

Page 1
查询FDC37B770供应商
FDC37B77x
ADVANCED INFORMATION
Enhanced Super I/O Controller with Wake-Up Features
and Consumer IR
5 Volt Operation
!"
PC98/99 and ACPI 1.0 Compliant
!"
ISA Plug-and-Play Compatible Register Set
!"
Intelligent Auto Power Management
!"
- Shadowed Write-Only Registers
- Programmable Wake-up Event
Interface
System Management Interrupt, Watchdog
!"
Timer
2.88MB Super I/O Floppy Disk Controller
!"
- Licensed CMOS 765B Floppy Disk
Controller
- Software and Register Compatible
with SMSC's Proprietary 82077AA
Compatible Core
- Supports One Floppy Drive
- Configurable Open Drain/Push-Pull
Output Drivers
- Supports Vertical Recording Format
- 16-Byte Data FIFO
- 100% IBM Compatibility
- Detects All Overrun and Underrun
Conditions
- Sophisticated Power Control Circuitry
(PCC) Including Multiple Powerdown
Modes for Reduced Power
Consumption
- DMA Enable Logic
- Data Rate and Drive Control Registers
- 480 Address, Up to Eight IRQ and
Three DMA Options
Floppy Disk Available on Parallel Port Pins
!"
Enhanced Digital Data Separator
!"
FEATURES
- 2 Mbps, 1 Mbps, 500 Kbps, 300
Kbps, 250 Kbps Data Rates
- Programmable Precompensation
Modes
!"
- 8042 Software Compatible
- 8 Bit Microcomputer
- 2k Bytes of Program ROM
- 256 Bytes of Data RAM
- Four Open Drain Outputs Dedicated
for Keyboard/Mouse Interface
- Asynchronous Access to Two Data
Registers and One Status Register
- Supports Interrupt and Polling Access
- 8 Bit Counter Timer
- Port 92 Support
- Fast Gate A20 and KRESET Outputs
- 8042 P12 and P16 Outputs
!"
- Two Full Function Serial Ports
- High Speed NS16C550 Compatible
UARTs with Send/Receive 16-Byte
FIFOs
- Supports 230k and 460k Baud
Programmable Baud Rate Generator
Modem Control Circuitry
- 480 Address and 15 IRQ Options
!"
- Multiprotocol Infrared Interface
- 32-Byte Data FIFO
- IrDA 1.0 Compliant
- Consumer IR
- SHARP ASK IR
Keyboard Controller
Serial Ports
Infrared Port
Page 2
- 480 Address, Up to 15 IRQ and Three
DMA Options
!" Multi-Mode Parallel Port with ChiProtect
- Standard Mode IBM PC/XT PC/AT,
and PS/2 Compatible Bidirectional
Parallel Port
- Enhanced Parallel Port (EPP)
Compatible - EPP 1.7 and EPP 1.9
(IEEE 1284 Compliant)
- IEEE 1284 Compliant Enhanced
Capabilities Port (ECP)
- ChiProtect Circuitry for Protection
- 480 Address, Up to 15 IRQ and
Three DMA Options
!" ISA Host Interface
- 16 Bit Address Qualification
- 8 Bit Data Bus
- IOCHRDY for ECP and IrCC
- Three 8 Bit DMA Channels
!" 100 Pin QFP Package
Against Damage Due to Printer PowerOn
- Serial IRQ Interface Compatible with
Serialized IRQ Support for PCI Systems
- PCI PME Interface
GENERAL DESCRIPTION
The FDC37B77x with advanced Consumer IR
and IrDA v1.0 support incorporates a keyboard
interface, SMSC's true CMOS 765B floppy disk
controller, advanced digital data separator, two
16C550A compatible UARTs, one Multi-Mode
parallel port which includes ChiProtect circuitry
plus EPP and ECP, on-chip 12 mA AT bus
drivers, one floppy direct drive support, and
Intelligent Power Management including PME
support. The true CMOS 765B core provides
100% compatibility with IBM PC/XT and PC/AT
architectures in addition to providing data
overflow and underflow protection. The SMSC
advanced digital data separator incorporates
SMSC's patented data separator technology,
allowing for ease of testing and use. Both onchip UARTs are compatible with the
NS16C550A. The parallel port is compatible
with IBM PC/AT architecture, as well as IEEE
1284 EPP and ECP. The FDC37B77x
incorporates sophisticated power control circuitry
(PCC) which includes support for keyboard,
mouse, modem ring and consumer infrared
wake-
up events. The PCC supports multiple low
power-down modes.
The FDC37B77x supports the ISA Plug-and-Play
Standard (Version 1.0a) and provides the
recommended functionality to support Windows
'95. The I/O Address, DMA Channel and
hardware IRQ of each logical device in the
FDC37B77x may be reprogrammed through the
internal configuration registers. There are 480
I/O address location options, a Serialized IRQ
interface, and three DMA channels.
The FDC37B77x does not require any external
filter components and is therefore easy to use
and offers lower system costs and reduced
board area. The FDC37B77x is software and
register compatible with SMSC's proprietary
82077AA core.
2
Page 3

TABLE OF CONTENTS
FEATURES ......................................................................................................................... 1
GENERAL DESCRIPTION .................................................................................................. 2
PIN CONFIGURATION........................................................................................................ 5
DESCRIPTION OF PIN FUNCTIONS.................................................................................. 6
DESCRIPTION OF MULTIFUNCTION PINS......................................................................10
REFERENCE DOCUMENTS..............................................................................................10
FUNCTIONAL DESCRIPTION............................................................................................12
SUPER I/O REGISTERS................................................................................................12
HOST PROCESSOR INTERFACE.................................................................................12
FLOPPY DISK CONTROLLER ..........................................................................................13
FDC INTERNAL REGISTERS ........................................................................................13
COMMAND SET/DESCRIPTIONS......................................................................................36
INSTRUCTION SET ...........................................................................................................40
SERIAL PORT (UART).......................................................................................................66
INFRARED INTERFACE ....................................................................................................80
PARALLEL PORT..............................................................................................................81
IBM XT/AT COMPATIBLE, BI-DIRECTIONAL AND EPP MODES..................................83
EXTENDED CAPABILITIES PARALLEL PORT...............................................................90
PARALLEL PORT FLOPPY DISK CONTROLLER..........................................................104
POWER MANAGEMENT ..................................................................................................106
V
SUPPORT..............................................................................................................106
TR
SERIAL IRQ .....................................................................................................................112
GP INDEX REGISTERS................................................................................................... 117
WATCH DOG TIMER .......................................................................................................119
8042 KEYBOARD CONTROLLER DESCRIPTION ..........................................................120
SYSTEM MANAGEMENT INTERRUPT (SMI).................................................................. 129
PME SUPPORT............................................................................................................129
CONFIGURATION............................................................................................................ 131
OPERATIONAL DESCRIPTION.......................................................................................160
MAXIMUM GUARANTEED RATINGS*.........................................................................160
3
Page 4
DC ELECTRICAL CHARACTERISTICS........................................................................160
TIMING DIAGRAMS.........................................................................................................165
ECP PARALLEL PORT TIMING ......................................................................................186
80 Arkay Dr.
Hauppauge, NY 11788
(631) 435-6000
FAX: (631) 273-3123
4
Page 5
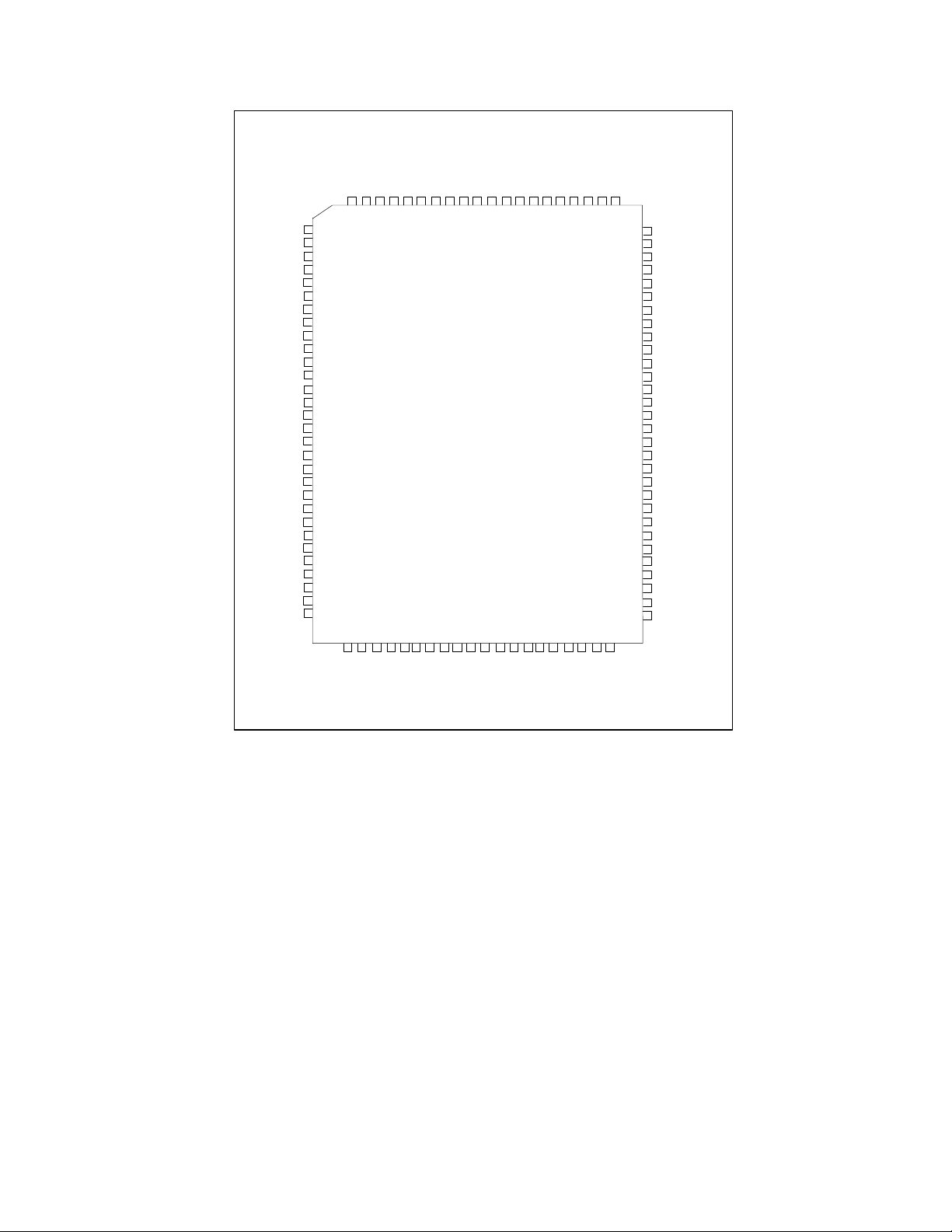
PIN CONFIGURATION
DRQ2
nDACK1
SD7
SD6
SD5
SD4
VSS
SD3
SD2
SD1
SD0
AEN
nIOW
nIOR
SER_IRQ
PCI_CLK
nCS/SA11
nDACK2
DRQ1
31323334353637383940414243444546474849
50
nERROR
nALF
nSTROBE
RXD1
TXD1
nDSR1
nRTS1/SYSOP
nCTS1
nDTR1
nRI1
nDCD1
nRI2/P16
VCC
nDCD2/P12
RXD2/IRRX
nDSR2/SA15
TXD2/IRTX
nCTS2/SA13
nRTS2/SA12
nDTR2/SA14100
99
98
97
96
95
94
93
92
91
90
89
88
87
86
85
84
83
82
81
DRVDEN0
DRVDEN1
nMTRO
nPME
nDS0
CLOCK132
VSS
nDIR
nSTEP
nWDATA
nWGATE
nHDSEL
nINDEX
nTRK0
nWRTPRT
nRDATA
nDSKCHG
V
CLOCKI
SA0
SA1
SA2
SA3
SA4
SA5
SA6
SA7
SA8
SA9
SA10
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
TR
19
20
21
22
23
24
25
26
27
28
29
30
FDC37B77x
100 PIN QFP
80
79
78
77
76
75
74
73
72
71
70
69
68
67
66
65
64
63
62
61
60
59
58
57
56
55
54
53
52
51
nACK
BUSY
PE
SLCT
VSS
PD7
PD6
PD5
PD4
PD3
PD2
PD1
PD0
nSLCTIN
nINIT
VCC
A20M
KBDRST
IRTX
IRRX
VSS
MCLK
MDAT
KCLK
KDAT
IOCHRDY
TC
VCC
DRQ3/P12
nDACK3/P16
5
Page 6
DESCRIPTION OF PIN FUNCTIONS
PIN
No./QFP
NAME TOTAL SYMBOL
BUFFER
PROCESSOR/HOST INTERFACE (36)
37:40,
System Data Bus 8 SD[0:7] IO12
42:45
20:30 11-bit System Address Bus 11 SA[0:10] I
31 Chip Select/SA11 (Note 1) 1 nCS/SA11 I
36 Address Enable 1 AEN I
55 I/O Channel Ready 1 IOCHRDY OD12
46 ISA Reset Drive 1 RESET_DRV IS
33 Serial IRQ 1 SER_IRQ IO12
32 PCI Clock for Serial IRQ (33MHz/30MHz) 1 PCI_CLK ICLK
50 DMA Request 1 1 DRQ1 O12
48 DMA Request 2 1 DRQ2 O12
52 DMA Request 3/8042 P12 1 DRQ3/P12 O12/IO12
47 DMA Acknowledge 1 1 nDACK1 I
49 DMA Acknowledge 2 1 nDACK2 I
51 DMA Acknowledge 3/8042 P16 1 nDACK3/
P16
54 Terminal Count 1 TC I
34 I/O Read 1 nIOR I
35 I/O Write 1 nIOW I
4 Power Management Event 1 nPME OD24
6 32.768 Trickle Clock Input 1 CLOCK132 ICLK
CLOCKS (1)
19 14.318MHz Clock Input 1 CLOCKI ICLK
INFRARED INTERFACE (2)
61 Infrared Rx 1 IRRX I
62 Infrared Tx (Note 4), (Note 5) 1 IRTX O24PD
POWER PINS (8)
53,65,93Power VCC
TYPE
I/IO12
7,41,
Ground VSS
60,76
18 Trickle Voltage VTR
6
Page 7
DESCRIPTION OF PIN FUNCTIONS
PIN
No./QFP
NAME TOTAL SYMBOL
BUFFER
FDD INTERFACE (14)
16 Read Disk Data 1 nRDATA IS
11 Write Gate 1 nWGATE O24/OD24
10 Write Disk Data 1 nWDATA O24/OD24
12 Head Select 1 nHDSEL O24/OD24
8 Step Direction 1 nDIR O24/OD24
9 Step Pulse 1 nSTEP O24/OD24
17 Disk Change 1 nDSKCHG IS
5 Drive Select 0 1 nDS0 O24/OD24
3 Motor On 0 1 nMTR0 O24/OD24
15 Write Protected 1 nWRTPRT IS
14 Track 0 1 nTRKO IS
13 Index Pulse Input 1 nINDEX IS
1 Drive Density Select 0 1 DRVDEN0 O24/OD24
2 Drive Density Select 1 1 DRVDEN1 O24/OD24
SERIAL PORT 1 INTERFACE (8)
84 Receive Serial Data 1 1 RXD1 I
85 Transmit Serial Data 1 1 TXD1 O4
87 Request to Send 1 1 nRTS1/
SYSOP
88 Clear to Send 1 1 nCTS1 I
89 Data Terminal Ready 1 1 nDTR1 O4
86 Data Set Ready 1 1 nDSR1 I
91 Data Carrier Detect 1 1 nDCD1 I
90 Ring Indicator 1 1 nRI1 I
SERIAL PORT 2 INTERFACE (8)
95 Receive Serial Data 2/Infrared Rx 1 RXD2/IRRX I
96 Transmit Serial Data 2/Infrared Tx (Note 4,
1 TXD2/IRTX O24PD
Note 7)
98 Request to Send 2/Sys Addr 12 (Note 6) 1 nRTS2/SA12 O4/I
99 Clear to Send 2/Sys Addr 13 1 nCTS2/SA13 I/I
100 Data Terminal Ready/Sys Addr 14 (Note 6) 1 nDTR2/
SA14
TYPE
O4/I
O4/I
7
Page 8
DESCRIPTION OF PIN FUNCTIONS
PIN
No./QFP
NAME TOTAL SYMBOL
BUFFER
TYPE
97 Data Set Ready 2/Sys Addr 15 1 nDSR2/
SA15
94 Data Carrier Detect 2/8042 P12 1 nDCD2/P12 I/IO24
92 Ring Indicator 2/8042 P16 1 nRI2/P16 I/IO24
PARALLEL PORT INTERFACE (17)
68:75 Parallel Port Data Bus 8 PD[0:7] IO24
67 Printer Select 1 nSLCTIN OD24/O24
66 Initiate Output 1 nINIT OD24/O24
82 Auto Line Feed 1 nALF OD24/O24
83 Strobe Signal 1 nSTROBE OD24/O24
79 Busy Signal 1 BUSY I
80 Acknowledge Handshake 1 nACK I
78 Paper End 1 PE I
77 Printer Selected 1 SLCT I
81 Error at Printer 1 nERROR I
KEYBOARD/MOUSE INTERFACE (6)
56 Keyboard Data 1 KDAT IOD16
57 Keyboard Clock 1 KCLK IOD16
58 Mouse Data 1 MDAT IOD16
59 Mouse Clock 1 MCLK IOD16
63 Keyboard Reset 1 KBDRST
(Note 3)
64 Gate A20 1 A20M O4
I/I
O4
Note 1: For 12 bit addressing, SA0:SA11 only, nCS should be tied to GND. For 16 bit external
address qualification, address bits SA11:SA15 can be "ORed" together and applied to nCS.
The nCS pin functions as SA11 in full 16 bit Internal Address Qualification Mode. CR24.6
controls the FDC37B77x addressing modes.
Note 2: The "n" as the first letter of a signal name indicates an "Active Low" signal.
Note 3: KBDRST is active low.
Note 4: The pull-down on this pin is always active including when the output driver is tristated
and regardless of the state of internal PWRGOOD.
Note 5: The “activate” bit for the CIrCC is reset by VTR POR only. The VCC power-up default for
this pin is Logic “0”.
Note 6: The “activate” bit for Serial Port 2 is reset by VTR POR only. The VCC power-up default for
this pin is Logic “1”.
8
Page 9

Note 7: The “activate” bit for Serial Port 2 (CIrCC) is reset by VTR POR only. The VCC power-up
default for this pin is Logic “1”. Do not use this pin for infrared transceivers that are
transmit active high.
Buffer Type Descriptions
I Input, TTL compatible.
IS Input with Schmitt trigger.
IOD16 Input/Open Drain Output, 16mA sink.
IO24 Input/Output, 24mA sink, 12mA source.
IO4 Input/Output, 4mA sink, 2mA source.
O4 Output, 4mA sink, 2mA source.
O24 Output, 24mA sink, 12mA source.
OD24 Output, Open Drain, 24mA sink.
ICLK Clock Input
IO12 Input/Output, 12mA sink, 6mA source
O12 Output, 12mA sink, 6mA source
OD12 Output, Open Drain, 12 mA sink
O24PD Output, 12mA sink, 6mA source with 30 µA pull-down
9
Page 10
DESCRIPTION OF MULTIFUNCTION PINS
PIN
NO./QFP
51
52
92
94
95
96
97
98
99
100
Note 1: Controlled by DMA3SEL(LD8:CRC0.1)
Note 2: Controlled by 8042COMSEL(LD8:CRC0.3)
Note 3: Controlled by IR Option Register( LD5:CRF1.6)
Note 4: Controlled by 16 bit Address Qualification (CR24.6)
For more information, refer to tables 63 through 73.
ORIGINAL
FUNCTION
nDACK3 8042 P16 nDACK3 1
DRQ3 8042 P12 DRQ3 1
nRI2 8042 P16 nRI2 2
nDCD2 8042 P12 nDCD2 2
RXD2 IRRX RXD2 3
TXD2 IRTX TXD2 3
nDSR2 SA15 nDSR2 4
nRTS2 SA12 nRTS2 4
nCTS2 SA13 nCTS2 4
nDTR2 SA14 nDTR2 4
ALTERNATE
FUNCTION 1 DEFAULT NOTE
REFERENCE DOCUMENTS
1. SMSC Consumer Infrared Communications Controller (CIrCC) V1.X
2. IEEE 1284 Extended Capabilities Port Protocol and ISA Standard, Rev. 1.14, July 14, 1993.
3. Hardware Description of the 8042, Intel 8 bit Embedded Controller Handbook.
4. PCI Bus Power Management Interface Specification, Rev. 1.0, Draft, March 18, 1997.
10
Page 11
14MHz
SER_IRQ
32KHz
PCI_CLK
SERIAL
IRQ
SMI
nPME
PME
WDT
ADDRESS BUS
DATA BUS
MULTI-MODE
PARALLEL
PORT/FDC
MUX
PD0-7
BUSY, SLCT, PE,
nERROR, nACK
nSTB, nSLCTIN,
nINIT, nALF
nIOR
nIOW
AEN
SA[0:12] (nCS)
SA[13-15]
SD[O:7]
DRQ[1:3]
nDACK[1:3]
RESET_DRV
IOCHRDY
CONFIGURATION
REGISTERS
*
*
HOST
CPU
INTERFACE
*
*
TC
CONTROL BUS
SMSC
PROPRIETARY
82077
COMPATIBLE
VERTICAL
FLOPPYDISK
CONTROLLER
CORE
WDATA
WCLOCK
RCLOCK
RDATA
DIGITAL
DATA
SEPARATOR
WITH WRITE
PRECOM-
PENSATION
16C550
COMPATIBLE
SERIAL
PORT 1
16C550
COMPATIBLE
SERIAL
PORT 2 WITH
INFRARED
CLOCK
8042
TXD1, nCTS1, nRTS1
RXD1
nDSR1, nDCD1, nRI1, nDTR1
IRRX, IRTX
TXD2(IRTX), nCTS2, nRTS2
*
RXD2(IRRX)
nDSR2, nDCD2, nRI2, nDTR2
KCLK
KDATA
MCLK
MDATA
GATEA20, KRESET
*
P12*, P16
*
*
GEN
DENSEL
V
TR
Vcc Vss
CLK32
CLOCKI
nINDEX
nTRK0
nDSKCHG
nWRPRT
nWGATE
nDIR
nSTEP
nHDSEL
nDS0
nMTR0
DRVDEN0
DRVDEN1
nWDATAnRDATA
*
*
Denotes Multifunction Pins
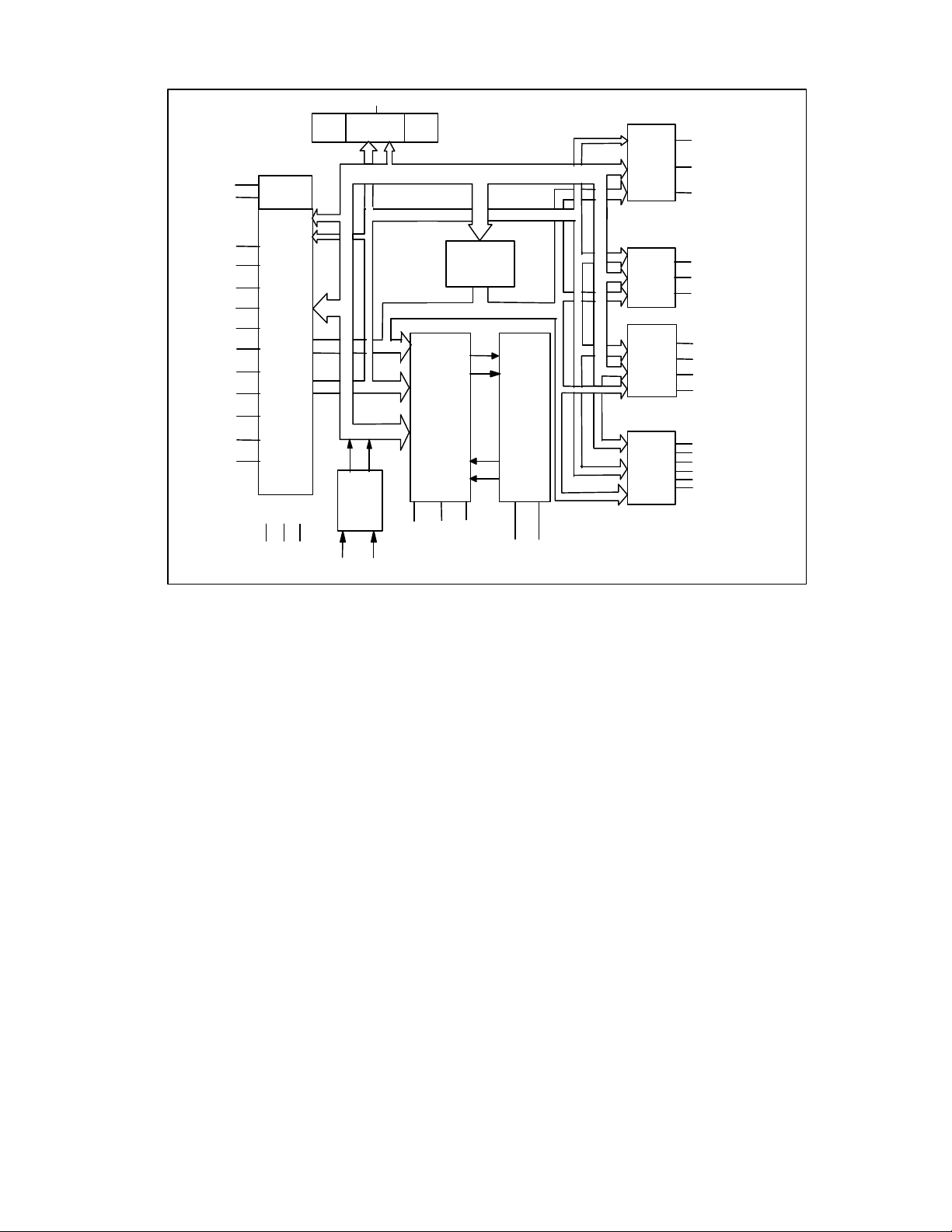
FIGURE 1 - FDC37B77x BLOCK DIAGRAM
11
Page 12

FUNCTIONAL DESCRIPTION
SUPER I/O REGISTERS
The address map, shown below in Table 1,
shows the addresses of the different blocks of
the Super I/O immediately after power up. The
base addresses of the FDC, serial and parallel
ports can be moved via the configuration
registers. Some addresses are used to access
more than one register.
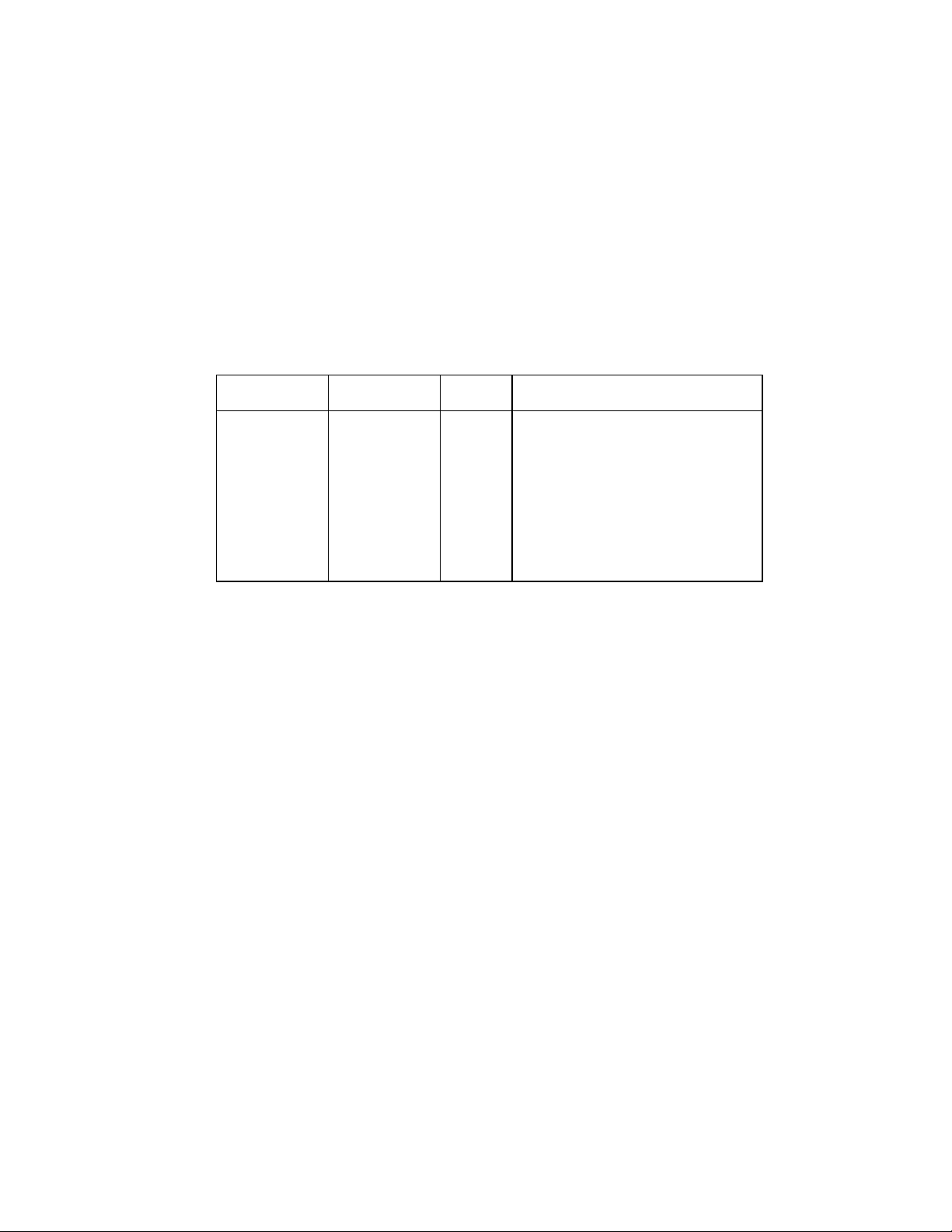
Table 1 - Super I/O Block Addresses
ADDRESS BLOCK NAME
Base+(0-5) and +(7) Floppy Disk 0
Base+(0-7) Serial Port Com 1 4
Base1+(0-7)
Base2+(0-7)
Base+(0-3)
Base+(0-7)
Base+(0-3), +(400-402)
Base+(0-7), +(400-402)
60, 64 KYBD 7
Note 1: Refer to the configuration register descriptions for setting the base address
Serial Port Com 2 5
Parallel Port
SPP
EPP
ECP
ECP+EPP+SPP
HOST PROCESSOR INTERFACE
The host processor communicates with the
FDC37B77x through a series of read/write
registers. The port addresses for these registers
are shown in Table 1. Register access is
accomplished through programmed I/O or DMA
transfers. All registers are 8 bits wide. All host
interface output buffers are capable of sinking a
minimum of 12 mA.
LOGICAL
DEVICE NOTES
IR Support
Fast IR
3
12
Page 13
FLOPPY DISK CONTROLLER
FDC INTERNAL REGISTERS
The Floppy Disk Controller (FDC) provides the
interface between a host microprocessor and
the floppy disk drives. The FDC integrates the
functions of the Formatter/Controller, Digital
Data Separator, Write Precompensation and
Data Rate Selection logic for an IBM XT/AT
compatible FDC. The true CMOS 765B core
guarantees 100% IBM PC XT/AT compatibility
in addition to providing data overflow and
underflow protection.
The FDC is compatible to the 82077AA using
SMSC's proprietary floppy disk controller core.
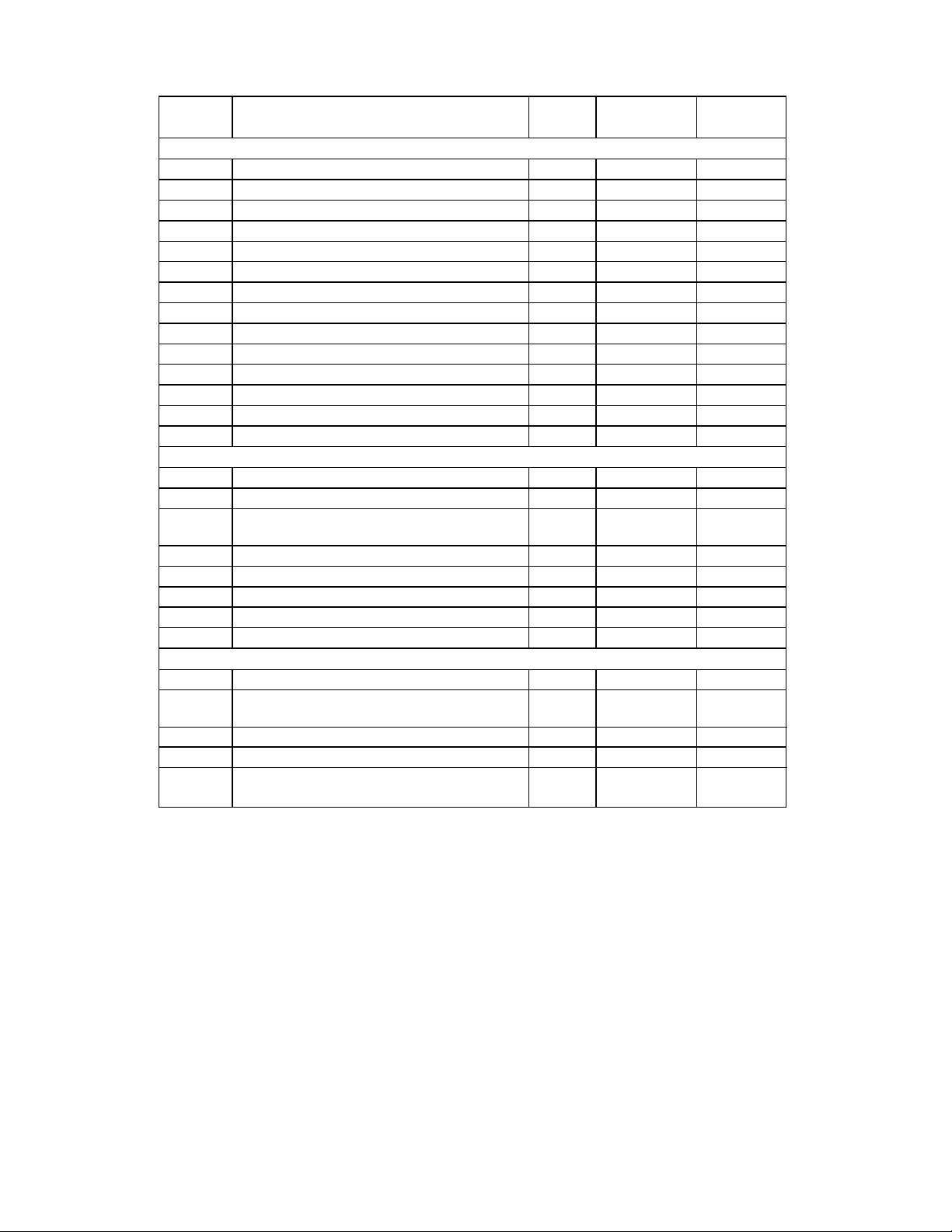
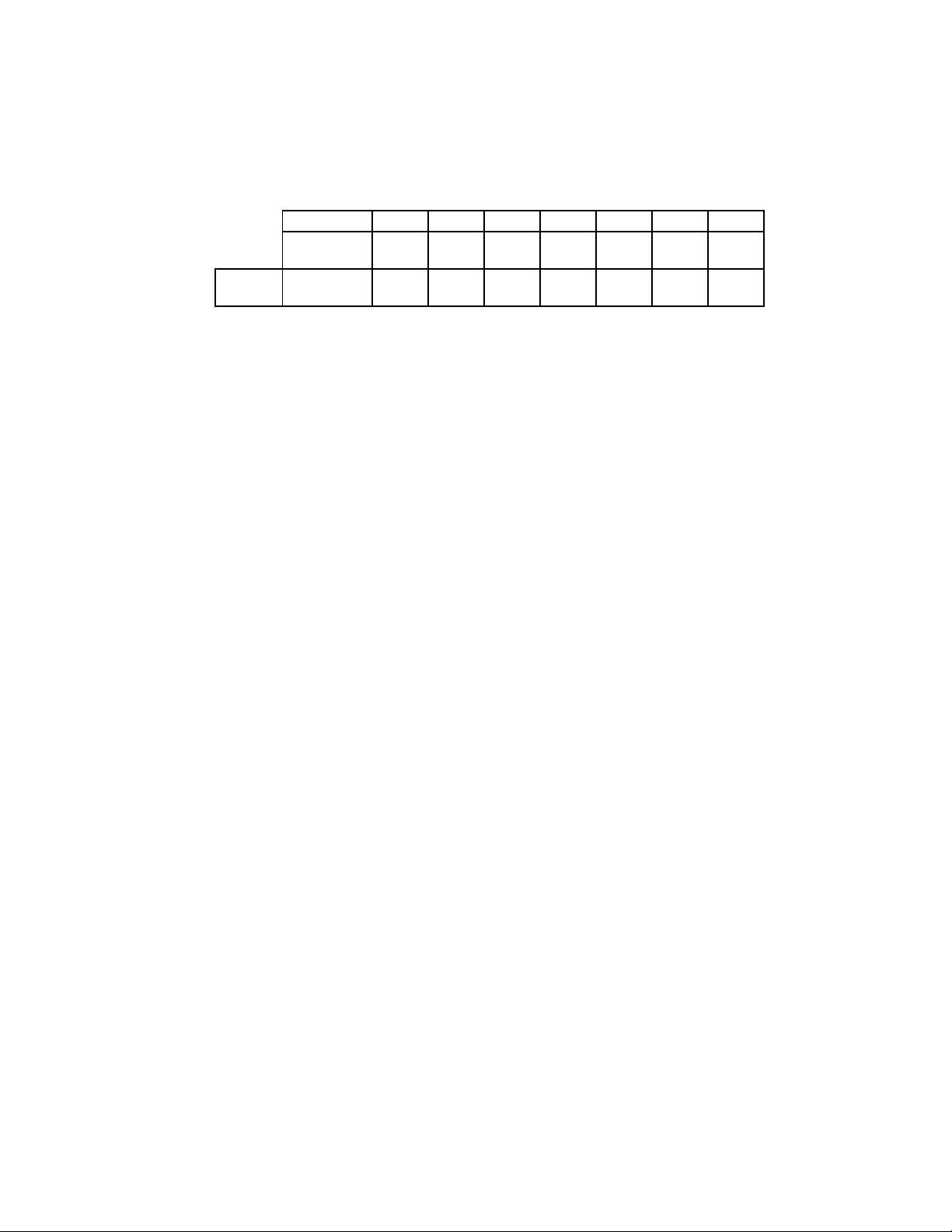
Table 2 - Status, Data and Control Registers
(Shown with base addresses of 3F0 and 370)
PRIMARY
ADDRESS
3F0
3F1
3F2
3F3
3F4
3F4
3F5
3F6
3F7
3F7
SECONDARY
ADDRESS R/W REGISTER
370
371
372
373
374
374
375
376
377
377
The Floppy Disk Controller contains eight
internal registers which facilitate the interfacing
between the host microprocessor and the disk
drive. Table 2 shows the addresses required to
access these registers. Registers other than the
ones shown are not supported. The rest of the
description assumes that the primary addresses
have been selected.
R
Status Register A (SRA)
R
Status Register B (SRB)
R/W
R/W
W
R/W
W
Digital Output Register (DOR)
Tape Drive Register (TSR)
R
Main Status Register (MSR)
Data Rate Select Register (DSR)
Data (FIFO)
Reserved
R
Digital Input Register (DIR)
Configuration Control Register (CCR)
13
Page 14
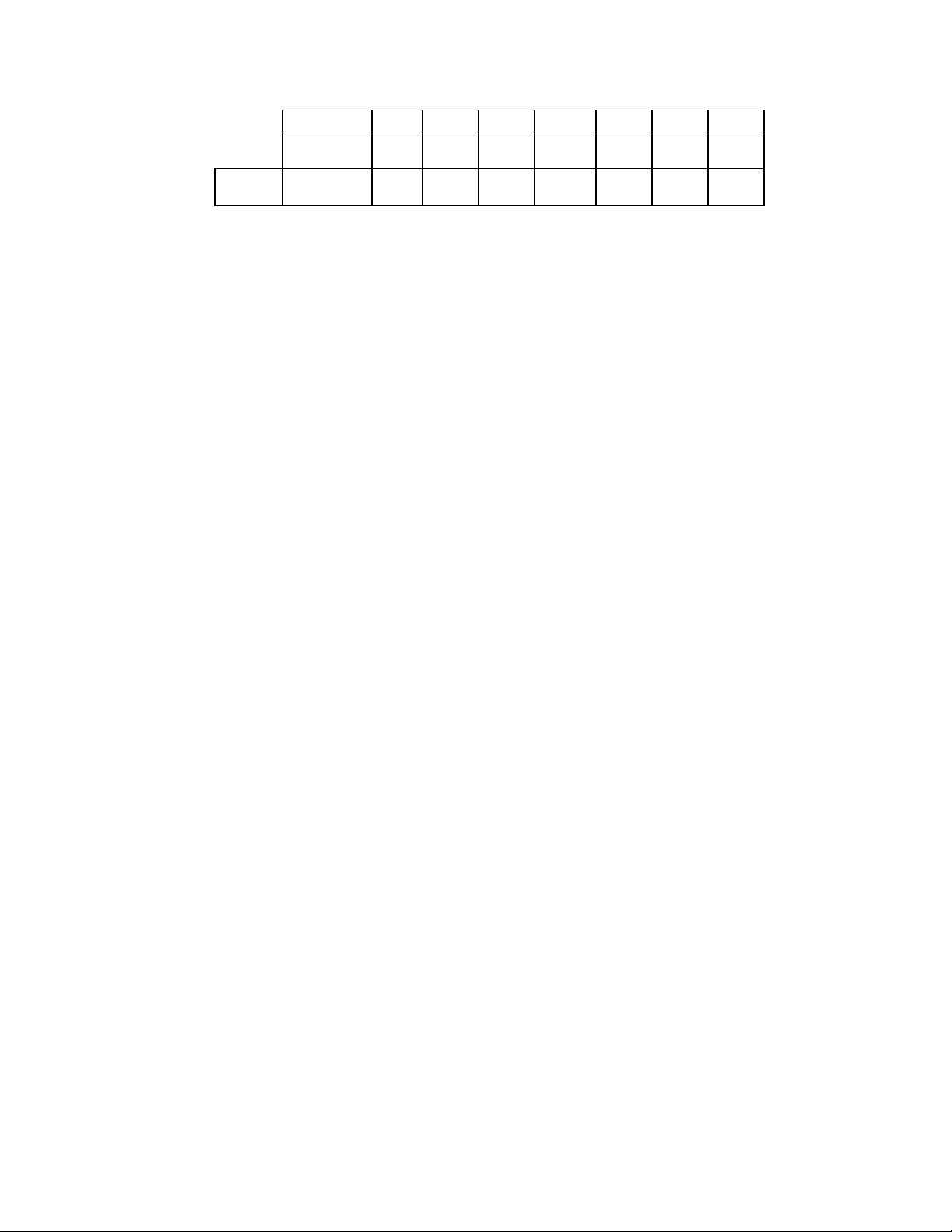
STATUS REGISTER A (SRA)
Address 3F0 READ ONLY
This register is read-only and monitors the state
of the FINTR pin and several disk
PS/2 Mode
7 6 5 4 3 2 1 0
INT
nDRV2 STEP nTRK0 HDSEL nINDX nWP DIR
PENDING
RESET
0 1 0 N/A 0 N/A N/A 0
COND.
interface pins in PS/2 and Model 30 modes. The
SRA can be accessed at any time when in PS/2
mode. In the PC/AT mode the data bus pins D0
- D7 are held in a high impedance state for a
read of address 3F0.
BIT 0 DIRECTION
Active high status indicating the direction of
head movement. A logic "1" indicates inward
direction; a logic "0" indicates outward direction.
BIT 1 nWRITE PROTECT
Active low status of the WRITE PROTECT disk
interface input. A logic "0" indicates that the disk
is write protected.
BIT 2 nINDEX
Active low status of the INDEX disk interface
input.
BIT 3 HEAD SELECT
Active high status of the HDSEL disk interface
input. A logic "1" selects side 1 and a logic "0"
selects side 0.
BIT 4 nTRACK 0
Active low status of the TRK0 disk interface
input.
BIT 5 STEP
Active high status of the STEP output disk
interface output pin.
BIT 6 nDRV2
Active low status of the DRV2 disk interface
input pin, indicating that a second drive has
been installed. Note: This function is not
supported in the FDC37B77x.
BIT 7 INTERRUPT PENDING
Active high bit indicating the state of the Floppy
Disk Interrupt output.
14
Page 15
PS/2 Model 30 Mode
RESET
COND.
7 6 5 4 3 2 1 0
INT
PENDING
0 0 0 N/A 1 N/A N/A 1
DRQ STEP
F/F
TRK0 nHDSEL INDX WP nDIR
BIT 0 nDIRECTION
Active low status indicating the direction of head
movement. A logic "0" indicates inward
direction; a logic "1" indicates outward direction.
BIT 1 WRITE PROTECT
Active high status of the WRITE PROTECT disk
interface input. A logic "1" indicates that the disk
is write protected.
BIT 2 INDEX
Active high status of the INDEX disk interface
input.
BIT 3 nHEAD SELECT
Active low status of the HDSEL disk interface
input. A logic "0" selects side 1 and a logic "1"
selects side 0.
BIT 4 TRACK 0
Active high status of the TRK0 disk interface
input.
BIT 5 STEP
Active high status of the latched STEP disk
interface output pin. This bit is latched with the
STEP output going active, and is cleared with a
read from the DIR register, or with a hardware
or software reset.
BIT 6 DMA REQUEST
Active high status of the DRQ output pin.
BIT 7 INTERRUPT PENDING
Active high bit indicating the state of the Floppy
Disk Interrupt output.
15
Page 16
STATUS REGISTER B (SRB)
Address 3F1 READ ONLY
This register is read-only and monitors the state
of several disk interface pins in PS/2 and
PS/2 Mode
7 6 5 4 3 2 1 0
RESET
1 1 DRIVE
SEL0
1 1 0 0 0 0 0 0
WDATA
TOGGLE
COND.
Model 30 modes. The SRB can be accessed at
any time when in PS/2 mode. In the PC/AT
mode the data bus pins D0 - D7 are held in a
high impedance state for a read of address 3F1.
RDATA
TOGGLE
WGATE MOT
EN1
MOT
EN0
BIT 0 MOTOR ENABLE 0
Active high status of the MTR0 disk interface
output pin. This bit is low after a hardware reset
and unaffected by a software reset.
BIT 1 MOTOR ENABLE 1
Active high status of the MTR1 disk interface
output pin. This bit is low after a hardware reset
and unaffected by a software reset. Note: In the
FDC37B77x only one drive is available at the
FDD interface.
BIT 2 WRITE GATE
Active high status of the WGATE disk interface
output.
BIT 3 READ DATA TOGGLE
Every inactive edge of the RDATA input causes
this bit to change state.
BIT 4 WRITE DATA TOGGLE
Every inactive edge of the WDATA input causes
this bit to change state.
BIT 5 DRIVE SELECT 0
Reflects the status of the Drive Select 0 bit of
the DOR (address 3F2 bit 0). This bit is cleared
after a hardware reset and it is unaffected by a
software reset.
BIT 6 RESERVED
Always read as a logic "1".
BIT 7 RESERVED
Always read as a logic "1".
16
Page 17
PS/2 Model 30 Mode
nDRV2 nDS1 nDS0 WDATA
RESET
COND.
7 6 5 4 3 2 1 0
F/F
RDATA
F/F
WGATE
F/F
nDS3 nDS2
N/A 1 1 0 0 0 1 1
BIT 0 nDRIVE SELECT 2
The DS2 disk interface is not supported in the
FDC37B77x.
BIT 1 nDRIVE SELECT 3
The DS3 disk interface is not supported in the
FDC37B77x.
BIT 2 WRITE GATE
Active high status of the latched WGATE output
signal. This bit is latched by the active going
edge of WGATE and is cleared by the read of
the DIR register.
BIT 3 READ DATA
Active high status of the latched RDATA output
signal. This bit is latched by the inactive going
edge of RDATA and is cleared by the read of the
DIR register.
BIT 4 WRITE DATA
Active high status of the latched WDATA output
signal. This bit is latched by the inactive going
edge of WDATA and is cleared by the read of
the DIR register. This bit is not gated with
WGATE.
BIT 5 nDRIVE SELECT 0
Active low status of the DS0 disk interface
output.
BIT 6 nDRIVE SELECT 1
Active low status of the DS1 disk interface
output.
BIT 7 nDRV2
Active low status of the DRV2 disk interface
input. Note: This function is not supported in
the FDC37B77x.
17
Page 18
DIGITAL OUTPUT REGISTER (DOR)
Address 3F2 READ/WRITE
The DOR controls the drive select and motor
enables of the disk interface outputs. It
7 6 5 4 3 2 1 0
MOT
EN3
RESET
MOT
EN2
MOT
EN1
0 0 0 0 0 0 0 0
COND.
also contains the enable for the DMA logic and a
software reset bit. The contents of the DOR are
unaffected by a software reset. The DOR can
be written to at any time.
MOT
EN0
DMAEN nRESETDRIVE
SEL1
DRIVE
SEL0
BIT 0 and 1 DRIVE SELECT
These two bits are binary encoded for the drive
selects, thereby allowing only one drive to be
selected at one time.
BIT 2 nRESET
A logic "0" written to this bit resets the Floppy
disk controller. This reset will remain active
until a logic "1" is written to this bit. This
software reset does not affect the DSR and CCR
registers, nor does it affect the other bits of the
DOR register. The minimum reset duration
required is 100ns, therefore toggling this bit by
consecutive writes to this register is a valid
method of issuing a software reset.
BIT 3 DMAEN
PC/AT and Model 30 Mode:
Writing this bit to logic "1" will enable the DRQ,
nDACK, TC and FINTR outputs. This bit being
a logic "0" will disable the nDACK and TC
inputs, and hold the DRQ and FINTR outputs in
a high impedance state. This bit is a logic "0"
after a reset and in these modes.
PS/2 Mode: In this mode the DRQ, nDACK, TC
and FINTR pins are always enabled. During a
reset, the DRQ, nDACK, TC, and FINTR pins
will remain enabled, but this bit will be cleared to
a logic "0".
BIT 4 MOTOR ENABLE 0
This bit controls the MTR0 disk interface output.
A logic "1" in this bit will cause the output pin to
go active.
BIT 5 MOTOR ENABLE 1
This bit controls the MTR1 disk interface output.
A logic "1" in this bit will cause the output pin to
go active.
BIT 6 MOTOR ENABLE 2
The MTR2 disk interface output is not supported
in the FDC37B77x.
BIT 7 MOTOR ENABLE 3
The MTR3 disk interface output is not supported
in the FDC37B77x.
Table 3 - Drive Activation Values
DRIVE DOR VALUE
0
1
1CH
2DH
18
Page 19
TAPE DRIVE REGISTER (TDR)
Address 3F3 READ/WRITE
The Tape Drive Register (TDR) is included for
82077 software compatibility and allows the
user to assign tape support to a particular drive
during initialization. Any future references to
that drive automatically invokes tape support.
The TDR Tape Select bits TDR.[1:0] determine
the tape drive number. Table 4 illustrates the
TAPE SEL1
Table 4 - Tape Select Bits
TAPE SEL0
(TDR.1)
(TDR.0)
0
0
1
1
DRIVE
SELECTED
0
None
1
0
1
Tape Select Bit encoding. Note that drive 0 is
the boot device and cannot be assigned tape
support. The remaining Tape Drive Register
bits TDR.[7:2] are tristated when read. The TDR
is unaffected by a software reset.
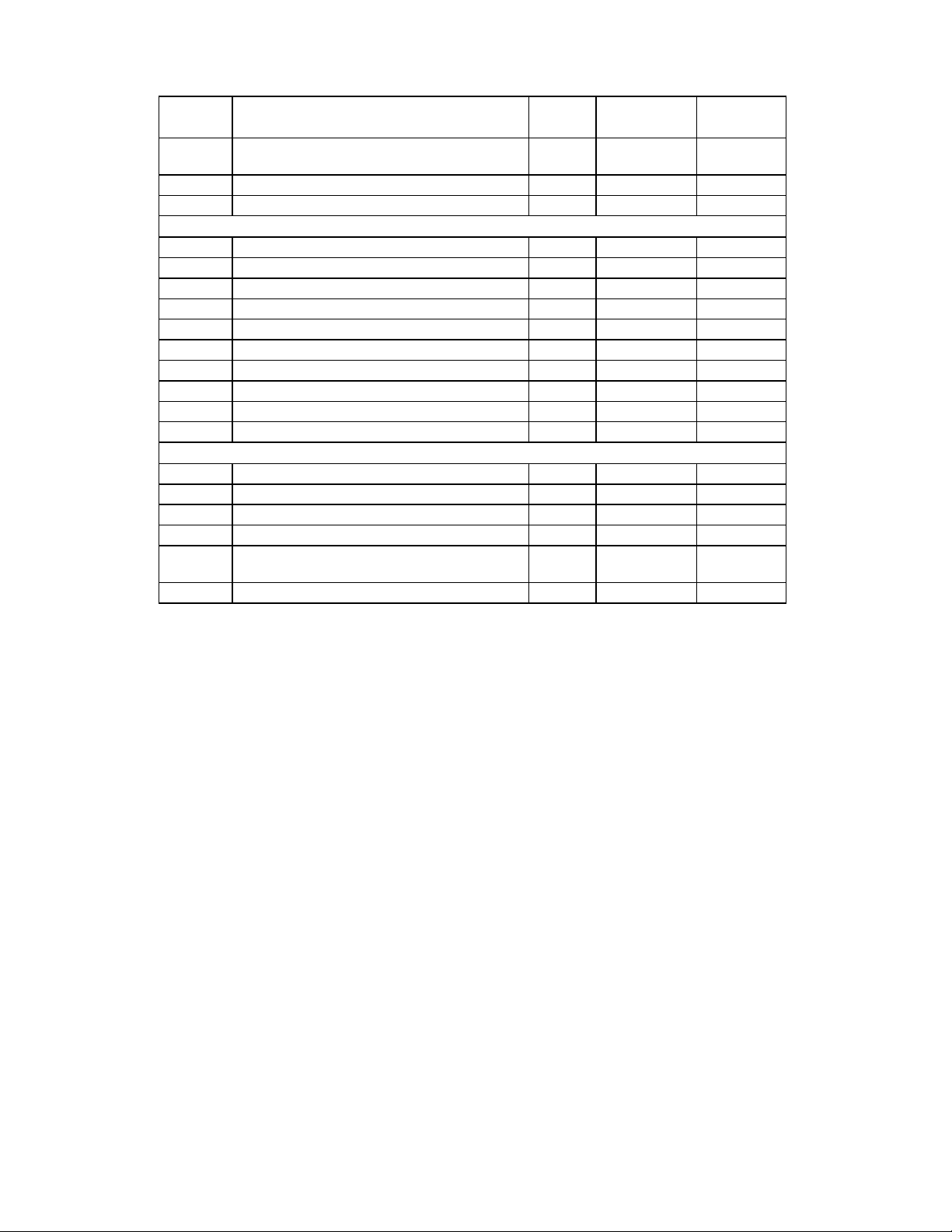
Table 5 - Internal 2 Drive Decode - Normal
DIGITAL OUTPUT REGISTER
DRIVE SELECT
OUTPUTS (ACTIVE LOW)
MOTOR ON OUTPUTS
(ACTIVE LOW)
Bit 7 Bit 6 Bit 5 Bit 4 Bit1 Bit 0 nDS1 nDS0 nMTR1 nMTR0
X X X 1 0 0 1 0 nBIT 5 nBIT 4
X X 1 X 0 1 0 1 nBIT 5 nBIT 4
X 1 X X 1 0 1 1 nBIT 5 nBIT 4
1 X X X 1 1 1 1 nBIT 5 nBIT 4
0 0 0 0 X X 1 1 nBIT 5 nBIT 4
1
2
3
Table 6 - Internal 2 Drive Decode - Drives 0 and 1 Swapped
DIGITAL OUTPUT REGISTER
DRIVE SELECT OUTPUTS
(ACTIVE LOW)
MOTOR ON OUTPUTS
(ACTIVE LOW)
Bit 7 Bit 6 Bit 5 Bit 4 Bit1 Bit 0 nDS1 nDS0 nMTR1 nMTR0
X X X 1 0 0 0 1 nBIT 4 nBIT 5
X X 1 X 0 1 1 0 nBIT 4 nBIT 5
X 1 X X 1 0 1 1 nBIT 4 nBIT 5
1 X X X 1 1 1 1 nBIT 4 nBIT 5
0 0 0 0 X X 1 1 nBIT 4 nBIT 5
19
Page 20
Normal Floppy Mode
Normal mode. Register 3F3 contains only bits 0 and 1. When this register is read, bits 2 - 7 are a
high impedance.
DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
REG 3F3 Tri-state Tri-state Tri-state Tri-state Tri-state Tri-state tape sel1 tape sel0
Enhanced Floppy Mode 2 (OS2)
Register 3F3 for Enhanced Floppy Mode 2 operation.
DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0
REG 3F3 Reserved Reserved Drive Type ID Floppy Boot Drive tape sel1 tape sel0
Table 7 - Drive Type ID
DIGITAL OUTPUT REGISTER REGISTER 3F3 - DRIVE TYPE ID
Bit 1 Bit 0 Bit 5 Bit 4
0 0 L0-CRF2 - B1 L0-CRF2 - B0
0 1 L0-CRF2 - B3 L0-CRF2 - B2
1 0 L0-CRF2 - B5 L0-CRF2 - B4
1 1 L0-CRF2 - B7 L0-CRF2 - B6
Note: L0-CRF2-Bx = Logical Device 0, Configuration Register F2, Bit x.
20
Page 21
DATA RATE SELECT REGISTER (DSR)
Address 3F4 WRITE ONLY
This register is write only. It is used to program
the data rate, amount of write precompensation,
power down status, and software reset. The
data rate is programmed using the
Configuration Control Register (CCR) not the
DSR, for PC/AT and PS/2 Model
7 6 5 4 3 2 1 0
S/W
RESET
RESET
POWER
0 PRE-
DOWN
0 0 0 0 0 0 1 0
COND.
30 and Microchannel applications. Other
applications can set the data rate in the DSR.
The data rate of the floppy controller is the most
recent write of either the DSR or CCR. The DSR
is unaffected by a software reset. A hardware
reset will set the DSR to 02H, which
corresponds to the default precompensation
setting and 250 Kbps.
COMP2
PRE-
COMP1
PRE-
COMP0
DRATE
SEL1
DRATE
SEL0
BIT 0 and 1 DATA RATE SELECT
These bits control the data rate of the floppy
controller. See Table 11 for the settings
corresponding to the individual data rates. The
data rate select bits are unaffected by a
software reset, and are set to 250 Kbps after a
hardware reset.
BIT 2 through 4 PRECOMPENSATION
SELECT
These three bits select the value of write
precompensation that will be applied to the
WDATA output signal. Table 10 shows the
precompensation values for the combination of
these bits settings. Track 0 is the default
starting track number to start precompensation.
this starting track number can be changed by
the configure command.
BIT 5 UNDEFINED
Should be written as a logic "0".
BIT 6 LOW POWER
A logic "1" written to this bit will put the floppy
controller into manual low power mode. The
floppy controller clock and data mode after a
software reset or access to the Data Register or
Main Status Register.
BIT 7 SOFTWARE RESET
This active high bit has the same function as the
DOR RESET (DOR bit 2) except that this bit is
self clearing.
Note: The DSR is Shadowed in the Floppy Data
Rate Select Shadow Register, LD8:CRC2[7:0].
separator circuits will be turned off. The
controller will come out of manual low power.
Table 8 - Precompensation Delays
PRECOMP
432
111
001
010
011
100
101
110
000
PRECOMPENSATION
DELAY (nsec)
<2Mbps 2Mbps*
0.00
41.67
83.34
125.00
166.67
208.33
250.00
Default
Default: See Table 12
0
20.8
41.7
62.5
83.3
104.2
125
Default
*2Mbps data rate is only available if VCC = 5V.
21
Page 22
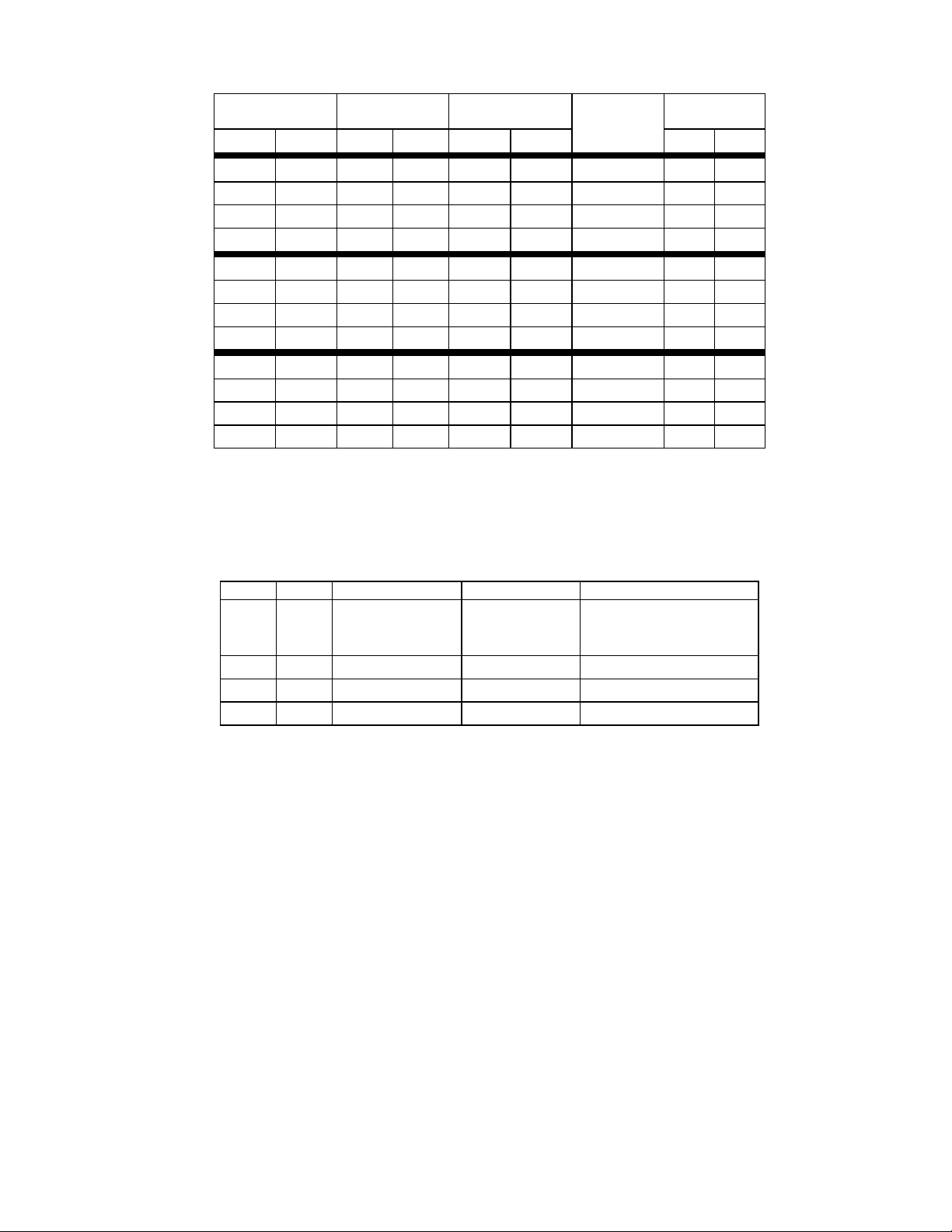
Table 9 - Data Rates
DRIVE RATE DATA RATE DATA RATE
DENSEL
DRT1 DRT0 SEL1 SEL0 MFM FM 1 0
0 0 1 1 1Meg --- 1 1 1
0 0 0 0 500 250 1 0 0
0 0 0 1 300 150 0 0 1
0 0 1 0 250 125 0 1 0
0 1 1 1 1Meg --- 1 1 1
0 1 0 0 500 250 1 0 0
0 1 0 1 500 250 0 0 1
0 1 1 0 250 125 0 1 0
1 0 1 1 1Meg --- 1 1 1
1 0 0 0 500 250 1 0 0
1 0 0 1 2Meg --- 0 0 1
1 0 1 0 250 125 0 1 0
Drive Rate Table (Recommended) 00 = 360K, 1.2M, 720K, 1.44M and 2.88M Vertical Format
01 = 3-Mode Drive
10 = 2 Meg Tape
DRATE(1)
Note 1: The DRATE and DENSEL values are mapped onto the DRVDEN pins.
Table 10 - DRVDEN Mapping
DT1 DT0 DRVDEN1 (1) DRVDEN0 (1) DRIVE TYPE
0 0 DRATE0 DENSEL 4/2/1 MB 3.5"
2/1 MB 5.25" FDDS
2/1.6/1 MB 3.5" (3-MODE)
1 0 DRATE0 DRATE1
0 1 DRATE0 nDENSEL PS/2
1 1 DRATE1 DRATE0
22
Page 23

Table 11 - Default Precompensation Delays
PRECOMPENSATION
DATA RATE
2 Mbps*
1 Mbps
500 Kbps
300 Kbps
250 Kbps
*The 2Mbps data rate is only available if VCC = 5V.
DELAYS
20.8 ns
41.67 ns
125 ns
125 ns
125 ns
23
Page 24
MAIN STATUS REGISTER
Address 3F4 READ ONLY
The Main Status Register is a read-only register
and indicates the status of the disk controller.
The Main Status Register can be read at any
7 6 5 4 3 2 1 0
RQM DIO
NON
DMA
CMD
BUSY
time. The MSR indicates when the disk
controller is ready to receive data via the Data
Register. It should be read before each byte
transferring to or from the data register except in
DMA mode. No delay is required when reading
the MSR after a data transfer.
Reserved Reserved
DRV1
BUSY
DRV0
BUSY
BIT 0 - 1 DRV x BUSY
These bits are set to 1s when a drive is in the
seek portion of a command, including implied
and overlapped seeks and recalibrates.
BIT 4 COMMAND BUSY
This bit is set to a 1 when a command is in
progress. This bit will go active after the
command byte has been accepted and goes
inactive at the end of the results phase. If there
is no result phase (Seek, Recalibrate
commands), this bit is returned to a 0 after the
last command byte.
BIT 5 NON-DMA
This mode is selected in the SPECIFY
command and will be set to a 1 during the
execution phase of a command. This is for
polled data transfers and helps differentiate
between the data transfer phase and the reading
of result bytes.
BIT 6 DIO
Indicates the direction of a data transfer once a
RQM is set. A 1 indicates a read and a 0
indicates a write is required.
BIT 7 RQM
Indicates that the host can transfer data if set to
a 1. No access is permitted if set to a 0.
24
Page 25
DATA REGISTER (FIFO)
Address 3F5 READ/WRITE
All command parameter information, disk data
and result status are transferred between the
host processor and the floppy disk controller
through the Data Register.
Data transfers are governed by the RQM and
DIO bits in the Main Status Register.
The Data Register defaults to FIFO disabled
mode after any form of reset. This maintains
PC/AT hardware compatibility. The default
values can be changed through the Configure
command (enable full FIFO operation with
threshold control). The advantage of the FIFO
is that it allows the system a larger DMA latency
without causing a disk error. Table 14 gives
several examples of the delays with a
Table 12 - FIFO Service Delay
FIFO THRESHOLD
EXAMPLES
1 byte
2 bytes
8 bytes
15 bytes
MAXIMUM DELAY TO SERVICING AT 2
1 x 4 µs - 1.5 µs = 2.5 µs
2 x 4 µs - 1.5 µs = 6.5 µs
8 x 4 µs - 1.5 µs = 30.5 µs
15 x 4 µs - 1.5 µs = 58.5 µs
FIFO. The data is based upon the following
formula:
Threshold # x 1
DATA RATE
x 8
- 1.5 µs = DELAY
At the start of a command, the FIFO action is
always disabled and command parameters
must be sent based upon the RQM and DIO bit
settings. As the command execution phase is
entered, the FIFO is cleared of any data to
ensure that invalid data is not transferred.
An overrun or underrun will terminate the
current command and the transfer of data. Disk
writes will complete the current sector by
generating a 00 pattern and valid CRC. Reads
require the host to remove the remaining data
so that the result phase may be entered.
Mbps* DATA RATE
FIFO THRESHOLD
EXAMPLES
1 byte
2 bytes
8 bytes
15 bytes
FIFO THRESHOLD
EXAMPLES
1 byte
2 bytes
8 bytes
15 bytes
MAXIMUM DELAY TO SERVICING AT 1
Mbps DATA RATE
1 x 8 µs - 1.5 µs = 6.5 µs
2 x 8 µs - 1.5 µs = 14.5 µs
8 x 8 µs - 1.5 µs = 62.5 µs
15 x 8 µs - 1.5 µs = 118.5 µs
MAXIMUM DELAY TO SERVICING AT
500 Kbps DATA RATE
1 x 16 µs - 1.5 µs = 14.5 µs
2 x 16 µs - 1.5 µs = 30.5 µs
8 x 16 µs - 1.5 µs = 126.5 µs
15 x 16 µs - 1.5 µs = 238.5 µs
*The 2 Mbps data rate is only available if VCC = 5V.
25
Page 26
DIGITAL INPUT REGISTER (DIR)
Address 3F7 READ ONLY
This register is read-only in all modes.
PC-AT Mode
7 6 5 4 3 2 1 0
DSK
CHG
RESET
N/A N/A N/A N/A N/A N/A N/A N/A
COND.
BIT 0 - 6 UNDEFINED
The data bus outputs D0 - 6 will remain in a
high impedance state during a read of this
register.
PS/2 Mode
7 6 5 4 3 2 1 0
DSK
1 1 1 1 DRATE
CHG
RESET
N/A N/A N/A N/A N/A N/A N/A 1
COND.
BIT 0 nHIGH DENS
This bit is low whenever the 500 Kbps or 1 Mbps
data rates are selected, and high when 250
Kbps and 300 Kbps are selected.
BITS 1 - 2 DATA RATE SELECT
These bits control the data rate of the floppy
controller. See Table 11 for the settings
corresponding to the individual data rates. The
data rate select bits are unaffected by a
software reset, and are set to 250 Kbps after a
hardware reset.
BIT 7 DSKCHG
This bit monitors the pin of the same name and
reflects the opposite value seen on the disk
cable or the value programmed in the Force
Disk Change Register (see Configuration
Register LD8:CRC1[1:0]).
SEL1
DRATE
SEL0
nHIGH
nDENS
BITS 3 - 6 UNDEFINED
Always read as a logic "1"
BIT 7 DSKCHG
This bit monitors the pin of the same name and
reflects the opposite value seen on the disk
cable or the value programmed in the Force
Disk Change Register (see Configuration
Register LD8:CRC1[1:0]).
26
Page 27
Model 30 Mode
RESET
COND.
7 6 5 4 3 2 1 0
DSK
CHG
N/A 0 0 0 0 0 1 0
0 0 0 DMAEN NOPREC DRATE
SEL1
DRATE
SEL0
BITS 0 - 1 DATA RATE SELECT
These bits control the data rate of the floppy
controller. See Table 11 for the settings
corresponding to the individual data rates. The
data rate select bits are unaffected by a
software reset, and are set to 250 Kbps after a
hardware reset.
BIT 2 NOPREC
This bit reflects the value of NOPREC bit set in
the CCR register.
BIT 3 DMAEN
This bit reflects the value of DMAEN bit set in
the DOR register bit 3.
BITS 4 - 6 UNDEFINED
Always read as a logic "0"
BIT 7 DSKCHG
This bit monitors the pin of the same name and
reflects the opposite value seen on the disk
cable or the value programmed in the Force
Disk Change Register (see Configuration
Register LD8:CRC1[1:0]).
27
Page 28
CONFIGURATION CONTROL REGISTER
(CCR)
Address 3F7 WRITE ONLY
PC/AT and PS/2 Modes
7 6 5 4 3 2 1 0
RESET
N/A N/A N/A N/A N/A N/A 1 0
COND.
DRATE
SEL1
DRATE
SEL0
BIT 0 and 1 DATA RATE SELECT 0 and 1
These bits determine the data rate of the floppy
controller. See Table 11 for the appropriate
values.
PS/2 Model 30 Mode
7 6 5 4 3 2 1 0
RESET
N/A N/A N/A N/A N/A N/A 1 0
COND.
BIT 0 and 1 DATA RATE SELECT 0 and 1
These bits determine the data rate of the floppy
controller. See Table 11 for the appropriate
values.
BIT 2 NO PRECOMPENSATION
This bit can be set by software, but it has no
functionality. It can be read by bit 2 of the DSR
when in Model 30 register mode. Unaffected by
software reset.
BIT 2 - 7 RESERVED
Should be set to a logical "0"
NOPREC DRATE
SEL1
DRATE
SEL0
BIT 3 - 7 RESERVED
Should be set to a logical "0"
Table 12 shows the state of the DENSEL pin.
The DENSEL pin is set high after a hardware
reset and is unaffected by the DOR and the
DSR resets.
28
Page 29
STATUS REGISTER ENCODING
During the Result Phase of certain commands, the Data Register contains data bytes that give the
status of the command just executed.
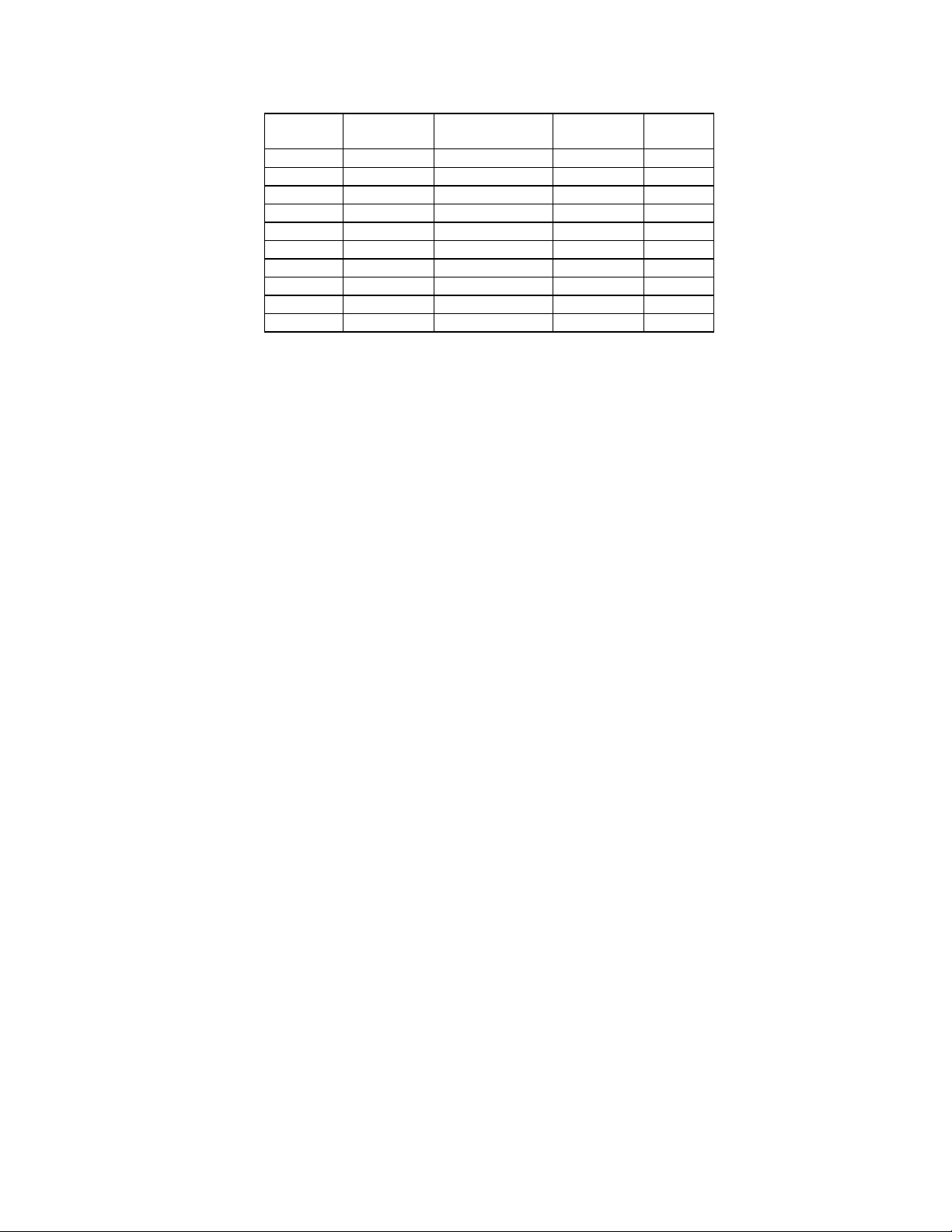
Table 13 - Status Register 0
BIT NO. SYMBOL NAME DESCRIPTION
7,6 IC Interrupt
Code
5 SE Seek End The FDC completed a Seek, Relative Seek or
4 EC Equipment
Check
3 Unused. This bit is always "0".
2 H Head
Address
1,0 DS1,0 Drive Select The current selected drive.
00 - Normal termination of command. The specified
command was properly executed and completed
without error.
01 - Abnormal termination of command. Command
execution was started, but was not successfully
completed.
10 - Invalid command. The requested command
could not be executed.
11 - Abnormal termination caused by Polling.
Recalibrate command (used during a Sense Interrupt
Command).
The TRK0 pin failed to become a "1" after:
1. 80 step pulses in the Recalibrate command.
2. The Relative Seek command caused the FDC to
step outward beyond Track 0.
The current head address.
29
Page 30
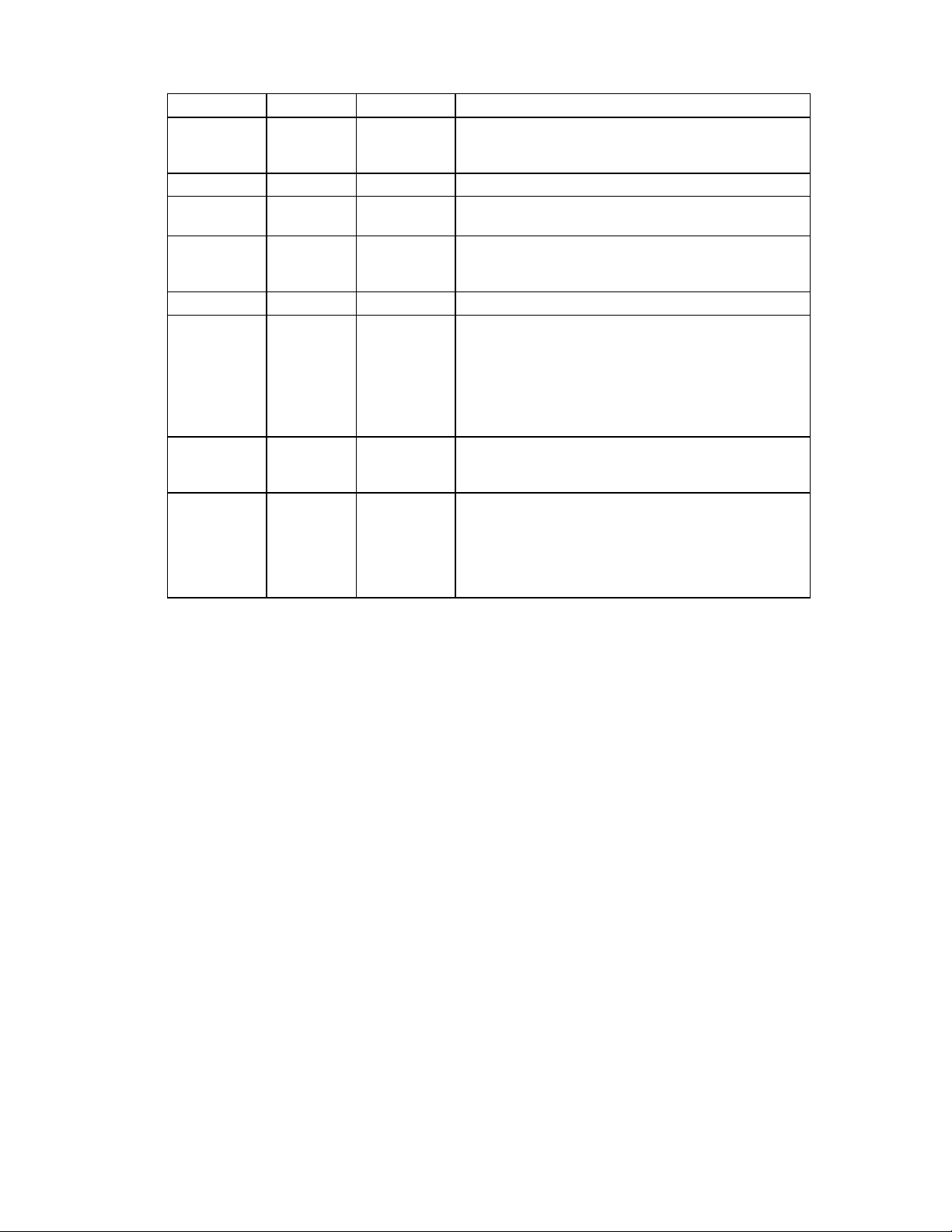
Table 14 - Status Register 1
BIT NO. SYMBOL NAME DESCRIPTION
7 EN End of
Cylinder
6 Unused. This bit is always "0".
5 DE Data Error The FDC detected a CRC error in either the ID field or
4 OR Overrun/
Underrun
3 Unused. This bit is always "0".
2 ND No Data Any one of the following:
1 NW Not Writeable WP pin became a "1" while the FDC is executing a
0 MA Missing
Address Mark
The FDC tried to access a sector beyond the final
sector of the track (255D). Will be set if TC is not
issued after Read or Write Data command.
the data field of a sector.
Becomes set if the FDC does not receive CPU or DMA
service within the required time interval, resulting in
data overrun or underrun.
1. Read Data, Read Deleted Data command - the
FDC did not find the specified sector.
2. Read ID command - the FDC cannot read the ID
field without an error.
3. Read A Track command - the FDC cannot find the
proper sector sequence.
Write Data, Write Deleted Data, or Format A Track
command.
Any one of the following:
1. The FDC did not detect an ID address mark at the
specified track after encountering the index pulse
from the IDX pin twice.
2. The FDC cannot detect a data address mark or a
deleted data address mark on the specified track.
30
Page 31

Table 15 - Status Register 2
BIT NO. SYMBOL NAME DESCRIPTION
7 Unused. This bit is always "0".
6 CM Control Mark Any one of the following:
1. Read Data command - the FDC encountered a
deleted data address mark.
2. Read Deleted Data command - the FDC
encountered a data address mark.
5 DD Data Error in
Data Field
4 WC Wrong
Cylinder
3 Unused. This bit is always "0".
2 Unused. This bit is always "0".
1 BC Bad Cylinder The track address from the sector ID field is different
0 MD Missing Data
Address Mark
The FDC detected a CRC error in the data field.
The track address from the sector ID field is different
from the track address maintained inside the FDC.
from the track address maintained inside the FDC and
is equal to FF hex, which indicates a bad track with a
hard error according to the IBM soft-sectored format.
The FDC cannot detect a data address mark or a
deleted data address mark.
31
Page 32

Table 16- Status Register 3
BIT NO. SYMBOL NAME DESCRIPTION
7 Unused. This bit is always "0".
6 WP Write
Indicates the status of the WP pin.
Protected
5 Unused. This bit is always "1".
4 T0 Track 0 Indicates the status of the TRK0 pin.
3 Unused. This bit is always "1".
2 HD Head
Indicates the status of the HDSEL pin.
Address
1,0 DS1,0 Drive Select Indicates the status of the DS1, DS0 pins.
RESET
There are three sources of system reset on the
FDC: the RESET pin of the FDC, a reset
generated via a bit in the DOR, and a reset
generated via a bit in the DSR. At power on, a
Power On Reset initializes the FDC. All resets
take the FDC out of the power down state.
All operations are terminated upon a RESET,
and the FDC enters an idle state. A reset while
a disk write is in progress will corrupt the data
and CRC.
On exiting the reset state, various internal
registers are cleared, including the Configure
command information, and the FDC waits for a
new command. Drive polling will start unless
disabled by a new Configure command.
RESET Pin (Hardware Reset)
The RESET pin is a global reset and clears all
registers except those programmed by the
Specify command. The DOR reset bit is
enabled and must be cleared by the host to exit
the reset state.
DOR Reset vs. DSR Reset (Software Reset)
These two resets are functionally the same.
Both will reset the FDC core, which affects drive
status information and the FIFO circuits. The
DSR reset clears itself automatically while the
DOR reset requires the host to manually clear it.
DOR reset has precedence over the DSR reset.
The DOR reset is set automatically upon a pin
reset. The user must manually clear this reset
bit in the DOR to exit the reset state.
MODES OF OPERATION
The FDC has three modes of operation, PC/AT
mode, PS/2 mode and Model 30 mode. These
are determined by the state of the IDENT and
MFM bits 6 and 5 respectively of CRxx.
PC/AT mode - (IDENT high, MFM a "don't
care")
The PC/AT register set is enabled, the DMA
enable bit of the DOR becomes valid (FINTR
and DRQ can be hi Z), and TC and DENSEL
become active high signals.
32
Page 33

PS/2 mode - (IDENT low, MFM high)
This mode supports the PS/2 models 50/60/80
configuration and register set. The DMA bit of
the DOR becomes a "don't care", (FINTR and
DRQ are always valid), TC and DENSEL
become active low.
Burst mode is enabled via Bit[1] of CRF0 in
Logical Device 0. Setting Bit[1]=0 enables burst
mode; the default is Bit[1]=1, for non-burst
mode.
CONTROLLER PHASES
Model 30 mode - (IDENT low, MFM low)
This mode supports PS/2 Model 30
configuration and register set. The DMA enable
bit of the DOR becomes valid (FINTR and DRQ
can be hi Z), TC is active high and DENSEL is
active low.
DMA TRANSFERS
DMA transfers are enabled with the Specify
command and are initiated by the FDC by
activating the FDRQ pin during a data transfer
command. The FIFO is enabled directly by
asserting nDACK and addresses need not be
valid.
Note that if the DMA controller (i.e. 8237A) is
programmed to function in verify mode, a
pseudo read is performed by the FDC based
only on nDACK. This mode is only available
when the FDC has been configured into byte
mode (FIFO disabled) and is programmed to do
a read. With the FIFO enabled, the FDC can
perform the above operation by using the new
Verify command; no DMA operation is needed.
The FDC37B77x supports two DMA transfer
modes for the FDC: Single Transfer and Burst
Transfer. In the case of the single transfer, the
DMA Req goes active at the start of the DMA
cycle, and the DMA Req is deasserted after the
nDACK. In the case of the burst transfer, the
Req is held active until the last transfer
(independent of nDACK). See timing diagrams
for more information.
For simplicity, command handling in the FDC
can be divided into three phases: Command,
Execution, and Result. Each phase is described
in the following sections.
Command Phase
After a reset, the FDC enters the command
phase and is ready to accept a command from
the host. For each of the commands, a defined
set of command code bytes and parameter
bytes has to be written to the FDC before the
command phase is complete. (Please refer to
Table 19 for the command set descriptions).
These bytes of data must be transferred in the
order prescribed.
Before writing to the FDC, the host must
examine the RQM and DIO bits of the Main
Status Register. RQM and DIO must be equal
to "1" and "0" respectively before command
bytes may be written. RQM is set false by the
FDC after each write cycle until the received
byte is processed. The FDC asserts RQM again
to request each parameter byte of the command
unless an illegal command condition is
detected. After the last parameter byte is
received, RQM remains "0" and the FDC
automatically enters the next phase as defined
by the command definition.
The FIFO is disabled during the command
phase to provide for the proper handling of the
"Invalid Command" condition.
33
Page 34

Execution Phase
All data transfers to or from the FDC occur
during the execution phase, which can proceed
in DMA or non-DMA mode as indicated in the
Specify command.
until the last byte is transferred out of the FIFO.
The FDC will deactivate the FINT pin and RQM
bit when the FIFO becomes empty.
Non-DMA Mode - Transfers from the Host to the
FIFO
After a reset, the FIFO is disabled. Each data
byte is transferred by an FINT or FDRQ
depending on the DMA mode. The Configure
command can enable the FIFO and set the
FIFO threshold value.
The following paragraphs detail the operation of
the FIFO flow control. In these descriptions,
<threshold> is defined as the number of bytes
available to the FDC when service is requested
from the host and ranges from 1 to 16. The
parameter FIFOTHR, which the user programs,
is one less and ranges from 0 to 15.
A low threshold value (i.e. 2) results in longer
periods of time between service requests, but
requires faster servicing of the request for both
read and write cases. The host reads (writes)
from (to) the FIFO until empty (full), then the
transfer request goes inactive. The host must
be very responsive to the service request. This
is the desired case for use with a "fast" system.
A high value of threshold (i.e. 12) is used with a
"sluggish" system by affording a long latency
period after a service request, but results in
more frequent service requests.
Non-DMA Mode - Transfers from the FIFO to
the Host
The FINT pin and RQM bits in the Main Status
Register are activated when the FIFO contains
(16-<threshold>) bytes or the last bytes of a full
sector have been placed in the FIFO. The FINT
pin can be used for interrupt-driven systems,
and RQM can be used for polled systems. The
host must respond to the request by reading
data from the FIFO. This process is repeated
The FINT pin and RQM bit in the Main Status
Register are activated upon entering the
execution phase of data transfer commands.
The host must respond to the request by writing
data into the FIFO. The FINT pin and RQM bit
remain true until the FIFO becomes full. They
are set true again when the FIFO has
<threshold> bytes remaining in the FIFO. The
FINT pin will also be deactivated if TC and
nDACK both go inactive. The FDC enters the
result phase after the last byte is taken by the
FDC from the FIFO (i.e. FIFO empty condition).
DMA Mode - Transfers from the FIFO to the
Host
The FDC activates the DDRQ pin when the
FIFO contains (16 - <threshold>) bytes, or the
last byte of a full sector transfer has been
placed in the FIFO. The DMA controller must
respond to the request by reading data from the
FIFO. The FDC will deactivate the DDRQ pin
when the FIFO becomes empty. FDRQ goes
inactive after nDACK goes active for the last
byte of a data transfer (or on the active edge of
nIOR, on the last byte, if no edge is present on
nDACK). A data underrun may occur if FDRQ
is not removed in time to prevent an unwanted
cycle.
DMA Mode - Transfers from the Host to the
FIFO.
The FDC activates the FDRQ pin when entering
the execution phase of the data transfer
commands. The DMA controller must respond
by activating the nDACK and nIOW pins and
placing data in the FIFO. FDRQ remains active
until the FIFO becomes full. FDRQ is again set
34
Page 35

true when the FIFO has <threshold> bytes
remaining in the FIFO. The FDC will also
deactivate the FDRQ pin when TC becomes true
(qualified by nDACK), indicating that no more
data is required. FDRQ goes inactive after
nDACK goes active for the last byte of a data
transfer (or on the active edge of nIOW of the
last byte, if no edge is present on nDACK). A
data overrun may occur if FDRQ is not removed
in time to prevent an unwanted cycle.
Data Transfer Termination
The FDC supports terminal count explicitly
through the TC pin and implicitly through the
underrun/overrun and end-of-track (EOT)
functions. For full sector transfers, the EOT
parameter can define the last sector to be
transferred in a single or multi-sector transfer.
If the last sector to be transferred is a partial
sector, the host can stop transferring the data in
mid-sector, and the FDC will continue to
complete the sector as if a hardware TC was
received. The only difference between these
implicit functions and TC is that they return
"abnormal termination" result status. Such
status indications can be ignored if they were
expected.
Note that when the host is sending data to the
FIFO of the FDC, the internal sector count will
be complete when the FDC reads the last byte
from its side of the FIFO. There may be a delay
in the removal of the transfer request signal of
up to the time taken for the FDC to read the last
16 bytes from the FIFO. The host must tolerate
this delay.
Result Phase
The generation of FINT determines the
beginning of the result phase. For each of the
commands, a defined set of result bytes has to
be read from the FDC before the result phase is
complete. These bytes of data must be read out
for another command to start.
RQM and DIO must both equal "1" before the
result bytes may be read. After all the result
bytes have been read, the RQM and DIO bits
switch to "1" and "0" respectively, and the CB bit
is cleared, indicating that the FDC is ready to
accept the next command.
35
Page 36

COMMAND SET/DESCRIPTIONS
Commands can be written whenever the FDC is
in the command phase. Each command has a
unique set of needed parameters and status
results. The FDC checks to see that the first
byte is a valid command and, if valid, proceeds
with the command. If it is invalid, an interrupt
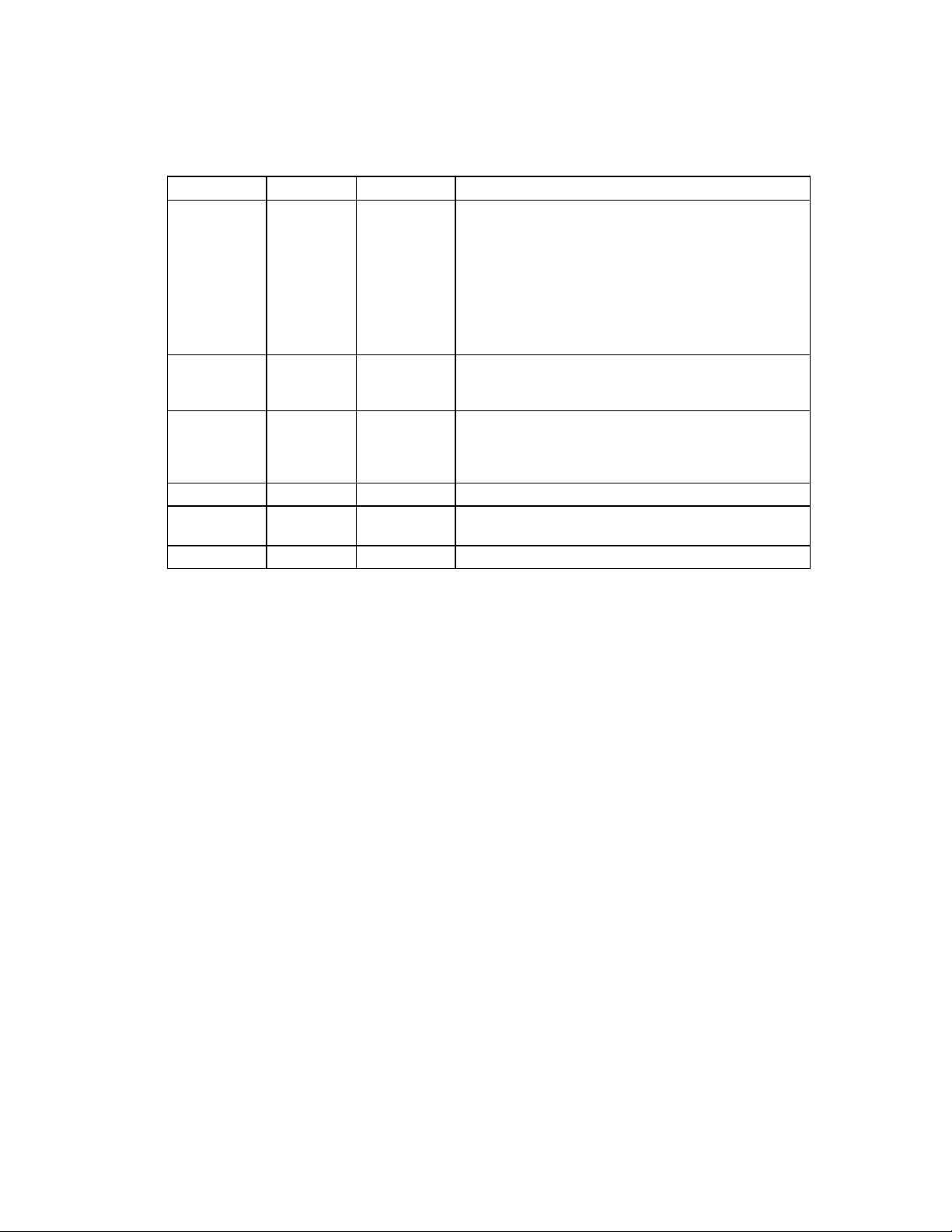
Table 17 - Description of Command Symbols
SYMBOL NAME DESCRIPTION
C Cylinder Address The currently selected address; 0 to 255.
D Data Pattern The pattern to be written in each sector data field during
formatting.
D0, D1 Drive Select 0-1 Designates which drives are perpendicular drives on the
Perpendicular Mode Command. A "1" indicates a perpendicular
drive.
DIR Direction Control If this bit is 0, then the head will step out from the spindle during a
relative seek. If set to a 1, the head will step in toward the spindle.
DS0, DS1 Disk Drive Select
DS1 DS0 DRIVE
0
0
is issued. The user sends a Sense Interrupt
Status command which returns an invalid
command error. Refer to Table 17 for
explanations of the various symbols used. Table
18 lists the required parameters and the results
associated with each command that the FDC is
capable of performing.
0
1
Drive 0
Drive 1
DTL Special Sector
Size
EC Enable Count When this bit is "1" the "DTL" parameter of the Verify command
EFIFO Enable FIFO This active low bit when a 0, enables the FIFO. A "1" disables the
EIS Enable Implied
Seek
EOT End of Track The final sector number of the current track.
By setting N to zero (00), DTL may be used to control the number
of bytes transferred in disk read/write commands. The sector size
(N = 0) is set to 128. If the actual sector (on the diskette) is larger
than DTL, the remainder of the actual sector is read but is not
passed to the host during read commands; during write
commands, the remainder of the actual sector is written with all
zero bytes. The CRC check code is calculated with the actual
sector. When N is not zero, DTL has no meaning and should be
set to FF HEX.
becomes SC (number of sectors per track).
FIFO (default).
When set, a seek operation will be performed before executing any
read or write command that requires the C parameter in the
command phase. A "0" disables the implied seek.
36
Page 37

37
Table 17 - Description of Command Symbols
SYMBOL NAME DESCRIPTION
GAP Alters Gap 2 length when using Perpendicular Mode.
GPL Gap Length The Gap 3 size. (Gap 3 is the space between sectors excluding
the VCO synchronization field).
H/HDS Head Address Selected head: 0 or 1 (disk side 0 or 1) as encoded in the sector
ID field.
HLT Head Load Time The time interval that FDC waits after loading the head and before
initializing a read or write operation. Refer to the Specify
command for actual delays.
HUT Head Unload
Time
The time interval from the end of the execution phase (of a read or
write command) until the head is unloaded. Refer to the Specify
command for actual delays.
LOCK Lock defines whether EFIFO, FIFOTHR, and PRETRK parameters
of the CONFIGURE COMMAND can be reset to their default
values by a "software Reset". (A reset caused by writing to the
appropriate bits of either tha DSR or DOR)
MFM MFM/FM Mode
Selector
MT Multi-Track
Selector
A one selects the double density (MFM) mode. A zero selects
single density (FM) mode.
When set, this flag selects the multi-track operating mode. In this
mode, the FDC treats a complete cylinder under head 0 and 1 as
a single track. The FDC operates as this expanded track started
at the first sector under head 0 and ended at the last sector under
head 1. With this flag set, a multitrack read or write operation will
automatically continue to the first sector under head 1 when the
FDC finishes operating on the last sector under head 0.
N Sector Size Code This specifies the number of bytes in a sector. If this parameter is
"00", then the sector size is 128 bytes. The number of bytes
transferred is determined by the DTL parameter. Otherwise the
sector size is (2 raised to the "N'th" power) times 128. All values
up to "07" hex are allowable. "07"h would equal a sector size of
16k. It is the user's responsibility to not select combinations that
are not possible with the drive.
N SECTOR SIZE
00
01
02
03
..
128 bytes
256 bytes
512 bytes
1024 bytes
...
Page 38

38
Table 17 - Description of Command Symbols
SYMBOL NAME DESCRIPTION
NCN New Cylinder
The desired cylinder number.
Number
ND Non-DMA Mode
Flag
When set to 1, indicates that the FDC is to operate in the nonDMA mode. In this mode, the host is interrupted for each data
transfer. When set to 0, the FDC operates in DMA mode,
interfacing to a DMA controller by means of the DRQ and nDACK
signals.
OW Overwrite The bits D0-D3 of the Perpendicular Mode Command can only be
modified if OW is set to 1. OW id defined in the Lock command.
PCN Present Cylinder
Number
The current position of the head at the completion of Sense
Interrupt Status command.
POLL Polling Disable When set, the internal polling routine is disabled. When clear,
polling is enabled.
PRETRK Precompensation
Programmable from track 00 to FFH.
Start Track
Number
R Sector Address The sector number to be read or written. In multi-sector transfers,
this parameter specifies the sector number of the first sector to be
read or written.
RCN Relative Cylinder
Number
SC Number of
Sectors Per Track
Relative cylinder offset from present cylinder as used by the
Relative Seek command.
The number of sectors per track to be initialized by the Format
command. The number of sectors per track to be verified during a
Verify command when EC is set.
SK Skip Flag When set to 1, sectors containing a deleted data address mark will
automatically be skipped during the execution of Read Data. If
Read Deleted is executed, only sectors with a deleted address
mark will be accessed. When set to "0", the sector is read or
written the same as the read and write commands.
SRT Step Rate Interval The time interval between step pulses issued by the FDC.
Programmable from 0.5 to 8 milliseconds in increments of 0.5 ms
at the 1 Mbit data rate. Refer to the SPECIFY command for actual
delays.
ST0
ST1
ST2
ST3
Status 0
Status 1
Status 2
Status 3
Registers within the FDC which store status information after a
command has been executed. This status information is available
to the host during the result phase after command execution.
Page 39

39
Table 17 - Description of Command Symbols
SYMBOL NAME DESCRIPTION
WGATE Write Gate Alters timing of WE to allow for pre-erase loads in perpendicular
drives.
Page 40

40
INSTRUCTION SET
Table 18 - Instruction Set
READ DATA
DATA BUS
PHASE R/W
Command W MT MFM SK 0 0 1 1 0 Command Codes
Execution Data transfer between the
Result R ST0 Status information after
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W C Sector ID information prior to
Command execution.
W H
W R
W N
W EOT
W GPL
W DTL
FDD and system.
Command execution.
R ST1
R ST2
R C Sector ID information after
Command execution.
R H
R R
R N
REMARKS
Page 41

41
READ DELETED DATA
DATA BUS
PHASE R/W
Command W MT MFM SK 0 1 1 0 0 Command Codes
Execution Data transfer between the
Result R ST0 Status information after
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W C Sector ID information prior to
Command execution.
W H
W R
W N
W EOT
W GPL
W DTL
FDD and system.
Command execution.
R ST1
R ST2
R C Sector ID information after
Command execution.
R H
R R
R N
REMARKS
Page 42

42
WRITE DATA
DATA BUS
PHASE R/W
Command W MT MFM 0 0 0 1 0 1 Command Codes
Execution Data transfer between the
Result R ST0 Status information after
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W C Sector ID information prior to
Command execution.
W H
W R
W N
W EOT
W GPL
W DTL
FDD and system.
Command execution.
R ST1
R ST2
R C Sector ID information after
Command execution.
R H
R R
R N
REMARKS
Page 43

43
WRITE DELETED DATA
DATA BUS
PHASE R/W
Command W MT MFM 0 0 1 0 0 1 Command Codes
Execution Data transfer between
Result R ST0 Status information after
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W C Sector ID information
W H
W R
W N
W EOT
W GPL
W DTL
R ST1
R ST2
R C Sector ID information
R H
R R
R N
REMARKS
prior to Command
execution.
the FDD and system.
Command execution.
after Command
execution.
Page 44

44
READ A TRACK
DATA BUS
PHASE R/W
Command W 0 MFM 0 0 0 0 1 0 Command Codes
Execution Data transfer between
Result R ST0 Status information after
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W C Sector ID information
W H
W R
W N
W EOT
W GPL
W DTL
R ST1
R ST2
R C Sector ID information
R H
R R
R N
REMARKS
prior to Command
execution.
the FDD and system.
FDC reads all of
cylinders' contents from
index hole to EOT.
Command execution.
after Command
execution.
Page 45

45
VERIFY
DATA BUS
PHASE R/W
Command W MT MFM SK 1 0 1 1 0 Command Codes
Execution No data transfer takes
Result R ST0 Status information after
PHASE R/W
Command W 0 0 0 1 0 0 0 0 Command Code
Result R 1 0 0 1 0 0 0 0 Enhanced Controller
D7 D6 D5 D4 D3 D2 D1 D0
W EC 0 0 0 0 HDS DS1 DS0
W C Sector ID information
W H
W R
W N
W EOT
W GPL
W DTL/SC
R ST1
R ST2
R C Sector ID information
R H
R R
R N
VERSION
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
REMARKS
prior to Command
execution.
place.
Command execution.
after Command
execution.
REMARKS
Page 46

46
FORMAT A TRACK
DATA BUS
PHASE R/W
Command W 0 MFM 0 0 1 1 0 1 Command Codes
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W N Bytes/Sector
W SC Sectors/Cylinder
W GPL Gap 3
W D Filler Byte
REMARKS
Execution for
Each Sector
Repeat:
Result R ST0 Status information after
W C Input Sector
Parameters
W H
W R
W N
FDC formats an entire
cylinder
Command execution
R ST1
R ST2
R Undefined
R Undefined
R Undefined
R Undefined
Page 47

47
RECALIBRATE
DATA BUS
PHASE R/W
Command W 0 0 0 0 0 1 1 1 Command Codes
Execution Head retracted to Track 0
PHASE R/W
Command W 0 0 0 0 1 0 0 0 Command Codes
Result R ST0 Status information at the end
PHASE R/W
Command W 0 0 0 0 0 0 1 1 Command Codes
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 0 DS1 DS0
Interrupt.
SENSE INTERRUPT STATUS
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
of each seek operation.
R PCN
SPECIFY
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
W SRT HUT
W HLT ND
REMARKS
REMARKS
REMARKS
Page 48

48
SENSE DRIVE STATUS
DATA BUS
PHASE R/W
Command W 0 0 0 0 0 1 0 0 Command Codes
Result R ST3 Status information about
PHASE R/W
Command W 0 0 0 0 1 1 1 1 Command Codes
Execution Head positioned over
PHASE R/W
Command W 0 0 0 1 0 0 1 1 Configure
Execution W PRETRK
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
SEEK
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W NCN
CONFIGURE
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 0 0 0
W 0 EIS EFIFO POLL FIFOTHR
REMARKS
FDD
REMARKS
proper cylinder on
diskette.
REMARKS
Information
Page 49

49
RELATIVE SEEK
DATA BUS
PHASE R/W
Command W 1 DIR 0 0 1 1 1 1
PHASE R/W
Command W 0 0 0 0 1 1 1 0 *Note:
Execution
Result R PCN-Drive 0
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
W RCN
DUMPREG
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
R PCN-Drive 1
R PCN-Drive 2
R PCN-Drive 3
R SRT HUT
R HLT ND
R SC/EOT
R LOCK 0 D3 D2 D1 D0 GAP WGATE
R 0 EIS EFIFO POLL FIFOTHR
R PRETRK
REMARKS
REMARKS
Registers
placed in
FIFO
Page 50

50
READ ID
DATA BUS
PHASE R/W
Command W 0 MFM 0 0 1 0 1 0 Commands
Execution The first correct ID
Result R ST0 Status information after
D7 D6 D5 D4 D3 D2 D1 D0
W 0 0 0 0 0 HDS DS1 DS0
R ST1
R ST2
R C
R H
R R
R N
REMARKS
information on the
Cylinder is stored in
Data Register
Command execution.
Disk status after the
Command has
completed
Page 51

51
PERPENDICULAR MODE
DATA BUS
PHASE R/W
Command W 0 0 0 1 0 0 1 0 Command Codes
PHASE R/W
Command W Invalid Codes Invalid Command Codes
Result R ST0 ST0 = 80H
PHASE R/W
Command W LOCK 0 0 1 0 1 0 0 Command Codes
Result R 0 0 0 LOCK 0 0 0 0
SC is returned if the last command that was issued was the Format command. EOT is returned if the
last command was a Read or Write.
D7 D6 D5 D4 D3 D2 D1 D0
OW 0 D3 D2 D1 D0 GAP WGATE
INVALID CODES
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
(NoOp - FDC goes into
Standby State)
LOCK
DATA BUS
D7 D6 D5 D4 D3 D2 D1 D0
REMARKS
REMARKS
REMARKS
Note: These bits are used internally only. They are not reflected in the Drive Select pins. It is the
user's responsibility to maintain correspondence between these bits and the Drive Select pins (DOR).
Page 52

52
DATA TRANSFER COMMANDS
All of the Read Data, Write Data and Verify type
commands use the same parameter bytes and
return the same results information, the only
difference being the coding of bits 0-4 in the first
byte.
An implied seek will be executed if the feature
was enabled by the Configure command. This
seek is completely transparent to the user. The
Drive Busy bit for the drive will go active in the
Main Status Register during the seek portion of
the command. If the seek portion fails, it is
reflected in the results status normally returned
for a Read/Write Data command. Status
Register 0 (ST0) would contain the error code
and C would contain the cylinder on which the
seek failed.
Read Data
A set of nine (9) bytes is required to place the
FDC in the Read Data Mode. After the Read
Data command has been issued, the FDC loads
the head (if it is in the unloaded state), waits the
specified head settling time (defined in the
Specify command), and begins reading ID
Address Marks and ID fields. When the sector
address read off the diskette matches with the
sector address specified in the command, the
FDC reads the sector's data field and transfers
the data to the FIFO.
After completion of the read operation from the
current sector, the sector address is
incremented by one and the data from the next
logical sector is read and output via the FIFO.
This continuous read function is called "MultiSector Read Operation". Upon receipt of TC, or
an implied TC (FIFO overrun/underrun), the
FDC stops sending data but will continue to
read data from the current sector, check the
CRC bytes, and at the end of the sector,
terminate the Read Data Command.
N determines the number of bytes per sector
(see Table 21 below). If N is set to zero, the
sector size is set to 128. The DTL value
determines the number of bytes to be
transferred. If DTL is less than 128, the FDC
transfers the specified number of bytes to the
host. For reads, it continues to read the entire
128-byte sector and checks for CRC errors. For
writes, it completes the 128-byte sector by filling
in zeros. If N is not set to 00 Hex, DTL should
be set to FF Hex and has no impact on the
number of bytes transferred.
Table 19 - Sector Sizes
N SECTOR SIZE
00
01
02
03
..
07
128 bytes
256 bytes
512 bytes
1024 bytes
...
16 Kbytes
The amount of data which can be handled with
a single command to the FDC depends upon
MT (multi-track) and N (number of bytes/sector).
The Multi-Track function (MT) allows the FDC to
read data from both sides of the diskette. For a
particular cylinder, data will be transferred
starting at Sector 1, Side 0 and completing the
last sector of the same track at Side 1.
If the host terminates a read or write operation
in the FDC, the ID information in the result
phase is dependent upon the state of the MT bit
and EOT byte. Refer to Table 20.
At the completion of the Read Data command,
the head is not unloaded until after the Head
Unload Time Interval (specified in the Specify
command) has elapsed. If the host issues
another command before the head unloads,
Page 53

53
then the head settling time may be saved
between subsequent reads.
If the FDC detects a pulse on the nINDEX pin
twice without finding the specified sector
(meaning that the diskette's index hole passes
through index detect logic in the drive twice), the
FDC sets the IC code in Status Register 0 to
"01" indicating abnormal termination, sets the
ND bit in Status Register 1 to "1" indicating a
sector not found, and terminates the Read Data
Command.
Table 20 - Effects of MT and N Bits
MAXIMUM TRANSFER
MT
N
0
1
256 x 26 = 6,656
1
1
256 x 52 = 13,312
0
2
512 x 15 = 7,680
1
2
512 x 30 = 15,360
0
3
1024 x 8 = 8,192
1
3
1024 x 16 = 16,384
CAPACITY
Table 21 - Skip Bit vs Read Data Command
DATA ADDRESS
SK BIT
VALUE
MARK TYPE
ENCOUNTERED
SECTOR
READ?
0
Normal Data
0
Deleted Data
1
Normal Data
1
Deleted Data
After reading the ID and Data Fields in each
sector, the FDC checks the CRC bytes. If a
CRC error occurs in the ID or data field, the
FDC sets the IC code in Status Register 0 to
"01" indicating abnormal termination, sets the
DE bit flag in Status Register 1 to "1", sets the
DD bit in Status Register 2 to "1" if CRC is
incorrect in the ID field, and terminates the Read
Data Command. Table 21 describes the effect
of the SK bit on the Read Data command
execution and results. Except where noted in
Table 21, the C or R value of the sector address
is automatically incremented (see Table 23).
FINAL SECTOR READ
FROM DISK
26 at side 0 or 1
26 at side 1
15 at side 0 or 1
15 at side 1
8 at side 0 or 1
16 at side 1
RESULTS
Yes
CM BIT OF
ST2 SET?
No
DESCRIPTION
OF RESULTS
Normal
termination.
Yes
Yes
Address not
incremented.
Next sector not
searched for.
Yes
No
Normal
termination.
No
Yes
Normal
termination.
Sector not read
("skipped").
Page 54

54
Read Deleted Data
This command is the same as the Read Data
command, only it operates on sectors that
contain a Deleted Data Address Mark at the
beginning of a Data Field.
Table 22 - Skip Bit vs. Read Deleted Data Command
DATA ADDRESS
SK BIT
VALUE
MARK TYPE
ENCOUNTERED
SECTOR
READ?
0
Normal Data
0
Deleted Data
1
Normal Data
1
Deleted Data
Table 22 describes the effect of the SK bit on
the Read Deleted Data command execution and
results.
Except where noted in Table 22, the C or R
value of the sector address is automatically
incremented (see Table 23).
RESULTS
Yes
CM BIT OF
ST2 SET?
Yes
DESCRIPTION
OF RESULTS
Address not
incremented.
Next sector not
searched for.
Yes
No
Normal
termination.
No
Yes
Normal
termination.
Sector not read
("skipped").
Yes
No
Normal
termination.
Read A Track
This command is similar to the Read Data
command except that the entire data field is
read continuously from each of the sectors of a
track. Immediately after encountering a pulse
on the nINDEX pin, the FDC starts to read all
data fields on the track as continuous blocks of
data without regard to logical sector numbers. If
the FDC finds an error in the ID or DATA CRC
check bytes, it continues to read data from the
track and sets the appropriate error bits at the
end of the command. The FDC compares the
ID information read from each sector with the
specified value in the command and sets
the ND flag of Status Register 1 to a "1" if there
is no comparison. Multi-track or skip operations
are not allowed with this command. The MT and
SK bits (bits D7 and D5 of the first command
byte respectively) should always be set to "0".
This command terminates when the EOT
specified number of sectors has not been read.
If the FDC does not find an ID Address Mark on
the diskette after the second occurrence of a
pulse on the IDX pin, then it sets the IC code in
Status Register 0 to "01" (abnormal
termination), sets the MA bit in Status Register
1 to "1", and terminates the command.
Page 55

55
Table 23 - Result Phase Table
MT HEAD
0 0
1
1 0
1
NC: No Change, the same value as the one at the beginning of command execution.
LSB: Least Significant Bit, the LSB of H is complemented.
FINAL SECTOR
TRANSFERRED TO
HOST C H R N
Less than EOT NC NC R + 1 NC
Equal to EOT C + 1 NC 01 NC
Less than EOT NC NC R + 1 NC
Equal to EOT C + 1 NC 01 NC
Less than EOT NC NC R + 1 NC
Equal to EOT NC LSB 01 NC
Less than EOT NC NC R + 1 NC
Equal to EOT C + 1 LSB 01 NC
ID INFORMATION AT RESULT PHASE
termination), sets the DE bit of Status Register 1
Write Data
to "1", and terminates the Write Data command.
After the Write Data command has been issued,
the FDC loads the head (if it is in the unloaded
state), waits the specified head load time if
unloaded (defined in the Specify command),
and begins reading ID fields. When the sector
address read from the diskette matches the
sector address specified in the command, the
FDC reads the data from the host via the FIFO
and writes it to the sector's data field.
After writing data into the current sector, the
FDC computes the CRC value and writes it into
the CRC field at the end of the sector transfer.
The Sector Number stored in "R" is incremented
by one, and the FDC continues writing to the
next data field. The FDC continues this "MultiSector Write Operation". Upon receipt of a
terminal count signal or if a FIFO over/under run
occurs while a data field is being written, then
the remainder of the data field is filled with
zeros. The FDC reads the ID field of each
sector and checks the CRC bytes. If it detects a
CRC error in one of the ID fields, it sets the IC
code in Status Register 0 to "01" (abnormal
The Write Data command operates in much the
same manner as the Read Data command. The
following items are the same. Please refer to the
Read Data Command for details:
• Transfer Capacity
• EN (End of Cylinder) bit
• ND (No Data) bit
• Head Load, Unload Time Interval
• ID information when the host terminates the
command
• Definition of DTL when N = 0 and when N
does not = 0
Write Deleted Data
This command is almost the same as the Write
Data command except that a Deleted Data
Address Mark is written at the beginning of the
Data Field instead of the normal Data Address
Mark. This command is typically used to mark
a bad sector containing an error on the floppy
disk.
Page 56

56
Verify
verify 256 sectors). This command can also be
terminated by setting the EC bit to "0" and the
The Verify command is used to verify the data
stored on a disk. This command acts exactly
like a Read Data command except that no data
is transferred to the host. Data is read from the
disk and CRC is computed and checked against
EOT value equal to the final sector to be
checked. If EC is set to "0", DTL/SC should be
programmed to 0FFH. Refer to Table 23 and
Table 24 for information concerning the values
of MT and EC versus SC and EOT value.
the previously-stored value.
Definitions:
Because data is not transferred to the host, TC
(pin 89) cannot be used to terminate this
command. By setting the EC bit to "1", an
# Sectors Per Side = Number of formatted
sectors per each side of the disk.
implicit TC will be issued to the FDC. This
implicit TC will occur when the SC value has
decremented to 0 (an SC value of 0 will
# Sectors Remaining = Number of formatted
sectors left which can be read, including side 1
of the disk if MT is set to "1".
Table 24 - Verify Command Result Phase Table
MT EC SC/EOT VALUE TERMINATION RESULT
0 0 SC = DTL
EOT ≤ # Sectors Per Side
0 0 SC = DTL
EOT > # Sectors Per Side
0 1
SC ≤ # Sectors Remaining AND
EOT ≤ # Sectors Per Side
0 1 SC > # Sectors Remaining OR
EOT > # Sectors Per Side
1 0 SC = DTL
EOT ≤ # Sectors Per Side
1 0 SC = DTL
EOT > # Sectors Per Side
1 1
SC ≤ # Sectors Remaining AND
EOT ≤ # Sectors Per Side
1 1 SC > # Sectors Remaining OR
EOT > # Sectors Per Side
Success Termination
Result Phase Valid
Unsuccessful Termination
Result Phase Invalid
Successful Termination
Result Phase Valid
Unsuccessful Termination
Result Phase Invalid
Successful Termination
Result Phase Valid
Unsuccessful Termination
Result Phase Invalid
Successful Termination
Result Phase Valid
Unsuccessful Termination
Result Phase Invalid
Note: If MT is set to "1" and the SC value is greater than the number of remaining formatted sectors
on Side 0, verifying will continue on Side 1 of the disk.
Page 57

57
Format A Track
The Format command allows an entire track to
be formatted. After a pulse from the IDX pin is
detected, the FDC starts writing data on the disk
including gaps, address marks, ID fields, and
data fields per the IBM System 34 or 3740
format (MFM or FM respectively). The particular
values that will be written to the gap and data
field are controlled by the values programmed
into N, SC, GPL, and D which are specified by
the host during the command phase. The data
field of the sector is filled with the data byte
specified by D. The ID field for each sector is
supplied by the host; that is, four data bytes per
sector are needed by the FDC for C, H, R, and
N (cylinder, head, sector number and sector size
respectively).
FORMAT FIELDS
SYSTEM 34 (DOUBLE DENSITY) FORMAT
GAP4a
80x
4E
SYNC
IAM GAP1
12x
00
3xC2FC 3xA1FE 3xA1FB
50x
4E
SYNC
12x
00
IDAM C
HDS
Y
L
After formatting each sector, the host must send
new values for C, H, R and N to the FDC for the
next sector on the track. The R value (sector
number) is the only value that must be changed
by the host after each sector is formatted. This
allows the disk to be formatted with
nonsequential sector addresses (interleaving).
This incrementing and formatting continues for
the whole track until the FDC encounters a pulse
on the IDX pin again and it terminates the
command.
Table 25 contains typical values for gap fields
which are dependent upon the size of the sector
and the number of sectors on each track. Actual
values can vary due to drive electronics.
NOC
E
C
GAP2
R
22x
C
4E
SYNC
12x
00
DATA
AM
DATACRCGAP3 GAP 4b
F8
GAP4a
40x
FF
GAP4a
80x
4E
SYSTEM 3740 (SINGLE DENSITY) FORMAT
SYNC
IAM GAP1
6x
00
FC FE FB or
26x
FF
SYNC
6x
00
IDAM C
HDS
NOC
Y
E
L
C
GAP2
R
11x
C
FF
PERPENDICULAR FORMAT
SYNC
IAM GAP1
12x
00
3xC2FC 3xA1FE 3xA1FB
50x
4E
SYNC
12x
00
IDAM C
HDS
NOC
Y
E
L
C
GAP2
R
41x
C
4E
SYNC
6x
00
SYNC
12x
00
DATA
AM
DATACRCGAP3 GAP 4b
F8
DATA
AM
DATACRCGAP3 GAP 4b
F8
Page 58

58
Table 25 - Typical Values for Formatting
FORMAT SECTOR SIZE N SC GPL1 GPL2
128
128
512
FM
5.25"
Drives
MFM
3.5"
Drives
GPL1 = suggested GPL values in Read and Write commands to avoid splice point
between data field and ID field of contiguous sections.
GPL2 = suggested GPL value in Format A Track command.
*PC/AT values (typical)
**PS/2 values (typical). Applies with 1.0 MB and 2.0 MB drives.
NOTE: All values except sector size are in hex.
FM
MFM
1024
2048
4096
...
256
256
512*
1024
2048
4096
...
128
256
512
256
512**
1024
00
00
02
03
04
05
...
01
01
02
03
04
05
...
12
10
08
04
02
01
12
10
09
04
02
01
0
1
2
1
2
3
0F
09
05
0F
09
05
07
10
18
46
C8
C8
0A
20
2A
80
C8
C8
07
0F
1B
0E
1B
35
09
19
30
87
FF
FF
0C
32
50
F0
FF
FF
1B
2A
3A
36
54
74
Page 59

59
CONTROL COMMANDS
Control commands differ from the other
commands in that no data transfer takes place.
Three commands generate an interrupt when
complete: Read ID, Recalibrate, and Seek. The
other control commands do not generate an
interrupt.
Read ID
The Read ID command is used to find the
present position of the recording heads. The
FDC stores the values from the first ID field it is
able to read into its registers. If the FDC does
not find an ID address mark on the diskette after
the second occurrence of a pulse on the
nINDEX pin, it then sets the IC code in Status
Register 0 to "01" (abnormal termination), sets
the MA bit in Status Register 1 to "1", and
terminates the command.
The following commands will generate an
interrupt upon completion. They do not return
any result bytes. It is highly recommended that
control commands be followed by the Sense
Interrupt Status command. Otherwise, valuable
interrupt status information will be lost.
Recalibrate
The Recalibrate command does not have a
result phase. The Sense Interrupt Status
command must be issued after the Recalibrate
command to effectively terminate it and to
provide verification of the head position (PCN).
During the command phase of the recalibrate
operation, the FDC is in the BUSY state, but
during the execution phase it is in a NON-BUSY
state. At this time, another Recalibrate
command may be issued, and in this manner
parallel Recalibrate operations may be done on
up to four drives at once.
Upon power up, the software must issue a
Recalibrate command to properly initialize all
drives and the controller.
Seek
The read/write head within the drive is moved
from track to track under the control of the Seek
command. The FDC compares the PCN, which
is the current head position, with the NCN and
performs the following operation if there is a
difference:
PCN < NCN: Direction signal to drive set to
"1" (step in) and issues step pulses.
PCN > NCN: Direction signal to drive set to
"0" (step out) and issues step pulses.
This command causes the read/write head
within the FDC to retract to the track 0 position.
The FDC clears the contents of the PCN counter
and checks the status of the nTR0 pin from the
FDD. As long as the nTR0 pin is low, the DIR
pin remains 0 and step pulses are issued. When
the nTR0 pin goes high, the SE bit in Status
Register 0 is set to "1" and the command is
terminated. If the nTR0 pin is still low after 79
step pulses have been issued, the FDC sets the
SE and the EC bits of Status Register 0 to "1"
and terminates the command. Disks capable of
handling more than 80 tracks per side may
require more than one Recalibrate command to
return the head back to physical Track 0.
The rate at which step pulses are issued is
controlled by SRT (Stepping Rate Time) in the
Specify command. After each step pulse is
issued, NCN is compared against PCN, and
when NCN = PCN the SE bit in Status Register
0 is set to "1" and the command is terminated.
During the command phase of the seek or
recalibrate operation, the FDC is in the BUSY
state, but during the execution phase it is in the
NON-BUSY state. At this time, another Seek or
Recalibrate command may be issued, and in
this manner, parallel seek operations may be
done on up to four drives at once.
Page 60

60
Note that if implied seek is not enabled, the read
and write commands should be preceded by:
g. Write Deleted Data command
h. Verify command
1) Seek command - Step to the proper track
2) Sense Interrupt Status command Terminate the Seek command
3) Read ID - Verify head is on proper track
4) Issue Read/Write command.
The Seek command does not have a result
phase. Therefore, it is highly recommended that
the Sense Interrupt Status command is issued
after the Seek command to terminate it and to
provide verification of the head position (PCN).
The H bit (Head Address) in ST0 will always
return to a "0". When exiting POWERDOWN
mode, the FDC clears the PCN value and the
status information to zero. Prior to issuing the
POWERDOWN command, it is highly
recommended that the user service all pending
interrupts through the Sense Interrupt Status
command.
Sense Interrupt Status
An interrupt signal on FINT pin is generated by
the FDC for one of the following reasons:
1. Upon entering the Result Phase of:
a. Read Data command
b. Read A Track command
c. Read ID command
d. Read Deleted Data command
e. Write Data command
f. Format A Track command
2. End of Seek, Relative Seek, or Recalibrate
command
3. FDC requires a data transfer during the
execution phase in the non-DMA mode
The Sense Interrupt Status command resets the
interrupt signal and, via the IC code and SE bit
of Status Register 0, identifies the cause of the
interrupt.
Table 26 - Interrupt Identification
SE IC INTERRUPT DUE TO
0
1
11
Polling
00
Normal termination of Seek
or Recalibrate command
Abnormal termination of
1
01
Seek or Recalibrate
command
The Seek, Relative Seek, and Recalibrate
commands have no result phase. The Sense
Interrupt Status command must be issued
immediately after these commands to terminate
them and to provide verification of the head
position (PCN). The H (Head Address) bit in
ST0 will always return a "0". If a Sense Interrupt
Status is not issued, the drive will continue to be
BUSY and may affect the operation of the next
command.
Page 61

61
Sense Drive Status
Sense Drive Status obtains drive status
information. It has not execution phase and
goes directly to the result phase from the
command phase. Status Register 3 contains
the drive status information.
Specify
The Specify command sets the initial values for
each of the three internal times. The HUT
(Head Unload Time) defines the time
Table 27 - Drive Control Delays (ms)
HUT SRT
2M 1M 500K 300K 250K 2M 1M 500K 300K 250K
0
64
1
..
E
F
00
01
02
..
7F
7F
128
4
..
56
112
60
120
2M 1M 500K 300K 250K
64
0.5
1
..
63
63.5
256
8
..
224
240
16
426
26.7
..
..
373
400
128
1
2
..
126
127
from the end of the execution phase of one of
the read/write commands to the head unload
state. The SRT (Step Rate Time) defines the
time interval between adjacent step pulses. Note
that the spacing between the first and second
step pulses may be shorter than the remaining
step pulses. The HLT (Head Load Time)
defines the time between when the Head Load
signal goes high and the read/write operation
starts. The values change with the data rate
speed selection and are documented in Table
27. The values are the same for MFM and FM.
512
32
..
448
480
256
2
4
..
252
254
4
3.75
..
0.5
0.25
HLT
8
7.5
..
1
0.5
426
3.3
6.7
..
420
423
16
15
26.7
25
..
2
3.33
1
1.67
32
30
..
512
4
8
.
504
508
..
4
2
The choice of DMA or non-DMA operations is
made by the ND bit. When this bit is "1", the
non-DMA mode is selected, and when ND is "0",
the DMA mode is selected. In DMA mode, data
transfers are signaled by the FDRQ pin. NonDMA mode uses the RQM bit and the FINT pin
to signal data transfers.
Configure
The Configure command is issued to select the
special features of the FDC. A Configure
command need not be issued if the default
values of the FDC meet the system
requirements.
Page 62

62
Configure Default Values:
Relative Seek
EIS - No Implied Seeks
EFIFO - FIFO Disabled
POLL - Polling Enabled
FIFOTHR - FIFO Threshold Set to 1 Byte
PRETRK - Pre-Compensation Set to Track 0
EIS - Enable Implied Seek. When set to "1", the
FDC will perform a Seek operation before
executing a read or write command. Defaults to
no implied seek.
EFIFO - A "1" disables the FIFO (default). This
means data transfers are asked for on a byteby-byte basis. Defaults to "1", FIFO disabled.
The threshold defaults to "1".
POLL - Disable polling of the drives. Defaults to
"0", polling enabled. When enabled, a single
interrupt is generated after a reset. No polling is
performed while the drive head is loaded and
the head unload delay has not expired.
FIFOTHR - The FIFO threshold in the execution
phase of read or write commands. This is
programmable from 1 to 16 bytes. Defaults to
one byte. A "00" selects one byte; "0F" selects
16 bytes.
PRETRK - Pre-Compensation Start Track
Number. Programmable from track 0 to 255.
Defaults to track 0. A "00" selects track 0; "FF"
selects track 255.
Version
The Version command checks to see if the
controller is an enhanced type or the older type
(765A). A value of 90 H is returned as the result
byte.
The command is coded the same as for Seek,
except for the MSB of the first byte and the DIR
bit.
DIR Head Step Direction Control
DIR ACTION
01Step Head Out
Step Head In
RCN Relative Cylinder Number that
determines how many tracks to step the
head in or out from the current track
number.
The Relative Seek command differs from the
Seek command in that it steps the head the
absolute number of tracks specified in the
command instead of making a comparison
against an internal register. The Seek
command is good for drives that support a
maximum of 256 tracks. Relative Seeks cannot
be overlapped with other Relative Seeks. Only
one Relative Seek can be active at a time.
Relative Seeks may be overlapped with Seeks
and Recalibrates. Bit 4 of Status Register 0
(EC) will be set if Relative Seek attempts to step
outward beyond Track 0.
As an example, assume that a floppy drive has
300 useable tracks. The host needs to read
track 300 and the head is on any track (0-255).
If a Seek command is issued, the head will stop
at track 255. If a Relative Seek command is
issued, the FDC will move the head the
specified number of tracks, regardless of the
internal cylinder position register (but will
increment the register). If the head was on track
40 (d), the maximum track that the FDC could
position the head on using Relative Seek will be
295 (D), the initial track + 255 (D). The
maximum count that the head can be moved
Page 63

63
with a single Relative Seek command is 255
(D).
The internal register, PCN, will overflow as the
cylinder number crosses track 255 and will
contain 39 (D). The resulting PCN value is thus
(RCN + PCN) mod 256. Functionally, the FDC
starts counting from 0 again as the track
number goes above 255 (D). It is the user's
responsibility to compensate FDC functions
(precompensation track number) when
accessing tracks greater than 255. The FDC
does not keep track that it is working in an
"extended track area" (greater than 255). Any
command issued will use the current PCN value
except for the Recalibrate command, which only
looks for the TRACK0 signal. Recalibrate will
return an error if the head is farther than 79 due
to its limitation of issuing a maximum of 80 step
pulses. The user simply needs to issue a second
Recalibrate command. The Seek command and
implied seeks will function correctly within the
44 (D) track (299-255) area of the "extended
track area". It is the user's responsibility not to
issue a new track position that will exceed the
maximum track that is present in the extended
area.
To return to the standard floppy range (0-255) of
tracks, a Relative Seek should be issued to
cross the track 255 boundary.
A Relative Seek can be used instead of the
normal Seek, but the host is required to
calculate the difference between the current
head location and the new (target) head
location. This may require the host to issue a
Read ID command to ensure that the head is
physically on the track that software assumes it
to be. Different FDC commands will return
different cylinder results which may be difficult
to keep track of with software without the Read
ID command.
Perpendicular Mode
The Perpendicular Mode command should be
issued prior to executing Read/Write/Format
commands that access a disk drive with
perpendicular recording capability. With this
command, the length of the Gap2 field and VCO
enable timing can be altered to accommodate
the unique requirements of these drives. Table
28 describes the effects of the WGATE and
GAP bits for the Perpendicular Mode command.
Upon a reset, the FDC will default to the
conventional mode (WGATE = 0, GAP = 0).
Selection of the 500 Kbps and 1 Mbps
perpendicular modes is independent of the
actual data rate selected in the Data Rate Select
Register. The user must ensure that these two
data rates remain consistent.
The Gap2 and VCO timing requirements for
perpendicular recording type drives are dictated
by the design of the read/write head. In the
design of this head, a pre-erase head precedes
the normal read/write head by a distance of 200
micrometers. This works out to about 38 bytes
at a 1 Mbps recording density. Whenever the
write head is enabled by the Write Gate signal,
the pre-erase head is also activated at the same
time. Thus, when the write head is initially
turned on, flux transitions recorded on the media
for the first 38 bytes will not be preconditioned
with the pre-erase head since it has not yet been
activated. To accommodate this head activation
and deactivation time, the Gap2 field is
expanded to a length of 41 bytes. The format
field shown on Page 58 illustrates the change in
the Gap2 field size for the perpendicular format.
Page 64

64
On the read back by the FDC, the controller
must begin synchronization at the beginning of
the sync field. For the conventional mode, the
internal PLL VCO is enabled (VCOEN)
approximately 24 bytes from the start of the
Gap2 field. But, when the controller operates in
the 1 Mbps perpendicular mode (WGATE = 1,
GAP = 1), VCOEN goes active after 43 bytes to
accommodate the increased Gap2 field size.
For both cases, and approximate two-byte
cushion is maintained from the beginning of the
sync field for the purposes of avoiding write
splices in the presence of motor speed variation.
For the Write Data case, the FDC activates
Write Gate at the beginning of the sync field
under the conventional mode. The controller
then writes a new sync field, data address mark,
data field, and CRC as shown on page 57. With
the pre-erase head of the perpendicular drive,
the write head must be activated in the Gap2
field to insure a proper write of the new sync
field. For the 1 Mbps perpendicular mode
(WGATE = 1, GAP = 1), 38 bytes will be written
in the Gap2 space. Since the bit density is
proportional to the data rate, 19 bytes will be
written in the Gap2 field for the 500 Kbps
perpendicular mode (WGATE = 1, GAP =0).
It should be noted that none of the alterations in
Gap2 size, VCO timing, or Write Gate timing
affect normal program flow. The information
provided here is just for background purposes
and is not needed for normal operation. Once
the Perpendicular Mode command is invoked,
FDC software behavior from the user standpoint
is unchanged.
The perpendicular mode command is enhanced
to allow specific drives to be designated
Perpendicular recording drives. This
enhancement allows data transfers between
Conventional and Perpendicular drives without
having to issue Perpendicular mode commands
between the accesses of the different drive
types, nor having to change write precompensation values.
When both GAP and WGATE bits of the
PERPENDICULAR MODE COMMAND are both
programmed to "0" (Conventional mode), then
D0, D1, D2, D3, and D4 can be programmed
independently to "1" for that drive to be set
automatically to Perpendicular mode. In this
mode the following set of conditions also apply:
1. The GAP2 written to a perpendicular drive
during a write operation will depend upon the
programmed data rate.
2. The write pre-compensation given to a
perpendicular mode drive will be 0ns.
3. For D0-D3 programmed to "0" for
conventional mode drives any data written
will be at the currently programmed write
pre-compensation.
Note: Bits D0-D3 can only be overwritten when
OW is programmed as a "1".If either
GAP or WGATE is a "1" then D0-D3 are
ignored.
Software and hardware resets have the
following effect on the PERPENDICULAR
MODE COMMAND:
1. "Software" resets (via the DOR or DSR
registers) will only clear GAP and WGATE
bits to "0". D0-D3 are unaffected and retain
their previous value.
2. "Hardware" resets will clear all bits
(GAP, WGATE and D0-D3) to "0", i.e all
conventional mode.
Page 65

65
Table 28 - Effects of WGATE and GAP Bits
WGATE GAP MODE
0
0
0
Conventional
1
Perpendicular
(500 Kbps)
1
0
Reserved
(Conventional)
1
1
Perpendicular
(1 Mbps)
LENGTH OF
GAP2 FORMAT
FIELD
22 Bytes
22 Bytes
22 Bytes
41 Bytes
PORTION OF
GAP 2
WRITTEN BY
WRITE DATA
OPERATION
0 Bytes
19 Bytes
0 Bytes
38 Bytes
LOCK
In order to protect systems with long DMA
latencies against older application software that
can disable the FIFO the LOCK Command has
been added. This command should only be
used by the FDC routines, and application
software should refrain from using it. If an
application calls for the FIFO to be disabled
then the CONFIGURE command should be
used.
The LOCK command defines whether the
EFIFO, FIFOTHR, and PRETRK parameters of
the CONFIGURE command can be RESET by
the DOR and DSR registers. When the LOCK
bit is set to logic "1" all subsequent "software
RESETS by the DOR and DSR registers will not
change the previously set parameters to their
default values. All "hardware" RESET from the
RESET pin will set the LOCK bit to logic "0" and
return the EFIFO, FIFOTHR, and PRETRK to
their default values. A status byte is returned
immediately after issuing a LOCK command.
This byte reflects the value of the LOCK bit set
by the command byte.
ENHANCED DUMPREG
The DUMPREG command is designed to
support system run-time diagnostics and
application software development and debug.
To accommodate the LOCK command and the
enhanced PERPENDICULAR MODE command
the eighth byte of the DUMPREG command has
been modified to contain the additional data
from these two commands.
COMPATIBILITY
The FDC37B77x was designed with software
compatibility in mind. It is a fully backwardscompatible solution with the older generation
765A/B disk controllers. The FDC also
implements on-board registers for compatibility
with the PS/2, as well as PC/AT and PC/XT,
floppy disk controller subsystems. After a
hardware reset of the FDC, all registers,
functions and enhancements default to a PC/AT,
PS/2 or PS/2 Model 30 compatible operating
mode, depending on how the IDENT and MFM
bits are configured by the system BIOS.
Page 66

66
SERIAL PORT (UART)
The FDC37B77x incorporates two full function
UARTs. They are compatible with the
NS16450, the 16450 ACE registers and the
NS16C550A. The UARTS perform serial-toparallel conversion on received characters and
parallel-to-serial conversion on transmit
characters. The data rates are independently
programmable from 460.8K baud down to 50
baud. The character options are programmable
for 1 start; 1, 1.5 or 2 stop bits; even, odd, sticky
or no parity; and prioritized interrupts. The
UARTs each contain a programmable baud rate
generator that is capable of dividing the input
clock or crystal by a number from 1 to 65535.
The UARTs are also capable of supporting the
MIDI data rate. Refer to the Configuration
Registers for information on disabling, power
down and changing the base address of the
UARTs. The interrupt from a UART is enabled
by programming OUT2 of that UART to a logic
Table 29 - Addressing the Serial Port
DLAB* A2 A1 A0 REGISTER NAME
0 0 0 0 Receive Buffer (read)
0 0 0 0 Transmit Buffer (write)
0 0 0 1 Interrupt Enable (read/write)
X 0 1 0 Interrupt Identification (read)
X 0 1 0 FIFO Control (write)
X 0 1 1 Line Control (read/write)
X 1 0 0 Modem Control (read/write)
X 1 0 1 Line Status (read/write)
X 1 1 0 Modem Status (read/write)
X 1 1 1 Scratchpad (read/write)
1 0 0 0 Divisor LSB (read/write)
1 0 0 1 Divisor MSB (read/write
*Note: DLAB is Bit 7 of the Line Control Register
"1". OUT2 being a logic "0" disables that
UART's interrupt. The second UART also
supports IrDA, HP-SIR, ASK-IR, Fast IR and
Consumer IR infrared modes of operation.
Note: The UARTs may be configured to share
an interrupt. Refer to the Configuration section
for more information.
REGISTER DESCRIPTION
Addressing of the accessible registers of the
Serial Port is shown below. The base
addresses of the serial ports are defined by the
configuration registers (see Configuration
section). The Serial Port registers are located at
sequentially increasing addresses above these
base addresses. The FDC37B77x contains two
serial ports, each of which contain a register set
as described below.
Page 67

67
The following section describes the operation of
the registers.
RECEIVE BUFFER REGISTER (RB)
Address Offset = 0H, DLAB = 0, READ ONLY
This register holds the received incoming data
byte. Bit 0 is the least significant bit, which is
transmitted and received first. Received data is
double buffered; this uses an additional shift
register to receive the serial data stream and
convert it to a parallel 8 bit word which is
transferred to the Receive Buffer register. The
shift register is not accessible.
TRANSMIT BUFFER REGISTER (TB)
Address Offset = 0H, DLAB = 0, WRITE ONLY
This register contains the data byte to be
transmitted. The transmit buffer is double
buffered, utilizing an additional shift register (not
accessible) to convert the 8 bit data word to a
serial format. This shift register is loaded from
the Transmit Buffer when the transmission of
the previous byte is complete.
INTERRUPT ENABLE REGISTER (IER)
Address Offset = 1H, DLAB = 0, READ/WRITE
The lower four bits of this register control the
enables of the five interrupt sources of the Serial
Port interrupt. It is possible to totally disable the
interrupt system by resetting bits 0 through 3 of
this register. Similarly, setting the appropriate
bits of this register to a high, selected interrupts
can be enabled. Disabling the interrupt system
inhibits the Interrupt Identification Register and
disables any Serial Port interrupt out of the
FDC37B77x. All other system functions operate
in their normal manner, including the Line
Status and MODEM Status Registers. The
contents of the Interrupt Enable Register are
described below.
Bit 0
This bit enables the Received Data Available
Interrupt (and timeout interrupts in the FIFO
mode) when set to logic "1".
Bit 1
This bit enables the Transmitter Holding
Register Empty Interrupt when set to logic "1".
Bit 2
This bit enables the Received Line Status
Interrupt when set to logic "1". The error
sources causing the interrupt are Overrun,
Parity, Framing and Break. The Line Status
Register must be read to determine the source.
Bit 3
This bit enables the MODEM Status Interrupt
when set to logic "1". This is caused when one
of the Modem Status Register bits changes
state.
Bits 4 through 7
These bits are always logic "0".
FIFO CONTROL REGISTER (FCR)
Address Offset = 2H, DLAB = X, WRITE
This is a write only register at the same location
as the IIR. This register is used to enable and
clear the FIFOs, set the RCVR FIFO trigger
level. Note: DMA is not supported. The UART1
and UART2 FCR’s are shadowed in the UART1
FIFO Control Shadow Register (LD8:CRC3[7:0])
and UART2 FIFO Control Shadow Register
(LD8:CRC4[7:0]).
Bit 0
Setting this bit to a logic "1" enables both the
XMIT and RCVR FIFOs. Clearing this bit to a
logic "0" disables both the XMIT and RCVR
FIFOs and clears all bytes from both FIFOs.
When changing from FIFO Mode to non-FIFO
(16450) mode, data is automatically cleared
from the FIFOs. This bit must be a 1 when
other bits in this register are written to or they
will not be properly programmed.
Page 68

68
Bit 1
Setting this bit to a logic "1" clears all bytes in
the RCVR FIFO and resets its counter logic to 0.
The shift register is not cleared. This bit is selfclearing.
Bit 2
Setting this bit to a logic "1" clears all bytes in
the XMIT FIFO and resets its counter logic to 0.
The shift register is not cleared. This bit is selfclearing.
Bit 3
Writing to this bit has no effect on the operation
of the UART. The RXRDY and TXRDY pins are
not available on this chip.
Bit 4,5
Reserved
Bit 6,7
These bits are used to set the trigger level for
the RCVR FIFO interrupt.
RCVR FIFO
Bit 7
Bit 6
Trigger Level (BYTES)
0 0 1
0 1 4
1 0 8
1 1 14
INTERRUPT IDENTIFICATION REGISTER
(IIR)
Address Offset = 2H, DLAB = X, READ
By accessing this register, the host CPU can
determine the highest priority interrupt and its
source. Four levels of priority interrupt exist.
They are in descending order of priority:
3. Transmitter Holding Register Empty
4. MODEM Status (lowest priority)
Information indicating that a prioritized interrupt
is pending and the source of that interrupt is
stored in the Interrupt Identification Register
(refer to Interrupt Control Table). When the CPU
accesses the IIR, the Serial Port freezes all
interrupts and indicates the highest priority
pending interrupt to the CPU. During this CPU
access, even if the Serial Port records new
interrupts, the current indication does not
change until access is completed. The contents
of the IIR are described below.
Bit 0
This bit can be used in either a hardwired
prioritized or polled environment to indicate
whether an interrupt is pending. When bit 0 is a
logic "0", an interrupt is pending and the
contents of the IIR may be used as a pointer to
the appropriate internal service routine. When
bit 0 is a logic "1", no interrupt is pending.
Bits 1 and 2
These two bits of the IIR are used to identify the
highest priority interrupt pending as indicated by
the Interrupt Control Table.
Bit 3
In non-FIFO mode, this bit is a logic "0". In
FIFO mode this bit is set along with bit 2 when a
timeout interrupt is pending.
Bits 4 and 5
These bits of the IIR are always logic "0".
Bits 6 and 7
These two bits are set when the FIFO
CONTROL Register bit 0 equals 1.
1. Receiver Line Status (highest priority)
2. Received Data Ready
Page 69

69
Table 30 - Interrupt Control Table
FIFO
MODE
ONLY
BIT 3 BIT 2 BIT 1 BIT 0
INTERRUPT
IDENTIFICATION
REGISTER INTERRUPT SET AND RESET FUNCTIONS
PRIORITY
LEVEL
INTERRUPT
TYPE
INTERRUPT
SOURCE
RESET CONTROL
0 0 0 1 - None None 0 1 1 0 Highest Receiver Line
Status
Overrun Error,
Parity Error,
Reading the Line
Status Register
Framing Error or
Break Interrupt
0 1 0 0 Second Received
Data
Available
Receiver Data
Available
Read Receiver
Buffer or the FIFO
drops below the
trigger level.
1 1 0 0 Second Character
Timeout
Indication
No Characters
Have Been
Removed From
Reading the
Receiver Buffer
Register
or Input to the
RCVR FIFO
during the last 4
Char times and
there is at least 1
char in it during
this time
0 0 1 0 Third Transmitter
Holding
Register
Empty
Transmitter
Holding Register
Empty
Reading the IIR
Register (if Source
of Interrupt) or
Writing the
Transmitter Holding
Register
0 0 0 0 Fourth MODEM
Status
Clear to Send or
Data Set Ready
or Ring Indicator
Reading the
MODEM Status
Register
or Data Carrier
Detect
INTERRUPT
Page 70

70
LINE CONTROL REGISTER (LCR)
Address Offset = 3H, DLAB = 0, READ/WRITE
This register contains the format information of
the serial line. The bit definitions are:
Bits 0 and 1
These two bits specify the number of bits in
each transmitted or received serial character.
The encoding of bits 0 and 1 is as follows:
BIT 1 BIT 0 WORD LENGTH
0
0
1
1
0
1
0
1
5 Bits
6 Bits
7 Bits
8 Bits
The Start, Stop and Parity bits are not included
in the word length.
Bit 2
This bit specifies the number of stop bits in each
transmitted or received serial character. The
following table summarizes the information.
NUMBER OF
BIT 2 WORD LENGTH
STOP BITS
0 -- 1
1 5 bits 1.5
1 6 bits 2
1 7 bits 2
1 8 bits 2
Note: The receiver will ignore all stop bits
beyond the first, regardless of the number used
in transmitting.
Bit 3
Parity Enable bit. When bit 3 is a logic "1", a
parity bit is generated (transmit data) or
checked (receive data) between the last data
word bit and the first stop bit of the serial data.
(The parity bit is used to generate an even or
odd number of 1s when the data word bits and
the parity bit are summed).
Bit 4
Even Parity Select bit. When bit 3 is a logic "1"
and bit 4 is a logic "0", an odd number of logic
"1"'s is transmitted or checked in the data word
bits and the parity bit. When bit 3 is a logic "1"
and bit 4 is a logic "1" an even number of bits is
transmitted and checked.
Bit 5
Stick Parity bit. When bit 3 is a logic "1" and bit
5 is a logic "1", the parity bit is transmitted and
then detected by the receiver in the opposite
state indicated by bit 4.
Bit 6
Set Break Control bit. When bit 6 is a logic "1",
the transmit data output (TXD) is forced to the
Spacing or logic "0" state and remains there
(until reset by a low level bit 6) regardless of
other transmitter activity. This feature enables
the Serial Port to alert a terminal in a
communications system.
Bit 7
Divisor Latch Access bit (DLAB). It must be set
high (logic "1") to access the Divisor Latches of
the Baud Rate Generator during read or write
operations. It must be set low (logic "0") to
access the Receiver Buffer Register, the
Transmitter Holding Register, or the Interrupt
Enable Register.
MODEM CONTROL REGISTER (MCR)
Address Offset = 4H, DLAB = X, READ/WRITE
This 8 bit register controls the interface with the
MODEM or data set (or device emulating a
MODEM). The contents of the MODEM control
register are described below.
Bit 0
This bit controls the Data Terminal Ready
(nDTR) output. When bit 0 is set to a logic "1",
the nDTR output is forced to a logic "0". When
bit 0 is a logic "0", the nDTR output is forced to
a logic "1".
Page 71

71
Bit 1
This bit controls the Request To Send (nRTS)
output. Bit 1 affects the nRTS output in a
manner identical to that described above for bit
0.
Bit 2
This bit controls the Output 1 (OUT1) bit. This
bit does not have an output pin and can only be
read or written by the CPU.
Bit 3
Output 2 (OUT2). This bit is used to enable an
UART interrupt. When OUT2 is a logic "0", the
serial port interrupt output is forced to a high
impedance state - disabled. When OUT2 is a
logic "1", the serial port interrupt outputs are
enabled.
Bit 4
This bit provides the loopback feature for
diagnostic testing of the Serial Port. When bit 4
is set to logic "1", the following occur:
1. The TXD is set to the Marking State(logic
"1").
2. The receiver Serial Input (RXD) is
disconnected.
3. The output of the Transmitter Shift
Register is "looped back" into the Receiver
Shift Register input.
4. All MODEM Control inputs (nCTS, nDSR,
nRI and nDCD) are disconnected.
5. The four MODEM Control outputs (nDTR,
nRTS, OUT1 and OUT2) are internally
connected to the four MODEM Control
inputs (nDSR, nCTS, RI, DCD).
6. The Modem Control output pins are forced
inactive high.
7. Data that is transmitted is immediately
received.
This feature allows the processor to verify the
transmit and receive data paths of the Serial
Port. In the diagnostic mode, the receiver and
the transmitter interrupts are fully operational.
The MODEM Control Interrupts are also
operational but the interrupts' sources are now
the lower four bits of the MODEM Control
Register instead of the MODEM Control inputs.
The interrupts are still controlled by the Interrupt
Enable Register.
Bits 5 through 7
These bits are permanently set to logic zero.
LINE STATUS REGISTER (LSR)
Address Offset = 5H, DLAB = X, READ/WRITE
Bit 0
Data Ready (DR). It is set to a logic "1"
whenever a complete incoming character has
been received and transferred into the Receiver
Buffer Register or the FIFO. Bit 0 is reset to a
logic "0" by reading all of the data in the Receive
Buffer Register or the FIFO.
Bit 1
Overrun Error (OE). Bit 1 indicates that data in
the Receiver Buffer Register was not read before
the next character was transferred into the
register, thereby destroying the previous
character. In FIFO mode, an overrunn error will
occur only when the FIFO is full and the next
character has been completely received in the
shift register, the character in the shift register is
overwritten but not transferred to the FIFO. The
OE indicator is set to a logic "1" immediately
upon detection of an overrun condition, and
reset whenever the Line Status Register is read.
Bit 2
Parity Error (PE). Bit 2 indicates that the
received data character does not have the
correct even or odd parity, as selected by the
even parity select bit. The PE is set to a logic
"1" upon detection of a parity error and is reset
to a logic "0" whenever the Line Status Register
is read. In the FIFO mode this error is
associated with the particular character in the
FIFO it applies to. This error is indicated when
the associated character is at the top of the
FIFO.
Page 72

72
Bit 3
Framing Error (FE). Bit 3 indicates that the
received character did not have a valid stop bit.
Bit 3 is set to a logic "1" whenever the stop bit
following the last data bit or parity bit is detected
as a zero bit (Spacing level). The FE is reset to
a logic "0" whenever the Line Status Register is
read. In the FIFO mode this error is associated
with the particular character in the FIFO it
applies to. This error is indicated when the
associated character is at the top of the FIFO.
The Serial Port will try to resynchronize after a
framing error. To do this, it assumes that the
framing error was due to the next start bit, so it
samples this 'start' bit twice and then takes in
the 'data'.
Bit 4
Break Interrupt (BI). Bit 4 is set to a logic "1"
whenever the received data input is held in the
Spacing state (logic "0") for longer than a full
word transmission time (that is, the total time of
the start bit + data bits + parity bits + stop bits).
The BI is reset after the CPU reads the contents
of the Line Status Register. In the FIFO mode
this error is associated with the particular
character in the FIFO it applies to. This error is
indicated when the associated character is at
the top of the FIFO. When break occurs only
one zero character is loaded into the FIFO.
Restarting after a break is received, requires the
serial data (RXD) to be logic "1" for at least 1/2
bit time.
Note: Bits 1 through 4 are the error conditions
that produce a Receiver Line Status Interrupt
whenever any of the corresponding conditions
are detected and the interrupt is enabled.
Bit 5
Transmitter Holding Register Empty (THRE).
Bit 5 indicates that the Serial Port is ready to
accept a new character for transmission. In
addition, this bit causes the Serial Port to issue
an interrupt when the Transmitter Holding
Register interrupt enable is set high. The THRE
bit is set to a logic "1" when a character is
transferred from the Transmitter Holding
Register into the Transmitter Shift Register. The
bit is reset to logic "0" whenever the CPU loads
the Transmitter Holding Register. In the FIFO
mode this bit is set when the XMIT FIFO is
empty, it is cleared when at least 1 byte is
written to the XMIT FIFO. Bit 5 is a read only
bit.
Bit 6
Transmitter Empty (TEMT). Bit 6 is set to a
logic "1" whenever the Transmitter Holding
Register (THR) and Transmitter Shift Register
(TSR) are both empty. It is reset to logic "0"
whenever either the THR or TSR contains a data
character. Bit 6 is a read only bit. In the FIFO
mode this bit is set whenever the THR and TSR
are both empty,
Bit 7
This bit is permanently set to logic "0" in the 450
mode. In the FIFO mode, this bit is set to a
logic "1" when there is at least one parity error,
framing error or break indication in the FIFO.
This bit is cleared when the LSR is read if there
are no subsequent errors in the FIFO.
MODEM STATUS REGISTER (MSR)
Address Offset = 6H, DLAB = X, READ/WRITE
This 8 bit register provides the current state of
the control lines from the MODEM (or peripheral
device). In addition to this current state
information, four bits of the MODEM Status
Register (MSR) provide change information.
These bits are set to logic "1" whenever a
control input from the MODEM changes state.
They are reset to logic "0" whenever the
MODEM Status Register is read.
Bit 0
Delta Clear To Send (DCTS). Bit 0 indicates
that the nCTS input to the chip has changed
state since the last time the MSR was read.
Bit 1
Delta Data Set Ready (DDSR). Bit 1 indicates
that the nDSR input has changed state since the
last time the MSR was read.
Page 73

73
Bit 2
Trailing Edge of Ring Indicator (TERI). Bit 2
indicates that the nRI input has changed from
logic "0" to logic "1".
Bit 3
Delta Data Carrier Detect (DDCD). Bit 3
indicates that the nDCD input to the chip has
changed state.
Note: Whenever bit 0, 1, 2, or 3 is set to a logic
"1", a MODEM Status Interrupt is generated.
Bit 4
This bit is the complement of the Clear To Send
(nCTS) input. If bit 4 of the MCR is set to logic
"1", this bit is equivalent to nRTS in the MCR.
Bit 5
This bit is the complement of the Data Set
Ready (nDSR) input. If bit 4 of the MCR is set
to logic "1", this bit is equivalent to DTR in the
MCR.
Bit 6
This bit is the complement of the Ring Indicator
(nRI) input. If bit 4 of the MCR is set to logic
"1", this bit is equivalent to OUT1 in the MCR.
Bit 7
This bit is the complement of the Data Carrier
Detect (nDCD) input. If bit 4 of the MCR is set
to logic "1", this bit is equivalent to OUT2 in the
MCR.
SCRATCHPAD REGISTER (SCR)
Address Offset =7H, DLAB =X, READ/WRITE
This 8 bit read/write register has no effect on the
operation of the Serial Port. It is intended as a
scratchpad register to be used by the
programmer to hold data temporarily.
PROGRAMMABLE BAUD RATE GENERATOR
(AND DIVISOR LATCHES DLH, DLL)
The Serial Port contains a programmable Baud
Rate Generator that is capable of taking any
clock input (DC to 3 MHz) and dividing it by any
divisor from 1 to 65535. This output frequency
of the Baud Rate Generator is 16x the Baud
rate. Two 8 bit latches store the divisor in 16 bit
binary format. These Divisor Latches must be
loaded during initialization in order to insure
desired operation of the Baud Rate Generator.
Upon loading either of the Divisor Latches, a 16
bit Baud counter is immediately loaded. This
prevents long counts on initial load. If a 0 is
loaded into the BRG registers the output divides
the clock by the number 3. If a 1 is loaded the
output is the inverse of the input oscillator. If a
two is loaded the output is a divide by 2 signal
with a 50% duty cycle. If a 3 or greater is
loaded the output is low for 2 bits and high for
the remainder of the count. The input clock to
the BRG is a 1.8462 MHz clock.
Table 31 shows the baud rates possible with a
1.8462 MHz crystal.
Effect Of The Reset on Register File
The Reset Function Table (Table 32) details the
effect of the Reset input on each of the registers
of the Serial Port.
Page 74

74
FIFO INTERRUPT MODE OPERATION
When the RCVR FIFO and receiver interrupts
are enabled (FCR bit 0 = "1", IER bit 0 = "1"),
RCVR interrupts occur as follows:
A. The receive data available interrupt will be
issued when the FIFO has reached its
programmed trigger level; it is cleared as
soon as the FIFO drops below its
programmed trigger level.
B. The IIR receive data available indication also
occurs when the FIFO trigger level is
reached. It is cleared when the FIFO drops
below the trigger level.
B. Character times are calculated by using the
RCLK input for a clock signal (this makes
the delay proportional to the baudrate).
C. When a timeout interrupt has occurred it is
cleared and the timer reset when the CPU
reads one character from the RCVR FIFO.
D. When a timeout interrupt has not occurred
the timeout timer is reset after a new
character is received or after the CPU reads
the RCVR FIFO.
When the XMIT FIFO and transmitter interrupts
are enabled (FCR bit 0 = "1", IER bit 1 = "1"),
XMIT interrupts occur as follows:
C. The receiver line status interrupt (IIR=06H),
has higher priority than the received data
available (IIR=04H) interrupt.
D. The data ready bit (LSR bit 0) is set as soon
as a character is transferred from the shift
register to the RCVR FIFO. It is reset when
the FIFO is empty.
When RCVR FIFO and receiver interrupts are
enabled, RCVR FIFO timeout interrupts occur
as follows:
A. A FIFO timeout interrupt occurs if all the
following conditions exist:
- At least one character is in the FIFO.
- The most recent serial character received
was longer than 4 continuous character
times ago. (If 2 stop bits are programmed,
the second one is included in this time
delay).
- The most recent CPU read of the FIFO was
longer than 4 continuous character times
ago.
This will cause a maximum character received
to interrupt issued delay of 160 msec at 300
BAUD with a 12 bit character.
A. The transmitter holding register interrupt
(02H) occurs when the XMIT FIFO is empty;
it is cleared as soon as the transmitter
holding register is written to (1 of 16
characters may be written to the XMIT FIFO
while servicing this interrupt) or the IIR is
read.
B. The transmitter FIFO empty indications will
be delayed 1 character time minus the last
stop bit time whenever the following occurs:
THRE=1 and there have not been at least
two bytes at the same time in the transmitter
FIFO since the last THRE=1. The transmitter
interrupt after changing FCR0 will be
immediate, if it is enabled.
Character timeout and RCVR FIFO trigger level
interrupts have the same priority as the current
received data available interrupt; XMIT FIFO
empty has the same priority as the current
transmitter holding register empty interrupt.
Page 75

75
FIFO POLLED MODE OPERATION
2
With FCR bit 0 = "1" resetting IER bits 0, 1, 2 or
3 or all to zero puts the UART in the FIFO
Polled Mode of operation. Since the RCVR and
XMITTER are controlled separately, either one
or both can be in the polled mode of operation.
In this mode, the user's program will check
RCVR and XMITTER status via the LSR. LSR
definitions for the FIFO Polled Mode are as
the same way as when in the interrupt
mode, the IIR is not affected since EIR bit
2=0.
- Bit 5 indicates when the XMIT FIFO is
empty.
- Bit 6 indicates that both the XMIT FIFO and
shift register are empty.
- Bit 7 indicates whether there are any errors
in the RCVR FIFO.
follows:
There is no trigger level reached or timeout
- Bit 0=1 as long as there is one byte in the
RCVR FIFO.
- Bits 1 to 4 specify which error(s) have
condition indicated in the FIFO Polled Mode,
however, the RCVR and XMIT FIFOs are still
fully capable of holding characters.
occurred. Character error status is handled
Table 31 - Baud Rates Using 1.8462 MHz Clock for <= 38.4K; Using 1.8432MHz Clock
for 115.2k ; Using 3.6864MHz Clock for 230.4k; Using 7.3728 MHz Clock for 460.8k
DESIRED
BAUD RATE
DIVISOR USED TO
GENERATE 16X CLOCK
PERCENT ERROR DIFFERENCE
BETWEEN DESIRED AND ACTUAL
50 2304 0.001 X
75 1536 - X
110 1047 - X
134.5 857 0.004 X
150 768 - X
300 384 - X
600 192 - X
1200 96 - X
1800 64 - X
2000 58 0.005 X
2400 48 - X
3600 32 - X
4800 24 - X
7200 16 - X
9600 12 - X
19200 6 - X
38400 3 0.030 X
57600 2 0.16 X
115200 1 0.16 X
230400 32770 0.16 1
1
SPEED BIT
HIGH
Page 76

76
DESIRED
2
BAUD RATE
DIVISOR USED TO
GENERATE 16X CLOCK
PERCENT ERROR DIFFERENCE
BETWEEN DESIRED AND ACTUAL
1
460800 32769 0.16 1
Note1: The percentage error for all baud rates, except where indicated otherwise, is 0.2%.
Note 2: The High Speed bit is located in the Device Configuration Space.
Table 32 - Reset Function Table
REGISTER/SIGNAL RESET CONTROL RESET STATE
Interrupt Enable Register RESET All bits low
Interrupt Identification Reg. RESET Bit 0 is high; Bits 1 - 7 low
FIFO Control RESET All bits low
Line Control Reg. RESET All bits low
MODEM Control Reg. RESET All bits low
Line Status Reg. RESET All bits low except 5, 6 high
MODEM Status Reg. RESET Bits 0 - 3 low; Bits 4 - 7 input
TXD1, TXD2 RESET High
INTRPT (RCVR errs) RESET/Read LSR Low
INTRPT (RCVR Data Ready) RESET/Read RBR Low
INTRPT (THRE) RESET/ReadIIR/Write THR Low
OUT2B RESET High
RTSB RESET High
DTRB RESET High
OUT1B RESET High
RCVR FIFO RESET/
All Bits Low
FCR1*FCR0/_FCR0
XMIT FIFO RESET/
All Bits Low
FCR1*FCR0/_FCR0
HIGH
SPEED BIT
Page 77

77
Table 33 - Register Summary for an Individual UART Channel
REGISTER
ADDRESS* REGISTER NAME
ADDR = 0
DLAB = 0
ADDR = 0
DLAB = 0
ADDR = 1
DLAB = 0
ADDR = 2 Interrupt Ident. Register (Read Only) IIR "0" if Interrupt
ADDR = 2 FIFO Control Register (Write Only) FCR (Note7)FIFO Enable RCVR FIFO
ADDR = 3 Line Control Register LCR Word Length
Receive Buffer Register (Read Only) RBR Data Bit 0
Transmitter Holding Register (Write Only) THR Data Bit 0 Data Bit 1
Interrupt Enable Register IER Enable
REGISTER
SYMBOL BIT 0 BIT 1
(Note 1)
Received Data
Available
Interrupt
(ERDAI)
Pending
Select Bit 0
(WLS0)
Data Bit 1
Enable
Transmitter
Holding
Register
Empty
Interrupt
(ETHREI)
Interrupt ID Bit
Reset
Word Length
Select Bit 1
(WLS1)
ADDR = 4 MODEM Control Register MCR Data Terminal
ADDR = 5 Line Status Register LSR
ADDR = 6 MODEM Status Register MSR
ADDR = 7
ADDR = 0
DLAB = 1
ADDR = 1
DLAB = 1
Scratch Register (Note 4) SCR Bit 0 Bit 1
Divisor Latch (LS) DDL Bit 0 Bit 1
Divisor Latch (MS) DLM Bit 8 Bit 9
Ready (DTR)
Data Ready
(DR)
Delta Clear to
Send (DCTS)
Request to
Send (RTS)
Overrun Error
(OE)
Delta Data Set
Ready
(DDSR)
*DLAB is Bit 7 of the Line Control Register (ADDR = 3).
Note 1: Bit 0 is the least significant bit. It is the first bit serially transmitted or received.
Note 2: When operating in the XT mode, this bit will be set any time that the transmitter shift
register is empty.
Page 78

78
Table 33 - Register Summary for an Individual UART Channel (continued)
BIT 2 BIT 3 BIT 4 BIT 5 BIT 6 BIT 7
Data Bit 2
Data Bit 2
Enable
Receiver Line
Status
Interrupt
(ELSI)
Interrupt ID
Bit
XMIT FIFO
Reset
Data Bit 3 Data Bit 4 Data Bit 5 Data Bit 6 Data Bit 7
Data Bit 3 Data Bit 4 Data Bit 5 Data Bit 6 Data Bit 7
Enable
0 0 0
0
MODEM
Status
Interrupt
(EMSI)
Interrupt ID
Bit (Note 5)
DMA Mode
Select (Note
0 0 FIFOs
Enabled
(Note 5)
Reserved Reserved RCVR Trigger
LSB
FIFOs
Enabled
(Note 5)
RCVR Trigger
MSB
6)
Number of
Stop Bits
(STB)
OUT1
(Note 3)
Parity Error
(PE)
Trailing Edge
Ring Indicator
(TERI)
Bit 2
Bit 2
Bit 10
Parity Enable
(PEN)
OUT2
Even Parity
Stick Parity Set Break
Select (EPS)
Loop 0 0 0
(Note 3)
Framing Error
(FE)
Delta Data
Carrier Detect
Break
Interrupt (BI)
Clear to Send
(CTS)
Transmitter
Holding
Register
(THRE)
Data Set
Ready (DSR)
Transmitter
Empty
(TEMT)
(Note 2)
Ring Indicator
(RI)
(DDCD)
Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
Bit 3 Bit 4 Bit 5 Bit 6 Bit 7
Bit 11 Bit 12 Bit 13 Bit 14 Bit 15
Divisor Latch
Access Bit
(DLAB)
Error in
RCVR FIFO
(Note 5)
Data Carrier
Detect (DCD)
Note 3: This bit no longer has a pin associated with it.
Note 4: When operating in the XT mode, this register is not available.
Note 5: These bits are always zero in the non-FIFO mode.
Note 6: Writing a one to this bit has no effect. DMA modes are not supported in this chip.
Note 7: The UART1 and UART2 FCR’s are shadowed in the UART1 FIFO Control Shadow
Register (LD8:CRC3[7:0]) and UART2 FIFO Control Shadow Register (LD8:CRC4[7:0]).
Page 79

79
NOTES ON SERIAL PORT OPERATION
FIFO MODE OPERATION:
GENERAL
The RCVR FIFO will hold up to 16 bytes
regardless of which trigger level is selected.
TX AND RX FIFO OPERATION
The Tx portion of the UART transmits data
through TXD as soon as the CPU loads a byte
into the Tx FIFO. The UART will prevent
loads to the Tx FIFO if it currently holds 16
characters. Loading to the Tx FIFO will again
be enabled as soon as the next character is
transferred to the Tx shift register. These
capabilities account for the largely autonomous
operation of the Tx.
The UART starts the above operations typically
with a Tx interrupt. The chip issues a Tx
interrupt whenever the Tx FIFO is empty and the
Tx interrupt is enabled, except in the following
instance. Assume that the Tx FIFO is empty
and the CPU starts to load it. When the first
byte enters the FIFO the Tx FIFO empty
interrupt will transition from active to inactive.
Depending on the execution speed of the service
routine software, the UART may be able to
transfer this byte from the FIFO to the shift
register before the CPU loads another byte. If
this happens, the Tx FIFO will be empty again
and typically the UART's interrupt line would
transition to the active state. This could cause a
system with an interrupt control unit to record a
Tx FIFO empty condition, even though the CPU
is currently servicing that interrupt. Therefore,
after the first byte has been loaded into the
FIFO the UART will wait one serial character
transmission time before issuing a new Tx
FIFO empty interrupt. This one character Tx
interrupt delay will remain active
until at least two bytes have the Tx FIFO
empties after this condition, the Tx been
loaded into the FIFO, concurrently. When
interrupt will be activated without a one
character delay.
Rx support functions and operation are quite
different from those described for the
transmitter. The Rx FIFO receives data until the
number of bytes in the FIFO equals the selected
interrupt trigger level. At that time if Rx
interrupts are enabled, the UART will issue an
interrupt to the CPU. The Rx FIFO will continue
to store bytes until it holds 16 of them. It will
not accept any more data when it is full. Any
more data entering the Rx shift register will set
the Overrun Error flag. Normally, the FIFO
depth and the programmable trigger levels will
give the CPU ample time to empty the Rx FIFO
before an overrun occurs.
One side-effect of having a Rx FIFO is that the
selected interrupt trigger level may be above the
data level in the FIFO. This could occur when
data at the end of the block contains fewer bytes
than the trigger level. No interrupt would be
issued to the CPU and the data would remain in
the UART. To prevent the software from
having to check for this situation the chip
incorporates a timeout interrupt.
The timeout interrupt is activated when there is
a least one byte in the Rx FIFO, and neither the
CPU nor the Rx shift register has accessed the
Rx FIFO within 4 character times of the last
byte. The timeout interrupt is cleared or reset
when the CPU reads the Rx FIFO or another
character enters it.
These FIFO related features allow optimization
of CPU/UART transactions and are especially
useful given the higher baud rate capability (256
kbaud).
Page 80

80
INFRARED INTERFACE
The infrared interface provides a two-way
wireless communications port using infrared as
a transmission medium. Several IR
implementations have been provided for the
second UART in this chip (logical device 5),
IrDA, Consumer Remote Control, and Amplitude
Shift Keyed IR. The IR transmission can use
the standard UART2 TXD2 and RXD2 pins or
optional IRTX and IRRX pins. These can be
selected through the configuration registers.
IrDA 1.0 allows serial communication at baud
rates up to 115.2 kbps. Each word is sent
serially beginning with a zero value start bit. A
zero is signaled by sending a single IR pulse at
the beginning of the serial bit time. A one is
signaled by sending no IR pulse during the bit
time. Please refer to the AC timing for the
parameters of these pulses and the IrDA
waveform.
The consumer remote control interface can
decode NEC PPM remote control frames in
hardware as well provide a general-purpose
synchronous ASK encoder/decoder with
programmable carrier frequency and bit rates to
emulate many other popular remote control
encoding formats; including 38 kHz PPM, PWM
and RC-5. Consult the SMSC CIrCC data
sheet for more details.
The Amplitude Shift Keyed IR allows
asynchronous serial communication at baud
rates up to 19.2K Baud. Each word is sent
serially beginning with a zero value start bit. A
zero is signaled by sending a 500KHz waveform
for the duration of the serial bit time. A one is
signaled by sending no transmission during the
bit time. Please refer to the AC timing for the
parameters of the ASK-IR waveform.
If the Half Duplex option is chosen, there is a
time-out when the direction of the transmission
is changed. This time-out starts at the last bit
transferred during a transmission and blocks the
receiver input until the timeout expires. If the
transmit buffer is loaded with more data before
the time-out expires, the timer is restarted after
the new byte is transmitted. If data is loaded
into the transmit buffer while a character is
being received, the transmission will not start
until the time-out expires after the last receive
bit has been received. If the start bit of another
character is received during this time-out, the
timer is restarted after the new character is
received. The IR half duplex time-out is
programmable via CRF2 in Logical Device 5.
This register allows the time-out to be
programmed to any value between 0 and
10msec in 100usec increments.
Page 81

81
PARALLEL PORT
The FDC37B77x incorporates an IBM XT/AT
compatible parallel port. This supports the
optional PS/2 type bi-directional parallel port
(SPP), the Enhanced Parallel Port (EPP) and
The parallel port also incorporates SMSC's
ChiProtect circuitry, which prevents possible
damage to the parallel port due to printer power-
up.
the Extended Capabilities Port (ECP) parallel
port modes. Refer to the Configuration
Registers for information on disabling, power
down, changing the base address of the parallel
port, and selecting the mode of operation.
The functionality of the Parallel Port is achieved
through the use of eight addressable ports, with
their associated registers and control gating.
The control and data port are read/write by the
CPU, the status port is read/write in the EPP
The FDC37B77x also provides a mode for
support of the floppy disk controller on the
mode. The address map of the Parallel Port is
shown below:
parallel port.
DATA PORT BASE ADDRESS + 00H
STATUS PORT BASE ADDRESS + 01H
CONTROL PORT BASE ADDRESS + 02H
EPP ADDR PORT BASE ADDRESS + 03H
EPP DATA PORT 0 BASE ADDRESS + 04H
EPP DATA PORT 1 BASE ADDRESS + 05H
EPP DATA PORT 2 BASE ADDRESS + 06H
EPP DATA PORT 3 BASE ADDRESS + 07H
The bit map of these registers is:
D0 D1 D2 D3 D4 D5 D6 D7 Note
DATA PORT PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 1
STATUS
PORT
CONTROL
PORT
EPP ADDR
PORT
EPP DATA
PORT 0
EPP DATA
PORT 1
EPP DATA
PORT 2
EPP DATA
PORT 3
TMOUT 0 0 nERR SLCT PE nACK nBUSY 1
STROBE AUTOFD nINIT SLC IRQE PCD 0 0 1
PD0 PD1 PD2 PD3 PD4 PD5 PD6 AD7 2,3
PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 2,3
PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 2,3
PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 2,3
PD0 PD1 PD2 PD3 PD4 PD5 PD6 PD7 2,3
Note 1: These registers are available in all modes.
Note 2: These registers are only available in EPP mode.
Note 3: For EPP mode, IOCHRDY must be connected to the ISA bus.
Page 82

82
Table 34 - Parallel Port Connector
HOST
CONNECTOR PIN NUMBER STANDARD EPP ECP
1 nStrobe nWrite nStrobe
2-9 PData<0:7> PData<0:7> PData<0:7>
10 nAck Intr nAck
11 Busy nWait Busy, PeriphAck(3)
12 PE (NU) PError,
nAckReverse(3)
13 Select (NU) Select
14 nAutofd nDatastb nAutoFd,
HostAck(3)
15 nError (NU) nFault(1)
nPeriphRequest(3)
16 nInit (NU) nInit(1)
nReverseRqst(3)
17 nSelectin nAddrstrb nSelectIn(1,3)
(1) = Compatible Mode
(3) = High Speed Mode
Note: For the cable interconnection required for ECP support and the Slave Connector pin
numbers, refer to the IEEE 1284 Extended Capabilities Port Protocol and ISA Standard, Rev.
1.14, July 14, 1993. This document is available from Microsoft.
Page 83

83
IBM XT/AT COMPATIBLE, BI-DIRECTIONAL
AND EPP MODES
DATA PORT
ADDRESS OFFSET = 00H
BIT 3 nERR - nERROR
The level on the nERROR input is read by the
CPU as bit 3 of the Printer Status Register. A
logic 0 means an error has been detected; a
logic 1 means no error has been detected.
The Data Port is located at an offset of '00H'
from the base address. The data register is
cleared at initialization by RESET. During a
WRITE operation, the Data Register latches the
contents of the data bus with the rising edge of
the nIOW input. The contents of this register
are buffered (non inverting) and output onto the
PD0 - PD7 ports. During a READ operation in
SPP mode, PD0 - PD7 ports are buffered (not
latched) and output to the host CPU.
STATUS PORT
ADDRESS OFFSET = 01H
The Status Port is located at an offset of '01H'
from the base address. The contents of this
register are latched for the duration of an nIOR
read cycle. The bits of the Status Port are
defined as follows:
BIT 0 TMOUT - TIME OUT
This bit is valid in EPP mode only and indicates
that a 10 usec time out has occurred on the
EPP bus. A logic O means that no time out
error has occurred; a logic 1 means that a time
out error has been detected. This bit is cleared
by a RESET. Writing a one to this bit clears the
time out status bit. On a write, this bit is self
clearing and does not require a write of a zero.
Writing a zero to this bit has no effect.
BIT 4 SLCT - PRINTER SELECTED STATUS
The level on the SLCT input is read by the CPU
as bit 4 of the Printer Status Register. A logic 1
means the printer is on line; a logic 0 means it is
not selected.
BIT 5 PE - PAPER END
The level on the PE input is read by the CPU as
bit 5 of the Printer Status Register. A logic 1
indicates a paper end; a logic 0 indicates the
presence of paper.
BIT 6 nACK - nACKNOWLEDGE
The level on the nACK input is read by the CPU
as bit 6 of the Printer Status Register. A logic 0
means that the printer has received a character
and can now accept another. A logic 1 means
that it is still processing the last character or has
not received the data.
BIT 7 nBUSY - nBUSY
The complement of the level on the BUSY input
is read by the CPU as bit 7 of the Printer Status
Register. A logic 0 in this bit means that the
printer is busy and cannot accept a new
character. A logic 1 means that it is ready to
accept the next character.
CONTROL PORT
ADDRESS OFFSET = 02H
BITS 1, 2 - are not implemented as register bits,
during a read of the Printer Status Register
these bits are a low level.
The Control Port is located at an offset of '02H'
from the base address. The Control Register is
initialized by the RESET input, bits 0 to 5 only
being affected; bits 6 and 7 are hard wired low.
Page 84

84
BIT 0 STROBE - STROBE
This bit is inverted and output onto the
nSTROBE output.
BIT 1 AUTOFD - AUTOFEED
This bit is inverted and output onto the
nAUTOFD output. A logic 1 causes the printer
to generate a line feed after each line is printed.
A logic 0 means no autofeed.
BIT 2 nINIT - nINITIATE OUTPUT
This bit is output onto the nINIT output without
inversion.
BIT 3 SLCTIN - PRINTER SELECT INPUT
This bit is inverted and output onto the nSLCTIN
output. A logic 1 on this bit selects the printer; a
logic 0 means the printer is not selected.
BIT 4 IRQE - INTERRUPT REQUEST ENABLE
The interrupt request enable bit when set to a
high level may be used to enable interrupt
requests from the Parallel Port to the CPU. An
interrupt request is generated on the IRQ port by
a positive going nACK input. When the IRQE
bit is programmed low the IRQ is disabled.
BIT 5 PCD - PARALLEL CONTROL
DIRECTION
Parallel Control Direction is not valid in printer
mode. In printer mode, the direction is always
out regardless of the state of this bit. In bidirectional, EPP or ECP mode, a logic 0 means
that the printer port is in output mode (write); a
logic 1 means that the printer port is in input
mode (read).
Bits 6 and 7 during a read are a low level, and
cannot be written.
EPP ADDRESS PORT
ADDRESS OFFSET = 03H
The EPP Address Port is located at an offset of
'03H' from the base address. The address
register is cleared at initialization by RESET.
During a WRITE operation, the contents of DB0DB7 are buffered (non inverting) and output onto
the PD0 - PD7 ports, the leading edge of nIOW
causes an EPP ADDRESS WRITE cycle to be
performed, the trailing edge of IOW latches the
data for the duration of the EPP write cycle.
During a READ operation, PD0 - PD7 ports are
read, the leading edge of IOR causes an EPP
ADDRESS READ cycle to be performed and the
data output to the host CPU, the deassertion of
ADDRSTB latches the PData for the duration of
the IOR cycle. This register is only available in
EPP mode.
EPP DATA PORT 0
ADDRESS OFFSET = 04H
The EPP Data Port 0 is located at an offset of
'04H' from the base address. The data register
is cleared at initialization by RESET. During a
WRITE operation, the contents of DB0-DB7 are
buffered (non inverting) and output onto the PD0
- PD7 ports, the leading edge of nIOW causes
an EPP DATA WRITE cycle to be performed,
the trailing edge of IOW latches the data for the
duration of the EPP write cycle. During a READ
operation, PD0 - PD7 ports are read, the leading
edge of IOR causes an EPP READ cycle to be
performed and the data output to the host CPU,
the deassertion of DATASTB latches the PData
for the duration of the IOR cycle. This register
is only available in EPP mode.
EPP DATA PORT 1
ADDRESS OFFSET = 05H
The EPP Data Port 1 is located at an offset of
'05H' from the base address. Refer to EPP
DATA PORT 0 for a description of operation.
This register is only available in EPP mode.
Page 85

85
EPP DATA PORT 2
ADDRESS OFFSET = 06H
The EPP Data Port 2 is located at an offset of
'06H' from the base address. Refer to EPP
DATA PORT 0 for a description of operation.
This register is only available in EPP mode.
EPP DATA PORT 3
ADDRESS OFFSET = 07H
The EPP Data Port 3 is located at an offset of
'07H' from the base address. Refer to EPP
DATA PORT 0 for a description of operation.
This register is only available in EPP mode.
EPP 1.9 OPERATION
When the EPP mode is selected in the
configuration register, the standard and bidirectional modes are also available. If no EPP
Read, Write or Address cycle is currently
executing, then the PDx bus is in the standard or
bi-directional mode, and all output signals
(STROBE, AUTOFD, INIT) are as set by the
SPP Control Port and direction is controlled by
PCD of the Control port.
In EPP mode, the system timing is closely
coupled to the EPP timing. For this reason, a
watchdog timer is required to prevent system
lockup. The timer indicates if more than 10usec
have elapsed from the start of the EPP cycle
(nIOR or nIOW asserted) to nWAIT being
deasserted (after command). If a time-out
occurs, the current EPP cycle is aborted and the
time-out condition is indicated in Status bit 0.
During an EPP cycle, if STROBE is active, it
overrides the EPP write signal forcing the PDx
bus to always be in a write mode and the
nWRITE signal to always be asserted.
Page 86

86
Software Constraints
Before an EPP cycle is executed, the software
must ensure that the control register bit PCD is
a logic "0" (ie a 04H or 05H should be written to
the Control port). If the user leaves PCD as a
logic "1", and attempts to perform an EPP write,
the chip is unable to perform the write (because
PCD is a logic "1") and will appear to perform an
EPP read on the parallel bus, no error is
indicated.
EPP 1.9 Write
The timing for a write operation (address or
data) is shown in timing diagram EPP Write
Data or Address cycle. IOCHRDY is driven
active low at the start of each EPP write and is
released when it has been determined that the
write cycle can complete. The write cycle can
complete under the following circumstances:
1. If the EPP bus is not ready (nWAIT is active
low) when nDATASTB or nADDRSTB goes
active then the write can complete when
nWAIT goes inactive high.
2. If the EPP bus is ready (nWAIT is inactive
high) then the chip must wait for it to go
active low before changing the state of
nDATASTB, nWRITE or nADDRSTB. The
write can complete once nWAIT is
determined inactive.
Write Sequence of operation
1. The host selects an EPP register, places
data on the SData bus and drives nIOW
active.
2. The chip drives IOCHRDY inactive (low).
3. If WAIT is not asserted, the chip must wait
until WAIT is asserted.
4. The chip places address or data on PData
bus, clears PDIR, and asserts nWRITE.
5. Chip asserts nDATASTB or nADDRSTRB
indicating that PData bus contains valid
information, and the WRITE signal is valid.
6. Peripheral deasserts nWAIT, indicating that
any setup requirements have been satisfied
and the chip may begin the termination
phase of the cycle.
7. a) The chip deasserts nDATASTB or
nADDRSTRB, this marks the beginning
of the termination phase. If it has not
already done so, the peripheral should
latch the information byte now.
b) The chip latches the data from the
SData bus for the PData bus and
asserts (releases) IOCHRDY allowing
the host to complete the write cycle.
8. Peripheral asserts nWAIT, indicating to the
host that any hold time requirements have
been satisfied and acknowledging the
termination of the cycle.
9. Chip may modify nWRITE and nPDATA in
preparation for the next cycle.
EPP 1.9 Read
The timing for a read operation (data) is shown
in timing diagram EPP Read Data cycle.
IOCHRDY is driven active low at the start of
each EPP read and is released when it has been
determined that the read cycle can complete.
The read cycle can complete under the following
circumstances:
1 If the EPP bus is not ready (nWAIT is active
low) when nDATASTB goes active then the
read can complete when nWAIT goes
inactive high.
2. If the EPP bus is ready (nWAIT is inactive
high) then the chip must wait for it to go
active low before changing the state of
WRITE or before nDATASTB goes active.
The read can complete once nWAIT is
determined inactive.
Page 87

87
Read Sequence of Operation
1. The host selects an EPP register and drives
nIOR active.
2. The chip drives IOCHRDY inactive (low).
3. If WAIT is not asserted, the chip must wait
until WAIT is asserted.
4. The chip tri-states the PData bus and
deasserts nWRITE.
5. Chip asserts nDATASTB or nADDRSTRB
indicating that PData bus is tri-stated, PDIR
is set and the nWRITE signal is valid.
6. Peripheral drives PData bus valid.
7. Peripheral deasserts nWAIT, indicating that
PData is valid and the chip may begin the
termination phase of the cycle.
8. a) The chip latches the data from the
PData bus for the SData bus and
deasserts nDATASTB or nADDRSTRB.
This marks the beginning of the
termination phase.
b) The chip drives the valid data onto the
SData bus and asserts (releases)
IOCHRDY allowing the host to
complete the read cycle.
9. Peripheral tri-states the PData bus and
asserts nWAIT, indicating to the host that
the PData bus is tri-stated.
10. Chip may modify nWRITE, PDIR and
nPDATA in preparation for the next cycle.
EPP 1.7 OPERATION
When the EPP 1.7 mode is selected in the
configuration register, the standard and bidirectional modes are also available. If no EPP
Read, Write or Address cycle is currently
executing, then the PDx bus is in the standard or
bi-directional mode, and all output signals
(STROBE, AUTOFD, INIT) are as set by the
SPP Control Port and direction is controlled by
PCD of the Control port.
In EPP mode, the system timing is closely
coupled to the EPP timing. For this reason, a
watchdog timer is required to prevent system
lockup. The timer indicates if more than 10usec
have elapsed from the start of the EPP cycle
(nIOR or nIOW asserted) to the end of the cycle
nIOR or nIOW deasserted). If a time-out
occurs, the current EPP cycle is aborted and the
time-out condition is indicated in Status bit 0.
Software Constraints
Before an EPP cycle is executed, the software
must ensure that the control register bits D0, D1
and D3 are set to zero. Also, bit D5 (PCD) is a
logic "0" for an EPP write or a logic "1" for and
EPP read.
EPP 1.7 Write
The timing for a write operation (address or
data) is shown in timing diagram EPP 1.7 Write
Data or Address cycle. IOCHRDY is driven
active low when nWAIT is active low during the
EPP cycle. This can be used to extend the cycle
time. The write cycle can complete when
nWAIT is inactive high.
Write Sequence of Operation
1. The host sets PDIR bit in the control
register to a logic "0". This asserts
nWRITE.
2. The host selects an EPP register, places
data on the SData bus and drives nIOW
active.
3. The chip places address or data on PData
bus.
4. Chip asserts nDATASTB or nADDRSTRB
indicating that PData bus contains valid
information, and the WRITE signal is valid.
5. If nWAIT is asserted, IOCHRDY is
deasserted until the peripheral deasserts
nWAIT or a time-out occurs.
6. When the host deasserts nIOW the chip
deasserts nDATASTB or nADDRSTRB and
Page 88

88
latches the data from the SData bus for the
PData bus.
7. Chip may modify nWRITE, PDIR and
nPDATA in preparation of the next cycle.
EPP 1.7 Read
The timing for a read operation (data) is shown
in timing diagram EPP 1.7 Read Data cycle.
IOCHRDY is driven active low when nWAIT is
active low during the EPP cycle. This can be
used to extend the cycle time. The read cycle
can complete when nWAIT is inactive high.
Read Sequence of Operation
1. The host sets PDIR bit in the control
register to a logic "1". This deasserts
nWRITE and tri-states the PData bus.
2. The host selects an EPP register and drives
nIOR active.
3. Chip asserts nDATASTB or nADDRSTRB
indicating that PData bus is tri-stated, PDIR
is set and the nWRITE signal is valid.
4. If nWAIT is asserted, IOCHRDY is
deasserted until the peripheral deasserts
nWAIT or a time-out occurs.
5. The Peripheral drives PData bus valid.
6. The Peripheral deasserts nWAIT, indicating
that PData is valid and the chip may begin
the termination phase of the cycle.
7. When the host deasserts nIOR the chip
deasserts nDATASTB or nADDRSTRB.
8. Peripheral tri-states the PData bus.
9. Chip may modify nWRITE, PDIR and
nPDATA in preparation of the next cycle.
Page 89

89
Table 35 - EPP Pin Descriptions
EPP
SIGNAL EPP NAME TYPE EPP DESCRIPTION
nWRITE nWrite O This signal is active low. It denotes a write operation.
PD<0:7> Address/Data I/O Bi-directional EPP byte wide address and data bus.
INTR Interrupt I This signal is active high and positive edge triggered. (Pass
through with no inversion, Same as SPP).
WAIT nWait I This signal is active low. It is driven inactive as a positive
acknowledgement from the device that the transfer of data is
completed. It is driven active as an indication that the
device is ready for the next transfer.
DATASTB nData Strobe O This signal is active low. It is used to denote data read or
write operation.
RESET nReset O This signal is active low. When driven active, the EPP
device is reset to its initial operational mode.
ADDRSTB nAddress
Strobe
PE Paper End I Same as SPP mode.
SLCT Printer
Selected
Status
nERR Error I Same as SPP mode.
PDIR Parallel Port
Direction
O This signal is active low. It is used to denote address read
or write operation.
I Same as SPP mode.
O This output shows the direction of the data transfer on the
parallel port bus. A low means an output/write condition and
a high means an input/read condition. This signal is
normally a low (output/write) unless PCD of the control
register is set or if an EPP read cycle is in progress.
Note 1: SPP and EPP can use 1 common register.
Note 2: nWrite is the only EPP output that can be over-ridden by SPP control port during an EPP
cycle. For correct EPP read cycles, PCD is required to be a low.
Page 90

90
EXTENDED CAPABILITIES PARALLEL PORT
ECP provides a number of advantages, some of
which are listed below. The individual features
are explained in greater detail in the remainder
of this section.
• High performance half-duplex forward and
reverse channel
• Interlocked handshake, for fast reliable
transfer
• Optional single byte RLE compression for
improved throughput (64:1)
• Channel addressing for low-cost peripherals
• Maintains link and data layer separation
• Permits the use of active output drivers
• Permits the use of adaptive signal timing
• Peer-to-peer capability
Vocabulary
The following terms are used in this document:
assert: When a signal asserts it transitions to a
"true" state, when a signal deasserts it
transitions to a "false" state.
forward: Host to Peripheral communication.
reverse: Peripheral to Host communication
Pword: A port word; equal in size to the width
of the ISA interface. For this
implementation, PWord is always 8
bits.
1 A high level.
0 A low level.
These terms may be considered synonymous:
• PeriphClk, nAck
• HostAck, nAutoFd
• PeriphAck, Busy
• nPeriphRequest, nFault
• nReverseRequest, nInit
• nAckReverse, PError
• Xflag, Select
• ECPMode, nSelectln
• HostClk, nStrobe
Reference Document: IEEE 1284 Extended
Capabilities Port Protocol and ISA Interface
Standard, Rev 1.14, July 14, 1993. This
document is available from Microsoft.
The bit map of the Extended Parallel Port
registers is:
D7 D6 D5 D4 D3 D2 D1 D0 Note
data PD7 PD6 PD5 PD4 PD3 PD2 PD1 PD0
ecpAFifo Addr/RLE Address or RLE field 2
dsr nBusy nAck PError Select nFault 0 0 0 1
dcr 0 0 Direction ackIntEn SelectIn nInit autofd strobe 1
cFifo Parallel Port Data FIFO 2
ecpDFifo ECP Data FIFO 2
tFifo Test FIFO 2
cnfgA 0 0 0 1 0 0 0 0
cnfgB compress intrValue Parallel Port IRQ Parallel Port DMA
ecr MODE nErrIntrEn dmaEn serviceIntr full empty
Note 1: These registers are available in all modes.
Note 2: All FIFOs use one common 16 byte FIFO.
Note 3: The ECP Parallel Port Config Reg B reflects the IRQ and DRQ selected by the Configuration
Registers.
Page 91

91
ISA IMPLEMENTATION STANDARD
This specification describes the standard ISA
interface to the Extended Capabilities Port
(ECP). All ISA devices supporting ECP must
meet the requirements contained in this section
or the port will not be supported by Microsoft.
For a description of the ECP Protocol, please
refer to the IEEE 1284 Extended Capabilities
Port Protocol and ISA Interface Standard, Rev.
1.14, July 14, 1993. This document is available
from Microsoft.
Description
The port is software and hardware compatible
with existing parallel ports so that it may be
used as a standard LPT port if ECP is not
required. The port is designed to be simple and
requires a small number of gates to implement.
It does not do any "protocol" negotiation,
rather it provides an automatic high
burst-bandwidth channel that supports DMA for
ECP in both the forward and reverse directions.
Small FIFOs are employed in both forward and
reverse directions to smooth data flow and
improve the maximum bandwidth requirement.
The size of the FIFO is 16 bytes deep. The port
supports an automatic handshake for the
standard parallel port to improve compatibility
mode transfer speed.
The port also supports run length encoded
(RLE) decompression (required) in hardware.
Compression is accomplished by counting
identical bytes and transmitting an RLE byte
that indicates how many times the next byte is
to be repeated. Decompression simply
intercepts the RLE byte and repeats the
following byte the specified number of times.
Hardware support for compression is optional.
Page 92

92
Table 36 - ECP Pin Descriptions
NAME TYPE DESCRIPTION
nStrobe O During write operations nStrobe registers data or address into the slave
on the asserting edge (handshakes with Busy).
PData 7:0 I/O Contains address or data or RLE data.
nAck I Indicates valid data driven by the peripheral when asserted. This signal
handshakes with nAutoFd in reverse.
PeriphAck (Busy) I This signal deasserts to indicate that the peripheral can accept data.
This signal handshakes with nStrobe in the forward direction. In the
reverse direction this signal indicates whether the data lines contain
ECP command information or data. The peripheral uses this signal to
flow control in the forward direction. It is an "interlocked" handshake
with nStrobe. PeriphAck also provides command information in the
reverse direction.
PError
(nAckReverse)
I Used to acknowledge a change in the direction the transfer (asserted =
forward). The peripheral drives this signal low to acknowledge
nReverseRequest. It is an "interlocked" handshake with
nReverseRequest. The host relies upon nAckReverse to determine
when it is permitted to drive the data bus.
Select I Indicates printer on line.
nAutoFd
(HostAck)
O Requests a byte of data from the peripheral when asserted,
handshaking with nAck in the reverse direction. In the forward direction
this signal indicates whether the data lines contain ECP address or
data. The host drives this signal to flow control in the reverse direction.
It is an "interlocked" handshake with nAck. HostAck also provides
command information in the forward phase.
nFault
(nPeriphRequest)
I Generates an error interrupt when asserted. This signal provides a
mechanism for peer-to-peer communication. This signal is valid only in
the forward direction. During ECP Mode the peripheral is permitted
(but not required) to drive this pin low to request a reverse transfer. The
request is merely a "hint" to the host; the host has ultimate control over
the transfer direction. This signal would be typically used to generate
an interrupt to the host CPU.
nInit O Sets the transfer direction (asserted = reverse, deasserted = forward).
This pin is driven low to place the channel in the reverse direction. The
peripheral is only allowed to drive the bi-directional data bus while in
ECP Mode and HostAck is low and nSelectIn is high.
nSelectIn O Always deasserted in ECP mode.
Page 93

93
Register Definitions
The register definitions are based on the
standard IBM addresses for LPT. All of the
standard printer ports are supported. The
additional registers attach to an upper bit
decode of the standard LPT port definition
Table 37 - ECP Register Definitions
NAME ADDRESS (Note 1) ECP MODES FUNCTION
data +000h R/W 000-001 Data Register
ecpAFifo +000h R/W 011 ECP FIFO (Address)
dsr +001h R/W All Status Register
dcr +002h R/W All Control Register
cFifo +400h R/W 010 Parallel Port Data FIFO
ecpDFifo +400h R/W 011 ECP FIFO (DATA)
tFifo +400h R/W 110 Test FIFO
cnfgA +400h R 111 Configuration Register A
cnfgB +401h R/W 111 Configuration Register B
ecr +402h R/W All Extended Control Register
Note 1: These addresses are added to the parallel port base address as selected by configuration
register or jumpers.
Note 2: All addresses are qualified with AEN. Refer to the AEN pin definition.
to avoid conflict with standard ISA devices. The
port is equivalent to a generic parallel port
interface and may be operated in that mode.
The port registers vary depending on the mode
field in the ecr. The table below lists these
dependencies. Operation of the devices in
modes other that those specified is undefined.
Table 38 - Mode Descriptions
MODE DESCRIPTION*
000 SPP mode
001 PS/2 Parallel Port mode
010 Parallel Port Data FIFO mode
011 ECP Parallel Port mode
100 EPP mode (If this option is enabled in the configuration registers)
101 Reserved
110 Test mode
111 Configuration mode
*Refer to ECR Register Description
Page 94

94
DATA and ecpAFifo PORT
ADDRESS OFFSET = 00H
Modes 000 and 001 (Data Port)
The Data Port is located at an offset of '00H'
from the base address. The data register is
cleared at initialization by RESET. During a
WRITE operation, the Data Register latches the
contents of the data bus on the rising edge of
the nIOW input. The contents of this register
are buffered (non inverting) and output onto the
PD0 - PD7 ports. During a READ operation,
PD0 - PD7 ports are read and output to the host
CPU.
Mode 011 (ECP FIFO - Address/RLE)
A data byte written to this address is placed in
the FIFO and tagged as an ECP Address/RLE.
The hardware at the ECP port transmits this
byte to the peripheral automatically. The
operation of this register is ony defined for the
forward direction (direction is 0). Refer to the
ECP Parallel Port Forward Timing Diagram,
located in the Timing Diagrams section of this
data sheet .
DEVICE STATUS REGISTER (dsr)
ADDRESS OFFSET = 01H
The Status Port is located at an offset of '01H'
from the base address. Bits 0 - 2 are not
implemented as register bits, during a read of
the Printer Status Register these bits are a low
level. The bits of the Status Port are defined as
follows:
BIT 3 nFault
The level on the nFault input is read by the CPU
as bit 3 of the Device Status Register.
BIT 4 Select
The level on the Select input is read by the CPU
as bit 4 of the Device Status Register.
BIT 5 PError
The level on the PError input is read by the CPU
as bit 5 of the Device Status Register. Printer
Status Register.
BIT 6 nAck
The level on the nAck input is read by the CPU
as bit 6 of the Device Status Register.
BIT 7 nBusy
The complement of the level on the BUSY input
is read by the CPU as bit 7 of the Device Status
Register.
DEVICE CONTROL REGISTER (dcr)
ADDRESS OFFSET = 02H
The Control Register is located at an offset of
'02H' from the base address. The Control
Register is initialized to zero by the RESET
input, bits 0 to 5 only being affected; bits 6 and
7 are hard wired low.
BIT 0 STROBE - STROBE
This bit is inverted and output onto the
nSTROBE output.
BIT 1 AUTOFD - AUTOFEED
This bit is inverted and output onto the
nAUTOFD output. A logic 1 causes the printer
to generate a line feed after each line is printed.
A logic 0 means no autofeed.
BIT 2 nINIT - nINITIATE OUTPUT
This bit is output onto the nINIT output without
inversion.
BIT 3 SELECTIN
This bit is inverted and output onto the nSLCTIN
output. A logic 1 on this bit selects the printer; a
logic 0 means the printer is not selected.
BIT 4 ackIntEn - INTERRUPT REQUEST
ENABLE
The interrupt request enable bit when set to a
high level may be used to enable interrupt
requests from the Parallel Port to the CPU due
to a low to high transition on the nACK input.
Refer to the description of the interrupt under
Operation, Interrupts.
Page 95

95
BIT 5 DIRECTION
If mode=000 or mode=010, this bit has no effect
and the direction is always out regardless of the
state of this bit. In all other modes, Direction is
valid and a logic 0 means that the printer port is
in output mode (write); a logic 1 means that the
printer port is in input mode (read).
BITS 6 and 7 during a read are a low level, and
cannot be written.
cFifo (Parallel Port Data FIFO)
ADDRESS OFFSET = 400h
Mode = 010
Bytes written or DMAed from the system to this
FIFO are transmitted by a hardware handshake
to the peripheral using the standard parallel port
protocol. Transfers to the FIFO are byte
aligned. This mode is only defined for the
forward direction.
Data in the tFIFO will not be transmitted to the
to the parallel port lines using a hardware
protocol handshake. However, data in the
tFIFO may be displayed on the parallel port data
lines.
The tFIFO will not stall when overwritten or
underrun. If an attempt is made to write data to
a full tFIFO, the new data is not accepted into
the tFIFO. If an attempt is made to read data
from an empty tFIFO, the last data byte is reread again. The full and empty bits must
always keep track of the correct FIFO state. The
tFIFO will transfer data at the maximum ISA
rate so that software may generate performance
metrics.
The FIFO size and interrupt threshold can be
determined by writing bytes to the FIFO and
checking the full and serviceIntr bits.
ecpDFifo (ECP Data FIFO)
ADDRESS OFFSET = 400H
Mode = 011
Bytes written or DMAed from the system to this
FIFO, when the direction bit is 0, are transmitted
by a hardware handshake to the peripheral
using the ECP parallel port protocol. Transfers
to the FIFO are byte aligned.
Data bytes from the peripheral are read under
automatic hardware handshake from ECP into
this FIFO when the direction bit is 1. Reads or
DMAs from the FIFO will return bytes of ECP
data to the system.
tFifo (Test FIFO Mode)
ADDRESS OFFSET = 400H
Mode = 110
Data bytes may be read, written or DMAed to or
from the system to this FIFO in any direction.
The writeIntrThreshold can be determined by
starting with a full tFIFO, setting the direction bit
to 0 and emptying it a byte at a time until
serviceIntr is set. This may generate a spurious
interrupt, but will indicate that the threshold has
been reached.
The readIntrThreshold can be determined by
setting the direction bit to 1 and filling the empty
tFIFO a byte at a time until serviceIntr is set.
This may generate a spurious interrupt, but will
indicate that the threshold has been reached.
Data bytes are always read from the head of
tFIFO regardless of the value of the direction bit.
For example if 44h, 33h, 22h is written to the
FIFO, then reading the tFIFO will return 44h,
33h, 22h in the same order as was written.
cnfgA (Configuration Register A)
ADDRESS OFFSET = 400H
Mode = 111
Page 96

96
This register is a read only register. When read,
10H is returned. This indicates to the system
that this is an 8-bit implementation. (PWord = 1
byte)
cnfgB (Configuration Register B)
ADDRESS OFFSET = 401H
Mode = 111
BIT 7 compress
This bit is read only. During a read it is a low
level. This means that this chip does not
support hardware RLE compression. It does
support hardware de-compression!
BIT 6 intrValue
Returns the value on the ISA IRq line to
determine possible conflicts.
BITS [5:3] Parallel Port IRQ (read-only)
Refer to Table 39B.
BITS [2:0] Parallel Port DMA (read-only)
Refer to Table 39C.
ecr (Extended Control Register)
ADDRESS OFFSET = 402H
Mode = all
This register controls the extended ECP parallel
port functions.
BITS 7,6,5
These bits are Read/Write and select the Mode.
BIT 4 nErrIntrEn
Read/Write (Valid only in ECP Mode)
1: Disables the interrupt generated on the
asserting edge of nFault.
0: Enables an interrupt pulse on the high to
low edge of nFault. Note that an interrupt
will be generated if nFault is asserted
(interrupting) and this bit is written from a 1
to a 0. This prevents interrupts from being
lost in the time between the read of the ecr
and the write of the ecr.
BIT 3 dmaEn
Read/Write
1: Enables DMA (DMA starts when serviceIntr
is 0).
0: Disables DMA unconditionally.
BIT 2 serviceIntr
Read/Write
1: Disables DMA and all of the service
interrupts.
0: Enables one of the following 3 cases of
interrupts. Once one of the 3 service
interrupts has occurred serviceIntr bit shall
be set to a 1 by hardware. It must be reset
to 0 to re-enable the interrupts. Writing this
bit to a 1 will not cause an interrupt.
case dmaEn=1:
During DMA (this bit is set to a 1 when
terminal count is reached).
case dmaEn=0 direction=0:
This bit shall be set to 1 whenever there are
writeIntrThreshold or more bytes free in the
FIFO.
case dmaEn=0 direction=1:
This bit shall be set to 1 whenever there are
readIntrThreshold or more valid bytes to be
read from the FIFO.
BIT 1 full
Read only
1: The FIFO cannot accept another byte or the
FIFO is completely full.
0: The FIFO has at least 1 free byte.
BIT 0 empty
Read only
1: The FIFO is completely empty.
0: The FIFO contains at least 1 byte of data.
Page 97

97
Table 39A - Extended Control Register
R/W MODE
000: Standard Parallel Port Mode . In this mode the FIFO is reset and common collector drivers
are used on the control lines (nStrobe, nAutoFd, nInit and nSelectIn). Setting the direction
bit will not tri-state the output drivers in this mode.
001: PS/2 Parallel Port Mode. Same as above except that direction may be used to tri-state the
data lines and reading the data register returns the value on the data lines and not the
value in the data register. All drivers have active pull-ups (push-pull).
010: Parallel Port FIFO Mode. This is the same as 000 except that bytes are written or DMAed to
the FIFO. FIFO data is automatically transmitted using the standard parallel port protocol.
Note that this mode is only useful when direction is 0. All drivers have active pull-ups
(push-pull).
011: ECP Parallel Port Mode. In the forward direction (direction is 0) bytes placed into the
ecpDFifo and bytes written to the ecpAFifo are placed in a single FIFO and transmitted
automatically to the peripheral using ECP Protocol. In the reverse direction (direction is 1)
bytes are moved from the ECP parallel port and packed into bytes in the ecpDFifo. All
drivers have active pull-ups (push-pull).
100: Selects EPP Mode: In this mode, EPP is selected if the EPP supported option is selected in
configuration register L3-CRF0. All drivers have active pull-ups (push-pull).
101: Reserved
110: Test Mode. In this mode the FIFO may be written and read, but the data will not be
transmitted on the parallel port. All drivers have active pull-ups (push-pull).
111: Configuration Mode. In this mode the confgA, confgB registers are accessible at 0x400 and
0x401. All drivers have active pull-ups (push-pull).
Table 39B Table 39C
CONFIG REG B
IRQ SELECTED
15 110 3 011
14 101 2 010
11 100 1 001
10 011 All Others 000
9 010
7 001
5 111
All Others 000
BITS 5:3 DMA SELECTED
CONFIG REG B
BITS 2:0
Page 98

98
OPERATION
Mode Switching/Software Control
Software will execute P1284 negotiation and all
operation prior to a data transfer phase under
programmed I/O control (mode 000 or 001).
Hardware provides an automatic control line
handshake, moving data between the FIFO and
the ECP port only in the data transfer phase
(modes 011 or 010).
Setting the mode to 011 or 010 will cause the
hardware to initiate data transfer.
If the port is in mode 000 or 001 it may switch to
any other mode. If the port is not in mode 000
or 001 it can only be switched into mode 000 or
001. The direction can only be changed in
mode 001.
Once in an extended forward mode the software
should wait for the FIFO to be empty before
switching back to mode 000 or 001. In this case
all control signals will be deasserted before the
mode switch. In an ecp reverse mode the
software waits for all the data to be read from
the FIFO before changing back to mode 000 or
001. Since the automatic hardware ecp
reverse handshake only cares about the state of
the FIFO it may have acquired extra data which
will be discarded. It may in fact be in the middle
of a transfer when the mode is changed back to
000 or 001. In this case the port will deassert
nAutoFd independent of the state of the transfer.
The design shall not cause glitches on the
handshake signals if the software meets the
constraints above.
ECP Operation
Prior to ECP operation the Host must negotiate
on the parallel port to determine if the peripheral
supports the ECP protocol. This is a
somewhat complex negotiation carried out
under program control in mode 000.
After negotiation, it is necessary to initialize
some of the port bits. The following are required:
• Set Direction = 0, enabling the drivers.
• Set strobe = 0, causing the nStrobe signal
to default to the deasserted state.
• Set autoFd = 0, causing the nAutoFd
signal to default to the deasserted state.
• Set mode = 011 (ECP Mode)
ECP address/RLE bytes or data bytes may be
sent automatically by writing the ecpAFifo or
ecpDFifo respectively.
Note that all FIFO data transfers are byte wide
and byte aligned. Address/RLE transfers are
byte-wide and only allowed in the forward
direction.
The host may switch directions by first switching
to mode = 001, negotiating for the forward or
reverse channel, setting direction to 1 or 0, then
setting mode = 011. When direction is 1 the
hardware shall handshake for each ECP read
data byte and attempt to fill the FIFO. Bytes
may then be read from the ecpDFifo as long as
it is not empty.
ECP transfers may also be accomplished (albeit
slowly) by handshaking individual bytes under
program control in mode = 001, or 000.
Termination from ECP Mode
Termination from ECP Mode is similar to the
termination from Nibble/Byte Modes. The host is
permitted to terminate from ECP Mode only in
specific well-defined states. The termination can
only be executed while the bus is in the forward
direction. To terminate while the channel is in
the reverse direction, it must first be transitioned
into the forward direction.
Page 99

99
Command/Data
ECP Mode supports two advanced features to
improve the effectiveness of the protocol for
some applications. The features are
implemented by allowing the transfer of normal
8 bit data or 8 bit commands.
When in the forward direction, normal data is
transferred when HostAck is high and an 8 bit
command is transferred when HostAck is low.
The most significant bit of the command
indicates whether it is a run-length count (for
compression) or a channel address.
When in the reverse direction, normal data is
transferred when PeriphAck is high and an 8 bit
command is transferred when PeriphAck is low.
The most significant bit of the command is
always zero. Reverse channel addresses are
seldom used and may not be supported in
hardware.
Page 100

100
Table 40 -
Forward Channel Commands (HostAck Low)
Reverse Channel Commands (PeripAck Low)
D7 D[6:0]
0 Run-Length Count (0-127)
(mode 0011 0X00 only)
1 Channel Address (0-127)
Data Compression
The ECP port supports run length encoded
(RLE) decompression in hardware and can
transfer compressed data to a peripheral. Run
length encoded (RLE) compression in hardware
is not supported. To transfer compressed data
in ECP mode, the compression count is written
to the ecpAFifo and the data byte is written to
the ecpDFifo.
Compression is accomplished by counting
identical bytes and transmitting an RLE byte
that indicates how many times the next byte is
to be repeated. Decompression simply
intercepts the RLE byte and repeats the
following byte the specified number of times.
When a run-length count is received from a
peripheral, the subsequent data byte is
replicated the specified number of times. A
run-length count of zero specifies that only one
byte of data is represented by the next data
byte, whereas a run-length count of 127
indicates that the next byte should be expanded
to 128 bytes. To prevent data expansion,
however, run-length counts of zero should be
avoided.
Pin Definition
The drivers for nStrobe, nAutoFd, nInit and
nSelectIn are open-collector in mode 000 and
are push-pull in all other modes.
ISA Connections
The interface can never stall causing the host to
hang. The width of data transfers is strictly
controlled on an I/O address basis per this
specification. All FIFO-DMA transfers are byte
wide, byte aligned and end on a byte boundary.
(The PWord value can be obtained by reading
Configuration Register A, cnfgA, described in
the next section). Single byte wide transfers
are always possible with standard or PS/2 mode
using program control of the control signals.
Interrupts
The interrupts are enabled by serviceIntr in the
ecr register.
serviceIntr = 1 Disables the DMA and all of the
service interrupts.
serviceIntr = 0 Enables the selected interrupt
condition. If the interrupting
condition is valid, then the
interrupt is generated
immediately when this bit is
changed from a 1 to a 0. This
can occur during Programmed
I/O if the number of bytes
 Loading...
Loading...