

Page 1

Veuillez lire entièrement ce manuel d'instructions avant d'assembler le kit.
Notice provenant du site www.mrcmodelisme.com
Le contenu peut être sujet à modification sans notification.
MANUEL D'INSTRUCTIONS
GARANTIE
Ce kit est garanti sans défaut de matière ou de fabrication à la date de l’achat. Cette garantie ne couvre pas les
dommages d’usage ni les modifications. La garantie couvre exclusivement le produit lui-même et est limité à la valeur
d’origine du kit. Elle ne concerne pas les éléments endommagés par l’usage ou à la suite de modifications. Le fait
pour l’utilisateur d’assembler les éléments de ce kit implique l’acceptation de la responsabilité de tous dommages
pouvant être causés par le produit tel qu’il aura été achevé. Dans le cas où l’acheteur n’accepterait pas cette
responsabilité, il peut rapporter le produit neuf et inutilisé à son détaillant pour en obtenir le remboursement.
Ref.T5220-F
Page 2
INSTRUCTIONS
Notice provenant du site www.mrcmodelisme.com
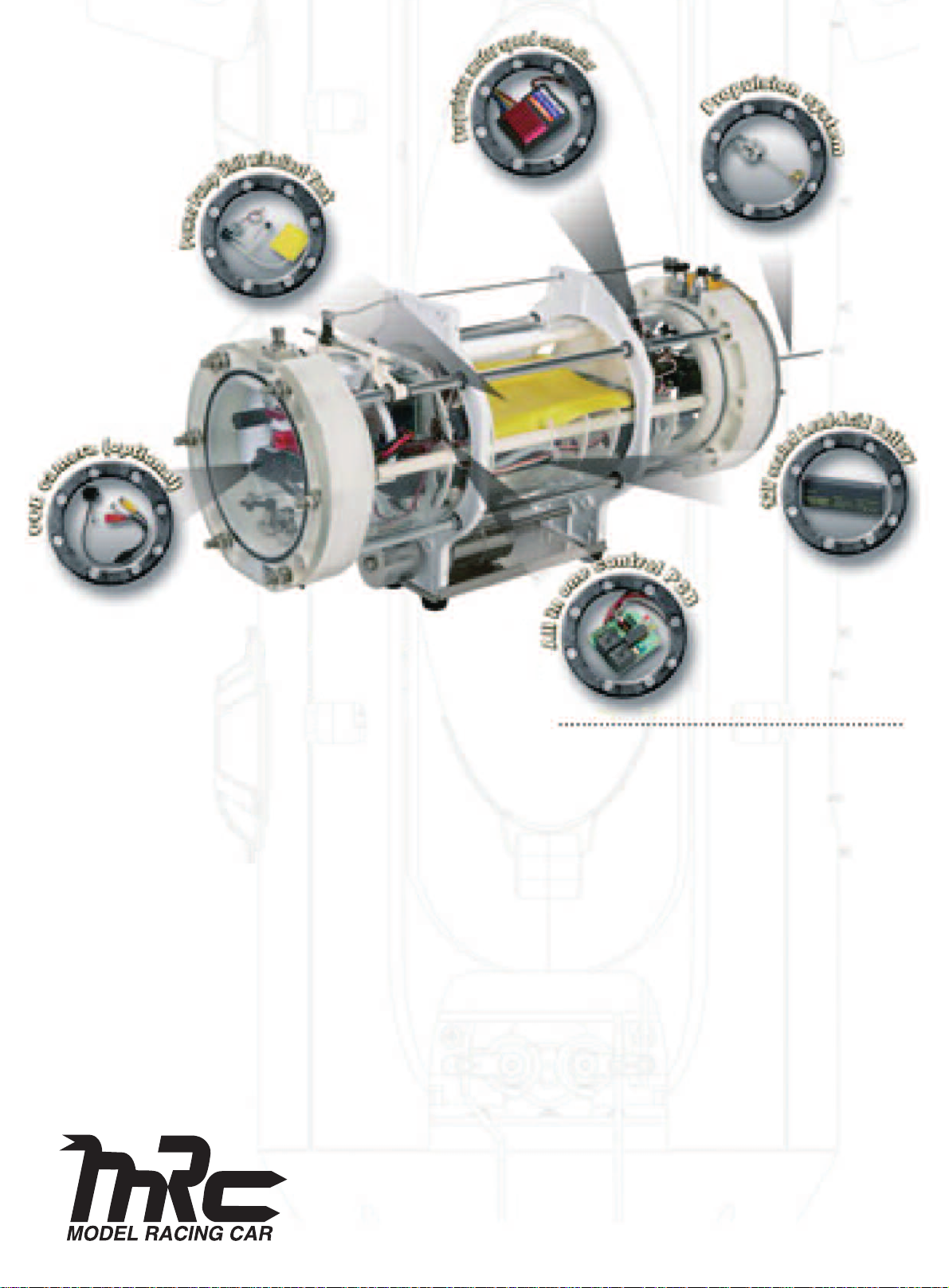
Félicitations pour l'achat de votre sous-marin Thunder Tiger NEPTUNE SB-1. Le sous-marin NEPTUNE SB-1 est le 1
er
modèle réduit submersible réalisé par Thunder Tiger. Il est équipé d'un équipement de technologie de pointe intégré
dans un tube hermétique habillé d'une coque jaune brillant. Le NEPTUNE SB-1 va vous permettre de découvrir un
monde caché, le monde sous-marin.
Adoptant un système de plongée statique, le fonctionnement du NEPTUNE est identique à celui d'un modèle à
l'échelle 1. Le système tire partie d'un ballast actionné par un ensemble de pompe motorisée. Lorsque la pompe se
met en marche, l'eau s'introduit dans le ballast. De ce fait le sous-marin peut plonger et resté statique sous la surface.
Utilisant un bloc motorisé de propulsion, un safran et deux barres de plongée lui permettant de contrôler son assiette
et son orientation, le NEPTUNE SB-1 peut plonger et naviguer gracieusement sous la surface. Installez une caméra
digitale (option) et vous pourrez observer des scènes sous-marines incroyables.
Equipé d'un système d'autoprotection, le sous-marin peut détecter une faible tension de la batterie, une mauvaise
réception du signal radio ou une fuite. Si une avarie se produit, la pompe se mettra automatiquement en marche
pour évacuer l'eau du ballast et ainsi permettre au sous-marin de remonter à la surface.
Le NEPTUNE SB-1 vous procurera une expérience inédite dans les mondes mystérieux que sont les fonds sous-marins!
INDEX
INTRODUCTION >> 1
EQUIPEMENT ET OUTILS NECESSAIRES >> 2
REMARQUES IMPORTANTES & AVERTISSEMENTS >> 2
ETAPES DE MONTAGE >> 3
1. ASSEMBLAGE DU BOUCHON HERMETIQUE AVANT >> 4
1.1 BOUCHON HERMETIQUE AVANT
1.2 UNITE DE REPARTITION D'ENERGIE
1.3 ASSEMBLAGE COMPLET DU BOUCHON HERMETIQUE AVANT
2. ASSEMBLAGE DU BOUCHON HERMETIQUE ARRIERE >> 7
2.1 BOUCHON HERMETIQUE ARRIERE
2.2 PLATINE SERVOS
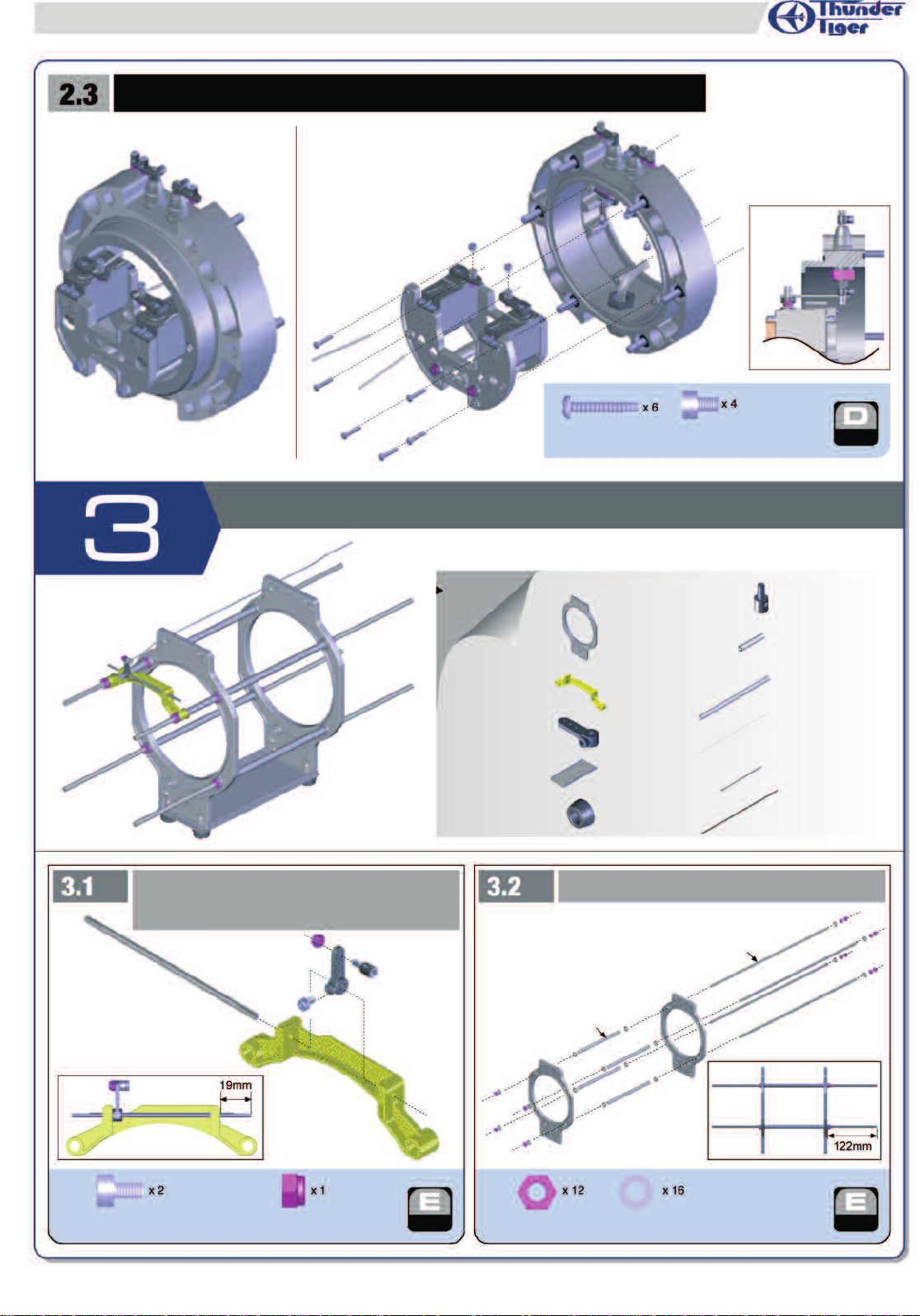
2.3 ASSEMBLAGE COMPLET DU BOUCHON HERMETIQUE ARRIERE
3. ASSEMBLAGE DU CHASSIS EXTERNE >> 9
3.1 SUPPORT DE LA BARRE DE PLONGEE AVANT
3.2 STRUCTURE DE RENFORT EXTERNE
3.3 PLAQUE INFERIEUR
3.4 INSTALLATION DU SUPPORT
3.5 TRINGLERIE
4. ASSEMBLAGE DU CHASSIS INTERNE >> 10
ERE
4.1 1
4.2 2
4.3 4
4.4 5
4.5 ASSEMBLAGE COMPLET DU CHASSIS INTERNE
CLOISON INTERNE ET CIRCUIT ELECTRONIQUE
PRINCIPAL DE CONTROLE
ERE
CLOISON INTERNE ET RECEPTEUR
ERE
CLOISON INTERNE ET POMPE
ERE
CLOISON INTERNE ET VARIATEUR DE VITESSE
ELECTRONIQUE
5. ASSEMBLAGE DE L'UNITE DE PROPULSION ET DE LA
PAROI HERMETIQUE >> 15
5.1 MOTEUR ET NOIX DE CARDAN
5.2 SUPPORT MOTEUR ET ARBRE DE PROPULSION
5.3 BLOC DE PROPULSION ET PAROI HERMETIQUE
6. ASSEMBLAGE DE LA STRUCTURE COMPLETE DE LA
COQUE >>16
6.1 CHASSIS EXTERNE ET ENTRETOISES CYLINDRIQUES
6.2 TUBE PRINCIPAL ET CHASSIS INTERNE/EXTERNE
6.3 UNITE DE PROPULSION ET BOUCHONS
HERMETIQUES
6.4 ASSEMBLAGE DES PAROIS HERMETIQUES
6.5 INSTALLATION DES LESTS
7. ASSEMBLAGE DE LA COQUE EXTERNE >> 18
7.1 HUBLOT
7.2 BLOC DE PROPULSION
7.3 FLANCS GAUCHE ET DROIT DE LA COQUE
7.4 ASSEMBLAGE COMPLET DU MODEL
CONFIGURARATION >> 22
CONTROLE DU SOUS-MARIN AVEC
LA RADIOCOMMANDE >> 23
INTRODUCTION AUX PRINCIPALES
CARACTERISTIQUES >> 24
FONCTIONNEMENT >> 25
MAINTENANCE ET REVISIONS >> 28
SERVICE >> 28
1
Page 3
ENSEMBLE RADIO
Notice provenant du site www.mrcmodelisme.com
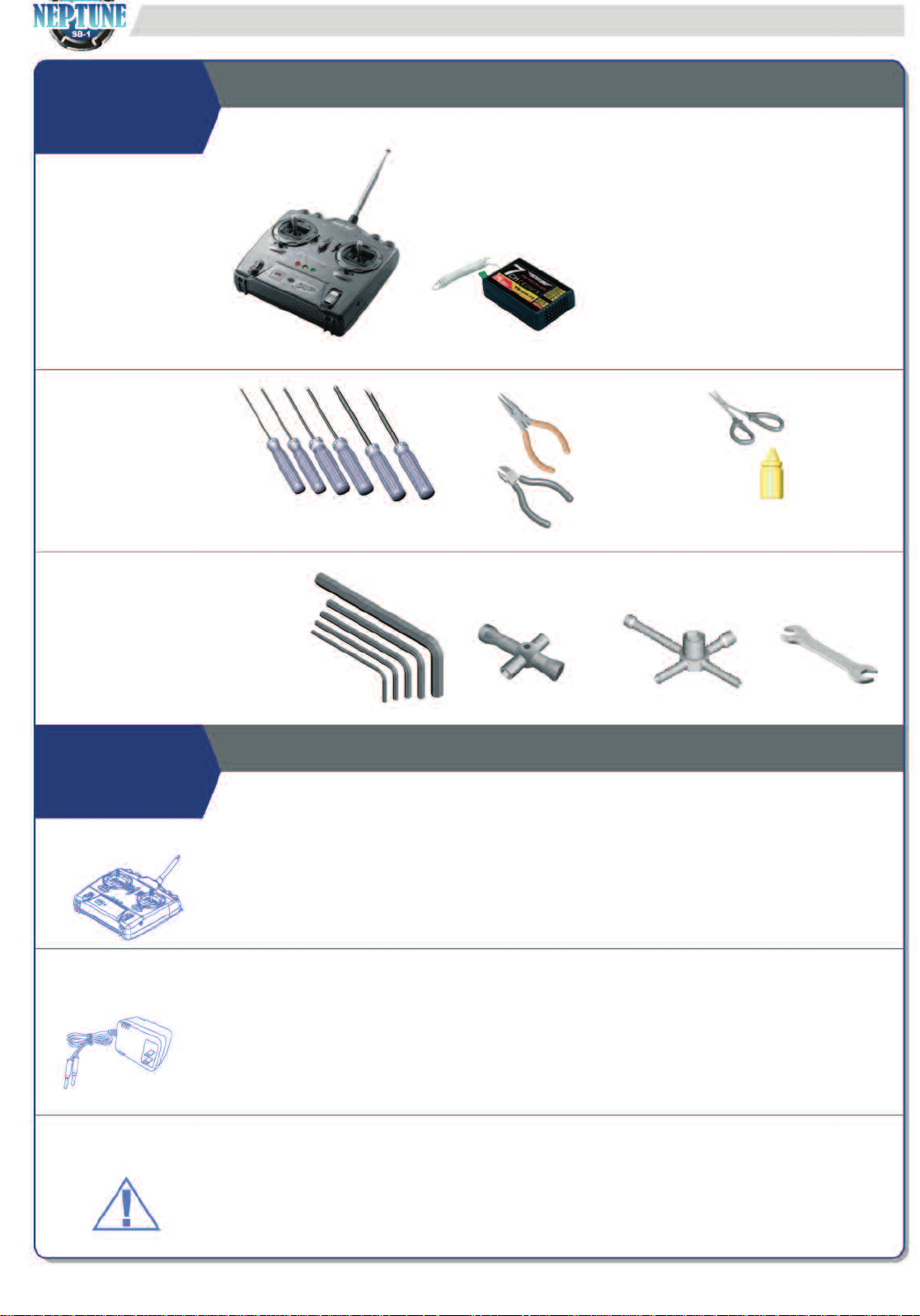
EQUIPEMENT ET OUTILS NECESSAIRES
Note :
Vous avez besoin d'une radiocommande
munie d'au minimum 4 voies pour faire
fonctionner ce modèle réduit. Concer
version Super Combo (Référence : T5220F),
l'ensemble radio est déjà inclus dans le kit.
nant la
OUTILS NECESSAIRES
AU MONTAGE
OUTILS INCLUS
DANS LE KIT
RADIOCOMMANDE
Ciseaux à
lexan courbé
Tournevis à empreintes cruciformes et
hexagonales (Référence : T1197)
Clés six pans de
1,5mm, 2mm, 2,5mm,
3mm et 5mm
Pince à becs ronds
Pince coupante
Clé en croix 4 branches Clé en croix 5 branches Clé plate 17/19mm
Frein filet
REMARQUES IMPORTANTES & AVERTISSEMENTS
1. Lorsque vous allumez la radio, allumez tout d'abord l'émetteur et dépliez son antenne.
2. Ensuite mettez sous tension le récepteur (l'interrupteur est situé sous le hublot). Lorsque vous
éteignez l'ensemble, arrêtez en premier le récepteur puis l'émetteur.
CHARGE DE LA
BATTERIE
AVERTISSEMENTS
Une batterie au plomb 12 volts est inclus dans le kit. Celle-ci permet d'alimenter en énergie
l'équipement électronique et la propulsion du NEPTUNE SB-1. Pour la charger, un chargeur lent
est inclus également dans le kit. Veuillez respecter la procédure de charge de la batterie. NE
LAISSEZ PAS sans surveillance le chargeur en fonctionnement. NE LAISSEZ PAS le chargeur
fonctionner dans un environnement inflammable.
1. Ce sous-marin radiocommandé n'est pas un jouet. Si il n'est pas assemblé ou utilisé
correctement, il peut provoquer des dommages. Thunder Tiger et Model Racing Car ne sont
pas responsables des dommages liés au transport, à un mauvais assemblage ou à une
mauvaise utilisation.
2. Vous devez faire évoluer votre sous-marin dans un environnement approprié. Evitez de le
mettre à l'eau dans des conditions dangereuses.
2
Page 4
ETAPES DE MONTAGE
Notice provenant du site www.mrcmodelisme.com
La majorité des pièces détachées de la version kit sont organisées et contenues dans différents sachets et boîtes. Les sachets
correspondent à des étapes d'assemblage. Toutes la partie électronique est contenue dans les boîtes 1 à 4 et les pièces
détachées sont dans les sachets A à I. Pour ce qui concerne la visserie, les joints, etc. ils sont fournis dans un unique sachet.
Dans chaque étape, la visserie indispensable au montage est précisée ainsi que le numéro de sachet contenant les pièces
détachées nécessaires. Ouvrez les sachets au fur et à mesure du montage. Préparez vos pièces détachées avant le montage.
Suivez les illustrations et remarques fournies dans ce manuel d'instructions.
3
Page 5
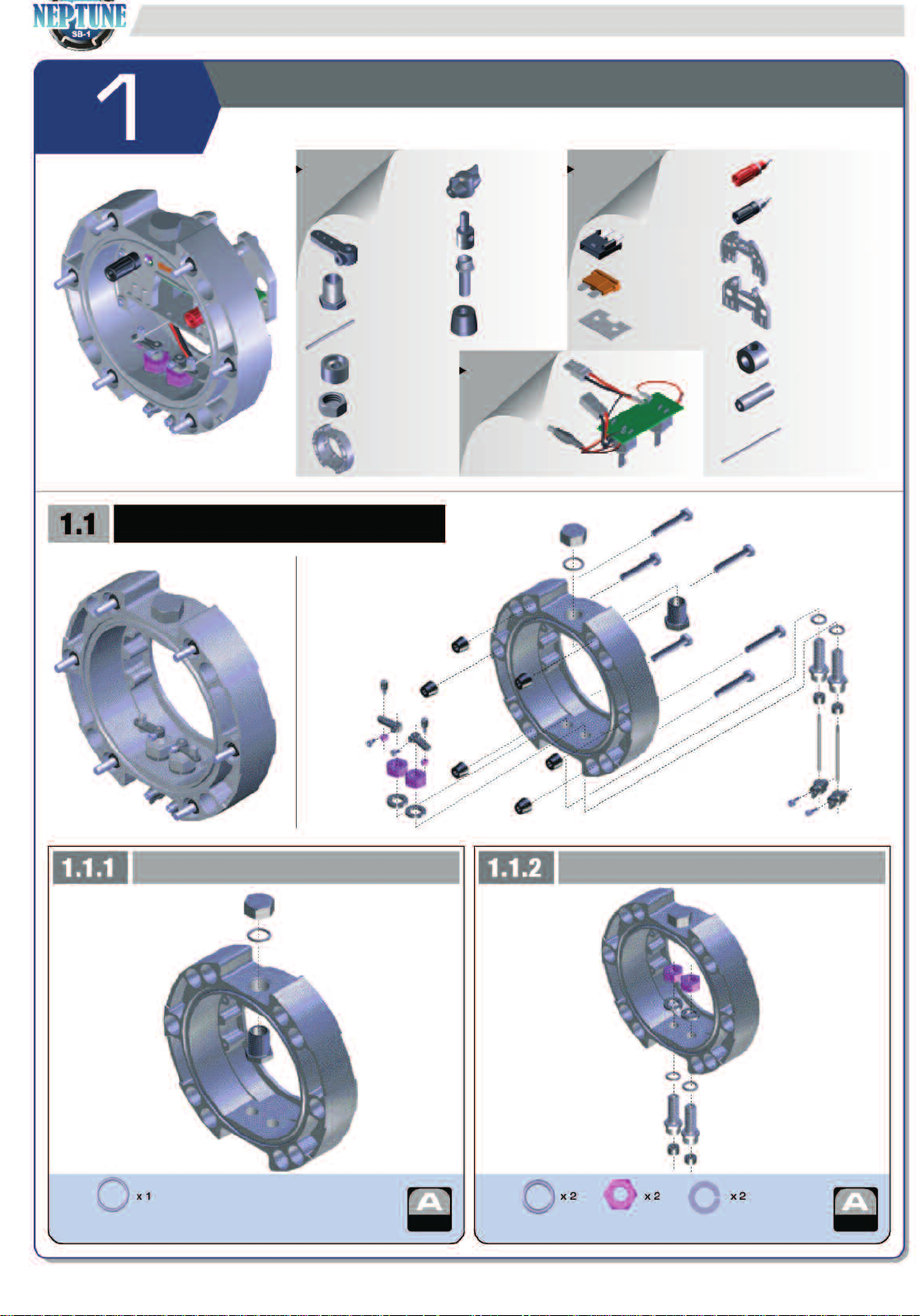
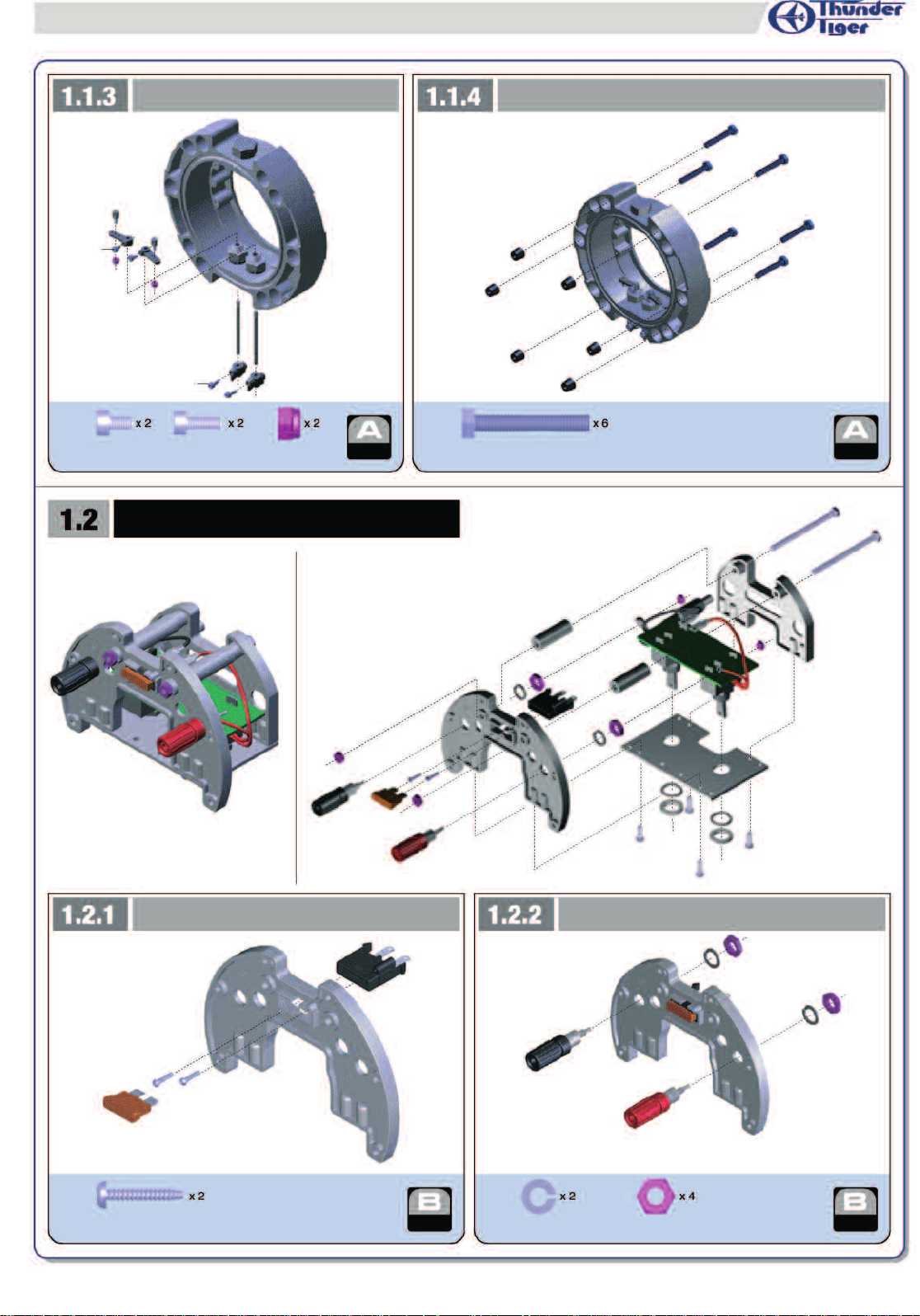
ASSEMBLAGE DU BOUCHON HERMETIQUE AVANT
Notice provenant du site www.mrcmodelisme.com
SAC A SAC B
Palonnier,
qté 2
Boulon M16,
qté 1
Axe,
qté 2
Joint caoutchouc
étanche, qté 2
Ecrou M16,
qté 1
Bouchon avant,
qté 1
BOUCHON HERMETIQUE AVANT
Support d'interrupteur
qté 2
Attache de
tringlerie,
qté 2
Boulon,
qté 2
Cône
caoutchouc,
qté 6
BOITE 1
Circuit de
répar
l'alimentation,qté 1
,
tition de
t de
Suppor
fusible, qté 1
Fusible,
qté 2
Support du
circuit de
répartition,
qté 1
Borne de charge
(Rouge), qté 2
Borne de charge
(Noire), qté 2
Cloison interne B,
qté 1
Cloison interne A,
qté 1
Bague d'arrêt,
qté 4
Tube plastique de
30mm de
longueur, qté 2
Tringlerie de
55mm de
longueur, qté 2
BOULON SUPERIEUR ETANCHE BOULONS INFERIEURS ETANCHES
Joint en caoutchouc
15mm
SAC
Joint en caoutchouc
9,5mm
4
Ecrou
M10
Rondelle
10mm
SAC
Page 6
M3x6mm
Notice provenant du site www.mrcmodelisme.com
BOULONS INFERIEURS ETANCHES
M3x8mm
FIXATION DES BOULONS & DES CONES EN CAOUTCHOUC
Vis six pans
M3x6mm
Vis à métaux
M3x8mm
Ecrou
nylstop M3
SAC
UNITE DE REPARTITION D'ENERGIE
FUSIBLE BORNES DE CHARGE
Vis à tête hexagonale
M6x38mm
SAC
Remarque :
Les écrous et les rondelles sont déjà installés sur les bornes.
Retirez-les avant l'assemblage.
Vis auto taraudeuse
M2x10mm
SAC
5
Rondelle
4mm
Ecrou
M4
SAC
Page 7
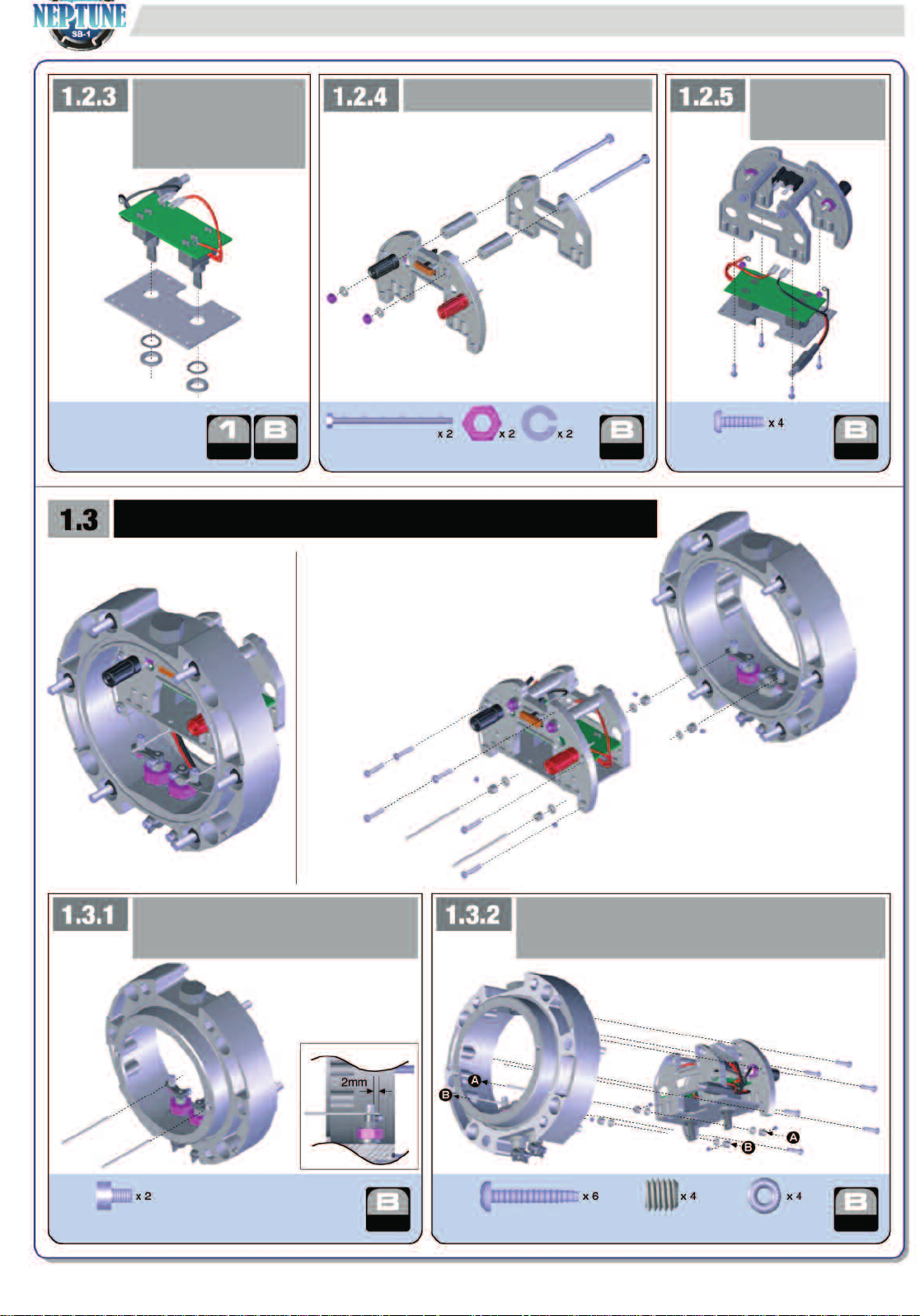
CIRCUIT DE
Notice provenant du site www.mrcmodelisme.com
ASSEMBLAGE DES PAROIS ASSEMBLAGE
REPARTITION DE
L'ALIMENTATION
BOITE
SAC
Vis à tête hexagonale
M4x60mm
Ecrou M4Rondelle
4mm
SAC
ASSEMBLAGE COMPLET DU BOUCHON HERMETIQUE AVANT
DE L'ENSEMBLE
Vis auto taraudeuse
M3x10mm
SAC
INSTALLATION DE LA TRINGLERIE DES INTERRUPTEURS
Vis à métaux six pans
M3x4mm
SAC
Vis auto taraudeuse
M3x16mm
6
INTALLATION DE L'ENSEMBLE DE
REPARTITION DE L'ALIMENTATION
Vis BTR
3x3mm
Rondelle
caoutchouc 3mm
SAC
Page 8
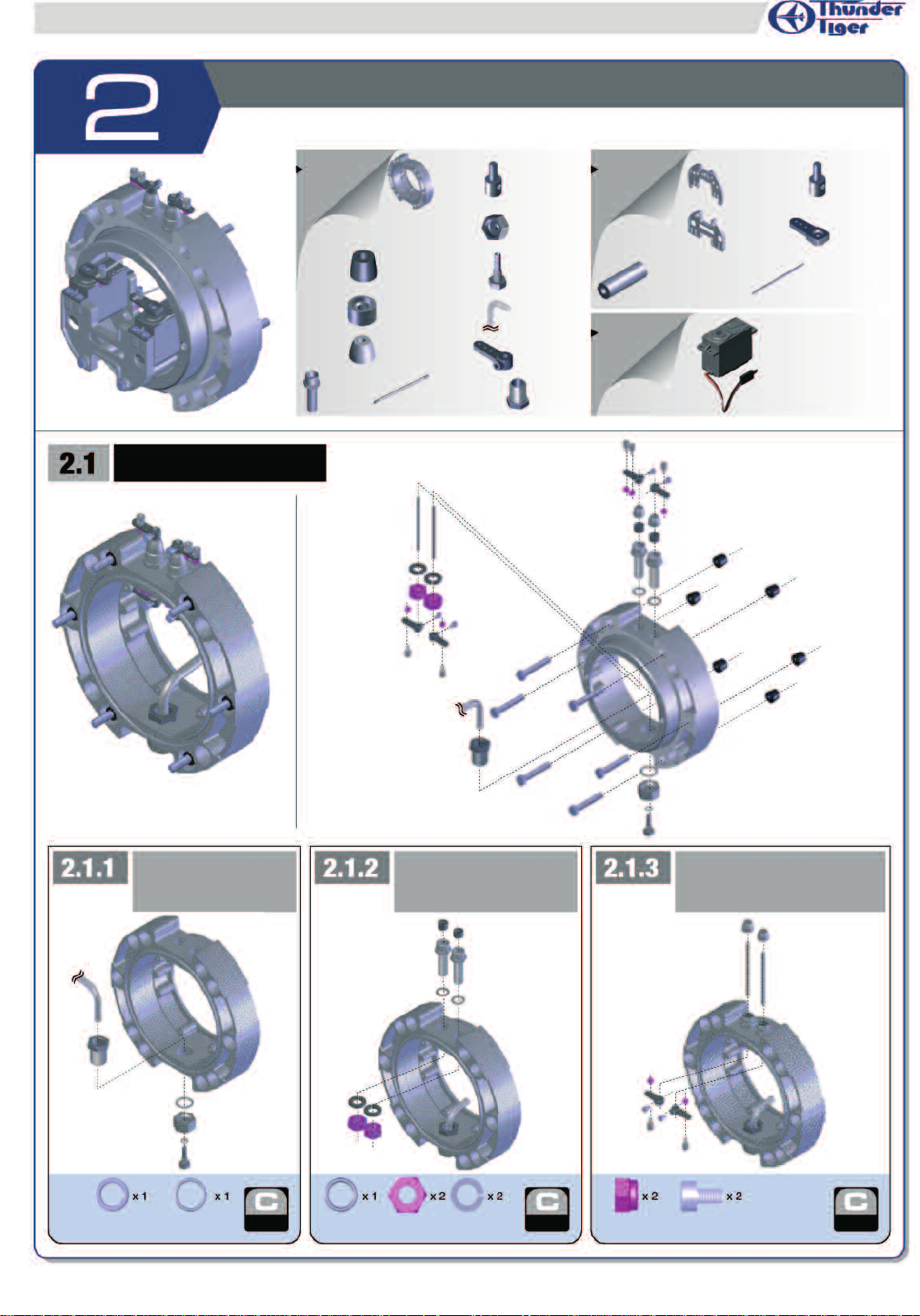
ASSEMBLAGE DU BOUCHON HERMETIQUE ARRIERE
Notice provenant du site www.mrcmodelisme.com
BOUCHON ARRIERE
SAC C
Boulon,
qté 2
Bouchon arrière,
qté 1
Cône
caoutchouc,
qté 6
Joint caoutchouc
étanche, qté 2
Cône
caoutchouc,
qté 2
Tringlerie,
qté 2
Attache de
tringlerie,
qté 5
Ecrou M16,
qté 1
Admission
d'eau, qté 1
Tube coudé,
qté 1
Palonnier,
qté 4
Boulon
M16,
qté 1
SAC D
BOITE 1
Entretoise
cylindrique
30mm, qté 2
Cloison
interne B,
qté 1
Cloison
interne A,
qté 1
Servo S1903,
qté 2
Attache de
tringlerie,
qté 2
Palonnier,
qté 2
Tringlerie de
55mm de
longueur, qté 2
BOULON D'ADMISSION D'EAU
Joint caoutchouc 4mm
Joint caoutchouc 15mm
SAC
Joint caoutchouc 9
BOULONS SUPERIEURS ETANCHES
Ecrou
M10
Rondelle
10mm
7
,5mm
SAC
Ecrou
nylstop M3
TRINGLERIES DE
COMMANDE
Vis à métaux six pans
M3x6mm
SAC
Page 9
PALONNIERS
Notice provenant du site www.mrcmodelisme.com
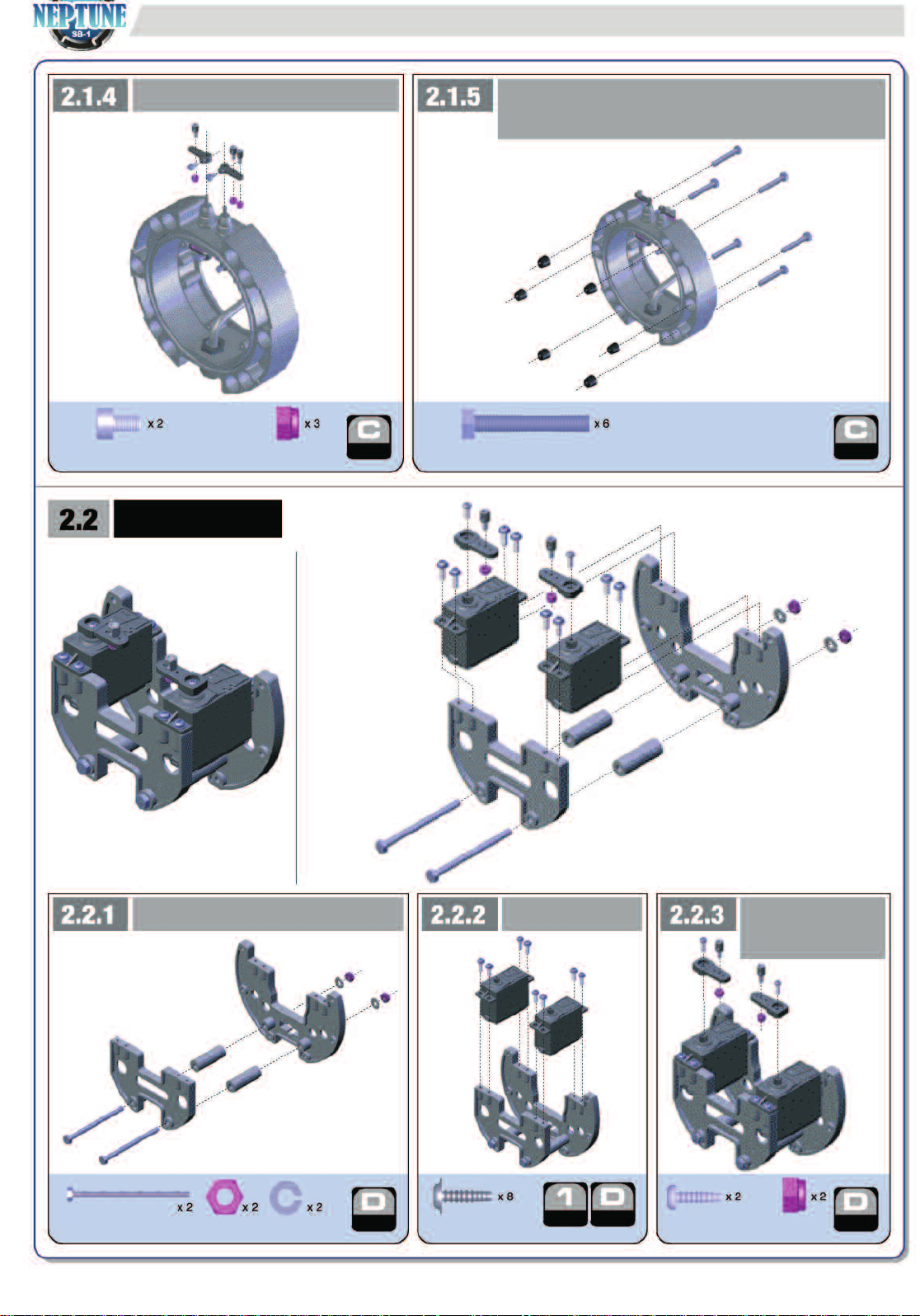
FIXATION DES BOULONS ET DES CONES
EN CAOUTCHOUC
Vis à métaux six pans
M3x6mm
Ecrou
nylstop M3
SAC
Vis à tête hexagonale
M6x38mm
PLATINE SERVOS
ASSEMBLAGE DES PAROIS SERVOS PALONNIERS
SAC
Vis à tête hexagonale
M4x60mm
Ecrou M4Rondelle
4mm
SAC
Vis auto taraudeuse
M3x10mm
8
BOITE
SAC
DE SERVOS
Vis auto taraudeuse
M2,6x8mm
Ecrou
nylstop M3
SAC
Page 10
ASSEMBLAGE COMPLET DU BOUCHON HERMETIQUE ARRIERE
Notice provenant du site www.mrcmodelisme.com
ASSEMBLAGE DU CHASSIS EXTERNE
SUPPORT DE BARRE DE PLONGEE
AVA NT
SAC E
Vis auto taraudeuse
M3x16mm
Structure de renfort
externe, qté 2
Support de barre de
plongée avant,
qté 1
Palonnier,
qté 1
Plaque inférieure,
qté 1
Pieds caoutchouc,
qté 4
Vis à métaux six pans
M3x4mm
Attache de
tringlerie, qté 1
Tube aluminium
43,5mm, qté 2
Tube aluminium
150mm, qté 4
Tringlerie de barre
de plongée, qté 1
Tige de barre de
plongée M6
110mm, qté 1
Tige filetée M6
416mm, qté 4
SAC
STRUCTURE DE RENFORT EXTERNE
ige filetée M6
T
416mm (4)
Vis à métaux six pans
M3x6mm
Ecrou
nylstop M3
SAC
Ecrou
M6
9
Tube aluminium
150mm (4)
Rondelle
6mm
SAC
Page 11
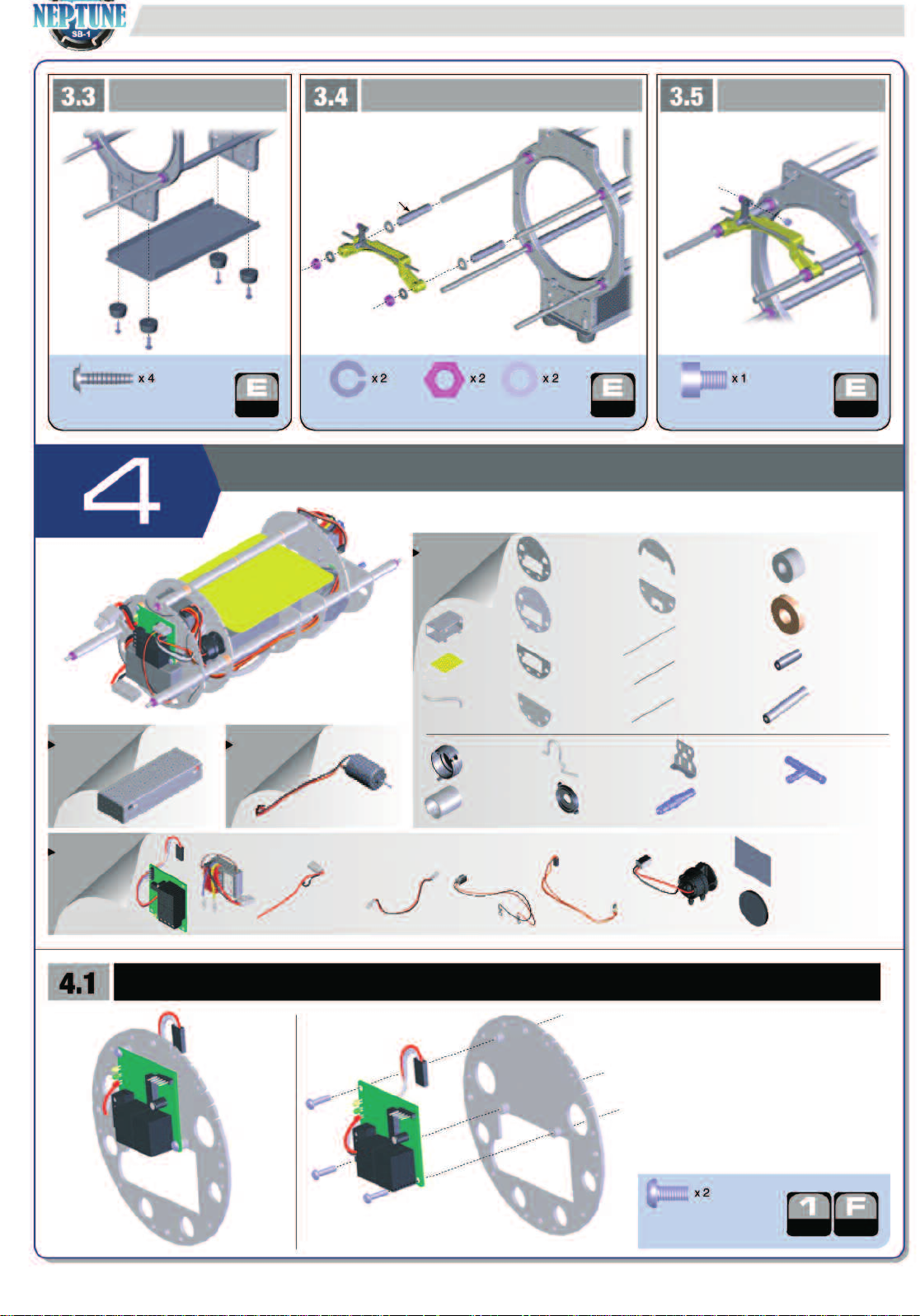
PLAQUE INFERIEURE INTALLATION DU SUPPORT TRINGLERIE
Notice provenant du site www.mrcmodelisme.com
Tube aluminium
43,5mm (2)
Vis auto taraudeuse
M2,6x8mm avec rondelle
BOITE 3
Batterie
BOITE 1
Circuit électronique de contrôle
de la pompe, qté 1
SAC
Rondelle
6mm
Ecrou
M6
Rondelle
6mm
SAC
Vis à métaux six
pans M3x4mm
ASSEMBLAGE DU CHASSIS INTERNE
5ème cloison
interne, qté 1
6ème cloison
interne, qté 1
Tige filetée M4
de 335mm de
longueur, qté 2
Tige filetée M4
de 240mm de
longueur, qté 1
Tige filetée M4
de 240mm de
longueur, qté 1
Sonde de
pression, qté 1
BOITE 4
Moteur de la
pompe
Variateur de vitesse
électronique,
qté 1
Câble de
branchement
de la batterie, qté 1
SAC F
Câble du variateur de vitesse
électronique,
qté 1
Boîtier,
qté 1
Ballast,
qté 1
Tube,
qté 1
Bouchon de
la pompe,
qté 1
Cylindre de
la pompe,
qté 3
Câble de détection d'entrée
d'eau, qté 1
1ère cloison
interne, qté 1
2ème cloison
interne, qté 1
3ème cloison
interne, qté 1
4ème cloison
interne, qté 1
Tube de
220mm de
longueur, qté 1
Support de
pompe,
qté 1
Module de
branchement
des servos,
qté 1
Support moteur
de la pompe,
qté 1
Raccord,
qté 1
Mousse adhésive
double faces, qté 2
Mousse adhésive
double faces (pour
sonde de pression),
qté 1
SAC
Entretoise,
qté 4
Entretoise,
qté 3
Tube plastique
de 30mm de
longueur, qté17
Tube plastique
de 60mm de
longueur, qté 8
Raccord 3
branches,
qté 1
ERE
1
CLOISON INTERNE ET CIRCUIT ELECTRONIQUE PRINCIPAL DE CONTROLE
10
Vis à métaux
M3x8mm
BOITE
SAC
Page 12
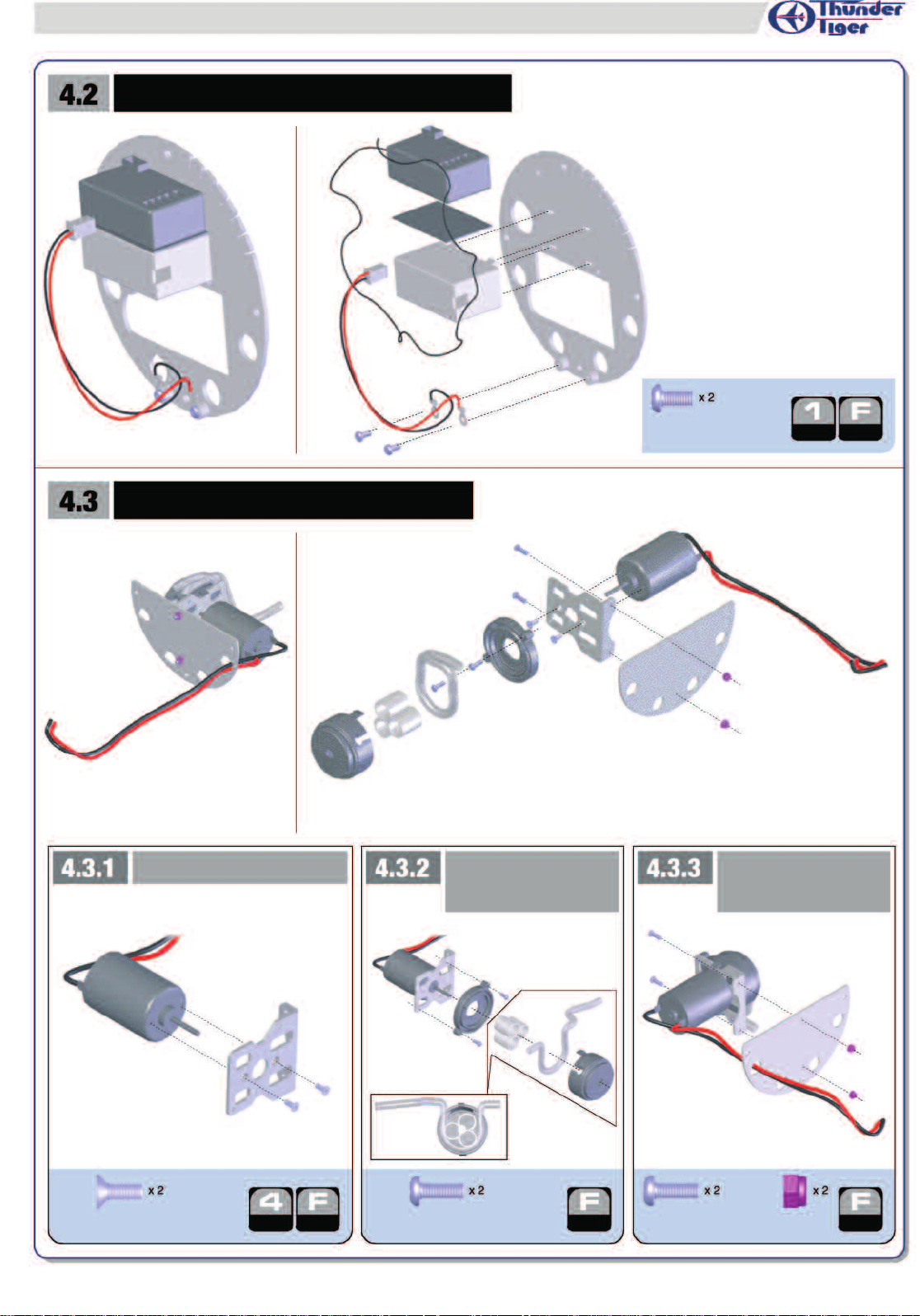
2
Notice provenant du site www.mrcmodelisme.com
EME
CLOISON INTERNE ET RECEPTEUR
EME
4
CLOISON INTERNE ET POMPE
SUPPORT MOTEUR
CYLINDRES DE LA
POMPE
Vis à métaux
M3x8mm
BOITE
SAC
CLOISON INTERNE
ET POMPE
is à métaux
V
M3x8mm
SACBOITE SAC SAC
V
is à métaux
M3x10mm
11
Vis à métaux
M3x10mm
Ecrou
nylstop M3
Page 13
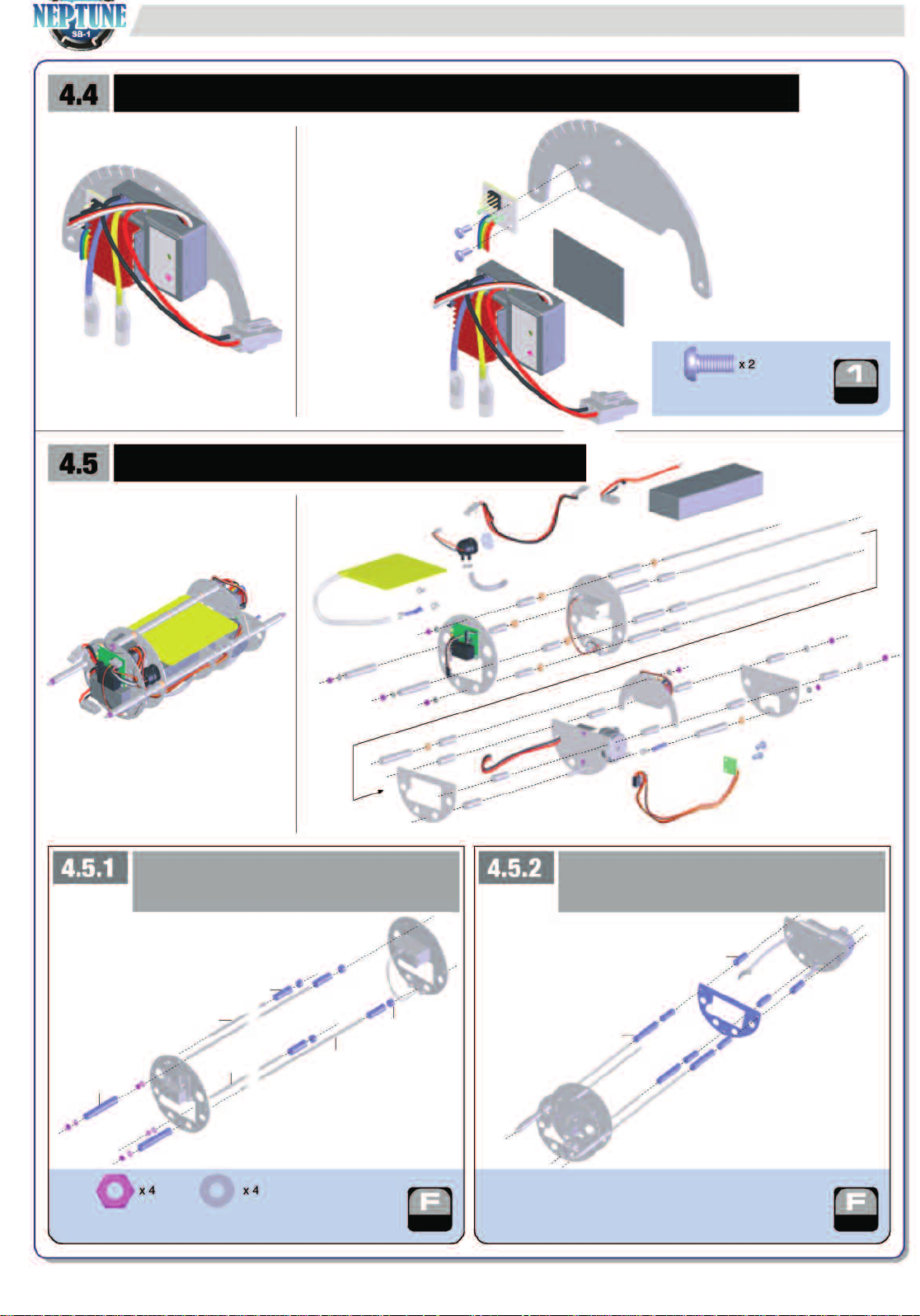
5
Notice provenant du site www.mrcmodelisme.com
EME
CLOISON INTERNE ET VARIATEUR DE VITESSE ELECTRONIQUE
ASSEMBLAGE COMPLET DU CHASSIS INTERNE
ASSEMBLAGE DES 1
ERE
& 2
EME
CLOISONS INTERNES
Vis à métaux
M3x8mm
ASSEMBLAGE DES 3
CLOISONS INTERNES
EME
& 4
BOITE
EME
L30mm(4)
L210mm
L355mm(2)
L60mm(2)
Ecrou
M4
L240mm
Rondelle
M4
Entretoise(4)
SAC SAC
12
L30mm(6)
L30mm(3)
Page 14

Entretoise
Notice provenant du site www.mrcmodelisme.com
L60mm(2)
ASSEMBLAGE DE LA 5
CLOISON INTERNE
L30mm(3)
EME
Rondelle
4mm
Ecrou
M4
ASSEMBLAGE DE LA 6
CLOISON INTERNE
Entretoise
L60mm
L30mm(4)
EME
Ecrou
M4(4)
Rondelle
4mm
Ecrou
M4
Rondelle
4mm
BALLAST & SONDE DE PRESSION
Sonde de
pression
Ballast
Raccord
3 branches
Connecter la durite
SAC
Ecrou
M4
Pompe
Rondelle
4mm
Raccord
SAC
Tube d'Entrée/Sortie
d'eau (Bouchon arrière)
13
Collier rilsan
SAC
Page 15

INTALLATION DU CABLAGE DES SERVOS ET DE LA BATTERIE
Notice provenant du site www.mrcmodelisme.com
BRANCHEMENT DE L'ENSEMBLE
ELECTRONIQUE ET DE LA BATTERIE
Prise du circuit de répartition
de l'alimentation
Prise de la batterie
au plomb
BRANCHEMENT DES CABLES AU RECEPTEUR
En fonction des différents système radio (Futaba, JR, etc.), les câbles devront être branchés
correctement au récepteur. Tous les câbles ont des couleurs différentes, veuillez vous référer
au tableau d'interprétation des couleurs de câbles pour réaliser votre installation.
Récepteur
Skymaster
/JR
CH 4 CH 4
CH 3 CH 2
CH 2 CH 1
CH 1 CH 3
Sea
Commander
/Futaba
Couleur Attribué à Fonction Câble
Pompe
Variateur
électronique
Servo de
direction
Servo de
profondeur
Câbles
Plongée
Remontée
Marche
av/arr
Tourner
G/D
Inclinaison
provenant du
Circuit de
répartition
d'énergie
Module de
branchement
des servos
Batterie Fusible Sonde pour la pression Variateur de vitesse électronique
Circuit de répartition d'énergie Câble de détection d'entrée d'eau Servo (direction et profondeur)
Bornes pour recharger la batterie Récepteur Prise de la batterie au plomb
Pompe Module de branchement des servos Prise du variateur électronique
Circuit de contrôle de la pompe Moteur de propulsion Caméra (option)
14
MODULE DE BRANCHEMENT
DES SERVOS
Variateur de vitesse
électronique
vo
Ser
de direction
NOTE
Tous les câbles doivent être branchés
avec le fil noir situé vers le haut
BOITE
vo de
Ser
profondeur
.
BOITE
SAC
Page 16

ASSEMBLAGE DU SYSTEME DE PROPULSION AVEC
Notice provenant du site www.mrcmodelisme.com
LA PAROI HERMETIQUE ARRIERE
SAC G
Arbre de
propulsion, qté 1
BOITE 4
Moteur de
propulsion, qté 1
SUPPORT MOTEUR ET ARBRE DE PROPULSIONMOTEUR ET NOIX DE CARDAN
Introduisez l'arbre de propulsion
dans le support moteur puis
logez le joint d'étanchéité.
Remplissez de graisse 1/3 du
cylindre qui compose le support
moteur. Faites glisser ensuite
l'arbre de propulsion vers
l'extrémité du cylindre. La graisse
va renforcer l'étanchéité lorsque
l'arbre de propulsion sera en
mouvement. Après un
certain temps de
fonctionnement,
contrôlez et remettez
à niveau la quantité
de graisse.
Graisse
Support
moteur, qté1
Noix de
cardan
(4mm), qté1
Cardan,
qté 1
Paroi her
arrière, qté 1
Noix de cardan
moteur (3,17mm),
qté 1
Joint caoutchouc
étanche, qté 1
Remplissez 1/3 du
cylindre de graisse.
métique
Vis BTR
M3x3mm
SACBOITE
Vis BTR
M3x3mm
BLOC DE PROPULSION ET PAROI HERMETIQUE
Initialement 4 joints (1 joint de 38mm
de diamètre et 3 de 3mm) sont
installés sur la cloison d'étanchéité.
Remplacez-les par le nouveau joint
monobloc de 38mm de diamètre.
is à métaux
V
M3x16mm avec rondelle
Rondelle en
caoutchouc 3mm
Rondelle
3mm (3)
Joint (1)
Vis à métaux M3x12mm
avec rondelle
Rondelle
3mm (3)
Ecrou
nylstop M3
SAC
SAC
15
Page 17

ASSEMBLAGE DE LA STRUCTURE COMPLETE DE LA
Notice provenant du site www.mrcmodelisme.com
COQUE
SAC H
Tube alu
94mm,
qté 4
Tige 220mm,
qté 1
Tube alu
101mm,
qté 2
Tube alu
40mm,
qté 2
Paroi
hermétiqu
e avant,
qté 1
Bague
d'arrêt,
qté 4
CHASSIS EXTERNE ET
ENTRETOISES CYLINDRIQUES
L40mm(2)
L101mm(2)
SAC M BOITE 2
Tube
principal,
qté1
L94mm(4)
Rondelle
6mm
Lest A,
qté 2
Lest B,
qté 1
Lest C,
qté 1
SAC
TUBE PRINCIPAL ET CHASSIS
INTERNE ET EXTERNE
Tube principal
16
SAC
Page 18

UNITE DE PROPULSION ET BOUCHONS HERMETIQUES
Notice provenant du site www.mrcmodelisme.com
Ar
rière
Avant
Remarque : Les joints étanches doivent être fixés
en premier sur les bouchons her
Vis à métaux
M3x4mm
Ecrou
M6
Rondelle
6mm
ASSEMBLAGE DES PAROIS HERMETIQUES AVANT & ARRIERE
vant
A
Arrière
Remarque : Les joints étanches doivent être fixés
en premier sur les bouchons hermétiques.
Joint caoutchouc 120mm
métiques.
Collier
rilsan
SAC
INSTALLATION DES LESTS
Lest B
Remar
que :
La position des lests doit
être respectée comme
illustrée ci-dessus.
Lest A
17
Joint caoutchouc
124mm
Lest C
Ecrou
M6
Vis à métaux
M4x5mm
Rondelle
6mm
SAC
SACBOITE
Page 19
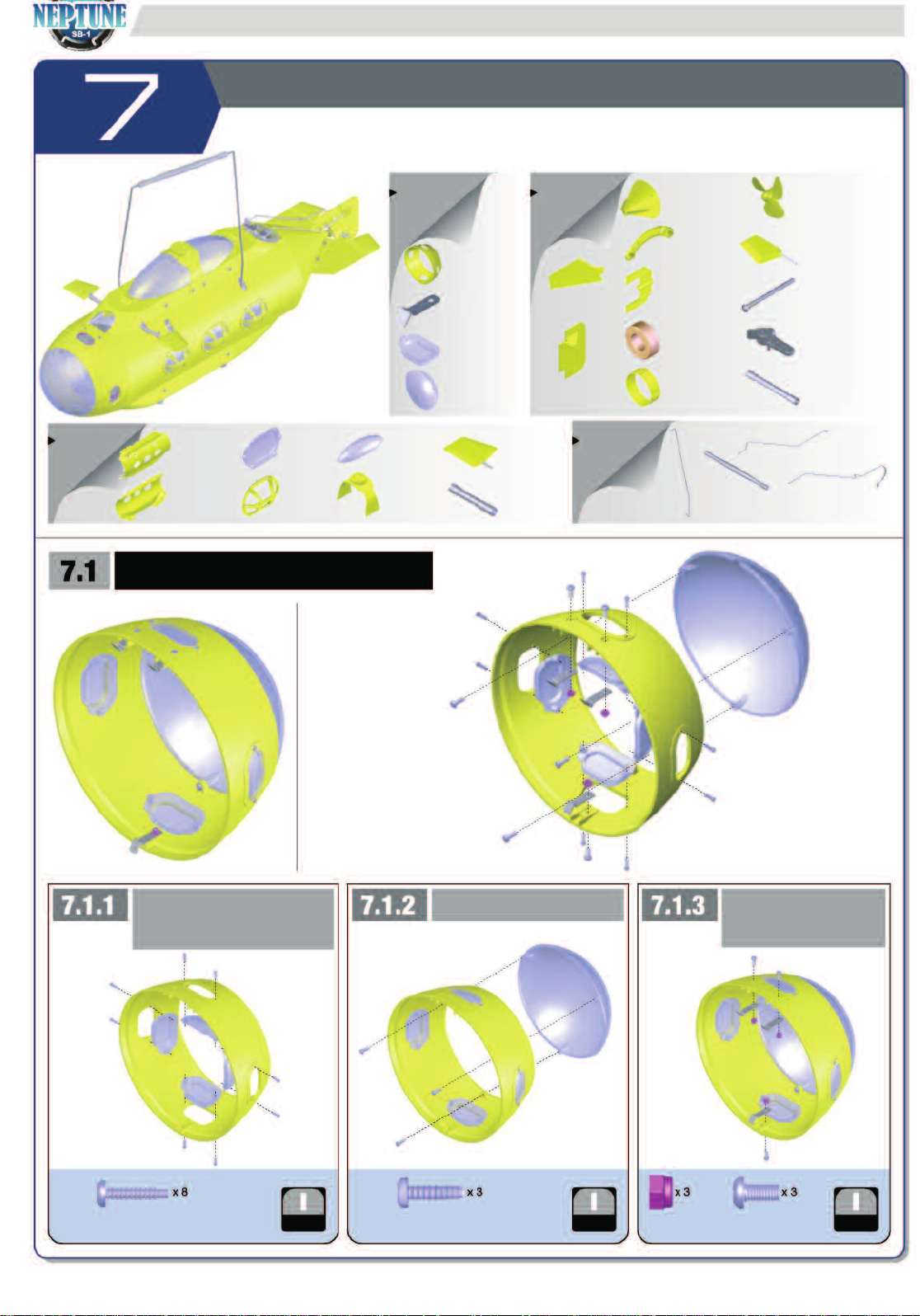
ASSEMBLAGE DE LA COQUE EXTERNE
Notice provenant du site www.mrcmodelisme.com
SAC K
Flanc de
la coque
(G), qté 1
Flanc de
la coque
(D), qté 1
HUBLOT
Hublot
latéral,
qté 6
Support
de hublot
latéral,
qté 6
SAC I
Verrière
supérieure,
qté 1
Support de
verrière sup,
qté 1
Support de
hublot
avant, qté 1
Lamelle de
fixation,
qté 3
Hublot
satellite,
qté 4
Hublot
avant, qté 1
Barre de
plongée
avant, qté 2
Support de
barre de
plongée
avant, qté 2
SAC J
Gouverne de
profondeur, qté2
Gouvernail,
qté 1
SAC L
Tige de poignée
de transport, qté 2
Bloc de
propulsion,
qté 1
Plaque de
support, qté 2
Support de
gouvernail,
qté 1
Bague,
qté 1
Anneau de
protection de
l'hélice, qté 1
Poignée de
transport, qté1
Hélice,
qté 1
Gouverne de
profondeur, qté 2
Axe de
gouvernail, qté 2
Palonnier, qté 1
Support de barre
de plongée
arrière, qté 1
Tringlerie de
gouvernail,
qté 1
Tringlerie de
barre de plongée
arrière, qté1
INSTALLATION DU SUP-
HUBLOT AVANT
PORT DE HUBLOT AV
Vis auto taraudeuse
M2x8mm
SAC
Vis auto taraudeuse
M3x10mm
18
SAC
Ecrou
nylstop M3
LAMELLE DE
FIXATION
Vis à métaux
M3x8mm
SAC
Page 20

BLOC DE PROPULSION
Notice provenant du site www.mrcmodelisme.com
GOUVERNES DE PROFONDEUR SUPPORT D'ARBRE DE PROPULSION
Vis à métaux
M3x12mm
Ecrou nylstop
M3
SAC
FLANCS GAUCHE ET DROIT DE LA COQUE
Remarque :
Le dessin représente le flanc
gauche de la coque.
Le montage du flanc droit est
rigoureusement le même.
Vis à métaux
M3x12mm
Ecrou nylstop
M3
Vis à métaux
M3x4mm
SAC
SAC
19
Page 21

ASSEMBLAGE COMPLET DU MODEL REDUIT
Notice provenant du site www.mrcmodelisme.com
HUBLOT AVANT ET BLOC DE
PROPULSION
Vis auto taraudeuse
M3x10mm
BARRE DE PLONGEE
Frein
Filet
Frein
Filet
SAC
HELICE
Vis BTR
M3x3
GOUVERNAIL
Frein
Filet
SAC
Vis à métaux
M3x4mm
Vis à métaux
M3x6mm
SAC
20
SAC
Page 22

TRINGLERIE DE BARRE DE
Notice provenant du site www.mrcmodelisme.com
INSTALLATION DES FLANCS LATERAUX
PLONGEE ET DE GOUVERNAIL
Frein
Filet
Vis à métaux
M3x4mm
SUPPORT DE VERRIERE SUPERIEURE
SAC
M3x12mm
Vis auto taraudeuse
M3x8mm
ET DE LA VERRIERE SUPERIEURE
M3x8mm
Vis auto taraudeuse
M3x12mm
INSTALLATION DE LA BARRE DE
PLONGEE AVANT
SAC
Vis auto taraudeuse
M3x8mm
SAC
Vis BTR
M3x4
ASSEMBLAGE DE LA POIGNEE DE
TRANSPORT
Vis BTR
M3x4
SAC
21
Vis à métaux
M3x4mm
FIXATION DE LA POIGNEE DE
TRANSPORT
SAC
Page 23

CONFIGURATION
Notice provenant du site www.mrcmodelisme.com
Interrupteur de mise sous tension du Neptune SB-1
Interrupteur de mise sous tension de la caméra (lorsque celle-ci est installée)
Prises de charge
Prise du câble vidéo
Barre de plongée avant
22
Barre de plongée arrière
LED (à l'intérieur de la coque)
Gouvernail
Hélice
Orifice d'entrée/sortie d'eau
Page 24
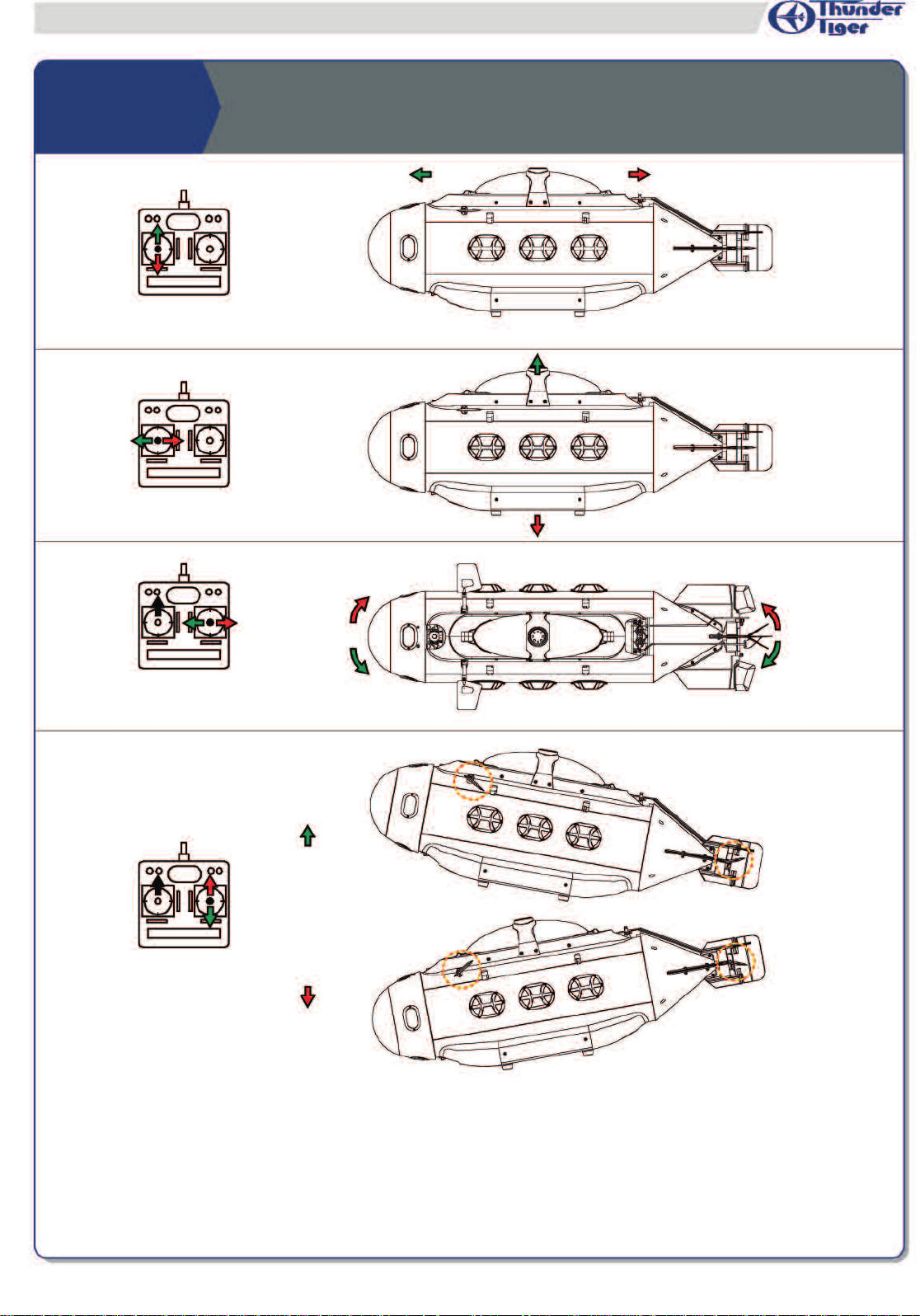
CONTROLE DU SOUS-MARIN AVEC LA
Notice provenant du site www.mrcmodelisme.com
RADIOCOMMANDE
Gaz
Remontée/Plongée
Avance
Tourne à droite
Recule
Note : Fonctionnement de la pompe:
L'eau pénètre dans le ballast
pour la plongée.
L'eau est évacuée du ballast
pour la remontée en surface.
Direction
(en marche avant)
Profondeur
(en marche avant)
REMARQUE :
1. Les illustrations des commandes de l'émetteur sont similaires au Mode 2 propre à l'aéromodélisme : les gaz sont sur
le manche de gauche et la profondeur est sur le manche de droite. Il est tout à fait possible de modifier les commandes
pour les faire passer en Mode 1. Pour cela il vous suffit de démonter le sous-marin et de per
des ser
vos au récepteur.
2. Dans la mesure où les signaux radio ont des difficultés à traverser l'eau (et particulièrement l'eau de mer qui a une
densité importante), la distance de contrôle est plus courte qu'en surface. D'après notre expérience, le contrôle en
bande 40Mhz fonctionne parfaitement tant que la profondeur n'excède pas les 5 mètres.
Tourne à gauche
Se cabre
Pique du nez
muter les branchements
23
Page 25

INTRODUCTION AUX PRINCIPALES
Notice provenant du site www.mrcmodelisme.com
CARACTERISTIQUES
INTERPRETATION DES LED
3 LED ont été intégrées au circuit de contrôle principal afin d'indiquer à l'utilisateur l'état du sous-marin. Vous
pouvez contrôler la couleur des LED à travers le 1er hublot latéral situé sur le côté droit. Veuillez utilisez le tableau
ci-dessous pour prendre connaissance de la réelle signification des couleurs.
Couleur Etat du SB-1 Couleur Etat du SB-1
(J)
(V)
(R)
(J)
(V)
(R)
Couleur jaune allumée
La pompe fonctionne
Le ballast est rempli
En plongée
Couleur verte allumée
La pompe fonctionne
Le ballast est vide
En surface
(J)
(V)
(R)
(J)
(V)
(R)
Couleur rouge allumée
(en continue)
- Fonctionnement normal
Couleur rouge clignote
La batterie est faible
Le signal d'émission a été perdu
Infiltration d'eau
SYSTEME D'AUTO-PROTECTION
Le circuit de contrôle principal est muni d'un système de détection qui permet de protéger le sous-marin. En effet,
si le système détecte une faible tension de la batterie, une mauvaise réception du signal radio ou une fuite (intrusion
d'eau dans la coque), il fera fonctionner la pompe afin de vider le ballast pour faire remonter le sous-marin à la
surface. Au même moment la LED rouge se mettra à clignoter.
LA POMPE ET LE BALLAST POUR LA PLONGEE STATIQUE
La plongée statique s'appuie sur le principe de poussée d'Archimède, c'est-à-dire que tout corps plongé dans un
liquide reçoit une poussée, qui s'exerce de bas en haut, et qui est égale au poids du volume de liquide déplacé.
Ce principe s'applique à la fois aux corps qui sont à la surface et immergés.
Adoptant ce principe, le sous-marin est pourvu d'une pompe qui rempli ou vide de l'eau dans un ballast situé à
l'intérieur de la coque. Le poids et le volume du sous-marin pouvant être modifiés, ce dernier peut soit flotté, soit
plongé et même resté statique en immersion. Cet état s'appelle la plongée statique qui est un système propre aux
sous-marins à l'échelle un.
La flottabilité d'un objet dépend de deux facteurs : le volume de l'objet et la densité du liquide qui l'entoure. De
ce fait lorsque vous faites évoluer le Neptune SB-1 dans des eaux différentes (avec une densité inégale), vous
devrez ajuster les lests pour faire en sorte que le sous-marin flotte et plonge facilement et rapidement. En principe
le Neptune SB-1 nécessite entre 20 et 30 secondes pour plonger et remonter à la surface.
24
Page 26
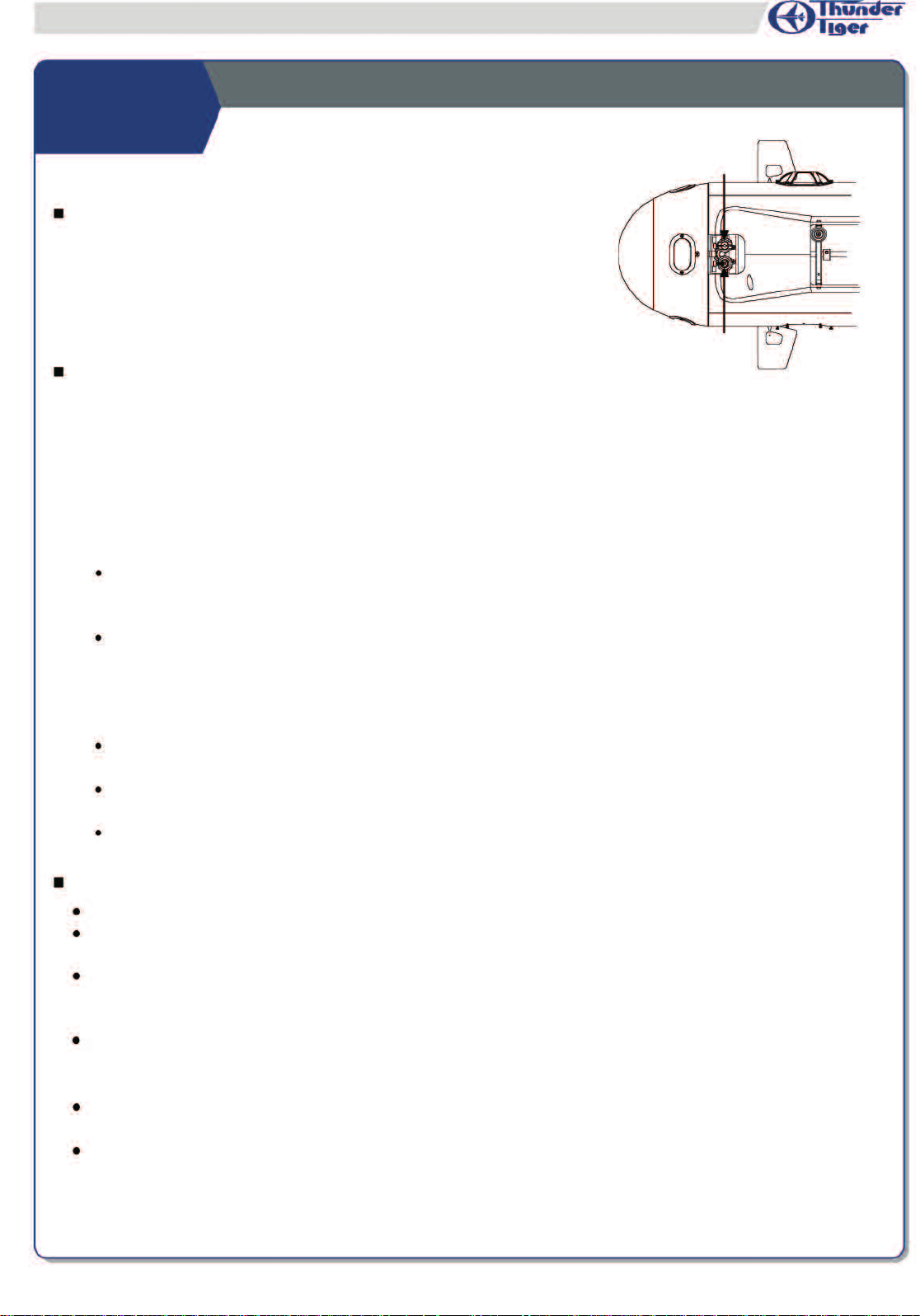
FONCTIONNEMENT
Notice provenant du site www.mrcmodelisme.com
Interrupteur
d'alimentation
INTERRUPTEURS
Deux interrupteurs sont placés sous le hublot avant. Lorsque vous regardez
le sous-marin par son dessous, l'interrupteur de droite est celui qui permet
de mettre sous tensions toute son électronique. L'interrupteur de gauche est
destiné à mettre sous tension un système de caméra (lorsque celle-ci est
installée).
Interrupteur
PREPARATION
Veuillez respecter les étapes de la procédure décrite ci-dessous pour réaliser la préparation du sous-marin.
1
Contrôlez qu'il n'y ait pas d'eau à l'intérieur de la coque. Si c'est le cas, le sous-marin ne devra pas être utilisé tant
)
vous n'avez résolu l'avarie.
2) Fixez la paroi hermétique et vissez les écrous (en les vissant de manière symétrique). Après avoir vissé complètement
les écrous, le joint avant doit apparaître écrasé contre la paroi.
3) Mettez en place le hublot.
4) Mettez sous tension l'émetteur et vérifiez le niveau des batteries.
5) Mettez sous tension le sous-marin. Conservez le sous-marin sur une table et contrôlez les fonctions suivantes :
Vérifiez la propulsion : déplacez vers le haut et vers le bas le manche de gauche et contrôlez que la vitesse
de propulsion avant/arrière fonctionne parfaitement. Lorsque le manche est au neutre, l'hélice ne doit pas
fonctionner. Ajustez le trim si nécessaire.
Vérifiez la pompe : déplacez vers la gauche et vers la droite le manche de gauche et contrôlez que la pompe
fonctionne en remplissant ou en vidant le ballast. Vous pourrez entendre le bruit du moteur et en plaçant votre
doigt sur le ballast, vous pourrez observer si ce dernier se gonfle ou se vide. REMARQUE : Le fonctionnement
de la pompe n'est pas proportionnel et fonctionne en tout ou rien. Assurez-vous que le neutre du manche soit
bien situé au centre. Si ce n'est pas le cas, ajustez le trim.
Vérifiez l'assiette de plongée (manche de droite haut et bas). Contrôlez que la position neutre du manche
corresponde à une plongée sur plan horizontal. Ajustez le trim si nécessaire.
Vérifiez le gouvernail (manche de droite gauche et droite). Contrôlez que la position neutre du manche
corresponde à un gouvernail en position centrale. Ajustez le trim si nécessaire.
Eteignez le sous-marin et son émetteur et transportez-le aux bords d'un plan d'eau.
de la caméra
VERIFICATION AVANT LA MISE A L'EAU
Mettez sous tension l'émetteur et vérifiez le niveau des batteries.
Mettez sous tension le sous-marin (interrupteur d'alimentation). Vérifiez qu'il n'y ait pas d'inter
d'autres émetteurs.
Si le sous-marin ne se met pas sous tension, vérifiez le fusible et changez-le si nécessaire (REMARQUE : si le
fusible se rompt une nouvelle fois cela peut-être dû à un cour
réduit. Ouvrez-le et cherchez le problème électrique).
Vérifiez que le hublot avant soit parfaitement installé. Si ce n'est pas le cas, vous risquez de le perdre lors de
la mise à l'eau du sous-marin. Une fois désolidarisé du sous-marin, le hublot va se remplir d'eau et couler. Faites
attention à la fixation de cet élément sur le sous-marin.
Si aucune caméra n'est utilisée, vérifiez que le bouchon (boulon) du câble soit parfaitement vissé. Si une caméra
est utilisée, reportez-vous au paragraphe consacré à son installation.
Mettez en route la pompe et videz entièrement le ballast (manche de gauche déplacé vers la gauche). Vous
pourrez vous assurer que le ballast est vide lorsque le bruit de la pompe sera différent et par l'absence d'air
dans le sac.
25
t circuit interne. Dans ce cas n'utilisez pas le modèle
férence avec
Page 27

FONCTIONNEMENT
Notice provenant du site www.mrcmodelisme.com
VERIFICATION DE LA LIGNE DE FLOTTAISON ET AGENCEMENT DES LESTS
Avant d'utiliser le sous-marin pour la première fois, vérifiez sa ligne de flottaison.
Remplissez d'eau froide une baignoire et introduisez le sous-marin dedans.
Avec le ballast complètement vide, le sous-marin doit flotter avec sa verrière et une petite partie de sa coque
émergées. Vous pouvez modifier les lests pour obtenir la flottabilité optimale.
Vérifiez si le sous-marin a une assiette correcte, il doit conserver un plan parfaitement horizontal. Si ce n'est pas
le cas, vous pouvez déplacer la position du ballast et des lests pour permettre au sous-marin d'être parallèle au
plan d'eau.
Gardez en mémoire que l'eau peut avoir différentes densités (par exemple une baignoire, une piscine, un lac).
Cela aura une influence sur la ligne de flottaison du sous-marin. Vous devrez l'ajuster de nouveau à chaque fois
que vous changerez de lieu de navigation.
Ballast vide Ballast rempli à 80% Ballast rempli à 100%
MISE A L'EAU
Trouvez une bonne position pour mettre le sous-marin à l'eau en vous évitant tout risque de tomber. Vous devez
être à proximité du plan d'eau et il ne doit pas être trop en contre bas.
Insérez la poignée de transport dans les trous prévus à cet effet. Assurez-vous que les crochets de la poignée
de transport soient bien fixés aux tiges métalliques de la coque et non pas sur des pièces plastiques.
Tout en douceur, mettez à l'eau le sous-marin.
Attendez que le hublot et le bloc de propulsion soient complètement immergés. La coque comporte des
compartiments non étanches et c'est pourquoi le sous-marin va se retrouver totalement immergé. Des petites
bulles d'air devraient s'extraire du sous-marin.
Une fois le sous-marin immergé, retirez la poignée de transport.
REMARQUE : Faites attention de ne pas faire tomber la poignée de transport dans l'eau car celle-ci coulera.
Commencez à faire naviguer votre Neptune SB-1.
RECUPERATION
Mettez en route la pompe afin de vider complètement le ballast.
Pilotez le sous-marin de façon à le mettre sur l'un des bords de la piscine ou du lac, dans une position où vous
allez pouvoir le récupérer facilement.
Fixez la poignée de transport dans les trous prévus à cet effet. Assurez-vous que les crochets de la poignée de
transport soient bien fixés aux tiges métalliques de la coque et non pas sur des pièces plastiques.
Levez le sous-marin hors de l'eau. Pendant cette phase, le sous-marin sera excessivement lourd car sa coque
sera remplie d'eau. L'eau va s'évacuer et le sous-marin va s'alléger. Ensuite posez le sous-marin sur une surface
horizontale.
Eteignez le sous-marin puis l'émetteur.
Faites une inspection rapide de la coque et vérifiez qu'aucun élément ne soit endommagé ou manquant.
26
Page 28

FONCTIONNEMENT
Notice provenant du site www.mrcmodelisme.com
UTILISATION
Toutes les commandes sont décrites ci-dessous.
Les fonctions de direction et de gaz sont similaires à tout autre bateau radiocommandé.
Ce sous-marin est capable d'effectuer la plongée statique et dynamique.
Pour une plongée statique parfaite, laissez le moteur de propulsion au neutre et faites fonctionner la pompe pour
remplir le ballast. Vous allez observer la ligne de flottaison du sous-marin progressivement disparaître : il va être
totalement immergé. Inversez la commande et faites fonctionner la pompe pour vider le ballast : le sous-marin
va retourner à la surface.
La plongée dynamique est possible grâce à la vitesse du navire et à l'action de ses barres de plongée. Comme
la flottabilité du sous-marin est importante, nous recommandons de la réduire en remplissant partiellement le
ballast. La situation idéale est atteinte lorsque uniquement l'anneau de la verrière est hors de l'eau. Dans cette
situation actionnez la propulsion avant à pleine vitesse et mettez les barres de plongée vers le bas : le sousmarin va plonger. Grâce à ses barres de plongée, vous aurez un contrôle dynamique de sa profondeur.
Faites attention à ne pas entrer en collision. Si le sous-marin évolue dans une piscine ou dans un plan d'eau
pourvu de murs verticaux, évitez d'entrer en contact avec ces structures solides. Le gouvernail pourrait être
endommagé et/ou le hublot pourrait être cassé.
Faites également attention à éviter les algues, les feuilles et tout autre corps contenus dans l'eau et qui pourraient
s'immiscer dans l'hélice et son arbre. Si c'est le cas, la performance de la propulsion va se retrouver grandement
diminuée et le moteur va être sollicité d'autant plus. Cette situation doit être à tout prix évité pour ne pas avoir
à subir de dommages sur le système de propulsion.
Si le sous-marin remonte à la surface de façon autonome, c'est que le système de protection s'est enclenché.
Sortez le sous-marin hors de l'eau et contrôlez la LED rouge pour prendre connaissance de son état.
Le sous-marin peut remonter à la surface si la tension de sa batterie est faible. Vous pourrez le vérifier car son
moteur de propulsion ne sera pas performant et il ne sera pas capable de plonger. Dans cette situation, sortez
immédiatement le sous-marin hors de l'eau avant que sa batterie ne soit complètement déchargée (gardez
toujours à l'esprit que le récepteur fonctionne par un système BEC et de ce fait l'alimentation électrique est la
même pour toute l'électronique).
RECUPERATION
Pour brancher le système de caméra, veuillez vous référer à
la procédure décrite ci-dessous.
1) Démontez du bouchon hermétique l'unité de répartition
d'énergie.
2) Installez la prise du câble sur le boulon supérieur étanche.
3) Installez la caméra sur l'unité de répartition d'énergie et
branchez la prise jaune sur la prise du câble.
4) Référez-vous à la section 1.3 pour assembler l'unité de
répartition et le bouchon hermétique.
REMARQUE : Veuillez vous référer au catalogue des pièces détachées options pour obtenir le système de caméra.
Pour utiliser la caméra, mettez sous tension l'interrupteur de la caméra ensuite dévissez le boulon qui fait office
de bouchon de la prise du câble vidéo et vissez avec précaution le câble vidéo (RCA). L'extrémité du câble vidéo
t « A
doit être branché au moniteur Polyphemus sur le por
Vérifiez le focus de la caméra et ajustez-le si besoin est.
Gardez en mémoire que le signal émis par la caméra est analogique. Si vous désirez réaliser un film digital,
vous devez utiliser un convertisseur analogique/digital (vendu séparément).
Après avoir utilisé la caméra, éteignez l'interrupteur de la caméra et revissez le boulon/bouchon de la prise du
câble vidéo.
V IN » ou sur un matériel équivalent.
27
Page 29
MAINTENANCE ET REVISIONS
Notice provenant du site www.mrcmodelisme.com
Démontez le hublot, la verrière et les flancs de la coque et nettoyez chaque élément.
Avant d'entreposer le sous-marin pendant une longue période, démontez le bouchon hermétique avant et retirez
la batterie.
Contrôlez le fonctionnement de la sonde de pression (tentez de gonfler le sac du ballast au-delà de ses limites).
Contrôlez le fonctionnement du système d'auto-protection (éteignez l'émetteur et observez si le système de
sécurité s'enclenche).
Contrôlez le système de sécurité de tension faible de la batterie.
Contrôlez l'intégrité du tube interne.
Contrôlez l'étanchéité du tube interne et des tringleries.
Contrôlez l'angle de rotation des barres de plongée et du gouvernail. Ajustez les trims de l'émetteur si
nécessaire.
Contrôlez l'état des joints et de la visserie.
Contrôlez le fonctionnement des interrupteurs et de toutes les entrées d'eau. Tous les éléments doivent être vissés
mais doivent conserver un petit jeu.
SERVICE
Tous les produits THUNDER TIGER ont été attentivement contrôlés avant leur sortie d'usine. Cependant, si votre
ensemble Neptune SB-1 venait à tomber en panne, veuillez contacter le service après-vente MRC, seul habilité
à effectuer des interventions garanties sur le matériel THUNDER TIGER à l'adresse suivante :
Model Racing Car
A l'attention du Service Après Vente
Z.A.C. de la Sablière
15bis, Avenue de la Sablière
94370 SUCY-EN-BRIE
Tél. :
Fax :
E-mail : mrcfrance@wanadoo.fr
Site : www.mrcmodelisme.com
01.49.62.09.60
01.49.62.09.73
28
Page 30
Sous-marin à plongée statique
Notice provenant du site www.mrcmodelisme.com
CARACTERISTIQUES
1) Modèle réduit radiocommandé
2) Coque intégralement en ABS
3) Unité de propulsion motorisée en 12V
4) Systèmes de plongée dynamique et statique
5) Système ballast par pompe motorisée
6) Commandes du gouvernail et des barres de plongée
7) Système électronique de protection automatique
8) Equipé d'une prise de branchement pour câble vidéo
9) Batterie au plomb 12 volts incluse
Importé en France par :
ZAC, 15bis Avenue De La Sablière
Contribution DEE (No.M823)
SPECIFICATIONS DE BASE
Poids 7,7kg en surface, 7,95kg immergé
Longueur totale 774mm
Diamètre 290mm
Plan 200mm
Hauteur 285mm
Moteur de propulsion Moteur 12V
Hélice Tri pales. 40mm de diamètre et 41mm de pas
Vitesse 2,7km/h en surface
2km/h immergé
Profondeur de fonctionnement 5 mètres
Profondeur maximale 10 mètres
Model Racing Car
94370 Sucy En Brie
Tel. : 01.49.62.09.60
Fax : 01.49.62.09.73
www.mrcmodelisme.com
Made in China
Page 31

tz d'émission
tz Thunder Tiger et de changer les quar
Emetteur SkyMaster T4
Référence 8417
Spécifications
Configuration Deux manches
Encodeur de canal 4 voies
Fréquence (MHz) 35/40/41
Modulation FM (PPM)
Courant 150mA@9,6V
Largeur de bande +/-10KHz/-40db
Tension d'alimentation 9,6V
Fonction de mixage Empennage en V
Prise pour simulateur Oui
Récepteur TR401-F
Fréquence (MHz) 35/40/41
Canal 4 voies
BEC NO
Modulation FM (PPM)
Simple Conversion 455KHz
Espacement des canaux 10KHz
Tension d'alimentation 4,8~-6V
Courant 35mA@6V
Dimension (mm) 43,7x28,5x17,3
tionnelles.
iger. En l'utilisant correctement et avec soin, la radiocommande
Poids 20g
Servos STD SERVO S1903 MICRO SERVO C1016
Référence 8114 8117
Contrôle Large bande
Angle de rotation +/- 45 degrés
Tension d'alimentation 4,8~-6V
Courant 10mA au neutre 5,0mA@4,8V
Couple (Kg-cm) 3Kg-cm 1,6Kg-cm
Vitesse 0,19sec 0,1sec
Poids 47,4g 9g
Dimensions 40,4x20,0x37,9 22,1x11,4x23,6
Manche droit : Contrôle des voies 1 et 2 en Mode 1. Contrôle des voies 3 et 4 en Mode 2.
Page 2
Contrôles de l'émetteur
1.
2. Manche gauche : Contrôle des voies 3 et 4 en Mode 1. Contrôle des voies 1 et 2 en Mode 2.
3-6. Trim de voie : Utilisez ces fonctions pour ajuster la position du neutre des servos de chaque voie.
créer des interférences auprès des autres modélistes.
que la tension des batteries devient faible et qu'il est temps de les changer par des nouvelles.
7. Interrupteur : Met sous tension et éteint l'émetteur.
8. Antenne : Ne faites jamais fonctionner l'émetteur sans avoir dépliée l'antenne au préalable. Vous pourriez
9. Indicateur de tension : La LED indique l'état des batteries de l'émetteur. Lorsqu'elle clignote, cela signifie
10. Poignée : Elle permet de transporter facilement l'émetteur.
Nous recommandons d'utiliser uniquement des quar
11. Interrupteur d'inversion : Inverse le sens de rotation des servos.
12. Quartz : La fréquence peut être modifiée en remplaçant l'ensemble des quartz d'émission et de réception.
1
-faire de Thunder T
ACE RC T4 SKY MASTER
Manuel d'instructions
Page 1
Introduction
Félicitations pour l'achat de votre ensemble radio ACE SkyMaster. La radiocommande SkyMaster a été
conçue avec tout le savoir
ACE SkyMaster vous permettra de contrôler votre modèle réduit à la fois d'une façon simple et avancée et
tz facilité.
tz interchangeable pour modifier la fréquence.
elle vous procurera de nombreuses années de satisfaction. Avant de faire fonctionner votre nouvel ensemble
radio ou de l'installer dans votre modèle réduit, veuillez consacrer quelques minutes à vous familiariser aux
différentes caractéristiques de votre ensemble en lisant entièrement ce manuel d'instructions.
Caractéristiques
Emetteur
- Conçu pour fonctionner à l'extérieur.
- Contrôle précis par le biais de 4 voies digitales propor
- Interrupteur de mise en route et alarme tension faible des batteries.
- Accès du quar
- Fonction empennage en V inclus (activée ou non par interrupteur).
- Disponible en bandes FM 35, 40 et 41MHz.
- Indicateur LED d'alimentation.
- Interrupteur d'inversion du sens de rotation des servos.
- Trims mécaniques.
- Prise jack DC
Récepteur
- Récepteur super hétérodyne pour une portée très importante.
- Quar
- Système multi signaux pour éviter tout interférence.
aille micro et standard pour se monter dans la majorité des modèles réduits.
Servo- Moteur à couple important.
- T
- Design étudié.
- Double roulements à disques (de type sleeve).
- Boîtier résistant.
Elément SkyMaster T4
Référence 8417-C3 8417-S4
Emetteur SkyMaster T4
Contenu de l'ensemble
Récepteur TR401-F
Boîtier porte-piles d'émission x 1, Drapeau de fréquence x 1
Servos C1016 x 3 S1903 x 4
Accessoires Interrupteur x 1, Porte-piles de réception x 1
Page 32

rupteur et le
, les servos, l'inter
. Si vous éteignez l'émetteur avant le
vos.
, des batteries NiCd/NiLH
, du quartz ou de l'antenne
ATTENTION
Allumez toujours l'émetteur en premier et éteignez-le toujours en dernier. Une bonne manière de s'en
souvenir est de s'imaginer que votre récepteur écoute l'émetteur
récepteur, le récepteur n'entendra plus rien et dans ces conditions, il peut donner de mauvais ordres
aux servos.
boîtier porte-piles de réception. En effet il est utile de tester l'ensemble radio pour se familiariser à son
fonctionnement. Après avoir branché chaque élément, dépliez totalement les antennes d'émission et de
réception. Tout d'abord mettez sous tension l'émetteur puis l'interrupteur du récepteur. Assurez-vous que tous
les servos et trims fonctionnent parfaitement et prenez un moment pour vous habituez au contrôle de votre
ensemble radio. Après le test, éteignez en premier le récepteur puis l'émetteur.
Receiver - Récepteur
Switch Harness - Interrupteur
PAGE 4
Installation radio
Avant d'installer votre radio dans votre modèle réduit, branchez le récepteur
Used on gaz powered model - Utilisé sur un modèle réduit thermique
Servos
Montez les servos comme indiqués dans le manuel d'instructions de votre modèle réduit.
Respectez la procédure de montage des ser
Installation du récepteur
Respectez l'emplacement où le récepteur doit être installé.
timent à batteries
te-piles qui est branché à l'émetteur comme illustré ci-dessous.
te-piles soient propres. Si il y a des traces de corrosion ou de la
REMARQUE
Il est important de placer le récepteur et son antenne dans un emplacement où le risque d'interférence
est faible, à l'écart d'autre matériel électrique pouvant générer des ondes radio.
CONSEIL UTILE
Installez toujours le récepteur aussi éloigné que possible du moteur, du contrôleur
et des câbles moteur. N'enroulez surtout pas les câbles moteur autour du récepteur
de réception.
En principe des anti-parasites sont installés sur la plupart des moteurs. Si ce n'est pas le cas, vous avez un
REMARQUE
Les câbles des servos à transistors FET génèrent des parasites. Positionnez-les aussi loin que possible
du récepteur et de son antenne.
risque d'interférences qui pourrait la perte de contrôle de votre modèle et ainsi causer des dommages.
Assurez-vous que votre moteur est muni de diodes ou de condensateurs anti-parasites.
.
PAGE 5
Le récepteur doit être positionné de manière à ce que le quartz soit situé vers le haut. Veuillez vous reporter
ATTENTION
Le récepteur contient des composants électroniques de précision. Ces éléments fragiles sont vulnérables
à l'illustration ci-dessous.
Crystal - Quartz
L'espace disponible dans votre modèle réduit va déterminer la façon dont vous allez le caler et le protéger.
Lorsque le récepteur est enveloppé dans une mousse de protection de bonne qualité, celui-ci est protégé des
vibrations.
.
face aux vibrations et aux chocs.
2
et réception au même moment.
accus rechargeables Nicd et NiHM sont utilisés.
REMARQUE
Avant de charger les accus de votre émetteur, veuillez vous assurer que l'interrupteur est bien positionné
sur "OFF". Le chargeur devra posséder une prise conventionnelle ("+" à l'intérieur et "-" à l'extérieur).
13. Prise de charge type Jack : Elle permet de charger les batteries de l'émetteur uniquement lorsque des
en V. Par défaut cet interrupteur est sur la position "OFF" (vers le haut). Si votre planeur ou votre avion
possède un empennage en V, vous pouvez activer cette fonction avec un outil pour positionner
Une prise non adaptée peut provoquer un incident et des dommages.
14. Interrupteur de la fonction mixage en V : Il vous permet d'activer la fonction de mixage pour empennage
l'interrupteur sur la position "ON" (vers le bas).
Utilisez uniquement des piles alcalines neuves du même fabriquant et installez toutes au même moment.
Assurez-vous que tous les contacts du por
poussière, nettoyez avec précaution les contacts à l'aide d'une gomme. Il est recommandé de les nettoyer
PAGE 3
Installation
Installation des batteries dans l'émetteur :
Installez 8 piles de type AA dans le boîtier por
chaque fois que vous remplacerez les piles.
, les batteries pourraient fuir ou être inutilisables.
endommager l'émetteur
ATTENTION
1) Ne tentez jamais de recharger des piles alcalines ou toute autre pile sèche ! Vous pourriez
Battery cover - Couvercle du compar
While pressing this part - Pressez le couvercle et tirez-le vers le bas
Battery cell (x8) - Elément (x8)
sont pas logées correctement, l'émetteur pourrait être endommagé.
2) Assurez-vous que les batteries soient logées dans le bon sens des polarités. Si les batteries ne
CONSEIL UTILE
Vous pouvez utiliser des accus rechargeables NiCd ou NiHM. Ils peuvent être rechargés par le biais de la
Câble à raccorder à l'émetteur via la prise Jack.
ATTENTION
Retirez toujours les batteries de l'émetteur lorsque celui-ci n'est pas utilisé pendant une courte ou une
longue période.
ATTENTION
Assurez-vous toujours que les contacts du boîtier porte-piles soient propres. Si il y a des traces de
corrosion ou de la poussière, nettoyez avec précaution les contacts à l'aide d'une gomme. Il est
recommandé de les nettoyer chaque fois que vous remplacerez les piles.
prise Jack située sur le côté de l'émetteur
Installation/remplacement des batteries de réception
Installez 4 piles de type AA dans le boîtier porte-piles de réception. Assurez-vous que les batteries soient
logées dans le bon sens des polarités. Branchez le boîtier porte-piles sur la prise "BATT" du récepteur
Page 33
vos
vos. Le sens de rotation de chaque servo peut
vos et
ous pouvez déterminer la direction des ser
minée, testez le fonctionnement de l'ensemble radiocommande
e est en dessous de -10°C ou au-dessus de
opre : enlevez toute poussière, saleté, ou tache d'huile ou de
tant car il est impossible d'utiliser en même temps une fréquence
FONCTIONS
Inversion du sens de rotation des ser
Il est parfois nécessaire d'inverser le sens de rotation des ser
être inversé tout simplement en déplaçant l'interrupteur attribué à la voie du récepteur.
VERIFICATIONS FINALES
Lorsque l'installation de votre radio est ter
avant de connecter les tringleries ou câbles de contrôle. V
utiliser autant de fois souhaitées l'interrupteur d'inversion du sens de rotation des servos.
Avant de connecter les tringleries ou câbles de contrôle, vérifiez qu'il n'y ait pas de résistance inutile ou de
blocage de la tringlerie. Un mauvais montage des tringleries entraîne une surconsommation d'énergie par les
servos et va rapidement épuiser votre batterie de réception et ainsi diminuer les performances de votre
modèle.
Lorsque vous êtes satisfait des tringleries ou câbles de contrôle, attachez-les au bras ou guignol du servo,
Foam Rubber - Mousse en caoutchouc
vos vont trembler à + ou - 25°.
vant de piloter, vérifiez toujours que personne n'utilise la même fréquence que vous. Sinon, assurez-vous
selon les instructions de votre modèle.
Avec tous les leviers de trim de l'émetteur mis au neutre, allumez la radio et vérifiez à nouveau de sens de
débattement des gouvernes. Prenez votre temps pour réaliser cette étape car de nombreux avions se sont
crashés à cause de modélistes qui n'avaient pas remarqué que les ailerons, la direction ou la profondeur
étaient montés à l'envers !
Ajustez mécaniquement les tringleries pour obtenir une position neutre centrale des gouvernes avec les trims
de l'émetteur au neutre.
PAGE 7
Liste des fréquences en France
En France, la bande de fréquences autorisée est de 40MHz.
Attachez le drapeau à l'extrémité de votre antenne pour que les autres modélistes puissent déterminer votre
fréquence même de loin. Ceci est très impor
identique à celle d'une autre personne.
. La
que vous n'allumez pas vos radios en même temps.
Précautions d'utilisation sur le terrain ou sur le circuit
- A
substance qui pourrait diminuer vos réactions et réflexes.
- Ne faites pas fonctionner votre modèle ou votre radio la nuit, lorsqu'il pleut ou lorsqu'il y a un orage.
- Ne faites pas fonctionner votre modèle ou votre radio lorsque vous avez consommé de l'alcool ou toute autre
les ser
- Vérifiez toujours le niveau de charge des batteries avant d'utiliser votre modèle et radiocommande.
- Si une fréquence entre 200MHz et 250MHz est utilisée aux alentours, pendant que vous utilisez cette radio,
carburant avec du détergent doux ou du produit à vitre. NE LAISSEZ JAMAIS PENETRER DE L'EAU A
Après utilisation :
L'INTERIEUR DU BOITIER DE L'EMETTEUR.
- Veillez à ce que votre émetteur soit toujours pr
tir du modèle. Utilisez un caoutchouc passe-fil (ou
tir l'antenne du carénage ou fuselage le plus près possible du
C. Il en est de même pour les endroits humides, poussiéreux ou à fortes vibrations. Ne laissez pas votre
40°
- Cette radio ne doit pas être utilisée par des enfants.
radio en plein soleil.
- Ne rangez pas votre radio dans des endroits dont la températur
- Pour éviter la corrosion, enlevez les batteries si vous comptez ranger votre radio pour une longue période.
3
REMARQUE
Lorsque vous emballez le récepteur, gardez à l'esprit que vous protégez un composant
électronique fragile.
CONSEIL UTILE
Une manière simple d'isoler le récepteur des vibrations est de le fixer au châssis à l'aide de scotch double-
faces.
Two Layers - Deux couches
cer la protection en plaçant le récepteur (enveloppé dans la mousse)
miner s'il y a de l'humidité dans l'emballage de protection. Pour ne plus
ATTENTION
Si le récepteur est en contacte avec un liquide ou de l'humidité, cela peut provoquer un
dysfonctionnement et provoquer une perte de contrôle de votre modèle réduit.
Rubber Spacer - Entretoise en caoutchouc
De nombreux modélistes préfèrent renfor
dans un ballon en caoutchouc sécurisé par un collier en nylon qui entoure le boîtier de servo, le servo et les
câbles de batterie.
Le ballon de baudruche est une bonne protection contre les éclaboussures de carburant ou d'huile notamment
lors de crashs importants. En revanche, si vous utilisez votre modèle dans un environnement humide et très
chaud, nous vous le déconseillons car de l'humidité peut s'accumuler à l'intérieur du récepteur et entraîner la
corrosion du circuit imprimé. Le récepteur présentera alors des dysfonctionnements.
CONSEIL UTILE
Si vous choisissez de protéger votre récepteur par de la mousse et un ballon de baudruche, nous vous
recommandons d'enlever régulièrement le récepteur de votre modèle et de ses protections pour le laisser à
l'air libre. Ainsi vous pourrez déter
réaliser ces vérifications régulières, percez de petits trous dans le ballon afin d'aérer votre récepteur
protection contre le carburant ou l'huile en sera d'autant diminuée.
upteur
REMARQUE
La longueur de l'antenne est fondamentale pour un bon fonctionnement de votre radio. En aucun cas,
ne coupez pas l'antenne car cela réduirait la portée et causerait ainsi un crash.
Installation de la batterie
Enroulez toujours de la mousse autour de la batterie et installez-la à l'emplacement indiqué sur le manuel
d'instruction de votre modèle. Puis enveloppez-la toujours dans un ballon de baudruche si son emplacement
est proche du moteur ou du réservoir.
Installation de l'interr
Choisissez le meilleur endroit pour installer l'interrupteur marche/arrêt en fonction des caractéristiques de
votre modèle. Placez l'interrupteur à l'opposé du pot d'échappement. Après le montage, attachez l'excès de
fils de servo à l'aide de colliers en veillant à les mettre à l'abri des pièces en mouvement (tringlerie, bras de
servos…) qui pourraient se prendre dans les fils et les couper. Tout espace vide dans votre compartiment radio
du fuselage peut être rempli par de la mousse.
PAGE 6
Antenne du récepteur
récepteur. Cela signifie que le plus d'antenne possible doit sor
un noeud suffira) où l'antenne sort du modèle afin de ne pas l'arracher du récepteur en cas d'accident. Si votre
modèle est un avion, veuillez également utiliser un passe-fil au point d'attache hors du fuselage. Une bande en
caoutchouc marche également. N'OUBLIEZ PAS : LE FIL D'ANTENNE EST LE SEUL LIEN QUI RELIE VOTRE
Reportez-vous au manuel d'instruction de votre modèle pour placer l'antenne du récepteur à l'emplacement
prévu. En général, il est recommandé de faire sor
MODELE A L'EMETTEUR. Faites attention à ce que l'antenne ne se prenne pas dans les hélices, les roues…
Page 34

Model Racing Car
94370 Sucy En Brie
Tel. : 01.49.62.09.60
Made in China
Fax : 01.49.62.09.73
www.mrcmodelisme.com
Contribution DEE (No.M823)
ZAC, 15bis Avenue De La Sablière
Importé en France par :
précaution.
PROCEDURE POUR DEMARRER RAPIDEMENT
1. Retirez le hublot. Prenez à l'intérieur du sous-marin le sachet contenant le fusible et conservez-le avec
2. Dévissez les 6 écrous et leur rondelle puis retirez la cloison étanche.
3. Chargez la batterie à l'aide des deux bornes.
Avant de charger la batterie, veuillez vous assurer que l'interrupteur du sous-marin soit sur la position
Un chargeur lent est fourni avec cet ensemble. Au minimum 12 heures seront nécessaires pour réaliser la
"OFF".
toute première charge.
Lorsque la charge est terminée, contrôlez la tension de la batterie avec un volt mètre. La tension doit être
Note
a.
b.
supérieure à 12 volts pour que le sous-marin soit opérationnel.
c.
d'instructions Page 17 étape 6.4)
4. Installez le fusible.
5. Mettez en place la cloison étanche et vissez les 6 écrous et leur rondelle. (Référez-vous au manuel
6. Mettez en place le hublot.
d'instructions Page 23 & 25).
7. Mettez sous tension l'émetteur puis l'interrupteur d'alimentation du sous-marin.
8. Vérifiez que les gouvernes et la propulsion fonctionnent correctement (Référez-vous au manuel
tz, utilisez un quartz ACE.
Si mauvaise position, placez les piles en accord avec
neuves ou rechargées.
Emetteur, Récepteur
- Si pas de courant, changez les piles par des piles
Batterie
les polarités indiquées.
-
- Si mauvais contact, nettoyez les languettes de contact.
Antenne
Si l'antenne n'est pas dépliée, dépliez-la.
Emetteur
- Si l'antenne s'en va, fixez-la de manière plus sûre.
-
Récepteur
Si l'antenne est coincée, décoincez-la.
de ces câbles.
- Si l'antenne est proche d'autres câbles, dégagez-la
-
- Si enlevé, rebranchez-le.
- Si mauvaise fréquence, utilisez la bonne fréquence.
Quartz
- Si mauvais câblage, branchez les prises correctement.
- Si mauvaise marque de quar
- Si mauvaise connexion, vérifiez les câbles et prises.
Connexions
4
- Si interférence, installez des condensateurs appropriés.
Moteurs électriques
vice Après Vente
Page 10
SERVICE
Tous les produits THUNDER TIGER ont été attentivement contrôlés avant leur sortie d'usine. Cependant, si
votre ensemble Neptune SB-1 venait à tomber en panne, veuillez contacter le service après-vente MRC, seul
habilité à effectuer des interventions garanties sur le matériel THUNDER TIGER à l'adresse suivante :
Model Racing Car
A l'attention du Ser
Z.A.C. de la Sablière
15bis, Avenue de la Sablière
94370 SUCY-EN-BRIE
Tél. : 01.49.62.09.60
Fax : 01.49.62.09.73
E-mail : mrcfrance@wanadoo.fr
Site : www.mrcmodelisme.com
ANNAGE
Page 11
DEP
Ne pilotez pas votre modèle si votre radio ne fonctionne pas correctement. Si vous ne parvenez pas à
résoudre les problèmes rencontrés, malgré les conseils ci-après, veuillez contacter votre détaillant.
SITUATION SOLUTION
Pas de courant
Pas d'action
Perte de portée
Mauvais
fonctionnement
des servos
 Loading...
Loading...