

Page 1
August 2011
BAS-SVX49A-EN
Operators Guide
TR200 Vertical Bypass/Non Bypass Panel
SAFETY WARNING
Only qualified personnel should install and service the equipment. The installation, starting up, and servicing
of heating, ventilating, and air-conditioning equipment can be hazardous and requires specific knowledge and
training. Improperly installed, adjusted or altered equipment by an unqualified person could result in death or
serious injury. When working on the equipment, ovserve all precautions in the literature and on the tags,
stickers, and labels that are attached to the equipment.
Page 2
Safety
Safety
WARNING
EQUIPMENT HAZARD!
The vertical bypass/non bypass panel contains dangerous
voltages when connected to mains voltage. It is strongly
recommended that all electrical work conform to the
National Electrical Code (NEC) and all national and local
regulations. Installation, start-up and maintenance should
be performed only by qualified personnel. Failure to follow
the NEC or local regulations could result in death or
serious injury.
Motor control equipment and electronic controls are
connected to hazardous mains voltages. Extreme care
should be taken to protect against shock. The user must
be protected against supply voltage and the motor must
be protected against overload in accordance with
applicable national and local regulations. Be sure
equipment is properly grounded. Wear safety glasses
whenever working on electric control or rotating
equipment.
Warning against unintended start
WARNING
UNINTENDED START!
When the vertical bypass/non bypass panel is connected
to AC input power, the motor may start at any time. The
drive, panel, motor, and any driven equipment must be in
operational readiness. Failure to be in operational
readiness when panel and drive are connected to AC input
power could result in death, serious injury, or equipment
or property damage.
Grounding
Correct protective grounding of the equipment must be
established in accordance with national and local codes.
Ground currents are higher than 3mA.
Safety Guidelines
1. Disconnect the drive and vertical bypass/non
bypass panel from mains before commencing
service work
2. DO NOT touch electrical parts of the vertical
bypass/non bypass panel or drive when mains is
connected. After mains has been disconnected,
wait 15 minutes before touching any electrical
components or read the label on vertical
bypass/non bypass panel.
3. The user must be protected against supply
voltage and the motor must be protected against
overload in accordance with applicable national
and local regulations.
4. While programming parameters, the motor may
start without warning. Activate the [Off] key on
the keypad when changing parameters.
5. The [Off] key on the keypad does not isolate the
drive from mains voltage and is not to be used as
a safety switch.
When the vertical bypass/non bypass panel is connected
to mains, the motor may be started by means of an
external switch, a serial bus command, an input reference
signal, or a cleared fault condition. Use appropriate
cautions to guard against an unintended start.
WARNING
GROUNDING HAZARD!
For operator safety, it is important to ground drive, vertical
bypass panel, and motor properly. Follow the grounding
guidelines of local and national codes. Failure to follow
grounding guidelines could result in death or serious
injury.
BAS-SVX49A-EN
Page 3
Contents
Contents
1 Introduction
1.1.1 Purpose of the Manual 2-1
1.1.2 Overview 2-1
1.1.3 Typical Bypass Operation 2-1
1.2 Bypass Circuits
1.2.1 Three-contactor Bypass 2-1
1.3 Bypass Options
1.3.1 Common Run/Stop with Bypass 2-2
1.3.2 Automatic Bypass 2-2
1.3.3 Run Permissive in Bypass 2-2
1.3.4 Basic Fire Mode in Bypass 2-2
1.3.5 Advanced Fire Mode in Bypass 2-2
1.3.6 Overload Protection 2-2
1.4 Bypass Platform Configurations
1.5 Switch Mode Power Supply
1.5.1 Control Transformer 2-3
1.6 Disconnects
2-1
2-1
2-2
2-3
2-3
2-3
1.6.1 Main Disconnect 2-3
1.6.2 Mode Selector Switch 2-4
1.6.3 Panel Configurations 2-5
1.6.4 Panel Voltage and Frame Ratings 2-6
1.7 Power Component Functions
1.7.1 Power Fusing 2-6
2 Pre-installation
2.1.1 Receiving Inspection 3-1
2.1.2 Pre-installation Check 3-1
2.1.3 Installation Site Check 3-1
2.2 Harsh Environments
2.2.1 Airborne Liquids 3-2
2.2.2 Airborne Solids 3-2
2.2.3 Corrosive Chemicals 3-2
3 Installation
3.1.1 Tools Required 4-1
2-6
3-1
3-2
4-1
BAS-SVX49A-EN
3.1.2 Drive Fuses 4-1
3.1.3 Internal Main Panel Fuses 4-3
3.2 Mechanical Installation
4-3
Page 4
Contents
3.2.1 Lifting 4-3
3.2.2 Hoist or Overhead Lift 4-3
3.2.3 Forklift 4-3
3.2.4 Shipping Weights 4-3
3.3 Cooling
3.4 Electrical Installation
3.4.1 Component Identification & Customer Connection 4-7
3.4.2 Wire and Cable Access 4-15
3.4.3 Wire Size 4-19
3.4.4 Wire Type Rating 4-20
3.4.5 Terminal Tightening Torques 4-20
3.4.6 Input Line Connection 4-25
3.4.7 Motor Wiring 4-25
3.4.8 Grounding (Earthing) 4-26
3.4.9 Control Wiring 4-26
3.4.10 Serial Communication Bus Connection 4-27
3.4.11 Drive Control Terminals 4-28
4 Start Up
4.1.1 Inspection Prior to Start Up 5-2
4.1.2 Start Up Procedure 5-2
4-4
4-5
5-1
5 Electromechanical Bypass (EMB2) Operation
5.1.1 Typical Control Connections for Common HVAC Applications 6-1
5.1.2 EMB2 Auto Bypass 6-3
5.1.3 EMB2 Common Run/Stop 6-3
5.1.4 EMB2 Run Permissive 6-4
5.1.5 EMB2 Overload 6-4
5.1.6 EMB2 Safety Interlock 6-5
5.1.7 EMB2 Fire Mode 6-5
5.1.8 EMB2 Fault Reporting 6-5
5.1.9 EMB2 Switches 6-6
6 Electronically Controlled Bypass (ECB) Operation
6.1 Electronically Controlled Bypass (ECB) Operation
6.1.1 Overview 7-1
6.1.2 ECB Control Card 7-2
6.1.3 ECB Drive or Bypass Selection 7-5
6.1.4 ECB Programming 7-7
6-1
7-1
7-1
BAS-SVX49A-EN
Page 5
6.1.5 ECB Hand/OFF/Auto 7-8
6.1.6 ECB Mode of Operation 7-8
6.1.7 Bypass Status Word Bit Examples 7-10
6.1.8 ECB Auto Bypass 7-10
6.1.9 ECB Run Permissive 7-11
6.1.10 ECB Overload 7-11
6.1.11 ECB Safety Interlock 7-12
6.1.12 ECB Common Run/Stop 7-12
6.1.13 ECB Advanced Fire Mode 7-13
6.1.14 ECB Fault Reporting 7-13
Contents
7 Start Up Troubleshooting
7.1.1 Option Panel Alarm and Warnings 8-1
8 Appendix
8.1.1 Dimensions 9-1
8.1.2 Mechanical Diagrams 9-2
8.1.3 Typical Wiring Diagrams 9-6
8-1
9-1
BAS-SVX49A-EN
Page 6

Contents
BAS-SVX49A-EN
Page 7

1Introduction
Introduction
1.1.1 Purpose of the Manual
This manual is intended to provide detailed information for
the installation and operation of the option panel used in
conjunction with a Trane variable frequency drive (VFD or
drive). To enable efficient handling of the equipment,
requirements are provided for installation of mechanical,
electrical, control wiring, proper grounding, and environmental considerations. Pre-start and start up procedures
are detailed. Also included is a detailed overview of the
option panel bypass function. In addition, identification of
other optional components and their operation and start
up troubleshooting instructions are included. For the
electronically controlled bypass, additional programming
and operation information is provided.
1.1.2 Overview
A variable frequency drive regulates the speed and
operation of an electric motor. The drive is programmable
and offers many features and savings compared to
operating a motor from unregulated line voltage. The
option panel is a protective enclosure in which the drive
and various optional components are assembled and
mounted. The vertical non bypass panel is always
configured with a disconnect switch and fuses to protect
the drive. The vertical bypass panel allows switching
between running the motor from the drive (variable speed)
or across the line input power (constant speed).
The vertical bypass panel comes with one of two control
options:
The electromechanical bypass (EMB2)
•
Electronically controlled bypass (ECB)
•
The EMB2 is operated by a selector switch on the front of
the panel. The EMB2 controls a motor by switching
between drive control, operation in bypass, or off. In
addition, a test selection is available, which disengages the
motor from the drive but keeps the drive operational while
the motor runs in bypass. The switching function activates
contactors to provide power to the motor through the
drive or bypass circuitry, as required.
inputs, and status reporting. The VFD’s logic circuitry is
backed up by an independent panel-mounted power
supply so that, even if the drive loses power, control and
communication functions are maintained. Programming
and display are provided by the keypad. An important
feature of the ECB is the ability to accept commands from
a building automation system (BAS) and to report
operational status in return.
See more detailed descriptions of the EMB2 in 5 Electrome-
chanical Bypass (EMB2) Operation and ECB in 6 Electronically
Controlled Bypass (ECB) Operation of this manual.
1.1.3 Typical Bypass Operation
With contactors M1 and M2 closed and contactor M3
open, the motor is running in drive control. Opening
contactor M2 removes power to the motor but allows the
drive to remain under power. This is referred to as test
mode. With contactors M1 and M2 open and contactor M3
closed, the motor is running in bypass from the line input
power.
1.2 Bypass Circuits
1.2.1 Three-contactor Bypass
The bypass circuit consists of a bypass contactor (M3)
interlocked with a drive output contactor (M2), a drive
input contactor (M1), and an overload relay. For the EMB2,
a door mounted Drive/OFF/Bypass/Test Selector switch is
used to electrically select whether the motor is powered
by the drive, connected to the full speed bypass, or
disconnected from both. The test position applies power
to the motor through the bypass (M3 closed) contactor but
removes power from the drive (M2 open) while keeping
the drive powered (M1 closed). A Pilot light indicates when
in bypass. For the ECB, control selection is made through
the drive keypad by pressing the DRIVE BYPASS key and
selecting from the available options shown. Display data
indicates when in bypass. The circuitry may be supplied
with either an input disconnect switch or an input circuit
breaker.
The ECB also uses contactors to provide power to the
motor through the drive or bypass circuitry. However, the
ECB contains a local processor that interacts with the
drive’s control logic for programmable options, remote
BAS-SVX49A-EN 1-1
Page 8
Introduction
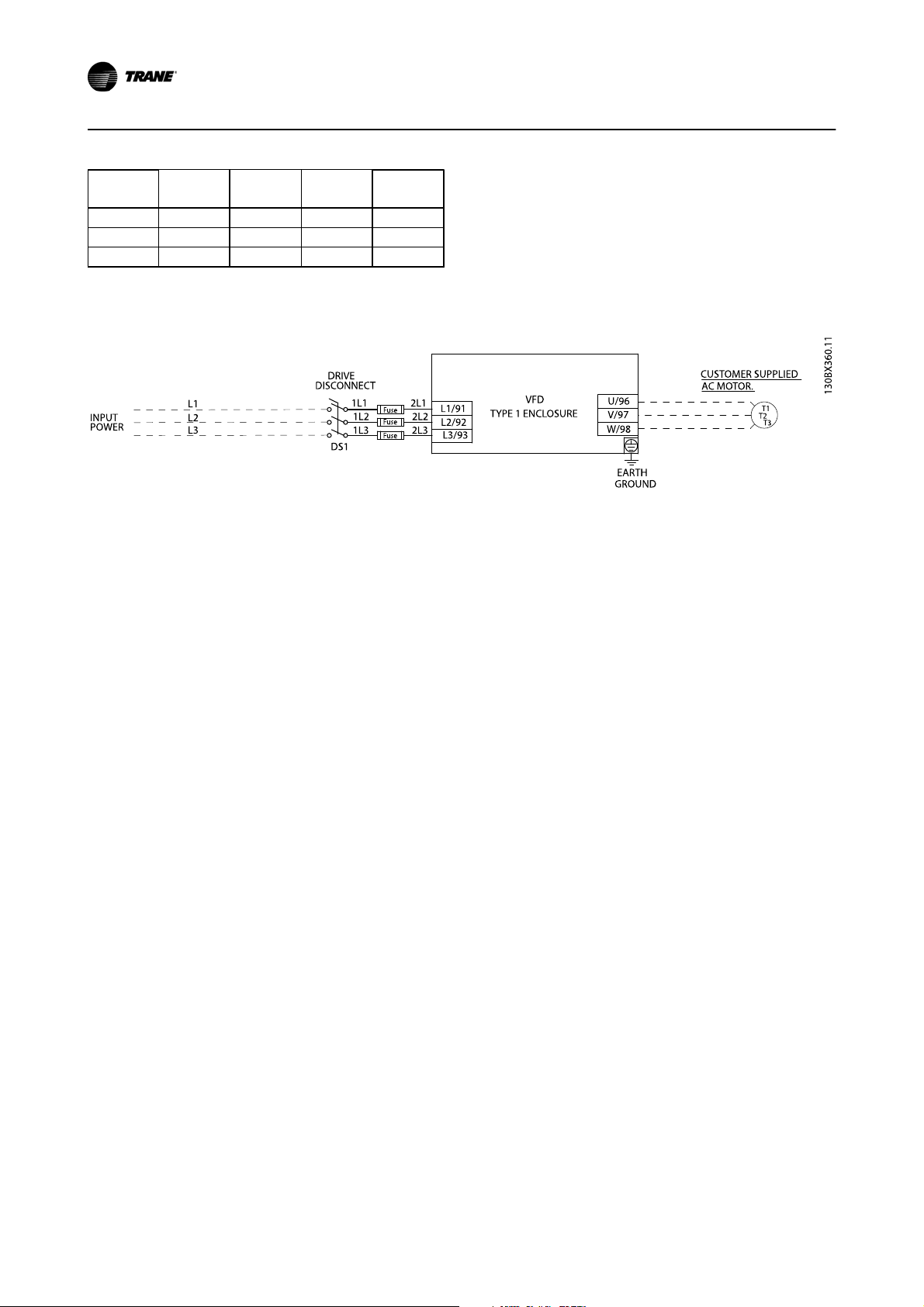
Contactor Drive Mode OFF Bypass
Mode
M1 Closed Open Open Closed
M2 Closed Open Open Open
M3 Open Open Closed Closed
Table 1.1 Contactor Operation
Figure 1.1 Basic Non Bypass Circuit
Test Mode
1.3 Bypass Options
1.3.1 Common Run/Stop with Bypass
Allows a remote signal to initiate operation in either drive
control or bypass depending upon the position of the
bypass selector switch.
1.3.2 Automatic Bypass
1.3.4 Basic Fire Mode in Bypass
This option switches the panel to bypass whenever a
remote fire mode signal is given to the VFD through the
input terminals. In either drive or bypass, fire mode is
intended to ignore common safety and overload inputs for
emergency situations. The motor will continue to run in
bypass until fire mode is removed or the drive, panel, or
motor fails. External safety signals and motor overload are
ignored when in fire mode.
This feature automatically transfers the motor from drive to
bypass without operator intervention when a fault
condition trips the drive, after a programmable time-out
period. The VFD’s internal fault circuitry controls this
action. The time delay permits all automatically resettable
faults to clear prior to transfer to bypass. Run permissive or
safety circuit signals override the auto bypass function and
may prevent or delay bypass operation.
1.3.5 Advanced Fire Mode in Bypass
The advanced fire mode allows for a variety of
programmable responses to an external fire mode
command signal. Bypass options are programmed through
the drive’s fire mode parameters. See 6.1.13 ECB Advanced
Fire Mode.
1.3.6 Overload Protection
1.3.3 Run Permissive in Bypass
This thermally activated device provides mechanical
With run permissive active, the drive sends a run request
and waits for a remote response before commanding the
motor to start. The response indicates the system is safe to
operate.
1-2 BAS-SVX49A-EN
overload protection for the motor while in bypass
operation. It measures motor current and is set to the full
load amps (FLA) of the motor. A 1.2 x FLA service factor is
built-in and maintained, meaning that should the motor
current increase above that value, the overload will
calculate the level of increase to activate timing for the trip
function. The higher the current draw, the quicker the trip
response. The overload provides Class 20 motor protection.
Page 9
1.4 Bypass Platform Configurations
The two bypass platform configurations are ECB and EMB2.
The features available as options with each platform are
listed in Table 1.2. The ECB, also listed below, has all option
features available. See 5 Electromechanical Bypass (EMB2)
Operation for additional details on the EMB2 and
6 Electronically Controlled Bypass (ECB) Operation for the
ECB.
Introduction
Control Features EMB2 ECB
Safety Interlock X X
Common Start / Stop X X
Automatic Bypass X X
Run Permissive X X
Basic Fire Mode X X
Advanced Fire Mode X
Serial Communication X
Table 1.2 Bypass Configurations
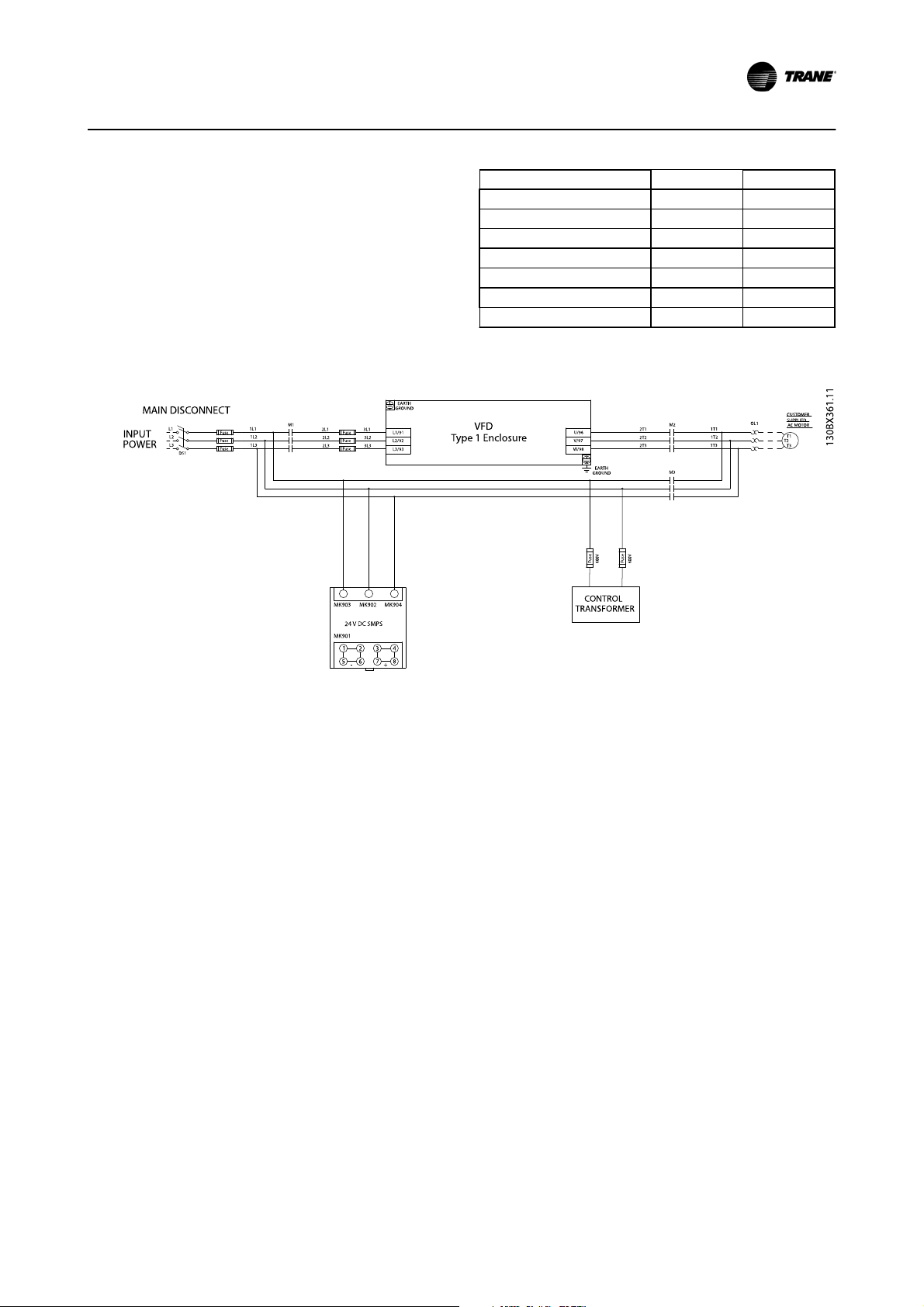
Figure 1.2 Basic Bypass Circuit
1.5 Switch Mode Power Supply
The VFD’s logic circuitry is backed up by an independent
panel-mounted switch mode power supply so if the drive
loses power, control and communication functions are
maintained. The SMPS converts three-phase AC input
power to 24 V DC control power. Since the SMPS draws
power from all three phases, it offers immunity protection
from most phase-loss and brown-out conditions. The SMPS
is internally protected from short circuit on its output and
three board-mounted fuses provide additional protection.
The SMPS is not designed for external use and may take
up to 5 sec. to initialize at power-up. The SMPS will
maintain a 24 V DC output with a low input line voltage.
The 200 Volt SMPS will maintain the 24 V DC output with
a line voltage as low as 150 V AC and the 600 V SMPS to
335 V AC. Refer to Figure 1.2.
1.5.1 Control Transformer
A control transformer is included on larger horsepower
units where the contactor coils are AC. The control
transformer steps down the line input voltage to 120V AC.
The coils of AC contactors are isolated from the Switch
Mode Power Supply via relays.
1.6 Disconnects
1.6.1 Main Disconnect
The main disconnect removes line input power to the
drive and bypass. A main disconnect is available in four
options.
Fused disconnect. Two-position (ON/OFF) rotary
•
switch, padlock compatible, with three fuses, one
on each phase, built into the switch. For safety,
the switch must be in the OFF position before
BAS-SVX49A-EN 1-3
Page 10

Introduction
the option panel door can be opened. (Bypass
panel only.)
Disconnect without fuses. For user-supplied fuses
•
option. (Bypass panel only.)
Main circuit breaker. A thermal/ magnetic current
•
interrupt device using an ON/TRIP/OFF/RESET
switch. When in the ON position, a trip fault
removes power from the drive/bypass circuit and
the switch moves to the TRIP setting. The switch
must be moved to the RESET position
momentarily after the fault has been cleared to
reset the circuit breaker. (Bypass panel only.)
Main Disconnect with drive fuses. Non-bypass
•
panel two-position (ON/OFF) rotary switch that
disconnects the main AC line power to the drive
only.
1.6.2 Mode Selector Switch
The mode selector switch is used for 3-contactor bypass
on EMB2 units. The selector switch allows the operator to
select from four modes of operation.
Drive mode: When drive mode is selected, the M1 and M2
contactors are closed allowing power to flow in and out of
the drive to the motor.
Off mode: This mode opens all contactors removing any
power to the motor.
Bypass mode:When bypass mode is selected, the M3
contactor closes and allows the motor to run directly from
the input line power.
Test mode:Test mode closes the M1 and M3 contactors
and allows the motor to be powered by the input line
power. This also allows the drive to power up without
being connected to the motor. Refer to Figure 1.2.
1-4 BAS-SVX49A-EN
Page 11
Introduction
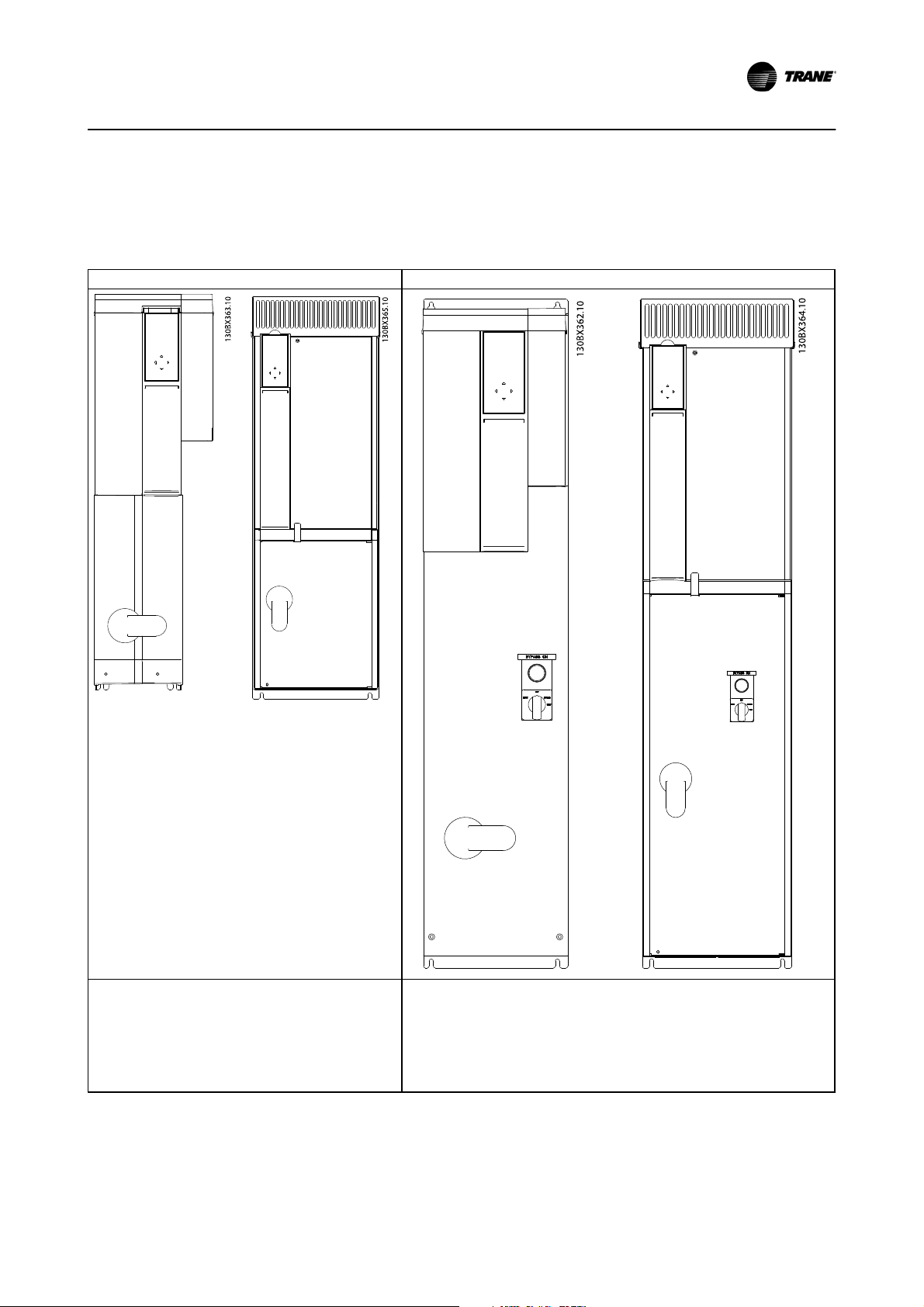
1.6.3 Panel Configurations
The TR 200 Drive Series comes in two panel enclosure types. One is the non bypass and the other is the bypass. See
Table 1.3 for descriptions and available options.
Non bypass Bypass
Drive plus both of the following:
1. Fuses
2. Disconnect
Table 1.3 Tier Definitions and Features
BAS-SVX49A-EN 1-5
Drive with bypass:
1. Fuses
2. Disconnect/Circuit Breaker
3. Contactors
4. Power Supply
5. Control Module
Page 12
Introduction
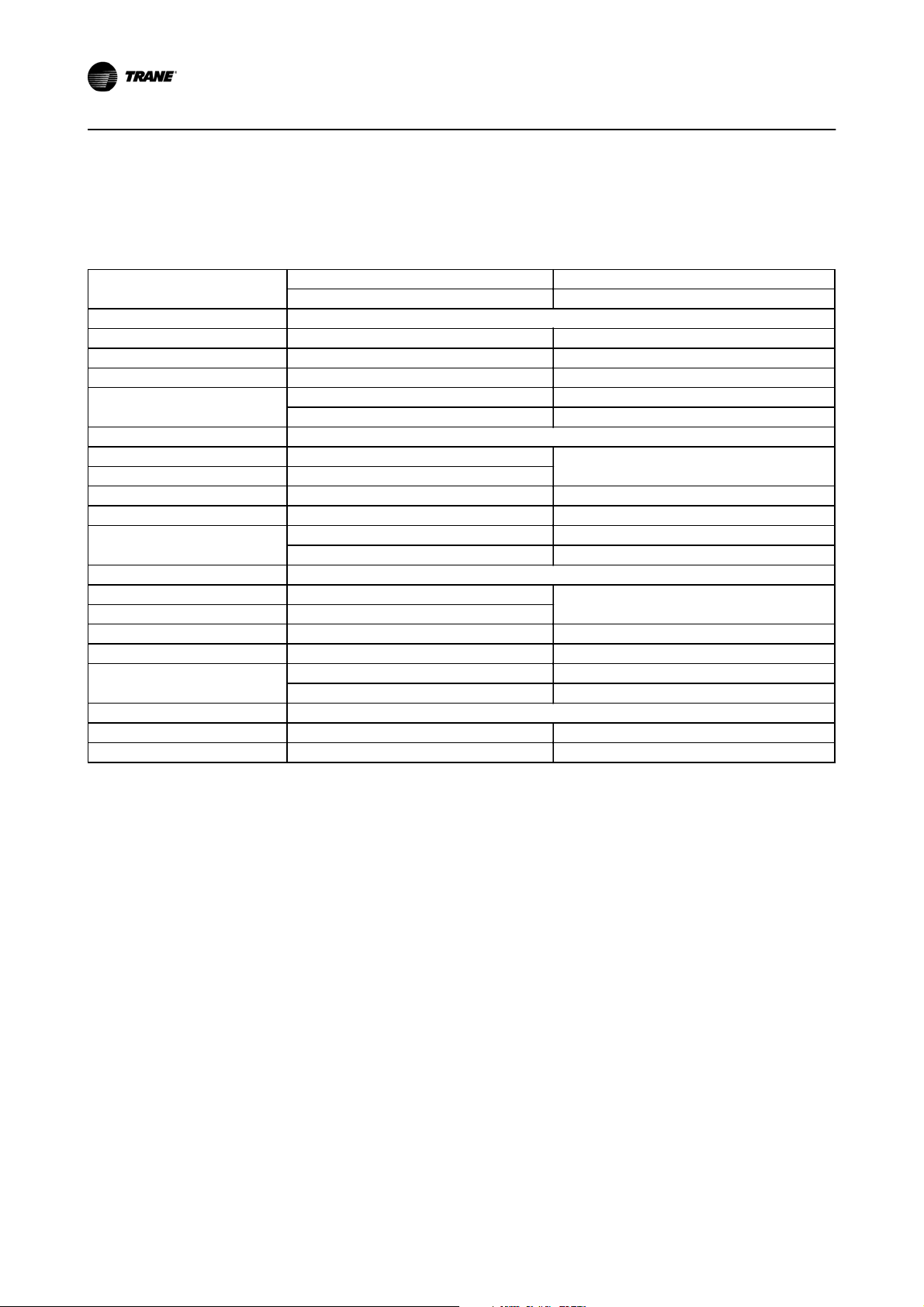
1.6.4 Panel Voltage and Frame Ratings
Table 1.4Table 1.4 defines the voltage and hp ratings of the frames sizes for the panel. See 8 Appendix for overall and
mounting dimensions.
Panel P2
(B3 - Drive)
Volts VAC HP (KW)
208 & 230 7.5 (5.5) - 15 (11) 7.5 (5.5) - 15 (11)
460 & 600 15 (11) - 25 (18.5) 15 (11) - 25 (18.5)
Panel P3
(B4 - Drive)
Volts VAC HP (KW)
208 20 (15)
230 20 (15) - 25 (18.5)
460 & 600 30 (22) - 50 (37) 30 (22) - 50 (37)
Panel P4
(C3 - Drive)
Volts VAC HP (KW)
208 25 (18.5)
230 30 (22) - 40 (30)
460 & 600 60 (45) - 75 (55) 60 (45) - 75 (55)
Panel P5
(C4 - Drive)
Volts VAC HP (KW)
208 & 230 50 (37) - 60 (45) 50 (37) - 60 (45)
460 & 600 100 (75) - 125 (90) 100 (75) - 125 (90)
Bypass Non Bypass
TR200 TR200
Bypass Non Bypass
TR200 TR200
20 (15) - 25 (18.5)
Bypass Non Bypass
TR200 TR200
30 (22) - 40 (30)
Bypass Non Bypass
TR200 TR200
Table 1.4 Panel Voltage and Frame Ratings
1.7 Power Component Functions
1.7.1 Power Fusing
For main panel power fuses, only use the specified fuse or
an equivalent replacement. For drive fuses only use the
specified fuse. See the fuse ratings label on the inside
cover of the unit or Table 3.2Table 3.2, Table 3.3Table 3.3,
Table 3.4Table 3.4 and Table 3.5Table 3.5.
Main fusing
Main fuses are located ahead of the drive and bypass.
Main fuses are designed to protect the circuitry within the
bypass panel but is not adequate to protect the drive.
Main fuses are dual-element, time-delay types and mount
inside the bypass enclosure.
1-6 BAS-SVX49A-EN
Drive fusing
Drive fuses are located ahead of the drive and are a fastacting type. Drive fuses are standard in all bypass and nonbypass panels.
5,000 or 100,000 amp SCCR
The bypass panel supplied with a non fusible Main
Disconnect Switch is 5,000 amps short-circuit current rating
(SCCR). The bypass panel supplied with a Fusible
disconnect or circuit breaker is 100,000 amp SCCR. The
non bypass panel supplied with a non-fusible Main
Disconnect is 100,000 amp SCCR. See the panel label for
SCCR rating.
NOTE!
The 600 V circuit breaker option is 5,000 amp (SCCR).
Page 13
2 Pre-installation
Pre-installation
2.1.1 Receiving Inspection
Inspect the packaging and equipment closely when
received. Any indication of careless handling by the carrier
should be noted on the delivery receipt, especially if the
equipment will not be immediately uncrated. Obtain the
delivery person’s signed agreement to any noted damages
for any future insurance claims. Ensure that the model
number and power match the order and intended use for
the drive.
IMPORTANT LOST OR DAMAGED GOODS INSPECT THIS
SHIPMENT IMMEDIATELY UPON ARRIVAL If goods are
received short or in damaged condition, insist on a
notation of the loss or damage across the face of the
freight bill. Otherwise no claim can be enforced against
the transportation company. If concealed loss or damage is
discovered, notify your carrier at once and request an
inspection. This is absolutely necessary. Unless you do this
the carrier will not entertain any claim for loss or damage.
The agent will make an inspection and can grant a
concealed damage notation. If you give the transportation
company a clear receipt for equipment that has been
damaged or lost in transit, you do so at your own risk and
expense.
Trane is willing to assist you to collect claims for loss or
damage, but willingness on our part does not make us
responsible for collection of claims or replacement of
material. The actual filing and processing of the claim is
your responsibility.
2.1.2 Pre-installation Check
1. Compare panel model number to what was
ordered.
2. Ensure each of the following are rated for the
same voltage:
Drive
•
Panel
•
Power line
•
Motor
•
3. Ensure that the panel output rating is equal to or
greater than motor total full load current for full
motor performance.
Motor power size and panel must match
•
for proper overload protection.
If panel rating is less than motor; full
•
motor output cannot be achieved.
4. Check motor wiring:
Any disconnect between drive and
•
motor should be interlocked to drive
safety interlock circuit to avoid
unwanted drive trips.
Do not connect power factor correction
•
capacitors between the drive and motor.
Two speed motors must be wired
•
permanently for full speed.
Y-start, Δ-run motors must be wired
•
permanently for run.
2.1.3 Installation Site Check
Because the option panel relies on the ambient
•
Figure 2.1 Sample Panel Label
BAS-SVX49A-EN 2-1
air for cooling, it is important to observe the
limitations on ambient air temperature. Derating
concerns start above 104°F (40°C) and 3300 feet
(1000m) elevation above sea level.
It is important with multiple panels to check wall
•
strength. Make sure that the proper mounting
screws or bolts are used.
Ensure that the wall or floor area for installation
•
will support the weight of the unit.
If construction work continues after the
•
equipment is mounted, it is important to keep
the interior free from concrete dust and similar
Page 14

Pre-installation
dirt. If the unit does not have power applied to it,
supply a protective covering. It is important to
ensure that the components stay as clean as
possible. It may be necessary to clean the interior
once construction is completed.
Keep drawings and manuals accessible for
•
detailed installation and operation instructions. It
is important that the manuals be available for
equipment operators.
2.2 Harsh Environments
NOTE!
The mechanical and electrical components within the
option panel can be adversely affected by the
environment. The effects of contaminants in the air, either
solid, liquid, or gas, are difficult to quantify and control.
2.2.1 Airborne Liquids
Liquids in the air can condense in components. Water
carried in the air is easily measured as relative humidity,
but other vapors are often more difficult to measure or
control. Steam, oil and salt water vapor may cause
corrosion of components. In such environments, use TYPE
12 enclosures to limit the exchange of outside air into the
option enclosure. Extremely harsh environments may
require a higher level of protection.
2.2.2 Airborne Solids
Particles in the air may cause mechanical, electrical or
thermal failure in components. A TYPE 1 enclosure
provides a reasonable degree of protection against falling
particles, but it will not prevent the fan from pulling dirty
air into the enclosure.
2.2.3 Corrosive Chemicals
In environments with high temperatures and humidity,
corrosive gases such as sulfur, nitrogen and chlorine
compounds cause corrosion to occur in components.
Indications of corrosion are blackened copper or rust on
steel or oxidized aluminum. In such environments, it is
recommended that the equipment be mounted in a
cabinet with fresh air ventilation and that corrosive
compounds be kept away. A non-ventilated cabinet fitted
with an air conditioner as a heat exchanger may be used.
Conformal coated circuit boards may be specified to
reduce the corrosive effects of a harsh environment.
2-2 BAS-SVX49A-EN
Page 15
3 Installation
Installation
3.1.1 Tools Required
In addition to the standard tool kit, the tools in Table 3.1
are recommended for installation of the option panel.
Spreader bar capable of lifting up to 750 lbs.
Max diameter 0.5 in.
Forklift, crane, hoist or other lifting device capable of handling
up to 750 lbs. (Qualified device operator available for operating
the equipment.)
Metric Socket Set: 7 - 19mm
Socket Extensions: 4, 6, and 12 inch
Torx driver set: T10 - T40
Torque wrench: 6 - 375 lbs-in
Allen Wrenches:1/8, 3/16, 1/4, & 5/16 inches
Metric or English wrenches: 7 - 19mm
Table 3.1 Tools Required
TOOLS
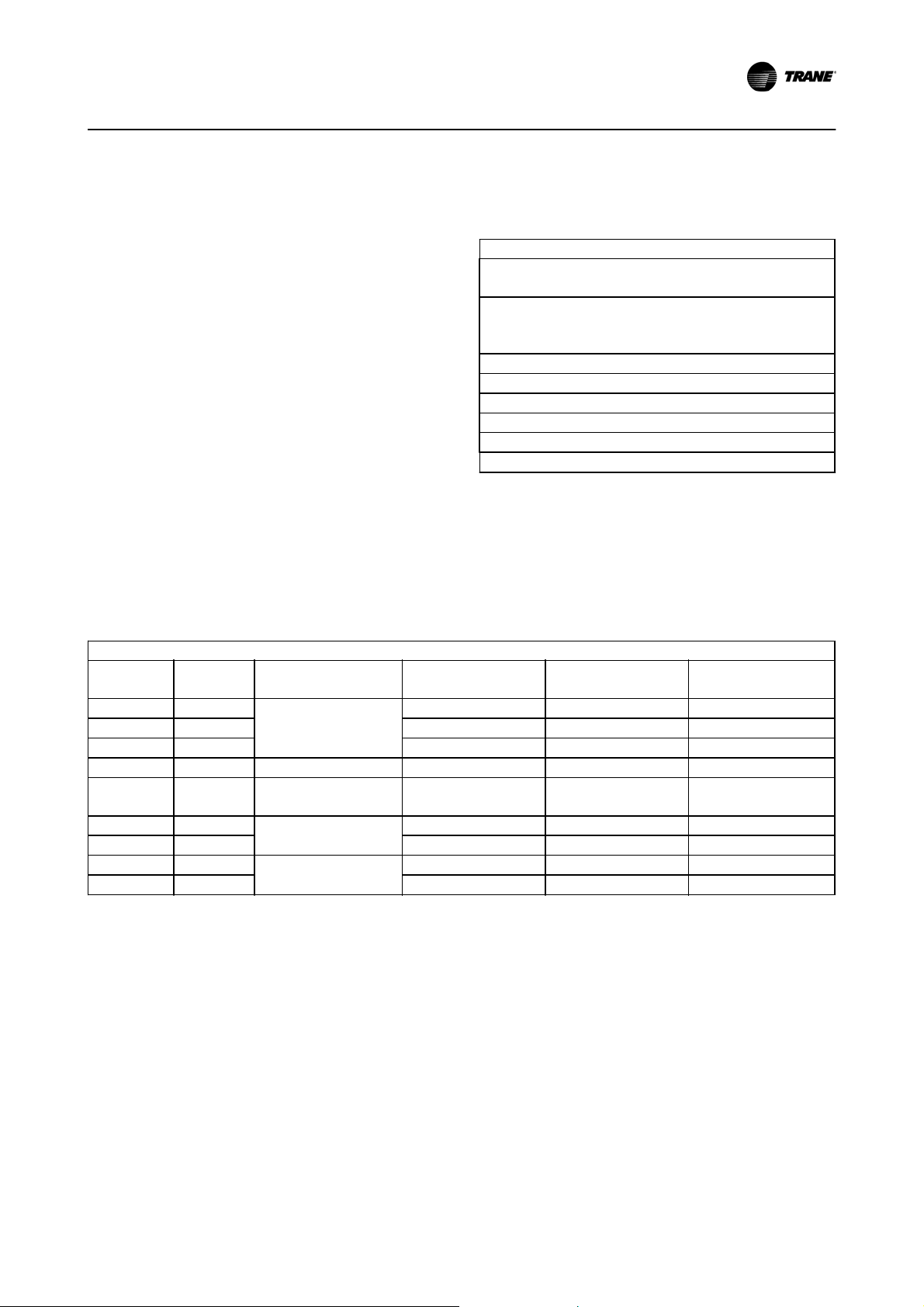
3.1.2 Drive Fuses
To maintain UL, the drive fuses should be replaced only with the fuses specified in , , , and . If an alternate drive fuse is
desired please consult the factory. See the specifications label inside the cover of the unit for acceptable replacement drive
fuses. A sample of this data can be seen in Table 3.6
208 V AC
HP (KW)
7.5 (5.5) 24,2
10 (7.5) 30,8 LPJ-50-SP JJN-50
15 (11) 46,2 LPJ-70-SP JJN-60
20 (15) 59,4 P3 LPJ-90-SP JJN-80
25 (18.5) 74,8
30 (22) 88
40 (30) 114 LPJ-175-SP JJN-150
50 (37) 143
60 (45) 169 LPJ-250-SP JJN-250 FNQ-R-1.25
UL Motor
Current
Panel (TR200) Non Bypass
& Bypass
P2
P3 - Non Bypass P4 -
Bypass
P4
P5
Main Fuse (TR200)
Bussman
LPJ-40-SP JJN-50
LPJ-125-SP JJN-125
LPJ-150-SP JJN-125
LPJ-250-SP JJN-200 FNQ-R-1.25
Drive Fuse (TR200)
Bussman
Transformer Fuse (TR200)
Bussman
Table 3.2 Drive Fuses 208 V
BAS-SVX49A-EN 3-1
Page 16
Installation
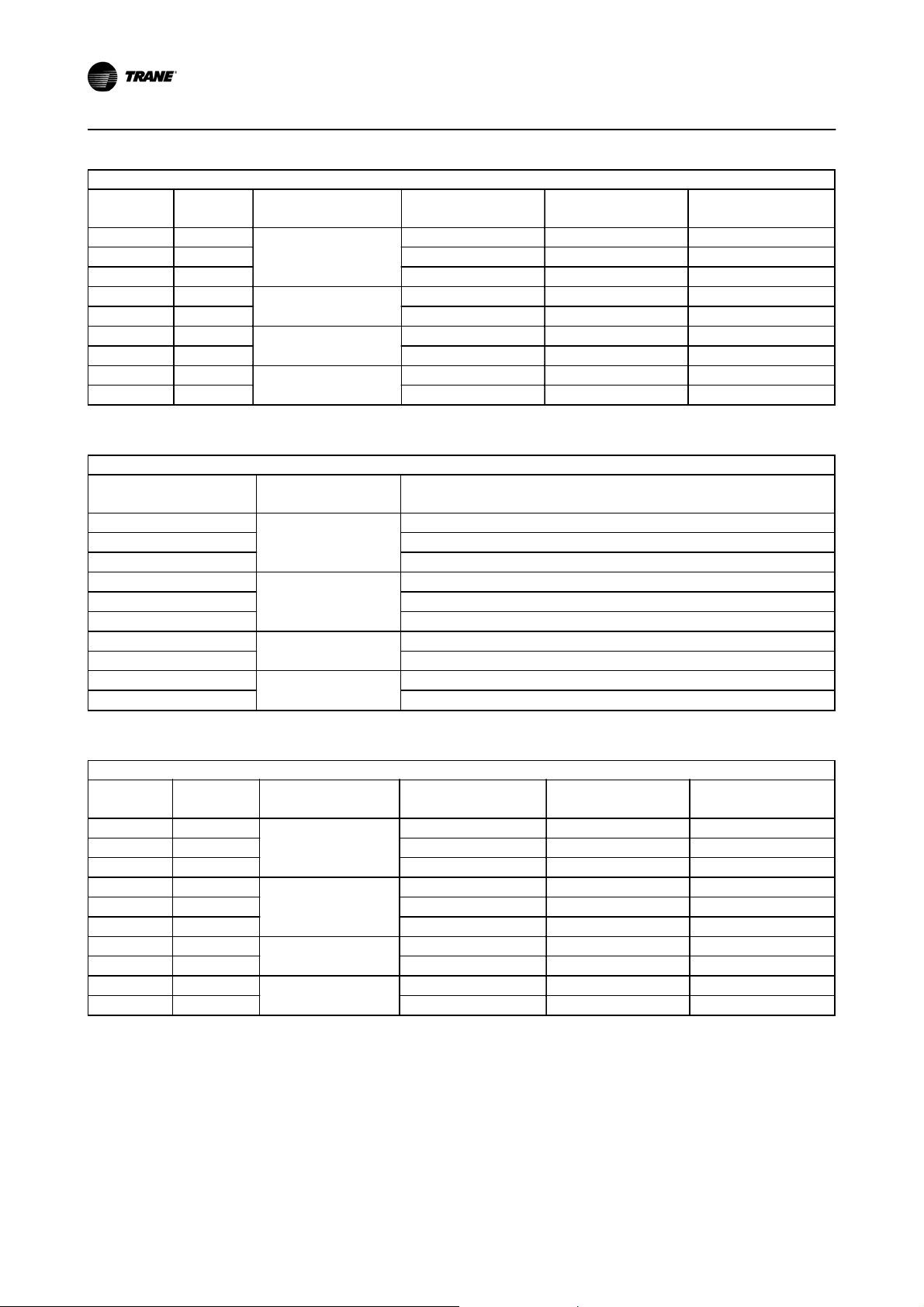
230 V AC
HP (KW)
7.5 (5.5) 22
10 (7.5) 28 LPJ-45-SP JJN-50
15 (11) 42 LPJ-70-SP JJN-60
20 (15) 54
25 (18.5) 68 LPJ-100-SP JJN-125
30 (22) 80
40 (30) 104 LPJ-150-SP JJN-150
50 (37) 130
60 (45) 154 LPJ-250-SP JJN-250 FNQ-R-1.25
Table 3.3 Drive Fuses 230 V
HP (KW)
15 (11) 21
20 (15) 27 LPJ-40-SP JJS-40
25 (18.5) 34 LPJ-50-SP JJS-50
30 (22) 40
40 (30) 52 LPJ-80-SP JJS-80
50 (37) 65 LPJ-100-SP JJS-100
60 (45) 77
75 (55) 96 LPJ-150-SP JJS-150
100 (75) 124
125 (90) 156 LPJ-250-SP JJS-250 FNQ-R-0.60
UL Motor
Current
UL Motor
Current
Panel (TR200) Non Bypass
& Bypass
P2
P3
P4
P5
Panel (TR200) Non
Bypass & Bypass
P2
P3
P4
P5
Main Fuse (TR200)
Bussman
LPJ-35-SP JJN-50
LPJ-90-SP JJN-80
LPJ-125-SP JJN-125
LPJ-200-SP JJN-200 FNQ-R-1.25
460 V AC
Main Fuse (TR200)
Bussman
LPJ-35-SP JJS-40
LPJ-60-SP JJS-60
LPJ-125-SP JJS-125
LPJ-200-SP JJS-200 FNQ-R-0.60
Drive Fuse (TR200)
Bussman
Drive Fuse (TR200)
Bussman
Transformer Fuse (TR200)
Transformer Fuse (TR200)
Bussman
Bussman
Table 3.4 Drive Fuses 460 V
600 V AC
HP (KW)
15 (11) 17
20 (15) 22 LPJ-35-SP JJS-35
25 (18.5) 27 LPJ-45-SP JJS-45
30 (22) 32
40 (30) 41 LPJ-60-SP JJS-60
50 (37) 52 LPJ-80-SP JJS-80
60 (45) 62
75 (55) 77 LPJ-125-SP JJS-125
100 (75) 99
125 (90) 125 LPJ-200-SP JJS-175 FNQ-R-0.50
Table 3.5 Drive Fuses 600 V
UL Motor
Current
Panel (TR200) Non
Bypass & Bypass
P2
P3
P4
P5
Main Fuse (TR200)
Bussman
LPJ-30-SP JJS-35
LPJ-50-SP JJS-50
LPJ-100-SP JJS-100
LPJ-150-SP JJS-150 FNQ-R-0.50
Drive Fuse (TR200)
Bussman
Transformer Fuse (TR200)
Bussman
3-2 BAS-SVX49A-EN
Page 17
Installation
3.1.3 Internal Main Panel Fuses
Use only the specified fuse or an equivalent replacement for the internal main fuses. See the specifications label inside the
cover of the unit for acceptable replacement main fuses. A sample of this can be seen in Table 3.6.
Fuse Description Manufacturer Part Number/Size
F13A & C Primary Transformer Bussmann FNQ-R-0.50
F15A, B, & C Main Fuses Bussmann LPJ-30-SP
F16A, B, & C Drive Fuses Bussmann JJS-35
F900, F901,F902 SMPS - Power Supply Bussmann FWH-020A6F, 500V
Table 3.6 Sample Fuse Rating Label
3.2 Mechanical Installation
3.2.1 Lifting
WARNING
Heavy Objects!
Do not use cables (chains or slings) except as shown. Each
of the cables (chains or slings) used to lift the unit must be
capable of supporting the entire weight of the unit. Lifting
cables (chains or slings) may not be of the same length.
Adjust as necessary for even unit lift. Other lifting
arrangements may cause equipment or property-only
damage. Failure to properly lift unit could result in death
or serious injury. See details below.
WARNING
Check the weight of unit to determine the safety of the
lifting method. Ensure that the lifting device is suitable for
the task. If necessary, plan for a hoist, crane or forklift with
appropriate rating to move the units.
Follow recommendations below. failure to do so could
result in death or serious injury.
3.2.2 Hoist or Overhead Lift
3.2.3 Forklift
Only a competent lift operator with additional
•
support personnel should attempt moving the
unit.
Carefully position forklift and ensure stability prior
•
to lift.
3.2.4 Shipping Weights
Weights listed in Table 3.7 are approximate for base units.
Options can add or reduce weight of unit. Weights listed
are in lbs.
Frame Non Bypass Panel Bypass Panel
P2 36 84
P3 66 106
P4 106 167
P5 155 248
Table 3.7 Approximate Shipping Weights
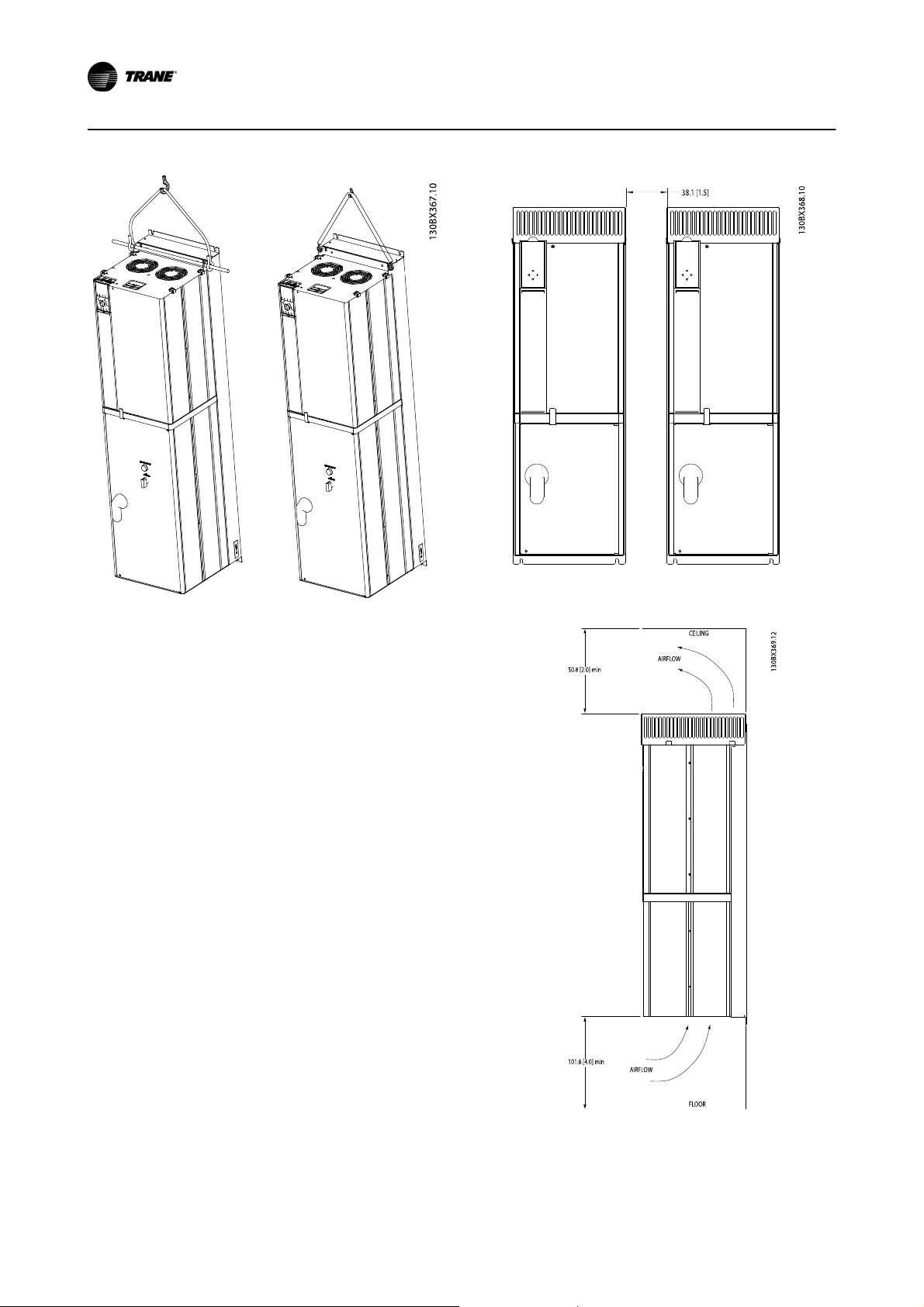
Use a solid steel spreader bar for lifting. Slide the
•
spreader bar through the two (2) lifting holes on
the panel. Lifting rings are 0.59in (15mm) in
diameter (see Figure 3.1). If VFD mounting screws
interfere with the spreader bar, lifting hooks can
be used instead of the lifting bar.
Connect the spreader bar to a hoist or other
•
lifting device.
Carefully lift the unit and secure it to the wall.
•
Refer to 8 Appendix for dimensional drawings to
determine fasteners size and location.
BAS-SVX49A-EN 3-3
Page 18
Installation
Figure 3.1 Proper Lifting Method
3.3 Cooling
Only mount the drive and panel vertically.
•
Panels rely on the ambient air for cooling. It is
•
important to observe the limitations on ambient
air temperature. The maximum ambient
temperature for all bypass panels is 40°C and
45°C for non bypass panels. Derating concerns
start above 3300 feet elevation above sea level.
Most panels may be mounted side-by-side
•
without additional side clearance. However, the
P2 (B3 frame size) units require 1.5 in. minimum
clearance between units (see Figure 3.2).
Top and bottom clearance is required for cooling
•
(see Figure 3.3). Generally, 2 to 10 inches (50 to
250mm) minimum clearance is required,
depending upon the hp (kW) of the unit. See the
dimensional drawings in 8 Appendix for specific
requirements.
No additional back plate is required for drives
•
with the bypass and non bypass panels.
Figure 3.2 Side Cooling Clearance
Figure 3.3 Cooling Airflow
3-4 BAS-SVX49A-EN
Page 19
Installation
3.4 Electrical Installation
WARNING
Hazardous Voltage!
Disconnect all electric power, including remote disconnects
before servicing. Follow proper lockout/tagout procedures
to ensure the power cannot be inadvertently energized.
Failure to disconnect power before servicing could result in
death or serious injury.
WARNING
Proper Field Wiring and Grounding Required!
All field wiring MUST be performed by qualified personnel.
Improperly installed and grounded field wiring poses FIRE
and ELECTROCUTION hazards. To avoid these hazards, you
MUST follow requirements for field wiring installation and
grounding as described in NEC and your local/state
electrical codes. Failure to follow codes could result in
death or serious injury.
WARNING
EQUIPMENT HAZARD!
Rotating shafts and electrical equipment can be hazardous.
It is strongly recommended that all electrical work conform
to all national and local regulations. Installation, start-up
and maintenance should be performed only by qualified
personnel. Failure to follow local regulations could result in
death or serious injury.
Motor control equipment and electronic controls
•
are connected to hazardous line voltages.
Extreme care should be taken to protect against
electrical hazard.
Correct protective grounding of the equipment
•
must be established. Ground currents are higher
than 3mA.
A dedicated ground wire is required.
•
Wear safety glasses whenever working on electric
•
control or rotating equipment.
NOTICE!
Make all power connections with a minimum of 60°C/
140°F rated copper wire.
WARNING
INDUCED VOLTAGE!
Run output motor cables from multiple drives separately.
Induced voltage from output motor cables run together
can charge equipment capacitors even with the equipment
turned off and locked out. Failure to run output motor
cables separately could result in death or serious injury.
NOTE!
Run input power, motor wiring and control wiring in three
separate metallic conduits or raceways for high frequency
noise isolation. Failure to isolate power, motor and control
wiring could result in less than optimum drive and
associated equipment performance.
NOTE RUN INPUT POWER, MOTOR WIRING AND CONTROL
WIRING IN THREE SEPARATE METALLIC CONDUITS OR
RACEWAYS FOR HIGH FREQUENCY NOISE ISOLATION.
FAILURE TO ISOLATE POWER, MOTOR AND CONTROL
WIRING COULD RESULT IN LESS THAN OPTIMUM DRIVE
AND ASSOCIATED EQUIPMENT PERFORMANCE.
Because the motor wiring carries high frequency
•
electrical pulses, it is important that no other
wires are run together. If the incoming power
wiring is run in the same conduit as the motor
wiring, these pulses can couple electrical noise
back onto the building power grid.
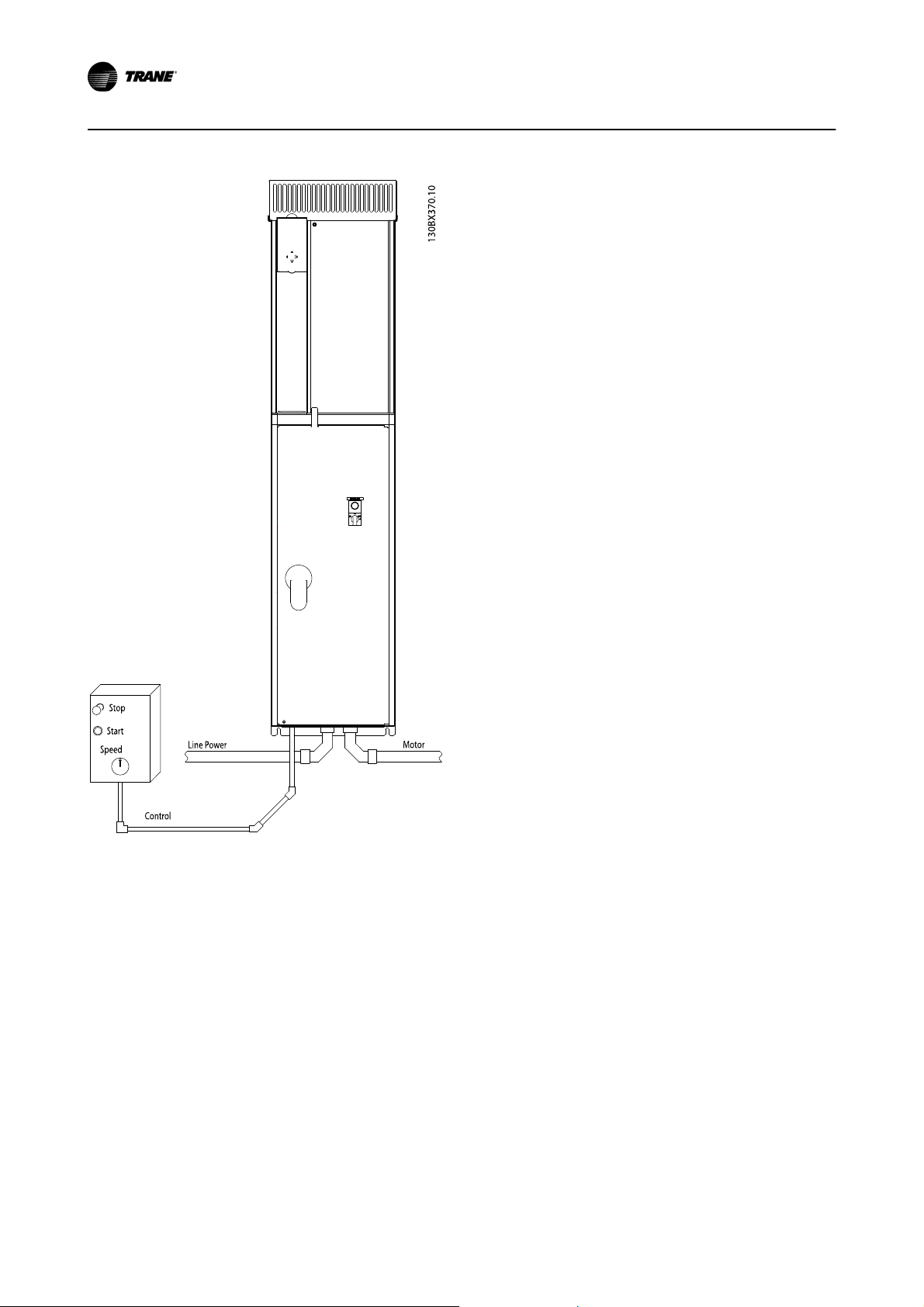
At least three separate conduits must be connected to the
panel (Figure 3.4).
Power into the panel (and ground back to the
•
distribution panel)
Power from the panel to the motor and earth
•
insulated motor ground
Control wiring
•
Control wiring should always be isolated from the high
voltage power wiring.
Avoid getting metal chips into electronics.
Follow the connection procedures as illustrated in the
drawing provided with the unit.
BAS-SVX49A-EN 3-5
Page 20
Installation
Figure 3.4 Power Connections
3-6 BAS-SVX49A-EN
Page 21
Installation
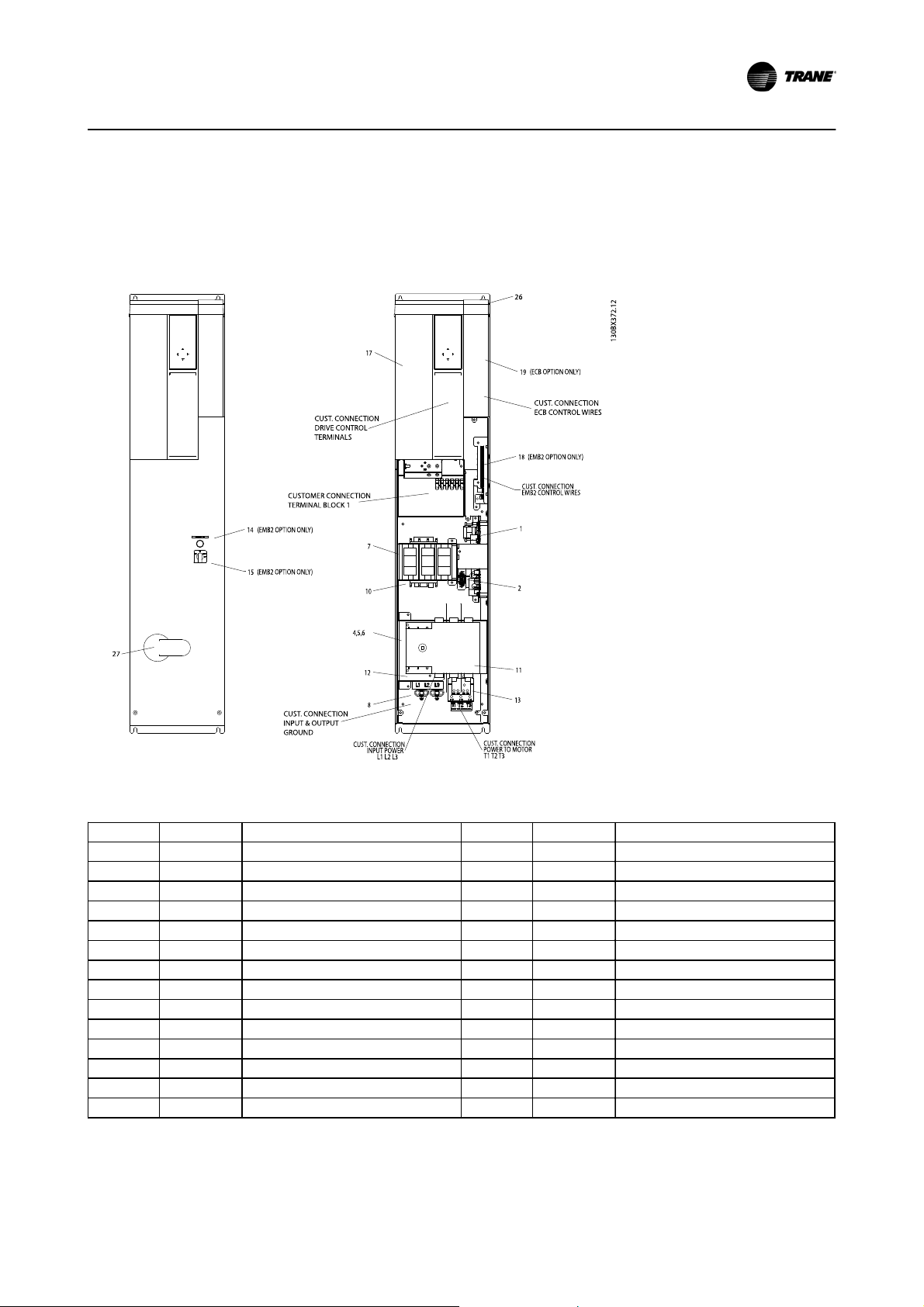
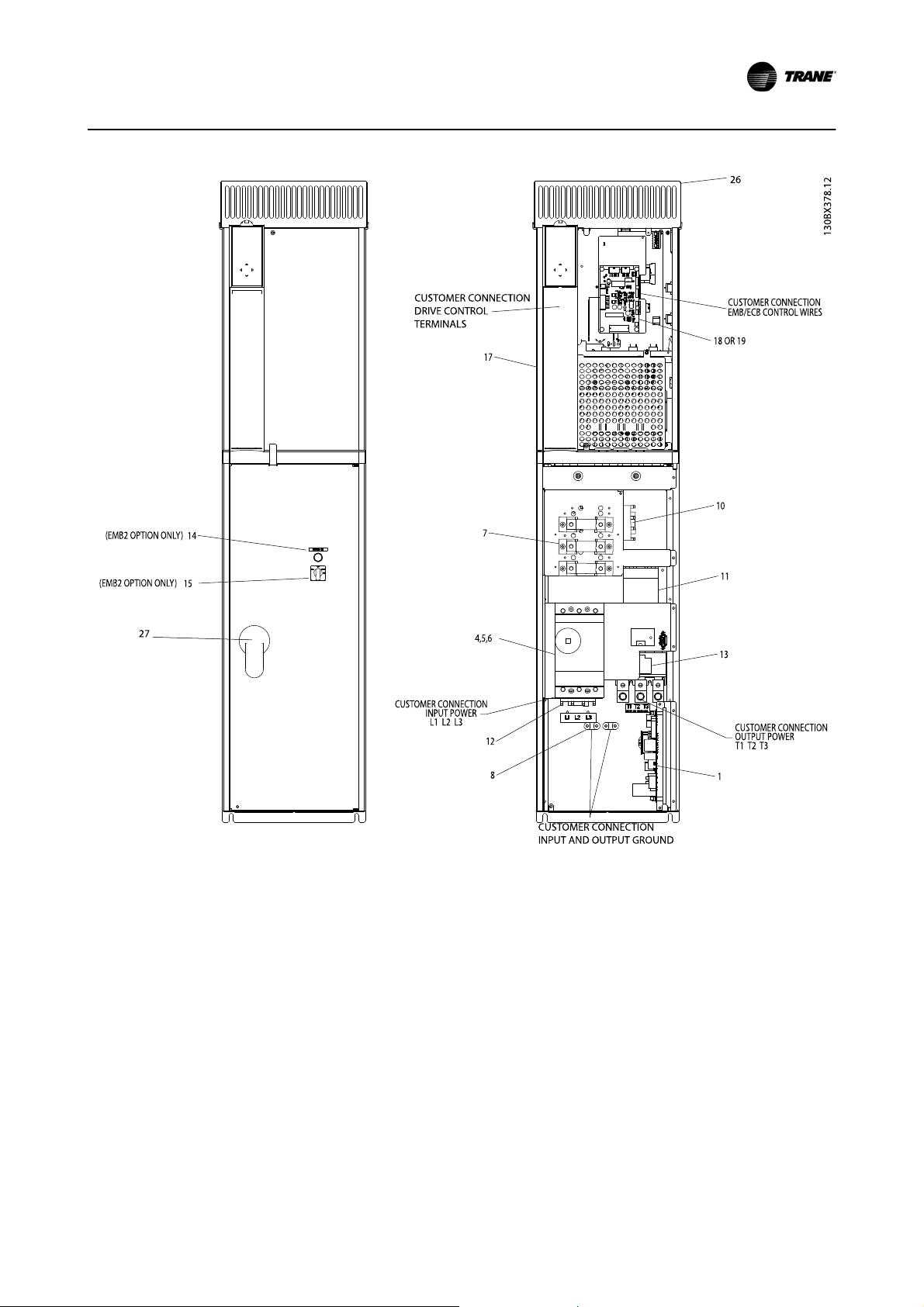
3.4.1 Component Identification & Customer Connection
Mechanical layout drawings are intended to provide the installer or equipment user with component identification and
location for that specific unit. Figure 3.5 represents a typical layout drawing. Table 3.8 provides definitions for drawing
reference designators. (Not all reference designators are shown.)
Figure 3.5 P2 Bypass Mechanical Layout Diagram
ID Device Definition ID Device Definition
1 24 V DC Panel 24 V DC SMPS 15 S1 Auto Bypass Selector Switch
2 HPC High Pot Connector 16 TF 120 V AC control transformer
3 F13 T1 primary fuse 17 VFD Variable frequency drive
4 CB1 Main Circuit Breaker 18 EMB2 Control Module
5 DS1 Main or Drive Disconnect 19 ECB Control Module
6 F15 Main fuse 20 TB1-C Terminal block 1 - Control
7 F16 Drive fuse 21 TB1-P Terminal block 1 - Power
8 GND Ground terminal 22 PR1 Control Relay for M1 Contactor
9 keypad keypad 23 PR2 Control Relay for M2 Contactor
10 M1 Drive Input contactor 24 PR3 Control Relay for M3 Contactor
11 M2 Drive Output contactor 25 UVM Under voltage module
12 M3 Bypass contactor 26 TC Top Cover
13 OL1 Overload for Motor 27 DH Disconnect Handle
14 PL1 Bypass indicator light
Table 3.8 Reference Designator Definitions
BAS-SVX49A-EN 3-7
Page 22
Installation
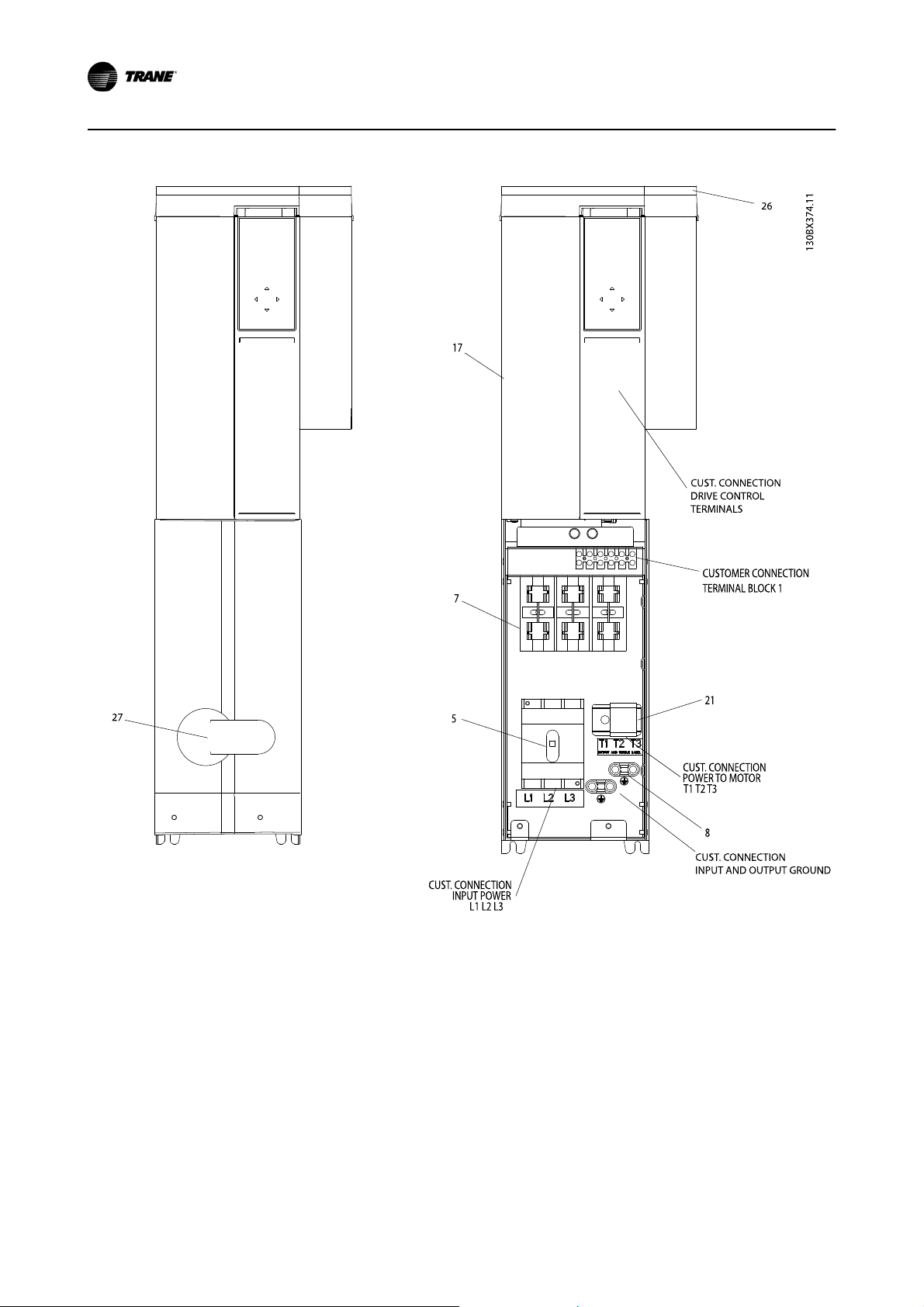
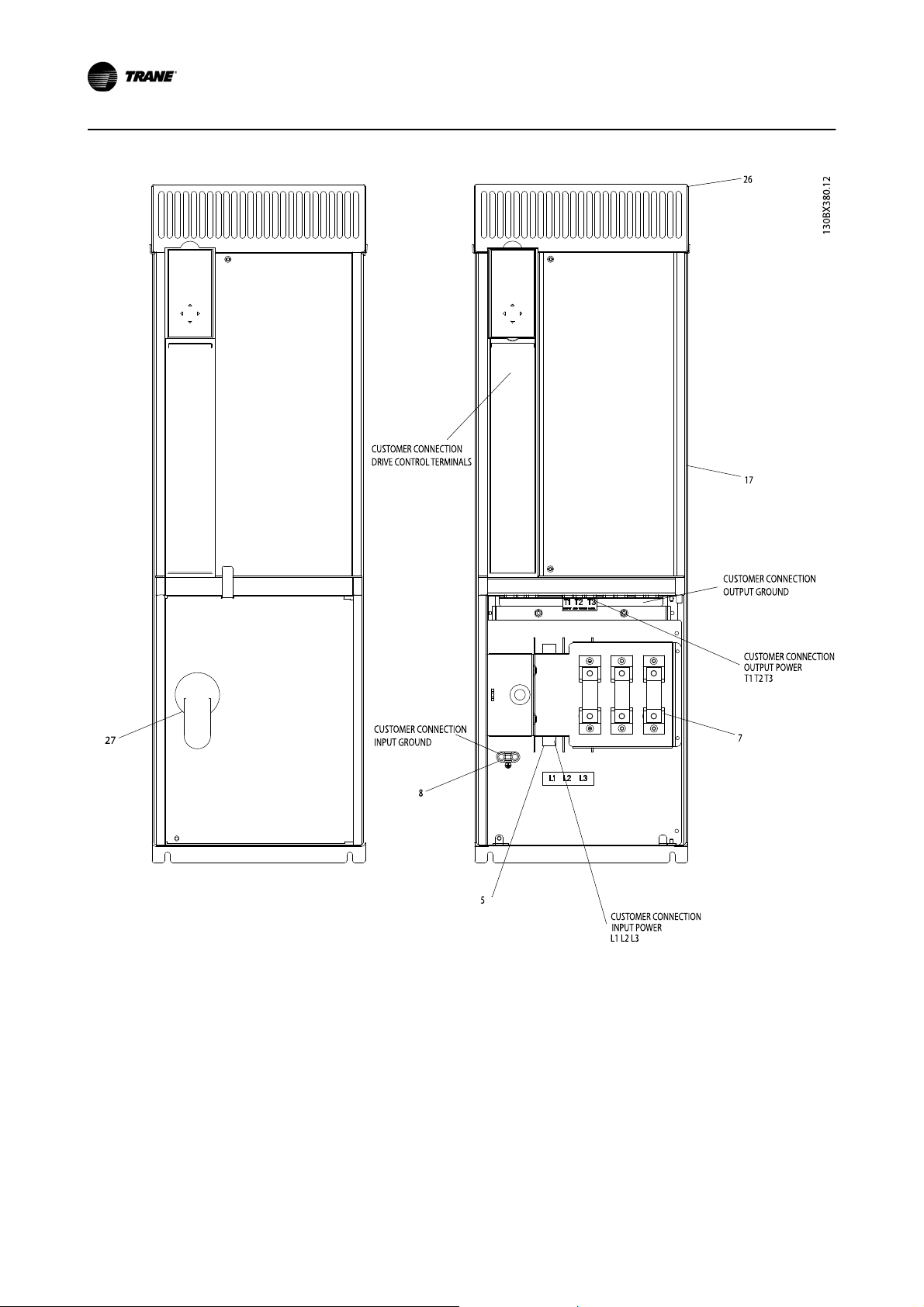
Figure 3.6 P2 Non Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
3-8 BAS-SVX49A-EN
Page 23
Installation
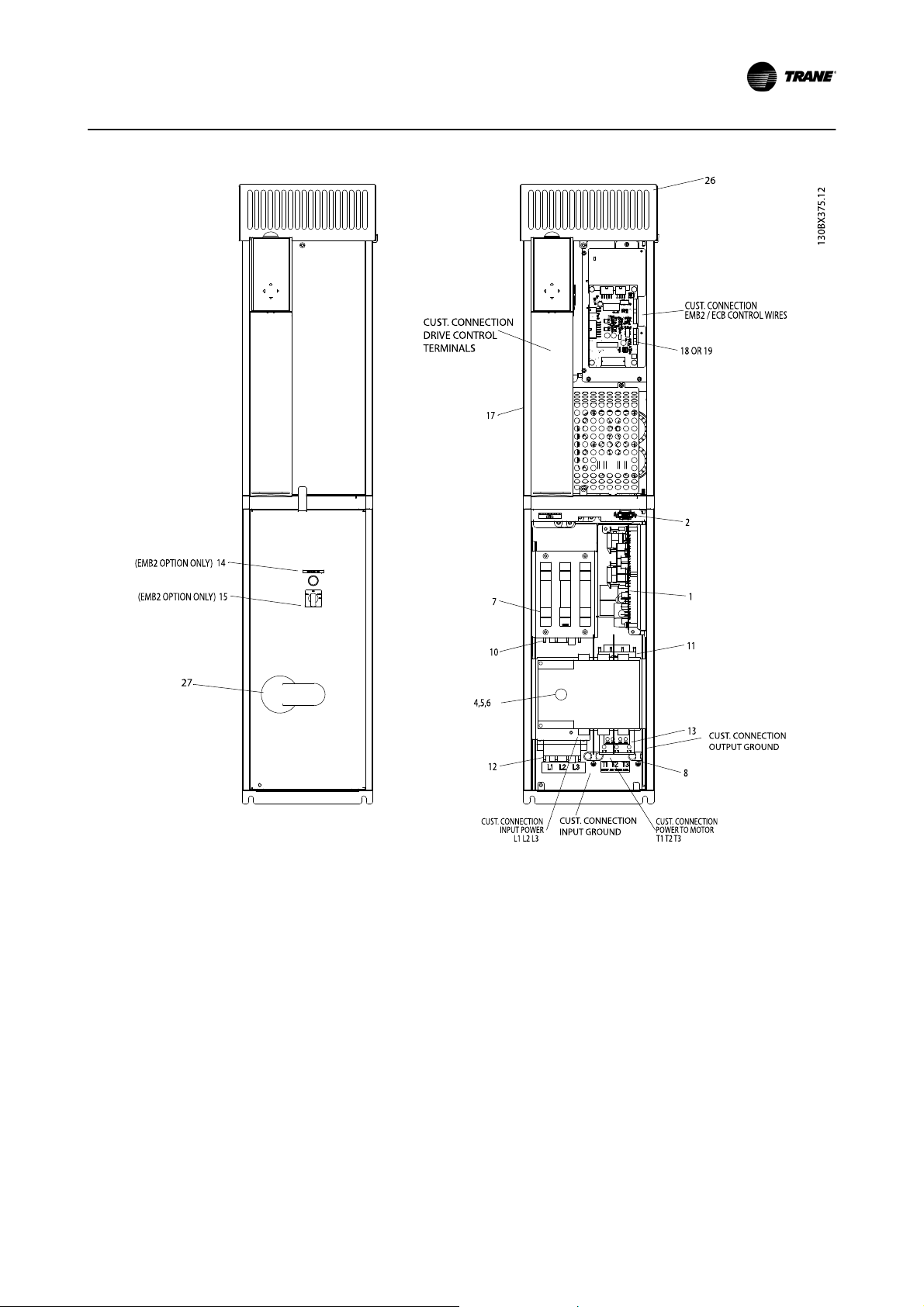
Figure 3.7 P3 Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
BAS-SVX49A-EN 3-9
Page 24
Installation
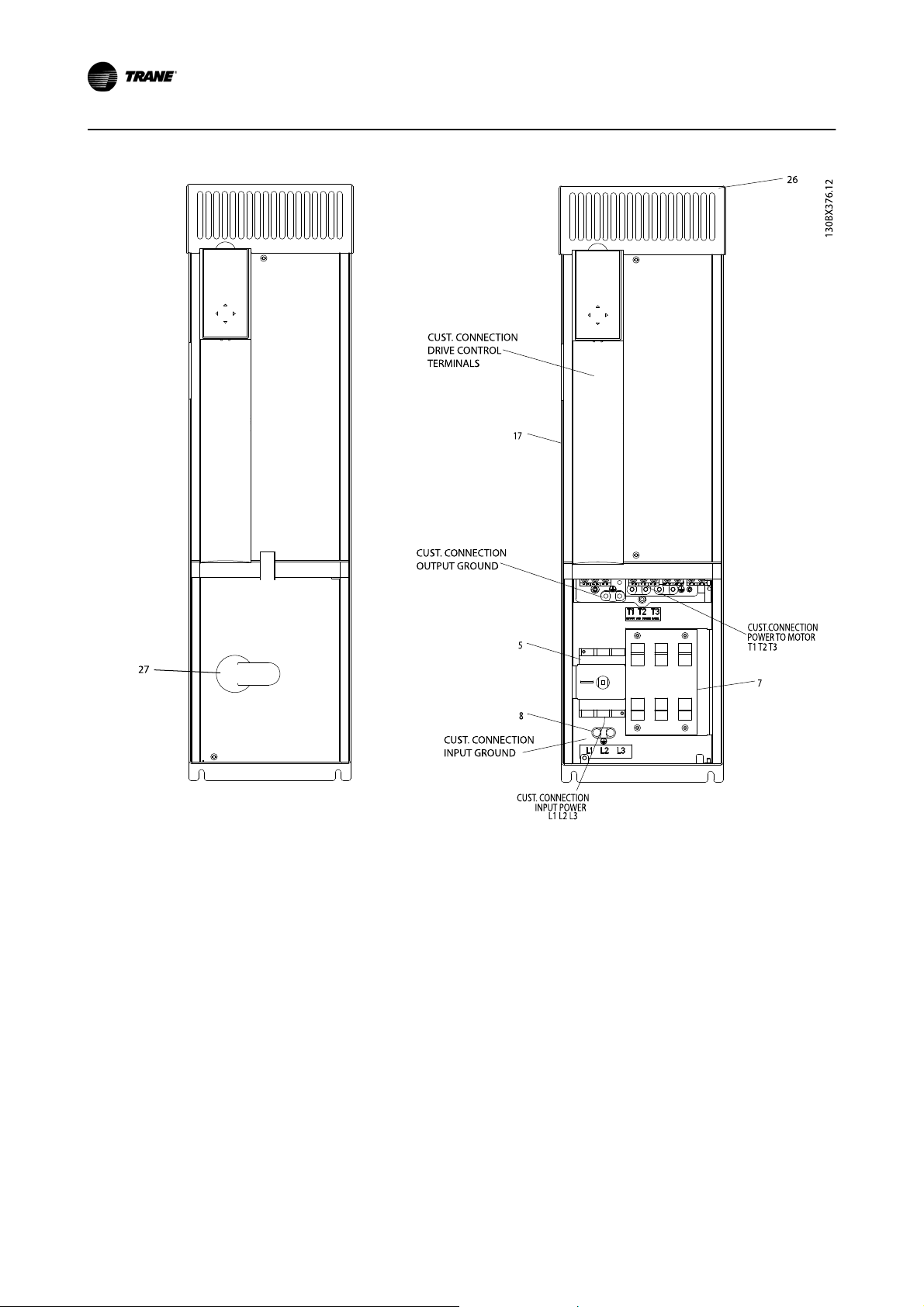
Figure 3.8 P3 Non Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
3-10 BAS-SVX49A-EN
Page 25
Installation
Figure 3.9 P4 Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
BAS-SVX49A-EN 3-11
Page 26
Installation
Figure 3.10 P4 Non Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
3-12 BAS-SVX49A-EN
Page 27

Installation
Figure 3.11 P5 Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
BAS-SVX49A-EN 3-13
Page 28

Installation
Figure 3.12 P5 Non Bypass Mechanical Layout Diagram.
See Table 3.8 for reference designator definitions.
3-14 BAS-SVX49A-EN
Page 29

3.4.2 Wire and Cable Access
WARNING
Hazardous Voltage!
Disconnect all electric power, including remote disconnects
before servicing. Follow proper lockout/tagout procedures
to ensure the power cannot be inadvertently energized.
Failure to disconnect power before servicing could result in
death or serious injury.
Refer to through for wire routing and termination
•
locations.
Removable access knockout covers are provided
•
for cable connections (see Figure 3.13 and
Figure 3.14).
Access holes are provided for input power, motor
•
leads, and control wiring.
Run input power, motor wiring, and control
•
wiring in three separate conduits for isolation.
Installation
Figure 3.13 Bypass Panel Conduit Entry Diagram
NOTE!
IMPORTANT NOTE
RUN INPUT POWER, MOTOR WIRING AND CONTROL
WIRING IN THREE SEPARATE METALLIC CONDUITS OR
RACEWAYS FOR HIGH FREQUENCY NOISE ISOLATION.
FAILURE TO ISOLATE POWER, MOTOR AND CONTROL
WIRING COULD RESULT IN LESS THAN OPTIMUM DRIVE
AND ASSOCIATED EQUIPMENT PERFORMANCE.
The drive always resides in the upper section of
•
the panel. Connections to the ECB and EMB2 are
in this area except on the P2 bypass panels.
Power connections are typically towards the
•
bottom side of the panel.
Control wiring should be isolated from power
•
components inside the unit as much as possible.
Trane has included hardware to allow for the
separation.
See the mechanical layout drawings in through
•
for connection details and recommended wire
routing.
Figure 3.14 Non Bypass Panel Conduit Entry Diagram
BAS-SVX49A-EN 3-15
Page 30

Installation
Figure 3.15 P2 Panel
Figure 3.16 P3 Panel
3-16 BAS-SVX49A-EN
Page 31

Installation
Figure 3.17 P4 Panel
BAS-SVX49A-EN 3-17
Page 32

Installation
Figure 3.18 P5 Panel
3-18 BAS-SVX49A-EN
Page 33

Installation
3.4.3 Wire Size
WARNING
ELECTROCUTION AND FIRE HAZARDS WITH IMPROPERLY INSTALLED AND GROUNDED FIELD WIRING!
Improperly installed and grounded field wiring poses FIRE & ELECTROCUTION hazards. To avoid these hazards, you MUST
follow requirements for field wiring installation and grounding as described in the National Electrical Codes (NEC) and your
local/state electrical codes. All field wiring MUST be performed by qualified personnel.
Failure to follow these requirements could result in death or serious injury.
NOTE!
Make all power connections with minimum 60 or 75°C/140 or 155°F rated copper wiring for installations in North America.
208 V AC
HP (KW) UL Motor Current
7.5 (5.5) 24.2
10 (7.5) 30.8 8 AWG 10 AWG 60
15 (11) 46.2 4 AWG 10 AWG 60
20 (15) 59.4 P3 3 AWG 10 AWG 60
25 (18.5) 74.8
30 (22) 88
40 (30) 114 1/0 AWG 6 AWG 75
50 (37) 143
60 (45) 169 4/0 AWG 6 AWG 75
HP (KW) UL Motor Current
7.5 (5.5) 22
10 (7.5) 28 8 AWG 10 AWG 60
15 (11) 42 6 AWG 10 AWG 60
20 (15) 54
25 (18.5) 68 3AWG 8 AWG 60
Panel (TR200) Non
Bypass & Bypass
P2
P3 - Non Bypass P4 -
Bypass
P4
P5
Panel (TR200) Non
Bypass & Bypass
P2
P3
Maximum Field
Wiring Size Class B
or C
8 AWG 10 AWG 60
2 AWG 8 AWG 60
2 AWG 8 AWG 60
3/0 AWG 6 AWG 75
230 VAC
Maximum Field
Wiring Size Class B
or C
10 AWG 10 AWG 60
4 AWG 10 AWG 60
Field Ground Wiring
Size Class B or C
Field Ground Wiring
Size Class B or C
Minimum Temperature
Wire Rating "
Minimum Temperature
Wire Rating "Degree C"
Copper Conductor
°
C" Copper
Conductor
30 (22) 80
40 (30) 104 1 AWG 6 AWG 75
50 (37) 130
60 (45) 154 3/0 AWG 6 AWG 75
Table 3.9 Wire Size Chart, 208 and 230 V
BAS-SVX49A-EN 3-19
P4
P5
3 AWG 8 AWG 60
2/0 AWG 6 AWG 75
Page 34

Installation
460 VAC
HP (KW) UL Motor Current
15 (11) 21
20 (15) 27 8 AWG 10 AWG 60
25 (18.5) 34 6 AWG 10 AWG 60
30 (22) 40
40 (30) 52 4 AWG 10 AWG 60
50 (37) 65 3 AWG 8 AWG 60
60 (45) 77
75 (55) 96 1 AWG 8 AWG 60
100 (75K) 124
125 (90) 156 3/0 AWG 6 AWG 75
HP (KW) UL Motor Current
15 (11) 17
20 (15) 22 10 AWG 10 AWG 60
25 (18.5) 27 8 AWG 10 AWG 60
30 (22) 32
40 (30) 41 6 AWG 10 AWG 60
50 (37) 52 4 AWG 10 AWG 60
60 (45) 62
75 (55) 77 1 AWG 8 AWG 60
100 (75) 99
125 (90) 125 2/0 AWG 6 AWG 75
Panel (TR200) Non Bypass
& Bypass
P2
P3
P4
P5
Panel (TR200) Non Bypass
& Bypass
P2
P3
P4
P5
Maximum Field
Wiring Size Class B
or C
10 AWG 10 AWG 60
6 AWG 10 AWG 60
1 AWG 8 AWG 60
2/0 AWG 6 AWG 75
600 VAC
Maximum Field
Wiring Size Class B
or C
10 AWG 10 AWG 60
8 AWG 10 AWG 60
3 AWG 8 AWG 60
1 AWG 8 AWG 60
Field Ground
Wiring Size Class B
or C
Field Ground
Wiring Size Class B
or C
Minimum Temperature
Wire Rating "
Minimum Temperature
Wire Rating "Degree C"
Copper Conductor
°
C" Copper
Conductor
Table 3.10 Wire Size Chart 460 and 600 V
3.4.4 Wire Type Rating
The wire style rating specifications are provided inTable 3.9 and Table 3.10
•
3.4.5 Terminal Tightening Torques
Tighten all connections to the torque specifications provided in Table 3.11 and Table 3.13
•
The torque specifications are also located on the tightening torque and wire rating label inside the panel cover.
•
See Table 3.15 for a sample of the torque and wire rating data.
3-20 BAS-SVX49A-EN
Page 35

Ground Wire
Torque lb-in (N-m)
Single Motor
Overload T1, T2, &
Circuit Breaker L1,
Installation
m)
T3 Torque lb-in (N-
in (N-m)
L2, & L3 Torque lb-
in (N-m)
Fusible UL98 L1,
Disconnect Switch
L2, & L3 Torque lb-
200 (22.5) 500 (56.5) 274 (31) 275 (31) 40 (4.5)
*Note 1
124/212.4 (14/24)
200 (22.5) 88.5 (10) 200 (22.5) 500 (56.5) 274 (31) 275 (31) 40 (4.5)
(w/o Fuses) UL508A
Motor T1, T2, & T3
Drive Disconnect
Switch L1, L2, & L3
L1, L2, & L3 Torque
Torque lb-in (N-m)
Torque lb-in (N-m)
lb-in (N-m)
55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 40 (4.5) 24 (2.7) 40 (4.5)
200 (22.5) 40 (4.5) 200 (22.5) 200 (22.5) 50 (5.6) 50 (5.6) 40 (4.5)
208 VAC
Disconnect Switch
Non Bypass Bypass
Input Output Input Output
P2
& Bypass
Panel (TR200) Non Bypass
15 (11) 55 (6.2) 16 (1.8) 18 (2) 120 (13.5) 45 (5) 50 (5.6) 40 (4.5)
20 (15) P3 - Non Bypass 55 (6.2) 40 (4.5) 18 (2) 120 (13.5) 50 (5.6) 50 (5.6) 40 (4.5)
10 (7.5) 55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 40 (4.5) 24 (2.7) 40 (4.5)
HP (KW)
BAS-SVX49A-EN 3-21
7.5 (5.5)
P4
30 (22)
40 (30) 200 (22.5) 88.5 (10) 200 (22.5) 200 (22.5) 50 (5.6) 275 (31) 40 (4.5)
25 (18.5) P4 - Bypass 70 (7.9) 40 (4.5) 55 (6.2) 200 (22.5) 50 (5.6) 50 (5.6) 40 (4.5)
50 (37)
P5
* Note 1 - Tightening of terminals for different cable dimensions x/y, where x <0.147in sq [95mm sq] and y>0.147 in sq [95mm sq]
60 (45) 200 (22.5)
Table 3.11 Tightening Torques, 208 V
Page 36

Installation
Ground Wire
Torque lb-in (N-m)
Single Motor
Overload T1, T2, &
Circuit Breaker L1,
m)
T3 Torque lb-in (N-
(N-m)
L2, & L3 Torque lb-in
230 V AC
Non Bypass Bypass
Input Output Input Output
Disconnect Switch
Disconnect Switch
(w/o Fuses) UL508A
Motor T1, T2, & T3
Drive Disconnect
Panel (TR200)
Non Bypass &
L3 Torque lb-in (N-m)
Fusible UL98 L1, L2, &
L1, L2, & L3 Torque
Torque lb-in (N-m)
Torque lb-in (N-m)
Switch L1, L2, & L3
Bypass
lb-in (N-m)
55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 40 (4.5) 24 (2.7) 40 (4.5)
P2
70 (7.9) 40 (4.5) 55 (6.2) 200 (22.5) 50 (5.6) 50 (5.6) 40 (4.5)
55 (6.2) 40 (4.5) 18 (2) 120 (13.5) 50 (5.6) 50 (5.6) 40 (4.5)
P3
P4
200 (22.5) 88.5 (10) 200 (22.5) 200 (22.5) 274 (31) 275 (31) 40 (4.5)
P5
30 (22)
40 (30) 200 (22.5) 88.5 (10) 200 (22.5) 200 (22.5) 50 (5.6) 50 (5.6) 40 (4.5)
15 (11) 55 (6.2) 16 (1.8) 18 (2) 120 (13.5) 45 (5) 50 (5.6) 40 (4.5)
20 (15)
10 (7.5) 55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 40 (4.5) 24 (2.7) 40 (4.5)
HP (KW)
3-22 BAS-SVX49A-EN
7.5 (5.5)
25 (18.5) 70 (7.9) 40 (4.5) 18 (2) 120 (13.5) 50 (5.6) 50 (5.6) 40 (4.5)
50 (37)
60 (45) 200 (22.5) 124 (14) 200 (22.5) 500 (56.5) 274 (31) 275 (31) 40 (4.5)
Table 3.12 Tightening Torques, 230 V
Page 37

Ground Wire
Torque lb-in (N-m)
Single Motor
Overload T1, T2, &
Circuit Breaker L1,
Installation
m)
T3 Torque lb-in (N-
in (N-m)
L2, & L3 Torque lb-
m)
Disconnect Switch
Fusible UL98 L1, L2,
& L3 Torque lb-in (N-
460 VAC
Disconnect Switch
Non Bypass Bypass
Input Output Input Output
(w/o Fuses) UL508A
Motor T1, T2, & T3
Drive Disconnect
Switch L1, L2, & L3
lb-in (N-m)
L1, L2, & L3 Torque
Torque lb-in (N-m)
Torque lb-in (N-m)
55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 40 (4.5) 24 (2.7) 40 (4.5)
55 (6.2) 40 (4.5) 18 (2) 30 (3.3) 45 (5) 50 (5.6) 40 (4.5)
70 (7.9) 88.5 (10) 55 (6.2) 200 (22.5) 50 (5.6) 50 (5.6) 40 (4.5)
200 (22.5) 124 (14) 200 (22.5) 200 (22.5) 274 (31) 275 (31) 40 (4.5)
P2
& Bypass
Panel (TR200) Non Bypass
15 (11)
HP (KW)
BAS-SVX49A-EN 3-23
20 (15) 55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 40 (4.5) 24 (2.7) 40 (4.5)
P3
30 (22)
40 (30) 55 (6.2) 40 (4.5) 18 (2) 120 (13.5) 50 (5.6) 50 (5.6) 40 (4.5)
25 (18.5) 55 (6.2) 16 (1.8) 7 (0.8) 30 (3.3) 45 (5) 24 (2.7) 40 (4.5)
P4
P5
50 (37) 55 (6.2) 40 (4.5) 18 (2) 120 (13.5) 50 (5.6) 50 (5.6) 40 (4.5)
60 (45)
75 (55) 200 (22.5) 88.5 (10) 200 (22.5) 200 (22.5) 50 (5.6) 50 (5.6) 40 (4.5)
125 (90) 200 (22.5) 124 (14) 200 (22.5) 500 (56.5) 274 (31) 275 (31) 40 (4.5)
100 (75)
Table 3.13 Tightening Torques, 460V
Page 38

Installation
Ground Wire
Torque lb-in (N-m)
Single Motor
Overload T1, T2, &
Circuit Breaker L1,
(N-m)
T3 Torque lb-in
lb-in (N-m)
L2, & L3 Torque
(N-m)
600 VAC
Non Bypass Bypass
Input Output Input Output
Disconnect Switch
Fusible UL98 L1, L2,
Disconnect Switch
(w/o Fuses) UL508A
Motor T1, T2, & T3
Drive Disconnect
Bypass
Switch L1, L2, & L3
& L3 Torque lb-in
L1, L2, & L3 Torque
Torque lb-in (N-m)
Torque lb-in (N-m)
lb-in (N-m)
P3
55 (6.2) 88.5 (10) 55 (6.2) 120 (13.5) 62 (7) 50 (5.6) 40 (4.5)
200 (22.5) 124 (14) 200 (22.5) 200 (22.5) 200 (22.5) 275 (31) 40 (4.5)
P4
P5
55 (6.2) 16 (1.8) 7 (.79) 17 (1.92) 62 (7) 24 (2.7) 40 (4.5)
55 (6.2) 40 (4.5) 7 (.79) 30 (3.3) 62 (7) 50 (5.6) 40 (4.5)
P2
Panel (TR200) Non Bypass &
75 (55) 70 (7.9) 88.5 (10) 55 (6.2) 200 (22.5) 62 (7) 50 (5.6) 40 (4.5)
50 (37) 55 (6.2) 40 (4.5) 18 (2) 120 (13.5) 62 (7) 50 (5.6) 40 (4.5)
60 (45)
40 (30) 55 (6.2) 40 (4.5) 18 (2) 30 (3.3) 62 (7) 50 (5.6) 40 (4.5)
30 (22)
20 (15) 55 (6.2) 16 (1.8) 7 (.79) 30 (3.3) 62 (7) 24 (2.7) 40 (4.5)
HP (KW)
3-24 BAS-SVX49A-EN
15 (11)
25 (18.5) 55 (6.2) 16 (1.8) 7 (.79) 30 (3.3) 62 (7) 24 (2.7) 40 (4.5)
100 (75)
125 (90) 200 (22.5) 124 (14) 200 (22.5) 200 (22.5) 200 (22.5) 275 (31) 40 (4.5)
Table 3.14 Tightening Torques, 600V
Page 39

Field Connection Tightening Torque lb-in (N-m) Temperature & Type Rating
L1, L2, L3/Ground 25 (2.8) 25 (2.8) Use 75
2T1, 2T2, 2T3/Ground 25 (2.8) 25 (2.8) Use 75
TB1 25 (2.8) 25 (2.8) Use 75
Table 3.15 Sample Tightening Torque and Wire Rating Label
°
C Copper Conductor
°
C Copper Conductor
°
C Copper Conductor
Installation
3.4.6 Input Line Connection
WARNING
Hazardous Voltage!
Disconnect all electric power, including remote disconnects
before servicing. Follow proper lockout/tagout procedures
to ensure the power cannot be inadvertently energized.
Failure to disconnect power before servicing could result in
death or serious injury.
CAUTION
RUN INPUT POWER, MOTOR WIRING AND CONTROL
WIRING IN THREE SEPARATE METALLIC CONDUITS OR
RACEWAYS FOR HIGH FREQUENCY NOISE ISOLATION.
FAILURE TO ISOLATE POWER, MOTOR AND CONTROL
WIRING COULD RESULT IN LESS THAN OPTIMUM DRIVE
AND ASSOCIATED EQUIPMENT PERFORMANCE.
Connect 3-phase AC input power wire to
•
terminals L1, L2, and L3. See the connection
drawing inside the cover of the unit.
Depending on the configuration of the
•
equipment, input power may be connected to a
circuit breaker or disconnect switch.
Torque terminals in accordance with the
•
information provided inTable 3.11 and Table 3.13
on the label inside the panel cover.
Use with Isolated Input Source. Many utility
•
power systems are referenced to earth ground.
Although not as common, the input power may
be an isolated source. All drives may be used
with an isolated input source as well as with
ground reference power lines.
WARNING
INDUCED VOLTAGE!
Run output motor cables from multiple drives separately.
Induced voltage from output motor cables run together
can charge equipment capacitors even with the equipment
turned off and locked out. Failure to run output motor
cables separately could result in death or serious injury.
NOTE!
Run input power, motor wiring and control wiring in three
separate metallic conduits or raceways for high frequency
noise isolation. Failure to isolate power, motor and control
wiring could result in less than optimum drive and
associated equipment performance.
CAUTION
RUN INPUT POWER, MOTOR WIRING AND CONTROL
WIRING IN THREE SEPARATE METALLIC CONDUITS OR
RACEWAYS FOR HIGH FREQUENCY NOISE ISOLATION.
FAILURE TO ISOLATE POWER, MOTOR AND CONTROL
WIRING COULD RESULT IN LESS THAN OPTIMUM DRIVE
AND ASSOCIATED EQUIPMENT PERFORMANCE.
3.4.7 Motor Wiring
WARNING
Hazardous Voltage!
Disconnect all electric power, including remote disconnects
before servicing. Follow proper lockout/tagout procedures
to ensure the power cannot be inadvertently energized.
Failure to disconnect power before servicing could result in
death or serious injury.
BAS-SVX49A-EN 3-25
Page 40

Installation
Connect the 3-phase motor wiring to bypass
•
terminals T1 (U), T2 (V), and T3 (W). See the
connection drawing inside the cover of the unit.
Depending on the configuration of the
•
equipment, motor wiring may be connected to
overload or terminal block.
Torque terminals in accordance with the
•
information provided on the connection diagram
inside the cover of the unit.
Motor wiring should never exceed the following
•
maximum distances: 300m (1000 ft) for
unshielded, 150m (500 ft) for shielded.
Motor wiring should always be as short as
•
practical.
3.4.8 Grounding (Earthing)
WARNING
GROUNDING HAZARD!
for operator safety, it is important to ground the option
panel properly. Failure to do so could result in death or
serious injury.
WARNING
ELECTROCUTION AND FIRE HAZARDS WITH
IMPROPERLY INSTALLED AND GROUNDED FIELD
WIRING!
Improperly installed and grounded field wiring poses FIRE
& ELECTROCUTION hazards. To avoid these hazards, you
MUST follow requirements for field wiring installation and
grounding as described in the National Electrical Codes
(NEC) and your local/state electrical codes. All field wiring
MUST be performed by qualified personnel. Failure to
follow these requirements could result in death or serious
injury.
NOTE!
It is the responsibility of the user or certified electrical
installer to ensure correct grounding (earthing) of the
equipment in accordance with national and local electrical
codes and standards.
Connect the ground wire directly to a reliable
•
earth ground. Grounding studs are provided on
the back plate of the panel for grounding.
Do not use conduit connected to the panel as a
•
replacement for a ground wire.
A high strand count ground wire is preferred for
•
dissipating high frequency electrical noise.
Keep the ground wire connections as short as
•
possible.
Ground the motor to the panel with insulated
•
wire run inside metal conduit with motor leads.
3.4.9 Control Wiring
WARNING
Electrocution and Fire Hazards with Improperly Installed
and Grounded
Field Wiring!
Improperly installed and grounded field wiring poses FIRE
& ELECTROCUTION hazards. To avoid these hazards, you
MUST follow requirements for field wiring installation and
grounding as described in the National Electrical Codes
(NEC) and your local/state electrical codes. All field wiring
MUST be performed by qualified personnel. Failure to
follow these requirements could result in death or serious
injury.
Detailed instructions for terminal connection, control
wiring installation, and operation are shown in Section 5
Electromechanical Bypass (EMB2) Operation and Section 6
Electronically Controlled Bypass (ECB) Operation.
It is recommended that control wiring is rated for
•
600 V for 480 V and 600 V drives and 300 V for
200-240 V drives.
Isolate control wiring from high power
•
components in the drive.
See 3.4.2 Wire and Cable Access for details.
•
Follow all local and national codes for proper
•
electrical equipment grounding (earthing).
Correct protective grounding of the equipment
•
must be established. Ground currents are higher
than 3 mA.
A dedicated ground wire is required for input
•
ground.
3-26 BAS-SVX49A-EN
Page 41

2
1
Figure 3.19 Control Terminals Location
1. EIA-485 terminal
2. Jumper wire
3. Control terminals
4. Grounded restraining clips
Installation
Programming
Serial communication point maps, parameter settings, and
130BX224.10
other details for bypass option functionality are included in
the serial communication materials supplied with the unit.
3
4
3.4.10 Serial Communication Bus
Connection
The ECB reports serial communication data to host systems
through the drive. Connection to the serial communication
network is made either through the EIA-485 terminals on
the drive (see figure above) or, for other protocols,
terminals located on the communication option card. For
option card connection, see the option card instructions
provided with the unit.
For ECB serial communication protocols using the
•
EIA-485 terminals, make connections in the
following manner.
NOTE!
It is recommended to use braided-shielded, twisted-pair
cables to reduce noise between conductors.
1. Connect signal wires to terminal (+) 68 and
terminal (-) 69 on control terminals of drive. (See
the drive support materials for wire size and
tightening torque.)
2. Terminate shield to grounded restraining clip
provided by stripping wire insulation at point of
contact.
3. If shielded cabling is used, do not connect the
end of the shield to terminal 61.
BAS-SVX49A-EN 3-27
Page 42

Installation
3.4.11 Drive Control Terminals
Definitions of the drive terminals are summarized in
Table 3.16.
Connector 1 provides four digital inputs; two
•
selectable digital inputs or outputs, 24 V DC
terminal supply voltage, and a common for
optional customer supplied 24 V DC voltage.
Serial communications use EIA-485 connector 2
•
with terminal 68 (+) and 69 (-).
Connector 3 provides two analog inputs, one
•
analog output, 10 V DC supply voltage, and
commons for the inputs and output.
A USB port, connector 4, is also available for use
•
with the available on the Trane website.
Also provided are two Form C relay outputs that
•
are in various locations depending upon the drive
configuration and size.
Terminal No. Function
01, 02, 03, 04,
05, 06
12, 13 24 V DC digital supply voltage. Useable for digital inputs and external transducers. To use the 24 V DC for digital input
18, 19, 32, 33 Digital inputs. Selectable for NPN or PNP function in parameter 5-00. Default is PNP.
27, 29 Digital inputs or outputs. Programmable for either. Parameter 5-01 for terminal 27 and 5-02 for 29 selects input/output
20 Common for digital inputs. To use for digital input common, program parameter 5-00 for NPN operation.
39 Common for analog output.
42 Analog output. Programmable for various functions in parameter 6-5*. The analog signal is 0 to 20 mA or 4 to 20 mA at
50 10 V DC analog supply voltage. 15 mA maximum commonly used for a potentiometer or thermistor.
53, 54 Analog input. Selectable for voltage (0-10 V) or current (0- or 4-20 mA). Closed is for current and open is for voltage.
55 Common for analog inputs.
61 Common for serial communication. Do not use to terminate shields. See drive support materials for proper shield
68 (+), 69 (-) RS-485 interface. When the drive is connected to an RS-485 serial communication bus, a drive control card switch is
Form-C relay output. Useable for AC or DC voltage and resistive or inductive loads. See drive support materials for
details on voltage and current ratings and relay location.
common, program parameter 5-00 for PNP operation. Maximum output current is 200 mA total for all 24V loads.
function. Default setting is input.
a maximum of 500
Switches are located on the drive control card behind the removable keypad. See drive support materials for details.
termination.
provided for termination resistance. ON for termination and OFF for no termination. See drive support materials for
details.
Ω
.
Figure 3.20 Removable Drive Connectors and Terminals
130BX231.10
Table 3.16 Drive Control Terminals Functions
3-28 BAS-SVX49A-EN
Page 43

4Start Up
Start Up
1. Input power to the unit must be OFF and locked
out per OSHA requirements. Do not rely on panel
disconnect switches.
WARNING
HAZARDOUS VOLTAGE!
if input and output connections have been connected
improperly, there is potential for high voltage on these
terminals. If power leads for multiple motors are
improperly run in same conduit, there is potential for
leakage current to charge capacitors within the panel, even
when disconnected from line input. For initial start up,
make no assumptions about power components. Follow
pre-start procedures described below. Failure to do so
could result in death, serious injury or damage to
equipment.
2. Use AC voltmeter to verify there is no voltage on
input terminals L1, L2, and L3, phase-to-phase
and phase-to-ground, and output terminals T1,
T2, and T3, phase-to-phase and phase-to-ground.
3. Use ohmmeter to confirm continuity of the motor
by measuring T1-T2, T2-T3, and T3-T1.
4. Use ohmmeter to confirm open on input by
measuring L1-L2, L2-L3, and L3-L1. Note that if an
isolation transformer is between the power
source and panel, continuity will be present. In
this case, visually confirm that motor and power
leads are not reversed.
5. Inspect the panel for loose connections on
terminals.
6. CheckTable 3.9 and Table 3.10 for proper ground
wire: panel to main building distribution ground,
and panel to motor ground.
7. Confirm control connections terminated per
connection diagrams supplied with the
equipment.
8. Check for external devices between drive panel
output and motor. It is recommended that no
devices be installed between the motor and
drive.
9. Record motor nameplate data; hp, voltage, full
load amps (FLA), and RPM. It will be needed to
match motor and drive later on.
10. Confirm that incoming power voltage matches
drive label voltage and motor nameplate voltage.
11. For multiple winding motors, the motor must be
wired on run winding, not start winding.
12. Confirm motor FLA is equal to or less than
maximum panel output current. Some motors
have higher than normal NEMA currents.
13. Check that the overload relay is set for FLA of
connected motor. Service factor is built into
overload relay. Relay trips at 120% of setting.
14. For drive start up procedures, see drive
instruction manual.
BAS-SVX49A-EN 4-1
Page 44

Start Up
4.1.1 Inspection Prior to Start Up
Before applying power to the unit, inspect the entire installation as detailed in Table 4.1.
Inspect For Description
Look for auxiliary equipment, switches, disconnects, or input fuses/circuit breakers that may reside on input
Auxiliary equipment
Cable routing
Control wiring
EMC considerations Check for proper installation with regard to electromagnetic capability.
Environmental
conditions
Fusing and circuit
breakers
Grounding
Input and output
power wiring
Panel interior
Proper Cooling
Clearance
Switches Ensure that all switch and disconnect settings are in the proper position.
Vibration Look for any unusual amount of vibration the equipment may be subjected to when mounting panel.
power side of drive or output side to motor. Examine their operational readiness and ensure they are ready in
all respects for operation at full speed. Check function and installation of pressure sensors or encoders (etc.)
used for feedback to drive. Remove power factor correction caps on motor, if present.
Ensure that input power, motor wiring, and control wiring are in three separate metallic conduits for high
frequency noise isolation. Failure to isolate power, motor, and control wiring could result in less than optimum
drive and associated equipment performance.
Check for broken or damaged wires and connections. Check the voltage source of the signals, if necessary. The
use of shielded cable or twisted pair is recommended for serial communication. Ensure the shield is terminated
correctly.
See panel label for the maximum ambient operating temperature. Humidity levels must be less than 95% non-
condensing. Attitude less than 3300 feet.
Check that all fuses are inserted firmly and in operational condition and that all circuit breakers are in the open
position.
The panel requires a dedicated ground wire from its chassis to the building ground. It is required that the
motor be grounded to the panel chassis. The use of conduit or mounting of the panel to a metal surface is not
considered a suitable ground. Check for good ground connections that are tight and free of oxidation. Run
insulated motor ground wire back to panel in conduit with motor wires.
Check for loose connections. Check for proper fusing or circuit breakers.
Panel interior must be free of dirt, metal chips, moisture, and corrosion. Check for harmful airborne contam-
inates such as sulfur based compounds.
Panels require top and bottom clearance adequate to ensure proper air flow for cooling. See Figure 3.2 and
Figure 3.3
Table 4.1 Inspection prior to Startup
4.1.2 Start Up Procedure
1. Perform pre-startup procedure.
2. Ensure that all operator devices are in the OFF
In the following procedures, changing the equipment
between drive mode and bypass mode is required.
Changing modes is different for the ECB and EMB2. The
ECB uses pushbuttons on the drive keypad while the EMB2
uses a selector switch on the front of the panel. Be familiar
with the operation of these devices prior to start up.
position. The main disconnect switch on the front
of the electromechanical bypass panel must be in
the OFF position. The panel door should be
closed.
3. Keep main disconnect switch in the OFF position
and apply voltage to the panel.
4. Confirm that input line voltage is balanced within
WARNING
HAZARDOUS VOLTAGE!
3%. If not, correct the input voltage imbalance
before proceeding.
The panel contains dangerous voltages when connected to
line voltage. Installation, start-up and maintenance should
be performed only by qualified personnel. Failure to
perform installation, start-up and maintenance by qualified
personnel only could result in death or serious injury.
4-2 BAS-SVX49A-EN
Page 45

Start Up
CAUTION
MOTOR START!
Ensure that motor, system, and any attached equipment is
ready for start. Failure to do so could result in personal
injury or equipment damage.
5. If a bypass is connected, place the Mode Selector
Switch in drive mode. Apply power by turning
the main disconnect switch to the ON position.
6. Enter drive programming data per the drive
instruction manual.
7. Check motor rotation direction in drive control as
follows.
7a Put panel in drive mode.
7b Hand start drive at minimum speed (see
drive instruction manual for details).
7c Confirm directional rotation.
7d If incorrect, stop the drive, remove
power, and lock out.
7e Reverse connection of T1 & T2 motor
leads. Do not change incoming power
leads.
7f Remove lockout and apply power.
7g Confirm directional rotation.
8. Check motor rotation direction in bypass as
follows.
8a Momentarily bump motor in bypass.
8b Confirm directional rotation.
8c If incorrect, stop drive, remove power,
and lock out.
8d Reverse connection of L1 & L2 input
power leads to the main disconnect. Do
not change motor leads.
8e Confirm directional rotation.
9. Check motor current in drive mode on the motor
terminals.
9a Put the unit in drive mode.
9b Check motor current on motor terminals
T1, T2, and T3. Verify the motor amps
are within drive and motor rated current
and are balanced within 3%. If incorrect,
see 7.1 Start Up Troubleshooting for
isolation procedures.
9c Check input current on input terminals
L1, L2, and L3. Verify that current is
within FLA of drive and balanced within
3%. If incorrect, see 7.1 Start Up Trouble-
shooting for isolation procedures.
10. Check motor current in bypass mode on the
motor terminals.
10a Put the unit in bypass mode.
10b Check full load amps on terminals T1,
T2, and T3. Verify the motor amps are
within motor FLA rated current and
balanced within 3%. If incorrect, see
7.1 Start Up Troubleshooting for isolation
procedures.
For steps 11-13, see 5 Electromechanical Bypass (EMB2)
Operation and 6 Electronically Controlled Bypass (ECB)
Operation for details.
11. Check operation of any optional functions to
confirm that they work, as applicable. Options
may include run permissive, fire mode, common
start/stop, or others.
12. Exercise the safety circuit and verify that the unit
stops running.
13. Exercise the start/stop circuit and verify that the
unit starts and stops with the system in the Auto
mode of operation.
BAS-SVX49A-EN 4-3
Page 46

Start Up
4-4 BAS-SVX49A-EN
Page 47

Electromechanical Bypass (EMB2) Operation
5 Electromechanical Bypass (EMB2) Operation
5.1.1 Typical Control Connections for Common HVAC Applications
Drive Terminal Parameter Number Parameter Name Value Number Value Name Function
27 500 Digital I/O Mode 0 PNP External Interlock
27 501 Term 27 mode 0 Input External Interlock
29 502 Term 29 Mode 1 Output Auto Bypass
18 510 Term 18 digital input 8 Start Common run/stop
19 511 Term 19 digital input 52 Run Permissive Run Permissive
27 512 Term 27 digital input 7 External Interlock External Interlock
29 531 Term 29 digital output 160 No Alarm Auto Bypass
01 & 02 540 [0] Relay 1 function 167 Start Command Active Run Permissive
01 & 02 540 [0] Relay 1 off delay 0.00 seconds Off Delay Run Permissive
Table 5.1 EMB2 Default Parameter Settings for Common HVAC Applications
If the drive is reinitialized, be sure that these settings are maintained or reset for proper bypass.
Name Function Drive Terminals EMB2 X59 EMB2 X55
Remote Drive Start (with common start/stop) Input Command 3, 4
Remote Drive Start (without common start/stop) Input Command 13, 18
Motor Running on Drive Output Status 04, 05, 06
Run Request (for run permissive) Output Command 11, 12
Run Enable (for run permissive) Input Command 1, 2
Safety Stop Input Command 5, 6
Drive Fault Output Status 5, 6, 7
Fire Mode Input Command 7, 8
Drive Mode Output Status 1, 2
Bypass Mode Output Status 3, 4
Fire Mode Output Status 9, 10
Table 5.2 Common Functions for Controlling Motor using Bypass and Typical Terminal Connections.
Commands enable drive functions. Status reports describe conditions, but do not enable a function.
BAS-SVX49A-EN 5-1
Page 48

Electromechanical Bypass (E...
Figure 5.1 Customer Side EMB2 Control Card Terminal Connections
5-2 BAS-SVX49A-EN
Page 49

Electromechanical Bypass (EMB2) Operation
5.1.2 EMB2 Auto Bypass
General Information
Auto bypass allows a fault condition in the drive to
activate running the motor in bypass without operator
intervention. Activation of the function is through setting
DIP switches (S100) located on the EMB2 bypass control
card (see Figure 5.1). A fault condition enables a delay
timer prior to tripping the drive into bypass. The fault trip
and running in bypass are reported as output from the
bypass control card. The auto bypass function is built in.
Prior to Enabling Auto Bypass
Complete the start-up procedure to verify that
•
the motor rotation direction in bypass is correct
and that the system is ready in all respects for
continuous full speed operation in bypass.
WARNING
HAZARDOUS VOLTAGE!
Remove power to the bypass panel before setting auto
bypass dip switch settings. Bypass can contain high
voltage. Failure to remove power to bypass panel before
setting dip switches could result in death or serious injury.
Operation
With the bypass selector switch in drive and auto
•
bypass enabled, a fault signal from the drive will
activate the auto bypass timer.
If the fault clears before the time delay is
•
complete, the motor remains operating in drive
mode. This allows temporary faults, such as a
momentary under or over voltage, to clear
without transferring the system to bypass.
If the timer completes its cycle before the fault
•
clears, the panel trips into bypass mode and the
motor runs at constant full speed from line input
voltage.
In bypass, the motor will stop if safety or motor
•
overload conditions are exceeded.
Once auto bypass is activated, the only way to
•
reset the unit back to drive is by operator
intervention. Ensure that the fault has been
cleared, then rotate the bypass switch to the OFF
position momentarily before setting it back to the
drive position. This resets the drive and fault
timer.
Auto Bypass Function Setup
Enable auto bypass by closing one or more DIP switches
on switch S100 located on the bypass control card. (Times
are approximate.)
All OFF = no auto bypass operation
•
Switch 1 only ON = 30 sec. delay
•
Switch 2 only ON = 60 sec. delay
•
Switch 3 only ON = 300 sec. delay (maximum)
•
Switch 4 = Always OFF
•
5.1.3 EMB2 Common Run/Stop
General Information
The common run/stop function provides remote run and
stop control of the motor in bypass. Without common run/
stop, the motor would automatically run at full speed
whenever the bypass is activated. The remote signal
provides drive control as well as bypass control, making
this one input common to both. Common run/stop is
enabled by factory default. When used with the run
permissive function, common run/stop permits run request
operation in bypass.
Prior to Enabling Common Run/Stop
Complete the start-up procedure to verify motor
•
rotation direction in bypass is correct and that
the system is ready in all respects for continuous
full speed operation in bypass.
Operation
A user supplied remote start command wired to
•
connector X55, terminals 3 and 4 initiates remote
bypass operation. With common run/ stop,
bypass mode cannot be activated by hand on the
drive keypad or by serial communication.
Common Run/Stop Setup
Wire input terminals 3 and 4 on connector X55
•
per the system application.
To Disable Common Run/Stop
Common run/stop is enabled by factory default
•
when ordered.
To disable the feature, turn switch four on dip
•
switch S105. This allows the bypass to start when
the bypass switch is placed in the bypass
position.
Remove wire from terminal 18 of the drive
•
control terminal and insulate the end of the wire
to prevent shorting. This is required or the drive
will always have a run command.
If applicable, connect remote run/stop input to
•
terminals 12 and 18 on the drive control card.
BAS-SVX49A-EN 5-3
Page 50

Electromechanical Bypass (E...
5.1.4 EMB2 Run Permissive
General Information
Run permissive allows a remote signal to notify the drive
to start, indicating the system is safe to operate. Run
permissive works in drive or bypass mode. Run permissive
is enabled by factory default and can be disabled by
switching dip switch #4 on S105 to the on position or
placing a jumper wire between terminal 1 and 2 of the
X55 customer connector.
Prior to Enabling Run Permissive
Complete the start-up procedure to verify that
•
motor rotation direction in bypass is correct and
that the system is ready in all respects for
continuous full speed operation in bypass.
Verify that the drive is programmed for the run
•
permissive function. See the drive support
manual provided for information on
programming the run permissive function.
Operation
A start command can be from local hand start on
•
the drive keypad or a remote auto start signal
through digital input connector X55 terminals 3
and 4, or via the serial communications input.
In response to a start command, an output
•
request is sent from X55 terminals 11 and 12 to
the external equipment (to activate a valve or
damper, for example).
When a return run signal on X55 terminals 1 and
•
2 is received, the motor is started in either drive
or bypass mode, depending upon the bypass
switch position.
Run Permissive Function Setup
Remove the factory-installed jumper wire on
•
connector X55, terminals 1 and 2.
Wire the output run request to connector X55,
•
terminals 11 and 12.
Wire the input run permission to connector X55,
•
terminals 1 and 2 per the system application.
Disable Run Permissive
Run permissive is enabled by factory default
•
when ordered.
To disable the run permissive function, jumper
•
between terminals 1 and 2 on connector X55 or
use dip switch 4 on 5105.
5.1.5 EMB2 Overload
General Information
The overload device provides overcurrent protection for
the motor when running in bypass. The thermally activated
overload monitors motor current and trips to remove
power to the motor if a sustained over-current condition
exists. A Class 20 overload is standard with a variable
setting for motor current. Test and reset buttons are also
provided. In drive mode, the drive provides current sensing
and trip protection. Fuses provide quick action for high
over current conditions.
Prior to Enabling Overload
Verify that the overload current dial setting
•
matches the motor FLA rating on the motor
nameplate.
If the motor FLA is greater or less than the range
•
of the current dial, reconfirm that the motor hp
and voltage are within the option panel (and
drive) rating. If greater than the FLA rating,
replace the panel with one of a proper rating.
CAUTION
MOTOR DAMAGE!
Repeated attempts to reset an overload can cause motor
damage. Correct the overload condition and let the
overload and motor return to normal operating
temperature before resetting. See motor manufacturer’s
recommendations for time between start attempts. Failure
to correct the overload condition and let the motor return
to normal operating temperature could cause motor
damage.
Operation
Overloads are rated by class. The class is defined by the
NEC to determine the maximum time to trip. A Class 20
overload, for example, has a typical trip delay of 20 sec. or
less at 600% current and normal operating temperature.
This allows for high motor inrush current for 20 sec. while
the motor is ramping up to synchronous speed. The trip
time, however, is based on the percentage of overload.
The higher the overload, the shorter the trip time. It is
important that the overload class not exceed the motor
class rating or motor damage could occur.
Overload Function Setup
Set the overload current dial to the FLA of the
•
motor. DO NOT add the service factor of the
motor into the setting. A service factor of 120%
for Class 20 is designed into the overload.
Pressing the test pushbutton verifies the
•
operation of the overload. The overload should
5-4 BAS-SVX49A-EN
Page 51

Electromechanical Bypass (EMB2) Operation
trip when pressed. Use the reset pushbutton to
reset the overload after the test.
Reset is used to reset the overload after it trips. If
•
the overload is still hot, wait until the motor
reaches normal operating temperature before
resetting. The overload offers a manual (hand) or
auto reset selection. It is highly recommended to
operate in the manual factory setting to prevent
the risk of damage to the motor.
TRIP
5
10
20
TEST
97NO
T1
Figure 5.2 Sample Overload Device
30
98NO 95NC
T2 T3
MANUAL
RESET
AUTO
96NC
130BX229.10
5.1.6 EMB2 Safety Interlock
General Information
The safety interlock feature prevents the drive or bypass
from operating. For operation in drive or bypass, the safety
interlock input contact must be closed. Only a fire mode
command to run in bypass overrides this function. Safety
inputs include, but are not limited to, high and low
pressure limit switches, fire alarm, smoke alarm, high and
low temperature switches, and vibration sensors.
Operation
When an external safety input closes, the panel is in
operational mode. When open, power is interrupted to the
drive output and bypass contactors and relays, and the
bypass ignores all run commands except for fire mode
operation. When power is interrupted in drive mode, the
drive display indicates an external fault, meaning the
problem is external to the drive. In some instances, a fault
can be caused by a failure within the panel, which will still
be reported as an external fault from the drive. A factory
installed jumper allows the unit to operate when no safety
input is connected. This jumper must be removed when
connecting a safety interlock in the circuit.
Safety Interlock Function Setup
Remove factory-installed jumper between
•
terminals 5 and 6 on connector X55
Wire safety input to terminals 5 and 6 on
•
connector X55
5.1.7 EMB2 Fire Mode
General Information
Fire mode runs the motor at full speed in bypass and is
intended to ignore common safety, overload, and mode
selector switch inputs in emergency situations. The motor
will continue to run in bypass until fire mode is removed
or the unit fails.
Prior to Enabling Fire Mode
Complete the start-up procedure to verify motor
•
rotation direction in bypass is correct and that
the system is ready in all respects for continuous
full speed operation in bypass.
Operation
Activation of fire mode is accomplished by
•
closing connector X55, input terminals 7 and 8.
When activated, a relay overrides the safety
•
circuit, motor overload, and bypass switch (SW1)
position.
Fire mode is deactivated only when removed or
•
fuses blow.
Fire mode status can be reported through
•
connector X55, terminals 9 and 10, a normally
open dry contact that closes when fire mode is
active.
Fire Mode Function Setup
Wire the fire mode input to connector X55,
•
terminals 7 and 8.
Wire the fire mode status output to connector
•
X55, terminals 9 and 10.
5.1.8 EMB2 Fault Reporting
General Information
A fault indication is provided if the drive experiences a
fault or bypass input power is lost. The EMB2 bypass
control card monitors the drive fault output for status
reporting. The fault contacts are fail-safe, meaning that if
power is removed, a fault condition is automatically
reported. Fault status is not monitored in bypass
operation.
Operation
For the EMB2, fault reporting is monitored through a
Form-C relay (RL2) on the bypass control board. The relay
reports a fault on connector X59 terminals 5, 6, and 7. In
normal operation, the relay is powered and terminal 5 is
closed with terminal 7 open. In a fault condition, power to
the relay is lost and the relay positions automatically
reverse, signaling the fault condition. Terminal 6 is
common to both.
BAS-SVX49A-EN 5-5
Page 52

Electromechanical Bypass (E...
Fault Reporting Function Setup
Fault reporting status is connected to connector
•
X55, output terminals 5, 6, and 7.
5.1.9 EMB2 Switches
Mode selector switch.
A panel mounted Drive/OFF/Bypass/Test selector switch is
used to electrically select whether the motor is controlled
by the drive (M1 and M2 contactors), connected to the
full-speed bypass (M3 contactor), or disconnected from
both. The test position allows for operation in bypass while
providing power to the drive (M1 and M3). See Figure 1.2.
5-6 BAS-SVX49A-EN
Page 53

Electronically Controlled Bypass (ECB) Opera-
6 Electronically Controlled Bypass (ECB) Operation
1. keypad Display
6.1 Electronically Controlled Bypass (ECB)
Operation
6.1.1 Overview
Information provided in this section is intended to enable
the user to connect control wiring, program functions, and
operate the ECB and its optional features.
The ECB contains a local processor located on the ECB
control card, which interacts with the drive’s control logic
for programmable options, remote command input, and
output status reporting. Rather than panel-mounted
operator-activated selector switches, as on the electromechanical option panel, ECB control is provided by the
drive’s processor.
The ECB also contains a power supply which provides back
up for the drive’s logic circuitry, so even if the drive loses
power, the control and communication functions are
maintained.
2. Menu keys
3. Menu navigation
4. Control keys
Programming and display are provided by the drive’s local
control panel. (keypad See Figure 6.1)
An important feature of the ECB is the ability to accept
commands from a building automation system (BAS) and
to report operational status in return.
Control wiring connections are made to either the drive’s
control terminals (see Figure 3.20) or terminals provided on
the ECB control card (see Figure 6.2). Drive analog and
digital I/O terminals are multifunctional and need to be
programmed for their intended use while the terminals on
the ECB control card are dedicated for specific functions.
Programming options for drive terminals are seen by
pressing the [Main Menu] key or [Quick Menu] key on the
keypad keypad. Parameter menus appear in the keypad
display. The arrow keys are used for navigating through
the parameter lists. Terminal functions are programmed in
parameter group 5-**. (See Table 6.1 for factory default
parameter settings for drives with an ECB.) Bypass
functions are programmed in parameter group 31-** (see
Table 6.4). See the drive’s supporting materials for detailed
programming instructions.
tion
Figure 6.1 keypad
BAS-SVX49A-EN 6-1
Page 54

Electronically Controlled B...
Parameter Parameter name Setting title Setting Function
5-01 Term 27 Mode Input 0 Customer Interlock
5-02 Term 29 Mode Output 1 Auto bypass
5-10 Term 18 digital input Start 8 Common run/stop
5-11 Term 19 digital input Run Permissive 52 Run Permissive
5-12 Term 27 digital input External Interlock 7 Customer Interlock
5-31 Term 29 digital output No Alarm 160 Auto bypass
5-40(0) Relay 1 function Start Command Active 167 Run Permissive
5-40(0) Relay 1 off delay Off Delay 0.00 S Run Permissive
Table 6.1 Parameter Group 5-** Factory Default Settings
6.1.2 ECB Control Card
The ECB control card (see Figure 6.2) provides input connector X57 for commanding bypass operation remotely and output
connector X59 for reporting the bypass mode of operation, either drive mode or running in bypass.
See Table 6.2 for ECB control card terminal types and functions.
1
1. Terminal X58
2. Terminal X56
3. Terminal X57
4. Terminal X59
130BX232.10
2
3
4
6-2 BAS-SVX49A-EN
Page 55

Electronically Controlled Bypass (ECB) Opera-
tion
Figure 6.2 ECB Control Card Terminal Connections
BAS-SVX49A-EN 6-3
Page 56

Electronically Controlled B...
Input Conn. Term. Function Type
1 Digital input for safety stop User supplied dry contact
2 Common User supplied dry contact
3Factory use only
4No function
5Factory use only
X57
Output Conn. Term. Function
X59
Relay Output Term. Function
X56
6Factory use only
7Factory use only
8 Digital input for remote bypass enable User supplied dry contact
9 Digital input overrides system to Bypass Mode ignoring all
other inputs and commands, except for safety stop on
terminal 1.
10 Digital input for remote overload reset User supplied dry contact
1 Common for binary I/O
2 Common for binary I/O
3No function
4No function
5 Digital output indicates panel is in Drive Mode. 24 VDC digital output
6 Digital output indicates panel is in Bypass Mode 24 VDC digital output
7 Common for binary I/O
8 Common for binary I/O
1 N.O. contact for running in bypass or drive Relay output for user
2 N.O. contact for running in bypass or drive Relay output for user
3-12 Factory use only
User supplied dry contact
Table 6.2 ECB Card Terminals
6-4 BAS-SVX49A-EN
Page 57

Electronically Controlled Bypass (ECB) Opera-
tion
6.1.3 ECB Drive or Bypass Selection
Use the keypad and display to switch between the motor running in drive mode or bypass when operating in local control.
The display in operating mode is shown below.
1. Press [Drive Bypass]. Display changes to show
bypass and drive mode options (shown in Step 2).
2. When running in drive mode, press [OK] on
keypad to activate bypass mode or press CANCEL
to remain in drive mode. In bypass, the motor will
run at full speed.
3. When running in drive mode, press [OK] on the
keypad to activate drive mode or press [Cancel] to
remain in bypass mode.
1 = Display
2 = Info key
3 = Drive/Bypass Option Key
4. Press [Status] to return to drive status display.
BAS-SVX49A-EN 6-5
Page 58

Electronically Controlled B...
NOTE!
Pressing [Info] at any time displays tips and guidelines for
performing the function currently activated.
130BX238.10
6-6 BAS-SVX49A-EN
Page 59

Electronically Controlled Bypass (ECB) Opera-
6.1.4 ECB Programming
Use the keypad and display for programming ECB functional options. All programming options appear in numbered
parameters. Parameters are arranged in groups by related functions. Programming is performed by accessing the
parameters through a menu and selecting from displayed options or entering numerical values. See the drives’ supporting
materials for detailed programming instructions.
Access parameters to program bypass functions in accordance with the following instructions:
1. Press [Main Menu] on the keypad to access parameter
groups. (Note that the memory function of the menu returns
to the most recently used function. Use [Back] to return to the
main menu index when necessary.)
tion
2. Press [▲] or [▼] to scroll through parameter groups. A
dotted outline surrounds the selected group. Bypass options
are found in parameter group 31-** Bypass.
3. Press [OK] to enter the selected parameter group.
4. Press [
5. Press [OK] again to enter programming mode, which allows
changing parameter options or data. Option is inverse
highlighted.
6. Press [
7. Press [OK] again to activate the selection or [Cancel] to
cancel.
8. For entering numeric values, press [►] or [◄] to select
numeric digit, then Press [
numbers 0-9. Selected digit is inverse highlighted.
9. Press [OK] to activate the selection or [Cancel] to cancel.
10. Press [Status] to return to operational display data or [Back]
to return to parameter menu options.
] or [▼] to scroll through the parameter list.
▲
] or [▼] to scroll through programmable options.
▲
] or [▼] to scroll through digit
▲
BAS-SVX49A-EN 6-7
Page 60

Electronically Controlled B...
6.1.5 ECB Hand/OFF/Auto
General Information
The [Hand on], [Off Reset], and [Auto on] keys on the keypad control both the drive and bypass (see Figure 6.1). [Drive
Bypass] allows the user to locally select drive or bypass mode of operation. It does not necessarily start or stop the motor.
Prior to Enabling Hand/Off/Auto
Complete the start-up procedure to verify that motor rotation direction in bypass is correct and that the system is
•
ready in all respects for continuous full speed operation in bypass.
Programming Key Functions
For [Off Reset] and [Drive Bypass], Table 6.3 lists the parameters that select functions for the control keys. A password
protection can also be assigned in these parameters.
Operation
[Hand on] allows the user to start the motor locally from the keypad. Press the [Hand on] to start the motor locally
•
either in drive or bypass mode.
[Off Reset] allows the user to stop the motor locally from the keypad. Press the [Off Reset] to stop the motor
•
locally, either in drive or bypass mode.
[Auto on] allows the motor to be started remotely from digital input or serial communications. Press [Auto on] to
•
activate the remote motor start and stop from a digital input or serial communications in drive or bypass mode.
Press [Drive Bypass] to initiate the display to toggle between drive or bypass mode of operation. Press [OK] to
•
accept the change or [Cancel] to cancel the action.
Parameter No. Key Function
00-44 [Off Reset] This disables or enables the [Off Reset] key on keypad. (0) disabled,
(1) enabled, (2) password Default value is (1) enabled.
00-45 [Drive Bypass] This disables or enables the [Drive Bypass] key on keypad. (0)
disabled, (1) enabled, (2) password Default value is (1) enabled.
Table 6.3 keypad Control Keys Programming
6.1.6 ECB Mode of Operation
General Information
The ECB has four modes of operation: drive, bypass, auto bypass, and test. Each mode is selected through the keypad and
display. Bypass mode select can be accessed directly by pressing [Drive Bypass].
Prior to Enabling Mode of Operation
Complete the start-up procedure and verify motor rotation direction in bypass is correct and that the system is
•
ready in all respects for continuous full speed operation in bypass.
Press [Off Reset] to prevent operation of the motor.
•
Operation
Drive mode: The motor is connected to and controlled by the drive. Contactors M1 and M2 are closed while
•
contactor M3 is open. The motor will not run until a run command is present.
Bypass mode: The motor operates at full speed across the line when a run command is present. Contactor M3 is
•
closed and M1 and M2 are open.
Test mode: Test mode puts the panel into bypass mode and will automatically run in bypass. Contactor M1 is
•
closed, supplying power to the drive for test purposes while M2 is open. Contactor M3 controls the operation of
the motor in bypass, closed to run the motor, open to remove power. The control keys on the keypad will not
control the bypass until test mode is removed.
6-8 BAS-SVX49A-EN
Page 61

Auto bypass mode: When in drive mode, auto bypass is a timed interval that allows a fault condition in the drive
•
to activate running the motor in bypass without operator intervention.
Mode of Operation Select
Mode of operation is programmed through parameter group 31-** . See Table 6.4.
•
Par. No. Selection Function
31-00 Bypass Mode Selects source of motor power.
31-01 Bypass Start Time Delay Sets a delay time for starting in bypass that
31-02 Bypass Trip Time Delay Setting a value other than 0 sec. enables
31-03 Test Mode Activation Setting enabled puts bypass in test mode.
31-10 Bypass Status Word Read-only display, which shows the bypass
31-11 Bypass Running Hours Read only display which shows bypass
Electronically Controlled Bypass (ECB) Opera-
tion
(0) Drive (drive mode) (1) Bypass (bypass
mode)
allows for external actions to take place prior
to line starting the motor.
0-60 sec. (default value is 5 sec.)
auto bypass. Bypass trip delay sets the delay
time before switching to bypass mode when
the drive has a fault.
0-300 sec. (default is 0 sec. = OFF)
See the manual for warnings and cautions.
(0) disabled (default value) (1) enabled
status in hex. See the next table for details.
0, 216-1 (default value is 0)
running hours.
Table 6.4 Bypass Parameter Functions
Bit Description
0 Test Mode The Test Mode bit will be true when the ECB is in Test Mode.
1 Drive Mode The Drive Mode bit will be true when the ECB is in Drive Mode.
2 Automatic Bypass Mode The Automatic Bypass Mode bit will be true when the ECB is in Automatic Bypass Mode.
3 Bypass Mode The Bypass Mode bit will be true when the ECB is in Bypass Mode.
4 Reserved This bit is reserved for future use.
5 Motor Running from Bypass/Drive The Motor Running from Bypass/Drive Bit will be true when the motor is running from
either the drive or the bypass.
6 Overload Trip The Overload Trip Bit will be true when the ECB detects an overload trip.
7 M2 Contactor Fault The Contactor Fault Bit will be true when an M2 Contactor Fault is detected.
8 M3 Contactor Fault The Contactor Fault Bit will be true when an M3 Contactor Fault is detected.
9 External Interlock The External Interlock Bit will be true when an External Interlock fault is detected.
10 Manual Bypass Override The Manual Bypass Override Bit will be true when the Manual Bypass Override input is true.
Table 6.5 Parameter 31-10 Bypass Status Word Bit Definitions
BAS-SVX49A-EN 6-9
Page 62

Electronically Controlled B...
6.1.7 Bypass Status Word Bit Examples
1. Motor running and bypass in drive mode. Status word 22 hexadecimal converts to 00000100010 binary.
Bit109876543 21 0
Binary00000100 01 0
1. External interlock fault (open) and bypass in bypass mode. Status word 208 hexadecimal converts to 01000001000
binary.
Bit109876543210
Binary01000001000
6.1.8 ECB Auto Bypass
General Information
Auto bypass allows a fault condition in the drive to
activate running the motor in bypass without operator
intervention. Activation of the function is through setting
timer start parameters in the drive programming. Fault trip
and running in bypass are reported through the drive
display, digital outputs, and serial communications. In
addition, the independently powered ECB card is available
to report bypass status when the drive is inoperable
(control card operative) through its serial communications
or digital outputs.
Prior to Enabling Auto Bypass
Complete the start-up procedure to verify motor
•
rotation direction in bypass is correct and that
the system is ready in all respects for continuous
full speed operation in bypass.
Operation
With the auto bypass function enabled, a fault
•
signal from the drive activates the auto bypass
timer.
If the fault clears before the time delay is
•
complete, the motor remains operating in drive
mode. This allows temporary faults, such as a
momentary under or over voltage, to clear
without transferring the system to bypass.
If the timer completes its cycle before the fault
•
clears, the panel trips into bypass mode and the
motor runs at constant full speed from line input
voltage.
In bypass, the motor will stop:
•
- if the drive receives a remote stop
command
- local stop ([Off]) on the keypad is
pressed
- a remote start command is removed
- a safety is open
- motor overload is tripped
Once auto bypass is activated, the only way to
•
reset the unit back to drive mode is by operator
intervention. Ensure that the fault has been
cleared, then press [Drive Bypass] and select drive
mode.
Auto Bypass Function Setup
Enable auto bypass by changing parameters in group 31 in
the drive extended menu.
31-01, Bypass start time delay. Setting the timer at
•
anything other than 0 time activates start delay
in bypass. Leave at 30 sec. default or set as
desired up to 60 sec.
31-02, Bypass trip time delay. Setting the timer at
•
anything other than 0 time activates auto bypass.
Leave at 5 sec. default or set as desired up to 60
sec.
Figure 6.3 Bypass Trip Time Delay
130BX243
6-10 BAS-SVX49A-EN
Page 63

Figure 6.4 Drive Display with Bypass Start Time Delay Active
Electronically Controlled Bypass (ECB) Opera-
Run Permissive Function Setup
See the drive manual or support materials for
•
130BX244.10
Disable Run Permissive
programming and wiring to the drive control
terminals.
Wire the output run request to the drive output
•
terminals selected, and program the terminals for
run request.
Wire the input run command to the drive input
•
terminals selected, and program the terminals for
run permissive.
Disable run permissive through the drive
•
parameters and terminal programming.
tion
6.1.9 ECB Run Permissive
General Information
With run permissive active, the drive sends a run request
and waits for a remote response before notifying the
motor to start. The response indicates the system is safe to
operate. Run permissive operates from the keypad
hand/off/auto select in drive or bypass mode. Run
permissive is enabled by programming in the drive
parameters.
Prior to Enabling Run Permissive
Complete the start-up procedure to verify motor
•
rotation direction in bypass is correct and that
the system is ready in all respects for continuous
full speed operation in bypass.
Verify that the drive is programmed for the run
•
permissive function. See the drive support
materials for programming the run permissive
function.
Operation
A start command can be initiated from local hand
•
start, serial communications, or a remote auto
start signal through digital drive input terminals.
In response to the start command, an output
•
request is sent from the programmable drive
relay to the external equipment (to activate a
valve or damper, for example).
When a return run signal on the digital input is
•
received, the motor is started in either drive or
bypass, depending upon which mode is active.
6.1.10 ECB Overload
General Information
An overload device provides overcurrent protection for the
motor when running in bypass. The thermally activated
overload monitors motor current and trips to remove
power to the motor if a sustained overcurrent condition
exists. A Class 20 overload is standard with a variable
setting for motor current. Test and reset buttons are also
provided. In drive mode, the drive provides current sensing
and trip protection. Fuses provide quick action for high
over current conditions.
Prior to Enabling Overload
Verify that the overload current dial setting
•
matches the motor FLA rating on the motor
nameplate.
If the motor FLA is greater or less than the range
•
of the current dial, reconfirm that the motor HP
and voltage are within the option panel (and
drive) rating. If greater than the FLA rating,
replace the panel with one of a proper rating.
CAUTION
MOTOR DAMAGE!
Repeated attempts to reset overload can cause motor
damage. Correct the overload condition and let the
overload and motor return to normal operating
temperature before resetting. See motor manufacturer’s
recommendations for time between start attempts. Failure
to correct the overload condition and let the motor return
to normal operating temperature could cause motor
damage.
BAS-SVX49A-EN 6-11
Page 64

Electronically Controlled B...
Operation
Overloads and motors are both rated by class. The class is
defined by the NEC to determine the maximum time to
trip. A Class 20 overload, for example, has a typical trip
delay of 20 sec. or less at 600% current and normal
operating temperature. This allows for high motor inrush
current for 20 sec. while the motor is ramping up to
synchronous speed. The trip time, however, is based on
the percentage of overload. The higher the overload, the
shorter the time.
TRIP
30
RESET
T2 T3
MANUAL
AUTO
96NC
130BX229.10
5
10
20
TEST
98NO 95NC
97NO
T1
Figure 6.5 Sample Overload Device
Overload Function Setup
Set the overload current dial to the FLA of the
•
motor. DO NOT add the service factor of the
motor into the setting. A service factor of 1.2 x
FLA is designed into the overload.
Pressing the test pushbutton verifies the
•
operation of the overload. The overload should
trip when pressed. Use the reset pushbutton to
reset the overload after testing.
Reset is used to reset the overload after it trips. If
•
the overload is still hot, wait until the motor
reaches normal operating temperature before
resetting. The overload offers a manual (hand) or
auto reset selection. It is highly recommended to
operate in the manual factory setting to prevent
the risk of damage to the motor.
6.1.11 ECB Safety Interlock
General Information
The safety interlock feature prevents the drive or bypass
from operating. Only a fire mode command to run
overrides this function. For operation in drive or bypass
mode, the safety external interlock input contact must be
closed. External inputs include, but are not limited to, high
and low pressure limit switches, fire alarm, smoke alarm,
high and low temperature switches, and vibration sensors.
Operation
When an external safety input closes on ECB terminals 1
and 2 on connector X57, the option panel is in operational
mode. When open, power to the motor is disabled. The
bypass ignores all run commands except for fire mode
operation, when applicable. The drive display indicates
alarm 221, bypass interlock, meaning the problem is
external to the drive. A factory installed jumper between
X57 terminals 1 and 2 allows the unit to operate when no
safety input is connected. This jumper must be removed
when connecting in a safety interlock circuit.
Safety Interlock Function Setup
Remove factory-installed jumper between ECB
•
connector X57 terminals 1 and 2 on drive control
terminals.
Wire safety input to connector X57 terminals 1
•
and 2.
For technicians familiar with connecting to drive
•
terminals 12 and 27 for safety interlock, be aware
that ECB bypass operation will NOT stop with the
external fault report. Use terminals 1 and 2 on
connector X57, as indicated, for bypass control.
6.1.12 ECB Common Run/Stop
General Information
The common run/stop function provides remote run and
stop control of the motor while in either drive or bypass.
Without common run/stop, the motor would automatically
run at full speed whenever the bypass is activated. The
remote signal provides drive control as well as bypass
control, making this one input common to both. Common
run/stop is enabled by factory default. When used with the
run permissive function, common run/stop permits run
request operation in bypass.
Operation
A user supplied remote run command wired to drive
terminals 13 and 18 initiates remote drive or bypass
operation. Common run/stop can also be activated by
hand on the keypad or through serial communication.
Operation in either drive or bypass is determined by drive
or bypass mode selection, not the run/stop command.
Prior to Enabling Common Run/Stop
Complete the start-up procedure to verify motor
•
rotation direction in bypass is correct and that
the system is ready in all respects for continuous
full speed operation in bypass.
Common Run/Stop Setup
Wire a remote run/stop to drive input terminals
•
13 and 18 (default run input). Ensure that
parameter 18 is programmed for run (default
setting).
6-12 BAS-SVX49A-EN
Page 65

Electronically Controlled Bypass (ECB) Opera-
tion
6.1.13 ECB Advanced Fire Mode
General Information
Drive operation in advanced fire mode is programmable. In
the event the drive does not function, the motor is
operated in bypass at full speed. Fire mode is intended to
ignore common safety and overload inputs in emergency
situations. The fire mode function is built-in. See the drive
support materials for programmable options.
Prior to Enabling Fire Mode
Complete the start-up procedure to verify motor
•
rotation direction in bypass is correct and that
the system is ready in all respects for continuous
full speed operation in bypass.
Verify that the drive is programmed for the fire
•
mode function. See the drive support materials
for programming the fire mode function.
Operation
Activation of fire mode is accomplished by
•
programming the drive for fire mode.
When activated, the ECB ignores safety circuits
•
and motor overload.
Fire mode is deactivated only when the
•
command is removed or the unit fails.
Fire mode status can be reported through serial
•
communications or drive output.
Fire Mode Function Setup
Program drive for fire mode.
•
If required, program a drive output for fire mode
•
status.
See the drive support materials for programming
•
the fire mode function.
The drive monitors the ECB card communication and
detects when communication stops. An ECB card failure or
communication error could cause this. Contact Trane using
the phone number on the back of this manual for
technical support if this happens. The phone number can
also be found on the label inside the panel cover.
Fault Reporting Function Setup
Automatic function. No set up required.
•
6.1.14 ECB Fault Reporting
General Information
The ECB monitors bypass contactors M2 and M3 and
reports failures to the drive for display and external
reporting. The drive also monitors the ECB card for bypass
communication errors.
Operation
ECB detected faults are reported by the drive in three
ways: Warnings and alarms are displayed on the keypad
display, through serial communication, or through output
relays. The drive provides a form-C fault relay on terminals
01, 02, and 03. The fault contacts are fail-safe, meaning
that if power is removed the contacts close and a fault
condition is reported.
BAS-SVX49A-EN 6-13
Page 66

Electronically Controlled B...
6-14 BAS-SVX49A-EN
Page 67

7 Start Up Troubleshooting
7.1.1 Option Panel Alarm and Warnings
Start Up Troubleshooting
Code
Number
220 Overload Trip Motor overload has tripped. Indicates excess motor load. Check motor and driven load. To reset,
221 Bypass Interlock Bypass interlock has opened and caused the motor to stop. Correct the problem. Depending on
222 M2 Open Failed ECB: The contactor that connects the drive to the motor failed to open. The motor can not be
223 M2 Close Failed ECB: The contactor that connects the drive to the motor failed to close. The motor can not be
224 M3 Open Failed ECB: The contactor that connects the motor to the power line has failed to open.
226 M3 Close Failed ECB: The contactor that connects the motor to the power line has failed to close. The motor can
227 Bypass Com Error Communication between the main control card and the bypass option has been lost. Motor control
228 APU Low Voltage The Option Panel Power Supply has failed, or there is a power problem.
229 Motor Disconn. Terminal 3 on connector X57 of the ECB control card shows an open. This generally means that
Table 7.1 Option Panel Alarms and Warnings (ECB only)
DisplayText Definition
Bypass Run Starts in: Indicates the number of sec. until the motor will be started in bypass. This time delay
Bypass Activates in: Indicates the number of sec. left until the system automatically activates Bypass Mode.
Title Definition
press [Off Reset]. Then, to restart the system, press [Auto on] or [Hand on].
the setting of parameter 14-20, the system will either automatically reset this alarm or require the
[Off Reset] key to be pressed.
operated.
operated.
not be operated.
lost. It will be possible to run the motor using Manual Bypass Override.
neither motor has been selected in contactor motor select. Select a motor.
can be adjusted using parameter 31-01.
Time delay can be adjusted using parameter 31-02.
Table 7.2 Option Panel Status Display (ECB only)
BAS-SVX49A-EN 7-1
Page 68

Start Up Troubleshooting
Symptom Possible cause Test Solution
Missing input power See startup guide for voltage checks. Correct voltage at source.
No function
Open power
fuses or
circuit
breaker trip
Missing or open fuses or circuit
breaker tripped
Loose connections in panel Perform pre-startup check for loose
Missing customer connections Missing customer connections can cause
Loose customer connections Check all customer connections for
Customer wires incorrectly terminated See customer connection drawing and
Improper voltage applied See pre-startup check list. Correct the voltage mismatch. This
Incorrect power connections See pre-startup check list to see if motor
Power disconnect open Verify that the disconnect or circuit
Operator switches off Verify that operator devices are in
OL tripped A tripped OL will disable the motor from
Improper voltage applied See pre-startup check list and correct
Incorrect power connections. Motor and line voltages swapped. Make
Power ground fault Check motor and panel power wires to
Phase to phase short Motor or panel has a short phase to
Motor overload Motor is overloaded for the application. Perform startup and verify motor
Drive overload Drive is overloaded for the application. Perform startup and verify that drive
Loose connections Perform pre-startup check for loose
See open fuses and tripped circuit
breaker in this section for possible
causes.
connections.
the safety circuit or start signal to be
open.
tightness. Loose customer connections
can act like an open circuit.
make sure wires are connected to correct
terminals.
and power leads were swapped.
breaker is closed.
operating position per startup
procedures.
running. Verify that OL relay is in the
normal operating position per the
manual.
improper voltages.
sure the line in and motor out are on
the correct terminals. See pre-startup
check list.
ground.
phase. Check motor and panel phase to
phase for shorts.
connections.
Reset circuit breaker. If fuses, check for
opens with power removed from panel.
Tighten loose connections in the panel.
See customer connections and make
sure all applicable connections are
made or jumpers installed, especially
customer interlock.
Tighten loose customer connections.
Correct any wrong connections. This
could potentially cause damage to the
panel.
could potentially damage the panel.
Use caution when applying power.
Correct any wrong connections. This
could potentially cause damage to the
panel.
Correct any wrong connections. This
could potentially cause damage to the
panel.
Set switches to the correct position.
Perform pre-startup checklist and set
OL per instructions.
Correct voltage mismatch. This could
potentially damage the panel. Use
caution when applying power.
Correct any wrong connections. This
could potentially cause damage to the
panel.
Eliminate any ground faults detected.
Eliminate any shorts detected.
current is within specifications. If motor
current is exceeding nameplate FLA,
reduce the load on the motor.
current is within specifications. If not,
reduce the load on the motor.
Tighten loose connections.
Table 7.3 Fault Table
7-2 BAS-SVX49A-EN
Page 69

Symptom Possible cause Test Solution
Repeated
fuse or circuit
breaker fault.
Open control
fuse
Application problem Perform startup procedures. Check
panel output motor current at full
speed and check for excessive over
current.
Panel problem Perform startup procedures. Check
panel input current at full load and
verify it is within acceptable range.
Power problem Monitor incoming power for surges,
sags and overall quality.
Motor problem Test motor for correct function. Repair or replace motor if a problem is
Improper voltage applied See pre-startup check list. Correct voltage mismatch. This could
Customer wires incorrectly terminated See the customer connection drawing
and make sure the wires are connected
to the correct terminals.
Control ground fault Check all control wires for a short to
ground.
Control short Check control wires for a short in
supply voltage.
Improper voltage applied See pre-startup check list. Correct voltage mismatch. This could
If current is too high, reduce the load
on the motor.
If current is too high, reduce the load
on the motor.
Correct any problems found.
found.
potentially damage the panel. Use
caution when applying power.
Correct any wrong connections. This
could potentially cause damage to the
panel.
Correct any ground faults found. This
could potentially cause damage to the
panel.
Correct any shorts. This could
potentially cause damage to the panel.
potentially damage the panel. Use
caution when applying power.
Start Up Troubleshooting
Open SMPS
fuse
Motor
rotation
incorrect
Customer wires incorrectly terminated See the customer connection drawing
and make sure the wires are connected
to the correct terminals.
Control ground fault Check all control wires for a short to
ground.
Control short Check control wires for a short in
supply voltage.
Rotation incorrect in bypass, drive or
both
Motor rotation is backwards in drive
mode, bypass mode, or both.
Correct any wrong connections. This
could potentially cause damage to the
panel.
Correct any ground faults found. This
could potentially cause damage to the
panel.
Correct any shorts. This could
potentially cause damage to the panel.
Perform motor rotation procedure in
4 Start Up.
BAS-SVX49A-EN 7-3
Page 70

Start Up Troubleshooting
Symptom Possible cause Test Solution
Overload trips
Contactor fails
to pull in
Contactor fails
to drop out
Mains current
imbalance
greater than
3%
Motor current
imbalance
greater than
3%
Motor overloaded Motor is drawing too much current for
the application.
Loose connections Look for signs of overheating on
connections to OL.
OL not set correctly An improperly set OL can cause the OL
to trip too soon. See pre-startup
procedure for correct setting.
Contamination Remove contactor and check for
contamination.
Defective coil Compare coil resistance to contactor
specification. Inspect the coil for signs
of overheating and damages.
Auxiliary contact binding action Remove auxiliary contacts and test
contactor action.
Contamination Remove the contactor and check for
contamination.
Defective coil Compare coil resistance to functional
contactors of the same size.
Auxiliary contact binding action Remove auxiliary contacts and test
contactor action.
Problem with mains power Rotate incoming power leads into
option panel one position; A to B, B to
C, and C to A.
Problem with option panel Rotate incoming power leads into
option panel one position; A to B, B to
C, and C to A.
Problem with motor or motor wiring Rotate outgoing motor leads one
position; U to V, V to W, and W to U.
Problem with option panel Rotate outgoing motor leads one
position; U to V, V to W, and W to U.
Perform startup and verify motor current
is within specifications. If not, reduce the
load on the motor.
Perform pre-startup check for loose
connections and tighten. Replace any
overheated components and wires.
Set correct motor current on OL.
If contamination is found, repair or
replace.
If readings are not the same or if there
are visible signs of damage, replace the
coil or contactor.
If contactor operates with auxiliaries
removed, replace auxiliary contacts.
If contamination is found, repair or
replace.
If readings are not the same or there are
visible signs of damage, replace the coil
or contactor.
If the contactor operates with auxiliaries
removed, replace auxiliary contacts.
If the imbalanced leg follows the wire, it
is a power problem. Causes can vary.
Contact an electrician or power expert
for a solution.
If the imbalanced leg stays on the same
option panel input terminal, it is a
problem with the option panel. Contact
the factory for assistance.
If the imbalanced leg follows the motor
lead, the problem is in the motor or
wiring to the motor. Causes can vary.
Contact an electrician or motor expert
for a solution.
If the imbalanced leg stays on the same
option panel output terminal, it is a
problem with the option panel. Contact
the factory for assistance.
7-4 BAS-SVX49A-EN
Page 71

8Appendix
8.1.1 Dimensions
Appendix
A 8.86 [225.0] 9.11 [231.4] 9.57 [243.0] 9.57 [243.0] 12.69 [322.3] 12.69 [322.2] 15.13 [384.3] 15.13 [384.2]
A16.66 [169.1]-------
B 29.92 [759.9] 41.77 [1061.0] 34.33 [872.0] 43.23 [1098.0] 39.58 [1005.4] 54.38 [1381.4] 45.79 [1163.1] 59.64 [1514.9]
C 11.45 [290.9] 15.94 [405.0] 11.23 [285.2] 17.70 [449.6] 14.78 [375.5] 17.99 [457.0] 14.78 [375.4] 18.01 [457.5]
D - 1.10 [28.0] 0.59 [15.0] 0.59 [15.0] 0.59 [15.0] 0.59 [15.0] 0.59 [15.0] 0.59 [15.0]
a 5.51 [140.0] 7.87 [200.0] 7.87 [200.0] 7.87 [200.0] 10.63 [270.0] 10.63 [270.0] 12.99 [330.0] 12.99 [330.0]
b 28.80 [731.5] 41.02 [1042.0] 32.13 [816.0] 41.18 [1046.0] 37.32 [948.0] 51.89 [1318.0] 43.54 [1106.0] 57.09 [1450.0]
c 0.27 [6.8] 0.27 [6.8] 0.33 [8.5] 0.33 [8.5] 0.33 [8.5] 0.33 [8.5] 0.33 [8.5] 0.33 [8.5]
d 0.39 [10.0] 0.43 [11.0] 0.47 [12.0] 0.39 [10.0] 0.47 [12.0] 0.59 [15.0] 0.47 [12.0] 0.59 [15.0]
e 0.49 [12.5] 0.65 [16.5] 0.72 [18.4] 0.61 [15.5] 0.91 [23.0] 0.75 [19.0] 0.94 [24.0] 0.79 [20.0]
f0.27 [6.9]0.27 [6.8]------
g0.47 [12.1]0.47 [12.0]------
h0.49 [12.5]0.65 [16.5]------
j0.31 [8.0]0.31 [8.0]------
k0.32 [8.0]0.31 [8.0]------
P2 NON-
BYPASS
P2 BYPASS
P3 NON-
BYPASS
P3 BYPASS
P4 NON-
BYPASS
P4 BYPASS
P5 NON-
BYPASS
P5 BYPASS
BAS-SVX49A-EN 8-1
Page 72

Appendix
8.1.2 Mechanical Diagrams
Figure 8.1 P2 Bypass
8-2 BAS-SVX49A-EN
Page 73

Appendix
Figure 8.2 P2 Non-bypass
BAS-SVX49A-EN 8-3
Page 74

Appendix
Figure 8.3 P3 P4 P5 Bypass
8-4 BAS-SVX49A-EN
Page 75

Appendix
Figure 8.4 P3 P4 P5 Non-bypass
BAS-SVX49A-EN 8-5
Page 76

Appendix
8.1.3 Typical Wiring Diagrams
Figure 8.5 EMB2 with Control Relay, Part 1
8-6 BAS-SVX49A-EN
Page 77

Appendix
Figure 8.6 EMB2 with Control Relay, Part 2
BAS-SVX49A-EN 8-7
Page 78

Appendix
Figure 8.7 EMB2, Part 1
8-8 BAS-SVX49A-EN
Page 79

Appendix
Figure 8.8 EMB2, Part 2
BAS-SVX49A-EN 8-9
Page 80

Appendix
Figure 8.9 ECB, Part 1
8-10 BAS-SVX49A-EN
Page 81

Appendix
Figure 8.10 ECB, Part 2
BAS-SVX49A-EN 8-11
Page 82

Appendix
Figure 8.11 ECB with Control Relays, Part 1
8-12 BAS-SVX49A-EN
Page 83

Appendix
Figure 8.12 ECB with Control Relays, Part 2
BAS-SVX49A-EN 8-13
Page 84

Appendix
Figure 8.13 Non-bypass
8-14 BAS-SVX49A-EN
Page 85

Page 86

Rev. 2011-08-12
177R0253 MG14D122
*MG14D122*
Trane optimizes the performance of homes and buildings around the world. A business of Ingersoll Rand, the
leader in creating and sustaining safe, comfortable and energy efficient environments, Trane offers a broad
portfolio of advanced controls and HVAC systems, comprehensive building services, and parts. For more
information, visit www.Trane.com.
Trane has a policy of continuous product and product data improvement and reserves the right to change design and specifications without notice.
© 2011 Trane All rights reserved
BAS-SVX49A-EN 12 August 2011
 Loading...
Loading...