

Page 1
1. GENERAL SAFETY GUIDELINES
2. NOMENCLATURE
2.1 Motors
2.2 Drives
2.3 Submersible Motor Controls
3. INSTALLATION AND SETUP
3.1 General Installation Guidelines
3.2 Proper Grounding
3.3 Corrosive Water and Ground
3.4 Check Valves
3.5 Start Up
4. ELECTRICAL POWER
4.1 Mixing Wire Size
4.2 Wire Splicing
4.3 Three-Phase Starters
4.4 Checking Motor Rotation
4.5 Three-Phase Current Balancing
4.6 Transformer Sizing
4.7 Using a Generator
4.8 Special Applications
5. XE-SERIES 4" SUBMERSIBLE MOTORS –
60 HZ
5.1 Motor Inspection
5.2 Testing
5.3 Storage and Transportation
5.4 4” Motor Specifications
5.5 4” Motor Dimensions
5.6 4” Motor Fuse Sizing
5.7 Cable Lengths
5.8 4” Motor Overload Protection
5.9 Motor Cooling
5.10 Starting Frequency
6. VARIABLE FREQUENCY DRIVES
PID-1, PID-6 INTELLIDRIVE SERIES
6.1 General Safety
6.2 Description
6.3 Installation
6.4 Initial Startup Programming Procedure
6.5 Advanced Programming
6.6 I/O Connections
6.7 Troubleshooting
6.8 Wire Sizing, Repair Parts, Specifications
7. VARIABLE FREQUENCY DRIVES – PPC20
7.1 How Drives Work
7.2 How the PPC20 Drive Works
7.3 PPC20 Specifications
7.4 PPC20 Mounting and Installation
7.5 Wiring Connections
7.6 Start-up Operation
7.7 LED Fault Codes
7.8 PPC20 Replacement Parts
8. VARIABLE FREQUENCY DRIVES –
50/60 HZ; PPC3, PPC5 SERIES
8.1 PENTEK PPC3 and PPC5 Drives
8.2 PPC3 Specifications
8.3 PPC5 Specifications
8.4 Wiring Conections
8.5 Transducer Connection
8.6 PENTEK Assistant
8.7 Timer Function
8.8 Helpful Hints
8.9 PPC3 and PPC5 Tank Sizing
8.10 Reactors and Filters
9. SUBMERSIBLE MOTOR CONTROLS –
50/60 HZ
9.1 How It Works
9.2 Specifications
9.3 Mounting and Installation
9.4 Wiring Connections and Replacement Parts
10. MOTOR PROTECTION DEVICES –
50/60 HZ
10.1 How They Work
10.2 Specifications
10.3 Mounting and Installation
10.4 Wiring Connections
PN793 (Rev. 11/09)
Table of Contents 1
PN793 11/20/09 9:21 AM Page 1
Page 2
Table of Contents 2
SECTION 1: General Safety Guidelines
11. TROUBLESHOOTING
11.1 System Troubleshooting
11.2 Motor Troubleshooting
11.3 Variable Speed Drive Troubleshooting
11.4 Motor Protection Troubleshooting
11.5 Submersible Controls Troubleshooting
12. APPENDIX
12.1 Installation Checklist
12.2 Choosing a Pump System
12.3 Sizing Submersible Pump, Motor,
and Tanks
12.4 How to Select the Correct
Pumping Equipment
12.5 Sizing Tanks
12.6 Record of Installation
PN793
READ AND FOLLOW
SAFETY INSTRUCTIONS!
This is the safety alert symbol. When you see this
symbol on your pump or in this manual, be alert to the
potential for personal injury.
warns about hazards that will cause serious
personal injury, death or major property damage if ignored.
warns about hazards that can cause serious
personal injury, death or major property damage if ignored.
warns about hazards that will or can cause
minor personal injury or property damage if ignored.
The word NOTICE indicates special instructions which are
important but not related to hazards.
Carefully read and follow all safety instructions in this
manual and on pump.
Keep safety labels in good condition.
Replace missing or damaged safety labels.
Fatal Electrical Shock Hazard.
• Ground motor, controls, all metal pipe and accessories
connected to the motor, to the power supply ground
terminal. Ground wire must be at least as large as
motor supply cables.
• Disconnect power before working on the system.
• Do not use the motor in a swimming area.
Hazardous voltage.
Can shock, burn, or
cause death.
Ground pump before
connecting to power
supply.
All work must be done by a
trained and qualified installer
or service technician.
PN793 11/20/09 9:21 AM Page 2
Page 3
SECTION 2: Nomenclature 3
PN793
2.1 MOTORS
TABLE 2-1: Motor Nomenclature
Nomenclature
PN793 11/20/09 9:21 AM Page 3
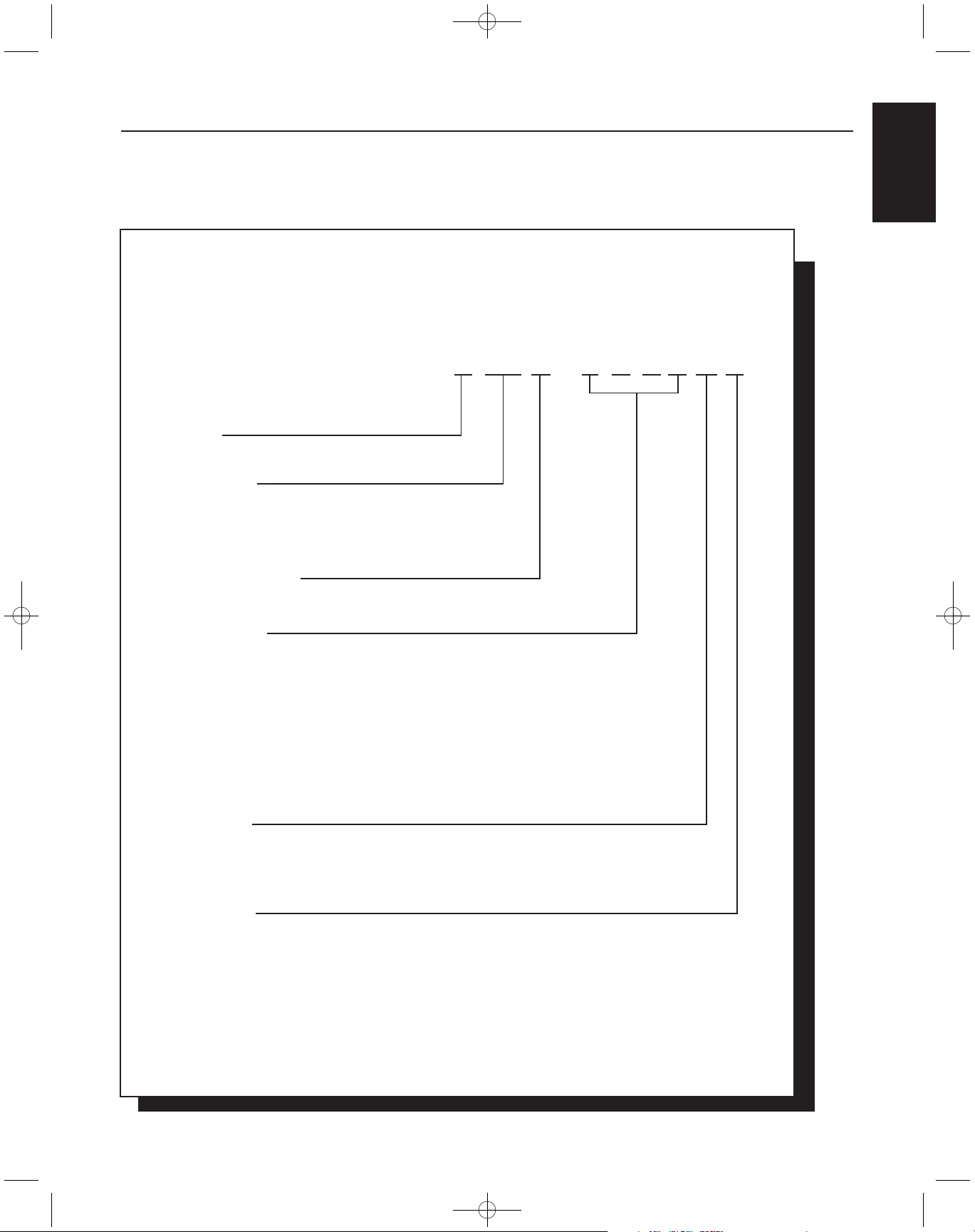
Sample:
P43B0010A2 is a PENTEK 4" Stainless Steel Motor
1 HP, 60 Hz., 230 V, 1 PH
NAME PLATE EXAMPLE:
BRAND
P = PENTEK
MOTOR SIZE
42 = 4 Inch, 2-Wire
43 = 4 Inch, 3-Wire
MOTOR MATERIAL
B = All Stainless Steel
HORSEPOWER
0005 = 0.5 HP
0007 = 0.75 HP
0010 = 1 HP
0015 = 1.5 HP
0020 = 2 HP
0030 = 3 HP
0050 = 5 HP
0075 = 7.5 HP
P43B 001 A
0 2
FREQUENCY
A = 60 Hz.
B = 50 Hz.
C = 50/60 Hz.
VOLTAGE
1 = 115V, 1 PH
2 = 230V, 1 PH
3 = 230V, 3 PH
4 = 460V, 3 PH
5 = 575
V, 3 PH
8 = 200V, 3 PH
Page 4
SECTION 2: Nomenclature 4
PN793
2.2 DRIVES
2.2.1 Variable / High Speed Drive
Nomenclature
The chart below shows the naming for a PPC5, 460 volt, 4
amp drive with a NEMA 1 enclosure.
Note that the output current (amps) of the control must be
greater than or equal to the maximum rated motor current.
Output of all drives is 3-phase power.
2.2.2 PID Variable frequency drive
Nomenclature
2.3 SUBMERSIBLE MOTOR
CONTROLS
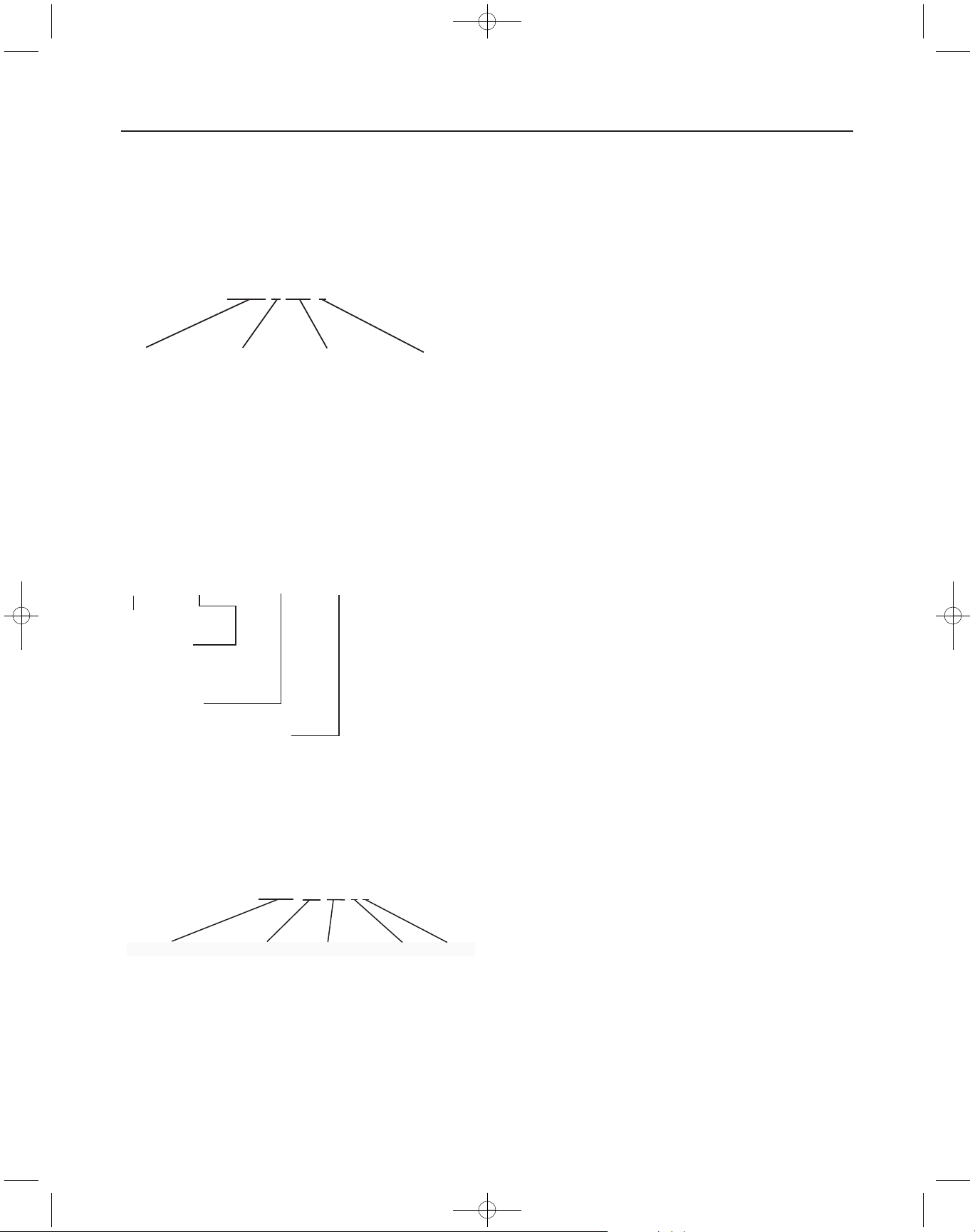
The chart below shows the naming for a Submersible
Motor control, Standard box, capacitor run, 10 horse
power, 230 volt single phase drive.
Series Input Voltage Output Amp Rating Enclosure
PPC5 2 (230 V, 3 ph.) 4A1 1 (NEMA 1)
PPC3 4 (460 V), 3 ph.) 4 (NEMA 4)
5 (575 V), 3 ph.) 12 (NEMA 12)
1 (230 V, 1 ph.) 3 (NEMA3R)
PPC5-4-4A1-1
4A1 = 4.1 amps
(Amps A tenths)
SMC
Voltage Rating:
1 = 190–265 Volt 1-Phase In,
3-Phase Out
6 = 190–265 Volt 1-Phase In,
1-Phase Out
PID – 1 – 10A1 – 1
PID-1- 10A1-1:
Product Family
PID = Pentek IntelliDrive
Max Amp Rating:
4A7 = 4.7 Amps
7A6 = 7.6 Amps
9A7 = 9.7 Amps
10A1 = 10.1 Amps
12A2 = 12.2 Amps
Enclosure Type:
1 = NEMA 1 (Indoor Rated)
3 = NEMA 3R (Outdoor Rated)
PN793 11/20/09 9:21 AM Page 4
- CR 100 2 1
Series
SMC_(Std.)
SMC5 (50 Hz)
Style
CR (Cap Run)
IR (Induction Run)
CRP (Cap Run
with contactor)
HP x 10
05 (0.5 hp)
07 (.75 hp)
10 (1 hp)
15 (1.5 hp)
20 (2 hp)
30 (3 hp)
50 (5 hp)
75 (7.5 hp)
100 (10 hp)
150 (15 hp)
Voltage
1 (115 v)
2 (230 v)
Phase
1 (Single)
Page 5
3.1 GENERAL INSTALLATION
GUIDELINES
• In order to avoid abrasion to the power and control
cables, pad the top of the well casing (a rubber pad is
recommended) where the cable will pass over it; use a
cable reel for cable control.
• The unit must always be easy to rotate in the hoisting
gear.
• Lay power and control cables out straight on the
ground (no loops) before installation. Guide cables
during lowering so that they are not stretched or
squeezed while pump is being installed. Make sure
that cable insulation is not nicked or damaged before
or during installation. Never use the electrical cables to
move the motor/pump.
• The pump and motor are heavy. Make sure that all
connections are secure and that the hoisting gear is
adequate to do the job before starting to lift pump.
Don’t stand under the unit. Don’t allow extra people
into the area while hoisting the unit.
• If motor or pump/motor unit are attached to a
supporting girder, do not remove girder until unit is
vertical.
• Install pump at least 10’ (3m) below the lowest water
level during pumping, but at least 6’ (2m) above the
bottom of the well.
• 6" motors must be installed in a vertical position only.
• 4" motors can be operated in vertical or horizontal
positions. Note that the thrust bearing will have shorter
life in a non-vertical application. In such an
installation, keep frequency of starts to less than 10 per
day.
3.2 PROPER GROUNDING
Hazardous voltage. Can shock, burn or
cause death. Installation or service to electrical equipment
should only be done by qualified electrician.
Control panels must be connected to supply ground
Proper grounding serves two main purposes:
1. It provides a path to ground in case of a ground-fault.
Otherwise the current would present a shock or
electrocution hazard.
2. It protects equipment from electrical surges.
Use wire the same size as, or larger than motor’s currentcarrying wires (consult Tables in the motor section).
Installations must comply with the National Electric Code
as well as state and local codes.
All systems must have lightning (surge) protection with a
secure connection to ground.
The grounding should extend to the water-bearing layer to
be effective.
Ground to casing if it is metal, and extends within 20’ of
motor.
If a metal drop pipe is used, then ground to the drop pipe.
Do not ground only to the supply ground or driven
grounding rod. These will not protect the pump.
All motors are internally grounded and requires a 3 or
4-wire drop cable.
3.3 CORROSIVE WATER AND
GROUND
Some waters are corrosive, and can eventually corrode the
ground wire. If the installation uses a metal well casing,
any ground current will flow through it. In the case of
plastic piping and casing, the water column would carry
the current in a ground fault situation.
To prevent this, route the motor ground wire and the motor
power leads through a GFCI with a 10 mA set point. In this
way, the GFCI will trip when a ground fault has occurred
AND the motor ground wire is no longer functional.
3.4 CHECK VALVES
Check valve installation is necessary for proper pump
operation. The pump should have a check valve on its
discharge, or within 25 feet (7.62 m) of the pump. For
very deep wells, locate a check valve at least every 200
feet (61 m).
• Use only spring type or gravity-poppet check valves.
Swing type valves can cause water hammer problems.
• Do not use drain-back style check valves (drilled).
Check valves serve the following purposes:
•
Maintain Pressure:
Without a check valve, the pump
has to start each cycle at zero head, and fill the drop
pipe. This creates upthrust in the motor, and would
eventually damage both the pump and motor.
•
Prevent Water Hammer:
If two check valves are used,
and the lower one leaks, then a partial vacuum forms
in the pipe. When the pump next starts, the flow fills
the void area quickly, and creates a shock wave that
can break piping and damage the pump. If you get
water hammer on pump start, this may be the cause.
•
Prevent Back-Spin:
Without a functioning check valve,
upon shutoff, the water drains back through the pump,
and cause it to rotate backwards. This can create
excessive wear on the thrust bearing, and if the pump
restarts as water is flowing down the pipe, it will put an
excessive load on the system.
SECTION 3: Installation and Setup 5
PN793
Installation
and Setup
PN793 11/20/09 9:21 AM Page 5
Page 6
PN793
SECTION 3: Installation and Setup 6
3.5 START-UP
NOTICE: To avoid sand-locking pump, follow procedure
below when starting pump for the first time. NEVER start a
pump with discharge completely open unless you have
done this procedure first.
1. Connect a pipe elbow, a short length of pipe and a
gate valve to pump discharge at well head.
2. Make sure that controls will not be subjected to
extreme heat or excess moisture.
3. Make sure power is OFF. DO NOT START PUMP YET.
4. Set gate valve on discharge 1/3 open; start pump.
5 Keep gate valve at this setting while water pumps out
on ground. Let it run until water is clear of sand or silt.
(To check solids in water, fill a glass from pump and let
solids settle out).
6. When water is completely clear at 1/3 setting, open
gate valve to approximately two-thirds open and repeat
process.
7. When water is completely clear at 2/3 setting, open
gate valve completely and run pump until water is
completely clear.
8. Do not stop the pump until the water is clear.
Otherwise sand will accumulate in the pump stages
which may bind or freeze the pump.
9. Remove gate valve and make permanent installation.
NOTICE: The motor may draw higher than normal current
while the riser pipe is filling. After the riser pipe is full, the
amp draw should drop back to less than the allowed
current given on the motor nameplate.
When pump is in service, the amp draw must be
approximately equal to or lower than the service factor
amps given on the motor nameplate. If not, recheck entire
installation and electrical hook-up to find out why amp
draw is higher than normal.
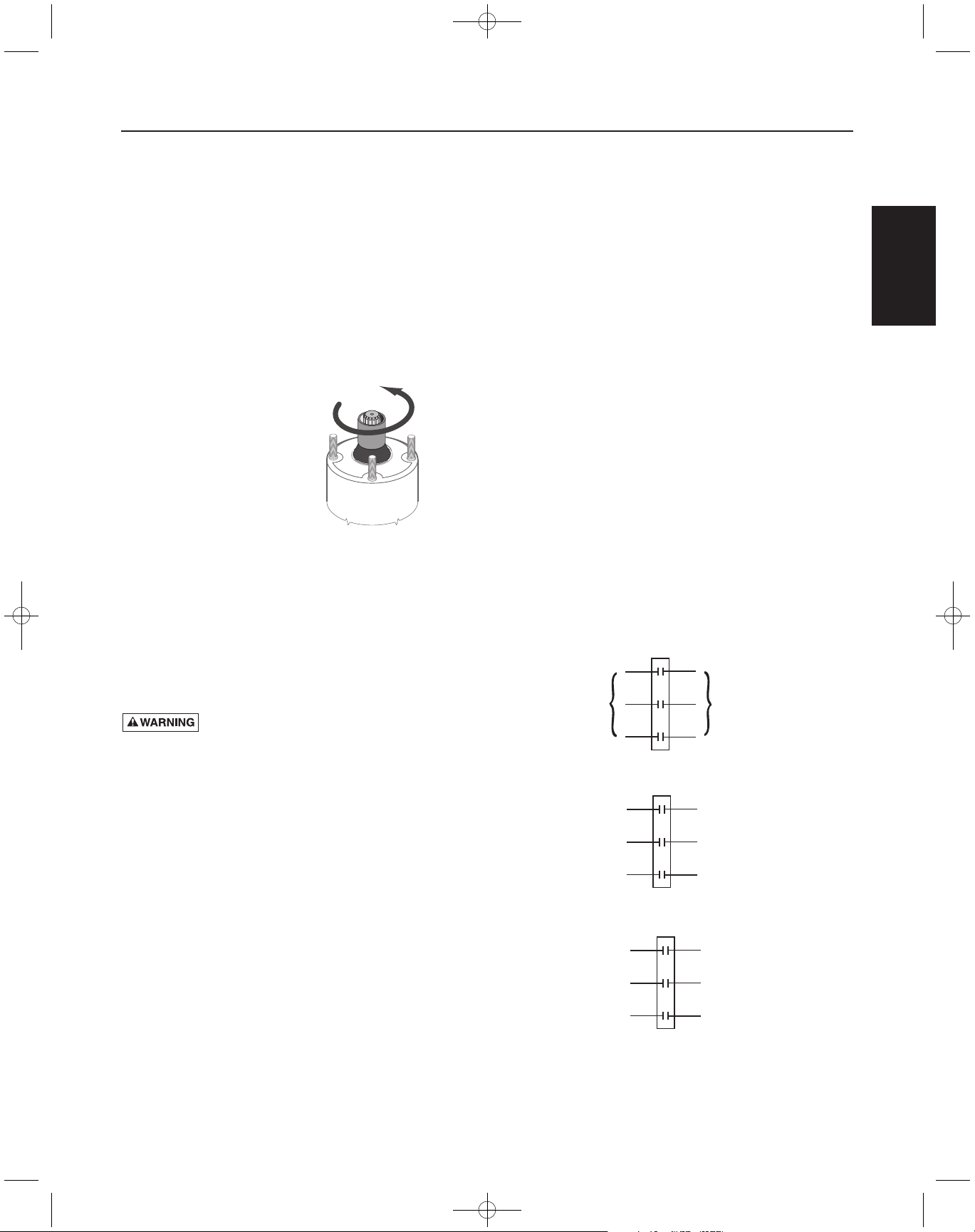
Motor Torque
The motor exerts a strong torque force on the downpipe
and any other supporting structures when it starts. This
torque is usually in the direction that would unscrew righthand threads (the motor’s reaction movement is clockwise
as seen from above).
All pipe and pump joints must be tightened to safely
handle the starting torque. Tighten all threaded joints
to a minimum of 10 ft.-lb per horsepower. i.e.
20 HP = 200 ft.-lb; 50 HP = 500 ft.-lb.
Tack welding or strap welding may be required with higher
horsepower pumps.
PN793 11/20/09 9:21 AM Page 6
Page 7
4.1 MIXING WIRE SIZE WITH
EXISTING INSTALLATION
Using two different cable sizes.
Sometimes conditions make it desirable to use more than
one size cable, such as replacing a pump in an existing
installation.
For example: Installing a pump with a 6”, 5 HP, 230 volt,
single phase motor, with the motor setting at 250' (76.2 m)
down the well and with 120' (36.5 m) of #8 cable buried
between the service entrance and the well head. In order
to avoid replacing the buried cable, the question is: What
size cable is required in the well? Calculate as follows:
1. According to Table 7-7, a total of 269' (82 m) of #8
cable is the maximum length cable to power a 5 HP
motor. The percent of this total that has been used by
the 120' (36.5 m) of cable in the buried run is:
120'/269' = .446 = 45%.
2. With 45% of the allowable cable already used, 55% of
the total length is left for use in the well. To avoid
running a cable that is too small (gauge) and lowering
the voltage to the motor, we have to find a cable size
large enough so that 250' (76.2 m) is less than 55% of
the total length allowed for that size.
3. 250 ÷ 55% = 455 feet.
4. From Table 7-7 we find that the total allowable length
for #4 cable is 667'.
This is longer than needed. Therefore, #4 cable can be
used for the 250' (76.2 m) of cable in the well.
Any combination of sizes can be used, provided that
the total percentage of the length of the two sizes of
cable is not less than 100% of the allowed lengths.
4.2 WIRE SPLICING
Splice wire to motor leads. Use only copper wire for
connections to pump motor and control box.
1. Taped splice (for larger wire sizes)
A. Stagger lead and wire length so that 2nd lead is 2"
(50mm) longer than 1st lead and 3rd lead is 2"
(50mm) longer than second.
B. Cut off power supply wire ends. Match colors and
lengths of wires to colors and lengths of motor
leads.
C. Trim insulation back 1/2" (13mm) from supply wire
and motor lead ends.
D. Insert motor lead ends and supply wire ends into
butt connectors. Match wire colors between supply
wires and motor leads.
E. Using crimping pliers, indent butt connector lugs to
attach wires.
F. Cut Scotchfil
TM
electrical insulation putty into 3
equal parts and form tightly around butt connectors.
Be sure Scotchfil overlaps insulated part of wire.
G. Using #33 Scotch tape, wrap each joint tightly;
cover wire for about 1-1/2" (38mm) on each side of
joint. Make four passes with the tape. When
finished you should have four layers of tape tightly
wrapped around the wire. Press edges of tape firmly
down against the wire.
NOTICE: Since tightly wound tape is the only means of
keeping water out of splice, efficiency of splice will
depend on care used in wrapping tape.
NOTICE: For wire sizes larger than No. 8 (7mm
2
), use
soldered joint rather than Scotchfil putty.
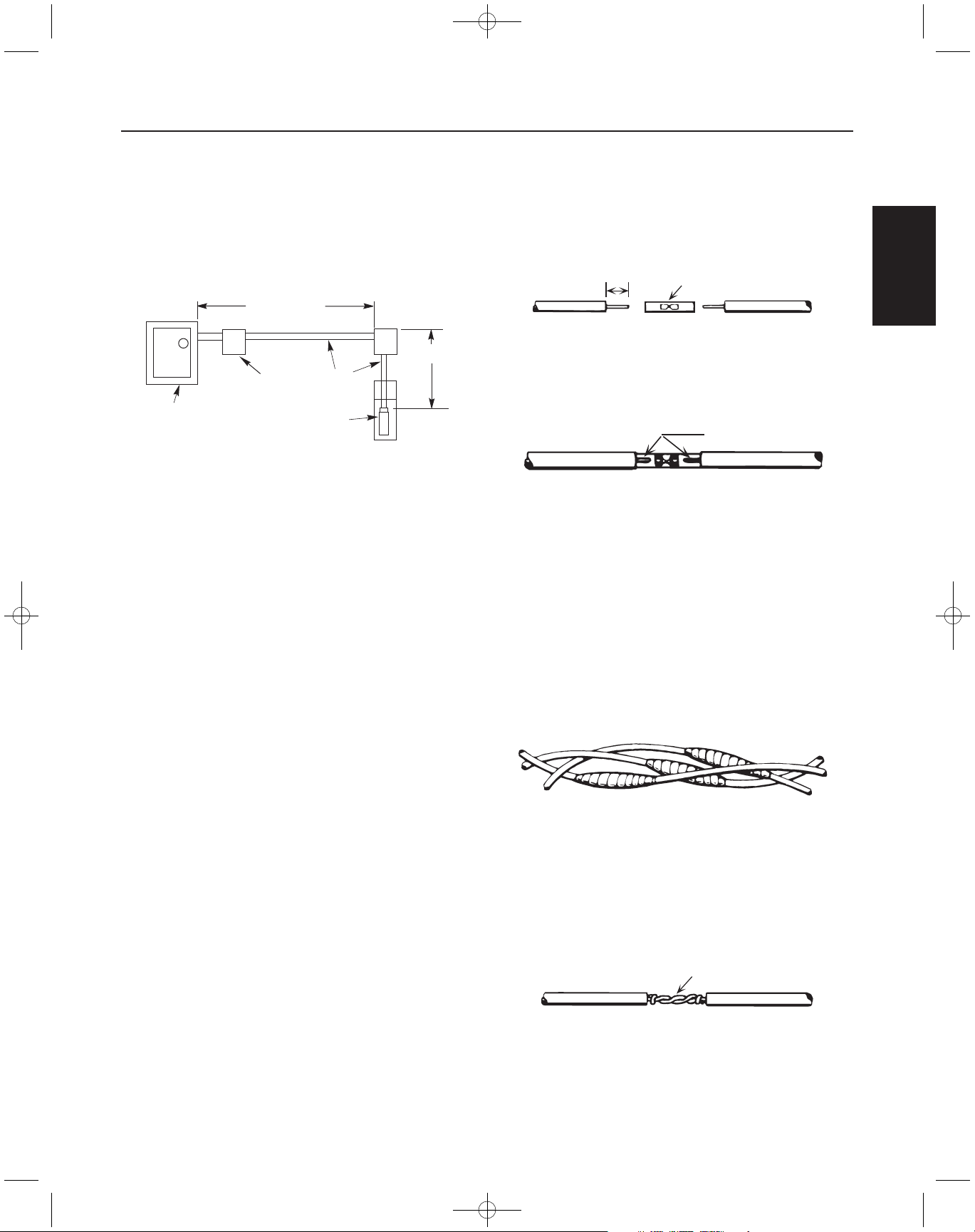
Figure 4-1: Mixing Wire Sizes: Example
Cable
Pump
Controls
Service Entrance
(Main Fuse Box
From Meter)
5 HP (4.9 kw)
230V 1Ph Motor
120 Ft. AWG 8
250 Ft.
Figure 4-2: Insert Wires
Indent here
Figure 4-4:Wrap Splices
Completed splice
Alternate method
twist and solder
Electrical Power
Figure 4-5:Twist Wires
Figure 4-3: Indent Connectors
SECTION 4: Electrical Power 7
PN793
PN793 11/20/09 9:21 AM Page 7
1/2"
(12.7mm)
Butt Connector
Page 8
PN793
2. Heat shrink splice (For wire sizes #14, 12 and 10 AWG
(2, 3 and 5mm2):
A. Remove 3/8" (9.5mm) insulation from ends of motor
leads and power supply wires.
B. Put plastic heat shrink tubing over motor leads
between power supply and motor.
C. Match wire colors and lengths between power
supply and motor.
D. Insert supply wire and lead ends into butt connector
and crimp. Match wire colors between power
supply and motor. Pull leads to check connections.
E. Center tubing over butt connector and apply heat
evenly with a torch (match or lighter will not supply
enough heat).
NOTICE: Keep torch moving. Too much concentrated heat
may damage tubing.
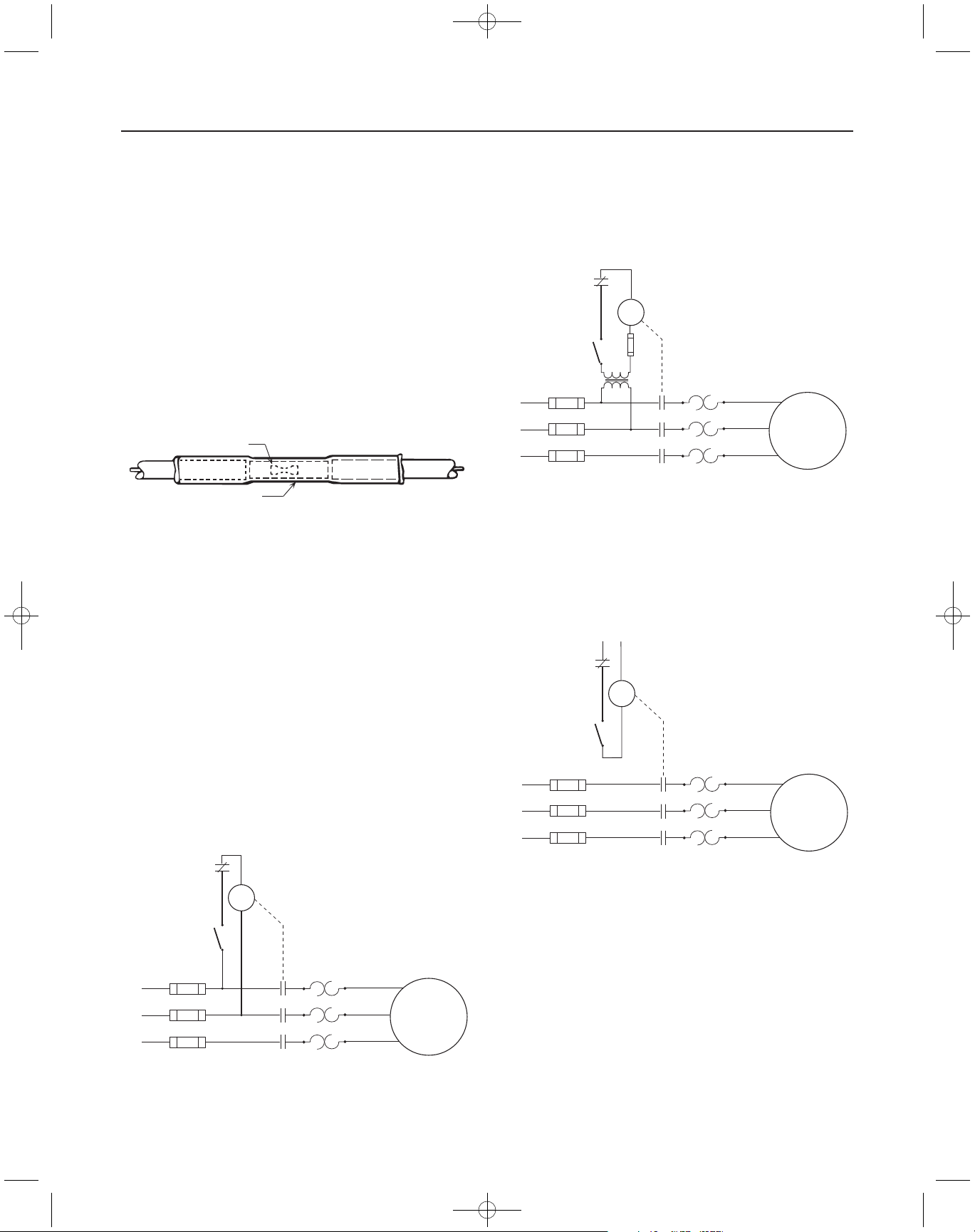
4.3 THREE-PHASE STARTERS
Starters are used to start the motor by engaging contacts
that will energize each line simultaneously. The contacts
are closed when the coil is energized.
Figures 4-7 through 4-9 show three types of starters used
on the motors. The control device in the secondary circuit
is typically a pressure switch. Other control could be
provided by level control, timers or manual switches.
Line Voltage Control
This commonly-used control has a coil energized by line
voltage. The coil voltage matches the line voltage.
Low Voltage Control
This starter arrangement uses a transformer to allow the
coil to be energized by a lower voltage. Note that the
secondary circuit must be fused, and the coil sized for the
secondary voltage.
Separate Voltage Control
This arrangement uses power from a separate source to
energize the coil.
SECTION 4: Electrical Power 8
Figure 4-6: Heat-Shrink Tubing Applied
Connector
Heat shrink tubing
Figure 4-8: Low Voltage Control
Figure 4-9: Separate Voltage Control
Figure 4-7: Line Voltage Control
PN793 11/20/09 9:21 AM Page 8
Overload
Control
Coil
Control
Device
Thermal
Overload
L1
L2
Heaters
3-Phase
Motor
L3
Separate
Voltage
Overload
Control
Coil
Control
Device
Thermal
Overload
L1
L2
Heaters
3-Phase
Motor
L3
Overload
Control
Coil
Control
Device
L1
L2
L3
Thermal
Overload
Heaters
3-Phase
Motor
Page 9
PN793
4.4 CHECKING MOTOR ROTATION
To check rotation before the pump is installed, follow
these steps:
During testing or checking rotation (such as “bumping” or
“inching”) the number of “starts” should be limited to 3
and total run time of less than 15 seconds.
Bumping must be done while motor is in horizontal
position and followed by a full 15-minute cooling-off
period before any additional “starts” are attempted.
Energize the motor briefly, and observe the direction of
rotation. It should be counter-clockwise when viewed from
the pump (shaft) end.
To check rotation after
the pump is installed:
NOTICE: NEVER
continuously operate a
pump with the discharge
valve completely closed
(dead head). This can
overload the motor or
destroy the pump and
will void the warranty.
After energizing the motor, check the flow and pressure of
the pump to make sure that the motor is rotating in the
correct direction. To correct a wrong rotation, switch “any
two of the three cable connections. (Three-phase motor
only). The setting that gives the most flow and pressure is
correct.
A cooling-off period of 15 minutes is required between
starts.
Hazardous voltage. Disconnect power
before working on wiring.
Input voltage, current and insulation resistance values
should be recorded throughout the installation and should
be used for preventive maintenance.
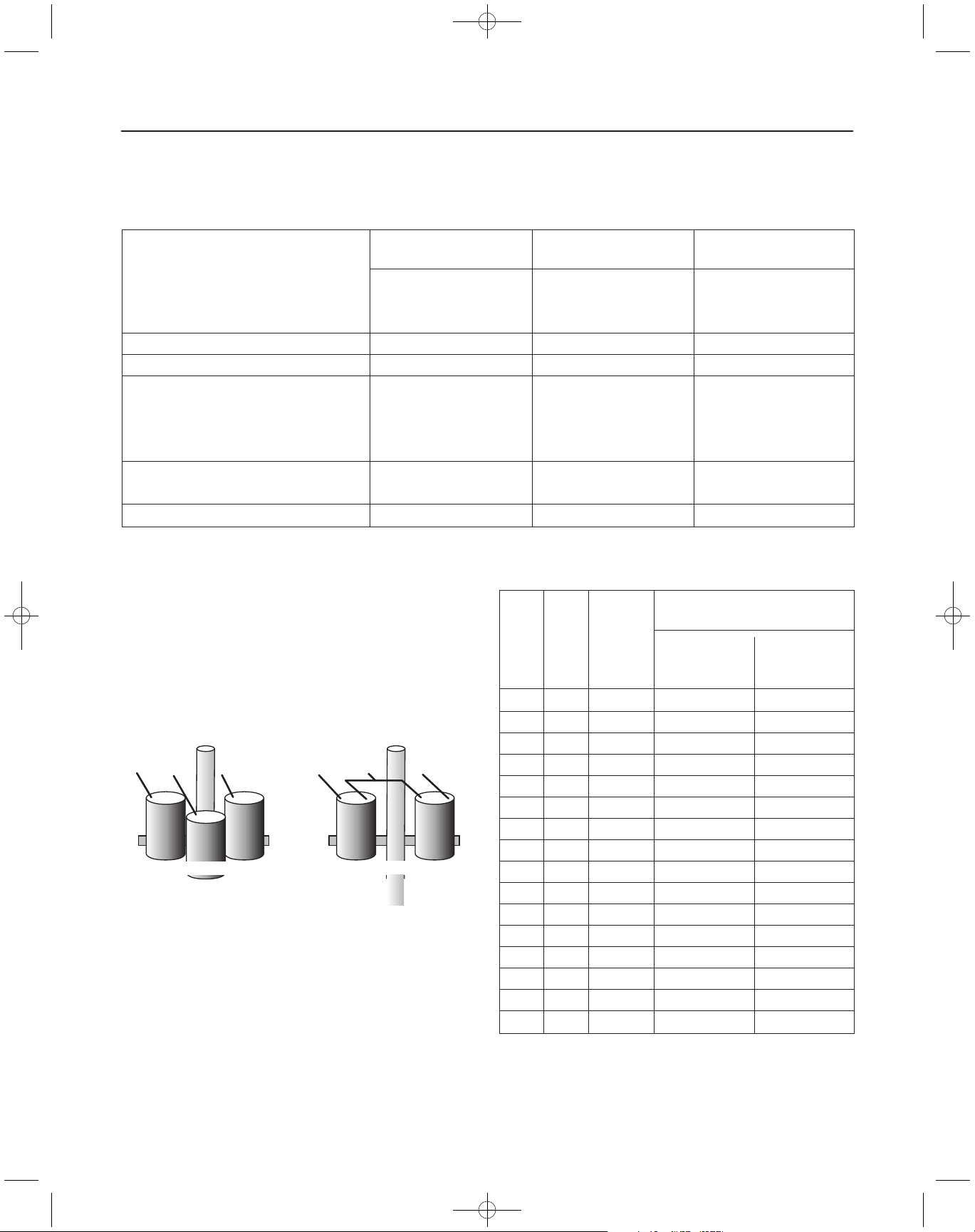
4.5 3-PHASE CURRENT BALANCING
Current Unbalance Test
Before checking for current unbalance, the pump must be
started, and rotation direction determined.
Determine current unbalance by measuring current in each
power lead. Measure current for all three possible hookups
(Figure 4-11). Use example and worksheet on the
Installation Checklist and Record in Section 12 to calculate
current unbalance on a three phase supply system and
retain for future reference.
NOTICE: Current unbalance between leads should not
exceed 5%. If unbalance cannot be corrected by rolling
the leads, locate the source of the unbalance.
Here is an example of current readings at maximum pump
loads on each leg of a three wire hookup. Make calculations for all three possible hookups.
A. For each hookup, add the readings for the three legs.
B. Divide each total by three to get average amps.
C. For each hookup, find current value farthest from aver-
age (Calculate the greatest current difference from the
average).
D. Divide this difference by the average and multiply by
100 to obtain the percentage of unbalance.
Use smallest percentage unbalance, in this case
Arrangement 2 (Table 4.1).
Use the Current-Balance worksheet located in
the Installation Record
After trying all three lead hookups, if the reading furthest
from average continues to show on the same power lead,
most of the unbalance is coming from the power source.
Call the power company.
If the reading furthest from average changes leads as the
hookup changes (that is, stays with a particular motor
lead), most of the unbalance is on the motor side of the
starter. This could be caused by a damaged cable, leaking
splice, poor connection, or faulty motor winding.
SECTION 4: Electrical Power 9
Starter
Electrical
Power
Supply
To Motor
L1
L2
L3
T1
T2
T3
Arrangement 1
Starter
L1
L2
L3
T1
T2
T3
Arrangement 2
Starter
L1
L2
L3
T1
T2
T3
Arrangement 3
Figure 4-10: Motor Rotation
Figure 4-11: 3-Phase Current
Unbalance: Example
Electrical Power
PN793 11/20/09 9:21 AM Page 9
Page 10
PN793
Use this worksheet to calculate current unbalance for your
installation.
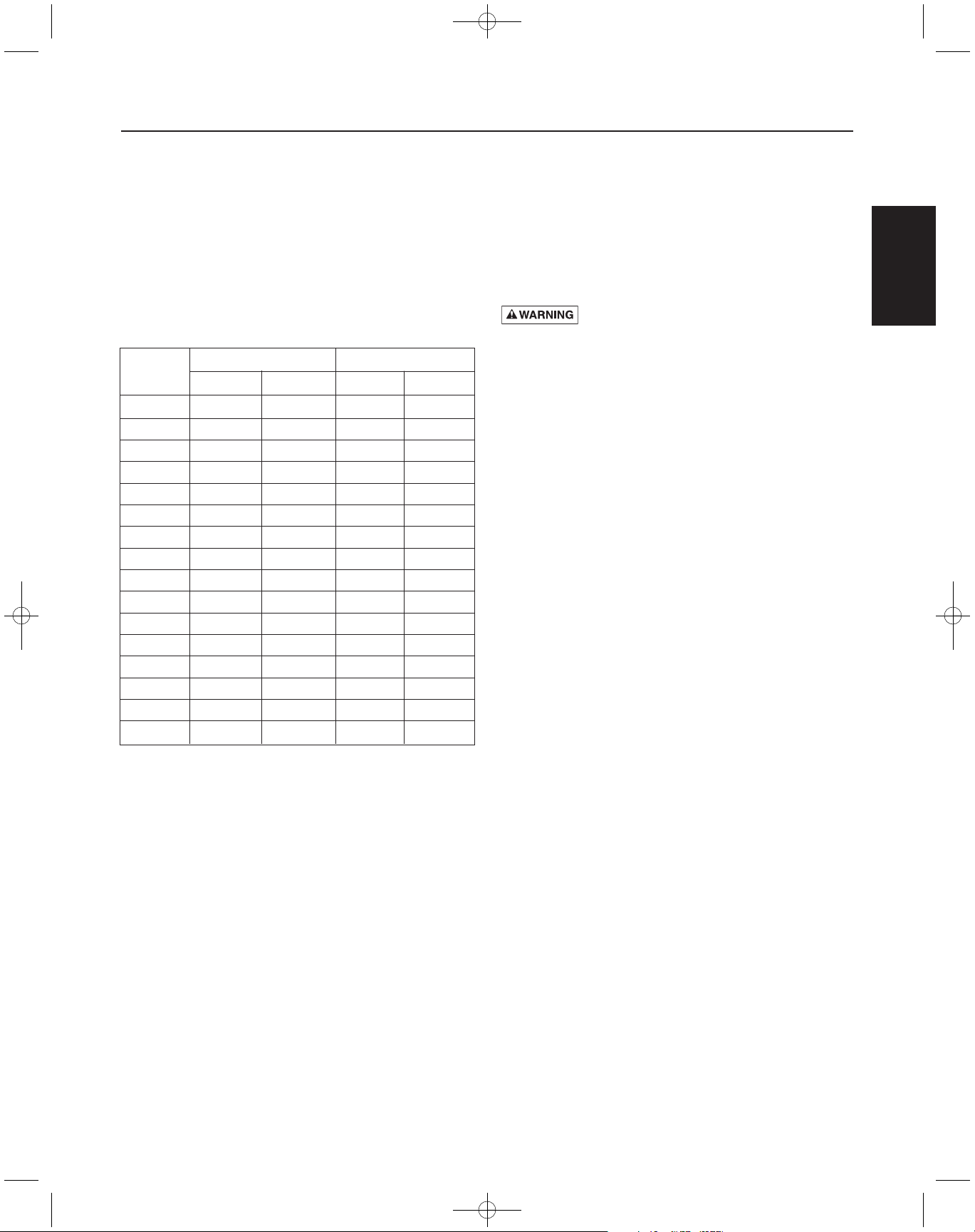
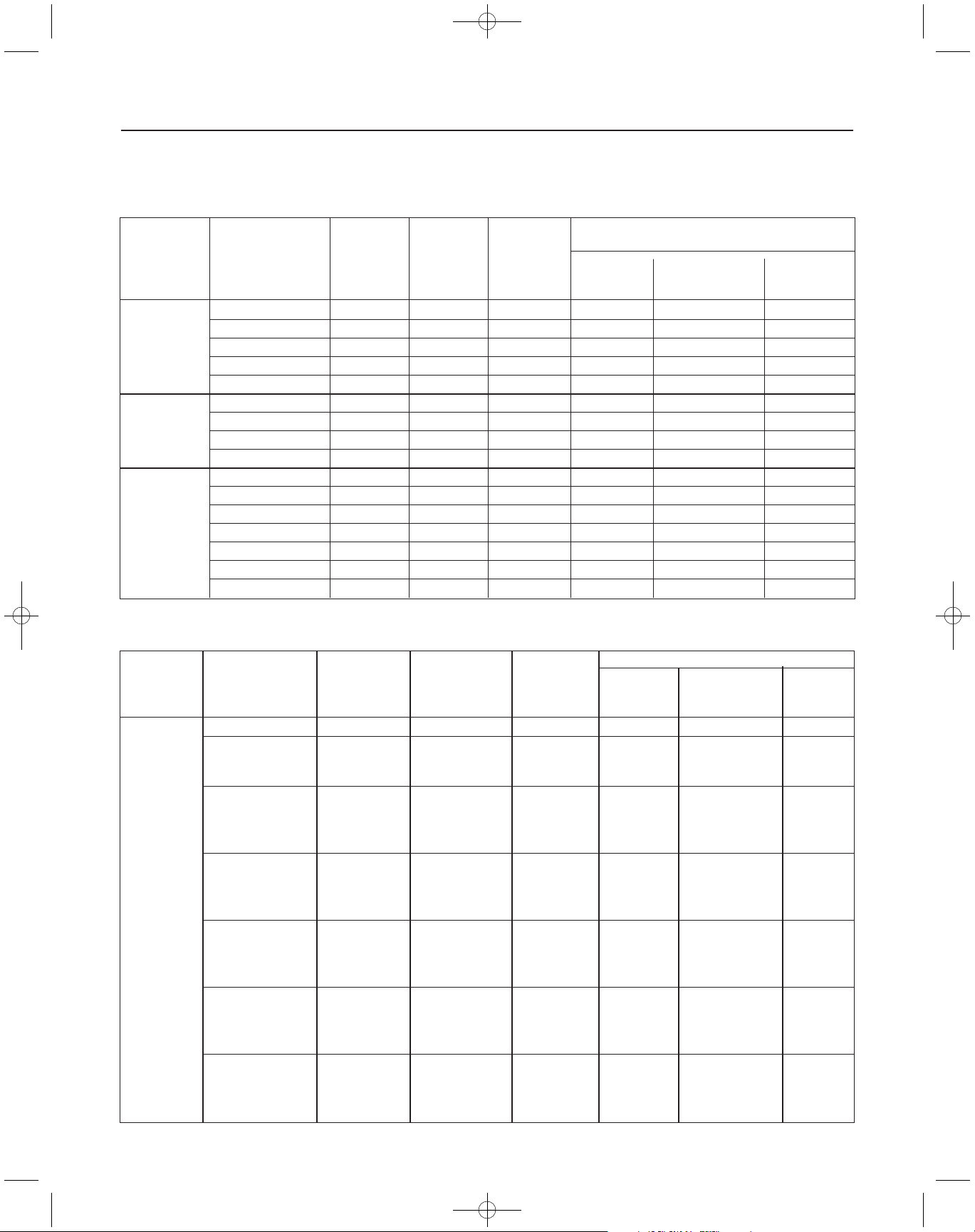
4.6 TRANSFORMER SIZING
The power supply to the installation must be capable of
furnishing enough power to the pump and associated
equipment.
Three-phase power may be furnished either through a
Delta-Delta, Wye-Delta or open Delta configuration. The
Delta-Delta uses three transformers to supply power to the
facility. The Wye-Delta and open Delta configuration use
only two transformers.
Transformers are rated by KVA capacity. This must be high
enough capacity for the motor being installed. If the
transformer capacity is too small, the motor will receive
reduced voltage and may be damaged.
Any other loads in the system would be in addition to the
motor alone.
Refer to the chart below. Note that the open delta
configuration can only use 87% of the rated power of the
two transformers.
SECTION 4: Electrical Power 10
Arrangement 1 Arrangement 2 Arrangement 3
Amps Amps Amps
L1–T1=17 L1–T3=16.7 L1–T2=16.7
L2–T2=15.3 L2–T1=16.3 L2–T3=16
L3–T3=17.7 L3–T2=17 L3–T1=17.3
Total Amps 50 50 50
Average Amps 50 ÷ 3 = 16.7 50 ÷ 3 = 16.7 50 ÷ 3 =16.7
From Average Amps
Deviation L1 0.3 0.0 0.0
Deviation L2 1.4 0.4 0.7
Deviation L3 1.0 0.3 0.6
% Current Unbalance
Largest Deviation 1.4 ÷ 16.7 0.3 ÷ 16.7 0.7 ÷ 16.7
% Unbalance + 8.4% 1.8% 4.2%
TABLE 4-1: Electrical Current Unbalance Example
EXAMPLE
Figure 4-12: Three Phase Power
L1 L2 L3
Wye or Open Delta 3-Phase
L1
L2
L3
Full 3-Phase (Delta)
KVA Rating (smallest)
For Each Transformer
Open WYE Closed WYE
Required or D or D
HP kW KVA 2 Transformers 3 Transformers
1/2 0.37 1.5 1.0 0.5
3/4 0.55 1.5 1.0 0.5
1 0.75 2.0 1.5 0.75
1-1/2 1.1 3.0 2.0 1.0
2 1.5 4.0 2.0 1.5
3 2.2 5.0 3.0 2.0
5 3.7 7.5 5.0 3.0
7.5 5.5 10.0 7.5 5.0
10 7.5 15.0 10.0 5.0
15 11.0 20.0 15.0 7.5
20 15.0 25.0 15.0 10.0
25 18.5 30.0 20.0 10.0
30 22.0 40.0 25.0 15.0
40 30.0 50.0 30.0 20.0
50 37.0 60.0 35.0 20.0
60 45.0 75.0 40.0 25.0
TABLE 4-2: Transformer Capacity
PN793 11/20/09 9:21 AM Page 10
Page 11
PN793
4.7 USING A GENERATOR
Selecting a generator
Select a generator that can supply at least 65% of rated
voltage upon start-up of the motor.
The chart shows ratings of generators, both externally and
internally regulated. This chart is somewhat conservative.
Consult the generator manufacturer if you are uncertain.
Frequency
It is highly important that the generator maintain constant
frequency (Hz), since the motor’s speed depends upon
frequency.
A drop of just 1 to 2 Hz can noticeably lower pump
performance. An increase of 1 to 2 Hz can cause overload
conditions.
Voltage Regulation
There is a significant difference in the performance of
internally and externally regulated generators.
An external regulator senses output voltage dips and
triggers an increase in the voltage output of the generator.
An internal regulator, senses current and responds to
increased current by supplying more voltage.
Generator Operation
Start the generator before starting the pump motor.
The motor must be stopped before turning off the
generator.
If the generator runs out of fuel, and the pump is still
connected, it will put excess strain on the thrust bearings
as the generator slows.
Electrocution Hazard. Use transfer switches
when the generator is used as a backup to the power grid.
contact your power company for proper use of standby or
backup generators.
4.8 SPECIAL APPLICATIONS
4.8.1 Using Phase Converters
Phase converters allow three-phase motors to operate from
one-phase supply. Various styles of phase converters are
available. Many converters do not supply a properly
balanced voltage, and using these will void the motor’s
warranty unless approval is obtained first.
GUIDELINES FOR PHASE CONVERTERS:
• Current unbalance must be less than 5%.
• Converter to be sized to service factor capacity
• Maintain motor cooling with a cooling flow of at least
3’ per second.
• Fuses and circuit breakers must be time-delay type.
MOTOR STARTING WITH REDUCED VOLTAGE
Starting a motor with full voltage will bring it to full speed
in less than 1/2 second. This can:
• Spike the load current, causing brief voltage dips in
other equipment.
• Over-stress pump and piping components because of
high torque.
• Cause water hammer.
4.8.2 Motor Starters (3-Phase Only)
Various types of motor starters are available.
Autotransformers are recommended because of reduced
current draw.
When motor starters are used, they should supply a
minimum of 55% of rated voltage for adequate starting
torque.
SECTION 4: Electrical Power 11
Motor
Externally Regulated Internally Regulated
HP kW KVA kW KVA
1/2 2.0 2.5 1.5 1.9
3/4 3.0 3.8 2.0 2.5
1 4.0 5.0 2.5 3.1
1-1/2 5.0 6.3 3.0 3.8
2 7.5 9.4 4.0 5.0
3 10.0 12.5 5.0 6.25
5 15.0 18.8 7.5 9.4
7-1/2 20.0 25.0 10.0 12.5
10 30.0 37.5 15.0 18.8
15 40.0 50.0 20.0 25.0
20 60.0 75.0 25.0 31.0
25 75.0 94.0 30.0 37.5
30 100.0 125.0 40.0 50.0
40 100.0 125.0 50.0 62.5
50 150.0 188.0 60.0 75.0
60 175.0 220.0 75.0 94.0
TABLE 4-3: Ratings of Generators
Electrical Power
PN793 11/20/09 9:21 AM Page 11
Page 12

5.1 MOTOR INSPECTION
Check the motor for damage in shipping.
Before installation, check the following.
• Check over all tools, especially the hoisting gear, for
wear or damage before hoisting unit.
• Inspect the motor cable for any nicks or cuts.
• Verify that motor nameplate data matches registration
card information exactly.
• Verify that motor nameplate voltage is correct for
available power supply voltage. Voltage must not vary
more than +/-10% from nameplate rated voltage.
• Verify that the well diameter is large enough to
accommodate the motor/pump unit all the way to the
pump setting depth.
• For installations with tight well casings, make sure that
riser pipe flanges are recessed to protect the power and
control cables from abrasion and squeezing during
installation.
Heavy object. Lifting equipment must be
capable of lifting motor and attached equipment.
• If the total length of the pump motor unit (without any
riser pipe) exceeds 10’ (3m), the unit must be
supported with a girder while hoisting. Do not remove
supporting girder until unit is standing vertically in the
hoist. Check for damage.
5.2 TESTING
Insulation Resistance
To check for insulation resistance:
Disconnect power to the motor for this test.
Connect an Ohm meter (resistance in Ω) between the
power leads and the motor ground or well casing.
20KΩ Damaged motor, possible result of
lightning strike.
500KΩ Typical of older installed motor in well.
2 MΩ Newly installed motor
10 MΩ Used motor, measured outside of well
20 MΩ New motor without cable
5.3 STORAGE AND TRANSPORTATION
Storage site should be clean, well vented, and cool.
Keep humidity at the storage site as low as possible.
Protect motor and cables from direct sunlight.
Protect power supply cables and control cables from
moisture by taping the cable ends with electrician’s tape.
Do not kink power supply or control cables.
Take care when moving unit (packed or unpacked) with
crane or hoisting gear not to knock it against walls, steel
structure, floors, etc. Do not drop motor.
Do not lift motor or motor/pump unit by power supply or
control cables.
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 12
PN793
PN793 11/20/09 9:21 AM Page 12
Page 13
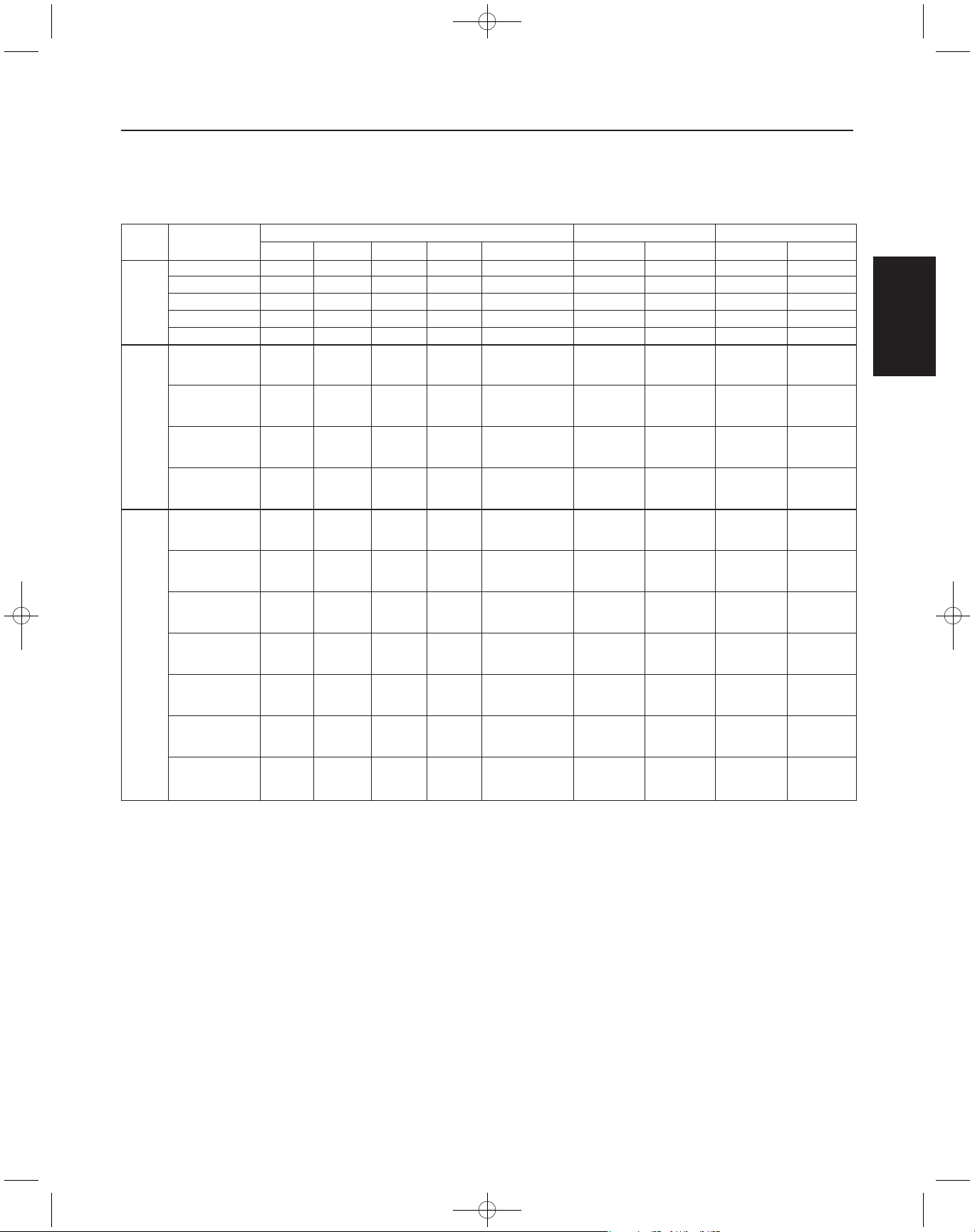
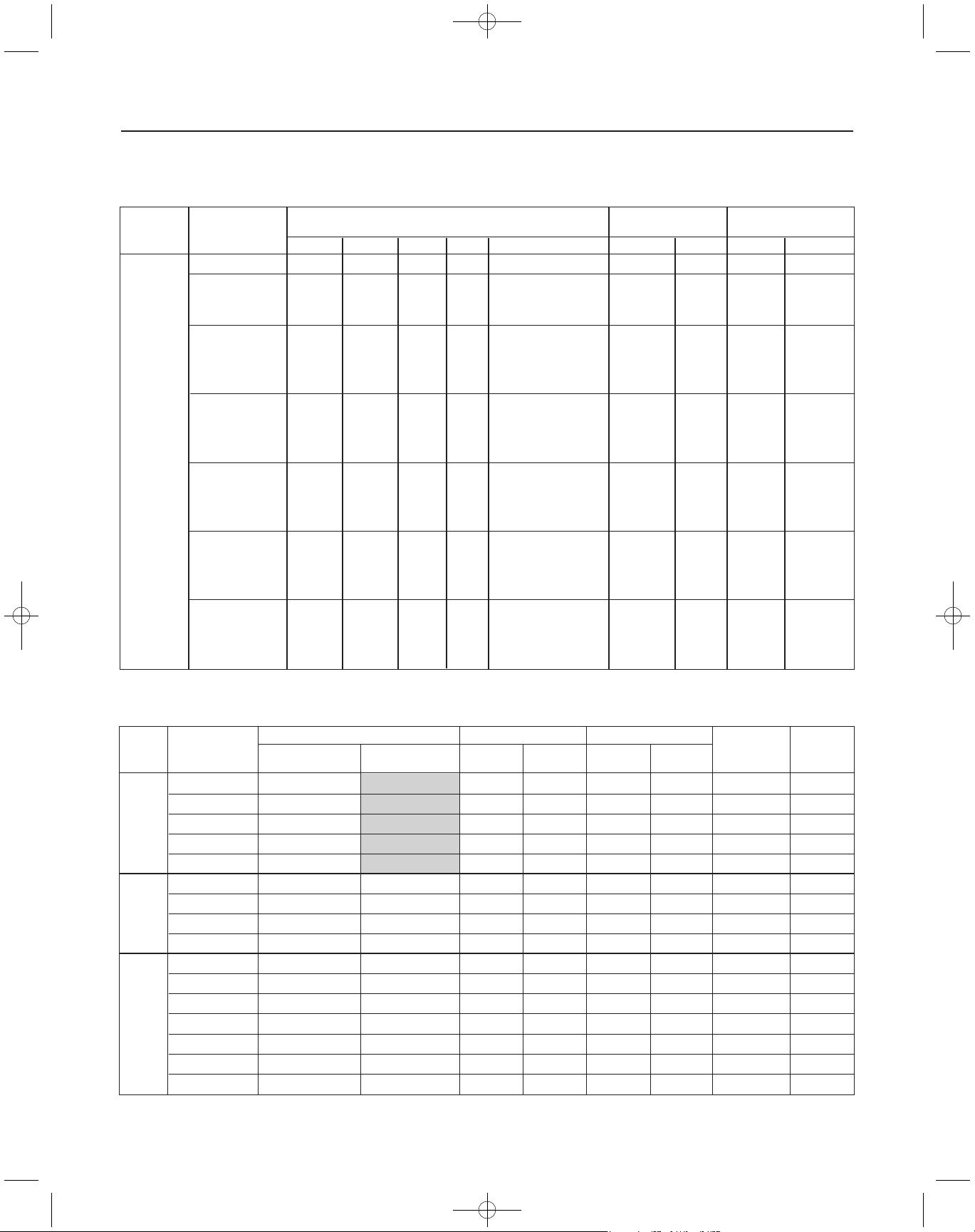
5.4 4" MOTOR SPECIFICATIONS
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 13
XE-Series Motors
PN793
Motor
PENTEK
Rating Full Load Maximum (S.F. Load)
Type Part Number HP kW Volts Hz. Service Factor Amps Watts Amps Watts
P42B0005A1 1/2 0.37 115 60 1.6 7.4 845 9.5 1088
4" P42B0005A2 1/2 0.37 230 60 1.6 3.7 834 4.7 1073
2-Wire P42B0007A2 3/4 0.55 230 60 1.5 5.0 1130 6.4 1459
P42B0010A2 1 0.75 230 60 1.4 7.9 1679 9.1 1990
P42B0015A2 1-1/2 1.1 230 60 1.3 9.2 2108 11.0 2520
Y - 11.0 Y - 12.6
P43B0005A1 1/2 0.37 115 60 1.6 B - 11.0 733 B - 12.6 1021
R - 0.0 R - 0
Y - 5.5 Y - 6.3
P43B0005A2 1/2 0.37 230 60 1.6 B - 5.5 745 B - 6.3 1033
CSIR R - 0 R - 0
3-Wire Y - 7.2 Y - 8.3
P43B0007A2 3/4 .55 230 60 1.5 B - 7.2 1014 B - 8.3 1381
R - 0 R - 0
Y - 8.4 Y - 9.7
P43B0010A2 1 0.75 230 60 1.4 B - 8.4 1267 B - 9.7 1672
R - 0 R - 0
Y - 4.1 Y - 4.9
P43B0005A2 1/2 0.37 230 60 1.6 B - 4.1 720 B - 4.4 955
R - 2.2 R - 2.1
Y - 5.1 Y - 6.3
P43B0007A2 3/4 0.55 230 60 1.5 B - 5.0 1000 B - 5.6 1300
R - 3.2 R - 3.1
Y - 6.1 Y - 7.2
P43B0010A2 1 0.75 230 60 1.4 B - 5.7 1205 B - 6.3 1530
R - 3.3 R - 3.3
CSCR
Y - 9.7 Y - 11.1
P43B0015A2 1-1/2 1.1 230 60 1.3 B - 9.5 1693 B - 11.0 2187
3-Wire
R - 1.4 R - 1.3
Y - 9.9 Y - 12.2
P43B0020A2 2 1.5 230 60 1.25 B - 9.1 2170 B - 11.7 2660
R - 2.6 R - 2.6
Y - 14.3 Y - 16.5
P43B0030A2 3 2.2 230 60 1.15 B - 12.0 3170 B - 13.9 3620
R - 5.7 R - 5.6
Y - 24.0 Y - 27.0
P43B0050A2 5 3.7 230 60 1.15 B - 19.1 5300 B - 22.0 6030
R - 10.2 R - 10.0
TABLE 5-1: SINGLE PHASE Motor Specifications (115 and 230 Volt, 60 Hz, 3450 RPM)
PN793 11/20/09 9:21 AM Page 13
Page 14
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 14
PN793
Maximum Load
Motor PENTEK Rating Full Load (SF Load)
Type Part Number HP kW Volts Hz Service Factor Amps Watts Amps Watts
P43B0007A8 3/4 0.55 200 60 1.5 3.8 812 4.5 1140
P43B0010A8 1 0.75 200 60 1.4 4.6 1150 5.5 1500
P43B0010A3 1 0.75 230 60 1.4 4.0 1090 4.7 1450
P43B0010A4 1 0.75 460 60 1.4 2.2 1145 2.5 1505
P43B0015A8 1 1/2 1.1 200 60 1.3 6.3 1560 7.2 1950
P43B0015A3 1 1/2 1.1 230 60 1.3 5.2 1490 6.1 1930
P43B0015A4 1 1/2 1.1 460 60 1.3 2.8 1560 3.2 1980
P43B0015A5 1 1/2 1.1 575 60 1.3 2 1520 2.4 1950
3-Phase P43B0020A8 2 1.5 200 60 1.25 7.5 2015 8.8 2490
P43B0020A3 2 1.5 230 60 1.25 6.5 1990 7.6 2450
P43B0020A4 2 1.5 460 60 1.25 3.3 2018 3.8 2470
P43B0020A5 2 1.5 575 60 1.25 2.7 1610 3.3 2400
P43B0030A8 3 2.2 200 60 1.15 10.9 2890 12.0 3290
P43B0030A3 3 2.2 230 60 1.15 9.2 2880 10.1 3280
P43B0030A4 3 2.2 460 60 1.15 4.8 2920 5.3 3320
P43B0030A5 3 2.2 575 60 1.15 3.7 2850 4.1 3240
P43B0050A8 5 3.7 200 60 1.15 18.3 4850 20.2 5515
P43B0050A3 5 3.7 230 60 1.15 15.7 4925 17.5 5650
P43B0050A4 5 3.7 460 60 1.15 7.6 4810 8.5 5530
P43B0050A5 5 3.7 575 60 1.15 7.0 5080 7.6 5750
P43B0075A8 7 1/2 5.6 200 60 1.15 27.0 7600 30.0 8800
P43B0075A3 7 1/2 5.6 230 60 1.15 24.0 7480 26.4 8570
P43B0075A4 7 1/2 5.6 460 60 1.15 12.2 7400 13.5 8560
P43B0075A5 7 1/2 5.6 575 60 1.15 9.1 7260 10.0 8310
TABLE 5-2: THREE PHASE Motor Specifications (230, 460, 200 and 575 Volt, 60 Hz, 3450 RPM,
60° and 75° C.)
TABLE 5-3: SINGLE PHASE 4” Motor Electrical Parameters (115 and 230 Volt, 60 Hz, 3450 RPM,
2 and 3 wire)
Winding Efficiency % Power Factor %
Locked
Motor PENTEK M = Main S = Start Rotor KVA
Type Part Number Resistance* Resistance F.L. S.F. F.L. S.F. Amps Code
P42B0005A1 M 1.3-1.8 49 61 99 99 36.4 K
P42B0005A2 M 4.5-5.2 50 62 97 99 19.5 K
PSC P42B0007A2 M 3.0-4.8 55 65 97 99 24.8 J
2-W
P42B0010A2 M 4.2-5.2 58 65 94 96 21.7 F
P42B0015A2 M 1.9-2.3 59 64 99 99 42.0 H
P43B0005A1 M 0.9-1.6 S 5.7-7.0 51 59 54 69 49.6 N
CSIR P43B0005A2 M 4.2-4.9 S 17.4-18.7 50 58 58 71 22.3 M
3-W
P43B0007A2 M 2.6-3.6 S 11.8-13.0 55 61 61 72 32.0 L
P43B0010A2 M 2.2-3.2 S 11.3-12.3 59 62 66 75 41.2 L
P43B0005A2 M 4.2-4.9 S 17.4-18.7 52 62 76 85 22.3 M
P43B0007A2 M 2.6-3.6 S 11.8-13.0 56 65 85 90 32.0 L
P43B0010A2 M 2.2-3.2 S 11.3-12.3 62 68 86 92 41.2 L
CSCR P43B0015A2 M 1.6-2.3 S 7.9-8.7 66 67 80 85 47.8 J
3-W
P43B0020A2 M 1.6-2.2 S 10.8-12.0 68 69 96 95 49.4 G
P43B0030A2 M 1.1-1.4 S 2.0-2.5 72 72 96 97 76.4 G
P43B0050A2 M0.62-0.76 S 1.36-1.66 71 71 97 98 101.0 E
* Main winding is between the yellow and black leads. Start winding is between the yellow and red leads.
PN793 11/20/09 9:21 AM Page 14
Page 15
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 15
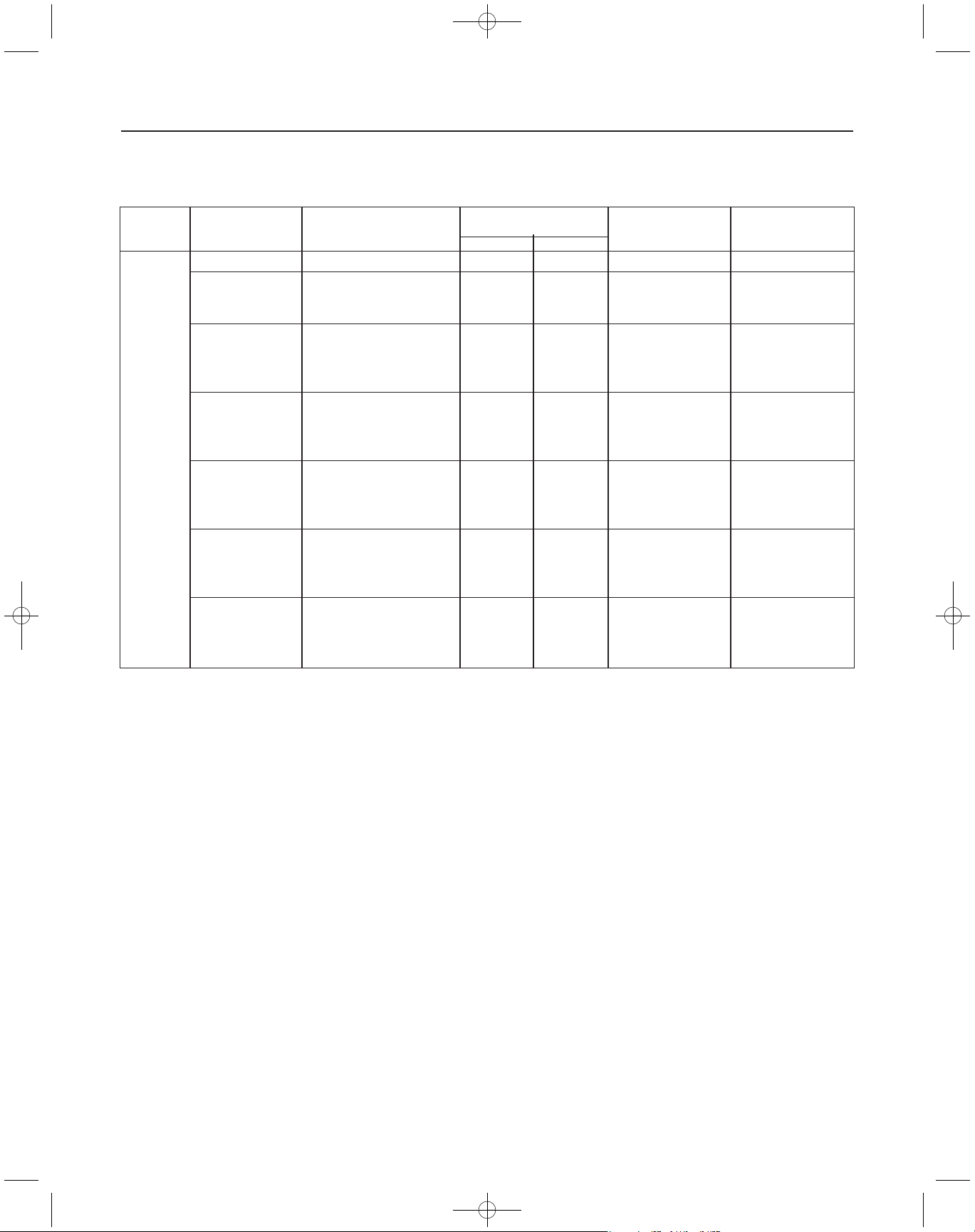
TABLE 5-4: THREE PHASE Motor Electrical Parameters (230, 460, 200 and 575 Volt, 60 Hz, 3450
RPM, 60° and 75° C.)
PN793
Locked
Motor Pentek Line to Line Efficiency % Rotor KVA
Type Part Number Resistance (Ohms) FL SF Amps Code
P43B0007A8 2.6-3.0 69 74 32.0 R
P43B0010A8 3.4-3.9 66 70 29.0 M
P43B0010A3 4.1-5.1 69 72 26.1 M
P43B0010A4 17.8-18.8 65 69 13.0 M
P43B0015A8 1.9-2.5 72 74 40.0 L
P43B0015A3 2.8-3.4 75 76 32.4 L
P43B0015A4 12.3-13.1 72 73 16.3 L
P43B0015A5 19.8-20.6 73 74 11.5 J
P43B0020A8 1.4-2.0 74 75 51.0 K
3-Phase P43B0020A3 1.8-2.4 75 75 44.0 K
P43B0020A4 8.0-8.7 74 75 23.0 K
P43B0020A5 9.4-9.7 78 78 21.4 M
P43B0030A8 0.9-1.3 77 77 71.0 K
P43B0030A3 1.3-1.7 77 77 58.9 J
P43B0030A4 5.9-6.5 76 77 30.0 J
P43B0030A5 9.4-9.7 78 78 21.4 J
P43B0050A8 0.4-0.8 76 76 113.0 J
P43B0050A3 .85-1.25 76 76 93.0 J
P43B0050A4 3.6-4.0 77 77 48.0 J
P43B0050A5 3.6-4.2 75 75 55.0 M
P43B0075A8 0.5-0.6 74 74 165.0 J
P43B0075A3 0.55-0.85 75 75 140.0 J
P43B0075A4 1.9-2.3 76 76 87.0 L
P43B0075A5 3.6-4.2 77 77 55.0 J
PN793 11/20/09 9:21 AM Page 15
Page 16
PN793
5.5 4" MOTOR DIMENSIONS
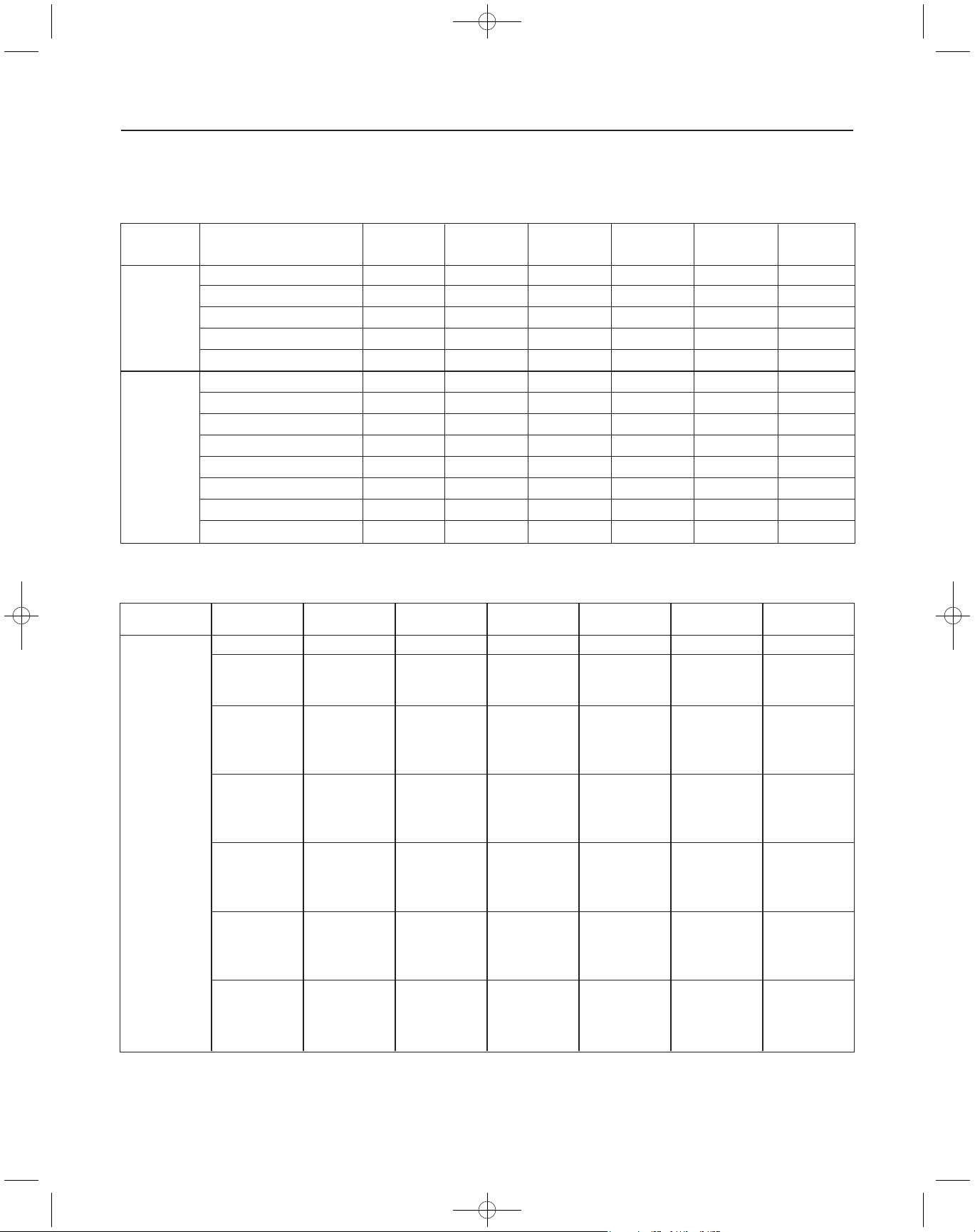
Motor PENTEK Length Length Weight Weight
Type Part Number HP kW (in) (mm) (lbs) (kg)
P42B0005A1 1/2 0.37 11.0 279 19.2 8.7
4-Inch P42B0005A2 1/2 0.37 11.0 279 19.2 8.7
2-Wire P42B0007A2 3/4 0.56 12.4 314 22.7 10.3
P42B0010A2 1 0.75 13.3 337 24.5 11.1
P42B0015A2 1-1/2 1.10 14.9 378 28.9 13.1
P43B0005A1 1/2 0.37 10.0 253 18.9 8.6
P43B0005A2 1/2 0.37 9.7 246 18.1 8.2
P43B0007A2 3/4 0.56 10.8 275 21.4 9.7
4-Inch
P43B0010A2 1 0.75 11.7 297 23.1 10.5
3-Wire
P43B0015A2 1-1/2 1.10 13.6 345 27.4 12.4
P43B0020A2 2 1.50 15.1 383 31.0 14.1
P43B0030A2 3 2.20 18.3 466 40.0 18.1
P43B0050A2 5 3.70 27.7 703 70.0 31.8
TABLE 5-5: SINGLE PHASE Motor Dimensions (115 and 230 Volt, 60 Hz, 3450 RPM)
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 16
Motor Pentek Length Length Weight Weight
Type Part Number HP kW Inches mm Lb Kg
P43B0007A8 3/4 0.55 10.8 275 21.4 9.7
P43B0010A8 1 0.75 11.7 297 23.1 10.5
P43B0010A3 1 0.75 11.7 297 23.1 10.5
P43B0010A4 1 0.75 11.7 297 23.1 10.5
P43B0015A8 1 1/2 1.1 11.7 297 23.1 10.5
P43B0015A3 1 1/2 1.1 11.7 297 23.1 10.5
P43B0015A4 1 1/2 1.1 11.7 297 23.1 10.5
P43B0015A5 1 1/2 1.1 11.7 297 23.1 10.5
P43B0020A8 2 1.5 13.8 351 27.4 12.4
P43B0020A3 2 1.5 13.8 351 27.4 12.4
P43B0020A4 2 1.5 13.8 351 27.4 12.4
3-Phase P43B0020A5 2 1.5 15.3 389 32.0 14.5
P43B0030A8 3 2.2 15.3 389 32.0 14.5
P43B0030A3 3 2.2 15.3 389 32.0 14.5
P43B0030A4 3 2.2 15.3 389 32.0 14.5
P43B0030A5 3 2.2 15.3 389 32.0 14.5
P43B0050A8 5 3.7 21.7 550 55.0 24.9
P43B0050A3 5 3.7 21.7 550 55.0 24.9
P43B0050A4 5 3.7 21.7 550 55.0 24.9
P43B0050A5 5 3.7 27.7 703 70.0 31.8
P43B0075A8 7 1/2 5.6 27.7 703 70.0 31.8
P43B0075A3 7 1/2 5.6 27.7 703 70.0 31.8
P43B0075A4 7 1/2 5.6 27.7 703 70.0 31.8
P43B0075A5 7 1/2 5.6 27.7 703 70.0 31.8
TABLE 5-6: THREE PHASE Motor Dimensions (230, 460, 200 and 575 Volt, 60 Hz, 3450 RPM)
PN793 11/20/09 9:21 AM Page 16
Page 17
PN793
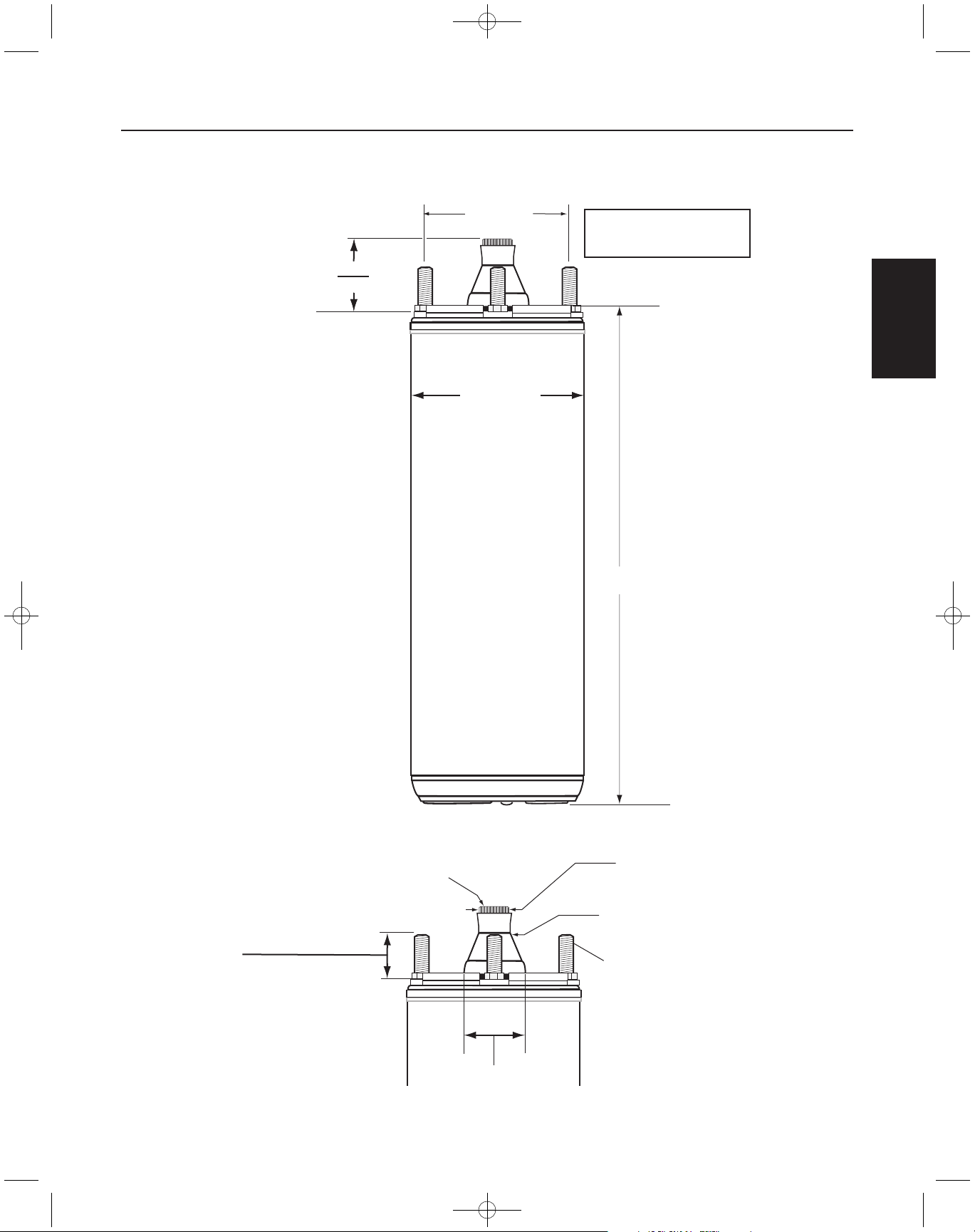
Figure 5-1:“XE” Series 4" Motor Dimensions – Single and Three Phase
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 17
XE-Series Motors
PN793 11/20/09 9:21 AM Page 17
1.508 (38.30)
1.498 (38.05)
All dimensions
in inches (mm)
3.00 (7.62)
3.750 (95.2)
4” Motor
Shaft free end-play
.005 -.040 (.127 - 1.02)
Length
14 Teeth 24/48 Pitch
30 Degee Pressure Angle
Min 0.50 (23.1) Full Spline
ANSI B92.1 Compliant
0.97 (24.6) max
0.79 (20.1) min
1.5 (38.1)max.
0.6255 (15.89)
0.6245 (15.86)
Sand Boot
(4) 5/16 - 24
UNF-2A Threaded
Studs on 3” (76.2)
Dia. Circle
Page 18
PN793
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 18
5.6 4" MOTOR FUSE SIZING
TABLE 5-7: SINGLE PHASE Motor Fuse Sizing (115 and 230 Volt, 60 Hz, 3450 RPM)
Volts and Circuit Breaker Amps
(Maximum Rating per NEC)
Dual Element
Motor PENTEK Standard Time Delay Circuit
Type Part Number HP kW Volts Fuse Fuse Breaker
P42B0005A1 0.5 0.37 115 25 15 20
4" P42B0005A2 0.5 0.37 230 15 10 10
2-Wire P42B0007A2 0.75 0.55 230 20 10 15
P42B0010A2 1 0.75 230 25 15 20
P42B0015A2 1.5 1.1 230 30 15 25
P43B0005A1 0.5 0.37 115 30 20 30
4"
P43B0005A2 0.5 0.37 230 15 10 15
3-Wire
P43B0007A2 0.75 0.55 230 20 10 20
CSIR
P43B0010A2 1 0.75 230 25 15 25
P43P0005A2 0.5 0.37 230 15 10 10
P43B0007A2 0.75 0.55 230 20 10 15
4" P43B0010A2 1.0 0.75 230 20 10 15
3-Wire P43B0015A2 1.5 1.1 230 30 15 25
CSCR P43B0020A2 2.0 1.5 230 30 20 25
P43B0030A2 3.0 2.2 230 45 25 40
P43B0050A2 5.0 3.7 230 70 40 60
Fuse Sizing Based on NEC
Dual Element
Motor PENTEK Standard Time Delay Circuit
Type Part Number HP kW Volts Fuse Fuse Breaker
P43B0007A8 3/4 0.55 200 15 10 10
P43B0010A8 1 0.75 200 15 10 10
P43B0010A3 1 0.75 230 15 6 10
P43B0010A4 1 0.75 460 6 3 6
P43B0015A8 1 1/2 1.1 200 20 10 15
P43B0015A3 1 1/2 1.1 230 20 10 15
P43B0015A4 1 1/2 1.1 460 8 6 6
P43B0015A5 1 1/2 1.1 575 6 3 6
P43B0020A8 2 1.5 200 25 15 20
P43B0020A3 2 1.5 230 20 15 20
P43B0020A4 2 1.5 460 15 6 10
3-Phase P43B0020A5 2 1.5 575 10 6 10
P43B0030A8 3 2.2 200 35 20 30
P43B0030A3 3 2.2 230 30 15 25
P43B0030A4 3 2.2 460 15 10 15
P43B0030A5 3 2.2 575 15 10 10
P43B0050A8 5 3.7 200 60 35 50
P43B0050A3 5 3.7 230 45 30 40
P43B0050A4 5 3.7 460 25 15 20
P43B0050A5 5 3.7 575 25 15 20
P43B0075A8 7 1/2 5.6 200 80 50 70
P43B0075A3 7 1/2 5.6 230 70 45 60
P43B0075A4 7 1/2 5.6 460 40 25 35
P43B0075A5 7 1/2 5.6 575 30 20 25
TABLE 5-8: THREE PHASE Motor Fuse Sizing (230, 460, 200 and 575 Volt, 60 Hz, 3450 RPM,
60° and 75° C.)
PN793 11/20/09 9:21 AM Page 18
Page 19
PN793
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 19
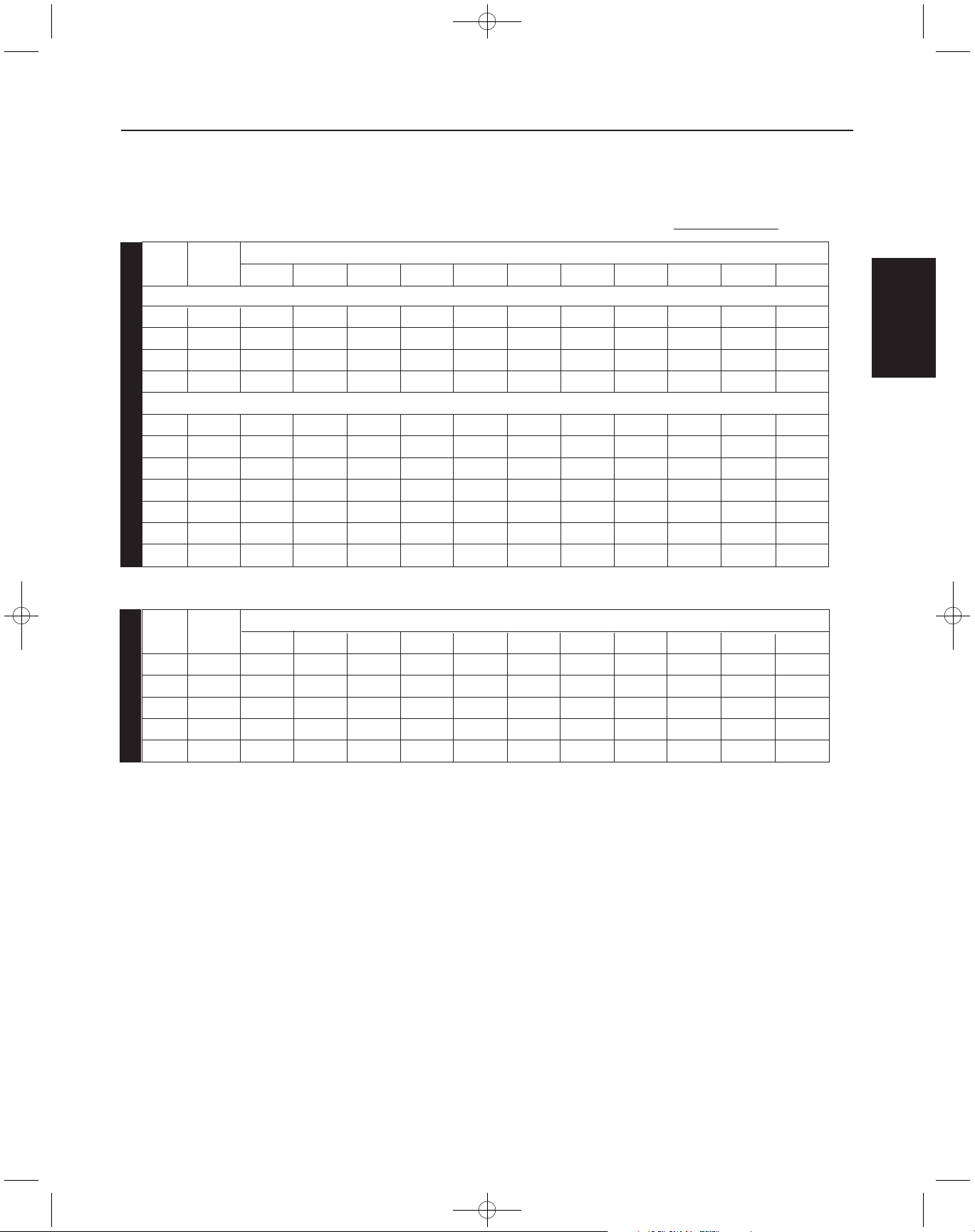
TABLE 5-9: Cable Lengths, SINGLE PHASE 115 and 230 Volt, 60 Hz, 3450 RPM, 2- and 3-wire
Motors, 60° and 75° C. Service Entrance to Motor: Maximum Length in F
eet
5.7 CABLE LENGTHS
XE-Series Motors
Wire Size, AWG
HP Volt 14 12 10 8 6 4 3 2 1 0 00
CSIR Control Boxes
1/2 115 87 138 221 349 544 867 1090 1376 1734 2188 2761
1/2 230 348 553 883 1398 2175 3467 4359 5505 6935 8753 –
3/4 230 264 420 670 1061 1651 2632 3309 4178 5264 6644 8383
1 230 226 359 573 908 1413 2252 2831 3575 4504 5685 7173
CSCR Control Boxes
1/2 230 447 711 1135 1797 2796 4458 5604 7078 8916 11254 –
3/4 230 348 553 883 1398 2175 3467 4359 5505 6935 8753 11044
1 230 304 484 772 1223 1903 3034 3814 4817 6068 7659 9663
1 1/2 230 197 314 501 793 1234 1968 2474 3124 3936 4968 6268
2 230 180 286 456 722 1123 1790 2251 2843 3581 4520 5703
3 230 133 211 337 534 830 1324 1664 2102 2648 3342 4217
5 230 – – 206 326 507 809 1017 1284 1618 2042 2577
* Table data are generated per NEC standards.
Wire Size, AWG
HP Volt 14 12 10 8 6 4 3 2 1 0 00
1/2 115 115 183 293 463 721 1150 1445 1825 2299 2902 3662
1/2 230 466 742 1183 1874 2915 4648 5843 7379 9295 11733 –
3/4 230 342 545 869 1376 2141 3413 4291 5419 6826 8617 10871
1 230 241 383 611 968 1506 2400 3018 3811 4801 6060 7646
1 1/2 230 199 317 505 801 1246 1986 2496 3153 3972 5013 6325
3-Wire in Feet
2-Wire in Feet
PN793 11/20/09 9:21 AM Page 19
Page 20
PN793
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 20
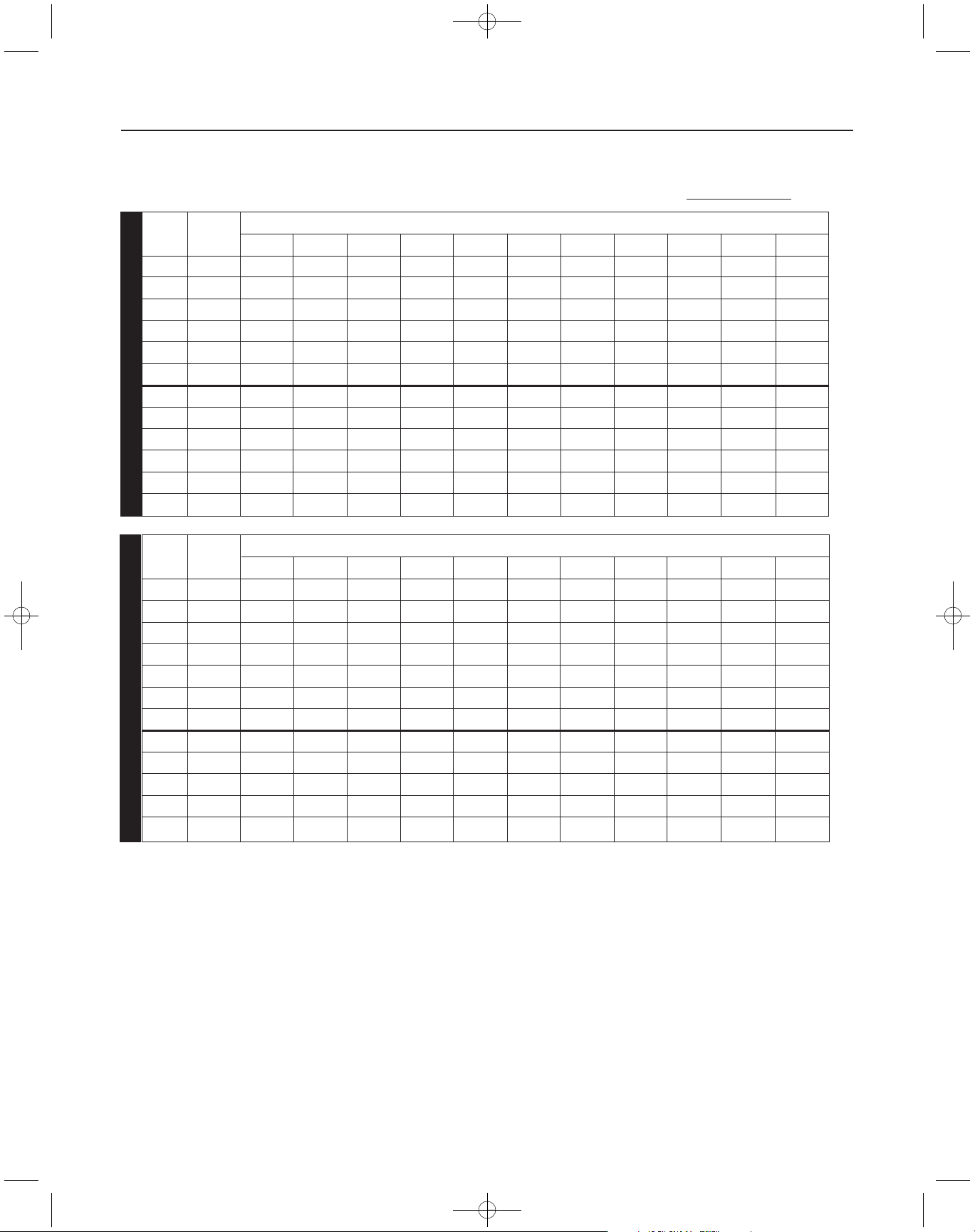
TABLE 5-10: Cable Lengths, THREE PHASE 230, 460, 200 and 575 Volt, 60 Hz, 3450 RPM
Motors, 60° and 75° C. Service Entrance to Motor: Maximum Length in F
eet
Wire Size, AWG
HP Volt 14 12 10 8 6 4 3 2 1 0 00
1 230 466 742 1183 1874 2915 4648 5843 7379
1 1/2 230 359 571 912 1444 2246 3581 4502 5685 7162 9040
2 230 288 459 732 1159 1803 2874 3613 4563 5748 7256 9155
3 230 217 345 551 872 1357 2163 2719 3434 4326 5460 6889
5 230 — — 318 503 783 1248 1569 1982 2496 3151 3976
7 1/2 230 — — — 334 519 827 1040 1314 1655 2089 2635
1 460 1753 2789 4448 7045
1 1/2 460 1370 2179 3475 5504
2 460 1153 1835 2926 4635 7212
3 460 827 1315 2098 3323 5171
5 460 516 820 1308 2072 3224 5140
7 1/2 460 325 516 824 1305 2030 3236 4068 5138 6472
* Table data are generated per NEC standards.
Wire Size, AWG
HP Volt 14 12 10 8 6 4 3 2 1 0 00
3/4 200 423 674 1074 1702 2648
1 200 346 551 879 1392 2166 3454 4342
1 1/2 200 265 421 672 1064 1655 2638 3317
2 200 217 344 549 870 1354 2158 2714 3427 4317 5449
3 200 159 253 403 638 993 1583 1990 2513 3166 3996
5 200 94 150 239 379 590 940 1182 1493 1881 2374 2995
7 1/2 200 64 101 161 255 397 633 796 1005 1266 1598 2017
1 1/2 575 2283 3631 5792
2 575 1660 2641 4212 6671
3 575 1336 2126 3390 5370
5 575 721 1147 1829 2897 4507
7 1/2 575 548 871 1390 2202 3426
Three Phase
Three Phase
PN793 11/20/09 9:21 AM Page 20
Page 21
5.8 4" MOTOR OVERLOAD
PROTECTION
Single Phase Motors
Single phase motors have overload protection either in the
motor or in the control box. Motors less than or equal to
1 HP have built-in protection. This automatic protection
will continue to cycle under a locked or stalled rotor
condition.
Single phase motors larger than 1 HP use overload
protection located in the SMC (Submersible Motor
Controls). These are manual overloads and must be
manually reset if an overload condition occurs.
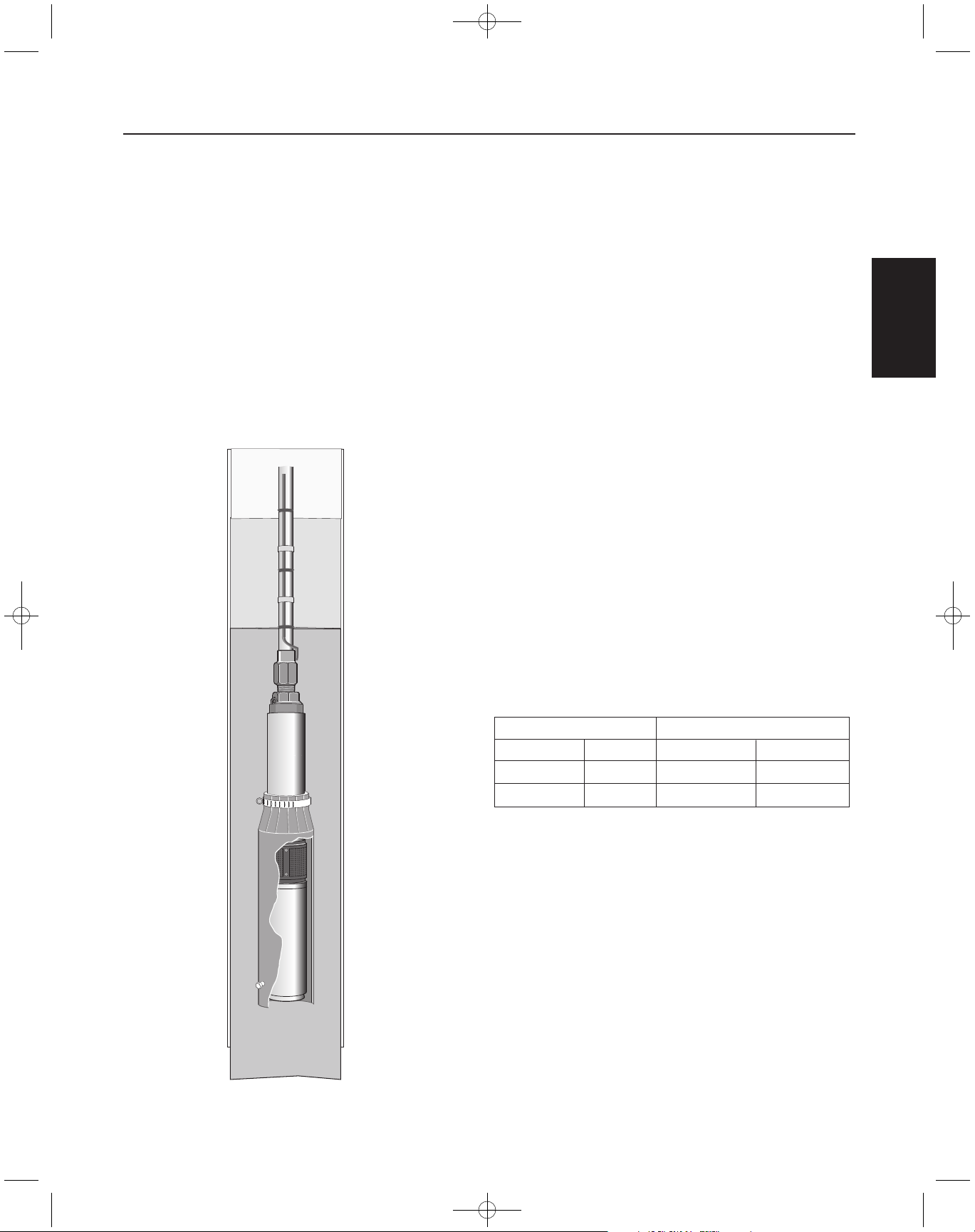
5.9 MOTOR COOLING
PENTEK 4" XE-Series motors are designed to operate to a
maximum SF (Service Factor) horsepower in water up to
86° F (30° C).
4" MOTORS: MINIMUM COOLING WATER FLOW OVER 3 HP
I.D of casing Flow GPM (LPM) required
4 1.2 (4.5
5 7 (26.5)
6 13 (49)
7 20 (76)
8 30 (114)
10 50 (189)
12 80 (303)
14 110 (416)
16 150 (568)
If the flow is less than specified, a flow-inducer sleeve can
be installed. This will act like a smaller casing size, and
force flow around the motor to aid cooling.
5.10 STARTING FREQUENCY
To extend the life of the pump motor and control, limit the
number of starts to 300 per day.
If higher starting frequencies are necessary, consult your
factory.
To prevent overheating, run motor for a minimum of one
minute.
Figure 5-2: Flow Inducer Sleeve
Motor Rating Maximum Starts in 24 Hours
HP KW Single Phase Three Phase
1/5 to 3/4 HP Up to .55 300 300
1 to 1-1/2 .75 thru 4 100 300
TABLE 5-11: Maximum starts in 24 hours
SECTION 5: XE-Series 4" Submersible Motors - 60 Hz 21
XE-Series Motors
PN793 11/20/09 9:21 AM Page 21
Page 22
SECTION 6:Variable Frequency Drives 22
PID-1, PID-6 INTELLIDRIVE Series
PN793
6.1 GENERAL SAFETY
Risk of high-voltage electrical shock from
the EMI/RFI Filter if the front cover of the VFD is open or
removed while power is connected to the VFD or the VFD
is running. The front cover of the VFD must be closed
during operation.
• After allowing at least 5 minutes for the EMI/RFI Filter
to discharge and before starting any wiring or
inspection procedures, check for residual voltage with
a voltage tester.
Risk of electrical shock if VFD is connected
to the power wiring before hanging the box. Always hang
the VFD box before connecting the wires to it.
Risk of electrical shock if the VFD is
handled or serviced with wet or damp hands. Always
make sure your hands are dry before working on the VFD.
Perform all operations on the HMI with dry hands.
Risk of electrical shock and hand injury. Do
not reach into or change the cooling fan while power is on
to the VFD.
Risk of electrical shock. Do not touch the
printed circuit board when power is on to the VFD.
Fire hazard if installed with incorrect or
inadequate circuit breaker protection. To make sure of
protection in the event of an internal fault in the VFD,
install the VFD on an independent branch circuit protected
by a circuit breaker (see Table 6-2, Page 23 for circuit
breaker sizing), with no other appliances on the circuit.
Risk of burns. The drive can become hot
during normal operation. Allow it to cool for 10 minutes
after shut-down before handling it to avoid burns.
NOTE: To avoid damage to the drive or problems with
the drive:
• Connect the output cables to 3-wire and 3-phase
motors as follows: Red to R, Yellow to Y, Black to B.
Any other order will reverse the motor rotation and
may damage the motor.
• Do not modify the equipment.
• Do not use power factor correction capacitors with this
VFD; they will damage both the motor and the VFD.
• Do not remove any parts unless instructed to do so in
the owner’s manual.
• Do not use a magnetic contactor on the VFD for
frequent starting/stopping of the VFD.
• Do not install or operate the VFD if it is damaged or
parts are missing.
• Before starting a VFD that has been stored for a long
time, always inspect it and test operation.
• Do not carry out a megger (insulation resistance) test
on the control circuit of the VFD.
• Do not allow loose foreign objects which can conduct
electricity (such as screws and metal fragments) inside
the VFD box at any time. Do not allow flammable
substances (such as oil) inside the VFD box at any
time.
• Ground the VFD according to the requirements of the
National Electrical Code Section 250, IEC 536 Class 1,
or the Canadian Electrical Code (as applicable), and
any other codes and ordinances that apply.
• All installation, service work, and inspections must be
done by a qualified electrician.
Carefully read and follow all safety instructions in this
manual or on drive.
Risk of high-voltage electrical shock
from EMI/RFI Filter inside Drive.
Make all wiring connections, then
close and fasten the cover before
turning on power to Drive.
DO NOT open the box when power is
connected to the Drive .
Before doing any
service or maintenance
inside the Drive:
1. DISCONNECT power.
2. WAIT 5 minutes for
retained voltage to
discharge.
3. Open box.
Before connecting or
disconnecting any wires
inside the Drive:
1. DISCONNECT power.
2. WAIT 5 minutes for
retained voltage to
discharge.
3. Open box.
EMI/RFI Filter
Hazardous voltage.
Drive internal components retain
high voltage for up to 5 minutes
after input power is disconnected.
EMI/RFI Filter carries high voltage
when pump is running.
Disconnect power and wait
5 minutes before opening and
removing VFD cover.
PN793 11/20/09 9:21 AM Page 22
Page 23
SECTION 6:Variable Frequency Drives 23
PID-1, PID-6 INTELLIDRIVE Series
PN793
6.2 DESCPRIPTION
The PENTEK INTELLIDRIVE is specifically designed to
operate 4” submersible pumps in water well applications.
Each drive is rated for horsepower and amp draw. Any use
of the drive outside of its intended use and design
parameters will void the warranty.
Transducer
The drive uses a 4-20mA, 0-100PSI pressure transducer to
control the speed of the motor.
The transducer senses pressure in the pipe and converts it
to an electrical signal which it sends to the drive. The drive
processes the signal in the PID (Proportional, Integration,
Derivative) control. When operating in PID mode the drive
increases and decreases the speed of the pump motor as
needed to maintain constant pressure in the system.
Fan
The PENTEK INTELLIDRIVE has a thermostatically
controlled internal fan. The fan may not operate under
normal operating conditions. It will automatically start
when necessary to cool the drive.
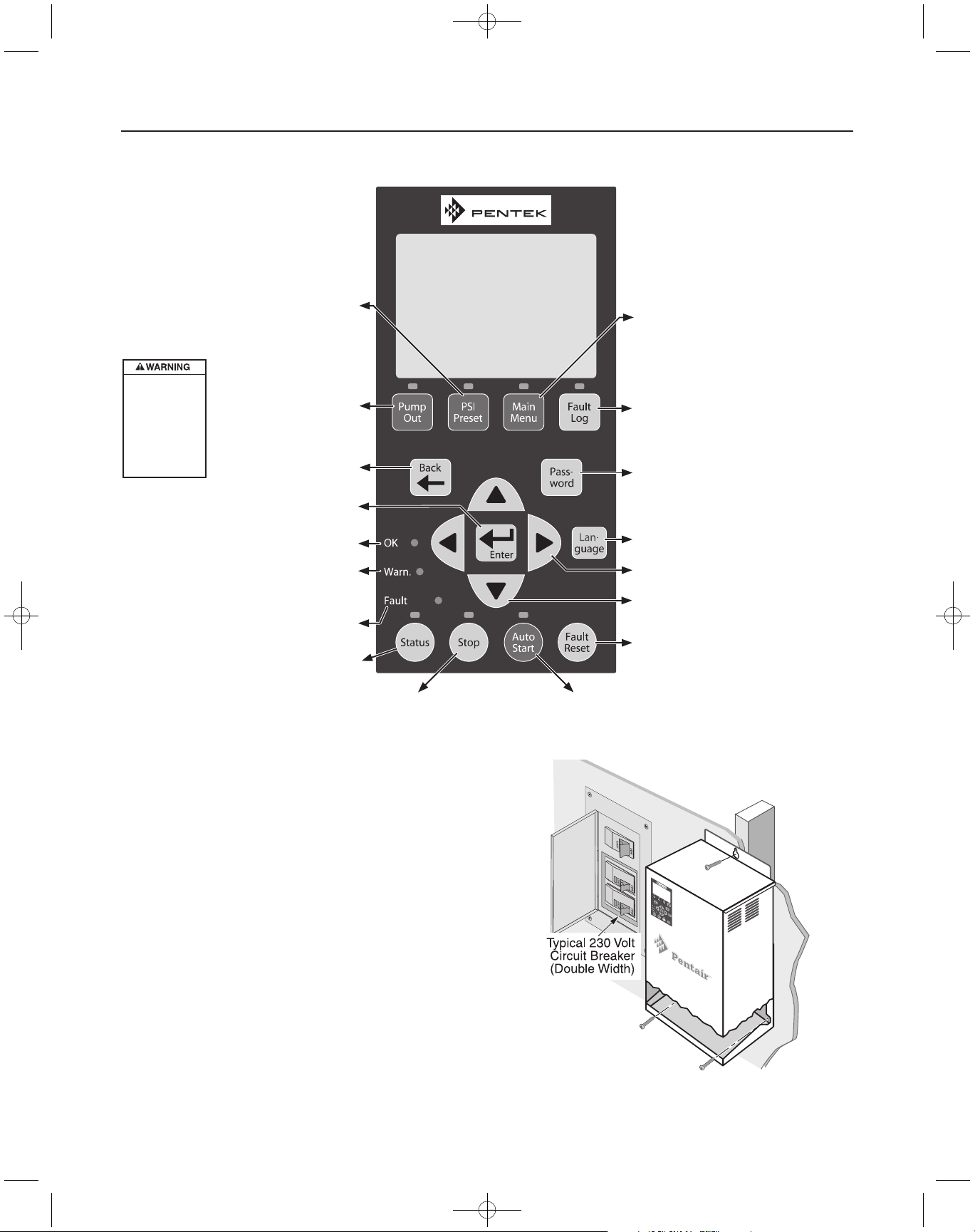
Keypad
The Keypad programs the drive, monitors the status of the
pump, and views faults if they occur. Each button has a
unique function (see Page 22). The LCD display shows a
text display of the status of the drive’s operation. Other
LEDs light up to indicate when certain buttons are pressed
or certain events occur.
VFD
PID-1, PID-6
Table 6-1: Model Number Structure
Voltage Rating:
1 = 190–265 Volt 1-Phase In,
3-Phase Out
6 = 190–265 Volt 1-Phase In,
1-Phase Out
PID – 1 – 10A1 – 1
PID-1- 10A1-1:
Product Family
PID = Pentek IntelliDrive
Max Amp Rating:
4A7 = 4.7 Amps
7A6 = 7.6 Amps
9A7 = 9.7 Amps
10A1 = 10.1 Amps
12A2 = 12.2 Amps
Enclosure T ype:
1 = NEMA 1 (Indoor Rated)
3 = NEMA 3R (Outdoor Rated)
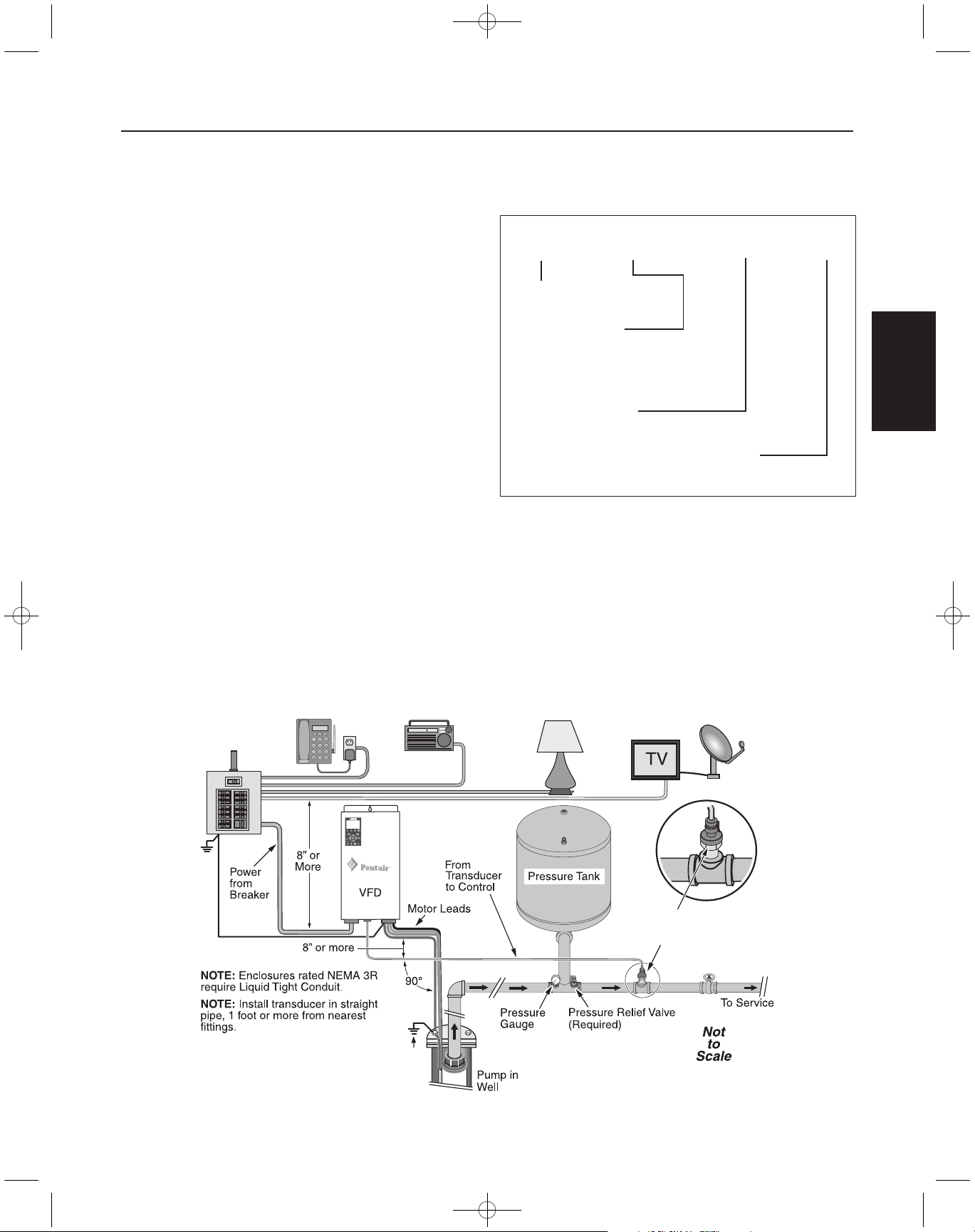
Figure 6-1: Overall Layout – Typical installation
PN793 11/20/09 9:21 AM Page 23
Transducer; install at
least one foot away from
pipe fittings on each side.
Grnd
6004 0509
Page 24
SECTION 6:Variable Frequency Drives 24
PID-1, PID-6 INTELLIDRIVE Series
PN793
6.3 INSTALLATION
Mounting (See Figure 6-3)
Mount the drive in an easily accessible area with
temperature maintained between –4°F and 104°F (–20°C
to 40°C). NEMA 1 enclosures must be mounted indoors;
NEMA 3R enclosures may be mounted outdoors with the
same ambient temperature limits.
To mount the drive, mark the location of the top keyhole
on the wall or stud. Drive a screw into the structure and
hang the drive on it. Back out the screw on the bottom of
the front cover and lift the cover off. Mark the locations of
the bottom two mounting holes. Mount the drive with
screws in all three holes.
Be sure that the ventilation holes are not blocked and that
there is enough space around the drive to allow free air
flow (minimum 3” clearance, top, bottom, and sides).
Once the drive is mounted, you are ready to connect
the wires.
Figure 6-2: Keypad functions
5997 0509
Figure 6-3
PN793 11/20/09 9:21 AM Page 24
Toggles the pressure setpoint
Hazardous
pressure.
Do not connect to
system or restrict
discharge flow
when running in
“Pump Out”
mode.
confirms numeric value changes
between 40, 60, and 70 PSI
(default is 60)
Runs the Drive at 45 Hz
(with no pressure control)
to allow the installer
to pump out the well
Changes the display to
the previous screen
Selects menu items and
Power is on to the Drive
Views and changes parameters
Shows the last 15 faults
With code, locks and unlocks the
password protected keys (default
password is 7777)
Toggles between English, Spanish,
and French (Default is English )
The Drive is in Temporary Performance
Mode (TPM) or Jam condition
A fault has occurred
Displays the Drive’s
urrent oper
c
changes the display parameters
ating conditions and
Stops the motor
Checks for line fill, then
starts the pump in constant
pressure mode
The left and right arrows
move the cursor.
The up and down arrows scroll through
the menus and change numeric values.
Resets the fault
that stopped the pump
6007 0509
Page 25
SECTION 6:Variable Frequency Drives 25
PID-1, PID-6 INTELLIDRIVE Series
PN793
Wiring
To allow for ease of wiring, the wiring area is free of
electronics other than the terminals. Conduit holes and
knockouts are located so that the wire can be fed straight
through to the connectors, with minimal bending. The
terminals accept 6-14 AWG wire.
NOTE: For convenience in wiring, the input and motor
terminals unplug from the box. Pull them down to remove
them for ease of access. See Figure 6-4.
BE SURE that when you replace them, they are completely
pushed in and seated.
Note: The best practice is to connect all output wires first
and all input wires last.
Output Connections (See Figure 6-5, Page 24):
See Tables 6-5 and 6-6, Page 32, for correct wires sizes,
VFD to motor.
The output of PID-1 Series drives is 230V three phase
power.
The output of PID-6 Series drives is 230V single phase
power.
NOTE: PID-1 series drives will not operate single phase
motors. PID-6 series drives will not operate three phase
motors.
The output power terminals (motor wire connections) are
located on the lower right side of the drive and are labeled
R (Red), Y (Yellow), and B (Black). Feed the motor cable
through the 3/4” conduit hole on the bottom right side and
into the appropriate terminals. If the wire is large enough
to require a larger conduit hole, remove the 1-1/4”
knockout and use the appropriate conduit connections.
Attach the motor ground wire to the grounding lug, located
to the upper right of the terminal block. Attach the motor
power wires to the terminals as shown in Figure 6-5,
Page 24.
VFD
PID-1, PID-6
Wire Size Minimum 240VAC
Controller Motor CB to VFD C.B. Size Generator
Model No. Volts/Hz/Ph H.P. Amps (AWG) (Amps) Cap’y (kVA)
PID-1-4A7-X 230/60/3 1 4.7 12 20 4.2 kVA
PID-1-7A6-X
230/60/3 1.5 6.1
10 30 6.9
230/60/3 2 7.6
PID-1-10A1-X 230/60/3 3 10.1 8 40 9.1
230/60/1 0.5 4.9
PID-6-9A7-X 230/60/1 0.75 6.3 12 20 4.4
230/60/1 1 7.2
PID6-12A2-X
230/60/1 1.5 11.1
10 30 7.4
230/60/1 2 12.2
Table 6-2: Circuit Breaker and Wire Sizes
Figure 6-4: Pull the input and motor terminals down to
unplug them for ease of wiring.
PN793 11/20/09 9:21 AM Page 25
Page 26
SECTION 6:Variable Frequency Drives 26
PID-1, PID-6 INTELLIDRIVE Series
PN793
Pressure Tank Recommendations:
Minimum tank size is 5 gallons. Use a pre-charged
pressure tank with the Drive. The tank size must equal at
least 20% of the pump’s rated flow in gallons per minute
(GPM), but cannot be less than 5 gallons capacity. For
example, a pump rated at 10 GPM would require a tank of
5 gallons capacity or larger. A pump rated at 50 GPM
would require a 10 gallon tank or larger. A larger tank will
reduce cycling of the pump.
NOTE: Set the pressure tank’s pre-charge to 70% of the
system operating pressure. When using an external set
point as well as an internal set point, pre-charge the tank to
70% of the lower set point of the two. Some applications
may require a different percentage when figuring the set
point.
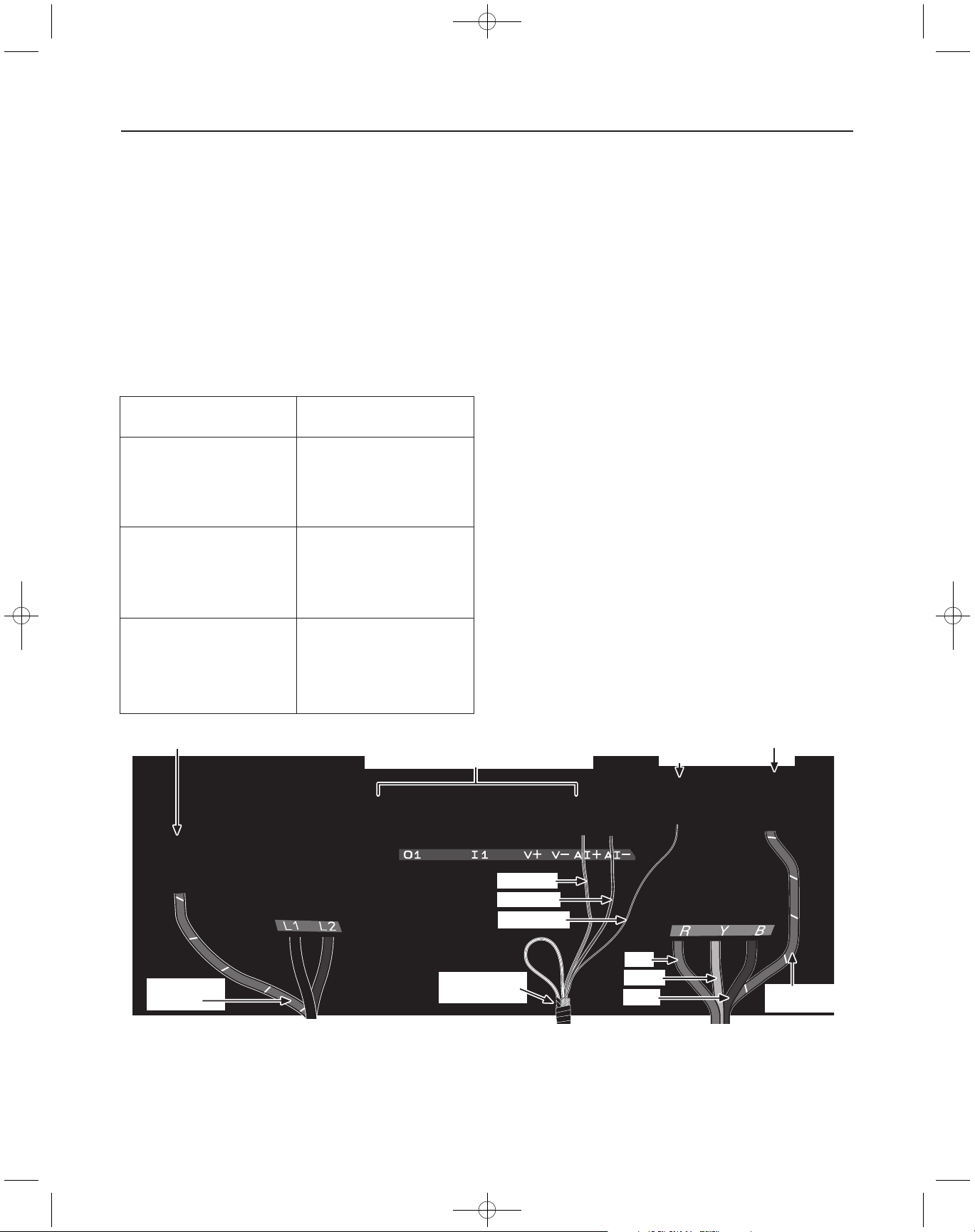
Transducer Connections (See Figure 6-5):
Use the transducer provided with the drive. Install the
transducer downstream of the tank. Install the transducer in
a tee in a straight section of pipe with at least 1 foot of
straight pipe on each side of the tee (that is, all fittings must
be at least one foot away from the transducer).
Feed the transducer cable through the open 1/2” conduit
hole on the bottom of the drive enclosure.
The transducer terminals, marked AI+ and AI-, are located
to the left of the output terminals. Connect the red wire of
the transducer cable to AI+, connect the black wire to AI–,
and connect the cable shield to the metal lug to the right.
NOTE: Do not use the clear wire on the transducer cable
for any connections; tape the end and tie it back to the
cable with electrical tape so that it does not touch any
other components or connections.
Note: To connect the wires;
1. If the wire ends are not pre-stripped, strip them back
about 1/2”.
2. Push the spring terminals up (back).
3. Insert the wires.
4. Release the spring terminals.
Table 6-3: Control Pressure Set Point and Tank
Pre-Charge Pressure Values (PSI)
Pressure Point Precharge
Setting (PSI) Pressure (PSI)
25 18
30 21
35 25
40 28
45 32
50 35
55 39
60 (Default) 42
65 46
70 49
75 53
80 56
85 60
90 63
95 67
Cable Shield
Clear Wire; tape
end to cable.
Red to AI+
Black to AI–
Transducer Cable
Connections
Connections for Both 3-Phase
and 3-Wire Motors.
Cable Shield Lug
Output Ground Screw
Input Power Connections
Input Ground Screw
See Figures 5–9, Page 11, for information
about I/O Connections O1, I1,V+, and V–.
Red
Yellow
Black
Green/Yellow
(Ground)
Green/Yellow
(Ground)
6012 0509
Figure 6-5: Basic Wiring Connections for Startup.
NOTE: Do not connect the clear wire on the transducer cable to any terminal; instead, tie it back with electrician’s tape so
that it cannot touch any other components or connections.
PN793 11/20/09 9:21 AM Page 26
Page 27

SECTION 6:Variable Frequency Drives 27
PID-1, PID-6 INTELLIDRIVE Series
PN793
Input Connections (See Figure 6-5):
The input power terminals are located on the lower left
side and marked L1 and L2 (see Figure 6-5); there is a
ground lug for the input ground wire to the left of the
connector. Feed the wire through the 3/4” conduit hole on
the bottom left side and into the appropriate terminals. If
the wire is large enough to require a larger conduit hole,
remove the 1-1/4” knockout and use the appropriate
conduit connections.
To determine the correct wire sizes for your installation,
see Table 6-2, Page 23.
NOTE: The drive only accepts 230V single phase input
power. If your incoming power does not match this, have a
competent electrician alter it to 230V/1Ph before
connecting the drive.
Lightning/Surge Protection
Lightning arrestors or other surge suppressing devices can
be used with this product. MOV (Metal Oxide Varistor),
SOV (Silicon Oxide Varistor), or a flashover type can be
used when wired between the drive and the circuit
breaker. If a lightning arrestor is to be used between the
drive and the motor, a flashover type arrestor is
recommended.
6.4 INITIAL STARTUP
PROGRAMMING PROCEDURE
Be Sure that the cover is installed before operating the
drive.
Most installations will only require the initial startup
settings. However, the installer may need to set additional
parameters occasionally. See “Advanced Programming”,
Page 26, for information about accessing all parameters,
explanations of their functions, and procedures for
changing parameter values, if necessary.
1. Program the Drive: Apply power to the PENTEK
INTELLIDRIVE. “Setup Guide” will appear.
A. Service Factor Amps (See Sidebar, “Service Factor
Amps”)
1. Use DIRECTIONAL Arrows to enter the correct
service factor amps (see Table 6-4)
2. Press ENTER to save the entry.
B. Current Time:
1. Use DIRECTIONAL Arrows to scroll to correct
time
2. Press ENTER to save the time.
C. Current Date:
1. Use DIRECTIONAL Arrows to scroll to
correct date
2. Press ENTER to save the date.
• To change any values, press Back to return to the
previous screen.
• To change any values after startup, go to Main Menu
and edit the parameters as needed.
VFD
PID-1, PID-6
Service Factor Amps (See Table 6-4)
To get the best performance out of your pump, be
sure you enter the correct Service Factor Amps
(SF Amps) in the PENTEK INTELLIDRIVE.
• Entering SF Amps
higher
than the motor rating
lets the drive supply more amps to the motor
than the motor is designed for and may allow the
motor to overheat;
• Entering SF Amps
lower
than the motor rating
limits the output amps to less than the motor is
designed for and will reduce the performance of
the pump.
• For any 1-Phase motor, the correct Ser vice
Factor Amp rating for the PENTEK
INTELLIDRIVE is Cap Start/Cap Run amps. This
may not match the motor nameplate, which (for a
3-Wire, Single Phase motor) will generally be
Cap Start/ Induction Run Amps.
• For any 3-Phase motor, use the motor nameplate
Service Factor Amp rating.
NOTE: PENTEK submersible motors may differ
from motors of the same horsepower from other
manufacturers.For 3-Wire, 1-Phase motors from
all other submersible motor manufacturers,
enter the motor manufacturer’s CS/CR ser vice
factor amps for your motor. For 3-Phase motors,
use the motor nameplate amps.
Part Number Volts/Hz/Ph HP S.F. Amps
Three Phase Motors
P43B0010A3 230/60/3 1.0 4.7
P43B0015A3 230/60/3 1.5 6.1
P43B0020A3 230/60/3 2.0 7.6
P43B0030A3 230/60/3 3.0 10.1
3-Wire Single Phase Motors
P43B0005A2 230/60/1 0.5 4.9
P43B0007A2 230/60/1 0.75 6 .3
P43B0010A2 230/60/1 1.0 7.2
P43B0015A2 230/60/1 1.5 11.1
P43B0020A2 230/60/1 2.0 12.2
Table 6-4: Pentek Motor Service Factor Amps
PN793 11/20/09 9:21 AM Page 27
Page 28

SECTION 6:Variable Frequency Drives 28
PID-1, PID-6 INTELLIDRIVE Series
PN793
2. 80 Hz Operation (if necessary—See “60 to 80 Hz
Operation,” below):
A. Press MAIN MENU button,
B. Use DIRECTIONAL Arrows to scroll to motor; press
ENTER.
C. Use DIRECTIONAL Arrows to scroll to Set Max
Frequency; press ENTER.
D. Use DIRECTIONAL Arrows to change to 80 Hz;
press ENTER.
3. Pump out the well (if necessary):
Direct the pump’s discharge to an appropriate location
not connected to the system and press Pump Out. The
pump will run at 45 Hz.
Adjust frequency as appropriate:
A. Press ENTER
B. Change frequency value
C. Press ENTER again.
Run the drive in this mode until the well discharge runs
clear, then press the ‘Stop’ button to stop the drive.
Hazardous pressure. In Pumpout mode,
the pump runs at a constant speed, which can cause
very high pressure if flow is restricted.
4. Check List:
Make sure that the system has a properly sized relief
valve and pressure tank.
Make sure that the pressure tank’s precharge is
correct. See Table 6-3, Page 24.
Make sure that the pump discharge is connected to the
system.
5. System Start:
Open valves at the ends of lines so that air will escape
during pressurization.
Press Auto Start; close valves at the ends of lines after
all air has escaped.
The system goes into Constant Pressure Operation as
soon as the transducer registers 10 PSI. If system
pressure does not reach 10 PSI within 3 minutes, the
drive will stop. Press AutoStart again to restart line fill.
60 to 80 Hz Operation (See 2, above):
When installing the PID-1 Series PENTEK INTELLIDRIVE
with a motor and liquid end of the same HP rating, operate
it at 60 Hz (the default value). The drive can be operated at
frequencies of up to 80 Hz when the installation uses a
large motor with a small pump (For example, a 1 HP pump
with a 2 HP 3-Phase motor. This combination will equal
the performance of a conventional 2 HP pump.).
Go to Main Menu as described in No. 2 (above). Be sure
to press Enter to save the new Max Frequency selected.
The drive will now use the new value selected.
NOTE: The drive will not allow the output amps to go
above the Service Factor Amps selected on the keypad.
Because of this, some 80 Hz operations may be limited by
a “TPM: Service Amps” warning. This protects the motor
and may be a common occurance.
6.5 ADVANCED PROGRAMMING
Locking & Unlocking the Keypad
Password: The password locks or unlocks the blue buttons
on the keypad. All PENTEK IntelliDrive units are shipped
from the factory with the default password ‘7777’. It can
be changed to any other 1 to 4 digit number. To reset the
password to a unique password for your unit, unlock the
key pad (see below) and go to “SETTINGS/Password”,
Page 27.
If the installer does not press the PASSWORD button, then
the Keypad will automatically lock 60 minutes after the
drive is powered up. The timeout period is adjustable
through the Main Menu/Settings/Password.
To unlock the keypad press PASSWORD, use the
directional arrows to enter the proper numeric code, and
press ENTER.
Note: For more detailed information on Keypad functions,
see the “Parameters” section.
Changing a Parameter Value:
NOTE: This procedure works for ANY parameter.
1. Find the parameter and display the current parameter
value on the screen.
2. Press ENTER to enable editing of the parameter.
3. Use the UP, DOWN, LEFT, and RIGHT arrows to
change the parameter values.
4. Press ENTER again to save the new parameter value.
NOTE: A “shorthand” way to remember this is:
• Press ENTER to change a value;
• Press ENTER again to save it.
• If you don’t save the new value, then as soon as you
change the screen, you lose it.
Keypad Access Parameters
Pump Out Speed: Press Pump Out. The Drive will start the
pump in a constant speed mode (default 45 Hz). The
pump will run until you push Stop or Auto Start. If
necessary to change the speed, Follow steps 2-4 above to
change the parameter.
PSI Preset: Press PSI Preset; follow steps 2-4 above to
change the parameter. The default is 60 PSI, but the
parameter can be set to 40, 60, or 70 PSI.
PN793 11/20/09 9:21 AM Page 28
Page 29

SECTION 6:Variable Frequency Drives 29
PID-1, PID-6 INTELLIDRIVE Series
PN793
Pressure Setpoint: Press Auto Start, then follow steps 2-4
under “Changing a Parameter Value,” Page 26. Use the
directional arrows to change the pressure by 1 or 10 PSI
increments.
• NOTE: This parameter allows you to change either the
Internal or the External Setpoint, depending on which
one is referenced at the time you are making the
change.
• NOTE: To change the setpoint before starting the
pump, go to the Main Menu/Settings/Setpoints/
Internal Setpoint.
• NOTE: If this value is changed from the default value
of 60 PSI, you must adjust the tank pressure
accordingly (see Table 6-3, Page 24).
Language: Press Language; follow steps 2-4 under
“Changing a Parameter Value,” Page 26, using the UP or
DOWN arrows to scroll through the available languages
(English, French, or Spanish; default is English).
• NOTE: To change the setpoint before startup, go to the
Main Menu under “Settings”.
Main Menu Parameters
The Main Menu has six secondary menus (plus a Reset)
that allow access to the Advanced Programming
parameters: 1) SETTINGS, 2) MOTOR, 3) SENSOR, 4) PIPE
BREAK, 5) DRY RUN, 6) I/O. The basic structure and
navigation instructions are listed below. Use the UP and
DOWN arrows to scroll to the next secondary menu or
submenu, or to a parameter. Press Enter to go into a
Submenu or to edit a parameter.
1) SETTINGS: (HAS 5 SUBMENUS)
Time (2 parameters):
Hour:
Allows you to change the time of day.
Date:
Allows you to change the calendar day.
PID Control: Changing these parameters is NOT
recommended. These parameters control the drive’s
reaction to pressure changes in the system. They
should be considered as a group. If it seems necessary
to alter anything in this group, please call Pentek
Customer Service at 1-866-9PENTEK (1-866-973-
6835) BEFORE YOU START. Also, note that the last
item on the main menu resets ALL parameters to the
default values.
Sleep (5 parameters plus Reset):
Boost Differential:
Raises the system pressure
slightly before going into sleep mode. Units are in
PSI. The default boost value is 3 PSI. (i.e., with
Boost Differential set to 3 PSI and Pressure Setpoint
set to 60 PSI, the system pressure will rise to 63 PSI
before the drive goes to sleep). Maximum is 10 PSI,
minimum is 3 PSI.
Boost Delay:
The length of time (in seconds) that
the drive monitors the system before boosting the
pressure. Default is 60 seconds, maximum is 300
seconds, minimum is 30 seconds.
Wakeup Differential:
The total pressure drop from
the setpoint that the drive must see to come out of
Sleep mode. The default setting is 5 PSI. (i.e., with
the Wakeup Differential set to 5 PSI, the drive will
wake up when the pressure in the system has
dropped 5 PSI below the system Pressure Setpoint.)
Maximum is 15 PSI, minimum is 5 PSI.
Wake Delay:
The time it takes to ramp down to the
Wake Up pressure. Default is 15 seconds,
maximum is 120 seconds, minimum is 3 seconds.
Sleep 2 PSI:
A setting to prevent Over-Pressure. If
the system pressure rises enough that the drive
reaches the Sleep 2 PSI setpoint, the drive will go
to sleep for one minute. Default pressure is 80 PSI,
maximum is ‘Max Sensor’ value minus 3 PSI,
minimum is 15 PSI.
• NOTE: If the Internal or External Setpoint is set to
a value that is near, at, or above the Sleep 2 PSI
setpoint, you may experience nuisance tripping.
In this case, raise the Sleep 2 PSI setpoint until
the nuisance tripping stops.
Reset to defaults:
Default value is NO. Change to
YES to reset all Sleep parameters to their default
values.
Password (2 parameters):
Password Timeout:
Sets the time (in minutes) that
the drive takes to lock out the password-protected
(blue) buttons on the keypad. The range is 1 – 360
minutes; the default is 60 minutes. When drive
programming is complete, a timer starts. Once it
reaches the time set in this parameter the buttons
automatically lockout.
Password:
The Password locks or unlocks the blue
buttons on the keypad. The password is a number
(default is 7777) and can be changed to any 1- to
4-digit number.
Setpoints (2 Parameters):
Internal Setpoint:
The main pressure setting used by
the drive. The default value is 60 PSI. Maximum is
the ‘Max Sensor’ value minus 3 PSI, minimum is
15 PSI.
External Setpoint:
The Drive’s pressure reference
when the External Input is set to External Setpoint
and the proper drive is connected to it (see I/O
section, Pages 28 and 29). Default is 40 PSI,
Maximum is ‘Max Sensor’ minus 3 PSI, minimum is
15 PSI.
VFD
PID-1, PID-6
PN793 11/20/09 9:21 AM Page 29
Page 30

SECTION 6:Variable Frequency Drives 30
PID-1, PID-6 INTELLIDRIVE Series
PN793
2) MOTOR (3 Parameters plus Reset):
Service Factor Amps:
The service factor amps of the
motor. This value is entered during the setup
process and can be changed if necessary. For your
PENTEK motor, use the value listed in Table 6-4,
Page 25. This value may differ slightly from the
motor’s nameplate amps. For other manufacturer’s
3-wire, 1-Phase motors, use the Cap Start/Cap Run
values supplied by the motor manufacturer. For
3-Phase motors, use motor manufacturer’s service
factor amps or nameplate amps.
Min Frequency:
The minimum frequency that the
drive will send to the motor (this translates to the
slowest speed at which the motor will run). The
default is 30 Hz. If necessary this value can be
increased, but cannot exceed the Max Frequency
value.
Max Frequency:
This is the maximum frequency
the drive will send to the motor (this translates to
the highest speed at which the motor will run).
The default is 60 Hz. If necessary the value can be
raised up to 80 Hz. for 3-phase (PID-1) units.
Reset to defaults:
Default value is NO. Change to
YES to reset all Motor parameters to their default
values.
3) SENSOR (2 Parameters plus Reset):
Min Pressure (PSI):
The minimum pressure of the
transducer (0 PSI). The default is 0 PSI. Do not
change this value unless you are using a transducer
other than the one shipped with the drive, and the
transducer being used requires a different minimum
setting.
Max Pressure (PSI):
The maximum pressure of the
transducer (300 PSI). The default is 100 PSI. Do not
change this value unless you are using a transducer
other than the one shipped with the drive, and the
transducer being used requires a different
maximum setting.
Reset to defaults:
Default value is NO. Change to
YES to reset all Sensor parameters to their default
values.
4) PIPE BREAK (2 Parameters):
Pipe Break Detection:
Detects a possible leak in
the system. The Default value is ENABLED. Change
to DISABLE to disable Pipe Break Detection.
Number of days with no sleep:
The maximum
number of days that the drive will operate without
going to sleep. If the maximum is exceeded, the
drive stops the pump with a Pipe Break Fault.
Default is one day. Range is 1–24 days.
5) DRY RUN (3 Parameters):
Auto Reset Delay:
The delay (in minutes) that the
drive will wait before attempting to restart after a
Dry Run Fault. Default is 10 minutes. Range is
3–60 minutes.
Number of Resets:
The number of times that the
drive will attempt to restart after a Dry Run Fault.
Default is 3. Range is 0–5.
Reset Window (Read Only):
The time window
allowed for resets after a Dry Run Fault. This is
calculated based on the values in the two
parameters above (Auto Reset Relay and Number
of Resets).
6) I/O (Two Submenus):
External Input (4 parameters – see Figures 6-6 through
6-9, Page 29).
NOTE: An external device must be connected before
changing these parameters:
Unused:
The default.
Setpoint:
Used with devices like automatic
sprinkler systems that start and stop on a timeclock.
When the timeclock starts the system, SETPOINT
tells the drive to operate at the External Setpoint
pressure (under the Settings menu) until the
external device switches off.
External Fault:
Stops the pump and indicates
EXTERNAL FAULT. Used to alert the user to
problems with external devices.
Run Enable:
Used with external switches (for
example, float switches) connected to I1 to allow
the drive to operate when the external switch is
ON, and stops the drive when the external switch
is OFF.
Relay Output (3 Settings—See Figures 6-6 through
6-9, page 29):
Unused:
Selected when nothing is connected to the
O1 terminals.
Running:
Can turn an external device on or off
when the drive is running the pump.
Fault:
Can turn an external device (such as an
alarm or autodialer) on or off if the drive has a
fault.
Reset to Factory defaults:
Change NO to YES to reset all the parameters in the VFD
(including all sub-menus) to the factory-set default values.
NOTE: This will display the startup menu. You must reenter the information required for startup (see “Initial
Startup Programming Procedure”, Page 25).
PN793 11/20/09 9:21 AM Page 30
Page 31

SECTION 6:Variable Frequency Drives 31
PID-1, PID-6 INTELLIDRIVE Series
PN793
6.6 I/O CONNECTIONS
The I/O terminals are located in the center of the wiring
compartment, to the left of the transducer terminals. The
Relay Output terminal is marked O1. The Relay Output
terminal powers an external device (warning light, etc.).
The External Input terminal is marked I1. The External
Input terminal allows the Drive’s operation to be
coordinated with or limited by an external device (float
switch, etc.). Each can be programmed for use with certain
external devices; see “6) I/O (Two Submenus),” Page 28,
the Parameters section (Page 26) for further information.
Two 1/2” conduit knockouts are provided on the bottom of
the drive enclosure for the I/O wires.
External Input Rating:
The unique design of the PENTEK INTELLIDRIVE allows
this input to be 24V DC or 24-230V AC. Power can be
supplied (24VDC) from terminals V+ and V– to the right of
I/O terminal I1. See Figures 6-6 and 6-7.
Output Relay Rating:
The unique design of the PENTEK INTELLIDRIVE allows
this output to be 24V DC or 24-230V AC. Power can be
supplied (24VDC) from terminals V+ and V– to the right of
I/O terminal I1. See Figures 6-8 and 6-9. The Output Relay
is rated at 5A @ 30VDC or 8A @ 230VAC.
Note: To connect the wires to either terminal:
1. Strip the wires back about 1/2”.
2. Push the spring terminals up (back).
3. Insert the wires.
4. Release the spring terminals.
VFD
PID-1, PID-6
+
–
Figure 6-7: External Input using external power supply
(can also be an A.C. source).
Figure 6-6: External Input using 24VDC and power from
terminals V+/V–.
Figure 6-8: Output relay example using 24VDC supply.
+
–
Figure 6-9: Output relay example using external supply.
NOTE: The external input and output relay can accept 24VDC. It also accepts AC voltage up to 230 volts.
PN793 11/20/09 9:21 AM Page 31
Page 32

SECTION 6:Variable Frequency Drives 32
PID-1, PID-6 INTELLIDRIVE Series
PN793
6.7 TROUBLESHOOTING
Fault Display Possible Causes Actions
Over Shorted output. Check for any shorts in the motor cables.
Current Motor current exceeded the S. F. Amp Make sure that motor Service Factor Amps
are correct.
Motor oversized or pump undersized. Make sure that pump and motor are sized correctly.
Pump Jammed or locked rotor. Pull pump; check for debris in pump
Over Power is cycling on and off. Check for a generator or for switching on
Voltage the input line.
Faulty check valve on pump. Check for back flow in the system.
Under Low input voltage. Make sure that input voltage is above 190VAC
Voltage No power for a short period of time. Check for brown out conditions
Excessive load current. Make sure motor is sized correctly for the
application
Loss of a motor phase. Make sure correct voltage is present on all
motor leads.
Loss of an input line. Make sure correct voltage is present on all
input lines.
Rotor Jam Exceeding S.F. Amps Make sure Service Factor Amps entered are correct.
Make sure pump and motor are correct.
Locked rotor. Pull pump; check for debris in pump.
Dry Run Well draws down too far, pump runs dry. Check water depth.
Under sized pump or motor. Make sure pump and motor are sized correctly.
Leak in the pipe system. Check system for leaks.
Intermittent transducer connection. Check transducer cable for loose
connections or damaged insulation.
Cannot reach pressure setpoint. May need to reduce pressure setpoint.
Possible Leak Check for a broken pipe or a large leak.
Ground Ground fault sensed in motor Make sure motor cable does not exceed
Fault cables or in motor. max length in specifications.
Check for damage or breaks in motor cables.
Check motor.
Motor cable too long Length of cable limited to 1,000’ unless a filter is
used to reduce capacitance between motor wires.
Open Intermittent connection. Check transducer cable for loose connections or
Transducer broken or damaged wires.
Open Connection Check transducer wires for correct connections and
verify secure cable connection to transducer.
Failed transducer. Check voltage at the transducer terminals
(12-24Vdc). If voltage is present, then transducer is
faulty. Replace the transducer.
Shorted Short in transducer wires. Check for shorted transducer wires,
Transducer reversed leads, or damaged insulation.
Failed transducer. Disconnect transducer from cable and press auto
start; if the error now reads “Open Transducer”
(and leads are not reversed) then replace the
transducer. If it still reads “Shorted Transducer”,
then the cable has a short; replace the cable.
PN793 11/20/09 9:21 AM Page 32
Page 33

SECTION 6:Variable Frequency Drives 33
PID-1, PID-6 INTELLIDRIVE Series
PN793
VFD
PID-1, PID-6
Fault Display Possible Causes Actions
Hard Exceeded Max faults allowed Check Fault log for list of faults. Correct
Faults in 30 minutes. issues. Press “Fault Reset”.
Any fault lasting continuously for Look in the Fault Log for the fault preceding the
30 minutes (including auto reset faults Hard Fault to determine what caused the Hard
lasting more than 30 minutes). Fault; refer to that fault’s troubleshooting section.
Over Excessive internal drive temperature. Make sure that the ambient temperature is
Temperature not above 60°C (104°F)
Make sure that the fan is operational and
unobstructed.
Make sure that all vents are clear.
Drive goes into TPM and limits the motor
current until it is within the operating temperature.
Pipe Break Leak detected. Check for any leaks in the pipe system.
Application calls for long run times. Extend run-time limitation: Go to ‘Main Menu,
Pipe Break, No. of Days without Sleep’ to verify
preset value and change if needed.
Disable Pipe Break Fault: Go to ‘Main Menu,
Pipe Break, Disable Pipe Break Detection’ to disable
this function if needed.
Internal Fault Internal voltages are out of range. Drive will auto reset and try to clear fault; press
Fault Reset to try to reset fault, then try to run pump.
If fault continues, replace drive.
Hardware Internal hardware failure. Press Fault Reset to try to reset fault, then try to
Fault run pump. If fault continues, replace drive.
External Fault External device detected a fault Check the external device.
condition and closed the I1 input.
Open Lead Motor has an open lead. Make sure that all motor lead connections
are tight and secure.
Motor’s thermal overload tripped. Wait for
it to cool and then restart pump.
Warning Cause Drive Operation
Over Current Motor current has exceeded S F Amps. Drive goes into TPM and limits the motor current.
TPM: Service Motor current has exceeded S F Amps. Drive goes into TPM and limits the motor current.
Amps
TPM: Speed Drive internal temperature limit Drive goes into TPM and limits the motor current
Reduced exceeded. until it is within operating temperature range.
Jam Warning Debris in pump has locked rotor. Drive reverses or pulses motor to try to free it.
NOTE: No user action is required when a Warning is displayed.
PN793 11/20/09 9:21 AM Page 33
Page 34

SECTION 6:Variable Frequency Drives 34
PID-1, PID-6 INTELLIDRIVE Series
PN793
6.8 WIRING SIZING, REPAIR PARTS,
SPECIFICATIONS
VFD PENTEK
Maximum Cable Length in Feet (Meters)
Model Motor H.P. Volts/Hz/Ph 14AWG 12AWG 10AWG 8AWG 6AWG
3 Phase
PID-1-4A7
P43B0010A3 1.0 230/60/3 449(137) 715(218) 1000(305)
PID-1-7A6
PID-1-7A6 P43B0015A3 1.5 230/60/3 346(105) 551(168) 878(268) 1000(305)
PID-1-7A6
P43B0020A3 2.0 230/60/3 278(85) 442(135) 705(215) 1000(305)
PID-1-10A1
PID-1-10A1 P43B0030A3 3.0 230/60/3 209(64) 333(101) 530(162) 840(256) 1000(305)
Table 6-5: AWG Wire Sizing, VFD to 3-Phase Motor.
NOTE: Information in this Table applies ONLY to PENTEK motors. For other motors, refer to motor
manufacturer’s specifications for wire sizing.
VFD PENTEK
Maximum Cable Length in Feet (Meters)
Model Motor H.P. Volts/Hz/Ph 14AWG 12AWG 10AWG 8AWG 6AWG
3-Wire, 1 Phase
PID-6-9A7 P43B0005A2 0.5 230/60/1 431 (131) 686(209) 1000(305)
PID-6-9A7 P43B0007A2 0.75 230/60/1 335(102) 533(162) 850(259) 1000(305)
PID-6-9A7
P43B0010A2 1.0 230/60/1 293(89) 467(142) 744(227) 1000(305)
PID-6-12A2
PID-6-12A2 P43B0015A2 1.5 230/60/1 190(58) 303(92) 483(147) 764(233) 1000(305)
PID-6-12A2 P43B0020A2 2.0 230/60/1 173(22) 275(84) 439(134) 696(212) 1000(305)
Table 6-6: AWG Wire Sizing, VFD to 3-Wire, 1-Phase Motor.
NOTE: Information in this Table applies ONLY to PENTEK motors. For other motors, refer to motor
manufacturer’s specifications for wire sizing.
PN793 11/20/09 9:21 AM Page 34
Page 35

SECTION 6:Variable Frequency Drives 35
PID-1, PID-6 INTELLIDRIVE Series
PN793
VFD
PID-1, PID-6
Part Description Qty. Part No.
Input Terminal Block Connector 1 PID-CON2
Output Terminal Block Connector 1 PID-CON3
Cooling Fan 1 PID-FAN
Pressure Transducer 1 U17-1561
10’ Transducer Cable 1 U18-1593
25’ Transducer Cable* 1 U18-1594
50’ Transducer Cable* 1 U18-1595
100’ Transducer Cable* 1 U18-1596
150’ Transducer Cable* 1 U18-1597
200’ Transducer Cable* 1 U18-1598
Cord Grip for Transducer Cable* 1 U17-1337
Keypad 1 PID-HMI
Repair Parts
Drive:
Max Input Amps: . . . . . . . . . . . . . . . . . . . . . . . . .17A
Max Output Amps . . . . . . . . . .See Table 6-1, Page 21
Input/Output Terminal Capacity . . . . . . . . .6-14AWG
Input Frequency . . . . . . . . . . . . . . . . . . . . . .50/60Hz
Input Voltage . . . . . .230VAC Nominal (190–265VAC)
Output Voltage:
PID-1 . . . . . . . . . . . . . . . . .230VAC/30-80Hz/3 Ph
PID-6 . . . . . . . . . . . . . . . . .230VAC/30-60Hz/1 Ph
Output Connections . . . . .3-Phase or 3-Wire/1-Phase
Max Motor Cable Length . . . . . . . . . . . . . . .1,000 Ft.*
Ambient Temperature . .–4°F to 104°F(–20°C to 40°C)
Transducer:
Pressure Range: .0-100 Pounds per Square Inch (PSI)
Output Signal: . . . . . . . . . . . . . . . . . . . . . . . .4-20mA
Pressure Port: . . . . . . . . . . . . . . . . . . . . . . . .1/4” NPT
Rated Voltage . . . . . . . . . . . . . . . . . . . . . . .8–28VDC
* Limit with no external filter
Specifications
* Purchase Separately
PN793 11/20/09 9:21 AM Page 35
Page 36

PN793
7.1 HOW DRIVES WORK
The PENTEK Pump controllers (PPC series) convert
constant voltage/frequency power into variable
voltage/frequency power. The variable voltage/frequency
power is supplied to the motor to cause it to operate at
variable speeds.
The incoming AC voltage is rectified, filtered and routed
to a bank of capacitors. The capacitor bank is refered to
as the DC bus. The DC bus voltage is approximately
1.414 times the incoming AC voltage. i.e 230V 60 Hz
input will result in a DC Bus voltage of approximately
325V (1.414 times 230V).
The drive uses an IGBT (Insulated Gate Bipolar
Transistor) to control the application of the DC bus
voltage to the motor.
By varying the duration and polarity of voltage pulses,
the IGBT provides the proper voltage/frequency to
operate the motor at different speeds. The methodology
of adjusting the duration of voltage pulses is commonly
called PWM (Pulse Width Modulation).
7.2 HOW THE PPC20 DRIVE WORKS
This Drive provides constant water pressure under varying
service conditions. Motor speed varies to deliver constant
water pressure (within the limits of the pump) despite
variations in water demand and flow.
When the system flow demand is light, the pump runs at
a relatively low speed. As system demand increases, the
motor speed increases to maintain the preset system
pressure.
In general, when there is a demand for water, the Drive
will be operating. However, with light demand, the
pump may cycle on and off at its minimum speed.
This will not damage either the motor or the pressure
transducer.
NOTICE: Do not use power factor correction capacitors
with this Drive; they will damage both the motor and the
Drive. Power factor correction is provided by the drive.
All wiring to Drive must be in liquid tight conduit with
liquid tight connectors and fittings to maintain the box’s
NEMA 4 rating.
7.3 PPC20 SPECIFICATIONS
INPUT TO DRIVE
Volts/Hz/Phase:
PPC20-1-6A8-4 230V/50-60Hz/1ø
PPC20-1A-6A0-4 115V/50-60Hz/1ø
Maximum RMS Current 16 Amps
Circuit Breaker Rating 20 Amps
Internal Fusing:
PPC20-1-6A8-4 BAF-15 (250 volts, 15 amps)
PPC20-1A-6A0-4 BAF-30 (250 volts, 30 amps)
OUTPUT POWER TO MOTOR
PPC20-1-6A8-4 230V, 6.8A, 3ø Output
PPC20-1A-6A0-4 230V, 6.0A, 3ø Output
Frequency Variable: 30-60, 30-80 or 30-200 Hz
MAX. LENGTH OF WIRE, DRIVE TO MOTOR*
14 AWG 300’(91m)
12 AWG 400’(122m)
10 AWG 625’(191m)
PRESSURE SETTING
Drive is Factory Preset to 60 psi(4.1 BAR)
Adjustable Range 25-95 psi(1.7-6.5 BAR)
Tank Precharge 70% of Pressure Set Point
(42 psi [2.9 BAR] pre-charge for
factory-set 60 psi [4.1 BAR] set point)
SECTION 7: Variable Frequency Drives—PPC20 Series 36
Shorter “ON” period = Lower voltage
Longer “ON” period = Higher voltage
Figure 7-1: Pulse Width Modulation Waveforms
* Longer cable lengths may be possible when reactors or filters are
used on the load side (See Section 8.4).
PN793 11/20/09 9:21 AM Page 36
Page 37

PN793
AMBIENT CONDITIONS (CONTINUOUS DUTY)
Operating Temperature Range
PPC20-1-6A8-4 -4° F to 131° F(-20 to 55° C)
PPC20-1A-6A0-4 -4° F to 104° F(-20 to 40° C)
Storage Temperature Range -40° F to 185° F (-40 to 85° C)
Humidity Range 10% to 90%
AUXILIARY RELAY RATING: 250 Volts, 16 Amps
DIMENSIONS: 13-3/8" H x 10-7/8" W x 5-7/8" D
WEIGHT: 20 lbs. (9 kg)
ENCLOSURE: NEMA4, IPX4, radiant cooled
INTERNAL OVERLOAD PROTECTION: Trips at 8.5 Amps
(125% of Maximum
Power Output)
7.4 PPC20 MOUNTING AND
INSTALLATION
1. Disconnect the electrical power at the main circuit
breaker.
2. If there is water in the system, drain it.
3. The system requires a pressure tank; for best pressure
regulation, use a 6 gallon tank or larger. You can also
use an existing tank of much larger capacity. Set the
tank pre-charge at 70% of the set-point pressure (42
psi when the Drive is set at 60 psi). See Table 7-1.
4. Install the pressure transducer in a tank tee or in a tee
in the water main downstream from the tank and less
than 10 feet from it. Do not install any elbows between
the tank and the pressure transducer. The Drive
includes a 10 foot length of cable to connect the
transducer to the Drive.
NOTICE: If you have a pressure gauge in the system,
make sure that the gauge and the transducer are on the
same level. If the gauge is higher or lower than the
transducer, the gauge pressure will not match the
transducer’s signal. The Drive will, of course, always
be governed by the transducer’s signal.
5. The Drive weighs about 20 pounds. Mount it on a
solid support with two mounting screws.
NOTICE: Mount the NEMA 4 drive with the wiring
ports down to protect the interior from dust and rain.
Leave at least 4" of clearance to the front and sides of
the box for heat radiation. To maintain the NEMA 4
rating, you must use liquid-tight conduit and fittings for
all connections to the Drive.
NOTICE: Allow access to the 115V or 230V 1ø
electrical supply wiring and to the submersible motor
wiring. Use only copper wire rated at 60° C or higher.
Maximum wire length between the Drive and the
pump motor will depend on the motor used, but must
meet National Electrical Code (NEC) requirements and
State and local codes (See Section 7.3).
SECTION 7: Variable Frequency Drives—PPC20 Series 37
Figure 7-2: PPC20 General Layout
VFD—PPC20
PN793 11/20/09 9:21 AM Page 37
LEDs
Incoming Power
Supply from
Circuit Breaker
in Liquid Tight
Conduit
Motor
Leads
Control
From Transducer
to Control
Ground Wire
From
Pump
Pump
Motor
230 volt
3-phase
NOTICE: Before connecting the pump to the system, make
sure the well is clean. If it isn’t, or you aren’t sure, ‘pump out’
the well to clean it out. Monitor the drive output amp draw
to be sure that the pump doesn’t overload and overheat.
If necessary, throttle the discharge to prevent this. Once
the well is clean, follow the Installation Procedure
Not
to
Scale
Pressure T ank
Pressure Gauge
To
Service
Relief Valve
For correct calibration SHUT OFF normal house
service, as well as any sprinkler zones, runouts,
hosebibbs, etc., which branch off between the pump
and the transducer.
Do this before initial startup and before
recalibrating the Control.
10' or less
Transducer
To Service
Page 38

PN793
7.5 WIRING CONNECTIONS
NOTICE: The input wiring to the Drive must meet NEC
requirements for a 115V or 200-240V/50 or 60Hz/1ø
circuit carrying 16 amps. For correct wire sizing from the
Drive to the motor, consult your motor manufacturer and
the NEC, as well as section 7.3.
Hazardous voltage inside Drive; can shock,
burn, or kill. Capacitors inside the Drive will hold lethal
voltage (up to 380 volts) even after power has been
disconnected. After disconnecting the power, allow 5
minutes for the capacitors to discharge before removing
the Drive cover. The ground terminals in the Drive must
be connected to the motor, metal plumbing, or other metal
near the motor, using a wire at least as large as the motor
cable wires. Disconnect the incoming power before
working on or around the system.
Ground the Drive as shown for safety and
to prevent current imbalance (ground loops) between
Drive, motor, and transducer.
1. Power must be off at the main circuit breaker.
2. Make sure that the dedicated branch circuit for the
Drive is protected by a 20 amp circuit breaker.
3. Remove the Drive cover; feed the wires through the
appropriate conduit hubs and into the Drive. Connect
them to the terminal blocks as shown in Figure 8-2. To
maintain the NEMA 4 rating of the Drive Box, all
wiring must be run to the Drive in liquid-tight conduit
and fittings and must run into the Drive through liquidtight connectors (included with the Drive).
TORQUE VALUES FOR TERMINALS:
• Torque the input power terminals to 16 lb.-in.
• Torque the motor output terminals to 12 lb.-in.
• Torque the auxiliary terminals, transducer terminals,
and run/stop terminals to 5-7 lb.-in.
• All low voltage field wiring terminals to be wired with
Class 1 wiring.
NOTICE: If you must replace the Drive cover
O-Ring, apply Scotch-Grip #847 adhesive to the
O-Ring groove in the Drive cover. Apply one drop in
each corner and midway across the top and bottom
and one drop midway down each side. Follow the
adhesive manufacturer’s instructions for proper
ventilation, preparation, and cleanup. Place the O-Ring
in the groove and apply even clamping pressure all
around the O-Ring.
4. Replace the Drive cover. Be sure that the O-Ring seats
properly in the cover groove. Do not over-tighten the
cover screws.
5. Connect the other end of the pressure transducer cable
to the transducer. (See Figure 7-2).
6. Connect the ground wire from the base of the
transducer to the electrical ground. (See Figure 7-3).
7. The pressure transducer is pre-calibrated; no
adjustment is needed.
SECTION 7: Variable Frequency Drives—PPC20 Series 38
0
1
2
3
4
5
6
PRESSURE
SET POINT
MOTOR
SELECT
Fast Acting Fuse
L1
L2
EGND
EGnd
Black
Yell ow
Red
Run/Stop
Jumper
Auxiliary T erminal
Power In:
115 or 230VAC,
50/60Hz/1Ph
Pressure Transducer
Cable
Power Out
(Motor Leads)
Not Used:
Tie off and
insulate
4-20mA Connections with Ground
Ground
4" Sub
Pump
To Pressure
Tank
Clamp Ground Wire
to base of transducer
with Hose Clamp
Well Casing
Circuit Breaker Box
Grounding Bus
Black
Red
Green
White
0-100 PSI
Pressure Transducer
Drain Line
Figure 7-3: PPC20 Wiring Connections
PN793 11/20/09 9:21 AM Page 38
Page 39

PN793
7.6 START-UP OPERATION
1. Pressure Central must have all lines in the system shut
off in order to calibrate itself correctly. Check all
sprinkler zones, service lines, household service, etc.,
to make sure that there are no open service lines in the
system. If you find any open lines, shut them off before
connecting the power to Pressure Central.
NOTICE: If, when the pump starts at calibration, there
are any open lines
between Pressure Central and the
transducer
, Pressure Central will accelerate the pump
to full speed and keep it there, which can damage both
the motor and the pump.
2. Turn on the power to Pressure Central at the circuit
breaker box. Pressure Central will start the pump,
perform a 30-second self-check, and pressurize the
system. If the Pressure Set Point or the Motor Select
Switch have changed since the last time Pressure
Central was powered up, it will re-calibrate itself
before going to normal operation.
3. Once Pressure Central is correctly calibrated, the pump
will stop if there is no demand for water. If there is a
demand for water, the pump will continue to run to
maintain the system pressure.
4. When the unit calibrates, it will increase both the
voltage and frequency to the motor. You will be able to
see this with the pressure changing in the system. It
will increase the pressure, shut off for a few seconds
and then start up again. The unit may repeat this
several times until the unit is calibrated.
NOTICE: If the phasing for the motor is not connected
properly, the pump will rotate backwards and the unit
may not calibrate itself correctly, even though it may
appear that it is. You may still be able to produce the
pressure at shutoff, but system performance may be
low. Verify that the proper motor three-phase wiring is
correct and the pump is rotating in the proper
direction. Recalibrate the unit after the wiring is
corrected.
NOTICE: Although the system maintains constant pressure
at the transducer, additional demands (more faucets
opened, more sprinklers on line, etc.) may cause pressure
drops in other places in the system. This is due to
limitations in the plumbing and will be more noticeable
the further the demand sites are from the transducer. This is
true of any system; it is not a system failure.
TPM MODE
You will see references to ‘TPM Mode’ in this manual.
‘TPM Mode’ (Temporary Performance Monitoring Mode) is
the mode the Drive goes into when it senses a fault (such
as a current overload) that would damage the Drive,
pump, or motor if it continued to try to run normally. In
TPM Mode, the Drive automatically reduces the pump
speed (and hence the load on the motor and Drive) to a
point that it can sustain without damage. TPM Mode
provides reduced service in a situation that otherwise
would either shut down the Drive or permanently damage
the Drive, pump, or motor. If the condition causing the
Drive to go into TPM Mode clears, the Drive will
automatically return to normal operation. If the drive
senses an excessive load for more than 3 hours, the drive
will shut down. To recover, turn off power, wait one
minute and then turn power on.
RECALIBRATION
Recalibration of the Drive is necessary after adjusting the
Pressure Set Point or the Motor Select Switch because the
Drive will not “see” the adjustment(s) until power has been
turned off and turned back on again. Wait one minute
between power down and power up to allow the Drive
components to discharge.
The Drive will automatically run a 30-second self-check if
you disconnect it from the power supply, wait one minute,
and reconnect it. It will recalibrate itself if the Pressure Set
Point or the Motor Select Switch have changed since the
Drive was last powered up.
NOTICE: Pressure Central must have all lines in the system
shut off and system pressure below the set point in order to
calibrate itself correctly (you may have to bleed off some
pressure before turning on the power). Check all sprinkler
zones, service lines, household service, etc., to make sure
that there are no open service lines in the system. If you
find any open lines, shut them off before connecting the
power to Pressure Central. If, when the pump starts at
calibration, there are any open lines
between Pressure
Central and the transducer
, Pressure Central will accelerate
the pump to full speed and keep it there, which can
damage both the motor and the pump.
SECTION 7: Variable Frequency Drives—PPC20 Series 39
Figure 7-4: Pressure Set Point and Motor Select Settings
VFD—PPC20
PN793 11/20/09 9:21 AM Page 39
Pressure is adjustable from
25 - 95 psi in 5 psi increments.
Switch is factory set to '8' (60 PSI)
Arrowhead
60 PSI
25 PSI
Auxiliary
Terminal
115 or 230VAC,
9
A
8
7
6
5
4
3
2
O
1
PRESSURE
SET POINT
L1
L2
EGND
Power In
Ter minal
50/60Hz/1Ph
B
F
C
D
E
95 PSI
Run/Stop
Jumper
Pressure
Transducer
Ter minal
Arrowhead is factory
set at '2' (30-80 Hz)
30-80 Hz
30-60 Hz
MOTOR
SELECT
PRESSURE
SET POINT
4
5
3
6
2
7
1
0
Power Out
Ter minal
(To Motor)
4
3
2
1
0
MOTOR
SELECT
Red
Yellow
Black
EGnd
5
6
7
Page 40

PN793
PRESSURE SET POINT
The Pressure Set Point Switch is located in the Drive unit
(see Figure 7-4). The pressure range is 25 - 95 psi. The
switch can be set with a common small blade screwdriver.
There are 16 settings, labeled 0 - 9 and A - F. The Set
Point adjusts in 5 psi increments. The factory setting is
60 psi (arrowhead at the number 8).
NOTICE: The Drive must be recalibrated, (that is, you must
disconnect the Drive from the power supply, wait one
minute, and then reconnect it) after you adjust the pressure
set point. The Drive will not acknowledge the new
pressure set point until it has gone through one power
off/1-minute wait/power on cycle.
NOTICE: You must adjust the tank pre-charge whenever
the pressure set point has been changed. The tank
pre-charge must be 70% of the pressure set point.
(This value is the pressure set point multiplied by .70.
For example: If the pressure set point is 60 psi, the tank
pre-charge would be 60 X .70 = 42 or 42 psi.
See Table 7-1, below).
MOTOR SELECT SWITCH
This switch matches the control parameters to the motor
you use. Settings are as follows:
1=30-60 Hz
2=30-80 Hz
The other settings are reserved for future use.
NOTICE: Allowing the motor operating speed to exceed
the motor’s design maximum speed can damage the pump
and motor and will void the warranty.
RUN/STOP INTERFACE TERMINALS
The Run/Stop Terminal connections must be closed for the
Drive to provide power to the pump‘s motor. A factory
installed Run/Stop Terminal connector (jumper) is
provided, located in the Run/Stop Terminal connection (see
Figure 7-4). To install a device to control the Run/Stop
Terminals, turn off the power to the Drive, remove the
Run/Stop jumper, and replace it with the leads to the
device.
For Example:
A moisture/leak sensor device can be
installed in the home or facility and connected to the
Run/Stop Terminal in place of the Run/Stop jumper. If the
moisture/leak sensor device detects a leak, the Drive will
shut down and the pump will not run (and consequently
will not pressurize the leaking system).
SECTION 7: Variable Frequency Drives—PPC20 Series 40
Switch Pressure Point Precharge
Setting Setting (PSI) Pressure
0 Not used –
12518
23021
33525
44028
54532
65035
75539
86042
96546
A7049
B7553
C8056
D8560
E9063
F9567
TABLE 7-1: Drive Pressure Set Point and Tank
Pre-Charge Pressure Values
PN793 11/20/09 9:21 AM Page 40
Page 41

PN793
SECTION 7: Variable Frequency Drives—PPC20 Series 41
7.7 LED FAULT CODES
TABLE 7-2: PENTEK PPC20 LED Codes (Fault Status)
The Drive has two LEDs set into the front of the Drive cover. The Green LED signals normal operation plus TPM
Mode operation. The Red LED indicates general faults recorded by the Drive.
The sequence of flashes which the Fault Code emits allows for easy troubleshooting. The fault code light will
continue to indicate the last recorded fault until the condition is corrected and the Drive is manually reset. The
reset button is located on the underside of the Drive, to the left of the conduit hubs.
The Drive will return to normal operation if the fault corrects itself, but will continue to show a fault on the red
LED indicator. Push the manual reset button for 1 second or more to stop the red LED from flashing. If the red LED
continues to flash a fault code after you have pushed the manual reset button, the fault is still present and should
be corrected.
LED Flash Flash
Color Rate Pattern Meaning of LED
Green Intermediate 1/2 Sec. On, 1/2 Sec. Off 30-Second Power-Up Delay (Normal)
Green Steady On Continuously Drive On, not driving motor (Normal)
Green Slow 2 Sec. On, 1 Sec. Off Drive On, Pump motor is running (Normal)
Green Fast 2/10 Sec. On, 2 Sec. Off Motor is running in TPM mode.
Red Off Off No system faults.
Red Slow 2 Sec. On, 1 Sec. Off
Over voltage, Under voltage,
Under Current (Running Dry)
Red Fast 2/10 Sec. On, 2 Sec. Off
Over Current, Output short-circuit,
Foreign object jamming pump
Red Combination 2/10 Sec. On, 1/2 Sec. Off
Over temp., Transducer open/shorted,
1 Sec. On, 1/2 Sec. Off
Excessive operation in TPM mode
Red Steady On Continuously
More than 15 faults in 30 minutes,
Excessive load for more than 3 hours
Drive will shut down until reset.
NOTE 1: After any fault that stops the motor, the Drive will wait 30 seconds and then restart.
NOTE 2: Pressing “Clear Faults” will stop the light from blinking; it will not clear the fault(s) or erase the fault log.
VFD—PPC20
PN793 11/20/09 9:21 AM Page 41
Page 42

PN793
SECTION 7: Variable Frequency Drives—PPC20 Series 42
Key Part Part
No. Description Qty. Number
1 RS232 Connection Gasket 1 U20-21
2 RS232 Connection Cover 1 U17-1340
3 RS232 Connection Screws 6-32x1/4" 4 U30-985SS
4 Switch Cover 1 U17-1339
5 Allen Head Screws 5/16-18x1-1/2 UNC 4 U30-984ZZPO
6 Light Tube A (Lower) 1 U17-1341
7 Light Tube B (Upper) 1 U17-1342
8 Controller Cover O-Ring 1 U20-22
• 3/4" Liquid Tight Conduit Connector 2 U17-1285
• 1/2" Liquid Tight Conduit Connector 1 U17-1284
• 1/2" NPT Liquid Tight Cord Grip (cable size 0.150"/0.250") 1 U17-1337
• 4-20 Milliamp, 0-100 psig Transducer 1 U17-1286-R
• Transducer Weather Boot 1 U17-1338
• 10’ - 18 gauge Shielded Transducer Cable * U18-1593
• 25’ - 18 gauge Shielded Transducer Cable * U18-1594
• 50’ - 18 gauge Shielded Transducer Cable * U18-1595
• 100’ - 18 gauge Shielded Transducer Cable * U18-1596
• 150’ - 18 gauge Shielded Transducer Cable * U18-1597
• 200’ - 18 gauge Shielded Transducer Cable * U18-1598
• 115 Volt Fuse (Model PPC20-1A-6A0-4)** 1 BAF-30
• 230 Volt Fuse (Model PPC20-1-6A8-4)** 1 BAF-15
* Use the cable appropriate to your installation.
• Not Illustrated.
** Standard hardware item; purchase locally.
1
2
3
4
6
7
5
8
REPAIR PARTS LIST
7.8 PPC20 REPLACEMENT PARTS
PN793 11/20/09 9:21 AM Page 42
Page 43

PN793
SECTION 8: Variable Frequency Drives—50/60 Hz 43
PPC3, PPC5
OUTPUT INPUT INPUT ENCLOSURE CATALOG
AMPS PHASE VOLTAGE RATING (NEMA) NUMBER
4.6 3 208-240 1 PPC5-2-4A6-1
4.6 3 208-240 12 PPC5-2-4A6-12
6.6 3 208-240 1 PPC5-2-6A6-1
6.6 3 208-240 12 PPC5-2-6A6-12
7.5 3 208-240 1 PPC5-2-7A5-1
7.5 3 208-240 12 PPC5-2-7A5-12
11.8 3 208-240 1 PPC5-2-11A-1
11.8 3 208-240 12 PPC5-2-11A-12
16.7 3 208-240 1 PPC5-2-16A-1
16.7 3 208-240 12 PPC5-2-16A-12
24.2 3 208-240 1 PPC5-2-24A-1
24.2 3 208-240 12 PPC5-2-24A-12
30.8 3 208-240 1 PPC5-2-30A-1
30.8 3 208-240 12 PPC5-2-30A-12
46.2 3 208-240 1 PPC5-2-46A-1
46.2 3 208-240 12 PPC5-2-46A-12
59.4 3 208-240 1 PPC5-2-59A-1
59.4 3 208-240 12 PPC5-2-59A-12
74.8 3 208-240 1 PPC5-2-74A-1
74.8 3 208-240 12 PPC5-2-74A-12
88.0 3 208-240 1 PPC5-2-88A-1
88.0 3 208-240 12 PPC5-2-88A-12
114 3 208-240 1 PPC5-2-114A-1
114 3 208-240 12 PPC5-2-114A-12
143 3 208-240 1 PPC5-2-143A-1
178 3 208-240 1 PPC5-2-178A-1
221 3 208-240 1 PPC5-2-221A-1
248 3 208-240 1 PPC5-2-248A-1
8.3 PPC5 SPECIFICATIONS.
PENTEK Pump Controller – PPC5 Series:
Table 8-3: 3-Phase/208-230V Output
Note: For detailed specifications see users manual.
8.1 PENTEK PPC3 AND PPC5 DRIVES
The PENTEK Pump Controllers (PPC5 and PPC3 series) are
pre-jumpered and include the PENTEK Assistant, which
simplifies programming and setup for constant pressure
applications. The PENTEK Assistant sets various
parameters to Pentek defaults which are described in this
manual. The PENTEK Assistant also prompts the user for
application-specific information.
PPC3, PPC5
VFD
For single phase input, derate the output amps by 50%.
OUTPUT INPUT INPUT ENCLOSURE CATALOG
AMPS PHASE VOLTAGE RATING (NEMA) NUMBER
2.4
3 380-480 1 PPC3-4-2A4-1
3.3
3 380-480 1 PPC3-4-3A3-1
4.1 3 380-480 1 PPC3-4-4A1-1
5.6 3 380-480 1 PPC3-4-5A6-1
8.8 3 380-480 1 PPC3-4-8A8-1
12.5 3 380-480 1 PPC3-4-12A5-1
15.6 3 380-480 1 PPC3-4-15A6-1
23.1
3 380-480 1 PPC3-4-23A1-1
31.0
3 380-480 1 PPC3-4-31A0-1
38.0
3 380-480 1 PPC3-4-38A0-1
44.0
3 380-480 1 PPC3-4-44A0-1
Table 8-2: 3-Phase/380-460V Output
Note: For detailed specifications see users manual.
OUTPUT INPUT INPUT ENCLOSURE CATALOG
AMPS PHASE VOLTAGE RATING (NEMA) NUMBER
4.7 1 200-240 1 PPC3-1-4A7-1
6.7 1 200-240 1 PPC3-1-6A7-1
7.5 1 200-240 1 PPC3-1-7A5-1
9.8 1 200-240 1 PPC3-1-9A8-1
12.4 1 200-240 1 PPC3-1-12A4-1
18.5 1 200-240 1 PPC3-1-18A5-1
4.7 3 200-240 1 PPC3-2-4A7-1
6.7 3 200-240 1 PPC3-2-6A7-1
7.5 3 200-240 1 PPC3-2-7A5-1
9.8 3 200-240 1 PPC3-2-9A8-1
17.6 3 200-240 1 PPC3-2-17A6-1
24.6 3 200-240 1 PPC3-2-24A6-1
31.0 3 200-240 1 PPC3-2-31A0-1
46.2 3 200-240 1 PPC3-2-46A2-1
8.2 PPC3 SERIES SPECIFICATIONS
Table 8-1: 3-Phase/208-230V Output
Note: For detailed specifications see users manual.
PN793 11/20/09 9:21 AM Page 43
Page 44

PN793
Table 8-4: 3-Phase/380-460V Output
OUTPUT INPUT ENCLOSURE CATALOG CATALOG
AMPS PHASE VOLTAGE RATING (NEMA) NUMBER
3.3 3 400-480 1 PPC5-4-3A3-1
3.3 3 400-480 12 PPC5-4-3A3-12
4.1 3 400-480 1 PPC5-4-4A1-1
4.1 3 400-480 12 PPC5-4-4A1-12
6.9 3 400-480 1 PPC5-4-6A9-1
6.9 3 400-480 12 PPC5-4-6A9-12
8.8 3 400-480 1 PPC5-4-8A8-1
8.8 3 400-480 12 PPC5-4-8A8-12
11.9 3 400-480 1 PPC5-4-11A-1
11.9 3 400-480 12 PPC5-4-11A-12
15.4 3 400-480 1 PPC5-4-15A-1
15.4 3 400-480 12 PPC5-4-15A-12
23 3 400-480 1 PPC5-4-23A-1
23 3 400-480 12 PPC5-4-23A-12
31 3 400-480 1 PPC5-4-31A-1
31 3 400-480 12 PPC5-4-31A-12
38 3 400-480 1 PPC5-4-38A-1
38 3 400-480 12 PPC5-4-38A-12
44 3 400-480 1 PPC5-4-44A-1
44 3 400-480 12 PPC5-4-44A-12
59 3 400-480 1 PPC5-4-59A-1
59 3 400-480 12 PPC5-4-59A-12
72 3 400-480 1 PPC5-4-72A-1
72 3 400-480 12 PPC5-4-72A-12
77 3 400-480 1 PPC5-4-77A-1
77 3 400-480 12 PPC5-4-77A-12
96 3 400-480 1 PPC5-4-96A-1
96 3 400-480 12 PPC5-4-96A-12
124 3 400-480 1 PPC5-4-124A-1
157 3 400-480 1 PPC5-4-157A-1
180 3 400-480 1 PPC5-4-180A-1
195 3 400-480 1 PPC5-4-196A-1
245 3 400-480 1 PPC5-4-245A-1
OUTPUT INPUT ENCLOSURE CATALOG CATALOG
AMPS PHASE VOLTAGE RATING (NEMA) NUMBER
2.7 3 575 1 PPC5-5-2A7-1
2.7 3 575 12 PPC5-5-2A7-12
3.9 3 575 1 PPC5-5-3A9-1
3.9 3 575 12 PPC5-5-3A9-12
6.1 3 575 1 PPC5-5-6A1-1
6.1 3 575 12 PPC5-5-6A1-12
9 3 575 1 PPC5-5-9A0-1
9 3 575 12 PPC5-5-9A0-12
11 3 575 1 PPC5-5-11A-1
11 3 575 12 PPC5-5-11A-12
17 3 575 1 PPC5-5-17A-1
17 3 575 12 PPC5-5-17A-12
22 3 575 1 PPC5-5-22A-1
22 3 575 12 PPC5-5-22A-12
27 3 575 1 PPC5-5-27A-1
27 3 575 12 PPC5-5-27A-12
32 3 575 1 PPC5-5-32A-1
32 3 575 12 PPC5-5-32A-12
41 3 575 1 PPC5-5-41A-1
41 3 575 12 PPC5-5-41A-12
52 3 575 1 PPC5-5-52A-1
52 3 575 12 PPC5-5-52A-12
62 3 575 1 PPC5-5-62A-1
62 3 575 12 PPC5-5-62A-12
77 3 575 1 PPC5-5-77A-1
77 3 575 12 PPC5-5-77A-12
99 3 575 1 PPC5-5-99A-1
99 3 575 12 PPC5-5-99A-12
125 3 575 1 PPC5-5-125A-1
125 3 575 12 PPC5-5-125A-12
144 3 575 1 PPC5-5-144A-1
144 3 575 12 PPC5-5-144A-12
Table 8-5: 3-Phase/575V Output
PENTEK PPC5 SERIES
SECTION 8: Variable Frequency Drives—50/60 Hz 44
PPC3, PPC5
PN793 11/20/09 9:21 AM Page 44
Page 45

PN793
SECTION 8: Variable Frequency Drives—50/60 Hz 45
PPC3, PPC5
8.4 WIRING CONNECTIONS
Three phase input power is connected to U1, V1, and
W1. If single phase input is used connect to U1 and
W1. The neutral and ground leads must be connected
to drive terminal PE. Motor leads are connected to U2,
V2, and W2. The motor ground must be connected to
terminal GND. For detailed instructions, see Users
Manual.
8.5 TRANSDUCER CONNECTION
The PENTEK Assistant defaults to a 4-20mA transducer
connected to AI2. The transducer is used to provide
pressure feedback to the drive. Transducers offered by
PENTEK have either a red or brown power lead. The red
or brown lead should be connected to the +24V power
connection. Transducers offered by PENTEK have either
a blue or black output lead. The blue or black lead
should be connected to terminal 5. The PENTEK U171286R transducer utilizes shielded cable. The bare lead
may be covered with green shrink-wrap tubing. The bare
lead is cable shielding, and should be connected to
terminal 1. The translucent lead is unused, and should
be tied off and insulated.
Figure 8-3 PPC3 Transducer Connection.
4 - 20 ma Output
Jumper Board
Power Lead
DIP Switches
+24 volt
Power
Connection
Figure 8-4 PPC5 Transducer Connection.
Figure 8-1 Typical Connections to PPC3
PE
Power
Output
to Motor
U2, V2, W2
Line Input
U1, V1, W1
Ground
Figure 8-2 Typical Connections to PPC5
PPC3, PPC5
VFD
PN793 11/20/09 9:21 AM Page 45
Analog I/O
U1/L V1-N W1 BRKBRK U2 V2 W2
Line Input
U1, V1, W1
Digital Inputs
Output to Motor
U2, V2, W2
Relay Output
Digital Output
5405 0506
Page 46

PN793
8.6.1 Description of Information
Required by the
PENTEK Assistant
9905 Motor Nom Voltage: This is the nominal voltage
stated on the motor nameplate. If the motor is rated for
operation at multiple voltages, select the voltage nearest
the utility voltage. Ensure the motor connections
correspond to the voltage selected.
9906 Motor Nom Current: This is the nominal current
found on the motor nameplate. Do not use service factor
amps.
9907 Motor Nom Freq: This is the nominal frequency
found on the motor nameplate.
9908 Motor Nominal Speed: This is the nominal speed
found on the motor nameplate. Use the number on the
motor nameplate. Do not enter 3600, 1800, etc.
9909 Motor Nom Power: This is the nominal horsepower
found on the motor nameplate. Do not include service
factor unless the service factor is greater than 1.15.
2001 Min Speed (Required for Subs only): This is the
minimum speed the motor is allowed to run. This
minimum is set to prevent damage to the motor thrust
bearings. Refer to motor literature to determine setting.
4011 Internal Setpoint: This is the pressure that the system
will maintain.
4009 100% Value: This is the full scale reading of the
TABLE 8-6: PPC3 PARAMETERS CHANGED RELATIVE TO PID CONTROL DEFAULTS
Parameter Code PENTEK Code
1002 Ext2 Commands Keypad
1102 EXT1/EXT2 Sel EXT2
1301 Minimum AI1 20%
1601 Run Enable Not Sel
1805 DO Signal Superv1 Over
1806 DO On Delay 10 Seconds
(Above Ground)
1806 DO On Delay 60 Seconds
(Submersible)
1807 DO Off Delay 2 sec
2001 Minimum Speed 0 (Above Ground)
2001 Minimum Speed User Defined
(Submersible)
2002 Maximum Speed Sync
2202 Accel Time 1 5 sec
(Above Ground)
2202 Accel Time 1 1 sec(Submersible)
3001 AI<Min Fault
3003 External Fault 1 DI5
3006 Mot Therm Time 500 sec
(Above Ground)
3006 Mot Therm Time 350 sec
(Submersible)
3007 Mot Load Curve 100%
(Above Ground)
3007 Mot Load Curve 112% (Submersible)
3013 Underload Function Fault
3014 Underload Time 10 sec
Parameter Code PENTEK Code
3022 AI2 Fault Limi 10%
3201 Superv 1 Param Output Freq
3202 SuperV 1 Lim Lo per 9907
3203 SuperV 1 Lim Hi per 9907
3401 Signal 1 Param Current
3405 Output 1 Unit A
3408 Signal 2 Param Speed
3412 Output 2 Unit RPM
3415 Signal 3 Param PID 1 FBK
3419 Output 3 Unit PSI
4001 Gain 1.0
4002 Integration Time 1.0
4006 Units PSI
4010 Set Point Sel Internal
4022 Sleep Selection Internal
4024 PID Sleep Delta 10 sec
4027 PID Param Set DI3
4101 Gain 1.0
4102 Integration Time 1.0 Sec
4106 Units PSI
4109 100% value Per 4009
4110 Set Point Sel Internal
4111 Internal Setpoint Per 4011
4122 Sleep Selection Internal
4123 PID Sleep Level Per 4023
4124 PID Sleep Delay 10 sec
4125 Wake-Up Deviation Per 4025
8.6 PENTEK ASSISTANT
SECTION 8: Variable Frequency Drives—50/60 Hz 46
PPC3, PPC5
PN793 11/20/09 9:21 AM Page 46
Page 47

transducer. The 100% Value of a 200PSI transducer is
200PSI.
4023 PID Sleep Level: Operation below this rpm will
cause the drive to stop.
4025 Wake-Up Dev: This is the pressure drop that will
trigger the drive to restart. For example, if the set point is
60 PSI and the Wake-Up Deviation is 10 PSI, the drive will
restart at 50 PSI.
8.6.2 Mounting and Installation
STARTUP THE
PENTEK ASSISTANT
Apply power to the unit, and follow the steps in section
8.6.3 after the Drive’s screen is lit.
8.6.3 Using the PENTEK Assistant
Apply power to the unit and follow the steps in Section
8.6.4 for changing operation parameters, use the steps
below to run the
PENTEK Assistant.
1. Use the MENU key to access the Menu List.
2. Select Assistants
3. Select
PENTEK Assistant
.
4. Follow the screen instructions to configure the system.
PN793
SECTION 8: Variable Frequency Drives—50/60 Hz 47
PPC3, PPC5
TABLE 8-7: PPC5 PARAMETERS CHANGED RELATIVE TO PID CONTROL DEFAULTS
Parameter Code PENTEK Code
1002 EXT2 Commands 8-Keypad
1102 EXT1/EXT2 SEL EXT2
1301 MINIMUM AI1 20%
1401 RELAY OUTPUT 1 SUPERV1 OVER
1404 RO 1 ON DELAY 10 S (above ground)
60 S (submersible)
1405 RO 1 OFF DELAY 2 S
1601 RUN ENABLE NOT SEL
1605 USER PAR SET CHG 3-DI3
2001 MINIMUM SPEED User defined
(above ground)
0 (submersible)
2002 MAXIMUM SPEED SYNC
2202 ACCELER TIME 1 5 SEC
(above ground)
1 SEC (submersible)
3001 AI<MIN FUNCTION 1-FAULT
3003 EXTERNAL FAULT 1 1-DI6
3004 EXTERNAL FAULT 2 5-DI5
3006 MOT THERM TIME 500 SEC
(above ground)
350 SEC
(submersible)
3007 MOT LOAD CURVE 100%
(above ground)
112% (submersible)
3013 UNDERLOAD FUNC 1-FAULT
3014 UNDERLOAD TIME 10S
3022 AI2 FAULT LIMIT 10%
3201 SUPERV 1 PARAM 103-OUTPUT FREQ
3202 SUPERV 1 LIM LO 60
Parameter Code PENTEK Code
3203 SUPERV 1 LIM HI 60
3401 SIGNAL 1 PARAM 104-CURRENT
3402 SIGNAL 1 MIN 0
3404 OUTPUT 1 DSP FORM 5-+0.0
3405 OUTPUT 1 UNIT 1 – AMPS
3408 SIGNAL 2 PARAM 102-SPEED
3411 OUTPUT 2 DSP FORM 4-+0
3412 OUTPUT 2 UNIT 7 – RPM
3415 SIGNAL 3 PARAMETER 128-PID 1 SETPNT
3418 OUTPUT 3 DSP FORM 1 - ± 0.0
3419 OUTPUT 3 UNIT 25 – PSI
4001 GAIN 1.0
4002 INTEGRATION TIME 2.0
4006 UNIT 25 – PSI
4010 SET POINT SEL 0 – KEYPAD
4011 INTERNAL SETPOINT USER DEFINED
4016 ACT1 INPUT 1-AI2
4017 ACT2 INPUT 1-AI2
4022 SLEEP SELECTION 7 – INT
4024 PID SLEEP DELAY 10 SEC
4027 PID 1 PARAM SET 3-DI3
4102 INTEGRATION TIME 1.0S
4106 UNIT 25-PSI
4109 100% VALUE per 4009
4110 SET POINT SEL 19-INTERNAL
4111 INTERNAL SETPOINT PER 4011
4122 SLEEP SELECTION 7-INT
4123 PID SLEEP LEVEL per 4023
4124 PID SLEEP DELAY 10SEC
4125 WAKE-UP DEV per 4025
PPC3, PPC5
VFD
PN793 11/20/09 9:21 AM Page 47
Page 48

PN793
EXIT
00:00
SAVE
REM
PAR EDIT
460 V
9905 MOTOR NOM VOLT
EXIT
00:00
SAVE
REM
PAR EDIT
3.8 A
9906 MOTOR NOM CURR
EXIT
00:00
SAVE
REM
PAR EDIT
60.0 Hz
9907 MOTOR NOM FREQ
EXIT
00:00
SAVE
REM
PAR EDIT
3450 rpm
9908 MOTOR NOM SPEED
8.6.4 Step by step instructions
EXIT
00:00
OK
STEP 1
INITIAL STARTUP PANEL DISPLAY
Upon initial drive power-up the user will be prompted to
run the
PENTEK assistant.
Scroll to YES and then select
OK. Wait while the assistant loads. On subsequent
startups, the
PENTEK assistant
can be found in the
ASSISTANTS menu.
STEP 2
MOTOR SELECTION SCREEN
Scroll to select the type installation and then press OK.
STEP 3
MOTOR VOLTAGE SCREEN
The screen shows motor voltage. Scroll to select the
correct voltage for your motor as stated on the motor
nameplate. This sample shows 460 volts. Press SAVE.
STEP 4
MOTOR CURRENT SCREEN
Enter the motor current from the motor nameplate (not
maximum amps). Scroll to select the current and press
SAVE.
STEP 5
MOTOR FREQUENCY SCREEN
Enter the motor frequency (Hz) from the motor nameplate.
Scroll to select the frequency and select SAVE.
STEP 6
MOTOR SPEED SCREEN
Enter the motor speed (RPM) from the motor nameplate.
Scroll to select the speed and press SAVE. The sample here
shows 3450 RPM.
EXIT
00:00
OK
REM
SECTION 8: Variable Frequency Drives—50/60 Hz 48
PPC3, PPC5
PN793 11/20/09 9:21 AM Page 48
R
Do you want to run
the PENTEK
assistant?
Yes
No
X
CHOICE
00 00
OK
Please Select Mtr Type
Above Ground
Submersible
X
00 00
OK
R M
9906 MO OR NOM CURR
AR D
3.8 A
X
R
9907 MO OR NOM R Q
60 0 Hz
X
00 00
P R
00 00
SAV
SAV
R
9905 MO OR NO VO
PAR
460 V
X
00 00
SAV
R M
9908 MO OR NOM S D
PAR D
3450 rpm
X
00 00
SAV
Page 49

PN793
SECTION 8: Variable Frequency Drives—50/60 Hz 49
PPC3, PPC5
EXIT
00:00
SAVE
REM
PAR EDIT
3.0 hp
9909 MOTOR NOM POWER
EXIT
00:00
SAVE
REM
PAR EDIT
0 RPM
2001 MIN SPEED
STEP 7
MOTOR HORSEPOWER SCREEN
Enter the motor horsepower (HP) from the motor
nameplate. Scroll to select the horsepower and press
SAVE. The sample here shows 3.0 HP.
STEP 8
FOR SUBMERSIBLE PUMPS ONLY
Enter the minimum speed allowed by the motor vendor
(consult motor literature). This is to prevent motor bearing
damage.
STEP 9
SCROLL TO SELECT CONSTANT PRESSURE POINT
Example shows 40 PSI.
EXIT
00:00
SAVE
REM
PAR EDIT
40 PSI
4011 INTERNAL SET PNT
EXIT
00:00
SAVE
REM
PAR EDIT
145.0 PSI
4009 100% VALUE
EXIT
00:00
SAVE
REM
PAR EDIT
0 rpm
4023 PID SLEEP LEVEL
STEP 10
TRANSDUCER 100% VALUE
Enter the transducer’s full range value which should be
stated on the transducer body. Scroll to select the pressure
and then press SAVE. The sample here shows 145 PSI.
NOTE: DO NOT choose maximum pressure.
STEP 11
PID SLEEP LEVEL SCREEN
Enter the PID sleep level. This is a motor speed setting. If
the motor speed falls below this RPM, the PID sleep
function will be enabled.This is a Drive-assigned value.
For additional information, refer to the ACS550 Users
Manual. Scroll to select the speed and then press SAVE.
The sample here shows 0 RPM (waiting to be set).
Burn Hazard. If the sleep level is set too
low, the pump my run without flow. This can boil water
inside the pump, causing dangerously high pressure and
temperature.
PPC3, PPC5
VFD
PN793 11/20/09 9:21 AM Page 49
R M
9909 MO OR NOM POW R
PAR D
3 0 hp
X
R M
00 M N S D
00 00
AR D
SAV
R
P R
4009 00% VA U
145 0 PSI
X
range: 0... 10 bar / 145 psi
max. pressure: 25 bar / 362.5 psi
UE: 80...330 VDC
OUT: 4...20mA Load <(N-8V) /0.02A
00 00
SAV
Use this Full Range Value
Do NOT use Maximum Pressure
0 RPM
X
40 RNA S P
00 00
PAR D
SAV
40 PSI
X
00 00
SAV
R M
4023 D S V
PAR
0 rpm
X
00 00
SAV
Page 50

PN793
EXIT
00:00
SAVE
REM
PAR EDIT
0.0 PSI
4025 WAKE-UP DEV
STEP 12
WAKE UP DEVIATION SCREEN
Enter the wake-up deviation. This is the amount pressure
drops (PSI) below the pressure set point before the drive
restarts. This sample is waiting to be set and shows 0 PSI.
DIR
00:00
MENU
LOC
100 RPM
0.0 A
0 rpm
0.0 PSI
EXIT
00:00
OK
STEP 13
ASSISTANT COMPETE
This ends setup of the
PENTEK Assistant.
The following
steps complete the setup of the pump system.
STEP 14
CHECK MOTOR ROTATION
Press the Local/Remote button to change to local control.
Check above-ground motors by viewing shaft rotation. For
submersible (3-phase) motors, start and check
performance. Reverse any two power leads and check
again. The lead arrangement with best performance is
correct.
STEP 15
CHECK FOR SYSTEM HARMONICS
While the pump is running, scroll
motor speed up to check for
harmonics. Verify that harmonics do
not exist above the PID sleep level.
STEP 16
STOP THE PUMP
Press the STOP button.
STEP 17
CHANGE TO REMOTE OPERATION
Press the Loc / Rem button to change
to remote control.
STEP 18
TEST SYSTEM SETUP
Press start to operate the pump. Test
system to ensure proper system
response and sleep function. Adjust
group 40 parameters as needed.
NOTICE: The upper left hand corner of the display shows
whether the drive is in local or remote control. In LOC
mode the drive holds a constant speed which can be
adjusted using the up/down buttons. The speed which will
be held is in the upper right hand corner. In REM mode
the drives holds a constant pressure.
NOTICE: For common parameters and menu items, use
the Help key ? to display descriptions.
If you encounter Alarms or Faults, use the Help key or
refer to the Diagnostic section of the ABB User’s Manual.
SECTION 8: Variable Frequency Drives—50/60 Hz 50
PPC3, PPC5
PN793 11/20/09 9:21 AM Page 50
R M
P R
025 WAK U D V
0.0 PSI
X
PENTEK Assistant
Complete
X
00 00
00 00
SAV
OK
LOC
REM
OC
R
0 0 A
0 rpm
0 0 S
00 00
00 R
M NU
Page 51

PN793
SECTION 8: Variable Frequency Drives—50/60 Hz 51
PPC3, PPC5
8.7 TIMER FUNCTION:
The PENTEK VFD includes four timer functions. Each timer
function can include up to four daily / weekly start and
stop times.
The following example show the parameter changes
required to use PID Set 2 on Monday, Wednesday, and
Friday from 8:00AM to 10:00AM.
Parameter Setting
3601 – Timers Enable ............................7 – Enabled
3602 – Start Time 1 .................................... 8:00AM
3603 – Stop Time 1 ................................. 10:00AM
3604 – Start Day 1 ................................. 1-Monday
3605 – Stop Day 1 ................................. 1-Monday
3606 – Start Time 2 .................................... 8:00AM
3607 – Stop Time 2 ................................. 10:00AM
3608 – Start Day 2 ............................. 3-Wednesday
3609 – Stop Day 2 ......................... 3 – Wednesday
3610 – Start Time 3 .................................... 8:00AM
3611 – Stop Time 3 .................................. 10:00AM
3612 – Start Day 3 ..................................... 5-Friday
3612 – Stop Day 3 ..................................... 5-Friday
3626 – Timer Func1SCR .............. 7 = P3 +P2 + P1
4027 – PID 1 Param Set ........ 8 = Timer Function 1
8.8 HELPFUL HINTS
ALARM 2025 UPON STARTUP
This is a normal alarm, and occurs whenever motor data is
changed. The alarm shows for about 15 seconds while the
drive performs a motor calibration.
FAULT 14 EXTERNAL FAULT 1
External fault 1 is triggered when the VFD’s output
frequency exceeds motor nameplate frequency for more
than 10 seconds. The ON delay parameter controls the
time delay for this fault. If the system includes a large tank,
or requires more time to reach the setpoint, increase
parameter 1404 (PPC5) or 1806 (PPC3).
This fault is designed to protect against loss of prime,
broken shafts, etc. To disable this fault, adjust parameter
2002 Maximum speed, to the motor nameplate rpm.
SLEEP
The PENTEK Drive monitors pump speed to determine
demand. The pump is shut off when the rpm goes below
parameter 4023: PID Sleep Level. Always set parameter
4023 high enough to trigger sleep mode during low
demand conditions. Note that the shut-off head at
parameter 4023: RPM, must be higher than the pressure
set-point. The pressure setpoint can be determined by
slowly closing the discharge valve to confirm that the RPM
decreases to a level that triggers the sleep mode. The
discharge head can also be found by using the BEC2
program, or see www.bec2.net.
Systems that use small tanks, or have a flat performance
curve, may cycle rapidly at intermediate flows. Correct this
by increasing Parameter 4024: PID Sleep Delay.
DO NOT increase parameter 4024 to a level that will cause
the pump to run with no demand. The water in the pump
can overheat.
SLEEP OPTIONS
Other devices such as flow or float switches can be used to
trigger sleep mode. Parameter 4022 determines the method
to trigger sleep mode. These options can be used for pump
up, pump down, and other on/off applications.
MULTIPLE SYSTEMS / SETPOINTS
The Pentek VFD includes (2) independent process control
sets (groups 40 and 41). Group 41 parameters can be
selected using Digital Input (DI3). When first set-up, groups
40 and 41 are identical. A set can be changed later with
parameters for a second process.
CONSTANT FLOW
After running the
PENTEK Assistant
, the drive can be
configured for constant flow by adjusting parameters 4006:
Units, and 4009: 100% Value.
Constant Flow Example 1:
Using a 4-20ma velocity meter with a range of
0 to 10 ft/sec. We want the display to be ft/sec.
Set 4006 to ft/sec
Set 4009 to 10
Constant Flow Example 2:
Same setup as example 1, but we have a 4" pipe and want
the display to be gpm.
Set 4006 to gpm
Set 4009 to 393 (this is the flow in a 4" pipe which results
in a 10 ft/sec velocity).
Constant Flow Example 3:
Using a 4-20ma flow meter with a range of 0 to 100 gpm.
We want the display to be gpm.
Set 4006 to gpm
Set 4009 to 100
PPC3, PPC5
VFD
PN793 11/20/09 9:21 AM Page 51
Page 52

PN793
8.10 REACTORS AND FILTERS
Variable frequency drives produce voltage spikes that
are a function of voltage rise-time and length of motor
cable. In extreme cases peak voltage may exceed three
times the nominal operating voltage.
Reactors
A reactor is a resistance and inductance device that
reduces voltage spikes. It does this by both increasing
the voltage rise-time and improving the impedance
match of the the cable and motor.
Filters
A filter combines a reactor with a capacitor network.
The capacitors absorb a portion of the voltage spikes.
This further reduces the peak voltage seen at the motor.
When to Use a Reactor or Filter
The chart below is a general guideline when choosing
between using a filter or reactor.
R = Reactor
F = Filter
The following list indicates a greater need for filters and
reactors:
• Long motor leads are used
• Standard efficiency or submersible motors are used.
• The cost of replacing the motor is prohibitive.
• Using a submersible motor with a voltage rating
greater than 230V.
• The quality and/or age of the motor is unknown.
• Condition of wiring and/or power quality is unknown.
Lead Length
up to 50’ 50’ to 150’ 150’ to 1000’
Motor Type 230 V 460V 230V 460V 230V 460V
NEMA Above-Ground
Std. Efficiency --RRFF
NEMA Above-Ground
Premium Efficiency -- -RFF
Submersible -RR FFF
8.9 PPC3 AND PPC5 TANK SIZING
These instructions are only for systems that require tanks.
Pressure tanks are generally required to maintain system
pressure during periods of low or no demand. Tank
precharge must be less than the pressure set point – wake
up deviation.
The tank can be sized using Boyle’s law
(V1 x P1 = V2 x P2). Units are in gallons and PSI.
Total Tank Size x (Precharge+14.7)
__
Total Tank Size x (Precharge+14.7)
(Setpoint+14.7 – Wake Up Deviation) (Setpoint+14.7)
Typically tanks are sized for approximately 20% of pump
capacity. For example, a 150 gpm pump typically requires
30 gallon total tank size.
Drawdown =
NEMA 1, 230, 460 or 575 v NEMA 1, CUL Listed
Model Model Rated Amps
KLC4BE KLCUL4BE 4
KLC6BE KLCUL6BE 6
KLC8BE KLCUL8BE 8
KLC12BE KLCUL12BE 12
KLC16BE KLCUL16BE 16
KLC25BE KLCUL25BE 25
KLC35BE KLCUL35BE 35
KLC45BE KLCUL45BE 45
KLC55BE KLCUL55BE 55
KLC80BE KLCUL80BE 80
KLC110BE KLCUL110BE 110
KLC130BE KLCUL130BE 130
KLC160BE KLCUL160BE 160
KLC200BE KLCUL200BE 200
KLC250BE KLCUL250BE 250
Filters
Reactors
Open Design NEMA 1
230 or 460 v 230 or 460 v
Rated
Model Model Amps
KDRA1P KDRA1PC1 3.4
DDRA2P KDRA2PC1 4.8
KDRA3P KDRA3PC1 7.6
KDRA4P KDRA4PC1 11
KDRB1P KDRB1PC1 14
KDRD1P KDRD1PC2 21
KDRD2P KDRD2PC2 27
KDRD3P KDRD3PC2 34
KDRD4P KDRD4PC2 40
KDRC1P KDRC1PC2 52
KDRF1P KDRF1PC3 65
KDRF2P KDRF2PC3 77
KDRF3P KDRF3PC4 96
KDRH1P KDRH1PC4 124
KDRI1P KDRI1PC4 156
KDRI2P KDRI2PC4 180
KDRG1P KDRG1PC4 240
NEMA 1
575 v
Rated
Model Amps
KDRA31PC1 2.7
KDRA35PC1 3.9
KDRA33PC1 6.1
KDRA34PC1 9
KDRA36PC1 11
KDRD31PC2 17
KDRD32PC2 22
KDRD35PC2 27
KDRD33PC2 32
KDRD34PC2 41
KDRC31PC2 52
KDRF31PC3 62
KDRF32PC3 77
KDRF33PC4 99
KDRH31PC4 125
KDRI31PC4 144
KDRI32PC4 192
KDRG31PC4 242
SECTION 8: Variable Frequency Drives—50/60 Hz 52
PPC3, PPC5
PN793 11/20/09 9:21 AM Page 52
Page 53

PN793
SECTION 9: Submersible Motor Controls—60 Hz 53
SMC for PENTEK XE-Series and Franklin Electric Motors
SMC
60 Hz.
9.2 SPECIFICATIONS
All PENTEK Submersible Motor Controls are rated for
Indoor or Outdoor use and employ NEMA 3R
enclosures. They are rain-tight and resistant to
weathering and corrosion.
The controls are rated for operation in temperatures up to
50° C (122° F). DO NOT locate the control box in direct
sunlight.
The terminals can accept up to #4 AWG copper wire rated
for at least 75° C. Internal wiring conforms to appliance
wiring standards UL 1015 which is resistant to acids, oils,
alkalies, moisture and fungus.
PENTEK Submersible Motor controls are agency
recognized and tested to rigorous safety standards.
For specific ratings of individual components please see
the repair parts portion of the manual.
9.3 MOUNTING AND INSTALLATION
Mounting and Installation
• Mount the control boxes to a secure backing
• Mount controls vertically
• In order to maintain NEMA 3R, plug all unused
openings
9.1 HOW IT WORKS
Submersible Motor Controls act as an above ground
control system for you submersible motor. They provide
easy access to the “brains” of your motor, so you can
monitor, adjust and perform maintenance without
removing the motor.
There are three main groups of motor controls. Each of
these controls has a slightly different function, although all
serve the main purpose of providing control for the motor.
Permanent Split Capacitor (PSC)
A PSC style control is the simplest of controls. The control
consists only of a run capacitor. The run capacitor keeps
the start (or auxiliary) windings in the circuit during both
startup and run.
Capacitor Start / Induction Run (CSIR)
A CSIR control uses a starting capacitor and a switch.
When voltage is first applied, the switch is closed and the
start capacitor is in the circuit. This provides extra torque
to bring the motor up to speed. The switch is often referred
to as a potential relay. The relay’s coil senses voltage
across the windings. When the windings get close to full
speed, they magnetize the coil and physically breaks the
connection to the start windings. This takes not only the
start windings out of the circuit, but the starting capacitor
as well. The motor then runs on the main winding alone.
Capacitor Start / Capacitor Run (CSCR)
A CSCR control functions very similar to a CSIR control
except that in addition to the starting capacitor, it also uses
a running capacitor. This allows the start winding to act as
an auxiliary winding during operation. This smoothes out
operation of the motor and provides greater efficiency and
a reduction in vibration and noise.
Plus Series Controls
PENTEK’s PLUS series controls, combine a CSCR design
and a control circuit to provide not only starting power to
the motor, but a switch to turn on and off the control. The
switch takes the form of a magnetic contactor. The
magnetic contactor uses a coil that physically closes the
contacts when energized. The contactor allows the
installer to use a pressure switch with a lower rating, since
it is not switching the full amperage of the motor.
Submersible Motor Control Compatability
Motor Submersible Motor Control Type
Type SMCT SMC Franklin SMCP
PENTEK XE-Series NO Yes Yes NO
Franklin NO Yes Yes NO
PENTEK T-Series Yes NO NO NO
PENTEK 6" NO NO NO Yes
PN793 11/20/09 9:21 AM Page 53
Page 54

PN793
SECTION 9: Submersible Motor Controls—60 Hz 54
SMC for PENTEK XE-Series and Franklin Electric Motors
NOTICE: Attach installation wiring to the top of the
terminal strip. Schematics may show otherwise for clarity.
1-1/2 HP Capacitor Start, Capacitor Run
Model SMC-CR1521
Part
Description Number
Start Capacitor, 105 µF, 330v U17-1430-R
Run Capacitor, 10 µF, 370v U17-1438-R
Overload Protector U17-1313-R
Relay, 50 Amp U17-1311-R
60 Hz.
9.4 WIRING CONNECTIONS
AND REPLACEMENT PARTS
Part
HP Description Number
1/2 Start Capacitor, 250 µF, 125v U17-1429-R
1/2 Start Capacitor, 59 µF, 270v U17-1423-R
3/4 Start Capacitor, 86 µF, 270v U17-1424-R
1 Start Capacitor, 105 µF, 270v U17-1425-R
230V Relay, 50 Amp U17-1311-R
115V Relay, 50 Amp U17-1343-R
1/2 to 1 HP Capacitor Start, Induction Run
Models SMC-IR0511, SMC-IR0521, SMC-IR0721
and SMC-IR1021
Part
HP Description Number
1/2 Start Capacitor, 43 µF, 270v U17-1422-R
3/4 Start Capacitor, 59 µF, 270v U17-1423-R
1 Start Capacitor, 86 µF, 270v U17-1424-R
1/2 Run Capacitor, 15 µF, 370v U17-1419-R
3/4 Run Capacitor, 23 µF, 370v U17-1292-R
1 Run Capacitor, 23 µF, 370v U17-1292-R
All Relay, 50 Amp U17-1311-R
1/2 to 1 HP Capacitor Start, Capacitor Run
Models SMC-CR0521, SMC-CR0721, and SMC-CR1021
PN793 11/20/09 9:21 AM Page 54
1/2 - 1 HP
OR
Start Capacitor
BK
YL
Main (B) Y Start (R)
Motor Leads
1/2 to 1 HP
Use only copper conductors
1
Relay
RD
52
L2
Line In
Use only copper conductors
L1
4773 1204
1.5 HP Std
Start
Capacitor
Installation wiring
should be installed
into the top of the
terminal block
BL
3
Run
Capacitor
47761204
RD
BK
Run
Capacitor
Line In
1
OR
Relay
5
Start
Capacitor
BK
Main (B) Y Start (R) L2 L1
2
YL RD
Motor Leads
4774 1204
Page 55

PN793
SECTION 9: Submersible Motor Controls—60 Hz 55
SMC for PENTEK XE-Series and Franklin Electric Motors
SMC
Part
Description Number
Start Capacitor,105 µF, 330v, 2 HP U17-1430-R
Start Capacitor, 208 µF, 330v, 3 HP U17-1428-R
Run Capacitor, 20 µF, 370v, 2 HP U17-1440-R
Run Capacitor, 45 µF, 370v, 3 HP U17-1443-R
Main Overload Protector, 2 HP U17-1319-R
Main Overload Protector, 3 HP U17-1322-R
Start Overload Protector, 2 HP U17-1320-R
Start Overload Protector, 3 HP U17-1323R
Relay, 50 Amp U17-1311-R
2 and 3 HP Standard
Models SMC-CR2021 and SMC-CR3021
Part
Description Number
Start Capacitor,105 µF, 330v, 2 HP U17-1430-R
Start Capacitor, 208 µF, 330v, 3 HP U17-1428-R
Run Capacitor, 20 µF, 370v, 2 HP U17-1440-R
Run Capacitor, 45 µF, 370v, 3 HP U17-1443-R
Main Overload Protector, 2 HP U17-1319-R
Main Overload Protector, 3 HP U17-1322-R
Start Overload Protector, 2 HP U17-1320-R
Start Overload Protector, 3 HP U17-1323R
Relay, 50 Amp U17-1311-R
Magnetic Contactor P17-954-R
2 and 3 HP Plus
Models SMC-CRP2021 and SMC-CRP3021
60 Hz.
PN793 11/20/09 9:21 AM Page 55
2 & 3 HP Std
Start
Capacitor
Installation wiring
should be installed
into the top of the
terminal block
BL
Run
Capacitor
3
3
2 and 3 HP Plus
Attach Installation
wiring to top of
terminal block
5339 0406
5341 0406
Page 56

PN793
SECTION 9: Submersible Motor Controls—60 Hz 56
SMC for PENTEK XE-Series and Franklin Electric Motors
5 HP Standard
Model SMC-CR5021
Part
Description Number
Start Capacitors, 270 µF, 330v U17-1437-R
Run Capacitor, (2) 30 µF, 370v U17-1502-R
Main Overload Protector U117-1456A-R
Start Overload Protector U17-1321-R
Relay, 50 Amp U17-1311-R
5 HP Plus
Model SMC-CRP5021
Part
Description Number
Start Capacitors, 270 µF, 330v U17-1437-R
Run Capacitor, (2) 40 µF, 370v U17-1442-R
Magnetic Contactor P17-953-R
Main Overload Protector U117-1456B-R
Start Overload Protector U17-1321-R
Relay, 50 Amp U17-1311-R
60 Hz.
If used with a Franklin 6” motor, a lightning arrestor must
be used (part # P17-966-R)
PN793 11/20/09 9:21 AM Page 56
5 HP Std
Attach Installation
wiring to top of
terminal block
BL
Start
Capacitor
Run Capacitors
3
5340 0406
5 HP Plus
Attach Installation
wiring to top of
terminal block
Run Capacitors
P.S.
5342 0406
Page 57

PN793
SECTION 9: Submersible Motor Controls—60 Hz 57
SMC for Franklin Electric Motors
SMC
Part
Description Number
Start Capacitor, 216 µF, 330v U17-1436-R
Start Capacitor, 270 µF, 330v U17-1437-R
Run Capacitor, 45 µF, 370v U17-1447-R
Magnetic Contactor P17-952-R
Main Overload Protector U17-1317B-R
Start Overload Protector U17-1321-R
Relay, 50 Amp U17-1311-R
Lightning Arrestor P17-966-R
Model SMC-CRP7521
Part
Description Number
Start Capacitor, 216 µF, 330v U17-1436-R
Start Capacitor, 270 µF, 330v U17-1437-R
Run Capacitor, 45 µF, 370v U17-1443-R
Main Overload Protector U17-1317A-R
Start Overload Protector U17-1321-R
Relay, 50 Amp U17-1311-R
Lightning Arrestor P17-966-R
Model SMC-CR7521
NOTICE: Attach installation wiring to the top of the
terminal strip. Schematics may show otherwise for clarity.
60 Hz.
7.5 HP Plus Series
7.5 HP Standard
PN793 11/20/09 9:21 AM Page 57
7.5 HP Std
Attach Installation
wiring to top of
terminal block
Start
Capacitor
BL
RunCapacitor
2
Attach Installation
wiring to top of
terminal block
P.S.
4781 1204
5349 0406
Page 58

PN793
SECTION 9: Submersible Motor Controls—60 Hz 58
SMC for Franklin Electric Motors
Part
Description Number
Start Capacitors, (2) 270 µF, 330v U17-1437-R
Start Capacitors, (2) 130 µF, 330v U17-1426-R
Run Capacitors, 35 µF, 370v U17-1441-R
Magnetic Contactor P17-952-R
Main Overload Protector P17-955-R
Start Overload Protector U117-1318D-R
Relay, 50 Amp U17-1311-R
Lightning Arrestor P17-966-R
Model SMC-CRP10021
Part
Description Number
Start Capacitors (2), 270 µF, 330v U17-1437-R
Run Capacitors (2) 35 µF, 370v U17-1441-R
Main Overload Protector P17-955-R
Start Overload Protector U117-1318C-R
Relay, 50 Amp U17-1311-R
Lightning Arrestor P17-966-R
Start Capacitor, 130 µF, 330v U17-1426-R
Model SMC-CR10021
NOTICE: Attach installation wiring to the top of the
terminal strip. Schematics may show otherwise for clarity.
60 Hz.
10 HP Plus Series
10 HP Standard
PN793 11/20/09 9:21 AM Page 58
10 HP Std
Attach Installation
wiring to top of
terminal block
Start
Capacitor
RunCapacitors
2
10 HP Plus
Attach Installation
wiring to top of
terminal block
Start
Capacitor
Run Capacitors
4783 1204
2
5350 0406
Page 59

PN793
SECTION 9: Submersible Motor Controls—60 Hz 59
SMC for Franklin Electric Motors
SMC
Part
Description Number
Start Capacitors, (2) 270 µF, 330v U17-1437-R
Start Capacitor, 161 µF, 330v U17-1427-R
Run Capacitors (3), 45 µF, 370v U17-1443-R
Magnetic Contactor P17-951-R
Main Overload Protector P17-956-R
Start Overload Protector U117-1318E-R
Relay, 50 Amp U17-1311-R
Lightning Arrestor P17-966-R
Model SMC-CRP15021
NOTICE: Attach installation wiring to the top of the
terminal strip. Schematics may show otherwise for clarity.
60 Hz.
15 HP Plus Series
PN793 11/20/09 9:21 AM Page 59
15 HP Plus
Attach Installation
wiring to top of
terminal block
2
Page 60

PN793
Part
Description Number
Start Capacitor, 43 µF, 270v, 0.5/0.75 HP U17-1422-R
Start Capacitor, 59 µF, 270v, 1.0 HP U17-1423-R
Start Capacitor, 105 µF, 270v, 1.5 HP U117-1425-R
Run Capacitor, 10 µF, 370v, 0.5 HP U17-1418-R
Run Capacitor, 15 µF, 370v, 0.75 HP U17-1419-R
Run Capacitor, 23 µF, 370v, 1.0 HP U17-1292-R
Run Capacitor, 20 µF, 370v, 1.5 HP U17-1440-R
Main Overload Protector, Automatic, 0.5/1.0 HP
U17-1504
Main Overload Protector, Automatic, 1.0 HP U17-1454-R
Main Overload Protector, Automatic, 1.5 HP U17-1554-R
Relay, 50 Amp, 50 Hz., 220-240 Volts U17-1421-R
SECTION 9: Submersible Motor Controls—50 Hz 60
SMC5 for Franklin Electric Motors
50 Hz.
1/2 through 1 HP Standard
Models SMC5-CR0521, SMC5-CR0721, SMC5-CR1021,
SMC5-CR1521
6122 1109
PN793 11/20/09 9:21 AM Page 60
1/2 to 1 HP CSCR w/Overload
Start
Capacitor
BK
BK
Main (B)
BK
OR
Y
Motor Leads
YL
1
Relay
2
Overload
5
Start (R)
RD
Use only copper conductors
12
3
BK
RD
L2
Run
Capacitor
Line In
BK
L1
U27-18865310 0306
Page 61

PN793
2 and 3 HP Standard
Models SMC5-CR2021-01, SMC5-CR3021-01
Part
Description Number
2 HP Start Capacitors, 208 µF, 330v U17-1428-R
2 HP Run Capacitor, 20 µF, 230v U17-1440-R
2 HP Main Overload Protector U17-1321-R
2 HP Start Overload Protector U17-1313-R
Relay, 50 Amp U17-1421-R
3 HP Start Capacitors, 270 µF, 320v U17-1437-R
3 HP Run Capacitor, 35 µF, 370v U17-1441-R
3 HP Main Overload Protector U117-1455A-R
3 HP Start Overload Protector U17-1320-R
2 and 3 HP Plus
Models SMC5-CRP2021-01, SMC5-CRP3021-01
50 Hz.
SECTION 9: Submersible Motor Controls—50 Hz 61
SMC5 for Franklin Electric Motors
Part
Description Number
2 HP Start Capacitors, 200 µF, 350v U17-1428-R
2 HP Run Capacitor, 20 µF, 370v U17-1440-R
2 HP Main Overload Protector U17-1321-R
2 HP Start Overload Protector U17-1313-R
Relay, 50 Amp U17-1458-R
3 HP Start Capacitors, 270 µF, 330v U17-1437-R
3 HP Run Capacitor, 35 µF, 370v U17-1441-R
3 HP Main Overload Protector U117-1455B-R
3 HP Start Overload Protector U17-1320-R
Magnetic Contactor P17-954-R
SMC
PN793 11/20/09 9:21 AM Page 61
2 & 3 HP Std
Start
Capacitor
Installation wiring
should be installed
into the top of the
terminal block
BL
Run
Capacitor
3
3
5339 0406
2 and 3 HP Plus
Attach Installation
wiring to top of
terminal block
5341 0406
Page 62

PN793
5 HP Std
3
Start
Capacitor
Run Capacitors
5344 0406
BL
Attach Installation
wiring to top of
terminal block
5 HP Standard
Models SMC5-CR5021-01
Part
Description Number
Start Capacitors, 216µF, 330v U17-1436-R
Start Cap, 161µF, 330v U17-1427-R
Run Capacitor, 35µF, 370v U17-1441-R
Run Cap, 40 F, 370v U17-1442-R
Main Overload Protector U117-1456A-R
Start Overload Protector U17-1321-R
Relay, 50 Amp U17-1421-R
5 HP Plus
Models SMC5-CRP5021-01
50 Hz.
SECTION 9: Submersible Motor Controls—50 Hz 62
SMC5 for Franklin Electric Motors
Part
Description Number
Start Capacitors, 216µF, 330v U17-1436-R
Start Cap, 161µF, 330v U17-1427-R
Run Capacitor, 35µF, 370v U17-1441-R
Run Cap, 40µF, 370v U17-1442-R
Main Overload Protector U117-1456B-R
Start Overload Protector U17-1321-R
Relay, 50 Amp U17-1421-R
PN793 11/20/09 9:21 AM Page 62
5 HP Plus
Attach Installation
wiring to top of
terminal block
Run Capacitors
P.S.
5345 0406
Page 63

SECTION 10: Motor Protective Devices - 50/60 Hz 63
10.2 SPECIFICATIONS
Specification SPP-111P SPP-111P-3RL SPP-231P SPP-233P SPP-235P-XX
1 Phase Line Voltage (±10%) 115 VAC 115 VAC 230 VAC 230 VAC 230 VAC
Load Range 1/3 - 1/2 HP 1/3 - 1 HP 1/3 - 1 HP 1/3 - 3 HP 5 - 15 HP
(.25 - .37 kW) (.33-.75 kW) (.25 - .75 kW) (.25 - 2.24 kW) (3.73 - 11.19 kW)
Frequency 50-60 Hz 50-60 Hz 50-60 Hz 50-60 Hz 50-60 Hz
Power Consumption
(Maximum) 5 W 5 W 5 W 5 W 5 W
Operating Temperature -40° to 158° F -40° to 158° F -40° to 158° F -40° to 158° F -40° to 158v F
(-40° to +70° C) (-40° to +70° C) (-40° to +70° C) (-40° to +70° C) (-40° to +70° C)
Electrostatic Discharge (ESD) IEC 1000-4-2, Level 2, EC 1000-4-2, Level 2, IEC 1000-4-2, Level 2, IEC 1000-4-2, Level 2, IEC 1000-4-2, Level 2,
4kV Contact, 6 kV Air 4kV Contact, 6 kV Air 4kV Contact, 6 kV Air 4kV Contact, 6 kV Air 4kV Contact, 6 kV Air
Output Contact Rating (SPST) 1/2 HP @ 115 VAC 1 HP @ 115 VAC 1 HP @ 240 VAC 3 HP @ 240 VAC
(17 AMPS MAX) (17 AMPS MAX) (17 AMPS MAX) (17 AMPS MAX) 480 VA @ 240 VAC
Weight .63 lbs (.28 kg) 1.6 bs (.73 kg) w/enclosure 63 bs (.28 kg) 1.6 lbs (.73 kg) 1.6 bs (.73 kg)
Enclosure None NEMA 3R None NEMA 3R w/ LENS NEMA 3R w/ LENS
Current Transformer Ratio N/A N/A N/A SPP-235-75 – 50:5
50:5 SPP-235-100 -- 75:5
SPP-235-150 -- 100:5
OPERATING POINTS
Overload 125 % of 125 % of 125 % of 125 % of 125 % of
Calibration Point Calibration Point Calibration Point Calibration Point Calibration Point
Underload (Dry Run) ~80% ~80% ~80% ~80% of ~80% of
of Cal bration Point of Calibration Point of Calibration Point Calibration Point Calibration Point
Overvoltage Trip Point 132.5 VAC 265 VAC 265 VAC 265 VAC 265 VAC
Undervoltage Trip Point 95 VAC 190 VAC 190 VAC 190 VAC 190 VAC
Number of Restarts allowed
in a 60 sec. Period before 4 4 4 4 4
lockout (Rapid Cycle Timer)
Trip Delay Time Overload) 5s 5s 5s 5s 5s
Trip Delay Time (Dry Run) 2s 2s 2s 2s 2s
RESTART DELAY TIME
Overvoltage/Undervoltage
Delay 5s 5s 5s 5s 5s
All other faults
(Dry Run Rec. Timer) 2-225 min 2-225 min 2-225 min 2-225 min 2-225 min
TERMINAL
Wire Gauge N/A N/A N/A 12-22 12-22
Maximum Torque N/A N/A N/A 7 in-lbs 7 in-lbs
10.1 HOW THEY WORK
PENTEK motor protectors are designed to protect single
phase pumps from dry run, dead head, jammed impeller,
and over & undervoltage conditions.
A calibration adjustment allows the motor protector to be
calibrated to specific pumping applications, thereby
reducing the possibility of false or nuisance tripping. A
micro drive based voltage and current sensing circuit
monitors for power fluctuations, over-current, and undercurrent conditions. When an abnormality, such as loss of
suction, is detected, the motor protector deactivates its
output relay and immediately disconnects the pump motor.
The motor protector then activates its user-selectable
“Restart Delay” (Dry run recovery) timer. When the timer
counts to zero or power is removed and reapplied, the
motor protector reactivates its output relay and turns the
pump back on.
An infrared LED communicates directly with a hand-held
diagnostics tool called the Informer (sold separately). The
Informer displays 16 parameters including calibration point,
trip point, running points, and last fault.
NOTICE: The use of flow restrictors or unusually high head
pressures at the time of calibration may interfere with the
detection of dead head conditions.
Motor Protection
PN793 11/20/09 9:21 AM Page 63
Page 64

PN793
10.3 MOUNTING AND INSTALLATION
Mount the PENTEK Motor Protector in a convenient
location in or near the motor control panel. If the location
is wet or dusty, then the PENTEK Motor Protector should
be mounted in a NEMA 3R, 4, or 12 enclosure.
10.4 WIRING CONNECTIONS
1. Connect one line from the fused disconnect to the
Motor protector’s “L1 IN” terminal. Run a wire from
the “L1 OUT” terminal to the other in-line controls
such as a pressure or float switch. See Figure 10-1.
2. Connect the other line from the fused disconnect to
Motor protector’s “L2 IN” terminal. Run a wire from
the “L2 OUT” terminal to the other in-line controls
such as pressure or float switches. See Figure 10-1.
NOTICE: The motor protector may not detect a dead head
(blocked pipe) condition on applications where the pump
is undersized for a given motor or flow restrictors are used
on high stage pumps or low yield wells.
Settings
CALIBRATION/SETTINGS
NOTICE: Calibrate the Motor Protector during normal
pumping conditions.
Turn the RESTART DELAY / CALIBRATION adjustment fully
counter-clockwise to the “CAL.” position.
Apply power to the Motor Protector
®
. The pump motor
should be running at this point.
The Motor Protector is being calibrated when the CAL.
LIGHT turns on (approximately 5 seconds). Within 10
seconds, proceed to step 4.
Set the RESTART DELAY / CALIBRATION adjustment to the
desired Restart Delay (Dry Well Recovery Time). If you
leave the RESTART DELAY / CALIBRATION adjustment in
the “CAL.” position, the unit will trip off and stay off. Turn
the adjustment out of the “CAL.” position to start the
pump.
Manual Reset Mode: If the RESTART DELAY /
CALIBRATION adjustment is set to “RESET”, the Motor
protector is in Manual Reset mode. After the Motor
protector shuts down due to a voltage or load problem, the
RESTART DELAY / CALIBRATION adjustment must be
rotated out of the “RESET” position to restart the pump.
NOTICE: Any restart delay can be by-passed by rotating
the RESTART DELAY / CALIBRATION adjustment to the
“RESET” position and back to the desired Restart Delay
setting.
Rapid Cycling Protection: Rapid cycling is defined as more
than four restarts in a 60 second period. The Motor
protector will lockout upon detecting a rapid cycling
condition until power is removed and re-applied to the L1
IN and L2 IN terminals. See the Diagnostics Table for
instructions to diagnose a rapid cycling fault.
Figure 10-2:“Plus” Control Box Connection for SPP233
Figure 10-3: 2-Wire Connection for SPP233
Figure 10-1: SPP233 Standard Control Box Connection
SECTION 10: Motor Protective Devices - 50/60 Hz 64
PN793 11/20/09 9:21 AM Page 64
100
150
RUN
LGHT
Submersb e Pump Protector
L1 N
50
2
225
CAL RESET
L2 IN
L1 OUT
L2 OUT
RUN
LIGHT
Submersible Pump Protector
L1 N
CAL
LIGHT
4“ Plus 3-Wire
Control Box
1/3 to 3 HP
SW
SW
5203
100
150
50
2
225
CAL RESET
L2 N
L1 OUT
L2 OUT
LGHT
GND
L2
L1
100
150
50
2
225
CAL RESET
RUN
LGHT
CAL
LGHT
L2
GND
L1
Fused
Disconnect
L1
L2
GND
Pressure
Switch
L2
GND
Disconnect
L1
Fused
Motor
CAL
Fused
Disconnect
L1
L2
GND
Alternate Pressure Switch
Location When Rapid Cycle
Protection is not needed
Submersible Pump Protec or
L2 N
L1 OUT
L2 OUT
L1 IN
Pressure
Switch
Standard 3-Wire
Control Box
1/3 to 3 HP
5201
Motor
L1
L2
GND
Alternate Pressure Switch
Location When Rapid Cycle
Protection is not needed
Pressure
Switch
5204
Page 65

SECTION 11: Troubleshooting 65
PROBLEM POSSIBLE CAUSE CHECK AND RESTORE
Pump Won’t Start No voltage 1. Main power supply off
(check with voltmeter) 2. Blown fuse or tripped circuit breaker
Typically will be no 3. Wiring damage, loose connection
startup noise 4. Burnt contactor points
Locked Pump 1. Check for sand in system
2. Crooked well (submersible)
Overloads Trip Low or high voltage 1. Check with voltmeter. (±10% of nameplate voltage)
Request power company correct problem
2. Determine if wire size is correct for
voltage and amperage
High ambient temperature 1. Improve cooling for motor and controls
or direct sunlight 2. Use ambient compensated overloads
Incorrect pump sizing 1. Check pump (gpm) make sure near B.E.P. - “Best
– mismatched motor Efficiency Point”
2. Recheck pump and motor model
numbers prior to installation.
Keep a written record
High cycling rate 1. Pressure control equipment malfunction
2. Hole in piping system
3. Pressure/storage tank failure
Damaged Motor Control 1. Check components per troubleshooting
Fuses Blow or Short or Ground 1. Fuses give superior protection and
Breaker Trips should be used in preference to circuit
breakers when possible
2. Inspect wiring for visible signs of
heat damage (discoloration, damage
to insulation)
3. Disconnect power and check with
ohmmeter or megohmmeter to ground
Improper sizing 1. Consult manufacturer’s information/
sizing chart for proper size and replace
as required
Low or No Water No rotation 1. Motor not turning (see “Pump won’t
Production start” above)
2. Broken shaft coupling. Ammeter
will show “low” amps
Restriction in piping 1. Check valve sticking
2. Check valve installed backward
3. Broken check valve poppet or flapper
lodged in piping system downstream
Plugged inlet 1. Intake screen encrusted with minerals
2. Insufficient clearance between pump and
well casing for high capacity pump.
Calculate intake velocity and limit to
less than 5 feet per second
11.1 SYSTEM TROUBLESHOOTING
PUMP AND MOTOR PROBLEM ANALYSIS
Troubleshooting
PN793 11/20/09 9:21 AM Page 65
Page 66

PN793
PROBLEM POSSIBLE CAUSE CHECK AND RESTORE
Low or No Water Well drawdown 1. Install air line upon reinstalling unit if not
Production already present for measuring depth with
(continued) tire pump and gage
2. Measure dynamic (drawdown) level
with string or resistance meter
3. Select different pump if appropriate
Well collapsed 1. Unit is pumping dirty or sandy water
2. Lift with pump hoist, check pull
weight and resistance
Pump selection 1. Recheck operating conditions by
comparing to pump curve
2. Operate within ±5 percentage
points of efficiency from B.E.P.
Hole in well piping 1. Listen for sucking sound at well head
when pump shuts off
2. Well pipe empties when submersible
pump is pulled from well
Wrong rotation 1. Three phase motor - exchange any two of
the three leads in the three phase motor
starter panel
2. Single phase motor - recheck motor and
control panel wiring diagrams. Change
wiring as appropriate
3. Proper rotation for motors for sub. and
centrifugal pumps with CW rotation is
CCW when looking at the shaft end of
the motor
4. Make a visual flow check or observe flow
meter. Amperage is not a reliable
indicator of wrong rotation
Improper sizing 1. Consult manufacturer’s performance
charts or curves
Hole in distribution 1. Observe pressure loss with system
piping shut off
2. Look for wet spot or depression
along pipe path
Pump Runs Drawdown 1. Check for surging, irregular
all the time amperage readings with amprobe
2. Look for bursts of air in water
2. Listen for surging sounds in piping
Control equipment 1. Control equipment incorrectly
selected or installed
2. Welded electrical contact points
3. Pressure switch supply pipe/tube
plugged with rust/scale/ice
Hazardous pressure and risk of explosion
and scalding. If pump is running continuously at no
flow (with discharge shut off) , water may boil in pump
and piping system. Under steam pressure, pipes may
rupture, blow off of fittings or blow out of pump ports
and scald anyone near.
PUMP AND MOTOR PROBLEM ANALYSIS (Continued)
SECTION 11: Troubleshooting 66
PN793 11/20/09 9:21 AM Page 66
Page 67

PN793
SECTION 11: Troubleshooting 67
Troubleshooting
PROBLEM POSSIBLE CAUSE CHECK AND RESTORE
Pump Runs All The Time Pump wear 1. Check amperage - generally lower unless
(Con’t) severe bearing damage has occurred
2. Verification may require removal of pump
for service and visual inspection
Electric Shock Grounded wiring 1. PROCEED WITH CAUTION!
or motor 2. Remove rings and other jewelry from hands
before working with live power circuits
3. Wear insulated boots and gloves
4. Disconnect the power, check
with ohmmeter
5. Progressively check wire at each splice
point (or obvious damage point)
6. When ground disappears, the fault is
behind the point of discovery
7. Check motor leads to motor shell with
cable splice removed to determine if
ground fault is in motor or supply cable
Moisture 1. Protect motor, motor starter and control
devices from condensation or direct
water spray
Ammeter Reads Three phase motor 1. One power lead is not live or online
High On Two “single phasing” 2. Check with local utility company
Leads, Zero On to see if having problems
The 3rd 3. Check local power installation for
transformer problems
4. Will not be able to observe this condition
very long. Very destructive to motor
windings. Motor stator will soon be
destroyed if single phasing protection
is not installed
5. This problem usually requires a
replacement motor
6. Determine source, install or replace
protective gear
Overload Trip – Binding or dragging 1. High volume of sand or other abrasives
Ammeter Reads in well. Check by observing water output
High On All Leads 2. Severe damage to motor thrust bearing
due to cavitation or abrasives.
Usually very noisy
3. Damage to motor control system
Power supply problems 1. Check with voltmeter while pump is running
for ±10% voltage variance.
2. Extreme grounding of motor or supply
cable. Check with ohmmeter or
megohmmeter
3. Poor wiring connections. Check splice,
and terminal screws for looseness.
Watch for discolored cable
PUMP AND MOTOR PROBLEM ANALYSIS (Continued)
PN793 11/20/09 9:21 AM Page 67
Page 68

PN793
11.2 MOTOR TROUBLESHOOTING FLOW CHARTS
SECTION 11: Troubleshooting 68
PN793 11/20/09 9:21 AM Page 68
Troubleshooting Flow Chart
Follow the arrow from the symptom on the left, to the inspection in the middle box.
If the middle box describes to symptom, proceed to the box on the right for the solution.
Motor Does
Not Start
No power or Incorrect Voltage.
Using voltmeter, check the line terminals.
Voltage must be +/
- 10% of rated voltage.
NO
Fuse blown or circuit breakers tripped.
Check fuses for correct size. Check for
loose, dirty or corroded connections in fuse
holder. Check for tripped fuses.
NO
Defective Pressure Switch.
Check voltage at contact points. Improper
contact of switch points can cause
lower voltage.
NO
Defective Wiring.
Check for loose or corroded connections.
Check motor lead terminals with voltmeter
for voltage.
Check resistance of the lines with an
ohmmeter (POWER OFF!)
YES
YES
YES
YES
Contact power company if
voltage is incorrect.
Replace with proper fuse
or reset circuit breaker.
Replace pressure switch.
Correct faulty wiring or
connections.
NO
Bound Pump.
Locked rotor condition can result from
misalignment between pump and motor,
or sand-bound pump. Amp readings will be
3 to 6 times higher than normal.
YES
Repair or replace pump
assembly.
Page 69

PN793
SECTION 11: Troubleshooting 69
Troubleshooting
PN793 11/20/09 9:21 AM Page 69
Troubleshooting Flow Chart (Continued)
Follow the arrow from the symptom on the left, to the inspection in the middle box.
If the middle box describes to symptom, proceed to the box on the right for the solution.
Motor Starts
Too Often
Pressure switch.
Check pressure switch settings, and
examine for damage or defects. Is the
switch damaged or set wrong?
NO
Check valve stuck open.
Damaged or defective check valve will
not hold pressure. Is water draining back
into the well?
NO
Waterlogged tank (air supply).
Check air charging system for proper
operation. Is there inadequate air in tank?
NO
Leak in System.
Check system for leaks. Are leaks found?
YES
YES
YES
YES
Reset or replace switch.
Replace check valve.
Correct or replace air
system.
Replace damaged pipes
or repair leaks.
Page 70

PN793
SECTION 11: Troubleshooting 70
PN793 11/20/09 9:21 AM Page 70
Troubleshooting Flow Chart (Continued)
Follow the arrow from the symptom on the left, to the inspection in the middle box.
If the middle box describes to symptom, proceed to the box on the right for the solution.
Motor runs
continuously
Pressure switch.
Are switch contacts “welded” in the
closed position, or set too high?
NO
YES
Replace pressure switch
Low well level.
Pump may exceed well capacity. Shut off
pump, and wait for well to recover. Check
static and drawdown levels from well head.
Does water level recover to original level?
NO
Leak in system.
Check system for leaks. Are leaks found?
NO
Worn pump.
Symptoms are similar to a leak in a downpipe, or low water level in the well. Reduce
pressure switch setting. If pump shuts off
worn parts may be at fault. Is sand found
in the tank?
NO
Loose or broken motor shaft.
Little or no water will be delivered if the
coupling between the motor and pump
shaft is loose. A jammed pumps may have
caused the motor shaft to shear off.
YES
YES
YES
YES
Throttle pump output or
reset pump to lower level.
Do not lower into sand.
Replace damaged pipes
or repair leaks.
Pull pump and replace
or repair.
Pull pump, replace or
repair damaged parts.
NO
Pump screen blocked.
Restricted flow may indicate a plugged
intake screen. Pump may be in mud / sand.
NO
Check valve stuck closed.
No water will flow past a check valve in the
closed position.
YES
YES
Clean screen and reset at
less depth. May need to
clean the well.
Replace check valve
Page 71

PN793
SECTION 11: Troubleshooting 71
Troubleshooting
PN793 11/20/09 9:21 AM Page 71
Troubleshooting Flow Chart (Continued)
Follow the arrow from the symptom on the left, to the inspection in the middle box.
If the middle box describes to symptom, proceed to the box on the right for the solution.
Motor runs
but overload
protector trips
Incorrect voltage
Using voltmeter, check the line terminals.
Is the voltage more than +/
rated voltage?
- 10% of
NO
Overheated protectors.
Direct sunlight or other heat source can
heat up the control box and cause
protectors to trip. Is control box in the
sunlight or hot to touch?
NO
Worn pump or motor.
Check motor running current. Is it higher
than nameplate amps?
NO
Incorrect wire size.
Check wire size and run-length with
wire size chart. Is it sized too small?
YES
YES
YES
YES
Contact power company.
Shade control box, provide
ventilation or move box
away from heat sorce.
Replace pump end
and / or motor.
Replace wire with correct
size.
Page 72

PN793
11.2.1 Testing Insulation and
Winding Resistance
INSULATION RESISTANCE
1. Turn off power!
2. Set the ohmmeter to RX100K ohms.
3. Zero the ohmmeter.
4. Connect one lead to the metal drop pipe (or to ground
if the pipe is plastic).
5. Connect the other lead to any motor lead.
6. Check each power lead.
7. Compare results to the following table.
Resistance Indicates
20K ohm Damaged motor, possible result of
lightning strike.
500K ohm Typical of older installed motor in well.
2 M ohm Newly installed motor
10 M ohm Used motor, measured outside of well
20 M ohm New motor without cable
WINDING RESISTANCE
1. Turn off power!
2. Set the ohmmeter to RX1 ohm range. For values over
10, use the RX10 ohm scale.
3. Zero the ohmmeter.
4. Compare results to Tables 6-5, 7-2 or 7-3.
THREE PHASE MOTORS
Measure each line to each other (three readings).
Compare these to the line-to-line resistance shown in
motor specification table.
• If all leads measure within the table specifications, the
leads and motor are okay.
• If a lead shows a higher resistance, then there is an
open in the cable or winding. Check for secure cable
connections.
• If a lead shows lower resistance, then there is a short
circuit in the cable or winding.
SINGLE PHASE MOTORS: 3-WIRE
• Measure the main winding (black to yellow).
• Measure the start winding (red to yellow).
• Compare these readings with the motor specification
table.
• If the readings vary widely (some high, some low), the
leads may be switched. Confirm that the cable colors
are correct.
SINGLE PHASE MOTORS: 2-WIRE
• Measure the resistance between the two lines.
• Compare the reading with the motor specification
table.
• If the reading shows a high resistance, there may be an
open in the cable or motor. Check for secure cable
connections.
• If the reading shows very low resistance, there may be
a short in the cable or motor.
11.3 VARIABLE SPEED DRIVE
TROUBLESHOOTING
For the PPC20 Variable Speed Drive, Refer to section 7.7
and Table 7-2 for LED Fault codes.
For the PPC3 and PPC5, refer to the ABB ACS350 or
ACS550 manual as appropriate for diagnostic information.
For the PID-1 and PID-6 Series, refer to Section 6.7 for
diagnostic information.
SECTION 11: Troubleshooting 72
PN793 11/20/09 9:21 AM Page 72
Page 73

PN793
SECTION 11: Troubleshooting 73
Troubleshooting
RUN LIGHT CAL. LIGHT PROBLEM or FUNCTION CORRECTIVE ACTION
On Steady Off RUN: Pump is running, no problems None
in operation.
On Steady On Steady CAL: The motor protector is in the None
calibration process
Off On Steady CAL COMPLETE: Pump will restart as soon as the
The motor protector is calibrated, RESTART DELAY / CALIBRATION pot is
RESTART DELAY / CALIBRATION pot rotated out of the “CAL.” position.
was left in “CAL.” position. Pump is off.
Off Off OFF / MANUAL RESTART: If pot is in the “RESET” position, rotate
The motor is not running. Either the out of that position. If the “CAL” light
Motor protector has tripped on dry run, blinks, check for an overload condition.
dead head, or overload while the If the RUN” light blinks, look for a dry
RESTART DELAY / CALIBRATION pot run or dead head condition. If no lights
was in the “RESET” position, or source come on, check incoming power for
power is not present. adequate voltage.
Blinking Off DRY RUN / DEAD HEAD: Check for restricted flow or inadequate
The motor protector has shut the pump supply of liquid.
off due to a dry run or dead head
condition. The unit is timing through the
restart delay and will try to restart.
Off Blinking OVERLOAD: The motor protector has Check for low or high voltage or
shut the pump off due to an overload jammed pump impeller. If these
condition. The unit is timing through the condition do not exist, recalibrate
restart delay and will try to restart if line the unit while it is drawing higher
voltage is at an acceptable level. amps (Amps should not exceed SFA).
Blinking Blinking VOLTAGE FAULT: The motor protector If the unit remains in this state for more
alternately with alternately is preventing the pump from starting than 5 seconds, check for high or low
the CAL. Light with the due to voltage problems. The voltage is voltage.
RUN Light being monitored and the unit will
remain in this mode until the voltage is
at an acceptable level.
Blinking in Blinking in RAPID CYCLE: The motor protector Check for broken bladder on the
unison with the unison with the has shut down on rapid cycling. Power pressure tank (if used), or check for
CAL. Light RUN Light must be removed and reapplied to reset defective pressure or float switch.
the unit.
11.4 MOTOR PROTECTION TROUBLESHOOTING
PN793 11/20/09 9:21 AM Page 73
Page 74

PN793
11.5 SUBMERSIBLE CONTROLS
TROUBLESHOOTING
Individual Component Diagnostics
POTENTIAL RELAYS
Measure Coil Resistance (Red-Yellow or 2 to 5). It should
measure according to the specification printed on the
wiring diagram.
Measure contact resistance (Red-Orange 1 to 2). It should
measure close to zero; higher values indicate deterioration
of the contacts.
When the SMC first starts a faint click should be heard very
shortly after the pump activates
START CAPACITOR
Using a capacitor meter – measured capacitance should be
within +20% of the rating printed on the capacitor (or
consult parts list for ratings).
Using ohm meter – the meter should quickly show low
resistance (ohms) and move slowly to show higher
resistance. Resistance should not be zero or open.
Physical Inspection – A foul smell or a buildup of black
soot indicates that a start capacitor has vented usually
because of heat or prolonged use.
RUN CAPACITOR
Using a capacitor meter – measured capacitance should be
within +/- 6% of the rating printed on the capacitor (or
consult parts list for ratings).
Using ohm meter – the meter should quickly show low
resistance (ohms) and move slowly to show higher
resistance. Resistance should not be zero or open.
Physical Inspection – Run capacitors have a built in fail
safe device that disconnects the capacitor in case of
overheat, in the case of such an event the capacitor will
bulge.
OVERLOADS
Push overload to ensure that it is reset.
Using ohm meter – connection resistance should measure
close to zero.
MAGNETIC CONTACTOR
Using ohm meter – Coil Resistance should measure per
specification on wiring diagram.
Using ohm meter – Resistance between T1 & L1 and T2 &
L2 should measure close to zero. Greater values indicates
degradation of the contacts.
Physical Inspection – Contacts should be free to move up
and down.
MEASUREMENTS WHILE RUNNING
Small Box – Measurements cannot be taken while running,
line voltage can be monitored with the cover off, by
placing a voltmeter across L1 & L2. Winding resistance can
be taken while motor is connected and should correspond
to manufacturers specification.
Medium and Large Box
Fatal electrical shock hazard. Only qualified
persons should perform this procedure.
To take measurements while running, remove the cover.
Turn on the pump and allow to cycle as usual. L1 to L2
should measure 230V +/- 10%, it should not dip during
operation. A clamp meter can be used to measure amp
draw along any number of circuits. The larger yellow wire
or main leads can be used to measure amp draw of the
system, it should spike and then come in less than 1
second. Orange lead amp draw should start out high and
then drop out to become zero. The voltage between Red
and Black or Red and Yellow should measure
approximately 330V, higher values indicate no load lower
values indicate the motor is not up to speed (CSCR or PSC
only). Note winding resistance cannot be taken while the
motor is attached to the control box.
SECTION 11: Troubleshooting 74
PN793 11/20/09 9:21 AM Page 74
Page 75

PN793
SECTION 11: Troubleshooting 75
Troubleshooting
PROBLEM POSSIBLE CAUSE CORRECTIVE ACTION
Pump Fails to Turn on – Damaged magnetic contactor, specifically the coil Plus Series only - replace coil
No Amp Draw
Damaged pressure switch All models - replace pressure switch
Loose connection Check to ensure that all connections are
made and all screws tightened to
20 in-lbs
Damaged motor Check winding resistance
Motor Draws Amps Damaged relay (welded contacts, bad coil) Replace relay
Significantly Higher
Wrong Control (e.g. 2 HP used on a 1 HP pump) Install correct control
Than Service Factor
Bad run capacitor (blown) Replace run capacitor
Miswired motor (e.g. Red and Black swapped) Verify motor wiring
Voltage outside of operational norms Verify incoming voltage
(T-Series, 230V +6%/-10%, for others +/- 10%)
Drop cable too small Replace drop cable with proper size
wire for installation
Overload Trips within Locked (stalled) rotor condition Check installation
10 seconds of Startup
Mis-wired control Check to ensure connections match
wiring diagram
Mis-matched motor & liquid end Verify installation
Wrong control used on motor Replace with correct control
Damaged Relay Check per above
Damaged Start Capacitor Check per above
Overload Trips After Rapid cycle Check installation
10 seconds of Startup
High Ambient Do not mount in direct sunlight,
provide proper ventilation
Damaged Run Capacitor Check per above
Chattering Relay/Bad Coil will make a clicking Check per above
noise during operation
Wiring too small for current/drop length Check installation
Wrong control used on motor Replace with correct control
Pump Performance Installation/Liquid End Problem Check per installation manual
is Low
Damaged motor Verify and replace
Voltage outside of operational norms Check with voltmeter
Drop cable too small for run length Check installation
Damaged or Incorrect Run Capacitor Check per above
Wrong Control used Replace with correct control
Start Capacitor Vents Line voltage outside of operational norms Verify incoming voltage
Contents (T-Series +6%/-10%)
Damaged relay Check and replace the relay or wires
if they failed
Wire too small for drop length Use a low-voltage relay
SUBMERSIBLE CONTROLS TROUBLESHOOTING
PN793 11/20/09 9:21 AM Page 75
Page 76

PN793
SECTION 12: Appendix 76
12.1 INSTALLATION CHECKLIST
This checklist can be used to preview and verify steps in
the installation of PENTAIRTMpumps. Refer to appropriate
section of the manual for more detailed information.
Electrical Power
■
Verify that the electrical service transformers KVA
rating is adequate per the Table 4-2.
■ Verify that motor voltage and frequency on the
nameplate match the power supply voltage.
■ Verify that fuse sizes are appropriate for the installation
■ Verify that the pump, casing and power supply are all
grounded.
■ Inspect lightning arrestors for proper sized wire and
grounding. Do not rely solely on a grounding rod in
the earth.
■ Verify that the cable size from the power supply box to
the pump is the correct size, Tables 5-1 through 5-4.
Motor
■
Lead Condition.
■ Check insulation resistance.
■ Verify nameplate information for the service needed.
■ Verify that the motor is correctly sized to pump.
■ Verify that fuses, heaters and other electrical
components are appropriate for the amp load.
■ Fluid level.
Pump and Motor Assembly
■
Verify pump shaft rotation.
■ Verify that the pump rating matches the site
requirements.
■ Visually inspect pump and motor for electrical lead
condition and splice condition.
Installation
■
Verify that the pipe joints are tight.
■ Verify that check valves have been installed.
■
Verify that the cable is supported with straps or tape at
least every 10 feet (3.05 m).
■ Pump cooling.
■ Start the pump and observe any noise, vibration, leaks
or overheating.
■ Verify that the pump performance is as specified,
that the electrical current is balanced and within
specifications.
Check Valves
Check valve installation is necessary for proper pump
operation. The pump should have a check valve on its
discharge, or within 25 feet (7.62 m) of the pump.
For very deep wells, locate a check valve at least every
200 feet (61 m).
• DO NOT install the check valve midway between the
pump and the ground surface. Vibration in the piping
will resonate and may damage or destroy the piping or
pump. Adjust check valve spacing to avoid a mid-point
placement.
• Use only spring type check valves. Swing type valves
can cause water hammer problems.
• Do not use drain-back style check valves (drilled).
Check valves serve the following purposes:
•
Maintain Pressure:
Without a check valve, the pump
has to start each cycle at zero head, and fill the down
pipe. This creates upthrust in the motor, and would
eventually damage both the pump and motor.
•
Prevent Water Hammer:
If two check valves are used,
and the lower one leaks, then a partial vacuum forms
in the pipe. When the pump next starts, The flow fills
the void area quickly, and creates a shock wave that
can break piping and damage the pump.
•
Prevent Back-Spin:
Without a functioning check valve,
upon shutoff, the water drains back through the pump,
and cause it to rotate backwards. This can create
excessive wear on the thrust bearing, and if the pump
restarts as water is flowing down the pipe, it will put an
excessive load on the pump.
PN793 11/20/09 9:21 AM Page 76
Page 77

PN793
SECTION 12: Appendix 77
Ventilated
Well Cap
Submersible
Cable
Pitless
Adaptor
Check
Valve
Tape Cable
To Pipe
Add T orque Arrestor
(especially needed with
plastic pipe)
Pump
Motor
Control Box
(3wire Models)
Electrical Disconnect
Pre-charged T ank
Pressure Switch
Pressure Gauge
To House Service
Relief
Valve
Union
Gate Valv es
Good System
Features
• Pressure Switch
• Wire, (10-2 w/ground)
• 1.5 HP, 20-22 gpm pump
• 1.5 HP, 2-wire motor
• 85 gal. Tank
• Optional Motor Protection (SPP-233)
Benefits
• Cost
• Simple to use
• PENTEK PSC motor offers lower
operating cost
“Better” System
Features
• Control Box
• Pressure Switch
• Wire, (10-3 w/ground)
• 1.5 HP, 20-32 gpm pump
• 1.5 HP, 3-wire motor
• 85 gal. Tank
• Optional Motor Protection (SPP-233)
Benefits
• Capacitors and switches can be
replaced without removing pump
• CSCR control offers higher efficiency
• Higher starting torque than 2-wire
“Best” System
Features
• VFD/PPC controller
• Pressure Transducer
• Wire, (12-3 w/ground)
• .75 HP, 15-18 gpm pump
• 1.5 HP, 3-Phase motor
• 6 gal. Tank
Benefits
• “City-like” pressure
• Lower operating costs
• Soft start/stop
• Motor protection built into VFD
12.2 CHOOSING A PUMP SYSTEM
A typical well application can be set up using one of three
electrical configurations for single-phase power. The
samples below are based upon a system using a 1.5 HP,
20-22 gpm pump, with 400 feet of wire from electrical
discconnect to the motor. All configurations shown are
suitable methods for residential applications
Appendix
PN793 11/20/09 9:21 AM Page 77
Page 78

PN793
SECTION 12: Appendix 78
12.3 SIZING SUBMERSIBLE PUMP,
MOTOR, AND TANKS
Sizing a Submersible Pump
The following steps should be taken relative to properly
sizing the system.
1. Determine gpm of system and well.
2. Size of well casing and type.
3. Determine service pressure requirements.
4. Determine voltage and phase.
5. Determine discharge pipe size.
6. Calculate friction head loss.
7. Determine total discharge head.
8. Select the submersible pump for the above criteria, and
appropriate controls for the pump.
9. Select the proper size tank for minimum one minute
pump run time.
10. Tank drawdown should be enough to keep pump off
for one minute (4” motors) 15 minute (6” motors).
11. Determine the distance from the service entrance panel
to the pump motor.
12. Determine the size wire required based on the motors
maximum load amps and the distance from the service
entrance to the motor.
Horizontal
Pipe Run
Pump
Setting
Pumping
Level
Service
Pressure
Friction
Loss
Total
Discharge
Head
Standing
Water
Level
Submergence
Drawdown
Elevation
Figure 12-1: Installed Pump Terminology
PN793 11/20/09 9:21 AM Page 78
Page 79

PN793
SECTION 12: Appendix 79
12.4 HOW TO SELECT THE CORRECT
PUMPING EQUIPMENT
The answer to four basic questions will help select the
proper pump.
1.
WHAT IS THE SIZE OF THE WELL?
The inside diameter
of the well must be known so that the proper size
pump and drop pipe can be determined.
2.
WHAT IS THE PUMPING LEVEL?
The vertical distance
in feet from the pump to the water level while the
pump is operating. If the pump is installed away from
the well and is on higher ground, this elevation must
also be included. Most wells draw down while being
pumped so this must not be confused with the standing
water level.
3.
WHAT SHOULD THE AVERAGE DISCHARGE
PRESSURE BE?
Usual average discharge pressure is
50 lbs. – halfway between the 40 lbs. to 60 lbs. switch
setting of most water systems. More pressure is needed
when the tank is installed away from the pump and at
a higher level, or when house or yard fixtures are
above the pump and tank, and a larger pump must be
used.
4.
WHAT CAPACITY IS REQUIRED?
The discharge
capacity of the pump in gallons per hour (GPM x 60)
that is needed for satisfactory service. The pump should
have enough capacity so that it can deliver the total
water requirement in 2 hours of continuous operation.
See TABLE 12-1 for average water requirements.
Submersible Pump Installation
NOTICE: “Top of Well” also means “Pitless Adapter Level”
or well exit.
“Service Inlet” also means “Storage Tank Inlet”.
Standing or Static Water Level – distance from top of well
to natural water level when pump is not operating.
Drawdown Distance – distance water level drops while
pump is operating.
Drawdown Level – standing water level plus drawdown.
Submergence – distance submersible pump intake screen
is installed below drawdown level.
Elevation – vertical distance between top of well and
service inlet.
Pump Setting – distance from top of well to pump inlet
screen.
Pumping Level – distance from drawdown level to service
inlet.
Service Pressure – pressure required (in PSI) at service
inlet.
Friction Loss – loss of pressure due to friction of water
flowing through pipe and fittings.
Total Discharge Head – discharge head (in feet) delivered
when pump is operating at desired capacity.
Horizontal Pipe Run – horizontal distance between service
inlet and well.
Selecting a Pump
NOTICE: PSI can be converted to equivalent feet of head
by multiplying by 2.31.
i.e. 60 psi = 138.6 feet of head
To choose a motor for your submersible pump you first
must know:
• Flow required in Gallons per Minute
• Total head (Pumping level, friction losses
and service pressure required)
Friction loss must be calculated, and depends upon total
length, diameter and type of pipe plus additions for each
fitting (valves, elbows...) in the line.
Refer to the product catalog for friction loss charts.
TABLE 12-1: Average Water Requirements
AVERAGE WATER REQUIREMENTS FOR GENERAL SERVICE
AROUND THE HOME AND FARM
Each person per day, for all purposes..........................50 gal.
Each horse, dry cow or beef animal ............................12 gal.
Each milking cow........................................................35 gal.
Each hog per day ..........................................................4 gal.
Each sheep per day .......................................................2 gal.
Each 100 chickens per day............................................4 gal.
AVERAGE AMOUNT OF WATER REQUIRED
BY VARIOUS HOME AND YARD FIXTURES
Drinking fountain, continuously
flowing.............................................50 to 100 gal. per day
Each shower bath ..............................................Up to 60 gal.
To fill bathtub ..............................................................30 gal.
To flush toilet ..........................................................2.5-6 gal.
To fill lavatory ...............................................................2 gal.
To sprinkle 1/4" of water on each 1000
square feet of lawn.................................................160 gal.
Dishwashing machine, per load ....................................3 gal.
Automatic washer, per load...............................Up to 50 gal.
Regeneration of domestic water softener..............50-100 gal.
AVERAGE FLOW RATE REQUIREMENTS
BY VARIOUS FIXTURES
(gpm equals gal. per minute, gph equals gal. per hour)
Fixture New (at 60 PSI) Older Style
Shower ..................................2.5 gpm..................4 to 6 gpm
Bathtub..................................3 gpm .....................4 to 8 gpm
Toilet......................................1.6 gpm ..................4 to 5 gpm
Lavatory.................................2.5 gpm ..................1 to 3 gpm
Kitchen sink...........................2.2 gpm..................2 to 3 gpm
1/2" hose and nozzle.................................................200 gph
3/4" hose and nozzle.................................................300 gph
Lawn sprinkler ..........................................................120 gph
Appendix
PN793 11/20/09 9:21 AM Page 79
Page 80

PN793
SECTION 12: Appendix 80
EXAMPLE
Assume we want 16 GPM at 60 PSI from a pump drawdown level (pumping level) 100 feet below the service
inlet.
We have a 35 foot horizontal run of 1 1/4" Plastic pipe
with two gate valves and (4) 90° elbows.
To find the Friction losses we must refer to friction loss
charts for pipe and fittings.
We find:
• 135 feet of pipe for the total pipe run (100 + 35).
• 10 equivalent feet of pipe for the gate valves (2 x5)
• 28 equivalent feet of pipe for the elbows (7x 4)
Add these for the total equivalent length of pipe = 173
• In the friction loss charts, find the loss of head for 173
feet of 1 1/4” pipe at 16 gpm. (3.96 per 100’) = 3.96 x
1.73 = 6.8 (round to 7.0)
Add: 7 Friction loss
100 Pumping level
139 60 PSI service pressure required (60 x
2.31=138.6. Round to 139)
= 246.0 Total Dynamic Head.
From this sample curve we would choose the 1 1/2 HP
pump.
Locate a pump with a best efficiency point near the desired
flow rate (16 GPM) that meets the total head requirements
(246 TDH).
Selecting a pump in this manner gives you the most
efficient pump for your application.
12.5 SIZING TANKS
Tanks should be sized to allow the pump to be off for at
least one minute between starts.
Refer to the dealer catalog for tank selection. Otherwise,
the following procedure can be used.
Drawdown based on Boyle’s Law
PROCEDURE:
1. Identify drawdown multiplier relating to specific
application.
2. Insert multiplier (X) into the following formula:
Pump GPM x Min Run Time
=
Minimum Tank
Multiplier (X)
Capacity Required
Example: An example of a 20 GPM pump with a minimum
run time of 1 minute, installed on a 50 - 70 PSIG
system pressure range:
20 GPM x 1 minute
=
83.3 minimum U.S.
.24 (factor) from Chart B
gallon tank capacity
NOTICE: Drawdown will be affected by operating
temperature of the system, accuracy of the pressure switch
and gauge, the actual precharge pressure and the rate of
fill.
Tank sizing for Variable Frequency Drives
Variable Frequency Drives (VFD) may require slightly
different methods for figuring tank size. Refer to Section 8
for VFD information.
Pump Off
Pump Start Pressure – PSI
Pressure
PSI
10 20 30 40 50 60 70 80
20 0.26
30 0.41 0.22
40 0.37 0.18
50 0.46 0.31 0.15
60 0.40 0.27 0.13
70 0.47 0.35 0.24 0.12
80 0.42 0.32 0.21 0.11
90 0.48 0.38 0.29 0.19 0.10
100 0.44 0.35 0.26 0.17
TABLE 12-2: Drawdown Volume Multiplier
(Approximate)
PN793 11/20/09 9:21 AM Page 80
600
500
400
CAPACITY LITRES PER MINUTE
25 0 50 75 100
2 HP
175
150
125
1-1/2 HP
300
200
TOTAL HEAD IN FEET
100
0 20 10 5 25 30 15
1 HP
CAPACITY GALLONS PER MINUTE
100
75
TOTAL HEAD IN METERS
50
25
0
Page 81

12.6 RECORD OF INSTALLATION
Outside Power:
Transformer 1 KVA
Transformer 2 KVA
Transformer 3 KVA
Cables
From Service Entrance to Pump Control:
Size AWG/MCM
Length ft.
Temp. Rating °F / °C (circle one)
Check appropriate boxes
■ Copper ■ Aluminum
■ Jacketed ■ Individual Conductors
From Pump Control to Motor:
Size AWG/MCM
Length ft.
Temp. Rating °F / °C (circle one)
Check appropriate boxes
■ Copper ■ Aluminum
■ Jacketed ■ Individual Conductors
Pump Motor Control Panel
Manufacturer / Model
Circuit Protection:
■ Circuit Breaker: Amps
■ Fuse Amps
■ Std. ■ Delay
Starter
Manufacturer Size
Type
■ Autotransformer
■ Full Voltage
■ Other
Time to full voltage sec.
Heaters
Manufacturer
Qty: Amp setting
Installation Data
Controls grounded to:
■ Motor ■ Well Head
■ Power Supply ■ Buried Rod
Grounding wire size AWG / MCM
Date
Location
Motor serial number
y
Arrangement 1 Arrangement 2 Arrangement 3
Amps Amps Amps
L1–T1= —— L1–T3= —— L1–T2= ——
L2–T2= —— L2–T1= —— L2–T3= ——
L3–T3= —— L3–T2= —— L3–T1= ——
Total Amps
—— —— ——
Average Amps
—— —— ——
From Average Amps
Deviation L1 —— —— ——
Deviation L2 —— —— ——
Deviation L3 —— —— ——
% Current Unbalance
Largest Deviation —— —— ——
% Unbalance + ——% ——% ——%
Motor Current - Balance Worksheet
SECTION 12: Appendix 81
Appendix
PN793
PN793 11/20/09 9:21 AM Page 81
T1 T2 T3
Transformers
Service
Entrance
Pump
Control
Pump
Assembl
Page 82

PN793
Record of Installation
SECTION 12: Appendix 82
Installer
Address
City State Zip
Phone Fax
E-mail
Who to contact?
Owner
Address
City State Zip
Phone Fax
E-mail
Who to contact?
Installation
Well Identification
Water Temperature
Date Installed
Signature
Pump Information
Model
GPM @ft. TDH
PSI
Date code
Motor Nameplate Information
Manufacture
Model
HP
Voltage
Phase
Max Amps
Date code
Serial Number
VFD (Variable Frequency Drive) Information
Drive Manufacture
Model Number
■ Input Filters
■
Output Filters
PN793 11/20/09 9:21 AM Page 82
Down Pipe Dia.
Casing Dia.
Static Water Level.
Total Dynamic Head
Drawdown Water Level.
Check Valve Locations
Perforated Casing
From
Well Screen
From
To
Pump Inlet depth
To
Flow Sleeve Dia.
Casing Depth
Well Depth
Page 83

83
PN793
PN793 11/20/09 9:21 AM Page 83
Page 84

84
PN793 (Rev. 11/09)
PN793 11/20/09 9:21 AM Page 84
 Loading...
Loading...