

Page 1

ENGLISH
R2009/R3016
User Manual
Page 2

Preface
Disclaimer
As Navico is continuously improving this product, we retain the right to make changes to the
product at any time which may not be reflected in this version of the manual. Please contact
your nearest distributor if you require any further assistance.
It is the owner’s sole responsibility to install and use the equipment in a manner that will not
cause accidents, personal injury or property damage. The user of this product is solely
responsible for observing maritime safety practices.
NAVICO HOLDING AS AND ITS SUBSIDIARIES, BRANCHES AND AFFILIATES DISCLAIM ALL
LIABILITY FOR ANY USE OF THIS PRODUCT IN A WAY THAT MAY CAUSE ACCIDENTS, DAMAGE
OR THAT MAY VIOLATE THE LAW.
This manual represents the product as at the time of printing. Navico Holding AS and its
subsidiaries, branches and affiliates reserve the right to make changes to specifications
without notice.
Governing Language
This statement, any instruction manuals, user guides and other information relating to the
product (Documentation) may be translated to, or has been translated from, another
language (Translation). In the event of any conflict between any Translation of the
Documentation, the English language version of the Documentation will be the official
version of the Documentation.
Copyright
Copyright © 2016 Navico Holding AS.
Warranty
The warranty card is supplied as a separate document.
Regulatory statements
This equipment is intended for use in international waters as well as coastal sea areas
administrated by member states pursuant to international conventions.
The R2009 and R3016 Control units comply with:
• EMC directive 2014/30/EU
Refer to the product website for the latest information about product compliance.
About this manual
This manual is a reference guide for operating, installing and configuring the software for the
R2009 and R3016 Control units.
¼
Note: This manual does not cover installation of the various antennas that can be used
in these radar systems.
In addition to this manual the following documents are available for the R2009 and R3016
Control units:
• R2009/R3016 Quick Guide (988-10951-00n)
• R2009 Control unit Mounting template (988-10916-00n)
• R3016 Control unit Mounting template (988-10917-00n)
The last digit in the part numbers is the document's revision code.
¼
Note: Separate manuals are delivered for the R3016 12U/6X type approved radar system.
Preface | R2009/R3016 User manual
3
Page 3
Important text conventions
Important text that requires special attention from the reader is emphasized as follows:
¼
Note: Used to draw the reader’s attention to a comment or some important information.
Warning: Used when it is necessary to warn personnel that they should
proceed carefully to prevent risk of injury and/or damage to equipment/
personnel.
Intended audience
This manual is written for system operators and installers. It assumes that the user has basic
knowledge of radars, navigation, nautical terminology and practices.
Viewing the manual on the screen
The PDF viewer included in the unit makes it possible to read the manuals and other PDF
files on the screen. The manuals can be read from a card inserted in the card reader or copied
to the unit’s internal memory.
The PDF file is opened from the File manager, refer to "Files" on page 48.
Use the keys to maneuver in the PDF file as described below:
• Scroll pages
Use the rotary knob.
• Zoom in/out
Use the + and - keys.
• Maneuver on a page that is larger than the display area
Use the arrow keys.
• Exit the PDF viewer
Use the EXIT key
Safety precautions
Safety precautions described in this section are applicable to the radar system. They are
general safety precautions that are not related to any specific procedure, and they might
therefore not appear elsewhere in this manual. They are recommended precautions that
personnel must understand and apply during operation and maintenance of the system.
You are obliged to read these operating instructions prior to operation, and to adhere to the
operating instructions in order to prevent possible danger. Prevention of danger includes
that operator personnel are trained and authorized for safe operation of the equipment. We
assume no liability for damage due to improper operation which could have been
prevented.
The system must only be operated by persons who have passed the relevant mandatory
training on the respective systems and applications. Only reading these operating
instructions cannot replace such training. Persons authorized to operate, maintain and
troubleshoot the system are instructed and trained by Simrad. Persons operating or servicing
this radar system must be familiar with the general safety regulations and specific safety
systems, and they must have passed all required training. They must have read the relevant
operating instructions and manuals before starting to work.
Have these operating instructions always at hand on all relevant locations, and ensure that
copies are available to all operators. Operating personnel must at all times follow all safety
regulations.
During normal operation, the unit can be quickly disconnected from the main power line by
turning OFF the relevant circuit breaker located on the electric switchboard.
Do not replace components or make adjustments inside the unit when the voltage supply is
turned ON. Always remove power and discharge to ground a circuit before touching it.
Under no circumstances should any person initiate servicing or repairing the unit except in
the presence of a qualified person.
4
Preface | R2009/R3016 User manual
Page 4
Ensure unobstructed access to all operator panels, controls, and relevant switchgear cabinets
in order to enable instant response to alarms.
Whenever it is necessary to disconnect the waveguide from a radar transmitter for
maintenance purpose, the transmitter output should be terminated with a matched load. If
this is not possible, care should be taken. Do not stand in front of an open-ended waveguide
from which power is being radiated.
¼
Note: Main power is always present on the terminal board unless the main break from
the power distribution panel of the vessel is turned off.
Warning: Never look down a waveguide from which power is being
radiated!
Warnings
High voltage
Radar equipment includes high voltage that can cause injury or loss of life. Danger exists only
when the units are opened, exposing internal circuits, as when servicing the equipment.
This radar has been carefully designed to protect personnel from possible injury from high
voltages. Although every effort has been made to eliminate danger to personnel, no
responsibility is accepted for any injury or loss of life suffered in connection with this
equipment.
Trademarks
Navico® is a registered trademark of Navico.
Simrad
®
is used by license from Kongsberg.
NMEA
®
and NMEA 2000® are registered trademarks of the National Marine Electronics
Association.
SimNet
®
is a registered trademark of Navico.
SD
™
and microSD™ are trademarks or registered trademarks of SD-3C, LLC in the United
States, other countries or both.
HDMI
®
and HDMI™, the HDMI Logo, and High-Definition Multimedia Interface are trademarks
or registered trademarks of HDMI Licensing LLC in the United States and other countries.
Preface | R2009/R3016 User manual
5
Page 5

Contents
9 Introduction
9 R2009 and R3016 Radar Control units
9 O2000 Controller
9 System diagrams
11 The user interface
11 Front panel and keys
12 Main panel
13 PPI symbols
13 Picture freeze indicator
14 Softkeys
14 The menu system
15 Measurements units
15 Radar palettes
16 On-screen keyboard
16 Screen capture
17 Basic operation
17 Turning the system on and off
17 Adjusting display brightness
17 Selecting radar source
17 Switching between Transmit and Standby mode
17 Adjusting the radar range
17 Using the cursor
18 Target tracking
18 Selecting speed source and stabilization mode
19 Adjusting the radar image
19 Gain
19 Rain anti-clutter
19 Sea anti-clutter
20 Tune
21 Radar view options
21 Target trails and past position
21 Radar orientation
21 Radar motion mode
22 Offsetting the PPI center
22 Vectors
23 Cursor bearings
23 Applying default control settings
24 Target tracking
24 Managing targets
24 Defining dangerous vessels
24 Radar targets
27 AIS targets
28 Displaying target information
30 Navigation tools
30 Guard zones
30 EBL/VRM markers
32 Measuring range and bearing
34 Advanced radar options
34 Use modes
6
Contents | R2009/R3016 User manual
Page 6

34 Radar threshold
34 Rejecting radar interference
35 Noise rejection
35 Target boost
35 Target expansion
35 Target separation
35 Fast scan
36 Installation
36 Box contents
36 Mounting location
37 Viewing angle
38 U-bracket mounting
38 Panel mounting
39 Wiring
39 Guidelines
39 Rear connections
40 Ethernet connector
40 Power connection
41 External alarm
42 NMEA 2000 backbone
44 NMEA 0183 device connection
46 Connect an external monitor
47 Software setup
47 System settings
48 Network settings
52 Radar settings
57 Own ship
58 Simulator
58 Demo mode
58 Simulator source files
58 Advanced simulator settings
60 Maintenance
60 Preventive maintenance
60 Cleaning the display unit
60 Cleaning the media port door
60 Checking the keys
60 Checking the connectors
60 NMEA Data logging
61 Software upgrades
61 Backing up your system data
62 The alert system
62 Type of alerts
62 Alert notifications
63 Acknowledging alerts
63 The Alerts dialog
64 Alphabetic alarm listing
65 Operating modes fallback
66 Terms and abbreviations
70 Spare parts and accessories
70 R2009 Options and accessories
Contents | R2009/R3016 User manual
7
Page 7

70 R2009 Spare parts and service packs
70 R3016 Options and accessories
71 R3016 Spare parts and service packs
72 Technical specifications
72 Overview
72 Display
72 Technical/environmental
73 Power
73 Compass safe distance
74 Menu tree
75 Dimensional drawings
75 R2009 Control unit
75 R3016 Control unit
8
Contents | R2009/R3016 User manual
Page 8
Introduction
R2009 and R3016 Radar Control units
The R2009 and R3016 are dedicated Radar Control units with integrated 9-inch portrait and
16-inch widescreen display. The units are compatible with a range of Simrad radar solutions,
including Halo™ Pulse Compression, Broadband 3G™/4G™, and HD Digital radars.
The R2009 is fitted with a high brightness screen and is suited for both pilot house and
outside installation. The R3016 is suited to pilot house installation only.
¼
Note: The R3016 is also used as control unit in the Category 3 type approved R3016
12U/6X Radar systems. Separate manuals are delivered for the R3016 12U/6X Radar
systems.
O2000 Controller
The optional O2000 Controller can be used to remotely operate up to 4 radar control units.
Separate documentation is delivered for the O2000 Controller.
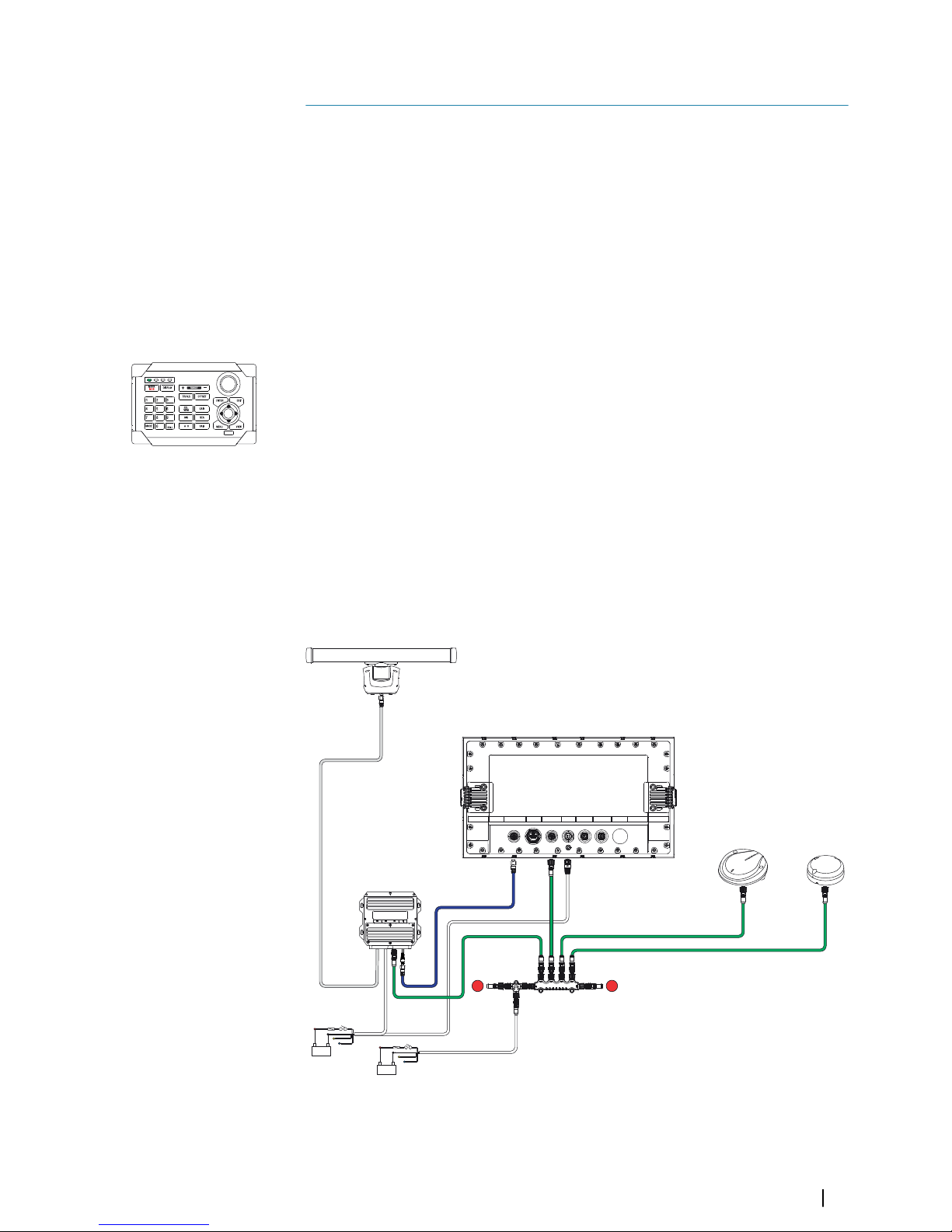
System diagrams
The images on the next pages shows examples of typical radar installations with the R2009
and R3016 control units.
• The first illustration is an example of a basic system installation with one control unit, a
radar antenna, a heading sensor and a position sensor
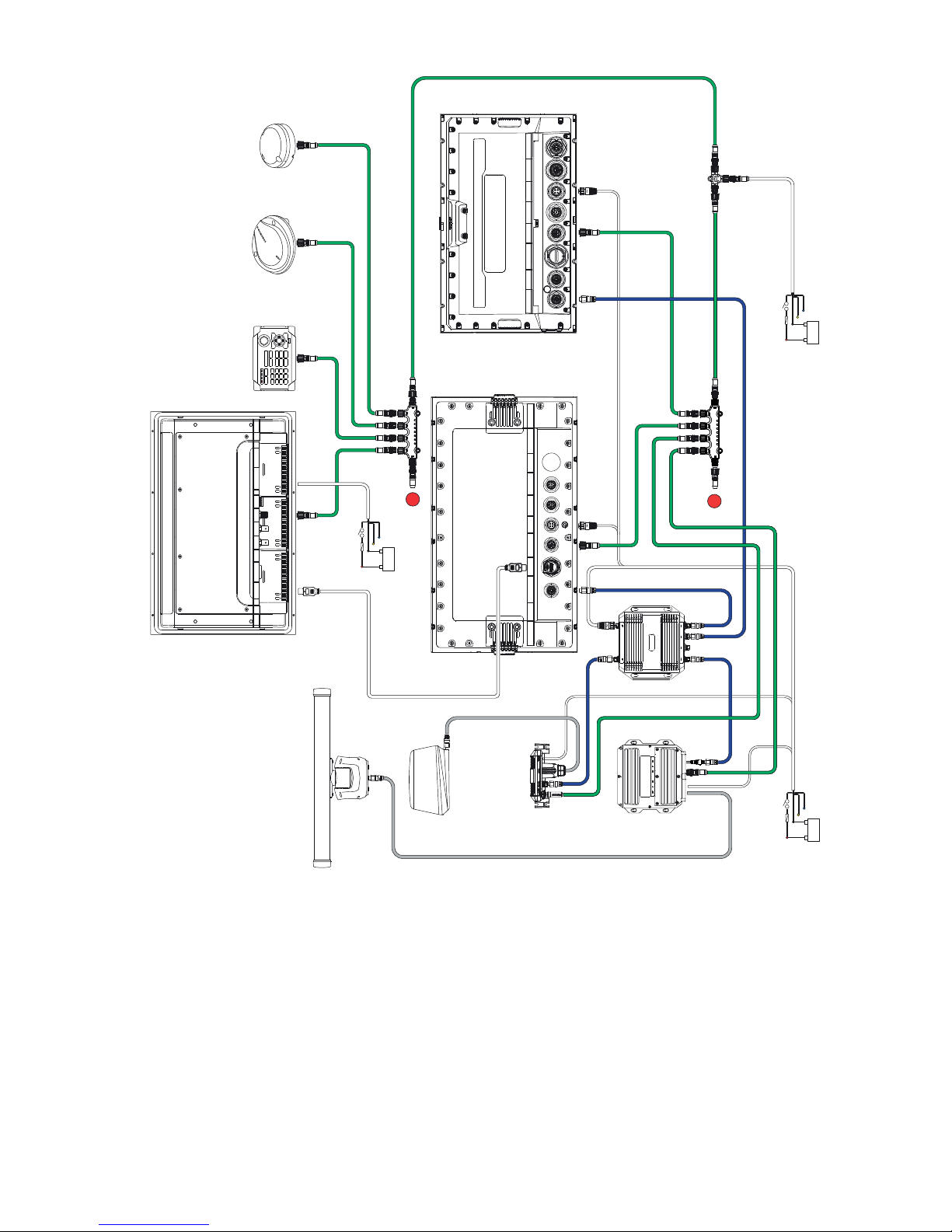
• The second illustration shows a complex radar installation. In addition to the R3016
Control unit and sensors this has the optional O2000 Remote controller and two radar
antennas connected. It is also indicated how the system can be combined with an MFD
and with a second monitor mirroring the radar signal.
+
_
12 / 24 V DC
+
_
12 V DC
TT
ETHERNET NMEA2000 POWER NMEA0183 NMEA0183HDMI
R3016 (or R2009)
Halo
Heading and position sensors
RI-12
STANDBY
C
ABC DEF
GHI
JKL
MNO
PQRS TUV WXYZ
1
Introduction | R2009/R3016 User manual
9
Page 9
ETHERNET NMEA2000 POWER NMEA0183 NMEA0183HDMI
+
_
12 / 24 V DC
+
_
12 / 24 V DC
+
_
12 V DC
T
T
NSS evo2
R3016 (or R2009)
MO Monitor (repeater from 3016 only)
O2000
Halo
4G
RI-10
RI-12
NEP-2
Heading and position sensors
ETHERNETETHERNET
HDMI
NMEA 2000
VIDEO
POWER
SONAR
STRUCTURE
POWER
NETWORK
NETWORK
NETWORK NETWORK NETWORK
HDMI-1 DVI-2
VIDEO-3 VIDEO-4NMEA2K
SERIAL USB
POWER
Page 10
The user interface
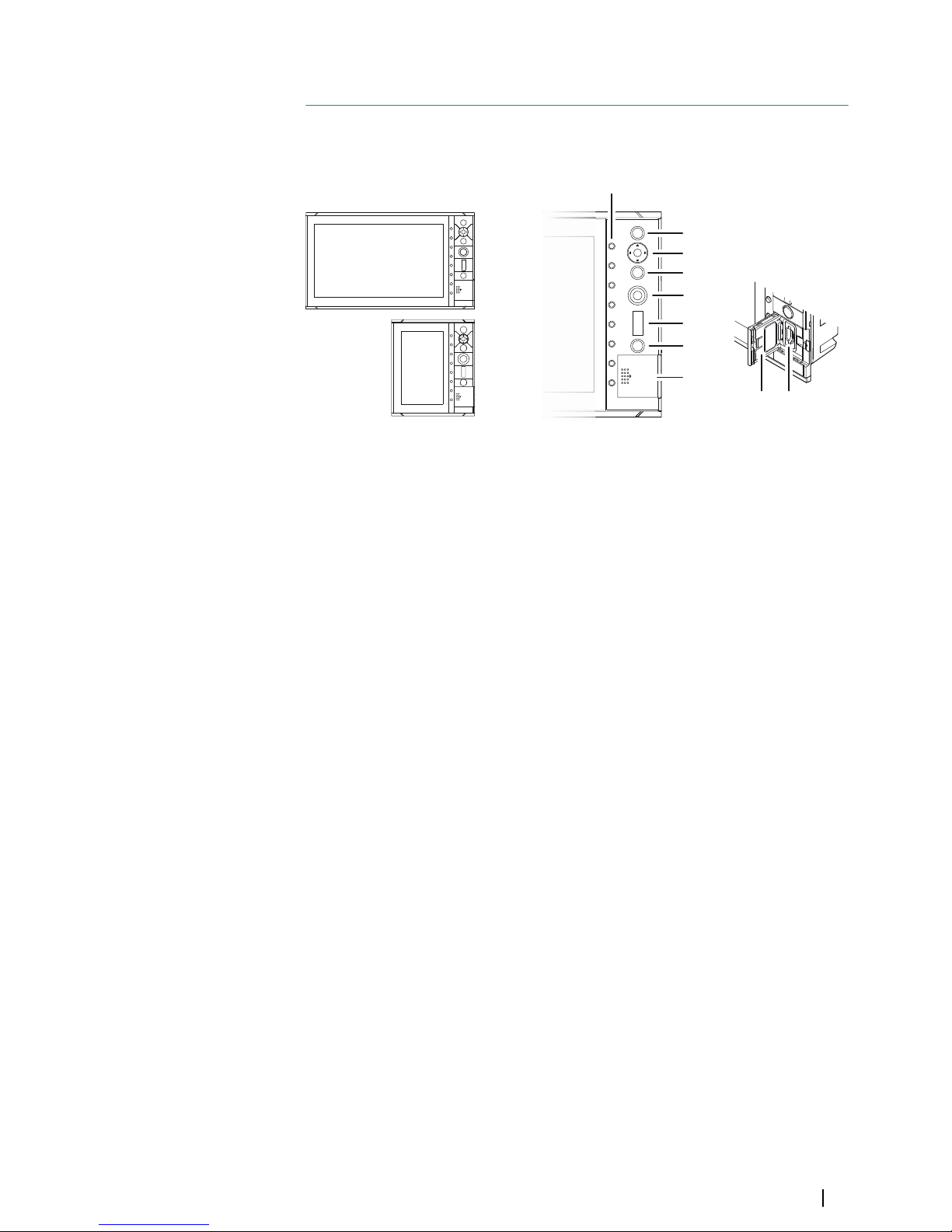
Front panel and keys
1
2
3
4
5
6
7
8
89
1 Softkeys
Press a key once to access options for the corresponding function.
2 Enter (ENT) key
With no menu or cursor not active: no function.
With cursor active on PPI: press to acquire a selected target, press and hold to
display options for managing targets.
Menu and pop-up operation: press to select an option or activate/deactivate an
option.
3 Arrow keys
With no menu active: press to move the cursor on the radar PPI.
Menu operation: press to move through menu items and to adjust a value.
4 Exit (EXIT) key
With no menu or cursor not active: no function.
With cursor active on PPI: press to remove cursor.
Menu operation: press to return to previous menu level or to exit a dialog.
5 Rotary knob
With no menu active: behavior depending on operational mode.
Menu operation: rotate to scroll through menu items and to adjust values, press to
select or to save settings.
6 Range (RANGE) key
Press the + or the - indication to increase or decrease the radar range.
7 Standby/Brilliance (STANDBY/BRILL) key
Press once to display the Brilliance/Standby pop-up, press again to toggle
between Standby and Transmit mode.
Press and hold to switch the radar system on/off.
8 Card reader door
9 SD card reader
2
The user interface | R2009/R3016 User manual
11
Page 11
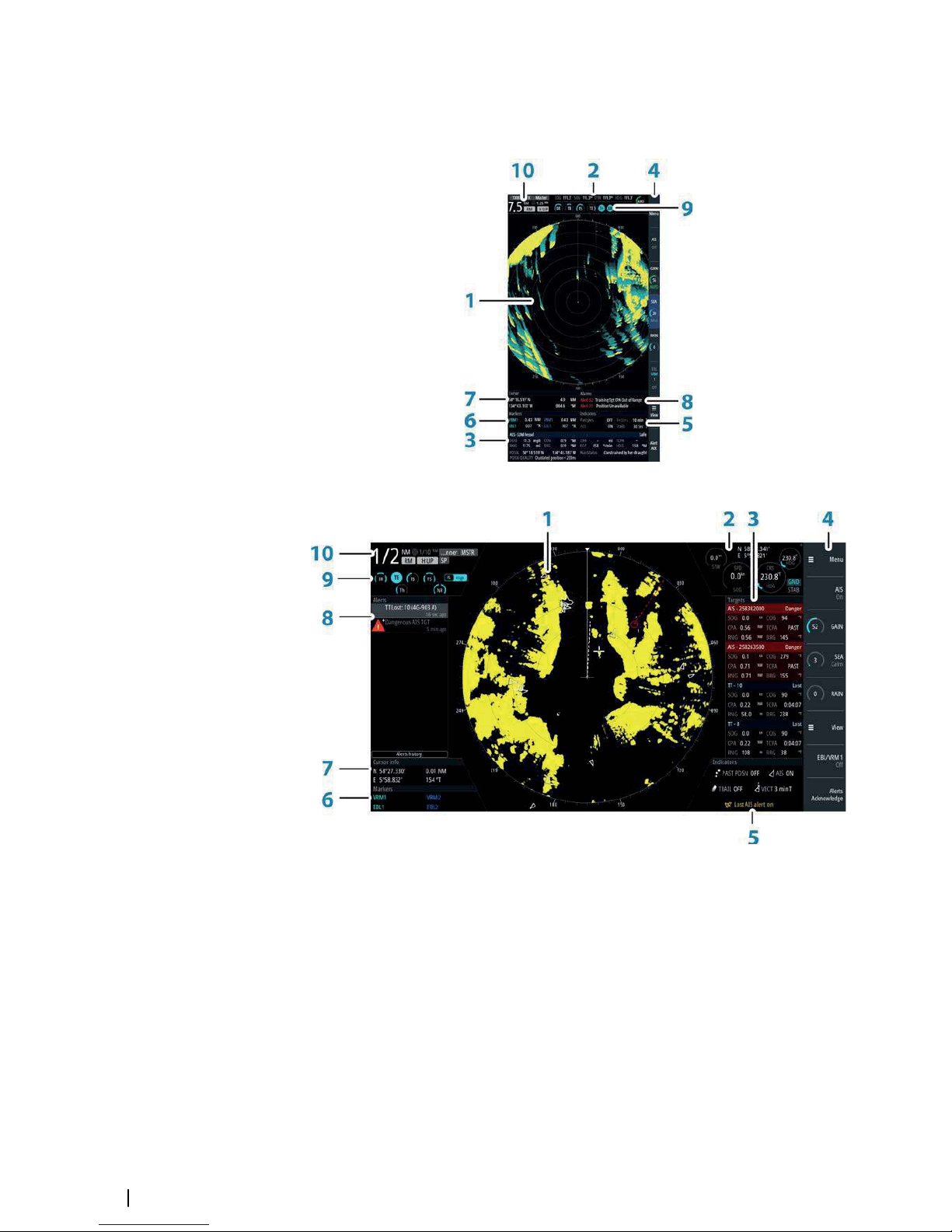
Main panel
The main panel is divided into predefined areas as shown in the figure below.
R2009
R3016
1 Plan Position Indicator (PPI)
Radar video area where all tracking and navigation options are performed.
2 Own ship information
Stabilization mode indicator, picture freeze indicator and gauges showing primary
and secondary sensors.
3 Target panel
Detailed information about selected targets and AIS targets.
4 Softkey bar
Reference for softkey functions.
5 Target indicators
Overview of target indicator settings.
6 Markers
Details for active VRM and EBL markers.
12
The user interface | R2009/R3016 User manual
Page 12
7 Cursor information
Range and bearing from the vessel to the cursor position. Also including position
information if a position source is available.
8 Alerts panel
List of all active alerts.
9 Signal indicators
Gauges for signal processing and indicators for radar functions.
10 System information
Range, mode and pulse details.
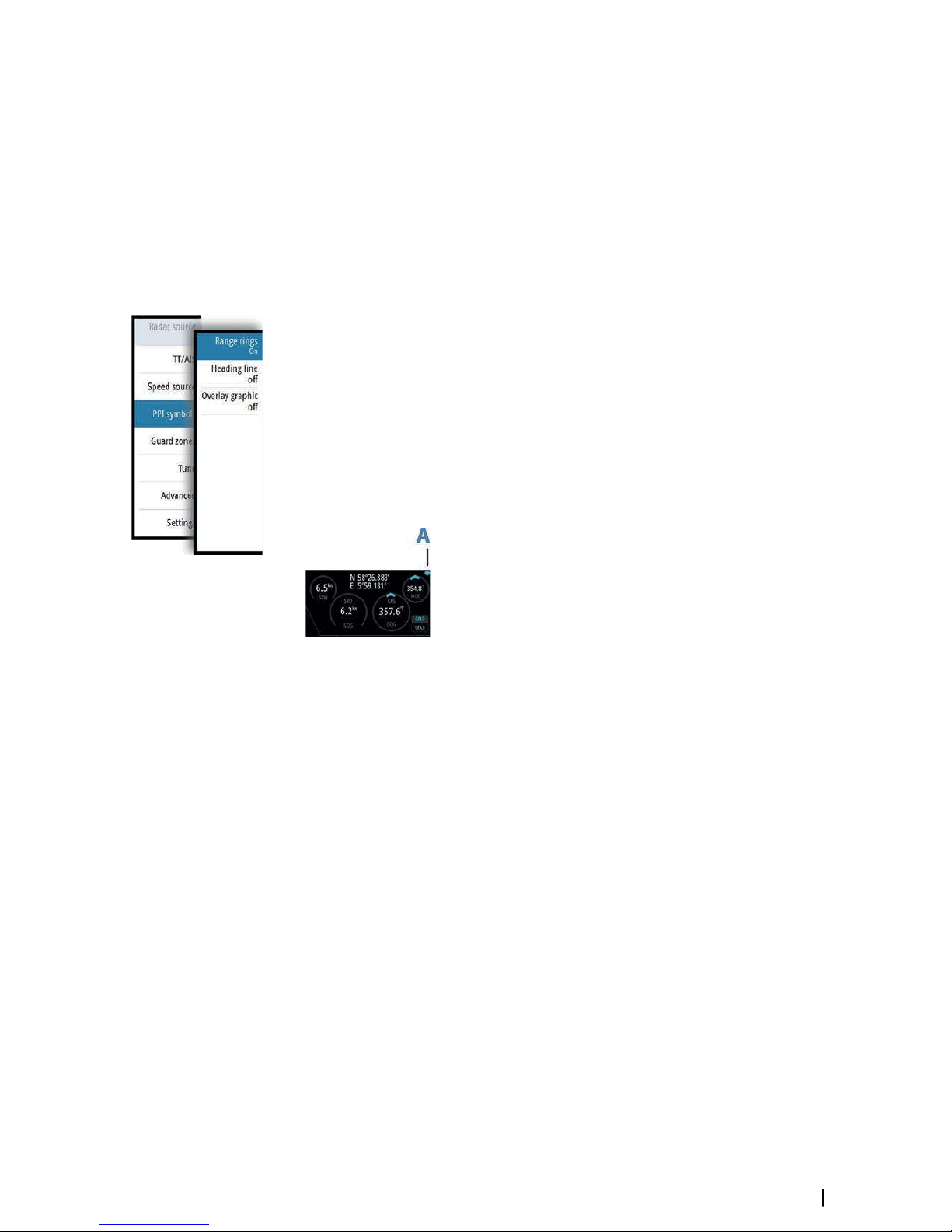
PPI symbols
Range rings and heading line symbols can be turned on and off individually from the PPI
symbols sub menu.
The Overlay graphic off menu option turns off all graphics overlaid on the radar PPI,
showing only the video signal.
¼
Note: The Heading line off and Overlay graphic off menu options are mono stable,
meaning that you need to press and hold the ENT key or the right arrow key to
temporarily remove the relevant symbols from the panel. The graphics are invisible as
long as the key is pressed, and will turn on again when the key is released.
Picture freeze indicator
The Own ship information area includes a picture freeze indicator (A). The small dot blinks at
an interval of 1 second to show that the screen is alive and that information from sensors are
updated.
If the picture freezes the R3016 Control unit needs to be restarted.
The user interface | R2009/R3016 User manual
13
Page 13
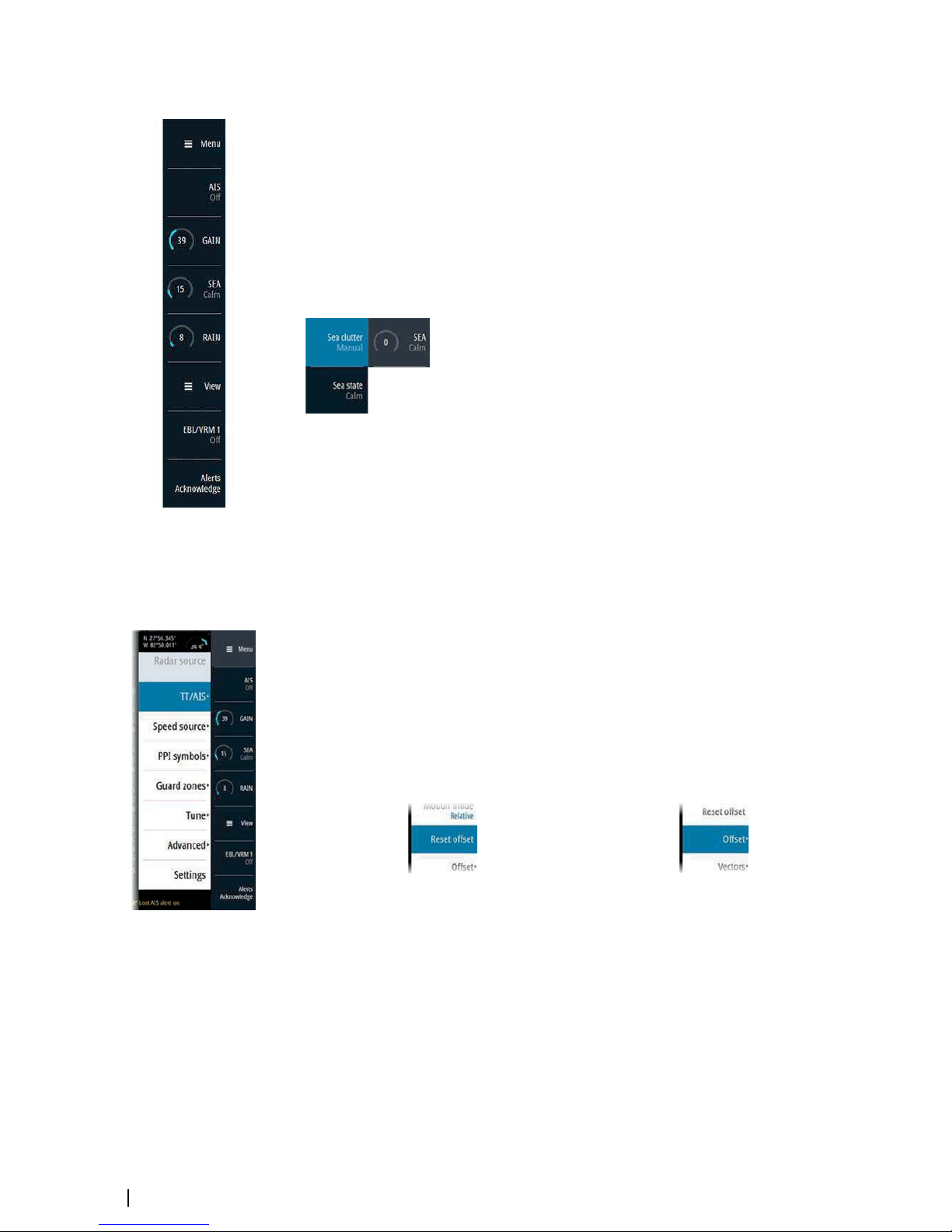
Softkeys
The softkeys are always accessible, and the softkey bar is always displayed on the radar panel.
When a softkey is pressed, the function for the selected softkey becomes available.
The arrow keys, the rotary knob and the ENT key have different functions depending on
which softkey is selected.
More details about the softkey functionality are available in the separate section describing
the functions later in this manual.
Softkey pop-ups
If you press the GAIN, SEA and EBL/VRM softkey twice, their corresponding pop-up is
displayed.
If a pop-up has more than one option, you select the options by using the arrow keys.
You remove the pop-up and revert to the softkey's main function by re-pressing the softkey,
by pressing another softkey or by pressing the EXIT key.
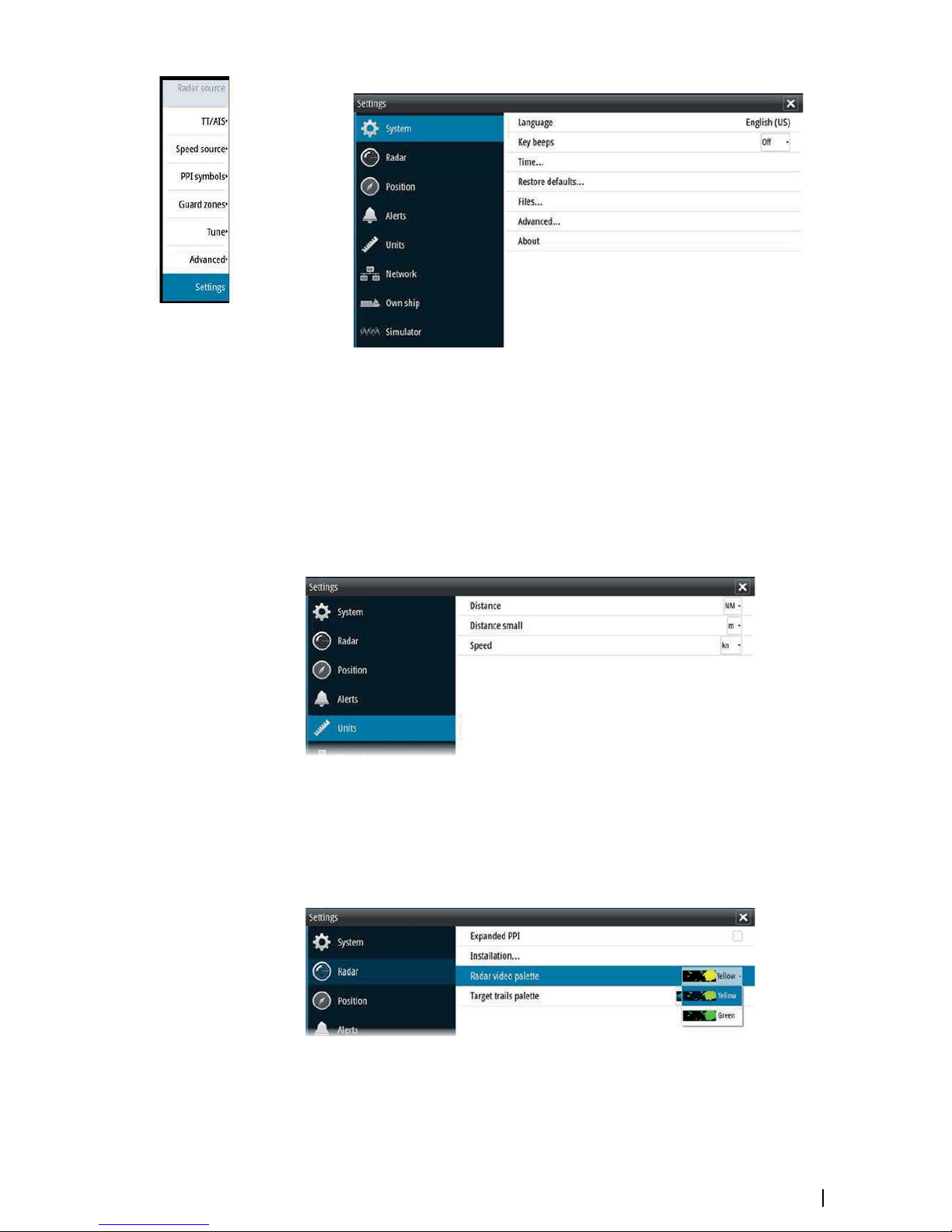
The menu system
The menu system consists of the main menu with sub menus. The main menu gives access
to the Settings dialogs.
If a menu is inactive for 10 seconds the menu will automatically close.
Main menu and sub menus
You access the Main menu by pressing the Menu softkey.
• Use the up and down arrow keys or turn the rotary knob to move up and down in a menu
• Press the ENT key, the right arrow key or the rotary knob to access a sub menu, to toggle
options and to confirm a selection
• Press the EXIT key or the left arrow key to return to previous menu level and then exit the
menu system
A selected menu item is indicated with a blue background. If a sub-menu is available this is
indicated with a right arrow after the text.
Selected menu item
Sub-menu indication
Settings dialogs
The various Settings dialogs provide access to system settings and for vessel specific settings.
You access the Settings dialogs from the Main menu.
14
The user interface | R2009/R3016 User manual
Page 14
• Use the up and down arrow keys or turn the rotary knob to move up and down in a
Settings dialog
• Press the ENT key, the right arrow key or the rotary knob to access the Settings details and
to confirm a selection
• Press the EXIT key to close a dialog
There is no time-out for the Settings dialogs. A dialog remains open until it is manually
closed.
Measurements units
You can change the measurement units from the Units Settings dialog.
¼
Note: Measurements units can only be changed when the connected antenna is in
standby.
Radar palettes
Different palettes are available for the radar video and for the target trails.
You select the palettes from the Radar Settings dialog.
The user interface | R2009/R3016 User manual
15
Page 15

On-screen keyboard
A numeric or alphanumeric virtual keyboard is displayed when required to enter user
information in dialogs.
• Select a virtual key by using the arrow keys followed by the ENT key to confirm the
selection
• Complete the entry and close the dialog by selecting the Enter virtual key
You remove the virtual keyboard without entering information by pressing the EXIT key.
Screen capture
Simultaneously press the ENT and Power/Brilliance keys to take a screen capture. Screen
captures are saved to internal memory.
To view files, refer to "Files" on page 48.
16
The user interface | R2009/R3016 User manual
Page 16
Basic operation
Turning the system on and off
The system is switched ON by pressing the STANDBY/BRILL key on the control unit.
Press and hold the STANDBY/BRILL key for 5 seconds to turn the control unit and the radar
antenna off
¼
Note: The R2009 Control unit can be wired and configured for power control. If the unit
is configured as a power slave, the unit will turn on and off when the power master is
turned on and off. Refer to "Power Control" on page 48.
Adjusting display brightness
At first start-up the display brilliance is set to 100%. When the unit is restarted the brilliance is
automatically set to the level it was prior to switching the unit off.
The brilliance is adjusted from the Brilliance/Standby pop-up.
• Display the pop-up by pressing the STANDBY/BRILL key, then adjust the display
brilliance by turning the rotary knob.
The system includes a Day and a Night color palette, optimized for day and night light
conditions. When the brilliance is set to 40% or lower, the system switches to use the night
palette.
• With the pop-open, you switch between Day and Night palette by pressing the left (40%)
or right (100%) arrow keys.
You remove the pop-up from the panel by pressing the EXIT key.
Selecting radar source
More than one antenna can be connected to the radar control unit.
You select active antenna from the main menu.
Switching between Transmit and Standby mode
You toggle between Transmit and Standby mode by pressing the STANDBY/BRILL key
when the Brilliance/Standby pop-up is displayed.
Adjusting the radar range
You increase or decrease the range by one step by pressing the + and - icons on the Range
key.
The radar range is shown in the upper left corner of the radar panel.
The range available depends on the connected radar antenna. Refer to the specifications for
your radar antenna for information.
Using the cursor
The cursor can be used to measure a distance and to aquire and select targets within the PPI
area.
The cursor is by default not active after power on.
• You activate the cursor and display the cursor icon by pressing one of the Arrow keys
• You move the cursor within the PPI area by pressing one of the Arrow keys
• You deactivate the cursor and remove the cursor icon from the PPI by pressing the EXIT
key
¼
Note: The cursor cannot be activated, deactivated or moved when a menu or a Settings
dialog is open.
When the cursor is active on the radar PPI, the cursor information area will show range and
bearing from the vessel to the cursor position. If the system is connected to a position source
(i.e. EPFS), the cursor information area includes the geographic position of the cursor.
3
Basic operation | R2009/R3016 User manual
17
Page 17

When the cursor is active the ENT key is used for managing targets.
Target tracking
When the cursor is active, you can use the ENT key for acquiring radar targets.
• Press the ENT key once to aquire the target at cursor position without displaying the
Cursor ENTER menu
• Press and hold the ENT key to display the Cursor ENTER menu.
The items in the Cursor ENTER menu depends on if a target is positioned at the cursor
position, the type of target, and the status of the target.
No target at cursor position Target at cursor position
See more details about Radar targets and AIS target in "Managing targets" on page 24.
Selecting speed source and stabilization mode
Speed information can be obtained from different speed sources connected to the system.
You can at any time switch the preferred primary speed source to any of the available speed
sensors from the Speed source menu.
The stabilization mode depends on selected speed source, and the system will automatically
switch to the available stabilization mode when you switch speed source.
The table shows stabilization modes available for each speed source type. Any restrictions for
a source are detailed under each speed source description in the following sections.
Speed source
Stabilization mode
available
Restrictions
Speed LOG (Single axis) Sea None
Speed LOG (Dual axis)
Sea and Ground (depending
on the transducer)
None
EPFS Ground None
Primary speed source (A), secondary speed source (B) and stabilization mode (C) are shown
in the Own ship information panel.
Speed LOG
The speed LOG can be Single or Dual axis input, either water track or bottom track. Therefore
the stabilization mode available can be either Sea or Ground depending on the sensor in use.
¼
Note: The speed through water measured close to the hull is affected by the tide and by
the current, so from time to time it will differ significantly from speed over the ground. A
Speed Log measuring speed through water may in specific cases be affected by poor
conditions due to e.g. air or ice below the sensor. If the sensor measures only the
longitudinal component of the speed, the transversal ship component is unknown to
the radar.
EPFS
The EPFS provides True Speed and True Course Over Ground.
18
Basic operation | R2009/R3016 User manual
Page 18
Adjusting the radar image
You may improve the radar image by adjusting the gain, by filtering out unwanted echoes
due to sea clutter, rain or other weather conditions, and by tuning the sensitivity of the radar
receiver.
¼
Note: Tuning is only available for HD radar sensors.
¼
Note: The radar image settings do not affect the AIS targets.
Sea and rain clutter could be present at the same time and further degradation in detection
performance will be experienced. As sea clutter is related to short range and rain clutter is
usually present in a longer range, rain clutter settings can be adjusted without affecting the
echoes in the sea clutter area.
Some functions include both a manual and an automatic mode. It is recommended to use
the manual mode only if the automatic mode doesn't provide satisfactory results.
The radar image is controlled by dedicated softkeys as described in the next sections.
¼
Note: It is recommended to turn Trails OFF when you adjust the radar image as trails
might hinder the proper video adjustment feedback.
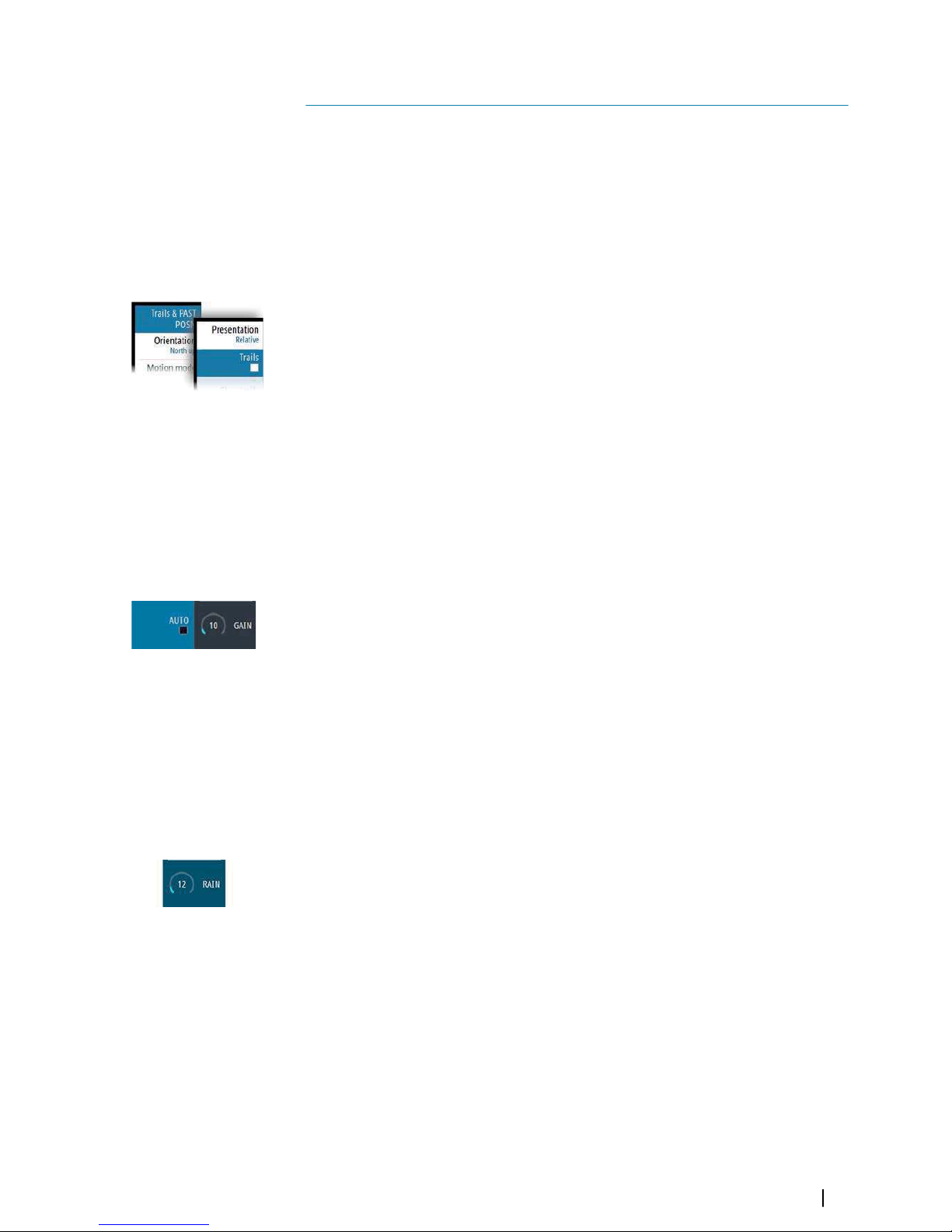
Gain
The Gain option controls the sensitivity of the radar receiver. A higher gain makes the radar
more sensitive to radar echoes, allowing it to display weaker targets. If the gain is set too
high, the image might be cluttered with background noise.
¼
Note: The Gain control shall not be used to clean the picture from sea or rain clutter.
The value of the Gain should be set so that the background noise is just visible on the radar
panel.
At start-up of the system, the Gain is 80% in order to receive the optimum noise level.
Gain has a manual and an automatic mode.
You adjust the gain by using the GAIN softkey:
• Press the softkey once to activate the function, then turn the rotary knob to manually
adjust the setting
• Press and hold the softkey to turn on/off the automatic option
• Press the softkey twice to display the Gain pop-up, then press the ENT key to turn on/off
the automatic option
Rain anti-clutter
Rain anti-clutter is used to reduce the effect of rain, snow or other weather conditions on the
radar image. When you increase the value, the sensitivity of the long distance field clutter
caused by rain is reduced. The value should not be increased too much as this may filter out
real targets.
Rain anti-clutter has no automatic mode.
You adjust the rain anti-clutter by using the RAIN softkey:
• Press the softkey once to activate the function, then turn the rotary knob to manually
adjust the setting.
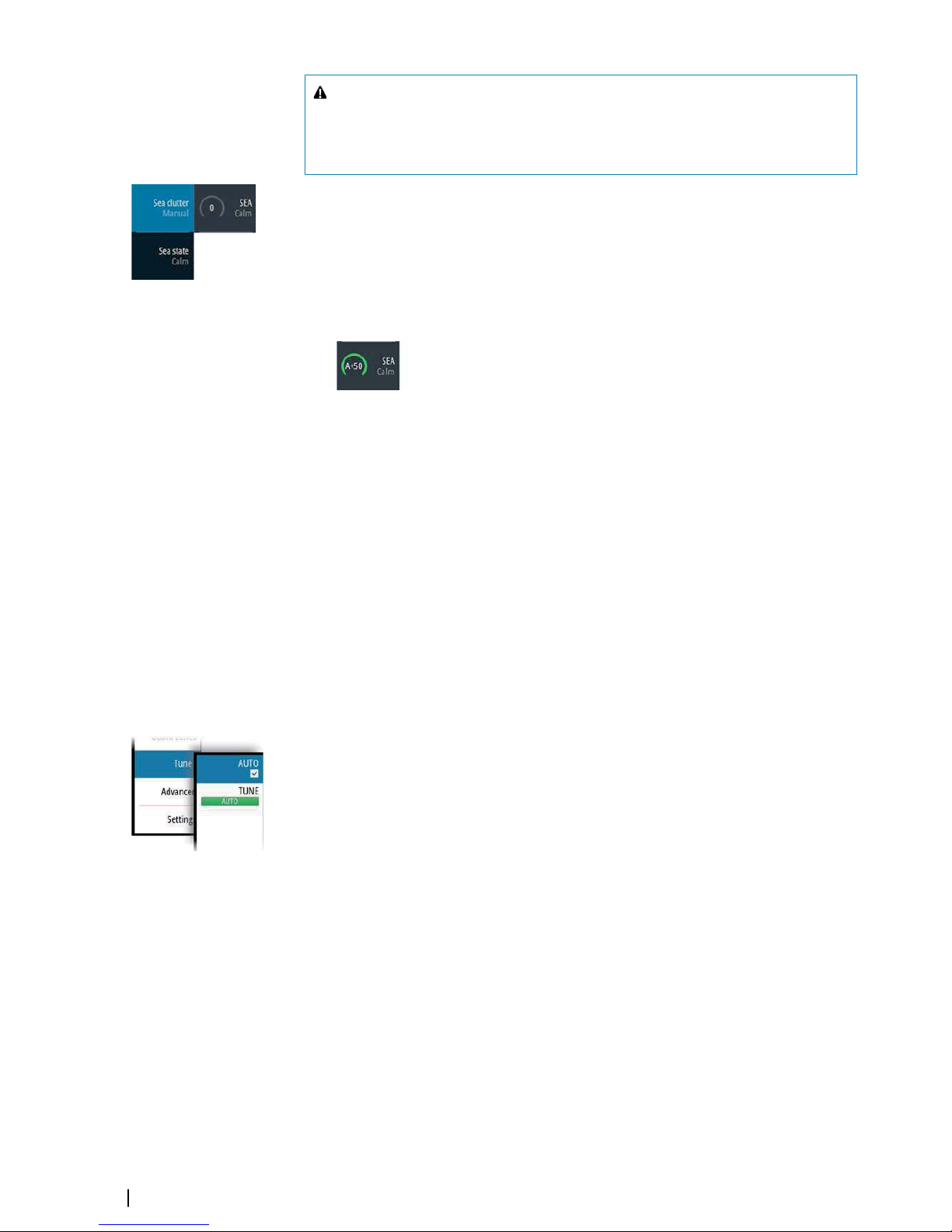
Sea anti-clutter
The Sea anti-clutter option is used to filter the effect of random echo returns from waves or
rough water near the vessel. When you increase the value, the sensitivity of the near field
clutter caused by waves is reduced. If the value is increased too much, both sea clutter and
targets will disappear from the display and targets around own ship may not show
potentially dangerous targets.
4
Adjusting the radar image | R2009/R3016 User manual
19
Page 19
Warning: At increasing levels of sea clutter, some targets cannot be
detected even by means of the Sea anti-clutter filtering, since buoys or other
small objects are producing echoes of a level lower than the ones coming
from waves.
The value of the Sea anti-clutter should be set so that the clutter is seen as small dots, and
small targets will become distinguishable around the ship.
Sea anti-clutter has a manual and an automatic mode, and the system includes predefined
settings for Calm, Moderate and Rough sea state conditions.
In Auto mode the Sea anti-clutter can be manually adjusted by the rotary knob to fine tune
the settings to achieve the best possible clutter cancellation. The text within the control icon
will then change from AUTO to A ± XX indicating that the setting is adjusted to remove a
superior or an inferior amount of clutter.
You adjust the sea clutter by using the SEA softkey:
• Press the softkey once to activate the function, then turn the rotary knob to manually
adjust the setting
• Press and hold the softkey to turn on/off the automatic option
• Press the softkey twice to display the Sea pop-up, then:
- press the ENT key to turn on/off the automatic option
- use the rotary knob to fine tune the setting in automatic mode
- use the arrow keys to select the Sea state option, then press the ENT key to toggle
through the predefined sea state conditions
Tune
¼
Note: Tuning is only required for HD radar sensors.
You can tune the radar receiver to have maximum target returns on the screen.
Tuning has a manual and an automatic mode.
In automatic tuning mode, the transceiver performs a tuning of the receiver when the range
scale changes.
Manual tuning should only be used if the automatic tuning fails. The tuning should not be
performed earlier than 10 minutes after the radar has been switched on. Manual tuning is
best done by a long pulse setting (range set to 24 NM), and by using a high level of gain. In
this condition, adjust the tuning control to obtain the maximum signal strength.
You adjust the tuning from the Tune sub-menu.
20
Adjusting the radar image | R2009/R3016 User manual
Page 20
Radar view options
Several radar view options are available from the View sub menu, activated by pressing the
View softkey.
Target trails and past position
You select how the radar targets are displayed on the radar image in the Trails and past
position sub menu. See "Display settings for radar targets" on page 25.
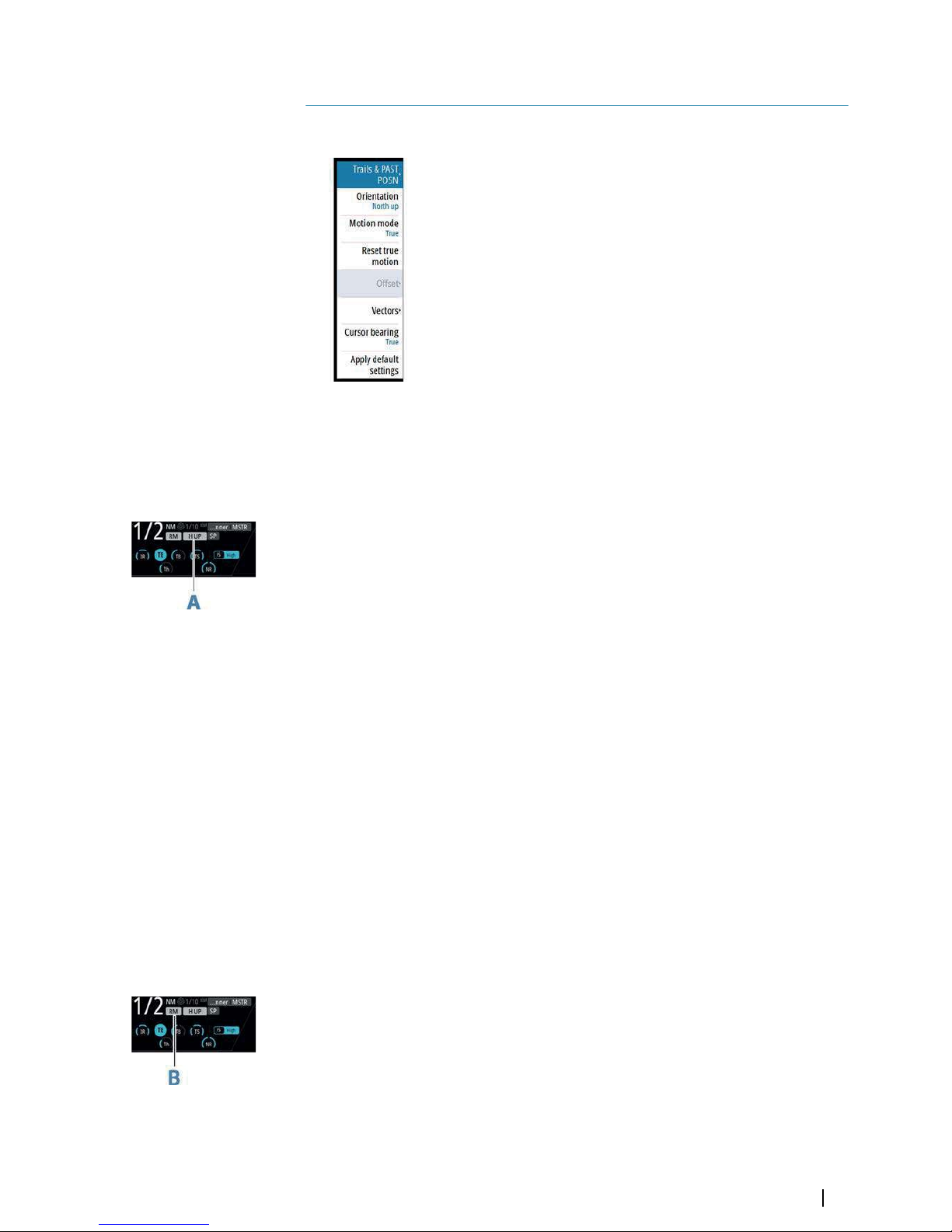
Radar orientation
Selected radar orientation is shown in the System information panel (A).
Head-up
In Head-up mode the heading line on the PPI is oriented on the 0° on the bearing scale and
towards the top of the screen. The radar image is displayed relative to own ship, and when
the ship turns the radar image rotates.
¼
Note: Head-up is only available in Relative motion mode, and it is the only orientation
mode available if the radar is not connected to a heading source.
North up
In North up mode the 0° indication on the PPI represents north. The heading line on the PPI
is oriented according to own ship heading obtained from the gyro compass. When the ship
turns the heading line changes its direction according to the ship's heading, while the radar
image remains stabilized.
The North up orientation is not available if no heading source is connected to the radar. If
heading data is lost, the system will automatically switch to Head-up orientation.
Course up
In Course up mode, the top of the bearing scale indicates the ship’s true course measured
from north at the time Course up was activated. When the ship turns the bearing scale
remains fixed, while the heading line rotates with the ship's yawing and course change.
The Course up orientation is reset by re-selecting the Course up mode.
Radar motion mode
Selected radar motion mode is shown in the System information panel (B).
Relative motion
In Relative motion your vessel remains in a fixed location on the Radar PPI, and all other
objects move relative to your position.
You select the position of the fixed location as described in "Offsetting the PPI center" on page 22.
5
Radar view options | R2009/R3016 User manual
21
Page 21
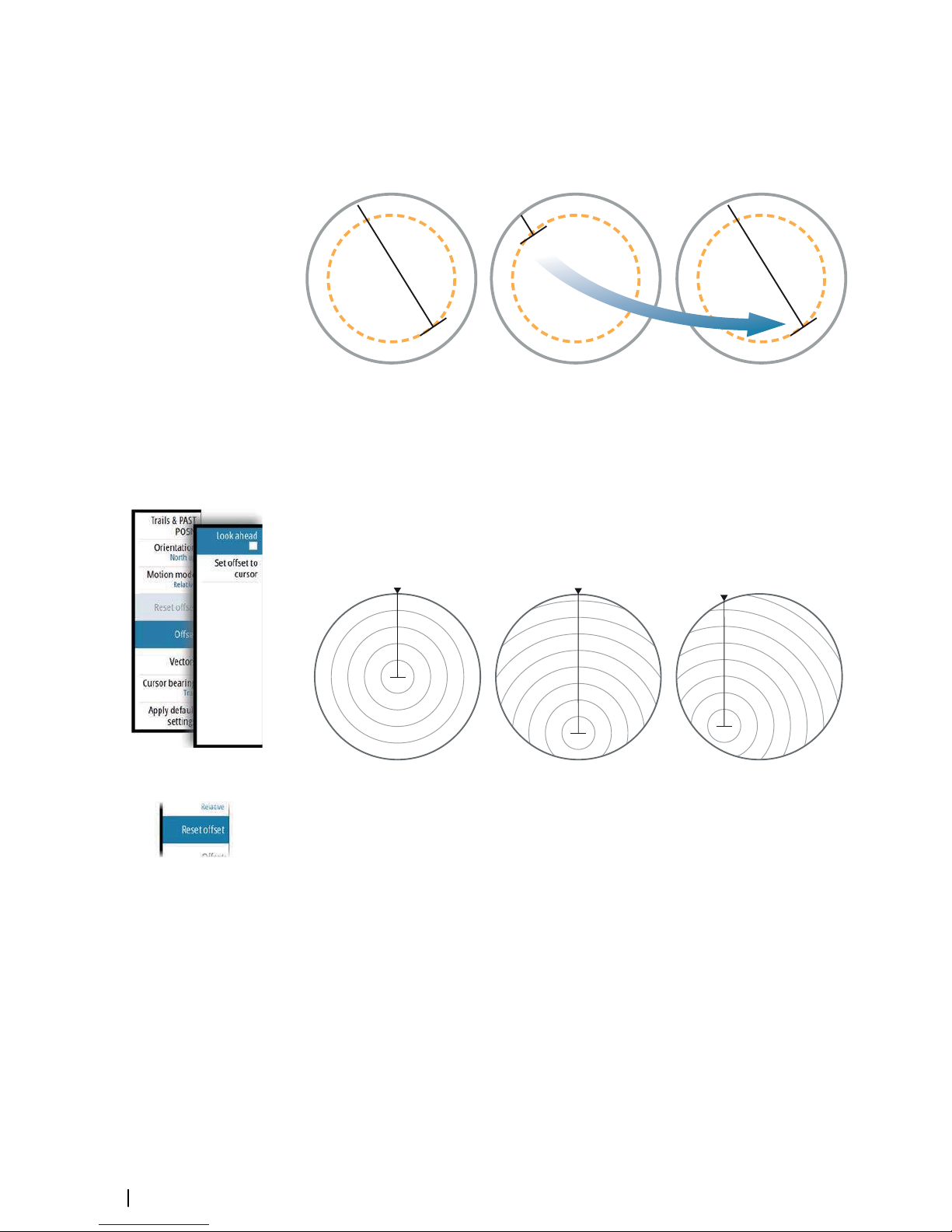
True motion
In True motion your vessel and all moving targets move across the Radar PPI as you travel. All
stationary objects remain in a fixed position. When the vessel’s symbol reaches 75% of the
PPI radius (A), the radar image is redrawn with the vessel symbol re-positioned (B) 180°
opposite the current heading bearing.
A
B
When True motion is selected, the True motion reset option is available from the menu. This
allows for manually resetting the radar image and vessel symbol to its starting position.
¼
Note: True motion is only available when the PPI is in either North Up or Course Up
orientation mode.
Offsetting the PPI center
You can set the antenna position origin to different location on the radar PPI. The options
described in the next sections are available.
¼
Note: Offsetting the PPI center is allowed only in Relative motion.
PPI center: Center PPI center: Look Ahead PPI Center: Offset
You return the antenna center to PPI center by using the Reset offset option in the View
menu.
Center
The Center option resets the antenna position to the center of the PPI.
Look ahead
The Look ahead option is used to maximize the view ahead of the vessel. When selected the
PPI center is placed at 70% of the radius of the PPI, 180° opposite the top of the display.
¼
Note: Look ahead is only available for Heading Up radar orientation.
Offset to cursor position
This option allows you to use the cursor for selecting the antenna center. When the option is
selected the PPI center is immediately moved to the cursor position.
Vectors
A target vector indicates the expected target movement within a defined time. The vectors
are computed by multiplying the target speed with the set time value.
22
Radar view options | R2009/R3016 User manual
Page 22
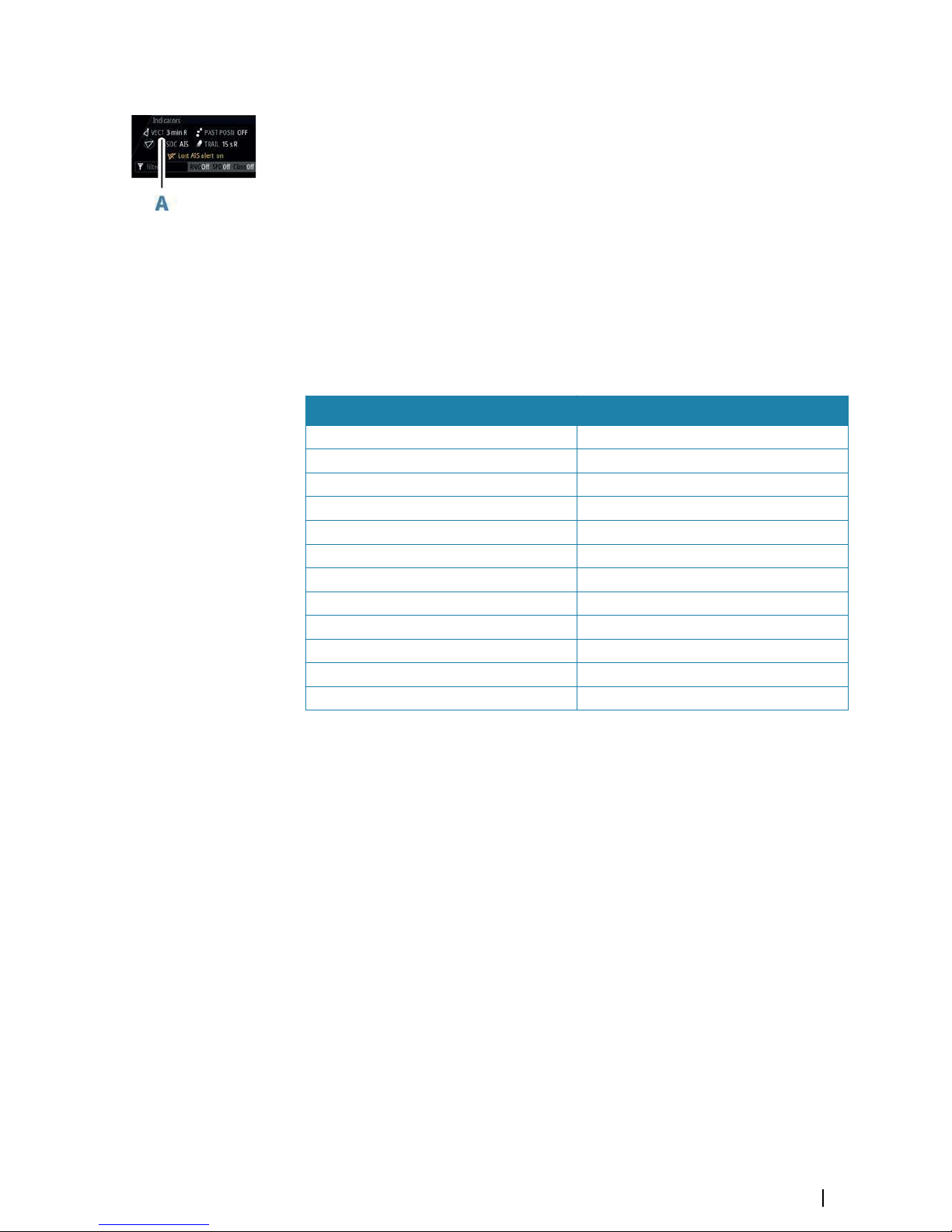
You can select to show target vectors with true or relative speed, and you can set the length
of the vector. The length represents the vessel movement within the given time period.
Vector settings are shown in the Target indicators panel (A).
¼
Note: True speed indication is not possible if there is a Gyro or Speed source failure. If the
vectors are in true presentation and one of the sensors (gyro or speed log) fails, the
presentation is automatically switched to relative.
Cursor bearings
You can select to show the cursor bearings as True or Relative to own vessel.
¼
Note: True can only be selected when a gyro is available.
Applying default control settings
The default control settings allows for quickly setting the system back to a known state.
The default parameters are:
Function Default setting
Vector Mode - relative; time - 6 min
Target trails Mode - relative; time - 6 min
Collision warning CPA - 2 NM; TCPA - 12 min
VRM EBL One EBL/VRM, EBL - 0.25 NM; VRM - 0
Range 6 NM
Range rings Off
Orientation North up
Motion mode True
Off-centering Look ahead
Speed source EPFS; Stabilization - Ground
Past position Off
AIS On
Radar view options | R2009/R3016 User manual
23
Page 23
Target tracking
Radar targets and AIS targets are used to estimate the relative speed and direction, and the
system can alert the user about potentially dangerous targets and loss of communication
with an AIS target.
Managing targets
When the cursor is active, you can use the ENT key for acquiring radar targets.
• Press the ENT key once to acquire the target at cursor position without displaying the
Cursor ENTER menu
• Press and hold the ENT key to display the Cursor ENTER menu.
The items in the Cursor ENTER menu depends on if a target is positioned at the cursor
position, the type of target, and the status of the target.
If more than one target is located at cursor position, the menu will show the targets'
reference number.
No target at cursor position One target at cursor position Two radar targets at cursor position
Selecting and de-selecting targets
AIS targets and tracked radar targets can be selected, but only one target can be selected at a
time. When a target is selected the target symbol will change to selected target, and the
Targets panel will show detailed information for the target.
You de-select a target and remove the detailed target information in the Target Panel by
selecting the deselect target option in the Cursor ENTER menu.
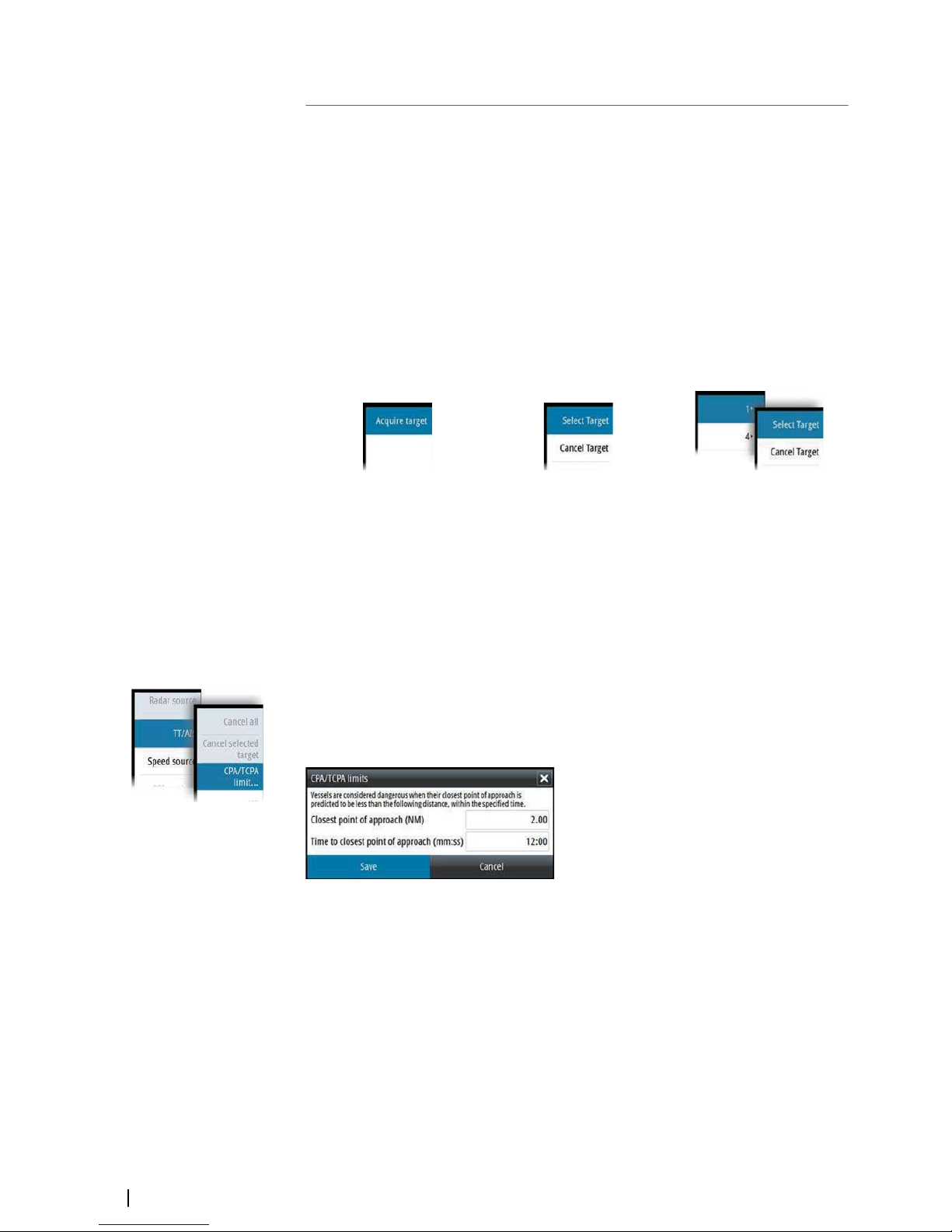
Defining dangerous vessels
You can use the CPA (Closest point of approach) and TCPA (Time to closest point of
approach) values to define when a target should be considered as dangerous. When a radar
or AIS target comes within this distance, the symbol changes to the “dangerous” target
symbol.
Radar targets
Any radar echo can be acquired and tracked.
Acquiring radar targets
The acquire target option is used for acquiring any targets within the radar range.
To start tracking a radar target, move the cursor to the target and then either:
• Press the ENT key once to acquire the selected target without displaying the Cursor
ENTER menu
• Press and hold the ENT key to display the Cursor ENTER menu, the select the Acquire
target menu option
There might be a delay after having selected the target before the system received stable
target data:
6
24
Target tracking | R2009/R3016 User manual
Page 24

• After 1 minute the symbol will show a trend vector, and speed and course of the trend will
be shown in the Target panel
• After 3 minutes the symbol will become steady, and all the data fields of selected targets
will be available. The target symbol will change to tracked radar target symbol
The above time references represent worst case situations. In a stable situation the radar
target information is available immediately.
¼
Note: The CPA/TCPA anti-collision functions will be enabled for tracked radar targets.
Radar target symbols
The following symbols are used for radar targets in the system:
Symbol Description
Tracked Radar target with velocity vector.
Selected Radar target, indicated with a square (dotted line)
around the target symbol.
Dangerous Radar target indicated with bold line and with red
color.The symbol flashes until the target alarm is acknowledged by
the operator. It remains red until the system no longer defines it as a
dangerous target.
Lost Radar target, indicated with crossed lines centered on the
target symbol. The symbol is located at the last received position
from the target.
Display settings for radar targets
You select how the radar targets are displayed on the radar image in the Trails and past
position sub menu.
The settings are indicated in the Indicators panel.
Trails and past position presentation mode
Trails and past position indicators can be displayed as either true or relative to own ship.
Trails and past position indicators are available in both Sea and Ground stabilization modes.
See "Selecting speed source and stabilization mode" on page 18.
Target trails
A target trail indicates the target movement by leaving an afterglow, gradually reducing the
intensity over time.
Target trails show where a target used to be, and the function is useful for quickly assessing
the movement of targets relative to your own vessel.
You can set the length of the trails. The length represents the time it takes for the trails to
fade out.
The Clear trails option clears target trails from your radar panel temporarily. The trails start
to build up again unless you switch the function off.
Target tracking | R2009/R3016 User manual
25
Page 25

Showing a target's past positions
The Past position option is used to visualize the previous positions of a tracked target or an
activated AIS target.
The time defines the length of time for which each target's past positions should be
displayed on the PPI, while the interval defines interval between each past position indicator.
Warning: Trails build-up starts when exiting from the standby condition.
Trails or past position length will be reached only after the selected time
duration.
Possible target tracking errors
Some factors can generate tracking errors or make the radar image difficult to read, and
therefore reduce target detection capability:
• Sea, rain, snow and low clouds returns
• Radar Interference
• Sidelobe echoes
• Blind sectors
• Low signal to noise ratio and signal to clutter ratio
Warning: The speed and course of a radar target are obtained by
consecutive measurements of the echo position. The data is then filtered to
reach the required precision. This means, that every abrupt change of speed
and direction will be recognized with a certain delay to reach absolute
certainty that the target is moving in a different way. The confirmation delay
is about five scans and after that some additional time is needed to reach
the same data precision as from before the maneuver.
Sea, rain, snow and low clouds returns
Radar echoes in sea, rain or weather clutter areas may be masked by the clutter. The effects
of such errors appear as continuous big changes of the target course and speed vectors.
Sometimes the symbol of a target that has been acquired at high speed can slip away from
the real target position after a certain time, and this might generate the lost target alarm.
These errors can be avoided or at least minimized by proper manual adjustments of sea and
rain controls, or by selecting the automatic control option. For more details, see "Adjusting the
radar image" on page 19.
Radar interference
Other radars operating in the same frequency band can generate interference. Normally this
is seen on the radar screen as a series of spirals. When the interference falls on the tracked
target, it can cause a deformation of the size of the echo, and consequently a small error in
the target's course and speed values.
Adjustment option is available in the Advanced menu. See "Rejecting radar interference" on page
34.
Sidelobe echoes
Radar antennas have a radiation pattern consisting of a main lobe and several very small
sidelobes. Most of the energy transmitted by the radar is radiated and received back on the
main lobe, and a very small part on the sidelobes. This has no effect in case of distant or small
targets, but the returns from a large target at short range (less than 3 NM) can generate, on
both sides of the main echo and at the same range, arcs or series of small echoes. These
effects, when they are an extension of the main echo, can cause momentary errors for the
tracking, and course and speed values given by the tracking can become unstable.
The problem can usually be eliminated or strongly reduced by an accurate adjustment of the
Sea control. Refer "Sea anti-clutter" on page 19.
26
Target tracking | R2009/R3016 User manual
Page 26

Blind sectors
Funnels, masts or other obstructions (when located near the radar antenna) may cause blind
or shadow sectors, where the target visibility may be completely lost or strongly reduced.
Targets remaining in these sectors for long time (more than 10 antenna revolutions) will be
considered lost, and the lost target alert will be triggered.
Low signal to noise ratio and signal to clutter ratio
In situations where the signal to noise or the signal to clutter ratio of the radar echoes is low
(small vessels in heavy sea or rain clutter, or big vessels close to the radar horizon), target
detection is poor and the tracking will not detect the target at each antenna revolution. This
will cause errors in the tracking, and it can range from missed information and up to
complete loss of the target when it is missed for 10 consecutive antenna revolutions.
AIS targets
If a compatible AIS receiver is connected to the radar system, any targets detected by these
devices can be displayed and tracked. You can set alarms to notify you if an AIS target gets
too close or if the target is lost.
The system can display up to 20 AIS targets. An alert is triggered if the number of AIS targets
exceeds 95% of the maximum system limitation.
By default, all AIS targets are shown on the panel if an AIS device is connected to the system
and the AIS function turned ON. You can select to filter AIS targets as described in "AIS target
filtering" on page 28.
The AIS function is available when:
• AIS data is available through the serial line
• Gyro compass heading is available. If gyro heading is lost the AIS function is automatically
switched OFF
• EPFS valid position is available
AIS target symbols
The following icons are used for AIS targets in the system:
Symbol Description
AIS target with heading line, SOG/COG (dotted line) and passed
track.
AIS target with heading line and SOG/COG (dotted line), and with
indicated turn direction.
Selected AIS target, indicated with a square (dotted line) around
the target symbol.
Dangerous AIS target indicated with bold line and with red
color.The symbol flashes until the target alarm is acknowledged by
the operator.
Real ATON (Aids To Navigation)
Lost AIS target, indicated with crossed lines centered on the target
symbol. The symbol is located at the last received position from the
target.
¼
Note: A symbol is drawn with a dotted line if the collision avoidance cannot be
calculated.
Target tracking | R2009/R3016 User manual
27
Page 27

AIS target filtering
By default, all AIS targets are shown on the panel if an AIS device is connected to the system
and the AIS function turned ON.
You can select to filter the icons based on range and target speed from the AIS sub menu.
Displaying target information
The Target panel
By default the Target panel displays basic information about four targets. The panel displays
both tracked radar targets and AIS targets, listed by distance to own vessel.
When you select a radar or an AIS target, the Target panel changes to show detailed
information for the selected target. This information remains in the Target panel until the
target is de-selected.
Target panel - no targets selected Target panel - AIS target selected
28
Target tracking | R2009/R3016 User manual
Page 28

The Vessels dialog
The Vessels dialog displays a list of all tracked targets. The dialog is activated from the TT/AIS
menu.
This dialog lists targets by distance to own vessel, but allows for sorting the targets based on
target name. The dialog also lists received AIS messages.
Target tracking | R2009/R3016 User manual
29
Page 29

Navigation tools
Guard zones
The Guard zone function is used to warn the user about objects inside a specified zone
ahead or around your vessel.
You can define two guard zones with individual settings.
When a guard zone is activated the following happens:
• Any radar echo and AIS target received near the same position for 3 consecutive scans are
automatically acquired
• The target symbol change to indicate a dangerous target
• An alert text is displayed in the Alert panel
The alert indications remains as long as the target is within the guard zone.
You turn the guard zones on/off and manage the guard zone settings from the Guard zones
sub menu.
Defining a guard zone
1. Turn on the guard zone you want to define
2. Select the shape for the zone
- The adjustment options depends on the guard zone shape
3. Select Adjust to define the setting for the guard zone:
- A: Bearing, relative to vessel heading
- B: Depth
- C: Range, relative to vessel center
- D: Width
4. Return to previous menu level by pressing the EXIT key or by selecting the Finish
adjusting option in the menu.
C
B
A
D
Shape: Sector
B
C
Shape: Circle
EBL/VRM markers
The EBL/VRM markers are a basic tool for collision avoidance. They are used to mark any fixed
or moving radar target, and to measure distances between two objects.
The EBL/VRM markers are by default positioned at the center of the vessel. It is, however,
possible to offset the reference point to any selected position on the radar image to measure
the distance between two objects on the PPI, or to fix the marker to a target.
Two different EBL/VRMs can be placed on the radar image. They are identified as dashed
rings/lines with different colors to be able to discriminate them from each other and from
the fixed range rings:
• EBM/VRM1 is cyan
• EBL/VRM2 is blue
The EBL presentation can be defined with true or relative presentation:
7
30
Navigation tools | R2009/R3016 User manual
Page 30

• True motion: the reference is geographic (e.g. a coastal line or current own vessel position)
• Relative motion: the EBL follows a moving reference (own vessel or a moving target)
The markers' line width indicates whether the marker is in edit mode (bold lines) or at a fixed
position (thin lines).
EBL/VRM1 OFF,
function not active
EBL/VRM1 ON,
EBL adjustable by rotary knob
EBL/VRM1 ON,
VRM adjustable by rotary knob
The EBL/VRM pop-up
You display the EBL/VRM pop-up by pressing the EBL/VRM softkey twice, or by re-pressing
the softkey when the function is active.
The content of the pop-up depends on status of the active EBL/VRM. The example shows the
pop-up when active EBL/VRM is offset.
The adjustable parameter is indicated with blue text in the softkey.
From the pop-up you can:
• switch between active EBL/VRM 1 and EBL/VRM 2 marker
• turn on and off displaying of the active marker
• switch between adjusting EBL and VRM for the active marker. You can also switch
between adjustable parameter by pressing the rotary knob
• set offset for active marker
• reset an offset marker to vessel position
Turning the EBL/VRM markers on and off
Both EBL/VRM markers are by system startup turned off.
• Turn ON the selected EBL/VRM by pressing the EBL/VRM softkey once
• Switch between EBL/VRM 1 and EBL/VRM 2 in the function's pop-up
• Turn OFF the selected EBL/VRM by pressing the EXIT key. Repress the EXIT key to turn off
the second marker if this is on.
• Leave the EBL/VRM function with the marker ON by pressing one of the other softkeys
You can also turn the EBL/VRM marker on and off from the function's pop-up.
Adjusting the EBL/VRM marker
The markers' line width indicates whether the marker is in edit mode or at a fixed position.
When in edit mode the adjustable parameter is bold.
EBL/VRM1 ON,
function not in edit mode
EBL/VRM1 ON,
EBL adjustable by rotary knob
EBL/VRM1 ON,
VRM adjustable by rotary knob
When an EBL/VRM marker is in edit mode, the following options are available for adjusting
the marker:
• use the arrow keys to move the EBL/VRM intersection
• turn the rotary knob to adjust the adjustable parameter (bold line and blue text in softkey)
Navigation tools | R2009/R3016 User manual
31
Page 31

• press the rotary knob to switch between adjusting EBL and VRM
Offsetting the EBL/VRM marker
1. Press the EBL/VRM softkey twice to display the pop-up
2. Select the Set offset option
- The pop-up closes, and the cursor is positioned in the EBL/VRM center
3. Use the arrow keys to move the EBL/VRM center, then select one of the following options:
- press the ENT key to fix the marker to the selected position, then use the arrow keys to
move the EBL/VRM intersection
- turn the rotary knob to adjust the EBL
- press the rotary knob to toggle between EBL and VRM, then turn the rotary knob or use
the arrow keys to adjust the item that is editable
You remove the EBL/VRM marker from the radar image by pressing the EXIT key.
Measuring range and bearing
Different options are available for measuring the position, speed, course, distance and
bearing of radar echoes.
• Cursor position
• Range rings and bearing scale
• EBL (Electronic Bearing Lines) and VRM (Variable Range Markers)
It is important to minimize the range to obtain the best precision for the measurement. In
most cases you can use a higher range if you position the PPI in one of the off-center modes.
Refer "Offsetting the PPI center" on page 22.
¼
Note: Every measurement made with cursor or EBL/VRM is always referred to the
Consistent Common Reference Point (CCRP).
Using the cursor
When you position the cursor over an echo, the cursor information area will show range and
bearing from the vessel to the cursor position.
This measuring option gives a fast and precise measurement of distance to a target.
Range rings and bearing scale
Range rings and bearing scale is used to measure distance when a fast measurement is
required. This measuring option gives only an approximate distance and speed of a target.
The range scale (A) and the distance between two adjacent range rings (B) are shown in the
System Information are on the radar image.
The range scales, the related distance between the range rings and number of rings are:
Range (NM) Distance between the
range rings (NM)
Number of range rings
1/8 1/40 5
1/4 1/20 5
1/2 1/10 5
3/4 1/4 3
1.5 1/4 6
3 1/2 6
616
12 2 6
24 4 6
36 6 6
48 8 6
32
Navigation tools | R2009/R3016 User manual
Page 32

Range (NM) Distance between the
range rings (NM)
Number of range rings
64 16 4
72 12 6
Measuring by using EBL/VRM markers
The Electronic Bearing Line (EBL) and Variable Range Marker (VRM) allows quick
measurements of range and bearing from own vessel to a target, or between two targets on
the PPI. Bearing and range are shown in the Markers panel (A).
Measuring distance from own vessel
1. Press the EBL/VRM softkey to turn the selected EBL/VRM marker on
2. Repress the EBL/VRM softkey to display the pop-up if you need to reposition the marker
to vessel position (if the center of the selected EBL/VRM is offset
3. Use the arrow keys or turn the rotary knob to position the EBL/VRM on the second
measuring point
Measuring distance between two objects
1. Press the EBL/VRM softkey twice
- The selected EBL/VRM marker is turned on and the pop-up displayed
2. Select the Set offset option
3. Use the arrow keys to reposition the EBL/VRM marker's center on the object from where
you want to measure the distance
4. Press the ENT key to confirm the position
- The cursor will automatically be moved from the marker's center to the EBL/VRM
intersection
5. Use the arrow keys or turn the rotary knob to move the EBL/VRM to the second
measuring point
- Range and bearing from the EBL/VRM marker's center to cursor position is now
displayed in the Markers panel
You can reset the EBL/VRM marker's center to vessel position by selecting the Reset offset
option in the EBL/VRM pop-up.
Navigation tools | R2009/R3016 User manual
33
Page 33

Advanced radar options
Use modes
¼
Note: Radar User modes are only available for Halo radar antennas.
Use modes are available with preset control settings for different environments. The
following modes are available:
• Custom - In this mode all radar controls can be adjusted and will be retained after a mode
change or radar power cycle. Radar defaults are set for general purpose use.
• Harbor - In this mode the radar settings are optimized for areas such as busy waterways
and large man-made structures where good target discrimination and rapid image
updates are needed.
• Offshore - In this mode the radar settings are optimized for offshore sea conditions and
making isolated targets larger and easy to see.
• Weather - In this mode the radar settings are optimized for best detection and
presentation of rain clutter. Image update rate is slowed and color depth is increased.
• Bird - In this mode the radar settings are optimized for best detection of birds. The radar is
set up for maximum sensitivity. This mode is not recommended for use in congested
harbor environments.
Not all controls are adjustable in each mode. The following table shows preset controls and
adjustability for each control.
Mode:
Control:
Custom Harbor Offshore Weather Bird
Range Full * Full * Full * Full * Up to 24nm
Gain Adjustable Adjustable Adjustable Adjustable Adjustable
Sea Adjustable Adjustable Adjustable Adjustable Adjustable
Rain Adjustable Adjustable Adjustable Adjustable Adjustable
Noise
rejection
Adjustable Medium High Medium High
Threshold Adjustable 30% 30% 0% 0%
Target
Expansion
Adjustable Low Medium Off Off
Interference
Reject
Adjustable Adjustable Adjustable Adjustable Adjustable
Target
Separation
Adjustable Medium Off Off Off
Fast scan Adjustable High High Off Off
* Maximum range is dependent on antenna length: 3’ = 48 nm, 4’ = 64 nm and 6’ = 72 nm.
Radar threshold
The threshold sets required signal strength for the lowest radar signals. Radar returns below
this limit are filtered and are not displayed.
Default value: 30%.
Rejecting radar interference
Interference could be caused by radar signals from other radar units operating in the same
frequency band.
A high setting reduces the interference from other radars.
In order not to miss weak targets, the interference rejection should be set to low when no
interference exists.
8
34
Advanced radar options | R2009/R3016 User manual
Page 34

Noise rejection
The Noise Rejection control sets the amount of noise filtering applied by the radar. Target
sensitivity is increased at longer ranges when this control is set to Low or High, but does
cause some loss of target discrimination.
Target boost
The target boost control increases pulse length or reduces radar bandwidth to make targets
appear larger in range and increase radar sensitivity.
Target expansion
Target expansion increases the length of targets in range, making them easier to see.
Target separation
The Target separation control allows you to control the target discrimination of the radar
(separation between objects is more prominent).
Fast scan
Sets the speed of the radar antenna rotation (from 20 RPM in standard mode to 36 RPM in
Fast scan mode). This option gives faster target updates.
Advanced radar options | R2009/R3016 User manual
35
Page 35

Installation
Box contents
EN
G
LIS
H
Installat
ion
Manual
ENGLI
S
H
Installation M
anua
l
EN
G
LI
SH
I
nst
allatio
n Ma
nual
ENGLIS
H
I
nstallat
i
on Manual
3
4
2
1
10
5
6
7
8
9
11
1 Control unit
2 Panel mounting gasket
3 Sun cover
4 Bezels
5 Gimbal inserts (R3016 only)
6 Power cable
7 Knobs
8 Fixing screws
9 Documentation pack
10 U-brackets
11 U-bracket straps (one for R2009, two for R3016)
Mounting location
Choose the mounting locations carefully before you drill or cut. The unit should be mounted
so that the operator can easily use the controls and clearly see the screen.
9
36
Installation | R2009/R3016 User manual
Page 36

Do not mount the R3016 in an outside location exposed to direct sunlight, it is intended for
pilothouse installation only. The R2009 may be mounted both inside, or outside in direct
sunlight due to a high brightness screen.
Ensure that any holes cut are in a safe position and will not weaken the boat’s structure. If in
doubt, consult a qualified boat builder, or marine electronics installer.
Before cutting a hole in a panel, make sure that there are no hidden electrical wires or other
parts behind the panel.
Check that it is possible to route cables to the intended mounting location.
Leave sufficient clearance to connect all relevant cables.
Do not mount any part where it can be used as a hand hold, where it might be submerged,
or where it will interfere with the operation, launching, or retrieving of the boat.
For overall width and height requirements, refer to "Dimensional drawings" on page 75.
Good ventilation is required. Choose a location that will not expose the unit to conditions
that exceed the specifications - refer to "Technical specifications" on page 72.
Warning: When installing, ensure appropriate safety equipment is used.
For example, ear muffs, protective glasses, gloves and a dust mask. Power
tools may exceed safe noise levels, and can cast off dangerous projectiles.
The dust from many materials commonly used in boat construction may
cause irritation or damage to eyes, skin, and lungs.
Viewing angle
The viewing angle influences the viewability of the monitor. The recommended viewing
angles relative to perpendicular are shown in the illustrations below.
C
C
A
A
30°
80°
9"
C
C
A
A
80°
80°
9"
C
C
AA
80° 80°
16"
Horizontal viewing angles
45°
A
40°
70°
20°
45°
C
B
C
40°
70°
20°
70°
40°
20°
16"
Vertical viewing angles
A Optimum viewing angle
B Good viewing angle
C Poor viewing angle or obstructed view
¼
Note: Installations requiring better left hand visibility on the 9" unit can optimize the
display for viewing from the left. Refer to "View from left" on page 56.
Installation | R2009/R3016 User manual
37
Page 37

U-bracket mounting
1. Place the bracket in the desired mounting location. Ensure that the chosen location has
enough height to accommodate the unit fitted in the bracket, and allows tilting of the
unit. Also adequate space is required on both sides to allow tightening and loosening of
the knobs.
2. Mark the screw locations using the bracket as a template, and drill pilot holes. Use
fasteners suited to the mounting surface material. If the material is too thin for selftappers, reinforce it, or mount the bracket with machine screws and large washers. Use
only 304 or 316 stainless steel fasteners.
3. Screw down the bracket.
4. (16" units only) Using the screws provided in the gimbal kit, fasten the gimbals to the unit.
5. Mount the unit to the bracket using the knobs. Hand tighten only. The ratchet teeth in the
bracket and display case ensure a positive grip and prevent the unit changing from the
desired angle.
6. Fix the bracket straps.
5
6
4
Panel mounting
The screws and gasket used for panel mounting are included in the box. For mounting
instructions, refer to the Panel mounting template.
38
Installation | R2009/R3016 User manual
Page 38

Wiring
Guidelines
Don't:
• make sharp bends in the cables
• run cables in a way that allows water to flow down into the connectors
• run the data cables adjacent to radar, transmitter, or large/high current carrying cables or
high frequency signal cables.
• run cables so they interfere with mechanical systems
Do this:
• make drip and service loops
• use cable-tie on all cables to keep them secure
• solder/crimp and insulate all wiring connections if extending or shortening the cables.
Extending cables should be done with suitable crimp connectors or solder and heat
shrink. Keep joins as high as possible to minimize possibility of water immersion.
• leave room adjacent to connectors to ease plugging and unplugging of cables
Warning: Before starting the installation, be sure to turn electrical power
off. If power is left on or turned on during the installation, fire, electrical
shock, or other serious injury may occur. Be sure that the voltage of the
power supply is compatible with the unit.
Warning: The positive supply wire (red) should always be connected to
(+) DC with the supplied fuse or a circuit breaker (closest available to fuse
rating).
Rear connections
ETHERNET
NMEA2000
POWER NMEA0183
1345
R2009 Rear connections
ETHERNET HDMI NMEA2000 POWER NMEA0183 NMEA0183
123456
R3016 Rear connections
1 Ethernet, 5-pin
2 HDMI (available on R3016 only)
3 NMEA 2000, 5-pin
4 Power, 4-pin
10
Wiring | R2009/R3016 User manual
39
Page 39

5 NMEA 0183 (Serial 1)
• Port 1: 1x input, 1x output
• Port 2: 1x input
6 NMEA 0183 (Serial 2)
• Port 3: 1x input, 1x output
• Port 4: 1x input
Ethernet connector
The unit is equipped with an Ethernet port, which allows connecting the unit to your
network using the 5 pin Ethernet connector.
1
2
3
4
5
Unit socket (female)
2
3
1
4
5
Cable plug (male)
Key Purpose Color
1 Transmit positive TX+ Blue/White
2 Transmit negative TX- Blue
3 Receive positive RX+ Orange/White
4 Receive negative RX- Orange
5 Shield Bare
Power connection
The unit is designed to be powered by a 12 or 24 VDC system. It is protected against reverse
polarity, under voltage and over voltage (for a limited duration). A fuse should be fitted to the
positive supply; 2 A for the 9" model and 5 A for the 16" model.
3
4
1
2
Unit socket (male)
1
2
3
4
Cable plug (female)
Key Purpose Color
1 -12/24 VDC Black
2 External alarm Blue
3
Power control (R2009),
Return for blue wire isolated signal
(R3016)
Yellow
4 +12/24 VDC Red
40
Wiring | R2009/R3016 User manual
Page 40

Power Control connection
¼
Note: R2009 only.
The yellow Power Control wire in the power cable is an input that will turn on the unit when
power is applied.
The following power control options are available for the R2009 Control unit:
• Power controlled by the STANDBY/BRILL key: Yellow wire not connected
• Power controlled by a Power Master unit: Yellow wires on the R2009 and on the Power
Master unit are connected (power control bus).
¼
Note: If the R2009 is set to Power Slave, the unit cannot be powered down using its own
POWER/BRILL key. Pressing and holding this key will set the unit to standby. Refer to
"Power Control" on page 48.
Power Control unconnected
Device will turn on and off when the power button on the front of the unit is pressed. Leave
the yellow Power Control wire disconnected and tape or heat-shrink the end to prevent
shorting.
Power Control to supply positive (auto on)
Device will turn on immediately when power is applied. Common the yellow wire with the
red wire after the fuse.
¼
Note: The unit cannot be powered down by power button, but can be put in to standby
mode. (The screen backlight turns off.)
External alarm
The display power cable has four wires, two of which provide power to the display, and two
for the alarm output.
The alarm output does not mirror the display buzzer. It is only used to report radar
functionality alarms, so connection is only recommended where an Alarm Management
System is present.
R2009 Alarm output connection
ETHERNET
NMEA2000
POWER NMEA0183
1
3
4
5
6
7
9
+
-
2
8
Key Purpose Color
1 Alert Management System
2
24 V Relay (NO/NC dependant on
AMS requirements)
3 Alarm output (grounded on alarm) Blue
4 Power control Yellow
5 Positive DC supply (24V DC system) Red
6 Negative DC supply (24V DC system) Black
Wiring | R2009/R3016 User manual
41
Page 41

Key Purpose Color
7 Fuse - see table at end of section
8 Fuse - to suit relay coil requirements
9 DC supply
R3016 Alarm output connection
1
2
3
4
5
6
7
+
-
ETHERNET NMEA2000 POWER NMEA0183 NMEA0183HDMI
Key Purpose Color
1 Alert Management System
2 Alarm output (N/C isolated contact) Blue
3 Alarm output (N/C isolated contact) Yellow
4 Positive DC supply (24V DC system) Red
5 Negative DC supply (24V DC system) Black
6 Fuse
7 DC supply
NMEA 2000 backbone
NMEA 2000 Device connection
The NMEA 2000 data port allows the receiving and sharing of a multitude of data from
various sources.
2
1
3
4
5
Unit socket (male)
1
2
5
4
3
Cable plug (female)
Key Purpose Color
1 Shield Drain
2 NET-S (+12 VDC) Red
3 NET-C (- 12 VDC) Black
42
Wiring | R2009/R3016 User manual
Page 42

Key Purpose Color
4 NET-H White
5 NET-L Blue
Planning and installing a network backbone
The backbone needs to run between the locations of all products to be installed - typically in
a bow to stern layout - and be no further than 6 m from a device to be connected.
Choose from the following components to make up the backbone:
• Micro-C cables: 0.6 m (2 ft), 1.8 m (6 ft), 4.5 m (15 ft), and 7.6 m (25 ft) cables.
• T-connector or 4-way connector. Used to connect a drop cable to the backbone.
• Micro-C power cable. Connect to the backbone at a position that is central to the network
load using a T-connector or 4-way connector.
Power the network
The network requires its own 12 V DC power supply protected by a 3 amp fuse or breaker.
Connect power at any location in the backbone for smaller systems.
For larger systems introduce power at central point in the backbone to “balance” the voltage
drop of the network.
¼
Note: If joining to an existing NMEA 2000 network that already has its own power
supply, do not make another power connection elsewhere in the network, and ensure
the existing network is not powered by 24 V DC.
¼
Note: Do not connect the NMEA 2000 power cable to the same terminals as the engine
start batteries, autopilot computer, bow thruster or other high current devices.
The following drawing demonstrates a typical small network. The backbone is made up of
directly interconnected T-connectors.
+
_
12 V DC
T
3
44
6
2
1
T
5
1 NMEA 2000 device
2 Connector to unit
3 Drop-cable, should not exceed 6 m (20 ft)
4 Terminators
5 Backbone
6 Power cable
Wiring | R2009/R3016 User manual
43
Page 43

NMEA 0183 device connection
The NMEA 0183 serial port provides input (Listeners) and outputs (Talkers) for the various IEC
61162 interfaced sensors. The port uses the NMEA 0183 (serial balanced) standard, and can
be configured in the software for different baud rates up to 38,400 baud.
For configuring of the ports, refer to "Serial ports" on page 51.
• The R2009 unit has one NMEA 0183 serial port, providing two inputs and two outputs.
Cable used: NMEA 0183 serial cable.
• The R3016 unit has two The NMEA 0183 serial ports, providing four inputs and two
outputs. Cable used: NMEA 0183 High speed serial cable.
NMEA 0183 serial cable
¼
Note: R2009 only.
Cable labelled: 032-0080-08. Spare part number: 000-11247-001.
1
2
6
7
8
3
4
5
Unit socket (male)
1
2
6
7
3
4
5
8
Cable plug (female)
Key Port Purpose Color
1 Port 2 Listener B (Rx+) Brown/White
2 Port 2 Listener A (Rx-) Brown
3 Port 2 Talker B (Tx+) Green/White
4 Port 2 Talker A (Tx-) Green
5 Port 1 Talker B (Tx+) Orange/White
6 Port 1 Talker A (Tx-) Orange
7 Port 1 Listener A (Rx-) Blue/White
8 Port 1 Listener B (Rx+) Blue
NMEA 0183 High speed serial cable
¼
Note: R3016 only.
Cable labelled: 032-0101-081. Spare part number: 000-12393-001.
44
Wiring | R2009/R3016 User manual
Page 44

A
1
2
3
B
*
*
*
4
5
6
Port.1
Talker
Port.1
Listener
Port.2
Listener
Port.2
Listener
Port.1
Listener
Port.1
Talker
ETHERNET NMEA2000 POWER NMEA0183 NMEA0183HDMI
Key Description
A Serial 1
B Serial 2
1 Port 1 (talker)
2 Port 1 (listener)
3 Port 2 (listener)
4 Port 3 (talker)
5 Port 3 (listener)
6 Port 4 (listener)
* Serial 2 cable is identical to Serial 1 cable. Therefore Serial 2 cable wires labelled as Port 1
denote Port 3, and wires labelled as Port 2 denote Port 4.
1
2
6
7
8
3
4
5
Unit socket (male)
1
2
6
7
3
4
5
8
Cable plug (female)
Key Left socket Right socket Purpose Color
N/A Port 2 and Port 4 Shield Bare wire
1 Port 2 Port 4 Listener B (Rx+) Green
2 Port 2 Port 4 Listener A (Rx-) Yellow
3 Port 1 Port 3 Shield Bare wire
4 Port 1 Port 3 Common Black
5 Port 1 Port 3 Talker B (Tx+) Brown
6 Port 1 Port 3 Talker A (Tx-) White
N/A Port 1 and Port 3 Shield Bare wire
7 Port 1 Port 3 Listener A (Rx-) Yellow
8 Port 1 Port 3 Listener B (Rx+) Green
Wiring | R2009/R3016 User manual
45
Page 45

Talkers and Listeners
Do not connect multiple devices outputting data (Talkers) on to any serial input (RX) of the
unit. The RS422 protocol is not intended for this type of connection, and data will be
corrupted if more than one device transmits simultaneously. The output (TX) however may
drive multiple receivers (Listeners). The number of receivers is finite, and depends on the
receiving hardware. Typically three devices is possible.
Connect an external monitor
The R3016 incorporates HDMI technology and has a HDMI output which can be connected
to an external monitor to replicate video at a remote location. Video is at a resolution of 1366
x 768, a connected monitor should support same resolution or be able to scale.
1
3
2
4
HDMI-1 DVI-2
VIDEO-3 VIDEO-4NMEA2K
SERIAL USB
POWER
ETHERNET NMEA2000 POWER NMEA0183 NMEA0183HDMI
1 MO series monitor
2 HDMI cable
3 R3016
4 HDMI cable - waterproof connector (use in exposed installations)
¼
Note: While the HDMI standard does not state maximum cable length, signal may be
compromised on long runs. Only use Navico or other high quality HDMI certified cables.
3rd party cables should be tested before installation. On runs over 10m it may be
required to add an HDMI amplifier or use HDMI-CAT6 adaptors.
¼
Note: Some HDMI TV displays may apply over-scan, which will in effect crop the image
possibly causing loss of important content. Check the display manual for an option to
disable over-scan or adjust scaling
46
Wiring | R2009/R3016 User manual
Page 46

Software setup
Prior to use, the radar system requires a number of settings be configured in order for the
system to perform as expected.
Access to the required dialogs for commissioning are found in the Settings dialog, accessed
from the main menu.
The settings dialogs consist of numerous parameters that will seldom require adjustment
beyond initial setup. All settings are stored in non-volatile memory. Most are intended to be
configured by the technician commissioning the system, by the operator at first use, or by a
technician after servicing or replacement of system parts.
The following areas must all be addressed during commissioning, and should be stepped
through one at a time. Refer to the detailed sections for further information.
1 General system settings. Refer "System settings" on page 47
2 Setting up external sensors. Refer "Network settings" on page 48
3 Radar Settings. Refer "Radar settings" on page 52
4 Own vessel charachteristics. Refer "Own ship" on page 57
System settings
Use the system settings dialog to set basic settings as described below. Some settings can
require a reboot of the system.
11
Software setup | R2009/R3016 User manual
47
Page 47

Language
Controls the language used on this unit for panels, menus, and dialogs. Changing the
language causes the unit to restart.
Key beeps
Controls the loudness of the beep sound when a key is pressed.
Default setting: Loud
Time
Controls the local time zone offset, and the format of the time and date.
Restore defaults
Allows you to select which settings are to be restored to their original factory settings.
Power Control
¼
Note: This option is available for R2009 Control units only.
Used for defining the R2009 Control unit as a power slave.
This setting is only applicable if the yellow wire is connected to ignition or to a stand-alone
switch that applies 12 V/24 V.
¼
Note: You cannot use the STANDBY/BRILLIANCE key to power down a unit that is set
to power slave. The unit is powered off when the power master is powered down, or
when the system power is removed.
Files
File management system, used to browse the contents of the unit's internal memory and
inserted SD card.
Advanced
Shows a panel with more advanced settings. Used for setting how your system displays
various user interface information. In addition, controls which features are shown in the
interface.
About
Displays copyright information, software version, and technical information for this unit.
Network settings
The unit has Ethernet, NMEA 0183 and NMEA 2000 port connections on the back allowing
you to connect the unit to your network. Use the Network settings dialog to setup networks
and connect to network devices.
48
Software setup | R2009/R3016 User manual
Page 48

Info
Displays the Ethernet connection status, the unit's IP and MAC addresses.
Device name
Assigning a name is useful in systems using more than one device of the same type and size.
When viewing data sources or the device list, the assigned name will append the default
product name + virtual device function for easy identification.
Data source selection
Data sources provide live data to the system.
The data may originate from modules internal to the unit (for example internal GPS or sonar),
or external modules connected to the NMEA 2000 or via NMEA 0183 if available on the unit.
When a device is connected to more than one source providing the same data, the user can
choose the preferred source. Before commencing with source selection make sure all
external devices and the NMEA 2000 backbone are connected and are turned on.
Auto select data sources
The Auto select option looks for all sources connected to the unit. If more than one source is
available for each data type, selection is made from an internal priority list. This option is
suitable for the majority of installations.
¼
Note: Auto data source selection may already have been selected at first time startup.
However, it should be redone if any new devices have been added to the network since.
Advanced data source selection
The advanced option allows for you to manually select or unselect data sources. Manual
selection is generally only required where there is more than one source for the same data,
and the ‘Auto select’ selected source is not the one desired.
Device list
The Device list shows the devices that provide data. This may include a module inside the
unit, or any external NMEA 2000 device.
Software setup | R2009/R3016 User manual
49
Page 49

Selecting a device in this list will bring up additional details and actions:
All devices allow allocation of an instance number in the configure option. Set unique
instance numbers on any identical devices on the network to allow for the unit to distinguish
between them. The data option shows all data being output by the device. Some devices will
show additional options specific to the device.
¼
Note: Setting the instance number on a 3rd party product is typically not possible.
Diagnostics
The NMEA 2000 tab on the diagnostics page can provide information useful for identifying
an issue with the network.
¼
Note: The following information may not always indicate an issue that can be simply
resolved with minor adjustment to network layout or connected devices and their
activity on the network. However, Rx and Tx errors are most likely indicating issues with
the physical network, which may be resolved by correcting termination, reducing
backbone or drop lengths, or reducing the number of network nodes (devices).
Bus state
Simply indicates whether the bus is powered, but not necessarily connected to any data
sources. However, if bus shows as ‘off’, but power is present along with an increasing error
count, it is possible that termination or cable topology is incorrect.
Rx Overflows
The unit received too many messages for its buffer before the application could read them.
Rx Overruns
The unit contained too many messages for its buffer before the driver could read them.
50
Software setup | R2009/R3016 User manual
Page 50

Rx/Tx Errors
These two numbers increase when there are error messages, and decrease when messages
are received successfully. These (unlike the other values) are not a cumulative count. Under
normal operation these should be at 0. Values around 96 upwards indicate a heavily error
prone network. If these numbers go too high for a given device, it will automatically drop off
the bus.
Rx/Tx Messages
Shows actual traffic in and out of device.
Bus Load
A high value here indicates network is near full capacity. Some devices automatically adjust
rate of transmission, if network traffic is heavy.
Fast Packet Errors
Cumulative counter of any fast packet error. This could be a missed frame, or a frame out of
sequence etc. NMEA 2000 PGNs are made of up to 32 frames. The entire message will be
discarded when a frame is missed.
¼
Note: Rx and Tx Errors often indicate an issue with the physical network, which may be
resolved by correcting termination, reducing backbone or drop lengths, or reducing the
number of network nodes (devices).
Reset counters
Resets all counters in the NMEA 2000 tab of the Diagnostics dialog to zero. The counters start
recounting immediately.
SimNet Groups
The SimNet Group function is used to control parameter settings, either globally or in groups
of units. The function is used on larger vessels where several SimNet units are connected to
the network. By assigning several units to the same group, a parameter update on one unit
will have the same effect on the rest of the group members.
Calibration
An offset (positive or negative) can be applied to correct inaccuracies in boat speed, sea
temp, air temp, barometric pressure, and depth sourced from NMEA 2000 devices.
NMEA 0183 setup
The NMEA 0183 port must be set to suit the speed of connected devices, and can be
configured to output only the sentences required by listening devices.
Serial ports
Specifies the baud rate for port for the devices connected to the NMEA 0183. The baud rate
should be set to correspond with devices connected to the NMEA 0183 input and output.
The input and output (Tx, Rx) use the same baud rate setting.
Software setup | R2009/R3016 User manual
51
Page 51

A
1
2
3
B
*
*
*
4
5
6
Port.1
Talker
Port.1
Listener
Port.2
Listener
Port.2
Listener
Port.1
Listener
Port.1
Talker
ETHERNET NMEA2000 POWER NMEA0183 NMEA0183HDMI
* Serial 2 cable (B) is identical to Serial 1 cable (A). Therefore Serial 2 cable wires labelled as
Port 1 denote Port 3, and wires labelled as Port 2 denote Port 4. Refer "NMEA 0183 High speed serial
cable" on page 44.
Serial Output
Selection determines whether the data is output via Tx lines, and will enable editing of the
output sentences list.
Serial Output Sentences
This list allows control over which sentences need to be transmitted to other devices from
the NMEA 0183 port. Due to the limited bandwidth of NMEA 0183 it is desirable to only
enable the data that is required. The less sentences that are selected, the higher the output
rate of the enabled sentences.
Commonly used sentences are enabled by default.
Radar settings
Expanded PPI
With this option selected the radar video outside the bearing scale is also visible.
Radar installation dialog
The content of the radar Installation dialog depends on the radar antenna connected to the
system as per the table below.
All options are described in the next sections.
Option 10 kW 25 kW 3G 4G Halo
Radar source xxxxx
Radar status xxxxx
Antenna setup xxxxx
Adjust range offset x x
Adjust bearing alignment xxxxx
Sector blanking x
Sidelobe suppression x x x
Tune x x
52
Software setup | R2009/R3016 User manual
Page 52

Option 10 kW 25 kW 3G 4G Halo
Adjust local interference rejection x x
Adjust open array park angle x
Halo light x
Reset radar to factory defaults xxxxx
¼
Note: Other installation options are available for the R3016 12U/6X systems. Refer to the
R3016 12U/6X Commissioning and Maintenance manual for details.
Radar source
More than one antenna can be connected to the radar control unit.
Use this option to select the antenna that is to be configured.
Radar status
Primarily for information and to assist with fault finding.
Antenna setup
This function is used for setting position and height of radar transceiver on the vessel.
The approximate position of the transceiver on the vessel must be set in order to correctly
position the vessel outline when viewing close range settings.
The antenna height is the height of the antenna above the water line, when vessel is carrying
a typical load. It is very important to set the antenna height correctly as this will affect the sea
clutter function. Do not set the height to 0.
Adjusting range offset
The radar sweep should commence at your vessel (a radar range of zero). You may need to
adjust the radar range offset to achieve this. If this is set incorrectly, a large dark circle in the
center of the sweep might occur. You might notice straight objects such as straight sea walls
Software setup | R2009/R3016 User manual
53
Page 53

or piers having curves or an indentation. Objects close to your vessel may appear “pulled in”
or “pushed out”.
Adjust the range offset as below when the vessel is about 45 to 90 m (50 to 100 yards) from a
straight-walled jetty or similar feature that produces a straight line echo on the display.
• Point the boat towards the jetty
• Adjust the gain setting until a reasonably good image of the jetty echo is displayed
With the Range offset dialog open:
• Turn the rotary knob to adjust the range offset to make the jetty echo appear as a straight
line on the display
• Press the ENT key to save the settings
XX
Adjust bearing alignment
This is to align the heading marker on the screen with the center line of the vessel. This
setting compensates for any slight misalignment of the up-mast transceiver during
installation. Misalignment that is not corrected for will compromise target tracking and can
result in dangerous misinterpretation of potential navigation hazards.
Point the vessel towards a stationary isolated object. Then with the Bearing alignment dialog
open:
• Press the rotary knob to switch focus between coarse and fine bearing alignment
• Turn the rotary knob to adjust the bearing alignment so that the heading line touches the
end of the selected stationary object
• Press the ENT key to save the settings and close the Bearing alignment dialog
Sector blanking
If the radar is installed in close proximity to a mast or structure, that could cause unwanted
reflections or interference to appear on the radar image. Use the sector blanking feature to
stop the radar from transmitting in the direction up to four sectors.
¼
Note: Sectors are setup relative to the heading line of the radar. The bearing of the
sector is measured from the front of the vessel to the center line of the sector.
Sidelobe suppression
Occasionally false target returns can occur adjacent to strong target returns such as large
ships or container ports. This occurs because not all of the transmitted radar energy can be
54
Software setup | R2009/R3016 User manual
Page 54

focused into a single beam by the radar antenna, a small amount energy is transmitted in
other directions. This energy is referred to as sidelobe energy and occurs in all radar systems.
The returns caused by sidelobes tend to appear as arcs.
When the radar is mounted where there are metallic objects near the radar, sidelobe energy
increases because the beam focus is degraded.
The increased sidelobe returns can be eliminated using the Sidelobe suppression option.
With dialog open:
• Press the rotary knob to switch focus between the manual and auto adjustment icons
• Turn the rotary knob to adjust the value of the active icon
Use the following procedure to adjust the sidelobe suppression:
1. Set the radar range to between 1/2 nm to 1 nm and the Sidelobe suppression value to
Auto
2. Take the vessel to a location where sidelobe returns are likely to be seen. Typically this
would be near a large ship, container port, or metal bridge
3. Traverse the area until the strongest sidelobe returns are seen
4. Change Auto sidelobe suppression to OFF then select and adjust the sidelobe
suppression control until the sidelobe returns are just eliminated. You may need to
monitor 5-10 radar sweeps to be sure they have been eliminated
5. Traverse the area again and readjust if sidelobes returns still occur
6. Press the ENT key to save the settings and leave the Sidelobe suppression dialog
Tuning
The Tuning options are used to do initial tuning of the radar system. The tuning should be
performed in an area with large and identifiable targets within range, and the value should
be adjusted until the best deflection is obtained.
With the Tune dialog open:
• Press the rotary knob to switch focus between the manual and auto adjustment icons
• Turn the rotary knob to adjust the value of the active icon
Local interference rejection
This is the start of your concept.
Open array park angle
The park angle is the final resting position of the antenna relative to the heading line of the
radar when the radar is set to standby. The antenna will stop rotating at the desired offset.
Halo light
Controls the levels of the Halo Radar pedestal blue accent lighting. There are four levels
possible for the lighting. The accent lighting can only be adjusted when the radar is in
standby mode.
¼
Note: The blue accent pedestal lighting might not be approved for use in your boating
location. Check your local boating regulations before turning the blue accent lights ON.
Software setup | R2009/R3016 User manual
55
Page 55

Reset radar to factory defaults
Clears all user and installer settings applied to radar, and restores ex-factory settings. Use with
caution, taking note of current settings first, especially those set by the operator if radar has
already been in active service.
Radar palettes
Different palettes are available for the radar video and for the target trails.
¼
Note: The palette color does only affect day colors. Night colors are automatically
selected when the brilliance are adjusted to 80% or lower.
View from left
¼
Note: This option is available for the R2009 control unit only.
Used for optimizing the display for viewing from the left. See "Viewing angle" on page 37.
56
Software setup | R2009/R3016 User manual
Page 56

Own ship
Own ship setup
This dialog is used for defining the CCRP and GPS sensors position.
• CCRP
- Sets the approximate location for the common reference point. This is the ship’s bridge
and location of the radar operator. With the radar antenna position also defined, the
radar can calculate the bearing and distance of radar targets relative to the CCRP.
• GPS Sensor
- Sets the approximate location for the primary GPS position sensor. This is relevant to
correct positioning of AIS targets on the PPI.
MMSI
Set the vessel’s own MMSI number. This prevents the vessel being identified as an AIS target
on own display.
Software setup | R2009/R3016 User manual
57
Page 57

Simulator
The simulation feature lets you see how the unit works in a stationary position and without
being connected to sensors or other devices.
Demo mode
In this mode the unit automatically runs through the main features of the product; it changes
pages automatically, adjusts settings, opens menus, etc.
¼
Note: Demo mode is designed for retail/showroom demonstrations.
Simulator source files
You can select which data files are used by the simulator. A set of source files is included in
your system, and you can import files by using a card inserted into the card reader. You can
also use your own recorded log data files in the simulator.
Advanced simulator settings
The Advanced simulator settings allows for manually controlling the simulator.
GPS source
Selects where the GPS data is generated from.
12
58
Simulator | R2009/R3016 User manual
Page 58

Speed and Course
Used for manually entering values when GPS source is set to Simulated course. Otherwise,
GPS data including speed and course come from the selected source file.
Set start position
Allows you to enter coordinates as a starting position.
¼
Note: This option is only available when the GPS source is set to Simulated course.
Simulator | R2009/R3016 User manual
59
Page 59

Maintenance
Preventive maintenance
The unit does not contain any field serviceable components. Therefore, the operator is
required to perform only a very limited amount of preventative maintenance.
It is recommended that you always fit the supplied protective sun cover when the unit is not
in use.
Cleaning the display unit
A proper cleaning cloth should be used to clean the screen, where possible. Use plenty of
water to dissolve and take away salt remains. Crystalized salt may scratch the coating if using
a damp cloth. Apply minimal pressure to the screen.
Where marks on the screen cannot be removed by the cloth alone, use a 50/50 mixture of
warm water and isopropyl alcohol to clean the screen. Avoid any contact with solvents
(acetone, mineral turpentine, etc.), or ammonia based cleaning products, as they may
damage the anti-glare layer or plastic bezel.
To prevent UV damage to the plastic bezel, it is recommended that the sun cover be fitted
when the unit is not in use for an extended period.
Cleaning the media port door
Clean the media port door regularly to avoid salt crystallization on the surface, causing water
to leak into the card slot.
Checking the keys
Make sure that no keys are stuck in the down position. If one is stuck, wiggle the key to free it
back to normal.
Checking the connectors
The connectors should be checked by visual inspection only.
Push the connector plugs into the connector. If the connector plugs are equipped with a
lock, ensure that it is in the correct position.
NMEA Data logging
All serial output sentences sent over the NMEA TCP connection are logged to an internal file.
You can export and review this file for service and fault finding purposes.
The maximum file size is predefined. If you have added several other files to the system (file
recordings, music, pictures, PDF files), this may reduce the allowed file size for the log file.
The system logs as much data as possible within the file size limitation, and then it starts
overwriting the oldest data.
13
60
Maintenance | R2009/R3016 User manual
Page 60

Exporting the log file
The log file can be exported from the files dialog.
When you select the Log database you are prompted to select a destination folder and
filename. Once accepted, the log file is written to the chosen location.
Software upgrades
Detailed instructions for how to install the software are included in the upgrade files.
Backing up your system data
It is recommended to regularly copy your system settings files as part of your back-up
routine. The files can be copied to a card inserted in the card reader. Refer to "Files" on page
48.
Maintenance | R2009/R3016 User manual
61
Page 61

The alert system
The system will continuously check for danger situations and system faults while running.
Type of alerts
There are 3 alert types in the system:
• Alarms: This is the system's highest priority alert, activated when situation occurs that
might result in collision, or for conditions that critically effect the capability or
performance of the system. An alarm is accompanied by an audible signal (3 short signals
repeated every 7 seconds), and the alarm icon is flashing until the alarm is acknowledged.
• Warnings: This is alerts of lower priority, announcing conditions that could result in
unwanted system response or eventual failure if no action is taken. A warning is
accompanied by an audible signal (2 short signals repeated every 2.5 minute), and the
warning icon is flashing until the warning is acknowledged.
• Cautions: This is information about danger and caution objects that requires attention.
Caution alerts have no audible signal.
Alert notifications
When an alert is triggered, the alert appears in the Alerts panel. Alarms and warnings remain
in the Alerts panel until the reason for the alarm/warning is removed and the alarm/warning
has been acknowledged.
The alerts are displayed in a sorted order. The sort order is the severity (i.e. alarm before
warning), then age.
Alarms and Warnings have different states:
• Active - not acknowledged, not silenced
• Active - not acknowledged, silenced
• Active - acknowledged
• Active - responsibility transferred to another work station
• Rectified - not acknowledged
When a rectified alert is acknowledged it will disappear from the Alerts panel.
Cautions are not acknowledged, and they disappear from the system when they are rectified.
Cautions have therefore only an active state.
A number of related alerts are aggregated and shown in the Alerts panel as one single item
with the aggregation symbol next to the alert symbol. The aggregated symbol shows the
state as unacknowledged if at least one alert in the aggregated list is unacknowledged. Each
alert in the list has to be acknowledged individually.
The table below shows alert icon and behavior depending on if the alert is active,
acknowledged, transferred or rectified.
Alert type Icon State Indication
Alarm
Active - not
acknowledged, not
silenced
• Flashing symbol
and descriptive
text
• Audible signal
Active acknowledged
• Steady symbol and
descriptive text
• No audible signal
Rectified - not
acknowledged
• Flashing symbol
and descriptive
text
• No audible signal
14
62
The alert system | R2009/R3016 User manual
Page 62

Alert type Icon State Indication
Warning
Active - not
acknowledged, not
silenced
• Flashing symbol
and descriptive
text
• Audible signal
Active - not
acknowledged,
silenced
• Flashing symbol
and descriptive
text
• No audible signal
Active acknowledged
• Steady symbol and
descriptive text
• No audible signal
Active - responsibility
transferred
• Steady symbol and
descriptive text
• No audible signal
Rectified - not
acknowledged
• Flashing symbol
and descriptive
text
• No audible signal
Caution
Active
• Steady symbol and
descriptive text
• No audible signal
Acknowledging alerts
The Alerts softkey is labelled Alerts Acknowledge if there is an un-acknowledged alarm or
warning in the system.
You acknowledge the most recent alarm or warning by pressing the Alerts Acknowledge
softkey. The cursor is then automatically moved to the Alerts panel, and you can use the
arrow keys to move up and down in the list of alerts.
Repeat pressing this softkey to continue to acknowledge alerts from the top of the Alerts
panel. The sort order of alerts is the severity (i.e. alarm before warning), then age.
If no active alerts or warnings are present, the softkey is labelled Alerts. Pressing this key
moves the cursor to the Alerts panel.
Press the EXIT key to exit the Alerts panel.
When an Alarm or Warning is acknowledged, the alert icon stops flashing and changes to the
acknowledged icon. The siren continues to sound if there are remaining unacknowledged
alarms or warnings, otherwise it is muted.
The acknowledged alert is not moved to its new position in the sort order until there has
been 2 seconds without any alerts being acknowledged.
All alerts remain in the Alerts panel until the reason for the alarm is rectified.
The Alerts dialog
The Alerts dialog includes a list of active alerts together with a historic listing of the last 100
alerts. All alerts in the Alerts dialog include a time stamp.
The alert system | R2009/R3016 User manual
63
Page 63

An alert is moved to the historic listing after the alert is removed from the Alerts panel.
Alphabetic alarm listing
Alert type abbreviations:
• C: Caution
• W: Warning
• A: Alarm
Alert text Description
Alert
type
AIS Capacity 95%
AIS target processing/displaying is about to be
exceeded.
C
AIS Capacity Full AIS capacity exceeded. W
AIS FAIL AIS failure C
AIS FAIL Not used AIS failure C
AIS TGT in GZ AIS Target in Guard zone W
AIS TGT Lost: # AIS target # is lost W
AZI FAIL Radar antenna failure W
BAM HBT Lost BAM Heartbeat lost C
Dangerous AIS TGT
CPA or TCPA values of an activated AIS target less than
set limits
A
Dangerous TT
CPA or TCPA values of a tracked target less than set
limits
A
EPFS speed FAIL Not used position source failure C
EPFS speed FAIL Position source failure W
Geodetic Datum FAIL Geodetic Datum failure W
GYRO FAIL Gyro failure W
GYRO FAIL Not used gyro failure C
HDG FAIL Heading marker failure W
Magnetron EOL Magnetron end of life reached C
POSN Invalid Position invalid W
POSN Unavailable Position unavailable W
RADAR FAIL Radar TXRX failure W
REF TGT Lost Reference target lost W
SOG FAIL Speed Over Ground failure W
Speed LOG FAIL Not used speed LOG failure C
Speed LOG FAIL Speed LOG failure W
64
The alert system | R2009/R3016 User manual
Page 64

Alert text Description
Alert
type
SPD Long. Axis FAIL Speed longitudinal axis data failure W
SPD Tran. Axis FAIL Speed transversal axis data failure W
STW FAIL Speed Through Water failure W
TGT in GZ Tracked target # within the vessel's guard zone W
Train TGT CPA FAIL Training target CPA out of range W
Train TGT TCPA FAIL Training target TCPA out of range W
TRIG FAIL Trigger failure W
TT Capacity 95%
Tracked target processing/displaying is about to be
exceeded
C
TT Capacity Full Tracked target capacity exceeded. W
TT Lost: # Tracked target # is lost W
UTC Data FAIL UTC data failure W
VID FAIL Radar video failure W
Operating modes fallback
The following table shows possible failure categories, and which operations that are allowed
or not allowed when the failure occurs.
Failure Possible alert Fallback
arrangement
Function Inhibited
Heading failure GYRO FAIL
Automatic
switch to relative
motion head-up
mode
• AIS
• Acquiring/Tracking Radar Targets
Speed through
water failure
Speed LOG FAIL
STW FAIL
Possible to set
Manual speed
• AIS
Course and
speed over
ground failure
Speed LOG FAIL
SOG FAIL
EPFS speed FAIL
Automatic
switch to relative
motion, relative
vectors and sea
stabilization
• True vectors
Position input
failure
POSN Invalid
POSN
Unavailable
• AIS
Radar video
input failure
RADAR FAIL
Possible to
display target
information
based on AIS
data
AIS input failure AIS FAIL
• AIS
The alert system | R2009/R3016 User manual
65
Page 65

Terms and abbreviations
ACK Acknowledge
ACQ Acquire
AZ Acquisition Zone
ADJ Adjust, Adjustment
ALT Altitude
AIS Automatic Identification System
AM Amplitude Modulation
ANCH Anchor Watch
ANT Antenna
AP Autopilot
APR April
ARPA Automatic Radar Plotting Aid
AUD Audible
AUTO Automatic
AZ Acquisition Zone
AZI Azimuth Indicator
BCR Bow Crossing Range
BCT Bow Crossing Time
BKGND Background
BRG Bearing
BRILL Display Brilliance
BWW Bearing Waypoint To Waypoint
C UP Course Up
CCRP Consistent Common Reference Point
CENT Centre
CNCL Cancel
COG Course Over Ground
CONT Contrast
CPA Closest Point Of Approach
CPU Central Processing Unit
CRS Course
CTS Course To Steer
CURS Cursor
DAY/NT Day/Night
DECR Decrease
DEG Degrees
DEL Delete
DGPS Differential Gps
DISP Display
DIST Distance
DPTH Depth
DR Dead Reckoning
DSC Digital Selective Calling
15
66
Terms and abbreviations | R2009/R3016 User manual
Page 66

DW Deep Water
EBL Electronic Bearing Line
ECDIS Electronic Chart Display And Information System
ECS Electronic Chart System
EGNOS European Geo-Stationary Navigational Overlay System
ENCSOG Automatic Navigational Chart
EP Estimated Position
EPFS Electronic Position Fixing System
EPIRB Emergency Position Indicating Radio Beacon
EQUIP Equipment
ERBL Automatic Range And Bearing Line
ETA Estimated Time Of Arrival
ETD Estimated Time Of Departure
EZ Exclusion Zone
FK User Function Key
FMCW Frequency Modulated Continuous Wave
FS Fast Scan
FWD Forward
GAS Grounding Avoidance System
GEOG Geographic
GLONASS Global Orbiting Navigation Satellite System
GMDSS Global Maritime Distress And Safety System
GND TRK Ground Track
GNDSTAB Ground Stabilized
GNSS Global Navigation Satellite System
GPS Global Positioning System
GZ Guard Zone
H UP Head Up
HDG Heading
HL Heading Line
HR Hours
I/O Input/Output
IBS Integrated Bridge System
ID Identification
IN Input
INIT Initialization
INS Integrated Navigation System
IR Interference Rejection
IRCS Integrated Radio Communication System
ISW Interswitch
Km Kilometre
KN Knots
LBL Label
LIM Limit
LOST TGT Lost Target
Terms and abbreviations | R2009/R3016 User manual
67
Page 67

LP Long Pulse
m Metres
MIN Minimum
MIN Minutes
MKR Marker
MOB Man Over Board
MP Medium Pulse
MSTR Master
N UP North Up
NAV Navigation
NC Normally Closed
NLT Not Less Than
NM Nautical Mile
NMT Not More Than
NR Noice Rejection
NUC Not Under Command
OFF CENT Off Centre
OFFTRK Off Track
OS Own Ship
OUT Output
PAD Predicted Area Of Danger
PAST POSN Past Position
PCB Printed Circuit Board
PI Parallel Index Line
PL Pulse Length
PM Performance Monitor
POSN Position
PPC Predicted Point Of Collision
PRF Pulse Repetition Frequency
PWR PWR
R BRG Relative Bearing
R CRS Relative Course
R VECT Relative Vector
RAD Radius
RAIN Anti Clutter Rain
RCDS Raster Chart Display System
REF Echo Reference
REF SOG Echo Reference Speed
REL or R Relative
RM Relative Motion
RM (R) Relative Motion (Relative Trails)
RM (T) Relative Motion (True Trails)
RNC Raster Navigational Chart
RNG Range
ROT Rate Of Turn
68
Terms and abbreviations | R2009/R3016 User manual
Page 68

RR Range Rings
RTE Route
RX Receiver
SAF CON Safety Contour
SAR Search And Rescue
SC/SC Scan To Scan
SDME Speed and Distance Measuring Equipment
SEA Anti Clutter Sea
SEL Select
SENC System Electronic Navigational Chart
SNR Signal To Noise Ratio
SOG Speed Over Ground
SP Short Pulse
SPD Speed
SRNC System Raster Navigational
STAB Stabilized
STBD Starboard
STBY Standby
STW Speed Through Water
T BRG True Bearing
T CRS True Course
T SPD True Speed
T VECT True Vector
TB Target Boost
TCPA Time To Closest Point Of Approach
TE Target Expand
TGT Target
Tgt exp Target expansion
Th Target threshold
TM True Motion
TPR Transponder
TRIAL Trial Maneuver
TRIG Trigger Pulse
TRK Track
TRKG Tracking
Tracking Time To Go
TS Target separation
TWOL Time To Wheel Over Line
TX Transmit, Transmitter
TX/RX Transceiver
UPS Uninterruptible Power Supply
VRM Variable Range Marker
VTS Vessel Traffic Services
WOL Wheel Over Line
WOP Wheel Over Point
Terms and abbreviations | R2009/R3016 User manual
69
Page 69

Spare parts and accessories
R2009 Options and accessories
Item Part number
O2000 Control unit 000-12189-001
Micro-C T-connector 000-0119-79
NMEA 2000 Cable, 1.8 m (6 ft) 000-0127-53
NMEA 2000 Cable, 4.6 m (15 ft) 000-0119-86
NMEA 2000 Power cable 000-0119-75
NEP-2 Network expansion 000-10029-001
R2009 Spare parts and service packs
Item Part number
O2000 Control unit 151-10369-001
R2009 Control unit 151-10366-001
Sun cover 000-12413-001
Front case service pack 000-12398-001
Keypad radar kit 000-12401-001
SD service pack 000-12402-001
Case re-assembly kit 000-12403-001
SD door kit 000-12407-001
Dash mounting pack 000-12409-001
Bracket mounting pack 000-12411-001
NMEA 0183 serial cable, 2 m (6.6 ft) 000-11247-001
Power cable 000-00128-001
R3016 Options and accessories
Item Part number
O2000 Control unit 000-12189-001
HDMI-DVI cable, 1.5 m (5 ft) 000-12427-001
Micro-C T-connector 000-0119-79
NMEA 2000 Cable, 1.8 m (6 ft) 000-0127-53
NMEA 2000 Cable, 4.6 m (15 ft) 000-0119-86
NMEA 2000 Power cable 000-0119-75
NEP-2 Network expansion 000-10029-001
16
70
Spare parts and accessories | R2009/R3016 User manual
Page 70

R3016 Spare parts and service packs
Item Part number
O2000 Control unit 151-10369-001
R3016 Control unit 151-10368-001
Sun cover 000-12414-001
Front case service pack 000-12399-001
Keypad radar kit 000-12401-001
SD service pack 000-12402-001
Case re-assembly kit 000-12404-001
SD door kit 000-12408-001
Dash mounting pack 000-12410-001
Bracket mounting pack 000-12412-001
High speed NMEA 0183 serial cable, 2 m (6.6 ft) 000-12393-001
Power cable 000-00128-001
Spare parts and accessories | R2009/R3016 User manual
71
Page 71

Technical specifications
Overview
Display size
R2009 9-inch portrait
R3016 16-inch widescreen
Screen brightness
R2009
≤1200 cd/m
2
R3016
300 cd/m
2
Networking capability
R2009 2 x NMEA 0183, 1x NMEA 2000, 1x Ethernet
R3016 4 x NMEA 0183, 1x NMEA 2000, 1x Ethernet
Video integration
R2009 None
R3016 1x HDMI output (Supported resolutions: 1366 x 768)
Display
Display resolution
R2009 480 x 800
R3016 1366 x 768
Display type
R2009 9-inch LED-backlit Colour TFT LCD
R3016 16-inch LED-backlit Colour TFT LCD
Technical/environmental
Operating temperature -15°C to +55°C / 5°F to 131°F
Waterproof standard/
rating
IPX6 and IPX7
Specified standards
• IEC/EN60945
¼
Note: Refer to the product website for the latest
information about product compliance.
Dimensions Refer to "Dimensional drawings" on page 75
Weight
R2009 1.95 kg / 4.3 lb
R3016 4 kg / 8.8 lb
17
72
Technical specifications | R2009/R3016 User manual
Page 72

Power
Supply voltage 12-24 V DC
Power consumption
R2009 11 W
R3016 20 W
Compass safe distance
Safe distance to the
standard magnetic
compass
Safe distance to the
steering magnetic
compass
R2009 Control unit 0.34 m 0.25 m
R3016 Control unit 0.65 m 0.43 m
Technical specifications | R2009/R3016 User manual
73
Page 73

Menu tree
The illustration below shown the main menu and the first level sub menus.
Main menu
TT/AIS
Speed source
PPI symbols
Guard zones
TUNE
Advanced
Settings...
Guard zone 1
Adjust
≡
Shape
[ = ]
[ = ]
[ = ]
[ = ]
Alarm when
Adjust
Alarm when
Sensitivity
Shape
[------]
[------]
[------]
Tune menu
Auto
Tuning
PPI symbols menu
Guard zones menu
Range rings
Heading line off
Overlay graphic off
Advanced menu
IR
Noise rejection
≡
≡
≡
≡
Use mode
Threshold
≡
Target expansion
≡
Target separation
Target boost
Fast scan mode
TT/AIS menu
Cancel all
Cancel selected target
CPA/TCPA limit...
AIS
Data...
Speed source menu
Stabilization
Sources
≡
Cursor ENTER menu
Acquire target
No target
Over target
Over target
Over AIS
Cancel target
Select/Deselect target
Select AIS
Radar source
Guard zone 2
[ = ]
[ = ]
[ √ ]
[ √ ]
[ √ ]
[ √ ]
18
74
Menu tree | R2009/R3016 User manual
Page 74

Dimensional drawings
R2009 Control unit
247 mm (9.72”)
224 mm (8.81”)
219 mm (8.62”)
111 mm (4.37”)
135 mm (5.31”)
67 mm
(2.63”)
280 mm (11.02”)
260 mm (10.23”)
R3016 Control unit
+
_
455 mm (17.91”)
477 mm (18.77”)
505 mm (19.88”)
280 mm (11.02”)
120 mm (4.72”)
67 mm
(2.63”)
19
'LVFRYHURWKHUPDULQHHOHFWURQLFVQDYLJDWLRQRQRXUZHEVLWH
 Loading...
Loading...