

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
1
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
D
700 KHz Operation
D
1.25 MHz Operation With External Driver
D
1.5% Reference Over Full Operating
T emperature Range
D
Synchronous Rectifier Driver for Greater
Than 90% Efficiency
D
Programmable Reference V oltage Range of
1.3 V to 3.5 V
D
User–Selectable Hysteretic T ype Control
D
Droop Compensation for Improved Load
Transient Regulation
D
Adjustable Overcurrent Protection
D
Programmable Softstart
D
Overvoltage Protection
D
Active Deadtime Control
D
Power Good Output
D
Internal Bootstrap Schottky Diode
D
Low Supply Current . . . 3-mA T yp
D
Reduced System Component Count and
Size
description
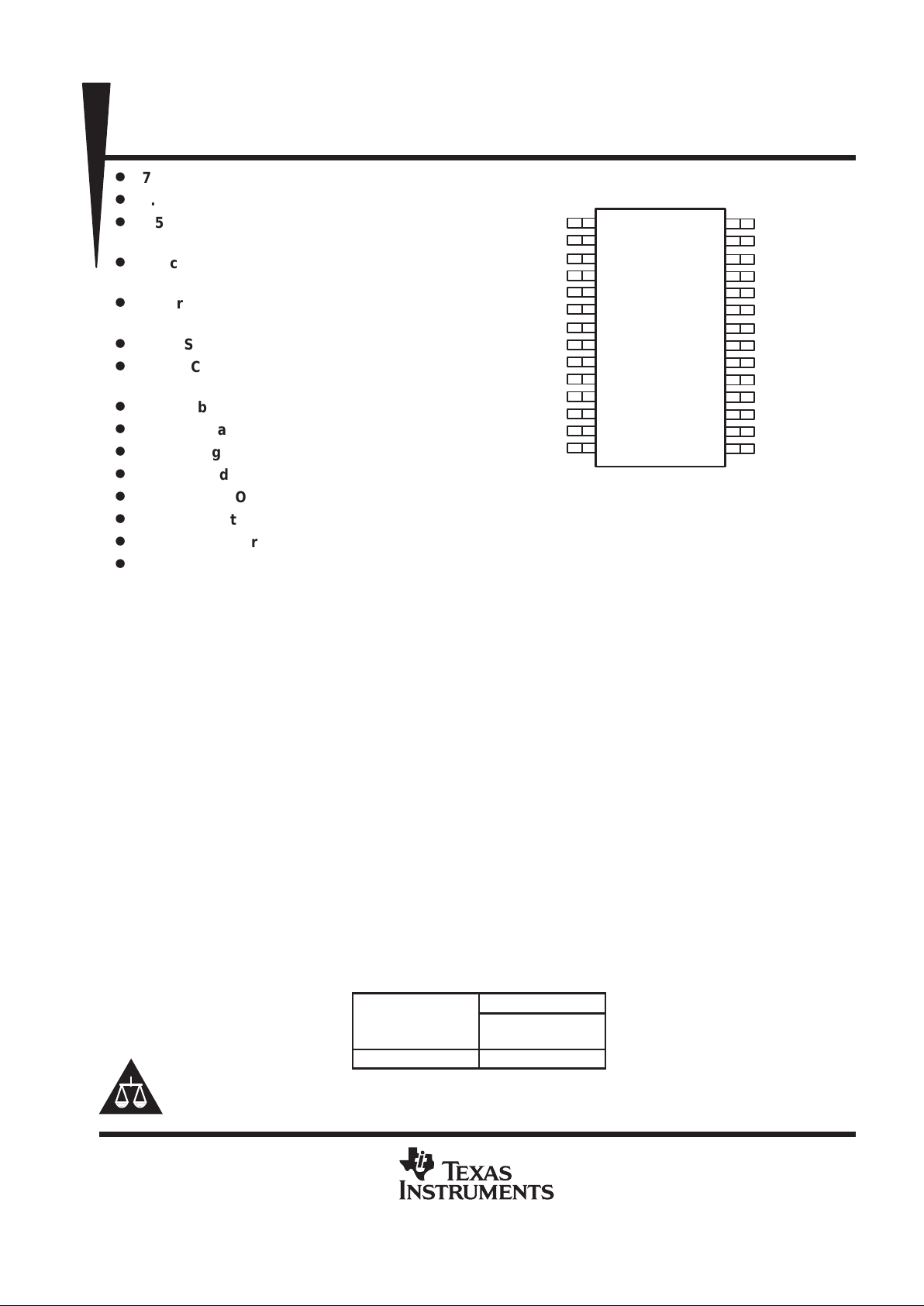
The TPS521 1 is a hysteretic regulator controller which provides an accurate, programmable supply voltage to
microprocessors. An internal 5-bit DAC is used to program the reference voltage to within a range of 1.3 V to
3.5 V. The output voltage can be set to equal the reference voltage or some multiple of the reference voltage.
A hysteretic controller with user-selectable hysteresis and programmable droop compensation is used to
dramatically reduce overshoot and undershoot caused by load transients. Propagation delay from the
comparator inputs to the output drivers is less than 250 ns. Overcurrent shutdown and crossover protection for
the output drivers combine to eliminate destructive faults in the output FETs. The softstart current source is
proportional to the reference voltage, thereby eliminating variation of the softstart timing when changes are
made to the output voltage. PWRGD monitors the output voltage and pulls the open-collector output low when
the output drops 7% below the nominal output voltage. An overvoltage circuit disables the output drivers if the
output voltage rises 15% above the nominal value. The inhibit pin can be used to control power sequencing.
Inhibit and undervoltage lockout assures the 12-V supply voltage and system supply voltage (5 V or 3.3 V) is
within proper operating limits before the controller starts. Single-supply (12 V) operation is easily accomplished
using a low-current divider for the required 5-V signals. The output driver circuits include 2-A drivers with internal
8-V gate-voltage regulators. The high-side driver can be configured either as a ground-referenced driver or as
a floating bootstrap driver. The TPS521 1 is available in a 28-pin TSSOP PowerP AD package. It operates over
a junction temperature range of 0°C to 125°C.
AVAILABLE OPTIONS
PACKAGE
T
J
TSSOP
(PWP)
0°C to 125°C TPS5211PWPR
Copyright 1999, Texas Instruments Incorporated
PRODUCTION DATA information is current as of publication date.
Products conform to specifications per the terms of Texas Instruments
standard warranty. Production processing does not necessarily include
testing of all parameters.
Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
28
27
26
25
24
23
22
21
20
19
18
17
16
15
IOUT
DROOP
OCP
VHYST
VREFB
VSENSE
ANAGND
SLOWST
BIAS
LODRV
LOHIB
DRVGND
LOWDR
DRV
PWRGD
VID0
VID1
VID2
VID3
VID4
INHIBIT
IOUTLO
LOSENSE
HISENSE
BOOTLO
HIGHDR
BOOT
V
CC
PWP PACKAGE
(TOP VIEW)
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
2
POST OFFICE BOX 655303 DALLAS, TEXAS 75265
•
11111
Decode
VID0
VID1
VID2
VID3
VID4
SQ
R
Deglitch
Deglitch
100 mV
+
V
OVP
1.15 V
ref
V
PGD
0.93 V
ref
Rising
Edge
Delay
–
+
+
–
PREREG
DRV REG
–
+
–
+
Hysteresis
Setting
–+
VID
MUX
and
Decoder
2x
SLOWST
OCP
INHIBIT
Bandgap Shutdown
I
VREFB
5
Shutdown
VSENSE
HIGHIN
HIGHDR
V
CC
Analog
Bias
Analog Bias
Slowstart
Comp
Hysteresis
Comp
CM Filters
VREF
–
+
Σ
28 20 21 1915 7
V
CC
ANAGND PWRGD LOSENSE IOUTLO HISENSE
2 V
10 V
V
CC
UVLO
NOCPU
Fault
Shutdown
IOUT
BIAS
DRV
BOOT
HIGHDR
BOOTLO
LOWDR
DRVGND
1
9
14
16
17
18
13
12
6
11 1042523
VID0 VID1 VID2 VID3 VID4
24252627
VREFB DROOP VHYST VSENSE LOHIB LODRV
8
3
22
200 kΩ
200 kΩ
I
VREFB
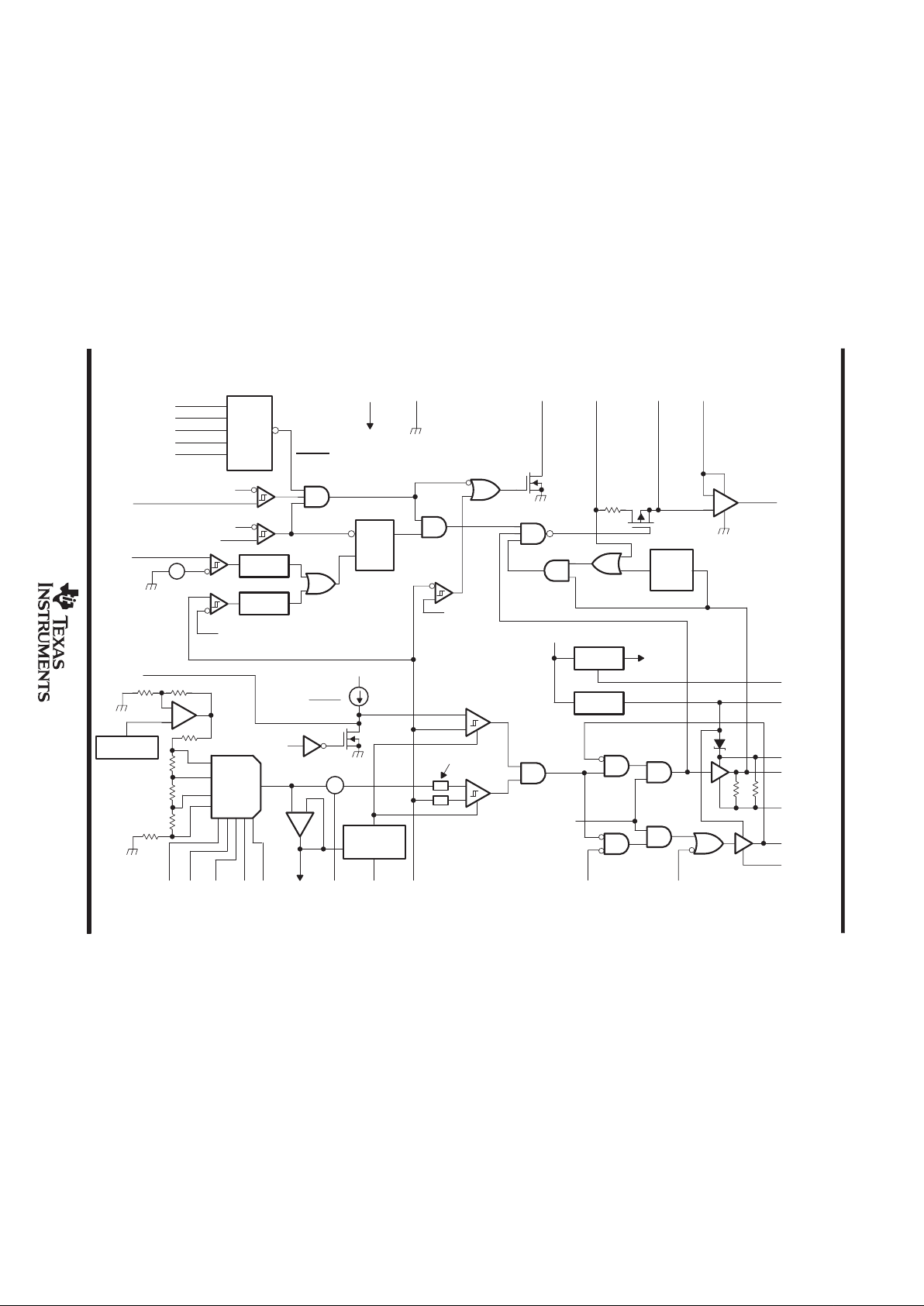
functional block diagram
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
3
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
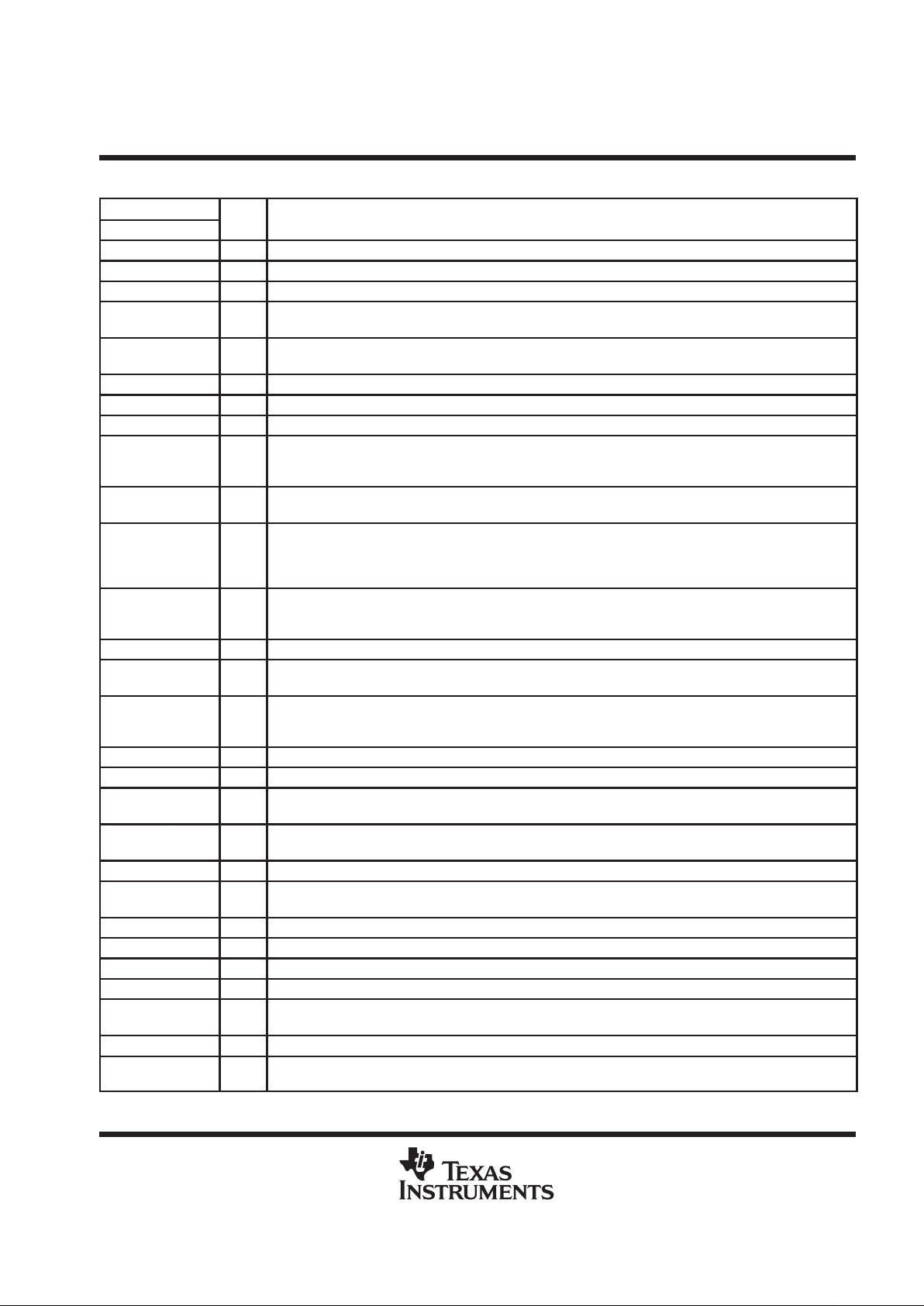
Terminal Functions
TERMINAL
NAME NO.
I/O
DESCRIPTION
ANAGND 7 Analog ground
BIAS 9 O Analog BIAS pin. A 1-µF ceramic capacitor should be connected from BIAS to ANAGND.
BOOT 16 I Bootstrap. Connect a 1-µF low-ESR capacitor from BOOT to BOOTLO.
BOOTLO 18 O Bootstrap low. Connect BOOTLO to the junction of the high-side and low-side FETs for floating drive
configuration. Connect BOOTLO to PGND for ground reference drive configuration.
DROOP 2 I Droop voltage. Voltage input used to set the amount of output-voltage set-point droop as a function of load
current. The amount of droop compensation is set with a resistor divider between IOUT and ANAGND.
DRV 14 O Drive regulator for the FET drivers. A 1-µF ceramic capacitor should be connected from DRV to DR VGND.
DRVGND 12 Drive ground. Ground for FET drivers. Connect to FET PWRGND.
HIGHDR 17 O High drive. Output drive to high-side power switching FETs
HISENSE 19 I High current sense. For current sensing across high-side FETs, connect to the drain of the high-side FETs; for
optional resistor sensing scheme, connect to power supply side of current-sense resistor placed in series with
high-side FET drain.
INHIBIT 22 I Disables the drive signals to the MOSFET drivers. Can also serve as UVLO for system logic supply (either 3.3 V
or 5 V).
IOUT 1 O Current out. Output voltage on this pin is proportional to the load current as measured across the Rds(on) of the
high-side FETs. The voltage on this pin equals 2×R
ds(on)×IOUT. In applications requiring very accurate
current sensing, a sense resistor should be connected between the input supply and the drain of the high-side
FET s.
IOUTLO 21 O Current sense low output. This is the voltage on the LOSENSE pin when the high-side FETs are on. A ceramic
capacitor should be connected from IOUTLO to HISENSE to hold the sensed voltage while the high-side FET s
are off. Capacitance range should be between 0.033 µF and 0.1 µF.
LODRV 10 I Low drive enable. Normally tied to 5 V. To activate the low-side FETs as a crowbar , pull LODRV low.
LOHIB 11 I Low side inhibit. Connect to the junction of the high and low side FETs to control the anti-cross-conduction and
eliminate shoot-through current. Disabled when configured in crowbar mode.
LOSENSE 20 I Low current sense. For current sensing across high-side FETs, connect to the source of the high-side FET s; for
optional resistor sensing scheme, connect to high-side FET drain side of current-sense resistor placed in series
with high-side FET drain.
LOWDR 13 O Low drive. Output drive to synchronous rectifier FETs
OCP 3 I Over current protection. Current limit trip point is set with a resistor divider between IOUT and ANAGND.
PWRGD 28 O Power good. Power good signal goes high when output voltage is within 7% of voltage set by VID pins.
Open-drain output.
SLOWST 8 O Slowstart (soft start). A capacitor from SLOWST to ANAGND sets the slowstart time.
Slowstart current = I
VREFB
/5
V
CC
15 12-V supply. A 1-µF ceramic capacitor should be connected from VCC to DRVGND.
VHYST 4 I HYSTERESIS set pin. The hysteresis is set with a resistor divider from V
REFB
to ANAGND.
The hysteresis window = 2 × (V
REFB
– V
HYST
)
VID0 27 I Voltage identification input 0
VID1 26 I Voltage identification input 1
VID2 25 I Voltage identification input 2
VID3 24 I Voltage identification input 3
VID4 23 I Voltage Identification input 4. Digital inputs that set the output voltage of the converter. The code pattern for
setting the output voltage is located in T able 1. Internally pulled up to 5 V with a resistor divider biased from V
CC
.
VREFB 5 O Buffered reference voltage from VID network
VSENSE 6 I Voltage sense input. To be connected to converter output voltage bus to sense and control output voltage. It is
recommended an RC low pass filter be connected at this pin to filter noise.
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
4
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
detailed description
V
REF
The reference/voltage identification (VID) section consists of a temperature-compensated bandgap reference
and a 5-bit voltage selection network. The 5 VID terminals are inputs to the VID selection network and are
TTL-compatible inputs internally pulled up to 5 V by a resistor divider connected to VCC. The VID codes conform
to the Intel
VRM 8.3 DC-DC Converter Specification
for voltage settings between 1.8 V and 3.5 V , and they are
decremented by 50 mV , down to 1.3 V, for the lower VID settings. V oltages higher than V
REF
can be implemented
using an external divider. Refer to T able 1 for the VID code settings. The output voltage of the VID network, V
REF
,
is within ±1.5% of the nominal setting over the VID range of 1.3 V to 2.5 V , including a junction temperature range
of 5°C to +125°C, and a VCC supply voltage range of 1 1.4 V to 12.6 V . The output of the reference/VID network
is indirectly brought out through a buffer to the V
REFB
pin. The voltage on this pin will be within 5mV of V
REF
.
It is not recommended to drive loads with V
REFB
, other than setting the hysteresis of the hysteretic comparator,
because the current drawn from V
REFB
sets the charging current for the slowstart capacitor. Refer to the
slowstart section for additional information.
hysteretic comparator
The hysteretic comparator regulates the output voltage of the synchronous-buck converter. The hysteresis is
set by 2 external resistors and is centered on V
REF
. The 2 external resistors form a resistor divider from V
REFB
to ANAGND, with the output voltage connecting to the VHYST pin. The hysteresis of the comparator will be
equal to twice the voltage
difference
between the VREFB and VHYST pins. The propagation delay from the
comparator inputs to the driver outputs is 250 ns (maximum). The maximum hysteresis setting is 60 mV.
low-side driver
The low-side driver is designed to drive low-Rds(on) n-channel MOSFETs. The current rating of the driver is
2 A, source and sink. The bias to the low-side driver is internally connected to the DRV regulator.
high-side driver
The high-side driver is designed to drive low-Rds(on) n-channel MOSFETs. The current rating of the driver is
2 A, source and sink. The high-side driver can be configured either as a ground-referenced driver or as a floating
bootstrap driver. When configured as a floating driver , the bias voltage to the driver is developed from the DR V
regulator. The internal bootstrap diode, connected between the DR V and BOOT pins, is a Schottky for improved
drive efficiency. The maximum voltage that can be applied between BOOT and DRVGND is 30 V. The driver
can be referenced to ground by connecting BOOTLO to DRVGND, and connecting BOOT to either DRV or VCC.
The rms current through the drivers output should not exceed 110 mA. Refer to the application information
section to determine how to calculate an operating frequency to meet this requirement.
deadtime control
Deadtime control prevents shoot-through current from flowing through the main power FETs during switching
transitions by actively controlling the turnon times of the MOSFET drivers. The high-side driver is not allowed
to turn on until the gate-drive voltage to the low-side FET s is below 2 V ; the low-side driver is not allowed to turn
on until the voltage at the junction of the high-side and low-side FETs (Vphase) is below 2 V.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
5
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
detailed description (continued)
current sensing
Current sensing is achieved by sampling and holding the voltage across the high-side power FETs while the
high-side FET s are on. The sampling network consists of an internal 60-Ω switch and an external ceramic hold
capacitor. Recommended value of the hold capacitor is between 0.033 µF and 0.1 µF. Internal logic controls
the turnon and turnoff of the sample/hold switch such that the switch does not turn on until the Vphase voltage
transitions high, and the switch turns off when the input to the high-side driver goes low . The sampling will occur
only when the high-side FETs are conducting current. The voltage on the IOUT pin equals 2 times the sensed
high-side voltage. In applications where a higher accuracy in current sensing is required, a sense resistor can
be placed in series with the high-side FETs, and the voltage across the sense resistor can be sampled by the
current sensing circuit.
droop compensation
The droop compensation network reduces the load transient overshoot/undershoot on V
O
, relative to V
REF
. V
O
is programmed to a voltage greater than V
REF
by an external resistor divider from VO to VSENSE to reduce the
undershoot on VO during a low-to-high load transient. The overshoot during a high-to-low load transient is
reduced by subtracting the voltage on DROOP from V
REF
. The voltage on IOUT is divided with an external
resistor divider, and connected to DROOP.
inhibit
INHIBIT is a TTL-compatible digital input used to enable the controller. When INHIBIT is low , the output drivers
are low and the slowstart capacitor is discharged. When INHIBIT goes high, the short across the slowstart
capacitor is released and normal converter operation begins. When the system-logic supply is connected to
INHIBIT, it also controls power sequencing by locking out controller operation until the system-logic supply
exceeds the input threshold voltage of the inhibit circuit. The 12-V supply and the system logic supply (either
5 V or 3.3 V) must be above UVLO thresholds before the controller is allowed to start up. The start threshold
is 2.1 V and the hysteresis is 100 mV for the INHIBIT comparator.
VCC undervoltage lockout (UVLO)
The undervoltage lockout circuit disables the controller while the VCC supply is below the 10-V start threshold
during power up. When the controller is disabled, the output drivers will be low and the slowstart capacitor is
discharged. When VCC exceeds the start threshold, the short across the slowstart capacitor is released and
normal converter operation begins. There is a 2-V hysteresis in the undervoltage lockout circuit for noise
immunity.
slowstart
The slowstart circuit controls the rate at which VO powers up. A capacitor is connected between SLOWST and
ANAGND and is charged by an internal current source. The current source is proportional to the reference
voltage, so that the charging rate of C
SLOWST
is proportional to the reference voltage. By making the charging
current proportional to V
REF
, the power-up time for VO will be independent of V
REF
. Thus, C
SLOWST
can remain
the same value for all VID settings. The slowstart charging current is determined by the following equation:
I
slowstart
= I(VREFB) / 5 (amps)
Where I(VREFB) is the current flowing out of VREFB.
It is recommended that no additional loads be connected to VREFB, other than the resistor divider for setting
the hysteresis voltage. The maximum current that can be sourced by the VREFB circuit is 500 µA. The equation
for setting the slowstart time is:
t
SLOWST
= 5 × C
SLOWST
× R
VREFB
(seconds)
Where R
VREFB
is the total external resistance from V
REFB
to ANAGND.
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
6
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
detailed description (continued)
power good
The power-good circuit monitors for an undervoltage condition on VO. If VO is 7% below V
REF
, then the PWRGD
pin is pulled low. PWRGD is an open-drain output.
overvoltage protection
The overvoltage protection (OVP) circuit monitors V
O
for an overvoltage condition. If VO is 15% above V
REF
,
then a fault latch is set and both output drivers are turned off. The latch will remain set until V
CC
goes below the
undervoltage lockout value. A 3-µs deglitch timer is included for noise immunity. Refer to the LODRV section
for information on how to protect the microprocessor against overvoltages due to a shorted fault across the
high-side power FET.
overcurrent protection
The overcurrent protection (OCP) circuit monitors the current through the high-side FET. The overcurrent
threshold is adjustable with an external resistor divider between IOUT and ANAGND, with the divider voltage
connected to the OCP pin. If the voltage on OCP exceeds 100 mV , then a fault latch is set and the output drivers
are turned off. The latch will remain set until VCC goes below the undervoltage lockout value. A 3-µs deglitch
timer is included for noise immunity . The OCP circuit is also designed to protect the high-side power FET against
a short-to-ground fault on the terminal common to both power FETs.
drive regulator
The drive regulator provides drive voltage to the output drivers. The minimum drive voltage is 7 V . The minimum
short circuit current is 100 mA. Connect a 1-µF ceramic capacitor from DRV to DRVGND.
LODRV
The LODRV circuit is designed to protect the microprocessor against overvoltages that can occur if the high-side
power FETs become shorted. External components to sense an overvoltage condition are required to use this
feature. When an overvoltage fault occurs, the low-side FET s are used as a crowbar . LODR V is pulled low and
the low-side FET will be turned on, overriding all control signals inside the TPS5211 controller. The crowbar
action will short the input supply to ground through the faulted high-side FETs and the low-side FETs. A fuse
in series with Vin should be added to disconnect the short-circuit.
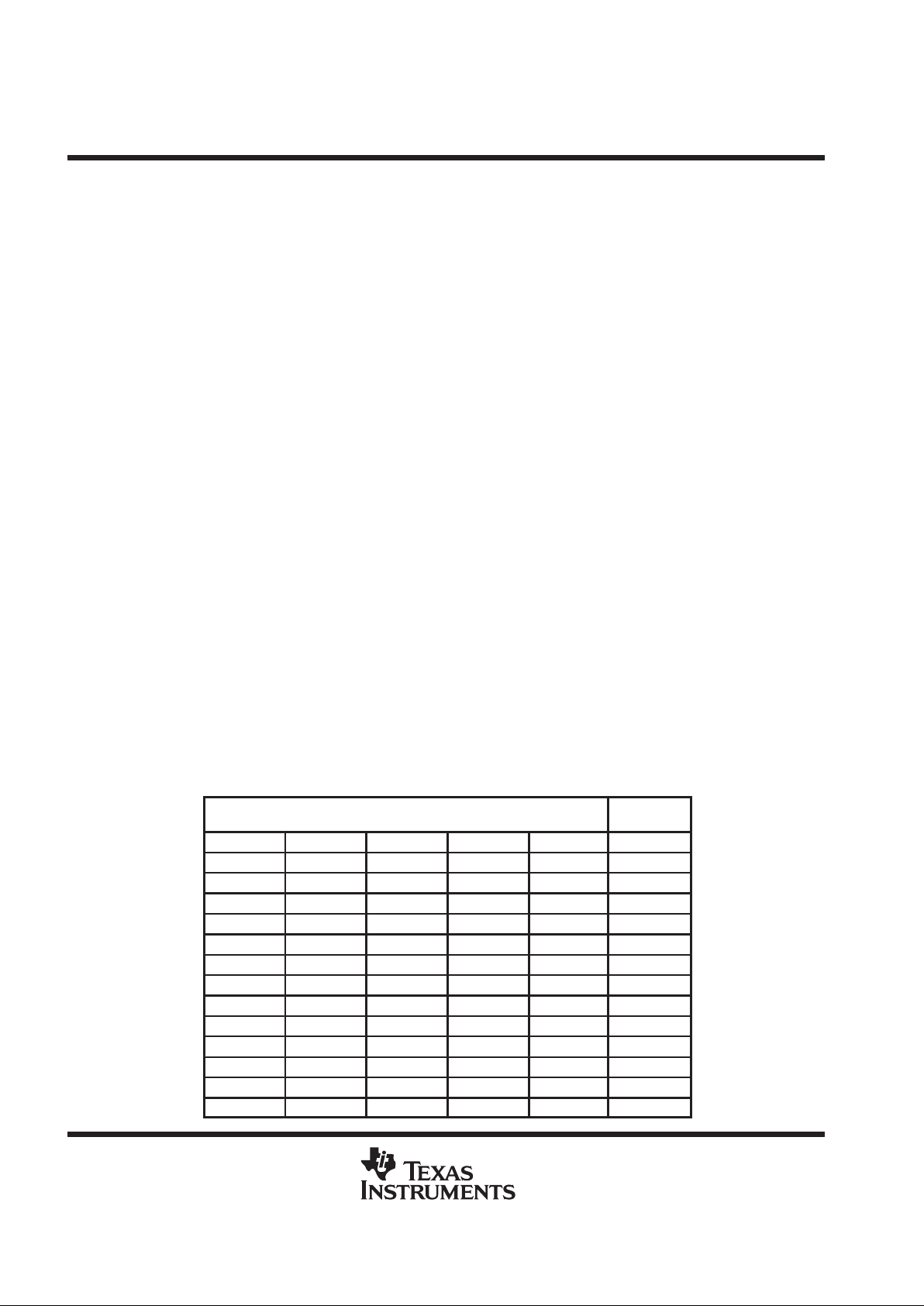
Table 1. Voltage Identification Codes
VID TERMINALS
(0 = GND, 1 = floating or pull-up to 5 V)
V
REF
VID4 VID3 VID2 VID1 VID0 (Vdc)
0 1 1 1 1 1.30
0 1 1 1 0 1.35
0 1 1 0 1 1.40
0 1 1 0 0 1.45
0 1 0 1 1 1.50
0 1 0 1 0 1.55
0 1 0 0 1 1.60
0 1 0 0 0 1.65
0 0 1 1 1 1.70
0 0 1 1 0 1.75
0 0 1 0 1 1.80
0 0 1 0 0 1.85
0 0 0 1 1 1.90
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
7
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
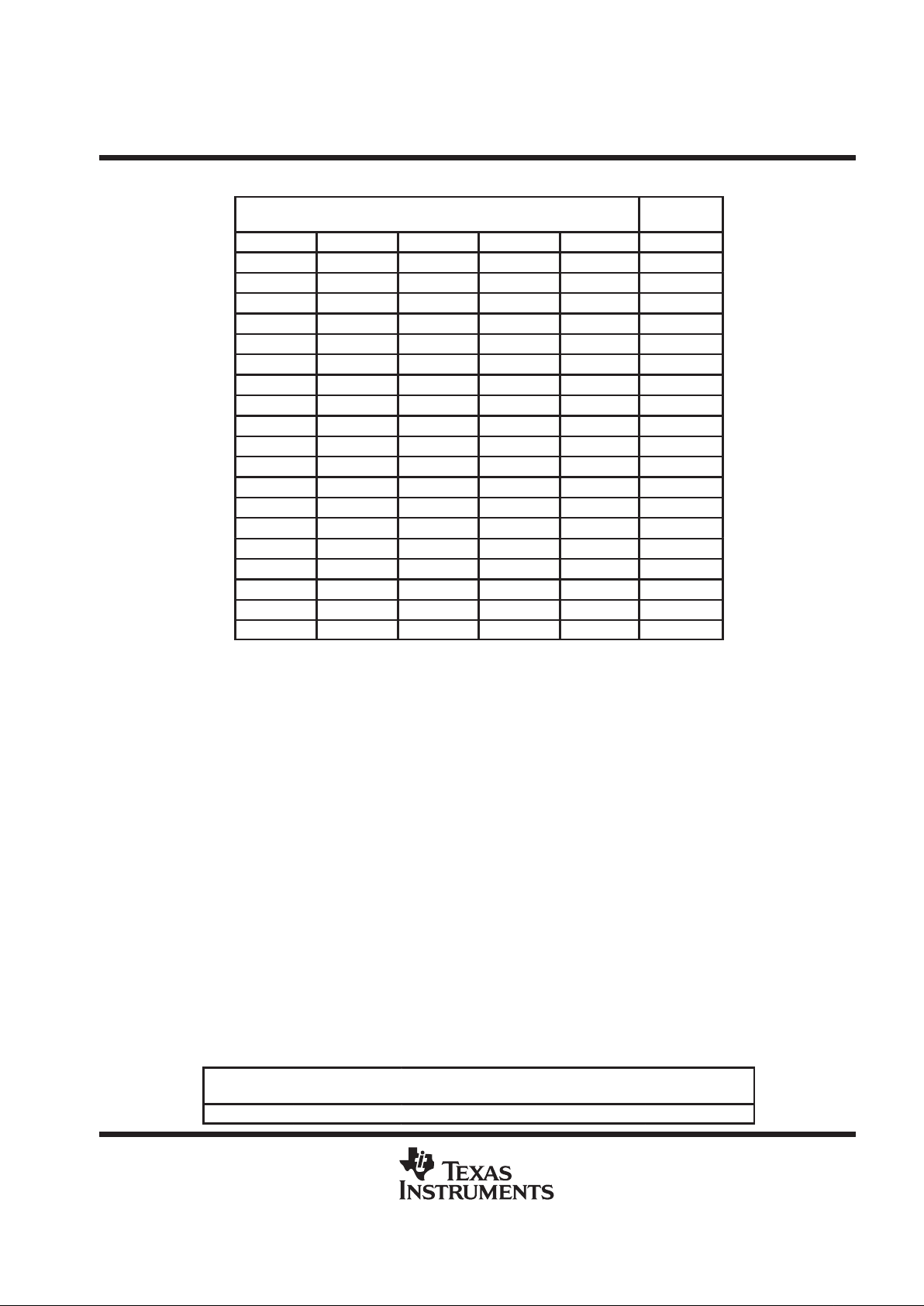
Table 1. Voltage Identification Codes (Continued)
VID TERMINALS
(0 = GND, 1 = floating or pull-up to 5 V)
V
REF
VID4 VID3 VID2 VID1 VID0 (Vdc)
0 0 0 1 0 1.95
0 0 0 0 1 2.00
0 0 0 0 0 2.05
1 1 1 1 1 No CPU
1 1 1 1 0 2.10
1 1 1 0 1 2.20
1 1 1 0 0 2.30
1 1 0 1 1 2.40
1 1 0 1 0 2.50
1 1 0 0 1 2.60
1 1 0 0 0 2.70
1 0 1 1 1 2.80
1 0 1 1 0 2.90
1 0 1 0 1 3.00
1 0 1 0 0 3.10
1 0 0 1 1 3.20
1 0 0 1 0 3.30
1 0 0 0 1 3.40
1 0 0 0 0 3.50
absolute maximum ratings over operating virtual junction temperature (unless otherwise noted)
†
Supply voltage range, V
CC
(see Note1) –0.3 V to 14 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Input voltage range: BOOT to DRVGND (High-side Driver ON) –0.3 V to 30 V. . . . . . . . . . . . . . . . . . . . . . . . .
BOOT to HIGHDRV –0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
BOOT to BOOTLO –0.3 V to 15 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
INHIBIT, VIDx, LODRV –0.3 V to 7.3 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
PWRGD, OCP, DROOP –0.3 V to 7 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
LOHIB, LOSENSE, IOUTLO, HISENSE –0.3 V to 14 V. . . . . . . . . . . . . . . . . . . . . . . . . .
VSENSE –0.3 V to 5 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Voltage difference between ANAGND and DRVGND ±0.5 V. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Output current, V
REFB
0.5 mA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Short circuit duration, DRV Continuous. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Continuous total power dissipation See Dissipation Rating Table. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Operating virtual junction temperature range, TJ 0°C to 125°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Storage temperature range, T
stg
–65°C to 150°C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Lead temperature soldering 1,6 mm (1/16 inch) from case for 10 seconds 260°C. . . . . . . . . . . . . . . . . . . . . . .
†
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only, and
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
NOTE 1: Unless otherwise specified, all voltages are with respect to ANAGND.
DISSIPATION RATING TABLE
PACKAGE
TA ≤ 25°C
POWER RATING
DERATING FACTOR
ABOVE TA = 25°C
TA = 70°C
POWER RATING
TA = 85°C
POWER RATING
PWP 1 150 mW 11.5 mW/°C 630 mW 460 mW
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
8
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
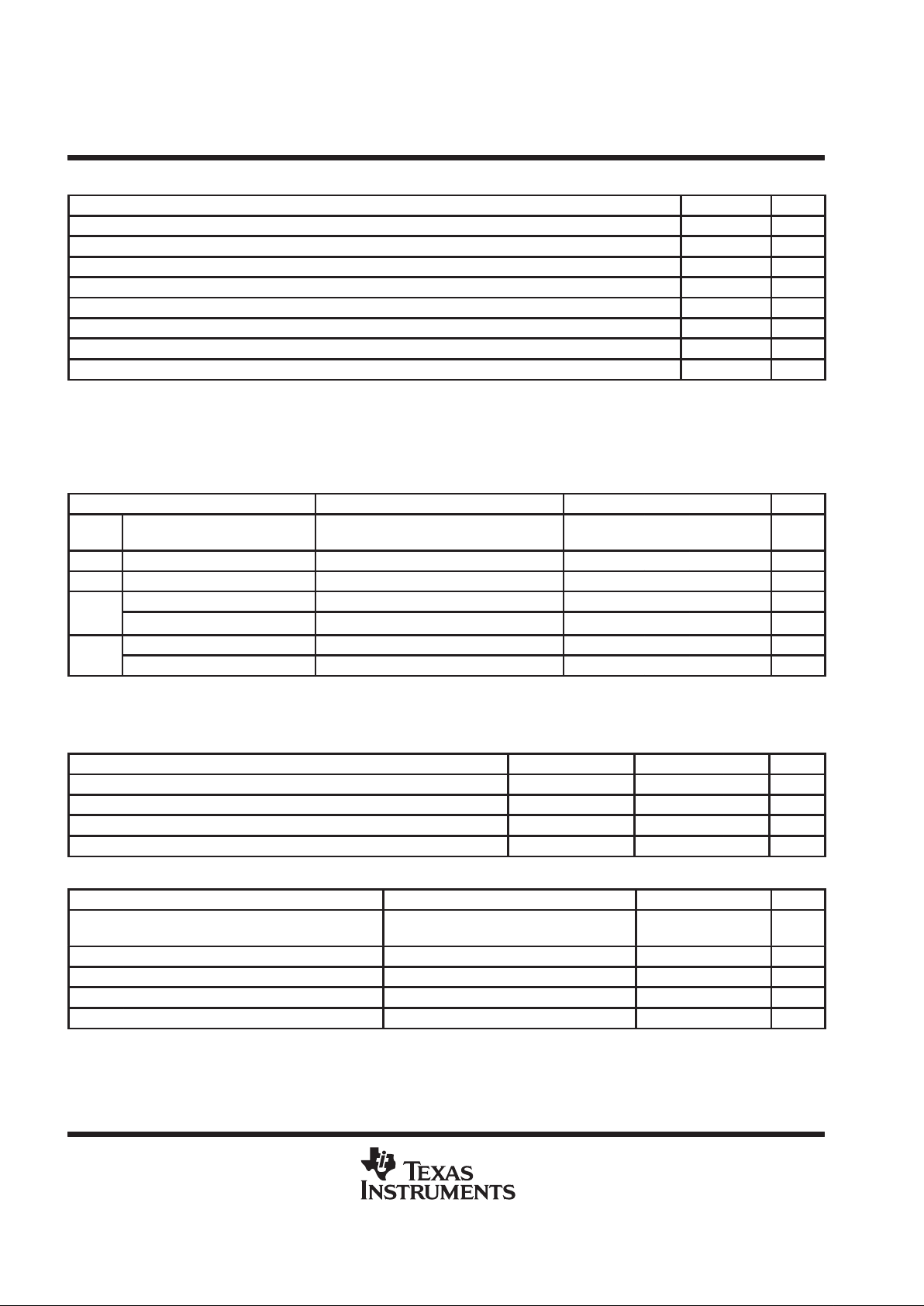
recommended operating conditions
MIN MAX UNIT
Supply voltage, V
CC
11.4 13 V
Input voltage, BOOT to DRVGND 0 28 V
Input voltage, BOOT to BOOTLO 0 13 V
Input voltage, INHIBIT, VIDx, LODRV , PWRGD, OCP, DROOP 0 6 V
Input voltage, LOHIB, LOSENSE, IOUTLO, HISENSE 0 13 V
Input voltage, VSENSE 0 4.5 V
Voltage dif ference between ANAGND and DRVGND 0 ±0.2 V
Output current, V
REFB
†
0 0.4 mA
†
Not recommended to load V
REFB
other than to set hystersis since I
VREFB
sets slowstart time.
electrical characteristics over recommended operating virtual junction temperature range,
V
CC
= 12 V, I
DRV
= 0 A (unless otherwise noted)
reference/voltage identification
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
V
REF
Cumulative reference accuracy
(see Note 2)
VCC = 11.4 to 12.6 V, 1.3 V ≤ V
REF
≤ 3.5 V –0.015 0.015 V/V
VIDx High-level input voltage 2.25 V
VIDx Low-level input voltage 1 V
Output voltage I
VREFB
= 50 µA V
REF
–5mV V
REFVREF
+5mV V
V
REFB
Output regulation 10 µA ≤ IO ≤ 500 µA 2 mV
Input resistance VIDx = 0 V 36 73 95 kΩ
VID
x
Input pull-up voltage divider 4.8 4.9 5 V
NOTES: 2. Cumulative reference accuracy is the combined accuracy of the reference voltage and the input offset voltage of the hysteretic
comparator. Cumulative accuracy equals the average of the high-level and low-level thresholds of the hysteretic comparator.
3. This parameter is ensured by design and is not production tested.
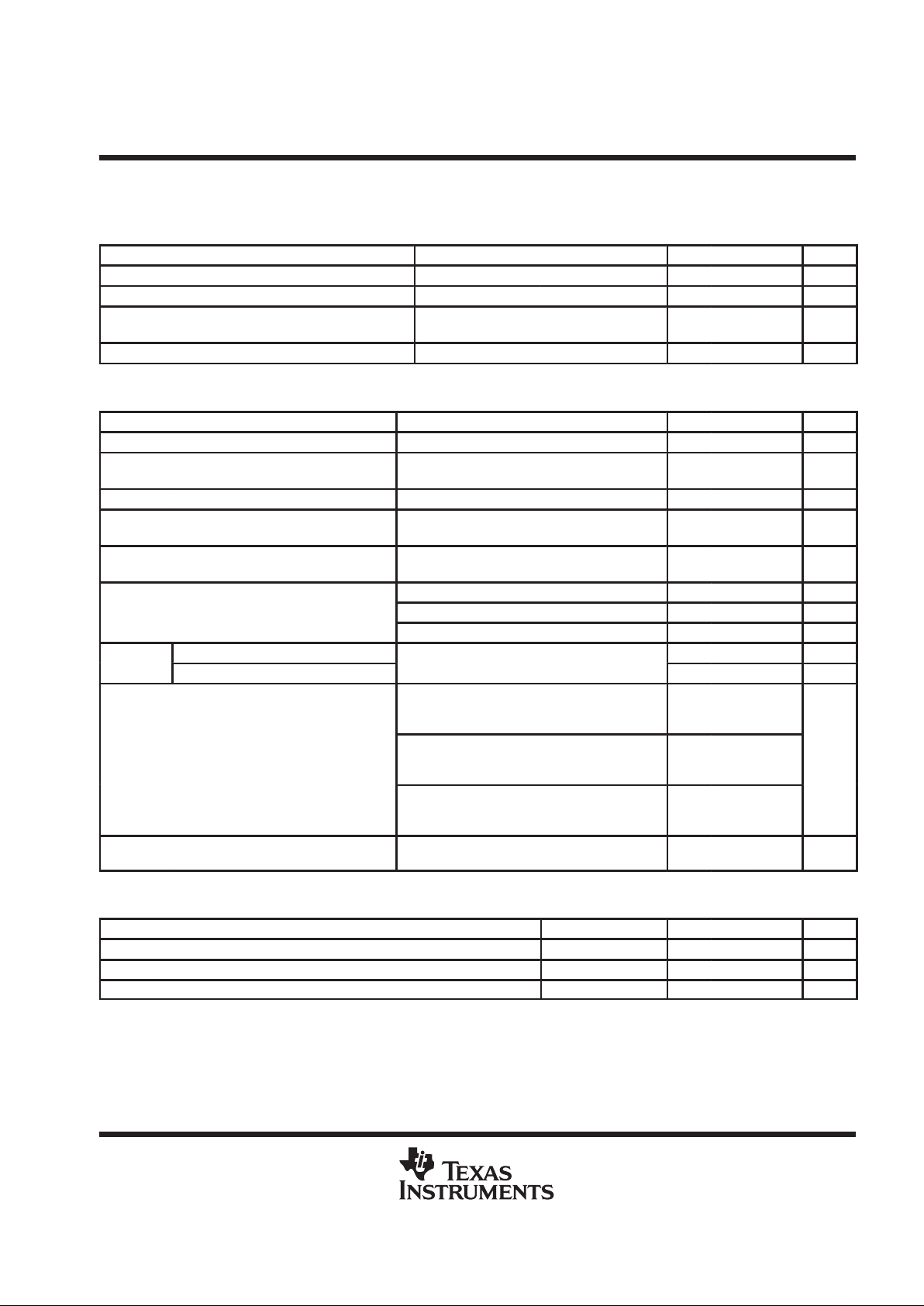
power good
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Undervoltage trip threshold 90 93 95 %V
REF
V
OL
Low-level output voltage IO = 5 mA 0.5 0.75 V
I
OH
High-level input current V
PWRGD
= 6 V 1 µA
V
hys
Hysteresis voltage 1.3 2.9 4.5 %V
REF
slowstart
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Charge current
V
SLOWST
= 0.5 V,
I
VREFB
= 65 µA
V
VREFB
= 1.3 V,
10.4 13 15.6 µA
Discharge current V
SLOWST
= 1 V 3 mA
Comparator input offset voltage 10 mV
Comparator input bias current See Note 3 10 100 nA
Comparator hysteresis –7.5 7.5 mV
NOTE 3: This parameter is ensured by design and is not production tested.
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
9
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
electrical characteristics over recommended operating virtual junction temperature range,
V
CC
= 12 V, I
DRV
= 0 A (unless otherwise noted) (continued)
hysteretic comparator
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Input offset voltage V
DROOP
= 0 V (see Note 3) –2.5 2.5 mV
Input bias current See Note 3 500 nA
Hysteresis accuracy V
REFB
– V
HYST
= 15 mV
(Hysteresis window = 30 mV)
–3.5 3.5 mV
Maximum hysteresis setting V
REFB
– V
HYST
= 30 mV 60 mV
NOTE 3: This parameter is ensured by design and is not production tested.
high-side VDS sensing
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Gain 2 V/V
Initial accuracy
V
HISENSE
= 12 V, V
LOSENSE
= 11.9 V,
Differential input to Vds sensing amp = 100 mV
194 206 mV
IOUTLO Sink current 5 V ≤ V
IOUTLO
≤ 13 V 250 nA
IOUT Source current
V
IOUT
= 0.5 V, V
HISENSE
= 12 V,
V
IOUTLO
= 11.5 V
500 µA
IOUT Sink current
V
IOUT
= 0.05 V, V
HISENSE
= 12 V,
V
IOUTLO
= 12 V
50 µA
V
HISENSE
= 11 V, R
IOUT
= 10 kΩ 0 2 V
Output voltage swing
V
HISENSE
= 4.5 V, R
IOUT
= 10 kΩ
0 1.5 V
V
HISENSE
= 3 V, R
IOUT
= 10 kΩ 0 0.75 V
High-level input voltage
2.85 V
LOSENSE
Low-level input voltage
V
HISENSE
= 4.5 V
(see Note 3)
2.4 V
11.4 V ≤ V
HISENSE
≤ 12.6 V,
LOSENSE connected to HISENSE,
V
HISENSE
– V
IOUTLO
= 0.15 V
50 60 80
Sample/hold resistance
4.5 V ≤ V
HISENSE
≤ 5.5 V,
LOSENSE connected to HISENSE,
V
HISENSE
– V
IOUTLO
= 0.15 V
62 85 123
Ω
3 V ≤ V
HISENSE
≤ 3.6 V,
LOSENSE connected to HISENSE,
V
HISENSE
– V
IOUTLO
= 0.15 V
67 95 144
CMRR
V
HISENSE
= 12.6 V to 3 V,
V
HISENSE
– V
OUTLO
= 100 mV
69 75 dB
NOTE 3. This parameter is ensured by design and is not production tested.
inhibit
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Start threshold 1.9 2.1 2.35 V
Hysteresis 0.08 0.1 0.12 V
Stop threshold 1.85 V
TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
10
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
electrical characteristics over recommended operating virtual junction temperature range,
V
CC
= 12 V, I
DRV
= 0 A (unless otherwise noted) (continued)
overvoltage protection
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Overvoltage trip threshold 112 115 120 %V
REF
Hysteresis See Note 3 10 mV
NOTE 3: This parameter is ensured by design and is not production tested.
overcurrent protection
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
OCP trip threshold 90 100 110 mV
Input bias current 100 nA
deadtime
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
High-level input voltage 2.4
LOHIB
Low-level input voltage 1.4
V
High-level input voltage See Note 3 3
LOWDR
Low-level input voltage See Note 3 1.7
V
NOTE 3: This parameter is ensured by design and is not production tested.
LODRV
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
High-level input voltage 1.85
LODRV
Low-level input voltage 0.95
V
droop compensation
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Initial accuracy V
DROOP
= 50 mV 46 54 mV
drive regulator
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Output voltage 11.4 V ≤ VCC ≤ 12.6 V, I
DRV
= 120 mA 7 9 V
Output regulation 1 mA ≤ I
DRV
≤ 50 mA 100 mV
Short-circuit current 120 mA
bias regulator
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Output voltage 11.4 V ≤ VCC ≤ 12.6 V, See Note 4 6 V
NOTE 4: The bias regulator is designed to provide a quiet bias supply for the TPS5211 controller. External loads should not be driven by the bias
regulator.
input undervoltage lockout
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
Start threshold 9.25 10 10.75 V
Hysteresis 1.9 2 2.2 V
Stop threshold 7.5 V

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
11
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
electrical characteristics over recommended operating virtual junction temperature range,
V
CC
= 12 V, I
DRV
= 0 A (unless otherwise noted) (continued)
output drivers
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
High-side sink
Duty cycle < 2%,
TJ = 125°C,
tpw < 100 µs,
V
BOOT
– V
BOOTLO
= 6.5 V,
2
Peak output
High-side source
V
HIGHDR
= 1.5 V (source) or 6 V (sink),
See Note 3
2
curren
t
(see Note 5)
Low-side sink
Duty Cycle < 2%,
TJ = 125°C,
tpw < 100 µs,
V
DRV
= 6.5 V,
2
A
Low-side source
V
LOWDR
= 1.5 V (source) or 5 V (sink),
See Note 3
2
High-side sink
T
= 125°C, V
– V
= 6.5 V,
3
Output
High-side source
J
,
BOOT BOOTLO
,
V
HIGHDR
= 6 V (source) or 0.5 V (sink)
45
resistance
(
see Note 5
)
Low-side sink
TJ = 125°C, V
DRV
= 6.5 V,
5.7
Ω
(see Note 5)
Low-side source
J DRV
V
LOWDR
= 6 V (source) or 0.5 V (sink)
45
NOTES: 3. This parameter is ensured by design and is not production tested.
5. The pullup/pulldown circuits of the drivers are bipolar and MOSFET transistors in parallel. The peak output current rating is the
combined current from the bipolar and MOSFET transistors. The output resistance is the R
ds(on)
of the MOSFET transistor when
the voltage on the driver output is less than the saturation voltage of the bipolar transistor.
supply current
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
V
CC
Supply voltage
range
11.4 12 13 V
V
INHIBIT
= 5 V,
VCC > 10.75 V at startup,
VID code ≠ 11111,
V
BOOTLO
= 0 V
3 10
V
CC
Quiescent
current
V
INHIBIT
= 5 V,
VCC > 10.75 V at startup,
C
HIGHDR
= 50 pF,
f
SWX
= 200 kHz,
VID code ≠ 11111,
V
BOOTLO
= 0 V,
C
LOWDR
= 50 pF,
See Note 3
5
mA
High-side
V
INHIBIT
= 0 V or VID code = 11111 or VCC < 9.25 V at startup,
V
BOOT
= 13 V, V
BOOTLO
= 0 V
80 µA
driver
quiescent
current
V
INHIBIT
= 5 V,
V
BOOT
= 13 V,
C
HIGHDR
= 50 pF,
VID code ≠ 11111, VCC > 10.75 V at startup,
V
BOOTLO
= 0 V,
f
SWX
= 200 kHz (see Note 3)
2 mA
NOTE 3: This parameter is ensured by design and is not production tested.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
12
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
switching characteristics over recommended operating virtual-junction temperature range,
V
CC
= 12 V, I
DRV
= 0 A (unless otherwise noted)
PARAMETER TEST CONDITIONS MIN TYP MAX UNIT
1.3 V ≤ V
VREF
≤ 3.5 V, 10 mV overdrive
(see Note 3)
150 250
VSENSE to HIGHDR or
LOWDR (excluding dead-
1.3 V ≤ V
VREF
≤ 3.5 V, 20 mV overdrive 200
ns
(g
time)
1.3 V ≤ V
VREF
≤ 3.5 V, 30 mV overdrive 190
Propagation delay
1.3 V ≤ V
VREF
≤ 3.5 V, 40 mV overdrive 180
gy
OCP comparator 1
OVP comparator
See Note 3
1
µs
PWRGD comparator 1
SLOWST comparator Overdrive = 10 mV (see Note 3) 560 900 ns
p
CL = 50 pF, V
BOOTLO
= 0 V 8
HIGHDR output
CL = 3 nF 35
Rise time
p
CL = 50 pF 8
ns
LOWDR output
CL = 3 nF 40
p
CL = 50 pF, V
BOOTLO
= 0 V TBD
HIGHDR output
CL = 3 nF 35
Fall time
p
CL = 50 pF TBD
ns
LOWDR output
CL = 3 nF 40
Deglitch time (Includes
p
p
p
OCP
2 5
comparator propagation
delay)
OVP
See Note 3
2 5
µ
s
V
HISENSE
= 12 V,
V
IOUTLO
pulsed from 12 V to 11.9 V,
100 ns rise/fall times (see Note 3)
2
Response time High-side VDS sensing
V
HISENSE
= 4.5 V,
V
IOUTLO
pulsed from 4.5 V to 4.4 V ,
100 ns rise/fall times (see Note 3)
3
µs
V
HISENSE
= 3 V,
V
IOUTLO
pulsed from 3 V to 2.9 V ,
100 ns rise/fall times (see Note 3)
3
Short-circuit protection
rising-edge delay
SCP LOSENSE = 0 V (see Note 3) 300 500 ns
Turnon/turnoff delay
VDS sensing sample/hold
switch
3 V ≤ V
HISENSE
≤ 11 V,
V
LOSENSE
= V
HISENSE
(see Note 3)
30 100 ns
Crossover delay time
LOWDR to HIGHDRV, and
LOHIB to LOWDR
See Note 3 30 100 ns
Prefilter pole frequency Hysteretic comparator See Note 3 5 MHz
Propagation delay LODRV See Note 3 400 ns
NOTE 3: This parameter is ensured by design and is not production tested.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
13
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
Figure 1
SLOWSTART TIME
vs
SLOWSTART CAPACITANCE
0.0001 0.0010
Slowstart Capacitance – µF
100
0
10
1
0.1
Slowstart Time – ms
V
(VREFB)
= 2 V
I
(VREFB)
= 100 µA
TJ = 25°C
0.0100 0.1000 1
Figure 2
SLOWSTART TIME
vs
SUPPLY CURRENT (VREFB)
110
ICC – Supply Current (VREFB) – µA
1000
1
10
Slowstart Time – ms
V
(VREFB)
= 2 V
CS = 0.1 µF
TJ = 25°C
100 1000
100
Figure 3
DRIVER
OUTPUT RISE TIME
vs
LOAD CAPACITANCE
CL – Load Capacitance – nF
– Rise Time – nst
r
1
10
100
1000
0.01 0.10 1.00 10.00 100.
0
High Side
Low Side
Tj = 27 °C
Figure 4
DRIVER
OUTPUT FALL TIME
vs
LOAD CAPACITANCE
1
10
100
1000
0.01 0.10 1.00 10.00 100.
0
CL – Load Capacitance – nF
High Side
Low Side
Tj = 27 °C
– Rise Time – nst
r

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
14
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
Figure 5
TJ – Junction Temperature – °C
OVP THRESHOLD
vs
JUNCTION TEMPERATURE
117
114
112
25 75
116
115
113
50 100 125
118
0
OVP Threshold – %
Figure 6
TJ – Junction Temperature – °C
OCP THRESHOLD VOLTAGE
vs
JUNCTION TEMPERATURE
99
95
25 75
103
101
97
50 100 125
105
0
OCP Threshold V oltage – mV
Figure 7
TJ – Junction Temperature – °C
INHIBIT START THRESHOLD VOLTAGE
vs
JUNCTION TEMPERATURE
2
1.9
25 75
2.05
1.95
50 100 125
2.1
0
Inhibit Start Threshold Voltage – V
Figure 8
TJ – Junction Temperature – °C
INHIBIT HYSTERESIS VOLTAGE
vs
JUNCTION TEMPERATURE
100
50
25 75
125
75
50 100 125
150
0
Inhibit Hysteresis Voltage – mV

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
15
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
Figure 9
TJ – Junction Temperature – °C
UVLO START THRESHOLD VOLTAGE
vs
JUNCTION TEMPERATURE
10
9
25 75
9.5
50 100 125
10.5
0
UVLO Start Threshold Voltage – V
VI = 12 V
Figure 10
TJ – Junction Temperature – °C
UVLO HYSTERESIS
vs
JUNCTION TEMPERATURE
1.9
1.5
25 75
2.3
2.1
1.7
50 100 125
2.5
0
UVLO Hysteresis – V
VI = 12 V
Figure 11
TJ – Junction Temperature – °C
QUIESCENT CURRENT
vs
JUNCTION TEMPERATURE
4
0
25 75
2
50 100 125
6
0
Quiescent Current – mA
VI = 12 V
Figure 12
TJ – Junction Temperature – °C
POWERGOOD THRESHOLD
vs
JUNCTION TEMPERATURE
92
90
25 75
94
93
91
50 100 125
95
0
Powergood Threshold – %

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
16
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
Figure 13
TJ – Junction Temperature – °C
SLOWSTART CHARGE CURRENT
vs
JUNCTION TEMPERATURE
12
10
25 75
14
13
11
50 100 125
15
0
Slow Start Charge Current – Aµ
V
(VREFB)
= 1.3 V
R
(VREFB)
= 20 kΩ
Figure 14
TJ – Junction Temperature – °C
DRIVER
REGULATOR VOLTAGE
vs
JUNCTION TEMPERATURE
8
7.5
25 75
8.25
7.75
50 100 125
8.5
0
Regulator Voltage – V
Figure 15
TJ – Junction Temperature – °C
DRIVER
HIGH-SIDE OUTPUT RESISTANCE
vs
JUNCTION TEMPERATURE
2
0
25 75
4
3
1
50 100 125
5
0
– High-Side Output Resistance – R
O
Ω
Figure 16
TJ – Junction Temperature – °C
DRIVER
LOW-SIDE OUTPUT RESISTANCE
vs
JUNCTION TEMPERATURE
4
0
25 75
2
50 100 125
6
0
– Low-Side Output Resistance – R
O
Ω

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
17
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
TYPICAL CHARACTERISTICS
TJ – Junction Temperature – °C
SENSING SAMPLE/HOLD RESISTANCE
vs
JUNCTION TEMPERATURE
50
0
25 75
75
25
50 100 125
100
0
– Sensing Sample/Hold Resistance – R
O
Ω
V
(HISENSE)
= 12 V
Figure 17

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
18
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
The following figure is a typical application schematic. The circuit can be divided into the power-stage section
and the control-circuit section. The power stage must be tailored to the input/output requirements of the
application. The control circuit is basically the same for all applications with some minor tweaking of specific
values. Table 2 shows the values of the power stage components for various output-current options.
1 uF
C1
1%
C8
2200 pF
ENABLE
1%
R4
2.55 k
1 uF
C3
C6
0.033 uF
10
LODRV
11
LOHIB
12
DRVGND
13
LOWDR
14
DRV
16
BOOT
17
HIGHDR
18
BOOTLO
19
HISENSE
15
VCC
23
VID4
24
VID3
25
VID2
26
VID1
27
VID0
22
INHIBIT
28
PWRGD
1
IOUT
9
BIAS
3
OCP
4
VHYST
6
VSENSE
5
VREFB
7
ANAGND
8
SLOWST
2
DROOP
20
LOSENSE
21
IOUTLO
U1
TPS5211
3.40 k
R1
GND
Control Section
Power Stage
12V
L101
Q102
LOSENSE
BOOTLO
12V
R102
C101
HIGHDRV
HISENSE
Q101
R101
DRVGND
Vo
L102
RTN
RTN
C102
+
C103
C104
R103
VSENSE
LOHIB
LODRV
VSENSE_HF
R9
4.32 k
R10
1.00 k
R11
10.0 k
1 uF
C2
R2
150
C4
1 uF
C5
0.1 uF
10.0 kR3
100
R5
20.0 k
R6
R7
3.92 k
1.00 k
R8
C7
1000pF
(see Note A)
NOTE A: VID0 – VID4 User – selected to set output voltage.
Figure 18. Standard Application Schematic

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
19
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
Table 2. Power Stage Components
12-V–Input Power Stage Components
Reference Designation
Function
4–A Out 8–A Out 12–A Out 20–A Out
C101 Input capacitor
muRata,
GRM235Y106Z016A,
2 x 10–uF , 16–V, Y5V
muRata,
GRM235Y106Z016A,
4 x 10–uF , 16–V, Y5V
muRata,
GRM235Y106Z016A,
6 x 10–uF , 16–V, Y5V
muRata,
GRM235Y106Z016A,
10 x 10–uF , 16–V, Y5V
C102 Snubber capacitor
muRata,
GRM39X7R102K050A,
1000–pF, 50–V, X7R
muRata,
GRM39X7R102K050A,
1000–pF, 50–V, X7R
muRata,
GRM39X7R102K050A,
2 x 1000–pF , 50–V, X7R
muRata,
GRM39X7R102K050A,
3 x 1000–pF , 50–V, X7R
C103
Output bulk
capacitor
Sanyo,
4TPC150M,
150–uF, 4–V, 20%
Sanyo,
4TPC150M,
2 x 150–uF , 4–V, 20%
Sanyo,
4TPC150M,
3 x 150–uF , 4–V, 20%
Sanyo,
4TPC150M,
4 x 150–uF , 4–V, 20%
C104
Output hi–freq
bypass capacitor
muRata,
GRM235Y106Z016A,
2 x 10–uF , 16–V, Y5V
muRata,
GRM235Y106Z016A,
4 x 10–uF , 16–V, Y5V
muRata,
GRM235Y106Z016A,
6 x 10–uF , 16–V, Y5V
muRata,
GRM235Y106Z016A,
8 x 10–uF , 16–V, Y5V
L101
Input filter
inductor
CoilCraft,
DO1607C–152,
1.5–uH, 2.1–A
CoilCraft,
DO1813HC–122,
1.2–uH, 4.4–A
CoilCraft,
DO1813HC–122,
1.2–uH, 4.4–A
CoilCraft,
DO3316P–152HC,
1.5–uH, 9.0–A
L102
Output filter
inductor
CoilCraft,
DO1813HCP–561,
0.56–uH, 6–A
CoilCraft,
DO3316P–681HC,
0.68–uH, 12–A
Vishay–Dale,
IHLP–5050CE–XX,
0.82–uH, 16–A,
New product
Vishay–Dale,
IHLP–5050CE–XX,
0.5–uH, 25–A,
New product
R101
High–side gate
resistor
10.0–Ohm,
1/16–W, 5%
10.0–Ohm,
1/16–W, 5%
2 x 10.0–Ohm,
1/16–W, 5%
2 x 10.0–Ohm,
1/16–W, 5%
R102
Lo–side gate
resistor
3.3–Ohm,
1/16–W, 5%
3.3–Ohm,
1/16–W, 5%
2 x 3.3–Ohm,
1/16–W, 5%
3 x 3.3–Ohm,
1/16–W, 5%
R103 Snubber resistor
2.7–Ohm,
1/10–W, 5%
2.7–Ohm,
1/10–W, 5%
2 x 2.7–Ohm,
1/10–W, 5%
3 x 2.7–Ohm,
1/10–W, 5%
Q101 Power switch
IR, IRF7811,
NMOS, 11–mOhm
IR, IRF7811,
NMOS, 11–mOhm
IR, 2 x IRF7811,
NMOS, 11–mOhm
IR, 2 x IRF7811,
NMOS, 11–mOhm
Q102 Synchronous switch
IR, IRF7811,
NMOS, 11–mOhm
IR, IRF7811,
NMOS, 11–mOhm
IR, 2 x IRF7811,
NMOS, 11–mOhm
IR, 2 x IRF7811,
NMOS, 11–mOhm
Nominal frequency
†
700 KHz
Hysteresis window 20 mV
†
Nominal frequency measured with Vo set to 2 V.
The values listed above are recommendations based on actual test circuits. Many variations of the above are
possible based upon the desires and/or requirements of the user. Performance of the circuit is equally, if not
more, dependent upon the layout than on the specific components, as long as the device parameters are not
exceeded. Fast-response, low-noise circuits require critical attention to the layout details. Even though the
operating frequencies of typical power supplies are relatively low compared to today’s microprocessor circuits,
the power levels and edge rates can cause severe problems both in the supply and the load. The power stage,
having the highest current levels and greatest dv/dt rates, should be given the greatest attention.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
20
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
frequency calculation
The simplified equation shown below can be used for a preliminary frequency calculation:
f
s
≅
V
REF
x(VI*
V
REF
)
VI
R11 C7 x Hysteresis Window
x0.85
(1)
High frequency operations require special attention not to exceed maxium current through the controller
(120mA), and the maximum total power dissipation.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
100
200
300
400
500
600
700
800
900
1000
1100
1200
1300
1400
Fmax D()
kHz
Fm D()
kHz
D
Fmax With
External Driver
Fmax With
Internal Driver
Figure 19
Another restriction relates to the maximum rms current through the output of the highside driver, (1 10mA.) The
maximum allowable operating frequency can be defined by the following equation:
Fmax
+
(
110mA)2
60ohm
)
Qg xǒVI)
Vdrv
Ǔ
(2)
Where Qg = Total gate charge of the upper FETs in the hysteretic converter (in nanocoulombs)
Vdrv = 8 V and is the drive regulator voltage of the TPS5211 controller
V
I
= Input voltage
Fmax = Maximum switching frequency in kHz
Figure 19 and equation (2) should be used to determine the maximum operating frequency of a converter. The
operating frequency should not exceed the lower of the two values determined by Figure 19 and equation (2).

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
21
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
Control Section
Below are the equations needed to select the various components within the control section.
output voltage selection
The most important function of the power supply is to regulate the output voltage to a specific value. Values
between 1.3 V and 3.5 V can be easily set by shorting the correct VID inputs to ground. Values above the
maximum reference voltage (3.5 V) can be set by setting the reference voltage to any convenient voltage within
its range and selecting values for R2 and R3 to give the correct output. Select R3:
R3 << than V
REF/IBIAS(VSENSE)
; a recommended value is 10 kΩ
Then, calculate R2 using:
VO+
V
REF
ǒ
1
)
R2
R3
Ǔ
R2
+
R3
ǒVO*
V
REF
Ǔ
V
REF
or
These equations are accurate if R2<<R1 1. If this condition is not fullfilled, the following equation must be used:
V
O
+
V
REF
ǒ
1
)
R2 x R11
R3 x (R2)R11)
Ǔ
Another soultion is to use 0.1-µF DC decoupling capacitor in series with R11. In such a case, R11 does not
influence the output voltage value.
R2 and R3 can also be used to make small adjusts to the output voltage within the reference-voltage range
and/or to adjust for load-current active droop compensation. If there is no need to adjust the output voltage, R3
can be eliminated. R2, R3 (if used), and C7 are used as a noise filter; calculate using:
C7
+
150 ns
ǒ
R2øR3
Ǔ
slowstart timing
Slowstart reduces the startup stresses on the power-stage components and reduces the input current surge.
Slowstart timing is a function of the reference-voltage current (determined by R6) and is independent of the
reference voltage. The first step in setting slowstart timing will be to determine R6:
R6 should be between 7 kΩ and 300 kΩ, a recommended value is 20 kΩ.
Set the slowstart timing using the formula:
C5
+
t
SS
ǒ
5 R
VREFB
Ǔ
≅
t
SS
(
5 R6
)
Where C5 = Slowstart capacitance in µF
tSS = Slowstart timing in µs
R
VREFB
= Resistance from VREFB to GND in ohms (≈ R6)

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
22
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
hysteresis voltage
A hysteretic controller regulates by self-oscillation, thus requiring a small ripple voltage on the VSENSE pin
which the input comparator uses for sensing. Once selected, the TPS5211 hysteresis is proportional to the
reference voltage; programming Vref to a new value automatically adjusts the hysteresis to be the same
percentage of Vref. Since the output current from VREFB should be less than 500 µA, the total divider resistance
(R5 + R6) should be greater than 7 KΩ. The hysteresis voltage should be no greater than 60 mV so R6 will
dominate the divider.
R5
R6
VHSYT
VREFB
Hysteresis Window = 2 × V
R5
Figure 20. Hysteresis Divider Circuit
The upper divider resistor, R5, is calculated using:
()
()
()
6
1002
6
2
5
0
0
R
V
R
WindowHysteresisVREFB
WindowHysteresis
R
HYST
×
×
≅×
–×
=
Where Hysteresis Window = The desired peak-to-peak hysteresis voltage
VREFB = Selected reference voltage
V
HYST
(%) = [(Hysteresis Window)/VREFB] * 100 < V
O(Ripple)(P–P)
(%)
current limit
Current limit can be implemented using the on-resistance of the upper FETs as the sensing elements. Select
R8:
()
Ω≤
×
≤<<
nA
V
I
V
R
OCPBias
OCP
10 k
100100
1.0
8
)(
(A recommended value is 1 kΩ)
The IOUT signal is used to drive the current limit and droop-circuit dividers. The voltage at IOUT at the output
current trip point will be:
()
I
NumFETs
TF
R
V
TripO
ONDS
TripIOUT
)(
)(
)(
2
×
××
=
Where NumFETS = Number of upper FETS in parallel
TF = R
DS(ON)
temperature correction factor
I
O(Trip)
= Desired output current trip level (A)

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
23
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
Calculate R7 using:
R7
+
ǒ
V
IOUT(Trip)
0.1 V
*
1Ǔ
R8
Note that since R
DS(ON)
of MOSFET s can vary from lot to lot and with temperature, tight current-limit control (less
than 1.5 x IO) using this method is not practical. If tight control is required, an external current-sense resistor
in series with the drain of the upper FET can be used with HISENSE and LOSENSE connected across the
resistor.
droop compensation
Active voltage droop positioning is used to reduce the output voltage range during load transients by increasing
the output voltage setpoint toward the upper tolerance limit during light loads and decreasing the voltage
setpoint toward the lower tolerance limit during heavy loads. This allows the output voltage to swing a greater
amount and still remain within the tolerance window. The maximum droop voltage is set with R9 and R10.
Select R10:
()
Ω≤
×
≤<<
nA
V
I
V
R
MaxDROOPBias
MinDROOP
1 k
100100
01.0
10
),(
)(
(Again, a value of 1 kΩ is recommended)
The voltage at IOUT during normal operation (0 to 100% load) will vary from 0 V up to:
()
I
NumFETs
TF
R
V
MaxO
ONDS
MaxIOUT
)(
)(
)(
2
×
××
=
Where I
O(Max)
= Maximum output load current (A).
droop compensation (continued)
Then, calculate R9:
R9
+
ǒ
V
IOUT(Max)
V
DROOP
*
1Ǔ
R10
Where V
DROOP
= Desired droop voltage
At full load, the output voltage will be:
V
O
+
V
REF
ǒ1
)
R2
R3
Ǔ
*
V
DROOP

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
24
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
using the TPS5211 when both 12 V and 5 V are available
When both 12 V and 5 V are available, several components can be removed from the basic schematic shown
in Figure 18. R1, R4, and C9 are no longer required if 5 V is brought in directly to INHIBIT and LODRV . However ,
if undervoltage lockout for the 5-V input is desired, R1 and R4 can be used to set the startup setpoint. The
INHIBIT pin trip level is 2.1 V. Select R4:
()
Ω≤
×
≤<<
k
nA
V
I
V
R
MaxINH
INH
210
100100
1.2
4
)(
Then, set the 5-V UVLO trip level with R1:
()
4
2
2
5
1
R
V
V
V
R
Trip
×
–
=
R1
R4
INHIBIT
LODRV
5 V IN
Figure 21. 5-V Input With UVLO

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
25
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
using the TPS5211 when only 5 V is available
The TPS5211 controller requires 12 V for internal control of the device. If an external source for 12 V is not
available, a small onboard source must be included in the design. A simple boost circuitry is described in TIs
application report AN452
Providing a DSP Power Solution from +5 V or +3.3 V only Systems.
T otal 12-V current
depends on switching frequency and power FETs gate charge characteristics. For reliable operation, this
current should not exceed 120 mA. The power stage is not voltage dependent, but component values must be
selected for 5-V inputs. The frequency of operation is dependent upon the power stage input voltage. A typical
5-V only application circuit is shown in Figure 22.
ENABLE
R4
11.0 k
C8
2200 pF
1%
12V
10.0 k
R1
1%
1 uF
C1
1 uF
C3
C6
0.033 uF
10
LODRV
11
LOHIB
12
DRVGND
13
LOWDR
14
DRV
16
BOOT
17
HIGHDR
18
BOOTLO
19
HISENSE
15
VCC
23
VID4
24
VID3
25
VID2
26
VID1
27
VID0
22
INHIBIT
28
PWRGD
1
IOUT
9
BIAS
3
OCP
4
VHYST
6
VSENSE
5
VREFB
7
ANAGND
8
SLOWST
2
DROOP
20
LOSENSE
21
IOUTLO
U1
TPS5211
R102
BOOTLO
LOSENSE
Q102
L101
GND
C101
HIGHDRV
Q101
R101
DRVGND
Power Stage
Control Section
HISENSE
5V
L102
RTN
RTN
C102
+
C103
C104
R103
VSENSE
LOHIB
LODRV
VSENSE_HF
R9 4.32 k
R10
1.00 k
1 uF
C2
R2
150
C4
1 uF
C5
0.1 uF
10.0 kR3
100
R5
20.0 k
R6
R7 3.92 k
1.00 k
R8
C7
1000pF
R11
7.5k
V
O
NOTE A: VID0 – VID4 User – selected to set output voltage.
(see Note A)
Figure 22. Typical 5-V-Only Application Circuit

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
26
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
controller operation
Operation of the TPS5211 controller differs from a regular hysteretic controller. The additional ramp signal
through the input of the hysteretic comparator is formed by R1 1 and C7. The two signals are summed through
the inputs of the comparator. The two signals are the ramp signal from R11 - C7 circuitry and the signal from
the output converter. By proper selection of R1 1 and C7, one can get the amplitude of an additional ramp signal
which is greater than the output ripple of the converter. As a result, the switching frequency is greater while the
output ripple becomes lower. The additional ramp signal and output ripple waveforms are shown in Figure 23.
The switching frequency now depends on R11 and C7 values and does not depend on the output filter
characteristics including ESR, ESL, and C of the output capacitor (see frequency calculation section).
The dc feedback signal from the output of the converter through resistor R2 controls the dc level of the output
voltage. Because the switching frequency of TPS5211 is high and it does not depend on output capacitor
characteristics, low cost cermic or film capacitors can be used in a dc to dc converter while having the same
load current transient response characteristics.
Additional Ramp-Signal
t
Output Ripple
(VHI – VLO) – Hysteresis Window
(V
MAX
– V
MIN
) – Overshoot
Because of Delays
V
HC
V
MAX
V
HI
V
REF
V
LO
V
MIN
VO
(P–P)
Figure 23. The Additional Ramp-Signal and Output Voltage Ripple Waveforms

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
27
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
application examples
Below are waveforms and test results measured on the EVM for a 12-V input and a 2-V , 20-A output application.
The output voltage ripple and power switches midpoints are shown in Figure 24. The converter operates at 450
kHz. The peak to peak output ripple is 9.6 mV , while the hysteresis window is set at 20 mV . Therefore, the output
ripple for converter with TPS5211 is much lower than the hysteresis window.
Output Voltage
Ripple (20 mV/div)
Low FET
Drain-Source
Voltage (5 V/div)
Figure 24. The Output Voltage Ripple ans Low FET Drain-Source Voltage Waveforms

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
28
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
The load current transient response waveforms are shown in Figure 25 to illustrate the excellent load current
transient response characteristics of TPS5211.
Output Voltage
(100 mV/div)
Load Current
(10 A/div)
Low FET
Drain-Source Voltage
(10 V/div)
Figure 25
The output voltage transient response of the converter with TPS521 1 controller. The load current has 14 A step
with slew rate of 30 A/µS.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
29
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
Comparison of TPS5210 and TPS5211 controller applications
The TPS5210 and TPS5211 hysteretic controllers have excellent load current transient response
characteristics, which is one of the most important advantages of hysteretic mode. There are specific
application areas where one of the hysteretic controllers is preferable over the other. The table below gives a
comparative view on application areas for the TPS5210 and TPS5211 controllers
comparison of TPS5210 and TPS5211 applications
Controller TPS5210 TPS5211
Switching frequency, kHz 100 – 400 400 – 700
Frequency variation Depends on outout filter characteristics
Independent of output filter and easy to
evaluate
Output current, A up to 40
up to 18 – 20 (can be increased in multiphase configuration)
Efficiency, % (depends on frequency, output current, Vin, Vout, components, etc.)
85 – 95 75 – 85
Input and output filter
Requires bulk electrolytic capacitors especially if Iout > 12A and larger inductor
Surface-mount ceramic and POSCAP
type capacitors and 40% – 65% smaller
inductors.
Component Cost 20% – 40% lower for TPS5211
System cost including reliability, power losses,
cooling, etc.
Can be estimated only during design for a given specific application.
Layout and design
Special attention to the noise sensitive
places such as the hysteresis comparator
and the sample hold circuitry.
Special attention not to exceed frequency
and lcc limits. The high frequency dc –
dc converter design rules should be
used.
Compatibility with the whole system
For high current applications, it is difficult to
meet high density minimum size requirements.
A dc – dc converter can be placed close
to the microprocessor or DSP to de-
crease the number of decoupling capaci-
tors.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
30
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
APPLICATION INFORMATION
layout guidelines
Good power supply results will only occur when care is given to proper design and layout. Layout will affect noise
pickup and generation and can cause a good design to perform with less than expected results. With a range
of currents from milliamps to tens or even hundreds of amps, good power supply layout is much more difficult
than most general PCB design. The general design should proceed from the switching node to the output, then
back to the driver section, and, finally, to placing the low-level components. Below are several specific points
to consider
before
layout of a TPS5211 design begins.
1. All sensitive analog components should be referenced to ANAGND. These include components connected
to SLOWST, DROOP, IOUT, OCP, VSENSE, VREFB, VHYST, BIAS, and LOHIB.
2. Analog ground and drive ground should be isolated as much as possible. Ideally , analog ground will connect
to the ground side of the bulk storage capacitors on V
O
, and drive ground will connect to the main ground
plane close to the source of the low-side FET.
3. Connections from the drivers to the gate of the power FETs, should be as short and wide as possible to
reduce stray inductance. This becomes more critical if external gate resistors are not being used.
4. The bypass capacitor for the DRV regulator should be placed close to the TPS5210 and be connected to
DRVGND.
5. The bypass capacitor for VCC should be placed close to the TPS5210 and be connected to DRVGND.
6. When configuring the high-side driver as a floating driver , the connection from BOOTLO to the power FET s
should be as short and as wide as possible. The other pins that also connect to the power FETs, LOHIB
and LOSENSE, should have a separate connection to the FETS since BOOTLO will have large peak
currents flowing through it.
7. When configuring the high-side driver as a floating driver , the bootstrap capacitor (connected from BOOT
to BOOTLO) should be placed close to the TPS5210.
8. When configuring the high-side driver as a ground-referenced driver, BOOTLO should be connected to
DRVGND.
9. The bulk storage capacitors across V
I
should be placed close to the power FETS. High-frequency bypass
capacitors should be placed in parallel with the bulk capacitors and connected close to the drain of the
high-side FET and to the source of the low-side FET.
10. High-frequency bypass capacitors should be placed across the bulk storage capacitors on VO.
11. HISENSE and LOSENSE should be connected very close to the drain and source, respectively, of the
high-side FET. HISENSE and LOSENSE should be routed very close to each other to minimize
differential-mode noise coupling to these traces. Ceramic decoupling capacitors should be placed close to
where HISENSE connects to Vin, to reduce high-frequency noise coupling on HISENSE.

TPS5211
HIGH FREQUENCY PROGRAMMABLE HYSTERETIC
REGULATOR CONTROLLER
SLVS243 – SEPTEMBER 1999
31
POST OFFICE BOX 655303 • DALLAS, TEXAS 75265
MECHANICAL DATA
PWP (R-PDSO-G**) PowerPAD PLASTIC SMALL-OUTLINE PACKAGE
4073225/E 03/97
0,50
0,75
0,25
0,15 NOM
Thermal Pad
(See Note D)
Gage Plane
2824
7,70
7,90
20
6,40
6,60
9,60
9,80
6,60
6,20
11
0,19
4,50
4,30
10
0,15
20
A
1
0,30
1,20 MAX
1614
5,10
4,90
PINS **
4,90
5,10
DIM
A MIN
A MAX
0,05
Seating Plane
0,65
0,10
M
0,10
0°–8°
20-PIN SHOWN
NOTES: A. All linear dimensions are in millimeters.
B. This drawing is subject to change without notice.
C. Body dimensions do not include mold flash or protrusions.
D. The package thermal performance may be enhanced by bonding the thermal pad to an external thermal plane. This pad is electrically
and thermally connected to the backside of the die and possibly selected leads.
E. Falls within JEDEC MO-153
PowerPAD is a trademark of Texas Instruments Incorporated.

IMPORTANT NOTICE
T exas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue
any product or service without notice, and advise customers to obtain the latest version of relevant information
to verify, before placing orders, that information being relied on is current and complete. All products are sold
subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those
pertaining to warranty, patent infringement, and limitation of liability.
TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in
accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent
TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily
performed, except those mandated by government requirements.
CERT AIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF
DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL
APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR
WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER
CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICA TIONS IS UNDERSTOOD T O
BE FULLY AT THE CUSTOMER’S RISK.
In order to minimize risks associated with the customer’s applications, adequate design and operating
safeguards must be provided by the customer to minimize inherent or procedural hazards.
TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent
that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other
intellectual property right of TI covering or relating to any combination, machine, or process in which such
semiconductor products or services might be or are used. TI’s publication of information regarding any third
party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.
Copyright 1999, Texas Instruments Incorporated
 Loading...
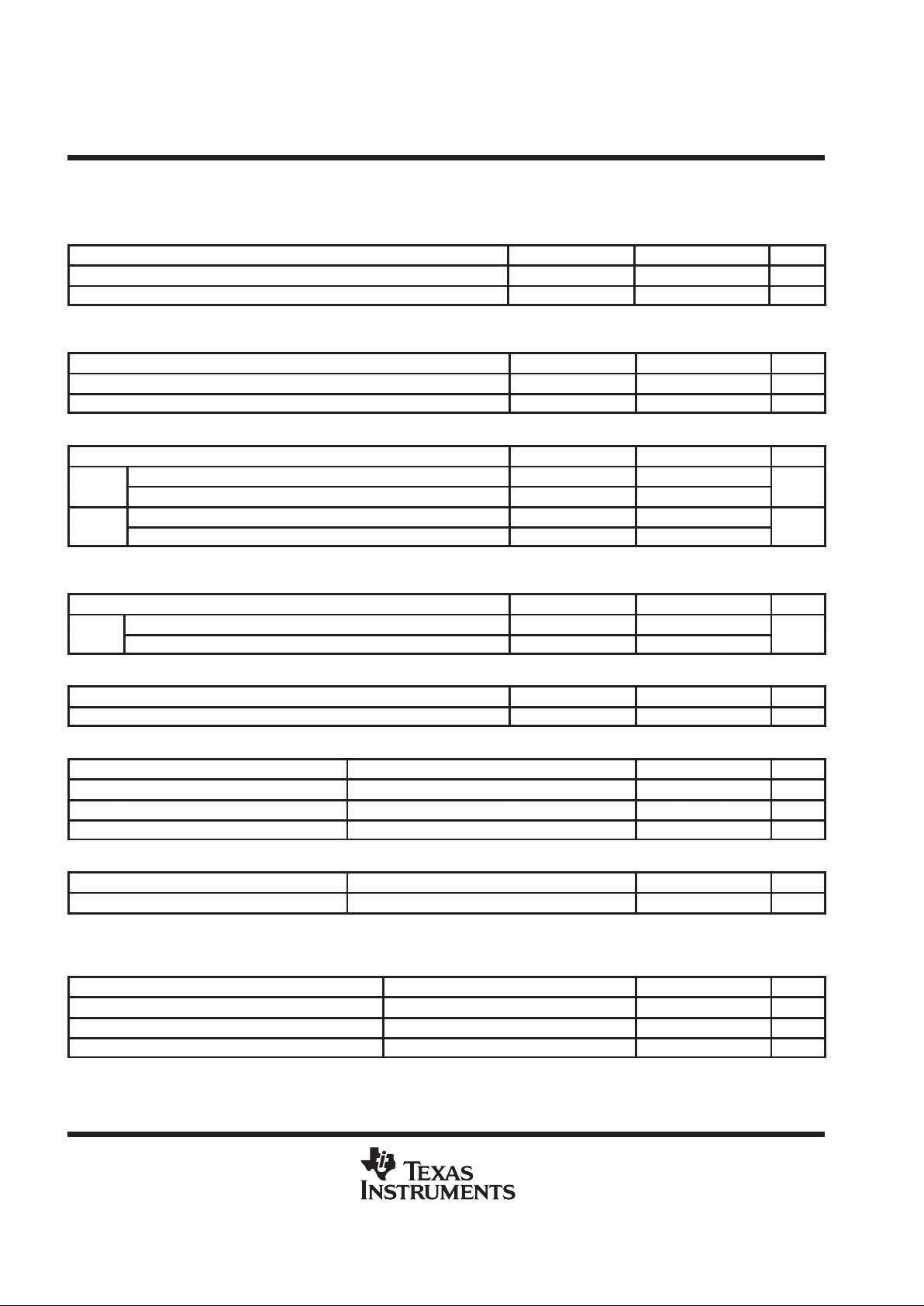
Loading...