

Page 1
C
(CD012201B)
A
B
D
E
Quick reference guide
Simrad PI Remote/Depth dual sensor
Purpose
The purpose of the PI Remote/
Depth sensor is to achieve accurate
measurements of both the water depth
and the distance between the two
trawl doors. In order to measure the
distance, it must be installed in a pair
with a PI Spread or PI Spread/Depth
sensor.
The adapter used to install the PI
Remote/Depth sensor is not the same
as the adapter used for the standard PI
Remote sensor.
Daily operation
The PI Remote/Depth dual sensor
will automatically be switched on
once the waterswitch is activated.
After startup, the sensor will
communicate with the PI Spread
sensor to measure the distance
between the two trawl doors. The
current depth result is transmitted
directly to the vessel.
When the sensor is not in use, check
that the sensor lamp does not flash,
as this indicates that the sensor is still
active and discharging the batteries.
If you operate with Fast update
rate, the sensors must be charged
approximately every 40 hours. Used
with Normal or Slow update rates, the
operational life is approximately 80 or
110 hours respectively. The optimal
sensor charging temperature is from
+10 to +25° C.
Note: Charging sensors at sub-zero
temperatures can create explosive
gasses. Simrad assumes no liability
for the improper charging of
sensors or the use of chargers not
specified in Simrad’s sensor charging
documentation.
The two rubber inserts provided at
the bottom of each sensor adapter
must not be replaced with any other
types or designs. It is essential that
these inserts provide a secure cradle
for the sensors, but they must also
allow for free water circulation to
allow the sensor’s water switch to
engage. Also, the design of the inserts
allows sand and mud to flow out when
the trawl doors are pulled up from the
water.
B
C
E
D
F
G
A
(CD012201A)
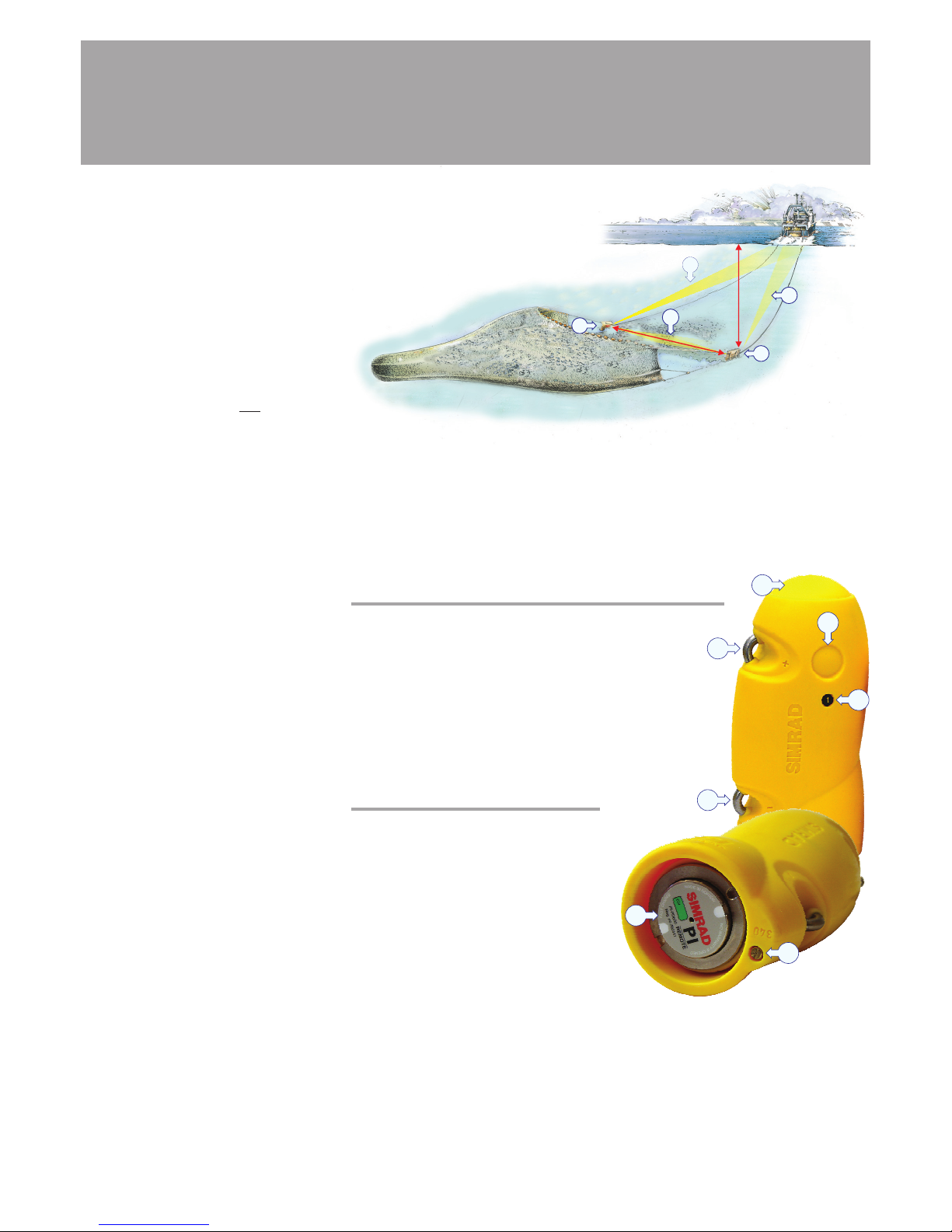
Main items
(A) Negative charging & fastening lug
(B) Positive charging & fastening lug
(C) Communication link to the vessel
(D) Transverse communication link
(E) Spread and Remote set
identification
(F) Water switch with sacrificial bolt
(G) Sensor identification label
(A) The Spread sensor is mounted in a special adapter on the port trawl door.
(B) The Remote/Depth sensor is mounted in an adapter on the starboard door.
(C) The Spread sensor communicates the distance between the trawl doors to
the PI system on the vessel.
(D) The Remote/Depth sensor communicates the current depth of the trawl door
to the PI system on the vessel.
(E) Using the transverse communication link, the two
sensors measure the distance between the trawl doors.
Sensor conguration
On delivery, all Spread sensors are
configured as follows:
Remote: Remote 1
Depth: Channel 11, 15 or 13 / Fast
Note: The sensor and the PI system
setup must correspond, otherwise the
communication will not work.
To change the setup, use the PI
Configurator utility.
The sensor update rate controls how
often the sensor reads and reports the
depth. Three settings are available;
Fast, Normal and Slow. Note that a
faster update rate will decrease the
battery life.
Page 2
302879 / Rev.A / December 2007
Sacricial water switch
The water switch on your sensor is
a sacrificial brass screw. It must be
checked every month, and whenever
required due to wear and tear, it must
be replaced.
(CD012200S)
A
B
C
E
F
D
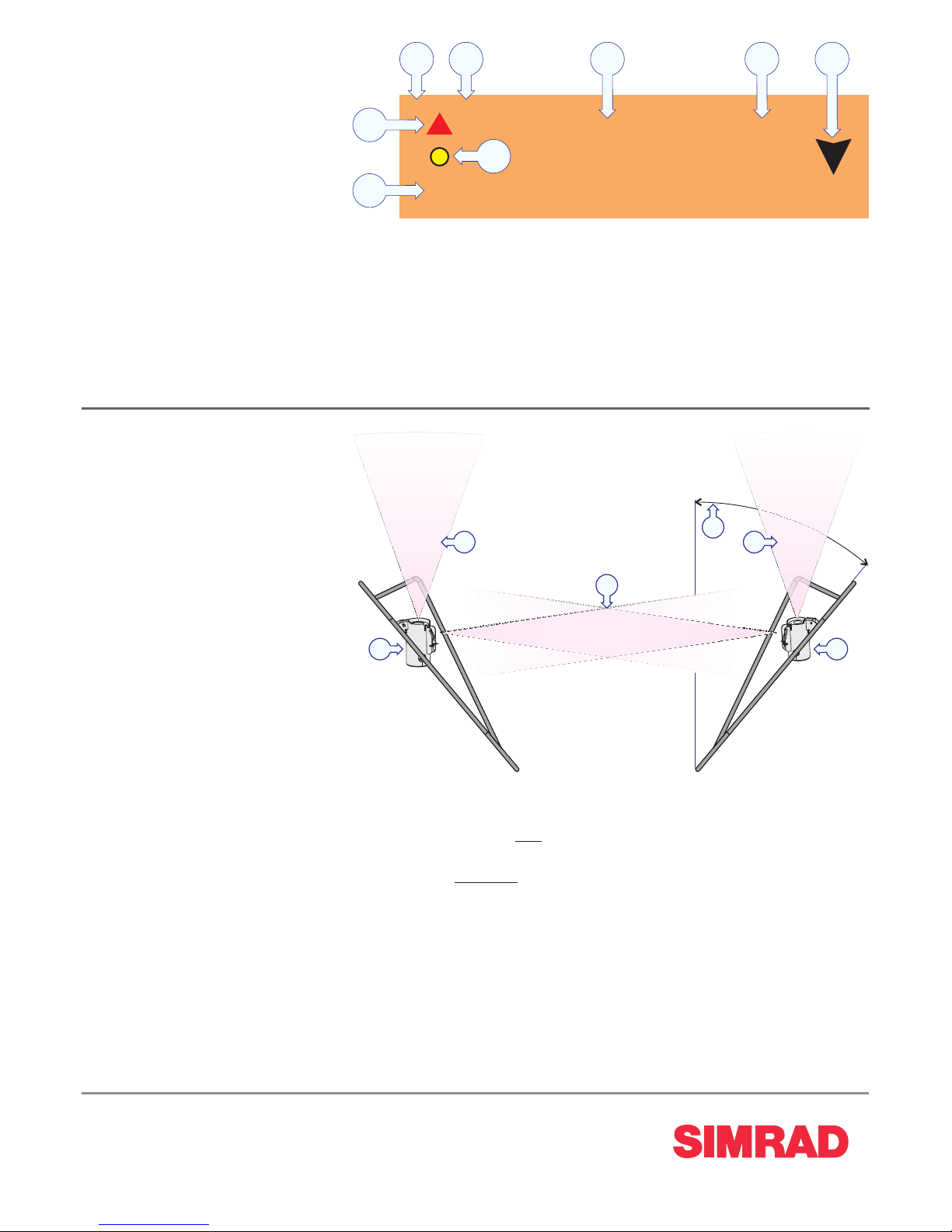
Mounting and installation
principles
The PI Remote/Depth sensor and
the Spread (or Spread/Depth) sensors
must be mounted in dedicated
adapters on each trawl door. These
adapters must be installed beforehand.
Detailed information on how to install
the adapters are provided with the
installation kit.
The PI Remote/Depth sensor is
mounted on the starboard door, while
the PI Spread (or PI Spread/Depth)
sensor is mounted on the port door.
Note: It is essential that there is a
clear line of sight between the two
transverse communication “eyes”
(one on each sensor). It is also
important that both the PI Spread (or
Spread/Depth) and the PI Remote/
Depth sensors have a clear line of
sight to the hydrophone on the vessel.
(A) The PI Spread (or Spread/Depth)
sensor is mounted on the port door.
(B) The PI Remote/Depth sensor is
mounted on the starboard door.
(C) Communication link between the
PI Spread (or Spread/Depth)
sensor and the PI hydrophone,
provides distance information.
Kongsberg Maritime AS
Strandpromenaden 50
P. O.Box111
N-3191 Horten,Norway
Simrad
Telephone: +4733034000
Telefax: +4733042987
simrad.sales@simrad.com
www.simrad.com
Numerical presentation
The numerical presentation of the PI
Remote/Depth data is automatically
shown in the relevant display modes.
It is identical to the presentation
provided by the PI Depth sensor.
When the readings are stable, the
digits are shown in black colour. If the
contact is lost, the characters *** are
shown in grey.
If the depth is out of range, the
displays shows ???.
18
D1 [m]
25.6
(CD012206G)
A
B
C
E
D
F
G
H
(A) Sensor identification
(B) Unit of measurement
(C) Depth
(D) Depth change per minute
(E) Arrow pointing “down” means
that the depth is increasing.
Arrow pointing “up” means that
depth is decreasing.
(F) Visual alarm
(G) Sensor transmission indicator
(H) Interference warning
(D) Communication link between
the PI Remote/Depth sensor and
the PI hydrophone, provides depth
information.
(E) The transverse link between the
two sensors is used to measure the
distance.
(F) Angle of attack.
 Loading...
Loading...