

Page 1

S
Руководство по эксплуатации издание А1
MICROMASTER 440
Документация пользователя
Page 2

Руководство пользователя преобразователей MICROMASTER 440
ВНИМАНИЕ
В настоящее время не все преобразователи имеют
сертификат соответствия стандартам UL.
Получение сертификата UL и соответствующей
маркировки обусловлено проведением испытаний.
Для изделий, внесенных в перечень соответствующих
стандартам UL присваивается следующая маркировка
:
Дополнительная информация доступна в Internet: http://www.siemens.de/micromaster
Качество программного обеспечения и обучения фирмы Siemens соответствует DIN ISO
9001, Рег. номер 2160-01
Размножение, передача или использование этой инструкции или ее содержания допускается только с письменного разрешения. В противном случае возмещается ущерб. Siemens оставляет за собой все права, включая возникающие при выдаче патентов или регистрации товарных
образцов или конструкций.
© Siemens AG 2001. Все права зарегистрированы.
MICROMASTER ® - зарегистрированный товарный знак фирмы Siemens.
В случае необходимости в распоряжении имеются другие функции, неописанные в настоящем
документе. Этот факт не обусловливает обязанность предоставлять такие функции в новых преобразователях или при обслуживании.
Соответствие содержания этого документа с описаниями аппаратного и программного обеспечения проверено. Тем не менее, возможны отклонения; гарантии полного соответствия не предоставляется. Содержащаяся в этом документе информация регулярно пересматривается и при необходимости изменяется в следующих изданиях. Предложения по улучшению содержания документа будут приняты с благодарностью.
Документация Siemens печатается на бумаге, не содержащей хлора, получаемой из контролируемых лесопосадок. Печать и переплет проводятся без растворителей.
Документация может изменяться без предварительного уведомления.
Заказной номер: 6SE6400-5СA00-0ВP0
Напечатано в России
Siemens-Aktiengesellschaft.
2
Page 3

Руководство пользователя преобразователей MICROMASTER 440
Предисловие
Документация пользователя
Предупреждение
Перед инсталляцией и вводом в эксплуатацию все без исключения требования
безопасности и предупреждения и все, имеющиеся в преобразователях предупредительные знаки, должны быть тщательно изучены. Внимание! Предупредительные знаки должны быть читаемыми, а поврежденные и недостающие этикетки необходимо заменить.
Документация для MICROMASTER состоит из трех частей:
• Краткие сведения
Краткие сведения изложены так, что их пользователю обеспечивается быстрый
доступ ко всем базовым сведениям, которые необходимы для установки и наладки MICROMASTER 440 в работе.
• Руководство по эксплуатации
Руководство по эксплуатации дает конкретную информацию для установки и
эксплуатации MICROMASTER 440. Руководство по эксплуатации предоставляет
описания параметров для специфических функций MICROMASTER 440, необходимых пользователю.
• Справочник
Справочник содержит подробные сведения о преобразователях MICROMASTER
440 по всем технических темам.
Относительно дальнейшей информации о публикациях по теме MICROMASTER
440 и сведений о прочих новостях в области MICROMASTER, пожалуйста, свяжитесь с региональным бюро Siemens или посетите нас в интернете:
http://www.siemens.de/micromaster
3
Page 4
Руководство пользователя преобразователей MICROMASTER 440
MICROMASTER 440
Руководство по эксплуатации
Документация пользователя
Применимо для преобразователей типа
MICROMASTER 440
(версия 04.2001)
Обзор
Монтаж, инсталляция
Ввод в эксплуатацию
Применение
Системные параметры
Неисправности
Технические данные
Дополнительные данные
Приложения
1
2
3
4
5
6
7
8
A
B
C
D
Издание A1
E
F
G
H
I
J
K
4
Page 5

Руководство пользователя преобразователей MICROMASTER 440
Определения понятий и предупреждения
Опасность
Надпись "Опасность" в этом документе и на предупредительных знаках в преобразователе означает, что пренебрежение мерами предосторожности может
вызвать смерть, тяжелые телесные повреждения или нанести значительный
материальный ущерб.
Предупреждение
Надпись "Предупреждение" в этом документе и на предупредительных знаках
в преобразователе означает, что пренебрежение мерами предосторожности
может вызвать смерть, тяжелые телесные повреждения или нанести значительный материальный ущерб.
Предостережение
Надпись "Осторожно" в этом документе и на предупредительных знаках в преобразователе означает, что пренебрежение мерами предосторожности может
вызвать легкие телесные повреждения или нанести материальный ущерб.
Указания
Надпись "Указания" в этом документе означает важную информацию о преобразователе или подчеркивает необходимость повышенного внимания к данной
части документа.
Квалифицированный персонал
Понятие "Квалифицированный персонал" в данном руководстве по эксплуатации и на этикетках преобразователей указывает на лицо, которому доверены
работы по подключению, монтажу, вводу в эксплуатацию и обслуживанию устройства и которое ознакомлено с техникой безопасного проведения работ.
Это лицо должно обладать следующими квалификационными навыками:
1. Быть обученным и правомочным включать, выключать, разблокировать
электрические установки, заземлять и снабжать их предупредительными знаками в соответствии с установленными указаниями безопасности.
2. Быть обученным, соответственно, действующим правилам техники безопасности правильному применению средств защиты.
3. Быть обученным оказывать первую помощь пострадавшим.
Применение исключительно для указанных целей
Устройства могут применяться только для целей, упомянутых в руководстве и
только в сочетании с устройствами и компонентами, которые рекомендованы и
разрешены фирмой Siemens.
Контактный адрес
Если при чтении этого руководства возникают вопросы или трудности, свяжитесь, пожалуйста, с компетентным бюро Siemens по адресу, указанному в конце руководства.
5
Page 6

Руководство пользователя преобразователей MICROMASTER 440
Инструкции по безопасности
Общие указания
Нижеследующие предупреждения, предписания и указания предусмотрены
для безопасности пользователя, а также как вспомогательное средство для
предотвращения повреждений изделия или составных частей присоединенных
машин. В этом разделе изложены предупреждения, предписания и указания,
установленные для работы с преобразователем MICROMASTER 440, классифицированные как: общие, транспортировка и хранение, ввод в эксплуата-
цию, эксплуатация, ремонт, демонтаж и утилизация отходов.
Специфические предупреждения, предписания и указания, которые дейст-
вительны для определенных видов деятельности, приводятся в начале каждой
главы и повторяются или дополняются в пределах этих глав в особо важных
местах.
Пожалуйста, тщательно изучите эти сведения, так как это обусловливает
Вашу личную безопасность и долговечность работы преобразователей
MICROMASTER 440 и подключенных к ним устройств.
Предупреждение
Данное устройство находится под опасным напряжением и управляет ме-
•
ханизмами с вращающимися механическими частями, которые являются источниками опасности. Пренебрежение к предупреждениям или неподчинение
указанным в этом руководстве предписаниям может вызвать опасность для
жизни, тяжелое телесное повреждение или принести серьезный материальный
ущерб.
Только соответствующий квалифицированный персонал может работать с
•
этими устройствами и только после того, как ознакомится со всеми указаниями
по безопасности, подключению, эксплуатации и указаниями по обслуживанию,
которые изложены в этом руководстве. Успешная и безопасная эксплуатация
устройства зависит от его правильного использования, подключения, обслуживания и ухода.
Электрическое напряжение в преобразователе опасно. Конденсаторы в
•
звене постоянного тока остаются еще заряженными в течение 5 минут после
выключения напряжения питания. Открытие устройства до истечения 5 ми-
нут после выключения напряжения питания недопустимо.
Осторожно
Необходимо предотвратить доступ детей и посторонних лиц к устройству!
•
Устройство может использоваться только для указанных производителем
•
целей. Недопустимые изменения и применение запасных частей и оснастки, не
изготавливаемых или не рекомендуемых производителем устройства, могут
стать причиной пожаров, поражений электрическим током или травм.
Указания
Данное руководство по эксплуатации должно храниться вблизи от устрой-
•
ства в доступном месте и предоставляться всем пользователям.
Если должны быть выполнены измерения или проверки на включенном
•
под напряжение устройстве, то следует соблюдать положения безопасности
согласно Safety Code VBG 4.0, в частности § 8 "Допустимые отклонения при
работе в установках под напряжением" или Правилам Техники Безопасности
для установок до 1000В. При этом должны применяться соответствующие
вспомогательные средства.
Перед подключением и вводом в эксплуатацию тщательно изучите эти за-
•
щитные указания и предупреждения, а также все предупредительные этикетки
и знаки, имеющиеся на устройстве. Предупредительные этикетки должны быть
читаемыми, а недостающие или поврежденные, при необходимости, должны
быть заменены.
6
Page 7

Руководство пользователя преобразователей MICROMASTER 440
Транспортировка и хранение
Предупреждение
Для правильной и безопасной эксплуатации устройства очень важными
•
являются правильная транспортировка, складирование, монтаж и крепление, а
также тщательное и своевременное обслуживание и уход.
Предостережение
Преобразователь должен при транспортировке и складировании защи-
•
щаться от механических ударов и вибраций. Необходимо также выполнять
защиту от попадания воды (дождя) и воздействия недопустимых температур (см. таблицу на странице 121).
Ввод в эксплуатацию
Предупреждения
Работы, проводимые с прибором или установкой неквалифицированным
•
персоналом, или игнорирование предупреждений могут привести к тяжелым
телесным повреждениям или большому материальному ущербу.
Работы с прибором или установкой должны вестись только подготовленным
квалифицированным персоналом, обученным наладке, установке, вводу в эксплуатацию и обслуживанию изделия.
Допустимы только постоянные присоединения к сети. Устройство должно
•
быть заземлено (IEC 536, класс 1, NEC и другие специальные нормы).
Если должны использоваться устройства защитного отключения по току
•
утечки (FSI), то должен применяться УЗО типа B или С.
Машины с питанием от 3-х фазной сети, которые оснащены фильтрами
•
защиты от влияния на сеть (EMV-ФИЛЬТРАЦИЕЙ), не могут подсоединяться к
сети через выключатель с защитой от замыкания на землю (см. DIN VDE 0160,
часть 5.5.2. и EN50178 раздел 5.2.11.1).
Следующие клеммы находятся под опасными напряжениями, даже если
•
преобразователь не работает:
- Клеммы источника питания L/L1, N/L2, L3,
- Клеммы двигателя U, V, W, DC+/В+, DC-, В- и DC/R+.
- Это оборудование не должно использоваться, как устройства ЭКСТРЕН
НОЙ ОСТАНОВКИ процесса ( см. EN6024, 9.2.5.4 )
Предостережение
Присоединение проводов сети, двигателя и системы управления к преобразователю должно производиться согласно рисункам 2-4 на странице 24, чтобы
снизить индуктивные и емкостные помехи, влияющие на правильное функционирование преобразователя.
7
Page 8

Руководство пользователя преобразователей MICROMASTER 440
Обслуживание
Предупреждения
Преобразователь MICROMASTER работает с высокими напряжениями.
•
При работе электрических устройств в определенных частях преобразова-
•
теля неизбежно возникают опасные напряжения.
Устройства экстренной остановки согласно EN 60204 IEC 204 (VDE 0113)
•
должны оставаться дееспособным во всех режимах работы устройства.
Возврат устройства экстренной остановки в исходное положение не должно
приводить к неконтролируемому или нерегламентируемому повторному
включению.
В случаях, в которых короткие замыкания в устройстве управления приво-
•
дят к значительному материальному ущербу или к тяжелым телесным повреждениям (то есть потенциально опасных коротких замыканий), должны
предусматриваться дополнительные мероприятия или устройства, для того, чтобы гарантировать или обеспечивать принудительно безопасную работу, даже, если короткое замыкание произошло (например, независимые
концевые выключатели, механические блокировки, и т.д.).
Определенные параметры настройки могут вызывать повторный запуск
•
преобразователя после пропадания напряжения питания.
Устройство может обеспечивать внутреннюю защиту от перегрузки элек-
•
тродвигателя согласно стандарту UL508C, Раздел 42. См. P0610 (уровень
3) и P0335, по умолчанию защита по I
электродвигателя может также осуществляться при помощи внешнего PTC
терморезистора, подключаемого на соответствующий вход (по умолчанию
P0601 отключен).
Устройство предназначено для применения в цепях, которые могут пропус-
•
кать симметричный ток (действующий) до 10 кА, при максимальном напряжении до 230/460 V, если ток можно отключить инерционными плавкими
предохранителями (см. таблицу на странице 93).
Устройство не может использоваться как устройство экстренной аварийной
•
остановки (см. EN 60204, 9.2.5.4).
2
t включена. Защита от перегрузки
Ремонт
Предупреждение
Ремонт устройства может производиться только в сервисных центрах и
•
ремонтными мастерскими Сименс, получившими разрешения от Сименс, или
квалифицированным персоналом, ознакомленным со всеми предупреждениями и способами обслуживания, изложенными в данном руководстве.
При необходимости поврежденные части или элементы должны заменять-
•
ся частями, указанными в перечне запасных частей.
Перед открытием устройства необходимо отключить питание.
•
Демонтаж и утилизация отходов
Указания
Упаковка преобразователей может использоваться повторно. Пожалуйста,
•
сохраняйте упаковку для дальнейшего применения или для обратной отправки
производителю.
Легко разбираемые винтовые и защелкивающиеся соединения делают
•
возможным разборку устройства на отдельные части. Эти части могут быть переработаны. Пожалуйста, утилизируйте отходы в соответствии с местными
нормами или отсылайте назад производителю.
8
Page 9

Руководство пользователя преобразователей MICROMASTER 440
Содержание
1 Обзор 11
1.1 MICROMASTER 440 12
1.2 Примечания 12
2 Установка 14
2.1 Общие замечания 15
2.2 Условия работы 16
2.3 Механический монтаж 17
2.4 Электрические подключения 19
3 Ввод в эксплуатацию 25
3.1 Блок-схема MICROMASTER 440 27
3.2 Способы обслуживания преобразователя 28
4 Применения MICROMASTER 440 38
4.1 Задание частоты ( P1000 ) 39
4.2 Источники команд (P0700) 39
4.3 Функции выключения и торможения 40
4.4 Виды управления (P1300) 41 4
4.5 Ошибки и предупреждения 41
5. Системные параметры 43
5.1 Обзор системных параметров MICROMASTER 45
5.2 Введение в системные параметры MICROMASTER 43
5.3 Системные параметры и определения 50
6. Неисправности 110
6.1 Устранение ошибок с помощью статусной панели 111
6.2 Устранение ошибок с помощью стандартного пульта оператора 112
6.3 Коды ошибок преобразователя MICROMASTER 440 113
7. MICROMASTER 440 Технические данные 118
8. Дополнительная информация 124
8.1 Предоставляемые опции 126
8.2 Электромагнитная совместимость (EMC) 126
Приложения
A - Замена операторской панели 128
B - Съем крышек типоразмера A 129
C -Снятие платы ввода/вывода 130
D - Съем крышек типоразмера B и C 131
E - Съем крышек типоразмера D и E 132
F- Съем крышек типоразмера F 133
G - Удаление Y- конденсатора на размере А 134
H - Удаление Y- конденсатора на размерах B и C 135
I - Удаление Y- конденсатора на размерах D и E 136
J- Удаление Y- конденсатора на размере F 137
К - Соответствия стандартам 138
Список сокращений 139
9
Page 10

Руководство пользователя преобразователей MICROMASTER 440
Перечень иллюстраций
Рисунок 2-1 Габаритные размеры MICROMASTER 440 17
Рисунок 2-2 Присоединительные зажимы MICROMASTER 440 21
Рисунок 2-3 Подключение электродвигателя и сети 22
Рисунок 2-4 Подключения с минимизацией эффекта излучения 24
Рисунок 3-1 Блок-схема преобразователя MICROMASTER 440 27
Рисунок 3-2 Установка DIP переключателей 28
Рисунок 3-3 Панели для преобразователей 29
Рисунок 3-4 Базовое включение элементов управления 30
Рисунок 3-5 Клавиши на базовой панели 34
Рисунок 3-6 Изменение параметров на панели ВОР 35
Рисунок 3-7 Пример шильдика на двигателе 36
Перечень таблиц
Таблица 3-1 предустановки для работы с дисплеем состояния 29
Таблица 3-2 предустановки для обслуживания с помощью BOP 33
Таблица 6-1 Состояния преобразователя, отображаемые светодиодами на SDP 111
Таблица 6-2 Коды ошибок MICROMASTER 440 113
Таблица 6-3 Коды предупреждений MICROMASTER 440 115
Таблица 7-1 MICROMASTER 440 - Технические данные 118
Таблица 7-2 Сечения проводников MICROMASTER 440 119
Таблица 7-3 Технические требования 119
Таблица 8-1 Класс 1 - Общее промышленное применение 126
Таблица 8-2 Класс 2 - Промышленное применение с фильтрами 126
Таблица 8-3 Класс 3 - Фильтры для жилья, коммерческих применений и легкой промыш-
ленности 127
Таблица 8-4 Таблица совместимости 127
10
Page 11

Руководство пользователя преобразователей MICROMASTER 440
1 Обзор
Эта глава содержит:
Описание наиболее важных свойств серии MICROMASTER 440.
1.1 MICROMASTER 440 .......................................................................12
1.2 Свойства ...................................................................................12
11
Page 12

Руководство пользователя преобразователей MICROMASTER 440
1.1 MICROMASTER 440
Преобразователи MICROMASTER 440 являются серийными преобразователями для регулирования трехфазных электродвигателей. Отдельные поставляемые модели имеют диапазон мощностей 120 Вт при однофазном входе и до 75
кВт при трехфазном входе.
Преобразователи оснащены микропроцессорной системой управления и используют самые современные технологии с IGBT модулями - транзисторами
(Insulated Gate Bipolar Transistor = биполярный транзистор с изолированным
затвором). Вследствие этого преобразователи надежны и разнообразны. Оригинальный способ широтно-импульсной модуляции с выбором частоты коммутации дает возможность бесшумной работы электродвигателя. Обширные
функции защиты обеспечивают эффективную защиту преобразователя и электродвигателя.
MICROMASTER 440 с заводскими установками является идеальным для широкой области простых применений регулирования скорости. MICROMASTER 440
может также использоваться для случаев с высокими требованиями к регулированию скорости электродвигателя за счет обширного списка параметров настроек.
MICROMASTER 440 может применяться как индивидуально, так и интегрироваться в системы автоматизации процесса.
1.2 Свойства
Основные характеристики
Легко устанавливать, параметрировать и пускать в эксплуатацию.
•
Малое время отклика на сигналы управления.
•
Соответствует международным нормам электромагнитной совместимости.
•
Может работать с источниками энергии сравнимой мощности.
•
Обширный набор параметров, которые дают возможность конфигурирова-
•
ния для широких областей применения.
Простое присоединение проводов.
•
Релейные выходы.
•
Аналоговые выходы 0-20мА.
•
6 изолированных переключаемых pnp/npn дискретных входов.
•
2 аналоговых входа:
•
AIN 1 - 0-10В, 0-20мА или -10 до +10В
AIN 2 - 0-10В, 0-20мА
Два аналоговых входа могут использоваться как 7-й и 8-й дискретные вхо-
•
ды.
Модульная конструкция для очень гибкой конфигурации.
•
Высокая частота коммутации для бесшумной работы электродвигателя.
•
Подробная информация о состоянии и встроенные функции сообщений.
•
Внешние опции для обмена данными с компьютером, базовая панель об-
•
служивания (BOP), расширенная панель оператора (AOP) и модули передачи данных по шине Profibus.
12
Page 13

Руководство пользователя преобразователей MICROMASTER 440
Функциональные особенности
Векторное регулирование без датчика скорости
•
Регулирование потока (FCC) для улучшения динамических характеристик и
•
повышения качества регулирования электродвигателя
Мгновенное ограничение тока (FCL) для работы без отключения двигателя
•
Встроенное динамическое торможение постоянным током
•
Комбинированное торможение для улучшения возможностей торможения
•
• Времена ускорения и торможения с программируемым сглаживанием
Использование замкнутого PID регулятора с автоподстройкой
•
Встроенный прерыватель тормоза
•
Выбираемая интенсивность разгона и остановки
•
4-х точечная интенсивность сглаживания
•
Многоточечная V/f характеристика, задаваемая пользователем
•
Установленные параметры могут быть перенесены на другие устройства
•
аналогичных процессов
Особенности защиты
Защита от повышенного и пониженного напряжений
•
Защита преобразователя от перегрева
•
Защита от замыкания на землю
•
Защита от короткого замыкания
•
Защита от перегрева двигателя по потерям I2 t
•
Защита двигателя по термисторам PTC/KTY
•
13
Page 14

Руководство пользователя преобразователей MICROMASTER 440
2 Установка
Эта глава содержит:
Общие данные по установке
•
Габариты преобразователей
•
Нормы монтажа для минимизации влияния электромагнитных помех
•
Особенности электрической установки
•
2.1 Общие замечания.........................................................................................15
2.2 Условия работы..................................................................……...................16
2.3 Механический монтаж...........................................................…........……….17
2.4 Электрические подключения........................................................................19
14
Page 15

Руководство пользователя преобразователей MICROMASTER 440
Предупреждения
Работы, выполняемые с прибором или установкой неквалифицированным
•
персоналом, или пренебрежение предупреждениями могут привести к тяжелым телесным повреждениям или значительному материальному ущербу. Работы с прибором или устройством могут выполняться только специальным квалифицированным персоналом, обученным наладке, инсталляции, вводу в эксплуатацию и обслуживанию изделия.
Допустимы только постоянно подключенные провода питания. Устройство
•
должно быть заземлено (IEC 536, класс 1, NEC и прочие специальные нормы).
Если используются устройства защитного отключения (FSI), то они должны
•
соответствовать типу B или С.
Машины с трехфазным питанием, оснащенные фильтрами электромагнит-
•
ной совместимости, не могут присоединяться к сети защитным выключателем замыкания на землю (EN 50178, часть 5.2.11.1)
Следующие зажимы могут даже при неработающем преобразователе на-
•
ходиться под опасным напряжением:
- зажимы присоединения сети L/L1, N/L2, L3,
- зажимы электродвигателя U, V, W, DC +/B, DC-, B- и DC/R+.
После отключения устройства необходимо выждать 5 минут для разряда
•
конденсаторов, прежде чем начинать монтажные работы.
Преобразователи не должны использоваться как устройства ЭКСТРЕННОЙ
•
ОСТАНОВКИ машин (см. EN 60204, 9.2.5.4).
Минимальное сечение заземляющего провода должно быть не менее чем
•
сечение линейного провода на вводе преобразователя.
Осторожно
Присоединение проводов сети, электродвигателя и управления в преобразователе должно выполняться, как показано на Рис. 2-4 на стр. 24, чтобы предотвратить индуктивные и емкостные помехи, которые могут нарушить правильность функционирования преобразователя.
2.1 Общие замечания
Установка после хранения
По окончании периода хранения необходимо выполнить формование конденсаторов преобразователя. Очень важно помнить, что время хранения ис-
числяется с момента выпуска преобразователя, а не с момента его поставки. Пользуйтесь следующими правилами.
Время хра-
нения
1 год и менее Нет необходимости в формовке
От 1 до 2 лет Подключить питание перед подачей команды на пуск 1 час
От 2 до 3 лет Использовать регулятор напряжения переменного тока
Подать 25% напряжения на 30 минут
Поднять напряжение до 50% на 30 минут
Поднять напряжение до 75% на 30 минут
Поднять напряжение до 100% на 30 минут
Инвертор готов к принятию команд
3 года и
больше
Использовать регулятор напряжения переменного тока
Подать 25% напряжения на 2 часа
Поднять напряжение до 50% на 2 часа
Поднять напряжение до 75% на 2 часа
Поднять напряжение до 100% на 2 часа
Инвертор готов к принятию команд
Действия Время работы
2 часа
8 часов
15
Page 16

Руководство пользователя преобразователей MICROMASTER 440
2.2 Условия работы
Температура наружного воздуха
Мин. рабочая температура = -10 °C
Макс. рабочая температура = 50 °C
Для габаритов от С до F при работе с переменным моментом для номинальной
мощности рабочая температура снижается до 40 °C.
Примечание
При работе инвертора с нагрузкой переменного момента (вентиляторы или насосы) допускается увеличивать номинальную выходную мощность инвертора
примерно на 1 габарит.
В этом случае необходимо снизить (программно) перегрузочную способность
инвертора (относительно его номинальных данных).
Влажность
95 %, без конденсации.
Высота установки
Если преобразователь инсталлируется на высоте более 1.000 м, то необходимо снижать мощность нагрузки. ( См. Руководство MM440).
Удар
Не допускать падений преобразователя и ударов.
Вибрации
Не устанавливать преобразователь в зонах постоянных вибраций.
Электромагнитное излучение
Не устанавливать преобразователь вблизи от источников электромагнитного
излучения.
Загрязнение атмосферного воздуха
Не устанавливать преобразователь в среде, содержащей загрязнения атмосферного воздуха, такие как пыль, агрессивные газы, и т.д.
Вода
Обратите внимание на то, чтобы преобразователь не подвергался воздействию влаги. Так нельзя устанавливать преобразователь под трубами, на которых возможно появление конденсата. Не устанавливать преобразователь в
местах с повышенной влажностью и наличием конденсата.
Внимание!
Привод не должен монтироваться в горизонтальном положении!
Установка и охлаждение
Преобразователь монтируют вертикально, чтобы гарантировать оптимальное
охлаждение силовых приборов. При горизонтальном монтаже может быть необходим дополнительный обдув. Допускается монтаж преобразователей бок о
бок.
Обеспечьте, чтобы вентиляционные отверстия преобразователя не были прикрыты. Над и под преобразователем необходимо свободное от оборудования
расстояние 100 мм.
16
Page 17

Руководство пользователя преобразователей MICROMASTER 440
2.3 Механический монтаж
Предупреждение
Преобразователь должен быть заземлен
Чтобы гарантировать безопасную работу устройства, оно должно устанав-
•
ливаться и вводиться в эксплуатацию квалифицированным персоналом,
при полном соблюдении изложенных в данном руководстве предупреждений.
Обратите особое внимание на выполнения Общих и Региональных правил
•
установки и безопасности при работе в электроустановках с опасными напряжениями (например, EN 50178), а так же специальные положения относительно правильного применения инструментов и индивидуальных
средств защиты.
Сетевые клеммы, клеммы цепи постоянного тока и электродвигателя могут
•
оставаться под опасными напряжениями даже при неработающем преобразователе; перед проведением монтажных работ после выключения необходимо выждать 5 минут для разряда конденсаторов.
Размер А
Размер В
Размер С
Размер F
Размер Е
Размер D
Рисунок 2-1. Габаритные размеры MICROMASTER 440
17
Page 18

Руководство пользователя преобразователей MICROMASTER 440
Таблица 2.1 Крепление преобразователей MICROMASTER 440
размер
Установочные размерыТипо-
ВысотаmmШиринаmmГлубина
mm
Способ крепления (кре-
пежные материалы)
A 173 73 149 Болты 2хМ4
Шайбы 2хМ4
Гайки 2хМ4
На рейке 35мм
B 202 149 172 Болты 4хМ4
Шайбы 4хМ4
Гайки 4хМ4
C 245 185 195 Болты 4хМ5
Шайбы 4хМ5
Гайки 4хМ5
D 520 275 245 Болты 4хМ8
Шайбы 4хМ8
Гайки 4хМ8
E 650 275 245 Болты 4хМ8
Шайбы 4хМ8
Гайки 4хМ8
фильт-
ром
с
350 300 Болты 4хМ8
Шайбы 4хМ8
Гайки 4хМ8
F 875
Момент затяжки
2,5 Nm
Со смазкой
2,5 Nm
Со смазкой
2,5 Nm
Со смазкой
3,0 Nm
Со смазкой
3,0 Nm
Со смазкой
3,0 Nm
Со смазкой
2.3.1. Монтаж преобразователей размера А на DIN рейку
Установка инвертора на рейку
1. Установите преобразователь верхними зажимами
на рейку.
2. Прижмите нижнюю
часть инвертора к рейке
и нажмите до появления
щелчка фиксатора.
Снятие инвертора с монтажной рейки
1. Установите отвертку в механизм защелки и оттяните
её.
2. Нажмите преобразователь вниз и снимите нижний
край с монтажной рейки.
3. Снимите инвертор с монтажной рейки.
18
Page 19

Руководство пользователя преобразователей MICROMASTER 440
2.4 Электрические подключения
Предупреждение
ПРИБОР ДОЛЖЕН БЫТЬ ЗАЗЕМЛЕН.
Чтобы гарантировать безопасную работу устройства, оно должно инстал-
•
лироваться и вводиться в эксплуатацию квалифицированным персоналом,
при полном соблюдении изложенных в данном руководстве предупреждений.
Обратите особое внимание на выполнения Общих и региональных правил
•
инсталляции и безопасности при работе в установках с опасными напряжениями (например, EN 50178),а так же специальные положения относительно правильного применения инструментов и индивидуальных средств защиты.
Сетевые клеммы, клеммы цепи постоянного тока и электродвигателя могут
•
оставаться под опасными напряжениями даже при неработающем преобразователе; перед проведением монтажных работ после выключения необходимо выждать 5 минут для разряда конденсаторов.
Преобразователи могут инсталлироваться рядом друг с другом. При ин-
•
сталляции один над другим, тем не менее, должно соблюдаться расстояние
100мм (3,94").
2.4.1 Общие сведения
Предупреждение
Преобразователь должен быть всегда заземлен. Если преобразователь не-
правильно заземлен, могут возникнуть явно опасные состояния внутри преобразователя, которые в данном случае могут быть фатальными.
Работа в сетях с изолированной нейтралью (IT)
MICROMASTER работает в сетях с изолированной нейтралью и остается работоспособным, если входная фаза соединяется с землей. Если выходная фаза
замыкается на землю, MICROMASTER выключается и показывает сообщение
F0001.
При работе в таких сетях должен удаляться ' Y ' - конденсатор внутри прибора.
Способ демонтажа этого конденсатора описан в Приложениях G, H, I и J.
Работа с устройством защитного отключения
Если установлено устройство защитного отключения УЗО (обозначаемое как
SFI, ELC или RCC), то преобразователи работают без нежелательного отклю-
чения при следующих условиях:
Применяется УЗО типа В или С.
Ток срабатывания УЗО составляет 300 mA.
Нейтральный провод сети является заземленным.
Каждое УЗО питает только один преобразователь.
Выходной кабель короче 50 м (экранированный) или соответственно
100 м (неэкранированный).
19
Page 20

Руководство пользователя преобразователей MICROMASTER 440
Работа с длинными проводами (кабелями)
Осторожно
Провода управления, сети и электродвигателя должны прокладываться раздельно. Они не должны прокладываться в одних трубах или каналах. Провода, подключенные к преобразователю, ни в коем случае не должны подвергаться проверке изоляции высоким напряжением.
Все преобразователи работают при полном соблюдении данных при длинах
экранированных проводов до 50 м или 100 м неэкранированных.
2.4.2 Подключение сети и электродвигателя
Предупреждение
Перед подключением или изменением подключения устройства отсоедини-
•
те электрическое питание.
Проверьте, сконфигурирован ли электродвигатель для правильного напря-
•
жения сети: однофазный или трехфазный преобразователь
MICROMASTER для 230В не должен подключаться к трехфазной сети
400В.
Если подключаются синхронные машины или параллельно подключаются
•
несколько асинхронных электродвигателей, то преобразователь должен
работать на характеристике напряжение/частота (P1300 = 0, 2 или 3).
Осторожно
После подключения проводов сети и электродвигателя к соответствующим
клеммам проверьте, правильно ли закрыты все крышки. Только после этого
подключайте снова напряжение питания!
Указание
Проверьте, включены ли между сетью и преобразователем подходящий
•
защитный выключатель/плавкие предохранители (см. таблицу на стр. 122).
Применяйте только медные проводники, класс 1 60/75°C (для соблюдения
•
норм UL). Момент затяжки клемм сети составляет 1,1 Нм (см. таблицу на
стр. 122).
Для зажима винтов сетевых клемм применяйте крестообразную отвертку 4-
•
5 мм.
Доступ к клеммам сети и электродвигателя
Последовательность действий для доступа к клеммам сети и электродвигателя
преобразователя MICROMASTER 440 отображена в Приложениях B и C. Пожалуйста, обратите внимание на фотографии на нижней стороне обложки этого руководства, где показано подсоединение клемм сети и клемм управления.
После того, как откроете крышки и освободите доступ к клеммам, присоедините провода сети и электродвигателя так, как показано на следующей странице.
20
Page 21

Руководство пользователя преобразователей MICROMASTER 440
р
Размер А
Размеры В и С
Размеры D и Е
Разме
F
Рисунок 2-2. MICROMASTER440 - клеммы силовых присоединений
21
Page 22

Руководство пользователя преобразователей MICROMASTER 440
Д
Д
Питающие
Входной фильтр
(опция)
FU
кабели
вигатель
FU
Однофазное питание преобразователя
Питающие
Входной фильтр
(опция)
кабели
Трехфазное питание преобразователя
вигатель
Рисунок 2-3 Подключение питающей сети и двигателя
22
Page 23

Руководство пользователя преобразователей MICROMASTER 440
2.4.3 Предотвращение влияния электромагнитных помех (EMI)
Преобразователь рассчитан для работы в промышленных условиях, где следует ожидать высокий уровень помех EMI. В общем, правильная установка гарантирует безопасную и безотказную работу. При возникновении затруднений
следуйте, пожалуйста, нижеследующим указаниям.
Эффективные мероприятия
Убедитесь, что все устройства в шкафу заземлены короткими заземляю-
•
щими проводами с большим сечением, причем провода соединены с общей
точкой или сборной шиной.
Убедитесь, что все присоединенные к преобразователю устройства управ-
•
ления (например, PLC) присоединены к точке заземления или к общей точке короткими проводами с большим поперечным сечением, как и преобразователь.
Обратный провод электродвигателей, управляемых преобразователем,
•
присоедините непосредственно к зажиму заземляющего провода (PE) этого
преобразователя.
Плоские проводники являются предпочтительными, так как при более вы-
•
соких частотах имеют меньшие сопротивления и потери.
Подключайте зачищенные концы проводов и следите, чтобы неэкраниро-
•
ванные провода были по возможности короткими.
Как можно лучше разделяйте управляющие и силовые проводники, исполь-
•
зуйте для них разделенные кабельные каналы, пересекающиеся под углом
90 градусов.
По возможности для соединения управляющих цепей используйте экрани-
•
рованные провода.
Убедитесь, что контакторы в шкафу защищены от помех либо R-C цепочка-
•
ми при переменном токе, либо обратными диодами при постоянном токе,
которые подключаются к катушкам. Варисторные разрядники перенапряжения также эффективны. Это обстоятельство важно, если контакторы управляются от преобразователя.
Используйте для подключения электродвигателя экранированные или ар-
•
мированные провода и заземляйте экран на обоих концах хомутом кабеля.
Предупреждение
Нельзя пренебрегать требованиями техники безопасности при установке преобразователя!
2.4.4 Метод экранирования
Размеры А, В и С
Для размеров А, В и С комплект платы с уплотнителями для ввода кабелей и
экранирования поставляется как опция, по желанию заказчика. Инструкцию по
установке, сборке и экранированию смотрите на CD-ROM, поставляемом в
комплекте с преобразователем 440.
Размеры D, E и F
Уплотнительная плата для этих размеров устанавливается на заводе изготовителя. Порядок подключения экранов выполняется как и на преобразователях
малых размеров.
23
Page 24

Руководство пользователя преобразователей MICROMASTER 440
Подключение без вводных уплотнителей
Если не используются крышки с уплотнителями для кабеля, то можно подключения выполнять в соответствии с приведенным рисунком 2-4.
Рисунок 2-4 Подключения с минимизацией эффекта излучений ЭМИ.
Обозначения
1. Силовые выводы питания
2. Контрольный кабель
3. Кабель двигателя
4. Опорная доска
5. Металлическая боковая стенка
6. Хомуты для крепления кабелей питания, двигателя и контрольного к металлическому основанию
7. Винтовой кабель
Примечание
Для улучшения экранирования кабелей двигателя и управления, могут быть
использованы опционные уплотнители (не показаны на рис. 2-4).
24
Page 25

Руководство пользователя преобразователей MICROMASTER 440
3 Ввод в эксплуатацию
Эта глава содержит:
Описание элементов управления лицевой панели
•
Краткое описание поставляемых как опции панелей и описание функций
•
базовой панели оператора (Basic Operator Panel, BOP)
Разделенное на восемь шагов руководство в конце главы, которое предос-
•
тавляет простой метод изменения параметров
3.1 Блок-схема MICROMASTER 440 .....……….................................................... 27
3.2 Способы обслуживания преобразователя..................................................... 28
3.3 Общее обслуживание ..................................................................................... 37
25
Page 26

Руководство пользователя преобразователей MICROMASTER 440
Предупреждение
Устройства MICROMASTER работают с высокими напряжениями.
•
При работе электрических устройств невозможно избежать наличия опас-
•
ных напряжений на определенных частях устройства.
Устройства экстренного останова согласно EN 60204 IEC 204 (VDE 0113)
•
должны оставаться работоспособными во всех рабочих состояниях устройства управления. Сброс устройства экстренной остановки не должен
приводить к неуправляемым или неопределенным повторным пускам.
Если возникающие в устройстве управления ошибки приводят к значитель-
•
ному материальному ущербу или, тем более, к серьезным телесным повреждениям (т.е. к опасным ошибкам), то должны выполняться дополнительные внешние мероприятия или предусматриваться оборудование, которое гарантирует (или принудительно обеспечивает) безопасную работу,
даже при возникновении ошибок (например, независимые концевые выключатели, механические блокировки и т.д.).
Определенные настройки параметра могут вызывать автоматический по-
•
вторный пуск преобразователя после исчезновения напряжения сети.
Данное устройство может выполнять внутреннюю защиту от перегрузки
•
электродвигателя соответственно UL508C, часть 42. Параметр. P0610 (уровень 3) и P0335 устанавливают их по умолчанию. Защита электродвигателя
от перегрузки может также производиться с помощью внешнего PTC (термистора), подключаемого к соответствующим входам.
Устройство предназначено для применения в цепях, которые допускают
•
симметричный ток короткого замыкания до 10.000 Ампер (действующее
значение) при максимальном напряжении 230/460/575В, если устройство
защищено плавким предохранителем типа H или К (см. таблицу на стр. 93).
Устройство не может использоваться как механизм экстренного выключе-
•
ния (см. EN 60204, 9.2.5.4).
Осторожно
Вводы данных с панели обслуживания может выполняться только квалифицированным персоналом. Мерам предосторожности и предупреждениям неукоснительно должно уделяться особенное внимание.
26
Page 27

Руководство пользователя преобразователей MICROMASTER 440
3.1 Блок-схема преобразователя
Применение аналоговых входов в
качестве
дискретных (DIN7 и DIN8).
Примечание:
1. Уровни напряжения для
использования аналоговых
входов в качестве
дискретных - 1,75В - Off,
3,7В - On.
2. Аналоговый вход AIN1 может использоваться как 010В, 0-20мА, -10-0+10В.
3. Встроенный источник +24В
может использоваться для
управления аналоговыми
входами (включая в
цифровом виде).
Рисунок 3-1 Блок-схема преобразователя частоты
27
Page 28

Руководство пользователя преобразователей MICROMASTER 440
3.2 Способы обслуживания преобразователя
MICROMASTER 440 поставляется с дисплеем состояния (Status Display Panel,
SDP) как стандартная операторская панель. Установки по умолчанию имеют
следующие основные значения:
Основные данные электродвигателя - напряжение, ток и частота соответст-
•
вуют энергетическим параметрам преобразователя, (рекомендуются стандартные электродвигатели Siemens).
Линейный V/f-закон регулирования частотой вращения, управление часто-
•
той аналоговым потенциометром.
Наибольшая частота вращения 3.000 мин-1 при 50 Hz (3.600 мин-1 при 60
•
Hz); задается потенциометром, подключенным к первому аналоговому вхо-
ду преобразователя.
Время разгона и время остановки = 10 с
•
Примечание
Установка номинальной частоты выполняется DIP переключателями, расположенными на плате управления.
DIP переключатель 2
•
-
Off положение для
Европейского
стандарта (50Гц, кВт)
-
On положение для
СевероАмериканского стандарта (60Гц, л.с.).
DIP переключатель 1
•
не используется.
DIP переключатель
для установки аналоговых входов
Рисунок 3.2.
DIP переключатель
для установки частоты
Сброс на заводские установки
Для переустановки всех параметров преобразователя на заводские (по умолчанию) с помощью одной из операторских панелей или средств коммуникации
необходимо установить:
1. Р0010 = 30
2. Р0970 = 1
Примечание
Процесс переустановки занимает около 3 минут
28
Page 29

Руководство пользователя преобразователей MICROMASTER 440
3.2.1 Передние панели для MICROMASTER 440
Для параметрирования преобразователя Вы можете использовать одну из опционных операторских панелей, таких как "Базовая Операторская Панель"
(BOP) или "Расширенная Панель Оператора" (AOP). Для более удобного обслуживания и параметрирования преобразователей можно использовать специальный инструмент - DriveMonitor - программу для настройки и документирования.
Панель индикации Базовая панель Расширенная панель
Рисунок 3-3. Панели для преобразователей MICROMASTER 440
3.2.2. Обслуживание с панелью индикации статуса (SDP)
SDP поставляется стандартно с каждым
преобразователем MICROMASTER 440. Поле
дисплея имеет впереди два светодиода LED,
которые отображают состояние при работе
преобразователя.
Преобразователь с SDP может быть применен с
предварительными настройками, которые закрывают потребности разнообразных пользователей.
Предварительные установки даны в таблице 3.1.
Расположение зажимов изображено на
фотографии клеммника управления на следующей
странице данного руководства.
Таблица 3-1 Предварительные установки для работы с дисплеем состояния
Клеммы Параметр По умолчанию
Дискретный вход 1 5 Р0701 = 1 Включение, вправо
Дискретный вход 2 6 Р0702 = 12 Реверс
Дискретный вход 3 7 Р0703 = 9 Сброс аварии
Дискретный вход 4 8 Р0704 = 15 Фиксированная частота
Дискретный вход 5 16 Р0705 = 15 Фиксированная частота
Дискретный вход 6 17 Р0706 = 15 Фиксированная частота
Дискретный вход 7 Через AIN 1 Р0707 = 0 Не используется
Дискретный вход 8 Через AIN 2 Р0708 = 0 Не используется
29
Page 30

Руководство пользователя преобразователей MICROMASTER 440
Предупреждения и отображение ошибок на дисплее состояния
Оба светодиода на дисплее состояния отображают режимы работы преобразователя. Они показывают также различные предупреждения или неисправные
состояния. В части 6.2 разъясняются состояния преобразователя и их индикация с помощью двух светодиодов LED.
При использовании SDP возможно следующее:
-
Запуск и останов электродвигателя (Внешний ключ на входе DIN1).
-
Реверсирование электродвигателя (Внешний ключ на входе DIN2).
-
Сброс ошибок (Внешний ключ на входе DIN3).
Подключение внешних цепей управления можно производить по приведенному
ниже рисунку.
Рисунок 3-4. Базовое включение внешних элементов управления для параметров по умолчанию с панелью SDP
30
Page 31

Руководство пользователя преобразователей MICROMASTER 440
3.2.3 Быстрый просмотр и ввод параметров с панелей ВОР или АОР
Подготовка
После окончания монтажа и электрических подключений.
Установка частоты двигателя
DIP переключатель 2 OFF – 50Гц / ON – 60Гц
Включить питание
Быстрый ввод параметров Р0010 = 1
(смотрите следующую страницу)
Примечание
Для пользователей, не имеющих опыта в программировании преобразователей частоты, мы рекомендуем пользоваться этим способом. Специалисты,
имеющие большой опыт в настройках преобразователей частоты, могут пользоваться более полными наборами параметров без фильтра Р0004.
Важно помнить, что параметр Р0010 используется для быстрого ввода, а параметр Р0003 для ограничения числа параметров, доступ к которым разрешен.
Этот параметр выделяет группу параметров по назначению, что позволяет
правильно и быстро осуществить необходимое параметрирование. Такие параметры, как данные двигателя и разгон/торможение, также включены в эти
группы.
Дальнейший ввод в действие через параметры
Р0003 и Р0004
Обзор структуры параметров приведен в
Разделе 5
Для более детального списка параметров
смотрите «Список параметров MICROMASTER
440»
После быстрого ввода в действие необходимо выйти на параметр Р3900 и установить его значение = 1, после чего преобразователь определит данные
двигателя и сбросит все настройки (за исключением тех, которые определены
Р0010) на заводские уставки. Это обеспечит быстрый и с минимальным количеством ошибок ввод в действие преобразователя частоты.
31
Page 32
Руководство пользователя преобразователей MICROMASTER 440
Диаграмма пути быстрого ввода в работу (параметры только 1 уровня)
Р0010
Начало быстрого ввода параметров
0 – Готовность к пуску
1 – Быстрое параметрирование
30 – Заводские установки
Примечание
Параметр Р0010 должен всегда устанавливаться в 0 перед работой привода. После установки параметра Р3900 в
Р0100
Параметры Европы или С.Америки
0 – мощность кВт, частота 50Гц
1 – мощность л.с., частота 60Гц
2 – мощность кВт, частота 60Гц
Примечание
Назначения 0 или 1 должны быть установлены в соответствии с DIP переключателями
Р0304
номинальное напряжение двигателя
10-2000В, устанавливается в Вольтах
Р0700
Выбор места команд управления
0 – Заводская установка
1 – Операторская панель
2 – Дискретные входы
Р1000
Выбор места задания частоты
0 – Нет задания частоты
1 – Операторская панель ↑ ↓
2 – Аналоговый вход
2)
2)
Р1080
Минимальная частота двигателя
0-650Гц. Устанавливает минимальную
частоту двигателя в Гц. При любых заданиях выходная частота будет не ниже указанной.
Р1082
Максимальная частота двигателя
0-650Гц. Устанавливает максимальную
1)
частоту двигателя в Гц. При любых заданиях выходная частота будет не выше указанной.
Р0305
номинальный ток двигателя
1)
2ххх , устанавливается в Амперах
Р0307
номинальная мощность двигателя
1)
0-2000кВт(л.с), в зависимости от Р0100
Р0310
номинальная частота двигателя
1)
12-650Гц, устанавливается в Герцах
Р0311
номинальная скорость двигателя
1)
0-40000 1/мин, в оборотах двигателя
1) Номинальные параметры двигателя можно
прочитать на шильдике двигателя.
2) Большее количество команд и заданий
можно найти в других уровнях доступа.
Р1120
Время разгона.
0-650 Сек. Время, за которое двигатель
разгоняется с остановленного состоя-
ния до максимальной скорости.
Р1121
Время торможения.
0-650 Сек. Время, за которое двигатель
затормозится с максимальной скорости
до полной остановки.
Р3900
Завершение быстрого ввода.
0 – завершение быстрого ввода без
расчета двигателя и заводских устано-
вок
1 – завершение быстрого ввода с расчетом двигателя и заводскими установками (рекомендуется)
2 - завершение быстрого ввода с расчетом двигателя и сбросом ввода/вывода
3 - завершение быстрого ввода с расчетом двигателя без сброса ввода/вывода
32
Page 33
Руководство пользователя преобразователей MICROMASTER 440
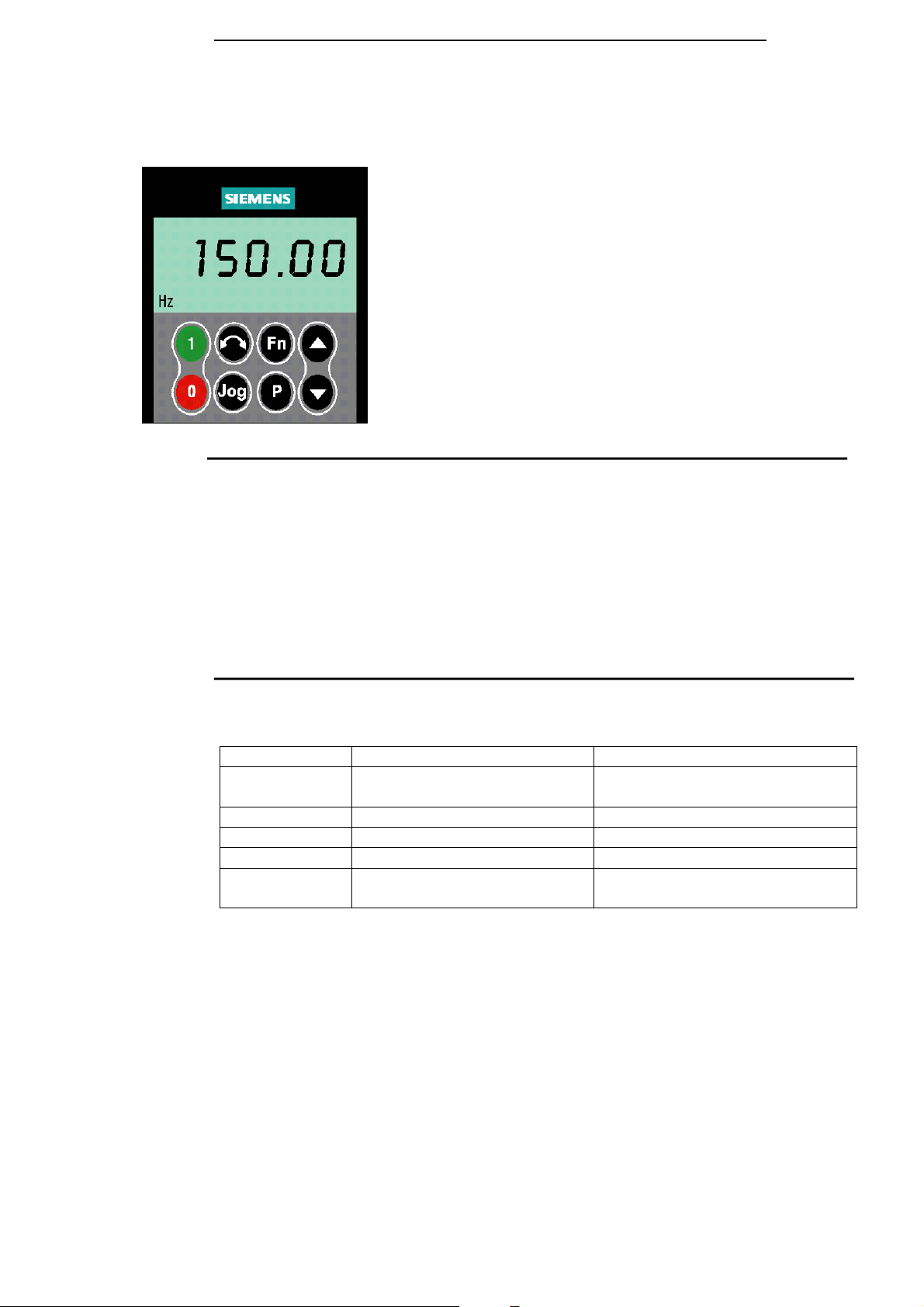
3.2.4. Ввод в эксплуатацию с базовой панелью оператора (ВОР)
Базовая панель оператора (BOP), поставляемая как
опция, дает возможность доступа к параметрам
преобразователя и обеспечивает специфическую
пользовательскую настройку MICROMASTER 440. BOP
может использоваться для конфигурирования большинства преобразователей MICROMASTER 440. Поэтому
нет необходимости покупать свою панель BOP для каждого преобразователя.
Панель имеет сегментные индикаторы для чтения и
записи параметров преобразователя. Панель не имеет
возможности собственного хранения информации и
параметров после её снятия.
Примечание
При установке панель не позволяет управлять двигателем (пуск/стоп), если
•
используются установки привода по умолчанию. Для активизации возможности управления необходимо установить параметры Р0700 и Р1000 в "1".
Панель может сниматься и устанавливаться на преобразователе при вклю-
•
ченном питании преобразователя.
Если панель предназначена для управления двигателем (Р0700 = 1), то
•
привод остановится после снятия панели.
Таблица 3-2. Заводские установки для работы с панелью ВОР
Параметр Описание Для Европы (Сев. Америки)
Р0100 Рабочий режим Евро-
па/США
Р0307 Ном. мощность двигателя В соответствии с приводом
Р0310 Ном. частота для двигателя 50Гц (60Гц)
Р0311 Ном. частота вращения 1395 (1680) об/мин
Р1082 Макс. частота для двигате-ля50Гц (60Гц)
50Гц, кВт (60Гц, л.с)
33
Page 34

Руководство пользователя преобразователей MICROMASTER 440
Клавиши базовой панели управления
Клавиша Функция Назначение
Индикатор
состояния
Пуск дви-
гателя
Стоп дви-
гателя
Реверс
вращения
Толчковый
режим
Функции
Доступ к
парамет-
рам
LCD показывает установку или параметр, с которой
преобразователь работает в данный момент.
При нажатии клавиши преобразователь пускается. Эта
клавиша является по умолчанию пассивной. Клавишу
активизируют установкой P0700 =1
OFF1 - Нажатие клавиши приводит к остановке преобразователя по выбранной рампе скорости. По умолчанию клавиша пассивна, активизируется установкой
P0700 = 1.
OFF 2 - Двойное нажатие (или длительное удержание)
вызывает свободный выбег электродвигателя до остановки.
Нажатие этой клавиши вызывает реверсирование (изменение направления вращения) электродвигателя.
Обратное вращение отображается знаком минус (-)
или мигающей десятичной точкой. По умолчанию клавиша пассивна, активизируется установкой P0700 = 1.
Нажатие этой клавиши при остановленном преобразователе обеспечивает пуск электродвигателя с заданной JOG-частотой. После отпускания клавиши преобразователь останавливает двигатель. Нажатие клавиши при работающем преобразователе с электродвигателем, не приводит ни к каким действиям.
Эта клавиша может использоваться для отображения
дополнительной информации.
Клавиша должна нажиматься и удерживаться в течение 2 секунд. Она указывает при работе следующее:
1. Напряжение звена постоянного тока (Обозначено
буквой d) в (V)
2. Выходной ток (A)
3. Выходная частота (Hz)
4. Выходное напряжение (V)
4. Величину (выбранную в P0005)
Повторные нажатия возвращают показания дисплея к
текущему значению.
Нажатие этой клавиши обеспечивает доступ к параметрам и настройкам привода
Нажатие этой клавиши увеличивает отображаемое
Увеличить
значение
Уменьшить
значение
Рисунок 3-5. Клавиши на базовой операторской панели
значение. Для изменения задания частоты с помощью
BOP необходимо установить P1000 = 1
Нажатие этой клавиши уменьшает отображаемое значение. Для изменения задания частоты с помощью
BOP нужно установить P1000 = 1.
34
Page 35

Руководство пользователя преобразователей MICROMASTER 440
Изменение параметров с панели ВОР
Нижеследующее описание показывает, как необходимо изменять параметры.
Это описание может использоваться как руководство для установки любого
параметра с помощью BOP.
Изменение параметра Р0004 - параметр доступа функций.
Шаг
1. Нажмите клавишу для доступа к параметрам
2. Нажимайте до появления параметра Р0004
3. Нажмите клавишу для доступа к значению
4. Нажимайте и до установки значения
5. Нажимайте для возврата и записи значения
6. Могут быть доступны только параметры двигателя
Изменение параметра Р1082 - установка максимальной частоты двигателя
Шаг
Отображение
Отображение
1. Нажмите клавишу для доступа к параметрам
2. Нажимайте до появления параметра Р1082
3. Нажмите клавишу для доступа к уровню
4. Нажмите клавишу для доступа к значению
5. Нажимайте и до установки значения
6. Нажимайте для возврата и записи значения
7. Нажмите клавишу для возврата к параметру
8. Нажмите клавишу для возврата к индикации установленного параметра
Рисунок 3-6. Изменение параметров с панели ВОР
35
Page 36

Руководство пользователя преобразователей MICROMASTER 440
Примечание - Сообщение "Занято"
Иногда при изменении значения параметра дисплей на BOP показывает
" - - - -". Это означает, что инвертор занят задачами более высокого приоритета
или неверно указан параметр.
Данные двигателя для параметрирования
Рисунок 3-7. Пример шильдика на двигателе
Примечание
Доступ к параметрам Р0308 и Р0309 возможен, если параметр Р0003 ≥ 2.
•
Изменение параметров двигателя невозможно, если Р0010 = 1.
•
Параметр Р0307 указывается в кВт или л.с., в зависимости от установок в
•
Р0100.
Внешняя тепловая защита двигателя от перегрузки
При работе привода с частотой вращения ниже номинальной, эффективность
охлаждения с помощью вентилятора, установленного на валу двигателя снижается. Следовательно, большинство двигателей требует уменьшения нагрузки для непрерывной работы на низких частотах. Чтобы гарантировать защиту
двигателя от перегрева при этих условиях, PTC температурный датчик, должен
быть установлен на двигателе и подключен к клеммам управления инвертора,
а параметр Р0601 должен быть активизирован.
36
Page 37

Руководство пользователя преобразователей MICROMASTER 440
3.2.3. Обслуживание с расширенной панели оператора (АОР)
Расширенная панель оператора (AOP) доступна как опция.
Она включает в себя следующие расширенные возможности
Многоязычный текстовый дисплей
•
Выгрузка/загрузка установок многих параметров
•
Возможность обслуживания в группе до 30
•
преобразователей.
Для уточнения деталей обращайтесь к Руководству по АОР
или к представительству Siemens в вашем регионе
3.3. Общее обслуживание
Для получения подробного описания стандартных и расширенных параметров,
пожалуйста, обращайтесь к разделу 6.
.
.
Примечание
Инвертор не имеет силовых выключателей питания и работает, когда на
•
него подано напряжение. Он находится в режиме ожидания с отключенным
выходом, пока не будет нажата кнопка RUN или будет присутствовать сигнал ON на выбранном дискретном входе.
Если установлены панели BOP или AOP и на дисплее отображается вы-
•
бранная выходная частота (P0005 = 21), то соответствующее задание отображается примерно каждую секунду пока инвертор находится в режиме
STOP.
Инвертор программируется под стандартное применение для четырехпо-
•
люсных двигателей, которые имеют такую же номинальную мощность, как и
инвертор. При использовании других двигателей необходимо ввести номинальные данные двигателя. Смотри рис. 3-7 для уточнения, как следует читать данные двигателя.
Изменение параметров двигателя невозможно, если параметр Р0010 = 1.
•
Вы должны установить Р0010 обратно в 0 для подготовки преобразователя
•
к запуску.
37
Page 38

Руководство пользователя преобразователей MICROMASTER 440
4 Применениe MICROMASTER 440
Эта глава содержит:
Разъяснение различных способов управления преобразователем
4.1 Задание частоты (Р1000).............................................................................39
4.2 Источники команд (P0700)...........................................................................39
4.3 Функции выключения и торможения................................................…........40
4.4 Виды управления (P1300).............................................................................42
4.5 Ошибки и предупреждения...........................................................................42
38
Page 39
Руководство пользователя преобразователей MICROMASTER 440
Предупреждения
При работе электрических устройств невозможно избежать наличия опас-
•
ных напряжений на определенных частях устройства.
Устройства экстренного останова согласно EN 60204 IEC 204 (VDE 0113)
•
должны оставаться работоспособными во всех рабочих состояниях устройства управления. Сброс устройства экстренной остановки не должен приводить к неуправляемым или неопределенным повторным пускам.
В случаях, если короткие замыкания в приборе управления приводят к зна-
•
чительному материальному ущербу или, тем более, к серьезным телесным
повреждениям (т.е. потенциально опасным ошибкам), то должны намечаться дополнительные внешние мероприятия или предусматриваться оборудование, которое гарантирует (или принудительно обеспечивают) безопасную работу даже при возникновении ошибок (например, независимые концевые выключатели, механические блокировки и т.д.).
Преобразователи MICROMASTER- работают с высокими напряжениями.
•
Определенные установки параметров могут вызывать автоматический по-
•
вторный пуск преобразователя после перерыва питающего напряжения.
Данное устройство может выполнять внутреннюю защиту от перегрузки
•
электродвигателя соответственно UL508C, часть 42,. См. P0610 (уровень 3)
и P0335. Защита электродвигателя от перегрузки может также производиться с помощью внешнего PTC (термистора) подключаемого к дискретным входам.
Устройство предназначено для применения в цепях, которые допускают
•
симметричный ток короткого замыкания до 10.000 А (действующее значение) при максимальном напряжении 230/460 В, если устройство защищено
инерционным плавким предохранителем (см. таблицу на стр. 93).
Устройство не может использоваться как механизм экстренного выключе-
•
ния (см. EN 60204, 9.2.5.4).
4.1 Задание частоты (Р1000)
По умолчанию - клеммы 3/4 (AIN+/AIN-, 0-10V соответствует 0 - 50(60)Гц).
•
Другие установки - см. описание параметра Р1000.
•
4.2 Источники команд (P0700)
Примечание
Функции времени и сглаживания разгона и торможения воздействуют также
на разгон и выбег электродвигателя. Относительно особенностей этих функций
см. параметры P1120, P1121, P1130 - P1134 в системных параметрах.
Пуск двигателя
По умолчанию - клемма 5 (высокий уровень на дискретном входе DIN1)
•
Другие установки - смотрите параметры Р0700 до Р0708
•
Остановка двигателя
Несколько способов остановки двигателя:
По умолчанию:
•
39
Page 40
Руководство пользователя преобразователей MICROMASTER 440
•
•
или дважды)
•
Другие установки - см. параметры Р0700 до Р0708.
•
Реверс двигателя
По умолчанию - клемма 6 (высокий уровень на дискретном входе DIN2).
•
• Другие установки - см. параметры Р0700 до Р0708.
OFF1 - клемма 5, низкий уровень дискретного входа DIN1
OFF2 - нажатие на кнопку Off на панели оператора (с удержанием
OFF3 – нет в стандартной установке.
4.3 Функции выключения и торможения
4.3.1 ВЫКЛ 1 (OFF1)
Эта команда (вырабатывающаяся вследствие отмены команды ВКЛ) вызывает
выбег преобразователя до останова в соответствии с выбранной рампой снижения скорости.
Параметры для изменения времени остановки см. P1121
•
Примечание
Команда ВКЛ и последующая команда ВЫКЛ1 должны иметь один источ-
•
ник.
Если установлена команда ВКЛ-/ВЫКЛ1 для более чем одного дискретного
•
входа, то активным является только номер дискретного входа, установленный в последнюю очередь, например, DIN3.
ВЫКЛ1 может комбинироваться с динамическим торможением или сме-
•
шанным торможением.
4.3.2 ВЫКЛ 2 (OFF2)
Эта команда вызывает свободный выбег электродвигателя до остановки.
Указание
Команда ВЫКЛ2 может иметь один или несколько источников. При предварительной установке команда ВЫКЛ2 установлена на BOP/AOP. Этот источник
остается даже в случае, если одним из параметров P0701до P0708 будут определены другие источники
4.3.3 ВЫКЛ 3 (OFF3)
Команда ВЫКЛ3 вызывает быстрый останов электродвигателя с торможением.
Для пуска электродвигателя при установленном ВЫКЛ3 дискретный вход должен быть закрыт (состояние высокого уровня High). Если ВЫКЛ3 будет закрыт
(high), то электродвигатель может быть запущен и остановлен командами
ВЫКЛ1 или ВЫКЛ2. В состоянии низкого уровня (low) ВЫКЛ3 пуск электродвигателя невозможен.
Время остановки устанавливается в параметре Р1135
•
Примечание
ВЫКЛ3 может комбинировать торможение постоянным током DC, комбинированным или динамическим торможением.
40
Page 41

Руководство пользователя преобразователей MICROMASTER 440
4.3.4 Динамическое торможение постоянным током
Динамическое торможение постоянным током возможно с ВЫКЛ1 и ВЫКЛ3.
Питание статора двигателя постоянным током быстро тормозит электродвигатель и удерживает вал до конца времени торможения.
Разрешение динамического торможения - P0701 - P0708
•
Установка длительности торможения: см. P1233
•
Установка тока торможения: см. P1232
•
Установка начальной частоты торможения Р1234
•
Примечание
Если ни один дискретный вход не установлен на динамическое торможение и
P1233 ≠ 0, то динамическое торможение включается после каждой команды
ВЫКЛ1 со временем, установленным в Р1233.
4.3.5 Смешанное торможение
Смешанное торможение возможно как с ВЫКЛ1 так и с ВЫКЛ3. Для
смешанного торможения на переменный ток накладывается составляющая
постоянного тока.
Установка тормозного тока: см. P1236
4.3.6 Торможение с внешним тормозным резистором
Торможение с внешним резистором обеспечивает более качественное и линейное торможение с контролем частоты.
41
Page 42

Руководство пользователя преобразователей MICROMASTER 440
4.4 Виды законов регулирования напряжения (P1300)
Различные режимы работы MICROMASTER 440 определяют зависимость между частотой вращения электродвигателя и напряжением преобразователя.
Возможны четыре режима работы:
• Линейное V/f-регулирование Р1300 = 0
Может применяться для нагрузки с изменяемым и с постоянным моментом
(насосы, конвейеры) -
• Линейное V/f-регулирование с FCC (контролем потокосцепления)
Этот способ регулирования может использоваться для увеличения к.п.д. и
динамических характеристик электропривода.
• Квадратичное V/f-регулирование Р1300 = 2
Этот закон регулирования применяется для приводов с насосной и вентиляторной характеристикой (с малым моментом трогания).
• Многоточечное V/f-регулирование Р1300 = 3
Сведения об этом режиме работы находятся в руководстве по MM440.
• Линейное V/f-регулирование с режимом ЕСО Р1300 = 4
С этой функцией происходит автоматическое снижение или повышение
напряжения для минимизации потерь мощности.
• V/f-регулирование для применения в текстиле Р1300 = 5
Нет никакой компенсации и демпфирования. Регулятор макс. тока использует частоту вместо напряжения.
• V/f-регулирование с FCC для применения в текстиле Р1300 = 6
Комбинация параметров Р1300=1 и Р1300=5
• V/f-регулирование с независимой уставкой напряжения Р1300 = 19
Можно задавать напряжение в Р1330 независимо от выходной частоты
преобразователя (RFG).
• Безсенсорное векторное регулирование Р1300 = 20
Обеспечивает точное регулирование частоты вращения двигателя без
применения датчика скорости. Обеспечивает высокий момент и динамические свойства привода.
• Безсенсорное векторное управление моментом Р1300 = 22
Обеспечивает векторное регулирование заданного момента на двигателе
без датчика момента. Применяется в технологиях, требующих поддержание заданного значения момента на валу двигателя.
Р1300 = 1
4.5 Ошибки и предупреждения
На панелях SDP
Если установлен SDP, то о состояниях ошибки и предупреждениях будут сигнализировать два светодиода LEDs.
Дальнейшие сведения: см. раздел 6.1.
Если привод работает исправно, то
Зеленый и желтый цвет - готовность к пуску
•
Зеленый - работа привода
•
На панелях BOP
На панелях BOP отображаются коды ошибок и предупреждений. Подробнее
они будут рассмотрены в разделе 6.3
На панелях АОР
Если установлены панели АОР, то коды ошибок и предупреждений отображаются на самой панели.
42
Page 43

Руководство пользователя преобразователей MICROMASTER 440
5 Системные параметры
Эта глава содержит:
• Функциональный обзор параметров, доступных для настройки вашего пре-
образователя MICROMASTER MM440
Подробный список используемых параметров (включающий диапазон зна-
•
чений и установки по умолчанию). Подробное описание действия параметра
5.1 Обзор системных параметров MICROMASTER ..........................................……......44
5.2 Введение в системные параметры MICROMASTER ................................….....…...45
5.3 Системные параметры и определения .....................................................….…........50
43
Page 44

Руководство пользователя преобразователей MICROMASTER 440
5.1 Обзор системных параметров MICROMASTER
5.1.1 Установки по умолчанию
Преобразователь MM440 снабжен пультом отображения состояния (Status
Display Panel) (SDP). Чтобы изменять и устанавливать требуемые параметры,
необходимо использовать базовый пульт оператора (Basic Operator Panel)
(BOP), расширенный пульт оператора (Advanced Operator Panel) (AOP) или по-
следовательный интерфейс связи. Преобразователь MM440 поставляется со
следующими установками по умолчанию:
Параметры двигателя подходят для 4-х полюсных двигателей Siemens по
•
мощности и напряжению.
Управление заданием от аналогового входа; 0 – 10В соответствует 0 - 50 Гц
•
или 0 - 60 Гц (Северная Америка).
Цифровые входы:
•
DIN 1 – Вращение вправо
•
DIN 2 - Реверс
•
DIN 3 - Сброс ошибки
•
DIP переключатель 2
•
Положение Выкл (Off): Европейские установки по умолчанию (50 Гц, кВт т.
д.)
Положение Вкл (On): Установки по умолчанию для Северной Америки (60
Гц, л. с. и т. д.). Для уточнения см. P0100.
DIP переключатель 1 не предназначен для пользователя.
•
Релейный выход 2 – возникновение ошибки.
•
Аналоговый выход – выходная частота
•
5.1.2 Функция кнопки (Fn) базового пульта оператора
Использование кнопки Функции.
Кнопка Функция используется для просмотра информации о параметрах привода. Для их просмотра должны быть выполнены следующие действия:
Из любого параметра, нажмите и удерживайте кнопку функции:
1. Дисплей изменится для индикации напряжения DC звена (обозначается d) .
2. Нажмите кнопку функции снова для индикации выходного тока (A).
3. Нажмите кнопку функции снова для индикации выходной частоты (Hz).
4. Нажмите кнопку функции снова для индикации выходного напряжения (обозначается o).
5. Нажмите кнопку функции снова для индикации функции, выбранной для ото-
бражения в P0005. (Если параметр P0005 установлен для индикации в одно из
вышеупомянутых значений (3,4 или 5), то они не будут индицироваться).
Примечание
Дополнительные нажатия приведут к переключению отображения по кругу.
Нажмите и удерживайте кнопку функции в любой точке в цикле для отображения; номер параметра, с которого Вы начнете (например, r0000) и возможность
возврата к этому отображению
.
44
Page 45

Руководство пользователя преобразователей MICROMASTER 440
Функция прокрутки
Если пользователю требуется изменить значение параметра, то для увеличения или уменьшения значения необходимо воспользоваться клавишами на
BOP или соответственно.
Изменение отдельных цифр в значениях параметра
Для быстрого изменения значения параметра могут быть изменены отдельные
отображаемые цифры путем выполняя следующих действий:
Убедитесь, что Вы находитесь на уровне изменения значения параметра
(см. "Изменение параметров с BOP").
1. Нажмите (функциональную клавишу), которая приведет к миганию крайней
правой цифры.
2. Измените значение этой цифры нажатием на /.
3. Нажмите (функциональную клавишу) снова, что приведет к миганию следующей
цифры.
4. Выполняйте шаги 2 - 4 до тех пор, пока не будет показано требуемое значение.
5. Нажмите , чтобы выйти из уровня изменения значения параметра.
Примечание
Функциональная клавиша может быть также использована для подтверждения
сбоев.
Функция перехода
Из любого параметра (rXXXX или PXXXX) кратким нажатием клавиши Fn, Вы
немедленно перейдете на r0000, и, если требуется, затем изменить другой параметр. После возврата в r0000, нажатие клавиши Fn возвратит Вас к отправной точке.
5.2 Введение в системные параметры MICROMASTER
Параметры могут быть изменены только при использовании базового
пульта оператора (BOP), расширенного пульта оператора (AOP) или последовательного интерфейса.
Для настройки желаемых свойств преобразователя, таких как время разгона,
минимальные и максимальные частоты и т.д., параметры могут быть изменены
и установлены при использовании BOP. Выбранные номера параметров и установка значений параметров индицируется на опционном пятизначном LCD
дисплее.
Примечание
Если Вы будете нажимать
•
или клавиши кратковременно, то
изменение значений будет происходить по шагам. Если Вы будете
удерживать эти клавиши более 2 секунд, то значения будут изменяться автоматически в быстром темпе до отпускания клавиши.
В таблицах параметров:
•
В зависимости от статуса параметры могут вводиться при рабочем состоянии преобразователя или только при остановленном. Учитывайте это при
работе с преобразователем.
Если вместо «P» индицируется «r», то параметр только для чтения.
•
P0010 инициирует “быстрый ввод в действие”.
•
45
Page 46

Руководство пользователя преобразователей MICROMASTER 440
Преобразователь не будет запускаться до тех пор, пока P0010 не будет ус-
•
тановлен в 0 после того, как к нему обратились. Эта функция автоматически выполняется, если P3900 > 0.
P0004 действует как фильтр открываемых параметров, предоставляя дос-
•
туп к параметрам в соответствии с их назначением.
Если сделана попытка изменения параметра, который не может быть изме-
•
нен в текущем состоянии, например, не может быть изменен пока преобразователь работает или может быть изменен только при быстром вводе в
действие, то будет отображаться ЕЕЕЕЕ.
• Сообщение о занятости
В некоторых случаях, при изменении значений параметров, дисплей на
BOP показывает максимум пять секунд. Это означает, что
преобразователь занят задачами с более высоким приоритетом.
5.2.1 Уровни доступа
Имеются четыре уровня доступа пользователя: Стандартный, Расширенный,
Экспертный и Сервисный, выбираемые параметром P0003. Для большинства
применений достаточно Стандартных и Расширенных параметров. Для ис-
ключения случайного изменения параметров выбирайте уровень доступа
в соответствии со своей подготовкой и решаемой задачей привода.
Номера параметров, которые появляются в пределах каждой функциональной
группы, зависят от установки уровня доступа в параметре P0003. Этот документ описывает уровни доступа 1 и 2 (стандартный и расширенный), а также
некоторые важные параметры уровня 3.
5.2.2 Быстрый ввод в действие (P0010=1)
Важно, что параметр P0010 используется для ввода в действие, а P0003 ис-
пользуется для выбора номеров параметров, к которым нужно иметь доступ.
Этот параметр позволяет отобрать группу параметров, которые позволят быстрый ввод в действие. Включаются такие параметры, как набор данных двигателя и установки рампы.
В конце последовательности быстрого ввода в действие, должен быть выбран
P3900, который, когда установлен в 1, выполнит необходимые вычисления
двигателя и сбросит все другие параметры (не включенный в P0010=1) в установки по умолчанию. Это произойдет только в режиме быстрого ввода в действие.
5.2.3 Сброс на заводские установки
Для сброса всех параметров на заводские установки должны быть установлены следующие параметры:
1. Установите P0010 = 30.
2. Установите P0970 = 1.
Примечание
Процесс переустановки полностью занимает приблизительно 10 секунд.
46
Page 47

Руководство пользователя преобразователей MICROMASTER 440
5.2.4 Обзор параметров уровня 1 и 2
Ниже представлен обзор параметров уровня 1 и 2. Полное описание всех
параметров уровня 1 и 2, см. раздел 5.3.
Быстрый ввод в действие P0010=1
P0100 Европа / Северная Америка
P0300 Выбор типа двигателя
P0304 Номинальное напряжение двигателя
P0305 Номинальный ток двигателя
P0307 Номинальная мощность двигателя
P0308 Номинальный Cos Phi двигателя
P0309 Номинальный КПД двигателя
P0310 Номинальная частота двигателя
P0311 Номинальные обороты двигателя
P0335 Охлаждение двигателя
P0640 Максимальный выходной ток
P0700 Выбор источника команды
P1000 Выбор задания частоты
P1080 Минимальная частота
P1082 Максимальная частота
P1120 Время разгона
P1121 Время замедления
P1135 Время замедления по OFF3
P1300 Режим управления
P3900 Быстрое параметрирование
Блок преобразователя P0004=2
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
r0018 Версия программного обеспечения
r0026 Текущее напряжение DC-звена
r0039 Потребленная мощность [кВтч]
P0040 Сброс потребленной мощности
r0206 Номинальная мощность привода
r0207 Номинальный ток привода
r0208 Номинальное напряжение привода
P1800 Частота переключения ШИМ
P1820 Изменение выходной последовательности фаз
Данные двигателя P0004=3
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
r0034 Загрузка двигателя
P0300 Выбор типа двигателя
P0304 Номин. напряжение двигателя
P0305 Номин. ток двигателя
P0307 Номинал. мощность двигателя (кВт
или л.с)
P0308 Номин. cosPhi двигателя
P0309 Номинал. КПД двигателя
P0310 Номинал. частота двигателя
P0311 Номинал. обороты двигателя
P0335 Охлаждение двигателя
P0340 Вычисление модели двигателя
P0350 Сопротивление статора между фа-
зами
P0611 Постоянная времени I 2 t двигателя
P0614 Уровень предупреждения при перегрузке двигателя по I 2 t
P0640 Максимальный выходной ток
P1910 Выбор идентификации данных дви-
гателя
r1912 Определенное сопротивление статора
Команды и бинарные I/O P0004=7
r0002 Состояние привода
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
r0052 Слово состояния 1
r0053 Слово состояния 2
P0700 Выбор источника команды
P0701 Выбор бинарного входа 1
P0702 Выбор бинарного входа 2
P0703 Выбор бинарного входа 3
P0704 Выбор бинарного входа 4
r0722 Состояния бинарных входов
P0731 Бинарный выход
47
Page 48

Руководство пользователя преобразователей MICROMASTER 440
Аналоговые входы/выходы P0004=8
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
r0752 Значение аналогового входа в В
r0754 Аналоговый выход в %
r0755 Факт. нормализованное значение
ADC (4000h)
P0756 Контроль ADC
P0757 Значение x1 характеристики ADC
P0758 Значение y1 характеристики ADC
P0759 Значение x2 характеристики ADC
P0760 Значение y2 характеристики ADC
P0761 Ширина зоны нечувствительности
P0771 DAC
r0774 Значение аналогового выхода
P0777 Значение x1 характеристики DAC
P0778 Значение y1 характеристики DAC
P0779 Значение x2 характеристики DAC
P0780 Значение y2 характеристики DAC
P0781 Мертвая зона для аналогового
выхода
Канал задания и формирователь рампы
P0004=10
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
P1000 Выбор задания частоты
P1001 Фиксированная частота 1
P1002 Фиксированная частота 2
P1003 Фиксированная частота 3
P1004 Фиксированная частота 4
P1005 Фиксированная частота 5
P1006 Фиксированная частота 6
P1007 Фиксированная частота 7
P1031 Память задания MOP
P1040 Задание MOP
P1058 Частота толчка (JOG) вправо
P1059 Частота толчка (JOG) влево
P1060 Время разгона при толчке
P1061 Время замедления при толчке
P1080 Минимальная частота
P1082 Максимальная частота
P1120 Время разгона
P1121 Время замедления
P1130 Начальное закругление при разгоне
P1131 Конечное закругление при разгоне
P1132 Начальное закругление при замед-
лении
P1133 Конечное закругление при замедлении
P1134 Тип закругления
Особенности привода P0004=12
P0003 BOP/AOP чтение уровня доступа
P0004 Параметр для отображения в r0000
P0010 Ввод в действие привода
P1200 Запуск на ходу
P1210 Автоматический перезапуск
P1215 Режим тормоза удержания MHB
P1216 Время задержки отпускания MHB
P1217 Время включения тормоза MHB
P1232 Ток при DC торможении
P1233 Длительность при DC торможении
P1236 Ток составного торможения
Связь P0010=20
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
P0918 Шинный адрес CB
P0927 Возможность изменения
параметров через
P2000 Относительная частота
P2010 Скорость передачи через USS
P2011 Адрес USS
Управление двигателем P0004=13
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
r0021 Фактическая частота
r0025 Фактич. выходное напряжение
r0027 Фактический выходной ток
r0056 Слово состояния 1 для V/F и VC
P1300 Режим управления
P1310 Продолжительное повышение
P1311 Повышение при разгоне
P1312 Стартовое повышение
P1333 Стартовая частота при FCC
P1335 Коэффициент компенсации сколь-
жения
P1336 Предел скольжения
Предупреждения & Контроль P0010=21
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
r0947 Номер сбоя
r2110 Номер предупреждения
r2197 Слово состояния 1 монитора
48
Page 49

Руководство пользователя преобразователей MICROMASTER 440
PID Регулятор P0004=22
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
P2200 Предоставление PID регулятора
P2201 Фиксированное задание 1
P2202 Фиксированное задание 2
P2203 Фиксированное задание 3
P2204 Фиксированное задание 4
P2205 Фиксированное задание 5
P2206 Фиксированное задание 6
P2207 Фиксированное задание 7
r2224 Коннектор: фиксирован. задание PID
P2231 Память задания для MOP
P2232 Запрещение задания реверса с кла-
виатуры
P2240 Задание MOP
r2250 Вывод действующей величины задания PID
P2253 Источник: PID задание
P2257 Время разгона для задания PID
P2258 Время замедления для задания PID
r2260 Задание PID
P2264 Обратная связь PID
P2265 Постоянная времени фильтра обратной связи PID
r2266 Обратная связь PID
P2271 Тип датчика для PID
P2272 Коннектор: масштабирование сигнала обратной связи PID
r2273 Ошибка PID
P2280 Пропорциональный коэффициент
PID
P2285 Время интегрирования PID
P2291 Верхний предел PID
P2292 Нижний предел выхода PID
r2294 Выход PID
Заводские установки P0010=30
P0003 BOP/AOP чтение уровня доступа
P0010 Ввод в действие привода
P0970 Заводские установки
49
Page 50
Руководство пользователя преобразователей MICROMASTER 440
5.3 Системные параметры и определения
5.3.1 Общие сведения по установке параметров
Преобразователи частоты имеют сложную микропроцессорную систему управления, обеспечивающую оптимальную работу электропривода в технологическом процессе, а также многофункциональную связь с внешними элементами и
системами управления. Система управления преобразователем включает несколько контуров регулирования параметров привода, которые связаны между
собой. Такое построение системы приводит к необходимости точной настройки
внутренних параметров этих контуров регулирования и любые их отклонения
от оптимальных значений может привести к неустойчивой или некорректной
работе привода в технологическом процессе.
Набор параметров преобразователей MICROMASTER 440 позволяет производить точную настройку и диагностирование привода на месте установки, без
применения специальных приборов. Однако, учитывая большое количество
применяемых параметров настройки, программное обеспечение предоставляет пользователю разные уровни доступа параметров, исключая возможность
случайного (или намеренного) неквалифицированного вмешательства в параметры, влияющие на качество работы внутренних блоков управления и регулирования, пользователю представляется несколько уровней доступа к параметрам настройки. Каждый уровень доступа рассчитан на соответствующую
квалификацию работника, выполняющего установку параметров привода.
Уровень 0 - минимальный набор параметров. Обеспечивает доступ парамет-
ров оперативным персоналом в процессе эксплуатации привода.
Типы и количество параметров определяется в процессе настройки преобразователя в параметре Р0013.
Уровень 1 - стандартный набор параметров. Предназначен для изменения за-
водской настройки привода на объекте. Этот набор параметров
позволяет настроить работу привода в технологическом процессе,
обеспечить его связь с внешними системами управления через
входы/выходы преобразователя.
Уровень 2 - расширенный набор параметров. Позволяет конфигурировать и
подстраивать вход/выходы преобразователя, производить выбор
функциональных свойств преобразователя.
Уровень 3 - экспертный набор. Предоставляет пользователю изменять все на-
стройки преобразователя, влияющие на работу привода в технологическом процессе, осуществлять точную настройку, производить диагностику работы привода и его внутренних контуров регулирования и управления.
Уровень 4 - сервисный набор параметров. Этим набором параметров пользу-
ются при диагностировании работы системы управления привода
на предмет определения неисправностей и специальной перенастройки привода под специальные задачи привода. Обычному
пользователю этот набор недоступен.
Важно помнить
Настройка привода - установка требуемых значений параметров на любом
уровне доступа должна производиться техническим персоналом, понимающим
технологический процесс, где установлен привод, и знающим основы теории
электропривода. Только эти знания обеспечат корректную и надежную работу
преобразователя в составе технологического процесса.
50
Page 51

Руководство пользователя преобразователей MICROMASTER 440
Все доступные параметры можно разделить на две основные группы - устанавливаемые и контролируемые.
Контролируемые параметры имеют индекс "r" и могут только считываться (наблюдаться). Их невозможно изменить общедоступными методами.
Устанавливаемые параметры имеют индекс "Р" и могут изменяться пользова-
телем в возможном диапазоне значений. Все устанавливаемые параметры автоматически заносятся в энергонезависимую память преобразователя и сохраняются после отключения питания на привод.
Обратите внимание
Настоящее руководство предназначено для широкого круга пользователей и
для основных стандартных применений преобразователя частоты MICROMASTER 440. В связи с этим в руководстве приведены все параметры для
уровня доступа 2 и основные параметры настройки для уровня доступа 3.
В случае необходимости получения дополнительной информации по специальным настройкам преобразователя обращайтесь, пожалуйста, в местные и
региональные представительства фирмы SIEMENS.
5.3.2 Основные параметры настройки привода
Ниже приводится таблица перечня основных параметров с их кратким описанием, назначением и возможными установками.
Номер
пара-
метра
Описание параметра
Мин. Макс.
(Заводские).
Ед. измер.
1 2 3 4
Дисплей привода
r0000
Отображает выходную величину, определенную пользователем в P0005.
Примечание:
Нажатие клавиши “Fn” в течение 2 секунд позволяет
пользователю наблюдать значения напряжения DC
звена, выходного тока, выходной частоты, выходного
напряжения, и выбранной установкой r0000 (определенной в P0005).
Состояние привода
r0002
0
5
Отображает фактическое состояние привода
Р0003 -
Уровень
доступа
1
2
Возможные значения:
0 “Режим ввода в действие – (P0010 = 0)”
1 “Готовность к запуску”
2 “Сбой”
3 “Включение – предварительная зарядка DC звена”
4 “Работа”
5 “Останов – (замедление)”
Примечание:
Состояние 3 будет наблюдаться только во время
предварительной зарядки DC звена и когда установленная плата связи имеет внешнее питание.
51
Page 52

Руководство пользователя преобразователей MICROMASTER 440
Уровень доступа пользователяР0003
Определяет уровень доступа в наборы параметров.
Для большинства простых применений достаточна установка по умолчанию (стандартная).
Возможные установки:
0 - “Список параметров, определенных пользователем"
– см. P0013 (Уровень 3) подробности использования”
1 - “Стандартный”: дает доступ к большинству часто
используемых параметров
2 - “Расширенный”: дает расширенный доступ к функ-
циям ввода /вывода преобразователя.
3 - “Экспертный”: только для экспертного использова-
ния.
4 - “Сервисный”: только для использования уполномо-
ченным обслуживающим персоналом - защищен паролем.
Фильтр параметровР0004
Функцией фильтров доступных параметров является возможность более сфокусированного подхода (сориентированного на определенную группу функций) к вводу в действие. Например, при P0004=22 будут наблюдаться только
PID параметры.
Возможные установки:
0 - "Все параметры"
2 - "Преобразователь"
3 - "Двигатель"
7 - "Команды и бинарные входы/выходы"
8 - "Аналоговые входы выходы"
10 - "Канал задания и формирователь рампы"
12 - "Особенности привода"
13 - "Управление двигателем"
20 - "Связь"
21 - "Сообщения, предупреждения и контроль"
22 - "PID регулятор"
Примечание:
Преобразователь можно запустить при любой установке
P0004. Некоторые параметры предназначены “только для
ввода в действие” и могут рассматриваться в пределах этого “фильтра” параметров, и они могут быть установлены
только при P0010=1 (Быстрый ввод в действие). Эти параметры обозначены символом ключа ‘ ’ в колонке справа.
0
4
(1)
0
22
(0)
1
1
[3]
Выбор текущего отображения на дисплееР0005
Выбор отображения для параметра r0000
Наиболее общие установки:
21 Фактическая частота
25 Выходное напряжение
26 Напряжение DC звена
27 Выходной ток
Индекс:
Р0005[0] - 1-й набор данных для привода
Р0005[1] - 2-й набор данных для привода
Р0005[2] - 3-й набор данных для привода
Примечание:
Указанные здесь установки относят к номерам параметров
только для чтения. Для более подробного ознакомления,
пожалуйста, см. соответствующие описания параметров
“rXXXX”.
0
400
(0)
2
52
Page 53

Руководство пользователя преобразователей MICROMASTER 440
Р0007
Р0010
Режим работы дисплеяР0006
Добавляет свойства параметра r0000:
0 - попеременно показывает заданную частоту и выходную
1 - в состоянии готовности отображает задание, при работе -
выходное значение
2 - в состоянии готовности чередуется параметр Р0005 и
к0020
3 - в состоянии готовности чередуется параметр r0002 и
r0020
4 - во всех случая показывает только параметр, записанный
в Р0005
Время отключения подсветки
Устанавливает время, в течение которого после последнего
нажатия на кнопки дисплея будет осуществлена подсветка.
0 - подсветка дисплея будет всегда
1 - 2000 время в секундах
Группа параметров для ввода в работу
0
4
(2)
0
2000
(0)
0
30
(0)
3
3
1
Р0011
Р0012
Эти установки отфильтровывают параметры таким образом,
чтобы были отобраны только необходимые группы функций,
как показано в таблице ниже.
Возможные установки:
0 - Подготовка к запуску и работе
1 - Быстрый ввод в работу
29 - Выгрузка параметров в панель
30 - Заводские установки
Примечания:
1 - Этот параметр должен быть установлен в 0 до запуска
преобразователя
(Автоматически при P3900 № 0 (по умолчанию)).
2 - На доступные параметры также влияет параметр уровня
доступа пользователя (P0003).
Блокировка пользовательских параметров
Смотрите параметры и установки в Р0013
Ключ для блокировки параметров
Смотрите параметры и установки в Р0013
0
65536
(0)
0
65535
(0)
3
3
53
Page 54

Руководство пользователя преобразователей MICROMASTER 440
Р0013
[20]
Версия программного обеспечения
Определяет ограничения доступа к параметрам, доступным
другими пользователями.
Использование:
1. Установите Р0003 = 3 (экспертный уровень).
2. Перейдите к Р0013 с индексом от 0 до 16 (лист пользователя)
3. Введите в Р0013 с индексом параметры, видимые в
пользовательском списке
Следующие значения фиксированы и не могут быть изменены:
Р0013 инд.19 = 12 (клавиши для пользовательских параметров)
Р0013 инд.18 = 10 (фильтр эксплуатационных параметров)
Р0013 инд.17 = 3 (пользовательский уровень доступа)
4. Установите в Р0003 значение 0 для активации параметров пользователя.
Сначала установите Р0011 (замок) с иным значением, чем в
Р0012, чтобы исключить доступ к параметрам пользователя.
Затем установите Р0003 в 0 для активации закрытия параметров пользователя.
При необходимости можно установить заводские параметры
(см. ниже), чтобы вернуть заводские установки.
Начальные (заводские) значения в Р0011 и Р0012 одинаковые.
0
65535
(0)
3
r0018
r0020
r0021
r0022
r0024
Примечание
В каждом индексе параметра Р0013 указывается номер закрываемого параметра без знака "Р".
Версия программного обеспечения
Отображает номер версии установленного программного
обеспечения.
Текущее значение задания частоты привода
Заданное значение частоты преобразователя (после замедления - рампы - источника задания частоты)
Текущая частота привода
Выходное значение частоты преобразователя (исключая
компенсацию скольжения, резонансные частоты, ограничения и т.д.)
Расчетная текущая частота вращения привода
Расчетное значение частоты вращения по параметру r0021
Текущая частота привода
Выходное значение частоты преобразователя (включая
компенсацию скольжения, ограничения и т.д.)
- 1
Hz 3
Hz 2
1/мин 3
Hz 3
r0025
Выходное напряжение преобразователя
Отображается среднеквадратическое значение напряжения,
приложенного к двигателю.
V 2
54
Page 55
Руководство пользователя преобразователей MICROMASTER 440
r0026
r0027
r0029
r0030
r0031
r0032
Напряжение звена постоянного тока DC
Среднее значение выпрямленного сетевого напряжения.
Ток двигателя
Отображается среднеквадратическое значение тока двигателя.
Ток намагничивания
Используется для выполнения расчетов оптимизации работы двигателя. При векторном регулировании устанавливается в 0.
Ток для создания момента двигателя
Используется для выполнения расчетов оптимизации работы двигателя. При векторном регулировании устанавливается в 0.
Расчетное значение момента на валу
Расчетное значение момента на валу двигателя.
Расчетное значение мощности
Отображает расчетное значение мощности, потребляемой
двигателем.
V 2
А 2
А 3
А
кВт•час
Nm 2
кВт (л.с.) 2
3
r0035[3]
r0037[2]
r0038
r0039
Расчетное значение температуры двигателя
Отображает (для 3-х наборов параметров) расчетное значение температуры двигателя.
Температура в преобразователе
Температура на элементах инвертора, измеренное значение.
Для индекса 0 - измеренная температура на силовых элементах
Для индекса 1 - температура процессора управления.
Коэффициент мощности двигателя
Показывает расчетное значение коэффициента мощности
двигателя. Индикация может устанавливаться в 0, в зависимости от выбора режимов в параметре Р1300.
Счетчик потребленной электроэнергии
Показывает потребленную энергию приводом в процессе
работы. Учет энергии ведется с момента сброса счетчика,
установки параметров на заводские и т.д.
°С
°С
кВт•час
2
3
3
2
Р0040
Сброс показаний учета потребленной энергии
Сброс отображения потребленной энергии в нуль
Возможные установки:
0 = Сброса нет
1 = Сброс r0039 в 0
Примечание:
Сброс происходит после нажатия клавиши “P”.
0
1
(0)
2
55
Page 56

Руководство пользователя преобразователей MICROMASTER 440
r0050
r0051[2]
r0052
Подключение рабочих наборов команд
Установленный номер подключает к управлению выбранный
набор команд.
0 - 1-й набор установок команд (CDS)
1 - 2-й набор установок команд (CDS)
2 - 3-й набор установок команд (CDS)
Подключение рабочих наборов данных привода
Отображаются выбранные и рабочие установки данных привода.
Значения
0 - 1-й набор установленных данных
1 - 2-й набор установленных данных
2 - 3-й набор установленных данных
Индексы
r0051[0] - выбранные установки данных
r0051[1] - активные установки данных
Слово состояния 1
Этот параметр показывает первое активное слово состояния преобразователя (битовый формат) и может использоваться для диагностики состояния преобразователя. Описание отображаемых сегментов слова состояния дается во
Введении и может интерпретироваться следующим образом.
2
2
2
Возможные значения:
Бит 0 Готовность привода
Бит 1 Готовность привода к запуску
Бит 2 Привод работает
Бит 3 Сбой привода активен
Бит 4 OFF2 активен
Бит 5 OFF3 активен
Бит 6 Запрещение включения активно
Бит 7 Предупреждение привода активно
Бит 8 Отклонение заданное/фактическое значение
Бит 9 PZD управление (Управление данными процесса)
Бит A Максимальная частота достигнута
Бит b Предупреждение: Предел тока двигателя
Бит C Удерживающий тормоз двигателя активен
Бит d Перегрузка двигателя
Бит E Направление вращения двигателя вправо
Бит F Перегрузка преобразователя
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Да
1 Нет
0 Да
1 Нет
0 Да
1 Нет
0 Нет
1 Да
0 Нет
1 Да
0 Да
1 Нет
0 Нет
1 Да
0 Нет
1 Да
0 Да
1 Нет
0 Да
1 Нет
0 Да
1 Нет
0 Нет
1 Да
0 Да
1 Нет
56
Page 57

Руководство пользователя преобразователей MICROMASTER 440
r0053
r0056
Слово состояния 2
Этот параметр показывает второе слово состояния преобразователя (битовый формат). Он может использоваться
для диагностики состояния преобразователя относящейся к
информации, данной во Введении.
Возможные значения:
Бит 0 DC торможение активно
Бит 1 Частота преобразователя < предела выключения
Бит 2 Частота преобразователя < минимальной частоты
Бит 3 Ток і предела
Бит 4 Фактическая частота >относительной частоты
Бит 5 Фактическая частота <_относительной частоты
Бит 6 Фактическая частота ≠ заданной
Бит 7 Напряжение <_ порога
Бит 8 Напряжение > порога
Бит 9 реверс
Бит A PID частота <_ порога
Бит b PID насыщение
0 Нет
1 Да
0 Да
1 Нет
0 Да
1 Нет
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
Слово состояния 1 для V/F
Отображает слово состояния (V/f) в битовом, которое может
быть использовано для диагностики состояния преобразователя. Обратитесь к диаграмме для r0052 с отображением
расположения.
3
3
Возможные значения:
Бит 0 Управление инициализацией закончено
Бит 1 Размагничивание двигателя закончено
Бит 2 Импульсы ШИМ разблокированы
Бит 3 Выбор напряжения мягкого старта
Бит 4 Возбуждение двигателя закончено
Бит 5 Стартовое повышение активно
Бит 6 Повышение при разгоне активно
Бит 7 Частота отрицательная
Бит 8 Ослабление поля активно
Бит 9 Задание напряжения ограничено
Бит A Частота скольжения ограничена
Бит b Регулятор I-
Бит C Регулятор Vdc-
Бит F Регулятор Vdc-
активен
max
max
min
активен
активен
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
0 Нет
1 Да
57
Page 58

Руководство пользователя преобразователей MICROMASTER 440
r0062
r0063
r0064
r0066
r0067
r0068
Задание частоты
Показывает заданную частоту векторного регулятора
Текущая частота
Отображает текущую частоту привода
Отклонение в регуляторе частоты
Отображает отклонение текущей частоты от заданной по
разности показаний параметров 62 и 63.
Значение выходной частоты инвертора
Показывает выходное значение частоты инвертора с учетом
ограничений, компенсаций и временных задержек.
Текущее значение установленного ограничения тока
двигателя
Отображает текущее значение тока ограничения двигателя.
В процессе работы, в зависимости от частоты вращения,
нагрузки и т.д. величина ограничения тока двигателя может
отличаться, от установленного значения в Р0640.
Выходной ток преобразователя
Показывает текущее неотфильтрованное значение выходного тока преобразователя.
Hz 3
Hz 3
Hz 3
Hz 3
А 3
А 3
r0069[3]
r0070
r0072
r0075
r0076
Пофазные значения токов привода
Индицирует пофазные токи привода.
r0069[0] - ток в фазе U
r0069[1] - ток в фазе V
r0069[2] - ток в фазе W
Напряжение постоянного тока
Неотфильтрованное значение напряжение на шинах постоянного тока.
Текущее выходное напряжение на приводе
Показывает текущее выходное напряжение на двигатель.
Задание продольной составляющей тока
Показывает заданное значение продольной составляющей
тока векторного регулирования и оптимизации потокосцепления.
Текущее значение продольной составляющей тока
Показывает текущее значение продольной составляющей
тока векторного регулирования и оптимизации потокосцепления.
А 3
V 3
V 3
А 3
А 3
r0077
r0078
Задание поперечной составляющей тока
Показывает заданное значение поперечной составляющей
тока векторного регулирования и оптимизации потокосцепления.
Текущее значение поперечной составляющей тока
Показывает текущее значение поперечной составляющей
тока векторного регулирования и оптимизации потокосцепления.
А 3
А 3
58
Page 59
Руководство пользователя преобразователей MICROMASTER 440
r0079
r0080
Р0100
Заданное значение полного момента
Показывает заданное значение момента двигателя. Работает только при установке векторного регулирования.
Текущее значение полного момента
Показывает текущее значение момента двигателя. Работает
только при установке векторного регулирования.
Управление для Европы / Северной Америки
Определяет, выражены ли назначения мощности (например,
номинальная табличная мощность - P0307) в кВт или л.с.
Здесь также автоматически устанавливаются значения по
умолчанию для номинальной табличной частоты (P0310) и
максимальной частоты двигателя (P1082), в дополнение к
относительной частоте (P2000).
Возможные установки:
0 = Установки мощности в кВт; частота по умолчанию 50 Гц
(Используйте DIP переключатель 2).
1 = Установки мощности в л.с; частота по умолчанию 60 Гц
(Используйте DIP переключатель 2)
2 = Установки мощности в кВт; частота по умолчанию 60 Гц
Предупреждение:
УСТАНОВКА ПЕРЕКЛЮЧАТЕЛЯ кВт / л.с ПОД ПУЛЬТОМ
ОПЕРАТОРА БУДЕТ ПЕРЕПИСАНА В УСТАНОВКИ 0 ИЛИ 1
ПРИ ВКЛЮЧЕНИИ ПИТАНИЯ.
Установка 2 переписана не будет.
Nm 3
Nm 3
0
2
(0)
1
Р0205
Примечание:
Этот параметр может быть изменен при P0010=1 (Режим
ввода в действие).
Технология применения инвертора
Выбирает характер нагрузки на инверторе.
С постоянным моментом - (СТ) на всем диапазоне частот
вращения присутствует постоянный момент на валу двигателя.
С переменным моментом - (VT) момент нагрузки возникает с
повышением частоты вращения, как правило, параболическую зависимость (характеристики насосов и вентиляторов).
Режим с переменным моментом позволяет установить более высокие параметры для номинального тока инвертора
Р0207, мощность инвертора Р0207, более высокий порог
для защиты I
Значения
0 - постоянный момент
1 - переменный момент
Примечание
Установка на заводские параметры не переустанавливает
установку параметра Р0205.
2
t.
0 3
r0206
Номинальная мощность преобразователя
Отображает номинальную мощность двигателя, который
может управляться преобразователем.
Примечание:
Отображение будет в кВт или в л.с в зависимости от установки P0100.
2
59
Page 60

Руководство пользователя преобразователей MICROMASTER 440
r0207
r0208
r0209
Р0210
Р0290
Номинальный ток преобразователя
Отображает максимальный длительный выходной ток преобразователя.
Номинальное входное напряжение преобразователя
Отображает номинальное AC напряжение питания преобразователя.
Возможные значения:
230 = 200-240В±10%
400 = 400-480В±10%
Максимальный ток инвертора
Отображает текущее значение установленного максимального тока инвертора.
Напряжение питания инвертора
Оптимизирует работу контроллера управления в звене постоянного тока.
Установка параметра Р1254 = 0 (не автоматическое определение напряжения питания) приводит к чтению номинального напряжения сети из параметра Р0210, необходимого для
управления режимами торможения и защиты.
Реакция привода на перегрузку
Выбор действия привода по внутреннему перегреву
Значения
0 - снижение выходной частоты, способ эффективен только
при работе с нагрузкой при переменном моменте.
1 - фиксация ошибки F0004
2 - снижение частоты переключения транзисторных ключей
и снижение выходной частоты
3 - снижение частоты переключения транзисторных клю-
чей и при дальнейшем нагреве включение ошибки
F0004.
А 2
V 2
А 2
0
1000
(230)
V
0
3
(2)
3
3
Р0295
Р0300
Время отключения вентилятора преобразователя
Определяет время задержки отключения вентилятора инвертора после его остановки.
Примечание
При установке 0 - вентилятор останавливается без задержки
времени.
Выбор типа двигателя
Выбор типа двигателя
Возможные установки:
1 = Асинхронный двигатель.
2 = Синхронный двигатель.
Примечание 1:
Этот параметр может быть изменен только при P0010=1
Этот параметр необходим только при вводе в действие для
выбора типа двигателя и оптимизации характеристик преобразователя.
Примечание 2:
Если выбран синхронный двигатель, то следующие функции
являются недоступными: коэффициент мощности (P0308),
КПД двигателя (P0309), время намагничивания (P0346, уровень 3), время размагничивания (P0347, уровень 3), перезапуск на ходу (P1200, P1202, уровень 3, P1203, уровень 3),
DC торможение (P1230, уровень 3, P1232, P1233), компенсация скольжения (P1335), предел скольжения (P1336).
0
3600
(0)
Сек.
0
3
(2)
3
2
60
Page 61

Руководство пользователя преобразователей MICROMASTER 440
Р0304
[3]
Р0305
[3]
Р0307
[3]
Р0308
[3]
Р0309
[3]
Р0310
[3]
Номинальное напряжение двигателя
Номинальное напряжение двигателя (V), которое берется
из табличных данных. (См. раздел 3.2)
Примечание:
Этот параметр может быть изменен только при P0010=1.
Индексы
Р0304[0] - 1-й набор данных привода (DDS)
Р0304[1] - 2-й набор данных привода (DDS)
Р0304[2] - 3-й набор данных привода (DDS)
Номинальный ток двигателя
Номинальный ток двигателя (А), который берется из табличных данных. (См. раздел 3.2)
Примечание:
Этот параметр может быть изменен только при P0010=1
Максимальное значение определяется как 2 * номинальный
ток преобразователя (r0207)
Минимальное значение определяется как 1/32 * номинальный ток преобразователя (r0207)
Р0305[0] - 1-й набор данных привода (DDS)
Р0305[1] - 2-й набор данных привода (DDS)
Р0305[2] - 3-й набор данных привода (DDS)
Номинальная мощность двигателя
Номинальная мощность двигателя (кВт) из табличных данных. Если P0100 = 1, значения будут в л.с.
Примечание:
Этот параметр может быть изменен только при P0010=1
Р0307[0] - 1-й набор данных привода (DDS)
Р0307[1] - 2-й набор данных привода (DDS)
Р0307[2] - 3-й набор данных привода (DDS)
Номинальный cos ϕ двигателя
Номинальный коэффициент мощности двигателя (cos f) из
табличных данных.
Примечание:
Этот параметр может быть изменен только при P0010=1.
Этот параметр может наблюдаться только при P0100 = 0
или 2, т. е. Когда мощность двигателя вводится в кВт.
Примечание:
Установка в 0 приведет к внутреннему вычислению значения.
Р0308[0] - 1-й набор данных привода (DDS)
Р0308[1] - 2-й набор данных привода (DDS)
Р0308[2] - 3-й набор данных привода (DDS)
Номинальный КПД двигателя
Номинальный КПД двигателя в (%) из табличных данных.
Примечание:
Этот параметр может быть изменен только при P0010=1.
Этот параметр может наблюдаться только при P0100 = 1, т.
е. когда мощность двигателя вводится в л.с.
Примечание:
Установка в 0 приведет к внутреннему вычислению значения.
Р0309[0] - 1-й набор данных привода (DDS)
Р0309[1] - 2-й набор данных привода (DDS)
Р0309[2] - 3-й набор данных привода (DDS)
Номинальная частота двигателя
Номинальная частота двигателя в (Гц) из табличных данных.
Р0310[0] - 1-й набор данных привода (DDS)
Р0310[1] - 2-й набор данных привода (DDS)
Р0310[2] - 3-й набор данных привода (DDS)
10
2000
(230)
V
0,12
10 000
A
0,01
2000
0
1
0
100
%
12
650
(50)
Hz
1
1
1
3
2
3
2
3
2
3
61
Page 62

Руководство пользователя преобразователей MICROMASTER 440
Р0311
[3]
Р0335
Номинальная частота вращения двигателя
Примечание 1:
Номинальные обороты двигателя (об/мин) из табличных
данных
Примечание 2:
Этот параметр может быть изменен только при P0010=1
Примечание 3:
Этот параметр должен быть введен правильно, чтобы компенсация скольжения функционировала должным образом.
Примечание 4:
Установка в нуль приведет к внутреннему вычислению значения.
Индексы
Р0304[0] - 1-й набор данных привода (DDS)
Р0304[1] - 2-й набор данных привода (DDS)
Р0304[2] - 3-й набор данных привода (DDS)
Охлаждение двигателя
Определяет используемую систему охлаждения двигателя
Возможные установки:
0 - самоохлаждаемый – использующий вентилятор, установленный на валу двигателя с ребристыми поверхностями.
1 - принудительно охлаждаемый – использующий отдельно
питаемый охлаждающий вентилятор с ребристыми поверхностями.
2 - самоохлаждаемый с внутренней вентиляцией
3 - принудительное охлаждение с внутренней вентиляцией
0
40000
1/мин
0
3
(0)
2
3
2
Р0340
[3]
Р0341 -
Р0347
Вычисление параметров двигателя
Вычисляются различные параметры двигателя, включая
P0344 (уровень 3) (вес двигателя), Р0346 - время намагни-
чивания, Р0347 - время размагничивания, P0350 (сопротивление статора), P2000 (относительная частота), P2002 (уровень 3) (относительный ток).
Возможные установки:
0 - "Вычисления не производятся"
1 - "Вычисление параметров двигателя из введенных таб-
личных данных"
2 - расчет данных по схеме замещения двигателя
3 - расчет V/f и векторного управления
4 - расчет только уставок регуляторам
Индексы
Р0304[0] - 1-й набор данных привода (DDS)
Р0304[1] - 2-й набор данных привода (DDS)
Р0304[2] - 3-й набор данных привода (DDS)
Примечание:
Этот параметр требуется при вводе в действие для оптимизации характеристик преобразователя.
Набор этих параметров вводится для оптимизации динамических свойств привода. К ним относятся: момент инерции
двигателя, отношение общего момента инерции агрегата к
моменту инерции двигателя, вес двигателя, время разгона
двигателя, время намагничивания и размагничивания. Каждый из параметров может записываться в соответствующие
наборы данных двигателя.
В большинстве случаев не требуют изменений установок.
0
4
(0)
2
3
3
62
Page 63

Руководство пользователя преобразователей MICROMASTER 440
Р0350
[3]
Р0601
[3]
Сопротивление статора двигателя
Значение сопротивления статора в Ом подключенного двигателя (сопротивление между линейными выводами двигателя).
Есть три метода определения значения этого параметра:
1. Возможно вычисление его значения при использовании
P0340 = 1
2. Возможно измерение его значения при использовании
P1910 = 1
3. Ручное измерение Омметром.
Примечание:
Значение, введенное в P0350, является результатом одного
из методов.
Индексы
Р0304[0] - 1-й набор данных привода (DDS)
Р0304[1] - 2-й набор данных привода (DDS)
Р0304[2] - 3-й набор данных привода (DDS)
Датчик температуры двигателя
Выбор типа установленного датчика температуры на двигателе.
Значения
0 - без датчика
1 - датчик типа РТС термистор
2 - датчик типа KTY84
Индексы
Р0304[0] - 1-й набор данных привода (DDS)
Р0304[1] - 2-й набор данных привода (DDS)
Р0304[2] - 3-й набор данных привода (DDS)
0,00001
2000
(4)
Ом
0
2
(0)
2
2
Р0604
[3]
Р0610
[3]
Р0625
[3]
Пороговая температуры двигателя
Определяет порог температуры двигателя для выдачи сигнала предупреждения. Отключение или максимальный ток
(для расчета температуры) определены в Р0600 (действия
по превышению температуры) и всегда на 10%, чем заданный здесь уровень предупреждения.
Индексы
Р0604[0] - 1-й набор данных привода (DDS)
Р0604[1] - 2-й набор данных привода (DDS)
Р0604[2] - 3-й набор данных привода (DDS)
Реакция привода на значение I2t температуру
Определяет действия привода при достижении порогов расчетной температуры.
Значения
0 - нет действий, только предупреждение
1 - предупреждение и ограничение тока
2 - предупреждение и отключение (F0010).
Индексы
Р0610[0] - 1-й набор данных привода (DDS)
Р0610[1] - 2-й набор данных привода (DDS)
Р0610[2] - 3-й набор данных привода (DDS)
Температура окружающего воздуха
Задается температура окружающего воздуха для корректности расчета перегрева двигателя.
Индексы
Р0625[0] - 1-й набор данных привода (DDS)
Р0625[1] - 2-й набор данных привода (DDS)
Р0625[2] - 3-й набор данных привода (DDS)
0
200
(130)
°С
0
2
(2)
-40
80
(20)
°С
2
3
3
63
Page 64
Руководство пользователя преобразователей MICROMASTER 440
Р0640
[3]
Р0700
[3]
Коэффициент перегрузки двигателя (%)
Определяет мгновенный предел тока двигателя как % от
номинального тока двигателя. Это значение ограничивается
150% номинального тока преобразователя (r0207) или не
более 400% тока двигателя.
Индексы
Р0640[0] - 1-й набор данных привода (DDS)
Р0640[1] - 2-й набор данных привода (DDS)
Р0640[2] - 3-й набор данных привода (DDS)
Выбор источника дискретных команд
Параметр для выбора источника команды управления.
Возможные установки
0 "Заводские установки по умолчанию"
1 "Клавиатура" (BOP/AOP)
2 "Клеммы" - физические дискретные входы
4 "USS1 протокол на BOP-Link" (RS-232)
5 "USS2 протокол на Comm-Link" (RS-485)
6 "PROFIBUS / полевая шина Comm-Link"
Индексы
Р0700[0] - 1-й набор данных привода (DDS)
Р0700[1] - 2-й набор данных привода (DDS)
Р0700[2] - 3-й набор данных привода (DDS)
Примечание:
Изменение этого параметра переустанавливает установки
источников управления на заводские, например, если Вы
изменили установку с 1 на 2, то все цифровые входы будут
иметь установку по умолчанию. После этого их необходимо
сконфигурировать - назначить на команды.
0
400
(150)
%
0
6
(0)
2
3
1
7
Р0701
[3]
Функции дискретного входа 1 (DIN 1)
Выбор функции дискретного входа 1
0 Дискретный вход не задействован
1 Вкл. /ВЫКЛ1
2 Вкл. влево (Вкл. + Реверс)/ВЫКЛ1
3 OFF2 (ВЫКЛ2) – свободный выбег до остановки
4 OFF3 (ВЫКЛ3) – Быстрое замедление (P1135 определяет
время замедления)
9 Подтверждение сбоя
10 Толчок вправо (JOG)
11 Толчок влево (JOG)
12 Реверс
13 МОТОР-ПОТЕНЦИОМЕТР - увеличение частоты
14 МОТОР-ПОТЕНЦИОМЕТР - уменьшение частоты
15 Фиксированная частота 1 (см. P1001)
16 Фиксированная частота 1 + Вкл. (см. P1001)
17 Фиксированные частоты с 1 по 7 (Бинарный код) (см.
P1001)
25 Разрешение DC тормоза (см. с P1230 по P1233)
29 Внешнее прерывание
33 Запрещение дополнительного задания (определено в
P1000)
99 Разрешение BICO параметрирования – только для экс-
пертного использования. Может быть переустановлен только через P0700 или P3900 = 1, 2 или заводские установки
P0970 = 1
Индексы
Р0701[0] - 1-й набор данных привода (DDS)
Р0701[1] - 2-й набор данных привода (DDS)
Р0701[2] - 3-й набор данных привода (DDS)
0
99
(1)
2
7
64
Page 65

Руководство пользователя преобразователей MICROMASTER 440
Р0702
[3]
Р0703
[3]
Р0704
[3]
Р0705
[3]
Р0706
[3]
Функции дискретного входа 2 (DIN 2)
Набор функций и их выбор аналогичен параметру Р0701.
Функции дискретного входа 3 (DIN 3)
Набор функций и их выбор аналогичен параметру Р0701.
Функции дискретного входа 4 (DIN 4)
Набор функций и их выбор аналогичен параметру Р0701.
Функции дискретного входа 5 (DIN 5)
Набор функций и их выбор аналогичен параметру Р0701.
Функции дискретного входа 6 (DIN 6)
Набор функций и их выбор аналогичен параметру Р0701.
0
99
(12)
0
99
(9)
0
99
(9)
0
99
(9)
0
99
(9)
2
2
2
2
2
Р0707
[3]
Функции дискретного входа 7 (от аналогового входа
AIN1)
Выбор функции бинарного входа 7 (через аналоговый вход)
0 Бинарный вход не задействован
1 Вкл. вправо
2 Вкл. влево (Вкл. + Реверс)
3 OFF2 – свободный выбег до остановки
4 OFF3 – Быстрое замедление (P1135 определяет время
замедления)
9 Подтверждение сбоя
10 Толчок вправо (JOG)
11 Толчок влево (JOG)
12 Реверс
13 Увеличение частоты (Главное / дополн. задание = клавиатура (P1000))
14 Уменьшение частоты (Главное или дополн. задание =
клавиатура)
25 Разрешение DC тормоза (см. с P1230 по P1233)
29 Внешнее прерывание
33 Запрещение дополнительного задания (определено в
P1000)
99 Разрешение BICO параметрирования – только для экс-
пертного использования. Может быть переустановлен только через P0700 или P3900 = 1, 2 или заводские установки
P0970 = 1
0
99
(0)
2
Примечание:
Сигналы выше 4В являются активными, сигналы ниже 1,6В
являются не активными.
Индексы
Р0707[0] - 1-й набор данных привода (DDS)
Р0707[1] - 2-й набор данных привода (DDS)
Р0707[2] - 3-й набор данных привода (DDS)
65
Page 66
Руководство пользователя преобразователей MICROMASTER 440
Р0708
[3]
Р0719
[3]
Функции дискретного входа 8 (от аналогового входа
AIN1)
Установка параметров аналогична Р0707.
Выбор источников команд и заданий
Основной переключатель выбора источников управления
преобразователем и заданий параметрам. Установленные
переключатели обеспечивают внутренние программные переключения между блоками управления. Десятки кодов установок определяют источники управления, а единицы кодов - источники заданий.
Здесь:
0 десятков - команды с дискретных входов/выходов
1 десяток - с базовой панели оператора (ВОР)
66 десятка - протоколом USS с панели оператора
66 десятков - протоколом USS по СОММ линии
66 десятков - через сетевой блок связи
Значения установки заданий
0
99
(0)
0
66
(0)
2
3
0 - по настройкам дискретных входов/выходов
1 - мотор-потенциометр
2 - аналоговое задание
3 - фиксированные частоты
4 - по протоколу USS через панель оператора
5 - протоколом USS по СОММ линии
6 - через сетевой блок связи
10 - по настройкам дискретных входов/выходов
11 - мотор-потенциометр
12 - аналоговое задание
13 - фиксированные частоты
14 - по протоколу USS через панель оператора
15 - протоколом USS по СОММ линии
16 - через сетевой блок связи
40 - по настройкам дискретных входов/выходов
41 - мотор-потенциометр
42 - аналоговое задание
43 - фиксированные частоты
44 - по протоколу USS через панель оператора
45 - протоколом USS по СОММ линии
46 - через сетевой блок связи
50 - по настройкам дискретных входов/выходов
51 - мотор-потенциометр
52 - аналоговое задание
53 - фиксированные частоты
54 - по протоколу USS через панель оператора
55 - протоколом USS по СОММ линии
56 - через сетевой блок связи
60 - по настройкам дискретных входов/выходов
61 - мотор-потенциометр
62 - аналоговое задание
63 - фиксированные частоты
64 - по протоколу USS через панель оператора
65 - протоколом USS по СОММ линии
66 - через сетевой блок связи
66
Page 67
Руководство пользователя преобразователей MICROMASTER 440
r0722
Р0731
[3]
Состояние дискретных входов
Отображает состояние дискретных входов (наличие сигналов управления). Активное состояние соответствует загоранию сегмента и состоянию ON дискретного входа.
Бит 00 - дискретный вход 1
Бит 01 - дискретный вход 2
Бит 02 - дискретный вход 3
Бит 03 - дискретный вход 4
Бит 04 - дискретный вход 5
Бит 05 - дискретный вход 6
Бит 06 - дискретный вход 7 (через аналоговый вход 1)
Бит 07 - дискретный вход 8 (через аналоговый вход 2)
Функции дискретного выхода 1
52.0 Преобразователь готов
52.1 Преобразователь готов к запуску
52.2 Преобразователь работает
52.3 Сбой преобразователя активен
52.4 OFF2 активен
52.5 OFF3 активен
52.6 Запрет включения активен
52.7 Предупреждение преобразователя активно
52.8 Отклонение заданное/фактическое значение
52.9 PZD управление (Process Data Control)
52.A Максимальная частота достигнута
52.b Предупреждение: Ограничение тока двигателя
52.C Удерживающий тормоз двигателя активен
52.d Перегрузка двигателя
52.E Направление вращения двигателя вправо
52.F Перегрузка преобразователя
53.0 DC торможение активно
53.1 Частота преобразователя ниже предела выключения
53.2 Частота преобразователя ниже миним. частоты.
53.3 Ток больше или равен пределу (P2170 – уровень 3)
53.4 Факт. частота > частоты сравнения (P2155 – уровень 3)
53.5 Факт. частота < частоты сравнения (P2155 – уровень 3)
53.6 Фактическая отличается от заданной
53.7 Напряжение меньше порога (P2172 – уровень 3)
53.8 Напряжение больше порога (P2172 – уровень 3)
53.9 Резерв
53.A Нижний предел выхода регулятора (P2292)
53.b Верхний предел выхода регулятора (P2291)
0.0
4000.0
(52.3)
2
2
Р0732
[3]
Р0733
[3]
Примечание:
Здесь представлены наиболее общие установки. Другие установки возможны в экспертном режиме.
Индексы
Р0731[0] - 1-й набор данных привода (DDS)
Р0731[1] - 2-й набор данных привода (DDS)
Р0731[2] - 3-й набор данных привода (DDS)
Функции дискретного выхода 2
Выбор функций дискретного выхода производится аналогично параметру Р0731.
Функции дискретного выхода 3
Выбор функций дискретного выхода производится аналогично параметру Р0731.
0.0
4000.0
(52.7)
0.0
4000.0
(0.0)
2
2
67
Page 68

r0747
Руководство пользователя преобразователей MICROMASTER 440
- 3
Состояние дискретных выходов
Индицирует активное или пассивное состояние дискретных
выходов преобразователя. Активное состояние индицируется 0 - реле обесточено (контакты разомкнуты) или 1 - реле
под напряжением - контакты замкнуты.
Бит 00 - цифровой выход 1
Бит 01 - цифровой выход 2
Бит 02 - цифровой выход 3
Р0748
r0752[2]
P0753
[2]
Инвертирование дискретных выходов
Определяет активное или инверсное состояние дискретного
выхода при срабатывании назначенной на выход функции.
По сути - инвертирование контактов реле.
Помните
При пропадании питания на преобразователе через некоторое время все выходные реле перейдут в обычное (обесточенное) состояние, независимо от выбранной функции и наличия инвертирования выхода.
Текущие значения аналоговых входов
Отображает значение аналоговых входов до характеристических блоков обработки.
Значения
r0752[0] - аналоговый вход 1
r0752[1] - аналоговый вход 2
Текущие значения аналоговых входов
Время фильтрации для аналоговых входов
Значения
Р0753[0] - аналоговый вход 1
Р0753[1] - аналоговый вход 2
0
7
(0)
- 2
0
10000
(3)
3
3
Сглаженное значение аналогового входаr0754[2]
Показывает сглаженное значение аналогового входа в %
после характеристического блока.
Примечание:
100% = 10В.
r0754[0] - аналоговый вход 1
r0754[1] - аналоговый вход 2
%
-
2
68
Page 69

Руководство пользователя преобразователей MICROMASTER 440
P0756[2]
Тип аналоговых входов
Определяет тип аналогового входа и разрешает его контроль. Вместе с DIP переключателями входа необходимо
также установить и этот параметр для программного соответствия.
Возможные установки:
0 = однополярное напряжение от 0 до 10В.
1 = однополярное напряжение от 0 до 10В с контролем.
2 = однополярный токовый ток 0 до 20мА
3 = однополярный токовый ток 0 до 20мА с контролем.
4 = биполярный вход -10В до +10В.
Р0756[0] - аналоговый вход 1
Р0756[1] - аналоговый вход 2
Внимание
Если блок аналогового масштабирования (см. P0757 –
P0760) программируется для заданий отрицательного выхода, то эта функция запрещается.
0
1
(0)
2
Примечание:
Если указана величина контроля (Р0761), то после достижения 50% значения этого предела включается ошибка F0080.
69
Page 70
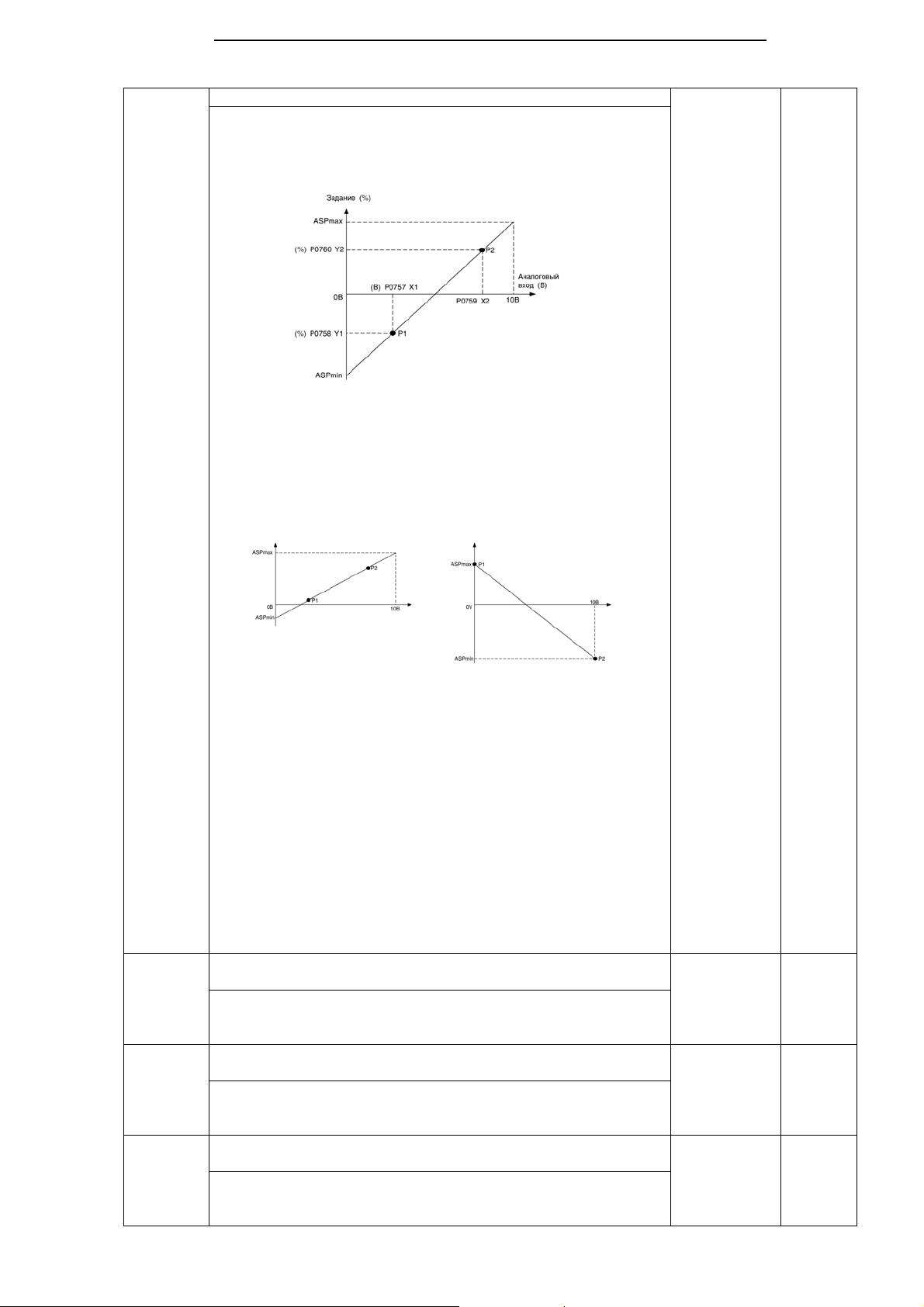
Руководство пользователя преобразователей MICROMASTER 440
Р0757[2]
Значение X1 масштабирования аналогового входа
Параметры P0757 – P0760 используются для конфигурирования и масштабирования аналоговых входов как показано
ниже:
Точки Р1 и Р2 на графиках приводят значения аналогового
входа к процентному соотношению задаваемого параметра.
При этом необходимо задавать точки X1, X2, Y1 и Y2. Соотношения можно выставить и в других вариантах, представленных ниже.
-20
20
(0)
2
Р0758[2]
Примечания:
Аналоговые задания представлены в % от нормализованной
частоты в P2000.
Аналоговые задания могут быть больше 100%.
ASP
представляет наивысшее аналоговое задание (это
max
может быть при 0В).
ASP
представляет наименьшее аналоговое задание (это
min
может быть при 10В).
Установки по умолчанию предоставляют следующее масштабирование:
0В = 0%, а 10В = 100%.
Р0757[0] - аналоговый вход 1
Р0757[1] - аналоговый вход 2
Значение Y1 масштабирования аналогового входа
Устанавливает значение Y1 как определено в P0757
Р0758[0] - аналоговый вход 1
Р0758[1] - аналоговый вход 2
Значение X2 масштабирования аналогового входаР0759[2]
Устанавливает значение Х2 как определено в P0757
Р0759[0] - аналоговый вход 1
Р0759[1] - аналоговый вход 2
Значение Y2 масштабирования аналогового входаР0760[2]
Устанавливает значение Y2 как определено в P0757
Р0760[0] - аналоговый вход 1
Р0760[1] - аналоговый вход 2
-99999
99999
(0)
%
-20
20
(10)
-99999
99999
(100)
%
2
2
2
70
Page 71

Руководство пользователя преобразователей MICROMASTER 440
Р0761[2]
Ширина мертвой зоны
Определяет зону, в которой изменения аналогового входа
не влияют на изменение задаваемого параметра. Рисунки,
расположенные ниже поясняют эти функции.
Пример 1 – от 2 до 10В и от 0 до 50Гц
Пример выше обеспечивает при аналоговом входе от 2 до
10В, 0 - 50Гц.
P0757 = 2В
P0761 = 2В
P2000 = 50Гц
Пример 2 – Нуль в центре (0 - 10В = - 50Гц - +50Гц
)
0
10
(0)
В
2
Пример выше обеспечивает при входе от 0 до 10В, от -50Гц
до +50Гц с нулем в центре и шириной “точки удержания”
0.2В.
P0758 = -100%
P0761 = 0.1 (0.1В с каждой стороны от центра)
P2000 = 50Гц
Примечание:
При использовании установки нуля в центре F
(P1080)
min
должна быть равна нулю. На концах мертвой зоны гистерезиса нет.
Р0761[0] - аналоговый вход 1
Р0761[1] - аналоговый вход 2
Функции аналогового выходаР0771[2]
Определяет функцию аналогового выхода 0 – 20 мA.
Возможные установки:
Наиболее типовые установки следующие:
21 Фактическая частота (масштабирована в P2000)
24 Выходная частота (масштабирована в P2000)
25 Выходное напряжение (масштабировано до 1000В)
26 Напряжение DC звена (масштабировано до 1000В)
27 Выходной ток (масштабирован в P2002 уровень 3)
Другие значения: Смотри индивидуальные описания параметров.
Р0771[0] - аналоговый выход 1
Р0771[1] - аналоговый выход 2
0
2248
(21)
2
71
Page 72
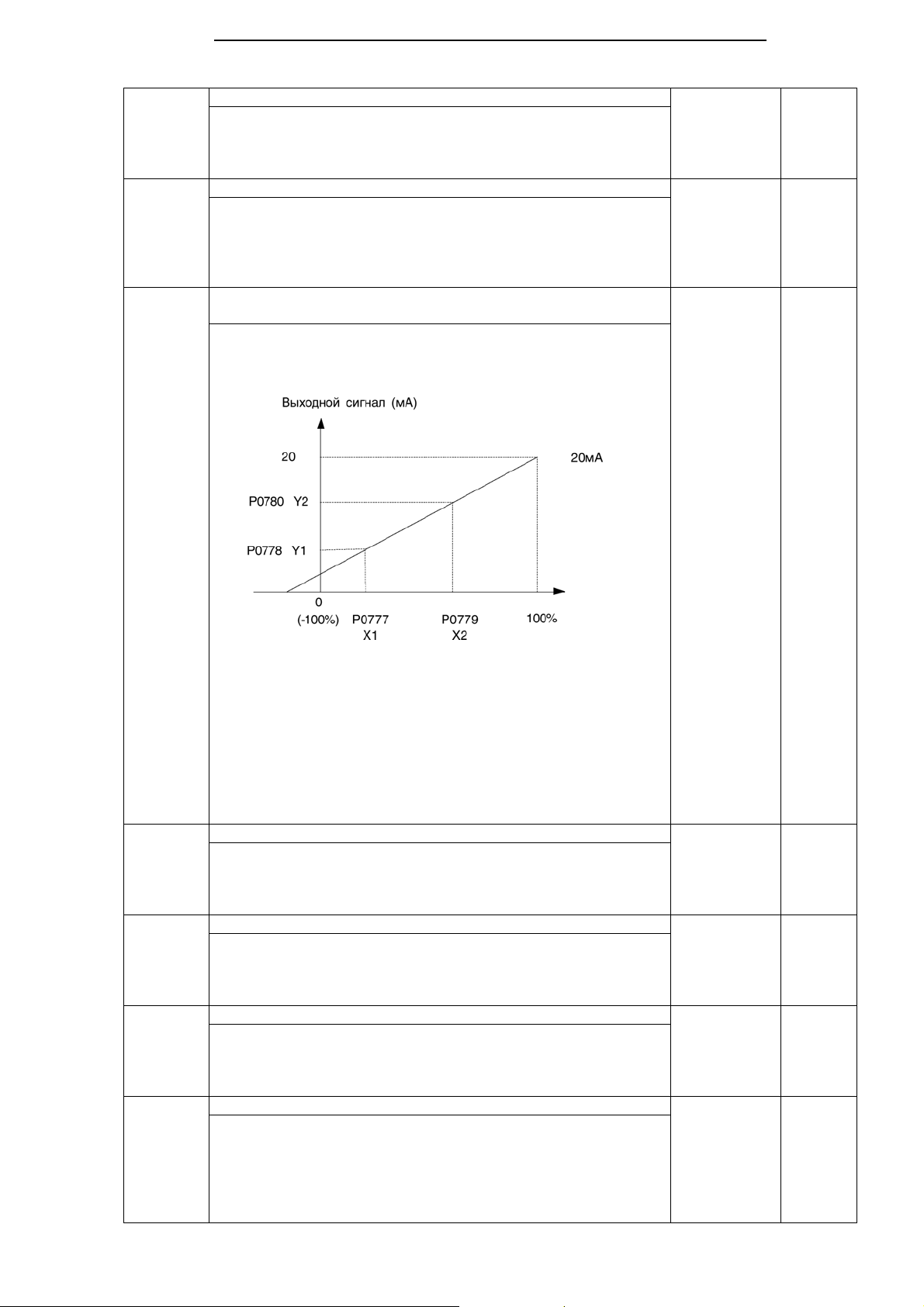
Руководство пользователя преобразователей MICROMASTER 440
Р0777[2]
Значение аналогового выходаr0773[2]
Время фильтрации аналогового выходного сигнала.
Р0773[0] - аналоговый выход 1
Р0773[1] - аналоговый выход 2
Значение аналогового выходаr0774[2]
Показывает значение аналогового выхода в мA.
Р0774[0] - аналоговый выход 1
Р0774[1] - аналоговый выход 2
Значение X1 характеристики аналогового выхода
Определяет точку x1 характеристики выхода.
Параметры P0777 – P0780 действуют следующим образом:
0
1000
(10)
мСек
-
%
-99999
99999
(0)
%
3
2
2
Настройка выхода показывает линейную пропорциональную
зависимость выходного тока от процентного значения запрограммированного на выход параметра. Указываются только
2 точки линейной характеристики.
Задаваемые точки могут выбираться произвольно на характеристике.
Р0777[0] - аналоговый выход 1
Р0777[1] - аналоговый выход 2
Значение Y1 характеристики аналогового выходаР0778[2]
Определяет y1 выходной характеристики
Р0778[0] - аналоговый выход 1
Р0778[1] - аналоговый выход 2
Значение X2 характеристики аналогового выходаР0779[2]
Определяет x2 выходной характеристики
Р0779[0] - аналоговый выход 1
Р0779[1] - аналоговый выход 2
Значение Y2 характеристики аналогового выходаР0780[2]
Определяет y2 выходной характеристики
Р0780[0] - аналоговый выход 1
Р0780[1] - аналоговый выход 2
Мертвая зона аналогового выходаР0781
Устанавливает ширину мертвой зоны в мA для аналогового
выхода.
Р0781[0] - аналоговый выход 1
Р0781[1] - аналоговый выход 2
0
4
(0)
мА
-99999
99999
(100)
%
0
20
(20)
мА
0
20
(0)
мА
2
2
2
2
72
Page 73

Руководство пользователя преобразователей MICROMASTER 440
Адрес PROFIBUSР0918
Определяет адрес PROFIBUS или адрес другого опционного
модуля.
Существует два метода установки сетевого адреса:
1 через DIP переключатели на модуле PROFIBUS
3 через значение, введенное пользователем
Возможные установки адреса PROFIBUS:
1... 125
0, 126, 127 не разрешены.
При установке DIP переключателя на модуле связи в 0 устанавливается адрес из параметра Р0918.
При установке DIP переключателя не в 0 (отличный от 0)
приоритетным является адрес на модуле связи.
Возможность изменения параметровР0927
Определяет, как пользователь может изменить параметры.
Возможные установки:
0
65535
(3)
0
15
(15)
2
2
Примечание:
Этот параметр является бинарным
Например, если вы хотите установить значение 15, то вам
необходимо установить дисплей в бинарное значение 15 (с
разделительным промежутком между “b - - n n” или, если
хотите установить 11 – “b - - r n” и т. д.
Последний код сбояr0947 [8]
Коды сбоев располагаются в паре индексных сообщений,
начиная с нулевого (0). В первом индексе этой пары указывается код сбоя, а во втором индексе - прерывание по этому
сбою.
Всего записывается 4 последних сбоя (пары сбоев), которые
подтверждены (нажата кнопка сброса ошибки) или пары
сбоев до подтверждения ошибки.
Примечание
Смотри список кодов сбоев в Разделе 6. Индекс 2 используется, только если 2-ой сбой происходит до подтверждения
1го.
- 2
73
Page 74

Руководство пользователя преобразователей MICROMASTER 440
Сброс кодов ошибокР0952
Число, указанное в параметре сообщает о количестве записанных кодов последних неисправностей (см. Р0947).
Установка этого параметра в 0 стирает список последних
кодов ошибок в параметре Р0947.
Заводские установкиР0970
Переустанавливает все параметры в их значения по умолчанию. Переустановка возможна на остановленном приводе.
Чтобы это сделать, Вам необходимо установить P0010=30,
затем P0970=1.
P0100 устанавливается в соответствии с установкой DIP
переключателя.
Выбор задания частотыР1000 [3]
Выбирается источник задания частоты. В таблице возможных установок, приведенных ниже, главное задание выбирается из цифр с наименьшим значением, т. е. от 0 до 6, а
некоторое дополнительное задание из цифр с большими
значениями, т. е. от x0 до x6. Например, установка 12 выбирает главное задание (2), получаемое с аналогового входа с
дополнительным заданием (1) поступающим с клавиатуры.
Одноразрядные цифры являются только главными заданиями без дополнительного задания.
0
8
(0)
0
1
(0)
0
66
(2)
3
2
1
Примечание!
В таблице не показано задание со второго аналогового входа. Для этого устанавливается значение параметра, аналогично первому аналоговому входу, но не 20-27, а 70-77 –
добавляется колонка с цифрами 70…77.
Аналогично для 2-го аналогового входа добавляется седьмая строка со значениями 7…77.
Наиболее типовыми установками являются:
1 Клавиатура (мотор-потенциометр)
2 Аналоговый вход 1
3 Фиксированные частоты
4 USS через RS232
5 USS через RS485 с клемм
6 Опционная плата связи
7 – Аналоговый вход 2
Другие установки, включающие дополнительные задания,
могут быть выбраны по таблице выше.
В каждый из 3-х наборов [индексов] можно установить
любую установку.
74
Page 75
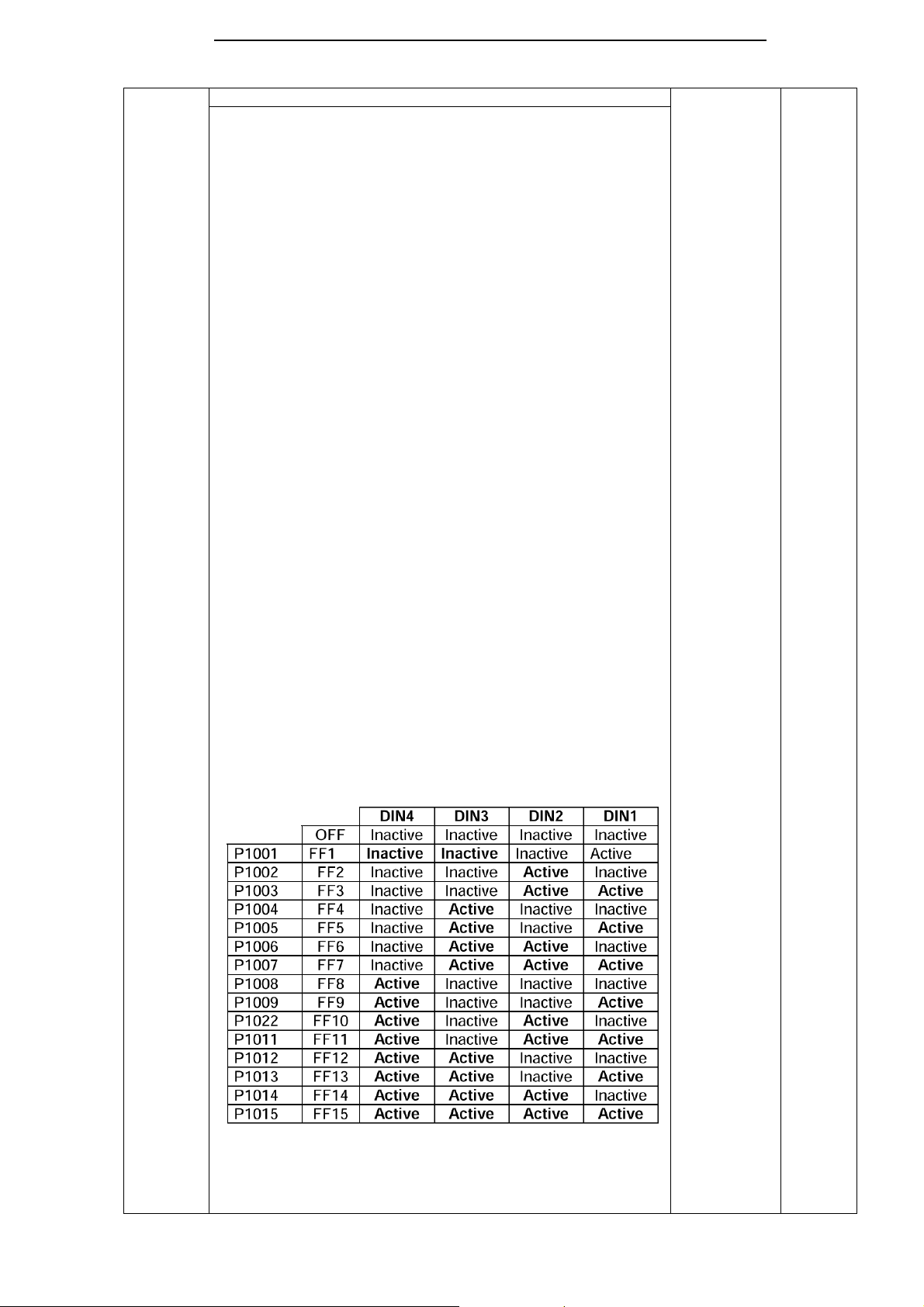
Руководство пользователя преобразователей MICROMASTER 440
Фиксированная частотаР1001 [3]
Определяет задание фиксированной частоты 1
Как используются фиксированные частоты;
Для использования фиксированных частот необходимо выбрать управление фиксированными частотами, используя
P1000.
Фиксированные частоты могут быть выбраны, используя
цифровые входы, и могут быть также объединены с командой Вкл (ON).
Есть три типа фиксированных частот.
1) Прямой выбор
2) Прямой выбор + команда ON
3) Выбор двоичными кодами + команда ON
1. Прямой выбор (P0701 – P0706 = 15)
В этом режиме управления один цифровой вход выбирает
одну фиксированную частоту. Если несколько входов задействованы вместе, то выбранные частоты суммируются. Например (FF1 + FF2 + FF3 + FF4 + FF5 + FF6).
Примечание:
Для запуска преобразователя также требуется команда ON,
например, с клавиатуры, последовательного интерфейса и
т. д.
-650
650
(0)
Гц
2
2. Прямой выбор + команда ON (P0701 – P0706 = 16)
Этот выбор фиксированной частоты сочетает фиксированные частоты с командой ON. В этом режиме управления
один цифровой вход выбирает одну фиксированную частоту. Если несколько входов задействованы вместе, то
выбранные частоты суммируются. Например (FF1 + FF2 +
FF3 + FF4 + FF5 + FF6).
3. Выбор двоичными кодами + команда ON (P0701 –
P0706 = 17)
Этим методом может быть выбрано до 16 фиксированных
частот.
Фиксированные частоты выбираются в соответствии с таблицей ниже:
Р1001[0] - 1-й набор данных привода (DDS)
Р1001[1] - 2-й набор данных привода (DDS)
Р1001[2] - 3-й набор данных привода (DDS)
Не забудьте выбрать режим фиксированных частот в
параметре Р1000.
75
Page 76

Руководство пользователя преобразователей MICROMASTER 440
Фиксированная частота 2Р1002[3]
Определяет значение фиксированной частоты 2.
Описание см. в параметре Р1001.
Р1002[0] - 1-й набор данных привода (DDS)
Р1002[1] - 2-й набор данных привода (DDS)
Р1002[2] - 3-й набор данных привода (DDS)
Фиксированная частота 3Р1003[3]
Определяет значение фиксированной частоты 3.
Описание см. в параметре Р1001.
Р1003[0] - 1-й набор данных привода (DDS)
Р1003[1] - 2-й набор данных привода (DDS)
Р1003[2] - 3-й набор данных привода (DDS)
Фиксированная частота 4Р1004[3]
Определяет значение фиксированной частоты 4.
Описание см. в параметре Р1001.
Р1004[0] - 1-й набор данных привода (DDS)
Р1004[1] - 2-й набор данных привода (DDS)
Р1004[2] - 3-й набор данных привода (DDS)
Фиксированная частота 5Р1005[3]
Определяет значение фиксированной частоты 5.
Описание см. в параметре Р1001.
Р1005[0] - 1-й набор данных привода (DDS)
Р1005[1] - 2-й набор данных привода (DDS)
Р1005[2] - 3-й набор данных привода (DDS)
Фиксированная частота 6Р1006[3]
Определяет значение фиксированной частоты 6.
Описание см. в параметре Р1001.
Р1006[0] - 1-й набор данных привода (DDS)
Р1006[1] - 2-й набор данных привода (DDS)
Р1006[2] - 3-й набор данных привода (DDS)
Фиксированная частота 7Р1007[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1007[0] - 1-й набор данных привода (DDS)
Р1007[1] - 2-й набор данных привода (DDS)
Р1007[2] - 3-й набор данных привода (DDS)
Фиксированная частота 8Р1008[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1008[0] - 1-й набор данных привода (DDS)
Р1008[1] - 2-й набор данных привода (DDS)
Р1008[2] - 3-й набор данных привода (DDS)
Фиксированная частота 9Р1009[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1009[0] - 1-й набор данных привода (DDS)
Р1009[1] - 2-й набор данных привода (DDS)
Р1009[2] - 3-й набор данных привода (DDS)
Фиксированная частота 10Р1010[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1010[0] - 1-й набор данных привода (DDS)
Р1010[1] - 2-й набор данных привода (DDS)
Р1010[2] - 3-й набор данных привода (DDS)
-650
650
(5)
Гц
-650
650
(10)
Гц
-650
650
(15)
Гц
-650
650
(20)
Гц
-650
650
(25)
Гц
-650
650
(30)
Гц
-650
650
(35)
Гц
-650
650
(40)
Гц
-650
650
(45)
Гц
2
2
2
2
2
2
2
2
2
Фиксированная частота 11Р1011[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1011[0] - 1-й набор данных привода (DDS)
Р1011[1] - 2-й набор данных привода (DDS)
Р1011[2] - 3-й набор данных привода (DDS)
-650
650
(50)
Гц
2
76
Page 77

Руководство пользователя преобразователей MICROMASTER 440
Фиксированная частота 12Р1012[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1012[0] - 1-й набор данных привода (DDS)
Р1012[1] - 2-й набор данных привода (DDS)
Р1012[2] - 3-й набор данных привода (DDS)
Фиксированная частота 13Р1013[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1013[0] - 1-й набор данных привода (DDS)
Р1013[1] - 2-й набор данных привода (DDS)
Р1013[2] - 3-й набор данных привода (DDS)
Фиксированная частота 14Р1014[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1014[0] - 1-й набор данных привода (DDS)
Р1014[1] - 2-й набор данных привода (DDS)
Р1014[2] - 3-й набор данных привода (DDS)
Фиксированная частота 15Р1015[3]
Определяет значение фиксированной частоты 7.
Описание см. в параметре Р1001.
Р1015[0] - 1-й набор данных привода (DDS)
Р1015[1] - 2-й набор данных привода (DDS)
Р1015[2] - 3-й набор данных привода (DDS)
-650
650
(55)
Гц
-650
650
(60)
Гц
-650
650
(65)
Гц
-650
650
(65)
Гц
2
2
2
2
Р1031[3]
Р1032[3]
Запоминание задания с клавиатуры (Мотор-потенцио-
метр)
Сохраняет последнее задание с клавиатуры (Моторпотенциометра), которое было активно до команды OFF или
выключения питания.
Возможные установки:
0 = Не сохраняется
1 = Сохраняется (P1040 обновляется).
Примечание:
При следующей команде ON, задание с клавиатуры (Моторпотенциометра) примет значение, сохраненное в P1040.
Р1031[0] - 1-й набор данных привода (DDS)
Р1031[1] - 2-й набор данных привода (DDS)
Р1031[2] - 3-й набор данных привода (DDS)
Запрещение реверса с клавиатуры (Мотор-
потенциометра)
Запрещает выбор реверса задания, когда клавиатура (Мотор-потенциометр) выбрана как источник главного или дополнительного задания (используя P1000)
Возможные установки:
0 - Реверс разрешен – при этом возможно изменение направления вращения двигателя используя задание с клавиатуры (Мотор-потенциометр) (увеличение / уменьшение
частоты с использованием цифровых входов или клавиш
клавиатуры больше / меньше).
1 - Обратное направление вращения запрещено.
0
1
(0)
0
1
(1)
2
2
Р1032[0] - 1-й набор данных привода (DDS)
Р1032[1] - 2-й набор данных привода (DDS)
Р1032[2] - 3-й набор данных привода (DDS)
77
Page 78

Руководство пользователя преобразователей MICROMASTER 440
Установка задания с клавиатуры (Мотор-потенциометр)Р1040[3]
Определяет начальное задание при управлении с клавиатуры (Мотор-потенциометр) - (P1000=1).
Примечание:
Если выбирается установка задания с клавиатуры (Моторпотенциометр) как главное или дополнительное задание, то
обратное направление вращения будет запрещено по умолчанию в P1032. Если вы хотите разрешить обратное направление вращения, то установите P1032 = 1.
Р1040[0] - 1-й набор данных привода (DDS)
Р1040[1] - 2-й набор данных привода (DDS)
Р1040[2] - 3-й набор данных привода (DDS)
Частота толчка вправо (JOG right)Р1058[3]
Проталкивание используется для незначительного проворачивания двигателя.
Оно управляется через клавишу проталкивания или один из
цифровых входов при использовании переключателя без
фиксации.
Если выбирается проталкивание вправо, то этот параметр
определяет частоту, при которой будет работать преобразователь. Времена разгона и замедления, используемые для
проталкивания, устанавливаются в P1060 и P1061 соответственно.
Р1058[0] - 1-й набор данных привода (DDS)
Р1058[1] - 2-й набор данных привода (DDS)
Р1058[2] - 3-й набор данных привода (DDS)
Частота толчка влево (JOG left)Р1059[3]
Если выбирается проталкивание влево, то этот параметр
определяет частоту, при которой будет работать преобразователь.
Р1059[0] - 1-й набор данных привода (DDS)
Р1059[1] - 2-й набор данных привода (DDS)
Р1059[2] - 3-й набор данных привода (DDS)
Время разгона при проталкиванииР1060[3]
Устанавливает время разгона. Это время используется при
проталкивании или когда активизирована функция "использования времени разгона при проталкивании”.
-650
650
(5)
Гц
0
650
(5)
Гц
0
650
(5)
Гц
0
650
(10)
Сек
2
2
2
2
Р1060[0] - 1-й набор данных привода (DDS)
Р1060[1] - 2-й набор данных привода (DDS)
Р1060[2] - 3-й набор данных привода (DDS)
78
Page 79

Руководство пользователя преобразователей MICROMASTER 440
Время замедления при проталкиванииР1061[3]
Устанавливает время замедления (сек).
Это время используется при проталкивании или когда активизирована функция “использование времени замедления
при проталкивании”.
Р1061[0] - 1-й набор данных привода (DDS)
Р1061[1] - 2-й набор данных привода (DDS)
Р1061[2] - 3-й набор данных привода (DDS)
0
650
(10)
Сек
2
Р1070[3]
Р1071[3]
Р1080[3]
Главное задание
Определяет источник главного задания.
Установки:
755 – аналоговый вход 1
1024 – фиксированные частоты
1050 – мотор-потенциометр.
Р1070[0] - 1-й набор данных привода (DDS)
Р1070[1] - 2-й набор данных привода (DDS)
Р1070[2] - 3-й набор данных привода (DDS)
Вычисление главного задания
Определяет источник вычисления главного задания.
Установки:
755 – аналоговый вход 1
1024 – фиксированные частоты
1050 – мотор-потенциометр.
Р1071[0] - 1-й набор данных привода (DDS)
Р1071[1] - 2-й набор данных привода (DDS)
Р1071[2] - 3-й набор данных привода (DDS)
Минимальная частота
Устанавливает минимальную частоту (Гц) при которой двигатель будет вращаться независимо от частоты задания.
Установка значения здесь для обоих направлений вращения.
Примечание
При определенных условиях (например, при разгоне/замедлении, ограничении тока), преобразователь может
работать при более низкой частоте.
Р1080[0] - 1-й набор данных привода (DDS)
Р1080[1] - 2-й набор данных привода (DDS)
Р1080[2] - 3-й набор данных привода (DDS)
0
4000
(755)
0
650
(0)
Гц
0
650
(0)
Гц
3
1
1
79
Page 80

Руководство пользователя преобразователей MICROMASTER 440
Максимальная частотаР1082[3]
Устанавливает максимальную частоту (Гц) при которой двигатель будет вращаться независимо от частоты задания.
Установка значения здесь для обоих направлений вращения.
Примечание
Имеются механические ограничения максимальной скорости, с которой двигатель может вращаться. В общем, максимальная частота двигателя не должна превышать 3-x номинальных табличных частот вращения. Максимальная частота может быть превышена, если активно одно из следующих условий:
Компенсация скольжения (fmax + fslip comp max) или
Перезапуск на ходу (fmax + fslip nom).
Р1082[0] - 1-й набор данных привода (DDS)
Р1082[1] - 2-й набор данных привода (DDS)
Р1082[2] - 3-й набор данных привода (DDS)
Пропуск частоты 1Р1091[3]
Определяет частоту пропуска (резонансной частоты) с зоной, определяемой в Р1101.
0
650
(50)
Гц
0
650
(0)
Гц
1
3
Р1091[0] - 1-й набор данных привода (DDS)
Р1091[1] - 2-й набор данных привода (DDS)
Р1091[2] - 3-й набор данных привода (DDS)
Пропуск частоты 2Р1092[3]
Устанавливается частота пропуска, аналогично параметру
1091.
Р1092[0] - 1-й набор данных привода (DDS)
Р1092[1] - 2-й набор данных привода (DDS)
Р1092[2] - 3-й набор данных привода (DDS)
Пропуск частоты 3Р1093[3]
Устанавливается частота пропуска, аналогично параметру
1091.
Р1093[0] - 1-й набор данных привода (DDS)
Р1093[1] - 2-й набор данных привода (DDS)
Р1093[2] - 3-й набор данных привода (DDS)
Пропуск частоты 4Р1094[3]
Устанавливается частота пропуска, аналогично параметру
1091.
Р1094[0] - 1-й набор данных привода (DDS)
Р1094[1] - 2-й набор данных привода (DDS)
Р1094[2] - 3-й набор данных привода (DDS)
0
650
(0)
Гц
0
650
(0)
Гц
0
650
(0)
Гц
3
3
3
80
Page 81
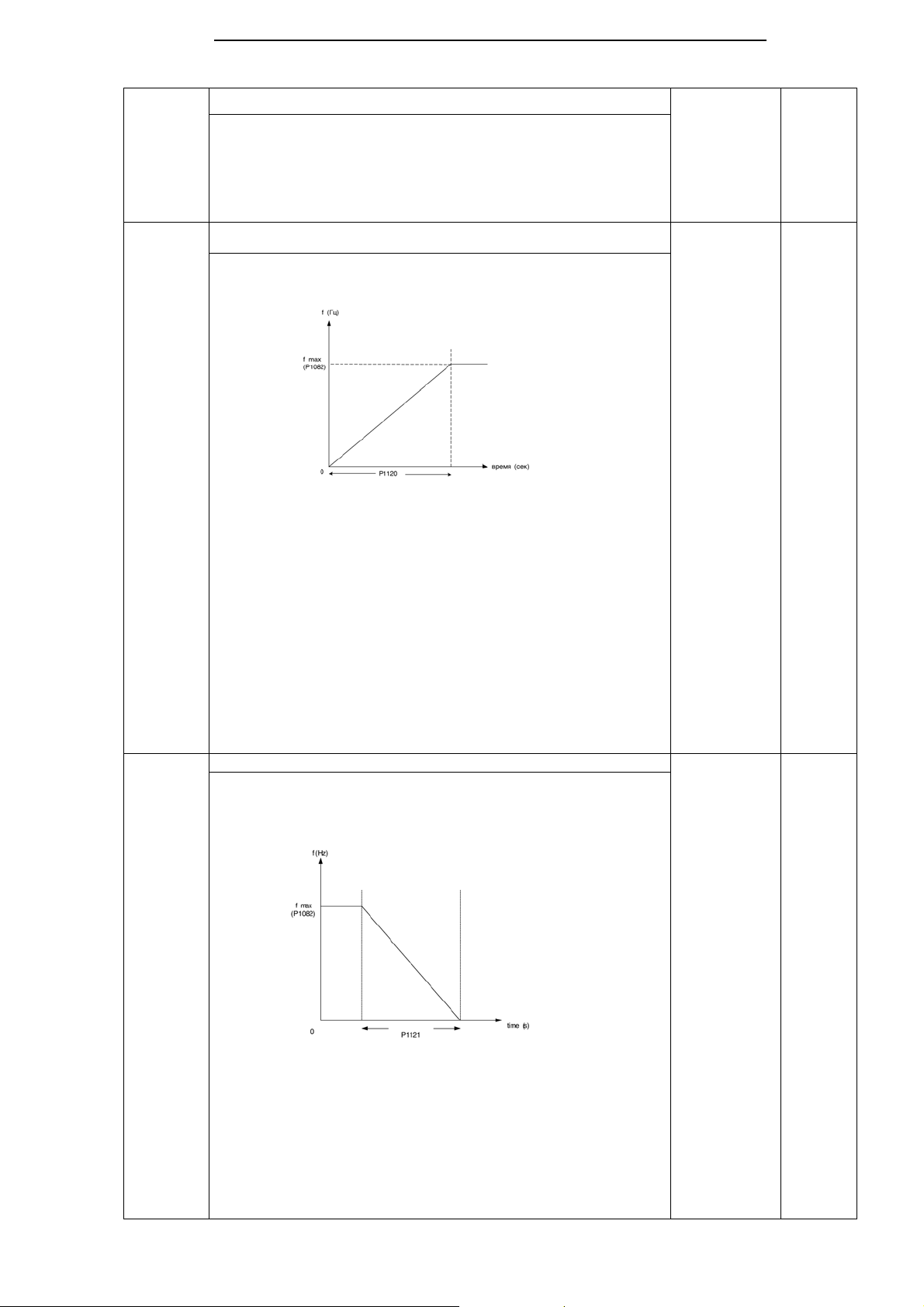
Руководство пользователя преобразователей MICROMASTER 440
Полоса пропуска частотыР1101[3]
Устанавливает полосу частоты относительно заданной пропускаемой частоты.
Р1101[0] - 1-й набор данных привода (DDS)
Р1101[1] - 2-й набор данных привода (DDS)
Р1101[2] - 3-й набор данных привода (DDS)
Время разгонаР1120[3]
Время, принятое для разгона двигателя, от состояния покоя
до максимальной частоты двигателя (P1082), когда закругление не используется.
Установка слишком короткого времени разгона может вызывать прерывание преобразователя (перегрузку по току).
0
10
(2)
Гц
0
650
(10)
Гц
3
1
Примечания
Если Вы используете внешнее задание частоты, которое
уже имеет установку разгона / замедления (например, от
PLC), то оптимальная работа привода достигается, если
времена разгона / замедления в P1120 и P1121 установлены
в значения, слегка более короткие, чем заданы PLC.
Изменения времен разгона / замедления не активны до тех
пор, пока не подтверждено нажатием клавиши P.
Р1120[0] - 1-й набор данных привода (DDS)
Р1120[1] - 2-й набор данных привода (DDS)
Р1120[2] - 3-й набор данных привода (DDS)
Время замедленияР1121
Время, принятое для замедления двигателя, от максимальной частоты двигателя (P1082) до полной остановки, когда
закругление не используется.
0
650
(10)
Гц
1
Примечания
Установка слишком короткого времени замедления может
привести к прерыванию преобразователя (перенапряжение
(F0002) / перегрузка по току (F0001)).
Изменения времен разгона / замедления не активны до тех
пор, пока не подтверждено нажатием клавиши P.
Р1121[0] - 1-й набор данных привода (DDS)
Р1121[1] - 2-й набор данных привода (DDS)
Р1121[2] - 3-й набор данных привода (DDS)
81
Page 82

Руководство пользователя преобразователей MICROMASTER 440
Р1130[3]
Р1131[3]
Время закругления в начале разгона
Определяет время сглаживания в начале разгона в секундах
как указано в Р1130 и показано на рисунке ниже.
где
Tup общ. = 1/2 * P1130 + X * P1120 + 1/2 * P1131
T
общ. = 1/2 * P1132 + X * P1121 + 1/2 * P1133
down
X определяется как _f = x * F
max
Р1130[0] - 1-й набор данных привода (DDS)
Р1130[1] - 2-й набор данных привода (DDS)
Р1130[2] - 3-й набор данных привода (DDS)
Время закругления в конце разгона
Определяет время сглаживания в конце разгона как указано
в P1130.
Р1131[0] - 1-й набор данных привода (DDS)
Р1131[1] - 2-й набор данных привода (DDS)
Р1131[2] - 3-й набор данных привода (DDS)
Время закругления в начале замедленияР1132[3]
Определяет время сглаживания в начале замедления как
указано в P1130.
Р1132[0] - 1-й набор данных привода (DDS)
Р1132[1] - 2-й набор данных привода (DDS)
Р1132[2] - 3-й набор данных привода (DDS)
Время закругления в конце замедленияР1133[3]
Определяет время сглаживания в конце замедления как
указано в P1130.
Р1133[0] - 1-й набор данных привода (DDS)
Р1133[1] - 2-й набор данных привода (DDS)
Р1133[2] - 3-й набор данных привода (DDS)
Тип закругленияР1134[3]
Определяет непрерывное сглаживание (по умолчанию) или
прерывающееся сглаживание по команде OFF или при
уменьшении задания.
Общее время сглаживания должно быть установлено > 0
сек, иначе этот параметр действовать не будет.
0
40
(0)
Сек
0
40
(0)
Сек
0
40
(0)
Сек
0
40
(0)
Сек
0
1
(0)
2
2
2
2
2
Возможные установки:
0 = Непрерывное
1 = Прерывающееся.
82
Page 83

Руководство пользователя преобразователей MICROMASTER 440
Р1135[3]
Р1200
Время остановки для режима OFF3
Определяет время выбега от максимальной частоты до
действия команды OFF3.
Р1135[0] - 1-й набор данных привода (DDS)
Р1135[1] - 2-й набор данных привода (DDS)
Р1135[2] - 3-й набор данных привода (DDS)
Старт на ходу
Запускает преобразователь при вращающемся двигателе.
Если есть возможность того, что двигатель вращается, например, после кратковременного отключения сети, или если
двигатель вращается нагрузкой, то должен использоваться
старт на ходу – иначе произойдет прерывание от перегрузки
по току.
Эта функция является практически полезной для двигателей с высоким моментом инерции.
Возможные установки:
0
650
(5)
Сек
0
6
(0)
2
2
Р1202[3]
0 “Старт на ходу не активен”
1 “Старт на ходу активен всегда. Запускает в направлении
задания".
2 “Старт на ходу при включении питания, сбоя, OFF2.
Запускает в направлении задания".
3 “Старт на ходу при сбое, OFF2”. Запускает в направлении
задания".
4 “Старт на ходу активен всегда. Поиск ТОЛЬКО в направлении задания”.
5 “Старт на ходу при включении питания, сбоя, OFF2.
Поиск ТОЛЬКО в направлении задания”.
6 “Старт на ходу при сбое, OFF2. Поиск ТОЛЬКО в направ-
лении задания".
Преобразователь быстро изменяет выходную частоту, до
тех пор, пока не будет найдена фактическая скорость двигателя. Как только это произойдет, двигатель разгонится до
своего задания, используя установленное время рампы.
Примечание:
Установки от 1 до 3 для поиска в обоих направлениях. Для
того чтобы поиск происходил в направлении задания, необходимы установки с 4 до 6.
Ток двигателя для начала подхвата
Устанавливает значение тока двигателя для начала подхвата двигателя. Величина устанавливается в % отношении к
номинальному току двигателя (параметр Р0305).
50
200
(100)
%
3
Р1202[0] - 1-й набор данных привода (DDS)
Р1202[1] - 2-й набор данных привода (DDS)
Р1202[2] - 3-й набор данных привода (DDS)
83
Page 84

Руководство пользователя преобразователей MICROMASTER 440
Р1210
Автоматический перезапуск
Позволяет перезапуск после отключения сетевого питания
или сбоя.
Возможные установки:
0 = Не задействован.
1 = Подтверждает сбои при включенном питании – преобра-
зователь не запускается. Для запуска преобразователя необходима команда повторного включения. Р1211 – отключено.
2 = Перезапуск после отключения сети (пропадание / подача
питания). Р1211 – отключено.
3 = Перезапуск после сбоя/отключения сети (пропадание /
частичное восстановление). Р1211 – включено.
4 = Перезапуск после отключения сети (пропадание / частично восстановление). Р1211 – включено.
5 = Перезапуск после сбоя/отключения сети, игнорирование
предыстории. Р1211 – отключено.
Внимание:
Установки с 2 по 5 могут перезапускать двигатель неожиданно!
0
5
(1)
2
Р1215
Примечание
Перезапуск будет работать, только если постоянно присутствует команда ВКЛ (ON). Например, через проводную связь
с цифрового ввода.
Если двигатель все еще может вращаться или есть возможность его вращения нагрузкой, то нужно также позволить
перезапуск на ходу (P1200).
Количество перезапускавР1211
Определяет количество раз автоматических перезапусков
преобразователя.
Разрешение конфигурирования удерживающего тормо-
за
Разрешает/запрещает функцию удерживающего тормоза Вы
можете использовать эту функцию для того, чтобы заставить преобразователь следовать за конфигурацией, указанной ниже.
Для управления тормозом также возможно обеспечить переключение реле в точке 1 и точке 2, если это запрограммировано в P0731 = 52.C.
0
10
(3)
0
1
(0)
3
2
Возможные установки:
0 = Запрещен
1 = Разрешен
Примечание
Если использование разрешено P0731, то до точки 1 реле
тормоза разомкнуто, и до точки 2 реле тормоза замыкается.
84
Page 85

Руководство пользователя преобразователей MICROMASTER 440
Задержка отпускания удерживающего тормоза.Р1216
Определяет время, в которое преобразователь работает
при f
перед разгоном в направление к точке 1 (как показа-
min
но на рисунке).
Примечание:
При этой конфигурации преобразователь запускается на f
min
, то есть не использует формирователь рампы. Если это ис-
пользуется удержания двигателя на некоторой частоте механическим тормозом), есть Вы используете реле для
управления механическим тормозом), важно чтобы f
min
< 5
Гц; иначе ток может стать слишком высоким, вследствие
чего реле может не разомкнуться из-за ограничения тока
преобразователя. Типовое значение f
для этого типа при-
min
менения является частота скольжения двигателя.
0
20
(1)
Сек
2
Р1217
Р1232
Р1233[3]
Время удержания после замедления
Определяет время, в течение которого преобразователь
работает при f
после замедления до точки 2 (как показано
min
на рисунке для P1215).
Ток DC торможения
Определяет уровень постоянного тока, как процент номинального тока двигателя (P0305).
Длительность торможения постоянным током после
OFF1
Определяет длительность, в течение которой активно инжекционное торможение постоянным током после команды
OFF1.
Возможные установки:
0 = не активно после OFF1
1 – 250 = активно для заданной длительности
Примечание
Функция DC торможения заставляет двигатель останавливаться быстро, применяя для торможения постоянный ток
(приложенный ток также удерживает вал неподвижным). Когда прикладывается сигнал DC торможения, выходные импульсы преобразователя блокируются, а постоянный ток
прикладывается только тогда, когда двигатель будет достаточно размагничен.
0
20
(1)
Сек
0
250
(100)
%
0
250
(0)
Сек
2
2
2
Внимание
Частое использование длительных периодов торможения
постоянным током может привести к перегреву двигателя.
Р1233[0] - 1-й набор данных привода (DDS)
Р1233[1] - 2-й набор данных привода (DDS)
Р1233[2] - 3-й набор данных привода (DDS)
85
Page 86

Руководство пользователя преобразователей MICROMASTER 440
Р1234[3]
Р1236[3]
Р1237
Р1300[3]
Начальная частота торможения постоянным током
Устанавливает частоту, с которой производится торможение
постоянным током.
Р1234[0] - 1-й набор данных привода (DDS)
Р1234[1] - 2-й набор данных привода (DDS)
Р1234[2] - 3-й набор данных привода (DDS)
Ток составного торможения
Определяет уровень постоянного тока, добавленного к переменному току. Этот вид торможения становится активным
после команд OFF1 / OFF3.
Увеличение значения, в общем, будет улучшать выполнение
торможения; причем, если Вы установите недостаточное
значение, то это может привести к прерыванию по перенапряжению.
Возможные установки:
0 = Составное торможение не выбрано.
1 – 250 = Уровень тока DC торможения определяется как %
от номинального тока двигателя (P0305).
Р1236[0] - 1-й набор данных привода (DDS)
Р1236[1] - 2-й набор данных привода (DDS)
Р1236[2] - 3-й набор данных привода (DDS)
Динамическое торможение
Этот параметр задает повторность включения тормозного
резистора и отвода энергии торможения.
Значения:
0 – отключено
1 – 5% повторность включения резистора (ПВ)
2 – 10% повторность включения резистора (ПВ)
3 – 20% повторность включения резистора (ПВ)
4 – 50% повторность включения резистора (ПВ)
5 – 100% повторность включения резистора (ПВ).
Примечание
Сначала торможение будет осуществляться постоянным
током, а затем будет подключаться тормозной резистор в
соответствии с установленной длительностью периода торможения.
Необходимо учитывать заданную длительность торможения
на резистор с параметрами выбираемого тормозного резистора – он должен обеспечить необходимый отвод тепловой
энергии.
V/F & FCC Режимы управления
Управляет зависимостью между скоростью частотой и напряжением, подаваемым преобразователем на двигатель.
Возможные установки:
0 = Линейная V/f (по умолчанию)
1 = FCC (Flux Current Control) – поддерживает ток двигателя,
создающий поток, для улучшения эффективности.
2 = Квадратичная V/f – подходит для центробежных венти-
ляторов / насосов.
3 = Многоточечная V/f (программируется только в эксперт-
ном режиме).
4 = с режимом для Eco преобразователей (квадратичная
зависимость с оптимизацией потока FCC).
5 = для текстильной промышленности с оптимизацией мо-
мента.
6 = для текстильной промышленности с оптимизацией пото-
ка.
19 = с независимым заданием напряжения.
20 = векторное регулирование без датчика скорости.
22 = векторное регулирование момента без датчика момен-
та.
Индексы [0-3] устанавливаются аналогично параметрам
выше.
0
650
(0)
Гц
0
250
(0)
%
0
5
(0)
0
23
(0)
2
2
2
2
86
Page 87

Руководство пользователя преобразователей MICROMASTER 440
Постоянное повышениеР1310[3]
Определяет уровень подъема напряжения, прикладываемого, как к линейной, так и к квадратичной V/f характеристикам,
в соответствии со следующими рисунками.
0 - VBOOST,
= напряжение при номинальном токе двига-
100
теля (P0305)
1 *Сопротивление статора (P0350).
Примечания
Когда используется постоянное повышение напряжения
•
P1310 вместе с другими параметрами повышения (по-
вышение при ускорении P1311 и повышение при старте
P1312), значения повышений комбинируются. Однако
распределение приоритетов этих параметров следующие:
P1310>P1311>P1312
•
Достижимое значение повышения ограничивается уста-
•
новкой в P0640.
Увеличение уровней повышения увеличивает нагрева-
•
ние двигателя, особенно остановленного.
• ∑ Boosts < 300/I
mo
t* RS
Повышение при разгонеР1311[3]
Применяет повышение, следующее за положительным изменением задания, и снижает обратно, как только задание
достигнуто. Это может быть полезно для улучшения реакции
на маленькие положительные изменения задания.
0
250
(50)
%
0
250
(0)
%
2
2
Примечание
Увеличение уровней повышения увеличивает нагрев
•
двигателя.
Обратитесь к примечанию в P1310 относительно при-
•
оритетов Повышения.
Достижимое значение увеличения ограничивается уста-
•
новкой в P0640.
• ∑Boosts < 300/I
mot
* R
S
87
Page 88

Руководство пользователя преобразователей MICROMASTER 440
Повышение при стартеР1312[3]
Добавляет постоянное линейное смещение к активной кривой V/f (как к линейной, так и к квадратичной) после команды
включения и активно, пока задание не будет достигнуто в
первый раз после пуска привода. Это полезно для запуска
нагрузок с высоким моментом инерции.
Примечания
Слишком высокая установка стартового повышения при-
•
ведет к ограничению тока преобразователя, который в
свою очередь ограничивает выходную частоту ниже частоты задания.
Увеличение уровней повышения увеличивает нагрев
•
двигателя.
Обратитесь к примечанию в P1310 относительно при-
•
оритетов повышения.
Достижимое значение повышения ограничивается уста-
•
новкой в P0640.
• ∑Boosts < 300/I
mot
* R
S
0
250
(0)
%
2
Программирование закона V/f, координата 1Р1320[3]
Устанавливает координаты кусочно-линейной характеристики закона регулирования напряжения. Эта зависимость может быть применена для организации работы синхронных
машин.
Р1320[0] - 1-й набор данных привода (DDS)
Р1320[1] - 2-й набор данных привода (DDS)
Р1320[2] - 3-й набор данных привода (DDS)
0
650
(0)
Гц
3
88
Page 89
Руководство пользователя преобразователей MICROMASTER 440
Программирование закона V/f, координата 1Р1321[3]
Смотрите назначение и параметры в соответствии с рисунком, поясняющим параметр Р1320.
Р1321[0] - 1-й набор данных привода (DDS)
Р1321[1] - 2-й набор данных привода (DDS)
Р1321[2] - 3-й набор данных привода (DDS)
Программирование закона V/f, координата 2Р1322[3]
Смотрите назначение и параметры в соответствии с рисунком, поясняющим параметр Р1320.
Р1322[0] - 1-й набор данных привода (DDS)
Р1322[1] - 2-й набор данных привода (DDS)
Р1322[2] - 3-й набор данных привода (DDS)
Программирование закона V/f, координата 2Р1323[3]
Смотрите назначение и параметры в соответствии с рисунком, поясняющим параметр Р1320.
Р1323[0] - 1-й набор данных привода (DDS)
Р1323[1] - 2-й набор данных привода (DDS)
Р1323[2] - 3-й набор данных привода (DDS)
Программирование закона V/f, координата 3Р1324[3]
Смотрите назначение и параметры в соответствии с рисунком, поясняющим параметр Р1320.
Р1324[0] - 1-й набор данных привода (DDS)
Р1324[1] - 2-й набор данных привода (DDS)
Р1324[2] - 3-й набор данных привода (DDS)
0
3000
(0)
Вольт
0
650
(0)
Гц
0
3000
(0)
Вольт
0
650
(0)
Гц
3
3
3
3
Программирование закона V/f, координата 3Р1325[3]
Смотрите назначение и параметры в соответствии с рисунком, поясняющим параметр Р1320.
Р1325[0] - 1-й набор данных привода (DDS)
Р1325[1] - 2-й набор данных привода (DDS)
Р1325[2] - 3-й набор данных привода (DDS)
Компенсация скольженияР1335[3]
Корректирует выходную частоту преобразователя в динамике, так чтобы скорость двигателя сохранилась постоянной
независимо от нагрузки.
0% = Компенсация скольжения не задействована
100% = Для этого значения используются данные и модель
двигателя так, чтобы номинальная частота скольжения добавлялась при номинальной скорости и токе двигателя.
Примечание
Значение коэффициента, в случае необходимости, может
быть откорректировано для подстройки фактической скорости двигателя.
Р1335[0] - 1-й набор данных привода (DDS)
Р1335[1] - 2-й набор данных привода (DDS)
Р1335[2] - 3-й набор данных привода (DDS)
Предел скольженияР1336[3]
Ограничивает компенсацию скольжения, добавленную к
частоте задания, когда компенсация скольжения активна.
0
3000
(0)
Вольт
0
600
(0)
%
0
600
(250)
%
3
2
2
Р1336[0] - 1-й набор данных привода (DDS)
Р1336[1] - 2-й набор данных привода (DDS)
Р1336[2] - 3-й набор данных привода (DDS)
89
Page 90

Руководство пользователя преобразователей MICROMASTER 440
Коэффициент усиления регулятора скоростиР1470[3]
Устанавливает коэффициент усиления регулятора скорости
для векторного безсенсорного регулирования.
Р1470[0] - 1-й набор данных привода (DDS)
Р1470[1] - 2-й набор данных привода (DDS)
Р1470[2] - 3-й набор данных привода (DDS)
Коэффициент интегрирования регулятора скоростиР1472[3]
Устанавливает коэффициент интегрирования регулятора
скорости для векторного безсенсорного регулирования.
Р1472[0] - 1-й набор данных привода (DDS)
Р1472[1] - 2-й набор данных привода (DDS)
Р1472[2] - 3-й набор данных привода (DDS)
Выбор для задания моментаР1500[3]
Выбирает источник задания для регулирования момента.
Для простых заданий используются целые числа до 10 в
соответствии с назначениями:
0 – нет задания
1 – задание мотор-потенциометром
2 – задание с аналогового входа
3 – фиксированная частота
4 – по протоколу USS с операторской панели ВОР
5 – по протоколу USS с сетевых клемм преобразователя
6 – через сетевой модуль связи
7 – через аналоговый вход 2
0
2000
(3)
25
32001
(25)
мСек
0
77
(0)
2
2
2
Для сложных заданий с двух мест (аналогично заданию параметра Р1000), добавляются десятки, умноженные на код
выбранного источника задания (смотрите таблицу заданий
для параметра Р1000 – задание частоты).
Р1500[0] - 1-й набор данных привода (DDS)
Р1500[1] - 2-й набор данных привода (DDS)
Р1500[2] - 3-й набор данных привода (DDS)
Заданный моментr1508
Отображает величину заданного момента привода перед
ограничениями.
Добавление к заданию моментаr1515
Отображает величину добавления к заданному значению
момента привода перед ограничениями.
Верхний предел моментаР1520[3]
Определяет величину верхнего предела ограничения момента привода.
Р1520[0] - 1-й набор данных привода (DDS)
Р1520[1] - 2-й набор данных привода (DDS)
Р1520[2] - 3-й набор данных привода (DDS)
Нижний предел моментаР1521[3]
Определяет величину нижнего предела ограничения момента привода.
Р1521[0] - 1-й набор данных привода (DDS)
Р1521[1] - 2-й набор данных привода (DDS)
Р1521[2] - 3-й набор данных привода (DDS)
- 2
- 2
-99999,0
99999,0
(5.13)
Nm
-99999,0
99999,0
(-5.13)
Nm
2
2
90
Page 91
Руководство пользователя преобразователей MICROMASTER 440
Ограничение мощности двигателяP1530[3]
Значение определяет предел мощности двигателя. Величина приведена к заданному параметру Р0310 – номинальной
мощности двигателя.
Р1530[0] - 1-й набор данных привода (DDS)
Р1530[1] - 2-й набор данных привода (DDS)
Р1530[2] - 3-й набор данных привода (DDS)
Ограничение генерируемой мощности двигателяP1531[3]
Ограничивает мощность привода в режиме генераторного
торможения. Величина приведена к заданному параметру
Р0310 – номинальной мощности двигателя.
Р1531[0] - 1-й набор данных привода (DDS)
Р1531[1] - 2-й набор данных привода (DDS)
Р1531[2] - 3-й набор данных привода (DDS)
Установленный верхний предел момента двигателяr1538
Отображает установленное значение верхнего предела ограничения момента привода.
Установленный нижний предел момента двигателяr1539
Отображает установленное значение нижнего предела ограничения момента привода.
0
8000
(0,75)
0
8000
(0,75)
-
Nm
-
Nm
2
2
2
2
Установка постоянного значения потокосцепленияP1570[3]
Устанавливает величину потокосцепления относительно
номинального значения для двигателя в %.
Р1570[0] - 1-й набор данных привода (DDS)
Р1570[1] - 2-й набор данных привода (DDS)
Р1570[2] - 3-й набор данных привода (DDS)
Коэффициент оптимизацииP1580[3]
Устанавливается степень оптимизации потокосцепления.
Р1580[0] - 1-й набор данных привода (DDS)
Р1580[1] - 2-й набор данных привода (DDS)
Р1580[2] - 3-й набор данных привода (DDS)
Продолжительное увеличение моментаP1610[3]
Устанавливает разрешенное длительное увеличение момента двигателя для низкой частоты вращения для векторного регулирования без датчика. Устанавливается значение
в % относительно номинального момента.
Р1610[0] - 1-й набор данных привода (DDS)
Р1610[1] - 2-й набор данных привода (DDS)
Р1610[2] - 3-й набор данных привода (DDS)
Продолжительное увеличение моментаP1611[3]
Устанавливает разрешенный момент ускорения на низких
оборотах для векторного регулирования без датчика скорости. Устанавливается в % относительно номинального момента.
50
200
(110)
%
100
0
(0)
%
0
200
(50)
%
0
200
(0)
%
2
2
2
2
Р1611[0] - 1-й набор данных привода (DDS)
Р1611[1] - 2-й набор данных привода (DDS)
Р1611[2] - 3-й набор данных привода (DDS)
91
Page 92

Руководство пользователя преобразователей MICROMASTER 440
Частота ШИМР1800
Устанавливает частоту импульсов ШИМ в преобразователе.
Частота может быть изменена шагами 2 кГц.
Если нет абсолютной необходимости в бесшумной работе,
то, выбирая более низкую частоту ШИМ возможно уменьшить потери преобразователя и радиочастотное излучение.
Если частота ШИМ выбрана более 4 кГц для блоков 380480В, то максимальный непрерывный ток двигателя будет
уменьшен. Требуемое уменьшение показано в таблице ниже.
Изменение чередования фаз выходного напряженияР1820
Изменяет направление чередования фаз выходного напряжения преобразователя.
Возможные значения
0 = Нормальное
1 = Обратная последовательность фаз.
Р1820[0] - 1-й набор данных привода (DDS)
Р1820[1] - 2-й набор данных привода (DDS)
Р1820[2] - 3-й набор данных привода (DDS)
Измерение параметров двигателяР1910
Примечания
Выполняет идентификацию параметров двигателя.
При установке параметра Р1910 в «1» - производятся из-
мерения (расчет):
Р0350 – сопротивление статора
Р0354 – сопротивление ротора двигателя
Р0356 – рассеяние статора
Р0358 – рассеяние ротора
Р0360 – индуктивное сопротивление.
2
16
(4)
кГц
0
1
(0)
0
20
(0)
2
2
2
Возможные значения:
0 = Измерение не производится – (будет использоваться
установка в P0350 – Р0360)
1 = Производится измерение всех параметров с изменениями в соответствующих местах.
2 = Производится измерение всех параметров без их записи
в соответствующих местах.
3 = Измерения кривой намагничивания с записью параметров.
4 = Измерения кривой намагничивания без записи параметров.
5 = Измерение индуктивного сопротивления (Р1920) без записи.
6 = Измерение Тd (Р1926) без записи параметра
7 = Измерение Rs (Р1912) без записи параметра
8 = Измерение Хs (Р1915) без записи параметра.
9 = Измерение Тr (Р1913) без записи параметра.
10 = Измерение Х
(Р1914) без записи параметра.
sigma
20 = Установка вектора напряжения.
Перед началом измерений необходимо ввести данные двигателя. После разрешения (P1910 =1), будет выдано предупреждение A0541, что измерение будет выполнено после
поступления команды ВКЛ. Если выбрана установка 1, то
введенные вручную / вычисленные значения перезаписываются.
Для других установок измеренные параметры будут только
отображаться в соответствующих номерах параметров и не
участвовать в регулировании.
92
Page 93

Руководство пользователя преобразователей MICROMASTER 440
Количество фаз для измеренийР1911
Задает количество фаз двигателя, которые будут
использоваться для проведения измерений и расчетов
параметров двигателя.
Измеренное сопротивления статораr1912[3]
Отображает измеренное значение сопротивления статора
(между фазами) в Ом (измеренное при P1910 = 1 или 2).
r1912[0] – фаза U
r1912[1] – фаза V
r1912[2] – фаза W
Постоянная времени ротораr1913[3]
Отображает измеренное значение постоянной времени
ротора двигателя.
r1913[0] – фаза U
r1913[1] – фаза V
r1913[2] – фаза W
Измеренная индуктивность рассеяния r1914[3]
Отображает измеренное значение индуктивности рассеяния
двигателя.
r1914[0] – фаза U
r1914[1] – фаза V
r1914[2] – фаза W
1
3
(3)
-
Ом
- 2
- 2
2
2
–
r1919[3]
Измеренная номинальная общая индуктивность статора r1915[3]
Отображает измеренное значение индуктивности статора
двигателя.
Примечание
Если измеренное значение не лежит в пределах
50%<X
<500% возникает сообщение об ошибке 41.
s
Дальнейшую информацию обеспечивает Р0949, а величина
ошибки в этом случае = 4 (см. параметры r1916-r1919).
r1915[0] – фаза U
r1915[1] – фаза V
r1915[2] – фаза W
Измеренные индуктивные сопротивления статора 1-4r1916[3]
Отображают измеренные индуктивные сопротивления (1-4)
статора по фазам в соответствии с индексами [0-2].
Динамическая индуктивность рассеянияr1920[3]
Отображает измеренное полное значение динамической
индуктивности рассеяния двигателя.
r1920[0] – фаза U
r1920[1] – фаза V
r1920[2] – фаза W
- 2
- 2
- 2
Измеренное напряжение на IGBT транзисторахr1925
Отображает статическое напряжение на транзисторах
инвертора.
Относительная задаваемая частотаР2000[3]
Установка полной шкалы частоты, используемой
последовательным интерфейсом и аналоговым
входом/выходом. Это соответствует 4000H – 12-ти
разрядному двоичному значению задания или полному
аналоговому входу.
Р2000[0] - 1-й набор данных привода (DDS)
Р2000[1] - 2-й набор данных привода (DDS)
Р2000[2] - 3-й набор данных привода (DDS)
-
V
0
650
(50)
Гц
2
2
93
Page 94
Руководство пользователя преобразователей MICROMASTER 440
Относительное значение напряженияР2001[3]
Полное значение напряжения для 100%, аналогично Р2000.
Р2001[0] - 1-й набор данных привода (DDS)
Р2001[1] - 2-й набор данных привода (DDS)
Р2001[2] - 3-й набор данных привода (DDS)
Относительное значение тока Р2002[3]
Полное значение тока для 100%, аналогично Р2000.
Р2002[0] - 1-й набор данных привода (DDS)
Р2002[1] - 2-й набор данных привода (DDS)
Р2002[2] - 3-й набор данных привода (DDS)
Относительное значение момента Р2003[3]
Полное значение момента для 100%, аналогично Р2000.
Р2003[0] - 1-й набор данных привода (DDS)
Р2003[1] - 2-й набор данных привода (DDS)
Р2003[2] - 3-й набор данных привода (DDS)
Относительное значение мощности r2004[3]
Полное значение мощности для 100%, аналогично Р2000.
Р2003[0] - 1-й набор данных привода (DDS)
Р2003[1] - 2-й набор данных привода (DDS)
Р2003[2] - 3-й набор данных привода (DDS)
Скорость для протокола USSР2010[2]
Определяет скорость передачи для связи по USS протоколу.
Индекс
10
2000
(1000)
V
0.10
10000
(0,10)
А
0,1
99999,0
(0,75)
Nm
- 3
4
12
(6)
3
3
3
2
P2010[0] = USS2 = Связь по RS485 (Клеммы 14, 15)
P2010[1] = USS1 = RS232 (при использовании опции)
Возможные установки:
4 = 2400 бод
5 = 4800 бод
6 = 9600 бод
7 = 19200 бод
8 = 38400 бод
9 = 57600 бод
10 = 76800 бод
11 = 93750 бод
12 = 115200 бод
Адрес для протокола USSР2011 [2]
Адрес USS. Устанавливает уникальный адрес для
преобразователя.
Вы можете подключить до 31 преобразователя через
последовательную связь, использующую USS шинный
протокол для управления ими. Этот параметр
устанавливает уникальный адрес для преобразователя.
Индекс
0 = USS2 = Связь по RS485 (Клеммы 14, 15)
1 = USS1 = RS232 (при использовании опции)
Выбор числа специальных аварийР2100 [3]
Выбирает до 3-х аварий (в одном или всех индексах [0-2])
или предупреждений, действия по которым будут отдельно
установлены (Р2101). Выбор необходимой аварии или
предупреждения определяется номером (кодом) ошибки по
таблице аварий и предупреждений (см. в след. главе).
0
31
(0)
0
65535
(0)
2
3
Примечания
Те аварии, действия по которым определяются программой
управления преобразователя и направлены на его защиту
(например, перегрузка) не могут быть изменены.
94
Page 95
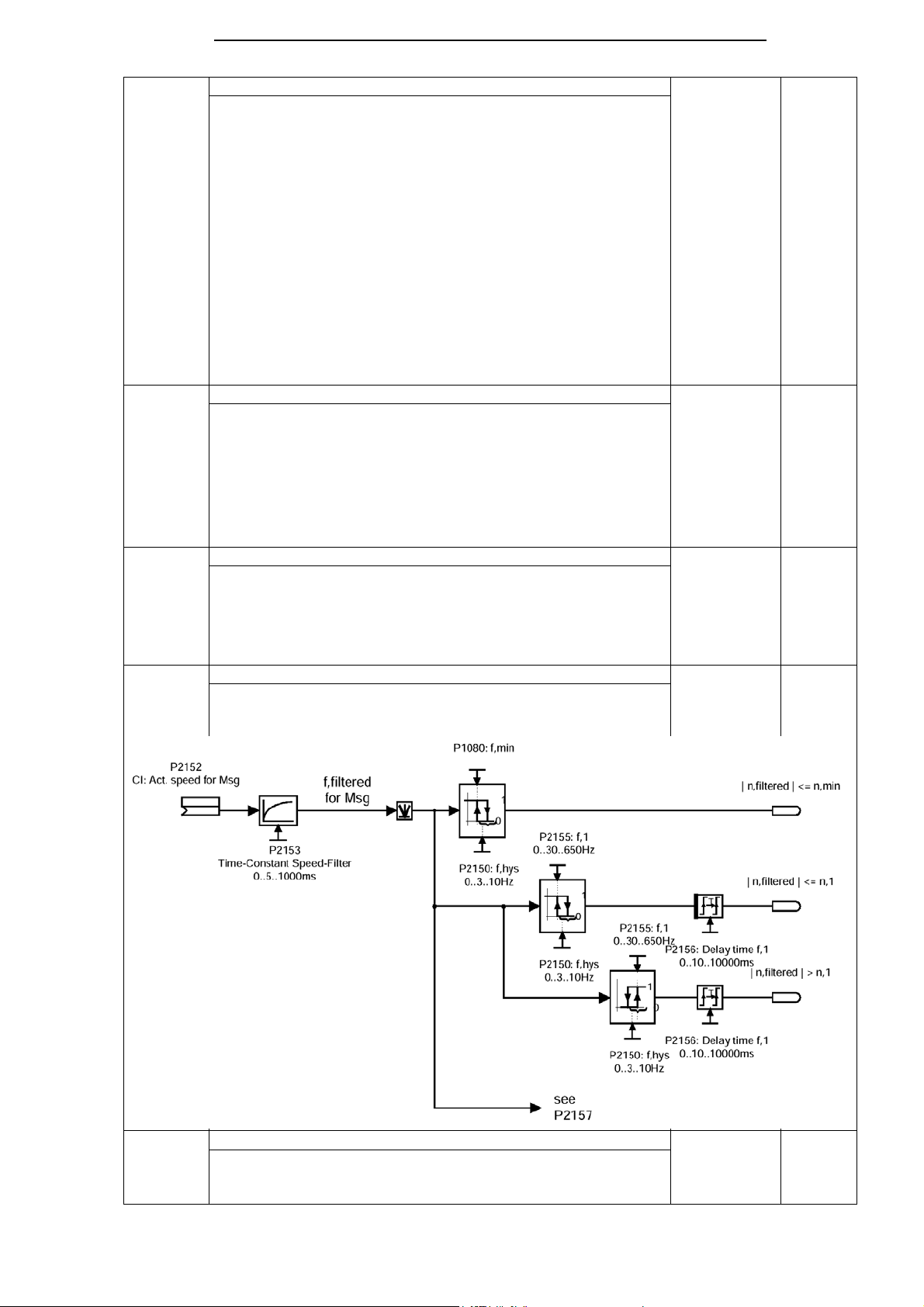
Руководство пользователя преобразователей MICROMASTER 440
Действия по выбранным авариямР2101 [3]
Выбирается реакция привода по возникновению аварий или
предупреждений, коды которых выбраны в Р2100. Для
каждой выбранной аварии в индексах [0-2] можно
установить любые значения действий привода.
Значения
0 – нет никакой реакции и отображения на панели
1 – остановка привода OFF1
2 - остановка привода OFF2
3 - остановка привода OFF3
4 – только предупреждение без остановки.
Примечание
Для аварий могут устанавливаться только значения 0-3.
История предупрежденийr2110
Отображает информацию о предупреждениях.
Можно просмотреть до 2-х активных предупреждений.
Примечание:
Если предупреждение активно, индикатор пульта будет
мерцать: индикатор указывает статус предупреждения. Если
используется AOP, дисплей показывает номер активного
предупреждения и текст.
Индексы 0 и 1 не сохраняются.
Постоянная времени фильтра скоростиР2153[3]
Устанавливает параметр фильтрации значений скорости
для сглаживания показаний и расчетов.
Р2153[0] - 1-й набор данных привода (DDS)
Р2153[1] - 2-й набор данных привода (DDS)
Р2153[2] - 3-й набор данных привода (DDS)
Порог для частоты f_1Р2155[3]
Задает порог 1 для сравнения с текущей частотой
двигателя. Пояснения установки параметров дает схема
сравнения частот.
0
4
(0)
- 2
0
1000
(5)
мСек
0
650
(30)
Гц
3
2
3
Задержка времени для порога частоты f_1Р2156[3]
Устанавливает задержку времени для сравнения текущей
частоты с установленной частотой.
0
10000
(10)
мСек
3
95
Page 96

Руководство пользователя преобразователей MICROMASTER 440
Порог для частоты сравнения f_2Р2157[3]
Задает порог 2 для сравнения с текущей частотой
двигателя. Пояснения установки параметров дает схема
сравнения частот.
0
1000
(5)
мСек
2
Этот рисунок является продолжением рисунка в параметре
Р2155.
Для каждого индекса можно устанавливать свои параметры.
Задержка времени для порога частоты f_2Р2158[3]
Устанавливает задержку времени для сравнения текущей
частоты с установленной частотой.
Р2158[0] - 1-й набор данных привода (DDS)
Р2158[1] - 2-й набор данных привода (DDS)
Р2158[2] - 3-й набор данных привода (DDS)
Порог для частоты сравнения f_3Р2159[3]
Задает порог 3 для сравнения с текущей частотой
двигателя. Пояснения установки параметров дает схема
сравнения частот в Р2157.
Р2159[0] - 1-й набор данных привода (DDS)
Р2159[1] - 2-й набор данных привода (DDS)
Р2159[2] - 3-й набор данных привода (DDS)
Задержка времени для порога частоты f_3Р2160[3]
Устанавливает задержку времени для сравнения текущей
частоты с установленной частотой.
Р2160[0] - 1-й набор данных привода (DDS)
Р2160[1] - 2-й набор данных привода (DDS)
Р2160[2] - 3-й набор данных привода (DDS)
Минимальное значение задаваемого порога Р2161[3]
Задается минимальное значение задаваемого порога
сравнения скоростей.
Р2161[0] - 1-й набор данных привода (DDS)
Р2161[1] - 2-й набор данных привода (DDS)
Р2161[2] - 3-й набор данных привода (DDS)
0
10000
(10)
мСек
0
650
(30)
Гц
0
10000
(10)
мСек
0
10
(3)
Гц
2
2
2
2
96
Page 97

Руководство пользователя преобразователей MICROMASTER 440
Гистерезис частоты для превышения скоростиР2162[3]
Гистерезис скорости (или частоты) иллюстрирует рисунок.
Р2162[0] - 1-й набор данных привода (DDS)
Р2162[1] - 2-й набор данных привода (DDS)
Р2162[2] - 3-й набор данных привода (DDS)
Порог для обнаружения отклонения скоростиР2163[3]
Порог отклонения частоты от заданного значения для принятия действий по отклонению частоты.
Р2163[0] - 1-й набор данных привода (DDS)
Р2163[1] - 2-й набор данных привода (DDS)
Р2163[2] - 3-й набор данных привода (DDS)
Гистерезис для отклонения по частотеР2164[3]
Устанавливает величину гистерезиса от заданного значения
отклонения частоты в Р2163.
Р2164[0] – 1-й набор данных привода (DDS)
Р2164[1] – 2-й набор данных привода (DDS)
Р2164[2] – 3-й набор данных привода (DDS)
0
6500
(20)
Гц
0
20
(3)
Гц
0
10
(3)
Гц
2
2
3
Время срабатывания по отклонению частотыР2165[3]
Устанавливает величину временной задержки для срабатывания по отклонению заданной частоты.
Р2165[0] – 1-й набор данных привода (DDS)
Р2165[1] – 2-й набор данных привода (DDS)
Р2165[2] – 3-й набор данных привода (DDS)
Время задержки срабатывания окончания разгонаР2166[3]
Устанавливает временную задержку для формирования
сигнала о завершении разгона привода.
Р2166[0] – 1-й набор данных привода (DDS)
Р2166[1] – 2-й набор данных привода (DDS)
Р2166[2] – 3-й набор данных привода (DDS)
Отфильтрованное значение текущей частотыr2169[3]
Показывает отфильтрованное значение частоты, участвующее в организации предупреждений и аварий.
Порог срабатывания моментаР2174[3]
Задается порог срабатывания для сравнения с текущим моментом.
Р2174[0] – 1-й набор данных привода (DDS)
Р2174[1] – 2-й набор данных привода (DDS)
Р2174[2] – 3-й набор данных привода (DDS)
0
10000
(10)
мСек
0
10000
(10)
мСек
Гц 2
0,0
99999
(5,13)
Nm
2
2
2
Время задержки для сравнения моментовР2176[3]
Задается время задержки для сравнения моментов текущего с пороговым значением.
Р2176[0] – 1-й набор данных привода (DDS)
Р2176[1] – 2-й набор данных привода (DDS)
Р2176[2] – 3-й набор данных привода (DDS)
0
10000
(10)
мСек
2
97
Page 98

Руководство пользователя преобразователей MICROMASTER 440
Р2177[3]
Время задержки для определения заклинивания приво-
да
Задается время для определения заклинивания двигателя.
Р2177[0] – 1-й набор данных привода (DDS)
Р2177[1] – 2-й набор данных привода (DDS)
Р2177[2] – 3-й набор данных привода (DDS)
Время задержки для определения остановки приводаР2178[3]
Задается время для определения остановки двигателя.
Р2178[0] – 1-й набор данных привода (DDS)
Р2178[1] – 2-й набор данных привода (DDS)
Р2178[2] – 3-й набор данных привода (DDS)
Предел тока для определения отключения нагрузкиР2179
Задает величину тока в % по отношению к Р0305 для срабатывания предупреждения А0922 (потеря нагрузки).
Обратите внимание на постоянное наличие нагрузки на двигатель.
Примечание
Если после запуска двигателя ток не превысит установленный предел, то через время в Р2180 сформируется сигнал
отключения нагрузки А0922.
0
10000
(10)
мСек
0
10000
(10)
мСек
0
10
(3)
%
2
2
3
Р2181[3]
Время срабатывания по отклонению нагрузкиР2180
Устанавливается время задержки для определения сброса
нагрузки по минимальному току.
Способ обнаружения отказа ремней привода с механиз-
мом
Позволяет косвенными методами определить неисправность в ременной передаче привода – обрыв, ослабление
передачи и т.д.
Применяются два способа определения неисправности – по
программируемой зависимости момент/скорость двигателя
или по импульсному датчику вращения, устанавливаемому
на механизме привода.
Значения
0 – отключение обнаружение отказа
1 – предупреждение о низком соотношении момент/скорость
2 – предупреждение о высоком соотношении мо-
мент/скорость
3 – предупреждение об отклонении соотношения мо-
мент/скорость (выше/ниже)
4 – отключение при низком соотношении момент/скорость
5 - отключение при высоком соотношении момент/скорость
6 - отключение при соотношении момент/скорость (вы-
ше/ниже)
0
10000
(2000)
мСек
0
6
(0)
3
2
Р2181[0] – 1-й набор данных привода (DDS)
Р2181[1] – 2-й набор данных привода (DDS)
Р2181[2] – 3-й набор данных привода (DDS)
98
Page 99

Руководство пользователя преобразователей MICROMASTER 440
Задание частоты 1 для функции обнаруженияР2182[3]
Устанавливает частоту 1 для сравнения фактического момента с заданными значениями для обнаружения.
Функция задается 3-мя значениями частоты (Р2182-Р2184) и
6-ю значениями момента (Р2185-Р2190), согласно приведенному ниже рисунку.
0
650
(5)
Гц
3
Выходы за указанные пределы сигнализирует о работе приводных механизмов.
Р2182[0] – 1-й набор данных привода (DDS)
Р2182[1] – 2-й набор данных привода (DDS)
Р2182[2] – 3-й набор данных привода (DDS)
Задание частоты 2 для функции обнаруженияР2183[3]
Задается точка контроля для графика Р2182 2-й частоты.
Р2183[0] – 1-й набор данных привода (DDS)
Р2183[1] – 2-й набор данных привода (DDS)
Р2183[2] – 3-й набор данных привода (DDS)
Задание частоты 3 для функции обнаруженияР2184[3]
Задается точка контроля для графика Р2182 3-й частоты.
Р2184[0] – 1-й набор данных привода (DDS)
Р2184[1] – 2-й набор данных привода (DDS)
Р2184[2] – 3-й набор данных привода (DDS)
Верхний предел момента для точки 1Р2185[3]
Задается верхний предел момента привода для точки 1
графика Р2182.
Р2185[0] – 1-й набор данных привода (DDS)
Р2185[1] – 2-й набор данных привода (DDS)
Р2185[2] – 3-й набор данных привода (DDS)
Нижний предел момента для точки 1Р2186[3]
Задается нижний предел момента привода для точки 1 графика Р2182.
Р2186[0] – 1-й набор данных привода (DDS)
Р2186[1] – 2-й набор данных привода (DDS)
Р2186[2] – 3-й набор данных привода (DDS)
0
650
(30)
Гц
0
650
(50)
Гц
0
99999
(99999)
Nm
0
99999,0
(0)
Nm
2
2
2
2
Верхний предел момента для точки 2Р2187[3]
Задается верхний предел момента привода для точки 2
графика Р2182.
Р2187[0] – 1-й набор данных привода (DDS)
Р2187[1] – 2-й набор данных привода (DDS)
Р2185[2] – 3-й набор данных привода (DDS)
0
99999
(99999)
Nm
2
99
Page 100
Руководство пользователя преобразователей MICROMASTER 440
Р2188[3]
Р2189[3]
Р2190[3]
Нижний предел момента для точки 2
Задается нижний предел момента привода для точки 2 графика Р2182.
Р2188[0] – 1-й набор данных привода (DDS)
Р2188[1] – 2-й набор данных привода (DDS)
Р2188[2] – 3-й набор данных привода (DDS)
Верхний предел момента для точки 3
Задается верхний предел момента привода для точки 3
графика Р2182.
Р2189[0] – 1-й набор данных привода (DDS)
Р2189[1] – 2-й набор данных привода (DDS)
Р2189[2] – 3-й набор данных привода (DDS)
Нижний предел момента для точки 3
Задается нижний предел момента привода для точки 3 графика Р2182.
0
99999,0
(0)
Nm
0
99999
(99999)
Nm
0
99999,0
(0)
Nm
2
2
2
Р2191[3]
Р2192[3]
Р2190[0] – 1-й набор данных привода (DDS)
Р2190[1] – 2-й набор данных привода (DDS)
Р2190[2] – 3-й набор данных привода (DDS)
Отклонение скорости механизма от привода
Задается разрешенное отклонение частоты движения механизма (ленты) по датчику скорости от частоты двигателя.
При превышении этого отклонения разрешается выполнение функции по обнаружению ошибки в работе механизма
привода.
Р2191[0] – 1-й набор данных привода (DDS)
Р2191[1] – 2-й набор данных привода (DDS)
Р2191[2] – 3-й набор данных привода (DDS)
Задержка на определение отклонения скорости
Устанавливается время задержки на реализацию проверки и
срабатывания функций Р2191.
Р2192[0] – 1-й набор данных привода (DDS)
Р2192[1] – 2-й набор данных привода (DDS)
Р2192[2] – 3-й набор данных привода (DDS)
0
20
(3)
Гц
0
65
(10)
Сек
2
2
100
 Loading...
Loading...