

Page 1

! 05/2002
MicroMaster 440
Page 2

MICROMASTER 440 文件
入门指南
用 SDP 和 BOP 进行快速调试。
操作说明书
给出与 MM440 特点有关的信息,即安装,调试,控制方式,系统参数的
结构,故障的排除,技术规格和用户可选用的 MM440 可选件。
参数表
参数表中给出实现变频器功能的所有参数的说明和详细的解释。参数表中
还包括若干功能图。
参考手册
参考手册中给出关于工程设计,通讯,排障和维护的详细资料。
产品样本
产品样本中您可以找到有关变频器选型,以及选择滤波器,电抗器,操作
面板和通讯模块选件所需的一切必要的资料。
Page 3

概况
1
MICROMASTER 440 变频器
0.12 kW - 200 kW
使用大全
用户文件
安装
调试
MICROMASTER 440 的使用
系统参数
排障
MICROMASTER 440 的技术规格
可选件
电磁兼容性
MICROMASTER 440 变频器的参数表
功能框图
2
3
4
5
6
7
8
9
10
11
合法出版物 版本 05/02
变频器型号 软件版本
MICROMASTER 440 V2.0
0.12 kW - 200 kW
二进制互联连接(BiCo)功能
通讯
高级操作板(AOP)
编码器
制动电阻
选件安装图
附录
12
13
14
15
16
17
A
B
C
D
E
F
版本 05/02
Page 4

更多的信息可在互联网上查阅,网址:
http://www.siemens.de/micromaster
说明:UL 认证现在正在进行中!
核准的西门子软件和培训标准是:
DIN ISO 9001,注册登记号: 2160-01
未经书面许可,不得翻印、传播、或使用本手册及其相关内
容。违者将对所造成的损害负法律责任。西门子公司保留一切
权利,包括由专利许可、实用样机注册、或工程设计等所产生
的所有权利。
© Siemens AG 2001。保留一切权利。
MICROMASTER® 是西门子公司已注册的商标。
订货号:6SE6400-5CA00-0BP0
本手册中对某些有效的功能可能未加说明。但是,在新的控制装
置中或进行服务时,并不因为西门子公司提供了这些功能而要承
担任何责任。
编审过程中,我们对本手册的内容与所述的硬件和软件的一致性
进行了审核。但是,仍然可能存在矛盾和谬误的地方,不可能保
证它们完全一致。我们将定期检查本手册中涵盖的内容,并在以
后修订的版本中予以必要的修正。欢迎提出改进的建议。
西门子公司的手册都是用无氯纸张印刷的,这种纸张的生产来源
予可持续生长的森林。打印和装订的过程中未使用化学溶剂。
保留不予先通知而修改本手册的权利。
Siemens-Aktiengesellschaft
Page 5

前言
用户文件
警告
在安装和调试变频器之前,请您务必阅读以下安全规则和警告,以及设备上粘贴的所有警
示标志。确保警示标志置于醒目的地方,并更换已脱落或损坏的标志。
由以下各处得到的信息也是有效的:
纽伦堡技术支持部
纽伦堡
电 话: +49 (0) 180 5050 222
传真: +49 (0) 180 5050 223
Email: techsupport@ad.siemens.de
星期一至星期五:上午 7:00 至下午 5:00 (当地时间)
前言
西门子(中国)有限公司技术支持部
北京
电话: 010 – 64738566
传真: 010 – 64731096,64719783
Email: adcs@pek1.siemens.com.cn
互联网地址
用户可以在以下网址查到技术资料和一般信息:
http://www.ad.siemens.com.cn/products/sd。
联系地址:
如果您在阅读本手册时有什麽疑问或问题,请根据本手册封底的地址与西门子公司的办事处联
系。
MICROMASTER 440 使用大全
i
Page 6

前言
报警信息及其含义
危险
!
!
!
本手册以及变频器上带有“警示标志”的“危险”是指,如果不遵守有关要求,不采取相应
措施,就会造成死亡或严重的人身伤害。
警告
本手册以及变频器上带有“警示标志”的“警告”是指,如果不遵守有关要求,不采取相应
措施,就存在有可能造成死亡或严重人身伤害的潜在危险。
注意
本手册以及变频器上带有“警示标志”的“注意”是指,如果不遵守有关要求,不采取相应
措施,就存在导致轻度或中等程度人身伤害的潜在危险。
注意
本手册以及变频器上不带“警示标志”的“注意”是指,如果不遵守有关要求,不采取相应
措施,就存在导致财产损失的潜在危险。
提示
本手册中的“提示”是指,如果使用者对提示的问题不加注意,就可能出现不希望有的结果
或状态。
说明
本手册中的“说明”是指出有关产品的重要信息,手册中的黑体字部分是要特别加以注意的
问题。
经过认证的人员
本手册以及变频器的标志上所谓“经过认证的人员”是指,在本设备上进行工作的人员必须
熟悉设备的安装,调试以及投入运行的步骤和要求,并能避免生产中出现的各种紧急情况。
他(她)们还必须具备下列条件:
1. 受过专门培训并考试合格,能够按照常规和本手册规定的安全操作步骤的要求对电路和
设备进行上电,断电,清扫,接地和线路连接等各种操作。
2. 受过培训,能够按照常规和本手册规定的安全操作步骤的要求,正确进行保护设备的维
护和使用。
3. 受过急救方面的培训。
♦ PE-通过接地导体的保护性接地,接地导体的截面大小应能保证在短路情况下接地点的
电压不超过 50 伏。通常,该点用于变频器的接地。
♦
只能用于指定的应用领域
-接地点,其参考电压可达到与地电压相同的值。通常,该点用于电动机的接地。
本变频器只能用于手册中指明的应用领域,而且只能与西门子公司推荐和认可的器件和部件一起
使用。
ii
MICROMASTER 440 使用大全
Page 7

安全指导
以下的“警告”,“注意”和“提示”是为了您的安全而提出的,是防止设备或与其连接的部件
受到损伤而采取的一项措施。在处理 MICROMASTER440 变频器的相关事项时,通常都要涉及本
节中列出的“警告”,“注意”和“提示”,它们分为以下几类:常规的,有关运输和存放,调
试,操作,维修以及拆卸和废品处理的。
特殊的“警告”,“注意”和“提示”:适用于特殊的操作,放在有关章节的开头,并在该章节
需要的地方再加以重复或补充。
请仔细阅读这些“警告”,“注意”和“提示”,因为它们为您提供了人身安全的保障,并且有
助于延长 MICROMASTER 440 变频器以及与之连接的设备的使用寿命。
常规的
!
前言
警告
♦ 本设备带有危险电压,而且它所控制的是带有潜在危险的转动机件。如果不遵守“警
告”的规定,或不按本手册的要求进行操作,就可能会造成死亡,严重的人身伤害或重
大的财产损失。
♦ 只有经过认证合格的专业人员才允许操作本设备,并且在使用设备之前要熟悉本手册中
所有的安全说明和有关安装,操作和维护的规定。正确地进行搬运装卸,就位安装和操
作维护,是实现本设备安全和成功地投入运行的可靠保证。
♦ 注意触电的危险。即使电源已经切断,变频器的直流回路电容器上仍然带有危险电压,
因此,在电源关断 5 分钟以后才允许打开本设备。
♦ 以“马力”为单位的额定功率是根据西门子的 1LA 电动机给出的,而且仅仅是指导性
的;它们不一定与 UL 或 NEMA 以马力为单位的额定功率一致。
注意
!
♦ 防止儿童和公众接触或接近本设备!
♦ 本设备只能按照制造商规定的用途来使用。未经授权的改装或使用非本设备制造商所出
售或推荐的零配件,可能导致火灾,触电和其它伤害。
提示
♦ 请将本“手册”放在变频设备附近容易找到的地方,保证所有的使用人员都使用方便。
♦ 在处于运行状态的带电设备上进行测量或测试时,必须遵守安全法规 VBG4.0 的规定,
特别是其第§8 节关于“带电部件上工作时允许的安全距离”的规定。实际操作时,应
该使用适当的电子器具。
♦ 在安装和调试变频器之前,请您务必仔细阅读这些安全规则和警告,以及设备上粘贴的
所有警示标志。确保警示标志置于醒目的地方,并更换已脱落或损坏的标志。
MICROMASTER 440 使用大全
iii
Page 8

前言
有关运输和存放的
!
!
有关调试的
!
警告
♦ 正确的运输,存放,就位和安装,以及细心地操作和维护,对于变频器的正常和安全
运行是至关重要的。
注意
♦ 在运输和存放期间要保证变频器不致遭受物理性的冲击和振动。也必须保证它不受雨淋
和不放在环境温度过高的地方 (参看表
警告
♦ 未经培训合格的人员在变频器的器件/系统上工作或不遵守“警告”中的有关规定,就
可能造成严重的人身伤害或重大的财产损失。只有在设备的设计,安装,调试和运行方
面受过培训的经过认证合格的专业人员才允许在本设备的器件/系统上进行工作。
♦ 输入电源线只允许永久性紧固连接。设备必须接地 (按照 IEC 536 Class 1,NEC 和其
它适用的标准)。
♦ 如果采用剩余电流保护器 (RCD) ,必须是 B 型 RCD。设备由三相电源供电,并装有
EMC 滤波器时,一定不要通过接地泄漏断路器 ELCB (Earth Leakage Circuit-Breaker -
参看
DIN VDE 0160 标准,第 5.5.2 节和 EN50178 第 5.2.11.1 节
♦ 即使变频器处于不工作状态,以下端子仍然可能带有危险电压:
- 电源端子 L/L1,L1,N/L2,L2,L3。
- 连接电动机的端子 U,V,W
- 以及 DC+ / B+,DC- ,B- 以及 DC / R+ 端子
♦ 本设备不可作为‘紧急停车机构’使用
7-1
)。
(参看 EN 60204,9.2.5.4)
)与 电源连接。
!
注意
与变频器连接的电源电缆,电动机电缆和控制电缆都必须按照图 2-13 所示的方式进行连
接,以避免由于变频器工作所造成的感性和容性干扰。
iv
MICROMASTER 440 使用大全
Page 9

有关运行的
前言
!
有关维修的
警告
♦ MICROMASTER 变频器是在高电压下运行。
♦ 电气设备运行时,设备的某些部件上不可避免地存在危险电压。
♦ 按照 EN60204IEC204(VDE0113)的要求,“紧急停车设备”必须在控制设备的所有工
作方式下都保持可控性。无论紧急停车设备是如何停止运转的,都不能导致不可控的或
者未曾予料的再次起动。
♦ 无论故障出现在控制设备的什么地方都有可能导致重大的设备损坏,甚至是严重的人身
伤害(即存在潜在的危险故障),因此,还必须采取附加的外部预防措施或者另外装设用
于确保安全运行的装置,即使在故障出现时也应如此(例如,安装独立的限流开关,机
械连锁等)。
♦ 在输入电源中断之后,一定的参数设置可能会造成变频器的自动再起动。
♦ 为了保证电动机的过载保护能够正确动作,输入变频器的电动机参数必须与实际使用的
电动机完全相符。
♦ 本设备可按照 UL508C 第 42 节的要求在变频器内部提供电动机过载保护功能。根据
P0610(第访问级)和 P0335,I
也可以采用外部 PTC(缺省情况下,由 P0601 禁止这一功能) 经由数字输入来实现。
♦ 本设备适合用于回路对称容量不大于 10,000 安培(均方根值)的地方,具有 H 或 K 型
熔断器保护(参看第 7 章的附表
♦ 本设备不可作为‘紧急停车机构’使用
2
t 保护功能是在缺省情况下投入。电动机的过载保护功能
)
时,最大电压为 230V/460V/575V 。
(参看 EN 60204,9.2.5.4)
!
警告
♦ 设备的维修只能由西门子公司的服务部门,西门子公司授权的维修中心或经过认证合格
♦ 任何有缺陷的部件和器件都必须用相应的备件更换。
♦ 在打开设备进行维修之前,一定要断开电源。
有关拆卸和废品处理的
注意
♦ 变频器的包装箱是可以重复使用的。请保管好包装箱以备将来使用或把它返还给制造
♦ 易卸螺丝和快速插接器便于您拆卸设备的部件。您可以回收这些拆卸下来的部件,并根
的人员进行,这些人员应当十分熟悉本手册中提出的所有警告和操作步骤。
商。
据地方当局的要求进行处理,或把它们返还给制造商。
MICROMASTER 440 使用大全
v
Page 10

目录
目录
1 概况 ....................................................................................................................................................1-1
1.1 MICROMASTER 440 通用型变频器 .................................................................................... 1-2
1.2 特点...................................................................................................................................... 1-2
2 安装 ....................................................................................................................................................2-1
2.1 变频器在长期存放后的安装 ................................................................................................. 2-3
2.2 变频器运行的环境条件.........................................................................................................2-4
2.3 机械安装 .............................................................................................................................. 2-5
2.3.1 外形尺寸为 A 型时标准导轨的安装方法 ............................................................ 2-11
2.3.2 电子控制箱中选件的安装...................................................................................2-12
2.4 电气安装 ............................................................................................................................ 2-13
2.4.1 概述 ................................................................................................................... 2-13
2.4.2 电源和电动机的连接..........................................................................................2-14
2.4.3 电磁干扰 (EMI) 的防护.......................................................................................2-19
2.4.4 屏蔽的方法 ........................................................................................................2-20
3 调试 ....................................................................................................................................................3-1
3.1 方框图.................................................................................................................................. 3-3
3.1.1 接线端子的标准设置............................................................................................ 3-4
3.1.2 模拟输入 .............................................................................................................. 3-4
3.2 调试方法 .............................................................................................................................. 3-5
3.2.1 用状态显示屏 (SDP)进行调试 .............................................................................. 3-6
3.2.2 用 BOP 或 AOP 进行调试的简要说明.................................................................. 3-7
3.2.2.1 用基本操作板( BOP) 进行调试 ............................................................ 3-8
3.2.2.2 用高级操作板( AOP) 调试变频器.......................................................3-11
3.2.3 BOP / AOP 的调试功能......................................................................................3-11
3.2.3.1 快速调试 (P0010=1) .......................................................................... 3-11
3.2.4 复位为出厂时变频器的缺省设置值 ....................................................................3-14
3.3 常规操作 ............................................................................................................................ 3-15
4 MICROMASTER 440 的使用 .............................................................................................................4-1
4.1 频率设定值
4.2 命令源
4.3 停车和制动功能 ................................................................................................................... 4-3
4.3.1 OFF1 ...................................................................................................................4-3
4.3.2 OFF2 ...................................................................................................................4-4
4.3.3 OFF3 ...................................................................................................................4-4
4.3.4 直流注入制动....................................................................................................... 4-4
4.3.5 复合制动 .............................................................................................................. 4-4
4.3.6 用外接制动电阻进行动力制动 ............................................................................. 4-5
4.4 控制方式(P1300) .................................................................................................................. 4-5
4.5 MICROMASTER 440 变频器的扩展功能 ............................................................................. 4-6
4.6 故障和报警........................................................................................................................... 4-6
(P1000).............................................................................................................. 4-2
(P0700)..................................................................................................................... 4-3
vi
MICROMASTER 440 使用大全
Page 11

目录
5 系统参数.............................................................................................................................................5-1
5.1 MICROMASTER 系统参数的简要介绍 ................................................................................ 5-2
5.1.1 访问级.................................................................................................................. 5-2
5.2 参数概览 .............................................................................................................................. 5-3
5.3 参数表
5.4 命令数据组和驱动数据组
(简略形式)................................................................................................................. 5-4
- 概览 ...................................................................................... 5-22
6 故障的排除 .........................................................................................................................................6-1
6.1 用
6.2 利用基本操作面板(
SDP 排障 .........................................................................................................................6-2
BOP)排障 .........................................................................................6-3
6.3 故障信息 .............................................................................................................................. 6-3
6.4 报警信息 .............................................................................................................................. 6-7
7 MICROMASTER 440 的技术规格......................................................................................................7-1
8 可选件 ................................................................................................................................................8-1
8.1 各种独立的选件 ................................................................................................................... 8-1
8.2 各种附属的选件 ................................................................................................................... 8-1
9 电磁兼容性 (EMC)..............................................................................................................................9-1
9.1 电磁兼容性
(EMC)................................................................................................................9-2
9.1.1 自我保证 .............................................................................................................. 9-2
9.1.2 技术支持文件....................................................................................................... 9-2
9.1.3 EC 形式的试验证书 ............................................................................................. 9-2
9.1.4 采用的 EMC 规范符合新近实施的谐波规程的有关要求 ...................................... 9-2
9.1.5 EMC 特性的分类 ................................................................................................. 9-3
10 MICROMASTER 440 变频器的参数表.............................................................................................10-1
10.1 MICROMASTER 440 变频器的系统参数简介.................................................................... 10-2
10.2 快速调试
10.3 命令和驱动数据组
(P0010=1)...........................................................................................................10-4
- 概览 .................................................................................................10-5
10.4 参数的说明......................................................................................................................... 10-6
11 功能框图...........................................................................................................................................11-1
12 二进制互联连接(BICO)功能.........................................................................................................12-1
12.1 概述....................................................................................................................................12-2
12.2 怎样进行 B
12.3 B
12.4 B
ICO 控制字和状态字的用法.............................................................................................. 12-4
ICO 的连接 ....................................................................................................................... 12-5
ICO 设置?........................................................................................................ 12-2
13 通讯 ..................................................................................................................................................13-1
13.1 采用的串行通讯接口 .......................................................................................................... 13-2
13.2 串行通讯的工作情况 .......................................................................................................... 13-2
13.2.1 概述 ................................................................................................................... 13-2
13.2.2 RS485 的排障 .................................................................................................... 13-3
13.3 采用通用的串行接口协议................................................................................................... 13-4
13.3.1 通讯报文的结构 .................................................................................................13-4
13.3.2 USS 协议有关信息的详细说明...........................................................................13-4
MICROMASTER 440 使用大全
vii
Page 12

目录
13.3.3 有效的数据字符 .................................................................................................13-5
13.3.4 USS 的任务和应答............................................................................................. 13-7
13.3.5 PKW 举例:.....................................................................................................13-10
13.3.6 PZD 区域(过程数据区) ................................................................................ 13-12
13.3.7 任务报文(主站→MICROMASTER4) ...........................................................13-12
13.3.8 应答报文(MICROMASTER4→主站) ...........................................................13-14
13.3.9 MICROMASTER4 有关 USS 通讯的参数设置..................................................13-16
13.3.10 基本设定 .......................................................................................................... 13-16
13.3.11 一般的高级设置 ...............................................................................................13-17
13.3.12 较复杂的高级设置 ........................................................................................... 13-17
13.3.13 与早期 MICROMASTER 产品的兼容性 ........................................................... 13-18
13.3.14 读出和写入参数 ...............................................................................................13-19
13.3.15 广播方式 .......................................................................................................... 13-20
13.3.16 通过 USS 利用 BiCo(二进制互联连接) ........................................................13-20
13.4 PROFIBUS .......................................................................................................................13-21
13.4.1 概况 ................................................................................................................. 13-21
13.4.2 PROFIBUS 的使用...........................................................................................13-21
13.5 PROFIBUS 模板...............................................................................................................13-22
13.5.1 PROFIBUS 模板的特点.................................................................................... 13-22
14 高级操作板(AOP) ........................................................................................................................14-1
14.1 警告和说明......................................................................................................................... 14-4
14.1.1 特殊键的功能..................................................................................................... 14-4
14.2 应用举例 ............................................................................................................................ 14-5
14.2.1 采用 AOP 控制单台变频器.................................................................................14-5
14.2.2 网络的配置(RS 485 带控制盘上安装的组合件).............................................14-6
14.2.2.1 网络控制-选择变频器...................................................................... 14-7
14.2.2.2 网络控制 -广播方式.........................................................................14-7
14.2.2.3 网络控制 - PC 方式 ......................................................................... 14-7
14.2.3 参数的“读出” .................................................................................................14-7
14.2.4 参数的“下载” .................................................................................................14-9
14.2.5 AOP 的参数 .....................................................................................................14-10
14.2.6 从站方式和 DriveMonitor 的操作 .................................................................... 14-10
14.2.7 MM3 参数的读出 ............................................................................................ 14-11
14.2.8 定时器的操作................................................................................................... 14-11
14.3 AOP 开始工作..................................................................................................................14-14
14.3.1 接通电源和初始化 ........................................................................................... 14-14
14.3.2 语言文本的选择 ...............................................................................................14-14
14.3.3 开机“帮助”................................................................................................... 14-15
14.3.4 常规的操作屏幕 ...............................................................................................14-15
14.3.5 主菜单(机旁操作方式).................................................................................14-16
14.3.6 请求等待 .......................................................................................................... 14-17
14.4 操作菜单 .......................................................................................................................... 14-17
14.4.1 机旁操作方式下的操作 .................................................................................... 14-17
14.4.1.1 通讯故障.......................................................................................... 14-17
14.4.1.2 显示变频器的状态 ........................................................................... 14-18
14.4.1.3 变频器类型的检验 ........................................................................... 14-18
14.4.2 主站方式下的操作 ........................................................................................... 14-18
14.4.2.1 广播操作方式 .................................................................................. 14-18
viii
MICROMASTER 440 使用大全
Page 13

目录
14.4.2.2 通讯故障.......................................................................................... 14-19
14.5 选择操作方式 ................................................................................................................... 14-19
14.5.1 机旁操作方式................................................................................................... 14-20
14.5.2 主站方式 .......................................................................................................... 14-20
14.5.3 内部方式 .......................................................................................................... 14-20
14.5.4 从站方式 .......................................................................................................... 14-20
14.5.5 PC 方式............................................................................................................14-20
14.6 参数的访问....................................................................................................................... 14-21
14.6.1 标准访问级的参数 ........................................................................................... 14-21
14.6.2 功能键的使用................................................................................................... 14-22
14.6.2.1 屏幕显示滚动功能 ........................................................................... 14-22
14.6.2.2 修改参数数值的某一位数字............................................................. 14-22
14.6.2.3 跳转功能.......................................................................................... 14-22
14.6.3 专家级参数 ......................................................................................................14-22
14.6.3.1 下标参数.......................................................................................... 14-23
14.6.4 AOP 存储的参数组 .......................................................................................... 14-23
14.6.5 工程设计 .......................................................................................................... 14-24
14.7 AOP 设定和组态 .............................................................................................................. 14-24
14.7.1 设定菜单 .......................................................................................................... 14-24
14.7.1.1 背景亮度.......................................................................................... 14-25
14.7.1.2 屏幕对比度 ......................................................................................14-25
14.7.1.3 用大字符显示 .................................................................................. 14-26
14.7.1.4 光标的形式 ......................................................................................14-26
14.7.1.5 开机时的帮助 .................................................................................. 14-26
14.7.1.6 欢迎词 ............................................................................................. 14-26
14.7.1.7 参数组的名称 .................................................................................. 14-27
14.7.1.8 设定时间/日期 ................................................................................. 14-27
14.7.1.9 AOP 复位 ........................................................................................ 14-28
14.8 故障指示 .......................................................................................................................... 14-29
14.8.1 故障屏幕 .......................................................................................................... 14-29
14.8.2 报警屏幕 .......................................................................................................... 14-29
14.8.3 多重故障 .......................................................................................................... 14-30
14.8.4 多重报警 .......................................................................................................... 14-30
14.8.5 故障和报警同时发生........................................................................................14-30
14.8.6 变频器的故障码 ...............................................................................................14-30
14.8.7 变频器的报警码 ...............................................................................................14-30
14.8.8 变频器的故障 / 报警记录(P0947)................................................................ 14-31
15 编码器模板 .......................................................................................................................................15-1
15.1 前言....................................................................................................................................15-2
15.2 一般情况 ............................................................................................................................ 15-3
15.3 安装....................................................................................................................................15-4
15.3.1 准备工作 ............................................................................................................ 15-4
15.3.1.1 变频器的准备工作 ............................................................................. 15-4
15.3.1.2 编码器模板的准备工作...................................................................... 15-5
15.3.2 接线方法的举例 .................................................................................................15-8
15.4 调试....................................................................................................................................15-9
15.4.1 TTL 编码器.......................................................................................................15-10
15.4.2 HTL 编码器 ...................................................................................................... 15-11
MICROMASTER 440 使用大全
ix
Page 14

目录
15.4.3 外接电源 .......................................................................................................... 15-11
15.4.4 编码器模板的参数化........................................................................................15-12
15.5 故障的排除....................................................................................................................... 15-14
15.5.1 LED 指示灯......................................................................................................15-14
15.5.2 故障码.............................................................................................................. 15-15
15.6 编码器模板的技术规格.....................................................................................................15-15
16 MICROMASTER 440 变频器的制动电阻.........................................................................................16-1
16.1 技术数据 ............................................................................................................................ 16-2
16.2 安装....................................................................................................................................16-2
16.3 接线....................................................................................................................................16-2
16.4 制动电阻的接线和外形尺寸 ............................................................................................... 16-3
16.5 制动电阻的选型 ................................................................................................................. 16-4
17 选件安装图 .......................................................................................................................................17-1
附录
A 更换操作面板................................................................................................................................ 附录-1
B 拆卸盖板 ....................................................................................................................................... 附录-2
C 拆卸 I/O 接口板............................................................................................................................. 附录-6
D 拆卸‘Y’形电容链路 .................................................................................................................. 附录-7
E 采用的标准 ................................................................................................................................. 附录-13
F 缩写字母表 ................................................................................................................................. 附录-14
插图
图 2-1 长期存放后投运前变频器的处理 ......................................................................................2-3
图 2-2 变频器工作地点的环境温度.............................................................................................. 2-4
图 2-3 安装地点的海拔高度.........................................................................................................2-4
图 2-4 MICROMASTER 440 (A 至 F)的安装钻孔图..................................................................... 2-7
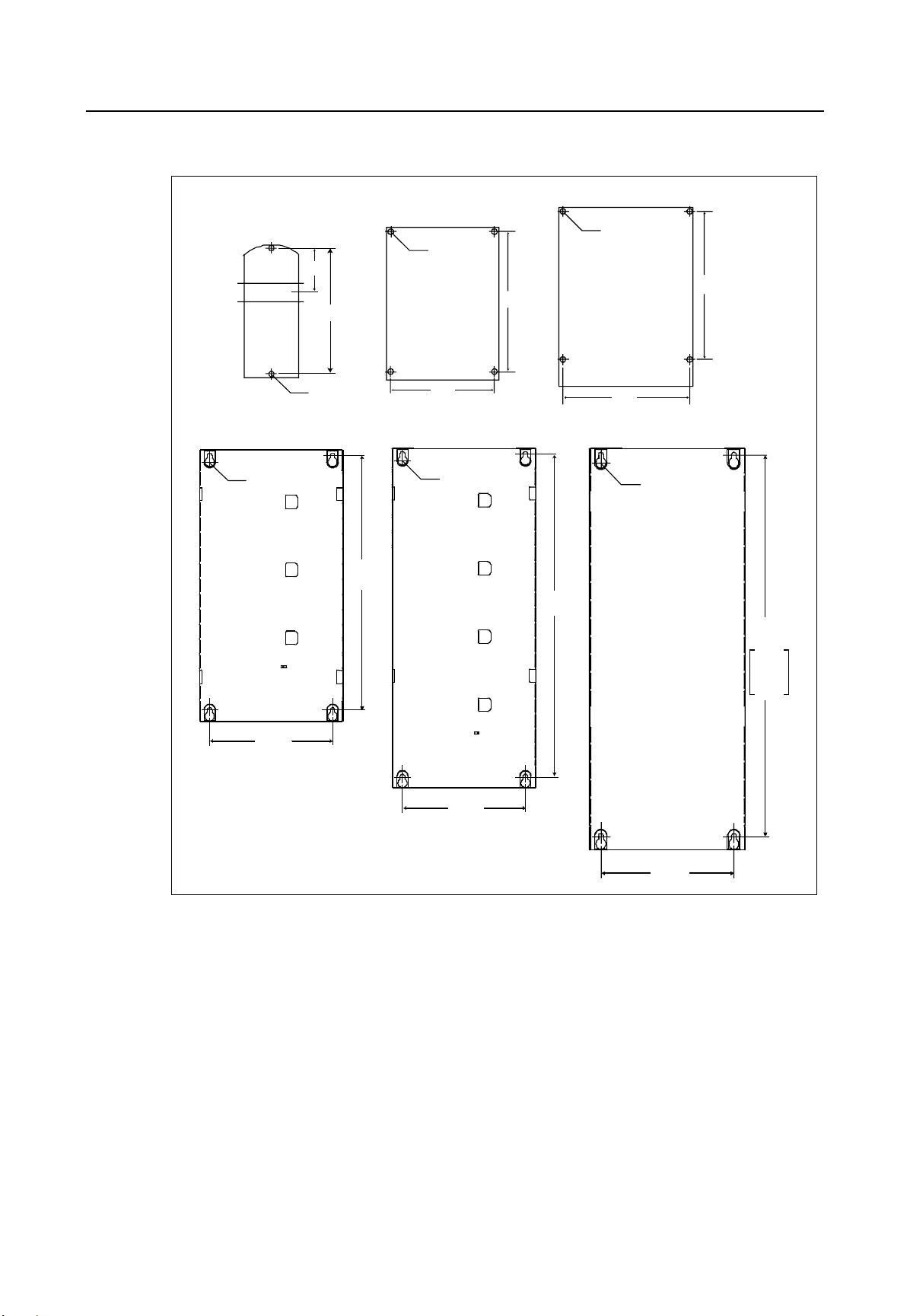
图 2-5 外形尺寸为 FX 的 MICROMASTER 440 变频器的安装钻孔尺寸 ..................................... 2-8
图 2-6 外形尺寸为 GX 的 MICROMASTER 440 变频器的安装钻孔尺寸..................................... 2-9
图 2-7 电子控制箱中的选件.......................................................................................................2-12
图 2-8 MICROMASTER 440 的接线端子 .................................................................................. 2-15
图 2-9 MICROMASTER 440 的接线图– 外形尺寸为 FX............................................................ 2-16
图 2-10 MICROMASTER 440 的接线图 – 外形尺寸为 GX .......................................................... 2-17
图 2-11 电动机和电源的接线方法 ............................................................................................... 2-18
图 2-12 冷却风机电源电压的匹配 ............................................................................................... 2-19
图 2-13 把电磁干扰的影响降到最小的布线方法..........................................................................2-20
图 3-1 变频器的方框图................................................................................................................ 3-3
图 3-2 模拟输入作为数字输入时外部线路的连接........................................................................ 3-4
图 3-3 适用于 MICROMASTER 440 变频器的操作面板..............................................................3-5
图 3-4 DIP 开关 ........................................................................................................................... 3-5
图 3-5 用 SDP 进行的基本操作 ...................................................................................................3-7
图 3-6 基本操作面板(BOP)上的按钮 ...................................................................................... 3-9
x
MICROMASTER 440 使用大全
Page 15

表格
目录
图 3-7 用 BOP 修改参数............................................................................................................3-10
图 3-8 典型的电动机铭牌举例................................................................................................... 3-14
图 5-1 参数概览........................................................................................................................... 5-3
图 13-1 典型的 RS485 多站接口 .................................................................................................13-3
图 13-2 通讯报文的结构..............................................................................................................13-4
图 13-3 地址(ADR)的位号 ...................................................................................................... 13-4
图 13-4 有效的数据字符..............................................................................................................13-5
图 15-1 编码器模板的外观 .......................................................................................................... 15-3
图 15-2 变频器的铭牌 ................................................................................................................. 15-4
图 15-3 选件的安装顺序.............................................................................................................. 15-5
图 15-4 屏蔽接线端和 PE 端子.................................................................................................... 15-5
图 15-5 编码器模板上的 LED 指示灯 ..........................................................................................15-6
图 15-6 编码器模板的 DIP 开关................................................................................................... 15-7
图 15-7 TTL 编码器的接线 (5V DC) .............................................................................................15-8
图 15-8 HTL 编码器的接线 (18V DC) ..........................................................................................15-8
图 15-9 具有外接电源的编码器................................................................................................... 15-9
图 15-10 编码器模板的安装方法................................................................................................. 15-10
图 15-11 编码器模板上的 LED 指示灯 ........................................................................................15-14
表 2-1 MICROMASTER 440 变频器的外形尺寸和螺丝紧固扭矩.............................................. 2-10
表 3-1 用 SDP 进行操作的缺省设置 ............................................................................................3-6
表 3-2 用 BOP 操作时的缺省设置值 ........................................................................................... 3-8
表 6-1 SDP 上 LED 指示的变频器状态........................................................................................ 6-2
表 7-1 MICROMASTER 440 的技术规格 .................................................................................... 7-2
表 7-2 固定功率端子的扭矩......................................................................................................... 7-3
表 7-3 随着脉冲频率的增加而降低的输出电流............................................................................ 7-4
表 7-4 MICROMASTER 440 的技术规格 .................................................................................... 7-5
表 9-1 允许的谐波电流发射......................................................................................................... 9-3
表 9-2 第 1 类-通用工业型产品................................................................................................. 9-3
表 9-3 第 2 类-具有滤波器的工业型产品...................................................................................9-4
表 9-4 第 3 类-适用于居民区,商业和轻工业的带有滤波器的产品........................................... 9-4
表 9-5 产品型号表 ....................................................................................................................... 9-5
表 12-1 BiCo 的连接(r0019 至 r0054)..................................................................................... 12-5
表 12-2 BiCo 的连接(r0055 至 r1119)..................................................................................... 12-6
表 12-3 BiCo 的连接(r1170 至 r2050)..................................................................................... 12-7
表 12-4 BiCo 的连接(r2053 至 r2294)..................................................................................... 12-8
表 13-1 任务识别标记 ID 的定义 ................................................................................................. 13-1
表 13-2 应答识别标记 ID 的定义 ................................................................................................. 13-8
表 13-3 对应答识别标记 ID 的错误数值=“任务不能执行”的定义.............................................. 13-9
表 13-4 PZD 区的结构...............................................................................................................13-12
表 13-5 变频器的控制字(STW)............................................................................................. 13-12
表 13-6 变频器的状态字(PZD).............................................................................................. 13-14
表 13-7 实际例子....................................................................................................................... 13-15
表 13-8 比较表(MICROMASTER4/早期生产的 MIsCROMASTER 变频器)..........................13-19
表 13-9 PROFIBUSSUB-D 插座的插针功能分配....................................................................... 13-24
表 13-10 与数据传输速率相应的最大电缆长度 ........................................................................... 13-24
表 13-11 插头/座和电缆的订货号................................................................................................ 13-24
MICROMASTER 440 使用大全
xi
Page 16

目录
表 13-12 技术数据.......................................................................................................................13-25
表 13-13 有关 PROFIBUS 的订货资料 ........................................................................................13-25
表 15-1 编码器模板的连接端子 ...................................................................................................15-6
表 15-2 DIP 开关的设定值...........................................................................................................15-7
表 15-3 编码器模板的参数 ........................................................................................................ 15-12
表 15-4 编码器的 LED 显示 ....................................................................................................... 15-14
表 15-5 编码器的技术规格 ........................................................................................................ 15-15
xii
MICROMASTER 440 使用大全
Page 17

1 概况
本章的内容有:
MICROMASTER 440 系列变频器的主要特点。
1.1 MICROMASTER 440 通用型变频器 .................................................................................... 1-2
1.2 特点...................................................................................................................................... 1-2
概况
MICROMASTER 440 使用大全
1-1
Page 18

概况
1.1 MICROMASTER 440 通用型变频器
MICROMASTER 440 是用于控制三相交流电动机速度的变 频器系列。本系列有多种型 号,额定
功率范围从 120W 到 200kW(恒定转矩(CT)控制方式),或者可达 250 kW(可变转 矩(VT)控制方
式) ,供用户选用。
本变频器由微处理器控制,并采用具有现代先进技术水平的绝缘栅双极型晶体管(IGBT)作为功
率输出器件。因此,它们具有很高的运行可靠性和功能的多样性。其脉冲宽度 调制的开关频率是
可选的,因而降低了电动机运行的噪声。全面而完善的保护功能为变频器和电动机提供了良好的
保护。
MICROMASTER 440 具有缺省的工厂设置参数,它是给数量众多的简单的电动机控制 系统供电
的理想变频驱动装置。由于 MICROMASTER 440 具有全面而完善的控制功 能,在设置相关参数
以后,它也可用于更高级的电动机控制系统。
MICROMASTER 440 既可用于单独驱动系统,也可集成到‘自动化系统’中。
1.2 特点
主要特性
¾ 易于安装,参数设置和调试
¾ 易于调试
¾ 牢固的 EMC 设计
¾ 可由 IT (中性点不接地)电源供电
¾ 对控制信号的响应是快速和可重复的
¾ 参数设置的范围很广,确保它可对广泛的应用对象进行配置
¾ 电缆连接简便
¾ 具有多个继电器输出
¾ 具有多个模拟量输出 (0 - 20 mA)
¾ 6 个带隔离的数字输入,并可切换为 NPN/PNP 接线
¾ 2 个模拟输入:
♦ AIN1:0 - 10 V,0 - 20 mA 和 -10 至 +10 V
♦ AIN2:0 - 10 V,0 - 20 mA
¾ 2 个模拟输入可以作为第 7 和第 8 个数字输入
¾ BiCo (二进制互联连接)技术
¾ 模块化设计,配置非常灵活
¾ 脉宽调制的频率高,因而电动机运行的噪音低
¾ 详细的变频器状态信息和全面的信息功能
¾ 有多种可选件供用户选用:用于与 PC 通讯的通讯模块,基本操作面板 (BOP),高级操作面板
(AOP),用于进行现场总线通讯的 PROFIBUS 通讯模块
1-2
MICROMASTER 440 使用大全
Page 19

性能特征
概况
> 矢量控制
♦ 无传感器矢量控制(SLVC)
♦ 带编码器的矢量控制(VC)
> V / f 控制
♦ 磁通电流控制 (FCC) ,改善了动态响应和电动机的控制特性
♦ 多点 V/f 特性
> 快速电流限制 (FCL)功能,避免运行中不应有的跳闸
> 内置的直流注入制动
> 复合制动功能改善了制动特性
> 内置的制动单元(仅限外形尺寸为 A 至 F 的 MM440 变频器)
> 加速 / 减速斜坡特性具有可编程的平滑功能
♦ 起始和结束段带平滑圆弧
♦ 起始和结束段不带平滑圆弧
> 具有比例,积分和微分( PID)控制功能的闭环控制
> 各组参数的设定值可以相互切换
♦ 电动机数据组(DDS)
♦ 命令数据组和设定值信号源(CDS)
> 自由功能块
> 动力制动的缓冲功能
> 定位控制的斜坡下降曲线
保护特性
过电压 / 欠电压保护
变频器过热保护
接地故障保护
短路保护
2
I
t 电动机过热保护
PTC/KTY 电动机保护
MICROMASTER 440 使用大全
1-3
Page 20

概况
1-4
MICROMASTER 440 使用大全
Page 21

2 安装
本章的内容有:
¾ 有关安装的一般数据
¾ 变频器的外形尺寸
¾ 最大限度地降低电磁干扰影响的布线原则
¾ 关于电气安装的细节
2.1 变频器在长期存放后的安装 ................................................................................................. 2-3
2.2 变频器运行的环境条件.........................................................................................................2-4
2.3 机械安装 .............................................................................................................................. 2-5
2.4 电气安装 ............................................................................................................................ 2-13
安装
2.3.1 外形尺寸为 A 型时标准导轨的安装方法 ............................................................ 2-11
2.3.2 电子控制箱中选件的安装...................................................................................2-12
2.4.1 概述 ................................................................................................................... 2-13
2.4.2 电源和电动机的连接..........................................................................................2-14
2.4.3 电磁干扰 (EMI) 的防护.......................................................................................2-19
2.4.4 屏蔽的方法 ........................................................................................................2-20
MICROMASTER 440 使用大全
2-1
Page 22

安装
警告
♦ 未经培训合格的人员在变频器的器件/系统上工作或不遵守“警告”中的有关规定,就
可能造成严重的人身伤害或重大的财产损失。只有在设备的设计,安装,调试和运行方
面受过培训的经过认证合格的专业人员才允许在本设备的器件/系统上进行工作。
♦ 输入电源线只允许永久性紧固连接。设备必须接地 (按照 IEC 536 Class 1,NEC 和其
它适用的标准)。
♦ 外形尺寸为 A 至 F 的 MM440 变频器只能采用 B 型 ELCB (接地泄漏断路器-Earth
Leakage Circuit-Breaker )。设备由三相电源供电,而且带 有 EMC 滤波器时,一定 不
要通过接地泄漏断路器 ELCB ( 参看
5.2.11.1 节
) 与电 源连接。
DIN VDE 0160 标准,第 5.5.2 节和 EN50178 第
♦ 即使变频器处于不工作状态,以下端子仍然可能带有危险电压:
- 电源端子 L/L1,N/L2,L3。
- 连接电动机的端子 U,V,W
♦ - 此外,还有端子:DC+/B+,DC-,B-和 DC/R+
♦ 在电源开关断开以后,必须等待 5 分钟,使变频器放电完毕,才允许开始安装作业
♦ 本设备不可作为‘紧急停车机构’使用 (参看 EN 60204,9.2.5.4)
♦ 接地导体的最小截面积必须等于或大于供电电源电缆的截面积
♦ 如果卸下了前面的盖板(仅指外形尺寸为 FX 和 GX 的 MM440 变频器),风机的叶片便
显露出来。当风机正在转动时,存在着造成人身伤害的危险。
注意
连接到变频器的供电电源电缆,电动机电缆和控制电缆必须按照下面图 2-13 所示的方式进
行连接,避免由于变频器工作所造成的感性和容性干扰。
2-2
MICROMASTER 440 使用大全
Page 23

2.1 变频器在长期存放后的安装
如果变频器的存放时间超过 2 年后进行安装,您必须对其中的电容器重新进行处理。
外形尺寸为 A 至 F 的 MM440 变频器:
电压
[%]
100
75
安装
50
0,5 1
图 2-1 长期存放后投运前变频器的处理
外形尺寸为 FX 和 GX 的 MM440 变频器:
处理的方法是在变频器空载的情况下施加 85% 的额定输入电源电压,加压时间至少 30 分钟。
存放时间不超过
存放时间为
存放时间为
存放时间为
2468
年
1
年 在投运之前, 预加电压1小时
1 至 2
年投运之前
2 至 3
年以上 投运之前, 按照曲线作加压处理
3 年或3
无需处理
按照曲线作加压处理
,
时间
t [h]
MICROMASTER 440 使用大全
2-3
Page 24

安装
)
)
2.2 变频器运行的环境条件
温度
外形尺寸 A 至 F: 外形尺寸 FX 和 GX:
允许的输出电流(%)
Permissible output current
[%]
100
75
允许的输出电流 (%)
Permissible output current
[%]
100
95
90
湿度范围
海拔高度
-10
50
constant torque
25
0
variable torque
20 301040
60
50
Ambient temperature
环境温度 环境温度
[癈]
85
0203010 40
[
50 55
45
Ambient temperature
癈
]
图 2-2 变频器工作地点的环境温度
空气的相对湿度 ≤ 95 % ,无结露
如果变频器安装在海拔高度 > 1000 mm 或 > 2000 m 的地方 ,其功率降格的要求如下图所示:
允许的输出电流
Permissible output current
100
%
85
80
外形尺寸为
Frame Sizes
FX 和 GX
FX and GX
Frame Sizes
A to F
外形尺寸
为 A 至 F
允许的输入电压
Permissible input voltage
100
%
80
77
冲击和振动
2-4
0 1000
Installation altitude in m above sea level
安装地点的海拔高度(M)
2000
3000 4000
M
0 1000
Installation altitude in m above sea level
安装地点的海拔高度(M)
2000
3000 4000
M
图 2-3 安装地点的海拔高度
不允许变频器掉到地下或遭受突然的撞击。不允许把变频器安装在有可能经常受到振动的地方。
DIN IEC 68-2-6 规定的机械强度如下:
偏移: 0.075mm (10…58 Hz)
加速度 9.8 m/s
2
(>58….500 Hz)
MICROMASTER 440 使用大全
Page 25

电磁辐射
大气污染
水
安装和冷却
安装
不允许把变频器安装在接近电磁辐射源的地方。
不要把变频器安装在存在大气污染的环境中,例如,存在灰尘、腐蚀性气体等的环境中。
变频器的安装位置切记要远离有可能出现淋水的地方。例如,不要把变频器安装在水管的下面,
因为水管的表面有可能结露。禁止把变频器安装在湿度过大和有可能出现结露的地方。
注意
变频器不得卧式安装(水平位置)。
变频器可以一个挨一个地并排安装,中间不需要空隙。当一台变频器安装在另一台变频器之上
时,必须保证规定的环境条件。因此,至少要留有下面规定的间隙:
> 外形尺寸为 A,B,C 时 上部和下部:100 mm
> 外形尺寸为 D,E 时 上部和下部:300 mm
> 外形尺寸为 F 时 上部和下部:350 mm
> 外形尺寸为 FX 和 GX 时 上部: 250 mm
下部: 150 mm
前面: 100 mm
在变频器的附近不要安装有对冷却空气流通造成负面影响的其它设备。确认变频器的冷却风口处
于正确的位置,不妨碍空气的流通。
2.3 机械安装
警告
♦ 为了保证变频器的安全运行,必须由经过认证合格的人员进行安装和调试,这 些人员
♦ 要特别注意,在安装具有危险电压的设备时,要遵守相关的常规和地方性安装和安全导
♦ 即使变频器不处于运行状态,其电源输入线,直流回路端子和电动机端子上仍然 可能
♦ 变频器可以一个挨一个地并排安装,中间不需要空隙。当一台变频器安装在另一台变频
> 外形尺寸为 A,B,C 时 上部和下部:100 mm
> 外形尺寸为 D,E 时 上部和下部:300 mm
> 外形尺寸为 F 时 上部和下部:350 mm
> 外形尺寸为 FX 和 GX 时 上部: 250 mm
下部: 150 mm
前面: 100 mm
♦ 如果卸下了前面的盖板(仅指外形尺寸为 FX 和 GX 的 MM440 变频器),风机的叶片便
应完全按照本操作说明书在下面提出的警告进行操作。
则(例如,EN50178),而且要遵守有关正确使用工具和人身防护装置(PPE)的规定 。
带有危险电压。因此,断开开关以后还必须等待 5 分钟,保证变频器放电完毕,再开始
安装工作。
器之上时,必须保证规定的环境条件。因此,至少要留有下面规定的间隙:
显露出来。当风机正在转动时,存在着造成人身伤害的危险。
MICROMASTER 440 使用大全
2-5
Page 26

安装
从运输集装箱上卸下变频器(仅指外形尺寸为 FX 和 GX 的 MM440 变频器)
运输过程中,是用两个铁质的固定卡件将变频器固定在运输支架上。
警告
注意,变频器的重心不在它的中部,因此,在起吊运输支架时,设备有可能突然改变位置,并
倒向一侧。
1. 将吊车的起吊钢缆与变频器上的起吊环结牢(外形尺寸为 FX 的变频器有两个起吊环,外形尺
寸为 GX 的变频器有 4 个起吊环)。
2. 将前盖板顶部的两个紧固螺栓卸下。
3. 拧松运输支架上铁质固定卡件的螺栓,将变频器吊离运输支架。
4. 在安装工作结束,并接线完毕以后,将前盖板的两个紧固螺栓固定在门的底部。
2-6
MICROMASTER 440 使用大全
Page 27
外形尺寸 A 至 F
外形尺寸 A 外形尺寸 B 外形尺寸 C
Frame Size A
55 mm
2.2"
160 mm
6.30"
Frame Size B Frame Size C
Ø 5.5 mm
Ø 4.8 mm
0.19"
174 mm
6.85"
0.22"
204 mm
8.03"
安装
Ø 4.5 mm
0.17"
外形尺寸 D 外形尺寸 F外形尺寸 E
Frame Size D Frame Size E Frame Size F
Ø 17.5 mm
0.68"
486 mm
19.13"
235 mm
9.25"
138 mm
5.43"
Ø 17.5 mm
0.68"
235 mm
9.25"
616.4 mm
24.27"
174 mm
6.85"
Ø 15 mm
0.59"
810 mm
31.89"
with
filter
1110 mm
43.70"
图 2-4 MICROMASTER 440 (A 至 F)的安装钻孔图
MICROMASTER 440 使用大全
300 mm
11.81"
2-7
Page 28

安装
外形尺寸 FX
2-8
图 2-5 外形尺寸为 FX 的 MICROMASTER 440 变频器的安装钻孔尺寸
MICROMASTER 440 使用大全
Page 29

外形尺寸 GX
安装
图 2-6 外形尺寸为 GX 的 MICROMASTER 440 变频器的安装钻孔尺寸
MICROMASTER 440 使用大全
4747
2-9
Page 30

安装
表 2-1 MICROMASTER 440 变频器的外形尺寸和螺丝紧固扭矩
外形尺寸类型 外形尺寸 固定方法 螺丝紧固扭矩
2M4 螺栓
4M4 螺母
4M4 垫圈或 固定在导轨上
4M4 螺栓
4M4 螺母
4M4 垫圈
4M5 螺栓
4M5 螺母
4M5 垫圈
4M8 螺栓
4M8 螺母
4M8 垫圈
4M8 螺栓
4M8 螺母
4 M8 垫圈
4M8 螺栓
4M8 螺母
4M8 垫圈
4M8 螺栓
4M8 螺母
4M8 垫圈
4M8 螺栓
4M8 螺母
4M8 垫圈
2.5 Nm
带安装固定垫圈
2.5 Nm
带安装固定垫圈
2.5 Nm
带安装固定垫圈
3.0 Nm
带安装固定垫圈
3.0 Nm
带安装固定垫圈
3.0 Nm
带安装固定垫圈
13 Nm +30 %
带安装固定垫圈
13 Nm +30 %
带安装固定垫圈
A
B
C
D
E
F
FX 宽 x 高 x 深
GX
宽 x 高 x 深
宽 x 高 x 深
宽 x 高 x 深
宽 x 高 x 深
宽 x 高 x 深
宽 x 高 x 深
宽 x 高 x 深
mm 73 x 173 x 149
inch 2.87 x 6.81 x 5.87
mm 149 x 202 x 172
inch 5.87 x 7.95 x 6.77
mm 185 x 245 x 195
inch 7.28 x 9.65 x 7.68
mm 275 x 520 x 245
inch 10.82 x 20.47 x 9.65
mm 275 x 650 x 245
inch 10.82 x 25.59 x 9.65
350 x 850 mm x 320
mm
带滤波器时高为 1150
13.78 x 33.46 x 12.60
inch
带滤波器时高为 45.28
mm 330 x 1555 x 360
inch 13.0 x 61.22 x 14.2
mm 330 x 1875 x 560
inch 13.0 x 73.82 x 22.05
2-10
MICROMASTER 440 使用大全
Page 31

2.3.1 外形尺寸为 A 型时标准导轨的安装方法
把变频器安装到 35 mm 标准导轨上 (EN 50022 标准)
安装
从导轨上拆卸变频器
释放机构
1. 用标准导轨的上闩销把变频器固定到导轨上。
导轨的
上闩销
导轨的
下闩销
2. 向导轨上按压变频器,直到
导轨 的下闩销嵌入到位。
1. 为了松开变频器的释放机构,将螺丝刀插入释放机 构中。
2. 向下施加压力,导轨的下闩销就会松开。
3. 将变频器从导轨上取下。
MICROMASTER 440 使用大全
2-11
Page 32

安装
2.3.2 电子控制箱中选件的安装
MICROMASTER 440 变频器前盖板的结构设计是使控制模板(通常是 SDP) 几乎与前 盖板的开缝
同在一个平面上。
如果电子控制箱中要安装的选件不止一个,整个电子控制箱必须对底板重新定位,这样,门的开
缝要再次正确定位。
Installation position 2
安装位置 1 安装位置 2
Installation position1
标准安装位置
Standard installation
选件的安装
Standard installation
标准安装位置
Installation position1
图 2-7 电子控制箱中的选件
¾ 卸掉电子控制箱的前盖板:
z 拧松前盖板底部的两个螺丝。
z 吊走前盖板。
¾ 卸掉电子控制箱的紧固螺栓。
¾ 如图 2-7 所示,在正确的安装位置用螺栓固定电子控制箱。
¾ 安装附加的选件。
¾ 重新装上前盖板。
安装位置 1 安装位置 2
Installation position 2
2-12
MICROMASTER 440 使用大全
Page 33

2.4 电气安装
警告
本变频器必须接地。
♦ 为了保证变频器的安全运行,必须由经过认证合格的人员进行安装和调试,这些人员应
♦ 要特别注意,在安装具有危险电压的设备时,要遵守相关的常规和地方性安装和安全导
♦ 禁止用高压绝缘测试设备测试与变频器连接的电缆的绝缘。
♦ 即使变频器不处于运行状态,其电源输入线,直流回路端子和电动机端子上仍然可能带
♦ 如果卸下了前面的盖板(仅指外形尺寸为 FX 和 GX 的 MM440 变频器),风机的叶片便
注意
变频器的控制电缆,电源电缆和与电动机的连接电缆的走线必须相互隔离。不要把它们放
在同一个电缆线槽中或电缆架上。
安装
完全按照本操作说明书在下面提出的警告进行操作。
则(例如,EN50178),而且要遵守有关正确使用工具和人身防护装置的规定。
有危险电压。因此,断开开关以后还必须等待 5 分钟,保证变频器放电完毕,再开始安
装工作。
显露出来。当风机正在转动时,存在着造成人身伤害的危险。
2.4.1 概述
警告
变频器必须可靠接地。如果不把变频器可靠地接地,装置内可能出现导致人身伤害的潜在
危险。
电源(中性点)不接地 (IT) 时变频器的运行
MICROMASTER 4 变频器在供电电源的中性点不接地的情况下是不允许使用的。电源(中性点)
不接地时需要从变频器中拆掉‘Y’形接线的电容器,并安装一台输出电抗器。拆卸电容器的操
作步骤在附录 D 中介绍。
当输入线中有一相接地短路时仍可继续运行。如果输出有一相接地,MICROMASTER 将跳闸,
并显示故障码 F0001。
具有剩余电流保护器(RCD)时变频器的运行(外形尺寸为 A 至 F)
如果安装了剩余电流保护器 RCD(也称为 ELCB 或 RCCB),运行中您将不会再为 MICROMASTER
变频器运行中不应有的跳闸而烦恼,但要求:
> 采用 B 型 RCD 。
> RCD 的跳闸限定值是 300mA。
> 供电电源的中性点接地。
> 每台 RCD 只为一台变频器供电。
> 输出电缆的长度不超过 50m (屏蔽的) 或 100m (不带屏蔽的)。
MICROMASTER 440 使用大全
2-13
Page 34

安装
使用长电缆时的运行
电缆长度按以下要求配置时,所有型号的变频器都将按照技术规格的数据满负载运行:
外形尺寸 A 至 F
¾ 带屏蔽的: 50 m
¾ 不带屏蔽的: 150 m
外形尺寸 FX 和 GX
¾ 带屏蔽的: 100 m
¾ 不带屏蔽的: 300 m
如果采用产品样本 DA 51.2 中指定的输出电抗器时,以下电缆长度也是可以的:
¾ 带屏蔽的: 200 m
¾ 不带屏蔽的: 150 m
2.4.2 电源和电动机的连接
警告
变频器必须接地。
♦ 在变频器与电源线连接或更换变频器的电源线之前,就应完成电源线的绝缘测试。
♦ 确信电动机与电源电压的匹配是正确的。不允许把 MICROMASTERS 变频器连接到电
压更高的电源。
♦ 连接同步电动机或并联连接几台电动机时,变频器必须在 U/f 控制特性下 (P1300 = 0,
2 或 3)运行。
注意
电源电缆和电动机电缆与变频器相应的接线端子连接好以后,在接通电源时必须确信变频
器的盖子已经盖好!
提示
♦ 确信供电电源与变频器之间已经正确接入与其额定电流相应的断路器 / 熔断器
后面第 7 章的表格)
♦ 连接线只能使用一级 60/75
阅后面的表 7-2。
电源和电动机端子的接线和拆卸
在拆下盖板以后,可以拆卸和连接 MICROMASTER 440 变频器与电源和电动机的接线端子(参看
图 2-8 和图 2-10)。
当变频器的盖子已经打开并露出接线端子时,电源和电动机端子的接线方法如图 2-11 所示。
制动单元的接线 (仅指外形尺寸 FX 和 GX)
在变频器的顶部附有拆卸和连接直流回路接线的窗口 。这些接线端子可以连接外部的制动单元。
窗口的位置如图 2-9 和 2-10 所示。
连接导线的最大横断面是 50 mm²,而且,在变频器一侧,电缆的端头应有带热装接线头的扁平
一段。对于保证绝缘气隙和漏电距离,这一措施是非常重要的。
。
(请参看
o
C 的铜线(符合 UL 的规定)。电源接线端子的紧固扭矩请查
2-14
MICROMASTER 440 使用大全
Page 35

安装
外形尺寸 A
外形尺寸 D 和 E
外形尺寸 B 和 C
图 2-8 MICROMASTER 440 的接线端子
MICROMASTER 440 使用大全
外形尺寸 F
2-15
Page 36

安装
Cable opening
连接外部制动
for connection of an
单元的电缆窗口
external braking unit
U1/L1 相
Phase U1/L1
V1/L2 相
Phase V1/L2
W1/L3 相
Phase W1/L3
外部制动单元的接线
Connection C/L+, D/L-
端子 C/L+,D/L-
external braking unit
电源电缆的屏蔽层
Shield connection
PE 连接端子
Mains cable PE
Connection to the
Y 接电容器的接线端子
Y-capacitor
上调整轨道
Top adjustment rail
上支持螺丝
Top retaining screw
SDP 状态显示板
Status Display Panel
电子控制箱
Electronikbox
下支持螺丝
Bottom retaining screw
下调整轨道
Bottom adjustment rail
Fan screws
风机螺丝
风机
Shield connection
控制电缆的屏蔽层接线端子
control leads
Transformer
Fan
风机熔断器
Fan fuses
变压器适配
adaption
Shield connection
SDP
连接电动机电缆的屏蔽层 PE
Motor cable PE
U2/T1 相
Phase U2/T1
V2/T2 相
Phase V2/T2
W3/T3 相
Phase W2T3
2-16
图 2-9 MICROMASTER 440 的接线图– 外形尺寸为 FX
MICROMASTER 440 使用大全
Page 37

Cable opening
连接外部制动单
for connection of an
external brake unit
电源电缆的屏蔽层 PE 连接端子
Connection C/L+, D/L-
外部制动单元的接线端子
Top adjustment rail
Top retaining screw
元的 电缆窗口
U1/L1 相
Phase U1/L1
Phase V1/L2
V1/L2 相
W1/L3 相
Phase W1/L3
Shield connection
Mains cable PE
external brake unit
Connection to the
Y 接电容器的接线端子
上调整轨道
上支持螺丝
C/L+,D/L-
Y-capacitor
安装
SDP
Status Display Panel
SDP 状态显示板
Electronikbox
电子控制箱
Bottom retaining screw
下支持螺丝
Bottom adjustment rail
下调整轨道
风机螺丝
Fan screws
风机
控制电缆的屏蔽层接线端子
Shield connection points
Fan
control leads
风机熔断器
Fan fuse
变压器适配
Transformer
adaption
Shield connection
连接电动机电缆的屏蔽层 PE
Motor cable PE
Phase U2/T1
U2/T1 相
V2/T2 相
Phase V2/T2
W3/T3 相
Phase W2T3
图 2-10 MICROMASTER 440 的接线图 – 外形尺寸为 GX
MICROMASTER 440 使用大全
2-17
Page 38

安装
外形尺寸 A 至 F
L3
L2
L1
N
Fuse
熔断器
L3
L2
L1
熔断器
Fuse
接触器
Contactor
PE PE
接触器
Contactor
线路换流电抗器
line choke
线路换流电抗器
line choke
PE PE
Single Phase
选件,
Optional
Three Phase
选件,
Optional
单相
三相
选件,
Optional
滤波器
Filter
PE
选件,
Optional
滤波器
Filter
PE
MICROMASTER
L/L1
U
V
N/L2
W
PE
MICROMASTER
L3
U
L2
V
L1
W
PE
1)
1)
电动机
Motor
电动机
Motor
1) 带有或不带滤波器
外形尺寸 FX 和 GX
图 2-11 电动机和电源的接线方法
L3
L2
L1
接触器
熔断器
Fuse
Contactor
PE PE
2) 不带滤波器
3) 利用接地点将滤波器接地
选件,
Optional
线路换流电抗器
Filter
选件,
Optional
滤波器
line choke
3)
MICROMASTER
L3
U
L2
V
L1
W
PE
2)
电动机
Motor
2-18
MICROMASTER 440 使用大全
Page 39

冷却风机电源电压的匹配(只限外形尺寸为 FX 和 GX 的变频器)
变频器内装有一个用于电源电压与冷却风机实际运行电压相匹配的变压器。
为了与实际电源电压相吻合,可能需要重新连接变压器一次侧端子的接线。
380V 400V 440V 480V 380V 400V 440V 480V 380V 400V 440V 480V
Phase L1 Phase L2 Phase L3
相 L1 相 L2 相 L3
图 2-12 冷却风机电源电压的匹配
注意
如果不重新连接电源电压的接线端子,冷却风机的熔断器可能熔断。
安装
冷却风机熔断器的更换
熔断器的型号:Ferraz Gould Shawmut ATQR,600 V
外形尺寸 熔断器 (每台变频器 3 个)
FX 2 A
GX 2.5 A
2.4.3 电磁干扰 (EMI) 的防护
变频器的设计允许它在具有很强电磁干扰的工业环境下运行。通常,如果安装的质量良好,就可
以确保安全和无故障的运行。如果您在运行中迂到问题,请按下面指出的措施进行处理。
采取的措施
¾ 确信机柜内的所有设备都已用短而粗的接地电缆可靠地连接到公共的星形接地点或公共的接
地母线。
¾ 确信与变频器连接的任何控制设备(例如 PLC)也像变频器一样,用短而粗的接地电缆连接到同
一个接地网或星形接地点。
¾ 由电动机返回的接地线直接连接到控制该电动机的变频器的接地端子 (PE)上。
¾ 接触器的触头最好是扁平的,因为它们在高频时阻抗较低。
¾ 截断电缆的端头时应尽可能整齐,保证未经屏蔽的线段尽可能短。
¾ 控制电缆的布线应尽可能远离供电电源线,使用单独的走线槽;在必须与电源线交叉时,相
互应采取 90º直角交叉。
¾ 无论何时,与控制回路的连接线都应采用屏蔽电缆。
MICROMASTER 440 使用大全
2-19
Page 40

安装
输
¾ 确信机柜内安装的接触器应是带阻尼的,即是说,在交流接触器的线圈上连接有 R-C 阻尼
回路;在直流接触器的线圈上连接有‘续流’二极管。安装压敏电阻对抑制过电压也是有效
的。当接触器由变频器的继电器进行控制时,这一点尤其重要。
¾ 接到电动机的连接线应采用屏蔽的或带有铠甲的电缆,并用电缆接线卡子将屏蔽层的两端接
地。
警告
在安装变频器时一定要不折不扣地遵守安全规程!
2.4.4 屏蔽的方法
机壳外形尺寸为 A,B 和 C 型时
机壳外形尺寸为 A,B 和 C 型时,密封盖组合件是作为可选件供货的。该组合件便于屏蔽层的连
接。详细的情况请查阅随 MM440 变频器供货的 CD-ROM 文件(光盘)。
无密封盖时屏蔽层的接线
如果不用密封盖板,变频器可以用图 2-13 所示的方法连接电缆的屏蔽层。
入电源线
1
控制电缆
2
电动机电缆
3
背板式滤波器
4
金属底板
5
使用适当的卡子固定电动机电缆,确保屏蔽层与金属底板可靠连接
6
屏蔽电缆
7
图 2-13 把电磁干扰的影响降到最小的布线方法
2-20
MICROMASTER 440 使用大全
Page 41

机壳外形尺寸为 D,E 和 F 型时
密封盖在设备出厂时已经装配好。屏蔽层的安装方法与 A,B 和 C 型时相同。
机壳外形尺寸为 FX 和 GX 时
导线的屏蔽层与接线图(参看图 2-9 和 2-10)中的屏蔽层连接端子应可靠连接。
为此,把电动机电缆的屏蔽层绞在一起,并把它与屏蔽层连接端子用螺丝紧固。
在采用 EMI(电磁干扰)滤波器时,必须接入进线换流电抗器。电缆的屏蔽层应紧固在紧靠电抗器
的金属安装面板上。
安装
MICROMASTER 440 使用大全
2-21
Page 42

安装
2-22
MICROMASTER 440 使用大全
Page 43

3 调试
本章的内容有:
¾ MICROMASTER 440 变频器的方框图
¾ 调试选件的简要说明以及显示和操作面板
¾ MICROMASTER 440 变频器快速调试的简要说明
3.1 方框图.................................................................................................................................. 3-3
3.2 调试方法 .............................................................................................................................. 3-5
3.3 常规操作 ............................................................................................................................ 3-15
调试
3.1.1 接线端子的标准设置............................................................................................ 3-4
3.1.2 模拟输入 .............................................................................................................. 3-4
3.2.1 用状态显示屏 (SDP)进行调试 .............................................................................. 3-6
3.2.2 用 BOP 或 AOP 进行调试的简要说明.................................................................. 3-7
3.2.2.1 用基本操作板( BOP) 进行调试 ............................................................ 3-8
3.2.2.2 用高级操作板( AOP) 调试变频器.......................................................3-11
3.2.3 BOP / AOP 的调试功能......................................................................................3-11
3.2.3.1 快速调试 (P0010=1) .......................................................................... 3-11
3.2.4 复位为出厂时变频器的缺省设置值 ....................................................................3-14
MICROMASTER 440 使用大全
3-1
Page 44

调试
警告
♦ MICROMASTER 变频器是在高电压下运行。
♦ 电气设备运行时,设备的某些部件上不可避免地存在危险电压。
♦ 按照 EN 60204 IEC 204( VDE 0113)的要求,“紧急停车设备”必须在控制设备的所有
工作方式下都保持可控性。无论紧急停车设备是如何停止运转的,都不能导致不可控的
或者未曾予料的再次起动。
♦ 无论故障出现在控制设备的什么地方都有可能导致重大的设备损坏,甚至是严重的人身
伤害(即存在潜在的危险故障),因此,还必须采取附加的外部预防措施或者另外装设用
于确保安全运行的装置,即使在故障出现时也应如此(例如,独立的限流开关,机械连
锁等)。
♦ 在输入电源中断之后,一定的参数设置可能会造成变频器的自动再起动。
♦ 为了保证电动机的过载保护功能正确动作,电动机的参数必须准确地配置。
♦ 本设备可按照 UL508C 第 42 节的要求在变频器内部提供电动机保护功能。根据 P0610
(第 3 访问级)和 P0335,I
2
t 保护功能是在缺省情况下投入。电动机的过载保护功能也可
以采用外部 PTC 经由数字输入来实现。
♦ 本设备可用于回路对称容量不大于 10,000 安培(均方根值)的地方,在采用 H 或 K 型熔
断器进行保护(参看从第 7 章的附表)时,最大电压为 230V/460V/575V
。
♦ 本设备不可作为‘紧急停车机构’使用 (参看 EN 60204,9.2.5.4)
注意
只有经过培训并认证合格的人员才可以在操作面板上输入设定值。任何时候都
应特 别注意遵守手册中要求采取的安全措施和给予的警告。
3-2
MICROMASTER 440 使用大全
Page 45

3.1 方框图
X
4.7 kΩ min
最小
PNP
or
或
NPN
Motor
电动机
PTC
0 - 20 mA
Ω
max. 500
0 - 20 mA
Ω
max. 500
30 V DC / 5 A (resistive)
250 V AC / 2 A (inductive)
(申阻负载)
(感性负载)
RELAIS 1
继电器
RELAIS 2
继电器
继电器
RELAIS 3
1
2
AIN1+
3
AIN1-
4
AIN2+
10
AIN2-
11
DIN1
5
DIN2
6
DIN3
7
DIN4
8
DIN5
16
DIN6
17
9
28
PTCA
14
PTCB
15
AOUT 1+
12
AOUT 1-
13
AOUT 2+
26
AOUT 2-
27
COM
20
NO
19
NC
18
COM
22
NO
21
COM
25
NO
24
NC
23
P+
29
N-
30
+10 V
0 V
A/D
A/D
Opto-Isolierung
光电隔离
Isolated +24 V
(带隔离的)
(Output)
(输出)
Isolated 0 V
(带隔离的)
(Output)
(输出)
(电阻负载)
D/A
D/A
RS485
CPU
PE
1 - 3 AC 200 - 240 V
3 AC 380 - 480 V
3 AC 500 - 600 V
BOP
seria l
串行通讯协议
protocol
外形尺寸为 A 至 F
未使
AIN1AIN2
0 - 20 mA
0 – 20 mA
current
电流
0 - 10 V
0 – 10 V
voltage
12
电压
BOP
150.00
Hz
I
Jog0
Frame Sizes
A to F
Frame Sizes
外形尺寸为
FX and GX
FX 和 G
Not
used
用
12
DIP Switches
DIP 开关
(on Control Board)
(在控制板上)
DIP Switches
DIP 开关
(on I/O Board)
(在 I/O 板上)
Fn
P
=
60 Hz
50 Hz
PE
~
PE
SI
L/L1, N/L2
or
L/L1, N/L2,L3
or
L1, L2, L3
=
3 ~
U,V,W
fitted
link
由制造厂安装的
DC/R+
B+/DC+
R
B-
DC-
D/L-
C/L+
braking module
connection
外部制动单元的
调试
Factory
连接线
external
接线端子
M
图 3-1 变频器的方框图
MICROMASTER 440 使用大全
3-3
Page 46

调试
3.1.1 接线端子的标准设置
参看图 3-2。
3.1.2 模拟输入
模拟输入 1 (AIN1) 可以用于:
¾ 0 - 10 V,0 - 20 mA 和 -10 V 至 +10 V
模拟输入 2 (AIN2) 可以用于:
¾ 0 - 10 V 和 0 - 20 mA
模拟输入回路可以另行配置,用于提供两个附加的数字输入 (DIN7 和 DIN8) ,如下图所示:
1
2
3
DIN7
4
图 3-2 模拟输入作为数字输入时外部线路的连接
DIN8
1
2
10
11
当模拟输入作为数字输入时,电压门限值如下:
1.75 V DC = OFF
3.70 V DC = ON
端子 9 (24 V) 在作为数字输入使用时也可用于驱动模拟输入。端子 2 和 28 (0 V)必须连接在一起。
3-4
MICROMASTER 440 使用大全
Page 47

3.2 调试方法
MICROMASTER 440 变频器在标准供货方式时装有状态显示板 (SDP) (参看图 3-2),对于很多用
户来说,利用 SDP 和制造厂的缺省设置值,就可以使变频器成功地投入运行。如果工厂的缺省设
置值不适合您的设备情况,您可以利用基本操作板 (BOP) (参看 图 3-2) 或高级操作板 (AOP) (参看
图 3-2)修改参数,使之匹配起来。BOP 和 AOP 是作为可 选件供货的。您也可以用 PC IBN 工具
“Drive Monitor”或“STARTER”来调整工厂的设置值。相关的软件在随变频器供货的 CD
ROM 中可以找到。
SDP BOP AOP
状态显示板 基本操作板 高级操作板
图 3-3 适用于 MICROMASTER 440 变频器的操作面板
调试
提示
缺省的电源频率设置值(工厂设置值)可以用 SDP 下的 DIP 开关加以改变;变频器交货时的 设置情
况如下:
¾ DIP 开关 2:
♦ Off 位置:用于欧洲地区
缺省值 (50 Hz,kW 等。)
♦ On 位置:用于北美地区
Frequency Setting
设置频率的 DIP 开关
DIP Switch
缺省值 (60 Hz,hp 等。)
¾ DIP 开关 1:
不供用户使用。
图 3-4 DIP 开关
MICROMASTER 440 使用大全
3-5
Page 48

调试
3.2.1 用状态显示屏 (SDP)进行调试
SDP 上有两个 LED 指示灯,用于指示变频器的运行状态(参看第 6.1 节)。
采用 SDP 进行操作时,变频器的预设定必须与以下的电动
机 数据兼容:
¾ 电动机的额定功率
¾ 电动机电压
¾ 电动机的额定电流
¾ 电动机的额定频率
(建议采用西门子的标准电动机)
此外,必须满足以下条件:
¾ 按照线性 V/f 控制特性,由模拟电位计控制电动机速度。
¾ 频率为 50Hz 时最大速度为 3000 转/分钟(60 Hz 时为 3600 转/分钟),可通过变频器的模拟输
入端用电位计控制。
¾ 斜坡上升时间 / 斜坡下降时间 = 10 s。
在“参数表”和本手册第 3.2.2 节“用 BOP 或 AOP 进行调试的简要说明”中可以找到如何对更
复杂的应用对象进行设置的相关资料。
表 3-1 用 SDP 进行操作的缺省设置
数字输入 1
数字输入 2
数字输入 3
数字输入 4
数字输入 5
数字输入 6
数字输入 7 经由 AIN1 P0707 =‘0’ 不激活
数字输入 8 经由 AIN2 P0708 =‘0’ 不激活
用 SDP 进行的基本操作
使用变频器上装设的 SDP 可进行以下操作:
¾ 启动和停止电动机 (数字输入 DIN1 由外接开关控制)
¾ 电动机反向 (数字输入 DIN2 由外接开关控制)
¾ 故障复位(数字输入 DIN3 由外接开关控制)
按图 3-5 连接模拟输入信号,即可实现对电动机速度的控制。
端子号 参数的设置值 缺省的操作
5
6
7
8
16
17
P0701 =‘1’ ON ,正向运行
P0702 =‘12’ 反向运行
P0703 =‘9’ 故障确认
P0704 =‘15’ 固定频率
P0705 =‘15’ 固定频率
P0706 =‘15’ 固定频率
3-6
MICROMASTER 440 使用大全
Page 49

调试
请参看第
节
电压:
OFF = Voltage 0 - 10 V
电流:
ON = Current 0 - 20 mA
OFF = Voltage 0 - 10 V
电压:
ON = Current 0 - 20 mA
电流:
Analogue
模拟输出
output
0 - 20 mA
Ω
(500
)
AIN2
AIN1
图 3-5 用 SDP 进行的基本操作
P+
N-
ACK
3.2.2 用 BOP 或 AOP 进行调试的简要说明
前提条件:
机械和电气安装已经完成。
设置电动机的频率
DIP 开关 2:Off = 50 Hz / ON = 60 Hz
接通电源
快速调试 P0010 = 1
3.2.3.1
通过 P0004 和 P0003 进行调试
参数结构的简要情况在 5.3 节给出,
参数的详细说明请参看参数表。
提示
我们建议您按照上面的框图进行调试。
MICROMASTER 440 使用大全
3-7
Page 50

调试
3.2.2.1 用基本操作板( BOP) 进行调试
利用基本操作面板(BOP)可以更改变频器的各个参数。为了用 BOP 设置参数,您首先
必须将 SDP 从变频上拆卸下来,然后装上 BOP(参看附录 A)。
BOP 具有五位数字的七段显示,用于显示参数的序号和数值,报警和故障信息,以及
该参数的设定值和实际值。BOP 不能存 储参数的信息。
表 3-2 表示由 BOP 操作时的工厂缺省设置值。
提示
♦ 在缺省设置时,用 BOP 控制电动机的功能是被禁止的。如果要用 BOP 进行控制,参数
P0700 应设置为 1 ,参数 P1000 也应设置为 1。
♦ 变频器加上电源时,也可以把 BOP 装到变频器上,或从变频器上将 BOP 拆卸下来。
♦ 如果 BOP 已经设置为 I/O 控制(P0700=1),在拆卸 BOP 时,变频器驱动装置将自动停车。
表 3-2 用 BOP 操作时的缺省设置值
参数 说明 缺省值,欧洲 (或北美)地区
P0100
P0307
P0310
P0311
P1082
运行方式,欧洲 / 北美 50 Hz,kW (60Hz,hp)
功率 (电动机额定值) 量纲 (kW (Hp)) 取决于 P0100 的设定值。[数值
电动机的额定频率
电动机的额定速度 1395 (1680) rpm [决定于变量]
最大电动机频率
决定于变量。]
50 Hz (60 Hz)
50 Hz (60 Hz)
3-8
MICROMASTER 440 使用大全
Page 51

基本操作面板(BOP)上的按钮
显示/按钮 功能 功能的说明
调试
状态显示 LCD 显示变频器当前的设定值。
起动电动机
停止电动机
改变电动机
的转动方向
电动机点动
功能
按此键起动变频器。缺省值运行时此键是被封锁的。为了使此键的操
作有效,应设定 P0700 = 1。
OFF1:按此键,变频器将按选定的斜坡下降速率减速停车。缺省值运
行时此键被封锁;为了允许此键操作,应设定 P0700 = 1。
OFF2:按此键两次(或一次,但时间较长)电动机将在惯性作用下自由
停车。
此功能总是“使能”的。
按此键可以改变电动机的转动方向。电动机的反向用负号(-)表示或用
闪烁的小数点表示。缺省值运行时此键是被封锁的,为了使此键的操
作有效,应设定 P0700 = 1。
在变频器无输出的情况下按此键,将使电动机起动,并按预设定的点
动频率运行。释放此键时,变频器停车。如果变频器 / 电动机正在运
行,按此键将不起作用。
此键用于浏览辅助信息。
变频器运行过程中,在显示任何一个参数时按下此键并保持不动 2 秒
钟,将显示以下参数值:
直流回路电压 (用 d 表示– 单位: V)。
输出电流 (A)
输出频率 (Hz)
输出电压 (用 o 表示 – 单位: V)。
由 P0005 选定的数值(如果 P0005 选择显示上述参数中的
任何一个 (3,4,或 5) ,这里将不再显示)。
连续多次按下此键,将轮流显示以上参数。
跳转功能
在显示任何一个参数(rXXXX 或 PXXXX)时短时间按下此键,将立即跳
转到 r0000 ,如果需要的话,您可以接着修改其它的参数。跳转到
r0000 后,按此键将返回原来的显示点。
退出
图 3-6 基本操作面板(BOP)上的按钮
MICROMASTER 440 使用大全
在出现故障或报警的情况下,按
或报警信息复位
访问参数 按此键即可访问参数。
增加数值 按此键即可增加面板上显示的参数数值。
减少数值 按此键即可减少面板上显示的参数数值。
键可以将操作板上显示的故 障
3-9
Page 52

调试
用基本操作面板(BOP)更改参数的数值
下面的插图介绍更改参数 P0004 数值的步骤。并以 P0719 为例,说明如何修改下标参数 的数
值。按照这个图表中说明的类似方法,可以用‘BOP’更改任何一个参数。
改变 P0004 – 参数过滤功能
操作步骤 显示的结果
1
2
3
4
5
6 使用者只能看到电动机的参数。
访问参数
按
按 直到显示出 P0004
按 进入参数数值访问级
按 或
按 确认并存储参数的数值
达到所需要的数值
修改 下标参数 P0719 – 选择命令/设定值源
操作步骤 显示的结果
1
按 访问参数
直到显示出 P019
按
2
3
进入参数数值访问级
按
3-10
4
按 显示当前的设定值
按 或
5
6
按 确认和存储这一数值
按
7
8
按 返回标准的变频器显示(由用户定义)
图 3-7 用 BOP 修改参数
选择运行所需要的数值
直到显示出
r0000
MICROMASTER 440 使用大全
Page 53

说明 - 忙碌信息
调试
修改参数的数值时,
改变参数数值的一个数字
为了快速修改参数的数值,可以一个个地单独修改显示出的每个数字,操作步骤如下:
确信已处于某一参数数值的访问级 (参看“用 BOP 修改参数”)。
1. 按
2. 按
3. 再按
4. 执行 2 至 4 步,直到显示出所要求的数值。
5. 按
提示
功能键也可以用于确认已发生的故障。
(功能键),最右边的一个数字闪烁。
/ ,修改这位数字的数值。
,退出参数数值的访问级。
(功能键) ,相邻的下一位数字闪烁。
BOP
有时会显示:
3.2.2.2 用高级操作板( AOP) 调试变频器
高级操作面板 (AOP) 是可选件。它具有以下特点:
¾ 清晰的多种语言文本显示
¾ 多组参数组的上装和下载功能
¾ 可以通过 PC 编程
busy
。表明变频器正忙于处理优先级更高的任务。
¾ 具有连接多个站点的能力,最多可以连接 30 台变频器
详细的情况请参看本手册第 14 章“高级操作板(AOP)”或与您当地的西门子销售
部门联系,取得他们的帮助。
3.2.3 BOP / AOP 的调试功能
3.2.3.1 快速调试 (P0010=1)
在进行“快速调试”之前,必须完成变频器的机械和电气安装。
P0010 的参数过滤功能和 P0003 选择用户访问级别的功能在调试时是十分重要的。
MICROMASTER 4 变频器有三个用户访问级:标准级,扩展级和专家级。进行快速调试时,访问
级较低的用户能够看到的参数较少。这些参数的数值要麽是缺省设置,要麽是在快速调试时进行
计算。
快速调试包括电动机的参数设定和斜坡函数的参数设定。
快速调试的进行与参数 P3900 的设定有关,在它被设定为 1 时,快速调试结束后,要完成必要的
电动机计算,并使其它所有的参数(P0010=1 不包括在内)复位为工厂的缺省设置。
在 P3900 = 1,并完成快速调试以后,变频器即已作好了运行准备;只是在快速调试方式下才是
这种情况。
MICROMASTER 440 使用大全
3-11
Page 54

调试
强制冷却和内置风机冷却
快速调试的流程图(QC) 访问级
P0003 用户访问级 - 2) 1
1 标准级
2 扩展级
3 专家级
P0010 开始快速调试 1
0 准备运行
1 快速调试
30 工厂的缺省设置值
P0100 选择工作地区是欧洲 / 北美 1
0 功率单位为 kW;f 的缺省值为 50 Hz
1 功率单位为 hp;f 的缺省值为 60 Hz
2 功率单位为 kW;f 的缺省值为 60 Hz
说明:
P0100 的设定值 0 和 1 应该用 DIP 关来更改,使其设
定的值固定不变。DIP 开关用来建立固定不变的设定
值。在电 源断开后,DIP 开关的设定值优先于参数的
设定值。
P0308 电动机的额定功率因数
设定值的范围 0.000-1.000
根据铭牌键入的电动机额定功率因数 (cos ϕ)。
只有在 P0100 = 0 或 2 的情况下(电动机的功率单位
是 kW 时) 才能看到。
P0309 电动机的额定效率
设定值的范围 0.0-99.9%
根据铭牌键入的以%值表示的电动机额定效率。
只有在 P0100 = 1 的情况下(电动机的功率单位是
hp 时) 才能看到
P0310 电动机的额定频率
设定值的范围 : 12Hz - 650 Hz
根据铭牌键入的电动机额定频率 (Hz)
P0311 电动机的额定速度
设定值的范围 : 0 - 40000 1/ min
根据铭牌键入的电动机额定速度( rpm)
1) 2
1) 2
1) 1
1) 1
P0205 变频器的应用对象 3
0 恒转矩
1 变转矩
说明:
P0205 = 1 时,只能用于平方 V/ f 特性 (水泵,风机)
的 负载
P0300 选择电动机的类型 2
1 异步电动机
2 同步电动机
说明 :
P0300 = 2 时,控制参数被禁止
P0304 额定电动机电压
设定值的范围 : 10V-2000V
根据铭牌键入的电动机额定电压 (V)
P0305 电动机的额定电流
设定值的范围 : 0 - 2 倍 变频器额定电流 (A)
根据铭牌键入的电动机额定电流 (A)
P0307 电动机的额定功率
设定值的范围 : 0 kW - 2000 kW
根据铭牌键入的电动机额定功率(KW)
如果 P0100 = 1,功率单位应是 hp
1) 1
1) 1
1) 1
P0320 电动机的磁化电流 3
设定值的范围 : 0.0 - 99.0 %
是以电动机额定电流 (P0305) 的% 值表示的磁化电
流 。
P0335 电动机的冷却 2
0 自冷
1 强制冷却
2 自冷和内置风机冷却
3
P0640 电动机的过载因子 2
设定值的范围 : 10.0 - 400.0 %
电动机过载电流的限定值 ,以电动机额定电流
(P0305) 的 % 值表示。
P0700 选择命令源
0 工厂设置值
1 基本操作面板 (BOP)
2 端子( 数字输入)
说明 :
如果选择 P0700 = 2 ,数字输入的功能决定于
P0701 至 P0708 。P0701 至 P0708 = 99 时 ,各个
数字输入端按 照 BICO 功能进行参数化
2) 1
3-12
1) 电动机的额定性能参数请参看电动机的铭牌
MICROMASTER 440 使用大全
Page 55

2) 与上面列出的设置相比,变频器的参数实际上有更多的设置方案可供选择。详细的设定值选择方法请参看参数表。
调试
P1000 选择频率设定值
1 电动电位计设定值
2 模拟设定值 1
3 固定频率设定值
7 模拟设定值 2
说明 :
附加设定值的设置方法请参看“参数表”。如果 P1000 =
1 或 3 ,频率设定值的选择决定于 P0700 至 P0708 的设
置 。
P1080 电动机最小频率 1
设定值的范围 :0-650 Hz
本参数设置电动机的最小频率(0-650Hz);达到这一频
率时电动机的运行速度将与频率的设定值无关。这里设
置的值对电动机的正转和反转都是适用的。
P1082 电动机最大频率 1
设定值的范围 :0-650 Hz
本参数设置电动机的最大频率(0-650Hz);达到这一频
率时电动机的运行速度将与频率的设定值无关。这里设
置的值对电动机的正转和反转都是适用的。
P1120 斜坡上升时间 1
设定值的范围 :0 s - 650 s
电动机从静止停车加速到最大电动机频率所需的时间 。
2) 1
P1500 转矩设定值的选择 2
0 无主设定值
2 模拟设定值 1
4 通过 BOP 链路的 USS 设定值
5 通过 COM 链路的 USS 设定值
6 通过 COM 链路的 (通讯板)设定值
7 模拟设定值 2
说明:
附加设定值的设置方法请参看“参数表“
P1910 选择电动机数据的自动检测方式 2
0 禁止自动检测
1 所有参数都带参数修改的自动检测
2 所有参数都不带参数修改的自动检测
3 饱和曲线带参数修改的自动检测
4 饱和曲线不带参数修改的自动检测
说明:
电动机数据的自动检测必须是在冷态 (20 °C) 下进行。如
果环境温度不在允许范围(20 °C+ 5 °C) 内,必须 修改参
数 P0625 的电动机运行环境温度值
P1910 =0
P1910 = 1,2,3,4
报警码 A0541 激活电 动
机 数据自动检测功能
P1121 斜坡下降时间 1
设定值的范围 :0 s - 650 s
电动机从其最大频率减速到静止停车所需的时间。
P1135 OFF3 的斜坡下降时间 2
设定值的范围 :0 s - 650 s
得到 OFF3 停止命令后,电动机从其最大频率减速到 静
止停车所需的斜坡下降时间。
P3900 结束快速调试 1
0 结束快速调试,不进行电动机计算或复位为工厂
缺省设置值。
1 结束快速调试,进行电动机计算和复位为工厂
缺省设置值(推荐的方式)。
2 结束快速调试,进行电动机计算和 I / O 复位。
3 结束快速调试,进行电动机计算,但不进行 I/O 复位。
P3900 = 1,2
P1300 控制方式 2
0 线性 V / f 控 制
1 带 FCC(磁通电流控制) 的 V / f 控制
2 抛物线 V / f 控制
3 可编程的多点 V / f 控制
5 用于纺织工业的 V / f 控制
6 用于纺织工业的带 FCC 功能的 V / f 控制
19 带独立电压设定值的 V / f 控制
20 无传感器矢量控制
21 带传感器矢量控制
22 无传感器的矢量转矩控制
23 带传感器的矢量转矩控制
说明 :
矢量控制方式只适用于异步电动机的控制。
2)
表示该参数包含有更详细的设定值表,可用于特定的应用场合。请参看 CD 上的“参考手册”和 “操作说明书”
快速调试结束,变频器进入“运行准备就绪“状态
接通电动机,开始电动机数据的自动
检测。在完成电动机数据的自动检
测以后,报警信号 A0541 消失。如
果 电动机要弱磁运行,操作要在
P1910 = 3“饱和曲线”下重复
P3900 =3 = 3
MICROMASTER 440 使用大全
3-13
Page 56

调试
用于参数化的电动机数据
P0305
P0308P0304
SIEMENS
3 ~Mot. 1PQ6 317-4AA60-Z 315L UC 0108/023730002 IM B3
V
Hz50A
400
690
EN 60 034 n
380...420 V , 360...330 A; 660...725 V , 205...192 A, 50 Hz
图 3-8 典型的电动机铭牌举例
提示
¾ 如果 P0003≥2,参数 P0308 和 P0309 是仅供查看的。究竟可以看到其中的哪一个参数,
决定于 P0100 的设定值。
¾ P0307 所显示的单位是 kW 或 HP,决定于 P0100 的设定值。详细的资料请参看参数表。
¾ 除非 P0010=1(工厂的缺省设置)和 P0004=0 或 3,否则是不能更改电动机参数的。
¾ 确信变频器已按电动机的铭牌数据正确地进行了配置 。
3.2.4 复位为出厂时变频器的缺省设置值
345
200
kW
200
cos
ϕ
0,87
max
2600 1/min Gew./Wt. 1,20 t
1/min
IA/INTE s Certif. No IP
1488
P0311P0307P0310
54
3-14
为了把变频器的所有参数复位为出厂时的缺省设置值;应按下面的数值设置参数 (需使用 BOP,
AOP 或通讯选件):
1. 设置 P0010=30。
2. 设置 P0970=1。
提示
复位过程约需 3 分钟才能完成。
MICROMASTER 440 使用大全
Page 57

3.3 常规操作
有关变频器标准参数和扩展参数的全面说明,请参看参数表。
提示
1. 变频器没有主电源开关,因此,当电源电压接通时变频器就已带电。在按下运行(RUN)
键,或者在数字输入端 5 出现“ON”信号(正向旋转)之前,变频器的输出一直被封锁,处于
等待状态。
2. 如果装有 BOP 或 AOP 并且已选定要显示输出频率(P0005=21),那么,在变频器减速停车
时,相应的设定值大约每一秒钟显示一次。
3. 变频器出厂时已按相同额定功率的西门子四极标准电动机的常规应用对象进行编程。如果用
户采用的是其它型号的电动机,就必须输入电动机铭牌上的规格数据。关于如何读取电动机
铭牌数据的细节,请参看图 3-8。
4. 除非 P0010 = 1,否则是不能修改电动机参数的。
5. 为了使电动机开始运行,必须将 P0010 返回“ 0 ”值。
用 BOP/AOP 进行的基本操作
调试
前提条件
¾ P0010 = 0 (为了正确地进行运行命令的初始化)。
¾ P0700 = 1 (使能 BOP 的起动 / 停止按钮)。
¾ P1000 = 1 (使能电动电位计的设定值)。
1. 按下绿色按键 ,起动电动机。
2. 在电动机转动时按下
3. 在电动机达到 50Hz 时按下
4. 用
键改变电动机的转动方向。
5. 用红色按键
外接的电动机热过载保护
电动机在额定速度以下运行时,安装在电动机轴上的风扇的冷却效果降低。因此,如果要在低频
下长时间连续运行,大多数电动机必须降低额定功率使用。为了保护电动机在这种情况下不致过
热而损坏,电动机应安装 PTC 温度传感器,并把它的输出信号连接到变频器的相应控制端,同时
必须将 P0601 设定为 1。
如果电动机的 PTC 已经接到 MICROMASTER 440 变频器的控制端 14 和 15 ,并且设定 P0601
= 1,使能 PTC 功能,那么,MICROMASTER 440 将按常规情况工作,端子上的电阻保持在大约
1500Ω以下。如果超过这一数值,变频器将发出报警信号 A0510 ,然后出现故障。实际电阻的
数值不应小于 1000Ω,并且不大于 2000Ω。
键。使电动机升速到 50Hz。
键,电动机速度及其显示值都降低。
停止电动机。
MICROMASTER 440 使用大全
3-15
Page 58

调试
采用 KTY84 传感器
KTY84 必须这样连接,使二极管正向偏置;这就是说,阳极接到 PTC A(+) ,阴极接到 PTCB(-)。
如果设定 P0601 = 2,使能温度监控功能,传感器 (因此也是电动机绕组的温度) 的温度测量值将
写入参数 r0035。电动机过温保护的动作阀值可以用参数 P0604 (缺省值为 130 °C) 设定。
接线故障
如果变频器到 PTC 或 KTY84 传感器的连线开路或短路,将显示故障状态,其缺省设置为变频器
跳闸。
说明
为了使能跳闸功能,请设定参数 P0701,P0702 或 P0703 = 29。
3-16
MICROMASTER 440 使用大全
Page 59

4 MICROMASTER 440 的使用
本章的内容有:
¾ 关于变频器各种控制方法的说明。
¾ 简要说明变频器控制方法的要点。
MICAROMASTER 440 的使用
4.1 频率设定值
4.2 命令源
(P1000).............................................................................................................. 4-2
(P0700)..................................................................................................................... 4-3
4.3 停车和制动功能 ................................................................................................................... 4-3
4.3.1 OFF1 ...................................................................................................................4-3
4.3.2 OFF2 ...................................................................................................................4-4
4.3.3 OFF3 ...................................................................................................................4-4
4.3.4 直流注入制动....................................................................................................... 4-4
4.3.5 复合制动 .............................................................................................................. 4-4
4.3.6 用外接制动电阻进行动力制动 ............................................................................. 4-5
4.4 控制方式(P1300) .................................................................................................................. 4-5
4.5 MICROMASTER 440 变频器的扩展功能 ............................................................................. 4-6
4.6 故障和报警........................................................................................................................... 4-6
MICROMASTER 440 使用大全
4-1
Page 60

MICAROMASTER 440 的使用
警告
♦ 电气设备运行时,设备的某些部件上不可避免地存在危险电压。
♦ 按照 EN 60204 IEC 204 (VDE 0113)的要求,“紧急停车设备”必须在控制设备的所有
工作方式下都保持可控性。无论紧急停车设备是如何停止运转的,都不能导致不可控的
或者未曾予料的再次起动。
♦ 无论故障出现在控制设备的什么地方都有可能导致重大的设备损坏,甚至是严重的人身
伤害(即存在潜在的危险故障),因此,还必须采取附加的外部预防措施或者另外装设用
于确保安全运行的装置,即使在故障出现时也应如此(例如,设置独立的限流开关,机
械连锁等)。
♦ MICROMASTER 变频器是在高电压下运行。
♦ 在输入电源中断之后,一定的参数设置可能会造成变频器的自动再起动。
♦ 为了保证电动机的过载保护功能正确动作,电动机的参数必须准确地配置。
♦ 本设备可按照 UL 508C 第 42 节的要求在变频器内部提供电动机保护功能。根据 P0610
(第 3 访问级)和 P0335,I
以采用外部 PTC (由缺省值 P0601 禁止)经由数字输入来实现。
♦ 本设备可用于回路对称供电能力不大于 10,000 安培(均方根值)的地方,具有 H 或 K
型熔断器保护 (参看第 7 章的附表)时,最大电压为 230V/460V/575V
♦ 本设备不可作为‘紧急停车机构’使用
2
t 保护功能是在缺省情况下投入。电动机的过载保护功能也可
。
(参看 EN 60204,9。2。5。4)。
4.1 频率设定值 (P1000)
¾ 缺省值: 端子 3/4 (AIN+/ AIN -,0…10 V 相当于 0…50/60 Hz)
¾ 其它设定值: 参看 P1000
提示
关于 USS 和 PROFIBUS 的有关资料,请参看本“手册”的第 13 章“通讯”。
4-2
MICROMASTER 440 使用大全
Page 61

4.2 命令源 (P0700)
提示
斜坡时间和斜坡平滑曲线功能也关系到电动机如何起动和停车。关于这些功能的详细说明,请参
看参数表中的参数 P1120,P1121,P1130 和 P1134 。
电动机起动
缺省值: 端子 5 (DIN 1,高电平)
其它设定值: 参看 P0700 至 P0708
电动机停车
电动机停车有几种方式:
> 缺省值:
♦ OFF1(4.3.1) 端子 5 (DIN 1,低电平)
♦ OFF2(4.3.2) 用 BOP/AOP 上的 OFF(停车)按键控制时,按下 OFF 按键(持续 2
秒钟)或按两次 OFF(停车)按钮即可。(使用缺省设定值 时,没有
BOP/AOP,因而不能使用这一方式)
♦ OFF3 在缺省设置的情况下无效
MICAROMASTER 440 的使用
> 其它设定值: 参看 P0700 至 P0708
电动机反向
> 缺省值: 端子 6 (DIN 2,高电平)
> 其它设定值: 参看 P0700 至 P0708
4.3 停车和制动功能
4.3.1 OFF1
这一命令(消除“ON”-“运行命令”而产生的)使变频器按照选定的斜坡下降速率减速并停止转
动。
修改斜坡下降时间的参数见 P1121。
提示
> ON 命令和后继的 OFF1 命令必须来自同一信号源。
> 如果“ON/OFF1”的数字输入命令不止由一个端子输入,那么,只有最后一个设 定的数字输
入,例如 DIN3 才是有效的。
> OFF1 可以同时具有直流注入制动,复合制动或动力制动。
MICROMASTER 440 使用大全
4-3
Page 62

MICAROMASTER 440 的使用
4.3.2 OFF2
这一命令使电动机依惯性滑行,最后停车 (脉冲被封锁)。
提示
OFF2 命令可以有一个或几个信号源。OFF2 命令以缺省方式设置到 BOP/AOP。即使参数 P0700
至 P0708 之一定义了其它信号源,这一信号源依然存在。
4.3.3 OFF3
OFF3 命令使电动机快速地减速停车。
在设置了 OFF3 的情况下,为了起动电动机,二进制输入端必须闭合 (高电平)。如果 OFF3 为高
电平,电动机才能起动并用 OFF1 或 OFF2 方式停车。
如果 OFF3 为低电平,电动机是不能起动的。
斜坡下降时间: 参看 P1135
提示
OFF3 可以同时具有直流制动,复合制动功能。
4.3.4 直流注入制动
直流注入制动可以与 OFF1 和 OFF3 同时使用。向电动机注入直流电流时,电动机将快速停止,
并在制动作用结束之前一直保持电动机轴静止不动。
> “使能”直流注入制动: 参看 P0701 至 P0708
> 设定直流制动的持续时间: 参看 P1233
> 设定直流制动电流: 参看 P1232
> 设定直流制动开始时的频率: 参看 P1234
提示
如果没有数字输入端设定为直流注入制动,而且 P1233≠0,那么,直流制动将在每个 OFF1 命令
之后起作用,制动作用的持续时间在 P1233 中设定。
4.3.5 复合制动
复合制动可以与 OFF1 和 FF3 命令同时使用。为了进行复合制动,应在交流电流中加入一个直流
分量。
设定制动电流: 参看 P1236
4-4
MICROMASTER 440 使用大全
Page 63

4.3.6 用外接制动电阻进行动力制动
用外接制动电阻(外形尺寸为 A 至 F 的 MM440 变频器采用内置的斩波器,外形尺寸为 FX 和 GX
的 MM440 变频器采用外接制动斩波器)进行制动是这样一种制动方法,即按线性方式平滑和可控
地降低电动机的速度。控制方式 (P1300)
MICROMASTER440 变频器有多种运行控制方式,即运行中电动机的速度与变频器的输出电压之
间可以有多种不同的控制关系。各种控制方式的简要情况如下所述:
4.4 控制方式(P1300)
MICROMASTER 440 变频器有多种运行控制方式,即运行中电动机的速度与变频器的输出电压
之间可以有多种不同的控制关系。各种控制方式的简要情况如下所述:
> 线性 V/f 控制, P1300 = 0
可用于可变转矩和恒定转矩的负载,例如,带式运输机和正排量泵类。
> 带磁通电流控制(FCC)的线性 V/f 控制, P1300 = 1
这一控制方式可用于提高电动机的效率和改善其动态响应特性。
MICAROMASTER 440 的使用
> 抛物线 V/f 控制 P1300 = 2
这一方式可用于可变转矩负载,例如,风机和水泵。
> 多点 V/f 控制 P1300 = 3
有关这种运行方式更详细的资料,请参看 MM440 “参考手册”。
> 纺织机械的 V/f 控制 P1300 = 5
没有滑差补偿或谐振阻尼。电流最大值 Imax 控制器从属于电压而不是频率。
> 用于纺织机械的带 FCC 功能的 V/f控制 P1300 = 6
P1300 = 1 和 P1300 = 5 的组合控制。
> 带独立电压设定值的 V/f 控制 P1300 = 19
电压设定值可以由参数 P1330 给定,而与斜坡函数发生器 (RFG) 的输出频率无关
> 无传感器矢量控制 P1300 = 20
这一控制方式的特点是,用固有的滑差补偿对电动机的速度进行控制。用这一控制方 式时,可以
得到大的转矩、改善瞬态响应特性、具有优良的速度稳定性,而且在低频时可以提高电动机的转
矩。可以从矢量控制变为转矩控制 (参看 P1501)。
> 带编码器反馈的速度控制 P1300 = 21
带速度编码器反馈的磁场定向控制可以实现:
♦ 提高速度控制的精度,改善速度控制的动态响应特性。
♦ 改善低速时的控制特性。
> 无传感器的矢量转矩控制 P1300 = 22
这一控制方式的特点是变频器可以控制电动机的转矩。当负载要求恒定转矩时,可以给出一个转
矩给定值,而变频器将改变向电动机输出的电流,使转矩维持在设定的数值。
¾ 带编码器反馈的转矩控制 P1300 = 23
带编码器反馈的转矩控制可以提高转矩控制的精度,改善转矩控制的动态响应特性。
MICROMASTER 440 使用大全
4-5
Page 64

MICAROMASTER 440 的使用
4.5 MICROMASTER 440 变频器的扩展功能
自由功能块 (P2800 ff)
利用自由功能块,可以实现内部信号 (数字输入,设定值,实际值,…) 的互连,用于特殊应用对
象的控制。
动态缓冲 (P2800 ff)
动态缓冲功能是在电源发生故障或电源中断时继续保持控制功能,动力制动保持多久,这 一控制
功能就持续多久。这一功能对电源故障以后变频器停车过程的控制也有效。
定位控制的斜坡下降曲线 (P0500 ff)
定位控制的斜坡下降曲线可以用于控制斜坡下降的过程,直至到达停止位置,例如,用一个终端
开关来结束控制。
4.6 故障和报警
安装 SDP
安装 BOP
安装 AOP
如果变频器安装的是 SDP ,变频器的故障状态和报警信号由屏上的两个 LED 显示出来,更多的
信息请参看第 6.1 节 。
如果变频器工作正常,可以看到以下的 LED 显示:
¾ 绿色和黄色 = 运行准备就绪
¾ 绿色 = 运行
如果安装的是 BOP ,在出现故障时将显示故障状态 (P0947) 和报警信号 (P2110) 。更多的信息请
参看本手册第 6 章“故障的排除”。
如果安装的是 AOP ,在出现故障时将在液晶显示屏 LCD 上显示故障码和报警码。
4-6
MICROMASTER 440 使用大全
Page 65

5 系统参数
本章内容有:
¾ MICROMASTER MM440 变频器的参数功能概览
¾ 变频器参数的简表
5.1 MICROMASTER 系统参数的简要介绍 ................................................................................ 5-2
5.1.1 访问级.................................................................................................................. 5-2
5.2 参数概览 .............................................................................................................................. 5-3
5.3 参数表
5.4 命令数据组和驱动数据组
系统参数
(简略形式)................................................................................................................. 5-4
- 概览 ...................................................................................... 5-22
MICROMASTER 440 使用大全
5-1
Page 66

系统参数
5.1 MICROMASTER 系统参数的简要介绍
变频器的参数只能用基本操作面板(BOP),高级操作面板(AOP)或者通过串行通讯接口进行修改。
用 BOP 可以修改和设定系统参数,使变频器具有期望的特性,例如,斜坡时间,最小和最大频
率等。选择的参数号和设定的参数值在五位数字的 LCD(可选件)上显示。
¾ r xxxx 表示一个用于显示的只读参数,Pxxxx 是一个设定参数。
¾ P0010 起动“快速调试”。
¾ 如果 P0010 被访问以后没有设定为 0,变频器将不运行。如果 P3900>0,这一功能是自动完
成的。
¾ P0004 的作用是过滤参数,据此可以按照功能去访问不同的参数。
¾
如果试图修改一个参数,而在当前状态下此参数不能修改,例如,不能在运行时修改该参数
或者该参数只能在快速调试时才能修改,那么 将显示
。
¾
忙碌信息某些情况下
表示变频器正忙于处理优先级更高的任务。
5.1.1 访问级
变频器的参数有三个用户访问级;即标准访问级,扩展访问级和专家访问级。访问的等级由参数
0003 来选择。对于大多数应用对象,只要访问标准级(P0003=1)和扩展级(P0003=2)参数就足够
了。
注意
有些第 4 访问级的参数只是用于内部的系统设置,因而是不能修改的。
第 4 访问级的参数只有得到授权的人员才能修改。
每组功能中出现的参数号取决于 P0003 中设定的访问级。有关参数的细节,请参看 CD-ROM 文
件(随机供货的光盘)中的参数表。
-
在修改参数的数值时
- BOP
上显示:
,最多可达5秒。这种情况
busy
5-2
MICROMASTER 440 使用大全
Page 67

5.2 参数概览
P0004 = 2, P0003 = 1
变频器的参数访问级
系统参数
P0004 = 2
变频器
,
1
P0004 = 0
无参数过滤功能
(
可以直接访问参数
对于
BOP 和 AOP
取决于选择的访问级
l
)
P0004 = 21
报警, 警告和监控
P0004 = 20
通讯
.
,
,
2
,
P0004 = 2, P0003 = 3
变频器的参数访问级
P0004 = 22
控制器
PI
,
1, 2 和 3
P0004 = 2
变频器
变频器的参数访问级
P0004 = 2, P0003 = 2
变频器的参数访问级 1和
P0004 = 2,
P0003 = 4
1, 2, 3 和4
P0004 = 3
电动机数据
P0004 = 4
速度传感器
P0004 = 13
电动机的控制
P0004 = 12
驱动装置的特点
图 5-1 参数概览
MICROMASTER 440 使用大全
P0004 = 10
设定值通道和
斜坡发生器
P0004 = 8
模拟
I/O
P0004 = 7
命令和数字
I/O
P0004 = 5
工艺应用
装置
5-3
Page 68

系统参数
5.3 参数表 (简略形式)
下面表格中的信息说明:
¾ 缺省值: 工厂设置值
¾ Level : 用户访问级
¾ DS : 变频器的状态(传动装置的状态) ,表示参数的数值可以在变频器的这种状态下进
行修改(参看 P0010)
♦ C 调试
♦ U 运行
♦ T 运行准备就绪
¾ QC 快速调试
♦ Q 可以在快速调试状态下修改参数
♦ N 快速调试状态下不能修改参数
常用的参数
快速调试
参数复位
技术应用功能
参数号 参数名称 缺省值
r0000 驱动装置只读参数的显示值 -1--
P0003 用户的参数访问级 11CUTN
P0004 参数过滤器 01CUTN
P0010 调试用的参数过滤器 01CTN
P0014[3] 存储方式 03UTN
P0199 设备的系统序号 02UTN
参数号 参数名称 缺省值
P0100 适用于欧洲 / 北美地区 01CQ
P3900 “快速调试”结束 01CQ
参数号 参数名称 缺省值
P0970
参数号 参数名称 缺省值
P0500[3] 技术应用 03CTQ
复位为工厂设置值
01CN
Level DS QC
Level DS QC
Level DS QC
Level DS QC
5-4
MICROMASTER 440 使用大全
Page 69

变频器 (P0004 = 2)
参数号 参数名称 缺省值
r0018
r0026[1]
r0037[5]
r0039
P0040
r0070
r0200
P0201
r0203
r0204
P0205
r0206
r0207
r0208
r0209
P0210
r0231[2]
P0290
P0292
P1800
r1801
P1802
P1820[3]
P1911
r1925
r1926
硬件的版本
CO:直流回路电压实际值
CO:变频器温度 [°C]
CO:能量消耗计量表 [kWh]
能量消耗计量表清零
CO:直流回路电压实际值
功率组合件的实际标号
功率组合件的标号
变频器的实际型号
功率组合件的特征
变频器的应用领域
变频器的额定功率 [kW] / [hp]
变频器的额定电流
变频器的额定电压
变频器的最大电流
电源电压
电缆的最大长度
变频器的过载保护
变频器的过载报警信号
脉宽调制频率
CO:脉宽调制的开关频率实际值
调制方式
输出相序反向
自动测定(识别)的相数
自动测定的 IGBT 通态电压
自动测定的门控单元死时
系统参数
Level DS QC
-1--
-2--
-3--
-2--
02CTN
-3--
-3--
03CN
-3--
-3--
03CQ
-2--
-2--
-2--
-2--
230 3 CT N
-3--
23CTN
15 3 CUT N
42CUTN
-3--
03CUTN
02CTN
32CTN
-2--
-2--
MICROMASTER 440 使用大全
5-5
Page 70

系统参数
电动机数据 (P0004 = 3)
参数号 参数名称 缺省值
r0035[3]
P0300[3]
P0304[3]
P0305[3]
P0307[3]
P0308[3]
P0309[3]
P0310[3]
P0311[3]
r0313[3]
P0320[3]
r0330[3]
r0331[3]
r0332[3]
r0333[3]
P0335[3]
P0340[3]
P0341[3]
P0342[3]
P0344[3]
r0345[3]
P0346[3]
P0347[3]
P0350[3]
P0352[3]
r0384[3]
r0395
r0396
P0601[3]
P0604[3]
P0610[3]
P0625[3]
P0640[3]
P1910
r1912[3]
r1913[3]
r1914[3]
CO:电动机温度实际值
选择电动机类型
电动机额定电压
电动机额定电流
电动机额定功率
电动机额定功率因数
电动机额定效率
电动机额定频率
电动机额定速度
电动机的极对数
电动机的磁化电流
电动机的额定滑差
电动机的额定磁化电流
电动机额定功率因数
电动机额定转矩
电动机的冷却方式
电动机参数的计算
电动机的转动惯量[kg-m∧2]
总惯量 / 电动机惯量的比值
电动机的重量
电动机起动时间
磁化时间
祛磁时间
定子电阻 (线间)
电缆电阻
转子时间常数
CO:定子总电阻[%]
CO:转子电阻实际值
电动机的温度传感器
电动机温度保护动作的门限值
电动机 I2t 温度保护
电动机运行的环境温度
电动机的过载因子 [%]
选择电动机数据是否自动测定
自动测定的定子电阻
自动测定的转子时间常数
自动测定的总泄漏电感
Level DS QC
-2--
12CQ
230 1 C Q
3.25 1 C Q
0.75 1 C Q
0.000 2 C Q
0.0 2 C Q
50.00 1 C Q
01CQ
-3--
0.0 3 CT Q
-3--
-3--
-3--
-3--
02CTQ
02CTN
0.00180 3 CUT N
1.000 3 CUT N
9.4 3 CUT N
-3--
1.000 3 CUT N
1.000 3 CUT N
4.0 2 CUT N
0.0 3 CUT N
-3--
-3--
-3--
02CUTN
130.0 2 CUT N
23CTN
20.0 3 CUT N
150.0 2 CUT Q
02CTQ
-2--
-2--
-2--
5-6
MICROMASTER 440 使用大全
Page 71

系统参数
参数号 参数名称 缺省值
r1915[3]
r1916[3]
r1917[3]
r1918[3]
r1919[3]
r1920[3]
P1960
自动测定的额定定子电感
自动测定的定子电感 1
自动测定的定子电感 2
自动测定的定子电感 3
自动测定的定子电感 4
自动测定的动态泄漏电感
速度控制的优化
命令和数字 I/O (P0004 = 7)
参数号 参数名称 缺省值
r0002 驱动装置的状态 -2--
r0019 CO/BO:BOP 控制字 -3--
r0050 CO:激活的命令数据组 -2--
r0051[2] CO:激活的驱动数据组 -2--
r0052 CO/BO:激活的状态字 1-2--
r0053 CO/BO:激活的状态字 2 - 2 - -
r0054 CO/BO:激活的控制字 1-3--
r0055 CO/BO:激活的辅助控制字 -3--
r0403 CO/BO:编码器的状态字 -2--
P0700[3] 选择命令源 21CTQ
P0701[3] 选择数字输入 1 的功能 12CTN
P0702[3] 选择数字输入 2 的功能 12 2 CT N
P0703[3] 选择数字输入 3 的功能 92CTN
P0704[3] 选择数字输入 4 的功能 15 2 CT N
P0705[3] 选择数字输入 5 的功能 15 2 CT N
P0706[3] 选择数字输入 6 的功能 15 2 CT N
P0707[3] 选择数字输入 7 的功能 02CTN
P0708[3] 选择数字输入 8 的功能 02CTN
P0719[3] 选择命令和频率设定值 03CTN
r0720 数字输入的数目 -3--
r0722 CO/BO:各个数字输入的状态 -2--
P0724 开关量输入的防颤动时间 33CTN
P0725 选择数字输入的 PNP / NPN 接线方式 13CTN
r0730 数字输出的数目 -3--
P0731[3] BI:选择数字输出 1 的功能 52:32 CUTN
P0732[3] BI:选择数字输出 2 的功能 52:72 CUTN
P0733[3] BI:选择数字输出 3 的功能 0:02 CUTN
r0747 CO/BO:各个数字输出的状态 -3--
Level DS QC
-2--
-2--
-2--
-2--
-2--
-2--
03CTQ
Level DS QC
MICROMASTER 440 使用大全
5-7
Page 72

系统参数
参数号 参数名称 缺省值
P0748 数字输出反相 03CUTN
P0800[3] BI:下载参数组 00:03 CTN
P0801[3] BI:下载参数组 10:03 CTN
P0809[3] 复制命令数据组 02CTN
P0810 BI:CDS 的位 0 (本机 / 远程)0:02 CUTN
P0811 BI:CDS 的位 10:02 CUTN
P0819[3] 复制驱动装置数据组 02CTN
P0820 BI:DDS 位 00:03 CTN
P0821 BI:DDS 位 10:03 CTN
P0840[3] BI:ON/OFF1 722:03 CT N
P0842[3] BI:ON/OFF1 ,反转方向 0:03 CTN
P0844[3] BI:1.OFF2 1:03 CTN
P0845[3] BI:2.OFF2 19:13 CT N
P0848[3] BI:1.OFF3 1:03 CTN
P0849[3] BI:2.OFF3 1:03 CTN
P0852[3] BI:脉冲使能 1:03 CTN
P1020[3] BI:固定频率选择,位 00:03 CTN
P1021[3] BI:固定频率选择,位 10:03 CTN
P1022[3] BI:固定频率选择,位 20:03 CTN
P1023[3] BI:固定频率选择,位 3 722:33 CT N
P1026[3] BI:固定频率选择,位 4 722:43 CT N
P1028[3] BI:固定频率选择,位 5 722:53 CT N
P1035[3] BI:使能 MOP (升速命令)19:13 3 CT N
P1036[3] BI:使能 MOP (减速命令)19:14 3 CT N
P1055[3] BI:使能正向点动 0:03 CTN
P1056[3] BI:使能反向点动 0:03 CTN
P1074[3] BI:禁止辅助设定值 0:03 CUTN
P1110[3] BI:禁止负向的频率设定值 0:03 CTN
P1113[3] BI:反向 722:13 CT N
P1124[3] BI:使能斜坡时间 0:03 CTN
P1140[3] BI:RFG 使能 1.0 3 CT N
P1141[3] BI:RFG 开始 1.0 3 CT N
P1142[3] BI:RFG 使能设定值 1.0 3 CT N
P1230[3] BI:使能直流注入制动 0:03 CUTN
P2103[3] BI:1.故障确认 722:23 CT N
P2104[3] BI:2.故障确认 0:03 CTN
P2106[3] BI:外部故障 1:03 CTN
P2220[3] BI:固定 PID 设定值选择,位 00:03 CTN
Level DS QC
5-8
MICROMASTER 440 使用大全
Page 73

系统参数
参数号 参数名称 缺省值
P2221[3] BI:固定 PID 设定值选择,位 10:03 CTN
P2222[3] BI:固定 PID 设定值选择,位 20:03 CTN
P2223[3] BI:固定 PID 设定值选择,位 3 722:33 CT N
P2226[3] BI:固定 PID 设定值选择,位 4 722:43 CT N
P2228[3] BI:固定 PID 设定值选择,位 5 722:53 CT N
P2235[3] BI:使能 PID-MOP (升速命令)19:13 3 CT N
P2236[3] BI:使能 PID-MOP (减速命令)19:14 3 CT N
模拟 I/O (P0004 = 8)
参数号 参数名称 缺省值
P0295 变频器风机停机断电的延时时间 03CUTN
r0750 ADC(模 / 数转换输入)的数目 -3--
r0752[2] ADC 的实际输入 [V] 或 [mA] - 2 - -
P0753[2] ADC 的平滑时间 33CUTN
r0754[2] 标定后的 ADC 实际值 [%] - 2 - -
r0755[2] CO:标定后的 ADC 实际值 [4000h] - 2 - -
P0756[2] ADC 的类型 02CTN
P0757[2] ADC 输入特性标定的 x1 值 [V / mA] 0 2 CUT N
P0758[2] ADC 输入特性标定的 y1 值 0.0 2 CUT N
P0759[2] ADC 输入特性标定的 x2 值 [V / mA] 10 2 CUT N
P0760[2] ADC 输入特性标定的 y2 值 100.0 2 CUT N
P0761[2] ADC 死区的宽度 [V / mA] 0 2 CUT N
P0762[2] 信号消失的延迟时间 10 3 CUT N
r0770 DAC(数 / 模转换输出)的数目 -3--
P0771[2] CI:DAC 输出功能选择 21:02 CUTN
P0773[2] DAC 的平滑时间 23CUTN
r0774[2] 实际的 DAC 输出值 [V] 或 [mA] - 2 - -
P0776[2] DAC 的型号 02CTN
P0777[2] DAC 输出特性标定的 x1 值 0.0 2 CUT N
P0778[2] DAC 输出特性标定的 y1 值 02CUTN
P0779[2] DAC 输出特性标定的 y1 值 100.0 2 CUT N
P0780[2] DAC 输出特性标定的 y2 值 20 2 CUT N
P0781[2] DAC 死区的宽度 02CUTN
Level DS QC
Level DS QC
MICROMASTER 440 使用大全
5-9
Page 74

系统参数
设定值通道和斜坡函数发生器 (P0004 = 10)
参数号 参数名称 缺省值
P1000[3]
P1001[3]
P1002[3]
P1003[3]
P1004[3]
P1005[3]
P1006[3]
P1007[3]
P1008[3]
P1009[3]
P1010[3]
P1011[3]
P1012[3]
P1013[3]
P1014[3]
P1015[3]
P1016
P1017
P1018
P1019
r1024
P1025
P1027
P1031[3]
P1032
P1040[3]
r1050
P1058[3]
P1059[3]
P1060[3]
P1061[3]
P1070[3]
P1071[3]
P1075[3]
P1076[3]
r1078
r1079
选择频率设定值
固定频率 1
固定频率 2
固定频率 3
固定频率 4
固定频率 5
固定频率 6
固定频率 7
固定频率 8
固定频率 9
固定频率 10
固定频率 11
固定频率 12
固定频率 13
固定频率 14
固定频率 15
固定频率方式-位 0
固定频率方式-位 1
固定频率方式-位 2
固定频率方式-位 3
CO:固定频率的实际值
固定频率方式-位 4
固定频率方式-位 5
存储 MOP 的设定值
禁止反转的 MOP 设定值
MOP 的设定值
CO: MOP 的实际输出频率
正向点动频率
反向点动频率
点动的斜坡上升时间
点动的斜坡下降时间
CI:主设定值 755:0
CI:标定的主设定值 1:0
CI:辅助设定值 0:0
CI:标定的辅助设定值 1:0
CO:总的频率设定值
CO:选定的频率设定值
21CTQ
0.00 2 CUT N
5.00 2 CUT N
10.00 2 CUT N
15.00 2 CUT N
20.00 2 CUT N
25.00 2 CUT N
30.00 2 CUT N
35.00 2 CUT N
40.00 2 CUT N
45.00 2 CUT N
50.00 2 CUT N
55.00 2 CUT N
60.00 2 CUT N
65.00 2 CUT N
65.00 2 CUT N
13CTN
13CTN
13CTN
13CTN
-3--
13CTN
13CTN
02CUTN
12CTN
5.00 2 CUT N
-3--
5.00 2 CUT N
5.00 2 CUT N
10.00 2 CUT N
10.00 2 CUT N
-3--
-3--
Level DS QC
3CTN
3CTN
3CTN
3CTN
5-10
MICROMASTER 440 使用大全
Page 75

系统参数
参数号 参数名称 缺省值
P1080[3] 最小频率 0.00 1 CUT Q
P1082[3] 最大频率 50.00 1 CT Q
P1091[3] 跳转频率 1 0.00 3 CUT N
P1092[3] 跳转频率 2 0.00 3 CUT N
P1093[3] 跳转频率 3 0.00 3 CUT N
P1094[3] 跳转频率 4 0.00 3 CUT N
P1101[3] 跳转频率的带宽 2.00 3 CUT N
r1114 CO:方向控制后的频率设定值 -3--
r1119 CO:未经斜坡函数发生器的频率设定值 -3--
P1120[3] 斜坡上升时间 10.00 1 CUT Q
P1121[3] 斜坡下降时间 10.00 1 CUT Q
P1130[3] 斜坡上升起始段园弧时间 0.00 2 CUT N
P1131[3] 斜坡上升结束段园弧时间 0.00 2 CUT N
P1132[3] 斜坡下降起始段园弧时间 0.00 2 CUT N
P1133[3] 斜坡下降结束段园弧时间 0.00 2 CUT N
P1134[3] 平滑圆弧的类型 02CUTN
P1135[3] OFF3 斜坡下降时间 5.00 2 CUT Q
r1170 CO:通过斜坡函数发生器后的频率设定值 -3--
P1257[3] 动态缓冲的频率限制 2.5 3 CUT N
Level DS QC
驱动装置的特点 (P0004 = 12)
参数号 参数名称 缺省值
P0005[3] 选择需要显示的参量 21 2 CUT N
P0006 显示方式 23CUTN
P0007 背板亮光延迟时间 03CUTN
P0011 锁定用户定义的参数 03CUTN
P0012 用户定义的参数解锁 03CUTN
P0013[20] 用户定义的参数 03CUTN
P1200 捕捉再起动 02CUTN
P1202[3] 电动机电流 :捕捉再起动 100 3 CUT N
P1203[3] 搜寻速率 :捕捉再起动 100 3 CUT N
r1205 观察器显示的捕捉再起动状态 -3--
P1210 自动再起动 12CUTN
P1211 自动再起动的重试次数 33CUTN
P1215 使能抱闸制动 02TN
P1216 释放抱闸制动的延迟时间 1.0 2 T N
P1217 斜坡下降后的抱闸时间 1.0 2 T N
P1232[3] 直流注入制动的电流 100 2 CUT N
Level DS QC
MICROMASTER 440 使用大全
5-11
Page 76

系统参数
参数号 参数名称 缺省值
P1233[3] 直流注入制动的持续时间 02CUTN
P1234[3] 投入直流注入制动的起始频率 650.00 2 CUT N
P1236[3] 复合制动电流 02CUTN
P1237 动力制动 02CUTN
P1240[3] 直流电压控制器的组态 13CTN
r1242 CO:最大直流电压的接通电平 -3--
P1243[3] 最大直流电压的动态因子 100 3 CUT N
P1245[3] 动态缓冲器的接通电平 76 3 CUT N
P1247[3] 动态缓冲器的动态因子 100 3 CUT N
P1253[3] 直流电压控制器的输出限幅 10 3 CUT N
P1254 直流电压接通电平的自动检测 13CTN
P1256[3] 动态缓冲的反应 03CTN
电动机的控制 (P0004 = 13)
参数号 参数名称 缺省值
r0020 CO:实际的频率设定值 -3--
r0021 CO:实际频率 -2--
r0022 转子实际速度 -3--
r0024 CO:实际输出频率 -3--
r0025 CO:实际输出电压 -2--
r0027 CO:实际输出电流 -2--
r0029 CO:磁通电流 -3--
r0030 CO:转矩电流 -3--
r0031 CO:实际转矩 -2--
r0032 CO:实际功率 -2--
r0038 CO:实际功率因数 -3--
r0056 CO/BO:电动机的控制状态 -3--
r0061 CO: 转子实际速度 -2--
r0062 CO:频率设定值 -3--
r0063 CO:实际频率 -3--
r0064 CO:频率控制器的输入偏差 -3--
r0065 CO:滑差频率 -3--
r0066 CO:实际输出频率 -3--
r0067 CO:实际的输出电流限值 -3--
r0068 CO:输出电流 -3--
r0071 CO:最大输出电压 -3--
r0072 CO:实际输出电压 -3--
r0075 CO: Isd 电流设定值 -3--
Level DS QC
Level DS QC
5-12
MICROMASTER 440 使用大全
Page 77

系统参数
参数号 参数名称 缺省值
r0076 CO: Isd 电流实际值 -3--
r0077 CO: Isq 电流设定值 -3--
r0078 CO: Isq 电流实际值 -3--
r0079 CO:转矩设定值 (总值)-3--
r0086 CO:实际的有效电流 -3--
r0090 CO:转子实际角度 -2--
P0095[10] CI: PZD 信号的显示 0:03 CTN
r0096[10] PZD 信号 -3--
r1084 最大频率设定值 -3--
P1300[3] 控制方式 02CTQ
P1310[3] 连续提升 50.0 2 CUT N
P1311[3] 加速度提升 0.0 2 CUT N
P1312[3] 起动提升 0.0 2 CUT N
P1316[3] 提升结束的频率 20.0 3 CUT N
P1320[3] 可编程 V/f 特性的频率座标 1 0.00 3 CT N
P1321[3] 可编程 V/f 特性的电压座标 1 0.0 3 CUT N
P1322[3] 可编程 V/f 特性的频率座标 2 0.00 3 CT N
P1323[3] 可编程 V/f 特性的电压座标 2 0.0 3 CUT N
P1324[3] 可编程 V/f 特性的频率座标.3 0.00 3 CT N
P1325[3] 可编程 V/f 特性的电压座标.3 0.0 3 CUT N
P1330[3] CI:电压设定值 0:03 T N
P1333[3] FCC 的起动频率 10.0 3 CUT N
P1335[3] 滑差补偿 0.0 2 CUT N
P1336[3] 滑差限值 250 2 CUT N
r1337 CO:V/f 特性的滑差频率 -3--
P1338[3] V/f 特性谐振阻尼的增益系数 0.00 3 CUT N
P1340[3] 最大电流(Imax) 控制器的比例增益系数 0.000 3 CUT N
P1341[3] 最大电流(Imax) 控制器的积分时间 0.300 3 CUT N
r1343 CO:最大电流(Imax) 控制器的输出频率 -3--
r1344 CO:最大电流(Imax) 控制器的输出电压 -3--
P1345[3] 最大电流(Imax) 控制器的比例增益系数 0.250 3 CUT N
P1346[3] 最大电流(Imax) 控制器的积分时间 0.300 3 CUT N
P1350[3] 电压软起动 03CUTN
P1400[3] 速度控制的组态 13CUTN
r1407 CO/BO:电动机控制的状态 2-3--
r1438 CO:控制器的频率设定值 -3--
P1452[3] 速度实际值 (SLVC) 的滤波时间 43CUTN
P1460[3] 速度控制器的增益系数 3.0 2 CUT N
Level DS QC
MICROMASTER 440 使用大全
5-13
Page 78

系统参数
参数号 参数名称 缺省值
P1462[3] 速度控制器的积分时间 400 2 CUT N
P1470[3] 速度控制器 (SLVC) 的增益系数 3.0 2 CUT N
P1472[3] 速度控制器 (SLVC) 的积分时间 400 2 CUT N
P1477[3] BI:设定速度控制器的积分器 0:03 CUTN
P1478[3] CI:设定速度控制器的积分器 0:03 UTN
r1482 CO:速度控制器的积分输出 -3--
P1488[3] 垂度的输入源 03CUTN
P1489[3] 垂度的标定 0.05 3 CUT N
r1490 CO:下垂的频率 -3--
P1492[3] 使能 垂度功能 03CUTN
P1496[3] 标定加速度预控 0.0 3 CUT N
P1499[3] 标定加速度转矩控制 100.0 3 CUT N
P1500[3] 选择转矩设定值 02CTQ
P1501[3] BI:切换到转矩控制 0:03 CTN
P1503[3] CI:转矩总设定值 0:03 T N
r1508 CO:转矩总设定值 -2--
P1511[3] CI:转矩附加设定值 0:03 T N
r1515 CI:转矩附加设定值 -2--
r1518 CO:加速转矩 -3--
P1520[3] CO:转矩上限 5.13 2 CUT N
P1521[3] CO:转矩下限 -5.13 2 CUT N
P1522[3] CI: 转矩上限 1520:03 T N
P1523[3] CI: 转矩下限 1521:03 T N
P1525[3] 标定的转矩下限 100.0 3 CUT N
r1526 CO:转矩上限值 -3--
r1527 CO:转矩下限值 -3--
P1530[3] 电动状态功率限值 0.75 2 CUT N
P1531[3] 再生状态功率限值 -0.75 2 CUT N
r1538 CO:转矩上限 (总值)-2--
r1539 CO:转矩下限 (总值)-2--
P1570[3] CO:固定的磁通设定值 100.0 2 CUT N
P1574[3] 动态电压 裕量 10 3 CUT N
P1580[3] 效率优化 02CUTN
P1582[3] 磁通设定值的平滑时间 15 3 CUT N
P1596[3] 弱磁控制器的积分时间 50 3 CUT N
r1598 CO:磁通设定值 (总值)-3--
P1610[3] 连续转矩提升 (SLVC) 50.0 2 CUT N
P1611[3] 加速度转矩提升 (SLVC) 0.0 2 CUT N
Level DS QC
5-14
MICROMASTER 440 使用大全
Page 79

系统参数
参数号 参数名称 缺省值
P1740 消除振荡的阻尼增益系数 0.000 3 CUT N
P1750[3] 电动机模型的控制字 13CUTN
r1751 电动机模型的状态字 -3--
P1755[3] 电动机模型(SLVC)的起始频率 5.0 3 CUT N
P1756[3] 电动机模型(SLVC)的回线频率 50.0 3 CUT N
P1758[3] 过渡到前馈方式的等待时间(T-wait) 1500 3 CUT N
P1759[3] 转速自适应的稳定等待时间(T-wait) 100 3 CUT N
P1764[3] 转速自适应 (SLVC) 的 Kp 0.2 3 CUT N
r1770 CO:速度自适应的比例输出 -3--
r1771 CO: 速度自适应的积分输出 -3--
P1780[3] Rs / Rr(定子/转子电阻)自适应的控制字 33CUTN
r1782 Rs 自适应的输出 -3--
r1787 Xm 自适应的输出 -3--
P2480[3] 位置方式 13CTN
P2481[3] 齿轮箱的速比输入 1.00 3 CT N
P2482[3] 齿轮箱的速比输出 1.00 3 CT N
P2484[3] 轴的圈数 = 1 1.0 3 CUT N
P2487[3] 位置误差微调值 0.00 3 CUT N
P2488[3] 最终轴的圈数 = 1 1.0 3 CUT N
Level DS QC
通讯 (P0004 = 20)
参数号 参数名称 缺省值
P0918 CB(通讯板) 地址 32CTN
P0927 修改参数的途径 15 2 CUT N
r0964[5] 微程序(软件)版本数据 -3--
r0965 Profibus profile - 3 - -
r0967
r0968
P0971
P2000[3]
P2001[3]
P2002[3]
P2003[3]
r2004[3]
P2009[2]
P2010[2]
P2011[2] USS 地址 02CUTN
控制字 1
状态字 1
从 RAM 到 EEPROM 的传输数据
基准频率
基准电压
基准电流
基准转矩
基准功率
USS 标称化
USS 波特率
Level DS QC
-3--
-3--
03CUTN
50.00 2 CT N
1000 3 CT N
0.10 3 CT N
0.75 3 CT N
-3--
03CTN
62CUTN
MICROMASTER 440 使用大全
5-15
Page 80

系统参数
参数号 参数名称 缺省值
P2012[2] USS PZD 的长度 23CUTN
P2013[2] USS PKW 的长度 127 3 CUT N
P2014[2] USS 停止发报时间 03CTN
r2015[8] CO:从 BOP 链接 PZD (USS) - 3 - -
P2016[8] CI:从 PZD 到 BOP 链接 (USS) 52:03 CT N
r2018[8] CO:从 COM 链接 PZD (USS) - 3 - -
P2019[8] CI:从 PZD 到 COM 链接(USS) 52:03 CT N
r2024[2] USS 报文无错误 -3--
r2025[2] USS 据收报文 -3--
r2026[2] USS 字符帧错误 -3--
r2027[2] USS 超时错误 -3--
r2028[2] USS 奇偶错误 -3--
r2029[2] USS 不能识别起始点 -3--
r2030[2] USS BCC 错误 -3--
r2031[2] USS 长度错误 -3--
r2032 BO:从 BOP 链接控制字 1 (USS) - 3 - -
r2033 BO:从 BOP 链接控制字 2 (USS) - 3 - -
r2036 BO:从 COM 链接控制字 1 (USS) - 3 - -
r2037 BO:从 COM 链接控制字 2 (USS) - 3 - -
P2040 CB 报文停止时间 20 3 CT N
P2041[5] CB 参数 03CTN
r2050[8] CO:从 CB 至 PZD - 3 - -
P2051[8] CI:从 PZD 至 CB 52:03 CT N
r2053[5] CB 识别 -3--
r2054[7] CB 诊断 -3--
r2090 BO:CB 发出的控制字 1-3--
r2091 BO:CB 发出的控制字 2-3--
Level DS QC
报警,警告和监控 (P0004 = 21)
参数号 参数名称 缺省值
r0947[8] 最新的故障码 -2--
r0948[12] 故障时间 -3--
r0949[8] 故障数值 -3--
P0952 故障的总数 03CTN
P2100[3] 选择报警号 03CTN
P2101[3] 停车的反冲值 03CTN
r2110[4] 警告信息号 -2--
P2111 警告信息的总数 03CTN
5-16
Levell DS QC
MICROMASTER 440 使用大全
Page 81

系统参数
参数号 参数名称 缺省值
r2114[2] 运行时间计数器 -3--
P2115[3] AOP 实时时钟 03CTN
P2150[3] 回线频率 f_hys 3.00 3 CUT N
P2151[3] CI:监控速度设定值 0:03 CUTN
P2152[3] CI:监控速度实际值 0:03 CUTN
P2153[3] 速度滤波器的时间常数 52CUTN
P2155[3] 门限频率 f_1 30.00 3 CUT N
P2156[3] 门限频率 f_1 的延迟时间 10 3 CUT N
P2157[3] 门限频率 f_2 30.00 2 CUT N
P2158[3] 门限频率 f_2 的延迟时间 10 2 CUT N
P2159[3] 门限频率 f_3 30.00 2 CUT N
P2160[3] 门限频率 f_3 的延迟时间 10 2 CUT N
P2161[3] 频率设定值的最小门限 3.00 2 CUT N
P2162[3] 超速的回线频率 20.00 2 CUT N
P2163[3] 输入允许的频率差 3.00 2 CUT N
P2164[3] 回线频率差 3.00 3 CUT N
P2165[3] 允许频率差的延迟时间 10 2 CUT N
P2166[3] 完成斜坡上升的延迟时间 10 2 CUT N
P2167[3] 关断频率 f_off 1.00 3 CUT N
P2168[3] 延迟时间 T_off 10 3 CUT N
r2169 CO:实际的滤波频率 -2--
P2170[3] 门限电流 I_thresh 100.0 3 CUT N
P2171[3] 电流延迟时间 10 3 CUT N
P2172[3] 直流回路电压门限值 800 3 CUT N
P2173[3] 直流回路电压延迟时间 10 3 CUT N
P2174[3] 转矩门限值 T_thresh 5.13 2 CUT N
P2176[3] 转矩门限的延迟时间 10 2 CUT N
P2177[3] 闭锁电动机的延迟时间 10 2 CUT N
P2178[3] 电动机停车的延迟时间 10 2 CUT N
P2179 判定无负载的电流限值 3.0 3 CUT N
P2180 判定无负载的延迟时间 2000 3 CUT N
P2181[3] 传动皮带 故障的检测方式 02CTN
P2182[3] 传动皮带门限频率 1 5.00 3 CUT N
P2183[3] 传动皮带门限频率 2 30.00 2 CUT N
P2184[3] 传动皮带门限频率 3 50.00 2 CUT N
P2185[3] 转矩上门限值 1 99999.0 2 CUT N
P2186[3] 转矩下门限值 1 0.0 2 CUT N
P2187[3] 转矩上门限值 2 99999.0 2 CUT N
Levell DS QC
MICROMASTER 440 使用大全
5-17
Page 82

系统参数
参数号 参数名称 缺省值
P2188[3] 转矩下门限值 2 0.0 2 CUT N
P2189[3] 转矩上门限值 3 99999.0 2 CUT N
P2190[3] 转矩下门限值 3 0.0 2 CUT N
P2192[3] 传动皮带故障的延迟时间 10 2 CUT N
r2197 CO/BO:监控字 1-2--
r2198 CO/BO:监控字 2-2--
PI 控制器 (P0004 = 22)
参数号 参数名称 缺省值
P2200[3] BI:使能 PID 控制器 0:02 CTN
P2201[3] 固定的 PID 设定值 1 0.00 2 CUT N
P2202[3] 固定的 PID 设定值 2 10.00 2 CUT N
P2203[3] 固定的 PID 设定值 3 20.00 2 CUT N
P2204[3] 固定的 PID 设定值 4 30.00 2 CUT N
P2205[3] 固定的 PID 设定值 5 40.00 2 CUT N
P2206[3] 固定的 PID 设定值 6 50.00 2 CUT N
P2207[3] 固定的 PID 设定值 7 60.00 2 CUT N
P2208[3] 固定的 PID 设定值 8 70.00 2 CUT N
P2209[3] 固定的 PID 设定值 9 80.00 2 CUT N
P2210[3] 固定的 PID 设定值 10 90.00 2 CUT N
P2211[3] 固定的 PID 设定值 11 100.00 2 CUT N
P2212[3] 固定的 PID 设定值 12 110.00 2 CUT N
P2213[3] 固定的 PID 设定值 13 120.00 2 CUT N
P2214[3] 固定的 PID 设定值 14 130.00 2 CUT N
P2215[3] 固定的 PID 设定值 15 130.00 2 CUT N
P2216 固定的 PID 设定值 方式 - 位 013CTN
P2217 固定的 PID 设定值 方式 - 位 113CTN
P2218 固定的 PID 设定值 方式 - 位 213CTN
P2219 固定的 PID 设定值 方式 - 位 313CTN
r2224 CO:实际的固定 PID 设定值 -2--
P2225 固定的 PID 设定值 方式 - 位 413CTN
P2227 固定的 PID 设定值 方式 - 位 513CTN
P2231[3] PID-MOP 的设定值存储 02CUTN
P2232 禁止 PID-MOP 的反向设定值 12CTN
P2240[3] PID-MOP 的设定值 10.00 2 CUT N
r2250 CO:PID-MOP 的设定值输出 -2--
P2251 PID 方式 03CTN
P2253[3] CI:PID 设定值 0:02 CUTN
Levell DS QC
Level DS QC
5-18
MICROMASTER 440 使用大全
Page 83

系统参数
参数号 参数名称 缺省值
P2254[3] CI:PID 微调信号 源 0:03 CUTN
P2255 PID 设定值的增益因子 100.00 3 CUT N
P2256 PID 微调的增益因子 100.00 3 CUT N
P2257 PID 设定值的斜坡上升时间 1.00 2 CUT N
P2258 PID 设定值的斜坡下降时间 1.00 2 CUT N
r2260 CO:实际的 PID 设定值 -2--
P2261 PID 设定值滤波器的时间常数 0.00 3 CUT N
r2262 CO:经滤波的 PID 设定值 -3--
P2263 PID 控制器的类型 03CTN
P2264[3] CI:PID 反馈 755:02 CUT N
P2265 PID 反馈信号滤波器的时间常数 0.00 2 CUT N
r2266 CO:PID 经滤波的反馈 -2--
P2267 PID 反馈的最大值 100.00 3 CUT N
P2268 PID 反馈的最小值 0.00 3 CUT N
P2269 PID 的增益系数 100.00 3 CUT N
P2270 PID 反馈的功能选择器 03CUTN
P2271 PID 变送器的类型 02CUTN
r2272 CO:已标定的 PID 反馈信号 -2--
r2273 CO:PID 错误 -2--
P2274 PID 的微分时间 0.000 2 CUT N
P2280 PID 的比例增益系数 3.000 2 CUT N
P2285 PID 的积分时间 0.000 2 CUT N
P2291 PID 输出的上限 100.00 2 CUT N
P2292 PID 输出的下限 0.00 2 CUT N
P2293 PID 限定值的斜坡上升 / 下降时间 1.00 3 CUT N
r2294 CO:实际的 PID 输出 -2--
P2295 PID 输出的增益系数 100.00 3 CUT N
P2350 使能 PID 自动整定 02CUTN
P2354 PID 参数自整定延迟时间 240 3 CUT N
P2355 PID 自动整定的偏差 5.00 3 CUT N
P2800 使能 FFB 0 3 CUT N
P2801[17] 激活的 FFB 0 3 CUT N
P2802[14] 激活的 FFB 0 3 CUT N
P2810[2] BI:AND (‘与’) 1 0:03 CUTN
r2811 BO:AND (‘与’) 1 - 3 - -
P2812[2] BI:AND (‘与’) 2 0:03 CUTN
r2813 BO:AND (‘与’) 2 - 3 - -
P2814[2] BI:AND (‘与’) 3 0:03 CUTN
Level DS QC
MICROMASTER 440 使用大全
5-19
Page 84

系统参数
参数号 参数名称 缺省值
r2815 BO:AND (‘与’) 3 - 3 - -
P2816[2] BI:OR (‘或’) 1 0:03 CUTN
r2817 BO:OR (‘或’) 1 - 3 - -
P2818[2] BI:OR (‘或’) 2 0:03 CUTN
r2819 BO:OR (‘或’) 2 - 3 - -
P2820[2] BI:OR (‘或’) 3 0:03 CUTN
r2821 BO:OR (‘或’) 3 - 3 - -
P2822[2] BI:XOR (‘异或’) 1 0:03 CUTN
r2823 BO:XOR (‘异或’) 1 - 3 - -
P2824[2] BI:XOR (‘异或’) 2 0:03 CUTN
r2825 BO:XOR (‘异或’) 2 - 3 - -
P2826[2] BI:XOR (‘异或’) 3 0:03 CUTN
r2827 BO:XOR (‘异或‘) 3 - 3 - -
P2828 BI:NOT (‘非’) 1 0:03 CUTN
r2829 BO:NOT (‘非’) 1 - 3 - -
P2830 BI:NOT (‘非’) 2 0:03 CUTN
r2831 BO:NOT (‘非’) 2 - 3 - -
P2832 BI:NOT (‘非’) 3 0:03 CUTN
r2833 BO:NOT (‘非’) 3 - 3 - -
P2834[4] BI:D-FF 1 0:03 CUTN
r2835 BO:Q D-FF 1 - 3 - -
r2836 BO:NOT-Q D-FF 1 - 3 - -
P2837[4] BI:D-FF 2 0:03 CUTN
r2838 BO:Q D-FF 2 - 3 - -
r2839 BO:NOT-Q D-FF 2 - 3 - -
P2840[2] BI:RS-FF 1 0:03 CUTN
r2841 BO:Q RS-FF 1 - 3 - -
r2842 BO:NOT-Q RS-FF 1 - 3 - -
P2843[2] BI:RS-FF 2 0:03 CUTN
r2844 BO:Q RS-FF 2 - 3 - -
r2845 BO:NOT-Q RS-FF 2 - 3 - -
P2846[2] BI:RS-FF 3 0:03 CUTN
r2847 BO:Q RS-FF 3 - 3 - -
r2848 BO:NOT-Q RS-FF 3 - 3 - -
P2849 BI:定时器 10:03 CUTN
P2850 定时器 1 的延迟时间 03CUTN
P2851 定时器 1 的操作方式 03CUTN
r2852 BO:定时器 1-3--
Level DS QC
5-20
MICROMASTER 440 使用大全
Page 85

系统参数
参数号 参数名称 缺省值
r2853 BO:定时器 1 无输出 -3--
P2854 BI:定时器 20:03 CUTN
P2855 定时器 2 的延迟时间 03CUTN
P2856 定时器 2 的操作方式 03CUTN
r2857 BO:定时器 2-3--
r2858 BO:定时器 2 无输出 -3--
P2859 BI:定时器 30:03 CUTN
P2860 定时器 3 的延迟时间 03CUTN
P2861 定时器 3 的方式 03CUTN
r2862 BO:定时器 3-3--
r2863 BO:定时器 3 无输出 -3--
P2864 BI:定时器 40:03 CUTN
P2865 定时器 4 的延迟时间 03CUTN
P2866 定时器 4 的操作方式 03CUTN
r2867 BO:定时器 4-3--
r2868 BO:定时器 4 无输出 -3--
P2869[2] CI:ADD (‘加’) 1 755:03 CUT N
r2870 CO:ADD 1 - 3 - -
P2871[2] CI:ADD 2 755:03 CUT N
r2872 CO:ADD 2 - 3 - -
P2873[2] CI:SUB (‘减’) 1 755:03 CUT N
r2874 CO:SUB 1 - 3 - -
P2875[2] CI:SUB 2 755:03 CUT N
r2876 CO:SUB 2 - 3 - -
P2877[2] CI:MUL (‘乘’) 1 755:03 CUT N
r2878 CO:MUL 1 - 3 - -
P2879[2] CI:MUL 2 755:03 CUT N
r2880 CO:MUL 2 - 3 - -
P2881[2] CI:DIV (‘除’) 1 755:03 CUT N
r2882 CO:DIV 1 - 3 - -
P2883[2] CI:DIV 2 755:03 CUT N
r2884 CO:DIV 2 - 3 - -
P2885[2] CI:CMP (‘比较’) 1 755:03 CUT N
r2886 BO:CMP (‘比较’) 1 - 3 - -
P2887[2] CI:CMP (‘比较’) 2 755:03 CUT N
r2888 BO:CMP (‘比较’) 2 - 3 - -
P2889 CO:以 [%] 值表示的固定设定值 103CUTN
P2890 CO:以 [%] 值表示的固定设定值 203CUTN
Level DS QC
MICROMASTER 440 使用大全
5-21
Page 86

系统参数
编码器
参数号 参数名称 缺省值
P0400[3]
P0408[3]
P0491[3]
P0492[3]
P0494[3]
选择编码器的类型
编码器每转一圈发出的脉冲数
速度信号丢失时的处理方法
允许的速度偏差
速度信号丢失时进行处理的延迟时间
5.4 命令数据组和驱动数据组 - 概览
命令数据组 (CDS)
参数号 参数文本
0701[3] 数字输入 1 的功能
0702[3] 数字输入 2 的功能
0703[3] 数字输入 3 的功能
0704[3] 数字输入 4 的功能
0705[3] 数字输入 5 的功能
0706[3] 数字输入 6 的功能
0707[3] 数字输入 7 的功能
0708[3] 数字输入 8 的功能
0719[3] 选择命令和频率设定值
0731[3] BI:数字输出 1 的功能
0732[3] BI:数字输出 2 的功能
0733[3] BI:数字输出 3 的功能
0800[3] BI:下载参数组 0
0801[3] BI:下载参数组 1
0840[3] BI:ON/OFF1
0842[3] BI:反向 ON /OFF1
0844[3] BI:1.OFF2
0845[3] BI:2.OFF2
0848[3] BI:1.OFF3
0849[3] BI:2.OFF3
0852[3] BI:脉冲使能
1000[3] 选择频率设定值
1020[3] BI:固定频率选择位 0
1021[3] BI:固定频率选择位 1
1022[3] BI:固定频率选择位 2
1023[3] BI:固定频率选择位 3
Level DS QC
02CTN
1024 2 CT N
02CTN
10.00 2 CT N
10 2 CUT N
参数号 参数文本
1026[3] BI:固定频率选择位 4
1028[3] BI:固定频率选择位 5
1035[3] BI:使能 MOP (UP-升速命令)
1036[3] BI:使能 MOP (DOWN-降速命令)
1055[3] BI:使能正向点动
1056[3] BI:使能反向点动
1070[3] CI:主设定值
1071[3] CI:经过标定的主设定值
1074[3] BI:禁止附加设定值
1075[3] CI:附加设定值
1076[3] CI:经过标定的附加设定值
1110[3] BI:禁止负向的频率设定值
1113[3] BI:反向
1124[3] BI:使能点动 (JOG) 斜坡时间
1140[3] BI:使能斜坡函数发生器 (RFG)
1141[3] BI:RFG 开始
1142[3] BI:RFG 使能设定值
1230[3] BI:使能直流( DC)制动
1330[3] CI:电压设定值
1477[3] BI:转速控制的 Set 积分器
1478[3] CI:转速控制的 Set 积分器数值
1500[3] 选择转矩设定值
1501[3] BI:切换到转矩控制
1503[3] CI:转矩设定值
1511[3] CI:附加的转矩设定值
1522[3] CI:转矩的上极限
5-22
MICROMASTER 440 使用大全
Page 87

参数号 参数文本
1523[3] CI:转矩的下极限
2103[3] BI:1.故障确认(应答)
2104[3] BI:2.故障确认(应答)
2106[3] BI:外部故障
2151[3] CI:监控的速度设定值
2152[3] CI:监控的速度实际值
2200[3] BI:使能 PID 控制器
2220[3] BI:PID 固定设定值选择位 0
2221[3] BI:PID 固定设定值选择位 1
2222[3] BI:PID 固定设定值选择位 2
2223[3] BI:PID 固定设定值选择位 3
2226[3] BI:PID 固定设定值选择位 4
2228[3] BI:PID 固定设定值选择位 5
2235[3] BI:使能 PID-MOP (UP-升速命令)
2236[3]
2253[3] CI:PID 设定值
2254[3] CI:PID 微调源
2264[3] CI:PID 反馈
BI:使能 PID-MOP (DOWN-降速
命令)
系统参数
MICROMASTER 440 使用大全
5-23
Page 88

系统参数
驱动数据组 (DDS)
参数号 参数文本
0035[3] CO:电动机的实际温度
0291[3] 变频器保护的组态
0300[3] 选择电动机的类型
0304[3] 电动机的额定电压
0305[3] 电动机的额定电流
0307[3] 电动机的额定功率
0308[3] 电动机的额定功率因数 ( cosPhi)
0309[3] 电动机的额定效率
0310[3] 电动机的额定频率
0311[3] 电动机的额定速度
0313[3] 电动机的极对数
0314[3] 电动机的极对数
0320[3] 电动机的磁化电流
0330[3] 电动机的额定滑差
0331[3] 电动机的额定磁化电流
0332[3] 额定功率因数
0333[3] 电动机的额定转矩
0335[3] 电动机的冷却
0340[3] 电动机参数的计算
0341[3] 电动机的惯性转矩 [kg*m^2]
0342[3] 总的 / 电动机的惯性之比
0344[3] 电动机的重量
0345[3] 电动机的起动时间
0346[3] 磁化时间
0347[3] 祛磁时间
0350[3] 定子电阻 (线-线间)
0352[3] 电缆电阻
0354[3] 转子电阻
0356[3] 电阻漏感
0358[3] 转子漏感
0360[3] 主电感
0362[3] 磁化曲线的磁通 1
0363[3] 磁化曲线的磁通 2
0364[3] 磁化曲线的磁通 3
0365[3] 磁化曲线的磁通 4
0366[3] 磁化曲线的磁化电流 1
参数号 参数文本
0367[3] 磁化曲线的磁化电流 2
0368[3] 磁化曲线的磁化电流 3
0369[3] 磁化曲线的磁化电流 4
0370[3] 定子电阻 [%]
0372[3] 电缆电阻 [%]
0373[3] 额定的定子电阻 [%]
0374[3] 转子电阻 [%]
0376[3] 额定的转子电阻 [%]
0377[3] 总的漏抗 [%]
0382[3] 主电抗 [%]
0384[3] 转子时间常数
0386[3] 总的漏抗时间常数
0400[3] 选择编码器的类型
0408[3] 编码器每转一圈发出的脉冲数
0491[3] 速度信号丢失时的处理方法
0492[3] 允许的速度偏差
0494[3]
0500[3] 技术应用
0530[3] 定位信号的单位
0531[3] 单位的转换
0601[3] 电动机的温度传感器
0604[3] 电动机温控动作的门限值
0625[3] 电动机运行的环境温度
0626[3] 定子铁芯过温
0627[3] 定子绕组过温
0628[3] 转子绕组过温
0630[3] CO:运行环境的温度
0631[3] CO:定子铁芯的温度
0632[3] CO:定子绕组的温度
0633[3] CO:转子绕组的温度
0640[3] 电动机的过载系数 [%]
1001[3] 固定频率 1
1002[3] 固定频率 2
1003[3] 固定频率 3
1004[3] 固定频率 4
1005[3] 固定频率 5
速度信号丢失时进行处理的延迟
时间
5-24
MICROMASTER 440 使用大全
Page 89

系统参数
参数号 参数文本
1006[3] 固定频率 6
1007[3] 固定频率 7
1008[3] 固定频率 8
1009[3] 固定频率 9
1010[3] 固定频率 10
1011[3] 固定频率 11
1012[3] 固定频率 12
1013[3] 固定频率 13
1014[3] 固定频率 14
1015[3] 固定频率 15
1031[3] MOP 的设定值存储
1040[3] MOP 的设定值
1058[3] 正向点动 (JOG) 频率
1059[3] 反向点动频率
1060[3] 点动斜坡上升时间
1061[3] 点动斜坡下降时间
1080[3] 最小频率
1082[3] 最大频率
1091[3] 跳转频率 1
1092[3] 跳转频率 2
1093[3] 跳转频率 3
1094[3] 跳转频率 4
1101[3] 跳转频率的频带宽度
1120[3] 斜坡上升时间
1121[3] 斜坡下降时间
1130[3] 斜坡上升起始段的平滑圆弧时间
1131[3] 斜坡上升结束段的平滑圆弧时间
1132[3] 斜坡下降起始段的平滑圆弧时间
1133[3] 斜坡下降结束段的平滑圆弧时间
1134[3] 圆弧的类型
1135[3] OFF3 停车命令的斜坡下降时间
1202[3] 电动机电流 :捕捉再起动
1203[3] 搜寻速率 :捕捉再起动
1232[3] 直流制动电流
1233[3] 直流制动的持须 6 时间
1234[3] 投入直流制动时的频率
1236[3] 复合制动电流
1240[3] Vdc 控制器的组态
参数号 参数文本
1243[3] Vdc-max 的动态因子
1245[3] 接通动态缓冲的电平
1246[3] CO:接通动态缓冲的电平
1247[3] 动态缓冲的动态因子
1250[3] Vdc-控制器的增益系数
1251[3] Vdc-控制器的积分时间
1252[3] Vdc-控制器的微分时间
1253[3] Vdc-控制器的输出限幅
1256[3] 动态缓冲的处理
1257[3] 动态缓冲的频率限值
1300[3] 控制方式
1310[3] 连续提升
1311[3] 加速度提升
1312[3] 起动提升
1316[3] 结束‘提升’的频率
1320[3] 可编程的 V/f 特性频率座标 1
1321[3] 可编程的 V/f 特性电压座标 1
1322[3] 可编程的 V/f 特性频率座标 2
1323[3] 可编程的 V/f 特性电压座标 2
1324[3] 可编程的 V/f 特性频率座标 3
1325[3] 可编程的 V/f 特性电压座标 3
1333[3] 开始 FCC(磁通电流控制) 的频率
1335[3] 滑差补偿
1336[3] 滑差限值
1338[3] V/ f 谐振阻尼的增益系数
1340[3] Imax 控制器的比例增益
1341[3] Imax 控制器的积分时间
1345[3] Imax 控制器的比例增益
1346[3] Imax 控制器的积分时间
1350[3] 电压软起动
1400[3] 速度控制的组态
1442[3] 对速度实际值的滤波时间
1452[3] 对速度实际值的滤波时间 (SLVC)
1460[3] 速度控制器的增益系数
1462[3] 速度控制器的积分时间
1470[3] 速度控制器的增益系数 (SLVC)
1472[3] 速度控制器的积分时间 (SLVC)
1488[3] 特性下垂度的输入源
MICROMASTER 440 使用大全
5-25
Page 90

系统参数
参数号 参数文本
1489[3] 经过标定的下垂度
1492[3] 使能特性下垂功能
1496[3] 经过标定的加速度预控
1499[3] 经过标定的加速度转矩控制
1520[3] CO:转矩上限
1521[3] CO:转矩下限
1525[3] 经过标定的转矩下限
1530[3] 电动功率的限制值
1531[3] 再生功率的限制值
1570[3] CO:固定值磁通设定值
1574[3] 动态电压的裕量
1580[3] 效率优化
1582[3] 磁通设定值的平滑时间
1596[3] 弱磁控制器的积分时间
1610[3] 连续转矩提升 (SLVC)
1611[3] 加速度转矩提升 (SLVC)
1654[3] Isq 设定值的平滑时间
1715[3] 电流控制器的增益系数
1717[3] 电流控制器的积分时间
1750[3] 电动机模型的控制字
1755[3] 起始频率的电动机模型 (SLVC)
1756[3] 回线频率的电动机模型 (SLVC)
1758[3]
1759[3]
1764[3] 转速自适应的 Kp (SLVC)
1767[3] 转速自适应的 Tn (SLVC)
1780[3]
1781[3] 定子电阻自适应的 Tn
1786[3] Xm-自适应 的 Tn
1803[3] 最大调制
1820[3] 输出相序反向
1909[3] 电动机数据自动检测的控制字
2000[3] 基准频率
2001[3] 基准电压
2002[3] 基准电流
2003[3] 基准转矩
过渡到前馈方式的等待时间
T(wait)
转速对 settle 自适应的等待时间
T(wait)
Rs/Rr(定子电阻 / 转子电阻)-自适
应的控制字
参数号 参数文本
2004[3] 基准功率
2150[3] 回线频率 f_hys
2153[3] 速度滤波器的时间常数
2155[3] 门限频率 f_1
2156[3] 门限频率 f_1 的延迟时间
2157[3] 门限频率 f_2
2158[3] 门限频率 f_2 的延迟时间
2159[3] 门限频率 f_3
2160[3] 门限频率 f_3 的延迟时间
2161[3] 频率设定值的最小门限
2162[3] 超速的回线频率
2163[3] 允许偏差的输入频率
2164[3] 回线频率偏差
2165[3] 延迟时间的允许偏差
2166[3] 完成斜坡上升的延迟时间
2167[3] 断开频率 f_off
2168[3] T_off 延迟时间
2170[3] 门限电流 I_thresh
2171[3] 电流延迟时间
2172[3] 直流回路电压的阀值
2173[3] 直流回路电压的延迟时间
2174[3] 转矩的阀值 T_thresh
2176[3] 转矩阀值的延迟时间
2177[3] 闭锁电动机的延迟时间
2178[3] 电动机 失步的延迟时间
2181[3] 传动皮带故障的检测方式
2182[3] 传动皮带故障的阀值频率 1
2183[3] 传动皮带故障的阀值频率 2
2184[3] 传动皮带故障的阀值频率 3
2185[3] 转矩上阀值 1
2186[3] 转矩下阀值 1
2187[3] 转矩上阀值 2
2188[3] 转矩下阀值 2
2189[3] 转矩上阀值 3
2190[3] 转矩下阀值 3
2192[3] 传动皮带故障的延迟时间
2201[3] PID 固定设定值 1
2202[3] PID 固定设定值 2
5-26
MICROMASTER 440 使用大全
Page 91

参数号 参数文本
2203[3] PID 固定设定值 3
2204[3] PID 固定设定值 4
2205[3] PID 固定设定值 5
2206[3] PID 固定设定值 6
2207[3] PID 固定设定值 7
2208[3] PID 固定设定值 8
2209[3] PID 固定设定值 9
2210[3] PID 固定设定值 10
2211[3] PID 固定设定值 11
2212[3] PID 固定设定值 12
2213[3] PID 固定设定值 13
2214[3] PID 固定设定值 14
2215[3] PID 固定设定值 15
2231[3] PID-MOP 的设定值存储
2240[3] PID-MOP 的设定值
2480[3] 定位方式
2481[3] 齿轮箱速比输入
2482[3] 齿轮箱速比输出
2484[3] 轴的圈数 = 1
2487[3] 定位误差微调值
2488[3] 最终轴的圈数 = 1
系统参数
MICROMASTER 440 使用大全
5-27
Page 92

系统参数
5-28
MICROMASTER 440 使用大全
Page 93

6 故障的排除
本章内容有:
¾ 装有 SDP 的变频器的运行状态
¾ 用 BOP 排障的说明
¾ 报警信息和故障信息一览表
故障的排除
6.1 用
6.2 利用基本操作面板(
SDP 排障 .........................................................................................................................6-2
BOP)排障 .........................................................................................6-3
6.3 故障信息 .............................................................................................................................. 6-3
6.4 报警信息 .............................................................................................................................. 6-7
MICROMASTER 440 使用大全
6-1
Page 94

故障的排除
警告
♦ 本设备的维修只能由西门子公司的服务部门,西门子公司授权的维修中心或经过认证
合格的人员进行,这些人员应当十分熟悉本手册中提出的所有警告和操作步骤。
♦ 任何有缺陷的部件和器件都必须用相应的备件更换。
♦ 在打开设备进行维修之前,一定要断开电源。
6.1 用 SDP 排障
表 说明状态显示屏
(SDP) 上 LED 各种
状 态的含义。
指示变频器状态的 LED
灯灭
灯亮
闪光约 1 s
闪光约
0.3 s
表 6-1 SDP 上 LED 指示的变频器状态
电源未接通 故障-变频器过温
运行准备就绪 电流极限报警-两个 LED 同时闪光
变频器故障- 以下故障除外 其它报警 -两个 LED 交替闪光
变频器正在运行 欠电压跳闸 / 欠电压报警
故障-过电流 变频器不在准备状态
故障-过电压 ROM 故障 - 两个 LED 同时闪 光
故障-电动机过温 RAM 故障 - 两个 LED 交替闪 光
6-2
MICROMASTER 440 使用大全
Page 95

6.2 利用基本操作面板( BOP)排障
在 BOP 上分别以 Axxxx 和 Fxxxx 表示报警信号和故障信号。相关的信息请参看本章后面的列
表。
如果“ ON ”命令发出以后电动机不起动,请检查以下各项:
¾ 检查是否 P0010 = 0。
¾ 检查给出的“ ON ”信号是否正常。
¾ 检查是否 P0700 = 2 (数字输入控制) 或 P0700 = 1 (用 BOP 进行控制)。
¾ 根据设定信号源(P1000)的不同,检查设定值是否存在 (端子 3 上应有 0 到 10V ) 或输入的
频率设定值参数号是否正确。详细情况请查阅“参数表”。
如果在改变参数后电动机仍然不起动,请设定 P0010 = 30 和 P0970 = 1 ,并按下 P 键,这时,
变频器应复位到工厂设定的缺省参数值。
现在,在控制板上的端子 5 和 9(图 3-5)之间用开关接通。那麽,驱动装置应运行在与模拟输入
相应的设定频率。
提示
电动机的功率和电压数据必须与变频器的数据相对应。
故障的排除
6.3 故障信息
发生故障时,变频器跳闸,并在显示屏上出现一个故障码。
说明
为了使故障码复位,可以采用以下三种方法中的一种:
1. 重新给变频器加上电源电压。
2. 按下 BOP 或 AOP 上的
3. 通过数字输入 3 (缺省设置)
故障 引起故障可能的原因 故障诊断和应采取的措施 反应
F0001
过流
♦ 电动机的功率 (P0307) 与变频器的功
率(P0206)不对应
♦ 电动机的导线短路
♦ 有接地故障
键。
检查以下各项:
1. 电动机的功率 (P0307) 必须与变频器的功率
(P0206)相对应。
2. 电缆的长度不得超过允许的最大值。
3. 电动机的电缆和电动机内部不得有短路或接
地故障
4. 输入变频器的电动机参数必须与实际使用的
电动 参数相对应
5. 输入变频器的定子电阻值 (P0350) 必须正确
无误
6. 电动机的冷却风道必须通畅,电动机不得过
载
> 增加斜坡时间
> 减少“提升”的数值
Off2
MICROMASTER 440 使用大全
6-3
Page 96

故障的排除
故障 引起故障可能的原因 故障诊断和应采取的措施 反应
F0002
过电压
F0003
欠电压
F0004
变频器过温
♦ 直流回路的电压 (r0026) 超过了跳闸
电平 (P2172)
♦ 由于供电电源电压过高,或者电动机
处于 生制动方式下引起过电压。
♦ 斜坡下降过快,或者电动机由大惯量
负载 带动旋转而处于再生制动状态
下。
♦ 供电电源故障。
♦ 冲击负载超过了规定的限定值。
♦ 冷却风量不足
♦ 环境温度过高。
检查以下各项:
1.
电源电压(P0210)必须在变频器铭牌规定的范
围以内 。
2.
直流回路电压控制器必须有效(P1240),而
且正确地进行了参数化。
斜坡下降时间 (P1121) 必须与负载的惯量相
3.
匹配。
4. 要求的制动功率必须在规定的限定值以内。
注意
负载的惯量越大需要的斜坡时间越长 ;否则,
应另外接入制动电阻。
检查以下各项:
1. 电源电压(P0210)必须在变频器铭牌规定的范
围以内。
2.
检查电源是否短时掉电或有瞬时的电压降
低。
检查以下各项:
1. 变频器运行时冷却风机必须正常运转
2. 调制脉冲的频率必须设定为缺省值
Off2
Off2
Off2
3. 环境温度可能高于变频器的允许值
P0949 = 1:整流器过温
P0949 = 2:运行环境过温
P0949 = 3:电子控制箱过温
F0005
变频器 I2T 过热保
护
F0011
电动机过温
F0012
变频器温度信号丢
失
F0015
电动机温度信号丢
失
F0020
电源断相
F0021
接地故障
F0022
功率组件故障
♦ 变频器过载。
♦ 工作 / 间隙周期时间不符合要求。
♦ 电动机功率(P0307)超过变频器的负
载能力 (P0206)。
♦ 电动机过载
♦ 变频器(散热器)的温度传感器断线
♦ 电动机的温度传感器开路或短路。如
果检测 到信号已经丢失,温度监控
开关便切换为监控电动机的温度模型
♦ 如果三相输入电源电压中的一相丢
失,便出 现故障,但变频器的脉冲
仍然允许输出,变气魄仍然可以带负
载
♦ 如果相电流的总和超过变频器额定电
流的 5 %时将引起这一故障。
♦ 在下列情况下将检测到 UCE 故障
♦ P0947 = 22 和故障值
♦ P0948 = 12 或 13 或 14,决定于
UCE
检查以下各项:
1. 负载的工作 / 间隙周期时间不得超过指定的允
许值。
2.
电动机的功率(P0307)必须与变频器的功率
(P0206)相匹配
检查以下各项:
1.
负载的工作 / 间隙周期必须正确
2. 标称的电动机温度超限值 (P0626-P0628)必须
正确
3. 电动机温度报警电平 (P0604) 必须匹配
检查输入电源各相的线路
检查 I / O 板 。它必须完全插入
Off2
Off1
Off2
Off2
Off2
Off2
Off2
6-4
MICROMASTER 440 使用大全
Page 97

故障的排除
故障 引起故障可能的原因 故障诊断和应采取的措施 反应
F0023
输出故障
F0024
整流器过温
F0030
冷却风机故障
F0035
在重试再起动后自
动再起动故障
F0040
自动校准故障
F0041
电动机参数自动检
测故障
F0042
速度控制优化功能
故障
F0051
参数 EEPROM 故
障
♦ 输出的一相断线
♦ 通风风量不足
♦ 冷却风机没有运行
♦ 环境温度过高
风机不再工作 1.
在重试自动再起动以后,出现自动再起动
故障
电动机参数自动检测故障。
报警值 =0:负载消失
报警值=1:进行自动检测时已达到电流
限制的电平。
报警值 =2:自动检测得出的定子电阻小
于 0。1% 或大于 100%。
报警值 =3:自动检测得出的转子电阻小
于 0。1% 或大于 100%。
报警值 =4:自动检测得出的定子电抗小
于 50% 或大于 500%。
报警值 =5:自动检测得出的电源电抗小
于 50% 或大于 500%。
报警值=6:自动检测得出的转子时间常
数小于 10ms 或大于 5s。
报警值 =7:自动检测得出的总漏抗小于
5% 或大于 50%。
报警值 =8:自动检测得出的定子漏抗小
于 25% 或大于 250%。
报警值 =9:自动检测得出的转子漏感小
于 25% 或大于 250%。
报警值=20:自动检测得出的 IGBT 通态
电压小于 0。5V 或大于 10V。
报警值 = 30:电流控制器达到了电压限
制值
报警值=40:自动检测得出的数据组自相
矛盾,至少有一个自动检测数据
错误
基于电抗 Zb 的百分值 = Vmot,nom /
sqrt(3) / Imot,nom
电动机数据自动检测失败。
♦ 报警值 = 0 :超出了速度稳定的等待
时间
♦ 报警值 = 1 :读数不合乎逻辑
存储不挥发的参数时出现读 / 写错误。 1. 工厂复位并重新参数化
检查以下各项:
♦ 变频器运行时冷却风机必须处于运转状态
♦ 脉冲频率必须设定为缺省值
♦ 环境温度可能高于变频器允许的运行温度
在装有操作面板选件(AOP 或 BOP)时,故障
不能被
屏蔽。
2. 需要安装新风机。
0:检查电动机是否与变频器正确连接。
1-40: 检查电动机参数 P304-311 是否正确。
检查电动机的接线应该是哪种型式 (星形,三角
形)。
2. 更换变频器
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
MICROMASTER 440 使用大全
6-5
Page 98

故障的排除
故障 引起故障可能的原因 故障诊断和应采取的措施 反应
F0052
功率组件故障
F0053
I/O EEPROM 故
障
F0054
I/O 板错误
F0060
Asic 超时
F0070
CB 设定值故障
F0071
USS(BOP-链接)
设定值故障
F0072
USS (COMM 链
接) 设定值故障
F0080
ADC 输入信号丢
失
F0085
外部故障
F0090
编码器反馈信号丢
失
F0101
功率组件溢出
F0221
PID 反馈信号低于
最小值
F0222
PID 反馈信号高于
最大值
F0450
BIST 测试故障
读取功率组件的参数时出错,或数据非法。更换变频器
读 I/O EEPROM 信息时出错,或数据非法。1. 检查数据
更换 I / O 模块
2.
♦ 连接的 I/O 板不对
♦ I/O 板检测不出识别号,检测不到数
据
内部通讯故障 1. 如果存在故障,请更换变频器
在通讯报文结束时,不能从 CB(通讯板)
接设定值
在通讯报文结束时,不能从 USS 得到设定值检查 USS 主站
在通讯报文结束时,不能从 USS 得到设定值检查 USS 主站
♦ 断线
♦ 信号超出限定值
由端子输入信号触发的外部故障 封锁触发故障的端子输入信号。
♦ 从编码器来的信号丢失
软件出错或处理器故障 运行自测试程序
PID 反馈信号低于 P2268 设置的最小值。 改变 P2268 的设置值 。或调整反馈增益系数。
PID 反馈信号超过 P2267 设置的最大值。 改变 P2267 的设置值 。或调整反馈增益系数。
故障值:
1. 有些功率部件的测试有故障
2. 有些控制板的测试有故障
4. 有些功能测试有故障
5. 上电检测时内部 RAM 有故障
1. 检查数据
2.
更换 I / O 模板
2. 或与维修部门联系
检查 CB 板和通讯对象
1. 检查编码器的安装固定情况,设定 P0400 = 0
并选择 SLVC 控制方式 (P1300 = 20 或 22)
2. 检查编码器与变频器之间的接线
3. 检查编码器应无故障(选择 P1300 = 0,
在一定速度下运行,检查 P66 中的编码器反馈信
号)
增加编码器反馈信号消失的门限值(P0492)
1. 变频器可以运行,但有的功能不能正确工作。
2. 更换变频器。
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
Off2
6-6
MICROMASTER 440 使用大全
Page 99

故障的排除
故障 引起故障可能的原因 故障诊断和应采取的措施 反应
F0452
检测出传动皮带有
故障
负载状态表明传动皮带故障或机械有故障。检查下列各项:
1. 驱动链有无断裂,卡死或堵塞现象。
2. 外接速度传感器(如果采用的话)是否正确
地工作;
检查以下的参数 :
P0409 (额定速度下每分钟脉冲数),
P2191 (传动皮带故障的频率偏差),
P2192 (与允许偏差相对应的延迟时间) 的数
值必须正确无误。
3. 如果采用转矩控制,以下参数的数值必须正
确无误:
P2182 (频率门限值 f 1),
P2183 (频率门限值f2),
P2184 (频率门限值f3),
P2185 (转矩上限值1) ,
P2186 (转矩下限值1),
P2187 (转矩上限值 2),
P2188 (转矩下限值 2),
P2189 (转矩 上限值 3),
P2190 (转矩下限值 3) ,
P2192 (与允许偏差对应的延迟时间) 。
4. 如果需要的话,加润滑油
Off2
6.4 报警信息
故障 引起故障可能的原因 故障诊断和应采取的措施
A0501
电流限幅
A0502
过压限幅
A0503
欠压限幅
A0504
变频器过温
A0505
2
变频器 I
A0506
变频器的“工作-停
止”周期
T 过温
♦ 电动机的功率与变频器的功率不匹配
♦ 电动机的连接导线太短
♦ 接地故障
达到了过压限幅值。
斜坡下降时如果直流回路控制器无效(P1240
= 0) 就可能出现这一报警信号。
供电电源故障
供电电源电压(P0210)和与之相应的直流回路
电压(r0026)低于规定的限定值(P2172)。
变频器散热器的温度(P0614)超过了报警电
平,将使调制脉冲的开关频率降低和/或输出频
率降低 (取决于 (P0610)的参数化)
变频器温度超过了报警电平;如果已参数化为
(P0610 = 1),将降低电流。
散热器温度与 IGBT 的结温之差超过了报警的
限定值
检查以下各项:
电动机的功率(P0307)必须与变频器功率(P0206) 相对应。
1.
电缆的长度不得超过最大允许值。
2.
电动机电缆和电动机内部不得有短路或接地故障
3.
输入变频器的电动机参数必须与实际使用的电动机 一致
4.
定子电阻值 (P0350) 必须正确无误
5.
电动机的冷却风道是否堵塞,电动机是否过载
6.
♦ 增加斜坡上升时间。
♦ 减少“提升”的数值。
如果这一报警显示一直存在,请检查变频器的输入电源电压 。
检查电源电压 (P0210)应保持在允许范围内。
检查以下各项:
环境温度必须在规定的范围内
1.
负载状态和“工作-停止”周期时间必须适当
2.
检查“工作-停止”周期的工作时间应在规定范围内
检查“工作-停止” 周期和冲击负载应在规定范围内
MICROMASTER 440 使用大全
6-7
Page 100

故障的排除
故障 引起故障可能的原因 故障诊断和应采取的措施
A0511
2
电动机 I
A0512
电动机温度信号丢失
A520
整流器过温
A521
运行环境过温
A522
I2C 读出超时
A523
输出故障
A0535
制动电阻过热
A0541
电动机数据自动检测
已激活
A0542
速度控制优化激活
A0590
编码器反馈信号丢失
的报警
A0600
RTOS 超出正常范围
A0700
CB 报警 1,详情请
参看 CB 手册。
A0701
CB 报警 2,详情请
参看 CB 手册。
A0702
CB 报警 3,详情请
参看 CB 手册。
A0703
CB 报警 4,详情请
参看 CB 手册。
A0704
CB 报警 5,详情请
参看 CB 手册。
T 过温
电动机过载。
负载的“工作-停止”周期中,工作时间太
长。
至电动机温度传感器的信号线断线。如果已检
查出信号线断线,温度监控开关应切换到采用
电动机的温度模型进行监控。
整流器的散热器温度超出报警值 请检查以下各项:
运行环境温度超出报警值 请检查以下各项;
通过 I 2 C 总线周期地存取 UCE 的值和功率 组
件的 温度发生故障。
输出的一相断线 可以对报警信号加以屏蔽
已选择电动机数据的自动检测(P1910)功能,
或检测正在进行
已经选泽速度控制的优化功能(P1960),或优
化正在进行
从编码器来的反馈信号丢失,变频器切换到无
传感器矢量控制方式运行
CB (通讯板) 特有故障 参看 “CB 用户手册”
CB (通讯板) 特有故障 参看 “CB 用户手册”
CB (通讯板) 特有故障 参看 “CB 用户手册”
CB (通讯板) 特有故障 参看 “CB 用户手册”
CB (通讯板) 特有故障 参看 “CB 用户手册”
无论是哪种过温,请检查以下各项:
P0604 电动机温度报警门限
1.
P0625 电动机运行的环境温度
2.
如果 P0601 = 0 或 1,请检查以下各项:
3.
♦ 铭牌数据是否正确 (如果不执行快速调试)
♦ 在进行电动机参数自动检测时(P1910 = 0),等效回路的数据
应准确
♦ 电动机的重量(P0344)是否可靠。必要时应进行修改
♦ 如果使用的电动机不是西门子的标准电机,应通过参数
P0626,P0627,P0628 改变过温的标准值
如果 P0601 = 1,请检查以下各项:
4.
♦ r0035 显示的温度值是否可靠
♦ 传感器是否是 KTY 84 ( 不支持其它的传感器 )
1. 环境温度必须在允许限值以内
2. 负载状态和“工作-停止”周期时间必须适当
3. 变频器运行时,冷却风机必须正常转动
1. 环境温度必须在允许限值以内
2. 变频器运行时,冷却风机必须正常转动
3. 冷却风机的进风口不允许有任何阻塞
停止变频器 ,然后,
1. 检查编码器的安装情况 。如果没有安装编码器,应设定 0400
=0 ,并选泽 SLVC 运行方式(P1300 = 20 或 22)
2. 检查变频器与编码器之间的接线
3. 检查编码器有无故障
速度下运行,检查 P0066 的编码器反馈信号)
4. 增加编码器信号丢失的门限值(P0492)
(选择 P1300 = 0,使变频器在某一固定
6-8
MICROMASTER 440 使用大全
 Loading...
Loading...