

Page 1
1 Introduction
This application note describes how to successfully develop a network device driver for LAN9118
Family products. It covers device features, software design techniques, network operating system
interfaces, and critical design points. It provides basic design guidelines for incorporating LAN9118
Family products into networked applications. It overviews topics as microprocessor-LAN hardware
interactions; initialization, interrupts, operating system, and communication protocol stack
considerations.It also reviews good design practice for engineers getting acquainted with network
device design.
1.1 References
This manual references the following documents:
SMSC LAN9118 Datasheet
SMSC LAN9117 Datasheet
SMSC LAN9116 Datasheet
SMSC LAN9115 Datasheet
SMSC LAN9118 Reference Design Schematic
SMSC LAN9117 Reference Design Schematic
SMSC LAN9116 Reference Design Schematic
SMSC LAN9115 Reference Design Schematic
AN 12.12
LAN9118 Family Programmer
Reference Guide
Always refer to these documents for complete and current device information. Circuit examples shown
in this document are for illustration only. Follow the corresponding Reference Design Schematic when
implementing an actual circuit design of a LAN9118 Family device.
Please visit SMSC’s website at http://www.smsc.com
for the latest updated documentation.
1.2 Document Conventions
In this document, the terms device, network device, controller, and network controller all refer to a
controller in the LAN9118 Family, which includes the LAN9118, LAN9117, LAN9116 and LAN9115.
Host refers to the system into which the device is designed, including the processor, and
application software, etc.
MAC stands for Media Access Controller; the portion of the device responsible for sending or
receiving blocks of data from the network.
A packet is a complete Ethernet frame not yet sent through the MAC, or a frame after it has been
received by the MAC.
A frame is a complete Ethernet data frame with the 802.3 Layer 2 (MAC) header included.
A bit is a single binary digit that has a value of 1 (high) or 0 (low). A field is a continuous string of
bits of whatever length specified.
SMSC AN 12.12 APPLICATION NOTE Revision 1.0 (12-14-09)
Page 2
An octet or byte is a group of 8 bits, treated as a single unit, with a value of 0-255 unsigned, or -
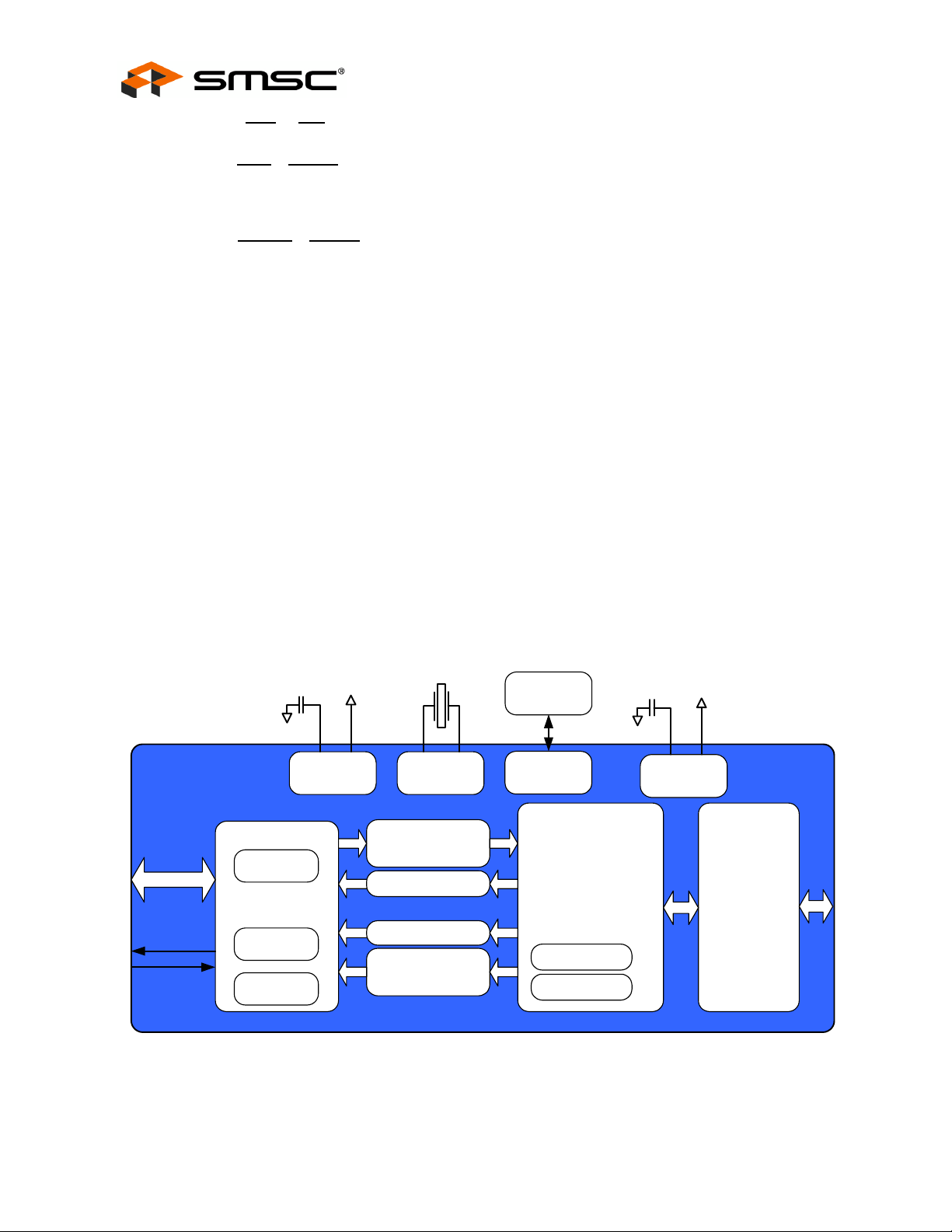
10/100 Ethernet
PHY
10/100 Ethernet MAC
2kB to 14kB
Configurable TX FIFO
2kB to 14kB
Configurable RX FIFO
Host Bus Interface
(HBI)
SRAM I/F
Interrupt
Controller
GP Timer
PIO Controller
IRQ
FIFO_SEL
+3.3V to +1.8V
PLL Regulator
PLL
25MHz
+3.3V
EEPROM
Controller
EEPROM
(Optional)
RX Status FIFO
TX Status FIFO
MIL - TX Elastic
Buffer - 2K
MIL - RX Elastic
Buffer - 128bytes
+3.3V to +1.8V
Core Regulator
+3.3V
127 to +127 signed. A byte is generally the smallest unit of data that can be individually addressed.
A word or short int is a group of 16 bits or two bytes,2 adjacent bytes, representing a 16-bit, single
symbol or a numeric range from 0 – 65,535 unsigned, or +/- 32,767 as a signed value. WORD
values are aligned on 2-byte memory boundaries. Their addresses are always expressed in even
number terms ending in 0x0, 0x2, 0x4, 0x6, 0x8, 0xa, 0xc, and 0xe.
A DWORD or long int always refers to 4 adjacent bytes, representing a 32-bit, single symbol or a
numeric range from 0 – 4,294,967,295, or +/- 2,147,483,647 as a signed value. DWORD values
are aligned on 4-byte memory boundaries. Their addresses are always expressed in even number
terms ending in 0x0, 0x4, 0x8, and 0xc.
2 Controller Overview
LAN9118 Family devices are full-featured, single-chip 10/100 Ethernet controllers designed for
embedded applications where performance, flexibility, ease of integration and low cost are required.
LAN9118 Family devices are fully IEEE 802.3 10BASE-T and 802.3u 100BASE-TX compliant.
LAN9118 Family devices include an integrated Ethernet MAC and PHY with a high-performance
SRAM-like slave interface. The simple, yet highly functional host bus interface provides glue-less
connection to most common 32- and 16-bit microprocessors and microcontrollers, including those 32bit microprocessors presenting a 16-bit data bus interface to the device. LAN9118 Family Devices
include large transmit and receive data FIFOs with a high-speed host bus interface to accommodate
high bandwidth, high latency applications. In addition, the devices memory buffer architecture allows
the most efficient use of memory resources by optimizing packet granularity.
LAN9118 Family Programmer Reference Guide
2.1 Block Diagrams
2.1.1 Internal Block Diagram
Figure 2.1 LAN9118 Family Device Internal Block Diagram
Revision 1.0 (12-14-09) 2 SMSC AN 12.12
APPLICATION NOTE
Page 3
LAN9118 Family Programmer Reference Guide
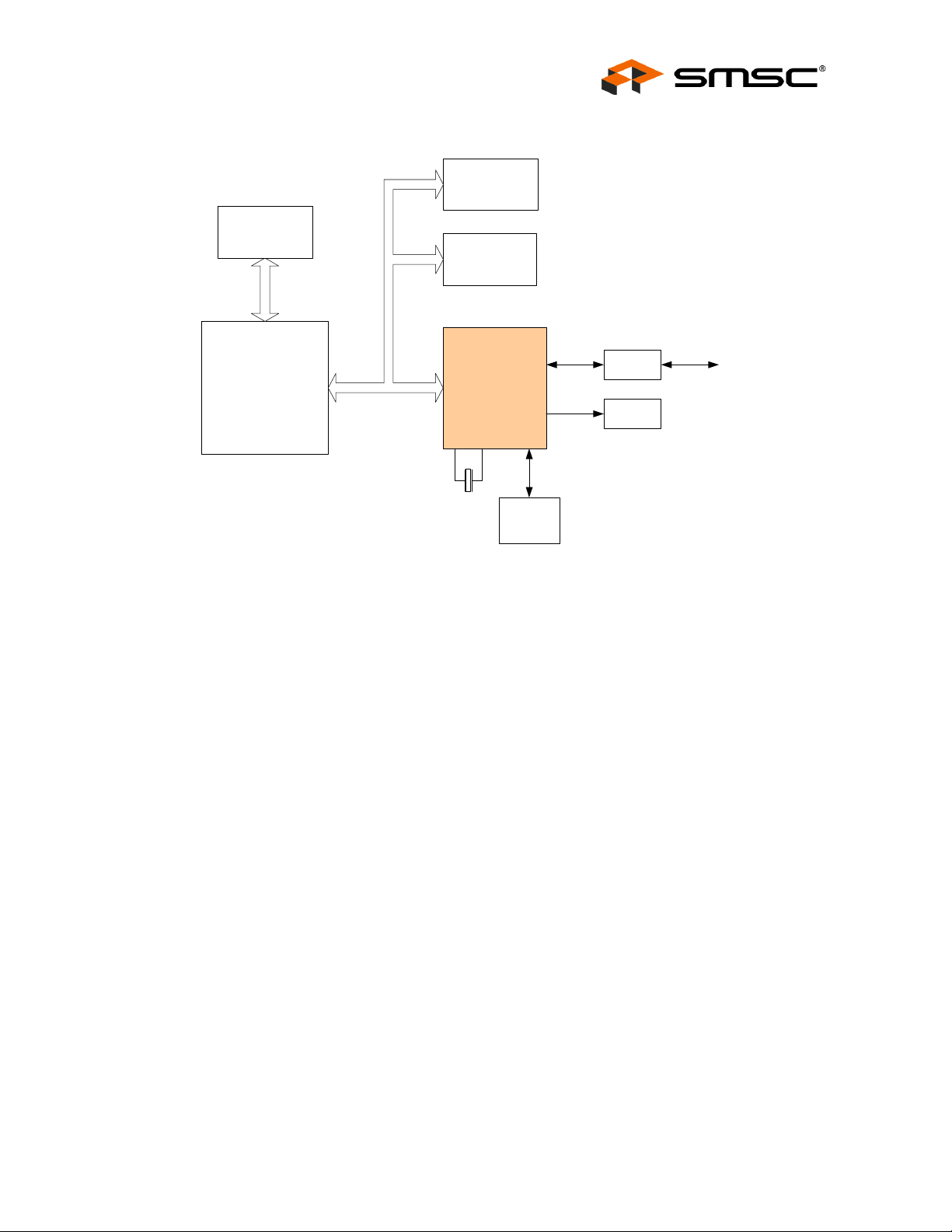
Microprocessor/
Microcontroller
LAN9118
Family
Member
Magnetics Ethernet
System
Peripherals
System Memory
System Bus
EEPROM
(Optional)
LEDS/GPIO
25MHz
XTAL
System Memory
2.1.2 System Level Block Diagram
Figure 2.2 LAN9118 Family Device System-Level Block-Diagram
2.2 Common Product Family Features
Single chip Ethernet controller
Fully compliant with IEEE 802.3/802.3u standards
Integrated Ethernet MAC and PHY
10BASE-T and 100BASE-TX support
Full- and Half-duplex support
Full-duplex flow control
Backpressure for half-duplex flow control
Preamble generation and removal
Automatic 32-bit CRC generation and checking
Automatic payload padding and pad removal
Loop-back modes
Flexible address filtering modes
Integrated Ethernet PHY
One 48-bit perfect address
64 hash-filtered multicast addresses
Pass all multicast
Promiscuous mode
Inverse filtering
Pass all incoming with status report
Disable reception of broadcast packets
Auto-negotiation
Automatic polarity correction
SMSC AN 12.12 3 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 4

LAN9118 Family Programmer Reference Guide
High-Performance host bus interface
Simple SRAM-like interface
Large, 16Kbyte FIFO memory with adjustable Tx/Rx allocation
Memory Alignment Technology (MAT) supports interleaved transmit/receive/command/status
access
One configurable Host interrupt
Burst read support
Comprehensive power management features
Numerous power management modes
Wake on LAN
“Packet-of-Interest” wakeup
Wakeup indicator event signal
Link Status Change
Miscellaneous features
Low profile 100-pin TQFP package
Single 3.3V power supply with 5V tolerant I/O
General Purpose Timer
Support for optional serial EEPROM
Supports for 3 LEDs/GPIO signals
Revision 1.0 (12-14-09) 4 SMSC AN 12.12
APPLICATION NOTE
Page 5
LAN9118 Family Programmer Reference Guide
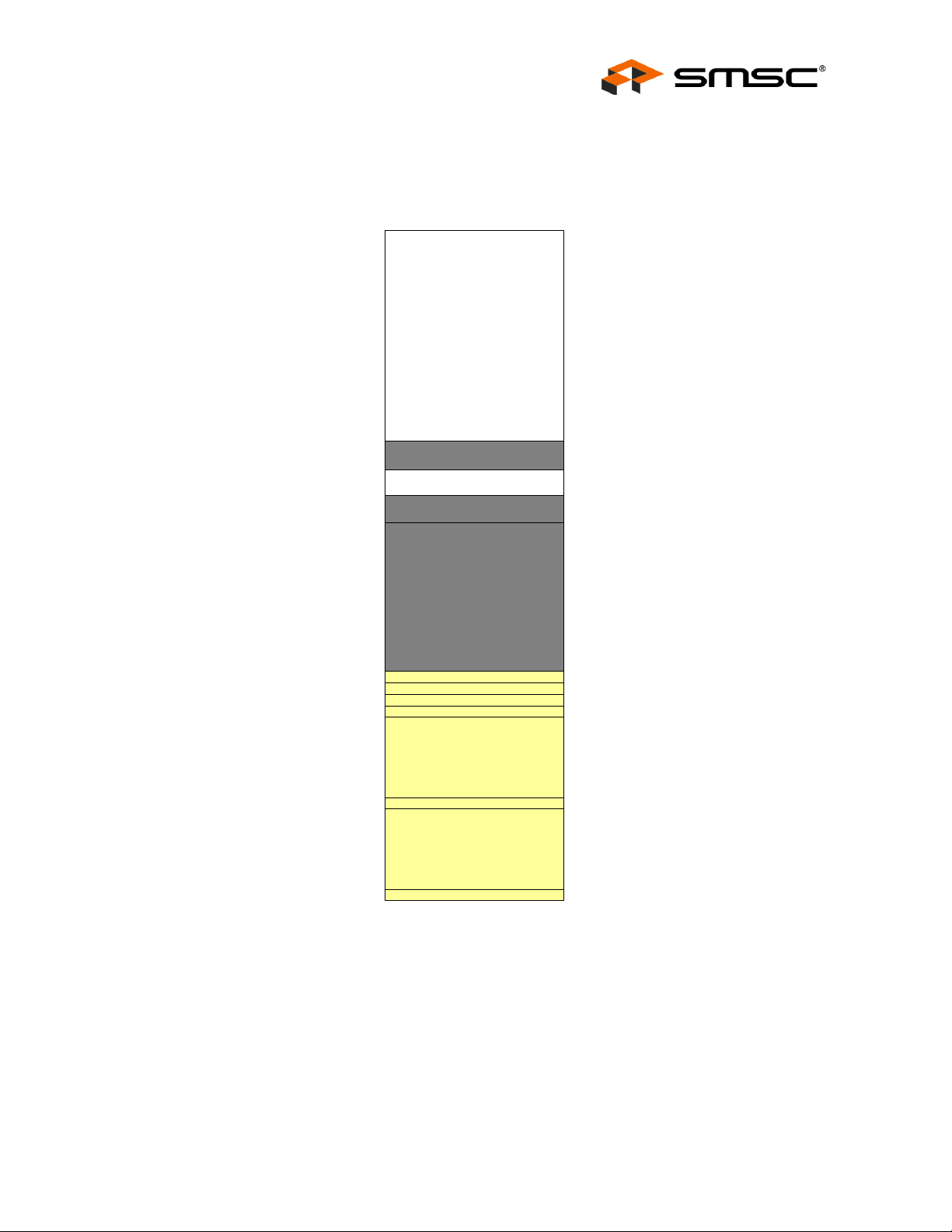
MAC CSR Port
SLAVE CSR's
A4h
B0h
Base + 00h
RESERVED
B4h
A0h
RX Data FIFO Port
TX Data FIFO Port
RX Status FIFO Port40h
20h
50h
FCh
EEPROM Port
04h
1Ch
RX Data FIFO Alias Ports
24h
3Ch
TX Data FIFO Alias Ports
RX Status FIFO PEEK44h
TX Status FIFO Port48h
TX Status FIFO PEEK4Ch
3 Register Description
Refer to the LAN9118 Family datasheets for complete descriptions of the Control and Status Registers
(CSRs), as well as for descriptions of register and bit names, nomenclature and attributes used in this
application note. Highlights are reproduced here for quick reference.
Figure 3.1 LAN9118 Family Device Memory MAP
SMSC AN 12.12 5 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 6
LAN9118 Family Programmer Reference Guide
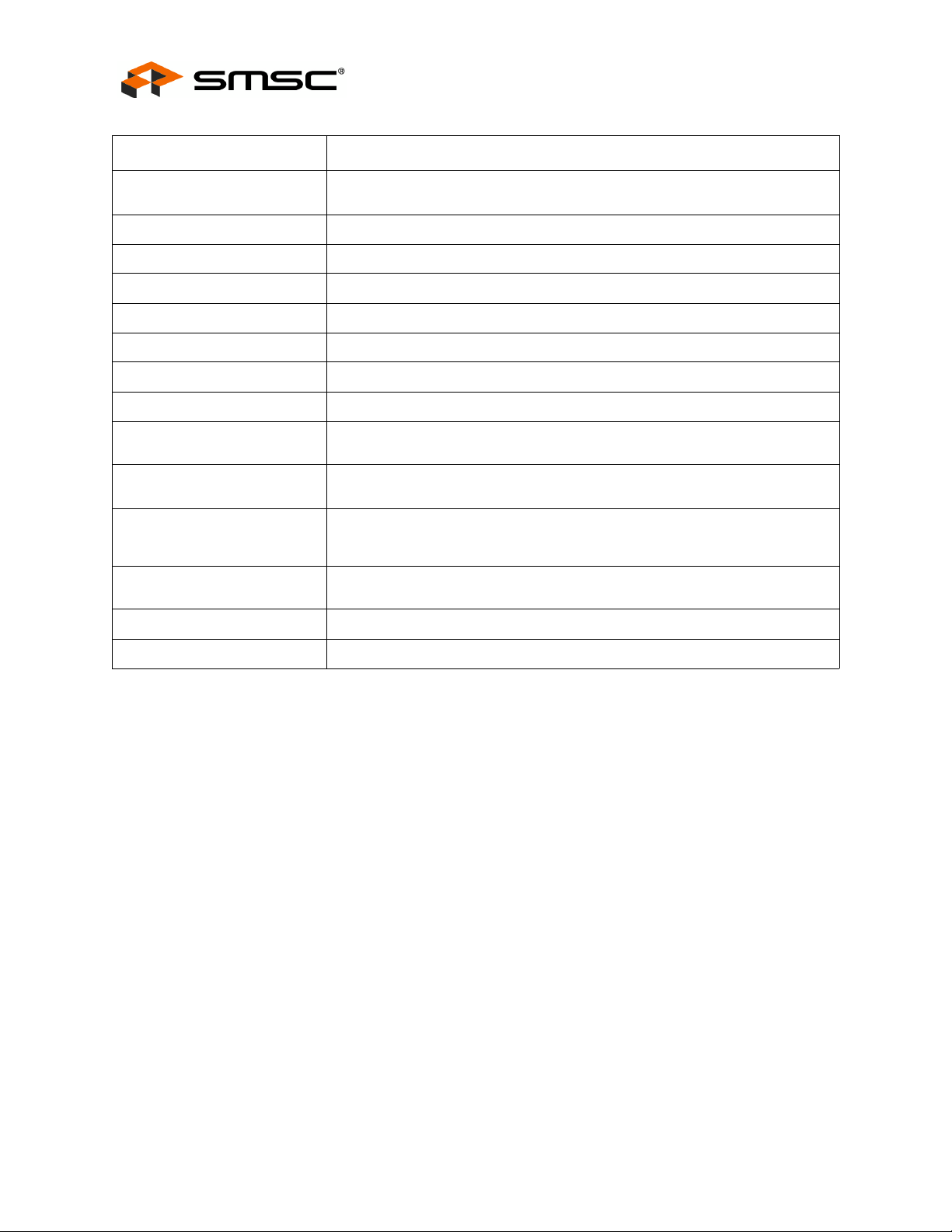
3.1 Directly Addressable Registers
These registers are also referred to as “Slave Registers”.
OFFSET SYMBOL REGISTER NAME DEFAULT
50h ID_REV Chip IP and Rev 01180001h
54h INT_CFG Main Interrupt Configuration 00000000h
58h INT_STS Interrupt Status 00000000h
5Ch INT_EN Interrupt Enable Register 00000000h
60h RESERVED Reserved for future use -
64h BYTE_TEST Read-only byte order testing register 87654321h
68h FIFO_INT FIFO Level Interrupts 48000000h
6Ch RX_CFG Receive Configuration 00000000h
70h TX_CFG Transmit Configuration 00000000h
Table 3.1 LAN9118 Family Directly Addressable Register Map
74h HW_CFG Hardware Configuration 00000800h
78h RX_DP_CTRL RX Datapath Control 00000000h
7Ch RX_FIFO_INF Receive FIFO Information 00000000h
80h TX_FIFO_INF Transmit FIFO Information 00001200h
84h PMT_CTRL Power Management Control 00000000h
88h GPIO_CFG General Purpose IO Configuration 00000000h
8Ch GPT_CFG General Purpose Timer 0000FFFFh
90h GPT_CNT General Purpose Timer Count 0000FFFFh
94h RESERVED Reserved for future use -
98h WORD_SWAP WORD_SWAP 00000000h
9Ch FREE_RUN Free Run Counter -
A0h RX_DROP RX Dropped Frames Counter 00000000h
A4h MAC_CSR_CMD These two registers are used to
access the MAC CSRs.
A8h MAC_CSR_DATA 00000000h
ACh AFC_CFG Automatic Flow Control 00000000h
B0h E2P_CMD These two registers are used to
access the EEPROM
B4h E2P_DATA 00000000h
00000000h
00000000h
B8h - FCh RESERVED Reserved for future use -
Revision 1.0 (12-14-09) 6 SMSC AN 12.12
APPLICATION NOTE
Page 7
LAN9118 Family Programmer Reference Guide
3.2 MAC Control and Status Registers
The registers listed below are accessed indirectly through the MAC_CSR_CMD and MAC_CSR_DATA
Registers. These registers are used in Section 5.1.2 and Section 5.5.
.
INDEX SYMBOL REGISTER NAME DEFAULT
1 MAC_CR MAC Control Register 00040000h
2 ADDRH MAC Address High 0000FFFFh
3 ADDRL MAC Address Low FFFFFFFFh
4 HASHH Multicast Hash Table High 00000000h
5 HASHL Multicast Hash Table Low 00000000h
6 MII_ACC MII Access 00000000h
7 MII_DATA MII Data 00000000h
Table 3.2 LAN9118 Family MAC CSR Register Map
MAC CONTROL AND STATUS REGISTERS
8 FLOW Flow Control 00000000h
9 VLAN1 VLAN1 Tag 00000000h
10 VLAN2 VLAN2 Tag 00000000h
11 WUFF Wake-up Frame Filter 00000000h
12 WUCSR Wake-up Status and Control 00000000h
3.3 PHY Registers
The PHY registers are accessed through two levels of indirection: through MAC_CSR_CMD/DATA
Registers and the MII_ACCESS/DATA Registers. The PHY provides its own interrupt source and mask
register; a “master” enable/disable bit for the PHY interrupts is found in the PHY_INT_EN bit in the
INT_STS/INT_EN registers.
Individual PHY Registers are identified through an index field located in the MII_ACC register . PHY
Register Indices are shown in Table 3.3 below. These registers are used in Section 5.6.
Note: PHY Register bits designated as NASR are reset when the SIM CSR Software Reset is
generated. The NASR designation is only applicable when bit 15 of the PHY Basic Control
Register (Reset) is set.
SMSC AN 12.12 7 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 8
LAN9118 Family Programmer Reference Guide
Table 3.3 LAN9118 Family PHY Control and Status Register
PHY CONTROL AND STATUS REGISTERS
INDEX
(IN DECIMAL) REGISTER NAME
0 Basic Control Register
1 Basic Status Register
2 PHY Identifier 1
3 PHY Identifier 2
4 Auto-Negotiation Advertisement Register
5 Auto-Negotiation Link Partner Ability Register
6 Auto-Negotiation Expansion Register
17 Mode Control/Status Register
29 Interrupt Source Register
30 Interrupt Mask Register
31 PHY Special Control/Status Register
3.4 Restrictions on Read-Follow-Write CSR Accesses
There are timing restrictions on successive operations to some CSRs. These restrictions come into
play whenever a write operation to a control register is followed by a read operation from a related
register. These restrictions arise because of internal delays between write operations and their effects.
For example, when the TX Data FIFO is written, there is a delay of up to 135ns before the
TX_FIFO_INF register changes.
In order to prevent the host from reading invalid status, minimum wait periods have been established
following write operations to each CSR. These periods are specified in Ta bl e 3 .4 below. For each CSR,
the host is required to wait the specified period of time after a write before performing any read. These
wait periods are for read operations that immediately follow any write cycle. Note that the required wait
period is dependant upon the register being read after the write.
Performing “dummy” reads of the BYTE_TEST register is a convenient way to guarantee that the
minimum write-to-read timing restriction is met. Tab le 3 .4 below also shows the number of dummy
reads that are required before reading the register indicated. The number of BYTE_TEST reads in this
table is based on the minimum timing for Tcyc (45ns). For microprocessors with slower busses, the
number of reads may be reduced as long as the total time is equal to, or greater than the time specified
in Ta bl e 3. 4. Note that dummy reads of the BYTE_TEST register are not required as long as the
minimum time period is met.
Revision 1.0 (12-14-09) 8 SMSC AN 12.12
APPLICATION NOTE
Page 9

LAN9118 Family Programmer Reference Guide
Table 3.4 Read after Write Timing Rules
MINIMUM WAIT AFTER ANY
REGISTER NAME
ID_REV 0 0
INT_CFG 135 3
INT_STS 90 2
INT_EN 45 1
BYTE_TEST 0 0
FIFO_INT 45 1
RX_CFG 45 1
TX_CFG 45 1
HW_CFG 45 1
RX_DP_CTRL 45 1
RX_FIFO_INF 0 0
TX_FIFO_INF 135 3
PMT_CTRL 513 7
GPIO_CFG 45 1
WRITE CYCLE (IN NS)
NUMBER OF BYTE_TEST READS
(ASSUMING 45NS T
CYC)
GPT_CFG 45 1
GPT_CNT 135 3
WORD_SWAP 45 1
FREE_RUN 180 4
RX_DROP 0 0
MAC_CSR_CMD 45 1
MAC_CSR_DATA 45 1
AFC_CFG 45 1
E2P_CMD 45 1
E2P_DATA 45 1
3.5 Restrictions on Read-Follow-Read CSR Accesses
There are also restrictions on certain CSR read operations following other read operations. These
restrictions arise when a read operation has a side-effect that affects another read operation. In many
cases there is a delay between reading the a CSR and the subsequent side-effect. To prevent the host
from reading invalid status, minimum wait periods have been established. These wait periods are
implemented by having the host perform “dummy” reads of the BYTE_TEST register. The required
dummy reads are listed in the Ta bl e 3. 5 below:
SMSC AN 12.12 9 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 10
LAN9118 Family Programmer Reference Guide
Table 3.5 Special Back-to-Back Cycles
AFTER READING... PERFORM X READS OF BYTE_TEST BEFORE READING...
RX Data FIFO 3 RX_FIFO_INF
RX Status FIFO 3 RX_FIFO_INF
TX Status FIFO 3 TX_FIFO_INF
RX_DROP 4 RX_DROP
4 Programming Recommendations
The fundamental operations of the driver are initialization, transmit packet processing, receive packet
processing, and interrupt processing. In addition, the driver needs to manage link negotiation and
interact with the operating system. The driver may be required to keep statistics, manage power
consumption, and control other functions.
4.1 The Necessity of Register Ownership
Writing a driver is a complex task. Every possible sequence of operations needs to be considered. A
commonly encountered problem is having to share a resource, such as a CSR, between two or more
code threads. Having multiple code threads access the same resource only increases the challenge.
If one thread is interrupted by a second thread, such that both threads are attempting to modify the
resource at the same time, unpredictable behavior may result. Collectively, these conflicts are known
as synchronization issues.
4.2 The Importance of Planning (strcmp(“Fail to Plan”) == strcmp (“Plan to Fail”))
To prevent this type of unpredictable behavior, the first step in writing a driver is to plan which portions
of the driver will access which registers. Every potential synchronization issue needs to be considered
before the first line of code is written. Failure to do so will result in errors that are intermittent and
extremely difficult to reproduce. Even worse, these problems may not even surface until well into the
driver development. Initially, the driver may appear to work, but as integration proceeds and more
threads are added, and the environment becomes more complex, the driver may suddenly and
inexplicably develop problems.
4.3 Orthogonal Register Set
In order to prevent these types of synchronization issues, the register set of every LAN9118 Family
device has been organized so that each register only needs to be accessed by a single thread.
Registers which are accessed by the receive process do not need to be accessed by the transmit or
initialization processes, and so on. In addition, registers used to manage flow control and separated
from those used to manage the link.
The design of the register set, which is “orthogonal” allows the multiple threads within the driver to be
interweaved, or run concurrently without interfering with each other.
Revision 1.0 (12-14-09) 10 SMSC AN 12.12
APPLICATION NOTE
Page 11
LAN9118 Family Programmer Reference Guide
4.4 Register Functionality in the LAN9118 Family Devices
Table 4.1, "Independent Data Threads Register Usage" details the functions of the most important
LAN9118 Family CSRs
Table 4.1 Independent Data Threads Register Usage
RECEIVE REGISTER NAME OFFSET PURPOSE
RX_FIFO_INF 0x7c Determine whether a packet is available
RX_STATUS_FIFO_PORT 0x40 Determine receive packet properties, such as size
RX_DATA_FIFO_PORT 0x00 Read received packet from device
TRANSMIT REGISTER NAME OFFSET PURPOSE
TX_FIFO_INF 0x80 Determine remaining free space in transmit FIFO, and
TX_STATUS_FIFO_PORT 0x48 Determine whether packets were sent successfully
TX_DATA_FIFO_PORT 0x20 Write packet data to device
FILTER REGISTER NAME OFFSET PURPOSE
MAC_CSR_CMD 0xa4 Access to MAC_CR, HASHH, and HASHL
MAC_CSR_DATA 0xa8 Access to MAC_CR, HASHH, and HASHL
LINK REGISTER NAME OFFSET PURPOSE
MAC_CSR_CMD 0xa4 Access to MII_ACC and MII_DATA
MAC_CSR_DATA 0xa8 Access to MII_ACC and MII_DATA
MII_ACC 0x6 Determine remaining free space in transmit FIFO, and
MII_DATA 0x7 Determine whether packets were sent successfully
Note: Notice that both the filter and link management functions depend upon the MAC_CSR_
registers. This shows the importance of synchronizing access to these particular registers
between the filter and link management threads.
number of packet statuses available
number of packet statuses available
SMSC AN 12.12 11 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 12
LAN9118 Family Programmer Reference Guide
4.5 An Example of Concurrency
The need of maintaining the independence of the transmit and receive packet processing functions
has already been mentioned. For example, suppose that the transmit thread needs to execute
operations T0-T9 below as part of transmitting a packet:
TIME 0, T+1, T+2, T+3, … T+19
T0 T1 T2 T3 T4 T5 T6 T7 T8 T9
At the same time the receive thread needs to execute operations R0-R9 as part of receiving a packet:
TIME 0, T+1, T+2, T+3, … T+19
R0 R1 R2 R3 R4 R5 R6 R7 R8 R9
It is entirely possible for these operations to be interleaved as follows:
TIME 0, T+1, T+2, T+3, … T+19
T0 T1 R0 T2 R1 R2 T3 R3 R4 T4 T5 T6 T7 R5 R6 T8 R7 R8 R9 T9
The only requirement is that within each thread, proper order of the data stream must be maintained;
Receive operations must remain properly ordered and transmit operations likewise must remain
properly ordered. Aside from the required ordering within each data stream, the streams can be
interweaved arbitrarily; the controller must be capable of handling any legitimate possibility.
Interleaving also applies to the host interface. If both transmit and receive DMA channels are used,
the transmit DMA channel can be writing a packet while the receive DMA channel is concurrently
reading a packet. LAN9118 Family devices have been designed specifically to handle these kinds of
cases.
Interleaved accesses also support interleaving between the link and filter management threads
concurrent with the transmit and receive threads already described. This could occur if the transmit
and receive threads were both involved in DMA activities, while the CPU was handling the filter thread
at the moment a link-state change interrupted the processor. Because of the orthogonality of the
register set, all four threads could be interleaved successfully without errors.
4.6 Software Interrupt Feature (SwInt)
LAN9118 Family devices provide a software interrupt feature (Swint). This feature allows the driver to
force the device to activate its IRQ signal. This is done by setting the INT_EN:SW_INT_EN bit. One
use of this feature is to allow the driver to verify that it has properly registered the Interrupt Service
Routine to the correct IRQ during initialization.
Another use of this feature is to protect critical registers. One case where this feature can be used is
when an ISR accesses a register and it is critical that this register not be accessed outside the ISR.
If a code segment outside the ISR needs to access this register, rather than access the register directly,
the segment can set a flag bit indicating that the register should be accessed and then invoke the ISR
via the Swint feature. When the ISR sees the flag bit, it performs the register access on behalf of the
code segment. The thread which called the ISR would also need some mechanism for determining
that the request had completed, such as polling a status bit from the ISR.
Of course, this only works if there is only one segment of code outside the ISR needing to access the
critical register. If there are multiple threads accessing the register, they need additional
synchronization between them. Otherwise the activity of one thread may undo another; and if multiple
threads call the ISR using the same flag bit, the ISR will not be able to tell which thread called it.
Revision 1.0 (12-14-09) 12 SMSC AN 12.12
APPLICATION NOTE
Page 13
LAN9118 Family Programmer Reference Guide
The first example works because of the assumption that only one thread will ever write to the flag and
signal the SwInt. The SwInt handler can use the flag to interpret the requested operation. This is known
as a producer-consumer relationship. That is, it is safe for multiple threads to share a variable if only
one thread is the writer, or producer of the variable, and all other threads are readers, or consumers
of that variable.
4.7 Ownership Policy in the Simple Driver
As a convenience to its customers, SMSC provides a simple driver for LAN9118 Family members,
written to run under the Linux, which has been reduced in complexity and function in order to highlight
the function of the device over the capabilities of a Linux device driver. Questions regarding register
usage, synchronization and ownership can generally be resolved through this reference work.
Table 4.2 below details the register ownership policy in the simple driver.
Table 4.2 Register Ownership Policy in the Simple Driver
REGISTER NAME OWNERSHIP POLICY
RX_DATA_FIFO Only used by the Rx thread, Rx_ProcessPackets
TX_DATA_FIFO Only used by the TX thread, Tx_SendSkb
RX_STATUS_FIFO Only used by the Rx thread, Rx_ProcessPackets
RX_STATUS_FIFO_PEEK Not Used
TX_STATUS_FIFO Used in Tx_CompleteTx in Tx_UpdateTxCounters.
TX_STATUS_FIFO_PEEK Not Used.
ID_REV Read Only
INT_CFG Set in Lan_Initialize,
INT_STS Sharable
INT_EN Initialized at startup.
BYTE_TEST Read Only
FIFO_INT Initialized at start up.
Tx_UpdateTxCounters is called by Tx_SendSkb in Simp911x_hard_start_xmit.
Tx_UpdateTxCounters is also called by Simp911x_stop but only after disabling
the TX queue in a multithreaded safe manner using the xmit_lock
Read in Simp911x_ISR
1) ClrBits in Simp911x_ISR
2) ClrBits in Rx_HandleInterrupt
3) SetBits in Rx_PopRxStatus
4) SetBits in Rx_ProcessPacketsTasklet
Items 1, 2, 3, 4 are not in contention because 1 and 2, are part of the ISR, and
3 and 4 is the tasklet which is only called while the ISR is disabled.
Used in Simp911x_stop
During run time only accessed by Tx_HandleInterrupt, and Tx_SendSkb and
done in a safe manner.
RX_CFG Only used during initialization
TX_CFG Only used during initialization
HW_CFG Only used during initialization
RX_DP_CTRL Only used in Rx thread, in Rx_FastForward
RX_FIFO_INF Read Only. Only used in Rx Thread, in Rx_PopRxStatus
SMSC AN 12.12 13 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 14
LAN9118 Family Programmer Reference Guide
Table 4.2 Register Ownership Policy in the Simple Driver (continued)
REGISTER NAME OWNERSHIP POLICY
TX_FIFO_INF Read Only. Used in TX thread, in Tx_GetTxStatusCount, Tx_SendSkb, and
PMT_CTRL Only used during initialization, in Phy_Initialize
GPIO_CFG Only used during initialization, in Lan_Initialize
GPT_CFG Not Used
GPT_CNT Not Used
WORD_SWAP Not Used
FREE_RUN Not Used
RX_DROP Only used in Rx thread, in Rx_ProcessPackets
MAC_CSR_CMD Protected by MacPhyAccessLock
MAC_CSR_DATA Protected by MacPhyAccessLock
All MAC and PHY registers Protected by MacPhyAccessLock
AFC_CFG Used during initialization, in Lan_Initialize.
E2P_CMD Used during initialization, in Lan_Initialize
Tx_CompleteTx
Except during initialization where only one thread is running.
Except during initialization where only one thread is running.
Because MAC_CSR_ registers are protected, then all MAC and PHY registers
are protected as well since they are access through the MAC_CSR_ registers.
Also used during run time in timer call back, in Phy_UpdateLinkMode
E2P_DATA Not Used
Revision 1.0 (12-14-09) 14 SMSC AN 12.12
APPLICATION NOTE
Page 15

LAN9118 Family Programmer Reference Guide
5 Initialization
5.1 MAC Initialization
The ID_REV register is a good starting point from which to begin initialization, in that it provides a
known location in memory containing a known value; in the case of a LAN9118, revision B, the value
is 0x1180001. Typical usage is twofold. One is as a probe point, while the other use is as a
discriminator of the LAN9118 Family member. The designation of the chip
(0x0118/0x0117/0x0116/0x0115) is found in the upper 16-bits of the register, while the step revision is
obtained from the lower 16-bits.
The BYTE_TEST register is provided to confirm the byte ordering of the host-device interface. The
interface between the host and the device is designed correctly when the host can read this register
as having a value of 0x87654321.
5.1.1 Software Reset of the MAC
Before performing a software reset operation to the MAC, the driver should ensure that the internal
PHY is running. This can be determined by examining the PMT_CTL:PM_MODE field for any powerdown state (non-zero). If this is found to be the case, a write to the BYTE_TEST register (a nondestructive write to a read-only register), followed by polling the PMT_CTL:READY bit until clear, will
guarantee the PHY to be active and the initialization ready to continue.
When the driver is aware of the device, a software reset should be performed by writing a ‘1’ value to
the HW_CFG:HW_CFG_SRST bit. This bit is self clearing and can be polled to determine when to
continue. Having finished the reset, the driver may then set the transmit FIFO size to a default value
of 5 KB (HW_CFG:TX_FIF_SZ field, which is 5 KB after reset).
5.1.2 FIFO Allocation and Flow-Control Configuration
Then set the Automatic Flow Control Configuration (AFC_CFG) register High Level to a value of 7
KB (110, or 0x006e) and the Low Level control to a value of 3.5 KB (55, or 0x37), which breaks the
FIFO up roughly in thirds. Also set the Backpressure duration to 50us for 100m operation (0x4), and
500 us for 10m operation.
5.1.3 Setting the MAC Address
5.1.3.1 The Unicast Address Register
LAN9118 Family members offer one 48-bit perfect (exact) address, whose value is divided between
the MAC ADDRH and ADDRL registers. This address identities the controller to the LAN on which it
is attached.
5.1.3.2 How a MAC Address is Stored
As an example, suppose the MAC address source address is supposed to be “1a:2b:3c:4d:5e:6f”,
where “1a” is the first octet sent on the wire. To do this, write the portion “6f5e” as the low 16-bits of
the ADDRH register value and write the address portion “4d3c2b1a” to the ADDRL register.
5.1.3.3 Reloading the MAC Address from EEPROM
When a software reset operation is performed, it also starts the EEPROM reload cycle. To ensure that
the EEPROM has finished loading, poll the EEPROM Command register (E2P_CMD) busy bit until
clear. The loading should complete in under a millisecond. Upon completion, the
MAC_Address_Loaded bit in the command register can be examined for success. This step should
be completed before the driver sets up the General Purpose I/O configuration (GPIO_CFG), since
some I/O pins are shared between EEPROM and GPIO usage.
SMSC AN 12.12 15 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 16

Besides the MAC address, no other values are automatically loaded to the controller from EEPROM
in a reload cycle.
5.1.3.4 Saving the MAC Address to EEPROM
A likely scenario during the manufacturing phase is to fix the MAC address of the host in the EEPROM
after assembly. There may also be valid reasons where the driver would allow a user to change the
MAC address after manufacture or startup. To reprogram the EEPROM under the control of the
controller, first ensure that the address in the MAC ADDRx register is correct.
Then write the signature value of 0xa5 to the first location in EEPROM, followed by the MAC address
as shown in Table 5.1 below:
:
Table 5.1 EEPROM MAC Address Layout
ADDRESS CONTENTS
0 0xa5
1 0x1a
2 0x2b
30x3c
LAN9118 Family Programmer Reference Guide
4 0x4d
5 0x5e
6 0x6f
5.2 Configuring Interrupts
All LAN9118 Family members provide an interrupt request signal (IRQ), which can easily be
programmed for a variety of hardware environments.
5.2.1 Configuring the IRQ Pin
The polarity of the IRQ pin can be programmed to be active low or active high by setting the IRQ_POL
bit in the INT_CFG register (1=high, 0=low). This programmability enables the device to accommodate
a variety of processors with minimal external support circuitry.
The buffer-type of the IRQ pin can also be programmed to be either Open-Drain or Push-Pull by setting
the IRQ_TYPE bit in the INT_CFG register (1 = Push-pull, 0 = Open Drain). If the Open-Drain setting
is chosen, the polarity defaults to active low, and the setting of the IRQ_POL bit is ignored.
Once triggered, the IRQ output remains in an active state until acknowledged by the host.
5.2.2 Setting The Interrupt De-assertion Period
The interrupt de-assertion timer sets a minimum interval between assertions of the interrupt pin,
allowing the host to control the percentage of time it dedicates to servicing the device, even during
periods of heavy network traffic. The field controlling this timer (INT_DEAS) is located in the upper
8-bits field of the main interrupt configuration register (INT_CFG). This timer counts in 10us increments.
The correct value for this timer depends on the processor, operating system and application. The Linux
driver maintained on the SMSC website uses a de-assertion period of 220us (22d).
5.2.3 Enabling and Disabling Interrupts
Individual interrupts are controlled through the interrupt enable register (INT_EN) via read-modify-write
operations. First read this register. To enable specific interrupts, OR the contents with a bit-mask which
Revision 1.0 (12-14-09) 16 SMSC AN 12.12
APPLICATION NOTE
Page 17

LAN9118 Family Programmer Reference Guide
has the bits corresponding with the interrupts to be enabled set to “1”. To disable specific interrupts,
AND the contents with a bit-mask which has the bits corresponding to the interrupts to be disabled set
to “0”. Write the modified value back to the register.
Per Section 3.4 and Section 3.5, the INT_EN register requires a “settling” time before its effects are
felt . Satisfying this timing is critical because this register is shared between send and receive paths.
The status of an interrupt source is reflected in the INT_STS register regardless of whether or not the
source is actually enabled as an IRQ interrupt. This register also handles interrupt acknowledgement.
Writing a “1” to any bit clears it as long as the interrupt source is no longer active. The interrupt bit will
not be cleared if the interrupt condition is still pending regardless of writing 1 to the bit.
The interrupt controller has the ability to generate an IRQ on a Power Management Event when the
controller is in the D0, D1 or D2 power states.
5.3 Stopping and Starting the Transmitter
To halt the transmitter, the host can set the STOP_TX bit in the TX_CFG register. The transmitter will
finish sending the current frame (if there is a frame transmission in progress). When the transmitter
has pushed the TX Status for this frame onto the TX status FIFO, it will clear the TX_CFG:STOP_TX
and TX_CFG:TX_ON bits, and then pulse the INT_STS:TXSTOP_INT bit.
Once the transmitter is stopped, the host can clear the TX Status and TX Data FIFOs by setting the
TX_CFG:TXS_DUMP and TXD_DUMP bits. It can also disable the MAC by clearing MAC_CR:TXEN.
To re-enable the transmitter, the host must set the TX_CFG:TX_ON and MAC_CR:TXEN bits. When
the transmitter is re-enabled, it will begin transmitting any packets that are in the TX DATA FIFO.
5.4 Stopping and Starting the Receiver
To stop the receiver, the host must clear the MAC_CR:RXEN bit in the MAC Control Register. When
the receiver is halted, the INT_STS:RXSTOP_INT bit will be set. Once stopped, the host can optionally
clear the RX Status and RX Data FIFOs. The host can re-enable the receiver by setting the
MAC_CR:RXEN bit.
SMSC AN 12.12 17 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 18

LAN9118 Family Programmer Reference Guide
5.5 Configuring Address Filtering Options
Table 5.2, "Address Filtering Modes" shows the relations between the control flags which affect the
address filter mode.
Table 5.2 Address Filtering Modes
MCPAS PRMS INVFILT HFILT HPFILT DESCRIPTION
0 0 0 0 0 MAC Address Perfect filtering only for
0 0 0 0 1 MAC Address Perfect filtering for
0 0 0 1 1 Hash Filtering for physical and
0 0 1 0 0 Inverse Filtering
X 1 0 X X Promiscuous
1 0 0 0 X Pass all multicast frames. Frames with
1 0 0 1 1 Pass all multicast frames. Frames with
all addresses.
physical address and Hash filtering for
multicast addresses
multicast addresses
physical addresses are perfect-filtered
physical addresses are hash-filtered
5.5.1 Configuring Multicast Filtering
Multicast applications act very much like broadcast radio, where all receivers attuned to one station
receive the same programming. Multicast packets are a type of broadcast packet, but require filtering
to be received by the intended audience.
The hash filtering works by identifying incoming packets with a 48-bit destination multicast MAC
addresses, those addresses having a leading bit pattern of 01:00:5e:xx:yy:zz, running only the
destination MAC address through a hash (actually it’s the CRC32 algorithm, taking the result of the
first 6 bytes of the incoming packet and extracting from that the high 6-bits), resulting in a 6-bit (1-of-
64) value, which is used to index a 64 x 1-bit array contained across the MAC HASHH:HASHL register
pair (from bit 0 of HASHL:0 on up through bit 31 of HASHH:63). If the bit indexed by the hash is a
‘1’, it is considered to be a match, and the entire packet is brought into the device for perfect multicast
address filtering in software.
At startup the hash filter is cleared. As the driver accepts requests to join multicast sessions, the driver
must add the multicast address to its perfect filter table in software. Then it must calculate the
appropriate bit to set in the hash array and update the devices’ HASHH:HASHL register pair. When
the application leaves the multicast session, the driver must update the filter table and the
HASHH:HASHL register pair appropriately.
5.5.2 Promiscuous Mode
Some applications need to examine every single packet traversing the LAN, whether the packet
destination MAC address is broadcast or not, and whether the packet data regards the host in question
or not. Communally these programs are referred to as “packet sniffers”. An example is the Ethereal
program, available for a wide range of operating systems (http://www.ethereal.com
these programs is the requirement for the LAN device driver to receive every packet on the LAN.
The term for receiving every packet on the LAN is called Promiscuous Mode, and it is supported by
all LAN9118 Family members. To enable Promiscuous Mode, set the MAC_CR:PRMS bit to a ‘1’ and
reset the MAC_CR:INVFLT bit to’0’.
Revision 1.0 (12-14-09) 18 SMSC AN 12.12
). At the heart of
APPLICATION NOTE
Page 19

LAN9118 Family Programmer Reference Guide
5.6 PHY Detection and Initialization
Applications commonly delegate link set-up to the physical media device (PHY). At initialization, the
driver can direct the PHY to determine the link parameters by auto-negotiating with its link partner (the
link partner is the node on the other side of the Ethernet cable). Using auto-negotiation, the PHY and
its link partner determine the optimum speed (10 or 100 Mbps) and duplex setting (full or half) by
advertising their capabilities to each other, and then choosing the highest capability that both share in
common. Auto-negotiation is documented in the 802.3u Fast Ethernet supplement to the IEEE
specification.
Every LAN9118 Family device provides a Media Independent Interface (MII) which connects its internal
MAC to an internal PHY. Each PHY must have a unique 5-bit PHY Address; the internal PHY has a
PHY Address of 00001b, and this address must be used when addressing the internal PHY. Individual
registers within the PHY are indicated through an Index Field. The Ta b le 5 . 3 and Table 5.4 below show
how the MAC_CSR_CMD register is used to access the PHY.
Table 5.3 Using the MAC_CSR_CMD Register to Access the MII_ACC Register
MAC_CSR_CMD (ACCESSING MII_ACC REGISTER)
CSR Busy R/nW Reserved (29:8) CSR Address (7:0)
11:0 0x6
Table 5.4 Using the MAC_CSR_CMD Register to Access the MII_DATA Register
MAC_CSR_CMD (ACCESSING MII_DATA REGISTER)
CSR Busy R/nW Reserved (29:8) CSR Address (7:0)
0x7
The LAN9117 and LAN9115 provide an external MII interface to support an external PHY, for
applications interfacing to other media, such as Fiber, or HPNA. The MII_ACC: PHY Address field
(bits 15:11) must always correctly reflect the active PHY. If an external PHY is used, it must have a
PHY address other than 00000b, 00001b, or 11111b.
Applications which only operate within a fixed environment might consider hardware strapping options
instead of auto-negotiating. The SPEED_SEL pin can be used to force the speed setting of the PHY
at reset. When the 100 Mbit option is strapped, the PHY will determine whether its link partner is
capable of auto-negotiation. If the link partner is capable of auto-negotiation, then the PHY will
advertise 100Mbps full and half-duplex capabilities, and use the auto-negotiation process to determine
whether the link is full or half-duplex. If the partner is incapable of auto-negotiation, then the PHY will
default to a 100Mbps, half-duplex mode of operation. When the 10 Mbit option is strapped, autonegotiation is disabled, and the PHY defaults to a 10Mbps, half-duplex mode of operation. Software
can always override the strap options.
Access to the PHY registers is a bit complex, due to the hierarchical organization of the register set.
Recall that the controller contains three sets of registers; the slave set, which are directly accessible
to the host processor, the MAC set, which are indirectly accessible to the host processor through a
command/data register pair (MAC_CSR_CMD/ MAC_CSR_DATA), and the PHY set, which are
accessed by the host through a command/data pair of MAC registers (MII_ACC/ MII_DATA).
When using the MAC_CSR_CMD register to access the MAC Registers (which include the MII_ACC
and MII_Data Registers), the R/nW bit selects the data direction for the MAC_CSR_Data Register.
When the R/nW bit is set low, the contents of the MAC_CSR_Data Register will be stored into the
MAC Register specified by the CSR Address field. When the R/nW bit is set high, the contents of the
MAC Register specified by the CSR Address field will be loaded into the MAC_CSR_Data Register.
The operation starts when the driver sets the CSR Busy bit high. The driver should continue polling
the MAC_CSR_Command Register until the CSR Busy bit is low to verify that the operation has
completed. A subsequent operation to a MAC Register should not be started until the first operation
SMSC AN 12.12 19 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 20

LAN9118 Family Programmer Reference Guide
has completed, or else spurious operations could result. Setting of the CSR Address, R/nW and CSR
busy bits can all be done with a single write command to the MAC_CSR_CMD Register.
Table 5.5 Media Independent Interface Access/Command Register
MII_ACC
Reserved
(31:16)
PHY Address (15:11) MII Register Index (10:6) Reserved
(5:2)
When using the MII_ACC register to access the PHY registers, the MII W/nR bit sets the data direction
for the MII_Data Register. When MII W/nR is set low, the contents of the PHY Register addressed by
the PHY_Address and MII Register Index fields will be loaded into the MII_Data Register. When the
MII W/nR bit is set high, the contents of the MII_Data Register will be stored into the PHY Register
indicated by the PHY Address and MII Register Index fields. The operation begins when the MII
Busy Bit is written with a 1 by the host. To verify that the operation has completed, the host should
continue polling the MII Busy Bit until it is 0. This verification must be completed before any other
attempts are made to read or write a PHY register, otherwise invalid operation could result. When
initiating a PHY Register access, the entire contents of the MII_ACC Register, including the PHY
Address, MII Register Index, MII W/nR bit and MII Busy bit can all be set in a single operation.
When planning access to the hierarchy of register sets, it is a good idea to serialize access to the MAC
and PHY registers by utilizing a spin lock (under Linux, or its equivalent). One per device should be
sufficient to guarantee that each code sequence in the driver completes without interference from
competing driver threads.
MII
W/nR
MII
Busy
Revision 1.0 (12-14-09) 20 SMSC AN 12.12
APPLICATION NOTE
Page 21

LAN9118 Family Programmer Reference Guide
Host Pro cessor
Slave CSRs (Directl y Addressable)
Host
Bus
Interface
MAC_CSR_CMD Register
MAC_CSR_Data Register
0xA4
0xA8
Offset
MAC CSRs
MII_ACC_Register
MII_Data_Register
0x6
0x7
Index
Internal MII
External MI I
(LAN9115 and
LAN9117
PH Y C S R s ( In te rn al PH Y)
Basic Control Register
Basic Stat us Regis ter
0
1
PHY Register Index
2
3
4
5
6
17
29
30
31
PHY ID Regis ter 1
PHY ID Regis ter 2
A/N Adv ertis ement Reg
Link Part ner Ability R eg
A/N Expans ion Regist er
Mode Control R egister
Interrupt Sourc e Register
Interrupt Mask Register
Special Cont rol Regis ter
PHY Address = 00001b
PHY CSRs (External PHY)
PHY Address /= 00001b
The driver can verify the existence of the internal PHY by reading the PHY Registers 2 and 3 at PHY
Figure 5.1 PHY Access Command and Data Pathways
Address 1 and ensuring the contents are 0x0007 and 0xc0c1 respectively. The existence of external
SMSC AN 12.12 21 Revision 1.0 (12-14-09)
PHYs is determined by reading the same two PHY Registers at PHY Addresses 0x02 through 0x30.
If values of 0xffff and 0xffff are obtained, there is no PHY at the given PHY Address.
The driver can reset the internal PHY by writing the Reset bit (15) in the Basic Control Register
(index 0). This bit is self clearing and can be polled (read back) in order to coordinate the PHY reset
completion with driver execution. After resetting the PHY, the driver should wait at least 50ms before
attempting any further operations on the PHY.
Auto-negotiation begins by enabling all the PHY capabilities in the Auto-Negotiation Advertisement
(0x1e1), then setting the Auto-negotiation Enable and Auto-negotiate Restart bits (12 and 9) in the
APPLICATION NOTE
Page 22

LAN9118 Family Programmer Reference Guide
Basic Control Register (index 0) and completes when the Auto-negotiate Complete bit (5) is set in
the Basic Status Register (index 1). Auto-negotiate Complete status should be available within 1.5
seconds. Beyond this time, the driver can then probe for the reason of the failure, such as link down
or remote fault, and additionally schedule a thread to revisit the PHY initialization periodically until a
proper link has been established.
Once link has been established, the driver can set the MAC_CR:RDPX duplex mode to follow the
settings of the PHYs Basic Status Register (10Base-T Full Duplex, 100Base-T Full Duplex). If
auto-negotiation is enabled, then duplex mode can by found by the following sequence:
AutoNegotiationAdvertisement= ReadPhy(index:4)
AutoNegotiationLinkPartnerAbility= ReadPhy(index:5)
AutoNegotiationCompatableSpeeds= AutoNegotiationAdvertisement &
AutoNegotiationLinkPartnerAbility
If (AutoNegotiationCompatableSpeeds & 100Base-T Full Duplex) <speed is 100 Mbits, full duplex>
If (AutoNegotiationCompatableSpeeds & 100Base-T) <speed is 100 Mbits, half duplex>
If (AutoNegotiationCompatableSpeeds & 10Base-T Full Duplex)<speed is 10 Mbits, full duplex>
If (AutoNegotiationCompatableSpeeds & 10Base-T)<speed is 10 Mbits, half duplex>
Driver writers can derive their own access routines for manipulating the PHY by examining the drivers
available from the SMSC website for the LAN9118 Family members. (http://www.smsc.com
).
5.7 Switching Between Internal and External PHYs
Drivers for the LAN9117 and LAN9115, which support an external PHY, will need to poll the external
MII address space to detect those PHYs. Valid addresses range from 2 to 31, while address 0 is
generally considered reserved.
The steps outlined in the flow diagram in Figure 5.2, along with accompanying text, detail the required
procedure for switching the MII port, including the MII clocks. These steps must be followed in order
to guarantee clean switching of the MII ports.
Revision 1.0 (12-14-09) 22 SMSC AN 12.12
APPLICATION NOTE
Page 23

LAN9118 Family Programmer Reference Guide
TX Stopped?
Halt Transmitter
Halt Receiver
RX Stopped?
Set
PHY_CLK_SEL
to 10b
Clocks Halted?
Set
EXT_PHY_SEL to
Desired MII Port
Set
PHY_CLK_SEL to
Desired MII Port
Enable RX
Enable TX
1
2
3
4
5
6
8
9
11
12
Complete
YES
NO
YES
NO
YES
NO
Using SMI, Set
Internal PHY and
External PHY to a
Stable State
7
13
10
Clocks
Running
YES
NO
SMSC AN 12.12 23 Revision 1.0 (12-14-09)
Figure 5.2 The MII Switching Procedure
1. Both the internal PHY and the external PHY must be placed in a stable state. The TX_CLK and
RX_CLKs of both devices must be stable and glitch-free before the switch can be made. If either
device does not generate a TX_CLK or RX_CLK, this clock must remain off until the switch is
complete. In either case the TX_CLK and RX_CLK of the device that will be selected after the
switch must be stable and glitch-free.
2. The host must command the transmitter to halt, and the halting of the transmitter must be complete
3. The host must command the receiver to halt, and the halting of the receiver must be complete.
APPLICATION NOTE
Page 24

LAN9118 Family Programmer Reference Guide
4. The PHY_CLK_SEL field must be set to 10b. This action will disable the MII clocks from the internal
and external PHYs to the controller’s internal logic.
5. The host must wait a period of time not less than 5 cycles of the slowest operating PHY clock
before executing the next step in this procedure. For example, if the internal PHY was operating
in 10Mbs mode, and the external PHY was operating at 100Mbs mode, the internal PHY’s TX_CLK
and RX_CLK period is the longest, and will determine the required wait time. In this case the
TX_CLK and RX_CLK period for the internal PHY is 400ns, therefore the host must wait 2us
(5*400ns) before proceeding. If the clocks of the device being deselected by the switch are not
running, they are not considered in this calculation.
6. Set EXT_PHY_SEL to the desired MII port. This step switches the RXD[3:0], RX_DV, RX_ER,
TXD[3:0], TX_EN, CRS and COL signals to the desired port.
7. Set PHY_CLK_SEL to the desired port. This must be the same port that is selected by
EXT_PHY_SEL.
8. The host must wait a period of time of not less than 5 cycles of the slowest, newly enabled clock
before executing the next step in this procedure.
9. Enable the transmitter.
10. Enable the receiver.
11. The process is complete. The controller is ready to access the new PHY.
The above procedure must be repeated each time the MII port is switched. The procedure is identical
whether switching from internal PHY to external MII, or vice-versa.
5.8 Examples of PHY MII Register Reads and Writes
A stated previously, it is better to access the PHY through a pair of routines that access the MAC
registers from the MAC_CSR_ registers, and a pair of routines that access the PHY registers from the
MII_ registers using the MAC register routines. The following examples are meant to only to illustrate
the concept of accessing the PHY registers.
Example 1: Write the value 0x01e1 to the PHY Auto-Negotiation Advertisement Register
(register 4; advertise all capabilities when auto-negotiating)
Step One:
Load the value (0x01e1) destined for PHY Auto-negotiation Advertisement register (4) into the
MAC_CSR_Data Register. Only the lower 16 bits will be written to the MII DATA register, and
eventually that will be written to the PHY itself.
MAC_CSR_DATA (TO BE LOADED INTO MII DATA REGISTER
Reserved
(31:16)
Step Two:
Write the command word into the MAC_CSR_CMD register. This causes the contents of the
MAC_CSR_Data register to be written (R/nW == 0) into the MII Data register (0x07).
PHY Data
(15:0)
0x01E!
MAC_CSR_CMD
CSR Busy R/nW Reserved (29:8) CSR Address (7:0)
1 0 0x07
Revision 1.0 (12-14-09) 24 SMSC AN 12.12
APPLICATION NOTE
Page 25

LAN9118 Family Programmer Reference Guide
Step Three:
Keep reading the MAC_CSR_CMD Register until the CSR Busy Bit =0.
Load the MII write command word (MII W/nR == 1) that is to be written to the MII ACC register into
the MAC_CSR_Data register. The command word will write the contents of the MII DATA register to
the PHY Advertisement register (0x4) (note that the lighter-shaded heading is expressed in MII ACC
register terms).
MAC_CSR_DATA (TO BE LOADED INTO MII ACC REGISTER)
Reserved
(31:16)
Step Four:
Write the command word into the MAC_CSR_CMD register. This causes the MII ACC register (0x06)
to be written (R/nW == 0) with the contents of the MAC_CSR_Data register, which in turn causes the
MII register write to be executed.
CSR Busy R/nW Reserved (29:8) CSR Address (7:0)
1 0 0x06
Steps 5-8:
5. Read the MAC_CSR_CMD Register until the Busy Bit = 0.
6. Load the MAC_CSR_CMD Register as follows: CSR Busy = 1, R/nW = 1 (Read), CSR Address
= 0x06 (MII_ACC Register)
7. Read the MAC_CSR_CMD Register until the Busy Bit = 0
8. Read the MAC_CSR_DATA Register. Repeat steps 6-8 until the MII Busy Bit (Bit 0) = 0.
PHY Address
(15:11)
0x1 0x4 1 1
MAC_CSR_CMD (ACCESSING MII_ACC REGISTER)
MII Register
(10:6)
Reserved
(5:2)
MII
W/nR
MII
Busy
Example 2: Read the PHY Status register (register 1)
Step One:
Load the MAC_CSR_Data register with the MII ACC register command word to read (MII W/nR == 1)
PHY register 1 (MII Register == 1). Note that the lighter-shaded heading is expressed in MII ACC
terms.
MAC_CSR_DATA
Reserved
(31:16)
Step Two:
Write the command word into the MAC_CSR_CMD register. This causes the contents of the
MAC_CSR_Data register to be written (R/nW == 0) to the MII ACC register (0x06), which executes
the PHY read. The resulting read from the PHY is then loaded to the MII Data register
SMSC AN 12.12 25 Revision 1.0 (12-14-09)
PHY Address
(15:11)
0x1 0x1 0 1
MII Register
(10:6)
Reserved
(5:2)
MII
W/nR
MII
Busy
APPLICATION NOTE
Page 26

LAN9118 Family Programmer Reference Guide
MAC_CSR_CMD (ACCESSING MII_ACC REGISTER)
CSR Busy R/nW Reserved (29:8) CSR Address (7:0)
1 0 0x06
Steps Three - Seven:
3. Read the MAC_CSR_CMD Register until the CSR Busy Bit = 0.
4. Write the MAC_CSR_CMD as follows: Busy Bit = 1, R/nW = 1, CSR Address = 0x06.
5. Read the MAC_CSR_CMD Register until the CSR Busy Bit = 0
6. Read the MAC_CSR_Data Register. Repeat Steps 3-6 until the MII Busy Bit = 0 The contents of
the PHY Status Register (Register 4) have now been loaded into the MII_Data Register.
Step Seven
Write the command word into the MAC_CSR_CMD register. This command causes the
MAC_CSR_Data register to be loaded (R/nW == 1) with the contents of the MII Data register (0x07).
MAC_CSR_CMD
CSR Busy R/nW Reserved (29:8) CSR Address (7:0)
1 1 0x07
Steps Eight-Nine:
8. Read the MAC_CSR_CMD Register until the CSR Busy Bit = 0
9. Read the MAC_CSR_Data register, which now contains the contents of the MII Data register in the
lower 16-bits.
MAC_CSR_DATA
Reserved
(31:16)
PHY Data
(15:11)
Revision 1.0 (12-14-09) 26 SMSC AN 12.12
APPLICATION NOTE
Page 27

LAN9118 Family Programmer Reference Guide
6 Transmit Packet Processing
Transmitting packets is a straightforward process compared with receiving packets; in that the host can
efficiently synchronize the entire transmit process with the application. In practice though, interrupts
are still needed for synchronizing to the time-dependant embedded applications.
Memory Alignment Technology (MAT) in the LAN9118 family allows the driver to optimize the data flow
between packet data memory and the device FIFO by allowing the driver to always perform aligned,
efficient data transfers, regardless of the packet data organization in memory. This is achieved by
providing a descriptor along with the data, one for each transfer, called a Command Word that indicates
the true alignment of the packet, along with an indicator of the underlying hardware nature of the
transfer.
6.1 Transmit Data Transfer
At the heart of the transmit packet process, two DWORD values called TX_CMD_A and TX_CMD_B
command words are written into the device transmit data register (TX_DATA_FIFO), followed by the
packet buffer data. Host devices using Programmed IO (PIO) for data transfers work by copying packet
data in 4-byte increments aligned to 4-byte address boundaries. DMA-controllers generally transfer
data in 4-, 16- and 32-byte increments that are correspondingly aligned in memory . On the other hand,
the OS data buffers may begin on arbitrary byte boundaries, creating misaligned transfers with respect
to the physical addressing and caching of the CPU or DMA Controller. Memory Alignment Technology
(MAT) uses a description of the misalignment to allow the hardware to compensate for the misaligned
data buffers.
Take a moment to notice that the transmit data FIFO register is aliased to 8 contiguous DWORD
locations. The purpose of this aliasing is to accommodate DMA controllers which transfer data in 16and 32-byte bursts. This is not meant to imply that misaligned data transfers need to write to
misaligned addresses within the device; that alignment is handled in the software construction of the
data transfer base address. Rather that the writer should be mindful that some CPUs and DMA
engines will generate extra, sequential addressing cycles to memory; use of the term “extra” is only
from the driver’s perspective. Phantom addressing cycles might be a more appropriate term, such as
when the DMA engine transfers a 32-byte burst of data to the device, creating 8 x DWORD accesses,
each on a unique, ascending DWORD boundary.
6.2 Command Word Construction
The TX_CMD_A command word contains six fields of concern:
1. Buffer End Alignment is a 2-bit field which controls device behavior with a DMA controller. As
mentioned above, PIO transfers always use 4-byte alignment, which results in the packet data
buffer transfer occurring in a multiple of DWORD transfers; the last DWORD transfer may contain
pad bytes, depending upon the size of the transfer, modulo 4.
In addition to PIO transfer, LAN9118 Family devices are designed to take advantage of the more
efficient data transfer modes afforded by the use of a DMA controller. When using DMA with the
device, burst transfers where the read/write access to the device is burst across 4 or 8 contiguous
DWORD addresses, the device’s aliasing of the TX Data FIFO register presents a simple memory
interface to the DMA controller. The setting of End Alignment causes the device to insert pad bytes
into the final transfer, filling the remainder of the 16- or 32-byte transfer, but without causing these
bytes to end up in the transmit data stream.
Data Start Offset is a 5-bit field which indicates to the device the number of bytes offset from the
aligned, base-address where the data actually begins. Table 4-2 shows how to construct the
Buffer End Alignment and Data Start Offset fields. In a 4-byte example, the data transfer begins
at physical address YYYY, with its lowest 2 address bits cleared (xx == 00b).
First Segment is a 1-bit indication that the data transfer marks the beginning of a single packet.
SMSC AN 12.12 27 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 28

LAN9118 Family Programmer Reference Guide
Last Segment is also a 1-bit field, marking the data transfer as the end of a single packet.
To better understand the use of these last two fields, let’s discuss two popular operating systems
that utilize different packet allocation schemes. Under Linux, system kernel buffers (skb’s) are used
to hold packet data and almost always contain enough space for the largest possible packet size
(1514 bytes) as an optimization of time-of-allocation. For sending a packet in a single data buffer
transfer operation, these two fields (First Segment, Last Segment) would both be set.
FreeBSD on the other hand uses an mbuf (64-byte memory management buffers) packet allocation
scheme to economize memory allocation space by chaining together only as much mbuf memory
as needed to contain a given packet. Each mbuf typically holds the header from a single layer
(MAC, IP, UDP, or RTP). Under this scheme each mbuf could be dealt with as an individual data
transfer, and the head link in the chain would have the First Segment flag set in its command
word, while the tail link would have Last Segment set. Intervening mbufs will have neither flag
set (see TX Buffer Fragmentation Rules in the datasheet for more detail).
Buffer Size is an 11-bit field specifying the number of data bytes in the current data transfer not
including the two command words.
Interrupt on Completion causes TX_DONE to be asserted after the current data transfer has
completed. This is useful and important for chained DMA transfer operations.
The TX_CMD_B command word contains 2 major and 2 minor fields of concern:
1. Packet Tag is a 16-bit field which contains a unique ID which can be read back from the TX Status
word after the packet has been sent. This field is examined by the device only to the extent that
in a chained packet transfer where all transfers relate to a single packet, all tags must be identical,
but beyond that, the tag may be used for a variety of purposes by the driver writer, such as tracking
the chains, or keeping byte count statistics.
2. Packet Length contains the overall number of bytes in the current packet. Note the distinction to
the Buffer Size field in TX_CMD_A. All links in an mbuf scheme will contain an identical value in
this field.
Add CRC Disable disables the automatic appending of CRC to the packet.
Disable Ethernet Frame Padding prevents the automatic padding of the packet when the overall
packet length is less than 64 bytes (IEEE 802.3). A side affect is that CRC is always added,
despite the setting of ADD CRC Disable.
6.3 Per Packet Flow Control
To regulate data transfers on a per-packet basis, a driver needs to track the space remaining in the
TX_FIFO for subsequent transmit packets (flow design works better if the packets which the device is
currently transmitting do not have to be stalled). This can be obtained by reading the TX Data FIFO
Free Space field (TDFREE) of the Transmit FIFO Information register (TX_FIFO_INF). Note that
TDFREE is read in bytes and represents the free space in the TX Data FIFO. The device offers the
driver writer a variety of techniques to synchronize the application with the device having enough free
space to accommodate a packet transfer. One method of handling the situation where there is not
enough free space to accommodate the current packet transfer is for the driver to enable the device
to interrupt when the free space exceeds a threshold level specified by the FIFO_INT:TX Data
Available Level field, and enabling the INT_EN:TDFA_INT_EN bit. Alternately a scheme could be
constructed using the INT_EN:TSFL_INT_EN interrupt which signals a level change in the TXUSED
count. In this scheme the driver would track the number of TX_FIFO bytes freed up simply by
summing the bytes used in packets completed, and deciding the appropriate moment to re-enable the
transmit packet flow. Use of the FIFO interrupt schemes is encouraged, as it helps eliminate register
sharing between transmit and receive threads.
Revision 1.0 (12-14-09) 28 SMSC AN 12.12
APPLICATION NOTE
Page 29

LAN9118 Family Programmer Reference Guide
6.4 Packet Transfer Completion: Management Statistics
Once a data packet has been transferred into the TX_Data_FIFO, most protocol stacks have no need
for the sending thread to acknowledge the transfer result; the upper protocol layers are expected to
deal with failures, such as a TCP layer re-transmit. There is a need in a managed host however, to
maintain statistics per device such as the number of packets or bytes sent, the number of packet that
have been deferred, collisions, under runs, etc. After a packet has been processed by the device, a
TX Status word is appended to the end of the device’s TX_Status_FIFO for checking individual packet
transfer status whether the packet has been transmitted or dropped; the driver can update the transmit
statistics periodically from a separate thread or call to examine these values. The Packet Tag field is
copied from the TX_CMD_B word used in the packet transfer, while Error Status is a 1-bit summation
of the remaining TX Status error flags; 0 means no errors, i.e., that the packet has been sent.
Table 6.1 ransmit Status Word
TX STATUS
Packet Tag (31:16) Error
Status
0x1234
The TX_FIFO_INF:TSUSED field gives a count of many TX Status words are pending to be read from
the TX_STATUS_FIFO register. A status word is added to the Status FIFO whenever a packet
completes processing, whether or not the packet was transmitted successfully. The count field does
not account for packets that are currently in the Transmit Data FIFO and have not yet been transmitted.
Use of the count field and its associated interrupt allows a driver some flexibility towards management
style. If no management is required, the driver can choose to ignore status word processing
completely and save code space and processing time. The strictest style of management can be
achieved by programming the FIFO to stop sending packets when the TX_Status_FIFO is full, and
examining every status word until TSUSED is again 0. A looser style of management could also be
achieved by allowing the TSUSED counter to overrun, and thus simply make a “best effort” at
managing the device.
14 131211109876543210
SMSC AN 12.12 29 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 30

6.5 Transmit Packet Examples
Let’s take a look at Table 6.2, "Transmit Packet Example", which shows a 78-byte (0x4e) transmit
packet used in the example, which begins at location 0xb4002013 in physical memory. In this case,
it happens to be an IP packet to be sent from our MAC source address of 00:80:0f:71:55:71 to a
destination MAC address of 00:0e:83:a0:de:ff.
Table 6.2 Transmit Packet Example
LAN9118 Family Programmer Reference Guide
PHYSICAL MEMORY
0XB4002000
0x00
0x10
0x20
0x30
0x40
0x50
0x60
0x70
0x80
0x0 0x1 0x2 0x3 0x4 0x5 0x6 0x7 0x8 0x9 0xa 0xb 0xc 0xd 0xe 0xf
XX XX XX 00 0e 83 a0 de ff 00 80 0f 71 55 71 08
00 45 00 00 28 11 56 40 00 80 06 f0 6a aa 81 50
76 aa 81 53 96 04 e7 01 bd a9 4a 38 0d 0a d6 7c
6c 50 10 Ff ff f9 29 00 00 66 6f 72 53 4d 53 43
4d 2e 20 44 62 76 69 64 20 47 65 4c 62 6d 61 6e
21 YY YY YY
In a PIO type transfer, 4-byte DWORD values are copied from memory to the device TX_DATA_FIFO,
so we begin building the TX_CMD_A command word by setting the Buffer End Alignment field to
0x0 to indicate 4-byte alignment:
Table 6.3 Buffer End Alignment
ALIGNMENT REQUIREMENT VALUE (25:24)
4-word alignment 0x0
16-word alignment 0x1
32-word alignment 0x2
(undefined, illegal) 0x3
Then, use the 2 low-bits from of the physical address (0x3) to set the 5-bit Data Start Offset field,
since we are only transferring 4 bytes at a time (PIO). Also we want to transfer the entire packet in
a single buffer transfer action, so First Segment and Last Segment flags are both set.
In the TX_CMD_B command word, we use a unique value of 0x1234 for the Packet Tag field, and an
overall Packet Length the same as the Buffer Size as the entire packet is transfer in a single action.
Note that the Buffer Size refers to the individual transfer payload, not counting the offset and padding
alignment, but in this simple case, length and size are the same.
TX_CMD_A
31 30 29 28 27 26 Buffer
Revision 1.0 (12-14-09) 30 SMSC AN 12.12
End
Alignment
0x0 0x3 1 1 0x4e
23 22 21 Data
Start
Offset
15 14 First
Segment
Last
Segment
11 B uff er
Size
APPLICATION NOTE
Page 31

LAN9118 Family Programmer Reference Guide
Table 6.4 Transmit Command Words
Packet Tag 15 14 13 12 11 Packet Length
0x1234 0x4e
Keep in mind that this example is running in a Little Endian environment. To begin the transfer
sequence, write the two command words as DWORDs, followed by the packet data. Since the transfer
is aligned on 4-byte boundaries, the data transfer start address must begin from 0xb4002010 and
continue up to and including 0xb4002060. Table 6.5, "Single Buffer Single Packet Data Transfer
Sequence" shows the sequence of data transferred from Tab le 6 .2 : Transmit Packet Example’s
memory into the TX_DATA_FIFO. To read the Table 6.5, start from the upper left portion, and following
the Host Source Address (light grey) headings down, then zigzag back up and down through the
middle, and then the right-hand columns, so that the transfer appears thus:
Table 6.5 Single Buffer Single Packet Data Transfer Sequence
TX_CMD_B
HOST
SOURCE
ADDRESS
TX_CMD_A 0x0003304e 0xb4002028 0xf0068000 0xb4002048 0x726f6600
TX_CMD_B 0x1234004e 0xb400202c 0x5081aa6a 0xb400204c 0x43534d53
0xb4002010 0x00XXXXXX 0xb4002030 0x5381aa76 0xb4002050 0x44202e4d
0xb4002014 0xdea0830e 0xb4002034 0x01e70496 0xb4002054 0x64697662
0xb4002018 0x0f8000ff 0xb4002038 0x384aa9bd 0xb4002058 0x4c654720
0xb400201c 0x08715571 0xb400203c 0x7cd60a0d 0xb400205c 0x6e616d62
0xb4002020 0x00004500 0xb4002040 0xff10506c 0xb4002060 0xYYYYYY21
0xb4002024 0x40561128 0xb4002044 0x0029f9ff
TX_DATA_FIFO
DATA
TRANSFER 1
The second example will demonstrate how to chain transfers together into a single packet. We will
re-use the sample packet shown in Ta bl e 6 . 2, and instead of a single transfer, we will make 3 separate
transfers; 29 bytes to start, then 32 bytes, then the remaining 17 bytes. Visually the chained transfer
appears like this:
HOST
SOURCE
ADDRESS
TX_DATA_FIFO
TRANSFER
CONT.
HOST
SOURCE
ADDRESS
TX_DATA_FIFO
TRANSFER
CONT.
SMSC AN 12.12 31 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 32

LAN9118 Family Programmer Reference Guide
78-byte Payload Data
Data Transfers to the
LAN911x
Data Passed on to the TX
Data FIFO
31 0
31 0
31
0
TX Command A Word
TX Command B Word
3-byte Data Start
Offset
29-byte Payload Data
3-byte Data End
padding
32-byte Payload Data
17-byte Payload Data
TX Command A Word
TX Command A Word
TX Command B Word
TX Command B Word
TX Command B Word
TX Command ‘A’
Buffer End Alignment = 1
Data Start Offset = 3
First Segment = 1
Last Segment = 0
Buffer Size = 29
TX Command ‘B’
Packet Length = 78
TX Command ‘A’
Buffer End Alignment = 1
Data Start Offset = 3
First Segment = 0
Last Segment = 0
Buffer Size = 32
TX Command ‘B’
Packet Length = 78
TX Command ‘A’
Buffer End Alignment = 1
Data Start Offset = 3
First Segment = 0
Last Segment = 1
Buffer Size = 17
TX Command ‘B’
Packet Length = 78
NOTE: Payload does not end on
DWORD boundary so 2 additional
bytes of padding are added. This
extra data is not transmitted
Figure 6.1 Multiple (3) Buffer Data Single Packet Transfer Sequence
Revision 1.0 (12-14-09) 32 SMSC AN 12.12
APPLICATION NOTE
Page 33

LAN9118 Family Programmer Reference Guide
6.5.1 Transmit Command Words for Figure 6.1, "Multiple (3) Buffer Data Single
Packet Transfer Sequence"
Table 6.6 TX_CMD_A for Segment 1
BUFFER
31302928272
PACKET TAG 15 14 13 12 11
END
ALIGNMENT23222
6
0x0 0x3 1 0 0x1d
Table 6.7 TX_CMD_B for Segment 1
0x5678 0x4e
Table 6.8 TX_CMD_A for Segment 2
DATA
START
1
OFFSET1514
FIRST
SEGMENT
LAST
SEGMENT11BUFFER
SIZE
PACKET
LENGTH
31302928272
31302928272
BUFFER
6
END
ALIGNMENT232221
0x0 0x0 0 0 0x20
DATA
START
OFFSET1514
FIRST
SEGMENT
LAST
SEGMENT11 BUFFER SIZE
Table 6.9 TX_CMD_B for Segment 2
PACKET TAG 15 14 13 12 11
0x5678 0x4e
Table 6.10 TX_CMD_A for Segment 3
BUFFER
6
END
ALIGNMENT232221
0x0 0x0 0 1 0x11
DATA
START
OFFSET1514
FIRST
SEGMENT
LAST
SEGMENT11 BUFFER SIZE
Table 6.11 TX_CMD_B for Segment 3
PACKET TAG 15 14 13 12 11
0x5678 0x4e
PACKET
LENGTH
PACKET
LENGTH
Note: The use of the First Segment and Last Segment flags in the example detailing the head,
middle, and tail of the chained transfer. Also see how the Buffer Size is unique for each
transfer, while the Packet Length reflects the total packet size. Finally, the Packet Tag must
be identical for correct operation. The new sequence of 3 data transfers looks like this:
SMSC AN 12.12 33 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 34

LAN9118 Family Programmer Reference Guide
Table 6.12 Multiple (3) Packet Data Transfer Sequence
HOST
SOURCE
ADDRESS
TX_CMD_A-1 0x0003201d TX_CMD_A-2 0x00000020 TX_CMD_A-3 0x00001011
TX_CMD_B-1 0x5678004e TX_CMD_B-2 0x5678004e TX_CMD_B-3 0x5678004e
0xb4002010 0x00XXXXXX 0xb4002030 0x5381aa76 0xb4002050 0x44202e4d
0xb4002014 0xdea0830e 0xb4002034 0x01e70496 0xb4002054 0x64697662
0xb4002018 0x0f8000ff 0xb4002038 0x384aa9bd 0xb4002058 0x4c654720
0xb400201c 0x08715571 0xb400203c 0x7cd60a0d 0xb400205c 0x6e616d62
0xb4002020 0x00004500 0xb4002040 0xff10506c 0xb4002060 0xYYYYYY21
0xb4002024 0x40561128 0xb4002044 0x0029f9ff
0xb4002028 0xf0068000 0xb4002048 0x726f6600
0xb400202c 0x5081aa6a 0xb400204c 0x43534d53
TX_DATA_FIFO
DATA
TRANSFER 1
HOST
SOURCE
ADDRESS
TX_DATA_FIFO
DATA
TRANSFER 2
HOST
SOURCE
ADDRESS
TX_DATA_FIFO
DATA
TRANSFER 3
6.6 The Overall Packet Transmit Process
Now that we’ve established a background for transmitting packets with the device, let’s look at the
diagram in Figure 6.2, "Packet Transmission" depicting a packet transmit scheme. This example is
based upon the SMSC simple Linux driver, which provides driver calls to block and un-block the
transmit queue which calls into the driver:
Revision 1.0 (12-14-09) 34 SMSC AN 12.12
APPLICATION NOTE
Page 35

LAN9118 Family Programmer Reference Guide
Can the FIFO accept the
next packet?
(TX_FIFO_INF:TDFREE )
Block NOS queuing
mechanism which
otherwise calls Hard
Transmit Packet
Set FIFO_INT:TX
Data Available Level
to largest possible
sized packet (0x18),
Enable TDFA_INT_EN
interrupt
return OK;
Hard Transmit
Packet
Interrupt Service Routine
Disable TDFA_INT_EN interrupt on
FIFO_INT:TX Data Available Level
exceeding marker
Un-block NOS queuing mechanism
which would call Hard Transmit Packet
ISR Complete
TDFA Interrupt: TDFREE threshold
reached
Transfer TX Cmd Words, Data Memory Buffer
to TX Data FIFO
Free up NOS Data Memory Buffer
N
Y
Accumulated TX stats
to process?
Schedule NOS thread to evaluate TX Status
for each packet sent, accumulate common
driver statistics and clear TX Status FIFO
Y
N
Once the device is initialized, the application can continue sending packets until the first indication
appears that the device can no longer accept packets (since we cannot know the size of the next
transmit packet a priori, we want to ensure that we can send the largest packet possible, 1518 bytes
in size). At that point we tell the network operating system (NOS) to stop sending the driver any more
transmit packets. When the device has freed up enough buffer space, due to the transmitting of
packets internally queued, it interrupts the application, which disables the interrupt and calls into the
NOS telling it that we can now resume accepting packets for transmit.
For simplicity and completeness, this example shows the TX status results processing handled as a
thread scheduled directly at the entry of the packet transmit function. In truth this thread of execution
could be scheduled from its own TX Status FIFO Level Interrupt (TSFL), which signals that a
threshold number of packets have completed the transmit process (successful or not).
Figure 6.2 Packet Transmission
SMSC AN 12.12 35 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 36

7 Receive Packet Processing
A receive process must signal the host that there are incoming packets to be read in, it must identify
the validity and length of each individual packet, copy the packet data from device to memory, hand
off the packet data memory to the protocol stack, maintain count statistics, and continue the application
when there are no more incoming packets. This is much like transmit processing in reverse, with the
difference mainly being one of synchronicity. The low-level transmit routine sends a packet whenever
the application offers it one; the transmitter is ready to accept the packet most of the time. The receive
processing on the other hand, does not know a priori when a packet is being received. Hence there
is a need to drive the process asynchronously via the device RX Status FIFO Level (RSFL) interrupt,
which signals the NOS that there are incoming packets to be serviced. Polling could be employed by
a thread to examine the same device status as that causing the interrupt, but it is better practice and
more efficient if the driver relies upon one of the available interrupts, either by detecting the change in
time, such as the GP Timer, or status change. Sometimes the underlying operating system can avail
the driver a useful polling API, such as NAPI under Linux, but in any case, the driver author can choose
from a variety of techniques to synchronize the ingress of packet data to the application.
The first information the driver needs for each packet arriving at the device is its associated receive
status word (RX Status). We are primarily concerned with the length of a packet (Packet Length)
and any indications of errors. Like the TX Status: Error Status, the RX Status:Error Status bit is a
quick summation of typical receive errors, such as runts, frames too long, late collisions, and CRC
errors. Using the remaining status information allows a driver other options, including a quick
discrimination between Ethernet, 802.3, broadcast and multicast frames. While discussing the receive
status word, keep in mind that when the MAC_CR:PADSTR bit is set, the Packet Length reflects the
data actually sent across the wire, and CRC is stripped off of the packet (0x5ea). Otherwise packets
less than 64-bytes are padded out to 64-bytes and CRC is always appended.
LAN9118 Family Programmer Reference Guide
Table 7.1 Receive Status Word
31 30 Packet Length (29:16) Error
Status
0x59 0
To detect the presence of incoming packets, the receiver maintains a queue of status words, which
can be individually read from the RX Status FIFO port, each corresponding to a packet positioned in
the data queue. Each read pops a status word off the front of the queue. Some driver environments
may require the driver to examine the status before popping it off of the queue, and for this a RX
Status FIFO PEEK port is provided. At any given moment, the RX_FIFO_INF:RXSUSED register field
gives a current, reliable count of status words in the FIFO, and hence how many packets, good or bad,
are queued up for processing. This field has associated with it an RSFL_INT_EN interrupt bit and
threshold count FIFO_INT:RX Status Level register field, which can be programmed to signal the host
whenever the current count exceeds the threshold value.
The RSFL interrupt handler depicted in Figure 7.1, "Packet Reception", should acknowledge and
disable the interrupt, and then schedule a thread to run outside of interrupt state, to minimize the
amount of time interrupts are blocked in the application. When the thread has read in all of the pending
receive packets, the interrupt can again be enabled.
RX STATUS
14 13 12 11 10 9876543210
Revision 1.0 (12-14-09) 36 SMSC AN 12.12
APPLICATION NOTE
Page 37

LAN9118 Family Programmer Reference Guide
Return;
Rx Process
Packets
Interrupt Service Routine
Disable RSFL_INT_EN interrupt on
FIFO_INT:RX Status Level exceeding
threshold
Schedule NOS Rx process packets
thread
ISR Complete
RSFL Interrupt: FIFO_INT:RX Status
Level threshold crossed
Read Rx Status
N
Y
Allocate NOS packet data memory to hold transfer
Transfer data from device to
memory
Send packet data memory up to NOS protocol stack
Rx Status
errors?
Allocation
failure?
Y
N
Restart the interrupt de-assertion interval
Any more packets?
(RX_FIFO_INF:RXSUSED)
Y
N
Enable RSFL_INT_EN interrupt on
FIFO_INT:RX Status Level exceeding
threshold
Multicast
match?
802.3 size
error?
N
N
Y
Purge packet
from device
Y
SMSC AN 12.12 37 Revision 1.0 (12-14-09)
Figure 7.1 Packet Reception
In the Figure 7.1 above we only begin reading packets whenever the RX Status FIFO contains any
entries (see RX_FIFO_INF:RSXUSED). Then, as long as we have more packets remaining in the
device, we check the individual RX Status per packet, and try to allocate a data packet in memory
from the network operating system. If everything is OK, then we can transfer the packet from our
device into packet data memory, and hand the packet up to the protocol stack for application
processing. Should any errors in status or an inability to obtain data memory be encountered in the
process, the driver will need to purge the device of the bad packet.
If Multicast reception is required in the application, then the driver may be the point at which to validate
the destination multicast address against a current list of multicast addresses acceptable to the
application. Although the hardware supports hashed multicast address matching, perfect multicast
filtering match must be performed, whether it’s in the in the driver, or in the upper layers of the protocol
stack. Should 802.3 style frames be an issue for the application, the driver can also evaluate the
length/type field and validate it against the device’s notion of the true, physical packet length.
APPLICATION NOTE
Page 38

7.1 Receive Data Transfer
Given that the device makes all data transfers in DWORD pieces, the driver can easily align the
receiving data memory address to a DWORD boundary. Recall too, that the data transfer length must
also be rounded up when considering overall data buffer length (i.e., a 109-byte packet should be
treated as a 4*28 or 112 byte transfer).
The RX Data Offset field gives the driver control over packet alignment
Table 7.2 Receive Data Buffer Example
0x00x10x20x30x40x50x60x70x80x90xa0xb0xc0xd0xe0xf
0XB
400
200
0
0x0
0
LAN9118 Family Programmer Reference Guide
PHYSICAL MEMORY
0x1
0
0x2045 00 00 28 11 56 40 00 80 06 f0 6a aa 81 50 76
0x30aa 81 53 96 04 e7 01 bd a9 4a 38 0d 0a d6 7c 6c
0x4050 10 ff ff f9 29 00 00 66 6f 72 53 4d 53 43 4d
0x502e 20 44 62 76 69 64 20 47 65 4c 62 6d 61 6e 20
0x6077 72 6f 74 65 20 74 68 69 73 2e
0x7
0
0x8
0
00 0e 83 a0 de ff 00 80 0f 71 55 71 08 00
Commonly, TCP/IP based protocol stacks optimize packet data access by aligning the start of the IP
header to a DWORD boundary. Using the example RX Status of an 89-byte packet shown in Tab le 7 . 2
just above is a packet buffer starting at 0xb4002000, and it shows where we want the data to wind up
after the transfer is complete, The data buffer is aligned on a 32-byte boundary, and contains an IP
version 4 style packet, with a header length of 5 DWORDS (0x45), After the transfer, the beginning
of the IP header portion, the byte containing the value 0x45 is aligned at physical address 0xb4002020.
As the MAC header which precedes it in memory is 14 bytes in length (6-byte destination address, 6byte source address, 2-byte packet type/length), adding an 18-byte offset to the start of where the
driver stores this packet, will align the IP header on the next 32-byte boundary (14+18 == 32). For
this example we will be working with a DMA controller capable of 32-byte cache line burst transfers,
hence the need for RX End Alignment. It is necessary for the driver to inform the device of the DMA
controllers burst ability because the burst addressing will cause additional reads to be generated to
the device even though no data may actually be transferred at the end of the packet transfer. Hence
the need for padding the packet memory buffer to the alignment indicated by this field
Revision 1.0 (12-14-09) 38 SMSC AN 12.12
APPLICATION NOTE
Page 39

LAN9118 Family Programmer Reference Guide
:
ALIGNMENT REQUIREMENT VALUE (31:30)
4-word alignment 0x0
16-word alignment 0x1
32-word alignment 0x2
(undefined, illegal) 0x3
Enabling a receive transfer requires setting up the RX_CFG register, shown in Table 7.4, "Receiver
Configuration Word" below. For this example, the RX_CFG: RX Data Offset is given a value of 18
(0x12), which gives the starting alignment of the MAC header which is needed to place the IP header
on the DWORD address of 0xb40020020. For PIO transfers, DWORD end alignment is sufficient, so
this field would be set with a value of ‘00’ to indicate such. But since we are doing this transfer using
a DMA controller capable of cache line bursting, we can set the RX End Alignment to reflect the
controller’s burst transfer ability, in this case 32-byte (‘10’ == 2) end alignment.
RX End Alignment 2928RX DMA
Count
Table 7.3 RX End Alignment
Table 7.4 Receiver Configuration Word
RX_CFG
151413RX Data Offset 76543210
0x2 0x20 0x12
When the driver is written to work along with a DMA controller, it becomes necessary to coordinate
the completion of a transfer. Usually this coordination is based upon the DMA controller interrupting
on terminal count (all bytes transferred), but there are situations where we want the driver to continue
receive processing in parallel to the DMA operations, particularly if the DMA controller is descriptorbased. The device will assert the RXD_INT interrupt to the host on terminal count by programming
the RX_CFG:RX DMA Count field with the transfer size. As this field is 12-bits wide and the count is
expressed in DWORDS, the driver can potentially start a series of transfers and continue only after
they have all completed. For this example we need to calculate the RX DMA Count by adding the
RX Data Offset preceding the start of the packet (0x12) to the Packet Length of 0x59 and finish by
adding the number of padding bytes implied by the RX End Alignment (from offset 0x6b through 0x7f
== 0x15) for a sum total of 18 + 89 + 21 == 128 bytes, or 32 DWORDS (0x20).
Having written the RX_CFG value we can enable the DMA controller to transfer 128 bytes from the
RX Data FIFO to the packet memory buffer beginning at address 0xb4002000. The device will handle
the correct data alignment for the transfer to result in the example shown in Table 7.2. Since we
assigned a non-zero value to the RX DMA Count, we are not counting on the controller to interrupt
us on its terminal count. The device will signal transfer complete by raising the RXD_INT interrupt.
7.2 Purging Receive Packets
There are valid reasons for throwing away data in the normal course of driver operations, such as
malformed data or a lack of data memory buffers in which to hold and process the data. Another
reasons is to do perfect multicast filtering, which is performed in software. Since only the destination
address is required for evaluation, the driver could read in 2 DWORDS, and decide whether or not to
bring the rest of the packet in. Another example is IEEE 802.3 frame size errors, where the MAC
header length/type field does not correspond with the value in the RxStatus:Packet Length field
A packet is purged by setting the RX_DP_CTRL:RX_FFWD bit, and then polling it (read back and test
for bit reset to 0) until it has reset. If the packet is less than 4 DWORDS in length however, then the
SMSC AN 12.12 39 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 40

RX_DATA_FIFO must be read an appropriate number of DWORDS to purge the miniscule packet.
This should only happen if the MAC_CR is configured to PASSBAD packets ( == ‘1’).
7.3 Flow Control Function
The flow control function monitors space available in the RX Data FIFO. When the threshold set by
the in AFC_CFG:AFC_HI field is reached, the Flow Controller will instruct the MAC to send a pause
frame (in full-duplex mode), or to jam incoming frames (in half-duplex mode). Logic residing in the
MAC is then responsible for inserting the PAUSE frame or generating backpressure at the appropriate
time.
7.3.1 Backpressure
When operating in half-duplex mode with the transmitter and flow control enabled, the controller will
automatically assert backpressure based on the setting of AFC_CFG register. When the RX Data FIFO
reaches the level set by AFC_HI the Backpressure Duration Timer will start. The controller will assert
backpressure for any received frames as defined by the FCANY, FCADD, FCMULT and FCBRD
control bits. This continues until the Backpressure Duration Timer reaches the time specified by the
BACK_DUR field. After the BACK_DUR time period has elapsed the receiver will accept one frame.
If, after receiving one RX frame, the RX Data FIFO is still above the threshold set by AFC_LO, the
controller will again start the Backpressure duration timer and will assert backpressure for subsequent
frames repeating the process described here until the RX Data FIFO level drops below the AFC_LO
setting. If the RX Data FIFO drops below AFC_LO before the Backpressure Duration Timer has
expired, the timer will immediately reset and backpressure will not be asserted until the RX Data FIFO
level exceeds AFC_HI.
LAN9118 Family Programmer Reference Guide
If the AFC_LO value is set to all ones (0xff) and the AFC_HI value is set to all zeros (0x00), the flow
controller will assert backpressure for received frames as if AFC_HI threshold is always exceeded. The
driver can use this mechanism to direct flow control by enabling and disabling the FCANY, FCADD,
FCMULT and FCBRD bits.The BACK_DUR field can be used to avoid excessive collisions, and the
FCANY bit can be used to eliminate late collisions, unless the LAN topography is known before hand.
7.3.2 Pause Frames
When operating in full-duplex mode with the transmitter and flow control enabled, the controller will
automatically transmit pause frames based on the settings of AFC_CFG and FLOW registers. When
the RX Data FIFO reaches the level set by AFC_HI the controller will transmit a pause frame. The
pause time field that is transmitted is set in the Pause Time (FCPT) field of the FLOW register. When
the RX Data FIFO drops below AFC_LO the controller will automatically transmit a pause frame with
a pause time of zero. The controller will only send another pause frame when the RX Data FIFO level
falls below AFC_LO and then exceeds AFC_HI again.
Revision 1.0 (12-14-09) 40 SMSC AN 12.12
APPLICATION NOTE
Page 41

LAN9118 Family Programmer Reference Guide
8 Instrumentation and Debug
This chapter is based upon the experience gained from the development of the simple Linux Driver for
the LAN9118 family. It assumes that the driver will have a rich feature set in its run-time environment
to draw upon for debugging. While not every operating system offers the functionality of a Linux, the
concepts remain useful and are offered to the driver developer as tips.
When something goes wrong in the driver, it is very helpful to have facilities for observing its internal
workings. This chapter will describe the various methods available to the driver writer.
8.1 Debug Prints
One of the simplest methods of debugging is Debug Prints. These are similar to printf() statements
that might be used by any software. They can be used to reveal the contents of a variable or a register
at some special location during code execution. They are useful when the driver is behaving
unexpectedly. Debug prints should not be left in performance-sensitive paths of the driver, because
debug prints are down execution tremendously. Debug prints can cause “Heisenberg-bugs”, since their
very presence alters timing. They may mask or even induce problems.
The simple driver uses the following macros for debug prints. See simp911x.c for details.
8.1.1 SMSC_TRACE(message, parameters)
SMSC_TRACE points work just like a printf() statement, in fact they call the Linux kernel routine
printk(). For debugging, SMSC_TRACE points can temporarily be added anywhere they are needed.
SMSC_TRACE points are enabled when USE_TRACE is defined during compile time and
((debug_mode&0x01UL) == 0x01UL ) during run time. It is used to indicate general information such
as driver parameters used at load time.
For example:
int globalDriverParameter=0;
void DriverInitializationEntryPoint()
{
SMSC_TRACE(“globalDriverParameter = %d”,globalDriverParameter);
Do other initialization;
}
//When loading a driver in Linux
// globalDriverParameter could be modified before
// DriverInitializationEntryPoint is called. Therefore
// it is useful to display what ever setting has been applied to
// globalDriverParameter.
8.1.2 SMSC_WARNING(message, parameters)
SMSC_WARNING points work just like SMSC_TRACE points, with the exception that they are enabled
when USE_WARNING is define during compile time and ((debug_mode&0x02UL)==0x02UL) during
run time. The slight difference in enabling allows SMSC_WARNING points to be enabled while
SMSC_TRACE points are disabled. SMSC_WARNING points are not intended to indicate general
information. They are intended for the purpose of exposing unexpected situations, but only those
situations that can be handled without crashing the driver.
For example:
void SomeDriverEntryPoint(int parameter)
{
if (parameter==invalid) {
SMSC_WARNING(“Invalid Parameter = %d”,parameter);
return;
}
do work;
}
//if Linux calls an entry point of the driver with
// invalid parameters, issue a warning and
// just return with out any further problems.
SMSC AN 12.12 41 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 42

LAN9118 Family Programmer Reference Guide
8.1.3 SMSC_ASSERT(condition)
SMSC_ASSERT points are enabled when USE_ASSERT is defined during compile time. It has no run
time dependency on debug mode. This macro is used to test assumptions made when coding. It is
useful to ensure consistency of logic through out the driver. It is only intended to be used in situations
where a failure of the condition is fatal. That is if code execution were allowed to continue it is assumed
that only further unrecoverable errors would occur and so this macro includes an infinite loop to prevent
further corruption. Assertion points are also useful when multiple programmers will be maintaining the
code. If the original programmer is good at using assertions then any maintainers will be immediately
alerted (during testing) if they break an original assumption. Assertions also serve as a good way of
documenting assumptions, which helps prevent maintainers from breaking them in the first place.
Examples:
SMSC_ASSERT(pointer!=NULL);
SMSC_ASSERT(index<size);
8.2 GPIO pins in Conjunction with Oscilloscope
Another method of debugging which can be very helpful is the use of the GPIO pins in conjunction
with an Oscilloscope. There are 3 GPIO pins available, which can be configured through the
GPIO_CFG register. The controller offers two additional output-only GPO pins, shown below as GP_3
and GP_4. The driver is capable of setting these pins high or low, and the resulting waveform can be
observed on the scope. Below is a scope trace that illustrates the use of GPIO pins. In this picture
NCS, NRD, and NWR are taken from the bus signals. TX_EN is an internal signal brought out on a
GPIO pin which the MAC uses to signal the PHY that it is sending data. The signal is high when a
packet is being transmitted on the wire. RX_DV is another internal signal brought out that is high when
a packet is being received on the wire. The driver sets GP_1 high when it begins receiving a packet,
and sets it low when it finishes receiving a packet. Also the driver sets GP_2 high when it begins
transmitting a packet, and sets it low when it finishes transmitting a packet. Displaying all these signals
in real time on a scope can give a clearer picture of data moving around the system. For example,
the GP_2 signal shows that six packets were packed into the transmit FIFO before one packet was
received back.
Revision 1.0 (12-14-09) 42 SMSC AN 12.12
APPLICATION NOTE
Page 43

LAN9118 Family Programmer Reference Guide
Figure 8.1 Oscilloscope/Logic Analyzer Display
GPIOs can also be used with a scope for instrumentation. Most scopes provide a way to measure the
time between events. In the trace above, the scope could be used to measure the time between the
rising and falling edges of GP_1, revealing the length of time it takes to read a packet out of the Rx
data FIFO with high accuracy. Measurements of the low time could be used to calculate the percentage
of bus usage. Almost any timing measurement imaginable can be measured using GPIOs and a scope.
GPIOs can also be used to create trigger points for the scope. If some kind of error is occurring in the
driver, it is useful to see what other events are occurring simultaneously. Pulsing the GPIO pin when
the error condition occurs provides a convenient sampling point for these events.
8.3 TxCLK and RxCLK
These signals can also be brought out on the GPIO pins to observe TX and RX characteristics. They
could be used in conjunction with an inexpensive frequency meter during a manufacture test to
measure the data bit rate on the wire. A frequency meter with accuracy of 50 ppm or better is
generally required to determine standards compliance.
8.4 Error Interrupts are Invaluable Tools
There are several interrupts available for detecting errors. Some of them can signal when the driver is
using the FIFOs incorrectly. They are Receiver Error (RXE), and Transmitter Error (TXE). If the driver
makes any mistakes with respect to data alignment, offsets, etc., it will trigger one of these interrupts.
When combined with a GPIO trigger pulse or a warning message, these interrupts can contribute
greatly to the robustness of the driver, because under normal operation these errors never occur. If
they do, then the driver likely has a bug which should be investigated.
SMSC AN 12.12 43 Revision 1.0 (12-14-09)
APPLICATION NOTE
Page 44

Some other useful error interrupts to be aware of include:
TXSO
TDFO
TSFF – TX status FIFO full
RSFF – RX status FIFO full
8.5 Integrating the Driver: Early Testing
When the driver development has come to the point where it is being integrated into the protocol stack,
a basic integration test which is useful for shaking out the data flows is to send the host a stream of
ICMP ping request packets, while looking for the ping responses. Once this basic skill is mastered by
the driver, the test should advance by varying the packet size through all possible values (64 – 1518
bytes). A PC could be used in this case, although the standard ping program supplied does not
automatically change the size of the packets sent. A better choice in this regard would be a packet
tester, such as those made by SmartBits or iXia. Continuing the advance, the testing should add faulty
packets injected at random points in the ping packet stream. Faulty packets should include, but not
be limited to runts, jabbers, and CRC errors.
When the ping responses coming back from the host maintain their correct sequence, this verifies to
a large extent that the low-level receive operation is working, that the packets are transferred and
aligned into the packet memory buffers correctly, and that the protocol stack can identify the packets
correctly as being of type ICMP. It also verifies that the low-level transmit routine basically works, too.
Adding in the random faulty packet errors validates the data error processing, as well as showing that
the low-level receive operation is not deterred by bad packets. This can be most important when using
DMA for receive data transfers, as the driver will need to interleave its “dialogues” with both the device
and the DMA engine. At this point in the testing the management features can also be verified by
comparing the packet statistics derived from the driver to the values generated by the ping stream
request source.
LAN9118 Family Programmer Reference Guide
The rate of the ping packets should be well within the abilities of the host hardware. Emphasis should
be on the correctness of the response sequence initially, not the data rate of the packet stream. Ideally
the test is striving for a data rate that manages to keep at least a few packets in the Rx FIFO while
the device is under test, and this can really only be determined by the hardware.
9 Power Management Events
LAN9118 Family members support power-down modes to allow the application to minimize power
consumption. These modes operate via the PME Block to control the necessary internal signals for
reduced power modes.
9.1 System Description
There is one normal operating power state, D0 and there are two power saving states: D1 and D2.
Upon entry into any of the three power management states, only the PMT_CTRL register is accessible
for read operations. Reads of any other addresses are forbidden until the READY bit is set. All writes,
with the exception of the wakeup write to BYTE_TEST register, are also forbidden until the READY bit
is set. Only when in the D0 (Normal) state, when the READY bit is set, can the rest of the device be
accessed.
Entering power saving states involves setting the desired power management state in the
PMT_CTL:PM_MODE field. If the PM interrupt is enabled, the device can be woken up by writing to
the BYTE_TEST register.
Revision 1.0 (12-14-09) 44 SMSC AN 12.12
APPLICATION NOTE
Page 45

LAN9118 Family Programmer Reference Guide
80 ARKAY DRIVE, HAUPPAUGE, NY 11788 (631) 435-6000, FAX (631) 273-3123
Copyright © 2009 SMSC or its subsidiaries. All rights reserved.
Circuit diagrams and other information relating to SMSC products are included as a means of illustrating typical applications. Consequently, complete information sufficient for
construction purposes is not necessarily given. Although the information has been checked and is believed to be accurate, no responsibility is assumed for inaccuracies. SMSC
reserves the right to make changes to specifications and product descriptions at any time without notice. Contact your local SMSC sales office to obtain the latest specifications
before placing your product order. The provision of this information does not convey to the purchaser of the described semiconductor devices any licenses under any patent
rights or other intellectual property rights of SMSC or others. All sales are expressly conditional on your agreement to the terms and conditions of the most recently dated
version of SMSC's standard Terms of Sale Agreement dated before the date of your order (the "Terms of Sale Agreement"). The product may contain design defects or errors
known as anomalies which may cause the product's functions to deviate from published specifications. Anomaly sheets are available upon request. SMSC products are not
designed, intended, authorized or warranted for use in any life support or other application where product failure could cause or contribute to personal injury or severe property
damage. Any and all such uses withou t prior written approval of an Officer of SMSC and further testing and/or modification will be fully at the risk of the customer. Copies of
this document or other SMSC literature, as well as the Terms of Sale Agreement, may be obtained by visiting SMSC’s website at http://www.smsc.com. SMSC is a registered
trademark of Standard Microsystems Corporation (“SMSC”). Product names and company names are the trademarks of their respective holders.
SMSC DISCLAIMS AND EXCLUDES ANY AND ALL WARRANTIES, INCLUDING WITHOUT LIMITATION ANY AND ALL IMPLIED WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE, TITLE, AND AGAINST INFRINGEMENT AND THE LIKE, AND ANY AND ALL WARRANTIES ARISING FROM ANY COURSE
OF DEALING OR USAGE OF TRADE. IN NO EVENT SHALL SMSC BE LIABLE FOR ANY DIRECT, INCIDENTAL, INDIRECT, SPECIAL, PUNITIVE, OR CONSEQUENTIAL
DAMAGES; OR FOR LOST DATA, PROFITS, SAVINGS OR REVENUES OF ANY KIND; REGARDLESS OF THE FORM OF ACTION, WHETHER BASED ON CONTRACT;
TORT; NEGLIGENCE OF SMSC OR OTHERS; STRICT LIABILITY; BREACH OF WARRANTY; OR OTHERWISE; WHETHER OR NOT ANY REMEDY OF BUYER IS HELD
TO HAVE FAILED OF ITS ESSENTIAL PURPOSE, AND WHETHER OR NOT SMSC HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
SMSC AN 12.12 45 Revision 1.0 (12-14-09)
APPLICATION NOTE
 Loading...
Loading...