

Page 1

MICROMASTER 440
Operating instructions Issue A1
User Documentation
Page 2
MICROMASTER 440 DOCUMENTATION
Getting Started Guide
Is for quick commissioning with SDP and BOP.
Operating Instructions
Gives information about features of the MM440,
Installation, Commissioning, Control modes, System
Parameter structure, Troubleshooting, Specifications
and available options of the MM440.
Parameter List
The Parameter List contains the description of all
Parameters structured in functional order and a
detailed description. The Parameter list also includes
a series of function plans.
Reference Manual
The Reference Manual gives detailed information
about engineering communication troubleshooting
and maintenance.
Catalogues
In the catalogue you will find all the necessary
information to select an appropriate inverter, as well
as filters, chokes, operator panels and
communication options.
Page 3
Overview
1
MICROMASTER 440
Operating instructions
User Documentation
Installation
Commissioning
Using the
MICROMASTER 440
System Parameters
Troubleshooting
MICROMASTER 440
Specifications
2
3
4
5
6
7
Valid for
Converter Type Control Version
MICROMASTER 440 04.2001
Available options
Electro-Magnetic
Compatibility
Appendices
8
9
A
B
C
D
E
F
G
H
I
J
Issue A1
K
L
Index
Page 4
IMPORTANT NOTICE
Not all inverters currently have UL approval.
UL listing can be determined by examining the
inverter's Rating Label.
For UL listed products the following UL mark is used:
Further information can be obtained from Internet
website:
http://www.siemens.de/micromaster
Approved Siemens Quality for Software and Training
is to DIN ISO 9001, Reg. No. 2160-01
The reproduction, transmission or use of this document,
or its contents is not permitted unless authorized in
writing. Offenders will be liable for damages. All rights
including rights created by patent grant or registration of a
utility model or design are reserved.
© Siemens AG 2001. All Rights Reserved.
MICROMASTER® is a registered trademark of Siemens
Order number: 6SE6400-5CA00-0BP0 Siemens-Aktiengesellschaft
Other functions not described in this document may be
available. However, this fact shall not constitute an
obligation to supply such functions with a new control, or
when servicing.
We have checked that the contents of this document
correspond to the hardware and software described.
There may be discrepancies nevertheless, and no
guarantee can be given that they are completely identical.
The information contained in this document is reviewed
regularly and any necessary changes will be included in
the next edition. We welcome suggestions for
improvement.
Siemens handbooks are printed on chlorine-free paper
that has been produced from managed sustainable
forests. No solvents have been used in the printing or
binding process.
Document subject to change without prior notice.
MICROMASTER 440 Operating instructions
4 6SE6400-5CA00-0BP0
Page 5
International English Foreword
Foreword
User Documentation
Warning
Before installing and commissioning the inverter, you must read all safety
instructions and warnings carefully including all the warning labels attached to the
equipment. Make sure that the warning labels are kept in a legible condition and
replace missing or damaged labels.
MICROMASTER documentation is structured within three distinct levels:
Getting Started Guide
The Getting Started Guide is designed to give the user quick access to all the
basic information required to install and set up your MICROMASTER 440 for
operation.
Operating Instructions
The Operating Instructions provide detailed information for installation and
operation of your MICROMASTER 440. The Operating Instructions also
provide detailed descriptions of the parameters available for customizing the
functions of the MICROMASTER 440.
Reference Manual
The Reference Manual contains in-depth information on all technical issues
relating to the MICROMASTER 440 Inverter.
Parameter List
The Parameter List contains a complete detailed listing of all MICROMASTER
440 parameters.
Information is also available from:
Technical Support Nuremberg
Tel: +49 (0) 180 5050 222
Fax: +49 (0) 180 5050 223
Email: techsupport@ad.siemens.de
Monday to Friday: 7:00 am to 5:00 pm (local time)
Internet Home Address
Customers can access technical and general information at:
http://www.siemens.de/micromaster
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
5
Page 6
Foreword International English
Definitions and Warnings
Danger
For the purpose of this documentation and the product warning labels, "Danger"
indicates that death, severe personal injury or substantial damage to property will
result if proper precautions are not taken.
Warning
For the purpose of this documentation and the product warning labels, "Warning"
indicates that death, severe personal injury or substantial damage to property can
result if proper precautions are not taken.
Caution
For the purpose of this documentation and the product warning labels, "Caution"
indicates that minor personal injury or material damage can result if proper
precautions are not taken.
Note
For the purpose of this documentation, "Note" indicates important information
relating to the product or highlights part of the documentation for special attention.
Qualified personnel
For the purpose of this Instruction Manual and product labels, a "Qualified person"
is someone who is familiar with the installation, mounting, start-up and operation
of the equipment and the hazards involved.
He or she must have the following qualifications:
1. Trained and authorized to energize, de-energize, clear, ground and tag
circuits and equipment in accordance with established safety procedures.
2. Trained in the proper care and use of protective equipment in accordance with
established safety procedures.
3. Trained in rendering first aid.
PE
= Ground
♦ PE – Protective Earth uses circuit protective conductors sized for short circuits
where the voltage will not rise in excess of 50 Volts. This connection is
normally used to ground the inverter.
♦
- Is the ground connection where the reference voltage can be the same
as the Earth voltage. This connection is normally used to ground the motor.
Use for intended purpose only
The equipment may be used only for the application stated in the manual and only
in conjunction with devices and components recommended and authorized by
Siemens.
Contact address
Should any questions or problems arise while reading this manual, please contact
the Siemens office concerned using the form provided at the back this manual.
MICROMASTER 440 Operating instructions
6 6SE6400-5CA00-0BP0
Page 7
International English Foreword
Safety Instructions
The following Warnings, Cautions and Notes are provided for your safety and as a
means of preventing damage to the product or components in the machines
connected. This section lists Warnings, Cautions and Notes, which apply generally
when handling MICROMASTER 440 Inverters, classified as General, Transport &
Storage, Commissioning, Operation, Repair and Dismantling & Disposal.
Specific Warnings, Cautions and Notes that apply to particular activities are
listed at the beginning of the relevant chapters and are repeated or supplemented
at critical points throughout these sections.
Please read the information carefully, since it is provided for your personal
safety and will also help prolong the service life of your MICROMASTER 440
Inverter and the equipment you connect to it.
General
Warnings
♦ This equipment contains dangerous voltages and controls potentially
dangerous rotating mechanical parts. Non-compliance with Warnings or
failure to follow the instructions contained in this manual can result in loss of
life, severe personal injury or serious damage to property.
♦ Only suitable qualified personnel should work on this equipment, and only
after becoming familiar with all safety notices, installation, operation and
maintenance procedures contained in this manual. The successful and safe
operation of this equipment is dependent upon its proper handling,
installation, operation and maintenance.
♦ Risk of electric shock. The DC link capacitors remain charged for five minutes
after power has been removed. It is not permissible to open the
equipment until 5 minutes after the power has been removed.
♦ HP ratings are based on the Siemens 1LA motors and are given for
guidance only; they do not necessarily comply with UL or NEMA HP
ratings.
Caution
♦ Children and the general public must be prevented from accessing or
approaching the equipment!
♦ This equipment may only be used for the purpose specified by the
manufacturer. Unauthorized modifications and the use of spare parts and
accessories that are not sold or recommended by the manufacturer of the
equipment can cause fires, electric shocks and injuries.
Notes
♦ Keep these operating instructions within easy reach of the equipment and
make them available to all users
♦ Whenever measuring or testing has to be performed on live equipment, the
regulations of Safety Code VBG 4.0 must be observed, in particular §8
“Permissible Deviations when Working on Live Parts”. Suitable electronic
tools should be used.
♦ Before installing and commissioning, please read these safety instructions
and warnings carefully and all the warning labels attached to the equipment.
Make sure that the warning labels are kept in a legible condition and replace
missing or damaged labels
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
7
Page 8
Foreword International English
Transport & Storage
Warning
♦ Correct transport, storage, erection and mounting, as well as careful
operation and maintenance are essential for proper and safe operation of the
equipment.
Caution
♦ Protect the inverter against physical shocks and vibration during transport and
storage. Also be sure to protect it against water (rainfall) and excessive
temperatures (see table on page 78).
Commissioning
Warnings
♦ Work on the device/system by unqualified personnel or failure to comply with
warnings can result in severe personal injury or serious damage to material.
Only suitably qualified personnel trained in the setup, installation,
commissioning and operation of the product should carry out work on the
device/system.
♦ Only permanently-wired input power connections are allowed. This equipment
must be grounded (IEC 536 Class 1, NEC and other applicable standards).
♦ If a Residual Current-operated protective Device (RCD) is to be used, it must
be an RCD type B.
♦ Machines with a three-phase power supply, fitted with EMC filters, must not
be connected to a supply via an ELCB (Earth Leakage Circuit-Breaker - see
DIN VDE 0160, section 5.5.2 and EN50178 section 5.2.11.1).
♦ The following terminals can carry dangerous voltages even if the inverter is
inoperative:
- the power supply terminals L/L1, N/L2, L3.
- the motor terminals U, V, W, DC+/B+, DC-, B- and DC/R+
♦ This equipment must not be used as an ‘emergency stop mechanism’ (see
EN 60204, 9.2.5.4)
Caution
The connection of power, motor and control cables to the inverter must be carried
out as shown in Figure 2-4 on page 30, to prevent inductive and capacitive
interference from affecting the correct functioning of the inverter.
MICROMASTER 440 Operating instructions
8 6SE6400-5CA00-0BP0
Page 9
International English Foreword
Operation
Warnings
♦ MICROMASTERS operate at high voltages.
♦ When operating electrical devices, it is impossible to avoid applying
hazardous voltages to certain parts of the equipment.
♦ Emergency Stop facilities according to EN 60204 IEC 204 (VDE 0113) must
remain operative in all operating modes of the control equipment. Any
disengagement of the Emergency Stop facility must not lead to uncontrolled
or undefined restart.
♦ Wherever faults occurring in the control equipment can lead to substantial
material damage or even grievous bodily injury (i.e. potentially dangerous
faults), additional external precautions must be taken or facilities provided to
ensure or enforce safe operation, even when a fault occurs (e.g. independent
limit switches, mechanical interlocks, etc.).
♦ Certain parameter settings may cause the inverter to restart automatically
after an input power failure.
♦ Motor parameters must be accurately configured for motor overload
protection to operate correctly.
♦ This equipment is capable of providing internal motor overload protection in
accordance with UL508C section 42. Refer to P0610 (level 3) and P0335, I
is ON by default. Motor overload protection can also be provided using an
external PTC (disabled by default P0601).
♦ This equipment is suitable for use in a circuit capable of delivering not more
than 10,000 symmetrical amperes (rms), for a maximum voltage of
230V/460V/575V when protected by a H or K type fuse (see Tables starting
on page 77).
♦ This equipment must not be used as an ‘emergency stop mechanism’ (see
EN 60204, 9.2.5.4)
2
t
Repair
Warnings
♦ Repairs on equipment may only be carried out by Sieme n s Serv ic e, by
repair centers authorized by Siemens or by qualified personnel who are
thoroughly acquainted with all the warnings and operating procedures
contained in this manual.
♦ Any defective parts or components must be replaced using parts contained in
the relevant spare parts list.
♦ Disconnect the power supply before opening the equipment for access
Dismantling & Disposal
Notes
♦ The inverter’s packaging is re-usable. Retain the packaging for future use or
return it to the manufacturer.
♦ Easy-to-release screw and snap connectors allow you to break the unit down
into its component parts. You can then re-cycle these component parts,
dispose of them in accordance with local requirements or return them to
the manufacturer.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
9
Page 10

Foreword International English
MICROMASTER 440 Operating instructions
10 6SE6400-5CA00-0BP0
Page 11

International English Table of Contents
Table of Contents
1 Overview ................................................................................................................ 15
1.1 The MICROMASTER 440 .......................................................................................16
1.2 Features ..................................................................................................................16
2 Installation .............................................................................................................19
2.1 General.................................................................................................................... 21
2.2 Ambient operating conditions.................................................................................. 22
2.3 Mechanical Installation ............................................................................................23
2.4 Electrical Installation................................................................................................ 25
3 Commissioning .....................................................................................................31
3.1 Block Diagram .........................................................................................................33
3.2 Commission Modes................................................................................................. 34
3.3 General operation.................................................................................................... 43
4 Using the MICROMASTER 440.............................................................................45
4.1 Frequency Setpoint (P1000) ................................................................................... 46
4.2 Command Sources (P0700).................................................................................... 47
4.3 OFF and braking Functions..................................................................................... 47
4.4 Control Modes (P1300) ...........................................................................................49
4.5 Faults and warnings ................................................................................................50
5 System Parameters...............................................................................................51
5.1 Introduction to MICROMASTER System Parameters............................................. 52
5.2 Parameter Overview................................................................................................ 53
5.3 Parameter List (short form) ..................................................................................... 54
6 Troubleshooting....................................................................................................67
6.1 Troubleshooting with the Status Display Panel....................................................... 68
6.2 Troubleshooting with the Basic Operator Panel...................................................... 69
6.3 Fault messages .......................................................................................................70
7 MICROMASTER 440 Specifications.....................................................................77
8 Available options...................................................................................................89
8.1 Available options ..................................................................................................... 90
9 Electro-Magnetic Compatibility (EMC)................................................................91
9.1 Electro-Magnetic Compatibility (EMC) ....................................................................92
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
11
Page 12
Table of Contents International English
A - Changing the Operator Panel .............................................................................................97
B - Removing Covers Frame Size A.........................................................................................98
C - Removing the I/O Board......................................................................................................99
D - Removing Covers Frame Sizes B and C..........................................................................100
E - Removal of Covers Frame Size D and E..........................................................................101
F - Removal of Covers Frame Size F......................................................................................102
G - Removing ‘Y’ Cap Link Frame Size A..............................................................................103
H - Removing ‘Y’ Cap Link Frame Sizes B and C.................................................................104
I - Removing ‘Y’ Cap Link Frame Sizes D and E...................................................................105
J - Removing ‘Y’ Cap Link Frame Sizes F ............................................................................. 106
K - Applicable Standards ........................................................................................................107
L - List of Abbreviations..........................................................................................................108
Index ...............................................................................................................................109
MICROMASTER 440 Operating instructions
12 6SE6400-5CA00-0BP0
Page 13

International English Table of Contents
List of Illustrations
Figure 2-1 Drill pattern for MICROMASTER 440....................................................................................22
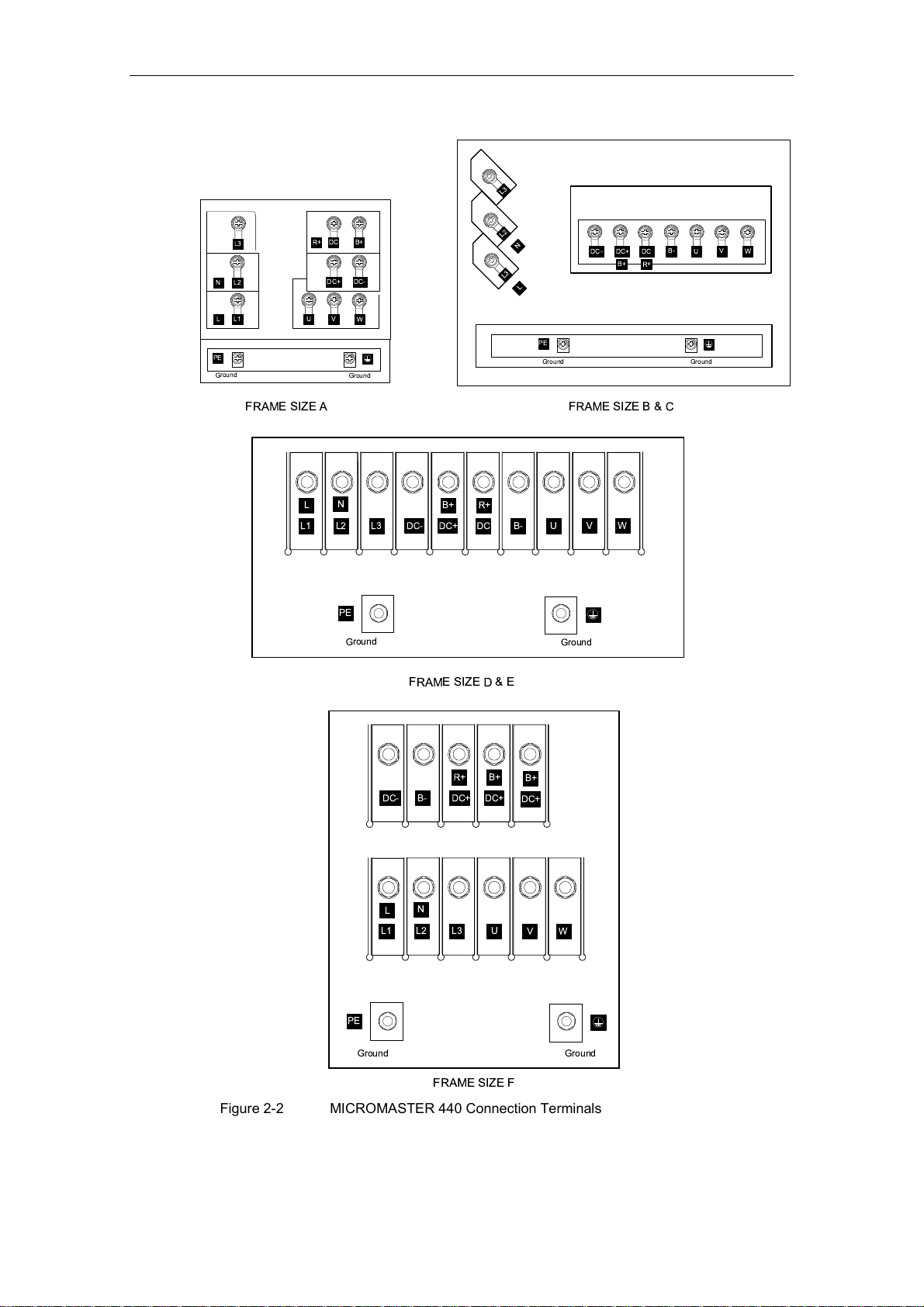
Figure 2-2 MICROMASTER 440 Connection Terminals ........................................................................26
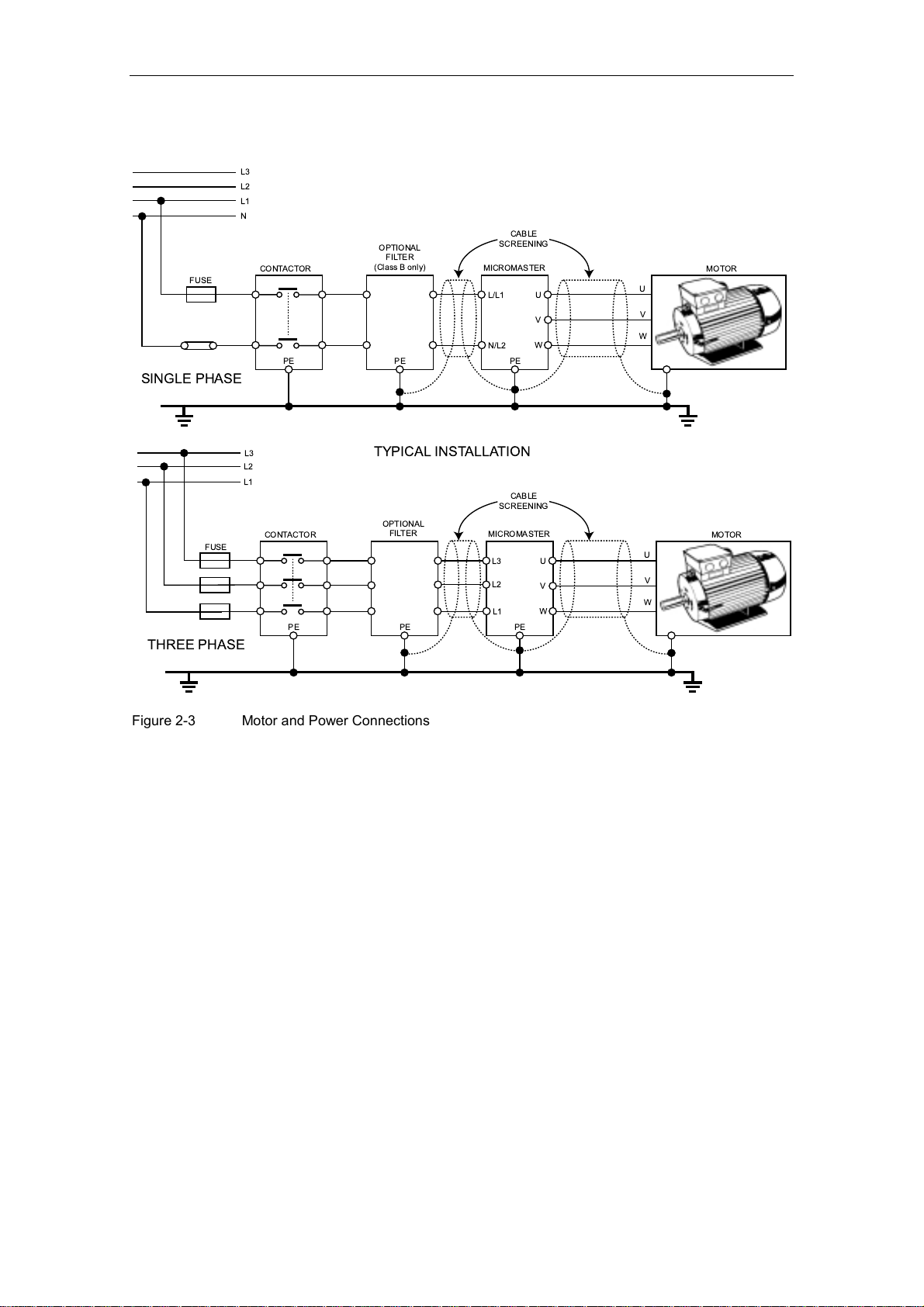
Figure 2-3 Motor and Power Connections..............................................................................................27
Figure 2-4 Wiring Guidelines to Minimize the Effects of EMI .................................................................29
Figure 3-1 Inverter block diagram ..........................................................................................................33
Figure 3-2 Panels available for the MICROMASTER 440 Inverter.........................................................34
Figure 3-3 Basic operation with SDP .....................................................................................................36
Figure 3-4 DIP locations on I/O board and the Control Board................................................................36
Figure 3-5 Buttons on the Basic Operator Panel....................................................................................38
Figure 3-6 Changing parameters via the BOP .......................................................................................39
Figure 3-7 Typical Motor Rating Plate Example.....................................................................................41
Figure 5-1 Quick Commissioning Flowchart...........................................................................................51
List of Tables
Table 2-1 Dimensions and Torques of MM440 (all frame sizes)...........................................................23
Table 3-1 Default settings for operation using the Status Display Panel...............................................35
Table 3-2 Default settings for operation using the BOP........................................................................39
Table 6-1 Inverter conditions indicated by the LEDs on the SDP .........................................................68
Table 7-1 MICROMASTER 440 Performance Ratings .........................................................................78
Table 7-2 Wire Sizes & Terminal Torques – Field Wiring Connectors ..................................................79
Table 7-3 MICROMASTER 440 Specifications.....................................................................................79
Table 9-1 Class 1 - General Industrial ..................................................................................................94
Table 9-2 Class 2 - Filtered Industrial ...................................................................................................94
Table 9-3 Class 3 - Filtered for Residential, Commercial and Light Industry ........................................95
Table 9-4 Compliance Table.................................................................................................................96
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
13
Page 14

Table of Contents International English
MICROMASTER 440 Operating instructions
14 6SE6400-5CA00-0BP0
Page 15
International English 1 Overview
1 Overview
This Chapter contains:
A summary of the major features of the MICROMASTER 440 range.
1.1 The MICROMASTER 440 .......................................................................................16
1.2 Features ..................................................................................................................16
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
15
Page 16

1 Overview International English
1.1 The MICROMASTER 440
The MICROMASTER 440s are a range of frequency inverters for controlling the
speed of three phase AC motors. The various models available range from the 120
W single-phase input to the 75 kW three phase input.
The inverters are microprocessor-controlled and use state-of-the-art Insulated Gate
BipoIar Transistor (IGBT) technology. This makes them reliable and versatile. A
special pulse-width modulation method with selectable Pulse frequency permits
quiet motor operation. Comprehensive protective functions provide excellent
inverter and motor protection.
The MICROMASTER 440 with its default factory settings is ideal for a large range
of simple motor control applications. The MICROMASTER 440 can also be used
for more advanced motor control applications via its comprehensive functionality.
The MICROMASTER 440 can be used in both 'stand-alone' applications as well as
being integrated into 'Automation Systems'.
1.2 Features
Main Characteristics
Easy to install, parameterize and commission
Rugged EMC design
Can be operated on IT line supplies
Fast repeatable response time to control signals
Comprehensive range of parameters enabling configuration for a wide range of
applications
Simple cable connection
Output relays
Analog outputs (0 – 20 mA)
6 Isolated and switchable NPN/PNP digital inputs
2 Analog inputs:
♦ AIN1: 0 – 10 V, 0 – 20 mA and -10 to +10 V
♦ AIN2: 0 – 10 V, 0 – 20 mA
The 2 analog inputs can be used as the 7
BiCo technology
Modular design for extremely flexible configuration
High switching frequencies for low-noise motor operation
Detailed status information and integrated message functions
External options for PC communications, Basic Operator Panel (BOP),
Advanced Operator Panel (AOP), PROFIBUS communications module
th
and 8th digital inputs
MICROMASTER 440 Operating instructions
16 6SE6400-5CA00-0BP0
Page 17

International English 1 Overview
Performance Characteristics
Sensorless Vector Control
Flux Current Control (FCC) for improved dynamic response and motor control
Fast Current Limitation (FCL) for trip-free operation
Built-in DC injection brake
Compound braking to improve braking performance
Acceleration/deceleration times with programmable smoothing
Closed-loop control using PID (Proportional, Integral and Differential) control
loop function, with auto-tuning
Built-in braking chopper
Selectable up and down ramps
4-point ramp smoothing
Multi-point V/f characteristic
parameter sets which can be switched, allowing one inverter to control several
alternative processes
Protection characteristics
Overvoltage/undervoltage protection
Overtemperature protection for the inverter
Ground fault protection
Short-circuit protection
2
I
t thermal motor protection
PTC/KTY for motor protection
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
17
Page 18

1 Overview International English
MICROMASTER 440 Operating instructions
18 6SE6400-5CA00-0BP0
Page 19

International English 2 Installation
2 Installation
This Chapter contains:
General data relating to installation
Dimensions of Inverter
Wiring guidelines to minimize the effects of EMI
Details concerning electrical installation
2.1 General.................................................................................................................... 21
2.2 Ambient operating conditions.................................................................................. 22
2.3 Mechanical Installation ............................................................................................23
2.4 Electrical Installation................................................................................................ 25
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
19
Page 20
2 Installation International English
Warnings
♦ Work on the device/system by unqualified personnel or failure to comply with
warnings can result in severe personal injury or serious damage to material.
Only suitably qualified personnel trained in the setup, installation,
commissioning and operation of the product should carry out work on the
device/system.
♦ Only permanently-wired input power connections are allowed. This equipment
must be grounded (IEC 536 Class 1, NEC and other applicable standards).
♦ If a Residual Current-operated protective Device (RCD) is to be used, it must
be an RCD type B.
♦ Machines with a three-phase power supply, fitted with EMC filters, must not
be connected to a supply via an ELCB (Earth Leakage Circuit-Breaker
EN50178 Section 5.2.11.1).
♦ The following terminals can carry dangerous voltages even if the inverter is
inoperative:
- the power supply terminals L/L1, N/L2, L3.
- the motor terminals U, V, W, DC+/B+, DC-, B- and DC/R+
♦ Always wait 5 minutes to allow the unit to discharge after switching off before
carrying out any installation work.
♦ This equipment must not be used as an ‘emergency stop mechanism’ (see
EN 60204, 9.2.5.4)
♦ The minimum size of the earth-bonding conductor must be equal to or greater
than the cross-section of the power supply cables.
Caution
The connection of power, motor and control cables to the inverter must be carried
out as shown in Figure 2-4 on page 30, to prevent inductive and capacitive
interference from affecting the correct functioning of the inverter.
MICROMASTER 440 Operating instructions
20 6SE6400-5CA00-0BP0
Page 21
International English 2 Installation
2.1 General
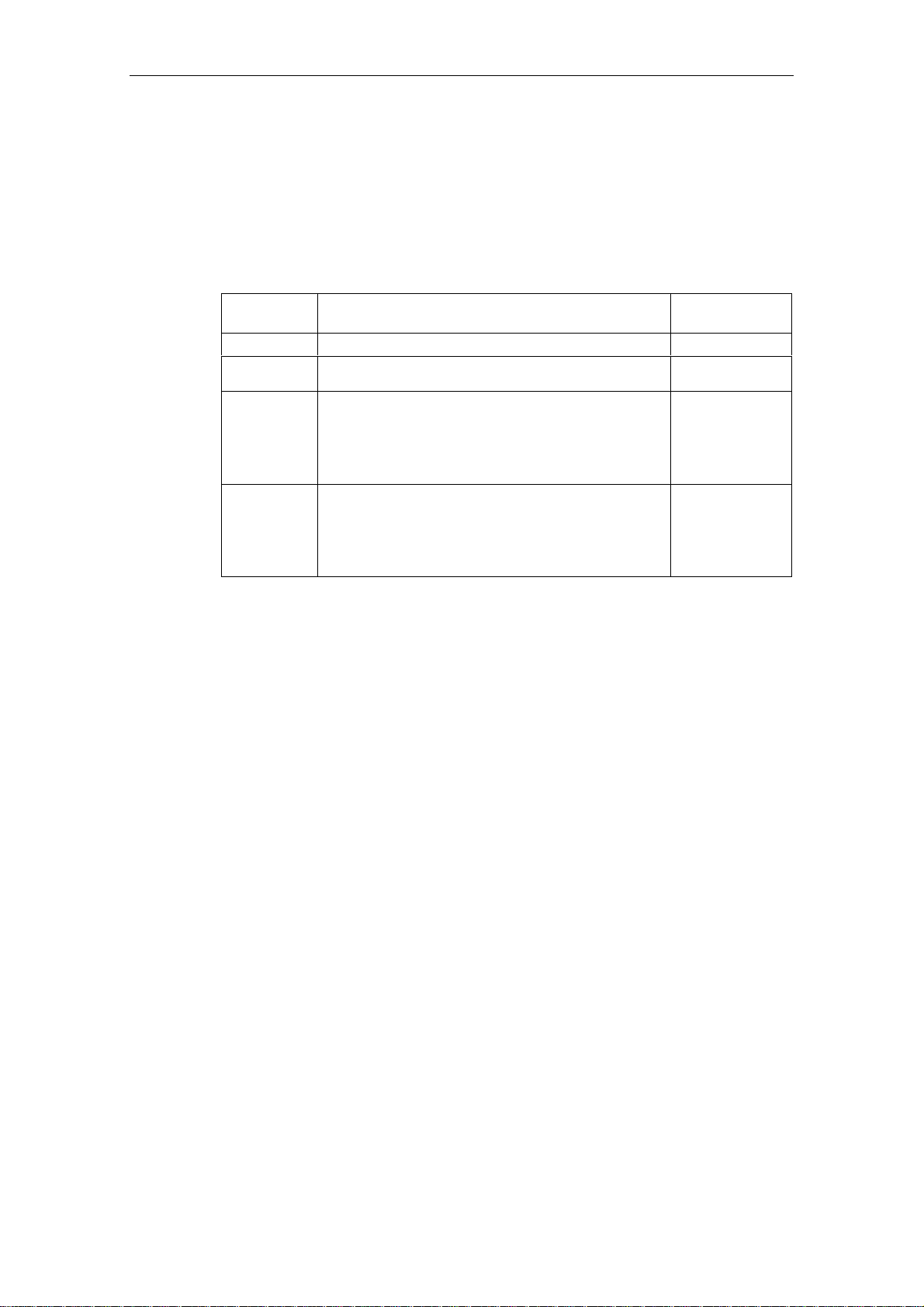
Installation after a Period of Storage
Following a prolonged period of storage, you must reform the capacitors in the
inverter. It is important that the time of storage is calculated from the time of
manufacture and not the time of delivery. The requirements are listed below.
Period of
Storage
1 year or less No reforming required No preparation
1 to 2 years
2 to 3 years
3 years and
over
Required Action
Apply power to the inverter for one hour before issuing the run
command
Use a variable AC supply
Apply 25% of input voltage for 30 minutes
Increase volts to 50% for a further 30 minutes
Increase volts to 75% for a further 30 minutes
Increase volts to 100% for a further 30 minutes
Inverter ready for run signal
Use a variable AC supply
Apply 25% of input voltage for 2 hours
Increase volts to 50% for a further 2 hours
Increase volts to 75% for a further 2 hours
Increase volts to 100% for a further 2 hours
Inverter ready for run signal
Preparation
Time
1 hour
2 hours
8 hours
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
21
Page 22
2 Installation International English
2.2 Ambient operating conditions
Temperature
Frame Size ABCDEF
Min. [°°°° C]
Max. [°°°° C]
Max. (Variable Torque) [°°°° C]
Note
The variable torque rating is the capability of the inverter to increase the nominal
power output for use with pump and fan applications.
When variable torque is selected the inverter ceases to have an overload
capacity.
Humidity Range
95% Non-condensing
-10 -10 -10 -10 -10 -10
50 50 50 50 50 50
- - 40404040
Altitude
If the inverter is to be installed at an altitude > 1000m, derating will be required.
(Refer to MM440 Reference Manual)
Shock
Do not drop the inverter or expose to sudden shock.
Vibration
Do not install the inverter in an area where it is likely to be exposed to constant
vibration.
Electromagnetic Radiation
Do not install the inverter near sources of electromagnetic radiation.
Atmospheric Pollution
Do not install the inverter in an environment, which contains atmospheric pollutants
such as dust, corrosive gases, etc.
Water
Take care to site the inverter away from potential water hazards, e.g. do not install
the inverter beneath pipes that are subject to condensation. Avoid installing the
inverter where excessive humidity and condensation may occur.
Installation and overheating
Warning
The inverters MUST not be mounted in an horizontal position.
Mount the inverter vertically to ensure optimum cooling, see Figure 2-1 on page 23.
It is also possible to mount the inverters side-by-side.
Ensure that the inverter’s air vents are not obstructed. Allow 100 mm clearance
above and below the inverter.
MICROMASTER 440 Operating instructions
22 6SE6400-5CA00-0BP0
Page 23
International English 2 Installation
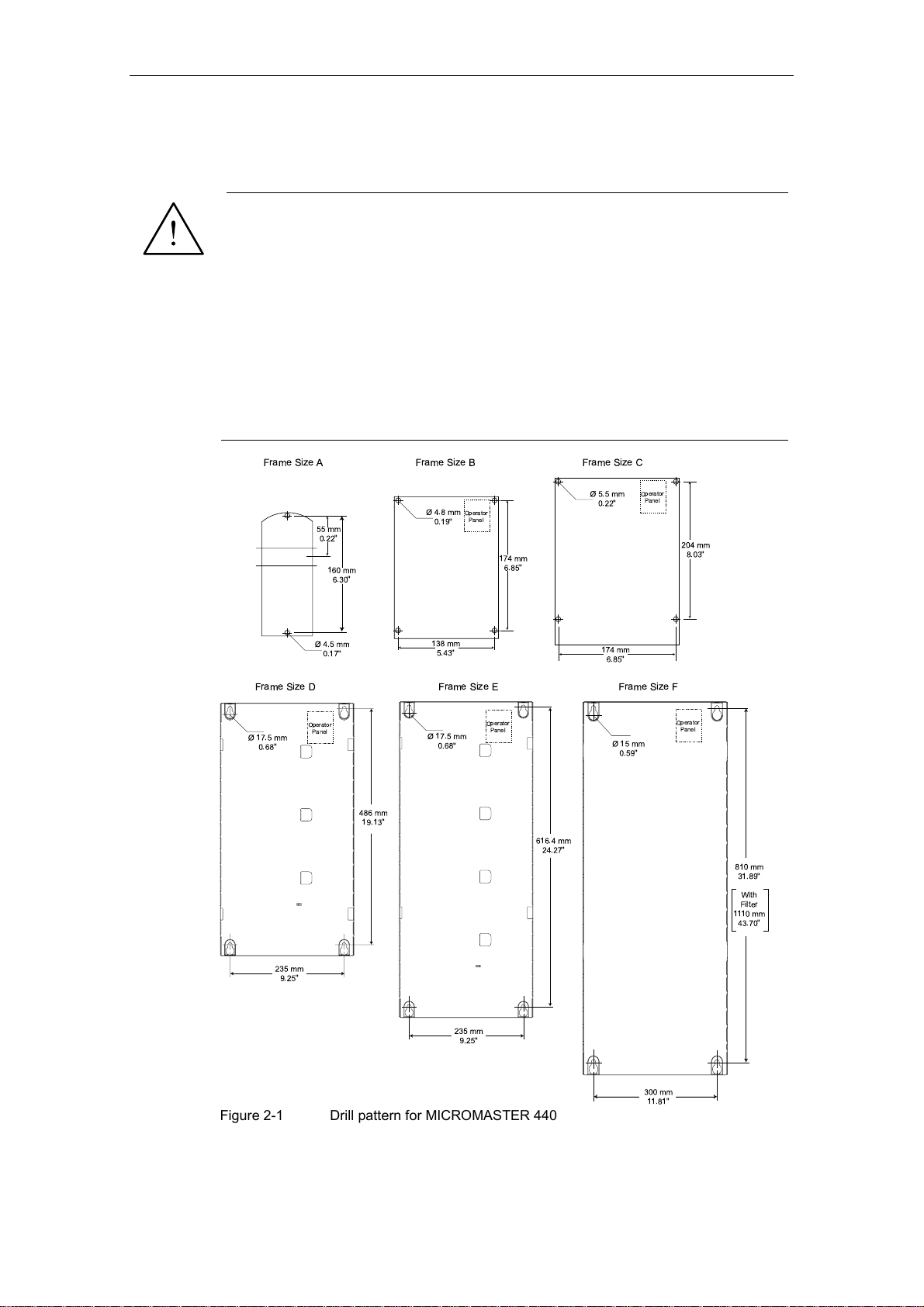
2.3 Mechanical Installation
Warning
THIS EQUIPMENT MUST BE GROUNDED.
♦ To ensure the safe operation of the equipment, it must be installed and
commissioned by qualified personnel in full compliance with the warnings laid
down in these operating instructions.
♦ Take particular note of the general and regional installation and safety
regulations regarding work on dangerous voltage installations (e.g. EN
50178), as well as the relevant regulations regarding the correct use of tools
and personal protective equipment (PPE).
♦ The mains input, DC and motor terminals, can carry dangerous voltages even
if the inverter is inoperative; wait 5 minutes to allow the unit to discharge after
switching off before carrying out any installation work.
4
Frame Size A
Frame Size B Frame Size C
0.22"
174 mm
6.85"
Operator
Panel
55 mm
0.22"
160 mm
6.30"
Ø 4.5 mm
0.17"
Ø 4.8 mm
0.19"
138 mm
5.43"
Operator
Panel
174 mm
6.85"
Ø 5.5 mm
Frame Size D Frame Size E Frame Size F
Ø 17.5 mm
0.68"
Operator
Panel
486 mm
19.13"
Ø 17.5 mm
0.68"
Operator
Panel
616.4 mm
24.27"
Ø15mm
0.59"
204 mm
8.03"
Operator
Panel
810 mm
31.89"
With
Filter
1110 mm
43.70"
235 mm
9.25"
Figure 2-1 Drill pattern for MICROMASTER 440
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
235 mm
9.25"
300 mm
11.81"
23
Page 24
2 Installation International English
Table 2-1 Dimensions and Torques of MM440 (all frame sizes)
FrameSize
A 173 mm 73 mm 149 mm
B 202 mm 149 mm 172 mm
C 245 mm 185 mm 195 mm
D 520 mm 275 mm 245 mm
E 650 mm 275 mm 245 mm
F
Overall Dimensions
Height Width Depth
850 mm
with filter
1150 mm
350 mm 300 mm
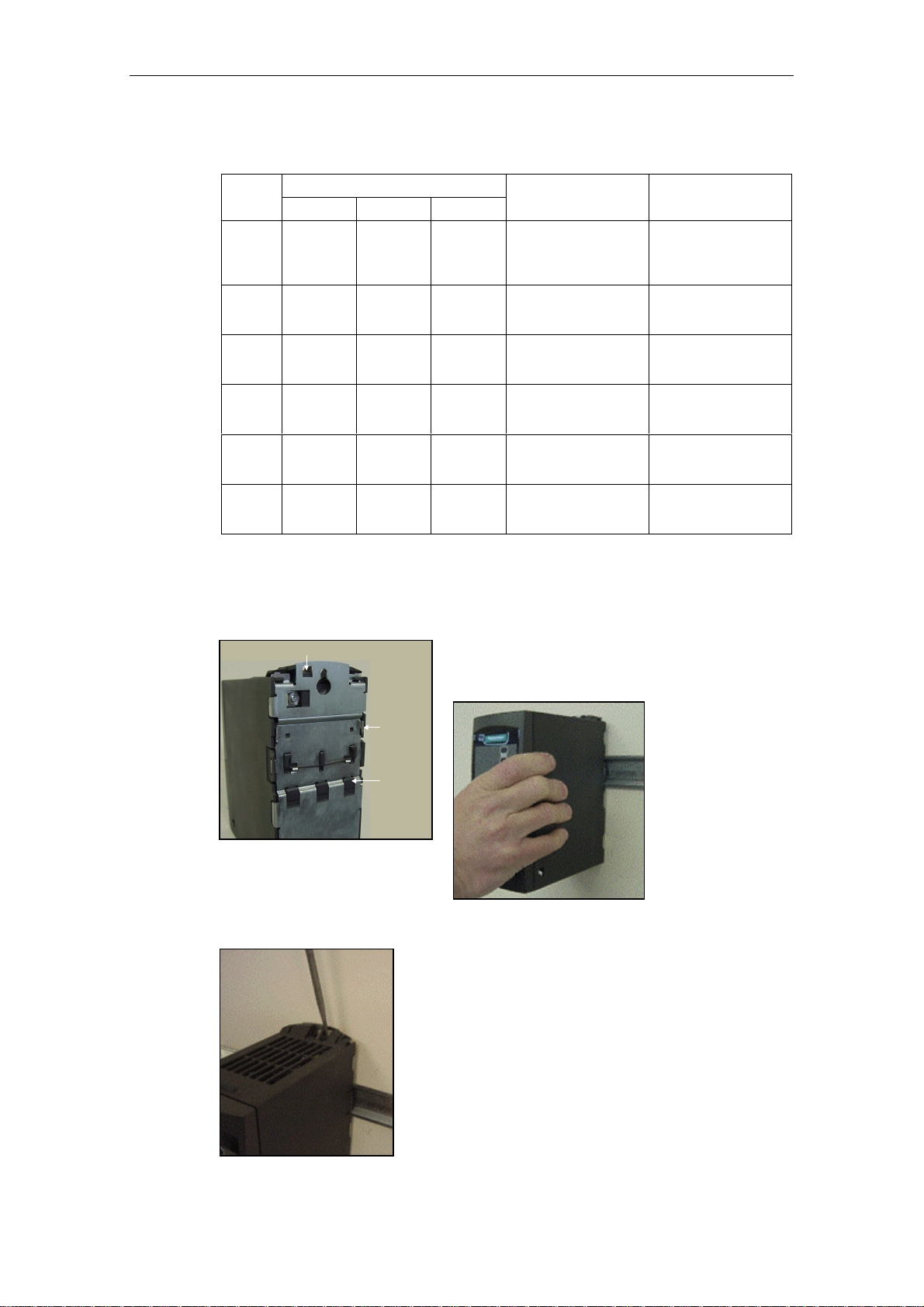
2.3.1 DIN Rail Mounting Frame Size A
Fitting the Inverter to the DIN Rail
Release Mechanism
1. Fit the inverter to the DIN rail using the upper
DIN rail latch.
Fixing Method Tightening Torque
2 x M4 Bolts
2 x M4 Nuts
2 x M4 Washers
Connecting to DIN rail
4 x M4 Bolts
4 x M4 Nuts
4 x M4 Washers
4 x M5 Bolts
4 x M5 Nuts
4 x M5 Washers
4 x M8 Bolts
4 x M8 Nuts
4 x M8 Washers
4 x M8 Bolts
4 x M8 Nuts
4 x M8 Washers
4 x M8 Bolts
4 x M8 Nuts
4 x M8 Washers
2.5 Nm
with washers fitted
2.5 Nm
with washers fitted
2.5 Nm
with washers fitted
3.0 Nm
with washers fitted
3.0 Nm
with washers fitted
3.0 Nm
with washers fitted
Upper DIN
rail latch
Lower DIN
rail latch
Removing the Inverter from the DIN Rail
1. To disengaged the release mechanism of the
inverter, insert a screwdriver into the release
mechanism.
2. Apply a downward pressure and the lower DIN rail
latch will disengage.
3. Pull the inverter from the DIN rail.
2. Push the
inverter against
the DIN rail
and the lower
DIN rail latch
should click
into place.
MICROMASTER 440 Operating instructions
24 6SE6400-5CA00-0BP0
Page 25
International English 2 Installation
2.4 Electrical Installation
Warning
THIS EQUIPMENT MUST BE GROUNDED.
♦ To ensure the safe operation of the equipment, it must be installed and
commissioned by qualified personnel in full compliance with the warnings laid
down in these operating instructions.
♦ Take particular note of the general and regional installation and safety
regulations regarding work on dangerous voltage installations (e.g. EN
50178), as well as the relevant regulations regarding the correct use of tools
and personal protective gear.
♦ The mains input, DC and motor terminals, can carry dangerous voltages even
if the inverter is inoperative; wait 5 minutes to allow the unit to discharge after
switching off before carrying out any installation work.
♦ The inverters can be installed in a side-by-side configuration, but a distance
of 100 mm (3.94 inches) must be maintained if the inverters are installed on
top of each other.
2.4.1 General
Warning
The inverter must always be grounded. If the inverter is not grounded correctly,
extremely dangerous conditions may arise within the inverter, which could prove
potentially fatal.
Operation with ungrounded (IT) supplies
The MICROMASTER will operate from ungrounded supplies and will continue to
operate if an input phase is shorted to ground. If an output phase is shorted to
ground, the MICROMASTER will trip and indicate F0001.
On ungrounded supplies, it will be necessary to remove the ‘Y’ capacitor from the
inside of the unit and fit an output choke. The procedure for removing this capacitor
is described in Appendices G, H, I and J.
Operation with Residual Current Device
If an RCD (also referred to as ELCB or RCCB) is fitted, the MICROMASTER
inverters will operate without nuisance tripping, provided that:
A type B RCD is used.
The trip limit of the RCD is 300mA.
The neutral of the supply is grounded.
Only one inverter is supplied from each RCD.
The output cables are less than 50m (screened) or 100m (unscreened).
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
25
Page 26
2 Installation International English
Operation with long cables
Caution
The control, power supply and motor leads must be laid separately. Do not feed
them through the same cable conduit/trunking. Never use high voltage insulation
test equipment on cables connected to the inverter.
All inverters will operate at full specification with cable lengths up to 50 m screened
or 100 m unscreened.
2.4.2 Power and motor connections
Warning
♦ Isolate the mains electrical supply before making or changing connections to
the unit.
♦ Ensure that the inverter is configured for the correct supply voltage: single /
three-phase 230 V MICROMASTERS must not be connected to a higher
voltage supply.
♦ When synchronous motors are connected or when coupling several motors in
parallel, the inverter must be operated with voltage/frequency control
characteristic (P1300 = 0, 2 or 3).
Caution
After connecting the power and motor cables to the proper terminals, make sure
that the covers have been replaced properly before supplying power to the unit!
Note
♦ Ensure that the appropriate circuit-breakers/fuses with the specified current
rating are connected between the power supply and inverter (see Tables
starting on page 77).
♦ Use Class 1 60/75
o
C copper wire only (for UL compliance). For tightening
torque see table on page 79.
♦ To tighten up the power terminal screws use a 4 - 5 mm cross-tip screwdriver.
Access to the power and motor terminals
The procedure for accessing the power and motor terminals on the
MICROMASTER 440 Inverter is illustrated in Appendices. Please also refer to the
photographs showing the Power Terminal connections and the Control Terminal
connections on the inside of the back cover of this manual.
When the covers have been removed to reveal the terminals, connect the power
and motor connections as shown on the next page.
MICROMASTER 440 Operating instructions
26 6SE6400-5CA00-0BP0
Page 27
International English 2 Installation
L3
L3
L2
N
L1
L
PE
Ground
FRAME SIZE A
DC
R+
DC+B+DC-
WU
V
Ground
N
L
L1 UB-DCDC+L2 L3 DC-
PE
Ground
FRAME SIZED&E
B+ R+
L2
N
L3
L
PE
Ground
DC+
DCDC-
B+
R+
U
Ground
W
VB-
FRAME SIZE B & C
WV
Ground
B+R+
B+
DC- DC+ DC+B-
N
L
L1 UL2 L3
DC+
WV
PE
Ground Ground
FRAME SIZE F
Figure 2-2 MICROMASTER 440 Connection Terminals
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
27
Page 28
2 Installation International English
L3
L2
L1
N
CABLE
SCREENING
MICROMASTER
L/L1
N/L2
PE
MOTOR
U
V
W
U
V
W
FUSE
SINGLE PHASE
CONTACTOR
OPTIONAL
FILTER
(Class Bonly)
PEPE
L3
L2
L1
CONTACTOR
FUSE
TYPICAL INSTALLATION
OPTIONAL
FILTER
PEPE
THREE PHASE
Figure 2-3 Motor and Power Connections
CABLE
SCREENING
MICROMASTER
L3
L2
L1
PE
MOTOR
U
V
W
U
V
W
MICROMASTER 440 Operating instructions
28 6SE6400-5CA00-0BP0
Page 29
International English 2 Installation
2.4.3 Avoiding Electro-Magnetic Interference (EMI)
The inverters are designed to operate in an industrial environment where a high
level of EMI can be expected. Usually, good installation practices will ensure safe
and trouble-free operation. If you encounter problems, follow the guidelines stated
below.
Action to Take
Ensure that all equipment in the cubicle is well grounded using short, thick
grounding cable connected to a common star point or busbar
Make sure that any control equipment (such as a PLC) connected to the
inverter is connected to the same ground or star point as the inverter via a
short thick link.
Connect the return ground from the motors controlled by the inverters directly
to the ground connection (PE) on the associated inverter
Flat conductors are preferred as they have lower impedance at higher
frequencies
Terminate the ends of the cable neatly, ensuring that unscreened wires are as
short as possible
Separate the control cables from the power cables as much as possible, using
separate trunking, if necessary at 90º to each other.
Whenever possible, use screened leads for the connections to the control
circuitry
Ensure that the contactors in the cubicle are suppressed, either with R-C
suppressors for AC contactors or 'flywheel' diodes for DC contactors fitted to
the coils. Varistor suppressors are also effective. This is important when the
contactors are controlled from the inverter relay
Use screened or armored cables for the motor connections and ground the
screen at both ends using the cable clamps
Warning
Safety regulations must not be compromised when installing inverters!
2.4.4 Screening Methods
Frame Sizes A, B and C
For frame sizes A, B and C the Gland Plate Kit is supplied as an option. It allows
easy and efficient connection of the necessary screening. See the Gland Plate
Installation Instructions contained on the Document CD-ROM, supplied with the
MM440.
Frame Sizes D, E and F
The Gland Plate is factory fitted. The installation of the screening is accomplished
using the same methodology as in frame sizes A, B and C.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
29
Page 30
2 Installation International English
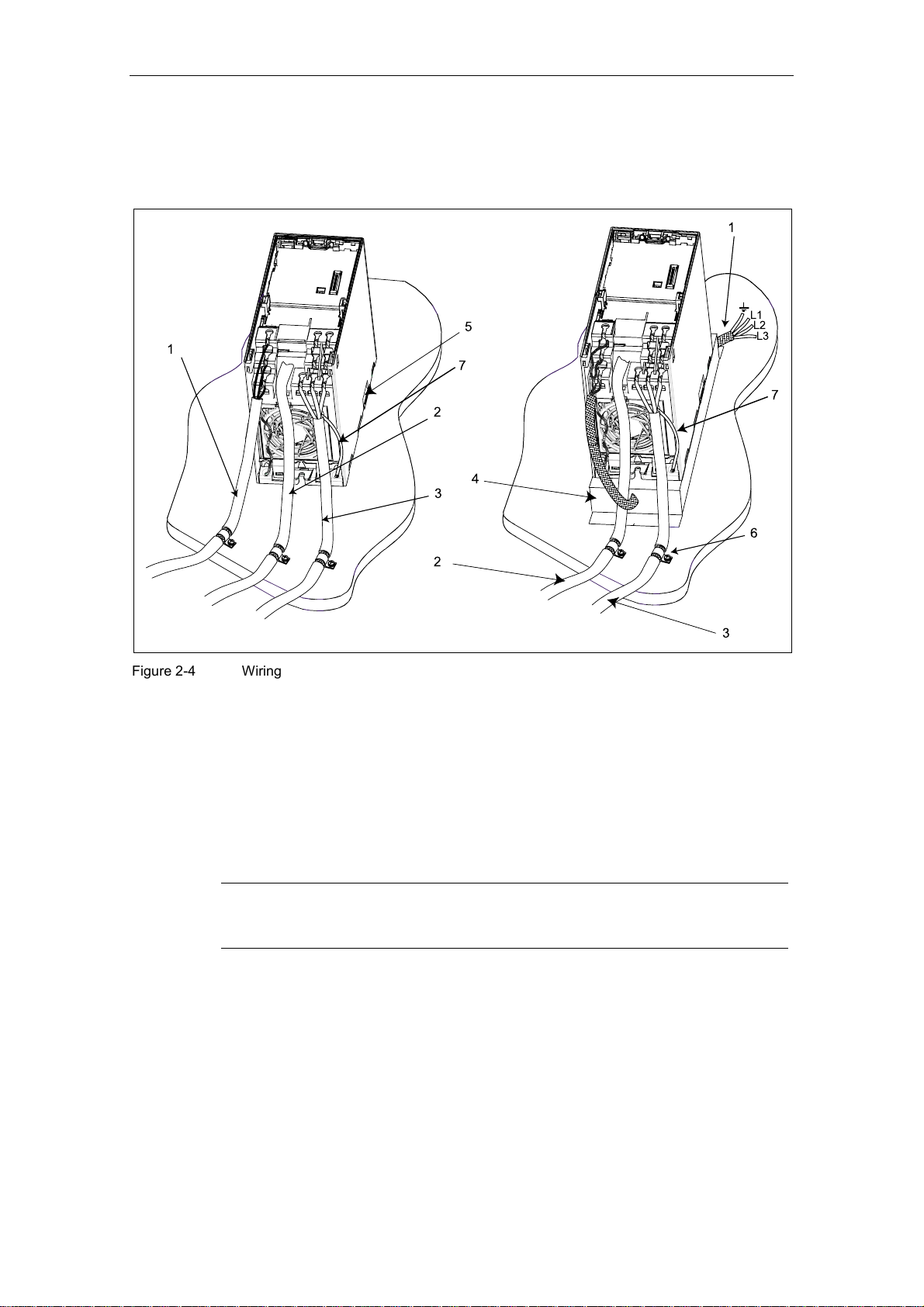
Screening without a Gland Plate
Should a Gland Plate not be available, then the inverter can be screened using the
methodology shown in Figure 2-4.
1
L1
5
1
7
2
4
3
L2
L3
7
2
Figure 2-4 Wiring Guidelines to Minimize the Effects of EMI
Legend
1 Mains power input
2 Control cable
3 Motor cable to I/O board
4 Footprint filter
5 Metal back plate
6 Use suitable clips to fix motor and control cable screens securely to metal
back plate
7 Screen cable
Note
To enhance the screening of the motor and control cables, the optional Gland
Plate can be used (not shown in Figure 2-4).
6
3
MICROMASTER 440 Operating instructions
30 6SE6400-5CA00-0BP0
Page 31

International English 3 Commissioning
3 Commissioning
This Chapter contains:
Description of the front panel controls
A brief description of the optional front panels available and an explanation of
the operation of the Basic Operator Panel (BOP)
An 8-step guide at the end of the Chapter, which provides a simple procedure
for changing parameters
3.1 Block Diagram .........................................................................................................33
3.2 Commission Modes................................................................................................. 34
3.3 General operation.................................................................................................... 43
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
31
Page 32

3 Commissioning International English
Warning
♦ MICROMASTERS operate at high voltages.
♦ When operating electrical devices, it is impossible to avoid applying
hazardous voltages to certain parts of the equipment.
♦ Emergency Stop facilities according to EN 60204 IEC 204 (VDE 0113) must
remain operative in all operating modes of the control equipment. Any
disengagement of the Emergency Stop facility must not lead to uncontrolled
or undefined restart.
♦ Wherever faults occurring in the control equipment can lead to substantial
material damage or even grievous bodily injury (i.e. potentially dangerous
faults), additional external precautions must be taken or facilities provided to
ensure or enforce safe operation, even when a fault occurs (e.g. independent
limit switches, mechanical interlocks, etc.).
♦ Certain parameter settings may cause the inverter to restart automatically
after an input power failure.
♦ Motor parameters must be accurately configured for motor overload
protection to operate correctly.
♦ This equipment is capable of providing internal motor overload protection in
accordance with UL508C section 42. Refer to P0610 (level 3) and P0335, I
2
t
is ON by default. Motor overload protection can also be provided using an
external PTC (disabled by default P0601).
♦ This equipment is suitable for use in a circuit capable of delivering not more
than 10,000 symmetrical amperes (rms), for a maximum voltage of
230V/460V/575V when protected by a H or K type fuse (see Tables starting
on page 77).
♦ This equipment must not be used as an ‘emergency stop mechanism’ (see
EN 60204, 9.2.5.4)
Caution
Only qualified personnel may enter settings in the control panels. Particular
attention must be paid to safety precautions and warnings at all times.
MICROMASTER 440 Operating instructions
32 6SE6400-5CA00-0BP0
Page 33

International English 3 Commissioning
3.1 Block Diagram
PE
1 - 3 AC 200 - 240 V
3 AC 380 - 480 V
3 AC 500 - 600 V
+10 V
1
0V
2
4.7k
W
MINIMUM
Ω
PNP
or
NPN
MOTOR
PTC
AIN1+
3
AIN1-
4
AIN2+
10
AIN2-
11
DIN1
5
DIN2
6
DIN3
7
DIN4
8
DIN5
16
DIN6
17
9
28
PTCA
14
PTCB
15
A/D
A/D
OPTO ISOLATION
Isolated +24 V (Output)
Isolated 0 V (Output)
CPU
BOP
Serial
Protocol
BOP
150.00
Hz
Jog
0IP
Fn
SI
PE
L/L1, N/L2
or
L/L1, N/L2, L3
~
=
DC/R+
Factory
Fitted
Link
B+/DC+
R
B-
DC-
The analog input circuit can be alternativelyconfigured to
provide additional digital inputs (DIN7 & DIN8)as shown:
1
2
DIN7
NOTES:
1.
When an analogue input is configured asa digital
input the threshold values are as follows:
2.
AIN1 can be used with:
0-10V,0-20mAand-10Vto+10V
AIN2 can be used with:
0-10Vand0-20mA
3.
Terminal 9 (24 V) can also be used to drive the
analog inputs when used as digital inputs.Terminals
2 and 28 (0 V) must belinked together.
3
4
DIN8
1.75VDC=Off
3.70VDC=On
1
2
10
11
Figure 3-1 Inverter block diagram
0-20mA
500
W
MAXIMUM
0-20mA
500
W
MAXIMUM
30 V DC / 5A (resistive)
250 V AC / 2A (resistive)
RELAY 1
RELAY 2
RELAY 3
AOUT 1+
12
AOUT 1-
13
AOUT 2+
26
AOUT 2-
27
COM
20
19
18
COM
22
21
COM
25
24
23
29
30
NO
NC
NO
NO
NC
P+
N-
D/A
D/A
RS485
0 - 10V
Voltage
0 - 20mA
Current
DIP Switches
(On Control Board)
AIN1 AIN2
DIP Switches
(On I/O Board)
12
Not
Used
12
=
3
60 Hz
50 Hz
PE U,V,W
M
~
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
33
Page 34

3 Commissioning International English
3.2 Commission Modes
The MICROMASTER 440 is supplied with a Status Display Panel (SDP) as the
standard operator panel. Default parameter settings cover the following
requirements:
The motor rating data; voltage, current and frequency data is keyed into the
inverter to ensure that the motor is compatible with the inverter. (A standard
Siemens motor is recommended).
Linear V/f motor speed, controlled by an analogue potentiometer.
Maximum speed 3000 min
using a potentiometer via the inverter’s analogue inputs.
Ramp-up time / Ramp-down time = 10 s.
If more complex application settings are required, please refer to Sections 3.2.4.1
“Quick commissioning (P0010=1)” and 5 “System Parameters” .
Note
Frequency setting; the DIP switch is located on the control board, underneath the
I/O board as shown in Figure 3-2 below. The inverter is delivered as follows:
DIP switch 2:
♦ Off position:
European defaults
(50 Hz, kW etc.)
♦ On position: North
American defaults
(60 Hz, hp etc.)
DIP switch 1:
Not for customer use.
-1
with 50 Hz (3600 min-1 with 60 Hz); controllable
Frequency Setting
DIP Switches
3.2.1 Reset to Factory default
To reset all parameters to the factory default settings; the following parameters
should be set as follows (BOP, AOP or Communication Option needed):
1. Set P0010=30.
2. Set P0970=1.
Note
The reset process can take up to 3 minutes to complete.
Analog Setting
DIP Switches
Figure 3-2 DIP locations on I/O board and the
Control Board
MICROMASTER 440 Operating instructions
34 6SE6400-5CA00-0BP0
Page 35

International English 3 Commissioning
Front Panels for the MICROMASTER 440
To change the parameters of the inverter you will require one of the optional
operator panels, either the "Basic Operator Panel" (BOP) or an "Advanced
Operator Panel" (AOP). To assist in the quick and efficient changing of parameters,
commissioning software tools such as DriveMonitor can be used; this software is
supplied on the Documentation CD-ROM.
Figure 3-3 Panels available for the MICROMASTER 440 Inverter
The parameters can also be changed using one of the communication options. For
further information, please refer to the Reference Manual.
For instructions on how to exchange/replace the Operator Panels, please refer to
the appropriate Appendices in this manual.
Note
♦ The terminal layout for connecting power and control cables is shown in the
photograph on the inside of the back cover of this manual.
3.2.2 Commissioning with the Status Display Panel (SDP)
The SDP is supplied with your MICROMASTER 440 Inverter as standard. This
panel has two LEDs on the front, which indicate the operational status of the
inverter.
With the SDP the inverter can be used with its default
settings, for a number of applications. The default settings
are shown in Table 3-1.
The terminal layout is shown in the photograph of the
Control Terminal Connections on the inside of the back
cover of this manual.
Warnings and faults states on the Status Display Panel
The two LEDs on the Status Display Panel indicate the operating status of your
inverter. These LEDs also indicate various warnings or fault states. In section 6.1
the inverter states, indicated by the two LEDs are explained.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
35
Page 36

3 Commissioning International English
Table 3-1 Default settings for operation using the Status Display Panel
Terminals Parameter Default Operation
Digital Input 1 5 P0701 = ‘1’ ON right
Digital Input 2 6 P0702 = ‘12’ Reverse
Digital Input 3 7 P0703 = ‘9’ Fault Acknowledge
Digital Input 4 8 P0704 = ‘15’ Fixed Frequency
Digital Input 5 16 P0705 = ‘15’ Fixed Frequency
Digital Input 6 17 P0706 = ‘15’ Fixed Frequency
Digital Input 7 Via AIN1 P0707 = ‘0’ Inactive
Digital Input 8 Via AIN2 P0708 = ‘0’ Inactive
3.2.3 Basic operation with SDP
With the SDP fitted, the following is possible:
Start and stopping the motor (DIN1 via external switch)
Reversing the motor (DIN2 via external switch)
Fault Reset (DIN3 via external switch)
Controlling the speed of the motor is accomplished by connecting the analog inputs
as shown in the Figure 3-4.
OFF = Voltage0-10V
ON =0-20mA
OFF = Voltage 0 - 10 V
Analogue
Output
0-20mA
(500Ω)
ON =0-20mA
AIN2
AIN1
P+
N-
ACK
Figure 3-4 Basic operation with SDP
MICROMASTER 440 Operating instructions
36 6SE6400-5CA00-0BP0
Page 37

International English 3 Commissioning
y
3.2.4 Commission Overview with BOP or AOP
Prerequisites:
Mechanical and electrical Installation are completed.
Setting the motor frequenc
DIP Switch 2: Off = 50 Hz / ON = 60 Hz
Power ON
Quick Commissioning P0010 = 1
See Section 3.2.4.1
Further Commissioning via P0004 and P0003
An overview of the parameter structure is given in
For a detailed description of the parameter, see the
Section 5.3
Parameter List.
Note
We recommend the commissioning according this scheme. Nevertheless an expert
user is allowed to do the commissioning without the filter functions of P0004.
3.2.4.1 Quick commissioning (P0010=1)
It is important that parameter P0010 is used for commissioning and P0003 is used
to select the number of parameters to be accessed. This parameter allows a group
of parameters to be selected that will enable quick commissioning. Parameters
such as Motor settings and Ramp settings are included.
At the end of the quick commissioning sequence, P3900 should be selected,
which, when set to 1, will carry out the necessary motor calculations and clear all
other parameters (not included in P0010=1) to the default settings. This will only
happen in the Quick Commissioning mode.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
37
Page 38

3 Commissioning International English
p
1)
1)
y
1)
1)
2)
g
2)
y
y
1)
Flow chart Quick Commissioning (Level 1 Only)
P0010 Start Quick Commissioning
0 Ready to Run
1 Quick Commissioning
30 Factory Setting
Note
P0010 must always be set back to '0' before
operating the motor. However if P3900 = 1 is set
after commissioning this is done automatically.
P0100 Operation for Europe/N. America
0 Power in kW; f default 50 Hz
1 Power in hp; f default 60 Hz
2 Power in kW; f default 60 Hz
Note
Settings 0 & 1 should be changed using the DIP
switches to allow
P0304 Rated Motor Voltage
10 V - 2000 V
Nominal motor voltage (V) from rating plate
ermanent setting.
P0700 Selection of Command Source
(on / off / reverse)
0 Factory Setting
1 Basic Operator Panel
2 Terminal / Di
P1000 Selection of Frequency Setpoint
0 No frequency setpoint
1 BOP frequency control ↑↓
2 Analogue Setpoint
P1080 Min. Motor Frequenc
Sets minimum motor frequency (0-650Hz) at which
the motor will run irrespective of the frequency
setpoint. The value set here is valid for both
clockwise and anti-clockwise rotation.
ital Inputs
P0305 Rated Motor Current
0 - 2 x inverter rated current (A)
Nominal motor current (A) from rating plate
P0307 Rated Motor Power
0 kW - 2000 kW
Nominal motor power (kW) from rating plate.
If P0100 = 1, values will be in hp
P0310 Rated Motor Frequenc
12 Hz - 650 Hz
Nominal motor frequency (Hz) from rating plate
P0311 Rated Motor Speed
0 - 40000 1/min
Nominal motor speed (rpm) from rating plate
P1082 Max. Motor Frequenc
Sets maximum motor frequency (0-650Hz) at which
the motor will run at irrespective of the frequency
setpoint. The value set here is valid for both
clockwise and anti-clockwise rotation.
P1120 Ramp-Up Time
0 s - 650 s
Time taken for the motor to accelerate from
standstill up to maximum motor frequency.
P1121 Ramp-Down Time
0 s - 650 s
Time taken for motor to decelerate from maximum
motor frequency down to standstill.
P3900 End Quick Commissioning
0 End Quick Commissioning without motor
calculation or factory reset.
1 End Quick Commissioning with motor
calculation and factory reset (Recommended)
2 End Quick Commissioning with motor
calculation and with I/O reset.
3 End Quick Commissioning with motor
calculation but without I/O reset.
1)
Motor related parameters – please refer to motor rating plate drawing.
2)
Denotes parameters that contain more detailed lists of possible settings for use in specific
applications. Please refer to the Reference Manual and Operating Instructions on the CD
MICROMASTER 440 Operating instructions
38 6SE6400-5CA00-0BP0
Page 39

International English 3 Commissioning
3.2.4.2 Commissioning with the Basic Operator Panel (BOP)
The Basic Operator Panel (BOP) provides access to the
inverter parameters and enables the user to customize
the settings of your MICROMASTER 440. The BOP can
be used to configure several MICROMASTER 440
Inverters. This is accomplished by using the BOP to set
the required parameters and once the process is
complete, then the BOP can be replaced by the SDP.
The BOP contains an five-digit display that allows the user
to read the input and output characteristics of any
parameter. The BOP does not have the capability to store
parameter information.
Table 3-1 shows the factory default settings for operation via the Basic Operator
Panel.
Notes
♦ The BOP motor control functions are disabled by default. To control the motor
via the BOP, parameter P0700 should be set to 1 and P1000 set to 1.
♦ The BOP can be fitted to and removed from the inverter whilst power is
applied.
♦ If the BOP has been set as the I/O control (P0700 = 1), the drive will stop if
the BOP is removed.
Table 3-1 Default settings for operation using the BOP
Parameter Meaning Default Europe (North America)
P0100 Operating Mode Europe/US 50 Hz, kW (60Hz, hp)
P0307 Power (rated motor)
P0310 Motor frequency rating 50 Hz (60 Hz)
P0311 Motor speed rating 1395 (1680) rpm [depending on variant]
P1082 Maximum Motor Frequency 50 Hz (60 Hz)
Dimension (kW (Hp)) depending on setting of P0100.
[Value depending on variant.]
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
39
Page 40

3 Commissioning International English
Buttons on the Basic Operator Panel
Panel/Button Function Effects
Indicates
Status
Start motor
Stop motor
Change
direction
Jog motor
Functions
The LCD displays the settings currently used by the converter.
Pressing the button starts the converter. This button is
disabled by default. To enable this button set P0700 = 1.
OFF1 Pressing the button causes the inverter to come to a
standstill at the selected ramp down rate. Disabled by default;
to enable set P0700 = 1.
OFF2 Pressing the button twice (or once long) causes the
motor to coast to a standstill.
This function is always enabled.
Press this button to change the direction of rotation of the
motor. Reverse is indicated by a minus (-) sign or a flashing
decimal point. Disabled by default, to enable set P0700 = 1.
Pressing this button while the inverter has no output causes
the motor to start and run at the preset jog frequency. The
inverter stops when the button is released. Pressing this
button when the inverter/motor is running has no effect.
This button can be used to view additional information.
Pressing and holding the button for 2 seconds from any
parameter during operation, shows the following:
1. DC link voltage (indicated by d – units V).
2. Output current. (A)
3. Output frequency (Hz)
4. Output voltage (indicated by o – units V).
5. The value selected in P0005 (If P0005 is set to show any
of the above (3,4, or 5) then this will not be shown again).
Additional presses will toggle around the above displays.
Jump Function
From any parameter (rXXXX or PXXXX) a short press of the
Fn button will immediately jump to r0000, you can then
change another parameter, if required. Upon returning to
r0000, pressing the Fn button will return you to your starting
point.
Access
parameters
Increase
value
Decrease
value
Figure 3-5 Buttons on the Basic Operator Panel
Pressing this button allows access to the parameters.
Pressing this button increases the displayed value.
Pressing this button decreases the displayed value.
MICROMASTER 440 Operating instructions
40 6SE6400-5CA00-0BP0
Page 41

International English 3 Commissioning
Changing parameters with the BOP
The following descriptions show how to change the parameters; use this
description as a guide for setting any parameters using the ‘BOP’.
Changing P0004 – parameter filter function
Step Result on display
1
Press
to access parameters
2
Press
3
Press
4
Press
5
Press
6 Only the motor parameters are visible to the user.
until P0004 is displayed
to access the parameter value level
or
to the required value
to confirm and store the value
Changing P1082 an indexed parameter – setting maximum motor frequency
Step Result on display
1
2
3
Press
Press
Press
to access parameters
until P1082 is displayed
to access the parameter value level
4
Press
5
Press
6
Press
7
Press
Press
8
drive display (as defined by the customer)
to display current set value
or
to the required value
to confirm and store the value
until r0000 is displayed
to return the display to the standard
Figure 3-6 Changing parameters via the BOP
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
41
Page 42

3 Commissioning International English
Note - Busy Message
In some cases - when changing parameter values - the display on the BOP shows
. This means the inverter is busy with tasks of higher priority.
Changing single digits in Parameter values
For changing the parameter value rapidly, the single digits of the display can be
changed by performing the following actions:
Ensure you are in the parameter value changing level (see "Changing parameters
with BOP").
1. Press
2. Change the value of this digit by pressing
3. Press
4. Perform steps 2 to 4 until the required value is displayed.
5. Press the
Note
The function button may also be used to acknowledge a fault condition
(function button), which causes the right hand digit to blink.
/ .
(function button) again causes the next digit to blink.
to leave the parameter value changing level.
Motor data for parameterization
P0308 P0310 P0304
50 Hz
Cosj0.81
65%
230/400V
0.61 0.35 A
0.12kW
2800 / min
3_Mot
IEC 56
IM B3
Nr. ED510 3053
IP54 Rot KL 16
60 Hz 440V Y
0.34A
0.14 kW
Cosj0.81
3310 /min
S.F. -- 1.15
12.022
I.CI.F
P0309 P0305 P0311 P0307
Figure 3-7 Typical Motor Rating Plate Example
MICROMASTER 440 Operating instructions
42 6SE6400-5CA00-0BP0
Page 43

International English 3 Commissioning
Note
P0308 & P0309 are only visible if P0003 ≥ 2. Only one of the parameters is
shown depending on the settings of P0100.
P0307 indicates kW or HP depending upon the setting of P0100. For detailed
information, please see the Parameter List.
Changing motor parameters is not possible unless P0010=1.
Ensure that the inverter is configured correctly to the motor, i.e. in the above
example delta terminal connection is for 230 V.
External motor thermal overload protection
When operated below rated speed, the cooling effect of fans fitted to the motor
shaft is reduced. Consequentially, most motors require de-rating for continuous
operation at low frequencies. To ensure that the motors are protected against
overheating under these conditions, a PTC temperature sensor must be fitted to
the motor and connected to the inverter control terminals and P0601 enabled.
3.2.4.3 Commissioning with the Advanced Operator Panel (AOP)
The Advanced Operator Panel (AOP) is available as an
option. Its advanced features include the following:
Multilingual clear text display
Upload/download of multiple parameter sets
Multidrop capability to drive up to 30 inverters
Please refer to the AOP Manual for details or contact your
local Siemens sales office for assistance.
3.3 General operation
For a full description of standard and extended parameters, please refer to the
Parameter List.
Notes
1. The inverter does not have a main power switch and is live when the mains
supply is connected. It waits, with the output disabled, until the RUN button is
pressed or for the presence of a digital ON signal at terminal 5 (rotate right).
2. If a BOP or an AOP is fitted and the output frequency is selected to be
displayed (P0005 = 21) the corresponding setpoint is displayed approximately
every 1.0 seconds while the inverter is stopped.
3. The inverter is programmed at the factory for standard applications on
Siemens four-pole standard motors that have the same power rating as the
inverters. When using other motors it is necessary to enter the specifications
from the motor's rating plate. See Figure 3-7 for details on how to read motor
data.
4. Changing motor parameters is not possible unless P0010 = 1.
5. You must set P0010 back to 0 in order to initiate a run.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
43
Page 44

3 Commissioning International English
MICROMASTER 440 Operating instructions
44 6SE6400-5CA00-0BP0
Page 45

International English 4 Using the MICROMASTER 440
4 Using the MICROMASTER 440
This Chapter contains:
An explanation of the various methods of controlling the inverter
An outline of some of the more commonly used parameters of the
MICROMASTER 440 which will allow the user to configure the inverter for a
number of applications.
A brief summary of all the inverter’s control modes and an introduction to the
inverter’s fault and warning reporting capability.
More detailed information can be found in the Parameter List and the
Reference manual associated with the MICROMASTER 440.
4.1 Frequency Setpoint (P1000) ................................................................................... 46
4.2 Command Sources (P0700).................................................................................... 47
4.3 OFF and braking Functions..................................................................................... 47
4.4 Control Modes (P1300) ...........................................................................................49
4.5 Faults and warnings ................................................................................................50
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
45
Page 46

4 Using the MICROMASTER 440 International English
Warnings
♦ When operating electrical devices, it is impossible to avoid applying
hazardous voltages to certain parts of the equipment.
♦ Emergency Stop facilities according to EN 60204 IEC 204 (VDE 0113) must
remain operative in all operating modes of the control equipment. Any
disengagement of the Emergency Stop facility must not lead to uncontrolled
or undefined restart.
♦ Wherever faults occurring in the control equipment can lead to substantial
material damage or even grievous bodily injury (i.e. potentially dangerous
faults), additional external precautions must be taken or facilities provided to
ensure or enforce safe operation, even when a fault occurs (e.g. independent
limit switches, mechanical interlocks, etc.).
♦ MICROMASTERS operate at high voltages.
♦ Certain parameter settings may cause the inverter to restart automatically
after an input power failure.
♦ Motor parameters must be accurately configured for motor overload
protection to operate correctly.
♦ This equipment is capable of providing internal motor overload protection in
accordance with UL508C section 42. Refer to P0610 (level 3) and P0335, I
2
t
is ON by default. Motor overload protection can also be provided using an
external PTC (disabled by default P0601).
♦ This equipment is suitable for use in a circuit capable of delivering not more
than 10,000 symmetrical amperes (rms), for a maximum voltage of
230V/460V/575V when protected by a H or K type fuse (see Tables starting
on page 77)
♦ This equipment must not be used as an ‘emergency stop mechanism’ (see
EN 60204, 9.2.5.4)
4.1 Frequency Setpoint (P1000)
Default: Terminal 3/4 (AIN+/ AIN -, 0…10 V corresponds to 0…50/60 Hz)
Other settings: see P1000
Notes
For USS see Reference Manual, for PROFIBUS see Reference Manual and
PROFIBUS Instructions.
MICROMASTER 440 Operating instructions
46 6SE6400-5CA00-0BP0
Page 47

International English 4 Using the MICROMASTER 440
4.2 Command Sources (P0700)
Notes
The ramp times and ramp-smoothing functions also affect how the motor starts and
stops. For details of these functions, please refer to parameters P1120, P1121,
P1130 – P1134 in the Parameter List.
Starting the motor
Default: Terminal 5 (DIN 1, high)
Other settings: see P0700 to P0708
Stopping the motor
There are several ways to stop the motor:
Default:
♦ OFF1 Terminal 5 (DIN 1, low)
♦ OFF2 Off button on BOP/AOP, pressing the Off button once long
(two seconds) or twice (with default settings not possible
without BOP/AOP)
♦ OFF3 no standard setting
Other settings: see P0700 to P0708
Reversing the motor
Default: Terminal 6 (DIN 2, high)
Other settings: see P0700 to P0708
4.3 OFF and braking Functions
4.3.1 OFF1
This command (produced by canceling the ON command) causes the inverter to
come to a standstill at the selected ramp-down rate.
Parameter to change ramp-down time see P1121
Notes
ON and the following OFF1 command must have the same source.
If the ON/OFF1 command is set to more than one digital input, only the last set
digital input is valid e.g. DIN3 is active.
OFF1 can be combined with DC braking, Compound braking or dynamic
braking.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
47
Page 48

4 Using the MICROMASTER 440 International English
4.3.2 OFF2
This command causes the motor to coast to a standstill (pulses disabled).
Note
The OFF2 command can have one or more sources. By default the OFF2
command is set to BOP/AOP. This source still exists even if other sources are
defined by one of the following parameters, P0700 to P0708 inclusive.
4.3.3 OFF3
An OFF3 command causes the motor to decelerate rapidly.
For starting the motor when OFF3 is set, the binary input has to be closed (high). If
OFF3 is high, the motor can be started and stopped by OFF1 or OFF2.
If OFF3 is low the motor cannot be started.
Ramp down time: see P1135
Note
OFF3 can be combined with DC braking, Compound braking or Dynamic braking.
4.3.4 DC braking
DC braking is possible together with OFF1 and OFF3. A DC current is applied to
stop the motor quickly and hold the shaft stationary until the end of the braking
period.
Enable DC braking: see P0701 to P0708
Set DC braking period: see P1233
Set DC braking current: see P1232
Set DC braking start frequency: see P1234
Note
If no digital input is set to DC braking and P1233 ≠ 0, DC braking will be active after
every OFF1 command with the time set in P1233.
4.3.5 Compound Braking
Compound Braking is possible with both OFF1 and OFF3. For Compound Braking
a DC component is added to the AC current.
Set the braking current: see P1236
4.3.6 Braking with external braking resistor
Braking with an external resistor is a method of braking that allows a smoothed,
controlled reduction in motor speed in a linear manner. The technique is also
known as Dynamic braking. For further details please refer to the Applications
Handbook.
MICROMASTER 440 Operating instructions
48 6SE6400-5CA00-0BP0
Page 49

International English 4 Using the MICROMASTER 440
4.4 Control Modes (P1300)
The various modes of operation of the MICROMASTER 440 control the relationship between the speed of the motor and the voltage supplied by the inverter. A
summary of the control modes available are listed below:
Linear V/f control, P1300 = 0
Can be used for variable and constant torque applications, such as conveyors
and positive displacement pumps.
Linear V/f control with FCC (Flux Current Control), P1300 = 1
This control mode can be used to improve the efficiency and dynamic
response of the motor.
Parabolic V/f control P1300 = 2
This mode can be used for variable torque loads, such as fans and pumps.
Multi-point V/f control P1300 = 3
For information regarding this mode of operation, please consult the MM440
Reference Manual.
Linear V/f control with ECO mode P1300 = 4
This feature automatically increases and decreases the motor voltage in order
to search for the minimum power consumption. It is designed to function when
the preset setpoint speed is reached.
V/f control for textile applications P1300 = 5
There is no slip compensation or resonance damping. The Imax controller
refers to the voltage instead of frequency.
V/f control with FCC for textile applications P1300 = 6
A combination of P1300 = 1 and P1300 = 5.
V/f control with independent voltage setpoint P1300 = 19
The voltage setpoint can be given using P1330 independent from the Ramp
Function Generator (RFG) output frequency
Sensorless Vector Control P1300 = 20
This feature allows the speed of the motor to be controlled with inherent slip
compensation. It allows for high torque, improved transient response, excellent
speed holding and improved torque at low frequencies. Allows change from
vector control to torque control (see P1501).
Sensoless Vector Torque Control P1300 = 22
This feature allows the inverter to control the torque of a motor. In an
application where a constant torque is required, a torque setpoint can be
established and the inverter will vary the current delivered to the motor to
maintain the required torque.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
49
Page 50

4 Using the MICROMASTER 440 International English
4.5 Faults and warnings
SDP fitted
If an SDP is fitted, the fault states and warnings are indicated by the two LEDs on
the panel, see section 6.1 on page 68 for further information.
If the inverter is working correctly, the following LED sequence is visible:
Green and Yellow = Ready to run
Green = Run
BOP fitted
If a BOP is fitted, the fault states (P0947) and warnings (P2110) are displayed
should a fault condition occur. For further details, please refer to the Parameter
List.
AOP fitted
If the AOP is fitted, the fault and warning codes are displayed on the LCD panel.
MICROMASTER 440 Operating instructions
50 6SE6400-5CA00-0BP0
Page 51

International English 5 System Parameters
5 System Parameters
This Chapter contains:
A functional overview of the parameters available for customizing your
MICROMASTER MM440 Inverter
A list of the parameters used
5.1 Introduction to MICROMASTER System Parameters............................................. 52
5.2 Parameter Overview................................................................................................ 53
5.3 Parameter List (short form) ..................................................................................... 54
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
51
Page 52

5 System Parameters International English
5.1 Introduction to MICROMASTER System Parameters
The parameters can only be changed by using the Basic Operator Pane l
(BOP), the Advance Operator Panel (AOP) or the Serial Interface.
Parameters can be changed and set using the BOP to adjust the desired
properties of the inverter, such as ramp times, minimum and maximum frequencies
etc. The parameter numbers selected and the setting of the parameter values are
indicated on the optional five-digit LCD display.
Read only parameters are indicated with r instead of P.
P0010 initiates “quick commissioning”.
The inverter will not run unless P0010 is set to 0 after it has been accessed.
This function is automatically perform if P3900 > 0.
P0004 acts as a filter, allowing access to parameters according to their
functionality.
If an attempt is made to change a parameter that cannot be changed in this
status, for example, cannot be changed whilst running or can only be changed
in quick commissioning, then
will be displayed.
Busy Message
In some cases - when changing parameter values - the display on the BOP
shows
for maximum of five seconds. This means the inverter is busy with
tasks of higher priority.
5.1.1 Access Levels
There are three access levels available to the user; Standard, Extended and
Expert. The level of access is set by parameter P0003. For most applications, the
Standard and Extended levels are sufficient.
The number of parameters that appear within each functional group depends on
the access level set in parameter P0003. For further details regarding parameters,
see the Parameter List on the Documentation CD-ROM.
MICROMASTER 440 Operating instructions
52 6SE6400-5CA00-0BP0
Page 53

International English 5 System Parameters
5.2 Parameter Overview
P0004 = 2
Inverter Unit
P0004 = 2, P0003 = 1,
Parameters level 1
concerning the inverter unit
P0004 = 2, P0003 = 2,
P0004 = 0
(no filter function)
allows direct access
to the parameters,
For BOP and AOP
depending on the
selected access
level
P0004 = 2, P0003 = 3,
Parameters level 1, 2 and 3
concerning the inverter unit
Parameters level 1, 2, 3 and
4concerning the inverter unit
Parameters level 1 and 2
concerning the inverter unit
P0004 = 2, P0003 = 4,
P0004 = 21
Alarms, Warnings &
Monitoring
P0004 = 20
Communication
P0004 = 13
Motor Control
P0004 = 12
Drive Features
P0004 = 22
PI Controller
P0004 = 10
Setpoint Channel &
Ramp Generator
P0004 = 2
Inverter Unit
P0004 = 3
Motor Data
P0004 = 4
Speed sensor
P0004 = 5
Technol.
Application / units
P0004 = 7
Commands and
Digital I/O
P0004 = 8
Analogue I/O
Figure 5-1 Parameter Overview
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
53
Page 54

5 System Parameters International English
5.3 Parameter List (short form)
Three states are possible for all the parameters:
Commissioning C
Ready to run U
Run T
This indicates when the parameter can be changed. One, two or all three states
may be specified. If all three states are specified, this means that it is possible to
change this parameter setting in all three inverter states.
Always
Par. No. Parametername Default Acc WS QC
r0000 Drive display - 1 - -
P0003 User access level 1 1 CUT N
P0004 Parameter filter 0 1 CUT N
P0010 Commissioning parameter filter 0 1 CT N
Quick Commissioning
Par.-No. Parametername Default Level WS QC
P0100 Europe / North America 0 1 C Q
P3900 End of quick commissioning 0 1 C Q
Parameter Reset
Par.-No. Parametername Default Level WS QC
P0970 Factory reset 0 1 C N
Inverter Unit (P0004 = 2)
Par. No. Parametername Default Acc WS QC
r0018 Firmware version - 1 - -
r0026[1] CO: Act. DC-link voltage - 2 - -
r0037[2] CO: Inverter temperature [°C] - 3 - -
r0039 CO: Energy consumpt. meter [kWh] - 2 - -
P0040 Reset energy consumption meter 0 2 CT N
r0070 CO: Act. DC-link voltage - 3 - -
r0200 Act. power stack code number - 3 - -
P0201 Power stack code number 0 3 C N
r0203 Act. inverter type - 3 - -
r0204 Power stack features - 3 - -
P0205 Inverter application 0 3 C Q
r0206 Rated inverter power [kW] / [hp] - 2 - -
r0207 Rated inverter current - 2 - -
r0208 Rated inverter voltage - 2 - -
r0209 Maximum inverter current - 2 - -
P0210 Supply voltage 230 3 CT N
r0231[2] Max. cable length - 3 - -
P0290 Inverter overload reaction 2 3 CT N
P0292 Inverter overload warning 15 3 CUT N
MICROMASTER 440 Operating instructions
54 6SE6400-5CA00-0BP0
Page 55

International English 5 System Parameters
Par. No. Parametername Default Acc WS QC
P1800 Pulse frequency 4 2 CUT N
r1801 CO: Act. switching frequency - 3 - -
P1802 Modulator mode 0 3 CUT N
P1820[3] Reverse output phase sequence 0 2 CT N
P1911 No. of phase to be identified 3 2 CT N
r1925 Identified on-state voltage - 2 - -
r1926 Ident. gating unit dead time - 2 - -
Motor Data (P0004 = 3)
Par. No. Parametername Default Acc WS QC
r0035[3] CO: Act. motor temperature - 2 - -
P0300[3] Select motor type 1 2 C Q
P0304[3] Rated motor voltage 230 1 C Q
P0305[3] Rated motor current 3.25 1 C Q
P0307[3] Rated motor power 0.75 1 C Q
P0308[3] Rated motor cosPhi 0.000 2 C Q
P0309[3] Rated motor efficiency 0.0 2 C Q
P0310[3] Rated motor frequency 50.00 1 C Q
P0311[3] Rated motor speed 0 1 C Q
r0313[3] Motor pole pairs - 3 - -
P0320[3] Motor magnetizing current 0.0 3 CT Q
r0330[3] Rated motor slip - 3 - -
r0331[3] Rated magnetization current - 3 - -
r0332[3] Rated power factor - 3 - -
r0333[3] Rated motor torque - 3 - -
P0335[3] Motor cooling 0 2 CT Q
P0340[3] Calculation of motor parameters 0 2 CT N
P0341[3] Motor inertia [kg*m^2] 0.00180 3 CUT N
P0342[3] Inertia ratio total/motor 1.000 3 CUT N
P0344[3] Motor weight 9.4 3 CUT N
r0345[3] Motor start-up time - 3 - -
P0346[3] Magnetization time 1.000 3 CUT N
P0347[3] Demagnetization time 1.000 3 CUT N
P0350[3] Stator resistance (line-to-line) 4.0 2 CUT N
P0352[3] Cable resistance 0.0 3 CUT N
r0384[3] Rotor time constant - 3 - -
r0395 CO: Total stator resistance [%] - 3 - -
r0396 CO: Act. rotor resistance - 3 - -
P0601[3] Motor temperature sensor 0 2 CUT N
P0604[3] Threshold motor temperature 130.0 2 CUT N
P0610[3] Motor I2t temperature reaction 2 3 CT N
P0625[3] Ambient motor temperature 20.0 3 CUT N
P0640[3] Motor overload factor [%] 150.0 2 CUT Q
P1910 Select motor data identification 0 2 CT Q
r1912[3] Identified stator resistance - 2 - -
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
55
Page 56

5 System Parameters International English
r1913[3] Identified rotor time constant - 2 - -
r1914[3] Ident. total leakage inductance - 2 - -
r1915[3] Ident. nom. stator inductance - 2 - -
r1916[3] Identified stator inductance 1 - 2 - -
r1917[3] Identified stator inductance 2 - 2 - -
r1918[3] Identified stator inductance 3 - 2 - -
r1919[3] Identified stator inductance 4 - 2 - -
r1920[3] Identified dyn.leak.induct. - 2 - -
Commands and Digital I/O (P0004 = 7)
Par. No. Parametername Default Acc W S QC
r0002 Drive state - 2 - -
r0019 CO/BO: BOP control word - 3 - -
r0050 CO: Active command data set - 2 - -
r0051[2] CO: Active drive data set - 2 - -
r0052 CO/BO: Act. status word 1 - 2 - -
r0053 CO/BO: Act. status word 2 - 2 - -
r0054 CO/BO: Act. control word 1 - 3 - -
r0055 CO/BO: Add. act. control word - 3 - -
P0700[3] Selection of command source 2 1 CT Q
P0701[3] Function of digital input 1 1 2 CT N
P0702[3] Function of digital input 2 12 2 CT N
P0703[3] Function of digital input 3 9 2 CT N
P0704[3] Function of digital input 4 15 2 CT N
P0705[3] Function of digital input 5 15 2 CT N
P0706[3] Function of digital input 6 15 2 CT N
P0707[3] Function of digital input 7 0 2 CT N
P0708[3] Function of digital input 8 0 2 CT N
P0719[3] Selection of cmd. & freq. setp. 0 3 CT N
r0720 Number of digital inputs - 3 - -
r0722 CO/BO: Binary input values - 2 - -
P0724 Debounce time for digital inputs 3 3 CT N
P0725 PNP / NPN digital inputs 1 3 CT N
r0730 Number of digital outputs - 3 - -
P0731[3] BI: Function of digital output 1 52:3 2 CUT N
P0732[3] BI: Function of digital output 2 52:7 2 CUT N
P0733[3] BI: Function of digital output 3 0:0 2 CUT N
r0747 CO/BO: State of digital outputs - 3 - -
P0748 Invert digital outputs 0 3 CUT N
P0800[3] BI: Download parameter set 0 0:0 3 CT N
P0801[3] BI: Download parameter set 1 0:0 3 CT N
P0809[3] Copy Command Data Set 0 2 CT N
P0810 BI: CDS bit 0 (Local / Remote) 0:0 2 CUT N
P0811 BI: CDS bit 1 0:0 2 CUT N
P0819[3] Copy Drive Data Set 0 2 CT N
P0820[3] BI: DDS bit 0 0:0 3 CT N
MICROMASTER 440 Operating instructions
56 6SE6400-5CA00-0BP0
Page 57

International English 5 System Parameters
Par. No. Parametername Default Acc W S QC
P0821[3] BI: DDS bit 1 0:0 3 CT N
P0840[3] BI: ON/OFF1 722:0 3 CT N
P0842[3] BI: ON/OFF1 reverse 0:0 3 CT N
P0844[3] BI: 1. OFF2 1:0 3 CT N
P0845[3] BI: 2. OFF2 19:1 3 CT N
P0848[3] BI: 1. OFF3 1:0 3 CT N
P0849[3] BI: 2. OFF3 1:0 3 CT N
P0852[3] BI: Pulse enable 1:0 3 CT N
P1020[3] BI: Fixed freq. selection Bit 0 0:0 3 CT N
P1021[3] BI: Fixed freq. selection Bit 1 0:0 3 CT N
P1022[3] BI: Fixed freq. selection Bit 2 0:0 3 CT N
P1023[3] BI: Fixed freq. selection Bit 3 722:3 3 CT N
P1026[3] BI: Fixed freq. selection Bit 4 722:4 3 CT N
P1028[3] BI: Fixed freq. selection Bit 5 722:5 3 CT N
P1035[3] BI: Enable MOP (UP-command) 19:13 3 CT N
P1036[3] BI: Enable MOP (DOWN-command) 19:14 3 CT N
P1055[3] BI: Enable JOG right 0:0 3 CT N
P1056[3] BI: Enable JOG left 0:0 3 CT N
P1074[3] BI: Disable additional setpoint 0:0 3 CUT N
P1110[3] BI: Inhibit neg. freq. setpoint 0:0 3 CT N
P1113[3] BI: Reverse 722:1 3 CT N
P1124[3] BI: Enable JOG ramp times 0:0 3 CT N
P1230[3] BI: Enable DC braking 0:0 3 CUT N
P2103[3] BI: 1. Faults acknowledgement 722:2 3 CT N
P2104[3] BI: 2. Faults acknowledgement 0:0 3 CT N
P2106[3] BI: External fault 1:0 3 CT N
P2220[3] BI: Fixed PID setp. select Bit 0 0:0 3 CT N
P2221[3] BI: Fixed PID setp. select Bit 1 0:0 3 CT N
P2222[3] BI: Fixed PID setp. select Bit 2 0:0 3 CT N
P2223[3] BI: Fixed PID setp. select Bit 3 722:3 3 CT N
P2226[3] BI: Fixed PID setp. select Bit 4 722:4 3 CT N
P2228[3] BI: Fixed PID setp. select Bit 5 722:5 3 CT N
P2235[3] BI: Enable PID-MOP (UP-cmd) 19:13 3 CT N
P2236[3] BI: Enable PID-MOP (DOWN-cmd) 19:14 3 CT N
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
57
Page 58

5 System Parameters International English
Analogue I/O (P0004 = 8)
Par. No. Parametername Default Acc WS QC
P0295 Inverter fan off delay time 0 3 CUT N
r0750 Number of ADCs - 3 - -
r0752[2] Act. input of ADC [V] or [mA] - 2 - -
P0753[2] Smooth time ADC 3 3 CUT N
r0754[2] Act. ADC value after scaling [%] - 2 - -
r0755[2] CO: Act. ADC after scal. [4000h] - 2 - -
P0756[2] Type of ADC 0 2 CT N
P0757[2] Value x1 of ADC scaling [V / mA] 0 2 CUT N
P0758[2] Value y1 of ADC scaling 0.0 2 CUT N
P0759[2] Value x2 of ADC scaling [V / mA] 10 2 CUT N
P0760[2] Value y2 of ADC scaling 100.0 2 CUT N
P0761[2] Width of ADC deadband [V / mA] 0 2 CUT N
P0762[2] Delay for loss of signal action 10 3 CUT N
r0770 Number of DACs - 3 - -
P0771[2] CI: DAC 21:0 2 CUT N
P0773[2] Smooth time DAC 2 3 CUT N
r0774[2] Act. DAC value [V] or [mA] - 2 - -
P0777[2] Value x1 of DAC scaling 0.0 2 CUT N
P0778[2] Value y1 of DAC scaling 0 2 CUT N
P0779[2] Value x2 of DAC scaling 100.0 2 CUT N
P0780[2] Value y2 of DAC scaling 20 2 CUT N
P0781[2] Width of DAC deadband 0 2 CUT N
Setpoint Channel and Ramp Generator (P0004 = 10)
Par. No. Parametername Default Acc WS QC
P1000[3] Selection of frequency setpoint 2 1 CT Q
P1001[3] Fixed frequency 1 0.00 2 CUT N
P1002[3] Fixed frequency 2 5.00 2 CUT N
P1003[3] Fixed frequency 3 10.00 2 CUT N
P1004[3] Fixed frequency 4 15.00 2 CUT N
P1005[3] Fixed frequency 5 20.00 2 CUT N
P1006[3] Fixed frequency 6 25.00 2 CUT N
P1007[3] Fixed frequency 7 30.00 2 CUT N
P1008[3] Fixed frequency 8 35.00 2 CUT N
P1009[3] Fixed frequency 9 40.00 2 CUT N
P1010[3] Fixed frequency 10 45.00 2 CUT N
P1011[3] Fixed frequency 11 50.00 2 CUT N
P1012[3] Fixed frequency 12 55.00 2 CUT N
P1013[3] Fixed frequency 13 60.00 2 CUT N
P1014[3] Fixed frequency 14 65.00 2 CUT N
P1015[3] Fixed frequency 15 65.00 2 CUT N
P1016 Fixed frequency mode - Bit 0 1 3 CT N
P1017 Fixed frequency mode - Bit 1 1 3 CT N
MICROMASTER 440 Operating instructions
58 6SE6400-5CA00-0BP0
Page 59

International English 5 System Parameters
Par. No. Parametername Default Acc WS QC
P1018 Fixed frequency mode - Bit 2 1 3 CT N
P1019 Fixed frequency mode - Bit 3 1 3 CT N
r1024 CO: Act. fixed frequency - 3 - -
P1025 Fixed frequency mode - Bit 4 1 3 CT N
P1027 Fixed frequency mode - Bit 5 1 3 CT N
P1031[3] Setpoint memory of the MOP 0 2 CUT N
P1032 Inhibit reverse direction of MOP 1 2 CT N
P1040[3] Setpoint of the MOP 5.00 2 CUT N
r1050 CO: Act. Output freq. of the MOP - 3 - -
P1058[3] JOG frequency right 5.00 2 CUT N
P1059[3] JOG frequency left 5.00 2 CUT N
P1060[3] JOG ramp-up time 10.00 2 CUT N
P1061[3] JOG ramp-down time 10.00 2 CUT N
P1070[3] CI: Main setpoint 755:0 3 CT N
P1071[3] CI: Main setpoint scaling 1:0 3 CT N
P1075[3] CI: Additional setpoint 0:0 3 CT N
P1076[3] CI: Additional setpoint scaling 1:0 3 CT N
r1078 CO: Total frequency setpoint - 3 - -
r1079 CO: Selected frequency setpoint - 3 - -
P1080[3] Min. frequency 0.00 1 CUT Q
P1082[3] Max. frequency 50.00 1 CT Q
P1091[3] Skip frequency 1 0.00 3 CUT N
P1092[3] Skip frequency 2 0.00 3 CUT N
P1093[3] Skip frequency 3 0.00 3 CUT N
P1094[3] Skip frequency 4 0.00 3 CUT N
P1101[3] Skip frequency bandwidth 2.00 3 CUT N
r1114 CO: Freq. setp. after dir. ctrl. - 3 - -
r1119 CO: Freq. setpoint before RFG - 3 - -
P1120[3] Ramp-up time 10.00 1 CUT Q
P1121[3] Ramp-down time 10.00 1 CUT Q
P1130[3] Ramp-up initial rounding time 0.00 2 CUT N
P1131[3] Ramp-up final rounding time 0.00 2 CUT N
P1132[3] Ramp-down initial rounding time 0.00 2 CUT N
P1133[3] Ramp-down final rounding time 0.00 2 CUT N
P1134[3] Rounding type 0 2 CUT N
P1135[3] OFF3 ramp-down time 5.00 2 CUT Q
r1170 CO: Frequency setpoint after RFG - 3 - -
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
59
Page 60

5 System Parameters International English
Drive Features (P0004 = 12)
Par. No. Parametername Default Acc WS QC
P0005[3] Display selection 21 2 CUT N
P0006 Display mode 2 3 CUT N
P0007 Backlight delay time 0 3 CUT N
P0011 Lock for user defined parameter 0 3 CUT N
P0012 Key for user defined parameter 0 3 CUT N
P0013[20] User defined parameter 0 3 CUT N
P1200 Flying start 0 2 CUT N
P1202[3] Motor-current: Flying start 100 3 CUT N
P1203[3] Search rate: Flying start 100 3 CUT N
r1205 Status flying-start on observer - 3 - -
P1210 Automatic restart 1 2 CUT N
P1211 Number of restart attempts 3 3 CUT N
P1215 Holding brake enable 0 2 T N
P1216 Holding brake release delay 1.0 2 T N
P1217 Holding time after ramp down 1.0 2 T N
P1232[3] DC braking current 100 2 CUT N
P1233[3] Duration of DC braking 0 2 CUT N
P1234[3] DC braking start frequency 0 2 CUT N
P1236[3] Compound braking current 0 2 CUT N
P1237 Dynamic braking 0 2 CUT N
P1240[3] Configuration of Vdc controller 1 3 CT N
r1242 CO: Switch-on level of Vdc-max - 3 - -
P1243[3] Dynamic factor of Vdc-max 100 3 CUT N
P1245[3] Switch on level kin. buffering 76 3 CUT N
P1247[3] Dyn. factor of kinetic buffering 100 3 CUT N
P1253[3] Vdc-controller output limitation 10 3 CUT N
P1254 Auto detect Vdc switch-on levels 1 3 CT N
P2354 PID tuning timeout length 240 3 CUT N
Motor Control (P0004 = 13)
Par. No. Parametername Default Acc WS QC
r0020 CO: Act. frequency setpoint - 3 - -
r0021 CO: Act. frequency - 2 - -
r0022 Act. rotor speed - 3 - -
r0024 CO: Act. output frequency - 3 - -
r0025 CO: Act. output voltage - 2 - -
r0027 CO: Act. output current - 2 - -
r0029 CO: Flux gen. current - 3 - -
r0030 CO: Torque gen. current - 3 - -
r0031 CO: Act. torque - 2 - -
r0032 CO: Act. power - 2 - -
r0038 CO: Act. power factor - 3 - -
r0056 CO/BO: Status of motor control - 3 - -
MICROMASTER 440 Operating instructions
60 6SE6400-5CA00-0BP0
Page 61

International English 5 System Parameters
Par. No. Parametername Default Acc WS QC
r0062 CO: Freq. setpoint - 3 - -
r0063 CO: Act. frequency - 3 - -
r0064 CO: Dev. frequency controller - 3 - -
r0065 CO: Slip frequency - 3 - -
r0066 CO: Act. output frequency - 3 - -
r0067 CO: Act. output current limit - 3 - -
r0068 CO: Output current - 3 - -
r0071 CO: Max. output voltage - 3 - -
r0072 CO: Act. output voltage - 3 - -
r0075 CO: Current setpoint Isd - 3 - -
r0076 CO: Act. current Isd - 3 - -
r0077 CO: Current setpoint Isq - 3 - -
r0078 CO: Act. current Isq - 3 - -
r0079 CO: Torque setpoint (total) - 3 - -
r0086 CO: Act. active current - 3 - -
P0095[10] CI: Display PZD signals 0:0 3 CT N
r0096[10] PZD signals - 3 - -
r1084 Max. frequency setpoint - 3 - -
P1300[3] Control mode 0 2 CT Q
P1310[3] Continuous boost 50.0 2 CUT N
P1311[3] Acceleration boost 0.0 2 CUT N
P1312[3] Starting boost 0.0 2 CUT N
P1316[3] Boost end frequency 20.0 3 CUT N
P1320[3] Programmable V/f freq. coord. 1 0.00 3 CT N
P1321[3] Programmable V/f volt. coord. 1 0.0 3 CUT N
P1322[3] Programmable V/f freq. coord. 2 0.00 3 CT N
P1323[3] Programmable V/f volt. coord. 2 0.0 3 CUT N
P1324[3] Programmable V/f freq. coord. 3 0.00 3 CT N
P1325[3] Programmable V/f volt. coord. 3 0.0 3 CUT N
P1330[3] CI: Voltage setpoint 0:0 3 T N
P1333[3] Start frequency for FCC 10.0 3 CUT N
P1335[3] Slip compensation 0.0 2 CUT N
P1336[3] Slip limit 250 2 CUT N
r1337 CO: V/f slip frequency - 3 - -
P1338[3] Resonance damping gain V/f 0.00 3 CUT N
P1340[3] Imax controller prop. gain 0.000 3 CUT N
P1341[3] Imax controller integral time 0.300 3 CUT N
r1343 CO: Imax controller freq. output - 3 - -
r1344 CO: Imax controller volt. output - 3 - -
P1345[3] Imax controller prop. gain 0.250 3 CUT N
P1346[3] Imax controller integral time 0.300 3 CUT N
P1350[3] Voltage soft start 0 3 CUT N
P1400[3] Configuration of speed control 1 3 CUT N
r1407 CO/BO: Status 2 of motor control - 3 - -
r1438 CO: Freq. setpoint to controller - 3 - -
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
61
Page 62

5 System Parameters International English
Par. No. Parametername Default Acc WS QC
P1452[3] Filter time for act.speed (SLVC) 4 3 CUT N
P1470[3] Gain speed controller (SLVC) 3.0 2 CUT N
P1472[3] Integral time n-ctrl. (SLVC) 400 2 CUT N
P1477[3] BI: Set integrator of n-ctrl. 0:0 3 CUT N
P1478[3] CI: Set integrator value n-ctrl. 0:0 3 UT N
r1482 CO: Integral output of n-ctrl. - 3 - -
P1488[3] Droop input source 0 3 CUT N
P1489[3] Droop scaling 0.05 3 CUT N
r1490 CO: Droop frequency - 3 - -
P1492[3] Enable droop 0 3 CUT N
P1496[3] Scaling accel. precontrol 0.0 3 CUT N
P1499[3] Scaling accel. torque control 100.0 3 CUT N
P1500[3] Selection of torque setpoint 0 2 CT Q
P1501[3] BI: Change to torque control 0:0 3 CT N
P1503[3] CI: Torque setpoint 0:0 3 T N
r1508 CO: Torque setpoint - 2 - -
P1511[3] CI: Additional torque setpoint 0:0 3 T N
r1515 CO: Additional torque setpoint - 2 - -
r1518 CO: Acceleration torque - 3 - -
P1520[3] CO: Upper torque limit 5.13 2 CUT N
P1521[3] CO: Lower torque limit -5.13 2 CUT N
P1522[3] CI: Upper torque limit 1520:0 3 T N
P1523[3] CI: Lower torque limit 1521:0 3 T N
P1525[3] Scaling lower torque limit 100.0 3 CUT N
r1526 CO: Upper torque limitation - 3 - -
r1527 CO: Lower torque limitation - 3 - -
P1530[3] Motoring power limitation 0.75 2 CUT N
P1531[3] Regenerative power limitation -0.75 2 CUT N
r1538 CO: Upper torque limit (total) - 2 - -
r1539 CO: Lower torque limit (total) - 2 - -
P1570[3] CO: Fixed value flux setpoint 110.0 2 CUT N
P1574[3] Dynamic voltage headroom 10 3 CUT N
P1580[3] Efficiency optimization 0 2 CUT N
P1582[3] Smooth time for flux setpoint 15 3 CUT N
P1596[3] Int. time field weak. controller 50 3 CUT N
r1598 CO: Flux setpoint (total) - 3 - -
P1610[3] Continuous torque boost (SLVC) 50.0 2 CUT N
P1611[3] Acc. torque boost (SLVC) 0.0 2 CUT N
P1740 Gain for oscillation damping 0.000 3 CUT N
P1750[3] Control word of motor model 0 3 CUT N
r1751 Status word of motor model - 3 - -
r1770 CO: Prop. output of n-adaption - 3 - -
r1771 CO: Int. output of n-adaption - 3 - -
P1780[3] Control word of Rs/Rr-adaption 3 3 CUT N
r1782 Output of Rs-adaptation - 3 - -
r1787 Output of Xm-adaption - 3 - -
MICROMASTER 440 Operating instructions
62 6SE6400-5CA00-0BP0
Page 63

International English 5 System Parameters
Communication (P0004 = 20)
Par. No. Parametername Default Acc WS QC
P0918 CB address 3 2 CT N
P0927 Parameter changeable via 15 2 CUT N
r0964[5] Firmware version data - 3 - -
r0965 Profibus profile - 3 - -
r0967 Control word 1 - 3 - -
r0968 Status word 1 - 3 - -
P0971 Transfer data from RAM to EEPROM 0 3 CUT N
P2000[3] Reference frequency 50.00 2 CT N
P2001[3] Reference voltage 1000 3 CT N
P2002[3] Reference current 0.10 3 CT N
P2003[3] Reference torque 0.75 3 CT N
r2004[3] Reference power - 3 - -
P2009[2] USS normalization 0 3 CT N
P2010[2] USS baudrate 6 2 CUT N
P2011[2] USS address 0 2 CUT N
P2012[2] USS PZD length 2 3 CUT N
P2013[2] USS PKW length 127 3 CUT N
P2014[2] USS telegram off time 0 3 CT N
r2015[8] CO: PZD from BOP link (USS) - 3 - -
P2016[8] CI: PZD to BOP link (USS) 52:0 3 CT N
r2018[8] CO: PZD from COM link (USS) - 3 - -
P2019[8] CI: PZD to COM link (USS) 52:0 3 CT N
r2024[2] USS error-free telegrams - 3 - -
r2025[2] USS rejected telegrams - 3 - -
r2026[2] USS character frame error - 3 - -
r2027[2] USS overrun error - 3 - -
r2028[2] USS parity error - 3 - -
r2029[2] USS start not identified - 3 - -
r2030[2] USS BCC error - 3 - -
r2031[2] USS length error - 3 - -
r2032 BO: CtrlWrd1 from BOP link (USS) - 3 - -
r2033 BO: CtrlWrd2 from BOP link (USS) - 3 - -
r2036 BO: CtrlWrd1 from COM link (USS) - 3 - -
r2037 BO: CtrlWrd2 from COM link (USS) - 3 - -
P2040 CB telegram off time 20 3 CT N
P2041[5] CB parameter 0 3 CT N
r2050[8] CO: PZD from CB - 3 - -
P2051[8] CI: PZD to CB 52:0 3 CT N
r2053[5] CB identification - 3 - -
r2054[7] CB diagnosis - 3 - -
r2090 BO: Control word 1 from CB - 3 - -
r2091 BO: Control word 2 from CB - 3 - -
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
63
Page 64

5 System Parameters International English
Alarms, Warnings and Monitoring (P0004 = 21)
Par. No. Parametername Default Acc WS QC
r0947[8] Last fault code - 2 - -
r0948[12] Fault time - 3 - -
P0952 Total number of faults 0 3 CT N
P2100[3] Alarm number selection 0 3 CT N
P2101[3] Stop reaction value 0 3 CT N
r2110[4] Warning number - 2 - -
P2111 Total number of warnings 0 3 CT N
r2114[2] Run time counter - 3 - -
P2115[3] AOP real time clock 0 3 CT N
P2150[3] Hysteresis frequency f_hys 3.00 3 CUT N
P2151[3] CI: Monitoring speed setpoint 0:0 3 CUT N
P2152[3] CI: Act. monitoring speed 0:0 3 CUT N
P2153[3] Time-constant speed filter 5 2 CUT N
P2155[3] Threshold frequency f_1 30.00 3 CUT N
P2156[3] Delay time of threshold freq f_1 10 3 CUT N
P2157[3] Threshold frequency f_2 30.00 2 CUT N
P2158[3] Delay time of threshold freq f_2 10 2 CUT N
P2159[3] Threshold frequency f_3 30.00 2 CUT N
P2160[3] Delay time of threshold freq f_3 10 2 CUT N
P2161[3] Min. threshold for freq. setp. 3.00 2 CUT N
P2162[3] Hysteresis freq. for overspeed 20.00 2 CUT N
P2163[3] Entry freq. for perm. deviation 3.00 2 CUT N
P2164[3] Hysteresis frequency deviation 3.00 3 CUT N
P2165[3] Delay time permitted deviation 10 2 CUT N
P2166[3] Delay time ramp up completed 10 2 CUT N
P2167[3] Switch-off frequency f_off 1.00 3 CUT N
P2168[3] Delay time T_off 10 3 CUT N
r2169 CO: Act. filtered frequency - 2 - -
P2170[3] Threshold current I_thresh 100.0 3 CUT N
P2171[3] Delay time current 10 3 CUT N
P2172[3] Threshold DC-link voltage 800 3 CUT N
P2173[3] Delay time DC-link voltage 10 3 CUT N
P2174[3] Torque threshold T_thresh 5.13 2 CUT N
P2176[3] Delay time for torque threshold 10 2 CUT N
P2177[3] Delay time for motor is blocked 10 2 CUT N
P2178[3] Delay time for motor is stalled 10 2 CUT N
P2179 Current limit for no load ident. 3.0 3 CUT N
P2180 Delay time for no load ident. 2000 3 CUT N
P2181[3] Belt failure detection mode 0 2 CT N
P2182[3] Belt threshold frequency 1 5.00 3 CUT N
P2183[3] Belt threshold frequency 2 30.00 2 CUT N
P2184[3] Belt threshold frequency 3 50.00 2 CUT N
P2185[3] Upper torque threshold 1 99999.0 2 CUT N
P2186[3] Lower torque threshold 1 0.0 2 CUT N
MICROMASTER 440 Operating instructions
64 6SE6400-5CA00-0BP0
Page 65

International English 5 System Parameters
Par. No. Parametername Default Acc WS QC
P2187[3] Upper torque threshold 2 99999.0 2 CUT N
P2188[3] Lower torque threshold 2 0.0 2 CUT N
P2189[3] Upper torque threshold 3 99999.0 2 CUT N
P2190[3] Lower torque threshold 3 0.0 2 CUT N
P2191[3] Belt failure speed tolerance 3.00 2 CUT N
P2192[3] Time delay for belt failure 10 2 CUT N
r2197 CO/BO: Monitoring word 1 - 2 - -
r2198 CO/BO: Monitoring word 2 - 2 - -
PI Controller (P0004 = 22)
Par. No. Parametername Default Acc WS QC
P2200[3] BI: Enable PID controller 0:0 2 CT N
P2201[3] Fixed PID setpoint 1 0.00 2 CUT N
P2202[3] Fixed PID setpoint 2 10.00 2 CUT N
P2203[3] Fixed PID setpoint 3 20.00 2 CUT N
P2204[3] Fixed PID setpoint 4 30.00 2 CUT N
P2205[3] Fixed PID setpoint 5 40.00 2 CUT N
P2206[3] Fixed PID setpoint 6 50.00 2 CUT N
P2207[3] Fixed PID setpoint 7 60.00 2 CUT N
P2208[3] Fixed PID setpoint 8 70.00 2 CUT N
P2209[3] Fixed PID setpoint 9 80.00 2 CUT N
P2210[3] Fixed PID setpoint 10 90.00 2 CUT N
P2211[3] Fixed PID setpoint 11 100.00 2 CUT N
P2212[3] Fixed PID setpoint 12 110.00 2 CUT N
P2213[3] Fixed PID setpoint 13 120.00 2 CUT N
P2214[3] Fixed PID setpoint 14 130.00 2 CUT N
P2215[3] Fixed PID setpoint 15 130.00 2 CUT N
P2216 Fixed PID setpoint mode - Bit 0 1 3 CT N
P2217 Fixed PID setpoint mode - Bit 1 1 3 CT N
P2218 Fixed PID setpoint mode - Bit 2 1 3 CT N
P2219 Fixed PID setpoint mode - Bit 3 1 3 CT N
r2224 CO: Act. fixed PID setpoint - 2 - -
P2225 Fixed PID setpoint mode - Bit 4 1 3 CT N
P2227 Fixed PID setpoint mode - Bit 5 1 3 CT N
P2231[3] Setpoint memory of PID-MOP 0 2 CUT N
P2232 Inhibit rev. direct. of PID-MOP 1 2 CT N
P2240[3] Setpoint of PID-MOP 10.00 2 CUT N
r2250 CO: Output setpoint of PID-MOP - 2 - -
P2253[3] CI: PID setpoint 0:0 2 CUT N
P2254[3] CI: PID trim source 0:0 3 CUT N
P2255 PID setpoint gain factor 100.00 3 CUT N
P2256 PID trim gain factor 100.00 3 CUT N
P2257 Ramp-up time for PID setpoint 1.00 2 CUT N
P2258 Ramp-down time for PID setpoint 1.00 2 CUT N
r2260 CO: Act. PID setpoint - 2 - -
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
65
Page 66

5 System Parameters International English
Par. No. Parametername Default Acc WS QC
P2261 PID setpoint filter timeconstant 0.00 3 CUT N
r2262 CO: Act. PID filtered setpoint - 3 - -
P2263 PID controller type 0 3 CT N
P2264[3] CI: PID feedback 755:0 2 CUT N
P2265 PID feedback filter timeconstant 0.00 2 CUT N
r2266 CO: PID filtered feedback - 2 - -
P2267 Max. value for PID feedback 100.00 3 CUT N
P2268 Min. value for PID feedback 0.00 3 CUT N
P2269 Gain applied to PID feedback 100.00 3 CUT N
P2270 PID feedback function selector 0 3 CUT N
P2271 PID tranducer type 0 2 CUT N
r2272 CO: PID scaled feedback - 2 - -
r2273 CO: PID error - 2 - -
P2274 PID derivative time 0.000 2 CUT N
P2280 PID proportional gain 3.000 2 CUT N
P2285 PID integral time 0.000 2 CUT N
P2291 PID output upper limit 100.00 2 CUT N
P2292 PID output lower limit 0.00 2 CUT N
P2293 Ramp-up /-down time of PID limit 1.00 3 CUT N
r2294 CO: Act. PID output - 2 - -
P2350 PID autotune enable 0 2 CUT N
P2355 PID tuning offset 5.00 3 CUT N
MICROMASTER 440 Operating instructions
66 6SE6400-5CA00-0BP0
Page 67

International English 6 Troubleshooting
6 Troubleshooting
This Chapter contains:
An overview of the inverter states indicated by the LEDs on the Status Display
Panel supplied as standard with your inverter
Some general information on a variety of troubleshooting measures.
A list of the fault codes that may appear on the display of the BOP. The cause
and recommended corrective action are indicated for each fault code listed.
6.1 Troubleshooting with the Status Display Panel....................................................... 68
6.2 Troubleshooting with the Basic Operator Panel...................................................... 69
6.3 Fault messages .......................................................................................................70
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
67
Page 68

6 Troubleshooting International English
Warnings
♦ Repairs on equipment may only be carried out by Sieme n s Serv ic e, by repair
centers authorized by Siemens or by qualified personnel who are thoroughly
acquainted with all the warnings and operating procedures contained in this
manual.
♦ Any defective parts or components must be replaced using parts contained in
the relevant spare parts list.
♦ Disconnect the power supply before opening the equipment for access
6.1 Troubleshooting with the Status Display Panel
Table 6-1 explains the meaning of the various states of the LEDs on the Status
Display Panel (SDP).
Table 6-1 Inverter conditions indicated by the LEDs on the SDP
LEDs
Green Yellow
OFF OFF 1 Mains not present
OFF ON 8 Inverter fault – other than those listed below
ON OFF 13 Inverter running
ON ON 14 Ready to run – standby
OFF Flashing – R1 4 Fault – Overcurrent
Flashing – R1 OFF 5 Fault – Overvoltage
Flashing – R1 ON 7 Fault – Motor Overtemperature
ON Flashing – R1 8 Fault – Inverter Overtemperature
Flashing – R1 Flashing – R1 9 Warning Current Limit (both LEDs flashing at the
Flashing – R1 Flashing – R1 11 Other warning (both LEDs alternate flashing)
Flashing – R1 Flashing – R2 6/10 Undervoltage trip/Undervoltage warning
Flashing – R2 Flashing – R1 12 Inverter is not in ready state – display >0
Flashing – R2 Flashing – R2 2 ROM failure (both LEDs flashing at the same time)
Flashing – R2 Flashing – R2 3 RAM failure (both LEDs alternate flashing)
R1 – On time 900 milliseconds R2 – On time 300 milliseconds
Priority
Display
Inverter Status Definitions
same time)
MICROMASTER 440 Operating instructions
68 6SE6400-5CA00-0BP0
Page 69

International English 6 Troubleshooting
6.2 Troubleshooting with the Basic Operator Panel
If the display shows a fault or warning code, please refer to Reference Manual.
If the motor fails to start when the ON command has been given:
Check that P0010 = 0.
Check that a valid ON signal is present.
Check that P0700 = 2 (for digital input control) or
P0700 = 1 (for BOP control).
Check that the setpoint is present (0 to 10V on Terminal 3) or the setpoint has
been entered into the correct parameter, depending upon the setpoint source
(P1000). See the Parameter List for further details.
If the motor fails to run after changing the parameters, set P0010 = 30 then P0970
= 1 and press P to reset the inverter to the factory default parameter values.
Now use a switch between terminals 5 and 8 on the control board. The drive
should now run to the defined setpoint by analogue input.
Note
Motor data must relate to the inverter data power range and voltage.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
69
Page 70

6 Troubleshooting International English
6.3 Fault messages
Fault Possible Causes Diagnose & Remedy Reac-
tion
F0001
OverCurrent
F0002
OverVoltage
F0003
UnderVoltage
F0004
Inverter Over
Temperature
F0005
Inverter I2T
F0011
Motor Over
Temperature
F0012
Inverter temp.
signal lost
F0021
Earth fault
Motor power (P0307) does not
correspond to the inverter power (P0206)
Motor lead short circuit
Earth faults
DC-link voltage (r0026) exceeds trip level
(P2172)
Overvoltage can be caused either by too
high main supply voltage or if motor is in
regenerative mode.
Regenerative mode can be cause by fast
ramp downs or if the motor is driven from
an active load.
Main supply failed.
Shock load outside specified limits.
Ventilation inadequate
Fan inoperative
Ambient temperature is too high.
Inverter overloaded.
Duty cycle too demanding.
Motor power (P0307) exceeds inverter
power capability (P0206).
Motor overloaded Check the following:
Wire breakage of inverter temperature
(heatsink) sensor
Fault occurs if the sum of the phase
currents is higher than
5 % of the nominal inverter current.
Note
This fault only occurs on inverters that have 3
current sensors. Frame sizes D to F
Check the following:
1. Motor power (P0307) must correspond to inverter
power (P0206).
2. Cable length limits must not be exceeded.
3. Motor cable and motor must have no shortcircuits or earth faults
4. Motor parameters must match the motor in use
5. Value of stator resistance (P0350) must be
correct
6. Motor must not be obstructed or overloaded
Increase the ramp time
Reduce the boost level
Check the following:
1. Supply voltage (P0210) must lie within limits
indicated on rating plate .
2. DC-link voltage controller must be enabled
(P1240) and parameterized properly.
3. Ramp-down time (P1121) must match inertia of
load.
4. Required braking power must lie within specified
limits.
Note
Higher inertia requires longer ramp times; otherwise,
apply braking resistor.
Check the following:
1. Supply voltage (P0210) must lie within limits
indicated on rating plate.
2. Supply must not be susceptible to temporary
failures or voltage reductions.
Check the following:
1. Fan must turn when inverter is running
2. Pulse frequency must be set to default value
Ambient temperature could be higher than specified
for the inverter
Check the following:
1. Load duty cycle must lie within specified limits.
2. Motor power (P0307) must match inverter power
(P0206)
1. Load duty cycle must be correct
2. Motor nominal overtemperatures (P0626-P0628)
must be correct
3. Motor temperature warning level (P0604) must
match
Off2
Off2
Off2
Off2
Off2
Off1
Off2
Off2
MICROMASTER 440 Operating instructions
70 6SE6400-5CA00-0BP0
Page 71

International English 6 Troubleshooting
Fault Possible Causes Diagnose & Remedy Reac-
tion
F0022
Powerstack fault
F0030
Fan has failed
F0040
Automatic
Calibration Failure
F0041
Motor Data
Identification
Failure
F0051
Parameter
EEPROM Fault
F0052
power stack Fault
F0053
IO Eeprom Fault
F0060
Asic Timeout
Fault caused by the following events:
(1) dc-link overcurrent = short circuit of
IGBT
(2) short circuit of chopper
(3) earth fault
Framesizes A to C (1),(2),(3)
Framesizes D to E (1),(2)
Framesize F (2)
Since all these faults are assigned to one
signal on the power stack, it is not
possible to establish which one actually
occurred.
Fan no longer working Fault cannot be masked while options module (AOP
MM 440 only Off2
Motor data identification failed.
Alarm value =0: Load missing
Alarm value =1: Current limit level
reached during identification.
Alarm value =2: Identified stator
resistance less than 0.1% or greater than
100%.
Alarm value =3: Identified rotorresistance
less than 0.1% or greater than 100%.
Alarm value =4: Identified stator
reactance less than 50% and greater than
500%
Alarm value =5: Identified main reactance
less than 50% and greater than 500%
Alarm value =6: Identified rotor time
constant less than 10ms or greater than
5s
Alarm value =7: Identified total leakage
reactance less than 5% and greater than
50%
Alarm value =8: Identified stator leakage
reactance less than 25% and greater than
250%
Alarm value =9: Identified rotor leakage
inductance less than 25% and greater
than 250%
Alarm value = 20: Identified IGBT on-
voltage less than 0.5 or greater than 10V
Alarm value = 30: Current controller at
voltage limit
Alarm value = 40: Inconsistence of
identified data set, at least one
identification failed
Percentage values based on the
impedance Zb = Vmot,nom / sqrt(3) /
Imot,nom
Read or write failure while saving non-
volatile parameter.
Read failure for power stack information
or invalid data.
Read failure for IO EEPROM information
or invalid data.
Internal communications failure If fault persists, change inverter
or BOP) is connected.Need a new fan.
0: Check that the motor is connected to the inverter.
1-40: Check if motor data in P304-311 are correct.
Check what type of motor wiring is required (star,
delta).
Factory Reset and new parameterization
Change drive
Change drive Off2
Check data
Change IO module
Contact Service Department
Off2
Off2
Off2
Off2
Off2
Off2
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
71
Page 72

6 Troubleshooting International English
Fault Possible Causes Diagnose & Remedy Reac-
tion
F0070
CB setpoint fault
F0071
USS (BOP-link)
setpoint fault
F0072
USS (COMM link)
setpoint fault
F0080
ADC lost input
signal
F0085
External Fault
F0101
Stack Overflow
F0221
PID Feedback
below min. value
F0222
PID Feedback
above max. value
F0450
BIST Tests Failure
F0452
Belt Failure
Detected
F0499
Fault Warning
Separation
A0501
Current Limit
A0502
Overvoltage limit
No setpoint values from CB
(communication board) during telegram
off time
No setpoint values from USS during
telegram off time
No setpoint values from USS during
telegram off time
Broken wire
Signal out of limits
External fault triggered via terminal inputs Disable terminal input for fault trigger. Off2
Software error or processor failure Run self test routines Off2
PID Feedback below min. value P545. Change value of P545.Adjust feedback gain. Off2
PID feedback above max. value P544. Change value of P544.Adjust feedback gain. Off2
Fault value:
1. Some power section tests have failed
2. Some control board tests have failed
4. Some functional tests have failed
8. Some IO module tests have failed.
(MM 420 only)
16. Internal RAM failed on power-up
check
Load conditions on motor indicate belt
failure or mechanical fault.
Motor power does not correspond to the
inverter power
Motor leads are too short
Earth faults
Overvoltage limit is reached.
This warning can occur during ramp
down, if the dc-link controller is disabled
(P1240 = 0).
Check CB and communication partner Off2
Check USS master Off2
Check USS master Off2
Off2
Drive may run but some features will not work
properly.
Replace drive.
Check the following:
1. No breakage, seizure or obstruction of drive train.
2. Proper operation of external speed sensor, if in
use.
3. P0402 (pulse per min at rated speed), P2164
(hysteresis freq. deviation) and P2165 (delay time
for permitted deviation)must have correct values.
4. P2155 (threshold frequency f1), P2157 (threshold
frequency f2)P2159 (threshold frequency
f3)P2174 (upper torque threshold 1)P2175 (lower
torque threshold 1)P2176 (delay T_Torque)P2182
(upper torque threshold 2)P2183 (lower torque
threshold 2)P2184 (upper torque threshold 3) and
P2185 (lower torque threshold 3) must have
correct values.
Check the following:
1. Motor power (P0307) must correspond to inverter
power (P0206).
2. Cable length limits must not be exceeded.
3. Motor cable and motor must have no short-
circuits or earth faults
4. Motor parameters must match the motor in use
5. Value of stator resistance (P0350) must be
correct
6. Motor must not be obstructed or overloaded
Increase the ramp-up-time.
Reduce the boost.
If this warning is displayed permanently, check drive
input voltage .
Off2
Off2
Off2
--
--
MICROMASTER 440 Operating instructions
72 6SE6400-5CA00-0BP0
Page 73

International English 6 Troubleshooting
Fault Possible Causes Diagnose & Remedy Reac-
tion
A0503
UnderVoltage
Limit
A0504
Inverter
OverTemperature
A0505
Inverter I
2
T
A0506
Inverter duty cycle
A0510
Motor
OverTemperature
A0511
Motor
OverTemperature
2
T
I
A0512
Motor temperature
signal lost
A0535
Braking Resistor
Hot
A0541
Motor Data
Identification
Active
A0600
RTOS Overrun
Warning
A0700
CB warning 1 see
CB manual for
details.
A0701
CB warning 2 see
CB manual for
details.
A0702
CB warning 3 see
CB manual for
details.
A0703
CB warning 4 see
CB manual for
details.
A0704
CB warning 5 see
CB manual for
details.
A0705
CB warning 6 see
CB manual for
details.
A0706
CB warning 7 see
CB manual for
details.
Main supply failed
Check main supply voltage (P0210). --
Main supply (P0210) and consequently
DC-link voltage (R0026) below specified
limit (P2172).
Warning level of inverter heat-sink
temperature (P0614) is exceeded,
resulting in pulse frequency
reduction and/or output frequency
reduction (depending on parametrization
in (P0610)
Warning level exceeded, current will be
Check the following:
1. Ambient temperature must lie within specified
limits
2. Load conditions and duty cycle must be
appropriate
3. Fan must turn when drive is running
Check that duty cycle lies within specified limits --
reduced if parameterized (P0610 = 1)
Difference between heatsink and IGBT
junction temperature exceeds warning
Check that duty cycle and shock loads lie within
specified limits
limits
Motor overloaded.
Load duty cycle too high.
Check the following:
1. P0611 (motor I
appropriate value
2. P0614 (Motor I
2
t time constant) should be set to
2
t overload warning level) should
be set to suitable level
Wire break to motor temperature sensor.
If a wire breakage is be detected,
temperature monitoring switches over to
monitoring with the motor thermal model.
Motor data identification (P1910) selected
or running
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
--
--
--
--
--
--
--
--
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
73
Page 74

6 Troubleshooting International English
Fault Possible Causes Diagnose & Remedy Reac-
tion
A0707
CB warning 8 see
CB manual for
details.
A0708
CB warning 9 see
CB manual for
details.
A0709
CB warning 10 see
CB manual for
details.
A0710
CB
communication
error
A0711
CB configuration
error
A0910
Vdc-max
controller deactivated
A0911
Vdc-max
controller active
A0912
Vdc-min controller
active
A0920
ADC parameters
not set properly.
A0921
DAC parameters
not set properly.
A0922
No load applied to
inverter
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
CB (communication board) specific See CB user manual --
Communication with CB (communication
board) is lost
CB (communication board) reports a
configuration error.
Vdc max controller has been de-
activated, since controller is not capable
of keeping DC-link voltage (r0026) within
limits (P2172).
Occurs if main supply voltage (P0210) is
permanently too high.
Occurs if motor is driven by an active
load, causing motor to goes into
regenerative mode.
Occurs at very high load inertias, when
ramping down.
Vdc max controller is active; so ramp-
down times will be increased
automatically to keep
DC-link voltage (r0026) within limits
(P2172).
Vdc min controller will be activated if DC-
link voltage (r0026) falls below minimum
level (P2172).
The kinetic energy of the motor is used to
buffer the DC-link voltage, thus causing
deceleration of the drive!
So short mains failures do not necessarily
lead to an undervoltage trip.
ADC parameters should not be set to
identical values, since this would produce
illogical results.
Index 0: Parameter settings for output
identical
Index 1: Parameter settings for input
identical
Index 2: Parameter settings for input do
not correspond to ADC type
DAC parameters should not be set to
identical values, since this would produce
illogical results.
Index 0: Parameter settings for output
identical
Index 1: Parameter settings for input
identical
Index 2: Parameter settings for output do
not correspond to DAC type
No Load is applied to the inverter.
As a result, some functions may not work
as under normal load conditions.
Check CB hardware --
Check CB parameters --
Check the following:
1. Input voltage (P0756) must lie within range.
2. Load must be match.
In certain cases apply braking resistor.
--
--
--
--
--
--
MICROMASTER 440 Operating instructions
74 6SE6400-5CA00-0BP0
Page 75

International English 6 Troubleshooting
Fault Possible Causes Diagnose & Remedy Reac-
tion
A0923
Both JOG Left and
JOG Right are
requested
A0924
Belt Failure
Detected
Both JOG right and JOG left
(P1055/P1056) have been requested.
This freezes the RFG output frequency at
its current value.
Load conditions on motor indicate belt
failure or mechanical fault.
Check the following:
1. No breakage, seizure or obstruction of drive train.
2. Proper operation of external speed sensor, if in
use.
3. P0402 (pulse per min at rated speed), P2164
(Hysteresis freq. deviation) and P2165 (delay
time for permitted deviation) must have correct
values.
4. P2155 (threshold frequency f1), P2157 (threshold
frequency f2)P2159 (threshold frequency
f3)P2174 (upper torque threshold 1)P2175 (lower
torque threshold 1)P2176 (delay T_Torque)P2182
(upper torque threshold 2)P2183 (lower torque
threshold 2)P2184 (upper torque threshold 3) and
P2185 (lower torque threshold 3) must have
correct values.
--
--
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
75
Page 76

6 Troubleshooting International English
MICROMASTER 440 Operating instructions
76 6SE6400-5CA00-0BP0
Page 77

International English 7 MICROMASTER 440 Specifications
7 MICROMASTER 440 Specifications
This Chapter contains:
In Table 7.1 the common technical data to the MICROMASTER 440 Inverters
In Table 7.2 the wire sizes and terminal torques
In Table 7.3 - divided in several tables - an overview of the specific technical
data of every MICROMASTER 440 Inverter
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
77
Page 78

7 MICROMASTER 440 Specifications International English
Table 7-1 MICROMASTER 440 Performance Ratings
Feature Specification
Mains Operating Voltage &
Power Ranges
Protection Level IP20
Storage Temperature
Humidity 95 % RH – non-condensing
Operational Altitudes Up to 1000 m above sea level without derating
Control Method
Constant
Overload Capability
Electromagnetic Compatibility
Protection Features
Input Frequency 47 to 63 Hz
Setpoint Resolution
Output Frequency Resolution 0.01 Hz Digital, 0.01 Hz Serial, 10 bit Analogue
Pulse Frequency 2 kHz to 16 kHz (2 kHz steps)
Digital Inputs 6 programmable isolated inputs, switchable active high / active low (PNP/NPN)
Fixed Frequencies 15 programmable
Skip Frequencies 4 programmable
Relay Outputs 3 programmable 30 V DC / 5 A (resistive), 250 V AC 2 A (resistive)
Analog Input 1 0 - 10 V, 0 - 20 mA and –10 V to +10 V
Analog Input 2 0 - 10 V and 0 - 20 mA
Analogue Output 2 (0/4 to 20 mA) programmable
Serial Interface RS-232 and RS-485
Design/Manufacture In accordance with ISO 9001
Standards UL, cUL, CE, C-tick
CE Marked
Power Factor
Inverter Efficiency 96 to 97 %
Torque (CT)
Variable
Torque (VT)
200 to 240 V ± 10% 1AC 0.12 kW – 3.0 kW
200 to 240 V ± 10% 3AC 0.12 kW – 45.0 kW
380 to 480 V ± 10% 3AC 0.37 kW – 75.0 kW
500 to 600 V ± 10% 3AC 0.75 kW – 75.0 kW
-40 °C to +70 °C
Linear V/f ; Flux Current Control (FCC); Quadratic V/f ; Multi-point V/f; Energy
Saving; Sensorless Vector; Close Loop Vector; Torque Control.
1.5 * nominal output current for 60 seconds (every 300 seconds)
2.0 * nominal output current for 3 seconds (every 300 seconds)
1.1 * nominal VT output current continuously
2.0 * nominal CT output current for 3 seconds (every 300 seconds)
Optional EMC filters to EN55011 Class A or B, also Internal Class A filters
available selected units
Undervoltage , Overvoltage, Ground Faults, Short circuit, Stall Prevention,
Locked Rotor, Motor Overtemperature, Inverter Overtemperature
0.01Hz Digital, 0.01 Hz Serial, 10 bit Analogue
(motor potentiometer 0.1 Hz [0.1% (in PID mode)])
Conformity with EC Low Voltage Directive 73/23/EEC
and Electromagnetic Compatibility Directive 89/336/EEC
≥0.7
Inrush Current Less than nominal input current
Braking DC braking, Compound braking and Dynamic braking
MICROMASTER 440 Operating instructions
78 6SE6400-5CA00-0BP0
Page 79

International English 7 MICROMASTER 440 Specifications
Table 7-2 Wire Sizes & Terminal Torques – Field Wiring Connectors
Frame Size A B C D E F
Tightening Torque
Minimum Cable Cross Section
Maximum Cable Cross Section
[Nm] 1.1 1.5 2.25 10 (max) 10 (max) 50
[lbf.in] 10 13.3 20 87 (max) 87 (max) 435
[mm2] 1 1.5 2.5 25 35 50
[AWG]171614320
[mm2]2.56 103535150
[AWG] 14 10 8 2 2 -5
Table 7-3 MICROMASTER 440 Specifications
In order to have a UL compliant installation fuses from the SITOR range with the
appropriate current rating must be used.
Input voltage range 1 AC 200 V – 240 V, ± 10 % (with built in Class A Filter)
Order No. 6SE6440-
Motor Output Rating
Output [kVA]
Output Current Max. [A]
Input Current [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
2AB11
-2AA0
3NA3803 3NA3803 3NA3803 3NA3805 3NA3805 3NA3807 3NA3807 3NA3810 3NA3812
173.0 173.0 173.0 173.0 173.0 202.0 202.0 202.0 245.0
149.0 149.0 149.0 149.0 149.0 172.0 172.0 172.0 195.0
2AB12
-5AA0
0.12 0.25 0.37 0.55 0.75 1.1 1.5 2.2 3.0
0.16 0.33 0.5 0.75 1.0 1.5 2.0 3.0 4.0
0.4 0.7 1.0 1.3 1.7 2.4 3.2 4.6 6.0
0.9 1.7 2.3 3.0 3.9 5.5 7.4 10.4 13.6
1.4 2.7 3.7 5.0 6.6 9.6 13.0 17.6 23.7
10 10 10 16 16 20 20 25 32
1.0 1.0 1.0 1.0 1.0 1.0 1.5 2.5 4.0
17 17 17 17 17 17 15 13 11
2.5 2.5 2.5 2.5 2.5 6.0 6.0 6.0 10.0
13 13 13 13 13 9 9 9 7
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.5
17 17 17 17 17 17 17 17 15
2.5 2.5 2.5 2.5 2.5 6.0 6.0 6.0 10.0
13 13 13 13 13 9 9 9 7
1.3 1.3 1.3 1.3 1.3 3.4 3.4 3.4 5.7
2.9 2.9 2.9 2.9 2.9 7.5 7.5 7.5 12.5
73.0 73.0 73.0 73.0 73.0 149.0 149.0 149.0 185.0
2.87 2.87 2.87 2.87 2.87 5.87 5.87 5.87 7.28
6.81 6.81 6.81 6.81 6.81 7.95 7.95 7.95 9.65
5.87 5.87 5.87 5.87 5.87 6.77 6.77 6.77 7.68
2AB13
-7AA0
2AB15
-5AA0
2AB17
-5AA0
2AB21
-1BA0
2AB21
-5BA0
2AB22
-2BA0
2AB23
-0CA0
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
79
Page 80

7 MICROMASTER 440 Specifications International English
Input voltage range 3 AC 200 V – 240 V, ± 10 % (with built in Class A Filter)
Order No. 6SE6440- 2AC23-
Motor Output Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
0CA0
13.6 17.5 22.0
10.5 13.1 17.5
10.5 17.6 26.5
13.6 22.0 28.0
3NA3807 3NA3810 3NA3814
17.0 13.0 11.0
10.0 10.0 10.0
15.0 11.0 11.0
10.0 10.0 10.0
12.5 12.5 12.5
185.0 185.0 185.0
245.0 245.0 245.0
195.0 195.0 195.0
2AC24-
0CA0
3.0 4.0 5.5
4.0 5.0 7.5
6.0 7.7 9.6
20 25 35
1.0 2.5 4.0
7.0 7.0 7.0
1.5 4.0 4.0
7.0 7.0 7.0
5.7 5.7 5.7
7.28 7.28 7.28
9.65 9.65 9.65
7.68 7.68 7.68
2AC25-
5CA0
MICROMASTER 440 Operating instructions
80 6SE6400-5CA00-0BP0
Page 81

International English 7 MICROMASTER 440 Specifications
Input voltage range 1 AC 3 AC 200 V – 240 V, ± 10 % (Unfiltered)
Order No. 6SE6440- 2UC11
Motor Output Rating
Output [kVA]
Output Current Max. [A]
Input Current, 3 AC [A]
Input Current , 1 AC [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
-2AA0
3NA3803 3NA3803 3NA3803 3NA3805 3NA3805 3NA3807 3NA3807 3NA3810 3NA3812
173.0 173.0 173.0 173.0 173.0 202.0 202.0 202.0 245.0
149.0 149.0 149.0 149.0 149.0 172.0 172.0 172.0 195.0
2UC12
-5AA0
0.12 0.25 0.37 0.55 0.75 1.1 1.5 2.2 3.0
0.16 0.33 0.5 0.75 1.0 1.5 2.0 3.0 4.0
0.4 0.7 1.0 1.3 1.7 2.4 3.2 4.6 6.0
0.9 1.7 2.3 3.0 3.9 5.5 7.4 10.4 13.6
0.6 1.1 1.6 2.1 2.9 4.1 5.6 7.6 10.5
1.4 2.7 3.7 5.0 6.6 9.6 13.0 17.6 23.7
10 10 10 16 16 20 20 25 32
1.0 1.0 1.0 1.0 1.0 1.0 1.5 2.5 4.0
17 17 17 17 17 17 15 13 11
2.5 2.5 2.5 2.5 2.5 6.0 6.0 6.0 10.0
13 13 13 13 13 9 9 9 7
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.5
17 17 17 17 17 17 17 17 15
2.5 2.5 2.5 2.5 2.5 6.0 6.0 6.0 10.0
13 13 13 13 13 9 9 9 7
1.3 1.3 1.3 1.3 1.3 3.3 3.3 3.3 5.5
2.9 2.9 2.9 2.9 2.9 7.3 7.3 7.3 12.1
73.0 73.0 73.0 73.0 73.0 149.0 149.0 149.0 185.0
2.87 2.87 2.87 2.87 2.87 5.87 5.87 5.87 7.28
6.81 6.81 6.81 6.81 6.81 7.95 7.95 7.95 9.65
5.87 5.87 5.87 5.87 5.87 6.77 6.77 6.77 7.68
2UC13
-7AA0
2UC15
-5AA0
2UC17
-5AA0
2UC21
-1BA0
2UC21
-5BA0
2UC22
-2BA0
2UC23
-0CA0
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
81
Page 82

7 MICROMASTER 440 Specifications International English
Input voltage range 3 AC 200 V – 240 V, ± 10 % (Unfiltered)
Order No. 6SE6440- 2UC24-
Motor Output Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
3NA3810 3NA3814 3NA3820 3NA3824 3NA3824 3NA3830 3NA3830 3NA3836 3NA3140 3NA3140
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
2UC25-
0CA0
4.0 5.5 7.5 11.0 15.0 18.5 22.0 30.0 37.0 45.0
5.0 7.5 10.0 15.0 20.0 25.0 30.0 40.0 50.0 60.0
7.7 9.6 12.3 18.4 23.7 29.8 35.1 45.6 57.0 67.5
17.5 22.0 28.0 42.0 54.0 68.0 80.0 104.0 130.0 154.0
13.1 17.5 25.3 37.0 48.8 61.0 69.4 94.1 110.6 134.9
17.6 26.5 38.4 50.3 61.5 70.8 96.2 114.1 134.9 163.9
22.0 28.0 42.0 54.0 68.0 80.0 104.0 130.0 154.0 178.0
25 35 50 80 80 100 100 160 200 200
2.5 4.0 10.0 16.0 16.0 25.0 25.0 50.0 70.0 70.0
13.0 11.0 7.0 5.0 5.0 3.0 3.0 0.0 -2.0 -2.0
10.0 10.0 35.0 35.0 35.0 35.0 35.0 150.0 150.0 150.0
7.0 7.0 2.0 2.0 2.0 2.0 2.0 -5.0 -5.0 -5.0
4.0 4.0 10.0 16.0 16.0 25.0 25.0 50.0 70.0 95.0
11.0 11.0 7.0 5.0 5.0 3.0 3.0 0.0 -2.0 -3.0
10.0 10.0 35.0 35.0 35.0 35.0 35.0 150.0 150.0 150.0
7.0 7.0 2.0 2.0 2.0 2.0 2.0 -5.0 -5.0 -5.0
5.5 5.5 17.0 16.0 16.0 20.0 20.0 55.0 55.0 55.0
12.1 12.1 37.0 35.0 35.0 44.0 44.0 121.0 121.0 121.0
185.0 185.0 275.0 275.0 275.0 275.0 275.0 350.0 350.0 350.0
245.0 245.0 520.0 520.0 520.0 650.0 650.0 850.0 850.0 850.0
195.0 195.0 245.0 245.0 245.0 245.0 245.0 320.0 320.0 320.0
7.28 7.28 10.83 10.83 10.83 10.83 10.83 13.78 13.78 13.78
9.65 9.65 20.47 20.47 20.47 25.59 25.59 33.46 33.46 33.46
7.68 7.68 9.65 9.65 9.65 9.65 9.65 12.6 12.6 12.6
5CA0
2UC27-
5DA0
2UC31-
1DA0
2UC31-
5DA0
2UC31-
8EA0
2UC32-
2EA0
2UC33-
0FA0
2UC33-
7FA0
2UC34-
5FAO
MICROMASTER 440 Operating instructions
82 6SE6400-5CA00-0BP0
Page 83

International English 7 MICROMASTER 440 Specifications
Input voltage range 3 AC 380 V – 480 V, ± 10 % (with built in Class A Filter), Part 1
Order No. 6SE6440- 2AD22-
Motor Output Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
2BA0
3NA3005 3NA3005 3NA3007 3NA3007 3NA3012 3NA3014 3NA3020 3NA3022
149.0 149.0 149.0 185.0 185.0 185.0 275.0 275.0
202.0 202.0 202.0 245.0 245.0 245.0 520.0 520.0
172.0 172.0 172.0 195.0 195.0 195.0 245.0 245.0
2AD23-
0BA0
2.2 3.0 4.0 5.5 7.5 11.0 15.0 18.5
3.0 4.0 5.0 7.5 10.0 15.0 20.0 25.0
4.5 5.9 7.8 10.1 14.0 19.8 24.4 29.0
5.9 7.7 10.2 13.2 18.4 26.0 32.0 38.0
5.0 6.7 8.5 11.6 15.4 22.5 30.0 36.6
5.0 6.7 8.5 16.0 22.5 30.5 37.2 43.3
5.9 7.7 10.2 18.4 26.0 32.0 38.0 45.0
16 16 20 20 32 35 50 63
1.0 1.0 1.0 2.5 4.0 6.0 10.0 10.0
17 17 17 13 11 9 7 7
6.0 6.0 6.0 10.0 10.0 10.0 35.0 35.0
99977722
1.0 1.0 1.0 2.5 4.0 6.0 10.0 10.0
17 17 17 13 11 9 7 7
6.0 6.0 6.0 10.0 10.0 10.0 35.0 35.0
99977722
3.4 3.4 3.4 5.7 5.7 5.7 17.0 17.0
7.5 7.5 7.5 12.5 12.5 12.5 37.0 37.0
5.87 5.87 5.87 7.28 7.28 7.28 10.83 10.83
7.95 7.95 7.95 9.65 9.65 9.65 20.47 20.47
6.77 6.77 6.77 7.68 7.68 7.68 9.65 9.65
2AD24-
0BA0
2AD25-
5CA0
2AD27-
5CA0
2AD31-
1CA0
2AD31-
5DA0
2AD31-
8DA0
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
83
Page 84

7 MICROMASTER 440 Specifications International English
Input voltage range 3 AC 380 V – 480 V, ± 10 % (with built in Class A Filter), Part 2
Order No. 6SE6440- 2AD32-
Motor Output Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
2DA0
22.0 30.0 37.0 45.0 55.0 75.0
30.0 40.0 50.0 60.0 75.0 100.0
34.3 47.3 57.2 68.6 83.8 110.5
45.0 62.0 75.0 90.0 110.0 145.0
43.1 58.7 71.2 85.6 103.6 138.5
59.3 71.7 86.6 103.6 138.5 168.5
62.0 75.0 90.0 110.0 145.0 178.0
3NA3024 3NA3030 3NA3032 3NA3036 3NA3036 3NA3140
16.0 25.0 25.0 35.0 70.0 70.0
35.0 35.0 35.0 150.0 150.0 150.0
16.0 25.0 25.0 50.0 70.0 95.0
35.0 35.0 35.0 150.0 150.0 150.0
17.0 22.0 22.0 75.0 75.0 75.0
37.0 48.0 48.0 165.0 165.0 165.0
275.0 275.0 275.0 350.0 350.0 350.0
520.0 650.0 650.0 1150.0 1150.0 1150.0
245.0 245.0 245.0 320.0 320.0 320.0
10.83 10.83 10.83 13.78 13.78 13.78
20.47 25.59 25.59 45.28 45.28 45.28
2AD33-
0EA0
80 100 125 160 160 200
5332-2-2
2 2 2 -5 -5 -5
5330-2-3
2 2 2 -5 -5 -5
9.65 9.65 9.65 12.6 12.6 12.6
2AD33-
7EA0
2AD34-
5FA0
2AD35-
5FA0
2AD37-
5FAO
MICROMASTER 440 Operating instructions
84 6SE6400-5CA00-0BP0
Page 85

International English 7 MICROMASTER 440 Specifications
Input voltage range 3 AC 380 V – 480 V, ± 10 % (Unfiltered), Part 1
Order No. 6SE6440-
Motor Output Rating
[kW]
[hp]
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
Dimensions
d [mm]
w [inches]
h [inches]
d [inches]
2UD13-
7AA0
3NA3003 3NA3003 3NA3003 3NA3003 3NA3003 3NA3005 3NA3005 3NA3007 3NA3007 3NA3012
73.0 73.0 73.0 73.0 73.0 149.0 149.0 149.0 185.0 185.0
173.0 173.0 173.0 173.0 173.0 202.0 202.0 202.0 245.0 245.0
149.0 149.0 149.0 149.0 149.0 172.0 172.0 172.0 195.0 195.0
2UD15-
5AA0
2UD17-
5AA0
2UD21-
1AA0
2UD21-
5AA0
2UD22-
2BA0
2UD23-
0BA0
2UD24-
0BA0
0.37 0.55 0.75 1.1 1.5 2.2 3.0 4.0 5.5 7.5
0.5 0.75 1.0 1.5 2.0 3.0 4.0 5.0 7.5 10.0
0.9 1.2 1.6 2.3 3.0 4.5 5.9 7.8 10.1 14.0
1.2 1.6 2.1 3.0 4.0 5.9 7.7 10.2 13.2 18.4
1.1 1.4 1.9 2.8 3.9 5.0 6.7 8.5 11.6 15.4
1.1 1.4 1.9 2.8 3.9 5.0 6.7 8.5 16.0 22.5
1.2 1.6 2.1 3.0 4.0 5.9 7.7 10.2 18.4 26.0
10 10 10 10 10 16 16 20 20 32
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 2.5 4.0
17 17 17 17 17 17 17 17 13 11
2.5 2.5 2.5 2.5 2.5 6.0 6.0 6.0 10.0 10.0
131313131399977
1.0 1.0 1.0 1.0 1.0 1.0 1.0 1.0 2.5 4.0
17 17 17 17 17 17 17 17 13 11
2.5 2.5 2.5 2.5 2.5 6.0 6.0 6.0 10.0 10.0
131313131399977
1.3 1.3 1.3 1.3 1.3 3.3 3.3 3.3 5.5 5.5
2.9 2.9 2.9 2.9 2.9 7.3 7.3 7.3 12.1 12.1
2.87 2.87 2.87 2.87 2.87 5.87 5.87 5.87 7.28 7.28
6.81 6.81 6.81 6.81 6.81 7.95 7.95 7.95 9.65 9.65
5.87 5.87 5.87 5.87 5.87 6.77 6.77 6.77 7.68 7.68
2UD25-
5CA0
2UD27-
5CA0
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
85
Page 86

7 MICROMASTER 440 Specifications International English
Input voltage range 3 AC 380 V – 480 V, ± 10 % (Unfiltered), Part 2
Order No. 6SE6440- 2UD31-
Motor Output Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
3NA3014 3NA3020 3NA3022 3NA3024 3NA3030 3NA3032 3NA3036 3NA3036 3NA3140
185.0 275.0 275.0 275.0 275.0 275.0 350.0 350.0 350.0
245.0 520.0 520.0 520.0 650.0 650.0 850.0 850.0 850.0
195.0 245.0 245.0 245.0 245.0 245.0 320.0 320.0 320.0
2UD31-
1CA0
11.0 15.0 18.5 22.0 30.0 37.0 45.0 55.0 75.0
15.0 20.0 25.0 30.0 40.0 50.0 60.0 75.0 100.0
19.8 24.4 29.0 34.3 47.3 57.2 68.6 83.8 110.5
26.0 32.0 38.0 45.0 62.0 75.0 90.0 110.0 145.0
22.5 30.0 36.6 43.1 58.7 71.2 85.6 103.6 138.5
30.5 37.2 43.3 59.3 71.7 86.6 103.6 138.5 168.5
32.0 38.0 45.0 62.0 75.0 90.0 110.0 145.0 178.0
10.0 35.0 35.0 35.0 35.0 35.0 150.0 150.0 150.0
10.0 35.0 35.0 35.0 35.0 35.0 150.0 150.0 150.0
12.1 35.0 35.0 35.0 44.0 44.0 123.0 123.0 123.0
5DA0
35 50 63 80 100 125 160 160 200
6.0 10.0 10.0 16.0 25.0 25.0 35.0 70.0 70.0
9775332-2-2
722222-5-5-5
6.0 10.0 10.0 16.0 25.0 25.0 35.0 70.0 95.0
9775332-2-3
722222-5-5-5
5.5 16.0 16.0 16.0 20.0 20.0 56.0 56.0 56.0
7.28 10.83 10.83 10.83 10.83 10.83 13.78 13.78 13.78
9.65 20.47 20.47 20.47 25.59 25.59 33.46 33.46 33.46
7.68 9.65 9.65 9.65 9.65 9.65 12.6 12.6 12.6
2UD31-
8DA0
2UD32-
2DA0
2UD33-
0EA0
2UD33-
7EA0
2UD34-
5FA0
2UD35-
5FA0
2UD37-
5FA0
MICROMASTER 440 Operating instructions
86 6SE6400-5CA00-0BP0
Page 87

International English 7 MICROMASTER 440 Specifications
Input voltage range 3 AC 500 V – 600 V, ± 10 % (Unfiltered), Part 1
Order No. 6SE6440-2UE17-
Motor Output
Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Fuse
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[A]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
5CA0
3NA3803-6 3NA3803-63NA3803-6 3NA3803-6 3NA3805-6 3NA3810-6 3NA3812-6 3NA3814-6 3NA3820-6
10.0 10.0 10.0 10.0 10.0 10.0 10.0 35.0 35.0
10.0 10.0 10.0 10.0 10.0 10.0 10.0 35.0 35.0
12.1 12.1 12.1 12.1 12.1 12.1 12.1 35.0 35.0
185.0 185.0 185.0 185.0 185.0 185.0 185.0 275.0 275.0
245.0 245.0 245.0 245.0 245.0 245.0 245.0 520.0 520.0
195.0 195.0 195.0 195.0 195.0 195.0 195.0 245.0 245.0
2UE21-
5CA0
0.75 1.5 2.2 4.0 5.5 7.5 11.0 15.0 18.5
1.0 2.0 3.0 5.0 7.5 10.0 15.0 20.0 25.0
1.3 2.6 3.7 5.8 8.6 10.5 16.2 21.0 25.7
1.4 2.7 3.9 6.1 9.0 11.0 17.0 22.0 27.0
2.0 3.2 4.4 6.9 9.4 12.3 18.1 24.2 29.5
3.2 4.4 6.9 9.4 12.6 18.1 24.9 29.8 35.1
2.7 3.9 6.1 9.0 11.0 17.0 22.0 27.0 32.0
10 10 10 10 16 25 32 35 50Recommended
1.0 1.0 1.0 1.0 1.5 2.5 4.0 6.0 6.0
17 17 17 17 15 13 11 9 9
777777722
1.0 1.0 1.0 1.0 1.0 2.5 4.0 4.0 6.0
17 17 17 17 17 13 11 11 9
777777722
5.5 5.5 5.5 5.5 5.5 5.5 5.5 16.0 16.0
7.28 7.28 7.28 7.28 7.28 7.28 7.28 10.83 10.83
9.65 9.65 9.65 9.65 9.65 9.65 9.65 20.47 20.47
7.68 7.68 7.68 7.68 7.68 7.68 7.68 9.65 9.65
2UE22-
2CA0
2UE24-
0CA0
2UE25-
5CA0
2UE27-
5CA0
2UE31-
1CA0
2UE31-
5DA0
2UE31-
8DA0
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
87
Page 88

7 MICROMASTER 440 Specifications International English
Input voltage range 3 AC 500 V – 600 V, ± 10 % (Unfiltered), Part 2
Order No. 6SE6440- 2UE32-
Motor Output Rating
Output [kVA]
CT Output Cur. Max. [A]
CT Input Current [A]
VT Input Current [A]
VT Output Cur. Max. [A]
Recommended Fuse [A]
Input Cable Min.
Input Cable Max.
Output C a ble Min.
Output Cable Max.
Weight
Dimensions
[kW]
[hp]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[mm2]
[awg]
[kg]
[lbs]
w [mm]
h [mm]
d [mm]
w [inches]
h [inches]
d [inches]
2DA0
22.0 30.0 37.0 45.0 55.0 75.0
30.0 40.0 50.0 60.0 75.0 100.0
30.5 39.1 49.5 59.1 73.4 94.3
32.0 41.0 52.0 62.0 77.0 99.0
34.7 47.2 57.3 69.0 82.9 113.4
47.5 57.9 69.4 83.6 113.4 137.6
41.0 52.0 62.0 77.0 99.0 125.0
63 80 80 125 125 160
3NA3822-6 3NA3824-6 3NA3824-6 3NA3132-6 3NA3132-6 3NA3136-6
10.0 16.0 25.0 25.0 50.0 70.0
35.0 35.0 35.0 150.0 150.0 150.0
10.0 16.0 16.0 25.0 35.0 50.0
35.0 35.0 35.0 150.0 150.0 150.0
16.0 20.0 20.0 56.0 56.0 56.0
35.0 44.0 44.0 123.0 123.0 123.0
275.0 275.0 275.0 350.0 350.0 350.0
520.0 650.0 650.0 850.0 850.0 850.0
245.0 245.0 245.0 320.0 320.0 320.0
10.83 10.83 10.83 13.78 13.78 13.78
20.47 25.59 25.59 33.46 33.46 33.46
9.65 9.65 9.65 12.6 12.6 12.6
2UE33-
0EA0
75330-2
2 2 2 -5 -5 -5
755320
2 2 2 -5 -5 -5
2UE33-
7EA0
2UE34-
5FA0
2UE35-
5FA0
2UE37-
5FA0
MICROMASTER 440 Operating instructions
88 6SE6400-5CA00-0BP0
Page 89

International English 8 Available options
8 Available options
This Chapter contains:
Supplementary information.
8.1 Available options ..................................................................................................... 90
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
89
Page 90

8 Available options International English
8.1 Available options
The following accessories are available as options for your MICROMASTER
MM440 Inverter. For more details please refer to the Reference Manual or contact
your local Siemens sales office if you require assistance.
Variant Dependent Options
EMC filter, Class A
Low leakage Class B filter
Additional EMC filter, Class B
Line commutating choke
Output choke
Gland plate
Variant Independent Options
Basic Operator Panel (BOP)
Advanced Operator Panel (AOP)
PROFIBUS module
PC to inverter connection kit
PC to AOP connection kit
BOP/AOP door mounting kit for single inverter control
AOP door mounting kit for multiple inverter control
“DriveMonitor” commissioning tool
MICROMASTER 440 Operating instructions
90 6SE6400-5CA00-0BP0
Page 91

International English 9 Electro-Magnetic Compatibility (EMC)
9 Electro-Magnetic Compatibility (EMC)
This Chapter contains:
EMC information.
9.1 Electro-Magnetic Compatibility (EMC) ....................................................................92
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
91
Page 92

9 Electro-Magnetic Compatibility (EMC) International English
9.1 Electro-Magnetic Compatibility (EMC)
All manufacturers / assemblers of electrical apparatus which “performs a complete
intrinsic function and is placed on the market as a single unit intended for the end
user” must comply with the EMC directive EEC/89/336.
There are three routes for the manufacturer/assembler to demonstrate compliance:
9.1.1 Self-Certification
This is a manufacturer's declaration that the European standards applicable to the
electrical environment for which the apparatus is intended have been met. Only
standards that have been officially published in the Official Journal of the European
Community can be cited in the manufacturer's declaration.
9.1.2 Technical Construction File
A technical construction file can be prepared for the apparatus describing its EMC
characteristics. This file must be approved by a ‘Competent Body’ appointed by the
appropriate European government organization. This approach allows the use of
standards that are still in preparation.
9.1.3 EC Type Examination Certificate
This approach is only applicable to radio communication transmitting apparatus. All
MICROMASTER units are certified for compliance with the EMC directive, when
installed in accordance with the recommendations in Section 2.
MICROMASTER 440 Operating instructions
92 6SE6400-5CA00-0BP0
Page 93

International English 9 Electro-Magnetic Compatibility (EMC)
9.1.4 EMC Directive Compliance with Imminent Harmonics
Regulations
From 1st January 2001 all electrical apparatus covered by the EMC Directive will
have to comply with
EN 61000-3-2 "Limits for harmonic current emissions (equipment input <= 16A per
phase)".
All Siemens variable speed drives of the MICROMASTER, MIDIMASTER,
MICROMASTER Eco and COMBIMASTER ranges, which are classified as
"Professional Equipment" within the terms of the standard, fulfill the requirements
of the standard.
Special considerations for 250W to 550W drives with 230V 1ac mains supplies
when used in non-industrial applications
Units in this voltage and power range will be supplied with the following warning:
”This equipment requires supply authority acceptance for connection to the public
supply network”. Please refer to EN 61000-3-12 sections 5.3 and 6.4 for further
information. Units connected to Industrial Networks1 do not require connection
approval (see EN 61800-3, section 6.1.2.2).
The harmonic current emissions from these products are described in the table
below:
Rating Typical Harmonic
Current (A)
3rd5th7th9th11th3rd5th7th9th11thTHD (%) THD (%) THD (%)
250W 230V 1ac 2.15 1.44 0.72 0.26 0.19 83 56 28 10 7 0.77 0.077 0.008
370W 230V 1ac 2.96 2.02 1.05 0.38 0.24 83 56 28 10 7 1.1 0.11 0.011
550W 230V 1ac 4.04 2.70 1.36 0.48 0.36 83 56 28 10 7 1.5 0.15 0.015
Typical Harmonic
Current (%)
Typical Voltage
Distortion
Distribution Transformer
Rating
10kVA 100kVA 1MVA
The allowed harmonic currents for “professional equipment” with an input power
>1kW are not yet defined. Therefore, any electrical apparatus containing the
above drives which has an input power >1kW will not require connection approval.
Alternatively, the necessity to apply for connection approval can be avoided by
fitting the input chokes recommended in the technical catalogues (except 550W
230V 1ac units).
1 Industrial Networks are defined as those which do not supply buildings used for domestic purposes.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
93
Page 94

9 Electro-Magnetic Compatibility (EMC) International English
9.1.5 Three General classes of EMC performance are available as
detailed below
Class 1: General Industrial
Compliance with the EMC Product Standard for Power Drive Systems EN 68100-3
for use in Second Environment (Industrial) and Restricted Distribution.
Table 9-1 Class 1 - General Industrial
EMC Phenomenon Standard Level
Emissions:
Radiated Emissions EN 55011 Level A1
Conducted Emissions EN 68100-3 Limits under consideration
Immunity:
Electrostatic Discharge EN 61000-4-2 8 kV air discharge
Burst Interference EN 61000-4-4 2 kV power cables, 1 kV control
Radio Frequency Electromagnetic Field IEC 1000-4-3 26-1000 MHz, 10 V/m
Class 2: Filtered Industrial
This level of performance will allow the manufacturer/assembler to self-certify their
apparatus for compliance with the EMC directive for the industrial environment as
regards the EMC performance characteristics of the power drive system.
Performance limits are as specified in the Generic Industrial Emissions and
Immunity standards EN 50081-2 and EN 50082-2.
Table 9-2 Class 2 - Filtered Industrial
EMC Phenomenon Standard Level
Emissions:
Radiated Emissions EN 55011 Level A1
Conducted Emissions EN 55011 Level A1
Immunity:
Supply Voltage Distortion
Voltage Fluctuations, Dips, Unbalance,
Frequency Variations
Magnetic Fields EN 61000-4-8 50 Hz, 30 A/m
Electrostatic Discharge EN 61000-4-2 8 kV air discharge
Burst Interference EN 61000-4-4 2 kV power cables, 2 kV control
Radio Frequency Electromagnetic
Field, amplitude modulated
Radio-frequency Electromagnetic Field,
pulse modulated
IEC 1000-2-4
(1993)
IEC 1000-2-1
ENV 50 140 80-1000 MHz, 10 V/m, 80% AM, power
and signal lines
ENV 50 204 900 MHz, 10 V/m 50% duty cycle, 200 Hz
repetition rate
MICROMASTER 440 Operating instructions
94 6SE6400-5CA00-0BP0
Page 95

International English 9 Electro-Magnetic Compatibility (EMC)
Class 3: Filtered - for residential, commercial and light industry
This level of performance will allow the manufacturer / assembler to self-certify
compliance of their apparatus with the EMC directive for the residential,
commercial and light industrial environment as regards the EMC performance
characteristics of the power drive system. Performance limits are as specified in
the generic emission and immunity standards EN 50081-1 and EN 50082-1.
Table 9-3 Class 3 - Filtered for Residential, Commercial and Light Industry
EMC Phenomenon Standard Level
Emissions:
Radiated Emissions* EN 55011 Level B
Conducted Emissions EN 55011 Level B
Immunity:
Supply Voltage Distortion
Voltage Fluctuations, Dips, Unbalance,
Frequency Variations
Magnetic Fields EN 61000-4-8 50 Hz, 30 A/m
Electrostatic Discharge EN 61000-4-2 8 kV air discharge
Burst Interference EN 61000-4-4 2 kV power cables, 2 kV control
Radio Frequency Electromagnetic
Field, amplitude modulated
Radio-frequency Electromagnetic Field,
pulse modulated
IEC 1000-2-4
(1993)
IEC 1000-2-1
ENV 50 140 80-1000 MHz, 10 V/m, 80% AM, power
and signal lines
ENV 50 204 900 MHz, 10 V/m 50% duty cycle, 200 Hz
repetition rate
* These limits are dependent on the inverter being correctly installed inside a
metallic switchgear enclosure. The limits will not be met if the inverter is not
enclosed.
Notes
To achieve these performance levels, you must not exceed the default Pulse
frequency nor use cables longer than 25 m.
The MICROMASTER inverters are intended exclusively for professional
applications. Therefore, they do not fall within the scope of the harmonics
emissions specification EN 61000-3-2.
Maximum mains supply voltage when filters are fitted is 460 V.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
95
Page 96

9 Electro-Magnetic Compatibility (EMC) International English
Table 9-4 Compliance Table
Model Remarks
Class 1 – General Industrial
6SE6440-2U***-**A0 Unfiltered units, all voltages and powers.
Class 2 – Filtered Industrial
6SE6440-2A***-**A0 All units with integral Class A filters
6SE6440-2A***-**A0 with
6SE6440-2FA00-6AD0
Class 3 – Filtered for residential, commercial and light industry
6SE6440-2U***-**A0 with
6SE6400-2FB0*-***0
* denotes any value is allowed.
Frame size A units 400-480 V with external Class A footprint filters
Unfiltered units fitted with external Class B footprint filters.
MICROMASTER 440 Operating instructions
96 6SE6400-5CA00-0BP0
Page 97

International English A - Changing the Operator Panel
A - Changing the Operator Panel
1
3
2
4
Fn
1
P
0
Fn
P
1
0
Fn
1
P
0
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
97
Page 98

B - Removing Covers Frame Size A International English
B - Removing Covers Frame Size A
1 2
3
4
MICROMASTER 440 Operating instructions
98 6SE6400-5CA00-0BP0
Page 99

International English C - Removing the I/O Board
C - Removing the I/O Board
1
2
3
Notes:
1. Only a small amount of pressure is required to release the I/O Board catch.
2. Currently, the I/O Board is removed using the same technique regardless of
frame size.
MICROMASTER 440 Operating instructions
6SE6400-5CA00-0BP0
99
Page 100

D - Removing Covers Frame Sizes B and C International English
D - Removing Covers Frame Sizes B and C
1
3
2
4
5 6
MICROMASTER 440 Operating instructions
100 6SE6400-5CA00-0BP0
 Loading...
Loading...