

Page 1

TP10, TP22, TP32
User Guide
ENGLISH
simrad-yachting.com
Page 2

Page 3

Preface
As Navico is continuously improving this product, we retain the
right to make changes to the product at any time which may not be
reflected in this version of the manual. Please contact your nearest
distributor if you require any further assistance.
It is the owner’s sole responsibility to install and use the equipment
in a manner that will not cause accidents, personal injury or
property damage. The user of this product is solely responsible for
observing safe boating practices.
NAVICO HOLDING AS AND ITS SUBSIDIARIES, BRANCHES AND
AFFILIATES DISCLAIM ALL LIABILITY FOR ANY USE OF THIS PRODUCT
IN A WAY THAT MAY CAUSE ACCIDENTS, DAMAGE OR THAT MAY
VIOLATE THE LAW.
Governing Language: This statement, any instruction manuals,
user guides and other information relating to the product
(Documentation) may be translated to, or has been translated from,
another language (Translation). In the event of any conflict between
any Translation of the Documentation, the English language
version of the Documentation will be the official version of the
Documentation.
This manual represents the product as at the time of printing.
Navico Holding AS and its subsidiaries, branches and affiliates
reserve the right to make changes to specifications without notice.
Copyright
Copyright © 2012 Navico Holding AS.
Warranty
The warranty card is supplied as a separate document.
In case of any queries, refer to the our web site:
www.simrad-yachting.com
Preface| TP10, TP22 & TP32 User Guide
| 1
Page 4

Contents
3 General
3 Introduction
4 The SimNet network system
5 Operation
5 General
5 Autopilot mode
5 Adjusting course
6 Autotack
7 Advanced Features
7 Nav mode
7 Steer To Wind
8 Using an external compass
9 Conguration
9 Porthand mounting
9 Calibration mode
11 Autotrim
12 Installation
12 Fitting the Tillerpilot
14 Electrical installation
16 Interfacing via SimNet
17 Configuring the TP on the SimNet bus
18 Interfacing via NMEA
19 Electronic interference suppression
19 Auto compass calibration
2 |
21 Appendix
21 Advice on operation
22 Troubleshooting
24 NMEA sentences received
25 Spares & accessories
25 Mounting accessories
26 Dimensions
26 Specification
Preface | TP10, TP22 & TP32 User Guide
Page 5

1
TACK
STBY
STBY
AUTO
NAV
General
Introduction
The TP10, TP22, and TP32 Tillerpilots from Simrad are suitable for a
wide variety of tiller-steered sailing yachts up to 12 m (39ft) overall
length.
Combining highly sophisticated electronics with advanced software
and a powerful mechanical drive, they are capable of providing
reliable and accurate steering performance under a variety of
different conditions with minimal current consumption.
The Tillerpilots have been designed so that, while they represent the
state-of-the-art in marine autopilots with many advanced features,
they remain very simple to operate, using only five keys to access all
functions.
Sophisticated functions of the TP22 and TP32 include Steer To Wind
mode and Nav mode (Steer To GPS) using external equipment
linked directly to the Tillerpilots via the SimNet high-speed bus, or
through the built-in NMEA 0183 interface. There is also the option to
operate the Tillerpilots remotely using a remote controller. For more
details please refer to our website: www.simrad-yachting.com.
To ensure the best results from your Tillerpilot, it is essential that the
unit is installed correctly. Please read this manual thoroughly before
installation.
General | TP10, TP22 & TP32 User Guide
| 3
Page 6
The SimNet network system
The SimNet system is built around a high-speed bus networking
system, that allows the TP22 and TP32 to be easily interconnected to
Simrad instruments and navigation equipment.
Units are interconnected and powered using a standard single
cable.
4 |
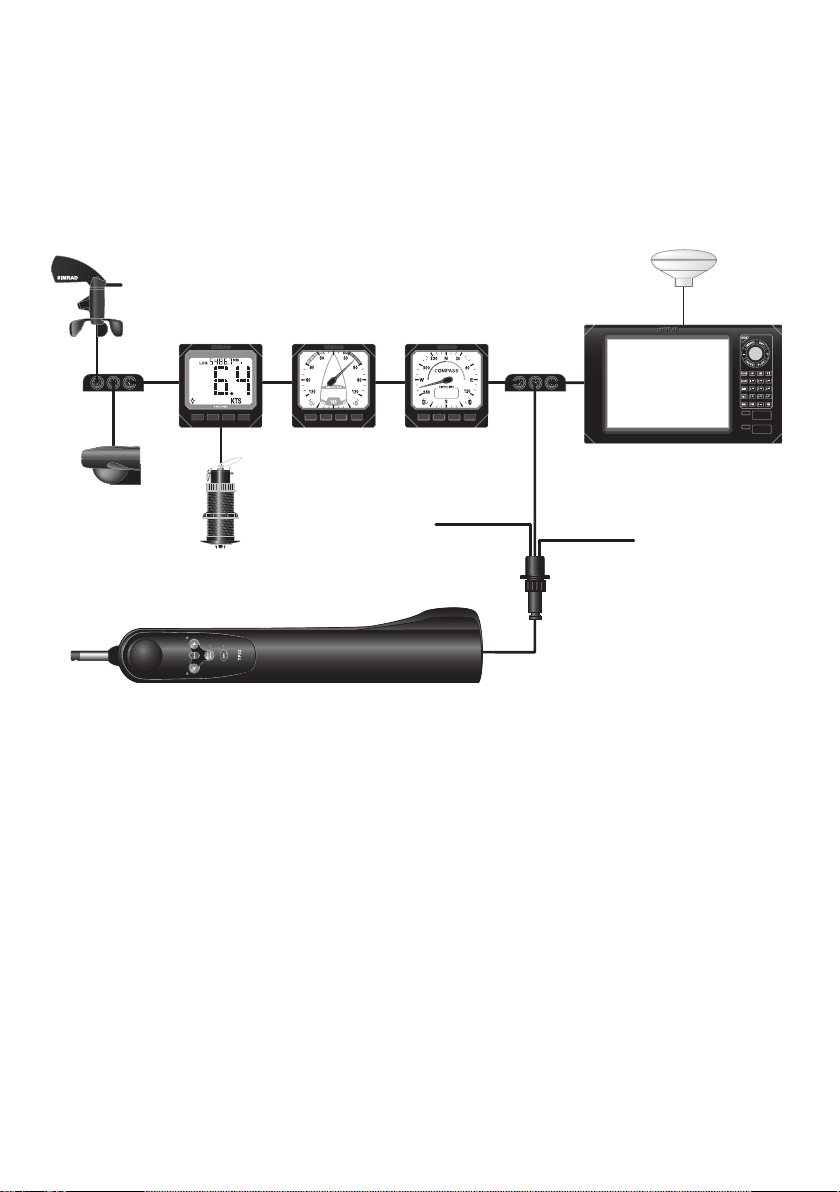
Typical SimNet system
The Tillerpilot can receive navigational information from the
chartplotter for Steer To GPS (Nav mode).
It will also accept wind angle data from the wind transducer for
Steer To Wind mode, boat speed data from the Speed instrument,
and heading data from the compass transducer.
Additionally, heading data from the Tillerpilot’s built-in fluxgate
compass can be displayed on any instrument displays capable of
showing compass information.
¼ Note: Heading data from the Tillerpilot will only be shown on
instrument displays if there is no external compass transducer
present on the network. Priority is always given to external compass
transducers for heading data.
General | TP10, TP22 & TP32 User Guide
Page 7
2
TACK
STBY
STBY
AUTO
NAV
TACK
STBY
STBY
AUTO
Operation
General
The unit powers up in Standby mode indicated by a flashing LED
next to the STBY/AUTO key. The two direction LEDs above the Port
( ) and Starboard ( ) keys are always dimly lit, which provides
night illumination for the keypad. All functions are confirmed
audibly by a “beep” and visually by the LEDs, so the status of the unit
can always be confirmed at a glance.
¼ Note: The NAV key on the TP22 and TP32 is labeled CAL on the
TP10. Both keys are referenced where applicable.
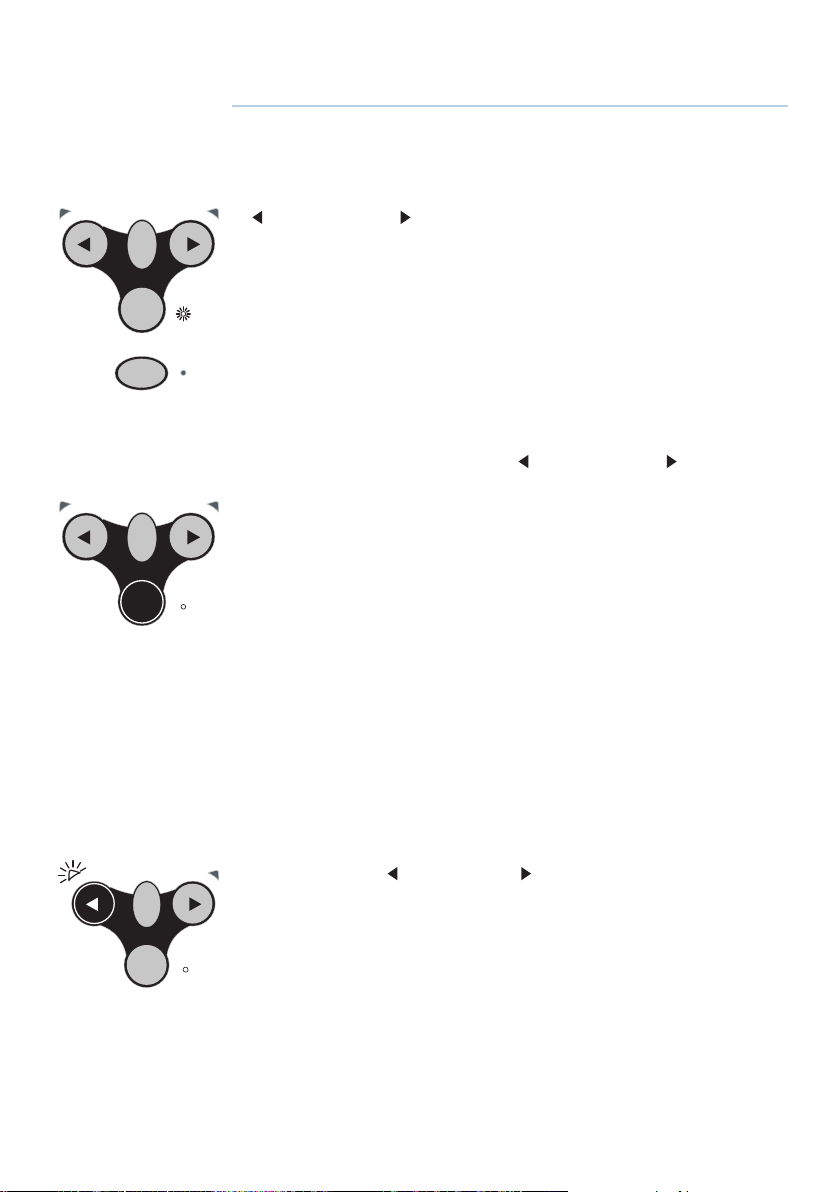
Autopilot mode
While in Standby mode, the pushrod can be manually driven in and
out by pressing the arrowed Port ( ) and Starboard ( ) keys, which
allows “power steering” of the vessel.
To engage Autopilot mode, press the STBY/AUTO key and the
Tillerpilot will lock onto the current course. The LED next to this key
will stop flashing and remain permanently lit as long as the pilot is
in Autopilot mode.
To lock the pilot onto the desired course, either steer the correct
course and then engage the autopilot, or engage the autopilot and
then adjust the heading until the correct course is being sailed (see
“Adjusting course” on page 5).
If the STBY/AUTO key is pressed and held, the pilot will beep a
second time and lock onto the previously used heading (this feature
will not be available if the unit has just been switched on).
TACK
STBY
STBY
AUTO
Adjusting course
In Autopilot mode, precise course adjustments can be easily made:
- Press the Port (
adjustment will be made in the specified direction. This is
confirmed by a single beep and the Port or Starboard LED will
flash once.
- Press and hold either key and a 10º course adjustment will be
made, confirmed by a double beep and a double flash of the Port
or Starboard LED.
¼ Note: Following any course adjustment in Nav mode (see “Nav
mode” on page 7), the Tillerpilot will gradually return to the
navigation track.
Operation | TP10, TP22 & TP32 User Guide
) or Starboard ( ) key once and a 1º course
| 5
Page 8
TACK
STBY
STBY
AUTO
TACK
STBY
STBY
AUTO
Autotack
The Tillerpilot has a built-in autotack facility, allowing easy tacking
of the vessel when single- or short-handed. An autotack is only
possible in Autopilot mode.
To initiate autotack, press and hold the TACK key, then short press
the Port (
down until both LEDS illuminate and you hear a beep. To confirm
the autotack press the Port ( ) or Starboard ( ) key depending on
which direction you wish to tack.
The operation of the Tillerpilot will differ during an autotack,
depending on whether the pilot is in Steer To Compass or Steer To
Wind mode:
Autotacking in Compass mode
If in Compass mode (default), the Tillerpilot will tack the vessel in the
selected direction through a tack angle of 100º.
Autotacking in Wind mode
The Tillerpilot will tack the vessel through to the same apparent
wind angle, but on the opposite tack.
¼ Note: As a safety feature the Tillerpilot will only allow an autotack if
the apparent wind is less than 90º – i.e. autotack is disabled when
sailing downwind.
) or Starboard ( ) key whilst keeping the tack key held
6 |
¼ Note: The Tillerpilot automatically prevents tacking in the wrong
direction – if on Port tack, only an autotack onto Starboard tack will
be possible.
Autotacking in Nav mode
As the Tillerpilot will be steering directly to a waypoint, the autotack
facility is disabled while in Nav mode.
If it is necessary to perform an autotack, disengage Nav mode by
pressing the NAV key then perform the autotack.
Warning: Ensure that the boat is on the correct tack before
re-engaging Nav mode.
Operation | TP10, TP22 & TP32 User Guide
Page 9

3
TACK
STBY
STBY
AUTO
NAV
Advanced Features
The TP22 and TP32 Tillerpilots contain many advanced features,
including the ability to accept course data from a variety of sources
other than the internal fluxgate compass. Such sources include
SimNet- and NMEA-compatible navigational receivers (GPS/
chartplotters, etc.), wind vanes, and compass heading transducers.
Nav mode
The TP22 and TP32 Tillerpilots can interface directly with compatible
Simrad chartplotters via the SimNet high-speed data bus. They also
have an inbuilt NMEA interface, which allows connection to NMEA
0183-compatible GPS and chartplotters.
Once interfaced with a GPS or chartplotter, the Tillerpilot can steer
using data from this source in addition to the internal compass,
allowing it to steer to a waypoint with great accuracy.
To activate Nav mode, the unit must be in Auto mode (press STBY/
AUTO). Simply activate a waypoint or route programmed into the
GPS/chartplotter and press the NAV key. The LED next to the NAV
key will light and the Tillerpilot will steer to the first waypoint using
Cross Track Error and Bearing To Waypoint information from the
navigational receiver to maintain an accurate course.
On arrival at the target waypoint an intermittent alarm will sound.
As a safety feature, to avoid an unexpected course change, the next
waypoint will not be automatically loaded until the NAV key is
pressed. When the vessel reaches the final waypoint, the Tillerpilot
will continue its current course under Compass (Auto) mode.
¼ Note : Some of the standard key stroke functions may have a
different effect in Nav mode than in Compass mode (see “Adjusting
course” on page 5 and “Autotacking in Nav mode” on page 6).
Steer To Wind
The TP22 and TP32 Tillerpilots can sail to the apparent wind angle
rather than a compass course using wind data via NMEA interfaces
or SimNet. Due to the faster data rate, the use of a SimNet windvane
is recommended – priority will be given to SimNet Wind data over
NMEA Wind data received by the Tillerpilot.
¼ Note: If no wind information is present, the Tillerpilot will not enter
Steer To Wind mode.
Advanced Features | TP10, TP22 & TP32 User Guide
| 7
Page 10

TACK
STBY
STBY
AUTO
NAV
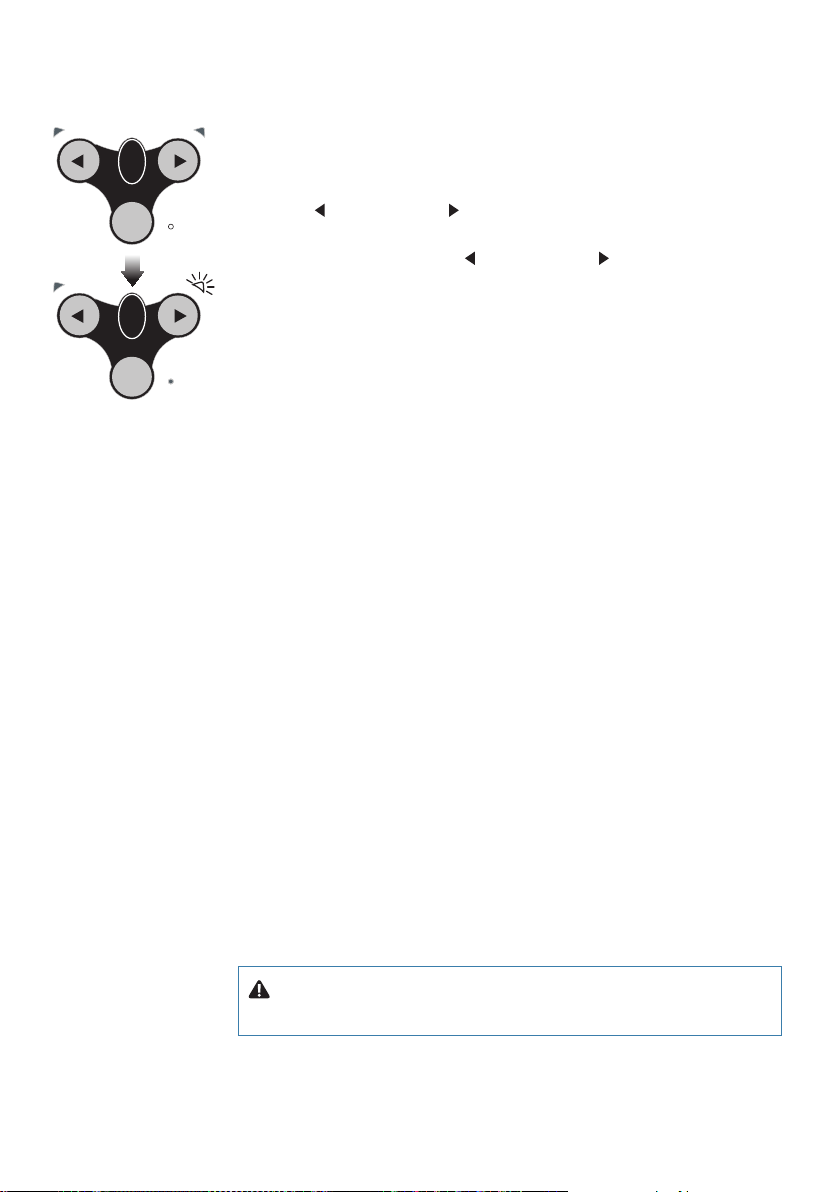
To select Steer To Wind mode, the unit must be in Auto mode (press
STBY/AUTO). Press and hold the PORT ( ) and STARBOARD ( )
keys together until a double beep is heard.
Both the Port and Starboard LEDs will flash simultaneously while the
pilot is in Steer To Wind mode. To switch back to Compass mode,
simply press and hold the
and keys together again until a
second beep is heard.
While in Steer To Wind mode, the Tillerpilot will lock onto the current
apparent wind angle being sailed. Any course adjustments made
will be relative to the apparent wind angle, rather than the compass
heading as when in Compass mode.
Initiating an autotack will turn the boat onto the same apparent
wind angle on the opposite tack. As a safety feature, autotack is
disabled when sailing downwind.
¼ Note: Nav mode cannot be selected while in Steer To Wind mode –
to activate, return to Compass mode first.
Using an external compass
The TP22 and TP32 Tillerpilots will preferentially steer to external
compass heading whenever such information is interfaced via the
SimNet bus.
The use of an external compass is particularly important on a
ferrous-hulled boat (i.e. steel, ferro cement, etc.), as the hull will
affect the bearing read by the internal fluxgate compass.
8 |
On a steel- or ferro-hulled boat,
the correct location for the
external compass would be
on the mast, between 1 and 2
meters above the deck. On a
non-ferrous-hulled boat, the
compass should be situated
low down, as near the center
point of the boat as possible,
but away from any sources of
magnetic interference such as
Tiller-
pilot
speakers, etc.
Advanced Features | TP10, TP22 & TP32 User Guide
SimNet
compass
Page 11

4
TACK
STBY
STBY
AUTO
NAV
POWER ON
TACK
Conguration
Porthand mounting
Although the Tillerpilot is factory preset for Starboard-side
mounting, it is possible to reconfigure it for mounting on the Portside of the cockpit to facilitate easy installation on most types of
yacht.
TACK
AUTO
STBY
STBY
NAV
Starboard and Port mounting options
TACK
STBY
STBY
AUTO
NAV
TACK
STBY
STBY
AUTO
NAV
With the power off, hold down the NAV (CAL) and TACK keys and
switch on the power. The Port or Starboard LED will illuminate,
depending on the current mounting configuration. Press the PORT
( ) key to select Port-side mounting – the Port LED will illuminate to
indicate selection. Confirm selection and exit to Standby mode by
pressing NAV (CAL).
To select Starboard mounting, repeat the above procedure, but
press the STARBOARD (
) key.
Calibration mode
The Response Control level and Seastate setting can be adjusted
while the Tillerpilot is in either Standby or Autopilot mode:
- Press and hold the TACK key, then press NAV (CAL)
- The Starboard LED will illuminate to indicate that Response
Control adjustment is selected. To toggle between Response
Control and Seastate adjustment, press TACK – the Port LED will
illuminate for Seastate.
Conguration | TP10, TP22 & TP32 User Guide
| 9
Page 12

A B C D
Adjusting Response Control
The Tillerpilot will apply adjustments to the tiller, in order to
compensate for heading variations, the amount of movement
being proportional to the heading error detected by the compass
unit. The amount of movement is set by the Response Control
(sometimes referred to as the rudder ratio).
The Response Control setting can be likened to driving a motor
vehicle – at high speeds, very little wheel movement is necessary
to steer the vehicle (LOW Response). When driving at slow speeds,
more wheel movement is necessary (HIGH Response).
The figure shows;
- A: Response Control too low – the vessel takes a long time to
return to the correct heading.
- B: The ideal setting, where errors are quickly corrected
- C: Illustrates the effects of setting the Response Control too high,
which causes the vessel to oscillate around the correct heading
- Excessive Response (D) creates a tendency to instability of course,
leading to increasing error.
10 |
TACK
STBY
STBY
AUTO
NAV
Deadband
When Response Control is selected, the NAV LED will flash and a
repeated sequence of beeps will be heard. The number of flashes
and beeps in the sequence indicates the level of the Response
Control setting.
- Use the PORT (
) and STARBOARD ( ) keys to adjust the
Response Control setting between 1 and 9
- Press NAV (CAL) to confirm settings and return to normal
operation, or press TACK to switch to Seastate adjustment.
Adjusting Seastate
In heavy seas, more variations in heading will be detected. If
the Tillerpilot tried to respond to all of these errors, it would be
overworked, causing unnecessary strain to the unit and excessive
drain on the batteries. Instead, it continuously monitors the
corrections applied over the course of a voyage and allows a
“dead band” within which the boat can go off course without
constant corrections being made. The size of the dead band is
normally automatically adjusted by the Tillerpilot to give the best
compromise between course holding and battery consumption,
but it can be turned off if required, giving a fixed deadband:
Conguration | TP10, TP22 & TP32 User Guide
Page 13

- In Calibration mode, press TACK to toggle between Response
Control and Seastate adjustment (indicated by the Port LED
illuminated). The Seastate setting is indicated by the number of
audible beeps and flashes of the Nav LED. The Seastate filter is
“ON” if there is one beep/flash and “OFF” if there are two beeps/
flashes.
- Use the PORT (
filter ON/OFF.
- Press NAV (CAL) to confirm settings and return to normal
operation.
) and STARBOARD ( ) keys to switch Seastate
Autotrim
Under differing conditions a tiller bias (sometimes known as
standing helm or rudder trim) is applied in order to steer a straight
course. An example is when sailing close-hauled, where the vessel
will normally pull into the wind, and the helmsman applies a
standing helm to leeward, in order to maintain course. The amount
of this standing helm varies according to factors such as strength of
wind, boat speed, sail trim, and amount of sail set. If no account of
these were taken, then the vessel would tend to veer off course, or
pull around head-to-wind when sailing close-hauled.
The Tillerpilot continuously
monitors the average course
error and applies a bias to the
tiller to compensate, until the
optimum condition is reached.
This bias, or standing helm, is
applied gradually, so as not to
upset the normal performance
of the Tillerpilot. Thus, it may
take up to a minute or so
to fully compensate after
changing tack. Once optimum
trim is reached, the pilot will
still monitor for changes in
the prevailing conditions and
update the trim accordingly.
Autotrim
Course
without
Ideal
course
Wind
and
Tide
¼ Note: Autotrim is applied automatically and cannot be manually
adjusted.
Conguration | TP10, TP22 & TP32 User Guide
| 11
Page 14

5
Installation
Fitting the Tillerpilot
The Tillerpilot is a very sophisticated piece of equipment and,
therefore, in order for it to function to its full capabilities, it is
essential that it is installed correctly. Please read this section
thoroughly before attempting installation and use.
Pushrod at
mid-stroke
90º
The Tillerpilot
should be
horizontally level
when fitted to the
tiller.
With the tiller
amidships and
the pushrod in
the midstroke
position, the
Tillerpilot should
be exactly 90º to
the tiller.
595 mm (23.5in)
TACK
STBY
AUTO
NAV
STBY
STBY
Hori-
zontal
38 mm
460 mm
(18in)
12 |
¼ Note: The pilot is factory preset to be mounted on the Starboard
side as shown, but this can be reconfigured for Port-side mounting
(see “Porthand mounting” on page 9).
The dimensions should be adhered to as closely as possible. Some
tolerance on the distance from the tillerstock is permissible, but the
Tillerpilot may require a Seastate adjustment to compensate.
¼ Note: If the dimensions given are not practical for the vessel to
which the Tillerpilot is to be fitted, a range of fitting accessories are
available to facilitate correct installation. (Please refer to “Spares &
accessories” on page 25 for more details.)
Installation | TP10, TP22 & TP32 User Guide
Page 15

Warning: The Tillerpilot houses an internal fluxgate compass
and should therefore be mounted away from sources of
magnetic interference, such as the vessel’s steering compass or
external loudspeakers. The minimum safe distance is 1m (3ft 3in).
The Tillerpilot is mounted using a supplied tillerpin and mounting
cup, which allows the unit to be fitted and stowed easily.
To fit the tillerpin, drill a 6.3 mm
(0.25 in) hole in the tiller (ensure
18 mm
(0.75 in)
Tillerpin
Tiller
that this is on the centerline of
the tiller and is vertical). Drill to
a depth that allows only the top
18 mm (0.75 in) to protrude. Fix in
place using an epoxy adhesive.
To fit the mounting cup, drill a
12.7 mm (0.5 in) hole into the
cockpit seat and mount, so
that only the flange protrudes.
Ensure the cup is a tight fit
(use an epoxy adhesive) and
Mounting Cup
is supported over its entire
depth – if necessary, reinforce
the underside of the cockpit
Hardwood Reinforcing
seat with hardwood or marine
plywood.
¼ Note: Due to the high loads exerted, do not fit the Tillerpilot to the
mounting cup and pin until the adhesive has completely set.
Installation | TP10, TP22 & TP32 User Guide
| 13
Page 16

Electrical installation
Installing the TP22 and TP32
The Tillerpilot operates from a 12V DC supply. The waterproof
plug fitted to the Tillerpilot is used to supply the power, SimNet
and NMEA data. The bulkhead socket should be mounted in a
convenient position, close to where the Tillerpilot is to be fitted, and
wired as shown.
STBY
AUTO
STBY
TACK
NAV
NMEA Data (Red)
NMEA Common (Blue)
+12V DC (Red)
SimNet plug
0 V (Black)
Warning: If the vessel has more than one separate battery
bank, when connecting the Tillerpilot to the power supply, always
ensure that the pilot and all interfaced equipment—whether
SimNet or NMEA—are connected to the same battery bank, even
if they each have independent connections to the switch panel.
This is to avoid a possible voltage drop between the interfaced
equipment, which would render the equipment inoperative.
Power cable selection table
Length of cable run Cross section Conductor type AWG
Under 4 m (13 ft) 1.5 mm
4 - 8 m (27 ft) 2.5 mm
2
2
30/0.25 16
50/0.25 14
- Mount the bulkhead socket on a vertical surface to prevent
standing water gathering around or in the socket. Always fit the
protective cap when the pilot is not plugged in
14 |
Installation | TP10, TP22 & TP32 User Guide
Page 17

- No power is supplied to or from the SimNet bus – the Tillerpilot
must always have its own dedicated power connection
- Use a suitable gauge cable to run from switch panel to the socket
- Connect to the vessel’s switch panel via a 10 Amp fuse or breaker
- Do not fit other electronic or electrical equipment to the supply
cable or “tap into” the supply from a nearby cable – always wire
each piece of equipment to its own breaker in the switch panel
- Ensure all wire ends are tinned, and any connections are well
made. Poor contact will result in loss of thrust from the Tillerpilot
and slower speed of response
- If in any doubt, employ a qualified engineer
Installing the TP10
The TP10 Tillerpilot operates from a 12V DC supply and is connected
to the supply by two wires. Although the cable is supplied with bare
ends, it is recommended that a good quality waterproof plug and
socket is fitted for maximum reliability. A suitable plug and socket
set is availble as an optional accessory (part no. SKT100; see “Spares
STBY
& accessories” on page 25).
Wire to the electrical supply as follows:
Wire color
Brown + 12 V DC
Blue 0 V
- Use a suitable gauge cable for the run from the socket to the
supply (see previous page)
- Connect to the vessel’s switch panel via a 10 Amp fuse or breaker.
- Do not fit other electronic or electrical equipment to this cable,
or “tap into” the supply from a nearby cable – always wire each
piece of equipment to its own breaker in the electrical panel
- Ensure all connections are well made. Poor contact will result in
loss of thrust from the Tillerpilot and slower speed of response
- If in any doubt, employ a qualified engineer to install the
equipment
Installation | TP10, TP22 & TP32 User Guide
| 15
Page 18

Interfacing via SimNet
The TP22 and TP32 Tillerpilots are linked to other SimNet-compatible
equipment via the integral SimNet cable and plug in the bulkhead
socket.
All SimNet units (Instruments, Chartplotters, Radars, Autopilots, etc.)
use the same single cable to share data on the high speed network.
If there are no spare SimNet ports convenient, a three-way cable
joiner can be used to create an additional port.
3-way
joiner
Speed Wind Compass
Bus
power
GPS/Chartplotter
NMEA
0183
Tillerpilot
power
16 |
¼ Note: It is not necessary to plug the Tillerpilot directly into any
equipment that you wish to share data with – all data is transmitted
across the whole bus network.
Installation | TP10, TP22 & TP32 User Guide
Page 19

Conguring the TP on the SimNet bus
Normally the TP22 and TP32 can be connected to the SimNet bus
and will automatically share data sources with other SimNet units
without any required user intervention.
Display
Two operation modes are available:
System mode (default) The Tillerpilot automatically shares data
StandAlone mode The Tillerpilot is disconnected from
- To change the mode, first turn off the Tillerpilot
- To select StandAlone mode, press and hold the TACK and
and turn the power on
- To select System mode, press and hold the TACK and
turn the power on
- The Tillerpilot will beep and all the LEDs will light briefly to
confirm the new configuration
Autopilot
GPS/Chartplotter
Compass
with other SimNet units.
Source selection can be done from any
SimNet unit using shared data resources
SimNet, and it will automatically
select its internal heading sensor. The
Tillerpilot cannot be configured by a
remote device.
keys and
keys
¼ Note: Please refer to the instructions supplied with the relevant
command unit for details on remote configuring of data sources.
Installation | TP10, TP22 & TP32 User Guide
| 17
Page 20

Interfacing via NMEA
The inbuilt NMEA processor allows NMEA 0183-compatible
equipment to be connected directly to the TP22 and TP32, without
any need for a separate interface unit.
Wind Speed
If a GPS or chartplotter is connected to the Tillerpilot, it can extract
the data necessary for Nav mode. Other functions, such as Steer To
Wind, may also be available if NMEA 0183-compatible instruments
are transmitting the correct NMEA sentences.
When connecting an external (“talker”) unit to the Tillerpilot, two
terminals are used – usually labeled DATA and COMMON (or COM).
These should be connected to the Tillerpilot’s NMEA cable as
follows:
NMEA talker unit Tillerpilot NMEA
NMEA Out Data/+ Data (Red)
NMEA Out Common/- Common (Blue)
GPS/
Chartplotter
SimNet
Tillerpilot
power
18 |
¼ Note: Some third party equipment does not have a dedicated
COMMON connection. In this case, the DATA connection will
usually be labeled NMEA OUT and the NMEA Common wire from
the Tillerpilot should be connected directly to 0V (terminal 2). If in
any doubt, refer to the manufacturer or Simrad’s Product Support
department for advice.
Installation | TP10, TP22 & TP32 User Guide
Page 21

Warning: Due to the limitations of NMEA0183, it is
recommended that only one talker is transmitting to the
Tillerpilot at any one time – i.e. instruments or GPS/chartplotter,
not both simultaneously! If more than one unit needs to be
interfaced to the Tillerpilot, these should be connected to the
NMEA cable via a changeover switch.
Because of the vast number of different manufacturers and models
of navigational equipment, Simrad cannot guarantee correct
operation and installation of third party equipment. Therefore,
before connecting any equipment to the Tillerpilot it is important
that the unit’s manual is referred to with regard to interfacing via
NMEA.
Electronic interference suppression
The Tillerpilot has been designed to minimize the effects of
interference generated by the engine alternator. However,
precautions should still be taken by routing the cables away from
the engine compartment. Do not run the cables down trunking
carrying high current or radio antenna cables.
Engines with spark ignition, also some refrigerators, should be fitted
with suppressors. Your local agent should be able to advise on this
and supply suppression kits where necessary.
TACK
TACK
STBY
STBY
AUTO
Auto compass calibration
Once the Tillerpilot is installed, it is necessary to calibrate the internal
compass to compensate for deviation caused by any metallic or
magnetic objects surrounding it on the vessel.
With the vessel motoring slowly (2–3 knots) in calm conditions and
the Tillerpilot in Standby mode, press the Starboard (
number of times to induce a slow, clockwise rotation of the vessel.
Then press and hold the TACK key, followed by the Port ( ) and
Starboard ( ) keys simultaneously.
The Port and Starboard LEDs will both light. Allow the vessel to
turn through a minimum of 11/4 turns (450º) in approximately two
minutes, during which time the fluxgate compass will automatically
calibrate itself.
Installation | TP10, TP22 & TP32 User Guide
) key a
| 19
Page 22

TACK
If the rate of turn or boat speed is too fast, the Port LED will flash.
Either slow the boat, or reduce the angle of turn. If the rate of turn
or boat speed is too slow, the Starboard LED will flash – either
increase the boat speed, or increase the angle of turn. A short
beep will indicate that the calibration has been successful and the
Tillerpilot will return to Standby mode. If the calibration has been
unsuccessful, after a period of four minutes a long beep will sound.
¼ Note: If the calibration routine keeps failing after repeated attempts,
the Tillerpilot may be experiencing excessive magnetic deviation
that it cannot compensate for. Check the area within 1 m (3 ft) of the
Tillerpilot for likely sources, such as cockpit speakers or large metallic
objects – if these cannot be relocated, it may be necessary to fit an
external compass (“Using an external compass” on page 8).
20 |
Installation | TP10, TP22 & TP32 User Guide
Page 23

6
Appendix
Advice on operation
When used correctly, your Tillerpilot can maintain as good a course
on most points of sail as a skilled helmsman, with the advantage
that it never gets distracted. A human can start showing lapses of
concentration after as little as 10 mins.
The following advice should improve efficiency when sailing using
your Tillerpilot:
1. When sailing close to the wind, it is easy to forget to trim the
mainsail, allowing excessive weather helm to build up. Where a
human helmsman can quickly weigh up the situation and adapt
to circumstances, the autopilot will struggle on and the boat will
be sailed less efficiently. Whereas a human normally likes to feel
some weather helm, this is not necessary for the functioning of
the Tillerpilot. Power consumption, wear, and drag will be greatly
reduced, if the mainsail is freed or reefed a little sooner than normal
when sailing manually.
2. It is also advisable, when sailing close-hauled, to set a course a few
degrees free of that normally sailed under manual control, to avoid
luffing into the wind.
3. When running dead downwind, a human pilot can see visual signs
warning him if the boat is about to gybe, which the Tillerpilot
cannot sense – it is advisable not to sail as close to the gybe as you
may do when sailing manually.
4. When broad reaching or running fast, particularly with quartering
waves, a helmsman will naturally apply periodic larger angles of
helm than when beating or sailing slowly. This is the equivalent
of increasing rudder gain, and it may be a good idea to adjust the
Response control on the Tillerpilot. Many people prefer to find a
compromise setting which is used for all sailing, but with practise
it can be optimized for different conditions, e.g. low for motoring
in a calm sea, or high for running fast. If the Response control is set
too low, the boat will go off course, because insufficient rudder is
applied in time; if the Response control is too high, the boat will
overcorrect, increasing power consumption.
5. The Tillerpilot is a highly advanced piece of equipment. However, it
would be a mistake to become complacent. As with all electronic
navigational equipment, it is an aid to navigation and should not be
used as a substitute for conventional navigational practise.
Appendix | TP10, TP22 & TP32 User Guide
| 21
Page 24

Troubleshooting
Symptom Probable Cause Remedy
When engaged,
the pilot
immediately
applies a large
helm angle and
increases course
error
After
functioning
normally course
is suddenly
lost and the
Tillerpilot goes
into Standby
mode
Helm is hard
over and alarm
is continuously
on
Power socket is
live, but pilot is
not on.
Loss of course
under Steer To
Wind mode.
Cannot select
Steer To Wind
mode
- Tillerpilot is
configured for
Port hand setting
but installed on
Starboard side (or
vice versa).
- Power interrupted
briefly, or low
voltage
- Cable used to
socket too small
- Intermittent
connection
- Steerage way
insufficient to
control course,
or sails are aback.
Pulsing is a correct
safety feature when
tiller is at full travel.
- Socket is wired
incorrectly
- Apparent wind has
become too light
to give a consistent
direction
- Masthead unit is
not connected.
- SimNet system is
not switched on or
powered.
- Required NMEA
sentence not being
transmitted
- Refer to “Porthand
mounting” on page
9
- Increase size of cable
- Check all
connections
- Charge batteries
- Uprate batteries
- Reset the vessel
on course and reengage pilot
- Check wiring of
socket. (“Electrical
installation” on page
14)
- Change to Compass
mode
- Check connections
- Check system is on
- See “NMEA
sentences received”
on page 24
& check NMEA
connections.
22 |
Appendix | TP10, TP22 & TP32 User Guide
Page 25

Symptom Probable Cause Remedy
Cannot select
Nav mode
Autotack
function not
working
Pilot exits Nav
mode before
waypoint is
reached
Pilot does not
hold accurate
course in Auto
mode
- GPS/Chart Plotter
not connected
- Waypoint not
active
- Wrong NMEA
format is being
used
- Pilot is in Nav Mode
- Pilot is in Steer To
Wind Mode and
a) apparent wind is
>90º
- b) autotack being
attempted is in the
wrong direction
- Cross Track Error
has exceeded 1.2
Nm
- Fluxgate compass
is being affected by
interference from
nearby magnetic
influences (binnacle
compass, speakers)
or metallic objects
(winches, deck
hardware etc).
- Check connections
- Activate waypoint/
route
- Check NMEA 0183
format is being
transmitted by
navigational receiver.
- Exit Nav Mode
- Luff up until
apparent wind is less
than 90º.
- Reset the vessel
on course and reengage Nav Mode.
- Check compass has
been calibrated
(“Auto compass
calibration” on page
19).
- Fit external SimNet
compass.
- Replace binnacle
compass
- Relocate objects
that are causing
interference.
These simple checks should be carried out before seeking technical
assistance and may save time and expense. Before contacting your
servicing agent, please note the Tillerpilot’s serial number.
Appendix | TP10, TP22 & TP32 User Guide
| 23
Page 26

NMEA sentences received
The NMEA 0183 information required for full functionality of the
TP22 and TP32 whilst in Nav mode is as follows:
- Cross Track Error
- Bearing to destination waypoint
- Arrival at waypoint indication
- Magnetic variation
- Boat speed
This information is extracted from the following NMEA 0183
sentences:
Received Data
APA Cross Track Error, bearing to/arrival at waypoint
APB Cross Track Error, bearing to/arrival at waypoint
RMA Speed & course over ground & magnetic variation
RMB Cross track error, bearing to/arrival at waypoint (T)
RMC Speed & course over ground & magnetic variation
BWR Bearing to/arrival at waypoint (rhumb line)
BWC Bearing to/arrival at waypoint (great circle)
VHW Boat Speed
XTE Cross Track Error
24 |
¼ Note: The Cross Track Error (XTE) information has a maximum value
of 1.2 Nautical Miles. If the XTE exceeds this while using Nav mode,
the Tillerpilot will sound an alarm, exit Nav mode and return to
Compass Auto mode.
The Tillerpilot also extracts the apparent wind angle from the
following NMEA 0183 sentences:
Received Data
VWR Apparent Wind Speed & Angle
MWV Apparent Wind Speed & Angle
Appendix | TP10, TP22 & TP32 User Guide
Page 27

Spares & accessories
The following spares and accessories are available from local Simrad
agents. Please quote the part number when ordering.
TPPK7 Tillerpin, Mounting Cup & Pushrod End Cap
SKT100 Waterproof Socket & Cable Assembly (TP10)
SKT22/32 Waterproof Bulkhead Socket & Cable
Assembly (TP22 and TP32)
¼ Note: Refer to www.simrad-yachting.com for range of compatible
displays and controllers.
Mounting accessories
Tiller Brackets
Height
Pedestal & Cantilever Brackets
Height
Push Rod Extensions
Length
Cantilever Bracket CB1
Length
Part No Height
TB30
TB60
TB90
TB120
Part No Height / Length
PB30
PB60
PB90
CB1 135 - 240mm
(5.31 - 9.44")
Part No Length
PRE30
PRE60
PRE90
PRE120
PRE150
PRE300
30mm (1.18")
60mm (2.36")
90mm (3.54")
120mm (4.72")
30mm (1.18")
60mm (2.36")
90mm (3.54")
30mm (1.18")
60mm (2.36")
90mm (3.54")
120mm (4.72")
150mm (5.90")
300mm (11.81")
Appendix | TP10, TP22 & TP32 User Guide
| 25
Page 28

Dimensions
610 mm (24 in) MID STROKE
Specication
Supply Voltage 12 V (10–16 V) DC
Current Consumption
(Typical)
NMEA Format
(TP22 & TP32)
Drive System
Operating Stroke 250 mm (10 in)
Peak Thrust
Hardover time
Ambient Temp Range -10ºC to +55ºC (14ºF to 131ºF)
Mounting Starboard as default (can be reversed)
Standby – 60 mA
Auto – 500 mA
Compliant with NMEA0183 versions 2.0,
2.3 and 3.0 (4800 baud, no parity, 8 bits,
1 stop bit)
TP10 – Screw thread
TP22 – Screw thread
TP32 – Recirculating ballscrew
TP10 – 65 kg (143 lbs)
TP22 – 70 kg (154 lbs)
TP32 – 85 kg (187 lbs)
0 kg P10 – 6.9 secs
TP22 – 6.9 secs
TP32 – 4.0 secs
20 kg TP10 – 8.0 secs
TP22 – 8.0 secs
TP32 – 4.7 secs
40 kg TP22 – 12.0 secs
TP32 – 6.0 secs
50 kg TP32 – 8.0 secs
(4 in)
105 mm
60 mm
(2.3 in)
26 |
Appendix | TP10, TP22 & TP32 User Guide
Page 29

Page 30

 Loading...
Loading...