

3D accelerometer and 3D gyroscope
Features
■ Analog supply voltage: 2.4 V to 3.6 V
■ Digital supply voltage IOs: 1.8 V
■ Low power mode
■ Power-down mode
■ 3 independent acceleration channels and 3
angular rate channels
■ ±2 g/±4 g/±8 g/±16 g dynamically selectable
full scale
■ ±250/±500/±2000 dps dynamically selectable
full scale
■ SPI/I
■ Programmable interrupt generator for free-fall
■ ECOPACK
2
C serial interface (16-bit data output)
and motion detection
®
RoHS and “Green” compliant
LSM330DLC
iNEMO inertial module:
Preliminary data
LGA-28L (4x5x1.1 mm)
ST’s family of MEMS sensor modules leverages
the robust and mature manufacturing processes
already used for the production of micromachined
accelerometers.
The various sensing elements are manufactured
using specialized micromachining processes,
while the IC interfaces are developed using a
CMOS technology that allows the design of a
dedicated circuit which is trimmed to better match
the sensing element characteristics.
The LSM330DLC has dynamically user-
Application
■ GPS navigation systems
■ Impact recognition and logging
■ Gaming and virtual reality input devices
■ Motion activated functions
■ Intelligent power saving for handheld devices
■ Vibration monitoring and compensation
■ Free-fall detection
■ 6D orientation detection
selectable full scale acceleration range of
±2 g/±4 g/±8 g/±16 g and angular rate of
±250/±500/±2000 deg/sec.
The accelerometer and gyroscope sensors can
be either activated or separately put in Low
power/Power-down mode for applications
optimized for power saving.
The LSM330DLC is available in a plastic land grid
array (LGA) package.
Description
The LSM330DLC is a system-in-package
featuring a 3D digital accelerometer and a 3D
digital gyroscope.
Table 1. Device summary
Part number Temperature range [°C] Package Packing
LSM330DLC -40 to +85
LSM330DLCTR -40 to +85 Tape and reel
LGA-28L (4x5x1.1 mm)
Tr ay
September 2011 Doc ID 022162 Rev 1 1/67
This is preliminary information on a new product now in development or undergoing evaluation. Details are subject to
change without notice.
www.st.com
67

Contents LSM330DLC
Contents
1 Block diagram and pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1 Block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Module specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.1 Mechanical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Temperature sensor characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4 Communication interface characteristics . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4.1 SPI - serial peripheral interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4.2 I2C - inter IC control interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.5 Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3 Terminology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.1 Sensitivity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Zero-g level . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4 Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1 Normal mode, Low power mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1.1 Self-test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1.2 6D/4D orientation detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4.1.3 “Sleep-to-wake” and “Return to sleep” . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2 Linear acceleration digital main blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.1 FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.2 Bypass mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.3 FIFO mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.4 Stream mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.2.5 Stream-to-FIFO mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.2.6 Retrieve data from FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3 Gyroscope digital main blocks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.4 FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.4.1 Bypass mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.4.2 FIFO mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2/67 Doc ID 022162 Rev 1

LSM330DLC Contents
4.4.3 Stream mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.4.4 Bypass-to-stream mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4.5 Stream-to-FIFO mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4.6 Retrieve data from FIFO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.5 Level-sensitive / Edge-sensitive data enable . . . . . . . . . . . . . . . . . . . . . . 25
4.5.1 Level-sensitive trigger stamping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.5.2 Edge-sensitive trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.6 Factory calibration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Application hints . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.1 External capacitors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.2 Soldering information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
6 Digital interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6.1 I2C serial interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
6.1.1 I2C operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6.2 SPI bus interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
6.2.1 SPI read . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.2.2 SPI write . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
6.2.3 SPI read in 3-wire mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
7 Register mapping . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
8 Register descriptions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
8.1 CTRL_REG1_A (20h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
8.2 CTRL_REG2_A (21h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
8.3 CTRL_REG3_A (22h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
8.4 CTRL_REG4_A (23h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
8.5 CTRL_REG5_A (24h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
8.6 CTRL_REG6_A (25h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
8.7 REFERENCE/DATACAPTURE_A (26h) . . . . . . . . . . . . . . . . . . . . . . . . . . 43
8.8 STATUS_REG_A (27h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
8.9 OUT_X_L_A (28h), OUT_X_H_A (29h) . . . . . . . . . . . . . . . . . . . . . . . . . . 44
8.10 OUT_Y_L_A (2Ah), OUT_Y_H_A (2Bh) . . . . . . . . . . . . . . . . . . . . . . . . . 44
8.11 OUT_Z_L _A (2Ch), OUT_Z_H_A (2Dh) . . . . . . . . . . . . . . . . . . . . . . . . . 44
Doc ID 022162 Rev 1 3/67

Contents LSM330DLC
8.12 FIFO_CTRL_REG_A (2Eh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
8.13 FIFO_SRC_REG_A (2Fh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.14 INT1_CFG_A (30h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.15 INT1_SRC_A (31h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.16 INT1_THS_A (32h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.17 INT1_DURATION_A (33h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.18 CLICK_CFG _A (38h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8.19 CLICK_SRC_A (39h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8.20 CLICK_THS_A (3Ah) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.21 TIME_LIMIT_A (3Bh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.22 TIME_LATENCY_A (3Ch) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.23 TIME WINDOW_A (3Dh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.24 Act_THS (3Eh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.25 Act_DUR (3Fh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.26 WHO_AM_I_G (0Fh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.27 CTRL_REG1_G (20h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.28 CTRL_REG2_G (21h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
8.29 CTRL_REG3_G (22h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
8.30 CTRL_REG4_G (23h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
8.31 CTRL_REG5_G (24h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
8.32 REFERENCE_G (25h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
8.33 OUT_TEMP_G (26h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
8.34 STATUS_REG_G (27h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
8.35 OUT_X_L_G (28h), OUT_X_H_G (29h) . . . . . . . . . . . . . . . . . . . . . . . . . 55
8.36 OUT_Y_L_G (2Ah), OUT_Y_H_G (2Bh) . . . . . . . . . . . . . . . . . . . . . . . . . 55
8.37 OUT_Z_L_G (2Ch), OUT_Z_H_G (2Dh) . . . . . . . . . . . . . . . . . . . . . . . . . 56
8.38 FIFO_CTRL_REG_G (2Eh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
8.39 FIFO_SRC_REG_G (2Fh) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
8.40 INT1_CFG_G (30h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
8.41 INT1_SRC_G (31h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
8.42 INT1_THS_XH_G (32h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8.43 INT1_THS_XL_G (33h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
8.44 INT1_THS_YH _G (34h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4/67 Doc ID 022162 Rev 1

LSM330DLC Contents
8.45 INT1_THS_YL_G (35h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.46 INT1_THS_ZH_G (36h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.47 INT1_THS_ZL_G (37h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.48 INT1_DURATION_G (38h) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
9 Package information . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
10 Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Doc ID 022162 Rev 1 5/67

List of tables LSM330DLC
List of tables
Table 1. Device summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Table 2. Pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Table 3. Mechanical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Table 4. Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Table 5. Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Table 6. SPI slave timing values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Table 7. I2C slave timing values . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Table 8. Absolute maximum ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Table 9. Operating mode selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Table 10. Serial interface pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 11. Serial interface pin description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Table 12. Transfer when master is writing one byte to slave . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 13. Transfer when master is writing multiple bytes to slave . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
Table 14. Transfer when master is receiving (reading) one byte of data from slave . . . . . . . . . . . . . 32
Table 15. Transfer when master is receiving (reading) multiple bytes of data from slave . . . . . . . . . 32
Table 16. Linear acceleration SAD+Read/Write patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 17. Angular rate SAD+Read/Write patterns . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Table 18. Register address map. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Table 19. CTRL_REG1_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Table 20. CTRL_REG1_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Table 21. Data rate configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Table 22. CTRL_REG2_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 23. CTRL_REG2_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 24. High-pass filter mode configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 25. CTRL_REG3_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 26. CTRL_REG3_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Table 27. CTRL_REG4_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 28. CTRL_REG4_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 29. CTRL_REG5_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 30. CTRL_REG5_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Table 31. CTRL_REG6_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 32. CTRL_REG6 description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 33. REFERENCE_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 34. REFERENCE register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 35. STATUS_REG_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 36. STATUS_REG_A register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Table 37. FIFO_CTRL_REG_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Table 38. FIFO_CTRL_REG_A register description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Table 39. FIFO mode configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 40. FIFO_SRC_REG_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 41. FIFO_SRC_REG_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 42. INT1_CFG_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 43. INT1_CFG_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Table 44. Interrupt mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Table 45. INT1_SRC_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Table 46. INT1_SRC_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Table 47. INT1_THS_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Table 48. INT1_THS_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6/67 Doc ID 022162 Rev 1

LSM330DLC List of tables
Table 49. INT1_DURATION_Aregister . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Table 50. INT1_DURATION_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Table 51. CLICK_CFG_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 52. CLICK_CFG_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 53. CLICK_SRC_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 54. CLICK_SRC_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Table 55. CLICK_THS_A register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 56. CLICK_SRC_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 57. TIME_LIMIT_A register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 58. TIME_LIMIT_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 59. TIME_LATENCY_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 60. TIME_LATENCY_A description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 61. TIME_WINDOW_A register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Table 62. TIME_WINDOW_A description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 63. Act_THS register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 64. Act_THS description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 65. Act_DUR register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 66. Act_DUR description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 67. WHO_AM_I_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 68. CTRL_REG1_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 69. CTRL_REG1_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table 70. DR and BW configuration setting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Table 71. Power mode selection configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Table 72. CTRL_REG2_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Table 73. CTRL_REG2_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Table 74. High-pass filter mode configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Table 75. High-pass filter cut-off frequency configuration [Hz] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
Table 76. CTRL_REG3_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 77. CTRL_REG3_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 78. CTRL_REG4_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 79. CTRL_REG4_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Table 80. CTRL_REG5_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 81. CTRL_REG5_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 82. REFERENCE_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 83. REFERENCE_G register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Table 84. OUT_TEMP_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 85. OUT_TEMP_G register description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 86. STATUS_REG_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 87. STATUS_REG description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Table 88. FIFO_CTRL_REG_G register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 89. FIFO_CTRL_REG_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 90. FIFO mode configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 91. FIFO_SRC_REG_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 92. FIFO_SRC_REG_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Table 93. INT1_CFG_G register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 94. INT1_CFG_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 95. INT1_SRC_G register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 96. INT1_SRC_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Table 97. INT1_THS_XH_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 98. INT1_THS_XH_G description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 99. INT1_THS_XL_G register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 100. INT1_THS_XL_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Doc ID 022162 Rev 1 7/67

List of tables LSM330DLC
Table 101. INT1_THS_YH_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 102. INT1_THS_YH_G description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Table 103. INT1_THS_YL_G register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 104. INT1_THS_YL_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 105. INT1_THS_ZH_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 106. INT1_THS_ZH_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 107. INT1_THS_ZL_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 108. INT1_THS_ZL_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 109. INT1_DURATION_G register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 110. INT1_DURATION_G description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Table 111. Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8/67 Doc ID 022162 Rev 1

LSM330DLC List of figures
List of figures
Figure 1. LSM330DLC block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Figure 2. Pin connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Figure 3. SPI slave timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 4. I2C slave timing diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Figure 5. Gyroscope block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 6. Bypass mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Figure 7. FIFO mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 8. Stream mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Figure 9. Bypass-to-stream mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Figure 10. Trigger stream mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
Figure 11. Level-sensitive trigger stamping (LVLen = 1; EXTRen = 0) . . . . . . . . . . . . . . . . . . . . . . . . 29
Figure 12. Edge-sensitive trigger . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Figure 13. LSM330DLC electrical connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Figure 14. Read and write protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Figure 15. SPI read protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 16. Multiple-byte SPI read protocol (2-byte example). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Figure 17. SPI write protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 18. Multiple bytes SPI write protocol (2 bytes example) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Figure 19. SPI read protocol in 3-wire mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Figure 20. INT1_Sel and Out_Sel configuration block diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Figure 21. Wait disabled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Figure 22. Wait enabled . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Figure 23. LGA-28 (4x5x1.1 mm): mechanical data and package dimensions . . . . . . . . . . . . . . . . . . 65
Doc ID 022162 Rev 1 9/67
Block diagram and pin description LSM330DLC
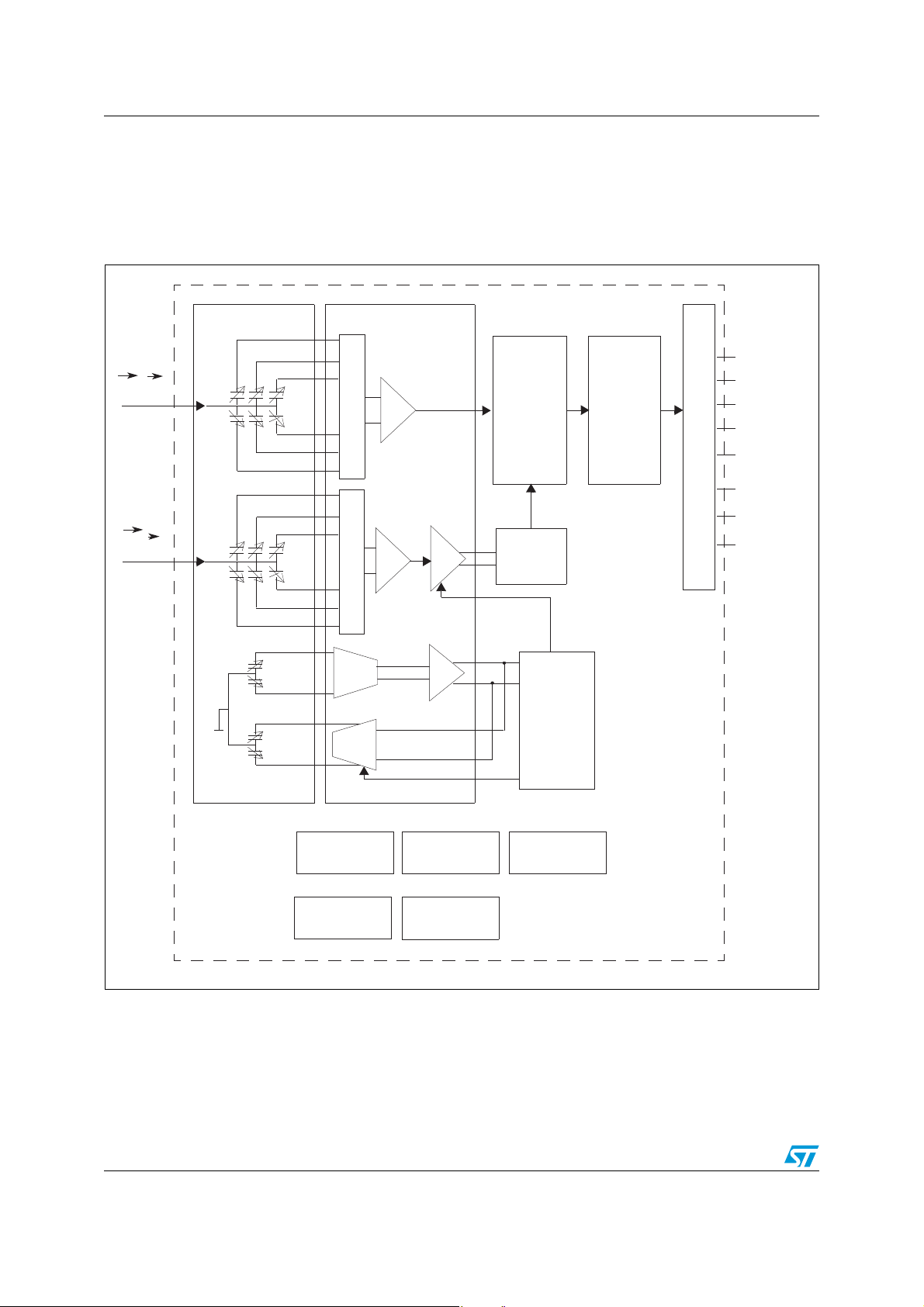
1 Block diagram and pin description
1.1 Block diagram
Figure 1. LSM330DLC block diagram
I (a)
I (
Ω)
Sensing Block
Feedback+
Feedback-
Drive-
Drive+
X+
Sensing Interface
Y+
Z+
Z-
Y-
X-
X+
Y+
Z+
Z-
Y-
X-
MUX
MUX
VOLTAGE
GAIN
AMPLIFIER
CHARGE
AMPLIFIER
+
-
CHARGE
AMPLIFIER
+
-
DEMODULATOR
ANALOG
CONDITIONING
A/D Control
LOW-PASS
FILTER
AUTOMATIC
GAIN
CONTROL
Logicconverter
I2C/SPI
CS_A/G
SDA/SDI_A/G
SDO_A/G
INT1_A
INT2_A
INT1_G
DRDY_G\INT2_
SCL_A/G
REFERENCE
CONTROL LOGIC
&
INTERRUPT GEN.
TRIMMING
CIRCUITS
PHASE
GENERATOR
10/67 Doc ID 022162 Rev 1
CLOCK
AM10160V1
LSM330DLC Block diagram and pin description
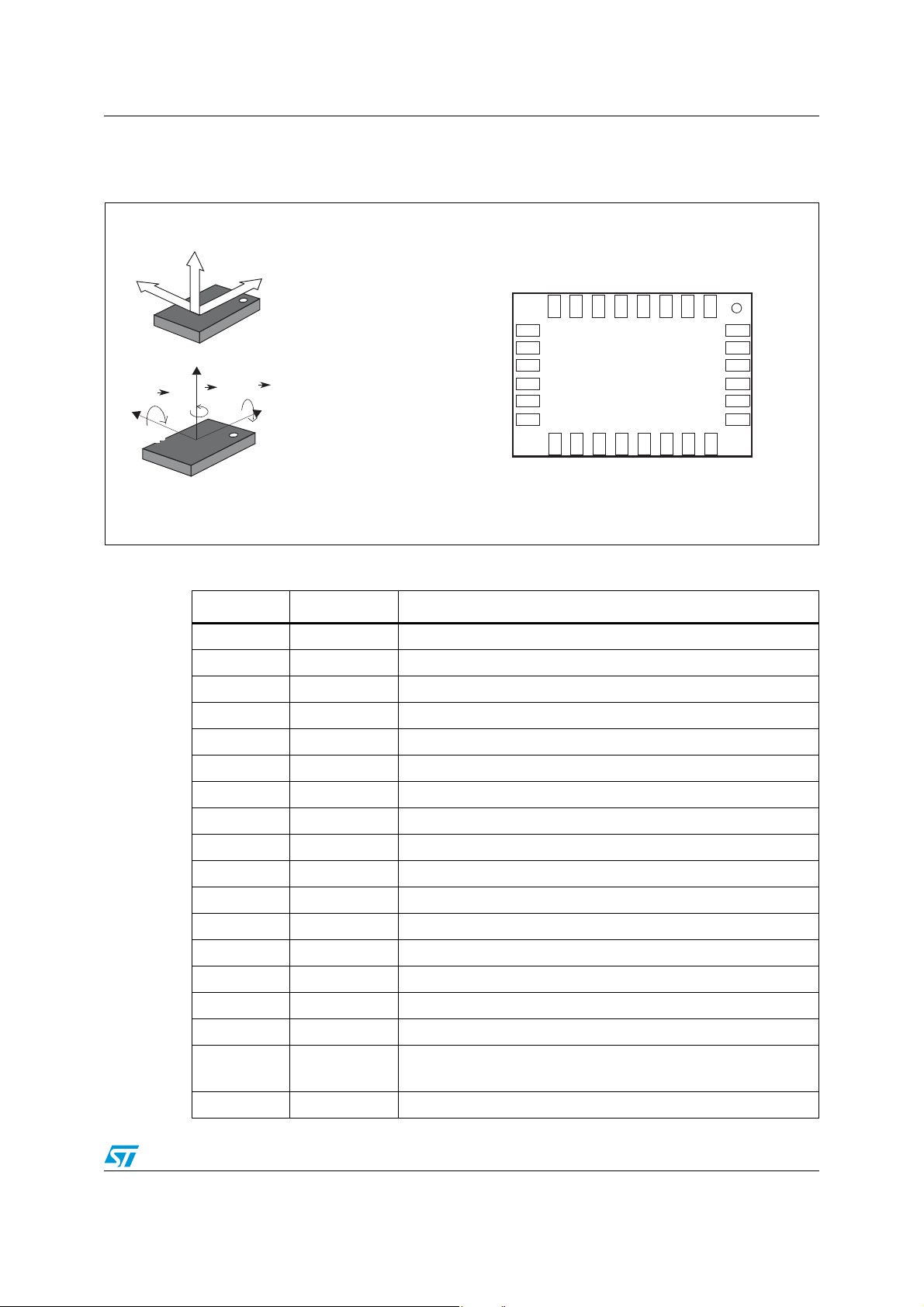
1.2 Pin description
Figure 2. Pin connection
Z
Y
X
1
+Ω
Y
X
DIRECTION OF
DETECTABLE
ACCELERATIONS
Z
+Ω
+Ω
z
1
X
X
INT1_A
INT2_A
INT1_G
DRDY_G/INT2_G
DEN_G
CAP
DIRECTION OF
DETECTABLE
VDD_IO
CS_A
SCL_A/G
CS_G
21
20
(BOTTOM VIEW)
15
14
SDO_A
VDD_IO
SDO_G
28
FILTVDD
FILTIN Y
FILTOUT Y/ OUT Y
SDA_A/G
GND
1
RES
RES
RES
RES
GND
6
7
ANGULAR RATES
RES
RES
RES
RES
RES
VDD
VDD
VDD
AM10161V1
Table 2. Pin description
Pin# Name Function
1 GND 0 V supply
2 Res Reserved. Connect to GND
3 Res Reserved. Connect to GND
4 Res Reserved. Connect to GND
5 Res Reserved. Connect to GND
6 GND 0 V supply
7VddPower supply
8VddPower supply
9VddPower supply
10 Res Reserved. Connect to Vdd
11 Res Reserved. Connect to Vdd
12 Res Reserved. Connect to Vdd
13 Res Reserved. Connect to Vdd
14 Res Reserved. Connect to Vdd
15 Cap Connect to GND with ceramic capacitor, 10 nF (+/-10%), 25 V
16 DEN_G Gyroscope data enable
17
DRDY_G/
INT2_G
Gyroscope data ready/interrupt signal 2
18 INT1_G Gyroscope interrupt signal
Doc ID 022162 Rev 1 11/67
Block diagram and pin description LSM330DLC
Table 2. Pin description (continued)
Pin# Name Function
19 INT2_A Accelerometer interrupt signal
20 INT1_A Accelerometer interrupt signal
21 Vdd_IO Power supply for IO pins
Gyroscope: SPI enable
22 CS_G
23 CS_A
24 SCL_A/G I
25 Vdd_IO Power supply for IO pins
26 SDO_G
27 SDO_A
28 SDA_A/G
2
C/SPI mode selection (1: SPI idle mode / I2C communication
I
enabled; 0: SPI communication mode / I2C disabled)
Accelerometer: SPI enable
2
C/SPI mode selection (1: SPI idle mode / I2C communication
I
enabled; 0: SPI communication mode / I
2
C serial clock (SCL)/SPI serial port clock (SPC)
2
C disabled)
Gyroscope:
SPI serial data output (SDO)
2
C least significant bit of the device address (SA0)
I
Accelerometer:
SPI serial data output (SDO)
I2C least significant bit of the device address (SA0)
2
I
C serial data (SDA)
SPI serial data input (SDI)
3-wire interface serial data output (SDO)
12/67 Doc ID 022162 Rev 1
LSM330DLC Module specifications
z
2 Module specifications
2.1 Mechanical characteristics
@ Vdd = 3V, T = 25 °C unless otherwise noted
Table 3. Mechanical characteristics
Symbol Parameter Test conditions Min. Typ.
LA_FS
G_FS
LA_So Linear acceleration sensitivity
G_So Angular rate sensitivity
LA_So
G_SoDr
LA_TyOff
G_TyOff
LA_TCOff
G_TCOff
An Acceleration noise density
Linear acceleration measurement
(2)
range
Angular rate
measurement range
Linear acceleration sensitivity
change vs. temperature
Angular rate sensitivity change vs.
temperature
Linear acceleration typical zero-g
level offset accuracy
Angular rate typical zero-rate
(4)
level
Linear acceleration zero-g level
change vs. temperature
Zero-rate level change vs.
temperature
(3)
(3)
User-selectable
User-selectable
FS = ±2 g 1
FS = ±4 g 2
FS = ±8 g 4
FS = ±16 g 12
FS = ±250 dps 8.75
FS = ±500 dps 17.50
FS = ±2000 dps 70
FS = ±2 g ±0.05 %/°C
From -40 °C to +85 °C ±2 %
FS bit set to 00 ±60 mg
FS = 250 dps ±10
FS = 2000 dps ±25
Max delta from 25 °C ±0.5 mg/°C
FS = ±2 g, Normal mode
Ta bl e 9 , ODR bit set to
1001 Ta b le 1 9
(a)
(1)
Max. Unit
±2
±4
±8
±16
±250
±2000
±0.2 dps/°C
220 µg/
g
dps±500
mg/digit
mdps/
digit
dpsFS = 500 dps ±15
H
a. The product is factory calibrated at 3.0 V. The operational power supply range is from 2.4 V to 3.6 V.
Doc ID 022162 Rev 1 13/67
Module specifications LSM330DLC
z
Table 3. Mechanical characteristics (continued)
Symbol Parameter Test conditions Min. Typ.
(1)
Max. Unit
Rn Rate noise density FS = ±250 dps, BW = 50 Hz 0.03 dps/
Top Operating temperature range -40 +85 °C
1. Typical specifications are not guaranteed.
2. Verified by wafer level test and measurement of initial offset and sensitivity.
3. Typical zero-g level offset value after MSL3 preconditioning.
4. Offset can be eliminated by enabling the built-in high-pass filter.
H
14/67 Doc ID 022162 Rev 1
LSM330DLC Module specifications
2.2 Electrical characteristics
@ Vdd = 3 V, T = 25 °C unless otherwise noted
Table 4. Electrical characteristics
Symbol Parameter Test conditions Min. Typ.
Vdd Supply voltage 2.4 3.6 V
Vdd_IO Power supply for I/O 1.71 Vdd+0.1 V
LA_Idd
LA_IddLowP
LA_IddPdn
G_Idd
Accelerometer current
consumption in Normal mode
Accelerometer current
consumption in Low power
mode
Accelerometer current
consumption in Power-down
mode
Gyroscope current
consumption in Normal mode
ODR = 50 Hz 11
ODR = 1 Hz 2
ODR = 50 Hz 6 µA
(1)
0.5 µA
6.1 mA
Max. Unit
µA
G_IddLowP
G_IddPdn
VIH Digital high level input voltage 0.8*Vdd_IO V
VIL Digital low level input voltage 0.2*Vdd_IO V
VOH High level output voltage 0.9*Vdd_IO V
VOL Low level output voltage 0.1*Vdd_IO V
Top Operating temperature range -40 +85
1. Typical specifications are not guaranteed.
2. Sleep mode introduces a faster turn-on time compared to Power-down mode.
Gyroscope supply current
in Sleep mode
Gyroscope current
consumption in Power-down
mode
(2)
2mA
5µA
°C
Doc ID 022162 Rev 1 15/67

Module specifications LSM330DLC
2.3 Temperature sensor characteristics
@ Vdd = 3V, T = 25 °C unless otherwise noted
Table 5. Electrical characteristics
Symbol Parameter Test condition Min. Typ.
(b)
(1)
Max. Unit
TSDr
TODR Temperature refresh rate 1 Hz
Top Operating temperature range -40 +85 °C
1. Typical specifications are not guaranteed.
Temperature sensor output
change vs. temperature
-1 °C/digit
-
b. The product is factory calibrated at 3.0 V.
16/67 Doc ID 022162 Rev 1
LSM330DLC Module specifications
t
t
t
t
t
t
t
t
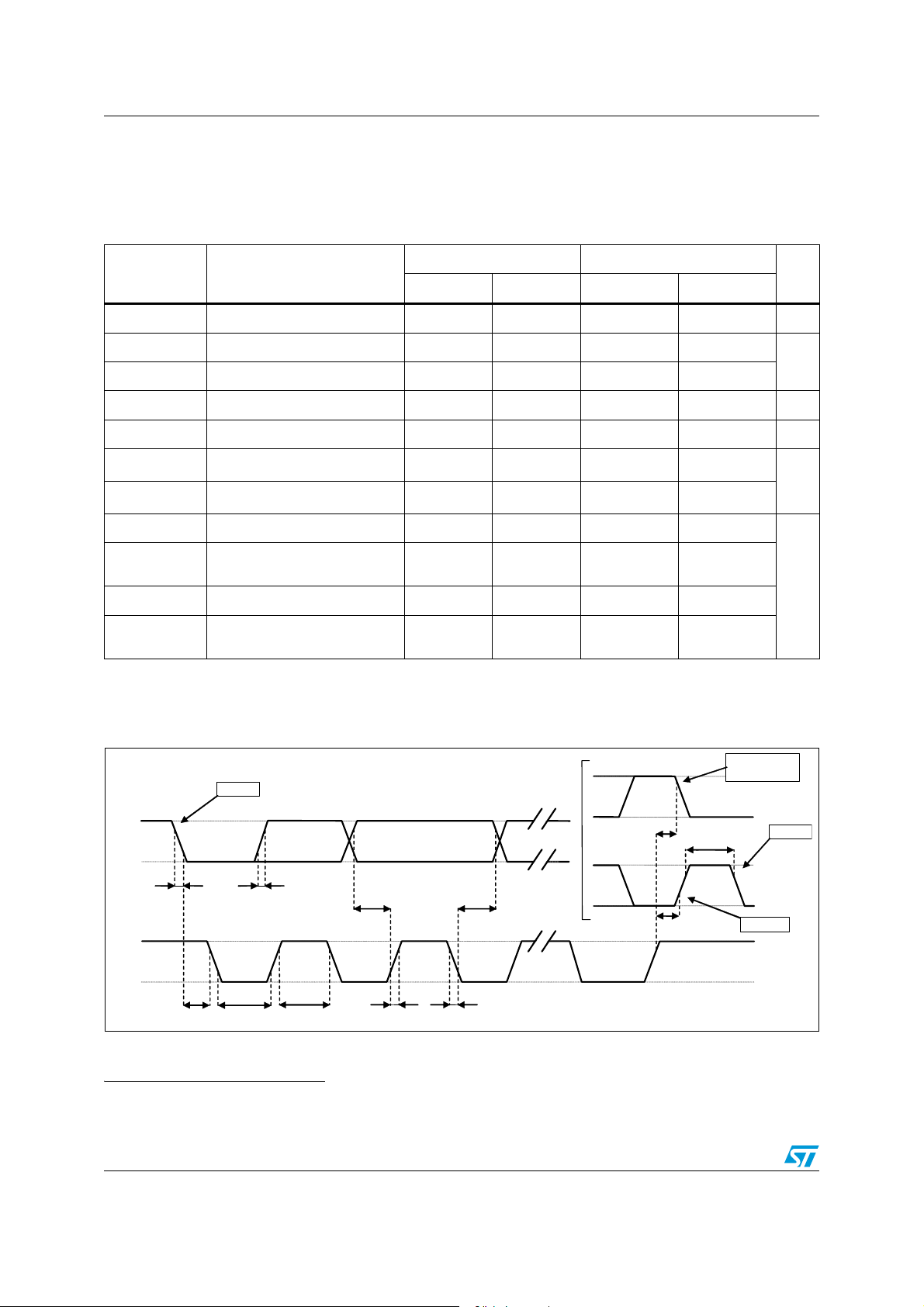
2.4 Communication interface characteristics
2.4.1 SPI - serial peripheral interface
Subject to general operating conditions for Vdd and TOP.
Table 6. SPI slave timing values
(1)
Val u e
Symbol Parameter
Min Max
tc(SPC) SPI clock cycle 100 ns
fc(SPC) SPI clock frequency 10 MHz
tsu(CS) CS setup time 6
th(CS) CS hold time 8
tsu(SI) SDI input setup time 5
th(SI) SDI input hold time 15
tv(SO) SDO valid output time 50
th(SO) SDO output hold time 9
tdis(SO) SDO output disable time 50
Unit
ns
1. Values are guaranteed at 10 MHz clock frequency for SPI with both 4 and 3 wires, based on characterization results. Not
tested in production.
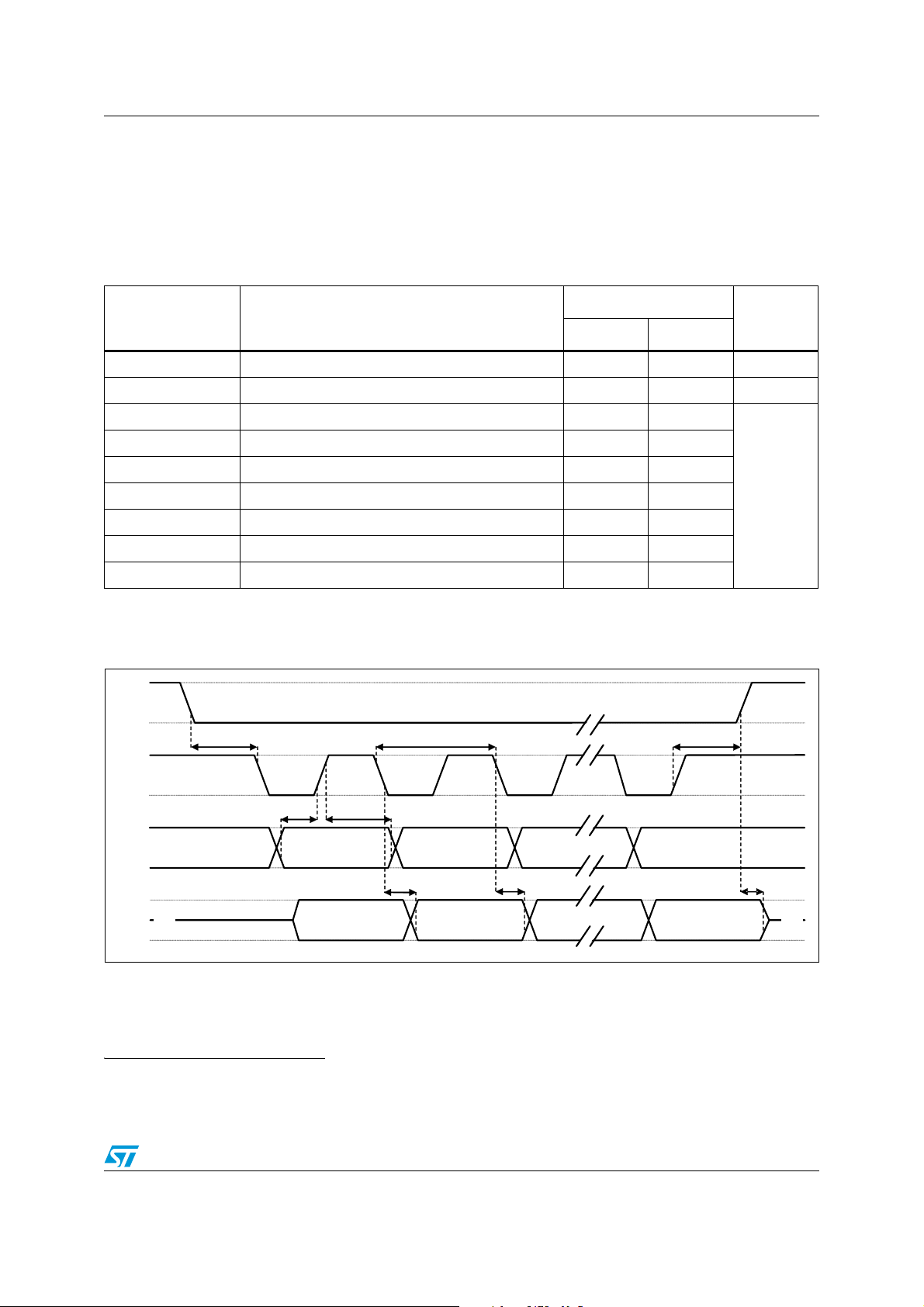
(c)(d)
Figure 3. SPI slave timing diagram
CS
(3)
su(CS)
SPC
(3)
h(SI)
MSB IN
MSB OUT
SDI
SDO
su(SI)
(3)
(3)
v(SO)
c(SPC)
h(SO)
h(CS)
LSB IN
LSB OUT
dis(SO)
3. Data on CS, SPC, SDI and SDO refer to pins: CS_A, CS_G, SCL_A/G, SDA_A/G, SDO_A / SDO_G.
(3)
(3)
(3)
(3)
c. The SDO output line features an internal pull-up.
d. Measurement points are done at 0.2·Vdd_IO and 0.8·Vdd_IO, for both input and output ports.
Doc ID 022162 Rev 1 17/67
Module specifications LSM330DLC
W
W
W
W
W
W
W
W
W
W
W
W
2.4.2 I2C - inter IC control interface
Subject to general operating conditions for Vdd and TOP.
Table 7. I2C slave timing values
Symbol Parameter
(1)
I2C standard mode
(1)
I2C fast mode
Min Max Min Max
(1)
Unit
f
(SCL)
t
w(SCLL)
t
w(SCLH)
t
su(SDA)
t
h(SDA)
t
r(SDA) tr(SCL)
t
f(SDA) tf(SCL)
t
h(ST)
t
su(SR)
t
su(SP)
t
w(SP:SR)
1. SCL (SCL_A/G pin), SDA (SDA_A/G pin)
2. Cb = total capacitance of one bus line, in pF
Figure 4. I
SCL clock frequency 0 100 0 400 KHz
SCL clock low time 4.7 1.3
SCL clock high time 4.0 0.6
SDA setup time 250 100 ns
SDA data hold time 0.01 3.45 0 0.9 µs
SDA and SCL rise time 1000
SDA and SCL fall time 300
START condition hold time 4 0.6
Repeated START condition
setup time
STOP condition setup time 4 0.6
Bus free time between STOP
and START condition
2
C slave timing diagram
67$57
(e)
20 + 0.1C
20 + 0.1C
4.7 0.6
4.7 1.3
µs
(2)
b
(2)
b
300
ns
300
µs
5(3($7('
67$57
6'$
I6'$
U6'$
VX6'$
K6'$
6&/
Z6&//
K67
e. Measurement points are done at 0.2·Vdd_IO and 0.8·Vdd_IO, for both ports
Z6&/+
U6&/
I6&/
18/67 Doc ID 022162 Rev 1
VX65
VX63
Z6365
67$57
6723
!-V
LSM330DLC Module specifications
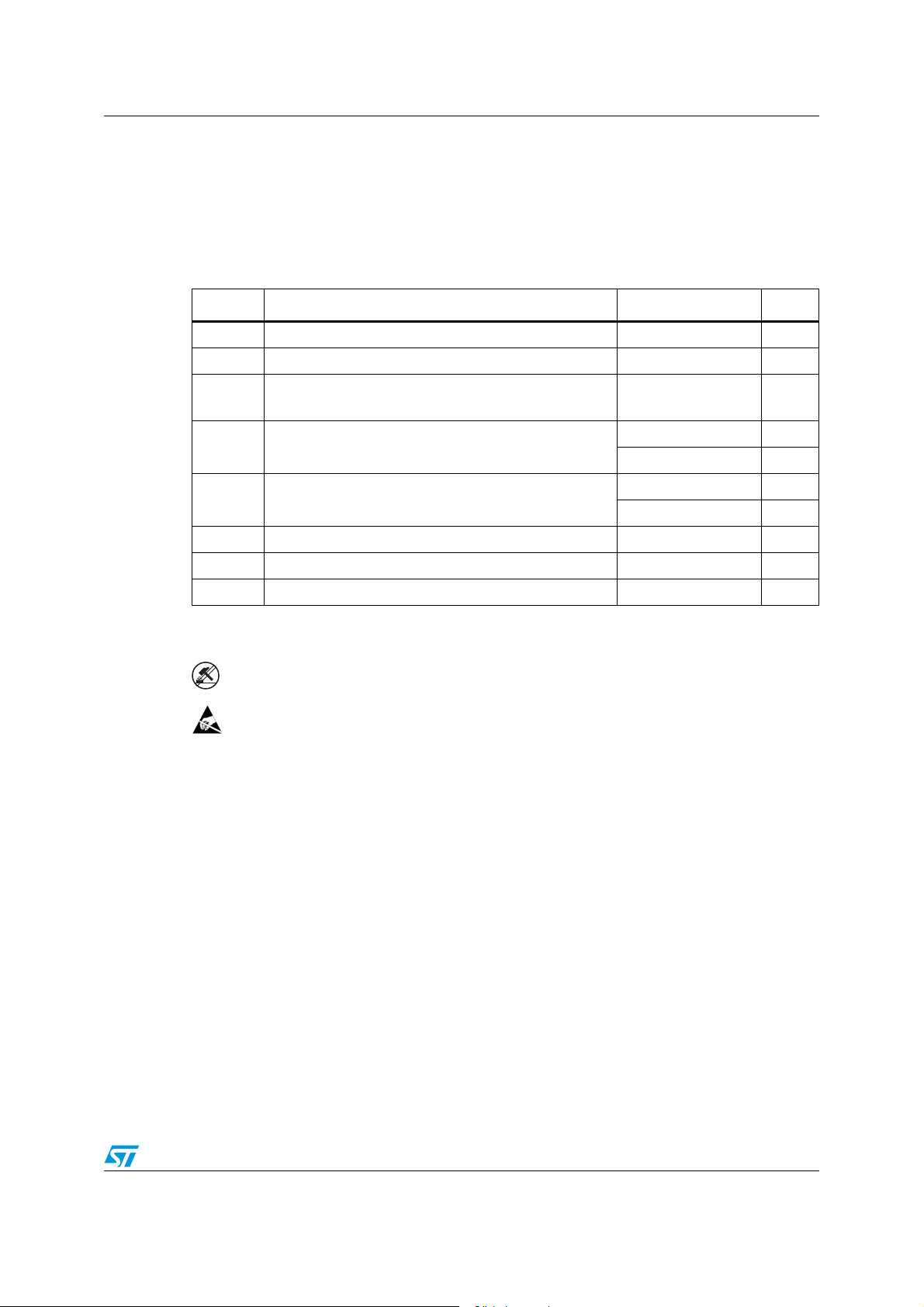
2.5 Absolute maximum ratings
Stresses above those listed as “absolute maximum ratings” may cause permanent damage
to the device. This is a stress rating only and functional operation of the device under these
conditions is not implied. Exposure to maximum rating conditions for extended periods may
affect device reliability.
Table 8. Absolute maximum ratings
Symbol Ratings Maximum value Unit
Vdd Supply voltage -0.3 to 4.8 V
Vdd_IO I/O pins supply voltage -0.3 to 4.8 V
Input voltage on any control pin (SCL_A/G, SDA_A/G,
SDO_A, SDO_G, CS_A, CS_G, DEN_G)
Acceleration (any axis, powered, Vdd = 3 V)
Acceleration (any axis, unpowered)
Operating temperature range -40 to +85 °C
OP
Storage temperature range -40 to +125 °C
A
A
T
T
Vin
POW
UNP
STG
ESD Electrostatic discharge protection 2 (HBM) kV
1. Supply voltage on any pin should never exceed 4.8 V.
(1)
-0.3 to Vdd_IO +0.3 V
3000 g for 0.5 ms
10000 g for 0.1 ms
3000 g for 0.5 ms
10000 g for 0.1 ms
This is a mechanical shock sensitive device, improper handling can cause permanent
damage to the part.
This is an ESD sensitive device, improper handling can cause permanent damage to
the part.
Doc ID 022162 Rev 1 19/67

Terminology LSM330DLC
3 Terminology
3.1 Sensitivity
Linear acceleration sensitivity can be determined e.g. by applying 1 g acceleration to the
device. Because the sensor can measure DC accelerations, this can be done easily by
pointing the selected axis towards the ground, noting the output value, rotating the sensor
180 degrees (pointing towards the sky) and noting the output value again. By doing so, ±1 g
acceleration is applied to the sensor. Subtracting the larger output value from the smaller
one, and dividing the result by 2, leads to the actual sensitivity of the sensor. This value
changes very little over temperature and over time. The sensitivity tolerance describes the
range of sensitivities of a large number of sensors.
Angular Rate Sensitivity describes the angular rate gain of the sensor and can be
determined by applying a defined angular velocity to it. This value changes very little over
temperature and also very little over time.
3.2 Zero-g level
Linear acceleration zero-g level offset (TyOff) describes the deviation of an actual output
signal from the ideal output signal if no acceleration is present. A sensor in a steady state on
a horizontal surface will measure 0 g on both the X axis and Y axes, whereas the Z axis will
measure 1 g. Ideally, the output is in the middle of the dynamic range of the sensor (content
of OUT registers 00h, data expressed as 2’s complement number). A deviation from the
ideal value in this case is called zero-g offset.
Offset is to some extent a result of stress to MEMS sensor and therefore the offset can
slightly change after mounting the sensor onto a printed circuit board or exposing it to
extensive mechanical stress. Offset changes little over temperature, see “Linear
acceleration zero-g level change vs. temperature” in Ta bl e 3 . The zero-g level tolerance
(TyOff) describes the standard deviation of the range of zero-g levels of a group of sensors.
Angular rate zero-rate level describes the actual output value if there is no angular rate
present. zero-rate level of precise MEMS sensors is, to some extent, a result of stress to the
sensor and therefore zero-rate level can slightly change after mounting the sensor onto a
printed circuit board or after exposing it to extensive mechanical stress. This value changes
very little over temperature and over time.
20/67 Doc ID 022162 Rev 1
LSM330DLC Functionality
4 Functionality
The LSM330DLC is a system-in-package featuring a 3D digital accelerometer and a 3D
digital gyroscope.
The device includes specific sensing elements and two IC interfaces capable to measuring
both the acceleration and angular rate applied to the module and to provide a signal to
external applications through an SPI/I
The various sensing elements are manufactured using specialized micromachining
processes, while the IC interfaces are developed using a CMOS technology that allows the
design of a dedicated circuit which is trimmed to better match the sensing element
characteristics.
The LSM330DLC may also be configured to generate an inertial wakeup and free-fall
interrupt signal according to a programmed acceleration event along the enabled axes.
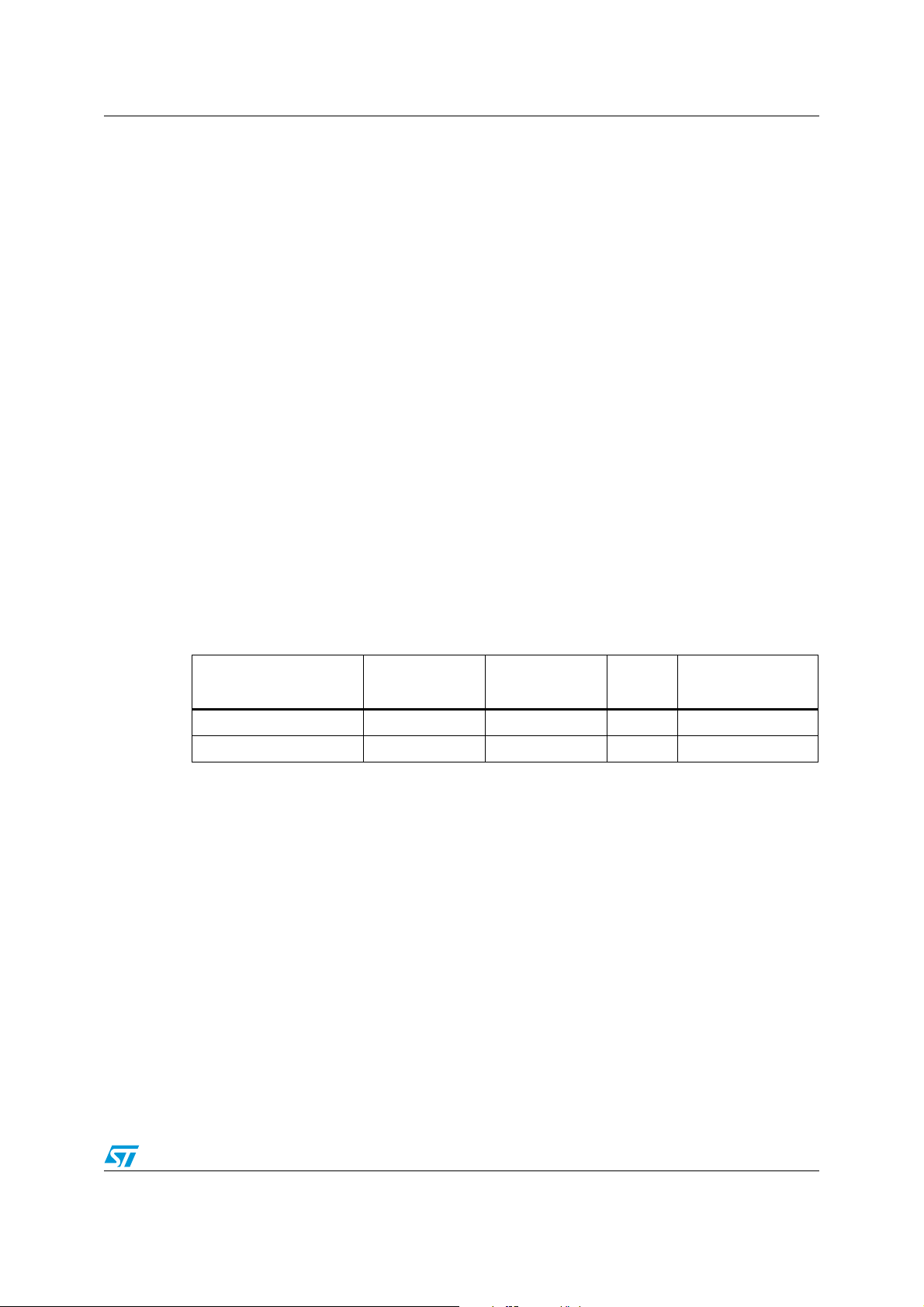
4.1 Normal mode, Low power mode
The LSM330DLC provides two different operating modes: Normal mode and Low power
mode. Normal mode guarantees high resolution, while Low power mode further reduces
current consumption.
2
C serial interface.
The table below summarizes how to select the operating mode and the corresponding
characteristics.
Table 9. Operating mode selection
Operating mode
Low power mode (8-bit) 1 0 ODR/2 1
Normal mode (12-bit) 0 1 ODR/9 7/ODR(kHz)
CTRL_REG1[3]
(LPen bit)
4.1.1 Self-test
Self-test allows the checking of sensor functionality without moving it. The self-test function
is off when the self-test bit (ST) is programmed to ‘0’. When the self-test bit is programmed
to ‘1’ an actuation force is applied to the sensor, simulating a definite input acceleration. In
this case, the sensor outputs exhibit a change in their DC levels which are related to the
selected full scale through the device sensitivity. When self-test is activated, the device
output level is given by the algebraic sum of the signals produced by the acceleration acting
on the sensor and by the electrostatic test-force. If the output signals change within the
amplitude specified in Ta bl e 3 , then the sensor is working properly and the parameters of
the interface chip are within the defined specifications.
4.1.2 6D/4D orientation detection
CTRL_REG4[3]
(HR bit)
BW [Hz] Turn-on time [ms]
The LSM330DLC includes 6D/4D orientation detection. In this configuration the interrupt is
generated when the device is stable in a known direction. In 4D configuration, Z axis
position detection is disabled.
Doc ID 022162 Rev 1 21/67
 Loading...
Loading...