

Page 1
VF-S11 Built-in Board Option
DEV001Z
Function Manual
E6581268 ①
* The data given in this manual are subject to change without notice.
© TOSHIBA INVERTER CORPORATION
All rights reserved.
2004
Page 2

E6581268 ①
Contents
1. INTRODUCTION ............................................................................................................................... 3
1.1. Usage Precautions ...............................................................................................................................3
1.2. General Specifications .........................................................................................................................3
2. CONNECTION INFORMATION............................................................................................................ 4
2.1. Connection Sizes..................................................................................................................................4
2.2. Names and functions ...........................................................................................................................4
2.3. DeviceNet indicators (Status LED).......................................................................................................5
2.4. VF-S11 communication parameters.....................................................................................................6
3. OBJECT SPECIFICATIONS ................................................................................................................. 7
3.1. Identity Object.......................................................................................................................................8
3.1.1. Identity Object Class Attributes ......................................................................................................8
3.1.2. Identity Object Instance Attributes..................................................................................................8
3.1.3. Identity Object Common Services ..................................................................................................8
3.1.4. Identity Object Specific Services ....................................................................................................8
3.2. Message Router ...................................................................................................................................9
3.2.1. Message Router Class Attributes...................................................................................................9
3.2.2. Message Router Instance Attributes ..............................................................................................9
3.2.3. Message Router Common Services ..............................................................................................9
3.2.4. Message Router Specific Services ................................................................................................9
3.3. DeviceNet Object ...............................................................................................................................10
3.3.1. DeviceNet Object Class Attributes ...............................................................................................10
3.3.2. DeviceNet Object Instance Attributes ..........................................................................................10
3.3.3. DeviceNet Object Common Services ...........................................................................................10
3.3.4. DeviceNet Object Specific Services .............................................................................................10
3.4. Assembly Object ................................................................................................................................11
3.4.1. Assembly Object Class Attributes ................................................................................................11
3.4.2. Assembly Object Instance Attributes ...........................................................................................11
3.4.3. Assembly Object Common Services............................................................................................11
3.4.4. Assembly Object Specific Services..............................................................................................11
3.4.5. Assembly Instance Details ...........................................................................................................12
3.4.5.1. Instance 20/70 – DeviceNet Standard (f894 = 0) ............................................................................ 12
3.4.5.2. Instance 21/71 – DeviceNet Standard (f894 = 1) ............................................................................ 13
3.4.5.3. Instance 100/150 – Toshiba Specific (f894 = 2).............................................................................. 15
3.4.5.4. Instance 101/151 – Toshiba Specific (f894 = 3).............................................................................. 17
3.5. Connection Object..............................................................................................................................19
3.5.1. Connection Object Attributes .......................................................................................................19
3.5.2. Connection Object Instance Attributes .........................................................................................19
3.5.2.1. Explicit Messaging Connection Object Instance Attributes (Instance 1)............................................... 19
3.5.2.2. Poll Connection Object Instance Attributes (Instance 2) ...................................................................... 20
3.5.3. Connection Class Common Services...........................................................................................20
3.5.4. Connection Class Specific Services.............................................................................................20
3.6. Motor Data Object ..............................................................................................................................21
3.6.1. Motor Data Object Class Attributes ..............................................................................................21
3.6.2. Motor Data Object Instance Attributes .........................................................................................21
3.6.3. Motor Data Object Common Services .........................................................................................21
3.6.4. Motor Data Object Specific Services............................................................................................21
3.7. Control Supervisor Object ..................................................................................................................22
3.7.1. Control Supervisor Object Class Attributes..................................................................................22
3.7.2. Control Supervisor Object Instance Attributes .............................................................................22
3.7.3. Control Supervisor Object Common Services .............................................................................23
3.7.4. Control Supervisor Object Specific Services................................................................................23
- 1/25 -
- 1 -
Page 3

E6581268 ①
3.8. AC Drive Object..................................................................................................................................24
3.8.1. AC Drive Object Class Attributes .................................................................................................24
3.8.2. AC Drive Object Instance Attributes.............................................................................................24
3.8.3. AC Drive Object Common Services.............................................................................................24
3.8.4. AC Drive Object Specific Services ...............................................................................................24
3.9. Vender Specific Device Pro-files ........................................................................................................25
3.10. About EDS-file ...................................................................................................................................25
- 2 -
Page 4
E6581268 ①
1. Introduction
Thank you for purchasing the DeviceNet communications interface PWB “DEV001Z” for the VFS11. Before using the
DeviceNet interface, please familiarize yourself with the product and be sure to thoroughly read the instructions and
precautions contained in this manual.
In addition, please make sure that this manual and “Instruction Manual” is delivered to the end user, and keep this
instruction manual in a safe place for future reference or drive/interface inspection.
This manual describes the supported functions for the “DEV001Z”.
In conjunction with this manual, the following manuals are supplied by Toshiba, and are essential both for ensuring a safe,
reliable system installation as well as for realizing the full potential of the “DEV001Z”:
- TOSVERT VF-S11 Instruction Manual
- DEV001Z Instruction Manual (Installation, Wiring, etc.)
1.1. Usage Precautions
- Do not touch charged parts of the drive such as the terminal block while the drive’s CHARGE lamp is lit. A charge will
still be present in the drive’s internal electrolytic capacitors, and therefore touching these areas may result in an
electrical shock. Always turn all drive input power supplies OFF, and wait at least 5 minutes after the CHARGE lamp
has gone out before connecting communication cables or motor wiring.
- Proper ground connections are vital for both safety and signal reliability reasons. For proper grounding procedures,
please refer to the ASD instruction manual for drive considerations and the ODVA DeviceNet Specifications for network
considerations.
- Route all communication cables separate from drive input/output power wiring.
- To avoid the possibility of electric shock due to leakage currents, always ground the drive’s E/GND terminal and the
motor. To avoid misoperation, do not connect the DeviceNet network SHIELD terminal directly to either of the abovementioned grounds or any other power ground.
- Do not assign the same MAC ID to more than one DeviceNet unit in the same network. For an explanation of station
addressing, refer to Instruction Manual.
1.2. General Specifications
LED Indicators
One bicolor red/green Module Status LED and Network Status LED.
Behavior according to ODVA DeviceNet Specifications
When a Watchdog is generated, each LED carries out the same display operation as reset.
Compatibility
Group 2 Server Only device utilizing the Predefined Master / Slave Connection Set.
DeviceNet AC Drive Profile
Vendor-specific I/O POLL connection (8 bytes of data consumed and 8 bytes of data produced). This product
has been self-tested by Toshiba Inverter Corporation and found to comply with ODVA Conformance
Test Software Version A-17.
- 3 -
Page 5
E6581268 ①
2. Connection Information
2.1. Connection Sizes
Connection Instance Produced Consumed
I/O Messaging 4 or 8 bytes 4 or 8 bytes
Explicit Messaging 49 bytes 49 bytes
Notes
- For the Explicit Messaging connection, this is the maximum message length: shorter messages are also acceptable.
- For the Polled I/O connection, if the actual consumed data size is less than the connection instance’s
consumed_connection_size attribute, the consumed data will be ignored, but the connection will otherwise produce
normally. If the actual consumed data size is larger than the connection instance’s consumed_connection_size attribute,
the consumed data will be ignored and the connection will not produce.
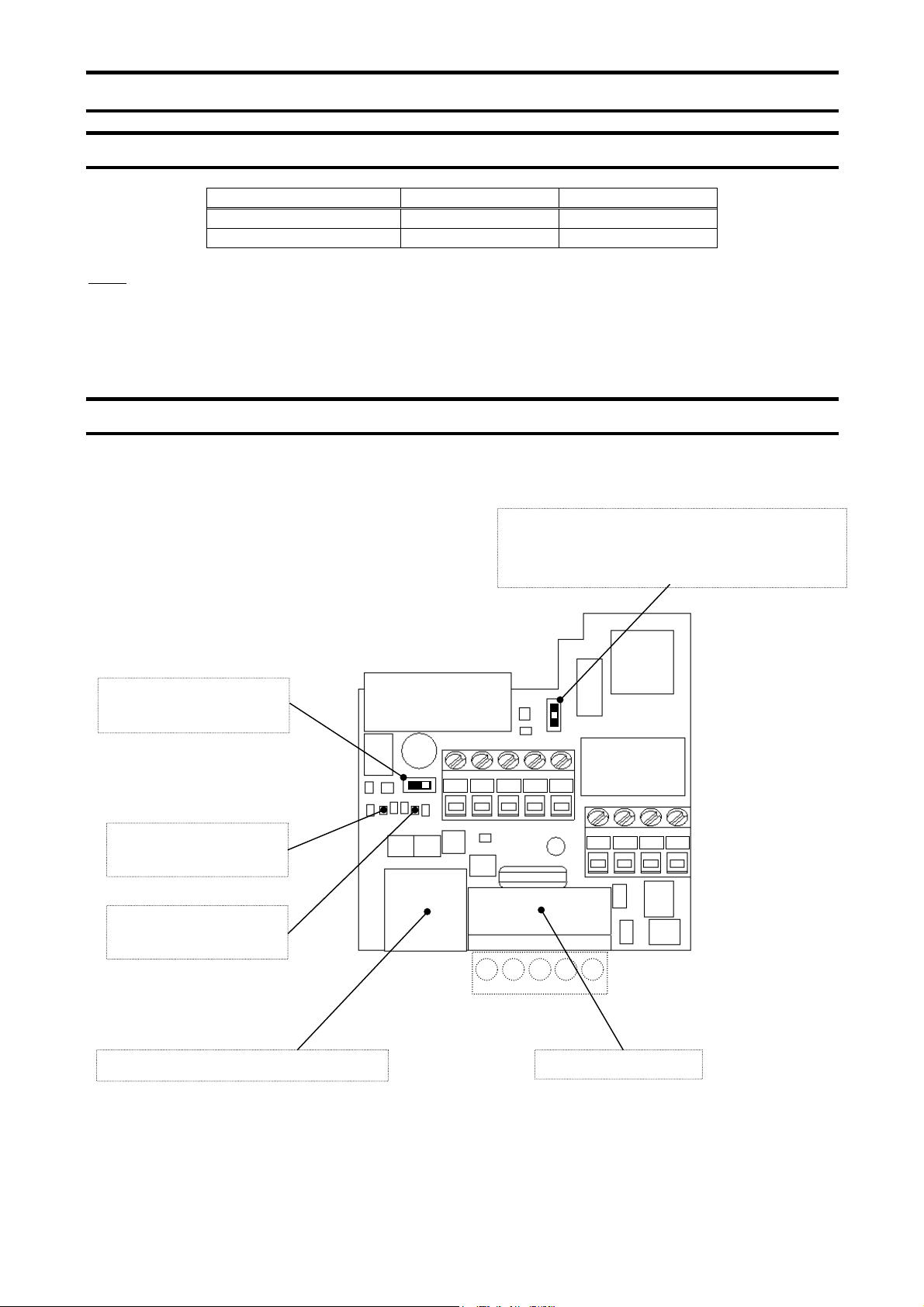
2.2. Names and functions
The external view of this option and the name of each part are shown below:
SW1: Terminal F, R
SINK/SOURCE switching
MS (Module status) LED
(Refer to 2.3)
NS (Network status) LED
(Refer to 2.3)
SW2: Factory set up
* Please do not change this switch from the factory
shipments. It becomes the cause of failure.
F R VIA CC P24
G/E FLA FLB FLC
RJ45
Common serial communication connector DeviceNet connector
- 4 -
Page 6
2.3. DeviceNet indicators (Status LED)
MS (Module status)
This bi–color (green/red) LED indicates the status of the communication link from
DEV001Z to the VF-S11. It indicates whether or not the device has power and is operating
properly. (According to ODVA DeviceNet Specifications.)
LED is: For this state: To indicate:
Off Power OFF There is no power applied to the device.
Green Device Operational The device is operating in a normal condition.
The device needs commissioning due to configuration missing,
incomplete or incorrect.
Flashing Green Device in Standby
Flashing Red Minor Fault Recoverable Fault
Red Unrecoverable Fault The device has an unrecoverable fault; may need replacing.
Flashing Red-Green Device Self Testing The Device is in Self Test.
* When a setup of the parameter f890 - f894 is outside
the range, it will be in this state.
The Device may be in the Standby state.
E6581268 ①
NS (Network status)
This bi–color (green/red) LED indicates the status of the communication link from the
DEV001Z to DeviceNet. (According to ODVA DeviceNet Specifications.)
LED is: For this state: To indicate:
Device is not on–line.
Off Not Powered/Not On–line
Green On-line and connect
Flashing Green On-line, not connect
Flashing Red Connection Time-out
Red Critical Link Failure
- The device has not completed the Dup_MAC_ID test yet.
- The device may not be powered, look at Module Status LED.
The device is on–line and has connections in the established state.
- The device is allocated to a Master.
Device is connected to the network but has no connections in the
established state.
- The device is not allocated to a master.
Recoverable Fault. One or more I/O Connections are in the
Timed–Out state.
Non Recoverable fault. The device has detected an error that has
rendered it incapable of communicating on the network (Duplicate
MAC ID, or Bus–off). Check parameters f890, f891 then
Cycle power to VF-S11 to reset this fault.
- 5 -
Page 7
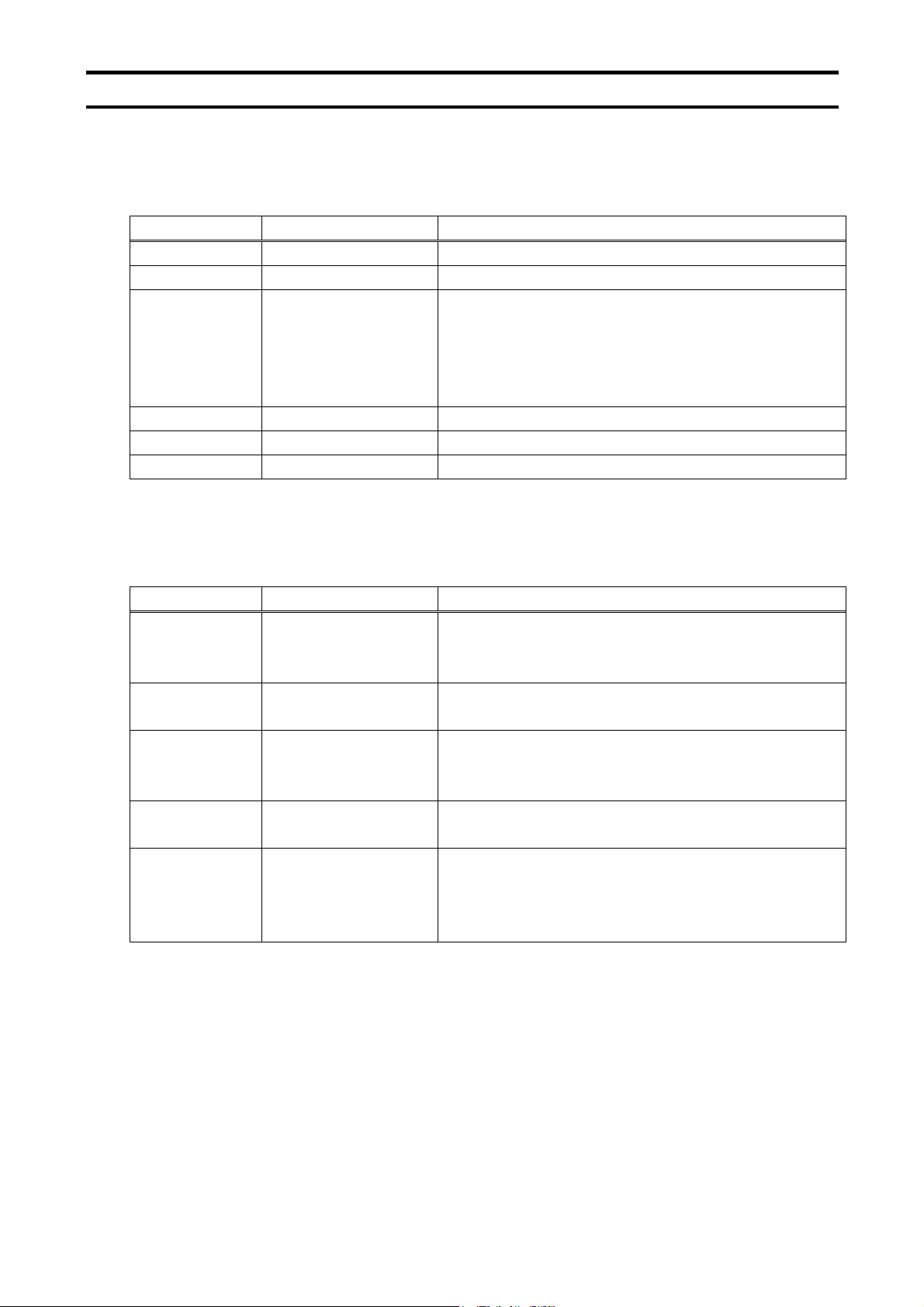
2.4. VF-S11 communication parameters
In a network, VF-S11 (DEV001Z) serves as a DeviceNet slave device. The DEV001Z
configuration is set by the following parameters.
The supported parameters for each drive and their allowable adjustment ranges are
defined in the appropriate Electronic Data Sheet (EDS) files. EDS files can be downloaded
via the internet from
http://www.inverter.co.jp/product/inv/vfs11/dev/
Parameter Function Adjustment range Shipment
f800 RJ45
Communication
speed
f803 Communication
error trip time
f890 MAC ID 0 - 63 0
f891 DeviceNet
Communication
speed
f892 Communications
Loss action
(Network wire breaks)
f893 Preset speed No. 0: No action
f894 Assembly
Object
*1 Parameter f800 is VF-S11 internal communication speed. It is recommended that
the "4" is set to f800 for getting faster response.
*2 For safty, set the communication error trip time (f803).
*3 When out of range values are set up, the MS (Module Status) LED and will flash green
continuously to indicate an invalid set-up. DeviceNet communication is not possible in
this state.
*4 When the parameters are changed, the power must be cycled to the VF-S11 for the
changes to take effect.
0: 1200bps
1: 2400bps
2: 4800bps
3: 9600bps
4: 19200bps
0: Disabled
1- 100 (s)
0: 125kbps
1: 250kbps
2: 500kbps
0: Stop, Communication release
1: No action
2: Deceleration stop
3: Coast stop
4: Emergency stop
5: Preset speed command
(Preset speed by f893 setting)
1-15: Preset speed
0: Instance 20/70
1: Instance 21/71
2: Instance 100/150
3: Instance 101/151
E6581268 ①
3
0
0
0
0
0
- 6 -
Page 8
3. Object Specifications
This section contains the object specifications for all DeviceNet objects currently supported by the
“DEV001Z”. Table 1 outlines those objects covered:
Class Code Object Class Page
0x01 Identity 8
0x02 Message Router 9
0x03 DeviceNet 10
0x04 Assembly 11
0x05 Connection 19
0x28 Motor Data 21
0x29 Control Supervisor 22
0x2A AC/DC Drive 24
TABLE 1: SUPPORTED OBJECTS
For definitions of all data types referred to in these object specifications, refer to the ODVA
DeviceNet Specifications. In general, however, the following are some of the most prevalent types:
SINT....................Signed 8-bit integer value
USINT .................Unsigned 8-bit integer value
BYTE...................Bit string – 8-bits
INT ......................Signed 16-bit integer value
UINT....................Unsigned 16-bit integer value
WORD ................Bit string – 16-bits
UDINT.................Unsigned 32-bit integer value
E6581268 ①
- 7 -
Page 9

3.1. Identity Object
Class code 0x01. This object provides identification of and general information about the device.
3.1.1. Identity Object Class Attributes
E6581268 ①
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.1.2. Identity Object Instance Attributes
Attribute
ID
1 Vendor ID UINT Get Identification of vendor by number 377
2 Device type UINT Get Indication of general type of product
3 Product code UINT Get
Revision
(Major)
4
Revision
(Minor)
5 Status (bits supported) WORD Get Summary status of device 6 Serial number UDINT Get Serial number of device -
7 Product name
8 State USINT Get
Name
Data
Type
USINT
(ARRAY)
USINT
(ARRAY)
SHORT_
STRING
Access
Rules
Identification of a particular product of
an individual vendor
Get (104)*
Get
Get Human-readable identification
Revision of the item the Identity Object
represents
Present state of the device
0 = Non-existent
1 = Device Self Testing
2 = Standby
3 = Operational
4 = Major Recoverable Fault
5 = Major Unrecoverable Fault
Description
Default
Value
1
Default
Value
2
(AC Drive)
1
(1)**
“DEV001Z
DeviceNet TB
Option”
-
3.1.3. Identity Object Common Services
Service
Code
0x05 Reset N/A Yes Invokes the Reset service for the device
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.1.4. Identity Object Specific Services
The Identity Object provides no object specific services.
Notes
* Revision is the same value as the VF-S11 CPU version.
** Minor revision is the revision of the DEV001Z software.
- 8 -
Page 10

3.2. Message Router
Class code 0x02. The Message Router Object provides a messaging connection point through
which a Client may address a service to any object class or instance residing in the DeviceNet
interface unit.
3.2.1. Message Router Class Attributes
Not supported.
3.2.2. Message Router Instance Attributes
E6581268 ①
Attribute
ID
1 Object List
Name
Data
Type
USINT
(ARRAY)
Access
Rules
Get A list of supported objects -
Description
3.2.3. Message Router Common Services
Service
Code
0x0E Get_Attribute_Single N/A Yes Returns the contents of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.2.4. Message Router Specific Services
The Message Router provides no object specific services.
Default
Value
- 9 -
Page 11

3.3. DeviceNet Object
Class Code 0x03. The DeviceNet Object provides for the configuration and status of a DeviceNet
port.
3.3.1. DeviceNet Object Class Attributes
E6581268 ①
Attribute
ID
1 Revision UINT Get Revision of this object. 2
Name
Data
Type
Access
Rules
Description
3.3.2. DeviceNet Object Instance Attributes
Attribute
ID
1 MAC ID USINT Get/Set Node address -*
2 Baud rate USINT Get/Set
4 Bus-off counter USINT Get/Set
Allocation information
(Allocation Choice Byte)
5
Allocation information
(Master’s MAC ID)
Name
Data
Type
BYTE
(ARRAY)
USINT
(ARRAY)
Access
Rules
Baud rate
0 = 125kbps
1 = 250kbps
2 = 500kbps
Number of times CAN went to
the bus-off state
Get -
Get
MAC ID of Master
(from Allocate)
Description
3.3.3. DeviceNet Object Common Services
Service
Code
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class
Instance
Description of Service
Default
Value
Default
Value
-*
0
-
3.3.4. DeviceNet Object Specific Services
Service
Code
0x4B
0x4C
Notes
Service Name
Allocate_Master/Slave
_Connection_Set
Release_Group_2
_Identifier_Set
Supported
Class
N/A
N/A
Instance
Yes
Yes
Requests the use of the Predefined Master/Slave
Connection Set.
Indicates that the specified connections within the
Predefined Master/Slave Connection Set are
no longer desired.
These connections are to be released (deleted).
* The MAC ID and Baud Rate are settable by parameter f890 and f891.
Description of Service
- 10 -
Page 12

3.4. Assembly Object
Class code 0x04. The Assembly Object binds attributes of multiple objects, which allows data to or
from each object to be sent or received over a single connection.
3.4.1. Assembly Object Class Attributes
No supported.
3.4.2. Assembly Object Instance Attributes
E6581268 ①
Attribute
ID
3Data
Name
Data
Type
BYTE
(ARRAY)
Access
Rules
Get/Set
Description
The data contained
in the assembly object.
3.4.3. Assembly Object Common Services
Service
Code
0x0E Get_Attribute_Single N/A Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.4.4. Assembly Object Specific Services
The Assembly Object for static assemblies provides no object specific services.
Default
Value
-
- 11 -
Page 13
E6581268 ①
3.4.5. Assembly Instance Details
3.4.5.1. Instance 20/70 – DeviceNet Standard (f894 = 0)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - - - - - Fault reset - Run forward
12 Drive Reference Speed min-1 (Low byte) *
3 Drive Reference Speed min-1 (High byte) *
Fig. 1 Output Instance 20 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0-----
12 Drive Actual Speed min-1 (Low byte)
3 Drive Actual Speed min-1 (High byte)
Running
Forward
-
Faulted/
tripped
Fig. 2 Input Instance 70 Layout
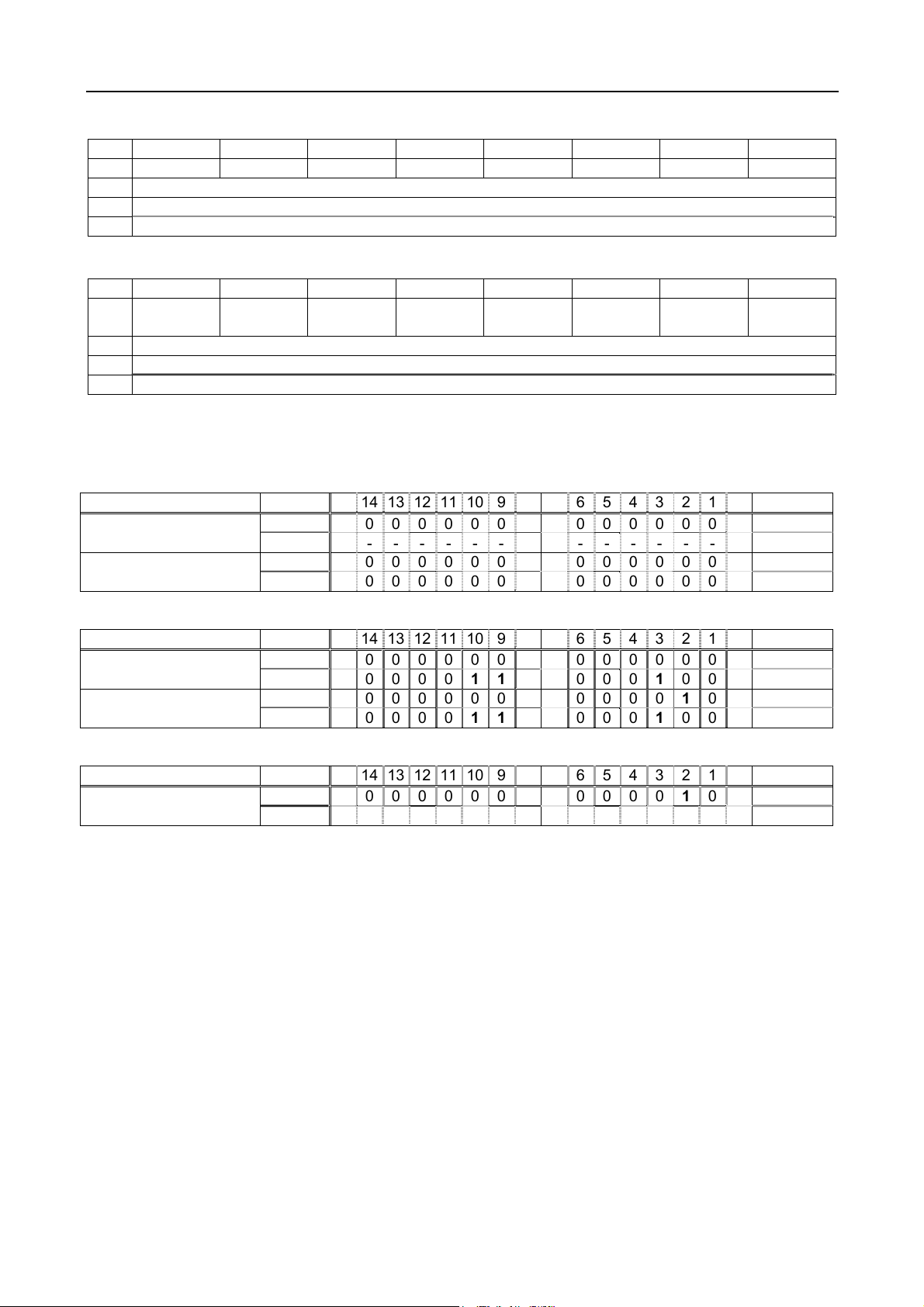
Examples of Instance 20/70
① Stop
Instance Byte 1514131211109876543210 Hex.
Output Instance 20
Input Instance 70
1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 ---------------- 1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
② Forward running 1800min-1
Instance Byte 1514131211109876543210 Hex.
Output Instance 20
Input Instance 70
1, 0 0000000000000001 0x0001
3, 2 0000011100001 0 0 0 0x0708
1, 0 00000000000001 0 0 0x0004
3, 2 0000011100001 0 0 0 0x0708
③ Fault reset **
Instance Byte 1514131211109876543210 Hex.
Output Instance 20
* Drive Reference Speed is set up number of rotations by the hexadecimal number.
For example, when "Frequency reference" is set up to 1800min
1, 0 00000000000001 0 0 0x0004
3, 2 ---------------- -
-1
:
1800 = 0x0708 (Hex.)
** Fault reset works only 1 time when 0 -> 1.
- 12 -
Page 14

E6581268 ①
3.4.5.2. Instance 21/71 – DeviceNet Standard (f894 = 1)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - Net Ref * Net Ctrl * - - Fault reset Run reverse Run forward
12 Drive Reference Speed min-1 (Low byte)
3 Drive Reference Speed min-1 (High byte)
Fig. 3 Output Instance 21 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0
1 Drive Status ***
2 Drive Actual Speed min-1 (Low byte)
3 Drive Actual Speed min-1 (High byte)
At
reference
**
Ref from
Net
**
Ctrl from
Net
**
Ready
Running
Reverse
Running
Forward
Warning
Faulted/
tripped
Fig. 4 Input Instance 71 Layout
* Bit 5 and 6 of the instance 21 byte 0 are defined as follows.
Bit 5 (Net Ctrl) ............ When “1” is set, bits 0 (Run forward) and 1 (Run reverse) of byte 0 are enabled.
When “0” is set, Run/Stop is according to setup of the parameter cmod.
Bit 6 (Net Ref) ............ When “1” is set, bytes 2 and 3 are enabled.
When “0” is set, Drive Reference Speed is according to setup of the parameter fmod.
** Bit 5, 6, and 7 of the instance 71 byte 0 are defined as follows.
Bit 5 (Ctrl from Net)......... When RUN/STOP command from DeviceNet is enabled, “1” is set.
Bit 6 (Ref from Net)......... When frequency command from DeviceNet is enabled, “1” is set.
Bit 7 (At reference).......... When output frequency becomes the same as frequency command, “1” is set.
*** Drive Status is same as the Control Supervisor class State attribute (refer to section 3.7.2).
1 (= BN: 00000001): Startup
2 (= BN: 00000010): Not Ready
3 (= BN: 00000011): Ready
4 (= BN: 00000100): Enabled
5 (= BN: 00000101): Stopping
6 (= BN: 00000110): Fault Stop
7 (= BN: 00000111): Faulted
- 13 -
Page 15

Examples of Instance 21/71
① Stop
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
Input Instance 71
② Forward running 1800min-1
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
Input Instance 71
③ Reverse running 1800min-1
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
Input Instance 71
1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 ---------------- 1, 0 000000110001 0 0 0 0 0x0310
3, 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
1, 0 0000000001100001 0x0061
3, 2 0000011100001 0 0 0 0x0708
1, 0 000001 0011110 110 0x04F6
3, 2 0000011100001 0 0 0 0x0708
1, 0 000000000110001 0 0x0062
3, 2 0000011100001 0 0 0 0x0708
1, 0 000001 00111110 1 0 0x04FA
3, 2 0000011100001 0 0 0 0x0708
E6581268 ①
④ Fault reset *
Instance Byte 1514131211109876543210 Hex.
Output Instance 21
* Fault reset works only 1 time when 0 -> 1.
1, 0 00000000000001 0 0 0x0004
3, 2 ---------------- -
- 14 -
Page 16

E6581268 ①
3.4.5.3. Instance 100/150 – Toshiba Specific (f894 = 2)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 DC braking
Command
1
2 Drive Reference Speed Hz (Low byte) **
3 Drive Reference Speed Hz (High byte) **
link
*
ACC1/
ACC2
Frequency
link
*
PI off THR2
Reset trip
Emergency
stop
Preset
Speed4
Free run (ST) Run/stop
Preset
Speed3
Preset
Speed2
Fw/
Reverse
Preset
Speed1
Jog
Fig. 5 Output Instance 100 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 DC braking ACC2 PI
READY
1-
2 Drive Actual Speed Hz (Low byte)
3 Drive Actual Speed Hz (High byte)
without
ST/RUN
READY
with ST/ RUN
tHr2
(VF2+tH2)
Emergency
stop
-
Free run
(ST)
ALARM
(fc91)
Run/
Stop
EMG FL
Fw/
Reverse
Jog
Fig. 6 Input Instance 150 Layout
* Bit 14 and 15 of the instance 100 byte 0 are defined as follows.
Bit 15 (Command link) ......... When “0” is set, the other command does not work except bit 12 and 13,
Run/Stop is according to setup of the parameter cmod.
Bit 14 (Frequency link)......... When “1” is set, bytes 2 and 3 are enabled. W hen “0” is set, Drive Reference
Speed is according to setup of the parameter fmod.
**
Drive Reference Speed is set up by 0.01Hz unit and the hexadecimal number.
For example, when "Frequency reference" is set up to 60Hz, since the minimum unit is 0.01Hz,
60 / 0.01 = 6000 = 0x1770 (Hex.)
- 15 -
Page 17

Examples of Instance 100/150
① Stop
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150
② Forward running 60Hz
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150
③ Reverse running 60Hz
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150
1, 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
3, 2 ---------------- 1, 0 0 1 001 0 0 0 0 0 0 0 0 0 0 0 0x4800
3, 2 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
1, 0 110001 0000000000 0xC400
3, 2 0001 0 1110 1110 0 0 0 0x1770
1, 0 0 11001 0 0 0 0 0 0 0 0 0 0 0x6400
3, 2 0001 0 1110 1110 0 0 0 0x1770
1, 0 1100011000000000 0xC600
3, 2 0001 0 1110 1110 0 0 0 0x1770
1, 0 0 1100110 0 0 0 0 0 0 0 0 0x6600
3, 2 0001 0 1110 1110 0 0 0 0x1770
E6581268 ①
④ Preset speed 1 with forward running (sr1)
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
Input Instance 150 1, 0 0 11001 0 0 0 0 0 0 0 0 0 0 0x6400
(sr1 is set 5Hz.) 3, 2 0 0 0 0 0 0 0 111110 1 0 0 0x01F4
⑤ Fault reset ***
Instance Byte 1514131211109876543210 Hex.
Output Instance 100
About the other command, refer to the Communications Function Instruction Manual (E6581222) section 8.1.
*** Fault reset works only 1 time when 0 -> 1.
1, 0 1 00001 0000000001 0x8401
3, 2 ---------------- -
1, 0 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0x2000
3, 2 ---------------- -
- 16 -
Page 18

E6581268 ①
3.4.5.4. Instance 101/151 – Toshiba Specific (f894 = 3)
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 - Net Ref Net Ctrl - - Fault reset Run reverse Run forward
12 Drive Reference Speed min-1 (Low byte)
3 Drive Reference Speed min-1 (High byte)
4 Index (Low byte)
5 Write Index (High byte)
6 Data (Low byte)
7 Data (High byte)
Fig. 7 Output Instance 101 Layout
Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
0 At reference Ref from Net Ctrl from Net Ready
1 Drive Status
2 Drive Actual Speed min-1 (Low byte)
3 Drive Actual Speed min-1 (High byte)
4 Index (Low byte)
5 Write Error Index (High byte)
6 Data (Low byte)
7 Data (High byte)
Running
Reverse
Running
Forward
Warning
Faulted/
tripped
Fig. 8 Input Instance 151 Layout
* Drive Status is same as the ControlSupervisor class State attribute (refer to 3.7.2).
1 (= BN: 00000001): Startup
2 (= BN: 00000010): Not Ready
3 (= BN: 00000011): Ready
4 (= BN: 00000100): Enabled
5 (= BN: 00000101): Stopping
6 (= BN: 00000110): Fault Stop
7 (= BN: 00000111): Faulted
- 17 -
Page 19

E6581268 ①
Examples of Instance 101/151
Access the inverter parameter is enabled using byte 4 to 6 of this Instance.
Set the communication number of the parameter to byte 4, 5 (Index), and the value to byte 6, 7 (Data).
In case of the monitor parameter “FE**”, the value becomes "communication number - 0xF000 (same as bit12 - 15
set to 0)".
① Read the parameter cmod (Command mode selection, communication number is 0003).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
5, 4 0000000000000011 0x0003
7, 6 ---------------- -
Input Instance 151 5, 4 0 0 0 0 0 0 0 0 0 0 0 0 0 0 11 0x0003
(cmod is set 0.) 7, 6 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0x0000
② Read the parameter f260 (Jogging frequency).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
5, 4 0000001 0011000 0 0 0x0260
7, 6 ---------------- -
Input Instance 151 5, 4 0 0 0 0 0 0 1 0011000 0 0 0x0260
(f268 is set 5.0Hz.) 7, 6 0 0 0 0 0 0 0 111110 1 0 0 0x01F4
③ Read the parameter fe04 (Voltage of DC bus).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
5, 4 00001110000001 0 0 0x0E04
7, 6 ---------------- -
Input Instance 151 5, 4 0 0 0 0 1110000001 0 0 0x0E04
(fe04 is 97.60%.) 7, 6 0 0 1 00110001 0 0 0 0 0 0x2620
④ Write “60 (Hz)” to the parameter sr1 (Preset speed 1, communication number is 0018).
Instance Byte 1514131211109876543210 Hex.
Output Instance 101
Input Instance 151 (OK)
5, 4 1 0000000000110 0 0 0x8018
7, 6 0001 0 1110 1110 0 0 0 0x1770
5, 4 1 0000000000110 0 0 0x8018
7, 6 0001 0 1110 1110 0 0 0 0x1770
Input Instance 151 (NG) 5, 4 11000000000110 0 0 0xC018
(Error code *) 7, 6 0000000000000001 0x0001
About byte 0 - 3, refer to section 3.4.5.2.
* Refer to following about the error code.
1
(= BN: 00000001):: Data out of range
2
(= BN: 00000010):: Bad address
- 18 -
Page 20

3.5. Connection Object
Class code 0x05. The Connection Class allocates and manages the internal resources associated
with both I/O and Explicit Messaging Connections.
3.5.1. Connection Object Attributes
Not supported.
3.5.2. Connection Object Instance Attributes
Connection Instance ID # Description
1 References the Explicit Messaging Connection
2 Reference the Polled I/O Connection
3.5.2.1. Explicit Messaging Connection Object Instance Attributes (Instance 1)
Attribute
ID
1 state USINT Get
2 instance_type USINT Get Indicates connection type 0
3 transportClass_trigger USINT Get Connection behavior 0x83
4 produced_connection_id UINT Get
5 consumed_connection_id UINT Get
6 initial_comm_characteristics USINT Get
7 produced_connection_size UINT Get
8 consumed_connection_size UINT Get
9 expected_packet_rate UINT Get/Set
12 watchdog_timeout_action USINT Get/Set Inactivity/watchdog timeout action
13
14 produced_connection_path
15
16 consumed_connection_path
17 production_inhibit_time UINT Get
produced_connection_path
_length
consumed_connection_path
_length
Name
Data
Type
UINT
USINT
(ARRAY)
UINT
USINT
(ARRAY)
Access
Rules
Get
Get
Get
Get
Description
State of the object
00 = Non-existent
01 = Configuring
02 = Waiting for connection ID
03 = Established
04 = Timed Out
05 = Deferred Delete
Placed in CAN ID field when
transmitting
CAN ID field value denoting received
messages
Defines producing / consuming
message groups
Max number of bytes transmitted across
this connection
Max number of bytes received across
this connection
Defines timing associated with this
connection
Number of bytes in
produced_connection_path
attribute
Specifies Application Object(s)
whose data is to be produced by
this connection
Number of bytes in
consumed_connection_path
attribute
Specifies Application Object(s) whose
data is to be consumed
by this connection
Defines minimum time between new
data production
E6581268 ①
Default
Value
-
0x40B*
0x40C*
0x21
49
49
2500
Auto Delete
(1)
0
Empty
0
Empty
0
* connection id dependant on device Mac ID
- 19 -
Page 21

3.5.2.2. Poll Connection Object Instance Attributes (Instance 2)
Attribute
ID
1 state USINT Get State of the object 2 instance_type USINT Get Indicates connection type 1
3 transportClass_trigger USINT Get Connection behavior 0x82
4 produced_connection_id UINT Get
5 consumed_connection_id UINT Get
6 initial_comm_characteristics USINT Get
7 produced_connection_size UINT Get
8 consumed_connection_size UINT Get
9 expected_packet_rate UINT Get/Set
12 watchdog_timeout_action USINT Get Inactivity/watchdog timeout action 0
13
14 produced_connection_path
15
16 consumed_connection_path
17 production_inhibit_time UINT Get
produced_connection_path_l
ength
consumed_connection_path
_length
Name
Data
Type
UINT
USINT
(ARRAY)
UINT
USINT
(ARRAY)
Access
Rules
Get
Get
Get
Get
Description
Placed in CAN ID field when
transmitting
CAN ID field value denoting received
messages
Defines producing / consuming
message groups
Max number of bytes transmitted across
this connection
Max number of bytes received across
this connection
Defines timing associated with this
connection
Number of bytes in
produced_connection_path
attribute
Specifies Application Object(s)
whose data is to be produced by
this connection
Number of bytes in
consumed_connection_path
attribute
Specifies Application Object(s) whose
data is to be consumed
by this connection
Defines minimum time between new
data production
E6581268 ①
Default
Value
0x3C1*
0x40D*
0x1
4
4
0
3
0x62
0x34
0x36
3
0x62
0x31
0x34
0
* connection id dependant on device Mac ID
3.5.3. Connection Class Common Services
Service
Code
0x05 Reset N/A Yes Used to reset all resetable connection objects.
0x0E Get_Attribute_Single N/A Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class Instance
Description of Service
3.5.4. Connection Class Specific Services
The Connection Class provides no object specific services.
- 20 -
Page 22

3.6. Motor Data Object
Class code 0x28. This object serves as a database for motor parameters.
3.6.1. Motor Data Object Class Attributes
E6581268 ①
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.6.2. Motor Data Object Instance Attributes
Attribute
ID
1 Number of Attributes USINT Get Number of Attributes supported 8
2 Attributes List
3 Motor Type USINT Get
6 Rated Current UINT Get/Set Rated Current [100mA] 7 Rated Voltage UINT Get/Set Rated Voltage [V] 9 Rated Frequency UINT Get/Set Rated Electrical Frequency [Hz] -
12 Pole Count UINT Get Number of poles in the motor -
15 Base Speed UINT Get/Set
Name
Data
Type
USINT
(ARRAY)
Access
Rules
Get List of attributes supported -
0 - Non-standard motor
1 - PM DC Motor
2 - FC DC Motor
3 - PM Synchronous Motor
4 - FC Synchronous Motor
5 - Switched Reluctance Motor
6 - Wound Rotor Induction Motor
7 - Squirrel Cage Induction Motor
8 - Stepper Motor
9 - Sinusoidal PM BL Motor
10 - Trapezoidal PM BL Motor
Nominal speed at rated frequency from
nameplate [min-1]
Description
Default
Value
1
Default
Value
7
-
3.6.3. Motor Data Object Common Services
Service
Code
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class
Instance
Description of Service
3.6.4. Motor Data Object Specific Services
The Motor Data Object provides no object specific services.
- 21 -
Page 23

3.7. Control Supervisor Object
Class code 0x29. This object models all the management functions for devices within the DeviceNet
“Hierarchy of Motor Control Devices”. The behavior of motor control devices is described by the
State Transition Diagram.
3.7.1. Control Supervisor Object Class Attributes
E6581268 ①
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.7.2. Control Supervisor Object Instance Attributes
Attribute
ID
1 Number of Attributes USINT Get Number of Attributes supported 13
2 Attribute List
3 Run 1 BOOL Get/Set
4 Run 2 BOOL Get/Set
5 Net Control BOOL Get/Set
6 State USINT Get
7 Running 1 BOOL Get
8 Running 2 BOOL Get
9 Ready BOOL Get
10 Faulted BOOL Get
11 W arning BOOL Get
12 Fault Reset BOOL Get/Set
15 Control From Net USINT Get
Name
Data
Type
USINT
(ARRAY)
Access
Rules
Get List of attributes supported -
See Run/Stop Event Matrix
00 = Stop
01 = Run
See Run/Stop Event Matrix
00 = Stop
01 = Run
Requests Run/Stop control to be local
or from network.
0 = Local Control
1 = Network Control
Note that the actual status of Run/Stop
control is reflected in attribute 15,
CtrlFromNet.
0 = Vendor Specific
1 = Startup
2 = Not_Ready
3 = Ready
4 = Enabled
5 = Stopping
6 = Fault_Stop
7 = Faulted
1 = (Enabled and Run1) or
(Stopping and Running1) or
(Fault_Stop and Running1)
0 = Other state
1 = (Enabled and Run2) or
(Stopping and Running2) or
(Fault_Stop and Running2)
0 = Other state
1 = Ready or Enabled or Stopping
0 = Other state
1 = Fault Occurred (latched)
0 = No Faults present
1 = Warning (not latched)
0 = No Warnings present
0->1 = Fault Reset
0 = No action
Status of Run/Stop control sourse.
0 = Control is local
1 = Control is from network
Description
Default
Value
1
Default
Value
-
-
-
-
-
-
-
-
-
-
-
- 22 -
Page 24

3.7.3. Control Supervisor Object Common Services
E6581268 ①
Service
Code
0x05 Reset N/A Yes Used to reset all resettable connection objects.
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single N/A Yes Modifies the value of the specified attribute.
Service Name
Supported
Class
Instance
Description of Service
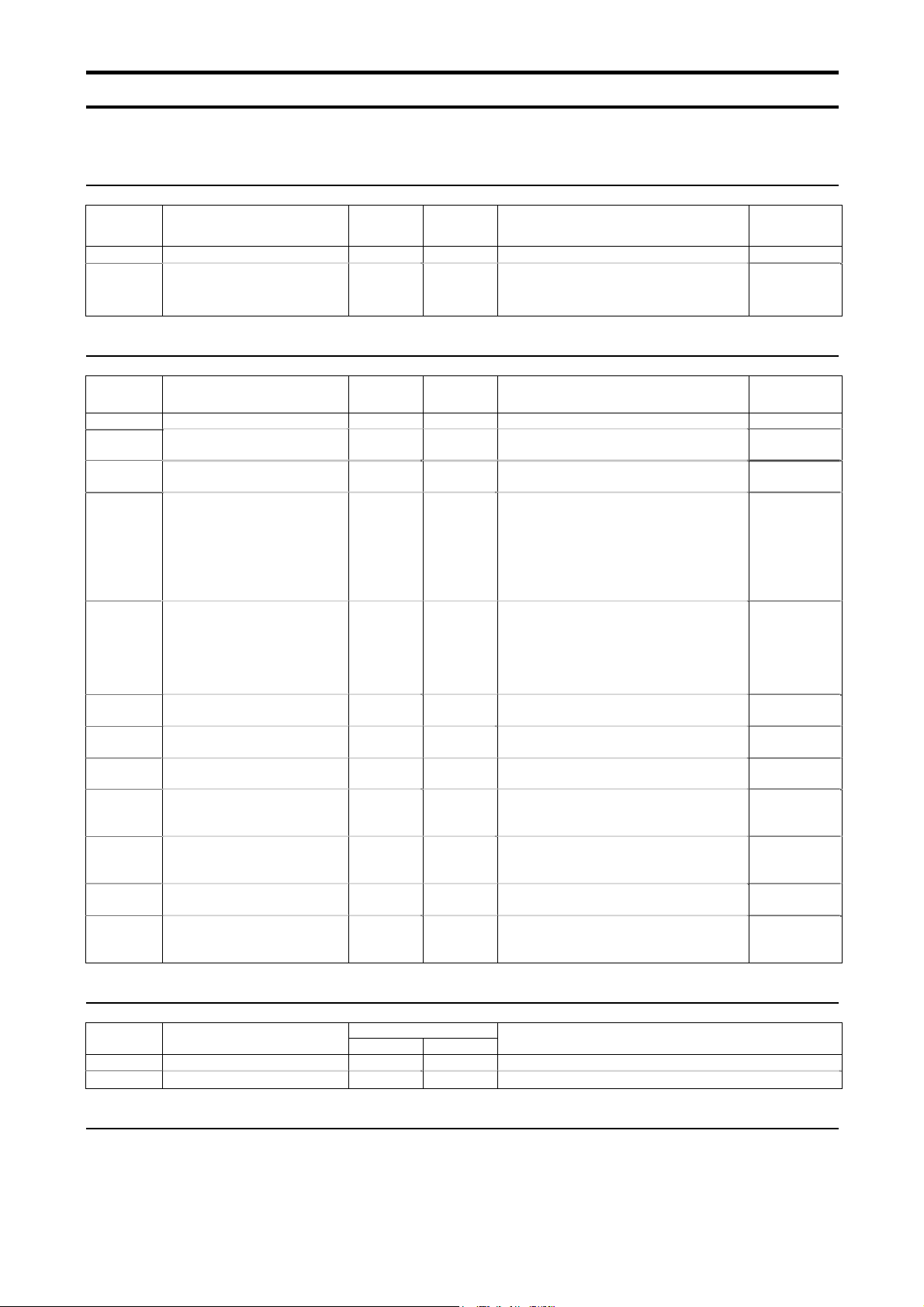
3.7.4. Control Supervisor Object Specific Services
The Control Supervisor Object provides no object specific services.
Run/Stop Event Matrix
Run1 Run2 Trigger Event Run Type
0 0 Stop No Action
0 -> 1 0 Run Run1
0 0 -> 1 Run Run2
0 -> 1 0 -> 1 No Action No Action
1 1 No Action No Action
1 -> 0 1 Run Run2
1 1 -> 0 Run Run1
Control Supervisor State Transition Diagram
Switch On
Reset
Initialization Complete
Main Power On
Non-Existant
Startup
Not_Ready
Ready
Run
Enabled
Switch Off
Main Power Off
Fault Detected
Fault Reset
Stop
Complete
Stopping
Stop
Fault Detected
Main Power Off
Faulted
Fault_Stop
Complete
Fault_Stop
Fault
Detected
- 23 -
Page 25
3.8. AC Drive Object
A
Class code 0x2A. This object models the functions specific to an AC Drive. e.g. speed ramp, torque
control etc
3.8.1. AC Drive Object Class Attributes
E6581268 ①
Attribute
ID
1 Revision UINT Get Revision of this object 1
2 Max instance UINT Get
Name
Data
Type
Access
Rules
Description
Maximum instance number of an object
currently created in this class level of
the device
3.8.2. AC Drive Object Instance Attributes
Attribute
ID
1 Number of Attributes USINT Get Number of Attributes supported 11
2 Attribute List
3 At Reference BOOL Get
4 Net Reference BOOL Get/Set
6 Drive Mode USINT Get
7 Speed Actual INT Get
8 Speed Reference INT Get/Set
9 Current Actual INT Get
18 Accel Time UINT Get/Set
19 Decel Time UINT Get/Set
21 High Speed Limit UINT Get/Set
29 Ref From Net BOOL Get
Name
Data
Type
USINT
(ARRAY)
ccess
Rules
Get List of Attributes supported -
1 = Drive actual at reference (speed or
torque reference) based on mode
Requests torque or speed reference to
be local or from network.
0 = Set Reference not DN Control
1 = Set Reference at DN Control
Note that the actual status of torque or
speed reference is reflected in atrribute
29, RefFromNet.
0 = Vendor specific mode
1 = Open loop speed (Frequency)
2 = Closed loop speed control
3 = Torque control
4 = Process control (e.g. PI)
5 = Position control
Actual drive speed (best approximation)
Units: min
Speed reference
Units: min
Actual motor phase current
Units: 100mA
Acceleration time
Time from 0 to High Speed Limit
Units: ms
Deceleration time
Time from High Speed Limit to 0
Units: ms
Maximum speed limit
Units: min
Status of torque/speed reference
0 = Local torque/speed reference
1 = Devicenet torque/speed reference
Description
-1
-1
-1
Default
Value
1
Default
Value
-
-
-
-
-
-
-
-
-
-
3.8.3. AC Drive Object Common Services
Service
Code
0x0E Get_Attribute_Single Yes Yes Returns the contents of the specified attribute.
0x10 Set_Attribute_Single
Service Name
Supported
Class
N/A
Instance
Yes
Description of Service
Modifies the value of the specified attribute.
3.8.4. AC Drive Object Specific Services
The AC/DC Drive Object provides no object specific services.
- 24 -
Page 26

3.9. Vender Specific Device Pro-files
Class code 0x64. This object provides VF-S11’s Parameter access.
All parameter’s Attribute ID is 3.
Refer to the following about each parameter’s Instance ID.
Example 1.
In case of Basic parameter “CMOd - Command mode selection”,
Communication No: 0003 -> Instance ID: 1003
Example 2.
In case of Extended parameter “F300 - PWM carrier frequency”,
Communication No: 0300 -> Instance ID: 1300
Example 3.
In case of Monitor parameter “FE03 - Output current”,
Communication No: FE03 -> Instance ID: 1E03
* Monitor parameter can access "Get" only.
3.10. About EDS-file
E6581268 ①
Even if access to each parameter of VF-S11 uses a configuration tool and an EDS file, it is
possible. As for acquisition of an EDS file, it is possible to download from homepage of our
company.
Please use what was in agreement with the software version of usage's VF-S11.
http://www.inverter.co.jp/product/inv/vfs11/dev/
- 25E -
- 25 -
 Loading...
Loading...