

Page 1
Quick Start Guide
Simrad FM90
Multibeam Trawl Sonar
www.simrad.co
m
TECHNOLOGY FOR
SUS
TAINABLE FISHERIE
S
Page 2

Page 3

922-00027021/2.2
January2018©KongsbergMaritimeAS
SimradFM90
MultibeamTrawlSonar
Quickstartguide
Thismanualprovidesyouwiththebasicinformationrequiredtoget
youstartedwiththeSimradFM90MultibeamTrawlSonar.
Formoreinformationaboutthepracticaluseoftheproduct,aswellas
detailedinformationaboutthefunctionsanddialogboxesprovided,
refertotheSimradFM90Referencemanual.
Page 4

KongsbergMaritimeAS
www.kongsberg.com
Documentinformation
•Product:SimradFM90
•Document:Quickstartguide
•Documentpartnumber:922-00027021
•Revision:2.2
•Dateofissue:01January2018
Copyright
TheinformationcontainedinthisdocumentremainsthesolepropertyofKongsbergMaritimeAS.No
partofthisdocumentmaybecopiedorreproducedinanyformorbyanymeans,andtheinformation
containedwithinitisnottobecommunicatedtoathirdparty,withoutthepriorwrittenconsentof
KongsbergMaritimeAS.
Warning
Theequipmenttowhichthismanualappliesmustonlybeusedforthepurposeforwhichitwas
designed.Improperuseormaintenancemaycausedamagetotheequipmentand/orinjurytopersonnel.
Youmustbefamiliarwiththecontentsoftheappropriatemanualsbeforeattemptingtooperate
orworkontheequipment.
KongsbergMaritimedisclaimsanyresponsibilityfordamageorinjurycausedbyimproperinstallation,
useormaintenanceoftheequipment.
Disclaimer
KongsbergMaritimeASendeavourstoensurethatallinformationinthisdocumentiscorrectandfairly
stated,butdoesnotacceptliabilityforanyerrorsoromissions.
Supportinformation
Ifyourequiremaintenanceorrepair,contactyourlocaldealer.Y oucanalsocontactususingthefollowing
address:simrad.support@simrad.com.Ifyouneedinformationaboutourotherproducts,visithttps:
//www.simrad.com.Onthiswebsiteyouwillalsondalistofourdealersanddistributors.
Page 5

922-00027021/2.2
3
Tableofcontents
ABOUTTHISMANUAL..............................................................5
SIMRADFM90.........................................................................7
Systemdescription.............................................................................................................8
Keyfeatures.......................................................................................................................9
Systemdiagram................................................................................................................10
Supportinformation.........................................................................................................11
GETTINGSTARTED................................................................13
PoweringtheFM90onandoff........................................................................................14
PoweringuptheFM90fornormaluse...................................................................14
PoweringofftheFM90..........................................................................................15
Gettingtoknowtheuserinterface...................................................................................16
Topbardescription..........................................................................................................17
Startingnormaloperation................................................................................................23
Introductiontothebasicprocedures......................................................................23
StartingoperationoftheSonarHead.....................................................................23
Customizingthesonarapplications........................................................................24
Choosingthesonarrange.......................................................................................26
Adjustingthesonarviews......................................................................................26
Conguringyourpreferences.................................................................................29
Settingupthecatchmonitoringsensors.................................................................30
Exportingsensordata.............................................................................................32
Importingsensordata.............................................................................................33
Quickstartguide
Page 6

4
922-00027021/2.2
SimradFM90
Page 7

922-00027021/2.2
5
Aboutthismanual
Thepurposeofthismanualistoprovideanintroductiontosafeandefcientuseofthe
SimradFM90MultibeamTrawlSonar.
Targetaudience
ThismanualisintendedforallinexperiencedandnewusersoftheSimradFM90.
Agoodunderstandingofsystemfunctionsandcontrolsisessentialtofullytake
advantageofthefunctionalityprovided.Seaconditionsvary ,sometimesdrastically,
anditisnotpossibletoidentifysettingsthatwillprovidethebestdataatalltimes.
Carefulstudyoftheinformationinthismanualishighlyrecommended,preferably
whileexploringtheFM90functionality.
Weassumethatyouarefamiliarwiththebasicacousticprinciplesofsoundinwater.
Onlineinformation
AllendusermanualsprovidedforoperationandinstallationofyourSimradFM90can
bedownloadedfromourwebsite.
•https://www.simrad.com/fm90
OurwebsitealsoprovidesinformationaboutotherSimradproducts.
Licenseinformation
TheFM90isnotalicensedproduct.
Softwareversion
ThisFM90QuickstartguidecompliestoFM90softwareversion1.2.
Registeredtrademarks
Observetheregisteredtrademarksthatapply.
Simrad
®
,SIMRAD
®
andtheSimrad
®
logoareeitherregisteredtrademarks,or
trademarksofKongsbergMaritimeASinNorwayandothercountries.
Windows
®
isaregisteredtrademarkofMicrosoftCorporationintheUnitedStatesand
othercountries.
Aboutthismanual
Page 8

6
922-00027021/2.2
Wewantyourfeedback
WewanttomaketheFM90asgoodaspossible.W ealsowantourenduser
documentationtobecomprehensiveandappropriate.Youcanhelp.Pleaseprovide
comments,suggestionsorconstructivecriticismtoanyofoursupportofces.
SimradFM90Quickstartguide
Page 9

922-00027021/2.2
7
SimradFM90
Topics
Systemdescription,page8
Keyfeatures,page9
Systemdiagram,page10
Supportinformation,page11
SimradFM90
Page 10
8
922-00027021/2.2
Systemdescription
TheSimradFM90isathird-wireMultibeamTrawlSonar.Itallowsforaccurateand
efcientmonitoringofthenetopening,thecatchsituation,andtheshingconditions.
TheFM90hasafastrefreshratethatallowsyoutoviewthesonarimagesinrealtime.
TheSimradFM90Multibeam
TrawlSonarprovides
signicantimprovementsover
theSimradFS70TrawlSonar
andotherscanningsonars.The
FM90Sonarcommunicates
withthevesselbymeansofa
third-wiresystemusingvery
highbit-ratedigitalsubscriber
line(VDSL2)communication,
transmittingreal-timeimages
ofthenetopeningatrapidrefreshrates.Inaddition,anechosounderlookingup("up
sounder")monitorsshescapingoverthenet,whileanotherechosoundershowsthe
foot-rope,theseabottom,andtheshenteringthenet.
BymeansofthesubmergedTrawlUnit,theFM90communicateswithanumberof
SimradPI/PX40kHzcatchmonitoringsensorsbymeansofhydroacousticlinks.Upto
sixmeasurementscanbemadesimultaneously.TheFM90supportspitch,roll,depth,
catch,bottom-contact,temperature,spread,height,andgeometrysensors.Standard
pitch,roll,depth,andtemperaturesensorsarealsobuiltintotheTrawlUnit.
TheFM90isasolid-statesonarsystem.Thisdesigneliminatesmovingparts,and
increasesreliabilityandavailabilityduringshingoperations.
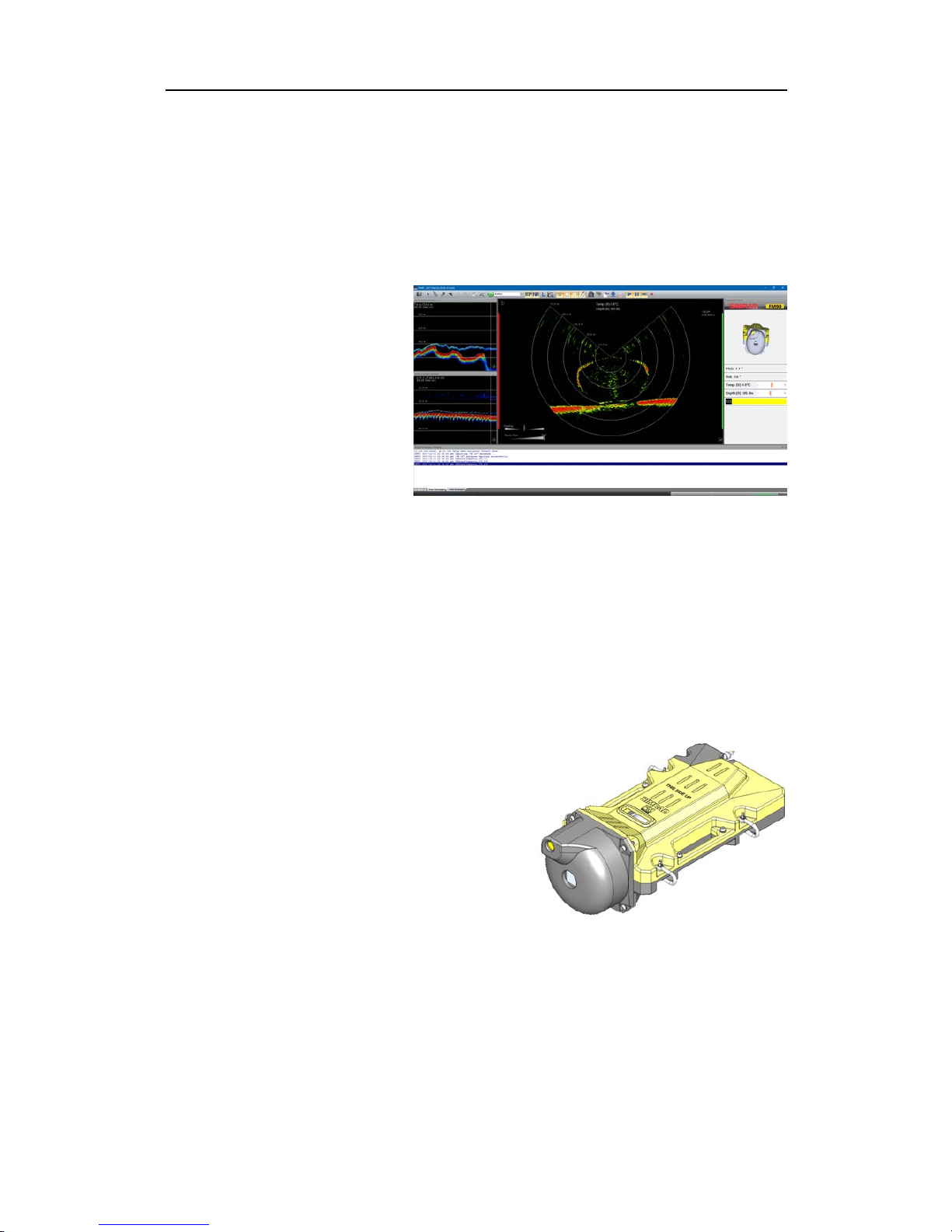
TheFM90DeploymentPackhasayellow
topandblackbottomtoassistyouinvisual
conrmationpriortolaunchandtoassistin
visualsightingduringrecovery.Itisquicklling
andquicktodrain.Ithasimprovedhandholds
toassisthandling—evenwithgloveson.The
strainreliefcanbeaccessedusingstandardtools
withoutopeningtheentireDeploymentPack.
Specicationsandfunctionality
TheFM90isauniquesonar,bothindesignandfunctionality.WhentheFM90sonar
pings,itsendsoutsoundenergyina240-degreesector.Thisenergyisreectedfrom
thenet,fromsh,andfromothertargetsinthewatercolumn.Thereectedenergyis
receivedbythetransducer,processed,andshownonthedisplay .BecausetheFM90
pingsacrossawideareainoneping,therefreshratetogenerateapictureofthenet
openingisalmostinstantaneous.Thisgivesyoureal-timeimages,allowingyoutoadjust
toveryfastmovementsofshschools.
SimradFM90Quickstartguide
Page 11

922-00027021/2.2
9
TheFM90usesanupdatedversionofKongsbergMesotech’striedandtestedM3Sonar
®
multibeamprocessingsoftware,successfullydeployedworld-wideformanyyears.The
softwareusesinnovativeprocessingalgorithmstoautomaticallyoptimizetheimage
qualityspecicallyforshingapplications.ItincludesFMtransmissions(alsoknownas
“Chirp”)toensureaclutter-freepicturewithaveryhighresolutioninrange.
TheFM90ProcessorUnitiscontrolledbytheMicrosoft
®
Windows
®
operatingsystem.
Thisallowsforaexiblechoiceofpresentationmodes,andforalargerangeofuser
applications.
Keyfeatures
TheSimradFM90isaexibleandfeature-packedthird-wireMultibeamTrawlSonar.It
operatesequallywellinthewatercolumnandclosetothebottom.TheFM90enables
useofyourexistingPI/PXcatchmonitoringsensors.
•Real-timenetpicture
•Superiorbottompicture
•Simpliedsoftwarewithautomaticadjustments
•TrawlandPI/PXsensorexporttoSerialPortorEthernetPort
•Nodonglerequiredtooperatesoftware
•ConvenientlifthandlesonDeploymentPack
•High-visibilityconrmationofDeploymentPackorientationduringnetlaunch
•Easyaccesstothird-wireconnector
•FastoodinganddrainingoftheDeploymentPack
•Nomovingpartsmeanslessmaintenance
•CompatiblewithSimradPI/PXcatchmonitoringsensors
SimradFM90
Page 12

10
922-00027021/2.2
Systemdiagram
ThesystemdiagramidentiesthemaincomponentsofabasicFM90system.Onlythe
mainconnectionsbetweentheunitsareshown.Detailedinterfacecapabilitiesandpower
cablesarenotshown.ThedisplayisnotastandardpartoftheFM90delivery.Thisisa
commercialitemthatcanbepurchasedlocally .
AProcessorUnit
BEthernetcable
CPower/VDSLUnit
DThird-wireorT estcable
ETrawlUnit
FAft-lookingCatchHydrophone
G(Optional)Forward-lookingPIHydrophone
H40kHzPI/PXSensors
SimradFM90Quickstartguide
Page 13

922-00027021/2.2
11
Supportinformation
IfyouneedtechnicalsupportforyourSimradFM90youmustcontactyourlocaldealer,
oroneofoursupportdepartments.Alistofallourofcesanddealersisprovidedonour
website.Y oucanalsocontactourmainsupportofceinNorway.
Norway(Mainofce)
•Companyname:KongsbergMaritimeAS/Simrad
•Address:Strandpromenaden50,3190Horten,Norway
•Telephone:+4733034000
•Telefax:+4733042987
•Website:https://www.simrad.no
•E-mailaddress:simrad.support@simrad.com
Spain
•Companyname:SimradSpainS.L.U
•Address:PartidaAtalayes20,03570Villajoyosa,Spain
•Telephone:+34966810149
•Telefax:+34966852304
•Website:http://www.simrad.es
•E-mailaddress:simrad.spain@simrad.com
France
•Companyname:SimradFrance
•Address:5ruedeMenMeur,29730Guilvinec,France
•Telephone:+33298582388
•Telefax:+33298582388
•Website:http://www.simrad.fr
•E-mailaddress:simrad.france@simrad.com
USA
•Companyname:KongsbergUnderwaterTechnologyInc/SimradFisheries
•Address:1921033rdAveW,Lynnwood,W A98036,USA
•Telephone:+14257121136
•Telefax:+14257121193
•Website:https://www.simrad.com
•E-mailaddress:sh.usa.support@simrad.com
SimradFM90
Page 14

12
922-00027021/2.2
Malaysia
•Companyname:KongsbergMaritimeMalaysiaSdn.Bhd
•Address:Unit27-5SignatureOfces,TheBoulevard,MidV alleyCity,Lingkaran
SyedPutra,59200KualaLumpur,Malaysia
•Telephone:+6564117488
•Telefax:+60322013359
•Website:https://www.simrad.com
•E-mailaddress:simrad.asia@simrad.com
Korea
•Companyname:KongsbergMaritimeKoreaLtd
•Address:#1101-HarborTower,113-1,Nampodong6-Ga,Jung-Gu,Busan600-046
Korea
•Telephone:+82-51-242-9933
•Telefax:+82-51-242-9934
•Website:https://www.simrad.com
•E-mailaddress:simrad.korea@simrad.com
China
•Companyname:KongsbergMaritimeChinaLtd
•Address:555ChuanqiaoRoad,China(Shanghai)PilotFreeTradeZone,201206,
China
•Telephone:+86-21-3127-9888
•Telefax:+86-21-3127-9555
•Website:https://www.simrad.com
•E-mailaddress:simrad.china@simrad.com
SimradFM90Quickstartguide
Page 15

922-00027021/2.2
13
Gettingstarted
Topics
PoweringtheFM90onandoff,page14
Gettingtoknowtheuserinterface,page16
Topbardescription,page17
Startingnormaloperation,page23
Gettingstarted
Page 16

14
922-00027021/2.2
PoweringtheFM90onandoff
Topics
PoweringuptheFM90fornormaluse,page14
PoweringofftheFM90,page15
PoweringuptheFM90fornormaluse
TopoweruptheFM90,usetheON/OFFpowerswitchonthefrontpanelofthe
Power/VDSLUnit.
Context
TheON/OFFswitchontherearpanelpowersupthePower/VDSLUnit.TheON/OFF
switchonthefrontpanelpowersuptheSonarHead.
Note
AfterpoweringuptheFM90,therewillbeabriefdelaybeforetheProcessorUnit
discoverstheSonarHead.Thelengthofthisdelaydependsonexternalfactors,such
asthelengthofyourthird-wiretrawlcable.W aitfortheVDSL/STATUSlightonthe
Power/VDSLUnittoturnsolidgreenbeforeattemptingtoconnecttotheSonarHead.
Procedure
1TurntheSonarHeadonusingtheON/OFFpowerswitch(A)onthePower/VDSL
Unitfrontpanel.
2Switchthevoltageselector(B)to200VDC.
3Conrmthatthevoltagemeter(C)shows200VDCandthecurrentmeter(D)
showsthecurrentislessthan0.5A.
4WaitfortheVDSL/STA TUSlight(E)toturnsolidgreen.
Thelightashesslowly ,thenquickly,thenstayscontinuouslyonwhenthesystem
isready.
SimradFM90Quickstartguide
Page 17

922-00027021/2.2
15
5PoweruptheProcessorUnit.
6ConrmthattheLINK/ACT3light(F)isashing.
TheashinglightindicatesalinkwiththeProcessorUnitEthernetport.
Relatedtopics
StartingoperationoftheSonarHead,page23
PoweringofftheFM90
TopowerofftheFM90,usetheON/OFFpowerswitchonthefrontpanelofthe
Power/VDSLUnit.
Context
WhenyoudonotusetheFM90,switchofftheentiresystem.
Procedure
1ClicktheRunbuttontostopoperationanddisconnecttheSonarHead.
ThisbuttonislocatedonthetopbaroftheFM90software.
2ClosethesoftwareandshutdownWindows
®
.
3Turnoffthedisplay.
Ifrequired,refertotheinstructionsprovidedbythedisplaymanufacturer.
4PresstheON/OFFpowerswitchonthefrontpanelofthePower/VDSLUnitto
theOFFposition.
Gettingstarted
Page 18

16
922-00027021/2.2
Gettingtoknowtheuserinterface
TheFM90consistsofspecicvisualelementsthatworktogether.Thevisual
elementsprovideyouwiththeechoinformationyouneed,theyhelpyoutocontrol
thefunctionalityneededtounderstandthisinformation,andnally,theyallowyouto
controltheoperationalparameters.
Context
AT opbar
BSonarviews
CDeploymentPackwindow
DStatusbar
Procedure
1Movethecursortothetopbar,andinvestigatethefunctionsprovided.
Observethatsmalltooltipsopentoidentifythevariousfunctionsyoucanuse.Y ou
canmakescreencaptures,selectoverlays,opencongurationdialogboxes,showor
hidewindows,andstartandstopthesonar.
2MovethecursortothesonarviewsinthemainFM90presentation.
Observethesmallcirculariconswithineachsonarview.Clickontheseiconsto
opentheInformationWidgetandDisplayWidget.
3Youcanchangethephysicalsizeofthewindowsbyclickingonthewindowborder,
thendraggingittocreatealargerwindow .Notethatthesizeoftheotherwindows
willbereducedaccordingly.
SimradFM90Quickstartguide
Page 19

922-00027021/2.2
17
Youcanalsodragthewindowstoanylocationonthedisplay,ordockthewindows
bydraggingthewindowtooneofthearrowiconswhichappear.
4MovethecursortotheDeploymentPackwindowontherightsideoftheFM90
presentation.
ObservetheTrawlUniticon,trawlsensorstatuspane,andPIsensorpane.
5MovethecursortothestatusbaratthebottomoftheFM90presentation.
Observethetextonthebottom-rightside.Clickingthesystemstatustextwillopen
aHeadStatuswindowshowingtelemetryinformation.
Relatedtopics
Topbardescription,page17
Topbardescription
TheFM90topbarislocatedonthetopofthedisplaypresentation,andstretchesfrom
thefarlefttothefarrightside.
Thetopbargivesyoufastaccesstokeyfunctionality .Itprovidesdedicatedbuttonsto
openvariousmenus,accesstools,andhideorshowvariouswindows.Italsoprovidesa
fewbuttonsrelatedtooperatingsystemfeatures.
Gettingstarted
Page 20

18
922-00027021/2.2
Tools
ASaveimagewithoverlays
Clickthisbuttontosavesonarviewimages,includinganyoverlaysyou’veplaced
inthesonarviews.
BArrow
Clicktousethedefaultarrowcursor.Withthedefaultcursoryoucanselectand
manipulateobjectsonthescreen.
CWiper
Removesitemsfromthesonarview.Whenselected,clickoneachoverlayyou
wishtodelete.
DT apeMeasure
Measuresdistancesonthesonarview.Alsoallowsyoutoplaceameasurement
overlayonthesonarview.
EStringMeasure
Denesandmeasuresperimetersandareas.Allowsyoutoplaceanareaoverlay
onthesonarview.
FReferenceCursor1
GReferenceCursor2
Youcanplaceoneortworeferencecursorsasoverlaysonthesonarview.When
youplacetwocursors,anadditionaloverlaywillappearwithinformationaboutthe
cursors.
SimradFM90Quickstartguide
Page 21

922-00027021/2.2
19
Sonarsetupandoperation
APreferencesdialogbox
ThePreferencesdialogboxisusedtosetupsystempreferencessuchasunitsof
measure,timeformat,etc.Thisdialogboxalsoallowsyoutoselectthesave
locationforscreenshotimagesandrecordedsonardatales.
BSonarSetupdialogbox
YoucandiscoverandconnecttotheSonarHeadusingtheSonarSetupdialogbox.
YoucanalsoviewtheSonarHeadnetworkpropertiesandadjustthenetworklink
speed.
CRun
ClicktoconnectandruntheFM90SonarHead.Whenrunning,clicktodisconnect
andstoptheFM90SonarHead.
DSonarapplicationslist
Thisdrop-downlistdisplaysvarioussonarapplicationsusedfordifferenttypesof
trawling.
Gettingstarted
Page 22

20
922-00027021/2.2
Filters
APingtoPinglter
ClickingthisbuttonwillenableordisablethePingtoPinglter.Thislterreduces
noiseandshowsamorepersistentnetprole.
BNoiseReductionlter
ClickingthisbuttonwillenableordisabletheNoiseReductionlter.Thislter
reducesnoisebyboostingweakechoesandsuppressingstrongechoes.
CLimitStrongT argetslter
ClickingthisbuttonwillenableordisabletheLimitStrongTargetslter.Thislter
reducesnoisebysuppressingstrongechoes,butdoesnotchangeweakechoes.
DTVGCorrectionlter
ClickingthisbuttonwillenableordisabletheTVGCorrectionlter.Thislter
reducesTVG-ampliednoiseatfurtherrangeswherenotargetsappear.
EShow/hideGrid
Turnsthedisplaygridonoroff.
FShow/hideUp-Sounderwindow
Clickthisbuttontoshoworhidetheup-sounderwindow.
GShow/hideDown-Sounderwindow
Clickthisbuttontoshoworhidethedown-sounderwindow.
HShow/hideOutputMessageswindow
ClickthisbuttontoshoworhidetheOutputMessageswindow.
SimradFM90Quickstartguide
Page 23

922-00027021/2.2
21
Sensors
ASensorSetupdialogbox
Thisdialogboxallowsyoutodeneyourcatchmonitoringsensors,improvethe
catchmonitoringsensorreceivesignal,andentersensoroffsetstocorrectreadings.
BSensorExportdialogbox
TheSensorExportdialogboxallowsyoutocontrolthepropertiesofeachavailable
communicationchannelprovidingoutputfromtheFM90ProcessorUnit,andto
selectwhichdatatoexport.
CExternalSensorImportdialogbox
TheSensorImportdialogboxallowsyoutocongureexternalsensorssuchasthe
GPSandHeadingsensortoprovidenavigationinformation.
DDepthgraph
ClickthisbuttontoopentheDepthgraph.TheDepthgraphshowstherecorded
depthasafunctionoftime.
ETemperaturegraph
ClickthisbuttontoopentheTemperaturegraph.TheT emperaturegraphshowsthe
recordedtemperatureasafunctionoftime.
Gettingstarted
Page 24

22
922-00027021/2.2
Recordingandplayback
APlayback
Clickingthisbuttonwillallowyoutoplaybackapreviouslyrecordedsonarsession.
BPause
Pausesplaybackwhenplayingbackale.PausestheSonarHeadwhenrunning
theFM90.
CPlaybackConsole
ClicktoshoworhidethePlaybackConsole.
DRecord
Clicktostartrecording.Clickagaintostoprecording.Thisbuttoncanbeused
whenrunningtheSonarHeadorwhenplayingbackale.
SimradFM90Quickstartguide
Page 25

922-00027021/2.2
23
Startingnormaloperation
Topics
Introductiontothebasicprocedures,page23
StartingoperationoftheSonarHead,page23
Customizingthesonarapplications,page24
Choosingthesonarrange,page26
Adjustingthesonarviews,page26
Conguringyourpreferences,page29
Settingupthecatchmonitoringsensors,page30
Exportingsensordata,page32
Importingsensordata,page33
Introductiontothebasicprocedures
OnceyouhavepoweredupthecompleteFM90system,andstartedtheFM90program,
youarereadytostarttheactualoperation.
Observethesebriefprocedurestofamiliarizeyourselfwiththebasicoperation.
Whenstartingup,theFM90willautomaticallyapplyitsprevioussettings.The
proceduresarepartlyprovidedtogetyouacquaintedwiththebasicfunctionality
offeredbytheFM90,andpartlytosetuptheFM90fornormaluse.Ifyoualready
knowthecurrentoperationalsettingsareacceptable,youmaynotneedtodoanyof
theseprocedures.
StartingoperationoftheSonarHead
TostartoperationoftheFM90sonar,youmayneedtoverifythattheSonarHeadhas
beendiscovered.
Context
Note
AfterpoweringuptheFM90,therewillbeabriefdelaybeforetheProcessorUnit
discoverstheSonarHead.Thelengthofthisdelaydependsonexternalfactors,such
asthelengthofyourthird-wiretrawlcable.W aitfortheVDSL/STATUSlightonthe
Power/VDSLUnittoturnsolidgreenbeforeattemptingtoconnecttotheSonarHead.
Gettingstarted
Page 26

24
922-00027021/2.2
Procedure
1Double-clicktheFM90iconontheProcessorUnitdesktoptostartthesoftware.
2ClicktheRunbuttontoconnecttotheSonarHead.
Thisbuttonislocatedonthetopbar.
Note
Ifthesonarisoperating,clickingtheRunbuttonstopsoperationanddisconnects
theSonarHead.
3VerifythattheSonarHeadconnectsandthesonarviewsupdate.
4IfyouseeanerrorintheOutputMessageswindow,verifythattheSonar
Headhasbeendiscovered.
aClicktheSonarSetupbutton.
Thisbuttonislocatedonthetopbar.
ObservethattheSonarSetupdialogboxopens.
bClickDiscoverSonarHeadstosearchforthesonaronthenetwork.
cIftheFM90SonarHeadisfound,selectit,thenclickUseDiscoveredHead.
AdiscoveredSonarHeadappearsintheOnlineSonarHeadslist.IftheSonar
Headdoesnotappear,theEthernetconnectionbetweentheProcessorUnitand
SonarHeadhasnotbeenestablished.
dClickClose.
Relatedtopics
PoweringuptheFM90fornormaluse,page14
Customizingthesonarapplications
Youcanselectwhichsonarapplicationswillappearinthesonarapplicationslist.T oget
thebestnetpicture,choosethesonarapplicationsthatdescribethekindoftrawling
thatyoudo.
Context
TherearetwogroupsofsonarapplicationsdesignedfortheFM90system—Bottom
andMidwater.
SimradFM90Quickstartguide
Page 27

922-00027021/2.2
25
TheBottomsonarapplicationsallowyoutoseeaclearnetpicture,evenwhentrawling
closetothebottom.
TheMidwatersonarapplicationsallowyoutoseethenetpicturewithafastupdaterate.
Note
Allsonarapplicationsapplytotheup-sounderanddown-sounderviews,aswellasthe
netopeningview .
•Bottom
Usethisapplicationfornormalbottomtrawling.
•Bottom-Hard
Usethisapplicationforbottomtrawlingonahardbottom.
•Bottom-MidWaterColumn(MWC)
Usethisapplicationforbottomtrawlingwhenthesonarisinthemid-watercolumn.
•Bottom-Shallow
Usethisapplicationforbottomtrawlinginshallowwater.
•Midwater
Usethisapplicationfornormalmidwatertrawling.
•Midwater-MidWaterColumn(MWC)
Usethisapplicationformidwatertrawlingwhenthesonarisinthemid-watercolumn.
•Midwater-Shallow
Usethisapplicationformidwatertrawlinginshallowwater.
•MidwaterNoise
Usethisapplicationformidwatertrawlinginanoisyenvironment.
NotethatMidwaterNoiseisatestapplicationthatdoesnottransmit—itonly
receives.Usethisapplicationtodetermineifthereisenvironmentalnoisepresent(for
example,fromthegeartouchingthebottom,orfromothersonarspinging).
Procedure
1SelectCustomizeAppsfromthesonar
applicationslist.
2UsetheAddandRemovebuttonsto
managethelist.
3SelectOKtosavethechosensettingsand
closethedialogbox.
Gettingstarted
Page 28

26
922-00027021/2.2
Choosingthesonarrange
TheRangefunctionallowsyoutospecifythemaximumtheoreticalverticaldepthand
horizontaldistancecoveredbytheFM90.
Context
TheFM90SonarHeadcanoperateatdifferentpredened
nearandfarranges.
TherangevalueisdenedfromtheSonarHead.
Note
Eventhoughyoucanchoosealargerangevalue,thatdoes
notmeanthatyoucandetectyourtargetsonthesamerange.
Therangevalueonlydenestherangethatisshowninthe
views.Actualtargetdetectionwillalwaysdependonthe
operationalenvironment,suchaswatertemperature,salinity,
interferenceandlayersinthewatercolumn.
Procedure
1Right-clickinoneofthesonarviewwindowstodisplay
therangemenu.
2Selectthedesirednearandfarrangefromthemenu.
Note
Youcanchangetheunitsofmeasurementinthe
Preferencesdialogbox.
Result
Therangeisdisplayedwithmeasuredintervalsinthesonarview.Thecurrentrangewill
beupdatedwhentheSonarHeadisrunning.
Adjustingthesonarviews
TheFM90offersthreedifferentsonarviews:anetopeningview,anup-sounderview ,
anddown-sounderview .Thesounderviewsareshowninwindowsthatcanberesized,
docked,oroatedanywhereonthedisplay.
Context
ThecurrenttemperatureanddepthoftheTrawlUnitisshowninanoverlayatthetopof
thenetopeningview.Youcanright-clickonthisoverlaytoincreasetheoverlaysize.
TheDisplayWidgetallowsyoutoadjustthelterstrength,changethedisplaygain,
chooseyourechocolours,andchangethecolourthreshold.Youcanapplydifferent
SimradFM90Quickstartguide
Page 29

922-00027021/2.2
27
settingstoeachsonarview.TheDisplayWidgeticonappearsinthenetopeningview,the
up-sounderview ,andthedown-sounderview.Clicktheiconinthebottom-rightcorner
ofeachsonarviewtoopentheDisplayWidget.
Additionalcontrolstorotateandresizethenetopeningviewareavailableinthe
bottom-leftcorneroftheview .
Tip
Youcandragsliderswiththemousetoincreaseordecreaseparametervalues.Forne
adjustments,usethemousescrollwheeltomovethesliderbyoneincrement.
Procedure
1Foraclearerviewofthenet,rotate
andresizetheimageinthenet
openingview.
aDragtheHeadingsliderto
therighttorotatetheimage
clockwise.DragtheHeading
slidertothelefttorotatethe
imagecounterclockwise.
Rotatethenetopeningviewuntilthenetappearstherightwayup.Y oucan
rotatetheimageuptothirtydegreesineitherdirection.Right-clickonthe
controltoresetittothedefaultvalue.
bDragtheSectorSizeslidertoincreaseordecreasethesizeoftheareadisplayed.
Youmay,forexample,wishtohidedistractingfeatures(suchasthewater
surface)andfocusonlyonthenet.Right-clickonthecontroltoresetitto
thedefaultvalue.
2Adjusttheimageinthenetopeningview.
aClicktheDisplayWidgeticon.
Thisiconislocatedinthebottom-rightcornerofeachsonarview.
ObservethattheDisplayWidgetopens.
bToadjusttherangeofthe
TVGCorrectionlter,dragthe
TVGCorrslidertoincreaseor
decreasethepercentagetobe
appliedtotherange.
Forexample,ifyourcurrent
rageis0.5mto10m,thena
TVGCorrectionof80percent
willapplytheltertothesonar
viewbeyondthe8mrangerings.TheTVGCorrectionrangewillappearasan
overlayinthesonarview(usingyourpreferredunitsofdistance).
Gettingstarted
Page 30

28
922-00027021/2.2
Note
TheTVGCorrsliderwillnotappearifTVGCorrectionisdisabled.
cToadjustthestrengthofthePingtoPinglter,dragtheFilterslidertoincrease
ordecreasetheltereffectinthesonarview.
Note
TheFiltersliderwillnotappearifthePingtoPinglterisdisabled.Notethat
ltersettingswillnotbesavedwhenthesoftwareisclosed.
dToadjustthedisplaygainmanually ,checktheboxanddragtheGainsliderto
increaseordecreasethegain.
Unchecktheboxifyouwantthesoftwaretoadjustthegainautomatically.
Note
TheDisplayGaincontrolsthe"visualamount"ofechothataredisplayed,in
otherwordsthestrengthoftheechopresentation.
eTochooseyourechocolours,right-clickonthePalettebartocyclethroughthe
colourscaleoptions.
Whichcolourscaletouseismainlyapersonalpreferencebasedonambient
lightconditions,thenatureoftheechoesandyourownexperience.
fTochangethecolourthreshold,dragthePaletteslidertoincreaseordecrease
thenumberofcolours.
Note
Decreasingcolourswillreducethemaximumdetectionrange.Thiswill
providealteringeffectthatremovestheweakestechoes.
gClicktheDisplayWidgeticontohidethewidget.
3Adjusttheimageintheupanddownsounderviews.
aClicktheDisplayWidgeticon.
Thisiconislocatedinthebottom-rightcornerofeachsonarview.
ObservethattheDisplayWidgetopens.
SimradFM90Quickstartguide
Page 31

922-00027021/2.2
29
bTheNRbuttonshowsthestatus
oftheNoiseReductionlterin
thesounderview.Clickingthis
buttonwillenableordisablethe
NoiseReductionlter.
Thislterreducesnoiseby
boostingweakechoesand
suppressingstrongechoes.In
thesounderviews,usethislter
toseethesh,footrope,and
bottomatthesametime.
cToadjusttheRCG(ReverberationControlledGain),checktheboxanddrag
theRCGslidertoincreaseordecreasethegain.
UnchecktheboxifyouwanttodisabletheRCG.
Note
TheRCG(ReverberationControlledGain)controlsthereceiverprocessing
individuallyforthereceivingbeams.Itwillautomaticallyremoveunwanted
reverberationfromthebottomorfromtheseasurface.TheRCGwillhelpyou
toseethefootropewhentherearealotofsh.Itmayhoweveralsoremove
scatteredshfromthepresentation.
dToadjustthedisplaygainmanually ,checktheboxanddragtheGainsliderto
increaseordecreasethegain.
Notethatautomaticgainadjustmentisnotavailablefortheupand
down-sounderviews.
eTochooseyourechocolours,right-clickonthePalettebartocyclethroughthe
colourscaleoptions.
fTochangethecolourthreshold,dragthePaletteslidertoincreaseordecrease
thenumberofcolours.
gClicktheDisplayWidgeticontohidethewidget.
Conguringyourpreferences
Usethetime,temperature,andmeasurementunitsthatareappropriateforyourcountry .
Context
ThePreferencesdialogboxisusedtosetupsystempreferencessuchasunitsofmeasure,
timeformat,etc.Thisdialogboxalsoallowsyoutoselectthesavelocationfor
screenshotimagesandrecordedsonardatales.
Gettingstarted
Page 32

30
922-00027021/2.2
Procedure
1ClickthePreferencesbutton.
Thisbuttonislocatedonthetopbar.
ObservethatthePreferencesdialogboxopens.
2Choosetheunitofmeasurementforallthereadoutsrelatedtorangeanddistances
intheFM90userinterface.
3Choosetheunitofmeasurementforallthetemperaturereadings.
4Enterthesoundvelocitytoensureaccuratedepthdetermination.
5ChooseyourdesiredFileSavingsettings.
6SelectClosetosavethechosensettingsandclosethedialogbox.
Settingupthecatchmonitoringsensors
TheFM90supportsuptosixmeasuresonsixchannels.
Prerequisites
•ThephysicalinstallationofyourPI/PXcatchmonitoringsensorsmustbecomplete.
•TheSonarHeadmustberunningtodothisprocedure.Ifnot,theSensorSetupicon
willbegreyedout.
Context
TheFishSensorspageisthersttabintheSensorSetupdialogbox.Thispageallows
youtodenewhichPI/PXcatchmonitoringsensorsshallbeusedwiththeFM90system.
Procedure
1ClicktheSensorSetupbutton.
Thisbuttonislocatedonthetopbar.
ObservethattheSensorSetupdialogboxopens.
2SelecttheFishSensorstab.
3Selecteachsensoryouwanttosetup(fromsensoronetosix)andclicktheAdd
Measurebuttontoaddameasureforeachsensor.
4Setthesensorpropertiesforeachmeasurethatyouadd.
aSelecttheUpdateRateforthecatchmonitoringsensor.
ThisparameterisusedtoselecthowoftentheFM90canexpecttoreceive
informationfromthesensor.Afasterupdaterategivesyouinformationmore
often,butwilldecreasethebatterylife.
SimradFM90Quickstartguide
Page 33

922-00027021/2.2
31
Note
TheUpdateRateparameterisveryimportant.Thevalueyouchoose
heremust
complytothevalueprogrammedintothesensor .Ifthesedonot
match,thecommunicationbetweentheFM90andthesensorwillnotwork.
IfyouusetheSimradPXMultiSensor ,theUpdateRateisxed.Y oumust
alwayschooseNormalupdaterate.
bSelectthePosition.
Forsensorsthatmeasurerollorpitch,chooseeitherPortorStarboard.Forall
othermeasurements,setthisvaluetoOther.
5Foreachnewcatchmonitoringsensoryouadd,repeatthefollowingsteps.
aSelectthemeasurementType.
Thissettingdenesthetypeofmeasurementthatisexpectedfromthecatch
monitoringsensor.Thetypemust
matchtheactualtypeofmeasurementmade
bythesensor.
bSelectthecommunicationChannel.
Thisisthecommunicationchannelusedbetweenthecatchmonitoringsensor
andtheFM90.
Ifyouusemorethanonesensorofthesametypeatthesametime,thechannel
numberononeofthesensorsmust
bechangedtomakeituniqueforthat
particularsensor.Thismustbechangedboth intheactualsensor,and inthe
SensorSetupdialogboxduringconguration.
Note
Thechannelnumberparameterisvital.Thechannelyouchoosemustcomply
withthechannelprogrammedintothecatchmonitoringsensor .Ifthesedonot
match,thecommunicationbetweentheFM90andthesensorwillnotwork.
Tochangethechannelnumberinthecatchmonitoringsensor,usetherelevant
softwareprogram.
cSelectEnabledtoactivatethecommunicationbetweenthecatchmonitoring
sensorandtheFM90.
dSelecttheOffsetvaluefordepthandspreadmeasurements.
Thissettingdenestheoffsetvalueforcatchmonitoringsensorsthatmeasure
spreadanddepth.
Theoffsetvalueforthedepthsensorsaredeterminedduringcalibration.The
offsetvalueforthespreadsensormustbeenteredmanuallybasedonyour
knowledgeaboutthephysicallocationsofthesensorsandthepropertiesof
thegear.
6SelectOKtosavethechosensettingsandclosethedialogbox.
Gettingstarted
Page 34

32
922-00027021/2.2
Exportingsensordata
Ifyouhavethird-partysoftwarethatrequiressensordata,thensetupsensordata
exporting.
Prerequisites
TheSonarHeadmustberunningtodothisprocedure.Ifnot,theSensorExporticon
willbegreyedout.
Context
TheSensorExportdialogboxallowsyoutocontrolthepropertiesofeachavailable
communicationchannelprovidingoutputfromtheFM90ProcessorUnit,andtoselect
whichdatatoexport.
Procedure
1ClicktheSensorExportbutton.
Thisbuttonislocatedonthetopbar.
ObservethattheSensorExportdialogboxopens.
2Setupsensordataexport.
aClick<<Selecttoaddthesensorsyouwanttoexportdatafrom.
bVerifythatEnabledOutputOnPortischecked.
cIntheCommunicationsSettingssection,conguretheserialportsettingsthat
areusedforsensordataexporting.
dIntheUDPExportSettingssection,conguretheUDPportsettingsthatare
usedforsensordataexporting.
Tip
IftheLocalPortsettingdoesnotconictwithanotherprogram,leaveitas
thedefault20009.
3SelectOKtosavethechosensettingsandclosethedialogbox.
SimradFM90Quickstartguide
Page 35

922-00027021/2.2
33
Importingsensordata
Ifyouhaveanyexternalsensors,thenyoucanimportyoursensordataforuseinthe
FM90software.
Context
TheSensorImportdialogboxallowsyoutocongureexternalsensorssuchastheGPS
andHeadingsensortoprovidenavigationinformation.
Procedure
1ClicktheSensorImportbutton.
Thisbuttonislocatedonthetopbar.
ObservethattheExternalSensorImportdialogboxopens.
2ClickAddDevice,thensettheProtocol,suchasGGAforGPS,orHDTforheading.
3ConguretheBaudRateifusingaserialporttoreceiveexternalsensordata.
Alternatively,ifyouareusingUDPEthernettoreceiveexternalsensordata,switch
thePortLocationtoconguretheUDPPort.
4ClickT estDevicetoconrmthatyouarereceivingsensordata.
5SelectClosetosavethechosensettingsandclosethedialogbox.
Gettingstarted
Page 36

©2018KongsbergMaritime
 Loading...
Loading...