

Page 1
TOSHIBA AMERICA INFORMATION SYSTEMS
STORAGE DEVICE DIVISION
IRVINE, CALIFORNIA
MK8026GAX (HDD2191)
2.5-INCH HARD DISK DRIVE
USER MANUAL
Rev 02
11/2006
Page 2
CONTENTS
Introduction..............................................................................1
Setup ........................................................................................2
Using the HDD .........................................................................4
Troubleshooting.......................................................................5
Specifications ..........................................................................6
Drive Connectors..................................................................... 8
Page 3
INTRODUCTION - MK8026GAX (HDD2191)
General Features
• Rotational speed of 5,400rpm
• 2.5" sized drive
• Fluid Dynamic Bearing (FDB) Motor
• 2 Platter
• 80 Gigabytes*
• 9.5mm High
• 12ms Average Seek Time
• ATA-2,3,4,5,6 Interface
• Supports high transfer rates of 100 MB/sec
• 16MB Buffer
• MTTF 300,000 Hours
*Toshiba defines a megabyte (MB) as 1,000,000 bytes and a gigabyte (GB) as 1,000,000,000 bytes.
1
Page 4
SETUP – MK8026GAX (HDD2191)
Caution: Your Hard Disk Drive is a precision device and even a small drop onto any surface can
cause damage. Electronstatic discharge can also damage the drive. You should ground yourself
prior to handling the drive.
Master/Slave Settings
Your Toshiba Hard Disk Drive can be configured as either a "Master" or "Slave" unit. Master
configuration is used for all single drive applications, and master or slave configuration (only one of each
per port) is used for two drive applications. Use the information in the following table before setting drive
as Master or Slave.
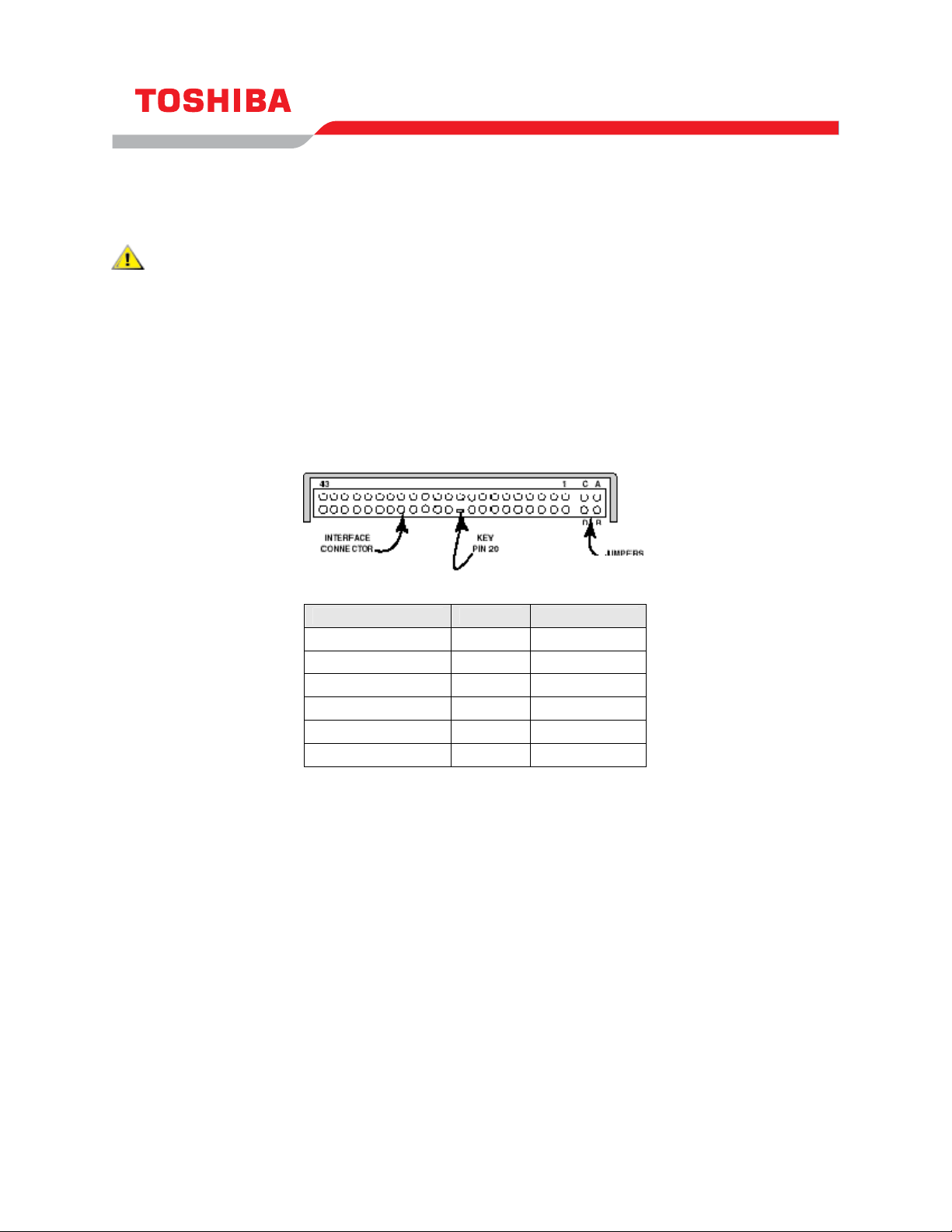
Master configuration is obtained by setting jumpers A, B, C & D open (no jumper present). Slave
configuration is obtained by setting jumpers C-D. When B-D jumper is installed, the drive is configured
as cable select. If pin 28 = Low, the drive is "Master", if pin 28 - High, the drive is "Slave".
Figure 1.HDD Jumper Locations
JUMPER P28 DRIVE
No Jumper - Master Drive
C-D Jumper - Slave Drive
B-D Jumper LOW Master Drive
B-D Jumper HIGH Slave Drive
Prohibit A-B Jumper - -
Prohibit A-C Jumper - -
2
Page 5

Installation Notes
The drive should be mounted carefully on the surface of 0.1mm or less flatness to avoid
excessive distortion.
In order to prevent short-circuit under any circumstances, a space of 0.5mm or more should be
kept under the PCB.
Space should be kept around the drive to avoid any contact with other parts, which may occur
due to shock or vibration.
The temperature of the top cover and the base must always be kept under 60C to maintain the
required reliability.
Be sure not to cover the breathing hole to keep the pressure inside the drive at a certain level
Do not apply any force to the top cover, except the screw areas on top cover. Maximum force to
the specified area is 2N.
The drive contains several parts which may be easily damaged by ESD (Electric Static
Discharge). Avoid touching the interface connector pins and the surface of PCB. Be sure to use
ESD proof wrist strap when handling drive.
The four mounting screws should be tightened equally with 0.3N-m (3kgf-cm) torque. The depth
should be 3.0mm minimum and 3.5mm maximum.
Placing Hard Drive inside your Computer
• Determine mounting configuration (the drive can be mounted in either a horizontal or vertical
orientation)
• Configure drive for system application.
• Configure the adapter board for the specific system application (if required).
• Install adapter board into an unused PC/AT 16 bit slot (if required).
• Install the I/F cable to the system's 44 pin connector port or adapter board. Ensure pin 1 is
oriented correctly, (pin 1 on the cable is usually identified by a red or blue strip.)
• Set correct drive type in system CMOS
• Refer to applicable manuals for software installation instructions.
Important Note: Disconnect power from your computer system before beginning installation.
3
Figure 2.HDD Mounting Holes
Page 6

USING THE HARD DISK DRIVE – MK8026GAX (HDD2191)
Backing up Data Files
To avoid data loss, regularly back up the data files on the hard disk drive.
4
Page 7

TROUBLESHOOTING – MK8026GAX (HDD2191)
Problem Solution
My system is not able to recognize all available capacity
on my Hard Disk Drive. What do I need to do to utilize
the complete hard drive?
How do I install my 2.5" Toshiba Hard Drive into my
desktop or tower system?
There are some systems that are unable to recognize the
new larger Hard Drives on the market. 3rd party software
is available that breaks the "capacity barrier". Some
suggestions are EZ Drive by Micro House and Disk
Manager DiskGo by Ontrack. Check with your local
computer/software supplier for availability or contact the
software manufacturer.
You will need a HDD mounting kit in order to install a
Toshiba 2.5" drive into your desktop or tower system.
Contact your local computer supplier for kit availability.
5
Page 8

SPECIFICATIONS –MK8026GAX (HDD2191)
General
Model MK8026GAX (HDD2191)
Interface ATA-2/3/4/5/6
Motor Fluid Dynamic Bearing (FDB)
Functionality
Formatted Capacity 80.012GB*
Rotational Speed 5,400rpm
Avg. Rotational Latency 5.55/ms
Spin-up Time 4sec (typical)
Buffer 16MB
Seek Time (Average) 12
Internal Transfer Rate 233 ~ 446 Mbits/sec (max)
Host Transfer Rate 100Mbytes/sec
*Toshiba defines a megabyte (MB) as 1,000,000 bytes and a gigabyte (GB) as 1,000,000,000 bytes.
Internal Drive Characteristics
Number of Disks 2
Number of Read/Write Heads 4
Track Density (TPI) 88k
User Data Cylinders 54,000
Logical Cylinders 16,383
Logical Heads 16
Logical Sectors/track 63
Bytes per Sector 512
Logical Blocks (LBA) 156,301,488
Reliability
Preventative maintenance None
Nonrecoverable read errors 1 error per 10
13
bits read
Electrical
Voltage 5V 5%
Power Consumption
Start 5.0W typ
Seek 2.9W typ
Read/Write 2.5W typ
Sleep 0.1W typ
Energy Consumption Efficiency 0.021W/GB avg
Shock
2
Operating 1,960m/s
Non-Operating 7,840m/s
(200G)(2msec)
2
(800G)(1msec)
6
Page 9

Physical
Height 0.37" (9.5mm)
Width 2.75" (69.85mm)
Depth 3.94" (100mm)
Weight 3.56oz (101g) typ
Regulatory
The drive satisfies the following standards:
Underwriters Laboratories (UL) 1950
Canadian Standard Association (CSA) C22.2 No.220 No. 950
TUV Rheinland EN 60 950
EMC - EN50081-1 EN55022: 1988 Class B
EN60555-2: 1987+ A1
EN60555-3: 77A (Co) 38
EMC - EN50082-1 IEC 801-2: 1991
EIC 801-3: 1994
IEC 801-4: 1988
7
Page 10

DRIVE CONNECTORS –MK8026GAX (HDD2191)
Figure 1.MK8026GAX HDD Rear View - Connectors
Interface Connector
Drive Side Connector Yamaichi GAP050K11617 or equivalent
Recommended Host Side Connector
Board Straight type: Berg 86455-044 86456-044 or equivalent
Cable Berg 89361-044 or equivalent
Recommended Cable Characteristics
Standard diameter 0.32mm (28AWG)
Characteristics impedance 100 - 132ohm
Max Length 0.46mm (max)
Capacitance 35pF (max)
* cable is not included with drive
8
Page 11

Interface Pin Assignment
DRIVE INTERFACE SIGNALS
PIN SIGNAL PIN SIGNAL
1 RESET 2 GROUND
3 DD 7 4 DD 8
5 DD 6 6 DD 9
7 DD 5 8 DD 10
9 DD 4 10 DD 11
11 DD 3 12 DD 12
13 DD 2 14 DD 13
15 DD 1 16 DD 14
17 DD 0 18 DD 15
19 GROUND 20 KEY
21 DMARQ 22 GROUND
23 DIOW/STOP 24 GROUND
25
27
29 DMACK 30 GROUND
31 INTRQ 32 IOCS16
33 DA1 34 PDIAG
35 DA0 36 DA 2
37 CS0 38 CS1
39 DASP 40 GROUND
41 +5V (LOGIC) 42 +5V (MOTOR)
43 GROUND 44 RESERVED
DIOR/
-DMARDY
HSTROBE
IORDY/
-DMARDY/DSTROBE
26 GROUND
28 CSEL
9
Note: Symbol () in front of signal indicates negative logic.
 Loading...
Loading...