

Vacon optea, opte9 Installation Manual

vacon
ac drives
advanced dual port ethernet board, optea
dual port ethernet board, opte9
®
installation manual


vacon • 3
TABLE OF CONTENTS
Document: DPD01583G
Release date : 17/8/18
1. Safety...............................................................................................................6
1.1 Danger................................................................................................................................6
1.2 Warnings ............................................................................................................................7
1.3 Grounding and earth fault protection ................................................................................8
2. General information.........................................................................................9
2.1 New features - OPTEA .....................................................................................................11
2.2 New features - OPTE9......................................................................................................11
3. OPTEA/OPTE9 Ethernet board technical data ................................................12
3.1 General.............................................................................................................................12
3.2 Cables...............................................................................................................................12
4. Layout and connections..................................................................................13
4.1 Layout and connections ...................................................................................................13
4.2 LED Indications ................................................................................................................14
4.2.1 Profinet IO ........................................................................................................................15
4.3 Ethernet devices ..............................................................................................................16
4.3.1 Human to machine...........................................................................................................16
4.3.2 Machine to machine .........................................................................................................17
4.4 Connections and wiring....................................................................................................17
4.4.1 Topology: Star ..................................................................................................................18
4.4.2 Topology: Daisy Chain ......................................................................................................18
4.4.3 Topology: Ring..................................................................................................................19
4.5 ACD (Address Conflict Detection) ....................................................................................25
4.6 Time synchronization .......................................................................................................26
4.6.1 Using ID 2551 ...................................................................................................................26
4.6.2 SNTP (Simple Network Time Protocol) ...........................................................................26
5. Installation.....................................................................................................27
5.1 VACON® OPTEA Advanced Dual port Ethernet drive support........................................27
5.2 VACON® OPTE9 Dual Port Ethernet drive support.........................................................28
5.3 Installation in VACON® NX..............................................................................................29
5.4 Installation in VACON® 20...............................................................................................31
5.4.1 Enclosures MI1, MI2, MI3.................................................................................................31
5.4.2 Enclosures MI4, MI5.........................................................................................................34
5.5 Installation in VACON® 20 X and 20 CP ..........................................................................37
5.6 Installation in VACON® 100 family..................................................................................39
5.7 installation in VACON® 100 X..........................................................................................42
5.8 PC Tools ...........................................................................................................................45
5.8.1 PC tool support ................................................................................................................45
5.8.2 Updating the OPTEA and OPTE9 option board firmware with VACON® Loader ............46
5.8.3 PC Tools for VACON® NX / NCIPConfig ..........................................................................49
5.8.4 PC Tools for VACON® NX / NCDrive ...............................................................................51
5.8.5 PC Tools for VACON® 100 family and VACON® 20 / VACON® Live...............................54
6. Commissioning ..............................................................................................57
6.1 Option board menu...........................................................................................................57
6.1.1 Option board parameters.................................................................................................57
6.1.2 Option board monitoring values ......................................................................................60
6.1.3 Communication protocol .................................................................................................61
6.1.4 IP Mode and IP settings ...................................................................................................62
6.1.5 Speed and duplex.............................................................................................................62
6.1.6 Communication timeout ..................................................................................................63
6.1.7 Profinet IO - Name of Station ..........................................................................................64
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

vacon • 4
6.1.8 EIP Input and Output instance .........................................................................................64
6.1.9 EIP Product code offset ...................................................................................................64
6.1.10 Mode.................................................................................................................................64
6.1.11 MAC Address....................................................................................................................65
6.1.12 Modbus Unit Identifier .....................................................................................................65
6.1.13 Media Redundancy...........................................................................................................66
6.1.14 SNTP settings...................................................................................................................66
6.1.15 SNTP monitoring values ..................................................................................................68
6.1.16 System Redundancy.........................................................................................................68
6.2 Internal communication modes.......................................................................................68
6.3 Safety parameters............................................................................................................69
6.4 Control and status word monitoring values ....................................................................69
6.5 OPTCx emulation mode ...................................................................................................69
6.5.1 Modbus in emulation mode .............................................................................................70
6.5.2 EtherNet/IP in emulation mode.......................................................................................70
6.5.3 PROFINET in emulation mode .........................................................................................71
7. Modbus TCP / Modbus UDP ............................................................................72
7.1 Modbus UDP vs TCP.........................................................................................................73
7.2 Modbus communications.................................................................................................75
7.3 Data addresses in Modbus messages .............................................................................76
7.3.1 Modbus memory map ......................................................................................................76
7.3.2 Modbus data mapping......................................................................................................76
7.4 Modbus communication and connection timeout ...........................................................88
7.5 Quick setup.......................................................................................................................89
7.6 Modbus - example messages ..........................................................................................90
7.6.1 Example 1 - Write process data.......................................................................................90
7.6.2 Example 2 - Read process data .......................................................................................91
7.6.3 Example 3 - Exception response .....................................................................................92
8. PROFINET IO ..................................................................................................93
8.1 PROFIdrive 4.1 profile ......................................................................................................93
8.2 PROFIdrive 4.1 state machine..........................................................................................94
8.3 PROFINET IO process communication ............................................................................95
8.3.1 Choosing telegram type ...................................................................................................95
8.3.2 Telegram types ................................................................................................................96
8.3.3 Telegram building blocks ..............................................................................................104
8.3.4 Quick setup.....................................................................................................................108
8.4 PROFIdrive IO parameters.............................................................................................109
8.4.1 Parameters of the PROFIdrive.......................................................................................109
8.4.2 Vendor-specific PROFIdrive parameters.......................................................................111
8.4.3 PROFIdrive signal numbers...........................................................................................112
8.4.4 User specific record data...............................................................................................115
8.4.5 Base Mode Parameter Access Model............................................................................116
8.4.6 Parameter responses ....................................................................................................120
8.4.7 Drive parameter access using application ID................................................................124
8.4.8 Parameter channel examples .......................................................................................124
8.5 PROFINET IO communications and connection timeout...............................................131
8.6 System Redundancy.......................................................................................................132
8.7 Alarm system .................................................................................................................133
8.8 PROFIsafe.......................................................................................................................135
8.8.1 Overview .........................................................................................................................135
8.8.2 PROFIdrive on PROFIsafe ..............................................................................................136
9. EtherNet/IP..................................................................................................137
9.1 General information.......................................................................................................137
9.1.1 Overview .........................................................................................................................137
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

vacon • 5
9.1.2 AC/DC Drive Profile........................................................................................................137
9.1.3 EDS file ...........................................................................................................................137
9.1.4 LED functionality ............................................................................................................138
9.1.5 Explicit Messaging .........................................................................................................140
9.1.6 EtherNet/IP communication and connection timeout...................................................144
9.2 Common Industrial Objects implemented by OPTE9 ....................................................146
9.2.1 CIP Objects .....................................................................................................................146
9.2.2 Vendor Specific Objects .................................................................................................171
9.3 Supported assembly instances......................................................................................179
9.3.1 CIP I/O Assembly instances for AC/DC Drive ................................................................179
9.3.2 Vendor-specific I/O Assembly Instances.......................................................................185
9.3.3 Mapping of Standard Output Assemblies onto VACON® data......................................197
9.3.4 Mapping of VACON® data onto Standard Input Assemblies ........................................198
9.3.5 Special assembly instances...........................................................................................200
9.4 EtherNet/IP connection example ..................................................................................200
10. Fault tracing.................................................................................................202
10.1 Typical fault conditions ..................................................................................................202
10.2 Other fault conditions ....................................................................................................203
10.3 Fieldbus fault codes.......................................................................................................204
11. APPENDIX 1 - VACON® IO DATA DESCRIPTION............................................205
11.1 VACON® Control Word - FBFixedControlWord ............................................................205
11.2 Control Word bit support in VACON® AC drives ...........................................................207
11.3 Vacon® Status Word - FBFixedStatusWord..................................................................208
11.4 Status Word bit support in VACON® AC drives.............................................................209
11.5 Monitoring of Control & Status words in VACON® AC drives.......................................209
11.6 VACON® Speed reference and actual speed - FBSpeedReference
and FBActualSpeed ......................................................................................................210
11.7 Process data...................................................................................................................210
11.8 FIELDBUS PROCESS DATA MAPPING AND SCALING ..................................................211
12. APPENDIX 2 - EXAMPLE WITH SIEMENS PLC .............................................. 214
12.1 Siemens STEP 7 .............................................................................................................214
12.2 Siemens TIA Portal ........................................................................................................223
13. APPENDIX 3 - EXAMPLE WITH SIEMENS SIMATIC PDM ...............................234
14. APPENDIX 4 - FIELDBUS PARAMETRISATION..............................................242
14.1 Fieldbus control and basic reference selection ............................................................242
14.2 Controlling Fieldbus Parameter....................................................................................243
14.3 Torque control parametrization ....................................................................................244
15. APPENDIX 5 - LWIP LICENCE .......................................................................245
16. Appendix 6 - Fieldbus option board communication ....................................246
16.1 Requirements for communication modes.....................................................................246
16.2 Fieldbus communication mode features and limitations .............................................247
16.3 Normal fieldbus communication ...................................................................................248
16.4 Fast fieldbus communication ........................................................................................249
16.5 Normal Extended Mode .................................................................................................249
16.6 Fast safety fieldbus communication..............................................................................250
16.7 Fast PROFIBUS fieldbus communication......................................................................250
17. APPENDIX 7 - parameters for application developers ................................. 251
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
vacon • 6 Safety
9000.emf
13006.emf
9001.emf
9000.emf
9000.emf
9000.emf
9000.emf
9000.emf
9000.emf
1. SAFETY
This manual contains clearly marked cautions and warnings that are intended for your personal
safety and to avoid any unintentional damage to the product or connected appliances.
Read the information included in cautions and warnings carefully.
The cautions and warnings are marked as follows:
Table 1. Warning signs
= DANGER! Dangerous voltage
= WARNING or CAUTION
= Caution! Hot surface
1.1 Danger
The components of the power unit are live when the drive is connected to mains
potential. Coming into contact with this voltage is extremely dangerous and may
cause death or severe injury.
The motor terminals U, V, W and the brake resistor terminals are live when the
AC drive is connected to mains, even if the motor is not running.
After disconnecting the AC drive from the mains, wait until the indicators on the
keypad go out (if no keypad is attached, see the indicators on the cover). Wait 5
more minutes before doing any work on the connections of the drive. Do not open
the cover before this time has expired. After expiration of this time, use a
measuring equipment to absolutely ensure that no
ensure absence of voltage before starting any electrical work!
The control I/O-terminals are isolated from the mains potential. However, the
relay outputs and other I/O-terminals may have a dangerous control voltage
present even when the AC drive is disconnected from mains.
voltage is present.
Always
Before connecting the AC drive to mains make sure that the front and cable
covers of the drive are closed.
During a ramp stop (see the Application Manual), the motor is still generating
voltage to the drive. Therefore, do not touch the components of the AC drive
before the motor has completely stopped. Wait until the indicators on the keypad
go out (if no keypad is attached, see the indicators on the cover). Wait additional 5
minutes before starting any work on the drive.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
Safety vacon • 7
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
13006.emf
1.2 Warnings
The AC drive is meant for fixed installations only.
Do not perform any measurements when the AC drive is connected to the mains.
The earth leakage current of the AC drives exceeds 3.5mA AC. According to
standard EN61800-5-1, a reinforced protective ground connection must be
ensured. See Chapter 1.3.
If the AC drive is used as a part of a machine, the machine manufacturer is
responsible for providing the machine with a supply disconnecting device (EN
60204-1).
Only spare parts delivered by VACON
®
can be used.
At power-up, power break or fault reset the motor will start immediately if the
start signal is active, unless the pulse control for
Start/Stop logic has been selected
Furthermore, the I/O functionalities (including start inputs) may change if
parameters, applications or software are changed. Disconnect, therefore, the
motor if an unexpected start can cause danger.
The motor starts automatically after automatic fault reset if the auto restart
function is activated. See the Application Manual for more detailed information.
Prior to measurements on the motor or the motor cable, disconnect the motor
cable from the AC drive.
Do not touch the components on the circuit boards. Static voltage discharge may
damage the components.
Check that the EMC level of the AC drive corresponds to the requirements of your
supply network.
.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
vacon • 8 Safety
13006.emf 13006.emf
1.3 Grounding and earth fault protection
CAUTION!
The AC drive must always be earthed with an grounding conductor connected to the grounding
terminal marked with .
The earth leakage current of the drive exceeds 3.5mA AC. According to EN61800-5-1, one or more
of the following conditions for the associated protective circuit must be satisfied:
a) The protective conductor must have a cross-sectional area of at least 10 mm2 Cu or 16
mm2 Al, through its total run.
b) Where the protective conductor has a cross-sectional area of less than 10 mm2 Cu or 16
mm2 Al, a second protective conductor of at least the same cross-sectional area must be
provided up to a point where the protective conductor has a cross-sectional area not less
than 10 mm2 Cu or 16 mm2 Al.
c) Automatic disconnection of the supply in case of loss of continuity of the protective
conductor.
The cross-sectional area of every protective grounding conductor which does not form part of the
supply cable or cable enclosure must, in any case, be not less than:
-2.5mm
-4mm
2
if mechanical protection is provided or
2
if mechanical protection is not provided.
The earth fault protection inside the AC drive protects only the drive itself against earth faults in the
motor or the motor cable. It is not intended for personal safety.
Due to the high capacitive currents present in the AC drive, fault current protective switches may
not function properly.
Do not perform any voltage withstand tests on any part of the AC drive. There is
a certain procedure according to which the tests must be performed. Ignoring
this procedure can cause damage to the product.
NOTE! You can download the English and French product manuals with applicable safety,
warning and caution information from https://www.danfoss.com/en/service-and-support/.
REMARQUE Vous pouvez télécharger les versions anglaise et française des manuels produit
contenant l’ensemble des informations de sécurité, avertissements et mises en garde
applicables sur le site https://www.danfoss.com/en/service-and-support/.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
1
General information vacon • 9
2. GENERAL INFORMATION
The VACON® AC drives can be connected to the Ethernet networks using the VACON® OPTEA
Advanced Dual Port Ethernet fieldbus option board (OPTEA) and the VACON
Ethernet fieldbus option board (OPTE9). The drives can be daisy chained by utilizing two Ethernet
ports. The option boards support PROFINET IO, Ethernet/IP, Modbus TCP and Modbus UDP fieldbus
protocols. The Advanced Dual Port Ethernet board (OPTEA) also supports PROFINET IO with
PROFIsafe in combination with OPTBL/OPTBM/OPTBN option board. In addition, OPTEA also
supports advanced features such as PROFINET System Redundancy "S2". OPTEA can be used alone
as PROFINET IO device, but PROFIsafe always requires OPTBL/OPTBM/OPTBN option board and
VACON
Chapter 4.4 "Connections and wiring".
Every appliance connected to an Ethernet network has two identifiers: a MAC address and an IP
address. The MAC address (Address format: xx:xx:xx:xx:xx:xx) is unique for each appliance and
cannot be changed.The Ethernet board’s MAC address can be found on the sticker attached to the
board. “EtherNet/IP
In a local network, IP addresses can be defined by the user as long as all the units connected to the
network are given the same network portion of the address. Overlapping IP addresses cause
conflicts between appliances. For more information about setting IP addresses, see Chapter 6
"Commissioning".
®
NXP control too. The following network topologies are supported. See details in
•Star
•Daisy chain
•Ring
TM
is a trademark of ODVA, Inc.
®
OPTE9 Dual Port
Table 2. List of abbreviations used in this document
Abbreviation Explanation
ACD Address Conflict Detection
CRC
DHCP
FB Fieldbus
GW Gateway
HI Upper 8/16 bits in a 16/32 bit value.
LO Lower 8/16 bits in a 16/32 bit value.
LWIP Light weight TCP/IP protocol stack for embedded systems.
Modbus TCP /
Modbus UDP
PDI Process data in (Profinet IO)
PDO Process data out (Profinet IO)
PHY(X)
Cyclic Redundancy Check is an error-detecting code commonly used in
fieldbusses to detect accidental changes to raw data.
Dynamic Host Configuration Protocol is used for dynamical resolving of network configuration parameters like an IP address.
Simple and vendor-neutral communication protocol intended for monitoring
and controlling of field devices.
Ethernet physical interface X, where X represents the number
of interface
PLC Programmable Logic Controller
PNU Parameter number (Profinet IO)
Profinet IO
RPM Revolutions per minute
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Profinet is a standard for industrial automation in Ethernet network. Profi-
net IO describes the exchange of data between controllers and field devices.
2
vacon • 10 General information
Table 2. List of abbreviations used in this document
Abbreviation Explanation
RSTP Rapid Spanning Tree Protocol
SNTP Simple Network Time Protocol
Transmission Control Layer provides reliable, ordered and error-checked
TCP
UTC Coordinated Universal Time
SNMP Simple Network Management Protocol
MIB Management Information Base
DLR Device Level Ring
CIP Common Industrial Protocol
RDHT Redundancy Data Hold Time
LLDP Link Layer Discovery Protocol
LED Light-Emitting Diode
MRP Media Ring Protocol
delivery of data streams between computers that are connected to a local
area network.
MRM Media Ring Master
MRC Media Ring Client
ARP Address Resolution Protocol
DCP Discovery and Basic Configuration Protocol
HD Half Duplex
FD Full Duplex
STW1 Steuerwort 1 (German for control word 1)
ZSW1 Zustandwort 1 (German for status word 1)
NSOLL Sollwert (German for reference value)
NIST Istwert (German for actual value)
EDD Electronic Device Description
EDS Electronic Data Sheet
GSDML General Station Description Markup Language
Table 3. List of data types used in this document
Type name Bit size Explanation
INT8 8 Signed short integer
2
UINT8 8 Unsigned short integer
INT16 16 Signed integer
UINT16 16 Unsigned integer
INT32 32 Signed long integer
UINT32 32 Unsigned long integer
FLOAT32 32 32-bit floating point
STRING3 24 Three byte string
STRING5 40 Five byte string
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
General information vacon • 11
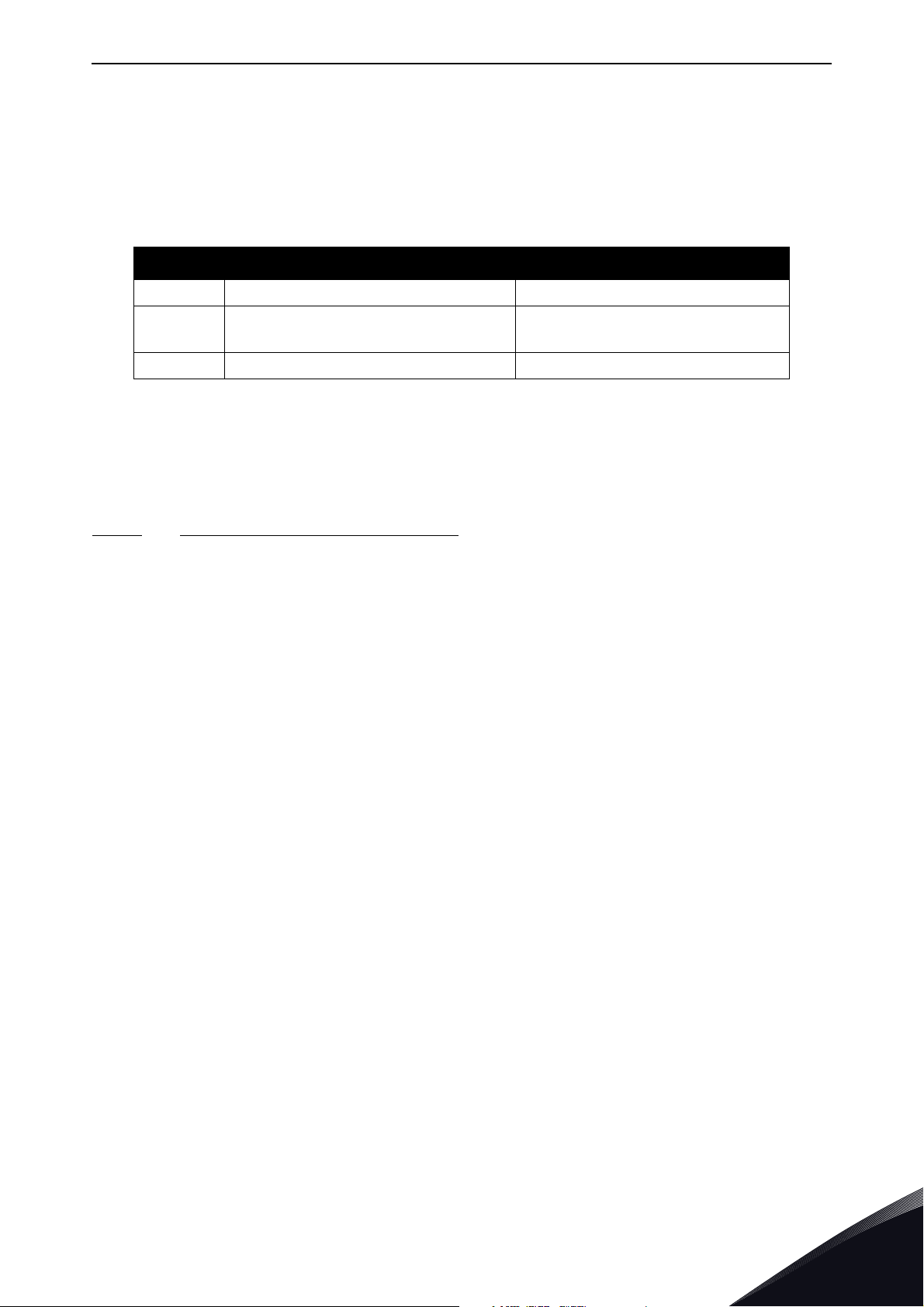
2.1 New features - OPTEA
The following table shows the new features that are added in the OPTEA Advanced Dual Port
Ethernet's firmware version.
Table 4. New features - OPTEA
New feature Firmware version
PROFINET IO + PROFIsafe V001
Support for all features supported by OPTE9 board
including EtherNet/IP and Modbus TCP/UDP protocols
Improved emulation mode with OPTCP, OPTCQ and
®
OPTCI boards when installed to VACON
PROFINET IO System Redundancy "S2" V002
PROFISAFE is supported in NXP only when OPTBL/M/N is also installed.
NXP
V002
V002
2.2 New features - OPTE9
The following table shows the new features that are added in the OPTE9 Dual Port Ethernet's
firmware versions.
Table 5. New features - OPTE9
New feature Firmware version
EtherNet/IP protocol V004
Ethernet ring support (RSTP) V004
Address Conflict Detection (ACD) V004
Media Redundancy Protocol (MRP) V006
Simple Network Management Protocol (SNMP) V006
LLDP-MIB, LLDP-EXT-DOT3-MIB, LLDP-EXT-PNO-MIB V006
EDD files SIMATIC PDM V006
Fast communication modes in VACON
PROFINET IO Alarms V007
Simple Network Time Protocol (SNTP) V008
Fast MRP support verified V008
Device Level Ring (DLR) V009
®
NXP
V007
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
2
vacon • 12 OPTEA/OPTE9 Ethernet board technical
3. OPTEA/OPTE9 ETHERNET BOARD TECHNICAL DATA
3.1 General
Table 6. Technical da ta
General Board name OPTEA/OPTE9
Ethernet connections
Communications
Protocol Modbus TCP, Modbus UDP, Profinet I/O, EtherNet/IP
Environment
Safety Fulfills EN50178 standard
Interface Two RJ-45 connectors
Transfer cable Shielded Twisted Pair (STP) CAT5e
Speed 10 / 100 Mb
Duplex half / full
Default IP-address By default the board is in DHCP mode
Ambient operating temperature
Storing temperature -40°C…70°C
Humidity <95%, no condensation allowed
Altitude Max. 1000 m
Vibration 0.5 G at 9...200 Hz
-10°C…50°C
3.2 Cables
For connecting the fieldbus Ethernet boards, use only Ethernet cables that meet at least the
requirements of category 5 (CAT5) according to EN 50173 or ISO/IEC 11801.
3
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Layout and connections vacon • 13
RN ER BS
A
B C
1
2
11592_00
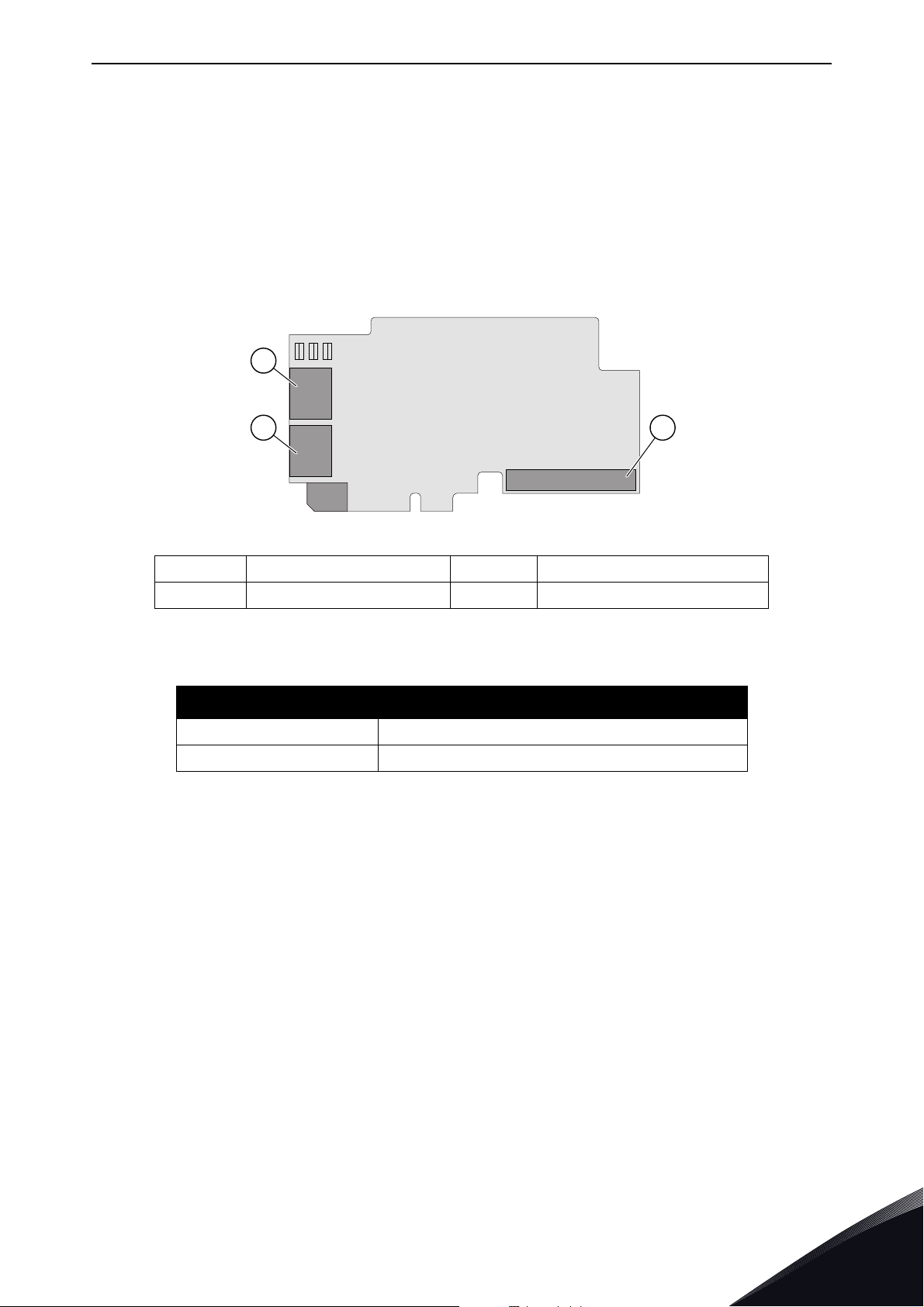
4. LAYOUT AND CONNECTIONS
The VACON® Ethernet option boards are connected to the Ethernet bus using the standard RJ45
connectors (1 and 2). The communication between the control board and the AC drive takes place
through a standard VACON
layout and connections.
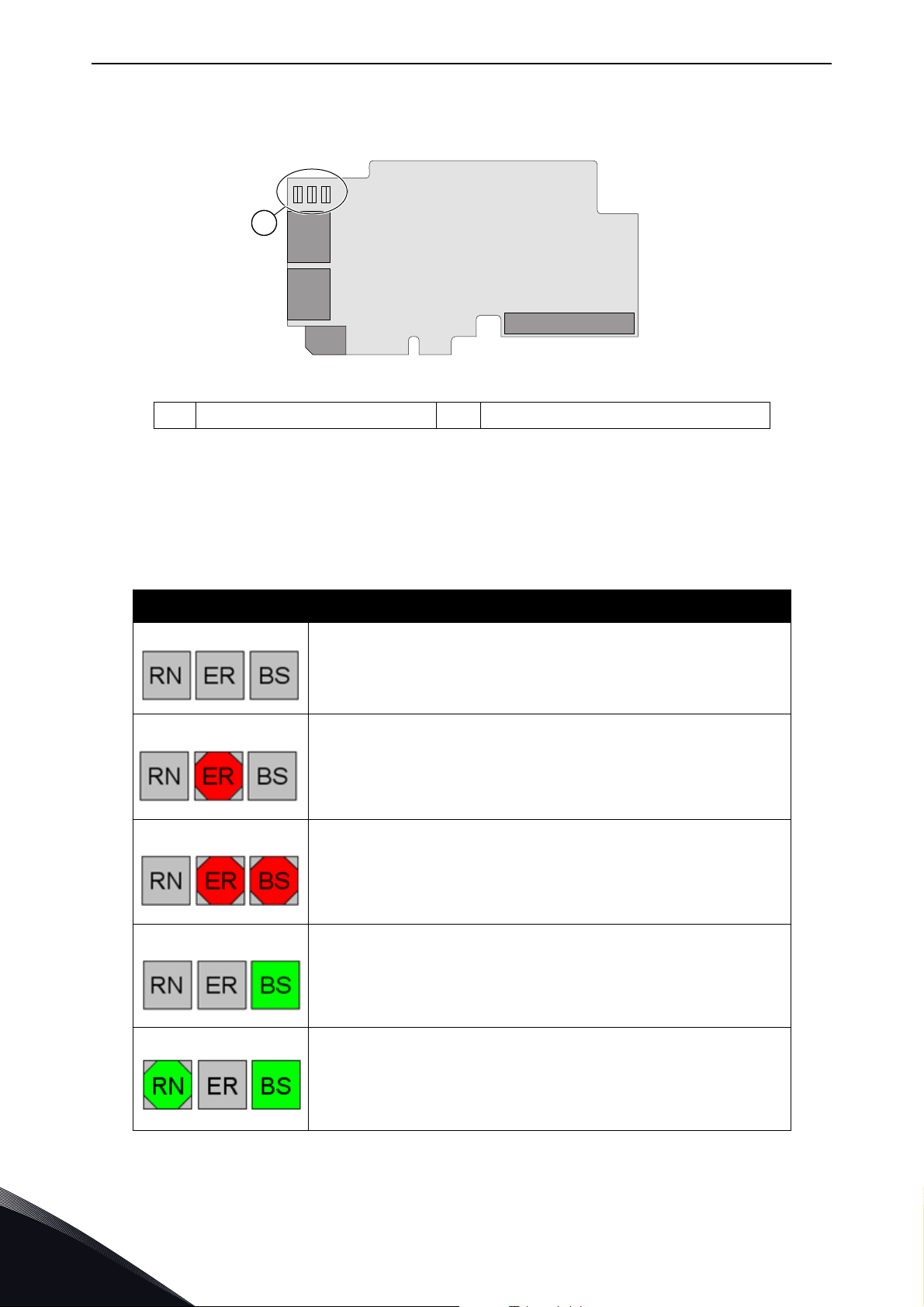
4.1 Layout and connections
®
Interface Board Connector. OPTEA and OPTE9 boards have identical
A Ethernet connector C Interface Board connector
B Ethernet connector
Figure 1. Option board layout
Table 7. Ethernet ports
Ethernet port Description
1 Ethernet port 1 (PHY1)
2 Ethernet port 2 (PHY2)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
vacon • 14 Layout and connections
RN ER BS
A
1
2
11593_00
4.2 LED Indications
ALED indications
Figure 2. Option board LED indicators
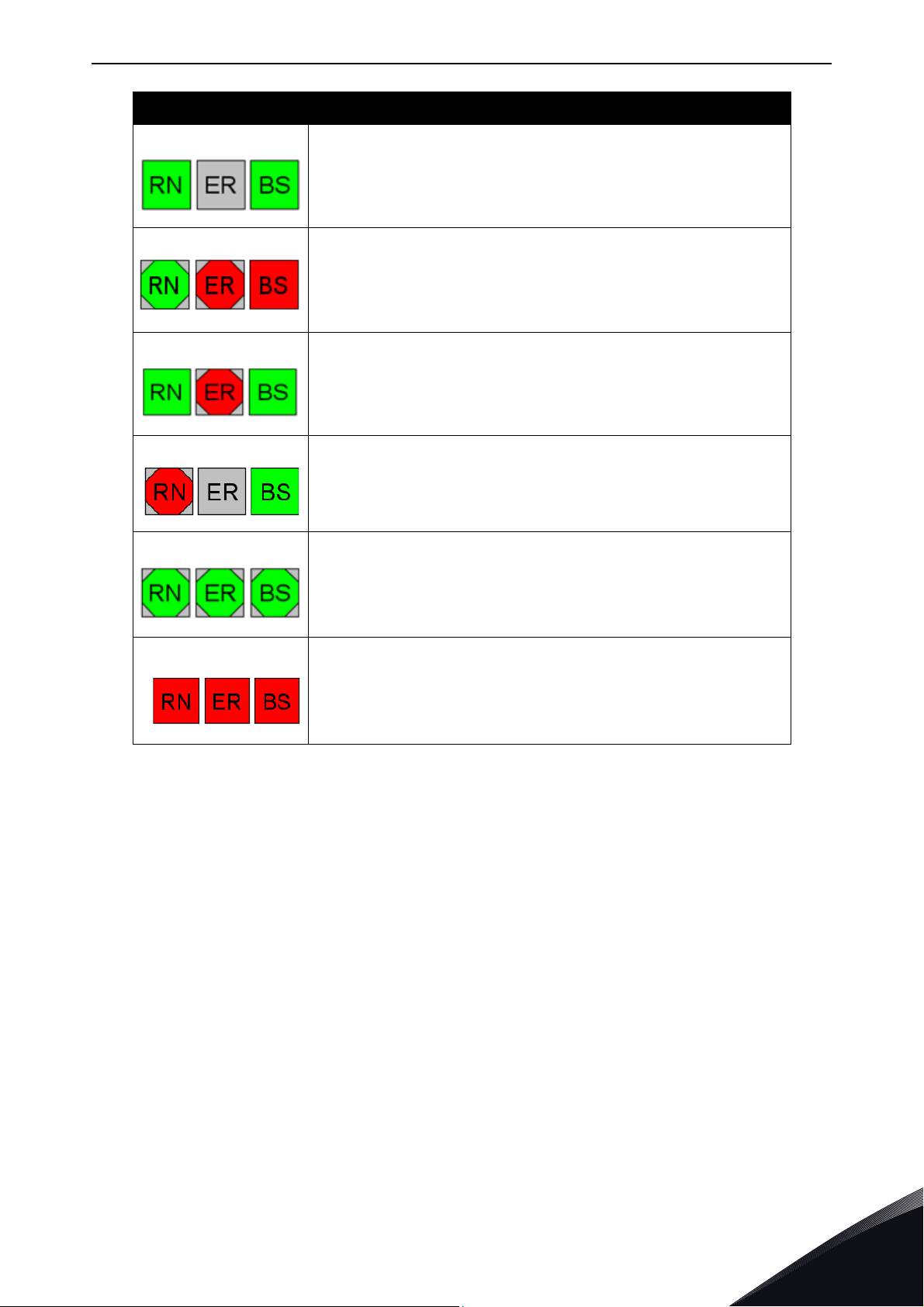
The table below lists possible LED combinations and their meanings. When the EtherNet/IP is
active, the option board follows CIP standard for LED indications. Therefore, the indications
described in Table 8 do not apply. See Chapter 9.1.4 "LED functionality".
Table 8. List of possible LED combinations
LED combinations Description
No power. All LEDs are OFF.
Option board firmware is corrupted or its software is missing.
ER is blinking (0.25s ON / 0.25s OFF)
Option board failure. Option board is not operational. BS is red
and ER is possibly blinking (2.5s ON / 2.5s OFF)
Option board is operational.
Protocol is ready for communications. RN is blinking (2.5s ON /
2.5s OFF).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
Layout and connections vacon • 15
LED combinations Description
Protocol is communicating.
Protocol communication fault. ER is blinking to indicate a fault.
RN is blinking to indicate that protocol is again ready for
communications.
Protocol is communicating with an active fault. ER is blinking.
Duplicate IP address detected. RN is blinking.
Profinet IO only! In node flashing test all three LEDs are
blinking.
If option board detects hardware failure or some other nonrecoverable fault situation, it will generate a slot fault (F54) and
all three LEDs are red. Try to update option board firmware. If
situation is not resolved with the update, you may need to
replace the option board.
4.2.1 Profinet IO
When using the "Node Flashing Test" function, you can determine to which device you are directly
connected. For example, in Siemens S7, by using the menu command "PLC > Diagnostics/Setting >
Node Flashing Test..." you can identify the station directly connected to the PG/PC if all three LEDs
are flashing green.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
vacon • 16 Layout and connections
Power
12345678
11594_uk
Vacon PC tools interface
- Parameters
- Slow rate actual
Values:
- Trends
- Fault history
Ethernet switch
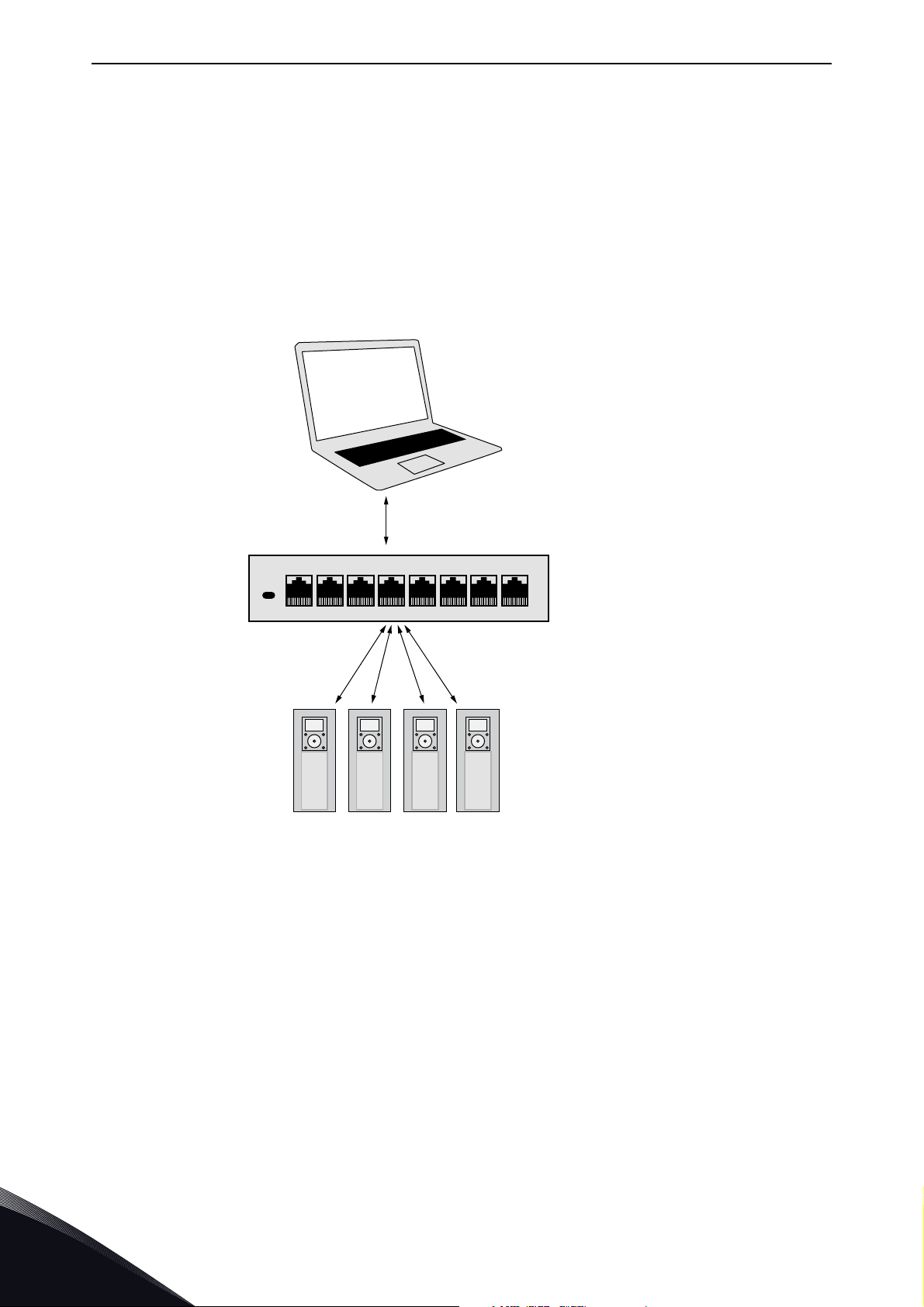
4.3 Ethernet devices
The common-use cases of Ethernet devices are 'human to machine' and 'machine to machine'. The
basic features of these two cases are presented in the pictures below.
4.3.1 Human to machine
Requirements:
- Graphical User Interface
- Relatively slow communication in use
NOTE! NCDrive can be used in VACON
with VACON
®
100 family.
NOTE! The Ethernet connection to VACON
Port Ethernet is not supported. OPTEA Advanced Dual Port Ethernet board does not support
VACON
®
20, VACON® 20 X or VACON® 20 CP.
Figure 3. Ethernet , Human to Machine
®
NXS and NXP drives via Ethernet. VACON® Live can be used
®
20, VACON® 20 X and VACON® 20 CP via the OPTE9 Dual
4
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/

Layout and connections vacon • 17
Power
12345678
11595_uk
MASTER
Real-Time Control
- Start/Stop, Direction,...
- Reference
- Feedback
Ethernet switch
4.3.2 Machine to machine
Requirements:
- Industrial environment
- Fast communication in use
4.4 Connections and wiring
The option boards have two Ethernet ports and an embedded switch. An option board is seen in
network as a single device as it has only one MAC and IP address. This configuration enables three
different topologies:
• Star (see Chapter 4.4.1 "Topology: Star")
• Daisy chain (see Chapter 4.4.2 "Topology: Daisy Chain")
• Ring (see Chapter 4.4.3 "Topology: Ring")
Each of these topologies has their own advantages and disadvantages. When designing the network
you must carefully consider the risks and benefits against the cost of the selected topology.
Both boards support 10/100 Mb speeds in both Full- and Half-duplex modes. However, real-time
process control requires the Full-duplex mode and the 100-megabit speed. The boards must be
connected to the Ethernet network with a Shielded Twisted Pair (STP) CAT-5e cable (or better).
Use only industrial standard components in the network and avoid complex structures to minimize
the length of response time and the amount of incorrect dispatches. Both option boards have an
internal switch, so it does not matter in which port of the option board the Ethernet cables are
connected to.
Figure 4. Ethernet, Machine to Machine
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4

vacon • 18 Layout and connections
k
PLC
DRIVE
OPTE9-1
DRIVE
...
OPTE9-2
DRIVE
OPTE9-3
DRIVE
OPTE9-8
11597A_uk
4.4.1 Topology: Star
In star network, all the devices are connected to the same switch(es). This topology reduces the
damage caused by single cable failure. It would affect only to a single drive instead of them all. In
this setup, a drive will receive only broadcast/multicast messages and messages directed to this
drive.
Only one port from the option board can be connected to a switch in the star topology. Connecting
both ports to switch(es) will cause an involuntary Ethernet ring which, in this setup, will break the
network.
1PLC
2345678
Power
DRIVE
OPTE9-1
DRIVE
OPTE9-2
DRIVE
OPTE9-3
DRIVE
...
OPTE9-8
11660_u
Figure 5. Star Topology
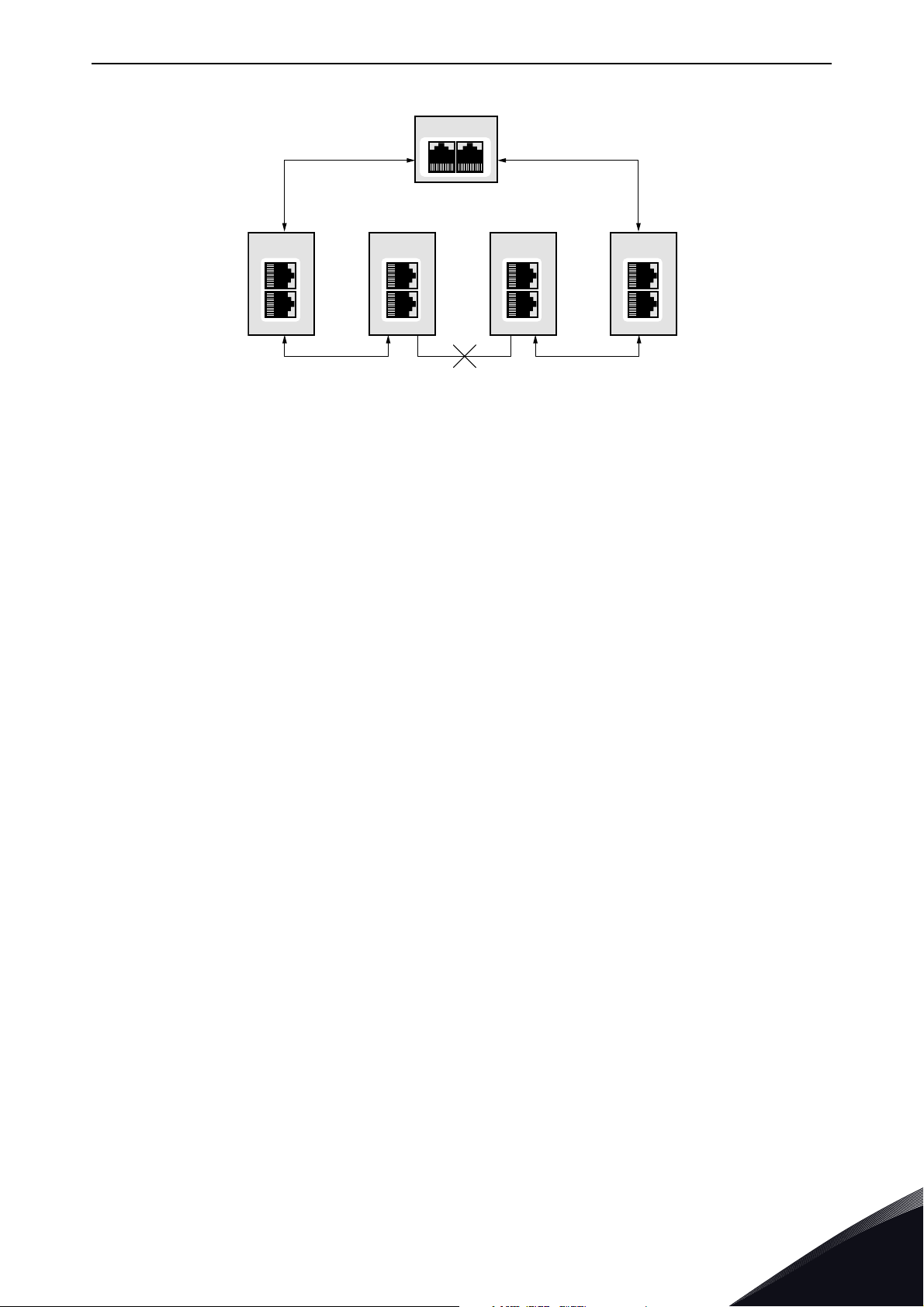
4.4.2 Topology: Daisy Chain
The daisy-chaining allows you to reduce the costs for cabling and networking equipment such as
switches. The maximum number of daisy-chained boards is 32. This restriction comes from the
average latency (20 to 40 microseconds) per Ethernet switch. The drawback in the daisy chain
topology is that it increases traffic in all except the last drive. The first drive in the daisy chain sees
all the traffic in the chain. Also damage to a single cable will drop all drives behind it from the
network.
Both in daisy chain topology and in star topology, the last drive's port must not be connected back
to the same line. This would cause an involuntary Ethernet ring which will break the network.
4
Figure 6. Daisy chain topology
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Layout and connections vacon • 19
4.4.3 Topology: Ring
In some cases it is possible to use a ring topology. The ring topology gains the same reduced cabling
cost as the daisy chain topology, but decreases the damage caused by a single cable failure.
Both Ethernet boards can be used with the following media redundancy protocols:
Table 9. Supported media redundancy protocols
Protocol Active fieldbus protocol Recovery time
RSTP Any Seconds
MRP PROFINET
DLR EtherNet/IP ~4 ms
NOTE! Ring network sizes should be limited from what is specified in the media redundancy
protocols (usually up to 50 nodes) depending on the network load. When low I/O data intervals are
used, we recommend that ring networks should be limited to fewer than 32 devices. High load on
network can cause recovery times to increase and in worst cases to trigger a watchdog failure.
< 50 or < 10 ms with Fast-MRP
< 200 ms (typical)
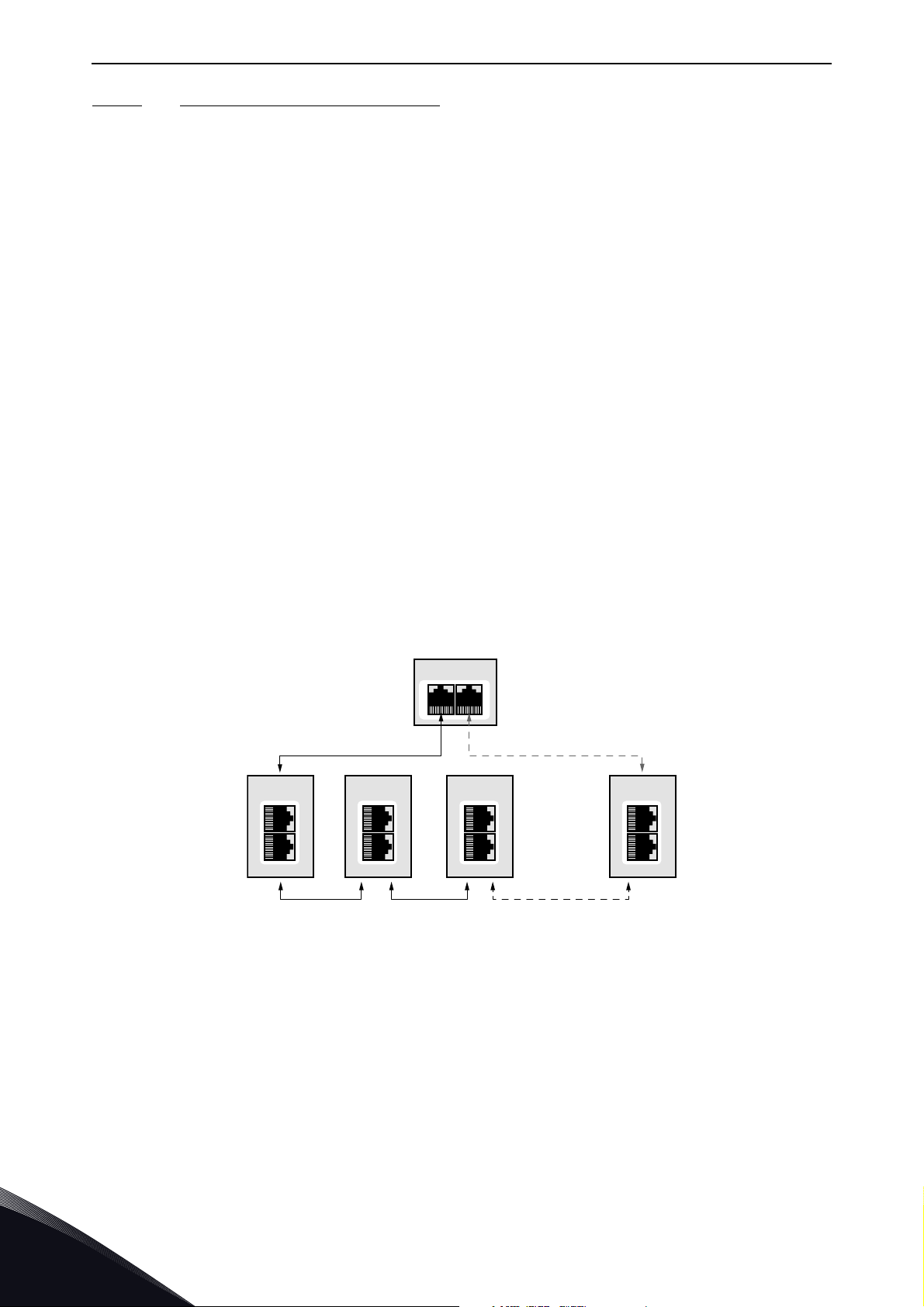
4.4.3.1
To use the RSTP protocol, add a managed Ethernet switch that supports the RSTP protocol. If a
single link is broken, the RSTP switch will notice this and start sending data from the PLC to both
directions effectively creating two daisy chains. When the link has been repaired, the switch will
notice this too and reverts back to normal operating mode. Compared to the star topology, the ring
topology adds more network traffic to almost all drives. Damage to two cables will always create an
isolated subnetwork.
In the RSTP configuration, one of the ports in the switch is "Designated Port" (DP) and the other
"Alternative Port" (AP). When the network is functioning properly, the traffic flows through the
designated port. Only the BPDU (Bridge Protocol Data Unit) packets are transferred through the AP
port. The BPDU packets are used by the switch to determine if the network is working properly. If it
detects that the BPDU packets do not go through the ring, it will change the alternative port to a
second designated port. Now the switch will send packets to both directions in the broken ring (see
Figure 8).
Each designated port has a list of MAC addresses which are behind that port. Only frames directed
to the device in the MAC list are forwarded into that designated port. The broadcast and multicast
frames are sent to all designated ports.
Rapid Spanning Tree Protocol (RSTP)
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4

vacon • 20 Layout and connections
PLC
Managed switch with RSTP support
DRIVE
OPTE9-1
DRIVE
...
OPTE9-2
DRIVE
OPTE9-3
DRIVE
11661_uk
OPTE9-8
Power
12
DP AP
345678
PLC
Managed switch with RSTP support
DRIVE
OPTE9-1
DRIVE
...
OPTE9-2
DRIVE
OPTE9-3
DRIVE
11662_uk
OPTE9-8
Power
12
DP DP
345678
Figure 7. Ring topology
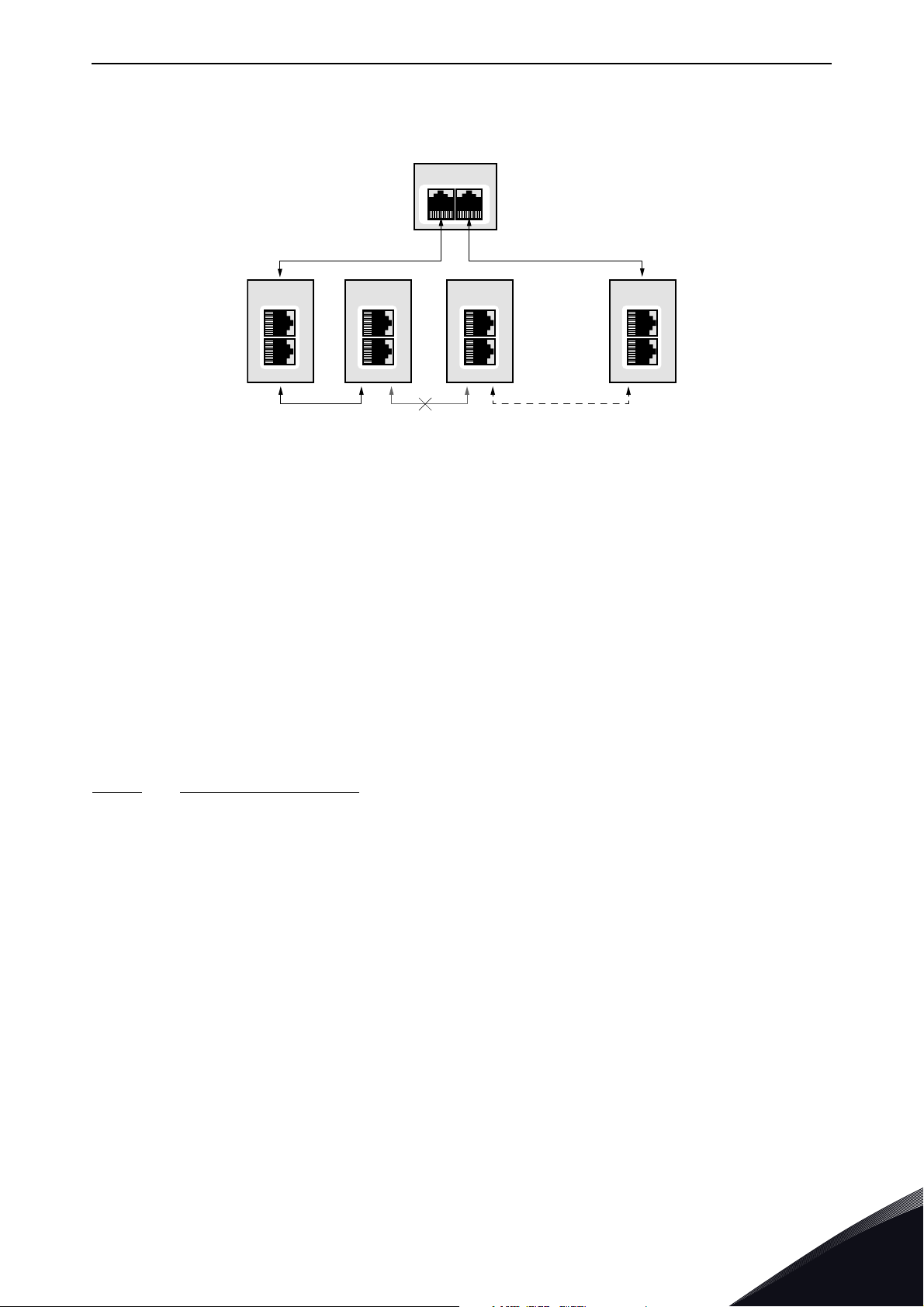
In the example below, the Ethernet communication will be interrupted to device number three and
other devices after that when the link is broken. The Fieldbus communication maybe faulted when
the link is broken, but when the switch enables the second designated port, the connections can be
reopened. In the RSTP protocol, it generally takes few seconds before the second designated port
will be activated. This depends on the BPDU exchange cycle, which is 2 seconds by default.
4
Figure 8. Ring topology: Error in network
NOTE! The switch in Ethernet boards itself does not implement the RSTP protocol, so the network
will always need a third party switch to support it.
NOTE! Do not use RSTP together with PROFIsafe. Recovery time in RSTP network can be several
seconds, and recovery time in STP network can be several tens of seconds. To compensate this, the
PROFIsafe watchdog time must be set long enough so that slow recovery time of RSTP network can
be tolerated. However, for example, in Siemens TIA portal, the longest PROFIsafe watchdog time
setting is 1920 ms, and this is too short for RSTP.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Layout and connections vacon • 21
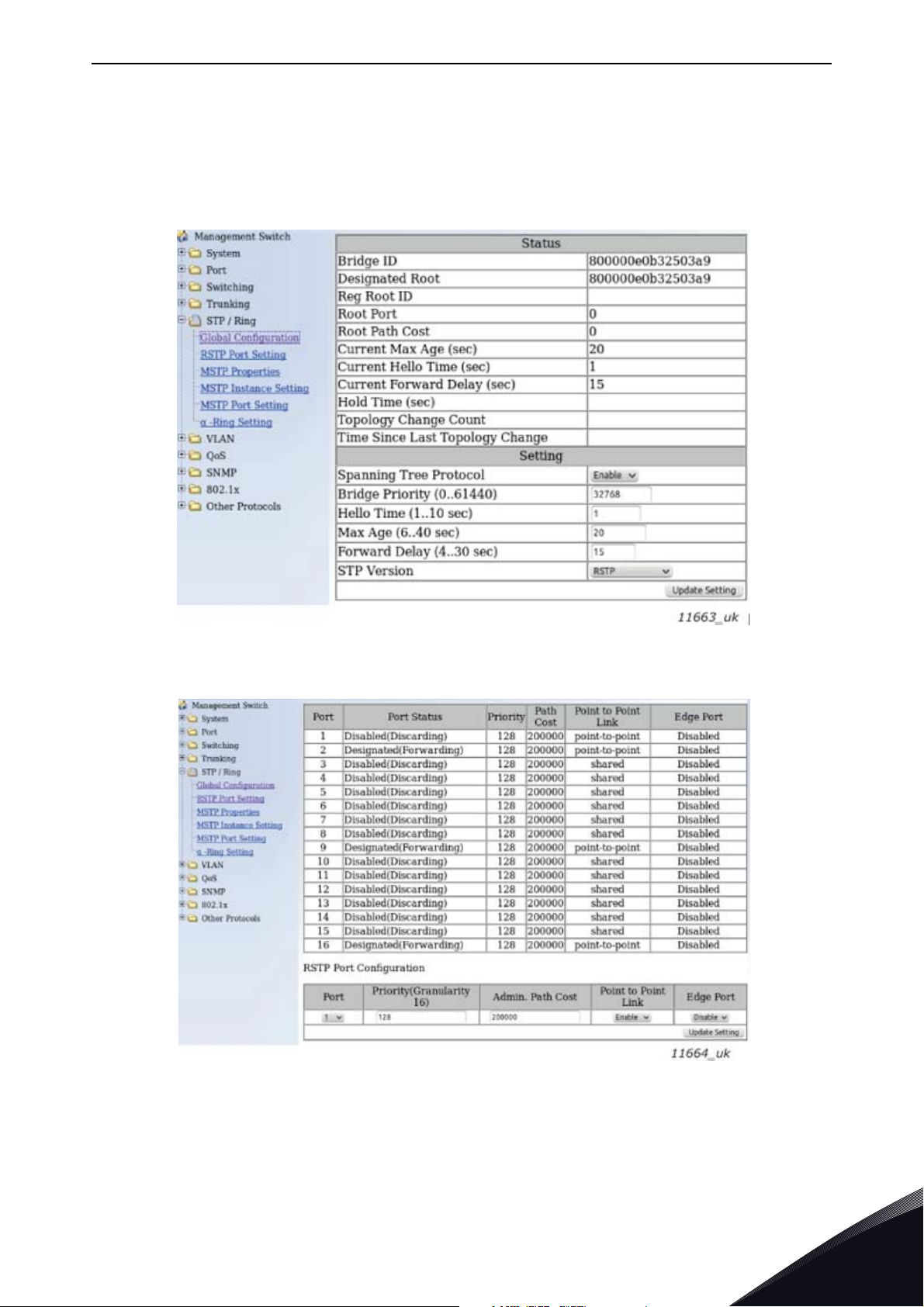
Configuration example
The screenshots below (Figure 9, Figure 10) show one example of configuring the RSTP in the switch
(in this case an EtherWAN switch). Port two is the designated port and port one is the alternative
port. The PLC was connected to port nine (the laptop taking the screenshots was in port 16). When
configuring your switch, refer to the switch manufacturer's manual.
Figure 9. EtherWAN Switch RSTP Configuration example
Figure 10. EtherWAN Switch RSTP Configuration example - Port Settings
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
vacon • 22 Layout and connections
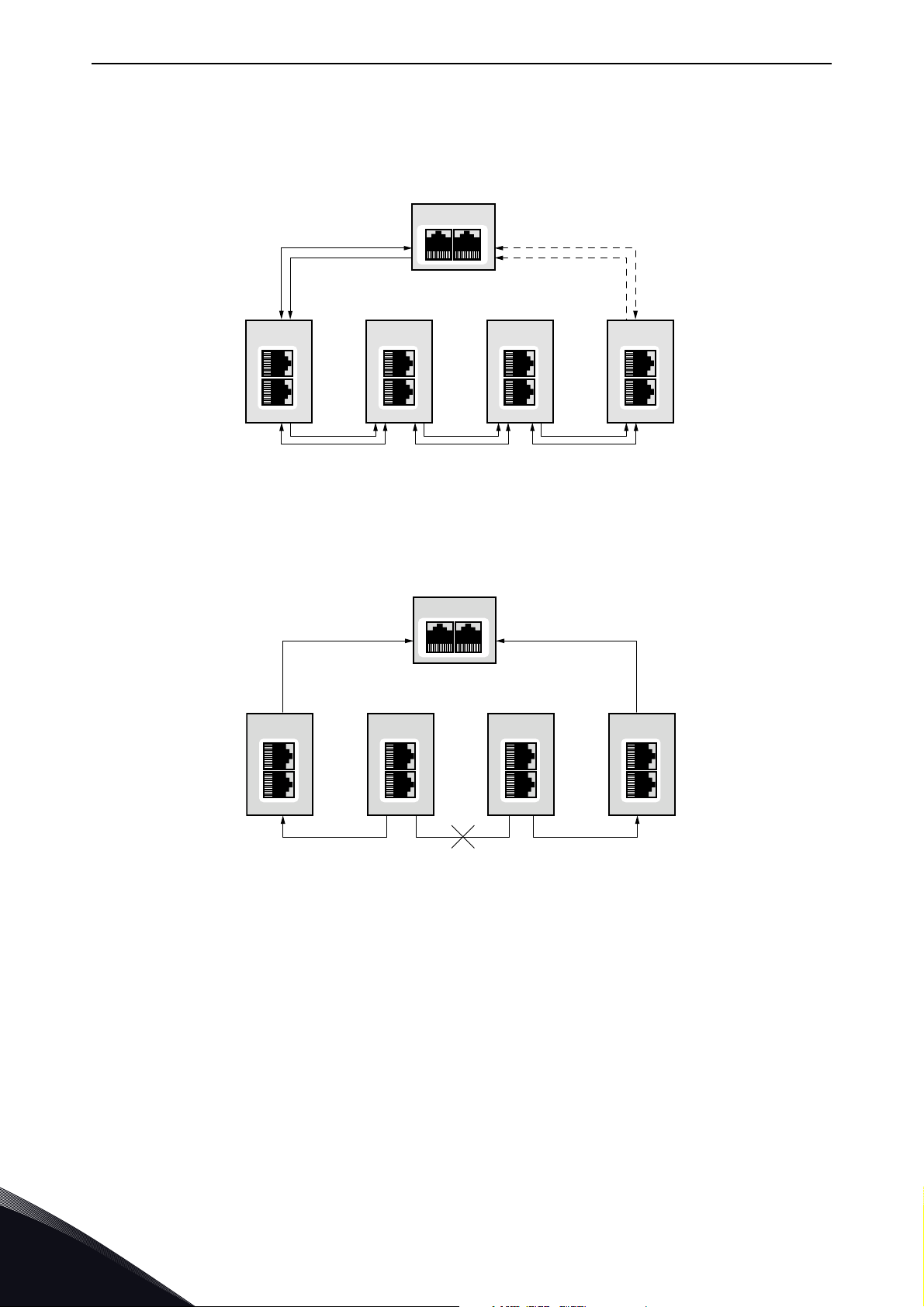
4.4.3.2 Media Redundancy Protocol (MRP)
The MRP is designed to react deterministically on a cable failure. This makes it suitable to be used
in process automation. One of the nodes in the network has the role of Media Redundancy Master
(MRM), which observes and controls the ring topology in order to react to network faults. Usually
this device is PLC or network switch.
The other nodes in the network are called Media Redundancy Clients (MRC), and they react on
received configuration frames from the MRM and can detect link changes on its ring ports. OPTEA
and OPTE9 boards support only MRC functionality.
The MRM and MRC have two ring ports, which take one of the following states:
•DISABLED
- All frames are dropped
•BLOCKING
- All frames are dropped, except the following frames:
a) MRP frames (e.g. MRP_test and MRP_TopologyChange)
b) Frames specified to pass ports in "Discarding" state, e.g. LLDP frames
•FORWARDING
- All frames are forwarded according to normal behaviour
The MRM sends MRP_Test frames in a configured time period to monitor the state of the ring
topology. If the MRM receives its own MRP_Test frames (network is closed), one of the ring ports is
set to FORWARDING state and the other to BLOCKED state (see Figure 11). If the MRP_Test frames
are not received by the MRM (network is open), it sets both of its ring ports to FORWARDING state
(see Figure 12).
The following figure shows an example of a MRP network, where the PLC acts as a MRM.
PLC
MRM
Forwarding Blocked
DRIVE
MRC
OPTE9-1
DRIVE
MRC
OPTE9-2 OPTE9-3
DRIVE
MRC
...
DRIVE
MRC
OPTE9-8
11713_uk
Figure 11. MRP ring: Closed network
4
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Layout and connections vacon • 23
In the example below, the Ethernet communication will be interrupted to device number three and
other devices after that when the link is broken.
PLC
MRM
Forwarding Forwarding
DRIVE
MRC
OPTE9-1
DRIVE
MRC
OPTE9-2 OPTE9-3
DRIVE
MRC
...
DRIVE
MRC
OPTE9-8
11714_uk
Figure 12. MRP ring: Error in network
NOTE! MRP (as MRC) can only be used when PROFINET IO is the selected protocol. MRP is available
in all versions of OPTEA board and in OPTE9 since V006 firmware.
MRP Recovery Times and Fast MRP
MRP can be configured to send test frames with different time periods, depending on the maximum
allowed recovery time for the network. These times are set as the guaranteed time for a network of
50 nodes to recover from a ring error.
Typically, in PROFINET IO systems the recovery time is defined as 200 ms. However, the MRP
specification allows for recovery times of 500, 200, 30 and 10 ms. OPTEA and OPTE9 boards can be
used in systems with the lowest recovery time of 10 ms. This is often called “Fast MRP”.
When you use MRP in a PROFINET IO network, we suggest that you set the watchdog time of each
device in the ring to the maximum recovery time, usually 200 ms. This guarantees that a cable
failure does not interrupt the fieldbus connection.
4.4.3.3
Device Level Ring (DLR)
Device Level Ring (DLR) protocol provides a means for detecting, managing and recovering from
faults in a ring-based network. It supports a single-ring topology. Multiple or overlapping rings are
not supported. Other features include "Sign on process" used to identify all ring participants and
"Neighbor check process" which allows nodes to check the health of their adjacent nodes.
One device acts as a ring supervisor, monitoring the state of the ring while other devices act as DLR
nodes. Only one device can act as an active supervisor, although backup supervisors are possible.
Nodes can be divided into Beacon- and Announce-based nodes depending on which frames the
nodes process. OPTEA and OPTE9 boards support Announce-based functionality.
DLR nodes have three states:
• IDLE_STATE: indicating linear topology for non-supervisor nodes
• FAULT_STATE: initial state for enabled ring supervisor, or when ring fault has been detected
• NORMAL_STATE: normal function in ring topology mode
The active ring supervisor sends Beacon frames from both its ring ports once per beacon interval
(400 μs by default) to monitor the state of the ring and an Announce frame once per second. If the
Beacon frames are received back at the supervisor, one of its ports is set to blocking and the other
to forwarding state (Figure 13).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4
vacon • 24 Layout and connections
DLR
NODE
OPTE9-1
DLR
NODE
OPTE9-2
DLR
NODE
OPTE9-3
11858_uk
DLR
NODE
OPTE9-4
ACTIVE RING
SUPERVISOR
Link Status Link Status
• Only the following packets are processed from the blocked port:
• Beacon frames from self and other supervisors
• Link_Status/Neighbor_Status frames
• Neighbor_Check request or response and Sign_On frames
RING
SUPERVISOR
Beacon
Beacon
DLR
NODE
OPTE9-1
Announce
DLR
NODE
OPTE9-2
DLR
NODE
OPTE9-3
Announce
DLR
NODE
OPTE9-4
11857_uk
Figure 13. DLR ring: Network configuration when ring is closed (NORMAL_STATE)
If a network error occurs to DLR capable nodes, Link_Status frames are sent by nodes to inform the
ring supervisor immediately which port(s) have a failure (Figure 14).
4
Figure 14. DLR ring: Failure in network
A Link_Status frame triggers an error response in active ring supervisor, which unblocks traffic on
its previously blocked port (Figure 15). In case of an uncommon failure (for example, if cable breaks
between two non-DLR capable devices), the error is noticed from Beacon timeout value, and not
from Link_Status frames. Therefore, a recovery in a network with non-DLR capable devices can take
longer.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Layout and connections vacon • 25
ACTIVE RING
SUPERVISOR
DLR
NODE
OPTE9-1
DLR
NODE
OPTE9-2
DLR
NODE
OPTE9-3
DLR
NODE
OPTE9-4
11859_uk
Figure 15. DLR ring: Network configuration after failure (FAULT_STATE)
The ring recovers after Beacon frames again are received from both of the active ring supervisors
ring ports. Ring recovers back to its original state (Figure 13).
NOTE! DLR is active only when EtherNet/IP is the selected protocol. DLR is available since V002
fimware for OPTEA and since V009 firmware for OPTE9 board.
DLR Recovery Times
DLR allows setting of the beacon interval and the beacon timeout values, with lower beacon interval
providing faster ring recovery performance. With default values (400 μs interval and 1960 μs
timeout), DLR can reach much faster ring recovery times than e.g. Media Redundancy Protocol.
Typically, these times are around 3 ms for Beacon-based and 4 ms for Announce-based nodes.
When using DLR, we recommend that the watchdog time is set to a value greater than 4 ms. This
will ensure that a properly configured ring network will recover from a network failure within the
watchdog time.
4.5 ACD (Address Conflict Detection)
The OPTEA and OPTE9 option boards implement ACD algorithm (IETF RFC 5227). The
implementation includes requirements from the EtherNet/IP protocol.
The ACD algorithm tries to actively detect if the IP address configured to this device is been used by
another device in the same network. To accomplish this, ACD sends four ARP request packets when
the device's Ethernet interface goes up or when its IP address changes. ACD prevents the use of the
Ethernet interface until the ARP probing finishes. This delays the startup of fieldbus protocols about
one second. During the delay or after it, the ACD passively checks incoming ARP messages for use
of the device's IP address. If another device with the same IP address is detected, the ACD will try
to defend its IP address with a single ARP message. If the other device with the same IP address
also supports ACD, it should stop using the address. If not, the ACD will close the Ethernet
connection and indicate the situation with LEDs. This is done according the "DefendWithPolicyB".
Other policies are not supported. If the fieldbus protocol has been active, a fieldbus fault may be
activated (depends on the fieldbus and drive application configuration).
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
4

vacon • 26 Layout and connections
4.6 Time synchronization
4.6.1 Using ID 2551
System time in VACON
bit unsigned value to ID 2551. This value is seconds since 1.1.1970 (Unix time). In VACON
family, the default timezone is UTC. Local time can be configured by changing the timezone and
setting the daylight saving mode. VACON
written to this ID must be local time.
4.6.2 SNTP (Simple Network Time Protocol)
Simple Network Time Protocol enables usage of network time servers. Date and time information
is requested from the time server and set as system time. With SNTP, you can keep all devices in
your network in same time. This device acts as SNTP client. One use case for SNTP is that fault
history time stamps can now be compared between drives, enabling better fault tracing, for
example, detecting, in which order the drives were faulted. Synchronized date and time also enables
drives to automatically do programmed operations based on time information.
SNTP has two modes: Poll and Listen Only. Both also have modes where failure to update time will
generate fieldbus fault. In Poll mode, option board will request new time information periodically.
Default interval is 200 seconds. Lowest possible value is 30 seconds. This time can be adjusted from
SNTP parameters. In Listen only mode, time broadcast from server is expected every interval. You
can set two SNTP server addresses. For Poll mode, you have to define at least one SNTP server
address. You do not have to set server address in Listen Only mode, but in that case, the time
broadcasts are accepted from anyone who sends them.
When the SNTP client fails to receive time update from server within the time interval, it will first
wait (or request, depending on mode) the interval time again for the update. If it again does not
receive time update, it will change server and request (or wait for broadcast) from the second server.
If it receives the response from the second server, this server will be used until it fails. After device
restart, the SNTP will always first try the server number 1 (if its address has been defined). If the
second server also fails twice, the SNTP moves back to the server number one. If the selected mode
is Poll Fault or Listen Only Fault, a fieldbus fault is generated at this point.
®
100 family and VACON® NXP/NXS AC drives can be updated by writing 32
®
NXP/NXS AC drive does not have time settings, so value
®
100
SNTP also has port setting. By default, the SNTP port is 123, but you can change it. In Poll mode,
the requests are sent to this port on the time server. In Listen Only mode, the broadcasts are
listened in this port.
The SNTP monitoring values show the currently used SNTP server and the time since the last
received update. The SNTP status value tells status of the time synchronization. For example, if the
SNTP mode is Poll and you have not defined any SNTP server addresses, the SNTP status will be
"Invalid configuration (3)".
4
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Installation vacon • 27
5. INSTALLATION
5.1 VACON
®
OPTEA Advanced Dual port Ethernet drive support
The VACON® OPTEA Advanced Dual Port Ethernet option board can be used with the following
VACON
®
AC drives. Option board can be used for PROFINET IO with PROFIsafe communication in
slot E, when OPTBL/OPTBM/OPTBN is installed to slot D. If PROFIsafe is not used, then OPTEA can
be installed to slot D too.
Table 10. OPTEA supported AC drives and slots
AC drive Slots
®
100 INDUSTRIAL
VACON
VACON
®
and 100 X
VACON® 100 FLOW
®
VACON
The VACON
100 family support
®
100 family AC drives are supported from the OPTEA firmware version V002. The
process data in VACON
From AC drive SW
version on
NXP
D, E NXP00002V196 V001
D, E FW0072V028 V002
D, E FW0159V018 V002
®
100 family AC drives is 32 bit. The 32-bit process data support is planned
From OPTEA SW
version on
for later firmware release. Only 16-bit process data is supported. PROFIsafe features are supported
®
only in VACON
NXP drives.
EtherNet/IP and Modbus TCP/UDP support
Support for EtherNet/IP, Modbus TCP/UDP and other features which were in OPTE9, were added to
OPTEA firmware V002. Table below shows required minimum AC drive firmware version.
Table 11. Required minimum AC drive firmware versions
AC Drive From AC drive SW version on
VACON
®
VACON
100 INDUSTRIAL and
VACON® 100 FLOW
®
100 X
NXP
NXP00002V197
FW0072V028
FW0159V018
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5

vacon • 28 Installation
5.2 VACON® OPTE9 Dual Port Ethernet drive support
The VACON® OPTE9 Dual Port Ethernet option board can be used with the following VACON® AC
drives.
Table 12. OPTE9 supported AC drives and slots
AC drive Slots
®
®
100 INDUSTRIAL
VACON
VACON
VACON
®
and 100 X
VACON® 100 FLOW
VACON
®
20 X and CP
®
100 family AC drives are supported from the OPTE9 firmware version V003. The
VACON
®
100 family support
The VACON
VACON
process data in VACON
From AC drive SW
version on
NXP
NXS
D, E NXP00002V188 V001
D, E NXS00002V179 V001
D, E FW0072V018 V003
D, E FW0159V012 V003
®
20
- FW0107V011 V002
- FW0117V007 V002
®
100 family AC drives is 32 bit. The 32-bit process data support is planned
From OPTE9 SW
version on
for later firmware release. Only 16-bit process data is supported.
EtherNet/IP support
EtherNet/IP protocol was added to OPTE9 firmware version V004. The table below shows required
minimum AC drive firmware version .
Table 13. Required minimum AC drive firmware versions
AC Drive From AC drive SW version on
VACON® NXP
VACON
®
VACON
100 INDUSTRIAL and
VACON® 100 FLOW
VACON
VACON
®
NXS
100 X
®
20
®
20 X and CP
NXP00002V191
NXS00002V181
FW0072V018
FW0159V012
FW0107V012
FW0117V009
5
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
Installation vacon • 29
13006.emf
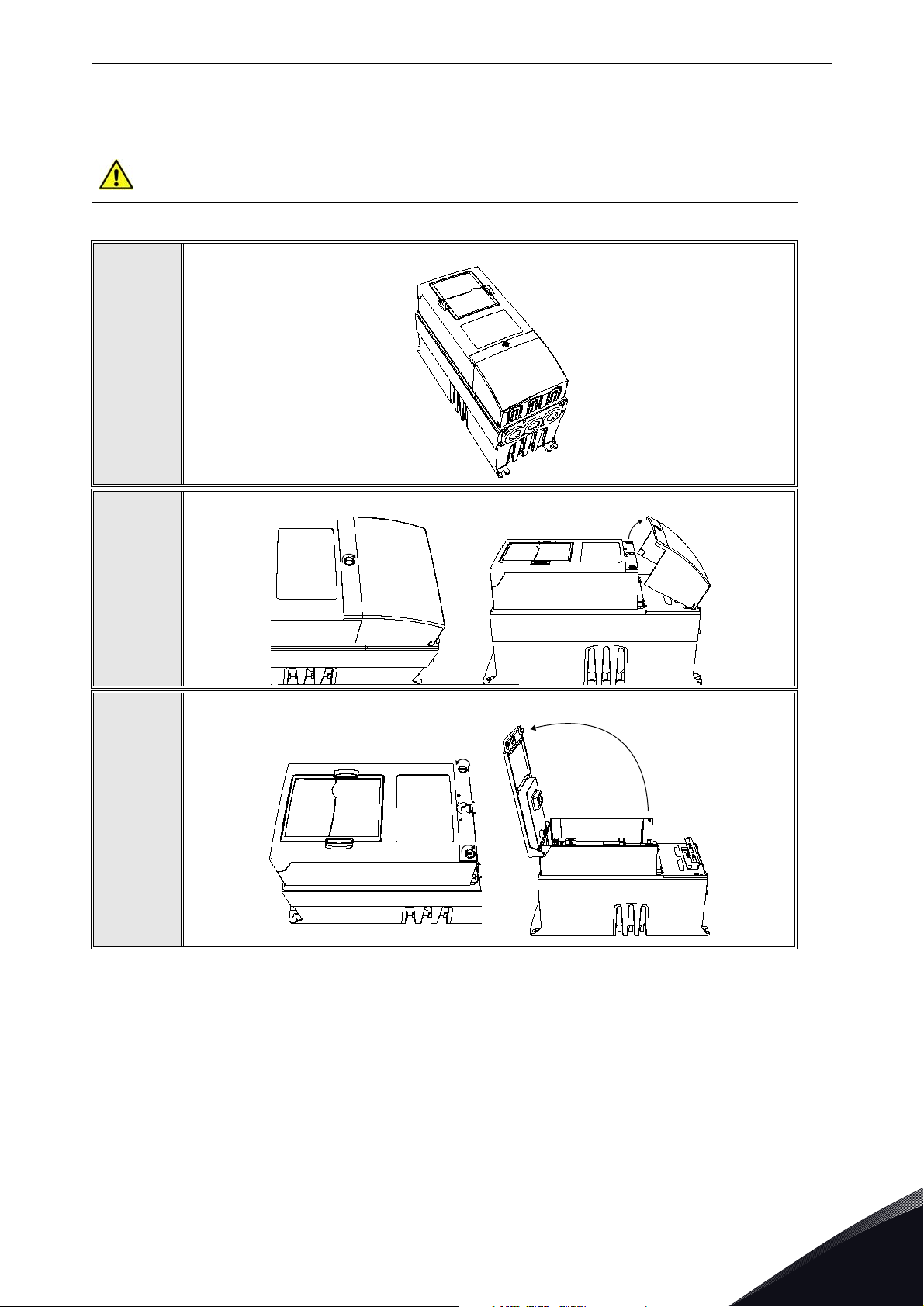
5.3 Installation in VACON® NX
Make sure that the AC drive is switched off before an option or fieldbus board is
changed or added!
VACON® NX AC drive.
1
Remove the cable cover.
2
3
Open the cover of the control unit.
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
5

vacon • 30 Installation
Install the option board in slot D or E on the control board of the AC drive. Make
sure that the grounding plate fits tightly in the clamp.
4
Make a sufficiently wide opening for your cable by cutting the grid as wide as
necessary.
5
6
Close the cover of the control unit and the cable cover.
5
Local contacts: https://www.danfoss.com/en/contact-us/contacts-list/
 Loading...
Loading...