

Page 1

FS 70 OPERATOR MANUAL
974-24007001
Issue 3.0 January 2009
Page 2

Page 3
FS 70 Operators Manual 974-24007001/3.0
List of Contents Page 1
KONGSBERG MESOTECH LTD
Customer Products Warranty Policy
Effective January 1, 2009
Kongsberg Mesotech Ltd. Warrants each new product (equipment) to be free of
defects caused by faulty materials or poor workmanship for a period of twenty-four
(24) months for underwater and surface equipment from date of installation by an
authorized Kongsberg Group Company, Simrad Distributor, Dealer or Agency. The
warranty does not apply to defects caused by force majeure events or misuse
including water damage to the surface equipment, improper maintenance and
installation or including excessive wear and tear for which Kongsberg Mesotech Ltd.
is not responsible.
Underwater Equipment:
• Warranty for Underwater Equipment that is hull mounted, such as those
mentioned below, will be assessed on a case-by-case basis but shall generally
not be covered by the warranty:
• Hull Units, Sonar Dome Assemblies and Echo Sounder Transducers
• Transducer Units, Speed, Temperature and Depth Sensors
Note: Additional expenses connected with replacement of transducers, such as drydocking and diving, are not covered by this warranty.
Warranty on Parts or Equipment Replacement:
• It is at the sole discretion of Kongsberg Mesotech Ltd. to either repair or replace
any unit/part that fails within the limits of the Warranty Policy.
• The Warranty Policy is only valid on new equipment
• Replacement of parts, components, and/or PCB Boards during a warranty repair
does not extend the original warranty period.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 4
974-24007001/3.0 FS 70 Operators Manual
Page 2 List of Contents
Consumable Materials:
• Consumable materials, such as lamps, fuses, O-rings, gaskets and batteries, will
not be replaced free of charge.
Warranty Service:
• Warranty service is available worldwide through authorized Kongsberg Group
Companies, Simrad Distributors, Dealers or Agencies. When requesting warranty
service, you must supply the following information:
1. Proof of purchase.
2. Equipment part number and serial number.
3. Fault description and all relevant vessel information.
• Labour cost for the repair or replacement of any products/equipment and/or
module/parts is the responsibility of the servicing agent or dealer.
• All customs duties, brokerage charges ocal taxes, overtime, expenses for meals,
tools, launch services, ferries, lodgings, normal adjustments and routine
maintenance are not covered by this warranty policy.
DISCLAIMER
• Maximum liability shall not, in any case, exceed the contract price of the products
claimed to be defective.
• Consequential damages including, but not limited to, any loss of profit, property
damage or personal injury, are not covered by the warranty policy.
• This equipment is not certified or approved for navigation and/or safe-navigation
practices, and is not to be used for navigation purposes under any
circumstances.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 5
FS 70 Operators Manual 974-24007001/3.0
List of Contents Page 3
LIST OF CONTENTS
Part 1......................................................................................System Familiarization
Part 2.......................................................................................... Theory of Operation
Part 3...................................................................................FS 70 System Operation
Part 4..................................................... FS 70 Installation, System Set-Up and Test
Part 5....................................................................Troubleshooting and Maintenance
Part 6...................................................................................Drawings & Attachments
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 6
974-24007001/3.0 FS 70 Operators Manual
Page 4 List of Contents
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 7
FS 70 Operators Manual 974-24007001/3.0
List of Contents Page 5
MODIFICATION RECORD
FS 70 OPERATORS MANUAL
974-24007001
Issue: 3.0
January 2009
Issue No. Date Initial Comments
1.0 01.06 L.F First release
2.0 01.07 L.F Second release
______3.0_________01.09________ L.F________Third release_______________
To assist us in making improvements to the product and documentation,
Kongsberg Mesotech welcomes comments and constructive criticisms.
Please send all such comments, in writing or by E-mail, to:
Kongsberg Mesotech Ltd.
Documentation Department
1598 Kebet Way
Port Coquitlam, BC V3C 5M5
Canada
E-Mail: km.sales.vancouver@kongsberg.com
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 8
974-24007001/3.0 FS 70 Operators Manual
Page 6 List of Contents
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 9
FS 70 Operators Manual 974-24007001/3.0
System Familiarization Page 1.1
PART 1
SYSTEM FAMILIARIZATION
1. SYSTEM FAMILIARIZATION...........................................................................1.3
1.1 OVERVIEW ...............................................................................................1.3
1.1.1 Equipment Configuration .......................................................................1.3
1.1.2 System Configuration.............................................................................1.4
1.1.3 Display Monitor ......................................................................................1.4
1.1.4 Processor Unit .......................................................................................1.4
1.1.5 Power /TTM Interface Module................................................................1.5
1.1.6 Deployment Housing Unit ......................................................................1.5
1.1.7 Jointing Tool...........................................................................................1.6
1.1.8 Catch Sensors .......................................................................................1.6
1.1.9 PI Sensors Option..................................................................................1.6
1.1.10 Depth & Temperature NMEA Output..................................................1.6
1.1.11 Trawl Cable, Winch and Block ...........................................................1.6
1.1.12 19” Rack Cabinet 9U,.........................................................................1.7
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 10
974-24007001/3.0 FS 70 Operators Manual
Page 1.2 System Familiarization
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 11
FS 70 Operators Manual 974-24007001/3.0
System Familiarization Page 1.3
1. SYSTEM FAMILIARIZATION
1.1 OVERVIEW
The SIMRAD FS 70 Series is a third wire trawl monitoring system for pelagic and
bottom fishing trawlers. The system provides real time images from the trawl sonar
head and data from the sensors to the bridge, thus maximizing the quality of the
catch and reducing sea time.
The FS 70 vertical trawl sonar allows the operator to see the complete net opening
and operation by displaying individual fish targets in the vertical plane, the fish
school location, bottom/net location and net geometry. In addition to the vertical
monitoring, the FS 70 also allows the operator to measure the spread of the trawl
door, view and skim banks to avoid reefs and locate boulders on the ocean floor that
may damage the trawl net.
The 200kHz Echo Sounder capability ensures maximum control of the foot rope
during the tow. The active motion sensor for pitch and roll comes as a standard
feature.
The addition of the trawl system’s sensor module will allow the operator to monitor
trawl depth, water temperature and receive information from up to 6 catch receivers
indicating when the cod end fills up with fish.
The FS Trawl Sonar Series is a modular system. It is operated with ease through
direct access Mouse and Keyboard operated menus. The major benefit of the third
wire trawl sonar system is that it prevents the loss of communication with the trawl
as the vessel is changing course.
1.1.1 Equipment Configuration
A complete Trawl Monitoring System consists of:
• Simrad LCD or VGA display monitor. (optional)
• FS 70 Processing Server Industrial Unit.
• FS PWR/TTM Interface Module, 19” Rack Mounted 3U
• FS 70, Vertical Sonar Head 120kHz, or 330kHz, C/W 200kHz Sounder
• 40kHz or 70kHz Catch Sensors
• Integrated Pitch and Roll Motion Sensor
• FS 70 Deployment Housing and Installation materials
• Industrial 9U, 19” Rack Cabinet, c/w with fans and glass door, (optional)
• Industrial UPS 19” Rack mounted 2U, 120Vac or 230Vac, (optional)
Refer to Part 6 “Attachment” for full Configuration Overview
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 12
974-24007001/3.0 FS 70 Operators Manual
Page 1.4 System Familiarization
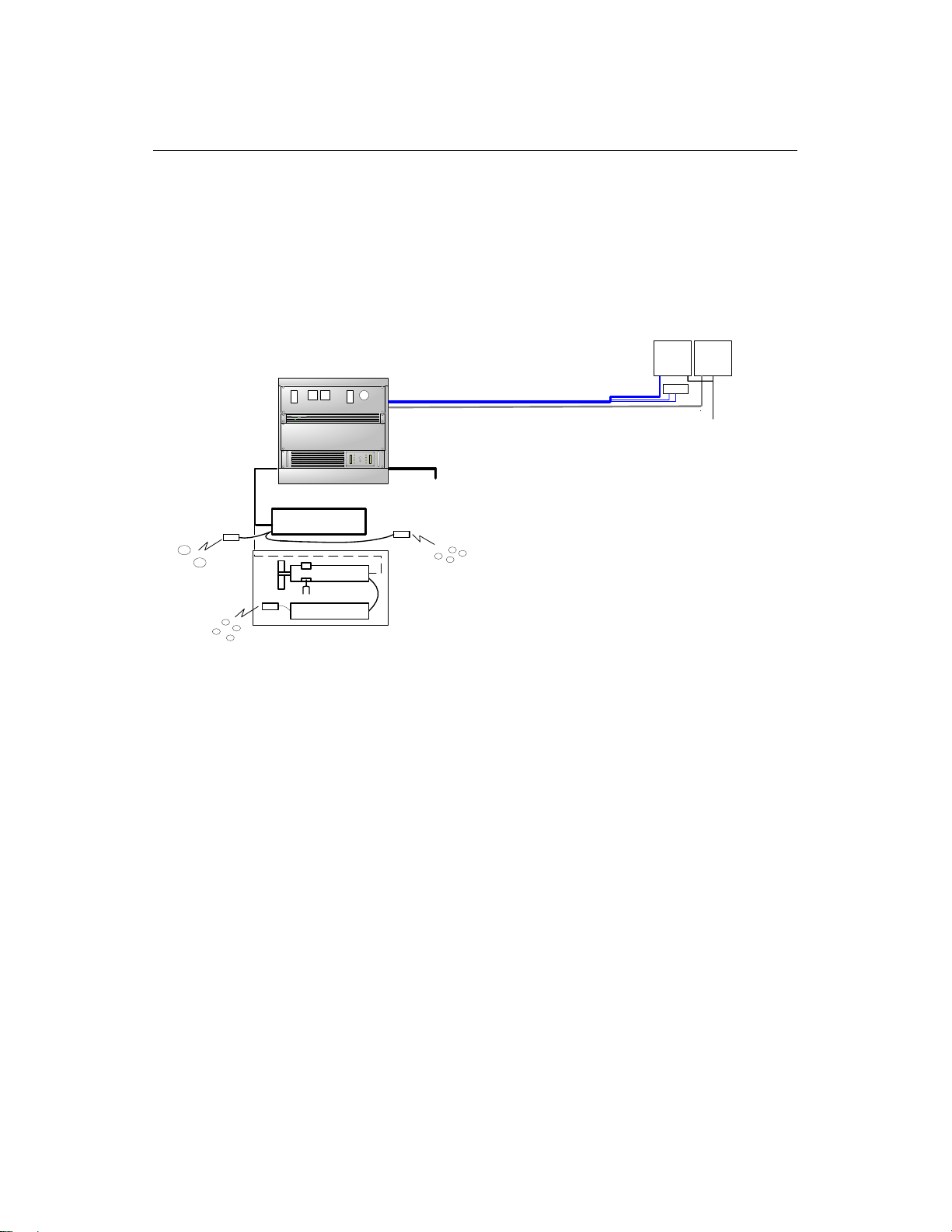
1.1.2 System Configuration
FS 70 TRAWL Monitoring
Integrated System Configuration
LCD
LCD
Monitor
KB & M
120 or 230 AC Power
Monitor
Input
1
PI Door Sensors
Door Spread
Hydrophone
2
Catch Sensors
1
2
70kHz Only
Rack Integrated System Cabinet
9 U
3 U
1 U
SIMRAD Power/TTM
30m.VGA Extender Cable c/w K & M,
30m.VGA Extender Cable
3 U
2 U
120 or 230 AC Power
Input
FS 70 Head Trawl unit
or
TS15 S Head
FS 3300 Sensor
3
4
Catch Hydrophone
2
1
3
PI Catch Sensors
40kHz or 70kHz
4
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
System Standard Equipments
3 U, 19" Rack Power/TTM c/w Front Test Cable Connection
1 U, 19" Rack Industrial Processing Unit
3 U, Expansion Space for Future Development
2 U, 19" Rack APC, 1500 UPS
Rack Cabinet Description
Cabinet, W 23.6", (600mm), D 23.6", (600mm) H 19.8", (502mm)
Dual 6" Ventilation Fan & Bracket
30m VGA Video Extender Cable c/w KB & Mouse
30m VGA Video extender Cable for Dual Monitor
Slide Rails
Glass Door
All Mounting Hardware Included
Refer to your price list for additional information
1.1.3 Display Monitor
The display monitor for the FS 70 can be a VGA ruggedized LCD monitor but any
commercially available VGA monitor may be used. This is in order to have the full
benefit of high resolution provided by the video Multi-Display adapter available with
the FS Processors.
1.1.4 Processor Unit
The FS 70 19” Rack mounted Industrial Processing unit is the control unit for the
system. The installed FS 70 system software provides a mechanism for the sonar
head detection, setup and operation. It is operated through the Main Control panel to
enable the Sonar selection, tilt, range, gain, cursor, and by moving the mouse
pointer over the toolbar will allow the operator to perform certain operations with a
simple Right or Left mouse click.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 13
FS 70 Operators Manual 974-24007001/3.0
System Familiarization Page 1.5
The sector heading and width are also controlled by a single mouse click used to set
the center of the area to be scanned and the width of the sector scan (up to 360°) in
the polar mode.
The rear panel of the Processing unit contains the connectors for AC power, Dual
Monitor port, one Serial port and several USB ports, Keyboard, Mouse, Printer, and
Network port. The Network port can be used to connect the remote workstation.
Note: A security key (or “dongle”) must be attached to a USB port to enable full
operation of the system.
1.1.5 Power /TTM Interface Module
The FS 19” Rack mounted Power/TTM interface Module unit provides the high
voltage required by the trawl sonar. The DC output voltage is combined with the
telemetry signals and supplied to the trawl sonar.
The power voltage supplied to the sonar head and current are monitored by voltage
and current meters. A selector switch located below the voltage meter can be used
to select the output voltage of the power supply required for the appropriate system
configuration. Also, a separate on/off switch is located in the front panel. Note: The
main on/off switch and fuse are located on the rear panel of the TTM Module.
The Power/TTM Interface provides translation between the Processing Unit Serial or
USB port and the sonar telemetry communication protocol.
A Test Cable connector and selection switch between the trawl cable and Test cable
are provided in the front panel, eliminating having to disconnect the 3
rd
wire cable
from the rear of the TTM.
1.1.6 Deployment Housing Unit
The trawl deployment housing unit is made from polyurethane and designed for the
harshest of environments yet it is easy to handle. The FS 70 trawl unit sits within the
deployment housing unit and contains the vertical sonar head, catch hydrophone
receiver, the optional forward hydrophone, the echo sounder 200kHz transducer and
depth and temperature sensors. The mounting kit supplied contains the strain relief
cable gland and other hardware used to attach the trawl cable to the trawl headrope.
The trawl cable is connected to the trawl sonar by a watertight connector and a
locking sleeve. Commands are sent down the cable from the processors to operate
the sonar. The sonar image and sensor data are sent up the cable to the processor
and displayed on the appropriate monitor.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 14
974-24007001/3.0 FS 70 Operators Manual
Page 1.6 System Familiarization
1.1.7 Jointing Tool
Jointing tools and materials are required for splicing the trawl cable and attaching the
trawl “2 pin pigtail” connector to the trawl sonar. We recommend using 3M 72-N1
jointing tool kits that can be purchase locally and especially designed for coaxial
cable with a breaking point of 1500kg. The jointing kit will allow you to make 1 cable
joint.
Note: Proper joining and crimping sleeve will be required based on the type of 3
rd
wire you are using.
1.1.8 Catch Sensors
The catch sensor “eggs” are wireless sensors mounted on the cod-end of the trawl
net to detect the stretch of the net as it fills up with the catch. When sufficient stretch
of the net occurs, the catch sensor sends an acoustic signal to the trawl sonar
through the catch receiver.
This information is then sent to the processor and displayed on the monitor.
The sensors are of a rugged construction in order to withstand the strain from
winches and the power block. The operator can use up to six sensors (with the
40kHz system) simultaneously. The catch sensors are equipped with rechargeable
batteries.
1.1.9 PI Sensors Option
The FS 70 provides full integration with the PI System, Door Spread, Bottom
Contact, Rip Sensor and Cod End Depth Sensor available from Simrad Horten AS.
1.1.10 Depth & Temperature NMEA Output
The FS 70 processing Unit can be configured to output NMEA 183 data information.
The integrated sensor module is included in the sonar head. The depth and
temperature outputs are transmitted to the processor and displayed on the monitor.
When interfaced to other Simrad echo sounders, the headrope depth information
appears on the sounder showing the location of the trawl in relation to the fish or
bottom returns.
1.1.11 Trawl Cable, Winch and Block
The trawl cable is chosen for maximum mechanical strength, durability and minimum
attenuation of the signals. Cables in common use are coaxial with breaking points of
1500kg and 6000kg.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 15
FS 70 Operators Manual 974-24007001/3.0
System Familiarization Page 1.7
Cable winches are delivered in different types and with different capacities; lowpressure hydraulic, high-pressure hydraulic and electrically driven. Choice of winch
is dependent on prevailing conditions; type and length of cable and available source
of power. Most types operate automatically - the cable is pulled out, kept tight during
towing, and hauled in together with the trawl. Control of the winch is done remotely
from the bridge.
Any commercially available pulley block may be used to properly align the cable onto
the winch. A snatch block has the advantage that it may be installed without having
to thread the cable through it. A unit with two movable steering arms (one on each
side of the pulley) is recommended to prevent the cable from coming off the pulley
and causing damage to the cable.
1.1.12 19” Rack Cabinet - 9U,
The Industrial Ventilated Rack Cabinet with a rugged black powder paint finish is an
ergonomic design with ventilated slots front and side. The pre-punched top allows
the installation of 2 fans. Cable accesses are available from the top or bottom.
The cabinet includes two pair of mounting rails, smoked glass door with full 180
degrees opening for easy access to the rack mounted equipment.
The overall dimensions are 19.8” (502mm) height, 23.6” (600mm) width, 24.0”
(600mm) depth.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 16
974-24007001/3.0 FS 70 Operators Manual
Page 1.8 System Familiarization
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 17
FS 70 Operators Manual 974-24007001/3.0
Theory of Operation Page 2.1
PART 2
THEORY OF OPERATION
2. THEORY OF OPERATION...............................................................................2.3
2.1 INTRODUCTION.......................................................................................2.3
2.1.1 Basic Principles......................................................................................2.3
2.1.2 Determining Target Position ..................................................................2.3
2.1.3 Forming an Image..................................................................................2.3
2.1.4 Key Feature Setting ...............................................................................2.4
2.1.4.1 AGC................................................................................................2.4
2.1.4.2 RCG................................................................................................2.4
2.1.4.3 RX Gain Response and Type.........................................................2.5
2.1.4.4 Pulse Length Control......................................................................2.5
2.1.4.5 Optimize Resolution........................................................................2.5
2.1.4.6 Maximize Range.............................................................................2.5
2.1.4.7 Peak Detection ...............................................................................2.6
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 18
974-24007001/3.0 FS 70 Operators Manual
Page 2.2 Theory of Operation
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 19
FS 70 Operators Manual 974-24007001/3.0
Theory of Operation Page 2.3
2. THEORY OF OPERATION
2.1 INTRODUCTION
This section explains the theory of operation of the Vertical and Sounder Scanning
Trawl Monitoring Sonar System.
2.1.1 Basic Principles
• Sound waves travel very efficiently through water.
• A sound pulse can be projected through water in a controlled direction with the
sonar transducer.
• An object in the path of the projected sound pulse will reflect some sound pulses
back toward the sonar transducer.
• The speed of the sound pulse projected through the water can be predicted for
given conditions.
2.1.2 Determining Target Position
The trawl scanning sonar processor measures the time from the start of the sound
pulse projected through water, to the reception of the sound pulse reflected back to
the sonar transducer. The measured time is then converted to distance by using the
value of sound speed through water.
Since the sound pulse is projected in a known direction, the bearing of the reflected
object is also known. This makes it possible to locate the object with respect to the
sonar transducer; the information will be used to plot the position of the reflected
target on a video graphic display monitor.
2.1.3 Forming an Image
The sound pulse projected will be attenuated as it travels through the water from the
transducer to the target and back. Much of this attenuation is a predictable function
of the total time or the distance the sound pulse traveled through water. Increasing
the receiving gain with time can compensate for this decrease in the signal level.
This is done automatically in the sonar with a Time Varying Gain (TVG) circuit.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 20
974-24007001/3.0 FS 70 Operators Manual
Page 2.4 Theory of Operation
After the TVG correction, the absolute levels of the received signals will be
determined by the acoustic response of the reflecting target.
The sonar processor system repeatedly measures the TVG corrected target levels
by digitizing a sequence of samples after each sound pulse transmission. Each
sample is then plotted on the video display at the appropriate position according to
its range and bearing. The level of the target strength sample determines the color
used to plot each sample.
The process can be repeated with the transducer pointed in different directions,
forming an image of a large area of the bottom, (or the trawl net geometry) and
displaying it on the video screen.
In simple words, the TVG function controls the gain of the receiver so that a school
with a given size and density is presented with approximately the same strength on
the display, inside the regulated TVG range.
2.1.4 Key Feature Setting
The following paragraph will explain some of the key features of the FS 70 System.
2.1.4.1 AGC
Automatic Gain Control (AGC)
The AGC “Automatic Gain Control” algorithm increases the gain during low acoustic
returns and reduces the gain during strong acoustic returns. The speed with which
the gain is adjusted is determined by the setting of the “RX Gain Response”
2.1.4.2 RCG
Reverberation Controlled Gain (RCG)
The RCG filter senses the noise level (reverberation, propeller noise, etc.), and
adjusts the gain of each of the received beams in order to eliminate noise on the
display. The strength of the filter can be selected in the menu. With maximum
strength selected, the RCG will effectively reduce the bottom in shallow water, while
variation on the bottom will be displayed.
Note that scattered fish can be perceived as reverberation. The RCG filter must be
used with care if scattered schools are to be detected.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 21
FS 70 Operators Manual 974-24007001/3.0
Theory of Operation Page 2.5
2.1.4.3 RX Gain Response and Type
The setting of the “RX Gain Response” determines the response of the filter
algorithm as selected by the “RX Gain Type”. For the AGC, this setting determines
the speed by which the gain is adjusted. For the RCG, this setting determines the
influence of the previous ping average over the current ping. If set to Slow, the
overall average is given by the sum of 20% current and 80% of previous average. In
Medium this ratio is 50% to 50%, and in Fast the ratio is 80% to 20%.
2.1.4.4 Pulse Length Control
The FS 70 Trawl Sonar Heads are capable of changing the acoustic pulse length
that is transmitted. The surface processing unit sets the pulse length based on the
operating range of the sonar head. It is generally better to use a longer pulse as the
operating range increases. However, the actual value can be optimized to enhance
the details in the sonar image (Optimize Resolution) or to increase the target visibility
at long distance away from the sonar head (Maximum Range). The system will
automatically set the pulse length to match the range, unless manually adjusted by
the operator.
2.1.4.5 Optimize Resolution
The pulse length selection can be optimized to enhance the detail of the targets. It
has been experimentally determined that the pulse length corresponding to 40% of
the sample period can increase the image resolution and details for targets that are
generally larger than a few samples. This pulse length increases linearly with
increasing operating range.
2.1.4.6 Maximize Range
The pulse length calculation can be optimized to increase the detection range of the
sonar head. Generally, the longer the pulse length, the more energy is transmitted
into the water which could then travel a longer distance and get reflected from the
targets that are further away from the sonar head. It has been determined that the
pulse length corresponding to 80% of the sample period can increase the detection
distance of the targets without a major drain on the sonar head power supply. This
pulse length increases linearly with increasing operating range.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 22
974-24007001/3.0 FS 70 Operators Manual
Page 2.6 Theory of Operation
2.1.4.7 Peak Detection
The Peak Detection feature is described as follows.
The older sonar heads were not capable of changing the acoustic pulse length. They
were generally operated at a pulse length of 100 Microseconds. This meant that at a
range greater than 50 meters, there would have been a good chance of not detecting
small targets. The reason for this is that the combination of small target size, short
pulse length and long sample period could result in the acoustic return from the
target falling between two samples and therefore not beings seen on the sonar
image.
To remedy this, it was decided to take additional samples and select the strongest
echo target for the sonar image display. This is generally referred to as Peak
Detection because we are detecting the peak value of signal in between two
samples. The user can select the number of additional samples that the system
takes in order to detect the peak value.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 23
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.1
PART 3
`FS 70 SYSTEM OPERATION
3. FS 70 SYSTEM OPERATION..........................................................................3.3
3.1 INTRODUCTION.......................................................................................3.3
3.2 CONTROL
3.2.1 Operating Control Panel Page ...............................................................3.5
3.2.2 Display Control Panel Page ...................................................................3.6
3.2.3 Setup Control Panel Page......................................................................3.7
3.2.4 Users Settings Control Panel Page........................................................3.8
3.2.5 Sensors Control Panel Page & Setup....................................................3.9
3.2.6 PI, 40kHz Channel Sensors Setup.......................................................3.10
3.2.7 PI, 40kHz Receiver Sensors Setup......................................................3.11
3.2.8 PI, 40kHz Sensors Activation Menu.....................................................3.12
3.2.9 PI, 70kHz Sensors Activation Menu.....................................................3.13
3.2.10 Advanced Panel Page......................................................................3.14
3.2.11 Advanced Operation TVG Mode ......................................................3.14
3.2.12 Display Rec Toolbar ......................................................................... 3.15
3.2.13 Record Selection..............................................................................3.15
3.3 DISPLAY
3.4 DEPTH
3.5 LANGUAGE.............................................................................................3.17
3.6 AUDIO
3.7 ACTIVATING
PANEL.....................................................................................3.4
TOOLS SELECTION.................................................................3.16
AND TEMPERATURE GRAPHS ................................................ 3.16
SET UP........................................................................................3.17
THE SONAR......................................................................3.18
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 24
974-24007001/3.0 FS 70 Operators Manual
Page 3.2 FS 70 System Operation
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 25
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.3
3. FS 70 SYSTEM OPERATION
3.1 INTRODUCTION
The FS 70 Sonar uses a control panel for the most frequently needed adjustments
and a software menu system for less frequently needed controls. This chapter
describes the menu system and explains the adjustments to the menu settings that
may be made to control the sonar operation
The menu system allows adjustments to several system parameters without
requiring a dedicated Control Panel for each item. Items that lead to dialog boxes
are shown in the “Advance Menu”. All other items are system parameters that may
be modified. As you move the pointer over the Control Panel, a simple help
message will pop up beside the pointer describing its function. To perform certain
operations, just left or right click the mouse over the desired item. Selected items
are highlighted.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 26
974-24007001/3.0 FS 70 Operators Manual
Page 3.4 FS 70 System Operation
3.2 CONTROL PANEL
The Sonar Control Panel located above is divided into 7 Pages, Page 1 “Operation”,
Page 2 “Display”, Page 3 “Setup”, Page 4 “Settings”, Page 5 “Sensors Control”,
Page 6 & 9 “Sensors”, Page 4 & 8 “Receiver Setup” and Page 10 “Advanced”. Each
page allows you to change the system parameters. To change the value of a system
parameter, move the mouse up or down until the desired button is highlighted and
click the left mouse button or right mouse button to activate the new setting.
Note: The main control panel can be docked or auto-hidden.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 27
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.5
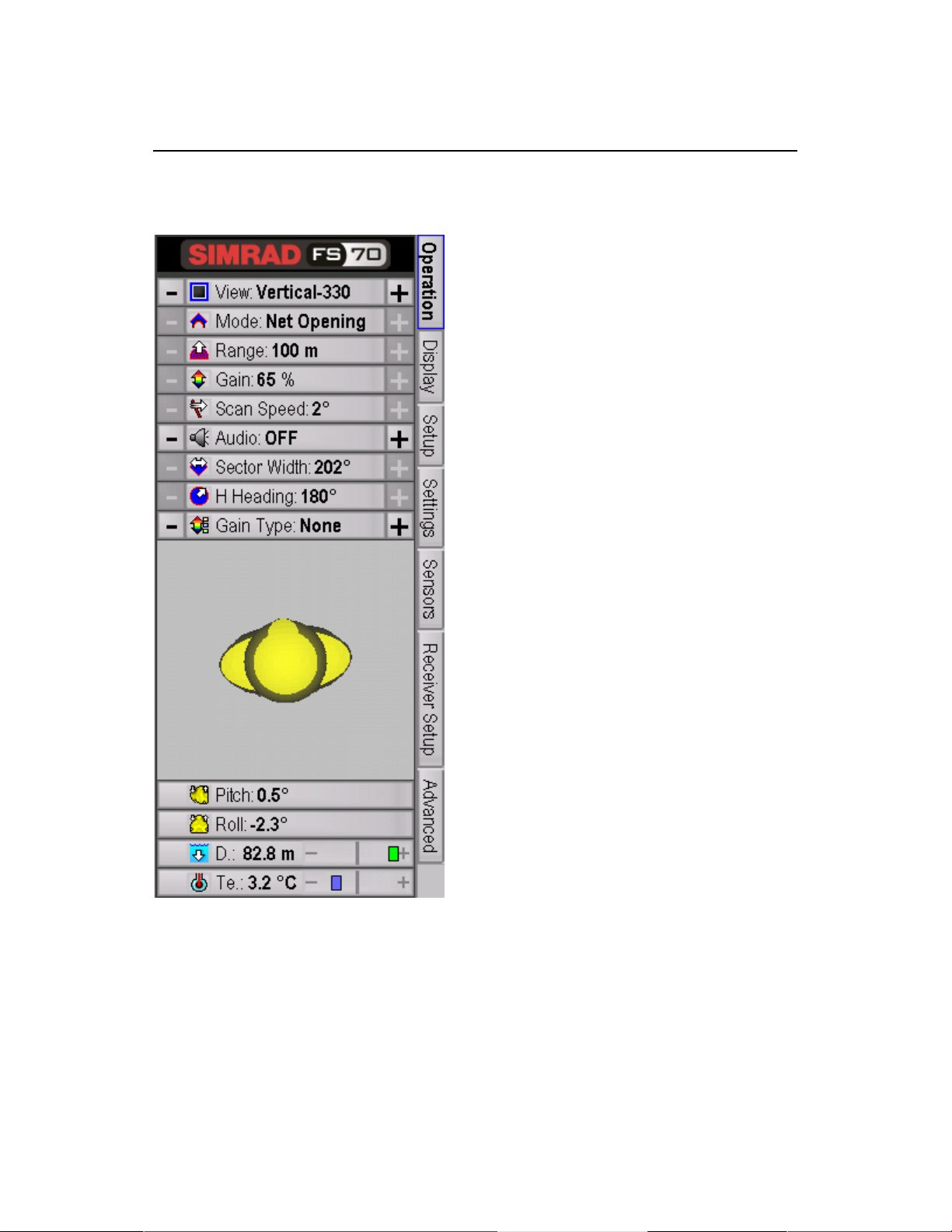
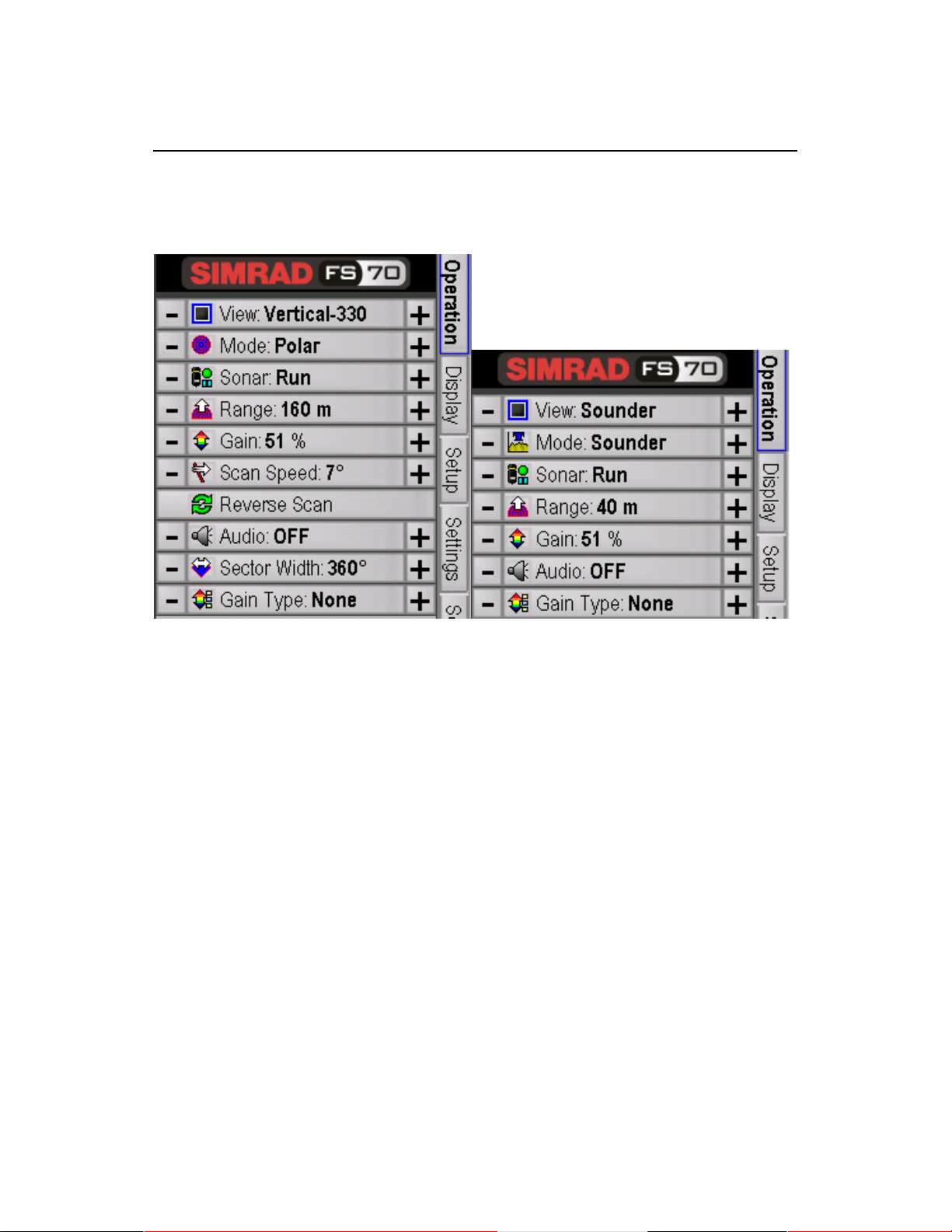
3.2.1 OPERATING CONTROL PANEL PAGE
The main “Operating” control panel allows you to select the sonar you want to
control; View Vertical or View Sounder as indicated above. Click on the appropriate
display window to activate the sonar you want to control, next position the mouse
cursor on the button you want to change, then, click the left mouse button or right
mouse button to change the settings.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 28
974-24007001/3.0 FS 70 Operators Manual
Page 3.6 FS 70 System Operation
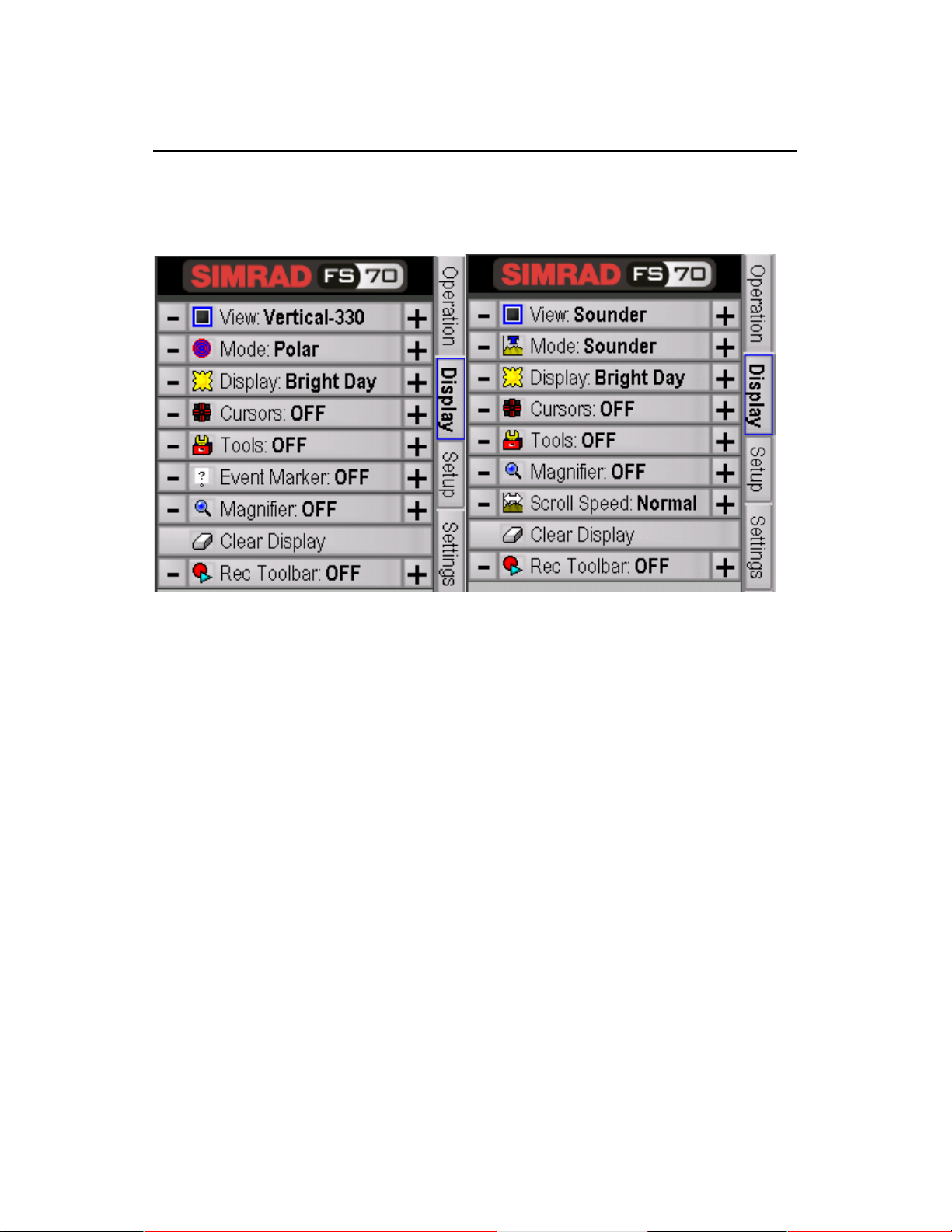
3.2.2 DISPLAY CONTROL PANEL PAGE
The main “Display” control panel allows you to select the sonar you want to control.
To change the value of the system parameter just left or right click the mouse over
the button you have selected, move the mouse up or down until the desired button is
highlighted and click the left mouse button or right mouse button to activate the new
setting.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 29
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.7
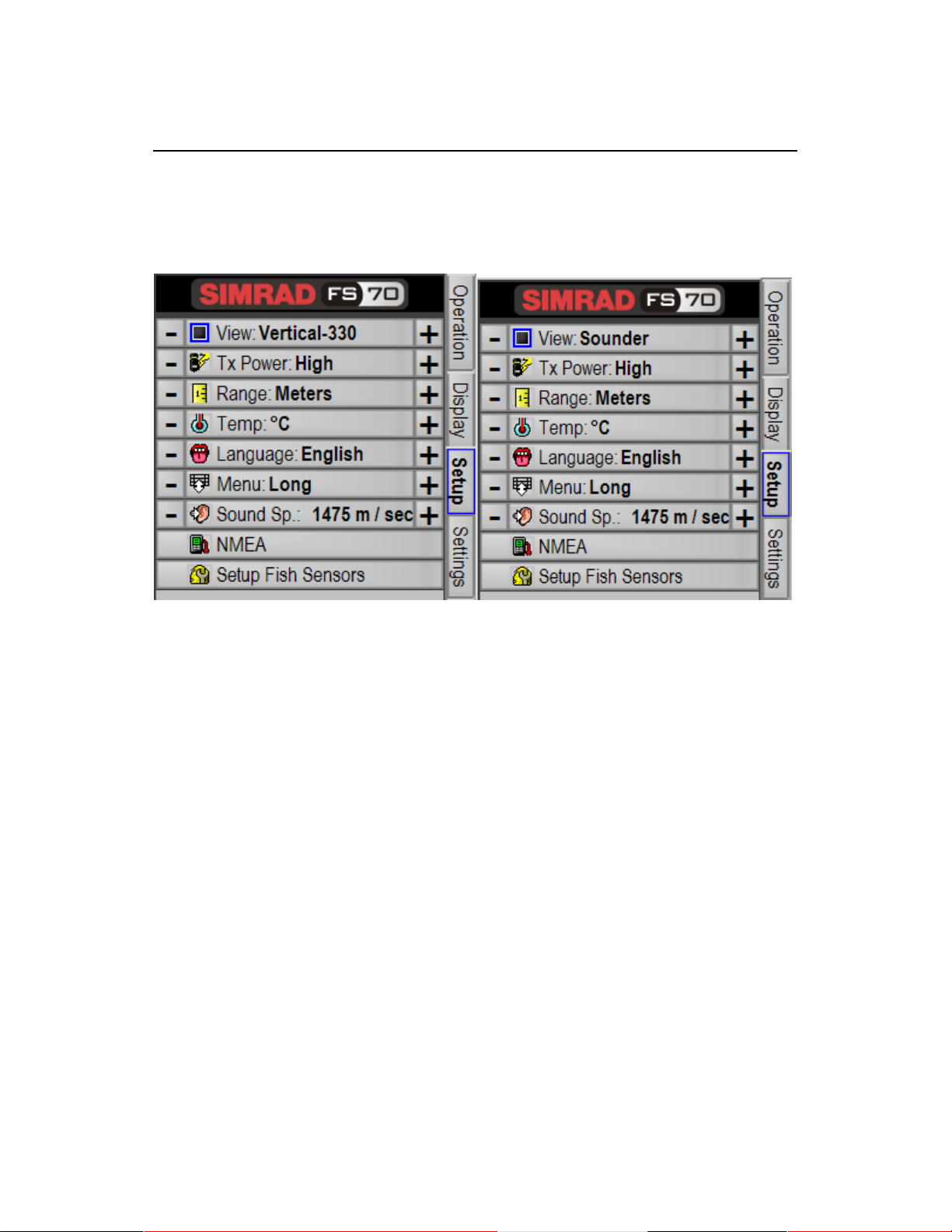
3.2.3 SETUP CONTROL PANEL PAGE
The main “Setup” control panel allows you to select the sonar you want to control. To
change the value of the system parameter just left or right click the mouse over the
button you have selected, move the mouse up or down until the desired button is
highlighted and click the left mouse button or right mouse button to activate the new
setting.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 30
974-24007001/3.0 FS 70 Operators Manual
Page 3.8 FS 70 System Operation
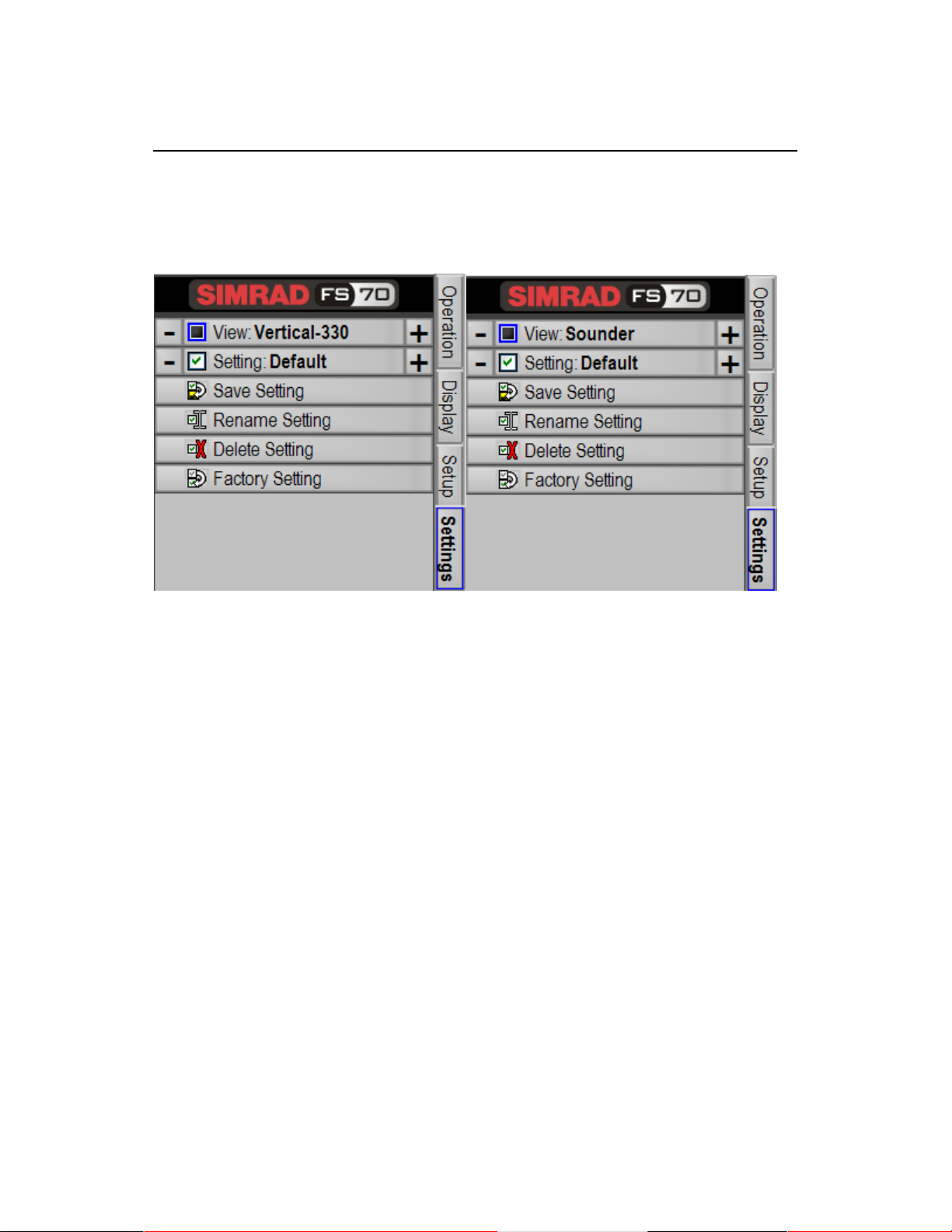
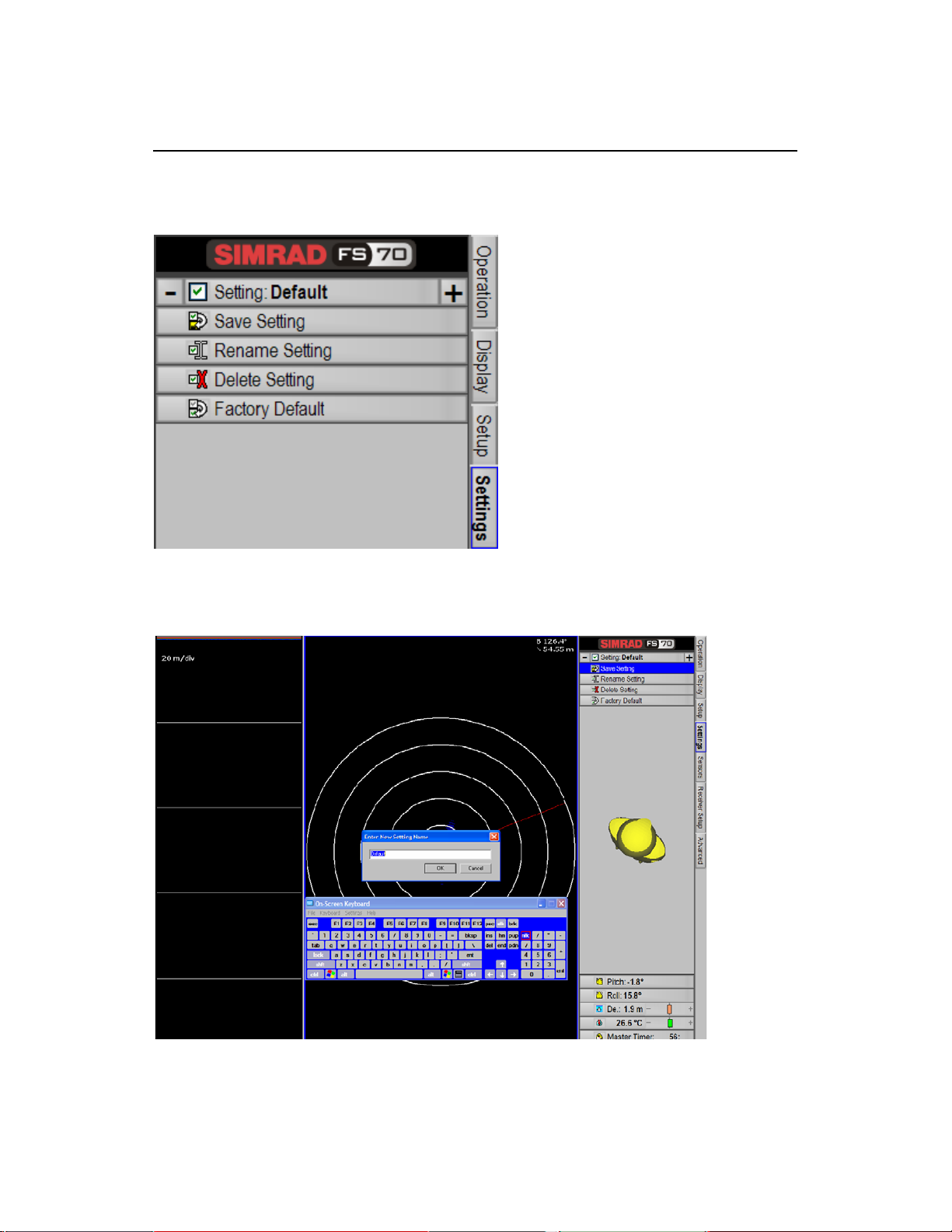
3.2.4 USERS SETTINGS CONTROL PANEL PAGE
The main “Users” control panel allows you to select the sonar you want to control. To
change the value of the system parameter, just left or right click the mouse over the
button you have selected, move the mouse up or down until the desired button is
highlighted and click the left mouse button or right mouse button to activate the new
setting.
Note: When you “Save Setting” you automatically save the setting for the vertical and
the sounder at the same time.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 31

FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.9
3.2.5 SENSORS CONTROL PANEL PAGE & SETUP
The main “SENSORS” control panel allows you to select the sensors you want to
setup. To change the value of the system parameter just left or right click the mouse
over the button you have selected, move the mouse up or down until the desired
button is highlighted and click the left mouse button or right mouse button to activate
the new setting.
By placing the mouse cursor on the “Setup Fish Sensors” button and then left
clicking the mouse, the Fish Sensor Window will pop up as indicated on the following
page. Move the mouse cursor up or down to select the sensor you want to select
and then left click the mouse on the appropriate selection to activate the mode of
operation.
By placing the mouse cursor on the “Sensors Panel” button and then right clicking
the mouse a drop down menu will appear. Move the mouse cursor up or down to
select the location of the sensor panel you want to select. Next left click the mouse
on the appropriate button selection to activate the operation.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 32
974-24007001/3.0 FS 70 Operators Manual
Page 3.10 FS 70 System Operation
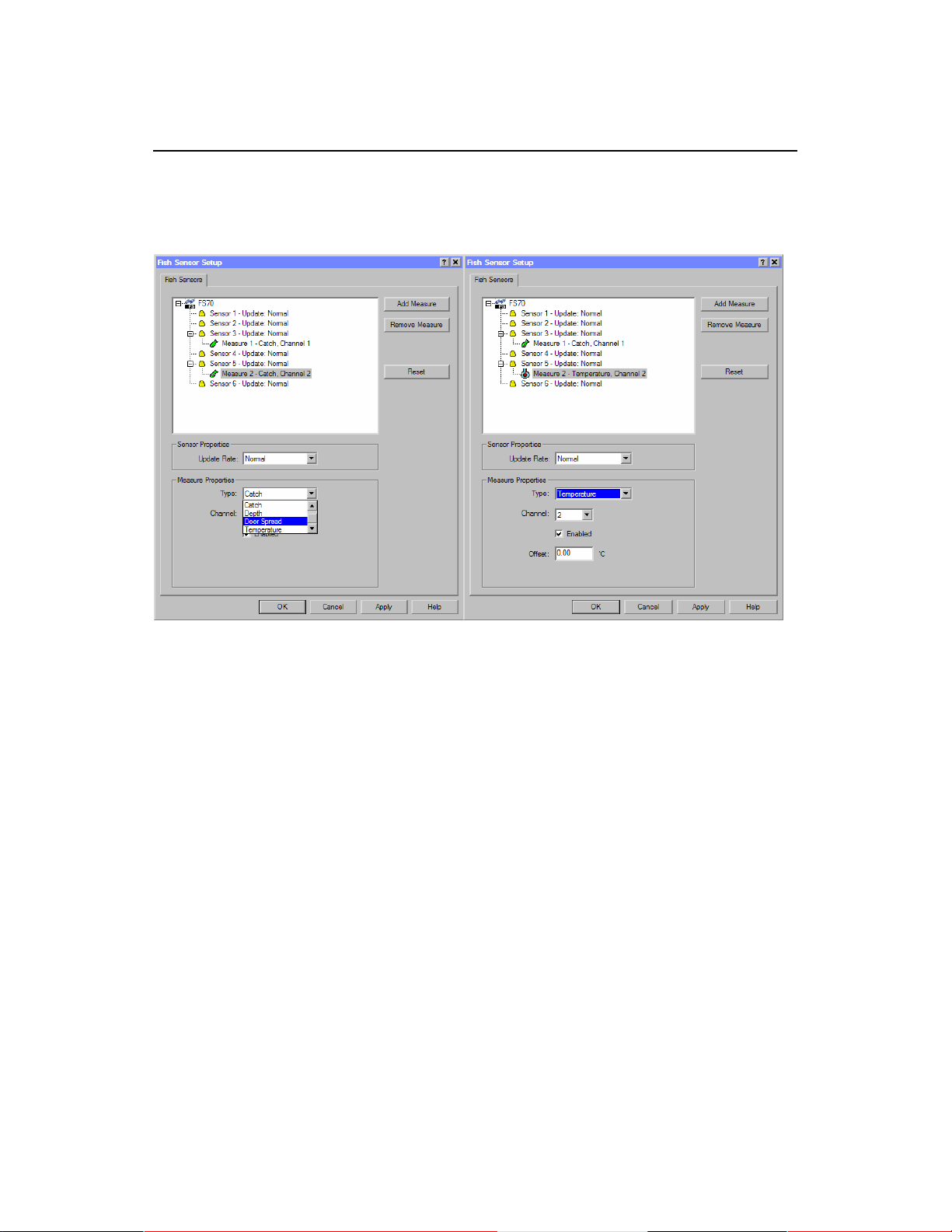
3.2.6 PI, 40KHZ CHANNEL SENSORS SETUP
The next step after the above operation, for example, will be to add a catch sensor.
Click on “sensor 5”; next select Door Spread or catch #2; next you would select the
channel of operation, in this case you would have selected #2.
If you are adding for example a temperature sensor you can setup an offset. see the
windows above for the example.
Note: For additional information on the Simrad PI 30 Setup, please refer to your PI
Instruction Manual.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 33
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.11
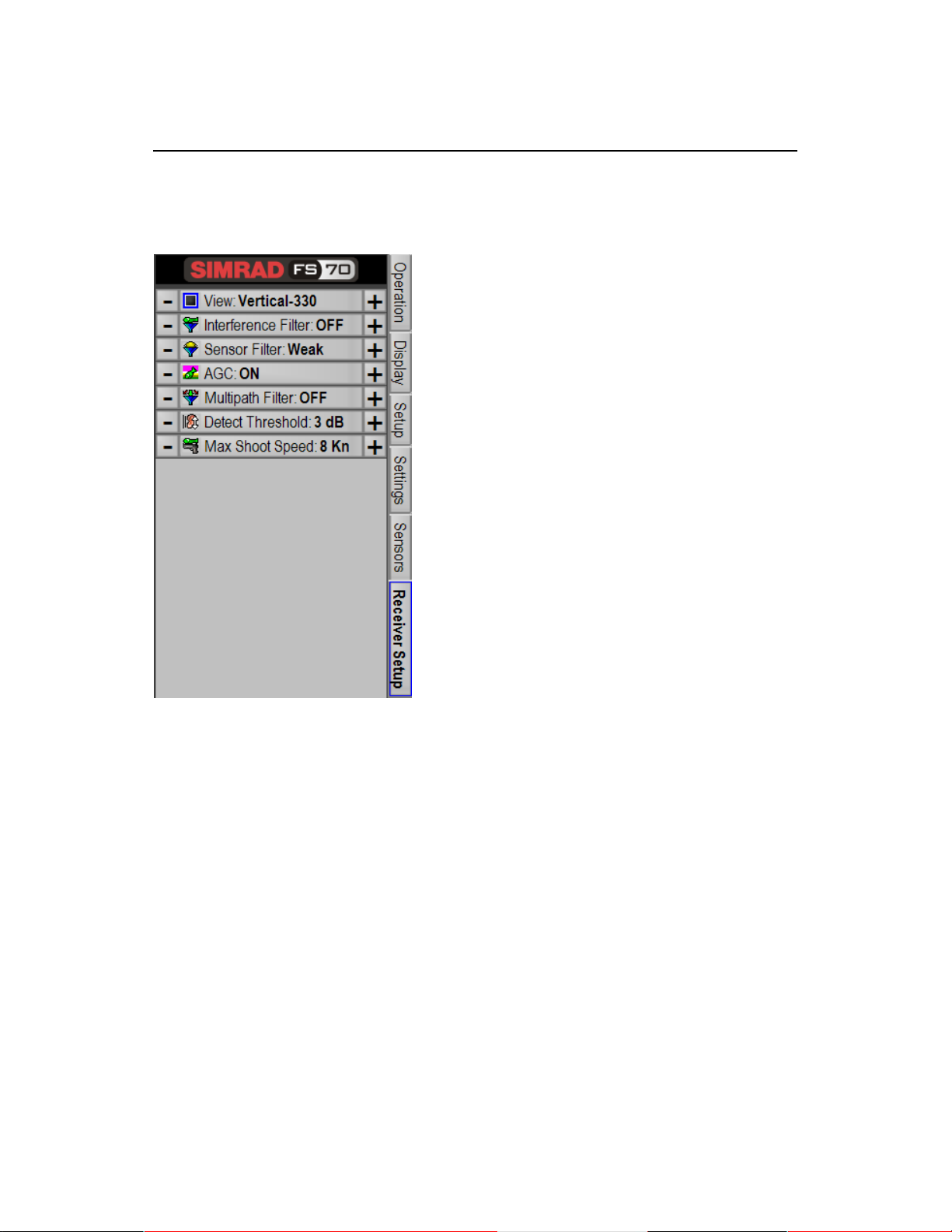
3.2.7 PI, 40KHZ RECEIVER SENSORS SETUP
The main “SENSORS RECEIVER SETUP” control panel allows you to select the
sensors you want to setup. To change the value of the system parameter just left or
right click the mouse over the button you have selected, move the mouse up or down
until the desired button is highlighted and click the left mouse button or right mouse
button to activate the new setting.
Note: For additional information on the Simrad PI Sensors Setup, please refer to
your PI Instruction Manual.
Note: The PI sensor setup menus are not available if you are using a 70kHz Catch
Sensors system.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 34

974-24007001/3.0 FS 70 Operators Manual
Page 3.12 FS 70 System Operation
3.2.8 PI, 40KHZ SENSORS ACTIVATION MENU
The main “SENSORS ACTIVATION MENU” control panel allows you to select the
sensors you want to turn ON or OFF. To change the value of the system parameter
just left or right click the mouse over the button you have selected, move the mouse
up or down until the desired button is highlighted and click the left mouse button or
right mouse button to activate the new setting.
Note: The PI sensor setup menus are not available if you are using a 70kHz Catch
Sensors system. Refer to the following Windows for the 70kHz Catch Sensors
activation setup
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 35
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.13
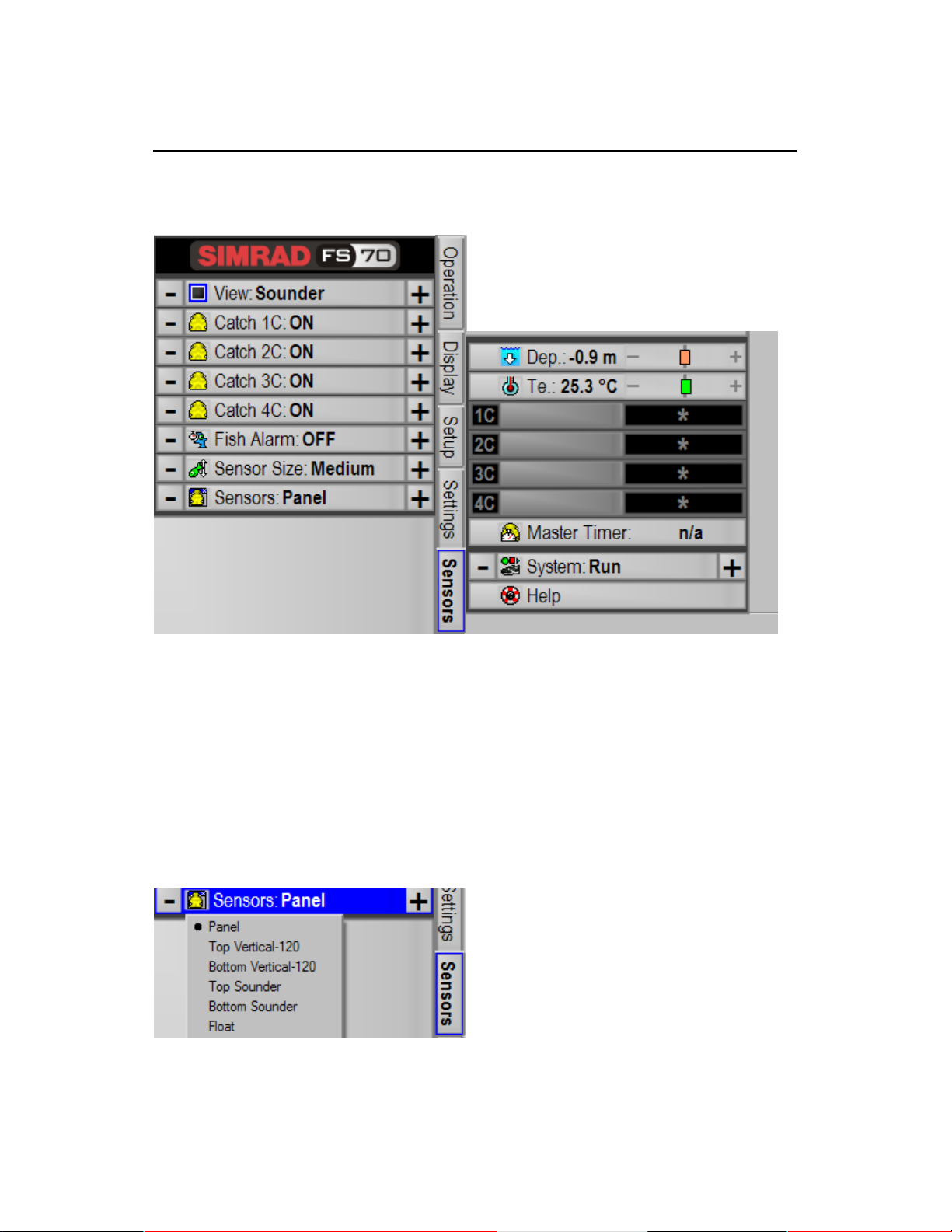
3.2.9 PI, 70KHZ SENSORS ACTIVATION MENU
The Catch Sensor windows will be displayed automatically when you left click on the
Catch Window button located on the Sensors Page. To activate or de-activate
individual Catch Sensors click on the appropriate button.
When you activate a Catch Sensor the sensor information is automatically displayed
in the Control Panel,
Note: Refer to the following windows. As indicated you may change the location of
the sensors panel.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 36

974-24007001/3.0 FS 70 Operators Manual
Page 3.14 FS 70 System Operation
3.2.10 ADVANCED PANEL PAGE
The main “Advanced” control panel allows you to select the sonar you want to
control. To change the value of the system parameter just left or right click the
mouse over the button you have selected, move the mouse up or down until the
desired button is highlighted and click the left mouse button or right mouse button to
activate the new setting.
3.2.11 ADVANCED OPERATION TVG MODE
Example of some of the controls located in the Advance panel
By placing the mouse cursor on the mode button and then right clicking the mouse a
drop down menu will appear. Move the mouse cursor up or down to select the TVG
mode of operation you want to select and then left click the mouse on the
appropriate TVG selection to activate the mode of operation.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 37

FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.15
3.2.12 DISPLAY REC TOOLBAR
Place the mouse cursor on the Record “REC” Toolbar button, and then right click the
mouse to enable the Record Toolbar ON or OFF. The Toolbar will automatically popup on the left side of the screen. Move the mouse cursor up or down to select the
RECORD mode of operation you want then left click the mouse to activate the
recording.
3.2.13 RECORD SELECTION
When the RECORD mode is activated the following windows will appear. Click on
the “Select File” and type the name of the file you want to record. Next click OK.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 38

974-24007001/3.0 FS 70 Operators Manual
Page 3.16 FS 70 System Operation
3.3 DISPLAY Tools SELECTION
By placing the mouse cursor on the TOOLS button and then right clicking the mouse,
a drop down menu will appear. Move the mouse cursor up or down to select the
TOOL of operation you want to select. Next left click the mouse on the appropriate
TOOL selection to activate the operation.
3.4 DEPTH AND TEMPERATURE GRAPHS
To activate the Depth or the Temperature graphs you must right click the mouse on
the center of the sonar image. The following menu will pop-up. Move the mouse
pointer up or down and then left click the mouse button to display the appropriate
window
Note: Additional information from the above menu can also be displayed.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 39
FS 70 Operators Manual 974-24007001/3.0
FS 70 System Operation Page 3.17
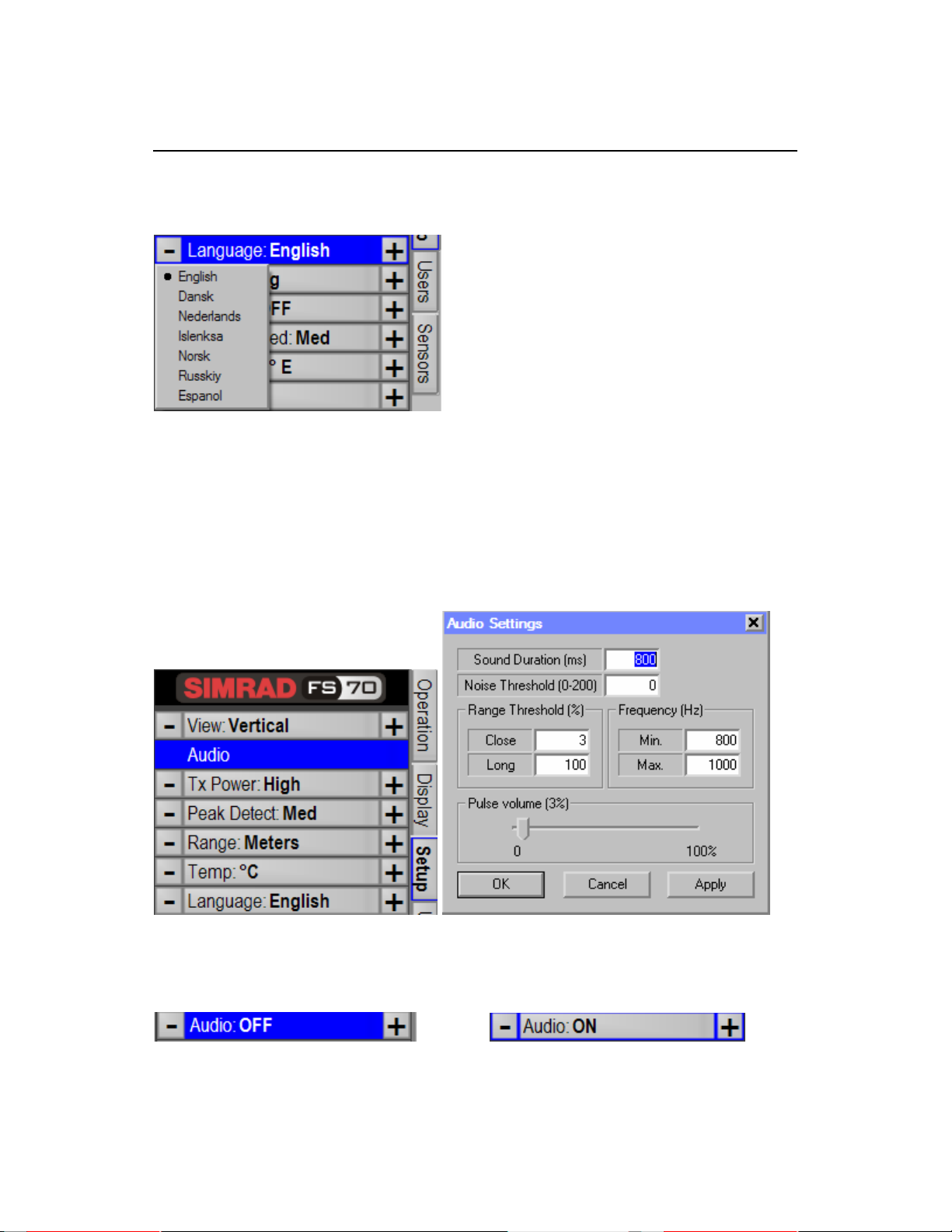
3.5 LANGUAGE
By placing the mouse cursor on the Language button and then right clicking the
mouse a drop down menu will appear. Move the mouse cursor up or down to select
the language of operation you want to select and then left click the mouse on the
appropriate selection to activate the language of operation.
3.6 AUDIO SET UP
Right Click on the “AUDIO” button located in the SETUP Page to open the Audio
Settings dialog window. After you have completed your changes. Click “Apply”. If
you are satisfied with your selection, Click “OK”
Next, go to the “Operation Page” to turn OFF or ON the Audio.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 40
974-24007001/3.0 FS 70 Operators Manual
Page 3.18 FS 70 System Operation
3.7 ACTIVATING THE SONAR
When you click on the Run button the system will initialize the serial port. and start
the calibration of each sonar head connected to the TTM module. When you click the
Stop button you will automatically disconnect the sonar heads from the system.
Note: If you only want to “PAUSE” the sonar image, just right click the mouse on the
Sonar “Run/PAUSE” Button located on the Operation Page. Left click the mouse to
“RUN” the system.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 41

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.1
PART 4
FS 70 INSTALLATION,
SYSTEM SET-UP AND TEST
4. FS 70 INSTALLATION, SYSTEM SET-UP AND TEST...................................4.3
4.1 INSTALLATION PROCEDURE.....................................................................4.3
4.2 SURFACE UNIT ELECTRONICS INSTALLATION.......................................4.3
4.2.1 Mounting of Units ...................................................................................4.3
4.2.2 Power Considerations............................................................................ 4.4
4.2.3 Connecting a Display Unit...................................................................... 4.4
4.2.4 Connecting the TTM Module..................................................................4.5
4.2.5 Selecting AC Input Supply Voltage ........................................................4.5
4.2.6 Connecting the Processing Unit............................................................. 4.6
4.2.7 Connecting an Echo Sounder ................................................................ 4.7
4.2.8 FS 70 Heading Sensor Installation Procedure.......................................4.7
4.2.9 Selecting the Trawl Output Voltage........................................................4.8
4.2.10 Connection to Cable Winch/Slip-Rings............................................... 4.9
4.3 ASSEMBLING OF TRAWL UNIT..................................................................4.9
4.3.1 FS 70 Configuration ............................................................................... 4.9
4.4 SYSTEM SET-UP AND TESTING USING TEST CABLE...........................4.10
4.4.1 Start Up................................................................................................ 4.10
4.4.2 Power-Up Configuration.......................................................................4.10
4.4.3 FS 70 Start-up Procedure ....................................................................4.11
4.4.4 FS 70 RUN UP Procedure ...................................................................4.14
4.4.5 Advanced Menu Display Settings ........................................................4.15
4.4.6 Control Setting ..................................................................................... 4.15
4.4.7 Head Sensors Setting .......................................................................... 4.17
4.4.8 FS 70 Head Setting.............................................................................. 4.18
4.4.9 Transmit Setting................................................................................... 4.19
4.4.10 TVG Page Setting............................................................................. 4.20
4.4.11 Info....................................................................................................4.21
4.4.12 Sensors Page................................................................................... 4.22
4.4.13 Auxiliary Transducer (Net Sounder) ................................................. 4.23
4.5 SAVE USER SETTING ...............................................................................4.24
4.5.1 Add User Setting..................................................................................4.25
4.5.2 Final System Test ................................................................................ 4.26
4.5.3 Completing the Trawl Unit Assembly ...................................................4.26
4.5.4 Mounting CATCH SENSORS ..............................................................4.27
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 42

974-24007001/3.0 FS 70 Operators Manual
Page 4.2 FS 70 Installation, System Set-Up and Test
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 43

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.3
4. FS 70 INSTALLATION, SYSTEM SET-UP AND TEST
4.1 INSTALLATION PROCEDURE
The installation of the FS 70 Trawl Monitoring System involves the following steps:
• Deciding on the locations in the wheel house for the surface units.
• Mounting the surface units and making the connections between the FS 70
Processor, the display unit, the FS Power Supply/TTM interface unit, and other
optional equipment being installed.
• Assembling the trawl unit.
• Running up the system on the test cable to verify proper installation, configuring
the control unit, and performing initial system tests.
• Installing the cable winch, snatch block and trawl cable, and connecting the
winch slip-rings to the control unit.
• Mounting the trawl unit to the headrope and completing the final system test.
• Mounting the catch sensors to the cod-end of the trawl and other PI sensors.
4.2 SURFACE UNIT ELECTRONICS INSTALLATION
4.2.1 Mounting of Units
If you have selected the FS Integrated Rack Mounted System, you can install the
cabinet up to 30 meters from the monitors. With a KVM extender option you can
install the cabinet up to 150 meters away from the monitors. If not, you will have to
follow the procedure indicated below.
The display unit should be located in the wheel house in a place that provides a good
view of the screen and avoids direct sunlight if possible. Depending on the monitor
that was selected the unit may be mounted on top or recessed into the bridge console.
Simrad supplied display units include the necessary mounting brackets.
If you have not selected the Rack Mounted System, the FS 70 Processing unit should
be mounted in close vicinity to the operator's position in the wheel house and near the
display unit. The unit may be mounted on top of the bridge console or recessed into a
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 44
974-24007001/3.0 FS 70 Operators Manual
Page 4.4 FS 70 Installation, System Set-Up and Test
cabinet. Note: You must have access to the ON/OFF switch and provide proper
ventilation to avoid overheating.
The Power Supply/TTM interface module supplied with the system may be mounted on
top of the bridge console or recessed and flush mounted into the bridge console.
Sufficient space should be left around the control unit for proper ventilation.
Optional equipment for interface to the control unit may be mounted in any convenient
location provided the user supplied interconnect cables are of sufficient length and the
required power is available.
Note:
The Processing Unit and the Power/TTM must be connected to a dedicated UPS.
4.2.2 Power Considerations
The display unit, generally, will require 120 VAC or 230 VAC. Depending on the
capabilities of the unit chosen, it may automatically detect the supply voltage or the
unit may have to be ordered for the correct voltage.
The FS 70 Processor will operate from either 120 VAC or 230 VAC. Voltage selection
must be selected, a voltage input selector switch is located at the rear of the unit. Note:
Some of the processors are equipped with auto detection voltage input. Failure to
select the proper Input voltage will damage the internal power supply.
The FS Power Supply/TTM module can be operated with either 120 VAC or 230 VAC.
Selection of the supply voltage is done by moving the voltage selector card located in
the power entry module at the rear panel. Details on selecting the proper voltage are
indicated on the voltage card. You must position the “indicator pin” location to the
desired voltage. The safety fuses must also be changed to the proper rating.
4.2.3 Connecting a Display Unit
Either an LCD VGA monitor or a Simrad LCD monitor may be connected to the FS
70 Processor. Depending on which type of monitor is used, the video output type
must be set accordingly.
An industry standard VGA monitor will connect directly to the miniature DB-15
connector located on the rear panel of the control unit.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 45
FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.5
The FS 70 Processor Unit has a Dual NVIDIA Quadro Video interface card installed as
standard equipment. You must set up your display software as per your requirement. If
you have only one monitor, simply plug your monitor cable into the monitor connector
marked “Connector 1” on the adapter card. If you are using two monitors, you must
connect the 2
nd
monitor to the “Connector 2” on the adapter card.
Note!
The FS 70 Processor must be is turned “OFF” prior to connecting the video
monitors
A User Guide manual is provided with the system including a Recovery CD-ROM. With
this CD you can recover your system as delivered and run the diagnostics.
Note:
The Dual NVIDIA software is installed at the factory, you only have to set up your
monitor configuration as per Window’s XP or Window’s Server.
4.2.4 Connecting the TTM Module
The TTM interface module comes with the long line power supply incorporated in
one unit, thus making the installation easier.
The Front Panel comes with an ON/Off switch, trawl DC output voltage meter,
amperage meter and a four position trawl voltage rotary selection switch. The
possible selections are; “OFF”, “TEST”, “120VDC and 200VDC”. A “TEST/TRAWL”
selector switch and test cable connector is also provided in the front panel.
The Rear Panel of the TTM module comes with the AC 110/230 power input, master
ON/OFF switch and fuse located in the AC power entry module, an RS232 serial port
“A”, “B” and “C” including the 3
rd
wire trawl cable connector.
4.2.5 Selecting AC Input Supply Voltage
You must select and position the line voltage card located inside the power entry
module to the desired position.
To change the input line voltage, use a small blade screwdriver and pop the cover.
Pull the voltage selector card straight out from the housing, and place the indicator
pin to the selected voltage. Reinsert the card, reinstall the cover and verify that the
indicator shows the desired voltage. You must insure that the proper fuse rating is
installed, 2 Amp for 230Vac and 4 Amp for 110Vac. Spare fuses are supplied with
the TTM module.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 46
974-24007001/3.0 FS 70 Operators Manual
Page 4.6 FS 70 Installation, System Set-Up and Test
4.2.6 Connecting the Processing Unit
The FS 70 Processor unit comes with the FS 70 Trawl Sonar System operating
software installed by the factory.
Note!
All Device drivers and utilities are preloaded on your system and
provided on a Driver, Utilities and documentation CD-ROM. This
CD-ROM also includes tips for re-installing the operating system.
If you have not selected the Rack Integrated Mounted System, mount the FS
Processing unit with easily accessible power outlet and enough space for the display,
keyboard, mouse, TTM module, and any other accessories. The connectors are
shaped to go in one way only.
For additional information, please refer to the User’s Guide supplied with the system.
Before applying the power to the processing unit, if required
ensure that the proper AC input voltage has been selected.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 47
FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.7
Connect the serial RS 232 Port “A” from the Power Supply/TTM module using the
RS232/USB dual channels telemetry converter part number 901-80010000 supplied
with the TTM module or connect the 2 meter RS232 crossover cable also supplied with
the system. (Note: The preference would be the USB converter). Connect the 2 meter
USB adaptor supplied cable to the RS232/USB telemetry converter and to a USB port
located at the rear of the processing unit.
Connecting the Dongle
Connect the security key “USB Dongle” to a USB port located at the rear of the
processing Unit.
Connecting a GPS
If you have to connect the GPS NMEA 183 output to the serial port at the rear of the
processing Unit. The Interconnect cable is not supplied.
The pin connections for your DGPS input/output PC/RS232 are as follows:
Pin number “2” 232 Rx, Pin number “3” 232 Tx, and Pin number “5” GND.
Note: If you require additional USB ports at the rear of the Processing Unit, you may
buy a USB HUB Locally.
4.2.7 Connecting an Echo Sounder
The FS 70 Processor Unit may be connected to an echo sounder for display of the
trawl unit depth on the sounder. This is made via the RS232 serial port on the rear
panel of the Processing Unit or an RS232/USB converter. The processor will output
the Temperature and the Depth from the trawl integrated sensor module in a NMEA
0183 format.
If port “B” is not available you will have to install an additional serial card or install an
RS232/USB external converter. The recommended type of serial card to install and
the installation procedure are provided in the Processing Unit Owner’s Manual
available on request.
4.2.8 FS 70 Heading Sensor Installation Procedure
If you need to connect a heading sensor output to the serial port at the rear of the
processing unit, you will have to install an additional serial card in the Processing Unit
or install an RS232/USB converter. The recommended type of serial card to install and
the installation procedure are provided in the Processing Unit Owner’s Manual
available on request.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 48
974-24007001/3.0 FS 70 Operators Manual
Page 4.8 FS 70 Installation, System Set-Up and Test
The pin connections for your heading sensor input/output PC/RS232 are as follows:
Pin number “2” 232 Rx, Pin number “3” 232 Tx, and Pin number “5” GND.
Your FS 70 Processing Unit comes equipped with a Network LAN interface adapter.
The LAN adapter provides two (2) ports. Both ports support 10Mbit/s and 100Mbit/s
operations and automatically detect which network type is being used. The RJ-45
plugs into your FS 70 workstation. LAN cables are not supplied with the system.
For additional information, please refer to the User’s Guide supplied with the system.
Warning!
Before applying the power to the processing unit, ensure that the
proper AC input voltage has been selected.
4.2.9 Selecting the Trawl Output Voltage
You must select the proper trawl voltage in accordance with the under water trawl
unit system you are using,
A- In the “OFF” position, no voltage is applied to the trawl cable.
B- In the “TEST” position, 60 VDC will be provided to the trawl cable. Note: The
“TEST” position is provided for the old FS 3300, 1000 meter sonar head. You
must connect the test cable supplied with the system to the front panel
connector of the TTM marked “TEST CABLE” and position the Trawl/Test
switch located on the front panel of the TTM module to “TEST”.
C- In the 120VDC position, 120 VDC will be provided to the trawl cable. The
120VDC is provided to run all FS3300, 1800 meter sonar head. The same
procedure should be used to test an FS3300 1800 meter head as indicated in
paragraph “B”
D- In the 200VDC position, 200VDC will be provided to the trawl cable. The
200VDC is provided to run all TS10, TS15, TS15S and the FS70 sonar
heads.
Note: To Test a TS10, TS15, TS15S and FS70 sonar head. Position the trawl
voltage switch to 120VDC, connect the test cable supplied with the system to
the front panel connector of the TTM marked “TEST CABLE”, and position
the Trawl/Test switch located on the front panel of the TTM module to
“TEST”.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 49
FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.9
4.2.10 Connection to Cable Winch/Slip-Rings
The connection between the FS TTM Interface unit and the cable winch/slip-rings
should be made with an 18 GA., or heavier, shielded twisted pair cable. The
connection to the control unit is made using the 3-pin MS connector supplied in the
TTM module accessory kit. To minimize noise interference on the cable, the shield
of the cable should be attached to the connector.
Note!
The shield of the cable between the FS TTM module and the slip-
rings should be connected at the TTM module, but NOT at the
slip-rings.
4.3 ASSEMBLING OF TRAWL UNIT
Assembling the trawl unit for the first time should be conducted in the wheel house
where the surface unit electronics have been mounted. This will facilitate testing the
trawl unit using the test cable.
Note!
WARNING
Make sure you have selected the trawl voltage for the appropriate sonar head
4.3.1 FS 70 Configuration
The FS 70 trawl configurations all consist of an FS 70, 120kHz or 330kHz vertical
sonar head with a 200kHz echo sounder, an FS 70 sensor module is integrated in
the trawl sonar head. The FS 70 polyurethane housing includes mounting and
assembling hardware and a strain relief. The trawl unit also contains a catch receiver
unit and the echo sounder transducer. Assembly of the unit involves correctly
locating the sonar head, attaching the strain relief to the trawl cable, proper routing
and connection of the cable to the sonar head and bolting the polyurethane housing
together. This section describes the connection and location of the sonar head, the
sensor module and catch receive transducer. Final assembly is illustrated in Part 6
“Drawings”.
A locating block located at the end of the housing or a guide bracket is used to prevent
the sonar head from rotating. Only one guide block is required and it can be placed
into the positioning hole of the bottom half of the trawl unit housing. As shown in the
assembly drawing in Chapter 6,
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 50
974-24007001/3.0 FS 70 Operators Manual
Page 4.10 FS 70 Installation, System Set-Up and Test
Note!
Incorrect placement of the sonar head, may result in movement
of the sonar head that could damage the transducer and/or drive
shaft and result in water damage to the entire unit.
Note!
Dow Corning #55 grease must be applied to all mating surfaces
of underwater connectors to insure proper sealing. Sufficient
grease should be applied so that excess squeezes out with any
air when the connectors are mated. RTV or any other sealant
must NOT be used, and when tightening the locking sleeves, do
NOT use a wrench or pliers! See chapter 5, "Troubleshooting and
Maintenance", for proper connector maintenance.
4.4 SYSTEM SET-UP AND TESTING USING TEST CABLE
Initial power-up, set-up and test of the system should be made with the trawl unit in
the wheel house connected to the PWR/TTM module using the supplied test cable.
The 3-pin MS connector of the test cable is attached to the connector labeled “TEST
CABLE” located on the front panel of the PWR/TTM unit. The other end of the test
cable is plugged into the 2-pin connector on the sonar head of the trawl unit.
4.4.1 Start Up
1. Check that the system has been properly installed and that all connections have
been made to the PWR/TTM and the Processing Unit.
2. First turn on the PWR/TTM interface module. The voltmeter should display
approximately 120 volts if on “120VDC” setting, 200 volts if on the “200VDC”
setting and approximately 60 volts if on “TEST” setting. The current meter
should read approximately 0.15 – 0.7 amps if everything is okay.
3. Next turn on the display monitor, and then turn on the processing unit. The
system will start up automatically.
4.4.2 Power-Up Configuration
For the system to operate properly the trawl unit configuration must be selected
correctly. In addition, modification of these power-up configuration parameters is
done in a special mode selected after power-up of the Processor unit.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 51

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.11
The following sections describe the process of configuring these parameters. These
steps must be followed only when the system is powered-up for the first time or when
you have to replace the Processing unit or the TTM Module assembly.
4.4.3 FS 70 Start-up Procedure
For the purpose of demonstrating the Start-up Procedure in this chapter, we are
using the recommended Processing Unit that has 2 Com Ports, Com 1 and Com 3.
The Com 1 and COM 3 Ports from the Processing Unit are not connected to the FS
TTM module RS 232 port “A”. No communication will be made from the Com 1 or
Com 3 to the TTM module. We will be using an RS232/USB telemetry converter
“KML-USB1” connected to the “A” port of the TTM module
We will be using an FS 70, 120kHz/40kHz Catch Trawl Sonar Head with the 200kHz
net sounder option with the integrated sensor module.
Configuring the System for the first time, or if you have replaced the Processing Unit
or the TTM Module, you will select and “Click” on “Setup Page” and then the
following window will pop up.
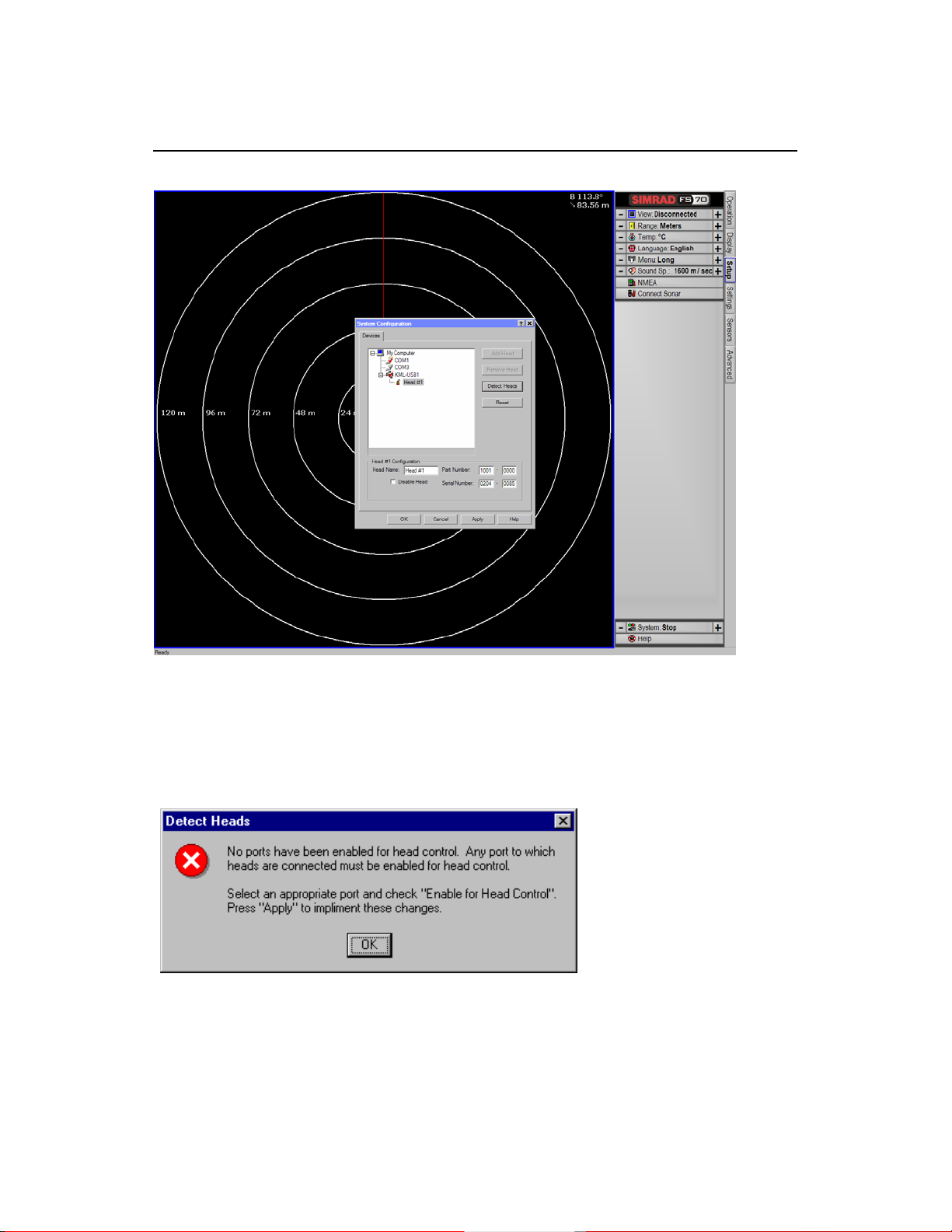
Next: Select “Connect Sonar” menu and “Click”. The following “System
Configuration” window will pop up, next “Click” on “Detect Heads”.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 52
974-24007001/3.0 FS 70 Operators Manual
Page 4.12 FS 70 Installation, System Set-Up and Test
After the “Detect Heads” the above Window will pops up, note that no Com ports
have not been enabled yet (and red check mark beside Com port). And If you “Click”
on “Detect Heads” from this position, the following warning window will pop up.
This warning window indicates that “No Ports have been enabled”; just “Click” “OK”.
The “System Configuration” window will reappear. Use the mouse to highlight KMLUSB 1. Use the mouse to “Enable for Head Control” (Left button click, check mark in
box to enable).
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 53

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.13
“Click” on “Apply”. The following window will appear, overlaying the above window,
asking you to reboot the computer. Just “Click” “OK” and do not “Reboot the
computer now”; “Click” “OK” in the “System Configuration” window.
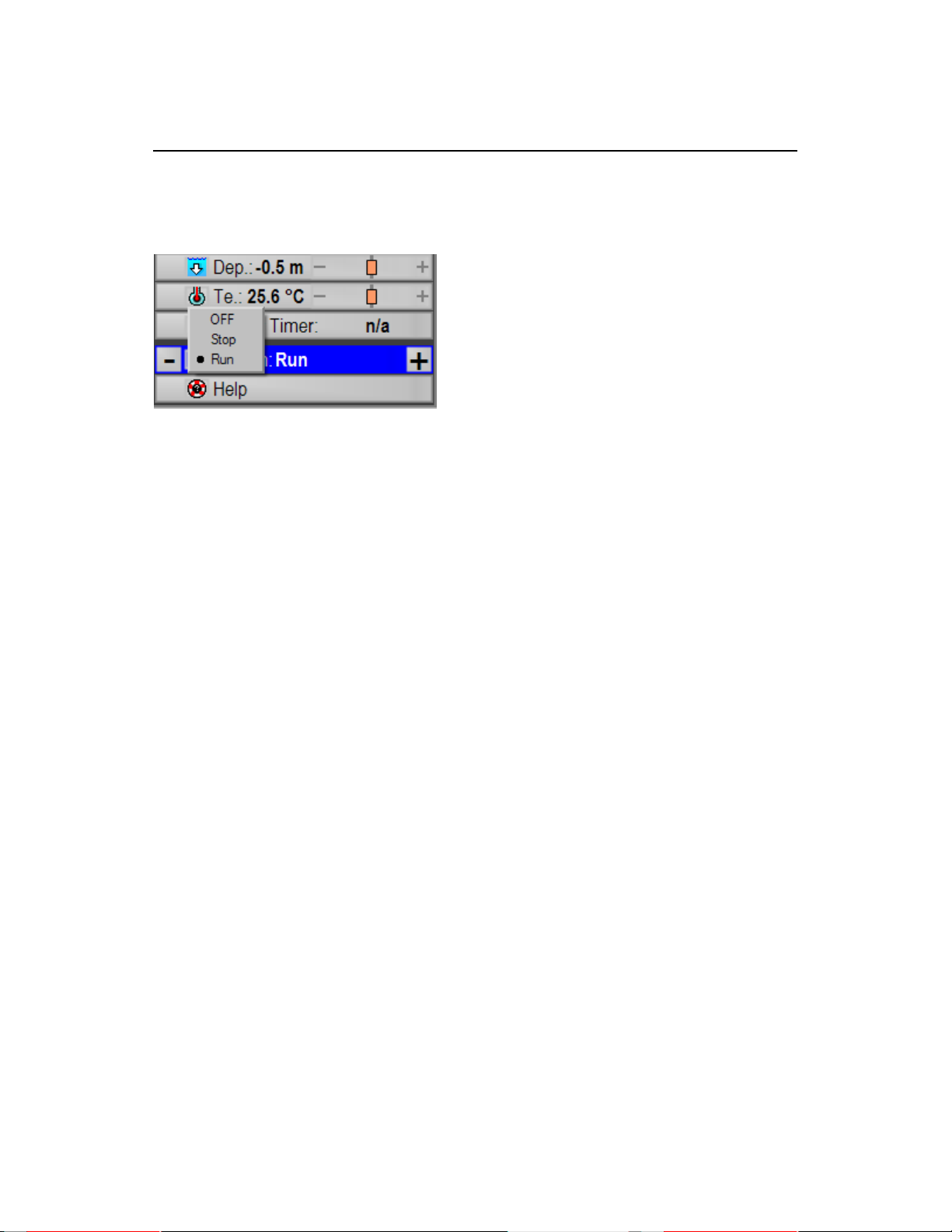
From the Operating Panel, position the mouse to highlight “System Stop” located at
the bottom of the panel, next, left Click on “Stop” and a “Off, Stop, Run and playback
window will pop up. To start the System, position the mouse on the “Run” bottom
and Click.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 54

974-24007001/3.0 FS 70 Operators Manual
Page 4.14 FS 70 Installation, System Set-Up and Test
4.4.4 FS 70 RUN UP Procedure
After you Click on the “Run” Icon, the system will automatically detect and setup the
sonar heads attached to the trawl cable. This operation will take approx. 40 sec.
After the system Run Up is completed the best way to setup your windows is to Click
on the separation window line and drag “Tile Windows”. By clicking on the individual
window, you can rearrange, change the size, as you prefer, etc.
The first step after a successful power up is to configure the system for the desired
“User Setting” operating mode and set-up, if not already done; you will automatically
select “Default”. Clicking on “Default” or clicking on specific types of fishery does
this. Refer to the following window. From this point on we will be using all Factory
Default setting
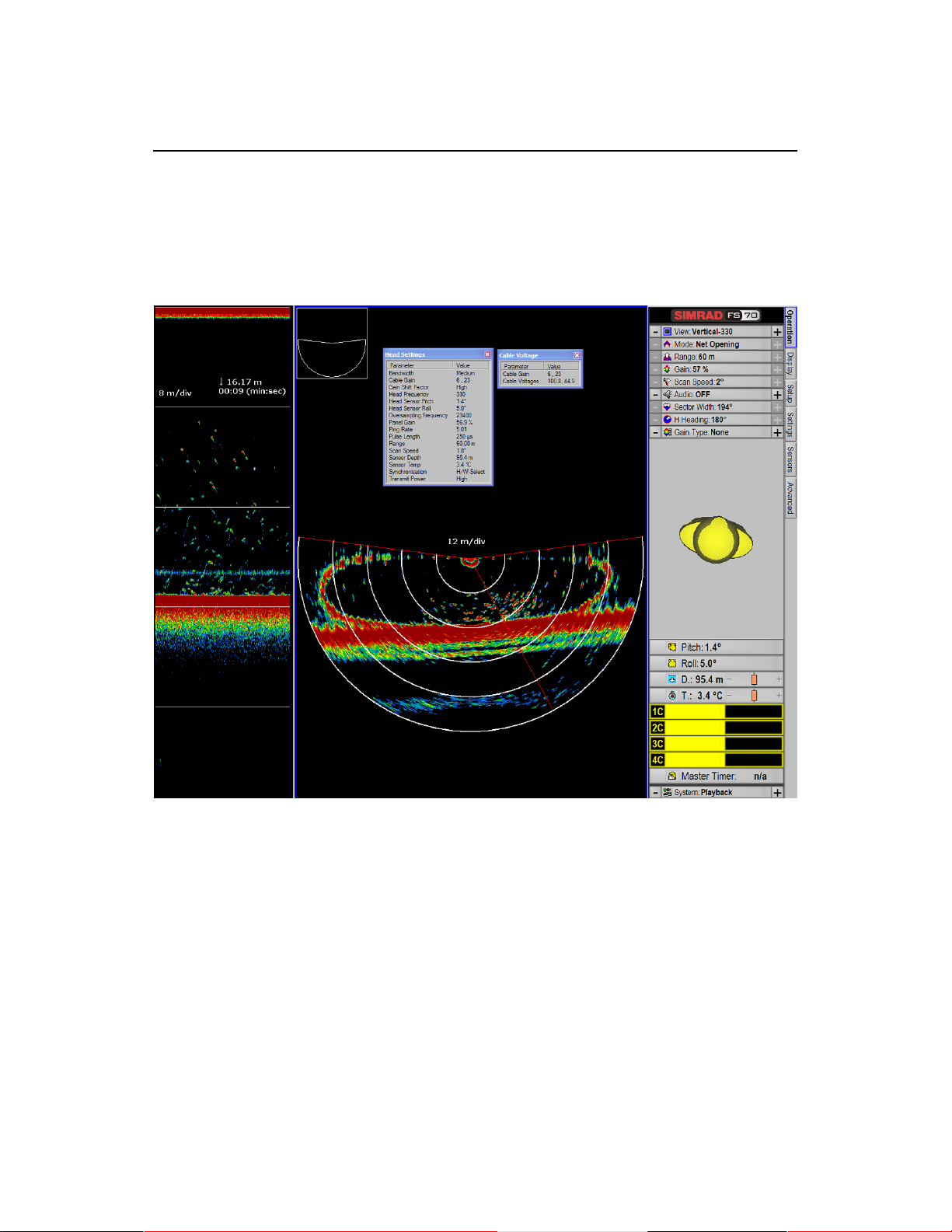
By clicking on the “Vertical Window” of the Sounder Window you will have control
over the selected Sonar. The sonar you have selected will be highlighted by a blue
bar across the top..
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 55
FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.15
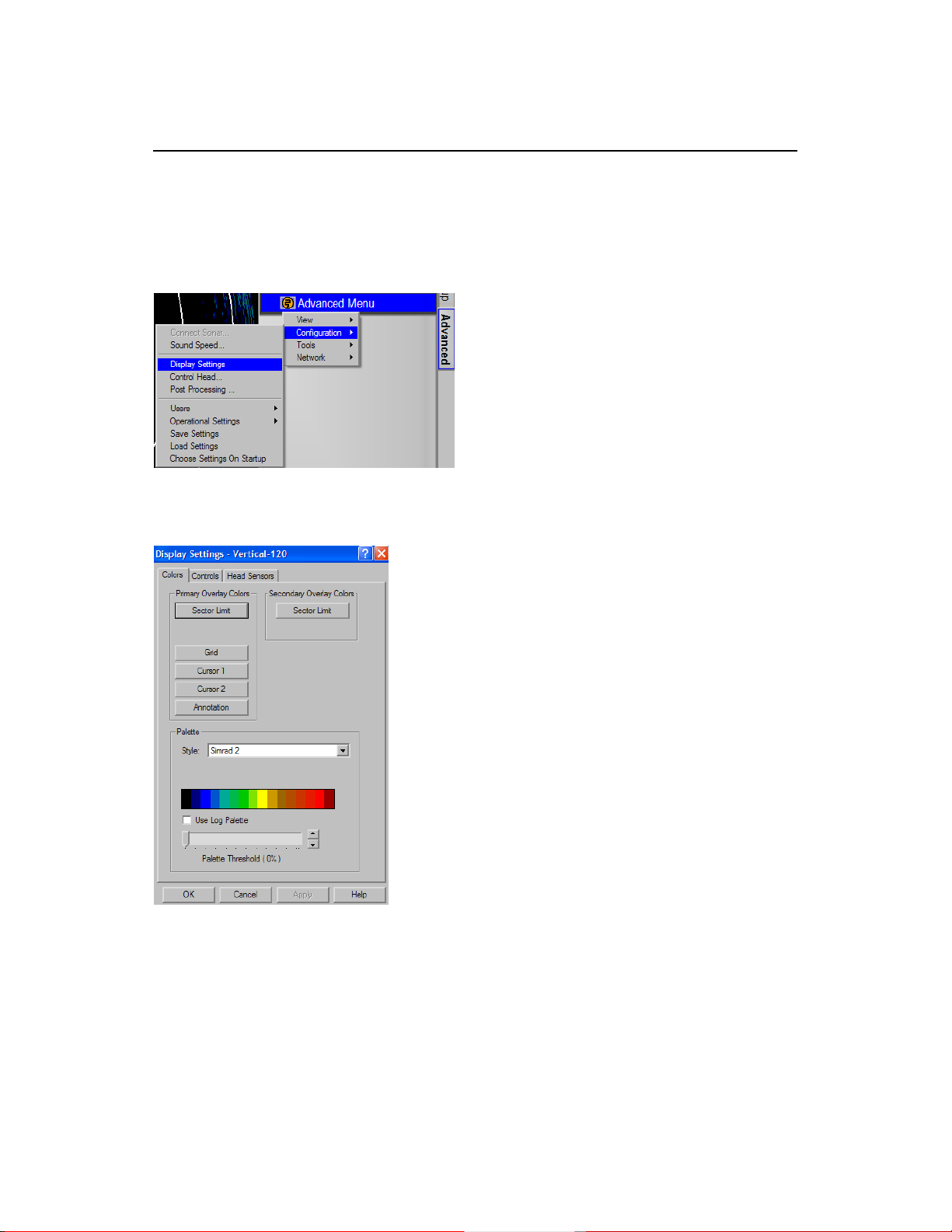
4.4.5 Advanced Menu Display Settings
Position the cursor on the “Display Settings” Icon, and Click. The window below will
pop up.
By selecting the appropriate “Key”, you will be able to setup your Colors, Controls
Setting and the Head Sensors.
By clicking on the appropriate “key” you will be able to change the color i.e. Overlay
colors, Palette styles and threshold, etc.
The same operation will apply to the FS Sounder window.
4.4.6 Control Setting
By selecting and clicking on the “Control” key on the above window, the following
window will pop up.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 56

974-24007001/3.0 FS 70 Operators Manual
Page 4.16 FS 70 Installation, System Set-Up and Test
By clicking on the appropriate key, you will be able to setup your control setting, i.e.
Gain Control, RX Gain, Scan Marker, etc.
Note: The “Timer Control” will be turned “ON” automatically when you Click on Timer
located on the “Menu Control Panel”.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 57

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.17
4.4.7 Head Sensors Setting
By selecting and clicking on the “Head Sensors” key on the following window will pop
up.
By clicking on the appropriate key, The Depth and Temperature range can also be
changed.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 58

974-24007001/3.0 FS 70 Operators Manual
Page 4.18 FS 70 Installation, System Set-Up and Test
4.4.8 FS 70 Head Setting
Position the cursor on the “Control Head” Icon, and CLICK. The window below will
pop up.
By clicking on the appropriate “KEY”, you will be able to setup your Scan option. You
also have full control of the Scan mode via the operator control panel.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 59

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.19
4.4.9 Transmit Setting
By selecting and clicking on the “Transmit” key on the above window, the following
window will pop up.
By clicking on the appropriate key, you will be able to setup your Transmitter
configuration in order to optimize fish detection.
The same operation will apply to the FS Sounder Window.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 60
974-24007001/3.0 FS 70 Operators Manual
Page 4.20 FS 70 Installation, System Set-Up and Test
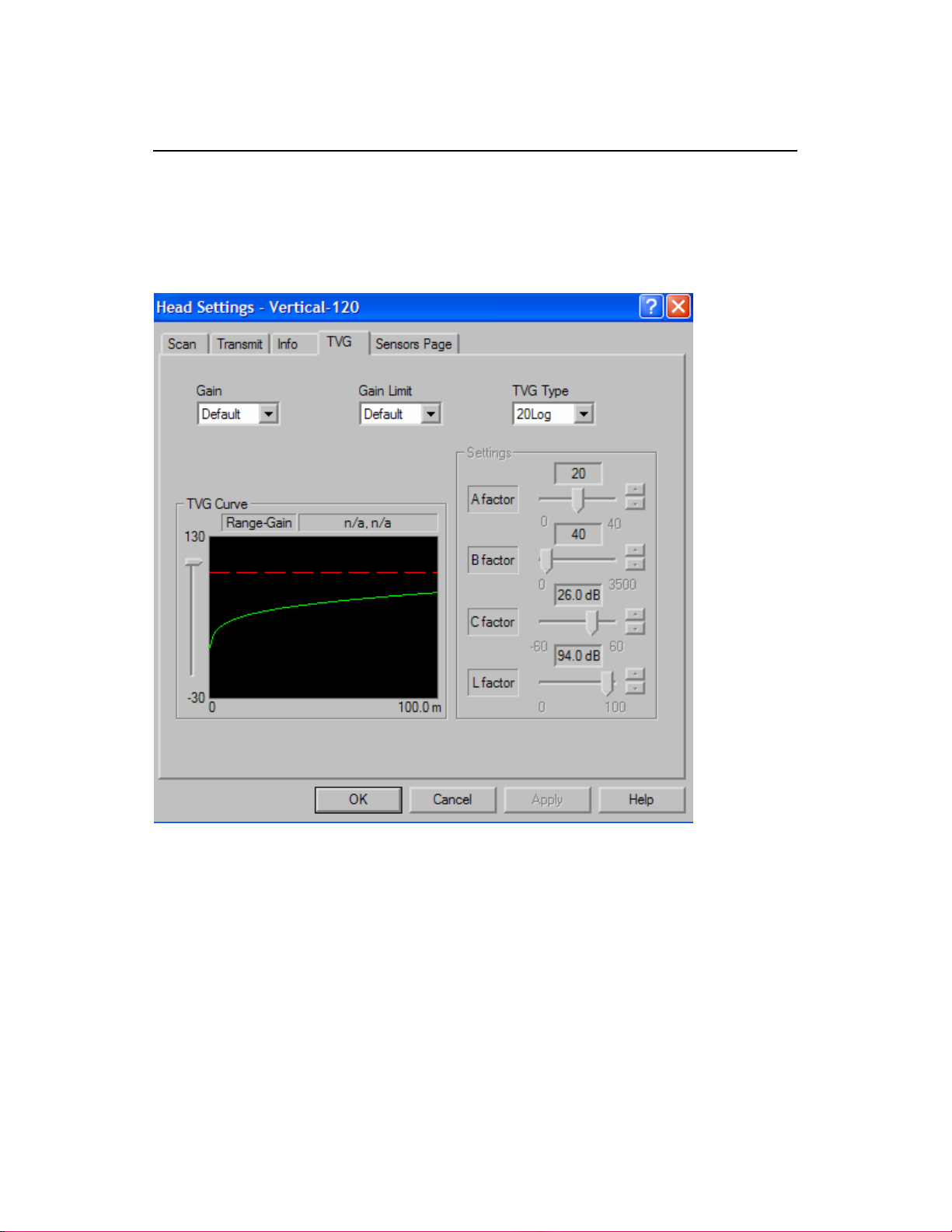
4.4.10 TVG Page Setting
By selecting and clicking on the “TVG Page” key on the above window, the following
window will pop up.
By clicking on the appropriate key you will be able to set up your TVG setting. You
also have the option of customizing your TVG setting for a specific fishery.
The same operation will apply to the FS Sounder Window.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 61
FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.21
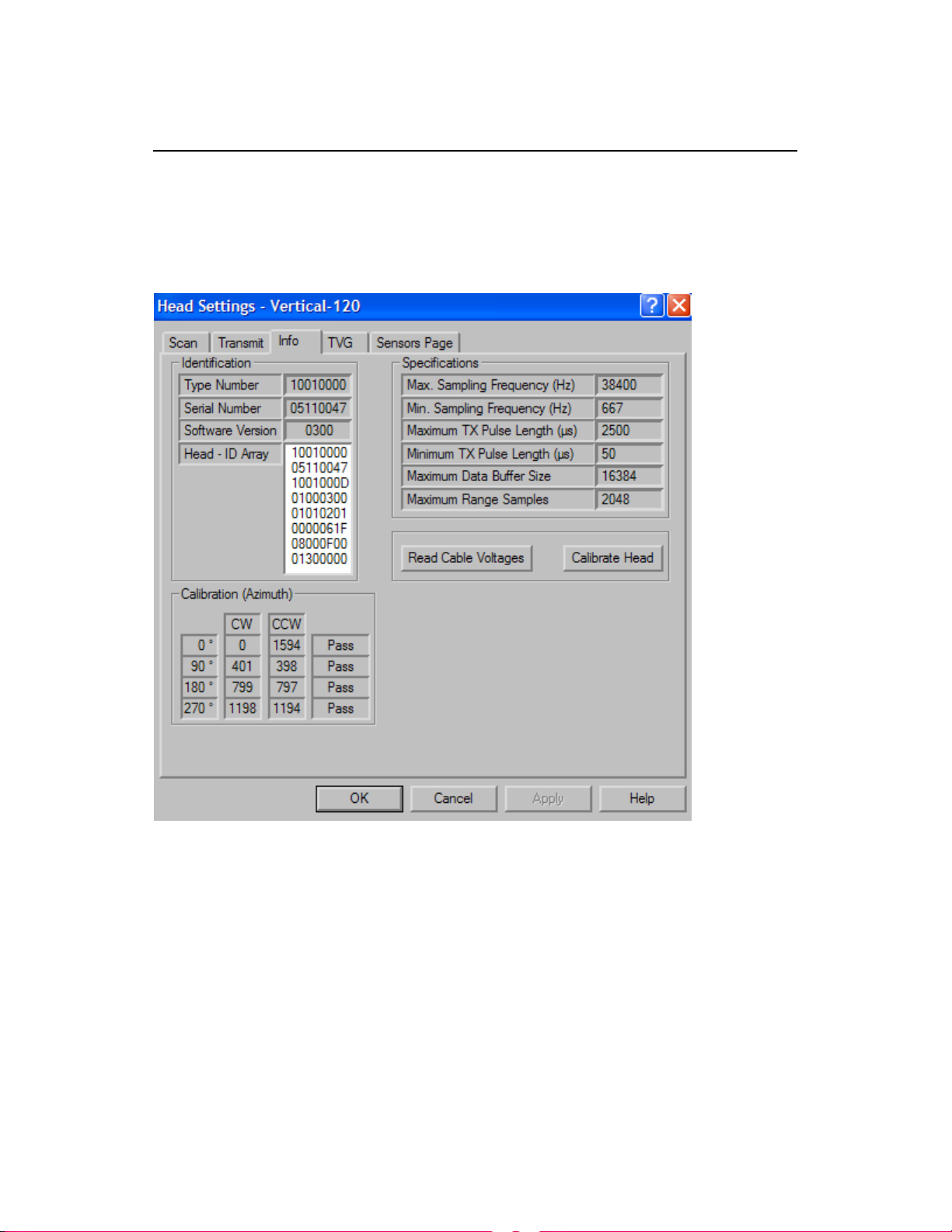
4.4.11 Info
By selecting and clicking on the “INFO” key on the above window, the following
window will pop up.
This INFO page will provide you with all the relevant information on the sonar head
attached to the system.
The same information will apply to the FS Sounder Window.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 62

974-24007001/3.0 FS 70 Operators Manual
Page 4.22 FS 70 Installation, System Set-Up and Test
4.4.12 Sensors Page
By selecting and clicking on the “sensors Page” key on the above window, the
following window will pop up.
This Sensors Page will provide you with all the relevant information on the sonar
head attached to the system.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 63

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.23
4.4.13 Auxiliary Transducer (Net Sounder)
By Clicking on the “Auxiliary Transducer” key on the above window, the following
window will pop up.
By Clicking on the appropriate key, you will be able to control the FS Sounder option.
Note: The Auxiliary Transducer window is only applicable to the FS Sounder.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 64
974-24007001/3.0 FS 70 Operators Manual
Page 4.24 FS 70 Installation, System Set-Up and Test
4.5 SAVE USER SETTING
After you have completed your system configuration, you should “SAVE” your
setting. Go to the User Menu and “Click” on “Save Setting”. The following window will
pop up.
Type the name of the “New Setting Name” by using the pop up keyboard, next Click
“OK”
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 65
FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.25
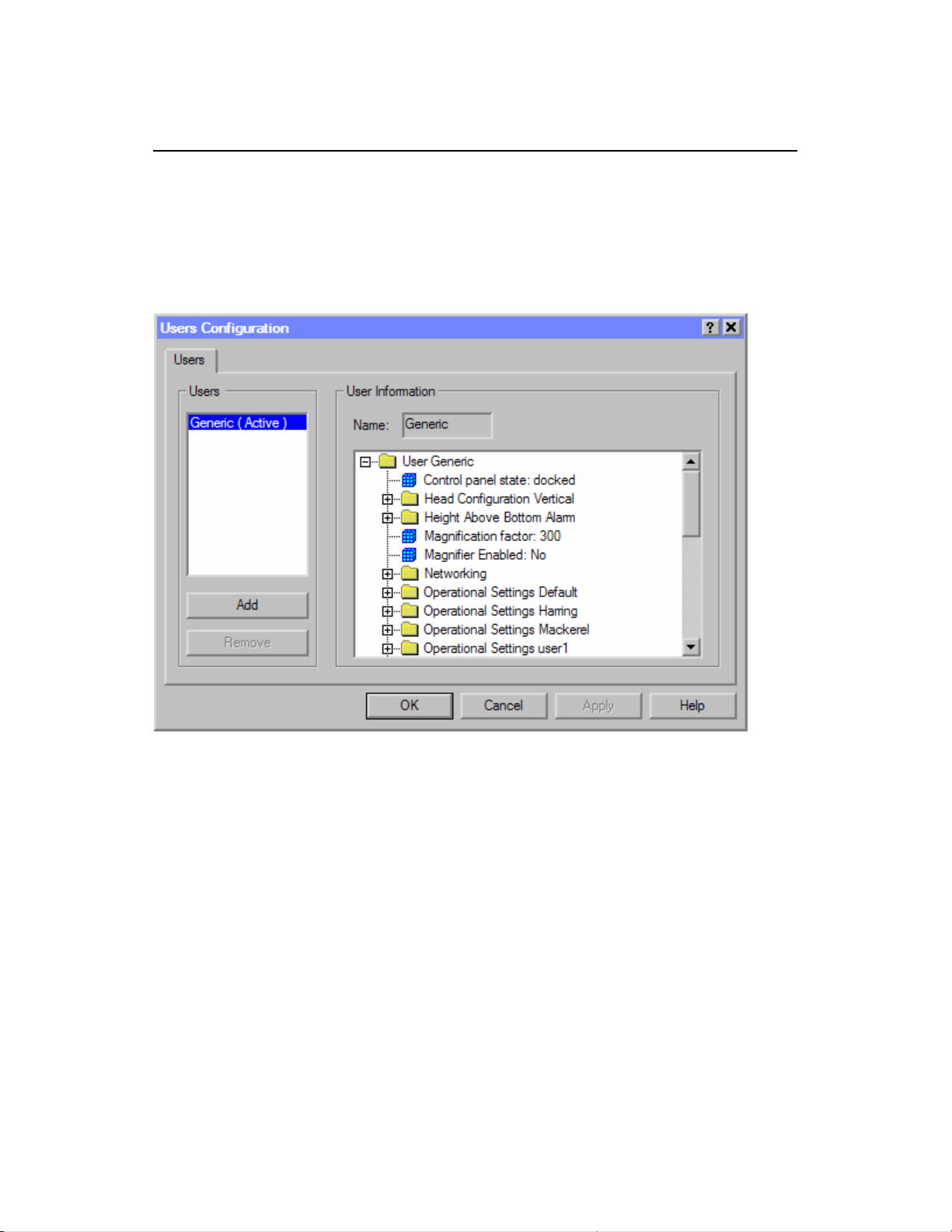
4.5.1 Add User Setting
After you have completed your system configuration you should save your setting,
Go to the Header Menu and Click on “Configuration”. Next Click on “USERS”, then
Click on “DEFINE”. The following window will pop up.
If you want to Add a User, the next step is to click “Add” then type your name in the
User 1 window. Next Click on “Apply” then “OK”.
The next time you start up the system, the “Select User” window will pop up
automatically. You must then select the type of Fishery or User setting you want and
“CLICK”. The system will start up with your personal setting.
When you Exit the system, the system will request if you want to save your setting.
Just click “YES” or “NO”
Note: After the Service Engineer has completed the initial Setup and Sea trial, we
recommend that all the settings are saved in the “GENERIC” setting or in a specific
file created as a reference in case a problem occurs.
Do not change the “GENERIC” setting. If you have a problem, just go
back and select the “GENERIC” setting, or to your specific file.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 66

974-24007001/3.0 FS 70 Operators Manual
Page 4.26 FS 70 Installation, System Set-Up and Test
4.5.2 Final System Test
After preparing the trawl cable and before the final trawl unit assembly a system test
should be conducted to insure correct operation of the FS 70 Trawl Monitoring
System over the trawl cable.
As before, the start- up procedures should be followed to power up the system. Once
the FS 70 has been turned on, the power supply voltage and current meters should be
examined. Expected values are 0.2 – 0.5 (output voltage selection switch should be
set to 200VDC. If the voltage and current values differ significantly from these values,
it indicates a problem with the trawl cable or its connections.
If there are any errors during the calibration a status report page will appear containing
the results that the control unit obtained from the tests performed. Again, any errors
will be due to the trawl cable or its connections. Check the connections again and
ensure that the signal polarity at the trawl unit is correct. A DC voltmeter can be used
to check that the positive voltage is on the small pin of the pigtail when the
FS PWR/TTM unit is powered up.
If all is okay then the sonar head will begin scanning and the sonar image display will
appear.
4.5.3 Completing the Trawl Unit Assembly
First, the plastic cable strain relief supplied with the trawl unit must be bolted to the
trawl cable. The location should be at or very near the pigtail splice, but NOT on the
pigtail itself. You must slide the rubber hose on the trawl cable, if used, down so that
approximately 3-4 cm (1-2") of the hose is clamped inside the strain relief.
Next, the trawl cable is connected to the sonar head. Liberal amounts of Dow Corning
#55 grease are applied to the connector surfaces before mating so that a water tight
seal is obtained. The locking sleeve is then hand-tightened.
Note!
Dow Corning #55 grease must be applied to all mating surfaces of
underwater connectors to insure proper sealing. Sufficient grease
should be applied so that excess squeezes out with any air when the
connectors are mated. RTV or any other sealant must NOT be used,
and when tightening the locking sleeves do NOT use a wrench or
pliers! See chapter 5, "Troubleshooting and Maintenance", for proper
connector maintenance.
The plastic strain relief attached to the trawl cable is now placed in the trawl unit
housing containing the electronics and the excess cable is routed in the housing as
shown in Chapter 6 “Drawings”. Care must be taken to insure that all cables within the
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 67

FS 70 Operators Manual 974-24007001/3.0
FS 70 Installation, System Set-Up and Test Page 4.27
trawl unit housing are properly placed to avoid being pinched and possibly damaged.
The top half of the trawl unit housing is then placed on top and the two halves are
secured together with the bolts supplied. Finally, the dome is secured over the Vertical
Sonar Head transducer with four additional bolts.
The fully assembled trawl unit is now ready for mounting to the trawl headrope in the
chosen manner.
4.5.4 Mounting CATCH SENSORS
Proper mounting of the catch sensors on the cod-end is shown in drawing # 830056482 (see chapter 6, “Drawings”).
The fill of the cod-end and the sensitivity of the sensors is dependent upon the
number of mesh knots between the catch sensor and the rubber straps. Make sure
that the sensor is mounted in the correct direction with the transducer pointing
towards the trawl unit (the metal lid pointing aft).
Caution!
Make sure that the chains do not strain the net when the cod-end
is being filled with fish. This is controlled by stretching the net to
capacity in the direction which is relevant AFTER THE SENSORS
HAVE BEEN MOUNTED TO THE TRAWL.
The purpose of the chains is to prevent the sensor from turning,
and as an insurance against loss should the rubber straps break.
Mounting the chains too tight can result in the fastening ears
being ripped off.
If a system with four catch sensors has been ordered, sensors numbered 1 and 2 can
be used on the trawl and the other two sensors kept for reserve.
For deep trawling, and when fish are abundant, it can be advantageous to mount three
or four catch indicators in such a way that cod-end filling can be monitored
continuously to insure that the trawl is hauled back in time.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 68

974-24007001/3.0 FS 70 Operators Manual
Page 4.28 FS 70 Installation, System Set-Up and Test
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 69

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.1
PART 5
TROUBLESHOOTING AND
MAINTENANCE
5. TROUBLESHOOTING AND MAINTENANCE.................................................5.3
5.1 I
5.2 S
5.3 H
5.4
5.5 T
5.6 S
5.7
5.8 S
NTRODUCTIONS..........................................................................................5.3
YSTEM OVERVIEW ..................................................................................... 5.3
5.2.1 FS 70 System.........................................................................................5.3
5.2.2 Trawl Cable Requirements.....................................................................5.3
ANDLING & MAINTENANCE..........................................................................5.4
5.3.1 Wheelhouse Electronics.........................................................................5.4
5.3.2 Trawl Unit............................................................................................... 5.5
5.3.2.1 Handling Tips.................................................................................. 5.5
5.3.2.2 Maintenance Schedule ...................................................................5.5
5.3.2.3 Connector Maintenance..................................................................5.6
5.3.2.4 Excessive Impacts..........................................................................5.6
5.3.2.5 Corrosion ........................................................................................5.7
5.3.2.6 Shaft or Transducer Damage..........................................................5.7
5.3.3 Catch Sensors........................................................................................5.7
5.3.4 Winch Slip-Rings and Trawl Cable.........................................................5.7
MONITORING SYSTEM PERFORMANCE...........................................................5.8
5.4.1 Test Cable.............................................................................................. 5.8
5.4.2 Power Supply Meter Readings...............................................................5.9
5.4.3 Trawl Cable Gain ................................................................................. 5.10
5.4.4 Telemetry Errors ..................................................................................5.10
ROUBLESHOOTING...................................................................................5.11
5.5.1 System Tools .......................................................................................5.11
5.5.2 Diagnosing Problem.............................................................................5.12
5.5.3 Testing Trawl Cable ............................................................................. 5.13
5.5.3.1 Cable Impedance..........................................................................5.14
5.5.3.2 Closed Loop Resistance...............................................................5.14
5.5.3.3 Voltage and Current at Trawl Unit.................................................5.14
5.5.3.4 Test for Water In Cable................................................................. 5.15
ECTION 1 - CATCH SENSORS ....................................................................5.15
SECTION 2 - WINCH SLIP-RINGS AND TRAWL CABLE......................................5.15
ECTION 3 – DIAGNOSTIC RECORDINGS.....................................................5.15
5.8.1 Snapshots............................................................................................5.15
5.8.2 Manual Recordings..............................................................................5.16
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 70
974-24007001/3.0 FS 70 Operators Manual
Page 5.2 Troubleshooting and Maintenance
5.8.3 Automatic Recordings.......................................................................... 5.16
5.8.4 File Transfer Procedures ...................................................................... 5.17
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 71

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.3
5. TROUBLESHOOTING AND MAINTENANCE
5.1 INTRODUCTIONS
This document is provided to instruct in the proper handling, maintenance and
troubleshooting of the FS 70 Trawl Monitoring System.
5.2 SYSTEM OVERVIEW
The Simrad FS Trawl Monitoring System FS 70 consists of wheelhouse electronics
and a trawl unit. The wheelhouse electronics include the display unit, the FS
Processing Unit, and the PWR/TTM interface unit. The trawl unit electronics include
the sonar head with a integrated sensor module, receiver transducer, and up to four
catch sensors and door spreads sensors. In addition to the above equipment, but
not supplied by Simrad, the system requires a winch with slip-rings, and a trawl cable
for connection of the FS trawl unit to the wheelhouse electronics.
5.2.1 FS 70 System
The FS PWR/TTM unit contains the power modules to provide the Test Voltage, the
120 and 200 VDC @ 1 A maximum for powering the trawl unit electronics, and the
voltage and ampere meters. The low-frequency telemetry adapter “LF 1” Low
Frequency PCB and the telemetry translation module “TTM” PC interface is now
incorporated into one unit.
With the FS 70 system, the trawl cable connects directly to the PWR/TTM unit.
Furthermore, the compensation for signal loss over the long trawl cable is done
automatically within the Processor Unit each time it is powered up. In this way
changes to the cable loss do not affect the intensity of the sonar return displayed.
5.2.2 Trawl Cable Requirements
For whatever cable type and length used the following specifications must be met for
operation with the Simrad FS trawl Monitoring system:
Cable Closed Loop Resistance <100 ohms
Signal Attenuation Through Cable: <40 dB (1/100 signal amplitude) @ 55 kHz
<20 dB (1/10 signal amplitude) @ 12 kHz
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 72

974-24007001/3.0 FS 70 Operators Manual
Page 5.4 Troubleshooting and Maintenance
The cable closed loop resistance determines the maximum voltage drop along the
trawl cable. For proper operation the FS 70 trawl unit electronics require 200 VDC
@ 1 A maximum. For typical operation, the current is approximately 350 mA with
peaks to 500 mA. The equations for calculating the voltage drop along the trawl
cable are:
Voltage Drop Along Cable = (Cable Resistance) x (Current through Cable)
i.e. Current = 300mA, Voltage at the head +180vdc,
therefore calculated Resistance = 180V
0.3A
Example: TTM set at 200Vdc
Voltage at head 180Vdc
Amp meter (0.3)
R = 200 - 180
0.3A
This results is 66.67 ohm
The cables allowable closed loop resistance is 100 ohms.
5.3 HANDLING & MAINTENANCE
The most common causes of failures to the Simrad FS Trawl Monitoring system are:
1. Trawl cable and/or winch slip-ring problems,
2. Sonar head and sensor module connector and interconnect cable failures.
3. Excessive impacts and/or physical damage to trawl unit electronics.
In all three of these cases, proper handling and maintenance can significantly reduce
the frequency of FS failures.
The following sections outline the recommended handling and maintenance for the
FS system.
5.3.1 Wheelhouse Electronics
Once installed these units require little maintenance other than removing dust. A
damp, lint-free cloth should be used for this purpose.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 73

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.5
5.3.2 Trawl Unit
The Trawl Unit is subjected to the harshest conditions and therefore proper handling
and maintenance is crucial to ensure trouble free operation.
5.3.2.1 Handling Tips
• Though the trawl unit electronics are ruggedized for the fishing environment
mishandling or repeated impacts may result in damage to, or failure of, the
electronic components. Care should be taken at all times to avoid dropping
or impacting the trawl unit or the individual components.
• Avoid scratching
the surface of the sonar head housings. The anodized
surfaces (black coating) are there to protect the electronic housings from
corrosion and any damage to these surfaces will increase the likelihood of
corrosion.
• Ensure correct installation of the sonar head into the trawl housing to avoid
improper operation. A locking block is located at the end cap to secure the
sonar head into the lower part of the housing.
• Protect connector mating surfaces from corrosion and damage. At the first
sign of damage, connectors should be replaced!
• Pigtails must be properly attached to the trawl cable and the connector
mating surface must be protected from moisture and dirt at all times. Failure
to do this may result in water damage to the cable causing improper
operation of the sonar system.
5.3.2.2 Maintenance Schedule
For optimum performance and trouble free operation, follow the maintenance
schedule below.
• Beginning of Fishing Season
Service all connectors
• Every Two Weeks of Continuous Use
The trawl unit package should be opened and the components cleaned
with fresh water. The trawl sonar head should be inspected for corrosion
or damage. Service all connectors. The FS processor should be
checked and cleaned if required.
• End of Fishing Season
The trawl unit package should be opened and the components cleaned
with fresh water. The trawl sonar head should be inspected for corrosion
or damage. Service all connectors and cover them with plastic. Store
unit in a dry, clean area.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 74

974-24007001/3.0 FS 70 Operators Manual
Page 5.6 Troubleshooting and Maintenance
• Every Twelve (12) Months Heavy usage or Every Two Years
Return the trawl sonar to a qualified Simrad service facility for inspection
of connectors, seals and shaft assembly. Have parts replaced as
required.
• Every Four Years
The trawl sonar head should be returned to a qualified Simrad service
facility for recalibration and upgrade to the latest specifications, and
inspection of connectors and housings for damage.
5.3.2.3 Connector Maintenance
Proper connector maintenance is crucial to the prevention of connector failure that
may result in failure of the sonar system and possible water damage to the sonar
head. The following steps should be taken whenever the connectors are assembled,
or at regular intervals as outlined in the “Maintenance Schedule” section above.
1. Wipe connectors clean of old grease and dirt with a lint free cloth.
2. Inspect the connector’s metal contacts and sealing surfaces for corrosion, wear
or damage. If problems are found, return the unit to a qualified Simrad service
facility for replacement of the connector!
3. Apply liberal amounts of Dow Corning “55” grease to each of the connector
prongs and to the sealing surfaces of the connectors. Do not use a silicone
rubber adhesive sealant!
4. Press connectors together until fully seated. Excess grease should be
squeezed out of the connector sockets.
5. Hand tighten the locking sleeve. Do not use a wrench or pliers!
6. When separating the connectors, avoid wrenching or bending connector.
Caution!
Failure to correctly maintain connectors may cause damage to
the system and will void the warranty.
5.3.2.4 Excessive Impacts
Though the FS Trawl Unit is designed for the harsh fishing environment, excessive
impacts to the trawl unit or the individual components may damage them.
Excessive impacts to the trawl unit usually result in physical damage to this housing.
However with the newer, more durable urethane housing, excessive impacts to the
trawl unit may NOT cause physical damage to either the trawl housing or the exterior
of the individual electronic units, but may result in damage to the electronics.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 75

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.7
Note!
As with all electronics, careful handling of the trawl unit will reduce the
likelihood of FS failures.
5.3.2.5 Corrosion
If on examination corrosion has occurred to the sonar head metal parts these areas
should be cleaned well and the area sealed with paint or a sealant to prevent
continuation of the corrosion in this area.
Caution!
If corrosion is allowed to continue, flooding of the unit may
result.
5.3.2.6 Shaft or Transducer Damage
The transducer and shaft are protected by a flexible dome and should be inspected
for damage. If the transducer dome has experienced an impact this could bend the
shaft and eventually allow water into the housing. If the shaft is bent the unit should
be returned to a qualified Simrad service facility for replacement of the shaft seal
assembly.
Note!
If the sonar head is correctly installed in the trawl unit, with
proper placement of the locating block, then damage to the
transducer and shaft should not occur.
5.3.3 Catch Sensors
The catch sensors are relatively maintenance free except to charge the batteries.
Refer to your Simrad FA701 and or PI 32 Catch sensors operator and installation
manual for the information on both the charging of the catch sensors and the proper
mounting of these sensors on the trawl.
5.3.4 Winch Slip-Rings and Trawl Cable
The winch slip-rings and trawl cable are the umbilical cord between the processor
unit and trawl unit electronics, and are critical to the proper operation of the Simrad
FS Trawl Monitoring system. Damaged, worn or poorly maintained cable or sliprings will degrade the performance of the system and may cause or lead to a
complete system failure.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 76
974-24007001/3.0 FS 70 Operators Manual
Page 5.8 Troubleshooting and Maintenance
Worn, dirty or wet winch slip-rings may add noise, current spikes or additional losses
to cable. Slip-ring assemblies should be checked regularly for wear and proper
sealing against the weather. Slip-ring technology has improved considerably over
the past several years and sealed units from several suppliers (such as IEC Corp.)
have proven to be very reliable.
Trawl cables, particularly the plastic jacketed type, are extremely susceptible to
damage and wear that may adversely affect system operation. Proper maintenance
is very important to ensure cable losses are minimized and adequate isolation
between the cable conductors and sea water are maintained. Common problems
include poor splices, water damage, cracked or worn outer casing (insulating jacket),
or severed cable. The trawl cable should be routinely checked for damage and
affected sections removed, splices redone or the entire cable replaced as required.
The pigtails spliced to the end of the trawl cable are susceptible to damage and
corrosion and must be checked and if necessary replaced every time prior to
connecting the trawl unit. When not in use the pigtail should be wrapped in a plastic
bag and stored, out of the weather and away from being stepped on or damaged in
any other way.
Polarity of the signals applied to the trawl cable (coax) may also be important in the
proper operation of the system. To provide optimum shielding from noise, we
recommend the positive signal be applied to the center conductor and the negative
signal to the shield.
For additional information on connecting to slip-rings and examples of splicing trawl
cable refer to Part 7 “Drawings”.
5.4 MONITORING SYSTEM PERFORMANCE
There are a number of tools available with the Simrad FS Trawl Monitoring system
that allow its performance to be checked. When these tools are utilized as part of
the regular maintenance they provide information about the state of the system and
allow it to be monitored. This can be valuable in detecting problems before they
cause an FS system failure.
5.4.1 Test Cable
With every FS Trawl Monitoring system, a 50’ test cable is supplied for testing the
system without requiring the trawl cable. This provides a quick and simple way of
verifying whether problems are due to the trawl cable or winch slip-rings. In addition
system performance values that are measured on the test cable provide a base for
later comparison (using either the test cable or trawl cable).
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 77

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.9
For the FS 70 system, the trawl cable and test cable are both connected to the 3-pin
connector (“2-wire”) on the rear panel of the PWR/TTM unit. To install the test cable,
disconnect the trawl cable and attach the test cable. Refer to Part 6 “Drawings” for
more information and interconnection drawings.
When using the test cable the power supply voltage can be set to “OFF” no voltage
on the trawl cable, to “TEST” (60 VDC) or 120 VDC). If the system is to be operated
for extended periods on the test cable, then the power supply voltage should be set
to “TEST”.
5.4.2 Power Supply Meter Readings
The voltage and ampere meters are useful for monitoring the trawl unit power
requirements. For the most benefit, these meters are mounted on the front panel of
the PWR/TTM unit next to the trawl voltage selection switch for continuous
monitoring.
When the system is first installed or when the trawl cable is replaced the trawl cable
voltage selection switch should be set to 200VDC and current values should be
recorded when the unit is running in normal operating mode (i.e., with range and
scan speed set to values normally used during fishing). Typical values are 200 mA
to 350 mA for sonar heads. To facilitate monitoring of this information these values
should be recorded on the charts provided in Part 6 “Drawing”.
Any changes in the recorded meter values during normal operation may indicate a
potential problem even if the unit continues to operate properly. Common cases are:
1. Current Meter Jitters
This is commonly due to dirty, wet or worn winch slip-rings that cause current
spikes on the trawl cable when the winch is rotating.
A test for slip-ring problems is to slow down the winch (at high winch speeds
you will not see jitter on the current meters) and check if the current meter is
jittering and whether the jitter rate changes with the winch speed.
2. Increase in Current
Gradual increases in the trawl unit current may be due to either the trawl
cable or the trawl unit electronics. A higher cable closed loop resistance, due
to cable damage, poor splices, poor winch slip-rings or water in cable may
reduce the voltage supplied to the sonar head below the required minimum of
60 VDC. This will result in the sonar head drawing more current.
Alternatively, there may be a problem in the sonar head that causes
additional current draw.
To diagnose this problem, a current reading should be made with the system
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 78

974-24007001/3.0 FS 70 Operators Manual
Page 5.10 Troubleshooting and Maintenance
running on the test cable. If this value is higher than a previous value
obtained on the test cable then the problem is likely with the trawl unit
electronics. If the current readings are the same on test the cable as
previously obtained, then the trawl cable and winch slip-rings should be
checked.
5.4.3 Trawl Cable Gain
When signals pass through cables, the signal is attenuated by a certain amount that
is normally dependent on the type and length of cable used. For the FS Trawl
Monitoring system to operate properly it must apply gain to the signals to
compensate for the cable losses. Monitoring of this required gain allows the trawl
cable to be checked for additional losses due to damage, water, poor splices, bad
connectors, etc.
With the FS 70 system the cable compensation gain has been automated. Each
time the system is powered up (or when a system calibration is performed) the gain
is set in the processor unit by monitoring the transmit pulse from the sonar head and
increasing the gain until the received signal is normalized to a standard level (that is
why you hear the transducer pinging just after turning the system on). The resulting
gain is displayed in the system test result page as two integer values separated by a
colon. Each value is an integer from 0 to 255 with a larger value corresponding to
higher gain.
By periodically checking the cable compensation gain obtained from the FS unit and
comparing it to a previously recorded value the condition of the trawl cable can be
monitored. Acceptable cable gain values have less than 100 for the first gain
number. If the first gain value is over 200 then there may be a problem with the trawl
cable and the system should be checked on the test cable. To facilitate monitoring
of the trawl cable, the cable gain values should be recorded on the charts.
5.4.4 Telemetry Errors
In the normal operation of the FS Trawl Monitoring system commands are sent from
the processor unit down the trawl cable to the trawl unit electronics and
acknowledgments are then sent back up to the processor unit. Rudimentary error
checking of these commands is performed to monitor the performance of the
telemetry.
Telemetry errors can result from noise induced on the trawl cable due to interference
or problems with the trawl cable or trawl unit electronics. Though a few telemetry
errors are quite common and acceptable, an excessive number of errors will
adversely affect the sonar operation and may indicate a problem that will eventually
cause a system failure.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 79

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.11
A common occurrence of telemetry errors is time-outs. This problem indicates the
trawl unit electronics are not responding to the processor unit or the integrated
sensor module is not responding to the sonar head. The causes of this are either
with the electronic units themselves or with the trawl cable or interconnect cable.
Typically, if the problem is with the sensor module or interconnect cable, the timeouts occur in multiples of 15 (the sonar head may still operate correctly with the
exception of periodic pauses).
5.5 TROUBLESHOOTING
In the event the Simrad FS Trawl Monitoring system does not operate correctly care
must be taken to properly diagnose the cause of the failure. Quite often the failure is
thought to be with the FS electronics when the actual cause is due to the winch sliprings, the interconnect cable or the trawl cable. The following sections provide
helpful advice on troubleshooting the FS system.
5.5.1 System Tools
The system tools available for troubleshooting the FS system are:
1. Test Cable
Provided with every FS Trawl Monitoring system, the test cable enables the
FS system to be tested without the winch slip-rings or test cable. This
provides a quick and simple means of checking whether the problem is with
the FS electronics or not.
2. Power Supply Unit Voltage and Current Meters
The power supply unit meters allow the trawl cable voltage and current to be
continuously monitored. When a fault is detected the meter values should be
noted and current meter behavior observed. Jitter in the current meter may
indicate current spikes due to the winch slip-rings. Higher or lower values
than normal (typical values: 110 VDC, 250 - 350 mA) may indicate additional
losses in the trawl cable due to physical or water damage, bad splice, etc., or
problems with the trawl unit electronics.
3. Processor Unit Calibration or Self Test Routines
The FS 70 processor unit has calibration or self test routines for checking
system performance. The SELF TEST MENU contains several items for
checking the gain and then displays it along with the current status of the
other system test value. Other useful selections include “Calibrate” for
performing a complete system calibration, and “Telemetry Test” which
repeatedly sends commands to the sonar head and reports all telemetry
errors in real-time. Results obtained from these routines may indicate noise
problems or additional losses in the trawl cable, or problems with the trawl
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 80
974-24007001/3.0 FS 70 Operators Manual
Page 5.12 Troubleshooting and Maintenance
unit electronics.
The usefulness of these tools is greatly enhanced when they are used on a
regular basis to monitor system performance. Records of past system
performance (when the unit is operating properly) provide a basis for
comparison that may assist in diagnosing the problem when an FS system
fails.
5.5.2 Diagnosing Problem
If the FS system develops a problem, or if it fails completely, the steps below should
be followed.
1. Check the power supply unit meters and record their values. If the failure was on
power up, ensure the voltage selection switch is on high and that the power is
on. If the system developed a problem or failed while operating, then note the
voltage and current meter behaviors. If the current meter jitters, then stop the
trawl winch if rotating, and note any changes in the meter values or their
behavior.
2. If the processor unit displays a system test result page then record the values
and make note of any failure (highlighted in red). If not, then implement a system
test and record the results obtained.
3. Disconnect the trawl unit from the trawl cable and re-connect to the FS system
using the test cable. Power up the system and repeat step 1 and 2.
Note!
If a Simrad FS unit is diagnosed as being faulty, then the unit(s)
should be returned to an authorized Simrad service center. ALL
system performance results and a complete description of the
problem should be supplied with the defective unit to assist in its
repair.
The following list common problems and probable causes
Problem Action/Possible Cause
1. Complete system and/or calibration
failure - cable gain at max., telemetry
errors head id + 1, etc.
− Check power supply unit voltage and
current, ensure unit is on (voltage
meter at 200 VDC). If current okay,
then sonar head needs replacing.
− If no current, then check trawl unit on
test cable. Trawl cable or slip-rings
at fault if unit runs fine. If not, then
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 81

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.13
replace sonar head.
2. Sonar head operates okay, but
pauses periodically - may not have
sensor module data
− Check for telemetry errors. If none,
then problem with sonar head or
processor unit.
− If errors and they occur in multiples
of 15, then the internal sensor
module is defective. Check by
restarting the system.
− If errors, check system using test
cable. If errors go away, then
problem with trawl cable or slip-rings,
otherwise problem with sonar head.
3. Sonar head operates okay, but image
skewed or distorted.
− Check calibration for errors in sonar
head positioning. If errors, then
problem with sonar head, otherwise
check that sonar head is properly
mounted in trawl housing.
4. Sonar head operates okay, but cable
gain higher than normal and possibly
telemetry errors.
− Check system on test cable. If gain
okay and errors go away, then trawl
cable or slip-rings faulty, otherwise
problem with sonar head.
5. No sensor module data.
− Internal sensor module electronics is
defective.
6. No catch indication, but depth and
temp okay
− Ensure catch sensors are properly
charged and display of catch data is
enabled.
− Check unit on deck with catch sensor
placed 1 meter from receive
transducer. Connect wire from “+”
lug to metal lid on back of catch
sensor, wait a couple minutes and
verify display. If no indication or
indication is wrong, then fault with the
internal sensor module.
5.5.3 Testing Trawl Cable
If after testing the FS system the trawl cable is suspected to be faulty, then
troubleshooting is needed to determine what and where the problem is. For
problems that are not obvious, however, this can be quite difficult to do and may
require someone experienced with testing trawl cables. This section provides some
basic tips in troubleshooting trawl cable but is in no way a complete and
comprehensive guide.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 82

974-24007001/3.0 FS 70 Operators Manual
Page 5.14 Troubleshooting and Maintenance
5.5.3.1 Cable Impedance
The use of a Meggar to check the impedance of the trawl cable may be the most
useful test. It can be done with or without the slip-rings connected and readings
should be taken between the cable’s two conductors and also from each conductor
to the fishing vessels hull. As a minimum, the impedance should be greater than 2
Mohms, and preferably over 6 Mohms.
Caution!
The FS system MUST be disconnected from trawl cable during
Meggar tests to prevent possible damage to the electronics!
If the impedance between the cable’s two conductors is too low, then possible
problems are bad splices, water in cable, moisture in slip-rings (if connected during
test) or damaged cable. If the impedance between the cable’s conductors and the
vessel’s hull is too low then possible causes are damaged outer jacket on cable, bad
splice or bad slip-rings (if connected during test).
5.5.3.2 Closed Loop Resistance
As previously mentioned, the closed loop resistance must be less than 100 ohms for
proper operation of the FS system. This test should be done with the FS system
disconnected but with the winch slip-rings included.
To do the test the conductors at one end of cable should be jumpered together
(shorted). An ohmmeter is then used at the other end of cable to measure the
resistance between the conductors.
5.5.3.3 Voltage and Current at Trawl Unit
A further check of the cable losses can be done by measuring the voltage and
current at the trawl unit. This measurement requires the trawl unit electronics to be
connected and the FS system powered up. This test is done where the trawl cable
pigtail plugs into the sonar head. Jumpers will be required to breakout the signals
for connection to voltage and ampere meters.
Caution!
There are DC voltages on the trawl cable that are capable of
delivering a lethal electric shock!
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 83

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.15
5.5.3.4 Test for Water In Cable
When a trawl cable is damaged or there is a poor splice, sea water can get into the
cable. As a result, the cable may act as a battery - producing a small dc voltage
across the conductors of the cable. This is detrimental to the operation of the FS
system and all affected cable should be removed.
To test for this the trawl cable should be disconnected from the FS system and a
voltage meter connected to the trawl unit end of the cable. If water is present, then
there may be a reading of 2 - 3 volts dc.
5.6 SECTION 1 - CATCH SENSORS
Refer to your Simrad FA701 or PI32 sensor operator and service manual.
5.7 SECTION 2 - WINCH SLIP-RINGS AND TRAWL CABLE
Refer to your Manufacture operator and installation manual.
5.8 SECTION 3 – DIAGNOSTIC RECORDINGS
The system will save your screen displays in three different ways. Two of these
ways are manually started by the operator and the third is automatically managed by
the system. All three methods create files on the system which can be sent to your
service provider for analysis.
5.8.1 Snapshots
The system will allow you to save snapshots of the screen display. In the lower right
hand corner of the display you will see the following display
To take a snapshot of your display simply left click on the camera icon. A snapshot
will be saved in the “diagnostic” folder. When you click the camera icon a grey
message box will appear in the top left hand side of your display stating ”Saving a
sonar image. Please wait.” This box will only appear for a second or two but
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 84

974-24007001/3.0 FS 70 Operators Manual
Page 5.16 Troubleshooting and Maintenance
confirms that you have taken a picture and that it has been saved. The snapshot
saved will be only of the active window on your display – either the vertical head or
the sounder. The system saves both a video picture of your display and a text file
listing all of your system settings.
5.8.2 Manual Recordings
You can, at any time, start a recording of your display. To do this left click on the red
button beside the camera icon (see image above). This recording will continue until
you stop it by clicking on the same button again. These recordings are saved into
the “record” folder.
The traditional way of starting a recording also still exists on the system. Refer to
section 3.2.13 of this manual. Go to the display toolbar and turn the Record Toolbar
on. The traditional recording toolbar will appear on the left side of your display. You
will also use this toolbar to playback any of your recordings.
5.8.3 Automatic Recordings
The system is also automatically recording your display without the need for you to
do anything at all. The reason for this background recording is to ensure that should
you experience difficulties or an error the system will have kept a recording of it for
future analysis. This file can then be sent to your service organization for analysis.
This file is a four hour recording that continually loops itself ensuring that there is
always a recording of the last four (4) hours of operation. These files are saved into
the “diagnostic” folder.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 85

FS 70 Operators Manual 974-24007001/3.0
Troubleshooting and Maintenance Page 5.17
5.8.4 File Transfer Procedures
To access any of the files that have been saved go to the following directory in your
system:
C:\ programs\KML\FS70 VO1.70
You will see the folders for “diagnostic”, “LOGS” and “Record”. Your recordings files
are saved as follows:
Diagnostic folder: Any snapshots that you take
The auto-run four (4) hour recording
LOGS folder: System messages and error messages (automatic)
Record folder: Any recordings that you manually start
All of these files are date and time stamped so you will know exactly when they
occurred.
If you have experienced a problem with the system you want to ensure that the auto
recording of the event will not be overwritten. In this event you want to simply move
the file from the “diagnostic” folder and place it into a folder where you will easily be
able to find it. This file should be sent to your service provider at your earliest
convenience so that they can help determine what has caused the problem.
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 86

974-24007001/3.0 FS 70 Operators Manual
Page 5.18 Troubleshooting and Maintenance
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 87

FS 70 Operators Manual 974-24007001/3.0
Drawings & Attachment Page 6.1
PART 6
DRAWINGS & ATTACHEMENTS
6. DRAWINGS & ATTACHMENTS......................................................................6.3
6.1 LIST
OF DRAWINGS & ATTACHMENTS......................................................6.3
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 88

974-24007001/3.0 FS 70 Operators Manual
Page 6.2
Drawings & Attachments
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 89
FS 70 Operators Manual 974-24007001/3.0
Drawings & Attachment Page 6.3
6. DRAWINGS & ATTACHMENTS
6.1 LIST OF DRAWINGS & ATTACHMENTS
The drawings below are included in the technical Information (P/N 974-24007902)
which is included in this chapter.
• Attachments Number Description
FS 70 Trawl Monitoring Integrated System Configuration
FS 70 40kHz or 70kHz Alternating Sounder Configuration
• Drawing Number Description
436-00411000 Test Cable
901-60181003 FS Power/TTM Wiring Diagram
901-60181001 FS power/TTM Outline Dwg
974-80161000 FS 70 Housing Dwg (4 drwgs)
200kHz Echo Xducer Installation Dwg
40/70kHz Hydrophone Installation Dwg
24/40kHz Door Spread & Trawl Installation Dwg
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 90

974-24007001/3.0 FS 70 Operators Manual
Page 6.4
Drawings & Attachments
FS 70 TRAWL Monitoring
Integrated System Configuration
LCD
Rack Integrated System Cabinet
9 U
3 U
1 U
SIMRAD Power/TTM
30m.VGA Extender Cable c/w K & M,
30m.VGA Extender Cable
3 U
System Standard Equipments
3 U, 19" Rack Power/TTM c/w Front Test Cable Connection
1 U, 19" Rack Industrial Processing Unit
3 U, Expansion Space for Future Development
2 U, 19" Rack APC, 1500 UPS
Rack Cabinet Description
Cabinet, W 23.6", (600mm), D 23.6", (600mm) H 19.8", (502mm)
Dual 6" Ventilation Fan & Bracket
30m VGA Video Extender Cable c/w KB & Mouse
30m VGA Video extender Cable for Dual Monitor
Slide Rails
Glass Door
All Mounting Hardware Included
Refer to your price list for additional information
1
PI Door Sensors
Door Spread
Hydrophone
2
Catch Sensors
1
2
70kHz Only
2 U
120 or 230 AC Power
Input
FS 70 Head Trawl unit
or
TS15 S Head
FS 3300 Sensor
3
4
Catch Hydrophone
2
1
3
PI Catch Sensors
40kHz or 70kHz
4
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
LCD
Monitor
KB & M
120 or 230 AC Power
Monitor
Input
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 91
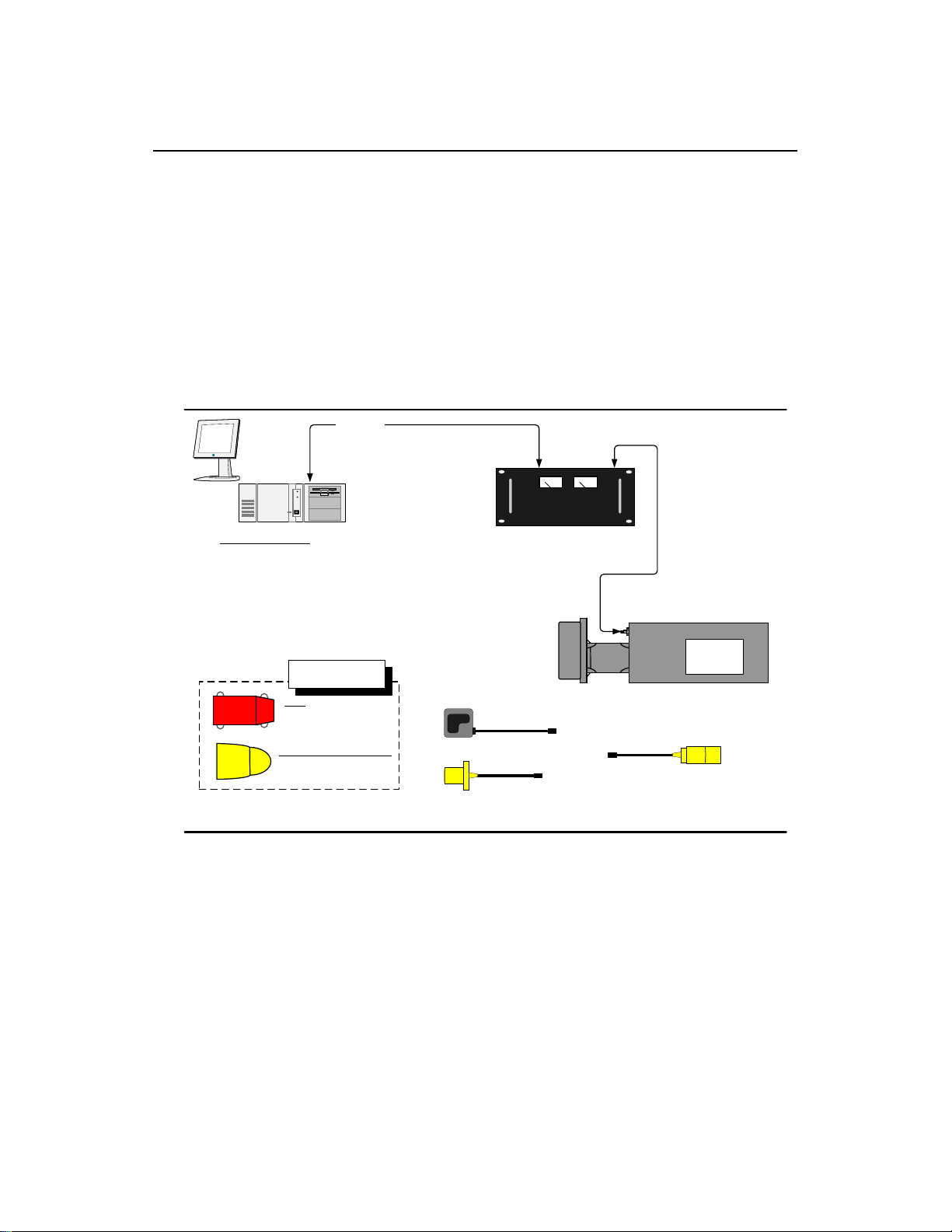
FS 70 Operators Manual 974-24007001/3.0
Drawings & Attachment Page 6.5
FS70 - 40KHZOR70KHZ CONFIGURATIONS (ALTERNATING SOUNDER)
RS232 or USB
Master (LF1)
FS70 Host Software Features:
Pitch/Roll presentation
Standardize User Interface
Ease of use
Scaleable Image windows
Dual Monitor support
FA 701
PI / PS
FS70 Host Software
(Winson)
c/w FS70 Dongle
CATCH SENSORS
FA-701
70 kHz Catch Egg
#1, #2, #3, #4
PI/PS Programmed as 40kHz or 70 kHz
Catch Egg
#1, #2, #3, #4
SIMRAD POWER / TTM
FS Power / TTM
V3.0 and greater firmware + Master/Slave Config
c/w LF1 telemetry set
200 kHz
Sounder
Universal
40/70 kHz Catch
Hydrophone
3rd Wire
FS70 Sonar (120 or 330 kHz)
70 kHz Catch (4 max.)
c/w 200 kHz sounder (alternating)
Internal Sensors
Universal
27/40 kHz Door
Spread
Hydrophone
Pitch/Roll
Depth
Temp
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 92
974-24007001/3.0 FS 70 Operators Manual
Page 6.6
Drawings & Attachments
Kongsberg Mesotech Ltd.
Port Coquitlam, BC - Canada
Page 93

Page 94

Page 95

Page 96

CATCH HYDROPHONE CABLE
3
6
11
DWG. NO.
974-80161000
2
2
5
"THIRD WIRE"
SHT
1
ISS
1.0
ITEM
NO.
1
2
3
PART NUMBER
172-0069
172-0070
359-01200000
DESCRIPTION
LOWER SHELL
UPPER SHELL
DOME
QTY
1
1
1
INTERCONNECT CABLE
4
3
4 9
7
2
974-24240000 (SHOWN)
5
974-40220000
6
805-30022201
7
359-01130000
8
359-00750000
9
171-49080101
10
171-01062203
11
171-01062202
12
171-01062204
13
171-01062201
14
171-05060902
15
171-05060901
16
171-02060102
17
805-31452501
FORWARD
18
HYDROPHONE 1
FLAT WASHER, 0.39"IDx0.88"OD,
HYDROPHONE FS70 40/70kHz
FS 70 SONAR
SOUNDER TRANSDUCER
CATCH HYDROPHONE
CABLE STRAIN RELIEF
WEDGE SPACER
SHACKLE D 0.5", 316SS
SCREW, HEX SOCKET CAP,
0.375-16UNCx1.75, 316SS
SCREW, HEX SOCKET CAP,
0.375-16UNCx1, 316 SS
SCREW, HEX SOCKET CAP,
0.375-16UNCx2.5, 316SS
BOLT, HEX HEAD, 0.375-
16UNCx1.375, 18-8SS
NYLOK JAM HEX NUT, 3/8-16
UNC, 316SS
NYLOK HEX NUT, 3/8-16 UNC,
316SS
316SS
FORWARD LOOKING
HYDROPHONE
CABLE
1
1
1
2
2
4
9
2
4
2
2
13
30
1
1
2
BOTTOM
SONAR HEAD
LOCATING BLOCK
TOP
SOUNDER CABLE
3
FORWARD LOOKING
17
HYDROPHONE CABLE
NOTES:
1. LUBRICATE FASTENERS WITH ANTISEIZE COMPOUND
2. SEE PAGE 2 FOR HARDWARE DETAILS
3. SEE PAGES 3AND 4 FOR CABLE ROUTING DETAILS
PROPRIETARY NOTICE
THIS DOCUMENT CONTAINS INFORMATION
WHICH IS SOLE PROPERTY OF
KONGSBERG MESOTECH LTD AND IS RECEIVED
3
1
IN CONFIDENCE. ITS CONTENTS MAY NOT BE
DISCLOSED OR REPRODUCED IN ANY WAY
WITHOUT WRITTEN CONSENT OF
KONGSBERG MESOTECH LTD.
DO NOT SCALE DRAWING.
CONFIDENTIAL. DO NOT COPY.
APPROVALS
DRAWN
REVISED
CHECKED
ENGR
ISSUED
NAME
DL
--
DATE
08/02/21
--
ISS
Kongsberg Mesotech Ltd.
ASSEMBLY DRAWING FS70 DEPLOYMENT PACKAGE
SIZE
NSCM NO
1C965
B
SCALE: 1:4
DESCRIPTION
REVISIONS
DWG. NO.
TYPE
974-80161000
MD
W.O. NO.
DATE
ISS
1.0
SHEET 1 OF 4
Page 97

DWG. NO.
974-80161000
SHT
2
ISS
1.0
B
TOP
B
C
C
12
16
5
14
16
2
"THIRD WIRE"
8
16
1
SECTION B-B
(SOUNDER INSTALLATION)
SCALE 1 : 2
13
7
16
15
1
SECTION C-C
SCALE 1 : 2.5
10
9
A
D
10
BOTTOM
16
DETAIL A
SCALE 1 : 1.5
15
16
16
15
DETAIL D
SCALE 1 : 2
PROPRIETARY NOTICE
THIS DOCUMENT CONTAINS INFORMATION
WHICH IS SOLE PROPERTY OF
KONGSBERG MESOTECH LTD AND IS RECEIVED
IN CONFIDENCE. ITS CONTENTS MAY NOT BE
DISCLOSED OR REPRODUCED IN ANY WAY
WITHOUT WRITTEN CONSENT OF
KONGSBERG MESOTECH LTD.
DO NOT SCALE DRAWING.
CONFIDENTIAL. DO NOT COPY.
APPROVALS
DRAWN
REVISED
CHECKED
ENGR
ISSUED
NAME
DL
--
DATE
08/02/21
--
NOTES:
1. LUBRICATE FASTENERS WITH ANTISEIZE COMPOUND
ISS
DESCRIPTION
REVISIONS
DATE
Kongsberg Mesotech Ltd.
ASSEMBLY DRAWING FS70 DEPLOYMENT PACKAGE
SIZE
NSCM NO
1C965
B
SCALE: 1:5
TYPE
MD
W.O. NO.
DWG. NO.
974-80161000
SHEET 2 OF 4
ISS
1.0
Page 98

CATCH HYDROPHONE CABLE
4-PIN WHIP
DWG. NO.
974-80161000
SHT
3
ISS
1.0
"THIRD WIRE"
INTERCONNECT CABLE
1
NOTES:
1. ROUTE CABLE UNDERNEATH SONAR HEAD
SINGLE 6-PIN WHIP
OPTION WITH 70kHz CATCH HYDROPHONE
SOUNDER CABLE
1
PROPRIETARY NOTICE
THIS DOCUMENT CONTAINS INFORMATION
WHICH IS SOLE PROPERTY OF
KONGSBERG MESOTECH LTD AND IS RECEIVED
IN CONFIDENCE. ITS CONTENTS MAY NOT BE
DISCLOSED OR REPRODUCED IN ANY WAY
WITHOUT WRITTEN CONSENT OF
KONGSBERG MESOTECH LTD.
DO NOT SCALE DRAWING.
CONFIDENTIAL. DO NOT COPY.
APPROVALS
DRAWN
REVISED
CHECKED
ENGR
ISSUED
NAME
DL
--
DATE
08/02/21
--
ISS
DESCRIPTION
REVISIONS
Kongsberg Mesotech Ltd.
ASSEMBLY DRAWING FS70 DEPLOYMENT PACKAGE
SIZE
NSCM NO
1C965
B
SCALE: 1:2
TYPE
MD
W.O. NO.
DWG. NO.
974-80161000
SHEET 3 OF 4
DATE
ISS
1.0
Page 99
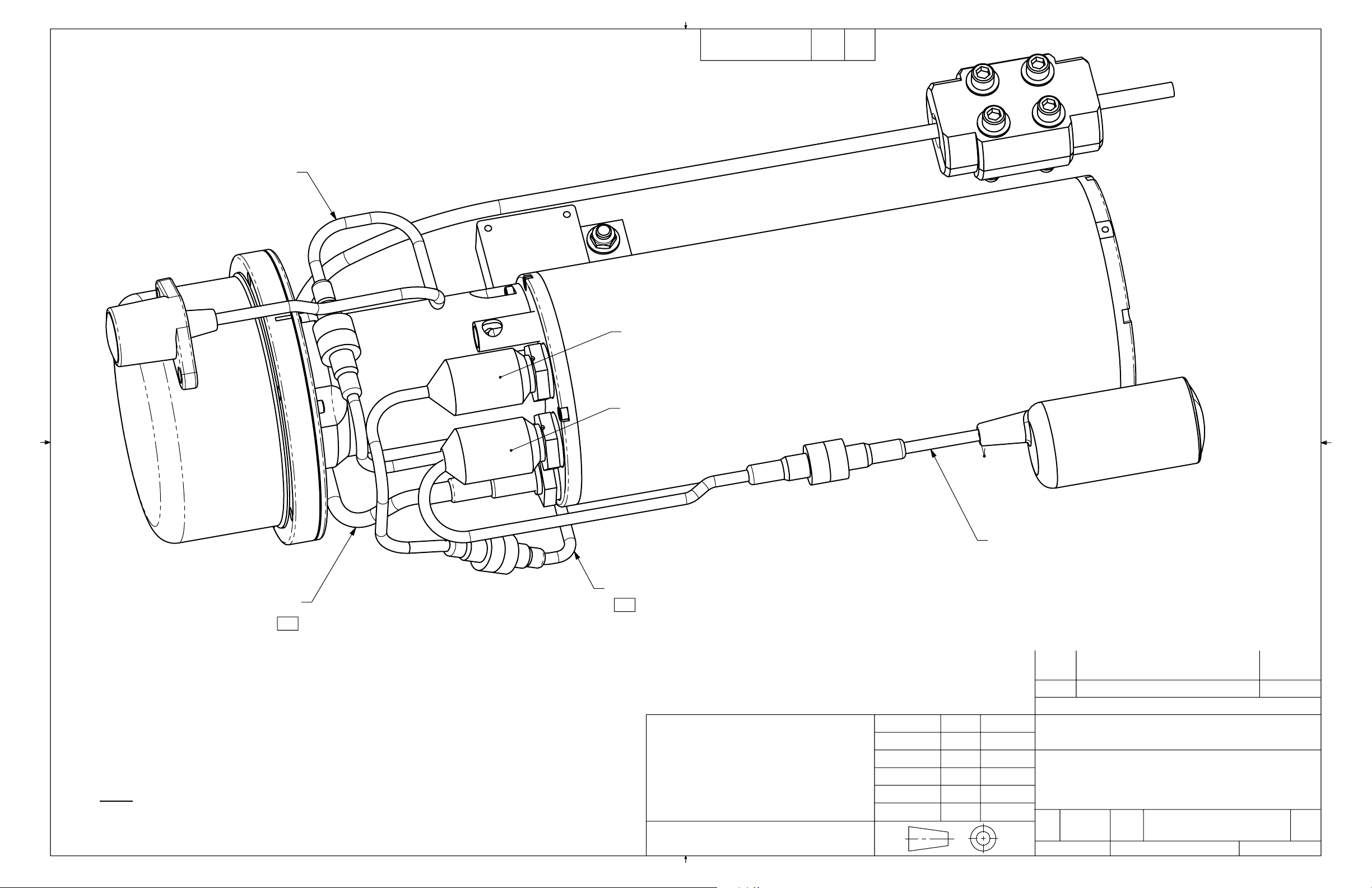
CATCH HYDROPHONE CABLE
4-PIN WHIP
DWG. NO.
974-80161000
SHT
4
ISS
1.0
"THIRD WIRE"
INTERCONNECT CABLE
1
NOTES:
1. ROUTE CABLE UNDERNEATH SONAR HEAD
DUAL 4-PIN / 6-PIN WHIP
SOUNDER CABLE
1
OPTION WITH 40kHz CATCH HYDROPHONE
AND FORWARD LOOKING HYDROPHONE
PROPRIETARY NOTICE
THIS DOCUMENT CONTAINS INFORMATION
WHICH IS SOLE PROPERTY OF
KONGSBERG MESOTECH LTD AND IS RECEIVED
IN CONFIDENCE. ITS CONTENTS MAY NOT BE
DISCLOSED OR REPRODUCED IN ANY WAY
WITHOUT WRITTEN CONSENT OF
KONGSBERG MESOTECH LTD.
DO NOT SCALE DRAWING.
CONFIDENTIAL. DO NOT COPY.
APPROVALS
DRAWN
REVISED
CHECKED
ENGR
ISSUED
NAME
DL
--
FORWARD LOOKING HYDROPHONE CABLE
DESCRIPTION
REVISIONS
DATE
08/02/21
--
ISS
Kongsberg Mesotech Ltd.
ASSEMBLY DRAWING FS70 DEPLOYMENT PACKAGE
SIZE
NSCM NO
1C965
B
SCALE: 1:2
TYPE
MD
W.O. NO.
DWG. NO.
974-80161000
DATE
ISS
1.0
SHEET 4 OF 4
 Loading...
Loading...