

TELEMECANIQUE ALTIVAR 31 User Manual
Programming Manual
Manual de programación
Guide de programmation
Retain for future use. /
Conservar para uso futuro. /
À conserver pour usage ultérieur.
Altivar® 31
Adjustable Speed Drive Controllers
Variadores de velocidad ajustable
Variateurs de vitesse

Altivar® 31 Adjustable Speed Drive Controllers
Programming Manual . . . . . . . . . . . . . . . . . . . . . . . . . 5
Variadores de velocidad Ajustable Altivar® 31
Manual de programación. . . . . . . . . . . . . . . . . . . . . .99
Variateurs de vitesse Altivar® 31
Guide de programmation. . . . . . . . . . . . . . . . . . . . 193
ENGLISHFRANÇAIS ESPAÑOL
© 2004 Schneider Electric All Rights Reserved 3

ENGLISH FRANÇAISESPAÑOL
© 2004 Schneider Electric All Rights Reserved4

VVDED303042NAR6/04 Altivar® 31 Programming Manual
06/2004 Contents
SECTION 1: INTRODUCTION Product Range ............................................................................................ 7
About This Document ................................................................................. 7
Hazard Categories and Special Symbols ................................................... 8
Product Support .......................................................................................... 8
Start-Up Overview ....................................................................................... 9
Preliminary Recommendations ................................................................. 10
Precautions ......................................................................................... 10
Starting from Line Power ..................................................................... 11
Power Up after a Manual Fault Reset or Stop Command ................... 11
Test on a Low Power Motor or without a Motor ................................... 11
Using Motors in Parallel ...................................................................... 11
Operation on an Impedance Grounded System .................................. 11
Programming Recommendations ........................................................ 11
Factory Settings ........................................................................................ 12
Drive Thermal Protection .......................................................................... 13
Ventilation ............................................................................................ 13
Motor Thermal Protection ......................................................................... 14
SECTION 2: PROGRAMMING Drive Keypad Display ................................................................................ 16
ATV31•••••• Controllers ....................................................................... 16
ATV31••••••A Controllers ..................................................................... 16
Key Functions ...................................................................................... 17
nSt: Freewheel Stop ............................................................................ 17
Remote Keypad Display ........................................................................... 18
Saving and Loading Configurations .................................................... 18
Accessing the Menus ................................................................................ 19
Accessing the Parameters ........................................................................ 20
bFr Parameter ..................................................................................... 20
Function Compatibility ............................................................................... 21
Logic and Analog Input Application Functions .......................................... 22
ENGLISH
SECTION 3: MENUS Settings Menu SEt- ................................................................................... 25
Drive Control Menu drC- ........................................................................... 29
I/O Menu I-O- ............................................................................................ 33
Control Menu CtL- ..................................................................................... 36
Control Channels ................................................................................. 36
Parameter LAC .................................................................................... 37
Parameter LAC = L1 or L2 .................................................................. 38
Parameter LAC = L3 ........................................................................... 39
Reference Channel for LAC = L1 or ................................................... 41
Control Channel for LAC = L1 or L2 .................................................... 42
Reference Channel for LAC = L3 ........................................................ 43
Control Channel for LAC = L3:
CHCF = SIM, Combined Reference and Control ................................ 44
Control Channel for LAC = L3:
CHCF = SEP, Mixed Mode (Separate Reference and Control) .......... 45
Application Functions Menu FUn- ............................................................. 50
Summing Inputs .................................................................................. 56
Preset Speeds ..................................................................................... 57
+/- Speed ............................................................................................. 61
PI Regulator ........................................................................................ 64
Manual–Automatic Operation with PI Regulator ................................. 66
Brake Control ...................................................................................... 70
Management of Limit Switches ........................................................... 76
Fault Menu FLt- ......................................................................................... 78
Communication Menu COM- .................................................................... 82
Display Menu SUP- ................................................................................... 84
© 2004 Schneider Electric All Rights Reserved
5

Altivar® 31 Programming Manual VVDED303042NAR6/04
Contents 06/2004
SECTION 4: MAINTENANCE AND TROUBLE-
ENGLISH
SHOOTING
Precautions ...............................................................................................87
Routine Maintenance ................................................................................ 87
Normal Display ..........................................................................................87
Fault Display .............................................................................................87
Drive Controller Does Not Start, No Fault Displayed ........................... 87
Clearing Faults ....................................................................................88
Faults Which Cannot Be Automatically Reset .....................................88
Faults Which Can Be Automatically Reset .......................................... 89
Faults That Reset When the Fault Is Cleared ..................................... 90
Configuration Settings Tables ................................................................... 90
Drive Controller and Customer ID .......................................................91
1st level Adjustment Parameter ........................................................... 91
Settings Menu .....................................................................................91
Drive Control Menu...............................................................................92
I/O Menu ............................................................................................. 92
Control Menu ...................................................................................... 92
Application Functions Menu ................................................................ 93
Application Functions Menu ................................................................ 94
Fault Menu ........................................................................................... 95
Communication Menu ..........................................................................95
Index of Parameter Codes ........................................................................96
Index of Functions ..................................................................................... 97
© 2004 Schneider Electric All Rights Reserved6

VVDED303042NAR6/04 Section 1: Introduction
06/2004 Product Range
SECTION 1: INTRODUCTION
PRODUCT RANGE The Altivar 31 (ATV31) family of adjustable frequency AC drive controllers is
used for controlling three-phase asynchronous motors. The controllers
range from:
• 0.25 to 3 hp (0.18 to 2.2 kW), 208/230/240 V, single-phase input
• 0.25 to 20 hp (0.18 to 15 kW), 208/230/240 V, three-phase input
• 0.5 to 20 hp (0.37 to 15 kW), 400/460/480 V, three-phase input
• 1 to 20 hp (0.75 to 15 kW), 525/575/600 V, three-phase input
Some ATV31 controllers are available with a reference potentiometer, a run
button, and a stop/reset button. These controllers are designated as
ATV31••••••A controllers throughout this manual. The symbol “•” in a catalog
number designates parts of the number that vary with the rating.
ABOUT THIS DOCUMENT This manual contains programming instructions for ATV31 drive controllers.
The following documentation is also provided with the controller:
• Altivar 31 Installation Manual, VVDED303041US
• Altivar 31 Start-Up Guide, VVDED303043US
Refer to the ATV31 Installation Manual for instructions on receiving,
inspection, mounting, installation, and wiring. Refer to the ATV31 Start-Up
Guide for instructions on bringing the drive controller into service with the
factory configuration.
Refer to the Index of Parameter Codes and the Index of Functions on
pages 96–97 of for an alphabetical index of the codes and functions
discussed in this manual.
NOTE: Throughout this manual, and on the drive keypad display, a dash
appears after menu and sub-menu codes to differentiate them from
parameter codes. For example, SEt- is a menu, but ACC is a parameter.
ENGLISH
© 2004 Schneider Electric All Rights Reserved
7
Section 1: Introduction VVDED303042NAR6/04
Hazard Categories and Special Symbols 06/2004
HAZARD CATEGORIES AND SPECIAL
SYMBOLS
ENGLISH
The following symbols and special messages may appear in this manual or
on the equipment to warn of potential hazards.
A lightening bolt or ANSI man symbol in a “Danger” or “Warning” safety
label on the equipment indicates an electrical hazard which will result in
personal injury if the instructions are not followed.
An exclamation point symbol in a safety message in the manual indicates
potential personal injury hazards. Obey all safety messages introduced by
this symbol to avoid possible injury or death.
Symbol Name
Lightening Bolt
ANSI Man
Exclamation Point
DANGER
DANGER indicates an imminently hazardous situation which, if not
avoided, will result in death or serious injury.
WARNING
WARNING indicates a potentially hazardous situation which, if not
avoided, can result in death or serious injury.
CAUTION
CAUTION indicates a potentially hazardous situation which, if not
avoided, can result in minor or moderate injury.
CAUTION
CAUTION, used without the safety alert symbol, indicates a potentially
hazardous situation which, if not avoided, can result in property damage.
PRODUCT SUPPORT For support and assistance, contact the Product Support Group. The
Product Support Group is staffed from 8:00 am until 6:00 pm Eastern time to
assist with product selection, start-up, and diagnosis of product or
application problems. Emergency phone support is available 24 hours a
day, 365 days a year.
Telephone 919-266-8600
Toll Free 888-Square D (888-778-2733)
E-mail drive.products.support@us.schneider-electric.com
Fax 919-217-6508
© 2004 Schneider Electric All Rights Reserved8

VVDED303042NAR6/04 Section 1: Introduction
06/2004 Start-Up Overview
START-UP OVERVIEW The following procedure is an overview of the minimum steps necessary for
bringing an ATV31 drive controller into service. Refer to the ATV31
Installation Manual for the mounting, wiring, and bus voltage measurement
steps. Refer to the appropriate sections of this manual for the programming
steps.
1. Mount the drive controller. Refer to the ATV31 Installation Manual.
2. Make the following connections to the drive controller. Refer to the
ATV31 Installation Manual:
— Connect the grounding conductors.
— Connect the line supply. Ensure that it is within the voltage range of
the drive controller.
— Connect the motor. Ensure that its rating corresponds to the drive
controller’s voltage.
3. Power up the drive controller, but do not give a run command.
4. Configure bFr (motor nominal frequency) if it is other than 50 Hz. bFr
appears on the display the first time the drive controller is powered up. It
can be accessed in the drC- menu (page 29) anytime.
5. Configure the parameters in the drC- menu if the factory configuration is
not suitable. Refer to page 12 for the factory settings.
6. Configure the parameters in the I-O-, CtL-, and FUn- menus if the
factory configuration is not suitable. Refer to page 12 for the factory
settings.
7. Configure the following parameters in the SEt- menu (pages 25–29):
— ACC (acceleration) and dEC (deceleration)
— LSP (low speed when the reference is zero) and HSP (high speed
when the reference is at its maximum)
— ItH (motor thermal protection)
8. Remove power from the drive controller and follow the bus voltage
measurement procedure in the ATV31 Installation Manual. Then
connect the control wiring to the logic and analog inputs.
9. Power up the drive controller, then issue a run command via the logic
input (refer to the ATV31 Start-Up Guide).
10. Adjust the speed reference.
ENGLISH
© 2004 Schneider Electric All Rights Reserved
9
Section 1: Introduction VVDED303042NAR6/04
Preliminary Recommendations 06/2004
PRELIMINARY RECOMMENDATIONS
ENGLISH
Precautions
Before powering up and configuring the drive controller, read and observe
the following precautions.
DANGER
UNINTENDED EQUIPMENT OPERATION
• Before powering up and configuring the drive controller, ensure that the
logic inputs are switched off (State 0) to prevent unintended starting.
• An input assigned to the run command may cause the motor to start
immediately upon exiting the configuration menus.
Failure to follow these instructions will result in death or serious
injury.
WARNING
LOSS OF CONTROL
• The designer of any control scheme must consider the potential failure
modes of control paths and, for certain critical control functions, provide
a means to achieve a safe state during and after a path failure.
• Examples of critical control functions are Emergency Stop and
Overtravel Stop.
• Separate or redundant control paths must be provided for critical control
functions.
Failure to follow these instructions can result in death, serious
injury, or equipment damage.
CAUTION
DAMAGED EQUIPMENT
Do not operate or install any drive controller that appears damaged.
Failure to follow this instruction can result in equipment damage.
© 2004 Schneider Electric All Rights Reserved10
VVDED303042NAR6/04 Section 1: Introduction
06/2004 Preliminary Recommendations
Starting from Line Power If you are starting the drive controller from line power, ensure that parameter
tCt is not set to trn (see page 33), and limit operations of the line contactor
to fewer than one per minute to avoid premature failure of the filter
capacitors and precharge resistors. The recommended method of control
is through inputs LI1 to LI6. The motor thermal state memory returns to zero
when line power is removed from the drive controller.
ENGLISH
Power Up after a Manual Fault Reset or
Stop Command
If parameter tCt is at its factory setting (trn), when the drive controller is
powered up after a manual fault reset or a stop command, the forward,
reverse, and DC injection stop commands must be reset for the drive
controller to start. If they are not reset, the drive controller will display nSt
and will not start. If automatic restart is configured (parameter Atr in the FLtmenu, see page 79) the reset is not necessary.
Test on a Low Power Motor or without a
Motor
With the factory configuration, motor phase loss detection (OPL) is active.
To check the drive controller in a test or maintenance environment without
having to switch to a motor with the same rating as the drive controller,
disable motor phase loss detection and configure the voltage/frequency
ratio (UFt) to L, constant torque (see page 31). The drive controller will not
provide motor thermal protection if the motor current is less than 0.2 times
the nominal drive current.
Using Motors in Parallel When using motors in parallel, configure the voltage/frequency ratio, UFt, to
L (constant torque) and provide an alternate means of thermal protection on
every motor. The drive controller cannot provide adequate motor thermal
protection for each motor.
Operation on an Impedance Grounded
System
When using the drive controller on a system with an isolated or impedance
grounded neutral, use a permanent insulation monitor compatible with nonlinear loads.
ATV31••••••M21 and N4 drive controllers feature built-in radio frequency
interference (RFI) filters which have capacitors to ground. These filters can
be disconnected from ground when using the drive controller on an
impedance grounded system to increase the operating life of their
capacitors. Refer to the ATV31 Installation Manual for more information.
Programming Recommendations Refer to “Start-Up Overview” on page 9 for the minimum programming steps
necessary for bringing the drive controller into service.
Use the configuration settings tables beginning on page 91 to prepare and
record the drive configuration before programming the drive controller. It is
always possible to return to the factory settings by setting the FCS
parameter to InI in the drC-, I-O-, CtL-, or FUn- menus. See pages 32, 35,
49, and 77.
When first commissioning an ATV31 drive controller for a 60 Hz system,
perform a factory parameter reset. Be sure to set bFr to 60 Hz.
We recommend using the auto-tuning function to optimize the drive
controller’s accuracy and response time. Auto-tuning measures the stator
resistance of the motor to optimize the control algorithms. See page 31.
1
Throughout this manual, the symbol “•” in a catalog number denotes the portion of the number
that varies with the drive controller rating.
© 2004 Schneider Electric All Rights Reserved
11
Section 1: Introduction VVDED303042NAR6/04
Factory Settings 06/2004
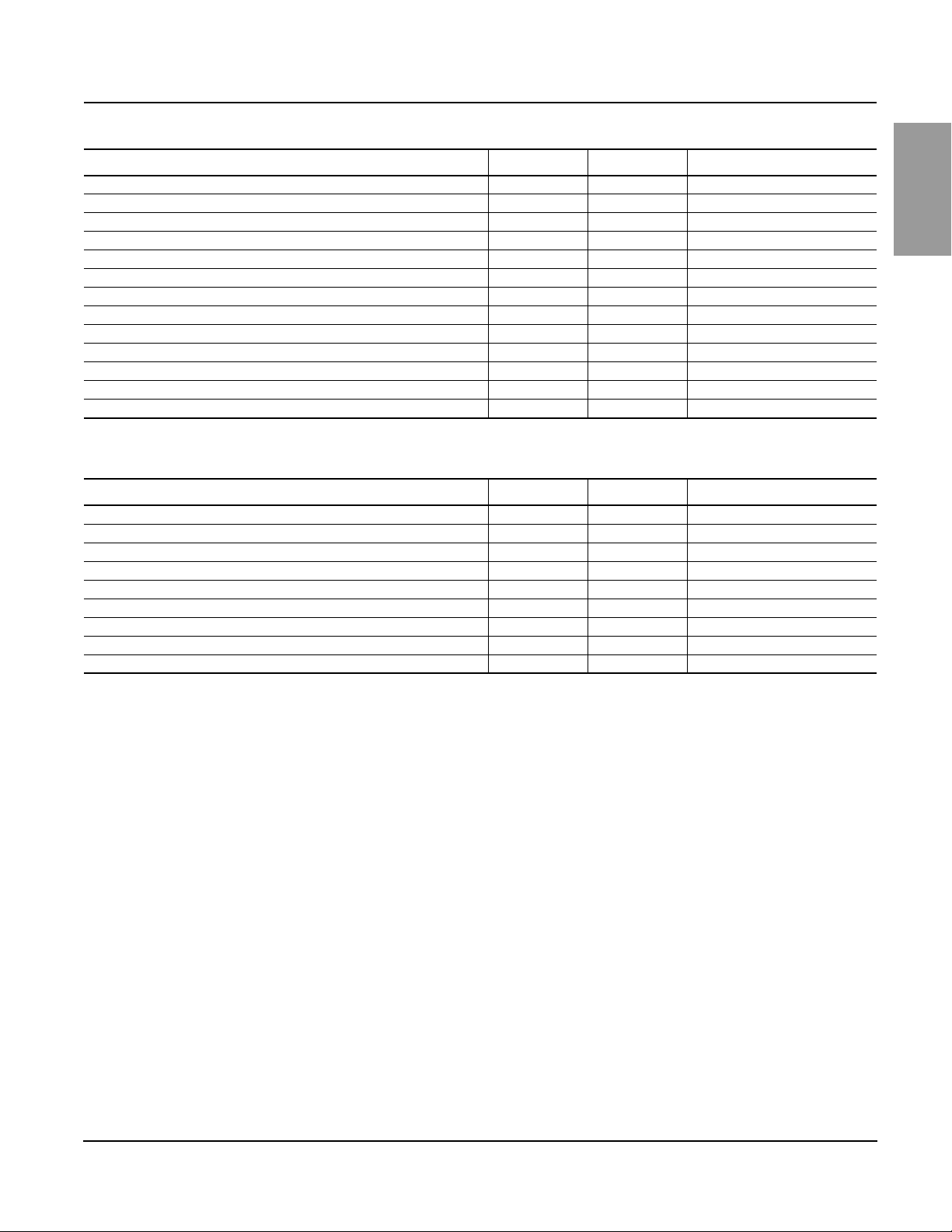
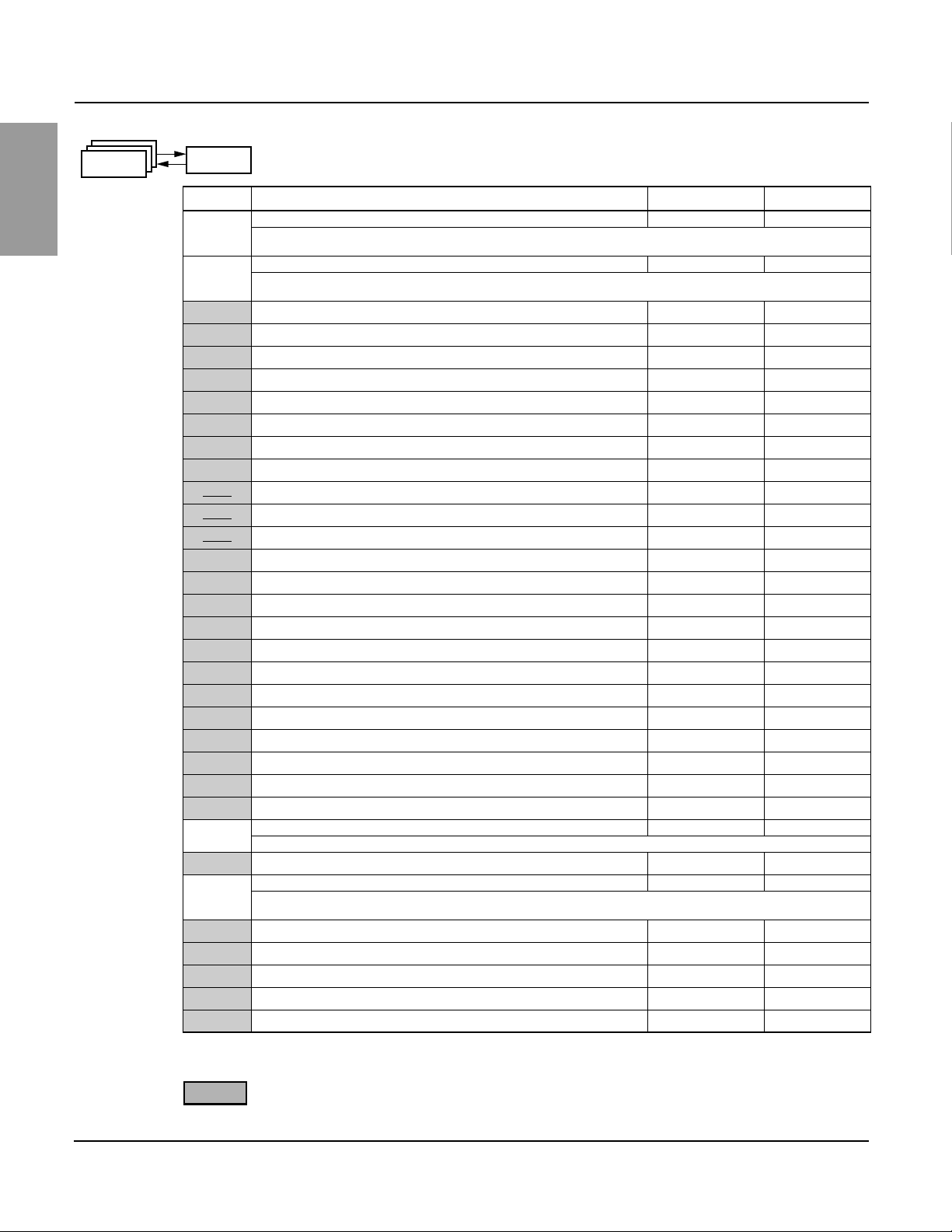
FACTORY SETTINGS The ATV31 drive controller is supplied ready for use in most applications,
ENGLISH
with the factory settings shown in Table 1.
Table 1: Factory Settings
Function Code Factory Setting
Display —
Motor frequency bFr 50 Hz
Type of voltage/frequency
ratio
Normal stop mode Stt Stn: normal stop on deceleration ramp
Stop mode in the event of a
fault
Linear ramps ACC, dEC 3 seconds
Low speed LSP 0 Hz
High speed HSP 50 Hz
Frequency loop gain FLG, StA Standard
Motor thermal current ItH
DC injection braking SdC
Deceleration ramp adaptation brA
Automatic restart Atr nO: no automatic restart after a fault
Switching frequency SFr 4 kHz
Logic inputs
Analog inputs
Relays
Analog output AOC 0–20 mA, not assigned
1
ATV31••••••A range drive controllers have a reference potentiometer, a run button, and a
stop/reset button. They are factory set for local control with the run button, the stop/reset button,
and the reference potentiometer active. Logic inputs LI1 and LI2 and analog input AI1 are
inactive (not assigned).
UFt
EPL YES: freewheel stop
LI1, LI2
LI3, LI4
LI5, LI6 Not assigned
AI1
AI2 Summed speed reference input 0 ±10 V
AI3 4–20 mA, not assigned
R1
R2 Not assigned
rdY with motor stopped,
motor frequency (for example, 50 Hz) with motor
running
n: sensorless flux vector control for constant
torque applications
Nominal motor current (value depends on the
drive controller rating)
0.7 x nominal drive controller current for
0.5 seconds
YES: automatic adaptation of the deceleration
ramp in the event of overvoltage on braking
2-wire transition detection control:
LI1 = forward, LI2 = reverse.
Not assigned on ATV31••••••A
4 preset speeds:
speed 1 = speed reference or LSP (see page 26)
speed 2 = 10 Hz
speed 3 = 15 Hz
speed 4 = 20 Hz
Speed reference 0–10 V.
Not assigned on ATV31••••••A
The contact opens in the event of a fault or if
power is removed from the drive controller.
1
drive controllers
1
drive controllers.
© 2004 Schneider Electric All Rights Reserved12
VVDED303042NAR6/04 Section 1: Introduction
06/2004 Drive Thermal Protection
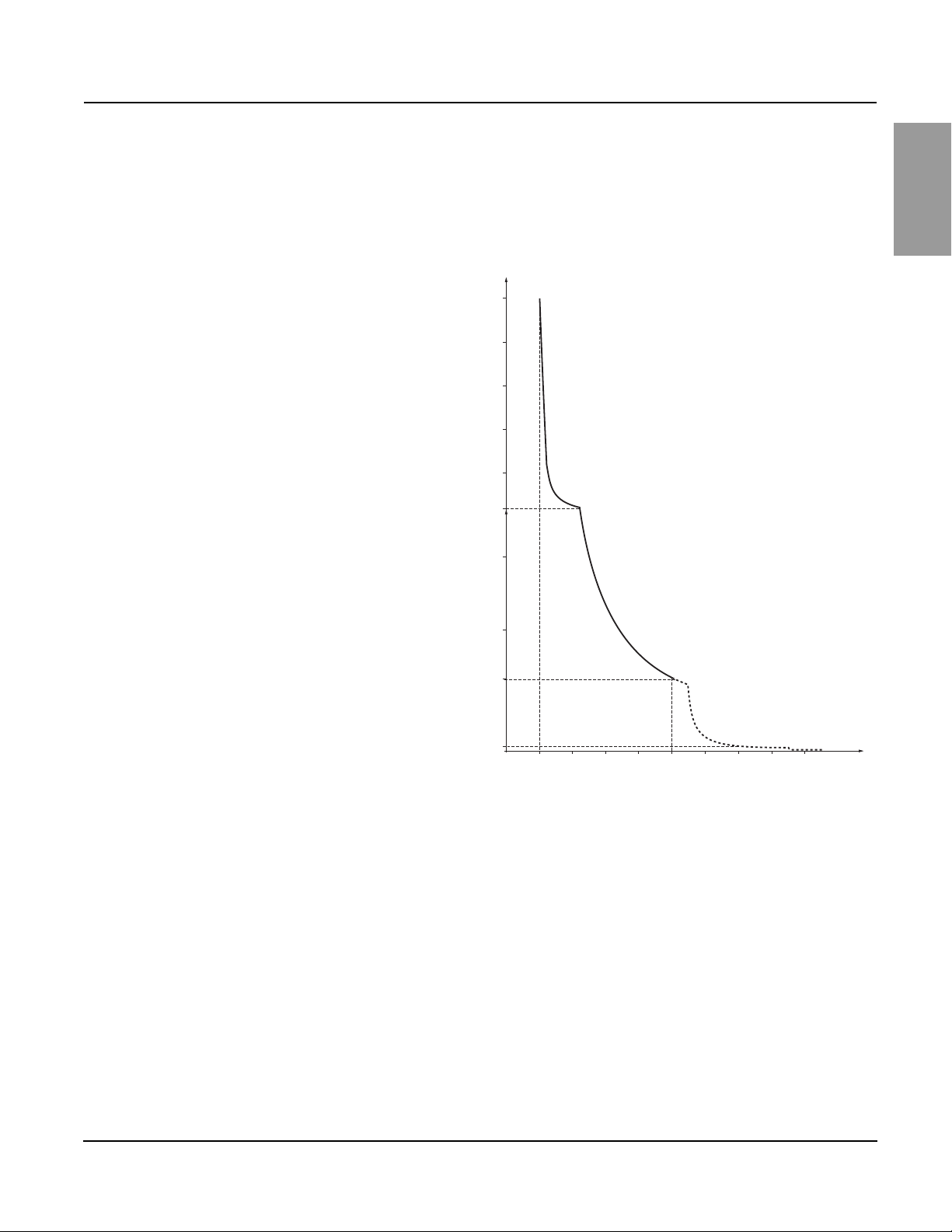
DRIVE THERMAL PROTECTION Thermal protection of the drive controller is achieved with a positive
temperature coefficient (PTC) resistor on the heatsink or power module. In
the event of an overcurrent, the drive controller trips to protect itself against
overloads. Typical tripping points are:
• Motor current is 185% of nominal drive controller current for 2 seconds
• Motor current is 150% of nominal drive controller current for 60 seconds
Time
(seconds)
5000
3000
1000
200
ENGLISH
160
100
60
2
0
1.11
1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9
Motor current/drive controller In
Ventilation The fan starts when the drive controller is powered up, but stops after
10 seconds if a run command is not received. The fan starts automatically
when the drive controller receives an operating direction and reference. It
stops a few seconds after motor speed is less than 0.2 Hz and injection
braking is completed.
© 2004 Schneider Electric All Rights Reserved
13
Section 1: Introduction VVDED303042NAR6/04
Motor Thermal Protection 06/2004
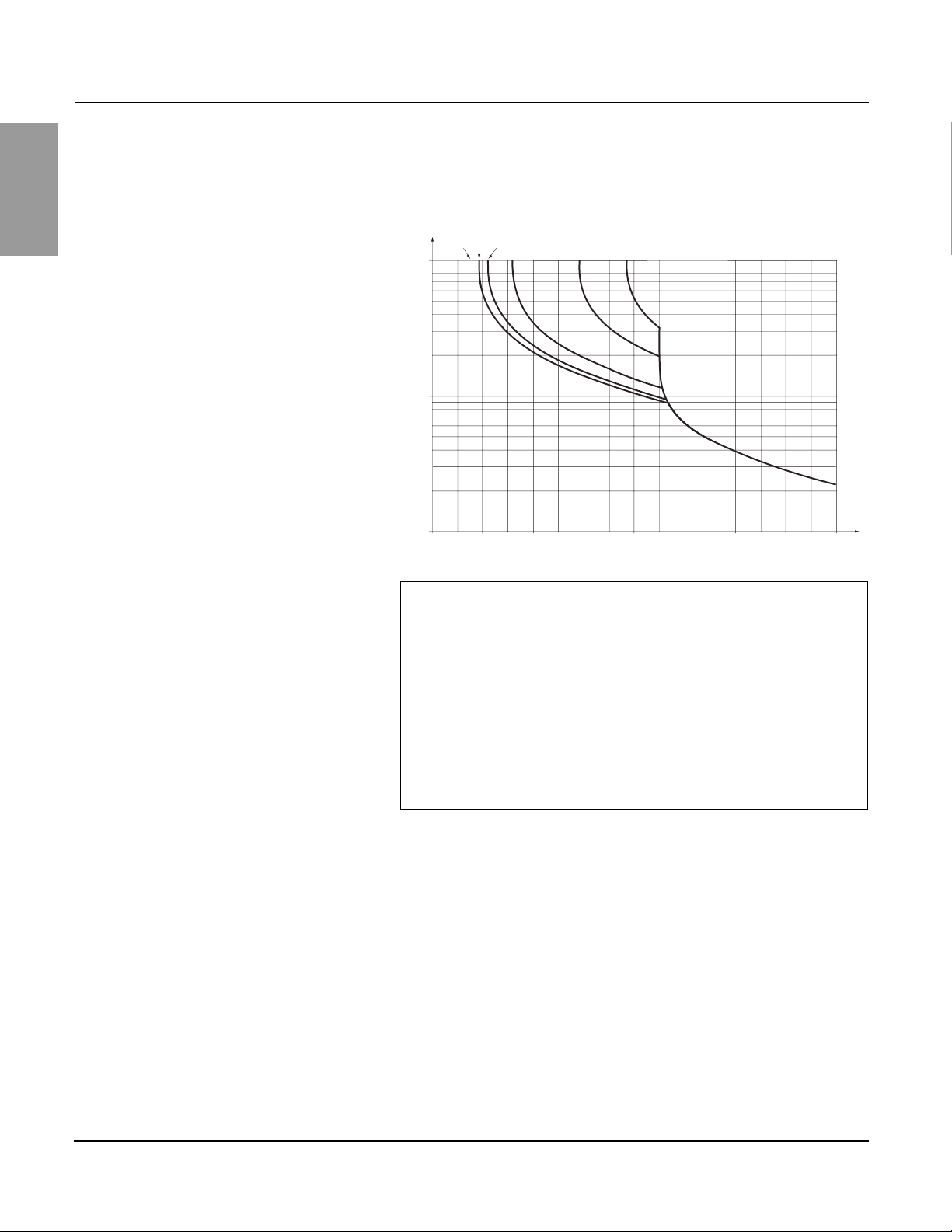
MOTOR THERMAL PROTECTION Motor thermal protection is achieved by continuous calculation of I
ENGLISH
protection is available for self-cooled motors.
NOTE: The motor thermal state memory returns to zero when line power is
removed from the drive controller.
Trip time in seconds
5 Hz
1 Hz
3 Hz
10,000
1,000
100
0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5
50 Hz20 Hz10 Hz
2
t. The
Motor current/ItH
CAUTION
INADEQUATE MOTOR THERMAL PROTECTION
The use of external overload protection is required under the following
conditions:
• Starting from line power
• Running multiple motors
• Running motors rated at less than 0.2 times the nominal drive current
• Using motor switching
Failure to follow this instruction can result in equipment damage.
Refer to “Preliminary Recommendations” on pages 10–11 for more
information about external overload protection.
© 2004 Schneider Electric All Rights Reserved14
VVDED303042NAR6/04 Section 2: Programming
06/2004
SECTION 2: PROGRAMMING
DANGER
UNQUALIFIED USER
• This equipment must be installed, programmed, and serviced only by
qualified personnel.
• The application of this product requires expertise in the design and
programming of control systems. Only persons with such expertise
should be allowed to program, install, alter, and apply this product.
• Qualified personnel performing diagnostics or troubleshooting that
requires electrical conductors to be energized must comply with
NFPA 70 E - Standard for Electrical Safety Requirements for Employee
Workplaces and OSHA Standards - 29 CFR Part 1910 Subpart S
Electrical.
Failure to follow these instructions will result in death or serious
injury.
ENGLISH
© 2004 Schneider Electric All Rights Reserved
15
Section 2: Programming VVDED303042NAR6/04
Drive Keypad Display 06/2004
DRIVE KEYPAD DISPLAY
ENGLISH
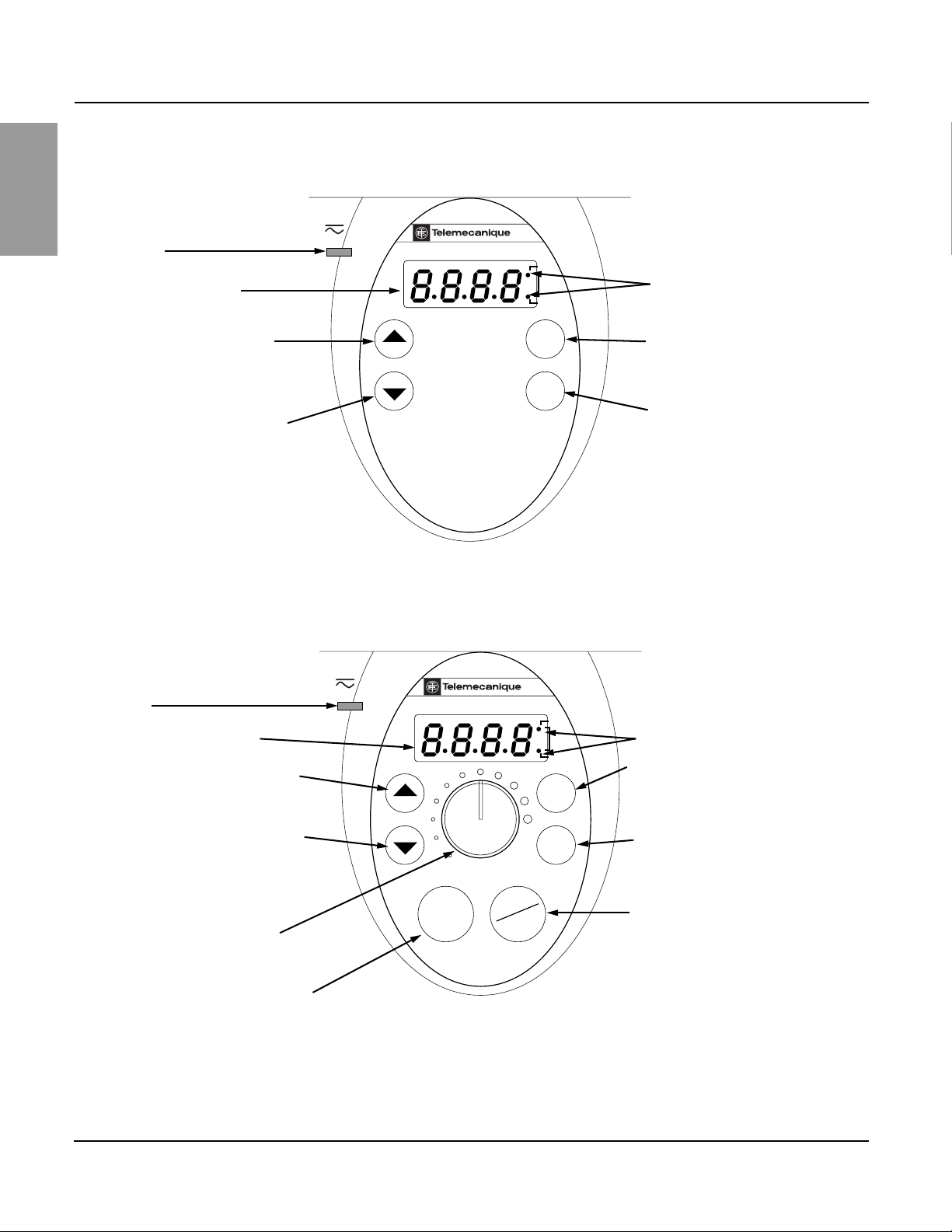
ATV31•••••• Controllers
Red LED
DC bus ON
Four 7-segment displays
Returns to the previous menu or
parameter, or increases the
displayed value
Advances to the next menu or
parameter, or decreases the
displayed value
ATV31••••••A Controllers
Red LED
DC bus ON
Four 7-segment displays
Returns to the previous menu or parameter,
or increases the displayed value
Altivar 31
RUN
CAN
ERR
ESC
2 CANopen status LEDs
Exits a menu or parameter, or clears the
displayed value to return to the previous
stored value
ENT
Enters a menu or a parameter, or saves
the displayed parameter or value
ATV31••••••A controllers have a reference potentiometer, a run button, and
a stop/reset button.
Altivar 31
RUN
CAN
ERR
ESC
2 CANopen status LEDs
Exits a menu or a parameter,
or clears the displayed value to return to the
previous stored value
Advances to the next menu or parameter, or
decreases the displayed value
Reference potentiometer:
Active if parameter Fr1 in the CtL- menu is
configured as AIP (see page 46)
RUN button: Starts the motor in forward
direction if parameter tCC in the I-O- menu is
configured as LOC (see page 33)
RUN
STOP
RESET
ENT
Enters a menu or a parameter, or saves the
displayed parameter or value
STOP/RESET button
Resets faults
Stops the motor:
• If tCC (I-O- menu) is not configured as LOC,
pressing the STOP/RESET key commands a
freewheel stop.
• If tCC (I-O- menu) is configured as LOC,
stopping is on a ramp, but if injection braking
is in progress, a freewheel stop takes place.
© 2004 Schneider Electric All Rights Reserved16
VVDED303042NAR6/04 Section 2: Programming
06/2004 Drive Keypad Display
Key Functions • Press and hold down (longer than 2 seconds) the or keys to
scroll through the data quickly.
• Pressing or does not store the selection.
• To store the selection, press the key.The display flashes when a
value is stored.
A normal display with no fault present and no run command shows:
ENT
• The value of one of the display parameters (see page 84). The default
display is motor frequency, for example 43.0. In current limiting mode,
the display flashes.
• Init: Initialization sequence
• rdY: Drive ready
• dcb: DC injection braking in progress
• nSt: Freewheel stop
• FSt: Fast stop
• tUn: Auto-tuning in progress
If a fault is present, the display flashes.
nSt: Freewheel Stop If the display shows the code nSt, one of the following conditions is
indicated:
1. With the factory configuration, when the drive controller is powered up
after a manual fault reset or stop command, the forward, reverse, and
DC injection stop commands must be reset for the drive controller to
start. If they are not reset, the drive controller will display nSt and will not
start. If automatic restart is configured, the reset is not necessary.
2. If the reference channel or the control channel is assigned to Modbus or
CANopen (see page 36), the drive controller will display nSt on power up
and remain stopped until the communication bus sends a command.
3. If a forward or reverse run command is present when the drive controller
is powered up and the drive controller is set for 3-wire control or for
2-wire control with “trn” transition (see page 33) the drive controller will
display nSt and will not run until the run command is cycled and a valid
speed reference is given.
ENGLISH
© 2004 Schneider Electric All Rights Reserved
17
Section 2: Programming VVDED303042NAR6/04
Remote Keypad Display 06/2004
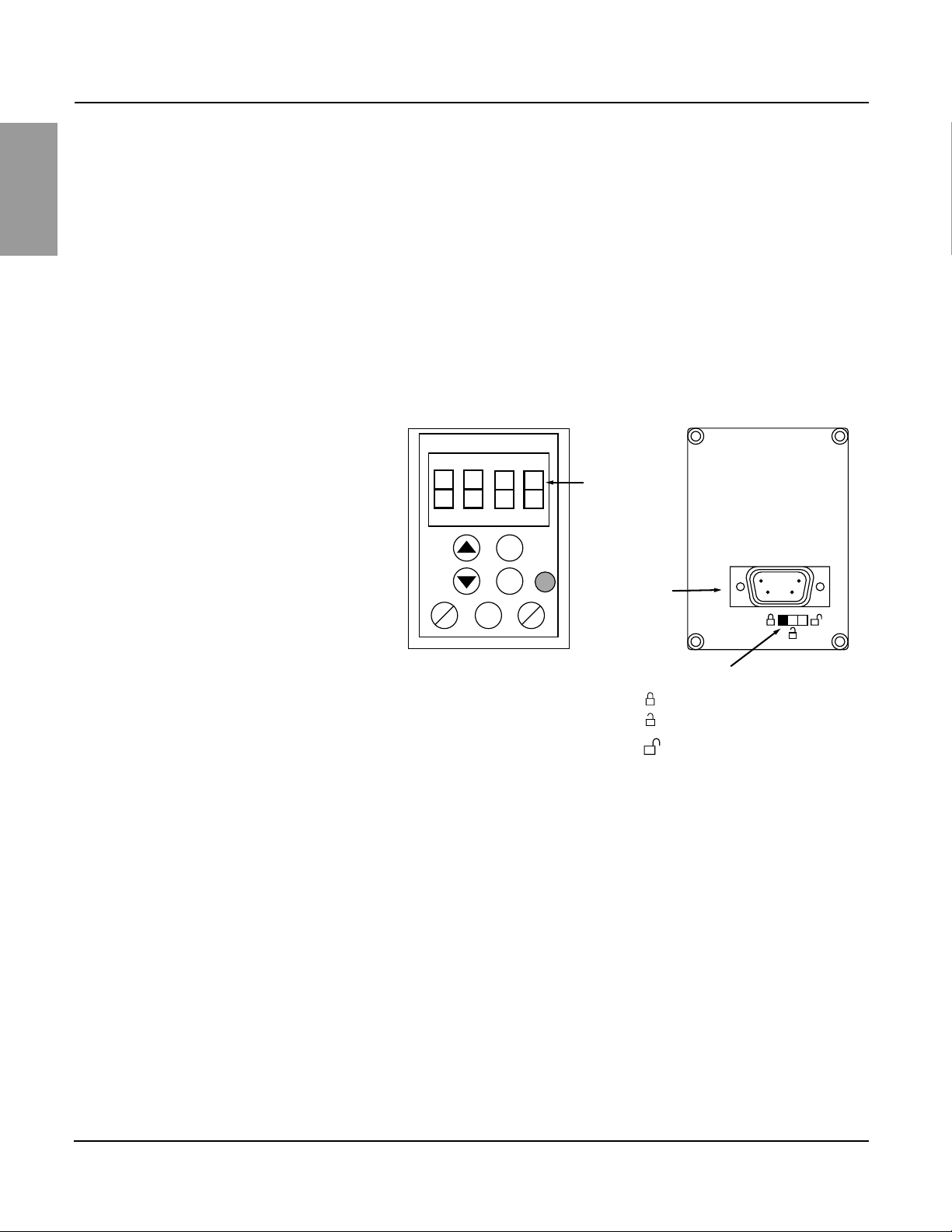
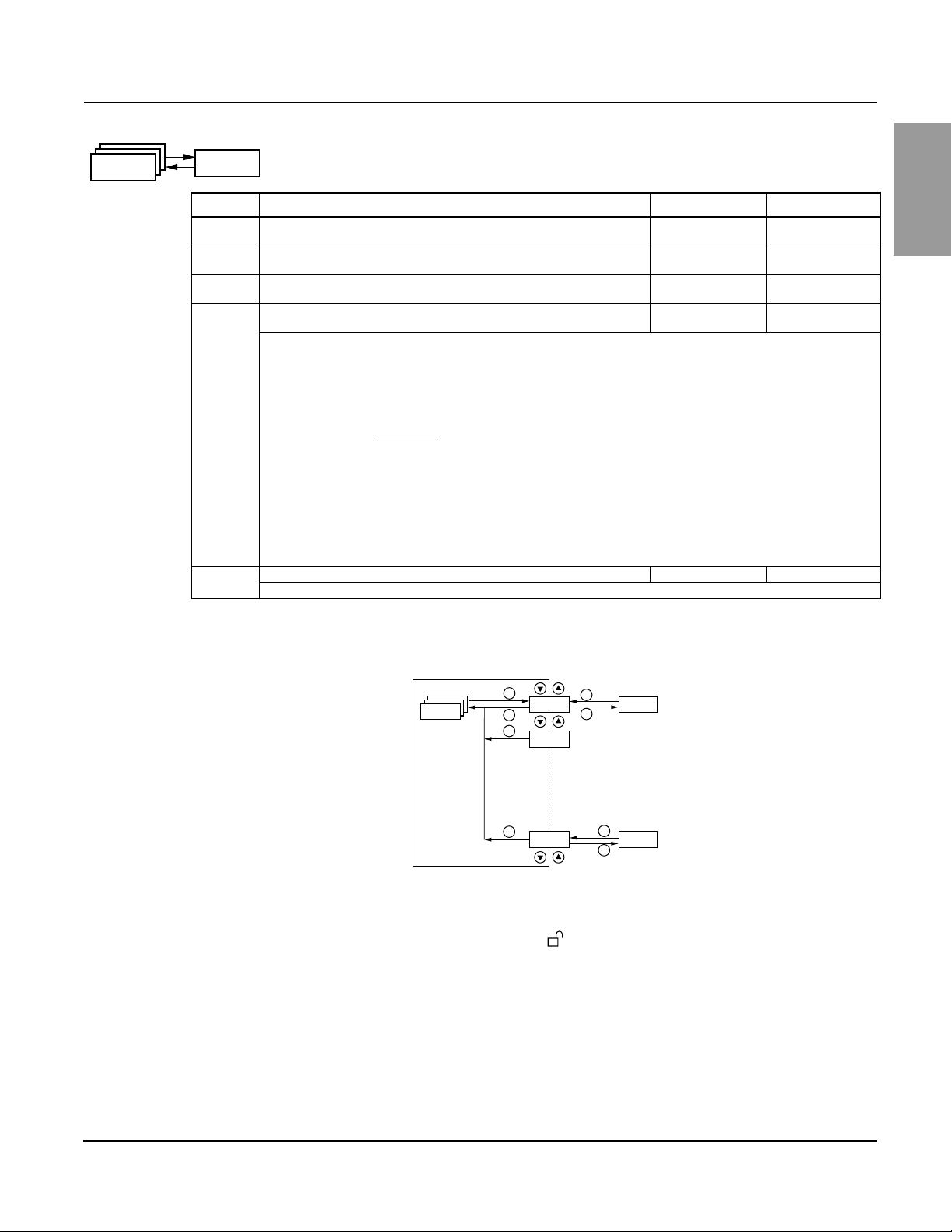
REMOTE KEYPAD DISPLAY The optional remote keypad display is a local control unit that can be wall-
ENGLISH
mounted on the door of an enclosure. It has a cable with connectors for
connection to the drive serial link (refer to the manual supplied with the
display). The remote keypad display has the same display and
programming buttons as the drive controller, with the addition of a switch to
lock access to the menu and three buttons for commanding the drive
controller:
• FWD/REV commands the direction of rotation.
• RUN commands the motor to run.
• STOP/RESET commands the motor to stop or resets a fault. Pressing
the STOP/RESET button once stops the motor; pressing it a second
time stops DC injection braking if it is configured.
In order for the remote keypad display to be active, the tbr parameter in the
COM- menu must remain at the factory setting, 19.2 (19,200 bps, see
page 82).
4-character
display
ESC
ENT
RUN
STOP
RESET
Access locking switch:
• Positions: settings and display are accessible
• Position: all menus can be accessed
FWD
REV
NOTE: Password protection has priority over the access locking switch. See
page 86.
Placing the access locking switch in the locked position also prevents the
drive settings from being accessed via the drive controller keypad. When
the remote keypad display is disconnected, if the access locking
switch is in the locked position, the drive controller keypad also
remains locked.
Connector
(SEt- and SUP- menus)
Saving and Loading Configurations Up to four complete configurations can be stored in the remote keypad
display and transferred to other drive controllers of the same rating. Four
different operations for the same device can also be stored on the terminal.
See the SCS and FCS parameters in the drC-, I-O-, CtL-, or FUn- menus.
See pages 32, 35, 49, and 77.
© 2004 Schneider Electric All Rights Reserved18
VVDED303042NAR6/04 Section 2: Programming
06/2004 Accessing the Menus
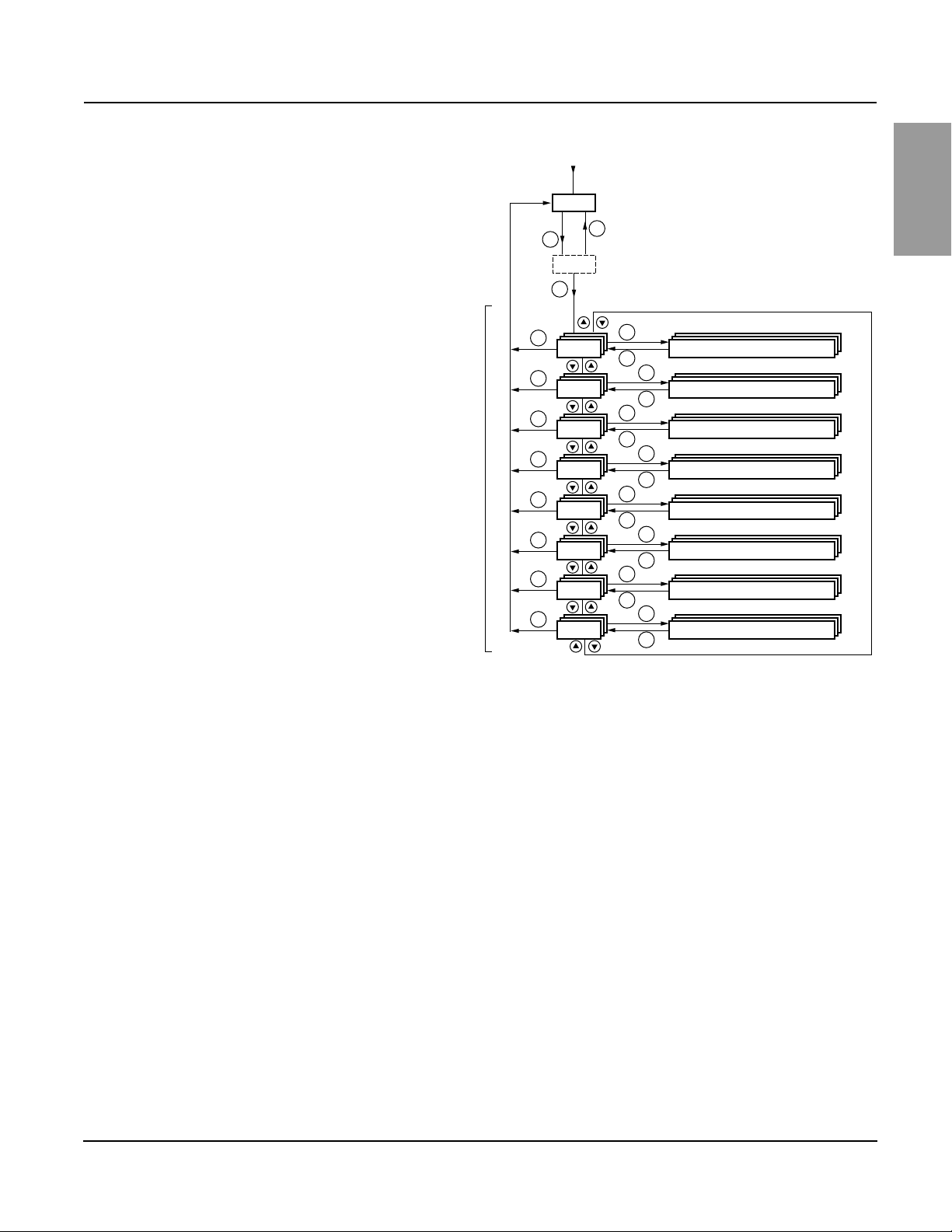
ACCESSING THE MENUS
Power-up
Displays drive controller status (variable, see page 17)
XXX
ESC
ENT
Motor frequency (the factory setting is only visible
bFr
the first time the drive is powered up. See page 20.)
ENT
ENGLISH
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
ENT
ESC
Settings (page 25)
Drive control (page 29)
I/O (page 33)
Control (page 36)
Functions (page 50)
Faults (page 78)
Communication (page 82)
Monitoring (page 84)
Menus
ESC
ESC
ESC
ESC
ESC
ESC
ESC
ESC
SEt-
drC-
I-O-
CtL-
FUn-
FLt-
CON-
SUP-
For added convenience, some parameters can be accessed in more than
one menu. For example, return to factory settings (FCS) and saving the
configuration (SCS) are available in multiple menus.
NOTE: Throughout this guide, a dash appears after menu codes to
differentiate them from parameter codes. For example, SEt- is a menu, but
ACC is a parameter.
© 2004 Schneider Electric All Rights Reserved
19
Section 2: Programming VVDED303042NAR6/04
Accessing the Parameters 06/2004
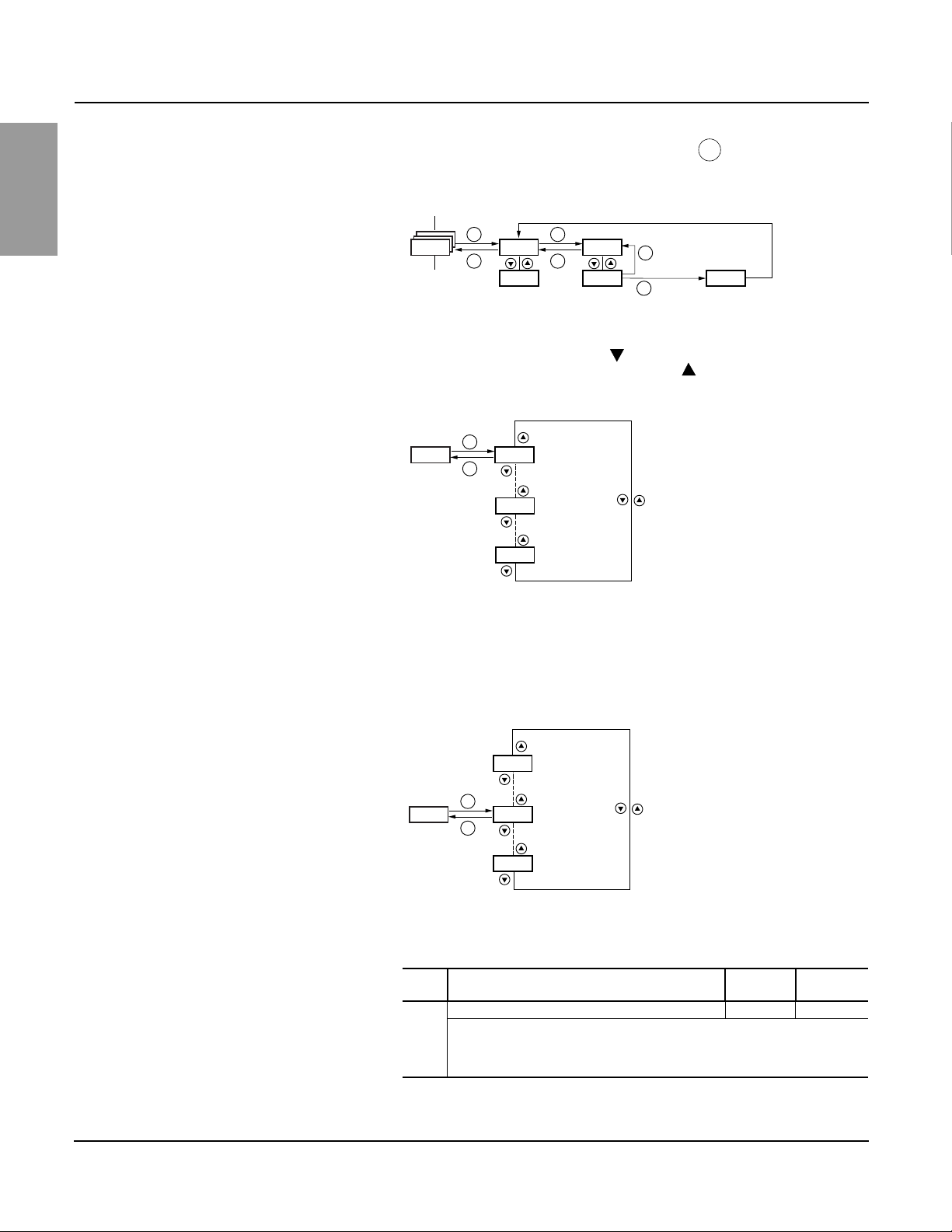
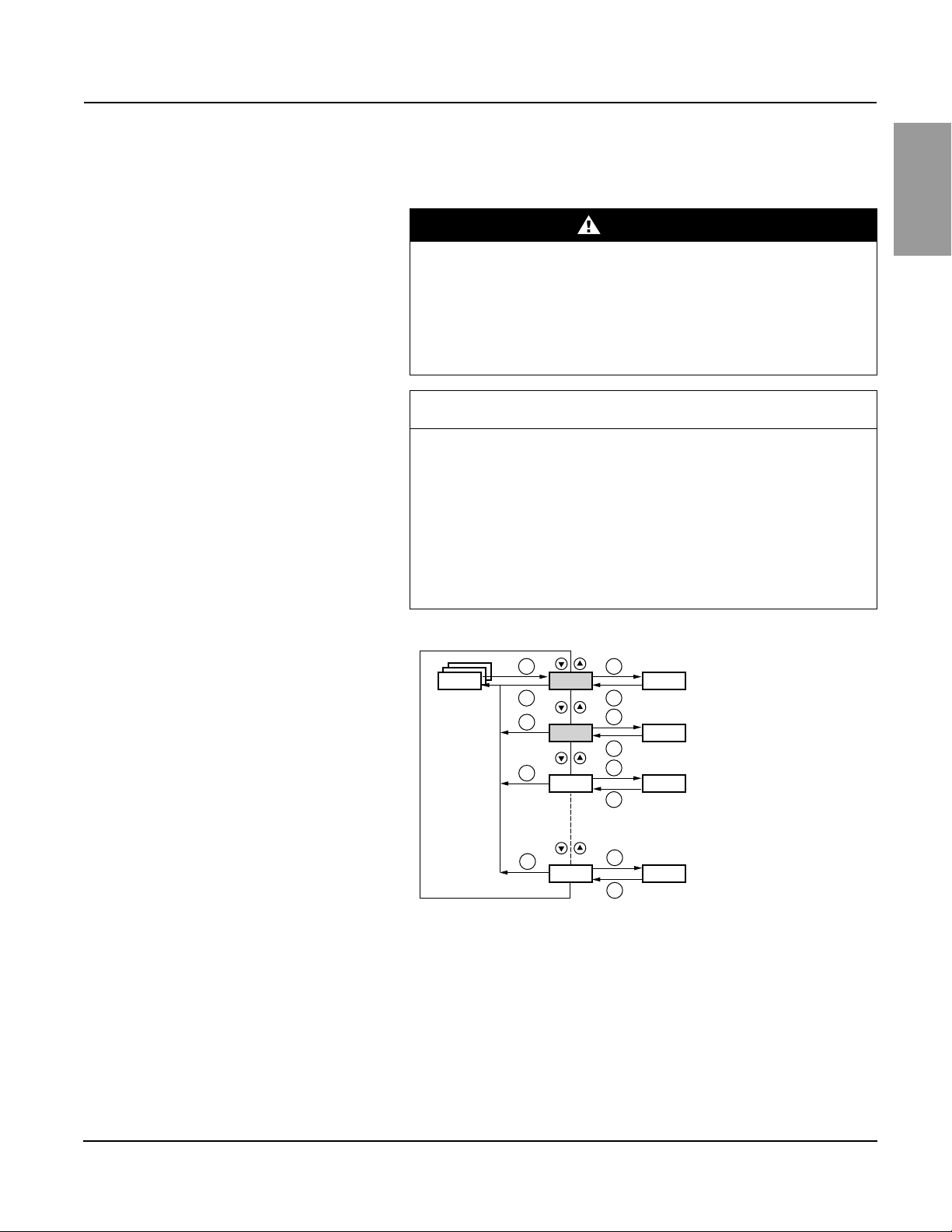
ACCESSING THE PARAMETERS The following figure illustrates how to access parameters and assign their
ENGLISH
values. To store the parameter value, press the key. The display
flashes when a value is stored.
Menu Parameter Value Assignment
ENT
SEt-
ENT
ESC
ENT
ACC 15.0
ESC
dEC
26.0 26.0
The display
ESC
ENT
flashes when a
value is stored.
Next Parameter
All of the menus are drop-down type menus. Once you have reached the
last parameter in a list, press the key to return to the first parameter.
From the first parameter in the list, press the key to jump to the last
parameter.
Menu
ENT
ESC
1
n
last
st
th
If you have modified a parameter in a menu and you return to that menu
without accessing another menu in the meantime, you will be taken directly
to the parameter you last modified. See the illustration below. If you have
accessed another menu or have restarted the drive controller since the
modification, you will be taken to the first parameter in the menu. See the
illustration above.
st
1
Menu
ENT
ESC
th
n
last
bFr Parameter Motor frequency, bFr, can only be modified when the drive controller is
stopped and not receiving a run command.
Code Description
Motor frequency 50 or 60 Hz 50 Hz
bFr
Adjustment
range
This is the first parameter displayed when the drive controller is first powered up.
bFr can be modified at any time in the drC- menu.
Modifying this parameter also modifies the values of the following parameters: HSP
(page 26), Ftd (page 29), FrS (page 30), and tFr (page 32).
© 2004 Schneider Electric All Rights Reserved20
Factory
setting
VVDED303042NAR6/04 Section 2: Programming
06/2004 Function Compatibility
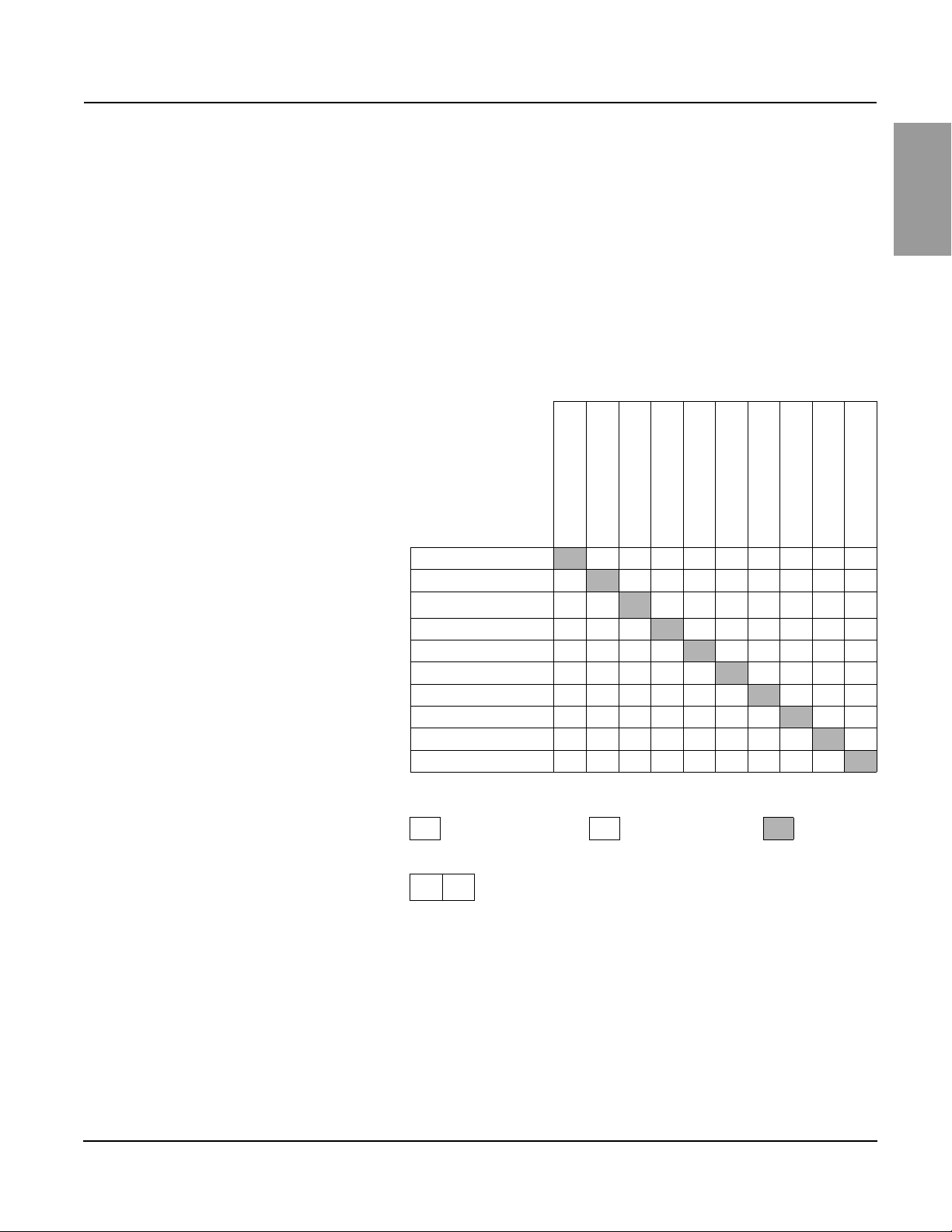
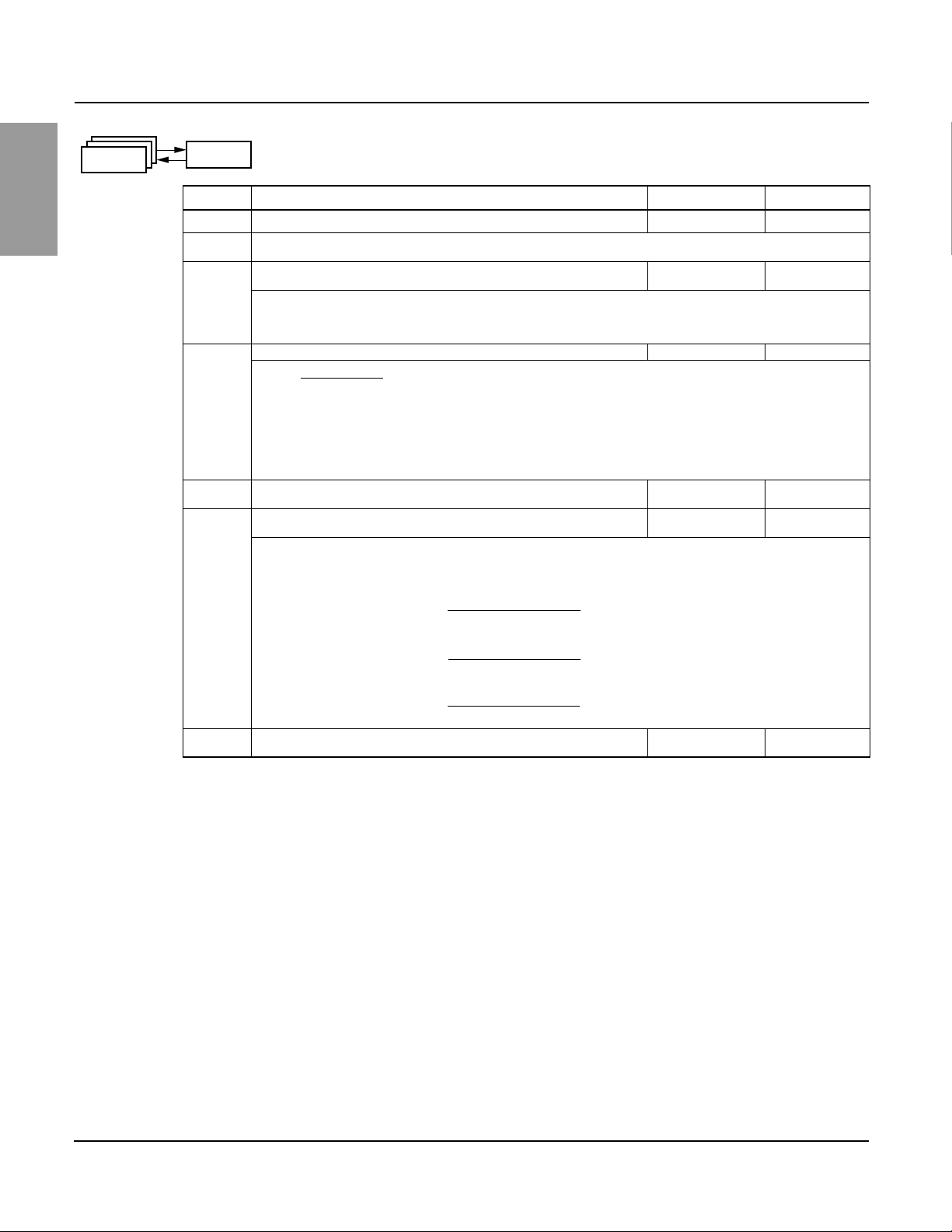
FUNCTION COMPATIBILITY Automatic restart, catch on the fly, and reverse direction are only available
as described below:
• Automatic restart is only available in 2-wire control (tCC = 2C and
tCt = LEL or PFO, see page 33).
• Catch on the fly is only available in 2-wire control (tCC = 2C and
tCt = LEL or PFO, see page 33). It is deactivated if automatic DC
injection braking is configured as DC (AdC = Ct, see page 55).
• Reverse direction is only available on ATV31••••••A controllers if local
control is active (tCC = LOC, see page 33).
The choice of application functions is limited by the number of I/O available
and by the fact that some functions are incompatible with one another as
illustrated in the figure below. Functions which are not listed in the figure are
fully compatible. If there is an incompatibility between functions, the first
function configured will prevent the others from being configured.
1
ENGLISH
Summing inputs
+/- Speed
Management of limit switches
Preset speeds
PI regulator
Jog operation
Brake sequence
DC injection stop
Fast stop
Freewheel stop
Summing inputs
+/- Speed
Management of limit
switches
Preset speeds
PI regulator
Jog operation
Brake sequence
DC injection stop
Fast stop
Freewheel stop
1
1
Excluding a special application with reference channel Fr2 (see pages 41 and 43).
Incompatible functions Compatible functions Not applicable
Functions which cannot be active at the same time. The arrow points to
the function that has priority.
Stop functions have priority over run commands. Speed references via logic
command have priority over analog references.
© 2004 Schneider Electric All Rights Reserved
21
Section 2: Programming VVDED303042NAR6/04
Logic and Analog Input Application Functions 06/2004
LOGIC AND ANALOG INPUT
APPLICATION FUNCTIONS
ENGLISH
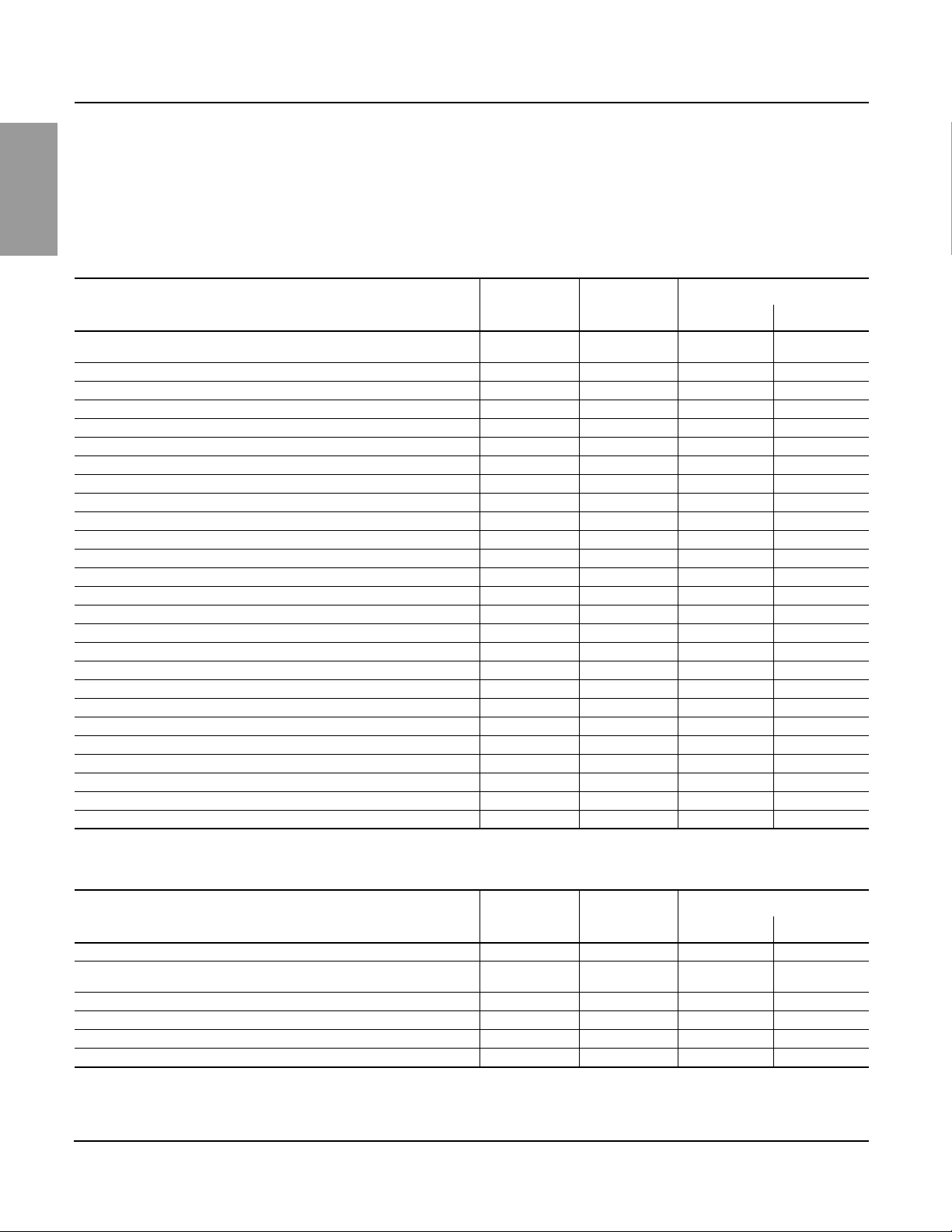
Tables 2–5 list the functions that can be assigned to the logic and analog
inputs and their factory assignments. A single input can activate several
functions at the same time. For example, reverse and second ramp can be
assigned to one input. When more than one function is assigned to an input,
ensure that the functions are compatible. Use the LIA- and AIA- sub-menus
of the SUP- menu (see page 86) to display the functions assigned to the
inputs and to check their compatibility.
Table 2: Logic Inputs
Function Code See Page:
Not assigned — — LI5–LI6
Forward ——LI1
2 preset speeds PS2 58 LI3 LI3
4 preset speeds PS4 58 LI4 LI4
8 preset speeds PS8 58 — —
16 preset speeds PS16 59 — —
2 preset PI references Pr2 68 — —
4 preset PI references Pr4 68 — —
+ speed USP 63 — —
- speed dSP 63 — —
Jog operation JOG 60 — —
Ramp switching rPS 52 — —
Switching for 2
Fast stop via logic input FSt 53 — —
DC injection via logic input dCI 53 — —
Freewheel stop via logic input nSt 54 — —
Reverse rrS 33 LI2 —
External fault EtF 80 — —
RESET (fault reset) rSF 79 — —
Forced local mode FLO 82 — —
Reference switching rFC 47 — —
Control channel switching CCS 48 — —
Motor switching CHP 74 — —
Limiting of forward motion (limit switch) LAF 76 — —
Limiting of reverse motion (limit switch) LAr 76 — —
Fault inhibit InH 81 — —
nd
current limit LC2 73 — —
ATV31•••••• ATV31••••••A
Factory Setting
LI1–LI2
LI5–LI6
Table 3: Analog Inputs
Function Code See Page:
Not assigned — — AI3 AI1 - AI3
Reference 1 Fr1 46 AI1
Reference 2 Fr2 46 —
Summing input 2 SA2 56 AI2 AI2
Summing input 3 SA3 56 — —
PI regulator feedback PIF 68 — —
© 2004 Schneider Electric All Rights Reserved22
Factory Setting
ATV31•••••• ATV31••••••A
AIP
(potentiometer)
VVDED303042NAR6/04 Section 2: Programming
06/2004 Logic and Analog Input Application Functions
Table 4: Analog and Logic Outputs
Function Code See Page: Factory Setting
Not assigned —— AOC/AOV
Motor current OCr 34 —
Motor frequency rFr 34 —
Motor torque OLO 34 —
Power supplied by the drive controller OPr 34 —
Drive fault (logic data) FLt 34 —
Drive running (logic data) rUn 34 —
Frequency threshold reached (logic data) FtA 34 —
High speed (HSP) reached (logic data) FLA 34 —
Current threshold reached (logic data) CtA 34 —
Frequency reference reached (logic data) SrA 34 —
Motor thermal threshold reached (logic data) tSA 34 —
Brake sequence (logic data) bLC 34 —
Table 5: Relays
Function Code See Page: Factory Setting
Not assigned —— R2
Drive fault FLt 34 R1
Drive running rUn 34 —
Frequency threshold reached FtA 34 —
High speed (HSP) reached FLA 34 —
Current threshold reached CtA 34 —
Frequency reference reached SrA 34 —
Motor thermal threshold reached tSA 34 —
Brake sequence bLC 34 —
ENGLISH
© 2004 Schneider Electric All Rights Reserved
23

Section 2: Programming VVDED303042NAR6/04
Logic and Analog Input Application Functions 06/2004
ENGLISH
© 2004 Schneider Electric All Rights Reserved24
VVDED303042NAR6/04 Section 3: Menus
06/2004 Settings Menu SEt-
SECTION 3: MENUS
SETTINGS MENU SEt-
DANGER
UNINTENDED EQUIPMENT OPERATION
Ensure that changes to the operating settings do not present any danger,
especially when making adjustments while the drive controller is running
the motor.
Failure to follow these instructions will result in death or serious
injury.
CAUTION
MOTOR OVERHEATING
• This drive controller does not provide direct thermal protection for the
motor.
• Use of a thermal sensor in the motor may be required for protection at
all speeds or loading conditions.
• Consult the motor manufacturer for the thermal capability of the motor
when operated over the desired speed range.
Failure to follow these instructions can result in equipment damage.
ENT
ESC
ENT
ESC
ENT
ESC
Speed reference from the remote
keypad
SEt-
ENT
LFr
ESC
ESC
rPI
ESC
ACC
ENGLISH
© 2004 Schneider Electric All Rights Reserved
ESC
SdS
ENT
ESC
Scale factor for SPd1–SPd3
parameters
The parameters in the SEt- menu can be modified with the drive controller
running or stopped. However, we recommend making modifications to the
settings with the drive controller stopped.
25
Section 3: Menus VVDED303042NAR6/04
Settings Menu SEt- 06/2004
ENGLISH
SEt-
Code Description Adjustment Range Factory Setting
Speed reference from the remote keypad. 0 to HSP
This parameter appears if LCC = YES (page 48) or if Fr1/Fr2 = LCC (page 46), and if the remote keypad is online. In this case,
1
LFr
rPI1Internal PI regulator reference See page 64. 0.0 to 100% 0
ACC
AC2 2
dE2 2nd deceleration ramp time See page 52. 0.1 to 999.9 s 5 s
dEC
tA1
tA2
tA3
tA4
LSP
HSP
ItH
1
Also accessible in the SUP- menu.
2
In is the nominal drive controller current indicated on the drive controller nameplate.
LFr can also be accessed via the drive controller keypad.
LFr is reset to 0 when the drive controller is powered down.
Acceleration ramp time 0.1 to 999.9 s 3 s
Defined as the time it takes for the motor to go from 0 Hz to FrS (nominal frequency, see page 30).
nd
acceleration ramp time See page 52. 0.1 to 999.9 s 5 s
Deceleration ramp time 0.1 to 999.9 s 3 s
Defined as the time it takes for the motor to go from FrS (nominal frequency, see page 30) to 0 Hz.
Ensure that dEC is not set too low for the load.
Start of custom acceleration ramp, rounded as a percentage
of total ramp time (ACC or AC2)
End of custom acceleration ramp, rounded as a percentage of
total ramp time (ACC or AC2)
Start of custom deceleration ramp, rounded as a percentage
of total ramp time (dEC or dE2)
End of custom deceleration ramp, rounded as a percentage of
total ramp time (dEC or dE2)
Low speed 0 to HSP 0 Hz
Minimum reference
High speed LSP to tFr bFr
Maximum reference. Ensure that this setting is suitable for the motor and the application.
Current used for motor thermal protection. 0.2 to 1.5 In
Set ItH to the full-load amperes (FLA) indicated on the motor nameplate.
Refer to OLL on page 80 if you wish to suppress motor thermal protection.
See page 51. 0 to 100 10%
See page 51. 0 to (100-tA1) 10%
See page 51. 0 to 100 10%
See page 51. 0 to (100-tA3) 10%
2
Varies with drive
controller rating
These parameters appear regardless of how the other menus have been configured.
They only appear in the Settings menu.
These parameters only appear if the corresponding function has been selected in another menu. To facilitate programming,
they can also be accessed and adjusted from the menu where the corresponding function is found. A detailed description of
these functions can be found on the indicated pages.
© 2004 Schneider Electric All Rights Reserved26
VVDED303042NAR6/04 Section 3: Menus
t
t
06/2004 Settings Menu SEt-
SEt-
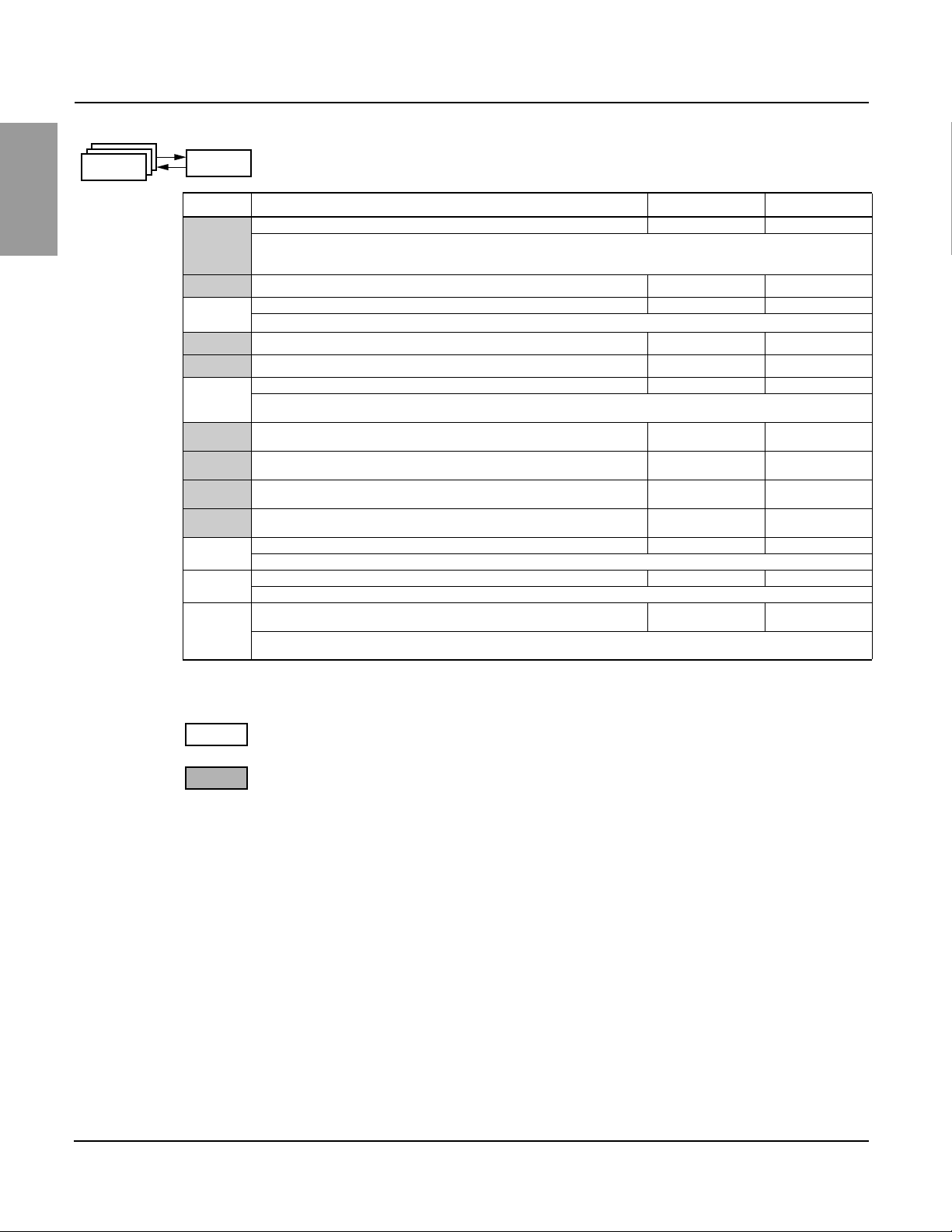
Code Description Adjustment Range Factory Setting
IR compensation or voltage boost 0 to 100% 20
If UFt (page 31) = n or nLd, UFr is IR compensation.
UFr
If UFt = L or P, UFr is voltage boost.
Used to optimize torque at very low speed. Increase UFr if the torque is insufficient.
To avoid operating instability, ensure that the value of UFr is not too high for a warm motor.
NOTE: Modifying UFt (page 31) will cause UFr to return to the factory setting (20%).
Frequency loop gain 1 to 100% 20
This parameter can only be accessed if UFt (page 31) = n or nLd.
FLG adjusts the speed ramp based on the inertia of the driven load.
If the value is too low, the response time is longer. If the value is too high, operating instability can result.
ENGLISH
FLG
Hz
50
40
30
20
10
0
-10
0 0.1 0.2 0.3 0.4 0.5
FLG low
In this case,
increase FLG
Hz
50
40
30
20
10
0
-10
t
0 0.1 0.2 0.3 0.4 0.5
FLG correct
Hz
50
40
30
20
10
0
-10
t
0 0.1 0.2 0.3 0.4 0.5
FLG high
In this case,
reduce FLG
Frequency loop stability 1 to 100% 20
This parameter can only be accessed if UFt (page 31) = n or nLd.
After a period of acceleration or deceleration, StA adapts the return to a steady state to the dynamics of the machine.
If the value is too low, overspeed or operating instability can result. If the value is too high, the response time is longer.
StA
Hz
50
40
30
20
10
0
-10
0 0.1 0.2 0.3 0.4 0.5 t
StA low
In this case,
increase StA
Hz
50
40
30
20
10
0
-10
0 0.1 0.2 0.3 0.4 0.5 t
StA correct
Hz
50
40
30
20
10
0
-10
0 0.1 0.2 0.3 0.4 0.5
StA high
Slip compensation 0 to 150% 100
This parameter can only be accessed if UFt (page 31) = n or nLd.
SLP
SLP adjusts slip compensation for fine tuning of speed regulation.
If the slip setting < actual slip, the motor is not rotating at the correct speed in steady state.
If the slip setting > actual slip, the motor is overcompensated and the speed is unstable.
0 to In (In is the
IdC
Level of DC injection braking current activated via a logic input
or selected as a stop mode.
1
tdC Total DC injection braking time selected as a stop mode.
See page 53.
1
See page 53. 0.1 to 30 s 0.5 s
nominal drive
controller current
indicated on the
nameplate).
tdC1 Automatic DC injection time See page 55. 0.1 to 30 s 0.5 s
SdC1 Level of automatic DC injection current See page 55. 0 to 1.2 In 0.7 In
tdC2 2nd automatic DC injection time See page 55. 0 to 30 s 0 s
SdC2 2
1
These settings are not related to the Automatic DC Injection function.
nd
level of DC injection current See page 55. 0 to 1.2 In 0.5 In
In this case, reduce
StA
0.7 In
These parameters only appear if the corresponding function has been selected in another menu. To facilitate programming,
they can also be accessed and adjusted from the menu where the corresponding function is found. A detailed description of
these functions can be found on the indicated pages.
© 2004 Schneider Electric All Rights Reserved
27
Section 3: Menus VVDED303042NAR6/04
Settings Menu SEt- 06/2004
ENGLISH
SEt-
Code Description Adjustment Range Factory Setting
JPF
JF2
JGF Jog operating frequency See page 60. 0 to 10 Hz 10 Hz
rPG PI regulator proportional gain See page 68. 0.01 to 100 1
rIG PI regulator integral gain See page 68. 0.01 to 100/s 1/s
FbS PI feedback multiplication coefficient See page 68. 0.1 to 100 1
PIC Reversal of the direction of correction of the PI regulator See page 68. nO - YES nO
rP2 2
rP3 3
rP4 4
SP2 2nd preset speed See page 59. 0 to 500 Hz 10 Hz
SP3 3rd preset speed See page 59. 0 to 500 Hz 15 Hz
SP4 4th preset speed See page 59. 0 to 500 Hz 20 Hz
SP5 5th preset speed See page 59. 0 to 500 Hz 25 Hz
SP6 6th preset speed See page 59. 0 to 500 Hz 30 Hz
SP7 7th preset speed See page 59. 0 to 500 Hz 35 Hz
SP8 8th preset speed See page 59. 0 to 500 Hz 40 Hz
SP9 9th preset speed See page 59. 0 to 500 Hz 45 Hz
SP10 10th preset speed See page 59. 0 to 500 Hz 50 Hz
SP11 11th preset speed See page 59. 0 to 500 Hz 55 HZ
SP12 12th preset speed See page 59. 0 to 500 Hz 60 Hz
SP13 13th preset speed See page 59. 0 to 500 Hz 70 Hz
SP14 14th preset speed See page 59. 0 to 500 Hz 80 Hz
SP15 15th preset speed See page 59. 0 to 500 Hz 90 Hz
SP16 16th preset speed See page 59. 0 to 500 Hz 100 Hz
CLI
CL2 2nd current limit See page 73. 0.25 to 1.5 In 1.5 In
tLS
rSL Restart error threshold (wake-up threshold) See page 69. 0 to 100% 0
UFr2 IR compensation, motor 2 See page 75. 0 to 100% 20
FLG2 Frequency loop gain, motor 2 See page 75. 1 to 100% 20
StA2 Stability, motor 2 See page 75. 1 to 100% 20
SLP2 Slip compensation, motor 2 See page 75. 0 to 150% 100%
1
In is the nominal drive controller current indicated on the drive controller nameplate.
Skip frequency 0 to 500 0 Hz
JPF prevents prolonged operation at a frequency range of ± 1 Hz around JPF. This function avoids a critical speed which leads
to resonance. Setting the function to 0 renders it inactive.
nd
2
skip frequency 0 to 500 0 Hz
JF2 prevents prolonged operation at a frequency range of ± 1 Hz around JF2. This function avoids a critical speed which leads to
resonance. Setting the function to 0 renders it inactive.
nd
preset PI reference See page 68. 0 to 100% 30%
rd
preset PI reference See page 68. 0 to 100% 60%
th
preset PI reference See page 68. 0 to 100% 90%
Current limit 0.25 to 1.5 In
Used to limit the torque and the temperature rise of the motor.
Low speed operating time 0 to 999.9 s 0 (no time limit)
After operation at LSP for a defined period, a motor stop is requested automatically. The motor restarts if the frequency reference
is greater than LSP and if a run command is still present.
1
1.5 In
These parameters only appear if the corresponding function has been selected in another menu. To facilitate programming,
they can also be accessed and adjusted from the menu where the corresponding function is found. A detailed description of
these functions can be found on the indicated pages.
© 2004 Schneider Electric All Rights Reserved28
VVDED303042NAR6/04 Section 3: Menus
06/2004 Drive Control Menu drC-
SEt-
Code Description Adjustment Range Factory Setting
Ftd
ttd
Ctd
SdS
SFr
1
In is the nominal drive controller current indicated on the drive controller nameplate.
Motor frequency threshold above which the relay contact (R1 or R2) closes,
or output AOV = 10 V. R1, R2, or dO must be assigned to FtA.
Motor thermal state threshold above which the relay contact (R1 or R2) closes,
or output AOV = 10 V. R1, R2, or dO must be assigned to tSA.
Motor current threshold beyond which the relay contact (R1 or R2) closes,
or output AOV = 10 V. R1, R2, or dO must be assigned to CtA.
Scale factor for display parameter SPd1/SPd2/SPd3 (see SUP- menu on
page 85)
0 to 500 Hz bFr
0 to 118% 100%
0 to 1.5 In
1
1
In
0.1 to 200 30
Used to scale a value (such as motor speed) in proportion to the output frequency rFr.
If SdS ≤
1, SPd1 is displayed (possible definition = 0.01).
If 1 < SdS ≤
10, SPd2 is displayed (possible definition = 0.1).
If SdS > 10, SPd3 is displayed (possible definition = 1).
If SdS > 10 and SdS x rFr > 9999:
Display of Spd3 = (to 2 decimal places).
SdS x rFr
1000
For example, if SdS x rFr equals 24,223, the display shows 24.22.
If SdS > 10 and SdS x rFr > 65535, the display shows 65.54.
Example: Display motor speed for a 4-pole motor,
1500 rpm at 50 Hz (synchronous speed):
SdS = 30
SPd3 = 1500 at rFr = 50 Hz
Switching frequency See page 32. 2.0 to 16 kHz 4 kHz
This parameter can also be accessed in the drC- menu.
ENGLISH
DRIVE CONTROL MENU drC-
drC-
ENT
ESC
ESC
ESC
bFr
tAI
FCS
ESC
ENT
ESC
ENT
Standard motor frequency
Return to factory settings/restore
configuration
With the exception of tUn, drive control parameters can only be modified
when the drive controller is stopped and no run command is present. This
menu can be accessed with the access locking switch on the remote
keypad display in the position. Drive controller performance can be
optimized by:
• Setting the drive control parameters to the values on the motor
nameplate
• Performing an auto-tune operation (on a standard asynchronous motor)
© 2004 Schneider Electric All Rights Reserved
29
Section 3: Menus VVDED303042NAR6/04
Drive Control Menu drC- 06/2004
ENGLISH
drC-
Code Description Adjustment Range Factory Setting
bFr Motor frequency 50 or 60 Hz 50
This parameter modifies the presets of the following parameters: HSP (page 26), Ftd (page 29), FrS (page 30), and tFr
(page 32).
Nominal motor voltage indicated on the nameplate
UnS
FrS
nCr Nominal motor current indicated on the nameplate 0.25 to 1.5 In
nSP
ATV31•••M2: 100 to 240 V
ATV31•••M3X: 100 to 240 V
ATV31•••N4: 100 to 500 V
ATV31•••S6X: 100 to 600 V
Nominal motor frequency indicated on the nameplate 10 to 500 Hz 50 Hz
The ratio must not exceed the following values:
ATV31•••M2: 7
ATV31•••M3X: 7
ATV31•••N4: 14
ATV31•••S6X: 17
NOTE: Changing the setting of bFr to 60 Hz also changes the setting of FrS to 60 Hz.
Nominal motor speed indicated on the nameplate 0 to 32760 rpm
0 to 9999 rpm, then 10.00 to 32.76 krpm
If the nameplate indicates synchronous speed and slip (in Hz or as a percentage) instead of nominal speed, calculate nominal
speed as follows:
Nominal speed = Synchronous speed x
or
UnS (in volts)
FrS (in Hz)
100 - slip as a%
100
Varies with drive
controller rating
1
Varies with drive
controller rating
Varies with drive
controller rating
Varies with drive
controller rating
Nominal speed = Synchronous speed x (50 Hz motors)
or
Nominal speed = Synchronous speed x (60 Hz motors)
COS Motor power factor indicated on the nameplate 0.5 to 1
1
In is the nominal drive controller current indicated on the drive controller nameplate.
50 - slip in Hz
50
60 - slip in Hz
60
Varies with drive
controller rating
© 2004 Schneider Electric All Rights Reserved30
 Loading...
Loading...