

Page 1
Manual
Simrad MX500
Navigation System
English
www.simrad-yachting.com A brand by Navico - Leader in Marine Electronics
Page 2

Manual
Simrad MX500
Navigation System
English
Document no: 500 100 2003
Revision: C
Date: April 2009
The original language for this document is English. In the
event of any discrepancy between translated versions
and the English version of this document, the English
document will be the official version.
To the best of our knowledge, the content in this
publication was correct at the time of printing.
As we are continuously improving our products we
retain the right to make changes to the product and
the documentation at any time. Updated manuals are
available from our website www.simrad-yachting.com,
and are free to download.
© Copyright 2009 by Navico Holding AS.
Page 3

2 | MX500
IMPORTANT NOTICE!!
THE MX500 IS AN AID TO NAVIGATION ONLY.
Under no circumstances should it be used in lieu of
authorized government charts. Its accuracy can be
affected by many factors such as equipment defects,
environmental conditions, or improper operation. The
user is responsible for safe navigation of the vessel.
This includes consulting authorized government charts
and exercising common prudence and navigational
judgement at all times.
How to contact us?
Contact your local Simrad dealer for:
Installation, Service, & Technical Support •
Sales of Accessories •
Hardware and Software Upgrades •
Unlike many other consumer electronics industries which
only sell consumer electronic devices, your marine dealer
is often your best advisor for installation and service of
your new GPS receiver. Simrad strongly encourages you
to utilize the knowledge and experience of your sales and
service dealer.
Should you need to contact us directly for new sales,
upgrades, repair service, or technical support, we can be
reached at the following:
International:
MX Marine (USA)
A Division of NAVICO, Inc.
23868 Hawthorne Blvd., Suite 201
Torrance, California 90505
USA
+1 310 791 8213 (Telephone)
+1 310 791 6108 (Fax)
www.mx-marine.com
In Europe:
Navico UK Ltd
Premier Way, Abbey Park
Romsey, Hampshire
SO51 9DH
United Kingdom
+44 (0)1794 510010 (Telephone)
+44 (0)1794 510006 (Fax)
www.navico.com
Page 4
MX500 | 3
Symbols Used In This Manual
!
Danger
Indicates an imminently hazardous situation which, if not
avoided, will result in death or serious injury.
Warning
Indicates a potentially hazardous situation which, if not
avoided, could result in death or serious injury.
Caution
Indicates a potentially hazardous situation which, if not
avoided, may result in minor or moderate injury and/
or appreciable material, financial and environmental
damage. This symbol is also used to alert against unsafe
practices.
Important paragraphs which must be adhered to in
practice, as they enable the product to be used in a
technically correct and efficient manner.
This manual contains important safety directions as
well as instructions for setting up the instrument and
operating it. Read carefully through the Operator’s &
Installation Manual before you switch on the instrument.
Page 5
Blank page
4 | MX500
Page 6
Contents
AIS
9
YZ
1 General ....................................................... 9
Related Documents .......................................9
About GPS Navigation .................................. 10
Special Notes ............................................. 11
MX500 USB Feature Overview ...................... 12
MX500 Networking Overview ....................... 12
Network Cables & Waterproong: .................. 13
2 Basic Operation ........................................ 15
Functional Description .................................15
DGPS Beacon System .................................. 19
Keypad & Display Description ....................... 20
Differential GPS Trafc Light Operation: ......... 21
GPS Trafc Light Operation: ......................... 22
The Display: ............................................... 24
+ Virtual Softkeys: .............................. 24
The Function Keys: ...................................... 25
Mark Position/MAN OVER BOARD (MOB)
Key 26
Automatic Identication System (AIS)....30
Navigate .................................................... 30
Dead Reckoning .......................................... 32
NAV1 - The Panorama Screen ....................... 32
Route ........................................................ 41
RTE1 - The Active Route .............................. 42
MX500 | 5
Page 7
6 | MX500
SOG Based on Arrival Date & Time: ...............58
RTE2 - The Route Bank ................................ 59
Waypoint ................................................... 61
Creating and Editing Waypoints ..................... 62
Removing Waypoints ................................... 69
Moving waypoints ....................................... 71
Uploading Waypoints from a Personal Computer
78
Mark or MOB ...................................... 80
GOTO ................................................ 81
Plot 83
Man Over Board .................................89
Tide 95
Position .....................................................99
GPS 103
3 Advanced Operation ............................... 111
Conguration.............................................111
Anchor - Anchor Watch Alarm ..................... 112
COG SOG - Course & Speed Filter Settings &
Setup ...................................................... 112
Compass - External Compass Input & Magnetic
Variation Table .......................................... 113
Security ....................................................147
Serial I/O ..................................................147
Time - Mode and Format Control ................. 148
Wpt & Rte Input - Uploading Waypoints into the
Receiver .................................................. 151
Page 8

MX500 | 7
4 Installation ............................................. 153
List of Components ................................... 153
Mechanical and installation drawings ........... 155
MX500 Electrical Installation Drawings ......... 160
Installation notes ...................................... 168
Equipment Interfacing ............................... 175
Troubleshooting Guide ............................... 188
Software Update Procedure ........................ 191
5 Specications ......................................... 195
MX521/MX525 Smart D/GPS Antenna .......... 195
MX500 Control and Display Unit (CDU) ......... 195
Appendix A - Datum List ............................ 201
Appendix B - Beacon List ........................... 203
Appendix C - Engineering Mode ................. 221
Appendix D - Multiple Unit Control (Via LAN
Connection) ............................................... 227
Appendix E - Demonstration Mode ............ 233
Appendix F - Glossary ................................ 235
Page 9

Blank page
8 | MX500
Page 10

1 General
This manual reflects the software capabilities in version
3.0 software.
We have attempted to take care and develop manuals
which provide in-depth information. Where possible, we
have attempted not only to describe what you see on
the screen, but how to understand and use it as well.
Obviously, we can’t teach you how to navigate, but we
can help make your work more thorough and enjoyable.
Throughout the manual, you will find helpful hints about
the interaction of various functions. In a piece of equipment that has the many capabilities of this receiver, important details can sometimes become obscured in one
or two lines of text. In our effort to ensure you get the
most out of this documentation, and to protect against
important details becoming lost, don’t be surprised if you
see the same or similar information more than once.
This manual is organized by describing first the MX500
model covered in this book. Then the special front panel
features including the traffic light indicator and USB
connector. The sections that follow detail each primary
function as it is presented on the front panel (i.e. NAV,
RTE, WPT, PLOT, ...CFG). The appedixes describe important details about special functions and installation of the
MX500.
We hope you find the manual enjoyable and informative reading. As always, we welcome your comments on
improving our products or manuals. We wouldn’t mind
if you wrote to tell us that we did the job right the first
time either. You can find a Reader Comment Card at the
back of the manual.
Related Documents
MX500 Quick Reference Guide (P/N 500 100 2003)
Simrad MX500 | 9
Page 11

10 | Simrad MX500
About GPS Navigation
This GPS receiver is a precision navigation instrument
utilizing the latest technology available today to provide
optimum performance from the GPS satellite and Beacon
land signals received. As with all other forms of radio
signals, the ultimate navigation result is dependent upon
the quality of these signals. Radio signals may, on occasion, be distorted, jammed, or otherwise incorrect. As a
result, your position accuracy may occasionally be less
than that which can normally be expected.
The Navstar Global Positioning System, commonly referred to as GPS, is a satel lite navigation system developed by the U.S. Department of Defense to provide both
military and civilian users with highly accurate, worldwide, three dimensional navigation and time. By receiving signals from orbiting GPS satellites, authorized users
are able to continuously navigate with an accuracy on the
order of 5 meters 2D RMS or better
A technique referred to as Differential GPS (DGPS), allows users to obtain maximum accuracy from the GPS
system. DGPS requires the use of two GPS receivers.
One receiver, known as the Reference Station, is placed
at a surveyed location, the coordinates of which are precisely known. The purpose of the differential GPS system
is to use the reference station to measure the errors in
the GPS signals and to compute corrections to remove
the errors. The corrections are then communicated in
real-time to the navigators, where they are combined
with the satellite signals received by the navigators,
thereby improving their navigation or positioning. The
geographic validity of these corrections decreases with
distance from the reference station, but the corrections
are valid for navigators hundreds of kilometers from the
reference station.
Marine radio beacons operating in the 283.5 to 325.0 KHz
frequency range are in widespread use for direction finding in coastal navigation. Because the beacon system has
been in place and widely used for many years, it provides
an effective means for the transmission of DGPS signals.
Depending on their local environment and power output,
their signals may be usable to several hundred miles.
Marine beacons provide an economical means of obtaining DGPS accuracy for coastal navigators. GPS receivers
Page 12

Simrad MX500 | 11
with built-in beacon receivers are designed to provide low
cost reception of DGPS corrections broadcast (normally
free of charge) by coastal authorities.
Special Notes
GPS
Never rely solely on any single navigational aid. Always
use whatever information is available, and cross-check
information when possible. GPS expected position accuracy is dependent upon multipath environment, number
of satellites in view, baseline length (for local services),
ionospheric activity, and HDOP. The derived speed and
course readings may be hampered accordingly. The GPS
system was declared operational in 1994; however, the
system’s availability and accuracy are subject to change
at the discretion of the U.S. Department of Defense.
DGPS
This GPS receiver’s position accuracy is dependent upon
ionospheric activity, multipath, subject to the availability,
accuracy, and control of the DGPS correction transmission from the Beacon Station.
The beacon radio signal which carries the DGPS corrections may be hampered by weather conditions such as
heavy rain, snow, and thunder storms. The beacon radio
signal may also be interrupted by powerful radio transmitters operating in long wavelength bands.
Charts and Navigational Aids
Positions obtained from charts are not always as accurate as your navigator (due to environmental changes,
the dates of charts, and datum offsets if the datum differs from the one in use by the navigator). The position
of a floating aid can differ due to tide, set and drift.
Compass Safe Distance
> 1 meter
Page 13

12 | Simrad MX500
MX500 USB Feature Overview
USB stands for Universal Serial Bus, and is a data port
in the MX500 that allows the use of USB flash drive
(memory stick) to save and restore waypoints, routes
and configuration data. In addition it can also be used to
download the MX500 firmware for software updates. Not
all commercially available USB flash drives are compatible with the MX500.
USB Formatting:
Before the USB device (i.e. flash drive) can be used for
the MX500, it is important to format it to FAT32 file system. This is available from any PC running Windows XP or
higher.
USB Waterproong:
When the USB port in the MX500 is not in use, please
close the rubber flap in order to maintain splashproof
integrity.
Do not remove the USB rubber ap completely from
the MX500 unit. This will affect the splashproof
integrity.
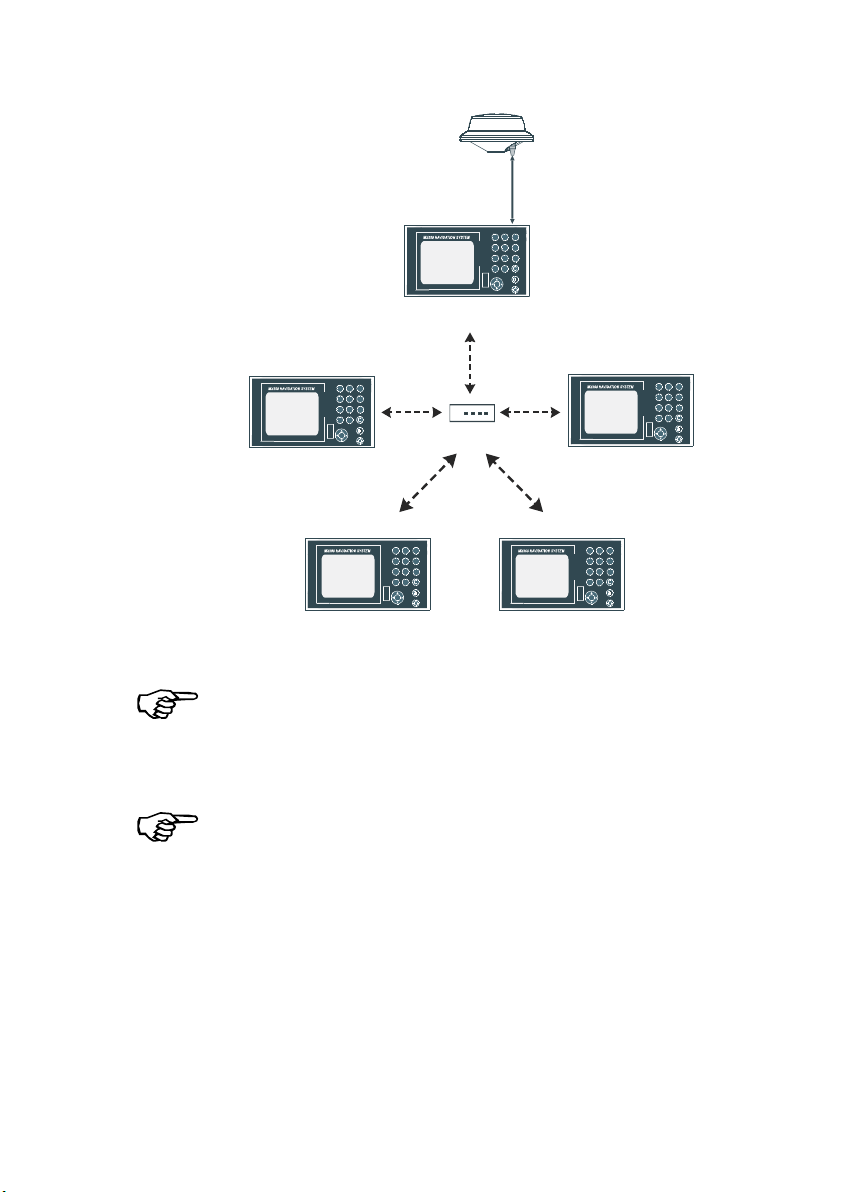
MX500 Networking Overview
The MX500 networking technology lets you connect two
or more MX500 units in Dual-Control or Multiple Unit
Control configuration via LAN (Local Area Networking)
in order to share navigation data among the units. A
change to routes and waypoints in the master or in a
slave unit is mirrored on all the networked units.
One MX500 is designated as the master and all others as
slaves or repeaters. The only restrictions on the networking are the following:
There must be one and only one master unit operat- •
ing in a network.
All MX500 units must have the same software version. •
Page 14

Simrad MX500 | 13
A maximum of five units may be connected in a net- •
work.
In a Multiple Unit Control (three or more units) net- •
working system, all Slave and Repeater units must be
enabled in CFG1/Dual Contrl before enabling it in the
Master unit.
The MX antenna sensor is connected to the master unit
and in turn shares its position to all the slaves.
Network Cables & Waterproong:
If all components are located in dry areas and do not
require waterproof cables and connectors, standard offthe-shelf Ethernet cables can be used. These cables are
available in a variety of lengths and can be obtained from
sources that carry computer networking supplies. The installer should ensure that the cable is category 5 (CAT5)
or category 5e (CAT5e) cable. Other cables, particularly
voice grade cables, look very similar but will not work as
part of the MX500 network system.
Any connector exposed to the weather or possibility of
exposure need to be waterproof. Cables can be ordered
from SIMRAD with waterproof connectors installed on
both ends. Cables are also available with a waterproof
connector on one end and a non-waterproof connector on
the other end.
The simplest way to interconnect a network consisting
of just two MX500 units (Dual Control configuration) is
to use an Ethernet cross-over (null) cable. A cross-over
cable eliminates the need for an Ethernet switch.
When more than two MX500 units (Multiple Unit Control
configuration) are being connected, or if you wish
to leave room for future expansion, use an Ethernet
switch that serves as a common connection point for
all the units. Do not use cross-over cables with an
Ethernet switch.
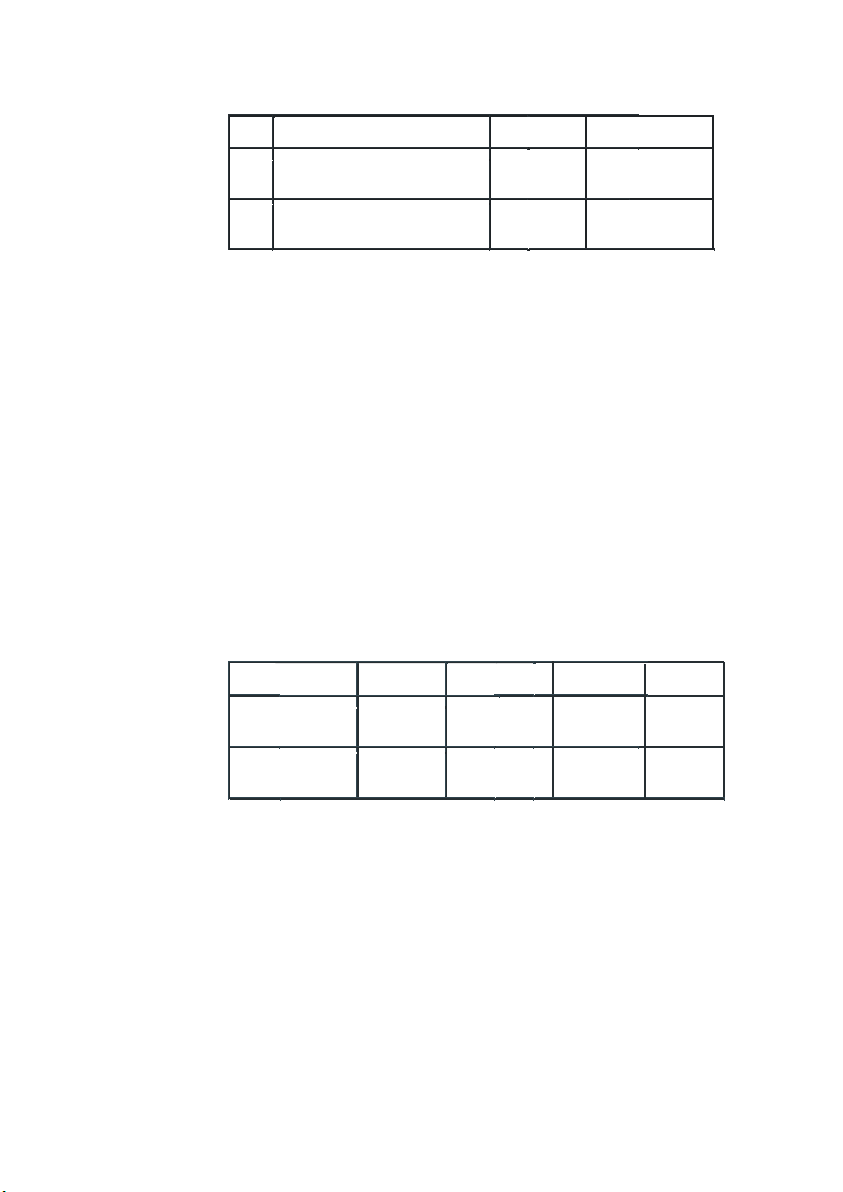
The table 1a below shows all the waterproof network
cables that SIMRAD offers for the MX500.
Page 15
Item Component Part Number
1.0
LAN Patch Cable Assembly (3 m)
(RJ45, si ngle-ended waterproof
connector)
1.1 LAN Cross-over Cable (3 m)
(RJ45, double-ended waterproof
connectors)
500 100 4 004
500 100 4 005
Ty pe
C AT 5
Cross-over
Table 1a: MX500 Waterproof Network Cables
Manufactu rer
Northstar P/N
Speed(Mbits)
Model
Netgear
Ports
FS108
10/100 Auto
8
ADAM
6520
SW103 5
Ethernet Switches:
Ethernet switches allow for the interconnection of more
than two MX500 units. Each MX500 can exchange data
with any other MX500 connected to the switch.
For non-waterproof switches, any standard 10/100 Mbit
Ethernet switch can be used. These devices generally come with a power adapter which is plugged into a
110VAC (or 220VAC) power outlet.
Fully waterproof, 10-32VDC powered switches are available from Woodhead Connectivity Ltd.
SIMRAD recommends the following Ethernet switches using standard Category 5 cables:
Table 1b: Ethernet Switches
14 | Simrad MX500
Page 16

2 Basic Operation
MX 422 Professional DGPS Navigator
MX500 CDU
MX Smart GPS Antenna
Functional Description
MX500 Congurations
The MX500 Navigation System is available in several configurations. Please refer to the Auxiliary Unit Information
section of the manual to view sample screens to identify
your particular model. Described below are the various
MX500 configurations and their differences.
MX500 GPS
This MX500 CDU configuration is equipped with two (2)
bidirectional user NMEA ports and one (1) high-speed
Local Area Network (LAN) port. It is supplied with a GPS
only smart antenna unit.
Basic MX500 GPS & DGPS Configuration
MX500 DGPS
This MX500 CDU is supplied with an MX combined
GPS and Beacon smart antenna (MX421B-10, MX521A,
MX525A, MX575A). The smart DGPS antenna unit can
achieve 1-2 meter accuracy in areas with good beacon
differential coverage.
LAN port must be setup before enabling this feature. The
units can be connected over an Ethernet cross-over cable
or using an Ethernet switch.
Simrad MX500 | 15
Page 17
16 | Simrad MX500
MX 422 Professional DGPS Navigator
MX500 CDU
MX Smart GPS Antenna
MX 422 Professional DGPS Navigator
MX500 CDU
LAN
(Host)
(Client 1)
Mast er unit
Slave unit
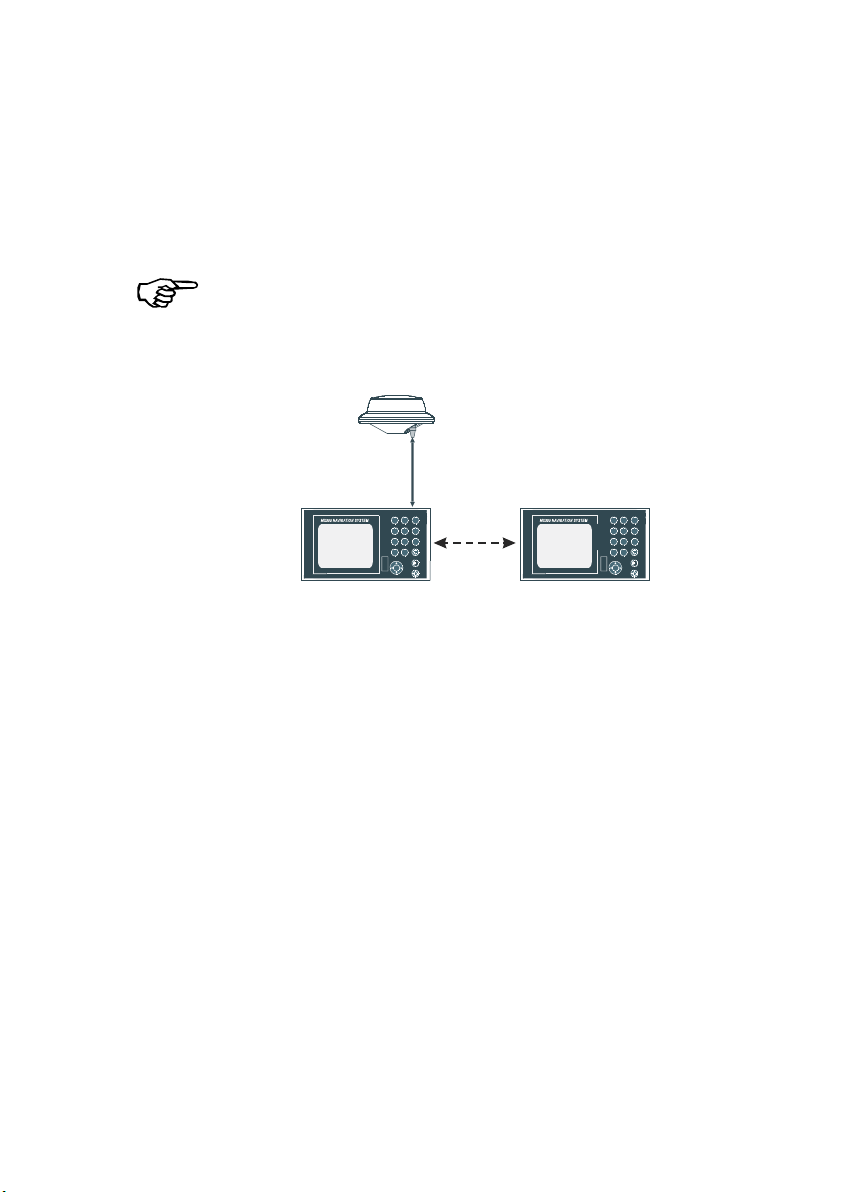
MX500/DC (Dual Control)
This is a dual-control CDU system where one MX500 (operating as a master) and the other (operating as a slave)
are supplied. Only one smart DGPS antenna is required.
The antenna unit is connected only to the MX500 master
unit.
LAN port must be setup before enabling this feature. The
units can be connected together over an Ethernet crossover cable or using an Ethernet switch.
MX500 BR Beacon and Remote Configuration
MX500/BRIM (Backup Receiver Integrity
Monitoring)
This is an enhanced Dual-Control configuration wherein
two MX500 CDUs and two smart DGPS antennas are supplied. The two MX500 units are connected in dual-control
configuration but they operate as independent navigator
units with dedicated antennas. The Dual Control Integrity
Monitoring (IM) feature is a software option that works in
the MX500 CDU hardware.
This configuration allows data to be shared between two
remotely separated stations (i.e. navigator’s station and
helmsman’s station), with independent access to various information fields. The purpose of this configuration
is to enable each CDU to calculate its own position, then
check the operational status of the other GPS receiver.
The GPS receiver with the best overall operational status
then provides the system position. This provides a fully
redundant system, with self-recovery capabilities.
Page 18
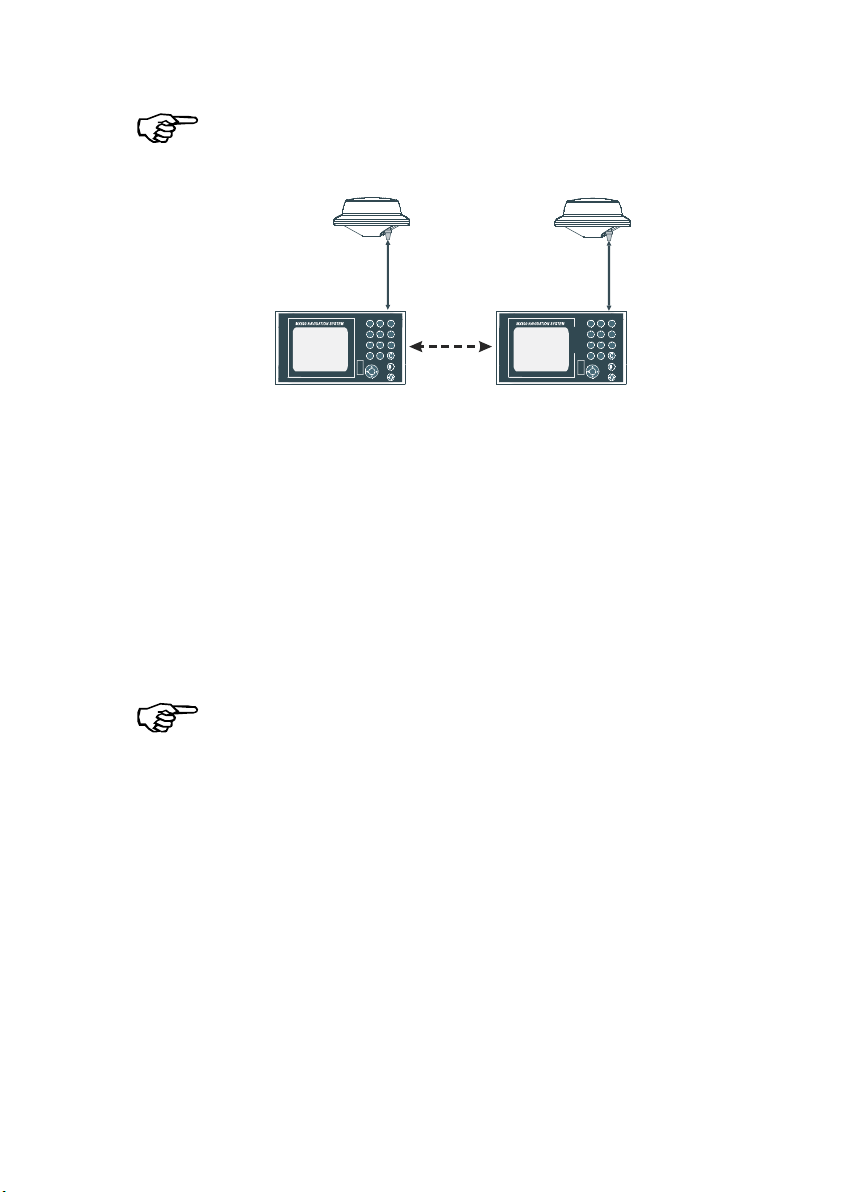
Simrad MX500 | 17
LAN port must be setup before enabling this feature. The
MX 422 Professional DGPS Navigator
MX500 CDU
MX 422 Professional DGPS Navigator
MX500 CDU
LAN
(Host)
(Client 1)
Master unit Slave unit
MX Smart GPS Antenna
units can be connected over an Ethernet cross-over cable
or using an Ethernet switch.
MX500/BRIM System Configuration
MX500/MUC (Multiple Unit Control)
This is a multiple unit control CDU system where one
MX500 operates as a master, at least one (maximum of
two) MX500 operates as a slave, and up to three (if any)
MX500 operate as a repeater are supplied. The multiple
unit control CDU system must contain a minimum of
three MX500 and a maximum of five MX500 units altogether. Only one smart DGPS antenna is required. The
antenna unit is connected only to the MX500 master unit.
LAN port must be setup before enabling this feature.
The units must be connected together using an Ethernet
switch.
Page 19
18 | Simrad MX500
MX 422 Professional DGPS Navigator
MX500 CDU
MX Smart GPS Antenna
MX 422 Professional DGP S Navigator
MX500 CDU
LAN
(Host)
(Client 1)
MX 422 Professional DGP S Navigator
MX500 CDU
(Client 2)
MX 422 Professional DGP S Navigator
MX500 CDU
(Client 3)
MX 422 Professional DGP S Navigator
MX500 CDU
(Client 4)
Master unit
Slave unit #1
Slave unit #2
Repeater unit #1
Repeater unit #2
Hub/Switch/Router
LAN
LAN
L
A
N
L
AN
this product line simply as the MX500 CDU or navigator.
Where distinction between models is necessary, the par-
1) In general, this manual will refer to all versions of
ticular model type will be indicated.
2) Six smart GPS/DGPS antenna models are compatible with the MX500 CDU. They are the MX421-10 (GPS),
MX421B-10(DGPS), MX525A (DGPS only), MX521G(GPS),
MX521A(DGPS), and MX575A Satellite Compass.
Page 20

Simrad MX500 | 19
DGPS Beacon System
5271-01C.500
Navigator Site
MX 50M
DGPS Beac on Modulat or
MX 9400R
DGPS R efere nce
Reference Station Site
MX 9400N
DGPS Navigator
MX 51R
Integrity Monitor Site
Surveyors / Commercial
Users
Professional / Commercial /
Personal Craft Users
As Maritime Safety Administrations, Navy, and Coast
Guard Organizations realize the limitations of standard
GPS positioning, many have begun installing DGPS
Beacon Stations. While an understanding of this system
is not necessary for operating receivers with internal
beacon receivers, you may want to read on to have a
better understanding of how your receiver is capable of
achieving the high levels of accuracy made possible by
this network of transmitters.
The DGPS Beacon System is comprised of three segments: the reference station, Integrity Monitor (IM)
equipment located at the beacon site, and the Navigator
equipment located on board the user’s boat or vehicle.
The DGPS beacon system design is illustrated below.
Because of the limited range of the beacon transmitters,
typically 150 to 400 km, the corrections generated by
the reference station are always valid for users who can
receive the correction signals and maintain a 5 meter or
better accuracy figure.
Page 21
20 | Simrad MX500
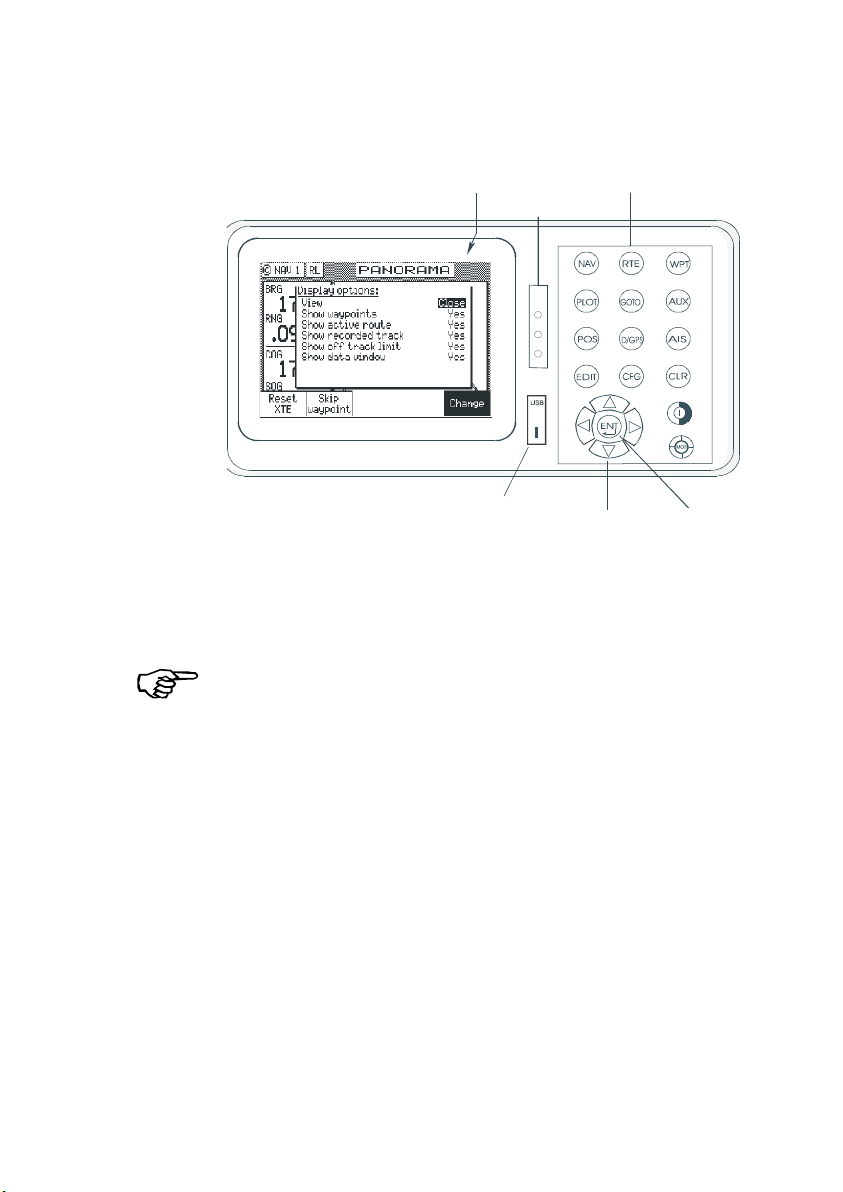
Keypad & Display Description
Traffic
Lights
Function Keys
Display
Cursor Key
Select
Virtual Softkey
USB
Connector
Refer to the illustration above. The Traffic Lights on the
left side of the display will tell you how your navigator is
operating.
You need to take care in reading the trafc light indications, as there are overlapping possibilities between the
GPS and DGPS modes. If you are unsure of the current
operating mode, select the CFG function key and scroll
down to the DGPS selection. If the DGPS mode is selected to anything other than Off, then follow the Differential
GPS Trafc Light Operation. If the DGPS mode is selected
to Off, then follow the GPS Trafc Light Operation.
Page 22
Simrad MX500 | 21
Differential GPS Trafc Light Operation:
!
Red Flashing
Not tracking satellites (no position update). This
is normal for the first 2 minutes or so when turning the
unit on. The very first time you turn the unit on, or if
the memory is reset or lost, this condition is also normal. Allow the receiver to run for at least 30 minutes
under these circumstances. If it still does not change
to Red Solid, refer to the troubleshooting section in the
Installation section of this manual.
Red/Yellow Solid
Dead Reckoning. When normal GPS or DGPS operation
is not available, this LED sequence is provided to quickly
identify the DR navigation mode. A DR indicator is also
displayed on all screens.
Red Solid
Tracking one or more satellites (no position update). This is also normal for the first 2 minutes or so
when turning the unit on. The very first time you turn the
unit on, allow the receiver to run for at least 20 minutes
after changing to Red Solid to collect an almanac from
the satellites, regardless of whether a position update
has been calculated or not. This is also a normal indication if the HDOP is greater than 10, if the receiver is
tracking too few satellites, or for other reasons as well.
Read the GPS and DGPS function screens for more information.
Yellow/Green Solid
GPS position update; DGPS corrections are not being received. You may see this from time to time during
normal operation. It usually occurs when the beacon
signal is not available (either it is being blocked by terrain
or a local object or you are out of range of the transmitter) and/or you are tracking 3, 4, or 5 satellites, and the
satellites have poor geometry relative to your position.
The condition will normally go back to green solid, when
it picks up another beacon station. The factory default
Page 23

22 | Simrad MX500
level for dropping DGPS corrections is 600 seconds.
During this period, your positioning information is less
than optimal, and position accuracy may be off by as
much as 3 to 5 meters. Press the GPS function key and
refer to the DGPS section in this manual for guidance if
this light condition occurs.
Yellow Solid
DGPS position update with poor HDOP value. You
may see this from time to time during normal operation. It usually occurs when you are tracking 3, 4, or 5
satellites, and the satellites have poor geometry relative to your position. The condition will normally go back
to Green Solid when it picks up another satellite or the
geometry of the existing satellites improves. The factory default level for this indication is with an HDOP of 4
to 10. During this period, your positioning information is
less than optimal, and position accuracy may be off by as
much as 5 to 10 meters. You can press the GPS function
key and refer to the GPS section in this manual for guidance if this light condition occurs.
Green Solid
DGPS position update with HDOP value less than 4.
This is the normal operating condition. Position accuracy
is normally better than 3 meters. Keep in mind that position accuracy is always only as good as the corrections
received, their age, your distance from the reference
station, and the geometry of the satellites. This is the
normal operating condition and no icon will be displayed.
GPS Trafc Light Operation:
Red Flashing
Not tracking satellites (no position update). This
is normal for the first 2 minutes or so when turning the
unit on. The very first time you turn the unit on, or if
the memory is reset or lost, this condition is also normal. Allow the receiver to run for at least 30 minutes
under these circumstances. If it still does not change
to Red Solid, refer to the troubleshooting section in the
Installation section of this manual.
Page 24

Simrad MX500 | 23
Red/Yellow Solid
Dead Reckoning . When normal GPS or DGPS operation
is not available, this LED sequence is provided to quickly
identify the DR navigation mode. A DR indicator is also
displayed on all screens in the upper left hand corner of
the display.
Red Solid
Tracking one or more satellites (no position update). This is also normal for the first 2 minutes or so
when turning the unit on. The very first time you turn the
unit on, allow the receiver to run for at least 20 minutes
after changing to Red Solid to collect an almanac from
the satellites, regardless of whether a position update
has been calculated or not. This is also a normal indication if the HDOP is greater than 10, if the receiver is
tracking too few satellites, or for other reasons as well.
Read the GPS and DGPS function screens for more information.
Yellow Solid
GPS position update has a poor HDOP value. You
may see this from time to time during normal operation.
It usually occurs when you are tracking 3, 4, or 5 satellites, and the satellites have poor geometry relative to
your position. If you are patient, the condition will normally go back to Green Solid when you pick up another
satellite or the geometry of the existing satellites improves. The factory default level for this indication is with
an HDOP of 4 to 10. During this period, your positioning
information is less than optimal, and position accuracy
may be off by as much as 10 to 30 meters. You can press
the GPS function key and refer to the GPS section in this
manual for guidance if this light condition occurs.
Green Solid
GPS position update with HDOP value less than 4.
This is the normal operating condition. Position accuracy
is normally between 3 to 5 meters, but can be out as
much as 30 meters. Keep in mind that position accuracy
is always only as good as the geometry of the satellites
and the navigation information provided by the satellites.
Page 25

24 | Simrad MX500
This is the normal operating condition and no icon will be
displayed.
The Display:
The CDU uses a Transflective LCD display screen. It
provides optimum viewing in virtually all lighting conditions. To change the display contrast or backlight condition, select the CFG function key and scroll down to the
Lighting menu choice. Refer to the CFG section of the
manual for a complete description of menu options. The
Power On/Off/Lighting triple function key allows you
to quickly change between daytime and night time
screen settings, and turn On or Off the unit.
Information displayed on the screen is normally divided
into windows, similar to what you might see on a normal
computer. Each screen has a page number in the upper
left hand corner. These page numbers are there to help
you quickly find the information you need, and to help us
guide you on the rare occasion that you might request
our assistance.
With the exception of a portion of the PLOT and MOB
screens which use the UP and DOWN arrows to change
the view scale, all of the screens require that you press
the EDIT (Edit Mode) function key before you are allowed
to change data on the screen. You can use the cursor key
(the big key with the arrows pointing in four directions)
to move between edit fields or menu choices on most
screens when in the edit mode. When you are not in
the edit mode, you can use the cursor to scroll between
screens (i.e. NAV1, NAV2, NAV3, ...) or to move up and
down on screens (like the menu bar in the CFG screen).
This function key activates or deactivates the softkeys
and edit fields within any screen where editing is appropriate. You will quickly learn that this is an important operating feature in the unit. Press the EDIT key when you
want to start editing a screen and again when you have
+ Virtual Softkeys:
Page 26

Simrad MX500 | 25
finished editing. If after editing you press a function key
and nothing seems to happen, check to make sure you
didn’t accidentally alter your information and press the
EDIT key to end editing. Some edit screens provide an
Escape softkey. If you decide for some reason that you
don’t want to use the changes you have made, pressing
the Escape softkey will restore the original information.
However, once you press the EDIT key, all changes are
accepted and the original data is lost.
The virtual softkeys under the bottom of the display
are so named because their purpose changes from one
menu or screen to the next. All of the screens require
that you press the EDIT (Edit Mode) function key before
the virtual softkeys can be accessed. Then use the LEFT
and RIGHT cursor arrows to highlight the desired virtual
softkey and press the ENT key to choose it. Don’t forget
to press the EDIT function key when you have finished
editing a screen.
The Function Keys:
The Function Keys are the keys to the right of the display.
There are 16 function keys in all. Eleven of the function
keys access various screen and editing displays. Three of
these function keys are used for editing or moving within
the screens. One function key is used to mark your present position, and to activate/deactivate Man Over Board
alarms when depresses for a few seconds. One is used as
the power on/off key, and switches between two display
lighting options when depresses for a few seconds.
The ten function keys with alpha abbreviations on them
are described in the ensuing chapters. The five function keys with symbols and the GOTO key are described
below.
The function keys are also used in the edit mode to enter
alphanumeric information into screen data fields.
Page 27
26 | Simrad MX500
Mark Position/MAN OVER BOARD
(MOB) Key
This dual function key stores your present position, date
and time at the next available waypoint location in the
waypoint bank. A window pops up on the screen to confirm your key depression, and to tell you where the mark
position is being stored. You can go into the WPT menu
and edit the coordinates or description later. The CDU is
also capable of performing this function from a remote
contact closure input via AUX Cable (MOB/Event) wire.
Refer to the Installation section of this manual for interface instructions.
When depressed for 3 seconds, this function key activates a number of automatic functions:
► Most obviously, it brings up an MOB1 (Plot) screen.
This is an automatic scaling screen which selects the
best zoom level to display your present position and the
MOB position. In addition, the MOB position is displayed
in the upper left corner, so that you can quickly read the
coordinates to others who may be available to render assistance. This plot screen also provides the vital bearing
and distance back to the MOB position, as well as your
present course over ground.
► The MOB position, date and time are stored in the
Waypoint Bank for future reference (e.g. log book entries).
► Navigation data output on the NMEA ports (i.e. BWC
and BWR), are changed to reflect the current crisis situation. This way, other interfaced equipment can also
help guide you back to the MOB position. When the MOB
condition is canceled via a MOB screen softkey, the NMEA
sentences will automatically revert to the active route information. Don’t forget to cancel the MOB so your inter-
faced equipment will read the correct data.
► The MOB function key and remote MOB input are disabled from subsequent activation, until the MOB Cancel
softkey is selected.
► Other functions such as Position and Navigate can still
be accessed; however, the screen will revert to the MOB
Plot screen after 30 seconds. Bearing and distance infor-
Page 28
Simrad MX500 | 27
mation in these other screens relate to the MOB position,
not the next waypoint in the active route, until MOB is
canceled.
To cancel a MOB condition, make sure you are in the MOB
Plot screen. Press the EDIT function key, then select the
Cancel MOB softkey.
The MX500 is also capable of performing the MOB function from a remote contact closure. If the contact closure
is made for 1 second, the input is registered as a Mark
Position. If the contact closure is made for 3 seconds,
the input is registered as a MOB Position. Refer to the
Installation Section of this manual for interface instructions.
GOTO
This function key allows you to quickly create a route
from your present position to waypoint or a route. This
single waypoint route can use an existing waypoint from
the Waypoint Bank, or you can quickly create one by
either defining the appropriate coordinates or specifying
a range and bearing.
Be careful when you use this selection, as it will erase
your current active route when it creates the new one.
Read through the ROUTE and PLOT sections of this
manual to find other ways to use this key within an active
route.
POWER ON/OFF & LIGHT
This triple function key turns the unit on and off. When
depressed while the unit is on, you will be prompted to
select a YES or NO softkey to confirm your action. This is
known as a software power off.
If the operating program should hang up for any reason,
you can also perform a hardware power off by continuing
to depress the power on/off function key for about 5 sec-
Page 29
28 | Simrad MX500
onds. When the GPS is turned off using this technique,
CLR
you can not reapply power for 10 seconds.
An occasion may arise when you need to reset the memory back to the factory default values. Doing this will
cause the CDU to lose all of your dened settings, as well
as all 2,000 of your waypoints and routes. If you hold
down the “CLR” button when power is applied for about
six seconds, then the memory will be cleared.
When depressed for 3 seconds, this triple function key
allows you to quickly switch between two predetermined
display lighting conditions, a daytime/night time setting. Select the CFG function key and scroll down to the
Lighting menu choice to make the desired adjustments.
Refer to the Configuration section of the manual for a
complete description of the Lighting menu options.
CLR (CLEAR)
This function key is probably the least used of all the
function keys; however, it can save you some otherwise
frustrating editing time. This key allows you to erase or
clear one character at a time. If you hold it down, it will
erase the entire line that the cursor is currently on.
CURSOR
This function key is the most used of all the function
keys. When pressing the EDIT key to activate the virtual
softkeys, the LEFT or RIGHT arrow cursor keys are used
to scroll left or right from one softkey to the next. It also
allows you to move between function screen pages (by
pressing left or right). In addition, many of the edit fields
allow you to use either the cursor key or the Change
softkey to scroll through or select from predetermined
choices.
ENTER
This key is often used just like the EDIT and the CURSOR
Page 30
Simrad MX500 | 29
keys. When pressing the EDIT key to activate the soft-
N A V
1
ABC
keys, the ENT key is used to select the particular virtual
softkey of user’s choice.
FUNCTION
You might have noticed that above and below each primary function key there are numbers and letters. These
numbers and letters are used when you are in the edit
mode. You will find that they are most often used in the
RTE, WPT, and CFG screens, but they are used in other
screens as well. If you are trying to enter text, simply
locate the desired letter and press the appropriate function key repeatedly until the appropriate letter or number
appears. If you accidentally go past the desired letter,
repeat pressing the function key and the letter will come
up again. You can toggle between upper and lower case
characters by pressing the function key for a long period.
You will also find that some screens allow you to input
symbols into the text fields. These symbols are selected
through a softkey selection where symbols are allowed.
Don’t forget to press the ‘EDIT’ key to get out of the edit
mode!
Another helpful feature on this CDU is that successive
depressions on the function key (when not in the edit
mode) allow you to page through all of the screens available for that particular function. You can accomplish the
same thing by selecting a function and using the left and
right arrows on the cursor key (which is sometimes faster). In addition, the software remembers which screen
you used last for each function. Each time you reenter a
function (e.g. you go from PLOT to NAV), you will enter
the last screen you viewed for that function. You can
change this setting in the CFG 1 Operation.
Use the associated function key to access the international character desired (i.e. A for Æ). The international
characters supported are:
ABC = Ä, Å, Æ, À, Ç
DEF = É, È
GHI = Í
MNO = Ñ, Ó, Ö
STU = Ú, Ü
Page 31

30 | Simrad MX500
Use the CFG key when in the edit mode to cycle through
AIS
9
YZ
these other optional characters.
‘ “ $ & ! ( ) ? / + - ° . , :
Automatic Identication System
(AIS)
(AIS not available in this model)
Navigate
There are six basic NAV screens. NAV4, NAV5, and
NAV6 only provides data if appropriate sensors (e.g.
wind speed/direction logs, NMEA compass, etc.) are
interfaced and activated on the CDU. The NAV functions
are highly interactive with the RTE1 screen, and a number of CFG menu selections.
The RTE1 screen provides the active route for the NAV
screens. It also maintains a waypoint pass log for you.
One other important feature in the RTE1 screen that
you need to be aware of is that the up and down arrow
softkeys control which waypoints are skipped (down arrow) and which are restored (up arrow) for your current
route. The ETA information is configured in the RTE 1
screen. Refer to the Route section of the manual for a full
description.
The following CFG menus directly impact the NAV functions:
COG SOG - sets the filtering time for the displayed •
values.
Page 32

Simrad MX500 | 31
Datum - sets the reference datum for your present •
position and waypoints in the active route.
GPS Offset - sets an offset for calculating the GPS •
antenna position if you can’t physically locate the an-
tenna exactly where you want it (e.g. over the center-
line of the boat).
Navigation - sets a variety of important functions and •
alarms
Rhumb line or Great Circle navigation Range units: nautical miles, nautical miles and me- -
ters (when under 1000 meters), nautical miles and
feet (when under 1000 feet), statute miles, statute miles and meters (when under 1000 meters),
statute miles and feet (when under 1000 feet),
kilometers, or kilometers and meters (when under
1000 meters)
Cross-track error limit and alarm control Waypoint pass criterion and distance: bisector line, -
perpendicular line, complex (combination of bisector line and perpendicular line), distance to waypoint, or manual
Waypoint Approach distance Autopilot alarm control -
Position - sets to either Lat/Lon or UTM, and some •
alarm limits. There is an optional software package
available to setup a user grid as well. The option is
explained in the Position, and CFG Position sections of
this manual.
Time - sets appropriate offsets, and 12 or 24 hour •
clock mode.
Various NMEA input controls for sensors (i.e. speed •
log, wind instruments, etc).
Page 33

32 | Simrad MX500
You have probably already figured out that you will need
to pay close attention to the configuration screens. The
good news is that you should only have to setup one
time. Keep in mind, though, that you may need to revisit
these and other configuration screens from time to time
to get the CDU to do exactly what you want it to.
Dead Reckoning
The MX500 CDU is capable of Dead Reckoning (DR) calculation when appropriate compass/heading and speed
log sensors are connected and activated. Refer to the
NAV4 and CFG sections of this document.
When the CDU is in the DR mode a DR icon is displayed
in the upper right corner of the screen.
NAV1 - The Panorama Screen
This screen is designed to give you a unique 3 dimensional look at the active route you are to follow. It is
typically referred to as a runway view because you can
see navigation markers, your course line, the cross-track
error lines, and waypoint flags as you pass them. Take a
look at the example below.
If you don’t see the information described in this screen,
you will need to create a route in RTE1 first.
The somewhat triangular shape at the bottom center of
the screen represents the bow of the boat. Icons on the
screen are always related to this object. The two dash
lines extending from the bottom of the screen towards
the center of the screen represent your cross-track error limits. The dotted line extending from the bow of
the boat icon represents your course line. The course
Page 34

Simrad MX500 | 33
line changes direction at the flags, which represent your
waypoints, and continues through to the end of the active route you entered in RTE1. Notice that the crosstrack error lines end at the first flag. As you pass the flag
and start the next leg of your course, these lines will be
redrawn to reflect the course change. Icons that you see
left and right of your course are navigation markers that
you define in the Waypoint Bank (WP T 1) where a symbol is used as the first character of the waypoint description. The Panorama and Plot screens will automatically
place these navigation markers on the screen as you
approach them.
The degree values that you see are your Course Over
Ground (COG), as calculated by the GPS receiver’s position fix to position fix, and Bearing (BRG) from your
present position to the waypoint. The speed value is your
Speed Over Ground (SOG) as calculated by the GPS. The
distance value displayed as the Range (RNG) is calculated
from your present position to the waypoint. The Time-ToGo (TTG) is the calculated time it will take you to reach
the waypoint, based on your Waypoint Closure Velocity
(see NAV4 description).
To keep the screen from jumping around when you are
stopped, the screen freezes the graphic representation
when your speed is under 0.5 Kn in DGPS mode or 2.0
Kn in GPS mode. Once you get underway, your course
details will update appropriately.
You will see a RL or GC symbol in the upper right corner of the display indicating whether you are navigating
under Rhumb Line or Great Circle. This is set in the CFG
Navigate menu.
If you press the EDIT key, the Panorama Display Option
screen will allow you to customize the information presented.
View • - allows you to adjust the display for a Close
(zoomed-in) or a Far (zoomed-out) representation of
your route.
Show Waypoints • - allows you to turn waypoints which
are not part of the active route on and off.
Show Active Route • - allows you to turn the course line
on or off on the display (assuming a symbol is entered
for the first charac ter of the waypoint name).
Page 35

34 | Simrad MX500
Show Off Track Limit • - allows you to turn the cross-
track error limit lines on or off on the display.
Show Data Window • - allows you to select between the
two NAV 1 display types depicted at the beginning of
this section, one in which the data is displayed in vari-
ous parts of the graphic screen, the other in which the
data is displayed in a separate window to the left of
the graphic screen.
If you drift outside of your cross-track error limit and you
decide not to return to your original course line, you can
reset your course line from your present position to the
waypoint by highlighting the Reset XTE softkey from the
display, and pressing the ENT key.
The Skip Waypoint softkey allows you to skip the waypoint you are presently going to, and advance to the
next waypoint. For example, if you were under way and
nearing waypoint 5 and you decide you want to go on to
waypoint 6 now, press the EDIT key, highlight the Skip
Waypoint softkey, and press the ENT key. If you make a
mistake and you want to go back (unskip) to waypoint 5,
you can do this by the following:
Go into the 1 RTE1 screen.
Press 2 EDIT in the RTE1 screen.
Highlight the Route Control softkey and press 3 ENT.
Highlight the up arrow softkey (fourth from the 4
left) and press ENT once.
Press the 5 EDIT key again.
Refer to the Route section of this manual for more details
about skipping and unskipping waypoints.
NAV2 - Basic Steering Information
Navigate screen 2 provides the bearing (BRG) and range
(RNG) to the waypoint you are approaching in large easily viewed characters. Below these, you will see your actual Course Over Ground (COG) and Speed Over Ground
(SOG). The bottom portion of the screen provides crosstrack error information. Again, if you don’t see the information described here on your screen, you will need to
create a route in RTE1 first (refer to the Route section of
the manual).
Page 36

Simrad MX500 | 35
In the bottom half of the window, the vertical line in the
center represents your course line. The checkered area
on the left and right side of this area represents the out
of bounds or beyond the cross-track error limit area.
Whenever the boat is left or right of the course line, the
corresponding checkered area changes to solid black,
indicating the side of the course line that you are on. The
number next to the course line is your calculated crosstrack error. The numbers in the lower left and right hand
corners indicate the cross-track limit you set in the CFG1
menu under Navigation. You will notice that the crosstrack error limit lines are slanted, just as they were in
the Panorama screen. So if the boat is off to the right of
the course, and the bow is pointing straight up, you are
actually traveling away from the course line. Keep the
bow pointed toward the top of the course line, and you
should be able to maintain your course without a lot of
drift. The BRG and COG values will confirm this for you,
when executed properly.
From time to time, you might drift off course and decide
not to return to your original course line. If you drift
outside of your cross-track error limit, you can reset your
course line from your present position to the waypoint
by pressing the EDIT key and selecting Reset XTE from
the display. This will save your autopilot from having to
work hard to get you back on course. Press the EDIT key
again to get back into normal display mode.
In addition, if you decide you want to skip this waypoint,
and go on to the next one, Press the EDIT key, and the
Page 37

36 | Simrad MX500
Skip Waypoint softkey one time. Press the EDIT key to
end this procedure. If you skip one waypoint manually,
and the CDU starts skipping more waypoints by itself,
you probably need to change your Waypoint Pass Criteria
in the CFG1 Navigate menu. Refer to the Route section
of this manual for more details about skipping waypoints.
Just as in NAV1, you will see an RL or GC symbol in the
upper right corner of the display indicating whether you
are navigating under Rhumb Line or Great Circle. This is
set in the CFG1 Navigate menu.
NAV 3 - Expanded Navigation Information
Navigate screen 3 has four windows. The upper left
window is a smaller version of NAV2. Please read the
previous section for a detailed description of this window.
The two windows below this one indicate the current
date, time and the ETA to the end of your route for the
time zone currently entered. The date and time format
is set in the CFG1 Time menu. The ETA and TTG (in the
right hand window) are filtered over time, so allow the
filtering to settle when you first make a course or speed
change. The filter time is controlled in the RTE1 ETA
Setup screen. The Time-To-Go (TTG) value on the bottom of the right hand window expands from HH:MM:SS
to HHHH:MM:SS when the time to go is greater than
99:59:59. Also, these values are calculated by using your
Waypoint Closure Velocity (WCV), not your SOG. WCV is
described in short detail in the NAV4 section which follows.
You will find the right hand window to be a helpful tool.
In addition to identifying the waypoint you are currently
approaching, it identifies the waypoint at the end of the
next leg. The really unique feature of this screen is the
Page 38

Simrad MX500 | 37
graphical representation of your actual course line approach angle relative to the next leg of your course. This
approach angle is continuously updated in real time and
will help you setup for course changes.
Reset XTE and Skip Waypoint, described at the end of
NAV2, is also available in NAV3.
NAV4 - Sensor Input Navigation
The NAV 4 screen applies the wind instruments, speed
log, compass, and depth sounder inputs from external
sensors to your active route, as appropriate. You can
setup the sensors in the CFG1 screen. The Installation
Section of this manual will guide you through the interfacing capabilities of the CDU.
Use the following CFG1 menus to set this screen up:
Compass - Sets the input port number, compass type
(gyro or magnetic), compass deviation table, and the input NMEA 0183 record from which to derive the compass
information. The NMEA 0183 record should be specified
by the user, because several NMEA 0183 records may
contain compass information. This provides you the capability of knowing the compass source exactly. The CDU
only accepts NMEA 0183 formatted data for the compass
input. Synchro or stepper gyro compasses are not compatible.
Depth - Sets the input port number, units of measure
for depths and tide data, sensor offset, alarms, and the
input NMEA 0183 record from which to derive the depth
information. The NMEA 0183 record should be specified
by the user, because several NMEA 0183 records may
contain depth information. This provides you the capability of knowing the depth source exactly.
Log - Sets the input port number, sensor type (pulse or
NMEA 0183), alarms, and a correction factor (if needed).
Set & Drift - automatically calculated based on GPS derived values.
Wind - Sets the input port number, units of measure,
sensor offset, alarms, and the input NMEA 0183 record
from which to derive the wind information. The NMEA
0183 record should be speci fied by the user, because
several NMEA 0183 records may contain wind informa-
Page 39

38 | Simrad MX500
tion. This provides you the capability of knowing the wind
source exactly.
This screen is divided into four windows. The window on
the top left provides details relating to the True Wind
Angle (TWA), True Wind Speed (TWS) and True Wind
Direction (TWD), which are taken from the NMEA 0183
record of MWV or VWR. If the wind information is given
in relative terms, the CDU calculates true values using
available GPS course and speed information to make the
necessary adjustments. Refer to the Glossary for definitions on Apparent/True Wind Angle/Speed/Direction. To
the right of the wind information is your Velocity Made
Good (VMG) towards the waypoint. The VMG data is filtered to show the average speed from the last waypoint
to your present position towards the next waypoint. VMG
is calculated from GPS data. The CDU will also use the
above data to calculate your speed parallel to wind and
can output the VPW NMEA 0183 data sentence to other
on-board instruments.
The window below the wind data provides information relating to your course and speed. You will find the Course
Over Ground (COG calculated by the MX421 smart GPS
antenna), Heading (HDG, your NMEA 0183 compass input), and Heading To Steer (HTS) data on the left side of
the window. HTS data is calculated by considering your
Heading, minus COG and adding BRG to the waypoint. In
doing so, the software considers any Set to be included
in the HDG value. If there is no Set, your HDG should be
equal to COG. Set and Drift is calculated from GPS and
your Speed Log (NMEA 0183 VHW record or Pulse input)
and Compass (NMEA 0183 HDM, HDT, or VHW) input or
an operator manual input.
Page 40

Simrad MX500 | 39
Present
Positi on
SOG 13 Kn
Beginning
Wa yp oi nt
Next
Wa yp oi nt
Original Course Line
Actual
Course
Line
VMG
Towards
Waypoint
10
Kn
BRG
Effect of
Set & Drift
6297_01B.100
Present
Positi on
SOG 13 Kn
WCV 9 Kn
Beginning
Wa yp oi nt
Next
Wa yp oi nt
Original Course Line
BRG
&
RNG
Extended
Course
Line
WCV is based on
Extended Cour se
Line (COG), SOG,
BRG & RNG to WPT
Effect of Set & Drift
HTS to
coun ter
Set & Drift
Veloc ity Made Good:
Di stance to
Waypoint Travelled
Waypoint Closure Veloc ity :
On the right side of the lower left window you will find
the Speed Over Ground (SOG, calculated by MX421 smart
GPS antenna), Speed Log (LOG, the NMEA 0183 or pulse
speed input), and the Waypoint Closure Velocity (WCV).
WCV reflects the real time velocity from your present
position and course towards the next waypoint. The VMG
and WCV are calculated from GPS data. Refer to the
diagram below to see a graphical representation between
VMG and WCV.
Below this information, you will find your Set and Drift
data, which is calculated using GPS and your compass
and speed sensor inputs.
Reset XTE and Skip Waypoint, described at the end of
NAV2, is also available in NAV4.
The window on the right displays depth information coming from the depth sounder unit using the NMEA 0183
record of DPT, DBS, DBT, or DBK. These are setup in the
CFG1 Depth screen, refer to the Advanced operation
Page 41

40 | Simrad MX500
section and the Installation section of this manual for full
details on depth data.
Below the depth data you will find the next route leg
vector, the Range to the waypoint and Time To Go data,
explained in the NAV3 section.
NAV5 - Compass Display Screen
The NAV 5 screen is used to display the Heading and
Rate of Turn values given by a heading sensor like the
MX575A Satellite Compass. In addition, it also displays
the position, COG, SOG, BRG, and RNG. This screen can
be accessed by pressing the NAV key repeatedly until you
reach the desired NAV screen.
NAV6 - Compass Display Screen
The NAV 6 screen is used to display the Heading and
Rate of Turn values given by the MX575A Satellite
Compass. In addition, it also displays the Set and Drift.
This screen can be accessed by pressing the NAV key
repeatedly until you reach the desired NAV screen.
The NAV1 - NAV5 screens are inactive if an MX antenna is
not connected or not detected.
Page 42

Simrad MX500 | 41
Route
There are two RTE screens. The NAV functions are
highly interactive with the RTE1 screen. The RTE2
screen allows you to create a pool of predetermined
routes that you might use often, so you need only create
the route one time. Routes are created from waypoints.
All waypoints are stored in the Waypoint Bank, regardless of which function is used to create them. Waypoints
are either created in the Waypoint Bank (WPT1), created
by the GOTO function, selected from the PLOT screens
in conjunction with the GOTO function, or from New
Waypoints that can be defined in the Route Insert menu
(and simultaneously stored in the route and the Waypoint
Bank).
We recognize the diverse needs of professional users.
We have designed the route features to be very flexible
to meet a wide range of users’ requirements by allowing up to 2000 waypoints to be stored between all of the
routes. You can create up to 99 routes, with any number
of waypoints, providing the maximum number of 2000
waypoints between all routes is not exceeded.
The Route (RTE) function serves two purposes:
First, the RTE1 screen provides all of the current, or ac-
tive waypoint navigation data to the Navigate and Plot
screens and is referred to as the Active Route. Therefore,
whenever you begin a new trip or voyage, you should
erase the previous voyage’s waypoints in this screen,
then insert the new waypoints or routes (from RTE2) for
the new voyage. If you want to store the waypoints from
the previous active route for future use, you can copy
these waypoints in the order in which they were entered
to the Route Bank in the RTE2 screen. This is described
in the RTE2 - The Route Bank section of this manual. If
you do not clear the RTE1 screen (refer to Erasing an
Existing Route section of this manual), the RTE1 screen
will grow each time you add new waypoints to the route.
The route function can hold a maximum of 2,000 waypoints between the routes stored in RTE1 and RTE2.
Second, the RTE2 screen provides storage space for up
to 100 user defined routes. You can pre-define routes,
Page 43

42 | Simrad MX500
or copy new routes from the RTE1 (active route) screen.
Later you can choose individual routes or link two or
more routes in the RTE1 screen (refer to Creating a
Multi-Waypoint Active Route section of this manual).
When you are finished using the copied route in RTE1,
you can erase the route from the RTE1 screen and
the original stored route will remain intact in the RTE2
screen.
The following CFG1 menus directly impact the RTE functions:
Navigation - sets a variety of important functions and •
alarms.
Rhumb line or Great Circle navigation. Range units: nautical miles, nautical miles and me- -
ters (when under 1,000 meters), nautical miles and
feet (when under 1,000 feet), statute miles, statute
miles and meters (when under 1,000 meters),
statute miles and feet (when under 1,000 feet),
kilometers, or kilometers and meters (when under
1,000 meters).
Waypoint pass criterion and distance: bisector line, perpendicular line, complex (combination of bisector line and perpendicular line), distance to waypoint, or manual.
Waypoint Approach distance. -
Autopilot alarm control. Position - sets Lat/Lon or UTM and some alarm limits. •
Time - sets time offsets and 12 or 24 hour clock •
mode (for ETA calculation, and waypoint passed time
stamp).
RTE1 - The Active Route
The RTE1 screen provides the active route data for the
NAV and PLOT screens. It also maintains a waypoint
pass log for you. Another important feature in the RTE1
screen that you need to be aware of is that the up and
down arrow softkeys, displayed when you are in the edit
mode under the Route Control softkey, control which
waypoints are skipped (down arrow) and which are re-
Page 44

Simrad MX500 | 43
stored (up arrow ) for your current route.
The CDU will recalculate the route when a navigation
mode, either Rhumb Line or Great Circle is selected.You
can enter waypoints using different datums into the route
The RTE1 screen is where you are likely to do most of
your trip preparation. There are several methods you can
use to create routes. You are sure to find one or more
methods which meet your needs in the following sections.
Creating a Route Using the GOTO Key:
Using the GOTO function key is the fastest way to create
a single leg route. Using this method will cause the existing active route to be erased and overwritten with the
new position you define.
From any screen, press the 1 GOTO key.
Press the 2 EDIT key.
Using the left or right arrow keys, highlight the 3
softkey desired and press the ENT key:
Waypoint Number - allows you to choose a waypoint
stored in the Waypoint Bank. This feature is nice to use if
you already know the waypoint number that you want to
go to and you don’t want to waste time scrolling through
the available waypoints. Enter the number of the waypoint, verify that the coordinates are correct, and press
the EDIT key to copy the waypoint to the active route.
Page 45

44 | Simrad MX500
Choose In Bank - allows you to scroll through the
Waypoint Bank. Align the cursor with the desired waypoint and press the EDIT key. The waypoint is automatically inserted into the active route and the unit will revert
to the NAV screens, displaying bearing and distance to
this waypoint.
Lat. Lon. - allows you to define a coordinate and description, which is also stored at the next available waypoint
location in the Waypoint Bank. Once the coordinates are
defined, press the EDIT key to copy the waypoint to the
active route.
Bearing Range - allows you to define a coordinate by
specifying the bearing and range from your present position, which is also stored at the next available waypoint
location in the Waypoint Bank. After entering the desired
bearing and range, press the EDIT key. The newly de-
Page 46

Simrad MX500 | 45
fined waypoint is copied to the active route automatically.
If you make a mistake, you can use the cursor key to
position the cursor over the mistake and overwrite the
erro r.
Use the 9 key to insert a space in the description, if
needed.
Use the 0 key to select a special character, if needed.
International characters are available by selecting the as-
sociated function key. Refer to the EDIT keypad & Display
Description section at the front of the manual.
If you decide you don’t want to continue with this function, highlight the Escape softkey and press the ENT key,
then press the EDIT key. Make another function key selection (e.g. NAV) and your original route will have been
left intact.
Press the 4 RTE function key. You will see two way-
points dened in the center of the screen.
Waypoint 0, the first waypoint, is your Point of
Departure, or the position you were at when you cre-
ated the route. Waypoint 0 is a unique waypoint, in that
the CDU internally constantly changes the position of
Waypoint 0 to your present position. However, the CDU
saves and displays the original coordinates entered when
you created the route.
Page 47

46 | Simrad MX500
Waypoint 0 is displayed in Inverse Video, that is, white
characters on a black background (when in the normal
Daylight display mode; see CFG1 Lighting). This indicates
that you have already passed this coordinate. The time
stamp at the lower portion of the description window indicates when the route was created. If you want to adjust
your point of departure position, you can edit Waypoint 0
in the WPT function.
To the right of the coordinate window of Waypoint 0 is
a bent arrow. The bend in the arrow is adjacent to the
range and bearing between the waypoint you just passed
and the waypoint you are approaching. Keep in mind
that these are the fixed calculated values between these
two coordinates and not the real time changing values
that you will see in the navigation screens between your
present position and your next waypoint during normal
navigation.
Below Waypoint 0 is the waypoint you defined in the
GOTO function. Notice that this information is in standard video, black characters on a white background, and
that an ETA time is displayed in the same position as the
waypoint passed time in Waypoint 0. This indicates that
the waypoint has not yet been passed. Remember that
the ETA time is filtered over time, so allow a few minutes
for the filter to settle when you first get underway or
make course and speed changes.
Erasing an Existing Route
To erase the active route:
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the 2 EDIT key.
Highlight the 3 Remove softkey and press the ENT
key.
Highlight the 4 Erase Route softkey and press the
ENT key.
Page 48

Simrad MX500 | 47
Highlight the Yes softkey and press the 5 ENT key to
conrm.
The active route is now erased and ready for new input.
If you want to work in other areas of the CDU first, you
will need to press the EDIT key to exit the edit mode.
Creating a Multi-Waypoint Active Route
There are four methods to create a multi-waypoint route:
Insert By Number • - allows you to type in or scroll
through in numerical order using the cursor key,
waypoints that you previously stored in the Waypoint
Bank (see WPT later in this manual).
Choose In Bank • - allows you to sort and scroll through
the waypoints stored in the Waypoint Bank (WPT)
by various techniques (symbol, date, distance from
present position, numerical order, alphabetical order,
or search by user defined string). This is a great tool if
you can’t remember where you stored the waypoints
you want to use.
Insert New Waypoint • - allows you to define new way-
point coordinates, define a waypoint by using Bearing
and Distance from an existing waypoint, and enter
them into the route and the Waypoint Bank at the
same time.
Page 49

48 | Simrad MX500
Insert Route • - allows you to copy a previously defined
route in the RTE2 screen to the active route. This
choice is only displayed when one or more routes are
defined in the RTE2 screen.
Our experience has shown that you are likely to choose
several of these methods at any given time to create
a route. You can mix any of these routines to create
routes, amend routes, or insert waypoints in the middle
of existing routes. The software is designed to be as flexible as possible to meet your changing needs.
Be sure to take a few minutes to read through the Plotter
section to find out how you can modify the active route
using the Plotter and GOTO functions.
The following four sections are examples of how to use
each of the four basic functions outlined above. We
encourage you to experiment using all of the methods
available to find the one that best meets your needs. As
long as you are working in the RTE1 screen and sitting
at the dock, you are not going to do any damage (e.g.
erase waypoints in the Waypoint Bank or routes in the
Route Bank), so have some fun and find out how helpful
this GPS receiver really is.
If you are already comfortable with setting up a basic
route, you might want to skip the examples which follow
and jump ahead to the Maneuvering Within the Route
section later in this section to understand some of the
more advanced features of the software.
Insert By Number
The following example assumes RTE1 is empty. Follow
the directions in the Erasing an Existing Route section to
start with an empty route if you have waypoints in the
RTE1 screen.
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the 2 EDIT key to enter the edit mode.
Highlight the 3 Insert softkey from the display and
press the ENT key. Skip to the next step if RTE1 is
empty.
Highlight Insert by 4 Number softkey from the dis-
play and press the ENT key.
Page 50

Simrad MX500 | 49
Use the 5 EDIT keypad to type in the number you
want or the beginning number of a range you
would like to select from, or use the cursor key to
scroll through the previously stored waypoints in
numerical order.
When you have found the waypoint you want, high-6
light the Insert this WPT softkey and press ENT.
You can then choose to select another waypoint 7
using the same method, highlight Escape and press
ENT to go back one level and use another method
to enter waypoints, or highlight Done and press
ENT to go back to the main menu.
Don’t forget to press the 8 EDIT key to end your
editing.
Choose in Bank
The following example assumes RTE1 is empty. Follow
the directions in the Erasing an Existing Route section to
start with an empty route if you have waypoints in the
RTE1 screen.
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the 2 EDIT key to enter the edit mode.
Page 51

50 | Simrad MX500
Highlight the 3 Insert softkey from the display and
press ENT. Skip to the next step if RTE1 is empty.
Highlight 4 Choose in Bank from the display and
press ENT.
Select a waypoint by:5
Highlight the a Sort By softkey and press ENT to
arrange the waypoints by number, name, type,
distance, or age (refer to the Waypoint section
for a full description), then using the cursor
key to scroll through the previously stored
waypoints in the Waypoint Bank.
Highlight the b Search for WPT softkey and press
ENT. When using this selection you actually
spell out the name and or symbols of the
waypoints you are looking for and the software
will display any waypoint containing that
combination of characters or symbols. Refer to
the Waypoint section for a full description.
When you have found the waypoint you want, 3
press the Insert this WPT softkey.
When you are nished, select the 4 Done softkey to
get back to the main menu.
You can then choose to select another waypoint 5
using the same method, select Escape to go back
one level and use another method to enter way-
points, or select Done do go back to the main
menu.
Page 52

Simrad MX500 | 51
Don’t forget to press the 6 EDIT key to end your
editing.
Insert New Waypoint
The following example assumes RTE1 is empty. Follow
the directions in the Erasing an Existing Route section to
start with an empty route if you have waypoints in the
RTE1 screen.
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the EDIT key to enter the edit mode.2
Highlight 3 Insert softkey from the display and press
ENT. Skip to the next step if RTE1 is empty.
Highlight Insert new Waypoint softkey from the 4
display and press ENT.
Choose either 5 Bearing, Distance or Lat/Lon (Grid
Point, or TD if you are using other coordinate sys-
tems). Use the EDIT keypad to type in the range
and bearing from the previous waypoint (or pres-
ent position in the case of the rst waypoint) or
the coordinates you want and their appropriate
description.
When the information is correct, highlight the 6 Done
softkey and press ENT.
Page 53

52 | Simrad MX500
You can then choose to enter another waypoint us-7
ing the same method, select Escape to go back one
level and use another method to enter waypoints,
or select Done to go back to the main menu.
Don’t forget to press the 8 EDIT key to end your
editing.
Insert Route
The following example assumes RTE1 is empty. Follow
the directions in the Erasing an Existing Route section to
start with an empty route if you have waypoints in the
RTE1 screen.
To perform this function, you must also have defined a
route in the RTE2 screen. The RTE2 description follows
later in the Route section.
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the 2 EDIT key to enter the edit mode.
Highlight Insert softkey from the display and press 3
ENT. Skip to the next step if RTE1 is empty.
Highlight 4 Insert Route softkey from the display and
press ENT.
Use the cursor key to scroll through the available 5
dened routes, which are created in the RTE 2
screen, in numerical order.
When you have found the route you want, highlight 6
the Insert Fwd or the Insert Reverse softkey and
press ENT. Insert Fwd enters the route from the
top of the dened list into the active route. Insert
Reverse enters the route from the bottom of the
dened list into the active route so that you can
travel down the route in the reverse direction.
Page 54

Simrad MX500 | 53
You can then choose to select another route us-7
ing the same method or select another method to
enter waypoints.
Don’t forget to press the 8 EDIT key to end your
editing.
Maneuvering Within the Route
Scrolling
You can use the cursor key to scroll up and down the
active route. You will probably want to do this when you
update your log book to indicate when you passed a
given waypoint, or when you want to know the ETA to a
waypoint other than the one you are currently traveling
towards. It is also a good idea to set the cursor at the
correct waypoint before entering the edit mode to insert
and delete waypoints from the route.
Skipping and Unpassing Waypoints
You are likely to run into an occasional circumstance
where you accidentally skipped a waypoint (due to your
waypoint pass criteria selection in the CFG1 Navigation
screen, or a manual skip in the NAV screens), and you
want to switch back to a previous waypoint in the active
route. You may also decide at some point that you want
to skip the current or subsequent waypoints in the route.
The software has a very simple design to accomplish
both of these tasks.
The easiest way to accomplish either of these tasks is
to scroll through the route with the cursor key until the
cursor arrow is at the bottom of the last waypoint you
want designated as passed (that is, white characters on
a black background), whether this waypoint was passed
several waypoints ago or is yet to be passed.
Then press the EDIT key.
Page 55

54 | Simrad MX500
Use the up (↑) softkey to unpass or the down (↓) softkey
to pass waypoints in the route until the waypoint marked
by the cursor is displayed with white characters on a
black background (Daylight display, see CFG1 Lighting).
Press the EDIT key to end editing.
If for some reason you can’t select the waypoint you
want (the screen keeps passing waypoints you unpassed), you are probably too close to one of the waypoints. You will need to either change your Waypoint Pass
Criteria, change your Waypoint Pass Distance (see CFG1
Navigation), or remove the waypoint from the route.
Inserting Waypoints or Routes into an Existing
Route
Select the 1 RTE key until the RTE1 screen is dis-
played.
Scroll through the route with the cursor key until 2
the cursor arrow is at the bottom of the waypoint
you want to insert the new waypoint after.
Page 56

Simrad MX500 | 55
Then press the 3 EDIT key.
Use one or more of the insert methods described 4
in the Creating a Multi-Waypoint Active Route sec-
tion above.
This example shows Waypoint 7 inserted into the
route using the Insert by Number method:
Press the 5 EDIT key to end editing.
There is one special way to add a waypoint to the active
route using the Plotter display. This method adds the
waypoint between your present position and the next
waypoint in your active route.
Select either 1 PLOT1 or PLOT2 display.
Use the 2 UP arrow (zoom-out) or DOWN arrow
(zoom-in) key to display the waypoint you want to
insert. Press the EDIT key. All waypoints in the
waypoint bank will be displayed if they are within
the zoom level of the display.
Note that the waypoint must have a symbol as the first
character of the waypoint name in order for it to be
displayed on the PLOT screen when the edit mode is not
active.
Page 57

56 | Simrad MX500
Use the cursor key to move the magnifying glass 3
icon over the waypoint or marker that you want to
go to.
Verify that the waypoint number and coordinates
are correct in the left hand window.
Press the 4 GOTO function key.
Press the 5 EDIT key to exit the edit mode.
Note that RTE1 and PLOT1 are updated with your new
waypoint.
Reversing the Active Route
Once you get to your final destination, you might want
to follow the same route home. To quickly accomplish
this, simply use the Reverse Direct softkey from the main
RTE1 menu.
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the 2 EDIT key.
Highlight the 3 Route Control softkey and press ENT.
Page 58

Simrad MX500 | 57
Highlight the 4 Reverse Direct softkey and press
ENT.
Press the 5 EDIT key. It’s that simple!
Notice that you still keep the same orientation on the
screen, in other words, you always read from the top of
the screen to the bottom of the screen. The waypoints
are rewritten in reverse order for you.
ETA Setup
If you choose to use this function, it is probably better
to operate the unit in UTC time mode if you are going to
cross one or more time zones. Note that the time entered
uses the offset to UTC applied in the CFG1 Time display.
The software calculates Estimated Time of Arrival based
on how you configure the unit. ETA settings are controlled from the RTE1 screen. To change the ETA settings:
Select the 1 RTE key until the RTE1 screen is dis-
played.
Press the 2 EDIT key.
Highlight the 3 ETA/SOG Calc. softkey and press
ENT.
Page 59

58 | Simrad MX500
Highlight the 4 Change softkey and press ENT to
select which value you want the CDU to calculate,
either ETA based on speed, or speed (SOG) based
on desired time and date of arrival.
SOG Based on Arrival Date & Time:
Enter the arrival time and date. Be sure to enter 1
the date as day, month, year, as indicated on the
screen.
Highlight the 2 Done softkey and press ENT.
In this mode, the actual SOG is compared to the required SOG to meet the specified arrival date and time.
The result is given in a percentage (%) value next to the
displayed SOG in the NAV screens. If the percentage is
below 100, you will arrive late. If the percentage is above
100, you will arrive early.
Page 60

Simrad MX500 | 59
ETA Based on Speed:
Select a 1 Speed Basis of either GPS SOG, which
uses a long lter time (in seconds) that you dene,
or Constant, which uses a speed you intend to
maintain (you dene the speed).
Highlight the 2 Done softkey and press ENT.
RTE2 - The Route Bank
The Route Bank is a convenient place for you to preprogram segments of a long voyage, or to program
routes that you follow over and over again. Creating
routes for the Route Bank uses the same methods as
the Active Route with a few exceptions: you can’t use
the GOTO key, and you can’t use the Plotter screen.
You can use other routes as a subset to create a new
route. Remember, you can always tie routes together in
the Active Route by inserting one after another. You will
find a Route Name softkey when you first enter the edit
mode. The Route Name selection allows you to identify
each route by name, number and symbol when you are
viewing the Route Bank from the main menu. To create a
route:
Select the 1 RTE key until the RTE2 screen is dis-
played.
Move the cursor to the route number you want to 2
create or edit.
Press the 3 EDIT key.
Use the entry methods described in the 4 Creating a
Multi-Waypoint Active Route section, following the
exceptions noted above.
Page 61

60 | Simrad MX500
If you have a route in RTE1 that is not stored in RTE2, you
can copy it into the Route Bank by selecting Insert then
Insert Route, either in the forward or reverse direction.
When you are nished selecting waypoints, high-5
light the Route Name softkey and press ENT. You
can enter any name, number or symbol you want
this route to be identified by.
Highlight the 6 Done softkey and press ENT when
you are nished editing the name.
It is a good idea at this point to select Lock Route so that
way you won’t accidentally erase the route.
The RTE1 screen is inactive if an MX antenna is not connected or not detected.
Finally press the 7 EDIT key to exit the edit mode.
Page 62

Simrad MX500 | 61
Waypoint
The Waypoint Bank (WPT) is a single list of up to 2,000
waypoints that you store for use in the routes you create.
It also stores special coordinates and time, through the
use of the Mark or Event function key or external input,
or the MOB function key or external input. You can also
enter waypoints from other NMEA 0183 devices (see
CFG1 WPT & RTE In), such as plotters. You can also out-
put waypoints and routes from the CDU to other NMEA
0183 devices (see CFG1 NMEA Out Rnn, RTE, and WPL).
You can input very accurate coordinates, down to 18 cm
in Lat/Lon or 0.1 m in UTM. You can select from more
than 110 Datums to store your waypoints in. The CFG1
Position screen controls which coordinate reference system is used by the CDU.
While entering waypoints in the list is rather straight
forward, the software does provide some helpful features
that should be mentioned before giving any examples.
There are six methods to view or sort waypoints:
Sort By Number • - displays the waypoints in waypoint
numerical order, starting with waypoint 0.
You can manually alter Waypoint 0 to a different Point of
Departure if you don’t want to start your route from your
present position.
Sort By Name • - displays the waypoints by name in
alphabetical order.
Sort By Type • - displays the waypoints by symbols,
numbers, then names.
Sort By Distance • - displays the waypoints which are
closest to your present location first.
Sort By Age • - displays the waypoints entered most
recently, first.
Page 63

62 | Simrad MX500
Search For WPT • - allows you to type a symbol or
name and the screen displays all waypoints having the
exact match of the name you type. If you are unsure
of the complete name, type a few of the characters
you know are in the name, and the software will
display all waypoints having the corresponding characters.
For example, if you are looking for the LA HARBOR
ENTRANCE and you enter HAR, the screen will display
all waypoints with these three characters in this exact
order.
Creating and Editing Waypoints
When editing a waypoint, you are always prompted to select the appropriate datum. You might occasionally see a
prompt warning you that the waypoint is used either in a
stored route or the active route. You ultimately have the
final decision whether to continue editing the waypoint,
or exiting this waypoint by pressing the EDIT key again to
exit the edit mode.
Creating and editing waypoints is easy.
Select the 1 WPT key until the WPT1 screen is dis-
played.
Press the 2 EDIT key.
Highlight the 3 Make New WPT softkey and press ENT
or align the cursor with the waypoint you want to
modify and highlight the Edit this WPT softkey then
press ENT.
Page 64

Simrad MX500 | 63
3. Make New WPT
4a. Use WGS-84 Datum
Select
Lat/Lon (W84)
4b. Use Datum Other
Than WGS-84
Select
Lat/Lon Datum
4c. Create a new WPT Based
on a Range & Bearing
from an existing WPT
Select
Range Bearing
Select desired datum
from displayed list.
Press
Select.
Enter desired range
and bearing.
Press the cursor
down
arrow
.
5. Enter Coordinates
Press the cursor
down
arrow
.
6. Modify WPT Number
(Optional)
Press the cursor
down
arrow
.
7. Modify WPT Text
& Symbol (Optional)
Press the
Done
softkey
.
4
Make New WPT a - Select Lat/Lon (W84), Lat/Lon
Datum, or Range Bearing.
Lat/Lon (W84) - allows you to enter coordinates
in the WGS 84 datum. This choice takes you
directly into the coordinate input screen. Go to
step 5.
Lat/Lon Datum - allows you to choose a datum
(see the list in the screen sample above) from
the more than 110 available Datums. Highlight
Page 65

64 | Simrad MX500
the desired datum and highlight the Select
softkey then press ENT. Refer to Appendix A
- Datum List for a complete list of datums and
their WGS-84 offset. Go to step 5.
Range Bearing - allows you to define new waypoint coordinates from an existing waypoint in
the Waypoint Bank. When you use this feature
make sure you align the cursor next to the from
waypoint number before you highlight the Make
New WPT softkey and press ENT.
Once you have entered the range and bearing,
the CDU calculates the coordinates. You can
then enter a text description or modify the waypoint number as described in step 6 below.
Edit This WPTb - Select Accept to use the WGS
84 datum or highlight Change and press ENT
to choose from the more than 110 available
Datums. Highlight the desired datum and
highlight the Select softkey then press ENT.
Refer to Appendix A - Datum List for a complete
list of datums and their WGS 84 offset.
Enter the appropriate coordinates using the cursor 3
key and numeric keypad.
Move the cursor down and modify the waypoint 4
number if you wish. Otherwise the CDU assigns the
next available number, beginning at 1.
Page 66

Simrad MX500 | 65
Range & Bearing Lat/Lon
This feature allows you to create a range of way-
points within a particular area. For example, you
could put all of the waypoints for fishing spots near
Catalina Island in the range of 500 to 530, all the
waypoints for Cabo San Lucas in the range of 575
to 600, etc.
Move the cursor down, and enter the symbol and 5
name information (optional). Use the techniques
described in the EDIT keypad & Display Description
section at the front of this manual.
The following international characters are support-
ed by cycling through the standard letter function
key:
ABC = Ä, Å, Æ, À, Ç
DEF = É, È
GHI = Í
MNO = Ñ, Ó, Ö
STU = Ú, Ü
Press the CFG key when in the edit mode to cycle
through these additional characters:
‘ “ $ & ! ( ) ? / + - ° . , :
Page 67

66 | Simrad MX500
About one second after you stop scrolling through
the alpha characters, the cursor will automatically
advance to the next space.
Highlight the 6 Done softkey and press ENT.
When you are nished, highlight the 7 Lock this WPT
softkey and press ENT to avoid accidentally eras-
ing the waypoint in the future.
Locked waypoints can not be overwritten by waypoints
downloaded from the NMEA port or saved by the Mark or
MOB functions.
Then press the 8 EDIT function key to end editing.
You can press the EDIT key when you finish
editing a waypoint. This is treated the same as
highlighting the Done softkey and press ENT.
Highlighting Done then press ENT allows you to
continue editing and entering other waypoints.
Waypoint Lock/Unlock
Locking a waypoint forces the user to consciously unlock
the waypoint before it can be modified and prevents the
waypoint from being overwritten when waypoints are be-
Page 68

Simrad MX500 | 67
ing input over the data port. Note that when a waypoint
received on the data port has the same waypoint number
as a locked waypoint already stored in the CDU, the waypoint data received on the data port is disregarded and
lost. Waypoints are locked by one of three methods: 1)
selecting Lock this WPT when in the waypoint bank edit
mode for a particular waypoint; 2) selecting Lock this
WPT when in the waypoint bank edit mode; or 3) incorporating a waypoint into a route stored in RTE2 and then
locking the route.
Waypoints that are locked from the waypoint bank are
indicated by a closed padlock in the display. Waypoints
that are party to a locked route will display a message
indicating that waypoint can not be modified.
To Lock a Waypoint
Select the 1 WPT key until the WPT1 screen is dis-
played.
Move the cursor to the desired waypoint. 2
Press the 3 EDIT key.
Highlight the 4 Lock this WPT softkey then press
ENT.
Press the 5 EDIT key.
To Unlock a Waypoint
Select the 1 WPT key until the WPT1 screen is dis-
played.
Move the cursor to the desired waypoint. 2
Press the 3 EDIT key.
Page 69

68 | Simrad MX500
Highlight the 4 Unlock this WPT softkey then press
ENT.
Press the 5 EDIT key.
If you simply want to modify the waypoint, Edit this WPT
will be displayed on the bottom left of the screen.
To Lock all Waypoints
Select the 1 WPT key until the WPT1 screen is dis-
played.
Move the cursor to the desired waypoint. 2
Press the 3 EDIT key.
Highlight the 4 More softkey and press ENT.
Highlight the 5 More softkey again and press ENT.
To Unlock all Waypoints
Highlight the 6 Lock all WPT softkey and press ENT.
Press the 7 EDIT key.
Select the 1 WPT key until the WPT1 screen is dis-
played.
Move the cursor to the desired waypoint. 2
Page 70

Simrad MX500 | 69
Press the 3 EDIT key.
Highlight the 4 More softkey and press ENT.
Highlight the 5 More softkey again and press ENT.
Highlight the 6 Unlock all WPT softkey and press
ENT.
Press the 7 EDIT key.
Removing Waypoints
Unlocked waypoints can be overwritten by waypoints
received on the NMEA port or downloaded from the USB
stick. Waypoints that are contained within a stored route
can not be removed until they are removed from the
stored route in the RTE2 screen. If you try to remove a
waypoint stored in a route, a warning will be displayed
indicating the first route a waypoint is stored in.
If the waypoint you want remove is locked, refer to the
Waypoint Lock/Unlock section for a step by step procedure, and then return to this section.
To remove a waypoint:
Select the 1 WPT key until the WPT1 screen is dis-
played.
Move the cursor to the desired waypoint. 2
Press the 3 EDIT key.
Highlight the 4 Remove softkey then press ENT.
Page 71

70 | Simrad MX500
There are three methods to remove a waypoint: Remove
this WPT, Remove Unused, and Remove Range:
5a If you select Remove this WPT, the waypoint will im-
mediately be removed from the Waypoint bank.
5b If you select Remove Unused, the CDU will delete all
waypoints that are not locked or stored in a route. You
will be prompted to confirm the deletion:
5c If you select Remove Range, the CDU will delete all
unlocked waypoints that are not stored in a route between a range of waypoint numbers that you enter. You
will be prompted to confirm the deletion:
6 Press the EDIT key.
Page 72

Simrad MX500 | 71
Moving waypoints
This feature allows you to create a range of waypoints
within a particular area. For example, you could put all
of the waypoints for fishing spots near Catalina Island in
the range of 500 to 530, all the waypoints for Cabo San
Lucas in the range of 575 to 600, etc.
To move a waypoint or range of waypoints:
Select the 1 WPT key until the WPT1 screen is dis-
played.
Press the 2 EDIT key.
Highlight the 3 More softkey then press ENT.
Highlight the 4 Move softkey then press ENT.
To move a single waypoint, enter the original way-5
point number on the First WPT Number and Last
WPT Number.
To move a range of waypoints, enter the rst and 6
last waypoint numbers to move on the First WPT
Number and Last WPT Number. Keep in mind that
the CDU will sort these waypoints numerically and
all waypoints between the entered numbers will be
moved to the new location.
Enter the waypoint number where you want 7
the rst waypoint moved to in Destination WPT
Number.
Page 73

72 | Simrad MX500
If the destination waypoint number is already being
used, you will be prompted to either overwrite the first
waypoint (Yes) and each subsequent waypoint that is to
be overwritten, confirming each waypoint one at a time,
overwrite all the waypoints (Yes To All), not overwrite
any waypoints (No); or Escape back to base softkey
menu.
Downloading Waypoints & Routes to Other
Devices
Refer to the Installation section of this manual for hardware interfacing guidelines.
The CDU can download all of your stored waypoints and
routes, and your active route to other NMEA 0183 devices which accept the RTE, Rnn, and WPL data sentences.
These sentences are controlled in the CFG1 NMEA Out
screens for the identifier given below. The CDU outputs
these sentences in the following format:
Page 74

Simrad MX500 | 73
Rnn - Routes:
Waypoint identifiers, listed in order with starting waypoint first, for route number “nn”. The active route in the
CDU is always route zero, but in the Rnn sentence the
route number can be transmitted as either route 00 or
01.
Rnn is NMEA version 1.5. Use of GPRTE is recommended
to comply with NMEA version 2.1.
field#: 1 2 3 4 1 1 1
4 5 6
$GPRnn,cccc,cccc,cccc,.....,cccc,cccc*hh<CR><LF>
explanation / actual use:
1: nn = active route number, 00 or 01
can be set to 00 or 01 (default 00).
2 - 15: 14 field sequence of route waypoint IDs.
16: Checksum can be set on or off (default on).
RTE - Active Route:
Waypoint identifiers, listed in order with starting waypoint first, for the identified route. Two modes of transmission are provided: “c” indicates that the complete list
of waypoints in the route are being transmitted; “w” indicates a working route (active) where the first listed waypoint is always the last waypoint that has been reached
(FROM), while the second listed waypoint is always the
waypoint that you are currently heading toward (TO). The
remaining list of waypoints represents the remainder of
the route.
RTE can be sent as version 2.1 and 2.0.
field#: 2 3 4 5 6 1 1 1
5 6 7
$GPRTE,x,x,a,cccc,cccc,.....,cccc,cccc*hh<CR><LF>
explanation / actual use:
2: Total number of messages being transmitted (a single
route may require the transmission of multiple messages). A maximum of 11 waypoints are transmitted in each
messages.
Page 75

74 | Simrad MX500
3: Message number.
4: Message mode: c = complete route, all waypoints, w
= working , 1st listed waypoint is ‘FROM’, 2nd is ‘TO’ and
remaining are the rest. c/w can be set to c or w (default
w).
5: Route identifier, always 00 (Active Route only).
6 - 16: Waypoint identifiers, (less than 11 waypoints may
be in the message).
The number of remaining waypoints can be set to 1, 2 or
“all” (default all) shortening the drawn track on the plotter.
17: Checksum can be set on or off (default on).
WPL - Waypoint Location - NMEA 0183
Standard:
Latitude and Longitude of specified waypoint. The content of this sentence will normally be the position of the
next waypoint in the route.
The CFG1 NMEA out WPL has a special “Send All” option.
Selecting this feature will send all the waypoints in the
Waypoint Bank once, independent of the WPL sentence
setup as ON or OFF. This format conforms to the NMEA
0183 standard.
WPL can be sent as version 1.5, 2.0 or 2.1.
field#: 2 3 4 5 6 7
$GPWPL,llll.ll,a,yyyyy.yy,a,cccc*hh <CR><LF>
explanation / actual use:
2 & 3: Waypoint Latitude, North or South, N/S number of
decimals can be set to 2, 3, 4 or 5 (default 2).
4 & 5: Waypoint longitude, East or West, E/W number of
decimals can be set to 2, 3, 4 or 5 (default 2).
6: Waypoint identifier.
7: Checksum can be set on or off (default on).
The WPL record can also contain the description informa-
tion when Include Waypoint Names in the CFG1 NMEA,
Details is selected.
Page 76

Simrad MX500 | 75
WPL - Waypoint with Symbols & Description NMEA 0183 Expanded:
Latitude and Longitude of specified waypoint. The content of this sentence will normally be the position of the
next waypoint in the route.
The CFG1 NMEA out WPL has a special “Send All” option.
Selecting this feature will send all the waypoints in the
Waypoint Bank once independent of the WPL sentence
setup as ON or OFF. This format does not strictly conform to the NMEA 0183 standard, and may not work with
all equipment. It is provided for your use to store data on
a PC using normal ASCII text editors.
WPL can be sent as version 1.5, 2.0 or 2.1.
field#: 2 3 4 5 6 7
$GPWPL,llll.ll,a,yyyyy.yy,a,cccc xxxxxxxxxxzzzzzzzzzz*hh <CR><LF>
explanation / actual use:
2 & 3: Waypoint Latitude, North or South, N/S number of
decimals can be set to 2, 3, 4 or 5 (default 2).
4 & 5: Waypoint longitude, East or West, E/W number of
decimals can be set to 2, 3, 4 or 5 (default 2).
6. Waypoint identifier; 4 place numeric waypoint
number, followed by 1 space, followed by 10
characters for the top line of the description, followed by 10 characters for the bottom line of the
description. When this field is output, you may
see spaces between the xxx and zzz. These are
“fill characters” and are necessary to fulfill the 10
character count to maintain character placement
when read back into the CDU.
7: Checksum can be set on or off (default on).
Page 77

76 | Simrad MX500
Downloading Waypoints to a Personal
Computer
You can use any terminal or communications program to
download or upload waypoints and routes to or from the
CDU and a PC.
Set the PC to:
4800 baud 8 bits
1 stop bit no parity
no flow control
When sending data to the CDU, it must be sent in block
form, followed by (with an appended) CR (carriage return) and LF (line feed). Normal communications programs, like Windows XP Hyper Terminal, are sufficient to
get the job done.
Using Windows XP Hyper Terminal, do the following (from
the Program Manager):
Using an RS-422 to RS-232 convertor, connect 1
the CDU’s port 2 to the PC’s communications port
(Refer to the Appendix F - MX500 PC Interface of
this manual).
On the CDU press the 2 CFG key until CFG1 screen
is displayed.
Scroll down the menu to 3 NMEA Out 2.
Press the 4 EDIT key.
If the port is already Active (5 Yes), write down
which NMEA sentences are set to Yes, then set all
of the NMEA sentences to No. You need to do this
to record just the waypoint data.
If the port is not Active (No), change it to Yes.
Scroll down to the 6 WPL record and change it On.
Highlight the 7 Details softkey and press ENT.
Set 8 Include Waypoint Names to either No or Yes.
Refer to WPL -Waypoint Location - NMEA Compliant
and WPL - Waypoint With Symbols & Description -
NMEA 0183 Non-Compliant sections in this manual
to determine the correct format for your purpose.
Set 9 Decimals in Position to 4.
Page 78

Simrad MX500 | 77
Highlight the 10 Done softkey and press ENT.
Set the 11 WPL record to Off (you will need to turn the
data off while setting up the computer).
On the computer, select 12 All Programs - Accessories
- Communications, and click on the Hyper Terminal
icon.
Give your 13 Connection Description a name and click
OK.
Under the Connect using option, choose 14 COM1 (or
COM2, depending where the external interface is).
Make the following 15 Port Settings:
4800 baud
8 data bits
1 stop bit
Parity - none
Flow Control - none
OK
Click on the 16 Transfer menu and select Capture
Text.
Click on 17 Browse and make the following settings.
[give the file a name.txt]
[select a location (folder) to store the file]
OK
On the CDU, you should still be in edit mode on 18
CFG1 NMEA Out 2 with the cursor ashing on Off
at the WPL record. Select the Send All softkey.
When all the waypoint sentences are sent, click 19
on Transfer - Capture Text - Stop from the Hyper
Terminal program.
Press the 20 EDIT key on the CDU to exit the edit
mode.
Page 79

78 | Simrad MX500
Uploading Waypoints from Other Devices
The CDU will accept waypoints from any device which
follows the WPL formats identified earlier in the Waypoint
section. The first two characters following the $ can be
any NMEA defined talker ID. You do not have to calculate
and include the checksum; however, you must end each
data record with a carriage return and line feed. If you
do include the checksum at the end of the data record,
the CDU will verify the checksum. If the checksum is
invalid, the waypoint will be rejected.
Waypoints received on the data port will be stored to
the waypoint location specified in the WPL record. If the
waypoint location specified in the WPL record is already
occupied, the CDU will overwrite the existing waypoint
(if it is unlocked). If the existing waypoint is locked, the
WPL record received on the input port will be ignored and
dropped.
The CDU will only recognize waypoints from one input
port at any given time. This port is defined in CFG1 WPT
& RTE In.
Uploading Waypoints from a Personal Computer
You can use any terminal or communications program to
download or upload waypoints and routes to or from the
CDU and a PC.
Set the PC to:
4800 baud
8 bits
1 stop bit
no parity
no flow control
Page 80

Simrad MX500 | 79
When sending data to the CDU, it must be sent in block
form, followed by (with an appended) CR (carriage return) and LF (line feed). Normal communications programs, like Windows XP Hyper Terminal are sufficient to
get the job done.
Using Windows XP Hyper Terminal, do the following (from
the Program Manager):
Using an RS-422 to RS-232 convertor, connect the 1
CDU’s port 1 or 2 to the PC’s communications port
(Refer to the page 195 - MX500 PC Interface sec-
tion of this manual).
On the CDU press the 2 CFG key until CFG1 screen
is displayed.
Scroll down the menu to 3 WPT & RTE In.
Press the 4 EDIT key.
Set the 5 External WPT Input to Yes.
Set the 6 Data Input Port No. to 1 or 2 (depending
where the external interface is).
Press the 7 EDIT key.
On the computer, select 8 All Programs - Accessories
- Communications, and click on the Hyper Terminal
icon.
Give your 9 Connection Description a name and click
OK.
Under the 10 Connect using option, choose COM1 (or
COM2, depending where the external interface is).
Make the following 11 Port Settings:
4800 baud
8 data bits
1 stop bit
Parity - none
Flow Control - none
OK
Click on the 12 Transfer menu and select Send Text
File.
Make the following settings: 13
[select the correct file name.txt]
[select the correct location (folder) for the file]
Open
Page 81

80 | Simrad MX500
When all the waypoint sentences are sent, press 14
the WPT key and scroll through the list to ensure
all the waypoints transferred properly. Go back
to the CFG1/WPT & RTE In option and change
External WPT Input to No.
Uploading Waypoints from a USB Memory
Stick
Waypoints and routes can also be downloaded or uploaded using a USB device (i.e. USB flash drive). Please refer
to the CFG1/USB feature of this manual for details.
Mark or MOB
This is a dual function key that either stores your present
position, date and time at the next available waypoint location in the Waypoint Bank or when pressed continuously for 3 seconds, calculates a MOB range and bearing to
a saved spot. A window pops up on the screen to confirm
your key depression, and to tell you where the Mark position is being stored. You can go into the WPT menu and
edit the coordinates or description later. This key function
is disabled for 2 seconds after each depression.
The cross-hair symbol to the left of the date in the
Waypoint Bank indicates that the Mark or Event key
created this waypoint. Note that you can also select the
cross-hair symbol from the various symbols for other
waypoints when editing waypoints.
The CDU is also capable of performing this function from
a remote contact closure input via the 8-pin AUX Cable
“MOB/Event” wire. Refer to the Installation Section of this
manual for interface instructions. Contact closure on the
two input pins for 1 second causes a Mark position to be
generated. Contact closure on the two input pins for 3
Page 82

Simrad MX500 | 81
seconds causes a Man Over Board condition to be generated.
The marker function stores the position of the antenna
location. Keep this in mind if you are trying to pinpoint
items such as buoys, crab pots, etc. For some special
applications such as these, you may need to locate the
antenna at the point on the boat or ship where you need
to make this exact measurement.
GOTO
Using the GOTO function key is the fastest way to create
a single leg route. This method will cause the existing
active route to be erased and overwritten with the new
position you define.
From any screen press the 1 GOTO key.
Press the 2 EDIT key.
Select the waypoint determination method you 3
want:
Waypoint Number - allows you to choose a way-
point stored in the Waypoint Bank, where you
enter the waypoint number.
Choose in Bank - as used in the Route func-
tion (refer to Route - Choose In Bank section of
the manual), allows you to view waypoints in the
Waypoint Bank as a list.
Lat. Lon., UTM- allows you to define a coordinate
and description, which is also stored at the next
available waypoint location in the Waypoint Bank.
Bearing Range - allows you to define a coordinate
by specifying the bearing and range from your
Page 83

82 | Simrad MX500
present position, which is also stored at the next
available waypoint location in the Waypoint Bank.
If you make a mistake, you can use the cursor key
to position the cursor over the mistake and over-
write the error.
Use the DGPS key or cursor key to insert a space
in the description, if needed.
Use the CFG key to select a special character, if
needed.
To activate the GOTO waypoint, press the 4 EDIT
key. A warning is briey displayed indicating that
the active route will be replaced with the GOTO
route.
If you decide you don’t want to continue with this
function, highlight the Escape softkey and press
ENT, then select another function key (e.g. NAV).
Your original route will be left intact.
Press the RTE function key. You will see two waypoints
defined in the center of the screen.
Waypoint 0, the first waypoint, is your Point of Departure,
or the position you were at when you created the route.
The CDU saves and displays the original coordinates, date
and time when you created the route in Waypoint 0.
Page 84

Simrad MX500 | 83
Waypoint 0 is displayed in Inverse Video, that is, white
characters on a black background (when in the normal
Daylight display mode; see CFG Lighting). This indicates
that you have already passed this coordinate. The time
stamp at the lower portion of the description window,
indicates when the route was created.
To the right of the coordinate window of Waypoint 0 is
a bent arrow. The bend in the arrow is adjacent to the
range and bearing between the waypoint you just passed
and the waypoint you are approaching.
Keep in mind that these are the fixed calculated values
between these two coordinates and not the real time
changing values that you will see in the navigate screens
between your present position and your next waypoint
during normal navigation.
Below Waypoint 0 is the waypoint you defined in the
GOTO function. Notice that this information is in standard video, black characters on a white background, and
that an ETA time is displayed in the same position as the
waypoint passed time in Waypoint 0. This indicates that
the waypoint has not been passed yet. Remember that
the ETA time is filtered over time, so allow a few minutes
for the filter to settle when you first get underway or
make course and speed changes.
Plot
The RTE1 and WPT functions are highly interactive with
the PLOT screen. The PLOT1 screen displays graphic
information around the boat at your present position. The
boat always remains in the center of the screen. The Plot
screen provides basic navigation information, zoom-in/
out capability and scaling factors for the display from
around 10 to 20 meters, depending on your latitude, out
to 128 nautical miles.
The Plot screen will not show your route and cross-track
error lines when in Great Circle Navigation mode.
Page 85

84 | Simrad MX500
The following CFG menus directly impact the PLOT functions:
Navigation - sets a variety of important functions and •
alarms.
Rhumb Line or Great Circle navigation -
Range units: nautical miles, nautical miles and me- -
ters (when under 1,000 meters), nautical miles and
feet (when under 1,000 feet), statute miles, statute
miles and meters (when under 1,000 meters),
statute miles and feet (when under 1,000 feet),
kilometers, or kilometers and meters (when under
1,000 meters)
Waypoint Pass Criterion and distance -
Waypoint Approach distance -
Autopilot alarm control -
Cross-track error limits -
COG / SOG Filter Settings. •
Take a quick look at both screens. They both have a
graphical area to the right, and a text data area to the
left.
In the PLOT screens the UP arrow key is the Zoom-out
key; the DOWN arrow key is the Zoom-In key. Each time
you depress one of these arrow keys, you scale by onehalf or by double the graphical area. If you look to the
top of the screen, just right of the page number (PLOT
1 ), you will see a number in a white square. This is the
scale of the graphic window based on the units selected
in CFG1 Navigation.
Now look along the left and right edge of the graphic
window, you will see some vertical black and white dash
marks (these are harder to see at small scales like 1 and
Page 86

Simrad MX500 | 85
2 or at large values such as 64 or 128). Each solid dash
mark represents 1 nautical mile. A broken dash mark indicates 1/100th of a nautical mile when you are zoomed
in at low scale. You will find your bearing and range to
the next waypoint just below the page number.
The CFG1 Navigation menu allows you to display fractions of the major unit (nautical miles, statute miles, or
kilometers) ranges less than 1000 in alternate units of
feet or meters.
PLOT 1 - Relative to Boat
The information in PLOT1 is always relative to your present position. The boat always remains in the center of the
screen and the bearing and range are always from your
present position to the next waypoint identified in RTE1.
Customizing the Display
There are a number of display options available, press
the EDIT key to modify the screen to your needs.
Highlight the Display Options softkey and press the ENT
key.
The following choices are available:
Page 87

86 | Simrad MX500
Show Boat • - Yes is the default condition, which places
the boat icon in the middle of the screen. No places
the boat in a Compass Rose in the upper right corner
of the screen (see the diagram below), where your direction is indicated by the boat in the Compass Rose.
The boat’s position is then indicated by an X in the
center of the screen.
Show All Waypoints • - Yes is the default condition,
which displays all waypoints, where the first character
of the description is a symbol, in its proper location
relative to the boat’s position. No causes none of the
waypoints to be displayed.
Show Active Route • - Yes is the default condition, which
causes the active route (course lines) and its waypoint
symbols to be displayed. No causes the course lines
not to be displayed. Note that these lines can only be
displayed in Rhumb Line navigation mode (see CFG1
Navigation).
Show Recorded Track • - Yes is the default condition,
which causes the course you have already traveled to
be displayed. No causes the traveled course not to be
displayed.
Show Off Track Limit • - Yes is the default condition,
which causes the active route cross-track error lines
to be displayed. These are only displayed for the leg
of the course you are presently on. If you reset your
cross-track error, these lines are redrawn to reflect
the course change (see NAV2). No causes the crosstrack error lines not to be displayed. Note that these
lines can only be displayed in Rhumb Line navigation
mode (see CFG1 Navigation).
Page 88

Simrad MX500 | 87
Show Lat/Lon Grid • - No is the default condition, which
causes the coordinate grid not to be displayed. Yes
causes the Lat/Lon grid to be displayed (regardless
of positioning reference system selection in CFG1
Position). Note that the grid is only displayed at the 4
Nm scale or lower.
Automatic Zoom • - No is the default condition, which
causes the displayed scale to be controlled by you.
Yes causes the boat icon to be placed along one edge
of the screen and the next waypoint flag to be placed
along the opposite edge of the screen. As you approach your waypoint, the screen will automatically
zoom in on your course, then expand back out after
you pass the waypoint and start the next leg of your
course.
If you highlight the Return softkey and press ENT, then
highlight the Track Plotter softkey and press ENT, you
will access the recorded track options.
Selecting Erase Track then pressing the ENT key allows
you to clear your recorded track. You can keep a portion,
say the last mile or two, of your recorded track if you
like, by specifying the range after you highlight the Erase
Track softkey and press ENT. Highlight Erase Now and
press ENT to confirm your action. Highlight Escape and
press ENT to return the previous screen without erasing
or EDIT to abort this process.
Page 89

88 | Simrad MX500
Selecting Record Track then pressing ENT allows you to
define how your course is saved. Choosing not to save
your track may free the processor up to run other functions a little bit faster; however, you are not likely to notice any difference in performance unless all data ports
are near their full throughput capacity. You also have
three different levels of track saving capability: Normal,
Fine, and Detailed. The software saves each calculated
position coordinate to draw the lines for the plot screen.
There are a finite number of plot points which can be
saved in memory, before the CDU begins overwriting the
first set of plot points. If you are traveling a long distance
at a high rate of speed (say over 10 knots) you probably
will want to use the Normal selection, which only stores a
plot point when your direction changes. If you are doing
some tight maneuvering or station keeping tasks, you
will probably want to use the Detailed selection, which
stores a position every 0.5 meters. The Fine selection
stores a plot point every 7 meters.
The PLOT screen is inactive if an MX antenna is not connected or not detected.
Page 90

Simrad MX500 | 89
Man Over Board
The Man Over Board function key shares the same key
with the “Mark or Event” function key. When depressed
for 3 seconds, it activates a number of automatic functions described below.
Most obviously, it brings up an MOB1 (Plot) screen. This
is an automatic scaling screen. The screen centers on
half the distance between your present position and the
MOB position. In addition, the MOB position is displayed
in the upper left corner, so that you can quickly read the
coordinates to others who may be available to render assistance. This plot screen also provides the vital bearing
and distance back to the MOB position, as well as your
present course over ground.
The MOB position, date and time are stored in the next
vacant waypoint memory of the Waypoint Bank for future
reference (e.g. log book entries). An MOB symbol is used
to denote an MOB waypoint.
The range and bearing in the PLOT, NAV, and MOB screens
all reect your bearing and range back to the MOB position, not the active route, until the MOB is canceled.
NMEA 0183 sentences (i.e. BWC and BWR) and the printer output are changed to reflect the current crisis situa-
Page 91

90 | Simrad MX500
tion by also indicating the bearing and range back to the
MOB position (until the MOB is canceled). This way, other
interfaced equipment can also help guide you back to the
MOB position. When the MOB condition is canceled, the
NMEA sentences will automatically revert to the active
route information. Don’t forget to cancel the MOB so your
interfaced equipment will read the correct data.
The MOB function key and remote MOB input are disabled from subsequent activation until Cancel MOB is
selected.
Other functions such as Position and Navigate can still be
accessed; however, the screen will revert to the MOB Plot
screen after 30 seconds.
To cancel an MOB condition, make sure you are in the
MOB Plot screen. Press the EDIT key, then highlight the
Cancel MOB softkey and press ENT. Press EDIT again to
exit the edit mode.
Remote MOB
The MX500 is capable of performing the MOB function
from a remote contact closure input via the AUX (8-pin)
cable. If the contact closure is made for 3 seconds, the
input is registered as a MOB Position. Refer to the installation section of this manual for wiring interface instructions.
Page 92

Simrad MX500 | 91
Auxiliary
There are eight Auxiliary screens described in this section:
AUX1 - Alarm Log
AUX2 - Speed Graph
AUX4 - Sun Almanac
AUX5 - Moon Phases
AUX6 - Batteries
AUX7 - Unit Information
AUX10 - Current Tide Display
AUX11 - Tide Table Port List
AUX1 - Alarm Log
All alarms are registered in this screen, whether or not
they have been corrected, until the log is erased or the
log is full. When the log is full, the oldest alarms are
overwritten. Alarms with an asterisk (*) next to the
alarm number have not been corrected and can not be
reset until they are corrected.
Reset Log clears the alarm log entries, except for any
alarm conditions which have not been corrected and any
alarms which have occurred since the uncorrected alarm.
Page 93

92 | Simrad MX500
AUX2 - Speed Graph
The graph scales automatically to the speed you are at.
You can zoom out to the last 56 minutes or in to the last
3.5 minutes. It is a handy tool if you are trying to maintain a certain speed.
AUX4 - Sun Almanac
This almanac provides the sunrise and sunset times for
a given day and location. You can enter another date or
location of interest by pressing the EDIT key, and editing
the appropriate date and/or place.
Page 94

Simrad MX500 | 93
AUX5 - Moon Phases
There are no edit functions available here. Moon phases
are given in approximately one week increments and
include all dates for new, half, and full moon. You change
the year displayed by pressing the up or down cursor
keys.
AUX6 - Batteries
This is where you reset the Lithium battery age. Press
the EDIT key and highlight the Reset Age softkey then
press ENT after you replace the Lithium battery. Please
note that the age reset requires that the unit is tracking
satellites.
Battery replacement should be done by an authorized
servicing dealer.
Page 95

94 | Simrad MX500
AUX7 -Unit Information
This screen indicates the specific CDU model, software
version number, the hardware configuration, and the
printed circuit board (PCB) serial number of your CDU.
If you are having problems with your CDU, refer to this
screen for information to provide to customer service
personnel.
A special softkey sequence displays sub-version levels,
the actual software build date and time, and allows access to a selftest sequence. This information is useful to
the technician and our Field Engineers during troubleshooting. To activate the screen press the EDIT key,
then press the ‘1’ or ‘NAV’ key three (3) times. Additional
information in the Software window will be displayed.
MX500 AUX7 Screens
This also activates several engineering screens (the same
as turning Engineering Display to Yes in CFG1 Operation).
Refer to Appendix C - Engineering Mode for more details.
Page 96

Simrad MX500 | 95
Tide
There are two TIDE screens, which are located under
the AUX option. The AUX 10 screen displays graphic
and digital information about the tide conditions at your
present position. This is based on tide table constants
that you must enter in the AUX 11 screen, then access
through the AUX 10 screen. You can store up to 100 tide
tables in AUX 11.
The following CFG1 menus directly impact the TIDE
functions:
Depth - sets the measurement units in meters, feet, •
or fathoms.
The Tide function is not active in the MX500 Basic model
without the MX antenna.
AUX 10 - Current Tide Display
This screen provides the current tide conditions for the
tide constants indicated in the upper left hand corner.
The number in the upper left corner of the window is the
identification number of this table in the British Admiralty
Tide Table and in the AUX 11 screen. The name to the
right of this number is the port name you entered in the
AUX 11 screen.
A graphical representation of the tide is given in the middle of the screen. The tide peak references are given to
the right of the High/Low time on the right of the screen.
High/Low tide times are given to the right of the graph.
The marker time (indicated by the clock icon or + sign in
the graphic area) and tide condition are given below the
High/Low tide information.
The tide marker automatically updates to the current
Page 97

96 | Simrad MX500
time. When the tide marker is in the automatic mode, the
cross-hair indicator is enclosed with a circle (like a clock).
You can move the marker forward or backward in time
using the softkeys at the bottom of the screen. Return
the marker to the present time by simply highlighting the
Marker to Now softkey then pressing the ENT key. When
you move the tide marker off of the present time, the
marker changes to a + sign. The marker will remain at
the manually positioned mark until you either select one
of the manual marker control softkeys, or until you highlight the Marker to Now softkey and press ENT - which
returns the marker to automatic mode (indicated by the
clock marker).
The tide measurement units can be displayed in meters,
feet, or fathoms. Tide units are controlled along with
depth units in the CFG1 Depth screen.
To select another port’s tide table, press the EDIT function key, and use the Change softkey to scroll down the
list or the Go Back softkey to scroll up the list. You can
also use the left and right cursor keys to scroll through
the tide tables available in AUX 11.
While in the edit mode, you can also move the cursor
down to the date and manually change it to any date you
are interested in.
Once you have found the table you need, press the EDIT
key again to load the table.
AUX 11 - Tide Table Port List
AUX 11 is where you store the constants for the port tide
tables you are interested in. You can store up to 100 tide
tables. The constants you need can be derived from Part
III of:
Page 98

Simrad MX500 | 97
Admiralty Tide Tables and Tidal Stream Tables
Volume 1
Volume 3
Volume 3
Volume 2
6322 -0 1A.600
Published by the Hydrographer of the Navy,
United Kingdom
Hydrographic Office
Tauton, Somerset TA1 2DN, United Kingdom
+44-1823-337-900
+44-1823-323-753 Fax
46274 Telex
This is a three volume set of tide tables, divided as follows:
The display provides the required tide table document
name and section (Admiralty Tide Tables, Part III) under
the Help softkey when in the edit mode as an added aid
to help you identify the proper reference material.
The Admiralty Tide Tables port lists are also available,
free of charge. Contact your dealer or us at the address,
fax, e-mail, or phone number provided at the back of
this manual if you have not received a copy of these tide
table lists.
Page 99

98 | Simrad MX500
Adding a Port
To add a port to the list, first locate it in Part III of the
tide table book, then align the cursor with Add port to
the Port List and press EDIT. The Zone in the upper left
corner refers to the time zone offset to UTC. Use the
name given in the tide table for the name given in the
Place portion of the screen. To help you locate this port
in the printed volume later, use the table number given in
the first column of the manual as the tide number in the
CDU.
Then simply follow along the table in the manual and
enter the appropriate offsets. The software is setup
just like the manual. You may encounter a table that
requires seasonal offsets. Where these might apply, the
CDU provides you the opportunity to input a Fixed value
or the seasonal Table values. Highlight the first softkey
and press ENT to toggle between these two selections.
Highlight the second softkey, Edit Table, and press ENT
to make the necessary corrections. Highlight the Done
softkey and press ENT when you finish the seasonal
table, otherwise press the EDIT key when the necessary
data is entered.
You can scroll through the entered tables with the up and
down cursor keys when you are not in the edit mode. You
also have the option to modify or delete a port from the
list.
Tide table information is mapped to an area of RAM
which is saved during future software upgrades.
Page 100

Simrad MX500 | 99
Position
There are three POS screens in the CDU. The POS functions are highly interactive with a number of CFG1 menu
selections.
The following CFG1 menus directly impact the POS functions:
COG SOG • - sets the filtering time for the displayed
values.
Datum • - sets the reference datum for your present
position.
DGPS • - sets the internal or external control for RTCM
SC-104 corrections which affect your position accuracy.
GPS • - sets an offset for calculating the GPS antenna
position if you can’t physically locate the antenna exactly where you want it (i.e. over the centerline of the
boat); sets the minimum elevation angle to look for
satellites; and in 6 channel models, it also controls the
satellite selection process.
Navigation • - sets a variety of important functions and
alarms (used in other function screens), but only the
Range units:
nautical miles (Nm) -
nautical miles and meters (Nm/mtrs) -
nautical miles and feet (Nm/ft) -
statute miles (Sm) -
statute miles and meters (Sm/mtrs) -
statute miles and feet (Sm/ft) -
kilometers (Km), or -
kilometers and meters (Km/mtrs), affect the - POS
screens.
Position • - sets Lat/Lon or UTM, Grid (optional) and
some alarm limits.
Time • - sets appropriate offsets, and 12 or 24 hour
clock mode.
 Loading...
Loading...