

Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of Texas Instruments
www.ti.com
SLAS412− DECEMBER 2003
FEATURES
D Low Power High Quality Audio Codec
D Stereo Audio DAC and Mono Audio ADC
Support Rates up to 48 ksps
D High Quality 97-dBA Stereo Audio Playback
Performance
D Low Power: 11-mW Stereo Audio Playback at
48 ksps
D On-Chip 325-mW, 8- Speaker Driver
D Stereo Headphone Amplifier With Capless
Output Option
D Microphone Preamp and Hardware Automatic
Gain Control
D Integrated PLL for Flexible Audio Clock
Generation
D Programmable Digital Audio
Bass/Treble/EQ/De-Emphasis
D Direct Battery Measurement Accepts up to
6-V Input
D On-Chip Temperature Measurement
D SPI and I
2
S Serial Interface
D Full Power-Down Control
D 32-Pin 5y5 mm QFN Package
DESCRIPTION
The TLV320AIC26 is a high-performance audio codec with
16/20/24/32-bit 97-dBA stereo playback, mono record
functionality at up to 4 8 k s p s . A microphone input includes
built-in preamp and hardware automatic gain control, with
single-ended or fully-differential input capability.
The audio output drivers on the ’AIC26 are highly flexible,
having software-programmable low or high-power drive
modes to optimize system power dissipation. The outputs
can be configured to supply up to 325 mW into a bridge
terminated 8-Ω load, can support stereo 16-Ω headphone
amplifiers in ac-coupled or capless output configurations,
and can supply a stereo line-level output
A programmable digital audio effects processor enables
bass, treble, midrange, or equalization playback
processing. The digital audio data format is programmable
to work with popular audio standard protocols (I
Left/Right Justified) in master or slave mode, and also
includes an on-chip programmable PLL for flexible clock
generation capability. Highly configurable software power
control is provided, enabling stereo audio playback at 48
ksps at 11 mW with a 3.3-V analog supply level.
2
S, DSP,
APPLICATIONS
D Cellular and Smart Phones
D MP3 Players
D Digital Still Cameras
D Digital Video Camcorders
semiconductor products and disclaimers thereto appears at the end of this data sheet.
SPI is a trademark of Motorola.
I2S is a trademark of Phillips Electronics.
!"#$%&" ' ()##*& %' "! +),-(%&" .%&*/ #".)(&'
("!"#$ &" '+*(!(%&"' +*# &0* &*#$' "! *1%' '&#)$*&' '&%.%#. 2%##%&3/
#".)(&" +#"(*''4 ."*' "& *(*''%#-3 (-).* &*'&4 "! %-- +%#%$*&*#'/
The ’AIC26 offers a 12-bit measurement ADC and internal
reference voltage, as well as two battery measurement
inputs capable of reading battery voltages up to 6 V, while
operating at an analog supply as low as 2.7 V. It includes
an on-chip temperature sensor capable of reading 0.3°C
resolution. The ’AIC26 is available in a 32 lead QFN.
Copyright 2003, Texas Instruments Incorporated
TLV320AIC26
QFN-32
RHB
−40°C to 85°C
www.ti.com
SLAS412− DECEMBER 2003
This integrated circuit can be damaged by ESD. Texas Instruments recommends that all integrated circuits be handled with appropriate
precautions. Failure to observe proper handling and installation procedures can cause damage.
ESD damage can range from subtle performance degradation to complete device failure. Precision integrated circuits may be more susceptible to
damage because very small parametric changes could cause the device not to meet its published specifications.
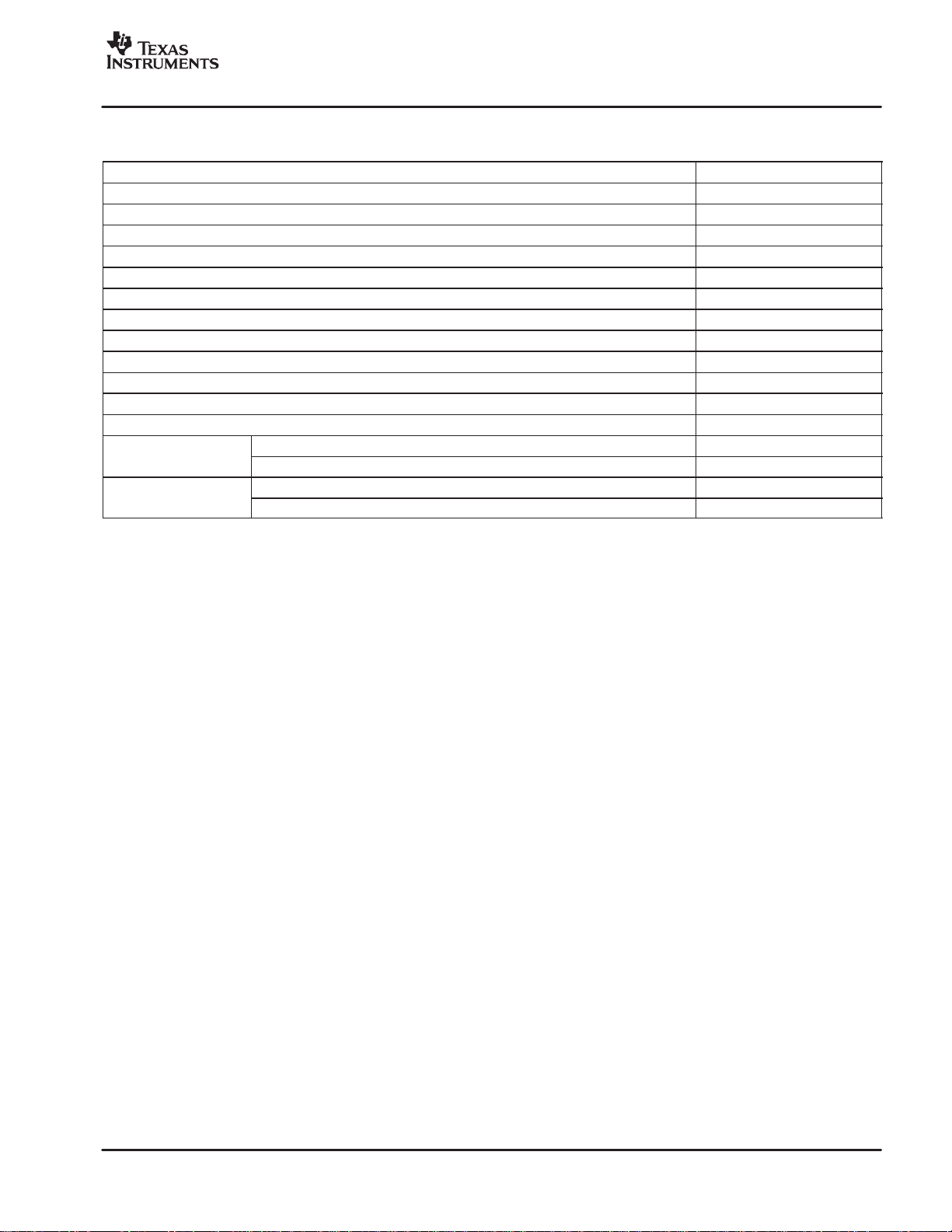
PACKAGE/ORDERING INFORMATION
PRODUCT PACKAGE
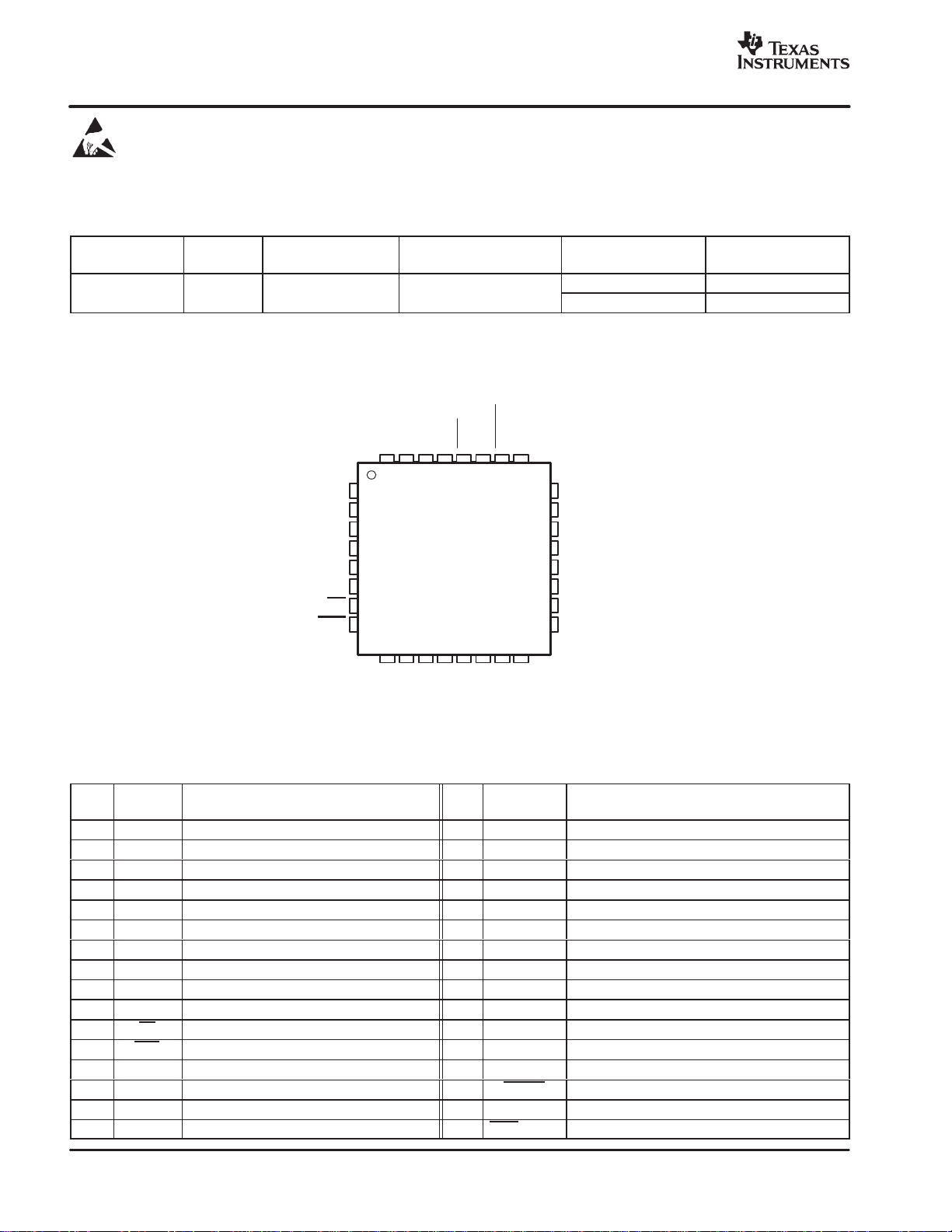
PIN ASSIGNMENTS
PACKAGE
DESIGNATOR
DVSS
IOVDD
MCLK
SCLK
MISO
MOSI
SS
DAV
DVDD
32 26
1
2
3
4
5
6
7
8
910
OPERATING
TEMPERATURE RANGE
BCLK
DOUT
DIN
PWD/ADWS
LRCK
RESET16HPR
31 30 29 28 27
AIC26
11 12 13 14 15
25
ORDERING NUMBER
TLV320AIC26IRHB Tubes, 74
TLV320AIC26IRHBR Tape and Reel, 3000
QFN(TOP VIEW)
24
DRVDD
23
VGND
22
DRVSS
21
HPL
20
AVDD
19
NC
18
NC
17
NC
TRANSPORT MEDIA,
QUANTITY
AUX
MICIN
VBAT2
VBAT1
AVSS
VREF
NC
MICBIAS
Terminal Functions
QFN
PIN
NAME DESCRIPTION
29 DIN Audio data input 13 VBAT1 Battery monitor input
30 DOUT Audio data output 14 VREF Reference voltage I/O
31 BCLK Audio bit−clock 15 AVSS Analog ground
32 DVDD Digital core supply 16 NC No connect
1 DVSS Digital core and IO ground 17 NC No connect
2 IOVDD IO supply 18 NC No connect
3 MCLK Master clock 19 NC No connect
4 SCLK SPI serial clock input 20 AVDD Analog power supply
5 MISO SPI serial data output 21 HPL Left channel audio output
6 MOSI SPI serial data input 22 DRVSS Speaker ground
7 SS SPI slave select input 23 VGND V irtual ground for audio output
8 DAV Auxiliary data available output 24 DRVDD Speaker /PLL supply
9 MICBIAS Microphone bias voltage 25 HPR Right channel audio output
10 MICIN Microphone input 26 RESET Device reset
11 AUX Auxiliary input 27 LRCK Audio DAC word-clock
12 VBAT2 Battery monitor input 28 PWD/ADWS Hardware powerdown/ADC word clock
QFN
PIN
NAME DESCRIPTION
2
www.ti.com
QFN package
Lead temperature
SLAS412− DECEMBER 2003
ABSOLUTE MAXIMUM RATINGS
over operating free-air temperature range unless otherwise noted
AVDD to AVSS −0.3 V to 3.9 V
DRVDD to DRVSS −0.3 V to 3.9 V
IOVDD to DVSS −0.3 V to 3.9 V
DVDD to DVSS −0.3 V to 2.5 V
AVDD to DRVDD −0.1 V to 0.1 V
AVSS to DR VSS to DVSS −0.1 V to 0.1 V
Analog inputs (except VBAT1 and VBAT2) to AVSS −0.3 V to AVDD + 0.3 V
VBAT1 / VBAT2 to AVSS −0.3 V to 6 V
Digital input voltage to DVSS −0.3 V to IOVDD + 0.3 V
Operating temperature range −40°C to 85°C
Storage temperature range −65°C to 105°C
Junction temperature (TJ Max) 105°C
Power dissipation (TJ Max − TA)/θ
θ
Thermal impedance 123°C/W
JA
Soldering vapor phase (60 sec) 215°C
Infrared (15 sec) 220°C
(1)
Stresses beyond those listed under “absolute maximum ratings” may cause permanent damage to the device. These are stress ratings only , a nd
functional operation of the device at these or any other conditions beyond those indicated under “recommended operating conditions” is not
implied. Exposure to absolute-maximum-rated conditions for extended periods may affect device reliability.
(2)
If the ’AIC26 is used to drive high power levels to an 8-Ω load for extended intervals at ambient temperatures above 70°C, multiple vias should be
used to electrically and thermally connect the thermal pad on the QFN package to an internal heat-dissipating ground plane on the user’s PCB.
(1)(2)
UNITS
JA
3
Voltage
www.ti.com
SLAS412− DECEMBER 2003
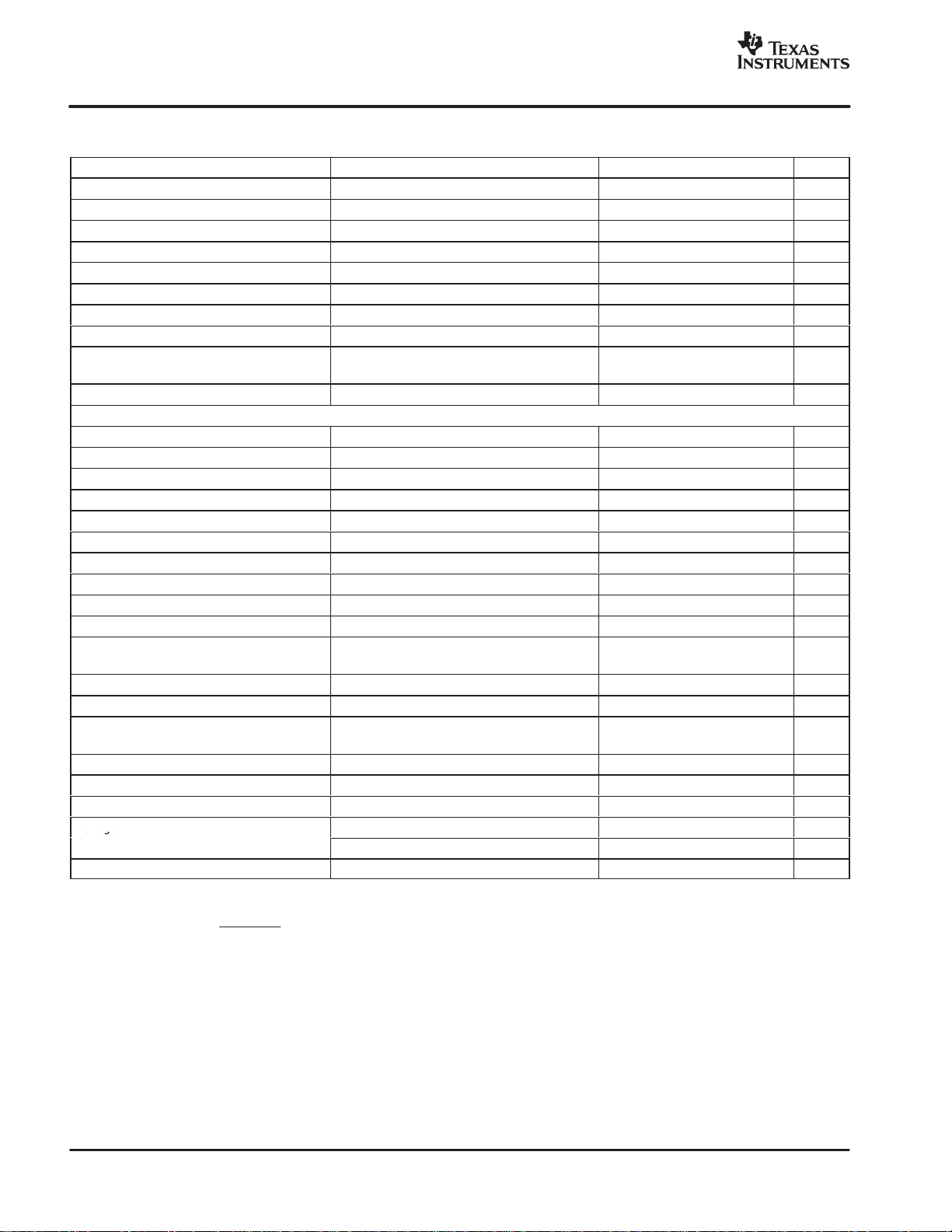
ELECTRICAL CHARACTERISTICS
At +25°C, AVDD,DRVDD,IOVDD = 3.3 V, DVDD = 1.8 V, Int. V
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
BATTERY MONITOR INPUTS
Input voltage range 0.5 6.0 V
Input leakage current Battery conversion not selected ±1 µA
AUXILIARY A/D CONVERTER
Resolution Programmable: 8-, 10-,12-bits 12 Bits
No missing codes 12-bit resolution 11 Bits
Integral nonlinearity −5 5 LSB
Offset error −6 6 LSB
Gain error
Noise 53 µVrms
AUDIO CODEC
ADC DECIMATION FILTER Sample rate of 48 ksps
Filter gain from 0 to 0.39Fs ±0.1 dB
Filter gain at 0.4125Fs −0.25 dB
Filter gain at 0.45Fs −3 dB
Filter gain at 0.5Fs −17.5 dB
Filter gain from 0.55Fs to 64Fs −75 dB
Filter group delay 17/Fs sec
MICROPHONE INPUT TO ADC 1 kHz sine wave input, Fs = 48 ksps
Full scale input voltage (0 dB) By design, not tested in production 0.707 Vrms
Input common mode By design, not tested in production 1.35 V
SNR
THD 0.63-Vrms input, 0-dB gain −89 −72 dB
PSRR 1 kHz, 100 mVpp on AVDD.
Mute attenuation Output code with 0.63-Vrms sine wave input at
Input resistance 20 kΩ
Input capacitance 10 pF
MICROPHONE BIAS
Voltage D4 = 0 control register 05H/Page2 2.5 V
Sourcing current 4.7 mA
(1)
ADC PSRR measurement is calculated as:
VSIG
PSRR + 20 log
10
ǒ
V
ADCOUT
sup
Ǔ
Calculated with effect of internal reference
variation removed.
Measured as idle channel noise, 0-dB gain,
A-weighted
1 kHz
D4 = 1 control register 05H/Page2 2.0 V
= 2.5 V , Fs (Audio) = 48 kHz, unless otherwise noted
ref
−6 6 LSB
80 92 dBA
(1)
57 dB
0000H
4
THD
www.ti.com
SLAS412− DECEMBER 2003
ELECTRICAL CHARACTERISTICS
At +25°C, AVDD,DRVDD,IOVDD = 3.3 V, DVDD = 1.8 V, Int. V
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
DAC INTERPOLATION FILTER
Pass band 20 0.45 Fs Hz
Pass band ripple ±0.06 dB
Transition band 0.45 Fs 0.5501 Fs Hz
Stop band 0.5501 Fs 7.455 Fs Hz
Stop band attenuation 65 dB
Filter group delay 21/Fs sec
De−emphasis error ±0.1 dB
DAC LINE OUTPUT
Full scale output voltage (0 dB) By design, D10−D9 = 00 in control register
Output common mode By design, D10−D9 = 00 in control register
SNR Measured as idle channel noise, A-weighted 85 97 dBA
THD 0-dB FS input, 0-dB gain −95 dB
PSRR 1 kHz, 100 mVpp on AVDD
Interchannel isolation Coupling from ADC to DAC 84 dB
DAC HEADPHONE OUTPUT 1-kHz sine wave input, 48 ksps, output drivers
Full scale output voltage (0 dB) By design, D10−D9 = 00 in control register
SNR Measured as idle channel noise, A-weighted 85 97 dBA
THD −1 dB FS input, 0-dB gain −91 −55 dB
PSRR 1 kHz, 100 mVpp on AVDD
Interchannel isolation Coupling from ADC to DAC 85 dB
Mute attenuation 121 dB
Maximum output power D10−D9 = 00 in control register 06H/Page2 30 mW
Digital volume control gain −63.5 0 dB
Digital volume control step size 0.5 dB
Channel separation Between HPL and HPR 80 dB
DAC SPEAKER OUTPUT Output driver in high power mode,
Output power 0 dB input to DAC 325 mW
SNR Measured as idle channel noise, A-weighted 102 dBA
THD −1 dB FS input, 0-dB gain −86 dB
(1)
DAC PSRR measurement is calculated as:
1-kHz sine wave input, 48 ksps, output drivers
in low power mode, load = 10 kΩ, 10 pF
06H/Page2 corresponding to 2-VPP output
swing
06H/Page2 corresponding to 2-VPP output
swing
down
in high power mode, load = 16 Ω, 10 pF
06H/Page2 corresponding to 2-VPP output
swing
down
load = 8 Ω,, connected between HPR and HPL
pins. D10−D9 = 10 in control register
06H/Page2 corresponding to 2.402-VPP output
swing
−6 dB FS input, 0-dB gain −88 dB
= 2.5 V , Fs (Audio) = 48 kHz, unless otherwise noted (continued)
ref
0.707 Vrms
1.35 V
(2)
VGND powered
(1)
VGND powered
56 dB
0.707 Vrms
54 dB
PSRR + 20 log
10
ǒ
VSIG
V
HPRńL
sup
Ǔ
5
Voltage range
V
48 ksps, output drivers in low
Stereo audio playback
power mode, VGND off, PLL
mA
Microphone record
48 ksps, no playback, PLL off
mA
PLL
when PLL is enabled.
mA
VGND
when VGND is powered.
mA
www.ti.com
SLAS412− DECEMBER 2003
ELECTRICAL CHARACTERISTICS
At +25°C, AVDD,DRVDD,IOVDD = 3.3 V, DVDD = 1.8 V, Int. V
PARAMETER TEST CONDITIONS MIN TYP MAX UNITS
VOLTAGE REFERENCE
VREF output programmed as 2.5 V 2.3 2.5 2.7
VREF output programmed as 1.25 V 1.15 1.25 1.35
Voltage range External VREF. By design, not tested in
production.
Reference drift Internal VREF = 1.25 V 29 ppm/°C
Current drain
DIGITAL INPUT / OUTPUT
Internal clock frequency 8.8 MHz
Logic family
Logic level: V
Capacitive load 10 pF
POWER SUPPLY REQUIREMENTS
Power supply voltage
(2)
AVDD
DRVDD
IOVDD 1.1 3.6 V
DVDD 1.525 1.95 V
Stereo audio playback
Microphone record
PLL
VGND
Hardware power down All currents 2 µA
(1)
Internal oscillator is designed to give nominally 8-MHz clock frequency. However, due to process variations, this frequency can vary from device
to device. All calculations for delays and wait times in the data sheet assume an 8-MHz oscillator clock.
(2)
It is recommended that AVDD and DRVDD be set to the same voltage for the best performance. It is also recommended that these supplies be
separated on the user’s PCB.
(2)
IH
V
IL
V
OH
V
OL
(1)
Extra current drawn when the internal
reference is turned on.
IIH = +5 µA 0.7xIOVDD V
IIL = +5 µA −0.3 0.3xIOVDD V
IOH = 2 TTL loads 0.8xIOVDD V
IOL = 2 TTL loads 0.1xIOVDD V
IAVDD
IDRVDD
IDVDD
IAVDD 2.9
IDRVDD
IDVDD
IAVDD
IDRVDD
IDVDD
IAVDD
IDRVDD
IDVDD
= 2.5 V , Fs (Audio) = 48 kHz, unless otherwise noted (continued)
ref
1.2 2.55 V
650 µA
CMOS
2.7 3.6 V
2.7 3.6 V
2.2
power mode, VGND off, PLL
off
48 ksps, no playback, PLL off
Additional power consumed
Additional power consumed
0
2.4
0
1.4
0.1
1.3
0.9
0.3
0.9
0
mA
mA
mA
mA
6
www.ti.com
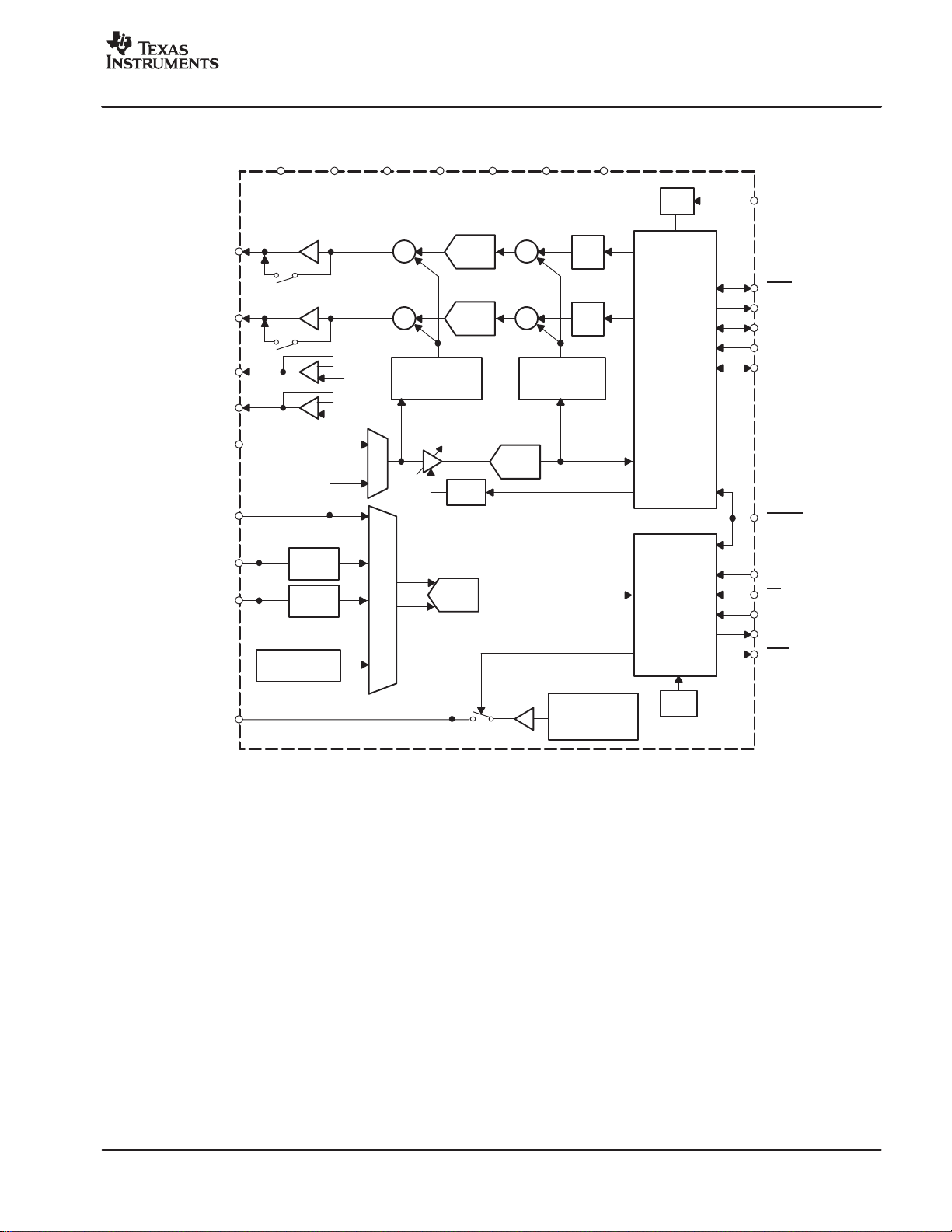
FUNCTIONAL BLOCK DIAGRAM
DRVDD DRVSS AVDD AVSS DVDD DVSS IOVDD
SLAS412− DECEMBER 2003
HPR
HPL
VGND
MICBIAS
MICIN
AUX
VBAT1
VBAT2
Headphone Driver
Headphone Driver
Battery
Monitor
Battery
Monitor
Temperature
Measurement
DAC CM
2.5 V/2 V
Σ Σ
Σ Σ
Analog Volume
Control −34.5 to
(0.5 dB Steps)
∑−∆
DAC
∑−∆
DAC
12 dB
0 to 59.5 dB
∑−∆
ADC
AGC
SAR
ADC
0 to −63.5 dB
(0.5 dB Steps)
Vol
Ctl
Vol
Ctl
Sidetone
−48 to 0 dB
1.5 dB Steps
PLL
Digital
Audio
Processing
and
Serial
Interface
SPI
Interface
MCLK
PWD
DOUT
LRCK
DIN
BCLK
RESET
SCLKSSSCLK
MOSI
MISO
DAV
/ADWS
VREF
Internal 2.5 V/
1.25 V
Reference
OSC
7
PARAMETER
UNITS
SLAS412− DECEMBER 2003
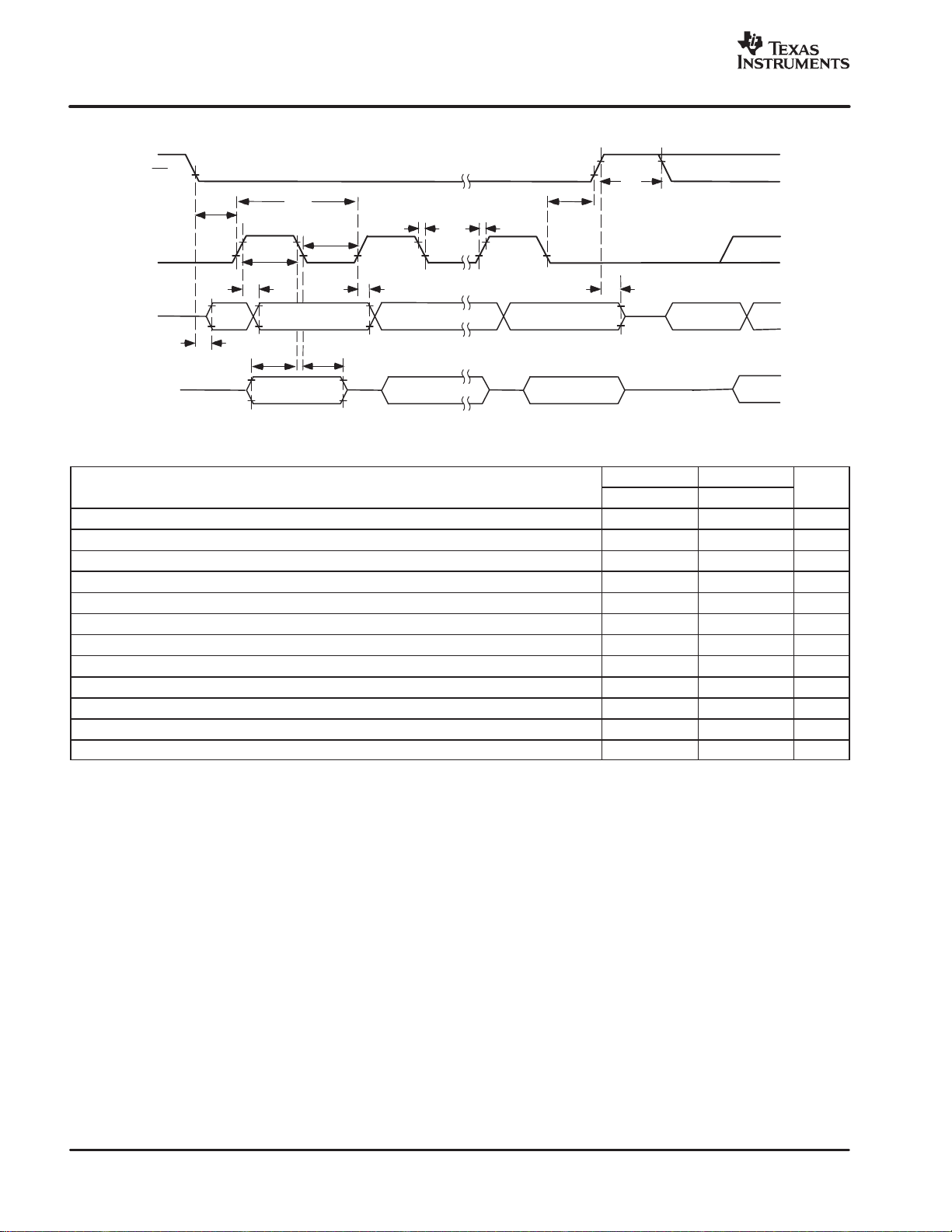
SPI TIMING DIAGRAM
www.ti.com
SS
t
sck
t
t
t
wsck
t
t
su
MSB OUT BIT . . . 1 LSB OUT
wsck
v
MSB OUT BIT . . . 1 LSB OUT
t
hi
f
t
ho
SCLK
MISO
MOSI
t
Lead
t
a
TYPICAL TIMING REQUIREMENTS
All specifications at 25°C, DVDD = 1.8 V
t
wsck
t
Lead
t
Lag
t
td
t
a
t
dis
t
su
t
hi
t
ho
t
v
t
r
t
f
(1)
These parameters are based on characterization and are not tested in production.
SCLK pulse width 27 18 ns
Enable lead time 18 15 ns
Enable lag time 18 15 ns
Sequential transfer delay 18 15 ns
Slave MISO access time 18 15 ns
Slave MISO disable time 18 15 ns
MOSI data setup time 6 6 ns
MOSI data hold time 6 6 ns
MISO data hold time 4 4 ns
MISO data valid time 22 13 ns
Rise time 6 4 ns
Fall time 6 4 ns
(1)
t
t
Lag
t
r
td
t
dis
IOVDD = 1.1 V IOVDD = 3.3 V
MIN MAX MIN MAX
8
www.ti.com
PARAMETER
UNITS
PARAMETER
UNITS
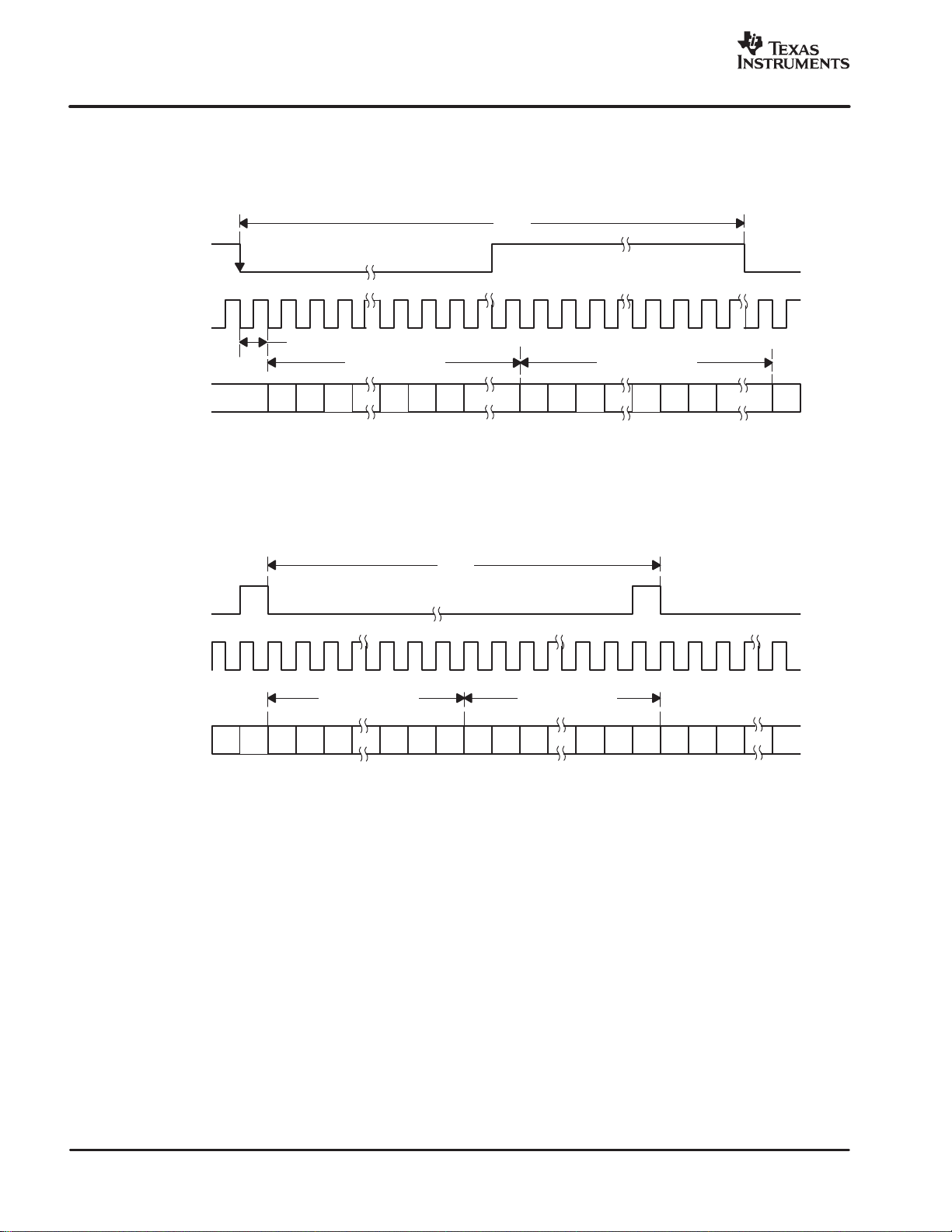
AUDIO INTERFACE TIMING DIAGRAMS
LRCK/ADWS
td (WS)
BCLK
SLAS412− DECEMBER 2003
td (DO−WS)
DOUT
DIN
td (DO−BCLK)
ts (DI) th (DI)
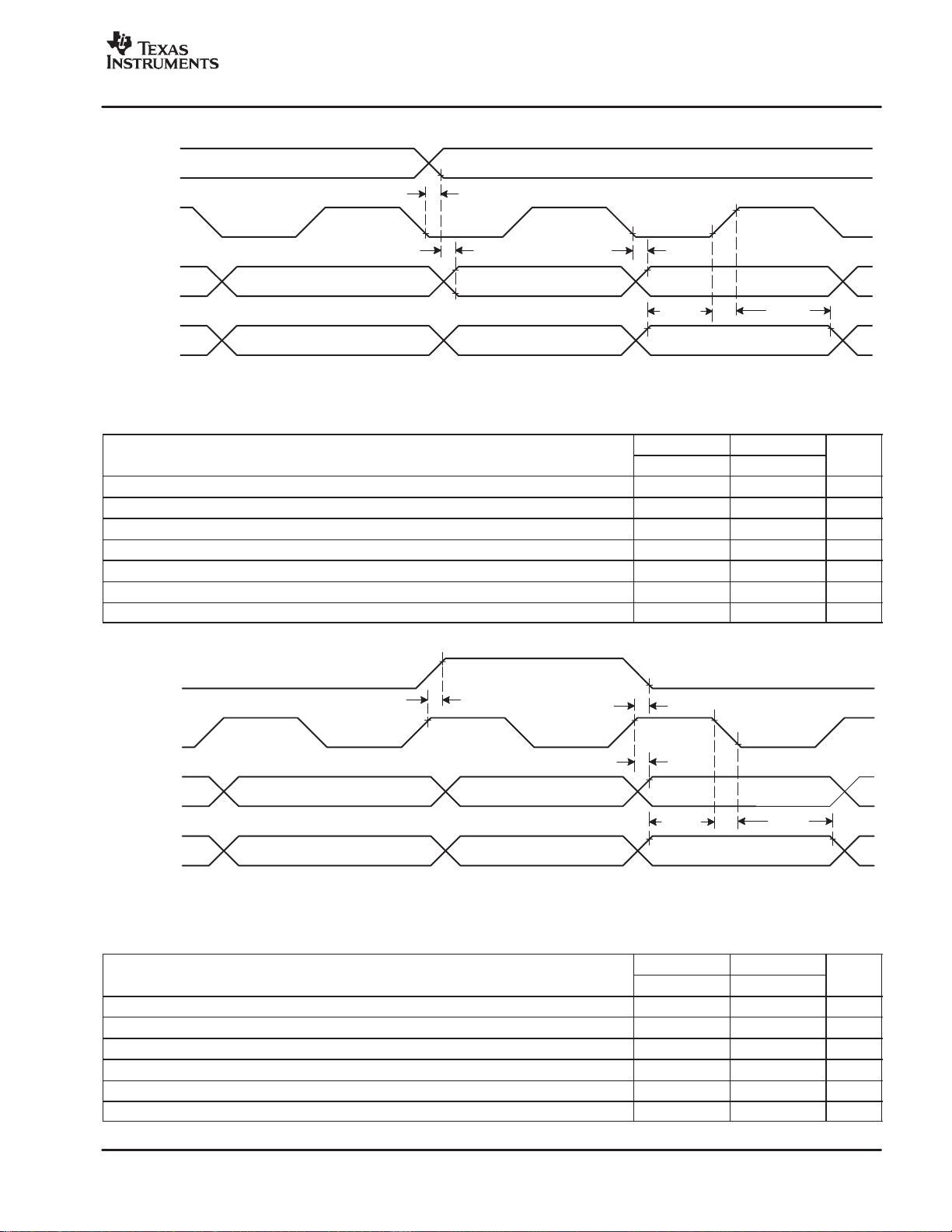
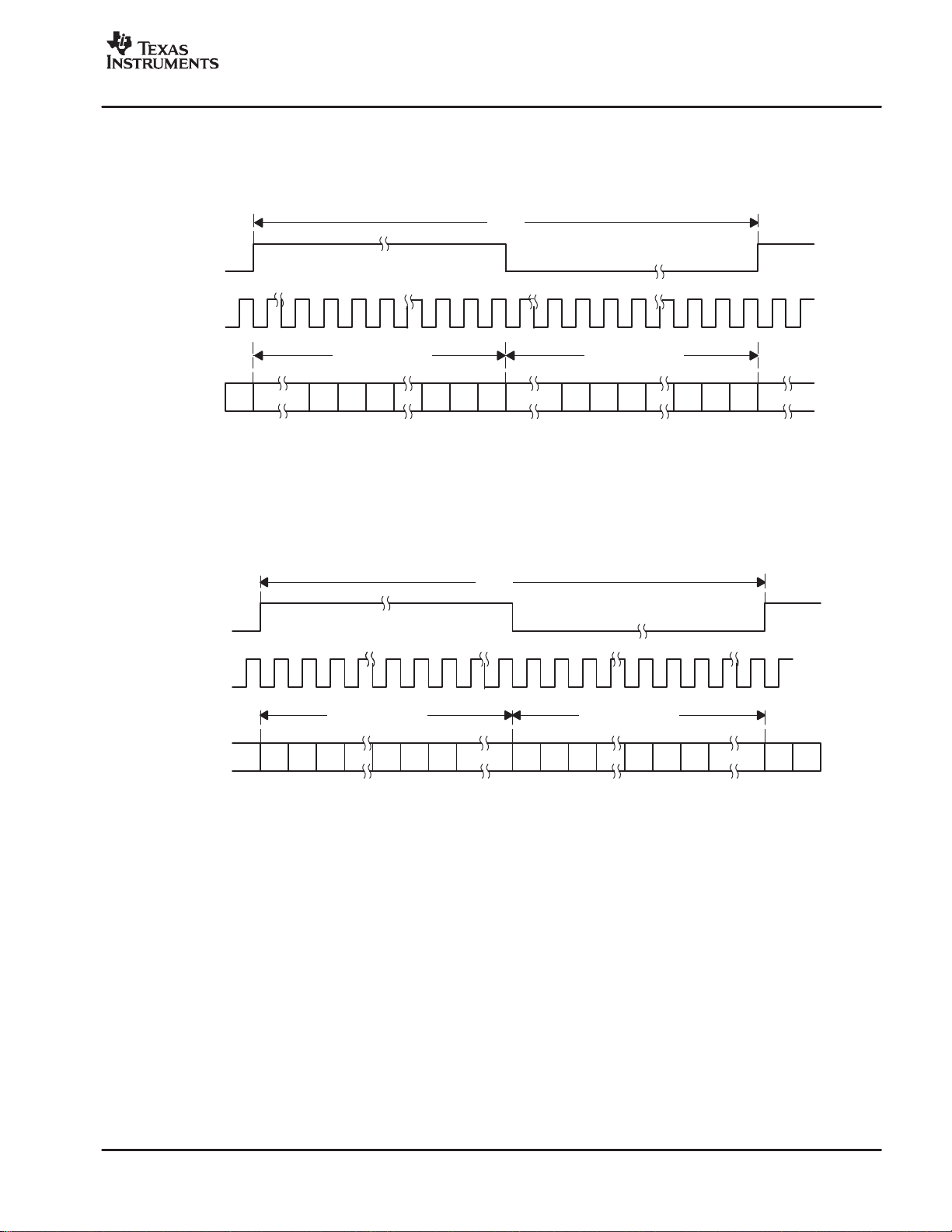
Figure 1. I2S/LJF/RJF Timing in Master Mode
TYPICAL TIMING REQUIREMENTS (FIGURE 1)
All specifications at 25°C, DVDD = 1.8 V
td (WS) ADWS/LRCK delay 25 15 ns
td (DO−WS) ADWS to DOUT delay (for LJF mode) 25 15 ns
td (DO−BCLK) BCLK to DOUT delay 25 15 ns
ts(DI) DIN setup 6 6 ns
th(DI) DIN hold 6 6 ns
t
r
t
f
(1)
These parameters are based on characterization and are not tested in production.
LRCK/ADWS
BCLK
Rise time 10 6 ns
Fall time 10 6 ns
(1)
td (WS)
IOVDD = 1.1 V IOVDD = 3.3 V
MIN MAX MIN MAX
td (WS)
td (DO−BCLK)
DOUT
ts (DI)
DIN
th (DI)
Figure 2. DSP Timing in Master Mode
TYPICAL TIMING REQUIREMENTS (FIGURE 2)
All specifications at 25°C, DVDD = 1.8 V
td (WS) ADWS/LRCK delay 25 15 ns
td (DO−BCLK) BCLK to DOUT delay 25 15 ns
ts(DI) DIN setup 6 6 ns
th(DI) DIN hold 6 6 ns
t
r
t
f
(1)
These parameters are based on characterization and are not tested in production.
Rise time 10 6 ns
Fall time 10 6 ns
(1)
IOVDD = 1.1 V IOVDD = 3.3 V
MIN MAX MIN MAX
9
PARAMETER
UNITS
SLAS412− DECEMBER 2003
LRCK/ADWS
www.ti.com
BCLK
DOUT
DIN
tL(BCLK)
th (WS)
tH(BCLK)
td(DO−WS)
tP(BCLK)
tS (WS)
td(DO−BCLK)
ts (DI)
th (DI)
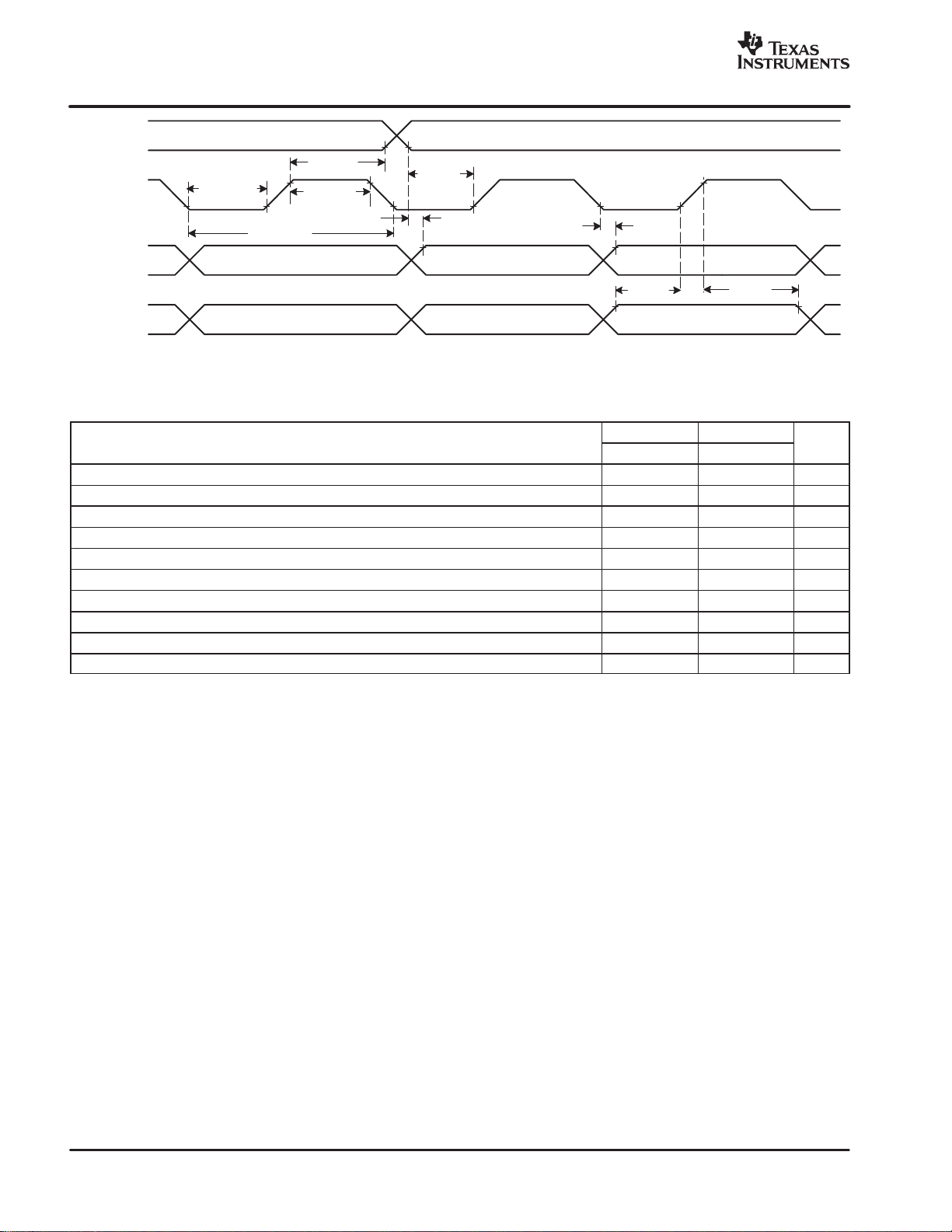
Figure 3. I2S/LJF/RJF Timing in Slave Mode
TYPICAL TIMING REQUIREMENTS (FIGURE 3)
All specifications at 25°C, DVDD = 1.8 V
tH (BCLK) BCLK high period 35 35 ns
tL (BCLK) BCLK low period 35 35 ns
ts(WS) ADWS/LRCK setup 6 6 ns
th(WS) ADWS/LRCK hold 6 6 ns
td (DO−WS) ADWS to DOUT delay (for LJF mode) 25 18 ns
td (DO−BCLK) BCLK to DOUT delay 25 15 ns
ts(DI) DIN setup 6 6 ns
th(DI) DIN hold 6 6 ns
t
r
t
f
(1)
These parameters are based on characterization and are not tested in production.
Rise time 5 4 ns
Fall time 5 4 ns
(1)
IOVDD = 1.1 V IOVDD = 3.3 V
MIN MAX MIN MAX
10
www.ti.com
PARAMETER
UNITS
SLAS412− DECEMBER 2003
LRCK/ADWS
BCLK
DOUT
DIN
tH(BCLK)
th(WS)
tL(BCLK)
tP(BCLK)
tS (WS)
th(WS)
td(DO−BCLK)
ts (DI)
tS (WS)
th (DI)
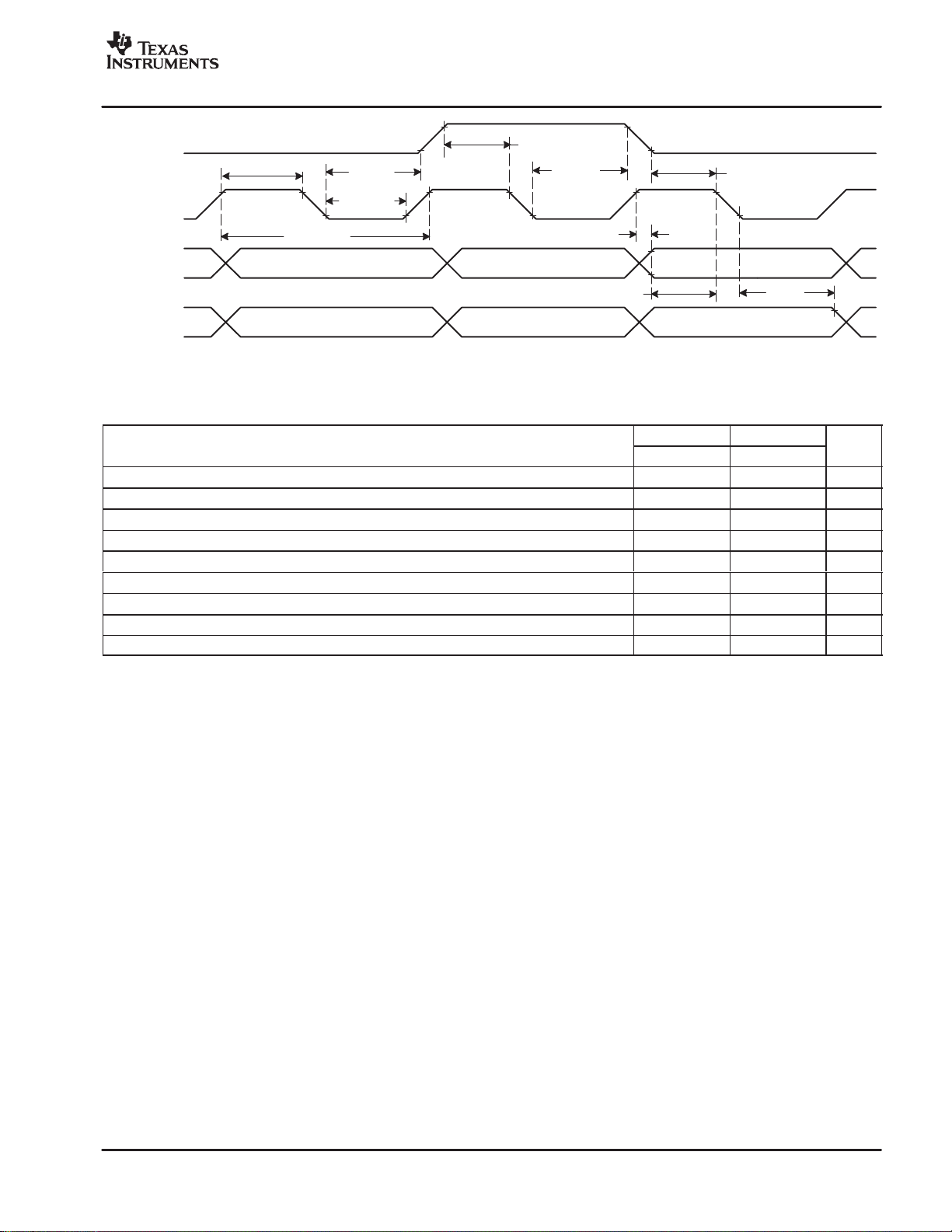
Figure 4. DSP Timing in Slave Mode
TYPICAL TIMING REQUIREMENTS (FIGURE 4)
All specifications at 25°C, DVDD = 1.8 V
tH (BCLK) BCLK high period 35 35 ns
tL (BCLK) BCLK low period 35 35 ns
ts(WS) ADWS/LRCK setup 6 6 ns
th(WS) ADWS/LRCK hold 6 6 ns
td (DO−BCLK) BCLK to DOUT delay 25 15 ns
ts(DI) DIN setup 6 6 ns
th(DI) DIN hold 6 6 ns
t
r
t
f
(1)
These parameters are based on characterization and are not tested in production.
Rise time 5 4 ns
Fall time 5 4 ns
(1)
IOVDD = 1.1 V IOVDD = 3.3 V
MIN MAX MIN MAX
11
SLAS412− DECEMBER 2003
1.5
1
0.5
0
LSB
−0.5
−1
−1.5
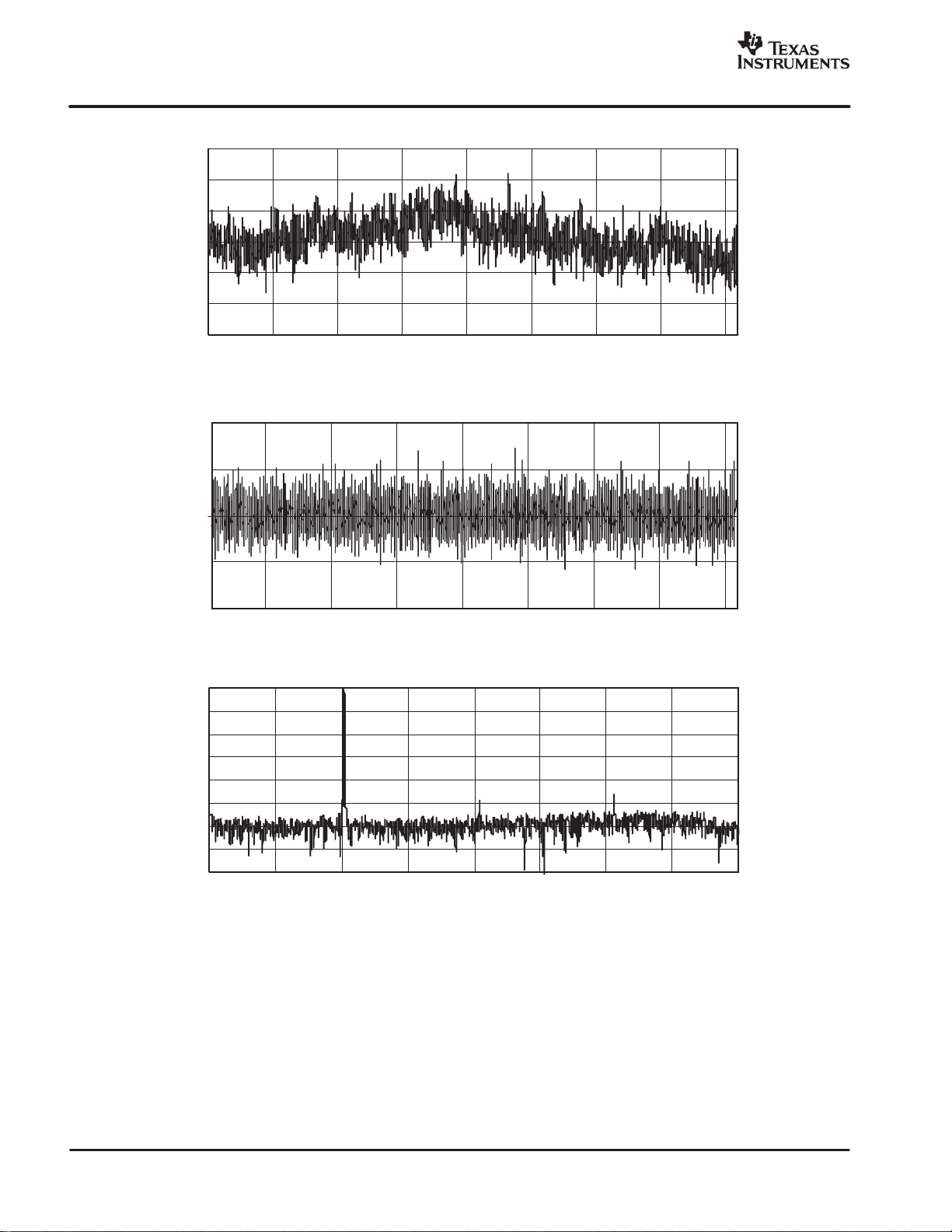
Figure 5. SAR INL (TA = 25°C, Internal Ref = 2.5 V, 12 bit, AVDD = 3.3 V)
1
0.5
www.ti.com
TYPICAL CHARACTERISTICS
0 500 1000 1500 2000 2500 3000 3500 4000
CODE
0
LSB
−0.5
−1
0 500 1000 1500 2000 2500 3000 3500 4000
s
CODE
Figure 6. SAR DNL (TA = 25°C, Internal Ref = 2.5 V, AVDD = 3.3 V)
0
−20
−40
−60
−80
dB
−100
−120
−140
−160
0 500 1000 1500 2000 2500 3000 3500 4000
Hz
Figure 7. ADC FFT Plot at 8 ksps (TA = 25°C, −1 dB, 1 kHz Input, AVDD = 3.3 V)
12
www.ti.com
0
SLAS412− DECEMBER 2003
−20
−40
−60
−80
dB
−100
−120
−140
−160
0 5000 10000 15000 20000
Hz
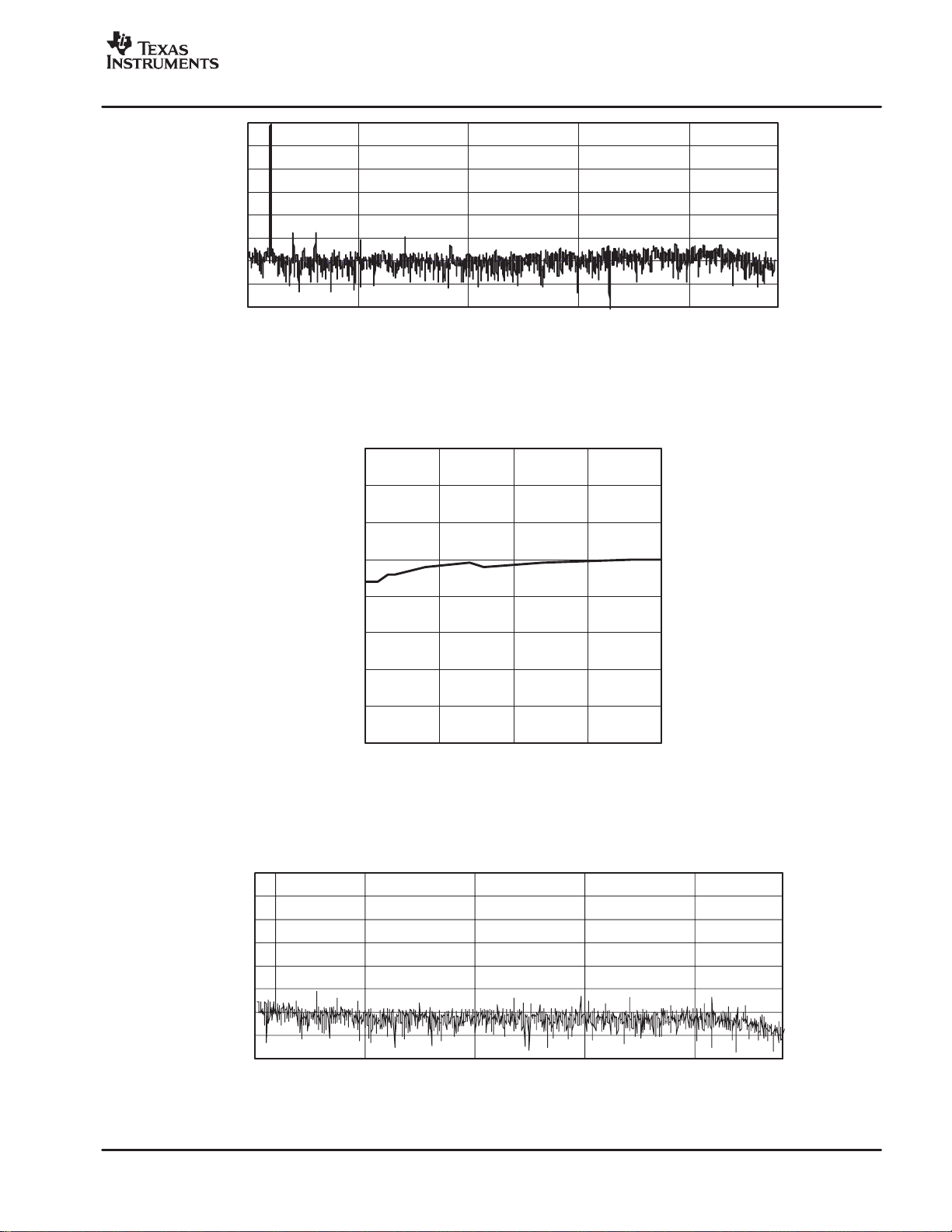
Figure 8. ADC FFT Plot at 48 ksps (TA = 25°C, −1 dB, 1 kHz Input, AVDD = 3.3 V)
90
89.5
89
88.5
88
87.5
Dynamic Range − dB
87
86.5
86
818283848
Sampling Rate − ksps
Figure 9. ADC Dynamic Range vs Sampling Speed (TA = 25°C, AVDD = 3.3 V)
0
−20
−40
−60
−80
dB
−100
−120
−140
−160
0 5000 10000 15000 20000
Hz
Figure 10. DAC FFT Plot (TA = 25°C, 48 ksps, 0 dB, 1 kHz Input, AVDD = 3.3 V, RL = 10 kΩ)
13
SLAS412− DECEMBER 2003
−10
−30
−50
−70
dB
−90
−110
−130
−150
www.ti.com
0
0 5000 10000 15000 20000
Hz
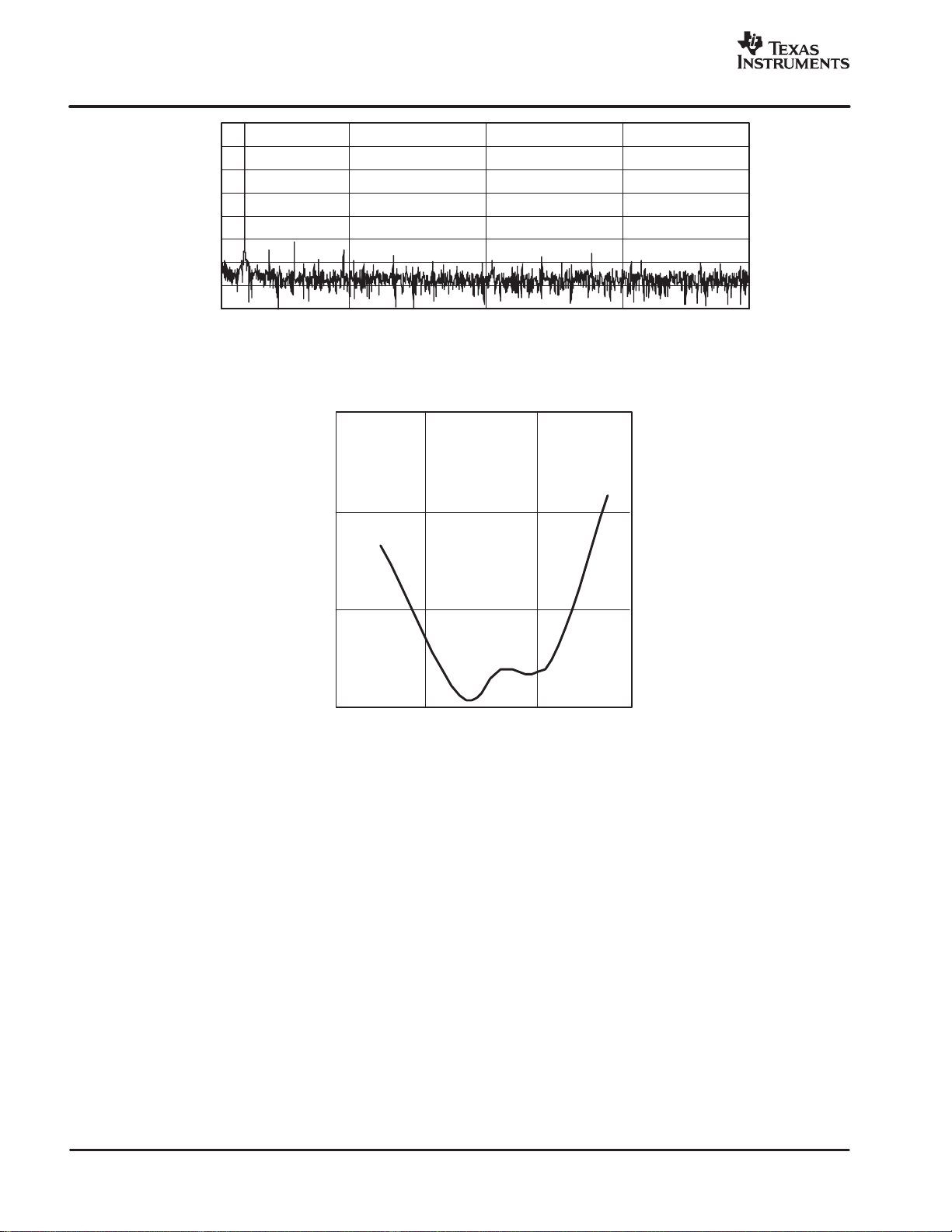
Figure 11. DAC FFT Plot (TA = 25°C, 48 ksps, −1 dB, 1 kHz Input, AVDD = DRVDD = 3.3 V, DVDD = 1.8 V,
RL = 16 Ω)
−88
−90
−92
THD − Total Harmonic Distortion − dB
−94
515 2535
Output Power − mW
Figure 12. High Power Output Driver THD vs Output Power
(T
=25°C, AVDD, DRVDD = 3.3 V, RL = 16 )
A
14
www.ti.com
SLAS412− DECEMBER 2003
OVERVIEW
The ’AIC26 is a highly integrated stereo audio codec for portable computing, communication, and entertainment
applications. The ’AIC26 has a register-based architecture where all functions are controlled through the registers and
onboard state machines.
The ’AIC26 consists of the following blocks (refer to the block diagram):
D Audio Codec
D Battery Monitors
D Auxiliary Inputs
D Temperature Monitor
Audio data is transferred between the host DSP/µP via a standard 4-wire interface and supports a variety of modes (i.e.,
2
I
S, DSP, etc).
Control of the ’AIC26 and its functions is accomplished by writing to different registers in the ’AIC26. A simple command
protocol is used to address the 16-bit registers. Registers control the operation of the A/D converter and audio codec. The
control and auxiliary functions are accessed via a SPI bus.
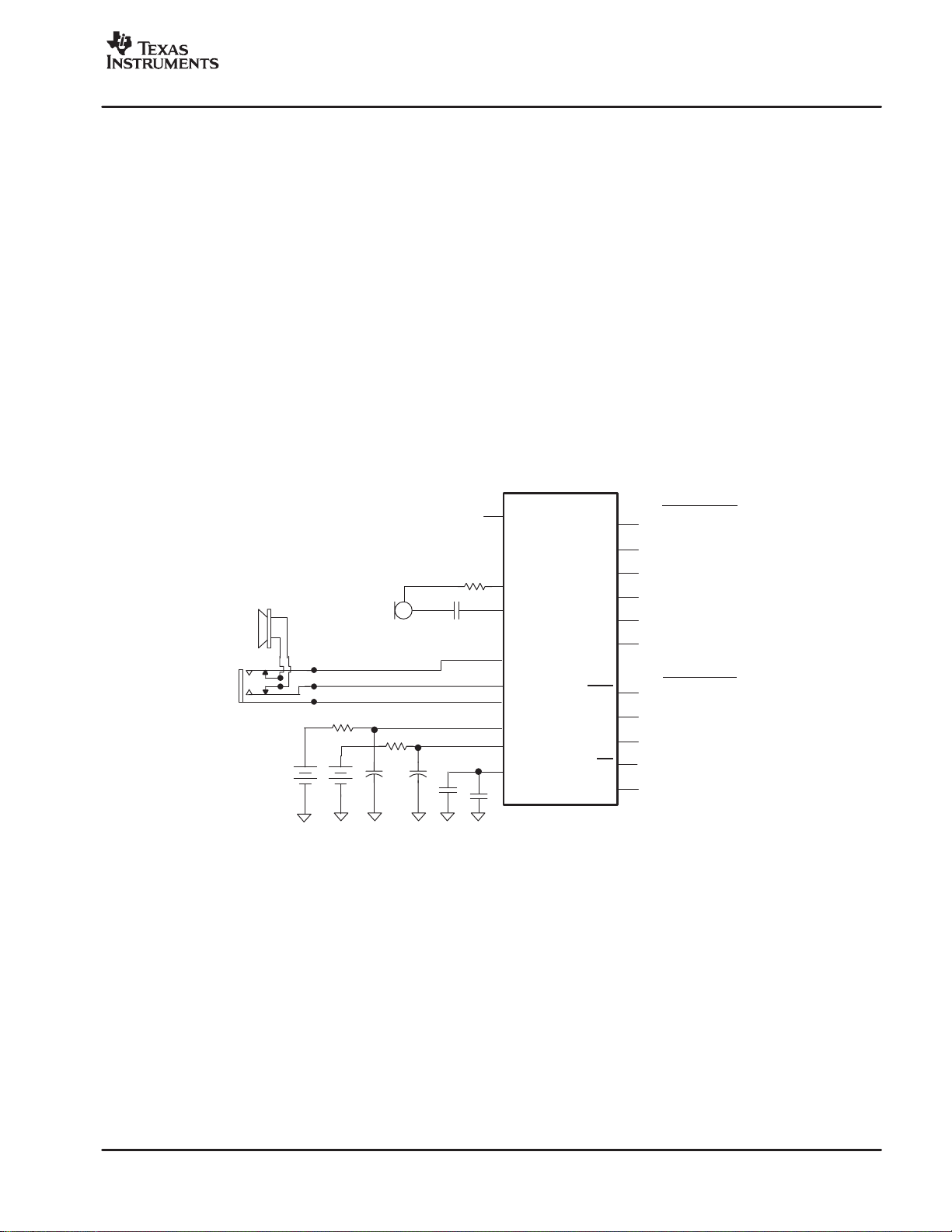
A typical application of the ’AIC26 is shown in Figure 13.
8
Speaker
V1: Main Battery
V2: Secondary Battery
C1: 1 µF − 10 µF (Optional)
C2, C3, C4: 0.1 F
R1, R2: 200 − 300
V1 V2
R1
C3
Auxiliary Input
Audio
R2
C4
2.2 k
C1
C2
AUX
MICBIAS
MICIN
HPR
HPL
VGND
VBAT1
VBAT2
VREF
MCLK
ADWS/
PWDZ
DOUT
LRCK
DIN
BCLK
DAV
MISO
MOSI
SS
SCLK
Figure 13. Typical Circuit Configuration
12S Interface
Master Clock Input
ADC Word Select
Serial Output to CPU/DSP
DAC Word Select
Serial Input From CPU/DSP
Serial Clock Input
SPI Interface
Auxiliary Data Interrupt Request to CPU
Serial Output to SPI Master
Serial Input From SPI Master
SPI Slave Select Input
SPI Serial Clock Input
15

www.ti.com
SLAS412− DECEMBER 2003
OPERATION−AUDIO CODEC
Audio Analog I/O
The ’AIC26 has one mono audio input (MICIN) typically used for microphone recording, and an auxiliary input (AUX) that
can be used as a second microphone or line input. The dual audio output drivers have programmable power level and can
be configured to drive up to 325 mW into an 8-Ω speaker, or to drive 16-Ω stereo headphones at over 30-mW per channel,
or to provide a stereo line-level output. The power level of the output drivers is controlled using bit D12 in control register
REG−05H/Page2. The ’AIC26 also has a virtual ground (VGND) output driver, which can optionally be used to connect
the return terminal of headphones, to eliminate the ac-coupling capacitors needed at the headphone output. The VGND
amplifier is controlled by bit D8 of REG−05H/Page2. A special circuit has also been included in the ’AIC26 to insert a short
keyclick sound into the stereo audio output, even when the audio DAC is powered down. The keyclick sound is used to
provide feedback to the user when a particular button is pressed or item is selected. The specific sound of the keyclick can
be adjusted by varying several register bits that control its frequency, duration, and amplitude.
Audio Digital Interface
Digital audio data samples are transmitted between the ’AIC26 and the audio processor via the serial bus (BCLK, ADWS,
DOUT, LRCK, DIN) that can be configured to transfer digital data in four different formats: right justified, left justified, I
and DSP. The four modes are MSB-first and operate with variable word length of 16, 20, 24, or 32 bits. The digital audio
serial bus of the ’AIC26 can operate in master or slave mode, depending on its register settings. The word-select signals
(ADWS, LRCK) and bit clock signal (BCLK) are configured as outputs when the bus is in master mode. They are configured
as inputs when the bus is in slave mode. The ADWS is representative of the sampling rate of the audio ADC and is
synchronized with DOUT. The LRCK is representative of the audio DAC sampling rate and is synchronized with DIN.
Although the DOUT signal can contain two channels of information (a left and right channel), the ’AIC26 sends the same
ADC data in both channels.
2
S,
D ADC/DAC SAMPLING RATE
The Audio Control 1 register (Register 00H, Page2) determines the sampling rates of the audio DAC and ADC, which
are scaled down from a reference rate (Fsref). The ADC and DAC can operate with either a common LRCK (equal
sampling rates) or separate ADWS and LRCK (unequal sampling rates). When the audio codec is powered up, it is
configured by default as an I
2
S slave with both the DAC and ADC operating at Fsref.
D WORD SELECT SIGNALS
The word select signal (LRCK, ADWS) indicates the channel being transmitted:
− LRCK/ADWS = 0: left channel for I
− LRCK/ADWS = 1: right channel for I
For other modes see the timing diagrams below.
Bitclock (BCLK) Signal
In addition to flexibility as master or slave mode, the BCLK can also be configured in two transfer modes—256−S and
Continuous Transfer Modes. These modes are set using bit D12/REG−06h/Page2.
2
S mode
2
S mode
D 256−S TRANSFER MODE
In the 256−S mode, the BCLK rate always equals 256 times the maximum of the LRCK and ADWS frequencies. In
the 256−S mode, the combination of ADC/DAC sampling rate equal to Fsref (as selected by bit
D5−D0/REG−00h/Page2) and left−justified mode is not supported.
D CONTINUOUS TRANSFER MODE
In the continuous transfer mode, the BCLK rate always equals two times the word length of the maximum of the LRCK
and ADWS frequencies.
16
www.ti.com
SLAS412− DECEMBER 2003
D RIGHT-JUSTIFIED MODE
In right-justified mode, the LSB of the left channel is valid on the rising edge of the BCLK preceding the falling edge of
ADWS or LRCK. Similarly, the LSB of the right channel is valid on the rising edge of the BCLK preceding the rising edge
of ADWS or LRCK.
1/fs
ADWS/
LRCK
BCLK
Left Channel Right Channel
DIN/
DOUT
n n−1 1 00 n n−1 1 0
n−2 2 2n−2
LSBMSB
Figure 14. Timing Diagram for Right-Justified Mode
D LEFT-JUSTIFIED MODE
In left−justified mode, the MSB of the right channel is valid on the rising edge of the BCLK, following the falling edge of
ADWS or LRCK. Similarly the MSB of the left channel is valid on the rising edge of the BCLK following the rising edge of
ADWS or LRCK.
1/fs
ADWS/
LRCK
BCLK
Left Channel Right Channel
DIN/
DOUT
n n−1 1 0 n n−1 1 0
LSBMSB
Figure 15. Timing Diagram for Left-Justified Mode
n n−1n−2 2 n−2 2
17
www.ti.com
SLAS412− DECEMBER 2003
2
D I
S MODE
In I2S mode, the MSB of the left channel is valid on the second rising edge of the BCLK after the falling edge of ADWS or
LRCK. Similarly the MSB of the right channel is valid on the second rising edge of the BCLK after the rising edge of
ADWS or LRCK.
1/fs
ADWS/
LRCK
BCLK
1 clock before MSB
Left Channel Right Channel
DIN/
DOUT
n n−1 1 0 n n−1 1 0
n−2 2 n−2 2
LSBMSB
Figure 16. Timing Diagram for I2S Mode
D DSP MODE
In DSP mode, the falling edge of ADWS or LRCK starts the data transfer with the left channel data first and immediately
followed by the right channel data. Each data bit is valid on the falling edge of BCLK.
1/fs
ADWS/
LRCK
BCLK
Left Channel Right Channel
DIN/
DOUT
n n−1 1 0 n n−1 1 0
n−2 2 n−2 2 n−2
LSBMSB
MSB LSB
Figure 17. Timing Diagram for DSP Mode
n n−11 0
MSBLSB
n
18

www.ti.com
SLAS412− DECEMBER 2003
AUDIO DATA CONVERTERS
The ’AIC26 has a stereo audio DAC and a mono audio ADC. Both ADC and DAC can operate with a maximum sampling
rate of 53 kHz and support all audio standard rates of 8 kHz, 11.025 kHz, 12 kHz, 16 kHz, 22.05 kHz, 24 kHz, 32 kHz,
44.1 kHz, and 48 kHz. By utilizing the flexible clock generation capability and internal programmable interpolation, a wide
variety of sampling rates up to 53 kHz can be obtained from many possible MCLK inputs. In addition, the DAC and ADC
can independently operate at different sampling rates as indicated in control register REG−00H/Page2.
When the ADC or DAC is operating, the ’AIC26 requires an applied audio MCLK input. The user should also set
bit D13/REG−06H/Page2 to indicate which Fsref rate is being used. If the codec ADC or DAC is powered up, then the
auxiliary
Typical audio DACs can suffer from poor out-of-band noise performance when operated at low sampling rates, such as
8 kHz or 11.025 kHz. The ’AIC26 includes programmable interpolation circuitry to provide improved audio performance at
such low sampling rates, by first upsampling low-rate data to a higher rate, filtering to reduce audible images, and then
passing the data to the internal DAC, which is actually operating at the Fsref rate. This programmable interpolation is
determined using bit D5−D3/REG−00H/Page2.
For example, if playback of 11.025-kHz data is required, the ’AIC26 can be configured such that Fsref = 44.1 kHz. Then
using bit D5−D3/REG−00H/Page2, the DAC sampling rate (Fs) can be set to Fsref/4, or Fs = 1 1.025 kHz. In operation, the
11.025-kHz digital input data is received by the ’AIC26, upsampled to 44.1 kHz, and filtered for images. It is then provided
to the audio DAC operating at 44.1 kHz for playback. In reality, the audio DAC further upsamples the 44.1 kHz data by a
ratio of 128x and performs extensive interpolation filtering and processing on this data before conversion to a stereo analog
output signal.
ADC uses MCLK and BCLK for its internal clocking, and the internal oscillator is powered down to save power.
PLL
The ’AIC26 has an on-chip PLL to generate the needed internal ADC and DAC operational clocks from a wide variety of
clocks available in the system. The PLL supports an MCLK varying from 2 MHz to 50 MHz and is register programmable
to enable generation of required sampling rates with fine precision.
ADC and DAC sampling rates are given by
DAC_FS = Fsref/N1 and ADC_FS = Fsref/N2
where, Fsref must fall between 39 kHz and 53 kHz, and N1, N2 =1, 1.5, 2, 3, 4, 5, 5.5, 6 are register programmable.
The PLL can be enabled or disabled using register programming.
D When PLL is disabled
Fsref +
Q = 2, 3…17
− Note: For ADC, with N2 = 1.5 or 5.5, odd values of Q are not allowed.
− In this mode, the MCLK can operate up to 50 MHz, and Fsref should fall within 39 kHz to 53 kHz.
MCLK
128 Q
D When PLL is enabled
Fsref +
P = 1, 2, 3, …, 8
K = J.D
J = 1, 2, 3, ….,64
D = 0, 1, 2, …, 9999
P, J, and D are register programmable, where J is an integer part of K before the decimal point, and D is a four-digit fractional
part of K after the decimal point, including lagging zeros.
Examples: If K = 8.5, Then J = 8, D = 5000
If K = 7.12, Then J = 7, D = 1200
If K = 7.012, Then J = 7, D = 120
The PLL is programmed through Registers 1BH and 1CH of Page2.
MCLK K
2048 P
19
SLAS412− DECEMBER 2003
D When PLL is enabled and D = 0, the following condition must be satisfied
www.ti.com
2MHzv
80 MHz v
4 v J v 55
MCLK
v 20 MHz
P
MCLK K
P
v 110 MHz
D When PLL is enabled and D ≠ 0, the following condition must be satisfied
10 MHz v
80 MHz v
4 v J v 11
Example 1:
For MCLK = 12 MHz and Fsref = 44.1 kHz
P = 1, K = 7.5264 ⇒ J = 7, D = 5264
Example 2:
For MCLK = 12 MHz and Fsref = 48.0 kHz
P = 1, K = 8.192 ⇒ J = 8, D = 1920
MONO AUDIO ADC
MCLK
v 20 MHz
P
MCLK K
P
v 110 MHz
Analog Front End
The analog front end of the audio ADC consists of an analog MUX and a programmable gain amplifier (PGA). The MUX
can connect either the MICIN or AUX signal through the PGA to the ADC for audio recording. The ’AIC26 also has an option
of choosing both MICIN and AUX as a differential input pair. The ’AIC26 also includes a microphone bias circuit, which can
source up to 4.7-mA current and is programmable to a 2-V or 2.5-V level. The bias block is powered down when both the
ADC and analog mixer blocks are powered down.
Because of the oversampling nature of the audio ADC and the integrated digital decimation filtering, requirements for
analog antialiasing filtering are very relaxed. The ’AIC26 integrates a second order analog antialiasing filter with 20-dB
attenuation at 1 MHz. This filter, combined with the digital decimal filter, provides sufficient antialiasing filtering without
requiring any external components.
The PGA allows analog gain control from 0 dB to 59.5 dB in steps of 0.5 dB. The PGA gain changes are implemented with
an internal soft-stepping algorithm that only changes the actual volume level by one 0.5-dB step every one or two ADC
output samples, depending on the register programming. This soft-stepping ensures that volume control changes occur
smoothly with no audible artifacts. On reset, the PGA gain defaults to a mute condition, and on power down, the PGA
soft-steps the volume to mute before shutting down. A read-only flag (D0 control register 04H/Page2) is set whenever the
gain applied by PGA equals the desired value set by the register. The soft−stepping control can be disabled by
programming D15=1 in register 1DH of Page02. When soft-stepping is enabled, the MCLK signal to the device should not
be changed until the ADC power-down flag is set. When the flag is set, the internal soft-stepping process and power-down
sequence is complete, and the MCLK can be stopped if desired.
Delta-Sigma ADC
The analog-to-digital converter is a delta-sigma modulator with 128 times oversampling ratio. The ADC can support a
maximum output rate of 53 kHz.
Decimation Filter
The audio ADC includes an integrated digital decimation filter that removes high-frequency content and downsamples the
audio data from an initial sampling rate of 128 times Fs to the final output sampling rate of Fs. The decimation filter provides
a linear phase output response with a group delay of 17/Fs. The −3-dB bandwidth of the decimation filter extends to 0.45
Fs and scales with the sample rate (Fs)
20

www.ti.com
SLAS412− DECEMBER 2003
Automatic Gain Control (AGC)
Automatic gain control (AGC) can be used to maintain nominally constant output signal amplitude when recording speech
signals. This circuitry automatically adjusts the PGA gain as the input signal becomes overly loud or very weak, such as
when a person speaking into a microphone moves closer or farther from the microphone. The AGC algorithm has several
programmable settings, including target gain, attack and decay time constants, noise threshold, and maximum PGA gain
applicable that allow the algorithm to be fine tuned for any particular application. The algorithm uses the absolute average
of the signal (which is the average of the absolute value of the signal) as a measure of the nominal amplitude of the output
signal.
Target gain represents the nominal output level at which the AGC attempts to hold the ADC output signal level. The ’AIC26
allows programming of eight different target gains, which can be programmed from −5.5 dB to −24 dB relative to a full-scale
signal. Since the ’AIC26 reacts to the signal absolute average and not to peak levels, it is recommended that the larger
gain be set with enough margin to avoid clipping at the occurrence of loud sounds.
Attack time determines how quickly the AGC circuitry reduces the PGA gain when the input signal is too loud. It can be
varied from 8 ms to 20 ms.
Decay time determines how quickly the PGA gain is increased when the input signal is too low. It can be varied in the range
from 100 ms to 500 ms.
Noise threshold is the minimum amplitude for the input signal that the AGC considers as a valid signal. If the average
amplitude of the incoming signal falls below this value, the AGC considers it as silence and brings down the gain to 0 dB
in steps of 0.5 dB for every FS. It also sets the noise threshold flag. The gain stays at 0 dB until the average amplitude of
the input signal rises above the noise threshold value. This ensures that noise does not get amplified in the absence of a
valid input speech signal. The noise threshold level is programmable between −60 dB and −90 dB relative to full scale. This
operation includes debounce and hysteresis to avoid having the AGC gain cycle from high gain to 0 dB when the signal
amplitude is close to the noise threshold level. When the noise threshold flag is set, the status of the gain applied by the
AGC and the saturation flag should be ignored.
Maximum input gain applicable allows the user to restrict the maximum gain applied by the AGC. This can be used for
limiting PGA gain in situations where environmental noise is greater than the programmed noise threshold. Depending on
the noise threshold setting, the value of the maximum input gain applicable can be programmed between 0 dB and 59.5
dB in steps of 0.5 dB as shown in Table 1.
Table 1. Input Gain Settings
NOISE THRESHOLD ALLOWED RANGE FOR THE MAXIMUM INPUT GAIN
−60 dB 0 dB to 59.5 dB
−70 dB 11.5 dB to 59.5 dB
−80 dB 21.5 dB to 59.5 dB
−90 dB 31.5 dB to 59.5 dB
21

SLAS412− DECEMBER 2003
See Table 2 for various AGC programming options.
Input
Signal
Output
Signal
AGC
Gain
www.ti.com
Target Gain
Decay Time
Attack Time
Figure 18. AGC Characteristics
Table 2. AGC Settings
MIC INPUT
BIT CONTROL REGISTER
AGC enable D0 01H
Target gain D7−D5 01H
Time constants (attack and decay time) D4−D1 01H
Noise threshold D5−D4 06H
Noise threshold flag D11 04H
Hysteresis D10−D9 1DH
Debounce time (normal to silence mode) D8−D6 1EH
Debounce time (silence to normal mode) D5−D3 1EH
Max input gain applicable D15−D9 1EH
Gain applied by AGC D15−D8 01H
Saturation flag D0 04H
Clip stepping enable D3 06H
NOTE:All settings shown in Table 2 are located in Page2 of the control registers.
STEREO AUDIO DAC
Each channel of the stereo audio DAC consists of a digital audio processing block, a digital interpolation filter, digital
delta-sigma modulator, and an analog reconstruction filter. The DAC is designed to provide enhanced performance at low
sample rates through increased oversampling and image filtering, thereby keeping quantization noise generated within the
delta-sigma modulator and signal images strongly suppressed within the audio band to beyond 20 kHz. This is realized
by keeping the upsampled rate constant at 128 x Fsref and changing the oversampling ratio as the input sample rate is
changed. For Fsref of 48 kHz, the digital delta-sigma modulator always operates at a rate of 6.144 MHz. This ensures that
quantization noise generated within the delta-sigma modulator stays low within the frequency band below 20 kHz at all
sample rates. Similarly, for Fsref rate of 44.1 kHz, the digital delta-sigma modulator always operates at a rate of 5.6448
MHz.
Digital Audio Processing
The DAC channel consists of optional filters for de-emphasis and bass, treble, midrange level adjustment, or speaker
equalization. The de-emphasis function is only available for sample rates of 32 kHz, 44.1 kHz, and 48 kHz. The transfer
function consists of a pole with time constant of 50 µs and a zero with time constant of 15 µs. Frequency response plots
are given in the Audio Codec Filter Frequency Responses section of this data sheet. The de-emphasis filter can be enabled
or bypassed depending on bit D0 of register 05H/Page2.
22

www.ti.com
SLAS412− DECEMBER 2003
The DAC digital effects processing block also includes a fourth order digital IIR filter with programmable coefficients (one
set per channel). The filter is implemented as cascade of two biquad sections with frequency response given by:
N0 ) 2 N1 z*1) N2 z
ǒ
32768 * 2 D1 z*1* D2 z
The N and D coefficients are fully programmable, and the entire filter can be enabled or bypassed depending on bit D1 of
register 05H/Page2. The coefficients for this filter implement a variety of sound ef fects, with bass-boost or treble boost being
the most commonly used in portable audio applications. The default N and D coefficients in the part are given by:
N0 = N3 = 27619 D1 = D4 = 32131
N1 = N4 = −27034 D2 = D5 = −31506
N2 = N5 = 26461
and implement a shelving filter with 0 dB gain from dc to approximately 150 Hz, at which point it rolls off to a 3-dB attenuation
for higher frequency signals, thus giving a 3-dB boost to signals below 150 Hz. The N and D coefficients are represented
by 16-bit twos complement numbers with values ranging from –32768 to +32767. Frequency response plots are given in
the Audio Codec Filter Frequency Responses section of this data sheet.
Interpolation Filter
The interpolation filter upsamples the output of the digital audio processing block by the required oversampling ratio. It
provides a linear phase output with a group delay of 21/Fs.
In addition, a digital interpolation filter provides enhanced image filtering and reduces signal images caused by the
upsampling process that are below 20 kHz. For example, upsampling an 8-kHz signal produces signal images at multiples
of 8 kHz (i.e., 8 kHz, 16 kHz, 24 kHz, etc). The images at 8 kHz and 16 kHz are below 20 kHz and still audible to the listener;
therefore, they must be filtered heavily to maintain good output quality. The interpolation filter is designed to maintain at
least 65-dB rejection of images that land below 7.455 Fs. In order to utilize the programmable interpolation capability, t h e
Fsref should be programmed to a higher rate (restricted to be in the range of 39 kHz to 53 kHz when the PLL is in use),
and the actual Fs is set using the dividers in bit D5−D3/REG−00H/Page2. For example, if Fs = 8 kHz is required, then Fsref
can be set to 48 kHz, and the DAC Fs set to Fsref/6. This ensures that all images of the 8-kHz data are sufficiently attenuated
well beyond the ~20-kHz audible frequency range.
*2
N3 ) 2 N4 z*1) N5 z
Ǔǒ
*2
32768 * 2 D4 z*1* D5 z
*2
*2
Ǔ
Delta-Sigma DAC
The audio digital-to-analog converter incorporates a third order multibit delta-sigma modulator followed by an analog
reconstruction filter. The DAC provides high-resolution, low-noise performance, using oversampling and noise shaping
techniques. The analog reconstruction filter design consists of a 6 tap analog FIR filter followed by a continuous time RC
filter. The analog FIR operates at a rate of 128 x Fsref (6.144 MHz when Fsref = 48 kHz, 5.6448 MHz when Fsref = 44.1 kHz).
Note that the DAC analog performance may be degraded by excessive clock jitter on the MCLK input. Therefore, care must
be taken to keep jitter on this clock to a minimum.
DAC Digital Volume Control
The DAC has a digital volume control block, which implements programmable gain. The volume level can be varied from
0 dB to –63.5 dB in 0.5 dB steps. In addition, there is an independent mute bit for each channel. The volume level of both
channels can also be changed simultaneously by the master volume control. The gain is implemented with a soft-stepping
algorithm, which only changes the actual volume by one step per input sample, either up or down, until the desired volume
is reached. The rate of soft-stepping can be slowed to one step per two input samples through bit D1 of control register
04H/Page2.
Because of soft-stepping, the host does not know when the DAC has been actually muted. This may be important if the
host wishes to mute the DAC before making a significant change, such as changing sample rates. In order to help with this
situation, the ’AIC26 provides a flag back to the host via a read-only register bit (D2−D3 of control register 04H/Page2) that
alerts the host when the part has completed the soft-stepping and the actual volume has reached the desired volume level.
The soft-stepping feature can be disabled by programming D14=1 in register 1DH in Page02. If soft-stepping is enabled,
the MCLK signal to the device should not be changed until the DAC power-down flag is set. When this flag is set, the internal
soft-stepping process and power-down sequence is complete, and the MCLK can be stopped if desired.
23

www.ti.com
SLAS412− DECEMBER 2003
The ’AIC26 also includes functionality to detect when the user switches are on or off the de-emphasis or digital audio
processing functions, to first (1) soft-mute the DAC volume control, (2) change the operation of the digital effects
processing, and (3) soft-unmute the part. This avoids any possible pop/clicks in the audio output due to instantaneous
changes in the filtering. A similar algorithm is used when first powering up or down the DAC. The circuit begins operation
at power up with the volume control muted, then soft-steps it up to the desired volume level. At power down, the logic first
soft-steps the volume down to a mute level, then powers down the circuitry.
DAC Power Down
The DAC power-down flag ( D6 of REG05H/Page2) along with D10 of REG05H/Page2 denotes the power-down status
of the DAC according to Table 3.
Table 3. DAC Powerdown Status
[D10,D6] POWERUP / DOWN ST ATE OF DAC
[0,0] DAC is in stable power-up state
[0,1]
[1,0]
[1,1] DAC is in a stable power-down state.
AUDIO OUTPUT DRIVERS
DAC is in the process of powering up. The length of this state is determined by PLL and output driver
power-up delays controlled by register programming.
DAC is in the process of powering down. The length of this state is determined by soft-stepping of volume
control block and DAC pop reduction sequencing controlled by register programming.
The ’AIC26 features audio output drivers which can be configured in either low power mode or high power mode depending
on the load and output power required. By default, at reset the output drivers are configured in low power mode. In this mode,
the output drivers can drive a full-scale line-level signal into loads of 10 kΩ minimum or drive moderate amplitude signals
into loads of 16 Ω minimum.
The output drivers can also be configured in high power mode by setting bit D12 of Reg05H/Page2 to 1. In this mode, each
output driver can deliver up to 30 mW per channel into a headphone speaker load of 16 Ω. The headphones can be
connected in a single-ended configuration using ac-coupling capacitors, or the capacitors can be removed and virtual
ground (VGND) powered for a capless output connection. The typical headphone jack configuration for these two modes
is shown in Figure 21. Note that the VGND amplifier must be powered if the capless configuration is used.
In the case of an ac-coupled output, the value of the capacitors is typically chosen based on the amount of low-frequency
cut that can be tolerated. The capacitor in series with the load impedance forms a high-pass filter with −3 dB cutoff frequency
of 1/(2πRC) in Hz, where R is the impedance of the headphones. Use of an overly small capacitor reduces low-frequency
components in the signal output and leads to low-quality audio. When driving 16-Ω headphones, capacitors of 220-µF (a
commonly used value) result in a high-pass filter cutoff frequency of 45 Hz, although reducing these capacitors to 50 µF
results in a cutof f frequency of 199 Hz, which is generally considered noticeable when playing music. The cutoff frequency
is reduced to half of the above values if 32-Ω headphones are used instead of 16 Ω.
The ’AIC26 programmable digital effects block can be used to help reduce the size of capacitors needed by implementing
a low frequency boost function to help compensate for the high-pass filter introduced by the ac-coupling capacitors. For
example, by using 50-µF capacitors and setting the ’AIC26 programmable filter coefficients as shown below, the frequency
response can be improved as shown in Figure 20.
Filter coefficients (use the same for both channels):
N0 = 32767, N1 = −32346, N2 = 31925, N3 = 32767, N4 = 0, N5 = 0
24
D0 = 32738, D1 = −32708 D4 = 0, D5 = 0

www.ti.com
0
−2
−4
−6
−8
−10
Gain − dB
−12
−14
−16
−18
−20
0 100 200 300 400 500 600
f − Frequency − Hz
700 800 900 1 k
Figure 19. Uncompensated Response For 16- Load and 50-F Decoupling Capacitor
SLAS412− DECEMBER 2003
0
−5
−10
Gain − dB
−15
−20
0 100 200 300 400 500 600
f − Frequency − Hz
700 800 900 1 k
Figure 20. Frequency Response For 16- Load and 50-F Decoupling Capacitor After Gain
Compensation Using a Suggested Set of Coefficients for Audio Effects Filter
Using the capless output configuration eliminates the need for these capacitors and removes the accompanying high-pass
filter entirely . However, this configuration does have one drawback – if the RETURN terminal of the headphone jack (which
is wired to the ’AIC26 VGND pin) is ever connected to a ground, that is shorted to the ’AIC26 ground pin, then the VGND
amplifier enters short-circuit protection, and the audio output does not function properly.
25

SLAS412− DECEMBER 2003
www.ti.com
’AIC26
VGND
HPR
HPL
Headphone Jack
’AIC26
VGND
HPR
HPL
Headphone Jack
Figure 21. Headphone Configurations, AC-Coupled (left) and Capless (right)
The audio output drivers in high power mode can also be configured to drive a mono differential signal into a speaker load
of 8-Ω minimum. The speaker load should be connected differentially between the HPR and HPL outputs. Several options
are possible for playback of DAC data in this case. If a stereo digital signal is available, this signal can be sent in normal
stereo fashion to the audio DAC. The programmable digital effects filters can then be used to invert one channel, so that
the signal applied across the speaker load is (LEFT + RIGHT), or effectively a mono-mix of the two channels. A simple
example of how to implement this inversion using the programmable filters is to set the coefficients as follows:
Left−channel coefficients: N0=32767, N1=0, N2=0, N3=32767, N4=0, N5=0
D1=0, D2=0, D4=0, D5=0
Right−channel coefficients: N0=−32767, N1=0, N2=0, N3=32767, N4=0, N5=0
D1=0, D2=0, D4=0, D5=0
This provides no spectral shaping; it only inverts the right channel relative to the left channel, such that the signals at HPL
and HPR are (LEFT) and (−RIGHT), with the signal across the speaker then being LEFT+ RIGHT. In a general case when
spectral shaping is also desired, the inversion can be accomplished simply by setting N0, N1, and N2 coefficients of one
channel to the negative of the values set for the other channel. Note that the programmable filtering must be enabled by
setting bit D1/REG−05H/Page2 to 1.
To enable the output drivers to deliver higher output power, the DAC output swing should be set to its highest level by setting
bit D10−D9/REG−06H/Page2 to 11. It is possible to increase power even further by disabling the built-in short-circuit
protection by programming bit D8 of Reg1DH/Page2 to 1. In this case care must be taken so a short-circuit at the output
does not occur . Figure 22 shows a typical jack configuration using a capless output configuration. In this configuration, the
’AIC26 drives the loudspeaker whenever headphones are not inserted in the jack and drives the headphones whenever
it is inserted in the jack.
’AIC26
HPR
HPL
VGND
Headphone Jack
Loud Speaker
Figure 22. Speaker Connection
26

www.ti.com
−10
−20
−30
−40
SLAS412− DECEMBER 2003
0
2.402 V
PP
−50
−60
−70
−80
THD − Total Harmonic Distortion − dB
−90
−100
0 50 100 150 200 250 300 350
PO − Output Power − mW
2 V
PP
Figure 23. THD vs Output Power Delivered to an an 8- Load (255C, AVDD = DRVDD = 3.3 V, DVDD = 1.8
V, DAC Output Swing Set to 2 V and 2.4V, and Short-Circuit Protection Disabled)
0
−10
−20
−30
−40
−50
−60
−70
−80
THD − Total Harmonic Distortion − dB
−90
−100
2.7 2.8 2.9 3 3.1 3.2 3.3 3.4 3.5 3.6
AVDD, DRVDD − V
Figure 24. THD vs AVDD, DRVDD Supply Voltage (255C When Driving a −1 dB, 1-kHz Sinewave From the
DAC Into an 8- Load, with DAC Output Swing Set to 2.4 V, and Short-Circuit Protection Disabled)
The ’AIC26 incorporates a programmable short-circuit detection/protection function with different modes of operation.
During the insertion or removal of a headphone plug from the jack, the output pins of the drivers may be accidentally shorted,
causing the part to potentially draw a huge current, which may cause the power supply voltages to dip. Bits D8−D7 of
REG−1DH/Page2 control how the short-circuit detection/protection operates in the ’AIC26. One option is to fully disable
short-circuit protection, which also enables the audio output drivers to deliver more power to a low-impedance load (such
as an 8-Ω speaker). However, care must be taken to prevent any short-circuit from occurring while the part is in this mode.
A second programmable configuration enables current-limiting in the audio output drivers, so that excessive currents
cannot be provided if the outputs are shorted. It also enables the internal short-circuit detection function, which can detect
excess current being drawn from the drivers and set a short-circuit detect flag (Page2, REG−1DH, bit D6). This flag can
be read by the user to power down the drivers if desired. This flag is cleared only if the short-circuit condition is removed.
If the user does not monitor this flag and powers down the drivers when a short-circuit occurs, the current-limiting prevents
excessive currents from being drawn, but power dissipation is higher due to this limited current flowing through the short.
27

www.ti.com
SLAS412− DECEMBER 2003
In a third programmable configuration, the ’AIC26 can be programmed to monitor and automatically power down the audio
output drivers upon detection of a short-circuit condition (Page2, REG−1DH, bit D7), in addition to setting the short-circuit
flag in Page2, REG−1DH, bit−D6. When the device has detected a short and resulted in this condition, the short-circuit flag
is cleared when all the routings to the speaker driver are disabled (i.e., DAC, Analog Mixer, and Keyclick blocks are powered
down by user).
AUDIO OUTPUT DRIVER POWER-ON POP REDUCTION SCHEME
The ’AIC26 implements a pop reduction scheme to reduce audible artifacts during power up and power down of the audio
output drivers. This scheme can be controlled by programming bits D2 and D1 of REG1EH/Page2. By default, the driver
pop reduction scheme is enabled and can be disabled by programming bit D2 of Reg1EH/Page2 to 1. When this scheme
is enabled and the virtual ground connection is not used (VGND amplifier is powered down), the audio output driver slowly
charges up any external ac-coupling capacitors to reduce audible artifacts. Bit D1 of REG1EH/Page2 provides control of
the charging time for the ac-coupling capacitor as either 0.8 sec or 4 sec. When the virtual ground amplifier is powered up
and used, the external ac-coupling capacitor is eliminated, and the power up time becomes 1 ms. This scheme takes effect
whenever the audio output drivers are powered up due to enabling any of the DAC, the Analog Mixer, or the Keyclick
Generator.
Pop Reduction for DAC Routing
Whenever the audio DAC is powered on or off, a slight change in the output dc o ffset voltage may occur and can be heard
as a weak pop in the output. In order to reduce this artifact, the ’AIC26 implements a DAC pop reduction scheme, which
is programmable using bits D5−D2 in REG−1DH/Page2. Bit D5 enables the scheme, which implements a slow transition
between the starting dc level and the final dc level. For best results, program bits D4−D2 in REG1DH/Page2 to 100.
AUDIO MIXING
Digital Sidetone
The digital sidetone control attenuates the output from the ADCs decimation filter and routes its output to be mixed with
the DAC digital input. If bit D7 of REG−03H/Page2 is reset, the output of the sidetone control is mixed with the stereo DAC
input. Care must be taken while selecting the digital sidetone gain so that the output of the digital mixer is not overloaded.
The digital sidetone block implements gains from 0 dB to –48 dB in steps of 1.5 dB. Gain changes are implemented at
zero-crossings of the signal to avoid any audible artifacts. The digital sidetone block is automatically internally disabled
if ADC and DAC are operating at different sampling rates, or if the DAC is powered down.
Analog Mixer
The analog mixer can be used to route the analog input selected for the ADC (MICIN or AUX) through an analog volume
control and then mix it with the audio DAC output. The analog mixer feature is available only if single-ended MICIN or AUX
is selected as the input to the ADC, not when the ADC input is configured in fully-differential mode. This feature is available
even if the ADC and DAC are powered down. The analog volume control in this path has a gain range from 12 dB to
–34.5 dB in 0.5-dB steps plus mute and includes soft-stepping logic. The internal oscillator is used for soft-stepping
whenever the ADC and DAC are powered down.
KEYCLICK
A special circuit has been included for inserting a square−wave signal into the analog output signal path based on register
control. This functionality is intended for generating keyclick sounds for user feedback. Register 04H/Page2 contains bits
that control the amplitude, frequency, and duration of the square-wave signal. The frequency of the signal can be varied
from 62.5 Hz to 8 kHz and its duration can be programmed from 2 periods to 32 periods. Whenever this register is written,
the square-wave is generated and coupled into the audio output, going to both audio outputs. The keyclick enable bit D15
of control register 04H/Page2 is reset after the duration of keyclick is played out. This capability is available even when
the ADC and DAC are powered down.
28

www.ti.com
SLAS412− DECEMBER 2003
SPI DIGITAL INTERFACE
All ’AIC26 control registers are programmed through a standard SPI bus. The SPI allows full-duplex, synchronous, serial
communication between a host processor (the master) and peripheral devices (slaves). The SPI master generates the
synchronizing clock and initiates transmissions. The SPI slave devices depend on a master to start and synchronize
transmissions.
A transmission begins when initiated by a master SPI. The byte from the master SPI begins shifting in on the slave SPIDIN
(MOSI) pin under the control of the master serial clock. As the byte shifts in on the SPIDIN pin, a byte shifts out on the
SPIDOUT (MISO) pin to the master shift register.
The idle state of the serial clock for the ’AIC26 is low, which corresponds to a clock polarity setting of 0 (typical
microprocessor SPI control bit CPOL = 0). The ’AIC26 interface is designed so that with a clock phase bit setting of 1 (typical
microprocessor SPI control bit CPHA = 1), the master begins driving its MOSI pin and the slave begins driving its SPIDOUT
pin on the first serial clock edge. The SS
command words which are transmitted after the falling edge of SS
OPERATION−AUXILIARY MEASUREMENT
Data Format
The ’AIC26 auxiliary output data is in unsigned binary format and can be read from the registers over the SPI interface.
Reference
The ’AIC26 has an internal voltage reference that can be set to 1.25 V or 2.5 V, through the reference control register.
The internal reference voltage should only be used in the single-ended mode for battery monitoring, temperature
measurement, and for measuring the auxiliary inputs.
An external reference can also be applied to the VREF pin, and the internal reference can be turned off.
Variable Resolution
The ’AIC26 provides three different resolutions for the A/D converter: 8-, 10- or 12-bits. Performing the conversions at lower
resolution reduces the amount of time it takes for the A/D converter to complete its conversion process, which lowers power
consumption.
Conversion Clock and Conversion Time
The ’AIC26 contains an internal 8-MHz clock, which is used to drive the state machines inside the device that perform the
many functions of the part. This clock is divided down to provide a clock to run the A/D converter. The division ratio for this
clock is set in the A/D converter control register. The ability to change the conversion clock rate allows the user to choose
the optimal value for resolution, speed, and power. If the 8-MHz clock is used directly, the A/D converter is limited to 8-bit
resolution; using higher resolutions at this speed may not result in accurate conversions. Using a 4-MHz conversion clock
is suitable for 10-bit resolution; 12-bit resolution requires that the conversion clock run at 1 or 2 MHz.
Regardless of the conversion clock speed, the internal clock runs nominally at 8 MHz. The conversion clock speed,
however, plays an important role in the time it takes for a conversion to complete, as a certain number of internal clock cycles
is needed for proper sampling of the signal. Throughout this data sheet, internal and conversion clock cycles are used to
describe the times that many functions take to execute. Considering the total system design, these times must be taken
into account by the user.
When both the audio ADC and DAC are powered down, the auxiliary A/D uses an internal oscillator for conversions.
However, to save power whenever audio ADC or DAC are powered up, the internal oscillator is powered down and MCLK
and BCLK are used to clock the auxiliary A/D.
The ’AIC26 uses the programmed value of Page2, Reg 06H D13 and the PLL programmability to derive a clock from MCLK.
The various combinations are listed in Table 4.
pin can remain low between transmissions; however, the ’AIC26 only interprets
.
PLL enabled
PLL disabled
Table 4. Conversion Clock Frequency
Page2, Reg 06H, D13 = 0 Page2, Reg 06H, D13 = 1
MCLK K 13
P 160
MCLK 13
Q 10
MCLK K 17
P 192
MCLK 17
Q 12
29

www.ti.com
SLAS412− DECEMBER 2003
Temperature Measurement
In some applications, such as battery recharging, a measurement of ambient temperature is required. The temperature
measurement technique used in the ’AIC26 relies on the characteristics of a semiconductor junction operating at a fixed
current level. The forward diode voltage (V
temperature can be predicted in applications by knowing the 25°C value of the V
of that voltage as the temperature changes.
The ’AIC26 offers two modes of temperature measurement. The first mode requires a single reading to predict the ambient
temperature. A diode, as shown in Figure 25, is used during this measurement cycle. This voltage is typically 600 mV at
25°C with a 20-µA current through it. The absolute value of this diode voltage can vary a few millivolts. During the final test
of the end product, the diode voltage must be stored at a known temperature. Further calibration can be done to calculate
the precise temperature coefficient of the particular device. This method has a temperature resolution of approximately 0.3
°C/LSB and accuracy of approximately 6°C.
) has a well-defined characteristic versus temperature. The ambient
BE
X+
MUX
A/D
Converter
voltage and then monitoring the delta
BE
Temperature Select
TEMP0TEMP1
Figure 25. Functional Block Diagram of Temperature Measurement Mode
The second mode uses a two-measurement (differential) method. This mode requires a second conversion with a current
82 times larger. The voltage difference between the first (TEMP1) and second (TEMP2) conversion, using 82 times the
bias current, is represented by:
kT
ǒ
Ǔ
ln(N)
q
where:
N is the current ratio = 82
k = Boltzmann’s constant (1.38054 • 10
q = the electron charge (1.602189 • 10
−23
electrons volts/degrees Kelvin)
−19
°C)
T = the temperature in degrees Kelvin
This method provides resolution of approximately 1.5°C/LSB and accuracy of approximately
5°C. The temperature
measured by the ’AIC26 is an approximate number with an accuracy of 5°C to 6°C depending on the method used. Further ,
it has been found that the measurement varies significantly from device to device. Therefore, it is recommended that the
user calibrate the temperature measurement during final system test.
30

www.ti.com
2700
SLAS412− DECEMBER 2003
2500
2300
2100
ADC Code
1900
1700
1500
−40 −20 0 20 40 60 80
Temperature − °C
Figure 26. Typical Plot for Single Measurement Method
500
450
400
Differential Code
350
300
−40 −20 0 20 40 60 80
Temperature − °C
Figure 27. Typical Plot for Differential Measurement Method
Battery Measurement
An added feature of the ’AIC26 is the ability to monitor the battery voltage on the other side of a voltage regulator (dc/dc
converter), as shown in Figure 28. The battery voltage can vary from 0.5 V to 6 V while maintaining the analog supply
voltage to the ’AIC26 in the range of 2.7 V to 3.6 V. The input voltage (VBAT1 or VBAT2) is divided by a factor of 6 so that
a 6.0-V battery voltage is represented as 1.0 V to the ADC. In order to minimize the power consumption, the divider is only
on during the sampling of the battery input. If the battery conversion results in a ADC output code of B, the voltage at the
battery pin can be calculated as
Vbat = (B/2
N
) x 6 x Vref
where N is the programmed resolution of ADC and Vref the programmed value of internal reference or the applied external
reference.
31

SLAS412− DECEMBER 2003
Battery
www.ti.com
DC/DC
Converter
+
−
VBAT
10 kΩ
V
DD
2 kΩ
GND
Figure 28. Battery Measurement Functional Block Diagram
For increased protection and robustness, TI recommends a minimum 100-Ω resistor be added in series between the
system battery and the VBAT pin. The 100-Ω resistor causes an approximately 1% gain change in the battery voltage
measurement, which can easily be corrected in software when the battery conversion data is read by the operating system.
See the Conversion Time Calculation for the ’AIC26 section in this data sheet for timing diagrams and conversion time
calculations.
Auxiliary Measurement
The auxiliary voltage input (AUX) can be measured in much the same way as the battery inputs. Applications might include
external temperature sensing, ambient light monitoring for controlling the back-light, or sensing the current drawn from the
battery. The auxiliary input can also be monitored continuously in scan mode.
See the Conversion Time Calculation for the ’AIC26 section in this data sheet for timing diagrams and conversion time
calculations.
Port Scan
If making measurements of BAT1, BAT2, and AUX is desired on a periodic basis, the port scan mode can be used. This
mode causes the ’AIC26 to sample and convert both battery inputs and the auxiliary input. At the end of this cycle, the
battery and auxiliary result registers contain the updated values. Thus, with one write to the ’AIC26, the host can cause
three different measurements to be made.
See the Conversion Time Calculation for the ’AIC26 section and the Port Scan Operation subsection in this data sheet for
timing diagrams and conversion time calculations.
Hardware Reset
The device requires a low-to-high pulse on RESET after power up for correct operation. A hardware reset pulse initializes
all the internal registers, counters, and logic.
Hardware Power Down
By default the PWD/ADWS pin is configured as a hardware power-down (active low) signal. The device powers down all
the internal circuitry to save power. All the register contents are maintained. Some counters maintain their value. The user
can optionally use this pin as ADWS (ADC word select) by register programming.
32

www.ti.com
SLAS412− DECEMBER 2003
’AIC26 COMMUNICATION PROTOCOL
Register Programming
The ’AIC26 is entirely controlled by registers. An SPI master controlls the reading and writing of these registers by the use
of a 16-bit command, which is sent prior to the data for that register. The command is constructed as shown in Figure 29.
The command word begins with a R/W bit, which specifies the direction of data flow on the SPI serial bus. The following
four bits specify the page of memory this command is directed to, as shown in Table 5. The next six bits specify the register
address on that page of memory to which the data is directed. The last five bits are reserved for future use and should be
written only with zeros.
Table 5. Page Addressing
PG3 PG2 PG1 PG0 PAGE ADDRESSED
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 Reserved
0 1 0 0 Reserved
0 1 0 1 Reserved
0 1 1 0 Reserved
0 1 1 1 Reserved
1 0 0 0 Reserved
1 0 0 1 Reserved
1 0 1 0 Reserved
1 0 1 1 Reserved
1 1 0 0 Reserved
1 1 0 1 Reserved
1 1 1 0 Reserved
1 1 1 1 Reserved
To read all the first page of memory, for example, the host processor must send the command 0x8000 to the ’AIC26 – this
specifies a read operation beginning at page 0, address 0. The processor can then start clocking data out of the ’AIC26.
The ’AIC26 automatically increments its address pointer to the end of the page; if the host processor continues clocking
data out past the end of a page, the ’AIC26 sends back the value 0xFFFF.
Likewise, writing to page 1 of memory consists of the processor writing the command 0x0800, which specifies a write
operation, with PG0 set to 1, and all the ADDR bits set to 0. This results in the address pointer pointing at the first location
in memory on Page 1. See the section on the ’AIC26 memory map for details of register locations
BIT 15
MSB
R/W* PG3 PG2 PG1 PG0 ADDR5 ADDR4 ADDR3 ADDR2 ADDR1 ADDR0 0 0 0 0 0
BIT 14 BIT 13 BIT 12 BIT 11 BIT 10 BIT 9 BIT 8 BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
LSB
Figure 29. ’AIC26 Command Word
33

SLAS412− DECEMBER 2003
SS
SCLK
www.ti.com
MOSI
SS
SCLK
MOSI
MISO
COMMAND WORD DATA DATA
Figure 30. Write Operation for ’AIC26 SPI Interface
COMMAND WORD
DATA DATA
Figure 31. Read Operation for ’AIC26 SPI Interface
34

www.ti.com
SLAS412− DECEMBER 2003
’AIC26 MEMORY MAP
The ’AIC26 has several 16-bit registers which allow control of the device as well as providing a location for results from
the ’AIC26 to be stored until read by the host microprocessor. These registers are separated into three pages of memory
in the ’AIC26: a data page (Page 0) and control pages (Page 1 and Page 2). The memory map is shown in Table 6.
Table 6. Memory Map
Page 0: Auxiliary Data Registers Page 1: Auxiliary Control Registers Page 2: Audio Control Registers
ADDR REGISTER ADDR REGISTER ADDR REGISTER
00 Reserved 00 AUX ADC 00 Audio Control 1
01 Reserved 01 Status 01 Codec ADC Gain
02 Reserved 02 Reserved 02 Codec DAC Gain
03 Reserved 03 Reference 03 Codec Sidetone
04 Reserved 04 Reset 04 Audio Control 2
05 BAT1 05 Reserved 05 Codec Power Control
06 BAT2 06 Reserved 06 Audio Control 3
07 AUX 07 Reserved 07 Digital Audio Effects Filter Coef ficients
08 Reserved 08 Reserved 08 Digital Audio Effects Filter Coefficients
09 TEMP1 09 Reserved 09 Digital Audio Effects Filter Coefficients
0A TEMP2 0A Reserved 0A Digital Audio Effects Filter Coefficients
0B Reserved 0B Reserved 0B Digital Audio Effects Filter Coefficients
0C Reserved 0C Reserved 0C Digital Audio Effects Filter Coefficients
0D Reserved 0D Reserved 0D Digital Audio Effects Filter Coefficients
0E Reserved 0E Reserved 0E Digital Audio Effects Filter Coefficients
0F Reserved 0F Reserved 0F Digital Audio Effects Filter Coefficients
10 Reserved 10 Reserved 10 Digital Audio Effects Filter Coefficients
11 Reserved 11 Reserved 11 Digital Audio Effects Filter Coefficients
12 Reserved 12 Reserved 12 Digital Audio Effects Filter Coefficients
13 Reserved 13 Reserved 13 Digital Audio Effects Filter Coefficients
14 Reserved 14 Reserved 14 Digital Audio Effects Filter Coefficients
15 Reserved 15 Reserved 15 Digital Audio Effects Filter Coefficients
16 Reserved 16 Reserved 16 Digital Audio Effects Filter Coefficients
17 Reserved 17 Reserved 17 Digital Audio Effects Filter Coefficients
18 Reserved 18 Reserved 18 Digital Audio Effects Filter Coefficients
19 Reserved 19 Reserved 19 Digital Audio Effects Filter Coefficients
1A Reserved 1A Reserved 1A Digital Audio Effects Filter Coefficients
1B Reserved 1B Reserved 1B PLL Programmability
1C Reserved 1C Reserved 1C PLL Programmability
1D Reserved 1D Reserved 1D Audio Control 4
1E Reserved 1E Reserved 1E Audio Control 5
1F Reserved 1F Reserved 1F Reserved
35

www.ti.com
SLAS412− DECEMBER 2003
’AIC26 CONTROL REGISTERS
This section describes each of the registers shown in the memory map of Table 6. The registers are grouped according
to the function they control. In the ’AIC26, bits in control registers can refer to slightly different functions depending on
whether you are reading the register or writing to it.
’AIC26 Data Registers (Page 0)
The data registers in Page 0 of the ’AIC26 hold data results from auxiliary ADC. All of these registers default to 0000H on
reset. These registers are read only.
BAT1, BAT2, AUX, TEMP1 and TEMP2 Registers
The results of all A/D conversions are placed in the appropriate data register. The data format of the result word, R, of these
registers is right-justified, as follows:
BIT 15
MSB
BIT 14 BIT 13 BIT 12 BIT 11 BIT 10 BIT 9 BIT 8 BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
0 0 0 0 R11
MSB
R10 R9 R8 R7 R6 R5 R4 R3 R2 R1 R0
LSB
LSB
All the updated data registers should be read back either with a single SPI transaction as shown in Figure 31 or by reading
in descending order of address (i.e., higher address data first and lower address data next). For example, read the updated
registers in order of AUX, BAT2, and then BAT1 instead of BAT1, BAT2, and then AUX.
PAGE 1 CONTROL REGISTER MAP
REGISTER 00H: ADC Control
BIT NAME
D15 R 0 Reserved.
D14 ADST R/W 1(for read status)
D13−10 ADSCM R/W 0000 A/D Scan Mode.
D9−D8 RESOL R/W 00 Resolution Control. The A/D converter resolution is specified with these bits.
READ/
WRITE
RESET VALUE FUNCTION
Note: The value of this bit should always be set to zero.
A/D Status.
0(for write status)
READ
0 => ADC is busy
1 => ADC is not busy (default)
WRITE
0 => Normal mode. (default)
1 => Stop conversion and power down. Power down happens immediately
0000 => No scan
0001 => Reserved
0010 => Reserved
0011 => Reserved
0100 => Reserved
0101 => Reserved
0110 => BAT1 input is converted, and the result is returned to the BAT1 data register.
0111 => BAT2 input is converted, and the result is returned to the BAT2 data register.
1000 => AUX input is converted, and the result is returned to the AUX data register.
1001 => Scan function: AUX input is converted and the result is returned to the AUX data
register. Scan continues until stop bit is sent.
1010 => TEMP1 is converted, and the result is returned to the TEMP1 data register.
101 1 => Port scan function: BAT1, BAT2, and AUX inputs are measured and the results
returned to the appropriate data registers.
1100 => TEMP2 is converted, and the result is returned to the TEMP2 data register.
1101 => Reserved
1110 => Reserved
1111 => Reserved
00 => 12−bit resolution
01 => 8−bit resolution
10 => 10−bit resolution
11 => 12−bit resolution
36

www.ti.com
a
N)4
SLAS412− DECEMBER 2003
BIT FUNCTIONRESET VALUE
D7−D6 ADAVG R/W 00 Converter Averaging Control. These two bits allow you to specify the number of averages
D5−D4 ADCR R/W 00 Conversion Rate Control. These two bits specify the internal clock rate which the A/D
D3−D1 R 000 Reserved.
D0 AVGFS R/W 0 Average Filter select
NAME
READ/
WRITE
the converter performs selected by bit D0, which selects either mean filter or
median filter.
Mean Filter Median filter
00 => No average No average
01 => 4−data average 5-data average
10 => 8−data average 9-data average
11 => 16−data average 15-data average
converter uses to perform a single conversion. These bits are the same whether
reading or writing.
t
+
conv
ƒ
INTCLK
where f
2-MHz internal clock frequency, the conversion time is 8.0 µs. This yields an effective
throughput rate of 125 kHz.
00 => 8-MHz internal clock rate (use for 8-bit resolution only)
01 => 4-MHz internal clock rate (use for 8-bit/10-bit resolution only)
10 => 2-MHz internal clock rate
11 => 1-MHz internal clock rate
0 => Mean filter
1 => Median filter
is the internal clock frequency. For example, with 12-bit resolution and
INTCLK
37

SLAS412− DECEMBER 2003
REGISTER 01H: Status Register
BIT NAME
D15−D14 DAV R/W 10 Data Available. These two bits program the function of the DAV pin.
D13 PWRDN R 0 AUX−ADC Power down status
D12 R 0 Reserved
D11 DAVAIL R 0 Data Available Status
D10−D7 R 0000 Reserved
D6 B1STAT R 0 BAT1 Data Register Status
D5 B2STAT R 0 BAT2 Data Register Status
D4 AXSTAT R 0 AUX Data Register Status
D3 R 0 Reserved
D2 T1STAT R 0 TEMP1 Data Register Status
D1 T2STAT R 0 TEMP2 Data Register Status
D0 R 0 Reserved
READ/
WRITE
RESET
VALUE
FUNCTION
00 => Reserved
01 => Acts as data available (Active Low) only. The DAV goes low as soon as one set of ADC
conversion i s completed. For scan mode, DAV remains low as long as all the appropriate
registers have not been read out.
10 => Reserved
11 => Reserved
Note: D15−D14 should be programmed to 01 for the ’AIC26 to operate correctly.
0 => AUX−ADC is active
1 => AUX−ADC stops conversion and powers down
0 => No data available.
1 => Data is available(i.e., one set of conversion is done).
Note:− This bit is cleared only after all the converted data has been completely read out.
0 => No new data is available in BAT1 data register
1 => New data is available in BAT1 data register
Note: This bit is cleared only after the converted data of BAT1 has been completely read out of the
register.
0 => No new data is available in BAT2 data register
1 => New data is available in BAT2 data register
Note: This bit is cleared only after the converted data of BAT2 has been completely read out of the
register.
0 => No new data is available in AUX data register
1 => New data is available in AUX data register
Note: This bit is cleared only after the converted data of AUX has been completely read out of the
register.
0 => No new data is available in TEMP1 data register
1 => New data is available in TEMP1 data register
Note: This bit is cleared only after the converted data of TEMP1 has been completely read out of the
register.
0 => No new data is available in TEMP2 data register
1 => New data is available in TEMP2 data register
Note: This bit is cleared only after the converted data of TEMP2 has been completely read out of the
register.
www.ti.com
38

www.ti.com
SLAS412− DECEMBER 2003
REGISTER 02H: Reserved
BIT NAME
D15−D0 R FFFFH Reserved
READ/
WRITE
REGISTER 03H: Reference Control
BIT NAME
D15−D5 R 000H Reserved
D4 VREFM R/W 0 Voltage Reference Mode. This bit configures the VREF pin as either external reference or internal
D3−D2 RPWUDL R/W 00 Reference Power Up Delay. These bits allow a delay time for measurements to be made after the
D1 RPWDN R/W 1 Reference Power Down. This bit controls the power down of the internal reference voltage.
D0 IREFV R/W 0 Internal Reference Voltage. This bit selects the internal voltage reference level for the TSC ADC.
READ/
WRITE
RESET
VALUE
RESET
VALUE
FUNCTION
FUNCTION
reference.
0 => External reference
1 => Internal reference
reference powers up, thereby ensuring that the reference has settled
00 => 0 µs
01 => 100 µs
10 => 500 µs
11 => 1000 µs
Note: This is valid only when the device is programmed for internal reference and bit D1 = 1, i.e.,
reference is powered down between the conversions if not required.
0 => Powered up at all times.
1 => Powered down between conversions.
Note: when D4 = 0, i.e., device is in external reference mode, then the internal reference is powered
down always.
0 => VREF = 1.25 V
1 => VREF = 2.50 V
REGISTER 04H: Reset Control
BIT NAME
D15−D0 RSALL R/W FFFFH Reset All. Writing the code 0xBB00, as shown below, to this register causes the ’AIC26 to reset all
READ/
WRITE
RESET
VALUE
FUNCTION
its registers to their default, power−up values.
1011101100000000 => Reset all registers
Others => Do not write other sequences to this register.
REGISTER 05H: Reserved
BIT NAME
D15−D0 R 0000H Reserved
READ/
WRITE
RESET
VALUE
FUNCTION
39

SLAS412− DECEMBER 2003
PAGE 2 CONTROL REGISTER MAP
REGISTER 00H: Audio Control 1
www.ti.com
BIT NAME
D15−D14 ADCHPF R/W 00 ADC High Pass Filter
D13−D12 ADCIN R/W 00 ADC Input Mux
D11−D10 WLEN R/W 00 Codec Word Length
D9−D8 DATFM R/W 00 Digital Data Format
D7−D6 R 00 Reserved
D5−D3 DACFS R/W 000 DAC Sampling Rate
D2−D0 ADCFS R/W 000 ADC Sampling Rate
READ/
WRITE
RESET
VALUE
00 => Disabled
01 => −3dB point = 0.0045 x Fs
10 => −3dB point = 0.0125 x Fs
11 => −3dB point = 0.025 x Fs
Note: Fs is ADC sample rate
00 => ADC Input = Single-ended input MIC
01 => ADC Input = Single-ended input AUX
10 => ADC Input = Differential input MICIN and AUX
11 => ADC Input = Differential input MICIN and AUX
00 => Word length = 16 bit
01 => Word length = 20 bit
10 => Word length = 24 bit
11 => W ord length = 32 bit
00 => I2S mode
01 => DSP mode
10 => Right justified
11 => Left justified
Note: Right justified, valid only when the ratio between DAC and ADC sample rate is an integer.
e.g., ADC = 32 kHz and DAC = 24 kHz or vice-versa is invalid for right-justified mode.
000 => DAC FS = Fsref/1
001 => DAC FS = Fsref/(1.5)
010 => DAC FS = Fsref/2
011 => DAC FS = Fsref/3
100 => DAC FS = Fsref/4
101 => DAC FS = Fsref/5
110 => DAC FS = Fsref/(5.5)
111 => DAC FS = Fsref/6
Note: Fsref can be set between 39 kHz and 53 kHz
000 => ADC FS = Fsref/1
001 => ADC FS = Fsref/(1.5)
010 => ADC FS = Fsref/2
011 => ADC FS = Fsref/3
100 => ADC FS = Fsref/4
101 => ADC FS = Fsref/5
110 => ADC FS = Fsref/(5.5)
111 => ADC FS = Fsref/6
Note: Fsref can be set between 39 kHz and 53 kHz
FUNCTION
40

www.ti.com
REGISTER 01H: CODEC ADC Gain Control
SLAS412− DECEMBER 2003
BIT NAME
D15 ADMUT R/W 1 ADC Channel Mute
D14−D8 ADPGA R/W 0000000 ADC PGA Settings
D7−D5 AGCTG R/W 000 AGC Target Level. These three bits set the AGC’s targeted ADC output level.
READ/
WRITE
RESET
VALUE
FUNCTION
1 => ADC channel muted
0 => ADC channel not muted
Note: If AGC is enabled, then D15−D8 reflects gain being applied by AGC.
If AGC is on, the decoding for read values is as follows:
01110111 => +59.5 dB
01110110 => +59.0 dB
−−−−−
00000000 => 0 dB
−−−−−
11101001 => −11.5 dB
11101000 => −12 dB
0000000 => ADC PGA = 0 dB
0000001 => ADC PGA = 0.5 dB
0000010 => ADC PGA = 1.0 dB
−−−−−
1110110 => ADC PGA = 59.0 dB
1110111 => ADC PGA = 59.5 dB
1111000 => ADC PGA = 59.5 dB
−−−−−
1111110 => ADC PGA = 59.5 dB
1111111 => ADC PGA = 59.5 dB
Note: If AGC is enabled, then D15−D8 reflects gain being applied by AGC. If AGC is
on, the decoding for read values is as follows
01110111 => +59.5 dB
01110110 => +59.0 dB
−−−−−
00000000 => 0 dB
−−−−−
11101001 => −11.5 dB
11101000 => −12 dB
000 => −5.5 dB
001 => −8.0 dB
010 => −10 dB
011 => −12 dB
100 => −14 dB
101 => −17 dB
110 => −20 dB
111 => −24 dB
41

SLAS412− DECEMBER 2003
www.ti.com
BIT FUNCTION
D4−D1 AGCTC R/W 0000 AGC Time Constant. These four bits set the AGC attack and decay time constants.
D0 AGCEN R/W 0 AGC Enable
NAME
READ/
WRITE
RESET
VALUE
Time constants remain the same irrespective of any sampling frequency .
Attack Time (ms) Decay Time (ms)
0000 8 100
0001 11 100
0010 16 100
0011 20 100
0100 8 200
0101 11 200
0110 16 200
0111 20 200
1000 8 400
1001 11 400
1010 16 400
1011 20 400
1100 8 500
1101 11 500
1110 16 500
1111 20 500
0 => AGC is off (ADC PGA is controlled by D15−D8 ADC PGA Control)
1 => AGC is on (ADC PGA is controlled by AGC)
REGISTER 02H: CODEC DAC Gain Control
BIT NAME
D15 DALMU R/W 1 DAC Left Channel Muted
D14−D8 DALVL R/W 1111111 DAC Left Channel Volume Control
D7 DARMU R/W 1 DAC Right Channel Muted
D6−D0 DARVL R/W 1111111 DAC Right Channel Volume Control
READ/
WRITE
RESET
VALUE
FUNCTION
1 => DAC left channel muted
0 => DAC left channel not muted
0000000 => DAC left channel volume control = 0 dB
0000001 => DAC left channel volume control = −0.5 dB
0000010 => DAC left channel volume control = −1.0 dB
−−−−−
1111110 => DAC left channel volume control = −63.0 dB
1111111 => DAC left channel volume control = −63.5 dB
1 => DAC right channel muted
0 => DAC right channel not muted
0000000 => DAC right channel volume control = 0 dB
0000001 => DAC right channel volume control = −0.5 dB
0000010 => DAC right channel volume control = −1.0 dB
−−−−−
1111110 => DAC right channel volume control = −63.0 dB
1111111 => DAC right channel volume control = −63.5 dB
42

www.ti.com
REGISTER 03H: CODEC Sidetone Control
BIT NAME
D15 ASTMU R/W 1 Analog Sidetone Mute Control
D14−D8 ASTG R/W 1000101 Analog Sidetone Gain Setting
D7 DSTMU R/W 1 Digital Sidetone Mute Control
D6−D1 DSTG R/W 000000 Digital Sidetone Setting
D0 ASTGF R 0 Analog Sidetone PGA Flag ( Read Only )
READ/
WRITE
RESET
VALUE
1 => Analog sidetone muted
0 => Analog sidetone not muted
0000000 => Analog sidetone gain setting = −34.5 dB
0000001 => Analog sidetone gain setting = −34 dB
0000010 => Analog sidetone gain setting = −33.5 dB
−−−−−
1000101 => Analog sidetone gain setting = 0 dB
1000110 => Analog sidetone gain setting = 0.5 dB
−−−−−
1011100 => Analog sidetone gain setting = 11.5 dB
1011101 => Analog sidetone gain setting = 12 dB
1011110 => Analog sidetone gain setting = 12 dB
1011111 => Analog sidetone gain setting = 12 dB
−−−−−
11xxxxx => Analog sidetone gain setting = 12 dB
1 => Digital sidetone muted
0 => Digital sidetone not muted
000000 => Digital sidetone gain = 0 dB
000001 => Digital sidetone gain = −1.5 dB
000010 => Digital sidetone gain = −3.0 dB
−−−−−
1xxxxx => Digital sidetone gain = −48 dB
Note: Digital sidetone setting applied at zero cross over
0 => Gain applied /= PGA register setting
1 => PGA applied = PGA register setting.
Note: Analog sidetone gain is implemented at zero crossings of the signal.
SLAS412− DECEMBER 2003
FUNCTION
43

SLAS412− DECEMBER 2003
REGISTER 04H: Audio Control 2
BIT NAME
D15 KCLEN R/W 0 Keyclick Enable
D14−D12 KCLAC R/W 100 Keyclick Amplitude Control
D11 APGASS R/W 0 ADC Channel PGA Soft-Stepping Control
D10−D8 KCLFRQ R/W 100 Keyclick Frequency
D7−D4 KCLLN R/W 0001 Keyclick Length
D3 DLGAF R 0 DAC Left Channel PGA Flag ( Read Only )
D2 DRGAF R 0 DAC Right Channel PGA Flag ( Read Only )
D1 DASTC R/W 0 DAC Channel PGA Soft-Stepping Control
D0 ADGAF R 0 ADC Channel PGA Flag ( Read Only )
READ/
WRITE
RESET
VALUE
0 => Keyclick disabled
1 => Keyclick enabled
Note: This bit is automatically cleared after giving out the keyclick signal length equal to the
programmed value.
000 => Lowest amplitude
100 => Medium amplitude
111 => Highest amplitude
0 => 0.5dB change every ADWS
1 => 0.5dB change every 2 ADWS
Note: When AGC is enabled, this bit is read only. The read values indicate the following
0 => signal power greater than noise threshold
1 => signal power is less than noise threshold
000 => 62.5 Hz
001 => 125 Hz
010 => 250 Hz
011 => 500 Hz
100 => 1 kHz
101 => 2 kHz
110 => 4 kHz
111 => 8 kHz
0000 => 2 periods key click
0001 => 4 periods key click
0010 => 6 periods key click
−−−−−
1110 => 30 periods key click
1111 => 32 periods key click
0 => Gain applied /= PGA register setting
1 => Gain applied = PGA register setting
Note: This flag indicates when the soft-stepping for DAC left channel is completed
0 => Gain applied /= PGA register setting
1 => Gain applied = PGA register setting
Note: This flag indicates when the soft-stepping for DAC right channel is completed
0 => 0.5dB change every LRCK
1 => 0.5dB change every 2 LRCK
1 => Gain applied = PGA register setting
0 => Gain applied /= PGA register setting
Note: This flag indicates when the soft-stepping for ADC channel is completed. When AGC is
enabled the read value of this bit indicates the following:
0 => AGC is not saturated.
1 => AGC is saturated.
www.ti.com
FUNCTION
44

www.ti.com
REGISTER 05H: CODEC Power Control
BIT NAME
D15 PWDNC R/W 1 Codec Power-Down Control
D14 R 0 Reserved (During read the value of this bit is 0. Write only 0 into this location.)
D13 ASTPWD R/W 1 Analog Sidetone Power-down Control
D12 DAODRC R/W 0 Audio Output Driver Control
D11 ASTPWF R 1 Analog Sidetone Power-Down Flag
D10 DAPWDN R/W 1 DAC Power-Down Control
D9 ADPWDN R/W 1 ADC Power-Down Control
D8 VGPWDN R/W 1 Driver Virtual Ground Power Down
D7 ADPWDF R 1 ADC Power-Down Flag
D6 DAPWDF R 1 DAC Power-Down Flag (See DAC Power down section of this data sheet)
D5 ADWSF R/W 0 ADWS Pin Function
D4 VBIAS R/W 0 VBIAS Voltage
D3−D2 R 00 Reserved. Write only 00 into this location.
D1 EFFCTL R/W 0 Digital Audio Effects Filter Control
D0 DEEMPF R/W 0 De−Emphasis Filter Enable
READ/
WRITE
RESET
VALUE
FUNCTION
0 => Codec powered up
1 => Codec powered down
0 => Analog sidetone powered up
1 => Analog sidetone powered down
0 => Output driver in low power mode
1 => Output driver in high power mode
0 => Analog sidetone powered down is not complete.
1 => Analog sidetone powered down is complete.
0 => Power up the DAC
1 => Power down the DAC
0 => Power up the ADC
1 => Power down the ADC
0 => Power up the VGND amp
1 => Power down the VGND amp
0 => ADC power down is not complete.
1 => ADC power down is complete.
0 => DAC power down is not complete.
1 => DAC power down is complete.
0 => ADWS pin acts as hardware power down.
1 => ADWS pin acts as ADC Word−Select.
Note: ADWS pin should be programmed as hardware power down only if the ADC channel is
powered down or both the ADC and DAC channels have the same sampling rate. If both the ADC
and DAC channels have the same sampling rates, then LRCK can act as a common word select
signal for the ADC and DAC.
0 => VBIAS output = 2.5 V
1 => VBIAS output = 2.0 V
0 => Disable digital audio effects filter
1 => Enable digital audio effects filter
0 => Disable de-emphasis filter
1 => Enable de-emphasis filter
SLAS412− DECEMBER 2003
45

SLAS412− DECEMBER 2003
REGISTER 06H: Audio Control 3
BIT NAME
D15−D14 DMSVOL R/W 00 DAC Channel Master Volume Control
D13 REFFS R/W 0 Reference Sampling Rate. This setting controls the coefficients in the de-emphasis filter, the
D12 DAXFM R/W 0 Master Transfer Mode
D11 SLVMS R/W 0 Codec Master Slave Selection
D10−D9 DAPK2PK R/W 00 DAC Max Output Signal Swing and Common Mode Voltage
D8 ADCOVF R 0 ADC Channel Overflow Flag ( Read Only )
D7 DALOVF R 0 DAC Left Channel Overflow Flag ( Read Only )
D6 DAROVF R 0 DAC Right Channel Overflow Flag ( Read Only )
D5−D4 AGCNL R/W 00 AGC Noise Threshold.
D3 CLPST R/W 0 AGC Clip Stepping Enable
D2−D0 REVID R XXX Reserved
READ/
WRITE
RESET
VALUE
FUNCTION
00 => Left channel and right channel have independent volume controls
01 => Left channel volume control is the programmed value of the right channel volume control.
10 => Right channel volume control is the programmed value of the left channel volume control.
11 => same as 00
time-constants in AGC, and internal divider values that generate a clock for the measurement
ADC. If an Fsref above 48 kHz is being used, then it is recommended to set this to the 48-kHz
setting, otherwise either setting can be used.
0 => Fsref = 48.0 kHz
1 => Fsref = 44.1 kHz
0 => Continuous data transfer mode
1 => 256−s data transfer mode
0 => ’AIC26 is slave codec
1 => ’AIC26 is master codec
00 => DAC max output signal swing = 2.0 V , VCM = 1.35 V
01 => DAC max output signal swing = 2.192 V (only recommended for analog supply of 3.0 V
and digital supply of 1.65 V and above), VCM = 1.48 V
10 => DAC max output signal swing = 2.402 V (only recommended for analog supply of 3.3 V
and digital supply of 1.8 V and above), VCM = 1.62 V
11 => DAC max output signal swing = 2.633 V (only recommended for analog supply of 3.6 V
and digital supply of 1.95 V), VCM = 1.78 V
0 => ADC channel data is within saturation limits.
1 => ADC channel data has exceeded saturation limits.
Note : This flag is reset only on register read.
0 => DAC left channel data is within saturation limits.
1 => DAC left channel data has exceeded saturation limits.
Note : This flag is reset only on register read.
0 => DAC right channel data is within saturation limits.
1 => DAC right channel data has exceeded saturation limits.
Note : This flag is reset only on register read.
00 => −60 dB
01 => −70 dB
10 => −80 dB
11 => −90 dB
Note: AGC does not try to achieve the programmed ADC output levels if the input signal is below
the programmed noise thresholds. This feature helps to avoid amplifying noise during silence
periods.
0 => Not enabled
1 => Enabled
www.ti.com
46

www.ti.com
REGISTER 07H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_N0 R/W 27619 Left channel digital audio effects filter coefficient N0
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 08H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_N1 R/W −27034 Left channel digital audio effects filter coefficient N1
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 09H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_N2 R/W 26461 Left channel digital audio effects filter coefficient N2
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 0AH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_N3 R/W 27619 Left channel digital audio effects filter coefficient N3
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 0BH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_N4 R/W −27034 Left channel digital audio effects filter coefficient N4
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
SLAS412− DECEMBER 2003
REGISTER 0CH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_N5 R/W 26461 Left channel digital audio effects filter coefficient N5
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 0DH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_D1 R/W 32131 Left channel digital audio effects filter coefficient D1
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 0EH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_D2 R/W −31506 Left channel digital audio effects filter coefficient D2
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 0FH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_D4 R/W 32131 Left channel digital audio effects filter coefficient D4
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 10H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 L_D5 R/W −31506 Left channel digital audio effects filter coefficient D5
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 11H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_N0 R/W 27619 Right channel digital audio effects filter coefficient N0
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 12H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_N1 R/W −27034 Right channel digital audio effects filter coefficient N1
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
47

SLAS412− DECEMBER 2003
REGISTER 13H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_N2 R/W 26461 Right channel digital audio effects filter coefficient N2
READ/
WRITE
REGISTER 14H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_N3 R/W 27619 Right channel digital audio effects filter coefficient N3
READ/
WRITE
REGISTER 15H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_N4 R/W −27034 Right channel digital audio effects filter coefficient N4
READ/
WRITE
REGISTER 16H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_N5 R/W 26461 Right channel digital audio effects filter coefficient N5
READ/
WRITE
REGISTER 17H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_D1 R/W 32131 Right channel digital audio effects filter coefficient D1
READ/
WRITE
RESET VALUE
(IN DECIMAL)
RESET VALUE
(IN DECIMAL)
RESET VALUE
(IN DECIMAL)
RESET VALUE
(IN DECIMAL)
RESET VALUE
(IN DECIMAL)
FUNCTION
FUNCTION
FUNCTION
FUNCTION
FUNCTION
www.ti.com
REGISTER 18H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_D2 R/W −31506 Right channel digital audio effects filter coefficient D2
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 19H: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_D4 R/W 32131 Right channel digital audio effects filter coefficient D4
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
REGISTER 1AH: Digital Audio Effects Filter Coefficients
BIT NAME
D15−D0 R_D5 R/W −31506 Right channel digital audio effects filter coefficient D5
READ/
WRITE
RESET VALUE
(IN DECIMAL)
FUNCTION
48

www.ti.com
REGISTER 1BH: PLL Programmability
BIT NAME
D15 PLLSEL R/W 0 PLL Enable
D14−D11 QVAL R/W 0010 Q value. Valid only if PLL is disabled.
D10−D8 PVAL R/W 000 P value. Valid when PLL is enabled
D7−D2 JVAL R/W 000001 J value. Valid only if PLL is enabled.
D1−D0 Reserved R 00 Reserved (write only 00)
READ/
WRITE
RESET VALUE FUNCTION
0 => Disable PLL
1 => Enable PLL
0000 => 16
0001 => 17
0010 => 2
0011 => 3
−−−−−
1100 => 12
1101 => 13
1110 => 14
1111 => 15
000 => 8
001 => 1
010 => 2
011 => 3
100 => 4
101 => 5
110 => 6
111 => 7
000000 => Not valid
000001 => 1
000010 => 2
−−−−−
111110 => 62
111111 => 63
SLAS412− DECEMBER 2003
REGISTER 1CH: PLL Programmability
BIT NAME
D15−D2 DVAL R/W 0 (in decimal) D value. Used when PLL is enabled.
D1−D0 Reserved R 00 Reserved (write only 00)
READ/
WRITE
RESET VALUE FUNCTION
D value is valid from 0000 to 9999 in decimal.
Programmed value greater than 9999 is treated as 9999.
00000000000000 => 0 decimal
00000000000001 => 1 decimal
49

SLAS412− DECEMBER 2003
REGISTER 1DH: Audio Control 4
BIT NAME
D15 ASTPD R/W 0 ADC PGA Soft-Stepping Control
D14 DASTPD R/W 0 DAC PGA Soft-Stepping Control
D13 ASSTPD R/W 0 Analog Sidetone Soft-Stepping Control
D12 DSTPD R/W 0 Digital Sidetone Zero Cross Control
D11 Reserved R 0 Reserved
D10−D9 AGC_HYST R/W 00 AGC Hysteresis Control
D8 SHCKT_DIS R/W 0 Disable Short Circuit Detection
D7 SHCKT_PD R/W 0 Power Down Drivers if Short Circuit Detected
D6 SHCKT_FLAG R 0 Short Circuit Detected Flag
D5 DAC_POP_RED R 0 DAC POP Reduction Enable
D4 DAC_POP_RED_
SET1
D3−D2 DAC_POP_RED_
SET2
D1−D0 PGID R XX
READ/
WRITE
R/W 0 DAC POP Reduction Setting 1
R/W 00 DAC POP Reduction Setting 2
RESET
VALUE
0 => Soft-stepping enabled
1 => Soft-stepping disabled
0 => Soft-stepping enabled
1 => Soft-stepping disabled
0 => Soft-stepping enabled
1 => Soft-stepping disabled
0 => Zero cross enabled
1 => Zero cross disabled
00 =>1-dB hysteresis
01 => 2-dB hysteresis
10 => 4-dB hysteresis
11 => No hysteresis
0 => Short circuit detection enabled
1 => Short circuit detection disabled
0 => No auto power down of drivers on short circuit.
1 => Auto power down drivers on short circuit.
0 => Short circuit not detected
1 => Short circuit detected
0 => Disable POP reduction
1 => Enable POP reduction
0 => Fast setting
1 => Slow setting
00 => Long setting
11 => Short setting
www.ti.com
FUNCTION
50

www.ti.com
REGISTER 1EH: Audio Control 5
BIT NAME
D15−D9 MAX_AGC_PGA R/W 1111111 MAX Input Gain Applicable for AGC
D8−D6 AGC_NOI_DEB R/W 000 AGC Debounce Time for Speech Mode to Silence Mode T ransition
D5−D3 AGC_SIG_DEB R/W 000 AGC Debounce Time for Silence Mode to Speech Mode Transition
D2 DRV_POP_DIS R/W 0 Audio Output Driver POP Reduction Enable
D1 DRV_POP_LEN R/W 0 Audio Output Driver POP Reduction Duration
D0 Reserved R 0 Reserved. Do not write 1 to this location.
READ/
WRITE
RESET
VALUE
FUNCTION
0000000 => 0 dB
0000001 => 0.5 dB
0000010 => 1.0 dB
−−−−−
1110110 => 59.0 dB
1110111 => 59.5 dB
1111000 => 59.5 dB
−−−−−
1111111 => 59.5 dB
000 => 0 ms
001 => 0.5 ms
010 => 1.0 ms
−−−−−
110 => 16.0 ms
111 => 32.0 ms
000 => 0 ms
001 => 0.5 ms
010 => 1.0 ms
−−−−−
110 => 16.0 ms
111 => 32.0 ms
0 => Enabled
1 => Disabled
0 => Output driver ramps to final voltage in approximately 0.8 sec, if VGND is
powered down (1 msec otherwise).
1 => Output driver ramps to final voltage in approximately 4 sec, if VGND is powered
down (1 msec otherwise).
SLAS412− DECEMBER 2003
LAYOUT
The following layout suggestions should provide optimum performance from the ’AIC26. However, many portable
applications have conflicting requirements concerning power, cost, size, and weight. In general, most portable devices
have fairly clean power and grounds because most of the internal components are very low power. This situation means
less bypassing for the converter power and less concern regarding grounding. Still, each situation is unique and the
following suggestions should be reviewed carefully.
For optimum performance, care must be taken with the physical layout of the ’AIC26 circuitry. The SAR architecture of the
auxiliary converter is sensitive to glitches or sudden changes on the power supply, reference, ground connections, and
digital inputs that occur just prior to latching the output of the analog comparator. Therefore, during any single conversion
for an n-bit SAR converter, there are n windows in which large external transient voltages can easily affect the conversion
result. Such glitches might originate from switching power supplies, nearby digital logic, and high power devices. The
degree of error in the digital output depends on the reference voltage, layout, and the exact timing of the external event.
The error can change if the external event changes in time with respect to the timing of the critical n windows.
With this in mind, power to the ’AIC26 must be clean and well bypassed. A 0.1-µF ceramic bypass capacitor must be placed
as close to the device as possible. A 1-µF to 10-µF capacitor may also be needed if the impedance between the ’AIC26
supply pins and the system power supply is high.
A bypass capacitor on the VREF pin is generally not needed because the reference is buffered by an internal op amp,
although it can be useful to reduce reference noise level. If an external reference voltage originates from an op amp, make
sure that it can drive any bypass capacitor that is used without oscillation.
51

www.ti.com
SLAS412− DECEMBER 2003
The ’AIC26 architecture offers no inherent rejection of noise or voltage variation in regards to using an external reference
input. This is of particular concern when the reference input is tied to the power supply. Any noise and ripple from the supply
appears directly in the digital results. While high frequency noise can be filtered out, voltage variation due to line frequency
(50 Hz or 60 Hz) can be difficult to remove.
The ground pins must be connected to a clean ground point. In many cases, this is the analog ground. Avoid connections
which are too near the grounding point of a microcontroller or digital signal processor. If needed, run a ground trace directly
from the converter to the power supply entry or battery connection point. The ideal layout includes an analog ground plane
dedicated to the converter and associated analog circuitry.
CONVERSION TIME CALCULATION FOR THE ’AIC26
Auxiliary Measurement Operation
The time needed to make temperature, auxiliary, or battery measurements is given by:
t +
NJN
AVG
ǒ
ƪ
N
BITS
) 1
Ǔ
where:
n
= 6 ; if ƒ
1
7 ; if ƒ
n
= 24 ; if measurement is for TEMP1 case
2
conv
conv
= 8 MHz
≠ 8 MHz
12 ; if measurement is for other than TEMP1 case
= 0 ; if external reference mode is selected
n
3
3 ; if t
1 + t
t
REF
= 0 µs or reference is programmed for power up all the time.
REF
/125 ns; if t
REF
is the reference power up delay time.
Waiting for Host to write
into REG−00 of PAGE−01
DAV
(PAGE01H,REG01H,
[D15−D14 = 01])
0 µs and reference needs to power down between conversions.
≠
REF
REG−00 of
PAGE−01
is updated
for
BAT1 Scan
Mode
8MHz
ƒ
conv
) n1) n
Wait for Reference Powerup Delay in case
of internal ref. mode if applicable.
ƫ
) 1Nj t
2
OSC
SS Deactivated
) 15 t
Sample,Conversion &
OSC
Averaging for
BAT1 input
) n3 t
Reading
BAT1−Data
Register
Waiting for Host to
write into REG−00
of PAGE−01
OSC
The time needed for continuous AUX conversion in scan mode is given by:
t +
NJN
AVG
ǒ
ƪ
N
BITS
) 1
Ǔ
8MHz
ƒ
conv
) n1) 12
ƫ
) 1Nj t
OSC
) 8 t
where:
n
= 6 ; if ƒ
1
7 ; if ƒ
NOTE:The above equation is valid only from second conversion onwards.
52
conv
conv
= 8 MHz
≠ 8 MHz
OSC

www.ti.com
REG−00 of
PAGE−01
is updated
for Continous
AUX SCAN
Mode
SS Deactivated
Reading
AUX−Data
Register
SLAS412− DECEMBER 2003
Reading
AUX−Data
Register
Waiting for Host to
write into REG−00
of PAGE−01
DAV
(PAGE01H,REG01H
[D15−D14 = 01])
Wait for Reference Powerup Delay in case
of internal ref. mode if applicable
Sample,Conversion &
Averaging for
AUX input
Port Scan Operation
The time needed to complete one set of port scan conversions is given by:
t + 3
NJN
AVG
ǒ
ƪ
N
BITS
) 1
Ǔ
8MHz
ƒ
conv
) n1) 12
ƫ
) 1Nj t
OSC
where:
n
= 6 ; if ƒ
1
7 ; if ƒ
n
= 0 ; if external reference mode is selected
2
3 ; if t
1 + t
t
REF
= 8 MHz
conv
≠ 8 MHz
conv
= 0 µs or reference is programmed for power up all the times.
REF
/125 ns; if t
REF
is the reference power up delay time.
0 µs and reference needs to power down between conversions.
≠
REF
Sample,Conversion &
Averaging for
AUX input
) 31 t
OSC
Sample,Conversion &
Averaging for
AUX input
) n2 t
OSC
53

SLAS412− DECEMBER 2003
AUDIO CODEC FILTER FREQUENCY RESPONSES
Pass-Band Frequency Response of ADC Digital Filter
Frequency Response of Full ADC Channel Digital Filter at Fs = 48 kHz
0.02
0
−0.02
−0.04
−0.06
−0.06
−0.1
Magnitude − dB
−0.12
−0.14
−0.16
−0.18
0.2
0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Frequency − Hz
x 10
www.ti.com
4
Frequency Response of ADC High-Pass Filter (Fcut-off = 0.0045 Fs)
Frequency Response of ADC HPF at Fs = 48 kHz With −3 dB at 0.0045 Fs
0
−2
−4
−6
−8
Magnitude − dB
−10
−12
−14
0 500 1000 1500 2000 2500 3000 3500 4000
Frequency − Hz
4500
54

www.ti.com
Frequency Response of ADC High-Pass Filter (Fcut-off = 0.0125 Fs)
Frequency Response of ADC HPF at Fs = −48 kHz With −3 dB at 0.0125 Fs
0
−2
−4
−6
−8
−10
Magnitude − dB
−12
−14
−16
−18
0 1000 2000 3000 4000 5000 6000
Frequency − Hz
SLAS412− DECEMBER 2003
Frequency Response of ADC High-Pass Filter (Fcut-off = 0.025 Fs)
Frequency Response of ADC HPF at Fs = 48 kHz With −3 dB at 0.025 Fs
0
−2
−4
−6
−8
−10
Magnitude − dB
−12
−14
−16
−18
0 1000 2000 3000 4000 5000 6000
Frequency − Hz
7000 8000 9000
55

SLAS412− DECEMBER 2003
DAC CHANNEL DIGITAL FILTER
DAC Channel Digital Filter Frequency Response
Frequency Response of Full DAC Channel Digital Filterat Fs = 48 kHz
0
−20
−40
−60
−80
−100
Magnitude − dB
−120
−140
−160
0 0.5 1 1.5 2 2.5 3 3.5
Frequency − Hz
x 10
www.ti.com
5
DAC Channel Digital Filter Pass-Band Frequency Response
Frequency Response of Full DAC Channel Digital Filter at Fs = 48 kHz
0.04
0.02
0
−0.02
−0.04
−0.06
Magnitude − dB
−0.08
−0.1
−0.12
−0.14
0.5 1 1.5 2
Frequency − Hz
x 10
4
56

www.ti.com
DEFAULT DIGITAL AUDIO EFFECTS FILTER RESPONSE AT 48 ksps
Frequency Response of 4th Order Effects Filter With Default Coefficients Set
0
−0.5
−1
−1.5
Magnitude − dB
−2
−2.5
−3
10
0
10
1
2
10
Frequency − Hz
10
3
10
SLAS412− DECEMBER 2003
4
DE-EMPHASIS FILTER FREQUENCY RESPONSE
De-Emphasis Filter Response at 32 ksps
Digital De-Emphasis Frequency Response at Fs = 32 kHz
0
−1
−2
−3
−4
−5
Gain − dB
−6
−7
−8
−9
−10
0 2000 4000 6000 8000 10000 12000 14000 16000
Frequency − Hz
57

SLAS412− DECEMBER 2003
De-Emphasis Error at 32 ksps
De-Emphasis Error With Respect to Ideal Frequency Response For Fs = 33 kHz
0.3
0.25
0.2
0.15
0.1
Gain − dB
0.05
0
−0.05
−0.1
0 2000 4000 6000 8000 10000 12000 14000 16000
www.ti.com
Frequency − Hz
De-Emphasis Filter Frequency Response at 44.1 ksps
Digital De-Emphasis Frequency Response For Fs = 44.1 kHz
0
−1
−2
−3
−4
−5
Gain − dB
−6
−7
−8
−9
−10
0 0.5 1 1.5 2
Frequency − Hz
x 10
4
58

www.ti.com
De-Emphasis Error at 44.1 ksps
De-Emphasis Error With Respect to Ideal Frequency Response For Fs = 44.1 kHz
0.3
0.25
0.2
0.15
0.1
Gain − dB
0.05
0
−0.05
−0.1
0 0.5 1 1.5 2 2.5
Frequency − Hz
x 10
SLAS412− DECEMBER 2003
4
De-Emphasis Frequency Response at 48 ksps
Digital De-Emphasis Frequency Response at Fs = 48 kHz
0
−1
−2
−3
−4
−5
Gain − dB
−6
−7
−8
−9
−10
0 0.5 1 1.5 2 2.5
Frequency − Hz
x 10
4
59

SLAS412− DECEMBER 2003
De-Emphasis Error at 48 ksps
De-Emphasis Error With Respect to Ideal Frequency Response For Fs = 48 kHz
0.3
0.25
0.2
0.15
0.1
Gain − dB
0.05
0
−0.05
−0.1
0 0.5 1 1.5 2 2.5
Frequency − Hz
x 10
www.ti.com
4
PLL PROGRAMMING
The on-chip PLL in the ’AIC26 can be used to generate sampling clocks from a wide range of MCLK’s available in a system.
The PLL works by generating oversampled clocks with respect to Fsref (44.1 kHz or 48 kHz). Frequency division generates
all other internal clocks. The table below gives a sample programming for PLL registers for some standard MCLK’s when
PLL is required. Whenever the MCLK is of the form of N x 128 x Fsref (N=2,3…,17), PLL is not required.
Fsref = 44.1 kHz
MCLK (MHz) P J D ACHIEVED FSREF % ERROR
2.8224 1 32 0 44100.00 0.0000
5.6448 1 16 0 44100.00 0.0000
12 1 7 5264 44100.00 0.0000
13 1 6 9474 44099.71 0.0007
16 1 5 6448 44100.00 0.0000
19.2 1 4 7040 44100.00 0.0000
19.68 1 4 5893 44100.30 −0.0007
48 4 7 5264 44100.00 0.0000
Fsref = 48 kHz
MCLK (MHz) P J D ACHIEVED FSREF % ERROR
2.048 1 48 0 48000.00 0.0000
3.072 1 32 0 48000.00 0.0000
4.096 1 24 0 48000.00 0.0000
6.144 1 16 0 48000.00 0.0000
8.192 1 12 0 48000.00 0.0000
12 1 8 1920 48000.00 0.0000
13 1 7 5618 47999.71 0.0006
16 1 6 1440 48000.00 0.0000
19.2 1 5 1200 48000.00 0.0000
19.68 1 4 9951 47999.79 0.0004
48 4 8 1920 48000.00 0.0000
60

PACKAGE OPTION ADDENDUM
www.ti.com
9-Oct-2007
PACKAGING INFORMATION
Orderable Device Status
(1)
Package
Type
Package
Drawing
Pins Package
Qty
Eco Plan
TLV320AIC26IRHB ACTIVE QFN RHB 32 73 Green (RoHS &
no Sb/Br)
TLV320AIC26IRHBG4 ACTIVE QFN RHB 32 73 Green (RoHS &
no Sb/Br)
TLV320AIC26IRHBR ACTIVE QFN RHB 32 3000 Green (RoHS &
no Sb/Br)
(1)
The marketing status values are defined as follows:
ACTIVE: Product device recommended for new designs.
LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.
NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in
a new design.
PREVIEW: Device has been announced but is not in production. Samples may or may not be available.
OBSOLETE: TI has discontinued the production of the device.
(2)
Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check
http://www.ti.com/productcontent for the latest availability information and additional product content details.
TBD: The Pb-Free/Green conversion plan has not been defined.
Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements
for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered
at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.
Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and
package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS
compatible) as defined above.
Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame
retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)
(2)
Lead/Ball Finish MSL Peak Temp
CU NIPDAU Level-2-260C-1 YEAR
CU NIPDAU Level-2-260C-1 YEAR
Call TI Level-2-260C-1 YEAR
(3)
(3)
MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder
temperature.
Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is
provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the
accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken and continues to take
reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on
incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited
information may not be available for release.
In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI
to Customer on an annual basis.
Addendum-Page 1

PACKAGE MATERIALS INFORMATION
www.ti.com
TAPE AND REEL INFORMATION
19-Mar-2008
*All dimensions are nominal
Device Package
TLV320AIC26IRHBR QFN RHB 32 3000 330.0 12.4 5.3 5.3 1.5 8.0 12.0 Q2
Type
Package
Drawing
Pins SPQ Reel
Diameter
(mm)
Reel
Width
W1 (mm)
A0 (mm) B0 (mm) K0 (mm) P1
(mm)W(mm)
Pin1
Quadrant
Pack Materials-Page 1

PACKAGE MATERIALS INFORMATION
www.ti.com
19-Mar-2008
*All dimensions are nominal
Device Package Type Package Drawing Pins SPQ Length (mm) Width (mm) Height (mm)
TLV320AIC26IRHBR QFN RHB 32 3000 340.5 333.0 20.6
Pack Materials-Page 2




IMPORTANT NOTICE
Texas Instruments Incorporated and its subsidiaries (TI) reserve the right to make corrections, modifications, enhancements, improvements,
and other changes to its products and services at any time and to discontinue any product or service without notice. Customers should
obtain the latest relevant information before placing orders and should verify that such information is current and complete. All products are
sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.
TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard
warranty. Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty. Except where
mandated by government requirements, testing of all parameters of each product is not necessarily performed.
TI assumes no liability for applications assistance or customer product design. Customers are responsible for their products and
applications using TI components. To minimize the risks associated with customer products and applications, customers should provide
adequate design and operating safeguards.
TI does not warrant or represent that any license, either express or implied, is granted under any TI patent right, copyright, mask work right,
or other TI intellectual property right relating to any combination, machine, or process in which TI products or services are used. Information
published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a
warranty or endorsement thereof. Use of such information may require a license from a third party under the patents or other intellectual
property of the third party, or a license from TI under the patents or other intellectual property of TI.
Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied
by all associated warranties, conditions, limitations, and notices. Reproduction of this information with alteration is an unfair and deceptive
business practice. TI is not responsible or liable for such altered documentation. Information of third parties may be subject to additional
restrictions.
Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all
express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice. TI is not
responsible or liable for any such statements.
TI products are not authorized for use in safety-critical applications (such as life support) where a failure of the TI product would reasonably
be expected to cause severe personal injury or death, unless officers of the parties have executed an agreement specifically governing
such use. Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications, and
acknowledge and agree that they are solely responsible for all legal, regulatory and safety-related requirements concerning their products
and any use of TI products in such safety-critical applications, notwithstanding any applications-related information or support that may be
provided by TI. Further, Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in
such safety-critical applications.
TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are
specifically designated by TI as military-grade or "enhanced plastic." Only products designated by TI as military-grade meet military
specifications. Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at
the Buyer's risk, and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use.
TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are
designated by TI as compliant with ISO/TS 16949 requirements. Buyers acknowledge and agree that, if they use any non-designated
products in automotive applications, TI will not be responsible for any failure to meet such requirements.
Following are URLs where you can obtain information on other Texas Instruments products and application solutions:
Products Applications
Amplifiers amplifier.ti.com Audio www.ti.com/audio
Data Converters dataconverter.ti.com Automotive www.ti.com/automotive
DSP dsp.ti.com Broadband www.ti.com/broadband
Clocks and Timers www.ti.com/clocks Digital Control www.ti.com/digitalcontrol
Interface interface.ti.com Medical www.ti.com/medical
Logic logic.ti.com Military www.ti.com/military
Power Mgmt power.ti.com Optical Networking www.ti.com/opticalnetwork
Microcontrollers microcontroller.ti.com Security www.ti.com/security
RFID www.ti-rfid.com Telephony www.ti.com/telephony
RF/IF and ZigBee® Solutions www.ti.com/lprf Video & Imaging www.ti.com/video
Mailing Address: Texas Instruments, Post Office Box 655303, Dallas, Texas 75265
Copyright © 2008, Texas Instruments Incorporated
Wireless www.ti.com/wireless
 Loading...
Loading...