

Siemens SIMATIC CP 440 User Manual
Preface, Contents
SIMATIC
Point-to-point Communication
CP 440
Installation and Parameter
Assignment
Manual
Product Description
Basic Principles of Serial Data
Transmission
Commissioning the CP 440
Installing the CP 440
Configuring and
Parameterizing the CP 440
Communication Using Function
Blocks
Start-up Characteristics and
Operating Mode Transitions of
the CP 440
Diagnostics with the CP 440
Programming Example –
Standard Blocks
1
2
3
4
5
6
7
8
9
02/2000
A5E00057742
Edition 02
Appendices
Technical Specifications
Connecting Cables
Communication Matrix of the
Protocols
Accessories and Order
Numbers
Reference for SIMATIC S7
Index
A
B
C
D
E
Safety Guidelines
This manual contains notices which you should observe to ensure your own personal safety, as well as to
protect the product and connected equipment. These notices are highlighted in the manual by a warning
triangle and are marked as follows according to the level of danger:
Danger
!
indicates that death, severe personal injury or substantial property damage will result if proper precautions are not taken.
Warning
!
indicates that death, severe personal injury or substantial property damage can result if proper precautions are not taken.
Caution
!
indicates that minor personal injury or property damage can result if proper precautions are not taken.
Note
draws your attention to particularly important information on the product, handling the product, or to a
particular part of the documentation.
Qualified Personnel
Only qualified personnel should be allowed to install and work on this equipment. Qualified persons are
defined as persons who are authorized to commission, to ground, and to tag circuits, equipment, and systems in accordance with established safety practices and standards.
Correct Usage
Note the following:
Warning
!
Trademarks
The reproduction, transmission or use of this document or its
contents is not permitted without express written authority.
Offenders will be liable for damages. All rights, including rights
created b y patent grant or registration of a utility model or design, are
reserved.
Siemens AG
Bereich Automatisierungs- und Antriebstechnik
Geschaeftsgebiet Industrie-Automatisierungssysteme
Postfach 4848, D- 90327 Nuernberg
Index-2
Siemens Aktiengesellschaft A5E00057742
This device and its components may only be used for the applications described in the catalog or the
technical descriptions, and only in connection with devices or components from other manufacturers
which have been approved or recommended by Siemens.
This product can only function correctly and safely if it is transported, stored, set up, and installed correctly, and operated and maintained as recommended.
SIMATIC, SIMATIC HMI and SIMATIC NET are registered trademarks of SIEMENS AG.
Some of other designations used in these documents are also registered trademarks; the owner’s rights
may be violated if they are used by third parties for their own purposes.
Disclaimer of LiabilityCopyright { Siemens AG 2000 All rights reserved
We have checked the contents of this manual for agreement with the
hardware and software described. Since deviations cannot be precluded entirely, we cannot guarantee full agreement. However, the
data in this manual are reviewed regularly and any necessary corrections included in subsequent editions. Suggestions for improvement are welcomed.
Siemens AG 2000
Point-to-point connection CP 341Installation and Parameter Assignment
Technical data subject to change.
C79000-G7000-C341-02
Preface
Purpose
This manual explains how to establish and operate a point-to-point connection.
Contents of This Manual
The manual describes the hardware and software of the CP 440 communication
processor and its integration in an S7-400 programmable controller. It is divided up
into instruction-based chapters and a reference section (appendices).
The following subjects are covered:
• The basics of point-to-point communication with the CP 440
• Starting up the CP 440
• Installing the CP 440
• Communication with the CP 440
• Troubleshooting
• Application examples
• Properties and technical specifications
Scope of This Manual
This manual is valid for the following:
Product Order Number As of Version
CP 440 with the
X27 RS 422/485 interface
Note
The description of the CP 440 communication processor in this manual were
correct at the time of publication. We reserve the right to describe modifications to
the functionality of the modules in a separate Product Information.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
6ES7 440-1CS00-0YE0 01
iii

Preface
Structure of This Manual
To help you to quickly find the information you require, this manual offers the
following:
• You will find a full table of contents at the beginning of the manual.
• Finally, a comprehensive index allows quick access to information on specific
subjects.
iv
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

Other Manuals Required
Appendix E contains a list of the other manuals on the subject of the S7-400 that
you will require in order to put your system into operation.
Electronic Manuals
The entire set of SIMATIC S7 documentation is available on CD-ROM.
Standards, Certificates and Approvals
The CP 440 communication processor meets the requirements and criteria of
IEC 1131, Part 2 and the requirements for CE marking. The CP 440 has CSA
certification, UL recognition and FM approval.
Recycling and Disposal
The CP 440 is an environment-friendly product. It is exceptional for the following:
Preface
• Housing plastic with halogen-free flame protection and is highly resistant to fire
• Laser inscriptions (i.e. no labels)
• Plastics identification in accordance with DIN 54840
• Fewer materials used due to size reduction; fewer parts due to integration in
ASICs
The CP 440 is suitable for recycling on account of the low level of contaminants in
its components.
For further information about environment-friendly recycling and the procedure for
disposing of your old equipment, please contact:
Siemens Aktiengesellschaft
Anlagenbau und Technische Dienstleistungen
ATD TD 3 Kreislaufwirtschaft
Postfach 32 40
D-91050 Erlangen, Germany
Phone: + 49 91 31/7-3 36 98
Fax: + 49 91 31/7-2 66 43
The people there will adapt their advice to suit your situation and provide a
comprehensive and flexible recycling and disposal system at a fixed price. After
disposal you will receive information giving you a breakdown of the relevant
material fractions and the associated documents as evidence of the materials
involved.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
v

Preface
Additional Assistance
Please contact your local Siemens representative if you have any queries about
the products described in this manual. A list of Siemens representatives worldwide
is contained, for example, in the “Siemens Worldwide” Appendix of the manual
S7-400 Programmable Controller, Hardware and Installation
If you have any questions or suggestions concerning this manual, please fill out the
form at the back and return it to the specified address. Please feel free to enter
your personal assessment of the manual in the form provided.
We offer a range of courses to help get you started with the SIMATIC S7
programmable controller. Please contact your local training center or the central
training center in Nuremberg, D-90027 Germany (tel. +49 911 895 3200).
Constantly Updated Information
You can obtain constantly updated information on the SIMATIC products on the
Internet at http://www.ad.siemens.de
.
In addition, SIMATIC Customer Support provides you with up-to-date information
and downloads that can be useful to you when using SIMATIC products:
• On the Internet at http://www.ad.siemens.de/simatic-cs
• Via the SIMATIC Customer Support Mailbox (German) at 49 (911) 895-7100
or the SIMATIC Customer Support BBS (English).
The mailbox is best accessed with a modem up to V.34 (28.8 kbps) parameterized
as follows: 8, N, 1, ANSI, or via ISDN (x.75, 64 kbits).
You can contact SIMATIC Customer Support by phone at 49 (911) 895-7000 or
by fax at 49 (911) 895-7002. You can send questions by e-mail on the Internet or
to the above-mentioned mailbox.
vi
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

Contents
1 Product Description 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.1 Applications of the CP 440 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Components Required for a Point-to-Point Connection with the CP 440 1-3.
1.3 Design of the CP 440 1-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Features of the X27 (RS 422/485) Interface 1-8. . . . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Cables for Connecting the CP 440 to a Communication Partner 1-8. . . . . . . .
2 Basic Principles of Serial Data Transmission 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.1 Serial Transmission of a Character 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 Transmission Procedure with a Point-to-Point Connection 2-6. . . . . . . . . . . . .
2.2.1 ISO 7-Layer Reference Model for Data Transmission 2-6. . . . . . . . . . . . . . . . .
2.2.2 Data Transmission with the ASCII Driver 2-11. . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2.3 Data Transmission with the 3964(R) Procedure 2-24. . . . . . . . . . . . . . . . . . . . . .
3 Commissioning the CP 440 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.1 Sequence of Steps to Be Taken 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Commissioning the Physical Interface 3-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4 Installing the CP 440 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.1 CP 440 Slots 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Installing and Removing the CP 440 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3 Installation Guidelines 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Configuring and Parameterizing the CP 440 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1 Configuring the CP 440 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2 Parameterizing the Communication Protocols 5-3. . . . . . . . . . . . . . . . . . . . . . .
5.3 Parameterization Data 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Basic Parameters of the CP 440 5-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Parameterization Data of the ASCII Driver 5-6. . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.3 Parameterization Data of the 3964(R) Procedure 5-14. . . . . . . . . . . . . . . . . . . .
5.4 Management of the Parameter Data 5-20. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5 Uploading Firmware Updates 5-21. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
vii

Contents
6 Communication Using Function Blocks 6-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.1 Communication Using Function Blocks 6-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.2 Overview of the Function Blocks 6-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.3 Notes on Program Structure 6-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4 Using the Function Blocks 6-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.1 The S7 Transmits Data to a Communication Partner,
10 SEND_440 FB 6-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.4.2 S7 Receives Data from a Communication Partner, 9 RECV_440 FB 6-10. . . .
6.4.3 Deleting the Receive Buffer (11 “RES_RECV” FB) 6-14. . . . . . . . . . . . . . . . . . .
6.5 Programming the Function Blocks 6-18. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.5.1 General Information on Data Block Assignment 6-18. . . . . . . . . . . . . . . . . . . . .
6.5.2 Supplying the Block Parameters 6-19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6.6 General Information on Program Processing 6-23. . . . . . . . . . . . . . . . . . . . . . . .
6.7 Technical Specifications of the Function Blocks 6-24. . . . . . . . . . . . . . . . . . . . . .
7 Startup Characteristics and Operating Mode Transitions of the CP 440 7-1. . . . .
7.1 Operating Modes of the CP 440 7-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.2 Startup Characteristics of the CP 440 7-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.3 Behavior of the CP 440 During Operating Mode Transitions of the CPU 7-3.
7.4 Behavior of the Sender Line Drivers of the Serial Interface
During Particular Operating Modes of the CP 440 7-4. . . . . . . . . . . . . . . . . . . .
8 Diagnostics with the CP 440 8-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Diagnostic functions of the CP 440 8-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.2 Diagnosis via the Display Elements of the CP 440 8-3. . . . . . . . . . . . . . . . . . .
8.3 Diagnostic Messages of the Function Blocks 8-5. . . . . . . . . . . . . . . . . . . . . . . .
8.4 Diagnostics Using the Diagnostic Buffer of the CP 440 8-14. . . . . . . . . . . . . . .
9 Programming Example – Standard Blocks 9-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.1 General 9-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Device Configuration 9-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Settings 9-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Blocks Used 9-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.5 Installation, Error Messages 9-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6 Activation, Startup Program and Cyclic Program 9-8. . . . . . . . . . . . . . . . . . . . .
9.6.1 “CP440 SEND RECV” Program Example 9-8. . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6.2 “CP440 1 CYC” Program Example 9-9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6.3 “CP440 ASCII BCC” Program Example 9-10. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6.4 “CP440 MASTER” Program Example 9-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6.5 “CP440 SLAVE” Program Example 9-12. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
viii
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

Contents
A Technical Specifications A-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.1 Technical Specifications of the CP 440 A-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
A.2 Transmission Times A-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B Connecting Cables B-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
B.1 X27 (RS 422/485) Interface of the CP 440 B-2. . . . . . . . . . . . . . . . . . . . . . . . . .
C Communication Matrix of the Protocols C-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
D Accessories and Order Numbers D-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
E Reference for SIMATIC S7 E-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Index Index-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
ix

Contents
x
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

Product Description
In Section You Will Find on Page
1.1 Applications of the CP 440 1-2
1.2 Components Required for a Point-to-Point Connection with the
CP 440
1.3 Design of the CP 440 1-6
1.4 Properties of the X27 (RS 422/485) Interface 1-8
1
1-3
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
1-1

Product Description
1.1 Applications of the CP 440
The CP 440 communication processor enables you to exchange data between
programmable controllers or computers by means of a point-to-point connection.
The CP 440 is designed to transfer short, fast frames.
The following are typically connected to it:
• Scanners, barcode readers
• Sensors
• Weighing scales
Functionality of the CP 440
The CP 440 communication processor provides the following functionality:
• An integrated MPI (Multipoint) X27 (RS422/485) interface
• A maximum transmission length of 200 bytes
• A transmission rate of up to 115.2 kbps, full-duplex
• Integration of the most important transmission protocols in the module firmware
– ASCII driver
– 3964(R) procedure
• Customization of the transmission protocols by means of parameter assignment
with the
CP 440: Point-to-Point Communication, Parameter Assignment
parameterization interface.
Applications of the CP 440
The CP 440 communication processor allows point-to-point communication with
SIMATIC modules and with non-Siemens products. The SIMATIC modules that
can be connected are listed in Appendix C.
Functions Supported by the Interfaces
Table 1-1 Functions of the CP 440
Function
3964(R) procedure Yes No
ASCII driver Yes Yes
• XON/XOFF flow control Yes No
CP 440
RS 422* RS 485*
1-2
* The RS 422 and RS 485 are distinguished by means of parameterization.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
Product Description
1.2 Components Required for a Point-to-Point Connection with the CP 440
To establish a point-to-point connection between the CP 440 communication
processor and a communication partner, you require certain hardware and
software components.
Hardware Components
The following table lists the hardware components required for establishing a
point-to-point connection with the CP 440.
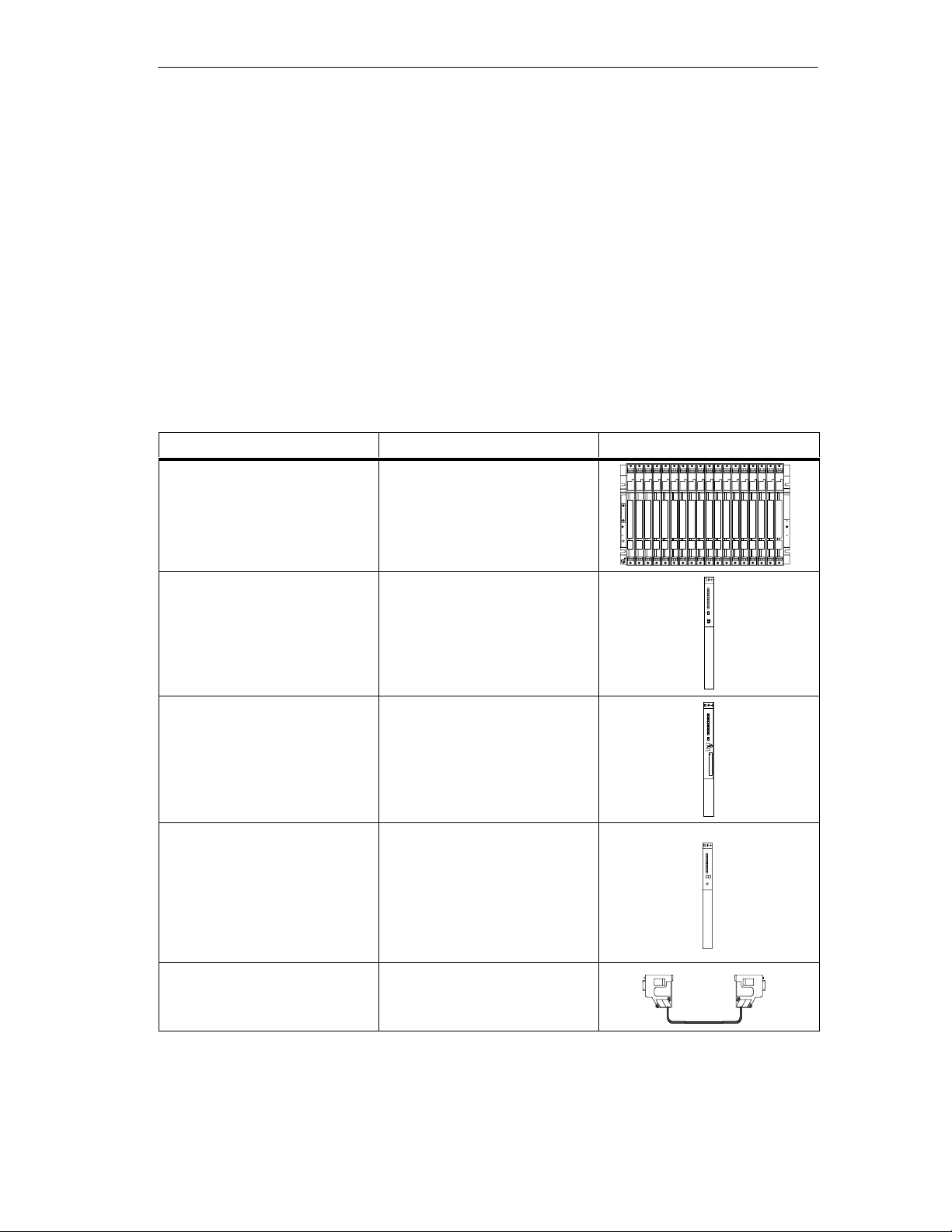
Table 1-2 Hardware Components for a Point-to-Point Connection with the CP 440
Components
Rack ... provides the mechanical and
electrical connections of the
S7-400.
Power supply module (PS) ... converts the line voltage
(120/230 VAC or 24 VDC) into
the operating voltage of 24 V and
5 VDC required to supply the
S7-400.
CPU
The CPUs with which the CP 440
cannot be used are listed in
Tables 1-5 and 1-4.
Accessories: Memory card
Backup battery
CP 440 communication
processor
... executes the user program;
communicates via the MPI
interface with other CPUs or with
a programming device.
... communicates via the interface
with one or more communication
partners.
Function Diagram
Standard connecting cable ... connects the CP 440
communication processor to the
communication partner.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
1-3
Product Description
Table 1-2 Hardware Components for a Point-to-Point Connection with the CP 440, continued
Components DiagramFunction
Programming device cable ... connects a CPU to a
programming device/PC.
Programming device or PC ... communicates with the CPU of
the S7-400.
Software Components
The following table lists the software components required for establishing a
point-to-point connection with the CP 440.
Table 1-3 Software Components for a Point-to-Point Connection with the CP 440
Components
STEP 7 software package,
as of version 4.0.2
CP 440: Point-to-Point
Communication, Parameter
Assignment
interface, Version 5.1
Function blocks (FBs) with
programming examples
Parameterization
... configures, parameterizes,
programs and tests the S7-400.
... parameterizes the interfaces of
the CP 440.
... control communication
between the CPU and the
CP 440.
Function Diagram
+
License
1-4
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
Product Description
CPU Versions
The CP 440 can be operated with all CPU versions except the CPUs listed in the
tables below:
Table 1-4 CPU Versions with Which the CP 440 Can Be Used as of the Version Indicated
CPU MLFB
CPU 412-1 6ES7 412-1XF01-0AB0, Release 5
CPU 413-1 6ES7 413-1XG01-0AB0, Release 5
CPU 413-2 6ES7 413-2XG01-0AB0, Release 5
CPU 414-1 6ES7 414-1XG01-0AB0, Release 5
CPU 414-2 with 128k 6ES7 414-2XG01-0AB0, Release 5
CPU 414-2 with 348k 6ES7 414-2XJ00-0AB0, Release 7
CPU 416-1 6ES7 416-1XJ01-0AB0, Release 5
CPU 416-2 with 0.8 M 6ES7 416-2XK00-0AB0, Release 7
CPU 416-2 with 1.6 M 6ES7 416-2XL00-0AB0, Release 7
CPU 416-2 DP ISA Lite
6ES7 616-2PK00-0AB4, Release 3
CPU 416-2 DP ISA
CPU 412-2 DP PCI
CPU 416-2 DP PCI
Table 1-5 CPU Versions with Which the CP 440 Cannot be Used
CPU MLFB
CPU 412-1 6ES7 412-1XF00-0AB0
CPU 413-1 6ES7 413-1XG00-0AB0
CPU 413-2 6ES7 413-2XG00-0AB0
CPU 414-1 6ES7 414-1XG00-0AB0
CPU 414-2 with 128k 6ES7 414-2XG00-0AB0
CPU 416-1 6ES7 416-1XJ00-0AB0
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
1-5
Product Description
1.3 Design of the CP 440
Interface
The CP 440 communication processor is supplied with an integrated serial X27
(RS422/485) interface.
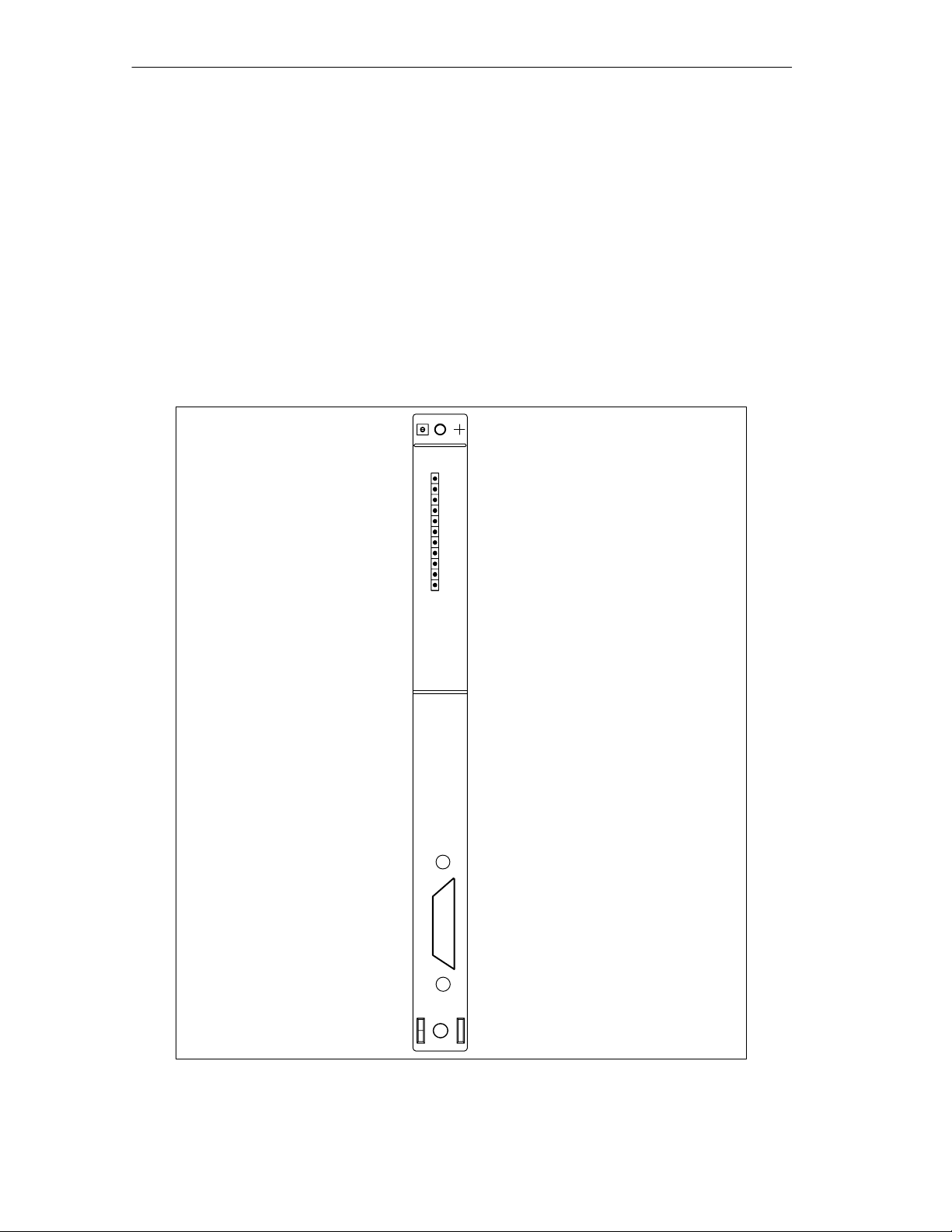
Arrangement of the Controls and Indicators
Fig. 1-1 shows the arrangement of the controls and indicators on the front panel of
the CP 440 communication processor.
CP 440
440 – 1CS00 – 0YE0
V1.0.0
INTF
EXTF
FAULT
TxD
RxD
CP 440
X 2
3 4
Firmware version
INTF
EXTF
FAULT
TxD
RxD
Integrated
X27
(RS422/485)
interface
1-6
Figure 1-1 Arrangement of the Controls and Indicators on the CP 440 Communication
Processor
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

LEDs
Interface
Product Description
The following LEDs are located on the front panel of the CP 440:
• INTF (red) Indicates an internal fault
• EXFT (red) Indicates an external fault
• FAULT (red) Fault LED for interface
• TXD (green) interface sends
• RXD (green) interface receives
The operating modes and faults and errors indicated by these LEDs are described
in Section 8.2. Section 5.5 contains information on the LEDs that come on when
you download firmware updates.
For a detailed description of the interface, see Section 1.4.
Base Connector for the S7 Backplane Bus
On the back panel of the CP 440 you will find the base connector for the S7-400
backplane bus.
The S7-400 backplane bus is the serial data bus via which the CP 440
communicates with the modules of the programmable controller.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
1-7

Product Description
1.4 Features of the X27 (RS 422/485) Interface
Definition
The X27 (RS 422/485) interface is a differential voltage interface used for serial
data transmission in compliance with the X27 standard.
Features
The X27 (RS 422/485) interface has the following features and meets the following
requirements:
• Type: differential voltage interface
• Front connector: 15-pin sub D female with screw fixing
• Max. transmission rate: 115.2 kbps
• Max. cable length: 1200 m at 19200 bps
*
• Standard: DIN 66259 Parts 1 and 3,
EIA-RS 422/485, CCITT V.11
• Degree of protection: IP00
Note
The X27 (RS 422/485) interface can only be run in 4-wire mode with the 3964(R)
protocol.
1.4.1 Cables for Connecting the CP 440 to a Communication Partner
Standard Connecting Cables
For point-to-point connection between the CP 440 and a communication partner,
Siemens offers standard connecting cables in various lengths.
The lengths and order numbers of these cables are listed in Appendix D.
Constructing Your Own Connecting Cables
If you make your own connecting cables, there are some points you must be
aware of. These are described in Appendix B, along with wiring plans and the pin
allocation for the sub D male connector.
* To find out which cable types you can use, see Appendix B.
Point-to-point connection CP 440 Installation and Parameter Assignment
1-8
A5E00057742-02

Basic Principles of Serial Data Transmission
In Section You Will Find on Page
2.1 Serial Transmission of a Character 2-2
2.2 Transmission Procedure with a Point-to-Point Connection 2-6
2
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
2-1

Basic Principles of Serial Data Transmission
2.1 Serial Transmission of a Character
There are various networking alternatives for the transfer of data between two or
more communication partners. The simplest form of data interchange is via a
point-to-point connection between two communication partners.
Point-to-Point Connection
In a point-to-point connection the CP 440 communication processor forms the
interface between a programmable controller and a communication partner. In a
point-to-point connection with the CP 440, the data is transferred serially.
Serial Data Transmission
In serial transmission, the individual bits of each byte of information are transmitted
one after the other in a fixed order.
Drivers for Bidirectional Data Traffic
The CP 440 executes data transfer with communication partners independently via
the serial interface. The CP 440 is equipped with two different drivers for this
purpose.
Bidirectional Data Traffic:
• ASCII driver
• 3964(R) procedure
The CP 440 executes data transfer via the serial interface depending on the
selected driver.
2-2
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
Bidirectional Data Traffic - Operating Modes
The CP 440 has two operating modes for bidirectional data traffic:
• Half-duplex operation (3964(R) procedure, ASCII driver)
Data is exchanged between the communication partners but only in one
direction at a time. In half-duplex operation, therefore, at any one time, data is
being either sent or received. The exception to this may be individual control
characters for data flow control (e.g. XON/XOFF), which can also be sent while
data is being received or received while data is being sent.
• Full-duplex operation (ASCII driver)
Data is exchanged between two or more communication partners in both
directions simultaneously. In full-duplex operation, therefore, data can be sent
and received at the same time. Each communication partner must be able to
send and receive simultaneously.
Only half-duplex mode can be used with an RS 485 (2-wire) setting.
Basic Principles of Serial Data Transmission
Asynchronous Data Transmission
With the CP 440, serial transmission takes place asynchronously. What is known
as timebase synchronization (a fixed timing code used in the transmission of a
fixed character string) is only upheld during transmission of a character. Each
character to be sent is preceded by a synchronization impulse, or start bit. The end
of the character transmission is signaled by the stop bit.
Declarations
As well as the start and stop bits, further declarations must be made between the
two communication partners before serial transmission can take place. These
include:
• Transmission rate (baud rate)
• Character and acknowledgment delay times
• Parity
• Number of data bits
• Number of stop bits
Section 2.2 describes the importance of the declarations in the various
transmission procedures, and how they are parameterized.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
2-3
Basic Principles of Serial Data Transmission
Character Frames
Data is transmitted between the CP 440 and a communication partner via the
serial interface in a character frame. Two data formats are available for each
character frame. 7 data bits without a parity bit are not supported. You can
parameterize the format for data transmission with the
Communication, Parameter Assignment
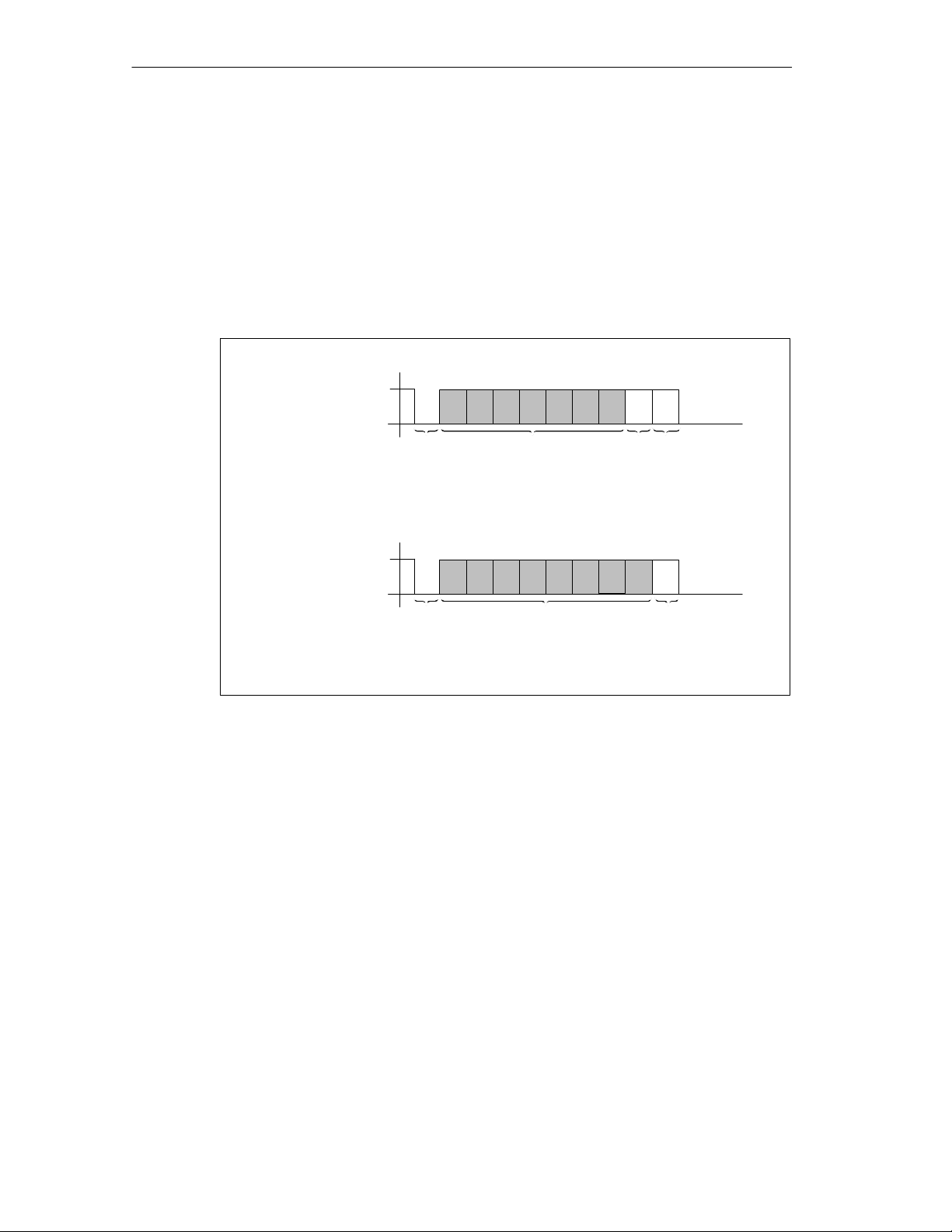
By way of example, the figure below shows the two data formats of the 10-bit
character frame.
7 data bits, 1 start bit, 7 data bits, 1 parity bit, 1 stop bit
Signal state “1”
1
Signal state “0”
CP 440: Point-to-Point
parameterization interface.
289
10
1 start bit
8 data bits: 1 start bit, 8 data bits, 1 stop bit
Signal state “1”
1
Signal state “0”
1 start bit
Figure 2-1 10-Bit Character Frame
7 data bits
2 109
8 data bits
1 stop bit
1 parity bit
1 stop bit
2-4
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
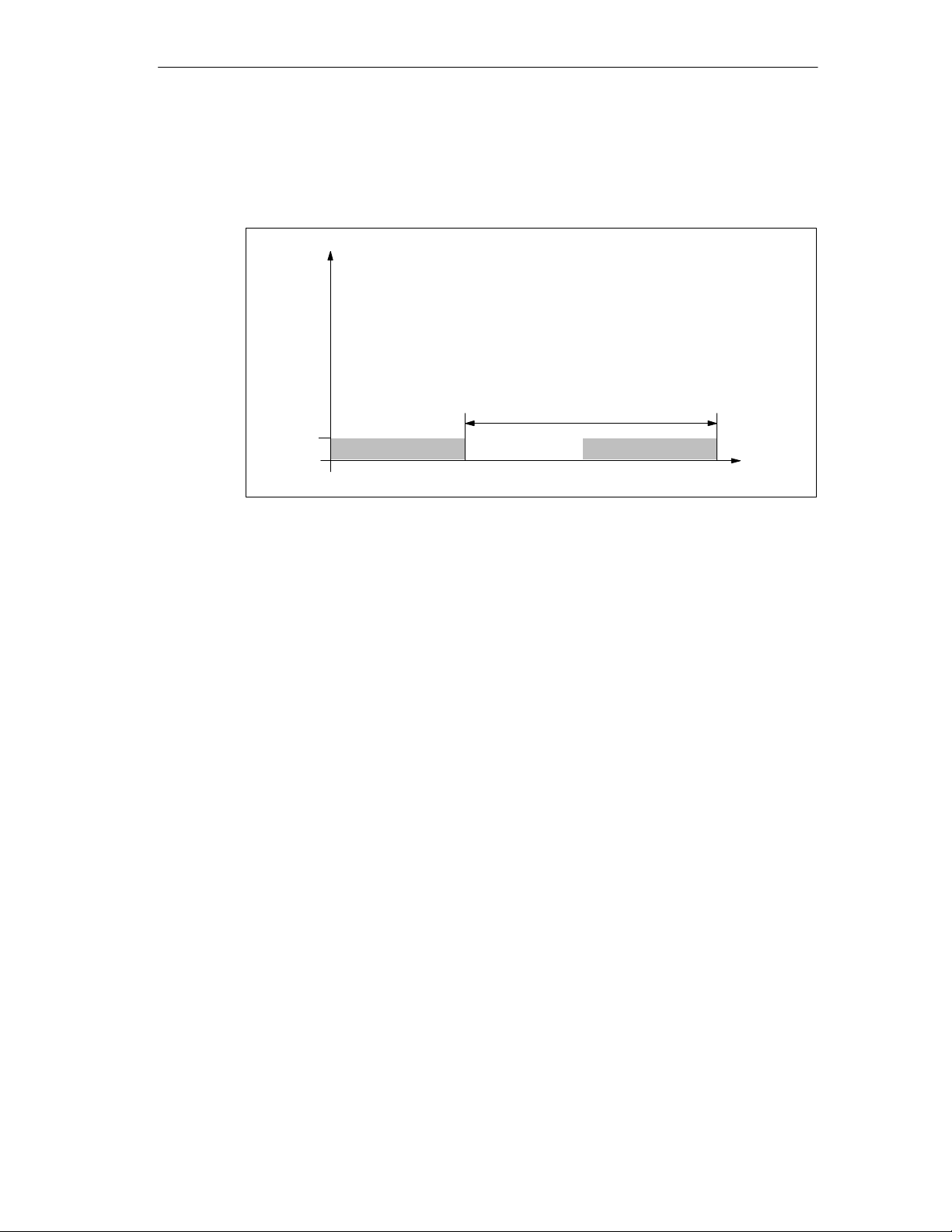
Character Delay Time
The figure below shows the maximum time permitted between two characters
received within a message frame. This is known as the character delay time.
Signal
1
Basic Principles of Serial Data Transmission
nth character (n + 1)th character
Character delay time
Time t
Figure 2-2 Character Delay Time
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
2-5
Basic Principles of Serial Data Transmission
2.2 Transmission Procedure with a Point-to-Point Connection
When data is transmitted, all communication partners involved must follow fixed
rules for handling and implementing the data traffic. The ISO has defined a 7-layer
model, which is recognized as the basis for a worldwide standardization of
transmission protocols for computer-to-computer communication.
2.2.1 ISO 7-Layer Reference Model for Data Transmission
Protocol
All communication partners involved in data transmission must follow fixed rules for
handling and implementing the data traffic. Such rules are called protocols.
A protocol defines the following points:
Procedure
• Operating mode
Half-duplex or full-duplex mode
• Initiative
Which communication partners can initiate data transmission and under what
conditions
• Control characters
Which control characters are to be used for data transmission
• Character frame
Which character frame is to be used for data transmission
• Data backup
The data backup procedure to be used
• Character delay time
The time period within which an incoming character must be received
• Transmission speed
The transmission rate in bps
2-6
This is the specific process according to which the data is transmitted.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

ISO 7-Layer Reference Model
The reference model defines the external behavior of the communication partners.
Each protocol layer, except for the lowest one, is embedded in the next one down.
The individual layers are as follows:
1. Physical layer
– Physical conditions for communication, e.g. transmission medium,
transmission rate
2. Data link layer
– Security procedure for the transmission
– Access modes
3. Network layer
– Network connections
– Definition of the addressing for communication between two partners
4. Transport layer
Basic Principles of Serial Data Transmission
– Error-detection procedure
– Debugging
– Handshaking
5. Session layer
– Establishing communication
– Data exchange management
– Terminating communication
6. Presentation layer
– Conversion of the standard form of data representation of the
communication system into a device-specific form (data interpretation rules)
7. Application layer
– Defining the communication task and the functions it requires
Processing the Protocols
The sending communication partner runs through the protocols from the highest
layer (no. 7 – application layer) to the lowest (no. 1 – physical layer), while the
receiving partner processes the protocols in the reverse order, i.e. starting with
layer 1.
Not all protocols have to take all 7 layers into account. If the sending and receiving
partners both use the same protocol, layer 6 can be omitted.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
2-7
Basic Principles of Serial Data Transmission
Transmission Integrity
Transmission integrity plays an important role in the transmission of data and in
selection of the transmission procedure. Generally speaking, the more layers of the
reference model are applied, the greater the transmission integrity.
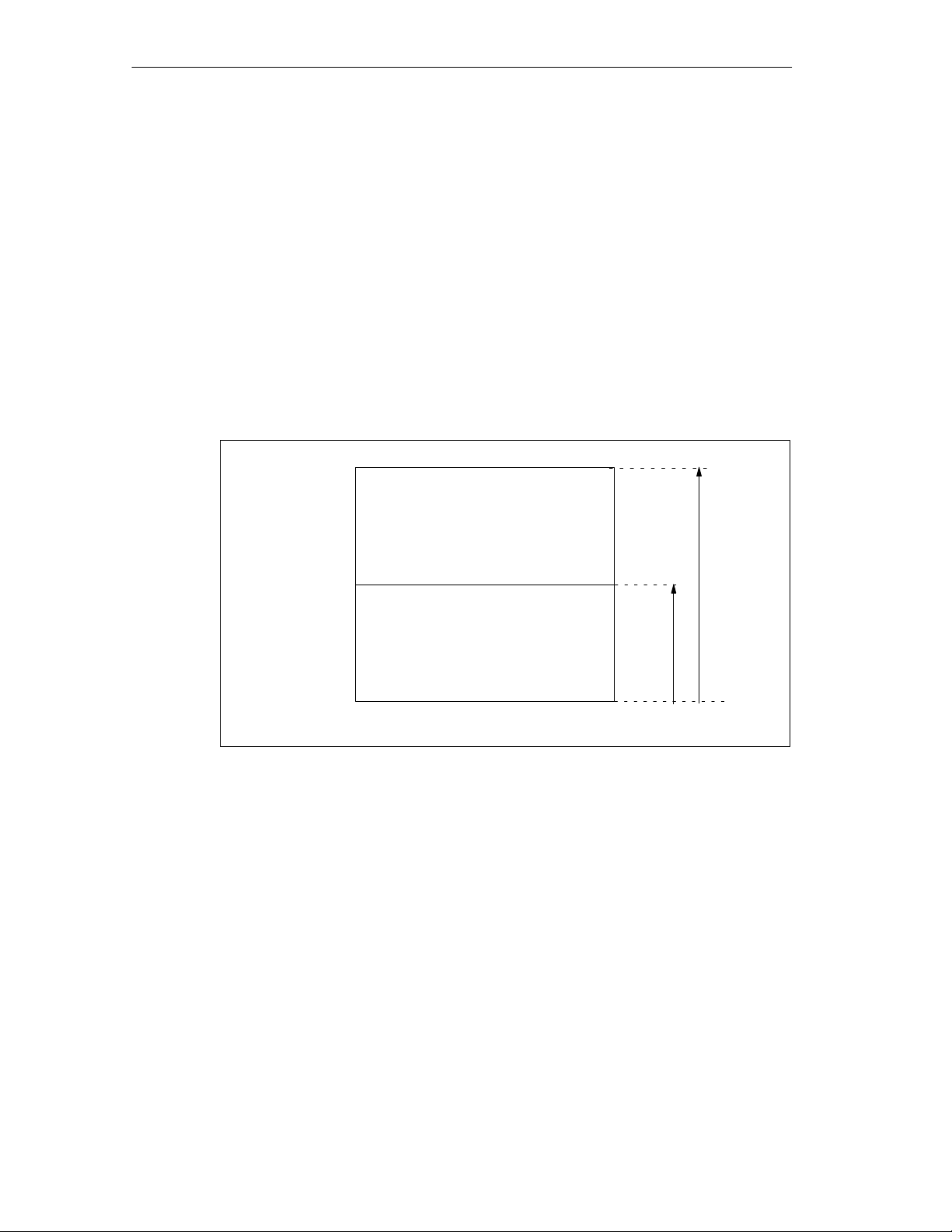
Classifying the Supplied Protocols
The CP 440 can handle the following protocols:
• ASCII driver
• 3964(R) procedure
The figure below illustrates how these protocols of the CP 440 fit into the ISO
reference model:
Data link layer
Layer 2
The data bytes are transmitted with
3964(R). Start and stop bits are added;
in the event of an error the transmission
may be repeated.
3964(R)
Layer 1
Figure 2-3 How the Protocols of the CP 440 Fit into the ISO Reference Model
Physical layer
The physical transmission of the
data bytes is defined.
ASCII driver
2-8
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
Transmission Integrity with the ASCII Driver
Data Integrity When Using the ASCII Driver:
• When data is transmitted by means of the ASCII driver, there are no measures
to ensure data integrity other than the use of a parity bit (which can also be
canceled, depending on how the character frame is set). This means that,
although data transmission with the ASCII driver is very efficient in terms of the
throughput rate, the integrity of the data is not checked.
• Using the parity bit ensures that the inversion of a bit in a character to be
transmitted can be detected. If two or more bits of a character are inverted, this
error can no longer be detected.
• To increase transmission integrity, a checksum and length specification for a
message frame can be employed. These measures must be implemented by
the user.
• A further increase in data integrity can be achieved by means of
acknowledgment message frames in response to send or receive message
frames. This is the case with high-level protocols for data communication (see
ISO 7-layer reference model).
Basic Principles of Serial Data Transmission
Transmission Integrity with 3964
Enhanced Data Integrity with the 3964R Procedure:
• The Hamming distance with the 3964R is 3. This measures the integrity of data
transmission.
• The 3964R procedure ensures high transmission integrity on the data line. This
high integrity is achieved by means of a fixed message-frame setup and
cleardown as well as the use of a block check character (BCC).
Two different procedures for data transmission can be used, either with or without
a block check character:
• Data transmission without a block check character: 3964
• Data transmission with block check character: 3964R
In this manual, the designation 3964(R) is used when descriptions and notes refer
to both data transmission procedures.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
2-9

Basic Principles of Serial Data Transmission
Performance Limits with 3964(R)
Performance Limits of the 3964(R) Procedure:
• Further processing of the send/receive data by the PLC program in the
communication partner is not guaranteed. You can only ensure this by using a
programmable acknowledgment mechanism.
• The block check of the 3964(R) procedure (EXOR logic operation) cannot
detect missing zeros (as a whole character) because a zero in the EXOR logic
operation does not affect the result of the calculation.
Although the loss of an entire character (this character has to be a zero!) is
highly unlikely, it could possibly occur under very bad transmission conditions.
You can protect a transmission against such errors by sending the length of the
data message along with the data itself, and having the length checked at the
other end.
2-10
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02

Basic Principles of Serial Data Transmission
2.2.2 Data Transmission with the ASCII Driver
The ASCII driver controls data transmission via a point-to-point connection
between the CP 440 and a communication partner. This driver contains the
physical layer (layer 1 of the ISO reference model.)
The structure of the message frames is left open through the S7 user passing on
the complete send message frame to the CP 440. For the receive direction, the
end criterion of a message must be parameterized. The structure of the send
message frames may differ from that of the receive message frames.
The ASCII driver allows data of any structure (all printable ASCII characters as
well as all other characters from 00 through FFH (with 8 data bit character frames)
or from 00 through 7FH (with 7 data bit character frames)) to be sent and received.
Both RS422 and RS485 operation are possible.
RS422 Operation
In RS422 operation, the data is transmitted via four cables (four-wire mode). Two
cables (differential signal) are available for the send direction and two for the
receive direction. This means you can send and receive data at the same time
(full-duplex operation).
RS485 Operation
In RS485 operation, the data is transmitted via two cables (two-wire mode). The
two cables (differential signal) are alternately available for the send direction and
the receive direction. This means you can either send or receive data at the same
time (half-duplex operation). After a send operation, the cable is immediately
switched over to receive (the sender becomes high-impedance). The maximum
switchover time is 0.1 ms.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
2-11
Basic Principles of Serial Data Transmission
Sending Data with the ASCII Driver
When you send data, you specify the number of user data bytes to be transferred
in the “LEN” parameter of the call of the SEND_440 function block.
When you work with the end criterion “character delay time expired” when
receiving data, the ASCII driver pauses between two message frames when
sending. You can call the SEND_440 FB at any time, but the ASCII driver does not
begin its output until a period longer than the parameterized character delay time
has elapsed since the last message frame was sent.
If you work with the “end-of-text character” criterion, you have a choice of
three options:
• Send up to and including the end-of-text character
The end-of-text character must be included in the data to be sent. Data is sent
only up to and including the end-of-text character, even if the data length
specified in the FB is longer.
• Send up to length parameterized at the FB
Data is sent up to the length parameterized at the FB. The last character must
be the end-of-text character.
• Send up to the length parameterized at the FB and automatically append the
end-of-text character or characters
Data is sent up to the length parameterized at the FB. The end-of-text
character(s) is/are automatically appended; in other words, the end-of-text
characters must not be included in the data to be sent. 1 or 2 characters more
than the number specified by the FB are sent to the partner, depending on the
number of end-of-text characters.
When you work with the end criterion “fixed frame length”, the number of data
bytes transferred in the send direction is as specified for the “LEN” parameter of
the SEND_440 FB. The number of data bytes transferred in the receive direction,
i.e. in the receive DB, is as specified at the receiver using the “fixed message
frame length” parameter in the parameterization interface. The two parameter
settings must be identical, in order to ensure correct data traffic. If an end code is
not detected when data is sent, a pause equal to the length of the monitoring time
is inserted between two message frames to allow the partner to synchronize
(identify the beginning of the message frame).
If some other method of synchronization is used, the pause in sending can be
deactivated by means of the parameterization interface.
2-12
Note
When XON/XOFF flow control is parameterized, the user data must not contain
any of the parameterized XON or XOFF characters. The default settings are DC1
= 11H for XON and DC3 = 13H for XOFF.
Point-to-point connection CP 440 Installation and Parameter Assignment
A5E00057742-02
 Loading...
Loading...