor de modo comum (“CM choke”)
na entrada do filtro é necessário: TOR2-CFW 08, 3 espiras. Para
instalação consulte a figura 3.19.
6) Nos modelo s de 41 a 44 é necessário usar um cabo blindado
entreofiltroexternoeoinversor.
7) Os inversores com nível de emissão conduzida Categoria C2
também foram testados usando os limites de emissão conduzida
para ambiente industrial (“second environment”) e distribuição
irrestrita, ou seja, Categoria C3, (para definições consulte as notas
2 e 3 do item 3.3.2).
Neste caso:
-Ocomprimentomáximodocabodomotoré30mparaos
modelo s de 1 a 8, 35 e 36 e 20 m para os modelos de 27 a 34;
-
máxima freqüência de chaveamento é 10 kHz para os modelo s
de 31 a 34 e 5 kHz para os modelo s de 1 a 8, 27 a 30, 35 e 36;
- Os modelos de 31 a 34 não necessitam de indutor de modo comum
(“CM choke”) na saída do inversor (como comentado na nota 4).
56
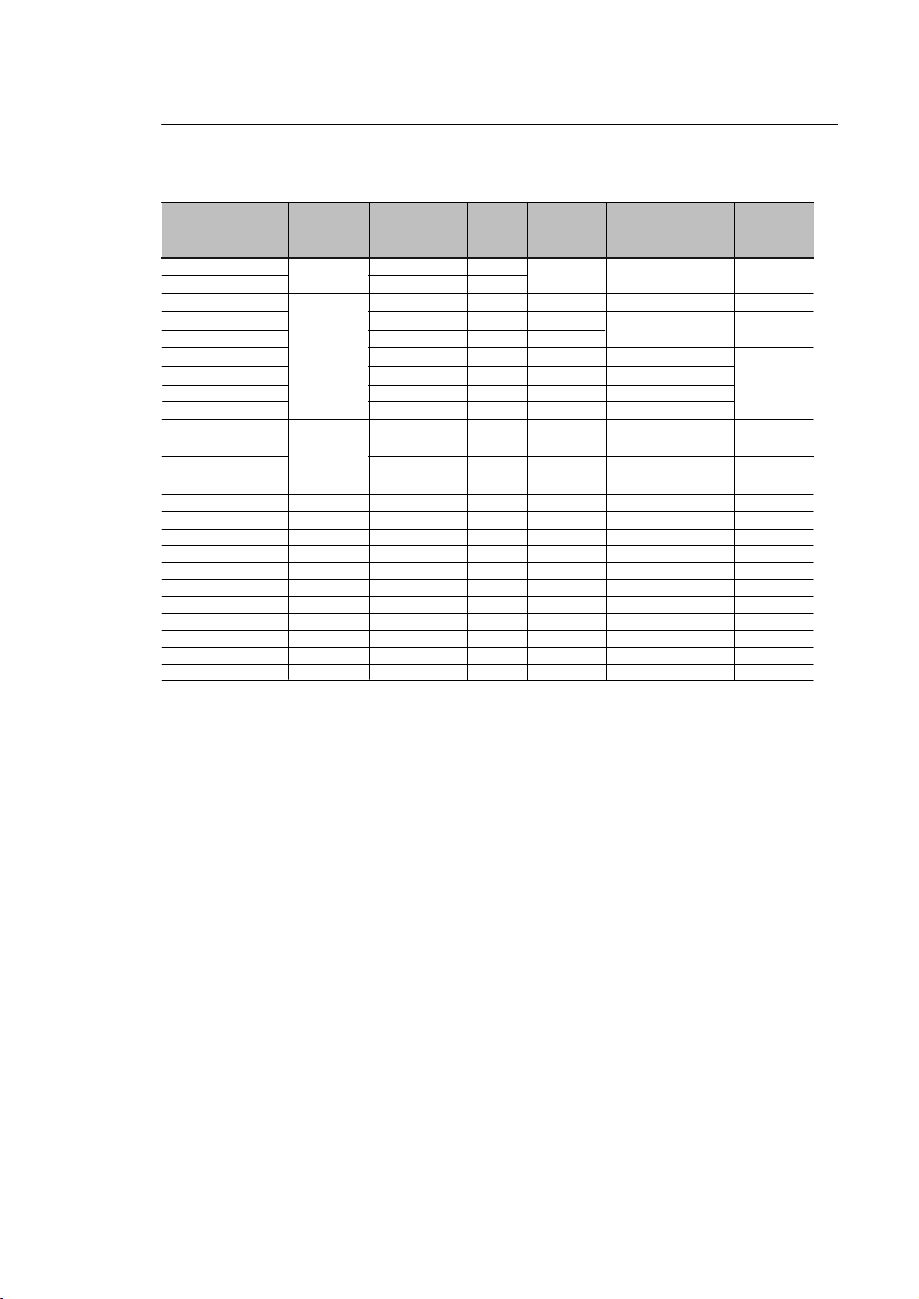
O
3.3.4 Características
C
(
x
)
A
g
A
A
A
g
A
g
A
g
A
g
A
g
A
g
g
g
g
g
A
g
A
g
A
g
A
A
g
A
g
A
g
A
g
A
g
A
g
A
g
dos Filtros de EMC
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
Filtro
FEX1-CFW 08
FEX2-CFW08 417118239 5
FS6007-16-06 0208.2072 16
FS6007-25-08 0208.2073 25
FS6007-36-08 0208.2074 36
FN3258-7-45 Schaffner0208.2075 7
FN3258-16-45 0208.2076 16
FN3258-30-47 0208.2077 30
FN3258-55-52 0208.2078 55
TOR1-CFW08 417100895 - 80
TOR2-CFW08 47100896 - 125
B84142-A16-R122 EPCOS 10951110 16
B84142-A30-R122 EPCOS 10951111 3 0
B84143-B16-R110 EPCOS 10951374 16
B84143-A16-R105 EPCOS 0208.2127 16
B84143-B36-R110 EPCOS 10951375 36
B84143-A36-R105 EPCOS 0208.2129 36
B84143-B50-R110 EPCOS 10951401 50
B84143-A50-R105 EPCOS 0208.2130 50
B84143-B8-R110 EPCOS 10951398 8
B84143-B25-R110 EPCOS 10951404 25
B84143-G36-R110 EPCOS 10951437 36
Fabricante
WEG
Thornton
Tabela 3.9- Características dos filtros de EM
Item de Corrente
Estoque W EG Nominal
417118238 10
Peso
0.6 k
0.9 kg85.5x119x57.6 mm Fig.3.21
1.0 k
1.0 k
0.5 k
0.8 k
1.2 k
1.8 k
1.1 k
1.7 k
1.5 k
0.90 kg46,4x231x70 mm Fig.3.29
3.2 k
1.75 k
3.7 k
1.75 k
1.5 k
2.7 k
2.8 k
Dimensões
Largura x Altura
Profundidade
79x190x51 mm Fig.3.20
85.5x119x57.6 mm Fig.3.22
40x190x70 mm
45x250x70 mm
50x270x85 mm
85x250x90 mm
fe = 35 mm,
h=22mm
fe = 52 mm,
h=22mm
46,4x231x70 mm Fig.3.26
58x265x90 mm Fig.3.27
46x230x80 mm Fig.3.28
56x280x150mm Fig.3.30
58x265x90 mm Fig.3.31
56x330x150mm Fig.3.32
58x265x90 mm Fig.3.33
46x230x80 mm Fig.3.34
56x280x150mm Fig.3.35
56x280x150mm Fig.3.36
Desenhos
Fig.3.23
Fi
.3.24
Fi
.3.25
57

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
8
r
A
)
r
r
6
x
g
Filtro Footprint
a
Vista Frontal
79
175
Vista Inferio
79
Conector para fio flexível
ou sólido de 4 mm
WG 10.
Max. torque: 0.8 Nm
53
Obs.: medidas das figuras em mm.
Figura 3.20 a) e b) - Desenhos dos filtros footprint FEX1-CFW08 e FEX2-CFW0
Vista Lateral
Direita
190
b)Filtroe Inverso
53
Vista Lateral Direita
2
ou
185
119
109
98.5
6.3x0.8
Vista Inferio
Vista Frontal
50
175
79
57.6
190
40
10,8
Type /05
Terminal de Engate
RápidoFast-on 6.3
0.8 mm
Obs.: medidas das fi
66
84.5
85.5
12,3
uras em mm.
513.7
4.4
1.2
15.6
Figura 3.21 - Desenho do filtro externo FS6007-16-0
58

O
8
2
r
r
A
A
119
g
113
98.5
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
57.6
M4
66
84.5
85.5
P/N E
ParafusoTipo
08 = M4
Obs.: medidas das figuras em mm.
Figura 3.22- Desenho dos filtros externos FS6007-25-08 e FS6007-36-0
Dados Mecânicos
Corrente Nominal
Conecto
Vista Lateral
I
51
3.7
4.4
D
Vista Superio
I
1.2
15.6
41,8
30,3
11,5
Tipo/45
Bloco de terminal para fios
sólidos de 6 mm
fio flexível 4 mm
55,5
40,5
15
Tipo/47
Bloco de terminal para fios
sólidos de 16 mm
D
fio flexível 10 mm
2
AWG 12.
2
19,3
2
,
23,5
2
,
WG 8.
40
F
C
Obs.: medidas das fi
Vista Frontal
L1 L2 L3
Line
E
uras em mm.
E
H
G
Figura 3.23 - Desenho dos filtros externos FN3258-7-45, FN3258-16-45, FN3258-30-47 e FN3258-55-5
59

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
(
)
(
)
8
(
)
8
g
Toróide: Thornton NT35/22/22-4100-IP12R
WEG P/N 0208.2102
Presilha plástica: HellermannTyton NXR-18
33.3 a 38.1
Obs.: medidas das figuras em mm.
Figura 3.24 - Desenho do kit TOR1-CFW0
Toróide:ThorntonNT52/32/20-440 0-IP12E
WEG P/N 0208.2103
22
22
WEG P/N 0504.0978
35
19.3
1.5
30
5.8
20
Obs.: medidas das fi
52
uras em mm.
32
Figura 3.25 - Desenho do toróide TOR2-CFW0
60

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
2
2
g
ç
g
ç
NOTA!
Os desenhos de filtros a seguir pertencem à Epcos. Para obter mais
informações, consulte o site da Epcos.
9
60
Não utilizado
para conexão
PE M5
Torque de aperto 2,8 ± 0,1 Nm
Obs.: medidas das fi
em mm.
19
Term inais 4 mm
2
199,5
Torque de aperto 0,5 - 0,6 Nm
Identifica
221
231
uras
38
46,4
Figura 3.26- Desenho do filtro externo B84142-A16-R12
200
70
1,5
4,5
ão
8
90
70
1,5
Não utilizado
para conexão
Terminais 10 mm
Torquede aperto 1,2 -1,5 Nm
2
PE M6x24
Torque de aperto
3 ± 0,15 Nm
Obs.: medidas das fi
em mm.
uras
255
265
ão
Identifica
4,5
58
35
Figura 3.27- Desenho do filtro externo B84142-A30-R12
61

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
0
5
ç
ç
g
ç
g
ç
Term inais 4 mm
Torque de aperto 0,7 ± 0,1 Nm
50
80
40
(31)
15
Conector Terra M6 x 25
Torque de aperto 4,8 ± 0,2 Nm
Obs.: medidas das fi
uras em mm.
Figura 3.28- Desenho do filtro externo B84143-B16-R11
PE M5x19
9
60
Torque de aperto 2 ± 0,1 Nm
1
2
Identifica
6,5
ão
46
25 ±0,3
70
ado 2,5 mm
2
Identifica
Fio tran
200 300 ±10
0,5
230
215 ±0,5
ão
199,5
Obs.: medidas das fi
62
Term inais 4 mm
2
Torque de aperto 0,5 - 0,6 Nm
38
46,4
Identifica
221
231
uras em mm.
Figura 3.29 - Desenho do filtro externo B84143-A16-R10
1,5
4,5
ão

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
0
5
ç
g
ç
g
Term inais 6 mm
Torque de aperto 1,5 - 1,8 Nm
60
150
75
60
PE M6x24
Torque de aperto 3 ± 0,15 Nm
Obs.: medidas das fi
8
uras em mm.
70
2
12481
400 ±10
30
265 ±0,5
280
Identificação
Carga
Linha
0,5
Identificação
6,5
Figura 3.30 - Desenho do filtro externo B84143-B36-R11
200
24
1
Fio tran
35 ±0,3
ado 4 mm
56
2
90
1,5
2
Conector Terra M6
Terminais 10 mm
Torque de aperto 1,2 - 1,5 Nm
Torque de aperto 4,8 ± 0,2 Nm
255
265
ão
35
58
Obs.: medidas das fi
Identifica
4,5
uras em mm.
Figura 3.31 - Desenho do filtro externo B84143-A36-R10
63

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
0
5
ç
ç
g
Terminais 16 mm
2
Torque de aperto 1,65 ± 0,15 Nm
60
150
75
(52)
30
Conector Terra M6x25
Torque de aperto 4,8 ± 0,2 Nm
Obs.: medidas das figuras em mm.
Figura 3.32- Desenho do filtro externo B84143-B50-R11
24
8
70
Fio tran
300
330
315 ±0,5
Identificação
200
ado 10 mm
2
500 ±10
1
0,5
6,5
56
35 ±0,3
90
Conector Terra M6
Torque de aperto 4,8 ± 0,2 Nm
Obs.: medidas das fi
64
Terminais 10 mm
2
Torque de aperto 1,2 - 1,5 Nm
ão
Identifica
4,5
255
265
uras em mm.
Figura 3.33 - Desenho do filtro externo B84143-A50-R10
1,5
35
58
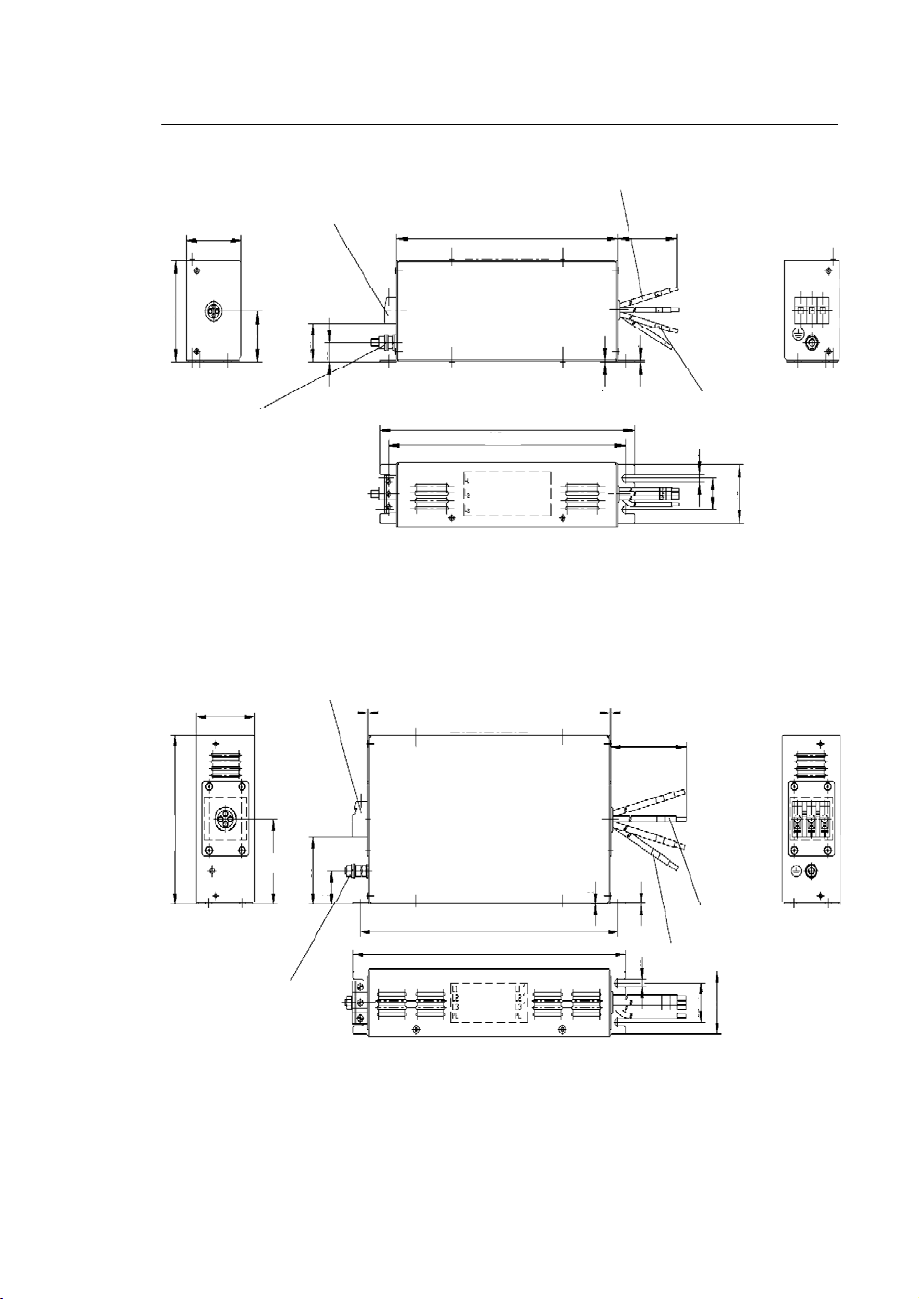
CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
0
0
ç
g
ç
ç
ç
Term inais 4 mm
Torque de aperto 0,7 ± 0,1 Nm
50
80
40
(31)
15
Conector Terra M6x25
Torque de aperto 4,8 ± 0,2 Nm
Obs.: medidas das fi
uras em mm.
Figura 3.34- Desenho do filtro externo B84143-B8-R11
Term inais 6 mm
Torque de aperto 1,5 - 1,8 Nm
60
Fio tran
2
200 300 ±10
230
215 ±0,5
ão
Identifica
2
1
248
ado 1,5 mm
0,5
1
400 ±10
2
1
Identifica
ão
6,5
46
25 ±0,3
150
75
60
30
PE M6x24
Torque de aperto 3 ± 0,15 Nm
265 ±0,5
280
Identificação
Linha Car ga
0,5
1
Fio tran
Identificação
6,5
35 ±0,3
ado 4 mm
56
2
Obs.: medidas das figuras em mm.
Figura 3.35 - Desenho do filtro externo B84143-B25-R11
65

CAPÍTULO 3 - INSTALAÇÃO E CONEXÃ
O
0
A
ç
Term inais 6 mm
2
Torque de aperto 1,5 - 1,8 Nm
60
150
75
60
30
PE M6x24
Torque de aperto 3 ± 0,15 Nm
Obs.: medidas das figuras em mm.
Figura 3.36- Desenho do filtro externo B84143-G36-R11
NOTA!
Declaração de Conformidade CE encontra-se disponível no site
www.weg.net, ou no CD que pode acompanhar os produtos.
248
265 ±0,5
280
Identificação
Linha Carg a
11
400 ±10
0,5
1
Fio tran
Identificação
6,5
35 ±0,3
ado 6 mm
56
2
66

CAPÍTULO 4
A
F
A
A
A
8
A
USO DA HMI
Este capítulo descreve a Interface Homem-Máquina (HMI)
standard do inversor (HMI-CFW 08-P) e a forma de usá-la,
apresentando as seguintes informações:
Descrição geral da HMI.
Uso da HMI.
Programação e leitura dos parâmetros.
Descrição das indicações de status e das sinalizações.
4.1 DESCRIÇÃO D
INTER
CE
HOMEM - MÁQUIN
HMI standard do CFW -08 contém um display de LEDs com
4 dígitos de 7 segmentos, 4 LEDs de estado e 8 teclas. A
figura 4. 1 mostr a um a vis t a f r ontal da HMI e indica a
localização do display e dos LEDs de estado.
Displayde LEDs
LED "Horário"
LED "Anti-horário"
Figura 4.1 -HMIdoCFW-0
LED "Local"
LED "Remoto"
Funções do display de LEDs:
Mostra mensagens de erro e estado (consulte a Referência
Rápida de Parâmetros e Mensagens de Erro), o número do
parâmetro ou o seu conteúdo. O display unidade (mais à
direita) indica a unidade de algumas variáveis [U = volts,
= ampéres ouoC = Graus Celsius]
Funções dos LEDs “Local” e “Remoto”:
Inversor no modo Local:
LED verde aceso e LED vermelho apagado.
Inversor no modo Remoto:
LED verde apagado e LED vermelho aceso.
Fun çõe sdos LEDs de sentidode giro (horárioe anti-ho rário ):
Consulte a figura 4.2.
67

CAPÍTULO 4 - USO DA HM
I
o
A
A
ç
A
ComandodeSeleção do
Sentido de Giro
Sentido de Giro
Situa
LEDs na HMI
ão dos
Horário
nti-Horário
t
Horário
t
4.2 USO DA HMI
apagado
aceso
piscante
Figura 4.2 - Indicações dos LEDs de sentido de giro (horário e anti-horário)
Funções básicas das teclas:
Habilita o inversor via rampa de aceleração (partida).
Desabilita o inversor via rampa de desaceleração (parada).
Reseta o inversor após a ocorrência de erros.
Seleciona (comuta) dis play entre número do parâmetro e seu
valor (posiçã
/conteúdo).
umenta a velocidade, número do parâmetro ou valor do
parâmetro.
Diminui a velocidade, número do parâmetro ou valor do
parâmetro.
Inverte o sentido de rotação do motor comutando entre horá-
rio e anti-horário.
Seleciona a origem dos comandos/referência entre LOCAL
ou REMOTO.
Quando pressionada realiza a função JOG [se a(s) entrada(s)
digital(is) programada(s) para GIRA/PÁRA ( se houver)
estiver ( em) abert a(s ) e a(s ) ent r ada( s ) digit al( is )
programada(s) para HABILITAGERAL (se houver) estiver(em)
fechada(s)].
HMI é uma interface simples que permite a operação e a
programação do inversor. Ela apresenta as seguintes funções:
Indicação do estadode operação do inversor, assim como
das variáveis principais.
Indicação das falhas.
Visualização e alteração dos parâmetros ajustáveis.
Operação do inversor (teclas , , , e )
e variação da referência da velocidade (teclas e ).
t
68

CAPÍTULO 4 - USO DA HM
I
A
e
o
e
e
r
a
A
A
4.2.1 Uso da HMI para Operação do Inversor
Todas as funções relacionadas à operação do inversor (Girar/Parar motor, Reversão, JOG, Incrementa/Decrementa,
Referência de Velocidade, comutação entre situação LOCAL/
REMOTO) podem ser executadas através da HMI.
Para a programação standard de fábrica do inversor, todas
as teclas da HMI estão habilitadas quando o modo LOCAL
estiver selecionado.
Estas funções podem ser também executadas por entradas
digita i s e analógica s. Para isso é necessária a programação
dos parâmetros relacionados a estas funções e às entradas
correspondentes.
NOTA!
s teclas de comando , e somente estarão
habilitadas se:
P229 = 0 para funcionamento no modo LOCAL.
P230 = 0 para funcionamento no modo REMOTO.
No caso da t
cla , esta irá depender dos parâmetros
acima e também se: P231 = 2.
Segue a descrição das teclas da HMI utilizadas para operaçã
LOCAL/REMOTO: quando programado (P220 = 2 ou 3), sele-
ciona a origem dos comandos e da r eferência d
(velocidad
), comutando entre LOCAL e REMOTO.
freqüência
“I”: quando pressionada o motor acelera segundo a rampa
de aceleração até a f
lhanteà executad apor entrad
eqüên cia de refer ência. Função seme-
digital GIRA/PÁRA quando esta
é fechada (ativada) e mantida.
“0”: desabilita o inversor via rampa (motor desacelera via ram-
pa de desaceleração e pára). Função semelhante à executada
por entr ada digital GIR A/PÁ RA qu and o est a é aber ta
(desativada) e mantida.
JOG: quando pressionada acelera o motor segundo a rampa
de aceleraçã o até a freqüência definida em P122.
Esta tecla só está habilitada quando o inversor estiver com a
entrada digital programada para GIRA/PÁRA (se houver)
aberta e a entrada digital programada para HABILITA GERAL (se houver) fechada.
Sentido de Giro: quando habilitada, inverte o sentido de rotação do motor cada vez que é pressionada.
juste da freqüência do motor (velocidade): estas teclas estão habilitadas para variação da freqüência (velocidade) somente quando:
fonte da referência de freqüência for o teclado (P221 = 0
paraomodoLOCALe/ou P222= 0paraomodoREMOTO).
O conteúdo dos s eguintes parâmetros estiver sendo
visualizado: P002, P005 ou P121.
:
69

CAPÍTULO 4 - USO DA HM
I
A
A
o
o
c
ó
4.2.2 Sinalizações/ Indicações no Display da HMI
O parâmetro P121 armazena o valor de referência de freqüência
(velocidade) ajustado pelas teclas:
Quando pressionada, incrementa a referência de freqüência
(velocidade).
Quando pressionada, decrementa a referência de freqüência (velocidade).
Backup da Referência:
O último valor da referência de freqüência ajustadopelas teclas
e é memorizado quando o inversor é desabilitado
ou desenergizado, desde que P120 = 1 (Backup da Referência
tivo - padrão de fábrica. Para alterar o valor da referência
antes de habilitar o inversor deve-se alterar o parâmetro P121.
Estados do inversor:
Inversor pronto (“READY”) para acionar o
motor.
Inversor com tensão de rede insuficiente
para a operação.
Inversor na s it uação de err o, o código d
erro aparece p is c ante. No cas o
exemplificado t emos a indicação de E02
(consulte o capítulo7).
Inversor está aplicando corrente contínua no
motor (frenagem CC) de acordo com valor es
program ados em P300, P301 e P302
(consulte o capítulo6).
Inversor está executando rotina de Auto-
juste para identificação automática de
parâmetros do motor. Est a operação é
comandada por P408 (consulte o capítulo 6).
Função COPY (somente disponível na HMI
-CFW08-RS), cópia da programação d
inversor paraHMI.
Função COPY (somente disponível na HMI
-CFW08-RS),
pia da programaçãoda HMI
para o inversor.
Inversor em modo Sleep rdy.
NOTA!
O display também pisca nas seguintes situações, além da
situação de erro:
Tentativa de alteração de um parâmetro não permitido.
Inversor em sobrecarga (consulte o capítulo 7).
70

CAPÍTULO 4 - USO DA HM
I
A
o
4.2.3 Parâmetros de Leitura
4.2.4 Visualização/Alteração de Parâmetros
Os parâmetros de P002 a P009 são reservados apenas para
leitura de valores.
Quando há a energização do inversor o display indicará o
valor do parâmetro P002 (valor da freqüência de saída no
modo de controle V/F (P202 = 0 ou 1) e valo r da velocidade
do motor em rpm no modo vetorial (P202 = 2)).
O parâmetro P205 define qual o parâmetro inicial que será
monitorado, isto é, define o parâmetro a ser mostrado quando o inversor é energizado. Para mais informações consulte
a descrição do parâmetro P205 no capítulo 6.
Todos os ajustes noinversor são feitos através de parâmetros.
Os parâmetros são indicados no display através da letra P
seguida de um número:
Exemplo (P101):
101 = N° do Parâmetro
cada parâmetro está associado um valor numérico (conteúdo do parâmetro), que corresponde à opção seleciona da
dentre as disponíveis para aquele parâmetro.
Os valores dos parâmetros definem a programação do inversor ou o valor de uma variável (ex.: corrente, freqüência,
tensão). Para realizar a programação do inversor deve-se
alterar o conteúdo do (s) parâmetro (s).
Para alterar o valor de um parâmetr o é necessário ajustar antes
P000 = 5. Caso contrário só será possível visualizar os
parâmetros mas nã
modificá-los. Para mais detalhes consulte
a descrição de P000 no capítulo 6.
71

CAPÍTULO 4 - USO DA HM
I
a
o
r
r
Aj
AÇÃO DISPLAY HMI DESCRIÇÃO
Energizarinverso
Pressione a tecla
Use as teclas e
Pressione a tecla
Use as teclas e
Pressione a tecla
Inversor pronto para opera
Localize o parâmetro desejado
Valornumérico associado ao
parâmetro
(1) (2) (3)
(4)
uste o novo valor desejado
(1) (4)
NOTAS!
(1) Para os parâmetros que podem ser alterados com motor
girando, o inversor passa a utilizar imediatamente o novo
valor ajustado. Para os parâmetros que só podem ser
alterados com motor parado, o inversor passa a utilizar o
novo valor ajustado somente após pressionar a tecl
(2) Pressionando a tecla após o ajuste, o último valor
ajustado é automaticamente gravado na memória não volátil do inversor, ficando retido até nova alteração.
.
(3) Caso o último valor ajustado no parâmetro o torne funcio-
nalmente incompatível com outro já ajustado, ocorre a indicação de E24 = Erro de programação.
Exemplo de erro de programação:
Programar duas entradas digitais (DI) com a mesma função. Consulte na tabela 4.1 a lista de incompatibilidades
de programação que podem gerar o E24.
(4) Para alterar o valor de um parâmetro é necess ário aj ustar
antes P000 = 5. Caso contrário só será possível visualizar
os parâmetros mas nã
modificá-los. Para mais detalhes
consulte a descrição de P000 no capítulo 6.
72

CAPÍTULO 4 - USO DA HM
I
(s)DI(s)zg
(s)DI(s)zg
(s)DI(s)zg
(s)DI(s)zg
g
(
)
)
A
z
z
=
z
=
z
z
z
z
z
z
g
z
=
Erro na programação - E24
P2 65 = 3 e o ut r a
JOG
Local/Remoto
Desabil it a FlyingStart P265 = 13 e P266 = 13 ou P267 = 13 ou P268 = 13
Reset P265 = 10 e P266 = 10 ou P267 = 10 ou P268 = 10
Liga/De sliga P263 = 14 e P264z14 ou P263z14 e P 264 = 14
Sentido de Giro Doi s ou mais parâm etros P264, P265, P266 , P 267 e P2 68 = 0(SentidodeGiro
vanço/ Retorno
Multispeed
Potenciômetro
Eletrônico
Corrente Nominal P295 incompatível com o modelo do inversor
Frenagem CC e
Ride-t hrou
PID P203 = 1 e P221 = 1,4,5,6,7 ou 8 ou P222 = 1,4,5,6,7 ou 8
2ª Rampa
Modelo
Entradas Analógicas
h
P2 66 = 3 e o ut r a
P2 67 = 3 e o ut r a
P2 68 = 3 e o ut r a
Doisou mais parâmetros entre P264, P265, P266, P267 e P268 i
LOC /REM
P2 63 = 8 e P 26 4 z 8eP264z 13
P2 63 = 1 3 e P2 64
8eP263z13 e P264=8
P2 63
P263 = 8 ou 13 e P264 = 8 o u 13 e P 265
P263 = 8 ou 13 e P264 = 8 o u 13 e P 231 z 2
P221 = 6 ou P222 = 6 e P264 z 7eP265z 7eP266z 7eP267z 7eP268
P2 21 z 6eP222z 6 e P264 = 7 ou P265 = 7 ou P266 = 7 o u P267
P221 = 4 ou P222 = 4 e P265 z 5ou16eP266z 5ou16eP267z5ou16e
P2 68
5ou16
4ouP222z 4 e P265 = 5 ou 16 ou P266= 5 ou 16 ou P267= 5 ou 16
P2 21
ou P268 = 5 ou 16
P265 = 5 ou 16 e P266 z 5ou16eP268
P266 = 5 ou 16 e P265 z 5ou16eP267
P267 = 5 ou 16 e P266 z 5ou16eP268
P268 = 5 ou 16 e P265 z 5ou16eP267
0e P310=2 ou3
P3 00
P265 = 6 e P266 = 6 ou P265 = 6 e P267 = 6 ou P2 65 = 6 e P 268 = 6
P266 = 6 e P267 = 6 ou P267 = 6 e P268 = 6 ou P2 66 = 6 e P 268 = 6
P265 = 6 ou P266 = 6 ou P267 = 6 ou P268 = 6 e P263 = 13
P265 = 6 ou P266 = 6 ou P267 = 6 ou P268 = 6 e P264 = 13
P265 = 6 ou P266 = 6 ou P267 = 6 ou P268 = 6 e P263 = 13
P265 = 6 ou P266 = 6 ou P267 = 6 ou P268 = 6 e P264 = 13
P221 = 2,3,7 ou 8 e inver sor standard
P221 = 2,3,7 ou 8 e inver sor standard
P221 = 1 ou P222 = 1 e P235 = 2, 3, 4 o u 5
P221 ou P2 22 = 2 ou 3 e P 2 39
Tabela 4.1 - Incompatibilidade entre parâmetros - E24
ira-páraouavanço e retorno ou ligae desliga
ira-páraouavanço e retorno ou ligae desliga
ira-páraouavanço e retorno ou ligae desliga
ira-páraouavanço e retorno ou ligae desliga
uais a 1
8eP264z13
0ouP266=0ouP267=0ouP268 = 0
7eP268=7
5ou16
5ou16
5ou16
5ou16
2,3,4ou5
7
NOTA!
Durante a programação é comum ocorrer E24, causado por
incompatibilidade entre alguns parâmetros já programados.
Nessecaso, deve-se continuar a parametrização. Se ao final
o erro não cessar, consulte a tabela de incompatibilidades
(tabela 4.1).
73

CAPÍTULO
5
P
A
P
ARA
o
A
A
Ç
ENERGIZAÇÃO/
COLOCA
Este capítulo explica:
Como verificar e preparar o inversor antes de energizar.
Como energizar e verificar o sucesso da energização.
Como operar o inversor quando estiver instalado segundo
os acionamentos típicos (consulte item 3.2 - Instalação
Elétrica).
ÃO EM FUNCIONAMENTO
5.1 PRE
ENERGIZAÇÃO
5.2 PRIMEI R
ENERGIZAÇÃO
RAÇÃO
O inversor j á deve ter sido instalado de acordo com o capítulo 3
-Instalaçã
diferente dos acionamentos típicos sugeridos, pode-se seguir
os procedimentos citados abaixo.
PERIGO!
Sempre desconecte a alimentação geral antes de efetuar
quaisquer conexões.
1) Verifique todas as conexões
Verifique se as conexões de potência, aterramento e de
controle estão corretas e firmes.
2) Verifique o motor
Ve rifique as conexões do motor e se a corrente e tensão
do motor estão de acordo com o inversor.
3) Desacople mecanicamente o motor da carga
Se o motor não pode ser desacoplado, tenha certeza que
o giro em qualquer direção (horário/anti-horário) não cause danos à máquina ou riscos pessoais.
pós a preparação para energização o inversor pode ser
energizado:
1) Verifique a tensão de alimentação
Meça a tensão de rede e verifique se está dentro da faixa
permitida (tensão nominal - 15 % / + 10 % ).
2) Energize a entrada
Feche a seccionadora de entrada.
3) Verifique o sucesso da energização
- Inversor com HMI-CFW 08-P, HMI-CFW08-RS ou HMICFW08-RP
O display da HMI indica:
e Conexão. Caso o projeto de acionamento seja
Enquanto isso os quatro LEDs da HMI permanecem acesos.
O inversor executa algumas rotinas de auto-diagnose e se
não existe nenhum problema o display indica:
74

CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
A
A
Isto significa que o inversor está pronto (rdy = ready) para ser
operado.
- Inversor com tampa cega TCL-CFW 08 ou TCR-CFW08.
Os LEDs ON (verde) e ERROR (vermelho) acendem.
O inversor executa algumas rotinas de auto-diagnose e se
não existe nenhum problema o led error (vermelho) apaga.
Isto significa que o inversor está pronto para ser operado.
5.3 COLOCAÇÃO EM FUNCIONAMENTO
Este item descreve a colocação em funcionamento, com
operação pela HMI. Dois tipos de controle serão considerados:
V/F e Vetorial:
O Controle V/F ou escalar é recomendado para os seguintes casos:
cionamento de vários motores com o mesmo inversor.
Corrente nominal do motor é menor que 1/3 da corrente
nominal do inversor.
O inversor, para propósito de testes, é ligado sem motor.
O controle esc alar também pode ser utilizado em
aplicações que não exijam resposta dinâmica rápida,
precisão na regula ção de velocidade ou alto torque de
parti da (o err o d e velocidade ser á fu nç ão do
escorregamento do motor; caso se programe o parâmetro
P138 - Compensação de Escorregamento - pode-se
conseguir precisão de 1 % na velocidade com controle
escalar e com variação de carga).
Para a maioria das aplicações recomenda-se a operação
no modo de controle vetorial, o qual permite uma maior
precisão na regulação de velocidade (típico 0,5 %), maior
torque de partida e melhor resposta dinâmica.
Os aj ustes necessários para o bom funcionamento do controle vetorial são feitos automaticamente. Para isto devese ter o motor a ser usado conectado ao CFW-08.
PERIGO!
ltas tensões podem estar presentes, mesmo após a
desconexão da aliment ação. Aguarde pelo menos 10 minutos para a descarga completa.
75
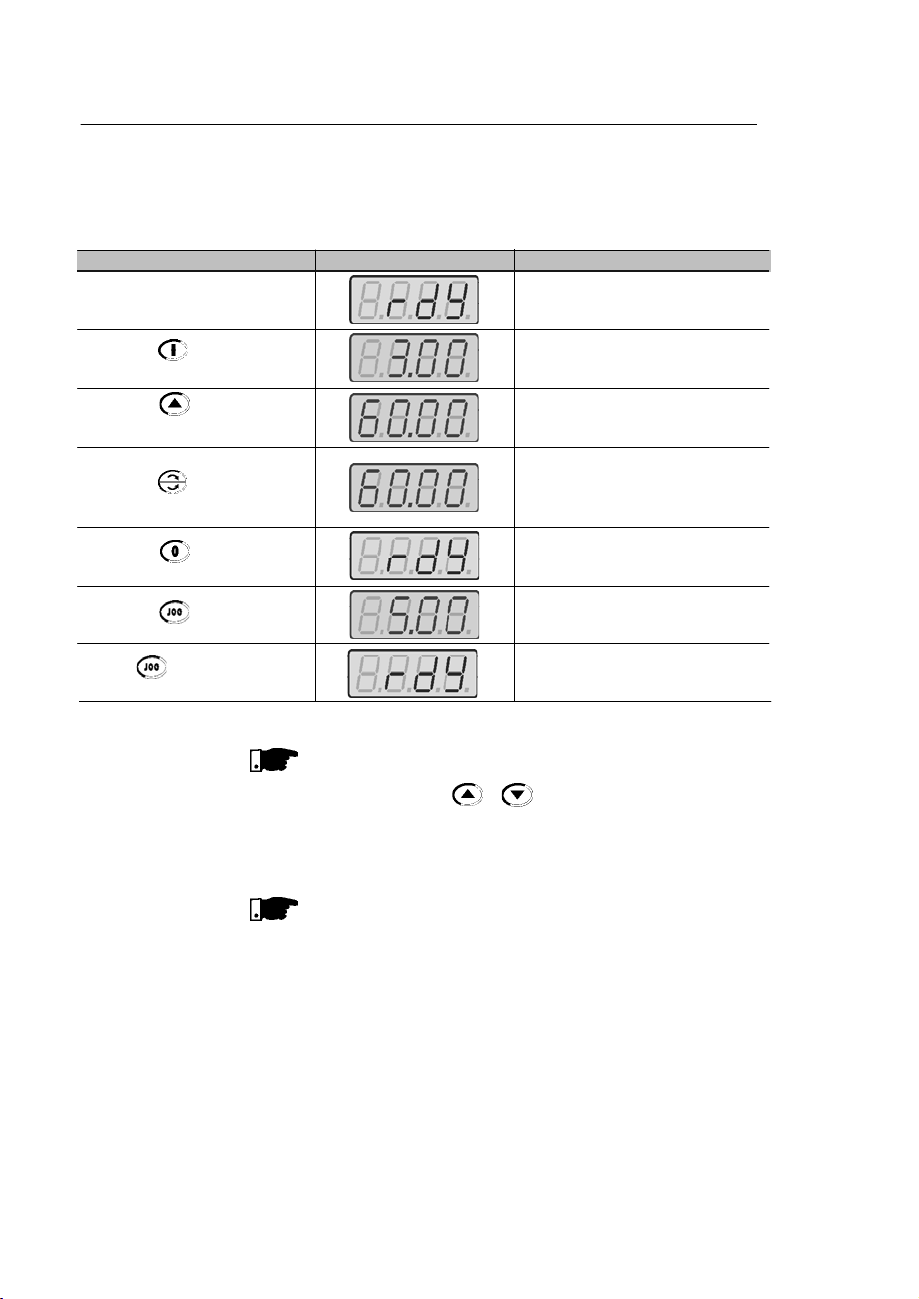
CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
A
r
r
r
r
r
r
r
r
(
ç
r
r
ç
r
A
5.3.1 Colocação em
Funcionamento
-OperaçãopelaHMITipo de Controle:
V/F Linear (P202 = 0)
AÇÃO DISPLAY HMI DESCRIÇÃO
EnergizarInverso
Pressiona
Pressionar e mante
até atingir 60 Hz
Pressiona
Pressiona
Pressionar e mante
Libera
(*) 90 rpm para motor 4 pólos.
(**) 1800 rpm para motor 4 pólos.
seqüência a seguir é válida para o caso Acionamento 1
(consulte o item 3.2.6). O inversor já deve ter sido instalado e
energizado de acordo com o capítulo 3 e item 5.2.
Conex ões de acordo com a figura 3.6.
Inversor pronto para opera
Motoracelerade0Hza3Hz
freqüênc ia míni ma), no sentido horário
Motor acelera até 60 Hz
Motor desacelera
rpm e então, troca o sentido de rota
horário anti-horário, voltando a acelera
até60Hz
Motor desacelera até para
Motor acelera até a freqüência de JOG dada
por P122. Ex: P122 = 5,00 Hz
Sentidoderota
Motor desacelera até para
(3)
ão anti-horário
(*)
(**) (2)
até a velocidade de 0
NOTA!
O último valor de referência de freqüência (velocidade ) ajustado pelas teclas e é memorizado.
Caso se deseje alterar seu valor antes de habilitar o inversor,
alter e-o através do par âmetro P121 - Ref erên cia de
Freqüência pelas Teclas.
(1)
ão
NOTAS!
(1) Caso o sentido de rotação do motor esteja invertido,
desenergizar o inversor, esperar 10 minutos para a descarga completa dos capacitores e trocar a ligação de dois
fios quaisquer da saída para o motor entre si.
(2) Casoacorrentenaaceleraçãofiquemuitoelevada,prin-
cipalmente em baixas freqüências é necessário o ajuste
do boost de torque manual (Compensação IxR) em P136.
umentar/diminuir o conteúdo de P136 de forma gradual
até obter uma operação com corrente aproximadamente
constante em toda a faixa de velocida de.
No caso acima, consulte a descrição do parâmetro no
capítulo 6.
(3) Caso ocorra E01 na desaceleração é necessário aumen-
76
tar o tempo através de P101 / P103.

CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
A
(
(
(
(
g
r
ç
j
r
A
r
r
ç
)
g
r
(
)
A
(
)
ção(
)
(
)
r
5.3.2 Colocação em
Funcionamento
- Operação Via Bornes Tipo de Controle:
V/F Linear (P202 = 0)
AÇÃO DISPLAY HMI DESCRIÇÃO
Consulte a figura 3.16
Chave S1
Chave S2
Chave S3
Potenciômetro R1
anti-horário
Ener
Pressionar,
Para inversores que saem de fábrica
sem HMI esta a
pois o mesmo
remoto automaticamente
Fechar S3 – Girar / Para
Anti-horário/Horário)=Aberta
Reset)= Aberta
Girar/Parar)=Aberta
Ref.)= Totalmente
izarinverso
ão não é necessária,
á estará no modo
Conex ões de acordo com as figuras 3.6 e 3.16.
Inversor pronto para opera
LED LOCAL apaga e REMOTO acende
Ocomandoeareferênciasãocomutados
para a situa
NOTA : Se o inversor for desligado e
Motoracelerade0Hza3Hz
cia mí nima
referência de freqüência passa a ser
dada pelo potenciômetro R1
ão REMOTO(via bornes
depois reli
para comando local devido ao
P220 = 2. Para manter o inverso
permanentemente na situação
REMOTO, deve-se fazer P220 = 1
ado, o inversor volta
, no sentido horário
(*)
freqüên-
(1)
Girar potenciômetro no sentido
horário até o fim
Fechar S1 –Anti-horário / Horário
brir S3 – Girar / Para
(*) 90 rpm para motor 4 pólos.
NOTAS!
(1) Caso o sentido de rotação do motor estej a invertido, desenergizar
(2) Caso a corrente na aceleração fique muito elevada, principalmen-
(3) Caso ocorra E01 na desaceleração é necessário aumentar o tempo
Motor acelera até a freqüência máxima
P134 = 66 Hz
Motor desacelera
inverteosentidoderota
anti-horário
máxima
O motor desacelera
(2)
(3)
até chegara0Hz,
(3)
até para
horário
e reacelera até a freqüência
P134 = 66 Hz
o inversor, aguardar 10 minutos para a descarga completa dos
capacitores e trocar a ligação de dois fios quaisquer da saída para
o motor entre si.
te em baixas freqüências é necessário o ajuste do boost de torque
manual (Compensação IxR) em P136.
umentar/diminuir o conteúdo de P136 de forma gradual até obter
uma operação com corrente aproximadame nte constante em toda
a faixa de velocidade.
No caso acima, consulte a descrição do parâmetro no capítulo 6.
desta - nos parâmetros P101 / P103.
77

CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
A
r
gir
A
r
g
g
(
)
g
gir
A
r
g
g
ç
j
g
r
)
r
g
ç
g
r
g
j
5.3.3 Colocação em
Funcionamento
-OperaçãopelaHMITipo de Controle:
Vetorial (P202 = 2)
AÇÃO DISPLAY HMI DESCRIÇÃO
Energizarinverso
Pressionar .
Manter pressionada a tecla até
P000.
atin
tecla também poderá se
utilizada para atingir o parâmetro
P000
Pressionar para entrar no modo
de pro
ramação de P000
Usar as teclas e para
pro
ramarovalordeliberação do
acesso aos parâmetros
Pressionar para salvar a opção
escolhida e sair do modo de
pro
ramação de P000
Pressionar a tecla até atin
P202
tecla também poderá se
utilizada para atingir o parâmetro
P202
Pressionar para entrar no modo
de pro
ramação de P202
P000 = 5
seqüência a seguir é baseada no seguinte exe mplo de in-
versor e motor:
Inversor: CFW080040S2024PSZ
Motor:WEG-IP55
Potência: 0,75 HP/0,55 kW;
Carcaça: 71; RPM: 1720; Pólos: IV;
Fator de Potência (cos M): 0,70;
Rendimento (K): 71 %;
Corrente nominal em 220 V: 2,90 A;
Freqüência: 60 Hz.
Inversor pronto para opera
P000 = acesso à alteração de
parâmetros
Entra no modo de pro
P000 = 5: libera a altera
parâmetros
Sai do modo de pro
Este parâmetro define o tipo de controle:
0 = V/F Linea
1 = V/F Quadrática
2=Vetorial
Entra no modo de pro
ramação
ão dos
ramação
ramação
Usar as teclas e para
pro
ramar o valor correto do tipo de
controle
Pressionar para salvar a op
escolhida e entrar na seqüência de
a
ustes após alteração do modo de
controle para vetorial
Pressionar e usar as teclas
e para pro
correto do rendimento do motor(neste
caso 71 %
78
ramar o valo
ão
P202 = 2: Vetorial
Rendimento do motor:
50 a 99,9 %
Rendimento do motor a
71 %
ustado:

CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
g
ç
g
r
r
g
ç
g
r
)
g
ç
g
r
r
(
)
g
ç
g
r
r
g
g
V
(
)
m
m
A
j
g
x
(
)
AÇÃO DISPLAY HMI DESCRIÇÃO
Pressionar para salvar a opção
escolhida e sair do modo de
pro
ramação
Sai do modo de pro
ramação
Pressionar para avan
ar para
o próximo parâmetro
Pressionar e usar as teclas
e para pro
ramar o valo
correto da tensão do moto
Pressionar para salvar a opção
escolhida e sair do modo de
pro
ramação
Pressionar para avan
ar para
o próximo parâmetro
Pressionar e usar as teclas
e para pro
ramar o valo
correto da corrente do motor(neste
caso 2,90 A
Pressionar para salvar a opção
escolhida e sair do modo de
pro
ramação
Pressionar para avan
ar para o
próximoparâmetro
Pressionar e usar as teclas
e para pro
ramar o valo
correto da velocidade do moto
neste caso 1720 rpm
Pressionar para salvar a opção
escolhida e sair do modo de
ramação
pro
Tensãonominal do motor:
0 a 600
Tensãonominal do motor ajustada:
220 V
mantidoo valorjá existente
(2)
Sai do modo de programação
Corrente nominal do motor:
0,3 x I
a1,3xI
no
no
Corrente nominal do motor ajustada:
2,90
Sai do modo de programação
Velocidade nominal do motor:
0 a 9999 rpm
Velocidade nominal do motor a
ustada:
1720rpm
Sai do modo de pro
ramação
Pressionar para avan
o próximo parâmetro
Pressionar e usar as teclas
e para pro
correto da freqüência do moto
ar para
ramar o valo
Freqüência nominal do motor:
0aF
má
Freqüência nominal do motor ajustada:
60 Hz
mantidoo valorjá existente
(2)
Pressionar para salvar a opção
escolhida e sair do modo de
pro
ramação
Sai do modo de programação
79
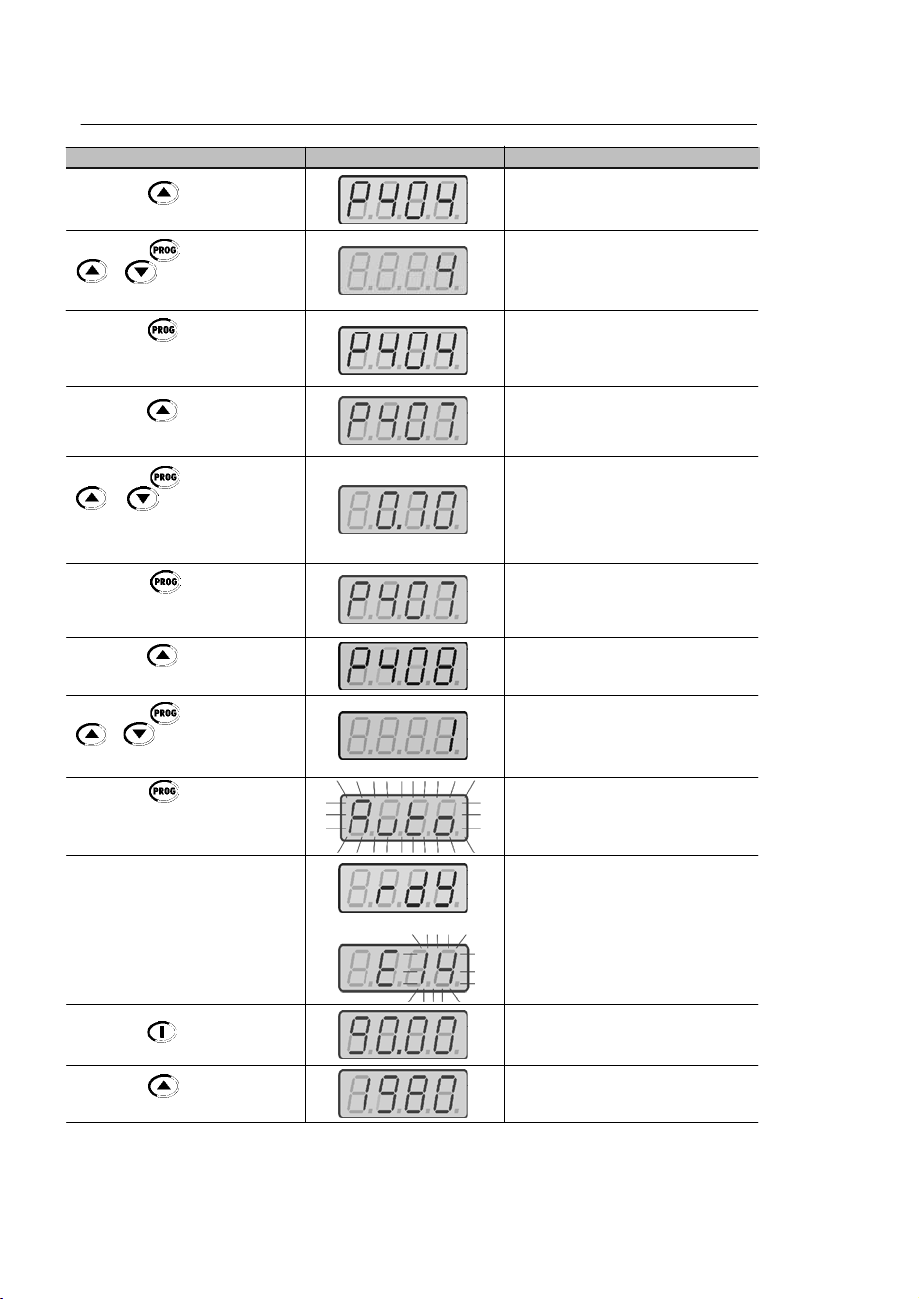
CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
g
r
r
g
ç
g
r
r
(
)
ç
g
ç
ç
j
A
r
y
(
r
ç
r
r
(
)
g
j
g
j
j
A
(
o
r
)
AÇÃO DISPLAY HMI DESCRIÇÃO
Pressionar para avançar para o
próximoparâmetro
Pressionar e usar as teclas
e para pro
ramar o valo
correto da potência do moto
Pressionar para salvar a opção
escolhida e sair do modo de
pro
ramação
Potência nominal do motor:
cada valor representa uma
0a15
potência
Potência nominal do motor ajustada:
4 = 0.75 HP / 0.55 kW
Sai do modo de pro
ramação
Pressionar para avan
ar para o
próximoparâmetro
Pressionar e usar as teclas
e para pro
ramar o valo
correto do Fator de Potência do
moto
neste caso 0,70
Pressionar para salvar a
op
ão escolhida e sair do modo de
pro
ramação
Pressionar para avan
ar para o
próximoparâmetro
Pressionar e usar as teclas
e para autorizar ou não o
inícioda estima
ão dos parâmetros
Pressionar para iniciar a rotina
de Auto-Ajuste. O displayindica
“Auto” enquanto o Auto-A
uste é
executado
pós algum tempo(pode demora
até 2 minutos)o Auto-Ajuste estará
concluído e o displa
indicará “rdy”
ready)se os parâmetros do moto
foram adquiridos com sucesso. Caso
contrário indicará “E14”. Neste último
caso consulte a observa
(1)
ão
adiante
Pressiona
Pressionar e manter até atingi
1980rpm
ou
Fator de potência do motor:
0.5 a 0.99
Fator de Potência do motor a
ustado:
0.70
Sai do modo de pro
ramação
Estimar parâmetros?
0=Não
1=Sim
1=Sim
Executando rotina de Auto-A
Inversor terminou o Auto-A
uste
usteeestá
pronto para operar,ou
uto-Ajuste não foi executado
com sucesso
(1)
Motor acelera até 90 rpm para motor 4
pólos
velocidade mínima), no sentido
(3)
horári
Motor acelera até 1980 rpm para moto
de 4 pólos(velocidade máxima
80

CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
A
A
r
r
r
r
ç
A
r
ç
r
AÇÃO DISPLAY HMI DESCRIÇÃO
Pressiona
Pressiona
Pressionar e mante
Libera
Motor desacelera
troca o sentido de rota
Horário
acelerar até 1980 rpm
Motor desacelera até para
Motor acelera de zero até velocidade
de JOG dada por P122
Ex: P122 = 5,00 Hz o que equivale a
150 rpm para motor 4 pólos
Sentidoderota
Motor desacelera até para
(4)
até 0 rpm e então,
nti-horário,voltandoa
ão
ão anti-horário
NOTA!
O último valor de referência de velocida de ajustado pelas
teclas e é memorizado.
Caso se deseje alterar seu valor antes de habilitar o
inversor, altere-o através do parâmetro P121 - Referência
de Freqüência pelas Teclas.
rotina de Auto-Ajuste pode ser cancelada pressionan-
do-seatecla .
NOTAS!
(1) Se o display indicar E14 durante o Auto-Ajuste significa
que os parâmetros do motor não foram adquiridos corretamente pelo inversor. A causa mais comum para isto é o
motor não estar conectado à saída do inversor. No entanto,
motores com correntes muito menores que os respectivos inversores ou a ligação errada do motor, também
podem levar à ocorrência de E14. Neste caso usar inversor no modo V/F (P202 = 0). No caso do motor não estar
conectado e ocorrer a indicação de E14 proceder da seguinte forma:
Desenergizar inversor e esperar 10 minutos para a descarga completa dos capacitores.
Conectar o motor à saída do inversor.
Energizar inversor.
justar P000 = 5 e P408 = 1.
Seguir roteiro de colocação em funcionamento do item
5.3.3 a partir deste ponto.
(2) Os parâmetros P399 a P407 são ajustados automatica-
mente para o motor nominal para cada modelo de inversor, considerando-se um motor WEG standard, 4 pólos,
60 Hz.
81

CAPÍTULO 5 - ENERGIZAÇÃO / COLOCAÇÃO EM FUNCIONAMENT
O
Para motores diferentes deve-se ajustar os parâmetros
manualmente, com base nos dados de placa do motor.
(3) Caso o sentido de rotação do motor esteja invertido,
desenergizar o inversor, aguardar 10 minutos para a descarga completa dos capacitores e trocar a ligação de dois
fios quaisquer da saída para o motor entre si.
(4) Caso ocorra E01 na desaceleração é necessário aumen-
tar o tempo desta através de P101/P103.
82

6.1 SIMBOLOGI
A
A
x
x
x
A
6
UTILIZAD
CAPÍTULO
DESCRIÇÃO DETALHADA DOS PARÂMETR OS
Este capítulo descreve detalhadamente todos os parâmetros
e funções do inversor.
Segue abaixo algumas convenções utilizadas neste capítulo
do manual :
AI
= Entrada analógica número x.
AO = Saída analógica.
DI
= Entrada digital número x.
F* = Referência de freqüência, este é o valor da freqüência
(ou alternativamente, da velocidade) desejada na saída do
inversor.
F
= F r eqüência de entrada da rampa de aceleração e
e
desaceleração.
F
= Freqüência de saída máxima, definida em P134.
max
F
= Freqüência de saída mínima, definida em P133.
min
F
= Freqüência de saída - freqüência aplicada ao motor.
s
I
= Corrente nominal de saída do inversor (valor eficaz),
nom
em ampères (A). É definida pelo parâmetro P295.
I
= Corrente de saída do inversor.
s
I
= Corrente ativa de saída do inversor, ou seja, é a compo-
a
nente da corrente total do motor proporcional à potência elétricaativaconsumidapelomotor.
RL
= Saída a relé número x.
U
=TensãoCCdocircuitointermediário.
d
6.2 INTRODUÇÃO
Neste item é feita uma descrição dos principais conceitos
relaciona dos ao inversor de freqüência CFW-08.
6.2.1 Modos de Controle (Escalar/Vetorial)
Conforme já comentado no item 2.3, o CFW -08 possui no
mesmo produto um controle V/F (escalar) e um controle
vetorial sensorless (VVC: “voltage vector control”).
Cabe ao usuário decidir qual deles irá usar.
presentamos na seqüência uma descrição de cada um dos
modos de controle.
6.2.2 Controle V/F (Escalar)
É baseado na curva V/F constante (P202 = 0 - Curva V/F
linear). A sua performance em baixas freqüências de saída é
limitada, em função da queda de t ensão na resistência
estatórica, que provoca uma redução significativa no fluxo
do entr eferro do motor e conseqüentemente na sua
capacidade de torque. Te nta-se compensar essa deficiência
com a utilização das compensações IxR (P136) e IxR
automática (boosts de torque - P137).
83

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
Na maioria das aplicações (exemplos: acionamento de bombas centrífugas e ventiladores), o ajuste dessas funções é
suficiente para se obter a performance necessária, porém
há aplicações que exigem um controle mais sofisticado neste c aso recomenda-se o us o do controle vetorial
sensorless, o qual será comentado no item 6.2.3 Controle
Vetorial (VVC).
No modo escalar, a regulação de velocidade que pode ser
obtida ajustando-se adequadamente a compensação de
escorregamentoéalgoemtornode1a2%darotaçãonominal. Por exemplo, para um motor de IV pólos/60 Hz, a
mínima variação de velocidade entre a condição a vazio e
carga nominal fica entre 18 a 36 rpm.
Há ainda uma variação do controle V/F linear descrito anteriormente: o controleV/F quadrático. Este controle é idealpara
acioname nto de cargas como bombas centrífugas e ventiladores (cargas com carac t er ística tor que x veloc i dade
quadrática), pois possibilita uma redução nas perdas no
motor, resultando em uma economia adicional de energia no
acionamento com inversor.
Na descrição dos parâmetros P136, P137, P138, P142 e
P145 há mais detalhes sobre a operação no modo V/F.
6.2.3 Controle Vetorial (VVC)
84
No controle vetorial sensorless disponível no CFW-08, a operação do inversor é otimizada para o motor em uso, obtendose um melho r desempenho em termos de torque e regulação
de velocidade. O controle vetorial do CFW -08 é sensorless,
ou seja, não necessita de um sinal de realimentação de velocidade (sensor de velocidade como tacogerador ou encoder
no eixo do motor).
Para que o fluxo no entreferro do motor, e conseqüentemente, a sua capacidade de torque, se mantenha constante durante toda a faixa de variação de velocidade (de zero até o
pontode enfraquecimento de campo) é utilizado um algoritmo
sofisticado de controle que leva em conta o modelo matemático do motor de indução.
Dessa forma, consegue-se manter o fluxo no entreferro do
motor aproximadamente constante para freqüências de até
aproximadamente 1 Hz.
Trabalhando no modo vetorial consegue-se uma regulação
de velocidade na ordem de 0.5 % da rotação nominal. Por
exe mplo, para um motor de IV pólos e 60 Hz, obtém-se uma
variação de velocidade na faixa de 10 rpm.
Outra grande vantagem do controle vetorial, é a sua inerente
facilidade de ajuste. Basta que o usuário entre com as informações relativas ao motor utilizado (dados de placa) nos
parâmetros P399 a P407 e rode a rotina de auto-ajuste (fazendo P408 = 1), que o inversor se auto-configura para a
aplicação em questão e está pronto para funcionar de maneira otimizada.

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
A
A
Para mais informações consulte a descrição dos parâmetros
P178 e P399 a P409.
6.2.4 Fontes de Referência de Freqüência
referência de freqüência (ou seja, a freqüência desejada
na saída, ou alternativamente, a velocidade do motor) pode
ser definida de várias formas:
Teclas - referência digital que pode ser alterada através
da HMI utilizando-se as teclas e (consulte os
parâmetros P221, P222 e P121);
Entrada analógica - pode ser utilizada a entrada analógica
I1 ( X C1:6), AI2 (XC1:8) ou ambas (consul te os
parâmetros P221, P222 e P234 a P240);
Multispeed - até 8 referências digitais pré-fixadas (consulte
os parâmetros P221, P222 e P124 a P131);
Potenciômetro eletrônico (E.P.) - mais uma referência digital, onde o seu valor é definido utilizando-se 2 entradas
digitais (DI3 e DI4) - consulte os parâmetros P221, P222,
P265 e P266;
Via serial.
Na figura 6.1 apresenta-se uma representação esquemática
da definição da referência de freqüência a ser utilizada pelo
inversor.
Odiagramadeblocosdafigura6.2mostraocontroledoinversor.
NOTA!
AI2 somente está disponivel na versão CFW-08 Plus.
DIs ON (estado 1) quando ligadas ao 0 V (XC1:5) com
S1:1 OFF e quando ligadas a 24 V (exte rno) com S1:1
em ON.
Quando F* < 0, toma-se o módulo de F* e inverte-se o
sentido de giro (se isto for possível - P231 = 2 e comando
selecionado não for avanço/retorno).
85
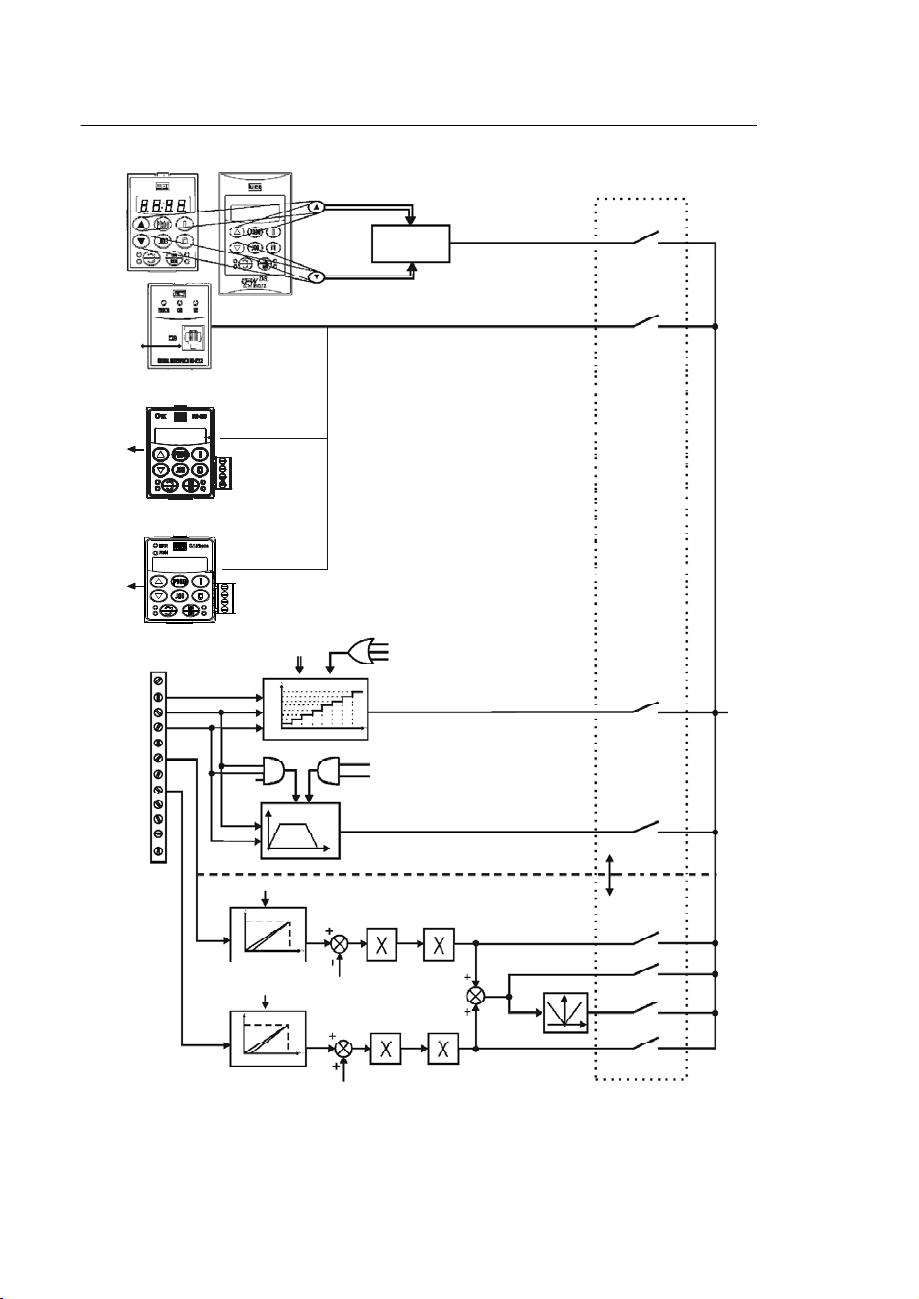
CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
A
A
A
A
A
A
A
A
V
t
A
)
RS-232
PC e CLP
RS-485
CANopen
ou
DeviceNet
HMI-CFW08-P
KRS-485
KFB-CO ou KFB-D N
KCS-CFW08
1
DI2
2
DI3
3
DI4
4
0
5
I1
6
7
I2
8
9
10
11
12
XC1
HMI-CFW08-RP ou
HMI-CFW08-RS
REFERÊNCI
TECLA(P121
P124 a P131
P131
P130
P129
P128
P127
P126
P125
P124
000001 010 011100 101 110 111
MULTISPE ED
Inversor
Desab ilita do
Rese
P265 = 5
P266 = 5
Habilita Função
cel.
Desacel.
POTÊNCIOME TRO ELETRÔNICO (E.P .)
P235
100%
I1
0
2V/4mA10 V/2 0 m
P235=0
P235=1
P239
P234 P134
P236
P264 = 7
P265 = 7
P266 = 7
Seleção da R efência
de Freqüência
P221 ou P222
0-Tecla
5 - Serial ou
CANopen ou
DeviceNet
6 - Multispeed
4-EP
Referênc i as
Digitais
Referênc i as
nalógicas
1-AI1
8 - Soma AI
F*
100%
P239=0
P239=1
0
I2
2V/4m
10 V/2 0 m
P238 P134
7 - Soma AI > 0
2ou3-AI2
P240
Figura 6.1 - Blocodiagrama da referência de freqüência
86

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
A
I
I
I
P151
Regulação
da Tensão
do Circuito
Intermediá rio
P100 P101
Rampa de
via
Entrada
P169
P169
Limitação
da Cor rente
de Sa ída
celeração e
Desaceleração
P102 P103
2
celeração e
Desaceleração
s
Fe
Coma ndo
Digital(DI)
P151
a
Rampa de
U
d
P136, P137,
Contr ole do
Inversor
(Escalar ou
Vet or ia l)
P138, P142,
P145
I
PWM
V
s
P178
P133 P134
Limites da
Ref erência de
Freqüênc ia
s
P202 P295
Parâmet ros
do Mo tor
(P399 a P409)
U
V
Rede
d
s
MI
3Ø
s
Figura 6.2 - Blocodiagrama do controle do inversor
NOTA!
No modo de controle escalar (P202 = 0 ou 1), Fe = F*
(consulte a figura 6.2) se P138 = 0 (compensação de
escorregamento desabilitada). Se P138 z 0consultea
figura 6.9 para relação entre Fe e F*.
No modo de controle vetorial (P202 = 2), sempre Fe = F*
(consulteafigura6.2).
87

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
A
A
o
o
6.2.5 Comandos O inversor de freqüência possui os seguintes comandos: habilitação e bloqueio dos pulsos PW M, definição do sentido de giro e JOG. Da mesma forma que a referência de freqüência, os comandos do inversor também podem ser definidos de várias formas.
s principais fontes de comandos são as seguintes:
Teclas das HMIs - , , e .
Bornes de controle (XC1) - via entradas digitais.
Via interface serial.
Os comandos de habilitação e bloqueio do inversor podem
ser assim definidos:
Via teclas e das HMIs.
Via serial.
Gira/pára (bornes XC1 - DI (s) - consulte os parâmetros
P263 a P266).
Habilita geral (bornes XC1 - DI (s) - consulte os parâmetros
P263 a P266).
vanço e retorno (bornes XC1 - DIs - consulte os parâmetros
P263 e P264) - define também o sentido de giro.
Liga/desliga (comando a 3 fios) (bornes XC1 - DIs - consulte
os parâmetros P263 e P264).
definição do sentido de giro pode ser feita via:
Tecla d as H M Is.
Serial.
Entrada digital (DI) programada para sentido de giro
(consulte os parâmetros P264 a P266).
Entradas digitais programadas como avanço e retorno,
que definem tanto a habilitação ou bloqueio do inversor,
quanto o sentido de giro (consulte os parâmetros P263
e P264).
Entrada analógica - quando a referência de freqüência
estiver via entrada analógica e for programado um offset
negativo (P236 ou P240 < 0), a referência pode assumir
valores negativos, invertendo o sentido de giro do motor.
6.2.6 Definição das
Situações de
Operaçã
Local/Remot
O usuário pode definir os modos de operação Local e Remoto
para a fonte referência de freqüência e para os comando s
do inversor.
Uma representação esquemática das situações de operação local e remoto é apresentada na figura 6.3.
Para o ajuste de fábrica, no modo local é possível controlar o
inversor utilizando-se as teclas da HMI, enquanto que no modo
remoto tudo é feito via bornes (XC1) - definição da referência e comandos do inversor.
88

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
y
g
ç
r
ç
ç
r
ç
j
ç
ç
(g
/
g
)
A
(
)
(g
/
g
)
A
(
)
A
ç
)
(
)
P
A
ão Local/Remoto(P220
Sele
LOCAL
0Teclas da
HMI-CFW08-P,
HMI-CFW08-RPe
HMI-CFW08-RS
1
Referência de
Freqüência
P221
Comandos
P229
ira
pára, sentido
iro e JOG
de
Referência de
Freqüência
P222
Comandos
P230
ira
pára, sentido
iro e JOG
de
Figura 6.3- Blocodiagrama dos modos de operação local e remoto
I1
2ou3AI2
4E.P.
5Serial
6 Multispeed
7SomaAI
8SomaAI>0
0Teclas
HMI-CFW08-RPe
HMI-CFW08-P
1 Bornes XC1
2 Serial ou Teclas
HMI-CFW08-RS
REMOTO
0Teclasda
HMI-CFW08-P,
HMI-CFW08-RPe
HMI-CFW08-RS
1
I1
2ou3AI2
4EP
5Serial
6 Multispeed
7SomaAI
8SomaAI>0
0Teclas
HMI-CFW08-RPe
HMI-CFW08-P
1 Bornes XC1
2 Serial ou Teclas
HMI-CFW08-RS
DIs
DIs
Comando Local/Remoto
,DI,Serial,etc
+
REFERÊNCI
F*
COMANDOS
6.3 RELAÇÃO DOS
RÂMETROS
Para facilitar a sua descrição, os parâmetros foram agrupados por tipos, conforme tabela a seguir:
Parâmetros de Leitura Variáveis que podem ser visualizadas nos
Parâmetros de Re
Parâmetros de Configuração Definem as características do inversor,
Parâmetros do Moto
Parâmetros das Fun
Especiais às fun
ulação São os valores ajustáveis a serem
displa
s mas não podem ser alteradas
pelo usuário
utili zados pelas fun
as fun
ões a serem executadas, bem
como as fun
do cartão de controle
São os dados do motor em uso:
informa
ões contidas nos dados de
placa do motor e aqueles obtidos pela
rotina de Auto-A
ões Inclui os parâmetros relacionados
ões especiais
ões do inverso
ões das entradas/saídas
uste
89
CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
A
A
o
r
o
o
V
a
t
V
s seguintes observações podem estar presentes em alguns
parâmetros no decorrer de sua descrição detalhada:
(1) Somente visível no modo vetorial (P202 = 2).
(2) Somente visível no modo de controle V/F (escalar)
P202 = 0 ou 1.
(3) Es se parâmetro só pode ser alterado com o invers or
desabilitado (motor parado).
(4) Este parâmetro está disponível somente via HMI-CFW 08-RS.
(5)
s entradas analógicas assumem valor zero quando não
conectadas a um sinal externo. Quando utilizar as AI’s
como entradadigital com lógica NPN (P235 ou P239 = 3)
é necessário utilizar um resistor de 10 k: do pino 7 ao
pino 6 ou 8 do borne de controle.
(6) Somente existentes na versão CFW-08 Plus.
(7) O valor do parâmetro muda automaticamente quando
P203 = 1.
6.3.1 Parâmetros de Acesso e de Leitura - P000 a P099
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P000 0 a 999
Parâmetro de [ 0 ]
cess
1
Libera o acesso para alteração do conteúdo dos
parâmetros.
O valor da senha é 5.
O uso de senha está sempre ativo.
P002 0 a 6553
Valo
[-]
Proporcional 0.01 (d 99.99);
à Freqüência 0.1 (t 100.0);
1(t 1000)
P003 0a1.5xI
Corrente de [ - ]
nom
Saída (Motor) 0.01A (d 9.99 A);
0.1 A (t 10.0 A)
P004 0 a 862
Tensão d
Circuit
[-]
Intermediário 1
P005 0.00 a 300.0
Freqüência de [ - ]
Saída (Motor) 0.01 Hz
(d 99.99 Hz);
0.1 Hz (
100.0 Hz)
P007 0 a 600
Tensão de Saída [ - ]
(Motor) 1
90
Indica o valor de P208 x P005.
Quando for utilizado o modo de controle vetorial
(P202 = 2), P002 indica o valor da velocidade real
em rpm.
Para diferentes escalas e unidades usar P208.
Indica o valor eficaz da corrente de saída do inversor,
em Ampères (A).
Indica a tensão atual no circuito intermediário, de corrente
con tín u
, emVolts (V).
Indica o valor da freqüência de saída do inversor,
emHertz (Hz).
Indica o valor eficaz da tensão de linha na saída do
inversor, em Volts (V).

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
r
V
V
V
V
V
V
V
A
A
o
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P008 25 a 110
T emperatura do [ - ]
Dissipador 1
o
C
Indica a temperatura atual do dissipador de potência,
em graus Celsius (°C).
proteção de sobretemperatura do dissipador (E04)
atua quando a temperatura no dissipador atinge:
Inverso
1.6-2.6-4.0-7.0A/200-240
1.0-1.6-2.6-4.0A/380-480
7.3-10-16A/200-240
2.7-4.3-6.5-10A/380-480
13-16 A/380-480
22-28-33A/200-240
24-30 A/380-480
Tabela 6.1 - Temperatura para atuação da proteção de
sobretemperatura
P008 [°C]@E04
103
90
90
103
108
104
104
(1)
P009
0.0 a 150.0
Torque do Motor [ - ]
0.1 %
P014 00 a 41
Último Erro [ - ]
Ocorrid
-
P023 x. yz
Ve rsão de [ - ]
Software -
P040 0 a 6553
V ariável de [ - ]
Processo (PID) 1
(Va l or % x P528)
Indica o torque m ecânic o do motor, em valor
percentual (%) com relação ao torque nominal do
motor ajustado.
O torqu e nominal do motor é d efin ido pelos
parâmetros P402 (velocidade nominal do motor) e
P404 (potência nominal do motor).
Ou seja:
T
=9.55.
nom
onde T
do motor em Watts (W) - P404, e n
édadoemN.m,P
nom
nominal do motor em rpm - P402.
P
nom
n
nom
é a potência nominal
nom
é a velocidade
nom
Indica o código referente ao último erro ocorrido.
O item 7.1 apresenta uma lista dos possíveis erros e
seus códigos e possíveis causas.
Indica a versão de software do inversor contida na
memória do DSP localizado no cartão de controle.
Os parâmetros P040, P203, P520 a P528 somente
estão disponíveis a partir da versão de software
V3.50.
Indica o valor da variável de processo utilizada como
realimentação do regulador PID, em percentual (%).
função PID somente está disponível a partir da
versão de software V3.50.
escala da unidade pode ser alterada através de
P528.
Consulte a descrição detalhada do regulador PID no
item 6.3.5 deste manual (Parâmetros das Funções
Especiais).
91

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
o
a
A
A
A
(
)
r
)
(
)
(
)
4
S
6.3.2 Parâmetros de Regulação - P100 a P199
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P100
Tempo de
celeração
P101
Tempo de
Desaceleração
P102
Tempo de
celeração da
a
2
Rampa
0.1 a 999
[5.0s]
0.1 s (d 99.9 s);
1s(t 100 s)
0.1 a 999
[ 10.0 s ]
0.1 s (d 99.9 s);
1s(t 100 s)
0.1 a 999
[5.0s]
0.1 s (d 99.9 s);
1s(t 100 s)
Este conjunto de parâmetros define os tempos para
acelerar linearmente de 0 até a freqüência nominal e
desacelerar linearmente da freqüência nominal até
0.
freqüência nominal é definida pelo parâmetro:
- P145 no modo escalar (P202 = 0 ou 1).
- P403 no modo vetorial (P202 = 2).
Para o ajuste de fábrica o inversor segue sempre os
tempos definidos em P100 e P101.
Se for desejado utilizar a 2
das rampas de acele raçã
os valores programados em P102 e P103, utilizar uma
entrad
digital. Consulte os parâmetros P263 a P265.
T empos de aceleração muito curtos podem provocar,
dependendo da carga acionada , bloqueio do inversor por sobrecorrente (E00).
P103
Tempo de
Desaceleração
a
da 2
Rampa
0.1 a 999
[ 10.0 s ]
0.1 s (d 99.9 s);
1s(t 100 s)
Tempos de desaceler aç ão m uito cur t os podem
provocar, dependendo da carga acionada, bloqueio
do inversor por sobretensão no circuito intermediário (E01). Consulte o parâmetro P151 para mais
detalhes.
a
rampa, ondeos tempos
e desaceleração seguem
P104 0a2
Rampa S [ 0 ]
-
92
rampa S redu z choqu es mec ân icos durante
acelerações e desacelerações.
P104
0
1
2
Tabela 6.2 - Configuração da rampa
Freqüência de Saída
Velocidadedo Motor
50 % rampa S
100 % rampa S
t
aceleraç ão
P100/P102
Figura 6.
Rampa S
Inativa
50 %
100 %
Linea
P101/P103
- Rampa S ou linear
t
desacelaraç ão
t(s
É recomendável utilizar a rampa S com referências
digitais de freqüência (velocidade).

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
P
t
A
A
A
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P120 0a2
Backup da [ 1 ]
Referência Digital -
Define se o inversor deve ou não memorizar a última
referência digital utilizada. Isto somente se aplica à
referência tecla (P121).
P120
0
1
2
independentementeda fonte de referência
Tabela 6.3 - Configuração do backup da referência digital
Backup da Referência
tivo, mas sempre dado por P121,
Se o backup da referência digital estiver inativo
(P120 = 0), sempre que o inversor for habilitado a
referência de freqüência (velocidade) será igual à
freqüênc ia mínima, conforme o valor de P133.
Para P120 = 1, o inversor automaticamente armazena o valor da referência digital (independente da fonte
de referência - tecla, E.P. ou serial) sempre que ocorra o bloqueio do inversor, s eja por c ondição d e
desabilita (rampa ou geral), erro ou subtensão.
No caso de P120 = 2, sempre que o inversor for habilitado a sua referência inicial é dada pelo parâmetro
P121, a qual é memorizada, independentemente da
fonte de referência. Exempl o de aplicação : referência
via E.
. na qual o inversor é bloqueado via entrada
digital desacelera E.P . (o que leva a referência a 0).
Porém, numa nova habilitação é desejável que o inversor voltepara uma freqüência difere nteda freqüência mínima, a qual é armazenada em P121.
Inativo
tivo
P121 P133 a P134
Referência de [ 3.00 Hz ]
Freqüência pelas 0.01 Hz
Teclas e
(d 99.99 Hz);
0.1 Hz (
100.0 Hz)
Permite o ajuste da freqüência de saída para o motor
via teclas e .
Esse ajuste também pode ser realizado durante a
visualização dos parâmetros P002 e P005.
s teclas e estão ativas se P221 = 0 (modo
local) ou P222 = 0 (modo remoto). O valor de P121 é
mantido no ú lt imo valor ajust ado, mesm o
desabilitando ou desenergizando o inversor, desde
que P120 = 1 ou 2 (backup ativo).
93

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
(
)
(
)
(
)
(
)
j
(
(
)
A
(
d
(
d
(
d
(
g
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P122 0.00 a P134
Referência JOG [ 5.00 Hz ]
0.01 Hz
(d 99.99 Hz);
0.1 Hz
(t 100.0 Hz)
Define a referência de freqüência (velocidade) para a
função JOG. A ativação da função JOG pode ser feita
de várias formas:
Tecla
Tecla
da HMI-CFW08-P
da HMI-CFW08-RS
DI3
DI4
DI5
DI6
Serial
Tabela 6.4 - Configuração da referência JOG
P229 = 0(modo local)ou
P230 = 0
P229 = 2(modo local)ou
P230 = 2
P265 = 3 e P229 = 1(local)ou
P230 = 1
P266 = 3 e P229 = 1(local)ou
P230 = 1
Chavedeajuste S1.3 em Off;
P235 = 2 ou P235 = 3 ou P235 = 4;
P229 = 1 ou P230 = 1 e P267 = 3
Chavedea
P239 = 2 ou P239 = 3 ou P239 = 4;
P229 = 1 ou P230 = 1 e P268 = 3
P229 = 2
P230 = 2
O inversor deve estar desabilitado por rampa (motor
parado) para a função JOG funcionar. Portanto, se a
fonte dos comandos for via bornes, deve existir pelo
menos uma entrada digital programadapara gira/pára
(caso contrário ocorre E24), a qual deve estar desligada para habilitar a função JOG via entrada digital.
O sentido de rotação é definido pelo parâmetro P231.
modo remoto
modo remoto
remoto
remoto
uste S1.4 em Off;
modo local)ou
modo remoto
P124 P133 a P134
Referência 1 [ 3.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
O multispeed é utilizado quando se deseja até 8 velocidades fixas pré-programadas.
Permite o controle da velocidade de saída relacionando os valores definidos pelos parâmetros P124 a
P131, conforme a combinação lógica das entradas
digitais programadas para multispeed.
tivação da função multispeed:
P125 P133 a P134
Referência 2 [ 10.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
P126 P133 a P134
Referência 3 [ 20.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
94
- Fazer com que a fonte de referência seja dada pela
função multispeed, ou seja, fazer P221 = 6 para o
modo local ou P222 = 6 para o modo remoto.
- Programar uma ou mais entradas digitais para
multispeed, conforme tabela abaixo:
DIHabilita Programação
DI2 P264 = 7
DI3 P265 = 7
DI4 P266 = 7
DI5 P267 = 7
Obs.: A DI2 e a DI5 não devem ser configuradas para Multispeed
simultaneamente. Caso isso ocorra, o invers or indicará E24
ramação).
de pro
Tabela 6.5 - Ajuste de parâmetros para definir função de
Multispeed nas DIs
Erro

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
(
d
(
d
(
d
(
d
(
d
A
A
A
A
A
A
A
V
A
V
A
A
V0V
V
A
A
V
A
V
V0V
A
V0V0V
(
d
A
V
V
V
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P127 P133 a P134
Referência 4 [ 30.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
P128 P133 a P134
Referência 5 [ 40.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
P129 P133 a P134
Referência 6 [ 50.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
P130 P133 a P134
Referência 7 [ 60.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
0.1 Hz
(t 100.0 Hz)
P131 P133 a P134
Referência 8 [ 66.00 Hz ]
Multispeed 0.01Hz
99.99Hz);
referência de freqüência é definida pelo estado das
entradas digitais programadas para multispeed, conforme mostrado na tabela abaixo:
8 velocidades
DI2 ou DI5 DI3 DI4 Ref. de Freq.
berta
berta
berta 0
berta 0
0
0
0
0
Tabela 6.6 - Referência de freqüência
4 velocidades
berta
berta 0
berta
berta 0
função multispeed traz como vantagens a estabilidade das referências fixas pré-programadas, e a imunidade contra ruídos elétricos (referências digitais e
entradas digitais isoladas).
Freqüênc ia
de Sa ída
P127
P126
P125
P124
P130
P129
P128
0.1 Hz
(t 100.0 Hz)
DI2ouDI5
DI3
DI4
Figura 6.5 - Diagrama de tempo da função multispeed
2 velocidades
berta P124
P125
berta P126
P127
berta P128
P129
berta P130
P131
P131
Rampa de
celeração
Te mp o
0
aberto
0
aberto
0
aberto
P133 0.00 a P134
Freqüência [ 3.00 Hz ]
Mínima (F
)0.01Hz
min
99.99Hz);
0.1 Hz
(t 100.0 Hz)
Defineovalor mínimoemáximodafreqüênciadesaída
(motor) quando o inversor é habilitado.
É vá lido par a qualq uer tipo de refer ênc ia de
velocidade, exceto do JOG.
O parâmetro P133 pode definir uma zona morta na
utilização das entradas analógicas - consulte os
parâmetros P233 a P240.
95

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
(
)
)
(
)
)
x
(
d
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
P134 P133 a 300.0
Freqüência [ 66.00 Hz ]
Máxima (F
)0.01Hz
ma
99.99Hz);
0.1 Hz
(t 100.0 Hz)
(2)
P136
0.0 a 30.0
Boost de Torque [ 5.0 % para
Manual 1.6-2.6-4.0-7.0A/
(Compensação 200-240 V e
IxR) 1.0-1.6-2.6-4.0 A/
380-480 V;
2.0 % para
7.3-10-16 A/
200-240 V e
2.7-4.3-6.5-10 A/
380-480 V;
1.0 % para
22-28-33 A/
200-240 V e
P134 em co njunto com o ganho e offset da (s) entrada (s)
analógica (s) (P234, P236, P238 e P240) define a escalaeafaixadeajustedevelocidadeviaentrada(s)
analógica (s). Par a mais det alh es consu l te os
parâmetros P234 a P240.
Compensa a queda de tensão na r esis t ênc ia
estatórica do motor. Atua em baixas velocidades, aumentando a tensão de saída do inversor para manter
o torque constante na operação V/F.
O ajuste ótimo é o menor valo r de P136 que permite
a partida do motor satisfatoriamente. Valor maior que
o necessário irá incrementar demasiadamente a corrente do motor em baixas velocidade s, podendo forçar o inversor a uma condição de sobrecorrente (E00
ou E05).
P202 = 0
a
Tensão de Saída
em % da tensão da entrada
13-16-24-30 A/
380-480 V]
P142
0.1 %
P136 x P142
Freqüência
0P145
P202 = 1
b
Tensão de Saída
em % da tensão da entrada
P142
P136
0P145
Figura 6.6 a) e b) - Curva V/F e detalhe do boost de torque
96
manual (compensação IxR)
de Saída
Freqüência
de Saída

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
ç
(
)
(
)
8
g
(
a
)
(F*)
(Fe)
A
A
(F*)
(
a
)
A
A
r
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
(2)
P137
0.00 a 1.00
Boost de Torque [ 0.00 ]
utomático -
(Compensaç ão
IxR
utomática)
O boost de torque automático compensa a queda de
tensão na resistênci a estatór ica em função da
corrente ativa do motor.
Os critérios para o ajuste de P137 são os mesmos
que os do parâmetro P136.
Referência
de Freqüência
Corrente Ativa
de Saída
I
Filtro
Figura6.7 - Blocodiagrama da função boost de torque automático
P136
utomático
P137
IxR
IxR
P007
Tensão
plicada
ao Moto
(2)
P138
0.0 a 10.0
Compensação de [ 0.0 ]
Escorregamento 0.1 %
Máxima
P142
Zona de
Compensa
Figura 6.
Tensão de Saída
ão
0
4Hz
- Curva V/F com boost de torque automático
(IxR automático)
Freqüência
de Saída
Enfraqu ecimento do
Campo
P145
O parâmetro P138 é utilizado na função de compensação de escorregamento do motor.
Esta função compensa a queda na rotação do motor
devido à aplicação de carga, característica essa inerente ao princípio de funcionamento do motor de
indução.
Essa queda de rotação é compensada com o aumento
da freqüência de saída (e tensão) (aplicada ao motor)
em função do aumento da corrente ativa do motor,
conforme é mostrado no diagrama de blocos e na
curva V/F das figuras a seguir.
Freqüência de Entrada
Referência
de Freqüência
da Rampa
CorrenteAtiva
de Saída
I
Filtro P138
Figura 6.9- Blocodiagrama da função compensação de
Compensação
de
amento
Escorre
escorregamento
F
97

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
A
e
(
d
o
A
A
(
g
)
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Tensão de Saída
função da
car
Figura 6.10 - Curva V/F com compensação de escorregamento
Para o ajuste do parâmetro P138, utilizar o seguinte
procedimento:
-
cionar o motor a vazio com aproximadamente metade
da faixa d
velocidade de utilização.
- Medir a velocidade do motor ou equipamento.
- Aplicar carga nominal no equipame nto .
- Incrementar o parâmetro P138 até que a velocidade
atinja o valor a vazio.
motor
ano
Freqüência
de Saída
(2) (3)
P142
0 a 100
Tensão de Saída [ 100 % ]
Máxima 1 %
(2) (3)
P145
P133 a P134
Freqüência de [ 60.00 Hz ]
Início de 0.01 Hz
Enfraquecimento
de Camp
99.99Hz);
0.1 Hz
(Freqüência (t 100.0 Hz)
Nominal )
98
Definem a curva V/F utilizada no controle escalar
(P202 = 0 ou 1).
Permite a alteração das curvas V/F padrões definidas em P202 - Tipo de Controle.
O parâmetro P142 ajusta a máxima tensão de saída.
O valor é ajustado em percentual da tensão de alimentação do inversor.
O parâmetro P145 define a freqü êncianominaldo motor utilizado.
curva V/F relaciona tensão e freqüência de saída
do inversor (aplicadas ao motor) e conseqüentemente, o fluxo de magnetização do motor.
curva V/F ajustável pode ser usada em aplicações
especiais nas quais os motores utilizados necessitam de tensão e/ou freqüência nominal diferentes do
padrão. Exemplos: motor de 220 V/300 Hz e motor
de 200 V/60 Hz.
O parâmetro P142 é útil também em aplicações nas
quais a tensão nominal do motor é diferenteda tensão
de alimenta ção do inversor. Exemplo : rede de 440 V
e motor de 380 V.

CAPÍTULO 6 - DESCRIÇÃO DETALHADA DOS PARÂMETROS
o
V
o
V
A
A
ç
(
)
(
)
2
Faixa
[Ajuste fábrica]
Parâmetro Unidade Descrição / Observações
Tensão de Saída
P142
P151 325 a 410
Nível de Atuação (linha 200-240 V)
da Regulação da [ 380 V ]
Tensão d
1
Circuit
Intermediário 564 a 820
(linha 380-480 V)
[ 780 V ]
1
0
0.1 Hz
Figura 6.11 - Curva V/F ajustável
P145
Freqüência
de Saída
regulação da tensão do circuito intermediário (holding
de rampa ) evita o bloqueio do inversor por erro relacionado a sobretensão no circuito intermediário (E01),
quando da desaceleração de cargas com alta inércia
ou com tempos de desaceleração pequenos.
tua de forma a prolongar o tempo de desaceleração
(conforme a carga - inércia), de modo a evitar a atuação do E01.
Tensãodo Circuito
Intermediário
P151
Ud nominal
Tensão CI
Ud
P004
Freqüência
de Saída
Velocidade do
Motor
Figura 6.1
- Desaceleração com limitação (regulação)
da tensão do circuito intermediário
E01 - Sobretensão
Limita
ão CI
Tem p o
Tem p o
Consegue-se assim, um tempo de desaceleração
otimizado (mínimo) para a carga acionada.
Esta função é útil em aplicações de média inércia que
exigem rampas de desaceleração curtas.
Caso continue ocorrendo o bloqueio do inversor por
sobretensão (E01) durante a desaceleração, deve-se
reduzir gradativamente o valor de P151 ou aumentar o
tempo da rampa de desaceleração (P101 e/ou P103).
99
 Loading...
Loading...