

Teledyne PATHFINDER User Manual

PATHFINDER
DOPPLER VELOCITY LOG (DVL) GUIDE
600 KHZ
Information included herein is controlled by the Export Administration Regulations
(EAR) and may require an export license, license exception or other approval from the
appropriate U.S. Government agency before being exported from the United States or
provided to any foreign person. Diversion contrary to U.S. law is prohibited.
P/N 95B-6116-00 (April 2018)
© 2018 Teledyne RD Instruments, Inc. All rights reserved.

Page ii
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
TABLE OF CONTENTS
CHAPTER 1 - AT A GLANCE ...................................................................................................................................1
Overview ...................................................................................................................................................... 2
Pathfinder Options ....................................................................................................................................... 4
Inventory ...................................................................................................................................................... 5
Optional Kits ......................................................................................................................................... 6
Health & Environment Monitoring Sensors ................................................................................................. 8
Setting up the Pathfinder System ................................................................................................................ 9
Computer and Software Considerations .............................................................................................. 9
Software Installation ............................................................................................................................ 9
Power Overview ................................................................................................................................... 10
Cables and Connector Protective Cap .................................................................................................. 10
Setting Up the Pathfinder ROV System ................................................................................................ 12
Setting Up the Pathfinder OEM System ............................................................................................... 13
Cable Wiring Diagrams ......................................................................................................................... 15
Connecting to the Pathfinder ....................................................................................................................... 17
Using the Network Configuration Page ................................................................................................ 18
Using the Ethernet Communications ................................................................................................... 19
Using TCP Protocol ......................................................................................................................... 19
Using UDP Protocol ........................................................................................................................ 20
Ethernet Module Firmware Update ..................................................................................................... 22
Testing the Pathfinder System ..................................................................................................................... 23
Caring for the Pathfinder System ................................................................................................................. 24
General Handling Guidelines ................................................................................................................ 24
Installation Guidelines .......................................................................................................................... 24
CHAPTER 2 – SYSTEM INT EGRATION .......................................................................................................................25
System Integration Introduction .................................................................................................................. 26
DVL Theory ................................................................................................................................................... 26
BroadBand Doppler .............................................................................................................................. 26
Bottom Tracking ................................................................................................................................... 26
Water Tracking ..................................................................................................................................... 27
Required Conditions for Water Tracking ....................................................................................... 27
Water Tracking Parameters ........................................................................................................... 28
Current Profiling ................................................................................................................................... 28
Beam Coordinate Systems ................................................................................................................... 29
DVL Performance and Influencing Factors ........................................................................................... 31
Long Term Performance ................................................................................................................ 31
Bottom Track ................................................................................................................................. 31
Water Track ................................................................................................................................... 31
Short Term Performance ...................................................................................................................... 32
Bottom Track ................................................................................................................................. 32
Water Track ................................................................................................................................... 32
Altitude Performance ........................................................................................................................... 33
Bottom Type & Slope ..................................................................................................................... 33
Temperature & Salinity .................................................................................................................. 33
Pitch & Roll..................................................................................................................................... 34
Transmit Power .............................................................................................................................. 34
Slant Range Performance ..................................................................................................................... 34
Speed of Sound Variation .............................................................................................................. 34
Bottom Slope ................................................................................................................................. 35
Pitch & Roll..................................................................................................................................... 35
Resolution ...................................................................................................................................... 35
Mechanical Integration Considerations ....................................................................................................... 36
Alignment ............................................................................................................................................. 36
Page iii
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

Beam Clearance ................................................................................................................................... 37
Mounting the Instrument ..................................................................................................................... 37
Pitch & Roll ........................................................................................................................................... 37
Routing Cables...................................................................................................................................... 38
Electrical Integration Considerations ........................................................................................................... 39
Grounding Issues .................................................................................................................................. 39
Electrical and Grounding Testing Best Practices .................................................................................. 40
Electro-Magnetic Interference (EMI) ................................................................................................... 41
EMI Coupling Through Cables .............................................................................................................. 41
Power Consumption ............................................................................................................................. 42
Inrush Currents..................................................................................................................................... 42
Acoustic Integration Considerations ............................................................................................................ 43
Flow Noise ............................................................................................................................................ 43
Cavitation ............................................................................................................................................. 43
Ringing.................................................................................................................................................. 43
Mounting Considerations ..................................................................................................................... 44
Windows Use Considerations ............................................................................................................... 44
Recommended Practices for Window Use ..................................................................................... 45
SONAR Interference Considerations .................................................................................................... 46
Interference Detection and Mitigation ................................................................................................ 46
Reference, Data & Timing Considerations ................................................................................................... 47
Coordinate Frames ............................................................................................................................... 47
Data Screening ..................................................................................................................................... 47
Three-Beam Solution............................................................................................................................ 48
Ping Timing ........................................................................................................................................... 48
System Synchronization ....................................................................................................................... 49
Operational and Setup Considerations ........................................................................................................ 49
Unfavorable Environments .................................................................................................................. 49
Triggering ............................................................................................................................................. 50
Design Considerations & Bench Test .................................................................................................... 50
Troubleshooting ........................................................................................................................................... 51
Communications Issues ........................................................................................................................ 51
Initial Shakedown Deployment .................................................................................................................... 51
Troubleshooting Checklist .................................................................................................................... 51
Identify Unit ................................................................................................................................... 51
Run Built-In Tests ........................................................................................................................... 51
Provide Unit Setup ......................................................................................................................... 52
Describe Deployment Environment & Operational Conditions ..................................................... 53
Describe the System Installation .................................................................................................... 53
Provide Raw Data & Describe Issue for Analysis by TRDI ............................................................... 53
Provide Additional Data for Analysis by TRDI ................................................................................ 53
Record Engineering Data for Analysis by TRDI ............................................................................... 53
Identifying EMI ............................................................................................................................................. 55
Purpose ................................................................................................................................................ 55
Adjustments ......................................................................................................................................... 55
Operation ............................................................................................................................................. 55
Install the NGSPFFT Software ........................................................................................................ 56
Connecting to the Pathfinder DVL ................................................................................................. 56
Check the Adjustments .................................................................................................................. 57
Zoom .............................................................................................................................................. 57
Mouse-Over: .................................................................................................................................. 57
Examples of Clean FFT Plots, No Interference ...................................................................................... 57
Examples of Interference ..................................................................................................................... 58
Alternative FFT Tool for Virtual Comports ........................................................................................... 60
Matlab Output Variable Definitions ............................................................................................................. 61
CHAPTER 3 – COLLECTING DATA ............................................................................................................................63
Pathfinder General Deployment Flow .......................................................................................................... 64
Page iv
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

Creating or Modifying Command Files ......................................................................................................... 65
Sending Commands to the Pathfinder ......................................................................................................... 69
CHAPTER 4 - MAINTENANCE .................................................................................................................................71
Replaceable Parts ......................................................................................................................................... 72
Inspection Schedule ..................................................................................................................................... 74
Periodic Maintenance Items ........................................................................................................................ 75
Cleaning the Cable Connectors ............................................................................................................ 75
Transducer Inspection .......................................................................................................................... 76
Removing Biofouling ............................................................................................................................ 76
Zinc Anode Inspection and Replacement ............................................................................................. 77
Zinc Anode Inspection .................................................................................................................... 77
Zinc Anode Electrical Continuity Check .......................................................................................... 77
Zinc Anode Replacement ............................................................................................................... 77
Protective Coating Inspection .............................................................................................................. 79
Long Term Maintenance Items .................................................................................................................... 79
Updating the DVL Firmware ................................................................................................................. 79
CHAPTER 5 - RETURNING SYSTEMS TO TRDI FOR SERVICE ............................................................................................81
Shipping the Pathfinder ............................................................................................................................... 82
Returning Systems to the TRDI Factory ........................................................................................................ 83
Returning Systems to TRDI Europe Factory .................................................................................................. 84
CHAPTER 6 - SPECIFIC ATIONS ................................................................................................................................87
Operational Specifications ........................................................................................................................... 89
Environmental Specifications ....................................................................................................................... 90
Electrical Specifications ................................................................................................................................ 90
Communications Specifications ................................................................................................................... 90
Outline Installation Drawings ....................................................................................................................... 90
CHAPTER 7 - COMMANDS ....................................................................................................................................93
Data Communication and Command Format .............................................................................................. 94
Command Input Processing ................................................................................................................. 94
Data Output Processing........................................................................................................................ 95
Command Summary ..................................................................................................................................... 95
Command Descriptions ................................................................................................................................ 98
? – Help Menus .............................................................................................................................. 98
Break .............................................................................................................................................. 99
OL – Display Feature List ................................................................................................................ 99
Y – Display Banner ......................................................................................................................... 100
Bottom Track Commands ............................................................................................................................. 101
Available Bottom Track Commands ..................................................................................................... 101
BP – Bottom-Track Pings per Ensemble ......................................................................................... 101
BX – Maximum Tracking Depth ...................................................................................................... 102
Expert Bottom Track Commands ......................................................................................................... 103
#B1 - Blank Range with Bad Velocity.............................................................................................. 103
#B2 - Depth Memory Timeout ....................................................................................................... 104
#BA - Evaluation Amplitude Minimum ........................................................................................... 104
#BB – Bottom Blanking Interval ..................................................................................................... 104
#BC - Correlation Magnitude Minimum ......................................................................................... 105
#BE - Error Velocity Maximum ....................................................................................................... 105
#BF - Depth Guess .......................................................................................................................... 105
#BH – Gain Switch Threshold ......................................................................................................... 106
#BI - Gain Switch Altitude .............................................................................................................. 106
#BJ – Data Type Output Control..................................................................................................... 107
#BK - Water-Mass Layer Mode ...................................................................................................... 107
#BL - Water-Mass Layer Parameters .............................................................................................. 108
#BM – Bottom Mode ..................................................................................................................... 109
#BN - Speed Log Hold/Drop Control .............................................................................................. 109
Page v
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

#BO - Distance Measure Filter Constant ........................................................................................ 110
#BQ – Over Range Limit ................................................................................................................. 110
#BS - Clear Distance Traveled ........................................................................................................ 110
#BY – Transmit Length ................................................................................................................... 111
#BZ – Low Altitude Mode ............................................................................................................... 111
Control System Commands .......................................................................................................................... 112
Available Control System Commands .................................................................................................. 112
CB - Serial Port Control .................................................................................................................. 112
CE – Enable Ethernet...................................................................................................................... 113
CF - Flow Control ............................................................................................................................ 113
CK - Keep Parameters .................................................................................................................... 114
CR – Retrieve Parameters .............................................................................................................. 114
CS – Start Pinging (Go) ................................................................................................................... 115
CT - Turnkey Operation .................................................................................................................. 115
CX – Input Trigger Enable ............................................................................................................... 116
CZ – Power Down ADCP ................................................................................................................. 117
Expert Control System Commands ....................................................................................................... 117
Environmental Commands ........................................................................................................................... 118
Available Environmental Commands ................................................................................................... 118
EA - Heading Alignment ................................................................................................................. 118
EC - Speed of Sound ....................................................................................................................... 119
ED - Depth of Transducer ............................................................................................................... 119
EH - Heading .................................................................................................................................. 120
EP - Pitch and Roll Angles ............................................................................................................... 120
ER - Roll Angle ................................................................................................................................ 121
ES – Salinity .................................................................................................................................... 122
ET - Temperature ........................................................................................................................... 122
EU - Up/Down Orientation ............................................................................................................. 123
EV - Heading Bias ........................................................................................................................... 123
EX – Coordinate Transformation .................................................................................................... 124
EZ - Sensor Source .......................................................................................................................... 125
Expert Environmental Commands ........................................................................................................ 126
#EE - Environmental Data Output .................................................................................................. 126
#EI - Roll Misalignment Angle ........................................................................................................ 128
#EJ - Pitch Misalignment Angle ...................................................................................................... 129
Recorder Commands .................................................................................................................................... 130
Recorder Command Descriptions......................................................................................................... 130
ME – Erase Recorder ...................................................................................................................... 130
MM – Show Memory Usage .......................................................................................................... 130
MN – Set File Name ....................................................................................................................... 131
MR – Set Recorder On/Off ............................................................................................................. 131
MY – Y-Modem Output .................................................................................................................. 131
Performance and Testing Commands .......................................................................................................... 132
Available Performance and Testing Commands ................................................................................... 132
PA – Run Go/No-Go Tests .............................................................................................................. 132
PC - Built-In Tests ........................................................................................................................... 133
PS – Display System Parameters .................................................................................................... 134
PT – Diagnostic Tests ..................................................................................................................... 136
PT0 - Help ....................................................................................................................................... 136
PT3 – Receive Test ......................................................................................................................... 136
PT5 – Transmit/Receive Continuity Check Test.............................................................................. 137
PT9 - Transmit Memory Test .......................................................................................................... 138
PT10 - Receive Memory Test ......................................................................................................... 138
PT11 - FRAM Test ........................................................................................................................... 138
PT12 - RAM Test ............................................................................................................................. 138
PT13 - ROM Test ............................................................................................................................ 138
PT14 - Recorder Test ...................................................................................................................... 139
Page vi
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

PT19 - Ringing Test ......................................................................................................................... 139
Expert Performance and Testing Commands ....................................................................................... 140
#PD - Data Stream Select ............................................................................................................... 140
#PE – Ethernet Data Streams Bitmask ........................................................................................... 141
Timing Commands ....................................................................................................................................... 142
Available Timing Commands ................................................................................................................ 142
TE – Time Per Ensemble ................................................................................................................. 142
TF – Time of First Ping .................................................................................................................... 142
TP – Time Between Pings ............................................................................................................... 143
TS – Set Real-Time Clock ................................................................................................................ 144
TT – Set Real-Time Clock (Y2k Compliant)...................................................................................... 144
Water Profiling Commands .......................................................................................................................... 145
Available Water Profiling Commands ................................................................................................... 145
WB – Bandwidth ............................................................................................................................ 145
WD – Data Out ............................................................................................................................... 146
WF – Blank after Transmit ............................................................................................................. 146
WN – Number of Depth Cells ......................................................................................................... 147
WP – Pings per Ensemble............................................................................................................... 147
WS – Depth Cell Size ...................................................................................................................... 147
WV – Ambiguity Velocity ............................................................................................................... 148
Expert Water Profiling Command Descriptions .................................................................................... 149
#WA – False Target Threshold Maximum ...................................................................................... 149
#WC – Low Correlation Threshold ................................................................................................. 149
#WE – Error Velocity Threshold ..................................................................................................... 150
#WJ – Receiver Gain Select ............................................................................................................ 150
#WT – Transmit Length .................................................................................................................. 151
#WX – Set single-beam transmit mode .......................................................................................... 151
CHAPTER 8 – OUTPUT DATA FORMATS ...................................................................................................................153
Choosing a Data Format ............................................................................................................................... 154
PD0 Output Data Format ............................................................................................................................. 156
Header Data Format ............................................................................................................................. 158
Fixed Leader Data Format .................................................................................................................... 160
Variable Leader Data Format ............................................................................................................... 166
Velocity Data Format............................................................................................................................ 174
Correlation Magnitude, Echo Intensity, Percent-Good, and Status Data Format ................................ 176
Binary Bottom-Track Data Format ....................................................................................................... 180
Environmental Command Parameters Output Format ........................................................................ 185
Bottom Track Command Output Format ............................................................................................. 187
Bottom Track High Resolution Velocity Format ................................................................................... 190
Bottom Track Range Format ................................................................................................................ 193
Navigation Parameters Data Format .................................................................................................... 197
Sensor Source for Doppler Processing Format ..................................................................................... 201
Binary Checksum Data Format ............................................................................................................. 205
Special Output Data Formats ....................................................................................................................... 206
Pathfinder Binary Data Format (PD4/PD5) ........................................................................................... 207
Pathfinder Output Data Format (PD4/PD5) Details ............................................................................. 209
Pathfinder Binary Data Format (PD5) ................................................................................................... 212
Pathfinder Output Data Format (PD5) Details ..................................................................................... 214
Pathfinder Output Data Format (PD6) ................................................................................................. 215
Pathfinder Output Data Format (PD13) ............................................................................................... 218
Decoding a Pathfinder Ensemble ................................................................................................................. 222
Rules for the BroadBand Data Format PD0 .......................................................................................... 222
Decoding Sequence for PD0 Data ........................................................................................................ 223
APPENDIX A – NOTICE OF COMPLIANCE ..................................................................................................................225
Date of Manufacture .................................................................................................................................... 226
Environmental Friendly Use Period (EFUP) .................................................................................................. 226
Page vii
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
WEEE ............................................................................................................................................................ 226
CE ................................................................................................................................................................. 226
Material Disclosure Table ............................................................................................................................. 227
LIST OF FIGURES
Figure 1. Pathfinder ROV Version .............................................................................................................. 2
Figure 2. Pathfinder ROV Version Face View............................................................................................. 3
Figure 3. OEM Version Transducer ............................................................................................................ 3
Figure 4. OEM Version Electronics Chassis ................................................................................................ 4
Figure 5. Connecting the Cable ............................................................................................................... 11
Figure 6. ROV Pathfinder Connections for Bench Test [73B-6057-00 & 73B-6046-00 Cables]................ 12
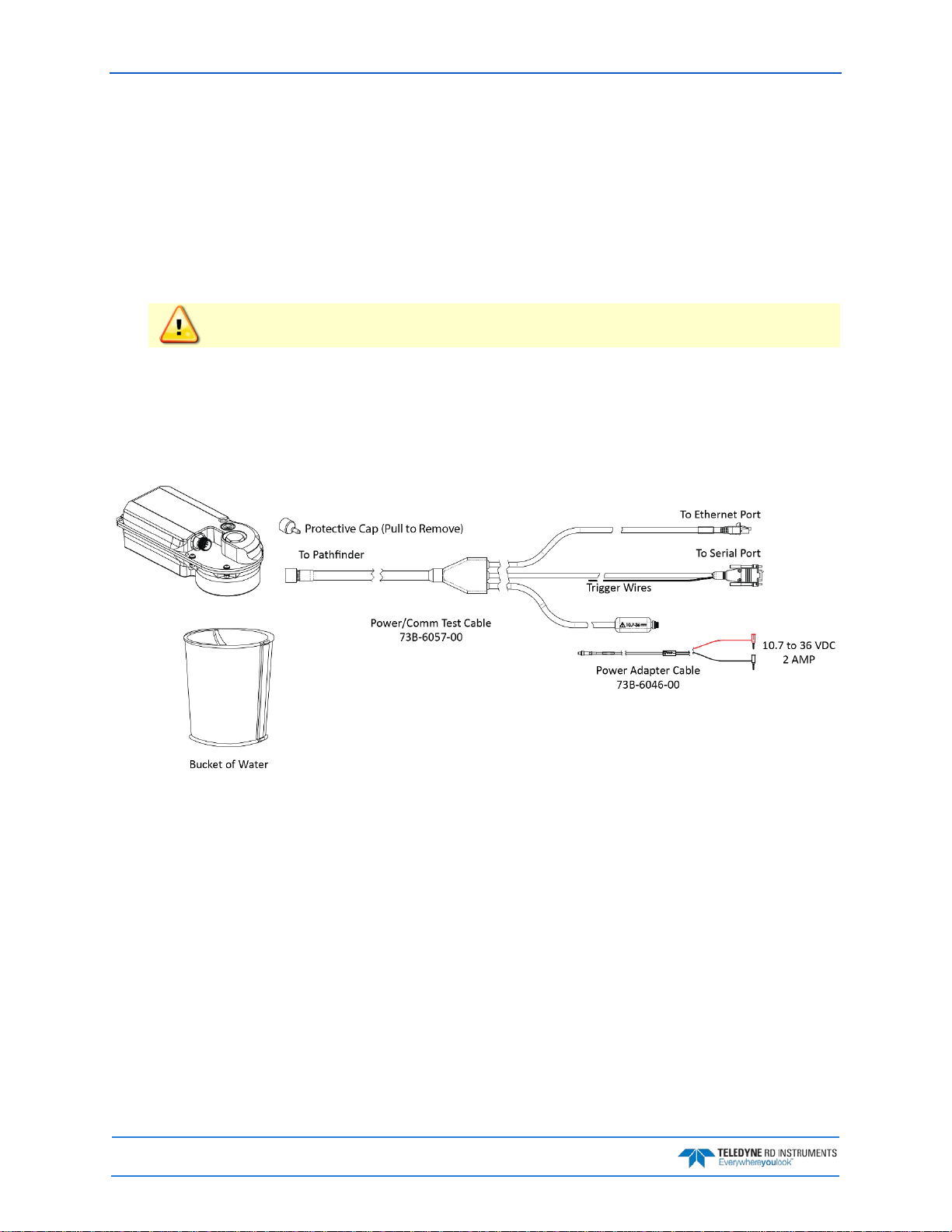
Figure 7. OEM Pathfinder Transducer Connections ................................................................................ 13
Figure 8. OEM Pathfinder Connections for Bench Test [73B-6059-00 Cable] ......................................... 15
Figure 9. Pathfinder Power/Comm Cable 73B-6057-005 Optional Test Cable ........................................ 15
Figure 10. Power Adapter Cable 73B-6046-00 .......................................................................................... 16
Figure 11. Pathfinder ROV Power/Comm Cable 73B-6058 Pigtail Cable ................................................... 16
Figure 12. Pathfinder OEM Power/Comm Cable 73B-6060 Pigtail Cable .................................................. 16
Figure 13. Pathfinder Network Configuration Page .................................................................................. 18
Figure 14. Short Pulse versus Long Pulse .................................................................................................. 27
Figure 15. Water-Mass Layer Processing .................................................................................................. 27
Figure 16. DVL Depth Cells for Current Measurements ............................................................................ 28
Figure 17. X, Y, and Z Velocities (ROV version shown) .............................................................................. 29
Figure 18. Pathfinder Ship Coordinates (OEM Transducer Shown) ........................................................... 30
Figure 19. Pathfinder Pitch and Roll .......................................................................................................... 30
Figure 20. Transducer Alignment Reference Points .................................................................................. 36
Figure 21. End-Cap view of the transducer showing mounting holes ....................................................... 37
Figure 22. Do not use Zip-Ties Directly on Cables ..................................................................................... 38
Figure 23. Ground Fault Current Check ..................................................................................................... 40
Figure 24. Pathfinder Power Circuit .......................................................................................................... 42
Figure 25. Transducer View ....................................................................................................................... 75
Figure 26. Top View ................................................................................................................................... 75
Figure 27. Replacing an Anode .................................................................................................................. 78
Figure 28. Outline Installation Drawing – OEM ......................................................................................... 91
Figure 29. Outline Installation Drawing – ROV Pathfinder ........................................................................ 92
Figure 30. PD0 Standard Output Data Buffer Format ............................................................................. 157
Figure 31. Binary Header Data Format .................................................................................................... 158
Figure 32. Fixed Leader Data Format ...................................................................................................... 161
Figure 33. Variable Leader Data Format ................................................................................................. 168
Figure 34. Velocity Data Format .............................................................................................................. 174
Figure 35. Correlation Magnitude, Echo Intensity, Percent-Good, and Status Data Format................... 176
Figure 36. Binary Bottom-Track Data Format ......................................................................................... 182
Figure 37. Environmental Command Parameters Output Format .......................................................... 186
Figure 38. Bottom Track Command Output Data Format ....................................................................... 188
Figure 39. Bottom Track High Resolution Velocity Output Format ......................................................... 192
Figure 40. Bottom Track Range Output Data Format .............................................................................. 194
Figure 41. Navigation Parameters Data Format ...................................................................................... 199
Figure 42. Sensor Source for Doppler Processing Output Format ........................................................... 203
Figure 43. Binary Checksum Data Format ............................................................................................... 205
Figure 44. Pathfinder Binary Data Format (PD4/PD5) ............................................................................. 208
Figure 45. Pathfinder Binary Data Format (PD5) ..................................................................................... 213
Page viii
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
LIST OF TABLES
Table 1. Pathfinder ROV System Inventory .............................................................................................. 5
Table 2. Pathfinder ROV Spare Parts* ...................................................................................................... 5
Table 3. Pathfinder OEM Inventory ......................................................................................................... 6
Table 4. 75BK6086-00 – Kit, Integration, ROV Pathfinder ........................................................................ 6
Table 5. 75BK6088-00 – Kit, Integration, OEM Pathfinder ....................................................................... 6
Table 6. 75BK6087-00 – Kit, Field Service, ROV Pathfinder ..................................................................... 6
Table 7. 75BK6089-00 – Kit, Field Service, OEM Pathfinder..................................................................... 7
Table 8: Minimum Computer Hardware Requirements ........................................................................... 9
Table 9. Pathfinder Nominal Voltage versus Bottom Tracking Range with Ethernet ............................. 34
Table 10: Window Thickness .................................................................................................................... 45
Table 11: Wavelength of sound in seawater (1500 m/s sound speed) .................................................... 46
Table 12: Transmit and Receive for Pathfinder DVLs ............................................................................... 46
Table 13: Approximate Bottom Track Ping Times (in milliseconds) ......................................................... 48
Table 14: Recommended Commands ...................................................................................................... 67
Table 15: Pathfinder ROV Spare Parts – Part of 75BK6084-00 ................................................................. 72
Table 16. 75BK6087-00 – Kit, Field Service, ROV Pathfinder ................................................................... 72
Table 17. 75BK6089-00 – Kit, Field Service, OEM Pathfinder................................................................... 73
Table 18. 75BK6090-00 – Kit, Accessories, OEM Pathfinder .................................................................... 73
Table 19: Visual Inspection Criteria .......................................................................................................... 74
Table 20. Pathfinder Commands and Defaults ........................................................................................ 96
Table 21: Water-Mass Reference-Layer Modes ..................................................................................... 108
Table 22: BM8 Minimum Tracking Depths ............................................................................................. 109
Table 23: Serial Port Control .................................................................................................................. 112
Table 24: Flow Control ........................................................................................................................... 114
Table 25: Retrieve Parameters ............................................................................................................... 115
Table 26. Input Trigger ........................................................................................................................... 116
Table 27: Coordinate Transformation Processing Flags ......................................................................... 124
Table 28: Sensor Source Switch Settings................................................................................................ 125
Table 29: Data Stream Selections .......................................................................................................... 140
Table 30: Bandwidth Control ................................................................................................................. 145
Table 31: Summary of Output Data Formats ......................................................................................... 155
Table 32: Header Data Format ............................................................................................................... 159
Table 33: Fixed Leader Data Format ...................................................................................................... 162
Table 34: Variable Leader Data Format ................................................................................................. 168
Table 35: Velocity Data Format .............................................................................................................. 175
Table 36: Correlation Magnitude Data Format ...................................................................................... 177
Table 37: Echo Intensity Data Format .................................................................................................... 177
Table 38: Percent-Good Data Format .................................................................................................... 179
Table 39: Status Data Format................................................................................................................. 179
Table 40: Bottom-Track Data Format..................................................................................................... 182
Table 41: Environmental Command Parameters Output Format .......................................................... 186
Table 42: Bottom Track Command Output Data Format ....................................................................... 189
Table 43: Bottom Track High Resolution Velocity Output Format ......................................................... 192
Table 44: Bottom Track Range Output Data Format .............................................................................. 195
Table 45. Navigation Parameters Data Format ...................................................................................... 200
Table 46: Sensor Source for Doppler Processing Output Format ........................................................... 203
Table 47: Checksum Data Format .......................................................................................................... 205
Table 48: Pathfinder Output Data Format (PD4/PD5) Details ................................................................ 209
Table 49: Pathfinder Output Data Format (PD5) Details ........................................................................ 214
Table 50: Pathfinder Output Data Format (PD6) ................................................................................... 215
Table 51. Pathfinder Output Data Format (PD13) ................................................................................. 219
Table 52: Common Data Format IDs ...................................................................................................... 222
Table 53. Toxic or Hazardous Substances and Elements Contained in Product ..................................... 227
Page ix
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
REVISION HISTORY
April 2018
• Updated the inventory tables
• Updated Figure 8, OEM Pathfinder Connections for Bench Test [73B-6059-00 Cable]
• Added additional pictures to OEM Pathfinder Transducer Connections
• Added bend radius and connector part number to Figure 11 Pathfinder ROV Power/Comm Cable
73B-6058 Pigtail Cable
• Updated Using UDP Protocol
• Added the input trigger voltage is 3.3VDC to 7VDC
• Added how the leak sensor status can be decoded to PC5 and PC50
• Updated Figure 30 PD0 Standard Output Data Buffer Format
• Added information on
PD0 variable leader transmit voltage, current, and impedance.
• Updated the HEM Status byte 67 in the Variable Leader data
• Updated Bottom Track/Water Track STD Deviation description in Navigation Parameters Data
• Corrected Bottom Track Command Output Data format
• Added figures for Environmental Command Parameters Output Format, Bottom Track Com-
mand Output Data Format, Bottom Track High Resolution Velocity Output Format, Bottom
Track Range Output Data Format, Navigation Parameters Data Format, and Sensor Source for
Doppler Processing Output Format
• Added Export Administration Regulations (EAR) footers
August 2017
• Corrected wiring diagram for 73B-6058 pigtail cable
• Updated the OEM transducer cable connections
June 2017
• Initial Release
Page x
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

HOW TO CONTACT TELEDYNE RD INSTRUMENTS
If you have technical issues or questions involving a specific application or deployment with the Pathfinder system, contact our Field Service group:
Teledyne RD Instruments Teledyne RD Instruments Europe
14020 Stowe Drive
Poway, California 92064
2A Les Nertieres
5 Avenue Hector Pintus
06610 La Gaude, France
Phone +1 (858) 842-2600 Phone +33(0) 492-110-930
FAX +1 (858) 842-2822 FAX +33(0) 492-110-931
Sales – rdisales@teledyne.com
Sales – rdie@teledyne.com
Field Service – rdifs@teledyne.com Field Service – rdiefs@teledyne.com
Client Services Administration – rdicsadmin@teledyne.com
Web: http://www.teledynemarine.com/rdi
Technical Support
For all your customer service needs including our emergency 24/7 technical support, call +1 (858) 842-2700
Self-Service Customer Portal
Use our online customer portal at http://www.teledynemarine.com/rdi and click on the Support link to down-
load manuals, firmware updates, software, or other Teledyne RDI documentation.
Page xi
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
CONVENTIONS USED IN THIS MANUAL
Thank you for purchasing a Teledyne RD Instruments Pathfinder Doppler Velocity Log (DVL). Conventions used in the Pathfinder DVL Guide have been established to help learn how to use the system.
Menu items are printed in bold: Collect Data. Items that need to be typed by the user or keys to press
will be shown as <F1>. If a key combination were joined with a plus sign (<ALT+F>), press and hold the
first key while pressing the second key. Words printed in italics include program names (TRDI Too lz ) and
file names (TestWH.rds).
Code or sample files are printed using a fixed font. Here is an example:
Pathfinder
Teledyne RD Instruments (c) 2017
All rights reserved.
Firmware Version: 67.xx
>
There are four visual aids to help: Notes, Cautions, Recommended Settings, and References.
This paragraph format indicates additional information that may help avoid problems or that
should be considered in using the described features.
This paragraph format warns the reader of hazardous procedures (for example, activities that
may cause loss of data or damage to the Pathfinder).
This paragraph format indicates additional information that may help set command
parameters.
This paragraph format tells the reader where they may find additional information.
Page xii
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

Pathfinder DVL Guide April 2018
A
Chapter 1
T A GLANCE
In this chapter, you will learn:
• System Overview
• Models and Options
• Computer Considerations
• Power Overview
• Setting up the PathFinder System
• How to connect and disconnect the cables
• Cable wiring diagrams
• Using the Network Configuration Page
• Caring for the PathFinder System
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 1
April 2018 Pathfinder DVL Guide
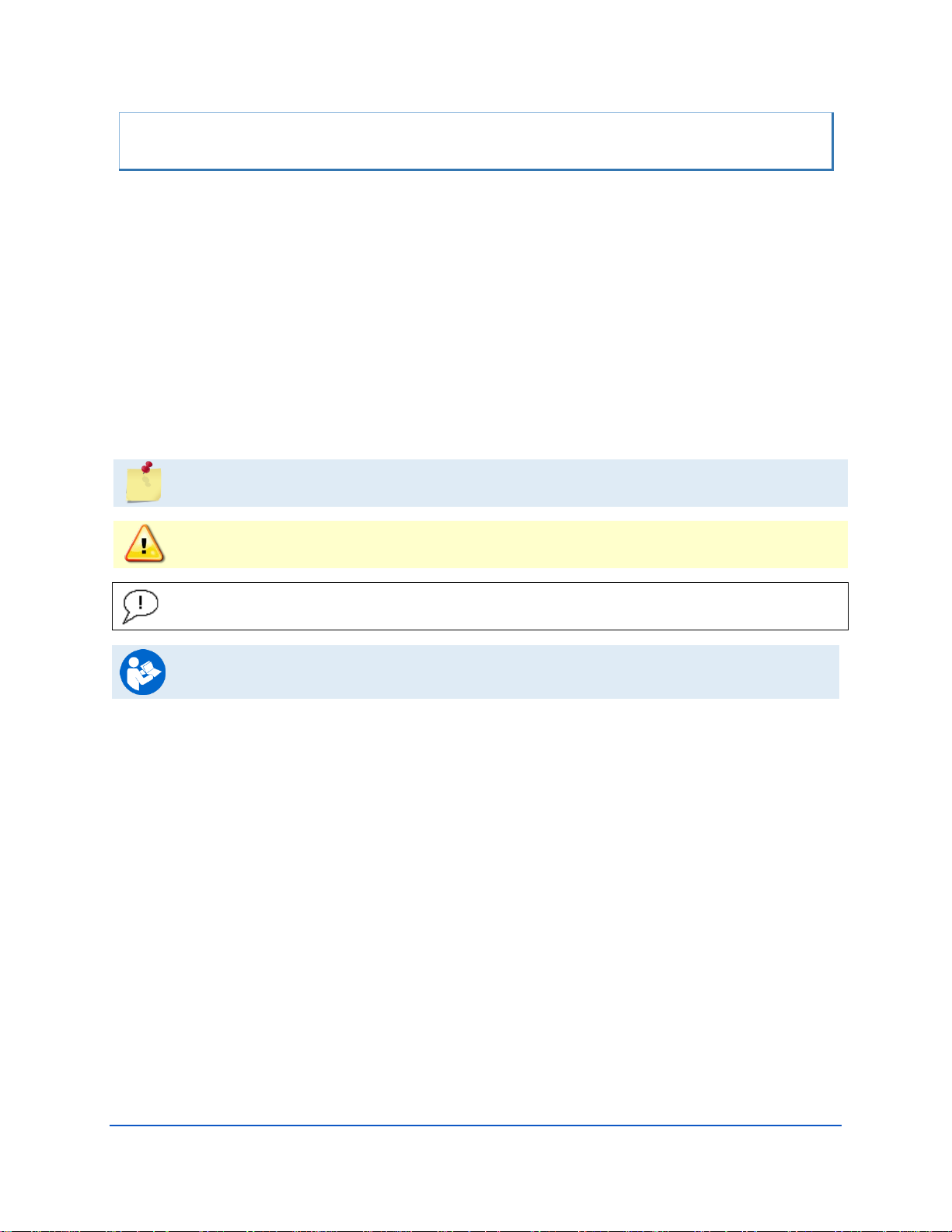
Overview
The Pathfinder transducer assembly contains the connectors with connector protective cap s, housing,
transducer ceramics, and electronics. The standard acoustic frequency is 600 kHz. See the Outline Instal-
lation Drawings for dimensions and weights.
The urethane face covers the transducer ceramics and provides a robust, flexible waterproof
seal. Avoid setting the transducer on bumpy surfaces that may leave an indentation in the
urethane or damage the urethane face, anodized finish, or paint.
The Pathfinder housing contains Electrostatic Sensitive Devices. Take accepted ESD
prevention measures before removing the housing.
The PWR/COMM cable connects the Pathfinder to the computer and external power supply.
When the cable is not connected, use the connector protective cap to protect the connector.
Figure 1. Pathfinder ROV Version
Page 2
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Pathfinder DVL Guide April 2018
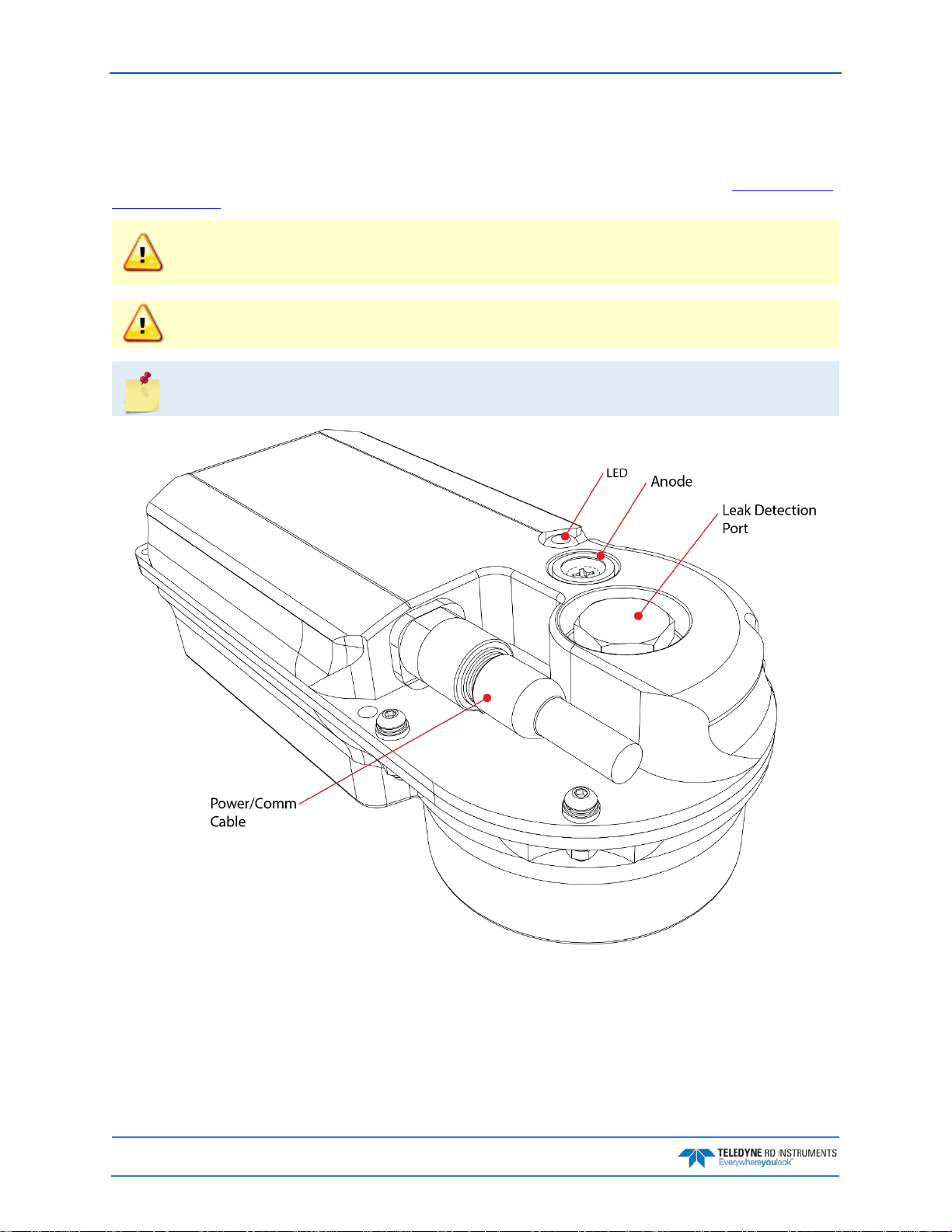
Figure 2. Pathfinder ROV Version Face View
Figure 3. OEM Version Transducer
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 3
April 2018 Pathfinder DVL Guide
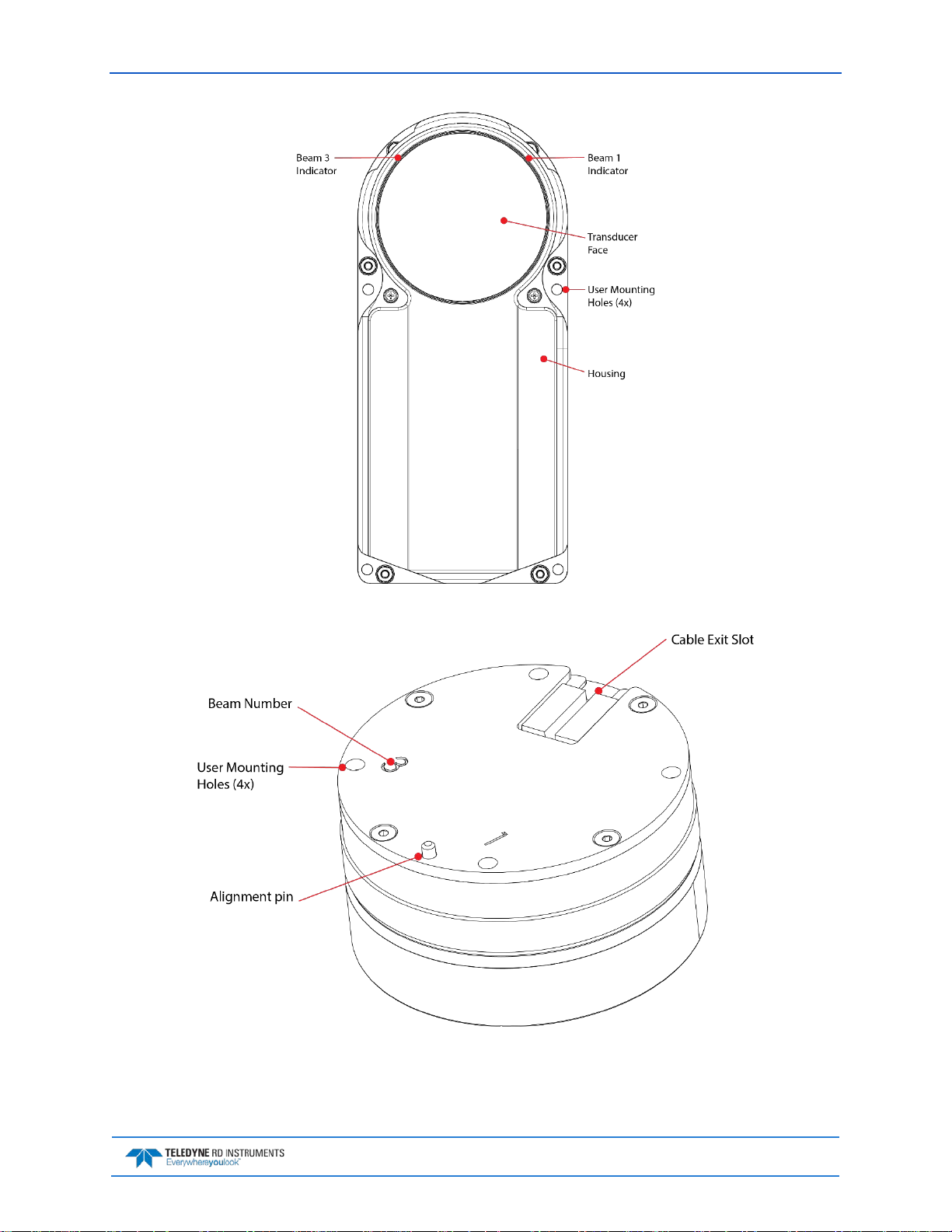
Figure 4. OEM Version Electronics Chassis
Pathfinder Options
The following options are available:
• The 73B-6057-00 ROV test cable is used for testing the system prior to installing it on a ROV.
• The 73b-6059-00 OEM test cable is used for testing the system prior to installing it on a ROV.
• The Ethernet command and control port is included with all systems but can be removed upon
request. This option must be selected when the system is ordered.
• Current Profiling Mode is a firmware upgrade.
• Low-altitude is a firmware upgrade.
• High accuracy Bottom Track is a firmware upgrade.
Page 4
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Pathfinder DVL Guide April 2018
Part Number
Name
Description
The Pathfinder ROV 600 kHz system includes the transducer and connector protec-
face and connectors. Use a soft pad to protect the transducer.
97B-7010-00
ROV hard Shipping Case
Shipping case with foam inserts.
The DVL PWR/COMM pigtail cable allows you to build custom cable to connect the
COM, Power and Trigger.
This CD has PDF versions of all of the Pathfinder DVL software and documentation
can be used to test the DVL.
Inventory
The following DVL Kits are available:
• DVL Standalone: This provides you an option to purchase the DVL with only the necessary parts
to install it in your vehicle. This is especially adapted, once the first integration has been completed and therefore test cables and other accessories are no longer needed.
• DVL Development Package: The DVL Development Package is a complete package to integrate,
evaluate and use your PathFinder DVL. The DVL Development Package was designed to help you
start testing, configuring and integrating your new devices quickly.
• DVL Integration Kit: The DVL Integration Kit has been designed to save you both time and money
by speeding up the evaluation and the integratio n of our products into your vehicle.
• Field Service Kit: The Field Service kit has been designed to allow you to service, repair, and test
your DVL with the assumption that you do not have any kits already available.
Table 1. Pathfinder ROV System Inventory
70B-9042-xx Pathfinder ROV version
73B-6058-00 ROV PWR/COMM Pigtail Cable
95B-6116-00
or
90Z-8002-00
95B-6117-00
95B-6119-00
ROV Spare Parts* See table below for description Anodes and closing hardware
Pathfinder DVL Software and
Documentation CD
Pathfinder ROV Getting Started
Guide
Pathfinder ROV Integration
Guide
tive cap. When unpacking, use care to prevent physical damage to the transducer
Pathfinder to your vehicle/platform. It provides all the leads for serial and Ethernet
including the Pathfinder DVL Guide. Please read the manual! The CD also includes
the TRDI Toolz Software. TRDI Toolz is a utility and testing software package that
A printed quick start card showing test setup is included. A PDF version is included
on the documentation CD.
A printed quick reference showing how to integrate the Pathfinder DVL onto a
ROV. Refer to Chapter 2 of the Pathfinder DVL guide for detailed instructions.
Table 2. Pathfinder ROV Spare Parts*
Description Part number Where used
Anode, housing, top 81B-4146-00
Anode, housing, bottom 810-4106-00
Anode Screw M5X0.8X10FH
Anode Screw M2.5X0.45X8FH
M4 Washer M4WASHSMOD
M4 Split Washer M4WASHSPL
M4 Nylon Washer M4WASHNYLON
M4 Nut M4X0.7NUT
Isolator 91145A148
M4 Bolt M4X0.7X25SH
Anodes for Housing Exterior
Closing hardware for housing
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 5

April 2018 Pathfinder DVL Guide
Part Number
Name
Description
97B-7011-00
97B-7012-00
OEM hard Shipping Case
OEM cardboard
The DVL PWR/COMM pigtail cable allows you to build custom cable to connect the
COM, Power and Trigger.
This CD has PDF versions of all of the Pathfinder DVL software and documentation in-
used to test the DVL.
Table 6. 75BK6087-00 – Kit, Field Service, ROV Pathfinder
Table 3. Pathfinder OEM Inventory
70B-9043-xx Pathfinder OEM version
73B-6060-00
95B-6116-00
or
90Z-8002-00
95B-6120-00
95B-6121-00
2-037
5020
OEM PWR/COMM Pigtail
Cable
Pathfinder DVL Software
and Documentation CD
Pathfinder OEM Getting
Started Guide
Pathfinder OEM Integration Guide
O-ring and Lubricant Remote OEM Transducer head O-ring and lubricant
The Pathfinder OEM 600 kHz system includes the transducer and electronics chassis.
When unpacking, use care to prevent physical damage to the transducer face and connectors. Use a soft pad to protect the transducer.
Shipping case with foam inserts.
Pathfinder to your vehicle/platform. It provides all the leads for serial and Ethernet
cluding the Pathfinder DVL Guide. Please read the manual! The CD also includes the
TRDI Toolz Software. TRDI Toolz is a utility and testing software package that can be
A printed quick start card showing test setup is included. A PDF version is included on
the documentation CD.
A printed quick reference showing how to integrate the Pathfinder DVL onto a ROV. Refer to Chapter 2 of the Pathfinder DVL guide for detailed instructions.
Optional Kits
Table 4. 75BK6086-00 – Kit, Integration, ROV Pathfinder
P/N Description QTY
73B-6057-00 Cable, Test, ROV, Pathfinder 1
73B-6046-00 Power cable with banana plugs 1
Table 5. 75BK6088-00 – Kit, Integration, OEM Pathfinder
P/N Description QTY
73B-6059-00 Cable, Test, OEM, Pathfinder 1
P/N Description QTY
M4WASHSMOD WASHER, SMALL OD, 8MM SST 14
M4WASHSPL WASHER, SPLIT LOCK,SST 8
M4WASHNYLON WASHER, FLAT,9MM OD,NYLON 8
M4X0.7NUT NUT, HEX, SST 8
91145A148 ISOLATOR, 1/4 LONG, SCREW #8, NYLON 8
M4X0.7X25SH SCREW, BUTTON/SOCKET HEAD 316 SST 8
81B-4146-00 ANODE, PIONEER 300 2
810-4106-00 ANODE, SMALL OD 4
M5X0.8X10FH SCREW, FLAT HEAD, SST 2
M2.5X0.45X8FH SCREW, FLAT HD SKT HD, 316SST 4
Page 6
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Pathfinder DVL Guide April 2018
Table 6. 75BK6087-00 – Kit, Field Service, ROV Pathfinder
P/N Description QTY
2-152 O-RING, -152, EPDM 70 DURO 2
97Z-6084-01 O-RING, 3-094, .072DIAX.351 ID, EPDM, DURO90A, VENT PLUG 2
7295K1 TIE WRAP, FASTENER MOUNT, 4.5 2
97Z-6007-00 O-RING, 2-011, DURO 70, EPDM 4
97Z-6009-00 O-RING, 2-014 DURO 70, EPDM 2
97Z-6036-00 O-RING, 2-166, 70 DURO,EPDM 2
97Z-6084-00 O-RING, 2-015, 070DIAX.551 ID, EPDM, DURO 90A, VENT PLUG 2
DES6 DESICCANT, SEALED BAG, 1/6 UNI 1
5020 SILICONE LUBRICANT, 4-PACK 2
425 THREADLOCKER, PLAS SCREW 1
81B-6042-00 O-RING TOOL, TELEDYNE 1
M7COMBINATION WRENCH, #7MM COMBINATION 1
7289A13 KEY, HEX, 2.5MM 1
84Z-6000-00 TOOL BAG, CANVA 1
95B-6116-00 Pathfinder DVL Documentation CD 1
95B-6117-00 Pathfinder DVL Quick Start Card 1
Table 7. 75BK6089-00 – Kit, Field Service, OEM Pathfinder
P/N Description QTY
5020 SILICONE LUBRICANT, 4-PACK 2
2-037 O-RING, FACE SEAL, DURO 70 2
84Z-6000-00 TOOL BAG, CANVAS 1
7289A13 KEY, HEX, 2.5MM 1
5503A37 L-KEY, HEX, 2MM 1
81B-6042-00 O-RING TOOL, TELEDYNE 1
95B-6116-00 Pathfinder DVL Documentation CD 1
95B-6117-00 Pathfinder DVL Quick Start Card 1
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 7
April 2018 Pathfinder DVL Guide
Health & Environment Monitoring Sensors
Health and Environment Monitoring (HEM) Sensors monitor the health of the Pathfinder system.
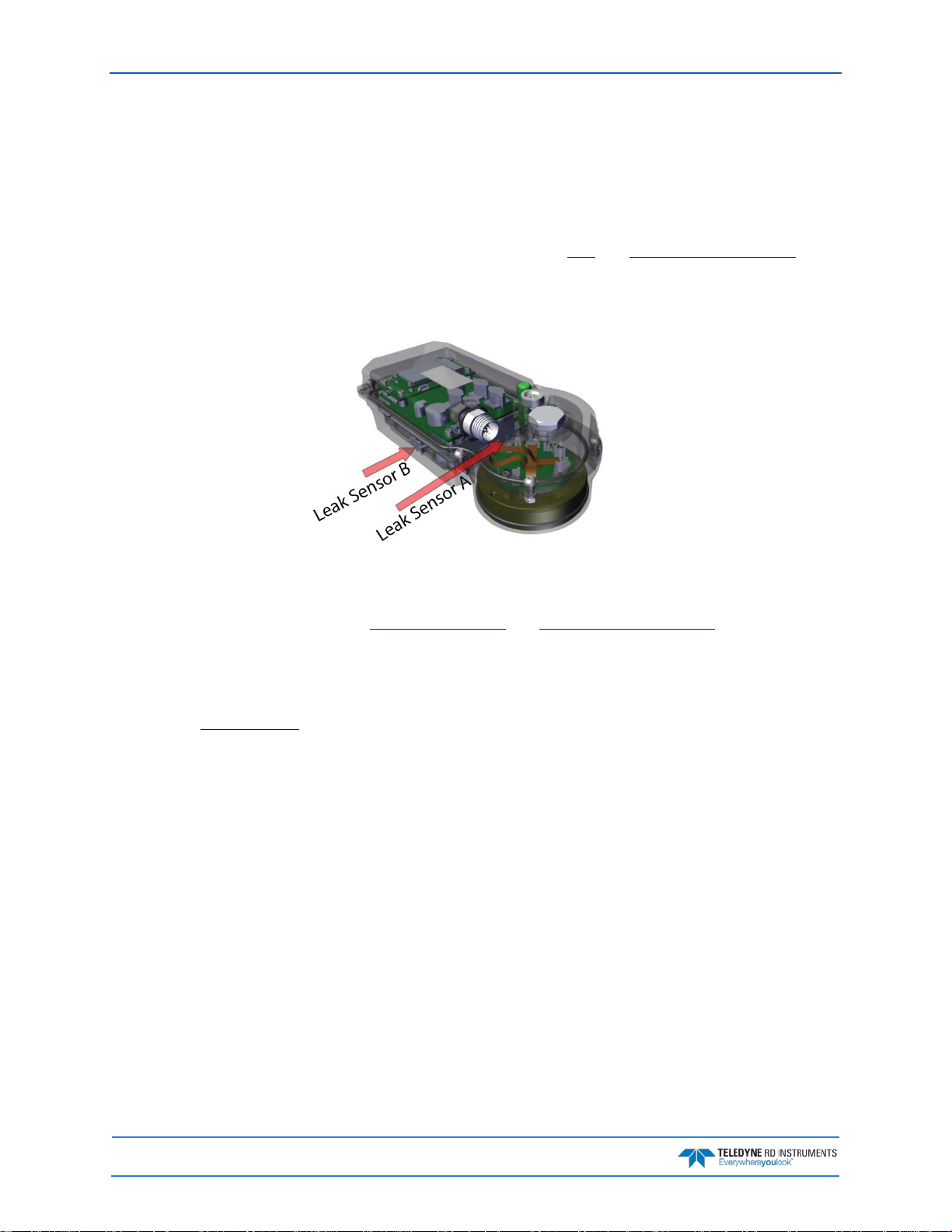
• Leak Detection – Water leaking into a Pathfinder DVL can not only potentially destroy the DVL,
but also cause severe issues for the host vehicle that is carrying the DVL, such as loss of navigation ability. The Pathfinder detects water leaking into the system and reports it in the PD0, PD4,
PD5, and PD6 messages. The Pathfinder also supports the PC4 and PC5 user interactive test for
reporting the status of the leak sensors. There are two leak sensors; One is mounted at the back
of the transducer head and the other at the bottom of the electronic section (Leak Sensor B is
only available on the ROV Self-Contained version).
• Transducer Monitor – The Pathfinder monitors the transmit voltage and current of the transducer
and reports Transducer Impedance as a result. This information provides insight, in near realtime, to the status of the transducer and alerts the user should problems arise. This data is relayed back to the user in the PD0 Bytes 76 and 77 and PD6 output data structure.
• Operating Time – The Pathfinder system records the total time of operation in minutes where
“operation” is defined as the time that the system ping loop is active (CS command has been
sent). The record of the total awake time has a maximum value of 33,554,432 minutes, which
corresponds to over 500,000 hours of operation. The value of the counter can be read as part of
the PS5 command. Although the time is stored in minutes, the operating time is reported in
hours with one decimal place.
Example PS5 output:
PS5
Operating time: 4327.5 hours
Page 8
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Pathfinder DVL Guide April 2018
Windows® 7, 8.1, or 10
Setting up the Pathfinder System
Use this section to connect the Pathfinder to a computer and establish communications. Install the TRDI
Toolz software in order to communicate with the Pathfinder.
Computer and Software Considerations
The Pathfinder system includes the utility program TRDI Toolz to help set up, use, test, and troubleshoot
the Pathfinder. Use this program to “talk” to the Pathfinder and to run script files (see Creating or Modify-
ing Command Files and send the Commands to the Pathfinder). For detailed information on how to use
TRDI Toolz, see the TRDI Toolz Help file.
TRDI designed the Pathfinder to use a Windows® compatible computer. Table 8
puter requirements.
TRDI highly recommends downloading and installing all of the critical updates, recommended
updates, and the service releases for the version of Windows® being used prior to installing
any TRDI software.
Table 8: Minimum Computer Hardware Requirements
1GHz class PC 32-bit (64-bit recommended)
2GB of RAM (4GB or more RAM recommended)
50 MB Free Disk Space plus space for data files (A large, fast hard drive is recommended)
Minimum display resolution of 1024 x 768, 256 color (higher recommended)
CD-ROM Drive (if software is installed from CD)
Mouse or other pointing device
Software Installation
To install the Pathfinder Software and Documentation CD:
1. Insert the CD into the drive.
lists the minimum com-
2. Use Windows Explorer® to open the CD drive folder.
3. Double-click on the launch.exe file. When the browser starts:
• To install TRDI Toolz, click the View Manu al s button and then click the In-
• To view the Pathfinder documentation, click the View Manuals button.
stall TRDI Toolz button.
Many companies require that Autorun be disabled. Double-click on Launch.exe to start the
browser on all TRDI software and documentation CDs.
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 9
April 2018 Pathfinder DVL Guide
Power Overview
The Pathfinder requires a DC supply between 10.7 to 36 VDC. Either an external DC power supply or battery can provide this power. The power supply should be able to source at least two Amps for a bench test
setup (no pinging).
Power on Cycle
The power supply must be able to handle the inrush current as well. Inrush current is the current required
to fully charge up the capacitors when power is applied to the Pathfinder. The capacitors provide a store of
energy for use during transmit. The inrush current is as much as four amps if plugged in after the DVL
Transmit Cap is fully discharged. The Pathfinder will draw this amperage until its capacitors are fully
charged (less than 200ms).
If the power supply limits the current or the power drop on the cable is significant, then the
power on cycle will fail or the system will reset during pinging. Therefore, TRDI recommends
a 1.5 to 2 Amp power supply to cover all performance cases. For more information, see
Electrical Specifications.
If the Power is put in then removed within a very short time (few secs) and then applied again,
then the Inrush limiter will not be able to limit the current pulled from the DVL which would
result in a higher than 4Amps Inrush current spike.
Cables and Connector Protective Cap
The underwater cables connector protective cap is a molded wet-mate-able connector. The end-cap connectors are a factory-installed item. TRDI does not recommend removing it for any routine maintenance.
The connector protective cap should be installed any time the cable is removed. Use the
protective connector cap when the DVL is in storage or is being handled.
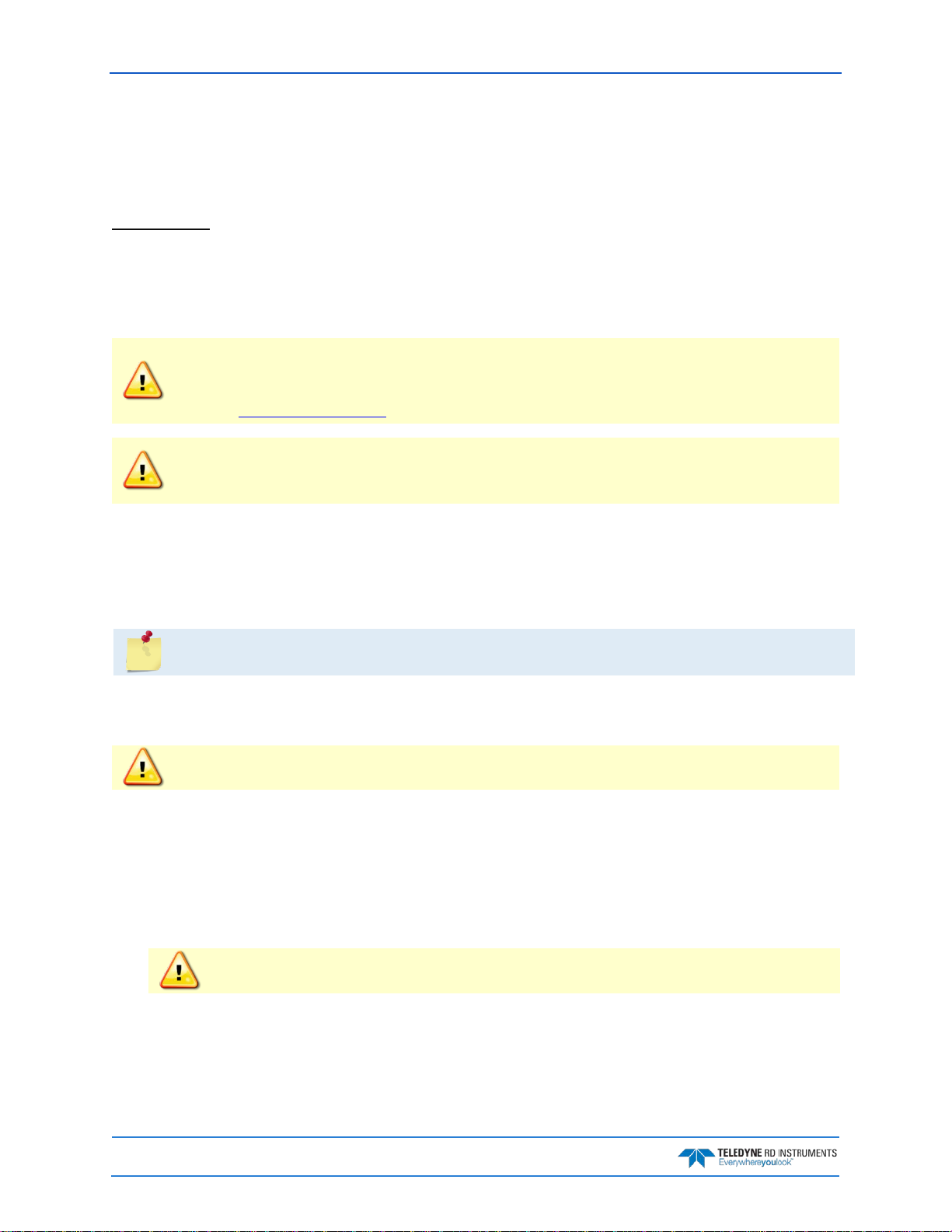
Prior to each connection:
1. Lubricate mating surfaces with 3M Silicone Spray or equivalent; DO NOT grease!
To connect the cable:
1. Check all pins for signs of damage (broken or bent pins or corrosion).
2. The Pathfinder cable connector must be lubricated before each connection.
3. Push the cable straight onto the connector ensuring the pins are properly aligned. While keeping a
slight inward pressure on the cable connector and ensuring that the connector is straight, thread
the locking sleeve onto the receptacle to complete the connection.
Use ONLY silicone based lubricants. DO NOT use petroleum based lubricants.
Do NOT use any tools to tighten the locking sleeve. It should only be “finger tight”.
Page 10
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Pathfinder DVL Guide April 2018
Figure 5. Connecting the Cable
Apply lubricant prior to each connection.
To disconnect the cable:
1. Place the Pathfinder on a soft pad to protect the transducer face.
2. Release the cable by turning the locking sleeve counter-clockwise until it can be moved away from
the connector.
3. Pull the cable straight out away from the housing.
4. Install the connector protective cap to protect the connector pins.
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 11
April 2018 Pathfinder DVL Guide
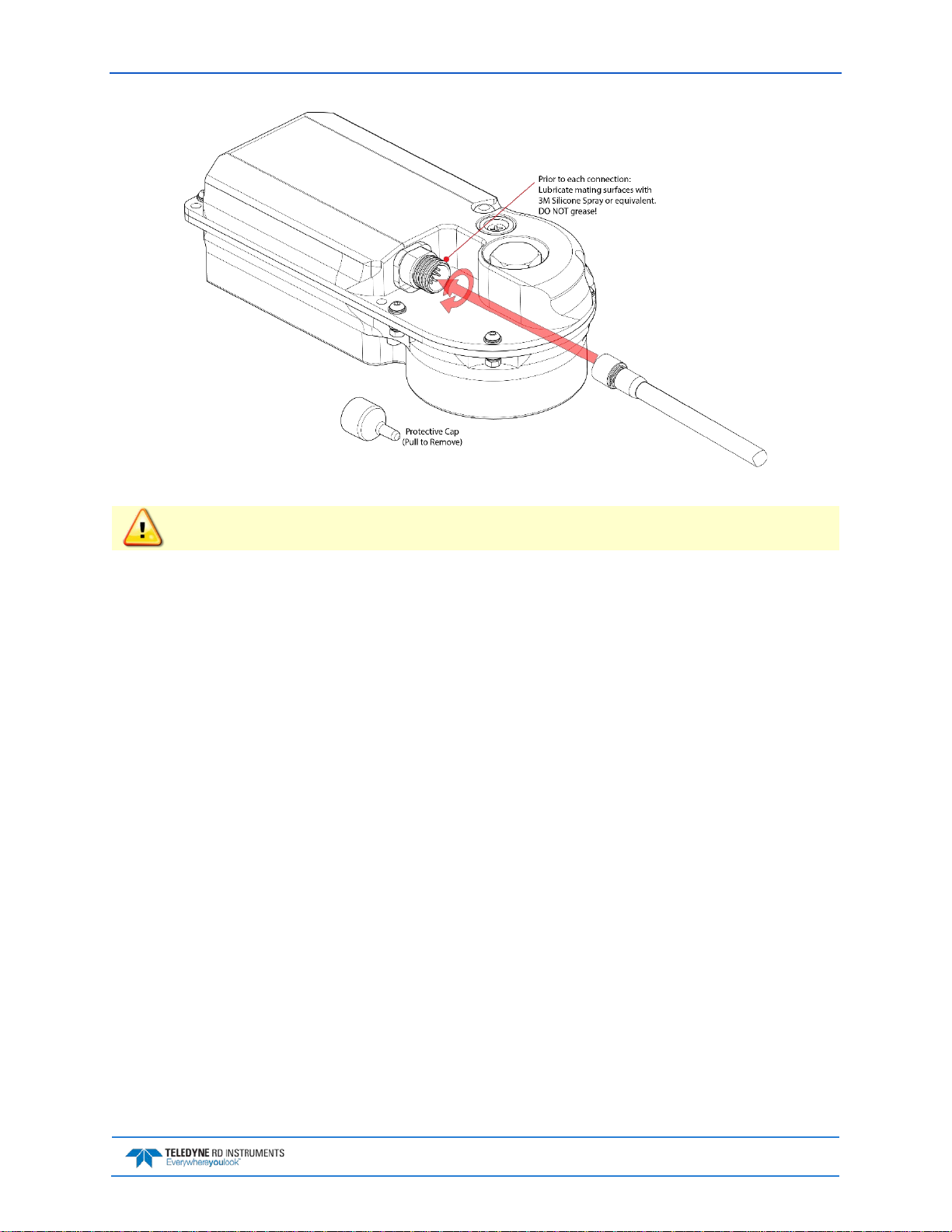
Setting Up the Pathfinder ROV System
To set up the Pathfinder:
1. The Pathfinder cable connector must be lubricated before each connection.
2. Place the Pathfinder on its transducer face on a soft pad. Remove the Power/Comm connector
protective cap and push the cable straight onto the Power/COMM connector ensuring the key and
pins are properly aligned. While keeping a slight inward pressure on the cable connector and ensuring that the connector is straight, thread the locking sleeve onto the receptacle to complete the
connection.
Do NOT use any tools to tighten the locking sleeve. It should only be “finger tight”.
3. Attach the Power/Comm cable to the computer’s serial communication port or Ethernet port.
4. Place the Pathfinder system in water (at least a few inches to cover the transducer face).
5. Connect the power adapter cable to the Power/Comm cable power connector by pushing it all the
way in until it “clicks” and then turn the locking sleeve to secure the connection. Connect +10.7 to
36 VDC power using the banana plugs. The power supply should be able to source at least two
Amps for a bench test setup (no pinging).
Figure 6. ROV Pathfinder Connections for Bench Test [73B-6057-00 & 73B-6046-00 Cables]
Page 12
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
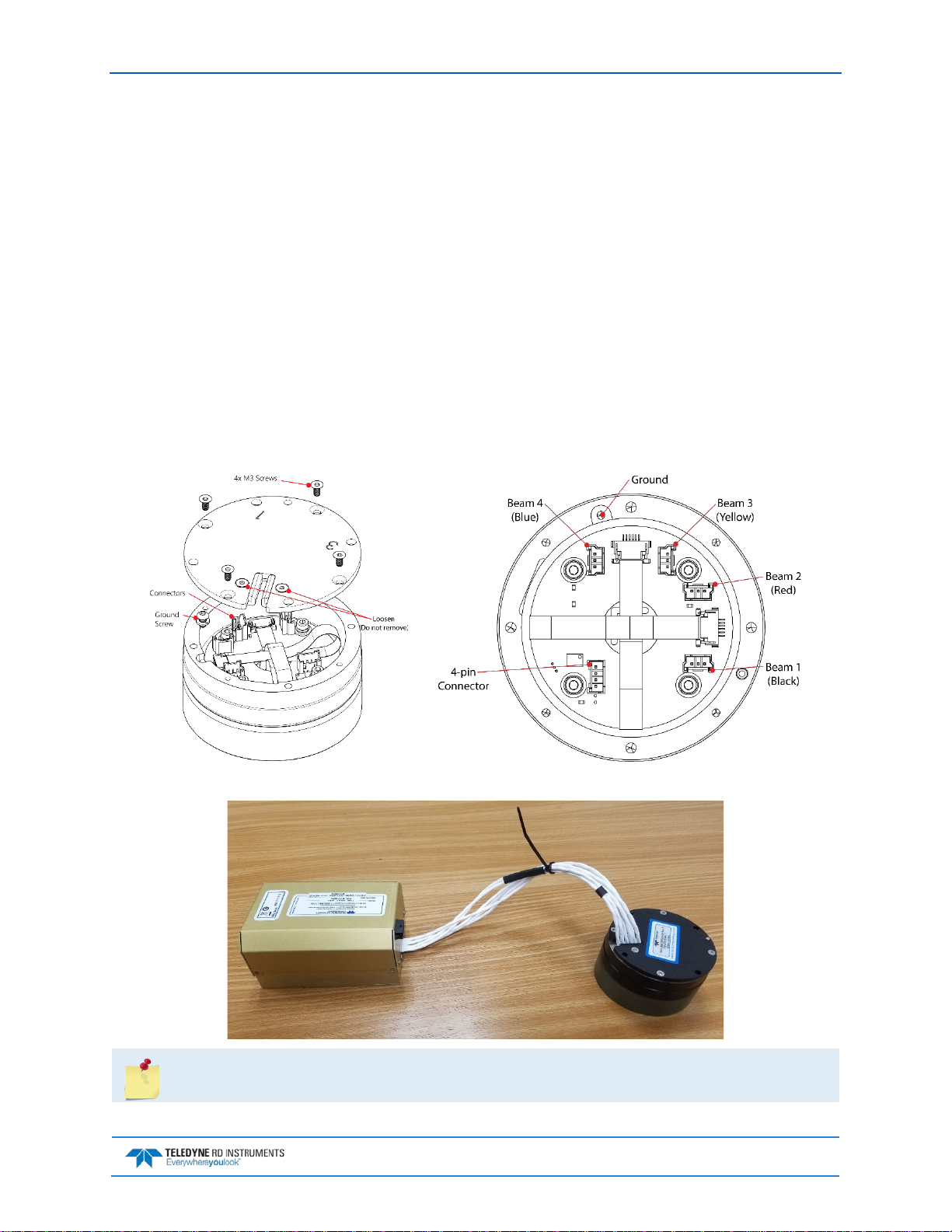
Pathfinder DVL Guide April 2018
Setting Up the Pathfinder OEM System
To set up the OEM Pathfinder:
1. Place the Pathfinder transducer face down on a soft surface.
2. With an ESD wrist strap on, remove the top cover on the transducer. Loosen, but do not remove
the two screws next to the cable exit slot.
3. Connect the five cables and ground wire. The 3-pin beam cables have the beam number on the
connector and are color-coded: Beam 1 = black, Beam 2 = red, Beam 3 = yellow, Beam 4 = blue.
Attach the only 4-pin connector to the board.
4. Remove the screw and attach the ground wire lug. Tighten the ground screw to 4 IN-LB.
5. Thread the cables through the slot and attach the cover. Tighten the four M3 screws on the cover
to 4 IN-LB. Tighten the two screws next to the cable exit slot to hold the cables in place.
6. Connect P1 to the Electronics Chassis.
7. Attach the Power/Comm cable to the computer’s serial or Ethernet communication port.
8. Connect +10.7 to 36 VDC power. The power supply should be able to source at least 1.5 to 2 Amps.
Figure 7. OEM Pathfinder Transducer Connections
The standard length of the cable between the transducer and chassis is 12”.
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 13

April 2018 Pathfinder DVL Guide
Page 14
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
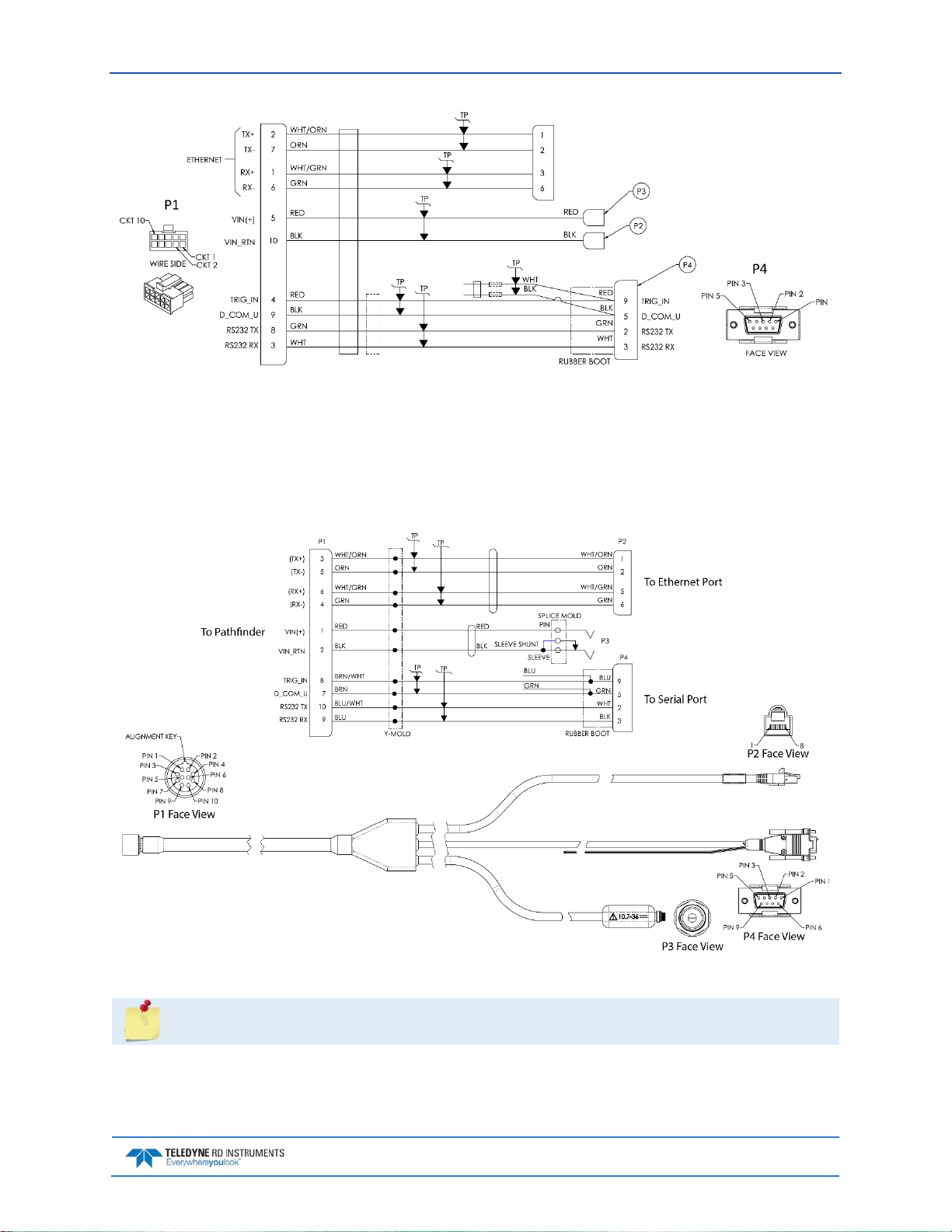
Pathfinder DVL Guide April 2018
Figure 8. OEM Pathfinder Connections for Bench Test [73B-6059-00 Cable]
Cable Wiring Diagrams
This section has information on Pathfinder cabling. Special user-requests may cause changes to the basic
wiring system and may not be shown here. If there is a conflict, contact TRDI for specific information
about the system. The following figures show various Pathfinder cable locations, connectors, and pin-outs.
Figure 9. Pathfinder Power/Comm Cable 73B-6057-005 Optional Test Cable
The connector protective cap should be installed any time the cable is removed. Use the
connector protective cap when the Pathfinder is in storage or is being handled.
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 15
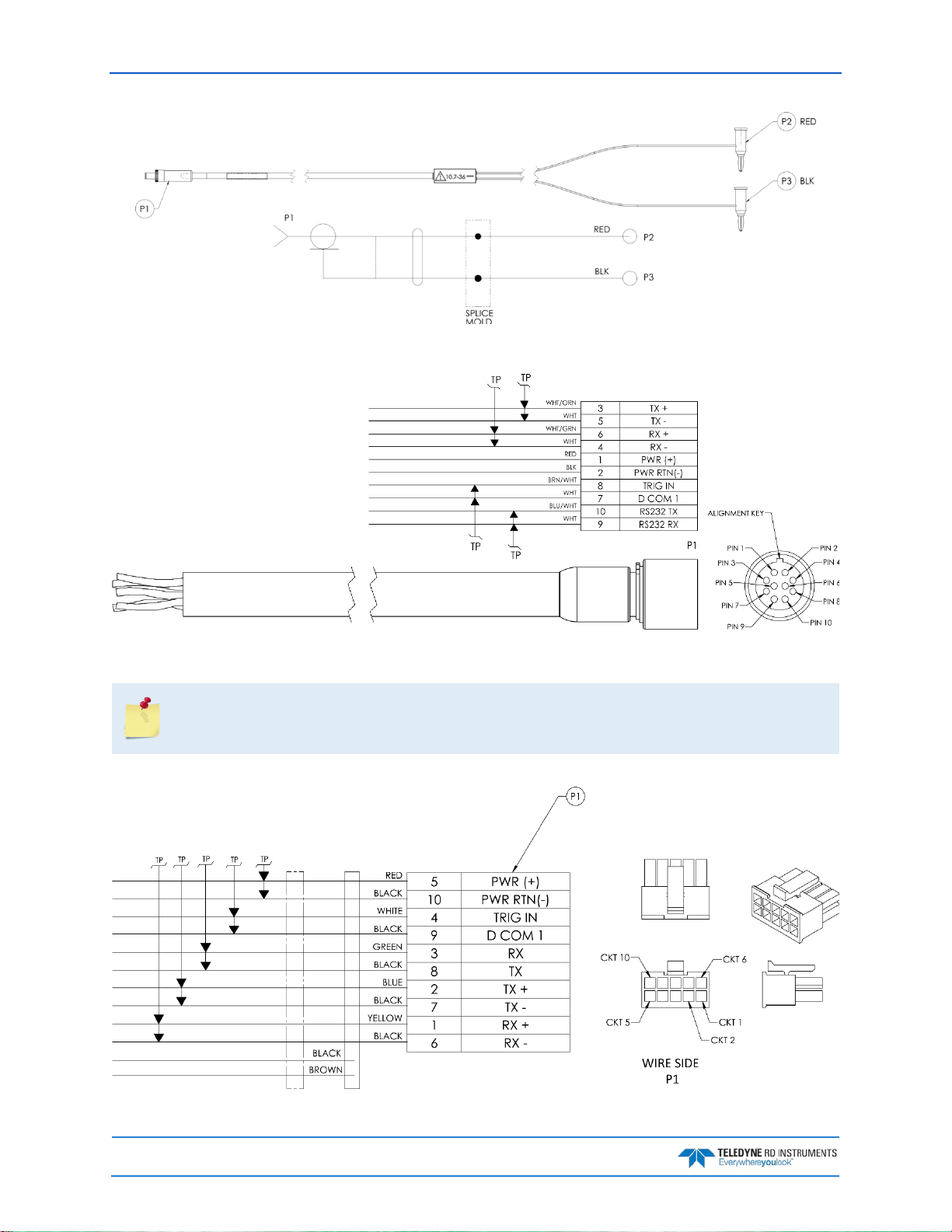
April 2018 Pathfinder DVL Guide
Figure 10. Power Adapter Cable 73B-6046-00
Figure 11. Pathfinder ROV Power/Comm Cable 73B-6058 Pigtail Cable
Where shown, RX is the incoming signal; TX is the outgoing signal.
Cable bend radius is 4.5 inches. The connector part number is MKS(W)-3L10-CCP-SB from
Teledyne Impulse.
Page 16
Figure 12. Pathfinder OEM Power/Comm Cable 73B-6060 Pigtail Cable
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.

Pathfinder DVL Guide April 2018
Connecting to the Pathfinder
To establish communications with the Pathfinder:
1. Connect the system and apply power.
2. Start the TRDI Toolz software.
3. Select New Serial Connection or New Ethernet Connection.
4. Enter the Pathfinder’s communication settings.
Serial Communications:
Select the COM Port the serial cable is
connected to and set the Baud Rate from
the drop down list to 115200
Ethernet Communications:
Enter the Static
DHCP server IP or host
name 192.168.1.100
Enter the Port Number 1033
Select TCP
5. Click the Connect button. Once connected, the button will change to Disconnect.
6. Click the Break ( ) button. From the Break button drop down
menu, select Soft Break (= = =). The wakeu p banner will display in the terminal window.
Pathfinder
Teledyne RD Instruments (c) 2017
All rights reserved.
Firmware Version: 67.xx
>
It may be necessary to click inside the terminal window and then click the Break button to
wake up the system.
If the network assigns a Dynamic IP address, the Static IP address 192.168.1.100 will not
work; Connect using the serial port and use the CE command to verify the IP address.
You must have the RJ45 connector plugged into the network switch for the CE command to
return the Ethernet setting info.
The command and control port can be Serial or Ethernet, but NOT both. The last port used to
send a break is the command and control port.
7. The LE D shou l d be solid on if no data is moving over the serial port and there is no active TCP/IP
connection on the Ethernet interface.
• The LED will blink 250ms/500ms when there is data on the serial port.
• The LED will blink 250ms/1000ms when there is traffic on the Ethernet port.
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
Page 17
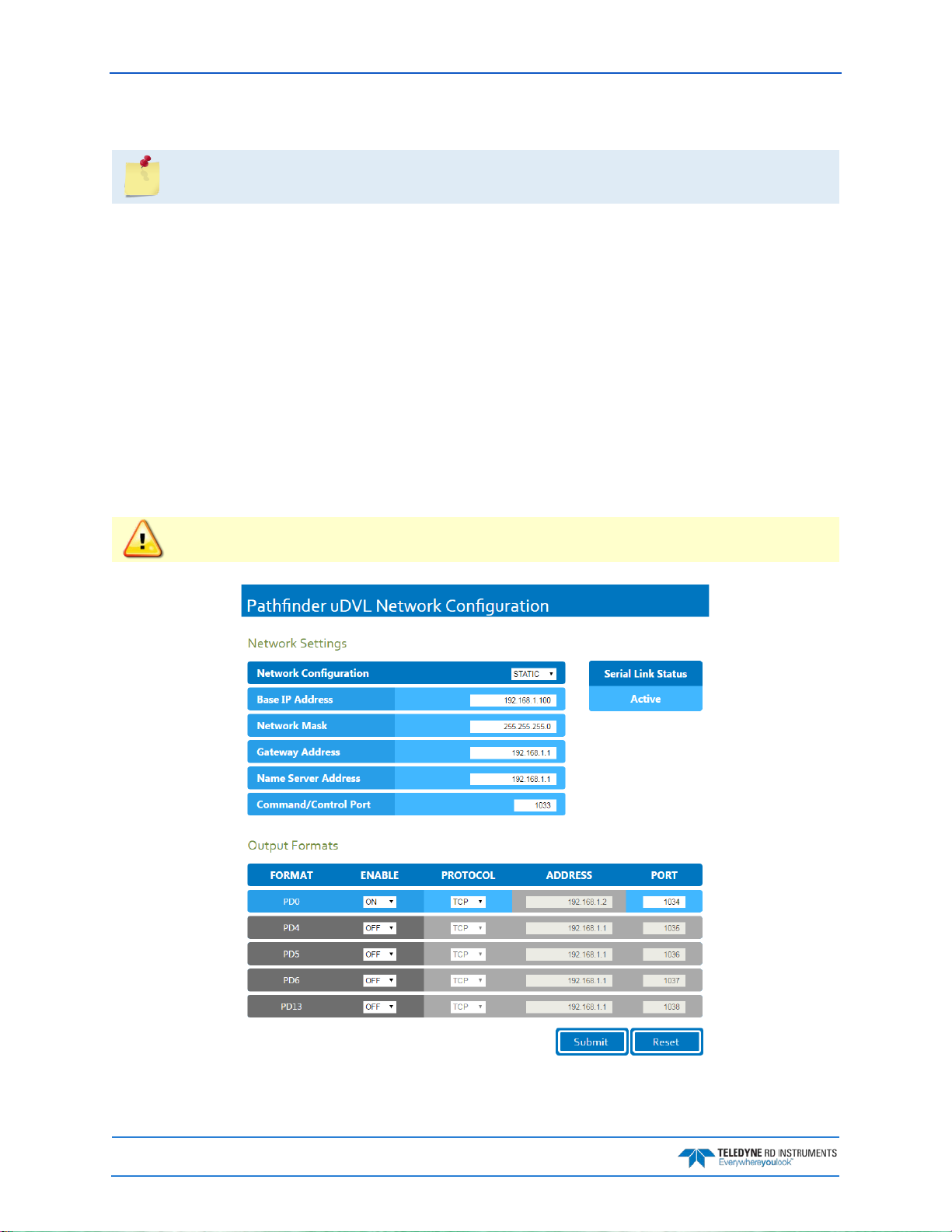
April 2018 Pathfinder DVL Guide
Using the Network Configuration Page
The system must be connected to the Ethernet port to use the Network Configuration page.
To establish communications with the Network Configuration page:
1. Connect the system and apply power.
2. Open a browser on the laptop (Internet Explorer
3. Enter the Pathfinder’s DHCP server IP address 192.168.1.100 into the address bar.
4. On Network Confi g ur ation, choose STATIC or DHCP. Use Dynamic Host Configuration Protocol (DHCP) server protocol when the network automatically provides an Internet Protocol (IP)
host with its IP address and other related configuration information such as the subnet mask and
default gateway.
If you are using a STATIC network, then configure the Base IP Address, Network Mask,
Gateway Address, Name Server Address, and Command/Control Port as needed. The
default configuration is shown in Figure 13.
5. On the Output Formats section, enable or disable the output data formats (PD0, PD4, PD5, PD6, and
PD13), Protocol (TCP or UDP), Address, and Ports. Once done, click Submit.
®
, FireFox®, Google Chrome®, or other browser).
If all outputs are enabled, it can affect the ping rate.
Figure 13. Pathfinder Network Configuration Page
Page 18
EAR-Controlled Technology Subject to Restrictions Contained on the Cover Page.
 Loading...
Loading...